La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...

Índice
AVENTICS | CANopen | R412005742–BDL–001–AD 325
Español
Índice
1 Acerca de esta documentación ............................... 329
1.1 Validez de la documentación............................................ 329
1.2 Documentación necesaria y complementaria............. 329
1.3 Presentación de la información.......................................329
1.3.1 Indicaciones de seguridad ............................................... 330
1.3.2 Símbolos ............................................................................... 331
1.3.3 Abreviaturas ........................................................................ 331
2 Indicaciones de seguridad ....................................... 331
2.1 Sobre este capítulo.............................................................. 331
2.2 Utilización conforme a las especificaciones................ 332
2.3 Utilización no conforme a las especificaciones .......... 332
2.4 Cualificación del personal..................................................333
2.5 Indicaciones de seguridad generales............................. 333
2.6 Indicaciones de seguridad según producto y
tecnología................................................................................ 334
3 Zonas de utilización .................................................. 336
4 Volumen de suministro ............................................ 337
5 Descripción del aparato ........................................... 337
5.1 Vista general del sistema de válvulas y de
los módulos............................................................................ 338
5.2 Componentes del aparato.................................................. 339
5.2.1 Acoplador de bus ................................................................ 339
5.2.2 Módulos de entrada/salida ............................................. 341
5.2.3 Módulos de entrada ........................................................... 342
5.2.4 Módulos de salida .............................................................. 343
6 Montaje ....................................................................... 344
6.1 Montaje del acoplador de bus en el sistema
de válvulas.............................................................................. 344
6.1.1 Medidas ................................................................................. 345
6.2 Rotulación de los módulos ................................................ 345
6.3 Conexión eléctrica de los módulos ................................. 347
6.3.1 Indicaciones generales para la conexión
del acoplador de bus ......................................................... 348
6.3.2 Conexión del acoplador de bus como estación
intermedia ............................................................................ 349

Índice
326 AVENTICS | CANopen | R412005742–BDL–001–AD
6.3.3 Conexión del acoplador de bus como última
estación ................................................................................. 349
6.3.4 Conexión de la alimentación de lógica y de carga del
acoplador de bus ................................................................ 350
6.3.5 Conexión de los módulos de entrada/
salida óctuples .................................................................... 352
6.3.6 Conexión de la alimentación de carga
del módulo de salida ......................................................... 354
6.3.7 Conexión FE .......................................................................... 355
7 Puesta en servicio y manejo .................................... 356
7.1 Realización de ajustes previos......................................... 356
7.1.1 Ajuste de la velocidad en baudios ................................. 357
7.1.2 Configuración de la dirección del acoplador de bus 357
7.1.3 Configuración de los mensajes de diagnóstico ......... 358
7.1.4 Asignación de la alimentación de válvulas ................ 359
7.1.5 Configuración del cierre de bus ..................................... 366
7.2 Configuración del sistema de bus................................... 367
7.3 Comportamiento en funcionamiento.............................. 368
7.4 Comportamiento del arranque......................................... 369
7.5 Ensayo y diagnóstico del acoplador de bus ................. 369
7.5.1 Lectura de los indicadores de diagnóstico
del acoplador de bus ......................................................... 369
7.5.2 Comprobación de los sensores del módulo
de entrada ............................................................................ 371
7.5.3 Comprobación de los actuadores del módulo
de salida ................................................................................ 372
7.6 Puesta en servicio del acoplador de bus....................... 373
7.7 Parada del sistema.............................................................. 374
7.7.1 Salida de la parada del sistema .................................... 375
8 Desmontaje y sustitución ......................................... 375
8.1 Sustitución del acoplador de bus.................................... 376
8.2 Montaje de módulo(s) de entrada/salida ...................... 378
9 Cuidado y mantenimiento ......................................... 381
9.1 Cuidado de los módulos .....................................................381
9.2 Mantenimiento del acoplador de bus............................. 381

Índice
AVENTICS | CANopen | R412005742–BDL–001–AD 327
Español
10 Datos técnicos ........................................................... 382
10.1 Parámetros ............................................................................ 382
10.2 Acoplador de bus.................................................................. 382
10.3 Módulos de entrada óctuples, RMV04-8DI_M8 y
RMV04-8DI_M12 ................................................................... 383
10.4 Módulos de salida óctuples, RMV04-8DO_M8 y
RMV04-8DO_M12.................................................................. 383
11 Repuestos y accesorios ............................................ 384
11.1 Acoplador de bus.................................................................. 384
11.2 Módulo de entrada/salida óctuple, 8DI/8DO................ 384
11.3 Enchufe Power para acoplador de bus y módulo
de salida.................................................................................. 385
12 Eliminación de residuos ........................................... 385
13 Apéndice .................................................................... 385
13.1 Electronic Data Sheet (EDS).............................................. 385
13.2 Comportamiento en funcionamiento.............................. 386
13.2.1 Comportamiento del arranque ....................................... 386
13.2.2 Identificador CAN ................................................................ 387
13.3 Object Dictionary................................................................... 390
13.3.1 Objetos OD generales ........................................................ 391
13.3.2 Objetos OD específicos de fabricante ........................... 392
13.3.3 Objetos OD específicos de aparato: .............................. 394
13.4 Diagnóstico CANopen.......................................................... 398
13.4.1 Tipo de funcionamiento CANopen ................................. 398
13.5 EMCY Error Codes ................................................................ 399
13.6 Volumen de funciones......................................................... 401
13.7 Objetos específicos del fabricante .................................. 402
13.7.1 Manufacturer Status Register (MSR) ........................... 402
13.7.2 Module Control Register (MCR) ...................................... 403
13.7.3 Diagnostic information ..................................................... 404
13.7.4 Parameter Information ..................................................... 406
14 Índice temático .......................................................... 407
La página se está cargando...

Acerca de esta documentación
AVENTICS | CANopen | R412005742–BDL–001–AD 329
Español
1 Acerca de esta documentación
1.1 Validez de la documentación
Esta documentación contiene información importante para
montar, utilizar, mantener y eliminar averías sencillas del
acoplador de bus de un modo seguro y apropiado.
O Lea esta documentación por completo y sobre todo el
capítulo 2 “Indicaciones de seguridad” en la página 331,
antes de empezar a trabajar con el acoplador de bus.
1.2 Documentación necesaria y complementaria
O No ponga el producto en servicio mientras no disponga de la
siguiente documentación y haya entendido su contenido.
Puede consultar otros datos sobre los componentes en el
catálogo online de AVENTICS en
www.aventics.com/pneumatics-catalog.
1.3 Presentación de la información
Para poder trabajar con su producto de forma rápida y segura
gracias a esta documentación, en ella se emplean de forma
coherente las indicaciones de seguridad, símbolos, términos y
Tabla 1: Documentación necesaria y complementaria
Título
N.º de
documento
Tipo de documento
Documentación del sistema de
válvulas HF03 LG
R412008233 Documentación
Documentación del sistema de
válvulas HF04 D-SUB
R412015493 Documentación
Documentación de la instalación

Acerca de esta documentación
330 AVENTICS | CANopen | R412005742–BDL–001–AD
abreviaturas. Para facilitar su comprensión, estos se explican
en las secciones siguientes.
1.3.1 Indicaciones de seguridad
En esta documentación se emplean indicaciones de seguridad
antes de una secuencia de acciones en la que existe riesgo de
daños materiales y personales. Se deben respetar las medidas
descritas de protección ante peligros.
Las indicaciones de seguridad tienen la estructura siguiente:
W Símbolo de advertencia: alerta sobre el peligro.
W Palabra de advertencia: indica la gravedad del peligro.
W Clase y fuente de peligro: determina el tipo y la fuente de
peligro
W Consecuencias: describe las consecuencias si no se sigue la
indicación.
W Protección: indica cómo evitar el peligro
PALABRA DE ADVERTENCIA
Tipo y fuente de peligro
Consecuencias si no se sigue la indicación
O Medidas de protección ante peligros
Tabla 2: Clases de peligros según ANSI Z535.6-2006
Símbolo de advertencia, palabra de advertencia Significado
PELIGRO
Identifica una situación de peligro con riesgo de
lesiones graves, incluso mortales.
ADVERTENCIA
Identifica una situación de peligro en la que puede
existir riesgo de lesiones graves, incluso mortales.
ATENCIÓN
Identifica una situación de peligro en la que puede
existir riesgo de lesiones de carácter leve o leve-
medio.
NOTA
Daños materiales: el producto o el entorno pueden
sufrir daños.

Indicaciones de seguridad
AVENTICS | CANopen | R412005742–BDL–001–AD 331
Español
1.3.2 Símbolos
Los símbolos siguientes identifican indicaciones que no son
relevantes para la seguridad, pero que ayudan a comprender
mejor la documentación.
1.3.3 Abreviaturas
En esta documentación se utilizan las siguientes abreviaturas:
2 Indicaciones de seguridad
2.1 Sobre este capítulo
Este producto ha sido fabricado conforme a las reglas de la
técnica generalmente conocidas. No obstante, existe riesgo de
sufrir daños personales y materiales si no se tienen en cuenta
este capítulo ni las indicaciones de seguridad contenidas en la
documentación.
Tabla 3: Significado de los símbolos
Símbolo Significado
Si no se tiene en cuenta esta información, no se puede
utilizar el producto de forma óptima.
O
Instrucción única, independiente
1.
2.
3.
Sucesión numerada de actuaciones:
Las cifras indican la secuencia de ejecución.
Tabla 4: Abreviaturas
Abreviatura Significado
VS Sistema de válvulas
GSD General Station Description
Placa final EP Placa final con conexiones eléctricas y neumáticas
Placa final P Placa final con conexiones neumáticas

Indicaciones de seguridad
332 AVENTICS | CANopen | R412005742–BDL–001–AD
O Lea esta documentación con detenimiento y por completo
antes de trabajar con el producto.
O Guarde esta documentación en un lugar al que siempre
puedan acceder fácilmente todos los usuarios.
O Entregue el producto a terceros siempre junto con la
documentación necesaria.
2.2 Utilización conforme a las especificaciones
Este producto es un componente electroneumático de la
instalación.
Puede utilizar el producto como se indica a continuación:
W Exclusivamente en el ámbito industrial. Para su utilización
en zonas urbanas (viviendas, comercios e industrias) se
necesita un permiso particular por parte de las autoridades.
W Exclusivamente en el campo de potencia que viene indicado
en los datos técnicos.
El producto está diseñado para uso profesional y no para uso
privado.
La utilización conforme a las especificaciones también incluye
que se haya leído y entendido esta documentación y, en
especial, el capítulo “Indicaciones de seguridad”.
2.3 Utilización no conforme a las
especificaciones
Cualquier otro uso distinto del descrito en la utilización no
conforme a las especificaciones se considera un uso no
conforme y, por lo tanto, no está autorizado.
Si se montan o utilizan en aplicaciones relevantes para la
seguridad productos inadecuados, pueden producirse estados
de servicio no previstos que podrían derivar en daños
personales y materiales. Por tanto, utilice un producto en una
aplicación relevante para la seguridad solo si dicha utilización
viene especificada y autorizada de forma expresa en la

Indicaciones de seguridad
AVENTICS | CANopen | R412005742–BDL–001–AD 333
Español
documentación del producto. Por ejemplo, en zonas con
protección contra explosión o en componentes de un control
relacionados con la seguridad (seguridad funcional).
AVENTICS GmbH no asume responsabilidad alguna por daños
debidos a una utilización no conforme a las especificaciones.
Los riesgos derivados de una utilización no conforme a las
especificaciones son responsabilidad exclusiva del usuario.
Dentro de la utilización no conforme a las especificaciones del
producto se incluye:
W la modificación o transformación del producto,
W la utilización fuera de los campos de aplicación que se
nombran en estas instrucciones,
W la utilización en condiciones de funcionamiento que difieran
de las que se describen en estas instrucciones.
2.4 Cualificación del personal
Las actividades descritas en esta documentación requieren
disponer de conocimientos básicos de electrónica y neumática,
así como de la terminología correspondiente. Para garantizar
un uso seguro, solamente personal cualificado o bien otra
persona supervisada por una persona cualificada podrá
realizar estas actividades.
Por personal cualificado se entiende una persona que, en virtud
de su formación especializada, sus conocimientos y
experiencias, así como su conocimiento acerca de las normas
vigentes, puede evaluar los trabajos que se le han
encomendado, detectar potenciales peligros y adoptar medidas
de seguridad adecuadas. El personal cualificado debe respetar
las normas en vigor específicas del sector.
2.5 Indicaciones de seguridad generales
W Observe la normativa vigente sobre prevención de
accidentes y protección del medio ambiente.
W Tenga en cuenta las normativas y disposiciones de
seguridad vigentes en el país de utilización del producto.

Indicaciones de seguridad
334 AVENTICS | CANopen | R412005742–BDL–001–AD
W Utilice los productos de AVENTICS solo si no presentan
problemas técnicos.
W Tenga en cuenta todas las indicaciones que figuran en el
producto.
W
Las personas que montan, manejan y desmontan productos de
AVENTICS o realizan su mantenimiento no deben encontrarse
bajo la influencia del alcohol, drogas o medicamentos que
pudieran afectar a la capacidad de reacción.
W Utilice solo los accesorios y piezas de repuesto autorizados
por el fabricante para evitar riesgos para las personas por
uso de piezas de repuesto no adecuadas.
W Respete los datos técnicos y condiciones ambientales que
se especifican en la documentación del producto.
W Si se montan o utilizan en aplicaciones relevantes para la
seguridad productos inadecuados, pueden producirse
estados de servicio no previstos que podrían derivar en
daños personales y materiales. Por tanto, utilice un
producto en una aplicación relevante para la seguridad solo
si dicha utilización viene especificada y autorizada de forma
expresa en la documentación del producto.
W El producto no se puede poner en servicio mientras no se
haya verificado que el producto final (por ejemplo, una
máquina o instalación) en el que están integrados los
productos de AVENTICS cumple las disposiciones,
normativas de seguridad y normas de utilización vigentes
en el país de explotación.
2.6 Indicaciones de seguridad según producto y
tecnología
W En ninguna circunstancia, debe someter el aparato a cargas
mecánicas. No apoye ningún objeto sobre el aparato.
W Asegúrese de que la alimentación de tensión se encuentre
dentro de la tolerancia indicada de los módulos.
W Tenga en cuenta las indicaciones de seguridad de las
instrucciones de servicio de su sistema de válvulas.

Indicaciones de seguridad
AVENTICS | CANopen | R412005742–BDL–001–AD 335
Español
W Todos los componentes reciben corriente de un bloque de
alimentación 24 V. El bloque de alimentación debe estar
dotado de una separación segura según EN 60742,
clasificación VDE 0551. Para ello se aplican los circuitos
eléctricos correspondientes como SELV/PELV según
IEC 60364-4-41.
W Antes de conectar o desconectar los enchufes, hay que
desconectar la tensión de servicio.
Durante el montaje W La garantía es válida exclusivamente para la configuración
entregada. La garantía prescribe en el caso de un montaje
defectuoso.
W Desconecte siempre la presión y la conexión con la red
eléctrica de la pieza de la instalación antes de montar o
desmontar el aparato. Compruebe que la instalación esté
asegurada durante los trabajos de montaje de modo que no
se pueda volver a conectar.
W Conecte a tierra los módulos y el sistema de válvulas.
Instalar el sistema respetando las siguientes normas:
– DIN EN 50178, clasificación VDE 0160
– VDE 0100
Durante la puesta
en servicio
W El sistema ha de instalarse únicamente cuando esté exento
de tensión y de presión. La instalación debe ser efectuada
solo por personal técnico capacitado. Efectúe la puesta en
servicio eléctrica solo cuando el sistema esté exento de
presión para evitar movimientos peligrosos de los
actuadores.
W Ponga en servicio el sistema solo cuando esté
completamente montado, correctamente cableado y
configurado y tras haberlo ensayado.
W El aparato está sujeto a la clase de protección IP65. Antes de
la puesta en servicio, asegúrese de que todas las juntas y
cierres de las conexiones por enchufe estén herméticos, con
el fin de evitar que penetren en el aparato líquidos y cuerpos
extraños.

Zonas de utilización
336 AVENTICS | CANopen | R412005742–BDL–001–AD
Durante el
funcionamiento
W Es indispensable que haya un buen intercambio de aire o
suficiente refrigeración cuando en el sistema de válvulas se
presenten las siguientes situaciones:
– Equipamiento total
– Carga continua de las bobinas magnéticas
Durante la
limpieza
W No utilice nunca disolventes ni detergentes agresivos.
Limpie el aparato exclusivamente con un paño humedecido
Utilice para ello exclusivamente agua o, en caso necesario,
un detergente suave.
3 Zonas de utilización
El acoplador de bus sirve para el pilotaje eléctrico de las
válvulas a través del sistema de bus de campo CANopen. Los
módulos de entrada/salida permiten leer las señales de
entrada eléctricas por la conexión de bus del sistema de
válvulas.
W El acoplador de bus se puede utilizar única y
exclusivamente como slave en un sistema de bus CANopen,
según EN 50170 parte 2.

Volumen de suministro
AVENTICS | CANopen | R412005742–BDL–001–AD 337
Español
4 Volumen de suministro
En el volumen de suministro se incluyen:
W 1 sistema de válvulas HF03 LG o HF04 según la
configuración y el pedido
W 1 manual de instrucciones de servicio del sistema de
válvulas
W 1 manual de instrucciones de servicio del acoplador de bus
En el volumen de suministro de un juego de piezas de acoplador
de bus se incluyen:
W 1 acoplador de bus con junta y 2 tornillos de fijación
W 1 manual de instrucciones de servicio para el acoplador de
bus
El VS se configura de manera individual. Usted puede ver la
configuración exacta con su número de referencia en el
configurador de Internet a través de AVENTICS.
5 Descripción del aparato
El acoplador de bus permite el control del VS a través de un
sistema de bus de campo. Además de la conexión de líneas de
datos y líneas de alimentación de tensión, el acoplador de bus
permite el ajuste de diferentes parámetros de bus y el
diagnóstico a través de LED. Asimismo, el acoplador de bus se
puede ampliar con módulos de entrada y salida. Usted
encontrará una descripción detallada del acoplador de bus y de
los módulos de entrada/salida en el capítulo “Componentes del
aparato” a partir de la página 339.
La siguiente vista de sistema ofrece una visión global de todo el
sistema de válvulas y de sus componentes. El VS se describe en
unas instrucciones de servicio propias.

Descripción del aparato
338 AVENTICS | CANopen | R412005742–BDL–001–AD
5.1 Vista general del sistema de válvulas y de
los módulos
El sistema de válvulas se compone, en función del volumen de
pedido, de los componentes que se muestran en Fig. 1:
Fig. 1: Vista general: configuración a modo de ejemplo de acoplador de bus con módulos E/S y VS
montado
1 Placa final E
2 Módulo de salida
1)
3 Módulo de entrada
1)
4 Acoplador de bus CANopen,, diseño B
1)
En total, pueden conectarse un máximo de 6 módulos (módulos de entrada y/o salida) en la combinación que se desee
(p. ej. 3 módulos de entrada y 3 de salida).
5 Placa final EP para HF03 LG o HF04
6 Portaválvulas
2)
7 Conexión FE en la placa final E
2)
Con instrucciones de servicio propias.
7
1
2
3
4
6
5

Descripción del aparato
AVENTICS | CANopen | R412005742–BDL–001–AD 339
Español
5.2 Componentes del aparato
5.2.1 Acoplador de bus
Fig. 2: Vista general del acoplador de bus
1 Indicadores LED para mensajes de diagnóstico
2 Campo de rotulación UB
3 Conexión X71 (BUS IN) para el acoplador de bus para el
pilotaje de las válvulas y los módulos E/S
1)
1)
Para la ocupación de enchufes, véase la página 348.
4 Conexión X72 (BUS OUT) para el pilotaje de las válvulas y los
módulos E/S
1)
5 Conexión X10 (POWER) para la alimentación de tensión de
las bobinas de válvula, lógica y entradas
6 Tapa roscada B para los conmutadores de corredera S4, S5,
S6 (asignación de las válvulas a la aliment. de tensión) y S8
(cierre de bus)
7 Tapa roscada A para los conmutadores giratorios S1, S2
(configuración de la dirección de la estación) y el interruptor
DIP S3 (configuración de modo)
2
3
4
5
6
7
1

Descripción del aparato
340 AVENTICS | CANopen | R412005742–BDL–001–AD
El acoplador de bus se puede utilizar única y exclusivamente
como slave en un sitema de bus.
Dirección de estación La dirección de estación ID nodo del acoplador de bus se
configura con los dos conmutadores giratorios S1 y S2.
Velocidad en baudios La tasa de baudios máx. es de 1 MBaud.
Diagnóstico Las tensiones de alimentación para la lógica y el pilotaje de
válvulas se supervisan. Si se excede o no se alcanza el margen
configurado, se emitirá una señal de fallo que se indica
mediante un LED de diagnóstico e información de diagnóstico.
Cantidad de válvulas que
se pueden pilotar
El acoplador de bus está disponible en 2 variantes con 24 o 32
salidas de válvula. De este modo, se limita el número máximo
de bobinas de válvula pilotables. Según la variante, se pueden
pilotar:
W 12 válvulas biestables o 24 válvulas monoestables o
W 16 válvulas biestables o 32 válvulas monoestables
de esta manera. También es posible una combinación de
válvulas.
Un acoplador de bus con 32 salidas solo puede conectarse a
un VS diseñado para 32 bobinas de válvula.
OSI El modelo de comunicación CANopen se basa en el ISO/OSI
Basic Reference Model.
Referencia:
W ISO 7498, 1984, Information Processing Systems –
Open System Interconnection – Basic Reference Model
CAN Los niveles inferiores del Basic Reference Model se basan en
CAN.
CANopen Todas las especificaciones y directivas CANopen deben
deducirse de las especificaciones del CiA.

Descripción del aparato
AVENTICS | CANopen | R412005742–BDL–001–AD 341
Español
Certificación El aparato está certificado según las directivas del
Conformance Test V2.0.2 del CiA.
Referencia:
W CiA Draft Standard 301, “Application Layer and
Communication Profile”, versión 4.01, estado 01 de junio de
2000
W CiA Draft Standard 401, “Device Profile for Generic I/O
Modules” versión 2.0, estado 20 de diciembre de 1999
5.2.2 Módulos de entrada/salida
Los módulos de entrada/salida permiten leer las señales de
entrada eléctricas por la conexión de bus del sistema de
válvulas mediante conexiones por enchufe desconectables.
Cantidad de módulos
conectables
Al sistema de válvulas con acoplador de bus se pueden conectar
tanto módulos de entrada, como de salida en la combinación
que se desee, con un máximo en total de 6 módulos. La
secuencia es aleatoria.
O ¡Asegúrese de que se cumplan los límites de capacidad de
carga!
El acoplador de bus suministra las entradas de los módulos de
entrada. La corriente total máxima para todas las entradas es
de 0,7 A.
El módulo de salida se alimenta a través de una conexión M12,
cada una de las cuales dispone de una alimentación de tensión
para 4 salidas (M8) (ver Tab. 6 en la página 350).

Descripción del aparato
342 AVENTICS | CANopen | R412005742–BDL–001–AD
5.2.3 Módulos de entrada
Los módulos de entrada para conectar sensores de señales
eléctricas están disponibles en dos versiones:
W 8 x M8 (RMV04-8DI_M8) ó
W 4 x M12, con ocupación doble (RMV04-8DI_M12)
Fig. 3: Módulo de entrada óctuple: RMV04-8DI_M8 (izquierda) y RMV04-8DI_M12 (derecha)
1 Campo de rotulación
2 RMV04-8DI_M8 (izquierda): 8 entradas en 8 casquillos M8
1)
RMV04-8DI_M12 (derecha): 8 entradas en 4 casquillos M12
1)
1)
Para la ocupación de enchufes, véase la página 348.
3 1 indicador LED (amarillo, estado) por entrada
2
3
1
2
3
1

Descripción del aparato
AVENTICS | CANopen | R412005742–BDL–001–AD 343
Español
5.2.4 Módulos de salida
Los módulos de salida para conectar los actuadores están
disponibles en dos versiones:
W 8 x M8 (RMV04-8DO_M8) ó
W 4 x M12, con ocupación doble (RMV04-8DO_M12)
Fig. 4: Módulo de salida óctuple: RMV04-8DO_M8 (izquierda) y RMV04-8DO_M12 (derecha)
1 Campo de rotulación
2 Indicador LED (amarillo, estado) por salida
3 Indicador LED bicolor alimentación de carga U
Q2
4 Alimentación de carga de la conexión a través de un enchufe M12
1)
1)
Para la ocupación de enchufes, véase la página 348.
5 RMV04-8DO_M8 (izquierda): 8 salidas en 8 casquillos M8
1)
RMV04-8DO_M12 (derecha): 8 salidas en 4 casquillos M12
1)
6 Indicador LED bicolor alimentación de carga U
Q1
1
2
3
4
6
5
2
1
4
3
5
6

Montaje
344 AVENTICS | CANopen | R412005742–BDL–001–AD
6Montaje
6.1 Montaje del acoplador de bus en el sistema
de válvulas
Obtendrá su sistema de válvulas de la serie HF03 LG o HF04
configurado de manera individual, atornillado por completo con
todos los componentes:
W Portaválvulas
W Acoplador de bus
W Módulos E/S en caso dado
El montaje del sistema de válvulas completo está descrito
detalladamente en las instrucciones de servicio para el VS
adjuntas. La posición de montaje para el VS es indiferente.
Las medidas del VS completo varían según el equipamiento del
módulo (véase Fig. 5).

Montaje
AVENTICS | CANopen | R412005742–BDL–001–AD 345
Español
6.1.1 Medidas
Fig. 5: Esquema acotado del sistema de válvulas con acoplador de bus
Con cada módulo de entrada/salida, el sistema de válvulas se
alarga 60 mm (60 x m). La placa final E tiene una profundidad
de montaje de 18 mm.
6.2 Rotulación de los módulos
Acoplador de bus O Rotule en el campo BTN del acoplador de bus la dirección
prevista/utilizada para el acoplador de bus.
Módulos de entrada/
salida
O Rotule las conexiones directamente en los campos de
rotulación de los módulos de entrada/salida.
La denominación de las conexiones indica la asignación de los
campos de rotulación para las conexiones.
135
A + (60 x m)
B + (60 x m)
96060

Montaje
346 AVENTICS | CANopen | R412005742–BDL–001–AD
Fig. 6: Campos de rotulación en el acoplador de bus (RMV04-CO), módulo de entrada (8DI_M8) y módulo
de salida (8DO_M8), ejemplos

Montaje
AVENTICS | CANopen | R412005742–BDL–001–AD 347
Español
6.3 Conexión eléctrica de los módulos
ATENCIÓN
Tensión eléctrica existente
Peligro de lesiones a través de un golpe eléctrico.
O Desconecte siempre la presión y la conexión con la red
eléctrica de la pieza de la instalación correspondiente
antes de conectar los módulos eléctricamente al sistema
de válvulas.
NOTA
Cableado incorrecto
Un cableado incorrecto o erróneo provoca funciones
erróneas y daños en el sistema de bus.
O Mientras no se indique algo distinto, se deben seguir las
normas de montaje del CiA.
O Emplear solamente cables que corresponden a las
especificaciones del bus de campo y a los requisitos
concernientes a la velocidad y la longitud de la conexión.
O Montar el cable y el enchufe a fin de garantizar el tipo de
protección y la descarga de tracción.
NOTA
Flujo de corriente por diferencias de potencial en la
pantalla
A través de la pantalla del cable de bus no debe fluir ninguna
corriente de compensación generada por diferencias de
potencial, ya que esto anula el blindaje y tanto el cable como
el acoplador de bus conectado pueden resultar dañados.
O A ser necesario, conecte los puntos de masa de la
instalación a través de un cable por separado.

Montaje
348 AVENTICS | CANopen | R412005742–BDL–001–AD
6.3.1 Indicaciones generales para la conexión del
acoplador de bus
Para la conexión de los módulos utilice conexiones por
enchufe y cables confeccionados.
O Si no utiliza conexiones por enchufe y cables
confeccionados, tenga en cuenta la ocupación de pines que
se representa en Tab. 5.
Técnica de conexión y ocupación de enchufes con-forme a
las especificaciones de la directriz técnica.
2
1
43
5
BU S IN
X71
2
3
4
1
5
BU S O UT
X72
Tabla 5: Ocupación X71 (BUS IN) und X72 (BUS OUT) M12, A-codiert
Pin
BUS IN X71
BUS OUT X72
Significado
1 CAN_SHIELD Revestimiento (opcional)
2CAN_V+
1)2)
1)
La alimentación del acoplador de bus se efectúa solo a través de X10.
Todos los cables se hacen pasar.
2)
La alimentación de bus de 24 V en el pin 2 solamente repasan en bucle.
No se supervisa internamente.
Alimentación de bus de 24 V
(opcional)
3CAN_V–
1)
Alimentación de bus GND
4 CAN_H CAN_H bus line (dominant high)
5 CAN_L CAN_L bus line (dominant high)
Carcasa
Pantalla
Blindaje o puesta a tierra

Montaje
AVENTICS | CANopen | R412005742–BDL–001–AD 349
Español
6.3.2 Conexión del acoplador de bus como estación
intermedia
1. Si utiliza un cableado no confeccionado, establezca la
ocupación de pines correcta (véase Tab. 5 en la página 348)
de sus conexiones por enchufe.
2. Conecte el cable de bus de llegada a X71 (1).
3. Conecte el cable de bus de salida a través de la salida
X72 (2) con el siguiente módulo.
4. Retire el racor PG B.
5. Ponga el interruptor S8 en “OFF” (cierre de bus = OFF, véase
también “Configuración del cierre de bus” en la página 366).
6. Vuelva a colocar el racor PG B enroscándolo. Compruebe
que el anillo obturador esté colocado correctamente.
7. Si utiliza cable y enchufe con carcasa de metal no
confeccionados, conecte la pantalla a ambos lados del cable
de bus directamente con la carcasa del enchufe (carcasa
CEM). De este modo se protegen las líneas de datos contra
fallos de acoplamiento.
Asegúrese de que la carcasa del enchufe esté conectada de
forma fija con la carcasa del acoplador de bus.
6.3.3 Conexión del acoplador de bus como última
estación
1. Si utiliza un cableado no confeccionado, establezca la
ocupación de pines correcta (véase Tab. 5 en la página 348)
de sus conexiones por enchufe.
2. Conecte el cable de bus solo a X71 (1).
3. Retire el racor PG B.
4. Conecte el bus a través del enchufe S8 (enchufe en posición
“ON”) con la conexión de bus interno disponible
(véase “Configuración del cierre de bus” en la página 366).
5. Vuelva a colocar el racor PG B enroscándolo. Compruebe
que el anillo obturador esté colocado correctamente.
2
1
2
1

Montaje
350 AVENTICS | CANopen | R412005742–BDL–001–AD
6. Instale en la caja de enchufes del aparato X72 (BUS OUT) una
tapa de protección (2).
7. Si utiliza cable y enchufe con carcasa de metal no
confeccionados, conecte la pantalla a ambos lados del cable
de bus directamente con la carcasa del enchufe (carcasa
CEM). De este modo se protegen las líneas de datos contra
fallos de acoplamiento.
Asegúrese de que la carcasa del enchufe esté conectada de
forma fija con la carcasa del acoplador de bus.
Para evitar corrientes de compensación a través de la
pantalla del acoplador de bus, se requiere entre los
aparatos una conexión de compensación del potencial de al
menos 10 mm
2
.
6.3.4 Conexión de la alimentación de lógica y de
carga del acoplador de bus
Las válvulas y el acoplador de bus se alimentan mediante un
enchufe del aparato X10 (POWER).
Al conectar la alimentación de lógica y de carga del módulo
CANopen, debe asegurarse de la ocupación de los pines que se
representa en Tab. 6.
2
1
43
PO WE R
X10
Tabla 6: Ocupación del enchufe del aparato X10 (POWER), M12, con
código A
Pin X10 Ocupación
1U
L
Alimentación de la lógica del acoplador de bus y
alimentación de sensores de los módulos de entrada
digitales
2U
Q1
Primera alimentación de tensión de las válvulas
3OVMasa para U
L
, U
Q1
y U
Q2
4U
Q2
Segunda alimentación de tensión de las válvulas

Montaje
AVENTICS | CANopen | R412005742–BDL–001–AD 351
Español
W U
L
, U
Q1
y U
Q2
están conectadas eléctricamente entre ellas.
W Mediante la alimentación de válvulas U
Q1
y U
Q2
se pueden
desconectar las válvulas por bytes (equivalente a cada 4
válvulas biestables u 8 válvulas monoestables).
W Asignar los grupos de válvulas (4 u 8 válvulas) a través de
los conmutadores de corredera S4, S5 y S6 (ver “Asignación
de la alimentación de válvulas” en la página 359). Esto hace
posible, p. ej. una desconexión antes y después de una
desconexión de emergencia.
El cable para la alimentación de carga debe cumplir las
siguientes exigencias:
W Casquillo de cable Terminal de 4 polos, con código A,
casquillo sin agujero central
W Sección transversal del conductor: cada hilo >
0,5 mm
2
W Longitud: Máx. 20 m
Tabla 7: Consumo de corriente de X10 (POWER) en el acoplador de
bus
Señal Ocupación Corriente total
U
L
Lógica y entradas máx. 1 A
U
Q1
Válvulas máx. 1 A
U
Q2
Válvulas máx. 1 A
ATENCIÓN
Separación insegura del bloque de alimentación
La alimentación 24 V se puede efectuar por un bloque de
alimentación conjunto. Una separación insegura del bloque
de alimentación puede causar daños en el sistema y lesiones
a causa de electrocución.
O ¡Utilice solamente un bloque de alimentación con una
separación segura según EN 60747, clasificación
VDE 05551! Para ello se aplican los circuitos eléctricos
correspondientes como SELV/PELV según
IEC 60364-4-41.

Montaje
352 AVENTICS | CANopen | R412005742–BDL–001–AD
De este modo se conecta la alimentación de carga del acoplador
de bus:
1. Si utiliza una conexión por enchufe no confeccionada,
establezca la ocupación de pines correcta (véase 6 en la
página 350) de sus conexiones por enchufe.
2. Con ayuda de la conexión por enchufe (véase “Repuestos y
accesorios” en la página 384), conecte las tensiones de
servicio al acoplador de bus.
3. Compruebe las especificaciones de las tensiones de servicio
según los parámetros eléctricos y asegúrese de que estos
se cumplan (véase capítulo “Datos técnicos” en la
página 382).
4. Prepare los servicios según Tab. 7, en la página 351.
Escoja las secciones transversales del cable conforme a la
longitud del cable y de las corrientes que se apliquen.
6.3.5 Conexión de los módulos de entrada/salida
óctuples
Módulo de entrada 1. Cablee las entradas según 8 (DI8_M8) o según Tab. 9
(DI8_M12).
2. Conecte las entradas/salidas eléctricas con enchufes de
acoplamiento M8 o M12 (accesorios) a los módulos E/S.
3. Cerrar con la tapa de protección M8 (accesorios) las cajas de
enchufe del aparato no ocupadas, para garantizar la clase
de protección IP65.
La corriente total de todas las alimentaciones de los
sensores (pin 1) en un sistema de válvulas no debe
sobrepasar 0,7 A.
ATENCIÓN
Piezas bajo corriente accesibles libremente
¡Peligro de electrocución al tocarlas!
O Al conectar la periferia (interface E/S) se deben respetar
las exigencias de la protección aisladora según la norma
EN 50178, clasificación VDE 0160.

Montaje
AVENTICS | CANopen | R412005742–BDL–001–AD 353
Español
Módulo de salida 1. Cablee las salidas según 10 (DO8_M8) o según 11
(DO8_M12).
2. Conecte las entradas/salidas eléctricas con enchufes de
acoplamiento M8 o M12 (accesorios) a los módulos E/S.
3. Cerrar con la tapa de protección M8 (accesorios) las cajas de
enchufe del aparato no ocupadas, para garantizar la clase
de protección IP65.
4
31
I0…I7
Tabla 8: Ocupación de las entradas en el módulo de entrada
óctuple, DI8_M8, casquillo M8x1
Pin Señal Ocupación
1 SENSOR+ Alimentación de sensor +
3 SENSOR– Potencial de referencia
4 I0 bis I7 Señal de sensor
Carcasa Sobre potencial de blindaje
2
3
4
1
5
Tabla 9: Ocupación de las entradas en el módulo de entrada
óctuple, D18_M12, casquillo M12x1, con código A
Pin Señal Ocupación
1 SENSOR+ Alimentación de sensor 24 V +
2 I1, I3, I5 oder I7 Señal de sensor
3 SENSOR– Potencial de referencia GND
4 I0, I2, I4 oder I6 Señal de sensor
5 NC No ocupado
Carcasa Sobre potencial de blindaje
4
31
O0…O7
Tabla 10: Ocupación de las salidas en el módulo de salida óctuple,
DO8_M8, casquillo M8x1
Pin Señal Ocupación
1Libre No ocupado
4 Ox Señal de salida Ox
(tensión nominal 24 V)
3 GND Referencia GND del actor
Carcasa Sobre potencial de blindaje

Montaje
354 AVENTICS | CANopen | R412005742–BDL–001–AD
6.3.6 Conexión de la alimentación de carga del
módulo de salida
A cada módulo de salida le corresponde una conexión M12
propia para la alimentación de carga. 4 salidas respectivamente
se alimentan a través de la tensión de carga. Las tensiones U
Q1
y U
Q2
están separadas entre ellas galvánicamente.
La conexión para la alimentación de carga de los módulos de
salida debe cumplir los siguientes requisitos:
W Casquillo de cable M12×1, 4 polos, con código A sin agujero
central (para garantizar el seguro contra polarización
inversa)
W Sección transversal del conductor: cada hilo >
0,5 mm
2
W Longitud: Máx. 20 m
2
3
4
1
5
Tabla 11: Ocupación de las salidas en el módulo de salida óctuple,
DO8_M12, casquillo M12x1, con código A
Pin Señal Ocupación
1 NC No ocupado
2 O1, O3, O5 oder O7 Señal de salida
3 GND Potencial de referencia
4 O0, O2, O4 oder O6 Señal de salida
5 NC No ocupado
Carcasa Sobre potencial de blindaje
NOTA
Corriente total demasiado alta
Cada salida ha sido concebida para una corriente
permanente de máx. 0,5 A. Puede limitarse el funcionamiento
si se producen cargas de corriente superiores a 0,5 A por
cada salida.
O Asegúrese de que no se sobrepase la carga de corriente
de 0,5 A por cada salida.

Montaje
AVENTICS | CANopen | R412005742–BDL–001–AD 355
Español
1. Si utiliza un cableado no confeccionado, establezca la
ocupación de pines correcta (véase Tab. 12) de sus
conexiones por enchufe.
2. Conecte la alimentación de carga con el enchufe M12.
6.3.7 Conexión FE
Puesta a tierra en el
VS HF04
O Para descargar averías CEM, conecte a tierra la conexión
FE (1) a la placa final EP del VS mediante un conducto de
baja impedancia.
Sección transversal del cable recomendada: 10 mm
2
En estado de suministro, el tornillo para la conexión FE está
montado en la placa final EP del VS. Opcionalmente la conexión
FE también se puede realizar en la placa final E (2) (véase
también Fig. 1 en la página 338).
O Para ello, desmonte el tornillo para la conexión FE de la
placa final EP del VS (1) y móntelo en la placa final E (2). A
continuación, establezca allí la conexión a tierra.
2
1
43
PO WE R
X10
Tabla 12: Ocupación de la alimentación de tensión en el módulo de
salida óctuple, DO8, M12x1, con código A
Pin X10 Ocupación
10V_U
Q2
Referencia GND para alimentación de tensión 2
2 24V_U
Q1
24 V alimentación de tensión 1 para salidas O0
hasta O3
30V_U
Q1
Referencia GND para alimentación de tensión 1
4 24V_U
Q2
24 V alimentación de tensión 2 para salidas O4
hasta O7

Puesta en servicio y manejo
356 AVENTICS | CANopen | R412005742–BDL–001–AD
Fig. 7: Conexión FE en el VS HF04 con CANopen
en la placa final EP (1) o en la placa final E (2)
Puesta a tierra en el
VS HF03 LG
O Coloque la puesta a tierra en la conexión FE de la placa final
E(2).
7 Puesta en servicio y manejo
7.1 Realización de ajustes previos
Debe realizar los siguientes ajustes previos:
W Ajuste de la velocidad en baudios
W Configuración de la dirección del acoplador de bus
W Configuración de los mensajes de diagnóstico
W Asignación de la alimentación de válvulas
W Configuración del cierre de bus
Todas estas configuraciones se realizan a través de los
interruptores debajo de los dos racores PG A y B.
Para realizar los ajustes previos, proceda como se indica a
continuación:
1. Retire los racores PG correspondientes mediante un
movimiento giratorio.
2. Realice la configuración correspondiente como se describe
a continuación.
3. Vuelva a colocar los racores PG enroscándolos. Compruebe
que los anillos obturadores estén colocados correctamente.
1
2
B
A

Puesta en servicio y manejo
AVENTICS | CANopen | R412005742–BDL–001–AD 357
Español
7.1.1 Ajuste de la velocidad en baudios
La tasa de baudios se ajusta con el interruptor S3 (veáse Fig. 8
en la página 358). este se encuentra debajo de la tapa
enroscable PG A.
1. Abra la tapa enroscable PG superior A.
2. Ajuste la tasa de baudios (tasa de transmisión) a través de
los interruptores S3/1 hasta S3/3 según las
especificaciones de Tab. 13 en la página 357.
Estado de entrega: 1 MBaud
7.1.2 Configuración de la dirección del acoplador de
bus
La dirección de estación se configura a través de los dos
interruptores S1 y S2 (véase Fig. 8).
Tabla 13: Ocupación de los interruptores para el ajuste de la tasa de
baudios
Velocidad en
baudios
Longitud máx. de los
cables
S3.3 S3.2 S3.1
1 Mbit/s 25 m ON ON ON
Reservado ON ON OFF
500 kbit/s 100 m ON OFF ON
250 kbit/s 250 m ON OFF OFF
125 kbit/s 500 m OFF ON ON
50 kbit/s 1 km OFF ON OFF
20 kbit/s 2,5 km OFF OFF ON
10 kbit/s 5 km OFF OFF OFF

Puesta en servicio y manejo
358 AVENTICS | CANopen | R412005742–BDL–001–AD
Fig. 8: Conmutadores de dirección S1, S2 y conmutador de modo S3
del acoplador de bus
Ambos conmutadores giratorios S1 y S2 para la dirección de
estación del sistema de válvulas en CANopen se encuentran
bajo los racores PG A.
O Con S1 y S2 (véase Fig. 8) asigne libremente la dirección de
estación de 1 a 99:
– S1: Decimal de 0 a 9
– S2: Unidad de 0 a 9
– S1 + S2 = dirección de estación
Estado de entrega: ID nodo = 2
La dirección introducida se memoriza de nuevo al poner en
funcionamiento el sistema (Power-on), tras el “NMT Reset
Node” y el “NMT Reset Communication” del acoplador de bus. El
cambio de dirección durante el funcionamiento se hará efectivo
solo después de uno de los casos citados.
No utilizar la dirección 0, ya que provoca la parada del
sistema.
7.1.3 Configuración de los mensajes de diagnóstico
El conmutador de modo S3 para la configuración de los
mensajes de diagnóstico se encuentra bajo el racor PG A (véase
Fig. 8 en la página 358).
El estado de entrega está en conformidad con CANopen.
El diagnóstico está desactivado (S3/5 desconectado (OFF).

Puesta en servicio y manejo
AVENTICS | CANopen | R412005742–BDL–001–AD 359
Español
O Active o desactive con el interruptor S3/5 el mensaje de
diagnóstico al master. La posición modificada del
conmutador se activa solamente tras una nueva puesta en
marcha “Power-on”.
A continuación, este ajuste se puede igualmente asignar a
través del Module Control Object. En el caso de que la
asignación se efectúe a través del Module Control Object, la
posición de 3/5 no tiene efecto alguno.
Los diagnósticos pendientes son mostrados en los LED incluso
con la función de mensajes de diagnóstico al master
desactivada.
7.1.4 Asignación de la alimentación de válvulas
Los conmutadores S4-S6 para la asignación de la alimentación
de válvulas se encuentran bajo el racor PG B (véase 9). A cada
conmutador se le han asignado:
W 4 lugares de placas de conexión para válvulas biestables
(con bobinas 12 y 14) o
W 8 Placa de conexión para válvulas monoestables (con
bobina 14).
Fig. 9: Conmutador S4, S5, S6 para la asignación de la tensión de
alimentación de válvulas (U
Q1
, U
Q2
)
Con este conmutador las válvulas se pueden asignar en grupos
a las tensiones de alimentación U
Q1
y U
Q2
.
S4 S5 S6
S8
UQ1
UQ2
OF FON
X71
X72
A
B
X10

Puesta en servicio y manejo
360 AVENTICS | CANopen | R412005742–BDL–001–AD
Todas las válvulas en estado de suministro tienen asignada la
tensión U
Q1
.
Los conmutadores S4...S6 se suministran en la posición
U
Q1
.
De este modo se asigna la alimentación de válvulas:
1. Abra la tapa roscada inferior B (véase Fig. 9 en la
página 359).
2. Con ayuda de los conmutadores S4, S5 y S6, asigne a cada
grupo de válvulas una de las dos tensiones de alimentación
U
Q1
o U
Q2
(véase Tab. 14 y Fig. 9 en la página 359).
Tabla 14: Asignación de los conmutadores S4, S5 y S6
Conmutador
Byte
Lugares de placas de conexión
para válvulas biestables
(bobinas 12, 14)
Lugares de placas de conexión
para válvulas monoestables
(bobinas 14)
con 24
S4 0 1 – 4 1 – 8
S5 1 5–8 09–16
S6 2 9 – 12 17 – 24
con 32
S6 2 9 – 12 17 – 24
3 13 – 16 25 – 32
NOTA
Tensión en los conmutadores
Se puede dañar los conmutadores si se ajusta una tensión
durante su funcionamiento.
O ¡Haga uso exclusivo de los conmutadores cuando estos
estén exentos de tensión!

Puesta en servicio y manejo
AVENTICS | CANopen | R412005742–BDL–001–AD 361
Español
Para la asignación de los conmutadores S4, S5 y S6 y la
alimentación de válvulas montadas figuran ejemplos de
24 bobinas de válvula pilotables en Tab. 15 y Tab. 16 en las
páginas 362, 363 y de 32 bobinas de válvula pilotables en
Tab. 17 y Tab. 18 en las páginas 364 y 365 (ejemplos 1 a 3 /
ejemplos 4 a 6, respectivamente). Allí se detallan los siguientes
ejemplos de combinaciones:
Visto desde el lado de la conexión eléctrica, deben
ordenarse primero las placas de conexión para válvulas
biestables y después aquellas para las válvulas
monoestables. El número máximo de bobinas referido a
todas las placas de conexión es de 24 (R412005747) o
32 (R412008080).
La asignación de conmutadores y alimentaciones de
válvulas cambia al utilizar ampliaciones de módulo (véanse
las instrucciones de servicio R412008961). Esto también es
válido para los ejemplos siguientes de las tablas 15 y 16.
Ejemplos
1)
1)
Según sus exigencias, también puede elegir otras combinaciones.
Placas de conexión Equipamiento de válvulas
Ejemplo 1 Placas de conexión para válvulas biestables Válvulas biestables
Ejemplo 2 Placas de conexión para válvulas biestables Válvulas monoestables
Ejemplo 3 Placas de conexión para válvulas biestables Válvulas monoestables y biestables
Ejemplo 4 Placas de conexión para válvulas monoestables Válvulas monoestables
Ejemplo 5 Placas de conexión para válvulas biestables Válvulas biestables
combinadas con
placas de conexión para válvulas monoestables Válvulas monoestables
Ejemplo 6 Placas de conexión para válvulas biestables Válvulas monoestables y biestables
combinadas con
placas de conexión para válvulas monoestables Válvulas monoestables

Puesta en servicio y manejo
362 AVENTICS | CANopen | R412005742–BDL–001–AD
Tabla 15: Ejemplos de la asignación de conmutadores y la alimentación de válvulas,
24 bobinas de válvula
Ejemplo 1 Ejemplo 2 Ejemplo 3
Conmutador
Byte
Dirección
Placa de conexión para válvulas biestables
Lugar de
válvula
1)
1)
Los campos en blanco indican lugares de válvula con válvulas biestables.
Los campos en gris indican lugares de válvula con válvulas monoestables.
Bobina LED
Lugar de
válvula
1)
Bobina LED
Lugar de
válvula
1)
Bobina LED
S4 0 A0.0 1 14
114114
A0.1 12 – 12
A0.2 2 14
214214
A0.3 12 – 12
A0.4 3 14
314314
A0.5 12 – 12
A0.6 4 14
414414
A0.7 12 – 12
S5 1 A1.0 5 14
514514
A1.1 12 – 12
A1.2 6 14
614614
A1.3 12 – –
A1.4 7 14
714714
A1.5 12 – –
A1.6 8 14
814814
A1.7 12 – –
S6 2 A2.0 9 14
914914
A2.1 12 – –
A2.2 10 14
10 14 10 14
A2.3 12 – 12
A2.4 11 14
11 14 11 14
A2.5 12 – 12
A2.6 12 14
12 14 12 14
A2.7 12 – –

Puesta en servicio y manejo
AVENTICS | CANopen | R412005742–BDL–001–AD 363
Español
Tabla 16: Ejemplos de la asignación de conmutadores y la alimentación de válvulas,
24 bobinas de válvula
Ejemplo 4 Ejemplo 5 Ejemplo 6
Conmutador
Byte
Dirección
Placa de conexión para
válvulas monoestables
Placa de conexión para válvulas biestables y
monoestables
Lugar de
válvula
1)
1)
Los campos en blanco indican lugares de válvula con válvulas biestables.
Los campos en gris indican lugares de válvula con válvulas monoestables.
Bobina LED
Lugar de
válvula
1)
Bobina LED
Lugar de
válvula
1)
Bobina LED
S4 0 A0.0
114114114
A0.1
214 12 12
A0.2
314214214
A0.3
414 12 –
A0.4
514314314
A0.5
614 12 –
A0.6
714414414
A0.7
814 12 12
S5 1 A1.0
914514514
A1.1
10 14 614 12
A1.2
11 14 714614
A1.3
12 14 814 12
A1.4
13 14 914714
A1.5
14 14 10 14 814
A1.6
15 14 11 14 914
A1.7
16 14 12 14 10 14
S6 2 A2.0
17 14 13 14 11 14
A2.1
18 14 14 14 12 14
A2.2
19 14 15 14 13 14
A2.3
20 14 16 14 14 14
A2.4
21 14 17 14 15 14
A2.5
22 14 18 14 16 14
A2.6
23 14 19 14 17 14
A2.7
24 14 20 14 18 14

Puesta en servicio y manejo
364 AVENTICS | CANopen | R412005742–BDL–001–AD
Tabla 17: Ejemplos de la asignación de conmutadores y la alimentación de válvulas,
32 bobinas de válvula
Ejemplo 1 Ejemplo 2 Ejemplo 3
Conmutador
Byte
Dirección
Placa de conexión para válvulas biestables
Lugar de
válvula
1)
1)
Los campos en blanco indican lugares de válvula con válvulas biestables.
Los campos en gris indican lugares de válvula con válvulas monoestables.
Bobina
LED
Lugar de
válvula
1)
Bobina
LED
Lugar de
válvula
1)
Bobina
LED
S4 0 A0.0 1 14
114114
A0.1 12 – 12
A0.2 2 14
214214
A0.3 12 – 12
A0.4 3 14
314314
A0.5 12 – 12
A0.6 4 14
414414
A0.7 12 – 12
S5 1 A1.0 5 14
514514
A1.1 12 – 12
A1.2 6 14
614614
A1.3 12 – –
A1.4 7 14
714714
A1.5 12 – –
A1.6 8 14
814814
A1.7 12 – –
S6 2 A2.0 9 14
914914
A2.1 12 – –
A2.2 10 14
10 14 10 14
A2.3 12 – 12
A2.4 11 14
11 14 11 14
A2.5 12 – 12
A2.6 12 14
12 14 12 14
A2.7 12 – –
3A3.0 13 14
13 14 13 14
A3.1 12 – –
A3.2 14 14
14 14 14 14
A3.3 12 – 12
A3.4 15 14
15 14 15 14
A3.5 12 – 12
A3.6 16 14
16 14 16 14
A3.7 12 – –

Puesta en servicio y manejo
AVENTICS | CANopen | R412005742–BDL–001–AD 365
Español
Tabla 18: Ejemplos de la asignación de conmutadores y la alimentación de válvulas,
32 bobinas de válvula
Ejemplo 4 Ejemplo 5 Ejemplo 6
Conmutador
Byte
Dirección
Placa de conexión para
válvulas monoestables
Placa de conexión para válvulas biestables y
monoestables
Lugar de
válvula
1)
1)
Los campos en blanco indican lugares de válvula con válvulas biestables.
Los campos en gris indican lugares de válvula con válvulas monoestables.
Bobina
LED
Lugar de
válvula
1)
Bobina
LED
Lugar de
válvula
1)
Bobina
LED
S4 0 A0.0
114114114
A0.1
2141212
A0.2
314214214
A0.3
414 12 –
A0.4
514314314
A0.5
614 12 –
A0.6
714414414
A0.7
8141212
S5 1 A1.0
914514514
A1.1
10 14 614 12
A1.2
11 14 714614
A1.3
12 14 814 12
A1.4
13 14 914714
A1.5
14 14 10 14 814
A1.6
15 14 11 14 914
A1.7
16 14 12 14 10 14
S6 2 A2.0
17 14 13 14 11 14
A2.1
18 14 14 14 12 14
A2.2
19 14 15 14 13 14
A2.3
20 14 16 14 14 14
A2.4
21 14 17 14 15 14
A2.5
22 14 18 14 16 14
A2.6
23 14 19 14 17 14
A2.7
24 14 20 14 18 14
3A3.0
25 14 21 14 19 14
A3.1
26 14 22 14 20 14
A3.2
27 14 23 14 21 14
A3.3
28 14 24 14 22 14
A3.4
29 14 25 14 23 14
A3.5
30 14 26 14 24 14
A3.6
31 14 27 14 25 14
A3.7
32 14 28 14 26 14

Puesta en servicio y manejo
366 AVENTICS | CANopen | R412005742–BDL–001–AD
7.1.5 Configuración del cierre de bus
Para minimizar las reflexiones de conductores y garantizar un
nivel de reposo definido en la línea de transferencia del
CANopen, se debe colocar un cierre de bus en ambos extremos
de la línea de transferencia.
En el acoplador de bus, el cierre de bus está integrado en el
aparato y se puede definir a través del conmutador S8.
Fig. 10: Conmutador S8 para cierre de bus
La configuración del cierre de bus se encuentra bajo el racor
PG B (véase 10).
O Configure el cierre de bus con el conmutador S8 (véase
Tab. 19).
El conmutador se suministra en la posición OFF, es decir, el
cierre de bus está desconectado.
S4 S5 S6
S8
UQ1
UQ2
OF FON
X71
X72
A
B
X10
Tabla 19: Posibilidades de configuración para el conmutador S8
Posición del
conmutador S8
Cierre de bus Cierre de bus Aplicación
OFF desconectado conectado Cuando el acoplador de bus está conectado con
otro módulo adicional y no supone el final de la
línea de transferencia.
ON conectado desconectado Cuando el acoplador de bus se encuentra al final
de la línea de transferencia.

Puesta en servicio y manejo
AVENTICS | CANopen | R412005742–BDL–001–AD 367
Español
7.2 Configuración del sistema de bus
Las configuraciones realizadas en el marco de la configuración
de master de bus del sistema completo se encuentran por
encima de las configuraciones en el acoplador de bus ya
descritas.
Todas las características del rendimiento y objetos para la
configuración del acoplador de bus se encuentran en el
Electronic Data Sheet (EDS).
Para el acoplador de bus existe este archivo con el nombre
RXyyRMV4_CO.EDS (yy = versión). El archivo EDS se puede
descargar en Internet de la dirección
www.aventics.com/mediadirectory.
Solamente personal cualificado en electrónica está
autorizado a llevar a cabo los trabajos de configuración,
teniendo en cuenta en todo momento la documentación del
explotador acerca de la configuración del master de bus, así
como las normas técnicas, reglamentos e indicaciones de
seguridad vigentes.
Antes de llevar a cabo la configuración se deben realizar y
finalizar los siguientes trabajos en el acoplador de bus:
W Ha montado el acoplador de bus y el sistema de válvulas
(véase “Montaje” en la página 344).
W Ha conectado el acoplador de bus (véase “Conexión eléctrica
de los módulos” en la página 347).
W Ha realizado los ajustes previos (véase “Realización de
ajustes previos” en la página 356).

Puesta en servicio y manejo
368 AVENTICS | CANopen | R412005742–BDL–001–AD
O Configure el sistema de bus según los requisitos del
sistema, las indicaciones del EDS, las especificaciones del
fabricante y todas las normas técnicas, reglamentos e
indicaciones de seguridad vigentes.
Tenga en cuenta la documentación del explotador acerca de
la configuración del master de bus.
7.3 Comportamiento en funcionamiento
El comportamiento de la conexión de bus depende tanto de las
propiedades de CANopen como de la configuración E/S.
Los telegramas CAN tienen una capacidad de datos máxima de
8 bytes. En CANopen, utilizando el procedimiento del CiA
DS-301 (Master/Slave Connection Set), se pueden definir
4 canales para el envío de PDO (Process Data Objects) y
4 canales para la recepción de PDO.
Dado que las conexiones de bus solamente ocupan como
máximo entradas de 3 bytes y salidas de 6 bytes, son suficientes
1 PDO de recepción y uno de emisión respectivamente.
Solamente son transmitidos los PDO con los módulos E/S
correspondientes conectados.
Además, cada nudo CAN tiene a disposición un canal SDO
(Service Data Object) para enviar y otro para recibir,
respectivamente.
NOTA
Error de configuración
Un acoplador de bus configurado de manera incorrecta
puede provocar funciones erróneas y daños en el sistema.
O ¡Por lo tanto, solamente personal cualificado en
electrónica podrá llevar a cabo la configuración!

Puesta en servicio y manejo
AVENTICS | CANopen | R412005742–BDL–001–AD 369
Español
7.4 Comportamiento del arranque
Comportamiento
después de
Power-on
Una vez conectados el conjunto (aplicación de la alimentación
de lógica de 24 V), se verifican los componentes del hardware.
Una vez que el test de arranque ha sido llevado a cabo con éxito
y se cuenta con tensión de bus, se determina la configuración
E/S. A continuación se inicializa el controlador CAN según los
ajustes previos en los conmutadores giratorios e interruptores
DIP.
Una vez inicializado con éxito, el módulo se encuentra en estado
„Preoperational“. Mediante un telegrama „NMT START“-
pasarse del master CAN al estado „Operational“. Los datos de
procesos solamente pueden transmitirse a través de PDO con el
módulo en modo „Operativo“.
En caso de error, el acoplador de bus se transfiere a la parada
del sistema (véase "Parada del sistema" en la página 374).
7.5 Ensayo y diagnóstico del acoplador de bus
7.5.1 Lectura de los indicadores de diagnóstico del
acoplador de bus
Los LED ubicados en la placa frontal del acoplador de bus
reproducen los mensajes enunciados en la tabla 20.
O Antes de la puesta en servicio y durante el funcionamiento
debe controlar periódicamente las funciones del acoplador
de bus mediante la lectura de los indicadores de
diagnóstico.

Puesta en servicio y manejo
370 AVENTICS | CANopen | R412005742–BDL–001–AD
Tabla 20: Significado de los LED de diagnóstico del acoplador de bus
LED Señal Descripción
U
L
/DIA verde Hay alimentación de lógica
rojo Sobrecarga de la alimentación del transmisor(diagnóstico
colectivo)
1)
apagado No hay alimentación de lógica
U
Q1
verde Alimentación de válvulas U
Q1
en regla
rojo Tensión inferior (12 V < U
Q1 < 18,5 V)
apagado Alimentación de válvulas U
Q1 < 12 V
U
Q2
verde Alimentación de válvulas U
Q2
en regla
rojo Tensión inferior (12 V < U
Q2
< 18,5 V)
apagado Alimentación de válvulas U
Q2
< 12 V
RUN verde Indicación de funcionamiento, el módulo se encuentra en estado
“Pre-Operational”.
intermitente verde~
3)
El módulo se encuentra en estado “Pre-Operational”.
(el slave está a la espera del telegrama del master CAN).
intermitente verde~~
4)
El módulo se encuentra en estado “Auto Buadrate Detection o LSS
Services
”(el ERROR LED parpadea también alternativamente).
Optional
intermitente verde+
5)
El módulo se encuentra en estado “STOPPED”.
apagado El módulo se encuentra en estado
“Initializing”.
ERR apagado ningún error de bus identificado
rojo El módulo se encuentra en estado
“Bus-Off” (inactivo en CAN).
ID nodo inválido (ID nodo = 0 no está permitido).
intermitente rojo+
4)
El módulo se encuentra en estado “Error passive” (al menos un
contador de errores ha alcanzado o sobrepasado el valor máximo).
intermitente rojo~~
3)
El módulo se encuentra en estado “Auto Baudrate Detection o LSS
Services
”(el RUN LED parpadea también alternativamente).
Optional
intermitente rojo++
5)
El módulo se encuentra en estado “Error Control Event”.
Ha aparecido un evento de supervisión/Heartbeat.
Condición: Object 1006 supported.
intermitente rojo+++
6
) El módulo se encuentra en estado “Sync Error”. No se ha enviado
el mensaje SYNC dentro del tiempo configurado.
1)
Esta indicación solamente aparece mientras la salida con sobrecarga se esté pilotando o mientras la
corriente total máx. de la alimentación de transmisor se traspase.
2)
intermitente verde~
3)
intermitente rojo~~ /intermitente
verde~~
4)
intermitente rojo+ / intermitente
verde+
5)
intermitente rojo++
6)
intermitente rojo+++
Parpadeo lento del indicador: 0,2 s encendido / 0,2 s apagado
Parpadeo rápido del indicador: 0,05 s encendido / 0,05 s apagado
Parpadeo del indicador: 0,2 s encendido / 1 s apagado
Parpadeo doble: 0,2 s encendido / 0,2 s apagado; 0,2 s encendido /
1 s apagado
Parpadeo triple: 0,2 s encendido / 0,2 s apagado; 0,2 s encendido /
0,2 s apagado; 0,2 s apagado / 1 s apagado

Puesta en servicio y manejo
AVENTICS | CANopen | R412005742–BDL–001–AD 371
Español
7.5.2 Comprobación de los sensores del módulo de
entrada
Para el control, en el módulo de entrada está disponible un LED
para cada entrada. Se iluminan cuando el nivel de señal es alto.
O La capacidad de funcionamiento y los efectos de los
sensores deben comprobarse antes de la puesta en servicio
mediante la lectura de los LED.
Fig. 11: Indicadores LED en el módulo de entrada M8 (izquierda) y M12
(derecha)
Tabla 21: Indicador LED en los módulos de entrada
LED Color Significado
Entrada amarillo Estado del nivel de señal alto

Puesta en servicio y manejo
372 AVENTICS | CANopen | R412005742–BDL–001–AD
7.5.3 Comprobación de los actuadores del módulo
de salida
O La capacidad de funcionamiento y los efectos del
nombramiento de actuadores deben comprobarse antes de
la puesta en servicio con ayuda de los indicadores LED en el
módulo de salida.
Fig. 12: Indicadores LED en el módulo de salida M8 (izquierda) y
M12 (derecha)
Tabla 22: Significado de los indicadores LED en el módulo de salida
LED Color Significado
U
Q1
verde Hay alimentación de carga U
Q1
rojo Diagnóstico: Sobrecarga/cortocircuito en
salida accionada O0, O1, O2 u O3
apagado No hay alimentación de carga U
Q1
(p. ej. parada de emergencia)
U
Q2
verde Hay alimentación de carga U
Q2
rojo Diagnóstico: Sobrecarga/cortocircuito en
salida accionada O4, O5, O6 u O7
apagado No hay alimentación de carga U
Q2
(p. ej.
parada de emergencia)
O0 bis O7 apagado Salida correspondiente nivel LOW
amarillo Salida correspondiente nivel HIGH
O
O
O
O
O
O
O
O
OO

Puesta en servicio y manejo
AVENTICS | CANopen | R412005742–BDL–001–AD 373
Español
7.6 Puesta en servicio del acoplador de bus
Antes de poner en servicio el sistema, se deben realizar y
finalizar los siguientes trabajos:
W Ha montado el acoplador de bus y el sistema de válvulas
(véase “Montaje del acoplador de bus en el sistema de
válvulas” en la página 344).
W Ha conectado el acoplador de bus (véase “Conexión eléctrica
de los módulos” en la página 347).
W Ha realizado los ajustes previos y la configuración (véase
“Realización de ajustes previos” en la página 356 y
“Configuración del sistema de bus” en la página 367).
W Ha configurado el master de bus de tal manera que las
válvulas y los módulos de entrada se piloten
adecuadamente.
W Ha llevado a cabo el ensayo de diagnóstico de los módulos
de entrada/salida (véase “Ensayo y diagnóstico del
acoplador de bus” en la página 369).
Solamente personal cualificado en electrónica o neumática
o bien otra persona vigilada y controlada por una persona
cualificada podrá realizar la puesta en servicio y su manejo
(véase “Cualificación del personal” en la página 333).

Puesta en servicio y manejo
374 AVENTICS | CANopen | R412005742–BDL–001–AD
1. Conecte la tensión de servicio.
2. Compruebe los indicadores LED en todos los módulos.
3. Conecte la alimentación de aire comprimido.
7.7 Parada del sistema
El estado “Parada del sistema” del acoplador de bus se señaliza
con los dos diodos luminosos RUN y ERR (véase Tab. 20 en la
página 370) parpadeando rápidamente a la vez.
Cuando el sistema se pare, las salidas quedarán protegidas
(= “0”) y se interrumpirá la comunicación del bus al master
CANopen.
Para salir del sistema hay que volver a poner en marcha la
unidad (Power-on).
Las paradas del sistema vienen provocadas por un error de
excepción del hardware o del firmware.
ATENCIÓN
Movimientos descontrolados de los actuadores al conectar
la neumática
Existe peligro de lesiones cuando el sistema se encuentra en
un estado indefinido o los accionamientos auxiliares
manuales están en la posición “1”.
O ¡Antes de conectar el sistema, asegúrese de que este se
encuentra en un estado definido!
O Ponga todos los accionamientos auxiliares manuales en
la posición “0”.
O Asegúrese de que no se encuentra ninguna persona
dentro de la zona de peligro cuando conecte la presión.
O También debe tener en cuenta las instrucciones y las
advertencias correspondientes de las instrucciones de
servicio de su VS.

Desmontaje y sustitución
AVENTICS | CANopen | R412005742–BDL–001–AD 375
Español
Error de excepción del
hardware
Durante el arranque del acoplador de bus (Power-on) se
comprueban los componentes del hardware. De producirse un
error, la unidad será colocado en modo de “Parada del sistema”.
Error de excepción del
firmware
Durante el funcionamiento del firmware se llevan a cabo
continuamente pruebas de plausibilidad. Si se detecta un error,
la unidad será colocado en modo de “Parada del sistema”.
7.7.1 Salida de la parada del sistema
O Vuelva a poner en marcha la unidad con “Power-on”.
8 Desmontaje y sustitución
En función de sus necesidades, puede sustituir el acoplador de
bus o montar más/otros módulos de entrada/salida.
La garantía de AVENTICS solo es válida para la
configuración entregada y las ampliaciones que se hayan
tenido en cuenta en la configuración. La garantía prescribe
después de realizar una modificación que vaya más allá de
estas ampliaciones.
Un acoplador de bus con 32 salidas solo puede conectarse
a un VS diseñado para 32 bobinas de válvula.

Desmontaje y sustitución
376 AVENTICS | CANopen | R412005742–BDL–001–AD
8.1 Sustitución del acoplador de bus
Fig. 13: Sustitución del acoplador de bus, ejemplo
1. Separe las conexiones eléctricas del acoplador de bus (4).
2. Afloje la placa final E (2) y, en caso de haberlos, todos los
módulos de entrada/salida a la izquierda del acoplador de
bus (cada 2 tornillos de hexágono interior DIN 912 – M4 (1),
ancho de llave 3) y retírelos de los tirantes (5).
3. Retire el acoplador de bus (4) de los tirantes (5).
ATENCIÓN
Tensión eléctrica existente y alta presión
Peligro de lesiones a través de un golpe eléctrico o caída de
presión repentina.
O ¡Conecte el sistema exento de presión y de tensión!
1 Tornillos de hexágono interior 4 Acoplador de bus
2 Placa final E 5 Tirantes
3 Junta 6 Placa final EP VS HF03 LG o HF04
4
1
2
3
3
6
5

Desmontaje y sustitución
AVENTICS | CANopen | R412005742–BDL–001–AD 377
Español
4. Desplace el nuevo acoplador de bus (4) hacia los tirantes (5).
5. Asegúrese de que
–los tirantes (5) están atornillados hasta el tope y
– las juntas (3) están encajadas correctamente.
6. En primer lugar, en caso de haberlos, desplace los módulos
de entrada/salida en el orden original y, a continuación, la
placa final E (2) de nuevo hacia los tirantes (5) y atorníllelos
(cada 2 tornillos de hexágono interior DIN 912 – M4 (1),
ancho de llave 3). Par de apriete: 2,5 a 3,0 Nm
7. Realice todos los ajustes previos en el nuevo acoplador de
bus (4) (véase “Realización de ajustes previos” en la página
356).
8. Establezca las conexiones de nuevo.
9. Compruebe la configuración y si es necesario modifíquela
(véase “Configuración del sistema de bus” en la página 367).

Desmontaje y sustitución
378 AVENTICS | CANopen | R412005742–BDL–001–AD
8.2 Montaje de módulo(s) de entrada/salida
Se debe ampliar el sistema de válvulas con un módulo de
entrada/salida más.
ATENCIÓN
Tensión eléctrica existente y alta presión
Peligro de lesiones a través de un golpe eléctrico o caída de
presión repentina.
O ¡Conecte el sistema exento de presión y de tensión!
ATENCIÓN
Entradas/salidas abiertas
Peligro de electrocución al tocarlas, pueden provocar un
cortocircuito y daños en el sistema.
O Cierre siempre las salidas o entradas que no utilice con
tapones de cierre M12 y M8 (ver accesorios), para
respetar la clase de protección IP65.

Desmontaje y sustitución
AVENTICS | CANopen | R412005742–BDL–001–AD 379
Español
Fig. 14: Montaje de módulo(s) de entrada/salida en VS HF03 LG o en VS HF04, ejemplo
En un sistema de válvulas puede haber un máximo de 6
módulos (módulos de entrada o salida) montados. ¡Tenga
en cuenta las cargas de corriente admisibles!
Tenga en cuenta 14 en la página 379.
1. Afloje la placa final E (2) del acoplador de bus (7) o del último
módulo de entrada (5)/salida (4) del sistema de válvulas
(2 tornillos de hexágono interior DIN 912 – M4 (1), ancho de
llave 3) y retírela de los tirantes (6).
1 Tornillos de hexágono interior 5 Módulo de entrada
2 Placa final E 6 Tirantes
3 Junta 7 Acoplador de bus
4 Módulo de salida
6
6
2
3
3
3
4
5
1
7

Desmontaje y sustitución
380 AVENTICS | CANopen | R412005742–BDL–001–AD
2. Atornille los tirantes (6) para módulos de entrada (5)/salida
(4) en los tirantes disponibles (6) (2 por cada módulo de
entrada (5)/salida(4)).
– ¡Asegúrese de que los tirantes (6) están atornillados hasta
el tope!
3. Desplace el (otro) módulo de entrada (5)/salida (4) hacia los
tirantes (6).
– ¡Asegúrese de que las juntas (3) estén encajadas
correctamente y los contactos estén conectados como es
debido!
4. Atornille de nuevo la placa final E (2) después del último
módulo de entrada (5) o salida (4) (2 tornillos de hexágono
interior DIN 912 – M4 (1), ancho de llave 3). Par de apriete:
2,5 a 3 Nm
5. Establezca las conexiones (véase “Conexión de la
alimentación de lógica y de carga del acoplador de bus” en
la página 350).
6. Modifique la configuración (véase "Configuración del
sistema de bus" en la página 367).

Cuidado y mantenimiento
AVENTICS | CANopen | R412005742–BDL–001–AD 381
Español
9 Cuidado y mantenimiento
9.1 Cuidado de los módulos
O Limpie el aparato periódicamente con un paño humedecido.
con agua o un detergente suave.
9.2 Mantenimiento del acoplador de bus
El acoplador de bus y los módulos E/S del VS HF03 LG y HF04
no requieren mantenimiento.
O No obstante, tenga en cuenta los intervalos de
mantenimiento y las especificaciones de toda la instalación.
ATENCIÓN
Tensión eléctrica existente y alta presión
Peligro de lesiones a través de un golpe eléctrico o caída de
presión repentina.
O Desconecte la presión y la tensión del sistema antes de
realizar trabajos de cuidado y mantenimiento.
NOTA
¡Daños en la superficie de la carcasa a consecuencia de
disolventes y detergentes agresivos!
Las superficies y juntas pueden resultar dañadas a
consecuencia de disolventes o detergentes agresivos.
O ¡No utilice nunca disolventes ni detergentes agresivos!

Datos técnicos
382 AVENTICS | CANopen | R412005742–BDL–001–AD
10 Datos técnicos
10.1 Parámetros
10.2 Acoplador de bus
Generalidades
Tipo de protección según EN 60
529 / IEC 529
IP 65 montado
Temperatura ambiente
U
0 C hasta +50 C sin condensación
Compatibilidad
electromagnética
Resistencia a interferencias EN 61131-2, EN 61000-6-2
Emisión perturbadora EN 61000-6-4
Sistema eléctrico
Tensión de servicio lógica U
L
24 V DC (+20 %/–15 %)
Tensión de servicio carga
U
Q1
U
Q2
24 V DC (+10 %/–10 %)
Tensión mínima de seguridad (SELV/PELV) según IEC 60364-4-41
Ondulación residual 0,5 %
Longitud de la línea de
alimentación de tensión
máx. 20 m

Datos técnicos
AVENTICS | CANopen | R412005742–BDL–001–AD 383
Español
10.3 Módulos de entrada óctuples,
RMV04-8DI_M8 y RMV04-8DI_M12
l
10.4 Módulos de salida óctuples,
RMV04-8DO_M8 y RMV04-8DO_M12
Sistema eléctrico
Entradas DIN EN 61131-2
(febrero 2004)
8 entradas digitales, tipo 3,
Interruptor de proximidad con doble cable con una corriente de reposo
de máx. 2,5 mA conectable.
La corriente total para todos los módulos de entrada está limitada a 0,7 A.
Retraso de entrada 0 – 1 3 ms
Retraso de entrada 1 – 0 3 ms
Longitudes de los cables
para conexión M8 y M12
máx. 30 m
Sistema eléctrico
Salidas DIN EN 61131-2
(febrero 2004)
8 salidas digitales
Tensión de salida Valor nominal 24 V
Caída de tensión cuando señal H 1,5 V
Corriente de salida Valor nominal 0,5 A
Por motivos térmicos, las salidas no se pueden cargar durante un
período de tiempo prolongado con corriente nominal.
Protección contra sobrecarga Desconexión al alcanzar 0,6 hasta 1,2 A
Reinicio automático con carga reducida
Longitudes de los cables para
conexión M8 y M12
máx. 30 m
Alimentación de tensión
U
Q1
und U
Q2
Valor nominal 24 V
(+20 %/-15 %)
Longitud de la línea de
alimentación de tensión
máx. 20 m

Repuestos y accesorios
384 AVENTICS | CANopen | R412005742–BDL–001–AD
11 Repuestos y accesorios
11.1 Acoplador de bus
11.2 Módulo de entrada/salida óctuple, 8DI/8DO
Número de
referencia
Acoplador de bus del VS para CANopen con pilotaje para 24 bobinas de válvula
1)
1)
Suministro incl. 2 tirantes, junta y manual
R412005747
Acoplador de bus del VS para CANopen con pilotaje para 32 bobinas de válvula
1)
R412008080
Accesorios
Enchufe de entrada de datos, M12×1, 5 pins, recto, con código A, cable Ø 6 – 8 mm 8942051602
Enchufe de salida de datos, M12×1, 5 pins, recto, con código A, cable Ø 6 – 8 mm 8942051612
Tapa de protección M12x1 1823312001
Placa final para acoplador de bus
2)
2)
Suministro incl. 2 tornillos de fijación y 1 junta
R412003490
Código de pedido Número de
referencia
Módulo de entrada óctuple (8 x M8)
1)
1)
Suministro incl. 2 tirantes y 1 junta.
8DI_M8 R412003489
Módulo de entrada óctuple (4 x M12)
1)
8DI_M12 R412000871
Módulo de salida óctuple (8 x M8)
1)
8DO_M8 R412005968
Módulo de salida óctuple (4 x M12)
1)
8DO_M12 R412000870
Accesorios
Conector recto, con cierre roscado autobloqueable,
M8x1, de 3 pins
Longitud del cable 2 m 894 620 360 2
Longitud del cable 5 m 894 620 361 2
Longitud del cable 10 m 894 620 362 2
Caperuza de protección M8x1 para entradas
(LE = 25 piezas)
R412003493
Caperuza de protección M12x1 para entradas
(LE = 25 piezas)
182 331 200 1
Distribuidor Y M12 con cierre roscado autobloqueable M12,
5 pins, 2 x caja de cables M12, 1 x enchufe de cable M12
894 100 239 2

Eliminación de residuos
AVENTICS | CANopen | R412005742–BDL–001–AD 385
Español
11.3 Enchufe Power para acoplador de bus y
módulo de salida
12 Eliminación de residuos
Elimine el aparato de acuerdo con las especificaciones de su
país.
13 Apéndice
Especificaciones de la configuración del master de bus con
CANopen
13.1 Electronic Data Sheet (EDS)
El EDS es un archivo ASCII específicado por CiA, que describe
los objetos/características de rendimiento de un aparato
CANopen. Para el acoplador de bus existe este archivo con el
nombre RXyyRMV4_CO.EDS (yy = versión). El archivo EDS se
puede descargar en Internet de la dirección www.aventics.com/
mediadirectory.
Número de
referencia
Conector por enchufe para alimentación de
tensión, casquillo M12×1, 4 pins para cable
Ø4–8mm, con código A
180
o
(X10, POWER) 894 105 432 4
90
o
(X10, POWER) 894 105 442 4
Conector por enchufe para módulos de
entrada/salida
Enchufe M12x1, recto 1 834 484 222
Enchufe M12x1, acodado 1 834 484 223
Enchufe Duo M12x1
para cable Ø 3 mm o 5 mm
1 834 484 246

Apéndice
386 AVENTICS | CANopen | R412005742–BDL–001–AD
13.2 Comportamiento en funcionamiento
El comportamiento de la conexión de bus depende tanto de las
propiedades de CANopen como de la configuración E/S.
Los telegramas CAN tienen una capacidad de datos máxima de
8 bytes. En CANopen, utilizando el procedimiento del CiA DS-
301 (Master/Slave Connection Set), se pueden definir 4 canales
para el envío de PDO (Process Data Objects) y 4 canales para la
recepción de PDO.
Dado que las conexiones de bus solamente ocupan como
máximo entradas de 3 bytes y salidas de 6 bytes, son suficientes
1 PDO de recepción y uno de emisión respectivamente.
Solamente son transmitidos los PDO con los módulos E/S
correspondientes conectados.
Además, cada nudo CAN tiene a disposición un canal SDO
(Service Data Object) para enviar y otro para recibir,
respectivamente.
13.2.1 Comportamiento del arranque
Comportamiento
después de Power-on
Una vez conectados el conjunto (aplicación de la alimentación
de lógica de 24 V), se verifican los componentes del hardware.
Una vez que el test de arranque ha sido llevado a cabo con éxito
y se cuenta con tensión de bus, se determina la configuración E/
S. A continuación se inicializa el controlador CAN según los
ajustes previos en los conmutadores giratorios e interruptores
DIP.
Una vez inicializado con éxito, el módulo se encuentra en estado
"Preoperational". Mediante un telegrama "NMT START" puede
pasarse del master CAN al estado "Operational". Los datos de
procesos solamente pueden transmitirse a través de PDO con el
módulo en modo "Operational".
En caso de error, el acoplador de bus se transfiere a la parada
del sistema (véase "Parada del sistema" en la página 374).

Apéndice
AVENTICS | CANopen | R412005742–BDL–001–AD 387
Español
13.2.2 Identificador CAN
Ocupación por defecto
del identificador
Tras la puesta en marcha, se ajustan los identificadores del
acoplador de bus por defecto que se atienen a los
procedimientos del CiA DS-301 (Master/Slave connection set).
La ocupación por defecto del identificador parte de una relación
entre master y slave en la que el sistema de válvulas se
comporta exactamente como un slave. Un master de aplicación
correspondiente, master DBT o master NMT puede calcular el
identificador a través del ID nodo del slave. La distribución por
defecto del identificador no permite la comunicación de los
slaves entre sí. A través del SDO, un master DBT puede
modificar los identificadores del acoplador de bus de manera
discrecional, diferente de la distribución por defecto, de manera
que también es posible una comunicación directa de los datos
de proceso entre slaves.
La ocupación por defecto del identificador (longitud de
identificación 11 bit correspondiente a un área de 0 a 2047)
tiene lugar según las indicaciones del CiA DS-301 (Master/
Slave connection set).
Los identificadores de los canales PDO así como aquellos para
el SYNC Object se pueden redefinir a voluntad a través del
Object Dictionary (para ejemplo véase Tab. 23 en la página 387).
Tabla 23: Ocupación estándar del identificador según las
especificaciones del CiA DS-301
Byte en hex Byte en bit Significado
de hasta de hasta
0Servicios NMT
1 0x7F 1 127 Reservado por CAL
0x80 128 Mensaje SYNC
0x81 0xFF 129 255 Mensajes de emergencia
0x100 256 Time Stamp
0x181 0x1FF 385 511 PDO 1 (transmitir)
0x200 512 Reservado por CAL
0x201 0x27F 513 639 PDO 1 (recibir)

Apéndice
388 AVENTICS | CANopen | R412005742–BDL–001–AD
En el acoplador de bus el PDO 1 está ocupado por defecto para
enviar y recibir respectivamente.
0x280 640 Reservado por CAL
0x281 0x2FF 641 767 PDO 2 (transmitir)
0x300 768 Reservado por CAL
0x301 0x37F 769 895 PDO 2 (recibir)
0x380 896 Reservado por CAL
0x381 0x3FF 897 1023 PDO 3 (transmitir)
0x400 1024 Reservado por CAL
0x401 0x47F 1025 1151 PDO 3 (recibir)
0x480 1152 Reservado por CAL
0x481 0x4FF 1153 1279 PDO 4 (transmitir)
0x500 1280 Reservado por CAL
0x501 0x57F 1281 1407 PDO 4 (recibir)
0x580 1408 Reservado por CAL
0x581 0x5FF 1409 1535 SDO (transmitir)
0x600 1536 Reservado por CAL
0x601 0x67F 1537 1663 SDO (recibir)
0x680 0x6E0 1664 1760 Reservado para SDO
0x701 0x77F 1793 1919 Node Guarding
0x760 0x7EF 1888 2031 Reservado para NMT
0x7F0 0x7FF 2032 2047 Reservado para CAL
Tabla 23: Ocupación estándar del identificador según las
especificaciones del CiA DS-301
Byte en hex Byte en bit Significado
de hasta de hasta
Tabla 24: Definiciones de identificador independientes de ID nodo
Object Identifier Dirección
NMT 0 Enviar/recibir
SYNC 128 Recibir

Apéndice
AVENTICS | CANopen | R412005742–BDL–001–AD 389
Español
Tabla 25: Definiciones de identificador dependientes de ID nodo
Object Identifier Dirección
Emergency 128 + Node-ID Enviar
NMT Node Guarding 1792 + Node-ID Enviar/recibir
SDO 1408 + Node-ID Enviar
SDO 1536 + Node-ID Recibir
PDO 1 384 + Node-ID Enviar
PDO 2 640 + Node-ID Enviar
PDO 3 896 + Node-ID Enviar
PDO 4 1152 + Node-ID Enviar
PDO 1 512 + Node-ID Recibir
PDO 2 768 + Node-ID recibir
PDO 3 1024 + Node-ID Recibir
PDO 4 1280 + Node-ID Recibir
Tabla 26: Ejemplo: ID nodo conectada = 4
Object Identifier Dirección
Emergency 132 Enviar
NMT Node Guarding 1796 Enviar/recibir
SDO 1412 Enviar
SDO 1540 Recibir
PDO 1 388 Enviar
PDO 2 644 Enviar
PDO 3 900 Enviar
PDO 4 1156 Enviar
PDO 1 516 Recibir
PDO 2 772 Recibir
PDO 3 1028 Recibir
PDO 4 1284 Recibir

Apéndice
390 AVENTICS | CANopen | R412005742–BDL–001–AD
13.3 Object Dictionary
Mediante el Object Dictionary (OD), puede determinarse, entre
otras funciones, qué objetos existentes pueden ser puestos a
disposición de la comunicación y de qué modo.
El OD está organizado en forma de tabla. Los registros son
direccionados con un índice de 16 bit (dirección de filas de la
tabla) y un subíndice de 8 bit (dirección de columnas de la tabla).
Perfiles El OD está compuesto de grupos de objetos, denominados
perfiles. Estos perfiles describen las características de un
aparato.
Perfiles de aparatos Aquí solamente se mencionan las normas CiA:
W DS-301 Perfil de comunicación CANopen
W DSP-306 Electronic Data Sheet
W DS-401Perfil de aparatos para módulos E/S digitales y
analógicos
Tabla 27: Object Dictionary Index
Índice en Hex Objeto
de hasta
0000 No utilizado
0001 001F Tipos de datos estáticos
0020 003F Tipos de datos complejos
0040 005F Tipos de datos específicos del fabricante
0060 007F Tipos de datos estáticos específicos del perfil
0080 009F Tipos de datos complejos específicos del perfil
00A0 0FFF Reservado
1000 1FFF Perfil de comunicación (CiA DS-301)
2000 5FFF Parámetros específicos del fabricante
6000 9FFF Parámetros de los perfiles de aparatos
estandarizados
A000 FFFF Reservado

Apéndice
AVENTICS | CANopen | R412005742–BDL–001–AD 391
Español
Clases de aparatos Los perfiles de aparatos describen las características
especiales o los parámetros de una clase de aparatos.
Hasta el momento han sido definidos los siguientes perfiles de
aparatos:
W Aparatos E/S digitales o analógicos
W Accionamientos
W Aparatos de mando
W Sensores
W Regulador
Otros perfiles de aparatos, p. ej. en el ámbito de la tecnología
médica y de la marina están en preparación.
Perfiles de comunicación Todos los perfiles de aparatos tienen el perfil de comunicación
según CiA DS-301en común. Con el perfil de comunicación
pueden consultarse y ajustarse datos básicos de los aparatos
como, p. ej.:
W Denominación de los aparatos
W Versión de hardware/software
W Estado de errores
W Identificador CAN utilizado
13.3.1 Objetos OD generales
Se establecen diversos registros en OD mediante el CiA DS-301.
El OD dispone de constantes, registros descriptibles, registros
legibles y registros descriptibles y legibles.
A través de las constantes y de los registros legibles, el usuario
puede conseguir informaciones sobre, p. ej. los estados de los
módulos e identificaciones de versión.
Los registros descriptibles sirven para el pilotaje y la
configuración del módulo que difiere de los ajustes por defecto.
Aquí el usuario puede, p. ej. redefinir la ocupación de objetos,
cambiar los identificadores, conectar y desconectar el
diagnóstico, etc. Si se produce una pérdida de tensión, todos los
valores de OD modificados por el usuario o condicionados por la
situación durante el tiempo de ejecución se pierden.

Apéndice
392 AVENTICS | CANopen | R412005742–BDL–001–AD
Tras volver a realizar la conexión, todos los objetos disponen del
valor por defecto.
Pueden conseguirse informaciones para el OD en las Electronic
Data Sheets correspondientes (RXxxRMV4_CO.EDS). Estos
archivos se encuentran en formato ASCII y describen todos los
objetos del acoplador de bus CANopen.
13.3.2 Objetos OD específicos de fabricante
Además de los objetos OD especificados por el CiA, existe un
sector reservado para el fabricante. En él, pueden registrarse
objetos específicos de un aparato, que, por tanto, son accesibles
para el usuario.
En las páginas siguientes se representa la estructura de bits de
MSR y MCR.
Tabla 28: Objetos OD generales
Índice en Hex Subíndice en Hex Descripción del objeto
1000 0 Device Type: 0x30191:
Nur digitale IO
1008 0 Device Name: RMV04-CO
1009 0 Hardware Version: 1.1
100A 0 Software Version: 1.1
1018 1 Vendor ID: 0x24
2 Product Code: 0x02
3 Revision Number: 0x11

Apéndice
AVENTICS | CANopen | R412005742–BDL–001–AD 393
Español
Tabla 29: Objetos OD específicos del fabricante
Índice
en Hex
Subíndice
en Hex
Descripción del objeto
1002 0 Manufacturer Status Register (MSR)
No se encuentra en el ámbito del OD reservado
para el fabricante. La codificación de este
objeto incumbe sin embargo al fabricante.
2000 0 Module Control Register (MCR)
Mediante el MCR se puede modificar el
comportamiento de los acopladores de bus.
2020 Diagnostic Information
0 Cantidad de registros de diagnóstico
1 Diagnostic Status
Suministra información superior sobre los
diagnósticos presentes.
El estado de diagnóstico se envía tras la
modificación de un caso de diagnóstico
mediante el Emergency Object. Se pueden
consultar más detalles sobre el caso de
diagnóstico ocurrido mediante el subíndice
siguiente por SDO.
2 Diagnostic Data
Información de error detallada.
2030 Configuration Information
0 Cantidad de módulos identificados
1 Configuration Data
Un byte de identificación por módulo.
La lista de configuraciones se puede leer
mediante un Upload Multiplexed Domain
Segment Protocol.
2040 Parameter Information
0 Parameter Data Length
1 Parameter Data
Mediante el byte de parámetro se puede
conectar y desconectar el diagnóstico.
2 Device Parameter Data
Con el acoplador de bus CANopen idéntico con
subíndice 1.

Apéndice
394 AVENTICS | CANopen | R412005742–BDL–001–AD
13.3.3 Objetos OD específicos de aparato:
Los siguientes objetos han sido tomados directamente del perfil
del CiA DS-401, versión 2.0.
Módulos de entrada
digitales
Object 6000h: Read Input 8 Bit
Este objeto lee el estado de los conductos de entrada en grupos
de 8 cada uno como información de 8 bits. Como máximo
pueden direccionarse 254 grupos, es decir 254 x 8 = 2032
entradas. Este objeto es obligatorio para módulos de entrada
digitales y debe registrar todos los conductos de entrada
conectados.
1 = entrada invertida
0 = entrada no invertida
Tabla 30: Objetos Read Input 8 Bit – Object Description
Object Description
INDEX 6000h
Name Read Input 8 Bit
Object Code Array
Data Type Unsigned 8
Category Conditional: Device with digital inputs
Tabla 31: Objetos Read Input 8 Bit – Entry Description
Entry Description
Sub-Index 0h
Description Number of Input 8 Bit
Access ro
Entry Category Mandatory
PDO Mapping No
Value Range 1h to FEh
Default Value No
Sub-Index 1h – 3h
Description Read Input 1h to 18h
Access ro
Entry Category Mandatory / Optional ab 2h
PDO Mapping Default

Apéndice
AVENTICS | CANopen | R412005742–BDL–001–AD 395
Español
Módulos de entrada
digitales
Object 6100h: Read Input 16 Bit
Este objeto lee el estado de los conductos de entrada en grupos
de 16 conductos cada uno como información de 16 bits.
Como máximo pueden dirigirse 254 grupos, es decir,
254 x 16 = 4064 entradas.
Cuando este objeto no es compatible, el aparato se comporta
según los valores por defecto.
1 = entrada invertida
0 = entrada no invertida
Value Range Unsigned 8
Default Value No
Tabla 31: Objetos Read Input 8 Bit – Entry Description (Cont.)
Entry Description
Tabla 32: Objetos Read Input 16 Bit – Object Description
Object Description
INDEX 6100h
Name Read Input 16 Bit
Object Code Array
Data Type Unsigned 16
Category Optional
Tabla 33: Objetos Read Input 16 Bit – Entry Description
Entry Description
Sub-Index 0h
Description Number of Input 16 Bit
Access ro
Entry Category Mandatory
PDO Mapping No
Value Range 1h to FEh
Default Value No
Sub-Index 1h – 2h
Description Read Input 1h to 20 h
Access ro
Entry Category Mandatory / Optional ab 2h

Apéndice
396 AVENTICS | CANopen | R412005742–BDL–001–AD
Módulos de salida
digitales
Object 6200h: Write Output 8 Bit
Este objeto define el estado de los conductos de salida en
grupos de 8 conductos cada uno como información de 8 bits (1
Byte). Como máximo pueden dirigirse 254 grupos, es decir,
254 x 8 = 2032 salidas.
PDO Mapping Default
Value Range Unsigned 16
Default Value No
Tabla 33: Objetos Read Input 16 Bit – Entry Description
Entry Description
Tabla 34: Objetos Write Output 8 Bit – Object Description
Object Description
INDEX 6200h
Name Read Input 8 Bit
Object Code Array
Data Type Unsigned 8
Category Conditional: Device with digital inputs
Tabla 35: Objetos Write Output 8 Bit – Entry Description
Entry Description
Sub-Index 0h
Description Number of Input 8 Bit
Access ro
Entry Category Mandatory
PDO Mapping No
Value Range 1h to FEh
Default Value No
Sub-Index 1h – 6h
Description Read Input 1h to 48 h
Access ro
Entry Category Mandatory / Optional ab 2h
PDO Mapping Default

Apéndice
AVENTICS | CANopen | R412005742–BDL–001–AD 397
Español
Módulos de salida
digitales
Object 6300h: Write Output 16 Bit
Este objeto define el estado de los conductos de salida en
grupos de 16 conductos cada uno como información de 16 bits
(2 Byte). Como máximo pueden dirigirse 255 grupos, es decir,
255 x 16 = 4080 salidas.
Value Range Unsigned 8
Default Value No
Tabla 35: Objetos Write Output 8 Bit – Entry Description (Cont.)
Entry Description
Tabla 36: Objetos Write Output 16 Bit – Object Description
Object Description
INDEX 6300h
Name Read Input 16 Bit
Object Code Array
Data Type Unsigned 16
Category Optional
Tabla 37: Objetos Write Output 16 Bit – Entry Description
Entry Description
Sub-Index 0h
Description Number of Input 16 Bit
Access ro
Entry Category Mandatory
PDO Mapping No
Value Range 1h to FEh
Default Value No
Sub-Index 1h – 3h
Description Read Input 1h to 48 h
Access ro
Entry Category Mandatory / Optional ab 2h
PDO Mapping Default
Value Range Unsigned 16
Default Value No

Apéndice
398 AVENTICS | CANopen | R412005742–BDL–001–AD
13.4 Diagnóstico CANopen
El acoplador de bus apoya el diagnóstico. Este puede ser
conectado o desconectado a través del bit de parámetros 2040.
Por defecto: diagnóstico desactivado
Los diagnósticos pendientes son mostrados en los LED
incluso con la función de mensajes de diagnóstico al
master desactivada.
13.4.1 Tipo de funcionamiento CANopen
A través del conmutador DIP S3 son ajustados los valores por
defecto, los cuales deben ser aceptados por el acoplador de bus
tras el Power-on.
Estos ajustes se pueden modificar a través del bus en
correspondencia con las especificaciones de CANopen.
Tabla 38: Asignación de las posiciones del conmutador S3
OFF
ON
Bit 8Bit 7Bit 6Bit 5Bit 4Bit 3Bit 2Bit 1
Tipo de servicio Diag. Res. Velocidad en baudios
Tabla 39: Combinaciones del conmutador para el tipo de servicio
Bit 8 Bit 7 Bit 6 Transmission Type
Comportamiento
de transmisión
de entrada
ON ON ON reserviert
ON ON OFF reserviert
ON OFF ON reserviert
ON OFF OFF reserviert
OFF ON ON 253 (RTR solo asincrónico)
OFF ON OFF SYNC 1 (cíclico sincrónico) todos PDO
OFF OFF ON 255 (asincrónico según
perfil 401)
1 PDO
OFF OFF OFF 255 (asincrónico según
perfil 401)
todos PDO

Apéndice
AVENTICS | CANopen | R412005742–BDL–001–AD 399
Español
Transmission Type El preajuste para el parámetro "Transmission Type" es válido
para todos los PDO del slave correspondiente. Un ajuste
referido al PDO de este parámetro debe realizarse a través del
bus con el servicio CANopen correspondiente.
A través del conmutador DIP S3 pueden seleccionar cuatro tipos
de ajuste (Transmission Types) por defecto:
W Asíncrono, según el perfil 401
W Cuando una entrada digital modifica su valor, este PDO debe
ser transmitido inmediatamente
W Cíclico síncrono
W Asíncrono solo RTR
Comportamiento de
transmisión de entrada
A través del parámetro “comportamiento de transmisión de
entrada” puede ajustarse el comportamiento de transmisión en
caso de modificación de una entrada. Los Transmission Types
restantes pueden ajustarse a través del bus según las
indicaciones del CiA DS-401.
Son posibles los siguientes ajustes:
W Todos los PDO, es decir, en caso de modificación de una o
varias entradas, el slave envía todos los PDO activos (todas
las entradas)
W 1 PDO, es decir, en caso de modificación de una o varias
entradas, el slave envía solo el/los PDO en el cual/los cuales
se ha/han realizado los cambios. Este ajuste solo es
relevante en el modo de servicio asíncrono. En el modo de
servicio síncrono se envían siempre todos los PDO de
entrada como respuesta al telegrama SYNC.
13.5 EMCY Error Codes
Con el Power-on y con la aparición de un error, el slave envía un
telegrama de emergencia (EMCY). La estructura del telegrama
EMCY corresponde a las especificaciones del perfil de
comunicación CANopen según CiA DS-301.
La codificación de cada uno de los estados de error puede
consultarse en la siguiente tabla:
La página se está cargando...

Apéndice
AVENTICS | CANopen | R412005742–BDL–001–AD 401
Español
13.6 Volumen de funciones
Tabla 41: Rendimiento y funciones
Rendimiento/función Características Comentarios
Independiente del protocolo
Tasa de baudio en kBaud 10, 20, 50, 125, 250,
500, 1000
CANopen
Datos de entrada máx. 3 Byte
Datos de salida máx. 6 Byte
Diagnóstico 1 Byte
Información configuración
actual
sí
CANopen
Modo asíncrono sí Configurable individualmente para cada PDO
Modo síncrono sí Configurable individualmente para cada PDO
Cantidad SDO (enviar) 1
Cantidad SDO (recibir) 1
Cantidad PDO (enviar) 4 (máx.) Los PDO pueden configurarse a voluntad
(asíncrono, síncrono, cíclico síncrono, acíclico
síncrono, etc.)
Cantidad PDO (recibir) 4 (máx.) Los PDO pueden configurarse a voluntad
(asíncrono, síncrono, cíclico síncrono, acíclico
síncrono, etc.)
Emergency Object 1
Time Stamp no no es compatible
Objeto SYNC 1 Solamente es compatible la recepción pero
no el envío del objeto SYNC.
Apoyo de servicio NMT Detener
Iniciar
Enter Pre-Operational
Reset Node
Reset Communication
Mapping por defecto y variable sí
Node Guarding sí
Simple Boot Up sí
Extended Boot Up no
Device Profile sí CiA DS-401

Apéndice
402 AVENTICS | CANopen | R412005742–BDL–001–AD
13.7 Objetos específicos del fabricante
13.7.1 Manufacturer Status Register (MSR)
El MSR se encuentra en Índice 1002 Subíndice 0 del OD. De los
4 bytes que ocupan las informaciones de estado, en este
momento solo se utiliza el 1er byte. Aquí están codificados el
estado del módulo y 1 bit para un mensaje de la colección de
errores.
Tabla 42: Manufacturer Status Register
MS LS
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
Byte Significado
Bit 2Bit 1Bit 0
000Inicialización
001Desconectado
010Conectando Actualmente
011Preparando sin usar
100Stopped
101Pre-Operational
110Operational
111Estado indefinido
Bit 3 bis Bit 6 Reservado
Bit 7 Bit colector de errores
0Ningún error
1 Existe, como mínimo, 1 error

Apéndice
AVENTICS | CANopen | R412005742–BDL–001–AD 403
Español
13.7.2 Module Control Register (MCR)
El Índice 2000 Subíndice 0 del OD contiene el Module Control
Register (MCR) con una amplitud de 16 bits. Con este módulo se
puede cambiar el comportamiento del acoplador de bus en caso
de servicio y en caso de error. Tab. 43 ofrece una vista general
sobre el significado de los bits individuales.
Tabla 43: Module Control Register
Low Byte
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
High Byte
Bit 15 Bit 14 Bit 13 Bit 12 Bit 11 Bit 10 Bit 9 Bit 8
Lowbyte Significado
Bit 0 Estado del módulo en caso de error
0 Pre-Operational
1Operational
Bit 2 Bit 1 Salidas en caso de error
0 0 CLAB: Anular las salidas (por defecto)
01Last State:
Las salidas mantienen su último estado
1 0 Reservado
1 1 Reservado
Bit 3 Reacción EMCY en caso de error
0 Enviar telegrama de emergencia
1 No enviar telegrama de emergencia
Bit 4 bis Bit 7 Reservado (fijo en 0)
Bit 8 Comportamiento de transmisión de entrada
0 Una modificación de entrada provoca: el envío de
todos los PDO activos
1 Solamente el envío del PDO al cual está asignada la
entrada (por defecto)
Bit 9 bis 15 Reservado (fijo en 0)

Apéndice
404 AVENTICS | CANopen | R412005742–BDL–001–AD
13.7.3 Diagnostic information
Mediante el índice 2020 del OD se puede leer la información de
diagnóstico. El acoplador de bus pone a disposición 1 byte de
diagnóstico.
Number of Diagnostic
Entries
El índice 2020 subíndice 0 contiene la longitud de los datos de
diagnóstico.
W Longitud = 1, cuando el diagnóstico está activado
W Longitud = 0, cuando el diagnóstico no está activado
Tabla 44: Comportamiento del acoplador de bus en caso de error
Caso de
error
Observación
Módulo
Status
Salidas
EMCY-
Reacción
BUS OFF El controlador CAN se encuentra en estado
"bus off", es decir, el "transmit error
counter" del controlador CAN ha
sobrepasado el límite de 256.
según MCR
Bit 0
según MCR
Bit 2, 1
según MCR
Bit 3
Missing PDO
(SYNC Mode)
No se ha recibido el PDO con servicio
síncrono cíclico.
según MCR
Bit 0
según MCR
Bit 2, 1
según MCR
Bit 3
Guarding
Failure
El tiempo de control Node-Guard ha
transcurrido. Solamente aparece cuando
Node Guarding ha sido activado por el
master CAN.
según MCR
Bit 0
según MCR
Bit 2, 1
según MCR
Bit 3
Tabla 45: Reacción del acoplador de bus en servicio NMT
(sin caso de error)
Servicio NMT
Estado del
módulo
Salidas Reacción
NMT_
RESET_NODE
pre-operational todas salidas
borradas
ningún
EMCY
NMT_
RESET_COM
pre-operational según MCR Bit 2,1 ningún
EMCY
NMT_
STOP
pre-operational según MCR Bit 2,1 ningún
EMCY
NMT_
PRE-
OPERATIONAL
pre-operational según MCR Bit 2,1 ningún
EMCY

Apéndice
AVENTICS | CANopen | R412005742–BDL–001–AD 405
Español
Diagnostic Status El índice 2020 subíndice 1 contiene el estado de diagnóstico.
W 00hex, Ningún diagnóstico activado
W 01hex, diagnóstico activado
Diagnostic Data El índice 2020 subíndice 2 posibilita la lectura del byte de
diagnóstico del acoplador de bus. estos están codificados en un
byte como en Tab. 42.
Configuration Information
A través del índice 2030 del OD se puede leer la información
sobre la configuración del hardware del acoplador de bus.
Cantidad de módulos
hallados
El índice 2030 subíndice 0 contiene la cantidad de módulos
encontrados.
Cantidad = 1...7 (3 entrada + 3 salida + 1 portaválvulas)
Tabla 46: Codificación del byte de diagnóstico
Byte Significado
Bit 0 0 nigún diagóstico
1 Cortocircuito de las válvulas o una salida digital
(diagnóstico colectivo)
Bit 1 0 nigún diagóstico
1 Tensión inferior de alimentación de carga U
Q1
1)
1)
Al conectar tras aprox. 110 ms, al desconectar tras aprox. 120 ms
Bit 2 0 nigún diagóstico
1 Tensión inferior de alimentación de carga U
Q2
1)
Bit 3 0 nigún diagóstico
1 Falta alimentación de carga U
Q1
Bit 4 0 nigún diagóstico
1 Falta alimentación de carga U
Q2
Bit 5 0 nigún diagóstico
1 Sobrecarga en la entrada del sensor
Bit 6 0 nigún diagóstico
1
Bit 7 0 nigún diagóstico
1

Apéndice
406 AVENTICS | CANopen | R412005742–BDL–001–AD
Configuration Data El índice 2030 subíndice 1 contiene el identificador del
hardware.
0x00 Elemento vacío
0x02 8 DI
0x08 8 DO
0x2A Acoplador de bus: Salidas de 3 bytes para válvulas
13.7.4 Parameter Information
A través del índice 2040 del OD se configura el acoplador de bus.
Parameter Data Length El índice 2040 subíndice 0 suministra el número de datos de
parametrización: Cantidad = 1
Parameter Data El índice 2040 subíndices 1 y 2 tienen la misma función. En
ellos se puede escribir los datos de parametrización y, de este
modo, conectar o desconectar el diagnóstico.
Tabla 47: Parameter Data, índice 2040 subíndice 1, 2
Byte Significado
Bit 0 Cortocircuito de las válvulas o una salida digital
(diagnóstico colectivo)
0 Diagnóstico bloqueado
1Diagnóstico liberado
Bit 1 Tensión inferior de alimentación de carga U
Q1
0 Diagnóstico bloqueado
1Diagnóstico liberado
Bit 2 Tensión inferior de alimentación de carga U
Q2
0 Diagnóstico bloqueado
1Diagnóstico liberado
Bit 3 Alimentación de carga U
Q1
0 Diagnóstico bloqueado
1Diagnóstico liberado
Bit 4 Alimentación de carga U
Q2
0 Diagnóstico bloqueado
1Diagnóstico liberado
Bit 5 Sobrecarga de la alimentación del sensor
0 Diagnóstico bloqueado
1Diagnóstico liberado

Índice temático
AVENTICS | CANopen | R412005742–BDL–001–AD 407
Español
14 Índice temático
W A
Abreviaturas 331
Acoplador de bus
Configuración 367
Datos técnicos 382
Función 344
Repuestos,
accesorios 384
Rotulación 345
Sustitución 376
Advertencias,
definiciones 329
Ajuste de la velocidad en
baudios 358
Ajustes previos
Ajuste de la velocidad en
baudios 358
Asignación de la
alimentación de
válvulas 359
Cierre de bus 366
Diagnóstico 358
Dirección de
estación 357
W C
CANopen
Configurar la dirección
de estación 357
Diagnóstico 398
Identificador CAN 387
Tipo de servicio 398
Características 382
Componentes
Módulo de entrada 342
Comportamiento en
funcionamiento, conexión
de bus 368, 386
Conexión eléctrica
Acoplador de bus como
estación intermedia 349
Acoplador de bus como
última estación 349
Alimentación de lógica y
de carga 350
Alimentación de
tensión 354
Módulos de entrada/
salida 352
Configuración 367
Configuración del cierre de
bus 366
Configurar ID nodo 357
Configuration
Information 405
Conmutador de modo 358
Cualificación,
personal 333
W D
Diagnóstico
Ajustar 358
Ajuste 358
CANopen 398
Diagnostic
Information 404
Módulo de entrada/
salida 369
W E
Electronic Data Sheet
(EDS) 385
EMCY, Emergency-

Índice temático
408 AVENTICS | CANopen | R412005742–BDL–001–AD
Telegramm 399
Enchufe del aparato, X10
(POWER) 350
Error Code, EMCY 399
W I
Identificador CAN 387
Instrucciones de
seguridad
Generalidades 333
Limpieza 336
W M
Manufacturer Status
Register (MSR) 402
Medidas, VS con
CANopen 345
Module Control Register
(MCR) 403
Módulo de entrada
Descripción 342
Ensayo y
diagnóstico 371
Módulo de salida
Conexión de la
alimentación de
carga 354
Datos técnicos 383
Ensayo y
diagnóstico 372
Módulos de entrada/salida
Ensayo y
diagnóstico 369
Montaje 378
Repuestos,
accesorios 384
Rotulación 345
Montaje
Conexión de los módulos
de entrada/salida 352
Conexión FE 355
Conexiones
eléctricas 347
Posibilidades de
montaje 344
W O
Objetos OD
Específicos de
aparato 394
Específicos del
fabricante 402
Ocupación de la conexión
FE 355
W P
Parada del sistema 374
Parameter,
Information 406
Puesta en servicio 373
W R
Rotulación
Acoplador de bus 345
Módulos 345 345
W S
Sustitución, acoplador de
bus 376
W U
Utilización
Conforme a las
especificaciones 332
No conforme a las
especificaciones 332
W V
Volumen de
funciones 401
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
Transcripción de documentos
AVENTICS | CANopen | R412005742–BDL–001–AD 325 Índice 1 1.1 1.2 1.3 1.3.1 1.3.2 1.3.3 2 2.1 2.2 2.3 2.4 2.5 2.6 3 4 5 5.1 5.2 5.2.1 5.2.2 5.2.3 5.2.4 6 6.1 6.1.1 6.2 6.3 6.3.1 6.3.2 Acerca de esta documentación ............................... 329 Validez de la documentación ............................................ 329 Documentación necesaria y complementaria............. 329 Presentación de la información ....................................... 329 Indicaciones de seguridad ............................................... 330 Símbolos ............................................................................... 331 Abreviaturas ........................................................................ 331 Indicaciones de seguridad ....................................... 331 Sobre este capítulo .............................................................. 331 Utilización conforme a las especificaciones ................ 332 Utilización no conforme a las especificaciones .......... 332 Cualificación del personal.................................................. 333 Indicaciones de seguridad generales............................. 333 Indicaciones de seguridad según producto y tecnología................................................................................ 334 Zonas de utilización .................................................. 336 Volumen de suministro ............................................ 337 Descripción del aparato ........................................... 337 Vista general del sistema de válvulas y de los módulos............................................................................ 338 Componentes del aparato.................................................. 339 Acoplador de bus ................................................................ 339 Módulos de entrada/salida ............................................. 341 Módulos de entrada ........................................................... 342 Módulos de salida .............................................................. 343 Montaje ....................................................................... 344 Montaje del acoplador de bus en el sistema de válvulas.............................................................................. 344 Medidas ................................................................................. 345 Rotulación de los módulos ................................................ 345 Conexión eléctrica de los módulos ................................. 347 Indicaciones generales para la conexión del acoplador de bus ......................................................... 348 Conexión del acoplador de bus como estación intermedia ............................................................................ 349 Español Índice 326 AVENTICS | CANopen | R412005742–BDL–001–AD Índice 6.3.3 6.3.4 6.3.5 6.3.6 6.3.7 7 7.1 7.1.1 7.1.2 7.1.3 7.1.4 7.1.5 7.2 7.3 7.4 7.5 7.5.1 7.5.2 7.5.3 7.6 7.7 7.7.1 8 8.1 8.2 9 9.1 9.2 Conexión del acoplador de bus como última estación ................................................................................. 349 Conexión de la alimentación de lógica y de carga del acoplador de bus ................................................................ 350 Conexión de los módulos de entrada/ salida óctuples .................................................................... 352 Conexión de la alimentación de carga del módulo de salida ......................................................... 354 Conexión FE .......................................................................... 355 Puesta en servicio y manejo .................................... 356 Realización de ajustes previos......................................... 356 Ajuste de la velocidad en baudios ................................. 357 Configuración de la dirección del acoplador de bus 357 Configuración de los mensajes de diagnóstico ......... 358 Asignación de la alimentación de válvulas ................ 359 Configuración del cierre de bus ..................................... 366 Configuración del sistema de bus ................................... 367 Comportamiento en funcionamiento.............................. 368 Comportamiento del arranque......................................... 369 Ensayo y diagnóstico del acoplador de bus ................. 369 Lectura de los indicadores de diagnóstico del acoplador de bus ......................................................... 369 Comprobación de los sensores del módulo de entrada ............................................................................ 371 Comprobación de los actuadores del módulo de salida ................................................................................ 372 Puesta en servicio del acoplador de bus....................... 373 Parada del sistema .............................................................. 374 Salida de la parada del sistema .................................... 375 Desmontaje y sustitución ......................................... 375 Sustitución del acoplador de bus .................................... 376 Montaje de módulo(s) de entrada/salida ...................... 378 Cuidado y mantenimiento ......................................... 381 Cuidado de los módulos ..................................................... 381 Mantenimiento del acoplador de bus............................. 381 AVENTICS | CANopen | R412005742–BDL–001–AD 327 Índice 10.4 11 11.1 11.2 11.3 12 13 13.1 13.2 13.2.1 13.2.2 13.3 13.3.1 13.3.2 13.3.3 13.4 13.4.1 13.5 13.6 13.7 13.7.1 13.7.2 13.7.3 13.7.4 14 Datos técnicos ........................................................... 382 Parámetros ............................................................................ 382 Acoplador de bus.................................................................. 382 Módulos de entrada óctuples, RMV04-8DI_M8 y RMV04-8DI_M12 ................................................................... 383 Módulos de salida óctuples, RMV04-8DO_M8 y RMV04-8DO_M12.................................................................. 383 Repuestos y accesorios ............................................ 384 Acoplador de bus.................................................................. 384 Módulo de entrada/salida óctuple, 8DI/8DO ................ 384 Enchufe Power para acoplador de bus y módulo de salida .................................................................................. 385 Eliminación de residuos ........................................... 385 Apéndice .................................................................... 385 Electronic Data Sheet (EDS).............................................. 385 Comportamiento en funcionamiento.............................. 386 Comportamiento del arranque ....................................... 386 Identificador CAN ................................................................ 387 Object Dictionary................................................................... 390 Objetos OD generales ........................................................ 391 Objetos OD específicos de fabricante ........................... 392 Objetos OD específicos de aparato: .............................. 394 Diagnóstico CANopen .......................................................... 398 Tipo de funcionamiento CANopen ................................. 398 EMCY Error Codes ................................................................ 399 Volumen de funciones......................................................... 401 Objetos específicos del fabricante .................................. 402 Manufacturer Status Register (MSR) ........................... 402 Module Control Register (MCR) ...................................... 403 Diagnostic information ..................................................... 404 Parameter Information ..................................................... 406 Índice temático .......................................................... 407 Español 10 10.1 10.2 10.3 AVENTICS | CANopen | R412005742–BDL–001–AD 329 Acerca de esta documentación 1 Acerca de esta documentación 1.1 Validez de la documentación Esta documentación contiene información importante para montar, utilizar, mantener y eliminar averías sencillas del acoplador de bus de un modo seguro y apropiado. O Lea esta documentación por completo y sobre todo el capítulo 2 “Indicaciones de seguridad” en la página 331, antes de empezar a trabajar con el acoplador de bus. 1.2 O Documentación necesaria y complementaria No ponga el producto en servicio mientras no disponga de la siguiente documentación y haya entendido su contenido. Tabla 1: Documentación necesaria y complementaria N.º de documento Tipo de documento Documentación del sistema de válvulas HF03 LG R412008233 Documentación Documentación del sistema de válvulas HF04 D-SUB R412015493 Documentación Título Documentación de la instalación Puede consultar otros datos sobre los componentes en el catálogo online de AVENTICS en www.aventics.com/pneumatics-catalog. Presentación de la información Para poder trabajar con su producto de forma rápida y segura gracias a esta documentación, en ella se emplean de forma coherente las indicaciones de seguridad, símbolos, términos y Español 1.3 330 AVENTICS | CANopen | R412005742–BDL–001–AD Acerca de esta documentación abreviaturas. Para facilitar su comprensión, estos se explican en las secciones siguientes. 1.3.1 Indicaciones de seguridad En esta documentación se emplean indicaciones de seguridad antes de una secuencia de acciones en la que existe riesgo de daños materiales y personales. Se deben respetar las medidas descritas de protección ante peligros. Las indicaciones de seguridad tienen la estructura siguiente: PALABRA DE ADVERTENCIA Tipo y fuente de peligro Consecuencias si no se sigue la indicación O Medidas de protección ante peligros W Símbolo de advertencia: alerta sobre el peligro. W Palabra de advertencia: indica la gravedad del peligro. W Clase y fuente de peligro: determina el tipo y la fuente de peligro W Consecuencias: describe las consecuencias si no se sigue la indicación. W Protección: indica cómo evitar el peligro Tabla 2: Clases de peligros según ANSI Z535.6-2006 Símbolo de advertencia, palabra de advertencia Significado PELIGRO Identifica una situación de peligro con riesgo de lesiones graves, incluso mortales. ADVERTENCIA Identifica una situación de peligro en la que puede existir riesgo de lesiones graves, incluso mortales. ATENCIÓN Identifica una situación de peligro en la que puede existir riesgo de lesiones de carácter leve o levemedio. NOTA Daños materiales: el producto o el entorno pueden sufrir daños. AVENTICS | CANopen | R412005742–BDL–001–AD 331 Indicaciones de seguridad 1.3.2 Símbolos Los símbolos siguientes identifican indicaciones que no son relevantes para la seguridad, pero que ayudan a comprender mejor la documentación. Tabla 3: Significado de los símbolos Símbolo Significado Si no se tiene en cuenta esta información, no se puede utilizar el producto de forma óptima. O Instrucción única, independiente 1. 2. 3. Sucesión numerada de actuaciones: 1.3.3 Las cifras indican la secuencia de ejecución. Abreviaturas En esta documentación se utilizan las siguientes abreviaturas: Tabla 4: Abreviaturas Abreviatura Significado VS Sistema de válvulas GSD General Station Description Placa final EP Placa final con conexiones eléctricas y neumáticas Placa final con conexiones neumáticas 2 Indicaciones de seguridad 2.1 Sobre este capítulo Este producto ha sido fabricado conforme a las reglas de la técnica generalmente conocidas. No obstante, existe riesgo de sufrir daños personales y materiales si no se tienen en cuenta este capítulo ni las indicaciones de seguridad contenidas en la documentación. Español Placa final P 332 AVENTICS | CANopen | R412005742–BDL–001–AD Indicaciones de seguridad O O O Lea esta documentación con detenimiento y por completo antes de trabajar con el producto. Guarde esta documentación en un lugar al que siempre puedan acceder fácilmente todos los usuarios. Entregue el producto a terceros siempre junto con la documentación necesaria. 2.2 Utilización conforme a las especificaciones Este producto es un componente electroneumático de la instalación. Puede utilizar el producto como se indica a continuación: W Exclusivamente en el ámbito industrial. Para su utilización en zonas urbanas (viviendas, comercios e industrias) se necesita un permiso particular por parte de las autoridades. W Exclusivamente en el campo de potencia que viene indicado en los datos técnicos. El producto está diseñado para uso profesional y no para uso privado. La utilización conforme a las especificaciones también incluye que se haya leído y entendido esta documentación y, en especial, el capítulo “Indicaciones de seguridad”. 2.3 Utilización no conforme a las especificaciones Cualquier otro uso distinto del descrito en la utilización no conforme a las especificaciones se considera un uso no conforme y, por lo tanto, no está autorizado. Si se montan o utilizan en aplicaciones relevantes para la seguridad productos inadecuados, pueden producirse estados de servicio no previstos que podrían derivar en daños personales y materiales. Por tanto, utilice un producto en una aplicación relevante para la seguridad solo si dicha utilización viene especificada y autorizada de forma expresa en la AVENTICS | CANopen | R412005742–BDL–001–AD 333 Indicaciones de seguridad documentación del producto. Por ejemplo, en zonas con protección contra explosión o en componentes de un control relacionados con la seguridad (seguridad funcional). AVENTICS GmbH no asume responsabilidad alguna por daños debidos a una utilización no conforme a las especificaciones. Los riesgos derivados de una utilización no conforme a las especificaciones son responsabilidad exclusiva del usuario. Dentro de la utilización no conforme a las especificaciones del producto se incluye: W la modificación o transformación del producto, W la utilización fuera de los campos de aplicación que se nombran en estas instrucciones, W la utilización en condiciones de funcionamiento que difieran de las que se describen en estas instrucciones. 2.4 Cualificación del personal Las actividades descritas en esta documentación requieren disponer de conocimientos básicos de electrónica y neumática, así como de la terminología correspondiente. Para garantizar un uso seguro, solamente personal cualificado o bien otra persona supervisada por una persona cualificada podrá realizar estas actividades. Por personal cualificado se entiende una persona que, en virtud de su formación especializada, sus conocimientos y experiencias, así como su conocimiento acerca de las normas vigentes, puede evaluar los trabajos que se le han encomendado, detectar potenciales peligros y adoptar medidas de seguridad adecuadas. El personal cualificado debe respetar las normas en vigor específicas del sector. Indicaciones de seguridad generales W Observe la normativa vigente sobre prevención de accidentes y protección del medio ambiente. W Tenga en cuenta las normativas y disposiciones de seguridad vigentes en el país de utilización del producto. Español 2.5 334 AVENTICS | CANopen | R412005742–BDL–001–AD Indicaciones de seguridad W Utilice los productos de AVENTICS solo si no presentan problemas técnicos. W Tenga en cuenta todas las indicaciones que figuran en el producto. W Las personas que montan, manejan y desmontan productos de AVENTICS o realizan su mantenimiento no deben encontrarse bajo la influencia del alcohol, drogas o medicamentos que pudieran afectar a la capacidad de reacción. W Utilice solo los accesorios y piezas de repuesto autorizados por el fabricante para evitar riesgos para las personas por uso de piezas de repuesto no adecuadas. W Respete los datos técnicos y condiciones ambientales que se especifican en la documentación del producto. W Si se montan o utilizan en aplicaciones relevantes para la seguridad productos inadecuados, pueden producirse estados de servicio no previstos que podrían derivar en daños personales y materiales. Por tanto, utilice un producto en una aplicación relevante para la seguridad solo si dicha utilización viene especificada y autorizada de forma expresa en la documentación del producto. W El producto no se puede poner en servicio mientras no se haya verificado que el producto final (por ejemplo, una máquina o instalación) en el que están integrados los productos de AVENTICS cumple las disposiciones, normativas de seguridad y normas de utilización vigentes en el país de explotación. 2.6 Indicaciones de seguridad según producto y tecnología W En ninguna circunstancia, debe someter el aparato a cargas mecánicas. No apoye ningún objeto sobre el aparato. W Asegúrese de que la alimentación de tensión se encuentre dentro de la tolerancia indicada de los módulos. W Tenga en cuenta las indicaciones de seguridad de las instrucciones de servicio de su sistema de válvulas. AVENTICS | CANopen | R412005742–BDL–001–AD 335 Indicaciones de seguridad Durante el montaje W La garantía es válida exclusivamente para la configuración entregada. La garantía prescribe en el caso de un montaje defectuoso. W Desconecte siempre la presión y la conexión con la red eléctrica de la pieza de la instalación antes de montar o desmontar el aparato. Compruebe que la instalación esté asegurada durante los trabajos de montaje de modo que no se pueda volver a conectar. W Conecte a tierra los módulos y el sistema de válvulas. Instalar el sistema respetando las siguientes normas: – DIN EN 50178, clasificación VDE 0160 – VDE 0100 Durante la puesta en servicio W El sistema ha de instalarse únicamente cuando esté exento de tensión y de presión. La instalación debe ser efectuada solo por personal técnico capacitado. Efectúe la puesta en servicio eléctrica solo cuando el sistema esté exento de presión para evitar movimientos peligrosos de los actuadores. W Ponga en servicio el sistema solo cuando esté completamente montado, correctamente cableado y configurado y tras haberlo ensayado. W El aparato está sujeto a la clase de protección IP65. Antes de la puesta en servicio, asegúrese de que todas las juntas y cierres de las conexiones por enchufe estén herméticos, con el fin de evitar que penetren en el aparato líquidos y cuerpos extraños. Español W Todos los componentes reciben corriente de un bloque de alimentación 24 V. El bloque de alimentación debe estar dotado de una separación segura según EN 60742, clasificación VDE 0551. Para ello se aplican los circuitos eléctricos correspondientes como SELV/PELV según IEC 60364-4-41. W Antes de conectar o desconectar los enchufes, hay que desconectar la tensión de servicio. 336 AVENTICS | CANopen | R412005742–BDL–001–AD Zonas de utilización Durante el funcionamiento W Es indispensable que haya un buen intercambio de aire o suficiente refrigeración cuando en el sistema de válvulas se presenten las siguientes situaciones: – Equipamiento total – Carga continua de las bobinas magnéticas Durante la limpieza W No utilice nunca disolventes ni detergentes agresivos. Limpie el aparato exclusivamente con un paño humedecido Utilice para ello exclusivamente agua o, en caso necesario, un detergente suave. 3 Zonas de utilización El acoplador de bus sirve para el pilotaje eléctrico de las válvulas a través del sistema de bus de campo CANopen. Los módulos de entrada/salida permiten leer las señales de entrada eléctricas por la conexión de bus del sistema de válvulas. W El acoplador de bus se puede utilizar única y exclusivamente como slave en un sistema de bus CANopen, según EN 50170 parte 2. AVENTICS | CANopen | R412005742–BDL–001–AD 337 Volumen de suministro 4 Volumen de suministro En el volumen de suministro se incluyen: W 1 sistema de válvulas HF03 LG o HF04 según la configuración y el pedido W 1 manual de instrucciones de servicio del sistema de válvulas W 1 manual de instrucciones de servicio del acoplador de bus En el volumen de suministro de un juego de piezas de acoplador de bus se incluyen: W 1 acoplador de bus con junta y 2 tornillos de fijación W 1 manual de instrucciones de servicio para el acoplador de bus El VS se configura de manera individual. Usted puede ver la configuración exacta con su número de referencia en el configurador de Internet a través de AVENTICS. Descripción del aparato El acoplador de bus permite el control del VS a través de un sistema de bus de campo. Además de la conexión de líneas de datos y líneas de alimentación de tensión, el acoplador de bus permite el ajuste de diferentes parámetros de bus y el diagnóstico a través de LED. Asimismo, el acoplador de bus se puede ampliar con módulos de entrada y salida. Usted encontrará una descripción detallada del acoplador de bus y de los módulos de entrada/salida en el capítulo “Componentes del aparato” a partir de la página 339. La siguiente vista de sistema ofrece una visión global de todo el sistema de válvulas y de sus componentes. El VS se describe en unas instrucciones de servicio propias. Español 5 338 AVENTICS | CANopen | R412005742–BDL–001–AD Descripción del aparato 5.1 Vista general del sistema de válvulas y de los módulos El sistema de válvulas se compone, en función del volumen de pedido, de los componentes que se muestran en Fig. 1: 6 5 4 3 2 1 7 Fig. 1: 1 2 3 4 Vista general: configuración a modo de ejemplo de acoplador de bus con módulos E/S y VS montado Placa final E Módulo de salida1) Módulo de entrada1) Acoplador de bus CANopen,, diseño B 5 6 7 Placa final EP para HF03 LG o HF04 Portaválvulas2) Conexión FE en la placa final E 1) En total, pueden conectarse un máximo de 6 módulos (módulos de entrada y/o salida) en la combinación que se desee (p. ej. 3 módulos de entrada y 3 de salida). 2) Con instrucciones de servicio propias. AVENTICS | CANopen | R412005742–BDL–001–AD 339 Descripción del aparato 5.2 5.2.1 Componentes del aparato Acoplador de bus 1 2 3 4 5 7 6 1 2 3 4 5 6 7 1) Vista general del acoplador de bus Indicadores LED para mensajes de diagnóstico Campo de rotulación UB Conexión X71 (BUS IN) para el acoplador de bus para el pilotaje de las válvulas y los módulos E/S1) Conexión X72 (BUS OUT) para el pilotaje de las válvulas y los módulos E/S1) Conexión X10 (POWER) para la alimentación de tensión de las bobinas de válvula, lógica y entradas Tapa roscada B para los conmutadores de corredera S4, S5, S6 (asignación de las válvulas a la aliment. de tensión) y S8 (cierre de bus) Tapa roscada A para los conmutadores giratorios S1, S2 (configuración de la dirección de la estación) y el interruptor DIP S3 (configuración de modo) Para la ocupación de enchufes, véase la página 348. Español Fig. 2: 340 AVENTICS | CANopen | R412005742–BDL–001–AD Descripción del aparato Dirección de estación Velocidad en baudios Diagnóstico Cantidad de válvulas que se pueden pilotar El acoplador de bus se puede utilizar única y exclusivamente como slave en un sitema de bus. La dirección de estación ID nodo del acoplador de bus se configura con los dos conmutadores giratorios S1 y S2. La tasa de baudios máx. es de 1 MBaud. Las tensiones de alimentación para la lógica y el pilotaje de válvulas se supervisan. Si se excede o no se alcanza el margen configurado, se emitirá una señal de fallo que se indica mediante un LED de diagnóstico e información de diagnóstico. El acoplador de bus está disponible en 2 variantes con 24 o 32 salidas de válvula. De este modo, se limita el número máximo de bobinas de válvula pilotables. Según la variante, se pueden pilotar: W 12 válvulas biestables o 24 válvulas monoestables o W 16 válvulas biestables o 32 válvulas monoestables de esta manera. También es posible una combinación de válvulas. Un acoplador de bus con 32 salidas solo puede conectarse a un VS diseñado para 32 bobinas de válvula. OSI CAN CANopen El modelo de comunicación CANopen se basa en el ISO/OSI Basic Reference Model. Referencia: W ISO 7498, 1984, Information Processing Systems – Open System Interconnection – Basic Reference Model Los niveles inferiores del Basic Reference Model se basan en CAN. Todas las especificaciones y directivas CANopen deben deducirse de las especificaciones del CiA. AVENTICS | CANopen | R412005742–BDL–001–AD 341 Descripción del aparato Certificación El aparato está certificado según las directivas del Conformance Test V2.0.2 del CiA. Referencia: W CiA Draft Standard 301, “Application Layer and Communication Profile”, versión 4.01, estado 01 de junio de 2000 W CiA Draft Standard 401, “Device Profile for Generic I/O Modules” versión 2.0, estado 20 de diciembre de 1999 5.2.2 Módulos de entrada/salida Los módulos de entrada/salida permiten leer las señales de entrada eléctricas por la conexión de bus del sistema de válvulas mediante conexiones por enchufe desconectables. Al sistema de válvulas con acoplador de bus se pueden conectar tanto módulos de entrada, como de salida en la combinación que se desee, con un máximo en total de 6 módulos. La secuencia es aleatoria. O ¡Asegúrese de que se cumplan los límites de capacidad de carga! El acoplador de bus suministra las entradas de los módulos de entrada. La corriente total máxima para todas las entradas es de 0,7 A. El módulo de salida se alimenta a través de una conexión M12, cada una de las cuales dispone de una alimentación de tensión para 4 salidas (M8) (ver Tab. 6 en la página 350). Español Cantidad de módulos conectables 342 AVENTICS | CANopen | R412005742–BDL–001–AD Descripción del aparato 5.2.3 Módulos de entrada Los módulos de entrada para conectar sensores de señales eléctricas están disponibles en dos versiones: W 8 x M8 (RMV04-8DI_M8) ó W 4 x M12, con ocupación doble (RMV04-8DI_M12) 1 2 1 3 3 Fig. 3: 1 2 3 1) Módulo de entrada óctuple: RMV04-8DI_M8 (izquierda) y RMV04-8DI_M12 (derecha) Campo de rotulación RMV04-8DI_M8 (izquierda): 8 entradas en 8 casquillos M81) RMV04-8DI_M12 (derecha): 8 entradas en 4 casquillos M121) 1 indicador LED (amarillo, estado) por entrada Para la ocupación de enchufes, véase la página 348. 2 AVENTICS | CANopen | R412005742–BDL–001–AD 343 Descripción del aparato 5.2.4 Módulos de salida Los módulos de salida para conectar los actuadores están disponibles en dos versiones: W 8 x M8 (RMV04-8DO_M8) ó W 4 x M12, con ocupación doble (RMV04-8DO_M12) 1 1 2 2 3 6 Fig. 4: 6 1) 5 3 4 5 Módulo de salida óctuple: RMV04-8DO_M8 (izquierda) y RMV04-8DO_M12 (derecha) Campo de rotulación Indicador LED (amarillo, estado) por salida Indicador LED bicolor alimentación de carga UQ2 Alimentación de carga de la conexión a través de un enchufe M121) RMV04-8DO_M8 (izquierda): 8 salidas en 8 casquillos M81) RMV04-8DO_M12 (derecha): 8 salidas en 4 casquillos M121) Indicador LED bicolor alimentación de carga UQ1 Para la ocupación de enchufes, véase la página 348. Español 1 2 3 4 5 6 4 344 AVENTICS | CANopen | R412005742–BDL–001–AD Montaje 6 Montaje 6.1 Montaje del acoplador de bus en el sistema de válvulas Obtendrá su sistema de válvulas de la serie HF03 LG o HF04 configurado de manera individual, atornillado por completo con todos los componentes: W Portaválvulas W Acoplador de bus W Módulos E/S en caso dado El montaje del sistema de válvulas completo está descrito detalladamente en las instrucciones de servicio para el VS adjuntas. La posición de montaje para el VS es indiferente. Las medidas del VS completo varían según el equipamiento del módulo (véase Fig. 5). AVENTICS | CANopen | R412005742–BDL–001–AD 345 Montaje 6.1.1 Medidas A + (60 x m) B + (60 x m) 60 9 135 60 Fig. 5: Esquema acotado del sistema de válvulas con acoplador de bus Con cada módulo de entrada/salida, el sistema de válvulas se alarga 60 mm (60 x m). La placa final E tiene una profundidad de montaje de 18 mm. 6.2 Módulos de entrada/ salida Rotule en el campo BTN del acoplador de bus la dirección prevista/utilizada para el acoplador de bus. O Rotule las conexiones directamente en los campos de rotulación de los módulos de entrada/salida. La denominación de las conexiones indica la asignación de los campos de rotulación para las conexiones. O Español Acoplador de bus Rotulación de los módulos 346 AVENTICS | CANopen | R412005742–BDL–001–AD Montaje Fig. 6: Campos de rotulación en el acoplador de bus (RMV04-CO), módulo de entrada (8DI_M8) y módulo de salida (8DO_M8), ejemplos AVENTICS | CANopen | R412005742–BDL–001–AD 347 Montaje 6.3 Conexión eléctrica de los módulos ATENCIÓN Tensión eléctrica existente Peligro de lesiones a través de un golpe eléctrico. O Desconecte siempre la presión y la conexión con la red eléctrica de la pieza de la instalación correspondiente antes de conectar los módulos eléctricamente al sistema de válvulas. NOTA Cableado incorrecto Un cableado incorrecto o erróneo provoca funciones erróneas y daños en el sistema de bus. O Mientras no se indique algo distinto, se deben seguir las normas de montaje del CiA. O Emplear solamente cables que corresponden a las especificaciones del bus de campo y a los requisitos concernientes a la velocidad y la longitud de la conexión. O Montar el cable y el enchufe a fin de garantizar el tipo de protección y la descarga de tracción. Flujo de corriente por diferencias de potencial en la pantalla A través de la pantalla del cable de bus no debe fluir ninguna corriente de compensación generada por diferencias de potencial, ya que esto anula el blindaje y tanto el cable como el acoplador de bus conectado pueden resultar dañados. O A ser necesario, conecte los puntos de masa de la instalación a través de un cable por separado. Español NOTA 348 AVENTICS | CANopen | R412005742–BDL–001–AD Montaje 6.3.1 Indicaciones generales para la conexión del acoplador de bus Para la conexión de los módulos utilice conexiones por enchufe y cables confeccionados. Si no utiliza conexiones por enchufe y cables confeccionados, tenga en cuenta la ocupación de pines que se representa en Tab. 5. O Tabla 5: BU S I N X71 2 3 Pin BUS IN X71 BUS OUT X72 Significado 1 CAN_SHIELD Revestimiento (opcional) 2 CAN_V+ 1)2) Alimentación de bus de 24 V (opcional) 3 CAN_V– 1) Alimentación de bus GND 4 CAN_H CAN_H bus line (dominant high) 5 CAN_L 1 5 4 BU S O UT X72 1 4 Ocupación X71 (BUS IN) und X72 (BUS OUT) M12, A-codiert 2 5 3 Carcasa Pantalla CAN_L bus line (dominant high) Blindaje o puesta a tierra 1) La alimentación del acoplador de bus se efectúa solo a través de X10. Todos los cables se hacen pasar. 2) La alimentación de bus de 24 V en el pin 2 solamente repasan en bucle. No se supervisa internamente. Técnica de conexión y ocupación de enchufes con-forme a las especificaciones de la directriz técnica. AVENTICS | CANopen | R412005742–BDL–001–AD 349 Montaje 6.3.2 2 1. Si utiliza un cableado no confeccionado, establezca la ocupación de pines correcta (véase Tab. 5 en la página 348) de sus conexiones por enchufe. 2. Conecte el cable de bus de llegada a X71 (1). 3. Conecte el cable de bus de salida a través de la salida X72 (2) con el siguiente módulo. 4. Retire el racor PG B. 5. Ponga el interruptor S8 en “OFF” (cierre de bus = OFF, véase también “Configuración del cierre de bus” en la página 366). 6. Vuelva a colocar el racor PG B enroscándolo. Compruebe que el anillo obturador esté colocado correctamente. 7. Si utiliza cable y enchufe con carcasa de metal no confeccionados, conecte la pantalla a ambos lados del cable de bus directamente con la carcasa del enchufe (carcasa CEM). De este modo se protegen las líneas de datos contra fallos de acoplamiento. Asegúrese de que la carcasa del enchufe esté conectada de forma fija con la carcasa del acoplador de bus. 6.3.3 1 2 Conexión del acoplador de bus como última estación 1. Si utiliza un cableado no confeccionado, establezca la ocupación de pines correcta (véase Tab. 5 en la página 348) de sus conexiones por enchufe. 2. Conecte el cable de bus solo a X71 (1). 3. Retire el racor PG B. 4. Conecte el bus a través del enchufe S8 (enchufe en posición “ON”) con la conexión de bus interno disponible (véase “Configuración del cierre de bus” en la página 366). 5. Vuelva a colocar el racor PG B enroscándolo. Compruebe que el anillo obturador esté colocado correctamente. Español 1 Conexión del acoplador de bus como estación intermedia 350 AVENTICS | CANopen | R412005742–BDL–001–AD Montaje 6. Instale en la caja de enchufes del aparato X72 (BUS OUT) una tapa de protección (2). 7. Si utiliza cable y enchufe con carcasa de metal no confeccionados, conecte la pantalla a ambos lados del cable de bus directamente con la carcasa del enchufe (carcasa CEM). De este modo se protegen las líneas de datos contra fallos de acoplamiento. Asegúrese de que la carcasa del enchufe esté conectada de forma fija con la carcasa del acoplador de bus. Para evitar corrientes de compensación a través de la pantalla del acoplador de bus, se requiere entre los aparatos una conexión de compensación del potencial de al menos 10 mm2. 6.3.4 Conexión de la alimentación de lógica y de carga del acoplador de bus Las válvulas y el acoplador de bus se alimentan mediante un enchufe del aparato X10 (POWER). Al conectar la alimentación de lógica y de carga del módulo CANopen, debe asegurarse de la ocupación de los pines que se representa en Tab. 6. Tabla 6: PO WE R X10 2 1 3 4 Ocupación del enchufe del aparato X10 (POWER), M12, con código A Pin X10 Ocupación 1 UL Alimentación de la lógica del acoplador de bus y alimentación de sensores de los módulos de entrada digitales 2 UQ1 Primera alimentación de tensión de las válvulas 3 OV Masa para UL, UQ1 y UQ2 4 UQ2 Segunda alimentación de tensión de las válvulas AVENTICS | CANopen | R412005742–BDL–001–AD 351 Montaje W UL, UQ1 y UQ2 están conectadas eléctricamente entre ellas. W Mediante la alimentación de válvulas UQ1 y UQ2 se pueden desconectar las válvulas por bytes (equivalente a cada 4 válvulas biestables u 8 válvulas monoestables). W Asignar los grupos de válvulas (4 u 8 válvulas) a través de los conmutadores de corredera S4, S5 y S6 (ver “Asignación de la alimentación de válvulas” en la página 359). Esto hace posible, p. ej. una desconexión antes y después de una desconexión de emergencia. El cable para la alimentación de carga debe cumplir las siguientes exigencias: W Casquillo de cable Terminal de 4 polos, con código A, casquillo sin agujero central W Sección transversal del conductor: cada hilo > 0,5 mm2 W Longitud: Máx. 20 m Tabla 7: Consumo de corriente de X10 (POWER) en el acoplador de bus Señal Ocupación Corriente total UL Lógica y entradas máx. 1 A UQ1 Válvulas máx. 1 A UQ2 Válvulas máx. 1 A Separación insegura del bloque de alimentación La alimentación 24 V se puede efectuar por un bloque de alimentación conjunto. Una separación insegura del bloque de alimentación puede causar daños en el sistema y lesiones a causa de electrocución. O ¡Utilice solamente un bloque de alimentación con una separación segura según EN 60747, clasificación VDE 05551! Para ello se aplican los circuitos eléctricos correspondientes como SELV/PELV según IEC 60364-4-41. Español ATENCIÓN 352 AVENTICS | CANopen | R412005742–BDL–001–AD Montaje De este modo se conecta la alimentación de carga del acoplador de bus: 1. Si utiliza una conexión por enchufe no confeccionada, establezca la ocupación de pines correcta (véase 6 en la página 350) de sus conexiones por enchufe. 2. Con ayuda de la conexión por enchufe (véase “Repuestos y accesorios” en la página 384), conecte las tensiones de servicio al acoplador de bus. 3. Compruebe las especificaciones de las tensiones de servicio según los parámetros eléctricos y asegúrese de que estos se cumplan (véase capítulo “Datos técnicos” en la página 382). 4. Prepare los servicios según Tab. 7, en la página 351. Escoja las secciones transversales del cable conforme a la longitud del cable y de las corrientes que se apliquen. 6.3.5 Conexión de los módulos de entrada/salida óctuples ATENCIÓN Piezas bajo corriente accesibles libremente ¡Peligro de electrocución al tocarlas! O Al conectar la periferia (interface E/S) se deben respetar las exigencias de la protección aisladora según la norma EN 50178, clasificación VDE 0160. Módulo de entrada 1. Cablee las entradas según 8 (DI8_M8) o según Tab. 9 (DI8_M12). 2. Conecte las entradas/salidas eléctricas con enchufes de acoplamiento M8 o M12 (accesorios) a los módulos E/S. 3. Cerrar con la tapa de protección M8 (accesorios) las cajas de enchufe del aparato no ocupadas, para garantizar la clase de protección IP65. La corriente total de todas las alimentaciones de los sensores (pin 1) en un sistema de válvulas no debe sobrepasar 0,7 A. AVENTICS | CANopen | R412005742–BDL–001–AD 353 Montaje Tabla 8: I0…I7 4 3 1 Ocupación de las entradas en el módulo de entrada óctuple, DI8_M8, casquillo M8x1 Pin Señal Ocupación 1 SENSOR+ Alimentación de sensor + 3 SENSOR– Potencial de referencia 4 I0 bis I7 Señal de sensor Carcasa Tabla 9: Pin 1 Sobre potencial de blindaje Ocupación de las entradas en el módulo de entrada óctuple, D18_M12, casquillo M12x1, con código A Señal Ocupación 2 3 1 SENSOR+ Alimentación de sensor 24 V + 2 I1, I3, I5 oder I7 Señal de sensor 3 SENSOR– Potencial de referencia GND 4 I0, I2, I4 oder I6 Señal de sensor 5 NC Carcasa Módulo de salida 4 3 1. Cablee las salidas según 10 (DO8_M8) o según 11 (DO8_M12). 2. Conecte las entradas/salidas eléctricas con enchufes de acoplamiento M8 o M12 (accesorios) a los módulos E/S. 3. Cerrar con la tapa de protección M8 (accesorios) las cajas de enchufe del aparato no ocupadas, para garantizar la clase de protección IP65. Tabla 10: O0…O7 1 No ocupado Sobre potencial de blindaje Ocupación de las salidas en el módulo de salida óctuple, DO8_M8, casquillo M8x1 Pin Señal Ocupación 1 Libre No ocupado 4 Ox Señal de salida Ox (tensión nominal 24 V) 3 GND Referencia GND del actor Carcasa Sobre potencial de blindaje Español 5 4 354 AVENTICS | CANopen | R412005742–BDL–001–AD Montaje Tabla 11: 1 4 Ocupación de las salidas en el módulo de salida óctuple, DO8_M12, casquillo M12x1, con código A Pin Señal Ocupación 1 NC No ocupado 2 O1, O3, O5 oder O7 Señal de salida 3 GND Potencial de referencia 4 O0, O2, O4 oder O6 Señal de salida 5 NC No ocupado 2 5 3 Carcasa Sobre potencial de blindaje NOTA Corriente total demasiado alta Cada salida ha sido concebida para una corriente permanente de máx. 0,5 A. Puede limitarse el funcionamiento si se producen cargas de corriente superiores a 0,5 A por cada salida. O Asegúrese de que no se sobrepase la carga de corriente de 0,5 A por cada salida. 6.3.6 Conexión de la alimentación de carga del módulo de salida A cada módulo de salida le corresponde una conexión M12 propia para la alimentación de carga. 4 salidas respectivamente se alimentan a través de la tensión de carga. Las tensiones UQ1 y UQ2 están separadas entre ellas galvánicamente. La conexión para la alimentación de carga de los módulos de salida debe cumplir los siguientes requisitos: W Casquillo de cable M12×1, 4 polos, con código A sin agujero central (para garantizar el seguro contra polarización inversa) W Sección transversal del conductor: cada hilo > 0,5 mm2 W Longitud: Máx. 20 m AVENTICS | CANopen | R412005742–BDL–001–AD 355 Montaje 1. Si utiliza un cableado no confeccionado, establezca la ocupación de pines correcta (véase Tab. 12) de sus conexiones por enchufe. 2. Conecte la alimentación de carga con el enchufe M12. Tabla 12: 2 1 3 4 Pin X10 Ocupación 1 0V_UQ2 Referencia GND para alimentación de tensión 2 2 24V_UQ1 24 V alimentación de tensión 1 para salidas O0 hasta O3 3 0V_UQ1 Referencia GND para alimentación de tensión 1 4 24V_UQ2 24 V alimentación de tensión 2 para salidas O4 hasta O7 6.3.7 Puesta a tierra en el VS HF04 Ocupación de la alimentación de tensión en el módulo de salida óctuple, DO8, M12x1, con código A Conexión FE Para descargar averías CEM, conecte a tierra la conexión FE (1) a la placa final EP del VS mediante un conducto de baja impedancia. Sección transversal del cable recomendada: 10 mm2 En estado de suministro, el tornillo para la conexión FE está montado en la placa final EP del VS. Opcionalmente la conexión FE también se puede realizar en la placa final E (2) (véase también Fig. 1 en la página 338). O Para ello, desmonte el tornillo para la conexión FE de la placa final EP del VS (1) y móntelo en la placa final E (2). A continuación, establezca allí la conexión a tierra. O Español PO WE R X10 356 AVENTICS | CANopen | R412005742–BDL–001–AD Puesta en servicio y manejo 2 Fig. 7: Puesta a tierra en el VS HF03 LG O 1 Conexión FE en el VS HF04 con CANopen en la placa final EP (1) o en la placa final E (2) Coloque la puesta a tierra en la conexión FE de la placa final E (2). 7 Puesta en servicio y manejo 7.1 Realización de ajustes previos Debe realizar los siguientes ajustes previos: W Ajuste de la velocidad en baudios W Configuración de la dirección del acoplador de bus W Configuración de los mensajes de diagnóstico W Asignación de la alimentación de válvulas W Configuración del cierre de bus A B Todas estas configuraciones se realizan a través de los interruptores debajo de los dos racores PG A y B. Para realizar los ajustes previos, proceda como se indica a continuación: 1. Retire los racores PG correspondientes mediante un movimiento giratorio. 2. Realice la configuración correspondiente como se describe a continuación. 3. Vuelva a colocar los racores PG enroscándolos. Compruebe que los anillos obturadores estén colocados correctamente. AVENTICS | CANopen | R412005742–BDL–001–AD 357 Puesta en servicio y manejo 7.1.1 Ajuste de la velocidad en baudios La tasa de baudios se ajusta con el interruptor S3 (veáse Fig. 8 en la página 358). este se encuentra debajo de la tapa enroscable PG A. 1. Abra la tapa enroscable PG superior A. 2. Ajuste la tasa de baudios (tasa de transmisión) a través de los interruptores S3/1 hasta S3/3 según las especificaciones de Tab. 13 en la página 357. Estado de entrega: 1 MBaud Tabla 13: Ocupación de los interruptores para el ajuste de la tasa de baudios Velocidad en baudios Longitud máx. de los cables S3.3 S3.2 S3.1 1 Mbit/s 25 m ON ON ON ON ON OFF 500 kbit/s 100 m ON OFF ON 250 kbit/s 250 m ON OFF OFF 125 kbit/s 500 m OFF ON ON 50 kbit/s 1 km OFF ON OFF 20 kbit/s 2,5 km OFF OFF ON 10 kbit/s 5 km OFF OFF OFF Reservado 7.1.2 Configuración de la dirección del acoplador de bus Español La dirección de estación se configura a través de los dos interruptores S1 y S2 (véase Fig. 8). 358 AVENTICS | CANopen | R412005742–BDL–001–AD Puesta en servicio y manejo Fig. 8: Conmutadores de dirección S1, S2 y conmutador de modo S3 del acoplador de bus Ambos conmutadores giratorios S1 y S2 para la dirección de estación del sistema de válvulas en CANopen se encuentran bajo los racores PG A. O Con S1 y S2 (véase Fig. 8) asigne libremente la dirección de estación de 1 a 99: – S1: Decimal de 0 a 9 – S2: Unidad de 0 a 9 – S1 + S2 = dirección de estación Estado de entrega: ID nodo = 2 La dirección introducida se memoriza de nuevo al poner en funcionamiento el sistema (Power-on), tras el “NMT Reset Node” y el “NMT Reset Communication” del acoplador de bus. El cambio de dirección durante el funcionamiento se hará efectivo solo después de uno de los casos citados. No utilizar la dirección 0, ya que provoca la parada del sistema. 7.1.3 Configuración de los mensajes de diagnóstico El conmutador de modo S3 para la configuración de los mensajes de diagnóstico se encuentra bajo el racor PG A (véase Fig. 8 en la página 358). El estado de entrega está en conformidad con CANopen. El diagnóstico está desactivado (S3/5 desconectado (OFF). AVENTICS | CANopen | R412005742–BDL–001–AD 359 Puesta en servicio y manejo O Active o desactive con el interruptor S3/5 el mensaje de diagnóstico al master. La posición modificada del conmutador se activa solamente tras una nueva puesta en marcha “Power-on”. A continuación, este ajuste se puede igualmente asignar a través del Module Control Object. En el caso de que la asignación se efectúe a través del Module Control Object, la posición de 3/5 no tiene efecto alguno. Los diagnósticos pendientes son mostrados en los LED incluso con la función de mensajes de diagnóstico al master desactivada. 7.1.4 Asignación de la alimentación de válvulas Los conmutadores S4-S6 para la asignación de la alimentación de válvulas se encuentran bajo el racor PG B (véase 9). A cada conmutador se le han asignado: W 4 lugares de placas de conexión para válvulas biestables (con bobinas 12 y 14) o W 8 Placa de conexión para válvulas monoestables (con bobina 14). X71 A X72 ON OF F S8 UQ1 B UQ2 X10 Conmutador S4, S5, S6 para la asignación de la tensión de alimentación de válvulas (UQ1, UQ2) Con este conmutador las válvulas se pueden asignar en grupos a las tensiones de alimentación UQ1 y UQ2. Español Fig. 9: S4 S5 S6 360 AVENTICS | CANopen | R412005742–BDL–001–AD Puesta en servicio y manejo Todas las válvulas en estado de suministro tienen asignada la tensión UQ1. con 32 Asignación de los conmutadores S4, S5 y S6 Conmutador S4 S5 S6 S6 Byte con 24 Tabla 14: Lugares de placas de conexión para válvulas biestables (bobinas 12, 14) Lugares de placas de conexión para válvulas monoestables (bobinas 14) 0 1–4 1–8 1 5–8 09 – 16 2 9 – 12 17 – 24 2 9 – 12 17 – 24 3 13 – 16 25 – 32 Los conmutadores S4...S6 se suministran en la posición UQ1. NOTA Tensión en los conmutadores Se puede dañar los conmutadores si se ajusta una tensión durante su funcionamiento. O ¡Haga uso exclusivo de los conmutadores cuando estos estén exentos de tensión! De este modo se asigna la alimentación de válvulas: 1. Abra la tapa roscada inferior B (véase Fig. 9 en la página 359). 2. Con ayuda de los conmutadores S4, S5 y S6, asigne a cada grupo de válvulas una de las dos tensiones de alimentación UQ1 o UQ2 (véase Tab. 14 y Fig. 9 en la página 359). AVENTICS | CANopen | R412005742–BDL–001–AD 361 Puesta en servicio y manejo Para la asignación de los conmutadores S4, S5 y S6 y la alimentación de válvulas montadas figuran ejemplos de 24 bobinas de válvula pilotables en Tab. 15 y Tab. 16 en las páginas 362, 363 y de 32 bobinas de válvula pilotables en Tab. 17 y Tab. 18 en las páginas 364 y 365 (ejemplos 1 a 3 / ejemplos 4 a 6, respectivamente). Allí se detallan los siguientes ejemplos de combinaciones: Ejemplos1) Placas de conexión Equipamiento de válvulas Ejemplo 1 Placas de conexión para válvulas biestables Válvulas biestables Ejemplo 2 Placas de conexión para válvulas biestables Válvulas monoestables Ejemplo 3 Placas de conexión para válvulas biestables Válvulas monoestables y biestables Ejemplo 4 Placas de conexión para válvulas monoestables Válvulas monoestables Ejemplo 5 Placas de conexión para válvulas biestables Válvulas biestables combinadas con Ejemplo 6 placas de conexión para válvulas monoestables Válvulas monoestables Placas de conexión para válvulas biestables Válvulas monoestables y biestables combinadas con placas de conexión para válvulas monoestables Válvulas monoestables Según sus exigencias, también puede elegir otras combinaciones. Visto desde el lado de la conexión eléctrica, deben ordenarse primero las placas de conexión para válvulas biestables y después aquellas para las válvulas monoestables. El número máximo de bobinas referido a todas las placas de conexión es de 24 (R412005747) o 32 (R412008080). La asignación de conmutadores y alimentaciones de válvulas cambia al utilizar ampliaciones de módulo (véanse las instrucciones de servicio R412008961). Esto también es válido para los ejemplos siguientes de las tablas 15 y 16. Español 1) 362 AVENTICS | CANopen | R412005742–BDL–001–AD Puesta en servicio y manejo Tabla 15: Ejemplos de la asignación de conmutadores y la alimentación de válvulas, 24 bobinas de válvula Conmutador Byte Dirección Ejemplo 1 Lugar de válvula1) S4 0 A0.0 1 2 3 1 A1.0 4 5 6 7 2 A2.0 8 9 10 A2.6 1) 2 14 14 14 14 14 14 14 14 11 14 3 14 12 2 14 4 14 3 14 4 14 5 14 6 14 7 14 8 14 9 14 10 14 – Los campos en blanco indican lugares de válvula con válvulas biestables. Los campos en gris indican lugares de válvula con válvulas monoestables. 14 14 12 11 – 12 14 – – 11 14 – – 10 14 – – 9 14 – – 8 14 12 – 7 14 12 – 6 14 12 – 5 14 12 – 12 12 14 Bobina LED 12 – 12 A2.5 A2.7 14 12 A2.3 A2.4 1 – 12 A2.1 A2.2 14 12 A1.7 S6 1 12 A1.5 A1.6 14 12 A1.3 A1.4 Lugar de válvula1) 12 A1.1 A1.2 Bobina LED 12 A0.7 S5 Lugar de válvula1) 12 A0.5 A0.6 Bobina LED 12 A0.3 A0.4 Ejemplo 3 Placa de conexión para válvulas biestables A0.1 A0.2 Ejemplo 2 14 12 12 14 – AVENTICS | CANopen | R412005742–BDL–001–AD 363 Puesta en servicio y manejo Ejemplos de la asignación de conmutadores y la alimentación de válvulas, 24 bobinas de válvula Byte S4 0 S5 S6 1) 1 2 Dirección Conmutador Ejemplo 4 Ejemplo 5 Placa de conexión para válvulas monoestables Ejemplo 6 Placa de conexión para válvulas biestables y monoestables Lugar de válvula1) Bobina LED Lugar de válvula1) Bobina LED Lugar de válvula1) Bobina LED A0.0 1 14 1 14 1 14 A0.1 2 14 A0.2 3 14 2 14 A0.3 4 14 A0.4 5 14 3 14 A0.5 6 14 A0.6 7 14 4 14 A0.7 8 14 A1.0 9 14 5 14 A1.1 10 14 6 14 A1.2 11 14 7 14 A1.3 12 14 8 14 A1.4 13 14 9 14 7 14 A1.5 14 14 10 14 8 14 A1.6 15 14 11 14 9 14 A1.7 16 14 12 14 10 14 A2.0 17 14 13 14 11 14 A2.1 18 14 14 14 12 14 A2.2 19 14 15 14 13 14 A2.3 20 14 16 14 14 14 A2.4 21 14 17 14 15 14 A2.5 22 14 18 14 16 14 A2.6 23 14 19 14 17 14 A2.7 24 14 20 14 18 14 12 12 2 14 3 14 4 14 12 – 12 – 12 Los campos en blanco indican lugares de válvula con válvulas biestables. Los campos en gris indican lugares de válvula con válvulas monoestables. 12 5 14 12 6 14 12 Español Tabla 16: 364 AVENTICS | CANopen | R412005742–BDL–001–AD Puesta en servicio y manejo Tabla 17: Ejemplos de la asignación de conmutadores y la alimentación de válvulas, 32 bobinas de válvula Conmutador Byte Dirección Ejemplo 1 Lugar de válvula1) S4 0 A0.0 1 1 A1.0 2 A2.0 A3.0 A3.7 1) 14 4 14 5 14 6 14 7 14 8 14 9 14 10 14 11 14 12 14 13 14 14 14 15 14 16 14 14 7 14 8 14 9 14 10 14 11 14 12 14 13 14 14 14 15 14 16 14 14 3 14 4 14 5 14 6 14 7 14 8 14 9 14 10 14 11 14 12 14 13 14 14 14 15 14 16 14 12 – 12 – 12 – 12 12 – 12 – – 12 – – 12 – – 12 – – 12 12 – 12 12 – 12 – – 12 – – 12 12 12 – 12 A3.5 A3.6 3 6 A3.3 A3.4 14 2 12 A3.1 A3.2 2 14 A2.7 3 14 5 A2.5 A2.6 1 – 12 A2.3 A2.4 14 14 A2.1 A2.2 1 4 A1.7 S6 14 12 A1.5 A1.6 Bobina LED 14 A1.3 A1.4 Lugar de válvula1) 3 A1.1 A1.2 Bobina LED 14 A0.7 S5 Lugar de válvula1) 2 A0.5 A0.6 Bobina LED 12 A0.3 A0.4 Ejemplo 3 Placa de conexión para válvulas biestables A0.1 A0.2 Ejemplo 2 12 – – Los campos en blanco indican lugares de válvula con válvulas biestables. Los campos en gris indican lugares de válvula con válvulas monoestables. 12 – AVENTICS | CANopen | R412005742–BDL–001–AD 365 Puesta en servicio y manejo Ejemplos de la asignación de conmutadores y la alimentación de válvulas, 32 bobinas de válvula Conmutador Byte Dirección Ejemplo 4 S4 0 A0.0 S5 S6 1 2 3 1) Ejemplo 5 Placa de conexión para válvulas monoestables Lugar de válvula1) Placa de conexión para válvulas biestables y monoestables Bobina LED Lugar de válvula1) 1 1 14 A0.1 2 14 A0.2 3 14 A0.3 4 14 A0.4 5 14 A0.5 6 14 A0.6 7 14 Ejemplo 6 Bobina LED Lugar de válvula1) 14 1 12 2 14 14 2 14 3 14 4 14 – 12 4 14 A0.7 8 14 A1.0 9 14 5 14 A1.1 10 14 6 14 A1.2 11 14 7 14 A1.3 12 14 8 14 14 12 12 3 Bobina LED – 12 12 5 14 12 6 14 12 A1.4 13 14 9 14 7 14 A1.5 14 14 10 14 8 14 A1.6 15 14 11 14 9 14 A1.7 16 14 12 14 10 14 A2.0 17 14 13 14 11 14 A2.1 18 14 14 14 12 14 A2.2 19 14 15 14 13 14 A2.3 20 14 16 14 14 14 A2.4 21 14 17 14 15 14 A2.5 22 14 18 14 16 14 A2.6 23 14 19 14 17 14 A2.7 24 14 20 14 18 14 A3.0 25 14 21 14 19 14 A3.1 26 14 22 14 20 14 A3.2 27 14 23 14 21 14 A3.3 28 14 24 14 22 14 A3.4 29 14 25 14 23 14 A3.5 30 14 26 14 24 14 A3.6 31 14 27 14 25 14 A3.7 32 14 28 14 26 14 Los campos en blanco indican lugares de válvula con válvulas biestables. Los campos en gris indican lugares de válvula con válvulas monoestables. Español Tabla 18: 366 AVENTICS | CANopen | R412005742–BDL–001–AD Puesta en servicio y manejo 7.1.5 Configuración del cierre de bus Para minimizar las reflexiones de conductores y garantizar un nivel de reposo definido en la línea de transferencia del CANopen, se debe colocar un cierre de bus en ambos extremos de la línea de transferencia. En el acoplador de bus, el cierre de bus está integrado en el aparato y se puede definir a través del conmutador S8. X71 ON OF F S8 A UQ1 X72 B X10 S4 S5 S6 UQ2 Fig. 10: Conmutador S8 para cierre de bus La configuración del cierre de bus se encuentra bajo el racor PG B (véase 10). O Configure el cierre de bus con el conmutador S8 (véase Tab. 19). Tabla 19: Posibilidades de configuración para el conmutador S8 Posición del conmutador S8 Cierre de bus Cierre de bus Aplicación OFF desconectado conectado Cuando el acoplador de bus está conectado con otro módulo adicional y no supone el final de la línea de transferencia. ON conectado desconectado Cuando el acoplador de bus se encuentra al final de la línea de transferencia. El conmutador se suministra en la posición OFF, es decir, el cierre de bus está desconectado. AVENTICS | CANopen | R412005742–BDL–001–AD 367 Puesta en servicio y manejo 7.2 Configuración del sistema de bus Las configuraciones realizadas en el marco de la configuración de master de bus del sistema completo se encuentran por encima de las configuraciones en el acoplador de bus ya descritas. Todas las características del rendimiento y objetos para la configuración del acoplador de bus se encuentran en el Electronic Data Sheet (EDS). Para el acoplador de bus existe este archivo con el nombre RXyyRMV4_CO.EDS (yy = versión). El archivo EDS se puede descargar en Internet de la dirección www.aventics.com/mediadirectory. Solamente personal cualificado en electrónica está autorizado a llevar a cabo los trabajos de configuración, teniendo en cuenta en todo momento la documentación del explotador acerca de la configuración del master de bus, así como las normas técnicas, reglamentos e indicaciones de seguridad vigentes. Español Antes de llevar a cabo la configuración se deben realizar y finalizar los siguientes trabajos en el acoplador de bus: W Ha montado el acoplador de bus y el sistema de válvulas (véase “Montaje” en la página 344). W Ha conectado el acoplador de bus (véase “Conexión eléctrica de los módulos” en la página 347). W Ha realizado los ajustes previos (véase “Realización de ajustes previos” en la página 356). 368 AVENTICS | CANopen | R412005742–BDL–001–AD Puesta en servicio y manejo NOTA Error de configuración Un acoplador de bus configurado de manera incorrecta puede provocar funciones erróneas y daños en el sistema. O ¡Por lo tanto, solamente personal cualificado en electrónica podrá llevar a cabo la configuración! O Configure el sistema de bus según los requisitos del sistema, las indicaciones del EDS, las especificaciones del fabricante y todas las normas técnicas, reglamentos e indicaciones de seguridad vigentes. Tenga en cuenta la documentación del explotador acerca de la configuración del master de bus. 7.3 Comportamiento en funcionamiento El comportamiento de la conexión de bus depende tanto de las propiedades de CANopen como de la configuración E/S. Los telegramas CAN tienen una capacidad de datos máxima de 8 bytes. En CANopen, utilizando el procedimiento del CiA DS-301 (Master/Slave Connection Set), se pueden definir 4 canales para el envío de PDO (Process Data Objects) y 4 canales para la recepción de PDO. Dado que las conexiones de bus solamente ocupan como máximo entradas de 3 bytes y salidas de 6 bytes, son suficientes 1 PDO de recepción y uno de emisión respectivamente. Solamente son transmitidos los PDO con los módulos E/S correspondientes conectados. Además, cada nudo CAN tiene a disposición un canal SDO (Service Data Object) para enviar y otro para recibir, respectivamente. AVENTICS | CANopen | R412005742–BDL–001–AD 369 Puesta en servicio y manejo 7.4 Una vez conectados el conjunto (aplicación de la alimentación de lógica de 24 V), se verifican los componentes del hardware. Una vez que el test de arranque ha sido llevado a cabo con éxito y se cuenta con tensión de bus, se determina la configuración E/S. A continuación se inicializa el controlador CAN según los ajustes previos en los conmutadores giratorios e interruptores DIP. Una vez inicializado con éxito, el módulo se encuentra en estado „Preoperational“. Mediante un telegrama „NMT START“pasarse del master CAN al estado „Operational“. Los datos de procesos solamente pueden transmitirse a través de PDO con el módulo en modo „Operativo“. En caso de error, el acoplador de bus se transfiere a la parada del sistema (véase "Parada del sistema" en la página 374). 7.5 7.5.1 Ensayo y diagnóstico del acoplador de bus Lectura de los indicadores de diagnóstico del acoplador de bus Los LED ubicados en la placa frontal del acoplador de bus reproducen los mensajes enunciados en la tabla 20. O Antes de la puesta en servicio y durante el funcionamiento debe controlar periódicamente las funciones del acoplador de bus mediante la lectura de los indicadores de diagnóstico. Español Comportamiento después de Power-on Comportamiento del arranque 370 AVENTICS | CANopen | R412005742–BDL–001–AD Puesta en servicio y manejo Tabla 20: LED Significado de los LED de diagnóstico del acoplador de bus Señal UL/DIA verde UQ1 UQ2 RUN ERR Descripción Hay alimentación de lógica rojo Sobrecarga de la alimentación del transmisor(diagnóstico colectivo) 1) apagado No hay alimentación de lógica verde Alimentación de válvulas UQ1 en regla rojo Tensión inferior (12 V < UQ1 < 18,5 V) apagado Alimentación de válvulas UQ1 < 12 V verde Alimentación de válvulas UQ2 en regla rojo Tensión inferior (12 V < UQ2 < 18,5 V) apagado Alimentación de válvulas UQ2 < 12 V verde Indicación de funcionamiento, el módulo se encuentra en estado “Pre-Operational”. intermitente verde~ 3) El módulo se encuentra en estado “Pre-Operational”. (el slave está a la espera del telegrama del master CAN). intermitente verde~~ 4) El módulo se encuentra en estado “Auto Buadrate Detection o LSS Services ”(el ERROR LED parpadea también alternativamente). Optional intermitente verde+ 5) El módulo se encuentra en estado “STOPPED”. apagado El módulo se encuentra en estado “Initializing”. apagado ningún error de bus identificado rojo El módulo se encuentra en estado “Bus-Off” (inactivo en CAN). ID nodo inválido (ID nodo = 0 no está permitido). intermitente rojo+ 4) El módulo se encuentra en estado “Error passive” (al menos un contador de errores ha alcanzado o sobrepasado el valor máximo). intermitente rojo~~3) El módulo se encuentra en estado “Auto Baudrate Detection o LSS Services ”(el RUN LED parpadea también alternativamente). Optional intermitente rojo++ 5) El módulo se encuentra en estado “Error Control Event”. Ha aparecido un evento de supervisión/Heartbeat. Condición: Object 1006 supported. intermitente rojo+++ 6) El módulo se encuentra en estado “Sync Error”. No se ha enviado el mensaje SYNC dentro del tiempo configurado. 1) Esta indicación solamente aparece mientras la salida con sobrecarga se esté pilotando o mientras la corriente total máx. de la alimentación de transmisor se traspase. 2) intermitente verde~ intermitente rojo~~ /intermitente verde~~ 4) intermitente rojo+ / intermitente verde+ 5) intermitente rojo++ 3) 6) intermitente rojo+++ Parpadeo lento del indicador: 0,2 s encendido / 0,2 s apagado Parpadeo rápido del indicador: 0,05 s encendido / 0,05 s apagado Parpadeo del indicador: 0,2 s encendido / 1 s apagado Parpadeo doble: 0,2 s encendido / 0,2 s apagado; 0,2 s encendido / 1 s apagado Parpadeo triple: 0,2 s encendido / 0,2 s apagado; 0,2 s encendido / 0,2 s apagado; 0,2 s apagado / 1 s apagado AVENTICS | CANopen | R412005742–BDL–001–AD 371 Puesta en servicio y manejo 7.5.2 Comprobación de los sensores del módulo de entrada Para el control, en el módulo de entrada está disponible un LED para cada entrada. Se iluminan cuando el nivel de señal es alto. O La capacidad de funcionamiento y los efectos de los sensores deben comprobarse antes de la puesta en servicio mediante la lectura de los LED. Fig. 11: Indicadores LED en el módulo de entrada M8 (izquierda) y M12 (derecha) Indicador LED en los módulos de entrada LED Color Significado Entrada amarillo Estado del nivel de señal alto Español Tabla 21: 372 AVENTICS | CANopen | R412005742–BDL–001–AD Puesta en servicio y manejo 7.5.3 O Comprobación de los actuadores del módulo de salida La capacidad de funcionamiento y los efectos del nombramiento de actuadores deben comprobarse antes de la puesta en servicio con ayuda de los indicadores LED en el módulo de salida. O O O O O O O O O O Fig. 12: Indicadores LED en el módulo de salida M8 (izquierda) y M12 (derecha) Tabla 22: Significado de los indicadores LED en el módulo de salida LED Color Significado UQ1 verde Hay alimentación de carga UQ1 rojo Diagnóstico: Sobrecarga/cortocircuito en salida accionada O0, O1, O2 u O3 apagado No hay alimentación de carga UQ1 (p. ej. parada de emergencia) verde Hay alimentación de carga UQ2 rojo Diagnóstico: Sobrecarga/cortocircuito en salida accionada O4, O5, O6 u O7 apagado No hay alimentación de carga UQ2 (p. ej. parada de emergencia) UQ2 O0 bis O7 apagado Salida correspondiente nivel LOW amarillo Salida correspondiente nivel HIGH AVENTICS | CANopen | R412005742–BDL–001–AD 373 Puesta en servicio y manejo 7.6 Puesta en servicio del acoplador de bus Antes de poner en servicio el sistema, se deben realizar y finalizar los siguientes trabajos: W Ha montado el acoplador de bus y el sistema de válvulas (véase “Montaje del acoplador de bus en el sistema de válvulas” en la página 344). W Ha conectado el acoplador de bus (véase “Conexión eléctrica de los módulos” en la página 347). W Ha realizado los ajustes previos y la configuración (véase “Realización de ajustes previos” en la página 356 y “Configuración del sistema de bus” en la página 367). W Ha configurado el master de bus de tal manera que las válvulas y los módulos de entrada se piloten adecuadamente. W Ha llevado a cabo el ensayo de diagnóstico de los módulos de entrada/salida (véase “Ensayo y diagnóstico del acoplador de bus” en la página 369). Español Solamente personal cualificado en electrónica o neumática o bien otra persona vigilada y controlada por una persona cualificada podrá realizar la puesta en servicio y su manejo (véase “Cualificación del personal” en la página 333). 374 AVENTICS | CANopen | R412005742–BDL–001–AD Puesta en servicio y manejo ATENCIÓN Movimientos descontrolados de los actuadores al conectar la neumática Existe peligro de lesiones cuando el sistema se encuentra en un estado indefinido o los accionamientos auxiliares manuales están en la posición “1”. O ¡Antes de conectar el sistema, asegúrese de que este se encuentra en un estado definido! O Ponga todos los accionamientos auxiliares manuales en la posición “0”. O Asegúrese de que no se encuentra ninguna persona dentro de la zona de peligro cuando conecte la presión. O También debe tener en cuenta las instrucciones y las advertencias correspondientes de las instrucciones de servicio de su VS. 1. Conecte la tensión de servicio. 2. Compruebe los indicadores LED en todos los módulos. 3. Conecte la alimentación de aire comprimido. 7.7 Parada del sistema El estado “Parada del sistema” del acoplador de bus se señaliza con los dos diodos luminosos RUN y ERR (véase Tab. 20 en la página 370) parpadeando rápidamente a la vez. Cuando el sistema se pare, las salidas quedarán protegidas (= “0”) y se interrumpirá la comunicación del bus al master CANopen. Para salir del sistema hay que volver a poner en marcha la unidad (Power-on). Las paradas del sistema vienen provocadas por un error de excepción del hardware o del firmware. AVENTICS | CANopen | R412005742–BDL–001–AD 375 Desmontaje y sustitución Error de excepción del firmware Durante el arranque del acoplador de bus (Power-on) se comprueban los componentes del hardware. De producirse un error, la unidad será colocado en modo de “Parada del sistema”. Durante el funcionamiento del firmware se llevan a cabo continuamente pruebas de plausibilidad. Si se detecta un error, la unidad será colocado en modo de “Parada del sistema”. 7.7.1 O 8 Salida de la parada del sistema Vuelva a poner en marcha la unidad con “Power-on”. Desmontaje y sustitución En función de sus necesidades, puede sustituir el acoplador de bus o montar más/otros módulos de entrada/salida. La garantía de AVENTICS solo es válida para la configuración entregada y las ampliaciones que se hayan tenido en cuenta en la configuración. La garantía prescribe después de realizar una modificación que vaya más allá de estas ampliaciones. Un acoplador de bus con 32 salidas solo puede conectarse a un VS diseñado para 32 bobinas de válvula. Español Error de excepción del hardware 376 AVENTICS | CANopen | R412005742–BDL–001–AD Desmontaje y sustitución 8.1 Sustitución del acoplador de bus ATENCIÓN Tensión eléctrica existente y alta presión Peligro de lesiones a través de un golpe eléctrico o caída de presión repentina. O ¡Conecte el sistema exento de presión y de tensión! 5 4 6 1 3 2 3 Fig. 13: Sustitución del acoplador de bus, ejemplo 1 2 3 Tornillos de hexágono interior Placa final E Junta 4 5 6 Acoplador de bus Tirantes Placa final EP VS HF03 LG o HF04 1. Separe las conexiones eléctricas del acoplador de bus (4). 2. Afloje la placa final E (2) y, en caso de haberlos, todos los módulos de entrada/salida a la izquierda del acoplador de bus (cada 2 tornillos de hexágono interior DIN 912 – M4 (1), ancho de llave 3) y retírelos de los tirantes (5). 3. Retire el acoplador de bus (4) de los tirantes (5). AVENTICS | CANopen | R412005742–BDL–001–AD 377 Desmontaje y sustitución 4. Desplace el nuevo acoplador de bus (4) hacia los tirantes (5). 5. Asegúrese de que – los tirantes (5) están atornillados hasta el tope y Español – las juntas (3) están encajadas correctamente. 6. En primer lugar, en caso de haberlos, desplace los módulos de entrada/salida en el orden original y, a continuación, la placa final E (2) de nuevo hacia los tirantes (5) y atorníllelos (cada 2 tornillos de hexágono interior DIN 912 – M4 (1), ancho de llave 3). Par de apriete: 2,5 a 3,0 Nm 7. Realice todos los ajustes previos en el nuevo acoplador de bus (4) (véase “Realización de ajustes previos” en la página 356). 8. Establezca las conexiones de nuevo. 9. Compruebe la configuración y si es necesario modifíquela (véase “Configuración del sistema de bus” en la página 367). 378 AVENTICS | CANopen | R412005742–BDL–001–AD Desmontaje y sustitución 8.2 Montaje de módulo(s) de entrada/salida Se debe ampliar el sistema de válvulas con un módulo de entrada/salida más. ATENCIÓN Tensión eléctrica existente y alta presión Peligro de lesiones a través de un golpe eléctrico o caída de presión repentina. O ¡Conecte el sistema exento de presión y de tensión! ATENCIÓN Entradas/salidas abiertas Peligro de electrocución al tocarlas, pueden provocar un cortocircuito y daños en el sistema. O Cierre siempre las salidas o entradas que no utilice con tapones de cierre M12 y M8 (ver accesorios), para respetar la clase de protección IP65. AVENTICS | CANopen | R412005742–BDL–001–AD 379 Desmontaje y sustitución 7 6 6 3 5 3 1 4 2 3 Fig. 14: Montaje de módulo(s) de entrada/salida en VS HF03 LG o en VS HF04, ejemplo Tornillos de hexágono interior Placa final E Junta Módulo de salida 5 6 7 Módulo de entrada Tirantes Acoplador de bus En un sistema de válvulas puede haber un máximo de 6 módulos (módulos de entrada o salida) montados. ¡Tenga en cuenta las cargas de corriente admisibles! Tenga en cuenta 14 en la página 379. 1. Afloje la placa final E (2) del acoplador de bus (7) o del último módulo de entrada (5)/salida (4) del sistema de válvulas (2 tornillos de hexágono interior DIN 912 – M4 (1), ancho de llave 3) y retírela de los tirantes (6). Español 1 2 3 4 380 AVENTICS | CANopen | R412005742–BDL–001–AD Desmontaje y sustitución 2. Atornille los tirantes (6) para módulos de entrada (5)/salida (4) en los tirantes disponibles (6) (2 por cada módulo de entrada (5)/salida(4)). – ¡Asegúrese de que los tirantes (6) están atornillados hasta el tope! 3. Desplace el (otro) módulo de entrada (5)/salida (4) hacia los tirantes (6). – ¡Asegúrese de que las juntas (3) estén encajadas correctamente y los contactos estén conectados como es debido! 4. Atornille de nuevo la placa final E (2) después del último módulo de entrada (5) o salida (4) (2 tornillos de hexágono interior DIN 912 – M4 (1), ancho de llave 3). Par de apriete: 2,5 a 3 Nm 5. Establezca las conexiones (véase “Conexión de la alimentación de lógica y de carga del acoplador de bus” en la página 350). 6. Modifique la configuración (véase "Configuración del sistema de bus" en la página 367). AVENTICS | CANopen | R412005742–BDL–001–AD 381 Cuidado y mantenimiento 9 Cuidado y mantenimiento ATENCIÓN Tensión eléctrica existente y alta presión Peligro de lesiones a través de un golpe eléctrico o caída de presión repentina. O Desconecte la presión y la tensión del sistema antes de realizar trabajos de cuidado y mantenimiento. 9.1 Cuidado de los módulos NOTA ¡Daños en la superficie de la carcasa a consecuencia de disolventes y detergentes agresivos! Las superficies y juntas pueden resultar dañadas a consecuencia de disolventes o detergentes agresivos. O ¡No utilice nunca disolventes ni detergentes agresivos! O Limpie el aparato periódicamente con un paño humedecido. con agua o un detergente suave. 9.2 Mantenimiento del acoplador de bus Español El acoplador de bus y los módulos E/S del VS HF03 LG y HF04 no requieren mantenimiento. O No obstante, tenga en cuenta los intervalos de mantenimiento y las especificaciones de toda la instalación. 382 AVENTICS | CANopen | R412005742–BDL–001–AD Datos técnicos 10 Datos técnicos 10.1 Parámetros Generalidades Tipo de protección según EN 60 529 / IEC 529 IP 65 montado 0 C hasta +50 C sin condensación Temperatura ambiente U Compatibilidad electromagnética Resistencia a interferencias EN 61131-2, EN 61000-6-2 Emisión perturbadora EN 61000-6-4 10.2 Acoplador de bus Sistema eléctrico Tensión de servicio lógica UL Tensión de servicio carga UQ1 UQ2 Longitud de la línea de alimentación de tensión 24 V DC (+20 %/–15 %) 24 V DC (+10 %/–10 %) Tensión mínima de seguridad (SELV/PELV) según IEC 60364-4-41 Ondulación residual 0,5 % máx. 20 m AVENTICS | CANopen | R412005742–BDL–001–AD 383 Datos técnicos 10.3 Módulos de entrada óctuples, RMV04-8DI_M8 y RMV04-8DI_M12 l Sistema eléctrico Entradas DIN EN 61131-2 (febrero 2004) 8 entradas digitales, tipo 3, Interruptor de proximidad con doble cable con una corriente de reposo de máx. 2,5 mA conectable. La corriente total para todos los módulos de entrada está limitada a 0,7 A. Retraso de entrada 0 – 1 3 ms Retraso de entrada 1 – 0 3 ms Longitudes de los cables para conexión M8 y M12 máx. 30 m 10.4 Módulos de salida óctuples, RMV04-8DO_M8 y RMV04-8DO_M12 Sistema eléctrico Tensión de salida Corriente de salida 8 salidas digitales Valor nominal 24 V Caída de tensión cuando señal H 1,5 V Valor nominal 0,5 A Por motivos térmicos, las salidas no se pueden cargar durante un período de tiempo prolongado con corriente nominal. Protección contra sobrecarga Desconexión al alcanzar 0,6 hasta 1,2 A Reinicio automático con carga reducida Longitudes de los cables para conexión M8 y M12 máx. 30 m Alimentación de tensión UQ1 und UQ2 Valor nominal 24 V (+20 %/-15 %) Longitud de la línea de alimentación de tensión máx. 20 m Español Salidas DIN EN 61131-2 (febrero 2004) 384 AVENTICS | CANopen | R412005742–BDL–001–AD Repuestos y accesorios 11 Repuestos y accesorios 11.1 Acoplador de bus Número de referencia Acoplador de bus del VS para CANopen con pilotaje para 24 bobinas de válvula1) R412005747 1) R412008080 Acoplador de bus del VS para CANopen con pilotaje para 32 bobinas de válvula Accesorios Enchufe de entrada de datos, M12×1, 5 pins, recto, con código A, cable Ø 6 – 8 mm 8942051602 Enchufe de salida de datos, M12×1, 5 pins, recto, con código A, cable Ø 6 – 8 mm 8942051612 Tapa de protección M12x1 1823312001 Placa final para acoplador de bus2) R412003490 1) Suministro incl. 2 tirantes, junta y manual 2) Suministro incl. 2 tornillos de fijación y 1 junta 11.2 Módulo de entrada/salida óctuple, 8DI/8DO Código de pedido Módulo de entrada óctuple (8 x M8)1) Módulo de entrada óctuple (4 x M12)1) Número de referencia 8DI_M8 R412003489 8DI_M12 R412000871 Módulo de salida óctuple (8 x M8) 1) 8DO_M8 R412005968 Módulo de salida óctuple (4 x M12) 1) 8DO_M12 R412000870 Accesorios Conector recto, con cierre roscado autobloqueable, M8x1, de 3 pins Caperuza de protección M8x1 para entradas (LE = 25 piezas) Longitud del cable 2 m 894 620 360 2 Longitud del cable 5 m 894 620 361 2 Longitud del cable 10 m 894 620 362 2 R412003493 Caperuza de protección M12x1 para entradas (LE = 25 piezas) 182 331 200 1 Distribuidor Y M12 con cierre roscado autobloqueable M12, 5 pins, 2 x caja de cables M12, 1 x enchufe de cable M12 894 100 239 2 1) Suministro incl. 2 tirantes y 1 junta. AVENTICS | CANopen | R412005742–BDL–001–AD 385 Eliminación de residuos 11.3 Enchufe Power para acoplador de bus y módulo de salida Número de referencia Conector por enchufe para alimentación de tensión, casquillo M12×1, 4 pins para cable Ø 4 – 8 mm, con código A 180o (X10, POWER) 90 (X10, POWER) 894 105 442 4 Conector por enchufe para módulos de entrada/salida Enchufe M12x1, recto 1 834 484 222 Enchufe M12x1, acodado 1 834 484 223 Enchufe Duo M12x1 para cable Ø 3 mm o 5 mm 1 834 484 246 o 894 105 432 4 12 Eliminación de residuos Elimine el aparato de acuerdo con las especificaciones de su país. 13 Apéndice Especificaciones de la configuración del master de bus con CANopen El EDS es un archivo ASCII específicado por CiA, que describe los objetos/características de rendimiento de un aparato CANopen. Para el acoplador de bus existe este archivo con el nombre RXyyRMV4_CO.EDS (yy = versión). El archivo EDS se puede descargar en Internet de la dirección www.aventics.com/ mediadirectory. Español 13.1 Electronic Data Sheet (EDS) 386 AVENTICS | CANopen | R412005742–BDL–001–AD Apéndice 13.2 Comportamiento en funcionamiento El comportamiento de la conexión de bus depende tanto de las propiedades de CANopen como de la configuración E/S. Los telegramas CAN tienen una capacidad de datos máxima de 8 bytes. En CANopen, utilizando el procedimiento del CiA DS301 (Master/Slave Connection Set), se pueden definir 4 canales para el envío de PDO (Process Data Objects) y 4 canales para la recepción de PDO. Dado que las conexiones de bus solamente ocupan como máximo entradas de 3 bytes y salidas de 6 bytes, son suficientes 1 PDO de recepción y uno de emisión respectivamente. Solamente son transmitidos los PDO con los módulos E/S correspondientes conectados. Además, cada nudo CAN tiene a disposición un canal SDO (Service Data Object) para enviar y otro para recibir, respectivamente. 13.2.1 Comportamiento después de Power-on Comportamiento del arranque Una vez conectados el conjunto (aplicación de la alimentación de lógica de 24 V), se verifican los componentes del hardware. Una vez que el test de arranque ha sido llevado a cabo con éxito y se cuenta con tensión de bus, se determina la configuración E/ S. A continuación se inicializa el controlador CAN según los ajustes previos en los conmutadores giratorios e interruptores DIP. Una vez inicializado con éxito, el módulo se encuentra en estado "Preoperational". Mediante un telegrama "NMT START" puede pasarse del master CAN al estado "Operational". Los datos de procesos solamente pueden transmitirse a través de PDO con el módulo en modo "Operational". En caso de error, el acoplador de bus se transfiere a la parada del sistema (véase "Parada del sistema" en la página 374). AVENTICS | CANopen | R412005742–BDL–001–AD 387 Apéndice 13.2.2 Tras la puesta en marcha, se ajustan los identificadores del acoplador de bus por defecto que se atienen a los procedimientos del CiA DS-301 (Master/Slave connection set). La ocupación por defecto del identificador parte de una relación entre master y slave en la que el sistema de válvulas se comporta exactamente como un slave. Un master de aplicación correspondiente, master DBT o master NMT puede calcular el identificador a través del ID nodo del slave. La distribución por defecto del identificador no permite la comunicación de los slaves entre sí. A través del SDO, un master DBT puede modificar los identificadores del acoplador de bus de manera discrecional, diferente de la distribución por defecto, de manera que también es posible una comunicación directa de los datos de proceso entre slaves. La ocupación por defecto del identificador (longitud de identificación 11 bit correspondiente a un área de 0 a 2047) tiene lugar según las indicaciones del CiA DS-301 (Master/ Slave connection set). Los identificadores de los canales PDO así como aquellos para el SYNC Object se pueden redefinir a voluntad a través del Object Dictionary (para ejemplo véase Tab. 23 en la página 387). Tabla 23: Ocupación estándar del identificador según las especificaciones del CiA DS-301 Byte en hex Byte en bit de de hasta hasta 0 1 Servicios NMT 0x7F 0x80 0x81 0xFF 127 129 0x1FF 385 255 513 Mensajes de emergencia Time Stamp 511 512 0x27F Reservado por CAL Mensaje SYNC 256 0x200 0x201 1 128 0x100 0x181 Significado PDO 1 (transmitir) Reservado por CAL 639 PDO 1 (recibir) Español Ocupación por defecto del identificador Identificador CAN 388 AVENTICS | CANopen | R412005742–BDL–001–AD Apéndice Tabla 23: Ocupación estándar del identificador según las especificaciones del CiA DS-301 Byte en hex Byte en bit de de hasta 0x280 0x281 0x301 0x2FF 0x37F 0x3FF 0x47F 0x4FF 897 1025 1153 0x57F 1281 1023 0x5FF 1409 PDO 3 (transmitir) Reservado por CAL 1151 PDO 3 (recibir) Reservado por CAL 1279 PDO 4 (transmitir) Reservado por CAL 1407 1408 0x600 PDO 2 (recibir) Reservado por CAL 1280 0x580 0x581 895 1152 0x500 0x501 769 PDO 2 (transmitir) Reservado por CAL 1024 0x480 0x481 767 896 0x400 0x401 641 Reservado por CAL 768 0x380 0x381 hasta 640 0x300 Significado PDO 4 (recibir) Reservado por CAL 1535 1536 SDO (transmitir) Reservado por CAL 0x601 0x67F 1537 1663 SDO (recibir) 0x680 0x6E0 1664 1760 Reservado para SDO 0x701 0x77F 1793 1919 Node Guarding 0x760 0x7EF 1888 2031 Reservado para NMT 0x7F0 0x7FF 2032 2047 Reservado para CAL Tabla 24: Definiciones de identificador independientes de ID nodo Object Identifier Dirección NMT 0 Enviar/recibir SYNC 128 Recibir En el acoplador de bus el PDO 1 está ocupado por defecto para enviar y recibir respectivamente. AVENTICS | CANopen | R412005742–BDL–001–AD 389 Apéndice Definiciones de identificador dependientes de ID nodo Object Identifier Dirección Emergency 128 + Node-ID Enviar NMT Node Guarding 1792 + Node-ID Enviar/recibir SDO 1408 + Node-ID Enviar SDO 1536 + Node-ID Recibir PDO 1 384 + Node-ID Enviar PDO 2 640 + Node-ID Enviar PDO 3 896 + Node-ID Enviar PDO 4 1152 + Node-ID Enviar PDO 1 512 + Node-ID Recibir PDO 2 768 + Node-ID recibir PDO 3 1024 + Node-ID Recibir PDO 4 1280 + Node-ID Recibir Tabla 26: Ejemplo: ID nodo conectada = 4 Object Identifier Dirección Emergency 132 Enviar NMT Node Guarding 1796 Enviar/recibir SDO 1412 Enviar SDO 1540 Recibir PDO 1 388 Enviar PDO 2 644 Enviar PDO 3 900 Enviar PDO 4 1156 Enviar PDO 1 516 Recibir PDO 2 772 Recibir PDO 3 1028 Recibir PDO 4 1284 Recibir Español Tabla 25: 390 AVENTICS | CANopen | R412005742–BDL–001–AD Apéndice 13.3 Object Dictionary Perfiles Mediante el Object Dictionary (OD), puede determinarse, entre otras funciones, qué objetos existentes pueden ser puestos a disposición de la comunicación y de qué modo. El OD está organizado en forma de tabla. Los registros son direccionados con un índice de 16 bit (dirección de filas de la tabla) y un subíndice de 8 bit (dirección de columnas de la tabla). El OD está compuesto de grupos de objetos, denominados perfiles. Estos perfiles describen las características de un aparato. Tabla 27: Object Dictionary Index Índice en Hex de hasta 0000 Perfiles de aparatos Objeto No utilizado 0001 001F Tipos de datos estáticos 0020 003F Tipos de datos complejos 0040 005F Tipos de datos específicos del fabricante 0060 007F Tipos de datos estáticos específicos del perfil 0080 009F Tipos de datos complejos específicos del perfil 00A0 0FFF Reservado 1000 1FFF Perfil de comunicación (CiA DS-301) 2000 5FFF Parámetros específicos del fabricante 6000 9FFF Parámetros de los perfiles de aparatos estandarizados A000 FFFF Reservado Aquí solamente se mencionan las normas CiA: W DS-301 Perfil de comunicación CANopen W DSP-306 Electronic Data Sheet W DS-401Perfil de aparatos para módulos E/S digitales y analógicos AVENTICS | CANopen | R412005742–BDL–001–AD 391 Apéndice Clases de aparatos Los perfiles de aparatos describen las características especiales o los parámetros de una clase de aparatos. Hasta el momento han sido definidos los siguientes perfiles de aparatos: W Aparatos E/S digitales o analógicos W Accionamientos W Aparatos de mando W Sensores W Regulador Otros perfiles de aparatos, p. ej. en el ámbito de la tecnología médica y de la marina están en preparación. Todos los perfiles de aparatos tienen el perfil de comunicación según CiA DS-301en común. Con el perfil de comunicación pueden consultarse y ajustarse datos básicos de los aparatos como, p. ej.: W Denominación de los aparatos W Versión de hardware/software W Estado de errores W Identificador CAN utilizado 13.3.1 Objetos OD generales Se establecen diversos registros en OD mediante el CiA DS-301. El OD dispone de constantes, registros descriptibles, registros legibles y registros descriptibles y legibles. A través de las constantes y de los registros legibles, el usuario puede conseguir informaciones sobre, p. ej. los estados de los módulos e identificaciones de versión. Los registros descriptibles sirven para el pilotaje y la configuración del módulo que difiere de los ajustes por defecto. Aquí el usuario puede, p. ej. redefinir la ocupación de objetos, cambiar los identificadores, conectar y desconectar el diagnóstico, etc. Si se produce una pérdida de tensión, todos los valores de OD modificados por el usuario o condicionados por la situación durante el tiempo de ejecución se pierden. Español Perfiles de comunicación 392 AVENTICS | CANopen | R412005742–BDL–001–AD Apéndice Tras volver a realizar la conexión, todos los objetos disponen del valor por defecto. Pueden conseguirse informaciones para el OD en las Electronic Data Sheets correspondientes (RXxxRMV4_CO.EDS). Estos archivos se encuentran en formato ASCII y describen todos los objetos del acoplador de bus CANopen. Tabla 28: Objetos OD generales Índice en Hex Subíndice en Hex Descripción del objeto 1000 0 Device Type: 0x30191: Nur digitale IO 1008 0 Device Name: RMV04-CO 1009 0 Hardware Version: 1.1 100A 0 Software Version: 1.1 1018 1 Vendor ID: 0x24 2 Product Code: 0x02 3 Revision Number: 0x11 13.3.2 Objetos OD específicos de fabricante Además de los objetos OD especificados por el CiA, existe un sector reservado para el fabricante. En él, pueden registrarse objetos específicos de un aparato, que, por tanto, son accesibles para el usuario. En las páginas siguientes se representa la estructura de bits de MSR y MCR. AVENTICS | CANopen | R412005742–BDL–001–AD 393 Apéndice Objetos OD específicos del fabricante Índice en Hex Subíndice Descripción del objeto en Hex 1002 0 Manufacturer Status Register (MSR) No se encuentra en el ámbito del OD reservado para el fabricante. La codificación de este objeto incumbe sin embargo al fabricante. 2000 0 Module Control Register (MCR) Mediante el MCR se puede modificar el comportamiento de los acopladores de bus. 2020 Diagnostic Information 0 Cantidad de registros de diagnóstico 1 Diagnostic Status Suministra información superior sobre los diagnósticos presentes. El estado de diagnóstico se envía tras la modificación de un caso de diagnóstico mediante el Emergency Object. Se pueden consultar más detalles sobre el caso de diagnóstico ocurrido mediante el subíndice siguiente por SDO. 2 Diagnostic Data Información de error detallada. 2030 Configuration Information 0 Cantidad de módulos identificados 1 Configuration Data Un byte de identificación por módulo. La lista de configuraciones se puede leer mediante un Upload Multiplexed Domain Segment Protocol. 2040 Parameter Information 0 Parameter Data Length 1 Parameter Data Mediante el byte de parámetro se puede conectar y desconectar el diagnóstico. 2 Device Parameter Data Con el acoplador de bus CANopen idéntico con subíndice 1. Español Tabla 29: 394 AVENTICS | CANopen | R412005742–BDL–001–AD Apéndice 13.3.3 Objetos OD específicos de aparato: Los siguientes objetos han sido tomados directamente del perfil del CiA DS-401, versión 2.0. Módulos de entrada digitales Object 6000h: Read Input 8 Bit Este objeto lee el estado de los conductos de entrada en grupos de 8 cada uno como información de 8 bits. Como máximo pueden direccionarse 254 grupos, es decir 254 x 8 = 2032 entradas. Este objeto es obligatorio para módulos de entrada digitales y debe registrar todos los conductos de entrada conectados. 1 = entrada invertida 0 = entrada no invertida Tabla 30: Objetos Read Input 8 Bit – Object Description Object Description INDEX 6000h Name Read Input 8 Bit Object Code Array Data Type Unsigned 8 Category Conditional: Device with digital inputs Tabla 31: Objetos Read Input 8 Bit – Entry Description Entry Description Sub-Index 0h Description Number of Input 8 Bit Access ro Entry Category Mandatory PDO Mapping No Value Range 1h to FEh Default Value No Sub-Index 1h – 3h Description Read Input 1h to 18h Access ro Entry Category Mandatory / Optional ab 2h PDO Mapping Default AVENTICS | CANopen | R412005742–BDL–001–AD 395 Apéndice Tabla 31: Objetos Read Input 8 Bit – Entry Description (Cont.) Entry Description Unsigned 8 Default Value No Object 6100h: Read Input 16 Bit Este objeto lee el estado de los conductos de entrada en grupos de 16 conductos cada uno como información de 16 bits. Como máximo pueden dirigirse 254 grupos, es decir, 254 x 16 = 4064 entradas. Cuando este objeto no es compatible, el aparato se comporta según los valores por defecto. 1 = entrada invertida 0 = entrada no invertida Tabla 32: Objetos Read Input 16 Bit – Object Description Object Description INDEX 6100h Name Read Input 16 Bit Object Code Array Data Type Unsigned 16 Category Optional Tabla 33: Objetos Read Input 16 Bit – Entry Description Entry Description Sub-Index 0h Description Number of Input 16 Bit Access ro Entry Category Mandatory PDO Mapping No Value Range 1h to FEh Default Value No Sub-Index 1h – 2h Description Read Input 1h to 20 h Access ro Entry Category Mandatory / Optional ab 2h Español Módulos de entrada digitales Value Range 396 AVENTICS | CANopen | R412005742–BDL–001–AD Apéndice Tabla 33: Objetos Read Input 16 Bit – Entry Description Entry Description PDO Mapping Módulos de salida digitales Default Value Range Unsigned 16 Default Value No Object 6200h: Write Output 8 Bit Este objeto define el estado de los conductos de salida en grupos de 8 conductos cada uno como información de 8 bits (1 Byte). Como máximo pueden dirigirse 254 grupos, es decir, 254 x 8 = 2032 salidas. Tabla 34: Objetos Write Output 8 Bit – Object Description Object Description INDEX 6200h Name Read Input 8 Bit Object Code Array Data Type Unsigned 8 Category Conditional: Device with digital inputs Tabla 35: Objetos Write Output 8 Bit – Entry Description Entry Description Sub-Index 0h Description Number of Input 8 Bit Access ro Entry Category Mandatory PDO Mapping No Value Range 1h to FEh Default Value No Sub-Index 1h – 6h Description Read Input 1h to 48 h Access ro Entry Category Mandatory / Optional ab 2h PDO Mapping Default AVENTICS | CANopen | R412005742–BDL–001–AD 397 Apéndice Tabla 35: Objetos Write Output 8 Bit – Entry Description (Cont.) Entry Description Unsigned 8 Default Value No Object 6300h: Write Output 16 Bit Este objeto define el estado de los conductos de salida en grupos de 16 conductos cada uno como información de 16 bits (2 Byte). Como máximo pueden dirigirse 255 grupos, es decir, 255 x 16 = 4080 salidas. Tabla 36: Objetos Write Output 16 Bit – Object Description Object Description INDEX 6300h Name Read Input 16 Bit Object Code Array Data Type Unsigned 16 Category Optional Tabla 37: Objetos Write Output 16 Bit – Entry Description Entry Description Sub-Index 0h Description Number of Input 16 Bit Access ro Entry Category Mandatory PDO Mapping No Value Range 1h to FEh Default Value No Sub-Index 1h – 3h Description Read Input 1h to 48 h Access ro Entry Category Mandatory / Optional ab 2h PDO Mapping Default Value Range Unsigned 16 Default Value No Español Módulos de salida digitales Value Range 398 AVENTICS | CANopen | R412005742–BDL–001–AD Apéndice 13.4 Diagnóstico CANopen El acoplador de bus apoya el diagnóstico. Este puede ser conectado o desconectado a través del bit de parámetros 2040. Por defecto: diagnóstico desactivado Los diagnósticos pendientes son mostrados en los LED incluso con la función de mensajes de diagnóstico al master desactivada. 13.4.1 Tipo de funcionamiento CANopen A través del conmutador DIP S3 son ajustados los valores por defecto, los cuales deben ser aceptados por el acoplador de bus tras el Power-on. Tabla 38: OFF ON Asignación de las posiciones del conmutador S3 Bit 8 Bit 7 Bit 6 Tipo de servicio Tabla 39: Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Diag. Res. Velocidad en baudios Combinaciones del conmutador para el tipo de servicio Bit 8 Bit 7 Bit 6 Transmission Type ON ON ON reserviert ON ON OFF reserviert ON OFF ON reserviert ON OFF OFF reserviert Comportamiento de transmisión de entrada OFF ON ON 253 (RTR solo asincrónico) OFF ON OFF SYNC 1 (cíclico sincrónico) todos PDO OFF OFF ON 255 (asincrónico según perfil 401) 1 PDO OFF OFF OFF 255 (asincrónico según perfil 401) todos PDO Estos ajustes se pueden modificar a través del bus en correspondencia con las especificaciones de CANopen. AVENTICS | CANopen | R412005742–BDL–001–AD 399 Apéndice Transmission Type El preajuste para el parámetro "Transmission Type" es válido para todos los PDO del slave correspondiente. Un ajuste referido al PDO de este parámetro debe realizarse a través del bus con el servicio CANopen correspondiente. A través del conmutador DIP S3 pueden seleccionar cuatro tipos de ajuste (Transmission Types) por defecto: W Asíncrono, según el perfil 401 W Cuando una entrada digital modifica su valor, este PDO debe ser transmitido inmediatamente W Cíclico síncrono W Asíncrono solo RTR Comportamiento de transmisión de entrada A través del parámetro “comportamiento de transmisión de entrada” puede ajustarse el comportamiento de transmisión en caso de modificación de una entrada. Los Transmission Types restantes pueden ajustarse a través del bus según las indicaciones del CiA DS-401. Son posibles los siguientes ajustes: W Todos los PDO, es decir, en caso de modificación de una o varias entradas, el slave envía todos los PDO activos (todas las entradas) W 1 PDO, es decir, en caso de modificación de una o varias entradas, el slave envía solo el/los PDO en el cual/los cuales se ha/han realizado los cambios. Este ajuste solo es relevante en el modo de servicio asíncrono. En el modo de servicio síncrono se envían siempre todos los PDO de entrada como respuesta al telegrama SYNC. Con el Power-on y con la aparición de un error, el slave envía un telegrama de emergencia (EMCY). La estructura del telegrama EMCY corresponde a las especificaciones del perfil de comunicación CANopen según CiA DS-301. La codificación de cada uno de los estados de error puede consultarse en la siguiente tabla: Español 13.5 EMCY Error Codes AVENTICS | CANopen | R412005742–BDL–001–AD 401 Apéndice 13.6 Volumen de funciones Tabla 41: Rendimiento y funciones Rendimiento/función Características Comentarios Tasa de baudio en kBaud 10, 20, 50, 125, 250, 500, 1000 CANopen Datos de entrada máx. 3 Byte Datos de salida máx. 6 Byte Diagnóstico 1 Byte Información configuración actual sí Independiente del protocolo CANopen Modo asíncrono sí Configurable individualmente para cada PDO Modo síncrono sí Configurable individualmente para cada PDO Cantidad SDO (enviar) 1 Cantidad SDO (recibir) 1 Cantidad PDO (enviar) 4 (máx.) Los PDO pueden configurarse a voluntad (asíncrono, síncrono, cíclico síncrono, acíclico síncrono, etc.) Cantidad PDO (recibir) 4 (máx.) Los PDO pueden configurarse a voluntad (asíncrono, síncrono, cíclico síncrono, acíclico síncrono, etc.) Emergency Object 1 no no es compatible Objeto SYNC 1 Solamente es compatible la recepción pero no el envío del objeto SYNC. Apoyo de servicio NMT Detener Iniciar Enter Pre-Operational Reset Node Reset Communication Mapping por defecto y variable sí Node Guarding sí Simple Boot Up sí Extended Boot Up no Device Profile sí Español Time Stamp CiA DS-401 402 AVENTICS | CANopen | R412005742–BDL–001–AD Apéndice 13.7 Objetos específicos del fabricante 13.7.1 Manufacturer Status Register (MSR) El MSR se encuentra en Índice 1002 Subíndice 0 del OD. De los 4 bytes que ocupan las informaciones de estado, en este momento solo se utiliza el 1er byte. Aquí están codificados el estado del módulo y 1 bit para un mensaje de la colección de errores. Tabla 42: Manufacturer Status Register MS Bit 7 LS Bit 6 Bit 5 Bit 2 Bit 1 Bit 0 0 0 0 Inicialización 0 0 1 Desconectado 0 1 0 Conectando Actualmente 0 1 1 Preparando sin usar 1 0 0 Stopped 1 0 1 Pre-Operational 1 1 0 Operational 1 1 1 Estado indefinido Byte Bit 4 Bit 3 Bit 2 Bit 1 Bit 0 Significado Bit 3 bis Bit 6 Reservado Bit 7 Bit colector de errores 0 Ningún error 1 Existe, como mínimo, 1 error AVENTICS | CANopen | R412005742–BDL–001–AD 403 Apéndice 13.7.2 Module Control Register (MCR) El Índice 2000 Subíndice 0 del OD contiene el Module Control Register (MCR) con una amplitud de 16 bits. Con este módulo se puede cambiar el comportamiento del acoplador de bus en caso de servicio y en caso de error. Tab. 43 ofrece una vista general sobre el significado de los bits individuales. Tabla 43: Module Control Register Low Byte Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0 Bit 10 Bit 9 Bit 8 High Byte Bit 14 Lowbyte Bit 13 Bit 12 Bit 11 Significado Bit 0 Estado del módulo en caso de error 0 Pre-Operational 1 Bit 2 Operational Bit 1 Salidas en caso de error 0 0 CLAB: Anular las salidas (por defecto) 0 1 Last State: Las salidas mantienen su último estado 1 0 Reservado 1 1 Reservado Bit 3 Reacción EMCY en caso de error 0 Enviar telegrama de emergencia 1 No enviar telegrama de emergencia Bit 4 bis Bit 7 Reservado (fijo en 0) Bit 8 Comportamiento de transmisión de entrada 0 Una modificación de entrada provoca: el envío de todos los PDO activos 1 Solamente el envío del PDO al cual está asignada la entrada (por defecto) Bit 9 bis 15 Reservado (fijo en 0) Español Bit 15 404 AVENTICS | CANopen | R412005742–BDL–001–AD Apéndice Tabla 44: Comportamiento del acoplador de bus en caso de error Caso de error Observación Módulo Status Salidas EMCYReacción BUS OFF El controlador CAN se encuentra en estado "bus off", es decir, el "transmit error counter" del controlador CAN ha sobrepasado el límite de 256. según MCR Bit 0 según MCR Bit 2, 1 según MCR Bit 3 Missing PDO (SYNC Mode) No se ha recibido el PDO con servicio síncrono cíclico. según MCR Bit 0 según MCR Bit 2, 1 según MCR Bit 3 Guarding Failure El tiempo de control Node-Guard ha transcurrido. Solamente aparece cuando Node Guarding ha sido activado por el master CAN. según MCR Bit 0 según MCR Bit 2, 1 según MCR Bit 3 Tabla 45: Servicio NMT Estado del módulo NMT_ RESET_NODE pre-operational todas salidas borradas ningún EMCY NMT_ RESET_COM pre-operational según MCR Bit 2,1 ningún EMCY NMT_ STOP pre-operational según MCR Bit 2,1 ningún EMCY NMT_ PREOPERATIONAL pre-operational según MCR Bit 2,1 ningún EMCY 13.7.3 Number of Diagnostic Entries Reacción del acoplador de bus en servicio NMT (sin caso de error) Salidas Reacción Diagnostic information Mediante el índice 2020 del OD se puede leer la información de diagnóstico. El acoplador de bus pone a disposición 1 byte de diagnóstico. El índice 2020 subíndice 0 contiene la longitud de los datos de diagnóstico. W Longitud = 1, cuando el diagnóstico está activado W Longitud = 0, cuando el diagnóstico no está activado AVENTICS | CANopen | R412005742–BDL–001–AD 405 Apéndice Diagnostic Status Diagnostic Data El índice 2020 subíndice 1 contiene el estado de diagnóstico. W 00hex, Ningún diagnóstico activado W 01hex, diagnóstico activado El índice 2020 subíndice 2 posibilita la lectura del byte de diagnóstico del acoplador de bus. estos están codificados en un byte como en Tab. 42. Tabla 46: Codificación del byte de diagnóstico Byte Bit 0 Bit 1 Bit 2 Bit 3 Bit 4 Bit 5 Bit 6 Significado 0 nigún diagóstico 1 Cortocircuito de las válvulas o una salida digital (diagnóstico colectivo) 0 nigún diagóstico 1 Tensión inferior de alimentación de carga UQ11) 0 nigún diagóstico 1 Tensión inferior de alimentación de carga UQ21) 0 nigún diagóstico 1 Falta alimentación de carga UQ1 0 nigún diagóstico 1 Falta alimentación de carga UQ2 0 nigún diagóstico 1 Sobrecarga en la entrada del sensor 0 nigún diagóstico 1 Bit 7 0 nigún diagóstico 1 1) Al conectar tras aprox. 110 ms, al desconectar tras aprox. 120 ms Cantidad de módulos hallados El índice 2030 subíndice 0 contiene la cantidad de módulos encontrados. Cantidad = 1...7 (3 entrada + 3 salida + 1 portaválvulas) Español Configuration Information A través del índice 2030 del OD se puede leer la información sobre la configuración del hardware del acoplador de bus. 406 AVENTICS | CANopen | R412005742–BDL–001–AD Apéndice Configuration Data El índice 2030 subíndice 1 contiene el identificador del hardware. 0x00 Elemento vacío 0x02 8 DI 0x08 8 DO 0x2A Acoplador de bus: Salidas de 3 bytes para válvulas 13.7.4 Parameter Data Length Parameter Data Parameter Information A través del índice 2040 del OD se configura el acoplador de bus. El índice 2040 subíndice 0 suministra el número de datos de parametrización: Cantidad = 1 El índice 2040 subíndices 1 y 2 tienen la misma función. En ellos se puede escribir los datos de parametrización y, de este modo, conectar o desconectar el diagnóstico. Tabla 47: Parameter Data, índice 2040 subíndice 1, 2 Byte Significado Bit 0 Cortocircuito de las válvulas o una salida digital (diagnóstico colectivo) 0 Diagnóstico bloqueado 1 Diagnóstico liberado 0 Diagnóstico bloqueado 1 Diagnóstico liberado Bit 1 Tensión inferior de alimentación de carga UQ1 Bit 2 Tensión inferior de alimentación de carga UQ2 0 Diagnóstico bloqueado 1 Diagnóstico liberado 0 Diagnóstico bloqueado 1 Diagnóstico liberado Bit 3 Alimentación de carga UQ1 Bit 4 Alimentación de carga UQ2 0 Diagnóstico bloqueado 1 Diagnóstico liberado 0 Diagnóstico bloqueado 1 Diagnóstico liberado Bit 5 Sobrecarga de la alimentación del sensor AVENTICS | CANopen | R412005742–BDL–001–AD 407 Índice temático 14 Índice temático W C CANopen Configurar la dirección de estación 357 Diagnóstico 398 Identificador CAN 387 Tipo de servicio 398 Características 382 Componentes Módulo de entrada 342 Comportamiento en funcionamiento, conexión de bus 368, 386 Conexión eléctrica Acoplador de bus como estación intermedia 349 Acoplador de bus como última estación 349 Alimentación de lógica y de carga 350 Alimentación de tensión 354 Módulos de entrada/ salida 352 Configuración 367 Configuración del cierre de bus 366 Configurar ID nodo 357 Configuration Information 405 Conmutador de modo 358 Cualificación, personal 333 W D Diagnóstico Ajustar 358 Ajuste 358 CANopen 398 Diagnostic Information 404 Módulo de entrada/ salida 369 W E Electronic Data Sheet (EDS) 385 EMCY, Emergency- Español W A Abreviaturas 331 Acoplador de bus Configuración 367 Datos técnicos 382 Función 344 Repuestos, accesorios 384 Rotulación 345 Sustitución 376 Advertencias, definiciones 329 Ajuste de la velocidad en baudios 358 Ajustes previos Ajuste de la velocidad en baudios 358 Asignación de la alimentación de válvulas 359 Cierre de bus 366 Diagnóstico 358 Dirección de estación 357 408 AVENTICS | CANopen | R412005742–BDL–001–AD Índice temático Telegramm 399 Enchufe del aparato, X10 (POWER) 350 Error Code, EMCY 399 W I Identificador CAN 387 Instrucciones de seguridad Generalidades 333 Limpieza 336 W M Manufacturer Status Register (MSR) 402 Medidas, VS con CANopen 345 Module Control Register (MCR) 403 Módulo de entrada Descripción 342 Ensayo y diagnóstico 371 Módulo de salida Conexión de la alimentación de carga 354 Datos técnicos 383 Ensayo y diagnóstico 372 Módulos de entrada/salida Ensayo y diagnóstico 369 Montaje 378 Repuestos, accesorios 384 Rotulación 345 Montaje Conexión de los módulos de entrada/salida 352 Conexión FE 355 Conexiones eléctricas 347 Posibilidades de montaje 344 W O Objetos OD Específicos de aparato 394 Específicos del fabricante 402 Ocupación de la conexión FE 355 W P Parada del sistema 374 Parameter, Information 406 Puesta en servicio 373 W R Rotulación Acoplador de bus 345 Módulos 345 345 W S Sustitución, acoplador de bus 376 W U Utilización Conforme a las especificaciones 332 No conforme a las especificaciones 332 W V Volumen de funciones 401-
 1
1
-
 2
2
-
 3
3
-
 4
4
-
 5
5
-
 6
6
-
 7
7
-
 8
8
-
 9
9
-
 10
10
-
 11
11
-
 12
12
-
 13
13
-
 14
14
-
 15
15
-
 16
16
-
 17
17
-
 18
18
-
 19
19
-
 20
20
-
 21
21
-
 22
22
-
 23
23
-
 24
24
-
 25
25
-
 26
26
-
 27
27
-
 28
28
-
 29
29
-
 30
30
-
 31
31
-
 32
32
-
 33
33
-
 34
34
-
 35
35
-
 36
36
-
 37
37
-
 38
38
-
 39
39
-
 40
40
-
 41
41
-
 42
42
-
 43
43
-
 44
44
-
 45
45
-
 46
46
-
 47
47
-
 48
48
-
 49
49
-
 50
50
-
 51
51
-
 52
52
-
 53
53
-
 54
54
-
 55
55
-
 56
56
-
 57
57
-
 58
58
-
 59
59
-
 60
60
-
 61
61
-
 62
62
-
 63
63
-
 64
64
-
 65
65
-
 66
66
-
 67
67
-
 68
68
-
 69
69
-
 70
70
-
 71
71
-
 72
72
-
 73
73
-
 74
74
-
 75
75
-
 76
76
-
 77
77
-
 78
78
-
 79
79
-
 80
80
-
 81
81
-
 82
82
-
 83
83
-
 84
84
-
 85
85
-
 86
86
-
 87
87
-
 88
88
-
 89
89
-
 90
90
-
 91
91
-
 92
92
-
 93
93
-
 94
94
-
 95
95
-
 96
96
-
 97
97
-
 98
98
-
 99
99
-
 100
100
-
 101
101
-
 102
102
-
 103
103
-
 104
104
-
 105
105
-
 106
106
-
 107
107
-
 108
108
-
 109
109
-
 110
110
-
 111
111
-
 112
112
-
 113
113
-
 114
114
-
 115
115
-
 116
116
-
 117
117
-
 118
118
-
 119
119
-
 120
120
-
 121
121
-
 122
122
-
 123
123
-
 124
124
-
 125
125
-
 126
126
-
 127
127
-
 128
128
-
 129
129
-
 130
130
-
 131
131
-
 132
132
-
 133
133
-
 134
134
-
 135
135
-
 136
136
-
 137
137
-
 138
138
-
 139
139
-
 140
140
-
 141
141
-
 142
142
-
 143
143
-
 144
144
-
 145
145
-
 146
146
-
 147
147
-
 148
148
-
 149
149
-
 150
150
-
 151
151
-
 152
152
-
 153
153
-
 154
154
-
 155
155
-
 156
156
-
 157
157
-
 158
158
-
 159
159
-
 160
160
-
 161
161
-
 162
162
-
 163
163
-
 164
164
-
 165
165
-
 166
166
-
 167
167
-
 168
168
-
 169
169
-
 170
170
-
 171
171
-
 172
172
-
 173
173
-
 174
174
-
 175
175
-
 176
176
-
 177
177
-
 178
178
-
 179
179
-
 180
180
-
 181
181
-
 182
182
-
 183
183
-
 184
184
-
 185
185
-
 186
186
-
 187
187
-
 188
188
-
 189
189
-
 190
190
-
 191
191
-
 192
192
-
 193
193
-
 194
194
-
 195
195
-
 196
196
-
 197
197
-
 198
198
-
 199
199
-
 200
200
-
 201
201
-
 202
202
-
 203
203
-
 204
204
-
 205
205
-
 206
206
-
 207
207
-
 208
208
-
 209
209
-
 210
210
-
 211
211
-
 212
212
-
 213
213
-
 214
214
-
 215
215
-
 216
216
-
 217
217
-
 218
218
-
 219
219
-
 220
220
-
 221
221
-
 222
222
-
 223
223
-
 224
224
-
 225
225
-
 226
226
-
 227
227
-
 228
228
-
 229
229
-
 230
230
-
 231
231
-
 232
232
-
 233
233
-
 234
234
-
 235
235
-
 236
236
-
 237
237
-
 238
238
-
 239
239
-
 240
240
-
 241
241
-
 242
242
-
 243
243
-
 244
244
-
 245
245
-
 246
246
-
 247
247
-
 248
248
-
 249
249
-
 250
250
-
 251
251
-
 252
252
-
 253
253
-
 254
254
-
 255
255
-
 256
256
-
 257
257
-
 258
258
-
 259
259
-
 260
260
-
 261
261
-
 262
262
-
 263
263
-
 264
264
-
 265
265
-
 266
266
-
 267
267
-
 268
268
-
 269
269
-
 270
270
-
 271
271
-
 272
272
-
 273
273
-
 274
274
-
 275
275
-
 276
276
-
 277
277
-
 278
278
-
 279
279
-
 280
280
-
 281
281
-
 282
282
-
 283
283
-
 284
284
-
 285
285
-
 286
286
-
 287
287
-
 288
288
-
 289
289
-
 290
290
-
 291
291
-
 292
292
-
 293
293
-
 294
294
-
 295
295
-
 296
296
-
 297
297
-
 298
298
-
 299
299
-
 300
300
-
 301
301
-
 302
302
-
 303
303
-
 304
304
-
 305
305
-
 306
306
-
 307
307
-
 308
308
-
 309
309
-
 310
310
-
 311
311
-
 312
312
-
 313
313
-
 314
314
-
 315
315
-
 316
316
-
 317
317
-
 318
318
-
 319
319
-
 320
320
-
 321
321
-
 322
322
-
 323
323
-
 324
324
-
 325
325
-
 326
326
-
 327
327
-
 328
328
-
 329
329
-
 330
330
-
 331
331
-
 332
332
-
 333
333
-
 334
334
-
 335
335
-
 336
336
-
 337
337
-
 338
338
-
 339
339
-
 340
340
-
 341
341
-
 342
342
-
 343
343
-
 344
344
-
 345
345
-
 346
346
-
 347
347
-
 348
348
-
 349
349
-
 350
350
-
 351
351
-
 352
352
-
 353
353
-
 354
354
-
 355
355
-
 356
356
-
 357
357
-
 358
358
-
 359
359
-
 360
360
-
 361
361
-
 362
362
-
 363
363
-
 364
364
-
 365
365
-
 366
366
-
 367
367
-
 368
368
-
 369
369
-
 370
370
-
 371
371
-
 372
372
-
 373
373
-
 374
374
-
 375
375
-
 376
376
-
 377
377
-
 378
378
-
 379
379
-
 380
380
-
 381
381
-
 382
382
-
 383
383
-
 384
384
-
 385
385
-
 386
386
-
 387
387
-
 388
388
-
 389
389
-
 390
390
-
 391
391
-
 392
392
-
 393
393
-
 394
394
-
 395
395
-
 396
396
-
 397
397
-
 398
398
-
 399
399
-
 400
400
-
 401
401
-
 402
402
-
 403
403
-
 404
404
-
 405
405
-
 406
406
-
 407
407
-
 408
408
-
 409
409
-
 410
410
-
 411
411
-
 412
412
-
 413
413
-
 414
414
-
 415
415
-
 416
416
-
 417
417
-
 418
418
-
 419
419
-
 420
420
-
 421
421
-
 422
422
-
 423
423
-
 424
424
-
 425
425
-
 426
426
-
 427
427
-
 428
428
-
 429
429
-
 430
430
-
 431
431
-
 432
432
-
 433
433
-
 434
434
-
 435
435
-
 436
436
-
 437
437
-
 438
438
-
 439
439
-
 440
440
-
 441
441
-
 442
442
-
 443
443
-
 444
444
-
 445
445
-
 446
446
-
 447
447
-
 448
448
-
 449
449
-
 450
450
-
 451
451
-
 452
452
-
 453
453
-
 454
454
-
 455
455
-
 456
456
-
 457
457
-
 458
458
-
 459
459
-
 460
460
-
 461
461
-
 462
462
-
 463
463
-
 464
464
-
 465
465
-
 466
466
-
 467
467
-
 468
468
-
 469
469
-
 470
470
-
 471
471
-
 472
472
-
 473
473
-
 474
474
-
 475
475
-
 476
476
-
 477
477
-
 478
478
-
 479
479
-
 480
480
-
 481
481
-
 482
482
-
 483
483
-
 484
484
-
 485
485
-
 486
486
-
 487
487
-
 488
488
-
 489
489
-
 490
490










































































































































































































































































































































































































































































































AVENTICS Bus Control CMS, B-Design, CANopen El manual del propietario
- Tipo
- El manual del propietario
- Este manual también es adecuado para
en otros idiomas
- français: AVENTICS Bus Control CMS, B-Design, CANopen Le manuel du propriétaire
- italiano: AVENTICS Bus Control CMS, B-Design, CANopen Manuale del proprietario
- English: AVENTICS Bus Control CMS, B-Design, CANopen Owner's manual
- Deutsch: AVENTICS Bus Control CMS, B-Design, CANopen Bedienungsanleitung
- svenska: AVENTICS Bus Control CMS, B-Design, CANopen Bruksanvisning
Artículos relacionados
-
AVENTICS Bus Control CMS, B-Design, EtherNet/IP El manual del propietario
-
-
-
-
-
-
-
-
-
Otros documentos
-
Fagor CANopen protocol (MCP-MCPi) Manual de usuario
-
Triax TDH 700 Manual de usuario
-
Vaillant VR 31 El manual del propietario
-
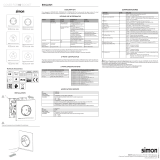 Simon 10002039-13X Manual de usuario
Simon 10002039-13X Manual de usuario
-
SICK MLS Quickstart
-
ProMinent delta 986524 Supplementary Instructions Manual
-
Fracarro SIG7900 Instrucciones de operación
-
-
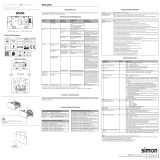 Simon 10003081-13X Manual de usuario
Simon 10003081-13X Manual de usuario
-
Pepperl+Fuchs VAA-2E2A-KE1-SE Instrucciones de operación

