La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...

106
Índice: pág.
1 Advertencias 107
2 Descripción del producto y uso previsto 108
2.1 Límites de utilización 108
2.2 Instalación típica 110
2.3 Lista de los cables 110
3 Instalación 111
3.1 Controles preliminares 111
3.2 Fijación del motorreductor 111
3.3 Fijación de los soportes de fin de carrera en
las versiones con fin de carrera inductivo 112
3.4 Instalación de los diferentes dispositivos 113
3.5 Conexiones eléctricas 113
3.6 Descripción de las conexiones eléctricas 114
4 Controles finales y puesta en marcha 114
4.1 Selección de la dirección 114
4.2 Conexión de la alimentación 114
4.3 Aprendizaje de los dispositivos 114
4.4 Aprendizaje de la longitud de la hoja 115
4.5 Control del movimiento de la puerta 115
4.6 Funciones predeterminadas 115
4.7 Receptor 115
5 Ensayo y puesta en servicio 115
5.1 Ensayo 116
5.2 Puesta en servicio 116
6 Mantenimiento y desguace 116
6.1 Mantenimiento 116
6.2 Desguace 116
7 Otras informaciones 117
7.1 Botones de programación 117
7.2 Programaciones 117
7.2.1 Funciones de primer nivel (funciones ON-OFF) 117
7.2.2 Programación de primer nivel
(funciones ON-OFF) 118
7.2.3 Funciones de segundo nivel
(parámetros regulables) 118
7.2.4 Programación de segundo nivel
(parámetros regulables) 119
7.2.5 Ejemplo de programación de primer nivel
(funciones ON-OFF) 119
7.2.6 Ejemplo de programación de segundo nivel
(parámetros regulables) 119
7.3 Instalación o desinstalación de dispositivos 119
7.3.1 BlueBUS 119
7.3.2 Entrada STOP 120
7.3.3 Fotocélulas 120
7.3.4 Fotosensor FT210B 121
7.3.5 ROBUS en modo “Slave” 122
7.3.6 Aprendizaje de otros dispositivos 123
7.4 Funciones especiales 123
7.4.1 Función “Abrir siempre” 123
7.4.2 Función “Mover igualmente” 123
7.4.3 Aviso de mantenimiento 123
7.5 Conexión de otros dispositivos 124
7.6 Solución de los problemas 125
7.6.1 Listado del historial de los desperfectos 125
7.7 Diagnóstico y señales 125
7.7.1 Señales con la luz intermitente 126
7.7.2 Señales en la central 126
7.8 Accesorios 127
8 Características técnicas 128
Instrucciones y advertencias para el usuario del
motorreductor ROBUS 129
Robus
600/600P
1000/1000P

107
E
1) Advertencias
Este manual de instrucciones contiene informaciones importantes en
materia de seguridad para la instalación; es necesario leer detenida-
mente todas las instrucciones antes de comenzar la instalación. Con-
serve este manual en buenas condiciones para su consultación poste-
rior.
Considerando las situaciones de peligro que pueden generarse durante
la instalación y el uso del ROBUS es oportuno que también la instalación
sea realizada respetando plenamente las leyes, normas y reglamentos.
En este capítulo se indicarán las advertencias de tipo general; otras
advertencias importantes están presentes en los capítulos “3.1 Contro-
les preliminares”; “5 Ensayo y puesta en servicio”.
Según la legislación europea más reciente, la realización
de una puerta o portón automático entra en el ámbito de las
disposiciones de la Directiva 98/37/CE (Directiva de Máqui-
nas) y, en particular, en las normas: EN 13241-1 (norma armo-
nizada); EN 12445; EN 12453 y EN 12635, que permiten
declarar la conformidad con la directiva de máquinas.
Otras informaciones, directrices para el análisis de los riesgos y la reali-
zación del Expediente Técnico están disponibles en: “www.nicefor-
you.com”. Este manual está destinado exclusivamente a personal técni-
co cualificado para la instalación. Salvo el anexo específico, que el ins-
talador se encargará de separar, “Instrucciones y advertencias para el
usuario del motorreductor ROBUS” ninguna de las informaciones aquí
incluidas puede ser de interés para el usuario final.
• Está prohibido utilizar el ROBUS con una finalidad diferente de aque-
lla dispuesta en estas instrucciones; un uso inadecuado puede causar
peligros o daños a las personas o bienes.
• Antes de comenzar la instalación, es necesario realizar el análisis de
los riesgos, que incluye la lista de los requisitos esenciales de seguri-
dad previstos en el anexo I de la Directiva de Máquinas, indicando las
relativas soluciones adoptadas.
Recuérdese que el análisis de los riesgos es uno de los documentos
que forman el “expediente técnico” de la automatización.
• Compruebe si es necesario incorporar otros dispositivos que puedan
servir para completar el automatismo con el ROBUS según la situa-
ción de empleo específica y los peligros presentes: por ejemplo,
deben considerarse los peligros de choque, aplastamiento, amputa-
ción, arrastre, etc. y otros peligros en general.
• No modifique ninguna parte salvo que esté previsto en estas instruc-
ciones; los trabajos de este tipo pueden causar solamente desperfec-
tos; NICE no es responsable de los daños que deriven de productos
modificados.
• Durante la instalación y el uso procure que no puedan entrar elemen-
tos sólidos o líquidos dentro de la central o de otros dispositivos abier-
tos; de ser oportuno, diríjase al servicio de asistencia NICE; el uso del
ROBUS en situaciones análogas puede originar situaciones peligro-
sas.
• El automatismo no puede utilizarse antes de haberlo puesto en servi-
cio tal como especificado en el capítulo: “5 Ensayo y puesta en servi-
cio”.
• El material de embalaje del ROBUS debe eliminarse respetando la nor-
mativa local.
• Si el desperfecto no pudiera resolverse utilizando las informaciones
indicadas en este manual, diríjase al servicio de asistencia NICE.
• Si se desconectaran los interruptores automáticos o los fusibles, antes
de restablecerlos hay que localizar y eliminar la avería.
• Antes de acceder a los bornes en el interior de la tapa del ROBUS,
desconecte todos los circuitos de alimentación; si el dispositivo de
desconexión no queda a la vista, colóquele un cartel: “ATENCIÓN
MANTENIMIENTO EN CURSO”.
Advertencias especiales sobre la idoneidad para el uso de este produc-
to con relación a la Directiva de "Máquinas" 98/37/CE (ex 89/392/CEE):
• Este producto se comercializa como "componente de máquina" y es
fabricado para ser incorporado en una máquina o para ser ensambla-
do con otras maquinarias, a fin de realizar "una máquina", con arreglo
a la Directiva 98/37/CE, sólo combinándolo con otros componentes y
según las pautas descritas en este manual de instrucciones. Tal como
previsto por la directiva 98/37/CE, se advierte que no se permite la
puesta en servicio de este producto hasta que el fabricante de la
máquina, donde se incorporará el producto, no la haya identificado y
declarado conforme a la directiva 98/37/CE.
Advertencias especiales sobre la idoneidad para el uso de este produc-
to con relación a la Directiva "Baja Tensión" 73/23/CEE y su modifica-
ción posterior 93/68/CEE:
• Este producto responde a los requisitos previstos por la Directiva "Baja
Tensión", si se lo emplea para el uso y en las configuraciones previs-
tas en este manual de instrucciones, y combinado con los artículos
presentes en el catálogo de productos de Nice S.p.a. Los requisitos
podrían no ser garantizados si el producto se utiliza en configuracio-
nes diferentes o con otros productos no previstos; está prohibido uti-
lizar el producto en estas condiciones, hasta que la persona que eje-
cuta la instalación haya verificado que responde a los requisitos pre-
vistos por la directiva.
Advertencias especiales sobre la idoneidad para el uso de este produc-
to con relación a la Directiva "Compatibilidad Electromagnética"
89/336/CEE y modificación siguiente 92/31/CEE y 93/68/CEE:
• Este producto ha sido sometido a los ensayos en materia de compa-
tibilidad electromagnética en las situaciones de uso más duras, en las
configuraciones previstas en este manual de instrucciones y en com-
binación con los artículos presentes en el catálogo de productos de
Nice S.p.A. Si el producto se utilizara con configuraciones o con otros
productos no previstos, podría perderse la garantía de la compatibili-
dad electromagnética; en dichas condiciones, está prohibido el uso
del producto hasta que la persona que efectúa la instalación haya veri-
ficado que responde a los requisitos previstos por la directiva.
!

108
ROBUS es una línea de motorreductores electromecánicos irreversi-
bles, que sirven para automatizar puertas de corredera. Disponen de
una central electrónica de control y de un conector para el receptor
del radiomando SMXI o SMXIS (opcionales). Las conexiones eléctri-
cas hacia los dispositivos externos son sencillas gracias a la utiliza-
ción de “BlueBUS”, una técnica que permite conectar diversos dis-
positivos sólo con 2 cables. El ROBUS funciona con energía eléctri-
ca, si se interrumpiera la alimentación de la red eléctrica, es posible
desbloquearlo con la llave y mover la puerta manualmente; también
es posible utilizar el accesorio opcional: batería compensadora
PS124 que permite ejecutar algunas maniobras también si falla la ali-
mentación de red.
La línea ROBUS está compuesta de los productos cuyas diferencias principales se describen en la tabla 1.
Nota: 1 kg = 9,81N, es decir, por ejemplo, 600N = 61 kg
2) Descripción del producto y uso previsto
1
Motorreductor tipo RB600 RB600P RB1000 RB1000P
Tipo de fin de carrera electromecánico de proximidad inductivo electromecánico de proximidad inductivo
Longitud máxima hoja 8m 12m
Peso máximo hoja 600Kg 1000Kg
Par máximo de arranque 18Nm 27Nm
(correspondientes a fuerza) (600N) (900N)
Motor y transformador Motor 24Vcc Ø 77mm Motor 24Vcc Ø 115mm
Transformador en columna EI Transformador toroidal
Tabla 1: comparación de las características esenciales de los motorreductores ROBUS
2.1) Límites de utilización
Los datos referidos a las prestaciones de los productos de la línea
ROBUS están indicados en el capítulo “8 Características técnicas” y
son los únicos valores que permiten la evaluación correcta de la ido-
neidad para su uso.
Por sus características estructurales, los productos ROBUS son
adecuados para ser utilizados en puertas de corredera, según los
límites indicados en las tablas 2, 3 y 4.
La real idoneidad del ROBUS, para automatizar una determinada
puerta de corredera, depende de los roces y de otros fenómenos,
incluso ocasionales, como la presencia de hielo que podría obsta-
culizar el movimiento de la puerta.
Para una verificación efectiva es absolutamente indispensable medir
la fuerza necesaria para mover la puerta a lo largo de toda su carre-
ra y controlar que dicha fuerza no supere el "par nominal" indicado
en el capítulo “8 Características técnicas” (se aconseja un margen
del 50%, porque las condiciones climáticas adversas pueden pro-
vocar un aumento de las fricciones); asimismo, para establecer el
número de ciclos/hora y los ciclos consecutivos hay que considerar
las indicaciones de las tablas 2 y 3.
RB600, RB600P RB1000, RB1000P
Longitud hoja (m) ciclos/hora máximos
ciclos consecutivos máximos ciclos/hora máximos ciclos consecutivos máximos
Hasta 4 40 20 50 25
4 ÷ 6 25 13 33 16
6 ÷ 8 20 10 25 12
8 ÷ 10 --- --- 20 10
10 ÷ 12 --- --- 16 8
Tabla 2: límites con relación a la longitud de la hoja
330mm 210mm
303mm
92mm

109
E
La longitud de la hoja permite determinar la cantidad máxima de ciclos por hora y de ciclos consecutivos, mientras que el peso permite
determinar el porcentaje de reducción de los ciclos y la velocidad máxima admitida; por ejemplo, para el ROBUS 1000, si la hoja tiene una
longitud de 5 m admitirá 33 ciclos/hora y 16 ciclos consecutivos, pero si la hoja pesa 700 kg hay que reducirlos al 50%, por lo que el resul-
tado es 16 ciclos/hora y unos 8 ciclos consecutivos, mientras que la velocidad máxima admitida es V4: rápida. Para evitar recalentamien-
tos, la central incorpora un limitador de maniobras que se basa sobre el esfuerzo del motor y la duración de los ciclos, interviniendo cuan-
do se supera el límite máximo. El limitador de maniobras también mide la temperatura ambiente, reduciendo aún más las maniobras si la
temperatura es muy alta.
En el capítulo “8 Características técnicas”, se indica una evaluación de “durabilidad”, es decir la vida económica media del producto. El valor
está muy influenciado por el coeficiente de desgaste de las maniobras, es decir la suma de todos los factores que intervienen en el des-
gaste. Para efectuar tal evaluación, hay que sumar los coeficientes de desgaste de la tabla 4, y con el resultado total verificar en el gráfico
la durabilidad calculada. Por ejemplo, ROBUS 1000 en una puerta de 650 kg, de 5 m de longitud, dotada de fotocélulas y sin otros ele-
mentos de fatiga, obtiene un coeficiente de desgaste equivalente al 50% (30+10+10). Del gráfico, la durabilidad se estima en 80.000 ciclos.
RB600, RB600P RB1000, RB1000P
Peso de la hoja (kg) Porcentaje ciclos Velocidad máxima Porcentaje ciclos Velocidad máxima
admitida admitida
Hasta 200 100% V6 = Rapidísima 100% V6 = Rapidísima
200 ÷ 400 80 V5 = Muy rápida 90 V5 = Muy rápida
400 ÷ 500 60 V4 = Rápida 75 V4 = Rápida
500 ÷ 600 50 V3 = Media 60 V4 = Rápida
600 ÷ 800 --- --- 50 V3 = Media
800 ÷ 900 --- --- 45 V3 = Media
900 ÷ 1000 --- --- 40 V3 = Media
Tabla 3: límites con relación al peso de la hoja
Coeficiente de desgaste % Robus Durabilidad en ciclos
600 1000
Peso de la hoja kg
Hasta 200 10 5
200 ÷ 400 30 10
400 ÷ 600 50 20
600 ÷ 700 --- 30
700 ÷ 800 --- 40
800 ÷ 900 --- 50
900 ÷ 1000 --- 60
Longitud de la hoja en metros
Hasta 4 10 5
4 ÷ 6 20 10
6 ÷ 8 35 20
8 ÷ 10 --- 35
10 ÷ 12 --- 50
Otros elementos de desgaste
(a considerar si la probabilidad de que
sucedan supera el 10% )
Temperatura ambiente superior a 40°C
o inferior a 0°C o humedad superior a 80%
10 10
Presencia de polvo o arena 15 15
Presencia de salinidad 20 20
Interrupción maniobra desde Fotocélula 15 10
Interrupción maniobra desde Stop 25 20
Velocidad superior a “L4 rápida” 20 15
Punto de arranque activo 25 20
Total coeficiente de desgaste %:
Nota: si el coeficiente de desgaste es mayor que el 100% significa que las condiciones superan el límite de aceptabilidad; se aconseja utilizar un
modelo de tamaño más grande.
Tabla 4: evaluación de la durabilidad con relación al coeficiente de desgaste de la maniobra
Coeficiente de desgaste %
Durabilidad en ciclos

110
2.2) Instalación típica
La figura 2 muestra la instalación típica de la automatización de una puerta de corredera utilizando el ROBUS.
2
1 Selector de llave
2 Fotocélulas en columna
3 Fotocélulas
4 Banda sensible principal montada en el ele-
mento fijo (opcional)
5 Banda sensible principal montada en el ele-
mento móvil
6 Soporte de fin de carrera de “Apertura”.
7 Cremallera
8 Banda sensible secundaria montada en el ele-
mento fijo (opcional)
9 Luz intermitente con antena incorporada
10 ROBUS
11 Soporte de fin de carrera de “Cierre”.
12 Banda sensible secundaria montada en el ele-
mento móvil (opcional)
13 Transmisor
2.3) Lista de cables
En la instalación típica de la figura 2 se indican también los cables necesarios para las conexiones de los diversos dispositivos; en la tabla 5
se indican las características de los cables.
Los cables utilizados deben ser adecuados para el tipo de instalación; por ejemplo, se aconseja un cable tipo H03VV-F para
instalación en ambientes internos o H07RN-F para instalaciones exteriores.
!
Nota 1: si el cable de alimentación es más largo de 30 m debe tener una sección más grande, por ejemplo 3x2,5mm
2
y es necesario pro-
curar una puesta a tierra de seguridad cerca del automatismo.
Nota 2: si el cable “BLUEBUS” es más largo de 30m, hasta un máximo de 50m, se necesita un cable 2x1mm
2
.
Nota 3: los dos cables 2x0,5mm
2
pueden sustituirse con un solo cable 4x0,5mm
2
.
Nota 4: si se incorpora más de una banda véase el capítulo “7.3.2 Entrada STOP” para el tipo de conexión aconsejada
Nota 5: para la conexión de las bandas sensibles montadas en los elementos móviles de las puertas de corredera, hay que utilizar dispo-
sitivos oportunos que permitan la conexión también con la puerta en movimiento.
Conexión Tipo de cable Longitud máxima admitida
A: Línea eléctrica de alimentación 1 cable 3x1,5mm
2
30m (nota 1)
B: Luz intermitente con antena 1 cable 2x0,5mm
2
20m
1 cable blindado tipo RG58 20 m (aconsejado menos de 5 m)
C: Fotocélulas 1 cable 2x0,5mm
2
30m (nota 2)
D: Selector de llave 2 cables 2x0,5mm
2
(nota 3) 50m
E: Bandas sensibles montadas en elemento fijo 1 cable 2x0,5mm
2
(nota 4) 30m
F: Bandas sensibles montadas en elemento móvil 1 cable 2x0,5mm
2
(nota 4) 30m (nota 5)
Tabla 5: lista de cables
2
43 38
10
2
6
11
7
9
13
1251
EC F
D
C
F
A
B

111
E
3.2) Fijación del motorreductor
Si ya existe la superficie de apoyo, el motorreductor se fija directa-
mente sobre la superficie utilizando elementos adecuados, por ejem-
plo tacos de expansión. Por el contrario, para fijar el motorreductor:
1. Efectúe la excavación para una cimentación de dimensiones
adecuadas, utilizando como referencia las cotas indicadas en la
Figura 3
2. Haga llegar uno o varios tubos para pasar los cables eléctricos,
como muestra la Figura 4.
3. Ensamble las dos grapas en la placa de cimentación colocando una
tuerca abajo y una encima de la placa; la tuerca debajo de la placa
se enrosca como se muestra en la Figura 5, a fin de que la parte
roscada sobresalga en torno a 25÷35 por encima de la placa.
4. Realice la colada de hormigón y, antes de que comience a fraguar,
coloque la placa de cimentación según las cotas indicadas en la
figura 3; compruebe que quede paralela a la hoja y perfectamente
nivelada. Espere a que el hormigón fragüe completamente.
5. Quite las 2 tuercas superiores de la placa y apoye el motorre-
ductor; compruebe que quede perfectamente paralelo respecto
de la hoja y después enrosque ligeramente las 2 tuercas y aran-
delas entregadas, como muestra la figura 7.
El ROBUS debe ser instalado por personal cualificado, respetando las leyes, normas y reglamentos y las indicaciones de
las presentes instrucciones.
!
3) Instalación
3.1) Controles preliminares
Antes de comenzar con la instalación del ROBUS es necesario efec-
tuar los siguientes controles:
• Controle que todo el material a utilizar esté en perfectas condicio-
nes, sea adecuado para su uso y que respete las normas.
• Controle que la estructura de la puerta sea adecuada para su
automatización.
• Controle que el peso y las dimensiones de la hoja respeten los lími-
tes de utilización indicados en el capítulo “2.1 Límites de utilización”
• Controle, comparando con los valores indicados en el capítulo “8
Características técnicas”, que la fuerza necesaria para poner en
movimiento la puerta sea inferior a la mitad del “Par máximo”, y
que la fuerza necesaria para mantener la puerta en movimiento,
sea inferior a la mitad del “Par nominal”; se aconseja un margen
del 50% sobre las fuerzas, porque las condiciones climáticas
adversas pueden aumentar las fricciones.
• Controle que a lo largo de toda la carrera de la puerta, tanto de
cierre como de apertura, no haya puntos con mayor fricción.
• Controle que no exista el peligro de que la hoja se descarrille y de
que se pueda salir de las guías
• Compruebe la robustez de los topes mecánicos de sobrerrecorri-
do, controlando que no se produzcan deformaciones tampoco si
la puerta golpeara con fuerza contra el tope.
• Controle que la puerta esté bien equilibrada, es decir que no se
mueva al dejarla detenida en cualquier posición.
• Controle que la zona de fijación del motorreductor no pueda inun-
darse; de ser oportuno, monte el motorreductor levantado del
piso.
• Controle que la zona de fijación del motorreductor permita el des-
bloqueo y una maniobra manual fácil y segura.
• Controle que los puntos de fijación de los distintos dispositivos se
encuentren en zonas protegidas de choques y que las superficies
sean suficientemente firmes.
• Los componentes del automatismo no deben quedar sumergidos
en agua ni en otras substancias líquidas.
• No coloque el ROBUS cerca de llamas o fuentes de calor; en
atmósferas con riesgo de explosión, muy ácidas o salinas; porque
el ROBUS podría arruinarse y tener problemas de funcionamiento
o generar situaciones peligrosas.
• Si hubiera un portillón de paso en la misma hoja o una puerta en
la zona de movimiento de la hoja, asegúrese de que no obstaculi-
ce la carrera normal e incorpore un sistema de interbloqueo opor-
tuno en su caso.
• Conecte la central a una línea de alimentación eléctrica dotada de
puesta a tierra de seguridad.
• La línea de alimentación eléctrica debe estar protegida por un dis-
positivo magnetotérmico y diferencial adecuado.
• En la línea de alimentación de la red eléctrica hay que montar un
dispositivo de desconexión de la alimentación (con categoría de
sobretensión III, es decir distancia entre los contactos de 3,5 mm
como mínimo) u otro sistema equivalente, por ejemplo una toma y
una clavija. Si el dispositivo de desconexión de la alimentación no
está cerca del automatismo, coloque un sistema de bloqueo a fin
de evitar la conexión accidental o no autorizada.
3
4
5
6
25÷35
7
192
330 0÷50
0÷50 330
192
0÷10
0÷10

112
3.3) Fijación de los soportes de fin de carrera en las versiones con fin de carrera de proximidad inductivo
Para evitar que el peso de la hoja pueda cargar sobre el moto-
rreductor, es importante que entre la cremallera y el piñón haya
un huelgo de 1÷2 mm tal como muestra la figura 10.
8.
Haga deslizar la hoja y utilice siempre el piñón como referencia para
fijar los demás elementos de la cremallera.
9.
Corte la parte excedente del último tramo de la cremallera.
10.
Abra y cierre varias veces la puerta, comprobando que la cremalle-
ra se deslice alineada al piñón, con una desalineación máxima de 5
mm, y que a todo lo largo se haya respetado un huelgo de 1÷2 mm
entre el piñón y la cremallera.
11.
Apriete con fuerza las tuercas de fijación del motorreductor a fin de
que quede fijado firmemente al piso; cubra las tuercas de fijación
con las tapas correspondientes, figura 11.
12.
Fije los soportes de fin de carrera tal como indicado a continuación
(para las versiones RB600P y RB1000P fije los soportes según las
instrucciones del párrafo “3.3 Fijación de los soportes de fin de
carrera en las versiones con fin de carrera de proximidad inductivo”):
• Coloque la puerta manualmente en posición de apertura dejando
por lo menos 2 - 3 cm de distancia desde el tope mecánico.
• Deslice el soporte sobre la cremallera en la dirección de apertura
hasta que se active el fin de carrera. Entonces, adelante el sopor-
te unos 2cm y después fíjelo a la cremallera con los tornillos sin
cabeza correspondientes, véase figura 12.
• Proceda de igual manera para el fin de carrera de cierre.
13. Bloquee el motorreductor tal como indicado en el párrafo “Desblo-
queo y movimiento manual” en el capítulo “Instrucciones y adver-
tencias para el usuario”.
!
8 9 10
11 12
Si la cremallera está instalada, una vez fijado el motorreductor, ajuste
los tornillos sin cabeza de regulación, como muestra la figura 8, a fin
de colocar el piñón del ROBUS a la altura justa, dejando 1÷2mm de
huelgo desde la cremallera. Por el contrario, para fijar la cremallera:
6. Desbloquee el motorreductor tal como indicado en el párrafo
“Desbloqueo y movimiento manual” en el capítulo “Instrucciones
y advertencias para el usuario del motorreductor ROBUS”.
7. Abra completamente la puerta, apoye sobre el piñón el primer
tramo de cremallera y controle que el comienzo de la cremallera
corresponda con el comienzo de la puerta, tal como muestra la
figura 9. Controle que entre el piñón y la cremallera haya un huel-
go de 1÷2, después fije la cremallera a la hoja utilizando los ele-
mentos adecuados.
1÷2
Para las versiones RB600P y RB1000P, que utilizan el fin de carrera
de proximidad inductivo, hay que fijar los soportes de fin de carrera
como se explica a continuación.
1. Coloque la puerta manualmente en posición de apertura dejando
por lo menos 2 - 3cm de distancia desde el tope mecánico.
2. Deslice el soporte sobre la cremallera en la dirección de apertura
hasta que el led correspondiente se apague, tal como en la figu-
ra 13. Entonces, adelante el soporte unos 2 cm y después fíjelo
a la cremallera con los tornillos sin cabeza correspondientes.
3. Coloque la puerta manualmente en posición de cierre dejando
por lo menos 2 - 3cm de distancia desde el tope mecánico.
4. Deslice el soporte sobre la cremallera en la dirección de cierre
hasta que el led correspondiente se apague. Entonces, adelante
el soporte unos 2 cm y después fíjelo a la cremallera con los tor-
nillos sin cabeza correspondientes.
En el fin de carrera de proximidad inductivo la distancia
ideal del soporte está comprendida entre 3 y 8 mm, como
muestra la figura 14.
!
13
14
3÷8

113
E
3.5) Conexiones eléctricas
Las conexiones eléctricas deben efectuarse sin tensión
en la instalación y, en su caso, con la batería compensa-
dora desconectada.
1. Para desmontar la tapa de protección y acceder a la central elec-
trónica de control del ROBUS quite el tornillo del costado y
extraiga la tapa tirando de ella hacia arriba.
2.
Quite la membrana de goma que cierra el agujero para la entrada de
los cables e introduzca todos los cables de conexión hacia los distin-
tos dispositivos, dejándolos 20÷30 cm más largos de lo necesario.
Véase la tabla 5 para el tipo de cable y la figura 2 para las conexiones.
3. Con una brida reúna todos los cables que entran en el motorre-
ductor. Coloque la brida un poco más abajo del agujero de entra-
da de los cables. En la membrana de goma, corte un agujero un
poco más estrecho que el diámetro de los cables recogidos e
introduzca la membrana a lo largo de los cables hasta la brida;
entonces, vuelva a colocar la membrana en el alojamiento del
agujero para el paso de los cables. Coloque otra brida para reco-
ger los cables un poco más arriba de la membrana.
4. Conecte el cable de alimentación en el borne correspondiente,
véase figura 15, y con una brida bloquee el cable en el primer ani-
llo sujetacable.
5. Conecte los demás cables según el esquema de la figura 17. Para
una mayor comodidad los bornes pueden extraerse.
6. Una vez concluidas las conexiones, bloquee con bridas los cables
reunidos en el segundo anillo sujetacables, la parte sobrante del
cable de la antena se bloquea a los demás cables con otra brida,
como muestra la figura 16.
!
3.4) Instalación de los diferentes dispositivos
Instale los demás dispositivos siguiendo las instrucciones correspondientes. Controle en el párrafo “3.6 Descripción de las conexiones eléc-
tricas” y en la figura 2, los dispositivos que pueden conectarse al ROBUS.
15
17
16
Para la conexión de 2 motores en hojas contrapuestas, véase el párrafo “7.3.5 ROBUS en modo Slave”.
LUCYB
S.C.A.
MOFB MOSE
OPEN CLOSE

114
3.6) Descripción de las conexiones eléctricas
En este párrafo hay una breve descripción de las conexiones eléc-
tricas; otras informaciones en el párrafo “7.3 Instalación y desinsta-
lación de dispositivos”.
FLASH: salida para la luz intermitente “LUCYB” o similar sólo con la
bombilla de 12V máximo 21W.
S.C.A.: salida “Indicador Luminoso Cancela Abierta”; es posible
conectar una bombilla de 24V, máximo 4W. También puede progra-
marse para otras funciones; véase el párrafo “7.2.3 Funciones
segundo nivel”
BLUEBUS: en este borne se pueden conectar los dispositivos
compatibles; todos los dispositivos se conectan en paralelo con dos
conductores solos por los que transitan tanto la alimentación eléc-
trica como las señales de comunicación. Para más informaciones
sobre BlueBUS véase el párrafo “7.3.1 BlueBUS”.
STOP: entrada para los dispositivos que bloquean o detienen la
maniobra que se está ejecutando; con soluciones oportunas
pueden conectarse en la entrada contactos tipo “Normalmente
Cerrado”, “Normalmente Abierto” o dispositivos de resistencia cons-
tante. Para más informaciones sobre STOP véase el párrafo “7.3.2
Entrada STOP”.
P.P. : entrada para dispositivos que controlan el movimiento; es posi-
ble conectar contactos tipo “Normalmente Abierto”.
OPEN : entrada para dispositivos que accionan el movimiento de
apertura sola; es posible conectar contactos tipo “Normalmente
Abierto”.
CLOSE: entrada para dispositivos que accionan el movimiento de
cierre solo; es posible conectar contactos tipo “Normalmente Abier-
to”.
ANTENA: entrada de conexión de la antena para receptor (la ante-
na está incorporada en LUCY B).
Antes de comenzar el control y de poner en marcha la automatización, se aconseja colocar la puerta en la mitad de su carrera para que
pueda abrirse o cerrarse libremente.
4) Controles finales y puesta en marcha
4.1) Selección de la dirección
De acuerdo con la posición del motorreductor respecto de la puer-
ta, es necesario elegir la dirección de la maniobra de apertura; si
para abrirse la hoja debe moverse hacia la izquierda, desplace el
selector hacia la izquierda, tal como indicado en la figura 18, si para
abrirse la puerta debe moverse hacia la derecha, coloque el selector
hacia la derecha, tal como indicado en la figura 19.
18
19
4.2) Conexión de la alimentación
La conexión de la alimentación al ROBUS debe ser
hecha por personal técnico experto y cualificado, que
posea los requisitos exigidos y respetando las normas,
leyes y reglamentos.
Ni bien se conecta la tensión al ROBUS, se aconseja realizar algu-
nos controles sencillos:
1. Controle que el led BlueBUS destelle regularmente con una fre-
cuencia de un destello por segundo.
2. Controle que también destellen los leds de las fotocélulas (tanto
en TX como en RX); no es importante el tipo de destello, depen-
de de otros factores.
3. Controle que la luz intermitente conectada a la salida FLASH y la
luz indicadora conectada a la salida S.C.A. estén apagadas.
Si así no fuera, se aconseja apagar inmediatamente la alimentación
de la central y controlar con mayor atención las conexiones eléctri-
cas.
Otras informaciones útiles para la búsqueda y el diagnóstico de las
averías se encuentran en el capítulo “7.6 Solución de los problemas”
!
4.3) Aprendizaje de los dispositivos
Después de concluir la conexión de la alimentación, hay que hacer que la central reconozca los dispositivos conectados en las entradas
BLUEBUS y STOP. Antes de esta etapa los leds L1 y L2 destellan indicando que se ha de efectuar el aprendizaje de los dispositivos.
La etapa de aprendizaje de los dispositivos conectados puede repetirse en cualquier momento, incluso después de la instalación, por ejem-
plo si se añade un dispositivo; para efectuar un nuevo aprendizaje véase el párrafo “7.3.6 Aprendizaje de otros dispositivos”.
1. Pulse y mantenga pulsados los botones [▲] y [Set]
2. Suelte los botones cuando los leds L1 y L2 comiencen a destellar muy rápidamente (transcurridos alre-
dedor de 3s)
3. Espere algunos segundos a que la central concluya el aprendizaje de los dispositivos.
4. Al concluir el aprendizaje, el led STOP debe quedar encendido y los leds L1 y L2 se apagarán (podrí-
an comenzar a destellar los leds L3 y L4).
20

115
E
4.4) Aprendizaje de la longitud de la hoja
Después del aprendizaje de los dispositivos comenzarán a destellar los leds L3 y L4; esto significa que es necesario que la central reconozca
la longitud de la hoja (distancia desde el fin de carrera de cierre al fin de carrera de apertura); dicha medida es necesaria para calcular los
puntos de deceleración y el punto de apertura parcial.
Si así no fuera, se aconseja apagar inmediatamente la alimentación de la central y controlar con mayor atención las conexiones eléctricas.
Otras informaciones útiles se encuentran en el capítulo “7.6 Solución de los problemas”.
1. Pulse y mantenga pulsados los botones [▼] y [Set]
2. Suelte los botones cuando comience la maniobra (transcurridos unos 3s)
3. Controle que la maniobra sea una apertura, por el contrario presione el botón [Stop] y lea con mayor aten-
ción el párrafo “4.1 Selección de la dirección”; entonces repita desde el punto 1.
4. Espere a que la central complete la maniobra de apertura hasta llegar al fin de carrera de apertura; inmedia-
tamente después comienza la maniobra de cierre.
5. Espere a que la central complete la maniobra de cierre.
4.5) Control del movimiento de la puerta
Después del aprendizaje de la longitud de la hoja se aconseja efec-
tuar algunas maniobras para verificar el movimiento correcto de la
puerta.
1. Pulse el botón [Open] para accionar una maniobra de “Abrir”; con-
trole que la puerta se abra normalmente sin cambios de velocidad;
solamente cuando la puerta está entre 50cm y 70 cm del fin de
carrera de apertura deberá desacelerar y detenerse, por la activa-
ción del fin de carrera, a 2÷3 cm del tope mecánico de apertura.
2. Pulse el botón [Close] para accionar una maniobra de “Cerrar”;
controle que la puerta se cierre normalmente sin cambios de velo-
cidad; solamente cuando la puerta está entre 50cm y 70 cm del fin
de carrera de cierre deberá desacelerar y detenerse, por la activa-
ción del fin de carrera, a 2÷3 cm del tope mecánico de cierre.
3. Durante las maniobras controle que la luz intermitente destelle
con intervalos de 0,5s encendido y 0,5s apagado. En su caso,
controle también los destellos de la luz indicadora conectada al
borne S.C.A.: destello lento durante la apertura y rápido durante
el cierre.
4. Realice varias maniobras de apertura y cierre a fin de observar
posibles defectos de montaje y de regulación u otras irregularida-
des, por ejemplo puntos de mayor fricción.
5. Controle que la fijación del motorreductor ROBUS, de la crema-
llera y de los soportes de fin de carrera sean firmes, estables y
adecuadamente resistentes también durante las aceleraciones o
deceleraciones violentas del movimiento de la puerta
4.6) Funciones predeterminadas
La central de control del ROBUS dispone de algunas funciones pro-
gramables; tales funciones se regulan en fábrica con una configura-
ción que debería satisfacer la mayoría de las automatizaciones; sin
embargo, las funciones pueden modificarse en cualquier momento
mediante un procedimiento de programación oportuno; a tal fin véa-
se el párrafo “7.2 Programaciones”.
21
4.7) Receptor
Para el accionamiento a distancia del ROBUS, la central de control incorpora el enchufe SM para radiorreceptores tipo SMXI o SMXIS. Para
más informaciones, consulte el manual de instrucciones del receptor. Para conectar el receptor, ejecute la operación indicada en la figura
22. En la tabla 6, se describe la asociación entre la salida del receptor y la orden que el ROBUS cumplirá:
22
Salida N°1 Mando “P.P.” (Paso a Paso)
Salida N°2 Mando “Apertura parcial”
Salida N°3 Mando “Abrir”
Salida N°4 Mando “Cerrar”
Tabla 6: mandos con transmisor
Esta es la etapa más importante de la realización del automatismo a
fin de garantizar su máxima seguridad. El ensayo también puede uti-
lizarse como control periódico de los dispositivos que componen el
automatismo.
El ensayo de toda la instalación debe ser efectuado por
personal cualificado y experto que deberá establecer los
ensayos previstos de acuerdo con los riesgos presentes y
controlar que se respeten las leyes, normativas y regla-
mentos, especialmente todos los requisitos de la norma
EN 12445 que establece los métodos de ensayo de los
automatismos para puertas.
!
5) Ensayo y puesta en servicio

116
5.1) Ensayo
Cada componente del automatismo, por ejemplo bandas neumáticas,
fotocélulas, parada de emergencia, etc., exige un fase de ensayo espe-
cífica; por dicha razón se deberán seguir los diferentes procedimientos
indicados en los manuales de instrucciones respectivos. Para el ensa-
yo del ROBUS ejecute la siguiente secuencia de operaciones:
1. Controle que hayan sido respetadas estrictamente las indicacio-
nes dadas en este manual y especialmente aquellas del capítulo
“1 Advertencias”;
2. Desbloquee el motorreductor tal como indicado en el párrafo
“Desbloqueo y movimiento manual” en el capítulo “Instrucciones
y advertencias para el usuario del motorreductor ROBUS”.
3. Controle que sea posible abrir y cerrar manualmente la puerta con
una fuerza que no supere 390N (alrededor de 40kg).
4. Bloqueo del motorreductor.
5. Utilizando los dispositivos de mando o de parada previstos (selec-
tor de llave, botones de mando o transmisores), efectúe ensayos
de apertura, cierre y parada de la puerta y compruebe que el
comportamiento sea el previsto.
6. Controle uno por uno el funcionamiento correcto de todos los dis-
positivos de seguridad incorporados en la instalación (fotocélulas,
bandas sensibles, parada de emergencia, etc.), comprobando
que el comportamiento de la puerta corresponda al previsto.
Cada vez que un dispositivo se acciona, el led “BlueBUS” en la
central debe emitir 2 destellos más rápidos, confirmando que la
central reconoce el evento.
7. Si las situaciones peligrosas causadas por el movimiento de la
puerta se han prevenido limitando la fuerza de impacto, hay que
medir la fuerza de acuerdo con la disposición de la norma EN
12445. Si la regulación de la “Velocidad” y el control de la “Fuer-
za del motor” se usan como una ayuda del sistema para reducir
la fuerza de impacto, pruebe y busque la regulación que dé los
mejores resultados.
5.2) Puesta en servicio
La puesta en servicio puede llevarse a cabo sólo después de haber
efectuado correctamente todas las etapas de ensayo del ROBUS y
de los demás dispositivos montados. Está prohibida la puesta en
servicio parcial o en situaciones “precarias”.
1. Realice y conserve durante al menos 10 años el expediente téc-
nico de la automatización que deberá incluir como mínimo: el
dibujo de conjunto de la automatización, esquema de las cone-
xiones eléctricas, análisis de los riesgos y soluciones adoptadas,
declaración de conformidad del fabricante de todos los dispositi-
vos utilizados (para el ROBUS utilice la Declaración de conformi-
dad CE adjunta); copia del manual de instrucciones de uso y del
plan de mantenimiento del automatismo.
2.
Aplique a la puerta una placa con los siguientes datos: tipo de automa-
tización, nombre y dirección del fabricante (responsable de la “puesta
en servicio”), número de matrícula, año de fabricación y marcado “CE”.
3. Aplique de manera permanente, cerca de la puerta, una etiqueta
o una placa que indique las operaciones para el desbloqueo y la
maniobra manual.
4. Prepare y entregue al dueño de la automatización la declaración
de conformidad correspondiente.
5. Prepare y entregue al dueño el “Manual de instrucciones y adver-
tencias para el uso de la automatización”.
6. Prepare y entregue al dueño el plan de mantenimiento de la auto-
matización (que debe incluir todas las prescripciones sobre el
mantenimiento de cada dispositivo).
7. Antes de poner en funcionamiento la automatización, informe
adecuadamente y por escrito al dueño (por ejemplo en el manual
de instrucciones y advertencias para el uso de la automatización)
acerca de los peligros y los riesgos presentes.
En este capítulo se mencionan las informaciones para realizar el plan de mantenimiento y el desguace del ROBUS.
6) Mantenimiento y desguace
6.1) Mantenimiento
Para que el nivel de seguridad sea constante y para garantizar la
duración máxima de la automatización, es necesario hacer un man-
tenimiento habitual; a tal fin el ROBUS dispone de un contador de
maniobras y de un sistema de señalización de petición de manteni-
miento; véase el párrafo “7.4.3 Aviso de Mantenimiento”.
El mantenimiento debe efectuarse respetando las pres-
cripciones en materia de seguridad de este manual y
según las leyes y normativas vigentes.
Para los demás dispositivos diferentes del ROBUS siga las instruc-
ciones mencionadas en los planes de mantenimiento correspon-
dientes.
1. El ROBUS requiere que se efectúe un mantenimiento programa-
do antes de transcurridos 6 meses o, como máximo, 20.000
maniobras a partir del mantenimiento anterior.
2. Desconecte cualquier fuente de alimentación eléctrica, incluidas
las baterías compensadoras.
3. Compruebe las condiciones de todos los materiales que compo-
nen la automatización, controlando especialmente los fenóme-
nos de corrosión y oxidación de las piezas de la estructura; sus-
tituya las piezas que no sean lo suficientemente seguras.
4. Controle el desgaste de las piezas en movimiento: piñón, crema-
llera y todas las piezas de la hoja, sustituya las piezas gastadas.
5. Conecte las fuentes de alimentación eléctrica y ejecute todos los
ensayos y controles previstos en el párrafo “5.1 Ensayo”.
!
6.2) Desguace
El ROBUS está formado de varios tipos de materiales, algunos de
los cuales pueden reciclarse; acero, aluminio, plástico, cables eléc-
tricos; otros deberán ser eliminados: baterías y tarjetas electrónicas.
Algunos componentes electrónicos y las baterías
podrían contener substancias contaminantes; no los
abandone en el medio ambiente. Infórmese sobre los sis-
temas de reciclaje o eliminación respetando las normas
locales vigentes.
1. Desconecte la alimentación eléctrica de la automatización y la
batería compensadora en su caso.
2.
Desmonte todos los dispositivos y accesorios, siguiendo el procedi-
miento en el orden inverso a aquel descrito en el capítulo “3 Instalación”.
3. Separe dentro de lo posible las partes que puedan o deban ser
recicladas o eliminadas de otro modo, por ejemplo las piezas metá-
licas de aquellas de plástico, las tarjetas electrónicas, baterías, etc.
4. Separe y entregue los materiales a las empresas locales autori-
zadas para la recuperación y eliminación de residuos.
!

117
E
En este capítulo se tratarán las posibilidades de programación, personalización, diagnóstico y búsqueda de las averías sobre el ROBUS.
7) Otras informaciones
Open El botón “OPEN” permite accionar la apertura de la puerta o desplazar hacia
▲ arriba el punto de programación
Stop El botón “STOP” permite detener la maniobra; al presionarlo durante más de
Set 5 segundos, permite entrar en programación.
Close El botón “CLOSE” permite accionar el cierre de la puerta o desplazar hacia
▼ abajo el punto de programación
7.1) Botones de programación
En la central de control del ROBUS hay 3 botones que pueden utili-
zarse para el accionamiento de la central durante los ensayos o para
las programaciones:
23
7.2) Programaciones
En la central de control del ROBUS hay algunas funciones progra-
mables; las funciones se regulan con los 3 botones situados en la
central: [▲] [Set] [▼] y se visualizan a través de los 8 leds:
L1….L8.
Las funciones programables disponibles en el ROBUS están dis-
puestas en 2 niveles:
Primer nivel: funciones regulables en modo ON-OFF (activo o
desactivado); en este caso, cada led L1….L8 indica una función; si
está encendido, la función está activa, si está apagado, la función
está desactivada; véase la tabla 7.
Segundo nivel: parámetros regulables en una escala de valores
(valores de 1 a 8); en este caso cada led L1….L8 indica el valor regu-
lado entre los 8 valores posibles; véase la tabla 9.
Led Función Descripción
L1 Cierre automático Esta función permite un cierre automático de la puerta después del tiempo de pausa programado, de
fábrica el Tiempo Pausa está configurado en 30 segundos, pero puede modificarse en 5, 15, 30, 45, 60,
80, 120 y 180 segundos. Si la función está desactivada, el funcionamiento es “semiautomático”.
L2 Cerrar Después de Esta función permite tener la puerta abierta solo durante el tiempo necesario para el tránsito, en efecto,
Fotocélula la activación de "Foto" provoca siempre un cierre automático con un tiempo de pausa de 5s
(independientemente del valor programado).
El comportamiento cambia según si se activa o no la función de "Cierre Automático".
Con "Cierre Automático" desactivado: la puerta siempre alcanza la posición de apertura total (aunque
si la Fotocélula queda descubierta antes). Al quedar la fotocélula descubierta se provoca el cierre
automático con una pausa 5s.
Con “Cierre Automático” activo: la maniobra de apertura se detiene inmediatamente después de que
las fotocélulas quedan descubiertas y, transcurridos 5 seg, comenzará la maniobra de cierre.
La función "Cerrar después de Fotocélula" siempre se deshabilita en las maniobras interrumpidas por un
mando de Stop. Si la función "Cerrar después de fotocélula" no está activa el tiempo de pausa será
aquel programado, o no se producirá el cierre automático si la función no está activa.
L3 Cerrar Siempre La función “Cerrar Siempre” se activa provocando un cierre cuando al volver la alimentación se detecta
que la puerta está abierta. Por motivos de seguridad, la maniobra es antecedida de 5s de destello
previo. Si la función está desactivada, al volver la alimentación la puerta quedará detenida.
L4 Stand-By Esta función permite reducir al máximo los consumos; es útil durante el funcionamiento con la batería
compensadora. Si esta función está activa, después de 1 minuto del final de la maniobra, la central
apaga la salida BlueBUS (y, por tanto, los dispositivos) y todos los leds, salvo el led BlueBUS que
destellará más lentamente. Cuando reciba un mando, la central reanudará el funcionamiento. Si la
función está desactivada, los consumos no disminuirán.
L5 Punto de arranque
Activando esta función se desactiva la aceleración gradual en cada comienzo de maniobra; permite obtener la
fuerza máxima de arranque y es útil donde existen grandes fricciones estáticas, por ejemplo en caso de nieve
o hielo que bloqueen la puerta. Si el punto de arranque no está activo, comienza con una aceleración gradual.
L6 Destello previo Con la función de destello previo se añade una pausa de 3s entre el encendido de la luz intermitente y el
comienzo de la maniobra, para advertir anticipadamente acerca de la situación de peligro. Si el destello
previo está desactivado, el encendido de la luz intermitente coincide con el comienzo de la maniobra.
L7 “Cerrar” se convierte en Activando esta función, todos los mandos “cerrar” (entrada “CLOSE” o mando radio “cerrar”) activan
“Abrir Parcial” una maniobra de apertura parcial (véase led L6 en la tabla 9).
L8 Modo “Slave” (esclavo) Activando esta función, el ROBUS se convierte en “Slave” (se esclaviza): así es posible sincronizar el
funcionamiento de 2 motores montados en dos hojas contrapuestas, en las que un motor funciona
como Máster y el otro como Slave; para más detalles véase el párrafo “ 7.3.5 ROBUS en modo “Slave”.
Durante el funcionamiento normal del ROBUS, los leds L1….L8 están encendidos o apagados de acuerdo con el estado de la función
que estos representan, por ejemplo L1 está encendido si la función “Cierre automático” está activa.
Tabla 7: lista de las funciones programables: primer nivel
7.2.1) Funciones de primer nivel (funciones ON-OFF)

118
Tiempo
Pausa
Función P.P.
Velocidad del
Motor
Salida S.C.A.
Fuerza del
motor
L1
L2
L3
L4
L5
L6
L7
L8
L1
L2
L3
L4
L5
L6
L7
L8
L1
L2
L3
L4
L5
L6
L7
L8
L1
L2
L3
L4
L5
L6
L7
L8
L1
L2
L3
L4
L5
L6
L7
L8
5 segundos
15 segundos
30 segundos
45 segundos
60 segundos
80 segundos
120 segundos
180 secondi
Abrir - stop - cerrar - stop
Abrir - stop - cerrar - abrir
Abrir - cerrar - abrir - cerrar
Comunitario
Comunitario 2 (más de 2” se detiene)
Paso a Paso 2 (menos de 2” provoca apertura par-
cial)
Hombre muerto
Apertura “semiautomática”, cierre “Hombre muerto”
Muy lenta
Lenta
Media
Rápida
Muy rápida
Rapidísima
Abrir “rápido”; cerrar “lento”
Abrir “rapidísimo”, Cerrar “rápido”
Función “Indicador Cancela Abierta”
Activa si la puerta está cerrada
Activa si la puerta está abierta
Activa con salida radio N°2
Activa con salida radio N°3
Activa con salida radio N°4
Indicador Mantenimiento
Electrocerradura
Puerta “muy ligera”
Puerta muy ligera
Puerta ligera
Puerta medio-ligera
Puerta “medio-pesada”
Puerta pesada
Puerta muy pesada
Puerta pesadísima
7.2.2) Programación de primer nivel (funciones ON-OFF)
Todas las funciones del primer nivel están configuradas de fábrica en “OFF”, pero pueden cambiarse en cualquier momento, tal como indi-
cado en la tabla 8. Tenga cuidado al efectuar este procedimiento porque hay un tiempo máximo de 10s entre que se presiona un botón y
el otro, en caso contrario, el procedimiento termina automáticamente, memorizando las modificaciones hechas hasta ese momento.
1. Pulse y mantenga pulsado el botón [Set] durante unos 3s
3s
2. Suelte el botón [Set] cuando el led L1 empiece a destellar
L1
3. Pulse los botones [▲] o [▼] para pasar del led intermitente al led que representa la función a modificar
o
4. Pulse el botón [Set] para cambiar el estado de la función (destello breve = OFF; destello prolongado = ON)
5. Espere 10s para salir de la programación por conclusión del tiempo máximo
10s
Nota: los puntos 3 y 4 pueden repetirse durante la misma etapa de programación para colocar en ON u OFF las demás funciones
Tabla 8: para cambiar las funciones ON-OFF Ejemplo
SET
SET
SET
7.2.3 Funciones de segundo nivel (parámetros regulables)
Tabla 9: lista de las funciones programables: segundo nivel
Led de entrada
Parámetro Led (nivel) valor Descripción
Regula el tiempo de pausa, es
decir el tiempo antes del cierre
automático. Tiene efecto sólo si el
cierre automático está activo
Regula la secuencia de mandos
asociados a la entrada P.P. o al 1°
mando por radio.
Regula la velocidad del motor
durante la carrera normal.
Regula la función asociada a la sali-
da S.C.A. (con cualquier función
asociada, la salida, cuando está
activa, suministra una tensión de
24V -30 +50% con una potencia
máxima de 4W)
Regula el sistema de control de la
fuerza del motor para adecuarlo al
peso de la puerta. El sistema de
control de la fuerza también mide la
temperatura ambiente, aumentan-
do automáticamente la fuerza en
caso de temperaturas muy bajas
L1
L2
L3
L4
L5

119
E
Nota: “ ” representa la regulación de fábrica
Todos los parámetros pueden regularse sin ninguna contraindicación; sólo la regulación de la “Fuerza del motor” requiere ciertas precaucio-
nes:
• Se desaconseja utilizar valores de fuerza elevados para compensar el hecho de que la puerta tiene puntos de fricción anormales; una fuer-
za excesiva puede perjudicar el funcionamiento del sistema de seguridad o averiar la hoja.
• Si el control de la “fuerza motor” se usa como ayuda del sistema para reducir la fuerza de impacto, después de cada regulación, repita la
medición de la fuerza tal como previsto por la norma EN 12445.
• El desgaste y las condiciones atmosféricas influyen sobre el movimiento de la puerta; por dicho motivo es necesario controlar periódica-
mente la regulación de la fuerza.
Abrir Parcial
Aviso de
mantenimiento
Lista de
desperfectos
L1
L2
L3
L4
L5
L6
L7
L8
L1
L2
L3
L4
L5
L6
L7
L8
L1
L2
L3
L4
L5
L6
L7
L8
0,5 mt
1 mt
1,5 mt
2 mt
2,5 mt
3 mt
3,4 mt
4 mt
Automático (según la dificultad de las manio-
bras)
1000
2000
4000
7000
10000
15000
20000
Resultado 1
a
maniobra (la más reciente)
Resultado 2
a
maniobra
Resultado 3
a
maniobra
Resultado 4
a
maniobra
Resultado 5
a
maniobra
Resultado 6
a
maniobra
Resultado 7
a
maniobra
Resultado 8
a
maniobra
Led de entrada
Parámetro Led (nivel) valor Descripción
Regula la medida de la apertura parcial. La
apertura parcial se puede accionar con el
2° mando por radio o con “CERRAR”, si
está activa la función “Cerrar” se convierte
en “Abrir Parcial”
Regula la cantidad de maniobras oportu-
nas para señalar la petición de manteni-
miento del automatismo (véase párrafo
“7.4.3 Aviso de Mantenimiento”).
Permite comprobar el tipo de desperfecto
que se produjo en las 8 últimas maniobras
(véase párrafo “7.6.1 Historial desperfec-
tos”).
L6
L7
L8
7.2.4) Programación de segundo nivel (parámetros regulables)
Los parámetros regulables se configuran de fábrica como se muestra en la tabla 9 con: “ ” pero pueden cambiarse en cualquier momento, tal
como indicado en la tabla 10. Tenga cuidado al efectuar este procedimiento porque hay un tiempo máximo de 10 s entre que se presiona un
botón y el otro, en caso contrario, el procedimiento termina automáticamente, memorizando las modificaciones hechas hasta ese momento.
1. Pulse y mantenga pulsado el botón [Set] durante alrededor de 3s
3s
2. Suelte el botón [Set] cuando el led L1 empiece a destellar
L1
3. Pulse los botones [▲] o [▼] para pasar del led intermitente al “led de entrada” que representa el
parámetro a modificar o
4.
Pulse y mantenga pulsado el botón [Set], mantenga pulsado el botón [Set] durante todos los pasos 5 y 6
5. Espere alrededor de 3s, después se encenderá el led que representa el nivel actual del parámetro a
modificar
6. Pulse los botones [▲] o [▼] para desplazar el led que representa el valor del parámetro.
o
7. Suelte el botón [Set]
8. Espere 10s para salir de la programación por conclusión del tiempo máximo.
10s
Nota: los puntos de 3 a 7 pueden repetirse durante la misma etapa de programación para regular varios parámetros
Tabla 10: para cambiar los parámetros regulables Ejemplo
SET
SET
SET
SET

120
7.2.6) Ejemplo de programación de segundo nivel (parámetros regulables)
Como ejemplo se menciona la secuencia de operaciones para modificar la configuración de fábrica de los parámetros y aumentar el “Tiem-
po Pausa” a 60s (entrada en L1 y nivel en L5) y reducir la “Fuerza del motor” para puertas ligeras (entrada en L5 y nivel en L2).
1. Pulse y mantenga pulsado el botón [Set] durante alrededor de 3s
3s
2. Suelte el botón [Set] cuando el led L1 empiece a destellar
L1
3. Pulse y mantenga pulsado el botón [Set]; el botón [Set] debe mantenerse pulsado durante todos
los pasos 4 y 5
4. Espere alrededor de 3s hasta que se encienda el led L3 que representa el nivel actual del “Tiempo Pausa”
L3 3s
5. Pulse 2 veces el botón [▼] para desplazar el led encendido en L5, que representa el nuevo valor
del “Tiempo Pausa” L5
6. Suelte el botón [Set]
7. Pulse 4 veces el botón [▼] para desplazar el led intermitente al led L5
L5
8. Pulse y mantenga pulsado el botón [Set]; el botón [Set] debe mantenerse pulsado durante todos
los pasos 9 y 10
9. Espere alrededor de 3s hasta que se encienda el led L5 que representa el nivel actual de la
“Fuerza del motor” 3s L5
10. Pulse 3 veces el botón [▲] para desplazar el led encendido en L2, que representa el nuevo valor de
la “Fuerza del motor” L2
11. Suelte el botón [Set]
12. Espere 10s para salir de la programación por conclusión del tiempo máximo.
10s
Tabla 12: ejemplo de programación de segundo nivel Ejemplo
SET
SET
SET
SET
SET
SET
7.3) Instalación o desinstalación de dispositivos
En una automatización que incorpora el ROBUS es posible instalar-
le o desinstalarle dispositivos en cualquier momento. En particular,
en “BlueBUS” y en la entrada “STOP” se pueden conectar diversos
tipos de dispositivos, tal como indicado en los párrafos siguientes.
Tras instalar o desinstalar los dispositivos, hay que hacer
de nuevo el aprendizaje de los dispositivos, tal como des-
crito en el párrafo “7.3.6 Aprendizaje de otros dispositi-
vos”.
7.3.1) BlueBUS
BlueBUS es una técnica que permite efectuar las conexiones de los
dispositivos compatibles con dos conductores solos, por los que
pasan la alimentación eléctrica y las señales de comunicación.
Todos los dispositivos se conectan en paralelo en esos 2 conducto-
res del BlueBUS y sin tener que respetar la polaridad; cada disposi-
tivo es reconocido individualmente puesto que durante la instalación
se le asigna una dirección unívoca. En BlueBUS se pueden conec-
tar, por ejemplo: fotocélulas, dispositivos de seguridad, botones de
mando, indicadores luminosos de señalización, etc. La central de
control del ROBUS, a través de una etapa de aprendizaje, reconoce
uno a uno todos los dispositivos conectados y es capaz de detec-
tar con extrema seguridad todos los posibles desperfectos. Por
dicho motivo, cada vez que se instala o desinstala un dispositivo
conectado en BlueBUS, la central deberá ejecutar el aprendizaje
como descrito en el párrafo “7.3.6 Aprendizaje de otros dispositi-
vos”.
7.2.5) Ejemplo de programación de primer nivel (funciones ON-OFF)
Como ejemplo se menciona la secuencia de operaciones para modificar la configuración de fábrica de las funciones de “Cierre Automático”
(L1) y “Cerrar Siempre” (L3).
1. Pulse y mantenga pulsado el botón [Set] durante alrededor de 3s
3s
2. Suelte el botón [Set] cuando el led L1 empiece a destellar
L1
3. Presione una vez el botón [Set] para modificar el estado de la función asociada a L1 (Cierre Automático);
ahora el led L1 destella con un destello prolongado L1
4. Pulse 2 veces el botón [▼] para desplazar el led intermitente al led L3
L3
5. Pulse una vez el botón [Set] para modificar el estado de la función asociada a L3 (Cerrar Siempre);
ahora el led L3 destella con un destello prolongado L3
6. Espere 10s para salir de la programación por conclusión del tiempo máximo.
10s
Al final de estas operaciones los leds L1 y L3 deben quedar encendidos, indicando que están activas las funciones “Cierre Automático” y
“Cerrar Siempre”.
Tabla 11: ejemplo de programación del primer nivel Ejemplo
SET
SET
SET
SET

121
E
7.3.2) Entrada STOP
STOP es la entrada que provoca la parada inmediata de la manio-
bra seguida de una breve inversión. En esta entrada se pueden
conectar los dispositivos con salida con contacto normalmente
abierto “NA”, normalmente cerrado “NC” o dispositivos con salida
de resistencia constante 8,2KΩ, por ejemplo bandas sensibles.
Al igual que para el BlueBUS, la central reconoce el tipo de disposi-
tivo conectado en la entrada STOP durante la etapa de aprendizaje
(véase el párrafo “7.3.6 Aprendizaje de otros dispositivos”); poste-
riormente, se provoca un STOP cuando se produce cualquier varia-
ción respecto del estado memorizado.
Con algunas soluciones oportunas es posible conectar varios dis-
positivos en la entrada STOP, incluso de diferentes tipos:
• Diversos dispositivos NA pueden conectarse en paralelo entre sí
sin límites de cantidad.
• Diversos dispositivos NC pueden conectarse en serie entre sí, sin
límites de cantidad.
• Dos dispositivos con salida de resistencia constante 8,2KΩ pue-
den conectarse en paralelo; si hubiera más de 2 dispositivos,
entonces todos deben conectarse “en cascada” con una sola
resistencia de terminación de 8,2KΩ.
• La combinación NA y NC puede efectuarse colocando los 2 con-
tactos en paralelo con la precaución de colocar, en serie al con-
tacto NC, una resistencia de 8,2KΩ (esto permite también la com-
binación de 3 dispositivos: NA, NC y 8,2KΩ).
Si la entrada STOP se utiliza para conectar los disposi-
tivos con funciones de seguridad, sólo los dispositivos con
salida con resistencia constante 8,2KΩ garantizan la cate-
goría de seguridad 3 contra las averías, según la norma
EN 954-1.
!
FOTO
Fotocélula exterior h = 50
con accionamiento en el cierre
FOTO II
Fotocélula exterior h = 100
con accionamiento en el cierre
FOTO 1
Fotocélula interior h = 50
con accionamiento en el cierre
FOTO 1 II
Fotocélula interior h = 100
con accionamiento en el cierre
FOTO 2
Fotocélula exterior
con accionamiento en la apertura
FOTO 2 II
Fotocélula interior
con accionamiento en la apertura
FOTO 3
Fotocélula única
que cubre todo el automatismo
La instalación de FOTO 3 junto con FOTO II requiere que la posi-
ción de los elementos que forman la fotocélula (TX-RX) respete la
advertencia indicada en el manual de instrucciones de las fotocélulas.
!
7.3.3) Fotocélulas
El sistema "BlueBus" permite, mediante el direccionamiento con los
puentes correspondientes, que la central reconozca las fotocélulas
y asignarles la función correcta de detección. La operación de direc-
cionamiento se realiza tanto en el TX como en el RX (colocando los
puentes de conexión de la misma manera), comprobando que no
haya otros pares de fotocélulas con la misma dirección.
En una automatización para puertas de correderas con el ROBUS es
posible instalar las fotocélulas según la representación de la figura 24.
Después de la instalación o desinstalación de fotocélulas, en la cen-
tral habrá que ejecutar la etapa de aprendizaje, tal como descrito en
el párrafo “7.3.6 Aprendizaje de otros dispositivos”.
7.3.4) Fotosensor FT210B
El fotosensor FT210B une, en un solo dispositivo, un sistema de
limitación de la fuerza (tipo C según la norma EN12453) y un detec-
tor de presencia de obstáculos presentes en el eje óptico entre
transmisor TX y receptor RX (tipo D según la norma EN12453). En el
fotosensor FT210B las señales del estado de la banda sensible se
envían mediante el rayo de la fotocélula integrando los 2 sistemas en
un solo dispositivo. La parte transmisora, situada en la hoja móvil, es
alimentada con baterías eliminando así los antiestéticos sistemas de
conexión; unos circuitos especiales reducen el consumo de la bate-
ría para garantizar una duración de hasta 15 años (véanse los deta-
lles de la evaluación en las instrucciones del producto).
Un solo dispositivo FT210B, combinado con una banda sensible
(ejemplo TCB65), permite alcanzar el nivel de seguridad de la "ban-
da sensible principal" exigido por la norma EN12453 para cualquier
"tipo de utilización" y "tipo de activación".
El fotosensor FT210B, combinado con bandas sensibles "resistivas"
(8,2Kohm), es seguro para una avería única (categoría 3 según EN
954-1). Dispone de un circuito especial antichoque que evita interfe-
rencias con otros detectores aunque no estén sincronizados y per-
mite añadir otras fotocélulas; por ejemplo, si pasan vehículos velo-
ces pesados donde normalmente se pone una segunda fotocélula a
1 m del piso.
Para más informaciones sobre los métodos de conexión y de direc-
cionamiento, véase el manual de instrucciones de FT210B.
24
Tabla 13: direcciones de las fotocélulas
Fotocélula Puentes Fotocélula Puentes

122
7.3.5) ROBUS en modo “Slave”
Programando y conectando oportunamente, el ROBUS puede fun-
cionar en modo “Slave” (esclavo); dicho modo de funcionamiento se
utiliza cuando usted deba automatizar 2 hojas contrapuestas y quie-
re que las hojas se muevan sincronizadas. En este modo un ROBUS
funciona como Máster (maestro), es decir que ordena las manio-
bras, y el segundo ROBUS funciona como Slave, es decir que eje-
cuta las órdenes enviadas por el Máster (de fábrica todos los
ROBUS son Máster).
Para configurar el ROBUS como Slave hay que activar la función de
primer nivel “Modo Slave” (véase la tabla 7).
La conexión entre el ROBUS Máster y el ROBUS Slave se efectúa
mediante BlueBUS.
En este caso debe respetarse la polaridad en la cone-
xión entre los dos ROBUS tal como muestra la figura 26
(los demás dispositivos siguen sin tener polaridad) .
Para instalar 2 ROBUS en modo Máster y Slave ejecute las siguien-
tes operaciones:
• Instale los 2 motores tal como muestra la figura 25. Es indiferente
cuál motor funciona como Máster y cuál como Slave; en dicha
decisión hay que evaluar la comodidad de las conexiones y el
hecho de que el mando Paso a Paso en el Slave permite la aper-
tura total solamente de la hoja Slave.
• Conecte los 2 motores como muestra la Figura 26
• Seleccione la dirección de la maniobra de apertura de los 2 moto-
res tal como muestra la figura 25 (véase también el párrafo “4.1
Selección de la dirección”).
• Alimente los 2 motores.
• En el ROBUS Slave programe la función “Modo Slave” (véase tabla
7).
• Efectúe el reconocimiento de los dispositivos en el ROBUS Slave
(véase el párrafo “4.3 Aprendizaje de los dispositivos”).
• Efectúe el reconocimiento de los dispositivos en el ROBUS Más-
ter (véase el párrafo “4.3 Aprendizaje de los dispositivos”).
• Efectúe el reconocimiento de la longitud de las hojas en el ROBUS
Máster (véase el párrafo “4.4 Aprendizaje de la longitud de la
hoja”).
!
25
26
En la conexión de 2 ROBUS en modo Máster-Slave observe que:
• Todos los dispositivos estén conectados en el ROBUS Máster (tal como en fig. 26) incluido el receptor radio
• Si se utilizan baterías compensadoras, cada motor debe tener su batería.
• Todas las programaciones en el ROBUS Slave se ignoran (prevalecen las del ROBUS Máster) excepto aquellas indicadas en la tabla 14.
LUCYB
S.C.A.
MOFB
MOSE
OPEN
CLOSE
LUCYB
S.C.A.
STOP
PP

123
E
7.4.1) Función “Abrir siempre”
La función “Abrir siempre” es una característica de la central de con-
trol que permite accionar siempre una maniobra de apertura cuan-
do el mando de “Paso a Paso” dura más de 2 segundos; esto es útil
por ejemplo para conectarle al borne P.P. el contacto de un reloj
programador para mantener abierta la puerta durante una cierta
franja horaria. Dicha característica es válida con cualquier progra-
mación de la entrada de P.P., salvo en la programación como
“Cerrar”, véase el parámetro “Función P.P.” en la tabla 9.
7.4.2) Función “Mover igualmente”
Aunque los dispositivos de seguridad no funcionen correctamente o
debieran ponerse fuera de uso, es posible igualmente accionar o
mover la puerta en modo “hombre muerto”.
Para mayores detalles, véase el párrafo “Accionamiento con dispo-
sitivos de seguridad fuera de uso” en el anexo “Instrucciones y
advertencias para el usuario del motorreductor ROBUS”.
7.4.3) Aviso de mantenimiento
El ROBUS permite avisar al usuario cuando conviene hacer un con-
trol de mantenimiento del automatismo. Pueden seleccionarse,
entre 8 niveles diferentes, la cantidad de maniobras que deben eje-
cutarse antes de la señalización, mediante el parámetro ajustable
“Aviso de mantenimiento” (véase tabla 9).
El nivel 1 de regulación es “automático” y tiene en cuenta la dificul-
tad de las maniobras, es decir el esfuerzo y la duración de la manio-
bra, mientras que las demás regulaciones están fijadas según la
cantidad de las maniobras.
La petición de mantenimiento se señala mediante la luz intermitente
Flash o en la lámpara conectada en la salida S.C.A. cuando está
programada como "Indicador de Mantenimiento" (véase tabla 9).
Según el número de maniobras efectuadas respecto del límite pro-
gramado, la luz intermitente Flash y el indicador luminoso manteni-
miento dan las señales indicadas en la tabla 16.
7.4) Funciones especiales
Tabla 14: programaciones en el ROBUS Slave independientes del ROBUS Máster
Funciones de primer nivel (funciones ON - OFF) Funciones de segundo nivel (parámetros regulables)
Stand-by Velocidad Motor
Punto de arranque Salida SCA
Modo Slave Fuerza Motor
Lista de Errores
En el Slave es posible conectar:
•
una luz intermitente (Flash)
•
un Indicador luminoso de Puerta Abierta (S.C.A.)
•
una banda sensible (Stop)
•
un dispositivo de mando (P.P.) que acciona la apertura total sólo de la hoja Slave.
•
En el Slave las entradas Open y Close no se utilizan
7.3.6) Aprendizaje de otros dispositivos
Normalmente, la operación de aprendizaje de los dispositivos conectados al BlueBUS y a la entrada STOP se ejecuta durante la instalación; sin
embargo, si se instalan o desinstalan dispositivos, es posible realizar nuevamente el aprendizaje como indicado en la tabla 15.
1. Pulse y mantenga pulsados los botones [▲] y [Set]
2. Suelte los botones cuando los leds L1 y L2 empiezan a destellar muy rápidamente (después de unos 3s)
L1 L2
3. Espere algunos segundos para que la central concluya el aprendizaje de los dispositivos.
4. Al concluir el aprendizaje, los leds L1 y L2 dejarán de destellar, el led STOP debe quedar encendido, mientras
que los leds L1…L8 se encenderán según el estado de las funciones ON-OFF que representan. L1 L2
Después de haber instalado o desinstalado los dispositivos es necesario realizar nuevamente el ensayo del automatismo,
de acuerdo con las indicaciones del párrafo “5.1 Ensayo”.
!
Tabla 15: para el aprendizaje de otros dispositivos Ejemplo
SET
SET
Número de maniobras Señalización en Flash
Señalización en indicador luminoso mantenimiento
Inferior al 80% del límite
Entre el 81 y el 100% del límite
Más del 100% del límite
Normal (0.5s encendido, 0.5s apagado)
Al inicio de la maniobra queda encendido
durante 2s, luego continúa normalmente
Al inicio y al final de la maniobra queda encen-
dido durante 2s, luego continúa normalmente
Encendido durante 2s al inicio de la apertura
Parpadea durante toda la maniobra
Parpadea siempre.
Tabla 16: aviso de mantenimiento con Flash e indicador luminoso mantenimiento

124
Control del número de maniobras efectuadas
Con la función de “Aviso de mantenimiento” es posible comprobar la cantidad de maniobras efectuadas en porcentaje sobre el límite confi-
gurado. Para verificar, proceda como indicado en la tabla 17.
1. Pulse y mantenga pulsado el botón [Set] durante alrededor de 3s
3s
2. Suelte el botón [Set] cuando el led L1 empiece a destellar
L1
3. Pulse los botones [▲] o [▼] para desplazar el led intermitente al L7, es decir el “led de entrada” para
el parámetro “Aviso de mantenimiento”. o L7
4. Pulse y mantenga pulsado el botón [Set], mantenga pulsado el botón [Set] durante los pasos 5, 6 y 7
5. Espere alrededor de 3s, después se encenderá el led que representa el nivel actual del parámetro
“Aviso de mantenimiento”. 3s
6. Pulse y suelte de inmediato los botones [▲] y [▼].
y
7. El led correspondiente al nivel seleccionado destellará algunas veces. La cantidad de destellos identifica
el porcentaje de maniobras efectuadas (en múltiplos de 10%) respecto del límite configurado.
Por ejemplo: configurando el aviso de mantenimiento en L6, es decir 10000, el 10% corresponde a
1000 maniobras; si el led de visualización destella 4 veces significa que se ha alcanzado el 40% de las
maniobras (es decir entre 4000 y 4999 maniobras). Si no se alcanzó el 10% de las maniobras, no
destellará.
8. Suelte el botón [Set]
Tabla 17: Control del número de maniobras efectuadas Ejemplo
SET
SET
SET
SET
.... n=?
Puesta a cero del contador de maniobras
Después de hacer el mantenimiento de la instalación, hay que poner a cero el contador de las maniobras.
Proceda como descrito en la tabla 18.
1. Pulse y mantenga pulsado el botón [Set] durante unos 3s
3s
2. Suelte el botón [Set] cuando el led L1 empiece a destellar
L1
3. Pulse los botones [▲] o [▼] para desplazar el led intermitente al L7, es decir el “led de entrada”
para el parámetro “Aviso de mantenimiento”. o L7
4. Pulse y mantenga pulsado el botón [Set], mantenga pulsado el botón [Set] durante los pasos 5 y 6
5. Espere alrededor de 3s, después se encenderá el led que representa el nivel actual del parámetro
“Aviso de mantenimiento”. 3s
6. Pulse y mantenga pulsados durante unos 5 segundos los botones [▲] y [▼], después suelte los 2 botones.
El led correspondiente al nivel seleccionado ejecutará una serie de destellos rápidos para señalar que el
contador de las maniobras fue puesto a cero.
y
7. Suelte el botón [Set]
Tabla 18: puesta a cero del contador de maniobras Ejemplo
SET
SET
SET
SET
7.5) Conexión de otros dispositivos
Si hubiera que alimentar algún dispositivo exterior, por ejemplo un
lector de proximidad para tarjetas por transponder o bien la luz de
iluminación del selector de llave, es posible tomar la alimentación tal
como indicado en la figura 27. La tensión de alimentación es 24Vcc
-30% ÷ +50% con corriente máxima disponible de 100mA.
-+
24Vcc
27

125
E
7.7) Diagnóstico y señales
Algunos dispositivos ofrecen directamente señales particulares a tra-
vés de las cuales es posible reconocer el estado de funcionamiento
o un posible desperfecto.
7.6) Solución de los problemas
En la tabla 19 se pueden encontrar indicaciones útiles para solucio-
nar problemas de funcionamiento que podrían producirse durante la
instalación o desperfectos del sistema.
29
Tabla 19: búsqueda de las averías
Síntomas Controles aconsejados
El transmisor no acciona la puerta y el led del
transmisor no se enciende
El transmisor no acciona la puerta pero el led
del transmisor se enciende
No se acciona ninguna maniobra y el led “Blue-
BUS” no destella
No se acciona ninguna maniobra y la luz inter-
mitente está apagada
No se acciona ninguna maniobra y la luz inter-
mitente destella algunas veces.
La maniobra arranca pero inmediatamente des-
pués se produce la inversión.
La maniobra se ejecuta regularmente pero la luz
intermitente no funciona.
La maniobra se ejecuta regularmente pero el
indicador luminoso SCA no funciona.
Controle que las pilas del transmisor no estén agotadas; de ser necesario, sustitúya-
las.
Controle que el transmisor esté memorizado correctamente en el receptor
Controle que el ROBUS esté alimentado con la tensión de red.
Controle que los fusibles no se hayan quemado; si así fuera, controle la causa de la
avería y sustitúyalos con otros con el mismo valor de corriente y características idénticas.
Controle que el mando llegue efectivamente. Si el mando llega a la entrada PP, el led
“PP” debe encenderse; por el contrario, si se utiliza el transmisor, el led “BlueBus”
debe emitir dos destellos rápidos.
Cuente la cantidad de destellos y controle según lo indicado en la tabla 21
La fuerza seleccionada podría ser muy baja para el tipo de puerta. Controle que no
haya obstáculos y, de ser necesario, seleccione una fuerza superior.
Controle que durante la maniobra haya tensión en el borne FLASH de la luz intermiten-
te (siendo intermitente, el valor de tensión no es significativo: alrededor de 10-30Vcc);
si hubiera tensión, el problema es la bombilla que habrá que sustituir con una con las
mismas características; si no hubiera tensión, se podría haber producido una sobre-
carga en la salida FLASH, controle que no haya cortocircuitos en el cable.
Controle el tipo de función programada para la salida SCA (Tabla 9)
Cuando el indicador luminoso se enciende, controle que haya tensión en el borne SCA
(alrededor de 24Vcc); si hubiera tensión, el problema es la bombilla que habrá que susti-
tuir con una con las mismas características; si no hubiera tensión, se podría haber produ-
cido una sobrecarga en la salida SCA, controle que no haya cortocircuitos en el cable.
F2
F1
1. Pulse y mantenga pulsado el botón [Set] durante unos 3s
3s
2. Suelte el botón [Set] cuando el led L1 empiece a destellar
L1
3. Pulse los botones [▲] o [▼] para desplazar el led intermitente al L8, es decir el “led de entrada”
para el parámetro “Listado desperfectos”. o L8
4. Pulse y mantenga pulsado el botón [Set], mantenga pulsado el botón [Set] durante los pasos 5 y 6
5. Espere unos 3s, se encenderán los leds correspondientes a las maniobras que han tenido algún
desperfecto. El led L1 indica el resultado de la maniobra más reciente, el led L8 indica el resultado
de la octava maniobra. Si el led está encendido significa que, durante la maniobra, se han producir
desperfectos; si el led está apagado significa que la maniobra se ha concluido sin problemas.
6. Pulse los botones [▲] y [▼] para seleccionar la maniobra deseada:
El led correspondiente destellará la misma cantidad de veces que la luz intermitente después de un
desperfecto (véase la tabla 21).
y
7. Suelte el botón [Set].
Tabla 20: historial desperfectos Ejemplo
SET
SET
SET
SET
7.6.1) Listado del historial de los desperfectos
El ROBUS permite visualizar los desperfectos que se hayan producido en las últimas 8 maniobras, por ejemplo la interrupción de una maniobra
por la activación de una fotocélula o de una banda sensible. Para comprobar el listado de los desperfectos, proceda como indicado en la tabla 20.
3s

126
Led BLUEBUS Causa ACCIÓN
Led STOP Causa ACCIÓN
Led P.P. Causa ACCIÓN
Led ABRIR Causa ACCIÓN
Apagado
7.7.2) Señales en la central
En la central del ROBUS hay una serie de LEDs que pueden dar
señales específicas, tanto durante el funcionamiento normal como
en caso de desperfecto.
Tabla 22: leds en los bornes de la central
Desperfecto
Controle si hay alimentación; controle que los fusibles no se hayan quemado; si así fue-
ra, controle la causa de la avería y sustitúyalos con otros del mismo valor de corriente.
Encendido Desperfecto grave
Hay un desperfecto grave; pruebe a apagar durante algunos segundos la central; si el
estado continúa, significa que hay una avería y hay que sustituir la tarjeta electrónica
Un destello por segundo Todo OK Funcionamiento normal de la central:
2 destellos rápidos
Se ha producido una variación
del estado de las entradas
Es normal cuando se produce un cambio de una de las entradas: PP, STOP,
OPEN, CLOSE, activación de las fotocélulas o se utiliza el transmisor
Serie de destellos separados
por una pausa de un segundo
Varias Es la misma señal que emite la luz intermitente. Véase la tabla 21
Apagado
Activación de la entrada de
STOP
Controle los dispositivos conectados a la entrada STOP.
Encendido Todo OK Controle los dispositivos conectados a la entrada STOP.
Apagado Todo OK Entrada PP desactivada
Encendido
Apagado
Activación de la entrada de PP
Todo OK
Es normal si está activo efectivamente el dispositivo conectado a la entrada PP
Entrada ABRIR desactivada
Encendido
Activación de la entrada de OPEN
Es normal si está activo efectivamente el dispositivo conectado a la entrada ABRIR
Led CERRAR Causa ACCIÓN
Apagado Todo OK Entrada CERRAR desactivada
Encendido
Activación de la entrada de CLOSE
Es normal si está activo efectivamente el dispositivo conectado a la entrada CERRAR
29
6 destellos
pausa de 1 segundo
6 destellos
Al comienzo de la maniobra, el control de los dispositivos conectados a BlueBUS
no corresponde a aquellos memorizados durante el aprendizaje. Es posible que
haya dispositivos averiados; controle y sustituya; si se han efectuado modificacio-
nes, hay que volver a repetir el aprendizaje (7.3.4 Aprendizaje de otros dispositivos).
7.7.1) Señales con la luz intermitente
Durante la maniobra la luz intermitente FLASH destella una vez por segundo; cuando se produce algún desperfecto, la luz intermitente des-
tella más lentamente; los destellos se repiten dos veces, separados por una pausa de un segundo.
Tabla 21: señales en la luz intermitente FLASH
Destellos rápidos Causa ACCIÓN
1 destello
pausa de 1 segundo
1 destello
Error en el BlueBUS
2 destellos
pausa de 1 segundo
2 destellos
Activación de una fotocélula
Durante el comienzo de la maniobra una o varias fotocélulas no dan el asenso
para el movimiento; controle que no haya obstáculos.
Durante el movimiento es normal si efectivamente hay un obstáculo.
3 destellos
pausa de 1 segundo
3 destellos
Activación del limitador de
la "Fuerza Motor"
Durante el movimiento, la puerta encontró un punto de mayor fricción; controle
el motivo.
4 destellos
pausa de 1 segundo
4 destellos
Activación de la entrada
STOP
Durante el comienzo de la maniobra o durante el movimiento se ha activado la
entrada STOP; controle el motivo.
5 destellos
pausa de 1 segundo
5 destellos
Error en los parámetros inter-
nos de la central electrónica
Espere 30 segundos como mínimo y pruebe a accionar un mando; si el estado
persiste, podría haber una avería grave y habrá que sustituir la tarjeta electróni-
ca.
Se ha superado el límite
máximo de maniobras por
hora.
Espere algunos minutos para que el limitador de maniobras retorne por debajo
del límite máximo.
7 destellos
pausa de 1 segundo
7 destellos
8 destellos
pausa de 1 segundo
8 destellos
Error en los circuitos eléctri-
cos internos
Hay un mando accionado
que no permite ejecutar
otros mandos.
Desconecte todos los circuitos de alimentación durante algunos segundos y
pruebe a accionar un mando; si el estado persiste, podría haber una avería
grave y habrá que sustituir la tarjeta electrónica.
Controle el tipo de mando siempre activo; por ejemplo, podría ser el mando de
un reloj en la entrada “abrir”.

127
E
7.8) Accesorios
Para el ROBUS hay previstos los siguientes accesorios opcionales:
• PS124 Batería compensadora 24V - 1,2Ah con cargador de bate-
ría incorporado.
•
SMXI o SMXIS Receptor a 433.92MHz con codificación digital Rolling Code.
Consulte el catálogo de los productos de Nice S.p.a. para la lista
completa y actualizada de los accesorios.
30
Led 1 Descripción
• Programación de las funciones ejecutándose.
• Si destella junto con L4 indica que es necesario ejecutar el aprendizaje de la longitud de la hoja (véase
el párrafo “4.4 Aprendizaje de la longitud de la hoja”).
Led L6 Descrizione
Led L5 Descripción
Led L3 Descripción
Led L2 Descripción
Led L4 Descripción
Durante el funcionamiento normal indica “Punto de arranque” desactivadoApagado
Apagado
Tabla 23: leds en los botones de la central
Durante el funcionamiento normal indica “Cierre automático” desactivado
Durante el funcionamiento normal indica “Cierre automático” activo
• Programación de las funciones ejecutándose.
• Si destella junto con L2 indica que es necesario ejecutar el aprendizaje de los dispositivos (véase el
párrafo “4.3 Aprendizaje de los dispositivos”).
Encendido
Destella
Apagado Durante el funcionamiento normal indica “Cerrar después Fotocélula” desactivado
Durante el funcionamiento normal indica “Cerrar después de Fotocélula” activo
• Programación de las funciones ejecutándose.
• Si destella junto con L1 indica que es necesario ejecutar el aprendizaje de los dispositivos (véase el
párrafo “4.3 Aprendizaje de los dispositivos”).
Encendido
Destella
Apagado Durante el funcionamiento normal indica “Cerrar Siempre” desactivado
Durante el funcionamiento normal indica “Cerrar Siempre” activo
Durante el funcionamiento normal indica “Stand-by” desactivado
Durante el funcionamiento normal indica “Stand-By” activo.
• Programación de las funciones ejecutándose.
• Si destella junto con L3 indica que es necesario ejecutar el aprendizaje de la longitud de la hoja (véase
el párrafo “4.4 Aprendizaje de la longitud de la hoja”).
Encendido
Destella
Apagado
Encendido
Destella
Durante el funcionamiento normal indica “Punto de arranque” activo.
Programación de las funciones ejecutándose.
Encendido
Destella
Durante el funcionamiento normal indica “Destello previo” desactivado
Durante el funcionamiento normal indica “Destello previo” activo.
Programación de las funciones ejecutándose.
Apagado
Encendido
Destella
Led L7 Descripción
Durante el funcionamiento normal indica que la entrada CERRAR activa una maniobra de cierre
Durante el funcionamiento normal indica que la entrada CERRAR activa una maniobra de apertura parcial.
Programación de las funciones ejecutándose.
Apagado
Encendido
Destella
Led L8 Descripción
Durante el funcionamiento normal indica que el ROBUS está configurado como Máster.
Durante el funcionamiento normal indica que el ROBUS está configurado como Slave.
Programación de las funciones ejecutándose.
Apagado
Encendido
Destella
31

128
Empleo en atmósfera ácida, salobre o con
riesgo de explosión
330 x 210 h 303; 11Kg 330 x 210 h 303; 13 Kg
Nice S.p.a., a fin de mejorar sus productos, se reserva el derecho de modificar las características técnicas en cualquier momento y sin pre-
vio aviso, garantizando la funcionalidad y el uso previstos.
Todas las características técnicas indicadas se refieren a una temperatura ambiente de 20°C (±5°C).
8) Características técnicas
Tipo
Modelo tipo
Características técnicas del ROBUS
Motorreductor electromecánico para el movimiento automático de puertas de correderas
para uso residencial con central electrónica de control.
RB600 – RB600P RB1000 – RB1000P
Piñón Z: 15; Módulo: 4; Paso: 12,6 mm; Diámetro primitivo: 60 mm
Par máximo en el punto de arranque
[correspondiente a la capacidad de desarrollar
una fuerza para poner en movimiento la puerta]
18Nm
[600N]
27Nm
[900N]
Par nominal
[correspondiente a la capacidad de desarrollar
una fuerza para poner en movimiento la puerta]
9Nm
[300N]
15Nm
[500N]
Velocidad con el par nominal
0,15m/s 0,14m/s
Velocidad en vacío (la central permite pro-
gramar 6 velocidades equivalentes a alrede-
dor de: 100, 85, 70, 55, 45, 30%)
0,31m/s 0,28m/s
Frecuencia máxima ciclos de funcionamien-
to (con el par nominal)
100 ciclos / día (la central limita los ciclos
al máximo previsto en las tablas 2 y 3)
150 ciclos / día (la central limita los ciclos
al máximo previsto en las tablas 2 y 3)
Tiempo máximo de funcionamiento conti-
nuo (con el par nominal)
7 minutos
(la central limita el funcionamiento continuo
al máximo previsto en las tablas 2 y 3)
5 minutos
(la central limita el funcionamiento continuo
al máximo previsto en las tablas 2 y 3)
Límites de utilización
Generalmente, el ROBUS puede automatizar puertas del peso o de la longitud indicados
en las tablas 2, 3 y 4
Durabilidad Estimada entre 20.000 y 250.000 ciclos, según las condiciones mencionadas en la tabla 4
Potencia máxima absorbida en el par de
arranque [correspondiente a Amperios]
515W [2,5A] [4,8A versión /V1] 450W [2,3A] [4,4A versión /V1]
Clase de aislamiento 1 (es necesaria la puesta a tierra de seguridad)
Alimentación de emergencia con accesorio opcional PS124
Salida luz intermitente para 2 luces intermitentes LUCYB (lámpara 12V, 21W)
Salida BLUEBUS una salida con una carga máxima de 15 unidades BlueBus
Salida S.C.A.
para 1 lámpara de 24V máximo 4W (la tensión de salida puede variar entre -30 y +50% y
puede accionar también pequeños relés)
Entrada STOP
Para contactos normalmente cerrados, normalmente abiertos o para resistencia constante 8,2KΩ;
en autoaprendizaje (una variación respecto del estado memorizado provoca el mando “STOP”)
Entrada PP para contactos normalmente abiertos (el cierre del contacto provoca el mando P.P.)
Entrada ABRIR
Entrada CERRAR
para contactos normalmente abiertos (el cierre del contacto provoca el mando ABRIR)
para contactos normalmente abiertos(el cierre del contacto provoca el mando CERRAR)
Conector radio Conector SM para receptores SMXI o SMXIS
Entrada ANTENA Radio 52Ω para cable tipo RG58 o similar
Alimentación ROBUS 600 - 1000
Alimentación ROBUS 600 - 1000/V1
230Vac (+10% -15%) 50/60Hz.
120Vac (+10% -15%) 50/60Hz.
Funzioni programmabili 8 funciones tipo ON-OFF y 8 funciones regulables (véanse las tablas 7 y 9)
Temperatura de funcionamiento -20°C ÷ 50°C
No
Clase de protección IP 44
Medidas y peso
Funciones en autoaprendizaje
Autoaprendizaje de los dispositivos conectados a la salida BlueBUS.
Autoaprendizaje del tipo de dispositivo de “STOP” (contacto NA, NC o resistencia 8,2KΩ)
Autoaprendizaje de la longitud de la puerta y cálculo de los puntos de deceleración y
apertura parcial.

129
E
Felicitaciones por haber elegido un producto Nice
para su automatización! Nice S.p.A. produce compo-
nentes para la automatización de cancelas, puertas,
cierres enrollables, persianas y toldos: motorreducto-
res, centrales de mando, radiomandos, luces intermi-
tentes, fotocélulas y accesorios. Los productos Nice
son fabricados sólo con materiales de calidad y exce-
lentes mecanizados. Nuestra empresa busca constan-
temente soluciones innovadoras que simplifiquen aún
más el uso de nuestros aparatos, cuidados en todos
los detalles técnicos, estéticos y ergonómicos: en la
vasta gama Nice, su instalador puede escoger el pro-
ducto que satisfaga de la mejor manera sus exigen-
cias. Nice no es quien escoge los componentes de su
automatización, este es un trabajo de análisis, evalua-
ción, elección de los materiales y realización de la ins-
talación efectuado por su instalador de confianza.
Cada automatización es única y sólo su instalador
posee la experiencia y profesionalidad necesarias a fin
de ejecutar una instalación a medida de sus exigen-
cias, segura y fiable en el tiempo y, sobre todo, que
respete las normativas vigentes. Una instalación de
automatización es una gran comodidad, además de
un sistema de seguridad válido y, con un manteni-
miento reducido y sencillo, está destinada a durar por
mucho tiempo. Aunque bien su automatización satis-
faga el nivel de seguridad requerido por las normati-
vas, esto no excluye la existencia de un “riesgo resi-
dual”, es decir, la posibilidad de que se puedan crear
situaciones de peligro causadas por un uso incons-
ciente o incorrecto, por dicho motivo, a continuación
le damos algunos consejos sobre cómo comportarse
para evitar inconvenientes.
•Antes de usar por primera vez el automatis-
mo: pida a su instalador que le explique el origen de
los riesgos residuales y lea este manual de ins-
trucciones y advertencias para el usuario entre-
gado por el instalador. Conserve el manual por cual-
quier problema que pueda surgir y recuerde entre-
garlo a un posible nuevo dueño del automatismo.
•El automatismo es una maquina que ejecuta
fielmente los mandos dados: un uso inconscien-
te o inadecuado puede ser peligroso. Por consi-
guiente, no accione el automatismo cuando en su
radio de acción haya personas, animales o cosas.
•Niños: una instalación de automatización garantiza
un elevado grado de seguridad, impidiendo, gracias
a sus sistemas de detección, que se mueva ante la
presencia de personas o cosas y garantizando una
activación previsible y segura. Procure que los niños
no jueguen cerca del automatismo y mantenga los
controles remotos lejos de su alcance: ¡no son un
juguete!
•Desperfectos: ni bien note que la automatización
no funciona correctamente, corte la alimentación
eléctrica de la instalación y realice el desbloqueo
manual. No realice ninguna reparación y llame a su
instalador de confianza: una vez desbloqueado el
motorreductor, la instalación podrá funcionar manual-
mente como un cerramiento no automatizado.
•Mantenimiento: para garantizar una larga vida útil
y para un funcionamiento seguro, la instalación, al
igual que cualquier otra maquinaria, requiere un man-
tenimiento periódico Establezca con su instalador un
plan de mantenimiento con frecuencia periódica.
Nice aconseja realizar un mantenimiento cada 6
meses para un uso residencial normal, que puede
variar según la intensidad de uso. Cualquier tipo de
control, mantenimiento o reparación debe ser realiza-
do sólo por personal cualificado.
•Aunque piense que lo sabe hacer, no modifique la
instalación ni los parámetros de programación y
regulación del automatismo: la responsabilidad es de
su instalador.
• El ensayo final, los trabajos de mantenimiento perió-
dico y las posibles reparaciones deben ser documen-
tados por quien los efectúa y los documentos tienen
que ser conservados por el dueño de la instalación.
Las únicas operaciones que pueden hacerse y que
le aconsejamos efectuar periódicamente son la limpie-
za de los vidrios de las fotocélulas y la eliminación de
hojas o piedras que podrían obstaculizar el automatis-
mo. Para que nadie pueda accionar la puerta, antes de
proceder recuerde desbloquear el automatismo
(como descrito más adelante) y utilice para la limpieza
únicamente un paño ligeramente humedecido con
agua.
•Desguace: al final de la vida útil del automatismo, el
desguace debe ser realizado por personal cualificado
y los materiales deben ser reciclados o eliminados
según las normas locales vigentes.
•En el caso de roturas o falta de alimentación:
esperando la intervención de su instalador, o la llega-
da de la energía eléctrica si la instalación no está
dotada de baterías compensadoras, la automatiza-
ción puede accionarse igual que cualquier cerramien-
to no automatizado. A tal fin es necesario realizar el
desbloqueo manual (única operación que el usuario
puede realizar): dicha operación ha sido estudiada
por Nice para facilitarle su empleo, sin necesidad de
utilizar herramientas ni hacer esfuerzos físicos.
Instrucciones y advertencias para el usuario del motorreductor ROBUS

130
Desbloqueo y movimiento manual: antes de ejecutar esta operación tenga cuidado de que el desbloqueo
puede efectuarse sólo cuando la hoja está detenida.
Para bloquear: efectúe las mismas operaciones en
el orden inverso
Mando con dispositivos de seguridad fuera de
uso: si los dispositivos de seguridad montados en la
puerta no funcionaran correctamente, es igualmente
posible accionar la puerta.
• Accione el mando de la puerta (con el telemando,
con el selector de llave, etc.); si todo es correcto, la
puerta se abrirá o cerrará normalmente, en caso
contrario, la luz intermitente destellará algunas
veces y la maniobra no arrancará (la cantidad de
destellos depende de la razón que impide que
arranque la maniobra).
• En este caso, dentro de tres segundos, accione
nuevamente el mando y manténgalo accionado.
• Transcurridos alrededor de 2s, empezará el movi-
miento de la puerta en modo “hombre muerto”, es
decir mientras se mantenga presionado el mando, la
puerta seguirá moviéndose; ni bien se suelte el
mando, la puerta se detendrá.
Con los dispositivos de seguridad fuera de
uso es necesario hacer reparar lo antes posi-
ble el automatismo.
Sustitución de la pila del telemando: si el radio-
mando después de transcurrido un cierto período no
funciona correctamente o deja de funcionar, podría ser
que la pila esté agotada (puede durar desde varios
meses a más de un año según el uso). Ud. se podrá
dar cuenta de este inconveniente por el hecho de que
la luz del indicador de confirmación de la transmisión
no se enciende, es débil, o bien se enciende sólo
durante un breve instante. Antes de llamar al instala-
dor, pruebe a sustituir la pila con una de otro transmi-
sor que funcione correctamente: si el problema fuera
este, sustituya la pila con otra del mismo tipo.
Las pilas contienen sustancias contaminantes: no las
arroje en los residuos normales sino que elimínelas de
acuerdo con las leyes locales.
Está Ud. satisfecho? Si Ud. deseara montar en su
casa un nuevo automatismo, contacte al mismo insta-
lador y a Nice, así podrá contar con la garantía del
asesoramiento de un experto y los productos más
modernos del mercado, el mejor funcionamiento y la
máxima compatibilidad de las automatizaciones. Le
agradecemos por haber leído estas recomendaciones
y esperamos que esté satisfecho de su nueva instala-
ción: ante cualquier exigencia, contacte con confianza
a su instalador.
!
1 Desplace el disco cubrecerradura. 2 Introduzca y gire la llave hacia la derecha.
3 Tire la manilla de desbloqueo. 4 Mueva manualmente la hoja.
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...
La página se está cargando...

ISTRB2.4865 REV. 01 del 31-01-2005
Nice SpA
Oderzo TV Italia
Tel. +39.0422.85.38.38
Fax +39.0422.85.35.85
Nice Padova
Sarmeola di Rubano PD Italia
Tel. +39.049.89.78.93.2
Fax +39.049.89.73.85.2
Nice Roma
Roma Italia
Tel. +39.06.72.67.17.61
Fax +39.06.72.67.55.20
Nice France
Buchelay
Tel. +33.(0)1.30.33.95.95
Fax +33.(0)1.30.33.95.96
Nice Rhône-Alpes
Decines Charpieu France
Tel. +33.(0)4.78.26.56.53
Fax +33.(0)4.78.26.57.53
Nice France Sud
Aubagne France
Tel. +33.(0)4.42.62.42.52
Fax +33.(0)4.42.62.42.50
Nice Belgium
Leuven (Heverlee)
Tel. +32.(0)16.38.69.00
Fax +32.(0)16.38.69.01
Nice España Madrid
Tel. +34.9.16.16.33.00
Fax +34.9.16.16.30.10
Nice España Barcelona
Tel. +34.9.35.88.34.32
Fax +34.9.35.88.42.49
Nice Polska
Pruszków
Tel. +48.22.728.33.22
Fax +48.22.728.25.10
Nice UK
Chesterfield
Tel. +44.87.07.55.30.10
Fax +44.87.07.55.30.11
Nice China
Shanghai
Tel. +86.21.575.701.45/46
Fax +86.21.575.701.44
www.niceforyou.com
Nice Gate is the doors and gate automation division of Nice Nice Screen is the rolling shutters and awnings automation division of Nice
Transcripción de documentos
Robus Índice: 1 600/600P 1000/1000P pág. Advertencias 107 2 Descripción del producto y uso previsto 108 2.1 Límites de utilización 108 2.2 Instalación típica 110 2.3 Lista de los cables 110 7.2.1 Funciones de primer nivel (funciones ON-OFF) 117 7.2.2 Programación de primer nivel (funciones ON-OFF) 7.2.3 Funciones de segundo nivel (parámetros regulables) 7.2.4 Instalación 111 3.1 Controles preliminares 111 3.2 Fijación del motorreductor 111 3.3 Fijación de los soportes de fin de carrera en 7.2.5 119 Ejemplo de programación de primer nivel (funciones ON-OFF) 7.2.6 118 Programación de segundo nivel (parámetros regulables) 3 118 119 Ejemplo de programación de segundo nivel (parámetros regulables) 119 las versiones con fin de carrera inductivo 112 7.3 Instalación o desinstalación de dispositivos 119 3.4 Instalación de los diferentes dispositivos 113 7.3.1 BlueBUS 119 3.5 Conexiones eléctricas 113 7.3.2 Entrada STOP 120 3.6 Descripción de las conexiones eléctricas 114 7.3.3 Fotocélulas 120 7.3.4 Fotosensor FT210B 121 4 Controles finales y puesta en marcha 114 7.3.5 ROBUS en modo “Slave” 122 4.1 Selección de la dirección 114 7.3.6 Aprendizaje de otros dispositivos 123 4.2 Conexión de la alimentación 114 7.4 Funciones especiales 123 4.3 Aprendizaje de los dispositivos 114 7.4.1 Función “Abrir siempre” 123 4.4 Aprendizaje de la longitud de la hoja 115 7.4.2 Función “Mover igualmente” 123 4.5 Control del movimiento de la puerta 115 7.4.3 Aviso de mantenimiento 123 4.6 Funciones predeterminadas 115 7.5 Conexión de otros dispositivos 124 4.7 Receptor 115 7.6 Solución de los problemas 125 7.6.1 Listado del historial de los desperfectos 125 5 Ensayo y puesta en servicio 115 7.7 Diagnóstico y señales 125 5.1 Ensayo 116 7.7.1 Señales con la luz intermitente 126 5.2 Puesta en servicio 116 7.7.2 Señales en la central 126 7.8 Accesorios 127 8 Características técnicas 128 6 Mantenimiento y desguace 116 6.1 Mantenimiento 116 6.2 Desguace 116 Instrucciones y advertencias para el usuario del 7 Otras informaciones 117 7.1 Botones de programación 117 7.2 Programaciones 117 106 motorreductor ROBUS 129 1) Advertencias Este manual de instrucciones contiene informaciones importantes en materia de seguridad para la instalación; es necesario leer detenidamente todas las instrucciones antes de comenzar la instalación. Conserve este manual en buenas condiciones para su consultación posterior. Considerando las situaciones de peligro que pueden generarse durante la instalación y el uso del ROBUS es oportuno que también la instalación sea realizada respetando plenamente las leyes, normas y reglamentos. En este capítulo se indicarán las advertencias de tipo general; otras advertencias importantes están presentes en los capítulos “3.1 Controles preliminares”; “5 Ensayo y puesta en servicio”. Advertencias especiales sobre la idoneidad para el uso de este producto con relación a la Directiva de "Máquinas" 98/37/CE (ex 89/392/CEE): • Este producto se comercializa como "componente de máquina" y es fabricado para ser incorporado en una máquina o para ser ensamblado con otras maquinarias, a fin de realizar "una máquina", con arreglo a la Directiva 98/37/CE, sólo combinándolo con otros componentes y según las pautas descritas en este manual de instrucciones. Tal como previsto por la directiva 98/37/CE, se advierte que no se permite la puesta en servicio de este producto hasta que el fabricante de la máquina, donde se incorporará el producto, no la haya identificado y declarado conforme a la directiva 98/37/CE. ! Según la legislación europea más reciente, la realización de una puerta o portón automático entra en el ámbito de las disposiciones de la Directiva 98/37/CE (Directiva de Máquinas) y, en particular, en las normas: EN 13241-1 (norma armonizada); EN 12445; EN 12453 y EN 12635, que permiten declarar la conformidad con la directiva de máquinas. Advertencias especiales sobre la idoneidad para el uso de este producto con relación a la Directiva "Baja Tensión" 73/23/CEE y su modificación posterior 93/68/CEE: • Este producto responde a los requisitos previstos por la Directiva "Baja Tensión", si se lo emplea para el uso y en las configuraciones previstas en este manual de instrucciones, y combinado con los artículos presentes en el catálogo de productos de Nice S.p.a. Los requisitos podrían no ser garantizados si el producto se utiliza en configuraciones diferentes o con otros productos no previstos; está prohibido utilizar el producto en estas condiciones, hasta que la persona que ejecuta la instalación haya verificado que responde a los requisitos previstos por la directiva. Otras informaciones, directrices para el análisis de los riesgos y la realización del Expediente Técnico están disponibles en: “www.niceforyou.com”. Este manual está destinado exclusivamente a personal técnico cualificado para la instalación. Salvo el anexo específico, que el instalador se encargará de separar, “Instrucciones y advertencias para el usuario del motorreductor ROBUS” ninguna de las informaciones aquí incluidas puede ser de interés para el usuario final. • Está prohibido utilizar el ROBUS con una finalidad diferente de aquella dispuesta en estas instrucciones; un uso inadecuado puede causar peligros o daños a las personas o bienes. • Antes de comenzar la instalación, es necesario realizar el análisis de los riesgos, que incluye la lista de los requisitos esenciales de seguridad previstos en el anexo I de la Directiva de Máquinas, indicando las relativas soluciones adoptadas. Recuérdese que el análisis de los riesgos es uno de los documentos que forman el “expediente técnico” de la automatización. • Compruebe si es necesario incorporar otros dispositivos que puedan servir para completar el automatismo con el ROBUS según la situación de empleo específica y los peligros presentes: por ejemplo, deben considerarse los peligros de choque, aplastamiento, amputación, arrastre, etc. y otros peligros en general. • No modifique ninguna parte salvo que esté previsto en estas instrucciones; los trabajos de este tipo pueden causar solamente desperfectos; NICE no es responsable de los daños que deriven de productos modificados. • Durante la instalación y el uso procure que no puedan entrar elementos sólidos o líquidos dentro de la central o de otros dispositivos abiertos; de ser oportuno, diríjase al servicio de asistencia NICE; el uso del ROBUS en situaciones análogas puede originar situaciones peligrosas. • El automatismo no puede utilizarse antes de haberlo puesto en servicio tal como especificado en el capítulo: “5 Ensayo y puesta en servicio”. • El material de embalaje del ROBUS debe eliminarse respetando la normativa local. • Si el desperfecto no pudiera resolverse utilizando las informaciones indicadas en este manual, diríjase al servicio de asistencia NICE. • Si se desconectaran los interruptores automáticos o los fusibles, antes de restablecerlos hay que localizar y eliminar la avería. • Antes de acceder a los bornes en el interior de la tapa del ROBUS, desconecte todos los circuitos de alimentación; si el dispositivo de desconexión no queda a la vista, colóquele un cartel: “ATENCIÓN MANTENIMIENTO EN CURSO”. Advertencias especiales sobre la idoneidad para el uso de este producto con relación a la Directiva "Compatibilidad Electromagnética" 89/336/CEE y modificación siguiente 92/31/CEE y 93/68/CEE: • Este producto ha sido sometido a los ensayos en materia de compatibilidad electromagnética en las situaciones de uso más duras, en las configuraciones previstas en este manual de instrucciones y en combinación con los artículos presentes en el catálogo de productos de Nice S.p.A. Si el producto se utilizara con configuraciones o con otros productos no previstos, podría perderse la garantía de la compatibilidad electromagnética; en dichas condiciones, está prohibido el uso del producto hasta que la persona que efectúa la instalación haya verificado que responde a los requisitos previstos por la directiva. 107 E 2) Descripción del producto y uso previsto ROBUS es una línea de motorreductores electromecánicos irreversibles, que sirven para automatizar puertas de corredera. Disponen de una central electrónica de control y de un conector para el receptor del radiomando SMXI o SMXIS (opcionales). Las conexiones eléctricas hacia los dispositivos externos son sencillas gracias a la utilización de “BlueBUS”, una técnica que permite conectar diversos dis- positivos sólo con 2 cables. El ROBUS funciona con energía eléctrica, si se interrumpiera la alimentación de la red eléctrica, es posible desbloquearlo con la llave y mover la puerta manualmente; también es posible utilizar el accesorio opcional: batería compensadora PS124 que permite ejecutar algunas maniobras también si falla la alimentación de red. La línea ROBUS está compuesta de los productos cuyas diferencias principales se describen en la tabla 1. Tabla 1: comparación de las características esenciales de los motorreductores ROBUS Motorreductor tipo Tipo de fin de carrera Longitud máxima hoja Peso máximo hoja Par máximo de arranque (correspondientes a fuerza) Motor y transformador RB600 electromecánico RB600P de proximidad inductivo 8m 600Kg 18Nm (600N) Motor 24Vcc Ø 77mm Transformador en columna EI RB1000 electromecánico RB1000P de proximidad inductivo 12m 1000Kg 27Nm (900N) Motor 24Vcc Ø 115mm Transformador toroidal 92mm 303mm Nota: 1 kg = 9,81N, es decir, por ejemplo, 600N = 61 kg 330mm 210mm 1 2.1) Límites de utilización Los datos referidos a las prestaciones de los productos de la línea ROBUS están indicados en el capítulo “8 Características técnicas” y son los únicos valores que permiten la evaluación correcta de la idoneidad para su uso. Por sus características estructurales, los productos ROBUS son adecuados para ser utilizados en puertas de corredera, según los límites indicados en las tablas 2, 3 y 4. del 50%, porque las condiciones climáticas adversas pueden provocar un aumento de las fricciones); asimismo, para establecer el número de ciclos/hora y los ciclos consecutivos hay que considerar las indicaciones de las tablas 2 y 3. La real idoneidad del ROBUS, para automatizar una determinada puerta de corredera, depende de los roces y de otros fenómenos, incluso ocasionales, como la presencia de hielo que podría obstaculizar el movimiento de la puerta. Para una verificación efectiva es absolutamente indispensable medir la fuerza necesaria para mover la puerta a lo largo de toda su carrera y controlar que dicha fuerza no supere el "par nominal" indicado en el capítulo “8 Características técnicas” (se aconseja un margen Tabla 2: límites con relación a la longitud de la hoja Longitud hoja (m) Hasta 4 4÷6 6÷8 8 ÷ 10 10 ÷ 12 108 RB600, RB600P ciclos/hora máximos ciclos consecutivos máximos 40 20 25 13 20 10 --------- RB1000, RB1000P ciclos/hora máximos ciclos consecutivos máximos 50 25 33 16 25 12 20 10 16 8 Tabla 3: límites con relación al peso de la hoja Peso de la hoja (kg) Hasta 200 200 ÷ 400 400 ÷ 500 500 ÷ 600 600 ÷ 800 800 ÷ 900 900 ÷ 1000 RB600, RB600P Porcentaje ciclos Velocidad máxima admitida 100% V6 = Rapidísima 80 V5 = Muy rápida 60 V4 = Rápida 50 V3 = Media ------------- RB1000, RB1000P Porcentaje ciclos Velocidad máxima admitida 100% V6 = Rapidísima 90 V5 = Muy rápida 75 V4 = Rápida 60 V4 = Rápida 50 V3 = Media 45 V3 = Media 40 V3 = Media La longitud de la hoja permite determinar la cantidad máxima de ciclos por hora y de ciclos consecutivos, mientras que el peso permite determinar el porcentaje de reducción de los ciclos y la velocidad máxima admitida; por ejemplo, para el ROBUS 1000, si la hoja tiene una longitud de 5 m admitirá 33 ciclos/hora y 16 ciclos consecutivos, pero si la hoja pesa 700 kg hay que reducirlos al 50%, por lo que el resultado es 16 ciclos/hora y unos 8 ciclos consecutivos, mientras que la velocidad máxima admitida es V4: rápida. Para evitar recalentamientos, la central incorpora un limitador de maniobras que se basa sobre el esfuerzo del motor y la duración de los ciclos, interviniendo cuando se supera el límite máximo. El limitador de maniobras también mide la temperatura ambiente, reduciendo aún más las maniobras si la temperatura es muy alta. En el capítulo “8 Características técnicas”, se indica una evaluación de “durabilidad”, es decir la vida económica media del producto. El valor está muy influenciado por el coeficiente de desgaste de las maniobras, es decir la suma de todos los factores que intervienen en el desgaste. Para efectuar tal evaluación, hay que sumar los coeficientes de desgaste de la tabla 4, y con el resultado total verificar en el gráfico la durabilidad calculada. Por ejemplo, ROBUS 1000 en una puerta de 650 kg, de 5 m de longitud, dotada de fotocélulas y sin otros elementos de fatiga, obtiene un coeficiente de desgaste equivalente al 50% (30+10+10). Del gráfico, la durabilidad se estima en 80.000 ciclos. Tabla 4: evaluación de la durabilidad con relación al coeficiente de desgaste de la maniobra Peso de la hoja kg Hasta 200 200 ÷ 400 400 ÷ 600 600 ÷ 700 700 ÷ 800 800 ÷ 900 900 ÷ 1000 Longitud de la hoja en metros Hasta 4 4÷6 6÷8 8 ÷ 10 10 ÷ 12 Otros elementos de desgaste (a considerar si la probabilidad de que sucedan supera el 10% ) Temperatura ambiente superior a 40°C o inferior a 0°C o humedad superior a 80% Presencia de polvo o arena Presencia de salinidad Interrupción maniobra desde Fotocélula Interrupción maniobra desde Stop Velocidad superior a “L4 rápida” Punto de arranque activo Total coeficiente de desgaste %: Robus 600 1000 10 30 50 --------- 5 10 20 30 40 50 60 10 20 35 ----- 5 10 20 35 50 10 10 15 20 15 25 20 25 15 20 10 20 15 20 Durabilidad en ciclos Durabilidad en ciclos Coeficiente de desgaste % Coeficiente de desgaste % Nota: si el coeficiente de desgaste es mayor que el 100% significa que las condiciones superan el límite de aceptabilidad; se aconseja utilizar un modelo de tamaño más grande. 109 E 2.2) Instalación típica La figura 2 muestra la instalación típica de la automatización de una puerta de corredera utilizando el ROBUS. 4 1 3 3 5 8 9 7 12 11 2 6 13 D 2 E C F 10 F B A C 2 1 2 3 4 5 6 7 Selector de llave Fotocélulas en columna Fotocélulas Banda sensible principal montada en el elemento fijo (opcional) Banda sensible principal montada en el elemento móvil Soporte de fin de carrera de “Apertura”. Cremallera 8 9 10 11 12 13 Banda sensible secundaria montada en el elemento fijo (opcional) Luz intermitente con antena incorporada ROBUS Soporte de fin de carrera de “Cierre”. Banda sensible secundaria montada en el elemento móvil (opcional) Transmisor 2.3) Lista de cables En la instalación típica de la figura 2 se indican también los cables necesarios para las conexiones de los diversos dispositivos; en la tabla 5 se indican las características de los cables. ! Los cables utilizados deben ser adecuados para el tipo de instalación; por ejemplo, se aconseja un cable tipo H03VV-F para instalación en ambientes internos o H07RN-F para instalaciones exteriores. Tabla 5: lista de cables Conexión A: Línea eléctrica de alimentación B: Luz intermitente con antena Tipo de cable 1 cable 3x1,5mm2 1 cable 2x0,5mm2 1 cable blindado tipo RG58 C: Fotocélulas 1 cable 2x0,5mm2 D: Selector de llave 2 cables 2x0,5mm2 (nota 3) E: Bandas sensibles montadas en elemento fijo 1 cable 2x0,5mm2 (nota 4) F: Bandas sensibles montadas en elemento móvil 1 cable 2x0,5mm2 (nota 4) Longitud máxima admitida 30m (nota 1) 20m 20 m (aconsejado menos de 5 m) 30m (nota 2) 50m 30m 30m (nota 5) Nota 1: si el cable de alimentación es más largo de 30 m debe tener una sección más grande, por ejemplo 3x2,5mm2 y es necesario procurar una puesta a tierra de seguridad cerca del automatismo. Nota 2: si el cable “BLUEBUS” es más largo de 30m, hasta un máximo de 50m, se necesita un cable 2x1mm2. Nota 3: los dos cables 2x0,5mm2 pueden sustituirse con un solo cable 4x0,5mm2. Nota 4: si se incorpora más de una banda véase el capítulo “7.3.2 Entrada STOP” para el tipo de conexión aconsejada Nota 5: para la conexión de las bandas sensibles montadas en los elementos móviles de las puertas de corredera, hay que utilizar dispositivos oportunos que permitan la conexión también con la puerta en movimiento. 110 3) Instalación ! El ROBUS debe ser instalado por personal cualificado, respetando las leyes, normas y reglamentos y las indicaciones de las presentes instrucciones. 3.1) Controles preliminares Antes de comenzar con la instalación del ROBUS es necesario efectuar los siguientes controles: • Controle que todo el material a utilizar esté en perfectas condiciones, sea adecuado para su uso y que respete las normas. • Controle que la estructura de la puerta sea adecuada para su automatización. • Controle que el peso y las dimensiones de la hoja respeten los límites de utilización indicados en el capítulo “2.1 Límites de utilización” • Controle, comparando con los valores indicados en el capítulo “8 Características técnicas”, que la fuerza necesaria para poner en movimiento la puerta sea inferior a la mitad del “Par máximo”, y que la fuerza necesaria para mantener la puerta en movimiento, sea inferior a la mitad del “Par nominal”; se aconseja un margen del 50% sobre las fuerzas, porque las condiciones climáticas adversas pueden aumentar las fricciones. • Controle que a lo largo de toda la carrera de la puerta, tanto de cierre como de apertura, no haya puntos con mayor fricción. • Controle que no exista el peligro de que la hoja se descarrille y de que se pueda salir de las guías • Compruebe la robustez de los topes mecánicos de sobrerrecorrido, controlando que no se produzcan deformaciones tampoco si la puerta golpeara con fuerza contra el tope. • Controle que la puerta esté bien equilibrada, es decir que no se mueva al dejarla detenida en cualquier posición. • Controle que la zona de fijación del motorreductor no pueda inundarse; de ser oportuno, monte el motorreductor levantado del piso. • Controle que la zona de fijación del motorreductor permita el desbloqueo y una maniobra manual fácil y segura. • Controle que los puntos de fijación de los distintos dispositivos se encuentren en zonas protegidas de choques y que las superficies sean suficientemente firmes. • Los componentes del automatismo no deben quedar sumergidos en agua ni en otras substancias líquidas. • No coloque el ROBUS cerca de llamas o fuentes de calor; en atmósferas con riesgo de explosión, muy ácidas o salinas; porque el ROBUS podría arruinarse y tener problemas de funcionamiento o generar situaciones peligrosas. • Si hubiera un portillón de paso en la misma hoja o una puerta en la zona de movimiento de la hoja, asegúrese de que no obstaculice la carrera normal e incorpore un sistema de interbloqueo oportuno en su caso. • Conecte la central a una línea de alimentación eléctrica dotada de puesta a tierra de seguridad. • La línea de alimentación eléctrica debe estar protegida por un dispositivo magnetotérmico y diferencial adecuado. • En la línea de alimentación de la red eléctrica hay que montar un dispositivo de desconexión de la alimentación (con categoría de sobretensión III, es decir distancia entre los contactos de 3,5 mm como mínimo) u otro sistema equivalente, por ejemplo una toma y una clavija. Si el dispositivo de desconexión de la alimentación no está cerca del automatismo, coloque un sistema de bloqueo a fin de evitar la conexión accidental o no autorizada. 3.2) Fijación del motorreductor Si ya existe la superficie de apoyo, el motorreductor se fija directamente sobre la superficie utilizando elementos adecuados, por ejemplo tacos de expansión. Por el contrario, para fijar el motorreductor: 1. Efectúe la excavación para una cimentación de dimensiones adecuadas, utilizando como referencia las cotas indicadas en la Figura 3 2. Haga llegar uno o varios tubos para pasar los cables eléctricos, como muestra la Figura 4. 3. Ensamble las dos grapas en la placa de cimentación colocando una tuerca abajo y una encima de la placa; la tuerca debajo de la placa se enrosca como se muestra en la Figura 5, a fin de que la parte roscada sobresalga en torno a 25÷35 por encima de la placa. 4. Realice la colada de hormigón y, antes de que comience a fraguar, coloque la placa de cimentación según las cotas indicadas en la figura 3; compruebe que quede paralela a la hoja y perfectamente nivelada. Espere a que el hormigón fragüe completamente. 5. Quite las 2 tuercas superiores de la placa y apoye el motorreductor; compruebe que quede perfectamente paralelo respecto de la hoja y después enrosque ligeramente las 2 tuercas y arandelas entregadas, como muestra la figura 7. 25÷35 0÷10 192 330 0÷50 4 5 0÷10 192 0÷50 3 330 6 7 111 E Si la cremallera está instalada, una vez fijado el motorreductor, ajuste los tornillos sin cabeza de regulación, como muestra la figura 8, a fin de colocar el piñón del ROBUS a la altura justa, dejando 1÷2mm de huelgo desde la cremallera. Por el contrario, para fijar la cremallera: 6. Desbloquee el motorreductor tal como indicado en el párrafo “Desbloqueo y movimiento manual” en el capítulo “Instrucciones y advertencias para el usuario del motorreductor ROBUS”. 7. Abra completamente la puerta, apoye sobre el piñón el primer tramo de cremallera y controle que el comienzo de la cremallera corresponda con el comienzo de la puerta, tal como muestra la figura 9. Controle que entre el piñón y la cremallera haya un huelgo de 1÷2, después fije la cremallera a la hoja utilizando los elementos adecuados. 1÷2 8 9 11 12 ! Para evitar que el peso de la hoja pueda cargar sobre el motorreductor, es importante que entre la cremallera y el piñón haya un huelgo de 1÷2 mm tal como muestra la figura 10. 8. Haga deslizar la hoja y utilice siempre el piñón como referencia para fijar los demás elementos de la cremallera. 9. Corte la parte excedente del último tramo de la cremallera. 10. Abra y cierre varias veces la puerta, comprobando que la cremallera se deslice alineada al piñón, con una desalineación máxima de 5 mm, y que a todo lo largo se haya respetado un huelgo de 1÷2 mm entre el piñón y la cremallera. 11. Apriete con fuerza las tuercas de fijación del motorreductor a fin de que quede fijado firmemente al piso; cubra las tuercas de fijación con las tapas correspondientes, figura 11. 10 12. Fije los soportes de fin de carrera tal como indicado a continuación (para las versiones RB600P y RB1000P fije los soportes según las instrucciones del párrafo “3.3 Fijación de los soportes de fin de carrera en las versiones con fin de carrera de proximidad inductivo”): • Coloque la puerta manualmente en posición de apertura dejando por lo menos 2 - 3 cm de distancia desde el tope mecánico. • Deslice el soporte sobre la cremallera en la dirección de apertura hasta que se active el fin de carrera. Entonces, adelante el soporte unos 2cm y después fíjelo a la cremallera con los tornillos sin cabeza correspondientes, véase figura 12. • Proceda de igual manera para el fin de carrera de cierre. 13. Bloquee el motorreductor tal como indicado en el párrafo “Desbloqueo y movimiento manual” en el capítulo “Instrucciones y advertencias para el usuario”. 3.3) Fijación de los soportes de fin de carrera en las versiones con fin de carrera de proximidad inductivo Para las versiones RB600P y RB1000P, que utilizan el fin de carrera de proximidad inductivo, hay que fijar los soportes de fin de carrera como se explica a continuación. 1. Coloque la puerta manualmente en posición de apertura dejando por lo menos 2 - 3cm de distancia desde el tope mecánico. 2. Deslice el soporte sobre la cremallera en la dirección de apertura hasta que el led correspondiente se apague, tal como en la figura 13. Entonces, adelante el soporte unos 2 cm y después fíjelo a la cremallera con los tornillos sin cabeza correspondientes. 3. Coloque la puerta manualmente en posición de cierre dejando por lo menos 2 - 3cm de distancia desde el tope mecánico. 4. Deslice el soporte sobre la cremallera en la dirección de cierre hasta que el led correspondiente se apague. Entonces, adelante el soporte unos 2 cm y después fíjelo a la cremallera con los tornillos sin cabeza correspondientes. 13 3÷8 ! En el fin de carrera de proximidad inductivo la distancia ideal del soporte está comprendida entre 3 y 8 mm, como muestra la figura 14. 112 14 3.4) Instalación de los diferentes dispositivos Instale los demás dispositivos siguiendo las instrucciones correspondientes. Controle en el párrafo “3.6 Descripción de las conexiones eléctricas” y en la figura 2, los dispositivos que pueden conectarse al ROBUS. 3.5) Conexiones eléctricas ! Las conexiones eléctricas deben efectuarse sin tensión en la instalación y, en su caso, con la batería compensadora desconectada. 1. Para desmontar la tapa de protección y acceder a la central electrónica de control del ROBUS quite el tornillo del costado y extraiga la tapa tirando de ella hacia arriba. 2. Quite la membrana de goma que cierra el agujero para la entrada de los cables e introduzca todos los cables de conexión hacia los distintos dispositivos, dejándolos 20÷30 cm más largos de lo necesario. Véase la tabla 5 para el tipo de cable y la figura 2 para las conexiones. 3. Con una brida reúna todos los cables que entran en el motorreductor. Coloque la brida un poco más abajo del agujero de entrada de los cables. En la membrana de goma, corte un agujero un poco más estrecho que el diámetro de los cables recogidos e introduzca la membrana a lo largo de los cables hasta la brida; entonces, vuelva a colocar la membrana en el alojamiento del agujero para el paso de los cables. Coloque otra brida para recoger los cables un poco más arriba de la membrana. 4. Conecte el cable de alimentación en el borne correspondiente, véase figura 15, y con una brida bloquee el cable en el primer anillo sujetacable. 5. Conecte los demás cables según el esquema de la figura 17. Para una mayor comodidad los bornes pueden extraerse. 6. Una vez concluidas las conexiones, bloquee con bridas los cables reunidos en el segundo anillo sujetacables, la parte sobrante del cable de la antena se bloquea a los demás cables con otra brida, como muestra la figura 16. E 15 16 LUCYB S.C.A. MOFB OPEN CLOSE MOSE 17 Para la conexión de 2 motores en hojas contrapuestas, véase el párrafo “7.3.5 ROBUS en modo Slave”. 113 3.6) Descripción de las conexiones eléctricas En este párrafo hay una breve descripción de las conexiones eléctricas; otras informaciones en el párrafo “7.3 Instalación y desinstalación de dispositivos”. FLASH: salida para la luz intermitente “LUCYB” o similar sólo con la bombilla de 12V máximo 21W. S.C.A.: salida “Indicador Luminoso Cancela Abierta”; es posible conectar una bombilla de 24V, máximo 4W. También puede programarse para otras funciones; véase el párrafo “7.2.3 Funciones segundo nivel” BLUEBUS: en este borne se pueden conectar los dispositivos compatibles; todos los dispositivos se conectan en paralelo con dos conductores solos por los que transitan tanto la alimentación eléctrica como las señales de comunicación. Para más informaciones sobre BlueBUS véase el párrafo “7.3.1 BlueBUS”. STOP: entrada para los dispositivos que bloquean o detienen la maniobra que se está ejecutando; con soluciones oportunas pueden conectarse en la entrada contactos tipo “Normalmente Cerrado”, “Normalmente Abierto” o dispositivos de resistencia constante. Para más informaciones sobre STOP véase el párrafo “7.3.2 Entrada STOP”. P.P.: entrada para dispositivos que controlan el movimiento; es posible conectar contactos tipo “Normalmente Abierto”. OPEN : entrada para dispositivos que accionan el movimiento de apertura sola; es posible conectar contactos tipo “Normalmente Abierto”. CLOSE: entrada para dispositivos que accionan el movimiento de cierre solo; es posible conectar contactos tipo “Normalmente Abierto”. ANTENA: entrada de conexión de la antena para receptor (la antena está incorporada en LUCY B). 4) Controles finales y puesta en marcha Antes de comenzar el control y de poner en marcha la automatización, se aconseja colocar la puerta en la mitad de su carrera para que pueda abrirse o cerrarse libremente. 4.1) Selección de la dirección De acuerdo con la posición del motorreductor respecto de la puerta, es necesario elegir la dirección de la maniobra de apertura; si para abrirse la hoja debe moverse hacia la izquierda, desplace el selector hacia la izquierda, tal como indicado en la figura 18, si para abrirse la puerta debe moverse hacia la derecha, coloque el selector hacia la derecha, tal como indicado en la figura 19. 18 19 4.2) Conexión de la alimentación ! La conexión de la alimentación al ROBUS debe ser hecha por personal técnico experto y cualificado, que posea los requisitos exigidos y respetando las normas, leyes y reglamentos. Ni bien se conecta la tensión al ROBUS, se aconseja realizar algunos controles sencillos: 1. Controle que el led BlueBUS destelle regularmente con una frecuencia de un destello por segundo. 2. Controle que también destellen los leds de las fotocélulas (tanto en TX como en RX); no es importante el tipo de destello, depende de otros factores. 3. Controle que la luz intermitente conectada a la salida FLASH y la luz indicadora conectada a la salida S.C.A. estén apagadas. Si así no fuera, se aconseja apagar inmediatamente la alimentación de la central y controlar con mayor atención las conexiones eléctricas. Otras informaciones útiles para la búsqueda y el diagnóstico de las averías se encuentran en el capítulo “7.6 Solución de los problemas” 4.3) Aprendizaje de los dispositivos Después de concluir la conexión de la alimentación, hay que hacer que la central reconozca los dispositivos conectados en las entradas BLUEBUS y STOP. Antes de esta etapa los leds L1 y L2 destellan indicando que se ha de efectuar el aprendizaje de los dispositivos. 1. Pulse y mantenga pulsados los botones [▲] y [Set] 2. Suelte los botones cuando los leds L1 y L2 comiencen a destellar muy rápidamente (transcurridos alrededor de 3s) 3. Espere algunos segundos a que la central concluya el aprendizaje de los dispositivos. 4. Al concluir el aprendizaje, el led STOP debe quedar encendido y los leds L1 y L2 se apagarán (podrían comenzar a destellar los leds L3 y L4). 20 La etapa de aprendizaje de los dispositivos conectados puede repetirse en cualquier momento, incluso después de la instalación, por ejemplo si se añade un dispositivo; para efectuar un nuevo aprendizaje véase el párrafo “7.3.6 Aprendizaje de otros dispositivos”. 114 4.4) Aprendizaje de la longitud de la hoja Después del aprendizaje de los dispositivos comenzarán a destellar los leds L3 y L4; esto significa que es necesario que la central reconozca la longitud de la hoja (distancia desde el fin de carrera de cierre al fin de carrera de apertura); dicha medida es necesaria para calcular los puntos de deceleración y el punto de apertura parcial. 1. Pulse y mantenga pulsados los botones [▼] y [Set] 2. Suelte los botones cuando comience la maniobra (transcurridos unos 3s) 3. Controle que la maniobra sea una apertura, por el contrario presione el botón [Stop] y lea con mayor atención el párrafo “4.1 Selección de la dirección”; entonces repita desde el punto 1. 4. Espere a que la central complete la maniobra de apertura hasta llegar al fin de carrera de apertura; inmediatamente después comienza la maniobra de cierre. 5. Espere a que la central complete la maniobra de cierre. 21 Si así no fuera, se aconseja apagar inmediatamente la alimentación de la central y controlar con mayor atención las conexiones eléctricas. Otras informaciones útiles se encuentran en el capítulo “7.6 Solución de los problemas”. 4.5) Control del movimiento de la puerta Después del aprendizaje de la longitud de la hoja se aconseja efectuar algunas maniobras para verificar el movimiento correcto de la puerta. 1. Pulse el botón [Open] para accionar una maniobra de “Abrir”; controle que la puerta se abra normalmente sin cambios de velocidad; solamente cuando la puerta está entre 50cm y 70 cm del fin de carrera de apertura deberá desacelerar y detenerse, por la activación del fin de carrera, a 2÷3 cm del tope mecánico de apertura. 2. Pulse el botón [Close] para accionar una maniobra de “Cerrar”; controle que la puerta se cierre normalmente sin cambios de velocidad; solamente cuando la puerta está entre 50cm y 70 cm del fin de carrera de cierre deberá desacelerar y detenerse, por la activación del fin de carrera, a 2÷3 cm del tope mecánico de cierre. 3. Durante las maniobras controle que la luz intermitente destelle con intervalos de 0,5s encendido y 0,5s apagado. En su caso, controle también los destellos de la luz indicadora conectada al borne S.C.A.: destello lento durante la apertura y rápido durante el cierre. 4. Realice varias maniobras de apertura y cierre a fin de observar posibles defectos de montaje y de regulación u otras irregularidades, por ejemplo puntos de mayor fricción. 5. Controle que la fijación del motorreductor ROBUS, de la cremallera y de los soportes de fin de carrera sean firmes, estables y adecuadamente resistentes también durante las aceleraciones o deceleraciones violentas del movimiento de la puerta 4.6) Funciones predeterminadas La central de control del ROBUS dispone de algunas funciones programables; tales funciones se regulan en fábrica con una configuración que debería satisfacer la mayoría de las automatizaciones; sin embargo, las funciones pueden modificarse en cualquier momento mediante un procedimiento de programación oportuno; a tal fin véase el párrafo “7.2 Programaciones”. 4.7) Receptor Para el accionamiento a distancia del ROBUS, la central de control incorpora el enchufe SM para radiorreceptores tipo SMXI o SMXIS. Para más informaciones, consulte el manual de instrucciones del receptor. Para conectar el receptor, ejecute la operación indicada en la figura 22. En la tabla 6, se describe la asociación entre la salida del receptor y la orden que el ROBUS cumplirá: Tabla 6: mandos con transmisor Salida N°1 Salida N°2 Salida N°3 Salida N°4 Mando “P.P.” (Paso a Paso) Mando “Apertura parcial” Mando “Abrir” Mando “Cerrar” 22 5) Ensayo y puesta en servicio Esta es la etapa más importante de la realización del automatismo a fin de garantizar su máxima seguridad. El ensayo también puede utilizarse como control periódico de los dispositivos que componen el automatismo. ! El ensayo de toda la instalación debe ser efectuado por personal cualificado y experto que deberá establecer los ensayos previstos de acuerdo con los riesgos presentes y controlar que se respeten las leyes, normativas y reglamentos, especialmente todos los requisitos de la norma EN 12445 que establece los métodos de ensayo de los automatismos para puertas. 115 E 5.1) Ensayo Cada componente del automatismo, por ejemplo bandas neumáticas, fotocélulas, parada de emergencia, etc., exige un fase de ensayo específica; por dicha razón se deberán seguir los diferentes procedimientos indicados en los manuales de instrucciones respectivos. Para el ensayo del ROBUS ejecute la siguiente secuencia de operaciones: 1. Controle que hayan sido respetadas estrictamente las indicaciones dadas en este manual y especialmente aquellas del capítulo “1 Advertencias”; 2. Desbloquee el motorreductor tal como indicado en el párrafo “Desbloqueo y movimiento manual” en el capítulo “Instrucciones y advertencias para el usuario del motorreductor ROBUS”. 3. Controle que sea posible abrir y cerrar manualmente la puerta con una fuerza que no supere 390N (alrededor de 40kg). 4. Bloqueo del motorreductor. 5. Utilizando los dispositivos de mando o de parada previstos (selector de llave, botones de mando o transmisores), efectúe ensayos de apertura, cierre y parada de la puerta y compruebe que el comportamiento sea el previsto. 6. Controle uno por uno el funcionamiento correcto de todos los dispositivos de seguridad incorporados en la instalación (fotocélulas, bandas sensibles, parada de emergencia, etc.), comprobando que el comportamiento de la puerta corresponda al previsto. Cada vez que un dispositivo se acciona, el led “BlueBUS” en la central debe emitir 2 destellos más rápidos, confirmando que la central reconoce el evento. 7. Si las situaciones peligrosas causadas por el movimiento de la puerta se han prevenido limitando la fuerza de impacto, hay que medir la fuerza de acuerdo con la disposición de la norma EN 12445. Si la regulación de la “Velocidad” y el control de la “Fuerza del motor” se usan como una ayuda del sistema para reducir la fuerza de impacto, pruebe y busque la regulación que dé los mejores resultados. 5.2) Puesta en servicio La puesta en servicio puede llevarse a cabo sólo después de haber efectuado correctamente todas las etapas de ensayo del ROBUS y de los demás dispositivos montados. Está prohibida la puesta en servicio parcial o en situaciones “precarias”. 1. Realice y conserve durante al menos 10 años el expediente técnico de la automatización que deberá incluir como mínimo: el dibujo de conjunto de la automatización, esquema de las conexiones eléctricas, análisis de los riesgos y soluciones adoptadas, declaración de conformidad del fabricante de todos los dispositivos utilizados (para el ROBUS utilice la Declaración de conformidad CE adjunta); copia del manual de instrucciones de uso y del plan de mantenimiento del automatismo. 2. Aplique a la puerta una placa con los siguientes datos: tipo de automatización, nombre y dirección del fabricante (responsable de la “puesta en servicio”), número de matrícula, año de fabricación y marcado “CE”. 3. Aplique de manera permanente, cerca de la puerta, una etiqueta o una placa que indique las operaciones para el desbloqueo y la maniobra manual. 4. Prepare y entregue al dueño de la automatización la declaración de conformidad correspondiente. 5. Prepare y entregue al dueño el “Manual de instrucciones y advertencias para el uso de la automatización”. 6. Prepare y entregue al dueño el plan de mantenimiento de la automatización (que debe incluir todas las prescripciones sobre el mantenimiento de cada dispositivo). 7. Antes de poner en funcionamiento la automatización, informe adecuadamente y por escrito al dueño (por ejemplo en el manual de instrucciones y advertencias para el uso de la automatización) acerca de los peligros y los riesgos presentes. 6) Mantenimiento y desguace En este capítulo se mencionan las informaciones para realizar el plan de mantenimiento y el desguace del ROBUS. 6.1) Mantenimiento Para que el nivel de seguridad sea constante y para garantizar la duración máxima de la automatización, es necesario hacer un mantenimiento habitual; a tal fin el ROBUS dispone de un contador de maniobras y de un sistema de señalización de petición de mantenimiento; véase el párrafo “7.4.3 Aviso de Mantenimiento”. ! El mantenimiento debe efectuarse respetando las prescripciones en materia de seguridad de este manual y según las leyes y normativas vigentes. Para los demás dispositivos diferentes del ROBUS siga las instrucciones mencionadas en los planes de mantenimiento correspondientes. 1. El ROBUS requiere que se efectúe un mantenimiento programado antes de transcurridos 6 meses o, como máximo, 20.000 maniobras a partir del mantenimiento anterior. 2. Desconecte cualquier fuente de alimentación eléctrica, incluidas las baterías compensadoras. 3. Compruebe las condiciones de todos los materiales que componen la automatización, controlando especialmente los fenómenos de corrosión y oxidación de las piezas de la estructura; sustituya las piezas que no sean lo suficientemente seguras. 4. Controle el desgaste de las piezas en movimiento: piñón, cremallera y todas las piezas de la hoja, sustituya las piezas gastadas. 5. Conecte las fuentes de alimentación eléctrica y ejecute todos los ensayos y controles previstos en el párrafo “5.1 Ensayo”. 6.2) Desguace El ROBUS está formado de varios tipos de materiales, algunos de los cuales pueden reciclarse; acero, aluminio, plástico, cables eléctricos; otros deberán ser eliminados: baterías y tarjetas electrónicas. ! Algunos componentes electrónicos y las baterías podrían contener substancias contaminantes; no los abandone en el medio ambiente. Infórmese sobre los sistemas de reciclaje o eliminación respetando las normas locales vigentes. 116 1. Desconecte la alimentación eléctrica de la automatización y la batería compensadora en su caso. 2. Desmonte todos los dispositivos y accesorios, siguiendo el procedimiento en el orden inverso a aquel descrito en el capítulo “3 Instalación”. 3. Separe dentro de lo posible las partes que puedan o deban ser recicladas o eliminadas de otro modo, por ejemplo las piezas metálicas de aquellas de plástico, las tarjetas electrónicas, baterías, etc. 4. Separe y entregue los materiales a las empresas locales autorizadas para la recuperación y eliminación de residuos. 7) Otras informaciones En este capítulo se tratarán las posibilidades de programación, personalización, diagnóstico y búsqueda de las averías sobre el ROBUS. 7.1) Botones de programación En la central de control del ROBUS hay 3 botones que pueden utilizarse para el accionamiento de la central durante los ensayos o para las programaciones: Open ▲ Stop Set Close ▼ El botón “OPEN” permite accionar la apertura de la puerta o desplazar hacia arriba el punto de programación El botón “STOP” permite detener la maniobra; al presionarlo durante más de 5 segundos, permite entrar en programación. El botón “CLOSE” permite accionar el cierre de la puerta o desplazar hacia abajo el punto de programación 23 7.2) Programaciones En la central de control del ROBUS hay algunas funciones programables; las funciones se regulan con los 3 botones situados en la central: [▲] [Set] [▼] y se visualizan a través de los 8 leds: L1….L8. Las funciones programables disponibles en el ROBUS están dispuestas en 2 niveles: Primer nivel: funciones regulables en modo ON-OFF (activo o desactivado); en este caso, cada led L1….L8 indica una función; si está encendido, la función está activa, si está apagado, la función está desactivada; véase la tabla 7. Segundo nivel: parámetros regulables en una escala de valores (valores de 1 a 8); en este caso cada led L1….L8 indica el valor regulado entre los 8 valores posibles; véase la tabla 9. 7.2.1) Funciones de primer nivel (funciones ON-OFF) Tabla 7: lista de las funciones programables: primer nivel Led L1 Función Cierre automático Descripción Esta función permite un cierre automático de la puerta después del tiempo de pausa programado, de fábrica el Tiempo Pausa está configurado en 30 segundos, pero puede modificarse en 5, 15, 30, 45, 60, 80, 120 y 180 segundos. Si la función está desactivada, el funcionamiento es “semiautomático”. L2 Cerrar Después de Esta función permite tener la puerta abierta solo durante el tiempo necesario para el tránsito, en efecto, Fotocélula la activación de "Foto" provoca siempre un cierre automático con un tiempo de pausa de 5s (independientemente del valor programado). El comportamiento cambia según si se activa o no la función de "Cierre Automático". Con "Cierre Automático" desactivado: la puerta siempre alcanza la posición de apertura total (aunque si la Fotocélula queda descubierta antes). Al quedar la fotocélula descubierta se provoca el cierre automático con una pausa 5s. Con “Cierre Automático” activo: la maniobra de apertura se detiene inmediatamente después de que las fotocélulas quedan descubiertas y, transcurridos 5 seg, comenzará la maniobra de cierre. La función "Cerrar después de Fotocélula" siempre se deshabilita en las maniobras interrumpidas por un mando de Stop. Si la función "Cerrar después de fotocélula" no está activa el tiempo de pausa será aquel programado, o no se producirá el cierre automático si la función no está activa. L3 Cerrar Siempre La función “Cerrar Siempre” se activa provocando un cierre cuando al volver la alimentación se detecta que la puerta está abierta. Por motivos de seguridad, la maniobra es antecedida de 5s de destello previo. Si la función está desactivada, al volver la alimentación la puerta quedará detenida. L4 Stand-By Esta función permite reducir al máximo los consumos; es útil durante el funcionamiento con la batería compensadora. Si esta función está activa, después de 1 minuto del final de la maniobra, la central apaga la salida BlueBUS (y, por tanto, los dispositivos) y todos los leds, salvo el led BlueBUS que destellará más lentamente. Cuando reciba un mando, la central reanudará el funcionamiento. Si la función está desactivada, los consumos no disminuirán. Activando esta función se desactiva la aceleración gradual en cada comienzo de maniobra; permite obtener la L5 Punto de arranque fuerza máxima de arranque y es útil donde existen grandes fricciones estáticas, por ejemplo en caso de nieve o hielo que bloqueen la puerta. Si el punto de arranque no está activo, comienza con una aceleración gradual. L6 Destello previo Con la función de destello previo se añade una pausa de 3s entre el encendido de la luz intermitente y el comienzo de la maniobra, para advertir anticipadamente acerca de la situación de peligro. Si el destello previo está desactivado, el encendido de la luz intermitente coincide con el comienzo de la maniobra. L7 “Cerrar” se convierte en Activando esta función, todos los mandos “cerrar” (entrada “CLOSE” o mando radio “cerrar”) activan “Abrir Parcial” una maniobra de apertura parcial (véase led L6 en la tabla 9). L8 Modo “Slave” (esclavo) Activando esta función, el ROBUS se convierte en “Slave” (se esclaviza): así es posible sincronizar el funcionamiento de 2 motores montados en dos hojas contrapuestas, en las que un motor funciona como Máster y el otro como Slave; para más detalles véase el párrafo “ 7.3.5 ROBUS en modo “Slave”. Durante el funcionamiento normal del ROBUS, los leds L1….L8 están encendidos o apagados de acuerdo con el estado de la función que estos representan, por ejemplo L1 está encendido si la función “Cierre automático” está activa. 117 E 7.2.2) Programación de primer nivel (funciones ON-OFF) Todas las funciones del primer nivel están configuradas de fábrica en “OFF”, pero pueden cambiarse en cualquier momento, tal como indicado en la tabla 8. Tenga cuidado al efectuar este procedimiento porque hay un tiempo máximo de 10s entre que se presiona un botón y el otro, en caso contrario, el procedimiento termina automáticamente, memorizando las modificaciones hechas hasta ese momento. Tabla 8: para cambiar las funciones ON-OFF Ejemplo 1. Pulse y mantenga pulsado el botón [Set] durante unos 3s 2. Suelte el botón [Set] cuando el led L1 empiece a destellar 3. Pulse los botones [▲] o [▼] para pasar del led intermitente al led que representa la función a modificar 4. Pulse el botón [Set] para cambiar el estado de la función (destello breve = OFF; destello prolongado = ON) 5. Espere 10s para salir de la programación por conclusión del tiempo máximo 3s SET L1 SET o SET 10s Nota: los puntos 3 y 4 pueden repetirse durante la misma etapa de programación para colocar en ON u OFF las demás funciones 7.2.3 Funciones de segundo nivel (parámetros regulables) Tabla 9: lista de las funciones programables: segundo nivel Led de entrada Parámetro Led (nivel) valor L1 Tiempo Pausa L2 Función P.P. L3 L4 L5 118 Velocidad del Motor Salida S.C.A. Fuerza del motor L1 L2 L3 L4 L5 L6 L7 L8 L1 L2 L3 L4 L5 L6 L7 L8 L1 L2 L3 L4 L5 L6 L7 L8 L1 L2 L3 L4 L5 L6 L7 L8 L1 L2 L3 L4 L5 L6 L7 L8 5 segundos 15 segundos 30 segundos 45 segundos 60 segundos 80 segundos 120 segundos 180 secondi Abrir - stop - cerrar - stop Abrir - stop - cerrar - abrir Abrir - cerrar - abrir - cerrar Comunitario Comunitario 2 (más de 2” se detiene) Paso a Paso 2 (menos de 2” provoca apertura parcial) Hombre muerto Apertura “semiautomática”, cierre “Hombre muerto” Muy lenta Lenta Media Rápida Muy rápida Rapidísima Abrir “rápido”; cerrar “lento” Abrir “rapidísimo”, Cerrar “rápido” Función “Indicador Cancela Abierta” Activa si la puerta está cerrada Activa si la puerta está abierta Activa con salida radio N°2 Activa con salida radio N°3 Activa con salida radio N°4 Indicador Mantenimiento Electrocerradura Puerta “muy ligera” Puerta muy ligera Puerta ligera Puerta medio-ligera Puerta “medio-pesada” Puerta pesada Puerta muy pesada Puerta pesadísima Descripción Regula el tiempo de pausa, es decir el tiempo antes del cierre automático. Tiene efecto sólo si el cierre automático está activo Regula la secuencia de mandos asociados a la entrada P.P. o al 1° mando por radio. Regula la velocidad del motor durante la carrera normal. Regula la función asociada a la salida S.C.A. (con cualquier función asociada, la salida, cuando está activa, suministra una tensión de 24V -30 +50% con una potencia máxima de 4W) Regula el sistema de control de la fuerza del motor para adecuarlo al peso de la puerta. El sistema de control de la fuerza también mide la temperatura ambiente, aumentando automáticamente la fuerza en caso de temperaturas muy bajas Led de entrada Parámetro L6 Abrir Parcial L7 Aviso de mantenimiento L8 Nota: “ Lista de desperfectos Led (nivel) L1 L2 L3 L4 L5 L6 L7 L8 L1 L2 L3 L4 L5 L6 L7 L8 L1 L2 L3 L4 L5 L6 L7 L8 valor 0,5 mt 1 mt 1,5 mt 2 mt 2,5 mt 3 mt 3,4 mt 4 mt Automático (según la dificultad de las maniobras) 1000 2000 4000 7000 10000 15000 20000 Resultado 1a maniobra (la más reciente) Resultado 2a maniobra Resultado 3a maniobra Resultado 4a maniobra Resultado 5a maniobra Resultado 6a maniobra Resultado 7a maniobra Resultado 8a maniobra Descripción Regula la medida de la apertura parcial. La apertura parcial se puede accionar con el 2° mando por radio o con “CERRAR”, si está activa la función “Cerrar” se convierte en “Abrir Parcial” Regula la cantidad de maniobras oportunas para señalar la petición de mantenimiento del automatismo (véase párrafo “7.4.3 Aviso de Mantenimiento”). Permite comprobar el tipo de desperfecto que se produjo en las 8 últimas maniobras (véase párrafo “7.6.1 Historial desperfectos”). E ” representa la regulación de fábrica Todos los parámetros pueden regularse sin ninguna contraindicación; sólo la regulación de la “Fuerza del motor” requiere ciertas precauciones: • Se desaconseja utilizar valores de fuerza elevados para compensar el hecho de que la puerta tiene puntos de fricción anormales; una fuerza excesiva puede perjudicar el funcionamiento del sistema de seguridad o averiar la hoja. • Si el control de la “fuerza motor” se usa como ayuda del sistema para reducir la fuerza de impacto, después de cada regulación, repita la medición de la fuerza tal como previsto por la norma EN 12445. • El desgaste y las condiciones atmosféricas influyen sobre el movimiento de la puerta; por dicho motivo es necesario controlar periódicamente la regulación de la fuerza. 7.2.4) Programación de segundo nivel (parámetros regulables) Los parámetros regulables se configuran de fábrica como se muestra en la tabla 9 con: “ ” pero pueden cambiarse en cualquier momento, tal como indicado en la tabla 10. Tenga cuidado al efectuar este procedimiento porque hay un tiempo máximo de 10 s entre que se presiona un botón y el otro, en caso contrario, el procedimiento termina automáticamente, memorizando las modificaciones hechas hasta ese momento. Tabla 10: para cambiar los parámetros regulables 1. Pulse y mantenga pulsado el botón [Set] durante alrededor de 3s 2. Suelte el botón [Set] cuando el led L1 empiece a destellar 3. Pulse los botones [▲] o [▼] para pasar del led intermitente al “led de entrada” que representa el parámetro a modificar Pulse y mantenga pulsado el botón [Set], mantenga pulsado el botón [Set] durante todos los pasos 5 y 6 Ejemplo 3s SET 4. L1 SET o SET 6. Espere alrededor de 3s, después se encenderá el led que representa el nivel actual del parámetro a modificar Pulse los botones [▲] o [▼] para desplazar el led que representa el valor del parámetro. 7. Suelte el botón [Set] 8. Espere 10s para salir de la programación por conclusión del tiempo máximo. 5. o SET 10s Nota: los puntos de 3 a 7 pueden repetirse durante la misma etapa de programación para regular varios parámetros 119 7.2.5) Ejemplo de programación de primer nivel (funciones ON-OFF) Como ejemplo se menciona la secuencia de operaciones para modificar la configuración de fábrica de las funciones de “Cierre Automático” (L1) y “Cerrar Siempre” (L3). Tabla 11: ejemplo de programación del primer nivel Ejemplo 1. Pulse y mantenga pulsado el botón [Set] durante alrededor de 3s 2. Suelte el botón [Set] cuando el led L1 empiece a destellar 3. Presione una vez el botón [Set] para modificar el estado de la función asociada a L1 (Cierre Automático); ahora el led L1 destella con un destello prolongado Pulse 2 veces el botón [▼] para desplazar el led intermitente al led L3 SET L1 4. 3s SET L1 SET L3 5. 6. Pulse una vez el botón [Set] para modificar el estado de la función asociada a L3 (Cerrar Siempre); ahora el led L3 destella con un destello prolongado Espere 10s para salir de la programación por conclusión del tiempo máximo. L3 SET 10s Al final de estas operaciones los leds L1 y L3 deben quedar encendidos, indicando que están activas las funciones “Cierre Automático” y “Cerrar Siempre”. 7.2.6) Ejemplo de programación de segundo nivel (parámetros regulables) Como ejemplo se menciona la secuencia de operaciones para modificar la configuración de fábrica de los parámetros y aumentar el “Tiempo Pausa” a 60s (entrada en L1 y nivel en L5) y reducir la “Fuerza del motor” para puertas ligeras (entrada en L5 y nivel en L2). Tabla 12: ejemplo de programación de segundo nivel 1. Ejemplo Pulse y mantenga pulsado el botón [Set] durante alrededor de 3s 3s SET 2. Suelte el botón [Set] cuando el led L1 empiece a destellar 3. Pulse y mantenga pulsado el botón [Set]; el botón [Set] debe mantenerse pulsado durante todos los pasos 4 y 5 Espere alrededor de 3s hasta que se encienda el led L3 que representa el nivel actual del “Tiempo Pausa” L1 4. SET SET L3 6. Pulse 2 veces el botón [▼] para desplazar el led encendido en L5, que representa el nuevo valor del “Tiempo Pausa” Suelte el botón [Set] 7. Pulse 4 veces el botón [▼] para desplazar el led intermitente al led L5 8. 11. Pulse y mantenga pulsado el botón [Set]; el botón [Set] debe mantenerse pulsado durante todos los pasos 9 y 10 Espere alrededor de 3s hasta que se encienda el led L5 que representa el nivel actual de la “Fuerza del motor” Pulse 3 veces el botón [▲] para desplazar el led encendido en L2, que representa el nuevo valor de la “Fuerza del motor” Suelte el botón [Set] 12. Espere 10s para salir de la programación por conclusión del tiempo máximo. 5. 3s L5 SET L5 9. 10. SET 3s L5 L2 SET 10s 7.3) Instalación o desinstalación de dispositivos En una automatización que incorpora el ROBUS es posible instalarle o desinstalarle dispositivos en cualquier momento. En particular, en “BlueBUS” y en la entrada “STOP” se pueden conectar diversos tipos de dispositivos, tal como indicado en los párrafos siguientes. Tras instalar o desinstalar los dispositivos, hay que hacer de nuevo el aprendizaje de los dispositivos, tal como descrito en el párrafo “7.3.6 Aprendizaje de otros dispositivos”. 7.3.1) BlueBUS BlueBUS es una técnica que permite efectuar las conexiones de los dispositivos compatibles con dos conductores solos, por los que pasan la alimentación eléctrica y las señales de comunicación. Todos los dispositivos se conectan en paralelo en esos 2 conductores del BlueBUS y sin tener que respetar la polaridad; cada dispositivo es reconocido individualmente puesto que durante la instalación se le asigna una dirección unívoca. En BlueBUS se pueden conectar, por ejemplo: fotocélulas, dispositivos de seguridad, botones de 120 mando, indicadores luminosos de señalización, etc. La central de control del ROBUS, a través de una etapa de aprendizaje, reconoce uno a uno todos los dispositivos conectados y es capaz de detectar con extrema seguridad todos los posibles desperfectos. Por dicho motivo, cada vez que se instala o desinstala un dispositivo conectado en BlueBUS, la central deberá ejecutar el aprendizaje como descrito en el párrafo “7.3.6 Aprendizaje de otros dispositivos”. 7.3.2) Entrada STOP STOP es la entrada que provoca la parada inmediata de la maniobra seguida de una breve inversión. En esta entrada se pueden conectar los dispositivos con salida con contacto normalmente abierto “NA”, normalmente cerrado “NC” o dispositivos con salida de resistencia constante 8,2KΩ, por ejemplo bandas sensibles. Al igual que para el BlueBUS, la central reconoce el tipo de dispositivo conectado en la entrada STOP durante la etapa de aprendizaje (véase el párrafo “7.3.6 Aprendizaje de otros dispositivos”); posteriormente, se provoca un STOP cuando se produce cualquier variación respecto del estado memorizado. Con algunas soluciones oportunas es posible conectar varios dispositivos en la entrada STOP, incluso de diferentes tipos: • Diversos dispositivos NA pueden conectarse en paralelo entre sí sin límites de cantidad. • Diversos dispositivos NC pueden conectarse en serie entre sí, sin límites de cantidad. • Dos dispositivos con salida de resistencia constante 8,2KΩ pueden conectarse en paralelo; si hubiera más de 2 dispositivos, entonces todos deben conectarse “en cascada” con una sola resistencia de terminación de 8,2KΩ. • La combinación NA y NC puede efectuarse colocando los 2 contactos en paralelo con la precaución de colocar, en serie al contacto NC, una resistencia de 8,2KΩ (esto permite también la combinación de 3 dispositivos: NA, NC y 8,2KΩ). ! Si la entrada STOP se utiliza para conectar los dispositivos con funciones de seguridad, sólo los dispositivos con salida con resistencia constante 8,2KΩ garantizan la categoría de seguridad 3 contra las averías, según la norma EN 954-1. 7.3.3) Fotocélulas El sistema "BlueBus" permite, mediante el direccionamiento con los puentes correspondientes, que la central reconozca las fotocélulas y asignarles la función correcta de detección. La operación de direccionamiento se realiza tanto en el TX como en el RX (colocando los puentes de conexión de la misma manera), comprobando que no haya otros pares de fotocélulas con la misma dirección. En una automatización para puertas de correderas con el ROBUS es posible instalar las fotocélulas según la representación de la figura 24. Después de la instalación o desinstalación de fotocélulas, en la central habrá que ejecutar la etapa de aprendizaje, tal como descrito en el párrafo “7.3.6 Aprendizaje de otros dispositivos”. Tabla 13: direcciones de las fotocélulas Fotocélula Puentes FOTO Fotocélula exterior h = 50 con accionamiento en el cierre FOTO II Fotocélula exterior h = 100 con accionamiento en el cierre FOTO 1 Fotocélula interior h = 50 con accionamiento en el cierre FOTO 1 II Fotocélula interior h = 100 con accionamiento en el cierre E 24 Fotocélula Puentes FOTO 2 Fotocélula exterior con accionamiento en la apertura FOTO 2 II Fotocélula interior con accionamiento en la apertura FOTO 3 Fotocélula única que cubre todo el automatismo ! La instalación de FOTO 3 junto con FOTO II requiere que la posición de los elementos que forman la fotocélula (TX-RX) respete la advertencia indicada en el manual de instrucciones de las fotocélulas. 7.3.4) Fotosensor FT210B El fotosensor FT210B une, en un solo dispositivo, un sistema de limitación de la fuerza (tipo C según la norma EN12453) y un detector de presencia de obstáculos presentes en el eje óptico entre transmisor TX y receptor RX (tipo D según la norma EN12453). En el fotosensor FT210B las señales del estado de la banda sensible se envían mediante el rayo de la fotocélula integrando los 2 sistemas en un solo dispositivo. La parte transmisora, situada en la hoja móvil, es alimentada con baterías eliminando así los antiestéticos sistemas de conexión; unos circuitos especiales reducen el consumo de la batería para garantizar una duración de hasta 15 años (véanse los detalles de la evaluación en las instrucciones del producto). Un solo dispositivo FT210B, combinado con una banda sensible (ejemplo TCB65), permite alcanzar el nivel de seguridad de la "banda sensible principal" exigido por la norma EN12453 para cualquier "tipo de utilización" y "tipo de activación". El fotosensor FT210B, combinado con bandas sensibles "resistivas" (8,2Kohm), es seguro para una avería única (categoría 3 según EN 954-1). Dispone de un circuito especial antichoque que evita interferencias con otros detectores aunque no estén sincronizados y permite añadir otras fotocélulas; por ejemplo, si pasan vehículos veloces pesados donde normalmente se pone una segunda fotocélula a 1 m del piso. Para más informaciones sobre los métodos de conexión y de direccionamiento, véase el manual de instrucciones de FT210B. 121 7.3.5) ROBUS en modo “Slave” Programando y conectando oportunamente, el ROBUS puede funcionar en modo “Slave” (esclavo); dicho modo de funcionamiento se utiliza cuando usted deba automatizar 2 hojas contrapuestas y quiere que las hojas se muevan sincronizadas. En este modo un ROBUS funciona como Máster (maestro), es decir que ordena las maniobras, y el segundo ROBUS funciona como Slave, es decir que ejecuta las órdenes enviadas por el Máster (de fábrica todos los ROBUS son Máster). Para configurar el ROBUS como Slave hay que activar la función de primer nivel “Modo Slave” (véase la tabla 7). La conexión entre el ROBUS Máster y el ROBUS Slave se efectúa mediante BlueBUS. ! En este caso debe respetarse la polaridad en la conexión entre los dos ROBUS tal como muestra la figura 26 (los demás dispositivos siguen sin tener polaridad) . Para instalar 2 ROBUS en modo Máster y Slave ejecute las siguientes operaciones: • Instale los 2 motores tal como muestra la figura 25. Es indiferente cuál motor funciona como Máster y cuál como Slave; en dicha decisión hay que evaluar la comodidad de las conexiones y el hecho de que el mando Paso a Paso en el Slave permite la apertura total solamente de la hoja Slave. 25 • Conecte los 2 motores como muestra la Figura 26 • Seleccione la dirección de la maniobra de apertura de los 2 motores tal como muestra la figura 25 (véase también el párrafo “4.1 Selección de la dirección”). • Alimente los 2 motores. • En el ROBUS Slave programe la función “Modo Slave” (véase tabla 7). • Efectúe el reconocimiento de los dispositivos en el ROBUS Slave (véase el párrafo “4.3 Aprendizaje de los dispositivos”). • Efectúe el reconocimiento de los dispositivos en el ROBUS Máster (véase el párrafo “4.3 Aprendizaje de los dispositivos”). • Efectúe el reconocimiento de la longitud de las hojas en el ROBUS Máster (véase el párrafo “4.4 Aprendizaje de la longitud de la hoja”). LUCYB LUCYB S.C.A. MOFB OPEN CLOSE MOSE S.C.A. STOP PP 26 En la conexión de 2 ROBUS en modo Máster-Slave observe que: • Todos los dispositivos estén conectados en el ROBUS Máster (tal como en fig. 26) incluido el receptor radio • Si se utilizan baterías compensadoras, cada motor debe tener su batería. • Todas las programaciones en el ROBUS Slave se ignoran (prevalecen las del ROBUS Máster) excepto aquellas indicadas en la tabla 14. 122 Tabla 14: programaciones en el ROBUS Slave independientes del ROBUS Máster Funciones de primer nivel (funciones ON - OFF) Stand-by Punto de arranque Modo Slave Funciones de segundo nivel (parámetros regulables) Velocidad Motor Salida SCA Fuerza Motor Lista de Errores En el Slave es posible conectar: • una luz intermitente (Flash) • un Indicador luminoso de Puerta Abierta (S.C.A.) • una banda sensible (Stop) • un dispositivo de mando (P.P.) que acciona la apertura total sólo de la hoja Slave. • En el Slave las entradas Open y Close no se utilizan 7.3.6) Aprendizaje de otros dispositivos Normalmente, la operación de aprendizaje de los dispositivos conectados al BlueBUS y a la entrada STOP se ejecuta durante la instalación; sin embargo, si se instalan o desinstalan dispositivos, es posible realizar nuevamente el aprendizaje como indicado en la tabla 15. Tabla 15: para el aprendizaje de otros dispositivos Ejemplo 1. Pulse y mantenga pulsados los botones [▲] y [Set] 2. Suelte los botones cuando los leds L1 y L2 empiezan a destellar muy rápidamente (después de unos 3s) 3. Espere algunos segundos para que la central concluya el aprendizaje de los dispositivos. 4. Al concluir el aprendizaje, los leds L1 y L2 dejarán de destellar, el led STOP debe quedar encendido, mientras que los leds L1…L8 se encenderán según el estado de las funciones ON-OFF que representan. SET SET L1 L2 E L1 L2 ! Después de haber instalado o desinstalado los dispositivos es necesario realizar nuevamente el ensayo del automatismo, de acuerdo con las indicaciones del párrafo “5.1 Ensayo”. 7.4) Funciones especiales 7.4.1) Función “Abrir siempre” La función “Abrir siempre” es una característica de la central de control que permite accionar siempre una maniobra de apertura cuando el mando de “Paso a Paso” dura más de 2 segundos; esto es útil por ejemplo para conectarle al borne P.P. el contacto de un reloj programador para mantener abierta la puerta durante una cierta franja horaria. Dicha característica es válida con cualquier programación de la entrada de P.P., salvo en la programación como “Cerrar”, véase el parámetro “Función P.P.” en la tabla 9. 7.4.2) Función “Mover igualmente” Aunque los dispositivos de seguridad no funcionen correctamente o debieran ponerse fuera de uso, es posible igualmente accionar o mover la puerta en modo “hombre muerto”. Para mayores detalles, véase el párrafo “Accionamiento con dispositivos de seguridad fuera de uso” en el anexo “Instrucciones y advertencias para el usuario del motorreductor ROBUS”. 7.4.3) Aviso de mantenimiento El ROBUS permite avisar al usuario cuando conviene hacer un control de mantenimiento del automatismo. Pueden seleccionarse, entre 8 niveles diferentes, la cantidad de maniobras que deben ejecutarse antes de la señalización, mediante el parámetro ajustable “Aviso de mantenimiento” (véase tabla 9). El nivel 1 de regulación es “automático” y tiene en cuenta la dificultad de las maniobras, es decir el esfuerzo y la duración de la maniobra, mientras que las demás regulaciones están fijadas según la cantidad de las maniobras. La petición de mantenimiento se señala mediante la luz intermitente Flash o en la lámpara conectada en la salida S.C.A. cuando está programada como "Indicador de Mantenimiento" (véase tabla 9). Según el número de maniobras efectuadas respecto del límite programado, la luz intermitente Flash y el indicador luminoso mantenimiento dan las señales indicadas en la tabla 16. Tabla 16: aviso de mantenimiento con Flash e indicador luminoso mantenimiento Número de maniobras Señalización en Flash Señalización en indicador luminoso mantenimiento Inferior al 80% del límite Entre el 81 y el 100% del límite Más del 100% del límite Normal (0.5s encendido, 0.5s apagado) Encendido durante 2s al inicio de la apertura Al inicio de la maniobra queda encendido Parpadea durante toda la maniobra durante 2s, luego continúa normalmente Al inicio y al final de la maniobra queda encen- Parpadea siempre. dido durante 2s, luego continúa normalmente 123 Control del número de maniobras efectuadas Con la función de “Aviso de mantenimiento” es posible comprobar la cantidad de maniobras efectuadas en porcentaje sobre el límite configurado. Para verificar, proceda como indicado en la tabla 17. Tabla 17: Control del número de maniobras efectuadas Ejemplo 1. Pulse y mantenga pulsado el botón [Set] durante alrededor de 3s 2. Suelte el botón [Set] cuando el led L1 empiece a destellar 3. Pulse los botones [▲] o [▼] para desplazar el led intermitente al L7, es decir el “led de entrada” para el parámetro “Aviso de mantenimiento”. Pulse y mantenga pulsado el botón [Set], mantenga pulsado el botón [Set] durante los pasos 5, 6 y 7 3s SET 4. L1 SET o L7 SET 5. 6. 7. 8. Espere alrededor de 3s, después se encenderá el led que representa el nivel actual del parámetro “Aviso de mantenimiento”. Pulse y suelte de inmediato los botones [▲] y [▼]. 3s y El led correspondiente al nivel seleccionado destellará algunas veces. La cantidad de destellos identifica el porcentaje de maniobras efectuadas (en múltiplos de 10%) respecto del límite configurado. Por ejemplo: configurando el aviso de mantenimiento en L6, es decir 10000, el 10% corresponde a 1000 maniobras; si el led de visualización destella 4 veces significa que se ha alcanzado el 40% de las maniobras (es decir entre 4000 y 4999 maniobras). Si no se alcanzó el 10% de las maniobras, no destellará. Suelte el botón [Set] .... n=? SET Puesta a cero del contador de maniobras Después de hacer el mantenimiento de la instalación, hay que poner a cero el contador de las maniobras. Proceda como descrito en la tabla 18. Tabla 18: puesta a cero del contador de maniobras 1. Ejemplo Pulse y mantenga pulsado el botón [Set] durante unos 3s 3s SET 2. Suelte el botón [Set] cuando el led L1 empiece a destellar 3. Pulse los botones [▲] o [▼] para desplazar el led intermitente al L7, es decir el “led de entrada” para el parámetro “Aviso de mantenimiento”. Pulse y mantenga pulsado el botón [Set], mantenga pulsado el botón [Set] durante los pasos 5 y 6 4. L1 SET o L7 SET 5. 6. 7. Espere alrededor de 3s, después se encenderá el led que representa el nivel actual del parámetro “Aviso de mantenimiento”. Pulse y mantenga pulsados durante unos 5 segundos los botones [▲] y [▼], después suelte los 2 botones. El led correspondiente al nivel seleccionado ejecutará una serie de destellos rápidos para señalar que el contador de las maniobras fue puesto a cero. Suelte el botón [Set] 3s y SET 7.5) Conexión de otros dispositivos Si hubiera que alimentar algún dispositivo exterior, por ejemplo un lector de proximidad para tarjetas por transponder o bien la luz de iluminación del selector de llave, es posible tomar la alimentación tal como indicado en la figura 27. La tensión de alimentación es 24Vcc -30% ÷ +50% con corriente máxima disponible de 100mA. 27 124 - + 24Vcc 7.6) Solución de los problemas En la tabla 19 se pueden encontrar indicaciones útiles para solucionar problemas de funcionamiento que podrían producirse durante la instalación o desperfectos del sistema. F2 29 Tabla 19: búsqueda de las averías Síntomas El transmisor no acciona la puerta y el led del transmisor no se enciende El transmisor no acciona la puerta pero el led del transmisor se enciende No se acciona ninguna maniobra y el led “BlueBUS” no destella No se acciona ninguna maniobra y la luz intermitente está apagada No se acciona ninguna maniobra y la luz intermitente destella algunas veces. La maniobra arranca pero inmediatamente después se produce la inversión. La maniobra se ejecuta regularmente pero la luz intermitente no funciona. La maniobra se ejecuta regularmente pero el indicador luminoso SCA no funciona. F1 Controles aconsejados Controle que las pilas del transmisor no estén agotadas; de ser necesario, sustitúyalas. Controle que el transmisor esté memorizado correctamente en el receptor Controle que el ROBUS esté alimentado con la tensión de red. Controle que los fusibles no se hayan quemado; si así fuera, controle la causa de la avería y sustitúyalos con otros con el mismo valor de corriente y características idénticas. Controle que el mando llegue efectivamente. Si el mando llega a la entrada PP, el led “PP” debe encenderse; por el contrario, si se utiliza el transmisor, el led “BlueBus” debe emitir dos destellos rápidos. Cuente la cantidad de destellos y controle según lo indicado en la tabla 21 La fuerza seleccionada podría ser muy baja para el tipo de puerta. Controle que no haya obstáculos y, de ser necesario, seleccione una fuerza superior. Controle que durante la maniobra haya tensión en el borne FLASH de la luz intermitente (siendo intermitente, el valor de tensión no es significativo: alrededor de 10-30Vcc); si hubiera tensión, el problema es la bombilla que habrá que sustituir con una con las mismas características; si no hubiera tensión, se podría haber producido una sobrecarga en la salida FLASH, controle que no haya cortocircuitos en el cable. Controle el tipo de función programada para la salida SCA (Tabla 9) Cuando el indicador luminoso se enciende, controle que haya tensión en el borne SCA (alrededor de 24Vcc); si hubiera tensión, el problema es la bombilla que habrá que sustituir con una con las mismas características; si no hubiera tensión, se podría haber producido una sobrecarga en la salida SCA, controle que no haya cortocircuitos en el cable. 7.6.1) Listado del historial de los desperfectos El ROBUS permite visualizar los desperfectos que se hayan producido en las últimas 8 maniobras, por ejemplo la interrupción de una maniobra por la activación de una fotocélula o de una banda sensible. Para comprobar el listado de los desperfectos, proceda como indicado en la tabla 20. Tabla 20: historial desperfectos 1. Ejemplo Pulse y mantenga pulsado el botón [Set] durante unos 3s 3s SET 2. Suelte el botón [Set] cuando el led L1 empiece a destellar 3. Pulse los botones [▲] o [▼] para desplazar el led intermitente al L8, es decir el “led de entrada” para el parámetro “Listado desperfectos”. Pulse y mantenga pulsado el botón [Set], mantenga pulsado el botón [Set] durante los pasos 5 y 6 4. L1 SET o L8 SET 5. 6. 7. Espere unos 3s, se encenderán los leds correspondientes a las maniobras que han tenido algún desperfecto. El led L1 indica el resultado de la maniobra más reciente, el led L8 indica el resultado de la octava maniobra. Si el led está encendido significa que, durante la maniobra, se han producir desperfectos; si el led está apagado significa que la maniobra se ha concluido sin problemas. Pulse los botones [▲] y [▼] para seleccionar la maniobra deseada: El led correspondiente destellará la misma cantidad de veces que la luz intermitente después de un desperfecto (véase la tabla 21). Suelte el botón [Set]. 3s y SET 7.7) Diagnóstico y señales Algunos dispositivos ofrecen directamente señales particulares a través de las cuales es posible reconocer el estado de funcionamiento o un posible desperfecto. 125 E 7.7.1) Señales con la luz intermitente Durante la maniobra la luz intermitente FLASH destella una vez por segundo; cuando se produce algún desperfecto, la luz intermitente destella más lentamente; los destellos se repiten dos veces, separados por una pausa de un segundo. Tabla 21: señales en la luz intermitente FLASH Destellos rápidos Causa ACCIÓN Al comienzo de la maniobra, el control de los dispositivos conectados a BlueBUS no corresponde a aquellos memorizados durante el aprendizaje. Es posible que haya dispositivos averiados; controle y sustituya; si se han efectuado modificaciones, hay que volver a repetir el aprendizaje (7.3.4 Aprendizaje de otros dispositivos). 1 destello pausa de 1 segundo 1 destello Error en el BlueBUS 2 destellos pausa de 1 segundo 2 destellos Activación de una fotocélula Durante el comienzo de la maniobra una o varias fotocélulas no dan el asenso para el movimiento; controle que no haya obstáculos. Durante el movimiento es normal si efectivamente hay un obstáculo. 3 destellos pausa de 1 segundo 3 destellos Activación del limitador de la "Fuerza Motor" Durante el movimiento, la puerta encontró un punto de mayor fricción; controle el motivo. 4 destellos pausa de 1 segundo 4 destellos Activación de la entrada STOP Durante el comienzo de la maniobra o durante el movimiento se ha activado la entrada STOP; controle el motivo. 5 destellos pausa de 1 segundo 5 destellos Error en los parámetros internos de la central electrónica Espere 30 segundos como mínimo y pruebe a accionar un mando; si el estado persiste, podría haber una avería grave y habrá que sustituir la tarjeta electrónica. 6 destellos pausa de 1 segundo 6 destellos Se ha superado el límite máximo de maniobras por hora. Espere algunos minutos para que el limitador de maniobras retorne por debajo del límite máximo. 7 destellos pausa de 1 segundo 7 destellos Error en los circuitos eléctricos internos Desconecte todos los circuitos de alimentación durante algunos segundos y pruebe a accionar un mando; si el estado persiste, podría haber una avería grave y habrá que sustituir la tarjeta electrónica. 8 destellos pausa de 1 segundo 8 destellos Hay un mando accionado que no permite ejecutar otros mandos. Controle el tipo de mando siempre activo; por ejemplo, podría ser el mando de un reloj en la entrada “abrir”. 7.7.2) Señales en la central En la central del ROBUS hay una serie de LEDs que pueden dar señales específicas, tanto durante el funcionamiento normal como en caso de desperfecto. 29 Tabla 22: leds en los bornes de la central Led BLUEBUS Causa Apagado Desperfecto Encendido Desperfecto grave Un destello por segundo Todo OK Se ha producido una variación del estado de las entradas 2 destellos rápidos Serie de destellos separados Varias por una pausa de un segundo Led STOP Causa Activación de la entrada de Apagado STOP Encendido Todo OK Led P.P. Causa Apagado Todo OK Encendido Activación de la entrada de PP Led ABRIR Causa Apagado Todo OK Activación de la entrada de OPEN Encendido Led CERRAR Causa Apagado Todo OK Encendido Activación de la entrada de CLOSE 126 ACCIÓN Controle si hay alimentación; controle que los fusibles no se hayan quemado; si así fuera, controle la causa de la avería y sustitúyalos con otros del mismo valor de corriente. Hay un desperfecto grave; pruebe a apagar durante algunos segundos la central; si el estado continúa, significa que hay una avería y hay que sustituir la tarjeta electrónica Funcionamiento normal de la central: Es normal cuando se produce un cambio de una de las entradas: PP, STOP, OPEN, CLOSE, activación de las fotocélulas o se utiliza el transmisor Es la misma señal que emite la luz intermitente. Véase la tabla 21 ACCIÓN Controle los dispositivos conectados a la entrada STOP. Controle los dispositivos conectados a la entrada STOP. ACCIÓN Entrada PP desactivada Es normal si está activo efectivamente el dispositivo conectado a la entrada PP ACCIÓN Entrada ABRIR desactivada Es normal si está activo efectivamente el dispositivo conectado a la entrada ABRIR ACCIÓN Entrada CERRAR desactivada Es normal si está activo efectivamente el dispositivo conectado a la entrada CERRAR Tabla 23: leds en los botones de la central Led 1 Descripción Durante el funcionamiento normal indica “Cierre automático” desactivado Apagado Durante el funcionamiento normal indica “Cierre automático” activo Encendido • Programación de las funciones ejecutándose. Destella • Si destella junto con L2 indica que es necesario ejecutar el aprendizaje de los dispositivos (véase el párrafo “4.3 Aprendizaje de los dispositivos”). Led L2 Descripción Apagado Durante el funcionamiento normal indica “Cerrar después Fotocélula” desactivado Encendido Durante el funcionamiento normal indica “Cerrar después de Fotocélula” activo • Programación de las funciones ejecutándose. Destella • Si destella junto con L1 indica que es necesario ejecutar el aprendizaje de los dispositivos (véase el párrafo “4.3 Aprendizaje de los dispositivos”). Led L3 Apagado Encendido Destella Led L4 Apagado Encendido Destella Led L5 Apagado Encendido Destella Led L6 Apagado Encendido Destella Led L7 Apagado Encendido Destella Led L8 Apagado Encendido Destella Descripción Durante el funcionamiento normal indica “Cerrar Siempre” desactivado Durante el funcionamiento normal indica “Cerrar Siempre” activo • Programación de las funciones ejecutándose. • Si destella junto con L4 indica que es necesario ejecutar el aprendizaje de la longitud de la hoja (véase el párrafo “4.4 Aprendizaje de la longitud de la hoja”). Descripción Durante el funcionamiento normal indica “Stand-by” desactivado Durante el funcionamiento normal indica “Stand-By” activo. • Programación de las funciones ejecutándose. • Si destella junto con L3 indica que es necesario ejecutar el aprendizaje de la longitud de la hoja (véase el párrafo “4.4 Aprendizaje de la longitud de la hoja”). Descripción Durante el funcionamiento normal indica “Punto de arranque” desactivado Durante el funcionamiento normal indica “Punto de arranque” activo. Programación de las funciones ejecutándose. Descrizione Durante el funcionamiento normal indica “Destello previo” desactivado Durante el funcionamiento normal indica “Destello previo” activo. Programación de las funciones ejecutándose. Descripción Durante el funcionamiento normal indica que la entrada CERRAR activa una maniobra de cierre Durante el funcionamiento normal indica que la entrada CERRAR activa una maniobra de apertura parcial. Programación de las funciones ejecutándose. Descripción Durante el funcionamiento normal indica que el ROBUS está configurado como Máster. Durante el funcionamiento normal indica que el ROBUS está configurado como Slave. Programación de las funciones ejecutándose. E 7.8) Accesorios Para el ROBUS hay previstos los siguientes accesorios opcionales: • PS124 Batería compensadora 24V - 1,2Ah con cargador de batería incorporado. • SMXI o SMXIS Receptor a 433.92MHz con codificación digital Rolling Code. 30 Consulte el catálogo de los productos de Nice S.p.a. para la lista completa y actualizada de los accesorios. 31 127 8) Características técnicas Nice S.p.a., a fin de mejorar sus productos, se reserva el derecho de modificar las características técnicas en cualquier momento y sin previo aviso, garantizando la funcionalidad y el uso previstos. Todas las características técnicas indicadas se refieren a una temperatura ambiente de 20°C (±5°C). Características técnicas del ROBUS Modelo tipo Tipo Piñón Par máximo en el punto de arranque [correspondiente a la capacidad de desarrollar una fuerza para poner en movimiento la puerta] RB600 – RB600P RB1000 – RB1000P Motorreductor electromecánico para el movimiento automático de puertas de correderas para uso residencial con central electrónica de control. Z: 15; Módulo: 4; Paso: 12,6 mm; Diámetro primitivo: 60 mm 18Nm [600N] 27Nm [900N] 9Nm [300N] 15Nm [500N] 0,15m/s 0,14m/s 0,31m/s 0,28m/s 100 ciclos / día (la central limita los ciclos al máximo previsto en las tablas 2 y 3) 150 ciclos / día (la central limita los ciclos al máximo previsto en las tablas 2 y 3) Tiempo máximo de funcionamiento continuo (con el par nominal) 7 minutos (la central limita el funcionamiento continuo al máximo previsto en las tablas 2 y 3) 5 minutos (la central limita el funcionamiento continuo al máximo previsto en las tablas 2 y 3) Límites de utilización Generalmente, el ROBUS puede automatizar puertas del peso o de la longitud indicados en las tablas 2, 3 y 4 Durabilidad Estimada entre 20.000 y 250.000 ciclos, según las condiciones mencionadas en la tabla 4 Alimentación ROBUS 600 - 1000 Alimentación ROBUS 600 - 1000/V1 Potencia máxima absorbida en el par de arranque [correspondiente a Amperios] Clase de aislamiento Alimentación de emergencia Salida luz intermitente 230Vac (+10% -15%) 50/60Hz. 120Vac (+10% -15%) 50/60Hz. Par nominal [correspondiente a la capacidad de desarrollar una fuerza para poner en movimiento la puerta] Velocidad con el par nominal Velocidad en vacío (la central permite programar 6 velocidades equivalentes a alrededor de: 100, 85, 70, 55, 45, 30%) Frecuencia máxima ciclos de funcionamiento (con el par nominal) Salida S.C.A. Salida BLUEBUS Entrada STOP Entrada PP Entrada ABRIR Entrada CERRAR Conector radio Entrada ANTENA Radio Funzioni programmabili Funciones en autoaprendizaje Temperatura de funcionamiento Empleo en atmósfera ácida, salobre o con riesgo de explosión Clase de protección Medidas y peso 128 515W [2,5A] [4,8A versión /V1] 450W [2,3A] [4,4A versión /V1] 1 (es necesaria la puesta a tierra de seguridad) con accesorio opcional PS124 para 2 luces intermitentes LUCYB (lámpara 12V, 21W) para 1 lámpara de 24V máximo 4W (la tensión de salida puede variar entre -30 y +50% y puede accionar también pequeños relés) una salida con una carga máxima de 15 unidades BlueBus Para contactos normalmente cerrados, normalmente abiertos o para resistencia constante 8,2KΩ; en autoaprendizaje (una variación respecto del estado memorizado provoca el mando “STOP”) para contactos normalmente abiertos (el cierre del contacto provoca el mando P.P.) para contactos normalmente abiertos (el cierre del contacto provoca el mando ABRIR) para contactos normalmente abiertos(el cierre del contacto provoca el mando CERRAR) Conector SM para receptores SMXI o SMXIS 52Ω para cable tipo RG58 o similar 8 funciones tipo ON-OFF y 8 funciones regulables (véanse las tablas 7 y 9) Autoaprendizaje de los dispositivos conectados a la salida BlueBUS. Autoaprendizaje del tipo de dispositivo de “STOP” (contacto NA, NC o resistencia 8,2KΩ) Autoaprendizaje de la longitud de la puerta y cálculo de los puntos de deceleración y apertura parcial. -20°C ÷ 50°C No IP 44 330 x 210 h 303; 11Kg 330 x 210 h 303; 13 Kg Instrucciones y advertencias para el usuario del motorreductor ROBUS Felicitaciones por haber elegido un producto Nice para su automatización! Nice S.p.A. produce componentes para la automatización de cancelas, puertas, cierres enrollables, persianas y toldos: motorreductores, centrales de mando, radiomandos, luces intermitentes, fotocélulas y accesorios. Los productos Nice son fabricados sólo con materiales de calidad y excelentes mecanizados. Nuestra empresa busca constantemente soluciones innovadoras que simplifiquen aún más el uso de nuestros aparatos, cuidados en todos los detalles técnicos, estéticos y ergonómicos: en la vasta gama Nice, su instalador puede escoger el producto que satisfaga de la mejor manera sus exigencias. Nice no es quien escoge los componentes de su automatización, este es un trabajo de análisis, evaluación, elección de los materiales y realización de la instalación efectuado por su instalador de confianza. Cada automatización es única y sólo su instalador posee la experiencia y profesionalidad necesarias a fin de ejecutar una instalación a medida de sus exigencias, segura y fiable en el tiempo y, sobre todo, que respete las normativas vigentes. Una instalación de automatización es una gran comodidad, además de un sistema de seguridad válido y, con un mantenimiento reducido y sencillo, está destinada a durar por mucho tiempo. Aunque bien su automatización satisfaga el nivel de seguridad requerido por las normativas, esto no excluye la existencia de un “riesgo residual”, es decir, la posibilidad de que se puedan crear situaciones de peligro causadas por un uso inconsciente o incorrecto, por dicho motivo, a continuación le damos algunos consejos sobre cómo comportarse para evitar inconvenientes. •Antes de usar por primera vez el automatismo: pida a su instalador que le explique el origen de los riesgos residuales y lea este manual de instrucciones y advertencias para el usuario entregado por el instalador. Conserve el manual por cualquier problema que pueda surgir y recuerde entregarlo a un posible nuevo dueño del automatismo. •El automatismo es una maquina que ejecuta fielmente los mandos dados: un uso inconsciente o inadecuado puede ser peligroso. Por consiguiente, no accione el automatismo cuando en su radio de acción haya personas, animales o cosas. •Niños: una instalación de automatización garantiza un elevado grado de seguridad, impidiendo, gracias a sus sistemas de detección, que se mueva ante la presencia de personas o cosas y garantizando una activación previsible y segura. Procure que los niños no jueguen cerca del automatismo y mantenga los controles remotos lejos de su alcance: ¡no son un juguete! manual. No realice ninguna reparación y llame a su instalador de confianza: una vez desbloqueado el motorreductor, la instalación podrá funcionar manualmente como un cerramiento no automatizado. •Mantenimiento: para garantizar una larga vida útil y para un funcionamiento seguro, la instalación, al igual que cualquier otra maquinaria, requiere un mantenimiento periódico Establezca con su instalador un plan de mantenimiento con frecuencia periódica. Nice aconseja realizar un mantenimiento cada 6 meses para un uso residencial normal, que puede variar según la intensidad de uso. Cualquier tipo de control, mantenimiento o reparación debe ser realizado sólo por personal cualificado. •Aunque piense que lo sabe hacer, no modifique la instalación ni los parámetros de programación y regulación del automatismo: la responsabilidad es de su instalador. • El ensayo final, los trabajos de mantenimiento periódico y las posibles reparaciones deben ser documentados por quien los efectúa y los documentos tienen que ser conservados por el dueño de la instalación. Las únicas operaciones que pueden hacerse y que le aconsejamos efectuar periódicamente son la limpieza de los vidrios de las fotocélulas y la eliminación de hojas o piedras que podrían obstaculizar el automatismo. Para que nadie pueda accionar la puerta, antes de proceder recuerde desbloquear el automatismo (como descrito más adelante) y utilice para la limpieza únicamente un paño ligeramente humedecido con agua. •Desguace: al final de la vida útil del automatismo, el desguace debe ser realizado por personal cualificado y los materiales deben ser reciclados o eliminados según las normas locales vigentes. •En el caso de roturas o falta de alimentación: esperando la intervención de su instalador, o la llegada de la energía eléctrica si la instalación no está dotada de baterías compensadoras, la automatización puede accionarse igual que cualquier cerramiento no automatizado. A tal fin es necesario realizar el desbloqueo manual (única operación que el usuario puede realizar): dicha operación ha sido estudiada por Nice para facilitarle su empleo, sin necesidad de utilizar herramientas ni hacer esfuerzos físicos. •Desperfectos: ni bien note que la automatización no funciona correctamente, corte la alimentación eléctrica de la instalación y realice el desbloqueo 129 E Desbloqueo y movimiento manual: antes de ejecutar esta operación tenga cuidado de que el desbloqueo puede efectuarse sólo cuando la hoja está detenida. 1 Desplace el disco cubrecerradura. 3 Tire la manilla de desbloqueo. Para bloquear: efectúe las mismas operaciones en el orden inverso Mando con dispositivos de seguridad fuera de uso: si los dispositivos de seguridad montados en la puerta no funcionaran correctamente, es igualmente posible accionar la puerta. • Accione el mando de la puerta (con el telemando, con el selector de llave, etc.); si todo es correcto, la puerta se abrirá o cerrará normalmente, en caso contrario, la luz intermitente destellará algunas veces y la maniobra no arrancará (la cantidad de destellos depende de la razón que impide que arranque la maniobra). • En este caso, dentro de tres segundos, accione nuevamente el mando y manténgalo accionado. • Transcurridos alrededor de 2s, empezará el movimiento de la puerta en modo “hombre muerto”, es decir mientras se mantenga presionado el mando, la puerta seguirá moviéndose; ni bien se suelte el mando, la puerta se detendrá. ! Con los dispositivos de seguridad fuera de uso es necesario hacer reparar lo antes posible el automatismo. 130 2 Introduzca y gire la llave hacia la derecha. 4 Mueva manualmente la hoja. Sustitución de la pila del telemando: si el radiomando después de transcurrido un cierto período no funciona correctamente o deja de funcionar, podría ser que la pila esté agotada (puede durar desde varios meses a más de un año según el uso). Ud. se podrá dar cuenta de este inconveniente por el hecho de que la luz del indicador de confirmación de la transmisión no se enciende, es débil, o bien se enciende sólo durante un breve instante. Antes de llamar al instalador, pruebe a sustituir la pila con una de otro transmisor que funcione correctamente: si el problema fuera este, sustituya la pila con otra del mismo tipo. Las pilas contienen sustancias contaminantes: no las arroje en los residuos normales sino que elimínelas de acuerdo con las leyes locales. Está Ud. satisfecho? Si Ud. deseara montar en su casa un nuevo automatismo, contacte al mismo instalador y a Nice, así podrá contar con la garantía del asesoramiento de un experto y los productos más modernos del mercado, el mejor funcionamiento y la máxima compatibilidad de las automatizaciones. Le agradecemos por haber leído estas recomendaciones y esperamos que esté satisfecho de su nueva instalación: ante cualquier exigencia, contacte con confianza a su instalador. Nice France Buchelay Tel. +33.(0)1.30.33.95.95 Fax +33.(0)1.30.33.95.96 Nice Belgium Leuven (Heverlee) Tel. +32.(0)16.38.69.00 Fax +32.(0)16.38.69.01 [email protected] Nice Polska Pruszków Tel. +48.22.728.33.22 Fax +48.22.728.25.10 [email protected] Nice Padova Sarmeola di Rubano PD Italia Tel. +39.049.89.78.93.2 Fax +39.049.89.73.85.2 [email protected] Nice Rhône-Alpes Decines Charpieu France Tel. +33.(0)4.78.26.56.53 Fax +33.(0)4.78.26.57.53 Nice España Madrid Tel. +34.9.16.16.33.00 Fax +34.9.16.16.30.10 [email protected] Nice UK Chesterfield Tel. +44.87.07.55.30.10 Fax +44.87.07.55.30.11 [email protected] Nice Roma Roma Italia Tel. +39.06.72.67.17.61 Fax +39.06.72.67.55.20 [email protected] Nice France Sud Aubagne France Tel. +33.(0)4.42.62.42.52 Fax +33.(0)4.42.62.42.50 Nice Gate is the doors and gate automation division of Nice Nice España Barcelona Tel. +34.9.35.88.34.32 Fax +34.9.35.88.42.49 [email protected] Nice Screen is the rolling shutters and awnings automation division of Nice Nice China Shanghai Tel. +86.21.575.701.45/46 Fax +86.21.575.701.44 [email protected] www.niceforyou.com ISTRB2.4865 REV. 01 del 31-01-2005 Nice SpA Oderzo TV Italia Tel. +39.0422.85.38.38 Fax +39.0422.85.35.85 [email protected]-
 1
1
-
 2
2
-
 3
3
-
 4
4
-
 5
5
-
 6
6
-
 7
7
-
 8
8
-
 9
9
-
 10
10
-
 11
11
-
 12
12
-
 13
13
-
 14
14
-
 15
15
-
 16
16
-
 17
17
-
 18
18
-
 19
19
-
 20
20
-
 21
21
-
 22
22
-
 23
23
-
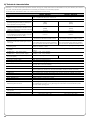 24
24
-
 25
25
-
 26
26
-
 27
27
-
 28
28
-
 29
29
-
 30
30
-
 31
31
-
 32
32
-
 33
33
-
 34
34
-
 35
35
-
 36
36
-
 37
37
-
 38
38
-
 39
39
-
 40
40
-
 41
41
-
 42
42
-
 43
43
-
 44
44
-
 45
45
-
 46
46
-
 47
47
-
 48
48
-
 49
49
-
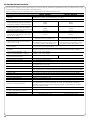 50
50
-
 51
51
-
 52
52
-
 53
53
-
 54
54
-
 55
55
-
 56
56
-
 57
57
-
 58
58
-
 59
59
-
 60
60
-
 61
61
-
 62
62
-
 63
63
-
 64
64
-
 65
65
-
 66
66
-
 67
67
-
 68
68
-
 69
69
-
 70
70
-
 71
71
-
 72
72
-
 73
73
-
 74
74
-
 75
75
-
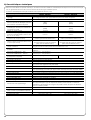 76
76
-
 77
77
-
 78
78
-
 79
79
-
 80
80
-
 81
81
-
 82
82
-
 83
83
-
 84
84
-
 85
85
-
 86
86
-
 87
87
-
 88
88
-
 89
89
-
 90
90
-
 91
91
-
 92
92
-
 93
93
-
 94
94
-
 95
95
-
 96
96
-
 97
97
-
 98
98
-
 99
99
-
 100
100
-
 101
101
-
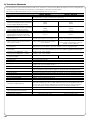 102
102
-
 103
103
-
 104
104
-
 105
105
-
 106
106
-
 107
107
-
 108
108
-
 109
109
-
 110
110
-
 111
111
-
 112
112
-
 113
113
-
 114
114
-
 115
115
-
 116
116
-
 117
117
-
 118
118
-
 119
119
-
 120
120
-
 121
121
-
 122
122
-
 123
123
-
 124
124
-
 125
125
-
 126
126
-
 127
127
-
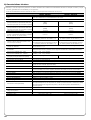 128
128
-
 129
129
-
 130
130
-
 131
131
-
 132
132
-
 133
133
-
 134
134
-
 135
135
-
 136
136
-
 137
137
-
 138
138
-
 139
139
-
 140
140
-
 141
141
-
 142
142
-
 143
143
-
 144
144
-
 145
145
-
 146
146
-
 147
147
-
 148
148
-
 149
149
-
 150
150
-
 151
151
-
 152
152
-
 153
153
-
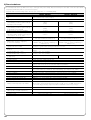 154
154
-
 155
155
-
 156
156
-
 157
157
-
 158
158
-
 159
159
-
 160
160
-
 161
161
-
 162
162
-
 163
163
-
 164
164
-
 165
165
-
 166
166
-
 167
167
-
 168
168
-
 169
169
-
 170
170
-
 171
171
-
 172
172
-
 173
173
-
 174
174
-
 175
175
-
 176
176
-
 177
177
-
 178
178
-
 179
179
-
 180
180
-
 181
181
-
 182
182
-
 183
183
-
 184
184
























































































































































































Nice Robus 1000 Instructions And Warnings
- Tipo
- Instructions And Warnings
- Este manual también es adecuado para
en otros idiomas
- français: Nice Robus 1000
- italiano: Nice Robus 1000
- English: Nice Robus 1000
- Deutsch: Nice Robus 1000
- Nederlands: Nice Robus 1000
- polski: Nice Robus 1000
Artículos relacionados
Otros documentos
-
Nice Automation Robus and Robuskit El manual del propietario
-
-
-
-
-
-
-
-
-