Schneider Electric Modicon M241 El manual del propietario
- Tipo
- El manual del propietario

EIO0000004270.04
www.se.com
SQL Gateway
EIO0000002417 04/2020
Modicon M241
Logic Controller
Guía del usuario
05/2023

EIO0000004270.04 05/20232
Tabla de materias
1 Modicon M241 Logic Controller - Guía de programación. . . . . Parte I
2 Modicon M241 Logic Controller - Funciones y variables
del sistema - Guía de la biblioteca PLCSystem. . . . . . . . . . . . . . Parte II
3 Modicon M241 Logic Controller - Contador de alta velocidad
Guía de la biblioteca HSC. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Parte III
4 Modicon M241 Logic Controller - PTOPWM
Guía de la biblioteca. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Parte IV
5 Modicon M241 Logic Controller - Guía de hardware. . . . . . . . . . Parte V
6 Modicon TMC4 - Cartuchos - Guía de programación. . . . . . . . . . Parte VI
7 Modicon TMC4 - Cartuchos - Guía de hardware. . . . . . . . . . . . . . Parte VII

Modicon M241
Logic Controller
Guía de programación
EIO0000003062.06
11/2022
www.se.com

Información legal
La marca Schneider Electric y cualquier otra marca comercial de Schneider Electric
SE y sus filiales mencionadas en esta guía son propiedad de Schneider Electric SE o
sus filiales. Todas las otras marcas pueden ser marcas comerciales de sus
respectivos propietarios. Esta guía y su contenido están protegidos por las leyes de
copyright aplicables, y se proporcionan exclusivamente a título informativo. Ninguna
parte de este manual puede ser reproducida o transmitida de cualquier forma o por
cualquier medio (electrónico, mecánico, fotocopia, grabación u otro), para ningún
propósito, sin el permiso previo por escrito de Schneider Electric.
Schneider Electric no concede ningún derecho o licencia para el uso comercial de la
guía o su contenido, excepto por una licencia no exclusiva y personal para
consultarla "tal cual".
La instalación, utilización, mantenimiento y reparación de los productos y equipos de
Schneider Electric la debe realizar solo personal cualificado.
Debido a la evolución de las normativas, especificaciones y diseños con el tiempo, la
información contenida en esta guía puede estar sujeta a cambios sin previo aviso.
En la medida permitida por la ley aplicable, Schneider Electric y sus filiales no
asumen ninguna responsabilidad u obligación por cualquier error u omisión en el
contenido informativo de este material o por las consecuencias derivadas o
resultantes del uso de la información contenida en el presente documento.
Como parte de un grupo de empresas responsables e inclusivas, estamos
actualizando nuestras comunicaciones que contienen terminología no inclusiva. Sin
embargo, hasta que completemos este proceso, es posible que nuestro contenido
todavía contenga términos estandarizados del sector que pueden ser considerados
inapropiados para nuestros clientes.
© 2022 - Schneider Electric. Todos los derechos reservados.

Tabla de contenido
Información de seguridad............................................................................7
Acerca de este libro ....................................................................................8
Acerca del Modicon M241 Logic Controller .................................................13
Descripción de M241 Logic Controller ..................................................13
Cómo configurar el controlador..................................................................18
Cómo configurar el controlador ............................................................18
Bibliotecas ...............................................................................................20
Bibliotecas .........................................................................................20
Tipos de datos estándar compatibles .........................................................21
Tipos de datos estándar compatibles....................................................21
Asignación de memoria.............................................................................22
Organización de la memoria del controlador .........................................22
Organización de la memoria RAM ........................................................23
Organización de la memoria no volátil ..................................................25
Tabla de reubicación ...........................................................................28
Tareas .....................................................................................................31
Cantidad máxima de tareas .................................................................31
Pantalla Configuración de tareas..........................................................31
Tipos de tareas...................................................................................33
Watchdogs de tareas y del sistema ......................................................35
Prioridad de tareas..............................................................................36
Configuración de tareas predeterminadas.............................................38
Estados y comportamientos del controlador................................................39
Diagrama de estado del controlador .....................................................39
Descripción de los estados del controlador ...........................................43
Transiciones de estados y eventos del sistema .....................................47
Estados del controlador y comportamiento de salida........................47
Comandos de transiciones de estado .............................................49
Detección, tipos y gestión de errores ..............................................58
Variables remanentes....................................................................58
Editor de dispositivos de controlador..........................................................60
Parámetros del controlador..................................................................60
Configuración de comunicación ...........................................................62
Ajustes PLC .......................................................................................63
Servicios ............................................................................................64
Servicios Ethernet...............................................................................65
Derechos de usuario...........................................................................66
Configuración de entradas y salidas incrustadas.........................................76
Configuración de E/S incrustadas ........................................................76
Configuración de funciones expertas .........................................................81
Descripción general de las funciones expertas......................................81
Función de recuento ...........................................................................83
Función integrada de generadores de pulsos........................................85
Configuración de cartuchos.......................................................................87
Configuración de cartuchos TMC4 .......................................................87
Configuración de módulos de extensión .....................................................88
Configuración del módulo de extensión TM4/TM3/TM2..........................88
Descripción general de la configuración de E/S de TM3.........................89
EIO0000003062.06 3

Configuración del bus de E/S TM3 .......................................................93
Módulos de extensión de E/S opcionales..............................................94
Configuración Ethernet .............................................................................97
Características, funciones y servicios Ethernet......................................97
Presentación ................................................................................97
Configuración de dirección IP.........................................................98
Cliente/servidor Modbus TCP.......................................................102
Servidor web...............................................................................103
Servidor FTP .............................................................................. 114
Cliente FTP ................................................................................ 116
SNMP ........................................................................................ 116
Controlador como dispositivo de destino en EtherNet/IP ................ 117
Controlador como dispositivo esclavo en Modbus TCP .................. 137
Cambio del puerto de Modbus TCP .............................................. 141
Configuración del cortafuegos ........................................................... 142
Introducción................................................................................142
Procedimiento de cambios dinámicos ........................................... 144
Comportamiento del cortafuegos..................................................144
Comandos de script del cortafuegos.............................................146
Administrador de Ethernet industrial......................................................... 150
Ethernet industrial.............................................................................150
Servidor DHCP.................................................................................154
Sustitución rápida de dispositivo ........................................................155
Configuración de línea serie .................................................................... 156
Configuración de línea serie ..............................................................156
Administrador de red de Machine Expert ............................................157
Gestor Modbus.................................................................................158
Gestor ASCII ....................................................................................161
IOScanner serie Modbus...................................................................163
Adición de un dispositivo en el IOScanner serie Modbus...................... 165
ControlChannel: Habilita o deshabilita un canal de
comunicación ...................................................................................170
Cómo añadir un módem a un administrador........................................ 171
Configuración de CANopen.....................................................................172
Configuración de la interfaz CANopen ................................................ 172
Configuración J1939...............................................................................175
Configuración de la interfaz J1939 .....................................................175
Configuración del servidor OPC UA ......................................................... 179
Visión General del servidor OPC UA .................................................. 179
Configuración del servidor OPC UA....................................................180
Configuración de símbolos del servidor OPC UA ................................ 182
Rendimiento del servidor OPC UA ..................................................... 184
Configuración de Post.............................................................................187
Presentación de la configuración de Post ........................................... 187
Administración de archivos de configuración de Post...........................188
Ejemplo de configuración de Post ...................................................... 190
Conexión de un Modicon M241 Logic Controller a un PC........................... 192
Conexión del controlador a un PC ...................................................... 192
Tarjeta SD..............................................................................................195
Archivos de script .............................................................................195
Comandos de la tarjeta SD................................................................195
4 EIO0000003062.06

Gestión del firmware...............................................................................202
Actualización del firmware de Modicon M241 Logic Controller..............202
Actualización del firmware de los módulos de extensión TM3...............204
Compatibilidad .......................................................................................208
Compatibilidad del software y el firmware ...........................................208
Apéndices ................................................................................................209
Cambio de la dirección IP del controlador.................................................210
changeIPAddress: cambiar la dirección IP del controlador.................... 210
Funciones para obtener/establecer la configuración de líneas serie en el
programa de usuario...............................................................................212
GetSerialConf: obtención de la configuración de línea serie .................212
SetSerialConf: cambio de la configuración de línea serie .....................213
SERIAL_CONF: estructura del tipo de datos de la configuración de
línea serie ........................................................................................215
Rendimiento del controlador....................................................................216
Rendimiento del procesamiento.........................................................216
Glosario ....................................................................................................217
Índice ........................................................................................................228
EIO0000003062.06 5


Información de seguridad
Información de seguridad
Información importante
Lea atentamente estas instrucciones y observe el equipo para familiarizarse con
el dispositivo antes de instalarlo, utilizarlo, revisarlo o realizar su mantenimiento.
Los mensajes especiales que se ofrecen a continuación pueden aparecer a lo
largo de la documentación o en el equipo para advertir de peligros potenciales, o
para ofrecer información que aclara o simplifica los distintos procedimientos.
Tenga en cuenta
La instalación, manejo, puesta en servicio y mantenimiento de equipos eléctricos
deberán ser realizados sólo por personal cualificado. Schneider Electric no se
hace responsable de ninguna de las consecuencias del uso de este material.
Una persona cualificada es aquella que cuenta con capacidad y conocimientos
relativos a la construcción, el funcionamiento y la instalación de equipos
eléctricos, y que ha sido formada en materia de seguridad para reconocer y evitar
los riesgos que conllevan tales equipos.
La inclusión de este icono en una etiqueta “Peligro” o “Advertencia” indica que existe
un riesgo de descarga eléctrica, que puede provocar lesiones si no se siguen las
instrucciones.
Éste es el icono de alerta de seguridad. Se utiliza para advertir de posibles riesgos
de lesiones. Observe todos los mensajes que siguen a este icono para evitar
posibles lesiones o incluso la muerte.
PELIGRO indica una situación de peligro que, si no se evita, provocará lesiones graves o
incluso la muerte.
!PELIGRO
ADVERTENCIA indica una situación de peligro que, si no se evita, podría provocar lesiones
graves o incluso la muerte.
ADVERTENCIA
!
ATENCIÓN indica una situación peligrosa que, si no se evita, podría provocar lesiones leves
o moderadas.
ATENCIÓN
!
AVISO indica una situación potencialmente peligrosa que, si no se evita, puede provocar
daños en el equipo.
AVISO
EIO0000003062.06 7

Acerca de este libro
Acerca de este libro
Alcance del documento
El objetivo de este documento es ayudarle a programar y manejar su Modicon
M241 Logic Controller con el software EcoStruxure Machine Expert.
NOTA: Lea detenidamente este documento y todos los documentos
relacionados, página 8 antes de instalar, utilizar o realizar el mantenimiento
de Modicon M241 Logic Controller.
Los usuarios de Modicon M241 Logic Controller deben leer todo el documento
para comprender sus características.
Campo de aplicación
Este documento se ha actualizado para la publicación de EcoStruxureTM Machine
Expert V2.1.
Las características técnicas de los dispositivos que se describen en este
documento también se encuentran online. Si desea consultar la información
online, visite la página de inicio de Schneider Electric www.se.com.
Las características que se indican en este manual deben coincidir con las que
figuran online. De acuerdo con nuestra política de mejoras continuas, es posible
que a lo largo del tiempo revisemos el contenido con el fin de elaborar
documentos más claros y precisos. En caso de que detecte alguna diferencia
entre el manual y la información online, utilice esta última para su referencia.
Documentos relacionados
Título de la documentación Número de referencia
EcoStruxure Machine Expert - Guía de
programación EIO0000002854 (ENG)
EIO0000002855 (FRE)
EIO0000002856 (GER)
EIO0000002858 (SPA)
EIO0000002857 (ITA)
EIO0000002859 (CHS)
Modicon M241 Logic Controller - Guía de
hardware EIO0000003083 (ENG)
EIO0000003084 (FRE)
EIO0000003085 (GER)
EIO0000003086 (SPA)
EIO0000003087 (ITA)
EIO0000003088 (CHS)
Modicon TM2 - Configuración de módulos de
ampliación - Guía de programación EIO0000003432 (ENG)
EIO0000003433 (FRE)
EIO0000003434 (GER)
EIO0000003435 (SPA)
EIO0000003436 (ITA)
EIO0000003437 (CHS)
8 EIO0000003062.06

Acerca de este libro
Título de la documentación Número de referencia
Modicon TM3 - Configuración de los módulos de
ampliación, Guía de programación EIO0000003119 (ENG)
EIO0000003120 (FRE)
EIO0000003121 (GER)
EIO0000003122 (SPA)
EIO0000003123 (ITA)
EIO0000003124 (CHS)
Acoplador de bus Modicon TM3 - Guía de
programación (EcoStruxure Machine Expert) EIO0000003635 (ENG)
EIO0000003636 (FRA)
EIO0000003637 (GER)
EIO0000003638 (SPA)
EIO0000003639 (ITA)
EIO0000003640 (CHS)
Modicon TM4 - Módulos de ampliación - Guía
de programación EIO0000003149 (ENG)
EIO0000003150 (FRE)
EIO0000003151 (GER)
EIO0000003152 (SPA)
EIO0000003153 (ITA)
EIO0000003154 (CHS)
Modicon TMC4 Cartuchos - Guía de
programación EIO0000003107 (ENG)
EIO0000003108 (FRE)
EIO0000003109 (GER)
EIO0000003110 (SPA)
EIO0000003111 (ITA)
EIO0000003112 (CHS)
Modicon M241 Logic Controller- Guía de la
biblioteca PLCSystem EIO0000003065 (ENG)
EIO0000003066 (FRE)
EIO0000003067 (GER)
EIO0000003068 (SPA)
EIO0000003069 (ITA)
EIO0000003070 (CHS)
Modicon M241 Logic Controller - Guía de la
biblioteca HSC EIO0000003071 (ENG)
EIO0000003072 (FRE)
EIO0000003073 (GER)
EIO0000003074 (SPA)
EIO0000003075 (ITA)
EIO0000003076 (CHS)
EIO0000003062.06 9

Acerca de este libro
Título de la documentación Número de referencia
Modicon TM3 Módulos de E/S expertas - Guía
de la biblioteca HSC EIO0000003683 (ENG)
EIO0000003684 (FRE)
EIO0000003685 (GER)
EIO0000003686 (SPA)
EIO0000003687 (ITA)
EIO0000003688 (CHS)
EIO0000003689 (POR)
EIO0000003690 (TUR)
Modicon M241 Logic Controller - Guía de la
biblioteca PTO/PWM EIO0000003077 (ENG)
EIO0000003078 (FRE)
EIO0000003079 (GER)
EIO0000003080 (SPA)
EIO0000003081 (ITA)
EIO0000003082 (CHS)
EcoStruxure Machine Expert - Guía de la
biblioteca FtpRemoteFileHandling EIO0000002779 (ENG)
EIO0000002780 (FRE)
EIO0000002781 (GER)
EIO0000002783 (SPA)
EIO0000002782 (ITA)
EIO0000002784 (CHS)
EcoStruxure Machine Expert - Guía de la
biblioteca SnmpManager EIO0000002797 (ENG)
EIO0000002798 (FRE)
EIO0000002799 (GER)
EIO0000002801 (SPA)
EIO0000002800 (ITA)
EIO0000002802 (CHS)
EcoStruxure Machine Expert - Gestionar el
intervalo de una tarea cíclica - Guía de la
biblioteca Toolbox_Advance
EIO0000000946 (ENG)
EIO0000000947 (FRE)
EIO0000000948 (GER)
EIO0000000950 (SPA)
EIO0000000949 (ITA)
EIO0000000951 (CHS)
EcoStruxure Machine Expert - Funciones de
módem - Guía de la biblioteca de módems EIO0000000552 (ENG)
Puede descargar estas publicaciones técnicas así como otra información técnica
de nuestro sitio web www.se.com/ww/en/download/.
10 EIO0000003062.06

Acerca de este libro
Información relacionada con el producto
ADVERTENCIA
PÉRDIDA DE CONTROL
• El diseñador del esquema de control debe tener en cuenta las posibles
modalidades de fallo de rutas de control y, para ciertas funciones de control
críticas, proporcionar los medios para lograr un estado seguro durante y
después de un fallo de ruta. Algunas funciones de control críticas son, por
ejemplo, la parada de emergencia y la parada de sobrecarrera, un corte de
alimentación o un reinicio.
• Para las funciones críticas de control deben proporcionarse rutas de control
separadas o redundantes.
• Las rutas de control del sistema pueden incluir enlaces de comunicación.
Deben tenerse en cuenta las implicaciones de retardos de transmisión
imprevistos o fallos del enlace.
• Tenga en cuenta todas las reglamentaciones para la prevención de
accidentes y las normativas de seguridad locales.1
• Cada instalación de este equipo debe probarse de forma individual y
exhaustiva antes de entrar en servicio.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
1Para obtener información adicional, consulte NEMA ICS 1.1 (última edición),
"Safety Guidelines for the Application, Installation, and Maintenance of Solid State
Control" (Directrices de seguridad para la aplicación, la instalación y el
mantenimiento del control de estado estático) y NEMA ICS 7.1 (última edición),
"Safety Standards for Construction and Guide for Selection, Installation and
Operation of Adjustable-Speed Drive Systems" (Estándares de seguridad para la
construcción y guía para la selección, instalación y utilización de sistemas de
unidades de velocidad ajustable) o su equivalente aplicable a la ubicación
específica.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
• Utilice solo software aprobado por Schneider Electric para este equipo.
• Actualice el programa de aplicación siempre que cambie la configuración de
hardware física.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Normas y términos utilizados
Los términos técnicos, símbolos y las descripciones correspondientes del
presente manual o que aparecen en la parte interior o exterior de los propios
productos se derivan, por lo general, de los términos y las definiciones de
estándares internacionales.
En el área de los sistemas de seguridad funcional, unidades y automatización
general se incluyen, pero sin limitarse a ellos, términos como seguridad,función
de seguridad,estado de seguridad,fallo,reinicio tras fallo,avería,funcionamiento
incorrecto,error,mensaje de error,peligroso, etc.
EIO0000003062.06 11

Acerca de este libro
Estos estándares incluyen, entre otros:
Norma Descripción
IEC 61131-2:2007 Controladores programables, parte 2: Requisitos y ensayos de los
equipos.
ISO 13849-1:2015 Seguridad de la maquinaria: componentes de los sistemas de control
relacionados con la seguridad.
Principios generales del diseño.
EN 61496-1:2013 Seguridad de las máquinas: equipos de protección electrosensibles.
Parte 1: pruebas y requisitos generales.
ISO 12100:2010 Seguridad de las máquinas. Principios generales para el diseño.
Evaluación del riesgo y reducción del riesgo
EN 60204-1:2006 Seguridad de las máquinas. Equipo eléctrico de las máquinas. Parte 1:
Requisitos generales
ISO 14119:2013 Seguridad de la maquinaria. Dispositivos de bloqueo asociados con
protecciones: principios de diseño y selección
ISO 13850:2015 Seguridad de la maquinaria. Parada de emergencia: principios de
diseño
IEC 62061:2015 Seguridad de la maquinaria. Seguridad funcional de los sistemas de
control programable de seguridad eléctrica y electrónica
IEC 61508-1:2010 Seguridad funcional de los sistemas eléctricos/electrónicos/electrónicos
programables relacionados con la seguridad: requisitos generales.
IEC 61508-2:2010 Seguridad funcional de los sistemas eléctricos/electrónicos/electrónicos
programables relacionados con la seguridad: requisitos para los
sistemas eléctricos/electrónicos/electrónicos programables
relacionados con la seguridad.
IEC 61508-3:2010 Seguridad funcional de los sistemas eléctricos/electrónicos/electrónicos
programables relacionados con la seguridad: requisitos de software.
IEC 61784-3:2016 Redes de comunicación industrial - Perfiles - Parte 3: Buses de campo
de seguridad funcionales - Reglas generales y definiciones de perfiles.
2006/42/EC Directiva de maquinaria
2014/30/EU Directiva de compatibilidad electromagnética
2014/35/EU Directiva de baja tensión
Además, los términos utilizados en este documento se pueden usar de manera
tangencial porque se obtienen de otros estándares como:
Norma Descripción
Serie IEC 60034 Máquinas eléctricas giratorias
Serie IEC 61800 Accionamientos eléctricos de potencia de velocidad variable
Serie IEC 61158 Comunicación digital de datos para la medición y control: bus de campo
para su uso en sistemas de control.
Por último, el término zona de funcionamiento se puede utilizar junto con la
descripción de peligros específicos, y se define como tal para una zona de peligro
ozona peligrosa en la Directiva de maquinaria (2006/42/EC) y ISO 12100:2010.
NOTA: Los estándares mencionados anteriormente podrían o no aplicarse a
los productos específicos citados en la presente documentación. Para
obtener más información en relación con los diferentes estándares aplicables
a los productos descritos en este documento, consulte las tablas de
características de las referencias de dichos productos.
12 EIO0000003062.06

Acerca del Modicon M241 Logic Controller
Acerca del Modicon M241 Logic Controller
Introducción
En este capítulo se facilita información sobre Modicon M241 Logic Controller y los
dispositivos que EcoStruxure Machine Expert puede configurar y programar.
Descripción de M241 Logic Controller
Descripción general
M241 Logic Controller tiene diferentes funciones potentes y puede servir para una
amplia gama de aplicaciones.
La configuración, la programación y la puesta en marcha del software se llevan a
cabo con el software EcoStruxure Machine Expert descrito con detalle en los
documentos EcoStruxure Machine Expert - Guía de programación y M241 Logic
Controller - Guía de programación, página 8.
Lenguajes de programación
El M241 Logic Controller se configura y programa con el software EcoStruxure
Machine Expert, que admite los siguientes lenguajes de programación IEC 61131-
3:
• IL: Lista de instrucciones
• ST: Texto estructurado
• FBD: Diagrama de bloques de funciones
• SFC: Diagrama funcional secuencial
• LD: Diagrama de contactos
El software EcoStruxure Machine Expert también se puede utilizar para
programar estos controladores utilizando el lenguaje CFC (Continuous Function
Chart).
Fuente de alimentación
La fuente de alimentación del M241 Logic Controller es de 24 V CC o 100-240 V
CA.
Reloj en tiempo real
El M241 Logic Controller incluye un sistema de reloj en tiempo real (RTC)
(consulte Modicon M241 Logic Controller - Guía de hardware).
EIO0000003062.06 13

Acerca del Modicon M241 Logic Controller
Run/Stop
El M241 Logic Controller puede utilizarse de la siguiente manera:
• Un conmutador Run/Stop del hardware.
• Una operación de Run/Stop mediante una entrada digital dedicada, definida
en la configuración del software. Para obtener más información, consulte
Configuración de las entradas digitales, página 76.
• Un comando de software de EcoStruxure Machine Expert.
Memoria
En esta tabla se describen los distintos tipos de memoria:
Tipo de memoria Tamaño Utilizada
RAM 64 Mbytes, de los cuales 8
Mbytes están disponibles para la
aplicación
Para ejecutar la aplicación.
No volátil 128 Mbytes Para guardar el programa y los datos en
caso de corte de electricidad.
Entradas/salidas incrustadas
En función de la referencia del controlador, están disponibles los siguientes tipos
de E/S incrustadas:
• Entradas normales
• Entradas rápidas asociadas con contadores
• Salidas transistorizadas normales (común negativo y positivo)
• Salidas transistorizadas rápidas (común negativo y positivo) asociadas con
generadores de pulsos
• Salidas de relé
Almacenamiento extraíble
Los M241 Logic Controller incluyen un slot de tarjetas SD integrado.
Los usos principales de la tarjeta SD son:
• Inicialización del controlador con una aplicación nueva
•Actualización del firmware del controlador y el módulo de extensión, página
202
•Aplicación de archivos de configuración de Post al controlador, página 187
• Almacenar archivos de fórmulas
• Recibir archivos de registro de datos
•Archivo de registro de datos de copia de seguridad, página 28
14 EIO0000003062.06

Acerca del Modicon M241 Logic Controller
Funciones de comunicación incorporadas
Están disponibles los siguientes tipos de puertos de comunicación, en función de
la referencia del controlador:
• Maestro CANopen
• Ethernet
• USB Mini-B
• Línea serie 1
• Línea serie 2
Compatibilidad de acoplador de bus y módulo de extensión
Consulte las tablas de compatibilidad de la EcoStruxure Machine Expert -
Compatibilidad y migración - Guía del usuario.
M241 Logic Controller
Referencia Entradas digitales Salidas digitales Puertos de
comunicaciones Tipo de terminal Fuente de
alimentación
TM241C24R 6 entradas normales
(1)
8 entradas rápidas
(contadores)(2)
6 salidas de relé de 2 A
4 salidas rápidas de
común negativo
(generadores de pulsos)
(3)
2 puertos de línea serie
1 puerto de
programación USB
Bloques de
terminales de
tornillos extraíbles
De 100 a 240 V
CA
TM241CE24R 6 entradas normales
(1)
8 entradas rápidas
(contadores)(2)
6 salidas de relé de 2 A
4 salidas rápidas de
común negativo
(generadores de pulsos)
(3)
2 puertos de línea serie
1 puerto de
programación USB
1 puerto Ethernet
Bloques de
terminales de
tornillos extraíbles
De 100 a 240 V
CA
TM241CEC24R 6 entradas normales
(1)
8 entradas rápidas
(contadores)(2)
6 salidas de relé de 2 A
4 salidas rápidas de
común negativo
(generadores de pulsos)
(3)
2 puertos de línea serie
1 puerto Ethernet
1 puerto maestro
CANopen
1 puerto de
programación USB
Bloques de
terminales de
tornillos extraíbles
De 100 a 240 V
CA
TM241C24T 6 entradas normales
(1)
8 entradas rápidas
(contadores)(2)
Salidas de común
positivo
6 salidas de transistor
normales
4 salidas rápidas
(generadores de pulsos)
(3)
2 puertos de línea serie
1 puerto de
programación USB
Bloques de
terminales de
tornillos extraíbles
24 V CC
TM241CE24T 6 entradas normales
(1)
8 entradas rápidas
(contadores)(2)
Salidas de común
positivo
6 salidas de transistor
normales
4 salidas rápidas
(generadores de pulsos)
(3)
2 puertos de línea serie
1 puerto de
programación USB
1 puerto Ethernet
Bloques de
terminales de
tornillos extraíbles
24 V CC
TM241CEC24T 6 entradas normales
(1)
8 entradas rápidas
(contadores)(2)
Salidas de común
positivo
6 salidas de transistor
normales
4 salidas rápidas
(generadores de pulsos)
(3)
2 puertos de línea serie
1 puerto de
programación USB
1 puerto Ethernet
1 puerto maestro
CANopen
Bloques de
terminales de
tornillos extraíbles
24 V CC
EIO0000003062.06 15

Acerca del Modicon M241 Logic Controller
Referencia Entradas digitales Salidas digitales Puertos de
comunicaciones Tipo de terminal Fuente de
alimentación
TM241C24U 6 entradas normales
(1)
8 entradas rápidas
(contadores)(2)
Salidas de común
negativo
6 salidas de transistor
normales
4 salidas rápidas
(generadores de pulsos)
(3)
2 puertos de línea serie
1 puerto de
programación USB
Bloques de
terminales de
tornillos extraíbles
24 V CC
TM241CE24U 6 entradas normales
(1)
8 entradas rápidas
(contadores)(2)
Salidas de común
negativo
6 salidas de transistor
normales
4 salidas rápidas
(generadores de pulsos)
(3)
2 puertos de línea serie
1 puerto de
programación USB
1 puerto Ethernet
Bloques de
terminales de
tornillos extraíbles
24 V CC
TM241CEC24U 6 entradas normales
(1)
8 entradas rápidas
(contadores)(2)
Salidas de común
negativo
6 salidas de transistor
normales
4 salidas rápidas
(generadores de pulsos)
(3)
2 puertos de línea serie
1 puerto de
programación USB
1 puerto Ethernet
1 puerto maestro
CANopen
Bloques de
terminales de
tornillos extraíbles
24 V CC
TM241C40R 16 entradas
normales(1)
8 entradas rápidas
(contadores)(2)
12 salidas de relé de 2 A
4 salidas rápidas de
común negativo
(generadores de pulsos)
(3)
2 puertos de línea serie
1 puerto de
programación USB
Bloques de
terminales de
tornillos extraíbles
De 100 a 240 V
CA
TM241CE40R 16 entradas
normales(1)
8 entradas rápidas
(contadores)(2)
12 salidas de relé de 2 A
4 salidas rápidas de
común negativo
(generadores de pulsos)
(3)
2 puertos de línea serie
1 puerto de
programación USB
1 puerto Ethernet
Bloques de
terminales de
tornillos extraíbles
De 100 a 240 V
CA
TM241C40T 16 entradas
normales(1)
8 entradas rápidas
(contadores)(2)
Salidas de común
positivo
12 salidas de transistor
normales
4 salidas rápidas
(generadores de pulsos)
(3)
2 puertos de línea serie
1 puerto de
programación USB
Bloques de
terminales de
tornillos extraíbles
24 V CC
TM241CE40T 16 entradas
normales(1)
8 entradas rápidas
(contadores)(2)
Salidas de común
positivo
12 salidas de transistor
normales
4 salidas rápidas
(generadores de pulsos)
(3)
2 puertos de línea serie
1 puerto de
programación USB
1 puerto Ethernet
Bloques de
terminales de
tornillos extraíbles
24 V CC
TM241C40U 16 entradas
normales(1)
8 entradas rápidas
(contadores)(2)
Salidas de común
negativo
12 salidas de transistor
normales
4 salidas rápidas
(generadores de pulsos)
(3)
2 puertos de línea serie
1 puerto de
programación USB
Bloques de
terminales de
tornillos extraíbles
24 V CC
16 EIO0000003062.06

Acerca del Modicon M241 Logic Controller
Referencia Entradas digitales Salidas digitales Puertos de
comunicaciones Tipo de terminal Fuente de
alimentación
TM241CE40U 16 entradas
normales(1)
8 entradas rápidas
(contadores)(2)
Salidas de común
negativo
12 salidas de transistor
normales
4 salidas rápidas
(generadores de pulsos)
(3)
2 puertos de línea serie
1 puerto de
programación USB
1 puerto Ethernet
Bloques de
terminales de
tornillos extraíbles
24 V CC
1) Las entradas normales tienen una frecuencia máxima de 1 kHz.
2) Las entradas rápidas se pueden utilizar como entradas normales o como entradas rápidas para funciones de conteo o de evento.
3) Las salidas transistorizadas rápidas se pueden utilizar como salidas transistorizadas normales, como salidas Reflex para la función de
recuento (HSC) o como salidas transistorizadas rápidas para las funciones del generador de pulsos (FreqGen/PTO/PWM).
Contenido que se entrega
En la siguiente figura se muestra el contenido de la entrega de M241 Logic
Controller:
1Hoja de instrucciones de M241 Logic Controller
2M241 Logic Controller
3Batería de monofluoruro de carbono-litio, tipo Panasonic BR2032.
EIO0000003062.06 17

Cómo configurar el controlador
Cómo configurar el controlador
Introducción
En este capítulo se muestra la configuración predeterminada de un proyecto.
Cómo configurar el controlador
Introducción
Primero, cree un nuevo proyecto o abra un proyecto existente en el software
EcoStruxure Machine Expert.
Consulte EcoStruxure Machine Expert - Guía de programación para obtener
información sobre cómo:
• Añadir un controlador al proyecto.
• Añadir módulos de extensión al controlador.
• Reemplazar un controlador existente.
• Convertir un controlador en un dispositivo distinto, pero compatible.
Árbol de dispositivos
El Devices tree presenta una vista estructurada de la configuración de hardware.
Al añadir un controlador al proyecto, se añadirán una serie de nodos a Devices,
según las funciones que proporcione el controlador.
18 EIO0000003062.06

Cómo configurar el controlador
Elemento Se utiliza para configurar...
DI Entradas digitales incrustadas del controlador lógico
DQ Salidas digitales incrustadas del controlador lógico
Contadores Funciones de conteo incrustadas (HSC)
Pulse_Generators Funciones del generador de pulsos incrustados (PTO/PWM/FreqGen)
Cartridge_x Cartuchos insertados en el controlador lógico
IO_Bus Módulos de extensión conectados al controlador lógico
COM_Bus Bus de comunicaciones del controlador lógico
Ethernet_x Ethernet incrustada, línea serie o interfaces de comunicaciones
CANopen
NOTA: Ethernet y CANopen solo están disponibles en algunas
referencias.
Serial_Line_x
CAN_x
Árbol de aplicaciones.
El árbol de aplicaciones permite gestionar aplicaciones específicas del
proyecto, así como aplicaciones globales, POU y tareas.
Árbol de herramientas
El árbol de herramientas permite configurar la parte de HMI del proyecto y
administrar bibliotecas.
EIO0000003062.06 19

Bibliotecas
Bibliotecas
Introducción
En este capítulo se describen las bibliotecas predeterminadas de Modicon M241
Logic Controller.
Bibliotecas
Introducción
Las bibliotecas proporcionan funciones, bloques de funciones, tipos de datos y
variables globales que se pueden utilizar para desarrollar el proyecto.
El Administrador de bibliotecas de EcoStruxure Machine Expert proporciona
información sobre las bibliotecas incluidas en su proyecto y le permite instalar
bibliotecas nuevas. Para obtener más información sobre Library Manager,
consulte Funciones y bibliotecas - Guía del usuario.
Modicon M241 Logic Controller
Cuando se selecciona un Modicon M241 Logic Controller para la aplicación,
EcoStruxure Machine Expert carga de forma automática las bibliotecas
siguientes:
Nombre de biblioteca Descripción
IoStandard CmpIoMgr tipos de configuración, ConfigAccess, parámetros y funciones de ayuda: gestiona las E/
S en la aplicación.
Estándar Contiene las funciones y los bloques de funciones que se requieren conforme a IEC61131-3 como
POU estándar para un sistema de programación que cumpla la normativa IEC. Vincule las POU
estándar al proyecto (standard.library).
Util Monitores analógicos, conversiones a BCD, funciones de bit/byte, tipos de datos del controlador,
manipuladores de funciones, funciones matemáticas, señales.
PLCCommunication SysMem, Standard. Estas funciones facilitan la comunicación entre dispositivos específicos. La
mayoría de ellas están destinadas al intercambio de Modbus. Las funciones de comunicación se
procesan de forma asíncrona en relación con la tarea de aplicación que haya invocado la función.
Consulte EcoStruxure Machine Expert - Funciones de lectura/escritura Modbus y ASCII - Guía de la
biblioteca PLCCommunication.
PLCSystem de M241 Contiene funciones y variables para obtener información y enviar comandos al sistema del
controlador. Consulte Modicon M241 Logic Controller - Funciones y variables del sistema - Guía de
la biblioteca PLCSystem.
HSC de M241 Contiene bloques de funciones y variables para obtener información y enviar comandos a las
entradas/salidas rápidas de Modicon M241 Logic Controller. Estos bloques de funciones permiten
implementar funciones del HSC (High Speed Counting, Contador de alta velocidad) en las salidas/
entradas rápidas de Modicon M241 Logic Controller. Consulte Modicon M241 Logic Controller -
Contador de alta velocidad - Guía de la biblioteca HSC.
PTOPWM de M241 Contiene bloques de funciones y variables para obtener información y enviar comandos a las
entradas/salidas rápidas de Modicon M241 Logic Controller. Estos bloques de funciones permiten
implementar funciones del PTO (salida de tren de pulsos) y PWM (modulación de ancho de pulsos)
en las salidas rápidas de Modicon M241 Logic Controller. Consulte Modicon M241 Logic Controller -
Guía de la biblioteca PTOPWM.
Tabla de reubicación Permite organizar datos para optimizar intercambios entre el cliente Modbus y el controlador
agrupando datos no contiguos en una tabla de registros contiguos. Consulte la tabla de reubicación,
página 28.
20 EIO0000003062.06

Tipos de datos estándar compatibles
Tipos de datos estándar compatibles
Introducción
En este capítulo se presentan los distintos tipos de datos IEC compatibles con el
controlador.
Tipos de datos estándar compatibles
Tipos de datos estándar compatibles
El controlador admite los siguientes tipos de datos IEC:
Tipo de datos Límite inferior Límite superior Contenido de
información
BOOL FALSE TRUE 1 bits
BYTE 0 255 8 bits
WORD 0 65.535 16 bits
DWORD 0 4.294.967.295 32 bits
LWORD 0 264-1 64 bits
SINT -128 127 8 bits
USINT 0 255 8 bits
INT -32.768 32.767 16 bits
UINT 0 65.535 16 bits
DINT -2.147.483.648 2.147.483.647 32 bits
UDINT 0 4.294.967.295 32 bits
LINT -263 263-1 64 bits
ULINT 0 264-1 64 bits
REAL 1,175494351e-38 3,402823466e+38 32 bits
STRING 1 carácter –1 carácter = 1 byte
WSTRING 1 carácter –1 carácter = 1 palabra
TIME 0 4294967295 32 bits
Para obtener más información, en ARRAY,LTIME,DATE,TIME,DATE_AND_TIME
yTIME_OF_DAY, consulte EcoStruxure Machine Expert - Guía de programación.
EIO0000003062.06 21

Asignación de memoria
Asignación de memoria
Introducción
En este capítulo se describen las asignaciones y tamaños de memoria de las
distintas áreas de memoria de Modicon M241 Logic Controller. Estas áreas de
memoria se utilizan para almacenar lógicas de programas de usuario, datos y
bibliotecas de programación.
Organización de la memoria del controlador
Introducción
La memoria del controlador se compone de dos tipos de memoria física:
• La memoria no volátil, página 25 contiene archivos (aplicación, archivos de
configuración, etc.).
• La memoria Random Access Memory (RAM), página 23 se utiliza para la
ejecución de aplicaciones.
Transferencias de archivos en memoria
22 EIO0000003062.06

Asignación de memoria
Ele-
mento Estado del
controlador Eventos de
transferencia de
archivos
Conexión Descripción
1–Iniciado automáticamente
en Encendido y Reinicio Interno Los archivos se transfieren de la memoria no volátil
a la RAM.
El contenido de la memoria RAM se sobrescribe.
2 Todos los estados
excepto INVALID_OS
(1)
Iniciado por el usuario Puerto de
programación
Ethernet o USB
Los archivos pueden transferirse mediante:
•Servidor web, página 103
•Servidor FTP, página 114
•Asistente del controlador
• EcoStruxure Machine Expert
3 Todos los estados Se inicia
automáticamente con un
script (transferencia de
datos) o al apagar y
encender (clonación)
cuando se inserta una
tarjeta SD
tarjeta SD Carga/descarga con SD card(1).
1) Si el controlador se encuentra en el estado INVALID_OS, la única memoria a la que se puede acceder es la tarjeta SD y solo para
actualizaciones de firmware.
NOTA: La modificación de archivos en la memoria no volátil no afecta a una
aplicación en ejecución. Cualquier cambio en los archivos de la memoria no
volátil se tendrá en cuenta en el próximo reinicio.
Organización de la memoria RAM
Introducción
En esta sección se describe el tamaño de RAM (Random Access Memory) para
las distintas áreas de Modicon M241 Logic Controller.
Asignación de memoria
El tamaño de la RAM es de 64 MB.
La memoria RAM está formada por dos áreas:
• Memoria dedicada para aplicaciones
• Memoria del SO
En esta tabla se describe la memoria dedicada para aplicaciones:
Área Elemento Tamaño
Área del
sistema
192 Kbytes
Direcciones asignables del área del sistema
%MW0...%MW59999
128 Kbytes
Variables de sistema y diagnóstico, página 24
(%MW60000...%MW60199)
Solamente puede accederse a esta memoria a través de peticiones
de Modbus.
Las peticiones deben ser de solo lectura.
Área de memoria dinámica: tabla de reubicación de lectura, página
28
(%MW60200...%MW61999)
Solamente puede accederse a esta memoria a través de peticiones
de Modbus.
EIO0000003062.06 23

Asignación de memoria
Área Elemento Tamaño
Las peticiones deben ser de solo lectura.
Variables de sistema y diagnóstico, página 24
(%MW62000...%MW62199)
Solamente puede accederse a esta memoria a través de peticiones
de Modbus.
Las peticiones pueden ser de lectura o escritura.
Área de memoria dinámica: tabla de reubicación de escritura,
página 28
(%MW62200...%MW63999)
Solamente puede accederse a esta memoria a través de peticiones
de Modbus.
Las peticiones pueden ser de lectura o escritura.
%MW64000…%MW65535
reservado
Datos retenidos y persistentes, página 26 64 Kbytes
Área del
usuario
8 Mbytes
Símbolos Asignación
dinámica
Variables
Application
Bibliotecas
Variables de sistema y diagnóstico
Variables Descripción
PLC_R Estructura de las variables del sistema de solo lectura del
controlador.
PLC_W Estructura de las variables del sistema de lectura/escritura del
controlador.
ETH_R Estructura de las variables del sistema de solo lectura Ethernet.
ETH_W Estructura de las variables del sistema de lectura/escritura de
Ethernet.
PROFIBUS_R Estructura de las variables del sistema de solo lectura PROFIBUS
DP.
SERIAL_R Estructura de las variables del sistema de solo lectura de líneas
serie.
SERIAL_W Estructura de las variables del sistema de lectura/escritura de
líneas serie.
TM3_MODULE_R Estructura de las variables del sistema de solo lectura de los
módulos TM3.
Para obtener más información sobre las variables de sistema y diagnóstico,
consulte Modicon M241 Logic Controller - Funciones y variables de sistema -
Guía de la biblioteca PLCSystem.
24 EIO0000003062.06

Asignación de memoria
Direccionamiento de memoria
En esta tabla se describe el direccionamiento de memoria para los tamaños de
dirección de Double Word (%MD), Word (%MW), Byte (%MB) y Bit (%MX):
Palabras
dobles Palabras Bytes Bits
%MD0 %MW0 %MB0 %MX0.7 ... %MX0.0
%MB1 %MX1.7 ... %MX1.0
%MW1 %MB2 %MX2.7 ... %MX2.0
%MB3 %MX3.7 ... %MX3.0
%MD1 %MW2 %MB4 %MX4.7 ... %MX4.0
%MB5 %MX5.7 ... %MX5.0
%MW3 %MB6 %MX6.7 ... %MX6.0
%MB7 %MX7.7 ... %MX7.0
%MD2 %MW4 %MB8 %MX8.7 ... %MX8.0
... ... ... ...
... ... ... ... ...
... ... ... ...
Ejemplo de solapamiento de rangos de memorias:
%MD0 contiene %MB0 (...) %MB3, %MW0 contiene %MB0 y %MB1, %MW1
contiene %MB2 y %MB3.
NOTA: La comunicación Modbus es asíncrona en relación con la aplicación.
Organización de la memoria no volátil
Introducción
La memoria no volátil contiene el sistema de archivos que utiliza el controlador.
EIO0000003062.06 25

Asignación de memoria
Tipo de archivo
Modicon M241 Logic Controller gestiona los siguientes tipos de archivos:
Tipo Descripción
Aplicación de arranque Este archivo reside en la memoria no volátil y contiene el código binario compilado de la aplicación
ejecutable. Siempre que se reinicia el controlador, la aplicación ejecutable se extrae de la aplicación de
arranque y se copia en la RAM del controlador (1).
Origen de aplicación Archivo de origen que se puede cargar de la memoria- al equipo si el archivo de origen no está
disponible en el equipo (2).
Configuración de Post Archivo que contiene Ethernet, línea serie y parámetros de cortafuegos.
Los parámetros especificados en el archivo sobrescriben los parámetros de la aplicación ejecutable en
cada reinicio.
Registro De Datos Archivos en los que el controlador registra eventos tal como especifica la aplicación.
Página HTML Páginas HTML mostradas por el servidor web para el sitio web incrustado en el controlador.
Sistema operativo (SO) El firmware del controlador que se puede escribir en una memoria no volátil. El archivo de firmware se
aplica la próxima vez que se reinicia el controlador.
Variable retentiva Variables remanentes
Variable retentiva-persistente
(1): La creación de una aplicación de arranque es opcional en EcoStruxure Machine Expert, según las propiedades de la aplicación. La
opción predeterminada es crear la aplicación de arranque en la descarga. Al descargar una aplicación de EcoStruxure Machine Expert al
controlador, solo se transfiere la aplicación ejecutable binaria directamente a la RAM.
(2): EcoStruxure Machine Expert no admite la carga de la aplicación ejecutable ni la aplicación de arranque en un PC para su
modificación. Las modificaciones de programas deben realizarse en el origen de la aplicación. Al descargar su aplicación, tiene la opción
de almacenar el archivo de origen a una memoria no volátil.
Organización de archivos
En esta tabla se muestra la organización de archivos de la memoria no volátil:
Disco Directorio Archivo Contenido Tipo de datos
cargados/
descargados
/sys OS M241M251FW1v_XX.YY (1) Firmware del núcleo 1 Firmware
M241M251FW2v_XX.YY (1) Firmware del núcleo 2
Version.ini Archivo de control de versión de firmware
Web Index.htm Páginas HTML proporcionadas por el servidor
web para el sitio web incrustado en el
controlador.
Sitio web
Conf.htm –
/usr App Application.app Aplicación de arranque Aplicación
Application.crc –
Application.map –
Archive.prj (2) Origen de aplicación –
settings.conf (3) Configuración de OPC UA Configuración
OpcUASymbolConf.map (3) Configuración de símbolos de OPC UA Configuración
Cfg Machine.cfg (2) Archivo de configuración de Post, página 187 Configuración
CodesysLateConf.cfg (2) • Nombre de la aplicación que se iniciará
• Tabla de enrutamiento (red principal/
subred)
Configuración
26 EIO0000003062.06

Asignación de memoria
Disco Directorio Archivo Contenido Tipo de datos
cargados/
descargados
/usr Log UserDefinedLogName_1.log Todos los archivos *.log creados mediante las
funciones de registro de datos (consulte
EcoStruxure Machine Expert - Funciones de
registro de datos - Guía de la biblioteca
DataLogging). Debe especificar el número total
de archivos creados y los nombres y
contenidos de cada archivo de registro.
Archivo de registro
UserDefinedLogName_n.log –
Rcp Directorio principal de fórmula –
Syslog crashC1.txt(2)
crashC2.txt(2)
crashBoot.txt(2)
Este archivo contiene un registro de errores del
sistema detectados. Para uso por parte del
servicio de soporte técnico de Schneider
Electric.
Archivo de registro
PlcLog.txt (2) Este archivo contiene datos de eventos del
sistema que también están visibles online en
EcoStruxure Machine Expert, al mostrar la
ficha Registro del Editor de dispositivos de
controlador, página 60.
–
FwLog.txt Este archivo contiene un registro de eventos
del sistema del firmware. Para uso por parte
del servicio de soporte técnico de
Schneider Electric.
–
/usr Fdr/FDRS (4)
solo para
TM241CE•
Device1.prm Archivos de parámetros almacenados por el
dispositivo1 del cliente FDR FDR, página 155
/data – – Datos retenidos y persistentes –
/sd0 – – Tarjeta SD. Extraíble –
–Archivos del usuario – –
(1): v_XX.YY representa la versión
(2): si existe
(3): si se ha configurado OPC UA, página 180
(4): el directorio Fdr/FDRS está oculto
NOTA: Para obtener más información acerca de bibliotecas y bloques de
funciones disponibles, consulte Bibliotecas, página 20.
Reenvío de archivos
Cuando el sistema, el programa o una actividad determinada del usuario crea
tipos de archivos específicos, M241 Logic Controller examina la extensión del
archivo y mueve el archivo automáticamente a una carpeta correspondiente de la
memoria no volátil.
En la siguiente tabla se enumeran los tipos de archivos que se mueven de este
modo y la carpeta de destino de la memoria no volátil:
Extensiones de archivo Carpeta de memoria no volátil
*.app, *.ap_, *.err, *.crc, *.frc, *.prj /usr/App
*.cfg, *.cf_ /usr/Cfg
*.log /usr/Log
*.rcp, *.rsi /usr/Rcp
EIO0000003062.06 27

Asignación de memoria
Archivo de registro de datos de copia de seguridad
Los archivos de registro de datos aumentan hasta el punto de exceder el espacio
disponible en el sistema de archivos. Por consiguiente, debe desarrollar un
método para archivar los datos de registro periódicamente en una tarjeta SD.
Puede dividir los datos de registro en varios archivos, por ejemploLogMonth1,
LogMonth2, y usar el comando ExecuteScript (see Modicon M241 Logic
Controller, System Functions and Variables, PLCSystem Library Guide) para
copiar el primer archivo en una tarjeta SD. A continuación, puede eliminarlo del
sistema de archivos interno mientras el segundo archivo acumula datos. Si
permite que el archivo de registro de datos aumente y supere el límite de tamaño
de archivo, podría perder datos.
AVISO
PÉRDIDA DE DATOS DE APLICACIÓN
• Haga copias de seguridad de la tarjeta SD con regularidad.
• No quite la alimentación ni resetee el controlador y no inserte ni extraiga la
tarjeta SD mientras se está accediendo a la tarjeta.
Si no se siguen estas instrucciones, pueden producirse daños en el
equipo.
Tabla de reubicación
Introducción
La tabla de reubicación permite organizar datos para optimizar comunicaciones
entre el controlador y otro equipo agrupando datos no contiguos en una tabla de
registros contiguos, accesible a través de Modbus.
NOTA: Una tabla de reubicación se considera un objeto. Solo se puede
añadir un objeto de tabla de reubicación a un controlador.
Descripción de la tabla de reubicación
En esta tabla se describe la organización de la tabla de reubicación:
Registro Descripción
60200-61999 Área de memoria dinámica: tabla de reubicación de lectura
62200-63999 Área de memoria dinámica: tabla de reubicación de escritura
Para obtener más información, consulte Modicon M241 Logic Controller - Guía de
la biblioteca PLCSystem.
28 EIO0000003062.06

Asignación de memoria
Adición de una tabla de reubicación
En esta tabla se describe cómo agregar una tabla de reubicación al proyecto:
Paso Acción
1 En la ficha Aplicaciones, seleccione el nodo Aplicación.
2 Haga clic en el botón derecho del ratón.
3Haga clic en Objetos >Tabla de reubicación....
Resultado: aparece la ventana Agregar tabla de reubicación.
4 Haga clic en Añadir.
Resultado: se ha creado e inicializado la nueva tabla de reubicación.
NOTA: Como una tabla de reubicación es única para un controlador, su nombre es
Tabla de reubicación y no se puede cambiar.
Editor de tablas de reubicación
El editor de la tabla de reubicación permite organizar las variables en la tabla de
reubicación.
Para acceder al editor de tablas de reubicación, haga doble clic en el nodo Tabla
de reubicación de la ficha Árbol de herramientas:
EIO0000003062.06 29

Asignación de memoria
En esta imagen se describe el editor de tablas de reubicación:
Icono Elemento Descripción
Nuevo
elemento de
menú
Agrega un elemento a la lista de variables del sistema.
Uno atrás Baja el elemento seleccionado en la lista.
Uno adelante Sube el elemento seleccionado en la lista.
Eliminar
elemento Elimina los elementos seleccionados de la lista.
Copiar Copia los elementos seleccionados de la lista.
Pegar Pega los elementos copiados.
Borrar
elemento vacío Elimina todos los elementos de la lista cuya columna "Variable" está
vacía.
-ID Entero incremental automático (no editable).
-Variable Nombre o ruta completa de una variable (editable).
-Dirección La dirección del área del sistema donde se almacena la variable (no
se puede modificar).
-Longitud Longitud variable de palabra.
-Validez Indica si la variable especificada es válida (no se puede modificar).
NOTA: Si una variable no está definida después de las modificaciones del
programa, el contenido de la celda aparece en rojo, el valor de la celda
Validez relacionada es Falso, y la Dirección se establece en -1.
30 EIO0000003062.06

Tareas
Tareas
Introducción
El nodo Configuración de tareas de Dispositivos sirve para definir una o varias
tareas a fin de controlar la ejecución del programa de aplicaciones.
Los tipos de tareas disponibles son los siguientes:
• cíclico
• Ejecución libre
• Evento
• Evento externo
Este capítulo empieza con una explicación de estos tipos de tareas y proporciona
información relacionada con el número máximo de tareas, la configuración
predeterminada de tareas y la priorización de tareas. Además, en este capítulo se
presentan las funciones de watchdog del sistema y de tareas, y se explica su
relación con la ejecución de tareas.
Cantidad máxima de tareas
Cantidad máxima de tareas
La cantidad máxima de tareas que se puede definir en Modicon M241 Logic
Controller es:
• Número total de tareas = 19
• Tareas cíclicas = 5
• Tareas de ejecución libre = 1
• Tareas de evento = 8
• Tareas de evento externo = 16
Consideraciones especiales para la ejecución libre
Una tarea de ejecución libre, página 34 no tiene duración fija. En la modalidad de
ejecución libre, cada análisis de tareas empieza cuando se ha terminado el
anterior análisis y después de un período de procesamiento del sistema (30 % de
la duración total de la tarea de ejecución libre). Si el período de procesamiento del
sistema se reduce a menos del 15 % durante más de tres segundos por
interrupciones de otras tareas, se detecta un error del sistema. Para obtener más
información, consulte Watchdog del sistema, página 35.
NOTA: Debería evitar el uso de una tarea de ejecución libre en una aplicación
multitarea cuando se ejecutan algunas tareas con una prioridad alta y que
consumen mucho tiempo. Podría provocar un timeout del watchdog de la
tarea. No debe asignar CANopen a una tarea de ejecución libre. CANopen se
debe asignar a una tarea cíclica.
Pantalla Configuración de tareas
Descripción de la pantalla
Esta pantalla permite configurar las tareas. Haga doble clic en la tarea que desee
configurar en el árbol de aplicaciones para acceder a esta pantalla.
EIO0000003062.06 31

Tareas
Cada tarea de configuración tiene sus propios parámetros, que son
independientes de las otras tareas.
La ventana Configuración se compone de 4 partes:
En esta tabla se describen los campos que constituyen la pantalla
Configuración:
Nombre del
campo Definición
Prioridad Configure la prioridad de cada tarea con un número del 0 al 31 (0 es la prioridad más alta y 31 la más baja).
Solo puede haber una tarea en ejecución a la vez. La prioridad determina cuándo se ejecuta la tarea: una tarea de
mayor prioridad evita una tarea de menor prioridad.
NOTA: No asigne tareas con la misma prioridad. Si todavía hay otras tareas que intentan adelantarse a tareas
con la misma prioridad, el resultado podría ser indeterminado e impredecible. Para obtener información
importante, consulte Prioridades de tareas, página 36.
Tipo Hay disponibles estos tipos de tareas:
•Cíclica, página 33
•Evento, página 34
•Externo , página 35
•Ejecución libre, página 34
Watchdog Para configurar el watchdog, página 36, defina estos 2 parámetros:
•Hora: especifique el timeout antes de la ejecución del watchdog.
•Sensibilidad: define el número de vencimientos del temporizador del watchdog antes de que el controlador
detenga la ejecución del programa y entre en estado PARADA.
POU La lista de POU (consulte EcoStruxure Machine Expert - Guía de programación) (Programming Organization Units,
unidades de organización de programación) controladas por la tarea se define en la ventana de configuración de
tareas:
• Para agregar una POU vinculada a la tarea, use el comando Agregar llamada y seleccione la POU en el
editor Accesibilidad.
• Para eliminar una POU de la lista, utilice el comando Eliminar llamada.
• Para reemplazar la POU seleccionada de la lista por otra, utilice el comando Change Call.
• Las POU se ejecutan en el orden mostrado en la lista. Para mover las POU en la lista, seleccione una POU y
use el comando Mover hacia arriba oMover hacia abajo.
NOTA: Puede crear tantas POU como desee. Una aplicación con diversas POU pequeñas, en lugar de una
POU grande, puede mejorar el tiempo de actualización de las variables en modalidad en línea.
32 EIO0000003062.06

Tareas
Tipos de tareas
Introducción
En la siguiente sección se describen los diferentes tipos de tareas disponibles
para el programa junto con una descripción de las características del tipo de
tarea.
Cyclic Task
A una tarea cíclica se le asigna un tiempo de ciclo fijo con el ajuste de intervalo de
la sección Tipo de la subficha Configuración de esa tarea. Cada tipo de tarea
cíclica se ejecuta así:
1. Read Inputs: los estados de entrada física se escriben en las variables
de memoria de entrada %I y se ejecutan otras operaciones del sistema.
2. Task Processing: se procesa el código de usuario (POU, etc.) definido
en la tarea. Las variables de memoria de salida %Q se actualizan según
las instrucciones del programa de aplicación pero no se escriben todavía
en las salidas físicas durante esta operación.
3. Write Outputs: Las variables de memoria de salida %Q se modifican con
cualquier forzado de salida que se haya definido; sin embargo, la
escritura de las salidas físicas depende del tipo de salida y de las
instrucciones utilizadas.
Para obtener más información, sobre cómo definir la tarea de ciclo de
bus, consulte EcoStruxure Machine Expert - Guía de programación y
Configuración de PLC, página 63.
Para obtener más información, sobre el comportamiento de E/S, consulte
Descripción detallada de los estados del controlador, página 43.
4. Remaining Interval time: El firmware del controlador lleva a cabo el
procesamiento del sistema y otras tareas de prioridad inferior.
NOTA: Si define un periodo demasiado corto para una tarea cíclica, se
repetirá inmediatamente después de la escritura de las salidas y sin ejecutar
otras tareas de prioridad inferior o sin ningún procesamiento del sistema. Esto
afectará a la ejecución de todas las tareas y debido a que el controlador
excederá los límites de watchdog del sistema, se generará una excepción de
watchdog del sistema.
NOTA: Cuando el tiempo de ciclo de tarea se establece en un valor menor de
3 ms, la duración real de la tarea debe monitorizarse primero desde la
pantalla Supervisión de tareas durante la puesta en marcha para asegurarse
de que es considerablemente menor que el tiempo de ciclo de tarea
configurado. Si es mayor, no se podrá cumplir el ciclo de tarea sin provocar un
timeout del watchdog y una transición del controlador a un estado HALT. Para
evitar esta condición hasta cierto punto, cuando el tiempo de ciclo de tarea se
establece en un valor menor que 3 ms, se imponen límites reales de +1 ms en
el caso de que, en un ciclo determinado, el tiempo de ciclo calculado supere
ligeramente el tiempo de ciclo configurado.
EIO0000003062.06 33

Tareas
NOTA: Obtenga y defina el intervalo de una tarea cíclica por aplicación
mediante las funciones GetCurrentTaskCycle ySetCurrentTaskCycle.
Consulte EcoStruxure Machine Expert - Gestionar un intervalo de tareas
cíclicas - Guía de la biblioteca Toolbox_Advance para obtener más
información.
Freewheeling Task
Una tarea de ejecución libre no tiene duración fija. En la modalidad de ejecución
libre, cada análisis de tareas empieza cuando se ha terminado el anterior análisis
y después de un corto periodo de procesamiento del sistema. Cada tipo de tarea
de ejecución libre se ejecuta así:
1. Read Inputs: los estados de entrada física se escriben en las variables
de memoria de entrada %I y se ejecutan otras operaciones del sistema.
2. Task Processing: se procesa el código de usuario (POU, etc.) definido
en la tarea. Las variables de memoria de salida %Q se actualizan según
las instrucciones del programa de aplicación pero no se escriben todavía
en las salidas físicas durante esta operación.
3. Write Outputs: Las variables de memoria de salida %Q se modifican con
cualquier forzado de salida que se haya definido; sin embargo, la
escritura de las salidas físicas depende del tipo de salida y de las
instrucciones utilizadas.
Para obtener más información, sobre cómo definir la tarea de ciclo de
bus, consulte EcoStruxure Machine Expert - Guía de programación y
Configuración de PLC, página 63.
Para obtener más información, sobre el comportamiento de E/S, consulte
Descripción detallada de los estados del controlador, página 43.
4. System Processing: El firmware del controlador lleva a cabo el
procesamiento del sistema y otras tareas de prioridad inferior (por
ejemplo: gestión de HTTP, gestión de Ethernet, gestión de parámetros).
NOTA: Si desea definir el intervalo de tareas, consulte Tarea cíclica, página
33.
Tarea de eventos
Este tipo de tarea está controlada por eventos y se inicia mediante una variable
de programa. Se inicia en el flanco ascendente de la variable booleana asociada
al evento activado, salvo que se le adelante una tarea de mayor prioridad. En ese
caso, la tarea de eventos se iniciará según lo establecido en las asignaciones de
prioridad de tareas.
34 EIO0000003062.06

Tareas
Por ejemplo, si ha definido una variable denominada my_Var y quiere asignarla a
un evento, siga estos pasos:
Paso Acción
1 Haga doble clic en TAREA, en el árbol de aplicaciones.
2 Seleccione Evento en la lista Tipo de la ficha Configuración.
3
Haga clic en el botón Accesibilidad situado a la derecha del campo Evento.
Resultado: Aparecerá la ventana Input Assistant.
4 Navegue por el árbol del cuadro de diálogo Accesibilidad para buscar y asignar la variable
my_Var.
NOTA: Cuando la tarea de eventos se activa con excesiva frecuencia, el
controlador entrará en el estado HALT (excepción). La tasa máxima de
eventos aceptable es de 6 eventos por milisegundo. Si la tarea de eventos se
activa a una frecuencia mayor que esta, se registra el mensaje "ISR Count
Exceeded" en la página de registro de la aplicación.
Tarea External Event
Este tipo de tarea está controlada por eventos y se inicia mediante la detección de
un evento de hardware o un evento de función relacionado con el hardware. Se
inicia cuando se produce el evento, salvo que se le adelante una tarea de mayor
prioridad. En ese caso, la tarea Evento externo se iniciará como lo indiquen las
asignaciones de prioridad de tareas.
Por ejemplo, una tarea de evento externo podría estar asociada a un evento de
detención de HSC. Para asociar el evento HSC0_STOP a una tarea de evento
externo, selecciónelo en la lista desplegable Evento externo de la ficha
Configuración.
En función del controlador, hay hasta cuatro tipos de eventos que pueden
asociarse a una tarea de evento externo:
• Flanco ascendente en una entrada avanzada (DI0 aDI15)
• Umbrales de HSC
• Parada HSC
• CAN Sync
NOTA: La sincronización de CAN es un objeto de evento específico que
depende de la configuración del Administrador CANopen.
NOTA: La frecuencia máxima de eventos es de 6 por milisegundo. Si la tarea
de evento externo se activa a una frecuencia mayor que esta, el controlador
pasa al estado HALT (Excepción) y se registra un mensaje "ISR Count
Exceeded" en la página de registro de la aplicación.
Watchdogs de tareas y del sistema
Introducción
Se han implementado dos tipos de funciones watchdog para Modicon M241 Logic
Controller:
•Watchdogs del sistema: Estos watchdogs están definidos y gestionados por
el firmware del controlador. El usuario no puede configurarlos.
•Watchdogs de tareas: son watchdogs opcionales que puede definir para
cada tarea. Los administra el programa de aplicación y pueden configurarse
en EcoStruxure Machine Expert.
EIO0000003062.06 35

Tareas
Watchdogs del sistema
Se han definido tres watchdogs del sistema para Modicon M241 Logic Controller.
Se gestionan mediante el firmware del controlador y, por lo tanto, a veces se les
denomina watchdogs del hardware en la ayuda online de EcoStruxure Machine
Expert. Cuando uno de los watchdogs del sistema supera las condiciones de
umbral, se detecta un error.
Las condiciones de umbral de los tres watchdogs del sistema se definen así:
• Si todas las tareas requieren más del 85 % de los recursos del procesador
durante más de tres segundos, se detecta un error del sistema. El
controlador entra en estado HALT.
• Si el tiempo de ejecución total de las tareas con prioridades entre 0 y 24
alcanza el 100 % de los recursos del procesador durante más de 1 segundo,
se detecta un error de la aplicación. El controlador responde con un reinicio
automático en estado EMPTY.
• Si la tarea de prioridad más baja del sistema no se ejecuta durante un
intervalo de 10 segundos, se detecta un error del sistema. El controlador
responde con un reinicio automático en estado EMPTY.
NOTA: El usuario no puede configurar los watchdogs del sistema.
Watchdogs de tareas
EcoStruxure Machine Expert permite configurar un watchdog de tarea opcional
para cada tarea definida en el programa de aplicación. (Los watchdogs de tareas
a veces también reciben el nombre de watchdogs del software o temporizadores
de control en la ayuda online de EcoStruxure Machine Expert). Cuando uno de los
watchdogs de tareas definidos alcanza su condición de umbral, se detecta un
error de aplicación y el controlador entra en estado HALT (PARADA).
Cuando se define un watchdog de tarea, hay disponibles las opciones siguientes:
•Time: esta opción define el tiempo máximo de ejecución de una tarea.
Cuando una tarea tarda más tiempo del permitido, el controlador notificará
una excepción de watchdog de tareas.
•Sensitivity: el campo de sensibilidad define el número de excepciones de
watchdog de tareas que debe producirse antes de que el controlador detecte
un error de aplicación.
Para acceder a la configuración del watchdog de una tarea, haga doble clic en la
tarea del árbol de aplicaciones.
NOTA: Para obtener más información sobre watchdogs, consulte
EcoStruxure Machine Expert - Guía de programación.
Prioridad de tareas
Configuración de la prioridad de tareas
Se puede configurar la prioridad de cada tarea entre 0 y 31 (0 es la prioridad más
alta y 31 la más baja). Cada tarea debe tener una prioridad exclusiva. Asignar la
misma prioridad a más de una tarea conduce a errores de compilación.
36 EIO0000003062.06

Tareas
Sugerencias de prioridad de tareas
• Prioridad de 0 a 24: Tareas de controlador. Asigne estas prioridades a tareas
con un requisito de alta disponibilidad.
• Prioridad de 25 a 31: Tareas de fondo. Asigne estas prioridades a tareas con
un requisito de baja disponibilidad.
Prioridad de tareas de E/S incorporadas
Cuando se inicia un ciclo de tareas, puede interrumpir cualquier tarea con una
prioridad inferior (preferencia de tareas). La tarea interrumpida se reanudará
cuando haya acabado el ciclo de la tarea con prioridad superior.
NOTA: Si se utiliza la misma entrada en tareas distintas, la imagen de entrada
puede cambiar durante el ciclo de la tarea de prioridad inferior.
Para mejorar la probabilidad de un comportamiento de salida correcto durante
la multitarea, aparecerá un mensaje de error de compilación si se utilizan
salidas del mismo byte en tareas distintas.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Asigne sus entradas de modo que las tareas no alteren las imágenes de
entrada de forma imprevista.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
EIO0000003062.06 37

Tareas
Prioridad de tareas de módulos TM2/TM3 y E/S de CANopen
Puede seleccionar la tarea que impulsa el intercambio físico de TM3 y CANopen.
En Ajustes PLC, seleccione Tarea de ciclo de bus para definir la tarea del
intercambio. De manera predeterminada, la tarea se define en MAST. La
configuración de bus de E/S, página 93 puede anular esta definición en el
controlador.
Durante las fases de lectura y escritura, todas las E/S físicas se actualizan al
mismo tiempo. TM3/TM2 y los datos CANopen se copian a la imagen de E/S
virtual durante una fase de intercambios físicos, como se muestra en esta figura:
Las entradas se leen desde la tabla de imágenes de E/S al comienzo del ciclo de
tarea. Las salidas se escriben en la tabla de imágenes de E/S al final de la tarea.
NOTA: Las tareas de eventos no pueden impulsar el ciclo de bus de TM3/
TM2.
Configuración de tareas predeterminadas
Configuración de tareas predeterminadas
La tarea MAST se puede configurar en modalidad de ejecución libre o cíclica. La
tarea MAST se crea automáticamente de forma predeterminada en modalidad
cíclica. Su prioridad preestablecida es media (15), su intervalo de tiempo
preestablecido es de 20 ms y su servicio de watchdog de tareas se activa con un
tiempo de 100 ms y una sensibilidad de 1. Consulte Prioridad de tareas, página
36 para obtener más información acerca de los ajustes de prioridad. Consulte
Watchdogs de tareas, página 35 para obtener más información sobre watchdogs.
Diseñar un programa de aplicación eficiente es importante en sistemas que estén
alcanzando el número máximo de tareas. En esa aplicación, puede resultar difícil
mantener la utilización de los recursos por debajo del umbral del watchdog del
sistema. Si las reasignaciones de prioridades por sí solas no resultan suficientes
para permanecer por debajo del umbral, se puede establecer que algunas tareas
de prioridad menor usen menos recursos del sistema si se añade la función
SysTaskWaitSleep, contenida en la biblioteca SysTask, a esas tareas.
NOTA: No elimine ni modifique el nombre de la tarea MAST. De lo contrario,
EcoStruxure Machine Expert detectará un error cuando intente compilar la
aplicación y no podrá descargarla en el controlador.
38 EIO0000003062.06

Estados y comportamientos del controlador
Estados y comportamientos del controlador
Introducción
En este capítulo se proporciona información sobre los estados del controlador, las
transiciones de estado y los comportamientos en respuesta a los eventos del
sistema. Empieza con un detallado diagrama del estado del controlador y una
descripción de cada estado. Después se define la relación de los estados de
salida con los estados del controlador antes de explicar los comandos y eventos
que tienen como resultado las transiciones de estado. Concluye con información
sobre las variables remanentes y el efecto de las opciones de programación de
tareas de EcoStruxure Machine Expert en el comportamiento del sistema.
Diagrama de estado del controlador
Diagrama de estado del controlador
En este diagrama se describe la modalidad de funcionamiento del controlador:
EIO0000003062.06 39

Estados y comportamientos del controlador
Leyenda:
• Los estados del controlador se indican en LETRAS MAYÚSCULAS EN
NEGRITA
• Los comandos de usuario y de la aplicación se indican en negrita
• Los eventos del sistema se indican en cursiva
• Las decisiones, resultados de decisiones e información general se indican
con texto normal
(1) Para obtener información detallada sobre la transición del estado STOPPED a
RUNNING, consulte Comando Run, página 49.
(2) Para obtener información detallada sobre la transición del estado RUNNING a
STOPPED, consulte Comando Stop, página 50.
Nota 1
El apagado y encendido (interrumpir y reanudar la alimentación eléctrica) elimina
todas las configuraciones del forzado de salida. Para obtener más información,
consulte Estado y comportamiento de salida del controlador, página 47.
Nota 2
Las salidas asumirán sus valores de inicialización de hardware.
Nota 3
En algunos casos, cuando se detecta un error de sistema, esto hace que el
controlador se reinicie automáticamente pasando al estado EMPTY como si no
hubiera aplicación de inicio en la memoria no volátil. Sin embargo, la aplicación
de inicio no se ha eliminado de la memoria no volátil. En este caso, el indicador
LED ERR (rojo) parpadea regularmente.
Nota 4
Tras la verificación de una aplicación de arranque válida se producen los
siguientes eventos:
• La aplicación se carga en la memoria RAM.
• Se aplica la configuración del archivo Configuración de Post, página 187 (si
existe).
Durante la carga de la aplicación de inicio, se produce una prueba de
comprobación de contexto para verificar que las variables restantes son válidas.
Si la prueba de comprobación de contexto no es válida, la aplicación de arranque
se cargará, pero el controlador adoptará el estado STOPPED, página 54.
Nota 5a
La modalidad de inicio se establece en la ficha Ajustes PLC del Editor de
dispositivos del controlador, página 63 .
40 EIO0000003062.06

Estados y comportamientos del controlador
Nota 5b
Cuando se produce una interrupción de la alimentación, el controlador continúa
en el estado RUNNING durante al menos 4 ms antes de apagarse. Si ha
configurado y proporcionado alimentación a la entrada Ejecutar/Detener de la
misma fuente que el controlador, la pérdida de alimentación en esta entrada se
detectará inmediatamente y el controlador actuará como si hubiera recibido un
comando STOP. Así pues, si la alimentación del controlador y de la entrada Run/
Stop provienen de la misma fuente, después de una interrupción de la
alimentación el controlador se reiniciará de forma normal en el estado STOPPED
si la Modalidad de inicio se ha establecido en Inicio con el estado anterior.
Nota 6
Durante la descarga correcta de la aplicación, se producen los siguientes
eventos:
• La aplicación se carga directamente en RAM.
• De forma predeterminada, la aplicación de arranque se crea y almacena en
la memoria no volátil.
Nota 7
El comportamiento predeterminado tras descargar un programa de aplicación es
que el controlador entre en estado STOPPED, independientemente del ajuste de
la entrada Ejecutar/Detener, la posición del conmutador Run/Stop o en el último
estado en que se encontraba antes de la descarga.
EIO0000003062.06 41

Estados y comportamientos del controlador
No obstante, deben tenerse en cuenta dos consideraciones al respecto:
Cambio en línea Un cambio online (descarga parcial) iniciado mientras el controlador está en estado RUNNING hace que el
controlador vuelva al estado RUNNING siempre y cuando la descarga se realice correctamente y la entrada Ejecutar/
Detener esté configurada y establecida en Ejecutar o el interruptor Ejecutar/Detener esté establecido en Ejecutar.
Antes de utilizar la opción Iniciar sesión con modificación en línea, compruebe los cambios del programa de
aplicación en un entorno virtual o entorno sin producción y compruebe que el controlador y el equipo adjunto admiten
las condiciones esperadas en el estado RUNNING.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Verifique siempre que los cambios en línea en un programa de aplicación EN EJECUCIÓN
funcionan según lo esperado antes de descargarlos a los controladores.
Si no se siguen estas instrucciones, pueden producirse lesiones graves, muerte o
daños en el equipo.
NOTA: Los cambios en línea del programa no se escriben automáticamente en la aplicación de inicio y se
sobrescribirán por la aplicación de arranque existente en el próximo reinicio. Si desea que los cambios se
conserven durante el reinicio, actualice manualmente la aplicación de inicio seleccionando la opción Crear
aplicación de inicio en el menú online (el controlador debe estar en el estado STOPPED para poder realizar
esta operación).
Descarga
múltiple EcoStruxure Machine Expert dispone de una función que le permitirá realizar una descarga de la aplicación completa
en múltiples destinos de la red o bus de campo. Una de las opciones predeterminadas cuando se selecciona el
comando Descarga múltiple... es la opción Tras descarga o modificación online iniciar todas las aplicaciones,
que reinicia todos los destinos de la descarga en el estado RUNNING siempre y cuando sus respectivas entradas
Run/Stop estén ordenando al estado RUNNING, pero independientemente del último estado del controlador antes de
iniciarse la descarga múltiple. Deseleccione esta opción si no desea que los controladores de destino se reinicien en
el estado RUNNING. Además, antes de utilizar la opción Descarga múltiple, compruebe los cambios del programa
de aplicación en un entorno virtual o entorno sin producción y compruebe que los controladores de destino y el equipo
adjunto asumen las condiciones esperadas en el estado RUNNING.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Compruebe siempre que el programa de aplicación funciona según lo esperado en todos
los controladores de destino y equipos antes de ejecutar el comando "Descarga múltiple..."
con la opción "Tras descarga o modificación online iniciar todas las aplicaciones"
seleccionada.
Si no se siguen estas instrucciones, pueden producirse lesiones graves, muerte o
daños en el equipo.
NOTA: A diferencia de una descarga normal, durante una descarga múltiple, EcoStruxure Machine Expert no
ofrece la posibilidad de crear una aplicación de arranque. Puede crear una aplicación de arranque manualmente
en cualquier momento si selecciona Crear aplicación de inicio en el menú En línea de todos los controladores
de destino.
Nota 8
La plataforma de software EcoStruxure Machine Expert ofrece múltiples opciones
potentes para la gestión de la ejecución de tareas y las condiciones de salida
mientras el controlador está en los estados STOPPED o HALT. Para obtener más
información, consulte Descripción de los estados del controlador, página 43.
Nota 9
Para salir del estado HALT, es necesario ejecutar uno de los comandos Reset
(Reset caliente, Reset frío, Reset origen), descargar una aplicación o apagar y
encender el dispositivo.
En caso de evento no recuperable (watchdog de hardware o error interno), es
obligatorio apagar y encender.
42 EIO0000003062.06

Estados y comportamientos del controlador
Nota 10
El estado RUNNING tiene dos condiciones de excepción:
• RUNNING con error externo: esta condición de excepción se indica mediante
el indicador LED I/O de color rojo fijo. Podría abandonar este estado
eliminando el error externo (probablemente cambiando la configuración de la
aplicación). No se requiere ningún comando de controlador, pero puede ser
necesario apagar y volver a encender el controlador. Para obtener más
información, consulte Descripción general de la configuración de E/S, página
89.
• RUNNING con punto de interrupción: esta condición de excepción se indica
mediante el indicador LED RUN, que muestra un parpadeo simple. Para
obtener más información, consulte Descripción de los estados del
controlador, página 43.
Nota 11
La aplicación de inicio puede ser diferente de la aplicación cargada. Puede ocurrir
si la aplicación de inicio se descargó mediante tarjeta SD, FTP o transferencia de
archivos o si se realizó un cambio online sin crear la aplicación de inicio.
Descripción de los estados del controlador
Introducción
En esta sección se proporciona una descripción detallada de los estados del
controlador.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
• Nunca asuma que el controlador se encuentra en un determinado estado
antes de ordenar una modificación de estado, configurar las opciones del
controlador, cargar un programa o modificar la configuración física del
controlador y de su equipo conectado.
• Antes de llevar a cabo cualquiera de estas operaciones, tenga en cuenta el
efecto que éstas tendrán en todos los equipos conectados.
• Antes de actuar sobre un controlador, confirme siempre de forma positiva el
estado del controlador visualizando sus indicadores LED, confirmando la
condición de la entrada Run/Stop, comprobando la presencia del forzado de
salida y revisando la información del estado del controlador a través de
EcoStruxure Machine Expert.(1)
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
1) Los estados del controlador se pueden leer en la variable de sistema PLC_R.i_
wStatus de la biblioteca PLCSystem de M241 (consulte Modicon M241 Logic
Controller - Funciones y variables de sistema - Guía de la biblioteca PLCSystem)
EIO0000003062.06 43

Estados y comportamientos del controlador
Tabla de estados del controlador
En la tabla siguiente se describen los estados del controlador:
Estado del
controlador Descripción Indicador LED
RUN
(Verde)
ERR
(Rojo)
I/O (E/S)
(Rojo)
BOOTING El controlador ejecuta el firmware de arranque y sus propias comprobaciones
automáticas internas. A continuación, verifica la suma de comprobación del
firmware y las aplicaciones de usuario.
Apagado Apagado Encendi-
do
Apagado Encendi-
do Encendi-
do
Apagado Encendi-
do Apaga-
do
INVALID_OS No hay ningún archivo de firmware válido en la memoria no volátil. El controlador
no ejecuta la aplicación. Consulte la sección Gestión del firmware, página 202
para restaurar un estado correcto.
Apagado Parpa-
deo
regular
Apaga-
do
EMPTY El controlador no tiene ninguna aplicación. Apagado Parpa-
deo
simple
Apaga-
do
EMPTY tras
detectar un error
del sistema
Este estado es el mismo que el otro estado EMPTY. Sin embargo, la aplicación
está presente y no se carga intencionadamente. Un reinicio (apagar y encender),
o una nueva descarga de la aplicación, restaura el estado correcto.
Apagado Parpa-
deo
rápido
Apaga-
do
RUNNING El controlador está ejecutando una aplicación válida. Encendi-
do Apagado Apaga-
do
RUNNING con
punto de
interrupción
Este estado es el mismo que el estado RUNNING con las siguientes
excepciones:
• La parte de procesamiento de tareas del programa no se reanuda hasta
que se elimina el punto de interrupción.
• Los indicadores LED son diferentes.
Para obtener más información sobre la administración de los puntos de
interrupción, consulte EcoStruxure Machine Expert - Guía de programación.
Parpa-
deo
simple
Apagado Apaga-
do
RUNNING con un
error externo
detectado
El controlador está ejecutando una aplicación válida y se ha detectado un error
de configuración, TM3, tarjeta SD u otro error de E/S.
Cuando el indicador LED de E/S está activado, puede consultar los detalles
sobre el error detectado en PLC_R.i_lwSystemFault_1 yPLC_R.i_
lwSystemFault_2. Cualquiera de las condiciones de error detectadas notificadas
por estas variables activa el indicador LED de E/S.
Encendi-
do Apagado Encendi-
do
STOPPED El controlador tiene una aplicación válida que está detenida. Consulte los
detalles del STOPPED state, página 45 para obtener una explicación del
comportamiento de las salidas y de los buses de campo en este estado.
Parpa-
deo
regular
Apagado Apaga-
do
STOPPED con un
error externo
detectado
El controlador está ejecutando una aplicación válida y se ha detectado un error
de configuración, TM3, tarjeta SD u otro error de E/S. Parpa-
deo
regular
Apagado Encendi-
do
HALT El controlador deja de ejecutar la aplicación porque ha detectado un error de
aplicación.
Parpa-
deo
regular
Encendi-
do
–
Aplicación de
inicio no
guardada
El controlador tiene una aplicación en la memoria que no coincide con la de la
memoria no volátil. La próxima vez que se apague y se encienda, la aplicación se
cambiará por la de la memoria no volátil.
ENCEN-
DIDO o
parpa-
deo
regular
Parpa-
deo
simple
Apaga-
do
44 EIO0000003062.06

Estados y comportamientos del controlador
En el siguiente diagrama de tiempos se muestra la diferencia entre el parpadeo
rápido, el parpadeo normal y el parpadeo simple:
Detalles del estado STOPPED
Las afirmaciones siguientes son válidas para el estado STOPPED:
• La entrada configurada como entrada Run/Stop permanece operativa.
• La salida configurada como salida de Alarma permanece operativa y pasa a
tener un valor de 0.
• Los servicios de comunicaciones Ethernet, serie (Modbus, ASCII, etc.) y USB
siguen siendo operativos, y los comandos escritos por estos servicios
pueden seguir afectando a la aplicación, al estado del controlador y a las
variables de memoria.
• Inicialmente, todas las salidas aceptan su estado predeterminado
configurado (Mantener los valores oEstablecer todas las salidas a los
valores predeterminados) o el estado fijado por el forzado de salida, si se
utiliza. En la salida que utilizan las funciones PTO, se ignora el valor
predeterminado para no generar un pulso adicional. El estado posterior de
las salidas depende del valor de la configuración de Actualizar E/S en
parada y de los comandos recibidos de los dispositivos remotos.
EIO0000003062.06 45

Estados y comportamientos del controlador
Tarea y comportamiento de E/
S cuando la opción Actualizar
E/S en parada está
seleccionada
Cuando está seleccionado el ajuste Actualizar E/S en parada:
• La operación Leer entradas funciona con normalidad. Las entradas físicas se leen y
posteriormente se escriben en las variables de memoria de entrada %I.
• La operación de procesamiento de tareas no se ejecuta.
• La operación Escribir salidas continúa. Las variables de memoria de salida %Q se actualizan para
reflejar la configuración de Mantener los valores o la configuración de Establecer todas las
salidas a los valores predeterminados, se ajustan para cualquier forzado de salida y,
posteriormente, se escriben en las salidas físicas.
NOTA: Las funciones expertas dejan de funcionar. Por ejemplo, un contador se detendrá.
- Si se selecciona la configuración Mantener los valores:
Las salidas reflejas PTO, PWM, FreqGen (generador de frecuencias) y HSC se establecen
en 0.
- Si se la selecciona la configuración Establecer todas las salidas a los valores
predeterminados:
Las salidas PTO se establecen en 0.
Las salidas reflejas PWM, FreqGen (generador de frecuencias) y HSC se establecen en los
valores predeterminados configurados.
Comportamiento de CAN
cuando la opción Actualizar
E/S en parada está
seleccionada
Lo siguiente es válido para los buses CAN cuando se ha seleccionado el ajuste Actualizar E/S en
parada:
• El bus CAN sigue operativo. Los dispositivos del bus CAN continúan percibiendo la presencia de
un maestro CAN funcional.
• TPDO y RPDO continúan intercambiándose.
• Si se ha configurado el SDO opcional, continúa intercambiándose.
• Si se han configurado, las funciones Heartbeat y Vigilancia de nodo continúan funcionando.
• Si el campo Comportamiento de las salidas en parada está establecido en Mantener los
valores, los TPDO continúan emitiéndose con los últimos valores.
• Si el campo Comportamiento de las salidas en parada se encuentra en Establecer todas las
salidas a los valores predeterminados, los últimos valores se actualizarán a los valores
predeterminados y los TPDO posteriores se emitirán con estos valores predeterminados.
Tarea y comportamiento de E/
S cuando la opción Actualizar
E/S en parada no está
seleccionada
Cuando el ajuste Actualizar E/S en parada no está seleccionado, el controlador establece la E/S en la
condición Mantener los valores oEstablecer todas las salidas a los valores predeterminados
(según se haya ajustado para el forzado de salida, si se utiliza). Tras ello, los siguientes elementos son
verdaderos:
• La operación Leer entradas se detiene. Las variables de memoria de entrada %I se congelan en
sus últimos valores.
• La operación de procesamiento de tareas no se ejecuta.
• La operación Escribir salidas se detiene. Las variables de memoria de salida %Q pueden
actualizarse a través de las conexiones Ethernet, serie y USB. No obstante, las salidas físicas no
se ven afectadas y conservan el estado especificado por las opciones de configuración.
NOTA: Las funciones expertas dejan de funcionar. Por ejemplo, un contador se detendrá.
- Si se selecciona la configuración Mantener los valores:
Las salidas reflejas PTO, PWM, FreqGen (generador de frecuencias) y HSC se establecen
en 0.
- Si se la selecciona la configuración Establecer todas las salidas a los valores
predeterminados:
Las salidas PTO se establecen en 0.
Las salidas reflejas PWM, FreqGen (generador de frecuencias) y HSC se establecen en los
valores predeterminados configurados.
Comportamiento de CAN
cuando la opción Actualizar
E/S en parada no está
seleccionada
Lo siguiente resulta verdadero para los buses CAN cuando el ajuste Actualizar E/S en parada no está
seleccionado:
• El maestro CAN detiene las comunicaciones. Los dispositivos del bus CAN asumen los estados
de retorno configurados.
• Los intercambios de TPDO y RPDO se detienen.
• Los intercambios del SDO opcional se detienen, si se ha configurado.
• Si se han configurado, las opciones Heartbeat y Vigilancia de nodo se detienen.
• Los valores actuales o predeterminados se escriben en los TPDO y se envían una vez antes de
detener el maestro CAN, si corresponde.
46 EIO0000003062.06

Estados y comportamientos del controlador
Transiciones de estados y eventos del sistema
Descripción general
Esta sección empieza con una explicación de los posibles estados de salida del
controlador. Después, presenta los comandos del sistema utilizados para cambiar
entre los estados del controlador y los eventos del sistema que también pueden
afectar a estos estados. Concluye con un explicación de las variables remanentes
y de las circunstancias en las que se retienen distintas variables y tipos de datos
durante las transiciones de estados.
Estados del controlador y comportamiento de salida
Introducción
Modicon M241 Logic Controller define el comportamiento de salida en respuesta
a los comandos y eventos del sistema de un modo que permite una mayor
flexibilidad. Es necesario comprender este comportamiento antes de tratar los
comandos y eventos que afectan a los estados del controlador.
Los posibles comportamientos de salida y los estados del controlador a los que se
aplican son:
• Gestión a través de un programa de aplicación
•Mantener los valores
•Establecer todas las salidas a los valores predeterminados
•Valores de inicialización del hardware
•Valores de inicialización del software
•Forzado de salida
Gestión a través de un programa de aplicación
El programa de aplicación gestiona las salidas con normalidad. Esto se aplica a
los estados RUNNING y RUNNING con un error externo detectado.
NOTA: Una excepción a esta regla se produce cuando el estado RUNNING
con un error externo detectado ha sido provocado por un error de bus de
extensión de E/S. Para obtener más información, consulte Descripción
general de la configuración de E/S, página 89.
Mantener los valores
Seleccione esta opción eligiendo Editor de controladores > Ajustes PLC >
Comportamiento de las salidas en parada > Mantener los valores. Para
acceder al editor de controladores, haga clic con el botón derecho en el
controlador en el Devices tree y seleccione Modificar objeto.
Este comportamiento de salida se aplica en el estado del controlador STOPPED.
También se aplica al bus CAN en el estado de controlador HALT. Las salidas
permanecen en su estado, aunque los detalles del comportamiento de salida
varían considerablemente en función de la configuración de la opción Actualizar
E/S en parada y de las acciones indicadas a través de los buses de campo
configurados. Consulte Descripción de los estados del controlador, página 43
para obtener más información acerca de estas variaciones.
NOTA: El ajuste Mantener los valores no se aplica a las salidas reflejas
PTO, PWM, FreqGen (generador de frecuencias) y HSC. Estas salidas
siempre se establecen en 0 cuando el controlador pasa al estado STOPPED,
independientemente del ajuste Mantener los valores.
EIO0000003062.06 47

Estados y comportamientos del controlador
Establecer todas las salidas a los valores predeterminados
Seleccione esta opción eligiendo Editor de controladores > Ajustes PLC >
Comportamiento de las salidas en parada > Establecer todas las salidas a
los valores predeterminados. Para acceder al Editor de controladores, haga
clic con el botón derecho en el controlador en el Devices tree y seleccione
Modificar objeto.
Este comportamiento de salida se aplica:
• Cuando el controlador pasa del estado RUNNING al estado STOPPED.
• Si el controlador va a pasar del estado RUNNING al estado HALT.
• Después de la descarga de la aplicación.
• Después del comando de restablecimiento de caliente/frío.
• Después de un reinicio.
También se aplica al bus CAN en el estado de controlador HALT. Las salidas
permanecen en su estado, aunque los detalles del comportamiento de salida
varían considerablemente en función de la configuración de la opción Actualizar
E/S en parada y de las acciones indicadas a través de los buses de campo
configurados. Consulte Descripción de los estados del controlador, página 43
para obtener más información acerca de estas variaciones.
Las salidas impulsadas por funciones expertas PTO, PWM, FreqGen y HSC no
aplicarán el valor predeterminado.
Valores de inicialización del hardware
Este estado de salida se aplica en los estados BOOTING, EMPTY (después de
apagar y encender sin aplicación de inicio o después de detectar un error del
sistema) e INVALID_OS.
En el estado de inicialización, la salidas analógicas, de transistor y de relé
asumen los siguientes valores:
• Para una salida analógica: Z (alta impedancia)
• Para una salida de transistor rápida: Z (alta impedancia)
• Para una salida de transistor normal: 0 V CC
• Para una salida de relé: Abrir
Valores de inicialización del software
Este estado de la salida se aplica al descargar o restablecer la aplicación. Se
aplica al final de la descarga o al final de un restablecimiento en caliente o en frío.
Los valores de inicialización del software son los valores de inicialización de
imágenes de salida (%I, %Q o variables asignadas en %I o %Q).
Se establecen de forma predeterminada en 0, pero se pueden asignar las E/S en
un GVL y definir las salidas con un valor diferente de 0.
Forzado de salida
El controlador permite forzar el estado de las salidas seleccionadas en un valor
definido a fin de probar, poner en marcha y mantener el sistema.
Únicamente puede forzar el valor de una salida mientras el controlador esté
conectado a EcoStruxure Machine Expert.
Para ello, utilice el comando Forzar valores del menú Depurar.
El forzado de salida invalida otros comandos en una salida independientemente
de la programación de la tarea que se esté ejecutando.
48 EIO0000003062.06

Estados y comportamientos del controlador
Cuando finalice sesión en EcoStruxure Machine Expert una vez definido el
forzado de salida, se mostrará la opción de conservar la configuración del forzado
de salida. Si selecciona esta opción, el forzado de salida continuará controlando
el estado de las salidas seleccionadas hasta que descargue una aplicación o
utilice uno de los comandos de restablecimiento.
Cuando está seleccionada la opción Actualizar E/S en parada, si el controlador
admite dicha opción (estado predeterminado), las salidas forzadas mantienen el
valor de forzado aunque el controlador esté en estado STOPPED.
Consideraciones sobre el forzado de salidas
La salida que desee forzar debe encontrarse en una tarea que el controlador esté
ejecutando actualmente. El forzado de salidas en tareas sin ejecutar o en tareas
cuya ejecución se retarde debido a prioridades o eventos no tiene ningún efecto
en la salida. Sin embargo, una vez que se ejecute la tarea que se había
retardado, el forzado surte efecto en ese momento.
En función de la ejecución de tareas, puede que el forzado tenga un impacto en la
aplicación de formas poco obvias para el usuario. Por ejemplo, puede que una
tarea de evento active una salida. Más tarde, puede que el usuario intente
desactivar dicha salida aunque en ese momento no se esté desencadenando el
evento. Como resultado, parecerá que se está ignorando el forzado. Además,
puede que posteriormente el evento desencadene la tarea, momento en el que
surtirá efecto el forzado.
Las salidas impulsadas por funciones expertas PTO, PWM, FreqGen y HSC no se
pueden forzar.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
• Debe entender perfectamente cómo afectará el forzado a las salidas de las
tareas que se estén ejecutando.
• No intente forzar una E/S que se encuentre en tareas si no está seguro de
que dichas tareas se ejecutarán oportunamente, a menos que pretenda que
el forzado surta efecto en la próxima ejecución de la tarea,
independientemente de cuándo se produzca.
• Si fuerza una salida y aparentemente no tiene ningún efecto en la salida
física, no salga de EcoStruxure Machine Expert sin eliminar el forzado.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Comandos de transiciones de estado
Comando Run
Efecto: Envía una transición al estado del controlador RUNNING.
Condiciones de inicio: Estado BOOTING o STOPPED.
EIO0000003062.06 49

Estados y comportamientos del controlador
Métodos para enviar un comando Ejecutar:
• Entrada Ejecutar/Detener: si se ha configurado, activa un flanco ascendente
a la entrada Run/Stop (suponiendo que el interruptor Run/Stop se encuentre
en la posición RUN). Defina Run/Stop en 1 para todas las opciones
posteriores para que sea efectiva.
Consulte Entrada Ejecutar/Detener, página 78 para obtener más información.
• Menú EcoStruxure Machine Expert Online: Seleccione el comando Start.
• Comando RUN del servidor web
• Mediante una llamada externa a través de una petición Modbus con las
variables del sistema PLC_W.q_wPLCControl y PLC_W.q_
uiOpenPLCControl de la biblioteca PLCSystem M241.
• Opción Login with online change: Un cambio online (descarga parcial)
iniciado mientras el controlador se encuentra en el estado RUNNING
devolverá al controlador a este estado si se realiza satisfactoriamente.
• Comando Descarga múltiple: establece los controladores en el estado
RUNNING si se ha seleccionado la opción Iniciar todas las aplicaciones
tras descarga o modificación en línea, independientemente de si los
controladores en cuestión estaban inicialmente en el estado RUNNING,
STOPPED o EMPTY.
• El controlador se reinicia automáticamente en el estado RUNNING en
determinadas condiciones.
Para obtener más información, consulte el Diagrama del estado del controlador,
página 39.
Comando de detención
Efecto: Envía una transición al estado del controlador STOPPED.
Condiciones de inicio: Estado BOOTING, EMPTY o RUNNING.
Métodos para enviar un comando Stop:
• Entrada Ejecutar/Detener: Si se configura, establece un valor 0 en la entrada
Run/Stop. Consulte Entrada Ejecutar/Detener, página 78 para obtener más
información.
• Menú EcoStruxure Machine Expert Online: Seleccione el comando Stop.
• Comando STOP del servidor web
• Con una llamada interna de la aplicación o una llamada externa mediante
una petición Modbus usando las variables del sistema PLC_W. q_
wPLCControl y PLC_W. q_uiOpenPLCControl de la biblioteca PLCSystem de
M241.
• Opción Iniciar sesión con modificación en línea: Un cambio online
(descarga parcial) iniciado mientras el controlador se encuentra en el estado
STOPPED devolverá al controlador a este estado si se realiza
satisfactoriamente.
• Comando Descarga: Establece implícitamente el controlador en el estado
STOPPED.
• Comando Descarga múltiple: establece los controladores en el estado
STOPPED si se ha seleccionado la opción Iniciar todas las aplicaciones
tras descarga o modificación en línea , independientemente de si los
controladores en cuestión estaban inicialmente en el estado RUNNING,
STOPPED o EMPTY
• REBOOT mediante script: el archivo de script de transmisión de archivo en
una tarjeta SD puede enviar un comando REBOOT como comando final. El
controlador se reinicia en estado STOPPED siempre que las otras
condiciones de la secuencia de inicio lo permitan. Para obtener más
información, consulte Reinicio, página 54.
• El controlador se reinicia automáticamente en el estado STOPPED en
determinadas condiciones.
50 EIO0000003062.06

Estados y comportamientos del controlador
Para obtener más información, consulte el Diagrama del estado del controlador,
página 39.
Reset caliente
Efecto: Restablece todas las variables, excepto las variables remanentes, a su
valor predeterminado. Sitúa al controlador en el estado STOPPED.
Condiciones de inicio: Estado RUNNING, STOPPED o HALT.
Métodos para enviar un comando de restablecimiento en caliente:
• Menú EcoStruxure Machine Expert Online: Seleccione el comando Reset
warm.
• Con una llamada interna de la aplicación o una llamada externa mediante
una petición Modbus usando las variables del sistema PLC_W. q_
wPLCControl y PLC_W. q_uiOpenPLCControl de la biblioteca PLCSystem de
M241.
Efectos del comando Reset (en caliente):
1. La aplicación se detiene.
2. Se elimina el forzado.
3. Se restablecen las indicaciones de diagnóstico de los errores.
4. Se mantienen los valores de las variables retentivas.
5. Se mantienen los valores de las variables retentivas-persistentes.
6. Las variables no ubicadas y no remanentes se restablecen a los valores de
inicialización.
7. Se mantienen los valores de los primeros 1.000 registros %MW.
8. Los valores de los registros %MW1000 a%MW59999 se restablecen a 0.
9. Las comunicaciones del bus de campo se detienen y una vez completado el
reinicio, se vuelven a iniciar.
10. Las entradas se restablecen en sus valores de inicialización. Las salidas se
restablecen en sus valores de inicialización de software o sus valores
predeterminados si no hay valores de inicialización de software definidos.
11. Se lee, página 187 el archivo de configuración de Post.
Para obtener más información sobre las variables, consulte Variables
remanentes, página 58.
Reset frío
Efecto: Restablece las variables, excepto las variables remanentes de tipo
retentivas-persistentes, a sus valores de inicialización. Sitúa al controlador en el
estado STOPPED.
Condiciones de inicio: Estado RUNNING, STOPPED o HALT.
Métodos para enviar un comando de restablecimiento en frío un comando:
• Menú EcoStruxure Machine Expert Online: Seleccione el comando Reset
cold.
• Con una llamada interna de la aplicación o una llamada externa mediante
una petición Modbus usando las variables del sistema PLC_W. q_
wPLCControl y PLC_W. q_uiOpenPLCControl de la biblioteca PLCSystem de
M241.
EIO0000003062.06 51

Estados y comportamientos del controlador
Efectos del comando Reset (frío):
1. La aplicación se detiene.
2. Se elimina el forzado.
3. Se restablecen las indicaciones de diagnóstico de los errores.
4. Se restablecen los valores de las variables retentivas a su valor de
inicialización.
5. Se mantienen los valores de las variables retentivas-persistentes.
6. Las variables no ubicadas y no remanentes se restablecen a los valores de
inicialización.
7. Se mantienen los valores de los primeros 1.000 registros %MW.
8. Los valores de los registros %MW1000 a%MW59999 se restablecen a 0.
9. Las comunicaciones del bus de campo se detienen y una vez completado el
reinicio, se vuelven a iniciar.
10. Las entradas se restablecen en sus valores de inicialización. Las salidas se
restablecen en sus valores de inicialización de software o sus valores
predeterminados si no hay valores de inicialización de software definidos.
11. Se lee, página 187 el archivo de configuración de Post.
Para obtener más información sobre las variables, consulte Variables
remanentes, página 58.
Reset origen
Efecto: Restablece todas las variables, incluidas las variables remanentes, a sus
valores de inicialización. Borra todos los archivos de usuario del controlador,
incluidos los derechos de usuario y los certificados. Reinicia y coloca el
controlador en el estado EMPTY.
Condiciones de inicio: Estado RUNNING, STOPPED o HALT.
Métodos para enviar un comando de restablecer origen:
• Menú EcoStruxure Machine Expert Online: Seleccione el comando Reset
origin.
Efectos del comando Reset Origin:
1. La aplicación se detiene.
2. Se elimina el forzado.
3. Se eliminan los archivos de visualización web.
4. Se eliminan los archivos de usuario (aplicación de inicio, registro de datos,
configuración de Post, derechos de usuario y certificados).
5. Se restablecen las indicaciones de diagnóstico de los errores.
6. Se restablecen los valores de las variables retentivas.
7. Se restablecen los valores de las variables retentivas-persistentes.
8. Se restablecen las variables no ubicadas y no remanentes.
9. Los valores de los primeros 1000 registros %MW se restablecen a 0.
10. Los valores de los registros %MW1000 a%MW59999 se restablecen a 0.
11. Se detienen las comunicaciones del bus de campo.
12. La E/S experta incrustada se restablece a sus valores predeterminados
anteriores configurados por el usuario.
13. Las demás entradas se restablecen en sus valores de inicialización.
Las demás salidas se restablecen en sus valores de inicialización de
hardware.
14. El controlador se reinicia.
Para obtener más información sobre las variables, consulte Variables
remanentes, página 58.
52 EIO0000003062.06

Estados y comportamientos del controlador
Reset Origin Device
Efecto: Restablece todas las variables, incluidas las variables remanentes, a sus
valores de inicialización. Coloca el controlador en el estado EMPTY si se
selecciona PLC Logic.
Condiciones de inicio: Estado RUNNING, STOPPED o HALT.
Métodos para emitir un comando de restablecer dispositivo de origen:
• Menú EcoStruxure Machine Expert Online: Haga clic con el botón derecho en
My controller, comando > Reset Origin Device.Resultado: Un cuadro de
diálogo le permite seleccionar los elementos que desea quitar:
◦Administración de usuarios
◦Lógica PLC
◦Certificados
Cuando se selecciona User Management:
• El usuario y los grupos se restablecen al valor predeterminado.
NOTA: Si los user rights del controlador están desactivados antes de utilizar
este comando, puede conectarse al controlador sin solicitud de inicio de
sesión posterior. Utilice el comando dedicado en el menú Online: Security >
Reset user rights management to default para aplicar de nuevo el uso de
administración de usuarios.
Cuando se selecciona PLC Logic:
1. La aplicación se detiene.
2. Se elimina el forzado.
3. Se eliminan los archivos de visualización web.
4. Se restablecen las indicaciones de diagnóstico de los errores.
5. Se restablecen los valores de las variables retentivas.
6. Se restablecen los valores de las variables retentivas-persistentes.
7. Se restablecen las variables no ubicadas y no remanentes.
8. Se detienen las comunicaciones del bus de campo.
9. La E/S experta incrustada se restablece a sus valores predeterminados
anteriores configurados por el usuario.
10. Las demás entradas se restablecen en sus valores de inicialización.
Las demás salidas se restablecen en sus valores de inicialización de
hardware.
11. Los registros del sistema se mantienen.
Al seleccionar Certificados, se restablecen los certificados utilizados para el
servidor web y el servidor FTP.
Machine Expert Logic Builder
¿Seguro que quiere restablecer el dispositivo a su estado original?
Restablecer el dispositivo eliminará todos los elementos seleccionados
a continuación.
Eliminar solo un subconjunto de elementos puede dejar inoperables
el resto de elementos. Según la configuración del dispositivo, también
podrían eliminarse elementos adicionales.
Eliminarelemento
Administración de usuarios
Lógica PLC
Certificados
Sí No
EIO0000003062.06 53

Estados y comportamientos del controlador
Para obtener más información sobre las variables, consulte Variables
remanentes, página 58.
Reiniciar
Efecto: Ordena el reinicio del controlador.
Condiciones de inicio: Cualquier estado.
Métodos para enviar un comando Reiniciar:
• Apagar y encender
• REINICIO por script, página 195
Efectos del reinicio:
54 EIO0000003062.06

Estados y comportamientos del controlador
1. El estado del controlador depende de las siguientes condiciones:
a. El estado del controlador es RUNNING si:
El reinicio se debe a un apagado y encendido, y:
- La Modalidad de inicio se define en Inicio en ejecución si la entrada
Run/Stop no está configurada, si el controlador no estaba en el estado
HALT antes de apagar y encender, y si las variables remanentes son
válidas.
- La Modalidad de inicio se define en Inicio en ejecución si la entrada
Run/Stop está configurada y se establece en RUN, si el controlador no
estaba en el estado HALT antes de apagar y encender, y si las variables
remanentes son válidas.
- La Modalidad de inicio se define en Inicio con el estado anterior, el
estado del controlador era RUNNING antes de apagar y encender, y si la
entrada Run/Stop no estaba configurada, la aplicación de arranque no
ha cambiado y las variables remanentes son válidas.
- La Modalidad de inicio se define en Inicio con el estado anterior, el
estado del controlador era RUNNING antes de apagar y encender, y si la
entrada Run/Stop está configurada y se define en RUN y las variables
remanentes son válidas.
El reinicio se debe a un script y:
- La Modalidad de inicio se define en Inicio en ejecución, y si la
entrada Run/Stop está configurada y se establece en RUN, o si el
interruptor se define en RUN y si el controlador no estaba en el estado
HALTantes de apagar y encender, y si las variables remanentes son
válidas.
b. El estado del controlador es STOPPED si:
El reinicio se debe a un apagado y encendido, y:
- La Modalidad de inicio se define en Inicio en parada.
- La Modalidad de inicio se define en Inicio con el estado anterior y el
estado del controlador no era RUNNING antes de apagar y encender.
- La Modalidad de inicio se define en Inicio con el estado anterior, el
estado del controlador era RUNNING antes de apagar y encender, la
entrada Run/Stop se define como no configurada, y la aplicación de
arranque ha cambiado.
- La Modalidad de inicio se define en Inicio con el estado anterior, el
estado del controlador era RUNNING antes de apagar y encender, la
entrada Run/Stop se define como no configurada, la aplicación de
arranque no ha cambiado y las variables remanentes no son válidas.
- La Modalidad de inicio se define en Inicio con el estado anterior, el
estado del controlador era RUNNING antes de apagar y encender, y la
entrada Run/Stop está configurada y se define en STOP.
- La Modalidad de inicio se define en Inicio en ejecución y si el estado
del controlador era HALT antes de apagar y encender.
- La Modalidad de inicio se define en Inicio en ejecución y si el estado
del controlador no era HALT antes de apagar y encender, y si la entrada
Run/Stop está configurada y se define en STOP.
- La Modalidad de inicio se define en Inicio con el estado anterior, y
si la entrada Run/Stop está configurada y se establece en , o si el
interruptor se define en RUN y si el controlador no estaba en el estado
HALT antes de apagar y encender.
- La Modalidad de inicio se define en Inicio con el estado anterior, la
entrada Run/Stop no está configurada y el controlador no estaba en el
estado HALT o el conmutador se configuró en ejecución antes de apagar
y encender.
c. El estado del controlador es EMPTY si:
- No existe ninguna aplicación de arranque o la aplicación de arranque
no es válida, o bien
- El reinicio se debe a errores de sistema específicos.
EIO0000003062.06 55

Estados y comportamientos del controlador
d. El estado del controlador es INVALID_OS si no hay un firmware válido.
2. Si la aplicación de arranque se carga correctamente, se mantiene el forzado.
De lo contrario, se elimina el forzado.
3. Se restablecen las indicaciones de diagnóstico de los errores.
4. Se restauran los valores de las variables retentivas si el contexto guardado
es válido.
5. Se restauran los valores de las variables retentivas-persistentes si el
contexto guardado es válido.
6. Las variables no ubicadas y no remanentes se restablecen a los valores de
inicialización.
7. Los valores de los primeros 1.000 registros %MW se restauran si el contexto
guardado es válido.
8. Los valores de los registros %MW1000 a%MW59999 se restablecen a 0.
9. Se detienen y reinician las comunicaciones del bus de campo una vez
cargada la aplicación de arranque correctamente.
10. Las entradas se restablecen en sus valores de inicialización. Las salidas se
restablecen en sus valores de inicialización de hardware y luego en sus
valores de inicialización de software o sus valores predeterminados si no se
definen valores de inicialización de software.
11. Se lee, página 187 el archivo de configuración de Post.
12. El sistema de archivos del controlador se inicializa y se anula la asignación
de sus recursos (sockets, controladores de archivos, etc.).
El sistema de archivos que emplea el controlador necesita restablecerse
periódicamente apagando y encendiendo el controlador. Si no lleva a cabo
un mantenimiento periódico de la máquina o si utiliza un sistema de
alimentación ininterrumpida (SAI), deberá forzar el apagado y encendido
(retirada y nueva aplicación de la alimentación) del controlador al menos una
vez al año.
AVISO
PÉRDIDA DE RENDIMIENTO
Reinicie el controlador al menos una vez al año, desconectando y
volviendo a conectar la alimentación.
Si no se siguen estas instrucciones, pueden producirse daños en el
equipo.
Para obtener más información sobre las variables, consulte Variables
remanentes, página 58.
NOTA: La prueba de comprobación de contexto determina que el contexto es
válido si la aplicación y las variables remanentes son las mismas que las
definidas por la aplicación de arranque.
NOTA: Si suministra alimentación a la entrada Ejecutar/Detener del mismo
origen que el controlador, se detecta inmediatamente la pérdida de
alimentación de esta entrada y el controlador se comporta como si se hubiera
recibido un comando STOP. Así pues, si la alimentación del controlador y de
la entrada Ejecutar/Detener provienen de la misma fuente, después de una
interrupción de la alimentación el controlador se reinicia de forma normal en el
estado STOPPED (Detenido) si la Modalidad de inicio se ha establecido en
Inicio con el estado anterior.
NOTA: Si realiza un cambio online en el programa de aplicación mientras su
controlador está en el estado RUNNING o STOPPED, pero no actualiza
manualmente la aplicación de arranque, el controlador detecta una diferencia
de contexto en el siguiente reinicio, las variables remanentes se restablecen
según el comando Reset frío, y el controlador pasa al estado STOPPED.
56 EIO0000003062.06

Estados y comportamientos del controlador
Descarga de aplicaciones
Efecto: Carga el ejecutable de la aplicación en la memoria RAM. De manera
opcional, crea una aplicación de arranque en la memoria no volátil.
Condiciones de inicio: Estados RUNNING, STOPPED, HALT y EMPTY.
Métodos para enviar un comando de descarga de aplicaciones:
• EcoStruxure Machine Expert:
Hay dos maneras de descargar una aplicación completa:
◦Comando Descarga:
◦Comando Descarga múltiple.
Para obtener información importante de los comandos de descarga de
aplicaciones, consulte el Diagrama del estado del controlador.
• FTP: cargue el archivo de aplicación de arranque en la memoria no volátil
mediante el FTP. El archivo actualizado se aplica en el próximo reinicio.
• Tarjeta SD: cargue el archivo de aplicación de arranque con una tarjeta SD
en el controlador. El archivo actualizado se aplica en el próximo reinicio. Para
obtener más información, consulte Transferencia de archivos con tarjeta SD,
página 200.
Efectos del comando Cargar de EcoStruxure Machine Expert:
1. Se detiene la aplicación actual, y luego se elimina.
2. Si es válida, se carga la nueva aplicación y el controlador adopta un estado
STOPPED.
3. Se elimina el forzado.
4. Se restablecen las indicaciones de diagnóstico de los errores.
5. Se restablecen los valores de las variables retentivas a sus valores de
inicialización.
6. Se mantienen los valores de las variables retentivas-persistentes actuales.
7. Las variables no ubicadas y no remanentes se restablecen a los valores de
inicialización.
8. Se mantienen los valores de los primeros 1.000 registros %MW.
9. Los valores de los registros %MW1000 a%MW59999 se restablecen a 0.
10. Se detienen las comunicaciones del bus de campo y se inicia el bus de
campo configurado de la nueva aplicación, una vez descargada.
11. Las E/S expertas incrustadas se restablecen en sus valores predeterminados
anteriores configurados por el usuario y una vez completada la descarga se
establecen en los nuevos valores predeterminados configurados por el
usuario.
12. Las entradas se restablecen en sus valores de inicialización. Las salidas se
restablecen en sus valores de inicialización de hardware y luego en sus
valores de inicialización de software o sus valores predeterminados si no se
definen valores de inicialización de software una vez que se hay completado
la descarga.
13. Se lee, página 187 el archivo de configuración de Post.
Para obtener más información sobre las variables, consulte Variables
remanentes, página 58.
Efectos del comando de descarga FTP o tarjeta SD:
No se produce ningún efecto hasta el próximo reinicio. En el siguiente reinicio, los
efectos son los mismos que en un reinicio con un contexto no válido. Consulte
Reinicio, página 54.
EIO0000003062.06 57

Estados y comportamientos del controlador
Detección, tipos y gestión de errores
Gestión de errores
El controlador detecta y gestiona tres tipos de errores:
• errores externos
• errores de aplicación
• errores del sistema
En esta tabla se describen los tipos de errores que se pueden detectar:
Tipo de error
detectado Descripción Estado resultante del
controlador
Error externo Los errores externos son detectados por el sistema mientras se encuentra en
RUNNING o STOPPED, pero no afectan al estado en curso del controlador. Un
error externo se detecta en los siguientes casos:
• Un dispositivo conectado informa de un error al controlador.
• El controlador detecta un error con un dispositivo externo, por ejemplo,
cuando el dispositivo externo se comunica, pero no está configurado
correctamente para usarse con el controlador.
• El controlador detecta un error con una salida.
• El controlador detecta una interrupción en la comunicación con un
dispositivo.
• El controlador está configurado para un módulo de extensión que no está
presente o que no se detecta y no se ha declarado como módulo opcional(1).
• La aplicación de arranque en memoria no volátil no es la misma que la que se
encuentra en RAM.
RUNNING con un error
externo detectado
O bien
STOPPED con un error
externo detectado
Error de aplicación Un error de aplicación se detecta cuando se encuentra una programación
incorrecta o cuando se sobrepasa un umbral de watchdog de tarea. HALT
Error de sistema Un error de sistema se detecta cuando el controlador entra en un estado que no se
puede gestionar durante el tiempo de ejecución. La mayoría de estas condiciones
son el resultado de excepciones de firmware o hardware, pero hay algunos casos
en que una programación incorrecta puede producir la detección de un error de
sistema, por ejemplo, al intentar escribir en una memoria reservada durante el
tiempo de ejecución o cuando tiene lugar un timeout del watchdog del sistema.
NOTA: Algunos errores del sistema se pueden gestionar en tiempo de
ejecución y, por lo tanto, se tratan como errores de la aplicación.
BOOTING → EMPTY
(1) Puede parecer que los módulos de extensión están ausentes por diversos motivos, incluso si el módulo de E/S ausente está
físicamente presente en el bus. Para obtener más información, consulte Descripción general de la configuración de E/S, página 89.
NOTA: Consulte la Modicon M241 Logic Controller -Guía de la biblioteca
PLCSystem para obtener más información sobre el diagnóstico.
Variables remanentes
Descripción general
Las variables remanentes pueden reinicializarse o conservar sus valores en caso
de cortes de alimentación, reinicios, restablecimientos y descargas de programas
de aplicación. Existen varios tipos de variables remanentes, declaradas
individualmente como de tipo "retain" o "persistent", o en combinación como
"retain-persistent" (retentivas-persistentes).
NOTA: Para este controlador, las variables declaradas como persistentes
tienen el mismo comportamiento que las variables declaradas como
retentivas-persistentes.
58 EIO0000003062.06

Estados y comportamientos del controlador
En esta tabla se describe el comportamiento de las variables remanentes en cada
caso:
Acción VAR VAR RETAIN VAR GLOBAL RETAIN PERSISTENT
Modificación online de un programa de
aplicación
X X X
Cambio en línea que modifica la aplicación de
arranque (1)
–X X
Detención X X X
Apagar y encender –X X
Reset caliente –X(2) X
Reset frío – – X
Reset origen – – –
Reset origin device – – –
Descarga del programa de aplicación mediante
EcoStruxure Machine Expert (3)
– – X
Descarga del programa de aplicación mediante
una tarjeta SD (3)
– – –
X) Se mantiene el valor.
–) El valor se reinicializa.
1) Los valores de las variables Retain se mantienen si un cambio en línea modifica solo la parte del código de la aplicación de arranque
(por ejemplo, a:=a+1; => a:=a+2;). En el resto de los casos, las variables Retain se reinicializarán.
2) Para obtener más información acerca de VAR RETAIN, consulte Efectos del comando Reset (en caliente), página 51.
3) Si la aplicación descargada contiene las mismas variables retentivas-persistentes que la aplicación actual, las variables retentivas
existentes mantienen sus valores.
NOTA: Los primeros 1000 %MW se retienen automáticamente y persisten si no
hay ninguna variable asociada a ellos. Los valores se conservan después de
un reinicio, un reset caliente o un reset frío. Los demás %MW se administran
como VAR.
Por ejemplo, si tiene en el programa:
VAR myVariable AT %MW0 : WORD; END_VAR
%MW0 se comporta como myVariable (no retentiva y no persistente).
Adición de variables retentivas-persistentes
Declare variables retentivas-persistentes (VAR GLOBAL PERSISTENT RETAIN)
en la ventana PersistentVars:
Paso Acción
1En la ficha Árbol de aplicaciones, seleccione el nodo Aplicación.
2 Haga clic en el botón derecho del ratón.
3Seleccione Agregar objetos >Variables persistentes
4 Haga clic en Añadir.
Resultado: Se muestra la ventana PersistentVars.
EIO0000003062.06 59

Editor de dispositivos de controlador
Editor de dispositivos de controlador
Introducción
En este capítulo se describe cómo configurar el controlador.
Parámetros del controlador
Parámetros del controlador
Para abrir el editor de dispositivos, haga doble clic en MyController en el árbol de dispositivos:
MyController
Ajustes PLC Distribución de tareas Estado InformaciónRegistro
Objetos IEC
Usuarios y gruposAplicaciones Archivos Configuración del servidor OPC UAConfiguración de
comunicación
C...ControladorNombre del proyectoIP_AddressTimeSinceBootNodeNameProjectAuthorVersión de FW
Derechos de
símbolos
Derechos de
accesoServicios EthernetServicios
60 EIO0000003062.06

Editor de dispositivos de controlador
Descripción de fichas
Ficha Descripción Restricción
Configuración de
comunicación, página 62 Gestiona la conexión entre el PC y el controlador:
• permite encontrar un controlador en una red,
• muestra la lista de controladores disponibles, para que pueda conectarse al
controlador seleccionado y gestionar la aplicación dentro del controlador,
• permite identificar físicamente el controlador desde el editor de dispositivo,
• permite modificar la configuración de comunicación del controlador.
La lista de controladores se detecta a través de NetManage o a través de la ruta activa,
según la configuración de comunicación. Para acceder a la Configuración de
comunicación, haga clic en Proyecto >Configuración del proyecto en la barra de
menús. Para obtener más información, consulte EcoStruxure Machine Expert - Guía de
programación (Configuración de comunicación).
Solo en
modalidad online
Aplicaciones Muestra la aplicación que se está ejecutando en el controlador y permite eliminar la
aplicación del controlador. Solo en
modalidad online
Archivos, página 25 Administración de archivos entre el PC y el controlador.
Solo se puede ver un disco del Logic Controller a la vez a través de esta ficha. Cuando
se inserta una tarjeta SD, este archivo muestra el contenido de la tarjeta SD. De lo
contrario, esta ficha muestra el contenido del directorio /usr de la memoria no volátil
interna del controlador.
Solo en
modalidad online
Registro Muestra el archivo de registro del controlador. Solo en
modalidad online
Ajustes PLC, página 63 Configuración de:
• nombre de aplicación
• Comportamiento de E/S en detención
• opciones de ciclo de bus
–
Servicios, página 64 Permite configurar los servicios online del controlador (RTC, identificación del
dispositivo). Solo en
modalidad online
Objetos IEC Permite acceder al dispositivo desde la aplicación IEC a través de los objetos
enumerados. Muestra una vista de supervisión en modalidad online. Para obtener más
información, consulte Objeto IEC en la ayuda online de CODESYS.
–
Distribución de tareas Muestra una lista de E/S y sus asignaciones a las tareas. Solo tras la
compilación
Servicios Ethernet La ficha Enrutamiento IP le permite configurar las rutas y la transparencia entre redes
a través de las opciones Enrutamiento IP.
NOTA: Si no hay conexión Ethernet disponible en la configuración, esta ficha está
vacía.
–
Usuarios y grupos La ficha Usuarios y grupos se proporciona para los dispositivos que admiten la
administración de usuarios online. Permite configurar usuarios y grupos de derechos
de acceso y asignárselos para controlar el acceso en proyectos de EcoStruxure
Machine Expert y dispositivos en la modalidad online.
Para obtener más información, consulte EcoStruxure Machine Expert - Guía de
programación.
–
Derechos de acceso La ficha Derechos de acceso le permite definir los derechos de acceso al dispositivo
de los usuarios.
Para obtener más información, consulte EcoStruxure Machine Expert - Guía de
programación.
–
Symbol Rights Permite al Administrador configurar el acceso de Usuarios y grupos a los conjuntos
de símbolos. Para obtener más información, consulte Configuración de símbolos en la
ayuda online de CODESYS.
–
Configuración del
servidor OPC UA Muestra la ventana Configuración del servidor OPC UA, página 180.–
Estado No utilizado. –
Información Muestra información general sobre el dispositivo (nombre, descripción, fabricante,
versión, imagen).
–
EIO0000003062.06 61

Editor de dispositivos de controlador
Configuración de comunicación
Introducción
En esta ficha se puede gestionar la conexión entre el equipo y el controlador:
• Permite encontrar un controlador en una red.
• Muestra la lista de controladores, para que pueda conectarse al controlador
seleccionado y gestionar la aplicación dentro del controlador.
• Permite identificar físicamente el controlador desde el editor de dispositivo.
• Permite modificar la configuración de comunicación del controlador.
Puede cambiar el modo de visualización de la ficha Configuración de
comunicación:
•Modalidad simple. Consulte EcoStruxure Machine Expert - Guía de
programación.
•Modalidad clásica. Consulte EcoStruxure Machine Expert - Guía de
programación.
•Modo de selección de controlador. Consulte EcoStruxure Machine Expert -
Guía de programación.
Editar configuración de comunicación
En Modo de selección de controlador, la ventana Editar configuración de
comunicación permite modificar la configuración de comunicación Ethernet.
Para ello, haga clic en la ficha Configuración de comunicación. Aparece la lista
de controladores disponibles en la red. Seleccione y haga clic con el botón
derecho del ratón en la fila que desee, y haga clic en Procesar configuración de
la comunicación... en el menú contextual.
Puede configurar los ajustes de Ethernet en la ventana Editar configuración de
la comunicación de dos formas:
• Sin la opción Guardar la configuración permanentemente:
Configure los parámetros de comunicación y haga clic en Aceptar. Esta
configuración se toma en consideración de forma inmediata y no se guarda si
el controlador se ha restablecido. En los próximos restablecimientos, se
tendrán en cuenta los parámetros de comunicación configurados en la
aplicación.
• Con la opción Guardar la configuración permanentemente:
También puede activar la opción Guardar la configuración
permanentemente antes de hacer clic en Aceptar. Cuando esta opción esté
activada, los parámetros de Ethernet configurados aquí se tomarán en
consideración en el restablecimiento, en lugar de los parámetros de Ethernet
configurados en la aplicación EcoStruxure Machine Expert.
Para obtener más información sobre la vista Configuración de comunicación
del editor de dispositivo, consulte EcoStruxure Machine Expert - Guía de
programación.
62 EIO0000003062.06

Editor de dispositivos de controlador
Ajustes PLC
Descripción general
En la figura siguiente se muestra la ficha Ajustes PLC:
Elemento Descripción
Aplicación para manejo E/S Seleccione Aplicación (ya que solo hay una aplicación en el controlador).
NOTA: Si se selecciona Ninguno, la aplicación no se generará.
Ajustes PLC Actualizar E/S en
parada Si esta opción está activada (valor predeterminado), los valores de los canales de entrada y
salida también se actualizarán cuando se detenga el controlador.
Comportamiento de
las salidas en parada En la lista de selección, elija una de las opciones siguientes para configurar cómo se deben
tratar los valores de los canales de salida si se detiene el controlador:
•Mantener los valores
•Establecer todas las salidas a los valores predeterminados
Actualizar siempre las
variables En la lista de selección, elija una de las opciones siguientes:
•Desactivado (actualizar únicamente si se utiliza en una tarea)
•Activado 1 (utilizar tarea de ciclo de bus si no la utiliza otra tarea)
•Activado 2 (siempre en tarea de ciclo de bus)
Opciones de
ciclo de bus Tarea de ciclo de bus Este ajuste de configuración es el principal de todos los parámetros de Tarea de ciclo de
bus utilizados en el árbol de dispositivos de la aplicación.
Algunos dispositivos con llamadas cíclicas, como el Administrador CANopen, se pueden
adjuntar a una tarea específica. En el dispositivo, cuando este ajuste se establece en
Emplear configuración de ciclo del bus de orden superior, se utiliza el ajuste
establecido para el controlador.
La lista de selección ofrece todas las tareas definidas actualmente en la aplicación activa. El
valor predeterminado es la tarea MAST.
NOTA: <Sin especificar> significa que la tarea está en la modalidad de "tarea cíclica
más lenta".
Configuracio-
nes
adicionales
Variables de forzado
para la asignación E/S No utilizado.
Habilitar diagnóstico
para dispositivos
No utilizado.
Mostrar advertencias
E/S como error No utilizado.
Aplicación para la gestión de E/S:Aplicación
Actualizar E/S en parada
Tratamiento de las salidas en parada
Actualizar siempre las variables
Tarea de ciclo de bus
Generar variables de fuerza para la asignación de E/SHabilitar el diagnóstico para los dispositivos
Mostrar las advertencias de E/S como errores
Modo de inicio
Establecer todas las salidas en los valores predeterminados
Deshabilitado (actualizar solo si se utiliza en la tarea)
<sin especificar>
Iniciar como estado anterior
Configuración de PLC
Opciones de ciclo de bus
Configuración adicional
Opciones de modo de inicio
EIO0000003062.06 63

Editor de dispositivos de controlador
Elemento Descripción
Opciones de
modalidad de
inicio
Modalidad de inicio Esta opción define la modalidad de inicio en un encendido. Para obtener más información,
consulte el Diagrama de funcionamiento del estado, página 39.
Seleccione una de estas modalidades de inicio con esta opción:
•Inicio con el estado anterior
•Inicio en parada
•Inicio en ejecución
Servicios
Ficha Services
La ficha Servicios tiene tres partes:
• Configuración RTC
• Identificación del dispositivo
• Configuración de Post
En la siguiente figura se muestra la ficha Servicios:
NOTA: Para tener información de controlador, debe estar conectado al
controlador.
64 EIO0000003062.06
Lectura
Fecha:
Hora:
Jueves
12:04:23
8 de septiembre de 2022Escritura
Escribir como UTC
Sincronice el controlador con la fecha y hora del ordenador
Versión del firmware:
Versión de arranque:
Versión del coprocesador:
Parámetros sobrescritos por la configuración de Post:
Lectura
Configuración RTC
Tiempo del PLC
Hora local
Identificación del dispositivo
Configuración de Post

Editor de dispositivos de controlador
Elemento Descripción
Configuración
RTC Tiempo del PLC Muestra la fecha y la hora leídas del controlador al hacer clic en el botón Lectura, sin
aplicar conversión. Este campo de sólo lectura está vacío inicialmente.
Lectura Lee la fecha y la hora guardadas en el controlador y muestra los valores en el campo Hora
PLC.
Hora local Define una fecha y una hora para enviar al controlador al hacer clic en el botón Escritura.
Si es necesario, modifique los valores predeterminados antes de hacer clic en el botón
Escritura. Un cuadro de mensaje informa al usuario del resultado del comando. Los
campos de fecha y hora se rellenan inicialmente con los ajustes del PC.
Escritura Escribe la fecha y la hora definidas en el campo Hora local en el controlador lógico. Un
cuadro de mensaje informa al usuario del resultado del comando. Seleccione la casilla de
verificación Escribir como UTC antes de ejecutar este comando si desea escribir los
valores en formato UTC.
Sincronizar
controlador con la
fecha y hora del
ordenador
Envía la fecha y la hora del PC. Un cuadro de mensaje informa al usuario del resultado del
comando. Seleccione Escribir como UTC antes de ejecutar este comando si desea utilizar
el formato UTC.
Identificación del dispositivo Muestra la Versión de firmware, la Versión de arranque y la Versión del coprocesador
del controlador seleccionado, si está conectado.
Configuración de Post Muestra los parámetros de aplicación sobrescritos por la postconfiguración, página 187.
Servicios Ethernet
Enrutamiento IP
La subficha Enrutamiento IP permite configurar las rutas IP en el controlador.
El parámetro Habilitar reenvío IP recuerda las opciones configuradas en la
página de configuración del módulo Ethernet TM4ES4 (opción no disponible en el
puerto Ethernet integrado).
Cuando se desactiva, la comunicación no se enruta de una red a otra. Ya no se
puede acceder a los dispositivos de la red de dispositivos desde la red de control,
y funciones relacionadas, como el acceso a páginas web desde el dispositivo o la
puesta en marcha del dispositivo con DTM, EcoStruxure Machine Expert - Safety,
etc., no pueden usarse.
El M241 Logic Controller puede tener hasta dos interfaces Ethernet. Es necesario
utilizar una tabla de enrutamiento para la comunicación con redes remotas
conectadas a diferentes interfaces de Ethernet. La pasarela es la dirección IP que
se usa para conectarse con la red remota, que tiene que estar en la red local del
controlador.
Use las tablas de ruteo para gestionar el reenvío de IP.
EIO0000003062.06 65

Editor de dispositivos de controlador
Para añadir una ruta, haga doble clic en MyController y luego haga clic en
Servicios Ethernet > Enrutamiento IP > Agregar ruta.
Por motivos de seguridad de red, el enrutamiento TCP/IP está deshabilitado de
forma predeterminada. Por lo tanto, debe habilitar manualmente el reenvío TCP/
IP si desea acceder a los dispositivos a través del controlador. Sin embargo,
hacer eso puede exponer su red a posibles ciberataques si no toma medidas
adicionales para proteger su empresa. Además, puede estar sujeto a leyes y
normativas sobre ciberseguridad.
ADVERTENCIA
ACCESO NO AUTENTICADO Y POSTERIOR INTRUSIÓN EN LA RED
• Cumpla y respete todas las leyes y normativas nacionales, regionales y
locales aplicables sobre ciberseguridad o datos personales cuando habilite
el enrutamiento TCP/IP en una red industrial.
• Aísle su red industrial de otras redes dentro de su empresa.
• Proteja cualquier red contra el acceso imprevisto utilizando servidores de
seguridad, VPN u otras medidas de seguridad demostradas.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Derechos de usuario
Introducción
Los derechos de usuario contienen los elementos siguientes: User,Group,
Object,Operation,User Rights,Access rights. Estos elementos permiten
administrar cuentas de usuario y derechos de acceso de usuarios para controlar
el acceso en los proyectos globales.
• Un User es una persona o un servicio con User Rights específicos.
• Un Group es una Persona o una Function. Está predefinido o añadido.
Cada Group proporciona accesos gracias al Object.
• Un Object se compone de accesos predefinidos gracias a Operation.
• Una Operation es la acción más elemental posible.
•User Rights son los Access rights posibles: VIEW,MODIFY,EXECUTE y
ADD–REMOVE para la operación dedicada.
Enrutamiento IP
Tabla de enrutamiento
Destino de redMáscara de redPasarela
MyController
Configuración de comunicación
AplicacionesArchivosRegistroAjustes PLCServiciosUsuarios y grupos
Agregar ruta... Borrar ruta... Editar ruta...
Editar ruta
Aceptar Cancelar
Máscara de red255 . 255 . 255 . 0
Destino de red10 . 100 . 100 . 0
Gateway172 . 16 . 4 . 0
Servicios EthernetObjetos IEC
Distribución de tareas
66 EIO0000003062.06

Editor de dispositivos de controlador
Para obtener más información, consulte EcoStruxure Machine Expert - Guía de
programación.
Nombres de usuario y contraseñas
El inicio de sesión y la contraseña no están configurados de forma
predeterminada. En esta tabla se describe cómo iniciar sesión:
Servidor/
Característica
Primera conexión o conexión después de
restablecer a los valores predeterminados/
restablecer origen/restablecer dispositivo de
origen
User Rights
habilitados
Conexión después de
deshabilitar los User Rights
EcoStruxure
Machine Expert
Primero debe crear su inicio de sesión y su
contraseña.
NOTA: El inicio de sesión y la contraseña que
cree durante la primera conexión tienen
privilegios de administrador.
NOTA: Para obtener información sobre inicios
de sesión y contraseñas perdidos, consulte
Solución de problemas, página 75.
Login: inicio de sesión
configurado
Password: contraseña
configurada
No requiere nombre de usuario
ni contraseña.
Servidor web No se puede iniciar sesión
Login: inicio de sesión
configurado
Password: contraseña
configurada
Login: Anonymous
Password: no se requiere
contraseña.
Servidor FTP No se puede iniciar sesión
Login: inicio de sesión
configurado
Password: contraseña
configurada
Login: Anonymous
Password: Anonymous
OPC-UA No se puede iniciar sesión
Login: inicio de sesión
configurado
Password: contraseña
configurada
Login: Anonymous
Password: Anonymous
Característica
Cambiar el
nombre de
dispositivo
No se puede iniciar sesión
Login: inicio de sesión
configurado
Password: contraseña
configurada
No requiere nombre de usuario
ni contraseña.
ADVERTENCIA
ACCESO NO AUTORIZADO A DATOS O APLICACIONES
• Utilice los derechos de usuario para proteger el acceso a los servidores
FTP/web/OPC-UA.
• Si deshabilita los derechos de usuario, deshabilite los servidores para evitar
cualquier acceso no deseado o no autorizado a sus datos o aplicaciones.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
NOTA: El inicio de sesión anónimo se puede restaurar quitando los derechos
de usuario en la página, página 113 User Management del servidor web.
NOTA: El controlador admite los siguientes caracteres:
• Inicio de sesión: a...z A...Z 0...9 - = [ ] \ ; ‘ , . / @ # $ % ^ & * ( ) _ + { }|: "<
> ? ` ~
• contraseña: a...z A...Z 0...9 - = [ ] \ ; ‘ , . / @ # $ % ^ & * ( ) _ + { }|: "< > ?
` ~ yespacio
La longitud está limitada a 60 caracteres.
EIO0000003062.06 67

Editor de dispositivos de controlador
Usuarios y grupos predeterminados
En esta tabla se indica el nombre y la descripción de los grupos
predeterminados:
Nombre del grupo Descripción del grupo
Administrador • Gestiona todos los derechos de usuario.
• Se crea en la primera conexión.
Persona
Persona Designer/
Programmer Grupo dedicado al diseño de la aplicación.
Persona Operator Grupo dedicado al uso de la aplicación.
Persona Web Designer Grupo dedicado a la gestión del servidor web.
Persona Communication Grupo dedicado a la gestión de las funciones de comunicación.
Persona Maintenance Grupo dedicado al mantenimiento de la aplicación.
Función
Function External Media Grupo dedicado a permitir el uso de Comando externo (desde la
tarjeta SD).
Function File Access Grupo para permitir permisos en la ficha de archivos.
Function FTP Grupo para permitir el uso de FTP.
Function Symbol
Configuration Grupo para permitir el acceso a Symbol Configuration.
Function Web Access Grupo para permitir comandos en el servidor web.
Function Monitor Grupo para permitir la supervisión de variables IEC.
Function OPC UA Grupo para permitir el acceso al servidor OPC UA.
Function Variable Grupo para permitir la lectura/escritura de variables IEC.
NOTA: El Administrador puede definir un nuevo Grupo si es necesario.
Object Names
En esta tabla se indica el nombre y la descripción de los objetos predefinidos:
Nombre de objeto Descripción del objeto
Dispositivo Objeto relacionado con la conexión del controlador a través de EcoStruxure Machine Expert.
ExternalCmd Objeto relacionado con el comando script (Clone yCloneCheck).
FTP Objeto relacionado con el acceso FTP (conexión, carga y descarga en el servidor FTP).
Registro Objeto relacionado con el registro de mensajes.
OPC_UA Objeto relacionado con el servidor OPC UA (conexión, lectura y escritura de variables).
PlcLogic Objeto relacionado con la aplicación en el controlador.
Ajustes Objeto relacionado con la configuración del controlador (nodename...).
Administración de usuarios Objeto relacionado con la administración de derechos de usuario.
Web Objeto relacionado con el acceso al servidor web.
FileSystem Objeto relacionado con el acceso al archivo (al acceder a través de la ficha Archivos del controlador).
68 EIO0000003062.06

Editor de dispositivos de controlador
Funciones de funcionamiento
Esta lista indica el nombre de las posibles operaciones predefinidas:
• SD Card command
◦Script Command: Reiniciar
◦Script Command: SET_NODE_NAME
◦Script Command: FIREWALL_INSTALL
◦Script Command: Eliminar
◦Script Command: Descargar
◦Script Command: Cargar
◦Script Command: UpdateBoot
◦Clone operation (clonar el contenido del controlador para vaciar la tarjeta
SD)
• FTP server command
◦Connection to FTP server
◦List Directory
◦Change Directory
◦Create Folder
◦Rename Folder
◦Suppress Folder
◦Create File
◦Rename File
◦Suppress File
◦Download File
◦Upload File
• OPC UA server command:
◦Connection to OPC UA server
◦Read Variable
◦Write Variable
• Web server command:
◦Connection to Web server
◦List Variables
◦Read Variable
◦Write Variable
◦Access to File System
◦Access to logger
• EcoStruxure Machine Expert command
◦Reset Origin Device
◦Inicio de sesión
◦Set Node Name
◦Update Logger
◦Create Application
◦Descarga de aplicaciones
◦Pass RUN / STOP
◦Reset (Cold / Warm / Origin)
◦Delete Application
◦Create Boot Application
◦Save Retain Variables
EIO0000003062.06 69

Editor de dispositivos de controlador
◦Restore Retain Variables
◦Agregar grupo
◦Remove Group
◦Agregar usuario
◦Remove User
◦Read User Rights
◦Import User Rights
◦Export User Rights
Derechos de acceso
Por cada Group vinculado con un Object, los User Rights están predefinidos
con Access Rights específicos.
En esta tabla se indican los Access Rights:
Derechos de
acceso Descripción de Access Rights (depende del objeto; consulte Derechos
de acceso predefinidos necesarios por el objeto y las operaciones
asociadas, página 73).
VIEW Permite leer solo parámetros y aplicaciones.
MODIFY Permite escribir, modificar y descargar parámetros y aplicaciones.
ADD_REMOVE Permite agregar y quitar archivos, scripts y carpetas.
EXECUTE Permite ejecutar e iniciar aplicaciones y scripts.
Access Rights predefinidos para Group Persona
Para cada Group, hay varios Objects predefinidos con Access Rights
preestablecidos:
Group: Administrador
Nombre de Object Derechos de acceso
Dispositivo VIEW /MODIFY /ADD_REMOVE /EXECUTE
FTP VIEW /MODIFY /ADD_REMOVE
Registro VIEW
OPC_UA VIEW /MODIFY
PlcLogic VIEW /MODIFY /ADD_REMOVE /EXECUTE
Ajustes VIEW /MODIFY
Administración de
usuarios VIEW /MODIFY
Web VIEW /MODIFY /EXECUTE
FileSystem VIEW /MODIFY /ADD_REMOVE
70 EIO0000003062.06

Editor de dispositivos de controlador
Group: Designer / Programmer persona
Nombre de Object Derechos de acceso
Dispositivo VIEW /ADD_REMOVE
FTP VIEW /MODIFY /ADD_REMOVE
Registro VIEW
OPC_UA VIEW /MODIFY
PlcLogic VIEW /MODIFY /ADD_REMOVE /EXECUTE
Ajustes VIEW /MODIFY
Administración de
usuarios
VIEW
Web VIEW /MODIFY /EXECUTE
FileSystem VIEW /MODIFY /ADD_REMOVE
Group: Operator persona
Nombre de Object Derechos de acceso
Dispositivo VIEW
Registro VIEW
PlcLogic VIEW /MODIFY /EXECUTE
Ajustes VIEW
Administración de
usuarios
VIEW
Web VIEW /MODIFY /EXECUTE
Group: Designer / Web designer persona
Nombre de Object Derechos de acceso
Dispositivo VIEW
FTP VIEW /MODIFY /ADD_REMOVE
Registro VIEW
OPC_UA VIEW
PlcLogic VIEW
Ajustes VIEW
Administración de
usuarios VIEW
Web VIEW /MODIFY /EXECUTE
FileSystem VIEW /MODIFY /ADD_REMOVE
EIO0000003062.06 71

Editor de dispositivos de controlador
Group: Communication expert persona
Nombre de Object Derechos de acceso
Dispositivo VIEW
FTP VIEW /MODIFY /ADD_REMOVE
Registro VIEW
OPC_UA VIEW /MODIFY
PlcLogic VIEW /MODIFY /EXECUTE
Ajustes VIEW
Administración de
usuarios VIEW
Web VIEW /MODIFY /EXECUTE
FileSystem VIEW /MODIFY /ADD_REMOVE
Group: Maintenance persona
Nombre de Object Derechos de acceso
Dispositivo VIEW
FTP VIEW /MODIFY /ADD_REMOVE
Registro VIEW
OPC_UA VIEW
PlcLogic VIEW /EXECUTE
Ajustes VIEW
Administración de
usuarios
VIEW
Web VIEW /MODIFY /EXECUTE
FileSystem VIEW /MODIFY /ADD_REMOVE
Access Rights predefinidos para Group Function
Para cada Group, hay varios Objects predefinidos con Access Rights
predefinidos:
Group: Function External Media (1)
Nombre de Object Derechos de acceso
ExternalCmd VIEW /MODIFY /ADD_REMOVE /EXECUTE
1) NOTA: La habilitación de los objetos en el grupo External Media permitirá los derechos de
acceso independientemente del usuario. Es decir, que los derechos que rigen las tarjetas SD son
globales y no se limitan a los usuarios definidos
Group: Function File Access
Nombre de Object Derechos de acceso
Registro VIEW
FileSystem VIEW /MODIFY /ADD_REMOVE
Group: Function FTP Access
Nombre de Object Derechos de acceso
FTP VIEW /MODIFY /ADD_REMOVE
Registro VIEW
72 EIO0000003062.06

Editor de dispositivos de controlador
Group: Function Symbol Configuration Access
Nombre de Object Derechos de acceso
Registro VIEW
OPC_UA VIEW /MODIFY
PlcLogic VIEW /MODIFY /ADD_REMOVE /EXECUTE
Web VIEW /MODIFY /EXECUTE
Group: Function Web Access
Nombre de Object Derechos de acceso
Registro VIEW
Web VIEW /MODIFY /EXECUTE
Group: Function Monitor Access
Nombre de Object Derechos de acceso
Registro VIEW
OPC_UA VIEW
PlcLogic VIEW
Web VIEW
Group: Function OPC UA Access
Nombre de Object Derechos de acceso
Registro VIEW
OPC_UA VIEW /MODIFY
Group: Function Variable Access
Nombre de Object Derechos de acceso
Registro VIEW
OPC_UA VIEW
PlcLogic VIEW /MODIFY /ADD_REMOVE /EXECUTE
Web VIEW
Derechos de acceso predefinidos necesarios por el objeto y las
operaciones asociadas
Nombre de Object
Derechos de acceso
ADD_REMOVE MODIFY VIEW EXECUTE
Dispositivo Reset origin device Set node name Inicio de sesión –
ExternalCmd –Descargar Cargar
Clon
Eliminar
Reiniciar
Set Node Name
Firewall install
Clone Check
EIO0000003062.06 73

Editor de dispositivos de controlador
Nombre de Object
Derechos de acceso
ADD_REMOVE MODIFY VIEW EXECUTE
FTP Connection to FTP
Server
Create file
Create folder
Upload file
Upload folder
Download file
Download folder
Delete file
Delete folder
Connection to FTP
Server
Download file
Download folder
Rename File
Rename Folder
Connection to FTP
Server
List directory
Change directory
Download file
Download folder
–
Registro – – Update logger –
OPC_UA –Connection OPC_UA
Read Variable
Write Variable
Connection OPC_UA
Read Variable
–
PlcLogic Create application
Descarga de
aplicaciones
Delete application
Create Boot
application
Write Variable Read Variable
Save retain variables
Pass Run / Stop
Resetear
Restore Retains Var
Ajustes –Reject / Trust Certificate
Set Node Name
– –
Administración de usuarios –Agregar grupo
Remove Group
Agregar usuario
Remove User
Edit User Rights
Import User Rights
Reset Origin Device
Read User Rights
Export User Rights
–
Web –Set Variables Connection to Web
Server
Monitor Variables
Access Files System
Execute Command
FileSystem – – – –
Symbol Rights
La ficha Symbol Rights (consulte Descripción de fichas, página 61) permite
configurar el acceso de grupos de usuarios a los conjuntos de símbolos. Consiste
en un conjunto de símbolos personalizables que permiten separar funciones y
asociarlas a un derecho de usuario. Si es compatible con el dispositivo de
destino, puede combinar diferentes conjuntos de símbolos de los símbolos de la
aplicación en el editor de configuración de símbolos. La información sobre los
conjuntos de símbolos se descarga en el controlador. A continuación, puede
definir el grupo de usuarios que tiene acceso a cada conjunto de símbolos.
74 EIO0000003062.06

Editor de dispositivos de controlador
Solución de problemas
La única manera de acceder a un controlador con derechos de acceso de usuario
habilitados y del que no se dispone de las contraseñas es realizar una operación
de actualización del firmware. Esta eliminación de derechos de usuario solo
puede realizarse con una tarjeta SD o una llave USB (en función de la
compatibilidad de su controlador) para actualizar el firmware del controlador.
Además, puede eliminar los derechos de usuario del controlador ejecutando una
secuencia de comandos (para obtener más información, consulte la Guía de
programación de EcoStruxure Machine Expert). Mediante esta acción se elimina
la aplicación existente de la memoria del controlador, pero se restaura la
capacidad de acceder al controlador.
EIO0000003062.06 75

Configuración de entradas y salidas incrustadas
Configuración de entradas y salidas incrustadas
Configuración de E/S incrustadas
Descripción general
La función de E/S incrustadas permite configurar las entradas y salidas del
controlador.
El Logic Controller M241 proporciona:
Tipo de E/S 24 referencias de E/S 40 referencias de E/S
TM241•24• TM241•40•
Entradas rápidas 8 8
Entradas normales 6 16
Salidas rápidas 4 4
Salidas normales 6 12
Acceso a la ventana de configuración de E/S
Siga estos pasos para acceder a la ventana de configuración de E/S:
Pa-
so Descripción
1 En Dispositivos, haga doble clic en DI (entradas digitales) o DQ (salidas digitales).
Consulte Devices tree, página 18.
2 Seleccione la ficha Configuración de E/S.
Configuración de entradas digitales
En esta figura se muestra la ficha Configuración de E/S para entradas digitales:
NOTA: Para obtener más información sobre la ficha Asignación E/S,
consulte EcoStruxure Machine Expert - Guía de programación.
76 EIO0000003062.06

Configuración de entradas y salidas incrustadas
Parámetros de configuración de entradas digitales
En cada entrada digital puede configurar los parámetros siguientes:
Parámetro Valor Descripción Condición
Filtro Ninguno
1 ms
4 ms*
12 ms
Reduce el efecto de ruido de una
entrada del controlador. Disponible si Retención yEvento están deshabilitados.
En los demás casos, este parámetro está deshabilitado y
su valor es Ninguno.
Retención No*
Sí
Permite capturar y registrar
pulsos entrantes con anchos de
amplitud más breves que el
tiempo de exploración del
controlador.
Este parámetro solo está disponible para las entradas
rápidas I0 a I7.
Disponible si Evento yFiltro están deshabilitados.
Utilice entradas con retención solo en la tarea MAST.
Evento No*
flanco ascendente
Flanco
descendente
Ambos flancos
Detección de eventos Este parámetro solo está disponible para las entradas
rápidas I0 a I7.
Disponible si Retención yEvento están deshabilitados.
Cuando se selecciona Both edges y el estado de entrada
es TRUE antes de que se encienda el controlador, se
ignora el primer flanco descendente.
Rebote 0,000 ms
0,001 ms
0,002 ms*
0,005 ms
0,010 ms
0,05 ms
0,1 ms
0,5 ms
1 ms
5 ms
Reduce el efecto del rebote en
una entrada del controlador. Disponible si se ha habilitado Retención oEvento.
En los demás casos, este parámetro está deshabilitado y
su valor es 0,002.
Entrada
Ejecutar/
Detener
Ninguno
De I0 a I13
(referencias
TM241•24•)
De I0 a I23
(referencias
TM241•40•)
La entrada Run/Stop se puede
utilizar para ejecutar o para
detener la aplicación del
controlador.
Seleccione una de las entradas para utilizarla como
entrada Ejecutar/Detener.
*Valor predeterminado del parámetro
NOTA: La selección está en gris e inactiva si el parámetro no está disponible.
EIO0000003062.06 77

Configuración de entradas y salidas incrustadas
Entrada Ejecutar/Detener
En esta tabla se presentan los distintos estados:
Estados de
entrada Result
Estado 0 Detiene el controlador e ignora los comandos Run externos.
Un flanco
ascendente Desde el estado STOPPED (Detenido), inicie una aplicación en el estado
RUNNING (En ejecución) si no existe ningún conflicto con la posición del
interruptor Ejecutar/Detener.
Estado 1 La aplicación se puede controlar mediante:
• EcoStruxure Machine Expert (Ejecutar/Detener)
• Un interruptor Run/Stop de hardware
• Una aplicación (comando del controlador)
• Un comando de red (comando Ejecutar/Detener)
El comando Ejecutar/Detener está disponible mediante el comando Servidor
Web.
NOTA: La entrada Ejecutar/Detener se gestiona incluso si la opción
Actualizar E/S en parada no está seleccionada en el Editor de dispositivos
del controlador (ficha Ajustes PLC), página 63.
Las entradas asignadas a funciones expertas configuradas no pueden
configurarse como entradas de Ejecutar/Detener.
Para obtener más información acerca de los estados del controlador y las
transiciones de estados, consulte Diagrama de estado del controlador, página 39.
ADVERTENCIA
INICIO NO DESEADO DE LA MÁQUINA O DEL PROCESO DE ACTIVACIÓN
• Compruebe el estado de seguridad de la máquina o del entorno de proceso
antes de aplicar electricidad a la entrada Run/Stop.
• Use la entrada Run/Stop para evitar activaciones no deseadas desde
ubicaciones remotas.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Configuración de salidas digitales
En esta figura se muestra la ficha Configuración de E/S para salidas digitales:
NOTA: Para obtener más información sobre la ficha Asignación E/S,
consulte EcoStruxure Machine Expert - Guía de programación.
78 EIO0000003062.06

Configuración de entradas y salidas incrustadas
Parámetros de configuración de salidas digitales
En esta tabla se presenta la función de los distintos parámetros:
Parámetro Función
Parámetros generales
Alarm Output Seleccione una salida para usarla como salida de alarma, página 79.
Rearming Output
Mode Seleccione la modalidad de restablecimiento de salidas, página 79.
Sincronización
Minimizar inestabilidad
de salida local Seleccione esta opción para minimizar la inestabilidad en las salidas
locales, página 80.
NOTA: La selección está en gris e inactiva si el parámetro no está disponible.
Salida de alarma
Esta salida está establecida en 1 lógico cuando el controlador se encuentra en
estado RUNNING (En ejecución) y el programa de aplicación no se detiene en un
punto de interrupción.
La salida de alarma se establece en 0 cuando una tarea se detiene en un punto
de interrupción para indicar que el controlador ha detenido la ejecución de la
aplicación.
La salida de alarma se establece en 0 cuando se detecta un método abreviado.
NOTA: Las salidas asignadas a funciones expertas configuradas no pueden
configurarse como la salida de alarma.
Modalidad de restablecimiento de salidas
Las salidas rápidas de Modicon M241 Logic Controller utilizan la tecnología push/
pull. En caso de detectarse un error (cortocircuito o sobretemperatura), la salida
se establece en el valor predeterminado y la condición se indica mediante el bit de
estado y PLC_R.i_wLocalIOStatus.
Existen dos comportamientos posibles:
•Restablecimiento automático: En cuanto se corrige el error detectado, se
vuelve a definir la salida según el valor actual que tiene asignado y se
resetea el valor de diagnóstico.
•Restablecimiento manual: cuando se detecta un error, se memoriza el
estado y se fuerza la salida al valor predeterminado hasta que el usuario
restablece manualmente el estado (consulte el canal de asignación de E/S).
En caso de un cortocircuito o una sobrecarga de corriente, el grupo común de
salidas pasa automáticamente a la modalidad de protección térmica (todas las
salidas del grupo se establecen en 0) y, a continuación, se rearman
periódicamente (cada segundo) para probar el estado de la conexión. Sin
embargo, debe ser consciente del efecto de este restablecimiento en la máquina
o el proceso que se controla.
ADVERTENCIA
INICIO IMPREVISTO DE LA MÁQUINA
Inhiba el restablecimiento automático de salidas si esta función implica un
comportamiento no deseado para la máquina o el proceso.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
EIO0000003062.06 79

Configuración de entradas y salidas incrustadas
Minimizar inestabilidad de salida local
Esta opción permite leer o establecer las E/S incrustadas en intervalos de tiempo
predecibles, con independencia de la duración de la tarea. Minimiza la
inestabilidad de las salidas retrasando la escritura en las salidas físicas hasta que
comienza la operación de lectura de entradas de la siguiente tarea de ciclo de
bus. La hora final de una tarea suele ser menos fácil de predecir que la hora
inicial.
La programación normal de fases de entrada/salida es:
Cuando se selecciona la opción Minimizar inestabilidad de salida local, la
programación de las fases IN y OUT pasa a ser la siguiente:
80 EIO0000003062.06

Configuración de funciones expertas
Configuración de funciones expertas
Descripción general
En este capítulo se describen las funciones expertas del M241.
Descripción general de las funciones expertas
Introducción
Las entradas y salidas disponibles en el controlador lógico M241 pueden
conectarse a funciones expertas.
El M241 Logic Controller es compatible con las siguientes funciones expertas:
Funciones Descripción
Contadores HSC simple Las funciones HSC pueden ejecutar el conteo rápido de pulsos a partir de sensores,
conmutadores, etc. conectados a entradas rápidas o regulares. Las HSC conectadas
a las entradas normales funcionan con una frecuencia máxima de 1 kHz.
Para obtener más información sobre las funciones HSC, consulte Tipos de contador
de alta velocidad (consulte M241 Modicon Logic Controller - Contadores de alta
velocidad - Guía de la biblioteca HSC).
Monofásico principal HSC
Fase dual principal HSC
Medidor de frecuencias
Medidor de periodos
Generadores de
pulsos PTO (consulte Modicon
M241 Logic Controller -
PTO/PWM - Guía de la
biblioteca)
La función PTO proporciona 4 canales de salida de tren de pulsos para controlar 4
unidades independientes servo o graduales lineales de un solo eje en la modalidad de
bucle abierto.
La función PTO conectada a salidas de transistor normales funciona con una
frecuencia máxima de 1 kHz.
PWM (consulte Modicon
M241 Logic Controller -
PTO/PWM - Guía de la
biblioteca)
La función PWM genera una señal de onda cuadrada en canales de salida dedicados
con un ciclo de servicio variable.
La función PWO conectada a salidas de transistor normales funciona con una
frecuencia máxima de 1 kHz.
Generador de frecuencia
(consulte Modicon M241
Logic Controller - PTO/
PWM - Guía de la
biblioteca)
La función de generador de frecuencias genera una señal de onda cuadrada en
canales de salida dedicados con un ciclo de servicio fijo (50%).
La función de Generador de frecuencias conectada a salidas de transistor normales
funciona con una frecuencia máxima de 1 kHz.
Desde el lanzamiento de EcoStruxure Machine Expert, cualquier E/S normal que
ya no esté en uso se puede configurar para que cualquiera de los tipos de
funciones expertas puedan usarla, del mismo modo que las E/S rápidas.
NOTA:
• Cuando se utiliza una entrada como Run/Stop, no puede ser utilizada por
una función experta.
• Cuando se utiliza una entrada como Alarm, no puede ser utilizada por
una función experta.
Para obtener más detalles, consulte Configuración de funciones incrustadas,
página 81.
EIO0000003062.06 81

Configuración de funciones expertas
Número máximo de funciones expertas
El número máximo de funciones expertas que se pueden configurar depende de:
1. La referencia del controlador lógico.
2. Los tipos de funciones expertas y el número de funciones opcionales
(consulte Modicon M241 Logic Controller - Contadores de alta velocidad -
Guía de la biblioteca HSC) que se han configurado. Consulte Asignación de
E/S expertas integradas (consulte Modicon M241 Logic Controller -
Contadores de alta velocidad - Guía de la biblioteca HSC).
3. El número de E/S disponibles.
Número máximo de funciones expertas por referencia del controlador lógico:
Tipo de función experta 24 referencias de E/S
(TM241•24•) 40 referencias de E/S
(TM241•40•)
Número total de funciones HSC 14 16
HSC Simple 14 16
Monofásico principal 4
Fase dual principal
Medidor de frecuencias
(1)
Medidor de periodos
PTO
PWM
FreqGen
1) Si se configura el número máximo, solo se pueden añadir 12 funciones HSC simple adicionales.
El número máximo de funciones expertas posibles puede limitarse más por el
número de E/S utilizadas por cada función experta.
Configuraciones de ejemplo:
• 4 PTO(2) + 14 HSC simple en 24 referencias de controlador de E/S
• 4 FreqGen(2) + 16 HSC simple en 40 referencias de controlador de E/S
• 4 Monofásico principal HSC + 10 HSC Simple en 24 referencias de
controlador de E/S
• 4 Fase dual principal HSC + 8 HSC Simple en 40 referencias de controlador
de E/S
• 2 PTO(2) + 2 Monofásico principal HSC + 14 HSC Simple en 40 referencias
de controlador de E/S
2) sin ninguna E/S opcional configurada
El rendimiento de la función experta está limitado por las E/S utilizadas:
• HSC con entradas rápidas: 100 kHz/200 kHz
• HSC con entradas normales: 1 kHz
82 EIO0000003062.06

Configuración de funciones expertas
Configuración de una función experta
Para configurar una función experta, siga estos pasos:
Paso Descripción
1 Haga doble clic en el nodo Contadores oPulse_Generators en el árbol de dispositivos.
Resultado: aparece la ventana de configuración Contadores oGeneradores de pulsos:
2 Haga doble clic en Ninguno en la columna Valor y elija el tipo de función experta para
asignar.
Resultado: la configuración predeterminada de la función experta aparece al hacer clic en
cualquier lugar en la ventana de configuración.
3 Configure los parámetros de la función experta como se describe en los siguientes
capítulos.
4 Para configurar una función experta adicional, haga clic en la ficha +.
NOTA: Si ya se ha configurado el número máximo de funciones expertas, aparece un
mensaje en la parte inferior de la ventana de configuración que informa de que ahora
solo puede añadir funciones HSC simple.
E/S normal configurada como función experta
Cuando se configuren E/S normales como funciones expertas, tenga en cuenta lo
siguiente:
• Las entradas se pueden leer a través de variables de memoria.
• Una entrada no se puede configurar como una función experta si ya se ha
configurado como entrada Run/Stop.
• Una salida no puede configurarse como función experta si ya se ha
configurado como una alarma.
• La gestión de cortocircuitos se aplica a las salidas. El estado de las salidas
está disponible.
• Las E/S no utilizadas por funciones expertas pueden utilizarse como
cualquier otra E/S normal.
• Cuando se utilizan entradas en funciones expertas (retención, HSC…), el
filtro integrador se sustituye por un filtro antirrebote. El valor de filtro se
configura en la pantalla de configuración.
Función de recuento
Descripción general
La función Conteo puede ejecutar el conteo rápido de pulsos a partir de sensores,
codificadores, conmutadores, etc., que estén conectados a entradas rápidas. La
función Conteo también puede conectarse a entradas normales, en cuyo caso la
función funciona en una frecuencia inferior.
Existen 2 tipos de funciones de conteo incrustadas:
• Tipo Simple: un contador de entrada única.
• Tipo Principal: un contador que utiliza hasta 4 entradas y 2 salidas reflejas.
EIO0000003062.06 83

Configuración de funciones expertas
Existen 5 tipos de contadores basados en las funciones de conteo incrustadas
que puede configurar en EcoStruxure Machine Expert:
•HSC simple
•Monofásico principal HSC
•Fase dual principal HSC
•Medidor de frecuencia
•Medidor de periodos
El tipo Medidor de frecuencias y el tipo Medidor de periodos están basados en
el tipo HSC principal.
Acceso a la ventana de configuración de la función de conteo
Siga estos pasos para acceder a la ventana de configuración de la función de
conteo incrustada:
Pa-
so Descripción
1 En Dispositivos, haga doble clic en Contadores.
Aparecerá la ventana Función de conteo:
2 Haga doble clic en Valor y elija el tipo de función de conteo que desea asignar.
Ventana de configuración de la función de conteo
En la figura siguiente se muestra una ventana de configuración de HSC de
ejemplo:
84 EIO0000003062.06

Configuración de funciones expertas
En la siguiente ventana se describen las áreas de la ventana de configuración de
Contadores:
Núme-
ro Acción
1 El nombre de instancia de la función y el tipo de función de conteo configurada
actualmente.
2 Haga clic en +para configurar una nueva instancia de función de conteo.
3 Haga doble clic en la columna Valor para que se muestre una lista de los tipos de
funciones del contador disponibles.
4 Haga doble clic en el valor de Nombre de instancia para editar el nombre de instancia
de la función.
EcoStruxure Machine Expert proporciona automáticamente el nombre de instancia. El
parámetro Nombre de instancia es editable y permite definir el nombre de la instancia.
Sin embargo, tanto si el nombre de instancia lo define el software como si lo define el
usuario, utilice el mismo nombre de instancia como entrada para los bloques de
funciones relacionados con el contador, tal como se define en el editor Contadores.
5Configure cada parámetro haciendo clic en el signo más situado junto a él para acceder
a su configuración.
Los parámetros disponibles dependen de la modalidad que se utilice.
Para obtener información detallada sobre los parámetros de configuración,
consulte M241 Guía de la biblioteca de HSC.
Función integrada de generadores de pulsos
Descripción general
Las funciones incrustadas de generadores de pulsos disponibles con el M241
son:
PTO La PTO (Salida de tren de pulsos) implementa tecnología digital que
ofrece un posicionamiento preciso para el control de bucle abierto de los
controladores de motores.
PWM La función PWM (Modulación de ancho de pulsos) genera una señal de
onda cuadrada programable en una salida dedicada con un ciclo de
servicio y una frecuencia ajustables.
FreqGen La función FreqGen (generador de frecuencias) genera una señal de
onda cuadrada en canales de salida dedicada con un ciclo de servicio fijo
(50 %).
Acceso a la ventana de configuración de los generadores de
pulsos
Siga estos pasos para acceder a la ventana Configuración de los generadores de
pulsos:
Paso Descripción
1 Haga doble clic en Generadores de pulsos en Dispositivos.
Aparece la ventana Función de generación de pulsos:
2 Haga doble clic en Valor y elija el tipo de función de generador de pulsos que desee
asignar.
EIO0000003062.06 85

Configuración de funciones expertas
Ventana Configuración de los generadores de pulsos
En la ilustración se muestra un ejemplo de ventana de configuración de
Generadores de pulsos utilizada para configurar una función PTO, PWM o
FreqGen:
En la tabla siguiente se describen las áreas de la ventana de configuración de
Generadores de pulsos:
Número Acción
1 Nombre de instancia de la función y tipo de función de generador de pulsos
configurada actualmente.
2 Haga clic en +para configurar una nueva instancia de función de generador de
pulsos.
3 Haga doble clic en la columna Valor para ver una lista de los tipos de función de
generador de pulsos disponibles.
4 Haga doble clic en el valor de Nombre de instancia para editar el nombre de
instancia de la función.
EcoStruxure Machine Expert proporciona automáticamente el nombre de instancia.
El parámetro Nombre de instancia es editable y permite definir el nombre de la
instancia. Sin embargo, tanto si el nombre de instancia lo define el software como
si lo define el usuario, utilice el mismo nombre de instancia como entrada para los
bloques de funciones relacionados con el contador, tal como se define en el editor
Contadores.
5Configure cada parámetro. Para ello, seleccione el valor correspondiente en la lista y
acceda a sus ajustes.
Los parámetros disponibles dependen del tipo de parámetro seleccionado.
Para obtener más información sobre los parámetros de configuración, consulte
Modicon M241 Logic Controller - Guía de la biblioteca PTO/PWM.
86 EIO0000003062.06

Configuración de cartuchos
Configuración de cartuchos
Configuración de cartuchos TMC4
Introducción
El Modicon M241 Logic Controller admite los siguientes cartuchos:
• Cartuchos TMC4 estándar
• Cartuchos TMC4 de aplicaciones
Para obtener más información sobre la configuración del cartucho de TMC4,
consulte la Guía de programación de cartuchos TMC4 (consulte Modicon TMC4 -
Cartuchos - Guía de programación).
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
• Utilice solo software aprobado por Schneider Electric para este equipo.
• Actualice el programa de aplicación siempre que cambie la configuración de
hardware física.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Adición de un cartucho TMC4
Para añadir un cartucho al controlador, seleccione el cartucho en el Catálogo de
hardware, arrástrelo hasta Dispositivos y suéltelo en uno de los nodos
resaltados.
Para obtener más información sobre cómo añadir un dispositivo al proyecto,
consulte:
• Uso del Catálogo de hardware (consulte EcoStruxure Machine Expert - Guía de
programación)
• Uso del menú contextual o el botón Más (véase EcoStruxure Machine Expert,
Programming Guide)
EIO0000003062.06 87

Configuración de módulos de extensión
Configuración de módulos de extensión
Descripción general
En este capítulo se describe cómo configurar los módulos de extensión TM4, TM3
y TM2 para el Modicon M241 Logic Controller.
Configuración del módulo de extensión TM4/TM3/TM2
Introducción
Modicon M241 Logic Controller admite los siguientes módulos de extensión:
• Módulos de extensión de comunicación TM4
• Módulos de extensión TM3
◦Módulos de E/S digitales
◦Módulos de E/S analógicos
◦Módulos de E/S expertas
◦Módulos de seguridad
◦Módulos transmisores y receptores
• Módulos de extensión TM2
◦Módulos de E/S digitales
◦Módulos de E/S analógicos
◦Módulos expertos
◦Módulos de comunicación
Para obtener más información sobre la configuración de los módulos de extensión
TM4,TM3 y TM2, consulte Configuración de los módulos de extensión TM4 - Guía
de programación, Configuración de los módulos de extensión TM3 - Guía de
programación y Configuración de los módulos de extensión TM2 - Guía de
programación, respectivamente.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
• Utilice solo software aprobado por Schneider Electric para este equipo.
• Actualice el programa de aplicación siempre que cambie la configuración de
hardware física.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Adición de un módulo de extensión
Para añadir un módulo de extensión al controlador, seleccione el módulo de
extensión en el Catálogo de hardware, arrástrelo hasta el árbol de dispositivos
y suéltelo en uno de los nodos resaltados.
88 EIO0000003062.06

Configuración de módulos de extensión
Para obtener más información sobre cómo añadir un dispositivo al proyecto,
consulte:
• Uso del Catálogo de hardware (consulte EcoStruxure Machine Expert - Guía de
programación)
• Uso del menú contextual o el botón Más (véase EcoStruxure Machine Expert,
Programming Guide)
Descripción general de la configuración de E/S de TM3
Introducción
En su proyecto, puede añadir módulos de extensión de E/S a su M241 Logic
Controller para aumentar el número de entradas y salidas digitales y analógicas
con respecto a las que tiene de forma nativa el controlador (E/S incrustadas).
Puede añadir módulos de extensión de E/S TM3 o TM2 al logic controller y
ampliar el número de E/S mediante módulos transmisores y receptores TM3 para
crear configuraciones de E/S remotas. Se aplican reglas especiales en todos los
casos al crear extensiones de E/S locales y remotas, así como al combinar
módulos de extensión E/S TM2 y TM3 (consulte Configuración máxima de
hardware (consulte Modicon M241 Logic Controller - Guía de hardware)).
El bus de extensión de E/S del M241 Logic Controller se crea cuando monta
módulos de extensión de E/S en el controlador lógico. Los módulos de extensión
de E/S se consideran dispositivos externos en la arquitectura del controlador
lógico y, como tales, se tratan de manera diferente de las E/S incrustadas del
controlador lógico.
Errores de bus de extensión de E/S
Si el controlador lógico no se puede comunicar con uno o varios módulos de
extensión de E/S contenidos en la configuración del programa y dichos módulos
no se configuran como módulos opcionales (consulte Módulos de extensión de E/
S opcionales, página 94), el controlador lógico lo considera un error de bus de
extensión de E/S. La comunicación no satisfactoria puede detectarse durante el
arranque del controlador lógico o durante la ejecución, y puede deberse a
diversas causas. Entre las diferentes causas de excepción de comunicación en el
bus de extensión de E/S se incluyen la desconexión de los módulos de E/S o su
ausencia física, una radiación electromagnética que sobrepasa las
especificaciones medioambientales publicadas, o bien el hecho de que los
módulos no estén operativos.
EIO0000003062.06 89

Configuración de módulos de extensión
Si se detecta un error de bus de extensión de E/S:
• El LED de estado del sistema I/O del controlador lógico está iluminado, lo
que indica un error de E/S.
• Cuando EcoStruxure Machine Expert está en modalidad online, se muestra
un triángulo de color rojo junto al módulo o módulos de extensión TM3 con
error y junto al nodo IO_Bus de la ventana del árbol Dispositivos.
También está disponible la siguiente información de diagnóstico:
• El bit 0 y el bit 1 de la variable de sistema PLC_R.i_lwSystemFault_1 se
establecen en 0.
• Las variables de sistema PLC_R.i_wIOStatus1 yPLC_R.i_wIOStatus2
se establecen en PLC_R_IO_BUS_ERROR.
• La variable de sistema TM3_MODULE_R[i].i_wModuleState, donde [i]
identifica el módulo de expansión TM3 con error, se establece en TM3_BUS_
ERROR.
• El bloque de funciones TM3_ERR_BUSTM3_GetModuleBusStatus
devuelve el código de error (consulte Modicon M241 Logic Controller -
Funciones y variables de sistema - Guía de la biblioteca de PLCSystem).
Consulte las estructuras PLC_R (consulte Modicon M241 Logic Controller -
Funciones y variables del sistema - Guía de la biblioteca de PLCSystem) y TM3_
MODULE_R (consulte Modicon M241 Logic Controller - Funciones y variables del
sistema - Guía de la biblioteca de PLCSystem) para obtener más información
sobre las variables de sistema.
Gestión de errores de bus de E/S activa
La variable de sistema TM3_BUS_W.q_wIOBusErrPassiv se establece de
forma predeterminada en ERR_ACTIVE para especificar el uso de la gestión de
errores de E/S activa. La aplicación puede establecer este bit en ERR_PASSIVE
para utilizar la gestión de errores de E/S pasiva.
De forma predeterminada, cuando el controlador lógico detecta un módulo TM3
con un error de comunicación de bus, establece el bus en una condición de "bus
desactivado", donde las salidas del módulo de extensión de TM3, el valor de la
imagen de entrada y el valor de la imagen de salida se establecen en 0. Se
considera que un módulo de extensión de TM3 presenta un error de
comunicación cuando no se ha podido realizar un intercambio de E/S con el
módulo de extensión como mínimo durante dos ciclos consecutivos de tareas de
bus. Cuando se produce un error de comunicación de bus, la variable de sistema
TM3_MODULE_R[i].i_wModuleState (donde [i] es el número del módulo de
extensión con error) se establece en TM3_BUS_ERROR. Los otros bits se
ajustan en TM3_OK.
90 EIO0000003062.06

Configuración de módulos de extensión
La actividad normal del bus de extensión de E/S solo se puede restablecer
después de eliminar el origen del error y llevar a cabo una de las acciones
siguientes:
• Apagar y encender
• Descargar de nuevo la aplicación
• Reiniciar el bus de E/S mediante el establecimiento de la variable de sistema
TM3_BUS_W.q_wIOBusRestart en 1. El bus se reinicia solo si no hay
módulos de expansión erróneos (TM3_MODULE_R[i].i_wModuleState =
TM3_BUS_ERROR). Consulte Reinicio del bus de extensión de E/S, página
92.
• Emitir un comando Reset caliente oReset frío con EcoStruxure Machine
Expert, página 49.
Gestión de bus de extensión de E/S pasiva
La aplicación puede establecer la variable de sistema TM3_BUS_W.q_
wIOBusErrPassiv en ERR_PASSIVE para utilizar la gestión de errores de E/S
pasiva. Esta gestión de errores se proporciona para garantizar la compatibilidad
con versiones anteriores del firmware.
Cuando se utiliza la gestión de errores de E/S pasiva, el controlador lógico intenta
seguir intercambiando buses de datos con los módulos durante los errores de
comunicación de bus. Mientras el error del bus de extensión sigue presente, el
controlador lógico intenta restablecer la comunicación en el bus con módulos con
los que no se puede establecer comunicación, en función del tipo de módulo de
extensión de E/S:
• Para los módulos de extensión de E/S TM3, el valor de los canales de E/S se
mantiene (Mantener los valores) durante unos 10 segundos
aproximadamente mientras el logic controller intenta restablecer la
comunicación. Si el controlador lógico no puede restablecer la comunicación
en ese tiempo, las salidas de extensión de E/S TM3 afectadas se establecen
en 0.
• Para los módulos de extensión de E/S TM2 que puedan formar parte de la
configuración, el valor de los canales de E/S se mantiene indefinidamente.
Es decir, las salidas de los módulos de extensión de E/S TM2 se establecen
en "Mantener los valores" hasta que se realiza un ciclo de apagado y
encendido en el sistema del controlador lógico o el usuario emite un
comando Reset caliente oReset frío con EcoStruxure Machine Expert,
página 49.
En ambos casos, el controlador lógico continúa resolviendo la lógica y, si el
controlador está equipado de esa manera, la aplicación sigue gestionando las E/S
incrustadas ("Gestión a través de un programa de aplicación, página 47")
mientras intenta restablecer la comunicación con los módulos de extensión de E/
S con los que no se ha podido establecer comunicación. Si la comunicación es
satisfactoria, los módulos de extensión de E/S se reanudan para que los gestione
la aplicación. Si la comunicación con los módulos de extensión de E/S no es
satisfactoria, debe resolver el motivo de la comunicación no satisfactoria y, a
continuación, apagar y encender el sistema del controlador lógico o emitir un
comando Reset caliente oReset frío con EcoStruxure Machine Expert, página
49.
El valor de la imagen de entrada de los módulos de extensión de E/S con los que
no se puede establecer la comunicación se mantiene, y el valor de imagen de
salida lo establece la aplicación.
Además, si los módulos de E/S con los que no se puede establecer comunicación
interrumpen la comunicación con los módulos no afectados, se considerará que
los módulos no afectados también presentan error y la variable de sistema TM3_
MODULE_R[i].i_wModuleState (donde [i] es el número del módulo de
expansión) se establece en TM3_BUS_ERROR. Sin embargo, con los
intercambios de datos en curso que caracterizan la Gestión de errores de bus de
extensión de E/S pasiva, los módulos no afectados aplicarán los datos enviados,
y no aplicarán los valores de retorno para el módulo con el que no se puede
establecer comunicación.
EIO0000003062.06 91

Configuración de módulos de extensión
Por consiguiente, es necesario supervisar en la aplicación el estado del bus y el
estado de error de los módulos del bus, y llevar a cabo la acción necesaria en
función de la aplicación que se utilice.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
• En la evaluación del riesgo, incluya la posibilidad de que se produzca un
error de comunicación entre el logic controller y uno de los módulos de
extensión de E/S.
• Si la opción "Mantener los valores" aplicada durante un error externo del
módulo de extensión de E/S no es compatible con la aplicación, use un
método alternativo para controlar la aplicación en estos casos.
• Supervise el estado del bus de extensión de E/S utilizando las variables de
sistema dedicadas y, de acuerdo con la evaluación del riesgo, lleve a cabo
las acciones que correspondan.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Para obtener más información sobre las acciones que se llevan a cabo después
del arranque del controlador lógico cuando se detecta un error de bus de
extensión de E/S, consulte Descripción de los estados del controlador, página 43.
Reinicio del bus de extensión de E/S
Cuando se aplica la gestión de errores de E/S activa, es decir, las salidas
incrustadas y las salidas TM3 se establecen en 0 cuando se detecta un error de
comunicación, la aplicación puede solicitar un reinicio del bus de extensión de E/S
mientras el controlador lógico sigue ejecutándose (sin que sea necesario llevar a
cabo un arranque en frío o en caliente, apagar y encender el equipo, ni descargar
la aplicación).
La variable del sistema TM3_BUS_W. q_wIoBusRestart está disponible para
solicitar el reinicio del bus de expansión de E/S. El valor predeterminado de este
bit es 0. Siempre y cuando al menos un módulo de expansión TM3 esté en estado
de error (TM3_MODULE_R[i].i_wModuleState configurado en TM3_BUS_
ERROR), la aplicación puede establecer TM3_BUS_W. q_wIoBusRestart en 1
para solicitar el reinicio del bus de extensión de E/S. Cuando se detecta un borde
ascendente de este bit, el controlador reconfigura y reinicia el bus de expansión
de E/S si se cumplen todas las siguientes condiciones:
• La variable de sistema TM3_BUS_W.q_wIOBusErrPassiv está establecida
en ERR_ACTIVE (es decir, la actividad del bus de extensión de E/S se
detiene)
• El bit 0 y el bit 1 de la variable de sistema PLC_R.i_lwSystemFault_1
están establecidos en 0 (error en bus de extensión de E/S)
• La variable de sistema TM3_MODULE_R[i].i_wModuleState está
establecida en TM3_BUS_ERROR (al menos un módulo de extensión presenta
un error de comunicación de bus)
Si la variable de sistema TM3_BUS_W.q_wIoBusRestart está establecida en 1
y no se cumple ninguna de las condiciones anteriores, el controlador lógico no
lleva a cabo acción alguna.
Coincidencia de configuración de software y hardware
La E/S que puede estar integrada en su controlador es independiente de la E/S
que puede haber añadido en forma de extensión de E/S. Es importante que la
configuración de E/S lógica dentro de su programa coincida con la configuración
de E/S física de su instalación. Si añade o elimina cualquier E/S física desde o
hacia el bus de extensión de E/S o, en función de la referencia del controlador,
92 EIO0000003062.06

Configuración de módulos de extensión
desde o hacia el controlador (en forma de cartuchos), es obligatorio que actualice
la configuración de su aplicación. Esto también se aplica a cualquier dispositivo
de bus de campo que pueda tener en su instalación. En caso contrario, existe la
posibilidad de que el bus de extensión o el bus de campo dejen de funcionar
mientras la E/S incrustada que puede haber en su controlador continúa
funcionando.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Actualice la configuración del programa cada vez que añada o elimine cualquier
tipo de extensión de E/S en el bus de E/S, o si añade o elimina cualquier
dispositivo en el bus de campo.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Presentación de la función opcional de los módulos de extensión
de E/S
Los módulos de extensión de E/S se pueden marcar como opcionales en la
configuración. La función Módulo opcional proporciona una configuración más
flexible al aceptar la definición de módulos no conectados físicamente al logic
controller. Por lo tanto, una única aplicación puede admitir varias configuraciones
físicas de módulos de extensión de E/S, lo cual favorece un mayor grado de
escalabilidad sin la necesidad de mantener varios archivos de aplicación para la
misma aplicación.
Debe ser muy consciente de las implicaciones y los efectos de marcar módulos
de E/S como opcionales en su aplicación, tanto si estos módulos están presentes
como si están ausentes físicamente al ejecutar la máquina o el proceso.
Asegúrese de incluir esta función en el análisis de riesgos.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Incluya en el análisis de riesgos cada una de las variantes de configuración de
E/S que se pueden realizar marcando módulos de extensión de E/S como
opcionales, y concretamente el establecimiento de módulos de seguridad TM3
(TM3S…) como módulos de E/S opcionales, y valore si es aceptable con
respecto a su aplicación.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
NOTA: Para obtener más información sobre esta función, consulte Módulos
de extensión de E/S opcionales, página 94.
Configuración del bus de E/S TM3
Descripción general
La configuración del bus de E/S TM3 le permite seleccionar la tarea que impulsa
los intercambios físicos de TM3. También puede anular la configuración definida
en la tarea de ciclo de bus Ajustes PLC, página 63.
EIO0000003062.06 93

Configuración de módulos de extensión
Configuración del bus de E/S
Siga estos pasos para configurar el bus de E/S TM3:
Pa-
so Descripción
1 En el árbol Dispositivos, haga doble clic en IO_Bus.
Resultado: Aparece la ficha del editor IO_Bus:
2 Establezca la Tarea de ciclo de bus desde la lista en alguna de los siguientes opciones :
•Emplear configuración de ciclo del bus de orden superior (predeterminada)
Establezca la tarea del intercambio de bus tal como se define en Ajustes PLC.
•MAST
Establece la tarea maestra para el intercambio de bus con independencia de la tarea
definida en Ajustes PLC.
Módulos de extensión de E/S opcionales
Presentación
Los módulos de extensión de E/S se pueden marcar como opcionales en la
configuración. La función Módulo opcional proporciona una configuración más
flexible al aceptar la definición de módulos no conectados físicamente al
controlador. Por lo tanto, una única aplicación puede admitir varias
configuraciones físicas de módulos de extensión de E/S, lo cual favorece un
mayor grado de escalabilidad sin la necesidad de mantener varios archivos de
aplicación para la misma aplicación.
Sin la función Módulo opcional, cuando el controlador inicia el bus de extensión
de E/S (después de apagado y encendido, descarga de aplicaciones o comando
de inicialización), compara la configuración definida en la aplicación con los
módulos de E/S físicos conectados al bus de E/S. Entre otros diagnósticos
realizados, si el controlador determina que hay módulos de E/S definidos en la
configuración que no están físicamente presentes en el bus de E/S, se detecta un
error y el bus de E/S no se inicia.
Con la función Módulo opcional, el controlador ignora los módulos de extensión
de E/S ausentes que se hayan marcado como opcionales, lo cual permite que el
controlador inicie el bus de extensión de E/S.
El controlador inicia el bus de extensión de E/S en el momento de la configuración
(después de apagar y encender, descargar una aplicación o después de un
comando de inicialización) aunque los módulos de extensión opcionales no estén
conectados físicamente al controlador.
94 EIO0000003062.06

Configuración de módulos de extensión
Se pueden marcar como opcionales los siguientes tipos de módulo:
• Módulos de extensión de E/S TM3
• Módulos de extensión de E/S TM2
NOTA: Los módulos de transmisor/receptor TM3 (TM3XTRA1 y TM3XREC1)
y los cartuchos TMC4 no se pueden marcar como opcionales.
Debe ser muy consciente de las implicaciones y los efectos de marcar módulos
de E/S como opcionales en su aplicación, tanto si estos módulos están presentes
como si están ausentes físicamente al ejecutar la máquina o el proceso.
Asegúrese de incluir esta función en el análisis de riesgos.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Incluya en el análisis de riesgos cada una de las variantes de configuración de
E/S que se pueden realizar marcando módulos de extensión de E/S como
opcionales, y concretamente el establecimiento de módulos de seguridad TM3
(TM3S…) como módulos de E/S opcionales, y valore si es aceptable con
respecto a su aplicación.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Marcar un módulo de extensión de E/S como opcional
Para añadir un módulo de extensión y marcarlo como opcional en la
configuración:
Paso Acción
1 Añada el módulo de extensión al controlador.
2 En el árbol de dispositivos, haga doble clic en el módulo de extensión.
3 Seleccione la ficha Configuración de E/S.
4 En la línea Módulo opcional, seleccione Sí en la columna Valor:
Códigos ID internos compartidos
Los controladores y acopladores de bus identifican los módulos de expansión
mediante un sencillo código de ID interno. Este código de ID no es específico
para cada referencia, pero identifica la estructura lógica del módulo de extensión.
Por tanto, varias referencias pueden compartir el mismo código ID.
No puede tener dos módulos con el mismo código ID interno declarados como
opcionales sin que haya al menos un módulo obligatorio entre ellos.
EIO0000003062.06 95

Configuración de módulos de extensión
En esta tabla se agrupan las referencias de módulo que comparten el mismo
código ID interno:
Módulos que comparten el mismo código ID interno
TM2DDI16DT, TM2DDI16DK
TM2DRA16RT, TM2DDO16UK, TM2DDO16TK
TM2DDI8DT, TM2DAI8DT
TM2DRA8RT, TM2DDO8UT, TM2DDO8TT
TM2DDO32TK, TM2DDO32UK
TM3DI16K, TM3DI16, TM3DI16G
TM3DQ16R, TM3DQ16RG, TM3DQ16T, TM3DQ16TG, TM3DQ16TK, TM3DQ16U, TM3DQ16UG,
TM3DQ16UK
TM3DQ32TK, TM3DQ32UK
TM3DI8, TM3DI8G, TM3DI8A
TM3DQ8R, TM3DQ8RG, TM3DQ8T, TM3DQ8TG, TM3DQ8U, TM3DQ8UG
TM3DM8R, TM3DM8RG
TM3DM24R, TM3DM24RG
TM3SAK6R, TM3SAK6RG
TM3SAF5R, TM3SAF5RG
TM3SAC5R, TM3SAC5RG
TM3SAFL5R, TM3SAFL5RG
TM3AI2H, TM3AI2HG
TM3AI4, TM3AI4G
TM3AI8, TM3AI8G
TM3AQ2, TM3AQ2G
TM3AQ4, TM3AQ4G
TM3AM6, TM3AM6G
TM3TM3, TM3TM3G
TM3TI4, TM3TI4G
TM3TI4D, TM3TI4DG
TM3TI8T, TM3TI8TG
TM3XHSC202, TM3XHSC202G
Diagnóstico de módulos opcionales
La siguiente información de diagnóstico está disponible: La variable del sistema
TM3_MODULE_R[i].i_wModuleState, donde [i] identifica el módulo de extensión
TM3 opcional ausente, se establece en TM3_MISSING_OPT_MOD.
96 EIO0000003062.06

Configuración Ethernet
Configuración Ethernet
Introducción
En este capítulo se describe cómo configurar la interfaz de red Ethernet de
Modicon M241 Logic Controller.
Características, funciones y servicios Ethernet
Presentación
Características, funciones y servicios Ethernet
El controlador admite los siguientes servicios:
•Servidor Modbus TCP, página 102
•Cliente Modbus TCP, página 102
•Servidor web, página 103
•Servidor FTP, página 114
•SNMP, página 116
•Controlador como dispositivo de destino en EtherNet/IP, página 117
•Controlador como dispositivo esclavo en Modbus TCP, página 137
•IEC VAR ACCESS, página 98
• Visualización web
•Servidor OPC UA, página 179
Protocolos Ethernet
El controlador admite los siguientes protocolos:
• IP (Internet Protocol)
• UDP (User Datagram Protocol)
• TCP (Transmission Control Protocol)
• ARP (Address Resolution Protocol)
• ICMP (Internet Control Messaging Protocol)
• IGMP (Internet Group Management Protocol)
Conexiones
En esta tabla se muestra el número máximo de conexiones:
Tipo de conexión Número máximo de conexiones
Servidor Modbus 8
Cliente Modbus 8
Destino de EtherNet/IP 16
Servidor FTP 4
Servidor web 10
Protocolo de Machine Expert (software
EcoStruxure Machine Expert, trazado,
visualización Web, dispositivos HMI)
8
EIO0000003062.06 97

Configuración Ethernet
NOTA: Si hay un destino de EtherNet/IP configurado como mínimo, el número
total de conexiones (EtherNet/IP más Modbus TCP) está limitado a 16. El
número total de dispositivos esclavos puede ser 64 únicamente si se utiliza el
Modbus TCP IOScanner de forma exclusiva. El control de estos máximos se
realiza en el momento de la compilación.
Cada conexión basada en TCP administra su propio conjunto de conexiones de la
manera siguiente:
1. Cuando un cliente intenta abrir una conexión que supera el tamaño de la
consulta, el controller cierra la conexión más antigua.
2. Si todas las conexiones están ocupadas (intercambio en curso), cuando un
cliente intenta abrir una nueva se deniega la nueva conexión.
3. Las conexiones de servidor permanecen abiertas siempre que el controlador
permanezca en los estados operativos (RUNNING,STOPPED,HALT).
4. Las conexiones de servidor se cierran al salir de los estados operativos
(RUNNING,STOPPED,HALT), excepto en caso de corte de alimentación
(porque el controlador no tiene tiempo de cerrar las conexiones).
Las conexiones pueden cerrarse cuando el dispositivo de origen de la conexión
solicita cerrar la conexión que ha abierto previamente.
Servicios disponibles
Con una conexión Ethernet, el servicio IEC VAR ACCESS es compatible con el
controlador. Con el servicio IEC VAR ACCESS, los datos se pueden intercambiar
entre el controlador y una HMI.
El servicio Variables de red también es compatible con el controlador. Con el
servicio Variables de red, los datos se pueden intercambiar entre los
controladores.
NOTA: Para obtener más información,, consulte la EcoStruxure Machine
Expert Guía de programación.
Configuración de dirección IP
Introducción
Existen distintos modos de asignar la dirección IP a la interfaz Ethernet añadida
del controlador:
• Asignación de direcciones mediante el servidor DHCP
• Asignación de direcciones mediante el servidor BOOTP
• Dirección IP fija
•Archivo de configuración de Post, página 187. Si existe un archivo de
configuración de configuración de Post, este método de asignación tiene
prioridad sobre los otros.
La dirección IP también se puede cambiar dinámicamente por medio de:
• La ficha Configuración de comunicación (consulte EcoStruxure Machine
Expert - Guía de programación en EcoStruxure Machine Expert
• El bloque de funciones, página 210 changeIPAddress
NOTA: Si el método de direccionamiento probado no da resultado, el enlace
utiliza una dirección IP predeterminada, página 100 derivada de la dirección
MAC.
Al gestionar las direcciones IP, recuerde que cada dispositivo de la red requiere
una dirección exclusiva. Si existen varios dispositivos con la misma dirección IP,
puede producirse un funcionamiento imprevisto en la red y el equipo asociado.
98 EIO0000003062.06

Configuración Ethernet
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
• Verifique que solo hay un controlador maestro configurado en la red o la
conexión remota.
• Verifique que todos los dispositivos tienen direcciones exclusivas.
• Solicite su dirección IP al administrador del sistema.
• Confirme que la dirección IP del dispositivo sea única antes de poner el
sistema en funcionamiento.
• No asigne la misma dirección IP a ningún otro equipo de la red.
• Actualice la dirección IP después de clonar cualquier aplicación que incluya
comunicaciones Ethernet a una dirección exclusiva.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
NOTA: Compruebe que el administrador del sistema conserva un registro de
las direcciones IP asignadas en la red y subred e infórmele de los cambios de
configuración realizados.
Gestión de direcciones
Este diagrama muestra los diferentes tipos de sistemas de direcciones para el
controlador:
EIO0000003062.06 99

Configuración Ethernet
NOTA: Si un dispositivo programado para utilizar los métodos de
direccionamiento DHCP o BOOTP no puede establecer contacto con su
servidor correspondiente, el controlador utiliza la dirección IP predeterminada.
Repite su petición constantemente.
El proceso de IP se reinicia en los siguientes casos:
• Reinicio del controlador
• Reconexión de cable Ethernet
• Descarga de aplicación (si los parámetros IP cambian)
• El servidor DHCP o BOOTP detectado después de un intento de
direccionamiento anterior no ha dado resultado.
Configuración de Ethernet
En el árbol Dispositivos, haga doble clic en Ethernet_1:
Nota: Si está en modo online, verá las dos ventanas. No puede editarlas. Si está
en modo offline, verá la ventana Parámetros configurados. Puede editarla.
En esta tabla se describen los parámetros configurados:
Parámetros configurados Descripción
Nombre de red Se utiliza como nombre de dispositivo para recuperar la dirección IP mediante DHCP, 15
caracteres como máximo.
Dirección IP de DHCP La dirección IP se obtiene por medio del servidor DHCP.
Dirección IP de BOOTP La dirección IP se obtiene por medio del servidor BOOTP.
Dirección IP fija El usuario define la dirección IP, la máscara de subred y la dirección de pasarela.
Protocolo Ethernet Tipo de protocolo utilizado (Ethernet 2).
Velocidad de transferencia Velocidad y dúplex están en modalidad de negociación automática.
Dirección IP predeterminada
La dirección IP predeterminada es 10.10.x.x.
Parámetros configurados
Nombre de la red
my_Device
Dirección IP por DHCP
Dirección IP por BOOTP
Dirección IP fija
Dirección IP
Máscara de subred
Dirección de pasarela
Protocolo Ethernet
Velocidad de transferencia
85 . 100 . 68 . 252
255 . 255 . 255 . 0
0 . 0 . 0 . 0
Ethernet 2
Automática
Parámetros de seguridad
Protocolo inactivoProtocolo activo
Protocolo de detección
Servidor FTP
Protocolo de Machine Expert
Servidor Modbus
Protocolo SNMPConexión remota (Fast TCP)
Protocolo de visualización web>>
<<
Estado del adaptador
Dirección MAC
00:80:F4:0C:CC:05
Estado de la redIntercambios de datos
Configuración actual
Nombre de la red
my_Device
Dirección IP por DHCP
Dirección IP por BOOTP
Dirección IP fija
Dirección IP
Máscara de subred
Dirección de pasarela
Protocolo Ethernet
Velocidad de transferencia
85 . 100 . 68 . 252
255 . 0 . 0 . 0
0 . 0 . 0 . 0
Ethernet 2
100 MBit full
Parámetros de seguridad
Protocolo inactivoProtocolo activo
>>
<<
Identificación de dispositivos esclavos
Cuando esta opción está activa, cada dispositivo que se añade
al bus de campo se puede configurar para que se le identifique
por su nombre o dirección MAC en vez de su dirección IP.
Servidor DHCP activo
Servidor FTP
Servidor Modbus
Protocolo SNMP
Protocolo de visualización web
Servidor web seguro (HTTPS)
Protocolo de detección
Protocolo de Machine Expert
Conexión remota (Fast TCP)
Servidor web seguro (HTTPS)
100 EIO0000003062.06

Configuración Ethernet
Los dos últimos campos de la dirección IP predeterminada se componen del
equivalente decimal de los dos últimos bytes hexadecimales de la dirección MAC
del puerto.
La dirección MAC del puerto se puede obtener de la etiqueta situada en el lado
frontal del controlador.
La máscara de subred predeterminada es la máscara de subred de clase A
predeterminada de 255.255.0.0.
NOTA: Una dirección MAC se escribe en formato hexadecimal y una
dirección IP en formato decimal. Convierta la dirección MAC al formato
decimal.
Ejemplo: Si la dirección MAC es 00.80.F4.01.80.F2, la dirección IP
predeterminada es 10.10.128.242.
Clases de dirección
La dirección IP está vinculada:
• A un dispositivo (el host).
• A la red a la que está conectado el dispositivo.
Una dirección IP siempre se codifica con 4 bytes.
La distribución de estos bytes entre la dirección de la red y la dirección del
dispositivo puede variar. La distribución viene definida por las clases de dirección.
Las diferentes clases de direcciones IP se definen en esta tabla:
Clase de
dirección Byte1 Byte 2 Byte 3 Byte 4
Clase A 0 ID de red ID de host
Clase B 1 0 ID de red ID de host
Clase C 1 1 0 ID de red ID de host
Clase D 1 1 1 0 Dirección de multidifusión
Clase E 1 1 1 1 0 Dirección reservada para uso posterior
Máscara de subred
La máscara de subred se utiliza para dirigirse a varias redes físicas con una única
dirección de red. La máscara se utiliza para separar la dirección de subred y la del
dispositivo en el ID de host.
La dirección de subred se obtiene conservando los bits de la dirección IP que
corresponden a las posiciones de la máscara que contienen 1 y sustituyendo los
otros por 0.
En cambio, la dirección de subred del dispositivo host se obtiene conservando los
bits de la dirección IP que corresponden a las posiciones de la máscara que
contienen 0 y sustituyendo los otros por 1.
Ejemplo de una dirección de subred:
dirección IP 192 (11000000) 1 (00000001) 17 (00010001) 11 (00001011)
Máscara de
subred 255 (11111111) 255 (11111111) 240 (11110000) 0 (00000000)
Dirección de
subred 192 (11000000) 1 (00000001) 16 (00010000) 0 (00000000)
NOTA: El dispositivo no se comunica en su subred cuando no hay ninguna
pasarela.
EIO0000003062.06 101

Configuración Ethernet
Dirección de pasarela
La puerta de enlace permite que un mensaje se pueda enrutar a un dispositivo
que no se encuentra en la misma red.
Si no hay ninguna puerta de enlace, la dirección de la puerta de enlace es 0.0.0.0.
La dirección de la puerta de enlace puede definirse en la interfaz Ethernet_1 o en
la interfaz Ethernet TM4ES4. El tráfico a redes desconocidas se envía a través de
esta dirección de puerta de enlace o la dirección configurada en la tabla de
enrutamiento IP, página 65.
Parámetros de seguridad
En esta tabla se describen los diferentes parámetros de seguridad:
Parámetros de
seguridad Descripción Ajustes
predetermi-
nados
Protocolo de detección Este parámetro desactiva el protocolo Discovery. Cuando está desactivado, se rechazan las
peticiones Discovery.
Activo
Servidor FTP Este parámetro desactiva el servidor FTP del controlador. Cuando está desactivado, se
rechazan las peticiones FTP.
Activo
Protocolo de Machine
Expert Este parámetro desactiva el protocolo de Machine Expert en las interfaces Ethernet. Cuando
se desactiva, se rechazan las solicitudes de Machine Expert desde cualquier dispositivo,
incluidas las de la conexión UDP o TCP. Por lo tanto, no es posible realizar una conexión
sobre Ethernet desde un PC con EcoStruxure Machine Expert, desde un destino HMI que
pretenda intercambiar variables con este controlador, desde un servidor OPC o desde
Controller Assistant.
Activo
Servidor Modbus Este parámetro desactiva el servidor Modbus del controlador. Cuando está desactivado, se
pasan por alto todas las peticiones de Modbus al controlador.
Inactivo
Conexión remota (Fast
TCP) Este parámetro desactiva la conexión remota. Cuando está desactivado, las peticiones de
Fast TCP se pasan por alto.
Activo
Servidor web seguro
(HTTPS) Este parámetro desactiva el Servidor web del controlador. Cuando está desactivado, las
solicitudes HTTPS realizadas al Servidor web del controlador se pasan por alto.
Activo
Protocolo SNMP Este parámetro desactiva el servidor SNMP del controlador. Cuando está desactivado, se
rechazan las peticiones SNMP.
Inactivo
Protocolo
WebVisualisation Este parámetro desactiva las páginas de WebVisualisation del controlador. Cuando se
desactivan, se pasan por alto las solicitudes HTTP realizadas al protocolo WebVisualisation
del controlador lógico.
Inactivo
Identificación del dispositivo esclavo
Cuando se ha seleccionado Servidor DHCP activo, los dispositivos añadidos al
bus de campo pueden configurarse para que se identifiquen por su nombre o por
su dirección MAC, en lugar de por su dirección IP. Consulte Servidor DHCP,
página 154.
Cliente/servidor Modbus TCP
Introducción
A diferencia del enlace serie Modbus, Modbus TCP no se basa en una estructura
jerárquica, sino en un modelo cliente/servidor.
Puesto que Modicon M241 Logic Controller implementa tanto los servicios de
cliente como los de servidor, puede iniciar comunicaciones con otros
controladores y dispositivos de E/S, así como responder a las peticiones de otros
controladores, SCADA, HMI y demás dispositivos. De forma predeterminada, la
funcionalidad Servidor Modbus no está activa.
102 EIO0000003062.06

Configuración Ethernet
Sin ninguna configuración, el puerto Ethernet incorporado del controlador admite
el servidor Modbus.
El cliente/servidor Modbus se incluye en el firmware y no requiere ninguna acción
de programación por parte del usuario. Debido a esta característica, es accesible
en los estados RUNNING, STOPPED y EMPTY.
Cliente Modbus TCP
El cliente Modbus TCP admite los siguientes bloques de funciones de la biblioteca
PLCCommunication sin ninguna configuración:
• ADDM
• READ_VAR
• SEND_RECV_MSG
• SINGLE_WRITE
• WRITE_READ_VAR
• WRITE_VAR
Para obtener más información, consulte las descripciones del bloque de
funciones (consulte EcoStruxure Machine Expert - Funciones de lectura/escritura
Modbus y ASCII - Guía de la biblioteca PLCCommunication).
Servidor Modbus TCP
El servidor Modbus admite las peticiones Modbus:
Código
funcional
Dec. (Hex)
Subfunción
Dec. (Hex)
Función
1 (1) –Lectura de salidas digitales (%Q)
2 (2) –Lectura de entradas digitales (%I)
3 (3) –Lectura de registro de mantenimiento (%MW)
6 (6) –Escritura de registro único (%MW)
8 (8) –Diagnostic
15 (F) –Escritura de salidas digitales múltiples (%Q)
16 (10) –Escritura de registros múltiples (%MW)
23 (17) –Lectura/escritura de registros múltiples (%MW)
43 (2B) 14 (E) Identificación del dispositivo de lectura
NOTA: El servidor Modbus integrado solo garantiza la coherencia en el
tiempo para una única palabra (2 bytes). Si su aplicación requiere coherencia
en el tiempo para más de una palabra, añada y configure un dispositivo
Modbus TCP esclavo, página 137 para que el contenido de los búferes %IW
y%QW sea coherente en el tiempo en la tarea IEC asociada (MAST de forma
predeterminada).
Servidor web
Introducción
Como equipo estándar, el controlador ofrece un Servidor webincrustado con un
sitio web integrado predefinido. Puede utilizar las páginas del sitio web para la
configuración y el control de módulos, así como para el diagnóstico y la
EIO0000003062.06 103

Configuración Ethernet
supervisión de aplicaciones. Estas páginas están listas para su utilización con un
navegador. No se necesita configuración ni programación.
Se puede acceder al Servidor web a través de los navegadores web que se
indican a continuación:
• Google Chrome (versión 87 o superior)
• Mozilla Firefox (versión 62 o superior)
El Servidor web puede mantener 10 sesiones abiertas simultáneamente, página
97.
NOTA: El Servidor web se puede deshabilitar desmarcando el parámetro
Servidor web activo en la ficha Configuración de Ethernet, página 100.
El Servidor web es una herramienta para leer y escribir datos, así como para
controlar el estado del controlador, con acceso a todos los datos de la aplicación.
Sin embargo, si existe preocupación por la seguridad de estas funciones, debe
asignar al menos una contraseña segura al Servidor web o deshabilitar el
Servidor web para impedir el acceso no autorizado a la aplicación. Al habilitar el
Servidor web, se habilitan estas funciones.
El Servidor web permite supervisar un controlador y su aplicación de forma
remota, realizar diversas actividades de mantenimiento, incluidas modificaciones
de parámetros de configuración y datos, y cambiar el estado del controlador. Se
debe tener cuidado para garantizar que el entorno físico inmediato de la máquina
y el proceso esté en un estado que no entrañe riesgos para la seguridad de las
personas o las propiedades antes de ejercer el control remotamente.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
• Configure e instale la entrada RUN/STOP para la aplicación, si está
disponible para su controlador específico, de forma que el control local
sobre el inicio o la detención del controlador pueda mantenerse
independientemente de los comandos remotos enviados al controlador.
• Defina una contraseña segura para el servidor web y no permita que
personal no autorizado o no cualificado utilice esta función.
• Asegúrese de que haya un observador local competente y cualificado
presente cuando se maneje el controlador desde una ubicación remota.
• Debe tener una comprensión completa de la aplicación y la máquina/
proceso que está controlando antes de intentar ajustar datos, detener una
aplicación que se está ejecutando o iniciar el controlador remotamente.
• Tome las precauciones necesarias para asegurarse de que está manejando
el controlador deseado. Para ello, tenga documentación de identificación
clara en la aplicación del controlador y su conexión remota.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Acceso al servidor web
El acceso al Servidor web se controla con derechos de usuario cuando estos
están habilitados en el controlador. Para obtener más información, consulte la
descripción de la ficha, página 61 Usuarios y grupos.
Para acceder al Servidor web, primero debe conectarse al controlador con
EcoStruxure Machine Expert o Controller Assistant.
104 EIO0000003062.06

Configuración Ethernet
ADVERTENCIA
ACCESO NO AUTORIZADO A DATOS
• Acceso seguro al servidor FTP/web con derechos de usuario.
• Si deshabilita los derechos de usuario, deshabilite el servidor FTP/web para
evitar el acceso no deseado o no autorizado a los datos de su aplicación.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Para cambiar la contraseña, vaya a la ficha Usuarios y grupos del editor de
dispositivos. Para obtener más información, consulte EcoStruxure Machine
Expert - Guía de programación.
NOTA: La única manera de acceder a un controlador con derechos de acceso
de usuario habilitados y del que no se dispone de las contraseñas es realizar
una operación de actualización del firmware. Esta eliminación de derechos de
usuario solo puede realizarse con una tarjeta SD o una llave USB (en función
de la compatibilidad de su controlador) para actualizar el firmware del
controlador. Además, puede eliminar los derechos de usuario del controlador
ejecutando una secuencia de comandos (para obtener más información,
consulte EcoStruxure Machine Expert - Guía de programación. Mediante esta
acción se elimina la aplicación existente de la memoria del controlador, pero
se restaura la capacidad de acceder al controlador.
Acceso a la página de inicio
Para acceder a la página de inicio del sitio web, escriba en el navegador la
dirección IP del controlador.
En esta figura se muestra la página de inicio de sesión del sitio del Servidor web:
EIO0000003062.06 105

Configuración Ethernet
En esta figura se muestra la página de inicio del sitio del Servidor web una vez
iniciada la sesión:
NOTA: Schneider Electric sigue las prácticas recomendadas del sector en el
desarrollo y la implementación de sistemas de control. Esto incluye un
método de defensa exhaustivo para proteger un sistema de control industrial.
Este método sitúa los controladores detrás de uno o varios servidores de
seguridad para limitar el acceso únicamente a los protocolos y el personal
autorizado.
ADVERTENCIA
ACCESO NO IDENTIFICADO Y POSTERIOR USO NO AUTORIZADO DE LA
MÁQUINA
• Evalúe si su entorno o sus máquinas están conectadas a su infraestructura
crítica y, de ser así, lleve a cabo los pasos necesarios en términos de
prevención, basándose en el método de defensa exhaustivo, antes de
conectar el sistema de automatización a una red.
• Limite el número de dispositivos conectados a una red al mínimo necesario.
• Aísle su red industrial de otras redes dentro de su empresa.
• Proteja cualquier red contra el acceso imprevisto utilizando servidores de
seguridad, VPN u otras medidas de seguridad demostradas.
• Monitorice las actividades dentro de sus sistemas.
• Evite el acceso o el enlace directos a los dispositivos en cuestión por parte
de personas no autorizadas o acciones sin identificación.
• Prepare un plan de recuperación que incluya una copia de seguridad de su
sistema y de información sobre los procesos.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Vigilancia: Parámetros de datos
Supervisión de variables del servidor web
106 EIO0000003062.06

Configuración Ethernet
Para supervisar las variables del Servidor web, debe añadir un objeto de Web
Data Configuration al proyecto. Dentro de este objeto, puede seleccionar todas
las variables que desee supervisar.
En esta tabla se describe cómo añadir un objeto de Web Data Configuration:
Paso Acción
1 Haga clic con el botón derecho en el nodo Application de la ficha Applications
tree.
2Haga clic en Add Object >Web Data Configuration....
Resultado: aparece la ventana Add Web Data Configuration.
3 Haga clic en Add.
Resultado: se crea el objeto de Web Data Configuration y se abre el editor de
Web Data Configuration.
NOTA: Ya que un objeto de Web Data Configuration es exclusivo para un
controlador, su nombre no se puede cambiar.
Editor de Web Data Configuration
Haga clic en el botón Refresh para poder seleccionar variables. Esta acción
mostrará todas las variables definidas en la aplicación.
EIO0000003062.06 107

Configuración Ethernet
Seleccione las variables que desea supervisar en el Servidor web:
NOTA: La selección de variables solo es posible en el modo offline.
Vigilancia: Submenú Data Parameters
El submenú Data Parameters permite crear y supervisar algunas listas de
variables. Puede crear varias listas de variables (10 listas como máximo), cada
una con varias variables de la aplicación del controlador (20 variables como
máximo en cada lista).
Cada lista posee un nombre y un periodo de actualización. Las listas se guardan
en la memoria no volátil del controlador, de manera que se puede acceder
(cargar, modificar, guardar) a una lista creada desde cualquier aplicación de
cliente web que acceda a este controlador.
108 EIO0000003062.06

Configuración Ethernet
El submenú Data Parameters permite visualizar y modificar los valores de las
variables:
Elemento Descripción
Agregar Añade la descripción de una lista o una variable
Supr Elimina la descripción de una lista o una variable
Período de
actualiza-
ción
Periodo de actualización de las variables incluidas en la descripción de la lista (en
ms)
Actualizar Habilita la actualización de E/S:
• Botón gris: actualización deshabilitada
• Botón naranja: actualización habilitada
Carga Carga listas guardadas desde la memoria no volátil del controlador en la página del
Servidor web
Guardar Guarda la descripción de la lista seleccionada en el controlador (directorio /usr/
web).
NOTA: No se puede acceder directamente a los objetos IEC (%IX,%QX). Para
acceder a los objetos IEC, primero debe agrupar sus contenidos en registros
ubicados (consulte la Tabla de reubicación, página 28).
NOTA: Las variables de memoria de bit (%MX) no se pueden seleccionar.
Vigilancia: Submenú IO Viewer
El submenú IO Viewer permite visualizar y modificar los valores de E/S:
EIO0000003062.06 109

Configuración Ethernet
Elemento Descripción
Actualizar Habilita la actualización de E/S:
• Botón gris: actualización deshabilitada
• Botón naranja: actualización habilitada
1000 ms Periodo de actualización de E/S en ms
<< Va a la página de la lista de E/S anterior
>> Va a la página de la lista de E/S siguiente
Vigilancia: Submenú Oscilloscope
El submenú Oscilloscope permite visualizar hasta dos variables en forma de
cronograma de registro:
Elemento Descripción
Resetear Borra la memorización
Actualizar Inicia/detiene la actualización
Carga Carga la configuración de parámetros de Item0 e Item1
Guardar Guarda la configuración de parámetros de Item0 e Item1 en el controlador
Item0 Variable que se mostrará
Item1 Variable que se mostrará
Mín. Valor mínimo del eje de variables
Máx. Valor máximo del eje de variables
Period(ms) Periodo de actualización de la página en milisegundos
110 EIO0000003062.06

Configuración Ethernet
Diagnósticos: Submenú Ethernet
En esta figura se muestra el servicio de ping remoto:
Diagnósticos: Submenú Scanner Status
En el submenú Estado del escáner se muestran el estado de Modbus TCP I/O
Scanner (IDLE, STOPPED, OPERATIONAL) y el bit de estado de hasta 64
dispositivos escaneados Modbus.
Para obtener más información, consulte la Guía del usuario de EcoStruxure
Machine Expert Modbus TCP.
Diagnósticos: Submenú EtherNet/IP Status
El submenú Estado EtherNet/IP muestra el estado del EtherNet/IP Scanner
(IDLE, STOPPED, OPERATIONAL) y el bit de estado de hasta 16 EtherNet/IP
dispositivos de destino:
Para obtener más información, consulte la Guía del usuario de EcoStruxure
Machine Expert EtherNet/IP.
Página Maintenance
La página Maintenance permite acceder a los datos del controlador para el
mantenimiento.
EIO0000003062.06 111

Configuración Ethernet
Maintenance: Submenú Post Conf
El submenú Post Conf le permite actualizar el archivo de configuración de Post,
página 187 guardado en el controlador:
Paso Acción
1 Haga clic en Load.
2Modifique los parámetros, página 189.
3 Haga clic en Save.
NOTA: Los nuevos parámetros se tendrán en cuenta en la siguiente lectura del
archivo de configuración de Post, página 187.
Archivos de registro
Esta página proporciona acceso a la carpeta /usr/Syslog/ de la memoria no
volátil, página 25 del controlador.
Mantenimiento: Submenú EIP Config Files
El árbol de archivos solo aparece cuando el servicio Ethernet IP está configurado
en el controlador.
Índice de /usr:
Archivo Descripción
My Machine Controller.gz Archivo GZIP
My Machine Controller.ico Archivo de icono
My Machine Controller.eds Archivo de hojas de datos electrónicas
112 EIO0000003062.06

Configuración Ethernet
Maintenance: Submenú User Management
El submenú User Management muestra una pantalla que permite acceder a dos
acciones diferentes, ambas restringidas mediante el uso del protocolo seguro
(HTTPS):
•User accounts management:
permite gestionar la administración de las cuentas de usuario, quitando todas las
contraseñas y restaurando la configuración predeterminada de todas las cuentas
de usuario del controlador.
Haga clic en Disable para desactivar todos los derechos de usuario del
controlador. (Las contraseñas se guardan y se restauran si hace clic en Enable).
Haga clic en OK en la ventana que aparece para confirmar. Resultado:
• Los usuarios ya no tienen que configurar e introducir una contraseña para
conectarse al controlador.
• Las conexiones al servidor OPC UA, a HTTP y a FTP aceptan conexiones de
usuarios anónimos. Consulte la tabla de inicios de sesión y contraseñas,
página 67.
NOTA: El botón Disable solo está activo si el usuario tiene privilegios de
administrador.
Haga clic en Enable para restaurar los derechos de usuario anteriores guardados
en el controlador.
Haga clic en OK en la ventana que aparece para confirmar. Como resultado, los
usuarios deben introducir la contraseña establecida previamente para conectarse
al controlador. Consulte la Tabla de inicios de sesión y contraseñas, página 67.
NOTA: La opción Enable solo aparece si los derechos de usuario estaban
deshabilitados y el archivo de copia de seguridad de derechos de usuario está
disponible en el controlador.
Haga clic en Reset to default para restaurar el estado de configuración
predeterminado de todas las cuentas de usuario del controlador.
Haga clic en OK en la ventana que aparece para confirmar.
NOTA: Las conexiones a FTP, HTTP y al servidor OPC UA quedan
bloqueadas hasta que se configure una nueva contraseña.
•Clone management:
Permite controlar si los derechos de usuario se copian y aplican al controlador de
destino al clonar un controlador con una SD Card, página 196.
Haga clic en Exclude users rights para no copiar los derechos de usuario en el
controlador de destino al clonar un controlador.
NOTA: De forma predeterminada, los derechos de usuario se excluyen.
Haga clic en Include users rights para copiar los derechos de usuario en el
controlador de destino al clonar un controlador. Un mensaje le pide que confirme
la copia de los derechos de usuario. Haga clic en OK para continuar.
Users accounts management
Disable Reset to default
Users accounts management
Enable Reset to default
Clone management
Exclude users rights Include users rights
EIO0000003062.06 113

Configuración Ethernet
NOTA: Los botones Exclude users rights yInclude users rights solo están
activos si el usuario actual se ha conectado al controlador usando un
protocolo seguro.
•System use notification:
Permite personalizar un mensaje que se mostrará al iniciar sesión.
Servidor FTP
Introducción
Todos los clientes FTP que estén conectados al controlador (puerto Ethernet), sin
EcoStruxure Machine Expert instalado, se pueden utilizar para transferir archivos
al área de almacenamiento de datos y del área de almacenamiento de datos del
controlador.
NOTA: Schneider Electric sigue las prácticas recomendadas del sector en el
desarrollo y la implementación de sistemas de control. Esto incluye un
método de defensa exhaustivo para proteger un sistema de control industrial.
Este método sitúa los controladores detrás de uno o varios servidores de
seguridad para limitar el acceso únicamente a los protocolos y el personal
autorizado.
114 EIO0000003062.06

Configuración Ethernet
ADVERTENCIA
ACCESO NO IDENTIFICADO Y POSTERIOR USO NO AUTORIZADO DE LA
MÁQUINA
• Evalúe si su entorno o sus máquinas están conectadas a su infraestructura
crítica y, de ser así, lleve a cabo los pasos necesarios en términos de
prevención, basándose en el método de defensa exhaustivo, antes de
conectar el sistema de automatización a una red.
• Limite el número de dispositivos conectados a una red al mínimo necesario.
• Aísle su red industrial de otras redes dentro de su empresa.
• Proteja cualquier red contra el acceso imprevisto utilizando servidores de
seguridad, VPN u otras medidas de seguridad demostradas.
• Monitorice las actividades dentro de sus sistemas.
• Evite el acceso o el enlace directos a los dispositivos en cuestión por parte
de personas no autorizadas o acciones sin identificación.
• Prepare un plan de recuperación que incluya una copia de seguridad de su
sistema y de información sobre los procesos.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
NOTA: Utilice los comandos relacionados con la seguridad (consulte
EcoStruxure Machine Expert - Comandos de menú - Ayuda online) que
proporcionan un método para añadir, editar y eliminar un usuario en la
administración de usuarios online del dispositivo de destino en el que ha
iniciado sesión.
Acceso FTP
El acceso al servidor FTP se controla con derechos de usuario cuando están
habilitados en el controlador. Para obtener más información, consulte la
descripción de la ficha, página 61 Usuarios y grupos.
Para acceder al servidor FTP, primero debe conectarse al controlador con
EcoStruxure Machine Expert o Controller Assistant y activar los derechos de
usuario o crear el usuario para el primer inicio de sesión.
NOTA: El FTPS (explícito a través de TLS FTP) está configurado de manera
predeterminada. El acceso FTP sencillo (no seguro) no es posible en la
primera conexión. Configure el parámetro 1106 en 0 en la configuración de
Post y reinicie el controlador para permitir una conexión FTP sencilla.
Acceso a archivos
Consulte Organización de archivos, página 25.
EIO0000003062.06 115

Configuración Ethernet
Cliente FTP
Introducción
La biblioteca FtpRemoteFileHandling proporciona las siguientes funciones de
cliente FTP para la gestión de archivos remotos:
• Lectura de archivos
• Escritura de archivos
• Borrado de archivos
• Listado del contenido de directorios remotos
• Adición de directorios
• Eliminación de directorios
NOTA: Schneider Electric sigue las prácticas recomendadas del sector en el
desarrollo y la implementación de sistemas de control. Esto incluye un
método de defensa exhaustivo para proteger un sistema de control industrial.
Este método sitúa los controladores detrás de uno o varios servidores de
seguridad para limitar el acceso únicamente a los protocolos y el personal
autorizado.
ADVERTENCIA
ACCESO NO IDENTIFICADO Y POSTERIOR USO NO AUTORIZADO DE LA
MÁQUINA
• Evalúe si su entorno o sus máquinas están conectadas a su infraestructura
crítica y, de ser así, lleve a cabo los pasos necesarios en términos de
prevención, basándose en el método de defensa exhaustivo, antes de
conectar el sistema de automatización a una red.
• Limite el número de dispositivos conectados a una red al mínimo necesario.
• Aísle su red industrial de otras redes dentro de su empresa.
• Proteja cualquier red contra el acceso imprevisto utilizando servidores de
seguridad, VPN u otras medidas de seguridad demostradas.
• Monitorice las actividades dentro de sus sistemas.
• Evite el acceso o el enlace directos a los dispositivos en cuestión por parte
de personas no autorizadas o acciones sin identificación.
• Prepare un plan de recuperación que incluya una copia de seguridad de su
sistema y de información sobre los procesos.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Para obtener más información, consulte la Guía de la biblioteca
FtpRemoteFileHandling.
SNMP
Introducción
El Simple Network Management Protocol (SNMP) se utiliza para proporcionar los
datos y servicios necesarios para administrar una red.
Los datos se almacenan en una base de información de administración (MIB). El
protocolo SNMP se utiliza para leer o escribir datos de MIB. La implementación
de los servicios SNMP de Ethernet es mínima, ya que solo se gestionan los
objetos obligatorios.
116 EIO0000003062.06

Configuración Ethernet
Servidor SNMP
En esta tabla se presentan los objetos de servidor MIB-2 estándar admitidos:
Objeto Descripción Acceso Valor
sysDescr Descripción textual del dispositivo Lectura SCHNEIDER M241-51 Fast
Ethernet TCP/IP
sysName Nombre administrativo del nodo Lectura/
escritura Referencia del controlador
Estas cadenas de caracteres pueden tener 50 caracteres como máximo.
Los valores escritos se guardan en el controlador a través del software de la
herramienta del cliente SNMP. El software de Schneider Electric para esta tarea
es ConneXview. ConneXview no se suministra con el controlador ni el acoplador
de bus. Para obtener más información, consulte www.se.com.
Cliente SNMP
El M241 Logic Controller admite una biblioteca de cliente SNMP que le permite
realizar consultas a los servidores SNMP. Para obtener más información, consulte
EcoStruxure Machine Expert - Guía de la biblioteca SnmpManager.
Controlador como dispositivo de destino en EtherNet/IP
Introducción
En esta sección se describe la configuración de M241 Logic Controller como
dispositivo de destino EtherNet/IP.
Para obtener más información sobre EtherNet/IP, consulte el sitio web www.odva.
org.
Configuración de destino EtherNet/IP
Para configurar el M241 Logic Controller como dispositivo de destino EtherNet/IP
, debe:
Paso Acción
1 Seleccione EthernetIP en el catálogo de hardware.
2 Arrástrelo y suéltelo al árbol dispositivos en uno de los nodos resaltados.
Para obtener más información sobre cómo añadir un dispositivo al proyecto, consulte:
• Uso del Catálogo de hardware (consulte EcoStruxure Machine Expert - Guía de
programación)
• Uso del menú contextual o el botón Más (véase EcoStruxure Machine Expert,
Programming Guide)
Configuración de parámetros EtherNet/IP
Para configurar los parámetros de EtherNet/IP/IP, haga doble clic en Ethernet_1
(Red Ethernet) > EthernetIP en el árbol de dispositivos.
EIO0000003062.06 117

Configuración Ethernet
Se muestra este cuadro de diálogo:
Los parámetros de configuración de EtherNet/IP se definen de la siguiente
manera:
•Instancia:
Número que hace referencia al ensamblado de entrada o salida.
•Tamaño:
Número de canales de un ensamblado de entrada o salida.
El tamaño de la memoria de cada canal es de 2 bytes y almacena el valor de
un objeto %IWx o %QWx, donde x es el número del canal.
Por ejemplo, si el Tamaño del Ensamblado de salida es 20, hay 20 canales
de entrada (de IW0 a IW19) que direccionan de %IWy a %IW(y+20-1), donde
y es el primer canal disponible para el ensamblado.
Elemento Gama de
controladores
admisibles
Valor predeterminado de
EcoStruxure Machine Expert
Ensamblado de
salida Instancia 150...189 150
Tamaño 2...120 20
Ensamblado de
entrada Instancia 100...149 100
Tamaño 2...120 20
Generación de archivos EDS
Puede generar el archivo EDS para configurar los intercambios de datos cíclicos
de EtherNet/IP.
Para generar el archivo EDS:
Paso Acción
1 En el árbol de dispositivos, haga clic con el botón derecho en el nodo EthernetIP y
elija el comando Export as EDS del menú contextual.
2 Modifique el nombre de archivo y la ubicación predeterminados según sea necesario.
3 Haga clic en Guardar.
NOTA: Los objetos Revisión principal yRevisión secundaria del archivo
EDS se usan para garantizar que el archivo EDS sea único. Los valores de
estos objetos no reflejan el nivel real de revisión del controlador.
Dispone de un archivo EDS genérico para M241 Logic Controller en el sitio web
de Schneider Electric. Deberá adaptar este archivo a su aplicación editándolo y
definiendo los tamaños e instancias de Assembly necesarios.
118 EIO0000003062.06

Configuración Ethernet
Ficha Asignación de E/S de EthernetIP esclavo
Las variables se pueden definir y nombrar en la ficha Asignación de E/S de
EthernetIP esclavo. En esta ficha también hay disponible información adicional,
como el direccionamiento topológico.
En la siguiente tabla se describe la configuración de la Asignación de E/S de
EthernetIP esclavo:
Canal Tipo Valor
pre-
deter-
mina-
do
Descripción
Entra-
da IW0 WOR-
D
-Palabra de comando de salidas del controlador (%QW)
IWxxx
Sali-
da QW0 WOR-
D
-Estado de las entradas del controlador (%IW)
QWxxx
El número de palabras depende del parámetro de tamaño configurado en
Configuración de destino EtherNet/IP, página 117.
Salida significa SALIDA del controlador de origen (= %IW para el controlador).
Entrada significa ENTRADA del controlador de origen (= %QW para el
controlador).
Conexiones en EtherNet/IP
Para acceder a un dispositivo de destino, un origen abrirá una conexión que
puede comprender varias sesiones que envían solicitudes.
EIO0000003062.06 119

Configuración Ethernet
Una conexión explícita utiliza una sesión (una sesión es una conexión TCP o
UDP).
Una conexión de E/S utiliza 2 sesiones.
En la siguiente tabla se muestran las limitaciones de las conexiones EtherNet/IP:
Característica Máximo
Conexiones explícitas 8 (clase 3)
Conexiones de E/S 1 (clase 1)
Conexiones 8
Sesiones 16
Solicitudes simultáneas 32
NOTA: El M241 Logic Controller solo admite conexiones cíclicas. Si el origen
abre una conexión mediante un cambio de estado como disparador, los
paquetes se envían a la velocidad de RPI.
Perfil
El controlador admite los siguientes objetos:
Clase del objeto ID de clase
(hex) Cat. Número de instancias Efecto en el comportamiento de la
interfaz
Identidad del objeto, página 121 01 1 1 Admite el servicio de restablecimiento
Objeto del enrutador de mensaje,
página 124
02 1 1 Conexión de mensajes explícita
Objeto ensamblado, página 125 04 2 2 Define el formato de los datos E/S
Objeto de administrador de conexiones,
página 127
06 –1–
Objeto de interfaz TCP/IP, página 128 F5 1 1 Configuración TCP/IP
Objeto de conexión Ethernet, página
129
F6 1 1 Información de contador y estado
Objeto de diagnóstico de interfaz,
página 130
350 1 1 –
Objeto de diagnóstico de IOScanner,
página 133
351 1 1 –
Objeto de diagnóstico de conexiones,
página 134
352 1 1 –
Objeto de diagnóstico de conexión
explícita , página 136
353 1 1 –
Objeto de lista de diagnóstico de
conexión explícita, página 136
354 1 1 –
120 EIO0000003062.06

Configuración Ethernet
Objeto de identidad (ID de clase = 01 hex)
En la siguiente tabla se describen los atributos de clase del objeto de identidad:
ID de atributo (hex) Acceso Nombre Tipo de datos Valor
(hexade-
cimal)
Detalles
1 Get Revisión UINT 01 Revisión de la implementación del objeto de
identidad
2 Get Máximo de
instancias UINT 01 El mayor número de instancias
3 Get Número de
instancias UINT 01 Número de instancias de objeto
4 Get Lista de atributos de
instancia opcionales UINT, UINT [ ] 00 Los 2 primeros bytes contienen el número
de atributos de instancia opcionales. Cada
par de bytes posterior representa el número
de otros atributos de instancia opcionales.
6 Get Máximo atributo de
clase UINT 07 El valor de los atributos de clase más
grandes
7Get Máximo atributo de
instancia
UINT 07 El valor de los atributos de instancia más
grandes
En la siguiente tabla se describen los servicios de clase:
Código de
servicio (hex) Nombre Descripción
01 Obtener todos los
atributos
Devuelve el valor de todos los atributos de clase
0E Obtener un único
atributo Devuelve el valor del atributo especificado
En la siguiente tabla se describen los servicios de instancia:
Código de
servicio (hex) Nombre Descripción
01 Obtener todos los
atributos
Devuelve el valor de todos los atributos de clase
05 Restablecimiento (1) Inicializa el componente EtherNet/IP (reinicio de
controlador)
0E Obtener un único
atributo Devuelve el valor del atributo especificado
(1) Descripción del servicio de restablecimiento:
Cuando el objeto de identidad recibe una solicitud de restablecimiento:
• Determina si puede proporcionar el tipo de restablecimiento solicitado.
• Responde a la solicitud.
• Intenta realizar el tipo de restablecimiento solicitado.
NOTA: El controlador rechaza el comando reset si existe una conexión
EtherNet/IP activa.
EIO0000003062.06 121

Configuración Ethernet
El servicio común de restablecimiento tiene un parámetro específico, Tipo de
restablecimiento (USINT), que tiene los siguientes valores:
Valor Tipo de restablecimiento
0 Reinicia el controlador
NOTA: Este es el valor predeterminado si se omite este parámetro.
1 No compatible
2 No compatible
3-99 reservado
100-199 Específico del proveedor
200-255 reservado
En la siguiente tabla se describen los atributos de instancia:
ID de atributo
(hex) Acceso Nombre Tipo de datos Valor
(hexade-
cimal)
Detalles
1 Get ID del proveedor UINT F3 ID de Schneider Electric
2 Get Tipo de dispositivo UINT 0E Controller
3 Get Código de
producto
UINT 1001 Código de producto del controlador
4 Get Revisión Struct de
USINT, USINT
–Número de revisión de producto del
controlador (1).
Equivalente a los 2 bytes de menor valor de la
versión del controlador
5Get Estado WORD –Palabra de estado(2)
6 Get Número de serie UDINT –Número de serie del controlador:
XX + 3 LSB de dirección MAC
7Get Nombre del
producto Struct de
USINT,
STRING
– –
(1) Asignado en WORD:
• MSB: Revisión secundaria (segundo USINT)
• LSB: revisión principal (primer USINT)
Ejemplo: 0205 hex significa revisión V5.2.
122 EIO0000003062.06

Configuración Ethernet
(2) Palabra de estado (atributo 5):
Bit Nombre Descripción
0 Con propietario no utilizado
1 reservado –
2 Configurado TRUE indica que la aplicación del dispositivo se ha reconfigurado.
3 reservado –
4-7 Estado de dispositivo
ampliado • 0: autodiagnóstico o indeterminado
• 1: actualización de firmware en curso
• 2: al menos una conexión de E/S no válida detectada
• 3: no se han establecido conexiones de E/S.
• 4: la configuración no volátil no es válida
• 5: error irrecuperable detectado
• 6: al menos una conexión de E/S en estado RUNNING.
• 7: al menos una conexión de E/S establecida, todas en modalidad inactiva.
• 8: reservado
• 9...15: no utilizado
8 Fallo leve recuperable TRUE indica que el dispositivo ha detectado un error, que, en la mayoría de los casos, es
recuperable.
Este tipo de evento no ocasiona un cambio en el estado del dispositivo.
9 Fallo leve
irrecuperable TRUE indica que el dispositivo ha detectado un error, que, en la mayoría de los casos, es
irrecuperable.
Este tipo de evento no ocasiona un cambio en el estado del dispositivo.
10 Fallo grave
recuperable TRUE indica que el dispositivo ha detectado un error que requiere que el dispositivo informe de una
excepción y pase al estado HALT.
Este tipo de evento conlleva un cambio en el estado del dispositivo, pero, en la mayoría de los
casos, es recuperable.
11 Fallo grave
irrecuperable TRUE indica que el dispositivo ha detectado un error que requiere que el dispositivo informe de una
excepción y pase al estado HALT.
Este tipo de evento conlleva un cambio en el estado del dispositivo, pero, en la mayoría de los
casos, no es recuperable.
12-15 reservado –
EIO0000003062.06 123

Configuración Ethernet
Objeto del enrutador de mensajes (ID de clase = 02 hex)
En la siguiente tabla se describen los atributos de clase del objeto del enrutador
de mensaje:
ID de atributo
(hex) Acceso Nombre Tipo de datos Valor
(hexade-
cimal)
Detalles
1 Get Revisión UINT 01 Número de revisión de la implementación del objeto
del enrutador de mensajes
2 Get Máximo de
instancias UINT 02 El mayor número de instancias
3 Get Número de
instancia
UINT 01 Número de instancias de objeto
4 Get Lista de
atributos de
instancia
opcionales
Struct de UINT,
UINT [ ]
02 Los 2 primeros bytes contienen el número de
atributos de instancia opcionales. Cada par de bytes
posterior representa el número de otros atributos de
instancia opcionales (de 100 a 119).
5Get Lista de
servicios
opcionales
UINT 0A Número y lista de cualquier atributo de servicios
opcionales implementado (0: ningún servicio
opcional implementado)
6 Get Máximo
atributo de
clase
UINT 07 El valor de los atributos de clase más grandes
7Get Máximo
atributo de
instancia
UINT 02 El valor de los atributos de instancia más grandes
En la siguiente tabla se describen los servicios de clase:
Código de
servicio (hex)
Nombre Descripción
01 Obtener todos los
atributos
Devuelve el valor de todos los atributos de clase
0E Obtener un único atributo Devuelve el valor del atributo especificado
En la siguiente tabla se describen los servicios de instancia:
Código de
servicio (hex) Nombre Descripción
01 Obtener todos los
atributos
Devuelve el valor de todos los atributos de clase
0E Obtener un único
atributo Devuelve el valor del atributo especificado
124 EIO0000003062.06

Configuración Ethernet
En la siguiente tabla se describen los atributos de instancia:
ID de atributo (hex) Acceso Nombre Tipo de datos Valor Descripción
1 Get Lista de objetos
implementados Struct de UINT,
UINT [ ]
–Lista de objetos implementados. Los
primeros dos bytes contienen el
número de objetos implementados.
Los siguientes dos bytes representan
otro número de clase implementada.
Esta lista contiene los siguientes
objetos:
• Identidad
• Enrutador de mensajes
• Ensamblado
• Administrador de la conexión
• Parámetro
• Objeto de archivo
• Modbus
• Puerto
• TCP/IP
• Conexión Ethernet
2 Get Número disponible UINT 512 Número máximo de conexiones de CIP
simultáneas (clase 1 o clase 3)
admitidas
Objeto ensamblado (ID de clase = 04 hex)
En la siguiente tabla se describen los atributos de clase del objeto ensamblado:
ID de atributo
(hex) Acceso Nombre Tipo de datos Valor
(hexadeci-
mal)
Detalles
1 Get Revisión UINT 02 Revisión de la implementación del
objeto ensamblado
2 Get Máximo de instancias UINT BE El mayor número de instancias
3 Get Número de instancias UINT 03 Número de instancias de objeto
4 Get Lista de atributos de
instancia opcionales Struct de:
UINT
UINT [ ]
01
04
Los 2 primeros bytes contienen el
número de atributos de instancia
opcionales. Cada par de bytes
posterior representa el número de
otros atributos de instancia
opcionales.
5Get Lista de servicios
opcionales UINT No
compatible Número y lista de cualquier atributo de
servicios opcionales implementado (0:
ningún servicio opcional
implementado)
6 Get Máximo atributo de clase UINT 07 El valor de los atributos de clase más
grandes
7Get Máximo atributo de
instancia UINT 04 El valor de los atributos de instancia
más grandes
En la siguiente tabla se describen los servicios de clase:
Código de
servicio (hex) Nombre Descripción
0E Obtener un único atributo Devuelve el valor del atributo especificado
EIO0000003062.06 125

Configuración Ethernet
En la siguiente tabla se describen los servicios de instancia:
Código de
servicio (hex) Nombre Descripción
0E Obtener un único atributo Devuelve el valor del atributo especificado
10 Establecer un único atributo Modifica el valor del atributo especificado
Instancias admitidas
Salida significa SALIDA del controlador de origen (= %IW para el controlador).
Entrada significa ENTRADA del controlador de origen (= %QW para el
controlador).
El controlador admite 2 ensamblados:
Nombre Instancia Tamaño de los datos
Salida de controlador (%IW) Configurable: debe estar entre 100 y 149 De 2 a 40 palabras
Entrada de controlador (%QW) Configurable: debe estar entre 150 y 189 De 2 a 40 palabras
NOTA: El objeto ensamblado enlaza los atributos de diversos objetos de
manera que la información dirigida a cada objeto o procedente de este se
puede comunicar a través de una sola conexión. Los objetos ensamblados
son estáticos.
Los ensamblados que se estén utilizando se pueden modificar mediante el
acceso a parámetros de la herramienta de configuración de la red
(RSNetWorx). Para registrar una nueva asignación de ensamblado se debe
apagar y volver a encender el controlador.
En la siguiente tabla se describen los atributos de instancia:
ID de atributo
(hex) Acceso Nombre Tipo de datos Valor Descripción
3 Get/Set Datos de instancia ARRAY de Byte –Servicio de conjunto de datos solo
disponible para la salida de
controlador
4 Get Tamaño de datos de
instancia UINT 4...80 Tamaño de datos en bytes
Acceso desde un explorador de EtherNet/IP
Cuando un EtherNet/IP Scanner necesita intercambiar ensamblados con un
M241 Logic Controller, utiliza los parámetros de acceso siguientes (Connection
path):
• Clase 4
• Instancia xx, donde xx es el valor de la instancia (ejemplo: 2464 hex =
instancia 100).
• Atributo 3
Además, se debe definir un ensamblado de configuración en el origen.
Ejemplo: Clase 4, Instancia 3, Atributo 3, la Connection Path resultante será:
• 2004 hex
• 2403 hex
• 2c<xx> hex
126 EIO0000003062.06

Configuración Ethernet
Objeto de administrador de conexiones (ID de clase = 06 hex)
En la siguiente tabla se describen los atributos de clase del objeto ensamblado:
ID de atributo
(hex) Acceso Nombre Tipo de datos Valor
(hexade-
cimal)
Detalles
1 Get Revisión UINT 01 Revisión de la implementación del objeto de
administrador de conexión
2 Get Máximo de
instancias UINT 01 El mayor número de instancias
3 Get Número de
instancias UINT 01 Número de instancias de objeto
4 Get Lista de
atributos de
instancia
opcionales
Struct de:
UINT
UINT [ ]
–El número y la lista de los atributos opcionales. La
primera palabra contiene el número de atributos que
se deben seguir y cada una de las palabras que
siguen contiene otro código de atributo.
Los siguientes atributos opcionales incluyen:
• El número total de peticiones de apertura de
conexión entrante.
• El número de peticiones rechazadas debido al
formato no conforme de Reenviar abrir.
• El número de peticiones rechazadas debido a
recursos insuficientes.
• El número de peticiones rechazadas debido al
valor de parámetro enviado con Reenviar abrir.
• El número de peticiones de Reenviar cerrar
recibidas.
• El número de peticiones de Reenviar cerrar
con formato no válido.
• El número de peticiones de Reenviar cerrar
que no se han podido asignar a una conexión
activa.
• El número de conexiones que han superado el
tiempo de espera porque el otro extremo ha
detenido la producción o se ha producido una
desconexión de la red.
6 Get Máximo
atributo de
clase
UINT 07 El valor de los atributos de clase más grandes
7Get Máximo
atributo de
instancia
UINT 08 El valor de los atributos de instancia más grandes
En la siguiente tabla se describen los servicios de clase:
Código de
servicio (hex) Nombre Descripción
01 Obtener todos los atributos Devuelve el valor de todos los atributos de
clase
0E Obtener un único atributo Devuelve el valor del atributo especificado
En la siguiente tabla se describen los servicios de instancia:
Código de
servicio (hex) Nombre Descripción
01 Obtener todos los atributos Devuelve el valor de todos los atributos de
la instancia
0E Obtener un único atributo Devuelve el valor del atributo especificado
4E Reenviar cerrar Cierra una conexión existente
52 Enviar no conectados Envía una solicitud multi-hop no conectada
54 Reenviar abrir Abre una conexión nueva
EIO0000003062.06 127

Configuración Ethernet
En la siguiente tabla se describen los atributos de instancia:
ID de atributo
(hex) Acceso Nombre Tipo de datos Valor Descripción
1 Get Solicitudes de apertura UINT –Número de solicitudes de servicios de Reenviar
abrir recibidas
2 Get Rechazos de abrir
formato UINT –Número de solicitudes de servicios de Reenviar
abrir que se han rechazado debido a un
formato no válido
3 Get Rechazos de abrir
recurso ARRAY de Byte –Número de solicitudes de servicios de Reenviar
abrir rechazadas debido a la falta de recursos
4 Get Rechazos de abrir otros UINT –Número de solicitudes de servicios de Reenviar
abrir que se han rechazado por motivos
diferentes a un formato no válido o falta de
recursos
5Get Solicitudes de cierre UINT –Número de solicitudes de servicios de Reenviar
cerrar recibidas
6 Get Solicitudes de cerrar
formato
UINT –Número de solicitudes de servicios de Reenviar
cerrar que se han rechazado debido a un
formato no válido
7Get Solicitudes de cerrar
otros
UINT –Número de solicitudes de servicios de Reenviar
cerrar que se han rechazado por motivos
diferentes a un formato no válido
8 Get Timeouts de la conexión UINT –Número total de timeouts de la conexión que se
han producido en las conexiones controladas
por este administrador de conexión
Objeto de interfaz TCP/IP (ID de clase = F5 hex)
Este objeto mantiene la información de estado y de contadores de conexiones
específicos para una interfaz de comunicaciones Ethernet 802.3.
En la siguiente tabla se describen los atributos de clase del objeto de interfaz de
TCP/IP:
ID de atributo
(hex) Acceso Nombre Tipo de datos Valor Detalles
1 Get Revisión UINT 4 Revisión de la implementación del objeto
de interfaz de TCP/IP
2 Get Máximo de instancias UINT 2 El mayor número de instancias
3 Get Número de instancias UINT 2 Número de instancias de objeto
En la siguiente tabla se describen los servicios de clase:
Código de servicio
(hex) Nombre Descripción
01 Obtener todos los
atributos
Devuelve el valor de todos los atributos de clase
0E Obtener un único
atributo Devuelve el valor del atributo especificado
Códigos de instancia
Solo se admite la instancia 1.
En la siguiente tabla se describen los servicios de instancia:
Código de
servicio (hex) Nombre Descripción
01 Obtener todos los
atributos
Devuelve el valor de todos los atributos de la
instancia
0E Obtener un único
atributo
Devuelve el valor del atributo de instancia
especificado
128 EIO0000003062.06

Configuración Ethernet
En la siguiente tabla se describen los atributos de instancia:
ID de atributo
(hex) Acceso Nombre Tipo de
datos Valor Descripción
1 Get Estado DWORD Nivel de bit • 0: el atributo de configuración de la
interfaz no se ha configurado.
• 1: la configuración de la interfaz contiene
una configuración válida.
• 2...15: Reservado.
2 Get Capacidad de la
configuración DWORD Nivel de bit • 0: Cliente BOOTP
• 1: cliente DNS
• 2: cliente DHCP
• 5: configurado en EcoStruxure Machine
Expert
El resto de los bits están reservados y
establecidos en 0.
3 Get Configuración DWORD Nivel de bit • 0: la configuración de la interfaz es válida.
• 1: la configuración de la interfaz se
obtiene con BOOTP.
• 2: la configuración de la interfaz se
obtiene con DHCP.
• 3: reservado
• 4: Habilitar DNS
El resto de los bits están reservados y
establecidos en 0.
4 Get Conexión física UINT Tamaño de la
ruta Número de palabras de 16 bits en la ruta del
elemento
EPATH
completada Ruta Segmentos lógicos que identifican el objeto de
conexión física. La ruta está limitada a un solo
segmento de clase lógico y un solo segmento
de instancia lógico. El tamaño máximo es de 12
bytes.
5Get Configuración de la
interfaz
UDINT Dirección IP –
UDINT Máscara de
red
–
UDINT Dirección de
pasarela
–
UDINT Nombre
principal
–
UDINT Nombre
secundario 0: no se ha configurado ninguna dirección de
servidor de nombres secundario.
STRING Nombre de
dominio
predetermina-
do
0: no se ha configurado ningún nombre de
dominio
6 Get Nombre de host STRING –Caracteres ASCII.
0: no se ha configurado ningún nombre de host
Objeto de conexión Ethernet (ID de clase = F6 hex)
Este objeto proporciona el mecanismo para configurar un dispositivo de interfaz
de red TCP/IP.
EIO0000003062.06 129

Configuración Ethernet
En la siguiente tabla se describen los atributos de clase del objeto de conexión
Ethernet:
ID de atributo
(hex) Acceso Nombre Tipo de datos Valor
(hexade-
cimal)
Detalles
1 Get Revisión UINT 4 Revisión de la implementación del
objeto de conexión Ethernet
2 Get Máximo de instancias UINT 3 El mayor número de instancias
3 Get Número de instancias UINT 3 Número de instancias de objeto
En la siguiente tabla se describen los servicios de clase:
Código de
servicio (hex)
Nombre Descripción
01 Obtener todos los
atributos
Devuelve el valor de todos los atributos de clase
0E Obtener un único
atributo Devuelve el valor del atributo especificado
Códigos de instancia
Solo se admite la instancia 1.
En la siguiente tabla se describen los servicios de instancia:
Código de
servicio (hex) Nombre Descripción
01 Obtener todos los
atributos
Devuelve el valor de todos los atributos de la instancia
0E Obtener un único
atributo
Devuelve el valor del atributo de instancia
especificado
En la siguiente tabla se describen los atributos de instancia:
ID de atributo
(hex) Acceso Nombre Tipo de
datos Valor Descripción
1 Get Velocidad de la
interfaz UDINT –Velocidad en Mbit/s (10 o 100)
2 Get Indicadores de la
interfaz DWORD Nivel de bit • 0: estado de la conexión
• 1: semidúplex/dúplex completo
• 2-4: estado de la negociación
• 5: ajuste manual/requiere restablecimiento
• 6: error de hardware local detectado
El resto de los bits están reservados y
establecidos en 0.
3 Get Dirección física ARRAY de 6
USINT
–Esta matriz contiene la dirección MAC del
producto.
Formato: XX-XX-XX-XX-XX-XX-XX
Objeto de diagnóstico de interfaz EtherNet/IP (ID de clase = 350 hex)
En la siguiente tabla se describen los atributos de clase del objeto de diagnóstico
de interfaz EtherNet/IP:
ID de atributo (hex) Acceso Nombre Tipo de datos Valor
(hexade-
cimal)
Detalles
1 Get Revisión UINT 01 Se incrementa en 1 en cada nueva
actualización del objeto
2 Get Instancia máxima UINT 01 Número máximo de instancias de objeto
130 EIO0000003062.06

Configuración Ethernet
En la siguiente tabla se describen los atributos de instancia del objeto de
diagnóstico de interfaz EtherNet/IP:
ID de atributo (hex) Acceso Nombre Tipo de datos Detalles
1 Get Protocolos compatibles UINT Protocolos compatibles (0 = No compatible, 1
= Compatible):
• Bit 0: EtherNet/IP
• Bit 1: Modbus TCP
• Bit 2: Serie Modbus
• Bits 3 a 15: reservados, 0
2 Get Diagnóstico de conexiones STRUCT de
Conexiones de E/S de CIP
abiertas como máximo
UINT Número máximo de conexiones de E/S de
CIP abiertas.
Conexiones de E/S de CIP
actuales
UINT Número de conexiones de E/S de CIP
abiertas actualmente.
Conexiones explícitas de CIP
abiertas como máximo
UINT Número máximo de conexiones explícitas de
CIP abiertas.
Conexiones explícitas de CIP
actuales
UINT Número de conexiones explícitas de CIP
abiertas actualmente.
Errores de apertura de
conexiones CIP UINT Se incrementa con cada intento sin éxito de
abrir una conexión CIP.
Errores de timeout de
conexiones CIP UINT Se incrementa cada vez que la conexión CIP
supera el tiempo de espera.
Conexiones TCP de EIP
abiertas como máximo
UINT Número máximo de conexiones TCP abiertas
y utilizadas en comunicaciones EtherNet/IP.
Conexiones TCP de EIP
actuales
UINT Número de conexiones TCP abiertas
actualmente y utilizadas en comunicaciones
EtherNet/IP.
3 Get Clear Diagnóstico de mensajería de
E/S STRUCT de
Contador de producción de E/
S
UDINT Se incrementa cada vez que se envía un
mensaje CIP de clase 0/1.
Contador de consumo de E/S UDINT Se incrementa cada vez que se recibe un
mensaje CIP de clase 0/1.
Contador de errores de envío
de producción de E/S
UINT Se incrementa cada vez que no se envía un
mensaje de clase 0/1.
Contador de errores de
recepción de consumo de E/S
UINT Se incrementa cada vez que se recibe un
consumo que contiene un error.
4 Get Clear Diagnóstico de mensajería
explícita STRUCT de
Contador de envío de
mensajes de clase 3
UDINT Se incrementa cada vez que se envía un
mensaje CIP de clase 3.
Contador de recepción de
mensajes de clase 3
UDINT Se incrementa cada vez que se recibe un
mensaje CIP de clase 3.
Contador de envío de
mensajes UCMM
UDINT Se incrementa cada vez que se envía un
mensaje UCMM.
Contador de recepción de
mensajes UCMM
UDINT Se incrementa cada vez que se recibe un
mensaje UCMM.
EIO0000003062.06 131

Configuración Ethernet
ID de atributo (hex) Acceso Nombre Tipo de datos Detalles
5Get Capacidad de COM STRUCT de
Max CIP Connections UINT Número máximo de conexiones CIP
admitidas.
Max TCP Connections UINT Número máximo de conexiones TCP
admitidas.
Max Urgent priority rate UINT Número máximo de paquetes de mensajes
de prioridad urgente de la clase de transporte
CIP 0/1 por segundo.
Max Scheduled priority rate UINT Número máximo de paquetes de mensajes
de prioridad programada de la clase de
transporte CIP 0/1 por segundo.
Max High priority rate UINT Número máximo de paquetes de mensajes
de prioridad alta de la clase de transporte CIP
0/1 por segundo.
Max Low priority rate UINT Número máximo de paquetes de mensajes
de prioridad baja de la clase de transporte
CIP 0/1 por segundo.
Max Explicit Messaging rate UINT Número máximo de paquetes de mensajes
de la clase de transporte CIP 2/3 u otros
mensajes de EtherNet/IP por segundo.
6 Get Diagnóstico de ancho de
banda STRUCT de
Tasa de prioridad urgente de
envío actual UINT Paquetes de mensajes de prioridad urgente
de la clase de transporte CIP 0/1 enviados
por segundo.
Tasa de prioridad urgente de
recepción actual UINT Paquetes de mensajes de prioridad urgente
de la clase de transporte CIP 0/1 recibidos
por segundo.
Tasa de prioridad programada
de envío actual UINT Paquetes de mensajes de prioridad
programada de la clase de transporte CIP 0/1
enviados por segundo.
Tasa de prioridad programada
de recepción actual UINT Paquetes de mensajes de prioridad
programada de la clase de transporte CIP 0/1
recibidos por segundo.
Tasa de prioridad alta de
envío actual UINT Paquetes de mensajes de prioridad alta de la
clase de transporte CIP 0/1 enviados por
segundo.
Tasa de prioridad alta de
recepción actual UINT Paquetes de mensajes de prioridad alta de la
clase de transporte CIP 0/1 recibidos por
segundo.
Tasa de prioridad baja de
envío actual UINT Paquetes de mensajes de prioridad baja de la
clase de transporte CIP 0/1 enviados por
segundo.
Tasa de prioridad baja de
recepción actual UINT Paquetes de mensajes de prioridad baja de la
clase de transporte CIP 0/1 recibidos por
segundo.
Current sending Explicit
Messaging rate
UINT Paquetes de mensajes de la clase de
transporte CIP 2/3 u otros mensajes de
EtherNet/IP enviados por segundo.
Current reception Explicit
Messaging rate
UINT Paquetes de mensajes de la clase de
transporte CIP 2/3 u otros mensajes de
EtherNet/IP recibidos por segundo.
132 EIO0000003062.06

Configuración Ethernet
ID de atributo (hex) Acceso Nombre Tipo de datos Detalles
7Get Diagnóstico de Modbus STRUCT de
Conexiones TCP de Modbus
abiertas como máximo
UINT Número máximo de conexiones TCP abiertas
y utilizadas en comunicaciones Modbus.
Conexiones TCP de Modbus
actuales
UINT Número de conexiones TCP abiertas
actualmente y utilizadas en comunicaciones
Modbus.
Contador de envío de
mensajes de Modbus TCP
UDINT Se incrementa cada vez que se envía un
mensaje de Modbus TCP.
Contador de recepción de
mensajes de Modbus TCP
UDINT Se incrementa cada vez que se recibe un
mensaje de Modbus TCP.
En la siguiente tabla se describen los servicios de clase:
Código de
servicio (hex)
Nombre Descripción
01 Obtener todos los
atributos
Devuelve el valor de todos los atributos de clase.
0E Obtener un único
atributo Devuelve el valor del atributo especificado.
4C Get_and_Clear Obtiene y borra un atributo especificado.
Objeto de diagnóstico de IOScanner (ID de clase = 351 hex)
En la siguiente tabla se describen los atributos de clase del objeto de diagnóstico
de IOScanner:
ID de
atributo
(hex)
Acce-
so Nombre Tipo de
datos Valor
(he-
xade-
ci-
mal)
Detalles
1 Get Revisión UINT 1 Se incrementa en 1 en cada
nueva actualización del objeto.
2 Get Instancia
máxima UINT 1 Número máximo de instancias
de objeto.
En la siguiente tabla se describen los atributos de instancia del objeto de
diagnóstico de IOScanner:
ID de atributo (hex) Acceso Nombre Tipo de datos Detalles
1 Get Tabla de estado de E/S STRUCT de
Tamaño UINT Tamaño en bytes del atributo Estado.
Estado ARRAY of UINT Estado de E/S. Bit n, donde n es la instancia
n del objeto, proporciona el estado del
intercambio de E/S en la conexión de E/S:
• 0: el estado de entrada o salida de la
conexión de E/S tiene un error o no hay
ningún dispositivo.
• 1: el estado de entrada o salida de la
conexión de E/S es correcto.
En la siguiente tabla se describen los servicios de clase:
Código de
servicio (hex) Nombre Descripción
01 Obtener todos los
atributos
Devuelve el valor de todos los atributos de clase.
EIO0000003062.06 133

Configuración Ethernet
Objeto de diagnóstico de conexiones de E/S (ID de clase = 352 hex)
En la siguiente tabla se describen los atributos de clase del objeto de diagnóstico
de conexiones de E/S:
ID de atributo (hex) Acceso Nombre Tipo de datos Valor
(hexade-
cimal)
Detalles
1 Get Revisión UINT 01 Se incrementa en 1 en cada nueva
actualización del objeto.
2 Get Instancia máxima UINT 01 Número máximo de instancias de objeto
De 0 a n
donde n es el número máximo de
conexiones de E/S CIP.
NOTA: Hay una instancia de objeto de
diagnóstico de conexiones de E/S para
tanto para rutas O->D como D->O.
134 EIO0000003062.06

Configuración Ethernet
En la siguiente tabla se describen los atributos de instancia del objeto de
diagnóstico de conexiones de E/S:
ID de atributo
(hex) Acceso Nombre Tipo de datos Detalles
1 Get Clear Diagnóstico de comunicación de
E/S STRUCT de
Contador de producción de E/S UDINT Se incrementa cada vez que se envía una
producción.
Contador de consumo de E/S UDINT Se incrementa cada vez que se recibe un
consumo.
Contador de errores de envío de
producción de E/S
UINT Se incrementa cada vez que no se envía una
producción debido a un error.
Contador de errores de recepción
de consumo de E/S
UINT Se incrementa cada vez que se recibe un
consumo que contiene un error.
Errores de timeout de conexión
CIP
UINT Se incrementa cada vez que una conexión
supera el tiempo de espera.
Errores de apertura de conexión
CIP UINT Se incrementa con cada intento sin éxito de abrir
una conexión.
Estado de la conexión CIP UINT Estado de la conexión CIP de E/S.
Estado general del último error
de CIP UINT Estado general del último error detectado en la
conexión.
Estado ampliado del último error
de CIP
UINT Estado ampliado del último error detectado en la
conexión.
Estado de comunicación de
entrada UINT Estado de comunicación de las entradas.
Estado de comunicación de
salida UINT Estado de comunicación de las salidas.
2 Get Diagnóstico de conexiones STRUCT de
ID de conexión de producción UDINT ID de conexión para la producción.
ID de conexión de consumo UDINT ID de conexión para el consumo.
RPI de producción UDINT Intervalo de paquete solicitado (RPI) para
producciones, en μs.
API de producción UDINT Intervalo de paquete real (API) para
producciones.
RPI de consumo UDINT RPI para consumos.
API de consumo UDINT API para consumos.
Parámetros de conexión de
producción UDINT Parámetros de conexión para producciones.
Parámetros de conexión de
consumo UDINT Parámetros de conexión para consumos.
IP local UDINT Dirección IP local para la comunicación de E/S.
Puerto UDP local UINT Número de puerto UDP local para la
comunicación de E/S.
IP remota UDINT Dirección IP remota para la comunicación de E/S.
Puerto UDP remoto UINT Número de puerto UDP remoto para la
comunicación de E/S.
IP de multidifusión de producción UDINT Dirección IP de multidifusión para producciones,
o 0 si no se utiliza multidifusión.
IP de multidifusión de consumo UDINT Dirección IP de multidifusión para consumos, o 0
si no se utiliza multidifusión.
Protocolos compatibles UINT Protocolos compatibles (0 = No compatible, 1 =
Compatible):
• Bit 0: EtherNet/IP
• Bit 1: Modbus TCP
• Bit 2: Serie Modbus
• Bits 3 a 15: reservados, 0
EIO0000003062.06 135

Configuración Ethernet
Atributos de instancia
En la siguiente tabla se describen los servicios de clase:
Código de
servicio (hex) Nombre Descripción
01 Obtener todos los
atributos
Devuelve el valor de todos los atributos de clase.
0E Obtener un único
atributo Devuelve el valor del atributo especificado.
4C Get_and_Clear Obtiene y borra un atributo especificado.
Objeto de diagnóstico de conexiones explícitas (ID de clase = 353 hex)
En la siguiente tabla se describen los atributos de clase del objeto de diagnóstico
de conexiones explícitas:
ID de atributo
(hex) Acceso Nombre Tipo de
datos Valor
(hexadecimal) Detalles
1 Get Revisión UINT 01 Se incrementa en 1 en cada nueva actualización
del objeto.
2 Get Instancia
máxima UINT De 0 a n (número
máximo de
conexiones CIP de
E/S)
Número máximo de instancias de objeto.
En la siguiente tabla se describen los atributos de instancia del objeto de
diagnóstico de conexiones explícitas:
ID de atributo
(hex) Acceso Nombre Tipo de
datos Detalles
1 Get ID de conexión de
origen
UDINT ID de conexión O->T
2 Get IP de origen UDINT
3 Get Puerto TCP de origen UINT
4 Get ID de conexión de
destino UDINT ID de conexión T->O
5Get IP de destino UDINT
6 Get Puerto TCP de destino UINT
7Get Contador de envío de
mensajes
UDINT Se incrementa cada vez que se envía un mensaje CIP de
clase 3 en la conexión.
8 Get Contador de recepción
de mensajes
UDINT Se incrementa cada vez que se recibe un mensaje CIP de
clase 3 en la conexión.
Objeto de lista de diagnóstico de conexión explícita (ID de clase = 354 hex)
En la siguiente tabla se describen los atributos de clase del objeto de lista de
diagnóstico de conexiones explícitas:
ID de atributo
(hex) Acceso Nombre Tipo de datos Valor
(hexadeci-
mal)
Detalles
1 Get Revisión UINT 01 Se incrementa en 1 en cada nueva actualización del
objeto.
2 Get Instancia
máxima UINT De 0 a n n es el número máximo de accesos de lista
simultáneos que se admiten.
136 EIO0000003062.06

Configuración Ethernet
En la siguiente tabla se describen los atributos de instancia del objeto de lista de
diagnóstico de conexiones explícitas:
ID de atributo
(hex) Acceso Nombre Tipo de datos Detalles
1 Get Número de conexiones UINT Número total de conexiones explícitas abiertas.
2 Get Lista de diagnóstico de
conexiones de
mensajería explícitas
ARRAY of
STRUCT Contenido de los objetos de diagnóstico de conexiones
explícitas con instancia.
ID de conexión de
origen
UDINT ID de conexión de origen a destino
IP de origen UDINT Dirección IP de origen a destino
Puerto TCP de origen UINT Número de puerto de origen a destino
ID de conexión de
destino UDINT ID de conexión de destino a origen
IP de destino UDINT Dirección IP de destino a origen
Puerto TCP de destino UINT Número de puerto de destino a origen
Contador de envío de
mensajes
UDINT Se incrementa cada vez que se envía un mensaje CIP de
clase 3 en la conexión.
Contador de recepción
de mensajes
UDINT Se incrementa cada vez que se envía un mensaje CIP de
clase 3 en la conexión.
En la siguiente tabla se describen los servicios de clase:
Código de
servicio (hex)
Nombre Descripción
08 Crear Crea una instancia del objeto de lista de diagnóstico
de conexiones explícitas.
09 Eliminar Elimina una instancia del objeto de lista de diagnóstico
de conexiones explícitas.
33 Explicit_
Connections_
Diagnostic_Read
Objeto de lectura de diagnóstico de conexiones
explícitas.
Controlador como dispositivo esclavo en Modbus TCP
Descripción general
En esta sección se describe la configuración de M241 Logic Controller como
dispositivo Modbus TCP esclavo.
El dispositivo Modbus TCP esclavo añade otra función de servidor Modbus al
controlador. La aplicación de cliente Modbus direcciona este servidor a través de
un ID de unidad (dirección Modbus) configurado en el rango de 1 a 247. El
servidor Modbus integrado del controlador esclavo no requiere configuración y se
direcciona a través del ID de unidad = 255. Consulte Configuración de Modbus
TCP, página 138.
Para configurar el M241 Logic Controller como un dispositivo Modbus TCP
esclavo, debe añadir la funcionalidad Dispositivo Modbus TCP esclavo al
controlador (consulte Adición de un dispositivo Modbus TCP esclavo más
adelante). Esta funcionalidad crea un área de E/S específica en el controlador,
accesible a través del protocolo Modbus TCP. Esta área de E/S se usa cada vez
que un maestro externo tiene que acceder a los objetos %IW y%QW del
controlador. La funcionalidad Dispositivo Modbus TCP esclavo permite
proporcionar a esta área los objetos de E/S del controlador a los que se puede
acceder con una solicitud de registro Modbus de lectura/escritura.
Las entradas/salidas se ven desde el controlador esclavo: las entradas se
escriben mediante el maestro y las salidas se leen mediante el maestro.
EIO0000003062.06 137

Configuración Ethernet
El dispositivo Modbus TCP esclavo puede definir una aplicación de cliente
Modbus con privilegios, cuya conexión no se cierra a la fuerza (las conexiones
Modbus integradas se pueden cerrar cuando se requieren más de 8 conexiones).
El watchdog asociado a la conexión con privilegios le permite verificar si el
maestro con privilegios sondea el controlador. Si no se recibe ninguna petición
Modbus dentro de la duración del timeout, la información de diagnóstico i_
byMasterIpLost se establece en 1 (TRUE). Para obtener más información,
consulte el apartado Variables de sistema de solo lectura del puerto Ethernet
(consulte Modicon M241 Logic Controller - Funciones y variables del sistema -
Guía de la biblioteca PLCSystem).
Para obtener más información sobre Modbus TCP, consulte el sitio web www.
odva.org.
Adición de un dispositivo esclavo Modbus TCP
Para configurar M241 Logic Controller como Dispositivo Modbus TCP esclavo,
debe hacer lo siguiente:
Paso Acción
1 Añadir un módulo de extensión TM4ES4 a la configuración. Para ello, debe haber
añadido Industrial_Ethernet_manager al controlador lógico.
2 Seleccione Dispositivo Modbus TCP esclavo en el Catálogo de hardware.
3 Arrástrelo y suéltelo al árbol Dispositivos en uno de los nodos resaltados.
Para obtener más información sobre cómo añadir un dispositivo al proyecto, consulte:
• Uso del Catálogo de hardware (consulte EcoStruxure Machine Expert - Guía de
programación)
• Uso del menú contextual o el botón Más (véase EcoStruxure Machine Expert,
Programming Guide)
Configuración de Modbus TCP
Para configurar Dispositivo Modbus TCP esclavo, haga doble clic en TM4ES4
Ethernet_1 > ModbusTCP_Slave_Device_ en Dispositivos.
Aparece el siguiente cuadro de diálogo:
138 EIO0000003062.06

Configuración Ethernet
Elemento Descripción
Dirección maestra IP Dirección IP del maestro Modbus
Las conexiones no están cerradas en esta dirección.
Watchdog Watchdog en incrementos de 500 ms
NOTA: Se aplica el watchdog a la dirección maestra IP a menos
que la dirección sea 0.0.0.0.
Puerto esclavo Puerto de comunicación Modbus (502)
NOTA: El número de puerto se puede modificar utilizando el
comando de script changeModbusPort, página 141.
ID de unidad Envía las peticiones al dispositivo Modbus TCP esclavo (de 1 a 247), en
lugar de enviarlas al servidor Modbus integrado (255).
Registros de
mantenimiento (%IW) Número de registros %IW que se van a usar en el intercambio (de 2 a
120) (2 bytes por registro)
Registros de entrada
(%QW) Número de registros %QW que se van a usar en el intercambio (de 2 a
120) (2 bytes por registro)
Ficha Asignación de E/S de dispositivo Modbus TCP esclavo
Las E/S se asignan a registros Modbus desde el punto de vista del maestro de la
siguiente manera:
• Los %IW se asignan desde el registro 0 al n - 1 y son L/E (n = cantidad de
registros de ensamblado de salida, 2 bytes para cada registro de
ensamblado de salida).
• Los %QW se asignan desde el registro n al n + m - 1 y son de solo lectura (m
= tamaño ensamblado de entrada, 2 bytes para cada registro de ensamblado
de entrada).
Una vez que se ha configurado un dispositivo Modbus TCP esclavo, los
comandos Modbus enviados a su ID de unidad (dirección Modbus) se gestionan
de manera diferente a como lo haría el mismo comando cuando se dirigen a
cualquier otro dispositivo Modbus de la red. Por ejemplo, cuando el comando
Modbus 3 (3 hex) se envía a un dispositivo Modbus estándar, lee y devuelve el
valor de uno o más registros. Cuando este mismo comando se envía al Modbus
TCP, página 102 esclavo, facilita una operación de lectura por parte del
explorador de E/S.
Una vez que se ha configurado un dispositivo Modbus TCP esclavo, los
comandos Modbus enviados a su ID de unidad (dirección Modbus) acceden a los
objetos %IW y%QW del controlador, en lugar de a las palabras Modbus normales
(a las que se accede cuando el ID de unidad es 255). De este modo se facilitan
las operaciones de lectura/escritura mediante una aplicación Modbus TCP
IOScanner.
El dispositivo Modbus TCP esclavo responde a un subconjunto de los
comandos Modbus normales con el objetivo de intercambiar datos con el
explorador de E/S externo. Se admiten los siguientes comandos Modbus con el
dispositivo Modbus TCP esclavo:
Decimal de
código de
función (Hex)
Función Comentario
3 (3) Leer registro de
mantenimiento Permite que el maestro lea los objetos %IW y %QW del
dispositivo
6 (6) Escribir registro único Permite que el maestro escriba en los objetos %IW del
dispositivo
16 (10) Escribir varios
registros Permite que el maestro escriba en los objetos %IW del
dispositivo
23 (17) Leer/escribir varios
registros Permite que el maestro lea los objetos %IW y %QW del
dispositivo y escriba en los objetos %IW del dispositivo
Otros No compatible –
EIO0000003062.06 139

Configuración Ethernet
NOTA: Modbus solicita que el intento para acceder a los registros superiores
a n+m- 1 se responda mediante el código de excepción 02 - DIRECCIÓN DE
DATOS NO VÁLIDA.
Para enlazar la E/S con variables, seleccione la ficha Asignación de E/S de
dispositivo Modbus TCP esclavo:
Canal Tipo Descripción
Entrada IW0 WORD Registro de mantenimiento 0
... ... ...
IWx WORD Registro de mantenimiento x
Salida QW0 WORD Registro de entrada 0
... ... ...
QWy WORD Registro de entrada y
El número de palabras depende de los parámetros Tamaño ensamblado de
salida (%IW) yTamaño ensamblado de entrada (%QW) de la ficha Modbus
TCP.
NOTA: Salida significa SALIDA del controlador de origen (= %IW para el
controlador). Entrada significa ENTRADA del controlador de origen (= %QW
para el controlador).
NOTA: El dispositivo Modbus TCP esclavo actualiza los registros %IW y%
QW como una unidad coherente en el tiempo una vez, sincronizada con las
tareas IEC (tarea MAST de forma predeterminada). En cambio, el servidor
Modbus TCP integrado solo garantiza la coherencia en el tiempo para 1
palabra (2 bytes). Si la aplicación necesita coherencia en el tiempo para más
de 1 palabra (2 bytes), use el Dispositivo Modbus TCP esclavo.
El parámetro Actualizar siempre las variables está establecido en Activado 1
(utilizar tarea de ciclo de bus si no se utiliza en ninguna tarea) y no se puede
editar.
Opciones de ciclo de bus
En la ficha Asignación de E/S de dispositivo esclavo TCP Modbus, seleccione
la Tarea de ciclo de bus para usar:
•Emplear configuración de ciclo del bus de orden superior (tarea
predeterminada)
•MAST
•Una tarea existente del proyecto: puede seleccionar una tarea existente y
asociarla con el explorador. Para obtener más información acerca de las
tareas de aplicación, consulte EcoStruxure Machine Expert Guía de
programación.
140 EIO0000003062.06

Configuración Ethernet
NOTA: Existe un parámetro de tarea de ciclo de bus en el editor de
asignación de E/S del dispositivo que contiene el dispositivo Modbus TCP
esclavo. Este parámetro define la tarea responsable de actualizar los
registros %IW y%QW.
Cambio del puerto de Modbus TCP
Comando changeModbusPort
El comando changeModbusPort se puede utilizar para cambiar el puerto que se
usa en el intercambio de datos con un Modbus TCP maestro.
El Puerto esclavo del Modbus actual se muestra en la ventana Configuración de
Modbus TCP, página 138.
El número del puerto Modbus predeterminado es 502.
Comando Descripción
changeModbusPort “portnum” portnum es el nuevo número de puerto Modbus que se
va a utilizar y se pasa como cadena de caracteres.
Antes de ejecutar el comando, consulte la lista de
puertos utilizados, página 149 para asegurarse de que
ningún otro protocolo TCP/UDP o proceso esté
utilizando portnum.
Si el número de puerto especificado ya estuviera en
uso, se registraría un error en el archivo /usr/Syslog/
FWLog.txt.
Para limitar el número de sockets abiertos, el comando changeModbusPort solo
se puede ejecutar dos veces.
Si apaga y enciende el controlador lógico, se recupera el valor predeterminado
(502) del número de puerto Modbus. Por tanto, debe ejecutar el comando
changeModbusPort después de cada operación de apagado y encendido.
NOTA: Después de cambiar el número de puerto, la selección de protocolo
activo para el servidor Modbus en el grupo Parámetros de seguridad de la
ventana Configuración de Ethernet, página 100 deja de ser válida.
Ejecución del comando mediante un script de tarjeta SD
Paso Acción
1 Cree un archivo de script, página 195, por ejemplo:
; Change Modbus slave port
changeModbusPort “1502”;
2 Asigne el nombre Script.cmd al archivo de script.
3 Copie el archivo de script en la tarjeta SD.
4 Inserte la tarjeta SD en el controlador.
Ejecución del comando con el bloque de función ExecuteScript
El comando changeModbusPort puede ejecutarse desde una aplicación con el
bloque de funciones ExecuteScript (consulte Modicon M241 Logic Controller -
Funciones y variables del sistema - Guía de la biblioteca PLCSystem).
EIO0000003062.06 141

Configuración Ethernet
El siguiente código de ejemplo cambia el valor predeterminado (502) del puerto
del Modbus TCP esclavo a 1502:
IF (myBExe = FALSE AND (PortNum <> 502)) THEN
myExecSc( // falling edge for a second change
xExecute:=FALSE ,
sCmd:=myCmd ,
xDone=>myBDone ,
xBusy=> myBBusy,
xError=> myBErr,
eError=> myIerr);
string1 := 'changeModbusPort "';
string2 := WORD_TO_STRING(PortNum);
myCmd := concat(string1,string2);
myCmd := concat(myCmd,'"');
myBExe := TRUE;
END_IF
myExecSc(
xExecute:=myBExe ,
sCmd:=myCmd ,
xDone=>myBDone ,
xBusy=> myBBusy,
xError=> myBErr,
eError=> myIerr);
Configuración del cortafuegos
Introducción
En esta sección se describe cómo configurar el cortafuegos de Modicon M241
Logic Controller.
Introducción
Presentación del cortafuegos
En general, los cortafuegos ayudan a proteger los perímetros de la zona de
seguridad de red bloqueando el acceso no autorizado y permitiendo el acceso
autorizado. Un cortafuegos es un dispositivo o un conjunto de dispositivos
configurados para permitir, denegar, cifrar, descifrar o delegar el tráfico entre
distintas zonas de seguridad según un conjunto de normas y otros criterios.
Los dispositivos de control del proceso y las máquinas de fabricación de alta
velocidad requieren un procesamiento de datos rápido y a menudo no pueden
tolerar la latencia introducida por una estrategia de seguridad agresiva dentro de
la red de control. Por tanto, los cortafuegos desempeñan un papel significativo en
la estrategia de seguridad y proporcionan niveles de protección en los perímetros
de la red. Los cortafuegos son parte importante de una estrategia general a nivel
de sistema. De forma predeterminada, las reglas del cortafuegos no permiten la
transferencia de telegramas IP entrantes de una red de controlador a una red de
bus de campo.
NOTA: Schneider Electric sigue las prácticas recomendadas del sector en el
desarrollo y la implementación de sistemas de control. Esto incluye un
método de defensa exhaustivo para proteger un sistema de control industrial.
Este método sitúa los controladores detrás de uno o varios servidores de
seguridad para limitar el acceso únicamente a los protocolos y el personal
autorizado.
142 EIO0000003062.06

Configuración Ethernet
ADVERTENCIA
ACCESO NO IDENTIFICADO Y POSTERIOR USO NO AUTORIZADO DE LA
MÁQUINA
• Evalúe si su entorno o sus máquinas están conectadas a su infraestructura
crítica y, de ser así, lleve a cabo los pasos necesarios en términos de
prevención, basándose en el método de defensa exhaustivo, antes de
conectar el sistema de automatización a una red.
• Limite el número de dispositivos conectados a una red al mínimo necesario.
• Aísle su red industrial de otras redes dentro de su empresa.
• Proteja cualquier red contra el acceso imprevisto utilizando servidores de
seguridad, VPN u otras medidas de seguridad demostradas.
• Monitorice las actividades dentro de sus sistemas.
• Evite el acceso o el enlace directos a los dispositivos en cuestión por parte
de personas no autorizadas o acciones sin identificación.
• Prepare un plan de recuperación que incluya una copia de seguridad de su
sistema y de información sobre los procesos.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Configuración del cortafuegos
Hay tres maneras de gestionar la configuración del cortafuegos del controlador:
• Configuración estática
• Cambios dinámicos
• Configuración de la aplicación
Los archivos de secuencia de comandos se emplean en la configuración estática
y en los cambios dinámicos.
Configuración estática
La configuración estática se carga en el inicio del controlador.
El cortafuegos del controlador se puede configurar de manera estática
gestionando un archivo de secuencia de comandos predeterminado situado en el
controlador. La ruta de este archivo es /usr/Cfg/FirewallDefault.cmd.
Cambios dinámicos
Tras el inicio del controlador, la configuración del cortafuegos del controlador se
puede cambiar usando los archivos de secuencia de comandos.
Hay dos maneras de cargar estos cambios dinámicos:
• Con una tarjeta SD, página 144 física.
• Con un bloque de funciones, página 144 en la aplicación.
Configuración de la aplicación
Consulte Configuración de Ethernet, página 100.
EIO0000003062.06 143

Configuración Ethernet
Procedimiento de cambios dinámicos
Utilización de una tarjeta SD
En esta tabla se describe el procedimiento para ejecutar un archivo de secuencia
de comandos desde una tarjeta SD:
Paso Acción
1 Cree un archivo de script, página 146 válido.
Por ejemplo, ponga nombre al archivo de script FirewallMaintenance.cmd.
2 Cargue el archivo de script en la tarjeta SD.
Por ejemplo, cargue el archivo de script en la carpeta usr/Cfg.
3 En el archivo Sys/Cmd/Script.cmd, añada una línea de código con el comando
Firewall_install ”/pathname/FileName”
Por ejemplo, la línea de código es
Firewall_install ”/sd0/usr/Cfg/FirewallMaintenance.cmd”
4 Inserte la tarjeta SD en el controlador.
Uso de un bloque de funciones en la aplicación
En esta tabla se describe el procedimiento para ejecutar un archivo de secuencia
de comandos desde una aplicación:
Paso Acción
1 Cree un archivo de script, página 146 válido.
Por ejemplo, ponga nombre al archivo de script FirewallMaintenance.cmd.
2 Cargue el archivo de script en la memoria del controlador.
Por ejemplo, cargue el archivo de script en la carpeta usr/Syslog con FTP.
3 Utilice un ExecuteScript (consulte Modicon M241 Logic Controller - Funciones y
variables de sistema - Guía de la biblioteca PLCSystem).
Por ejemplo, la entrada SCmd es ‘Firewall_install “/usr/Syslog/
FirewallMaintenance.cmd”’
Comportamiento del cortafuegos
Introducción
La configuración del cortafuegos depende de la acción realizada en el controlador
y el estado de configuración inicial. Existen cinco estados iniciales posibles:
• No existe un archivo de secuencia de comandos predeterminado en el
controlador.
• Hay un archivo de secuencia de comandos correcto.
• Hay un archivo de secuencia de comandos incorrecto.
• No hay un archivo de secuencia de comandos predeterminado y la aplicación
ha configurado el cortafuegos.
• Ya se ha ejecutado la configuración de un archivo de secuencia de
comandos dinámico.
144 EIO0000003062.06

Configuración Ethernet
No hay un archivo de secuencia de comandos predeterminado
Si… Entonces…
Se reinicia el controlador El cortafuegos no está configurado. No se ha activado ninguna protección.
Se ejecuta un archivo de secuencia de
comandos dinámico El cortafuegos se configura según el archivo de secuencia de comandos dinámico.
Se ejecuta un archivo de secuencia de
comandos dinámico incorrecto El cortafuegos no está configurado. No se ha activado ninguna protección.
Descarga de aplicaciones El cortafuegos se configura según la configuración de la aplicación.
Hay un archivo de secuencia de comandos predeterminado
Si… Entonces…
Se reinicia el controlador El cortafuegos se configura según el archivo de secuencia de comandos predeterminado.
Se ejecuta un archivo de secuencia de
comandos dinámico Se elimina toda la configuración del archivo de secuencia de comandos predeterminado.
El cortafuegos se configura según el archivo de secuencia de comandos dinámico.
Se ejecuta un archivo de secuencia de
comandos dinámico incorrecto El cortafuegos se configura según el archivo de secuencia de comandos predeterminado.
El archivo de secuencia de comandos dinámico no se tiene en cuenta.
Descarga de aplicaciones Se ignora toda la configuración de la aplicación.
El cortafuegos se configura según el archivo de secuencia de comandos predeterminado.
Hay un archivo de secuencia de comandos predeterminado incorrecto
Si… Entonces…
Se reinicia el controlador El cortafuegos no está configurado. No se ha activado ninguna protección
Se ejecuta un archivo de secuencia de
comandos dinámico El cortafuegos se configura según el archivo de secuencia de comandos dinámico.
Se ejecuta un archivo de secuencia de
comandos dinámico incorrecto El cortafuegos no está configurado. No se ha activado ninguna protección.
Descarga de aplicaciones El cortafuegos se configura según la configuración de la aplicación.
Configuración de la aplicación sin un archivo de secuencia de comandos
predeterminado
Si… Entonces…
Se reinicia el controlador El cortafuegos se configura según la configuración de la aplicación.
Se ejecuta un archivo de secuencia
de comandos dinámico Se elimina toda la configuración de los ajustes de la aplicación.
El cortafuegos se configura según el archivo de secuencia de comandos dinámico.
Se ejecuta un archivo de secuencia
de comandos dinámico incorrecto El cortafuegos se configura según la configuración de la aplicación. El archivo de secuencia de
comandos dinámico no se tiene en cuenta.
Descarga de aplicaciones Se elimina toda la configuración de la aplicación anterior.
El cortafuegos se configura según la nueva configuración de la aplicación.
EIO0000003062.06 145

Configuración Ethernet
Ejecutar un archivo de secuencia de comandos dinámico ya ejecutado
Si… Entonces…
Se reinicia el controlador El cortafuegos se configura según la configuración del archivo de secuencia de comandos
dinámico (véase la nota).
Se ejecuta un archivo de secuencia
de comandos dinámico Se elimina toda la configuración del archivo de secuencia de comandos dinámico anterior.
El cortafuegos se configura según el nuevo archivo de secuencia de comandos dinámico.
Se ejecuta un archivo de secuencia
de comandos dinámico incorrecto El cortafuegos se configura según la configuración del archivo de secuencia de comandos
dinámico anterior. El archivo de secuencia de comandos dinámico incorrecto no se tiene en
cuenta.
Descarga de aplicaciones Se ignora toda la configuración de la aplicación
El cortafuegos se configura según el archivo de secuencia de comandos dinámico.
NOTA: Si se inserta en el controlador una tarjeta SD con un script de ciberseguridad, se bloquea el inicio. Primero, quite la tarjeta SD
para iniciar el controlador correctamente.
Comandos de script del cortafuegos
Descripción general
En esta sección se describe cómo se escriben los archivos de script (archivos de
script predeterminados o archivos de script dinámico) para que se puedan
ejecutar durante el inicio del controlador o durante la activación de un comando
específico.
NOTA: Las reglas de capa MAC se gestionan por separado y tienen más
prioridad que otras reglas de filtrado de paquetes.
Sintaxis de los archivos de script
La sintaxis de los archivos de script se describe en Directrices de la sintaxis de
script, página 195.
Comandos generales del cortafuegos
Los siguientes comandos están disponibles para gestionar el cortafuegos de
Ethernet de M241 Logic Controller:
Comando Descripción
Firewall Enable Bloquea las tramas desde las interfaces Ethernet. Si no se autoriza ninguna
dirección IP específica, no es posible comunicarse en las interfaces Ethernet.
NOTA: De manera predeterminada, cuando se habilite el cortafuegos,
se rechazarán las tramas.
Firewall Disable Las reglas del cortafuegos no se aplican. Las tramas no se bloquean.
Firewall Ethx Default Allow (1) El controlador acepta las tramas.
Firewall Ethx Default Reject(1) El controlador rechaza las tramas.
NOTA: De manera predeterminada, si esta línea no está presente,
corresponde al comando Firewall Eth1 Default Reject.
(1)Donde Ethx =
• Eth1: Ethernet_1
• Eth2: TM4ES4
146 EIO0000003062.06

Configuración Ethernet
Comandos específicos del cortafuegos
Los siguientes comandos están disponibles para configurar normas del
cortafuegos para puertos y direcciones específicos:
Comando Rango Descripción
Firewall Eth1 Allow IP •.•.
•.•
• = de 0 a 255 Se aceptan las tramas de la dirección IP especificada en todos los
números y tipos de puerto.
Firewall Eth1 Reject IP •.•.
•.•
• = de 0 a 255 Se rechazan las tramas de la dirección IP especificada en todos los
números y tipos de puerto.
Firewall Eth1 Allow IPs •.•.
•.• to •.•.•.•
• = de 0 a 255 Se aceptan las tramas de las direcciones IP dentro del intervalo
especificado para todos los números y tipos de puerto.
Firewall Eth1 Reject IPs •.
•.•.• to •.•.•.•
• = de 0 a 255 Se rechazan las tramas de las direcciones IP dentro del intervalo
especificado para todos los números y tipos de puerto.
Firewall Eth1 Allow port_
type port Y
Y = (números de puerto de
destino, página 149)Se aceptan las tramas con el número de puerto de destino
especificado.
Firewall Eth1 Reject port_
type port Y
Y = (números de puerto de
destino, página 149)Se rechazan las tramas con el número de puerto de destino
especificado.
NOTA: Cuando está activado el reenvío de IP, las normas con
puerto de rechazo solamente filtran las tramas con el
controlador actual como destino. No se aplican a tramas
enrutadas por el controlador actual.
Firewall Eth1 Allow port_
type ports Y1 to Y2
Y = (números de puerto de
destino, página 149)Se aceptan las tramas con un número de puerto de destino dentro
del intervalo especificado.
Firewall Eth1 Reject port_
type ports Y1 to Y2
Y = (números de puerto de
destino, página 149)Se rechazan las tramas con un número de puerto de destino dentro
del intervalo especificado.
Firewall Eth1 Allow IP •.•.
•.• on port_type port Y
• = de 0 a 255
Y = (números de puerto de
destino, página 149)
Se aceptan las tramas de la dirección IP especificada y con el
número de puerto de destino especificado.
Firewall Eth1 Reject IP •.•.
•.• on port_type port Y
• = de 0 a 255
Y = (números de puerto de
destino, página 149)
Se rechazan las tramas de la dirección IP especificada y con el
número de puerto de destino especificado.
Firewall Eth1 Allow IP •.•.
•.• on port_type ports Y1 to
Y2
• = de 0 a 255
Y = (números de puerto de
destino, página 149)
Se aceptan las tramas de la dirección IP especificada y con un
número de puerto de destino dentro del intervalo especificado.
Firewall Eth1 Reject IP •.•.
•.• on port_type ports Y1 to
Y2
• = de 0 a 255
Y = (números de puerto de
destino, página 149)
Se rechazan las tramas de la dirección IP especificada y con un
número de puerto de destino dentro del intervalo especificado.
Firewall Eth1 Allow IPs •1.
•1.•1.•1 to •2.•2.•2.•2 on
port_type port Y
• = de 0 a 255
Y = (números de puerto de
destino, página 149)
Se aceptan las tramas de una dirección IP dentro del intervalo
especificado y con el número de puerto de destino especificado.
Firewall Eth1 Reject IPs •1.
•1.•1.•1 to •2.•2.•2.•2 on
port_type port Y
• = de 0 a 255
Y = (números de puerto de
destino, página 149)
Se rechazan las tramas de una dirección IP dentro del intervalo
especificado y con el número de puerto de destino especificado.
Firewall Eth1 Allow IPs •1.
•1.•1.•1 to •2.•2.•2.•2 on
port_type ports Y1 to Y2
• = de 0 a 255
Y = (números de puerto de
destino, página 149)
Se aceptan las tramas de una dirección IP dentro del intervalo
especificado y con un número de puerto de destino dentro del
intervalo especificado.
Firewall Eth1 Reject IPs •1.
•1.•1.•1 to •2.•2.•2.•2 on
port_type ports Y1 to Y2
• = de 0 a 255
Y = (números de puerto de
destino, página 149)
Se rechazan las tramas de una dirección IP dentro del intervalo
especificado y con un número de puerto de destino dentro del
intervalo especificado.
EIO0000003062.06 147

Configuración Ethernet
Comando Rango Descripción
Firewall Eth1 Allow MAC ••:
••:••:••:••:••
• = 0-F Se aceptan las tramas de la dirección MAC especificada ••:••:••:••:
••.
NOTA: Cuando se aplican las reglas para permitir la dirección
MAC, solo las direcciones MAC de la lista pueden
comunicarse con el controlador, aunque se permitan otras
reglas.
Firewall Eth1 Reject MAC ••:
••:••:••:••:••
• = 0-F Se rechazan las tramas de la dirección MAC especificada ••:••:••:••:
••.
NOTA: port_type puede ser TCP o UDP.
Ejemplo de script
; Enable FireWall. All frames are rejected;
FireWall Enable;
; Allow frames on Eth1
FireWall Eth1 Default Allow;
; Block all Modbus Requests on all IP address
Firewall Eth1 Reject tcp port 502;
; Reject frames on Eth2
FireWall Eth2 Default Reject;
; Allow Fast TCP on interface ETH1. This allow to connect to the
controller using TCP
Firewall Eth1 Allow TCP port 1105;
; Allow FTP active connection for IP address 85.16.0.17
FireWall Eth2 Allow IP 85.16.0.17 on tcp ports 20 to 21;
NOTA: Las direcciones IP se convierten al formato CIDR.
Ejemplo:
“FireWall Eth2 Allow IPs 192.168.100.66 to 192.168.100.99 on
tcp port 44818;”, separado en 7:
•192.168.100.66/31
•192.168.100.68/30
•192.168.100.72/29
•192.168.100.80/28
•192.168.100.96/27
•192.168.100.128/26
•192.168.100.192/29
Para evitar un error del cortafuegos, use toda la configuración de la subred.
NOTA: Máximo 200 caracteres por línea, incluidos comentarios.
148 EIO0000003062.06

Configuración Ethernet
Puertos utilizados
Protocolo Números de puertos de destino
Machine Expert UDP 1740, 1741, 1742, 1743
TCP 1105
FTP TCP 21
HTTP/HTTPS TCP 80, 443 (servidor web)
TCP 8080 (visualización web)
Modbus TCP 502 (1)
OPC UA TCP 4840
Detección de Machine Expert UDP 27126, 27127
SNMP UDP 161, 162
NVL Valor predeterminado UDP: 1202
EtherNet/IP UDP 2222
TCP 44818
TFTP UDP 69 (utilizado solo para servidor FDR)
1) El valor predeterminado se puede modificar mediante el comando de modificación ModbusPort,
página 141.
EIO0000003062.06 149

Administrador de Ethernet industrial
Administrador de Ethernet industrial
Introducción
En este capítulo se describe cómo añadir y configurar Ethernet industrial.
Ethernet industrial
Descripción general
Ethernet industrial es el término utilizado para representar los protocolos
industriales que utilizan la capa física Ethernet estándar y los protocolos Ethernet
estándar.
En una red Ethernet industrial puede conectar:
• Dispositivos industriales (protocolos industriales)
• Dispositivos no industriales (otros protocolos Ethernet)
Para obtener más información, consulte Guía de usuario de Ethernet Industrial.
150 EIO0000003062.06

Administrador de Ethernet industrial
Arquitectura de Ethernet industrial
En esta figura se muestra una arquitectura Ethernet industrial típica:
A Red de control
B Red de dispositivos
1 Controlador lógico (consulte EcoStruxure Machine Expert Industrial
Ethernet - Descripción general - Guía de usuario)
2 Dispositivos de encadenamiento tipo margarita
3 Conmutador Ethernet
4 Isla de E/S (Modbus TCP)
5Sensor de visión (EtherNet/IP)
6 PC y HMI (TCP/UDP)
2, 4 y 5 Dispositivos esclavos de Ethernet industrial (EtherNet/IP/Modbus TCP)
Esta arquitectura puede configurarse con EcoStruxure Machine Expert.
M241 Logic Controller puede conectarse a la vez a la red de control y a la red de
dispositivos. Para usar esta funcionalidad, debe hacer que un segundo puerto
Ethernet esté disponible añadiendo un módulo de expansión TM4ES4 a la
configuración. El puerto Ethernet integrado en el controlador lógico se conecta a
la red de dispositivos y el puerto Ethernet en TM4ES4 se conecta a la red de
control.
Si no se ha añadido ningún módulo de expansión TM4ES4, el puerto Ethernet
integrado en M241 Logic Controller se puede conectar a la red de control o a la
red de dispositivos.
EIO0000003062.06 151

Administrador de Ethernet industrial
Descripción de Ethernet industrial
M241 Logic Controller
Características Descripción
Topología Cadena tipo margarita y en estrella a través de conmutadores
ancho de banda 10/100 Mbit/s
Explorador de EtherNet/IP
Rendimiento Hasta 16 dispositivos de destino EtherNet/IP gestionados por el controlador lógico y supervisados en un
intervalo de 10 ms
Número de conexiones 0...16
Número de palabras de
entrada 0...1024
Número de palabras de
salida 0...1024
Comunicaciones de E/S Servicio de explorador de EtherNet/IP
Bloque de funciones para configuración y transferencia de datos
Origen/Destino
Modbus TCP IOScanner
Rendimiento Hasta 64 dispositivos del servidor Modbus TCP administrados por el controlador lógico y supervisados con
un espacio de tiempo de 35 ms
Número de conexiones 0...64
Número de palabras de
entrada 0...2048
Número de palabras de
salida 0...2048
Comunicaciones de E/S Servicio Modbus TCP IOScanner
Bloque de funciones para la transferencia de datos
Cliente/servidor
Otros servicios Administración FDT/DTM/EDS
FDR (Fast Device Replacement, sustitución rápida de dispositivo)
servidor DHCP
Gestión de la seguridad (consulte Parámetros de seguridad, página 102 yConfiguración del cortafuegos,
página 142)
Servidor Modbus TCP
Cliente Modbus TCP
Servidor web, página 103
Servidor FTP (protocolos FTP y TFTP), página 114
OPC UA, página 179
SNMP, página 116
EtherNet/IP adapter (controlador como destino en EtherNet/IP)(1)
Origen EtherNet/IP
Servidor Modbus TCP (controlador como esclavo en Modbus TCP)(1)
IEC VAR ACCESS
152 EIO0000003062.06

Administrador de Ethernet industrial
M241 Logic Controller
Características Descripción
Características
adicionales Es posible combinar hasta 16 dispositivos EtherNet/IP y servidores Modbus TCP.
Se puede acceder directamente a los dispositivos para configurarlos, supervisarlos y administrarlos.
Transparencia de red entre la red de control y la red de dispositivos (el logic controller se puede utilizar como
pasarela).
NOTA: El rendimiento del logic controller puede resultar afectado, si se utiliza como pasarela.
1) Para usar este servicio, además de las funciones de escáner EtherNet/IP o Modbus TCP IOScanner, debe añadir un módulo de
extensión TM4ES4 al controlador lógico.
Descripción general de EtherNet/IP
EtherNet/IP es la implementación del protocolo CIP sobre Ethernet estándar.
El protocolo EtherNet/IP utiliza una arquitectura de origen/destino para el
intercambio de datos.
Los orígenes son los dispositivos que inician los intercambios de datos con los
dispositivos de destino de la red. Esto se aplica tanto a las comunicaciones de E/
S como a los servicios de mensajería. Equivale a la función de cliente en una red
Modbus.
Los destinos son los dispositivos que responden a las peticiones de datos
generadas por los orígenes. Esto se aplica tanto a las comunicaciones de E/S
como a los servicios de mensajería. Equivale a la función de servidor en una red
Modbus.
El adaptador de EtherNet/IP es un dispositivo final de una red EtherNet/IP. Las
unidades y los bloques de E/S pueden ser dispositivos adaptadores de EtherNet/
IP.
La comunicación entre un dispositivo de origen EtherNet/IP y un destino se
realiza mediante una conexión EtherNet/IP.
Descripción general de Modbus TCP
El protocolo Modbus TCP utiliza una arquitectura cliente/servidor para el
intercambio de datos.
La aplicación administra los intercambios de datos explícitos (no cíclicos) de
Modbus TCP.
Modbus TCP IOScanner administra los intercambios de datos implícitos (cíclicos)
de Modbus TCP. Modbus TCP IOScanner es un servicio basado en Ethernet que
consulta continuamente los dispositivos esclavos para intercambiar datos,
estados e información de diagnóstico. En este proceso se supervisan las
entradas y salidas de control de los dispositivos esclavos.
Los clientes son dispositivos que inician el intercambio de datos con otros
dispositivos de la red. Esto se aplica tanto a las comunicaciones de E/S como a
los servicios de mensajería.
Los servidores son dispositivos que tratan las peticiones de datos generadas por
los clientes. Esto se aplica tanto a las comunicaciones de E/S como a los
servicios de mensajería.
La comunicación entre Modbus TCP IOScanner y el dispositivo esclavo se realiza
mediante el uso de canales Modbus TCP.
EIO0000003062.06 153

Administrador de Ethernet industrial
Adición del administrador de Ethernet industrial
Industrial_Ethernet_manager debe estar presente en el nodo Ethernet_1 (red
Ethernet) del árbol de dispositivos para activar estas funciones y servicios:
• Explorador de EtherNet/IP
• Modbus TCP IOScanner
Si Ethernet_1 (red Ethernet) está ya en uso, debe añadir un módulo de
extensión TM4ES4 al controlador y mover el EthernetIP o los nodos del
dispositivo Modbus TCP esclavo de Ethernet_1 (red Ethernet) al nodo
TM4ES4.
Industrial_Ethernet_manager se añade automáticamente al añadir un
dispositivo esclavo en el nodo Ethernet_1 (red Ethernet).
Para añadir manualmente Industrial_Ethernet_manager aEthernet_1 (red
Ethernet):
Paso Acción
1 En el árbol de dispositivos, seleccione Ethernet_1 (Red Ethernet) y haga clic en el
signo más de color verde del nodo o bien haga clic con el botón derecho en Ethernet_
1(Red Ethernet) y ejecute el comando Añadir dispositivo desde el menú contextual.
Resultado: se abre el cuadro de diálogo Agregar dispositivo.
2 En el cuadro de diálogo Agregar dispositivo, seleccione Administradores de
protocolos >Administrador de Ethernet industrial.
3 Haga clic en el botón Agregar dispositivo.
4 Haga clic en el botón Cerrar.
Para obtener más información, consulte Configuración del Administrador de
Ethernet industrial, Configuración de destino de EtherNet/IP y Configuración de
Modbus TCP (consulte EcoStruxure Machine Expert Modbus - Guía de usuario).
Servidor DHCP
Descripción general
Se puede configurar un servidor DHCP en la red Ethernet_1 de M241 Logic
Controller.
El servidor DHCP ofrece direcciones a los dispositivos conectados a la red
Ethernet_1. El servidor DHCP sólo proporciona direcciones estáticas. A cada
esclavo identificado se le asigna una dirección única. Los dispositivos esclavos
DHCP se identifican mediante su dirección MAC o su nombre de dispositivo
DHCP. La tabla de configuración del servidor DHCP define la relación entre las
direcciones y los dispositivos esclavos identificados.
Las direcciones del servidor DHCP se proporcionan con un tiempo de cesión
infinito. No es necesario que los dispositivos esclavos actualicen la dirección IP
cedida.
Para obtener más información, consulte Métodos de direccionamiento IP (véase
EcoStruxure Machine Expert Modbus TCP, Guía del usuario).
154 EIO0000003062.06

Administrador de Ethernet industrial
Sustitución rápida de dispositivo
Descripción general
La sustitución rápida de dispositivo (FDR, Fast Device Replacement) facilita la
sustitución y reconfiguración de un dispositivo de red. Esta función está
disponible en el puerto Ethernet_1 de M241 Logic Controller.
Para obtener más información, consulte Sustitución de un dispositivo esclavo con
FDR (véase EcoStruxure Machine Expert Modbus TCP, Guía del usuario).
EIO0000003062.06 155

Configuración de línea serie
Configuración de línea serie
Introducción
En este capítulo se describe cómo configurar la comunicación de línea serie de
Modicon M241 Logic Controller.
Modicon M241 Logic Controller cuenta con dos puertos de línea serie. Estos
puertos están configurados para utilizar los siguientes protocolos cuando sean
nuevos o después de la actualización del firmware del controlador:
• Línea serie 1: Administrador de red de Machine Expert.
• Línea serie 2: Gestor Modbus.
Configuración de línea serie
Introducción
La ventana de configuración de línea serie permite configurar los parámetros
físicos de una línea serie (velocidad de transmisión, paridad, etc.).
Configuración de línea serie
Para configurar una línea serie, haga doble clic en Línea serie en Dispositivos.
La ventana Configuración se muestra de este modo:
156 EIO0000003062.06

Configuración de línea serie
Los parámetros siguientes deben ser idénticos para todos los dispositivos serie
conectados al puerto:
Elemento Descripción
Velocidad de
transmisión Velocidad de transmisión en bits/s
Paridad Se utiliza para detectar errores.
Bits de datos Número de bits para transmitir datos.
Bits de parada Número de bits de parada.
Medio físico Permite especificar el medio que se utilizará:
• RS485 (con o sin resistencia de polarización)
• RS232 (solo disponible en línea serie 1)
Resistencia de
polarización Las resistencias de polarización están integradas en el controlador. Se activan o
desactivan mediante este parámetro.
Cuando el firmware del controlador es nuevo o lo actualiza, de forma
predeterminada los puertos de línea serie del controlador se configuran para el
protocolo Machine Expert. El protocolo de Machine Expert es incompatible con el
de otros protocolos como el de la línea serie Modbus. Conectar un nuevo
controlador a una línea serie Modbus activa configurada, o actualizar el firmware
de un controlador conectado a ella, puede hacer que los otros dispositivos de la
línea serie dejen de comunicarse. Asegúrese de que el controlador no esté
conectado a una red de línea serie de Modbus activo antes de descargar por
primera vez una aplicación válida que tenga el puerto o los puertos respectivos
correctamente configurados para el protocolo en cuestión.
AVISO
INTERRUPCIÓN DE COMUNICACIONES DE LA LÍNEA SERIE
Asegúrese de que su aplicación tenga los puertos de línea serie correctamente
configurados para Modbus antes de conectar físicamente el controlador a una
red de línea serie Modbus operativa.
Si no se siguen estas instrucciones, pueden producirse daños en el
equipo.
En esta tabla se indica el valor máximo de la velocidad de transmisión en baudios
de los administradores:
Administrador Velocidad de transmisión en baudios
máxima (bits/s)
Administrador de red de Machine Expert 115200
Gestor Modbus
Gestor ASCII
Modbus IOScanner
Administrador de red de Machine Expert
Introducción
Use el administrador de red de Machine Expert para intercambiar variables con
un Panel avanzado XBTGT/XBTGK con el protocolo de software de Machine
Expert, o bien si se utiliza la línea serie para la programación de EcoStruxure
Machine Expert.
EIO0000003062.06 157

Configuración de línea serie
Adición del administrador
Para añadir un administrador de red de Machine Expert al controlador, seleccione
el Administrador de red de Machine Expert en el Catálogo de hardware,
arrástrelo al árbol Dispositivos y colóquelo en uno de los nodos resaltados.
Para obtener más información sobre cómo añadir un dispositivo al proyecto,
consulte:
• Uso del Catálogo de hardware (consulte EcoStruxure Machine Expert - Guía de
programación)
• Uso del menú contextual o el botón Más (véase EcoStruxure Machine Expert,
Programming Guide)
Configuración del administrador
No hay ninguna configuración para el administrador de red de Machine Expert.
Adición de un módem
Para añadir un módem al administrador de red de Machine Expert, consulte
Cómo añadir un módem a un administrador, página 171.
Gestor Modbus
Introducción
El gestor Modbus se utiliza para el protocolo Modbus RTU o ASCII en modo
maestro o esclavo.
Adición del administrador
Para añadir un gestor Modbus al controlador, seleccione el Gestor Modbus en el
Catálogo de hardware, arrástrelo al árbol de dispositivos y colóquelo en uno
de los nodos resaltados.
Para obtener más información sobre cómo añadir un dispositivo al proyecto,
consulte:
• Uso del Catálogo de hardware (consulte EcoStruxure Machine Expert - Guía de
programación)
• Uso del menú contextual o el botón Más (véase EcoStruxure Machine Expert,
Programming Guide)
Configuración del gestor Modbus
Para configurar el gestor Modbus para el controlador, haga doble clic en Gestor
Modbus en el árbol de dispositivos.
158 EIO0000003062.06

Configuración de línea serie
La ventana de configuración del Gestor Modbus se muestra como sigue:
Defina los parámetros tal como se describe en esta tabla:
Elemento Descripción
Modalidad de
transmisión Especifique la modalidad de transmisión que se utilizará:
• RTU: usa codificación binaria y comprobación de errores de CRC (8 bits
de datos).
• ASCII: los mensajes están en formato ASCII, comprobación de errores
LRC (7 bits de datos)
Este parámetro debe ser idéntico para todos los dispositivos Modbus del
enlace.
Direcciona-
miento Especifique el tipo de dispositivo:
• Maestro
• Esclavo
Dirección Dirección Modbus del dispositivo cuando esclavo está seleccionado.
Tiempo entre
tramas (ms) Tiempo para evitar la colisión de buses.
Este parámetro debe ser idéntico para todos los dispositivos Modbus del
enlace.
Ajustes de
línea de serie Parámetros especificados en la ventana de configuración de líneas serie.
Maestro Modbus
Si el controlador se configura como un maestro Modbus, se admiten los
siguientes bloques de funciones de la biblioteca PLCCommunication:
• ADDM
• READ_VAR
• SEND_RECV_MSG
• SINGLE_WRITE
• WRITE_READ_VAR
• WRITE_VAR
Para obtener más información, consulte las descripciones del bloque de
funciones (consulte EcoStruxure Machine Expert - Funciones de lectura/escritura
Modbus y ASCII - Guía de la biblioteca PLCCommunication) de la biblioteca
PLCCommunication.
Información Estado
Modbus
Ajustes de línea serie
Tiempo entre tramas (ms):
Direccionamiento:
Velocidad en baudios:
Paridad:
Bits de datos:
Bits de parada:
Medio físico:
Esclavo
10
Dirección [1.a.247]:
1
38400
Ningun
o
8
1
RS485
Configuración
Modalidad de transmisión:
RTU ASCII
Modbus_Manager
EIO0000003062.06 159

Configuración de línea serie
Esclavo Modbus
Si el controlador se configura como un esclavo Modbus, se admiten las siguientes
peticiones de Modbus:
Código de
función
Dec. (Hex)
Subfunción
Dec. (Hex)
Función
1 (1 hex) –Lectura de salidas digitales (%Q)
2 (2 hex) –Lectura de entradas digitales (%I)
3 (3 hex) –Lectura de registro múltiple (%MW)
6 (6 hex) –Escritura de registro único (%MW)
8 (8 hex) –Diagnostic
15 (F hex) –Escritura de salidas digitales múltiples (%Q)
16 (10 hex) –Escritura de registros múltiples (%MW)
23 (17 hex) –Lectura/escritura de registros múltiples (%MW)
43 (2B hex) 14 (E hex) Identificación del dispositivo de lectura
En esta tabla se incluyen los códigos de subfunción que admite la petición
Modbus de diagnóstico 08:
Código de subfunción Función
Decimal Hexadeci-
mal
10 0A Limpia contadores y el registro de diagnóstico
11 0B Devuelve el recuento de mensajes del bus
12 0C Devuelve el recuento de errores de comunicaciones del bus
13 0D Devuelve el recuento de errores de excepción del bus
14 0E Devuelve el recuento de mensajes del esclavo
15 0F Devuelve el recuento de esclavos sin respuesta
16 10 Devuelve el recuento de esclavos NAK
17 11 Devuelve el recuento de esclavos ocupados
18 12 Devuelve el recuento de desbordamiento de caracteres del bus
En esta tabla se enumeran los objetos que se pueden leer con una petición de
identificación de dispositivo de lectura (nivel de identificación básico):
ID de
objeto Nombre del objeto Tipo Valor
00 hex Código de fabricante Cadena ASCII Schneider Electric
01 hex Código de producto Cadena ASCII Referencia del controlador
P. ej.: TM241CE24T
02 hex Revisión principal/
secundaria Cadena ASCII aa.bb.cc.dd (igual que el descriptor del
dispositivo)
En el siguiente apartado se describen las diferencias entre la asignación de
memoria Modbus del controlador y la asignación de HMI Modbus. Si no programa
la aplicación para identificar estas diferencias en la asignación, el controlador y
HMI no se comunicarán correctamente. Por consiguiente, puede que los valores
incorrectos se escriban en áreas de memoria encargadas de las operaciones de
salida.
160 EIO0000003062.06

Configuración de línea serie
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Programe la aplicación para que traduzca la asignación de memoria de Modbus
utilizada por el controlador y la que utiliza cualquier dispositivo HMI conectado.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Cuando el controlador y el HMI Magelis están conectados a través de Modbus
(HMI es un maestro de peticiones Modbus), el intercambio de datos utiliza
peticiones de palabra simple.
Las palabras sencillas de la memoria HMI se solapan cuando se utilizan palabras
dobles, pero no en el caso de la memoria del controlador (consulte el siguiente
diagrama). Para que el área de la memoria HMI y la de la memoria del controlador
coincidan, la relación entre las palabras dobles de la memoria HMI y las de la
memoria del controlador debe ser 2.
A continuación encontrará ejemplos de coincidencias de memoria en el caso de
palabras dobles:
• El área de memoria %MD2 de HMI corresponde al área de memoria %MD1
del controlador porque la petición Modbus utiliza las mismas palabras
sencillas.
• El área de memoria %MD20 de HMI corresponde al área de memoria %
MD10 del controlador porque la petición Modbus utiliza las mismas palabras
sencillas.
A continuación encontrará ejemplos de coincidencias de memoria en el caso de
bits:
• El área de memoria %MW0:X9 de HMI corresponde al área de memoria %
MX1.1 del controlador porque las palabras sencillas están divididas en 2
bytes diferentes dentro de la memoria del controlador.
Adición de un modem
Para añadir un modem al gestor Modbus, consulte Cómo añadir un módem a un
administrador, página 171.
Gestor ASCII
Introducción
El gestor ASCII se utiliza en una línea serie para transmitir o recibir datos con un
dispositivo simple.
EIO0000003062.06 161

Configuración de línea serie
Adición del gestor
Para añadir un gestor ASCII al controlador, seleccione Gestor ASCII en el
Catálogo de hardware, arrástrelo a Dispositivos y colóquelo en uno de los
nodos resaltados.
Para obtener más información sobre cómo añadir un dispositivo al proyecto,
consulte:
• Uso del Catálogo de hardware (consulte EcoStruxure Machine Expert - Guía de
programación)
• Uso del menú contextual o el botón Más (véase EcoStruxure Machine Expert,
Programming Guide)
Configuración del gestor ASCII
Para configurar el gestor ASCII del controlador, haga doble clic en Gestor ASCII,
en Dispositivos.
La ventana de configuración del Gestor ASCII se muestra de este modo:
Defina los parámetros tal como se describe en esta tabla:
Parámetro Descripción
Carácter de
inicio Si se selecciona 0, no se utilizará ningún carácter de inicio en la trama. De lo
contrario, en la modalidad de recepción se utilizará el carácter ASCII
correspondiente para detectar el inicio de una trama. En la modalidad de envío,
se añade este carácter al inicio de la trama.
Primer
carácter de
fin
Si se selecciona 0, no se utilizará ningún primer carácter de fin en la trama. De lo
contrario, en la modalidad de recepción se utilizará el carácter ASCII
correspondiente para detectar el final de una trama. En la modalidad de envío,
este carácter se añade al final de la trama.
Segundo
carácter de
fin
Si se selecciona 0, no se utilizará ningún segundo carácter de fin en la trama. De
lo contrario, en la modalidad de recepción se utilizará el carácter ASCII
correspondiente para detectar el final de una trama. En la modalidad de envío,
este carácter se añade al final de la trama.
Longitud
recibida de
trama
Si se especifica 0, no se utiliza este parámetro. Este parámetro permite al sistema
concluir un fin de trama en la recepción, cuando el controlador ha recibido el
número de caracteres especificado.
Nota: Este parámetro no se puede utilizar simultáneamente con Timeout de
trama recibido (ms).
Timeout de
trama
recibido (ms)
Si se especifica 0, no se utiliza este parámetro. Este parámetro permite al sistema
concluir el fin de trama en la recepción después de un silencio del número de ms
especificado.
Ajustes de
línea de serie Parámetros especificados en la ventana Configuración de línea serie, página 156.
162 EIO0000003062.06

Configuración de línea serie
NOTA: En caso de utilizar varias condiciones de terminación de trama, la
primera condición que sea TRUE hará que finalice el intercambio.
Adición de un módem
Para añadir un módem al gestor ASCII, consulte Cómo añadir un módem a un
administrador, página 171.
IOScanner serie Modbus
Introducción
Modbus IOScanner se utiliza para simplificar los intercambios con los dispositivos
esclavos Modbus.
Adición de un Modbus IOScanner
Para añadir un explorador de E/S Modbus en una línea serie, seleccione el
Modbus_IOScanner en Catálogo de hardware, arrástrelo al árbol de
dispositivos y colóquelo en uno de los nodos resaltados.
Para obtener más información sobre cómo añadir un dispositivo al proyecto,
consulte:
• Uso del Catálogo de hardware (consulte EcoStruxure Machine Expert - Guía de
programación)
• Uso del menú contextual o el botón Más (véase EcoStruxure Machine Expert,
Programming Guide)
Configuración de Modbus IOScanner
Para configurar un explorador de E/S Modbus en una línea serie, haga doble clic
en Modbus IOScanner, en el árbol de dispositivos.
La ventana de configuración se muestra de este modo:
Modalidad de transmisión
Timeout de respuesta (ms)
Tiempo entre tramas (ms)
Configuración de maestro de Modbus
Asignación de E/S del maestro Modbus
Estado Información
1000
10
RTU ASCII
Modbus-RTU/ASCII
EIO0000003062.06 163

Configuración de línea serie
Defina los parámetros tal como se describe en esta tabla:
Elemento Descripción
Modalidad de
transmisión Especifique la modalidad de transmisión que se utilizará:
• RTU: usa codificación binaria y comprobación de errores de CRC (8 bits
de datos).
• ASCII: los mensajes están en formato ASCII, comprobación de errores
LRC (7 bits de datos)
Defina este parámetro igual para todos los dispositivos Modbus de la red.
Timeout de
respuesta (ms) Timeout utilizado en los intercambios.
Tiempo entre
tramas (ms) Retardo para reducir colisiones de datos en el bus.
Defina este parámetro igual para todos los dispositivos Modbus de la red.
NOTA: No utilice los bloques de funciones de la biblioteca
PLCCommunication en una línea serie que tenga un Modbus IOScanner
configurado. Si lo hace, se interrumpirá el intercambio del Modbus IOScanner.
Selección de tarea de ciclo de bus
El IOScanner Modbus y los dispositivos intercambian datos en cada ciclo de la
tarea de aplicación seleccionada.
Para seleccionar esta tarea, seleccione la ficha Asignación de E/S de maestro
Modbus. La ventana de configuración se muestra de este modo:
El parámetro Tarea de ciclo de bus permite seleccionar la tarea de aplicación
que gestionará el explorador:
•Emplear configuración de ciclo del bus de orden superior: asocia el
explorador con la tarea de aplicación que gestiona el controlador.
•MAST: asocia el explorador con la tarea MAST.
• Otra tarea existente: puede seleccionar una tarea existente y asociarla con el
explorador. Para obtener más información sobre las tareas de la aplicación,
consulte EcoStruxure Machine Expert - Guía de programación (consulte
EcoStruxure Machine Expert - Guía de programación).
El tiempo de exploración de la tarea asociada con el explorador debe ser inferior a
500 ms.
164 EIO0000003062.06

Configuración de línea serie
Adición de un dispositivo en el IOScanner serie Modbus
Introducción
En esta sección se describe cómo añadir un dispositivo en el Modbus IOScanner.
Adición de un dispositivo en el Modbus IOScanner
Para añadir un dispositivo en el explorador de E/S Modbus, seleccione el Esclavo
Modbus genérico en el Catálogo de hardware, arrástrelo al árbol de
dispositivos y colóquelo en el nodo Modbus_IOScanner del árbol de
dispositivos.
Para obtener más información sobre cómo añadir un dispositivo al proyecto,
consulte:
• Uso del Catálogo de hardware (consulte EcoStruxure Machine Expert - Guía de
programación)
• Uso del menú contextual o el botón Más (véase EcoStruxure Machine Expert,
Programming Guide)
NOTA: La variable para el intercambio se crea automáticamente en el %IWx y
%QWx de la ficha Asignación de E/S del maestro serie Modbus.
Configuración de un dispositivo añadido en el Modbus IOScanner
Para configurar el dispositivo añadido en el Modbus IOScanner, haga lo siguiente:
Paso Acción
1 En el árbol de dispositivos, haga doble clic en Esclavo Modbus genérico.
Resultado: Aparecerá la ventana de configuración.
2 Introduzca un valor Dirección de esclavo para su dispositivo (seleccione un valor de 1 a 247).
3 Seleccione un valor para Respuesta del tiempo de espera (en ms).
Dirección de esclavo [1-247]
Timeout de respuesta [ms]
1000
Modbus-RTU/ASCII
Asignación de E/S del maestro Modbus Información
Generic_Modbus_Slave
Estado
1
Canal esclavo Modbus
General
Init esclavo Modbus
EIO0000003062.06 165

Configuración de línea serie
Para configurar los canales Modbus, haga lo siguiente:
Paso Acción
1 Haga clic en la ficha Canal esclavo Modbus:
2 Haga clic en el botón Agregar canal:
Canal Modbus
Nombre
Correcto
Canal 0
Cancelar
Canal
Tipo de acceso
Lectura de registros de mantenimiento (código funcional 3)
Desencadenador
Comentario
Offset
Registro READ
Longitud
Tratamiento de errores
0x0000
1
Conservar el último valor
Offset
Registro WRITE
Longitud
0x0000
1
CíclicoTiempo de ciclo (ms)
100
166 EIO0000003062.06

Configuración de línea serie
Paso Acción
3 Configurar un intercambio:
En el área Canal puede añadir los valores siguientes:
•Nombre: escriba un nombre para el canal.
•Tipo de acceso: elija el tipo de intercambio: solicitudes múltiples de lectura o escritura o lectura/escritura. Consulte
Tipos de acceso, página 169.
•Activador: Elija el activador del intercambio. Puede ser CYCLIC con el periodo definido en el campo Tiempo de
ciclo (ms), iniciado por un RISING EDGE en una variable booleana (esta variable booleana se crea en la ficha
Asignación de E/S del maestro Modbus) o por la Aplicación.
•Comentario: añada un comentario sobre este canal.
En el área Registro READ (si su canal es de lectura o lectura/escritura), puede configurar los %MW para leerse en el
esclavo Modbus. Estos se asignan a %IW (consulte la ficha Asignación de E/S de maestro Modbus):
•Compensación: compensación de los %MW que se leerán. 0 significa que el primer objeto que se lee es %MW0.
•Longitud: número de %MW que se leerán. Por ejemplo, si "Desplazamiento" = 2 y "Longitud" = 3, el canal lee %MW2,
%MW3 y%MW4.
•Administración de errores: seleccione el comportamiento del %IW relacionado en caso de pérdida de
comunicación.
En el área Registro WRITE (si su canal es de escritura o lectura/escritura), puede configurar los %MW para escribirse en
el esclavo Modbus. Estos se asignan a %QW (consulte la ficha Asignación de E/S de maestro Modbus):
•Compensación: Desplazamiento de los %MW que se escribirán. 0 significa que el primer objeto que se escribe es %
MW0.
•Longitud: número de %MW que se van a escribir. Por ejemplo, si Offset = 2 y Length = 3, el canal escribe %MW2, %
MW3 y%MW4
4 Haga clic en Aceptar para validar la configuración de este canal.
NOTA: También se puede:
• Haga clic en el botón Eliminar para eliminar un canal.
• Haga clic en el botón Editar para cambiar los parámetros de un canal.
Resultado: Se muestran los canales configurados:
Administrador de
bibliotecasSR_MainTM3BC_ModbusTCPGeneric_Modbus_SlaveModbus_IOScanner
TM3BC_ModbusSL
GeneralCanal esclavo ModbusInit esclavo ModbusAsignación E/S maestra ModbusObjetos IEC Maestro ModbusEstadoInformación
NombreTipo de accesoDesencadenadorDesplazamiento READLongitudTratamiento de errores
16#0000
LongitudComentario
0
1
Canal 0
Canal 1
Lectura de registros de mantenimiento (Código funcional 03)Conservar el
último valor
1
16#0000
Cíclico, t#100 ms
1
Cíclico, t#100 ms
Escritura de registros múltiples (Código funcional 16)
Desplazamiento WRITE
EIO0000003062.06 167

Configuración de línea serie
Para configurar el valor de inicialización de Modbus, haga lo siguiente:
Paso Acción
1 Haga clic en la ficha Init esclavo Modbus:
2 Haga clic en Nuevo para crear un nuevo valor de inicialización:
La ventana Valor de inicialización contiene los siguientes parámetros:
•Tipo de acceso: introduzca el tipo de intercambio: solicitudes de escrituraTipos de acceso, página 169.
•Desplazamiento de registro: número del registro que debe inicializarse.
•Longitud: número de %MW que se leerán. Por ejemplo, si "Desplazamiento" = 2 y "Longitud" = 3, el canal lee %MW2,
%MW3 y%MW4.
•Valor de inicialización: valor con el que se inicializan los registros.
•Comentario: añada un comentario sobre este canal.
3 Haga clic en Aceptar para crear un nuevo Valor de inicialización.
NOTA: También se puede:
• Hacer clic en Subir oBajar para cambiar la posición de un valor de la lista.
• Haga clic en Eliminar para eliminar un valor de la lista.
• Haga clic en Editar para cambiar los parámetros de un valor.
168 EIO0000003062.06

Configuración de línea serie
Para configurar la Asignación de E/S del maestro Modbus, siga estos pasos:
Paso Acción
1 Haga clic en la ficha Asignación de E/S del maestro Modbus:
2 Haga doble clic en una celda de la columna Variable para abrir un campo de texto.
Introduzca el nombre de una variable o haga clic en el botón de exploración [...] y seleccione una variable con
Accesibilidad.
3 Para obtener más información, en Asignación E/S, consulte EcoStruxure Machine Expert - Guía de programación.
Tipos de acceso
En esta tabla se describen los distintos tipos de acceso que existen:
Función Código de
función Disponibilidad
Read Coils 1Canal Modbus
Read Discrete Inputs 2Canal Modbus
Read Holding Registers
(configuración predeterminada para
la configuración del canal)
3Canal Modbus
Read Input Registers 4Canal Modbus
Write Single Coil 5Canal Modbus
Valor de inicialización
Write Single Register 6Canal Modbus
Valor de inicialización
Write Multiple Coils 15 Canal Modbus
Valor de inicialización
Write Multiple Registers
(configuración predeterminada para
la inicialización del esclavo)
16 Canal Modbus
Valor de inicialización
Read/Write Multiple Registers 23 Canal Modbus
EIO0000003062.06 169

Configuración de línea serie
ControlChannel: Habilita o deshabilita un canal de
comunicación
Descripción de la función
Esta función permite habilitar o deshabilitar un canal de comunicación.
Cualquier canal que gestione esta función se reinicializará con su valor
predeterminado tras un restablecimiento (en frío o en caliente).
Tras una parada o un inicio, el canal sigue deshabilitado si ya lo estaba antes.
Tras un restablecimiento, en cambio, el canal se habilitará aunque se haya
deshabilitado antes.
En el caso del acoplador de bus Modbus de línea serie TM3BCSL, hay varios
canales de comunicación separados e independientes.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Asegúrese en todo momento de que los canales de comunicación Modbus
serial line del acoplador de bus TM3BCSL estén ajustados en el mismo estado,
ya sea habilitado o deshabilitado.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
NOTA: Utilice el valor de ChannelID -1 para aplicar el ControlChannel en
todos los canales configurados en el acoplador de bus de línea serie Modbus
TM3BCSL.
Representación gráfica
Descripción de variables de E/S
En esta tabla se describen las variables de entrada:
Entrada Tipo Comentario
ControlChannel INT Devuelve 0 si la operación se realiza correctamente o
un valor negativo en caso de error.
ChannelID INT El número de canal, que se muestra en la primera
columna de la página de configuración.
O -1 para aplicar el comando en todos los canales
del dispositivo en cuestión.
En esta tabla se describe la variable de salida:
Salida Tipo Comentario
Enable BOOL Comando de habilitación o deshabilitación.
ControlChannel
channelIDINT
enableBOOL
ControlChannel INT
170 EIO0000003062.06

Configuración de línea serie
Cómo añadir un módem a un administrador
Introducción
Se puede añadir un módem a los siguientes administradores:
• Gestor ASCII
• Gestor Modbus
• Administrador de red de Machine Expert
NOTA: Use un módem que implemente comandos Hayes si necesita una
conexión con Machine Expert con el administrador de red de Machine Expert.
Cómo añadir un módem a un administrador
Para añadir un módem al controlador, seleccione el módem que desee en el
Catálogo de hardware, arrástrelo a Dispositivos y colóquelo en el nodo del
administrador.
Para obtener más información sobre cómo añadir un dispositivo al proyecto,
consulte:
• Uso del Catálogo de hardware (consulte EcoStruxure Machine Expert - Guía de
programación)
• Uso del menú contextual o el botón Más (véase EcoStruxure Machine Expert,
Programming Guide)
Para obtener más información, consulte la Guía de la biblioteca Modem (consulte
EcoStruxure Machine Expert - Funciones del módem - Guía de la biblioteca
Modem).
EIO0000003062.06 171

Configuración de CANopen
Configuración de CANopen
Introducción
En este capítulo se describe cómo configurar la interfaz CAN incluida en el
controlador.
Para poder utilizar la interfaz CANopen, M241 Logic Controller tiene una conexión
CAN (CAN0) que admite un administrador CANopen.
Configuración de la interfaz CANopen
Configuración de bus CAN
Para configurar el bus CAN del controlador, siga estos pasos:
Paso Acción
1 En Dispositivos, haga doble clic en CAN_1.
2 Configurar la velocidad en baudios (de manera predeterminada: 250 000 bits/s):
NOTA: La opción Acceso de bus en línea permite bloquear el envío de SDO,
DTM y NMT mediante la pantalla de estado.
Cuando conecta un DTM a un dispositivo mediante la red, el DTM se comunica en
paralelo con la aplicación que se esté ejecutando. Esto afecta al rendimiento
general del sistema y puede sobrecargar la red, por lo que podría tener
consecuencias en la coherencia de los datos entre los diferentes dispositivos
controlados.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Coloque la máquina o el proceso de manera que su rendimiento no se vea
afectado por la comunicación de DTM.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
172 EIO0000003062.06

Configuración de CANopen
Creación y configuración del Administrador CANopen
Si el Administrador CANopen ya no aparece bajo el nodo CAN, proceda como
sigue para crearlo y configurarlo:
Paso Acción
1
Haga clic en el signo Más junto al nodo CAN_1 en el árbol de dispositivos. En la
ventana Añadir dispositivo, seleccione Rendimiento de CANopen y haga clic en el
botón Añadir dispositivo.
Para obtener más información sobre cómo añadir un dispositivo al proyecto, consulte:
• Uso del Catálogo de hardware (consulte EcoStruxure Machine Expert - Guía de
programación)
• Uso del menú contextual o el botón Más (véase EcoStruxure Machine Expert,
Programming Guide)
Para obtener más información sobre cómo añadir un dispositivo al proyecto, consulte:
2 Haga doble clic en CANopen_Performance.
Resultado: aparece la ventana de configuración del Administrador CANopen:
NOTA: Si se selecciona Activar la generación Sync, la tarea CAN_x_Sync
se añade al nodo Aplicación > Configuración de tarea de la ficha Árbol de
aplicaciones.
No elimine ni modifique los atributos Tipo oEvento externo de las tareas
CAN_x_Sync. Si lo hace, EcoStruxure Machine Expert detectará un error
cuando intente generar la aplicación y no podrá descargarla en el controlador.
Si desactiva la opción Activar la generación Sync en la subficha
Administrador CANopen de la ficha CANopen_Performance, la tarea
CAN0_Sync se elimina automáticamente del programa.
EIO0000003062.06 173

Configuración de CANopen
Adición de un dispositivo CANopen
Consulte la Guía de programación de EcoStruxure Machine Expert para obtener
más información sobre añadir administradores de comunicación y añadir
dispositivos esclavos a un administrador de comunicación.
Límites de funcionamiento de CANopen
El maestro de CANopen de Modicon M241 Logic Controller tiene los siguientes
límites de funcionamiento.
Número máximo de dispositivos esclavos 63
Número máximo de PDO recibidos (RPDO) 252
Número máximo de PDO transmitidos
(TPDO)
252
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
• No conecte más de 63 dispositivos esclavos CANopen al controlador.
• Programe la aplicación para que utilice 252, o menos, PDO de transmisión
(TPDO).
• Programe la aplicación para que utilice 252 PDO de recepción (RPDO) o
menos.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Formato de bus CAN
El formato de bus CAN es CAN2.0A para CANopen.
174 EIO0000003062.06

Configuración J1939
Configuración J1939
Configuración de la interfaz J1939
Configuración de bus CAN
Para configurar el bus CAN del controlador, consulte Configuración de bus CAN,
página 172.
El formato de bus CAN es CAN2.0B para J1939.
Creación y configuración del gestor J1939
Siga estas instrucciones para crear y configurar un gestor J1939, si no existe ya,
por debajo del nodo CAN_1:
Paso Acción
1Haga clic en el signo más junto al nodo CAN_1 en el Árbol de dispositivos.
2 En la ventana Agregar dispositivo, seleccione J1939_Manager y haga clic en el
botón Agregar dispositivo.
Para obtener más información sobre cómo añadir un dispositivo al proyecto, consulte:
• Uso del Catálogo de hardware (consulte EcoStruxure Machine Expert - Guía de
programación)
• Uso del menú contextual o el botón Más (véase EcoStruxure Machine Expert,
Programming Guide)
3 Cierre la ventana Agregar dispositivo.
4 Haga doble clic en J1939_Manager (J1939_Manager).
Resultado: aparece la ventana de configuración del J1939_Manager:
5Para configurar el J1939_Manager, consulte los apartados de la ayuda en línea de
EcoStruxure Machine Expert Programming with EcoStruxure Machine Expert / Device
Editors / J1939 Configuration Editor / J1939 Manager Editor / Manager Editor.
EIO0000003062.06 175

Configuración J1939
Creación y configuración de ECU
Siga estas instrucciones para crear y configurar unidades de control electrónicas
(ECU):
Paso Acción
1Haga clic en el signo más junto al nodo J1939_Manager (J1939_Manager) en el
Árbol de dispositivos.
2 En la ventana Agregar dispositivo, seleccione J1939_ECU y haga clic en el botón
Agregar dispositivo.
Para obtener más información sobre cómo añadir un dispositivo al proyecto, consulte:
• Uso del Catálogo de hardware (consulte EcoStruxure Machine Expert - Guía de
programación)
• Uso del menú contextual o el botón Más (véase EcoStruxure Machine Expert,
Programming Guide)
3 Cierre la ventana Agregar dispositivo.
4 Haga doble clic en J1939_ECU (J1939_ECU).
Resultado: aparece la ventana de configuración del J1939_ECU:
5Para configurar la ECU J1939, consulte Configuración de ECU J1939, página 177.
176 EIO0000003062.06

Configuración J1939
Configuración de ECU J1939
Por lo general, se deben realizar las siguientes tareas:
• Añada un nodo J1939_ECU para cada dispositivo J1939 físico conectado al
bus CAN.
• Para cada dispositivo J1939, especifique una única dirección preferida en
el rango del 1 al 253.
• Para cada dispositivo J1939, configure las señales (SPN) de la ficha Señales
TX. Estas señales son difundidas por el dispositivo J1939 a otros dispositivos
J1939.
Consulte la documentación del dispositivo para obtener más información
sobre los SPN admitidos.
• Asocie las señales SPN con variables en la ficha J1939 I/O Mapping para
que la aplicación pueda procesarlas.
• Cuando se hayan añadido las señales, compruebe su configuración en la
ventana Conversión de la ficha Señales TX; por ejemplo, Escalonamiento,
Desplazamiento yUnidad. El protocolo J1939 no admite valores REAL
directamente, en su lugar se codifican en el protocolo y se deben convertir en
la aplicación. De manera similar, en las unidades J1939 están definidos
según el sistema internacional de unidades (SI) y, por tanto, es necesario
convertirlas a valores de otros sistemas de unidades.
Ejemplos:
◦La señal Engine Speed del grupo de parámetros EEC1 tiene un Scaling=
0.125 de propiedad que está codificado en una variable bruta del tipo
ARRAY[0..1] OF BYTE. Utilice el código ST siguiente para convertirla en
una variable REAL
rRPM:=(Engine_Speed[1]*256 + Engine_Speed[0])*0.125;
◦La señal Total Vehicle Distance tiene propiedades Scaling=0.125 yUnit=
km, que se reciben en una variable (bruta) del tipo ARRAY[0..3] OF
BYTE. Utilice el código ST siguiente para convertirla en una variable REAL
en millas:
rTVD := (Total_Vehicle_Distance[3]*EXPT(256,3) +
Total_Vehicle_Distance[2]*EXPT(256,2) + Total_Vehicle_
Distance[1]*256 +
Total_Vehicle_Distance[0])*0.125*0.621371;
◦La señal Engine Coolant Temperature del grupo de parámetros ET1
tiene propiedades Offset=-40 yUnit=C(Celsius), que se reciben en una
variable (bruta) del tipo BYTE. Utilice el código ST siguiente para
convertirla en una variable REAL en grados Fahrenheit:
rEngineCoolantTemperature := (Engine_Coolant_
Temperature - 40)*1.8 + 32;
Para obtener más información acerca de cómo configurar J1939_ECU, consulte
los apartados de la ayuda en línea de EcoStruxure Machine Expert Programming
with EcoStruxure Machine Expert / Device Editors / J1939 Configuration Editor /
J1939 ECU Editor / ECU Editor.
EIO0000003062.06 177

Configuración J1939
Configuración de M241 Logic Controller como un dispositivo
ECU
El controlador también se puede configurar como un dispositivo ECU J1939:
Paso Acción
1 Añada un nodo J1393_ECU al J1939_Manager. Consulte Creación y configuración de
ECU, página 176.
2 Seleccione la opción Dispositivo local en la ficha Generalidades.
3 Configure las señales enviadas desde el controlador a otros dispositivos J1939 en la
ficha Señales TX. Los grupos de parámetros son del tipo Broadcast, es decir, se
envían a todos los dispositivos, o del tipo P2P (de igual a igual), es decir, se envían a
un dispositivo especificado.
4 Para las señales P2P, configure la dirección de destino del dispositivo ECU J1939
receptor en la ventana de propiedades del grupo de parámetros.
5Añada las señales P2P enviadas por otro dispositivo J1939 al controlador en la ficha
RX Signals (P2P) del dispositivo J1939 (local) que representa el controlador.
6 Configure la Dirección de origen del grupo de parámetros especificando la dirección
del dispositivo J1939 emisor.
178 EIO0000003062.06

Configuración del servidor OPC UA
Configuración del servidor OPC UA
Introducción
En este capítulo se describe cómo configurar el servidor OPC UA del M241 Logic
Controller.
Visión General del servidor OPC UA
Descripción general
El servidor OPC Unified Architecture (servidor OPC UA) permite que M241 Logic
Controller intercambie datos con clientes OPC UA. El servidor y el cliente se
comunican a través de sesiones.
Los elementos supervisados de datos (también denominados símbolos) que el
servidor OPC UA va a compartir se seleccionan manualmente de una lista de las
variables IEC utilizadas en la aplicación.
OPC UA utiliza un modelo de suscripción. Los clientes se suscriben a símbolos.
El servidor OPC UA lee los valores de los símbolos desde los dispositivos con
una tasa de muestreo fija, coloca los datos en una cola y, a continuación, los
envía a los clientes a modo de notificaciones con un intervalo de publicación
periódico. El intervalo de muestreo puede ser más corto que el intervalo de
publicación, en cuyo caso las notificaciones se pueden poner en cola hasta que
transcurra el intervalo de publicación.
Los símbolos cuyo valor no ha cambiado desde el muestreo anterior no se
vuelven a publicar. En su lugar, el servidor OPC UA envía mensajes KeepAlive
regulares para indicar al cliente que la conexión permanece activa.
Derechos de acceso de usuarios y grupos
El acceso al servidor OPC UA se controla a través de los derechos de acceso.
Consulte Derechos del usuario, página 66.
Servicios OPC UA
En la siguiente tabla se describen los servicios OPC UA admitidos:
Servicio OPC UA Descripción
Modelo de espacio de direcciones Sí
Servicios de sesión Sí
Servicios de atributos Sí
Servicios de elementos supervisados Sí
Elementos en cola Sí
Servicios de suscripción Sí
Método de publicación Sí
EIO0000003062.06 179

Configuración del servidor OPC UA
Configuración del servidor OPC UA
Introducción
En la ventana Configuración del servidor OPC UA puede configurar el servidor
OPC UA.
También puede personalizar el nombre del servidor OPC UA con la configuración
de Post. Consulte Parámetros, página 187.
Acceso a la ficha Configuración del servidor OPC UA
Para configurar el servidor OPC UA:
Paso Acción
1 En el árbol de dispositivos, haga doble clic en MyController.
2 Seleccione la ficha Configuración del servidor OPC UA.
Ficha Configuración del servidor OPC UA
En la siguiente figura se muestra la ventana Configuración del servidor OPC UA:
180 EIO0000003062.06

Configuración del servidor OPC UA
Descripción de la configuración del servidor OPC UA
En esta tabla se describen los parámetros de la configuración del servidor OPC
UA:
Parámetro Valor Valor
predetermi-
nado
Descripción
Configuración de seguridad
Deshabilitar inicio de
sesión anónimo Activado/
desactivado
Desactivado De manera predeterminada esta casilla está desactivada, es decir,
los clientes OPC UA se pueden conectar al servidor de forma
anónima. Seleccione esta casilla para exigir a los clientes que
proporcionen un nombre de usuario y contraseña válidos para
conectarse al servidor OPC UA.
Configuración del servidor
Puerto del servidor De 0 a 65 535 4840 Número de puerto del servidor OPC UA. Los clientes OPC UA deben
agregar este número de puerto al URL TCP del controlador para
conectarse al servidor OPC UA.
Máximo de suscripciones
por sesión De 1 a 100 20 Especifique el número máximo de suscripciones permitidas en cada
sesión.
Intervalo de publicación
mínimo De 200 a 5000 1000 El intervalo de publicación define la frecuencia con la que el servidor
OPC UA envía paquetes de notificaciones a los clientes. Especifique
en milisegundos el tiempo mínimo que debe transcurrir entre las
notificaciones.
Máximo de elementos
supervisados por
suscripción
De 1 a 1000 100 Número máximo de elementos supervisados en cada suscripción que
el servidor agrupa en un paquete de notificaciones.
Intervalo de KeepAlive
mínimo De 500 a 5000 500 El servidor OPC UA solo envía notificaciones cuando se modifican los
valores de los elementos supervisados de los datos. Una notificación
KeepAlive es una notificación vacía enviada por el servidor para
informar al cliente que, aunque no se ha modificado ningún dato, la
suscripción permanece activa. Especifique en milisegundos el
intervalo mínimo entre las notificaciones KeepAlive.
Número máximo de
sesiones De 1 a 4 2 Número máximo de clientes que se pueden conectar
simultáneamente al servidor OPC UA.
Tipo de identificador Numérico
Cadena de
caracteres
Numérico Determinados clientes OPC UA requieren un formato específico de
identificador exclusivo de símbolo (ID de nodo). Seleccione el formato
de los identificadores:
• Valores numéricos
• Cadenas de texto
Diagnostic
EIO0000003062.06 181

Configuración del servidor OPC UA
Parámetro Valor Valor
predetermi-
nado
Descripción
Habilitar trazado Habilitado/
deshabilitado
Habilitado Seleccione esta casilla de verificación para incluir mensajes de
diagnóstico de OPC UA en el archivo de registro del controlador
(consulte EcoStruxure Machine Expert - Guía de programación). Las
trazas están disponibles en la ficha Registro o en el archivo de
registro del sistema del servidor web.
Puede seleccionar la categoría de eventos que se vayan a escribir en
el archivo de registro:
•Ninguno
•Error
•Advertencia
•System
•Información
•Depurar
•Contenido
•Todos (predeterminado)
Tasas de muestreo (ms) De 200 a 5000 500
1000
2000
La tasa de muestreo indica un intervalo de tiempo en milisegundos
(ms). Una vez transcurrido este intervalo, el servidor envía el paquete
de notificaciones al cliente. La tasa de muestreo puede ser más corta
que el intervalo de publicación, en cuyo caso las notificaciones se
ponen en cola hasta que transcurra el intervalo de publicación.
Las tasas de muestreo deben estar en el rango de 200-5000 (ms).
Se puede configurar hasta 3 tasas de muestreo diferentes.
Haga doble clic en la tasa de muestreo para editar su valor.
Para añadir una tasa de muestreo a la lista, haga clic con el botón
derecho y seleccione Añadir nueva tasa.
Para eliminar una tasa de muestreo de la lista, seleccione el valor y
haga clic en .
Haga clic en Restablecer a los valores predeterminados para recuperar los
parámetros de configuración predeterminados de esta ventana.
Configuración de símbolos del servidor OPC UA
Introducción
Los símbolos son los elementos de datos que se comparten con los clientes OPC
UA. Los símbolos se seleccionan en una lista que contiene todas las variables
IEC que se utilizan en la aplicación. Los símbolos seleccionados se envían a
continuación al controlador lógico como parte de la descarga de la aplicación.
A cada símbolo se le asigna un identificador exclusivo. Como determinados tipos
de cliente pueden exigir un formato específico, los identificadores se pueden
configurar para ofrecer un formato numérico o de cadena.
El servidor OPC UA admite los siguientes tipos de variables IEC:
• Booleano
• Byte
• Int16, Int32, Int64
• UInt16, UInt32, UInt64
• Flotante
• Doble
• Cadena (255 bytes)
• Sbyte
182 EIO0000003062.06

Configuración del servidor OPC UA
Las variables de memoria de bit (%MX) no se pueden seleccionar.
Visualización de la lista de variables
Para visualizar la lista de variables:
Paso Acción
1En la ficha Árbol de aplicaciones, haga clic con el botón derecho en Aplicación y
elija Agregar objeto >Configuración de símbolos OPC UA.
Resultado: Se muestra la ventana Símbolos OPC UA. El controlador lógico inicia el
servidor OPC UA.
2 Haga clic en Add.
NOTA: Los objetos IEC %MX,%IX,%QX no tienen un acceso directo. Para
acceder a los objetos IEC, primero debe agrupar sus contenidos en registros
ubicados (consulte la Tabla de reubicación, página 28).
Selección de los símbolos del servidor OPC UA
En la ventana Símbolos OPC UA se muestran las variables disponibles para la
selección como símbolos:
Seleccione IoConfig_Globals_Mapping para seleccionar todas las variables
disponibles. De lo contrario, seleccione símbolos individuales para compartir con
los clientes OPC UA. Se puede seleccionar un máximo de 1000 símbolos.
Cada símbolo tiene las propiedades siguientes:
Nombre Descripción
Símbolos Nombre de la variable seguido de la dirección de la variable.
Tipo Tipo de datos de la variable.
Tipo de acceso Haga clic de forma repetida para alternar entre los derechos de
acceso del símbolo:
• solo lectura ( ) (predeterminado)
• solo escritura ( )
• lectura/escritura ( )
NOTA: Haga clic en la columna Tipo de acceso de IoConfig_
Globals_Mapping para establecer los derechos de acceso de
todos los símbolos a la vez.
Comentario Comentario opcional.
Haga clic en Actualizar para actualizar la lista de las variables disponibles.
EIO0000003062.06 183

Configuración del servidor OPC UA
Rendimiento del servidor OPC UA
Descripción general
A modo de ejemplo, a continuación se proporciona información sobre la
capacidad y el rendimiento del servidor OPC UA de M241 Logic Controller.
También se ofrecen consideraciones de diseño para ayudarle a considerar las
condiciones óptimas para el rendimiento del servidor OPC UA. Por supuesto, el
rendimiento realizado por la aplicación depende de muchas variables y
condiciones, y puede diferir de este ejemplo.
Configuraciones del sistema que se utilizan para evaluar el
rendimiento
El rendimiento del servidor OPC UA viene determinado por la configuración del
sistema, el número de símbolos que se publica y el porcentaje de símbolos que
se actualiza.
En la siguiente tabla se presenta el número de elementos en configuraciones de
ejemplo de tamaño pequeño, mediano y grande que se utilizan para evaluar el
rendimiento del servidor OPC UA:
Elementos Pequeño Mediano Grande
Adaptadores EtherNet/IP 0 7 0
Módulos de extensión 0 5 7
Dispositivos esclavos CANopen 0 1 63
Funciones PTO 0 4 4
Funciones HSC 0 8 8
Conexiones de Profibus 0 0 1
Dispositivos esclavos Modbus TCP 0 6 64
En esta tabla se presentan los tiempos medios de petición de lectura/escritura de
cada configuración de ejemplo y para distintos números de símbolos:
Tiempos medios de petición de lectura/escritura
Configuración
Número de símbolos
50 100 250 400 500 1000
Pequeño 42 ms 70 ms 151 ms 232 ms 284 ms 554 ms
Mediano 73 ms 121 ms 265 ms 412 ms 514 ms 1024 ms
Grande 520 ms 895 ms 2045 ms 3257 ms 4071 ms 7153 ms
En las siguientes tablas se presenta el tiempo medio necesario para actualizar un
conjunto supervisado de símbolos con una tasa de muestreo de 200 ms y un
intervalo de publicación de 200 ms.
En esta tabla se presenta el tiempo medio necesario para actualizar el 100 % de
los símbolos de cada configuración de ejemplo:
Tiempo medio para actualizar el 100 % de los símbolos
Configuración
Número de símbolos
100 400 1000
Pequeño 214 ms 227 ms 254 ms
Mediano 224 ms 250 ms 292 ms
Grande 324 ms 330 ms 800 ms
184 EIO0000003062.06

Configuración del servidor OPC UA
En esta tabla se presenta el tiempo medio necesario para actualizar el 50% de los
símbolos de cada configuración de ejemplo:
Tiempo medio para actualizar el 50% de los símbolos
Configuración
Número de símbolos
100 400 1000
Pequeño 211 ms 220 ms 234 ms
Mediano 219 ms 234 ms 254 ms
Grande 284 ms 300 ms 660 ms
En esta tabla se presenta el tiempo medio necesario para actualizar el 1% de los
símbolos de cada configuración de ejemplo:
Tiempo medio para actualizar el 1% de los símbolos
Configuración
Número de símbolos
100 400 1000
Pequeño 210 ms 210 ms 212 ms
Mediano 215 ms 217 ms 220 ms
Grande 270 ms 277 ms 495 ms
Optimización del rendimiento del servidor OPC UA
La funcionalidad del servidor OPC UA depende de las redes de comunicación
externas, del rendimiento del dispositivo externo y de otros parámetros externos.
Puede que los datos transmitidos se retrasen o que surjan otros errores de
comunicación que impongan límites prácticos en el control de la máquina. No
utilice la funcionalidad del servidor OPC UA para datos relacionados con la
seguridad u otros fines que dependen del tiempo.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
• No permita datos relacionados con la seguridad en intercambios de datos
del servidor OPC UA.
• No utilice intercambios de datos de servidor OPC UA para ningún fin crítico
o que dependa del tiempo.
• No utilice intercambios de datos de servidor OPC UA para cambiar los
estados de los equipos sin haber realizado un análisis de riesgos y sin
implementar las medidas de seguridad adecuadas.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Las tablas anteriores pueden resultar de utilidad para determinar si el rendimiento
del servidor OPC UA está dentro de los límites aceptables. No obstante, debe
saber que el rendimiento general del sistema también se ve afectado por otros
factores externos, como el volumen del tráfico de Ethernet o el uso de fluctuación,
página 80.
EIO0000003062.06 185

Configuración del servidor OPC UA
Para optimizar el rendimiento del servidor OPC UA, tenga en cuenta lo siguiente:
• Para minimizar el tráfico de Ethernet, en Intervalo de publicación mínimo
establezca el valor más bajo que produzca un tiempo de respuesta
aceptable.
• El tiempo de ciclo de tarea, página 33 configurado para M241 Logic
Controller debe ser menor que el valor de Intervalo de publicación mínimo
configurado.
• Si en Número máximo de sesiones (número de clientes OPC UA que se
pueden conectar simultáneamente al servidor OPC UA) configura un valor
mayor que 1, disminuye el rendimiento de todas las sesiones.
• La tasa de muestreo determina la frecuencia de intercambio de los datos.
Ajuste el valor de Tasas de muestreo (ms) para producir el tiempo de
respuesta más bajo que no afecte negativamente al rendimiento general del
controlador lógico.
186 EIO0000003062.06

Configuración de Post
Configuración de Post
Introducción
En este capítulo se describe el modo de generar y configurar el archivo de
configuración Post de Modicon M241 Logic Controller.
Presentación de la configuración de Post
Introducción
La configuración de Post es una opción que permite modificar algunos
parámetros de la aplicación sin cambiar la aplicación. Los parámetros de
configuración de Post se definen en un archivo denominado Machine.cfg, que se
almacena en el controlador.
De forma predeterminada, todos los parámetros están establecidos en la
aplicación. Se utilizan los parámetros definidos en el archivo de configuración de
Post en lugar de los parámetros correspondientes definidos en la aplicación. No
es necesario definir todos los parámetros en el archivo de configuración de Post
(por ejemplo, un parámetro puede cambiar la dirección IP sin cambiar la dirección
de la puerta de enlace).
Parámetros
El archivo de configuración de Post permite cambiar los parámetros de red.
Parámetros de OPC UA:
• Nombre del servidor
NOTA: En el parámetro Nombre del servidor se admiten los siguientes
caracteres: a-z, A-Z, 0-9, - y _
La longitud está limitada a 30 caracteres.
Parámetros de Ethernet:
• Dirección IP
• Máscara de subred
• Dirección de pasarela
• Velocidad de transmisión
• Modo de configuración IP
• Nombre del dispositivo
•Dirección maestra IP, página 138
Parámetros de la línea serie para todas las líneas serie de la aplicación (módulo
PCI o puerto incrustado):
• Velocidad de transmisión en baudios
• Paridad
• Bits de datos
• Bit de parada
FTP:
• Parámetro de configuración de cifrado FTP
Parámetros de Profibus, para cada Profibus de la aplicación (TM4 module):
• Dirección de estación
• Velocidad de transmisión en baudios
EIO0000003062.06 187

Configuración de Post
NOTA: Las actualizaciones de parámetros con un archivo de configuración de
Post que influya en los parámetros usados por otros dispositivos a través de
un puerto de comunicación no se actualizan en los demás dispositivos.
Por ejemplo, si la dirección IP usada por una HMI se actualiza en la configuración
con un archivo de configuración de Post, la HMI usa la anterior dirección. Debe
actualizar la dirección utilizada por la HMI de forma independiente.
Modo de funcionamiento
Se lee el archivo de configuración de Post después de:
• Un comando Reset caliente, página 51.
• Un comando Reset frío, página 51.
• Un reinicio, página 54
• Una descarga de aplicación, página 57
Para obtener más información sobre los estados y transiciones del controlador,
consulte Estados y comportamientos del controlador, página 39.
Administración de archivos de configuración de Post
Introducción
El archivo Machine.cfg se encuentra en el directorio /usr/cfg.
Todos los parámetros se especifican con un tipo de variable, un ID de variable y
un valor. El formato es el siguiente:
id[moduleType].pos[param1Id].id[param2Id].param[param3Id].
paramField=value
Cada parámetro se define en tres líneas en el archivo de configuración de Post:
• En la primera línea se describe la ruta de acceso interna para este
parámetro.
• La segunda línea es un comentario que describe el parámetro.
• La tercera línea es la definición del parámetro (tal como se describe arriba)
con su valor.
Generación del archivo de configuración de Post
EcoStruxure Machine Expert genera el archivo de configuración de Post
(Machine.cfg).
Para generarlo, haga lo siguiente:
Paso Acción
1En la barra de menús, seleccione Compilar >Configuración de Post >Generar...
Resultado: Se muestra una ventana del explorador.
2 Seleccione la carpeta de destino del archivo de configuración de Post.
3 Haga clic en Aceptar.
Si usa EcoStruxure Machine Expert para crear un archivo de configuración de
Post (Generar), este leerá el valor de cada parámetro asignado en su programa
de aplicación y luego escribirá los valores en el archivo de configuración de Post
Machine.cfg. Tras generar un archivo de configuración de Post, revise el archivo
y elimine cualquier asignación de parámetro que desee que quede bajo el control
188 EIO0000003062.06

Configuración de Post
de su aplicación. Mantenga solo los parámetros que desee que la función de
configuración de Post cambie y que sean necesarios para que la aplicación sea
portátil. A continuación, modifique estos valores según sea necesario.
Transferencia del archivo de configuración de Post
Tras crear y modificar el archivo de configuración de Post, transfiéralo al directorio
/usr/cfg del controlador. El controlador no lee el archivo Machine.cfg a menos
que esté en este directorio.
Puede transferir el archivo de configuración de Post con estos métodos:
•Tarjeta SD, página 195 (con el script adecuado)
• Descarga mediante el servidor FTP, página 114
• Descarga mediante el editor de dispositivos del controlador, página 60 de
EcoStruxure Machine Expert
Modificación de un archivo de configuración de Post
Si el archivo de configuración de Post se encuentra en el PC, utilice un editor de
texto para modificarlo.
NOTA: No cambie la codificación del archivo de texto. La codificación
predeterminada es ANSI.
Para modificar el archivo de configuración de Post directamente en el controlador,
use el menú Configuración del Servidor Web, página 103.
Para modificar el archivo de configuración de Post en el controlador con
EcoStruxure Machine Expert en modalidad online:
Paso Acción
1 En el árbol de dispositivos, haga clic en el nombre del controlador.
2Haga clic en Compilar >Configuración de Post >Editar....
Resultado: se abre el archivo de configuración Post en un editor de texto.
3 Edite el archivo.
4 Si desea aplicar las modificaciones después de guardarlas, seleccione Resetear
dispositivo tras el envío.
5Haga clic en Guardar como.
6 Haga clic en Cerrar.
NOTA: Si los parámetros no son válidos, no se tendrán en cuenta.
Supresión de un archivo de configuración de Post
Puede eliminar el archivo de configuración de Post mediante estos métodos:
• Tarjeta SD (con el script de eliminación)
• Mediante el servidor FTP, página 114
• En línea con el editor de dispositivos del controlador de EcoStruxure Machine
Expert, página 60, ficha Archivos
Para obtener más información, en la ficha Files del Editor de dispositivos,
consulte EcoStruxure Machine Expert - Guía de programación.
EIO0000003062.06 189

Configuración de Post
NOTA: Se usan los parámetros definidos en la aplicación, en lugar de los
parámetros correspondientes definidos en el archivo de configuración de Post
después de:
• Un comando Reset caliente, página 51.
• Un comando Reset frío, página 51.
• Un reinicio, página 54
• Una descarga de aplicación, página 57
Ejemplo de configuración de Post
Ejemplo de archivo de configuración de Post
# TM241CE40T/U / FTP Encryption
# 1=encryption enforced, 0 otherwise
.param[1106] = 1
# TM241CE40T/U / OPCUA server name
# Only ASCII letters, digits, '-' and '_', 30 char max
.param[1204] = 'M241_server'
# TM241CE40T/U / Ethernet_1 / IPAddress
# Ethernet IP address
id[45000].pos[8].id[111].param[0] = [85, 100, 108, 241]
# TM241CE40T/U / Ethernet_1 / SubnetMask
# Ethernet IP mask
id[45000].pos[8].id[111].param[1] = [255, 255, 0, 0]
# TM241CE40T/U / Ethernet_1 / GatewayAddress
# Ethernet IP gateway address
id[45000].pos[8].id[111].param[2] = [0, 0, 0, 0]
# TM241CE40T/U / Ethernet_1 / IPConfigMode
# IP configuration mode: 0:FIXED 1:BOOTP 2:DHCP
id[45000].pos[8].id[111].param[4] = 0
# TM241CE40T/U / Ethernet_1 / DeviceName
# Name of the device on the Ethernet network
id[45000].pos[8].id[111].param[5] = 'my_Device'
# TM241CE40T/U / Serial_Line_1 / Serial Line Configuration /
Baudrate
# Serial Line Baud Rate in bit/s
id[45000].pos[8].id[40101].param[10000].Bauds = 115200
# TM241CE40T/U / Serial_Line_1 / Serial Line Configuration /
Parity
# Serial Line Parity (0=None, 1=Odd, 2=Even)
id[45000].pos[9].id[40101].param[10000].Parity = 0
# TM241CE40T/U / Serial_Line_1 / Serial Line Configuration /
DataBits
190 EIO0000003062.06

Configuración de Post
# Serial Line Data bits (7 or 8)
id[45000].pos[9].id[40101].param[10000].DataFormat = 8
# TM241CE40T/U / Serial_Line_1 / Serial Line Configuration /
StopBits
# Serial Line Stop bits (1 or 2)
id[45000].pos[9].id[40101].param[10000].StopBit = 1
# TM241CE40T/U / Serial_Line_2 / Serial Line Configuration /
Baudrate
# Serial Line Baud Rate in bit/s
id[45000].pos[10].id[40102].param[10000].Bauds = 19200
# TM241CE40T/U / Serial_Line_2 / Serial Line Configuration /
Parity
# Serial Line Parity (0=None, 1=Odd, 2=Even)
id[45000].pos[10].id[40102].param[10000].Parity = 2
# TM241CE40T/U / Serial_Line_2 / Serial Line Configuration /
DataBits
# Serial Line Data bits (7 or 8)
id[45000].pos[10].id[40102].param[10000].DataFormat = 8
# TM241CE40T/U / Serial_Line_2 / Serial Line Configuration /
StopBits
# Serial Line Stop bits (1 or 2)
id[45000].pos[10].id[40102].param[10000].StopBit = 1
EIO0000003062.06 191

Conexión de un Modicon M241 Logic Controller a un PC
Conexión de un Modicon M241 Logic Controller a un
PC
Introducción
En este capítulo se muestra cómo conectar un Modicon M241 Logic Controller a
un PC.
Conexión del controlador a un PC
Descripción general
Para transferir, ejecutar y monitorizar las aplicaciones, conecte el controlador a un
equipo que tenga instalado EcoStruxure Machine Expert mediante un cable USB
o una conexión Ethernet (para referencias compatibles con puertos Ethernet).
AVISO
EQUIPO INOPERATIVO
Conecte siempre el cable de comunicación al PC antes de conectarlo al
controlador.
Si no se siguen estas instrucciones, pueden producirse daños en el
equipo.
Descarga USB con alimentación
Para ejecutar operaciones limitadas, el M241 Logic Controller tiene la capacidad
de recibir alimentación a través del puerto USB mini-B. Un mecanismo de diodos
evita que el controlador lógico reciba alimentación por USB y por la fuente de
alimentación normal o que suministre tensión en el puerto USB.
Cuando solo recibe alimentación por USB, el controlador lógico ejecuta el
firmware y el proyecto de inicio (si existe), y el panel de E/S no recibe
alimentación durante el arranque (la misma duración que un arranque normal). La
descarga USB con alimentación inicializa la memoria no volátil interna con
algunos firmwares o aplicaciones y parámetros cuando el controlador recibe
alimentación por USB. La herramienta preferida para conectarse al controlador es
el Asistente del controlador. Consulte la Guía de usuario del Asistente del
controlador de EcoStruxure Machine Expert .
El empaquetado del controlador permite un acceso rápido al puerto USB mini-B
sin necesidad de abrir demasiado el empaquetado. Puede conectar el controlador
al PC con un cable USB. Los cables largos no son adecuados para la descarga
USB con alimentación.
ADVERTENCIA
ALIMENTACIÓN INSUFICIENTE PARA DESCARGA USB
No utilice un cable USB de más de 3 m (9,8 pies) para la descarga USB con
alimentación.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
192 EIO0000003062.06

Conexión de un Modicon M241 Logic Controller a un PC
NOTA: La descarga USB con alimentación no está diseñada para utilizarse
en un controlador instalado. En función del número de módulos de extensión
de E/S en la configuración física del controlador instalado, es posible que no
se reciba la potencia suficiente desde el puerto USB del PC para completar la
descarga.
Conexión a través del puerto USB mini-B
Referencia de cableado Detalles
BMXXCAUSBH018: Este cable USB, con puesta a tierra y blindado,
es adecuado para conexiones de larga
duración.
TCSXCNAMUM3P: Este cable USB es adecuado para conexiones
de corta duración, como actualizaciones rápidas
o recuperación de valores de datos.
NOTA: Solo se puede conectar un controlador o cualquier otro dispositivo
asociado con el EcoStruxure Machine Expert y su componente al PC de
forma simultánea.
El puerto USB mini-B es el puerto de programación que pueden utilizar para
conectar un PC con un puerto host USB mediante el software de EcoStruxure
Machine Expert. Con un cable USB normal, esta conexión es adecuada para las
actualizaciones rápidas del programa o las conexiones de corta duración para
realizar el mantenimiento e inspeccionar los valores de los datos. No es adecuada
para las conexiones a largo plazo, como la puesta en marcha o la supervisión, sin
el uso de cables adaptados especialmente para ayudar a minimizar los efectos de
las interferencias electromagnéticas.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO O EQUIPO INOPERATIVO
• Deberá usar un cable USB como BMX XCAUSBH0•• asegurado a la
conexión a tierra funcional (FE) del sistema para cualquier conexión a largo
plazo.
• No conecte más de un controlador o acoplador de bus a la vez mediante
conexiones USB.
• No utilice los puertos USB, si están incorporados, a menos que tenga la
certeza de que la ubicación no es peligrosa.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
El cable de comunicación debe conectarse primero al PC para minimizar la
posibilidad de que una descarga electrostática afecte al controlador.
EIO0000003062.06 193

Conexión de un Modicon M241 Logic Controller a un PC
Para conectar el cable USB al controlador, siga estos pasos:
Paso Acción
11a Si está realizando una conexión de larga duración con el cable BMXXCAUSBH018 u
otro cable con una conexión con puesta a tierra y blindada, asegúrese de conectar bien
el conector blindado a la puesta a tierra funcional (FE) o a la puesta a tierra de
protección (PE) de su sistema antes de conectar el cable al controlador y al PC.
1b Si está realizando una conexión de corta duración con el cable TCSXCNAMUM3P u
otro cable USB sin puesta a tierra, vaya al paso 2.
2 Conecte el cable USB al equipo.
3 Abra la cubierta de protección de la ranura USB mini-B del controlador.
4 Conecte el conector del cable USB mini-B al conector USB del controlador.
Conexión al puerto Ethernet
También puede conectar el controlador a un PC mediante un cable Ethernet.
Para conectar el controlador al PC, haga lo siguiente:
Paso Acción
1 Conecte el cable Ethernet al PC.
2 Conecte el cable Ethernet al puerto Ethernet del controlador.
194 EIO0000003062.06

Tarjeta SD
Tarjeta SD
Introducción
En este capítulo se describe cómo transferir firmware y aplicaciones a Modicon
M241 Logic Controller utilizando una llave de memoria USB.
Archivos de script
Descripción general
A continuación se describe cómo escribir archivos de script (archivo de script
predeterminado o archivo de script dinámico) para ejecutarlos desde una tarjeta
SD o mediante una aplicación que utilice el Bloque de funciones ExecuteScript
(consulte Modicon M241 Logic/Motion Controller - Funciones y variables de
sistema - Guía de la biblioteca de sistema).
Los archivos de script se pueden utilizar para:
•Configurar el cortafuegos de Ethernet, página 146.
• Realizar operaciones de transferencia de archivos. Los archivos de script
para estos comandos se pueden generar automáticamente y los archivos
necesarios copiarse a la tarjeta SD utilizando el comando Almacenamiento
masivo (USB o tarjeta SD).
• Cambiar el puerto esclavo Modbus, página 141 para intercambios de datos
Modbus TCP.
Directrices de la sintaxis de script
A continuación se describen las directrices de sintaxis del script:
• Acabe cada línea de un comando del script con un ";".
• Si la línea comienza con un ";", significa que la línea es un comentario.
• El número máximo de líneas en un archivo de script es 50.
• La sintaxis no distingue entre mayúsculas y minúsculas.
• Si la sintaxis no se respeta en el archivo de script, no se ejecutará. Por
ejemplo, esto significa que la configuración del cortafuegos permanece en el
estado anterior.
NOTA: Si no se ejecuta el archivo de script, se genera un archivo de registro.
La ubicación del archivo de registro en el controlador es /usr/Syslog/FWLog.
txt.
Comandos de la tarjeta SD
Introducción
Modicon M241 Logic Controller permite transferencias de archivos con una tarjeta
SD.
Para cargar o descargar archivos del controlador con una tarjeta SD, utilice uno
de los siguientes métodos:
• La función de clonar, página 196 (utilice una tarjeta SD vacía)
• Un script almacenado en la tarjeta SD
EIO0000003062.06 195

Tarjeta SD
Cuando se inserta una tarjeta SD en el slot para tarjeta SD del controlador, el
firmware busca y ejecuta el script contenido en la tarjeta SD (/sys/cmd/Script.
cmd).
NOTA: No se modifica el funcionamiento del controlador durante la
transferencia de archivos.
Para comandos de transferencia de archivos, el editor de Almacenamiento
masivo (USB o tarjeta SD) le permite generar y copiar el script y todos los
archivos necesarios a la tarjeta SD.
NOTA: El Modicon M241 Logic Controller solo acepta tarjetas SD
formateadas en FAT o FAT32.
La tarjeta SD debe tener una etiqueta. Para añadir una etiqueta, inserte la tarjeta
SD en el PC, haga clic con el botón derecho en la unidad en Windows Explorer y
seleccione Propiedades.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
• Debe tener conocimientos operativos de la máquina o el proceso antes de
conectar este dispositivo al controlador.
• Asegúrese de que las protecciones estén instaladas, de modo que si se
produjera un posible funcionamiento imprevisto del equipo, no provoque
lesiones al personal ni daños al propio equipo.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Si retira la alimentación del dispositivo o se produce un corte de alimentación o se
interrumpe la comunicación durante la transferencia de la aplicación, el
dispositivo podría quedar inoperativo. Si se produce una interrupción de la
comunicación o un corte de alimentación, intente volver a realizar la transferencia.
Si se produce un corte de alimentación o una interrupción de la comunicación
durante una actualización de firmware, o si se utiliza un firmware no válido, el
dispositivo quedará inoperativo. En este caso, utilice un firmware válido e intente
volver a realizar la actualización del firmware.
AVISO
EQUIPO INOPERATIVO
• No interrumpa la transferencia del programa de aplicación o un cambio del
firmware si se ha iniciado la transferencia.
• Reinicie la transferencia si se ha interrumpido por algún motivo.
• No intente poner en funcionamiento el dispositivo hasta que no haya
finalizado correctamente la transferencia de archivos.
Si no se siguen estas instrucciones, pueden producirse daños en el
equipo.
Función de clon
La función de clonar permite cargar la aplicación de un controlador y descargarla
en una misma referencia del controlador.
Esta función clona todos los parámetros del controlador (por ejemplo,
aplicaciones, firmware, archivo de datos o configuración de Post). Consulte
Asignación de memoria, página 22.
NOTA: Los derechos de acceso del usuario solo se pueden copiar si se ha
hecho clic previamente en el botón Include User Rights en la subpágina
Clone Management del Servidor web, página 113.
De forma predeterminada, se permite la clonación sin usar el bloque de funciones
FB_ControlClone. Si desea restringir el acceso a la función de clonación, puede
quitar los derechos de acceso del objeto ExternalCmd en el grupo
196 EIO0000003062.06

Tarjeta SD
ExternalMedia. Consulte Usuarios y grupos predeterminados, página 68. Como
resultado, no se permitirá clonar sin usar FB_ControlClone. Para obtener más
información sobre este bloque de funciones, consulte Modicon M241 Logic/
Motion Controller - Funciones y variables de sistema - Guía de la biblioteca
PLCSystem (consulte Modicon M241 Logic/Motion Controller - Funciones y
variables de sistema - Guía de la biblioteca PLCSystem). Para obtener más
información sobre los derechos de acceso, consulte EcoStruxure Machine Expert
- Guía de programación.
Si desea controlar el acceso a la aplicación clonada en el controlador de destino,
debe usar el botón Include users rights (en la subpágina Clone Management
del Servidor web, página 113) del controlador de origen antes de realizar la
operación de clonar. Para obtener más información sobre los derechos de
acceso, consulte EcoStruxure Machine Expert - Guía de programación.
Este procedimiento describe cómo cargar en la tarjeta SD la aplicación
almacenada en el controlador:
Paso Acción
1 Borre una tarjeta SD y defina la etiqueta de la tarjeta de esta manera:
CLONExxx
NOTA: La etiqueta tiene que empezar por "CLONE" (no distingue entre mayúsculas
y minúsculas) y puede ir seguida de hasta 6 caracteres alfanuméricos sin acentuar
(a-z, A-Z, 0-9).
2 Indique si desea clonar los Derechos de usuario. Consulte la subpágina, página 113
Clone Management del servidor web.
3 Desconecte la alimentación del controlador.
4 Inserte la tarjeta SD preparada en el controlador.
5 Restaure la alimentación del controlador.
Resultado: el procedimiento de clonado se inicia automáticamente. Durante el
procedimientos de clonado, están encendidos los indicadores LED PWR eI/O y el
indicador LED SD parpadea periódicamente.
NOTA: El procedimiento de clonado dura dos o tres minutos.
Resultado: al finalizar el procedimiento de clonado, el LED SD está encendido y el
controlador se inicia en la modalidad de aplicación normal. Si se ha detectado un error, el
LED ERR está encendido y el estado del controlador es STOPPED.
6 Extraiga la tarjeta SD del controlador.
Este procedimiento describe cómo descargar en el controlador la aplicación
almacenada en la tarjeta SD:
Paso Acción
1 Desconecte la alimentación del controlador.
2 Inserte la tarjeta SD en el controlador.
3 Restaure la alimentación del controlador.
Resultado: se inicia el procedimiento de descarga y el LED SD parpadea durante este
procedimiento.
4 Espere hasta que finalice la descarga:
• Si el LED SD (verde) está encendido y el red LED ERR (rojo) parpadea
regularmente, la descarga ha finalizado correctamente.
• Si el indicador LED SD (verde) está apagado y los indicadores LED ERR yI/O
(rojos) parpadean periódicamente, se ha detectado un error.
5Extraiga la tarjeta SD para reiniciar el controlador.
NOTA: Si desea controlar el acceso a la aplicación clonada en el controlador
de destino, deberá habilitar y establecer derechos de acceso de usuario y
cualquier contraseña del servidor web/FTP que sean específicos del
controlador. Para obtener más información sobre los derechos de acceso,
consulte EcoStruxure Machine Expert - Guía de programación.
EIO0000003062.06 197

Tarjeta SD
NOTA: Si descarga una aplicación clonada en el controlador, se eliminará
primero la aplicación existente de la memoria del controlador,
independientemente de los derechos de acceso de usuario que puedan estar
habilitados en el controlador de destino.
Generación de scripts y archivos con el almacenamiento masivo
en
Haga clic en Proyecto > Almacenamiento masivo (USB o tarjeta SD) en el
menú principal.
Elemento Descripción
Nuevo Crea un script nuevo.
Abrir Abre un script.
Macros Inserta una macro.
Una macro es una secuencia de comandos unitarios. Una macro ayuda a realizar
muchas operaciones comunes como cargar y descargar aplicaciones, etc.
Generate Genera el script y todos los archivos necesarios en la tarjeta SD.
Comando Instrucciones básicas.
Origen Ruta de origen en el PC o el controlador.
Destino Directorio de destino en el PC o el controlador.
Añadir
nuevo Añade un comando de script.
Subir/Bajar Cambia el orden de los comandos de script.
Eliminar Elimina un comando de script.
198 EIO0000003062.06

Tarjeta SD
Descripciones de comandos:
Comando Descripción Origen Destino Sintaxis
Descargar Descarga un archivo de la tarjeta
SD en el controlador. Seleccione el archivo
que se desea
descargar.
Seleccione el
directorio de
destino del
controlador.
’Download “/usr/Cfg/*”’
SetNodeName Establece el nombre de nodo del
controlador. Nuevo nombre del
nodo. Nombre del nodo
del controlador. ’SetNodeName “Name_PLC”’
Restablece el nombre de nodo del
controlador. Nombre de nodo
predeterminado. Nombre del nodo
del controlador. ’SetNodeName “”’
Cargar Carga los archivos contenidos en
un directorio del controlador a la
tarjeta SD.
Seleccione el
directorio.
-’Upload “/usr/*”’
Eliminar Elimina archivos contenidos en un
directorio del controlador.
NOTA: Delete "*" no elimina
archivos del sistema.
Seleccione el directorio
e introduzca un nombre
de archivo específico.
Importante: De forma
predeterminada, todos
los archivos de
directorio están
seleccionados.
-’Delete “/usr/SysLog/*”’
Quita el UserRights del
controlador.
- - ’Delete “/usr/*”’
Elimina los archivos contenidos en
la tarjeta SD o en una carpeta de
la tarjeta SD.
- - ’Delete “/sd0/*”’
o bien
’Delete “/sd0/folder
name”’
Reiniciar Reinicia el controlador (solo
disponible al final del script).
- - ’Reboot’
NOTA: Cuando se activan los derechos de usuario en un controlador y si el
usuario no puede leer, escribir o eliminar el sistema de archivos, se
deshabilitarán los scripts usados para Cargar/Descargar/Eliminar archivos.
Incluye la operación de clonado.
En esta tabla se describen las macros:
Macros Descripción Directorio/Archivos
Download App Descargue la aplicación de la tarjeta SD en el
controlador. /usr/App/*.app
/usr/App/*.crc
/usr/App/*.map
/usr/App/*.conf (1)
Upload App Cargue la aplicación desde el controlador a la
tarjeta SD.
Download Sources Descargue el archivo de proyecto de la tarjeta
SD en el controlador. /usr/App/*.prj
Upload Sources Cargue el archivo de proyecto desde el
controlador a la tarjeta SD.
Download Multi-files Descargue varios archivos de la tarjeta SD en
un directorio del controlador. Definido por el usuario
Upload Log Cargue los archivos de registro desde el
controlador a la tarjeta SD. /usr/Log/*.log
(1): Si se ha configurado OPC UA, página 180.
EIO0000003062.06 199

Tarjeta SD
Restablecer los valores predeterminados de los derechos de
usuario
Si lo desea, puede crear manualmente un script para eliminar del controlador los
derechos de usuario, junto con la aplicación. El script deberá incluir el siguiente
comando:
Format “/usr/”
Reboot
NOTA: Este comando también quita los datos y la aplicación del usuario.
Paso Acción
1 Desconecte la alimentación del controlador.
2 Inserte la tarjeta SD preparada en el controlador de origen.
3 Restaure la alimentación del controlador de origen.
Resultado: La operación se inicia automáticamente. Durante la operación, los LED PWR
eI/O están encendidos y el LED SD parpadea con regularidad.
4 Espere hasta que se complete la operación.
Resultado:
• El LED SD permanece encendido si la operación se ha realizado correctamente.
• El LED ERR permanece encendido y el controlador no se inicia si se detecta un
error.
5Extraiga la tarjeta SD del controlador.
NOTA: El controlador se reinicia con los derechos de usuario predeterminados.
Procedimiento de transferencia
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
• Debe tener conocimientos operativos de la máquina o el proceso antes de
conectar este dispositivo al controlador.
• Asegúrese de que las protecciones estén instaladas, de modo que si se
produjera un posible funcionamiento imprevisto del equipo, no provoque
lesiones al personal ni daños al propio equipo.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Paso Acción
1 Cree el script con el editor de Almacenamiento masivo (USB o tarjeta SD).
2 Haga clic en Generar... y seleccione el directorio de raíz de la tarjeta SD.
Resultado: El script y los archivos se transfieren a la tarjeta SD.
3 Inserte la tarjeta SD en el controlador.
Resultado: Se inicia el procedimiento de transferencia y el LED SD parpadea durante
este procedimiento.
4 Espere hasta que finalice la descarga:
• Si el LED SD (verde) está encendido y el red LED ERR (rojo) parpadea
regularmente, la descarga ha finalizado correctamente.
• Si el indicador LED SD (verde) está apagado y los indicadores LED ERR yI/O
(rojos) parpadean periódicamente, se ha detectado un error.
5Extraiga la tarjeta SD del controlador.
NOTA: Las modificaciones se aplicarán después del próximo reinicio.
200 EIO0000003062.06

Tarjeta SD
Cuando el controlador haya ejecutado el script, el resultado se registrará en la
tarjeta SD (archivo /sys/cmd/Cmd.log).
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Para comprender el estado que asumirá el controlador tras apagarlo y volverlo
a encender, consulte el diagrama de estado y los comportamientos del
controlador en este documento.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
EIO0000003062.06 201

Gestión del firmware
Gestión del firmware
Descripción general
La actualización del firmware del controlador y los módulos de extensión están
disponibles en el sitio web de Schneider Electric (en . formato .zip o .seco).
Actualización del firmware de Modicon M241 Logic
Controller
Introducción
El firmware se puede actualizar de los modos siguientes:
• Mediante una tarjeta SD con un archivo de secuencia de comandos
compatible
• Mediante el Asistente del controlador
Al actualizar el firmware se elimina el programa de aplicación del dispositivo,
incluidos los archivos de configuración, la administración de usuarios, los
derechos de usuario, los certificados y la aplicación de arranque de la memoria no
volátil.
AVISO
PÉRDIDA DE DATOS DE APLICACIÓN
• Haga una copia de seguridad del programa de aplicación en el disco duro
del PC antes de intentar actualizar el firmware.
• Restaure el programa de aplicación en el dispositivo después de actualizar
correctamente el firmware.
Si no se siguen estas instrucciones, pueden producirse daños en el
equipo.
Si retira la alimentación del dispositivo o se produce un corte de alimentación o se
interrumpe la comunicación durante la transferencia de la aplicación, el
dispositivo podría quedar inoperativo. Si se produce una interrupción de la
comunicación o un corte de alimentación, intente volver a realizar la transferencia.
Si se produce un corte de alimentación o una interrupción de la comunicación
durante una actualización de firmware, o si se utiliza un firmware no válido, el
dispositivo quedará inoperativo. En este caso, utilice un firmware válido e intente
volver a realizar la actualización del firmware.
AVISO
EQUIPO INOPERATIVO
• No interrumpa la transferencia del programa de aplicación o un cambio del
firmware si se ha iniciado la transferencia.
• Reinicie la transferencia si se ha interrumpido por algún motivo.
• No intente poner en funcionamiento el dispositivo hasta que no haya
finalizado correctamente la transferencia de archivos.
Si no se siguen estas instrucciones, pueden producirse daños en el
equipo.
Cuando el firmware del controlador es nuevo o lo actualiza, de forma
predeterminada los puertos de línea serie del controlador se configuran para el
protocolo Machine Expert. El protocolo de Machine Expert es incompatible con el
de otros protocolos como el de la línea serie Modbus. Conectar un nuevo
202 EIO0000003062.06

Gestión del firmware
controlador a una línea serie Modbus activa configurada, o actualizar el firmware
de un controlador conectado a ella, puede hacer que los otros dispositivos de la
línea serie dejen de comunicarse. Asegúrese de que el controlador no esté
conectado a una red de línea serie de Modbus activo antes de descargar por
primera vez una aplicación válida que tenga el puerto o los puertos respectivos
correctamente configurados para el protocolo en cuestión.
AVISO
INTERRUPCIÓN DE COMUNICACIONES DE LA LÍNEA SERIE
Asegúrese de que su aplicación tenga los puertos de línea serie correctamente
configurados para Modbus antes de conectar físicamente el controlador a una
red de línea serie Modbus operativa.
Si no se siguen estas instrucciones, pueden producirse daños en el
equipo.
Actualización del firmware con una tarjeta SD
Siga estos pasos para actualizar el firmware con una tarjeta SD:
Paso Acción
1 Extraiga el archivo .zip a la raíz de la tarjeta SD.
NOTA: La carpeta \sys\cmd\ de la tarjeta SD contiene el archivo de script para la
descarga.
2 Desconecte la alimentación del controlador.
3 Inserte la tarjeta SD en el controlador.
4 Restaure la alimentación del controlador.
NOTA: Durante la operación, el LED SD (verde) parpadeará.
5Espere hasta que finalice la descarga:
• Si el LED SD (verde) está encendido y el red LED ERR (rojo) parpadea
regularmente, la descarga ha finalizado correctamente.
• Si el indicador LED SD (verde) está apagado y los indicadores LED ERR yI/O
(rojos) parpadean periódicamente, se ha detectado un error.
6 Extraiga la tarjeta SD del controlador.
Resultado: El controlador se reinicia automáticamente con el nuevo firmware si la
descarga terminó correctamente.
Actualización del firmware con el Asistente del controlador
Para actualizar el firmware, debe abrir el Asistente del controlador. Haga clic en
Herramientas > Herramientas externas > Abrir el Asistente del controlador.
EIO0000003062.06 203

Gestión del firmware
Para realizar una actualización de firmware completa de un controlador sin
sustituir la aplicación de inicio ni los datos, realice lo siguiente:
Paso Acción
1 En el cuadro de diálogo Inicio, haga clic en el botón Leer desde... del controlador.
Resultado: se abre el cuadro de diálogo Selección de dispositivos.
2 Seleccione el tipo de conexión y el controlador necesarios y haga clic en el botón
Leyendo.
Resultado: la imagen se transmite del controlador al equipo.
Una vez realizado esto correctamente, volverá automáticamente al cuadro de diálogo
Inicio.
3 Haga clic en el botón Nuevo/Proceso... y luego en Actualizar firmware...
Resultado: se abre el cuadro de diálogo para guardar un archivo.
4 Ejecute cada uno de los pasos de actualización de firmware que se indican en la imagen
actual (los cambios solo surten efecto en la imagen de su equipo).
En el último paso, puede decidir si desea crear una copia de seguridad de la imagen
leída por el controlador.
Resultado: tras la actualización del firmware, volverá automáticamente al cuadro de
diálogo Inicio.
5 En el cuadro de diálogo Inicio, haga clic en el botón Escribir en... del controlador.
Resultado: se abre el cuadro de diálogo Selección de dispositivos.
6 Seleccione el tipo de conexión y el controlador necesarios y haga clic en el botón
Escribir.
Resultado: se abre el cuadro de diálogo Administración de derechos de usuario del
dispositivo de escritura.
7En el cuadro de diálogo Administración de derechos de usuario del dispositivo de
escritura, seleccione una opción para administrar los derechos de usuario en el
controlador:
7a: opción Mantener la administración de derechos de usuario existente en la
opción del controlador.
7b: opción Sobrescribir la administración de derechos de usuario existente en el
controlador con la de la imagen actual.
7c: Restablecer la administración de derechos de usuario en el controlador a la
opción predeterminada (configuración de fábrica).
8 Haga clic en Aceptar.
Resultado: se transmite la imagen del equipo al controlador.
Después de la transmisión, volverá automáticamente al cuadro de diálogo Inicio, que se
reinicia automáticamente.
Para obtener más información sobre la actualización del firmware y la creación de
un nuevo disco Flash con firmware, consulte Configuración del proyecto -
Actualización de firmware y Organización de la memoria no volátil, página 25.
Actualización del firmware de los módulos de extensión
TM3
Descarga de firmware en módulos de extensión TM3
El firmware se puede actualizar en:
• TM3XHSC202 y TM3XHSC202G
• TM3D• y TM3XTYS4 con versión de firmware ≥ 28 (SV ≥ 2.0), excepto
TM3DM16R y TM3DM32R (que no se pueden actualizar)
• TM3A• y TM3T• con versión de firmware ≥ 26 (SV ≥ 1.4)
204 EIO0000003062.06

Gestión del firmware
NOTA: La versión de software (SV) figura en las etiquetas de producto y el
empaquetado.
Las actualizaciones de firmware se realizan si, durante el encendido, hay al
menos un archivo de firmware en el directorio /usr/TM3fwupdate/ del
controlador. Puede descargar los archivos en el controlador mediante la tarjeta
SD, una transferencia de archivos FTP o a través de EcoStruxure Machine
Expert.
El controlador actualiza el firmware de los módulos de extensión TM3 en el bus de
E/S, incluidos los siguientes:
• Módulos que están conectados de forma remota, mediante un módulo
transmisor/receptor de TM3.
• En configuraciones que constan de una combinación de módulos de
extensión TM3 y TM2.
En la tabla siguiente se describe cómo descargar firmware en uno o varios
módulos de extensión de TM3 utilizando una tarjeta SD:
Paso Acción
1 Inserte una tarjeta SD vacía en el PC.
2 Cree la ruta de la carpeta /sys/Cmd y cree un archivo denominado Script.cmd.
3 Edite el archivo e inserte el comando siguiente por cada archivo de firmware que desee
transferir al controlador.
Download "usr/TM3fwupdate/<filename>"
4 Cree la ruta de la carpeta /usr/TM3fwupdate/ en el directorio raíz de la tarjeta SD y
copie los archivos de firmware en la carpeta TM3fwupdate.
5 Asegúrese de que el controlador no reciba alimentación.
6 Retire la tarjeta SD del PC e insértela en el slot para tarjeta SD del controlador.
7Restaure la alimentación del controlador. Espere a que termine la operación (hasta que
el indicador LED SD esté verde encendido).
Resultado: El controlador empezará a transferir los archivos de firmware de la tarjeta
SD a /usr/TM3fwupdate en el controlador. Durante esta operación parpadea el indicador
LED de SD del controlador. Se crea un archivo SCRIPT.log en la tarjeta SD y contiene
el resultado de la transferencia de archivos. Si se detecta un error, los LED SD yERR
parpadean y el error detectado se registra en el archivo SCRIPT.log.
8 Desconecte la alimentación del controlador.
9 Extraiga la tarjeta SD del controlador.
10 Restaure la alimentación del controlador.
Resultado: El controlador transfiere los archivos de firmware a los módulos de E/S de
TM3 pertinentes.
NOTA: El proceso de actualización de TM3 añade aproximadamente 15 segundos
a la duración de inicio del controlador.
11 Compruebe en el registro de mensajes del controlador que el firmware se haya
actualizado correctamente. Your TM3 Module X successfully updated. X
corresponde a la posición del módulo en el bus.
NOTA: También puede obtener la información del registro en el archivo PlcLog.txt
del directorio /usr/Syslog/ del sistema de archivos del controlador.
NOTA: Si el controlador detecta un error durante la actualización, esta terminará
con ese módulo.
12 Si todos los módulos objetivo se han actualizado correctamente, elimine los archivos de
firmware de la carpeta /usr/TM3fwupdate/ en el controlador.
Puede eliminar directamente los archivos usando EcoStruxure Machine Expert o
creando y ejecutando un script que contenga el comando siguiente:
Delete "usr/TM3fwupdate/*"
NOTA: Si no se ha actualizado correctamente un módulo objetivo, o no hay
mensajes del registro de mensajes para todos los módulos objetivo, consulte más
abajo la sección Procedimiento de recuperación, página 206.
EIO0000003062.06 205

Gestión del firmware
Procedimiento de recuperación
Si retira la alimentación del dispositivo o se produce un corte de alimentación o se
interrumpe la comunicación durante la transferencia de la aplicación, el
dispositivo podría quedar inoperativo. Si se produce una interrupción de la
comunicación o un corte de alimentación, intente volver a realizar la transferencia.
Si se produce un corte de alimentación o una interrupción de la comunicación
durante una actualización de firmware, o si se utiliza un firmware no válido, el
dispositivo quedará inoperativo. En este caso, utilice un firmware válido e intente
volver a realizar la actualización del firmware.
AVISO
EQUIPO INOPERATIVO
• No interrumpa la transferencia del programa de aplicación o un cambio del
firmware si se ha iniciado la transferencia.
• Reinicie la transferencia si se ha interrumpido por algún motivo.
• No intente poner en funcionamiento el dispositivo hasta que no haya
finalizado correctamente la transferencia de archivos.
Si no se siguen estas instrucciones, pueden producirse daños en el
equipo.
Si, durante un nuevo intento de actualización del firmware, la actualización
finaliza prematuramente con un error, la interrupción de la comunicación o el corte
de la electricidad han dañado el firmware de uno de los módulos de la
configuración y será preciso reiniciarlo.
NOTA: Cuando el proceso de actualización del firmware detecte un error en el
firmware en el módulo de destino, el proceso de actualización se terminará.
Una vez que haya reinicializado el módulo dañado siguiendo el procedimiento
de recuperación, todos los módulos que hayan seguido al módulo dañado
permanecerán sin cambios y será preciso actualizar su firmware.
206 EIO0000003062.06

Gestión del firmware
En la tabla siguiente se describe cómo reinicializar el firmware en los módulos de
extensión de TM3:
Paso Acción
1 Asegúrese de que el directorio /usr/TM3fwupdate/ del controlador tenga el firmware
correcto.
2 Desconecte la alimentación del controlador.
3 Desmonte del controlador todos los módulos de extensión de TM3 que funcionen
normalmente, hasta el primer módulo que hay que recuperar. Consulte la guía de
hardware de los módulos para obtener las instrucciones de desmontaje.
4 Conecte la alimentación al controlador.
NOTA: El proceso de actualización de TM3 añade aproximadamente 15 segundos
a la duración de inicio del controlador.
5Compruebe en el registro de mensajes del controlador que el firmware se haya
actualizado correctamente. Your TM3 Module X successfully updated. X
corresponde a la posición del módulo en el bus.
6 Desconecte la alimentación del controlador.
7Vuelva a montar la configuración de módulos de extensión de TM3 en el controlador.
Consulte la guía de hardware de los módulos para obtener las instrucciones de
montaje.
8 Restaure la alimentación del controlador.
Resultado: El controlador transfiere los archivos de firmware a los módulos de E/S de
TM3 apropiados que todavía tienen que actualizarse.
NOTA: El proceso de actualización de TM3 añade aproximadamente 15 segundos
a la duración de inicio del controlador.
9 Compruebe en el registro de mensajes del controlador que el firmware se haya
actualizado correctamente. Your TM3 Module X successfully updated. X
corresponde a la posición del módulo en el bus.
NOTA: También puede obtener la información del registro en el archivo Sys.log del
directorio /usr/Log del sistema de archivos del controlador.
10 Elimine los archivos de firmware de la carpeta /usr/TM3fwupdate/ del controlador.
EIO0000003062.06 207


Apéndices
Contenido de esta parte
Cambio de la dirección IP del controlador....................................................... 210
Funciones para obtener/establecer la configuración de líneas serie en el
programa de usuario ....................................................................................212
Rendimiento del controlador .........................................................................216
Descripción general
En este apéndice se enumeran los documentos técnicos necesarios para
comprender la Guía de programación de Modicon M241 Logic Controller.
EIO0000003062.06 209

Cambio de la dirección IP del controlador
Cambio de la dirección IP del controlador
Contenido de este capítulo
changeIPAddress: cambiar la dirección IP del controlador .............................. 210
changeIPAddress: cambiar la dirección IP del controlador
Descripción del bloque de funciones
El bloque de funciones changeIPAddress proporciona la capacidad de
modificar de manera dinámica la dirección IP de un controlador, su máscara de
subred y su dirección de la puerta de enlace. El bloque de funciones también
puede guardar la dirección IP para que se use en reinicios posteriores del
controlador.
NOTA: El cambio de las direcciones IP solo es posible si la modalidad IP está
configurada en Dirección IP fija. Para obtener más información, consulte
Configuración de la dirección IP, página 98.
NOTA: Para obtener más información sobre el bloque de funciones, use la
ficha Documentación del Editor del Administrador de bibliotecas de
EcoStruxure Machine Expert. Para utilizar este editor, consulte la EcoStruxure
Machine ExpertGuía de usuario de funciones y bibliotecas.
Representación gráfica
Descripción de parámetros
Entrada Tipo Comentario
xExecute BOOL • Flanco ascendente: Se inicia la acción.
• Flanco descendente: Se restablecen las salidas. Si se produce un flanco
descendente antes de que el bloque de funciones haya completado su
acción, las salidas funcionan de la forma habitual y solo se resetean si la
acción se ha completado o en caso de que se haya detectado un error. En
este caso, los correspondientes valores de salida (xDone,xError,
iError) están presentes en las salidas exactamente durante un ciclo.
xSave BOOL TRUE: guardar la configuración para los siguientes reinicios del controlador.
eChannel changeIPAddress_Channel La entrada eChannel es el puerto Ethernet que se va a configurar. Según el
número de puertos disponibles en el controlador en changeIPAddress_
Channel (0 o 1). Consulte changeIPAddress_Channel: Puerto Ethernet
para configurar, página 211.
i_abyIPAddress ARRAY[0..3] OF BYTE La nueva dirección IP que se va a configurar. Formato: 0.0.0.0.
NOTA: Si esta entrada se establece en 0.0.0.0, se configurarán las
direcciones IP predeterminadas, página 100 del controlador.
i_abyIPMask ARRAY[0..3] OF BYTE La nueva máscara de subred. Formato: 0.0.0.0.
i_abyIPGateway ARRAY[0..3] OF BYTE La nueva dirección IP de la puerta de enlace. Formato: 0.0.0.0.
210 EIO0000003062.06

Cambio de la dirección IP del controlador
Salida Tipo Comentario
xDone BOOL TRUE: si las direcciones IP se han configurado correctamente o si las
direcciones IP predeterminadas se han configurado correctamente porque la
entrada i_abyIPAddress se define en 0.0.0.0.
xBusy BOOL Bloque de funciones activo.
xError BOOL • TRUE: error detectado, el bloque de funciones interrumpe la acción.
• FALSE: no se ha detectado ningún error.
eError changeIPAddress_Error Código del error detectado, página 211.
xSaved BOOL Configuración almacenada para los siguientes reinicios del controlador.
q_abyIPAddress ARRAY[0..3] OF BYTE Dirección IP del controlador actual. Formato: 0.0.0.0.
q_abyIPMask ARRAY[0..3] OF BYTE Máscara de subred actual. Formato: 0.0.0.0.
q_abyIPGateway ARRAY[0..3] OF BYTE Dirección de IP de la puerta de enlace actual. Formato: 0.0.0.0.
changeIPAddress_Channel: Puerto Ethernet para configurar
El tipo de datos de enumeración changeIPAddress_Channel contiene los
siguientes valores:
Enumerador Valor Descripción
CHANNEL_ETHERNET_NETWORK 0 M241, M251MESC, M258, LMC058, LMC078: Puerto Ethernet
M251MESE: Puerto Ethernet_2
CHANNEL_DEVICE_NETWORK 1 M241: Puerto Ethernet TM4ES4
M251MESE: Puerto Ethernet_1
changeIPAddress_Error: Códigos de error
El tipo de datos de enumeración changeIPAddress_Error contiene los
siguientes valores:
Enumerador Valor Descripción
ERR_NO_ERROR 00 hex No se ha detectado ningún error.
ERR_UNKNOWN 01 hex Error interno detectado.
ERR_INVALID_MODE 02 hex La dirección IP no se ha configurado como dirección IP fija.
ERR_INVALID_IP 03 hex Dirección IP no válida.
ERR_DUPLICATE_IP 04 hex La nueva dirección IP ya se ha utilizado en la red.
ERR_WRONG_CHANNEL 05 hex Puerto de comunicación Ethernet incorrecto.
ERR_IP_BEING_SET 06 hex La dirección IP ya se ha modificado.
ERR_SAVING 07 hex Existen direcciones IP no almacenadas debido a un error detectado o memoria no
volátil.
ERR_DHCP_SERVER 08 hex Un servidor DHCP está configurado en este puerto de comunicación Ethernet.
EIO0000003062.06 211

Funciones para obtener/establecer la configuración de líneas
serie en el programa de usuario
Funciones para obtener/establecer la configuración
de líneas serie en el programa de usuario
Contenido de este capítulo
GetSerialConf: obtención de la configuración de línea serie............................ 212
SetSerialConf: cambio de la configuración de línea serie................................ 213
SERIAL_CONF: estructura del tipo de datos de la configuración de línea
serie...........................................................................................................215
Descripción general
En esta sección se describen las funciones para obtener/establecer la
configuración de líneas serie en el programa.
Para usar estas funciones, añada la biblioteca Comunicación M2xx .
Para obtener más información sobre cómo añadir una biblioteca, consulte
EcoStruxure Machine Expert - Guía de programación.
GetSerialConf: obtención de la configuración de línea
serie
Descripción de la función
GetSerialConf devuelve los parámetros de configuración para un puerto de
comunicación de línea serie específico.
Representación gráfica
Descripción de parámetros
Entrada Tipo Comentario
Link LinkNumber (consulte
EcoStruxure Machine
Expert - Funciones de
lectura/escritura Modbus
y ASCII - Guía de la
biblioteca
PLCCommunication)
Link es el número de puerto de comunicación.
PointerToSerialConf PointerToSerial-
Conf, página 215 PointerToSerialConf es la dirección de la estructura de configuración
(variable de tipo SERIAL_CONF) en la que se almacenan los nuevos
parámetros de la configuración. La función estándar ADR debe utilizarse para
definir el puntero asociado. Consulte el ejemplo siguiente.
212 EIO0000003062.06

Funciones para obtener/establecer la configuración de líneas
serie en el programa de usuario
Salida Tipo Comentario
GetSerialConf WORD Esta función devuelve:
• 0: se devuelven los parámetros de configuración
• 255: los parámetros de configuración no se devuelven porque:
◦la función no se ha ejecutado correctamente
◦la función está en curso
Ejemplo
Consulte el ejemplo de SetSerialConf, página 214.
SetSerialConf: cambio de la configuración de línea serie
Descripción de la función
SetSerialConf se utiliza para cambiar la configuración de línea serie.
Representación gráfica
NOTA: El cambio de la configuración de los puertos de línea serie durante la
ejecución de la programación puede interrumpir las comunicaciones en curso
con otros dispositivos conectados.
ADVERTENCIA
PÉRDIDA DE CONTROL DEBIDA A UN CAMBIO DE CONFIGURACIÓN
Valide y pruebe todos los parámetros de la función SetSerialConf antes de
poner el programa en funcionamiento.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Descripción de parámetros
Entrada Tipo Comentario
Link LinkNumber(consulte
EcoStruxure Machine
Expert - Funciones de
lectura/escritura Modbus
y ASCII - Guía de la
biblioteca
PLCCommunication)
LinkNumber es el número de puerto de comunicación.
PointerToSerialConf PointerToSerial-
Conf, página 215 PointerToSerialConf es la dirección de la estructura de configuración
(variable de tipo SERIAL_CONF) en la que se almacenan los nuevos
parámetros de la nueva configuración. La función estándar ADR debe
utilizarse para definir el puntero asociado. Consulte el ejemplo siguiente. Si
se especifica 0, la configuración predeterminada de la aplicación será la línea
serie.
EIO0000003062.06 213

Funciones para obtener/establecer la configuración de líneas
serie en el programa de usuario
Salida Tipo Comentario
SetSerialConf WORD Esta función devuelve:
• 0: se ha establecido la nueva configuración
• 255: se rechaza la nueva configuración porque:
◦la función está en curso
◦los parámetros de entrada no son válidos
Ejemplo
VAR
MySerialConf: SERIAL_CONF
result: WORD;
END_VAR
(*Get current configuration of serial line 1*)
GetSerialConf(1, ADR(MySerialConf));
(*Change to modbus RTU slave address 9*)
MySerialConf.Protocol := 0; (*Modbus RTU/Machine
Expert protocol (in this case CodesysCompliant selects the
protocol)*)
MySerialConf.CodesysCompliant := 0; (*Modbus RTU*)
MySerialConf.address := 9; (*Set modbus address to
9*)
(*Reconfigure the serial line 1*)
result := SetSerialConf(1, ADR(MySerialConf));
214 EIO0000003062.06

Funciones para obtener/establecer la configuración de líneas
serie en el programa de usuario
SERIAL_CONF: estructura del tipo de datos de la
configuración de línea serie
Descripción de la estructura
La estructura SERIAL_CONF contiene información de la configuración del puerto
de línea serie. Contiene estas variables:
Variable Tipo Descripción
Bauds DWORD velocidad de transmisión en baudios
InterframeDelay WORD tiempo mínimo (en ms) entre 2 tramas en Modbus (RTU, ASCII)
FrameReceivedTimeout WORD En el protocolo ASCII, FrameReceivedTimeout permite al sistema concluir el fin
de trama en la recepción después de un silencio del número de ms especificado. Si
se especifica 0, no se utiliza este parámetro.
FrameLengthReceived WORD En el protocolo ASCII, FrameLengthReceived permite al sistema concluir el fin
de una trama en la recepción, cuando el controlador ha recibido el número de
caracteres especificado. Si se especifica 0, no se utiliza este parámetro.
Protocol BYTE 0: Modbus RTU o Machine Expert (consulte CodesysCompliant)
1: Modbus ASCII
2: ASCII
Address BYTE Dirección Modbus de 0 a 255 (0 para el maestro)
Parity BYTE 0: ninguna
1: impar
2: par
Rs485 BYTE 0: RS232
1: RS485
ModPol (resistencia de
polarización)
BYTE 0: no
1: sí
DataFormat BYTE 7 bits u 8 bits
StopBit BYTE 1: 1 bit de parada
2: 2 bits de parada
CharFrameStart BYTE En el protocolo ASCII, si se especifica 0, no se utilizará ningún carácter de inicio en
la trama. De lo contrario, se utiliza el carácter correspondiente en ASCII para
detectar el inicio de una trama en el modo de recepción. En el modo de envío, se
añade este carácter al inicio de la trama de usuario.
CharFrameEnd1 BYTE En el protocolo ASCII, si se especifica 0, no se utilizará ningún carácter de fin en la
trama. De lo contrario, se utiliza el carácter correspondiente en ASCII para detectar
el fin de una trama en el modo de recepción. En el modo de envío, se añade este
carácter al final de la trama de usuario.
CharFrameEnd2 BYTE En el protocolo ASCII, si se especifica 0, no se utilizará ningún segundo carácter de
fin en la trama. De lo contrario, se utiliza el carácter correspondiente en ASCII
(junto con CharFrameEnd1) para detectar el fin de una trama en el modo de
recepción. En el modo de envío, se añade este carácter al final de la trama de
usuario.
CodesysCompliant BYTE 0: Modbus RTU
1: Machine Expert (cuando Protocol = 0)
CodesysNetType BYTE sin utilizar
EIO0000003062.06 215

Rendimiento del controlador
Rendimiento del controlador
Contenido de este capítulo
Rendimiento del procesamiento ................................................................... 216
En este capítulo se proporciona información sobre el rendimiento de
procesamiento de Modicon M241 Logic Controller.
Rendimiento del procesamiento
Introducción
En este capítulo se proporciona información sobre el rendimiento de
procesamiento de M241.
Procesamiento de la lógica
En esta tabla se muestra el rendimiento del procesamiento de la lógica para
diversas instrucciones lógicas:
Tipo de instrucción IL Duración de 1.000 instrucciones
Suma/resta/multiplicación de INT 42 μs
Suma/resta/multiplicación de DINT 41 μs
Suma/resta/multiplicación de REAL 336 μs
División de REAL 678 μs
Operación BOOLEANA; por ejemplo, Estado:= Estado y
valor
75 μs
LD INT + ST INT 64 μs
LD DINT + ST DINT 49 μs
LD REAL + ST REAL 50 μs
Tiempo de procesamiento del sistema y de la comunicación
El tiempo de procesamiento de la comunicación varía en función del número de
peticiones enviadas/recibidas.
Tiempo de respuesta en evento
El tiempo de respuesta que se muestra en la tabla siguiente representa el tiempo
entre el flanco ascendente de una señal en una entrada que desencadena una
tarea externa y el flanco de una salida configurada por esta tarea. La tarea de
evento también procesa 100 instrucciones IL antes de establecer la salida:
Mínimo Típico Máximo
120 μs 200 μs 500 μs
216 EIO0000003062.06

Glosario
A
Aplicación de arranque:
(aplicación de arranque) El archivo binario que contiene la aplicación.
Normalmente está guardada en el controlador y permite que este arranque en la
aplicación generada por el usuario.
aplicación:
Un programa que incluye datos de configuración, símbolos y documentación.
ARP:
(protocolo de resolución de direcciones) Un protocolo de capas de red IP para
Ethernet que asigna una dirección IP a una dirección MAC (hardware).
ASIC:
(circuito integrado específico de aplicaciones) Un procesador de silicio (chip)
personalizado diseñado especialmente para una aplicación.
B
BCD:
(decimal codificado en binario) El formato que representa números decimales
entre 0 y 9 con un conjunto de 4 bits (medio byte/cuarteto, también llamado half
byte). En este formato, los cuatro bits utilizados para codificar los números
decimales disponen de un rango de combinaciones que no se utiliza.
Por ejemplo, el número 2450 se codifica como 0010 0100 0101 0000.
bloque de terminales:
(bloque de terminales) El componente que se monta en un módulo electrónico y
proporciona las conexiones eléctricas entre el controlador y los dispositivos de
campo.
BOOL:
(booleano) Un tipo de datos básico en informática. Una variable BOOL puede
tener uno de estos valores: 0 (FALSE) o 1 (TRUE). Un bit extraído de una palabra
es de tipo BOOL, por ejemplo, %MW10.4 es un quinto bit con un número de
palabra de memoria 10.
BOOTP:
(protocolo bootstrap) Un protocolo de red UDP que puede utilizar un cliente de
red para obtener de forma automática una dirección IP (y tal vez otros datos) de
un servidor. El cliente se identifica ante el servidor utilizando la dirección MAC del
cliente. El servidor, que mantiene una tabla preconfigurada de direcciones MAC
de los dispositivos cliente y las direcciones IP asociadas, envía al cliente su
dirección IP predefinida. BOOTP se utilizaba originariamente como un método
que permitía iniciar los hosts sin disco de forma remota por una red. El proceso
BOOTP asigna un arrendamiento infinito de una dirección IP. El servicio BOOTP
utiliza los puertos UDP 67 y 68.
bucle abierto:
Bucle abierto hace referencia a un sistema de control de movimiento sin
sensores externos para ofrecer señales de corrección de la posición o la
velocidad.
Consulte también: bucle cerrado.
EIO0000003062.06 217

bus de extensión:
Bus de comunicación electrónico entre los módulos de E/S de extensión y un
controlador o acoplador de bus.
byte:
Un tipo que está codificado en un formato de 8 bits que, en el formato
hexadecimal, va de 00 hex a FF hex.
C
cadena:
Una variable que es una serie de caracteres ASCII.
CFC:
(diagrama de función continua) Un lenguaje de programación (una ampliación del
estándar IEC 61131-3) basado en el lenguaje de diagrama de bloque de
funciones (FBD) y que funciona como un diagrama de flujo. Sin embargo, no se
utiliza ninguna red y es posible un posicionamiento libre de elementos gráficos, lo
que permite bucles de realimentación. En cada bloque, las entradas se sitúan a
la izquierda y las salidas, a la derecha. Las salidas del bloque se pueden
conectar a las entradas de otros bloques para formar expresiones complejas.
codificador:
Un dispositivo para la medición de longitud o de ángulos (codificadores lineales o
rotativos).
configuración de Post:
(configuración de Post) Una opción que permite modificar algunos parámetros de
la aplicación sin cambiarla. Los parámetros de configuración de Post se definen
en un archivo que se almacena en el controlador. Sobrecargan los parámetros de
configuración de la aplicación.
configuración:
Organización e interconexión de los componentes de hardware en un sistema y
los parámetros del hardware y software que determina las características
operativas del sistema.
controlador:
Automatiza procesos industriales (también conocido como controlador lógico
programable o controlador programable).
CRC:
(comprobación de redundancia cíclica) Método que se emplea para determinar la
validez de la transmisión de la comunicación. La transmisión contiene un campo
de bits que constituye una suma de comprobación. El mensaje se usa para que el
transmisor calcule la suma de comprobación según el contenido del mensaje. A
continuación, los nodos receptores recalculan el campo de la misma manera.
Toda discrepancia en el valor de los dos cálculos CRC indica que el mensaje
transmitido y el mensaje recibido son diferentes.
D
DHCP:
(protocolo de configuración dinámica del host) Una ampliación avanzada de
BOOTP. DHCP es más avanzado, pero tanto DHCP como BOOTP son
habituales. (DHCP puede manejar las solicitudes de clientes BOOTP).
DINT:
(tipo entero doble) Codificado en formato de 32 bits.
218 EIO0000003062.06

dirección MAC:
(dirección de control de acceso a medios) Un número único de 48 bits asociado a
una parte específica del hardware. La dirección MAC se programa en cada
tarjeta de red o dispositivo cuando se fabrica.
DNS:
(sistema de nombres de dominio) El sistema de asignación de nombres para los
ordenadores y los dispositivos conectados con LAN o con Internet.
DTM:
(device type manager) Se clasifica en 2 categorías:
• Los DTMs del dispositivo se conectan a los componentes de configuración
del dispositivo de campo.
• Los CommDTMs se conectan a los componentes de comunicaciones del
software.
El DTM ofrece una estructura unificada para acceder a los parámetros de
dispositivo, además de configurar, utilizar y diagnosticar los dispositivos. Los
DTMs pueden incluir desde una simple interfaz gráfica de usuario para configurar
parámetros de dispositivo hasta una aplicación sofisticada que permite realizar
cálculos complejos en tiempo real con fines de diagnóstico y mantenimiento.
DWORD:
(palabra doble) Con codificación en formato de 32 bits.
E
ejecución:
Un comando que hace que el controlador explore el programa de la aplicación,
lea las entradas físicas y escriba en las salidas físicas según la solución de la
lógica del programa.
elementos supervisados:
En OPC UA, los elementos de datos (muestras) que el servidor OPC UA pone a
disposición y a los que se suscriben los clientes.
entrada analógica:
Convierte los niveles de tensión o corriente recibidos en valores numéricos.
Puede almacenar y procesar estos valores en el controlador lógico.
equipo:
Una parte de la máquina que incluye subconjuntos tales como cintas
transportadoras, plataformas giratorias, etc.
E/S:
(entrada/salida)
EDS:
(hoja de datos electrónica) Un archivo para la descripción del dispositivo de bus
de campo que contiene, por ejemplo, las propiedades de un dispositivo, como los
parámetros y los ajustes.
Ethernet:
Una tecnología de capas física y de conexión de datos para LANs, también
conocida como IEEE 802.3.
EIO0000003062.06 219

exploración:
Una función que incluye:
• La lectura de las entradas y la colocación de los valores en la memoria.
• Ejecutar una instrucción del programa de la aplicación cada vez y almacenar
los resultados en la memoria.
• Utilizar los resultados para actualizar salidas.
F
FBD:
(diagrama de bloques de funciones) Uno de los cinco lenguajes para lógica o
control que cumplen con el estándar IEC 61131-3 para sistemas de control. El
diagrama de bloques de funciones es un lenguaje de programación orientado
gráficamente. Funciona con una lista de redes en la que cada red contiene una
estructura gráfica de cuadros y líneas de conexión que representa una expresión
lógica o aritmética, la llamada de un bloque de funciones, un salto o una
instrucción de retorno.
FE:
(conexión a tierra funcional) Una toma de tierra común para mejorar o, si no,
permitir el funcionamiento normal de equipos accionados con electricidad
(también llamada Functional Ground en Norteamérica).
A diferencia de una conexión a tierra de protección, una conexión a tierra
funcional sirve para un objetivo distinto de la protección contra descargas
eléctricas y normalmente puede llevar corriente. Entre los dispositivos que
emplean conexiones a tierra funcionales se encuentran los limitadores de
tensión, los filtros de interferencia electromagnética, algunas antenas y los
instrumentos de medición.
firmware:
Representa el BIOS, los parámetros de datos y las instrucciones de
programación que constituyen el sistema operativo en un controlador. El firmware
se almacena en la memoria no volátil del controlador.
freewheeling:
Cuando un controlador lógico está en modalidad de exploración libre, en cuanto
termina la exploración anterior empieza una nueva. A diferencia de la modalidad
de exploración periódica.
FreqGen:
(generador de frecuencias) Función que genera una señal de onda cuadrada con
frecuencia programable.
FTP:
(protocolo de transferencia de archivos) Un protocolo de red estándar
incorporado en una arquitectura de cliente-servidor que sirve para intercambiar y
manipular archivos por redes basadas en TCP/IP independientemente de su
tamaño.
G
GRAFCET:
El funcionamiento de una operación secuencial de forma gráfica y estructurada.
Método analítico que divide cualquier sistema de control secuencial en una serie
de pasos a los que se asocian acciones, transiciones y condiciones.
220 EIO0000003062.06

H
HE10:
Conector rectangular para señales eléctricas con frecuencias inferiores a 3 MHz,
conforme a IEC 60807-2.
HSC:
(contador de alta velocidad) Una función que cuenta pulsos en el controlador o
en entradas del módulo de extensión.
I
ICMP:
(protocolo de mensajes de control de Internet) Informa acerca de los errores y
proporciona información relacionada con el procesamiento de datagramas.
IEC 61131-3:
Tercera parte de un estándar de tres partes de la IEC para los equipos de
automatización industriales. IEC 61131-3 se ocupa de los lenguajes de
programación del controlador y define dos estándares de lenguajes de
programación gráficos y dos textuales. Los lenguajes de programación gráficos
son un diagrama de contactos y un diagrama de bloque de funciones. Los
lenguajes de programación textuales incluyen texto estructurado y lista de
instrucciones.
IEC:
(International Electrotechnical Commission) Una organización de estándares
internacional sin ánimo de lucro y no gubernamental que prepara y publica
estándares internacionales para todas las tecnologías eléctricas, electrónicas y
relacionadas.
IL:
(lista de instrucciones) Un programa escrito en lenguaje que se compone de una
serie de instrucciones basadas en texto y ejecutadas secuencialmente por el
controlador. Cada instrucción incluye un número de línea, un código de
instrucción y un operando (consulte IEC 61131-3).
INT:
(entero) Un número entero con codificación de 16 bits.
IP:
(protocolo de Internet) Parte de la familia de protocolos TCP/IP que hace un
seguimiento de las direcciones de Internet de los dispositivos, encamina los
mensajes salientes y reconoce los mensajes entrantes.
K
KeepAlive:
Los mensajes que envía el servidor OPC UA para mantener activa una
suscripción. Esto es necesario si, desde la publicación anterior, no se ha
actualizado ninguno de los elementos supervisados de los datos.
L
LD:
(diagrama de contactos) Una representación gráfica de instrucciones de un
programa de controlador con símbolos para contactos, bobinas y bloques en una
serie de escalones ejecutados de forma secuencial por un controlador (consulte
IEC 61131-3).
EIO0000003062.06 221

LED:
(diodo electroluminiscente) Un indicador que se ilumina con una carga eléctrica
de nivel bajo.
lenguaje de diagrama de contactos:
Una representación gráfica de instrucciones de un programa de controlador con
símbolos para contactos, bobinas y bloques en una serie de escalones
ejecutados de forma secuencial por un controlador (consulte IEC 61131-3).
lenguaje de gráfica de función continua:
Un lenguaje de programación gráfico (una ampliación del estándar IEC61131-3)
basado en el lenguaje de diagrama del bloque de funciones y que funciona como
un diagrama de flujo. Sin embargo, no se utiliza ninguna red y es posible un
posicionamiento libre de elementos gráficos, lo que permite bucles de
realimentación. En cada bloque, las entradas se sitúan a la izquierda y las
salidas, a la derecha. Las salidas del bloque se pueden conectar a las entradas
de otros bloques para formar expresiones complejas.
lenguaje de la lista de instrucciones:
Un programa escrito en el lenguaje de la lista de instrucciones que se compone
de una serie de instrucciones basadas en texto y ejecutadas secuencialmente
por el controlador. Cada instrucción incluye un número de línea, un código de
instrucción y un operando (consulte IEC 61131-3).
LINT:
(entero largo) Un número codificado en formato de 64 bits (cuatro veces INT o
dos veces DINT).
LRC:
(comprobación de redundancia longitudinal) Un método de detección de errores
para determinar que los datos transmitidos o almacenados son correctos.
LREAL:
(entero largo) Un número de coma flotante codificado en formato de 64 bits.
LWORD:
(palabra larga) Un tipo de datos con codificación en formato de 64 bits.
M
MAST:
Una tarea del procesador que se ejecuta en el software de programación. La
tarea MAST consta de dos secciones:
•IN: Las entradas se copian en la sección IN antes de ejecutar la tarea MAST.
•OUT: Las salidas se copian en la sección OUT después de ejecutar la tarea
MAST.
NOTA:
MDT:
(telegrama de datos maestro) En el bus Sercos, el maestro envía un telegrama
MDT una vez durante cada ciclo de transmisión para transmitir datos (valores de
comando) a las servounidades (esclavos).
MIB:
(base de información de gestión) Una base de datos de objetos que se visualiza
con un sistema de gestión de red como SNMP. SNMP monitoriza dispositivos
que se definen por sus MIBs. Schneider Electric ha obtenido una MIB privada,
groupeschneider (3833).
222 EIO0000003062.06

Modbus:
El protocolo de comunicaciones que permite las comunicaciones entre muchos
dispositivos conectados a la misma red.
MSB:
(bit/byte más significativo) La parte de un número, una dirección o un campo que
se escribe como el valor individual situado más a la izquierda en notación
convencional hexadecimal o binaria.
ms:
(milisegundo)
%MW:
Según el estándar IEC, %MW representa un registro de palabra de memoria (por
ejemplo, un objeto de lenguaje del tipo palabra de memoria).
N
NMT:
(gestión de redes) Protocolos de CANopen que proporcionan servicios para la
inicialización de redes, el control de errores detectados y el control de estados de
dispositivos.
nodo:
Un dispositivo direccionable en una red de comunicaciones.
notificaciones:
En OPC UA, los mensajes que envía el servidor OPC UA para informar a los
clientes de que hay disponibles nuevos elementos de datos.
NVM:
(Memoria no volátil) Memoria no volátil que se puede sobrescribir. Se almacena
en una memoria EEPROM especial que se puede borrar y volver a programar.
O
origen de aplicación:
El conjunto de instrucciones del controlador, datos de configuración,
instrucciones HMI, símbolos y otra documentación del programa, que puede leer
una persona. El archivo de origen de la aplicación se guarda en PC y también se
puede descargar en la mayoría de los controladores lógicos. El archivo de origen
de la aplicación se emplea para generar el programa que se ejecuta en el
controlador lógico.
OS:
(sistema operativo) Una colección de software que gestiona los recursos de
hardware para ordenador y ofrece servicios comunes para los programas
informáticos.
P
PCI:
(interconexión de componentes periféricos) Un bus estándar en el sector para la
conexión de periféricos.
PDO:
(objeto de datos de proceso) Un mensaje de difusión sin confirmar o enviado
desde un dispositivo productor a un dispositivo consumidor en una red basada en
CAN. El PDO transmitido desde el dispositivo productor tiene un identificador
específico que corresponde al PDO recibido de los dispositivos consumidores.
EIO0000003062.06 223

PE:
(tierra de protección) Una conexión a tierra común para riesgos de descargas
eléctricas al exponer las superficies conductoras de un dispositivo al potencial de
tierra. Para evitar posibles caídas de tensión, en este conductor no circula
corriente (conocido también como conexión a tierra de protección en
Norteamérica o como conexión a tierra del equipo según el US National Electrical
Code).
programa :
El componente de una aplicación consistente en código fuente compilado capaz
de poder ser instalado en la memoria de un controlador lógico.
protocolo:
Una convención o una definición de norma que controla o habilita la conexión, la
comunicación y la transferencia de datos entre dos sistemas o dispositivos
informáticos.
PTO:
(salidas de tren de pulsos) Una salida rápida que oscila entre apagado y
encendido en un ciclo de servicio fijo 50-50, que produce una forma de onda
cuadrada. La PTO resulta especialmente útil para aplicaciones como motores
paso a paso, conversores de frecuencia, controles de servomotor, etc.
publishing interval:
En OPC UA, la frecuencia con la que el servidor OPC_UA envía notificaciones a
los clientes informando de la disponibilidad de actualizaciones de datos.
PWM:
(modulación de ancho de pulsos) Una salida rápida que oscila entre el apagado y
el encendido en un ciclo de servicio ajustable, que produce una forma de onda
rectangular (aunque se puede ajustar para que produzca una onda cuadrada).
R
REAL:
Un tipo de datos que se define como un número de coma flotante codificado en
formato de 32 bits.
red de control:
Red que contiene logic controllers, sistemas SCADA, PC, HMI, conmutadores,
etc.
Se admiten dos tipos de topología:
• Plana: todos los módulos y dispositivos de esta red pertenecen a la misma
subred.
• Dos niveles: la red se divide en una red operativa y en una red de
controladores.
Estas dos redes pueden ser físicamente independientes, pero normalmente
están conectadas mediante un dispositivo de enrutamiento.
red de dispositivos:
Red que contiene dispositivos conectados a un puerto de comunicación
específico de un logic controller. Desde el punto de vista de los dispositivos, este
controlador se percibe como un maestro.
red:
Un sistema de dispositivos interconectados que comparten una ruta de datos
común y un protocolo de comunicaciones.
224 EIO0000003062.06

registro de datos:
El controlador registra los eventos relacionados con la aplicación de usuario en
un registro de datos.
RJ45:
Un conector estándar de 8 pins para cables de red definido para Ethernet.
RPDO:
(objeto de datos de proceso de recepción) Mensaje de difusión sin confirmar o
enviado desde un dispositivo productor a un dispositivo consumidor en una red
basada en CAN. El PDO transmitido desde el dispositivo productor tiene un
identificador específico que corresponde al PDO recibido de los dispositivos
consumidores.
RPI:
(requested packet interval, intervalo entre paquetes solicitados) Intervalo de
tiempo entre intercambios cíclicos de datos solicitados por el explorador. Los
dispositivos EtherNet/IP publican datos a la velocidad especificada por el RPI
que les asigna el explorador y reciben las solicitudes de mensajes del explorador
con un periodo igual al RPI.
RSTP:
(rapid spanning tree protocol) Protocolo de red de alta velocidad que crea una
topología lógica sin bucles para redes Ethernet.
RTC:
(reloj de tiempo real) Un reloj calendario de fecha/hora con respaldo de batería
que funciona de forma continua aunque el controlador no reciba alimentación,
mientras dure la batería.
RTP:
(proceso en tiempo real) El proceso en tiempo real es la tarea más importante del
sistema. Se encarga de ejecutar todas las tareas en tiempo real en el momento
correcto. El procesamiento en tiempo real se activa mediante el ciclo de bus en
tiempo real Sercos.
S
salida analógica:
Convierte los valores numéricos del controlador lógico y envía niveles de tensión
o corriente proporcionales.
SDO:
(objeto de datos de servicio) Un mensaje utilizado por el maestro de bus de
campo para acceder (por lectura/escritura) a los directorios de objetos de los
nodos de red en las redes basadas en CAN. Entre los tipos de SDO se incluyen
los SDOs de servicio (SSDOs) y los SDOs de cliente (CSDOs).
SFC:
(diagrama funcional secuencial) Un lenguaje formado por pasos con acciones
asociadas, transiciones con una condición lógica asociada y enlaces dirigidos
entre pasos y transiciones. (La norma SFC está definida en IEC 848. Es
conforme con IEC 61131-3.)
símbolo:
Una cadena con un máximo de 32 caracteres alfanuméricos cuyo primer carácter
es alfabético. Permite personalizar un objeto del controlador para facilitar el
mantenimiento de la aplicación.
SINT:
(entero con signo) Un valor de 15 bits más signo.
EIO0000003062.06 225

SNMP:
(protocolo simple de gestión de redes) Un protocolo que puede controlar una red
de forma remota consultando los dispositivos para conocer su estado, realizar
pruebas de seguridad y ver información sobre la transmisión de datos. También
se puede utilizar para gestionar software y bases de datos de forma remota. El
protocolo también permite realizar tareas de gestión activas, por ejemplo la
modificación y aplicación de una nueva configuración.
STOP:
Comando que hace que el controlador detenga la ejecución de un programa de
aplicación.
ST:
(texto estructurado) Un lenguaje que incluye instrucciones complejas y anidadas
(por ejemplo, bucles de repetición, ejecuciones condicionales o funciones). ST
cumple con IEC 61131-3.
T
tarea cíclica:
El tiempo de exploración cíclica tiene una duración fija (intervalo) especificada
por el usuario. Si el tiempo de exploración actual es más corto que el cíclico, el
controlador espera hasta que transcurre el tiempo de exploración cíclica antes de
iniciar una nueva exploración.
tarea:
Grupo de secciones y subrutinas ejecutadas cíclica o periódicamente si se trata
de la tarea MAST, o periódicamente si se trata de la tarea FAST.
Una tarea siempre tiene un nivel de prioridad y tiene asociadas entradas y
salidas del controlador. Estas E/S se actualizan en función de la tarea.
Un controlador puede tener diversas tareas.
NOTA:
tasa de muestreo:
En OPC UA, la frecuencia con la que el servidor OPC UA lee elementos de datos
de dispositivos conectados.
TCP:
(protocolo de control de transmisión) Un protocolo de capas de transporte
basado en conexiones que proporciona una transmisión de datos simultánea y
bidireccional. TCP forma parte del conjunto de protocolos TCP/IP.
TPDO:
(objeto de datos de proceso de transmisión) Un mensaje de difusión sin confirmar
o enviado desde un dispositivo productor a un dispositivo consumidor en una red
basada en CAN. El PDO transmitido desde el dispositivo productor tiene un
identificador específico que corresponde al PDO recibido de los dispositivos
consumidores.
U
UDINT:
(entero doble sin signo) Codificado en 32 bits.
226 EIO0000003062.06

UDP:
(protocolo de datagramas de usuario) Un protocolo de modalidades sin conexión
(definido por IETF RFC 768) en el que los mensajes se entregan en un
datagrama (telegrama de datos) a un ordenador de destino de una red IP. El
protocolo UDP generalmente se integra con el protocolo de Internet. Los
mensajes UDP/IP no necesitan una respuesta y, por lo tanto, son perfectos para
aplicaciones en las que los paquetes cerrados no requieren retransmisión (como
redes y vídeos que necesitan rendimiento en tiempo real).
UINT:
(entero sin signo) Codificado en 16 bits.
V
variable del sistema:
Una variable que proporciona datos del controlador e información de diagnóstico,
y permite enviar comandos al controlador.
variable:
Una unidad de memoria direccionada y modificada por un programa.
W
watchdog:
Un watchdog es un cronómetro especial utilizado para garantizar que los
programas no superen su tiempo de exploración asignado. El cronómetro
watchdog suele configurarse con un valor superior al tiempo de exploración y se
resetea a 0 cuando termina cada ciclo de exploración. Si el cronómetro watchdog
alcanza el valor predeterminado, por ejemplo, porque el programa queda
atrapado en un bucle infinito, se declara un error·y el programa se detiene.
WORD:
Un tipo codificado en formato de 16 bits.
EIO0000003062.06 227

Índice
A
actualización del firmware de los módulos de
extensión TM3...................................................204
Adaptador EtherNet/IP......................................... 117
archivo de script
reglas de sintaxis .............................................195
Archivo EDS, generar .......................................... 118
Asignación de memoria .........................................22
B
Biblioteca FTPRemoteFileHandling ...................... 116
bibliotecas ............................................................20
Bibliotecas
FTPRemoteFileHandling .................................. 116
C
changeIPAddress ................................................210
cambiar de la dirección IP del controlador ..........210
changeModbusPort
ejemplo de script..............................................141
sintaxis de comandos.......................................141
Cliente FTP......................................................... 116
Cliente/servidor Modbus TCP
Ethernet ..........................................................102
Comando de detención..........................................50
Comando Run.......................................................49
comandos de script
cortafuegos .....................................................146
Comportamiento de la salida..................................48
Comunicación M2••
GetSerialConf..................................................212
SetSerialConf ..................................................213
configuración de bus de E/S...................................93
configuración de funciones integradas
configuración de generadores de pulsos
integrada .........................................................85
Configuración de funciones integradas
Configuración de E/S incrustadas........................76
Configuración de HSC integrada .........................83
configuración de Post ..........................................187
Configuración de Post
administración de archivos ...............................188
bit de parada ...................................................187
bits de datos....................................................187
dirección de estación........................................ 187
dirección de pasarela .......................................187
dirección IP .....................................................187
Ejemplo...........................................................190
FTP ................................................................187
máscara de subred ..........................................187
modo de configuración IP ................................. 187
nombre del dispositivo......................................187
Nombre maestro IP .......................................... 187
paridad............................................................187
presentación....................................................187
velocidad de transmisión .................................. 187
velocidad de transmisión en baudios .................187
Configuración del controlador
Ajustes PLC ......................................................63
Configuración de comunicación ..........................62
Servicios ...........................................................64
ControlChannel...................................................170
Habilita o deshabilita un canal de
comunicación.................................................170
cortafuegos
archivo de script predeterminado ...................... 144
comandos de script .......................................... 146
configuración...................................................144
D
Descarga de aplicaciones ......................................57
Diagrama de estado ..............................................39
dirección IP
changeIPAddress.............................................210
E
elementos supervisados ( OPAQ).........................179
ECU, creación para J1939 ...................................176
Ejemplo de ExecuteScript ....................................141
Ethernet
Bloque de funciones changeIPAddress..............210
Cliente/servidor Modbus TCP ...........................102
Dispositivo Modbus TCP esclavo ...................... 137
Servicios ...........................................................97
Servidor FTP ................................................... 114
Servidor web ...................................................103
SNMP ............................................................. 116
EtherNet
Dispositivo EtherNet/IP..................................... 117
Ethernet industrial
descripción general..........................................150
External Event ......................................................35
F
firmware
descarga en módulos de expansión TM3 ........... 204
Forzado de salida..................................................48
funciones
funciones principales..........................................13
G
Gestor ASCII ......................................................162
Gestor Modbus ...................................................158
GetSerialConf
obtención de la configuración de línea serie ....... 212
H
Habilita o deshabilita un canal de comunicación
ControlChannel................................................ 170
I
Información general sobre la configuración de E/S
prácticas generales............................................89
intercambios de datos cíclicos, generación de
archivo EDS para .............................................. 118
J
J1939
configuración de la interfaz ............................... 175
creación de ECU para ......................................176
228 EIO0000003062.06

K
KeepAlive ( OPCUA) ...........................................179
KeepAlive interval (OPC UA)................................181
L
lenguajes de programación
IL, LD, Grafcet ...................................................13
línea serie
Gestor ASCII ...................................................162
Gestor Modbus ................................................158
GetSerialConf..................................................212
SetSerialConf ..................................................213
M
Modbus
Protocolos.......................................................102
Modbus Ioscanner...............................................163
módulos de E/S analógicos TM3
descarga del firmware en..................................204
P
protocolos
SNMP ............................................................. 116
Protocolos ............................................................97
IP......................................................................98
Modbus...........................................................102
publishing interval (OPC UA).........................179, 181
puerto de Modbus TCP, cambio............................ 141
R
Reiniciar ...............................................................54
Reset caliente.......................................................51
Reset frío..............................................................51
Reset origen .........................................................52
Reset origin device................................................53
S
sampling interval (OPC UA) ..........................179, 181
SERIAL_CONF...................................................215
servidor DHCP....................................................154
Servidor FTP
Ethernet .......................................................... 114
Servidor OPC UA
configuración...................................................180
Configuración de símbolos ...............................182
descripción general..........................................179
KeepAlive interval ............................................ 181
publishing interval ............................................ 181
sampling interval..............................................181
Selección de símbolos......................................183
Servidor web
Ethernet ..........................................................103
SetSerialConf .....................................................213
configuración de línea serie ..............................213
Símbolos (OPC UA) ............................................ 182
SNMP
Ethernet .......................................................... 116
protocolos ....................................................... 116
sustitución rápida de dispositivo ........................... 155
T
Tarea
Cyclic task.........................................................33
Freewheeling task..............................................34
Tarea de eventos ...............................................34
Tarea External Event..........................................35
Tipos.................................................................33
Watchdog..........................................................35
tarjeta SD
comandos .......................................................195
transferencia de archivos con la tarjeta SD............195
V
Valores de inicialización del hardware.....................48
Valores de inicialización del software ......................48
Variables remanentes............................................58
EIO0000003062.06 229

Schneider Electric
35 rue Joseph Monier
92500 Rueil Malmaison
France
+ 33 (0) 1 41 29 70 00
www.se.com
Debido a que las normas, especificaciones y diseños cambian
periódicamente, solicite la confirmación de la información dada en esta
publicación.
© 2022 Schneider Electric. Reservados todos los derechos.
EIO0000003062.06

Modicon M241
Logic Controller
Funciones y variables de sistema
Guía de la biblioteca PLCSystem
EIO0000003068.04
11/2022
www.se.com

Información legal
La marca Schneider Electric y cualquier otra marca comercial de Schneider Electric
SE y sus filiales mencionadas en esta guía son propiedad de Schneider Electric SE o
sus filiales. Todas las otras marcas pueden ser marcas comerciales de sus
respectivos propietarios. Esta guía y su contenido están protegidos por las leyes de
copyright aplicables, y se proporcionan exclusivamente a título informativo. Ninguna
parte de este manual puede ser reproducida o transmitida de cualquier forma o por
cualquier medio (electrónico, mecánico, fotocopia, grabación u otro), para ningún
propósito, sin el permiso previo por escrito de Schneider Electric.
Schneider Electric no concede ningún derecho o licencia para el uso comercial de la
guía o su contenido, excepto por una licencia no exclusiva y personal para
consultarla "tal cual".
La instalación, utilización, mantenimiento y reparación de los productos y equipos de
Schneider Electric la debe realizar solo personal cualificado.
Debido a la evolución de las normativas, especificaciones y diseños con el tiempo, la
información contenida en esta guía puede estar sujeta a cambios sin previo aviso.
En la medida permitida por la ley aplicable, Schneider Electric y sus filiales no
asumen ninguna responsabilidad u obligación por cualquier error u omisión en el
contenido informativo de este material o por las consecuencias derivadas o
resultantes del uso de la información contenida en el presente documento.
Como parte de un grupo de empresas responsables e inclusivas, estamos
actualizando nuestras comunicaciones que contienen terminología no inclusiva. Sin
embargo, hasta que completemos este proceso, es posible que nuestro contenido
todavía contenga términos estandarizados del sector que pueden ser considerados
inapropiados para nuestros clientes.
© 2022 Schneider Electric. Todos los derechos reservados.

Funciones y variables de sistema
Tabla de contenido
Información de seguridad............................................................................7
Acerca de este libro ....................................................................................8
M241 Variables del sistema.......................................................................11
Variables del sistema: definición y uso.................................................. 11
Descripción de las variables de sistema.......................................... 11
Utilización de las variables de sistema ............................................12
Estructuras de PLC_R yPLC_W..........................................................13
PLC_R: variables de sistema de solo lectura del controlador ............14
PLC_W: variables de sistema de lectura/escritura del
controlador ...................................................................................17
Estructuras de SERIAL_R ySERIAL_W ...............................................17
SERIAL_R[0 a 1]: Variables de sistema de solo lectura de línea
serie.............................................................................................17
SERIAL_W[0 a 1]: Variables de sistema de lectura/escritura de
línea serie.....................................................................................18
Estructuras de ETH_R yETH_W .........................................................19
ETH_R: variables de sistema de solo lectura del puerto
Ethernet .......................................................................................19
ETH_W: variables de sistema de lectura/escritura del puerto
Ethernet .......................................................................................22
Estructura de TM3_MODULE_R ..........................................................22
TM3_MODULE_R[0...13]: variables del sistema de solo lectura
de los módulos TM3 ......................................................................22
Estructura de TM3_BUS_W.................................................................23
TM3_BUS_W: variables de sistema de bus TM3 .............................23
Estructura de PROFIBUS_R................................................................23
PROFIBUS_R: Variables de sistema de solo lectura de
PROFIBUS...................................................................................23
Estructura de CART_R........................................................................24
CART_R_STRUCT: Variables de sistema de solo lectura del
cartucho .......................................................................................24
Funciones de sistema M241, ....................................................................25
Funciones de lectura M241..................................................................25
GetImmediateFastInput: leer entrada de una E/S experta
incrustada.....................................................................................25
GetRtc: obtener el reloj en tiempo real ............................................26
IsFirstMastColdCycle: indicar si este ciclo es el primer ciclo
MAST del arranque en frío.............................................................26
IsFirstMastCycle: indicar si este ciclo es el primer ciclo
MAST...........................................................................................27
IsFirstMastWarmCycle: indicar si este ciclo es el primer ciclo
MAST del arranque en caliente ......................................................28
Funciones de escritura de M241 ..........................................................29
InhibitBatLed: Activa o desactiva el indicador LED de la
batería..........................................................................................29
PhysicalWriteFastOutputs: escribir salida rápida de una E/S
experta incrustada.........................................................................30
EIO0000003068.04 3

Funciones y variables de sistema
SetRTCDrift: Establecer el valor de compensación en el
RTC .............................................................................................31
Funciones de usuario de M241 ............................................................32
FB_ControlClone: clonar el controlador...........................................32
DataFileCopy: copiar comandos de archivo.....................................33
ExecuteScript: ejecutar comandos de script ....................................35
Funciones de espacio en disco de M241 ..............................................36
FC_GetFreeDiskSpace: Obtiene el espacio libre de la
memoria.......................................................................................36
FC_GetLabel: Obtiene la etiqueta de memoria ................................37
FC_GetTotalDiskSpace: Obtiene el tamaño de la memoria...............38
Funciones de lectura TM3 ...................................................................39
TM3_GetModuleBusStatus: obtener estado del bus del módulo
TM3 .............................................................................................39
TM3_GetModuleFWVersion: Obtener la versión de firmware del
módulo TM3 .................................................................................40
TM3_GetModuleInternalStatus: obtener estado interno del
módulo TM3 .................................................................................40
Tipos de datos de la biblioteca PLCSystem de M241...................................43
Tipos de datos de variables de sistema de PLC_RW .............................43
PLC_R_APPLICATION_ERROR: códigos de estado de error
detectado de la aplicación..............................................................44
PLC_R_BOOT_PROJECT_STATUS: códigos de estado del
proyecto de arranque ....................................................................45
PLC_R_IO_STATUS: códigos de estado de E/S..............................45
PLC_R_SDCARD_STATUS: códigos de estado de la ranura de la
tarjeta SD .....................................................................................46
PLC_R_STATUS: códigos de estado del controlador .......................46
PLC_R_STOP_CAUSE: códigos de causa de transición de
estado RUN a otro estado..............................................................47
PLC_R_TERMINAL_PORT_STATUS: códigos de estado de la
conexión del puerto del programación ............................................48
PLC_R_TM3_BUS_STATE: Códigos de estado del bus TM3 ...........48
PLC_W_COMMAND: códigos de comando de control .....................48
Tipos de datos de variables de sistema de DataFileCopy .......................49
DataFileCopyError: códigos de error detectado ...............................49
DataFileCopyLocation: códigos de ubicación ..................................49
Tipos de datos de variables de sistema de ExecScript ...........................49
ExecuteScriptError: códigos de error detectado...............................50
Tipos de datos de variables de sistema de ETH_RW .............................50
ETH_R_FRAME_PROTOCOL: códigos de protocolo de
transmisión de tramas ...................................................................50
ETH_R_IP_MODE: códigos de origen de la dirección IP ..................50
ETH_R_PORT_DUPLEX_STATUS: códigos de modo de
transmisión...................................................................................51
ETH_R_PORT_IP_STATUS: códigos de estado del puerto TCP/
IP Ethernet ...................................................................................51
ETH_R_PORT_LINK_STATUS: códigos de estado de la
conexión de comunicación.............................................................51
ETH_R_PORT_SPEED: códigos de velocidad de comunicación
del puerto Ethernet........................................................................52
4 EIO0000003068.04

Funciones y variables de sistema
ETH_R_RUN_IDLE: códigos de estado de ejecución e
inactividad Ethernet/IP...................................................................52
Tipos de datos de variables de sistema de TM3_MODULE_RW .............52
TM3_ERR_CODE: códigos de error detectado del módulo de
extensión TM3 ..............................................................................53
TM3_MODULE_R_ARRAY_TYPE: tipo de matriz de lectura del
módulo de extensión TM3..............................................................53
TM3_MODULE_STATE: códigos de estado del módulo de
extensión TM3 ..............................................................................53
TM3_BUS_W_IOBUSERRMOD: modalidad de error del bus
TM3 .............................................................................................54
Tipos de datos de variables de sistema del cartucho..............................54
CART_R_ARRAY_TYPE: Tipo de matriz de lectura del
cartucho .......................................................................................54
CART_R_MODULE_ID: Identificador del módulo de lectura del
cartucho .......................................................................................54
CART_R_STATE: Estado de lectura del cartucho ............................55
Tipos de datos de funciones de sistema................................................55
IMMEDIATE_ERR_TYPE:GetImmediateFastInput leer entrada
de códigos de E/S expertas incrustadas..........................................55
RTCSETDRIFT_ERROR: Códigos de error detectados de la
función SetRTCDrift ......................................................................55
Apéndices ..................................................................................................57
Representación de funciones y de bloques de funciones ............................58
Diferencias entre una función y un bloque de funciones .........................58
Usar una función o un bloque de funciones en lenguaje IL .....................59
Usar una función o un bloque de funciones en lenguaje ST....................62
Glosario ......................................................................................................65
Índice ..........................................................................................................72
EIO0000003068.04 5


Información de seguridad Funciones y variables de sistema
Información de seguridad
Información importante
Lea atentamente estas instrucciones y observe el equipo para familiarizarse con
el dispositivo antes de instalarlo, utilizarlo, revisarlo o realizar su mantenimiento.
Los mensajes especiales que se ofrecen a continuación pueden aparecer a lo
largo de la documentación o en el equipo para advertir de peligros potenciales, o
para ofrecer información que aclara o simplifica los distintos procedimientos.
Tenga en cuenta
La instalación, manejo, puesta en servicio y mantenimiento de equipos eléctricos
deberán ser realizados sólo por personal cualificado. Schneider Electric no se
hace responsable de ninguna de las consecuencias del uso de este material.
Una persona cualificada es aquella que cuenta con capacidad y conocimientos
relativos a la construcción, el funcionamiento y la instalación de equipos
eléctricos, y que ha sido formada en materia de seguridad para reconocer y evitar
los riesgos que conllevan tales equipos.
La inclusión de este icono en una etiqueta “Peligro” o “Advertencia” indica que existe
un riesgo de descarga eléctrica, que puede provocar lesiones si no se siguen las
instrucciones.
Éste es el icono de alerta de seguridad. Se utiliza para advertir de posibles riesgos
de lesiones. Observe todos los mensajes que siguen a este icono para evitar
posibles lesiones o incluso la muerte.
PELIGRO indica una situación de peligro que, si no se evita, provocará lesiones graves o
incluso la muerte.
!PELIGRO
ADVERTENCIA indica una situación de peligro que, si no se evita, podría provocar lesiones
graves o incluso la muerte.
ADVERTENCIA
!
ATENCIÓN indica una situación peligrosa que, si no se evita, podría provocar lesiones leves
o moderadas.
ATENCIÓN
!
AVISO indica una situación potencialmente peligrosa que, si no se evita, puede provocar
daños en el equipo.
AVISO
EIO0000003068.04 7

Funciones y variables de sistema Acerca de este libro
Acerca de este libro
Presentación
Esta documentación le permitirá familiarizarse con las funciones y las variables
del sistema ofrecidas en Modicon M241 Logic Controller. La biblioteca M241
PLCSystem contiene funciones y variables para obtener información y enviar
comandos al sistema del controlador.
En este documento se describen las funciones y las variables de tipos de datos
de la biblioteca M241 PLCSystem.
Se requieren los siguientes conocimientos:
• Información básica sobre la funcionalidad, la estructura y la configuración de
M241 Logic Controller.
• Programación en lenguaje FBD, LD, ST, IL o CFC.
• Variables del sistema (variables globales).
Campo de aplicación
Este documento se ha actualizado para la publicación de EcoStruxureTM Machine
Expert V2.1.
Las características descritas en el presente documento, así como las descritas en
los documentos incluidos a continuación en la sección Documentos relacionados,
pueden consultarse en línea. Para acceder a la información en línea, visite la
página de inicio de Schneider Electric www.se.com/ww/en/download/.
Las características descritas en el presente documento deben coincidir con las
características que aparecen en línea. De acuerdo con nuestra política de
mejoras continuas, es posible que a lo largo del tiempo revisemos el contenido
con el fin de elaborar documentos más claros y precisos. En caso de que detecte
alguna diferencia entre el documento y la información online, utilice esta última
para su referencia.
8 EIO0000003068.04

Acerca de este libro Funciones y variables de sistema
Documentos relacionados
Título de la documentación Número de referencia
Guía de programación de EcoStruxure Machine
Expert EIO0000002854 (ENG)
EIO0000002855 (FRE)
EIO0000002856 (GER)
EIO0000002858 (SPA)
EIO0000002857 (ITA)
EIO0000002859 (CHS)
Modicon M241 Logic Controller, Guía de
hardware EIO0000003083 (ENG)
EIO0000003084 (FRE)
EIO0000003085 (GER)
EIO0000003086 (SPA)
EIO0000003087 (ITA)
EIO0000003088 (CHS)
Guía de programación de Modicon M241 Logic
Controller EIO0000003059 (ENG)
EIO0000003060 (FRE)
EIO0000003061 (GER)
EIO0000003062 (SPA)
EIO0000003063 (ITA)
EIO0000003064 (CHS)
EIO0000003068.04 9

Funciones y variables de sistema Acerca de este libro
Información relacionada con el producto
ADVERTENCIA
PÉRDIDA DE CONTROL
• El diseñador del esquema de control debe tener en cuenta los posibles
modos de fallo de rutas de control y, para ciertas funciones de control
críticas, proporcionar los medios para lograr un estado seguro durante y
después de un fallo de ruta. Funciones de control críticas son, por ejemplo,
una parada de emergencia y una parada de sobrerrecorrido, un corte de
alimentación y un reinicio.
• Para las funciones críticas de control deben proporcionarse rutas de control
separadas o redundantes.
• Las rutas de control del sistema pueden incluir enlaces de comunicación.
Deben tenerse en cuenta las implicaciones de los retrasos de transmisión
no esperados o los fallos en el enlace.
• Tenga en cuenta todas las reglamentaciones para la prevención de
accidentes y las directrices de seguridad locales.1
• Cada implementación de este equipo debe probarse de forma individual y
exhaustiva antes de entrar en servicio.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
1Para obtener información adicional, consulte NEMA ICS 1.1 (última edición),
"Safety Guidelines for the Application, Installation, and Maintenance of Solid State
Control" (Directrices de seguridad para la aplicación, la instalación y el
mantenimiento del control de estado estático) y NEMA ICS 7.1 (última edición),
"Safety Standards for Construction and Guide for Selection, Installation and
Operation of Adjustable-Speed Drive Systems" (Estándares de seguridad para la
construcción y guía para la selección, instalación y utilización de sistemas de
unidades de velocidad ajustable) o su equivalente aplicable a la ubicación
específica.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
• Utilice sólo software aprobado por Schneider Electric para este equipo.
• Actualice el programa de aplicación siempre que cambie la configuración de
hardware física.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
10 EIO0000003068.04

M241 Variables del sistema Funciones y variables de sistema
M241 Variables del sistema
Descripción general
En este capítulo:
• Se proporciona una introducción a las variables de sistema, página 11.
•Se describen las variables de sistema, página 14 incluidas en la biblioteca
PLCSystem de M241.
Variables del sistema: definición y uso
Descripción general
En esta sección se definen las variables del sistema y cómo implementarlas en
Modicon M241 Logic Controller.
Descripción de las variables de sistema
Introducción
En esta sección se describe el modo en que se implementan las variables de
sistema. Las variables de sistema:
• Permiten acceder a información general del sistema, realizar diagnósticos del
sistema y controlar acciones sencillas.
• Son variables estructuradas que cumplen las definiciones y las convenciones
de nomenclatura de IEC 61131-3. Puede acceder a las variables de sistema
con el nombre simbólico de IEC PLC_GVL. Algunas de las variables de PLC_
GVL son de solo lectura (por ejemplo, PLC_R) y otras son de lectura/
escritura (por ejemplo, PLC_W).
• Se declaran automáticamente como variables globales. Tienen alcance en
todo el sistema y cualquier unidad de organización del programa (POU)
puede acceder a ellas en cualquier tarea.
Convención sobre nomenclatura
Las variables de sistema se identifican mediante:
• Un nombre de estructura que representa la categoría de la variable de
sistema. Por ejemplo, representa un nombre de estructura de variables de
solo lectura utilizado para el diagnóstico del controlador.
• Un conjunto de nombres de componentes que identifica el objetivo de la
variable. Por ejemplo, i_wVendorID representa el ID del proveedor del
controlador.
Puede acceder a las variables de sistema escribiendo el nombre de estructura de
las variables seguido del nombre del componente.
Aquí tiene un ejemplo de implementación de variables de sistema:
VAR
myCtr_Serial : DWORD;
myCtr_ID : DWORD;
myCtr_FramesRx : UDINT;
END_VAR
myCtr_Serial := PLC_GVL.PLC_R.i_dwSerialNumber;
myCtr_ID := PLC_GVL.PLC.R.i_wVendorID;
myCtr_FramesRx := SERIAL_R[0].i_udiFramesReceivedOK
EIO0000003068.04 11

Funciones y variables de sistema M241 Variables del sistema
NOTA: El nombre completo de la variable de sistema en el ejemplo anterior
es PLC_GVL.PLC_R. El PLC_GVL está implícito al declarar una variable
mediante la opción de Accesibilidad, pero también puede introducirse con el
prefijo. Las buenas prácticas de programación suelen dictar la utilización de
nombres de variables completos en las declaraciones.
Ubicación de las variables de sistema
Se definen dos variables de sistema para su uso al programar el controlador:
• Variables ubicadas
• Variables no ubicadas
Se utilizan en programas de EcoStruxure Machine Expert según la convención
structure_name.component_name explicada anteriormente. Se puede acceder
directamente a las direcciones %MW de 0 a 59999. EcoStruxure Machine Expert
considera que las direcciones mayores están fuera de rango y solo son
accesibles mediante la convención structure_name.component_name.
Las variables ubicadas:
• Tienen una ubicación fija en un área de %MW estática: de %MW60000 a %
MW60199 para variables de sistema de solo lectura.
• Son accesibles mediante Modbus TCP, serie Modbus y peticiones de
EtherNet/IP en los estados RUNNING y STOPPED.
Las variables no ubicadas:
• No están ubicadas físicamente en el área %MW.
• No son accesibles mediante ninguna petición de bus de campo o de red, a
menos que las ubique en la tabla de reubicación, y solo entonces se puede
acceder a estas variables en los estados RUNNING y STOPPED. La tabla de
reubicación utiliza las siguientes áreas %MW dinámicas:
◦De %MW60200 a %MW61999 para variables de solo lectura
◦De %MW62200 a %MW63999 para variables de lectura/escritura
Utilización de las variables de sistema
Introducción
En este apartado se describen los pasos necesarios para programar y usar las
variables de sistema en EcoStruxure Machine Expert.
Las variables de sistema son globales en lo que respecta al ámbito de la
aplicación y se pueden utilizar en todas las unidades de organización de
programa (POU) de la aplicación.
No es necesario declarar las variables de sistema en la Lista de variables
globales (GVL). Se declaran automáticamente desde la biblioteca del sistema del
controlador.
12 EIO0000003068.04

M241 Variables del sistema Funciones y variables de sistema
Utilización de las variables de sistema en una POU
EcoStruxure Machine Expert tiene una función de autocompletado. En una POU,
empiece por especificar el nombre de estructura de la variable de sistema (PLC_
R,PLC_W...) seguido de un punto. Las variables de sistema se muestran en
Accesibilidad. Puede seleccionar la variable que desee o especificar el nombre
completo manualmente.
NOTA: En el ejemplo anterior, tras introducir el nombre de estructura PLC_R.,
EcoStruxure Machine Expert ofrece un menú emergente de nombres/
variables de componentes posibles.
Ejemplo
En el siguiente ejemplo se muestra el uso de algunas variables de sistema:
VAR
myCtr_Serial : DWORD;
myCtr_ID : WORD;
myCtr_FramesRx : UDINT;
END_VAR
myCtr_Serial := PLC_R.i_dwSerialNumber;
myCtr_ID := PLC_R.i_wVendorID;
myCtr_FramesRx := SERIAL_R[0].i_udiFramesReceivedOK;
Estructuras de PLC_R yPLC_W
Descripción general
En este apartado se describen las diferentes variables de sistema incluidas en las
estructuras PLC_R yPLC_W.
EIO0000003068.04 13

Funciones y variables de sistema M241 Variables del sistema
PLC_R: variables de sistema de solo lectura del controlador
Estructura de la variable
En esta tabla se describen los parámetros de la variable de sistema PLC_R (tipo
PLC_R_STRUCT):
Dirección
Modbus (1)
Nombre de variable Tipo Comentario
60000 i_wVendorID WORD ID de proveedor del controlador.
101A hex = Schneider Electric
60001 i_wProductID WORD ID de referencia del controlador.
NOTA: ID de proveedor e ID de referencia son los
componentes del ID del destino del controlador
mostrado en la vista de la configuración de
comunicación (ID del destino = 101A XXXX hex).
60002 i_dwSerialNumber DWORD Número de serie del controlador
60004 i_byFirmVersion ARRAY[0..3] OF
BYTE Versión de firmware del controlador [aa.bb.cc.dd]:
• i_byFirmVersion[0] = aa
• ...
• i_byFirmVersion[3] = dd
60006 i_byBootVersion ARRAY[0..3] OF
BYTE Versión de arranque del controlador [aa.bb.cc.dd]:
• i_byBootVersion[0] = aa
• ...
• i_byBootVersion[3] = dd
60008 i_dwHardVersion DWORD Versión de hardware del controlador.
NOTA: Parámetro reservado únicamente para uso
interno. Para conocer la versión del producto (PV),
consulte la etiqueta del producto.
60010 i_dwChipVersion DWORD Versión de coprocesador del controlador.
60012 i_wStatus PLC_R_STATUS,
página 46
Estado del controlador.
60013 i_wBootProjectStatus PLC_R_BOOT_
PROJECT_STATUS,
página 45
Devuelve información sobre la aplicación de arranque
almacenada en la memoria no volátil.
60014 i_wLastStopCause PLC_R_STOP_
CAUSE, página 47 Causa de la última transición desde el estado RUN a
otro estado.
60015 i_wLastApplicationError PLC_R_
APPLICATION_
ERROR, página 44
Causa de la última excepción del controlador.
60016 i_lwSystemFault_1 LWORD El campo de bit FFFF FFFF FFFF FFFF hex indica que
no se ha detectado ningún error.
Un bit en nivel bajo significa que se ha detectado un
error:
• Bit 0 = Error detectado de E/S expertas
• Bit 1 = Error detectado de TM3
• Bit 2 = Error detectado de Ethernet IF1
• Bit 3 = Error detectado de Ethernet IF2
• Bit 4 = Error detectado de sobrecorriente de serie
1
• Bit 5 = Error detectado de serie 2
• Bit 6 = Error detectado de CAN 1
• Bit 7 = Error detectado de cartucho 1
• Bit 8 = Error detectado de cartucho 2
• Bit 9 = Error detectado de TM4
• Bit 10 = Error detectado de tarjeta SD
• Bit 11 = Error detectado de servidor de cortafuegos
• Bit 12 = Error detectado del servidor DHCP
• Bit 13 = Error detectado de servidor OPC UA
14 EIO0000003068.04

M241 Variables del sistema Funciones y variables de sistema
Dirección
Modbus (1)
Nombre de variable Tipo Comentario
60020 i_lwSystemFault_2 LWORD El campo de bit FFFF hex indica que no se ha detectado
ningún error.
Si i_wIOStatus1 =PLC_R_IO_SHORTCUT_FAULT, el
significado de i_lwSystemFault_2 es:
• Bit 0 = 0: se ha detectado un cortocircuito en el
grupo de salidas 0 (de Q0 a Q1)
• Bit 1 = 0: se ha detectado un cortocircuito en el
grupo de salidas 1 (de Q2 a Q3)
• Bit 2 = 0: se ha detectado un cortocircuito en el
grupo de salidas 2 (de Q4 a Q7)
• Bit 3 = 0: se ha detectado un cortocircuito en el
grupo de salidas 3 (de Q8 a Q11)
• Bit 4 = 0: se ha detectado un cortocircuito en el
grupo de salidas 4 (de Q12 a Q15)
60024 i_wIOStatus1 PLC_R_IO_STATUS,
página 45 Estado de E/S experta incrustada.
60025 i_wIOStatus2 PLC_R_IO_STATUS,
página 45 Estado de E/S de TM3.
60026 i_wClockBatterystatus WORD Estado de la batería del RTC:
• 0 = Se requiere cambio de batería
• 100 = Batería completamente cargada
Otros valores (de 1 a 99) representa el porcentaje de la
carga. Por ejemplo, si el valor es 75, representa que la
carga de la batería es del 75%.
60 028 i_dwAppliSignature1 DWORD Primera DWORD de la firma de 4 DWORD (16 bytes en
total).
El software genera la firma de la aplicación durante la
compilación.
60030 i_dwAppliSignature2 DWORD Segunda DWORD de la firma de 4 DWORD (16 bytes
en total).
El software genera la firma de la aplicación durante la
compilación.
60032 i_dwAppliSignature3 DWORD Tercera DWORD de la firma de 4 DWORD (16 bytes en
total).
El software genera la firma de la aplicación durante la
compilación.
60034 i_dwAppliSignature4 DWORD Cuarta DWORD de la firma de 4 DWORD (16 bytes en
total).
El software genera la firma de la aplicación durante la
compilación.
n/d i_sVendorName STRING(31) Nombre del fabricante: "Schneider Electric".
n/d i_sProductRef STRING(31) Referencia del controlador.
n/d i_sNodeName STRING(99) Nombre de nodo en la red de EcoStruxure Machine
Expert.
n/d i_dwLastStopTime DWORD La hora de la última detención (STOP) detectada en
segundos, comenzando por el 1 de enero de 1970 a las
00:00 UTC.
n/d i_dwLastPowerOffDate DWORD La fecha y la hora del último apagado detectado en
segundos, comenzando por el 1 de enero de 1970 a las
00:00 UTC.
NOTA: Convierta este valor en fecha y hora
mediante la función SysTimeRtcConvertUtcToDate.
Para obtener más información sobre la conversión
de fecha y hora, consulte la Guía de la biblioteca
Systime (consulte EcoStruxure Machine Expert,
Obtención y ajuste del reloj en tiempo real,
SysTimeRtc y SysTimeCore, Guía de la biblioteca).
n/d i_uiEventsCounter UINT Número de eventos externos detectados en las entradas
configuradas para detección de eventos externos desde
el último arranque en frío.
Restablecimiento mediante un arranque en frío o con el
comando PLC_W.q_wResetCounterEvent.
n/d i_wTerminalPortStatus PLC_R_TERMINAL_
PORT_STATUS,
página 48
Estado del puerto de programación USB (USB Mini-B).
EIO0000003068.04 15

Funciones y variables de sistema M241 Variables del sistema
Dirección
Modbus (1)
Nombre de variable Tipo Comentario
n/d i_wSdCardStatus PLC_R_SDCARD_
STATUS, página 46 Estado de la tarjeta SD.
n/d i_wUsrFreeFileHdl WORD Número de controladores de archivos disponibles.
Un controlador de archivos es el recurso asignado por el
sistema cuando se abre un archivo.
n/d i_udiUsrFsTotalBytes UDINT Tamaño total de la memoria del sistema de archivos del
usuario (en bytes).
Se trata del tamaño de la memoria no volátil del
directorio /usr/.
n/d i_udiUsrFsFreeBytes UDINT Tamaño de memoria libre del sistema de archivos del
usuario (en bytes).
n/d i_uiTM3BusState PLC_R_TM3_BUS_
STATE, página 48
Estado de bus TM3.
i_uiTM3BusState puede tener los siguientes valores:
• 1: TM3_CONF_ERROR
Discrepancia entre la configuración física y la
configuración de EcoStruxure Machine Expert.
• 3: TM3_OK
La configuración física coincide con la de
EcoStruxure Machine Expert.
• 4: TM3_POWER_SUPPLY_ERROR
El bus TM3 no recibe alimentación (por ejemplo,
cuando el Logic Controller recibe alimentación por
USB).
n/d i_ExpertIO_RunStop_Input BYTE La ubicación de la entrada Run/Stop es:
• 16 a FF hex si la E/S experta no se ha configurado
• 0 para %IX0.0
• 1 para %IX0.1
• 2 para %IX0.2
• ... etc.
n/d i_x10msClk BOOL Bit de TimeBase de 10 ms.
Esta variable alterna On/Off con un período = 10 ms. El
valor se alterna cuando el Logic Controller se encuentra
en el estado Stop y Run.
n/d i_x100msClk BOOL Bit de TimeBase de 100 ms.
Esta variable alterna On/Off con un período = 100 ms. El
valor se alterna cuando el Logic Controller se encuentra
en el estado Stop y Run.
n/d i_x1sClk BOOL Bit de TimeBase de 1 s.
Esta variable alterna On/Off con un período = 1 s. El
valor se alterna cuando el Logic Controller se encuentra
en el estado Stop y Run.
(1) significa que no se puede acceder a la dirección Modbus a través de la aplicación.
n/d significa que no hay ninguna asignación de dirección Modbus predefinida para esta variable de sistema.
16 EIO0000003068.04

M241 Variables del sistema Funciones y variables de sistema
PLC_W: variables de sistema de lectura/escritura del controlador
Estructura de la variable
En esta tabla se describen los parámetros de la variable de sistema PLC_W (tipo
PLC_W_STRUCT):
%MW Nombre de variable Tipo Comentario
n/d q_wResetCounterEvent WORD La transición de 0 a 1 restablece el contador de eventos
(PLC_R.i_uiEventsCounter).
Para volver a restablecer el contador, es necesario
escribir 0 en esta variable antes de que pueda llevarse
a cabo otra transición de 0 a 1.
n/d q_uiOpenPLCControl UINT Cuando el valor de la variable pasa de 0 a 6699, se
ejecuta el comando escrito previamente en el siguiente
PLC_W.q_wPLCControl.
n/d q_wPLCControl PLC_W_COMMAND,
página 48 Los comandos RUN/STOP del controlador se ejecutan
cuando el valor de la variable de sistema PLC_W.q_
uiOpenPLCControl pasa de 0 a 6699.
n/d significa que no existe ninguna asignación de %MW predefinida para esta variable de sistema.
Estructuras de SERIAL_R ySERIAL_W
Descripción general
En este apartado se enumeran y describen las diversas variables de sistema
incluidas en las estructuras SERIAL_R ySERIAL_W.
SERIAL_R[0 a 1]: Variables de sistema de solo lectura de línea
serie
Introducción
SERIAL_R es una matriz de dos tipos SERIAL_R_STRUCT. Cada elemento de la
matriz devuelve las variables de sistema de diagnóstico para la línea serie
correspondiente.
En el caso de M241 Logic Controller:
•Serial_R[0] hace referencia a la línea serie 1
•Serial_R[1] hace referencia a la línea serie 2
EIO0000003068.04 17

Funciones y variables de sistema M241 Variables del sistema
Estructura de la variable
En esta tabla se describen los parámetros de las variables de sistema de
SERIAL_R[0...1]:
%MW Nombre de variable Tipo Comentario
Línea serie
n/d i_udiFramesTransmittedOK UDINT Número de tramas transmitidas correctamente.
n/d i_udiFramesReceivedOK UDINT Número de tramas recibidas sin errores detectados.
n/d i_udiRX_MessagesError UINT Número de tramas recibidas con errores detectados
(suma de comprobación, paridad).
Específico de Modbus
n/d i_uiSlaveExceptionCount UINT Número de respuestas de excepción de Modbus
devueltas por el controlador lógico.
n/d i_udiSlaveMsgCount UINT Número de mensajes recibidos desde el maestro y
dirigidos al controlador lógico.
n/d i_uiSlaveNoRespCount UINT Número de peticiones de difusión de Modbus recibidas
por el controlador lógico.
n/d i_uiSlaveNakCount UINT No se utiliza
n/d i_uiSlaveBusyCount UINT No se utiliza
n/d i_uiCharOverrunCount UINT Número de desbordes de caracteres.
n/d significa que no existe ninguna asignación de %MW predefinida para esta variable de sistema.
No se utiliza significa que la variable no está gestionada por el sistema y que, si el valor de la variable es diferente de cero, debe
considerarse externa.
Los contadores de SERIAL_R se restablecen en los siguientes casos:
• Descarga
• Restablecimiento del controlador.
• Comando SERIAL_W[x].q_wResetCounter
• Comando de restablecimiento mediante el número 8 del código de la función
de petición Modbus.
SERIAL_W[0 a 1]: Variables de sistema de lectura/escritura de
línea serie
Introducción
SERIAL_W es una matriz de dos tipos SERIAL_W_STRUCT. Cada elemento de
la matriz restablece las variables de sistema SERIAL_R para restablecer la línea
serie correspondiente.
En el caso de M241 Logic Controller:
•Serial_W[0] hace referencia a la línea serie 1
•Serial_W[1] hace referencia a la línea serie 2
18 EIO0000003068.04

M241 Variables del sistema Funciones y variables de sistema
Estructura de la variable
En esta tabla se describen los parámetros de la variable de sistema SERIAL_W
[0...1]:
%MW Nombre de variable Tipo Comentario
n/d q_wResetCounter WORD La transición de 0 a 1 restablece todos los contadores
de SERIAL_R[0...1].
Para volver a restablecer los contadores, es necesario
escribir esta variable en 0 antes de que pueda llevarse a
cabo otra transición de 0 a 1.
n/d significa que no existe ninguna asignación de %MW predefinida para esta variable de sistema.
Estructuras de ETH_R yETH_W
Descripción general
En este apartado se describen las diferentes variables de sistema incluidas en las
estructuras ETH_R yETH_W.
ETH_R: variables de sistema de solo lectura del puerto Ethernet
Estructura de la variable
En esta tabla se describen los parámetros de la variable de sistema ETH_R (tipo
ETH_R_STRUCT):
%MW Nombre de variable Tipo Comentario
60050 i_byIPAddress ARRAY[0..3] OF
BYTE
Dirección IP [aaa.bbb.ccc.ddd]:
• i_byIPAddress[0] = aaa
• ...
• i_byIPAddress[3] = ddd
60052 i_bySubNetMask ARRAY[0..3] OF
BYTE
Máscara de subred [aaa.bbb.ccc.ddd]:
• i_bySub-netMask[0] = aaa
• ...
• i_bySub-netMask[3] = ddd
60054 i_byGateway ARRAY[0..3] OF
BYTE
Dirección de pasarela [aaa.bbb.ccc.ddd]:
• i_byGateway[0] = aaa
• ...
• i_byGateway[3] = ddd
60056 i_byMACAddress ARRAY[0..5] OF
BYTE Dirección MAC [aa.bb.cc.dd.ee.ff]:
• i_byMACAddress[0] = aa
• ...
• i_byMACAddress[5] = ff
60059 i_sDeviceName STRING(15) Nombre utilizado para obtener la dirección IP del
servidor.
n/d i_wIpMode ETH_R_IP_MODE,
página 50
Método utilizado para obtener una dirección IP.
n/d i_byFDRServerIPAddress ARRAY[0..3] OF
BYTE
La dirección IP [aaa.bbb.ccc.ddd] del servidor
DHCP o BootP:
• i_byFDRServerIPAddress[0] = aaa
• ...
• i_byFDRServerIPAddress[3] = ddd
Igual a 0.0.0.0 si se usa la IP almacenada o
predeterminada.
n/d i_udiOpenTcpConnections UDINT Número de conexiones TCP abiertas.
EIO0000003068.04 19

Funciones y variables de sistema M241 Variables del sistema
%MW Nombre de variable Tipo Comentario
n/d i_udiFramesTransmittedOK UDINT Número de tramas transmitidas correctamente.
Restablecer al encender o con el comando de
restablecimiento ETH_W.q_wResetCounter.
n/d i_udiFramedReceivedOK UDINT Número de tramas recibidas correctamente.
Restablecer al encender o con el comando de
restablecimiento ETH_W.q_wResetCounter.
n/d i_udiTransmitBufferErrors UDINT Número de tramas transmitidas con errores detectados.
Restablecer al encender o con el comando de
restablecimiento ETH_W.q_wResetCounter.
n/d i_udiReceiveBufferErrors UDINT Número de tramas recibidas con errores detectados.
Restablecer al encender o con el comando de
restablecimiento ETH_W.q_wResetCounter.
n/d i_wFrameSendingProtocol ETH_R_FRAME_
PROTOCOL, página
50
Protocolo Ethernet configurado para el envío de tramas
(IEEE 802.3 o Ethernet II).
n/d i_wPortALinkStatus ETH_R_PORT_
LINK_STATUS,
página 51
Conexión del puerto Ethernet (0 = sin conexión, 1 =
conexión conectada a otro dispositivo Ethernet).
n/d i_wPortASpeed ETH_R_PORT_
SPEED, página 52 Velocidad de red del puerto Ethernet (10 Mb/s, 100 Mb/
s).
n/d i_wPortADuplexStatus ETH_R_PORT_
DUPLEX_STATUS,
página 51
Estado dúplex del puerto Ethernet (0 = semidúplex o 1 =
dúplex completo).
n/d i_udiPortACollisions UDINT Número de tramas implicadas en una o más colisiones y
transmitidas a continuación correctamente. Restablecer
al encender o con el comando de restablecimiento ETH_
W.q_wResetCounter.
n/d i_byIPAddress_If2 ARRAY[0..3] OF
BYTE Dirección IP del módulo de extensión TM4.
n/d i_bySubNetMask_If2 ARRAY[0..3] OF
BYTE
Máscara de subred del módulo de extensión TM4.
n/d i_byGateway_If2 ARRAY[0..3] OF
BYTE Dirección de pasarela del módulo de extensión TM4.
n/d i_byMACAddress_If2 ARRAY[0..3] OF
BYTE Dirección MAC del módulo de extensión TM4.
n/d i_sDeviceName_If2 STRING(15) Nombre utilizado para obtener la dirección IP del
módulo de extensión TM4.
n/d i_wIpMode_If2 ETH_R_IP_MODE,
página 50
Método utilizado para obtener la dirección IP del módulo
de extensión TM4.
n/d i_wPortALinkStatus_If2 ETH_R_PORT_
LINK_STATUS,
página 51
Enlace del puerto Ethernet del módulo de extensión
TM4:
• 0: Sin conexión
• 1: Conexión a otro dispositivo Ethernet
n/d i_wPortASpeed_If2 ETH_R_PORT_
SPEED, página 52 Velocidad de red del puerto Ethernet del módulo de
extensión TM4 (10 Mb/s o 100 Mb/s).
n/d i_wPortADuplexStatus_If2 ETH_R_PORT_
DUPLEX_STATUS,
página 51
Estado de dúplex del puerto Ethernet del módulo de
extensión TM4:
• 0: Semi
• 1: Dúplex completo
n/d i_wPortAIpStatus_If2 ETH_R_PORT_IP_
STATUS, página 51 Estado de la pila del puerto TCP/IP Ethernet del módulo
de extensión TM4.
Específico de Modbus TCP/IP
n/d i_udiModbusMessageTransmitted UDINT Número de mensajes Modbus transmitidos.
Restablecer al encender o con el comando de
restablecimiento ETH_W.q_wResetCounter.
n/d i_udiModbusMessageReceived UDINT Número de mensajes Modbus recibidos.
Restablecer al encender o con el comando de
restablecimiento ETH_W.q_wResetCounter.
n/d i_udiModbusErrorMessage UDINT Mensajes de error detectados de Modbus transmitidos y
recibidos.
Restablecer al encender o con el comando de
restablecimiento ETH_W.q_wResetCounter.
Específico de EtherNet/IP
20 EIO0000003068.04

M241 Variables del sistema Funciones y variables de sistema
%MW Nombre de variable Tipo Comentario
n/d i_udiETHIP_IOMessagingTransmitted UDINT Tramas EtherNet/IP Clase 1 transmitidas.
Restablecer al encender o con el comando de
restablecimiento ETH_W.q_wResetCounter.
n/d i_udiETHIP_IOMessagingReceived UDINT Tramas EtherNet/IP Clase 1 recibidas.
Restablecer al encender o con el comando de
restablecimiento ETH_W.q_wResetCounter.
n/d i_udiUCMM_Request UDINT Mensajes recibidos de EtherNet/IP desconectada.
Restablecer al encender o con el comando de
restablecimiento ETH_W.q_wResetCounter.
n/d i_udiUCMM_Error UDINT Mensajes recibidos no válidos de EtherNet/IP
desconectada.
Restablecer al encender o con el comando de
restablecimiento ETH_W.q_wResetCounter.
n/d i_udiClass3_Request UDINT Solicitudes de EtherNet/IP Clase 3 recibidas.
Restablecer al encender o con el comando de
restablecimiento ETH_W.q_wResetCounter.
n/d i_udiClass3_Error UDINT Solicitudes de EtherNet/IP Clase 3 no válidas recibidas.
Restablecer al encender o con el comando de
restablecimiento ETH_W.q_wResetCounter.
n/d i_uiAssemblyInstanceInput UINT Número de instancia de unidad de entrada. Consulte la
guía de programación correspondiente del controlador
para obtener más información.
n/d i_uiAssemblyInstanceInputSize UINT Tamaño de la instancia de unidad de entrada. Consulte
la guía de programación correspondiente del
controlador para obtener más información.
n/d i_uiAssemblyInstanceOutput UINT Número de instancia de unidad de salida. Consulte la
guía de programación correspondiente del controlador
para obtener más información.
n/d i_uiAssemblyInstanceOutputSize UINT Tamaño de instancia de unidad de salida. Consulte la
guía de programación correspondiente del controlador
para obtener más información.
n/d i_uiETHIP_ConnectionTimeouts UINT Número de timeouts de la conexión. Restablecer al
encender o con el comando de restablecimiento ETH_
W.q_wResetCounter.
n/d i_ucEipRunIdle ETH_R_RUN_IDLE,
página 52 Indicador de ejecución (valor=1)/inactividad (valor=0)
para la conexión EtherNet/IP de Clase 1.
n/d i_byMasterIpTimeouts BYTE Contador de eventos de timeout del maestro Ethernet
Modbus TCP.
Restablecer al encender o con el comando de
restablecimiento ETH_W.q_wResetCounter.
n/d i_byMasterIpLost BYTE Estado de la conexión del maestro Ethernet Modbus
TCP: 0 = conexión correcta, 1 = conexión perdida.
n/d i_wPortAIpStatus ETH_R_PORT_IP_
STATUS, página 51 Estado de la pila del puerto TCP/IP Ethernet.
n/d significa que no existe ninguna asignación de %MW predefinida para esta variable de sistema.
EIO0000003068.04 21

Funciones y variables de sistema M241 Variables del sistema
ETH_W: variables de sistema de lectura/escritura del puerto
Ethernet
Estructura de la variable
En esta tabla se describen los parámetros de la variable de sistema ETH_W (tipo
ETH_W_STRUCT):
%MW Nombre de variable Tipo Comentario
n/d q_wResetCounter WORD La transición de 0 a 1 restablece todos los contadores
de ETH_R.
Para volver a restablecer, es necesario escribir 0 en
esta variable antes de que pueda llevarse a cabo otra
transición de 0 a 1.
n/d significa que no existe ninguna asignación de %MW predefinida para esta variable de sistema.
Estructura de TM3_MODULE_R
Descripción general
En esta sección se enumeran y describen las diversas variables de sistema
incluidas en la estructura TM3_MODULE_R.
TM3_MODULE_R[0...13]: variables del sistema de solo lectura de
los módulos TM3
Introducción
TM3_MODULE_R es una matriz de 14 variables de tipo TM3_MODULE_R_
STRUCT. Cada elemento de la matriz devuelve las variables del sistema de
diagnóstico para el módulo de extensión TM3 correspondiente.
En el caso de Modicon M241 Logic Controller:
•TM3_MODULE_R[0] hace referencia al módulo de extensión TM3 0
• ...
•TM3_MODULE_R[13] hace referencia al módulo de extensión TM3 13
Estructura de variables
En la siguiente tabla se describen los parámetros de la variable del sistema TM3_
MODULE_R[0...13]:
%MW Nombre de variable Tipo Comentario
n/d i_wProductID WORD ID del módulo de extensión TM3.
n/d i_wModuleState TM3_MODULE_
STATE, página 53
Describe el estado del módulo TM3.
n/d significa que no existe ninguna asignación de %MW predefinida para esta variable del sistema.
22 EIO0000003068.04

M241 Variables del sistema Funciones y variables de sistema
Estructura de TM3_BUS_W
Descripción general
En esta sección se enumeran y describen las diversas variables de sistema
incluidas en la estructura TM3_BUS_W.
TM3_BUS_W: variables de sistema de bus TM3
Estructura de la variable
En esta tabla se describen los parámetros de la variable de sistema TM3_BUS_W
(tipo TM3_BUS_W_STRUCT):
Nombre de variable Tipo Comentario
q_wIOBusErrPassiv TM3_BUS_W_IOBUSERRMOD Cuando está establecido en ERR_ACTIVE (el valor predeterminado), los
errores de bus detectados en los módulos de extensión TM3 detienen los
intercambios de E/S.
Cuando está establecido en ERR_PASSIVE, se utiliza la gestión de
errores de E/S pasivas: el controlador intenta seguir intercambiando
buses de datos.
q_wIOBusRestart TM3_BUS_W_IOBUSINIT Cuando se establece en 1, reinicia el bus de extensión de E/S. Esto solo
es necesario cuando q_wIOBusErrPassiv está configurado en ERR_
ACTIVE y al menos un bit de TM3_MODULE_R[i] .i_wModuleState está
configurado en TM3_BUS_ERROR.
Para obtener más información, consulte Descripción general de la configuración
de E/S (consulte Modicon M241 Logic Controller, Guía de programación).
Estructura de PROFIBUS_R
PROFIBUS_R: Variables de sistema de solo lectura de PROFIBUS
Estructura de la variable
En esta tabla se describen los parámetros de la variable de sistema PROFIBUS_
R(tipo PROFIBUS_R_STRUCT):
%MW Nombre de variable Tipo Comentario
n/d i_wPNOIdentifier WORD Código de identificación de esclavo (de 1 a 126).
n/d i_wBusAdr UINT Dirección del esclavo PROFIBUS.
n/d i_CommState UDINT Valor que representa el estado del módulo PROFIBUS:
• 0x00: No determinable
• 0x01: Sin configurar
• 0x02: Detención
• 0x03: Inactivo
• 0x04: Funcionamiento
n/d i_CommError UDINT Si el valor no es cero, significa que el módulo Profibus
detectó un error de comunicación indicado mediante un
código de error (consulte Módulos de extensión TM4 -
Guía de programación).
n/d i_ErrorCount UDINT Contador de error de comunicación.
n/d significa que no existe ninguna asignación de %MW predefinida para esta variable de sistema.
EIO0000003068.04 23

Funciones y variables de sistema M241 Variables del sistema
Estructura de CART_R
CART_R_STRUCT: Variables de sistema de solo lectura del
cartucho
Estructura de la variable
En la siguiente tabla se describen los parámetros de la variable de sistema
CART_R_STRUCT:
%MW Nombre de variable Tipo Comentario
n/d i_uiModuleId CART_R_MODULE_
ID, página 54
ID del módulo
n/d i_uifirmwareVersion UINT Versión del firmware
n/d i_udiCartState CART_R_STATE,
página 55
Estado del cartucho
n/d significa que no existe ninguna asignación de %MW predefinida para esta variable de sistema.
24 EIO0000003068.04

Funciones de sistema M241, Funciones y variables de sistema
Funciones de sistema M241,
Descripción general
En este capítulo se describen las funciones de sistema incluidas en la biblioteca
PLCSystem de M241.
Funciones de lectura M241
Descripción general
En este apartado se describen las funciones de lectura incluidas en la biblioteca
PLCSystem de M241.
GetImmediateFastInput: leer entrada de una E/S experta
incrustada
Descripción de la función
Esta función devuelve el valor de la entrada, que puede ser diferente del valor
lógico de esa entrada. El valor se lee directamente desde el hardware en el
momento de la llamada de la función. Esta función solo permite acceder a I0
hasta I7.
Representación gráfica
Representación IL y ST
Para ver la representación general en lenguaje IL o ST, consulte el capítulo
Representación de funciones y de bloques de funciones, página 58.
Descripción de variables de E/S
En la siguiente tabla se describen las variables de entrada:
Entrada Tipo Comentario
Block INT No se utiliza.
Input INT Índice de entrada para leer de 0 a 7.
En la siguiente tabla se describe la variable de salida:
Salida Tipo Comentario
GetImmediateFastInput BOOL Valor de la entrada <Input>: FALSE/
TRUE.
EIO0000003068.04 25

Funciones y variables de sistema Funciones de sistema M241,
En la siguiente tabla se describen las variables de entrada/salida:
Entrada/salida Tipo Comentario
Error BOOL FALSE= funcionamiento correcto.
TRUE= error de funcionamiento, la
función devuelve un valor no válido.
ErrID IMMEDIATE_ERR_TYPE,
página 55 Código del error en la operación
cuando Error es TRUE.
GetRtc: obtener el reloj en tiempo real
Descripción de la función
Esta función devuelve la hora del RTC en segundos en formato UNIX (tiempo
transcurrido en segundos desde el 1 de enero de 1970 a las 00:00 UTC).
Representación gráfica
Representación IL y ST
Para ver la representación general en lenguaje IL o ST, consulte el capítulo
Representación de funciones y de bloques de funciones, página 58.
Descripción de variables de E/S
En la siguiente tabla se describe la variable de E/S:
Salida Tipo Comentario
GetRtc DINT RTC en segundos en formato UNIX.
Ejemplo
En el siguiente ejemplo se describe cómo obtener el valor del RTC:
VAR
MyRTC : DINT := 0;
END_VAR
MyRTC := GetRtc();
IsFirstMastColdCycle: indicar si este ciclo es el primer ciclo
MAST del arranque en frío
Descripción de la función
Esta función devuelve TRUE durante el primer ciclo MAST después de un
arranque en frío (primer ciclo tras la descarga o el restablecimiento en frío).
26 EIO0000003068.04

Funciones de sistema M241, Funciones y variables de sistema
Representación gráfica
Representación IL y ST
Para ver la representación general en lenguaje IL o ST, consulte el capítulo
Representación de funciones y de bloques de funciones, página 58.
Descripción de variables de E/S
En esta tabla se describe la variable de salida:
Salida Tipo Comentario
IsFirstMastColdCycle BOOL TRUE durante el primer ciclo de tarea MAST
después de un arranque en frío.
Ejemplo
Consulte la función IsFirstMastCycle, página 27.
IsFirstMastCycle: indicar si este ciclo es el primer ciclo MAST
Descripción de la función
Esta función devuelve TRUE durante el primer ciclo MAST después de un
arranque.
Representación gráfica
Representación IL y ST
Para ver la representación general en lenguaje IL o ST, consulte el capítulo
Representación de funciones y de bloques de funciones, página 58.
Descripción de variables de E/S
Salida Tipo Comentario
IsFirstMastCycle BOOL TRUE durante el primer ciclo de tarea MAST
después de un arranque.
EIO0000003068.04 27

Funciones y variables de sistema Funciones de sistema M241,
Ejemplo
En este ejemplo se describen las tres funciones utilizadas a la vez:
IsFirstMastCycle,IsFirstMastColdCycle yIsFirstMastWarmCycle.
Use este ejemplo en la tarea MAST. De lo contrario, se puede ejecutar varias
veces o posiblemente nunca (puede llamarse varias veces a una tarea adicional o
no llamarse durante un ciclo de tarea MAST):
VAR
MyIsFirstMastCycle : BOOL;
MyIsFirstMastWarmCycle : BOOL;
MyIsFirstMastColdCycle : BOOL;
END_VAR
MyIsFirstMastWarmCycle := IsFirstMastWarmCycle();
MyIsFirstMastColdCycle := IsFirstMastColdCycle();
MyIsFirstMastCycle := IsFirstMastCycle();
IF (MyIsFirstMastWarmCycle) THEN
(*This is the first Mast Cycle after a Warm Start: all
variables are set to their initialization values except the
Retain variables*)
(*=> initialize the needed variables so that your
application runs as expected in this case*)
END_IF;
IF (MyIsFirstMastColdCycle) THEN
(*This is the first Mast Cycle after a Cold Start: all
variables are set to their initialization values including
the Retain Variables*)
(*=> initialize the needed variables so that your
application runs as expected in this case*)
END_IF;
IF (MyIsFirstMastCycle) THEN
(*This is the first Mast Cycle after a Start, i.e. after a
Warm or Cold Start as well as STOP/RUN commands*)
(*=> initialize the needed variables so that your
application runs as expected in this case*)
END_IF;
IsFirstMastWarmCycle: indicar si este ciclo es el primer ciclo
MAST del arranque en caliente
Descripción de la función
Esta función devuelve TRUE durante el primer ciclo MAST después de un
arranque en caliente.
Representación gráfica
Representación IL y ST
Para ver la representación general en lenguaje IL o ST, consulte el capítulo
Representación de funciones y de bloques de funciones, página 58.
28 EIO0000003068.04

Funciones de sistema M241, Funciones y variables de sistema
Descripción de variables de E/S
En esta tabla se describe la variable de salida:
Salida Tipo Comentario
IsFirstMastWarmCycle BOOL TRUE durante el primer ciclo de tarea MAST
después de un arranque en caliente.
Ejemplo
Consulte la función IsFirstMastCycle, página 27.
Funciones de escritura de M241
Descripción general
En este capítulo se describen las funciones de escritura incluidas en la biblioteca
M241 PLCSystem.
InhibitBatLed: Activa o desactiva el indicador LED de la batería
Descripción de la función
Esta función activa o desactiva la visualización del indicador LED de la batería,
independientemente de su nivel de carga.
Representación gráfica
Representación IL y ST
Para ver la representación general en lenguaje IL o ST, consulte el capítulo
Representación de funciones y de bloques de funciones, página 58.
Descripción de variables de E/S
En la siguiente tabla se describe la variable de entrada:
Entrada Tipo Comentario
Inhibit BOOL Si es TRUE, desactiva la visualización del
indicador LED de la batería.
Si es FALSE, activa habilita la visualización del
indicador LED de la batería.
InhibitBatLed
InhibitBOOLInhibitBatLed INT
EIO0000003068.04 29

Funciones y variables de sistema Funciones de sistema M241,
En la siguiente tabla se describe la variable de salida:
Salida Tipo Comentario
InhibitBatLed INT Un valor de 0 indica que no se ha detectado
ningún error al ejecutar el bloque de funciones.
Un valor distinto de cero indica que se ha
detectado un error.
Ejemplo
En este ejemplo se describe cómo desactivar la visualización del indicador LED
de la batería:
(* Disable Battery LED Information *)
SEC.InhibitBatLed(TRUE);
PhysicalWriteFastOutputs: escribir salida rápida de una E/S
experta incrustada
Descripción de la función
Esta función escribe un estado en las salidas de Q0 a Q3 en el momento de la
llamada de la función.
Representación gráfica
Representación IL y ST
Para ver la representación general en lenguaje IL o ST, consulte el capítulo
Representación de funciones y de bloques de funciones, página 58.
Descripción de variables de E/S
En la siguiente tabla se describen las variables de entrada:
Entrada Tipo Comentario
Q0Value BOOL Valor solicitado para la salida 0.
Q1Value BOOL Valor solicitado para la salida 1.
Q2Value BOOL Valor solicitado para la salida 2.
Q3Value BOOL Valor solicitado para la salida 3.
En la siguiente tabla se describe la variable de salida:
Salida Tipo Comentario
PhysicalWriteFastOutputs WORD Valor de salida de la función.
30 EIO0000003068.04

Funciones de sistema M241, Funciones y variables de sistema
NOTA: Solo son importantes los cuatro primeros bits del valor de salida, y se
utilizan como campo de bit para indicar si se escribe la salida.
Si el bit correspondiente a la salida es 1, la salida se escribe correctamente.
Si el bit correspondiente a la salida es 0, la salida no se escribe porque ya la
utiliza una función experta.
Si el bit correspondiente a la salida es 1111 bin, las cuatro salidas se escriben
correctamente.
Si el bit correspondiente a la salida es 1110 bin, Q0 no se escribe porque lo
utiliza un generador de frecuencias.
NOTA: Los valores se aplican al principio y al final de un ciclo de
procesamiento. La función aplica un valor dentro del ciclo.
NOTA: Si se asigna una variable a más de una de las salidas incrustadas, la
última (ordenada de Q0 a Q3) establece el valor en la variable al final de la
ejecución del bloque de funciones.
SetRTCDrift: Establecer el valor de compensación en el RTC
Descripción de la función
Esta función acelera o ralentiza la frecuencia del RTC para dar control a la
aplicación para compensar el RTC, en función del entorno de funcionamiento
(temperatura, etc.). El valor de compensación se indica en segundos por semana.
Puede ser positivo (acelerar) o negativo (ralentizar).
NOTA: La función SetRTCDrift solo debe llamarse una vez. Con cada nueva
llamada, se reemplaza el valor de compensación por el nuevo. El valor se
mantendrá en el hardware del controlador mientras el RTC reciba
alimentación de la red eléctrica o por medio de la batería. Si se retiran la
batería y la fuente de alimentación, el valor de compensación del RTC no
estará disponible.
Representación gráfica
Representación IL y ST
Para ver la representación general en lenguaje IL o ST, consulte el capítulo
Representación de funciones y de bloques de funciones, página 58.
Descripción de variables de E/S
En esta tabla se describen los parámetros de entrada:
Entradas Tipo Comentario
RtcDrift SINT (-36..73) Corrección en segundos por semana (de –36
a +73).
NOTA: Los parámetros Day,Hour yMinute se utilizan únicamente para
garantizar la compatibilidad con versiones anteriores.
EIO0000003068.04 31

Funciones y variables de sistema Funciones de sistema M241,
NOTA: Si el valor introducido para RtcDrift sobrepasa el límite, el firmware del
controlador definirá el valor en el máximo.
En esta tabla se describe la variable de salida:
Salida Tipo Comentario
SetRTCDrift RTCSETDRIFT_ERROR,
página 55 Devuelve RTC_OK (00 hex) si el comando es
correcto; en caso contrario, devuelve el código
ID del error detectado.
Ejemplo
En este ejemplo, la función únicamente se invoca durante el primer ciclo de la
tarea MAST. Acelera el RTC 4 segundos a la semana (18 segundos al mes).
VAR
MyRTCDrift : SINT (-36..+73) := 0;
MyDay : sec.DAY_OF_WEEK;
MyHour : sec.HOUR;
MyMinute : sec.MINUTE;
END_VAR
IF IsFirstMastCycle() THEN
MyRTCDrift := 4;
MyDay := 0;
MyHour := 0;
MyMinute := 0;
SetRTCDrift(MyRTCDrift, MyDay, MyHour, MyMinute);
END_IF
Funciones de usuario de M241
Descripción general
En esta sección se describen las funciones FB_Control_Clone,DataFileCopy y
ExecuteScript incluidas en la biblioteca M241 PLCSystem.
FB_ControlClone: clonar el controlador
Descripción del bloque de funciones
La clonación es posible de forma predeterminada mediante la tarjeta SD o el
Asistente del controlador. Cuando los derechos de usuario están habilitados y
se deniega el derecho de visualización ExternalCmd para el grupo
ExternalMedia, no se permite la función de clonación. En este caso, el bloque de
funciones habilitará la funcionalidad de clonación una vez cuando se vuelva a
encender el controlador.
NOTA: Puede elegir si incluir los derechos de usuario en el clon en la página
Gestión de clones del servidor web (consulte Modicon M241 Logic
Controller, Guía de programación).
En esta tabla se muestra cómo configurar el bloque de funciones y los derechos
de usuario:
Ajuste del bloque de
funciones Con derechos de usuario
habilitados Con derechos de usuario
deshabilitados
xEnable = 1 Clonación permitida Clonación permitida
xEnable = 0 Clonación no permitida Clonación no permitida
32 EIO0000003068.04

Funciones de sistema M241, Funciones y variables de sistema
Representación gráfica
Representación IL y ST
Para ver la representación general en lenguaje IL o ST, consulte el capítulo
Representación de funciones y de bloques de funciones, página 58.
Descripción de variables de E/S
En la siguiente tabla se describen las variables de entrada:
Entrada Tipo Comentario
xEnable BOOL Si está ajustada en TRUE, habilita la funcionalidad de clonación
una vez.
Si está ajustada en FALSE, deshabilita la funcionalidad de
clonación.
En la siguiente tabla se describen las variables de salida:
Salida Tipo Comentario
xError UDINT Un valor de 0indica que no se ha detectado ningún error al
ejecutar el bloque de funciones. Un valor distinto de cero indica
que se ha detectado un error.
DataFileCopy: copiar comandos de archivo
Descripción del bloque de funciones
Este bloque de funciones copia los datos de la memoria en un archivo y
viceversa. El archivo se encuentra en el sistema de archivos interno o en un
sistema de archivos externo (tarjeta SD).
El bloque de funciones DataFileCopy puede:
• Leer datos de un archivo formateado.
• Copiar los datos de la memoria en un archivo formateado. Para obtener más
información, consulte Non-Volatile Memory Organization (see Modicon M241
Logic Controller, Programming Guide).
Representación gráfica
EIO0000003068.04 33

Funciones y variables de sistema Funciones de sistema M241,
Representación IL y ST
Para ver la representación general en lenguaje IL o ST, consulte el capítulo
Representación de funciones y de bloques de funciones, página 58.
Descripción de variables de E/S
En esta tabla se describen las variables de entrada:
Entrada Tipo Comentario
xExecute BOOL En el flanco ascendente, inicia la ejecución del bloque de funciones.
En el flanco descendente, restablece las salidas del bloque de funciones cuando finaliza
cualquier ejecución en curso.
NOTA: Con el flanco descendente, la función continúa hasta que concluye su ejecución y
actualiza sus salidas. Las salidas se conservan durante un ciclo y se restablecen.
sFileName STRING Nombre de archivo sin extensión (la extensión .DTA se agrega automáticamente). Utilice
solamente caracteres alfanuméricos (mayúsculas, minúsculas o números).
xRead BOOL TRUE: copiar datos del archivo identificado por sFileName en la memoria interna del
controlador.
FALSE: copiar datos de la memoria interna del controlador en el archivo identificado por
sFileName.
xSecure BOOL TRUE: la dirección MAC siempre se almacena en el archivo. Solo un controlador con la misma
dirección MAC podrá leer el archivo.
FALSE: otro controlador con el mismo tipo de memoria puede leer desde el archivo.
iLocation INT 0: la ubicación del archivo en el sistema de archivos interno es /usr/DTA.
1: la ubicación del archivo en el sistema de archivos externo (tarjeta SD) es /usr/DTA.
NOTA: Si el archivo no existe todavía en el directorio, se creará.
uiSize UINT Indica el tamaño en bytes. El máximo son 65 534 bytes.
Utilice solamente direcciones de variables conformes con IEC 61131-3 (variables, matrices,
estructuras); por ejemplo:
Variable : int;
uiSize := SIZEOF (Variable);
dwAdd DWORD Indica la dirección de la memoria desde la que leerá o en la que escribirá la función.
Utilice solamente direcciones de variables conformes con IEC 61131-3 (variables, matrices,
estructuras); por ejemplo:
Variable : int;
dwAdd := ADR (Variable);
ADVERTENCIA
FUNCIONAMIENTO NO DESEADO DEL EQUIPO
Compruebe que el tamaño de la ubicación de la memoria sea el adecuado y
que el tipo de archivo sea el correcto antes de copiar el archivo en la memoria.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
En esta tabla se describen las variables de salida:
Salida Tipo Comentario
xDone BOOL TRUE = indica que la acción se ha llevado a cabo correctamente.
xBusy BOOL TRUE = indica que el bloque de funciones está en ejecución.
xError BOOL TRUE = indica que se ha detectado un error y el bloque de funciones ha anulado la acción.
eError DataFileCopyError,
página 49
Indica el tipo de error de copia de archivo de datos que se ha detectado.
34 EIO0000003068.04

Funciones de sistema M241, Funciones y variables de sistema
NOTA: Si modifica los datos de la memoria (variables, matrices, estructuras)
que se utilizan para escribir el archivo, se producirá un error de integridad de
CRC.
Ejemplo
En este ejemplo se describe cómo copiar comandos de archivo:
VAR
LocalArray : ARRAY [0..29] OF BYTE;
myFileName: STRING := ‘exportfile’;
EXEC_FLAG: BOOL;
DataFileCopy: DataFileCopy;
END_VAR
DataFileCopy(
xExecute:= EXEC_FLAG,
sFileName:= myFileName,
xRead:= FALSE,
xSecure:= FALSE,
iLocation:= DFCL_INTERNAL,
uiSize:= SIZEOF(LocalArray),
dwAdd:= ADR(LocalArray),
xDone=> ,
xBusy=> ,
xError=> ,
eError=> );
ExecuteScript: ejecutar comandos de script
Descripción del bloque de funciones
Esta función puede ejecutar los siguientes comandos de script de la tarjeta SD:
•Download
•Upload
•SetNodeName
•Delete
•Reboot
•ChangeModbusPort
Para obtener información sobre el formato de archivo de script requerido,
consulte Archivos de script para tarjetas SD (consulte Modicon M241 Logic
Controller, Guía de programación).
Representación gráfica
Representación IL y ST
Para ver la representación general en lenguaje IL o ST, consulte el capítulo
Representación de funciones y de bloques de funciones, página 58.
EIO0000003068.04 35

Funciones y variables de sistema Funciones de sistema M241,
Descripción de variables de E/S
En esta tabla se describen las variables de entrada:
Entrada Tipo Comentario
xExecute BOOL Cuando se detecta un flanco ascendente, inicia la ejecución del bloque de funciones.
Cuando se detecta un flanco descendente, restablece las salidas del bloque de funciones cuando
finaliza cualquier ejecución en curso.
NOTA: Con el flanco descendente, la función continúa hasta que concluye su ejecución y
actualiza sus salidas. Las salidas se conservan durante un ciclo y se restablecen.
sCmd STRING Sintaxis de comando de script de la tarjeta SD.
No se permiten ejecuciones de comando simultáneas: si se ejecuta un comando desde otro bloque
de funciones o desde un script de la tarjeta SD, el bloque de funciones pone el comando en cola y
no lo ejecuta inmediatamente.
NOTA: Se considera que un script de tarjeta SD ejecutado desde una tarjeta SD se estará
ejecutando hasta que se extraiga la tarjeta SD.
En esta tabla se describen las variables de salida:
Salida Tipo Comentario
xDone BOOL TRUE indica que la acción se ha completado correctamente.
xBusy BOOL TRUE indica que el bloque de funciones se está ejecutando.
xError BOOL TRUE indica la detección de errores; el bloque de funciones anula la acción.
eError ExecuteScriptE-
rror, página 50 Indica el tipo de error detectado en la ejecución del script.
Ejemplo
En este ejemplo se describe cómo ejecutar un comando de script Upload:
VAR
EXEC_FLAG: BOOL;
ExecuteScript: ExecuteScript;
END_VAR
ExecuteScript(
xExecute:= EXEC_FLAG,
sCmd:= ‘Upload "/usr/Syslog/*"’,
xDone=> ,
xBusy=> ,
xError=> ,
eError=> );
Funciones de espacio en disco de M241
Descripción general
En esta sección se describen las funciones de espacio en disco incluidas en esta
biblioteca.
FC_GetFreeDiskSpace: Obtiene el espacio libre de la memoria
Descripción de la función
Esta función recupera la cantidad de espacio libre de memoria de un soporte de
memoria (disco de usuario, disco de sistema, tarjeta SD) en bytes.
36 EIO0000003068.04

Funciones de sistema M241, Funciones y variables de sistema
El nombre del soporte de memoria se transfiere:
• Disco de usuario = "/usr"
• Disco de sistema = "/sys"
• Tarjeta SD = "/sd0"
No se puede acceder al espacio libre en la memoria de un dispositivo remoto. Si
se especifica como parámetro un dispositivo remoto, la función devuelve "-1".
Representación gráfica
Representación IL y ST
Para ver la representación general en lenguaje IL o ST, consulte el capítulo
Representación de funciones y de bloques de funciones, página 58.
Descripción de variables de E/S
En esta tabla se describen las variables de entrada:
Input Tipo de datos Descripción
i_sVolumeName STRING[80] Nombre del dispositivo a cuyo espacio libre en la
memoria se debe acceder
iq_uliFreeDiskSpace ULINT Espacio libre en la memoria en bytes
En esta tabla se describen las variables de salida:
Salida Tipo de datos Descripción
FC_GetFreeDiskSpace DINT 0: La cantidad de espacio de memoria libre se
recuperó correctamente.
-1: Error al intentar acceder a la cantidad de
memoria libre. Por ejemplo, se ha seleccionado un
dispositivo no válido o un dispositivo remoto.
-318: Parámetro no válido (i_sVolumeName)
FC_GetLabel: Obtiene la etiqueta de memoria
Descripción de la función
Esta función recupera la etiqueta de un soporte de memoria. Si un dispositivo no
tiene etiqueta, se devuelve una cadena vacía.
El nombre del soporte de memoria (disco de usuario, disco de sistema, tarjeta
SD) se transfiere:
• Disco de usuario = "/usr"
• Disco de sistema = "/sys"
• Tarjeta SD = "/sd0"
EIO0000003068.04 37

Funciones y variables de sistema Funciones de sistema M241,
Representación gráfica
Representación IL y ST
Para ver la representación general en lenguaje IL o ST, consulte el capítulo
Representación de funciones y de bloques de funciones, página 58.
Descripción de variables de E/S
En esta tabla se describen las variables de entrada:
Input Tipo de datos Descripción
i_sVolumeName STRING[80] Nombre del dispositivo a cuya etiqueta se debe
acceder
iq_sLabel STRING[11] Etiqueta del dispositivo
En esta tabla se describen las variables de salida:
Salida Tipo de datos Descripción
FC_GetLabel DINT 0: La etiqueta se recuperó correctamente.
-1: Error al acceder a la etiqueta.
-318: Parámetro no válido
FC_GetTotalDiskSpace: Obtiene el tamaño de la memoria
Descripción de la función
Esta función permite recuperar el tamaño de un soporte de memoria (disco de
usuario, disco de sistema, tarjeta SD) en bytes.
El nombre del soporte de memoria se transfiere:
• Disco de usuario = "/usr"
• Disco de sistema = "/sys"
• Tarjeta SD = "/sd0"
No se puede acceder al tamaño de un dispositivo remoto. Si se especifica como
parámetro un dispositivo remoto, la función devuelve "-1".
Representación gráfica
Representación IL y ST
Para ver la representación general en lenguaje IL o ST, consulte el capítulo
Representación de funciones y de bloques de funciones, página 58.
38 EIO0000003068.04

Funciones de sistema M241, Funciones y variables de sistema
Descripción de variables de E/S
En esta tabla se describen las variables de entrada:
Input Tipo de datos Descripción
i_sVolumeName STRING[80] Nombre del dispositivo a cuyo tamaño de memoria
se debe acceder
iq_uliTotalDiskSpace ULINT El tamaño del soporte de la memoria en bytes
En esta tabla se describen las variables de salida:
Salida Tipo de datos Descripción
FC_GetTotalDiskSpace DINT 0: El tamaño se recuperó correctamente.
-1: Error al leer el tamaño.
-318: Al menos uno de los parámetros no es válido.
Funciones de lectura TM3
Descripción general
En este apartado se describen las funciones de lectura TM3 incluidas en la
biblioteca M241 PLCSystem.
TM3_GetModuleBusStatus: obtener estado del bus del módulo
TM3
Descripción de la función
Esta función devuelve el estado del bus del módulo. El índice del módulo se
proporciona como parámetro de entrada.
Representación gráfica
Representación IL y ST
Para ver la representación general en lenguaje IL o ST, consulte el capítulo
Representación de funciones y de bloques de funciones, página 58.
Descripción de variables de E/S
En la siguiente tabla se describe la variable de entrada:
Entrada Tipo Comentario
ModuleIndex BYTE Índice del módulo (0 para la primera
expansión, 1 para la segunda, etc.).
EIO0000003068.04 39

Funciones y variables de sistema Funciones de sistema M241,
En la siguiente tabla se describe la variable de salida:
Salida Tipo Comentario
TM3_GetModuleBusStatus TM3_ERR_
CODE, página 53 Devuelve TM3_OK (00 hex) si el comando es
correcto; en caso contrario, devuelve el
código ID del error detectado.
TM3_GetModuleFWVersion: Obtener la versión de firmware del
módulo TM3
Descripción de la función
Esta función devuelve la versión del firmware de un módulo TM3 especificado.
Representación gráfica
Representación IL y ST
Para ver la representación general en lenguaje IL o ST, consulte el capítulo
Representación de funciones y de bloques de funciones, página 58.
Descripción de variables de E/S
En la siguiente tabla se describen las variables de entrada:
Entrada Tipo Comentario
ModuleIndex BYTE Índice del módulo (0 para la primera
expansión, 1 para la segunda, etc.).
En la siguiente tabla se describe la variable de salida:
Salida Tipo Comentario
TM3_GetModuleFWVersion UINT Devuelve la versión del firmware del
módulo, o FFFF hex si no se puede leer la
información.
Por ejemplo, 001A hex indica la versión de
firmware 26.
TM3_GetModuleInternalStatus: obtener estado interno del
módulo TM3
Descripción de la función
Esta función lee selectivamente el estado del canal de E/S de un módulo TM3
analógico o de temperatura, que se indica mediante ModuleIndex. El bloque de
40 EIO0000003068.04

Funciones de sistema M241, Funciones y variables de sistema
funciones escribe el estado de cada canal solicitado a partir de la ubicación de la
memoria señalada por pStatusBuffer.
NOTA: Este bloque de funciones está diseñado para usarse con módulos de
E/S analógicos y de temperatura. Para obtener información de estado de los
módulos de E/S digitales, consulte TM3_GetModuleBusStatus, página 39.
NOTA: Es posible actualizar el valor de los bytes de diagnóstico ejecutando la
función TM3_GetModuleInternalStatus solo si el parámetro Estado
habilitado de la ficha Configuración de E/S está desactivado.
Representación gráfica
Representación IL y ST
Para ver la representación general en lenguaje IL o ST, consulte el capítulo
Representación de funciones y de bloques de funciones, página 58.
Descripción de variables de E/S
Cada canal de E/S analógico o de temperatura del módulo solicitado requiere un
byte de memoria. Si no hay suficiente memoria asignada al búfer para el número
de estados de canal del módulo de E/S solicitado, es posible que la función
sobrescriba la memoria asignada para otros fines o quizás intente sobrescribir un
área restringida de memoria.
ADVERTENCIA
FUNCIONAMIENTO NO DESEADO DEL EQUIPO
Asegúrese de que pStatusBuffer apunte a un área de memoria que haya sido
suficientemente asignada para el número de canales que se van a leer.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
En la siguiente tabla se describen las variables de entrada:
Entrada Tipo Comentario
ModuleIndex BYTE Índice del módulo de extensión (0 para
el módulo más próximo al controlador, 1
para el segundo más próximo y así
sucesivamente)
StatusOffset BYTE Offset del primer estado que se debe
leer en la tabla de estado.
StatusSize BYTE Número de bytes que se deben leer en
la tabla de estado.
pStatusBuffer POINTER TO BYTE Búfer que contiene la tabla de estado
de lectura (IBStatusIWx/IBStatusQWx).
EIO0000003068.04 41

Funciones y variables de sistema Funciones de sistema M241,
En la siguiente tabla se describe la variable de salida:
Salida Tipo Comentario
TM3_GetModuleInternalStatus TM3_ERR_CODE,
página 53 Devuelve TM3_NO_ERR (00 hex) si el
comando es correcto. En caso
contrario, devuelve el código ID del
error. A los efectos de este bloque de
funciones, cualquier valor devuelto
distinto de cero indica que el módulo no
es compatible con la solicitud de estado
o que el módulo tiene otros problemas
de comunicación.
Ejemplo
En los siguientes ejemplos se describe cómo obtener el estado interno del
módulo:
VAR
TM3AQ2_Channel_0_Output_Status: BYTE;
END_VAR
TM3AQ2 is on position 1
Status of channel 0 is at offset 0
We read 1 channel
TM3_GetModuleInternalStatus(1, 0, 1, ADR(TM3AQ2_Channel_0_
Output_Status));
status of channel 0 is in TM3AQ2_Channel_0_Output_Status
Módulo TM3AQ2 (2 salidas)
Obtención del estado de la primera salida QW0
•StatusOffset = 0 (0 entradas x 2)
•StatusSize = 1 (1 estado para leer)
•pStatusBuffer debe tener al menos 1 byte
VAR
TM3AM6_Channels_1_2_Input_Status: ARRAY[1..2] OF BYTE;
END_VAR
TM3AM6 is on position 1
Status of channel 1 is at offset 1
We read 2 consecutive channels
TM3_GetModuleInternalStatus(1, 1, 2, ADR(TM3AM6_Channels_1_
2_Input_Status));
status of channel 1 is in TM3AM6_Channels_1_2_Input_Status
[1]
status of channel 2 is in TM3AM6_Channels_1_2_Input_Status
[2]
Módulo TM3AM6 (4 entradas, 2 salidas)
Obtención del estado de la entrada IW1 e IW2 (IW0 es la primera)
•StatusOffset = 1 (1 para omitir el estado IW0)
•StatusSize = 2 (2 estados para leer)
•pStatusBuffer debe tener al menos 2 bytes
42 EIO0000003068.04

Tipos de datos de la biblioteca PLCSystem de M241 Funciones y variables de sistema
Tipos de datos de la biblioteca PLCSystem de M241
Descripción general
En este capítulo se describen los tipos de datos de la biblioteca PLCSystem de
M241.
Hay dos tipos de datos disponibles:
• Los tipos de datos de variables de sistema los utilizan las variables de
sistema, página 11 de la biblioteca PLCSystem de M241 (PLC_R,PLC_W...).
• Los tipos de datos de funciones de sistema los utilizan las funciones de
sistema, página 25 de lectura/escritura de la biblioteca PLCSystem de M241.
Tipos de datos de variables de sistema de PLC_RW
Descripción general
En esta sección se enumeran y describen los tipos de datos de las variables de
sistema incluidos en las estructuras PLC_R yPLC_W.
EIO0000003068.04 43

Funciones y variables de sistema Tipos de datos de la biblioteca PLCSystem de M241
PLC_R_APPLICATION_ERROR: códigos de estado de error
detectado de la aplicación
Descripción del tipo enumerado
El tipo de datos de enumeración PLC_R_APPLICATION_ERROR contiene los
siguientes valores:
Enumerador Valor Comentario Qué hacer
PLC_R_APP_ERR_UNKNOWN FFFF hex Error no definido detectado. Póngase en contacto con su
representante de servicio de
Schneider Electric.
PLC_R_APP_ERR_NOEXCEPTION 0000 hex No se ha detectado ningún error. –
PLC_R_APP_ERR_WATCHDOG 0010 hex Ha caducado el watchdog de la
tarea. Compruebe la aplicación. Es
necesario un restablecimiento
para acceder a la modalidad Run
(ejecución).
PLC_R_APP_ERR_
HARDWAREWATCHDOG
0011 hex Ha caducado el watchdog de
sistema. Si el problema se reproduce,
verifique que no haya puertos de
comunicación configurados y
desconectados. De lo contrario,
actualice el firmware. Si el
problema persiste, póngase en
contacto con su representante
de servicio de Schneider Electric.
PLC_R_APP_ERR_IO_CONFIG_ERROR 0012 hex Se han detectado parámetros de
configuración de E/S incorrectos. La aplicación puede estar
dañada. Para resolver este
problema, utilice uno de los
siguientes métodos:
1. Compilar >Limpiar todo
2. Exporte/Importe la
aplicación.
3. Actualice EcoStruxure
Machine Experta la última
versión.
PLC_R_APP_ERR_UNRESOLVED_
EXTREFS
0018 hex Funciones no definidas detectadas. Elimine las funciones no
resueltas de la aplicación.
PLC_R_APP_ERR_IEC_TASK_CONFIG_
ERROR
0025 hex Se han detectado parámetros de
configuración de tareas incorrectos.
La aplicación puede estar
dañada. Para resolver este
problema, utilice uno de los
siguientes métodos:
1. Compilar >Limpiar todo
2. Exporte/Importe la
aplicación.
3. Actualice EcoStruxure
Machine Experta la última
versión.
PLC_R_APP_ERR_ILLEGAL_INSTRUCTION 0050 hex Instrucción no definida detectada. Para resolver el problema,
depure la aplicación.
PLC_R_APP_ERR_ACCESS_VIOLATION 0051 hex Intento de acceso al área de
memoria reservada. Para resolver el problema,
depure la aplicación.
PLC_R_APP_ERR_DIVIDE_BY_ZERO 0102 hex Detectada división de entero por
cero. Para resolver el problema,
depure la aplicación.
PLC_R_APP_ERR_PROCESSORLOAD_
WATCHDOG
0105 hex Las tareas de la aplicación han
sobrecargado el procesador. Reduzca la carga de trabajo de
la aplicación mejorando la
arquitectura de la aplicación.
Aumente la duración del ciclo de
tarea. Reduzca la frecuencia de
evento.
PLC_R_APP_ERR_DIVIDE_REAL_BY_
ZERO
0152 hex Detectada división de real por cero. Para resolver el problema,
depure la aplicación.
44 EIO0000003068.04

Tipos de datos de la biblioteca PLCSystem de M241 Funciones y variables de sistema
Enumerador Valor Comentario Qué hacer
PLC_R_APP_ERR_EXPIO_EVENTS_
COUNT_EXCEEDED
4E20 hex Se han detectado demasiados
eventos en E/S expertas.
Reduzca el número de tareas de
evento.
PLC_R_APP_ERR_APPLICATION_
VERSION_MISMATCH
4E21 hex Discrepancia detectada en la versión
de la aplicación. La versión de la aplicación en el
controlador lógico no coincide
con la versión en EcoStruxure
Machine Expert. Consulte
Aplicaciones (consulte
EcoStruxure Machine Expert,
Guía de programación).
PLC_R_BOOT_PROJECT_STATUS: códigos de estado del
proyecto de arranque
Descripción del tipo enumerado
El tipo de datos de enumeración PLC_R_BOOT_PROJECT_STATUS contiene
los siguientes valores:
Enumerador Valor Comentario
PLC_R_NO_BOOT_PROJECT 0000 hex El proyecto de arranque no existe en la memoria no volátil.
PLC_R_BOOT_PROJECT_CREATION_IN_
PROGRESS
0001 hex Se está creando el proyecto de arranque.
PLC_R_DIFFERENT_BOOT_PROJECT 0002 hex El proyecto de inicio en la memoria no volátil es distinto del cargado en la
memoria.
PLC_R_VALID_BOOT_PROJECT FFFF hex El proyecto de arranque de la memoria no volátil es el mismo que el
proyecto cargado en la memoria.
PLC_R_IO_STATUS: códigos de estado de E/S
Descripción del tipo enumerado
El tipo de datos de enumeración PLC_R_IO_STATUS contiene los siguientes
valores:
Enumerador Valor Comentario
PLC_R_IO_OK FFFF hex Las entradas/salidas están operativas.
PLC_R_IO_NO_INIT 0001 hex Las entradas/salidas no se han inicializado.
PLC_R_IO_CONF_FAULT 0002 hex Se han detectado parámetros de configuración de E/S incorrectos.
PLC_R_IO_SHORTCUT_FAULT 0003 hex Se ha detectado un cortocircuito de las entradas/salidas.
PLC_R_IO_POWER_SUPPLY_FAULT 0004 hex Se ha detectado un error de alimentación en las entradas/salidas.
EIO0000003068.04 45

Funciones y variables de sistema Tipos de datos de la biblioteca PLCSystem de M241
PLC_R_SDCARD_STATUS: códigos de estado de la ranura de la
tarjeta SD
Descripción del tipo enumerado
El tipo de datos de enumeración PLC_R_SDCARD_STATUS contiene los
siguientes valores:
Enumerador Valor Comentario
NO_SDCARD 0000 hex No se ha detectado ninguna tarjeta SD en la ranura o la ranura no está
conectada.
SDCARD_READONLY 0001 hex La tarjeta SD se encuentra en la modalidad de solo lectura.
SDCARD_READWRITE 0002 hex La tarjeta SD se encuentra en la modalidad de lectura/escritura.
SDCARD_ERROR 0003 hex Error detectado en la tarjeta SD. El archivo FwLog.txt contiene más
detalles sobre el error.
PLC_R_STATUS: códigos de estado del controlador
Descripción del tipo enumerado
El tipo de datos de la enumeración PLC_R_STATUS contiene los siguientes
valores:
Enumerador Valor Comentario
PLC_R_EMPTY 0000 hex El controlador no contiene ninguna aplicación.
PLC_R_STOPPED 0001 hex El controlador se ha detenido.
PLC_R_RUNNING 0002 hex El controlador está en ejecución.
PLC_R_HALT 0004 hex El controlador se encuentra en estado HALT (consulte el diagrama de
estado del controlador en la guía de programación [consulte Modicon
M241 Logic Controller, Guía de programación]).
PLC_R_BREAKPOINT 0008 hex El controlador se ha detenido en un punto de interrupción.
46 EIO0000003068.04

Tipos de datos de la biblioteca PLCSystem de M241 Funciones y variables de sistema
PLC_R_STOP_CAUSE: códigos de causa de transición de estado
RUN a otro estado
Descripción del tipo enumerado
El tipo de datos de enumeración PLC_R_STOP_CAUSE contiene los siguientes
valores:
Enumerador Valor Comentario Qué hacer
PLC_R_STOP_REASON_UNKNOWN 00 hex El valor inicial o la causa de la detención
no se pueden determinar. Póngase en contacto con
su representante local de
Schneider Electric.
PLC_R_STOP_REASON_HW_WATCHDOG 01 hex Detenido tras un timeout de watchdog de
hardware. Póngase en contacto con
su representante local de
Schneider Electric.
PLC_R_STOP_REASON_RESET 02 hex Detenido tras restablecimiento. Vea las opciones de
restablecimiento en el
diagrama de estado del
controlador.
PLC_R_STOP_REASON_EXCEPTION 03 hex Detenido tras excepción. Compruebe su aplicación
y corríjala si es necesario.
Consulte Watchdogs del
sistema y de tareas
(consulte Modicon M241
Logic Controller, Guía de
programación). Es
necesario un
restablecimiento para
acceder a la modalidad
Run (ejecución).
PLC_R_STOP_REASON_USER 04 hex Detenido tras una petición de usuario. Consulte Comando de
parada en Comandos de
transiciones de estado
(consulte Modicon M241
Logic Controller, Guía de
programación).
PLC_R_STOP_REASON_IECPROGRAM 05 hex Detenido después de una petición de
comando de programa (por ejemplo:
comando de control con parámetro PLC_
W.q_wPLCControl:=PLC_W_COMMAND.
PLC_W_STOP;).
–
PLC_R_STOP_REASON_DELETE 06 hex Detenido tras un comando de eliminación
de aplicación. Consulte la ficha
Aplicaciones del Editor
de dispositivos del
controlador (consulte
Modicon M241 Logic
Controller, Guía de
programación).
PLC_R_STOP_REASON_DEBUGGING 07 hex Detenido tras entrar en la modalidad de
depuración.
–
PLC_R_STOP_FROM_NETWORK_
REQUEST
0A hex Detenido tras una petición de la red, el
servidor web del controlador o el comando
PLC_W.
–
PLC_R_STOP_FROM_INPUT 0B hex Detención requerida por una entrada de
controlador.
–
PLC_R_STOP_FROM_RUN_STOP_SWITCH 0C hex Detención requerida por el interruptor del
controlador.
–
PLC_R_STOP_REASON_RETAIN_
MISMATCH
0D hex Detenido tras una prueba de
comprobación de contexto incorrecta
durante el reinicio.
Algunas variables
retenidas en la memoria
no volátil no existen en la
aplicación que se está
ejecutando.
Compruebe su aplicación,
corríjala si es necesario y
restablezca la aplicación
de arranque.
EIO0000003068.04 47

Funciones y variables de sistema Tipos de datos de la biblioteca PLCSystem de M241
Enumerador Valor Comentario Qué hacer
PLC_R_STOP_REASON_BOOT_APPLI_
MISMATCH
0E hex Detenido tras una comparación incorrecta
entre la aplicación de arranque y la
aplicación que se encontraba en la
memoria antes del reinicio.
Cree una aplicación de
arranque válida.
PLC_R_STOP_REASON_POWERFAIL 0F hex Detenido tras una interrupción de la
alimentación.
–
Para obtener más información sobre los motivos por los que se ha detenido el
controlador, consulte la descripción de los estados del controlador.
PLC_R_TERMINAL_PORT_STATUS: códigos de estado de la
conexión del puerto del programación
Descripción del tipo enumerado
El tipo de datos de enumeración PLC_R_TERMINAL_PORT_STATUS contiene
los siguientes valores:
Enumerador Valor Comentario
TERMINAL_NOT_CONNECTED 00 hex No hay ningún PC conectado al puerto de programación.
TERMINAL_CONNECTION_IN_PROGRESS 01 hex La conexión está en curso.
TERMINAL_CONNECTED 02 hex El PC está conectado al puerto de programación.
TERMINAL_ERROR 0F hex Error detectado durante la conexión.
PLC_R_TM3_BUS_STATE: Códigos de estado del bus TM3
Descripción del tipo enumerado
El tipo de datos de enumeración PLC_R_TM3_BUS_STATE contiene los
siguientes valores:
Enumerador Valor Comentario
TM3_CONF_ERROR 01 hex Error detectado debido a una discrepancia entre la configuración física y
la configuración de EcoStruxure Machine Expert.
TM3_OK 03 hex La configuración física y la configuración de EcoStruxure Machine Expert
coinciden.
TM3_POWER_SUPPLY_ERROR 04 hex Error detectado en la fuente de alimentación.
PLC_W_COMMAND: códigos de comando de control
Descripción del tipo enumerado
El tipo de datos de enumeración PLC_W_COMMAND contiene los siguientes
valores:
Enumerador Valor Comentario
PLC_W_STOP 0001 hex Comando para detener el controlador.
PLC_W_RUN 0002 hex Comando para ejecutar el controlador.
PLC_W_RESET_COLD 0004 hex Comando para iniciar un restablecimiento en frío del controlador.
PLC_W_RESET_WARM 0008 hex Comando para iniciar un restablecimiento en caliente del controlador.
48 EIO0000003068.04

Tipos de datos de la biblioteca PLCSystem de M241 Funciones y variables de sistema
Tipos de datos de variables de sistema de DataFileCopy
Descripción general
En esta sección se describen los tipos de datos de variables de sistema incluidos
en las estructuras DataFileCopy.
DataFileCopyError: códigos de error detectado
Descripción del tipo enumerado
El tipo de datos de enumeración DataFileCopyError contiene los siguientes
valores:
Enumerador Valor Descripción
ERR_NO_ERR 00 hex No se ha detectado ningún error.
ERR_FILE_NOT_FOUND 01 hex El archivo no existe.
ERR_FILE_ACCESS_REFUSED 02 hex No se puede abrir el archivo.
ERR_INCORRECT_SIZE 03 hex El tamaño de la petición es diferente del tamaño que se ha leído en el
archivo.
ERR_CRC_ERR 04 hex El CRC es incorrecto y se supone que el archivo está dañado.
ERR_INCORRECT_MAC 05 hex El controlador que intenta leer del archivo no tiene la misma dirección
MAC que la que se presenta en el archivo.
DataFileCopyLocation: códigos de ubicación
Descripción del tipo enumerado
El tipo de datos de enumeración DataFileCopyLocation contiene los siguientes
valores:
Enumerador Valor Descripción
DFCL_INTERNAL 00 hex El archivo de datos con la extensión DTA se encuentra en el directorio
/usr/Dta.
DFCL_EXTERNAL 01 hex El archivo de datos con la extensión DTA se encuentra en el directorio
/sd0/usr/Dta.
DFCL_TBD 02 hex No utilizado.
Tipos de datos de variables de sistema de ExecScript
Descripción general
En esta sección se describen los tipos de datos de variables de sistema incluidos
en las estructuras ExecScript.
EIO0000003068.04 49

Funciones y variables de sistema Tipos de datos de la biblioteca PLCSystem de M241
ExecuteScriptError: códigos de error detectado
Descripción del tipo enumerado
El tipo de datos de enumeración ExecuteScriptError contiene los siguientes
valores:
Enumerador Valor Descripción
CMD_OK 00 hex No se ha detectado ningún error.
ERR_CMD_UNKNOWN 01 hex El comando no es válido.
ERR_SD_CARD_MISSING 02 hex La tarjeta SD no está presente.
ERR_SEE_FWLOG 03 hex Se ha detectado un error durante la ejecución del comando, consulte
FwLog.txt. Para obtener más información, consulte Tipo de archivo
(consulte Modicon M241 Logic Controller, Guía de programación).
ERR_ONLY_ONE_COMMAND_ALLOWED 04 hex Se han intentado ejecutar diversos scripts simultáneamente.
CMD_BEING_EXECUTED 05 hex Ya hay un script en curso.
Tipos de datos de variables de sistema de ETH_RW
Descripción general
En esta sección se enumeran y describen los tipos de datos de las variables de
sistema incluidos en las estructuras ETH_R yETH_W.
ETH_R_FRAME_PROTOCOL: códigos de protocolo de
transmisión de tramas
Descripción del tipo enumerado
El tipo de datos de enumeración ETH_R_FRAME_PROTOCOL contiene los
siguientes valores:
Enumerador Valor Comentario
ETH_R_802_3 00 hex El protocolo utilizado para la transmisión de tramas es IEEE 802.3.
ETH_R_ETHERNET_II 01 hex El protocolo utilizado para la transmisión de tramas es Ethernet II.
ETH_R_IP_MODE: códigos de origen de la dirección IP
Descripción del tipo enumerado
El tipo de datos de enumeración ETH_R_IP_MODE contiene los siguientes
valores:
Enumerador Valor Comentario
ETH_R_STORED 00 hex Se utiliza la dirección IP almacenada.
ETH_R_BOOTP 01 hex Se usa el protocolo Bootstrap (BOOTP) para obtener una dirección IP.
ETH_R_DHCP 02 hex Se usa el protocolo DHCP para obtener una dirección IP.
ETH_DEFAULT_IP FF hex Se utiliza la dirección IP predeterminada.
50 EIO0000003068.04

Tipos de datos de la biblioteca PLCSystem de M241 Funciones y variables de sistema
ETH_R_PORT_DUPLEX_STATUS: códigos de modo de
transmisión
Descripción del tipo enumerado
El tipo de datos de enumeración ETH_R_PORT_DUPLEX_STATUS contiene los
siguientes valores:
Enumerador Valor Comentario
ETH_R_PORT_HALF_DUPLEX 00 hex Se utiliza la modalidad de transmisión semidúplex.
ETH_R_FULL_DUPLEX 01 hex Se utiliza la modalidad de transmisión de dúplex completo.
ETH_R_PORT_NA_DUPLEX 03 hex No se utiliza ninguna modalidad de transmisión de dúplex.
ETH_R_PORT_IP_STATUS: códigos de estado del puerto TCP/IP
Ethernet
Descripción del tipo enumerado
El tipo de datos de enumeración ETH_R_PORT_IP_STATUS contiene los
siguientes valores:
Enumerador Valor Comentario
WAIT_FOR_PARAMS 00 hex En espera de parámetros.
WAIT_FOR_CONF 01 hex En espera de configuración.
DATA_EXCHANGE 02 hex Listo para el intercambio de datos.
ETH_ERROR 03 hex Error detectado en el puerto TCP/IP Ethernet (cable desconectado,
configuración no válida, etc.).
DUPLICATE_IP 04 hex Dirección IP ya usada por otro equipo.
ETH_R_PORT_LINK_STATUS: códigos de estado de la conexión
de comunicación
Descripción del tipo enumerado
El tipo de datos de enumeración ETH_R_PORT_LINK_STATUS contiene los
siguientes valores:
Enumerador Valor Comentario
ETH_R_LINK_DOWN 00 hex Enlace de comunicación a otro dispositivo no disponible.
ETH_R_LINK_UP 01 hex Enlace de comunicación a otro dispositivo disponible.
EIO0000003068.04 51

Funciones y variables de sistema Tipos de datos de la biblioteca PLCSystem de M241
ETH_R_PORT_SPEED: códigos de velocidad de comunicación
del puerto Ethernet
Descripción del tipo enumerado
El tipo de datos de enumeración ETH_R_PORT_SPEED contiene los siguientes
valores:
Enumerador Valor Comentario
ETH_R_SPEED_NA 0 dec La velocidad de la red no está disponible.
ETH_R_SPEED_10_MB 10 dec La velocidad de la red es de 10 megabits por segundo.
ETH_R_100_MB 100 dec La velocidad de la red es de 100 megabits por segundo.
ETH_R_RUN_IDLE: códigos de estado de ejecución e inactividad
Ethernet/IP
Descripción del tipo enumerado
El tipo de datos de enumeración ETH_R_RUN_IDLE contiene los siguientes
valores:
Enumerador Valor Comentario
IDLE 00 hex La conexión EtherNet/IP está inactiva.
RUN 01 hex La conexión EtherNet/IP está funcionando.
Tipos de datos de variables de sistema de TM3_MODULE_
RW
Descripción general
En esta sección se enumeran y describen los tipos de datos de las variables de
sistema incluidos en las estructuras TM3_MODULE_R yTM3_MODULE_W.
52 EIO0000003068.04

Tipos de datos de la biblioteca PLCSystem de M241 Funciones y variables de sistema
TM3_ERR_CODE: códigos de error detectado del módulo de
extensión TM3
Descripción del tipo enumerado
El tipo de datos de enumeración TM3_ERR_CODE contiene los siguientes
valores:
Enumerador Valor Comentario
TM3_NO_ERR 00 hex El último intercambio de bus con el módulo de extensión se ha realizado
correctamente.
TM3_ERR_FAILED 01 hex Error detectado debido a que el último intercambio de bus con el
módulo de extensión no se ha realizado correctamente.
TM3_ERR_PARAMETER 02 hex Error de parámetro detectado en el último intercambio de bus con el
módulo.
TM3_ERR_COK 03 hex Error de hardware temporal o permanente detectado en uno de los
módulos de extensión TM3.
TM3_ERR_BUS 04 hex Error de bus detectado en el último intercambio de bus con el módulo de
extensión.
TM3_MODULE_R_ARRAY_TYPE: tipo de matriz de lectura del
módulo de extensión TM3
Descripción
TM3_MODULE_R_ARRAY_TYPE es una matriz de 0 a 13 TM3_MODULE_R_
STRUCT.
TM3_MODULE_STATE: códigos de estado del módulo de
extensión TM3
Descripción del tipo enumerado
El tipo de datos de enumeración TM3_MODULE_STATE contiene los siguientes
valores:
Enumerador Valor Comentario
TM3_EMPTY 00 hex No hay módulo.
TM3_CONF_ERROR 01 hex El módulo de extensión física no coincide con el configurado en
EcoStruxure Machine Expert.
TM3_BUS_ERROR 02 hex Error de bus detectado en el último intercambio con el módulo.
TM3_OK 03 hex El último intercambio de bus con este módulo se ha realizado
correctamente.
TM3_MISSING_OPT_MOD 05 hex El módulo opcional no está físicamente presente.
EIO0000003068.04 53

Funciones y variables de sistema Tipos de datos de la biblioteca PLCSystem de M241
TM3_BUS_W_IOBUSERRMOD: modalidad de error del bus TM3
Descripción del tipo enumerado
El tipo de datos de enumeración TM3_BUS_W_IOBUSERRMOD contiene los
siguientes valores:
Enumerador Valor Comentario
IOBUS_ERR_ACTIVE 00 hex Modalidad activa. El controlador lógico detiene todos los intercambios
de E/S en el bus TM3 cuando detecta un error permanente. Consulte
Descripción general de la configuración de E/S (consulte Modicon M241
Logic Controller, Guía de programación).
IOBUS_ERR_PASSIVE 01 hex Modalidad pasiva. Los intercambios de E/S continúan en el bus TM3
aunque se detecte un error.
Tipos de datos de variables de sistema del cartucho
Descripción general
En esta sección se enumeran y se describen los tipos de datos de variables de
sistema incluidos en la estructura Cartridge.
CART_R_ARRAY_TYPE: Tipo de matriz de lectura del cartucho
Descripción
CART_R_ARRAY_TYPE es una matriz de 0 a 1 de tipo CART_R_STRUCT.
CART_R_MODULE_ID: Identificador del módulo de lectura del
cartucho
Descripción del tipo enumerado
El tipo de datos de enumeración CART_R_MODULE_ID contiene los siguientes
valores:
Enumerador Valor Descripción
CART_R_MODULE_ID 40 hex TMC4AI2
CART_R_MODULE_ID 41 hex TMC4AQ2
CART_R_MODULE_ID 42 hex TMC4TI2
CART_R_MODULE_ID 48 hex TMC4HOIS01
CART_R_MODULE_ID 49 hex TMC4PACK01
CART_R_MODULE_ID FF hex Ninguno
54 EIO0000003068.04

Tipos de datos de la biblioteca PLCSystem de M241 Funciones y variables de sistema
CART_R_STATE: Estado de lectura del cartucho
Descripción del tipo enumerado
El tipo de datos de enumeración CART_R_STATE contiene los siguientes
valores:
Enumerador Valor Comentario
CONFIGURED 00 hex El cartucho está configurado.
INITIALIZED_NOT_CONFIGURED 01 hex El cartucho se ha inicializado, pero no se ha configurado.
NOT_INITIALIZED 02 hex El cartucho no se ha inicializado.
Tipos de datos de funciones de sistema
Descripción general
En este apartado se describen los diferentes tipos de datos de funciones de
sistema de la biblioteca PLCSystem de M241.
IMMEDIATE_ERR_TYPE:GetImmediateFastInput leer entrada de
códigos de E/S expertas incrustadas
Descripción del tipo enumerado
El tipo de datos de enumeración contiene los siguientes valores:
Enumerador Tipo Comentario
IMMEDIATE_NO_ERROR WORD No se han detectado errores.
IMMEDIATE_UNKNOWN WORD La referencia de la función Immediate es incorrecta o no está
configurada.
IMMEDIATE_UNKNOWN_PARAMETER WORD Una referencia de parámetro es incorrecta.
RTCSETDRIFT_ERROR: Códigos de error detectados de la
función SetRTCDrift
Descripción del tipo enumerado
El tipo de datos de enumeración RTCSETDRIFT_ERROR contiene los siguientes
valores:
Enumerador Valor Comentario
RTC_OK 00 hex Desviación del RTC correctamente configurada.
RTC_BAD_DAY 01 hex No utilizado.
RTC_BAD_HOUR 02 hex No utilizado.
RTC_BAD_MINUTE 03 hex No utilizado.
RTC_BAD_DRIFT 04 hex Parámetro de desviación de RTC fuera de rango.
RTC_INTERNAL_ERROR 05 hex Ajustes de desviación de RTC rechazados en el error interno detectado.
EIO0000003068.04 55


Funciones y variables de sistema
Apéndices
Contenido de esta parte
Representación de funciones y de bloques de funciones ..................................58
Descripción general
Este apéndice contiene extractos de la guía de programación que ayudan a
obtener una comprensión técnica de la documentación de la biblioteca.
EIO0000003068.04 57

Funciones y variables de sistema Representación de funciones y de bloques de funciones
Representación de funciones y de bloques de
funciones
Contenido de este capítulo
Diferencias entre una función y un bloque de funciones ...................................58
Usar una función o un bloque de funciones en lenguaje IL................................59
Usar una función o un bloque de funciones en lenguaje ST ..............................62
Descripción general
Cada función se puede representar en los lenguajes siguientes:
• IL: Lista de instrucciones
• ST: Texto estructurado
• LD: Diagrama de contactos
• FBD: Diagrama de bloques de funciones
• CFC: Diagrama de función continua
En este capítulo se proporcionan funciones y ejemplos de representación de
bloques de funciones y se describe cómo utilizarlas en lenguajes IL y ST.
Diferencias entre una función y un bloque de funciones
Función
Una función:
• es una POU (Unidad de organización de programa) que devuelve un
resultado inmediato.
• Se le llama directamente por su nombre (y no a través de una instancia).
• No tiene instancias creadas.
• Se puede utilizar como un operando en otras expresiones.
Ejemplos: operadores booleanos (AND), cálculos, conversión (BYTE_TO_INT)
Bloque de funciones
Un bloque de funciones:
• Es una POU (Unidad de organización de programa) que devuelve una o más
salidas.
• Debe ser convocado por una instancia (copia del bloque de funciones con un
nombre y variables específicos).
• Todas las instancias tienen un estado persistente (salidas y variables
internas) de una llamada a otra desde un bloque de funciones o programa.
Ejemplos: temporizadores, contadores
58 EIO0000003068.04

Representación de funciones y de bloques de funciones Funciones y variables de sistema
En el ejemplo, Timer_ON es una instancia del bloque de funciones TON:
Usar una función o un bloque de funciones en lenguaje IL
Información general
En esta sección se describe cómo implementar una función y un bloque de
funciones en lenguaje IL.
Las funciones IsFirstMastCycle ySetRTCDrift y el bloque de funciones
TON se usan como ejemplos para mostrar implementaciones.
Usar una función en lenguaje IL
En este procedimiento se describe cómo insertar una función en lenguaje IL:
Paso Acción
1 Abra o cree una POU nueva en el lenguaje de Lista de instrucciones (IL).
NOTA: Aquí no se detalla el procedimiento para crear una POU. Para obtener más
información, consulte Añadir y llamar POU (consulte EcoStruxure Machine Expert -
Guía de programación).
2 Cree las variables que necesite la función.
3 Si la función tiene 1 o más entradas, empiece a cargar la primera entrada usando la
instrucción LD.
4 Inserte una nueva línea abajo y:
• escriba el nombre de la función en la columna de operadores (campo izquierdo); o
• utilice la opción de Accesibilidad para seleccionar la función (seleccione Insertar
llamada de módulo en el menú contextual).
5Si la función tiene más de una entrada y se usa Accesibilidad, se crea automáticamente
el número necesario de líneas con ??? en los campos de la derecha. Sustituya los ???
por el valor o la variable adecuada que corresponda al orden de las entradas.
6 Inserte una línea nueva para almacenar el resultado de la función en la variable
correspondiente: escriba la instrucción ST en la columna del operador (campo de la
izquierda) y el nombre de la variable en el campo de la derecha.
EIO0000003068.04 59

Funciones y variables de sistema Representación de funciones y de bloques de funciones
Para ilustrar el procedimiento, considere las funciones IsFirstMastCycle (sin
parámetro de entrada) y SetRTCDrift (con parámetros de entrada) que se
representan gráficamente a continuación:
Función Representación gráfica
sin parámetros de
entrada:
IsFirstMastCycle
con parámetros de
entrada:
SetRTCDrift
En lenguaje IL, el nombre de la función se usa directamente en la columna de
operadores:
Función Representación en el Editor IL de POU
Ejemplo en IL de una
función sin parámetros
de entrada:
IsFirstMastCycle
Ejemplo en IL de una
función con
parámetros de
entrada:
SetRTCDrift
60 EIO0000003068.04

Representación de funciones y de bloques de funciones Funciones y variables de sistema
Usar un bloque de funciones en lenguaje IL
En este procedimiento se describe cómo insertar un bloque de funciones en
lenguaje IL:
Paso Acción
1 Abra o cree una POU nueva en el lenguaje de Lista de instrucciones (IL).
NOTA: Aquí no se detalla el procedimiento para crear una POU. Para obtener más
información, consulte Añadir y llamar POU (consulte EcoStruxure Machine Expert
- Guía de programación).
2 Cree las variables que necesita el bloque de funciones, incluido el nombre de instancia.
3 Se llama a los bloques de funciones usando una instrucción CAL:
• Utilice la opción de Accesibilidad para seleccionar el bloque de funciones (haga
clic con el botón derecho y seleccione Insertar llamada de módulo en el menú
contextual).
• La instrucción CAL y la E/S necesaria se crean automáticamente.
Cada parámetro (E/S) es una instrucción:
• Los valores de las entradas se establecen con ":=".
• Los valores de las salidas se establecen con "=>".
4 En el campo de la derecha CAL, sustituya ??? por el nombre de la instancia.
5Sustituya otros ??? por una variable apropiada o un valor inmediato.
Para ilustrar el procedimiento, considere este ejemplo con el bloque de funciones
TON que se representa gráficamente a continuación:
Bloque de
funciones Representación gráfica
TON
En lenguaje IL, el nombre del bloque de funciones se usa directamente en la
columna de operadores:
Bloque de
funciones Representación en el Editor IL de POU
TON
EIO0000003068.04 61

Funciones y variables de sistema Representación de funciones y de bloques de funciones
Usar una función o un bloque de funciones en lenguaje ST
Información general
En esta sección se describe el modo de implementar una función y un bloque de
funciones en lenguaje ST.
La función SetRTCDrift y el bloque de funciones TON se usan como ejemplos
para mostrar implementaciones.
Usar una función en lenguaje ST
En este procedimiento se describe cómo insertar una función en lenguaje ST:
Paso Acción
1 Abra o cree una POU nueva en el lenguaje de Texto estructurado (ST).
NOTA: Aquí no se detalla el procedimiento para crear una POU. Para obtener más
información, consulte Añadir y llamar POU (consulte EcoStruxure Machine Expert -
Guía de programación).
2 Cree las variables que necesite la función.
3 Utilice la sintaxis general en el Editor POU ST para el lenguaje ST de una función. La
sintaxis general es:
FunctionResult:= FunctionName(VarInput1, VarInput2,.. VarInputx);
Para ilustrar el procedimiento, considere la función SetRTCDrift que se
representa gráficamente a continuación:
Función Representación gráfica
SetRTCDrift
El lenguaje ST de esta función es este:
Función Representación en el editor POU ST de
SetRTCDrift PROGRAM MyProgram_ST
VAR
myDrift: SINT (-36..+73) := 5;
myDay: sec.DAY_OF_WEEK := SUNDAY;
myHour: sec.HOUR := 12;
myMinute: sec.MINUTE;
myRTCAdjust: sec.RTCDRIFT_ERROR;
END_VAR
myRTCAdjust:= SetRTCDrift(myDrift, myDay, myHour,
myMinute);
62 EIO0000003068.04

Representación de funciones y de bloques de funciones Funciones y variables de sistema
Usar un bloque de funciones en lenguaje ST
En este procedimiento se describe cómo insertar un bloque de funciones en
lenguaje ST:
Paso Acción
1 Abra o cree una POU nueva en el lenguaje de Texto estructurado (ST).
NOTA: Aquí no se detalla el procedimiento para crear una POU. Para obtener
más información sobre la adición, declaración y llamada de POU, consulte la
documentación correspondiente (consulte EcoStruxure Machine Expert: guía de
programación).
2 Cree las variables de entrada y salida y la instancia requeridas para el bloque de
funciones:
• Las variables de entrada son los parámetros de entrada requeridos por el bloque
de funciones
• Las variables de salida reciben el valor devuelto por el bloque de funciones
3 Utilice la sintaxis general en el Editor POU ST para el lenguaje ST de un bloque de
funciones. La sintaxis general es:
FunctionBlock_InstanceName(Input1:=VarInput1, Input2:
=VarInput2,... Ouput1=>VarOutput1, Ouput2=>VarOutput2,...);
Para ilustrar el procedimiento, considere este ejemplo con el bloque de funciones
TON que se representa gráficamente a continuación:
Bloque de
funciones Representación gráfica
TON
En esta tabla se muestran ejemplos de una llamada de bloque de funciones en
lenguaje ST:
Bloque de
funciones Representación en el editor POU ST de
TON
EIO0000003068.04 63


Funciones y variables de sistema
Glosario
A
Aplicación de arranque:
(aplicación de arranque) El archivo binario que contiene la aplicación.
Normalmente está guardada en el controlador y permite que este arranque en la
aplicación generada por el usuario.
aplicación:
Un programa que incluye datos de configuración, símbolos y documentación.
ARRAY:
La disposición sistemática de objetos de datos de un solo tipo en forma de tabla
definida en la memoria del controlador lógico. La sintaxis es la siguiente: ARRAY
[<dimensión>] OF <Tipo>
Ejemplo 1: ARRAY [1..2] OF BOOL es una tabla de una dimensión compuesta
por dos elementos de tipo BOOL.
Ejemplo 2: ARRAY [1..10, 1..20] OF INT es una tabla de dos dimensiones
compuesta por 10 x 20 elementos de tipo INT.
B
bloque de funciones:
Una unidad de programación que dispone de una o varias entradas y devuelve
una o varias salidas. Los FBs se llaman mediante una instancia (copia del bloque
de funciones con nombre y variables dedicados), y todas las instancias tienen un
estado persistente (salidas y variables internas) de una llamada a otra.
Ejemplos: temporizadores, contadores
BOOL:
(booleano) Un tipo de datos básico en informática. Una variable BOOL puede
tener uno de estos valores: 0 (FALSE) o 1 (TRUE). Un bit extraído de una palabra
es de tipo BOOL, por ejemplo, %MW10.4 es un quinto bit con un número de
palabra de memoria 10.
BOOTP:
(protocolo bootstrap) Un protocolo de red UDP que puede utilizar un cliente de
red para obtener de forma automática una dirección IP (y tal vez otros datos) de
un servidor. El cliente se identifica ante el servidor utilizando la dirección MAC del
cliente. El servidor, que mantiene una tabla preconfigurada de direcciones MAC
de los dispositivos cliente y las direcciones IP asociadas, envía al cliente su
dirección IP predefinida. BOOTP se utilizaba originariamente como un método
que permitía iniciar los hosts sin disco de forma remota por una red. El proceso
BOOTP asigna un arrendamiento infinito de una dirección IP. El servicio BOOTP
utiliza los puertos UDP 67 y 68.
byte:
Un tipo que está codificado en un formato de 8 bits que, en el formato
hexadecimal, va de 00 hex a FF hex.
C
cadena:
Una variable que es una serie de caracteres ASCII.
EIO0000003068.04 65

Funciones y variables de sistema
CAN:
(red de área del controlador) Un protocolo (ISO 11898) para redes de bus serie
diseñado para la interconexión de dispositivos inteligentes (de varios fabricantes)
en sistemas inteligentes para aplicaciones industriales en tiempo real. CAN,
diseñado originariamente para utilizarlo en automóviles, se emplea actualmente
en una amplia variedad de entornos industriales de control automático.
CFC:
(diagrama de función continua) Un lenguaje de programación (una ampliación del
estándar IEC 61131-3) basado en el lenguaje de diagrama de bloque de
funciones (FBD) y que funciona como un diagrama de flujo. Sin embargo, no se
utiliza ninguna red y es posible un posicionamiento libre de elementos gráficos, lo
que permite bucles de realimentación. En cada bloque, las entradas se sitúan a
la izquierda y las salidas, a la derecha. Las salidas del bloque se pueden
conectar a las entradas de otros bloques para formar expresiones complejas.
configuración:
Organización e interconexión de los componentes de hardware en un sistema y
los parámetros del hardware y software que determina las características
operativas del sistema.
CRC:
(comprobación de redundancia cíclica) Método que se emplea para determinar la
validez de la transmisión de la comunicación. La transmisión contiene un campo
de bits que constituye una suma de comprobación. El mensaje se usa para que el
transmisor calcule la suma de comprobación según el contenido del mensaje. A
continuación, los nodos receptores recalculan el campo de la misma manera.
Toda discrepancia en el valor de los dos cálculos CRC indica que el mensaje
transmitido y el mensaje recibido son diferentes.
D
DHCP:
(protocolo de configuración dinámica del host) Una ampliación avanzada de
BOOTP. DHCP es más avanzado, pero tanto DHCP como BOOTP son
habituales. (DHCP puede manejar las solicitudes de clientes BOOTP).
diagrama de bloques de funciones:
Uno de los cinco lenguajes para lógica o control que cumplen con el estándar IEC
61131-3 para sistemas de control. El diagrama de bloques de funciones es un
lenguaje de programación orientado gráficamente. Funciona con una lista de
redes en la que cada red contiene una estructura gráfica de cuadros y líneas de
conexión que representa una expresión lógica o aritmética, la llamada de un
bloque de funciones, un salto o una instrucción de retorno.
dirección MAC:
(dirección de control de acceso a medios) Un número único de 48 bits asociado a
una parte específica del hardware. La dirección MAC se programa en cada
tarjeta de red o dispositivo cuando se fabrica.
DWORD:
(palabra doble) Con codificación en formato de 32 bits.
E
ejecución:
Un comando que hace que el controlador explore el programa de la aplicación,
lea las entradas físicas y escriba en las salidas físicas según la solución de la
lógica del programa.
elemento:
El nombre abreviado de ARRAY.
66 EIO0000003068.04

Funciones y variables de sistema
E/S:
(entrada/salida)
EtherNet/IP:
(protocolo industrial de Ethernet) Un protocolo de comunicaciones abiertas para
fabricar soluciones de automatización en sistemas industriales. EtherNet/IP se
incluye en una familia de redes que implementan el protocolo industrial común en
sus capas superiores. La organización de apoyo (ODVA) especifica EtherNet/IP
para cumplir la adaptabilidad y la independencia de los medios.
Ethernet:
Una tecnología de capas física y de conexión de datos para LANs, también
conocida como IEEE 802.3.
F
FB:
(bloque de funciones) Un práctico mecanismo de programación que consolida un
grupo de instrucciones de programación para realizar una acción específica y
normalizada, por ejemplo, el control de velocidad, el control de intervalo o el
conteo. Un bloque de funciones se puede componer de datos de configuración,
un conjunto de parámetros de funcionamiento internos o externos y,
normalmente, una o diversas entradas y salidas de datos.
firmware:
Representa el BIOS, los parámetros de datos y las instrucciones de
programación que constituyen el sistema operativo en un controlador. El firmware
se almacena en la memoria no volátil del controlador.
función:
Una unidad de programación que dispone de una entrada y devuelve un
resultado inmediato. No obstante, a diferencia de los FBs, se llama directamente
por su nombre (y no mediante una instancia), no tiene un estado persistente
desde una llamada hasta la siguiente y se puede utilizar como un operando en
otras expresiones de programación.
Ejemplos: operadores booleanos (AND), cálculos, conversiones (BYTE_TO_INT)
G
GVL:
(lista de variables globales) Gestiona las variables globales dentro de un
proyecto EcoStruxure Machine Expert.
H
hex:
(hexadecimal)
I
ID:
(identificador/identificación)
EIO0000003068.04 67

Funciones y variables de sistema
IEC 61131-3:
Tercera parte de un estándar de tres partes de la IEC para los equipos de
automatización industriales. IEC 61131-3 se ocupa de los lenguajes de
programación del controlador y define dos estándares de lenguajes de
programación gráficos y dos textuales. Los lenguajes de programación gráficos
son un diagrama de contactos y un diagrama de bloque de funciones. Los
lenguajes de programación textuales incluyen texto estructurado y lista de
instrucciones.
IEC:
(International Electrotechnical Commission) Una organización de estándares
internacional sin ánimo de lucro y no gubernamental que prepara y publica
estándares internacionales para todas las tecnologías eléctricas, electrónicas y
relacionadas.
IEEE 802.3:
Una recopilación de estándares de IEEE que definen la capa física y la subcapa
de control de acceso a medios de la capa de conexión de datos, de Ethernet
cableado.
IL:
(lista de instrucciones) Un programa escrito en lenguaje que se compone de una
serie de instrucciones basadas en texto y ejecutadas secuencialmente por el
controlador. Cada instrucción incluye un número de línea, un código de
instrucción y un operando (consulte IEC 61131-3).
INT:
(entero) Un número entero con codificación de 16 bits.
IP:
(protocolo de Internet) Parte de la familia de protocolos TCP/IP que hace un
seguimiento de las direcciones de Internet de los dispositivos, encamina los
mensajes salientes y reconoce los mensajes entrantes.
L
LD:
(diagrama de contactos) Una representación gráfica de instrucciones de un
programa de controlador con símbolos para contactos, bobinas y bloques en una
serie de escalones ejecutados de forma secuencial por un controlador (consulte
IEC 61131-3).
LED:
(diodo electroluminiscente) Un indicador que se ilumina con una carga eléctrica
de nivel bajo.
LWORD:
(palabra larga) Un tipo de datos con codificación en formato de 64 bits.
M
MAST:
Una tarea del procesador que se ejecuta en el software de programación. La
tarea MAST consta de dos secciones:
•IN: las entradas se copian en la sección IN antes de ejecutar la tarea MAST.
•OUT: las salidas se copian en la sección OUT después de ejecutar la tarea
MAST.
68 EIO0000003068.04

Funciones y variables de sistema
Modbus:
El protocolo de comunicaciones que permite las comunicaciones entre muchos
dispositivos conectados a la misma red.
%MW:
Según el estándar IEC, %MW representa un registro de palabra de memoria (por
ejemplo, un objeto de lenguaje del tipo palabra de memoria).
N
NVM:
(Memoria no volátil) Memoria no volátil que se puede sobrescribir. Se almacena
en una memoria EEPROM especial que se puede borrar y volver a programar.
P
PCI:
(interconexión de componentes periféricos) Un bus estándar en el sector para la
conexión de periféricos.
PLC:
(controlador lógico programable) Un ordenador industrial que se usa para
automatizar procesos industriales, de fabricación y otros procesos
electromecánicos. Los PLCs se diferencian de los ordenadores comunes en que
están diseñados de forma que tienen varias matrices de entrada y salida, y que
disponen de especificaciones más sólidas contra los golpes, las vibraciones, la
temperatura, las interferencias eléctricas, etc.
POU:
(unidad de organización de programas) Una declaración variable en el código
fuente y el conjunto de instrucciones correspondiente. Las POUs facilitan la
reutilización modular de programas de software, funciones y bloques de
funciones. Una vez declaradas, cada una de las POUs está disponible para las
otras.
programa :
El componente de una aplicación consistente en código fuente compilado capaz
de poder ser instalado en la memoria de un controlador lógico.
protocolo:
Una convención o una definición de norma que controla o habilita la conexión, la
comunicación y la transferencia de datos entre dos sistemas o dispositivos
informáticos.
R
red de control:
Red que contiene logic controllers, sistemas SCADA, PC, HMI, conmutadores,
etc.
Se admiten dos tipos de topología:
• Plana: todos los módulos y dispositivos de esta red pertenecen a la misma
subred.
• Dos niveles: la red se divide en una red operativa y en una red de
controladores.
Estas dos redes pueden ser físicamente independientes, pero normalmente
están conectadas mediante un dispositivo de enrutamiento.
EIO0000003068.04 69

Funciones y variables de sistema
red:
Un sistema de dispositivos interconectados que comparten una ruta de datos
común y un protocolo de comunicaciones.
RTC:
(reloj de tiempo real) Un reloj calendario de fecha/hora con respaldo de batería
que funciona de forma continua aunque el controlador no reciba alimentación,
mientras dure la batería.
S
%:
Según el estándar IEC, % es un prefijo que identifica direcciones de memoria
interna en el controlador lógico que se utilizan para almacenar el valor de las
variables del programa, constantes, E/S, etc.
SINT:
(entero con signo) Un valor de 15 bits más signo.
STOP:
Comando que hace que el controlador detenga la ejecución de un programa de
aplicación.
ST:
(texto estructurado) Un lenguaje que incluye instrucciones complejas y anidadas
(por ejemplo, bucles de repetición, ejecuciones condicionales o funciones). ST
cumple con IEC 61131-3.
T
tarea:
Grupo de secciones y subrutinas ejecutadas cíclica o periódicamente si se trata
de la tarea MAST, o periódicamente si se trata de la tarea FAST.
Una tarea siempre tiene un nivel de prioridad y tiene asociadas entradas y
salidas del controlador. Estas E/S se actualizan en función de la tarea.
Un controlador puede tener diversas tareas.
TCP:
(protocolo de control de transmisión) Un protocolo de capas de transporte
basado en conexiones que proporciona una transmisión de datos simultánea y
bidireccional. TCP forma parte del conjunto de protocolos TCP/IP.
U
UDINT:
(entero doble sin signo) Codificado en 32 bits.
UINT:
(entero sin signo) Codificado en 16 bits.
V
variable del sistema:
Una variable que proporciona datos del controlador e información de diagnóstico,
y permite enviar comandos al controlador.
70 EIO0000003068.04

Funciones y variables de sistema
variable no ubicada:
Una variable que no tiene dirección (consulte variable ubicada).
variable:
Una unidad de memoria direccionada y modificada por un programa.
W
watchdog:
Un watchdog es un cronómetro especial utilizado para garantizar que los
programas no superen su tiempo de exploración asignado. El cronómetro
watchdog suele configurarse con un valor superior al tiempo de exploración y se
resetea a 0 cuando termina cada ciclo de exploración. Si el cronómetro watchdog
alcanza el valor predeterminado, por ejemplo, porque el programa queda
atrapado en un bucle infinito, se declara un error·y el programa se detiene.
WORD:
Un tipo codificado en formato de 16 bits.
EIO0000003068.04 71

Funciones y variables de sistema
Índice
B
bloques de funciones
FB_ControlClone ...............................................32
C
CART_R_ARRAY_TYPE
Tipos de datos ...................................................54
CART_R_MODULE_ID
Tipos de datos ...................................................54
CART_R_STATE
Tipos de datos ...................................................55
CART_R_STRUCT
Variable de sistema............................................24
ciclo
IsFirstMastColdCycle .........................................26
IsFirstMastCycle ................................................27
IsFirstMastWarmCycle .......................................28
comandos de script
ExecuteScript ....................................................35
copiar comandos de archivo
DataFileCopy.....................................................33
D
DataFileCopy
copiar datos en o de un archivo...........................33
DataFileCopyError
Tipos de datos ...................................................49
DataFileCopyLocation
Tipos de datos ...................................................49
DAY_OF_WEEK ...................................................31
E
E/S incrustada
GetImmediateFastInput......................................25
PhysicalWriteFastOutputs ..................................30
estado del bus del módulo TM3
TM3_GetModuleBusStatus.................................39
estado interno del módulo TM3
TM3_GetModuleInternalStatus ...........................40
ETH_R
variable de sistema ............................................19
ETH_R_FRAME_PROTOCOL
Tipos de datos ...................................................50
ETH_R_IP_MODE
Tipos de datos ...................................................50
ETH_R_PORT_DUPLEX_STATUS
Tipos de datos ...................................................51
ETH_R_PORT_LINK_STATUS
Tipos de datos ...................................................51
ETH_R_PORT_SPEED
Tipos de datos ...................................................52
ETH_R_STRUCT..................................................19
ETH_W
variable de sistema ............................................22
ETH_W_STRUCT.................................................22
ExecuteScript
ejecutar comandos de script ...............................35
ExecuteScriptError
Tipos de datos ...................................................50
F
FB_ControlClone
bloque de funciones ...........................................32
FC_GetFreeDiskSpace
función..............................................................36
FC_GetLabel
función..............................................................37
FC_GetTotalDiskSpace
función..............................................................38
función
FC_GetFreeDiskSpace ......................................36
FC_GetLabel.....................................................37
FC_GetTotalDiskSpace ......................................38
funciones
diferencias entre una función y un bloque de
funciones.........................................................58
usar una función o un bloque de funciones en
lenguaje IL.......................................................59
usar una función o un bloque de funciones en
lenguaje ST .....................................................62
G
GetImmediateFastInput
obtener el valor de una entrada rápida.................25
GetRtc
obtener valor del reloj en tiempo real (RTC) .........26
H
HOUR ..................................................................31
I
Indicador LED de la batería
InhibitBatLed .....................................................29
InhibitBatLed
Enabling or disabling the Battery led....................29
INMEDIATE_ERR_TYPE
Tipos de datos ...................................................55
IsFirstMastColdCycle
primer ciclo del arranque en frío ..........................26
IsFirstMastCycle
primer ciclo MAST..............................................27
IsFirstMastWarmCycle
primer ciclo del arranque en caliente ...................28
M
MINUTE ...............................................................31
P
PhysicalWriteFastOutputs
writing output of an embedded expert I/O.............30
PLC_GVL .............................................................11
PLC_R
variable de sistema ............................................14
PLC_R_APPLICATION_ERROR
Tipos de datos ...................................................44
PLC_R_BOOT_PROJECT_STATUS
Tipos de datos ...................................................45
PLC_R_IO_STATUS
Tipos de datos ...................................................45
PLC_R_SDCARD_STATUS
Tipos de datos ...................................................46
72 EIO0000003068.04

Funciones y variables de sistema
PLC_R_STATUS
Tipos de datos ...................................................46
PLC_R_STOP_CAUSE
Tipos de datos ...................................................47
PLC_R_STRUCT..................................................14
PLC_R_TERMINAL_PORT_STATUS
Tipos de datos ...................................................48
PLC_R_TM3_BUS_STATE
Tipos de datos ...................................................48
PLC_W
variable de sistema ............................................17
PLC_W_COMMAND
Tipos de datos ...................................................48
PLC_W_STRUCT .................................................17
PLCSystem de M241
DataFileCopy.....................................................33
ExecuteScript ....................................................35
GetImmediateFastInput......................................25
GetRtc ..............................................................26
InhibitBatLed .....................................................29
IsFirstMastColdCycle .........................................26
IsFirstMastCycle ................................................27
IsFirstMastWarmCycle .......................................28
PhysicalWriteFastOutputs ..................................30
SetRTCDrift.......................................................31
TM3_GetModuleBusStatus.................................40
PROFIBUS_R
variable de sistema ............................................23
PROFIBUS_R_STRUCT .......................................23
R
reloj en tiempo real
GetRtc ..............................................................26
SetRTCDrift.......................................................31
RTC
GetRtc ..............................................................26
SetRTCDrift.......................................................31
RTCSETDRIFT_ERROR
Tipos de datos ...................................................55
S
SERIAL_R
variable de sistema ............................................17
SERIAL_R_STRUCT.............................................17
SERIAL_W
variable de sistema ............................................18
SERIAL_W_STRUCT............................................18
SetRTCDrift
aceleración o desaceleración de la frecuencia del
RTC ................................................................31
T
Tipos de datos
CART_R_ARRAY_TYPE....................................54
CART_R_MODULE_ID ......................................54
CART_R_STATE ...............................................55
DataFileCopyError .............................................49
DataFileCopyLocation........................................49
ETH_R_FRAME_PROTOCOL............................50
ETH_R_IP_MODE.............................................50
ETH_R_PORT_DUPLEX_STATUS .....................51
ETH_R_PORT_IP_STATUS ...............................51
ETH_R_PORT_LINK_STATUS...........................51
ETH_R_PORT_SPEED......................................52
ETH_R_RUN_IDLE ...........................................52
ExecuteScriptError.............................................50
INMEDIATE_ERR_TYPE ...................................55
PLC_R_APPLICATION_ERROR ........................44
PLC_R_BOOT_PROJECT_STATUS...................45
PLC_R_IO_STATUS ..........................................45
PLC_R_SDCARD_STATUS................................46
PLC_R_STATUS ...............................................46
PLC_R_STOP_CAUSE......................................47
PLC_R_TERMINAL_PORT_STATUS..................48
PLC_R_TM3_BUS_STATE.................................48
PLC_W_COMMAND..........................................48
RTCSETDRIFT_ERROR....................................55
TM3_BUS_W_IOBUSERRMOD .........................54
TM3_ERR_CODE..............................................53
TM3_MODULE_R_ARRAY_TYPE ......................53
TM3_MODULE_STATE......................................53
TM3_BUS_W
variable de sistema ............................................23
TM3_BUS_W_IOBUSERRMOD
Tipos de datos ...................................................54
TM3_BUS_W_IOBUSINIT .....................................23
TM3_BUS_W_STRUCT ........................................23
TM3_ERR_CODE
Tipos de datos ...................................................53
TM3_GetModuleBusStatus
obtención del estado del bus de un módulo TM3 ..39
TM3_GetModuleFWVersion
obtener la versión del firmware de un módulo
TM3 ................................................................40
TM3_GetModuleInternalStatus
obtención del estado interno de un módulo TM3...40
TM3_MODULE_R
variable de sistema ............................................22
TM3_MODULE_R_ARRAY_TYPE
Tipos de datos ...................................................53
TM3_MODULE_R_STRUCT..................................22
TM3_MODULE_STATE
Tipos de datos ...................................................53
V
variable de sistema
ETH_R..............................................................19
ETH_W .............................................................22
PLC_R..............................................................14
PLC_W .............................................................17
PROFIBUS_R ...................................................23
SERIAL_R.........................................................17
SERIAL_W........................................................18
TM3_BUS_W ....................................................23
TM3_MODULE_R..............................................22
Variable de sistema
CART_R_STRUCT............................................24
Variables de sistema
Definición .......................................................... 11
Utilización..........................................................12
versión del firmware del módulo TM3
TM3_GetModuleFWVersion................................40
EIO0000003068.04 73

Schneider Electric
35 rue Joseph Monier
92500 Rueil Malmaison
France
+ 33 (0) 1 41 29 70 00
www.se.com
Debido a que las normas, especificaciones y diseños cambian
periódicamente, solicite la confirmación de la información dada en esta
publicación.
© 2022 Schneider Electric. Reservados todos los derechos.
EIO0000003068.04

EIO0000003074.01
www.se.com
Modicon M241 Logic Contr oller
EIO0000003074 12/2019
Modicon M241
Logic Controller
Contador de alta velocidad
Guía de la biblioteca HSC
12/2019

2EIO0000003074 12/2019
La información que se ofrece en esta documentación contiene descripciones de carácter general
y/o características técnicas sobre el rendimiento de los productos incluidos en ella. La presente
documentación no tiene como objeto sustituir dichos productos para aplicaciones de usuario
específicas, ni debe emplearse para determinar su idoneidad o fiabilidad. Los usuarios o
integradores tienen la responsabilidad de llevar a cabo un análisis de riesgos adecuado y
completo, así como la evaluación y las pruebas de los productos en relación con la aplicación o el
uso de dichos productos en cuestión. Ni Schneider Electric ni ninguna de sus filiales o asociados
asumirán responsabilidad alguna por el uso inapropiado de la información contenida en este
documento. Si tiene sugerencias de mejoras o modificaciones o ha hallado errores en esta
publicación, le rogamos que nos lo notifique.
Usted se compromete a no reproducir, salvo para su propio uso personal, no comercial, la
totalidad o parte de este documento en ningún soporte sin el permiso de Schneider Electric, por
escrito. También se compromete a no establecer ningún vínculo de hipertexto a este documento
o su contenido. Schneider Electric no otorga ningún derecho o licencia para el uso personal y no
comercial del documento o de su contenido, salvo para una licencia no exclusiva para consultarla
"tal cual", bajo su propia responsabilidad. Todos los demás derechos están reservados.
Al instalar y utilizar este producto es necesario tener en cuenta todas las regulaciones sobre
seguridad correspondientes, ya sean regionales, locales o estatales. Por razones de seguridad y
para garantizar que se siguen los consejos de la documentación del sistema, las reparaciones solo
podrá realizarlas el fabricante.
Cuando se utilicen dispositivos para aplicaciones con requisitos técnicos de seguridad, siga las
instrucciones pertinentes.
Si con nuestros productos de hardware no se utiliza el software de Schneider Electric u otro
software aprobado, pueden producirse lesiones, daños o un funcionamiento incorrecto del equipo.
Si no se tiene en cuenta esta información, se pueden causar daños personales o en el equipo.
© 2019 Schneider Electric. Reservados todos los derechos.

EIO0000003074 12/2019 3
Tabla de materias
Información de seguridad . . . . . . . . . . . . . . . . . . . . . . . . 7
Acerca de este libro . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Parte I Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Capítulo 1 Introducción a las funciones expertas . . . . . . . . . . . . . . 13
Descripción general de las funciones expertas . . . . . . . . . . . . . . . . . . 14
Asignación de E/S experta incrustada. . . . . . . . . . . . . . . . . . . . . . . . . 17
Capítulo 2 Tipos de contadores de alta velocidad . . . . . . . . . . . . . . 21
Seleccionar el contador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
Descripción general del tipo simple. . . . . . . . . . . . . . . . . . . . . . . . . . . 26
Descripción general del tipo Principal . . . . . . . . . . . . . . . . . . . . . . . . . 27
Descripción general del tipo Medidor de frecuencias . . . . . . . . . . . . . 28
Descripción general del tipo Medidor de periodos . . . . . . . . . . . . . . . 29
Parte II Una tarea Modalidad . . . . . . . . . . . . . . . . . . . . . . . . 31
Capítulo 3 Principio de la modalidad Una tarea. . . . . . . . . . . . . . . . 33
Descripción del principio de modalidad One-shot . . . . . . . . . . . . . . . . 33
Capítulo 4 Una tarea con un tipo Simple . . . . . . . . . . . . . . . . . . . . . 35
Diagrama de sinopsis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
Configuración del tipo simple de la modalidad Una tarea . . . . . . . . . . 37
Programación del tipo Simple . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
Ajuste de parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
Capítulo 5 Una tarea con un tipo Principal. . . . . . . . . . . . . . . . . . . . 41
Diagrama de sinopsis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
Configuración de monofásico de tipo principal en la modalidad Una
tarea . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
Programación del tipo principal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
Ajuste de parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
Parte III Bucle de módulo Modalidad . . . . . . . . . . . . . . . . . . . 49
Capítulo 6 Principio del Bucle de módulo . . . . . . . . . . . . . . . . . . . . 51
Descripción del principio de modalidad Modulo-loop . . . . . . . . . . . . . 51
Capítulo 7 Bucle en el módulo con un tipo Simple. . . . . . . . . . . . . . 55
Diagrama de sinopsis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
Configuración del tipo simple de la modalidad Bucle en el módulo . . 57
Programación del tipo Simple . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
Ajuste de parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60

4EIO0000003074 12/2019
Capítulo 8 Bucle en el módulo con un tipo Principal . . . . . . . . . . . . . 61
Diagrama de sinopsis. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
Configuración de monofásico de tipo principal en la modalidad Bucle
en el módulo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
Configuración de fase dual de tipo principal en la modalidad Bucle en
el módulo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
Programación del tipo principal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
Ajuste de parámetros. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
Parte IV Modalidad Grande libre . . . . . . . . . . . . . . . . . . . . . . 71
Capítulo 9 Principio de la modalidad Grande libre. . . . . . . . . . . . . . . 73
Descripción de principios de la modalidad Grande libre . . . . . . . . . . . 74
Gestión de límites . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
Capítulo 10 Grande libre con un tipo Principal . . . . . . . . . . . . . . . . . . 79
Diagrama de sinopsis. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
Configuración de fase dual de tipo principal en la modalidad Grande
libre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
Programación del tipo principal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
Ajuste de parámetros. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
Parte V Conteo de eventos Modalidad . . . . . . . . . . . . . . . . . 89
Capítulo 11 Conteo de eventos Principio . . . . . . . . . . . . . . . . . . . . . . 91
Descripción de principios de la modalidad Conteo de eventos . . . . . . 91
Capítulo 12 Conteo de eventos con un tipo Principal . . . . . . . . . . . . . 93
Diagrama de sinopsis. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
Configuración de monofásico de tipo principal en la modalidad Conteo
de eventos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
Programación del tipo principal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
Ajuste de parámetros. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
Parte VI Tipo Medidor de frecuencias . . . . . . . . . . . . . . . . . . 101
Capítulo 13 Principio del Medidor de frecuencias . . . . . . . . . . . . . . . . 103
Descripción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
Capítulo 14 Medidor de frecuencias con un tipo principal . . . . . . . . . . 105
Diagrama de sinopsis. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
Configuración del tipo Medidor de frecuencias . . . . . . . . . . . . . . . . . . 107
Programación. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
Parte VII Tipo Medidor de periodos . . . . . . . . . . . . . . . . . . . . 111
Capítulo 15 Principio del tipo Medidor de periodos . . . . . . . . . . . . . . . 113
Descripción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113

EIO0000003074 12/2019 5
Capítulo 16 Medidor de periodos con un tipo principal . . . . . . . . . . . 115
Diagrama de sinopsis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
Configuración del tipo Medidor de periodos en la modalidad De flanco
a flanco . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
Configuración del tipo Medidor de periodos en la modalidad De flanco
al contrario. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
Programación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
Ajuste de parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
Parte VIII Funciones opcionales . . . . . . . . . . . . . . . . . . . . . . . . 123
Capítulo 17 Función de comparación . . . . . . . . . . . . . . . . . . . . . . . . 125
Principio de comparación con un tipo Principal. . . . . . . . . . . . . . . . . . 126
Configuración de la comparación en un tipo Principal . . . . . . . . . . . . 130
Configuración de eventos externos . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
Capítulo 18 Función de captura. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 133
Principio de captura con un tipo Principal . . . . . . . . . . . . . . . . . . . . . . 134
Configuración de la captura en un tipo principal . . . . . . . . . . . . . . . . . 136
Capítulo 19 Funciones de preajuste y habilitación. . . . . . . . . . . . . . . 137
Función de preajuste . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138
Condiciones de Preajuste para Grande libre o Medidor de periodos . 140
Enable: Autorizar operación de conteo . . . . . . . . . . . . . . . . . . . . . . . . 141
Apéndices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143
Apéndice A Información general . . . . . . . . . . . . . . . . . . . . . . . . . . . . 145
Funciones específicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 146
Información general sobre la gestión del bloque de funciones
administrativas y de movimiento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 147
Apéndice B Tipos de datos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 149
EXPERT_DIAG_TYPE: tipo para diagnóstico EXPERTGetDiag. . . . . 150
EXPERT_ERR_TYPE: tipo de variable de error del bloque de
funciones EXPERT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 151
EXPERT_FREQMETER_TIMEBASE_TYPE: Tipo para la variable de
referencia de tiempo del medidor de frecuencias . . . . . . . . . . . . . . . . 152
EXPERT_HSCMAIN_TIMEBASE_TYPE: Tipo para variable de la
referencia de tiempo HSC principal. . . . . . . . . . . . . . . . . . . . . . . . . . . 153
EXPERT_IMMEDIATE_ERR_TYPE: Tipo para variable de error del
bloque de funciones GetImmediateValue . . . . . . . . . . . . . . . . . . . . . . 154
EXPERT_PARAMETER_TYPE: Tipo de parámetros que obtener o
establecer en EXPERT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 155
EXPERT_PERIODMETER_RESOLUTION_TYPE: Tipo para variable
de referencia de tiempo del medidor de períodos . . . . . . . . . . . . . . . . 156
EXPERT_REF: valor de referencia EXPERT . . . . . . . . . . . . . . . . . . . 157

6EIO0000003074 12/2019
Apéndice C Bloques de funciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
EXPERTGetCapturedValue: valor leído de los registros de captura . . 160
EXPERTGetDiag: devuelve detalles de un error HSC detectado . . . . 162
EXPERTGetImmediateValue: Valor del contador de lectura de una
función de HSC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 164
EXPERTGetParam: devuelve los parámetros de HSC . . . . . . . . . . . . 166
EXPERTSetParam: ajuste de los parámetros de un HSC. . . . . . . . . . 168
HSCMain_M241: controla un contador de tipo principal para M241 . . 170
HSCSimple_M241: control de un contador del tipo simple para M241175
Apéndice D Representación de funciones y de bloques de funciones 177
Diferencias entre una función y un bloque de funciones . . . . . . . . . . . 178
Cómo utilizar una función o un bloque de funciones en lenguaje IL . . 179
Cómo utilizar una función o un bloque de funciones en lenguaje ST . 183
Glosario . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 187
Índice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 191

EIO0000003074 12/2019 7
Información de seguridad
Información importante
AVISO
Lea atentamente estas instrucciones y observe el equipo para familiarizarse con el dispositivo
antes de instalarlo, utilizarlo, revisarlo o realizar su mantenimiento. Los mensajes especiales que
se ofrecen a continuación pueden aparecer a lo largo de la documentación o en el equipo para
advertir de peligros potenciales, o para ofrecer información que aclara o simplifica los distintos
procedimientos.

8EIO0000003074 12/2019
TENGA EN CUENTA LO SIGUIENTE:
La instalación, el manejo, las revisiones y el mantenimiento de equipos eléctricos deberán ser
realizados sólo por personal cualificado. Schneider Electric no se hace responsable de ninguna
de las consecuencias del uso de este material.
Una persona cualificada es aquella que cuenta con capacidad y conocimientos relativos a la
construcción, el funcionamiento y la instalación de equipos eléctricos, y que ha sido formada en
materia de seguridad para reconocer y evitar los riesgos que conllevan tales equipos.

EIO0000003074 12/2019 9
Acerca de este libro
Presentación
Objeto
Esta documentación le permitirá familiarizarse con las funciones y variables del contador de alta
velocidad (HSC) ofrecidas dentro del M241 Logic Controller.
En esta documentación se describen las funciones y variables de la biblioteca del HSC de M241.
Para utilizar este manual, debe:
Tener una comprensión amplia de M241, incluidos su diseño, funcionalidad e implementación
dentro de los sistemas de control.
Ser experto en el uso de los lenguajes de programación IEC 61131-3 PLC siguientes:
Diagrama de bloques de funciones (Function Block Diagram, FBD)
Diagrama de contactos (Ladder Diagram, LD)
Texto estructurado (Structured Text, ST)
Lista de instrucciones (Instruction List, IL)
Diagrama funcional secuencial (SFC)
El software EcoStruxure Machine Expert también se puede utilizar para programar estos
controladores utilizando el lenguaje CFC (Continuous Function Chart).
Campo de aplicación
Este documento se ha actualizado para la publicación de EcoStruxureTM Machine Expert V1.2.
Documentos relacionados
Título de la documentación Número de referencia
EcoStruxure Machine Expert - Guía de programación
EIO0000002854 (ENG)
,
EIO0000002855 (FRE)
,
EIO0000002856 (GER)
,
EIO0000002858 (SPA)
,
EIO0000002857 (ITA)
,
EIO0000002859 (CHS)
Modicon M241 Logic Controller - Guía de programación
EIO0000003059 (ENG)
,
EIO0000003060 (FRE)
,
EIO0000003061 (GER)
,
EIO0000003062 (SPA)
,
EIO0000003063 (ITA)
,
EIO0000003064 (CHS)

10 EIO0000003074 12/2019
Puede descargar estas publicaciones técnicas y otra información técnica de nuestro sitio web
https://www.se.com/ww/en/download/ .
Información relativa al producto
1 Para obtener información adicional, consulte NEMA ICS 1.1 (última edición), "Safety Guidelines
for the Application, Installation, and Maintenance of Solid State Control" (Directrices de seguridad
para la aplicación, la instalación y el mantenimiento del control de estado estático) y NEMA ICS
7.1 (última edición), "Safety Standards for Construction and Guide for Selection, Installation and
Operation of Adjustable-Speed Drive Systems" (Estándares de seguridad para la construcción y
guía para la selección, instalación y utilización de sistemas de unidades de velocidad ajustable) o
su equivalente aplicable a la ubicación específica.
ADVERTENCIA
PÉRDIDA DE CONTROL
El diseñador del esquema de control debe tener en cuenta las posibles modalidades de fallo
de rutas de control y, para ciertas funciones de control críticas, proporcionar los medios para
lograr un estado seguro durante y después de un fallo de ruta. Algunas funciones de control
críticas son, por ejemplo, la parada de emergencia y la parada de sobrecarrera, un corte de
alimentación o un reinicio.
Para las funciones críticas de control deben proporcionarse rutas de control separadas o
redundantes.
Las rutas de control del sistema pueden incluir enlaces de comunicación. Deben tenerse en
cuenta las implicaciones de retardos de transmisión imprevistos o fallos del enlace.
Tenga en cuenta todas las reglamentaciones para la prevención de accidentes y las
normativas de seguridad locales.1
Cada instalación de este equipo debe probarse de forma individual y exhaustiva antes de
entrar en servicio.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Utilice solo software aprobado por Schneider Electric para este equipo.
Actualice el programa de aplicación siempre que cambie la configuración de hardware física.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.

EIO0000003074 12/2019 11
Modicon M 241 Logic Controller
Introducción
EIO0000003074 12/2019
Introducción
Parte I
Introducción
Descripción general
Esta parte proporciona una descripción general, las modalidades disponibles, la funcionalidad y el
rendimiento de las diferentes funciones.
Contenido de esta parte
Esta parte contiene los siguientes capítulos:
Capítulo Nombre del capítulo Página
1 Introducción a las funciones expertas 13
2 Tipos de contadores de alta velocidad 21

Introducción
12 EIO0000003074 12/2019

EIO0000003074 12/2019 13
Modicon M 241 Logic Controller
EIO0000003074 12/2019
Introducción a las funciones expertas
Capítulo 1
Introducción a las funciones expertas
Descripción general
En este capítulo se puede leer la descripción general, las funciones y el rendimiento de:
Contador de alta velocidad (HSC)
Salida de tren de pulsos (PTO)
Modulación de ancho de pulsos (PWM)
Generador de frecuencias (FreqGen)
Contenido de este capítulo
Este capítulo contiene los siguientes apartados:
Apartado Página
Descripción general de las funciones expertas 14
Asignación de E/S experta incrustada 17

14 EIO0000003074 12/2019
Descripción general de las funciones expertas
Introducción
Las entradas y salidas disponibles en el controlador lógico M241 pueden conectarse a funciones
expertas.
El M241 Logic Controller es compatible con las siguientes funciones expertas:
Desde el lanzamiento de EcoStruxure Machine Expert, cualquier E/S normal que ya no esté en
uso se puede configurar para que cualquiera de los tipos de funciones expertas puedan usarla,
del mismo modo que las E/S rápidas.
NOTA:
Cuando se utiliza una entrada como Run/Stop, no puede ser utilizada por una función experta.
Cuando se utiliza una entrada como Alarm, no puede ser utilizada por una función experta.
Para obtener más detalles, consulte Configuración de funciones incrustadas.
Funciones Descripción
Contadores HSC simple Las funciones HSC pueden ejecutar conteos rápidos de pulsos
de sensores, conmutadores, etc., que están conectados a las
entradas rápidas o normales. Las HSC conectadas a las
entradas normales funcionan con una frecuencia máxima de
1kHz.
Para obtener más información acerca de las funciones HSC
consulte Tipos de contador de alta velocidad
(véase página 21)
.
Monofásico principal HSC
Fase dual principal HSC
Medidor de frecuencias
Medidor de periodos
Generadores
de pulsos
PTO La función PTO proporciona 2 canales de salida de tren de
pulsos para controlar 2 unidades independientes servo o
graduales lineales de un solo eje en la modalidad de bucle
abierto.
La función PTO conectada a salidas de transistor normales
funciona con una frecuencia máxima de 1 kHz.
PWM La función PWM genera una señal de onda cuadrada en
canales de salida dedicados con un ciclo de servicio variable.
La función PWO conectada a salidas de transistor normales
funciona con una frecuencia máxima de 1 kHz.
Generador de frecuencias La función de generador de frecuencias genera una señal de
onda cuadrada en canales de salida dedicados con un ciclo de
servicio fijo (50%).
La función de Generador de frecuencias conectada a salidas de
transistor normales funciona con una frecuencia máxima de
1kHz.

EIO0000003074 12/2019 15
Número máximo de funciones expertas
El número máximo de funciones expertas que se pueden configurar depende de:
1. La referencia del controlador lógico.
2. Los tipos de funciones expertas y el número de funciones opcionales
(véase página 123)
configuradas. Consulte Asignación E/S expertas incrustadas
(véase página 17)
.
3. El número de E/S disponibles.
Número máximo de funciones expertas por referencia del controlador lógico:
El número máximo de funciones expertas posibles puede limitarse más por el número de E/S
utilizadas por cada función experta.
Configuraciones de ejemplo:
4 PTO(2) + 14 HSC simple en 24 referencias de controlador de E/S
4 FreqGen(2) + 16 HSC simple en 40 referencias de controlador de E/S
4 Monofásico principal HSC + 10 HSC Simple en 24 referencias de controlador de E/S
4 Fase dual principal HSC + 8 HSC Simple en 40 referencias de controlador de E/S
2 PTO(2) + 2 Monofásico principal HSC + 14 HSC Simple en 40 referencias de controlador de
E/S
(2) sin ninguna E/S opcional configurada
El rendimiento de la función experta está limitado por las E/S utilizadas:
HSC con entradas rápidas: 100 kHz/200 kHz
HSC con entradas normales: 1 kHz
Tipo de función experta 24 referencias de E/S
(TM241•24•)
40 referencias de E/S
(TM241•40•)
Número total de funciones HSC 14 16
HSC Simple 14 16
Monofásico principal 4
Fase dual principal
Medidor de frecuencias(1)
Medidor de periodos
PTO
PWM
FreqGen
(1) Si se configura el número máximo, sólo se pueden añadir 12 funciones HSC simple adicionales.

16 EIO0000003074 12/2019
Configuración de una función experta
Para configurar una función experta, siga estos pasos:
E/S normal configurada como función experta
Cuando se configuren E/S normales como funciones expertas, tenga en cuenta lo siguiente:
Las entradas se pueden leer a través de variables de memoria.
Una entrada no se puede configurar como una función experta si ya se ha configurado como
entrada Run/Stop.
Una salida no puede configurarse como función experta si ya se ha configurado como una
alarma.
La gestión de cortocircuitos se aplica a las salidas. El estado de las salidas está disponible.
Las E/S no utilizadas por funciones expertas pueden utilizarse como cualquier otra E/S normal.
Cuando se utilizan entradas en funciones expertas (retención, HSC…), el filtro integrador se
sustituye por un filtro antirrebote. El valor de filtro se configura en la pantalla de configuración.
Paso Descripción
1 Haga doble clic en el nodo de Contadores o Pulse_Generators en Dispositivos.
Resultado: Aparece la ventana de configuración Contadores o Generadores de pulsos:
2 Haga doble clic en Ninguno en la columna Valor y elija el tipo de función experta para asignar.
Resultado: La configuración predeterminada de la función experta aparece al hacer clic en cualquier
lugar en la ventana de configuración.
3 Configure los parámetros de la función experta tal como se describe en los siguientes capítulos.
4 Para configurar una función experta adicional, haga clic en la ficha +.
NOTA: Si ya se ha configurado el número máximo de funciones expertas, aparece un mensaje en la
parte inferior de la ventana de configuración que informa de que ahora sólo puede añadir funciones
HSC simple.

EIO0000003074 12/2019 17
Asignación de E/S experta incrustada
Asignación de E/S de
Las siguientes E/S normales o rápidas se pueden configurar para que la utilicen las funciones
expertas:
Cuando se asigna una E/S a una función experta, ya no está disponible para que la seleccionen
otras funciones expertas.
NOTA: Todas las E/S están deshabilitadas de forma predeterminada en la ventana de
configuración.
En la siguiente tabla se muestran las E/S que se pueden configurar para las funciones expertas:
24 referencias de E/S 40 referencias de E/S
TM241•24T, TM241•24U TM241•24R TM241•40T,
TM241•40U
TM241•40R
Entradas 8 entradas rápidas (I0-I7)
6 entradas normales (I8-I13)
8 entradas rápidas (I0-I7)
8 entradas normales (I8-I15)
Salidas 4 salidas rápidas (Q0-Q3)
4 salidas normales (Q4 a
Q7)
4 salidas rápidas
(Q0-Q3)
4 salidas rápidas
(Q0-Q3)
4 salidas normales
(Q4 a Q7)
4 salidas rápidas (Q0-
Q3)
Función experta Nombre Entrada (rápida o
normal)
Salida (rápida o
normal)
HSC simple Entrada O
HSC principal Entrada A O
Entrada B/EN C
SYNC C
CAP C
Reflex 0 C
Reflex 1 C
Medidor de
frecuencias/Medidor de
periodos
Entrada A O
EN C
PWM/FreqGen Salida A O
SYNC C
EN C
O Obligatorio
C Configurable de modo opcional

18 EIO0000003074 12/2019
Uso de E/S regulares con funciones expertas
E/S de función experta en E/S normal:
Las entradas pueden leerse mediante variables de memoria estándar incluso si están
configuradas como funciones expertas.
Todas las E/S no utilizadas por funciones expertas pueden utilizarse como E/S normales.
Una E/S sólo la puede usar una función experta. Una vez configurada, la E/S ya no está
disponible para otras funciones expertas.
Si no hay más E/S rápidas disponibles, se puede configurar una E/S normal en su lugar. Sin
embargo, en este caso la máxima frecuencia de la función experta está limitada a 1 kHz.
No puede configurar una entrada en una función experta y utilizarla como entrada Run/Stop,
entrada de evento o entrada con retención a la vez.
Una salida no se puede configurar en una función experta si ya se ha configurado como Alarm.
La gestión de cortocircuitos se aplicará igualmente a todas las salidas. El estado de las salidas
está disponible. Para obtener más información, consulte Gestión de salidas
(véase Modicon
M241 Logic Controller, Guía de hardware)
.
Cuando se utilizan entradas en las funciones expertas (PTO, HSC…), el filtro integrador se
sustituye por el filtro antirrebote
(véase página 146)
. El valor del filtro se configura en la ventana
de configuración.
Para obtener más detalles, consulte Configuración de funciones incrustadas
(véase Modicon
M241 Logic Controller, Guía de programación)
.
PTO Salida A/CW/Pulso O
Salida B/CCW/Dir C
REF (Origen) C
INDEX (Proximidad) C
PROBE C
Función experta Nombre Entrada (rápida o
normal)
Salida (rápida o
normal)
O Obligatorio
C Configurable de modo opcional

EIO0000003074 12/2019 19
Resumen de E/S
La ventana Resumen E/S muestra las E/S utilizadas por las funciones expertas.
Para mostrar la ventana Resumen E/S:
Ejemplo de la ventana Resumen E/S:
Paso Acción
1 En la ficha Dispositivos, haga clic con el botón derecho en el nodo MyController y seleccione
Resumen E/S.

20 EIO0000003074 12/2019

EIO0000003074 12/2019 21
Modicon M 241 Logic Controller
Tipos de contadores de alta velocidad
EIO0000003074 12/2019
Tipos de contadores de alta velocidad
Capítulo 2
Tipos de contadores de alta velocidad
Descripción general
En este capítulo se describen los diferentes tipos de contadores de alta velocidad (HSC).
Contenido de este capítulo
Este capítulo contiene los siguientes apartados:
Apartado Página
Seleccionar el contador 22
Descripción general del tipo simple 26
Descripción general del tipo Principal 27
Descripción general del tipo Medidor de frecuencias 28
Descripción general del tipo Medidor de periodos 29

Tipos de contadores de alta velocidad
22 EIO0000003074 12/2019
Seleccionar el contador
Descripción general
Inicie la configuración de HSC seleccionando un tipo de contador en función del tipo de sensor
que está usando y la aplicación necesaria.
En el editor Contadores, seleccione una Función de conteo de la lista que ofrece los tipos de
contadores siguientes (para obtener más información, consulte Función de contador
(véase Modicon M241 Logic Controller, Guía de programación)
):
HSC simple
Monofásico principal HSC
Fase dual principal HSC
Medidor de frecuencias
Medidor de periodos
El tipo Medidor de frecuencias y el tipo Medidor de periodos están basados en el tipo HSC
principal.
Para cada contador definido en el editor Contadores, EcoStruxure Machine Expert asigna un
Nombre de instancia predeterminado. Este Nombre de instancia predeterminado se puede editar.
Se debe utilizar exactamente el mismo nombre de instancia que una entrada a los bloques de
funciones relacionados con el contador.
Tipo y modalidad Matrix
En esta tabla se presentan los distintos tipos y las modalidades disponibles:
Tipo HSC simple Monofásico
principal HSC
Fase dual
principal HSC
Medidor de
frecuencias
Medidor de
periodos
Modalidad
One-shot XX– – –
Bucle en el
módulo
XXX– –
Conteo de
eventos
–X–––
Grande libre ––X––
De flanco a
flanco
––––X
De flanco al
contrario
––––X

Tipos de contadores de alta velocidad
EIO0000003074 12/2019 23
HSC simple
En esta tabla se ofrece una descripción general de las especificaciones disponibles en el tipo HSC
Simple según la modalidad solicitada:
Monofásico principal HSC
En esta tabla se ofrece una descripción general de las especificaciones disponibles en el tipo
Monofásico principal HSC según la modalidad solicitada:
Característica Función
Modalidad Una tarea Modalidad de Bucle en el módulo
Modalidad de conteo Conteo regresivo Conteo progresivo
Habilitación con una entrada física
de HSC
No No
Sincronización/preajuste con una
entrada física HSC
No No
Función de comparación No No
Función de captura No No
Característica Función
Modalidad Una tarea Modalidad de Bucle en el
módulo
Modalidad de conteo de
eventos
Modalidad de conteo Conteo regresivo Conteo progresivo Conteo de pulso durante
un período de tiempo
determinado (10 ms,
100 ms o 1000 ms)
Habilitación con una
entrada física de HSC
Sí Sí No
Sincronización/preajuste
con una entrada física
HSC
Sí Sí Sí
Función de comparación Sí, 4 umbrales, 2 salidas
y 4 eventos
Sí, 4 umbrales, 2 salidas
y 4 eventos
No
Función de captura Sí, 1 registro de capturas Sí, 1 registro de capturas No

Tipos de contadores de alta velocidad
24 EIO0000003074 12/2019
Fase dual principal HSC
En esta tabla se ofrece una descripción general de las especificaciones disponibles en el tipo Fase
dual principal HSC según la modalidad solicitada:
Medidor de frecuencias
En esta tabla se muestra una descripción general de las especificaciones disponibles en el tipo
Medidor de frecuencias:
Característica Función
Modalidad de Bucle en el módulo Modalidad Grande libre
Modalidad de conteo Conteo progresivo/regresivo
Pulso/dirección
Cuadratura
Conteo progresivo/regresivo
Pulso/dirección
Cuadratura
Habilitación con una entrada física
de HSC
No No
Sincronización/preajuste con una
entrada física HSC
Sí Sí
Función de comparación Sí, 4 umbrales, 2 salidas y 4
eventos
Sí, 4 umbrales, 2 salidas y 4
eventos
Función de captura Sí, 1 registro de capturas Sí, 1 registro de capturas
Característica Función
Modalidad de conteo Frecuencia de pulsos en Hz con valor actualizado
disponible en cada valor de referencia de tiempo
(10 ms, 100 ms o 1000 ms)
Habilitación con una entrada física de HSC Sí
Sincronización/preajuste con una entrada física HSC No
Función de comparación No
Función de captura No

Tipos de contadores de alta velocidad
EIO0000003074 12/2019 25
Medidor de periodos
En esta tabla se ofrece una descripción general de las especificaciones disponibles en el tipo
Medidor de periodos según la modalidad solicitada:
Característica Función
Modalidades de conteo De flanco a flanco: calcula el tiempo que transcurre entre dos
eventos
De flanco a contrario: calcula la duración de un evento
Habilitación con una entrada física de HSC Sí
Sincronización/preajuste con una entrada
física HSC
No
Función de comparación No
Función de captura No
Resolución Recuento de la duración con la resolución configurable (0,1 µs,
1 µs, 100 µs, o 1000 µs)
Timeout 0-858993459, se calcula utilizando unidades de resolución
0 significa que no hay timeout

Tipos de contadores de alta velocidad
26 EIO0000003074 12/2019
Descripción general del tipo simple
Descripción general
El tipo Simple es un contador de entrada individual.
Cualquier operación realizada en el contador (habilitación, sincronización) y toda acción activada
(cuando se alcanza el valor de conteo) se ejecuta en el contexto de una tarea.
Con el tipo Simple, no se puede activar un evento o una salida refleja.
Modalidades de tipo simple
El tipo Simple admite 2 modalidades de conteo configurables en los pulsos monofásicos:
One-shot
(véase página 35)
. En esta modalidad, el registro del valor actual del contador
disminuye (desde un valor definido por el usuario) para cada pulso aplicado a la entrada A, hasta
que el contador llega a 0.
Modulo-loop
(véase página 55)
. En esta modalidad, el contador cuenta repetidamente desde 0
hasta un valor de módulo definido por el usuario y luego vuelve a 0 y reinicia el recuento.
Rendimiento
La frecuencia máxima admisible en una entrada rápida es de 100 kHz si el valor del filtro de rebote
es de 0,005 ms (valor predeterminado para la configuración). Si el valor del filtro de rebote es de
0,002 ms, la frecuencia máxima es de 200 kHz.
La frecuencia admisible máxima en una entrada regular es 1 kHz si el valor del filtro de rebote es
0,5 ms. Si el valor del filtro de rebote es de 1 ms, la frecuencia máxima es de 500 Hz.
Para obtener más información acerca del filtro de rebote, consulte Funciones específicas
(véase página 146)
.

Tipos de contadores de alta velocidad
EIO0000003074 12/2019 27
Descripción general del tipo Principal
Descripción general
El tipo Principal es un contador que utiliza hasta 4 entradas rápidas o normales y 2 salidas reflejas.
M241 Logic Controller puede tener hasta 4 contadores de alta velocidad del tipo Principal.
Modalidades del tipo principal
El tipo Principal admite las siguientes modalidades de recuento en pulsos monofásicos (1 entrada)
o de fase dual (2 entradas):
Una tarea
(véase página 41)
: En esta modalidad, el registro del valor actual del contador
disminuye (desde un valor definido por el usuario) por cada pulso aplicado la entrada A hasta que
el contador llega a 0.
Bucle en el módulo
(véase página 61)
: En esta modalidad, el contador cuenta repetidamente
desde 0 hasta un valor de módulo definido por el usuario y luego vuelve a 0 y reinicia el recuento.
En sentido inverso, el contador cuenta hacia atrás desde el valor del módulo hasta 0 y luego se
preestablece en el valor de módulo y reinicia el conteo.
Grande libre
(véase página 79)
: en esta modalidad, el contador se comporta como un contador
progresivo y regresivo de rango superior.
Conteo de eventos
(véase página 93)
: En esta modalidad, el contador acumula el número de
eventos recibidos durante una referencia de tiempo configurada por el usuario.
Funciones opcionales
Las funciones opcionales se pueden configurar según la modalidad seleccionada:
Entradas de hardware para hacer funcionar el contador (habilitación, preajuste) o capturar el
valor de recuento actual
Hasta 4 umbrales, los valores de los cuales se pueden comparar.
Hasta 4 eventos (1 por umbral) asociados a las tareas externas
Hasta 2 salidas reflejas
Rendimiento
La frecuencia máxima admisible en una interfaz de E/S experta es de 100 kHz si el valor del filtro
de rebote es de 0,005 ms (valor predeterminado para la configuración). Si el valor del filtro de
rebote es de 0,002 ms, la frecuencia máxima es de 200 kHz.
Si se configura la función EXPERT con una E/S normal, el periodo mínimo admisible es 0,4 ms.

Tipos de contadores de alta velocidad
28 EIO0000003074 12/2019
Descripción general del tipo Medidor de frecuencias
Descripción general
El tipo Medidor de frecuencias es un contador que utiliza hasta 2 entradas rápidas o normales.
M241 Logic Controller puede tener hasta 4 contadores de alta velocidad del tipo Medidor de
frecuencias.
Modalidad del tipo Medidor de frecuencias
El contador del medidor de frecuencias
(véase página 105)
mide la frecuencia de los eventos. La
frecuencia es el número de eventos por segundo (Hz).
Rendimiento
La frecuencia máxima admisible en una entrada rápida es de 100 kHz si el valor del filtro de rebote
es de 0,005 ms (valor predeterminado para la configuración). Si el valor del filtro de rebote es de
0,002 ms, la frecuencia máxima es de 200 kHz.
La frecuencia admisible máxima en una entrada regular es 1 kHz si el valor del filtro de rebote es
0,5 ms. Si el valor del filtro de rebote es de 1 ms, la frecuencia máxima es de 500 Hz.

Tipos de contadores de alta velocidad
EIO0000003074 12/2019 29
Descripción general del tipo Medidor de periodos
Descripción general
El tipo Medidor de periodos es un contador que utiliza hasta 2 entradas rápidas o normales.
M241 Logic Controller puede tener hasta 4 contadores de alta velocidad del tipo Medidor de
periodos.
Modalidad del tipo Medidor de periodos
Utilice la modalidad de conteo Medidor de periodos para:
Determinar la duración de un evento
medir el tiempo que transcurre entre 2 eventos
Establecer y medir el tiempo de ejecución de un proceso
Rendimiento
El periodo mínimo admisible en una entrada rápida es 0,005 ms.
Si se configura la función EXPERT con una E/S normal, el periodo mínimo admisible es 0,4 ms.
Para obtener más información acerca del filtro de rebote, consulte Funciones específicas
(véase página 146)
.

Tipos de contadores de alta velocidad
30 EIO0000003074 12/2019

EIO0000003074 12/2019 31
Modicon M 241 Logic Controller
Modalidad Una tarea
EIO0000003074 12/2019
Una tarea Modalidad
Parte II
Una tarea Modalidad
Descripción general
En este apartado se describe el uso de un HSC en la modalidad Una tarea .
Contenido de esta parte
Esta parte contiene los siguientes capítulos:
Capítulo Nombre del capítulo Página
3 Principio de la modalidad Una tarea 33
4Una tarea con un tipo Simple 35
5Una tarea con un tipo Principal 41

Modalidad Una tarea
32 EIO0000003074 12/2019

EIO0000003074 12/2019 33
Modicon M 241 Logic Controller
Principio de la modalidad Una tarea
EIO0000003074 12/2019
Principio de la modalidad Una tarea
Capítulo 3
Principio de la modalidad Una tarea
Descripción del principio de modalidad One-shot
Descripción general
Un flanco de sincronización activa el contador, y el valor preestablecido se carga.
Cuando se habilita el conteo, cada pulso aplicado a la entrada disminuye el valor actual. El
contador se detiene cuando el valor actual llega a 0.
El valor del contador permanece en 0 incluso si se aplican nuevos pulsos a la entrada.
Se necesita una nueva sincronización para volver a activar el contador.
Diagrama de principio

Principio de la modalidad Una tarea
34 EIO0000003074 12/2019
En esta tabla se explican las fases del gráfico anterior:
NOTA: Las condiciones Enable y Sync dependen de la configuración. Dichas condiciones se
describen en la función Habilitación
(véase página 141)
y Preajuste
(véase página 138)
.
Fase Acción
1 En el flanco ascendente de la condición Sync, el valor preestablecido se carga en el contador
(independientemente del valor actual) y se activa el contador.
2 Cuando la condición Enable es igual a 1, el valor del contador actual disminuye en cada pulso en
la entrada A hasta que llega a 0.
3 El contador espera hasta el siguiente flanco ascendente de la condición Sync.
Nota: en este punto, los pulsos de la entrada A no tienen ningún efecto en el contador.
4 Cuando la condición Enable es igual a 0, el contador ignora los pulsos de la entrada A y conserva
su valor actual hasta que la condición Enable vuelve a ser 1. El contador reanuda el conteo de
pulsos de la entrada A en el flanco ascendente de la entrada Enable desde el valor retenido.

EIO0000003074 12/2019 35
Modicon M 241 Logic Controller
Una tarea con un tipo Simple
EIO0000003074 12/2019
Una tarea con un tipo Si mple
Capítulo 4
Una tarea con un tipo Simple
Descripción general
En este capítulo se describe cómo implementar un contador de alta velocidad en la modalidad Una
tarea utilizando un tipo Simple.
Contenido de este capítulo
Este capítulo contiene los siguientes apartados:
Apartado Página
Diagrama de sinopsis 36
Configuración del tipo simple de la modalidad Una tarea 37
Programación del tipo Simple 38
Ajuste de parámetros 40

Una tarea con un tipo Simple
36 EIO0000003074 12/2019
Diagrama de sinopsis
Diagrama de sinopsis
Este diagrama proporciona una descripción general del tipo Simple en la modalidad Una tarea:
A es la entrada de conteo del High Speed Counter. El conteo de tipo Simple para la modalidad
Una tarea siempre es regresivo.

Una tarea con un tipo Simple
EIO0000003074 12/2019 37
Configuración del tipo simple de la modalidad Una tarea
Procedimiento
Siga este procedimiento para configurar un tipo simple en la modalidad Una tarea:
Paso Acción
1 Haga doble clic en MyController → Contadores.
Resultado: Se abre la ficha del editor Contadores para la configuración HSC.
2 En la ficha del editor Contadores, establezca el valor del parámetro Función de conteo en HSC
simple y luego haga clic en cualquier lugar del área de configuración.
Resultado: Los parámetros de configuración aparecen en la ficha del editor Contadores.
3 En caso necesario, modifique el valor del parámetro General → Nombre de instancia.
NOTA: El software proporciona el nombre de instancia automáticamente y se puede utilizar
para el bloque de funciones del contador.
4 Defina el valor del parámetro General → Modalidad de conteo en Una tarea.
5En Entradas de conteo → Entrada A → Ubicación seleccione la entrada rápida o normal para
utilizar como entrada A.
NOTA: Si no hay más E/S disponibles para la configuración, se muestra un mensaje en la parte
inferior de la ventana de configuración. Libere una o más E/S antes de continuar con la
configuración de esta función.
6 Establezca el valor del parámetro Entradas de conteo → Entrada A → Filtro de rebote para
reducir el efecto de rebote en la entrada.
El valor de filtrado determina la frecuencia máxima del contador como se muestra en la tabla
Filtro de rebote
(véase página 146)
.
7 Introduzca el valor del parámetro Rango → Preajuste para definir el valor inicial del conteo.
8 Con un módulo de ampliación , puede especificar el nombre de un evento externo. Cuando este
evento se activa en una tarea, el contador se detiene. Establezca el valor de Detener → Evento
de detención en Sí y luego sustituya el Nombre del evento de detención por el nombre del
evento externo.

Una tarea con un tipo Simple
38 EIO0000003074 12/2019
Programación del tipo Simple
Descripción general
Un contador de tipo Simple siempre se gestiona mediante un bloque de funciones
HSCSimple_M241
(véase página 175)
.
NOTA: Se detecta un error durante la compilación si se utiliza el bloque de funciones
HSCSimple_M241 para gestionar un tipo de HSC diferente.
Adición de un bloque de funciones HSCSimple
Paso Descripción
1 Seleccione la ficha Bibliotecas en el catálogo de software y haga clic en Bibliotecas.
Seleccione Controlador → M241 → M241 HSC → HSC → HSCSimple_M241 de la lista y, a
continuación, arrastre el elemento y suéltelo en la ventana POU.
2 Escriba el nombre de la instancia del tipo Simple (definido en la configuración) o seleccione
la instancia del bloque de funciones haciendo clic en:
Puede seleccionar la instancia HSC mediante el asistente de entrada en la siguiente ruta:
<MyController> → Contadores.

Una tarea con un tipo Simple
EIO0000003074 12/2019 39
Utilización de las variables de E/S
En las tablas siguientes se describe cómo se utilizan los diversos pins del bloque de funciones en
la modalidad Una tarea.
En esta tabla se describen las variables de entrada:
En esta tabla se describen las variables de salida:
Entrada Tipo Comentario
Sync BOOL En el flanco ascendente, preajusta e inicia el contador
ACK_Modulo BOOL No se utiliza en la modalidad Una tarea.
Salida Tipo Comentario
HSC_REF EXPERT_REF
(véase página 157)
Referencia al HSC.
Para utilizar como entrada de los bloques de funciones
administrativas.
HSC_Err BOOL TRUE = indica que se ha detectado un error.
Utilice el bloque de funciones EXPERTGetDiag
(véase página 162)
para obtener más información sobre este
error detectado.
Validity BOOL TRUE = significa que los valores de salida del bloque de
funciones son válidos.
Run BOOL Se establece en 1 cuando el contador esté en ejecución.
Pasa a 0 cuando CurrentValue llega a 0. Se requiere una
sincronización para reiniciar el contador.
Modulo_Flag BOOL No se utiliza en la modalidad Una tarea.
CurrentValue DWORD Valor actual del contador.

Una tarea con un tipo Simple
40 EIO0000003074 12/2019
Ajuste de parámetros
Descripción general
La lista de parámetros descritos en la tabla se puede leer o modificar mediante los bloques de
funciones EXPERTGetParam
(véase página 166)
o EXPERTSetParam
(véase página 168)
.
NOTA: Los parámetros establecidos mediante el programa sobrescriben los valores de
parámetros configurados en la ventana de configuración de HSC. Los parámetros de
configuración iniciales se restauran tras un arranque en frío o en caliente del controlador
(véase Modicon M241 Logic Controller, Guía de programación)
.
Parámetros ajustables
En esta tabla se proporciona la lista de parámetros de EXPERT_PARAMETER_TYPE
(véase página 155)
que se pueden leer o modificar mientras el programa está en ejecución:
Parámetro Descripción
EXPERT_PRESET para obtener o establecer el valor preestablecido de un HSC

EIO0000003074 12/2019 41
Modicon M 241 Logic Controller
Una tarea con un tipo Principal
EIO0000003074 12/2019
Una tarea con un tipo Pr incipal
Capítulo 5
Una tarea con un tipo Principal
Descripción general
En este capítulo se describe cómo implementar un contador de alta velocidad en la modalidad Una
tarea utilizando un tipo Principal.
Contenido de este capítulo
Este capítulo contiene los siguientes apartados:
Apartado Página
Diagrama de sinopsis 42
Configuración de monofásico de tipo principal en la modalidad Una tarea 43
Programación del tipo principal 44
Ajuste de parámetros 48

Una tarea con un tipo Principal
42 EIO0000003074 12/2019
Diagrama de sinopsis
Diagrama de sinopsis
Este diagrama ofrece una descripción general del tipo Principal en la modalidad Una tarea:
A es la entrada de conteo del contador.
EN es la entrada de habilitación del contador.
SYNC es la entrada de sincronización del contador.
CAP es la entrada de captura del contador.
Función opcional
Aparte de la modalidad Una tarea, el tipo Principal ofrece las siguientes funciones:
Función de preajuste
(véase página 138)
Función de habilitación
(véase página 141)
Función de captura
(véase página 133)
Función de comparación
(véase página 125)

Una tarea con un tipo Principal
EIO0000003074 12/2019 43
Configuración de monofásico de tipo principal en la modalidad Una tarea
Procedimiento
Siga este procedimiento para configurar un monofásico de tipo Principal en la modalidad Una
tarea:
Paso Acción
1 Haga doble clic en MyController → Contadores.
Resultado: Se abre la ficha del editor Contadores para la configuración HSC.
NOTA: Si ya se ha configurado el número máximo de funciones HSC principal, aparece un
mensaje en la parte inferior de la ventana de configuración. Considere utilizar una función HSC
simple en su lugar.
2 En la ficha del editor Contadores, establezca el valor del parámetro Función de conteo en
Monofásico principal HSC y haga clic en cualquier lugar de la ventana de configuración.
Resultado: Los parámetros de configuración aparecen en la pestaña Contadores.
3 En caso necesario, introduzca el valor del parámetro General → Nombre de instancia.
NOTA: El software proporciona el nombre de instancia automáticamente y se puede utilizar
para el bloque de funciones del contador.
4 Defina el valor del parámetro General → Modalidad de conteo en Una tarea.
5En Entradas de conteo → Entrada A → Ubicación seleccione la entrada rápida o normal para
utilizar como entrada A.
NOTA: Si no hay más E/S disponibles para la configuración, se muestra un mensaje en la parte
inferior de la ventana de configuración. Libere una o más E/S antes de continuar con la
configuración de esta función.
6 Establezca el valor del parámetro Entradas de conteo → Entrada A → Filtro de rebote para
reducir el efecto de rebote en la entrada.
El valor de filtrado determina la frecuencia máxima del contador como se muestra en la tabla
Filtro de rebote
(véase página 146)
.
7 Introduzca el valor del parámetro Rango → Preajuste para establecer el valor de conteo inicial
de la función de preajuste
(véase página 138)
.
8 De manera opcional, puede habilitar estas funciones:
Función de preajuste
(véase página 138)
Función de habilitación
(véase página 141)
Función de captura
(véase página 133)
Función de comparación
(véase página 125)
9 De manera opcional, defina el valor del parámetro Eventos → Evento de detención en Sí para
habilitar la función de eventos externos
(véase página 131)
.
NOTA: Esta opción sólo está disponible para los módulos de ampliación TM3XF•, que admiten
eventos externos.

Una tarea con un tipo Principal
44 EIO0000003074 12/2019
Programación del tipo principal
Descripción general
El tipo principal siempre se gestiona mediante un bloque de funciones HSCMain_M241.
NOTA: Se detecta un error durante la compilación si se utiliza el bloque de funciones
HSCMain_M241 para gestionar un tipo de HSC diferente.
Adición del bloque de funciones HSCMain
Paso Descripción
1 Seleccione la ficha Bibliotecas en el catálogo de software y haga clic en Bibliotecas.
Seleccione Controlador → M241 → M241 HSC → HSC → HSCMain_M241 de la lista y, a
continuación, arrastre el elemento y suéltelo en la ventana POU.
2 Escriba el nombre de la instancia del tipo Principal (definido en la configuración) o seleccione
la instancia del bloque de funciones haciendo clic en:
Puede seleccionar la instancia HSC mediante el asistente de entrada en la siguiente ruta:
<MyController> → Contadores.

Una tarea con un tipo Principal
EIO0000003074 12/2019 45
Utilización de las variables de E/S
En las tablas siguientes se describe cómo se utilizan los diversos pins del bloque de funciones en
la modalidad Una tarea.
En esta tabla se describen las variables de entrada:
Entrada Tipo Descripción
EN_Enable BOOL Cuando se configura la entrada EN: si es TRUE, autoriza la
habilitación de contador mediante la entrada de habilitación
(véase página 141)
.
EN_Preset BOOL Cuando se configura la entrada SYNC: si es TRUE, autoriza el
preajuste del contador mediante la entrada SYNC
(véase página 138)
.
EN_Cap BOOL Cuando la entrada CAP está configurada: sif TRUE, habilita la
entrada de captura.
EN_Compare BOOL TRUE = habilita la operación de comparación
(véase página 125)
(utilizando los umbrales 0, 1, 2, 3):
comparación básica (bits de salida de TH0, TH1, TH2, TH3)
salidas reflejas (bits de salida Reflex0, Reflex1)
eventos (para activar las tareas externas en el cruce de
umbral)
NOTA: Esta opción sólo está disponible para los módulos de
ampliación TM3XF•, que admiten eventos externos.
EN_Out0 BOOL TRUE = habilita la salida física Out_R0 para utilizar eco del valor
Reflex0 (si está configurado).
EN_Out1 BOOL TRUE = habilita la salida física Out_R1 para utilizar eco del valor
Reflex1 (si está configurado).
F_Enable BOOL TRUE = autoriza cambios en el valor actual del contador.
F_Preset BOOL En el flanco ascendente, preajusta e inicia el contador.
F_Out0 BOOL TRUE = fuerza Out_R0 en 1 (si se ha configurado Reflex0 en
Función incrustada de HSC). Tiene prioridad sobre EN_Out0.
F_Out1 BOOL TRUE = fuerza Out_R1 en 1 (si se ha configurado Reflex1 en
Función incrustada de HSC). Tiene prioridad sobre EN_Out1.
ACK_Preset BOOL En el flanco ascendente, restablece Preset_Flag.
ACK_Cap BOOL En el flanco ascendente, restablece Cap_Flag.

Una tarea con un tipo Principal
46 EIO0000003074 12/2019
En esta tabla se describen las variables de salida:
SuspendCompare BOOL TRUE suspende los resultados de la comparación:
Los bits de salida de TH0, TH1, TH2, TH3, Reflex0,
Reflex1, Out0, Out1 del bloque mantienen su último valor.
Las salidas físicas 0 y 1 del hardware mantienen su último
valor.
Los eventos están enmascarados.
NOTA: EN_Compare, EN_ReflexO, EN_Reflex1,
F_Out0, F_Out1 siguen siendo operativas mientras
SuspendCompare esté definido.
Salida Tipo Comentario
HSC_REF EXPERT_REF
(véase página 157)
Referencia al HSC.
Para utilizar como entrada de los bloques de funciones
administrativas.
Validity BOOL TRUE = indica que los valores de salida del bloque de
funciones son válidos.
Run BOOL TRUE = el contador está en ejecución.
Se establece en False cuando CurrentValue llega a 0.
TH0 BOOL Se establece en 1 cuando CurrentValue > Umbral 0
(véase página 125)
.
TH1 BOOL Se establece en 1 cuando CurrentValue > Umbral 1
(véase página 125)
.
TH2 BOOL Se establece en 1 cuando CurrentValue > Umbral 2
(véase página 125)
.
TH3 BOOL Se establece en 1 cuando CurrentValue > Umbral 3
(véase página 125)
.
Preset_Flag BOOL Se establece en 1 mediante el preajuste del contador
(véase página 138)
.
Cap_Flag BOOL Se establece en 1 cuando se almacena un nuevo valor de
captura en el registro de captura.
Este indicador debe resetearse antes de que pueda
realizarse una nueva captura.
Reflex0 BOOL Estado de Reflex0
(véase página 126)
.
Sólo está activo cuando se establece EN_Compare.
Entrada Tipo Descripción

Una tarea con un tipo Principal
EIO0000003074 12/2019 47
Reflex1 BOOL Estado de Reflex1
(véase página 126)
.
Sólo está activo cuando se establece EN_Compare.
Out0 BOOL Estado de la salida física Out_R0 (si se ha configurado
Reflex0).
Out1 BOOL Estado de la salida física Out_R1 (si se ha configurado
Reflex1).
CurrentValue DINT Valor actual del contador.
Salida Tipo Comentario

Una tarea con un tipo Principal
48 EIO0000003074 12/2019
Ajuste de parámetros
Descripción general
La lista de parámetros descritos en la tabla se puede leer o modificar mediante los bloques de
funciones EXPERTGetParam
(véase página 166)
o EXPERTSetParam
(véase página 168)
.
NOTA: Los parámetros establecidos mediante el programa sobrescriben los valores de
parámetros configurados en la ventana de configuración de HSC. Los parámetros de
configuración iniciales se restauran tras un arranque en frío o en caliente del controlador
(véase Modicon M241 Logic Controller, Guía de programación)
.
Parámetros ajustables
En esta tabla se proporciona la lista de parámetros de EXPERT_PARAMETER_TYPE
(véase página 155)
que se pueden leer o modificar mientras el programa está en ejecución:
Parámetro Descripción
EXPERT_PRESET para obtener o establecer el valor preestablecido de un HSC
EXPERT_THRESHOLD0 para obtener o establecer el valor de umbral 0 de un HSC
EXPERT_THRESHOLD1 para obtener o establecer el valor de umbral 1 de un HSC
EXPERT_THRESHOLD2 para obtener o establecer el valor de umbral 2 de un HSC
EXPERT_THRESHOLD3 para obtener o establecer el valor de umbral 3 de un HSC
EXPERT_REFLEX0 para obtener o establecer la modalidad de salida refleja 0 de una función
EXPERT
EXPERT_REFLEX1 para obtener o establecer la modalidad de salida refleja 1 de una función
EXPERT

EIO0000003074 12/2019 49
Modicon M 241 Logic Controller
Modalidad Bucle de módulo
EIO0000003074 12/2019
Bucle de módulo Modal idad
Parte III
Bucle de módulo Modalidad
Descripción general
En este capítulo se describe el uso de un HSC en la modalidad Bucle de módulo.
Contenido de esta parte
Esta parte contiene los siguientes capítulos:
Capítulo Nombre del capítulo Página
6 Principio del Bucle de módulo 51
7Bucle en el módulo con un tipo Simple 55
8Bucle en el módulo con un tipo Principal 61

Modalidad Bucle de módulo
50 EIO0000003074 12/2019

EIO0000003074 12/2019 51
Modicon M 241 Logic Controller
Principio del Bucle de módulo
EIO0000003074 12/2019
Principio del Bucle de módulo
Capítulo 6
Principio del Bucle de módulo
Descripción del principio de modalidad Modulo-loop
Descripción general
La modalidad Bucle en el módulo puede utilizarse para acciones repetidas en una serie de objetos
en movimiento, por ejemplo aplicaciones de empaquetado y etiquetado.
Principio
En un flanco ascendente de la condición de sincronización
(véase página 138)
, el contador se
activa y el valor actual se restablece a 0.
Cuando el conteo está habilitado
(véase página 141)
:
Dirección progresiva: el contador aumenta hasta alcanzar el valor del módulo -1. En el pulso
siguiente, el contador se restablece en 0, un indicador de módulo se establece en 1 y el conteo
continúa.
Dirección regresiva: el contador disminuye hasta alcanzar 0. En el pulso siguiente, el contador se
establece en el valor del módulo, un indicador de módulo se establece en 1 y el conteo
continúa.
Modalidades de entrada
En esta tabla se muestran los 8 tipos de modalidades de entrada disponibles:
Modalidad de entrada Comentario
A = progresivo, B = regresivo modalidad predeterminada
El valor del contador aumenta en A y disminuye en B.
A = impulso, B = dirección Si un flanco ascendente en A y B es true, el valor del contador disminuye.
Si un flanco ascendente en A y B es false, el valor del contador aumenta.
Cuadratura normal X1 Un codificador físico siempre proporciona un giro de 90° de 2 señales que
primero permite al contador contar pulsos y detectar el sentido:
X1: 1 conteo mediante ciclo de codificador
X2: 2 conteos mediante ciclo de codificador
X4: 4 conteos mediante ciclo de codificador
Cuadratura normal X2
Cuadratura normal X4
Cuadratura inversa X1
Cuadratura inversa X2
Cuadratura inversa X4

Principio del Bucle de módulo
52 EIO0000003074 12/2019
Diagrama del principio progresivo/regresivo
NOTA: Las condiciones Enable y Sync dependen de la configuración. Dichas condiciones se
describen en la función Habilitación
(véase página 141)
y Preajuste
(véase página 138)
.
Fase Acción
1 En el flanco ascendente de la condición Sync, el valor actual se resetea en 0 y el contador se
activa.
2 Cuando la condición Enable es 1, cada pulso en A aumenta el valor del contador.
3 Cuando el contador alcanza el valor (modulo-1), el contador vuelve al 0 en el pulso siguiente y el
conteo continúa. Modulo_Flag se establece en 1.
4 En el flanco ascendente de la condición Sync, el valor de contador actual se resetea en 0.
5 Cuando la condición Enable es 1, cada pulso en B disminuye el contador.
6 Cuando el contador alcanza 0, el contador vuelve a (modulo-1) en el pulso siguiente y el conteo
continúa.
7 Cuando la condición Enable es 0, los pulsos en las entradas se omiten.
8 En el flanco ascendente de la condición Sync, el valor de contador actual se resetea en 0.

Principio del Bucle de módulo
EIO0000003074 12/2019 53
Diagrama del principio de cuadratura
La señal del codificador se cuenta según la modalidad de entrada seleccionada, tal como se
muestra más adelante:

Principio del Bucle de módulo
54 EIO0000003074 12/2019

EIO0000003074 12/2019 55
Modicon M 241 Logic Controller
Bucle en el módulo con un tipo Simple
EIO0000003074 12/2019
Bucle en el módulo con un tipo Simple
Capítulo 7
Bucle en el módulo con un tipo Simple
Descripción general
En este capítulo se describe cómo implementar un contador de alta velocidad en la modalidad
Bucle en el módulo utilizando un tipo Simple.
Contenido de este capítulo
Este capítulo contiene los siguientes apartados:
Apartado Página
Diagrama de sinopsis 56
Configuración del tipo simple de la modalidad Bucle en el módulo57
Programación del tipo Simple 58
Ajuste de parámetros 60

Bucle en el módulo con un tipo Simple
56 EIO0000003074 12/2019
Diagrama de sinopsis
Diagrama de sinopsis
Este diagrama ofrece una descripción general del tipo Simple en la modalidad Bucle en el módulo:
El conteo de tipo Simple para la modalidad Bucle en el módulo es progresivo únicamente.

Bucle en el módulo con un tipo Simple
EIO0000003074 12/2019 57
Configuración del tipo simple de la modalidad Bucle en el módulo
Procedimiento
Siga este procedimiento para configurar un tipo simple en la modalidad Bucle de módulo:
Paso Acción
1 Haga doble clic en MyController → Contadores.
Resultado: Se abre la ficha del editor Contadores para la configuración HSC.
NOTA: Si ya se ha configurado el número máximo de funciones HSC principal, aparece un
mensaje en la parte inferior de la ventana de configuración. Considere utilizar una función HSC
simple en su lugar.
2 En la ficha del editor Contadores, defina el valor del parámetro Función de conteo en HSC
simple.
Resultado: Los parámetros de configuración aparecen en la ficha del editor Contadores.
3 En caso necesario, introduzca el valor del parámetro General → Nombre de instancia.
NOTA: El software proporciona el nombre de instancia automáticamente y se puede utilizar
para el bloque de funciones del contador.
4 Defina el valor del parámetro General → Modalidad de conteo en Bucle en el módulo.
5En Entradas de conteo → Entrada A → Ubicación seleccione la entrada rápida o normal para
utilizar como entrada A.
NOTA: Si no hay más E/S disponibles para la configuración, se muestra un mensaje en la parte
inferior de la ventana de configuración. Libere una o más E/S antes de continuar con la
configuración de esta función.
6 Establezca el valor del parámetro Entradas de conteo → Entrada A → Filtro de rebote para
reducir el efecto de rebote en la entrada.
El valor de filtrado determina la frecuencia máxima del contador como se muestra en la tabla
Filtro de rebote
(véase página 146)
.
7 Introduzca el valor del parámetro Rango → Módulo para definir el valor del módulo de conteo.

Bucle en el módulo con un tipo Simple
58 EIO0000003074 12/2019
Programación del tipo Simple
Descripción general
Un tipo Simple siempre se gestiona mediante un bloque de funciones HSCSimple_M241
(véase página 175)
.
NOTA: Se detecta un error durante la compilación si se utiliza el bloque de funciones
HSCSimple_M241 para gestionar un tipo de HSC diferente.
Adición de un bloque de funciones HSCSimple
Paso Descripción
1 Seleccione la ficha Bibliotecas en el catálogo de software y haga clic en Bibliotecas.
Seleccione Controlador → M241 → M241 HSC → HSC → HSCSimple_M241 de la lista y, a
continuación, arrastre el elemento y suéltelo en la ventana POU.
2 Escriba el nombre de la instancia del tipo Simple (definido en la configuración) o seleccione
la instancia del bloque de funciones haciendo clic en:
Puede seleccionar la instancia HSC mediante el asistente de entrada en la siguiente ruta:
<MyController> → Contadores.

Bucle en el módulo con un tipo Simple
EIO0000003074 12/2019 59
Utilización de las variables de E/S
En las tablas siguientes se describe cómo se utilizan los diversos pins del bloque de funciones en
la modalidad Bucle en el módulo.
En esta tabla se describen las variables de entrada:
En esta tabla se describen las variables de salida:
Entrada Tipo Comentario
Enable BOOL TRUE = autoriza cambios en el valor actual del
contador.
Sync BOOL En el flanco ascendente, restablece e inicia el contador.
ACK_Modulo BOOL En el flanco ascendente, resetea Modulo_Flag.
Salida Tipo Comentario
HSC_REF EXPERT_REF
(véase página 157)
Referencia al HSC.
Se utiliza como entrada de bloques de funciones
administrativas.
HSC_Err BOOL TRUE = indica que se ha detectado un error.
Utilice el bloque de funciones EXPERTGetDiag
(véase página 162)
para obtener más información
sobre este error detectado.
Validity BOOL TRUE = significa que los valores de salida del bloque de
funciones son válidos.
Run BOOL Irrelevante
Modulo_Flag BOOL Se establece en TRUE cuando el contador sobrepasa el
valor Modulo.
CurrentValue DWORD Valor actual del contador.

Bucle en el módulo con un tipo Simple
60 EIO0000003074 12/2019
Ajuste de parámetros
Descripción general
La lista de parámetros descritos en la tabla se puede leer o modificar mediante los bloques de
funciones EXPERTGetParam
(véase página 166)
o EXPERTSetParam
(véase página 168)
.
NOTA: Los parámetros establecidos mediante el programa sobrescriben los valores de
parámetros configurados en la ventana de configuración de HSC. Los parámetros de
configuración iniciales se restauran tras un arranque en frío o en caliente del controlador
(véase Modicon M241 Logic Controller, Guía de programación)
.
Parámetros ajustables
En esta tabla se proporciona la lista de parámetros de EXPERT_PARAMETER_TYPE
(véase página 155)
que se pueden leer o modificar mientras el programa está en ejecución:
Parámetro Descripción
EXPERT_MODULO para obtener o establecer el valor de módulo de un HSC

EIO0000003074 12/2019 61
Modicon M 241 Logic Controller
Bucle en el módulo con un tipo Principal
EIO0000003074 12/2019
Bucle en el módulo con un tipo Principal
Capítulo 8
Bucle en el módulo con un tipo Principal
Descripción general
En este capítulo se describe cómo implementar un contador de alta velocidad en la modalidad
Bucle en el módulo utilizando un tipo Principal.
Contenido de este capítulo
Este capítulo contiene los siguientes apartados:
Apartado Página
Diagrama de sinopsis 62
Configuración de monofásico de tipo principal en la modalidad Bucle en el módulo 63
Configuración de fase dual de tipo principal en la modalidad Bucle en el módulo 64
Programación del tipo principal 65
Ajuste de parámetros 69

Bucle en el módulo con un tipo Principal
62 EIO0000003074 12/2019
Diagrama de sinopsis
Diagrama de sinopsis
En este diagrama se ofrece una descripción general del tipo Principal en la modalidad Bucle en el
módulo:
A y B son las entradas de conteo del contador.
EN no se puede configurar cuando se utiliza la entrada B.
SYNC es la entrada de sincronización del contador.
CAP es la entrada de captura del contador.
Funciones opcionales
Aparte de la modalidad Bucle en el módulo, el tipo Principal ofrece las siguientes funciones:
Función de habilitación
(véase página 141)
Función de captura
(véase página 133)
Función de comparación
(véase página 125)
NOTA: El valor preestablecido es 0 y no puede modificarse.

Bucle en el módulo con un tipo Principal
EIO0000003074 12/2019 63
Configuración de monofásico de tipo principal en la modalidad Bucle en el módulo
Procedimiento
Siga este procedimiento para configurar un monofásico de tipo Principal en la modalidad Bucle en
el módulo:
Paso Acción
1 Haga doble clic en MyController → Contadores.
Resultado: se abre la ficha del editor Contadores para la configuración HSC.
NOTA: Si ya se ha configurado el número máximo de funciones HSC principal, aparece un
mensaje en la parte inferior de la ventana de configuración. Considere utilizar una función HSC
simple en su lugar.
2 En la ficha del editor Contadores, defina el valor del parámetro Función de conteo en
Monofásico principal HSC.
Resultado: Los parámetros de configuración aparecen en la ficha del editor Contadores.
3 En caso necesario, introduzca el valor del parámetro General → Nombre de instancia.
NOTA: El software proporciona el nombre de instancia automáticamente y se puede utilizar
para el bloque de funciones del contador.
4 Defina el valor del parámetro General → Modalidad de conteo en Bucle en el módulo.
5En Entradas de conteo → Entrada A → Ubicación seleccione la entrada rápida o normal para
utilizar como entrada A.
NOTA: Si no hay más E/S disponibles para la configuración, se muestra un mensaje en la parte
inferior de la ventana de configuración. Libere una o más E/S antes de continuar con la
configuración de esta función.
6 Establezca el valor del parámetro Entradas de conteo → Entrada A → Filtro de rebote para
reducir el efecto de rebote en la entrada.
El valor de filtrado determina la frecuencia máxima del contador como se muestra en la tabla
Filtro de rebote
(véase página 146)
.
7 Introduzca el valor del parámetro Rango → Módulo para definir el valor del módulo de conteo.
8 De manera opcional, puede habilitar estas funciones de control:
Función de habilitación
(véase página 141)
Función de captura
(véase página 133)
Función de comparación
(véase página 125)

Bucle en el módulo con un tipo Principal
64 EIO0000003074 12/2019
Configuración de fase dual de tipo principal en la modalidad Bucle en el módulo
Procedimiento
Siga este procedimiento para configurar una fase dual de tipo Principal en la modalidad Bucle en
el módulo:
Paso Acción
1 Haga doble clic en MyController → Contadores.
Resultado: Se abre la ficha del editor Contadores para la configuración HSC.
NOTA: Si ya se ha configurado el número máximo de funciones HSC principal, aparece un
mensaje en la parte inferior de la ventana de configuración. Considere utilizar una función HSC
simple en su lugar.
2 En la ficha del editor Contadores, defina el valor del parámetro Función de conteo en Fase dual
principal HSC.
Resultado: Los parámetros de configuración aparecen en la ficha del editor Contadores.
3 En caso necesario, introduzca el valor del parámetro General → Nombre de instancia.
NOTA: El software proporciona el nombre de instancia automáticamente y se puede utilizar
para el bloque de funciones del contador.
4 Defina el valor del parámetro General → Modalidad de conteo en Bucle en el módulo.
5 Defina el valor del parámetro General → Modalidad de entrada para seleccionar la modalidad
de entrada del bucle de módulo
(véase página 51)
.
6En Entradas de conteo → Entrada A → Ubicación seleccione la entrada rápida o normal para
utilizar como entrada A.
NOTA: Si no hay más E/S disponibles para la configuración, se muestra un mensaje en la parte
inferior de la ventana de configuración. Libere una o más E/S antes de continuar con la
configuración de esta función.
7 Establezca el valor del parámetro Entradas de conteo → Entrada A → Filtro de rebote para
reducir el efecto de rebote en la entrada.
El valor de filtrado determina la frecuencia máxima del contador como se muestra en la tabla
Filtro de rebote
(véase página 146)
.
8En Entradas de conteo → Entrada B → Ubicación seleccione la entrada rápida o normal para
utilizar como entrada B.
9 Establezca el valor del parámetro Entradas de conteo → Entrada B → Filtro de rebote para
reducir el efecto de rebote en la entrada.
10 Introduzca el valor del parámetro Rango → Módulo para definir el valor del módulo de conteo.
11 De manera opcional, puede habilitar estas funciones de control:
Función de captura
(véase página 133)
Función de comparación
(véase página 125)

Bucle en el módulo con un tipo Principal
EIO0000003074 12/2019 65
Programación del tipo principal
Descripción general
El tipo principal siempre se gestiona mediante un bloque de funciones HSCMain_M241.
NOTA: Se detecta un error durante la compilación si se utiliza el bloque de funciones
HSCMain_M241 para gestionar un tipo de HSC diferente.
Adición del bloque de funciones HSCMain
Paso Descripción
1 Seleccione la ficha Bibliotecas en el catálogo de software y haga clic en Bibliotecas.
Seleccione Controlador → M241 → M241 HSC → HSC → HSCMain_M241 de la lista y, a
continuación, arrastre el elemento y suéltelo en la ventana POU.
2 Escriba el nombre de la instancia del tipo Principal (definido en la configuración) o seleccione
la instancia del bloque de funciones haciendo clic en:
Puede seleccionar la instancia HSC mediante el asistente de entrada en la siguiente ruta:
<MyController> → Contadores.

Bucle en el módulo con un tipo Principal
66 EIO0000003074 12/2019
Utilización de las variables de E/S
En las tablas siguientes se describe cómo se utilizan los diversos pins del bloque de funciones en
la modalidad Bucle en el módulo.
En esta tabla se describen las variables de entrada:
Entrada Tipo Descripción
EN_Enable BOOL Cuando se configura la entrada EN: si es TRUE, autoriza la
habilitación de contador mediante la entrada de habilitación
(véase página 141)
.
EN_Preset BOOL Cuando se configura la entrada SYNC: si es TRUE, autoriza
el preajuste del contador mediante la entrada SYNC
(véase página 138)
.
EN_Cap BOOL Cuando la entrada CAP está configurada: sif TRUE, habilita
la entrada de captura.
EN_Compare BOOL TRUE = habilita la función de comparación
(véase página 125)
con el umbral 0, 1, 2, 3:
comparación básica (bits de salida de TH0, TH1, TH2,
TH3)
salida refleja (bits de salida Reflex0, Reflex1)
eventos (para activar las tareas externas en el cruce de
umbral)
EN_Out0 BOOL TRUE = habilita la salida física Out_R0 para utilizar eco del
valor Reflex0 (si está configurado).
EN_Out1 BOOL TRUE = habilita la salida física Out_R1 para utilizar eco del
valor Reflex1 (si está configurado).
F_Enable BOOL TRUE = autoriza cambios en el valor actual del contador.
F_Preset BOOL En el flanco ascendente, resetea e inicia el contador.
F_Out0 BOOL TRUE fuerza Out_R0 en 1 (si se ha configurado Reflex0).
F_Out1 BOOL TRUE fuerza Out_R1 en 1 (si se ha configurado Reflex1).
ACK_Modulo BOOL En el flanco ascendente, resetea Modulo_Flag.
ACK_Preset BOOL En el flanco ascendente, restablece Preset_Flag.
ACK_Cap BOOL En el flanco ascendente, resetea Cap_Flag.

Bucle en el módulo con un tipo Principal
EIO0000003074 12/2019 67
En esta tabla se describen las variables de salida:
SuspendCompare BOOL TRUE suspende los resultados de la comparación:
Los bits de salida de TH0, TH1, TH2, TH3, Reflex0,
Reflex1, Out0, Out1 del bloque mantienen su último
valor.
Las salidas físicas 0 y 1 mantienen su último valor.
Los eventos están enmascarados.
NOTA: EN_Compare, EN_ReflexO, EN_Reflex1,
F_Out0, F_Out1 siguen siendo operativas mientras
SuspendCompare esté definido.
Salida Tipo Comentario
HSC_REF EXPERT_REF
(véase página 157)
Referencia al HSC.
Para utilizar como entrada de los bloques de funciones
administrativas.
HSC_Err BOOL TRUE = indica que se ha detectado un error.
Utilice el bloque de funciones EXPERTGetDiag
(véase página 162)
para obtener más información sobre este
error detectado.
Validity BOOL TRUE = indica que los valores de salida del bloque de
funciones son válidos.
Run BOOL TRUE = el contador está en ejecución.
El bit de ejecución pasa a 0 cuando CurrentValue alcanza 0.
Se requiere una sincronización para reiniciar el contador.
TH0 BOOL Se establece en 1 cuando CurrentValue > Umbral 0
(véase página 125)
.
TH1 BOOL Se establece en 1 cuando CurrentValue > Umbral 1
(véase página 125)
.
TH2 BOOL Se establece en 1 cuando CurrentValue > Umbral 2
(véase página 125)
.
TH3 BOOL Se establece en 1 cuando CurrentValue > Umbral 3
(véase página 125)
.
Modulo_Flag BOOL Se establece en 1 cuando el contador se desplaza por el
módulo o 0.
Preset_Flag BOOL Se establece en 1 mediante el preajuste del contador
(véase página 138)
.
Cap_Flag BOOL Se establece en 1 cuando se almacena un nuevo valor de
captura en el registro de captura
(véase página 134)
.
Este indicador debe resetearse antes de que pueda
realizarse una nueva captura.
Entrada Tipo Descripción

Bucle en el módulo con un tipo Principal
68 EIO0000003074 12/2019
Reflex0 BOOL Estado de Reflex0
(véase página 128)
.
Sólo está activo cuando se establece EN_Compare .
Reflex1 BOOL Estado de Reflex1
(véase página 128)
.
Sólo está activo cuando se establece EN_Compare.
Out0 BOOL Estado de la salida física Out_R0 (si se ha configurado
Reflex0).
Out1 BOOL Estado de la salida física Out_R1 (si se ha configurado
Reflex1).
CurrentValue DINT Valor actual del contador.
Salida Tipo Comentario

Bucle en el módulo con un tipo Principal
EIO0000003074 12/2019 69
Ajuste de parámetros
Descripción general
La lista de parámetros descritos en la tabla se puede leer o modificar mediante los bloques de
funciones EXPERTGetParam
(véase página 166)
o EXPERTSetParam
(véase página 166)
.
NOTA: Los parámetros establecidos mediante el programa sobrescriben los valores de
parámetros configurados en la ventana de configuración de HSC. Los parámetros de
configuración iniciales se restauran tras un arranque en frío o en caliente del controlador
(véase Modicon M241 Logic Controller, Guía de programación)
.
Parámetros ajustables
En esta tabla se proporciona la lista de parámetros de EXPERT_PARAMETER_TYPE
(véase página 155)
que se pueden leer o modificar mientras el programa está en ejecución:
Parámetro Descripción
EXPERT_MODULO para obtener o establecer el valor de módulo de un HSC
EXPERT_THRESHOLD0 para obtener o establecer el valor de umbral 0 de un HSC
EXPERT_THRESHOLD1 para obtener o establecer el valor de umbral 1 de un HSC
EXPERT_THRESHOLD2 para obtener o establecer el valor de umbral 2 de un HSC
EXPERT_THRESHOLD3 para obtener o establecer el valor de umbral 3 de un HSC
EXPERT_REFLEX0 para obtener o establecer la modalidad de salida refleja 0 de una función
EXPERT
EXPERT_REFLEX1 para obtener o establecer la modalidad de salida refleja 1 de una función
EXPERT

Bucle en el módulo con un tipo Principal
70 EIO0000003074 12/2019

EIO0000003074 12/2019 71
Modicon M 241 Logic Controller
Modalidad Grande libre
EIO0000003074 12/2019
Modalidad Grande libre
Parte IV
Modalidad Grande libre
Descripción general
En esta parte se describe el uso de un HSC en la modalidad Grande libre.
Contenido de esta parte
Esta parte contiene los siguientes capítulos:
Capítulo Nombre del capítulo Página
9 Principio de la modalidad Grande libre 73
10 Grande libre con un tipo Principal 79

Modalidad Grande libre
72 EIO0000003074 12/2019

EIO0000003074 12/2019 73
Modicon M 241 Logic Controller
Principio de la modalidad Grande li bre
EIO0000003074 12/2019
Principio de la modalidad Grande li bre
Capítulo 9
Principio de la modalidad Grande libre
Descripción general
En este capítulo se describe el principio de la modalidadGrande libre.
Contenido de este capítulo
Este capítulo contiene los siguientes apartados:
Apartado Página
Descripción de principios de la modalidad Grande libre 74
Gestión de límites 77

Principio de la modalidad Grande libre
74 EIO0000003074 12/2019
Descripción de principios de la modalidad Grande libre
Descripción general
La modalidad Grande libre puede emplearse para la supervisión o el etiquetado de ejes en los que
se debe registrar la posición de cada pieza.
Principio
En la modalidad Grande libre, el módulo se comporta como un contador estándar progresivo y
regresivo.
Cuando el conteo está habilitado
(véase página 141)
, el contador cuenta del modo siguiente en:
Dirección progresiva: el contador avanza.
Dirección regresiva: el contador retrocede.
El contador se activa mediante un flanco de preajuste
(véase página 140)
que carga el valor
preestablecido.
El contador actual se almacena en el registro de capturas utilizando la función de captura
(véase página 133)
.
Si el contador alcanza los límites de conteo, reaccionará según la configuración de Gestión de
límites
(véase página 77)
.
Modalidades de entrada
En esta tabla se muestran los 8 tipos de modalidades de entrada disponibles:
Modalidad de entrada Comentario
A = progresivo, B = regresivo modalidad predeterminada
El valor del contador aumenta en A y disminuye en B.
A = Pulso, B = Dirección Si un flanco ascendente en A y B es true, el valor del
contador disminuye.
Si un flanco ascendente en A y B es false, el valor del
contador aumenta.
Cuadratura normal X1 Un codificador físico siempre proporciona un giro de 90° de
2 señales que primero permite al contador contar pulsos y
detectar el sentido:
X1: 1 conteo para cada ciclo del codificador
X2: 2 conteos para cada ciclo del codificador
X4: 4 conteos para cada ciclo del codificador
Cuadratura normal X2
Cuadratura normal X4
Cuadratura inversa X1
Cuadratura inversa X2
Cuadratura inversa X4

Principio de la modalidad Grande libre
EIO0000003074 12/2019 75
Diagrama del principio progresivo/regresivo
En las figuras se muestra la modalidad A = progresivo, B = regresivo:
Fase Acción
1 En el flanco ascendente de la condición Preajuste, se establece como valor actual
el valor preestablecido y se activa el contador.
2 Cuando la condición Enable es 1, cada pulso en A aumenta el valor del contador.
3 En el flanco ascendente de la condición Preajuste, se establece como valor actual
el valor preestablecido.
4 Cuando la condición Enable es 1, cada pulso en B disminuye el valor del contador.
5 Cuando la condición Enable es 0, los pulsos en A o B se omiten.
6 En el flanco ascendente de la condición Preajuste, se establece como valor actual
el valor preestablecido.
7 Cuando la condición Enable es 1, los pulsos en B disminuyen el valor del contador.

Principio de la modalidad Grande libre
76 EIO0000003074 12/2019
Diagrama del principio de cuadratura
La señal del codificador se cuenta según la modalidad de entrada seleccionada, tal como se
muestra más adelante:

Principio de la modalidad Grande libre
EIO0000003074 12/2019 77
Gestión de límites
Descripción general
Cuando se alcanza el límite del contador, el contador puede tener 2 comportamientos según la
configuración:
Bloqueo en los límites
Desplazamiento
Bloqueo en los límites
En caso de desborde o transgresión por debajo del contador: el valor actual del contador se
mantiene en el valor límite, el bit de validez pasa a 0 y el bit de error indica este error detectado
hasta que el contador vuelva a preajustarse.
Se proporciona el valor 2M como:
+2M = 2 (exp. 31) -1
-2M = -2 (exp. 31)

Principio de la modalidad Grande libre
78 EIO0000003074 12/2019
Desplazamiento
En caso de desborde o transgresión por debajo del contador, el valor actual del contador pasa
automáticamente al valor límite contrario.
Modulo_Flag se establece en
1.

EIO0000003074 12/2019 79
Modicon M 241 Logic Controller
Grande libre con un tipo Principal
EIO0000003074 12/2019
Grande libre con un tipo Principal
Capítulo 10
Grande libre con un tipo Principal
Descripción general
En este capítulo se describe cómo implementar un contador de alta velocidad en la modalidad
Grande libre utilizando un tipo Principal.
Contenido de este capítulo
Este capítulo contiene los siguientes apartados:
Apartado Página
Diagrama de sinopsis 80
Configuración de fase dual de tipo principal en la modalidad Grande libre 81
Programación del tipo principal 83
Ajuste de parámetros 87

Grande libre con un tipo Principal
80 EIO0000003074 12/2019
Diagrama de sinopsis
Diagrama de sinopsis
En este diagrama se ofrece una descripción general del tipo Principal en la modalidad Grande
libre:
A y B son las entradas de conteo del contador.
EN es la entrada de habilitación del contador.
SYNC es la entrada de sincronización del contador.
CAP es la entrada de captura del contador.
Función opcional
Aparte de la modalidad Grande libre, el tipo Principal ofrece las siguientes funciones:
Función de preajuste
(véase página 138)
Función de habilitación
(véase página 141)
Función de captura
(véase página 133)
Función de comparación
(véase página 125)

Grande libre con un tipo Principal
EIO0000003074 12/2019 81
Configuración de fase dual de tipo principal en la modalidad Grande libre
Procedimiento
Siga este procedimiento para configurar una fase dual de tipo Principal en la modalidad Grande
libre:
Paso Acción
1 Haga doble clic en MyController → Contadores.
Resultado: Se abre la ficha del editor Contadores para la configuración HSC.
NOTA: Si ya se ha configurado el número máximo de funciones HSC principal, aparece un
mensaje en la parte inferior de la ventana de configuración. Considere utilizar una función HSC
simple en su lugar.
2 En la ficha del editor Contadores, defina el valor del parámetro Función de conteo en Fase dual
principal HSC.
Resultado: Los parámetros de configuración aparecen en la ficha del editor Contadores.
3 En caso necesario, introduzca el valor del parámetro General → Nombre de instancia.
NOTA: El software proporciona el nombre de instancia automáticamente y se puede utilizar
para el bloque de funciones del contador.
4 Defina el valor del parámetro General → Modalidad de conteo en Grande libre.
5 Establezca el valor del parámetro General → Modalidad de entrada para seleccionar la
modalidad de entrada
(véase página 74)
.
6En Entradas de conteo → Entrada A → Ubicación seleccione la entrada rápida o normal para
utilizar como entrada A.
NOTA: Si no hay más E/S disponibles para la configuración, se muestra un mensaje en la parte
inferior de la ventana de configuración. Libere una o más E/S antes de continuar con la
configuración de esta función.
7 Establezca el valor del parámetro Entradas de conteo → Entrada A → Filtro de rebote para
reducir el efecto de rebote en la entrada.
El valor de filtrado determina la frecuencia máxima del contador como se muestra en la tabla
Filtro de rebote
(véase página 146)
.
8En Entradas de conteo → Entrada B → Ubicación seleccione la entrada rápida o normal para
utilizar como entrada B.
NOTA: Si no hay más E/S disponibles para la configuración, se muestra un mensaje en la parte
inferior de la ventana de configuración. Libere una o más E/S antes de continuar con la
configuración de esta función.
9 Establezca el valor del parámetro Entradas de conteo → Entrada B → Filtro de rebote.
10 Introduzca el valor del parámetro Rango → Preajuste para definir el valor inicial del conteo.
11 Introduzca el valor de Rango → Límites para la gestión de límites
(véase página 77)
.


Grande libre con un tipo Principal
EIO0000003074 12/2019 83
Programación del tipo principal
Descripción general
El tipo principal siempre se gestiona mediante un bloque de funciones HSCMain_M241.
NOTA: Se detecta un error durante la compilación si se utiliza el bloque de funciones
HSCMain_M241 para gestionar un tipo de HSC diferente.
Adición del bloque de funciones HSCMain
Paso Descripción
1 Seleccione la ficha Bibliotecas en el catálogo de software y haga clic en Bibliotecas.
Seleccione Controlador → M241 → M241 HSC → HSC → HSCMain_M241 de la lista y, a
continuación, arrastre el elemento y suéltelo en la ventana POU.
2 Escriba el nombre de la instancia del tipo Principal (definido en la configuración) o seleccione
la instancia del bloque de funciones haciendo clic en:
Puede seleccionar la instancia HSC mediante el asistente de entrada en la siguiente ruta:
<MyController> → Contadores.

Grande libre con un tipo Principal
84 EIO0000003074 12/2019
Utilización de las variables de E/S
En las tablas siguientes se describe cómo se utilizan los diversos pins del bloque de funciones en
la modalidad Grande libre.
En esta tabla se describen las variables de entrada:
Entrada Tipo Descripción
EN_Enable BOOL Cuando se configura la entrada EN: si es TRUE, autoriza la
habilitación de contador mediante la entrada de habilitación
(véase página 141)
.
EN_Preset BOOL Cuando se configura la entrada SYNC: si es TRUE, autoriza
el preajuste del contador mediante la entrada SYNC
(véase página 138)
.
EN_Cap BOOL Cuando la entrada CAP está configurada: sif TRUE, habilita la
entrada de captura
(véase página 136)
.
EN_Compare BOOL TRUE habilita la operación de comparación
(véase página 125)
(utilizando los umbrales 0, 1, 2, 3):
comparación básica (bits de salida de TH0, TH1, TH2,
TH3)
salidas reflejas (bits de salida Reflex0, Reflex1)
eventos (para activar las tareas externas en el cruce de
umbral)
EN_Out0 BOOL TRUE = habilita la salida física Out_R0 para utilizar eco del
valor Reflex0 (si está configurado).
EN_Out1 BOOL TRUE = habilita la salida física Out_R1 para utilizar eco del
valor Reflex1 (si está configurado).
F_Enable BOOL TRUE = autoriza cambios en el valor actual del contador.
F_Preset BOOL En el flanco ascendente, preajusta e inicia el contador.
F_Out0 BOOL TRUE fuerza Out_R0 en 1 (si se ha configurado Reflex0).
F_Out1 BOOL TRUE fuerza Out_R1 en 1 (si se ha configurado Reflex1).
ACK_Modulo BOOL En el flanco ascendente, resetea Modulo_Flag.
ACK_Preset BOOL En el flanco ascendente, restablece Preset_Flag.
ACK_Cap BOOL En el flanco ascendente, resetea Cap_Flag.

Grande libre con un tipo Principal
EIO0000003074 12/2019 85
En esta tabla se describen las variables de salida:
SuspendCompare BOOL TRUE suspende los resultados de la comparación:
Los bits de salida de TH0, TH1, TH2, TH3, Reflex0,
Reflex1, Out0, Out1 del bloque mantienen su último
valor.
Las salidas físicas 0 y 1 mantienen su último valor.
Los eventos están enmascarados.
NOTA: EN_Compare, EN_ReflexO,
EN_Reflex1,F_Out0, F_Out1 permanecen operativos
mientras SuspendCompare esté definido.
Salidas Tipo Comentario
HSC_REF EXPERT_REF
(véase página 157)
Referencia al HSC.
Para utilizar como entrada de los bloques de funciones
administrativas.
HSC_Err BOOL TRUE = indica que se ha detectado un error.
Utilice el bloque de funciones EXPERTGetDiag
(véase página 162)
para obtener más información sobre este
error detectado.
Validity BOOL TRUE = indica que los valores de salida del bloque de
funciones son válidos.
Run BOOL No utilizado.
TH0 BOOL Se establece en 1 cuando CurrentValue > Umbral 0
(véase página 125)
.
TH1 BOOL Se establece en 1 cuando CurrentValue > Umbral 1
(véase página 125)
.
TH2 BOOL Se establece en 1 cuando CurrentValue > Umbral 2
(véase página 125)
.
TH3 BOOL Se establece en 1 cuando CurrentValue > Umbral 3
(véase página 125)
.
Modulo_Flag BOOL Se establece en 1 cuando el contador sobrepasa el límite.
Preset_Flag BOOL Se establece en 1 mediante la el preajuste del contador
(véase página 138)
.
Cap_Flag BOOL Se establece en 1 cuando se almacena un nuevo valor de
captura en el registro de captura
(véase página 133)
.
Este indicador debe resetearse antes de que pueda realizarse
una nueva captura.
Reflex0 BOOL Estado de Reflex0.
Sólo está activo cuando se establece EN_Compare.
Entrada Tipo Descripción

Grande libre con un tipo Principal
86 EIO0000003074 12/2019
Reflex1 BOOL Estado de Reflex1.
Sólo está activo cuando se establece EN_Compare.
Out0 BOOL Estado de las salidas físicas Out_R0 (si se ha configurado
Reflex0 en Función incrustada de HSC; de lo contrario,
FALSE).
Out1 BOOL Estado de las salidas físicas Out_R1 (si se ha configurado
Reflex1 en Función incrustada de HSC; de lo contrario,
FALSE).
Salidas Tipo Comentario

Grande libre con un tipo Principal
EIO0000003074 12/2019 87
Ajuste de parámetros
Descripción general
La lista de parámetros descritos en la tabla se puede leer o modificar mediante los bloques de
funciones EXPERTGetParam
(véase página 166)
o EXPERTSetParam
(véase página 168)
.
NOTA: Los parámetros establecidos mediante el programa sobrescriben los valores de
parámetros configurados en la ventana de configuración de HSC. Los parámetros de
configuración iniciales se restauran tras un arranque en frío o en caliente del controlador
(véase Modicon M241 Logic Controller, Guía de programación)
.
Parámetros ajustables
En esta tabla se proporciona la lista de parámetros de EXPERT_PARAMETER_TYPE
(véase página 155)
que se pueden leer o modificar mientras el programa está en ejecución:
Parámetro Descripción
EXPERT_PRESET para obtener o establecer el valor preestablecido del HSC
EXPERT_THRESHOLD0 para obtener o establecer el valor de umbral 0 de un HSC
EXPERT_THRESHOLD1 para obtener o establecer el valor de umbral 1 de un HSC
EXPERT_THRESHOLD2 para obtener o establecer el valor de umbral 2 de un HSC
EXPERT_THRESHOLD3 para obtener o establecer el valor de umbral 3 de un HSC
EXPERT_REFLEX0 para obtener o establecer la modalidad de salida refleja 0 de una función
EXPERT
EXPERT_REFLEX1 para obtener o establecer la modalidad de salida refleja 0 de una función
EXPERT

Grande libre con un tipo Principal
88 EIO0000003074 12/2019

EIO0000003074 12/2019 89
Modicon M 241 Logic Controller
Modalidad Conteo de eventos
EIO0000003074 12/2019
Conteo d e eventos Modalidad
Parte V
Conteo de eventos Modalidad
Descripción general
En este apartado se describe el uso de un HSC en la modalidad Conteo de eventos.
Contenido de esta parte
Esta parte contiene los siguientes capítulos:
Capítulo Nombre del capítulo Página
11 Conteo de eventos Principio 91
12 Conteo de eventos con un tipo Principal 93

Modalidad Conteo de eventos
90 EIO0000003074 12/2019

EIO0000003074 12/2019 91
Modicon M 241 Logic Controller
Conteo de eventos Principio
EIO0000003074 12/2019
Conteo d e eventos Principio
Capítulo 11
Conteo de eventos Principio
Descripción de principios de la modalidad Conteo de eventos
Descripción general
La modalidad Conteo de eventos permite contar el número de eventos que se producen durante
un periodo de tiempo determinado.
Principio
El contador valora el número de pulsos aplicados a la entrada para un periodo de tiempo
predefinido. Al final de cada periodo, el registro de conteo se actualiza con el número de eventos
recibidos.
La sincronización se puede utilizar durante el periodo de tiempo. De este modo se reinicia el
evento de conteo de un nuevo periodo de tiempo predefinido. El recuento se reinicia en el flanco
condición de sincronización
(véase página 138)
.
Diagrama de principio

Conteo de eventos Principio
92 EIO0000003074 12/2019
NOTA:
En el tipo Principal, cuando la condición Enable está:
Definida en 0: el conteo actual se cancela y el valor de CurrentValue se mantiene en el valor
válido anterior.
Definida en 1: el valor acumulado se restablece en 0, el CurrentValue (valor actual)
permanece sin cambios y el conteo se reinicia para un nuevo periodo.
Fase Acción
1 Cuando la condición Enable es 1, el contador acumula el número de eventos (pulsos) en la
entrada física durante un periodo de tiempo predefinido.
Si el valor de validez es 0, el valor actual no es relevante.
2 Una vez transcurrido el primer periodo de tiempo, el valor del contador se establece en el número
de eventos contados durante el periodo y el valor de validez se establece en 1.
El conteo se reinicia para un nuevo periodo de tiempo.
3 En el flanco ascendente de la condición Sync:
El valor acumulado se restablece en 0
El valor actual no se actualiza
El conteo se reinicia para un nuevo periodo de tiempo
4 Cuando ya ha pasado el periodo de tiempo, como valor del contador se establece el número de
eventos contados durante el periodo.
El conteo se reinicia para un nuevo periodo de tiempo.

EIO0000003074 12/2019 93
Modicon M 241 Logic Controller
Conteo de eventos con un t ipo Principal
EIO0000003074 12/2019
Conteo d e eventos con un tipo Principal
Capítulo 12
Conteo de eventos con un tipo Principal
Descripción general
En este capítulo se describe cómo implementar un contador de alta velocidad en la modalidad
Conteo de eventos utilizando un tipo Principal.
Contenido de este capítulo
Este capítulo contiene los siguientes apartados:
Apartado Página
Diagrama de sinopsis 94
Configuración de monofásico de tipo principal en la modalidad Conteo de eventos 95
Programación del tipo principal 96
Ajuste de parámetros 99

Conteo de eventos con un tipo Principal
94 EIO0000003074 12/2019
Diagrama de sinopsis
Diagrama de sinopsis
En este diagrama se ofrece una descripción general del tipo Principal en la modalidad Conteo de
eventos:
A es la entrada de conteo del contador.
SYNC es la entrada de sincronización del contador.
Función opcional
Además de la modalidad Conteo de eventos, el tipo Principal proporciona la función de preajuste
(véase página 138)
.

Conteo de eventos con un tipo Principal
EIO0000003074 12/2019 95
Configuración de monofásico de tipo principal en la modalidad Conteo de eventos
Procedimiento
Siga este procedimiento para configurar un monofásico de tipo Principal en la modalidad Conteo
de eventos:
Paso Acción
1 Haga doble clic en MyController → Contadores.
Resultado: se abre la ficha del editor Contadores para la configuración HSC.
NOTA: Si ya se ha configurado el número máximo de funciones HSC principal, aparece un
mensaje en la parte inferior de la ventana de configuración. Considere utilizar una función HSC
simple en su lugar.
2 En la ficha del editor Contadores, defina el valor del parámetro Función de conteo en
Monofásico principal HSC.
Resultado: Los parámetros de configuración aparecen en la ficha del editor Contadores.
3 En caso necesario, introduzca el valor del parámetro General → Nombre de instancia.
NOTA: El software proporciona el nombre de instancia automáticamente y se puede utilizar
para el bloque de funciones del contador.
4 Defina el valor del parámetro General → Modalidad de conteo en Conteo de eventos.
5En Entradas de conteo → Entrada A → Ubicación seleccione la entrada rápida o normal para
utilizar como entrada A.
NOTA: Si no hay más E/S disponibles para la configuración, se muestra un mensaje en la parte
inferior de la ventana de configuración. Libere una o más E/S antes de continuar con la
configuración de esta función.
6 Establezca el valor del parámetro Entradas de conteo → Entrada A → Filtro de rebote para
reducir el efecto de rebote en la entrada.
El valor de filtrado determina la frecuencia máxima del contador como se muestra en la tabla
Filtro de rebote
(véase página 146)
.
7 Defina el valor del parámetro Rango → Referencia de tiempo para determinar el período durante
el cual se hace un recuento del número de eventos.
Seleccione la medida del tiempo del ciclo de actualización:
0,1 s
1 s (valor predeterminado)
10 s
60 s
8 De manera opcional, defina el valor del parámetro Entradas de control → Entrada SYNC →
Ubicación para habilitar la Función de preajuste
(véase página 138)
.

Conteo de eventos con un tipo Principal
96 EIO0000003074 12/2019
Programación del tipo principal
Descripción general
El tipo principal siempre se gestiona mediante un bloque de funciones HSCMain_M241.
NOTA: Se detecta un error durante la compilación si se utiliza el bloque de funciones
HSCMain_M241 para gestionar un tipo de HSC diferente.
Adición del bloque de funciones HSCMain
Paso Descripción
1 Seleccione la ficha Bibliotecas en el catálogo de software y haga clic en Bibliotecas.
Seleccione Controlador → M241 → M241 HSC → HSC → HSCMain_M241 de la lista y, a
continuación, arrastre el elemento y suéltelo en la ventana POU.
2 Escriba el nombre de la instancia del tipo Principal (definido en la configuración) o seleccione
la instancia del bloque de funciones haciendo clic en:
Puede seleccionar la instancia HSC mediante el asistente de entrada en la siguiente ruta:
<MyController> → Contadores.

Conteo de eventos con un tipo Principal
EIO0000003074 12/2019 97
Utilización de las variables de E/S
En estas tablas se describe cómo se utilizan los diferentes pins del bloque de funciones en la
modalidad Evento.
En esta tabla se describen las variables de entrada:
Entrada Tipo Descripción
EN_Enable BOOL No utilizado.
EN_Preset BOOL Cuando se configura la entrada SYNC: si es TRUE, autoriza el
preajuste del contador mediante la entrada SYNC
(véase página 138)
.
EN_Cap BOOL No utilizado.
EN_Compare BOOL No utilizado.
EN_Out0 BOOL No utilizado.
EN_Out1 BOOL No utilizado.
F_Enable BOOL TRUE = autoriza cambios en el valor actual del contador.
F_Preset BOOL En el flanco ascendente, reinicie el temporizador interno relativo
a la referencia de tiempo.
F_Out0 BOOL No utilizado.
F_Out1 BOOL No utilizado.
ACK_Modulo BOOL No utilizado.
ACK_Preset BOOL En el flanco ascendente, restablece Preset_Flag.
ACK_Cap BOOL No utilizado.
SuspendCompare BOOL No utilizado.

Conteo de eventos con un tipo Principal
98 EIO0000003074 12/2019
En esta tabla se describen las variables de salida:
Salidas Tipo Comentario
HSC_REF EXPERT_REF
(véase página 157)
Referencia al HSC.
Para utilizar con el pin de entrada EXPERT_REF_IN de los
bloques de funciones administrativas.
HSC_Err BOOL TRUE = indica que se ha detectado un error.
El bloque de funciones EXPERTGetDiag
(véase página 162)
se puede utilizar para obtener más información sobre este
error detectado.
Validity BOOL TRUE indica que los valores de salida del bloque de funciones
son válidos.
Run BOOL El contador está en ejecución
TH0 BOOL No utilizado.
TH1 BOOL No utilizado.
TH2 BOOL No utilizado.
TH3 BOOL No utilizado.
Modulo_Flag BOOL No utilizado.
Preset_Flag BOOL Se establece en 1 mediante el preajuste del contador
(véase página 138)
.
Cap_Flag BOOL No utilizado.
Reflex0 BOOL No utilizado.
Reflex1 BOOL No utilizado.
Out0 BOOL No utilizado.
Out1 BOOL No utilizado.
CurrentValue DINT Valor actual del contador.

Conteo de eventos con un tipo Principal
EIO0000003074 12/2019 99
Ajuste de parámetros
Descripción general
La lista de parámetros descritos en la tabla se puede leer o modificar mediante los bloques de
funciones EXPERTGetParam
(véase página 166)
o EXPERTSetParam
(véase página 168)
.
NOTA: Los parámetros establecidos mediante el programa sobrescriben los valores de
parámetros configurados en la ventana de configuración de HSC. Los parámetros de
configuración iniciales se restauran tras un arranque en frío o en caliente del controlador
(véase Modicon M241 Logic Controller, Guía de programación)
.
Parámetros ajustables
En esta tabla se proporciona la lista de parámetros de EXPERT_PARAMETER_TYPE
(véase página 155)
que se pueden leer o modificar mientras el programa está en ejecución:
Parámetro Tipo Descripción
EXPERT_TIMEBASE EXPERT_HSCMAIN_TIMEBASE_TYPE
Para obtener más información, consulte
Tipo para HSC
(véase página 153)
.
Para obtener o establecer el valor
Referencia de tiempo del HSC.

Conteo de eventos con un tipo Principal
100 EIO0000003074 12/2019

EIO0000003074 12/2019 101
Modicon M 241 Logic Controller
Tipo Medidor de frecuencias
EIO0000003074 12/2019
Tipo Medidor de frecuencias
Parte VI
Tipo Medidor de frecuencias
Descripción general
En esta sección se describe el uso de HSC en el tipo Medidor de frecuencias.
Contenido de esta parte
Esta parte contiene los siguientes capítulos:
Capítulo Nombre del capítulo Página
13 Principio del Medidor de frecuencias 103
14 Medidor de frecuencias con un tipo principal 105

Tipo Medidor de frecuencias
102 EIO0000003074 12/2019

EIO0000003074 12/2019 103
Modicon M 241 Logic Controller
Principio del Medidor de frecuencias
EIO0000003074 12/2019
Principio del Medidor de frecuencias
Capítulo 13
Principio del Medidor de frecuencias
Descripción
Descripción general
El tipo Medidor de frecuencias mide la frecuencia de un evento en Hz.
El tipo Medidor de frecuencias calcula el número de pulsos en intervalos de tiempo de 1 s. Hay un
valor actualizado en Hz disponible para cada valor de referencia de tiempo (10, 100 o 1.000 ms).
Si hay una variación de frecuencia, el tiempo de restauración del valor es de 1 s con una precisión
de 1 Hz.
Límites de funcionamiento
La frecuencia máxima que el módulo puede medir en la entrada A es de 200 kHz. Por encima de
200 kHz, el valor de registro de conteo puede reducirse hasta llegar a 0.
Si se configura la función EXPERT con una E/S normal, el periodo mínimo admisible es 0,4 ms.
El ciclo de servicio máximo a 200 kHz es del 60%.
Diagrama de sinopsis
En este diagrama se proporciona una descripción general del principio del medidor de frecuencia:

Principio del Medidor de frecuencias
104 EIO0000003074 12/2019

EIO0000003074 12/2019 105
Modicon M 241 Logic Controller
Medidor de frecuencias con un tipo principal
EIO0000003074 12/2019
Medidor de frecuencias con un tipo principal
Capítulo 14
Medidor de frecuencias con un tipo principal
Descripción general
En este capítulo se describe cómo implementar un contador de alta velocidad en la modalidad
Medidor de frecuencias con un tipo principal.
Contenido de este capítulo
Este capítulo contiene los siguientes apartados:
Apartado Página
Diagrama de sinopsis 106
Configuración del tipo Medidor de frecuencias 107
Programación 108

Medidor de frecuencias con un tipo principal
106 EIO0000003074 12/2019
Diagrama de sinopsis
Diagrama de sinopsis
En este diagrama se proporciona una descripción general del tipo Principal en el tipo Medidor de
frecuencias:
A es la entrada de conteo del contador.
EN es la entrada de habilitación del contador.
Función opcional
Aparte del tipo Medidor de frecuencias, el tipo Principal ofrece la siguiente función:
Función de habilitación
(véase página 141)

Medidor de frecuencias con un tipo principal
EIO0000003074 12/2019 107
Configuración del tipo Medidor de frecuencias
Procedimiento
Siga este procedimiento para configurar un tipo Medidor de frecuencias:
Paso Acción
1 Haga doble clic en MyController → Contadores.
Resultado: Se abre la ficha del editor Contadores para la configuración HSC.
NOTA: Si ya se ha configurado el número máximo de funciones HSC principal, aparece un
mensaje en la parte inferior de la ventana de configuración. Considere utilizar una función HSC
simple en su lugar.
2 En la ficha del editor Contadores, defina el valor del parámetro Función de conteo en Medidor
de frecuencias.
Resultado: Los parámetros de configuración aparecen en la ficha del editor Contadores.
3 En caso necesario, introduzca el valor del parámetro General → Nombre de instancia.
NOTA: El software proporciona el nombre de instancia automáticamente y se puede utilizar
para el bloque de funciones del contador.
4En Entradas de conteo → Entrada A → Ubicación seleccione la entrada rápida o normal para
utilizar como entrada A.
NOTA: Si no hay más E/S disponibles para la configuración, se muestra un mensaje en la parte
inferior de la ventana de configuración. Libere una o más E/S antes de continuar con la
configuración de esta función.
5 Establezca el valor del parámetro Entradas de conteo → Entrada A → Filtro de rebote para
reducir el efecto de rebote en la entrada.
El valor de filtrado determina la frecuencia máxima del contador como se muestra en la tabla
Filtro de rebote
(véase página 146)
.
6 Defina el valor del parámetro Rango → Referencia de tiempo para determinar el período durante
el cual se hace un recuento del número de eventos.
Seleccione la medida del tiempo del ciclo de actualización:
10 ms
100 ms
1.000 ms (valor predeterminado)
7 De manera opcional, defina el valor del parámetro Entradas de control → Entrada SYNC →
Ubicación para habilitar la Función de habilitación
(véase página 141)
.

Medidor de frecuencias con un tipo principal
108 EIO0000003074 12/2019
Programación
Descripción general
El tipo principal siempre se gestiona mediante un bloque de funciones HSCMain_M241.
NOTA: Se detecta un error durante la compilación si se utiliza el bloque de funciones
HSCMain_M241 para gestionar un tipo de HSC diferente.
Adición del bloque de funciones HSCMain
Paso Descripción
1 Seleccione la ficha Bibliotecas en el catálogo de software y haga clic en Bibliotecas.
Seleccione Controlador → M241 → M241 HSC → HSC → HSCMain_M241 de la lista y, a
continuación, arrastre el elemento y suéltelo en la ventana POU.
2 Escriba el nombre de la instancia del tipo Principal (definido en la configuración) o seleccione
la instancia del bloque de funciones haciendo clic en:
Puede seleccionar la instancia HSC mediante el asistente de entrada en la siguiente ruta:
<MyController> → Contadores.

Medidor de frecuencias con un tipo principal
EIO0000003074 12/2019 109
Utilización de las variables de E/S
En las tablas siguientes se describe cómo se utilizan los diversos pins del bloque de funciones en
el tipo Medidor de frecuencias.
En esta tabla se describen las variables de entrada:
Entrada Tipo Descripción
EN_Enable BOOL Si el valor es TRUE y la entrada EN está configurada, autoriza
la habilitación del contador utilizando la Entrada de habilitación
(véase página 141)
.
EN_Preset BOOL No utilizado.
EN_Cap BOOL No utilizado.
EN_Compare BOOL No utilizado.
EN_Out0 BOOL No utilizado.
EN_Out1 BOOL No utilizado.
F_Enable BOOL TRUE = autoriza cambios en el valor actual del contador.
F_Preset BOOL En el flanco ascendente, reinicie el temporizador interno
relativo a la referencia de tiempo.
F_Out0 BOOL No utilizado.
F_Out1 BOOL No utilizado.
ACK_Modulo BOOL No utilizado.
ACK_Preset BOOL En el flanco ascendente, restablece Preset_Flag.
ACK_Cap BOOL No utilizado.
SuspendCompare BOOL No utilizado

Medidor de frecuencias con un tipo principal
110 EIO0000003074 12/2019
En esta tabla se describen las variables de salida:
Salidas Tipo Comentario
HSC_REF EXPERT_REF
(véase página 157)
Referencia al HSC.
Para utilizar con el pin de entrada EXPERT_REF_IN de los
bloques de funciones administrativas.
HSC_Err BOOL TRUE = indica que se ha detectado un error.
Utilice el bloque de funciones EXPERTGetDiag
(véase página 162)
para obtener más información sobre
este error detectado.
Validity BOOL TRUE = indica que los valores de salida del bloque de
funciones son válidos.
Run BOOL El contador está en ejecución
TH0 BOOL No utilizado.
TH1 BOOL No utilizado.
TH2 BOOL No utilizado.
TH3 BOOL No utilizado.
Modulo_Flag BOOL No utilizado.
Preset_Flag BOOL Se establece en 1 mediante la el preajuste del contador
(véase página 138)
.
Cap_Flag BOOL No utilizado.
Reflex0 BOOL No utilizado.
Reflex1 BOOL No utilizado.
Out0 BOOL No utilizado.
Out1 BOOL No utilizado.
CurrentValue DINT Valor actual del contador.

EIO0000003074 12/2019 111
Modicon M 241 Logic Controller
Tipo Medidor de periodos
EIO0000003074 12/2019
Tipo Medidor de periodos
Parte VII
Tipo Medidor de periodos
Descripción general
En esta sección se describe el uso de un HSC en el tipo Medidor de periodos.
Contenido de esta parte
Esta parte contiene los siguientes capítulos:
Capítulo Nombre del capítulo Página
15 Principio del tipo Medidor de periodos 113
16 Medidor de periodos con un tipo principal 115

Tipo Medidor de periodos
112 EIO0000003074 12/2019

EIO0000003074 12/2019 113
Modicon M 241 Logic Controller
Principio del tipo Medidor de periodos
EIO0000003074 12/2019
Principio del tipo Medidor de periodos
Capítulo 15
Principio del tipo Medidor de periodos
Descripción
Descripción general
Utilice el tipo Medidor de periodos para:
Determinar la duración de un evento
Determinar el tiempo que transcurre entre dos eventos
Establecer y medir el tiempo de ejecución de un proceso.
El Medidor de periodos puede utilizarse de dos maneras:
De flanco a contrario: permite el cálculo de la duración de un evento.
De flanco a flanco: permite el cálculo del tiempo que transcurre entre dos eventos.
La medición se expresa en las unidades definidas por el parámetro Resolución (0,1 µs, 1 µs,
100 µs, 1000 µs).
Por ejemplo, si el valor actual CurrentValue es igual a 100 y el parámetro Resolución es:
0,0001 (0,1 µs) medición = 0,01 ms
0,001 (1 µs) medición = 0,1 ms
0,1 (100 µs) medición = 10 ms
1 (1000 µs) medición = 100 ms
Se puede especificar un valor de timeout en la pantalla de configuración. La medición se detiene
si se supera este valor de timeout. En este caso, el registro de conteo no es válido hasta el
siguiente cálculo completo.
Modalidad de flanco al contrario
La modalidad de flanco al contrario mide la duración de un evento.
Cuando la condición Enable es igual a 1, la medición se realiza entre el flanco ascendente y el
flanco descendente de la entrada A. El registro de conteo se actualiza en cuanto se detecta el
flanco descendente.

Principio del tipo Medidor de periodos
114 EIO0000003074 12/2019
Modalidad de flanco a flanco
La modalidad de flanco a flanco mide el tiempo transcurrido entre dos eventos.
Cuando la condición Enable es igual a 1, el cálculo se realiza entre dos flancos ascendentes de la
entrada A. El registro de conteo se actualiza en cuanto se detecta el segundo flanco ascendente.
Comportamiento en caso de interrupción de la condición Enable
En el siguiente diagrama de tendencias se describe el comportamiento del registro de conteo
cuando se interrumpe la condición Enable:
Límites de funcionamiento
El módulo puede realizar un máximo de un cálculo cada 5 ms.
El pulso más breve que se puede calcular es de 100 μs, incluso si la unidad definida en la
configuración es 1 μs.
La duración máxima que se puede medir es 1.073.741.823 unidades.

EIO0000003074 12/2019 115
Modicon M 241 Logic Controller
Medidor de periodos con un tipo principal
EIO0000003074 12/2019
Medidor de periodos con un tipo principal
Capítulo 16
Medidor de periodos con un tipo principal
Descripción general
En este capítulo se describe cómo implementar un contador de alta velocidad en la modalidad
Medidor de periodos con un tipo principal.
Contenido de este capítulo
Este capítulo contiene los siguientes apartados:
Apartado Página
Diagrama de sinopsis 116
Configuración del tipo Medidor de periodos en la modalidad De flanco a flanco 117
Configuración del tipo Medidor de periodos en la modalidad De flanco al contrario 118
Programación 119
Ajuste de parámetros 122

Medidor de periodos con un tipo principal
116 EIO0000003074 12/2019
Diagrama de sinopsis
Diagrama de sinopsis
En este diagrama se proporciona una descripción general del Tipo principal en el tipo Medidor de
periodos:
A es la entrada de conteo del contador.
EN es la entrada de habilitación del contador.
Función opcional
Además del tipo Medidor de periodos, el tipo Principal puede proporcionar la siguiente función:
Función de habilitación
(véase página 141)

Medidor de periodos con un tipo principal
EIO0000003074 12/2019 117
Configuración del tipo Medidor de periodos en la modalidad De flanco a flanco
Procedimiento
Siga este procedimiento para configurar un tipo Medidor de periodos en la modalidad De flanco a
flanco:
Paso Acción
1 Haga doble clic en MyController → Contadores.
Resultado: Se abre la ficha del editor Contadores para la configuración HSC.
NOTA: Si ya se ha configurado el número máximo de funciones HSC principal, aparece un
mensaje en la parte inferior de la ventana de configuración. Considere utilizar una función HSC
simple en su lugar.
2 En la ficha del editor Contadores, defina el valor del parámetro Función de conteo en Medidor
de periodos.
Resultado: Los parámetros de configuración aparecen en la ficha del editor Contadores.
3 En caso necesario, introduzca el valor del parámetro General → Nombre de instancia.
NOTA: El software proporciona el nombre de instancia automáticamente y se puede utilizar
para el bloque de funciones del contador.
4 Defina el valor del parámetro General → Modalidad PeriodMeter en De flanco a flanco.
5En Entradas de conteo → Entrada A → Ubicación seleccione la entrada rápida o normal para
utilizar como entrada A.
NOTA: Si no hay más E/S disponibles para la configuración, se muestra un mensaje en la parte
inferior de la ventana de configuración. Libere una o más E/S antes de continuar con la
configuración de esta función.
6 Establezca el valor del parámetro Entradas de conteo → Entrada A → Filtro de rebote para
reducir el efecto de rebote en las entradas.
El valor de filtrado determina la frecuencia máxima del contador como se muestra en la tabla
Filtro de rebote
(véase página 146)
.
7 Defina el valor del parámetro Rango → Resolución.
Seleccione la unidad de medida:
0,1 µs
1 µs (valor predeterminado)
100 µs
1000 µs
8 Introduzca el valor del parámetro Rango → Timeout para definir el valor de tiempo que un
periodo medido no debe superar.
9 De manera opcional, puede habilitar estas funciones:
Función de habilitación
(véase página 141)

Medidor de periodos con un tipo principal
118 EIO0000003074 12/2019
Configuración del tipo Medidor de periodos en la modalidad De flanco al contrario
Procedimiento
Siga este procedimiento para configurar un tipo Medidor de periodos en la modalidad De flanco al
contrario:
Paso Acción
1 Haga doble clic en MyController → Contadores.
Resultado: Se abre la ficha del editor Contadores para la configuración HSC.
NOTA: Si ya se ha configurado el número máximo de funciones HSC principal, aparece un
mensaje en la parte inferior de la ventana de configuración. Considere utilizar una función HSC
simple en su lugar.
2 En la ficha del editor Contadores, defina el valor del parámetro Función de conteo en Medidor
de periodos.
Resultado: Los parámetros de configuración aparecen en la ficha del editor Contadores.
3 En caso necesario, introduzca el valor del parámetro General → Nombre de instancia.
NOTA: El software proporciona el nombre de instancia automáticamente y se puede utilizar
para el bloque de funciones del contador.
4 Defina el valor del parámetro General → Modalidad PeriodMeter en De flanco a contrario.
5En Entradas de conteo → Entrada A → Ubicación seleccione la entrada rápida o normal para
utilizar como entrada A.
NOTA: Si no hay más E/S disponibles para la configuración, se muestra un mensaje en la parte
inferior de la ventana de configuración. Libere una o más E/S antes de continuar con la
configuración de esta función.
6 Establezca el valor del parámetro Entradas de conteo → Entrada A → Filtro de rebote para
reducir el efecto de rebote en las entradas.
El valor de filtrado determina la frecuencia máxima del contador como se muestra en la tabla
Filtro de rebote
(véase página 146)
.
7 Defina el valor del parámetro Rango → Resolución.
Seleccione la unidad de medida:
0,1 µs
1 µs (valor predeterminado)
100 µs
1000 µs
8 Introduzca el valor del parámetro Rango → Timeout para definir el valor de tiempo que un
periodo medido no debe superar.
9 De manera opcional, puede habilitar estas funciones:
Función de habilitación
(véase página 141)

Medidor de periodos con un tipo principal
EIO0000003074 12/2019 119
Programación
Descripción general
El tipo principal siempre se gestiona mediante un bloque de funciones HSCMain_M241.
NOTA: Se detecta un error durante la compilación si se utiliza el bloque de funciones
HSCMain_M241 para gestionar un tipo de HSC diferente.
Adición del bloque de funciones HSCMain
Paso Descripción
1 Seleccione la ficha Bibliotecas en el catálogo de software y haga clic en Bibliotecas.
Seleccione Controlador → M241 → M241 HSC → HSC → HSCMain_M241 de la lista y, a
continuación, arrastre el elemento y suéltelo en la ventana POU.
2 Escriba el nombre de la instancia del tipo Principal (definido en la configuración) o seleccione
la instancia del bloque de funciones haciendo clic en:
Puede seleccionar la instancia HSC mediante el asistente de entrada en la siguiente ruta:
<MyController> → Contadores.

Medidor de periodos con un tipo principal
120 EIO0000003074 12/2019
Utilización de las variables de E/S
En las tablas siguientes se describe cómo se utilizan los diversos pins del bloque de funciones en
el tipo Medidor de periodos.
En esta tabla se describen las variables de entrada:
Entrada Tipo Descripción
EN_Enable BOOL Cuando se configura la entrada EN: si es TRUE, autoriza la
habilitación de contador mediante la entrada de habilitación
(véase página 141)
.
EN_Preset BOOL No utilizado.
EN_Cap BOOL No utilizado.
EN_Compare BOOL No utilizado.
EN_Out0 BOOL No utilizado
EN_Out1 BOOL No utilizado
F_Enable BOOL TRUE = autoriza cambios en el valor actual del contador.
F_Preset BOOL No utilizado.
F_Out0 BOOL No utilizado.
F_Out1 BOOL No utilizado.
ACK_Modulo BOOL No utilizado.
ACK_Preset BOOL No utilizado.
ACK_Cap BOOL No utilizado.
SuspendCompare BOOL No utilizado

Medidor de periodos con un tipo principal
EIO0000003074 12/2019 121
En esta tabla se describen las variables de salida:
Salidas Tipo Comentario
HSC_REF EXPERT_REF
(véase página 157)
Referencia al HSC.
Para utilizar con el pin de entrada EXPERT_REF_IN de los
bloques de funciones administrativas.
HSC_Err BOOL TRUE = indica que se ha detectado un error.
Utilice el bloque de funciones EXPERTGetDiag
(véase página 162)
para obtener más información sobre este
error detectado.
Validity BOOL TRUE = indica que los valores de salida del bloque de
funciones son válidos.
Si se ha superado el valor de timeout, validez = FALSE.
Run BOOL TRUE = el contador está en ejecución.
TH0 BOOL No utilizado.
TH1 BOOL No utilizado.
TH2 BOOL No utilizado.
TH3 BOOL No utilizado.
Modulo_Flag BOOL No utilizado.
Preset_Flag BOOL No utilizado.
Cap_Flag BOOL No utilizado.
Reflex0 BOOL No utilizado.
Reflex1 BOOL No utilizado.
Out0 BOOL Irrelevante
Out1 BOOL Irrelevante
CurrentValue DINT Valor actual del contador.

Medidor de periodos con un tipo principal
122 EIO0000003074 12/2019
Ajuste de parámetros
Descripción general
La lista de parámetros descritos en la tabla se puede leer o modificar mediante los bloques de
funciones EXPERTGetParam
(véase página 166)
o EXPERTSetParam
(véase página 168)
.
NOTA: Los parámetros establecidos mediante el programa sobrescriben los valores de
parámetros configurados en la ventana de configuración de HSC. Los parámetros de
configuración iniciales se restauran tras un arranque en frío o en caliente del controlador
(véase Modicon M241 Logic Controller, Guía de programación)
.
Parámetros ajustables
En esta tabla se proporciona la lista de parámetros de EXPERT_PARAMETER_TYPE
(véase página 155)
que se pueden leer o modificar mientras el programa está en ejecución:
Parámetro Descripción
EXPERT_TIMEBASE Para obtener o establecer el valor de resolución del HSC.
EXPERT_PERIODMETER_
RESOLUTION_TYPE Para leer o modificar dinámicamente la referencia de tiempo.
Para obtener más información, consulte Tipo para medidor de periodos
(véase página 156)
.

EIO0000003074 12/2019 123
Modicon M 241 Logic Controller
Funciones opcionales
EIO0000003074 12/2019
Funciones opcionales
Parte VIII
Funciones opcionales
Descripción general
En esta sección se proporciona información sobre funciones opcionales para HSC.
Contenido de esta parte
Esta parte contiene los siguientes capítulos:
Capítulo Nombre del capítulo Página
17 Función de comparación 125
18 Función de captura 133
19 Funciones de preajuste y habilitación 137

Funciones opcionales
124 EIO0000003074 12/2019

EIO0000003074 12/2019 125
Modicon M 241 Logic Controller
Función de comparación
EIO0000003074 12/2019
Función de comparación
Capítulo 17
Función de comparación
Descripción general
En este capítulo se proporciona información sobre la función de comparación para el HSC.
Contenido de este capítulo
Este capítulo contiene los siguientes apartados:
Apartado Página
Principio de comparación con un tipo Principal 126
Configuración de la comparación en un tipo Principal 130
Configuración de eventos externos 131

Función de comparación
126 EIO0000003074 12/2019
Principio de comparación con un tipo Principal
Descripción general
El bloque de comparación con el tipo Principal gestiona umbrales, salidas reflejas y eventos en las
siguientes modalidades:
One-shot
(véase página 35)
Modulo-loop
(véase página 49)
Free-Large
(véase página 71)
La comparación se configura en la pantalla Configuración
(véase página 130)
activando al menos
un umbral.
La comparación puede utilizarse para activar:
Una acción de programación en los umbrales
(véase página 128)
Un evento en un umbral asociado a una tarea externa
(véase página 127)
NOTA: Esta opción sólo está disponible para los módulos de ampliación TM3XF•, que admiten
eventos externos.
Salidas reflejas
(véase página 128)
.
Principio de una comparación
El tipo principal puede gestionar hasta cuatro umbrales.
Un umbral es un valor configurado que se compara con el valor de recuento actual. Los umbrales
se utilizan para definir hasta cinco zonas o para reaccionar a un valor que supera el valor del
umbral.
Los valores de los umbrales se definen en la ventana de configuración y también se pueden
ajustar en el programa de aplicación con el bloque de funciones EXPERTSetParam
(véase página 168)
.
Si se configura Thresholdx (x= 0, 1, 2, 3) y se habilita la comparación (EN_Compare = 1), el pin
de salida THx del bloque de funciones HSCMain_M241 es:
se establece cuando el valor del contador >= Thresholdx
se restablece cuando el valor del contador < Thresholdx
NOTA: Cuando EN_Compare se establece en 0 en el bloque de funciones HSCMain_M241, se
deshabilitan las funciones de comparación, incluidas las tareas externas activadas por un evento
de umbral y las salidas reflejas.

Función de comparación
EIO0000003074 12/2019 127
En el siguiente ejemplo del Bucle de módulo con dos umbrales se muestra la comparación en el
bloque de funciones HSCMain_M241:
Configuración de la activación de eventos en monofásico o fase dual principal HSC
La configuración de un evento en una transgresión de umbral permite activar una tarea externa
(véase página 131)
. Puede elegir activar un evento cuando se cruce un umbral configurado de la
siguiente manera:
Cruce ascendente. El evento se activa cuando el valor medido supera el valor del umbral.
Cruce descendente. El evento se activa cuando el valor medido está por debajo del valor del
umbral.
Ambos cruces. El evento se activa cuando el valor medido supera el valor del umbral y cuando
el valor medido está por debajo del valor del umbral.
Configuración de la activación de eventos en modalidad de medidor de periodos
La configuración de un evento permite activar una tarea externa
(véase página 131)
. Puede optar
por activar un evento tal como se indica a continuación:
Por debajo del valor de umbral. El evento se activa cuando el valor medido es inferior al valor
del umbral.
Por encima del valor de umbral. El evento se activa cuando el valor medido es superior al valor
del umbral.
Entre valores de umbral. El evento se activa cuando el valor medido está entre dos valores de
umbral.

Función de comparación
128 EIO0000003074 12/2019
Comportamiento de los umbrales
Utilizar el estado de comparación de umbrales disponible en el contexto de la tarea (pins de salida
de TH0 a TH2 del bloque de funciones) es adecuado para su aplicación con una constante de hora
baja.
Puede utilizarse, por ejemplo, para supervisar el nivel de líquidos en un depósito.
Comportamiento de las salidas reflejas
Configurar salidas reflejas permite activar salidas reflejas físicas.
Estas salidas no se controlan en el contexto de la tarea, lo cual reduce al mínimo el tiempo de
reacción. Esto es conveniente para las operaciones que requieren una ejecución rápida.
Sólo se puede acceder a salidas usadas por el contador de alta velocidad mediante el bloque de
funciones. No se puede leer ni escribir directamente en la aplicación.
El rendimiento está directamente relacionado con el tipo de salida utilizada: rápida o normal. Para
obtener más información, consulte Asignación de E/S expertas incrustadas
(véase página 17)
.
Ejemplo de las salidas reflejas activadas por el umbral:
NOTA: El estado de las salidas reflejas depende de la configuración.

Función de comparación
EIO0000003074 12/2019 129
Modificación de los valores de umbral
Debe tenerse cuidado cuando las comparaciones de umbrales están activas para evitar
resultados imprevistos de las salidas o de la ejecución repentina de tareas de eventos. Si la
función de comparación está desactivada, los valores de umbral se pueden modificar como se
desee. Sin embargo, si la función de comparación está habilitada, suspenda al menos la función
de comparación de umbrales mientras modifica los valores de umbral.
Cuando está en EN_Compare = 1, la comparación está activa y es necesario seguir este
procedimiento para aplicar cambios en los valores del umbral:
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No modifique los valores de umbral sin utilizar la entrada SuspendCompare si EN_Compare
es igual a 1.
Verifique que TH0 es inferior a TH1, que TH1 es inferior a TH2 y que TH2 es inferior a TH3
antes de reactivar la función de comparación de umbrales.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.
Paso Acción
1Establezca SuspendCompare en 1.
La comparación se congela en el valor actual:
Los bits de salida de TH0, TH1, Reflex0, Reflex1, Out0 y Out1 del bloque de funciones
conservan su último valor.
Las salidas físicas 0 y 1 conservan su último valor.
Los eventos están enmascarados.
NOTA: EN_Compare, EN_Out0, EN_Out1, F_Out0 y F_Out1 permanecen operativos
mientras se establece SuspendCompare.
2 Modifique los valores de umbral como sea necesario utilizando el bloque de funciones
EXPERTSetParam
(véase página 166)
.
NOTA: Siga esta regla para configurar los valores del umbral: TH0 < TH1 < TH2 < TH3.
3Establezca SuspendCompare en 0.
Los nuevos valores de umbral se aplican y la comparación se reanuda.

Función de comparación
130 EIO0000003074 12/2019
Configuración de la comparación en un tipo Principal
Procedimiento de configuración
Siga este procedimiento para configurar la función de comparación en un tipo Principal :
Paso Acción
1En Dispositivos, haga doble clic en MyController → Contadores.
2 Establezca el valor del parámetro Función de conteo en Monofásico principal HSC o Fase dual
principal HSC.
3 En el parámetro Número de umbrales, seleccione el número de umbrales que desea usar.
4 Establezca el valor de cada umbral.
NOTA: Siga esta regla para configurar los valores del umbral: TH0 < TH1 < TH2 < TH3
5 Como opción, defina las condiciones del evento para los umbrales:
1. Configure eventos externos
(véase página 131)
asociados a las tareas.
2. En Eventos → Umbral x, establezca un tipo de desencadenador (Cruce ascendente, Cruce
descendente, Ambos cruces).
3. En ID de HSC principal, seleccione el grupo de eventos externos (HSC0-HSC3) que
contienen el evento externo.
Resultado: Los eventos externos en el grupo seleccionado (HSCx_TH0, HSCx_TH1,
HSCx_TH2, HSCx_TH3, HSCx_STOP) aparecen debajo de Evento externo del umbral x.

Función de comparación
EIO0000003074 12/2019 131
Configuración de eventos externos
Procedimiento
En el procedimiento siguiente se describe cómo configurar un evento externo
(véase Modicon
M241 Logic Controller, Guía de programación)
para activar una tarea:
Eventos externos
En esta tabla se proporciona una descripción de los posibles eventos externos que se pueden
asociar a una tarea:
Paso Acción
1 Añada una tarea en la ficha Aplicaciones.
2 Haga doble clic en el nodo de la tarea para asociarla a un evento externo.
3 En el menú desplegable Tipo, seleccione Externo.
4 En el menú desplegable Evento externo, seleccione el evento que desea asociar a la tarea
(consulte la lista siguiente).
Nombre de evento Descripción
I0 La tarea se activa cuando la entrada I0 está establecida en 1.
I1 La tarea se activa cuando la entrada I1 está establecida en 1.
I2 La tarea se activa cuando la entrada I2 está establecida en 1.
I3 La tarea se activa cuando la entrada I3 está establecida en 1.
I4 La tarea se activa cuando la entrada I4 está establecida en 1.
I5 La tarea se activa cuando la entrada I5 está establecida en 1.
I6 La tarea se activa cuando la entrada I6 está establecida en 1.
I7 La tarea se activa cuando la entrada I7 está establecida en 1.
HSC0_TH0 La tarea se activa cuando el umbral TH0 del HSC0 están establecidos en 1.
HSC0_TH1 La tarea se activa cuando el umbral TH1 del HSC0 están establecidos en 1.
HSC0_TH2 La tarea se activa cuando el umbral TH2 del HSC0 están establecidos en 1.
HSC0_TH3 La tarea se activa cuando el umbral TH3 del HSC0 están establecidos en 1.
HSC0_STOP La tarea se activa cuando HSC0.Value está establecido en 0.
HSC1_TH0 La tarea se activa cuando el umbral TH0 del HSC1 están establecidos en 1.
HSC1_TH1 La tarea se activa cuando el umbral TH1 del HSC1 están establecidos en 1.
HSC1_TH2 La tarea se activa cuando el umbral TH2 del HSC1 están establecidos en 1.
HSC1_TH3 La tarea se activa cuando el umbral TH3 del HSC1 están establecidos en 1.

Función de comparación
132 EIO0000003074 12/2019
NOTA: El evento de detención sólo está disponible en el monofásico principal HSC, en la
modalidad de una tarea.
HSC1_STOP La tarea se activa cuando HSC1.Value está establecido en 0.
HSC2_TH0 La tarea se activa cuando el umbral TH0 del HSC2 está establecido en 1.
HSC2_TH1 La tarea se activa cuando el umbral TH1 del HSC2 está establecido en 1.
HSC2_TH2 La tarea se activa cuando el umbral TH2 del HSC2 está establecido en 1.
HSC2_TH3 La tarea se activa cuando el umbral TH3 del HSC2 está establecido en 1.
HSC2_STOP La tarea se activa cuando HSC2.Value está establecido en 0.
HSC3_TH0 La tarea se activa cuando el umbral TH0 del HSC3 está establecido en 1.
HSC3_TH1 La tarea se activa cuando el umbral TH1 del HSC3 está establecido en 1.
HSC3_TH2 La tarea se activa cuando el umbral TH2 del HSC3 está establecido en 1.
HSC3_TH3 La tarea se activa cuando el umbral TH3 del HSC3 está establecido en 1.
HSC3_STOP La tarea se activa cuando HSC3.Value está establecido en 0.
Nombre de evento Descripción

EIO0000003074 12/2019 133
Modicon M 241 Logic Controller
Función de captura
EIO0000003074 12/2019
Función de captura
Capítulo 18
Función de captura
Descripción general
En este capítulo ofrece información sobre la función de captura para HSC.
Contenido de este capítulo
Este capítulo contiene los siguientes apartados:
Apartado Página
Principio de captura con un tipo Principal 134
Configuración de la captura en un tipo principal 136

Función de captura
134 EIO0000003074 12/2019
Principio de captura con un tipo Principal
Descripción general
La función de captura almacena el valor de contador actual cuando se detecta una señal de
entrada externa.
La función de captura está disponible en el tipo Principal con las modalidades siguientes:
One-shot
(véase página 41)
Modulo-loop
(véase página 61)
Free-large
(véase página 79)
Para utilizar esta función:
Configure la entrada de captura opcional CAP.
Utilice el parámetro EXPERTGetCapturedValue
(véase página 160)
para recuperar el valor
capturado en su aplicación.

Función de captura
EIO0000003074 12/2019 135
Principio de una captura
En este gráfico se muestra cómo funciona la captura en la modalidad Bucle de módulo:
Fase Acción
1 Cuando EN_Cap es 0, la función no está operativa.
2 Cuando EN_Cap = 1, el borde en CAP captura el valor de contador actual, lo coloca en el registro
de captura y activa el flanco ascendente de Cap_Flag.
3 Obtenga el valor almacenado utilizando EXPERTGetCapturedValue
(véase página 160)
.
4Si Cap_Flag = 1, se omiten los flancos nuevos en la entrada física CAP.
5 El flanco ascendente de la entrada del bloque de funciones HSCMain_M241
(véase página 170)
ACK_Cap activa la salida Cap_Flag del flanco descendente.
Se autoriza una nueva captura.

Función de captura
136 EIO0000003074 12/2019
Configuración de la captura en un tipo principal
Procedimiento de configuración
Siga este procedimiento para configurar la función de captura en un tipo principal:
Paso Acción
1En Dispositivos, haga doble clic en MyController → Contadores.
2 Establezca el valor del parámetro Función de conteo en Monofásico principal HSC o Fase dual
principal HSC.
3 Seleccione un valor para Captura → Entrada CAP → Ubicación.
4 Seleccione un valor para el parámetro Captura → Entrada CAP → Filtro de rebote para reducir
el efecto de rebote en la entrada.
El valor de filtrado determina la frecuencia máxima del contador como se muestra en la tabla
Filtro de rebote
(véase página 146)
.
5 Seleccione una modalidad de activación para el parámetro Captura → Modalidad:
Preajuste
(véase página 138)
(valor predeterminado)
CAP ascendente
CAP descendente
CAP ambos

EIO0000003074 12/2019 137
Modicon M 241 Logic Controller
Funciones de sincronización y habilitació n
EIO0000003074 12/2019
Funciones de preajuste y habilitación
Capítulo 19
Funciones de preajuste y habilitación
Descripción general
En este capítulo se proporciona información sobre las funciones de preajuste y habilitación para
un HSC.
Contenido de este capítulo
Este capítulo contiene los siguientes apartados:
Apartado Página
Función de preajuste 138
Condiciones de Preajuste para Grande libre o Medidor de periodos 140
Enable: Autorizar operación de conteo 141

Funciones de sincronización y habilitación
138 EIO0000003074 12/2019
Función de preajuste
Descripción general
La función de preajuste se utiliza para establecer/restablecer el funcionamiento del contador.
La función de preajuste autoriza la función de conteo, la sincronización y el inicio en las siguientes
modalidades de conteo:
Contador de Una tarea: preestablece e inicia el contador.
Contador de Bucle en el módulo: restablece e inicia el contador.
Conteo de eventos: reinicia la referencia de tiempo interna al principio.
NOTA: La condición Sync para un tipo de HSC Simple corresponde a la entrada Sync del bloque
de funciones.
Descripción
Esta función se utiliza para sincronizar el contador según el estado y la configuración de la entrada
física SYNC opcional y las entradas F_Preset y EN_Preset del bloque de funciones.
En el siguiente diagrama se muestran las condiciones Sync del HSC:
EN_Preset entrada del bloque de funciones HSC
F_Preset entrada del bloque de funciones HSC
SYNC SYNC de entrada física
La salida del bloque de funciones Preset_Flag se establece en 1 tras alcanzar la condición
Sync.
Cualquiera de los eventos siguientes desencadena la captura de la condición Sync:
flanco ascendente de la entrada F_Preset
flanco ascendente, flanco descendente o flanco ascendente y descendente de la entrada física
SYNC (si se configura la entrada SYNC y la entrada de EN_Preset es TRUE).

Funciones de sincronización y habilitación
EIO0000003074 12/2019 139
Configuración
En este procedimiento se describe cómo configurar una función de preajuste:
Paso Acción
1En Dispositivos, haga doble clic en MyController → Contadores.
2 Defina el valor del parámetro de la función de conteo en Monofásico principal HSC o Fase dual
principal HSC.
3 Seleccione el valor del parámetro Entradas de control → Entrada SYNC → Ubicación.
4 Seleccione el valor del parámetro Entradas de control → Entrada SYNC → Filtro de rebote.
5 Seleccione el valor del parámetro Entradas de control → entrada SYNC → Condición
preestablecida para especificar el tipo de transición de la entrada física SYNC:
SYNC ascendente. Flanco ascendente de la entrada SYNC
SYNC descendente. Flanco descendente de la entrada SYNC
Ambas SYNC. Ambos flancos de la entrada SYNC

Funciones de sincronización y habilitación
140 EIO0000003074 12/2019
Condiciones de Preajuste para Grande libre o Medidor de periodos
Descripción general
En la modalidad Grande libre, la condición de Preajuste se crea con una entrada física:
SYNC
Condición de preajuste disponible:
En el flanco de la entrada SYNC (ascendente)
En el flanco de la entrada SYNC (ascendente)
El contador se sincroniza con el punto de referencia del codificador.

Funciones de sincronización y habilitación
EIO0000003074 12/2019 141
Enable: Autorizar operación de conteo
Descripción general
La función Enable se emplea para autorizar la operación de conteo.
La función de habilitación está disponible en las siguientes modalidades de HSC:
Monofásico principal HSC (una tarea)
Monofásico principal HSC (bucle de módulo)
Medidor de frecuencias
Medidor de periodos
Descripción
Esta función se utiliza para autorizar cambios en el valor de contador actual según el estado de la
entrada física EN opcional y las entradas del bloque de funciones F_Enable y EN_Enable.
En el diagrama siguiente se ilustran las condiciones de habilitación:
EN_Enable entrada del bloque de funciones HSC
F_Enable entrada del bloque de funciones HSC
EN entrada física Enable
Mientras la función no está activada, los pulsos de conteo se omiten.
NOTA: La condición de habilitación para un tipo Simple corresponde a la entrada del bloque de
funciones Habilitar.

Funciones de sincronización y habilitación
142 EIO0000003074 12/2019
Configuración
En este procedimiento se describe cómo configurar una función de habilitación:
Paso Acción
1En Dispositivos, haga doble clic en MyController → Contadores.
2 Seleccione la ficha Contadores.
3 Seleccione una Función de conteo que admita la función de habilitación:
Monofásico principal HSC (una tarea o Bucle de módulo)
Medidor de frecuencias
Medidor de periodos
4 Establezca el valor del parámetro Entradas de control → Entrada EN → Ubicación.
5 Seleccione el valor del parámetro Entradas de control → Entrada EN → Filtro de rebote para
reducir el efecto de rebote en la entrada.
El valor de filtrado determina la frecuencia máxima del contador como se muestra en la tabla
Filtro de rebote
(véase página 146)
.

EIO0000003074 12/2019 143
Modicon M 241 Logic Controller
EIO0000003074 12/2019
Apéndices
Descripción general
Este apéndice contiene extractos de la guía de programación que ayudan a obtener una
comprensión técnica de la documentación de la biblioteca.
Contenido de este anexo
Este anexo contiene los siguientes capítulos:
Capítulo Nombre del capítulo Página
A Información general 145
B Tipos de datos 149
C Bloques de funciones 159
D Representación de funciones y de bloques de funciones 177

144 EIO0000003074 12/2019

EIO0000003074 12/2019 145
Modicon M 241 Logic Controller
Información general
EIO0000003074 12/2019
Información general
Apéndice A
Información general
Contenido de este capítulo
Este capítulo contiene los siguientes apartados:
Apartado Página
Funciones específicas 146
Información general sobre la gestión del bloque de funciones administrativas y de movimiento 147

Información general
146 EIO0000003074 12/2019
Funciones específicas
Filtro de rebote
En esta tabla se muestran las frecuencias de contador máximas determinadas por los valores de
filtrado utilizados para reducir el efecto de rebote de la entrada:
Salidas dedicadas
Sólo se puede acceder a las salidas utilizadas por las funciones expertas de alta velocidad a
través del bloque de funciones. No se puede leer ni escribir directamente en la aplicación.
Entrada Valor de filtro de rebote
(ms)
Frecuencia de contador máxima
Experto
Frecuencia de contador máxima
Habitual
A
B
0,000 200 kHz 1 kHz
0,001 200 kHz 1 kHz
0,002 200 kHz 1 kHz
0,005 100 kHz 1 kHz
0,01 50 kHz 1 kHz
0,05 25 kHz 1 kHz
0,1 5 kHz 1 kHz
0,5 1 kHz 1 kHz
1 500 Hz 500 Hz
5 100 Hz 100 Hz
A es la entrada de conteo del contador.
B es la entrada de conteo del contador de fase dual.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No utilice la misma instancia de bloque de funciones en diferentes tareas de programas.
No modifique ni cambie en modo alguno la referencia del bloque de funciones (AXIS) mientras
esté en ejecución el bloque de funciones.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.

Información general
EIO0000003074 12/2019 147
Información general sobre la gestión del bloque de funciones administrativas y de
movimiento
Gestión de variables de entrada
En el flanco ascendente de la entrada Execute, se inicia el bloque de funciones.
No se tendrá en cuenta cualquier modificación posterior realizada en las variables de entrada.
Siguiendo la normativa IEC 61131-3, si falta alguna entrada de variable en un bloque de
funciones, es decir, si alguna se deja abierta o sin conectar, se utilizará el valor de la invocación
anterior de la instancia del bloque de funciones. En este caso, en la primera invocación se aplicará
el valor inicial configurado. Por tanto, es mejor que un bloque de funciones siempre tenga valores
conocidos atribuidos a sus entradas para evitar así dificultades en la depuración del programa.
Para los bloques de funciones HSC y PTO, es mejor utilizar la instancia solo una vez, y dicha
instancia debe estar en la tarea principal.
Gestión de variables de salida
Las salidas Done, InVelocity o InFrequency se excluyen mutuamente con las salidas Busy,
CommandAborted y Error: solamente una de ellas puede ser TRUE en un bloque de funciones.
Si la entrada Execute es TRUE, una de estas salidas es TRUE.
En el flanco ascendente de la entrada Execute, se establece la salida Busy. Esta salida Busy
permanece establecida durante la ejecución del bloque de funciones, y se resetea en el flanco
ascendente de una de las otras salidas (Done, InVelocity, InFrequency, CommandAborted
y Error).
La salida Done, InVelocity o InFrequency se establece cuando la ejecución del bloque de
funciones se ha completado correctamente.
Cuando se interrumpe una ejecución de bloques de funciones con otra, se establece la salida
CommandAborted en su lugar.
Cuando una ejecución de bloques de funciones termina por un error detectado, se define la salida
Error y se ofrece el número de error detectado a través de la salida ErrId.
Las salidas Done, InVelocity, InFrequency, Error, ErrID y CommandAborted se resetean
con el flanco descendente de Execute. Si la entrada Execute se resetea antes de que finalice
la ejecución, entonces las salidas se establecen para un ciclo de tareas al finalizar la ejecución.
Cuando una instancia de un bloque de funciones recibe una nueva Execute antes de finalizar, el
bloque de funciones no devuelve información, como Done, para la acción anterior.

Información general
148 EIO0000003074 12/2019
Gestión de un error detectado
Todos los bloques tienen dos salidas que pueden notificar un error detectado durante la ejecución
del bloque de funciones:
Error = TRUE cuando se detecta un error.
ErrID Cuando Error = TRUE, devuelve el ID de error detectado.

EIO0000003074 12/2019 149
Modicon M 241 Logic Controller
Tipos de datos
EIO0000003074 12/2019
Tipos de datos
Apéndice B
Tipos de datos
Descripción general
En este capítulo se describen los tipos de datos de la biblioteca HSC.
Contenido de este capítulo
Este capítulo contiene los siguientes apartados:
Apartado Página
EXPERT_DIAG_TYPE: tipo para diagnóstico EXPERTGetDiag 150
EXPERT_ERR_TYPE: tipo de variable de error del bloque de funciones EXPERT 151
EXPERT_FREQMETER_TIMEBASE_TYPE: Tipo para la variable de referencia de tiempo del
medidor de frecuencias
152
EXPERT_HSCMAIN_TIMEBASE_TYPE: Tipo para variable de la referencia de tiempo HSC
principal
153
EXPERT_IMMEDIATE_ERR_TYPE: Tipo para variable de error del bloque de funciones
GetImmediateValue
154
EXPERT_PARAMETER_TYPE: Tipo de parámetros que obtener o establecer en EXPERT 155
EXPERT_PERIODMETER_RESOLUTION_TYPE: Tipo para variable de referencia de tiempo
del medidor de períodos
156
EXPERT_REF: valor de referencia EXPERT 157

Tipos de datos
150 EIO0000003074 12/2019
EXPERT_DIAG_TYPE: tipo para diagnóstico EXPERTGetDiag
Descripción de tipos enumerados
Esta enumeración describe los distintos errores de contador que puede leer el bloque de funciones
EXPERTGetDiag:
Nombre Valor Comentario
EXPERT_NO_ERROR 0 Sin errores
EXPERT_PERIODMETER_TIMEOUT_REACHED 1 Se ha alcanzado el tiempo de
espera en la medida del periodo.
EXPERT_SHORTCUT_DETECTED 4 Método abreviado detectado en la
salida refleja HSC principal
EXPERT_CONFIGURATION_FAULT 128 El contador está configurado
incorrectamente.

Tipos de datos
EIO0000003074 12/2019 151
EXPERT_ERR_TYPE: tipo de variable de error del bloque de funciones EXPERT
Descripción del tipo enumerado
El tipo de datos de enumeración ENUM contiene diversos tipos de errores detectados con los
valores siguientes:
Enumerador Valor Descripción
EXPERT_NO_ERROR 00 hex No se ha detectado ningún error.
EXPERT_UNKNOWN 01 hex La referencia EXPERT es incorrecta o no está
configurada.
EXPERT_UNKNOWN_PARAMETER 02 hex La referencia de parámetros es incorrecta.
Consulte la sección PARAMETER_TYPE para ver
los parámetros válidos
(véase página 155)
.
EXPERT_INVALID_PARAMETER 03 hex El valor del parámetro es incorrecto.
Por ejemplo, Preset Value es <TH1 o <TH0.
EXPERT_COM_ERROR 04 hex Se ha detectado un error de comunicación con
el módulo EXPERT.
EXPERT_CAPTURE_NOT_CONFIGURED 05 hex La captura no está configurada.
No es posible obtener un valor capturado.

Tipos de datos
152 EIO0000003074 12/2019
EXPERT_FREQMETER_TIMEBASE_TYPE: Tipo para la variable de referencia de
tiempo del medidor de frecuencias
Descripción de los tipos enumerados
El tipo de datos de enumeración ENUM contiene los diversos valores de referencia de tiempo
permitidos para ser utilizados con un bloque de funciones EXPERT:
Nombre Valor
EXPERT_FREQMETER_10ms 10
EXPERT_FREQMETER_100ms 100
EXPERT_FREQMETER_1000ms 1.000

Tipos de datos
EIO0000003074 12/2019 153
EXPERT_HSCMAIN_TIMEBASE_TYPE: Tipo para variable de la referencia de tiempo
HSC principal
Descripción de los tipos enumerados
El tipo de datos de enumeración ENUM contiene los diversos valores de referencia de tiempo
permitidos para ser utilizados con un bloque de funciones EXPERT principal:
Nombre Valor
EXPERT_HSCMAIN_100ms 00 hex
EXPERT_HSCMAIN_1s 01 hex
EXPERT_HSCMAIN_10s 02 hex
EXPERT_HSCMAIN_60s 03 hex

Tipos de datos
154 EIO0000003074 12/2019
EXPERT_IMMEDIATE_ERR_TYPE: Tipo para variable de error del bloque de
funciones GetImmediateValue
Descripción de los tipos enumerados
El tipo de datos de enumeración ENUM contiene diversos tipos de errores detectados con los
valores siguientes:
Enumerador Valor Descripción
EXPERT_IMMEDIATE_FUNC_NO_ERROR 00 hex No se ha detectado ningún error
EXPERT_IMMEDIATE_FUNC_UNKNOWN 01 hex La referencia de la función INMEDIATA es
incorrecta o no está configurada.
EXPERT_IMMEDIATE_FUNC_UNKNOWN_
PARAMETER 02 hex Alguna referencia de parámetro es incorrecta.

Tipos de datos
EIO0000003074 12/2019 155
EXPERT_PARAMETER_TYPE: Tipo de parámetros que obtener o establecer en
EXPERT
Descripción del tipo enumerado
El tipo de datos de enumeración ENUM contiene los valores siguientes:
Enumerador Valor Descripción
EXPERT_PRESET 00 hex Para obtener o establecer el valor preestablecido
de una función EXPERT.
EXPERT_MODULO 01 hex Para obtener o establecer el valor de módulo de
una función EXPERT.
EXPERT_TIMEBASE 03 hex Para obtener o establecer el valor de referencia
de tiempo
(véase página 153)
de una función
EXPERT.
EXPERT_THRESHOLD0 06 hex Para obtener o establecer el valor de umbral 0 de
una función EXPERT.
EXPERT_THRESHOLD1 07 hex Para obtener o establecer el valor de umbral 1 de
una función EXPERT.
EXPERT_THRESHOLD2 08 hex Para obtener o establecer el valor de umbral 2 de
una función EXPERT.
EXPERT_THRESHOLD3 09 hex Para obtener o establecer el valor de umbral 3 de
una función EXPERT.
EXPERT_REFLEX0 0A hex Para obtener o establecer la modalidad de salida
refleja 0 de una función EXPERT
EXPERT_REFLEX1 0B hex Para obtener o establecer la modalidad de salida
refleja 1 de una función EXPERT.

Tipos de datos
156 EIO0000003074 12/2019
EXPERT_PERIODMETER_RESOLUTION_TYPE: Tipo para variable de referencia de
tiempo del medidor de períodos
Descripción de los tipos enumerados
El tipo de datos de enumeración ENUM contiene los diversos valores de referencia de tiempo
permitidos para ser utilizados con un bloque de funciones EXPERT:
Nombre Valor
EXPERT_PERIODMETER_100ns FFFFFFFF hex (–1 decimal)
EXPERT_PERIODMETER_1µs 00 hex (0 decimal)
EXPERT_PERIODMETER_100µs 01 hex (1 decimal)
EXPERT_PERIODMETER_1000µs 02 hex (2 decimal)

Tipos de datos
EIO0000003074 12/2019 157
EXPERT_REF: valor de referencia EXPERT
Descripción del tipo de datos
EXPERT_REF es un byte que se utiliza para identificar la función EXPERT asociada al bloque
administrativo.

Tipos de datos
158 EIO0000003074 12/2019

EIO0000003074 12/2019 159
Modicon M 241 Logic Controller
Bloques de funciones
EIO0000003074 12/2019
Bloques de funciones
Apéndice C
Bloques de funciones
Descripción general
En este capítulo se describen las funciones y los bloques de funciones de la biblioteca de HSC.
Contenido de este capítulo
Este capítulo contiene los siguientes apartados:
Apartado Página
EXPERTGetCapturedValue: valor leído de los registros de captura 160
EXPERTGetDiag: devuelve detalles de un error HSC detectado 162
EXPERTGetImmediateValue: Valor del contador de lectura de una función de HSC 164
EXPERTGetParam: devuelve los parámetros de HSC 166
EXPERTSetParam: ajuste de los parámetros de un HSC 168
HSCMain_M241: controla un contador de tipo principal para M241 170
HSCSimple_M241: control de un contador del tipo simple para M241175

Bloques de funciones
160 EIO0000003074 12/2019
EXPERTGetCapturedValue: valor leído de los registros de captura
Descripción del bloque de funciones
Este bloque de funciones administrativas devuelve el contenido de un registro de captura.
Representación gráfica
Representación IL y ST
Para ver la representación general en lenguaje IL o ST, consulte el capítulo
Representación de
funciones y de bloques de funciones (véase página 177)
.
Descripción de variables de E/S
En esta tabla se describen las variables de entrada:
Entradas Tipo Comentario
EXPERT_REF_IN EXPERT_REF
(véase página 157)
Consulte el bloque de funciones EXPERT.
No se debe cambiar durante la ejecución del
bloque.
Execute BOOL En el flanco ascendente, inicia la ejecución del
bloque de funciones.
En el flanco descendente, restablece las salidas
del bloque de funciones cuando finaliza su
ejecución.
CaptureNumber BYTE Índice del registro de captura: 0

Bloques de funciones
EIO0000003074 12/2019 161
En esta tabla se describen las variables de salida:
NOTA: En caso de detectar un error, las variables toman el último valor capturado.
NOTA: Para obtener más información sobre los pins Done, Busy y Execution, consulte la
Información general sobre la gestión de bloques de funciones
(véase página 147)
.
Adición del bloque de funciones EXPERTGetCapturedValue
Salidas Tipo Comentario
EXPERT_REF_OUT EXPERT_REF
(véase página 157)
Consulte el bloque de funciones EXPERT.
Terminado BOOL TRUE indica que CaptureValue es válido.
La ejecución del bloque de funciones ha finalizado.
Ocupado BOOL TRUE = indica que la ejecución del bloque de
funciones está en curso.
Error BOOL TRUE = indica que se ha detectado un error.
La ejecución del bloque de funciones ha finalizado.
ErrID EXPERT_ERR_TYPE
(véase página 151)
Cuando Error es TRUE: tipo de error detectado.
CaptureValue DINT Cuando Done es TRUE: el valor del registro de la
captura es válido.
Paso Descripción
1 Seleccione la ficha Bibliotecas en el catálogo de software y haga clic en Bibliotecas.
Seleccione Controlador → M241 → M241 HSC → Administrativas →
EXPERTGetCapturedValue de la lista y, a continuación, arrastre el elemento y suéltelo en la
ventana POU.
2 Conecte la entrada EXPERT_REF_IN a la salida HSC_REF de HSC.

Bloques de funciones
162 EIO0000003074 12/2019
EXPERTGetDiag: devuelve detalles de un error HSC detectado
Descripción del bloque de funciones
Este bloque de funciones administrativas devuelve los detalles de un error de HSC detectado.
Representación gráfica
Representación IL y ST
Para ver la representación general en lenguaje IL o ST, consulte el capítulo
Representación de
funciones y de bloques de funciones (véase página 177)
.
Descripción de variables de E/S
En esta tabla se describen las variables de entrada:
Entradas Tipo Comentario
EXPERT_REF_IN EXPERT_REF
(véase página 157)
Consulte el bloque de funciones EXPERT.
No se debe cambiar durante la ejecución del
bloque.
Execute BOOL En el flanco ascendente, inicia la ejecución del
bloque de funciones.
En el flanco descendente, restablece las salidas
del bloque de funciones cuando finaliza su
ejecución.

Bloques de funciones
EIO0000003074 12/2019 163
En esta tabla se describen las variables de salida:
NOTA: Para obtener más información sobre los pins Done, Busy y Execution, consulte la
Información general sobre la gestión de bloques de funciones
(véase página 147)
.
En esta tabla se indican los valores de diagnóstico:
Adición del bloque de funciones EXPERTGetDiag
Salidas Tipo Comentario
EXPERT_REF_OUT EXPERT_REF
(véase página 157)
Consulte el bloque de funciones EXPERT.
Done BOOL TRUE = indica que HSCDiag es válido.
La ejecución del bloque de funciones ha finalizado.
Busy BOOL TRUE = indica que la ejecución del bloque de
funciones está en curso.
Error BOOL TRUE = indica que se ha detectado un error.
La ejecución del bloque de funciones ha finalizado.
ErrID EXPERT_ERR_TYPE
(véase página 151)
Cuando Error es TRUE: tipo de error detectado.
EXPERTDiag DWORD Cuando Done es TRUE: el valor de diagnóstico es
válido; consulte la tabla que encontrará a
continuación.
Bit BASE (HSCMain o
HSCSimple)
Descripción
0 – No se ha detectado ningún error
1 – Timeout alcanzado en medidor de periodos
2 – Método abreviado detectado en la salida experta HSC principal
7 – Error detectado en la configuración del contador
Paso Descripción
1 Seleccione la ficha Bibliotecas en el Catálogo de software y haga clic en Bibliotecas.
Seleccione Controlador → M241 → M241 HSC → Administrativas → EXPERTGetDiag de la
lista y, a continuación, arrastre el elemento y suéltelo en la ventana POU.
2 Conecte la entrada EXPERT_REF_IN a la salida HSC_REF de HSC.

Bloques de funciones
164 EIO0000003074 12/2019
EXPERTGetImmediateValue: Valor del contador de lectura de una función de HSC
Descripción del bloque de funciones
Este bloque de funciones administrativo permite leer el valor del contador de un HSC omitiendo el
ciclo de controlador.
Representación gráfica
Representación IL y ST
Para ver la representación general en lenguaje IL o ST, consulte el capítulo
Representación de
funciones y de bloques de funciones (véase página 177)
.
Descripción de variables de E/S
En esta tabla se describen las variables de entrada:
Entradas Tipo Comentario
EXPERT_REF_IN EXPERT_REF
(véase página 157)
Consulte el bloque de funciones EXPERT.
Execute BOOL En el flanco ascendente, inicia la ejecución
del bloque de funciones. En el flanco
descendente, restablece las salidas del
bloque de funciones cuando finaliza su
ejecución.

Bloques de funciones
EIO0000003074 12/2019 165
En esta tabla se describen las variables de salida:
Adición del bloque de funciones EXPERTGetImmediateValue
Salidas Tipo Comentario
EXPERT_REF_OUT EXPERT_REF
(véase página 157)
Consulte el bloque de funciones EXPERT.
Done BOOL TRUE = indica que ExpertDiag es válido.
La ejecución del bloque de funciones ha
finalizado.
Error BOOL TRUE = indica que se ha detectado un error.
ErrID IMMEDIATE_FUNC_ERR_
TYPE
(véase página 154)
Cuando Error es TRUE: tipo de error
detectado.
ImmediateValue DINT Contiene el valor del contador.
Paso Descripción
1 Seleccione la ficha Bibliotecas en el catálogo de software y haga clic en Bibliotecas.
Seleccione Controller → M241 → M241 HSC → Administrative →
EXPERTGetImmediateValue en la lista, arrastre y suelte el elemento en la ventana POU.
2 Vincule la entrada EXPERT_REF_IN a la salida HSC_REF del HSC.

Bloques de funciones
166 EIO0000003074 12/2019
EXPERTGetParam: devuelve los parámetros de HSC
Descripción del bloque de funciones
Este bloque de funciones administrativas devuelve un valor de parámetro de un HSC.
Representación gráfica
Representación IL y ST
Para ver la representación general en lenguaje IL o ST, consulte el capítulo
Representación de
funciones y de bloques de funciones (véase página 177)
.
Descripción de variables de E/S
En esta tabla se describen las variables de entrada:
Entradas Tipo Comentario
EXPERT_REF_IN EXPERT_REF
(véase página 157)
Consulte el bloque de funciones
EXPERT.
No se debe cambiar durante la ejecución
del bloque.
Execute BOOL En el flanco ascendente, inicia la
ejecución del bloque de funciones.
En el flanco descendente, restablece las
salidas del bloque de funciones cuando
finaliza su ejecución.
Param EXPERT_PARAMETER_
TYPE
(véase página 155)
Parámetro para leer.

Bloques de funciones
EIO0000003074 12/2019 167
En esta tabla se describen las variables de salida:
NOTA: Para obtener más información sobre los pins Done, Busy y Execution, consulte la
Información general sobre la gestión de bloques de funciones
(véase página 147)
.
Adición del bloque de funciones EXPERTGetParam
Salidas Tipo Comentario
EXPERT_REF_OUT EXPERT_REF
(véase página 157)
Consulte el bloque de funciones
EXPERT.
Done BOOL TRUE = indica que ParamValue es
válido.
La ejecución del bloque de funciones ha
finalizado.
Busy BOOL TRUE = indica que la ejecución del bloque
de funciones está en curso.
Error BOOL TRUE = indica que se ha detectado un
error.
La ejecución del bloque de funciones ha
finalizado.
ErrID EXPERT_ERR_TYPE
(véase página 151)
Cuando Error es TRUE: tipo de error
detectado.
ParamValue DINT Valor del parámetro que se ha leído.
Paso Descripción
1 Seleccione la ficha Bibliotecas en el Catálogo de software y haga clic en Bibliotecas.
Seleccione Controlador → M241 → M241 HSC → Administrativas → EXPERTGetParam de
la lista y, a continuación, arrastre el elemento y suéltelo en la ventana POU.
2 Conecte la entrada EXPERT_REF_IN a la salida HSC_REF de HSC.

Bloques de funciones
168 EIO0000003074 12/2019
EXPERTSetParam: ajuste de los parámetros de un HSC
Descripción del bloque de funciones
Este bloque de funciones administrativas modifica el valor de un parámetro de un HSC.
Representación gráfica
Representación IL y ST
Para ver la representación general en lenguaje IL o ST, consulte el capítulo
Representación de
funciones y de bloques de funciones (véase página 177)
.
Descripción de variables de E/S
En esta tabla se describen las variables de entrada:
Entradas Tipo Comentario
EXPERT_REF_IN EXPERT_REF
(véase página 157)
Consulte el bloque de funciones EXPERT.
No se debe cambiar durante la ejecución del
bloque.
Execute BOOL En el flanco ascendente, inicia la ejecución del
bloque de funciones.
En el flanco descendente, restablece las salidas
del bloque de funciones cuando finaliza su
ejecución.
Param EXPERT_PARAMETER_TYPE
(véase página 155)
Parámetro para leer.
ParamValue DINT Valor de parámetro que escribir.

Bloques de funciones
EIO0000003074 12/2019 169
En esta tabla se describen las variables de salida:
NOTA: Para obtener más información acerca de los pins Done, Busy y Execution, consulte la
sección Información general sobre la gestión de bloques de funciones
(véase página 147)
.
Adición del bloque de funciones EXPERTSetParam
Salidas Tipo Comentario
EXPERT_REF_OUT EXPERT_REF
(véase página 157)
Consulte el bloque de funciones EXPERT.
Done BOOL TRUE = indica que el parámetro se ha escrito
correctamente.
La ejecución del bloque de funciones ha finalizado.
Busy BOOL TRUE = indica que la ejecución del bloque de
funciones está en curso.
Error BOOL TRUE = indica que se ha detectado un error.
La ejecución del bloque de funciones ha finalizado.
ErrID EXPERT_ERR_TYPE
(véase página 151)
Cuando Error es TRUE: tipo de error detectado.
Paso Descripción
1 Seleccione la ficha Bibliotecas en el Catálogo de software y haga clic en Bibliotecas.
Seleccione Controlador → M241 → M241 HSC → Administrativas → EXPERTSetParam de
la lista y, a continuación, arrastre el elemento y suéltelo en la ventana POU.
2 Conecte la entrada EXPERT_REF_IN a la salida HSC_REF de HSC.

Bloques de funciones
170 EIO0000003074 12/2019
HSCMain_M241: controla un contador de tipo principal para M241
Descripción de bloques de funciones
Este bloque de funciones controla un contador de tipo Principal con las siguientes funciones:
conteo progresivo/regresivo
medidor de frecuencias
umbrales
eventos
medidor de periodos
fase dual
El bloque de funciones HSC principal es obligatorio al utilizar un contador Principal.
El nombre de la instancia del bloque de funciones debe coincidir con el nombre definido por la
configuración. La información relacionada con el hardware administrada por este bloque de
funciones está sincronizada con el ciclo de tareas MAST.
NOTA: EcoStruxure Machine Expert permite forzar los valores de salida lógica del bloque de
funciones, pero hacerlo no afectará a las salidas relacionadas con el hardware si la función está
activa (en ejecución).
ADVERTENCIA
VALORES DE SALIDA IMPREVISTOS
Utilice únicamente la instancia de bloque de funciones en la tarea MAST.
No utilice la misma instancia de bloque de funciones en otra tarea.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.

Bloques de funciones
EIO0000003074 12/2019 171
Representación gráfica
Representación IL y ST
Para ver la representación general en lenguaje IL o ST, consulte el capítulo
Representación de
funciones y de bloques de funciones (véase página 177)
.
Descripción de variables de E/S
En esta tabla se describen las variables de entrada:
Entrada Tipo Descripción
EN_Enable BOOL TRUE autoriza la habilitación del contador utilizando la entrada
Enable.
EN_Preset BOOL TRUE autoriza la sincronización y el inicio del contador mediante la
entrada de sincronización.
EN_Cap BOOL TRUE = habilita la entrada de capturas (si está configurado en las
modalidades Una tarea, Bucle de módulo, Grande libre).
EN_Compare BOOL TRUE = habilita la operación de comparación (utilizando los
umbrales 0, 1, 2, 3):
comparación básica (bits de salida de TH0, TH1, TH2, TH3)
salidas reflejas (bits de salida Reflex0, Reflex1)
eventos (para activar las tareas externas en el cruce de umbral)
EN_Out0 BOOL TRUE = habilita Output0 a utilizar eco del valor Reflex0 (si está
configurado en las modalidades Una tarea, Bucle de módulo,
Grande libre).

Bloques de funciones
172 EIO0000003074 12/2019
EN_Out1 BOOL TRUE = habilita Output1 a utilizar eco del valor Reflex1 (si está
configurado en las modalidades Una tarea, Bucle de módulo,
Grande libre).
F_Enable BOOL TRUE = autoriza cambios en el valor actual del contador.
F_Preset BOOL En el flanco ascendente, autoriza la sincronización y el inicio de
funciones de conteo en las modalidades de conteo siguientes:
Contador de Una tarea: para preajustar e iniciar el contador
Contador de bucle de módulo: para restablecer e iniciar el
contador
Contador grande libre: para preajustar e iniciar el contador
Contador de eventos: para reiniciar la referencia de tiempo interna
al principio
Medidor de frecuencias: para reiniciar el temporizador interno en
relación con la referencia de tiempo.
F_Out0 BOOL TRUE = fuerza Output0 en 1 (si se ha configurado en las
modalidades de Una tarea, Bucle de módulo, Grande libre).
F_Out1 BOOL TRUE = fuerza Output1 en TRUE (si se ha configurado en las
modalidades de Una tarea, Bucle de módulo, Grande libre).
ACK_Modulo BOOL En el flanco ascendente, resetea Modulo_Flag (modalidades
Bucle de módulo y Grande libre).
ACK_Preset BOOL En el flanco ascendente, restablece Preset_Flag.
ACK_Cap BOOL En el flanco ascendente, resetea Cap_Flag (modalidades de Una
tarea, Bucle de módulo, Grande libre).
SuspendCompare BOOL TRUE suspende los resultados de la comparación:
Los bits de salida de TH0, TH1, TH2, TH3, Reflex0, Reflex1,
Out0, Out1 del bloque mantienen su último valor.
Las salidas físicas 0 y 1 mantienen su último valor.
Los eventos de comparación están enmascarados.
NOTA: EN_Compare, EN_ReflexO,
EN_Reflex1,F_Out0,F_Out1 permanecen operativos mientras
SuspendCompare esté definido.
Entrada Tipo Descripción

Bloques de funciones
EIO0000003074 12/2019 173
En esta tabla se describen las variables de salida:
Salidas Tipo Comentario
HSC_REF EXPERT_REF
(véase página 157)
Referencia al HSC.
Validity BOOL TRUE = indica que los valores de salida del bloque de funciones
son válidos.
En el tipo Medidor de periodos, si se supera el valor de timeout,
la validez = FALSE.
En la modalidad Una tarea, Validity se establece en TRUE
cuando se detecta un flanco ascendente de Preajuste.
HSC_Err BOOL TRUE = indica que se ha detectado un error.
Utilice el bloque de funciones HSCGetDiag
(véase página 162)
para obtener más información sobre este error detectado.
Run BOOL TRUE = el contador está en ejecución.
En la modalidad de Una tarea, el bit de ejecución pasa a 0
cuando CurrentValue llega a 0.
TH0 BOOL TRUE = valor del contador actual > Threshold 0 (si está
configurado en las modalidades Una tarea, Bucle de módulo y
Grande libre).
Sólo está activo cuando se establece EN_Compare.
TH1 BOOL TRUE = valor del contador actual > Threshold 1 (si está
configurado en las modalidades Una tarea, Bucle de módulo y
Grande libre).
Sólo está activo cuando se establece EN_Compare.
TH2 BOOL TRUE = valor actual del contador > Umbral 2 (si se ha
configurado en las modalidades de Una tarea, Bucle de
módulo, Grande libre).
Sólo está activo cuando se establece EN_Compare.
TH3 BOOL TRUE = valor actual del contador > Umbral 3 (si se ha
configurado en las modalidades de Una tarea, Bucle de
módulo, Grande libre).
Sólo está activo cuando se establece EN_Compare.
Modulo_Flag BOOL Se establece en TRUE cuando el contador sobrepasa su límite
en las modalidades siguientes:
Contador de bucle de módulo: cuando el contador desplaza
el módulo o 0
Contador de Grande libre: cuando el contador sobrepasa
sus límites.

Bloques de funciones
174 EIO0000003074 12/2019
Preset_Flag BOOL Se establece en TRUE mediante la sincronización de:
Contador de Una tarea: cuando el contador se preajusta y se
inicia
Contador de Bucle de módulo: cuando el contador se
restablece
Contador de Grande libre: cuando el contador se preajusta
Contador de eventos: cuando se reinicia el temporizador
interno relativo a la referencia de tiempo
Medidor de frecuencias: cuando se reinicia el temporizador
interno relativo a la referencia de tiempo
Cap_Flag BOOL TRUE indica que se ha retenido un valor en el registro de
capturas.
Este indicador debe resetearse antes de que pueda realizarse
una nueva captura.
Reflex0 BOOL Estado de Reflex0 (si está configurado en las modalidades
Una tarea, Bucle de módulo, Grande libre).
Sólo está activo cuando se establece EN_Compare.
Reflex1 BOOL Estado de Reflex1 (si está configurado en las modalidades
Una tarea, Bucle de módulo, Grande libre).
Sólo está activo cuando se establece EN_Compare.
Out0 BOOL Indica el estado de Output0.
Out1 BOOL Indica el estado de Output1.
CurrentValue DINT Valor actual del contador.
Salidas Tipo Comentario

Bloques de funciones
EIO0000003074 12/2019 175
HSCSimple_M241: control de un contador del tipo simple para M241
Descripción de bloques de funciones
Este bloque de funciones controla un contador de tipo Simple con las siguientes funciones
reducidas:
conteo de un canal
sin umbral
sin evento
sin captura
sin reflex
El bloque de funciones HSCSimple es obligatorio al usar un tipo de contador Simple.
El nombre de la instancia del bloque de funciones debe coincidir con el nombre definido por la
configuración. La información relacionada con el hardware administrada por este bloque de
funciones está sincronizada con el ciclo de tareas MAST.
NOTA: EcoStruxure Machine Expert permite forzar los valores de salida lógica del bloque de
funciones, pero hacerlo no afectará a las salidas relacionadas con el hardware si la función está
activa (en ejecución).
Representación gráfica
Representación IL y ST
Para ver la representación general en lenguaje IL o ST, consulte el capítulo
Representación de
funciones y de bloques de funciones (véase página 177)
.
ADVERTENCIA
VALORES DE SALIDA IMPREVISTOS
Utilice únicamente la instancia de bloque de funciones en la tarea MAST.
No utilice la misma instancia de bloque de funciones en otra tarea.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.

Bloques de funciones
176 EIO0000003074 12/2019
Descripción de variables de E/S
En esta tabla se describen las variables de entrada:
En esta tabla se describen las variables de salida:
Entradas Tipo Comentario
Enable BOOL TRUE = autoriza cambios en el valor actual del
contador.
Sync BOOL En el flanco ascendente, preajusta e inicia el contador.
ACK_Modulo BOOL Modalidad de Bucle de módulo: En el flanco
ascendente, restablece el indicador de módulo
Modulo_Flag.
Salidas Tipo Comentario
HSC_REF EXPERT_REF
(véase página 157)
Referencia al HSC.
HSC_Err BOOL TRUE = indica que se ha detectado un error.
Utilice el bloque de funciones EXPERTGetDiag
(véase página 162)
para obtener más información
sobre este error detectado.
Validity BOOL TRUE = significa que los valores de salida del bloque de
funciones son válidos.
Run BOOL TRUE = el contador está en ejecución.
En la modalidad de una tarea, cambia a 0 cuando
CurrentValue llega a 0. Se requiere un flanco
ascendente en Sync para reiniciar el contador.
Modulo_Flag BOOL Modalidad de Bucle de módulo: Se establece en TRUE
cuando el contador sobrepasa el valor del módulo.
CurrentValue DWORD Valor actual del contador.

EIO0000003074 12/2019 177
Modicon M 241 Logic Controller
Represen tación de funciones y de bloques de funciones
EIO0000003074 12/2019
Represen tación de funciones y de bloques de funciones
Apéndice D
Representación de funciones y de bloques de funciones
Descripción general
Cada función se puede representar en los lenguajes siguientes:
IL: Lista de instrucciones
ST: Texto estructurado
LD: Diagrama de contactos
FBD: Diagrama de bloques de funciones
CFC: Diagrama de función continua
En este capítulo se proporcionan funciones y ejemplos de representación de bloques de funciones
y se describe cómo utilizarlas en lenguajes IL y ST.
Contenido de este capítulo
Este capítulo contiene los siguientes apartados:
Apartado Página
Diferencias entre una función y un bloque de funciones 178
Cómo utilizar una función o un bloque de funciones en lenguaje IL 179
Cómo utilizar una función o un bloque de funciones en lenguaje ST 183

Representación de funciones y de bloques de funciones
178 EIO0000003074 12/2019
Diferencias entre una función y un bloque de funciones
Función
Una función:
Es una POU (Unidad de organización de programa) que devuelve un resultado inmediato.
Se le llama directamente por su nombre (y no a través de una instancia).
No tiene un estado persistente desde una llamada hasta la otra.
Se puede utilizar como un operando en otras expresiones.
Ejemplos: operadores booleanos (AND), cálculos, conversión (BYTE_TO_INT)
Bloque de funciones
Bloque de funciones
Es una POU (Unidad de organización de programa) que devuelve una o más salidas.
Debe llamarse a través de una instancia (copia del bloque de funciones con nombre y variables
dedicados).
Todas las instancias tienen un estado persistente (salidas y variables internas) de una llamada
a otra desde un bloque de funciones o programa.
Ejemplos: temporizadores, contadores
En el ejemplo, Timer_ON es una instancia del bloque de funciones TON:

Representación de funciones y de bloques de funciones
EIO0000003074 12/2019 179
Cómo utilizar una función o un bloque de funciones en lenguaje IL
Información general
En esta sección se describe cómo implementar una función y un bloque de funciones en lenguaje
IL.
Las funciones IsFirstMastCycle y SetRTCDrift y el bloque de funciones TON se utilizan
como ejemplos para mostrar implementaciones.
Uso de una función en lenguaje IL
En este procedimiento se describe cómo insertar una función en lenguaje IL:
Paso Acción
1 Abra o cree una nueva POU en el lenguaje de Lista de instrucciones (IL).
NOTA: Aquí no se detalla el procedimiento para crear una POU. Para obtener más información,
consulte Adding and Calling POUs
(véase EcoStruxure Machine Expert, Guía de programación)
.
2 Cree las variables que necesite la función.
3 Si la función tiene 1 o más entradas, empiece a cargar la primera entrada utilizando la instrucción
LD.
4 Inserte una nueva línea abajo y:
escriba el nombre de la función en la columna de operadores (campo izquierdo); o
utilice la opción Accesibilidad para seleccionar la función (seleccione Insertar llamada de módulo
en el menú contextual).
5 Si la función tiene más de una entrada y se utiliza Accesibilidad, se crea automáticamente el número
necesario de líneas con ??? en los campos de la derecha. Sustituya los ??? por el valor o la variable
adecuada que corresponda al orden de las entradas.
6 Inserte una línea nueva para almacenar el resultado de la función en la variable correspondiente:
escriba la instrucción ST en la columna del operador (campo de la izquierda) y el nombre de la
variable en el campo de la derecha.

Representación de funciones y de bloques de funciones
180 EIO0000003074 12/2019
Para ilustrar el procedimiento, considere las funciones IsFirstMastCycle (sin parámetro de
entrada) y SetRTCDrift (con parámetros de entrada) que se representan gráficamente a
continuación:
En lenguaje IL, el nombre de la función se utiliza directamente en la columna de operadores:
Función Representación gráfica
sin parámetros de entrada:
IsFirstMastCycle
con parámetros de
entrada:
SetRTCDrift
Función Representación en el Editor IL de POU
Ejemplo en IL de una
función sin parámetros
de entrada:
IsFirstMastCycle

Representación de funciones y de bloques de funciones
EIO0000003074 12/2019 181
Uso de un bloque de funciones en lenguaje IL
En este procedimiento se describe cómo insertar un bloque de funciones en lenguaje IL:
Ejemplo en IL de una
función con parámetros
de entrada:
SetRTCDrift
Función Representación en el Editor IL de POU
Paso Acción
1 Abra o cree una POU nueva en el lenguaje de Lista de instrucciones (IL).
NOTA: Aquí no se detalla el procedimiento para crear una POU. Para obtener más información,
consulte Adding and Calling POUs
(véase EcoStruxure Machine Expert, Guía de programación)
.
2 Cree las variables que necesita el bloque de funciones, incluido el nombre de instancia.
3 Se llama a los bloques de funciones utilizando una instrucción CAL:
Utilice la opción Accesibilidad para seleccionar el bloque de funciones (botón derecho del ratón y
seleccionar Insertar llamada de módulo en el menú contextual).
La instrucción CAL y la E/S necesaria se crean automáticamente.
Cada parámetro (E/S) es una instrucción:
Los valores de las entradas se establecen con ":=".
Los valores de las salidas se establecen con "=>".
4 En el campo de la derecha CAL, sustituya ??? por el nombre de la instancia.
5 Sustituya otros ??? por una variable apropiada o un valor inmediato.

Representación de funciones y de bloques de funciones
182 EIO0000003074 12/2019
Para ilustrar el procedimiento, considere este ejemplo con el bloque de funciones TON que se
representa gráficamente a continuación:
En lenguaje IL, el nombre del bloque de funciones se utiliza directamente en la columna de
operadores:
Bloque de funciones Representación gráfica
TON
Bloque de funciones Representación en el Editor IL de POU
TON

Representación de funciones y de bloques de funciones
EIO0000003074 12/2019 183
Cómo utilizar una función o un bloque de funciones en lenguaje ST
Información general
En esta sección se describe el modo de implementar una función y un bloque de funciones en
lenguaje ST.
La función SetRTCDrift y el bloque de funciones TON se utilizan como ejemplos para mostrar
implementaciones.
Uso de una función en lenguaje ST
En este procedimiento se describe cómo insertar una función en lenguaje ST:
Para ilustrar el procedimiento, considere la función SetRTCDrift que se representa
gráficamente a continuación:
Paso Acción
1 Abra o cree una POU nueva en el lenguaje de Texto estructurado (ST).
NOTA: Aquí no se detalla el procedimiento para crear una POU. Para obtener más información,
consulte Adding and Calling POUs
(véase EcoStruxure Machine Expert, Guía de programación)
.
2 Cree las variables que necesite la función.
3 Utilice la sintaxis general en el Editor POU ST para el lenguaje ST de una función. La sintaxis
general es:
FunctionResult:= FunctionName(VarInput1, VarInput2,.. VarInputx);
Función Representación gráfica
SetRTCDrift

Representación de funciones y de bloques de funciones
184 EIO0000003074 12/2019
El lenguaje ST de esta función es este:
Uso de un bloque de funciones en lenguaje ST
En este procedimiento se describe cómo insertar un bloque de funciones en lenguaje ST:
Para ilustrar el procedimiento, considere este ejemplo con el bloque de funciones TON que se
representa gráficamente a continuación:
Función Representación en el editor POU ST de
SetRTCDrift PROGRAM MyProgram_ST
VAR myDrift: SINT(-29..29) := 5;
myDay: DAY_OF_WEEK := SUNDAY;
myHour: HOUR := 12;
myMinute: MINUTE;
myRTCAdjust: RTCDRIFT_ERROR;
END_VAR
myRTCAdjust:= SetRTCDrift(myDrift, myDay, myHour, myMinute);
Paso Acción
1 Abra o cree una POU nueva en el lenguaje de Texto estructurado (ST).
NOTA: Aquí no se detalla el procedimiento para crear una POU. Para obtener más
información sobre la adición, declaración y llamadas de POU, consulte la
documentación
(véase EcoStruxure Machine Expert, Guía de programación)
relacionada.
2 Cree las variables de entrada y salida y la instancia requeridas para el bloque de
funciones:
Las variables de entrada son los parámetros de entrada requeridos por el bloque
de funciones
Las variables de salida reciben el valor devuelto por el bloque de funciones
3 Utilice la sintaxis general en el Editor POU ST para el lenguaje ST de un bloque de
funciones. La sintaxis general es:
FunctionBlock_InstanceName(Input1:=VarInput1,
Input2:=VarInput2,... Ouput1=>VarOutput1,
Ouput2=>VarOutput2,...);
Bloque de
funciones
Representación gráfica
TON

Representación de funciones y de bloques de funciones
EIO0000003074 12/2019 185
En esta tabla se muestran ejemplos de una llamada de bloque de funciones en lenguaje ST:
Bloque de funciones Representación en el editor POU ST de
TON

Representación de funciones y de bloques de funciones
186 EIO0000003074 12/2019

EIO0000003074 12/2019 187
Modicon M 241 Logic Controller
Glosario
EIO0000003074 12/2019
Glosario
A
aplicación
Un programa que incluye datos de configuración, símbolos y documentación.
B
byte
Un tipo que está codificado en un formato de 8 bits que, en el formato hexadecimal, va de 00 hex
a FF hex.
C
CFC
(
diagrama de función continua
) Un lenguaje de programación (una ampliación del estándar IEC
61131-3) basado en el lenguaje de diagrama de bloque de funciones (FBD) y que funciona como
un diagrama de flujo. Sin embargo, no se utiliza ninguna red y es posible un posicionamiento libre
de elementos gráficos, lo que permite bucles de realimentación. En cada bloque, las entradas se
sitúan a la izquierda y las salidas, a la derecha. Las salidas del bloque se pueden conectar a las
entradas de otros bloques para formar expresiones complejas.
controlador
Automatiza procesos industriales (también conocido como controlador lógico programable o
controlador programable).
D
diagrama de bloques de funciones
Uno de los cinco lenguajes para lógica o control que cumplen con el estándar IEC 61131-3 para
sistemas de control. El diagrama de bloques de funciones es un lenguaje de programación
orientado gráficamente. Funciona con una lista de redes en la que cada red contiene una
estructura gráfica de cuadros y líneas de conexión que representa una expresión lógica o
aritmética, la llamada de un bloque de funciones, un salto o una instrucción de retorno.

Glosario
188 EIO0000003074 12/2019
F
FB
(
bloque de funciones
) Un práctico mecanismo de programación que consolida un grupo de
instrucciones de programación para realizar una acción específica y normalizada, por ejemplo, el
control de velocidad, el control de intervalo o el conteo. Un bloque de funciones se puede
componer de datos de configuración, un conjunto de parámetros de funcionamiento internos o
externos y, normalmente, una o diversas entradas y salidas de datos.
I
ID
(
identificador/identificación
)
IEC 61131-3
Tercera parte de un estándar de tres partes de la IEC para los equipos de automatización
industriales. IEC 61131-3 se ocupa de los lenguajes de programación del controlador y define dos
estándares de lenguajes de programación gráficos y dos textuales. Los lenguajes de
programación gráficos son un diagrama de contactos y un diagrama de bloque de funciones. Los
lenguajes de programación textuales incluyen texto estructurado y lista de instrucciones.
IL
(
lista de instrucciones
) Un programa escrito en lenguaje que se compone de una serie de
instrucciones basadas en texto y ejecutadas secuencialmente por el controlador. Cada instrucción
incluye un número de línea, un código de instrucción y un operando (consulte IEC 61131-3).
INT
(
entero
) Un número entero con codificación de 16 bits.
L
LD
(
diagrama de contactos
) Una representación gráfica de instrucciones de un programa de
controlador con símbolos para contactos, bobinas y bloques en una serie de escalones ejecutados
de forma secuencial por un controlador (consulte IEC 61131-3).
N
nodo
Un dispositivo direccionable en una red de comunicaciones.

Glosario
EIO0000003074 12/2019 189
P
POU
(
unidad de organización de programas
) Una declaración variable en el código fuente y el conjunto
de instrucciones correspondiente. Las POUs facilitan la reutilización modular de programas de
software, funciones y bloques de funciones. Una vez declaradas, cada una de las POUs está
disponible para las otras.
programa
El componente de una aplicación consistente en código fuente compilado capaz de poder ser
instalado en la memoria de un controlador lógico.
PTO
(
salidas de tren de pulsos
) Una salida rápida que oscila entre apagado y encendido en un ciclo de
servicio fijo 50-50, que produce una forma de onda cuadrada. La PTO resulta especialmente útil
para aplicaciones como motores paso a paso, conversores de frecuencia, controles de
servomotor, etc.
S
ST
(
texto estructurado
) Un lenguaje que incluye instrucciones complejas y anidadas (por ejemplo,
bucles de repetición, ejecuciones condicionales o funciones). ST cumple con IEC 61131-3.
V
variable
Una unidad de memoria direccionada y modificada por un programa.

Glosario
190 EIO0000003074 12/2019

EIO0000003074 12/2019 191
Modicon M241 Logic Controller
Índice
EIO0000003074 12/2019
Índice
B
Bucle en el módulo
modalidades HSC de HSC incrustado,
51
Busy
gestionar variables de estado,
147
C
captura
HSCMain,
134
CommandAborted
gestionar variables de estado,
147
comparación
HSCMain,
126
contador de alta velocidad
EXPERTGetDiag,
162
EXPERTGetImmediateValue,
164
EXPERTGetParam,
166
EXPERTSetParam,
168
HSCMain_M241,
170
HSCSimple_M241,
175
conteo de eventos
Modalidades HSC de HSC incrustado,
91
D
Done
gestionar variables de estado,
147
E
Enable
autorizar operación de conteo,
141
ErrID
gestión de un error detectado,
148
gestionar variables de estado,
147
Error
gestión de un error detectado,
148
gestionar variables de estado,
147
Execute
gestionar variables de estado,
147
EXPERT_DIAG_TYPE
tipos de datos,
150
EXPERT_ERR_TYPE,
151
EXPERT_FREQMETER_TIMEBASE_TYPE
tipos de datos,
152
EXPERT_HSCMAIN_TIMEBASE_TYPE
tipos de datos,
153
EXPERT_IMMEDIATE_ERR_TYPE,
154
EXPERT_PARAMETER_TYPE,
155
EXPERT_PERIODMETER_RESOLUTION_-
TYPE
tipos de datos,
156
EXPERTGetCapturedValue
obtener un valor de registro de captura,
160
EXPERTGetDiag
obtener el error detectado en una función
de E/S EXPERT,
162
EXPERTGetImmediateValue
obtener el valor del contador de un HSC,
164
EXPERTGetParam
obtener valores de parámetros de un
HSC,
166
EXPERTSetParam
configurar valores de parámetros de un
HSC,
168
F
funciones
cómo utilizar una función o un bloque de
funciones en lenguaje IL,
179
cómo utilizar una función o un bloque de
funciones en lenguaje ST,
183
diferencias entre una función y un bloque
de funciones,
178
Enable,
141
funciones específicas,
146

Índice
192 EIO0000003074 12/2019
G
gestión de un error detectado
ErrID,
148
Error,
148
gestionar variables de estado
Busy,
147
CommandAborted,
147
Done,
147
ErrID,
147
Error,
147
Execute,
147
Grande libre
modalidades de HSC de HSC incrustado,
74
H
HSC
EXPERTGetDiag,
162
EXPERTGetImmediateValue,
164
EXPERTGetParam,
166
EXPERTSetParam,
168
HSCMain_M241,
170
HSCSimple_M241,
175
HSC_REF,
157
HSCMain
captura,
134
comparación,
126
HSCMain_M241
controlar un contador de alta velocidad
del tipo principal (M241),
170
HSCSimple_M241
controlar un contador de alta velocidad
del tipo simple (M241),
175
M
M241 HSC
EXPERTGetCapturedValue,
160
EXPERTGetDiag,
162
EXPERTGetImmediateValue,
164
EXPERTGetParam,
166
EXPERTSetParam,
168
HSCMain_M241,
170
HSCSimple_M241,
175
medidor de frecuencias
descripción,
103
programación,
108
sinopsis,
106
medidor de periodos
descripción,
113
parámetros,
122
programación,
119
sinopsis,
116
modalidades de HSC de HSC incrustado
Grande libre,
74
modalidades HSC de HSC incrustado
Bucle en el módulo,
51
conteo de eventos,
91
R
registro de captura de HSC
EXPERTGetCapturedValue,
160
T
tipos de datos
EXPERT_DIAG_TYPE,
150
EXPERT_ERR_TYPE,
151
EXPERT_FREQMETER_TIMEBASE_-
TYPE,
152
EXPERT_HSCMAIN_TIMEBASE_TYPE,
153
EXPERT_IMMEDIATE_ERR_TYPE,
154
EXPERT_PARAMETER_TYPE,
155
EXPERT_PERIODMETER_RESOLU-
TION_TYPE,
156
HSC_REF,
157

EIO0000003080.01
www.se.com
Modicon M241 Logic Contr oller
EIO0000003080 12/2019
Modicon M241
Logic Controller
PTOPWM
Guía de la biblioteca
12/2019

2EIO0000003080 12/2019
La información que se ofrece en esta documentación contiene descripciones de carácter general
y/o características técnicas sobre el rendimiento de los productos incluidos en ella. La presente
documentación no tiene como objeto sustituir dichos productos para aplicaciones de usuario
específicas, ni debe emplearse para determinar su idoneidad o fiabilidad. Los usuarios o
integradores tienen la responsabilidad de llevar a cabo un análisis de riesgos adecuado y
completo, así como la evaluación y las pruebas de los productos en relación con la aplicación o el
uso de dichos productos en cuestión. Ni Schneider Electric ni ninguna de sus filiales o asociados
asumirán responsabilidad alguna por el uso inapropiado de la información contenida en este
documento. Si tiene sugerencias de mejoras o modificaciones o ha hallado errores en esta
publicación, le rogamos que nos lo notifique.
Usted se compromete a no reproducir, salvo para su propio uso personal, no comercial, la
totalidad o parte de este documento en ningún soporte sin el permiso de Schneider Electric, por
escrito. También se compromete a no establecer ningún vínculo de hipertexto a este documento
o su contenido. Schneider Electric no otorga ningún derecho o licencia para el uso personal y no
comercial del documento o de su contenido, salvo para una licencia no exclusiva para consultarla
"tal cual", bajo su propia responsabilidad. Todos los demás derechos están reservados.
Al instalar y utilizar este producto es necesario tener en cuenta todas las regulaciones sobre
seguridad correspondientes, ya sean regionales, locales o estatales. Por razones de seguridad y
para garantizar que se siguen los consejos de la documentación del sistema, las reparaciones solo
podrá realizarlas el fabricante.
Cuando se utilicen dispositivos para aplicaciones con requisitos técnicos de seguridad, siga las
instrucciones pertinentes.
Si con nuestros productos de hardware no se utiliza el software de Schneider Electric u otro
software aprobado, pueden producirse lesiones, daños o un funcionamiento incorrecto del equipo.
Si no se tiene en cuenta esta información, se pueden causar daños personales o en el equipo.
© 2019 Schneider Electric. Reservados todos los derechos.

EIO0000003080 12/2019 3
Tabla de materias
Información de seguridad . . . . . . . . . . . . . . . . . . . . . . . . 7
Acerca de este libro . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Parte I Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Capítulo 1 Introducción a las funciones expertas . . . . . . . . . . . . . . 17
Descripción general de las funciones expertas . . . . . . . . . . . . . . . . . . 18
Asignación de E/S experta incrustada. . . . . . . . . . . . . . . . . . . . . . . . . 21
Capítulo 2 Generalidades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
Funciones específicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
Información general sobre la gestión de bloques de funciones . . . . . 28
Parte II Salida de tren de pulsos (PTO) . . . . . . . . . . . . . . . . 31
Capítulo 3 Descripción general . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
Salida de tren de pulsos (PTO) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
Capítulo 4 Configuración . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
4.1 Configuración . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
Configuración de PTO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
Modalidades de salida de pulsos . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
Rampa de aceleración/deceleración . . . . . . . . . . . . . . . . . . . . . . . . . . 47
Evento PROBE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
Compensación de holgura (Solamente disponible en modalidad de
cuadratura) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
Límites de posicionamiento. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
4.2 Modalidades de toma de referencia . . . . . . . . . . . . . . . . . . . . . . . . . . 59
Modalidades de toma de referencia . . . . . . . . . . . . . . . . . . . . . . . . . . 60
Ajuste de posición . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
Referencia larga . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
Referencia larga e índice. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
Referencia corta invertida . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
Referencia corta no invertida. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
Referencia corta y fuera de índice. . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
Referencia corta y dentro de índice. . . . . . . . . . . . . . . . . . . . . . . . . . . 72
Offset de inicio. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74

4EIO0000003080 12/2019
Capítulo 5 Tipos de unidades de datos . . . . . . . . . . . . . . . . . . . . . . . 75
AXIS_REF_PTO Tipo de datos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
MC_BUFFER_MODE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
MC_DIRECTION . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
PTO_HOMING_MODE. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
PTO_PARAMETER . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
PTO_ERROR. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
Capítulo 6 Bloques de funciones de movimiento. . . . . . . . . . . . . . . . 85
6.1 Modalidades de funcionamiento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
Diagrama de estado de movimiento . . . . . . . . . . . . . . . . . . . . . . . . . . 87
Modalidad de búfer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
Ejemplos de diagramas de tiempos. . . . . . . . . . . . . . . . . . . . . . . . . . . 91
6.2 Bloque de funciones de MC_Power_PTO . . . . . . . . . . . . . . . . . . . . . . 100
Descripción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
MC_Power_PTO: gestionar la alimentación del estado del eje . . . . . . 102
6.3 Bloque de funciones MC_MoveVelocity_PTO . . . . . . . . . . . . . . . . . . . 105
Descripción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
MC_MoveVelocity_PTO: control de la velocidad del eje . . . . . . . . . . . 107
6.4 Bloque de funciones MC_MoveRelative_PTO . . . . . . . . . . . . . . . . . . . 113
Descripción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
MC_MoveRelative_PTO: control del movimiento del eje relativo. . . . . 115
6.5 Bloque de funciones MC_MoveAbsolute_PTO . . . . . . . . . . . . . . . . . . 120
Descripción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
MC_MoveAbsolute_PTO: control del movimiento a la posición
absoluta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
6.6 Bloque de funciones MC_Home_PTO . . . . . . . . . . . . . . . . . . . . . . . . . 127
Descripción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 128
MC_Home_PTO: control del eje para moverlo a una posición de
referencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
6.7 Bloque de funciones MC_SetPosition_PTO. . . . . . . . . . . . . . . . . . . . . 133
Descripción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134
MC_SetPosition_PTO: forzado de la posición de referencia del eje . . 135
6.8 Bloque de funciones MC_Stop_PTO . . . . . . . . . . . . . . . . . . . . . . . . . . 136
Descripción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137
MC_Stop_PTO: control de una detención del movimiento controlado.138
6.9 Bloque de funciones MC_Halt_PTO. . . . . . . . . . . . . . . . . . . . . . . . . . . 141
Descripción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142
MC_Halt_PTO: control de una detención del movimiento controlado
hasta que la velocidad sea igual a cero . . . . . . . . . . . . . . . . . . . . . . . . 143

EIO0000003080 12/2019 5
6.10 Añadir un bloque de funciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 146
Añadir un bloque de funciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 146
Capítulo 7 Bloques de funciones administrativas . . . . . . . . . . . . . . 147
7.1 Bloques de funciones de estado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 148
MC_ReadActualVelocity_PTO: obtención de la velocidad solicitada del
eje . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 149
MC_ReadActualPosition_PTO: obtención de la posición del eje . . . . 151
MC_ReadStatus_PTO: obtención del estado del eje . . . . . . . . . . . . . 153
MC_ReadMotionState_PTO: obtención del estado de movimiento del
eje . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 155
7.2 Bloques de funciones de parámetros . . . . . . . . . . . . . . . . . . . . . . . . . 157
MC_ReadParameter_PTO: obtención de parámetros del PTO. . . . . . 158
MC_WriteParameter_PTO: escribir parámetros en el PTO. . . . . . . . . 160
MC_ReadBoolParameter_PTO: obtención de parámetros BOOL del
PTO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162
MC_WriteBoolParameter_PTO: escritura de parámetros BOOL en el
PTO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 164
7.3 Bloques de funciones PROBE. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 166
MC_TouchProbe_PTO: activación de un evento desencadenador. . . 167
MC_AbortTrigger_PTO: anulación/desactivación de los bloques de
funciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 169
7.4 Bloques de funciones de tratamiento de errores. . . . . . . . . . . . . . . . . 170
MC_ReadAxisError_PTO: obtención del error de control del eje . . . . 171
MC_Reset_PTO: restablecimiento de todos los errores relacionados
con el eje . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 173
7.5 Añadir un bloque de funciones administrativas . . . . . . . . . . . . . . . . . . 174
Añadir un bloque de funciones administrativas . . . . . . . . . . . . . . . . . . 174
Parte III Modulación de ancho de pulsos (PWM) . . . . . . . . . . 175
Capítulo 8 Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 177
Descripción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 178
Convención de asignación de nombres de FreqGen/PWM . . . . . . . . 180
Funciones de sincronización y habilitación . . . . . . . . . . . . . . . . . . . . . 181
Capítulo 9 Configuración y programación . . . . . . . . . . . . . . . . . . . . 183
Configuración . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 184
PWM_M241: control de una señal de modulación de ancho de pulsos 187
Programación del bloque de funciones PWM . . . . . . . . . . . . . . . . . . . 189
Capítulo 10 Tipos de datos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 191
FREQGEN_PWM_ERR_TYPE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 191

6EIO0000003080 12/2019
Parte IV Generador de frecuencias (FreqGen) . . . . . . . . . . .193
Capítulo 11 Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 195
Descripción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 196
Convención de asignación de nombres de FreqGen. . . . . . . . . . . . . . 197
Funciones de sincronización (Sync) y habilitación (Enable) . . . . . . . . 198
Capítulo 12 Configuración y programación . . . . . . . . . . . . . . . . . . . . . 199
Configuración. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 200
FrequencyGenerator_M241: control de una señal de onda cuadrada. 203
Programar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 205
Apéndices . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 207
Apéndice A Representación de funciones y de bloques de funciones 209
Diferencias entre una función y un bloque de funciones . . . . . . . . . . . 210
Cómo utilizar una función o un bloque de funciones en lenguaje IL . . 211
Cómo utilizar una función o un bloque de funciones en lenguaje ST . 215
Glosario . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 219
Índice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 223

EIO0000003080 12/2019 7
Información de seguridad
Información importante
AVISO
Lea atentamente estas instrucciones y observe el equipo para familiarizarse con el dispositivo
antes de instalarlo, utilizarlo, revisarlo o realizar su mantenimiento. Los mensajes especiales que
se ofrecen a continuación pueden aparecer a lo largo de la documentación o en el equipo para
advertir de peligros potenciales, o para ofrecer información que aclara o simplifica los distintos
procedimientos.

8EIO0000003080 12/2019
TENGA EN CUENTA LO SIGUIENTE:
La instalación, el manejo, las revisiones y el mantenimiento de equipos eléctricos deberán ser
realizados sólo por personal cualificado. Schneider Electric no se hace responsable de ninguna
de las consecuencias del uso de este material.
Una persona cualificada es aquella que cuenta con capacidad y conocimientos relativos a la
construcción, el funcionamiento y la instalación de equipos eléctricos, y que ha sido formada en
materia de seguridad para reconocer y evitar los riesgos que conllevan tales equipos.
ANTES DE EMPEZAR
No utilice este producto en maquinaria sin protección de punto de funcionamiento. La ausencia de
protección de punto de funcionamiento en una máquina puede provocar lesiones graves al
operador de dicha máquina.
Este equipo de automatización y el software relacionado se utilizan para controlar diversos
procesos industriales. El tipo o modelo del equipo de automatización adecuado para cada uso
varía en función de factores tales como las funciones de control necesarias, el grado de protección
requerido, los métodos de producción, la existencia de condiciones poco habituales, las
normativas gubernamentales, etc. En algunos usos, puede ser necesario más de un procesador,
como en el caso de que se requiera redundancia de respaldo.
Solamente el usuario, el fabricante de la máquina o el integrador del sistema conocen las
condiciones y los factores presentes durante la configuración, el funcionamiento y el
mantenimiento de la máquina y, por consiguiente, pueden decidir el equipo asociado y las
medidas de seguridad y los enclavamientos relacionados que se pueden utilizar de forma
adecuada. Al seleccionar los equipos de automatización y control, así como el software
relacionado para un uso determinado, el usuario deberá consultar los estándares y las normativas
locales y nacionales aplicables. La publicación National Safety Council's Accident Prevention
Manual (que goza de un gran reconocimiento en los Estados Unidos de América) también
proporciona gran cantidad de información de utilidad.
ADVERTENCIA
EQUIPO SIN PROTECCIÓN
No utilice este software ni los equipos de automatización relacionados en equipos que no
dispongan de protección de punto de funcionamiento.
No introduzca las manos u otras partes del cuerpo dentro de la maquinaria mientras está en
funcionamiento.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.

EIO0000003080 12/2019 9
En algunas aplicaciones, como en el caso de la maquinaria de embalaje, debe proporcionarse
protección adicional al operador, como la protección de punto de funcionamiento. Esta medida es
necesaria si existe la posibilidad de que las manos y otras partes del cuerpo del operador puedan
introducirse y quedar atrapadas en áreas o puntos peligrosos, lo que puede provocar lesiones
graves. Los productos de software por sí solos no pueden proteger al operador frente a posibles
lesiones. Por este motivo, el software no se puede sustituir por la protección de punto de funciona-
miento ni puede realizar la función de esta.
Asegúrese de que las medidas de seguridad y los enclavamientos mecánicos/eléctricos
relacionados con la protección de punto de funcionamiento se hayan instalado y estén operativos
antes de que los equipos entren en funcionamiento. Todos los enclavamientos y las medidas de
seguridad relacionados con la protección de punto de funcionamiento deben estar coordinados
con la programación del software y los equipos de automatización relacionados.
NOTA: La coordinación de las medidas de seguridad y los enclavamientos mecánicos/eléctricos
para la protección de punto de funcionamiento está fuera del ámbito de la biblioteca de bloques
de funciones, la guía de usuario del sistema o de otras instalaciones mencionadas en esta
documentación.
INICIAR Y PROBAR
Antes de utilizar los equipos eléctricos de control y automatización para su funcionamiento normal
tras la instalación, es necesario que personal cualificado lleve a cabo una prueba de inicio del
sistema para verificar que los equipos funcionan correctamente. Es importante realizar los
preparativos para una comprobación de estas características y disponer de suficiente tiempo para
llevar a cabo las pruebas de forma completa y correcta.
Realice todas las pruebas de inicio recomendadas en la documentación del equipo. Guarde la
documentación del equipo para consultarla en el futuro.
ADVERTENCIA
PELIGRO DE FUNCIONAMIENTO DEL EQUIPO
Compruebe que se hayan seguido todos los procedimientos de instalación y configuración.
Antes de realizar las pruebas de funcionamiento, retire de todos los dispositivos todos los
bloqueos u otros medios de sujeción temporales utilizados para el transporte.
Retire del equipo las herramientas, los medidores y el material de desecho que pueda haber.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.

10 EIO0000003080 12/2019
Las pruebas del software deben realizarse tanto en un entorno simulado como en un entorno real.
Verifique que no existen cortocircuitos ni conexiones a tierra temporales en todo el sistema que
no estén instalados según la normativa local (de conformidad con National Electrical Code de
EE. UU., por ejemplo). Si fuera necesario realizar pruebas de tensión de alto potencial, siga las
recomendaciones de la documentación del equipo para evitar dañar el equipo fortuitamente.
Antes de dar tensión al equipo:
Retire del equipo las herramientas, los medidores y el material de desecho que pueda haber.
Cierre la puerta de la carcasa del equipo.
Retire todas las conexiones a tierra temporales de las líneas de alimentación de entrada.
Realice todas las pruebas iniciales recomendadas por el fabricante.
FUNCIONAMIENTO Y AJUSTES
Las precauciones siguientes proceden de NEMA Standards Publication ICS 7.1-1995 (prevalece
la versión en inglés):
Aunque se ha extremado la precaución en el diseño y la fabricación del equipo o en la selección
y las especificaciones de los componentes, existen riesgos que pueden aparecer si el equipo
se utiliza de forma inadecuada.
En algunas ocasiones puede desajustarse el equipo, lo que provocaría un funcionamiento
incorrecto o poco seguro. Utilice siempre las instrucciones del fabricante como guía para
realizar los ajustes de funcionamiento. El personal que tenga acceso a estos ajustes debe estar
familiarizado con las instrucciones del fabricante del equipo y con la maquinaria utilizada para
los equipos eléctricos.
El operador solo debe tener acceso a los ajustes de funcionamiento que realmente necesita. El
acceso a los demás controles debe restringirse para evitar cambios no autorizados en las
características de funcionamiento.

EIO0000003080 12/2019 11
Acerca de este libro
Presentación
Objeto
Esta documentación le proporciona información sobre las funciones de Salida de tren de pulsos
(PTO), Modulación de ancho de pulsos (PWM) y Generador de frecuencias (FreqGen) ofrecidas
en Modicon M241 Logic Controller.
En este documento se describen los tipos de datos y las funciones de la biblioteca PTOPWM de
M241.
Para utilizar este manual, debe:
Tener una comprensión amplia de M241, incluidos su diseño, funcionalidad e implementación
dentro de los sistemas de control.
Ser experto en el uso de los lenguajes de programación IEC 61131-3 PLC siguientes:
Diagrama de bloques de funciones (Function Block Diagram, FBD)
Diagrama de contactos (Ladder Diagram, LD)
Texto estructurado (Structured Text, ST)
Lista de instrucciones (Instruction List, IL)
Diagrama funcional secuencial (SFC)
Lenguaje CFC (Continuous Function Chart)
Campo de aplicación
Este documento se ha actualizado para la publicación de EcoStruxureTM Machine Expert V1.2.
Documentos relacionados
Puede descargar estas publicaciones técnicas y otra información técnica de nuestro sitio web
https://www.se.com/ww/en/download/ .
Título de la documentación Número de referencia
Modicon M241 Logic Controller - Guía de programación
EIO0000003059 (ENG)
,
EIO0000003060 (FRE)
,
EIO0000003061 (GER)
,
EIO0000003062 (SPA)
,
EIO0000003063 (ITA)
,
EIO0000003064 (CHS)

12 EIO0000003080 12/2019
Información relativa al producto
1 Para obtener información adicional, consulte NEMA ICS 1.1 (última edición), "Safety Guidelines
for the Application, Installation, and Maintenance of Solid State Control" (Directrices de seguridad
para la aplicación, la instalación y el mantenimiento del control de estado estático) y NEMA ICS
7.1 (última edición), "Safety Standards for Construction and Guide for Selection, Installation and
Operation of Adjustable-Speed Drive Systems" (Estándares de seguridad para la construcción y
guía para la selección, instalación y utilización de sistemas de unidades de velocidad ajustable) o
su equivalente aplicable a la ubicación específica.
ADVERTENCIA
PÉRDIDA DE CONTROL
El diseñador del esquema de control debe tener en cuenta las posibles modalidades de fallo
de rutas de control y, para ciertas funciones de control críticas, proporcionar los medios para
lograr un estado seguro durante y después de un fallo de ruta. Algunas funciones de control
críticas son, por ejemplo, la parada de emergencia y la parada de sobrecarrera, un corte de
alimentación o un reinicio.
Para las funciones críticas de control deben proporcionarse rutas de control separadas o
redundantes.
Las rutas de control del sistema pueden incluir enlaces de comunicación. Deben tenerse en
cuenta las implicaciones de retardos de transmisión imprevistos o fallos del enlace.
Tenga en cuenta todas las reglamentaciones para la prevención de accidentes y las
normativas de seguridad locales.1
Cada instalación de este equipo debe probarse de forma individual y exhaustiva antes de
entrar en servicio.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Utilice solo software aprobado por Schneider Electric para este equipo.
Actualice el programa de aplicación siempre que cambie la configuración de hardware física.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.

EIO0000003080 12/2019 13
Terminología derivada de los estándares
Los términos técnicos, símbolos y las descripciones correspondientes del presente manual o que
aparecen en la parte interior o exterior de los propios productos se derivan, por lo general, de los
términos y las definiciones de estándares internacionales.
En el área de los sistemas de seguridad funcional, unidades y automatización general se incluyen,
pero sin limitarse a ellos, términos como
seguridad
,
función de seguridad
,
estado de seguridad
,
fallo
,
reinicio tras fallo
,
avería
,
funcionamiento incorrecto
,
error
,
mensaje de error
,
peligroso
, etc.
Estos estándares incluyen, entre otros:
Norma Descripción
IEC 61131-2:2007 Controladores programables, parte 2: Requisitos y ensayos de los equipos.
ISO 13849-1:2015 Seguridad de la maquinaria: componentes de los sistemas de control
relacionados con la seguridad.
Principios generales del diseño.
EN 61496-1:2013 Seguridad de las máquinas: equipos de protección electrosensibles.
Parte 1: pruebas y requisitos generales.
ISO 12100:2010 Seguridad de las máquinas. Principios generales para el diseño. Evaluación del
riesgo y reducción del riesgo
EN 60204-1:2006 Seguridad de las máquinas. Equipo eléctrico de las máquinas. Parte 1:
Requisitos generales
ISO 14119:2013 Seguridad de la maquinaria. Dispositivos de bloqueo asociados con
protecciones: principios de diseño y selección
ISO 13850:2015 Seguridad de la maquinaria. Parada de emergencia: principios de diseño
IEC 62061:2015 Seguridad de la maquinaria. Seguridad funcional de los sistemas de control
programable de seguridad eléctrica y electrónica
IEC 61508-1:2010 Seguridad funcional de los sistemas eléctricos/electrónicos/electrónicos
programables relacionados con la seguridad: requisitos generales.
IEC 61508-2:2010 Seguridad funcional de los sistemas eléctricos/electrónicos/electrónicos
programables relacionados con la seguridad: requisitos para los sistemas
eléctricos/electrónicos/electrónicos programables relacionados con la
seguridad.
IEC 61508-3:2010 Seguridad funcional de los sistemas eléctricos/electrónicos/electrónicos
programables relacionados con la seguridad: requisitos de software.
IEC 61784-3:2016 Redes de comunicación industrial - Perfiles - Parte 3: Buses de campo de
seguridad funcionales - Reglas generales y definiciones de perfiles.
2006/42/EC Directiva de maquinaria
2014/30/EU Directiva de compatibilidad electromagnética
2014/35/EU Directiva de baja tensión

14 EIO0000003080 12/2019
Además, los términos utilizados en este documento se pueden usar de manera tangencial porque
se obtienen de otros estándares como:
Por último, el término
zona de funcionamiento
se puede utilizar junto con la descripción de peligros
específicos, y se define como tal para una
zona de peligro
o
zona peligrosa
en la
Directiva de
maquinaria
(
2006/42/EC
) y
ISO 12100:2010
.
NOTA: Los estándares mencionados anteriormente podrían o no aplicarse a los productos
específicos citados en la presente documentación. Para obtener más información en relación con
los diferentes estándares aplicables a los productos descritos en este documento, consulte las
tablas de características de las referencias de dichos productos.
Norma Descripción
Serie IEC 60034 Máquinas eléctricas giratorias
Serie IEC 61800 Accionamientos eléctricos de potencia de velocidad variable
Serie IEC 61158 Comunicación digital de datos para la medición y control: bus de campo para su
uso en sistemas de control.

EIO0000003080 12/2019 15
Modicon M 241 Logic Controller
Introducción
EIO0000003080 12/2019
Introducción
Parte I
Introducción
Descripción general
Esta parte proporciona una descripción general, las modalidades disponibles, la funcionalidad y el
rendimiento de las diferentes funciones.
Contenido de esta parte
Esta parte contiene los siguientes capítulos:
Capítulo Nombre del capítulo Página
1 Introducción a las funciones expertas 17
2 Generalidades 25

Introducción
16 EIO0000003080 12/2019

EIO0000003080 12/2019 17
Modicon M 241 Logic Controller
EIO0000003080 12/2019
Introducción a las funciones expertas
Capítulo 1
Introducción a las funciones expertas
Descripción general
En este capítulo se puede leer la descripción general, las funciones y el rendimiento de:
Contador de alta velocidad (HSC)
Salida de tren de pulsos (PTO)
Modulación de ancho de pulsos (PWM)
Generador de frecuencias (FreqGen)
Contenido de este capítulo
Este capítulo contiene los siguientes apartados:
Apartado Página
Descripción general de las funciones expertas 18
Asignación de E/S experta incrustada 21

18 EIO0000003080 12/2019
Descripción general de las funciones expertas
Introducción
Las entradas y salidas disponibles en el controlador lógico M241 pueden conectarse a funciones
expertas.
Desde el lanzamiento de EcoStruxure Machine Expert, cualquier E/S normal que ya no esté en
uso se puede configurar para que cualquiera de los tipos de funciones expertas puedan usarla,
del mismo modo que las E/S rápidas.
NOTA:
Cuando se utiliza una entrada como Run/Stop, no puede ser utilizada por una función experta.
Cuando se utiliza una entrada como Alarm, no puede ser utilizada por una función experta.
Para obtener más detalles, consulte Configuración de funciones incrustadas
(véase Modicon
M241 Logic Controller, Guía de programación)
.
Número máximo de funciones expertas
El número máximo de funciones expertas que se pueden configurar depende de:
1. La referencia del controlador lógico.
2. Los tipos de funciones expertas y el número de funciones opcionales
(véase Modicon M241
Logic Controller, Contador de alta velocidad, Guía de la biblioteca HSC)
configuradas. Consulte
Asignación E/S expertas incrustadas
(véase página 21)
.
3. El número de E/S disponibles.
Número máximo de funciones expertas por referencia del controlador lógico:
El número máximo de funciones expertas posibles puede limitarse más por el número de E/S
utilizadas por cada función experta.
Tipo de función experta 24 referencias de E/S
(TM241•24•)
40 referencias de E/S
(TM241•40•)
Número total de funciones HSC 14 16
HSC Simple 14 16
Monofásico principal 4
Fase dual principal
Medidor de frecuencias(1)
Medidor de periodos
PTO
PWM
FreqGen
(1) Si se configura el número máximo, sólo se pueden añadir 12 funciones HSC simple adicionales.

EIO0000003080 12/2019 19
Configuraciones de ejemplo:
4 PTO(2) + 14 HSC simple en 24 referencias de controlador de E/S
4 FreqGen(2) + 16 HSC simple en 40 referencias de controlador de E/S
4 Monofásico principal HSC + 10 HSC Simple en 24 referencias de controlador de E/S
4 Fase dual principal HSC + 8 HSC Simple en 40 referencias de controlador de E/S
2 PTO(2) + 2 Monofásico principal HSC + 14 HSC Simple en 40 referencias de controlador de
E/S
(2) sin ninguna E/S opcional configurada
El rendimiento de la función experta está limitado por las E/S utilizadas:
HSC con entradas rápidas: 100 kHz/200 kHz
HSC con entradas normales: 1 kHz
Configuración de una función experta
Para configurar una función experta, siga estos pasos:
Paso Descripción
1 Haga doble clic en el nodo de Contadores o Pulse_Generators en Dispositivos.
Resultado: Aparece la ventana de configuración Contadores o Generadores de pulsos:
2 Haga doble clic en Ninguno en la columna Valor y elija el tipo de función experta para asignar.
Resultado: La configuración predeterminada de la función experta aparece al hacer clic en cualquier
lugar en la ventana de configuración.
3 Configure los parámetros de la función experta tal como se describe en los siguientes capítulos.
4 Para configurar una función experta adicional, haga clic en la ficha +.
NOTA: Si ya se ha configurado el número máximo de funciones expertas, aparece un mensaje en la
parte inferior de la ventana de configuración que informa de que ahora sólo puede añadir funciones
HSC simple.

20 EIO0000003080 12/2019
E/S normal configurada como función experta
Cuando se configuren E/S normales como funciones expertas, tenga en cuenta lo siguiente:
Las entradas se pueden leer a través de variables de memoria.
Una entrada no se puede configurar como una función experta si ya se ha configurado como
entrada Run/Stop.
Una salida no puede configurarse como función experta si ya se ha configurado como una
alarma.
La gestión de cortocircuitos se aplica a las salidas. El estado de las salidas está disponible.
Las E/S no utilizadas por funciones expertas pueden utilizarse como cualquier otra E/S normal.
Cuando se utilizan entradas en funciones expertas (retención, HSC…), el filtro integrador se
sustituye por un filtro antirrebote. El valor de filtro se configura en la pantalla de configuración.

EIO0000003080 12/2019 21
Asignación de E/S experta incrustada
Asignación de E/S de
Las siguientes E/S normales o rápidas se pueden configurar para que la utilicen las funciones
expertas:
Cuando se asigna una E/S a una función experta, ya no está disponible para que la seleccionen
otras funciones expertas.
NOTA: Todas las E/S están deshabilitadas de forma predeterminada en la ventana de
configuración.
En la siguiente tabla se muestran las E/S que se pueden configurar para las funciones expertas:
24 referencias de E/S 40 referencias de E/S
TM241•24T, TM241•24U TM241•24R TM241•40T,
TM241•40U
TM241•40R
Entradas 8 entradas rápidas (I0-I7)
6 entradas normales (I8-I13)
8 entradas rápidas (I0-I7)
8 entradas normales (I8-I15)
Salidas 4 salidas rápidas (Q0-Q3)
4 salidas normales (Q4 a Q7)
4 salidas rápidas
(Q0-Q3)
4 salidas rápidas
(Q0-Q3)
4 salidas normales
(Q4 a Q7)
4 salidas rápidas
(Q0-Q3)
Función experta Nombre Entrada (rápida o
normal)
Salida (rápida o
normal)
HSC simple Entrada O
HSC principal Entrada A O
Entrada B/EN C
SYNC C
CAP C
Reflex 0 C
Reflex 1 C
Medidor de
frecuencias/Medidor de
periodos
Entrada A O
EN C
PWM/FreqGen Salida A O
SYNC C
EN C
O Obligatorio
C Configurable de modo opcional

22 EIO0000003080 12/2019
Uso de E/S regulares con funciones expertas
E/S de función experta en E/S normal:
Las entradas pueden leerse mediante variables de memoria estándar incluso si están
configuradas como funciones expertas.
Todas las E/S no utilizadas por funciones expertas pueden utilizarse como E/S normales.
Una E/S sólo la puede usar una función experta. Una vez configurada, la E/S ya no está
disponible para otras funciones expertas.
Si no hay más E/S rápidas disponibles, se puede configurar una E/S normal en su lugar. Sin
embargo, en este caso la máxima frecuencia de la función experta está limitada a 1 kHz.
No puede configurar una entrada en una función experta y utilizarla como entrada Run/Stop,
entrada de evento o entrada con retención a la vez.
Una salida no se puede configurar en una función experta si ya se ha configurado como Alarm.
La gestión de cortocircuitos se aplicará igualmente a todas las salidas. El estado de las salidas
está disponible. Para obtener más información, consulte Gestión de salidas.
Cuando se utilizan entradas en las funciones expertas (PTO, HSC…), el filtro integrador se
sustituye por el filtro antirrebote
(véase página 27)
. El valor del filtro se configura en la ventana
de configuración.
Para obtener más detalles, consulte Configuración de funciones incrustadas.
PTO Salida A/CW/Pulso O
Salida B/CCW/Dir C
REF (Origen) C
INDEX (Proximidad) C
PROBE C
Función experta Nombre Entrada (rápida o
normal)
Salida (rápida o
normal)
O Obligatorio
C Configurable de modo opcional

EIO0000003080 12/2019 23
Resumen de E/S
La ventana Resumen E/S muestra las E/S utilizadas por las funciones expertas.
Para mostrar la ventana Resumen E/S:
Ejemplo de la ventana Resumen E/S:
Paso Acción
1 En la ficha Dispositivos, haga clic con el botón derecho en el nodo MyController y seleccione
Resumen E/S.

24 EIO0000003080 12/2019

EIO0000003080 12/2019 25
Modicon M 241 Logic Controller
Generalidades
EIO0000003080 12/2019
Generalidades
Capítulo 2
Generalidades
Descripción general
En este capítulo se proporciona información general sobre las funciones Generador de
frecuencias (FreqGen), Salida de tren de pulsos (PTO) y Modulación de ancho de pulsos (PWM).
Las funciones proporcionan soluciones simples, aunque potentes, para la aplicación. En concreto,
son muy útiles para controlar el movimiento. Sin embargo, el uso y la aplicación de la información
contenida en el presente documento requieren experiencia en diseño y programación de sistemas
de control automatizados. Solamente el usuario, el fabricante o el integrador saben cuáles son las
condiciones y los factores presentes durante la instalación y la configuración, el funcionamiento y
el mantenimiento de la máquina o los procesos relacionados, por lo que pueden decidir la
automatización y el equipo asociado, así como las medidas de seguridad y los enclavamientos
relacionados que se pueden utilizar de forma efectiva y correcta. Al seleccionar el equipo de
control y automatización (así como cualquier otro equipo o software relacionado) para una
determinada aplicación, también debe tener en cuenta todas las normativas o estándares locales,
regionales o nacionales.
ADVERTENCIA
INCOMPATIBILIDAD CON NORMATIVAS
Asegúrese de que todos los equipos que utilice y que los sistemas diseñados cumplan con las
normativas y los estándares locales, regionales y nacionales.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.

Generalidades
26 EIO0000003080 12/2019
Las funciones proporcionadas por las bibliotecas de funciones expertas fueron pensadas y
diseñadas presuponiendo que usted ha incorporado el hardware de seguridad necesario a la
arquitectura de la aplicación, como (aunque sin limitarse a ello) conmutadores de fin de carrera
apropiados y hardware de parada de emergencia y de control de los circuitos. Se acepta
implícitamente que hay medidas de seguridad funcional presentes en el diseño de la máquina para
prevenir comportamientos indeseados de la máquina como sobrerrecorrido u otros movimientos
no controlados. Además, se presupone que ha llevado a cabo análisis de seguridad funcional y de
evaluación del riesgo apropiados para su máquina o proceso.
Contenido de este capítulo
Este capítulo contiene los siguientes apartados:
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Durante el diseño de la máquina, debe asegurarse de que se lleva a cabo y se respeta una
evaluación de riesgo según la norma EN/ISO 12100.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.
Apartado Página
Funciones específicas 27
Información general sobre la gestión de bloques de funciones 28

Generalidades
EIO0000003080 12/2019 27
Funciones específicas
Filtro de rebote
En esta tabla se muestran las frecuencias de contador máximas determinadas por los valores de
filtrado utilizados para reducir el efecto de rebote de la entrada:
Salidas dedicadas
Sólo se puede acceder a las salidas utilizadas por las funciones expertas de alta velocidad a
través del bloque de funciones. No se puede leer ni escribir directamente en la aplicación.
Entrada Valor de filtro de rebote (ms) Frecuencia de contador máxima
Experto
Frecuencia de contador máxima
Habitual
A
B
0,000 200 kHz 1 kHz
0,001 200 kHz 1 kHz
0,002 200 kHz 1 kHz
0,005 100 kHz 1 kHz
0,01 50 kHz 1 kHz
0,05 25 kHz 1 kHz
0,1 5 kHz 1 kHz
0,5 1 kHz 1 kHz
1 500 Hz 500 Hz
5 100 Hz 100 Hz
A es la entrada de conteo del contador.
B es la entrada de conteo del contador de fase dual.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No utilice la misma instancia de bloque de funciones en diferentes tareas de programas.
No modifique ni cambie en modo alguno la referencia del bloque de funciones (AXIS) mientras
esté en ejecución el bloque de funciones.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.

Generalidades
28 EIO0000003080 12/2019
Información general sobre la gestión de bloques de funciones
Gestión de variables de entrada
Las variables se utilizan con el flanco ascendente de la entrada Execute. Para modificar una
variable, es necesario cambiar las variables de entrada y desencadenar de nuevo el bloque de
funciones.
Los bloques de funciones gestionados por una entrada Enable se ejecutan cuando esta entrada
es TRUE. Los valores de las entradas del bloque de funciones pueden modificarse de forma
continua, y las salidas se actualizan de forma continua. Cuando la entrada Enable es FALSE, la
ejecución del bloque de funciones finaliza y se restablecen las salidas.
Según IEC 61131-3, si falta una variable de una entrada de bloque de funciones (= abierta), se
utilizará el valor de la invocación anterior de esta instancia. En la primera invocación se aplica el
valor inicial.
Gestión de variables de salida
Las salidas Done, Error, Busy y CommandAborted son mutuamente exclusivas; es decir, solo
una de ellas puede ser TRUE en un bloque de funciones. Cuando la entrada Execute es TRUE,
una de estas salidas es TRUE.
En el flanco ascendente de la entrada Execute, se establece la salida Busy. Sigue establecida
durante la ejecución del bloque de funciones y se restablece en el flanco ascendente de una de
las otras salidas (Done, Error).
La salida Done se establece cuando se completa correctamente la ejecución del bloque de
funciones.
Si se detecta un error, el bloque de funciones termina estableciendo la salida Error y el código
de error está contenido dentro de la salida ErrId.
Las salidas Done, Error, ErrID y CommandAborted se establecen o restablecen con el flanco
descendente de la entrada Execute:
Se restablecen si la ejecución del bloque de funciones ha finalizado.
Se establecen para al menos un ciclo de tarea si la ejecución del bloque de funciones no ha
finalizado.
Cuando una instancia de un bloque de funciones recibe una nueva entrada Execute antes de
finalizar (como una serie de comandos en la misma instancia), el bloque de funciones no devuelve
información, como Done, para la acción anterior.

Generalidades
EIO0000003080 12/2019 29
Tratamiento de errores
Todos los bloques tienen dos salidas que pueden notificar la detección de un error durante la
ejecución del bloque de funciones:
Error= El flanco ascendente de este bit informa que se ha detectado un error.
ErrID= El código de error del error detectado.
Cuando se produce un Error, se restablecen las demás señales de salida, como Done.

Generalidades
30 EIO0000003080 12/2019

EIO0000003080 12/2019 31
Modicon M 241 Logic Controller
PTO
EIO0000003080 12/2019
Salida de tren de pulsos (PTO)
Parte II
Salida de tren de pulsos (PTO)
Descripción general
En esta parte se describe la función de Pulse Train Output.
Contenido de esta parte
Esta parte contiene los siguientes capítulos:
Capítulo Nombre del capítulo Página
3 Descripción general 33
4 Configuración 37
5 Tipos de unidades de datos 75
6 Bloques de funciones de movimiento 85
7 Bloques de funciones administrativas 147

PTO
32 EIO0000003080 12/2019

EIO0000003080 12/2019 33
Modicon M 241 Logic Controller
PTO: descripción general
EIO0000003080 12/2019
Descripc ión general
Capítulo 3
Descripción general
Salida de tren de pulsos (PTO)
Introducción
La función PTO proporciona hasta cuatro canales de salida de tren de pulsos para un número
concreto de pulsos a una velocidad concreta (frecuencia). La función PTO se utiliza para controlar
el posicionamiento o la velocidad de hasta cuatro motores paso a paso de un solo eje lineales
independientes o servounidades en modalidad de bucle abierto (por ejemplo, con Lexium 28).
La función PTO no tiene información de realimentación de posición del proceso.
La función PTO puede configurarse en cualquier canal de salida del controlador lógico que no se
haya configurado ya para usarlo por otra función experta.
Cada canal PTO puede utilizar hasta:
Seis entradas, si se utilizan señales de interfaz opcionales para el punto de referencia
(ref/index), eventos (probe), límites (limP, limN) o la interfaz de unidad (driveReady).
Tres salidas físicas, si se utiliza una señal de interfaz de unidad opcional (driveEnable).
El offset de origen automático y la compensación de holgura también se gestionan para mejorar
la exactitud de la posición. Existen diagnósticos disponibles para la supervisión del estado, lo que
permite una solución de problemas rápida y completa.
Funciones compatibles
Los cuatro canales PTO son compatibles con las siguientes funciones:
Cuatro modalidades de salida, incluida la de cuadratura
Movimientos de eje único (velocidad y posición)
Posicionamiento absoluto y relativo
Aceleración y deceleración de curva en S y trapezoidal automática
Punto de referencia (siete modalidades con compensación de offset)
Aceleración dinámica, deceleración, velocidad y modificación de la posición
Cambio entre la modalidad de velocidad y la de posición y viceversa
Cola de movimientos (búfer de un movimiento)
Captura de posición y desencadenador de movimientos en el evento (utilizando una entrada
probe)
Compensación de holgura (en modalidad de cuadratura)
Límites (hardware y software)
Diagnóstico

PTO: descripción general
34 EIO0000003080 12/2019
Bloques de funciones PTO
La función PTO está programada en EcoStruxure Machine Expert utilizando los siguientes
bloques de funciones, disponibles en la biblioteca M241 PTOPWM:
NOTA: Los bloques de funciones de movimiento actúan en la posición del eje de acuerdo con el
diagrama de estado de movimiento
(véase página 87)
. Los bloques de funciones administrativas
no influyen en el estado del movimiento.
Categoría Subcategoría Bloques de funciones
Movimiento (un solo eje) Alimentación MC_Power_PTO
(véase página 100)
Binario MC_MoveAbsolute_PTO
(véase página 120)
MC_MoveRelative_PTO
(véase página 113)
MC_Halt_PTO
(véase página 141)
MC_SetPosition_PTO
(véase página 133)
Continuo MC_MoveVelocity_PTO
(véase página 105)
Toma de referencia MC_Home_PTO
(véase página 127)
Detención MC_Stop_PTO
(véase página 136)
Administrativa Estado MC_ReadActualVelocity_PTO
(véase página 149)
MC_ReadActualPosition_PTO
(véase página 151)
MC_ReadStatus_PTO
(véase página 153)
MC_ReadMotionState_PTO
(véase página 155)
Parámetros MC_ReadParameter_PTO
(véase página 158)
MC_WriteParameter_PTO
(véase página 160)
MC_ReadBoolParameter_PTO
(véase página 162)
MC_WriteBoolParameter_PTO
(véase página 164)
Sonda MC_TouchProbe_PTO
(véase página 167)
MC_AbortTrigger_PTO
(véase página 169)
Tratamiento de errores MC_ReadAxisError_PTO
(véase página 171)
MC_Reset_PTO
(véase página 173)

PTO: descripción general
EIO0000003080 12/2019 35
NOTA: El bloque de funciones MC_Power_PTO es obligatorio antes de que pueda emitirse un
comando de movimiento.
Características de PTO
La función PTO tiene las siguientes características:
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No utilice la misma instancia de bloque de funciones en diferentes tareas de programas.
No modifique la referencia del bloque de funciones (AXIS) mientras esté en ejecución el
bloque de funciones.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.
Característica Valor
Número de canales 4
Número de ejes 1 por canal
Intervalo de posición -2.147.483.648 a 2.147.483.647 (32 bits)
Velocidad mínima 1 Hz
Velocidad máxima Para un ciclo de servicio de 40/60 y 200 mA máx.:
Salidas rápidas (Q0-Q3): 100 kHz
Salidas normales (Q4-Q7): 1 kHz
Paso mínimo 1 Hz
Aceleración/deceleración mín. 1 Hz/ms
Aceleración/deceleración máx. 100.000 Hz/ms
Iniciar movimiento IEC 300 µs + 1 tiempo de salida de pulsos
Iniciar movimiento en evento PROBE
Modificar parámetros de movimiento
Precisión de velocidad 0,5 %
Precisión en posición Depende del tiempo de salida de pulsos

PTO: descripción general
36 EIO0000003080 12/2019

EIO0000003080 12/2019 37
Modicon M 241 Logic Controller
Configuración
EIO0000003080 12/2019
Configuración
Capítulo 4
Configuración
Descripción general
En este capítulo se describe cómo configurar un canal PTO y los parámetros asociados.
Contenido de este capítulo
Este capítulo contiene las siguientes secciones:
Sección Apartado Página
4.1 Configuración 38
4.2 Modalidades de toma de referencia 59

Configuración
38 EIO0000003080 12/2019
Configuración
Sección 4.1
Configuración
Descripción general
En esta sección se describe cómo configurar un canal PTO y los parámetros asociados.
Contenido de esta sección
Esta sección contiene los siguientes apartados:
Apartado Página
Configuración de PTO 39
Modalidades de salida de pulsos 45
Rampa de aceleración/deceleración 47
Evento PROBE 51
Compensación de holgura (Solamente disponible en modalidad de cuadratura) 54
Límites de posicionamiento 56

Configuración
EIO0000003080 12/2019 39
Configuración de PTO
Configuración del hardware
Hay hasta seis entradas para un canal PTO:
Tres entradas físicas están asociadas a la función PTO mediante configuración y se tienen en
cuenta inmediatamente en un flanco ascendente en la entrada:
Entrada REF
Entrada ÍNDICE
Entrada SONDA
Tres entradas están asociadas con el bloque de funciones MC_Power_PTO. No tienen
asignación fija (se asignan libremente; es decir, no se configuran en la pantalla de
configuración) y se leen como cualquier otra entrada:
Entrada de unidad lista
Entrada positiva de límite
Entrada negativa de límite
NOTA: Estas entradas se gestionan como cualquier otra entrada, pero las utiliza el controlador
PTO al ser utilizado por el bloque de funciones MC_Power_PTO.
NOTA: Las entradas de límite positivo y negativo son necesarias para ayudar a evitar el
sobrerrecorrido.
Hay hasta tres salidas físicas para un canal PTO:
Una salida física sólo para gestionar pulsos o dos salidas físicas para gestionar el pulso y la
dirección; deben habilitarse en la configuración:
A / CW / Pulso
B / CCW / Dirección
La otra salida, DriveEnable, se utiliza en el bloque de funciones MC_Power_PTO.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Asegúrese de que los interruptores de posición de seguridad de hardware del controlador
estén integrados en el diseño y la lógica de la aplicación.
Monte los conmutadores de límite de hardware del controlador en una posición que permita
una distancia de frenado adecuada.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.

Configuración
40 EIO0000003080 12/2019
Descripción de la ventana de configuración
Esta figura proporciona un ejemplo de una ventana de configuración en un canal PTO_0:

Configuración
EIO0000003080 12/2019 41
Esta tabla describe todos los parámetros disponibles cuando se configura el canal en modalidad
PTO:
Parámetro Valor Predeterminado Descripción
General Nombre de
instancia
- PTO_0-PTO_3 Nombre del eje controlado
por este canal PTO. Se
utiliza como entrada de los
bloques de funciones PTO.
Modalidad de
salida
(véase página 45)
A Sentido
horario/B Sentido
antihorario
A Pulso/B Dirección
APulso
Cuadratura
A Sentido
horario/B Sentido
antihorario
Selecciona la modalidad de
salida de pulsos.
Punto de salida A Deshabilitado
Q0-Q3 (salidas
rápidas)
Q4-Q7 (salidas
normales)(1)
Deshabilitado Seleccione la salida de
controlador utilizada para la
señal A.
Punto de salida B Deshabilitado
Q0-Q3 (salidas
rápidas)
Q4-Q7 (salidas
normales)(1)
Deshabilitado Seleccione la salida de
controlador utilizada para la
señal B.
Mecánica Compensación de
holgura
(véase página 54)
De 0 a 255 0 En modalidad de cuadratura,
es la cantidad de movimiento
necesaria para compensar la
distancia mecánica cuando
se invierte el movimiento.
Límites de
posición/
Límites de
software
Habilita los límites
de software
(véase página 57)
Habilitado
Deshabilitado
Habilitado Selecciona si se utilizan los
límites de software.
Límite bajo SW -2.147.483.648 a
2.147.483.647
-2.147.483.648 Establece que la posición de
límite de software sea
detectada en dirección
negativa.
Límite alto SW -2.147.483.648 a
2.147.483.647
FF (Hex) Establece que la posición de
límite de software sea
detectada en dirección
positiva.
(1) No disponible para referencias de M241 Logic Controller con salidas de relé.

Configuración
42 EIO0000003080 12/2019
Movimiento/
General
Velocidad máxima 0-100000 (salidas
rápidas)
0-1000 (salidas
normales)
100000 salidas
rápidas
1000 salidas
normales
Establece la velocidad
máxima de salida de pulsos
(en Hz).
Velocidad de inicio
(véase página 47)
Velocidad de inicio-
100000 (salidas
rápidas)
Velocidad de inicio-
1000 (salidas
normales)
0 Establece la velocidad de
inicio de salida de pulsos (en
Hz). 0 si no se utiliza
Velocidad de
detención
(véase página 47)
0-100000 (salidas
rápidas)
0-1000 (salidas
normales)
0 Establece la velocidad de
detención de salida de
pulsos (en Hz). 0 si no se
utiliza
Unidad de
acel./decel.
(véase página 48)
Hz/ms
ms
Hz/ms Establece la
aceleración/deceleración
como intervalos (Hz/ms) o
como constantes de tiempo
desde 0 hasta la velocidad
máxima (ms).
Aceleración
máxima
De 1 a 100.000 100000 Establece el valor de
aceleración máxima (en
unidad de acel./decel.).
Deceleración
máxima
De 1 a 100.000 100000 Establece el valor de
deceleración máxima (en
unidad de acel./decel.).
Movimiento/
Parada
rápida
Deceleración de
parada rápida
De 1 a 100000 5000 Establece el valor de
deceleración en caso de que
se detecte un error (en
Unidad de acel./decel.)
Parámetro Valor Predeterminado Descripción
(1) No disponible para referencias de M241 Logic Controller con salidas de relé.

Configuración
EIO0000003080 12/2019 43
Punto de
referencia/
Entrada
REF
Posición Deshabilitado
I0-I7 (entradas
rápidas)
I8-15 (entradas
normales)
Deshabilitado Seleccione la entrada de
controlador utilizada para la
señal REF
(véase página 59)
.
Filtro de rebote 0,000
0,001
0,002
0,005
0,010
0,05
0,1
0,5
1
5
0,005 Establece el valor de filtrado
para reducir el efecto de
rebote en la entrada REF
(en ms).
Tipo Normalmente abierto
Normalmente cerrado
Normalmente
abierto
Selecciona si el estado
predeterminado del contacto
de conmutador es abierto o
cerrado.
Punto de
referencia/
Entrada
INDEX
Posición Deshabilitado
I0-I7 (entradas
rápidas)
I8-15 (entradas
normales)
Deshabilitado Seleccione la entrada de
controlador utilizada para la
señal INDEX
(véase página 59)
.
Filtro de rebote 0,000
0,001
0,002
0,005
0,010
0,05
0,1
0,5
1
5
0,005 Establece el valor de filtrado
para reducir el efecto de
rebote en la entrada INDEX
(en ms).
Tipo Normalmente abierto
Normalmente cerrado
Normalmente
abierto
Selecciona si el estado
predeterminado del contacto
de conmutador es abierto o
cerrado.
Parámetro Valor Predeterminado Descripción
(1) No disponible para referencias de M241 Logic Controller con salidas de relé.

Configuración
44 EIO0000003080 12/2019
Registro/
Entrada
PROBE
Posición Deshabilitado
I0-I7 (entradas
rápidas)
I8-15 (entradas
normales)
Deshabilitado Seleccione la entrada de
controlador utilizada para la
señal PROBE
(véase página 51)
.
Filtro de rebote 0,000
0,001
0,002
0,005
0,010
0,05
0,1
0,5
1
5
0,005 Establece el valor de filtrado
para reducir el efecto de
rebote en la entrada PROBE
(en ms).
Parámetro Valor Predeterminado Descripción
(1) No disponible para referencias de M241 Logic Controller con salidas de relé.

Configuración
EIO0000003080 12/2019 45
Modalidades de salida de pulsos
Descripción general
Existen cuatro posibles modalidades de salida:
A Sentido horario / B Sentido antihorario
A Pulso
A Pulso / B Dirección
Cuadratura
A Modalidad en sentido horario (CW)/B Modalidad en sentido antihorario (CCW)
Esta modalidad genera una señal que define la dirección y la velocidad de funcionamiento del
motor. Esta señal se implementa en la salida PTO A o en la salida PTO B según el sentido de
rotación del motor.
A Modalidad de pulso
Esta modalidad genera una señal en las salidas PTO:
Salida A: pulso que proporciona la velocidad de funcionamiento del motor.
NOTA: El bloque de funciones correspondiente genera un error de "Dirección no válida" si se
especifica un valor de dirección negativo.

Configuración
46 EIO0000003080 12/2019
A Modalidad de pulso / B Modalidad de dirección
Esta modalidad genera dos señales en las salidas PTO:
Salida A: pulso que proporciona la velocidad de funcionamiento del motor.
Salida B: dirección que proporciona la dirección de rotación del motor.
Modalidad de cuadratura
Esta modalidad genera dos señales en fase de cuadratura en las salidas PTO (el signo de fase
depende de la dirección del motor).

Configuración
EIO0000003080 12/2019 47
Rampa de aceleración/deceleración
Velocidad de inicio
La Velocidad de inicio es la frecuencia mínima a la que un motor paso a paso puede crear
movimiento, con una carga aplicada, sin pérdida de pasos.
El parámetro Velocidad de inicio se utiliza al iniciar un movimiento desde la velocidad 0.
Velocidad de inicio debe estar dentro del rango de 0 a MaxVelocityAppl
(véase página 81)
.
El valor 0 significa que el parámetro Velocidad de inicio no se utiliza. En este caso, el movimiento
empieza a una velocidad = tasa de aceleración x 1 ms.
Velocidad de detención
La Velocidad de detención es la frecuencia máxima a la que un motor paso a paso deja de producir
movimiento, con una carga aplicada, sin pérdida de pasos.
Velocidad de detención solamente se utiliza cuando se realiza un movimiento desde una
velocidad superior a la Velocidad de detención hacia la velocidad 0.
Velocidad de detención debe estar dentro del rango de 0 a MaxVelocityAppl
(véase página 81)
.
El valor 0 significa que el parámetro Velocidad de detención no se utiliza. En este caso, el
movimiento se detiene a una velocidad = tasa de deceleración x 1ms.
Aceleración/Deceleración
La aceleración es la tasa de cambio de velocidad, desde Velocidad de inicio hasta la velocidad de
destino. La deceleración es la tasa de cambio de velocidad, desde la velocidad de destino hasta
la Velocidad de detención. Estos cambios de velocidad están gestionados implícitamente por la
función PTO según los parámetros Acceleration, Deceleration y JerkRatio siguiendo un
perfil trapezoidal o de curva en S.

Configuración
48 EIO0000003080 12/2019
Rampa de aceleración / deceleración con un perfil trapezoidal
Cuando el parámetro de ratio jerk se establece en 0, la rampa de aceleración / deceleración tiene
un perfil trapezoidal.
Los parámetros acceleration y deceleration, expresados en Hz/ms, representan la
variación del cambio de velocidad.
Expresado en ms, representan el tiempo de 0 a la velocidad máxima.
Rampa de aceleración / deceleración con un perfil de curva en S
Cuando el parámetro de ratio jerk es mayor que 0, la rampa de aceleración / deceleración tiene
un perfil de curva en S.
La rampa de curva en S se utiliza en aplicaciones que controlan la inercia alta, o que manipulan
objetos o líquidos frágiles. La rampa de curva en S habilita una aceleración/deceleración más
suave y progresiva, como se muestra en los gráficos siguientes:
JerkRatio 0%: aceleración/deceleración constante.
JerkRatio 66%: 2/3 del tiempo de aceleración y deceleración se emplean en aumentar y
disminuir el valor de aceleración y deceleración.

Configuración
EIO0000003080 12/2019 49
NOTA: El valor del parámetro JerkRatio es común para la aceleración y la deceleración, de
manera que el tiempo cóncavo y el tiempo convexo son iguales.
JerkRatio 100%: todo el tiempo se dedica a aumentar y disminuir el valor de aceleración y
deceleración.
Ejemplo en el que se usan 4 fases JerkRatio con una longitud variable.
Ejemplo en el que se usan 2 fases JerkRatio con una longitud variable.

Configuración
50 EIO0000003080 12/2019
Afectación de la rampa de curva en S en la aceleración/deceleración
La duración de la aceleración/deceleración se mantiene, sea cual sea el parámetro JerkRatio.
Para mantener esta duración, la aceleración o la deceleración es diferente de la configurada en el
bloque de funciones (parámetros Acceleration o Deceleration).
Cuando se aplica el JerkRatio, la aceleración/deceleración se ve afectada.
Cuando se aplica el JerkRatio al 100%, la aceleración/deceleración es el doble que la
Acceleration configurada / parámetros Deceleration.
NOTA: Si el valor del parámetro JerkRatio no es válido, se vuelve a calcular el valor para
respetar los parámetros MaxAccelerationAppl y MaxDecelerationAppl.
JerkRatio no es válido si:
Su valor es superior a 100. En dicho caso, se aplica un Jerkratio de 100.
Su valor es inferior a 0. En dicho caso, se aplica un Jerkratio de 0.

Configuración
EIO0000003080 12/2019 51
Evento PROBE
Descripción
La entrada Sonda se habilita mediante configuración y se activa utilizando el bloque de funciones
MC_TouchProbe_PTO.
La entrada Sonda se utiliza como un evento para:
capturar la posición,
Iniciar un movimiento independiente de la tarea.
Ambas funciones pueden estar activas al mismo tiempo, es decir, el mismo evento captura la
posición e inicia un bloque de funciones de movimiento
(véase página 85)
.
El evento de entrada Sonda puede definirse para ser habilitado dentro de una ventana predefinida
delimitada por los límites de posición (consulte MC_TouchProbe_PTO
(véase página 167)
).
NOTA: Solamente es válido el primer evento después del flanco ascendente en el pin Busy del
bloque de funciones MC_TouchProbe_PTO. Una vez establecido el pin de la salida Done se
ignorarán los eventos posteriores. Se debe volver a activar el bloque de funciones para dar
respuesta a otros eventos.
Captura de posición
La posición capturada está disponible en MC_TouchProbe_PTO.RecordedPosition.

Configuración
52 EIO0000003080 12/2019
Desencadenador de movimiento
La entrada BufferMode de un bloque de funciones de movimiento debe establecerse como
seTrigger.
En este ejemplo se muestra un cambio en la velocidad de destino con ventana de habilitación:
1 Captura el valor del contador de la posición
2 Desencadena el bloque de funciones Move Velocity
Este ejemplo muestra un movimiento de distancia programada previamente, con un perfil simple
y sin ventanas de habilitación:
1 Captura el valor del contador de la posición
2 Desencadena el bloque de funciones Move Relative

Configuración
EIO0000003080 12/2019 53
Este ejemplo muestra un movimiento de distancia programada previamente, con un perfil
complejo y ventanas de habilitación:
1 Captura el valor del contador de la posición
2 Desencadena el bloque de funciones Move Relative
Este ejemplo muestra un evento desencadenador fuera de la ventana de habilitación:

Configuración
54 EIO0000003080 12/2019
Compensación de holgura (Solamente disponible en modalidad de cuadratura)
Descripción
El parámetro Compensación de holgura se define como la cantidad de movimiento necesaria para
compensar la distancia mecánica cuando se invierte el movimiento y el eje ha vuelto al punto de
referencia:
NOTA: La función no tiene en cuenta ninguna fuente externa de movimiento, como movimiento de
inercia u otras formas de movimiento inducido.
La compensación de holgura se establece en número de pulsos (de 0 a 255, el valor predeter-
minado es 0) Al establecerse, en cada inversión de dirección, el número especificado de pulsos
se envía primero a velocidad de inicio y después se ejecuta el movimiento programado. Los pulsos
de compensación de holgura no se añaden al contador de posición.

Configuración
EIO0000003080 12/2019 55
En esta figura se muestra la compensación de holgura.
NOTA:
Antes del movimiento inicial, la función no puede determinar la cantidad de holgura que se debe
compensar. Por lo tanto, la compensación de holgura solamente se activa después de que se
haya realizado con éxito una toma de referencia. Si la toma de referencia se realiza sin
movimiento, se asume que el movimiento inicial no aplica compensación, y se aplica
compensación en la primera inversión de dirección.
Una vez iniciados, los pulsos de compensación se envían hasta su finalización, aunque se
reciba un comando de cancelación mientras tanto. En este caso, el comando de cancelación
se almacena en el búfer y se iniciará tan pronto como se envíen los pulsos de compensación.
En este caso, no se aceptan otros comandos almacenados en el búfer.
Si un error detectado detiene el eje antes de que se hayan enviado todos los pulsos de
compensación, la compensación de holgura se resetea. Se necesita un nuevo procedimiento
de toma de referencia para reinicializar la compensación de holgura.
Timeout de holgura de 80 s: El sistema no acepta la configuración de un movimiento de más
de 80 s. Así que si se configura una holgura no puede ser mayor que 80 pulsos a 1 Hz, por
ejemplo. El error detectado en caso de producirse este timeout es "Error interno" (código 1000).

Configuración
56 EIO0000003080 12/2019
Límites de posicionamiento
Introducción
Los límites positivos y negativos pueden establecerse para controlar los límites de movimiento en
ambas direcciones. Tanto los límites de hardware como los de software se gestionan mediante el
controlador.
Los conmutadores de límite de hardware y software solamente se utilizan para gestionar los
límites en la aplicación del controlador. No están diseñados para reemplazar ningún conmutador
de límite de seguridad funcional conectado a la unidad. Es necesario activar los conmutadores de
límite de la aplicación del controlador antes que los conmutadores de límite de seguridad funcional
conectados a la unidad. En cualquier caso, el tipo de arquitectura de seguridad funcional que
despliegue, que no se contempla en este documento, depende de su análisis de seguridad,
incluido, aunque sin limitación:
Evaluación del riesgo de acuerdo con EN/ISO 12100
FMEA de acuerdo con EN 60812
En la figura se muestra los conmutadores de límite de hardware y software:
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Durante el diseño de la máquina, debe asegurarse de que se lleva a cabo y se respeta una
evaluación de riesgo según la norma EN/ISO 12100.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.

Configuración
EIO0000003080 12/2019 57
Una vez se traspasan los límites de software o hardware del controlador, se detecta un error y se
lleva a cabo una deceleración de parada rápida:
El eje cambia al estado ErrorStop, con ErrorId 1002 a 1005 (PTO_ERROR
(véase página 82)
).
El bloque de funciones en ejecución detecta el estado de error.
Los bits de estado en otros bloques de funciones aplicables se establecen en
CommandAborted.
Para borrar el estado de error del eje y volver a un estado Standstill se requiere la ejecución de
MC_Reset_PTO, ya que se rechazará cualquier comando de movimiento (consulte los parámetros
de PTO EnableDirPos o EnableDirNeg) mientras el eje permanezca fuera de los límites (el
bloque de funciones finaliza con ErrorId=InvalidDirectionValue). Solo es posible ejecutar
un comando de movimiento en dirección opuesta bajo estas circunstancias.
Límites de software
Los límites de software pueden establecerse para controlar los límites de movimiento en ambas
direcciones.
Los valores de límite se habilitan y establecen en la pantalla de configuración, por ejemplo:
Límite positivo > límite negativo
Valores dentro del rango de -2.147.483.648 a 2.147.483.647
También pueden habilitarse, deshabilitarse o modificarse en el programa de aplicación
(MC_WriteParameter_PTO
(véase página 160)
y PTO_PARAMETER
(véase página 81)
).
NOTA: Cuando están habilitados, los límites de software son válidos después de una toma de
referencia realizada con éxito (es decir, el eje ha vuelto al punto de referencia, MC_Home_PTO
(véase página 127)
).
NOTA: Solo se detecta un error cuando el límite de software se alcanza físicamente, no al inicio
del movimiento.

Configuración
58 EIO0000003080 12/2019
Límites de hardware
Los límites de hardware son necesarios para el proceso de toma de referencia y para ayudar a
prevenir daños de la máquina. En los bits de entrada MC_Power_PTO.LimP y
MC_Power_PTO.LimN se deben utilizar las entradas apropiadas. Los dispositivos de límite de
hardware deben ser de un tipo normalmente cerrado de manera que la entrada al bloque de
funciones sea FALSE cuando se alcanza el límite correspondiente.
NOTA: Las restricciones sobre el movimiento son válidas mientras las entradas de límite sean
FALSE e independientemente del sentido de dirección. Cuando vuelven a TRUE, se eliminan las
restricciones de movimiento y los límites de hardware se rearman de manera funcional. Así pues,
utilice contactos de flanco descendente para resetear las instrucciones de salida anteriores al
bloque de funciones. Después utilice esos bits para controlar estas entradas de bloques de
funciones. Cuando se completen las operaciones, establezca los bits para restaurar el funciona-
miento normal.
NOTA: Una distancia de frenado adecuada depende de la velocidad máxima, la carga máxima
(masa) del equipo que se está moviendo y el valor del parámetro de deceleración de parada
rápida.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Asegúrese de que los interruptores de posición de seguridad de hardware del controlador
estén integrados en el diseño y la lógica de la aplicación.
Monte los conmutadores de límite de hardware del controlador en una posición que permita
una distancia de frenado adecuada.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.

Configuración
EIO0000003080 12/2019 59
Modalidades de toma de referencia
Sección 4.2
Modalidades de toma de referencia
Descripción general
En esta sección se describen las modalidades de toma de referencia de PTO.
Contenido de esta sección
Esta sección contiene los siguientes apartados:
Apartado Página
Modalidades de toma de referencia 60
Ajuste de posición 63
Referencia larga 64
Referencia larga e índice 65
Referencia corta invertida 66
Referencia corta no invertida 68
Referencia corta y fuera de índice 70
Referencia corta y dentro de índice 72
Offset de inicio 74

Configuración
60 EIO0000003080 12/2019
Modalidades de toma de referencia
Descripción
Toma de referencia es el método utilizado para establecer el punto de referencia u origen para el
movimiento absoluto.
Un movimiento de toma de referencia puede realizarse utilizando diferentes métodos. Los canales
PTO de M241 proporcionan diversos tipos de movimientos de toma de referencia estándar:
Ajuste de posición
(véase página 63)
Referencia larga
(véase página 64)
Referencia larga e índice
(véase página 65)
.
Referencia corta invertida
(véase página 66)
Referencia corta no invertida
(véase página 68)
Referencia corta y fuera de índice
(véase página 70)
Referencia corta y dentro de índice
(véase página 72)
Un movimiento de toma de referencia debe finalizar sin interrupciones para que el nuevo punto de
referencia sea válido. Si el movimiento de referencia es interrumpido, debe iniciarse de nuevo.
Consulte MC_Home_PTO
(véase página 127)
y PTO_HOMING_MODE
(véase página 80)
.

Configuración
EIO0000003080 12/2019 61
Posición inicial
La toma de referencia finaliza con un conmutador externo y la posición del punto de referencia se
define en el flanco de conmutación. Después, se decelera el movimiento hasta que se detiene.
La posición real del eje al final de la secuencia de movimientos puede diferir, por lo tanto, del
parámetro de posición establecido en el bloque de funciones:
REF (NO) Punto de referencia (normalmente abierto)
1 Posición al final del movimiento = MC_HOME_PTO.Position + distancia de “deceleración hasta la
detención”.
Para simplificar la representación de una parada en los diagramas de modalidad de toma de
referencia, la siguiente presentación se realiza para representar la posición real del eje:
REF (NO) Punto de referencia (normalmente abierto)

Configuración
62 EIO0000003080 12/2019
Límites
Los límites de hardware son necesarios para el correcto funcionamiento del bloque de funciones
MC_Home_PTO (Límites de posicionamiento
(véase página 56)
y MC_Power_PTO
(véase página 100)
). En función del tipo de movimiento que solicite con la modalidad de toma de
referencia, la ayuda del límite de hardware se asegura de que el bloque de funciones respeta el
fin de recorrido.
Cuando una acción de toma de referencia se inicia en una dirección alejada del conmutador de
referencia, los límites de hardware sirven para alguna de las siguientes opciones:
indicar que se necesita realizar una inversión del sentido para mover el eje hacia el conmutador
de referencia o
Indicar que se ha detectado un error debido a que no se encontró el conmutador de referencia
antes de alcanzar el fin de recorrido.
Para tipos de movimientos de toma de referencia que permiten inversiones del sentido, cuando el
movimiento alcanza el límite de hardware, el eje se detiene utilizando la deceleración configurada
y retoma el movimiento en dirección inversa.
En tipos de movimientos de toma de referencia que no permiten inversiones del sentido, cuando
el movimiento alcanza el límite de hardware se cancela el procedimiento de toma de referencia y
el eje se detiene con la deceleración de parada rápida.
NOTA: Una distancia de frenado adecuada depende de la velocidad máxima, la carga máxima
(masa) del equipo que se está moviendo y el valor del parámetro de deceleración de parada
rápida.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Asegúrese de que los interruptores de posición de seguridad de hardware del controlador
estén integrados en el diseño y la lógica de la aplicación.
Monte los conmutadores de límite de hardware del controlador en una posición que permita
una distancia de frenado adecuada.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.

Configuración
EIO0000003080 12/2019 63
Ajuste de posición
Descripción
En caso de un ajuste de posición, la posición actual se establece en el valor de posición
especificado. No se realiza ningún movimiento.

Configuración
64 EIO0000003080 12/2019
Referencia larga
Referencia larga: dirección positiva
Punto de referencia al flanco descendente del conmutador de referencia en dirección inversa.
La dirección inicial del movimiento depende del estado del conmutador de referencia
REF (NO) Punto de referencia (normalmente abierto)
Referencia larga: dirección negativa
Punto de referencia al flanco descendente del conmutador de referencia en dirección de avance.
La dirección inicial del movimiento depende del estado del conmutador de referencia
REF (NO) Punto de referencia (normalmente abierto)

Configuración
EIO0000003080 12/2019 65
Referencia larga e índice
Referencia larga e índice: dirección positiva
Punto de referencia al primer índice, después del flanco descendente del conmutador de
referencia en dirección inversa.
La dirección inicial del movimiento depende del estado del conmutador de referencia
REF (NO) Punto de referencia (normalmente abierto)
Referencia larga e índice: dirección negativa
Punto de referencia al primer índice, después del flanco descendente del conmutador de
referencia en dirección de avance.
La dirección inicial del movimiento depende del estado del conmutador de referencia
REF (NO) Punto de referencia (normalmente abierto)

Configuración
66 EIO0000003080 12/2019
Referencia corta invertida
Referencia corta invertida: dirección positiva
Punto de referencia al flanco ascendente del conmutador de referencia en dirección de avance.
La dirección inicial del movimiento depende del estado del conmutador de referencia
REF (NO) Punto de referencia (normalmente abierto)
REF (NO) Punto de referencia (normalmente abierto)

Configuración
EIO0000003080 12/2019 67
Referencia corta invertida: dirección negativa
Punto de referencia al flanco ascendente del conmutador de referencia en dirección de avance.
La dirección inicial del movimiento depende del estado del conmutador de referencia
REF (NO) Punto de referencia (normalmente abierto)
REF (NO) Punto de referencia (normalmente abierto)

Configuración
68 EIO0000003080 12/2019
Referencia corta no invertida
Referencia corta no invertida: dirección positiva
Punto de referencia a baja velocidad al flanco ascendente del conmutador de referencia sin
inversión:
REF (NO) Punto de referencia (normalmente abierto)
REF (NO) Punto de referencia (normalmente abierto)

Configuración
EIO0000003080 12/2019 69
Referencia corta no invertida: dirección negativa
Punto de referencia a baja velocidad al flanco ascendente del conmutador de referencia en
dirección inversa, sin inversión:
REF (NO) Punto de referencia (normalmente abierto)
REF (NO) Punto de referencia (normalmente abierto)

Configuración
70 EIO0000003080 12/2019
Referencia corta y fuera de índice
Referencia corta y fuera de índice: dirección positiva
Punto de referencia al primer índice, después de transiciones activadas y desactivadas del
conmutador de referencia en dirección de avance.
La dirección inicial del movimiento depende del estado del conmutador de referencia
REF (NO) Punto de referencia (normalmente abierto)
REF (NO) Punto de referencia (normalmente abierto)

Configuración
EIO0000003080 12/2019 71
Referencia corta y fuera de índice: dirección negativa
Punto de referencia al primer índice, después de transiciones activadas y desactivadas del
conmutador de referencia en dirección de avance.
La dirección inicial del movimiento depende del estado del conmutador de referencia
REF (NO) Punto de referencia (normalmente abierto)
REF (NO) Punto de referencia (normalmente abierto)

Configuración
72 EIO0000003080 12/2019
Referencia corta y dentro de índice
Referencia corta y dentro de índice: dirección positiva
Punto de referencia al primer índice, después del flanco ascendente del conmutador de referencia
en dirección de avance.
La dirección inicial del movimiento depende del estado del conmutador de referencia
REF (NO) Punto de referencia (normalmente abierto)
REF (NO) Punto de referencia (normalmente abierto)

Configuración
EIO0000003080 12/2019 73
Referencia corta y dentro de índice: dirección negativa
Punto de referencia al primer índice, después del flanco ascendente del conmutador de referencia
en dirección de avance.
La dirección inicial del movimiento depende del estado del conmutador de referencia
REF (NO) Punto de referencia (normalmente abierto)
REF (NO) Punto de referencia (normalmente abierto)

Configuración
74 EIO0000003080 12/2019
Offset de inicio
Descripción
Si el origen no puede ser definido por conmutadores con la precisión suficiente, es posible mover
el eje hasta una posición específica alejada del conmutador de origen. El offset de inicio permite
diferenciar entre origen mecánico y origen eléctrico.
El offset de inicio se establece en número de pulsos (-2.147.483.648 a 2.147.483.647, el valor
predeterminado es 0). Cuando se establece mediante configuración, primero se ejecuta el
comando MC_Home_PTO
(véase página 127)
y luego se envía el número especificado de pulsos
a la velocidad baja de inicio en la dirección especificada. El parámetro solo es efectivo durante un
movimiento de referencia sin pulso de índice.
NOTA: El tiempo de espera entre la detención del comando MC_Home_PTO en el conmutador de
origen y el inicio del movimiento de offset es fijo y se establece en 500 ms. El indicador de ocupado
del comando MC_Home_PTO solo se libera después de que se haya completado el offset de origen.

EIO0000003080 12/2019 75
Modicon M 241 Logic Controller
Tipos de unidades de datos
EIO0000003080 12/2019
Tipos de unidades de datos
Capítulo 5
Tipos de unidades de datos
Descripción general
En este capítulo se describen los tipos de unidades de datos de la biblioteca PTO de M241.
Contenido de este capítulo
Este capítulo contiene los siguientes apartados:
Apartado Página
AXIS_REF_PTO Tipo de datos 76
MC_BUFFER_MODE 77
MC_DIRECTION 79
PTO_HOMING_MODE 80
PTO_PARAMETER 81
PTO_ERROR 82

Tipos de unidades de datos
76 EIO0000003080 12/2019
AXIS_REF_PTO Tipo de datos
Descripción del tipo de datos
El tipo AXIS_REF_PTO es un tipo de datos que contiene información sobre el eje correspondiente.
Se utiliza como VAR_IN_OUT en todos los bloques de funciones de la biblioteca PTO.

Tipos de unidades de datos
EIO0000003080 12/2019 77
MC_BUFFER_MODE
Enumeración de modalidad de búfer
En esta tabla se muestran los valores para la enumeración MC_BUFFER_MODE:
Enumerador Valor Descripción
mcAborting 0 Inicia el FB inmediatamente (modalidad predeterminada).
Se cancela cualquier movimiento en curso. Se borra la cola
de movimientos.
mcBuffered 1 Inicia el bloque de funciones después de que haya finalizado
el movimiento en curso (se establece el bit de Done o
InVelocity). No se produce una combinación.
mcBlendingPrevious 3 La velocidad se combina con la velocidad del primer bloque
de funciones (combinado con la velocidad de FB1 en la
posición final de FB1).
seTrigger 10 Inicia el FB inmediatamente cuando se detecta un evento en
la entrada PROBE.
Se cancela cualquier movimiento en curso. Se borra la cola
de movimientos.
seBufferedDelay 11 Inicia el bloque de funciones después de que haya finalizado
el movimiento en curso (se establece el bit de Done o
InVelocity) y haya transcurrido el retardo de tiempo. No
se produce una combinación.
El parámetro Delay se establece mediante
MC_WriteParameter_PTO
(véase página 160)
, con
ParameterNumber 1000.

Tipos de unidades de datos
78 EIO0000003080 12/2019
Ejemplos
En los ejemplos siguientes se muestra un movimiento ejecutado por dos comandos de
movimiento. El eje se desplaza de la posición P0 a P1 y, a continuación, a P2. El segundo comando
se transmite mientras el eje ejecuta el primer comando pero antes de alcanzarse la rampa de
detención. Para cada perfil de movimiento siguiente, P1 constituye el punto de referencia para el
cálculo de combinación. La modalidad de búfer determina si se alcanza la velocidad V1 o V2 en la
posición P1.

Tipos de unidades de datos
EIO0000003080 12/2019 79
MC_DIRECTION
Enumeración de dirección de movimientos
En esta tabla se muestran los valores para la enumeración de MC_DIRECTION:
Enumerador Valor Descripción
mcPositiveDirection 1 CW, hacia delante, positivo (según el ajuste de la
configuración de Modalidad de salida).
mcNegativeDirection -1 CCW, hacia atrás, inverso, negativo (según el ajuste de
la configuración de Modalidad de salida).
mcCurrentDirection 2 Movimiento en la última dirección utilizada.

Tipos de unidades de datos
80 EIO0000003080 12/2019
PTO_HOMING_MODE
Enumeración de modalidad de toma de referencia
En esta tabla se muestran los valores para la enumeración de PTO_HOMING_MODE:
Enumerador Valor Descripción
PositionSetting 0 Ubicación.
LongReference 1 Referencia larga.
LongReferenceAndIndex 10 Referencia larga e índice.
ShortReference_Reversal 20 Referencia corta.
ShortReference_NoReversal 21 Referencia corta no invertida.
ShortReferenceAndIndex_Outside 30 Referencia corta y fuera de índice.
ShortReferenceAndIndex_Inside 31 Referencia corta y dentro de índice.

Tipos de unidades de datos
EIO0000003080 12/2019 81
PTO_PARAMETER
Enumeración de parámetros de PTO
En esta tabla se muestran los valores para la enumeración PTO_PARAMETER:
Nombre del parámetro Número del
parámetro
Tipo Estándar R/W Descripción
CommandedPosition 1DINT Obligatorio R Posición solicitada
SWLimitPos 2DINT Opcional R/W Posición del interruptor de límite de
software positivo.
SWLimitNeg 3DINT Opcional R/W Posición del interruptor de límite de
software negativo.
EnableLimitPos 4BOOL Opcional R/W Habilita el interruptor de límite de software
positivo.
EnableLimitNeg 5BOOL Opcional R/W Habilita el interruptor de límite de software
negativo.
MaxVelocityAppl 9DINT Obligatorio R/W Velocidad máxima permitida del eje en la
aplicación.
ActualVelocity 10 DINT Obligatorio R Velocidad real
CommandedVelocity 11 DINT Obligatorio R Velocidad solicitada
MaxAccelerationAppl 13 DINT Opcional R/W Aceleración máxima permitida del eje en
la aplicación.
MaxDecelerationAppl 15 DINT Opcional R/W Deceleración máxima permitida del eje en
la aplicación.
Reservado a 999 - - - Reservado para el estándar PLCopen
Delay 1000 DINT Opcional R/W Tiempo en ms (0 a 65.535)
Valor predeterminado: 0

Tipos de unidades de datos
82 EIO0000003080 12/2019
PTO_ERROR
Enumeración de errores de PTO
En esta tabla se muestran los valores para la enumeración PTO_ERROR:
Enumerador Valor Descripción
NoError 0 No se ha detectado ningún error.
Alertas de control del eje
InternalError 1000 Error interno del Motion Controller detectado.
DisabledAxis 1001 No pudo iniciarse el movimiento o ha sido cancelado porque el
eje no estaba preparado.
HwPositionLimitP 1002 Límite de posición positivo limP de hardware sobrepasado.
HwPositionLimitN 1003 Límite de posición negativo limN de hardware sobrepasado.
SwPositionLimitP 1.004 Límite de posición positivo de software sobrepasado.
SwPositionLimitN 1.005 Límite de posición negativo de software sobrepasado.
ApplicationStopped 1006 La ejecución de la aplicación se ha detenido (apagar y
encender, controlador en estado STOPPED o HALT).
OutputProtection 1007 La protección de salida de cortocircuito está activa en los
canales PTO.
Información de control del eje
WarningVelocityValue 1100 El parámetro de velocidad solicitado está fuera de rango
WarningAccelerationValue 1.101 El parámetro de aceleración solicitado está fuera de rango
WarningDecelerationValue 1.102 El parámetro de deceleración solicitado está fuera de rango
WarningDelayedMove 1103 No se dispone del tiempo suficiente para detener el movimiento
activo, por lo que se retrasa el movimiento solicitado.
WarningJerkRatioValue 1104 El parámetro jerk de ratio solicitado está limitado por la
aceleración o deceleración máxima configuradas. En este
caso, el jerk de ratio se recalcula con respecto a estos
máximos.
Alerta de estado del movimiento
ErrorStopActive 2000 No ha podido iniciarse el movimiento o se ha cancelado debido
a que una condición ErrorStop prohíbe el movimiento.
StoppingActive 2001 El movimiento no ha podido iniciarse debido a que
MC_Stop_PTO prohíbe el movimiento y tiene el control del eje
(el eje está detenido o la entrada MC_Stop_PTO.Execute
está alta).
InvalidTransition 2002 Transición no permitida, consulte el Diagrama de estado del
movimiento
(véase página 87)
.

Tipos de unidades de datos
EIO0000003080 12/2019 83
Una Alerta de control del eje cambia el estado del eje a ErrorStop (MC_Reset_PTO es obligatorio
para salir del estado ErrorStop). El estado del eje resultante se refleja en MC_ReadStatus_PTO
y MC_ReadAxisError_PTO.
Una Alerta de estado del movimiento o una Alerta de rango no afectan al estado del eje ni a
cualquier otro movimiento en ejecución o a la cola de movimientos. En este caso, el error solo
afecta localmente al bloque de funciones aplicable: se establece la salida ErrorError y el pin
ErrorId se establece en el valor apropiado de PTO_ERROR.
InvalidSetPosition 2003 MC_SetPosition_PTO no se puede ejecutar mientras el eje
está en movimiento.
HomingError 2.004 La secuencia de toma de referencia no se puede iniciar en la
leva de referencia en esta modalidad.
InvalidProbeConf 2005 La entrada PROBE debe configurarse.
InvalidHomingConf 2006 Las entradas del punto de referencia (Ref, Index) deben
configurarse para esta modalidad de punto de referencia.
InvalidAbsolute 2.007 Un movimiento absoluto no puede ejecutarse hasta que el eje
no haya vuelto con éxito a una posición de origen. Una
secuencia de toma de referencia debe ejecutarse antes
(MC_Home_PTO
(véase página 127)
).
MotionQueueFull 2.008 El movimiento no puede ser almacenado en el búfer porque la
cola de movimientos está completa.
Alerta de rango
InvalidAxis 3000 No se puede aplicar el bloque de funciones en el eje
especificado.
InvalidPositionValue 3.001 El parámetro de posición está fuera de los límites o el
parámetro de distancia indica una posición fuera de los límites.
InvalidVelocityValue 3.002 El parámetro de velocidad está fuera de rango
El valor debe ser superior a la velocidad de inicio e inferior a la
velocidad máxima.
InvalidAccelerationValue 3.003 El parámetro de aceleración está fuera de rango
InvalidDecelerationValue 3.004 El parámetro de deceleración está fuera de rango
InvalidBufferModeValue 3005 La modalidad de búfer no se corresponde con un valor válido.
InvalidDirectionValue 3006 La dirección no se corresponde con un valor válido, o la
dirección no es válida debido a que sobrepasa el límite de
posición del software.
InvalidHomeMode 3007 La modalidad de toma de referencia no es aplicable.
InvalidParameter 3008 El número de parámetro no existe en el eje especificado.
InvalidParameterValue 3.009 El valor del parámetro está fuera de rango.
ReadOnlyParameter 3.010 El parámetro es de solo lectura.
Enumerador Valor Descripción

Tipos de unidades de datos
84 EIO0000003080 12/2019

EIO0000003080 12/2019 85
Modicon M 241 Logic Controller
Bloques de funciones de movimiento
EIO0000003080 12/2019
Bloques de funciones de movimiento
Capítulo 6
Bloques de funciones de movimiento
Descripción general
En este capítulo se describen los bloques de funciones de movimiento
Un bloque de funciones de movimiento actúa sobre el diagrama de estado del eje para modificar
el movimiento del eje. Estos bloques de funciones pueden devolver un estado a la aplicación antes
de completar el movimiento. El programa de la aplicación utiliza estos bits de estado para
determinar el estado del movimiento (Done, Busy, Active, CommandAborted y Error
[detectado]). Para el estado del eje puede utilizar el bloque de funciones MC_ReadStatus_PTO.
Contenido de este capítulo
Este capítulo contiene las siguientes secciones:
Sección Apartado Página
6.1 Modalidades de funcionamiento 86
6.2 Bloque de funciones de MC_Power_PTO 100
6.3 Bloque de funciones MC_MoveVelocity_PTO 105
6.4 Bloque de funciones MC_MoveRelative_PTO 113
6.5 Bloque de funciones MC_MoveAbsolute_PTO 120
6.6 Bloque de funciones MC_Home_PTO 127
6.7 Bloque de funciones MC_SetPosition_PTO 133
6.8 Bloque de funciones MC_Stop_PTO 136
6.9 Bloque de funciones MC_Halt_PTO 141
6.10 Añadir un bloque de funciones 146

Bloques de funciones de movimiento
86 EIO0000003080 12/2019
Modalidades de funcionamiento
Sección 6.1
Modalidades de funcionamiento
Descripción general
En esta sección se describen las modalidades de funcionamiento.
Contenido de esta sección
Esta sección contiene los siguientes apartados:
Apartado Página
Diagrama de estado de movimiento 87
Modalidad de búfer 89
Ejemplos de diagramas de tiempos 91

Bloques de funciones de movimiento
EIO0000003080 12/2019 87
Diagrama de estado de movimiento
Diagrama de estado
El eje está siempre en alguno de los estados definidos en este diagrama:
Nota 1 En cualquiera de los estados, al detectarse un error.
Nota 2 Desde cualquier estado excepto ErrorStop, cuando MC_Power_PTO.Status = FALSE.
Nota 3 MC_Reset_PTO.Done = TRUE y MC_Power_PTO.Status = FALSE.
Nota 4 MC_Reset_PTO.Done = TRUE y MC_Power_PTO.Status = TRUE.
Nota 5 MC_Power_PTO.Status = TRUE.
Nota 6 MC_Stop_PTO.Done = TRUE y MC_Stop_PTO.Execute = FALSE.
Esta tabla describe los estados del eje:
Estado Descripción
Disabled Estado inicial del eje, no se permite ningún comando de movimiento. El eje no ha
vuelto al punto de referencia.
Standstill La alimentación está conectada, no se ha detectado ningún error y no hay ningún
comando de movimiento activo en el eje. Se permite un comando de movimiento.
ErrorStop Prioridad máxima, aplicable cuando se ha detectado un error en el eje o en el
controlador. Cualquier movimiento en curso es cancelado por una Deceleración de
parada rápida. El pin de Error se establece en bloques de funciones aplicables y un
ErrorId establece el código de error. No se aceptarán más comandos de
movimiento hasta que se haya restablecido utilizando MC_Reset_PTO.
Homing Aplicable cuando MC_Home_PTO controla el eje.
Discrete Aplicable cuando MC_MoveRelative_PTO, MC_MoveAbsolute_PTO o
MC_Halt_PTO controlan el eje.

Bloques de funciones de movimiento
88 EIO0000003080 12/2019
NOTA: Los bloques de funciones que no se muestran en el diagrama de estado no afectan a un
cambio de estado del eje.
El comando de movimiento al completo, incluyendo las rampas de aceleración y deceleración, no
puede sobrepasar los 4.294.967.295 pulsos. A la frecuencia máxima de 100 kHz, las rampas de
aceleración y deceleración están limitadas a 80 segundos.
Tabla de transición de movimientos
El canal PTO puede responder a un nuevo comando al ejecutar (y antes de que se complete) el
comando en curso según la tabla siguiente:
NOTA: Cuando se detecta un error en la transición de movimiento, el eje entra en estado
ErrorStop. ErrorId se establece en InvalidTransition.
Continuous Aplicable cuando MC_MoveVelocity_PTO controla el eje.
Stopping Aplicable cuando MC_Stop_PTO controla el eje.
Estado Descripción
Comando Siguiente
Home MoveVelocity MoveRelative MoveAbsolute Halt Stop
En curso Standstill Permitido Permitido(1) Permitido(1) Permitido(1) Permitido Permitido
Home Rechazado Rechazado Rechazado Rechazado Rechazado Permitido
MoveVelocity Rechazado Permitido Permitido Permitido Permitido Permitido
MoveRelative Rechazado Permitido Permitido Permitido Permitido Permitido
MoveAbsolute Rechazado Permitido Permitido Permitido Permitido Permitido
Halt Rechazado Permitido Permitido Permitido Permitido Permitido
Stop Rechazado Rechazado Rechazado Rechazado Rechazado Rechazado
(1) Cuando el eje está en parada, para las modalidades de búfer
mcAborting/mcBuffered/mcBlendingPrevious, el movimiento comienza inmediatamente.
Permitido El nuevo comando comienza la ejecución incluso si el comando previo no ha completado la ejecución.
Rechazado Se ignora el nuevo comando y esto da como resultado la declaración de un error.

Bloques de funciones de movimiento
EIO0000003080 12/2019 89
Modalidad de búfer
Descripción
Algunos bloques de funciones de movimiento tienen una entrada llamada BufferMode. Con esta
entrada, el bloque de funciones puede iniciarse inmediatamente, iniciarse en un evento PROBE o
almacenarse en el búfer.
Las opciones disponibles se definen en la enumeración de tipos MC_BUFFER_MODE
(véase página 77)
:
Un movimiento de cancelación (mcAborting) se inicia inmediatamente, cancela cualquier
movimiento en curso y borra la cola de movimientos.
Un movimiento almacenado en el búfer (mcBuffered, mcBlendingPrevious,
seBufferedDelay) se pone en cola, es decir, se añade a cualquier movimiento en ejecución
o en espera para ser ejecutado, y se iniciará al finalizar el movimiento anterior.
Un movimiento de evento (seTrigger) es un movimiento almacenado en el búfer, que se
inicia en el evento PROBE
(véase página 51)
.
Diagrama de cola de movimientos
En esta figura se muestra el diagrama de cola de movimientos:
El búfer solamente puede contener un bloque de funciones de movimiento.

Bloques de funciones de movimiento
90 EIO0000003080 12/2019
La condición para la ejecución del bloque de funciones de movimiento en el búfer es:
mcBuffered: cuando el movimiento continuo actual es InVelocity y cuando el movimiento
binario actual se detiene.
seBufferedDelay: cuando ha transcurrido el retardo especificado y el movimiento continuo
actual es InVelocity, o se detiene desde el movimiento binario actual.
mcBlendingPrevious: cuando se alcanzan los destinos de velocidad y posición del bloque
de funciones actual.
seTrigger: cuando se detecta un evento válido en la entrada PROBE.
Se borra la cola de movimientos (se eliminan todos los movimientos almacenados en el búfer):
Cuando se activa un movimiento de cancelación (mcAborting): el pin CommandAborted se
establece en los bloques de funciones almacenados en el búfer.
Cuando se ejecuta una función MC_Stop_PTO: el pin Error se establece en los bloques de
funciones almacenados en el búfer borrados, con ErrorId=StoppingActive
(véase página 82)
.
Cuando se detecta una transición al estado ErrorStop: el pin Error se establece en los bloques
de función almacenados en el búfer, con ErrorId=ErrorStopActive
(véase página 82)
.
NOTA:
Solamente se puede poner en cola un movimiento válido. Si la ejecución del bloque de
funciones finaliza estableciendo la salida de Error, el movimiento no se pone en cola, ningún
movimiento en ejecución resulta afectado y la cola no se borra.
Cuando la cola ya está completa, la salida Error se establece en el bloque de funciones
aplicable y la salida ErrorId devuelve un error MotionQueueFull
(véase página 82)
.

Bloques de funciones de movimiento
EIO0000003080 12/2019 91
Ejemplos de diagramas de tiempos
De Move Velocity a Move Velocity con mcAborting

Bloques de funciones de movimiento
92 EIO0000003080 12/2019
1 Flanco ascendente de Execute: los comandos de parámetro son retenidos, el movimiento se inicia con
una velocity de destino de 1.000.
2 La velocity de destino alcanza 1.000.
3 El parámetro de Velocity cambia a 2.000: no aplicado (sin flanco ascendente en la entrada Execute,
y ContinuousUpdate fue retenido con valor 0 al inicio del movimiento).
4 Flanco descendente de Execute: los bits de estado son borrados.
5 Flanco ascendente de Execute: los comandos de parámetro son retenidos, el movimiento se inicia con
una velocity de destino de 2.000 y se activa ContinuousUpdate.
6 Parámetro de velocidad cambia a 500: el valor de ContinuousUpdate aplicado es TRUE). Nota: la
velocity anterior de destino (2.000) no se ha alcanzado.
7 La velocity de destino alcanza 500.
8 El parámetro de Velocity cambia a 2000: el valor de ContinuousUpdate aplicado es TRUE).
9 Flanco descendente de Execute: los bits de estado se borran.
10 Se alcanza la velocity de destino de 2.000, se establece InVelocity para un ciclo (se restablece el
pin de Execute).
11 El parámetro de Velocity cambia a 3.000: no aplicado (el movimiento aún está activo, pero ya no está
ocupado).

Bloques de funciones de movimiento
EIO0000003080 12/2019 93
De Move Relative a Move Relative con mcAborting

Bloques de funciones de movimiento
94 EIO0000003080 12/2019
1 Flanco ascendente FB1 de Execute: los comandos de parámetro son retenidos, el movimiento se inicia
con una velocity de destino de 2.000 y una distance de 1.000.
2 Termina el movimiento: la distancia recorrida es 1000.
3 Flanco ascendente FB1 de Execute: los comandos de parámetro son retenidos, el movimiento se inicia
con una velocity de destino de 2.000 y una distance de 2.000.
4 Flanco ascendente FB2 de Execute: los comandos de parámetro son retenidos, el movimiento se inicia
con una velocity de destino de 1.000 y una distance de 500. Nota: se cancela el FB1
5 Termina el movimiento.

Bloques de funciones de movimiento
EIO0000003080 12/2019 95
De Move Relative a Move Absolute con mcAborting

Bloques de funciones de movimiento
96 EIO0000003080 12/2019
1 Flanco ascendente FB1 de Execute: los comandos de parámetro son retenidos, el movimiento se inicia
con una velocity de destino de 2.000 y una distance de 1.800.
2 Flanco ascendente FB2 de Execute: los parámetros de comando son retenidos, se cancela el FB1 y el
movimiento continúa con una velocity de destino de 1.000 y una position de destino de 3.400.
Gestión de dirección automática: se necesita invertir la dirección para alcanzar la posición de destino y
detener el movimiento en deceleration del FB2.
3 Velocidad 0, inversión de dirección, el movimiento se reanuda con una velocity de destino de 1.000 y
una position de destino de 3.400.
4 Termina el movimiento: posición de destino de 3.400 alcanzada.

Bloques de funciones de movimiento
EIO0000003080 12/2019 97
De Move Velocity a Move Relative con seTrigger

Bloques de funciones de movimiento
98 EIO0000003080 12/2019
1 MC_TouchProbe_PTO no ejecutado aún: la entrada PROBE no está activa.
2 Flanco ascendente de MC_MoveVelocity_PTOExecute: los comandos de parámetro son retenidos y se
inicia el movimiento con la velocity de destino vel1.
3 Flanco ascendente deMC_TouchProbe_PTO Execute: la entrada PROBE está activa.
4 Se alcanza vel1.

Bloques de funciones de movimiento
EIO0000003080 12/2019 99
5 Flanco ascendente deMC_MoveRelative_PTOExecute: los parámetros de comandos de flanco
ascendente son retenidos, en espera de un evento PROBE para empezar.
6 Evento PROBE fuera de las ventanas de habilitación: el evento es ignorado.
7 Se detecta un evento válido MC_MoveRelative_PTO cancela MC_MoveVelocity_PTO, y se desactiva
la entrada PROBE.
8 Se ignora cualquier evento posterior.
9 Termina el movimiento.

Bloques de funciones de movimiento
100 EIO0000003080 12/2019
Bloque de funciones de MC_Power_PTO
Sección 6.2
Bloque de funciones de MC_Power_PTO
Descripción general
En esta sección se describe el bloque de funcionesMC_Power_PTO.
Contenido de esta sección
Esta sección contiene los siguientes apartados:
Apartado Página
Descripción 101
MC_Power_PTO: gestionar la alimentación del estado del eje 102

Bloques de funciones de movimiento
EIO0000003080 12/2019 101
Descripción
Descripción general
El bloque de funciones MC_Power_PTO es obligatorio para poder ejecutar el resto de los bloques
de funciones PTO. Permite habilitar la alimentación y el control del eje, cambiando el estado del
eje de Disabled a Standstill.
Este bloque de funciones siempre debe ser el primer bloque de funciones PTO al que se llame.
No se permite que ningún bloque de funciones de movimiento afecte al eje hasta que el bit de
MC_Power_PTO.Status sea TRUE.
Al deshabilitar la energía (MC_Power_PTO.Enable = FALSE), el eje cambia:
del estado Standstill al estado Disabled.
De cualquier movimiento en curso a ErrorStop y luego a Disabled cuando se restablece el error.
Si se restablece la entrada DriveReady, el estado del eje cambia a ErrorStop.

Bloques de funciones de movimiento
102 EIO0000003080 12/2019
MC_Power_PTO: gestionar la alimentación del estado del eje
Representación gráfica
Representación IL y ST
Para ver la representación general en lenguaje IL o ST, consulte el capítulo Representación de
funciones y de bloques de funciones
(véase página 209)
.
Variables de entrada
En esta tabla se describen las variables de entrada:
Entrada Tipo Valor
inicial
Descripción
Axis AXIS_REF_PTO - Nombre del eje (instancia) para el que se ejecutará el
bloque de funciones. En Dispositivos, el nombre aparece
debajo de la configuración del controlador.
Enable BOOL FALSE Cuando es TRUE se ejecuta el bloque de funciones. Los
valores de las entradas de los bloques de funciones
pueden modificarse y las salidas se actualizan
continuamente.
Cuando es FALSE, finaliza la ejecución del bloque de
funciones y restablece sus salidas.
DriveReady(1) BOOL FALSE Información de accionamiento de la unidad. Debe ser
TRUE cuando la unidad esté lista para iniciar el
movimiento de ejecución.
Si la señal de la unidad está conectada al controlador,
utilice la entrada %Ix apropiada. Si la unidad no
proporciona esta señal, puede seleccionar el valor TRUE
para esta entrada.
LimP(1) BOOL TRUE Información del interruptor de límite de hardware, en
dirección positiva. Debe ser FALSE cuando se alcanza el
interruptor de límite de hardware.
Si la señal del interruptor de límite de hardware está
conectada al controlador, utilice la entrada %Ix apropiada.
Si esta señal no está disponible, puede no utilizar esta
entrada o establecerla en TRUE.

Bloques de funciones de movimiento
EIO0000003080 12/2019 103
(1) DriveReady, LimP y LimN se leen en el tiempo de ciclo de tarea.
Variables de salida
En esta tabla se describen las variables de salida:
LimN(1) BOOL TRUE Información del interruptor de límite de hardware, en
dirección negativa. Debe ser FALSE cuando se alcanza el
interruptor de límite de hardware.
Si la señal del interruptor de límite de hardware está
conectada al controlador, utilice la %Ix apropiada. Si esta
señal no está disponible, puede no utilizar esta entrada o
establecerla en TRUE.
Entrada Tipo Valor
inicial
Descripción
Salida Tipo Valor inicial Descripción
Status BOOL FALSE Cuando está en TRUE, se habilita la
alimentación y los comandos de movimiento son
posibles.
DriveEnable BOOL FALSE Habilita a la unidad para aceptar comandos.
Si la unidad no utiliza esta señal, puede optar
por no utilizar esta salida.
Error BOOL FALSE Si es TRUE, indica que se ha detectado un
error. La ejecución del bloque de funciones ha
finalizado.
ErrorId PTO_ERROR PTO_ERROR.NoError Cuando Error es TRUE: código del error
detectado
(véase página 82)
.

Bloques de funciones de movimiento
104 EIO0000003080 12/2019
Ejemplo de diagrama de tiempos
El diagrama muestra el funcionamiento del bloque de funciones:

Bloques de funciones de movimiento
EIO0000003080 12/2019 105
Bloque de funciones MC_MoveVelocity_PTO
Sección 6.3
Bloque de funciones MC_MoveVelocity_PTO
Descripción general
En esta sección se describe el bloque de funciones MC_MoveVelocity_PTO.
Contenido de esta sección
Esta sección contiene los siguientes apartados:
Apartado Página
Descripción 106
MC_MoveVelocity_PTO: control de la velocidad del eje 107

Bloques de funciones de movimiento
106 EIO0000003080 12/2019
Descripción
Descripción general
Esta función hace que el eje especificado se mueva a la velocidad especificada y transfiere el eje
al estado Continuous. Este movimiento continuo se mantiene hasta que se alcanza un límite de
software, se activa un movimiento de cancelación o se detecta una transición al estado ErrorStop.

Bloques de funciones de movimiento
EIO0000003080 12/2019 107
MC_MoveVelocity_PTO: control de la velocidad del eje
Representación gráfica
Representación IL y ST
Para ver la representación general en lenguaje IL o ST, consulte el capítulo Representación de
funciones y de bloques de funciones
(véase página 209)
.

Bloques de funciones de movimiento
108 EIO0000003080 12/2019
Variables de entrada
En esta tabla se describen las variables de entrada:
Entrada Tipo Valor inicial Descripción
Axis AXIS_REF_PTO - Nombre del eje (instancia) para el que se
ejecutará el bloque de funciones. En
Dispositivos, el nombre aparece en la
configuración del controlador.
Execute BOOL FALSE En el flanco ascendente, inicia la ejecución
del bloque de funciones.
En el flanco descendente, restablece las
salidas del bloque de funciones cuando
finaliza su ejecución.
Los cambios posteriores en los parámetros
de entrada del bloque de funciones no
afectan al comando en curso, a menos que se
utilice la entrada ContinuousUpdate.
Si se detecta un segundo flanco ascendente
durante la ejecución del bloque de funciones,
se anula la ejecución en curso y se reinicia el
bloque de funciones con los valores de los
parámetros en ese momento.
ContinuousUpdate BOOL FALSE En TRUE, hace que el bloque de funciones
utilice los valores de las variables de entrada
(Velocity, Acceleration,
Deceleration y Direction) y se aplica al
comando en curso, independientemente de
sus valores originales.
El impacto de la entrada
ContinuousUpdate comienza cuando un
flanco ascendente activa el bloque de
funciones en el pin Execute y termina
cuando el bloque de funciones deje de estar
en estado Busy o se establezca la entrada
ContinuousUpdate en FALSE.
Velocity DINT 0 Velocidad de destino en Hz, no
necesariamente alcanzada.
Rango: 0...MaxVelocityAppl
(véase página 81)
Acceleration DINT 0 Aceleración en Hz/ms o en ms (según la
configuración).
Rango (Hz/ms): de 1 a
MaxAccelerationAppl
(véase página 81)
Rango en ms: de MaxAccelerationAppl
(véase página 81)
a 100.000

Bloques de funciones de movimiento
EIO0000003080 12/2019 109
Deceleration DINT 0 Deceleración en Hz/ms o en ms (según la
configuración).
Rango (Hz/ms): de 1 a
MaxDecelerationAppl
(véase página 81)
Rango en ms: de MaxDecelerationAppl
(véase página 81)
a 100.000
Direction MC_DIRECTION mcPositiveDirection Dirección del movimiento
(véase página 79)
.
BufferMode MC_BUFFER_
MODE
mcAborting Modalidad de transición del movimiento en
curso
(véase página 77)
.
JerkRatio1 INT 0 Porcentaje de aceleración desde la parada
utilizado para crear el perfil de la curva en S
(véase página 48)
.
JerkRatio2 INT 0 Porcentaje de aceleración hasta la velocidad
constante utilizado para crear el perfil de la
curva en S
(véase página 48)
.
JerkRatio3 INT 0 Porcentaje de deceleración desde la
velocidad constante utilizado para crear el
perfil de la curva en S
(véase página 48)
.
JerkRatio4 INT 0 Porcentaje de deceleración hasta la parada
utilizado para crear el perfil de la curva en S
(véase página 48)
.
Entrada Tipo Valor inicial Descripción

Bloques de funciones de movimiento
110 EIO0000003080 12/2019
Variables de salida
En esta tabla se describen las variables de salida:
NOTA:
Para detener el movimiento, el bloque de funciones tiene que ser interrumpido por otro bloque
de funciones emitiendo un nuevo comando.
Si un movimiento está en curso y se invierte la dirección, primero se detiene el movimiento con
la deceleración del bloque de funciones MC_MoveVelocity_PTO y después se reanuda el
movimiento en la dirección contraria.
La duración de la aceleración/deceleración del bloque de segmento no debe sobrepasar los 80
segundos.
Salida Tipo Valor inicial Descripción
InVelocity BOOL FALSE Si es TRUE, indica que se ha alcanzado la velocidad
de destino.
Busy BOOL FALSE Si es TRUE indica que la ejecución del bloque de
funciones está en curso.
Active BOOL FALSE El bloque de funciones controla la Axis. Solamente
un bloque de funciones a la vez puede establecer
Active en TRUE para un Axis definido.
CommandAborted BOOL FALSE Finaliza la ejecución del bloque de funciones por
cancelación debida a otro comando de movimiento o
a un error detectado.
Error BOOL FALSE Si es TRUE, indica que se ha detectado un error. La
ejecución del bloque de funciones ha finalizado.
ErrorId PTO_ERROR PTO_ERROR.NoError Cuando Error es TRUE: código del error detectado
(véase página 82)
.

Bloques de funciones de movimiento
EIO0000003080 12/2019 111
Ejemplo de diagrama de tiempos
El diagrama muestra un perfil simple desde el estado Standstill:
El diagrama muestra un perfil complejo desde el estado Continuous:
El diagrama muestra un perfil complejo desde el estado Continuous con cambio de dirección:

Bloques de funciones de movimiento
112 EIO0000003080 12/2019
El diagrama muestra un perfil complejo desde el estado Discrete:

Bloques de funciones de movimiento
EIO0000003080 12/2019 113
Bloque de funciones MC_MoveRelative_PTO
Sección 6.4
Bloque de funciones MC_MoveRelative_PTO
Descripción general
En esta sección se describe el bloque de funciones MC_MoveRelative_PTO.
Contenido de esta sección
Esta sección contiene los siguientes apartados:
Apartado Página
Descripción 114
MC_MoveRelative_PTO: control del movimiento del eje relativo 115

Bloques de funciones de movimiento
114 EIO0000003080 12/2019
Descripción
Descripción general
Esta función hace que el eje especificado se mueva a una distancia incremental y transfiere el eje
al estado Discrete. La posición de destino se referencia desde la posición actual en tiempo de
ejecución, incrementado por una distancia.

Bloques de funciones de movimiento
EIO0000003080 12/2019 115
MC_MoveRelative_PTO: control del movimiento del eje relativo
Representación gráfica
Representación IL y ST
Para ver la representación general en lenguaje IL o ST, consulte el capítulo Representación de
funciones y de bloques de funciones
(véase página 209)
.

Bloques de funciones de movimiento
116 EIO0000003080 12/2019
Variables de entrada
En esta tabla se describen las variables de entrada:
Entrada Tipo Valor inicial Descripción
Axis AXIS_REF_PTO - Nombre del eje (instancia) para el que se ejecutará el
bloque de funciones. En Dispositivos, el nombre aparece
en la configuración del controlador.
Execute BOOL FALSE En el flanco ascendente, inicia la ejecución del bloque de
funciones.
En el flanco descendente, restablece las salidas del bloque
de funciones cuando finaliza su ejecución.
Distance DINT 0 Distancia relativa del movimiento en número de pulsos. El
signo especifica la dirección.
Velocity DINT 0 Velocidad de destino en Hz, no necesariamente
alcanzada.
Rango: 1...MaxVelocityAppl
(véase página 81)
Acceleration DINT 0 Aceleración en Hz/ms o en ms (según la configuración).
Rango (Hz/ms): de 1 a MaxAccelerationAppl
(véase página 81)
Rango en ms: de MaxAccelerationAppl
(véase página 81)
a 100.000
Deceleration DINT 0 Deceleración en Hz/ms o en ms (según la configuración).
Rango (Hz/ms): de 1 a MaxDecelerationAppl
(véase página 81)
Rango en ms: de MaxDecelerationAppl
(véase página 81)
a 100.000
BufferMode MC_BUFFER_
MODE
mcAborting Modalidad de transición del movimiento en curso
(véase página 77)
.
JerkRatio1 INT 0 Porcentaje de aceleración desde la parada utilizado para
crear el perfil de la curva en S
(véase página 48)
.
JerkRatio2 INT 0 Porcentaje de aceleración hasta la velocidad constante
utilizado para crear el perfil de la curva en S
(véase página 48)
.
JerkRatio3 INT 0 Porcentaje de deceleración desde la velocidad constante
utilizado para crear el perfil de la curva en S
(véase página 48)
.
JerkRatio4 INT 0 Porcentaje de deceleración hasta la parada utilizado para
crear el perfil de la curva en S
(véase página 48)
.

Bloques de funciones de movimiento
EIO0000003080 12/2019 117
Variables de salida
En esta tabla se describen las variables de salida:
NOTA:
El bloque de funciones se completa con velocidad cero si no hay más bloques pendientes.
Si la distancia es demasiado corta para alcanzar la velocidad de destino, el perfil del
movimiento es triangular en lugar de trapezoidal.
Si hay un movimiento en curso y se sobrepasa la distancia solicitada debido a los parámetros
de movimiento, se invierte automáticamente la dirección: primero se detiene el movimiento con
la deceleración del bloque de funciones MC_MoveRelative_PTO y después se reanuda el
movimiento en dirección contraria.
La duración de la aceleración/deceleración del bloque de segmento no debe sobrepasar los 80
segundos.
Salida Tipo Valor inicial Descripción
Done BOOL FALSE Si es TRUE, indica que ha terminado la
ejecución del bloque de funciones sin
detectar ningún error.
Busy BOOL FALSE Si es TRUE indica que la ejecución del
bloque de funciones está en curso.
Active BOOL FALSE El bloque de funciones controla la Axis.
Solamente un bloque de funciones a la vez
puede establecer Active en TRUE para un
Axis definido.
CommandAborted BOOL FALSE Finaliza la ejecución del bloque de
funciones por cancelación debida a otro
comando de movimiento o a un error
detectado.
Error BOOL FALSE Si es TRUE, indica que se ha detectado un
error. La ejecución del bloque de funciones
ha finalizado.
ErrorId PTO_ERROR PTO_ERROR.NoError Cuando Error es TRUE: código del error
detectado
(véase página 82)
.

Bloques de funciones de movimiento
118 EIO0000003080 12/2019
Ejemplo de diagrama de tiempos
El diagrama muestra un perfil simple desde el estado Standstill:
El diagrama muestra un perfil complejo desde el estado Continuous:
El diagrama muestra un perfil complejo desde el estado Continuous con cambio de dirección:

Bloques de funciones de movimiento
EIO0000003080 12/2019 119
El diagrama muestra un perfil complejo desde el estado Discrete:
El diagrama muestra un perfil complejo desde el estado Discrete con cambio de dirección:

Bloques de funciones de movimiento
120 EIO0000003080 12/2019
Bloque de funciones MC_MoveAbsolute_PTO
Sección 6.5
Bloque de funciones MC_MoveAbsolute_PTO
Descripción general
En esta sección se describe el bloque de funciones MC_MoveAbsolute_PTO.
Contenido de esta sección
Esta sección contiene los siguientes apartados:
Apartado Página
Descripción 121
MC_MoveAbsolute_PTO: control del movimiento a la posición absoluta 122

Bloques de funciones de movimiento
EIO0000003080 12/2019 121
Descripción
Descripción general
Esta función hace que el eje especificado se mueva hacia una posición dada y a la velocidad
especificada, y transfiere el eje al estado Discrete. Para utilizar el bloque de funciones
MC_MoveAbsolute_PTO, primero debe referenciar el eje. De lo contrario el bloque de funciones
acabará en error (Error se establece en 1 y ErrorId se establece en InvalidAbsolute).

Bloques de funciones de movimiento
122 EIO0000003080 12/2019
MC_MoveAbsolute_PTO: control del movimiento a la posición absoluta
Representación gráfica
Representación IL y ST
Para ver la representación general en lenguaje IL o ST, consulte el capítulo Representación de
funciones y de bloques de funciones
(véase página 209)
.

Bloques de funciones de movimiento
EIO0000003080 12/2019 123
Variables de entrada
En esta tabla se describen las variables de entrada:
Entrada Tipo Valor inicial Descripción
Axis AXIS_REF_PTO - Nombre del eje (instancia) para el que se ejecutará
el bloque de funciones. En Dispositivos, el nombre
aparece en la configuración del controlador.
Execute BOOL FALSE En el flanco ascendente, inicia la ejecución del
bloque de funciones.
En el flanco descendente, restablece las salidas
del bloque de funciones cuando finaliza su
ejecución.
Position DINT 0 Posición absoluta de destino.
Velocity DINT 0 Velocidad de destino en Hz, no necesariamente
alcanzada.
Rango: 1...MaxVelocityAppl
(véase página 81)
Acceleration DINT 0 Aceleración en Hz/ms o en ms (según la
configuración).
Rango (Hz/ms): de 1 a MaxAccelerationAppl
(véase página 81)
Rango en ms: de MaxAccelerationAppl
(véase página 81)
a 100.000
Deceleration DINT 0 Deceleración en Hz/ms o en ms (según la
configuración).
Rango (Hz/ms): de 1 a MaxDecelerationAppl
(véase página 81)
Rango en ms: de MaxDecelerationAppl
(véase página 81)
a 100.000
Direction MC_DIRECTION mcPositiveDirection Dirección del movimiento.
BufferMode MC_BUFFER_
MODE
mcAborting Modalidad de transición del movimiento en curso
(véase página 77)
.
JerkRatio1 INT 0 Porcentaje de aceleración desde la parada
utilizado para crear el perfil de la curva en S
(véase página 48)
.
JerkRatio2 INT 0 Porcentaje de aceleración hasta la velocidad
constante utilizado para crear el perfil de la curva
en S
(véase página 48)
.
JerkRatio3 INT 0 Porcentaje de deceleración desde la velocidad
constante utilizado para crear el perfil de la curva
en S
(véase página 48)
.
JerkRatio4 INT 0 Porcentaje de deceleración hasta la parada
utilizado para crear el perfil de la curva en S
(véase página 48)
.

Bloques de funciones de movimiento
124 EIO0000003080 12/2019
Variables de salida
En esta tabla se describen las variables de salida:
NOTA:
El bloque de funciones se completa con velocidad cero si no hay más bloques pendientes.
La dirección del movimiento se establece automáticamente, de acuerdo con la posición actual
y de destino.
Si la distancia es demasiado corta para alcanzar la velocidad de destino, el perfil del
movimiento es triangular en lugar de trapezoidal.
Si no se puede alcanzar la posición con la dirección actual, se invierte automáticamente la
dirección. Si hay un movimiento en curso, primero se detiene con la deceleración del bloque de
funciones MC_MoveAbsolute_PTO y después se reanuda el movimiento en sentido contrario.
La duración de la aceleración/deceleración del bloque de segmento no debe sobrepasar los 80
segundos.
Salida Tipo Valor inicial Descripción
Done BOOL FALSE Si es TRUE, indica que ha terminado la ejecución del
bloque de funciones sin detectar ningún error.
Busy BOOL FALSE Si es TRUE indica que la ejecución del bloque de
funciones está en curso.
Active BOOL FALSE El bloque de funciones controla la Axis. Solamente un
bloque de funciones a la vez puede establecer
Active en TRUE para un Axis definido.
CommandAborted BOOL FALSE Finaliza la ejecución del bloque de funciones por
cancelación debida a otro comando de movimiento o a
un error detectado.
Error BOOL FALSE Si es TRUE, indica que se ha detectado un error. La
ejecución del bloque de funciones ha finalizado.
ErrorId PTO_ERROR PTO_ERROR.NoError Cuando Error es TRUE: código del error detectado
(véase página 82)
.

Bloques de funciones de movimiento
EIO0000003080 12/2019 125
Ejemplo de diagrama de tiempos
El diagrama muestra un perfil simple desde el estado Standstill:
El diagrama muestra un perfil complejo desde el estado Continuous:
El diagrama muestra un perfil complejo desde el estado Discrete:

Bloques de funciones de movimiento
126 EIO0000003080 12/2019
El diagrama muestra un perfil complejo desde el estado Discrete con cambio de dirección:

Bloques de funciones de movimiento
EIO0000003080 12/2019 127
Bloque de funciones MC_Home_PTO
Sección 6.6
Bloque de funciones MC_Home_PTO
Descripción general
En esta sección se describe el bloque de funciones MC_Home_PTO.
Contenido de esta sección
Esta sección contiene los siguientes apartados:
Apartado Página
Descripción 128
MC_Home_PTO: control del eje para moverlo a una posición de referencia 129

Bloques de funciones de movimiento
128 EIO0000003080 12/2019
Descripción
Descripción general
Este bloque de funciones ordena que el eje se mueva a la posición absoluta de referencia y
transfiere el eje al estado Homing. Los detalles de esta secuencia dependen de los ajustes de los
parámetros de configuración del punto de referencia.

Bloques de funciones de movimiento
EIO0000003080 12/2019 129
MC_Home_PTO: control del eje para moverlo a una posición de referencia
Representación gráfica
Representación IL y ST
Para ver la representación general en lenguaje IL o ST, consulte el capítulo Representación de
funciones y de bloques de funciones
(véase página 209)
.

Bloques de funciones de movimiento
130 EIO0000003080 12/2019
Variables de entrada
En esta tabla se describen las variables de entrada:
Entrada Tipo Valor inicial Descripción
Axis AXIS_REF_PTO - Nombre del eje (instancia) para el que se ejecutará
el bloque de funciones. En Dispositivos, el nombre
aparece en la configuración del controlador.
Execute BOOL FALSE En el flanco ascendente, inicia la ejecución del
bloque de funciones.
En el flanco descendente, restablece las salidas
del bloque de funciones cuando finaliza su
ejecución.
Mode PTO_HOMING_
MODE
mcPositionSetting Tipo de modalidad de toma de referencia
(véase página 80)
predefinida.
Position DINT 0 El valor de posición se establece como una
posición absoluta en la detección de conmutación
del punto de referencia, cuando se ha·ejecutado
correctamente la toma de referencia.
Direction MC_DIRECTION mcPositiveDirection Se inicia la dirección. Para el punto de referencia
únicamente son válidos mcPositiveDirection
y mcNegativeDirection.
HighVelocity DINT 0 Velocidad de toma de referencia de destino para
buscar la conmutación de límite o referencia.
Rango en Hz: de 1 a MaxVelocityAppl
(véase página 81)
LowVelocity DINT 0 Velocidad de toma de referencia de destino para
buscar la conmutación de referencia o señal
INDEX. El movimiento se detiene al detectar un
punto de conmutación.
Rango en Hz: de 1 a HighVelocity
Acceleration DINT 0 Aceleración en Hz/ms o en ms (según la
configuración).
Rango (Hz/ms): de 1 a MaxAccelerationAppl
(véase página 81)
Rango en ms: de MaxAccelerationAppl
(véase página 81)
a 100.000
Deceleration DINT 0 Deceleración en Hz/ms o en ms (según la
configuración).
Rango (Hz/ms): de 1 a MaxDecelerationAppl
(véase página 81)
Rango en ms: de MaxDecelerationAppl
(véase página 81)
a 100.000

Bloques de funciones de movimiento
EIO0000003080 12/2019 131
Variables de salida
En esta tabla se describen las variables de salida:
NOTA: La duración de la aceleración/deceleración del bloque de segmento no debe sobrepasar
los 80 segundos.
Offset DINT 0 Distancia al punto de origen. Al alcanzar el punto
de origen se reanuda el movimiento hasta cubrir la
distancia. La dirección depende del signo (offset
de toma de referencia
(véase página 74)
).
Rango: de 2.147.483.648 a 2.147.483.647
JerkRatio1 INT 0 Porcentaje de aceleración desde la parada
utilizado para crear el perfil de la curva en S
(véase página 48)
.
JerkRatio2 INT 0 Porcentaje de aceleración hasta la velocidad
constante utilizado para crear el perfil de la curva
en S
(véase página 48)
.
JerkRatio3 INT 0 Porcentaje de deceleración desde la velocidad
constante utilizado para crear el perfil de la curva
en S
(véase página 48)
.
JerkRatio4 INT 0 Porcentaje de deceleración hasta la parada
utilizado para crear el perfil de la curva en S
(véase página 48)
.
Entrada Tipo Valor inicial Descripción
Salida Tipo Valor inicial Descripción
Done BOOL FALSE Si es TRUE, indica que ha terminado la
ejecución del bloque de funciones sin
detectar ningún error.
Busy BOOL FALSE Si es TRUE indica que la ejecución del
bloque de funciones está en curso.
Active BOOL FALSE El bloque de funciones controla la Axis.
Solamente un bloque de funciones a la vez
puede establecer Active en TRUE para un
Axis definido.
CommandAborted BOOL FALSE Finaliza la ejecución del bloque de funciones
por cancelación debida a otro comando de
movimiento o a un error detectado.
Error BOOL FALSE Si es TRUE, indica que se ha detectado un
error. La ejecución del bloque de funciones
ha finalizado.
ErrorId PTO_ERROR PTO_ERROR.NoError Cuando Error es TRUE: código del error
detectado
(véase página 82)
.


Bloques de funciones de movimiento
EIO0000003080 12/2019 133
Bloque de funciones MC_SetPosition_PTO
Sección 6.7
Bloque de funciones MC_SetPosition_PTO
Descripción general
En esta sección se describe el bloque de funciones MC_SetPosition_PTO.
Contenido de esta sección
Esta sección contiene los siguientes apartados:
Apartado Página
Descripción 134
MC_SetPosition_PTO: forzado de la posición de referencia del eje135

Bloques de funciones de movimiento
134 EIO0000003080 12/2019
Descripción
Descripción general
Este bloque de funciones modifica las coordenadas de la posición actual del eje sin ningún
movimiento físico. Este bloque de funciones solo se puede utilizar cuando el eje está en estado
Standstill.

Bloques de funciones de movimiento
EIO0000003080 12/2019 135
MC_SetPosition_PTO: forzado de la posición de referencia del eje
Representación gráfica
Representación IL y ST
Para ver la representación general en lenguaje IL o ST, consulte el capítulo Representación de
funciones y de bloques de funciones
(véase página 209)
.
Variables de entrada
En esta tabla se describen las variables de entrada:
Variables de salida
En esta tabla se describen las variables de salida:
Entrada Tipo Valor inicial Descripción
Axis AXIS_REF_PTO - Nombre del eje (instancia) para el que se ejecutará el
bloque de funciones. En Dispositivos, el nombre
aparece en la configuración del controlador.
Execute BOOL FALSE En el flanco ascendente, inicia la ejecución del bloque
de funciones.
En el flanco descendente, restablece las salidas del
bloque de funciones cuando finaliza su ejecución.
Position DINT 0 Nuevo valor de posición absoluta del Axis.
Salida Tipo Valor inicial Descripción
Done BOOL FALSE Si es TRUE, indica que ha terminado la ejecución
del bloque de funciones sin detectar ningún error.
Error BOOL FALSE Si es TRUE, indica que se ha detectado un error. La
ejecución del bloque de funciones ha finalizado.
ErrorId PTO_ERROR PTO_ERROR.NoError Cuando Error es TRUE: tipo del error detectado
(véase página 82)
.

Bloques de funciones de movimiento
136 EIO0000003080 12/2019
Bloque de funciones MC_Stop_PTO
Sección 6.8
Bloque de funciones MC_Stop_PTO
Descripción general
En esta sección se describe el bloque de funciones MC_Stop_PTO.
Contenido de esta sección
Esta sección contiene los siguientes apartados:
Apartado Página
Descripción 137
MC_Stop_PTO: control de una detención del movimiento controlado 138

Bloques de funciones de movimiento
EIO0000003080 12/2019 137
Descripción
Descripción general
Este bloque de funciones ordena una detención del movimiento controlado y transfiere el eje al
estado Stopping. Cancela la ejecución de cualquier movimiento en curso y se borra la cola de
movimientos. Mientras el eje está en estado Stopping, ningún otro bloque de funciones puede
realizar movimientos en el mismo eje. Este bloque de funciones está principalmente destinado a
situaciones de excepción o de funcionalidad de parada rápida.

Bloques de funciones de movimiento
138 EIO0000003080 12/2019
MC_Stop_PTO: control de una detención del movimiento controlado
Representación gráfica
Representación IL y ST
Para ver la representación general en lenguaje IL o ST, consulte el capítulo Representación de
funciones y de bloques de funciones
(véase página 209)
.
Variables de entrada
En esta tabla se describen las variables de entrada:
Entrada Tipo Valor inicial Descripción
Axis AXIS_REF_PTO - Nombre del eje (instancia) para el que se ejecutará el bloque de
funciones. En Dispositivos, el nombre aparece en la
configuración del controlador.
Execute BOOL FALSE En el flanco ascendente, inicia la ejecución del bloque de
funciones.
En el flanco descendente, restablece las salidas del bloque de
funciones cuando finaliza su ejecución.
Deceleration DINT 20 Deceleración en Hz/ms o en ms (según la configuración).
Rango (Hz/ms): de 1 a MaxDecelerationAppl
(véase página 81)
Rango en ms: de MaxDecelerationAppl
(véase página 81)
a 100.000
JerkRatio1 INT 0 Porcentaje de deceleración desde la velocidad constante
utilizado para crear el perfil de la curva en S
(véase página 48)
.
JerkRatio2 INT 0 Porcentaje de deceleración hasta la parada utilizado para crear
el perfil de la curva en S
(véase página 48)
.

Bloques de funciones de movimiento
EIO0000003080 12/2019 139
Variables de salida
En esta tabla se describen las variables de salida:
NOTA:
Llamar a este bloque de funciones en estado Standstill cambia el estado a Stopping, y lo
devuelve a Standstill cuando Execute es FALSE.
El estado Stopping se mantiene mientras la entrada Execute sea TRUE.
La salida Done se establece cuando termina la rampa de detención.
Si Deceleration = 0, se utiliza la deceleración de parada rápida.
El bloque de funciones se completa con velocidad cero.
La duración de la deceleración del bloque de segmento no debe sobrepasar los 80 segundos.
Salida Tipo Valor inicial Descripción
Done BOOL FALSE Si es TRUE, indica que ha terminado la ejecución del
bloque de funciones sin detectar ningún error.
Busy BOOL FALSE Si es TRUE indica que la ejecución del bloque de
funciones está en curso.
CommandAborted BOOL FALSE Finaliza la ejecución del bloque de funciones por
cancelación debida a otro comando de movimiento o
a un error detectado.
Error BOOL FALSE Si es TRUE, indica que se ha detectado un error. La
ejecución del bloque de funciones ha finalizado.
ErrorId PTO_ERROR PTO_ERROR.NoError Cuando Error es TRUE: tipo del error detectado
(véase página 82)
.

Bloques de funciones de movimiento
140 EIO0000003080 12/2019
Ejemplo de diagrama de tiempos
El diagrama muestra un perfil simple desde el estado Continuous:
El diagrama muestra un perfil simple desde el estado Discrete:

Bloques de funciones de movimiento
EIO0000003080 12/2019 141
Bloque de funciones MC_Halt_PTO
Sección 6.9
Bloque de funciones MC_Halt_PTO
Descripción general
En esta sección se describe el bloque de funciones MC_Halt_PTO.
Contenido de esta sección
Esta sección contiene los siguientes apartados:
Apartado Página
Descripción 142
MC_Halt_PTO: control de una detención del movimiento controlado hasta que la velocidad sea
igual a cero
143

Bloques de funciones de movimiento
142 EIO0000003080 12/2019
Descripción
Descripción general
Este bloque de funciones ordena una detención del movimiento controlado hasta que la velocidad
sea cero y transfiere el eje al estado Discrete. Con la salida Done establecida, se transfiere el
estado a Standstill.

Bloques de funciones de movimiento
EIO0000003080 12/2019 143
MC_Halt_PTO: control de una detención del movimiento controlado hasta que la
velocidad sea igual a cero
Representación gráfica
Representación IL y ST
Para ver la representación general en lenguaje IL o ST, consulte el capítulo Representación de
funciones y de bloques de funciones
(véase página 209)
.
Variables de entrada
En esta tabla se describen las variables de entrada:
Entrada Tipo Valor inicial Descripción
Axis AXIS_REF_PTO - Nombre del eje (instancia) para el que se ejecutará el
bloque de funciones. En Dispositivos, el nombre aparece
en la configuración del controlador.
Execute BOOL FALSE En el flanco ascendente, inicia la ejecución del bloque de
funciones.
En el flanco descendente, restablece las salidas del bloque
de funciones cuando finaliza su ejecución.
Deceleration DINT 20 Deceleración en Hz/ms o en ms (según la configuración).
Rango (Hz/ms): de 1 a MaxDecelerationAppl
(véase página 81)
Rango en ms: de MaxDecelerationAppl
(véase página 81)
a 100.000
BufferMode MC_BUFFER_MODE mcAborting Modalidad de transición del movimiento en curso
(véase página 77)
.
JerkRatio1 INT 0 Porcentaje de deceleración desde la velocidad constante
utilizado para crear el perfil de la curva en S
(véase página 48)
.
JerkRatio2 INT 0 Porcentaje de deceleración hasta la parada utilizado para
crear el perfil de la curva en S
(véase página 48)
.

Bloques de funciones de movimiento
144 EIO0000003080 12/2019
Variables de salida
En esta tabla se describen las variables de salida:
NOTA: El bloque de funciones se completa con velocidad cero.
Salida Tipo Valor inicial Descripción
Done BOOL FALSE Si es TRUE, indica que ha terminado la ejecución del
bloque de funciones sin detectar ningún error.
Busy BOOL FALSE Si es TRUE indica que la ejecución del bloque de
funciones está en curso.
Active BOOL FALSE El bloque de funciones controla la Axis. Solamente
un bloque de funciones a la vez puede establecer
Active en TRUE para un Axis definido.
CommandAborted BOOL FALSE Finaliza la ejecución del bloque de funciones por
cancelación debida a otro comando de movimiento o
a un error detectado.
Error BOOL FALSE Si es TRUE, indica que se ha detectado un error. La
ejecución del bloque de funciones ha finalizado.
ErrorId PTO_ERROR PTO_ERROR.NoError Cuando Error es TRUE: tipo del error detectado
(véase página 82)
.

Bloques de funciones de movimiento
EIO0000003080 12/2019 145
Ejemplo de diagrama de tiempos
El diagrama muestra un perfil simple desde el estado Continuous:
El diagrama muestra un perfil simple desde el estado Discrete:

Bloques de funciones de movimiento
146 EIO0000003080 12/2019
Añadir un bloque de funciones
Sección 6.10
Añadir un bloque de funciones
Añadir un bloque de funciones
Procedimiento
Siga estos pasos para añadir y crear la instancia de un bloque de funciones de movimiento:
Paso Action
1 Añadir un POU
(véase EcoStruxure Machine Expert, Guía de programación)
a Aplicaciones.
2 Seleccione la ficha Bibliotecas en el catálogo de software y haga clic en Bibliotecas.
Seleccione Controlador → M241 → M241 PTOPWM → PTO → Movimiento → MC_xxxxxx_PTO
en la lista, arrastre y suelte el elemento en la ventana de POU.
3 Cree la instancia del bloque de funciones haciendo clic en:
4 Asociar las variables de entradas/salidas
(véase página 85)
del bloque de funciones.

EIO0000003080 12/2019 147
Modicon M 241 Logic Controller
Bloques de funciones ad ministrativas
EIO0000003080 12/2019
Bloques de funciones ad ministrativas
Capítulo 7
Bloques de funciones administrativas
Descripción general
En este capítulo se describen los bloques de funciones administrativas.
Los bloques de funciones administrativas no influyen en el diagrama de estado
(véase página 87)
.
Contenido de este capítulo
Este capítulo contiene las siguientes secciones:
Sección Apartado Página
7.1 Bloques de funciones de estado 148
7.2 Bloques de funciones de parámetros 157
7.3 Bloques de funciones PROBE 166
7.4 Bloques de funciones de tratamiento de errores 170
7.5 Añadir un bloque de funciones administrativas 174

Bloques de funciones administrativas
148 EIO0000003080 12/2019
Bloques de funciones de estado
Sección 7.1
Bloques de funciones de estado
Descripción general
En esta sección se describen los bloques de funciones de estado.
Contenido de esta sección
Esta sección contiene los siguientes apartados:
Apartado Página
MC_ReadActualVelocity_PTO: obtención de la velocidad solicitada del eje 149
MC_ReadActualPosition_PTO: obtención de la posición del eje 151
MC_ReadStatus_PTO: obtención del estado del eje 153
MC_ReadMotionState_PTO: obtención del estado de movimiento del eje 155

Bloques de funciones administrativas
EIO0000003080 12/2019 149
MC_ReadActualVelocity_PTO: obtención de la velocidad solicitada del eje
Descripción del bloque de funciones
Este bloque de funciones devuelve el valor de la velocidad solicitada del eje.
Representación gráfica
Representación IL y ST
Para ver la representación general en lenguaje IL o ST, consulte el capítulo Representación de
funciones y de bloques de funciones
(véase página 209)
.
Variables de entrada
En esta tabla se describen las variables de entrada:
Entrada Tipo Valor inicial Descripción
Axis AXIS_REF_PTO - Nombre del eje (instancia) para el que se ejecutará el
bloque de funciones. En Dispositivos, el nombre aparece
en la configuración del controlador.
Enable BOOL FALSE Cuando es TRUE se ejecuta el bloque de funciones. Los
valores de las entradas de los bloques de funciones
pueden ser modificados continuamente y las salidas se
actualizan también continuamente.
Cuando es FALSE, finaliza la ejecución del bloque de
funciones y se restablecen sus salidas.

Bloques de funciones administrativas
150 EIO0000003080 12/2019
Variables de salida
En esta tabla se describen las variables de salida:
Salida Tipo Valor inicial Descripción
Valid BOOL FALSE Los datos válidos están disponibles en el pin de
salida del bloque de funciones.
Error BOOL FALSE Si es TRUE, indica que se ha detectado un error.
La ejecución del bloque de funciones ha finalizado.
ErrorId PTO_ERROR PTO_ERROR.NoError Cuando Error es TRUE: código del error
detectado
(véase página 82)
.
Velocity DINT 0 Velocidad real del eje (en Hz).

Bloques de funciones administrativas
EIO0000003080 12/2019 151
MC_ReadActualPosition_PTO: obtención de la posición del eje
Descripción del bloque de funciones
Este bloque de funciones devuelve el valor de la posición solicitada del eje.
Representación gráfica
Representación IL y ST
Para ver la representación general en lenguaje IL o ST, consulte el capítulo Representación de
funciones y de bloques de funciones
(véase página 209)
.
Variables de entrada
En esta tabla se describen las variables de entrada:
Entrada Tipo Valor inicial Descripción
Axis AXIS_REF_PTO - Nombre del eje (instancia) para el que se ejecutará el
bloque de funciones. En Dispositivos, el nombre aparece
en la configuración del controlador.
Enable BOOL FALSE Cuando es TRUE se ejecuta el bloque de funciones. Los
valores de las entradas de los bloques de funciones
pueden ser modificados continuamente y las salidas se
actualizan también continuamente.
Cuando es FALSE, finaliza la ejecución del bloque de
funciones y se restablecen sus salidas.

Bloques de funciones administrativas
152 EIO0000003080 12/2019
Variables de salida
En esta tabla se describen las variables de salida:
Salida Tipo Valor inicial Descripción
Valid BOOL FALSE Los datos válidos están disponibles en el pin de
salida del bloque de funciones.
Error BOOL FALSE Si es TRUE, indica que se ha detectado un error.
La ejecución del bloque de funciones ha
finalizado.
ErrorId PTO_ERROR PTO_ERROR.NoError Cuando Error es TRUE: código del error
detectado
(véase página 82)
.
Position DINT 0 Posición real del eje.

Bloques de funciones administrativas
EIO0000003080 12/2019 153
MC_ReadStatus_PTO: obtención del estado del eje
Descripción del bloque de funciones
Este bloque de funciones devuelve el estado del diagrama de estado
(véase página 87)
del eje.
Representación gráfica
Representación IL y ST
Para ver la representación general en lenguaje IL o ST, consulte el capítulo Representación de
funciones y de bloques de funciones
(véase página 209)
.
Variables de entrada
En esta tabla se describen las variables de entrada:
Entrada Tipo Valor inicial Descripción
Axis AXIS_REF_PTO - Nombre del eje (instancia) para el que se ejecutará el
bloque de funciones. En Dispositivos, el nombre aparece
en la configuración del controlador.
Enable BOOL FALSE Cuando es TRUE se ejecuta el bloque de funciones. Los
valores de las entradas de los bloques de funciones
pueden ser modificados continuamente y las salidas se
actualizan también continuamente.
Cuando es FALSE, finaliza la ejecución del bloque de
funciones y se restablecen sus salidas.

Bloques de funciones administrativas
154 EIO0000003080 12/2019
Variables de salida
En esta tabla se describen las variables de salida:
Salida Tipo Valor inicial Descripción
Valid BOOL FALSE La salida establecida es válida
Error BOOL FALSE Si es TRUE, indica que se ha detectado
un error. La ejecución del bloque de
funciones ha finalizado.
ErrorId PTO_ERROR PTO_ERROR.NoError Cuando Error es TRUE: código del error
detectado
(véase página 82)
.
ErrorStop BOOL FALSE Si es TRUE, el estado está activo
(diagrama de estado del movimiento
(véase página 87)
).
Disabled BOOL FALSE
Stoppping BOOL FALSE
Homing BOOL FALSE
Stanstill BOOL FALSE
DiscreteMotion BOOL FALSE
ContinuousMotion BOOL FALSE
IsHomed BOOL FALSE Si es TRUE, el punto de referencia es
válido y se permite el movimiento
absoluto.
AxisWarning BOOL FALSE Si es TRUE, se produce una alerta en el
eje (haga una llamada a
MC_ReadAxisError_PTO
(véase página 171)
para obtener más
información).
QueueFull BOOL FALSE Si es TRUE, la cola de movimientos está
completa y no se permite almacenar más
movimientos en el búfer.

Bloques de funciones administrativas
EIO0000003080 12/2019 155
MC_ReadMotionState_PTO: obtención del estado de movimiento del eje
Descripción del bloque de funciones
Este bloque de funciones devuelve el estado de movimiento real del eje.
Representación gráfica
Representación IL y ST
Para ver la representación general en lenguaje IL o ST, consulte el capítulo Representación de
funciones y de bloques de funciones
(véase página 209)
.
Variables de entrada
En esta tabla se describen las variables de entrada:
Entrada Tipo Valor inicial Descripción
Axis AXIS_REF_PTO - Nombre del eje (instancia) para el que se ejecutará el
bloque de funciones. En Dispositivos, el nombre aparece
en la configuración del controlador.
Enable BOOL FALSE Cuando es TRUE se ejecuta el bloque de funciones. Los
valores de las entradas de los bloques de funciones
pueden ser modificados continuamente y las salidas se
actualizan también continuamente.
Cuando es FALSE, finaliza la ejecución del bloque de
funciones y se restablecen sus salidas.

Bloques de funciones administrativas
156 EIO0000003080 12/2019
Variables de salida
En esta tabla se describen las variables de salida:
Salida Tipo Valor inicial Descripción
Valid BOOL FALSE Los datos válidos están disponibles en el
pin de salida del bloque de funciones.
Error BOOL FALSE Si es TRUE, indica que se ha detectado
un error. La ejecución del bloque de
funciones ha finalizado.
ErrorId PTO_ERROR PTO_ERROR.NoError Cuando Error es TRUE: código del
error detectado
(véase página 82)
.
ConstantVelocity BOOL FALSE La velocidad real es constante.
Accelerating BOOL FALSE La velocidad real está aumentando.
Decelerating BOOL FALSE La velocidad real está disminuyendo.

Bloques de funciones administrativas
EIO0000003080 12/2019 157
Bloques de funciones de parámetros
Sección 7.2
Bloques de funciones de parámetros
Descripción general
En esta sección se describen los bloques de funciones de parámetros.
Contenido de esta sección
Esta sección contiene los siguientes apartados:
Apartado Página
MC_ReadParameter_PTO: obtención de parámetros del PTO 158
MC_WriteParameter_PTO: escribir parámetros en el PTO 160
MC_ReadBoolParameter_PTO: obtención de parámetros BOOL del PTO 162
MC_WriteBoolParameter_PTO: escritura de parámetros BOOL en el PTO 164

Bloques de funciones administrativas
158 EIO0000003080 12/2019
MC_ReadParameter_PTO: obtención de parámetros del PTO
Descripción del bloque de funciones
Este bloque de funciones se utiliza para obtener parámetros desde el PTO.
Representación gráfica
Representación IL y ST
Para ver la representación general en lenguaje IL o ST, consulte el capítulo Representación de
funciones y de bloques de funciones
(véase página 209)
.
Variables de entrada
En esta tabla se describen las variables de entrada:
Entrada Tipo Valor inicial Descripción
Axis AXIS_REF_PTO - Nombre del eje (instancia) para el que se ejecutará el
bloque de funciones. En Dispositivos, el nombre
aparece en la configuración del controlador.
Enable BOOL FALSE Cuando es TRUE se ejecuta el bloque de funciones.
Los valores de las entradas de los bloques de
funciones pueden ser modificados continuamente y las
salidas se actualizan también continuamente.
Cuando es FALSE, finaliza la ejecución del bloque de
funciones y se restablecen sus salidas.
ParameterNumber INT 0 ID del parámetro solicitado (PTO_PARAMETER
(véase página 81)
)

Bloques de funciones administrativas
EIO0000003080 12/2019 159
Variables de salida
En esta tabla se describen las variables de salida:
Salida Tipo Valor inicial Descripción
Valid BOOL FALSE Los datos válidos están disponibles en el pin de
salida del bloque de funciones.
Error BOOL FALSE Si es TRUE, indica que se ha detectado un error. La
ejecución del bloque de funciones ha finalizado.
ErrorId PTO_ERROR PTO_ERROR.NoError Cuando Error es TRUE: código del error detectado
(véase página 82)
.
Value DINT 0 Valor del parámetro solicitado.

Bloques de funciones administrativas
160 EIO0000003080 12/2019
MC_WriteParameter_PTO: escribir parámetros en el PTO
Descripción del bloque de funciones
Este bloque de funciones se utiliza para escribir parámetros al PTO.
Representación gráfica
Representación IL y ST
Para ver la representación general en lenguaje IL o ST, consulte el capítulo Representación de
funciones y de bloques de funciones
(véase página 209)
.
Variables de entrada
En esta tabla se describen las variables de entrada:
Entrada Tipo Valor inicial Descripción
Axis AXIS_REF_PTO - Nombre del eje (instancia) para el que se ejecutará el
bloque de funciones. En Dispositivos, el nombre aparece
en la configuración del controlador.
Execute BOOL FALSE En el flanco ascendente, inicia la ejecución del bloque de
funciones.
En el flanco descendente, restablece las salidas del
bloque de funciones cuando finaliza su ejecución.
ParameterNumber INT 0 ID del parámetro solicitado (PTO_PARAMETER
(véase página 81)
)
Value DINT 0 Valor que se va a escribir para el parámetro solicitado.

Bloques de funciones administrativas
EIO0000003080 12/2019 161
Variables de salida
En esta tabla se describen las variables de salida:
Salida Tipo Valor inicial Descripción
Done BOOL FALSE Si es TRUE, indica que ha terminado la ejecución del
bloque de funciones sin detectar ningún error.
Error BOOL FALSE Si es TRUE, indica que se ha detectado un error. La
ejecución del bloque de funciones ha finalizado.
ErrorId PTO_ERROR PTO_ERROR.NoError Cuando Error es TRUE: código del error detectado
(véase página 82)
.

Bloques de funciones administrativas
162 EIO0000003080 12/2019
MC_ReadBoolParameter_PTO: obtención de parámetros BOOL del PTO
Descripción del bloque de funciones
Este bloque de funciones se utiliza para obtener parámetros BOOL desde el PTO.
Representación gráfica
Representación IL y ST
Para ver la representación general en lenguaje IL o ST, consulte el capítulo Representación de
funciones y de bloques de funciones
(véase página 209)
.
Variables de entrada
En esta tabla se describen las variables de entrada:
Entrada Tipo Valor inicial Descripción
Axis AXIS_REF_PTO - Nombre del eje (instancia) para el que se ejecutará
el bloque de funciones. En Dispositivos, el nombre
aparece en la configuración del controlador.
Enable BOOL FALSE Cuando es TRUE se ejecuta el bloque de funciones.
Los valores de las entradas de otros bloques de
funciones pueden ser modificados continuamente y
las salidas de bloques de funciones se actualizan
también continuamente.
Cuando es FALSE, finaliza la ejecución del bloque
de funciones y se restablecen sus salidas.
ParameterNumber INT 0 ID del parámetro solicitado (PTO_PARAMETER
(véase página 81)
)

Bloques de funciones administrativas
EIO0000003080 12/2019 163
Variables de salida
En esta tabla se describen las variables de salida:
Salida Tipo Valor inicial Descripción
Valid BOOL FALSE Los datos válidos están disponibles en el pin de
salida del bloque de funciones.
Error BOOL FALSE Si es TRUE, indica que se ha detectado un error. La
ejecución del bloque de funciones ha finalizado.
ErrorId PTO_ERROR PTO_ERROR.NoError Cuando Error es TRUE: código del error detectado
(véase página 82)
.
Value BOOL FALSE Valor del parámetro solicitado.

Bloques de funciones administrativas
164 EIO0000003080 12/2019
MC_WriteBoolParameter_PTO: escritura de parámetros BOOL en el PTO
Descripción del bloque de funciones
Este bloque de funciones se utiliza para escribir parámetros BOOL al PTO.
Representación gráfica
Representación IL y ST
Para ver la representación general en lenguaje IL o ST, consulte el capítulo Representación de
funciones y de bloques de funciones
(véase página 209)
.
Variables de entrada
En esta tabla se describen las variables de entrada:
Entrada Tipo Valor inicial Descripción
Axis AXIS_REF_PTO - Nombre del eje (instancia) para el que se ejecutará el
bloque de funciones. En Dispositivos, el nombre aparece
en la configuración del controlador.
Execute BOOL FALSE En el flanco ascendente, inicia la ejecución del bloque de
funciones.
En el flanco descendente, restablece las salidas del bloque
de funciones cuando finaliza su ejecución.
ParameterNumber INT 0 ID del parámetro solicitado (PTO_PARAMETER
(véase página 81)
)
Value BOOL FALSE Valor que se va a escribir para el parámetro solicitado.

Bloques de funciones administrativas
EIO0000003080 12/2019 165
Variables de salida
En esta tabla se describen las variables de salida:
Salida Tipo Valor inicial Descripción
Done BOOL FALSE Si es TRUE, indica que ha terminado la ejecución del
bloque de funciones sin detectar ningún error.
Error BOOL FALSE Si es TRUE, indica que se ha detectado un error. La
ejecución del bloque de funciones ha finalizado.
ErrorId PTO_ERROR PTO_ERROR.NoError Cuando Error es TRUE: código del error detectado
(véase página 82)
.

Bloques de funciones administrativas
166 EIO0000003080 12/2019
Bloques de funciones PR OBE
Sección 7.3
Bloques de funciones PROBE
Descripción general
En esta sección se describen los bloques de funciones PROBE.
Contenido de esta sección
Esta sección contiene los siguientes apartados:
Apartado Página
MC_TouchProbe_PTO: activación de un evento desencadenador 167
MC_AbortTrigger_PTO: anulación/desactivación de los bloques de funciones 169

Bloques de funciones administrativas
EIO0000003080 12/2019 167
MC_TouchProbe_PTO: activación de un evento desencadenador
Descripción del bloque de funciones
Este bloque de funciones se utiliza para activar un evento desencadenador en la entrada PROBE.
Este evento desencadenador permite registrar la posición del eje y/o iniciar un movimiento
almacenado en el búfer.
Representación gráfica
Representación IL y ST
Para ver la representación general en lenguaje IL o ST, consulte el capítulo Representación de
funciones y de bloques de funciones
(véase página 209)
.
Variables de entrada
En esta tabla se describen las variables de entrada:
Entrada Tipo Valor inicial Descripción
Axis AXIS_REF_
PTO
- Nombre del eje (instancia) para el que se ejecutará el bloque de
funciones. En Dispositivos, el nombre aparece en la configuración
del controlador.
Execute BOOL FALSE En el flanco ascendente, inicia la ejecución del bloque de funciones.
En el flanco descendente, restablece las salidas del bloque de
funciones cuando finaliza su ejecución.
WindowOnly BOOL FALSE Si es TRUE, solamente utiliza la ventana definida por
FirstPosition y LastPosition para aceptar eventos
desencadenadores.
FirstPosition DINT 0 Inicia la posición absoluta desde donde (dirección positiva) se
aceptan eventos desencadenadores (valor incluido en ventana).
LastPosition DINT 0 Detiene la posición absoluta hasta donde (dirección positiva) se
aceptan eventos desencadenadores (valor incluido en ventana).
TriggerLevel BOOL FALSE Si es FALSE, captura de posición en el flanco descendente.
SI es TRUE, captura de posición en el flanco ascendente.

Bloques de funciones administrativas
168 EIO0000003080 12/2019
Variables de salida
En esta tabla se describen las variables de salida:
NOTA: Sólo es válido el primer evento después del flanco ascendente en el pin Busy del bloque
de funciones MC_TouchProbe_PTO. Una vez establecido el pin de la salida Done se ignorarán
los eventos posteriores. Se debe volver a activar el bloque de funciones para dar respuesta a otros
eventos.
Salida Tipo Valor inicial Descripción
Done BOOL FALSE Si es TRUE, indica que ha terminado la ejecución
del bloque de funciones sin detectar ningún error.
Busy BOOL FALSE Si es TRUE indica que la ejecución del bloque de
funciones está en curso.
CommandAborted BOOL FALSE Finaliza la ejecución del bloque de funciones por
cancelación debida a otro comando de movimiento
o a un error detectado.
Error BOOL FALSE Si es TRUE, indica que se ha detectado un error. La
ejecución del bloque de funciones ha finalizado.
ErrorId PTO_ERROR PTO_ERROR.NoError Cuando Error es TRUE: código del error
detectado
(véase página 82)
.
RecordedPosition DINT 0 Posición en la que se detectó un evento
desencadenador.

Bloques de funciones administrativas
EIO0000003080 12/2019 169
MC_AbortTrigger_PTO: anulación/desactivación de los bloques de funciones
Descripción del bloque de funciones
Este bloque de funciones se utiliza para anular bloques de funciones conectados a eventos
desencadenadores (por ejemplo, MC_TouchProbe_PTO).
Representación gráfica
Representación IL y ST
Para ver la representación general en lenguaje IL o ST, consulte el capítulo Representación de
funciones y de bloques de funciones
(véase página 209)
.
Variables de entrada
En esta tabla se describen las variables de entrada:
Variables de salida
En esta tabla se describen las variables de salida:
Entrada Tipo Valor inicial Descripción
Axis AXIS_REF_PTO - Nombre del eje (instancia) para el que se ejecutará el
bloque de funciones. En Dispositivos, el nombre aparece
en la configuración del controlador.
Execute BOOL FALSE En el flanco ascendente, inicia la ejecución del bloque de
funciones.
En el flanco descendente, restablece las salidas del
bloque de funciones cuando finaliza su ejecución.
Salida Tipo Valor inicial Descripción
Done BOOL FALSE Si es TRUE, indica que ha terminado la ejecución del
bloque de funciones sin detectar ningún error.
Error BOOL FALSE Si es TRUE, indica que se ha detectado un error. La
ejecución del bloque de funciones ha finalizado.
ErrorId PTO_ERROR PTO_ERROR.NoError Cuando Error es TRUE: código del error detectado
(véase página 82)
.

Bloques de funciones administrativas
170 EIO0000003080 12/2019
Bloques de funciones de tratamiento de errores
Sección 7.4
Bloques de funciones de tratamiento de errores
Descripción general
En esta sección se describen los bloques de funciones de tratamiento de errores.
Contenido de esta sección
Esta sección contiene los siguientes apartados:
Apartado Página
MC_ReadAxisError_PTO: obtención del error de control del eje 171
MC_Reset_PTO: restablecimiento de todos los errores relacionados con el eje 173

Bloques de funciones administrativas
EIO0000003080 12/2019 171
MC_ReadAxisError_PTO: obtención del error de control del eje
Descripción del bloque de funciones
Este bloque de funciones recupera el error de control de ejes. Si no hay ningún error de control de
ejes pendiente, el bloque de funciones devuelve AxisErrorId =0.
Representación gráfica
Representación IL y ST
Para ver la representación general en lenguaje IL o ST, consulte el capítulo Representación de
funciones y de bloques de funciones
(véase página 209)
.
Variables de entrada
En esta tabla se describen las variables de entrada:
Entrada Tipo Valor inicial Descripción
Axis AXIS_REF_PTO - Nombre del eje (instancia) para el que se ejecutará el bloque
de funciones. En Dispositivos, el nombre aparece en la
configuración del controlador.
Enable BOOL FALSE Cuando es TRUE se ejecuta el bloque de funciones. Los
valores de las entradas de los bloques de funciones pueden ser
modificados continuamente y las salidas se actualizan también
continuamente.
Cuando es FALSE, finaliza la ejecución del bloque de
funciones y se restablecen sus salidas.

Bloques de funciones administrativas
172 EIO0000003080 12/2019
Variables de salida
En esta tabla se describen las variables de salida:
Salida Tipo Valor inicial Descripción
Valid BOOL FALSE Los datos válidos están disponibles en el pin de
salida del bloque de funciones.
Error BOOL FALSE Si es TRUE, indica que se ha detectado un
error. La ejecución del bloque de funciones ha
finalizado.
ErrorId PTO_ERROR PTO_ERROR.NoError Cuando Error es TRUE: código del error
detectado
(véase página 82)
.
AxisErrorId PTO_ERROR PTO_ERROR.NoError Índice 1000 de PTO_ERROR
(véase página 82)
.

Bloques de funciones administrativas
EIO0000003080 12/2019 173
MC_Reset_PTO: restablecimiento de todos los errores relacionados con el eje
Descripción del bloque de funciones
Si es posible, este bloque de funciones restablece todos los errores relacionados con los ejes, lo
que permite una transición del estado ErrorStop a Standstill. No afecta a la salida de las instancias
de los bloques de funciones.
Representación gráfica
Representación IL y ST
Para ver la representación general en lenguaje IL o ST, consulte el capítulo Representación de
funciones y de bloques de funciones
(véase página 209)
.
Variables de entrada
En esta tabla se describen las variables de entrada:
Variables de salida
En esta tabla se describen las variables de salida:
Entrada Tipo Valor inicial Descripción
Axis AXIS_REF_PTO - Nombre del eje (instancia) para el que se ejecutará el
bloque de funciones. En Dispositivos, el nombre aparece
en la configuración del controlador.
Execute BOOL FALSE En el flanco ascendente, inicia la ejecución del bloque de
funciones.
En el flanco descendente, restablece las salidas del
bloque de funciones cuando finaliza su ejecución.
Salida Tipo Valor inicial Descripción
Done BOOL FALSE Si es TRUE, indica que ha terminado la ejecución del
bloque de funciones sin detectar ningún error.
Error BOOL FALSE Si es TRUE, indica que se ha detectado un error. La
ejecución del bloque de funciones ha finalizado.
ErrorId PTO_ERROR PTO_ERROR.NoError Cuando Error es TRUE: código del error detectado
(véase página 82)
.

Bloques de funciones administrativas
174 EIO0000003080 12/2019
Añadir un bloque de funcion es administrativas
Sección 7.5
Añadir un bloque de funciones administrativas
Añadir un bloque de funciones administrativas
Procedimiento
Siga estos pasos para añadir y crear la instancia de un bloque de funciones administrativas:
Paso Action
1 Añadir un POU
(véase EcoStruxure Machine Expert, Guía de programación)
a Aplicaciones.
2 Seleccione la ficha Bibliotecas en el catálogo de software y haga clic en Bibliotecas.
Seleccione Controlador → M241 → M241 PTOPWM → PTO → Administrativas →
MC_xxxxxx_PTO en la lista, arrastre y suelte el elemento en la ventana de POU.
3 Cree la instancia del bloque de funciones haciendo clic en:
4 Asociar las variables de entradas/salidas
(véase página 147)
del bloque de funciones.

EIO0000003080 12/2019 175
Modicon M 241 Logic Controller
Modulación de ancho de pulsos (PWM)
EIO0000003080 12/2019
Modulación de ancho de pulsos (PWM)
Parte III
Modulación de ancho de pulsos (PWM)
Descripción general
Esta parte describe la función de Pulse Width Modulation
Contenido de esta parte
Esta parte contiene los siguientes capítulos:
Capítulo Nombre del capítulo Página
8 Introducción 177
9 Configuración y programación 183
10 Tipos de datos 191

Modulación de ancho de pulsos (PWM)
176 EIO0000003080 12/2019

EIO0000003080 12/2019 177
Modicon M 241 Logic Controller
Introducción
EIO0000003080 12/2019
Introducción
Capítulo 8
Introducción
Descripción general
En este capítulo se proporciona una descripción de las funciones de PWM.
Contenido de este capítulo
Este capítulo contiene los siguientes apartados:
Apartado Página
Descripción 178
Convención de asignación de nombres de FreqGen/PWM 180
Funciones de sincronización y habilitación 181

Introducción
178 EIO0000003080 12/2019
Descripción
Descripción general
La función de modulación de ancho de pulsos genera una señal de onda de pulso programable en
una salida especializada con un ciclo de servicio y una frecuencia ajustables.
Forma de señal
La forma de señal depende de los siguientes parámetros de entrada:
Frequency configurable:
de 0,1 Hz a 20 kHz con incrementos de 0,1 Hz (salidas rápidas: Q0-Q3)
de 0,1 Hz a 1 kHz con incrementos de 0,1 Hz (salidas normales: Q4-Q7)
Ciclo de servicio de la señal de salida del 0 % al 100 % con incrementos de 1 % o de 0,1 % con
HighPrecision.
Ciclo de servicio=Tp/T
Tp ancho de pulso
T periodo de pulso (1/frecuencia)
Modificar el ciclo de servicio en el programa modula el ancho de la señal. A continuación, se facilita
la ilustración de una señal de salida con ciclos de servicio cambiantes.

Introducción
EIO0000003080 12/2019 179
En la siguiente ilustración se muestra un ciclo de servicio del 20 %:

Introducción
180 EIO0000003080 12/2019
Convención de asignación de nombres de FreqGen/PWM
Definición
Generador de frecuencias y Modulación de ancho de pulsos utilizan 1 salida física rápida y hasta
2 entradas físicas.
En este documento, utilice la siguiente convención de asignación de nombres:
Nombre Descripción
SYNC Función de sincronización
(véase página 181)
.
EN Función de habilitación
(véase página 181)
.
IN_SYNC Entrada física dedicada a la función SYNC.
IN_EN Entrada física dedicada a la función EN.
OUT_PWM Salida física dedicada a FreqGen o PWM.

Introducción
EIO0000003080 12/2019 181
Funciones de sincronización y habilitación
Introducción
En esta sección se presentan las funciones utilizadas por FreqGen/PWM:
Función de sincronización
Función de habilitación
Cada función utiliza los dos bits de bloques de funciones siguientes:
Bit EN_(función): establecer este bit en 1 permite que la (función) opere en una entrada física
externa si se ha configurado.
Bit F_(función): establecer este bit en 1 fuerza la (función).
En el diagrama siguiente se explica cómo se gestiona la función:
NOTA: (función) hace referencia a Enable (para la función de habilitación) o Sync (para la función
de sincronización).
Si se requiere la entrada física, habilítela en la pantalla de configuración
(véase página 184)
.
Función de sincronización
La función Sincronización se utiliza para interrumpir el ciclo de FreqGen/PWM actual y reiniciar un
nuevo ciclo.
Función Habilitar
La función Habilitar se utiliza para activar FreqGen/PWM:

Introducción
182 EIO0000003080 12/2019

EIO0000003080 12/2019 183
Modicon M 241 Logic Controller
Configuración y programación
EIO0000003080 12/2019
Configuración y programación
Capítulo 9
Configuración y programación
Descripción general
En este capítulo se proporcionan las directrices de configuración y programación para utilizar las
funciones de PWM.
Contenido de este capítulo
Este capítulo contiene los siguientes apartados:
Apartado Página
Configuración 184
PWM_M241: control de una señal de modulación de ancho de pulsos 187
Programación del bloque de funciones PWM 189

Configuración y programación
184 EIO0000003080 12/2019
Configuración
Descripción general
Se pueden configurar cuatro funciones de modulación de ancho de pulsos en el controlador.
Adición de una función de modulación de ancho de pulsos
Para añadir una función de modulación de ancho de pulsos, realice lo siguiente:
Parámetros
En esta figura se muestra un ejemplo de una ventana de configuración de PWM:
Paso Acción
1 Haga doble clic en el nodo Generadores de pulsos del controlador en Dispositivos.
2 Haga doble clic en el valor Función de generación de pulsos y seleccione PWM.
Resultado: Aparecen los parámetros de configuración de PWM.

Configuración y programación
EIO0000003080 12/2019 185
La función de modulación de ancho de pulsos contiene los siguientes parámetros:
Parámetro Valor Predeterminado Descripción
General Nombre
de
instancia
- PWM_0-PWM_3 Establezca el nombre de instancia de la
función PWM.
Un punto
de salida
Deshabilitado
Q0-Q3 (salidas rápidas)
Q4-Q7 (salidas
normales)(1)
Deshabilitado Seleccione la salida de controlador utilizada
para la señal A.
Entradas de
control/
entrada
SYNC
Posición Deshabilitado
I0-I7 (entradas rápidas)
I8-13 (entradas normales
TM241•24)
I8-15 (entradas normales
TM241•40)
Deshabilitado Seleccione la entrada del controlador utilizada
para predefinir la función PWM.
Filtro de
rebote
0,000
0,001
0,002
0,005
0,010
0,1
1,5
1
5
0,005 Establezca el valor de filtrado para reducir el
efecto de rebote de la entrada SYNC (en ms).
Flanco
SYNC
Ascendente
Descendente
Ambos
Ascendente Seleccione la condición para preajustar la
función PWM con la entrada SYNC.
Entradas de
control/
entrada EN
Posición Deshabilitado
I0-I7 (entradas rápidas)
I8-15 (entradas normales
TM241•40)
I8-13 (entradas normales
TM241•24)
Deshabilitado Seleccione la entrada del controlador utilizada
para habilitar la función PWM.
Filtro de
rebote
0,000
0,001
0,002
0,005
0,010
0,1
1,5
1
5
0,005 Establezca el valor de filtrado para reducir el
efecto de rebote de la entrada EN (en ms).
(1) No disponible para referencias de M241 Logic Controller con salidas de relé.

Configuración y programación
186 EIO0000003080 12/2019
Sincronización con un evento externo
En un flanco ascendente de la entrada física IN_SYNC (con EN_Sync = 1), el ciclo actual se
interrumpe y PWM reinicia un ciclo nuevo.
En esta ilustración se muestra un diagrama de pulsos para el bloque de funciones Pulse Width
Modulation con la entrada IN_SYNC:

Configuración y programación
EIO0000003080 12/2019 187
PWM_M241: control de una señal de modulación de ancho de pulsos
Descripción general
El bloque de funciones de Pulse Width Modulation controla una salida de señal modulada
de ancho de pulsos en la frecuencia y ciclo de servicio especificados.
Representación gráfica
Esta ilustración corresponde a un bloque de funciones Pulse Width Modulation:
Representación IL y ST
Para ver la representación general en lenguaje IL o ST, consulte el capítulo
Diferencias entre una
función y un bloque de funciones (véase página 210)
.
Variables de entrada
En esta tabla se describen las variables de entrada:
Entradas Tipo Comentario
EN_Enable BOOL TRUE = autoriza la habilitación de PWM mediante la entrada IN_EN
(si se ha configurado).
F_Enable BOOL TRUE = habilita la Pulse Width Modulation.
EN_SYNC BOOL TRUE = autoriza el reinicio mediante la entrada IN_Sync del
temporizador interno correspondiente a la referencia de tiempo (si se
ha configurado).
F_SYNC BOOL En un flanco ascendente, fuerza un reinicio del temporizador interno
correspondiente a la referencia de tiempo.
HighPrecision BOOL Si es FALSE (predeterminado), el ciclo de servicio se especifica en
unidades del 1 %. Consulte Duty a continuación.
Si es TRUE, el ciclo de servicio
(véase página 178)
se especifica en
unidades del 0,1 %.
NOTA: El valor del parámetro Duty se actualiza automáticamente a
0-100 o 0-1000 según el valor seleccionado.

Configuración y programación
188 EIO0000003080 12/2019
Variables de salida
En esta tabla se describen las variables de salida:
NOTA: Cuando por algún motivo no se puede alcanzar la frecuencia requerida, la salida
InFrequency no se establece como TRUE, pero Error permanece como FALSE.
Frequency DWORD Frecuencia de la señal de salida de Pulse Width Modulation en
décimas de Hz (rango: de 1 [0,1 Hz] a 200.000 [20 kHz]).
Duty UINT Ciclo de servicio de la señal de salida de Pulse Width
Modulation en unidades del 1 % (rango: 0-100 [0 %-100 %]).
NOTA: Si la entrada HighPrecision se establece en TRUE, el ciclo
de servicio es en unidades del 0,1 % (rango: 0-1000 [0 %-100 %]).
Entradas Tipo Comentario
Salidas Tipo Comentario
InFrequency BOOL TRUE = La señal de Pulse Width Modulation se está
emitiendo actualmente en la frecuencia y ciclo de servicio
especificados.
FALSE =
No se puede acceder a la frecuencia requerida por algún
motivo.
F_Enable se establece en False.
EN_Enable se establece en False o no se detecta
señal en la entrada física EN Input (si se ha configurado).
Ocupado BOOL Busy se emplea para indicar que se está modificando un
comando: se modifica la frecuencia.
Se establece en TRUE cuando se ha establecido el
comando Enable y cuando ha cambiado la frecuencia o el
ciclo de trabajo.
Se restablece en FALSE cuando InFrequency o Error
están establecidos o cuando el comando Enable se ha
restablecido.
Error BOOL TRUE = indica que se ha detectado un error.
ErrID FREQGEN_PWM_ERR_TYPE
(véase página 191)
Cuando se establece Error: tipo de error detectado.

Configuración y programación
EIO0000003080 12/2019 189
Programación del bloque de funciones PWM
Procedimiento
Siga estos pasos para programar un bloque de funciones PWM:
Paso Acción
1 Seleccione la ficha Bibliotecas en el Catálogo de software y haga clic en Bibliotecas.
Seleccione Controlador → M241 → M241 PTOPWM → PWM → PWM_M241 en la lista, arrastre el
elemento y suéltelo en la ventana POU.
2
Seleccione la instancia de bloque de funciones haciendo clic en .
Aparece el cuadro de diálogo Accesibilidad. Seleccione la variable global que hace referencia al
PWM añadido
(véase página 184)
durante la configuración y confirme la operación.
NOTA: Si la instancia de bloque de funciones no es visible, verifique que el PWM esté configurado.
3 Las entradas y salidas están detalladas en el bloque de funciones
(véase página 187)
.

Configuración y programación
190 EIO0000003080 12/2019

EIO0000003080 12/2019 191
Modicon M 241 Logic Controller
Tipos de datos
EIO0000003080 12/2019
Tipos de datos
Capítulo 10
Tipos de datos
FREQGEN_PWM_ERR_TYPE
Enumeración de tipos de error
En esta tabla se muestran los valores para la enumeración FREQGEN_PWM_ERR_TYPE:
Enumerador Valor Descripción
FREQGEN_PWM_NO_ERROR 0 No se ha detectado ningún error.
FREQGEN_PWM_UNKNOWN_REF 1 La referencia al FreqGen/PWM no es válida.
FREQGEN_PWM_UNKNOWN_PARAMETER 2 El tipo de parámetro es desconocido en la modalidad
actual.
FREQGEN_PWM_INVALID_PARAMETER 3 Un valor de parámetro no es válido o la combinación de
los valores de los parámetros no es válida.
FREQGEN_PWM_COM_ERROR 4 Error de comunicación con FreqGen/PWM.
FREQGEN_PWM_AXIS_ERROR 5 PWM está en estado de error ("PWMError" se establece
en instancia PTOSimple). No es posible realizar ningún
movimiento hasta que se haya eliminado el error.

Tipos de datos
192 EIO0000003080 12/2019

EIO0000003080 12/2019 193
Modicon M 241 Logic Controller
Generador de frecuencias (FreqGen)
EIO0000003080 12/2019
Generador de frecuencias (FreqGen)
Parte IV
Generador de frecuencias (FreqGen)
Descripción general
En esta parte se describe la función Frequency Generator.
Contenido de esta parte
Esta parte contiene los siguientes capítulos:
Capítulo Nombre del capítulo Página
11 Introducción 195
12 Configuración y programación 199

Generador de frecuencias (FreqGen)
194 EIO0000003080 12/2019

EIO0000003080 12/2019 195
Modicon M 241 Logic Controller
Introducción
EIO0000003080 12/2019
Introducción
Capítulo 11
Introducción
Descripción general
En este capítulo se proporciona una descripción de las funciones de FreqGen.
Contenido de este capítulo
Este capítulo contiene los siguientes apartados:
Apartado Página
Descripción 196
Convención de asignación de nombres de FreqGen 197
Funciones de sincronización (Sync) y habilitación (Enable) 198

Introducción
196 EIO0000003080 12/2019
Descripción
Descripción general
La función de generador de frecuencias genera una señal de onda cuadrada en canales de salida
dedicados con un ciclo de servicio fijo (50%).
Frecuencia es configurable de 0,1 Hz a 100 kHz con un paso de 0,1 Hz.



EIO0000003080 12/2019 199
Modicon M 241 Logic Controller
Configuración y programación
EIO0000003080 12/2019
Configuración y programación
Capítulo 12
Configuración y programación
Descripción general
En este capítulo se proporcionan las directrices de configuración y programación para utilizar las
funciones de FreqGen.
Contenido de este capítulo
Este capítulo contiene los siguientes apartados:
Apartado Página
Configuración 200
FrequencyGenerator_M241: control de una señal de onda cuadrada 203
Programar 205

Configuración y programación
200 EIO0000003080 12/2019
Configuración
Descripción general
Pueden configurarse hasta 4 funciones de generador de frecuencias en el controlador.
Añadir una función en el generador de frecuencias
Para añadir una función en el generador de frecuencias, siga estos pasos:
Parámetros
En esta figura se muestra un ejemplo de una ventana de configuración del generador de
frecuencias:
Paso Acción
1 Haga doble clic en el nodo Generadores de pulsos del controlador en Dispositivos.
2 Haga doble clic en el valor de Función de generación de pulsos y seleccione FreqGen.
Resultado: Se muestran los parámetros de configuración del generador de frecuencias.

Configuración y programación
EIO0000003080 12/2019 201
La función de generador de frecuencias contiene los siguientes parámetros:
Parámetro Valor Predeterminado Descripción
General Nombre de
instancia
- FreqGen0-
FreqGen3
Establezca el nombre de instancia de la
función de generador de frecuencias.
Punto de
salida A
Deshabilitado
Q0-Q3 (salidas rápidas)
Q4-Q7 (salidas
normales)(1)
Deshabilitado Seleccione la salida de controlador utilizada
para la señal A.
Entradas de
control/
entrada
SYNC
Posición Deshabilitado
I0-I7 (entradas rápidas)
I8-13 (entradas
normales TM241•24)
I8-15 (entradas
normales TM241•40)
Deshabilitado Seleccione la entrada del controlador
utilizada para predefinir la función del
generador de frecuencias.
Filtro de
rebote
0,000
0,001
0,002
0,005
0,010
0,1
1,5
1
5
0,005 Establezca el valor de filtrado para reducir el
efecto de rebote de la entrada SYNC (en ms).
Flanco
SYNC
Ascendente
Descendente
Ambos
Ascendente Seleccione la condición para preajustar la
función de generador de frecuencias con la
entrada SYNC.
Entradas de
control/
entrada EN
Posición Deshabilitado
I0-I7 (entradas rápidas)
I8-15 (entradas
normales TM241•40)
I8-13 (entradas
normales TM241•24)
Deshabilitado Seleccione la entrada del controlador
utilizada para habilitar la función del
generador de frecuencias.
Filtro de
rebote
0,000
0,001
0,002
0,005
0,010
0,1
1,5
1
5
0,005 Establezca el valor de filtrado para reducir el
efecto de rebote de la entrada EN (en ms).
(1) No disponible para referencias de M241 Logic Controller con salidas de relé.

Configuración y programación
202 EIO0000003080 12/2019
Sincronización con un evento externo
En un flanco ascendente de la entrada física IN_SYNC (con EN_Sync = 1), el ciclo actual se
interrumpe y FreqGen reinicia un ciclo nuevo.
En esta ilustración se muestra un diagrama de pulsos para el bloque de funciones del generador
de frecuencias con la entrada IN_SYNC:

Configuración y programación
EIO0000003080 12/2019 203
FrequencyGenerator_M241: control de una señal de onda cuadrada
Descripción general
El bloque de funciones del Frequency Generator controla una salida de señal de ondas
cuadradas en la frecuencia especificada.
Representación gráfica (LD/FBD)
Esta ilustración corresponde a un bloque de funciones Frequency Generator:
Representación IL y ST
Para ver la representación general en lenguaje IL o ST, consulte el capítulo
Diferencias entre una
función y un bloque de funciones (véase página 210)
.
Variables de entrada
En esta tabla se describen las variables de entrada:
Entradas Tipo Comentario
EN_Enable BOOL TRUE = autoriza la habilitación del Frequency Generator mediante la entrada
IN_EN (si se ha configurado).
F_Enable BOOL TRUE = habilita la Frequency Generator.
EN_SYNC BOOL TRUE = autoriza el reinicio mediante la entrada IN_SYNC del temporizador interno
correspondiente a la referencia de tiempo (si se ha configurado).
F_SYNC BOOL En el flanco ascendente, fuerza un reinicio del temporizador interno
correspondiente a la referencia de tiempo.
Frequency DWORD Frecuencia de la señal de salida del Frequency Generator en décimas de Hz.
(Rango: mín. 1 [0,1 Hz]-máx. 1.000.000 [100 kHz])

Configuración y programación
204 EIO0000003080 12/2019
Variables de salida
En esta tabla se describen las variables de salida:
NOTA: Cuando por algún motivo no se puede alcanzar la frecuencia requerida, la salida
InFrequency no se establece como TRUE, pero Error permanece como FALSE.
NOTA: Las salidas se fuerzan a 0 cuando el controlador lógico se encuentra en el estado
STOPPED.
Salidas Tipo Comentario
InFrequency BOOL TRUE = la señal del Frequency Generator se emite en
la frecuencia especificada.
FALSE =
No se puede acceder a la frecuencia requerida por algún
motivo.
F_Enable se establece en False.
EN_Enable se establece en False o no se detecta
señal en la entrada física EN Input (si se ha configurado).
Busy BOOL Busy se emplea para indicar que se está modificando un
comando: se modifica la frecuencia.
Se establece en TRUE cuando se ha establecido el
comando Enable y cuando ha cambiado la frecuencia.
Se restablece en FALSE cuando InFrequency o Error
están establecidos o cuando el comando Enable se ha
restablecido.
Error BOOL TRUE = indica que se ha detectado un error.
ErrID FREQGEN_PWM_ERR_TYPE
(véase página 191)
Cuando se establece Error: tipo de error detectado.

Configuración y programación
EIO0000003080 12/2019 205
Programar
Procedimiento
Siga estos pasos para programar un bloque de funciones Frequency Generator:
Paso Acción
1 Seleccione la ficha Bibliotecas en el Catálogo de software y haga clic en Bibliotecas.
Seleccione Controlador → M241 → M241 PTOPWM → FrequencyGenerator →
FrequencyGenerator_M241 en la lista, arrastre el elemento y suéltelo en la ventana POU.
2
Seleccione la instancia de bloque de funciones haciendo clic en .
Aparece la pantalla Accesibilidad. Seleccione la variable global que hace referencia al FreqGen
añadido
(véase página 200)
durante la configuración y confirme la operación.
NOTA: Si la instancia de bloque de funciones no es visible, verifique que el generador de
frecuencias esté configurado.
3 Las entradas y salidas están detalladas en el bloque de funciones
(véase página 203)
.

Configuración y programación
206 EIO0000003080 12/2019

EIO0000003080 12/2019 207
Modicon M 241 Logic Controller
EIO0000003080 12/2019
Apéndices

208 EIO0000003080 12/2019

EIO0000003080 12/2019 209
Modicon M 241 Logic Controller
Represen tación de funciones y de bloques de funciones
EIO0000003080 12/2019
Represen tación de funciones y de bloques de funciones
Apéndice A
Representación de funciones y de bloques de funciones
Descripción general
Cada función se puede representar en los lenguajes siguientes:
IL: Lista de instrucciones
ST: Texto estructurado
LD: Diagrama de contactos
FBD: Diagrama de bloques de funciones
CFC: Diagrama de función continua
En este capítulo se proporcionan funciones y ejemplos de representación de bloques de funciones
y se describe cómo utilizarlas en lenguajes IL y ST.
Contenido de este capítulo
Este capítulo contiene los siguientes apartados:
Apartado Página
Diferencias entre una función y un bloque de funciones 210
Cómo utilizar una función o un bloque de funciones en lenguaje IL 211
Cómo utilizar una función o un bloque de funciones en lenguaje ST 215

Representación de funciones y de bloques de funciones
210 EIO0000003080 12/2019
Diferencias entre una función y un bloque de funciones
Función
Una función:
Es una POU (Unidad de organización de programa) que devuelve un resultado inmediato.
Se le llama directamente por su nombre (y no a través de una instancia).
No tiene un estado persistente desde una llamada hasta la otra.
Se puede utilizar como un operando en otras expresiones.
Ejemplos: operadores booleanos (AND), cálculos, conversión (BYTE_TO_INT)
Bloque de funciones
Bloque de funciones
Es una POU (Unidad de organización de programa) que devuelve una o más salidas.
Debe llamarse a través de una instancia (copia del bloque de funciones con nombre y variables
dedicados).
Todas las instancias tienen un estado persistente (salidas y variables internas) de una llamada
a otra desde un bloque de funciones o programa.
Ejemplos: temporizadores, contadores
En el ejemplo, Timer_ON es una instancia del bloque de funciones TON:

Representación de funciones y de bloques de funciones
EIO0000003080 12/2019 211
Cómo utilizar una función o un bloque de funciones en lenguaje IL
Información general
En esta sección se describe cómo implementar una función y un bloque de funciones en lenguaje
IL.
Las funciones IsFirstMastCycle y SetRTCDrift y el bloque de funciones TON se utilizan
como ejemplos para mostrar implementaciones.
Uso de una función en lenguaje IL
En este procedimiento se describe cómo insertar una función en lenguaje IL:
Paso Acción
1 Abra o cree una nueva POU en el lenguaje de Lista de instrucciones (IL).
NOTA: Aquí no se detalla el procedimiento para crear una POU. Para obtener más información,
consulte Adding and Calling POUs
(véase EcoStruxure Machine Expert, Guía de programación)
.
2 Cree las variables que necesite la función.
3 Si la función tiene 1 o más entradas, empiece a cargar la primera entrada utilizando la instrucción
LD.
4 Inserte una nueva línea abajo y:
escriba el nombre de la función en la columna de operadores (campo izquierdo); o
utilice la opción Accesibilidad para seleccionar la función (seleccione Insertar llamada de módulo
en el menú contextual).
5 Si la función tiene más de una entrada y se utiliza Accesibilidad, se crea automáticamente el número
necesario de líneas con ??? en los campos de la derecha. Sustituya los ??? por el valor o la variable
adecuada que corresponda al orden de las entradas.
6 Inserte una línea nueva para almacenar el resultado de la función en la variable correspondiente:
escriba la instrucción ST en la columna del operador (campo de la izquierda) y el nombre de la
variable en el campo de la derecha.

Representación de funciones y de bloques de funciones
212 EIO0000003080 12/2019
Para ilustrar el procedimiento, considere las funciones IsFirstMastCycle (sin parámetro de
entrada) y SetRTCDrift (con parámetros de entrada) que se representan gráficamente a
continuación:
En lenguaje IL, el nombre de la función se utiliza directamente en la columna de operadores:
Función Representación gráfica
sin parámetros de entrada:
IsFirstMastCycle
con parámetros de
entrada:
SetRTCDrift
Función Representación en el Editor IL de POU
Ejemplo en IL de una
función sin parámetros
de entrada:
IsFirstMastCycle

Representación de funciones y de bloques de funciones
EIO0000003080 12/2019 213
Uso de un bloque de funciones en lenguaje IL
En este procedimiento se describe cómo insertar un bloque de funciones en lenguaje IL:
Ejemplo en IL de una
función con parámetros
de entrada:
SetRTCDrift
Función Representación en el Editor IL de POU
Paso Acción
1 Abra o cree una POU nueva en el lenguaje de Lista de instrucciones (IL).
NOTA: Aquí no se detalla el procedimiento para crear una POU. Para obtener más información,
consulte Adding and Calling POUs
(véase EcoStruxure Machine Expert, Guía de programación)
.
2 Cree las variables que necesita el bloque de funciones, incluido el nombre de instancia.
3 Se llama a los bloques de funciones utilizando una instrucción CAL:
Utilice la opción Accesibilidad para seleccionar el bloque de funciones (botón derecho del ratón y
seleccionar Insertar llamada de módulo en el menú contextual).
La instrucción CAL y la E/S necesaria se crean automáticamente.
Cada parámetro (E/S) es una instrucción:
Los valores de las entradas se establecen con ":=".
Los valores de las salidas se establecen con "=>".
4 En el campo de la derecha CAL, sustituya ??? por el nombre de la instancia.
5 Sustituya otros ??? por una variable apropiada o un valor inmediato.

Representación de funciones y de bloques de funciones
214 EIO0000003080 12/2019
Para ilustrar el procedimiento, considere este ejemplo con el bloque de funciones TON que se
representa gráficamente a continuación:
En lenguaje IL, el nombre del bloque de funciones se utiliza directamente en la columna de
operadores:
Bloque de funciones Representación gráfica
TON
Bloque de funciones Representación en el Editor IL de POU
TON

Representación de funciones y de bloques de funciones
EIO0000003080 12/2019 215
Cómo utilizar una función o un bloque de funciones en lenguaje ST
Información general
En esta sección se describe el modo de implementar una función y un bloque de funciones en
lenguaje ST.
La función SetRTCDrift y el bloque de funciones TON se utilizan como ejemplos para mostrar
implementaciones.
Uso de una función en lenguaje ST
En este procedimiento se describe cómo insertar una función en lenguaje ST:
Para ilustrar el procedimiento, considere la función SetRTCDrift que se representa
gráficamente a continuación:
Paso Acción
1 Abra o cree una POU nueva en el lenguaje de Texto estructurado (ST).
NOTA: Aquí no se detalla el procedimiento para crear una POU. Para obtener más información,
consulte Adding and Calling POUs
(véase EcoStruxure Machine Expert, Guía de programación)
.
2 Cree las variables que necesite la función.
3 Utilice la sintaxis general en el Editor POU ST para el lenguaje ST de una función. La sintaxis
general es:
FunctionResult:= FunctionName(VarInput1, VarInput2,.. VarInputx);
Función Representación gráfica
SetRTCDrift

Representación de funciones y de bloques de funciones
216 EIO0000003080 12/2019
El lenguaje ST de esta función es este:
Uso de un bloque de funciones en lenguaje ST
En este procedimiento se describe cómo insertar un bloque de funciones en lenguaje ST:
Para ilustrar el procedimiento, considere este ejemplo con el bloque de funciones TON que se
representa gráficamente a continuación:
Función Representación en el editor POU ST de
SetRTCDrift PROGRAM MyProgram_ST
VAR myDrift: SINT(-29..29) := 5;
myDay: DAY_OF_WEEK := SUNDAY;
myHour: HOUR := 12;
myMinute: MINUTE;
myRTCAdjust: RTCDRIFT_ERROR;
END_VAR
myRTCAdjust:= SetRTCDrift(myDrift, myDay, myHour, myMinute);
Paso Acción
1 Abra o cree una POU nueva en el lenguaje de Texto estructurado (ST).
NOTA: Aquí no se detalla el procedimiento para crear una POU. Para obtener más información
sobre la adición, declaración y llamadas de POU, consulte la documentación
(véase EcoStruxure
Machine Expert, Guía de programación)
relacionada.
2 Cree las variables de entrada y salida y la instancia requeridas para el bloque de funciones:
Las variables de entrada son los parámetros de entrada requeridos por el bloque de funciones
Las variables de salida reciben el valor devuelto por el bloque de funciones
3 Utilice la sintaxis general en el Editor POU ST para el lenguaje ST de un bloque de funciones. La
sintaxis general es:
FunctionBlock_InstanceName(Input1:=VarInput1, Input2:=VarInput2,...
Ouput1=>VarOutput1, Ouput2=>VarOutput2,...);
Bloque de
funciones
Representación gráfica
TON

Representación de funciones y de bloques de funciones
EIO0000003080 12/2019 217
En esta tabla se muestran ejemplos de una llamada de bloque de funciones en lenguaje ST:
Bloque de funciones Representación en el editor POU ST de
TON

Representación de funciones y de bloques de funciones
218 EIO0000003080 12/2019

EIO0000003080 12/2019 219
Modicon M 241 Logic Controller
Glosario
EIO0000003080 12/2019
Glosario
A
aceleración/deceleración
La aceleración es la tasa del cambio de velocidad, desde la Velocidad de inicio hasta la velocidad
de destino. La deceleración es la tasa del cambio de velocidad, desde la velocidad de destino
hasta la Velocidad de detención. Estos cambios de velocidad se gestionan de forma implícita
mediante la función PTO de acuerdo con los parámetros de aceleración, deceleración y ratio jerk
siguiendo un perfil de curva en S o trapezoidal.
aplicación
Un programa que incluye datos de configuración, símbolos y documentación.
B
byte
Un tipo que está codificado en un formato de 8 bits que, en el formato hexadecimal, va de 00 hex
a FF hex.
C
CFC
(
diagrama de función continua
) Un lenguaje de programación (una ampliación del estándar IEC
61131-3) basado en el lenguaje de diagrama de bloque de funciones (FBD) y que funciona como
un diagrama de flujo. Sin embargo, no se utiliza ninguna red y es posible un posicionamiento libre
de elementos gráficos, lo que permite bucles de realimentación. En cada bloque, las entradas se
sitúan a la izquierda y las salidas, a la derecha. Las salidas del bloque se pueden conectar a las
entradas de otros bloques para formar expresiones complejas.
controlador
Automatiza procesos industriales (también conocido como controlador lógico programable o
controlador programable).
curva en S rampa
Una rampa de aceleración/deceleración con un parámetro de JerkRatio mayor que 0%.

Glosario
220 EIO0000003080 12/2019
D
diagrama de bloques de funciones
Uno de los cinco lenguajes para lógica o control que cumplen con el estándar IEC 61131-3 para
sistemas de control. El diagrama de bloques de funciones es un lenguaje de programación
orientado gráficamente. Funciona con una lista de redes en la que cada red contiene una
estructura gráfica de cuadros y líneas de conexión que representa una expresión lógica o
aritmética, la llamada de un bloque de funciones, un salto o una instrucción de retorno.
F
FB
(
bloque de funciones
) Un práctico mecanismo de programación que consolida un grupo de
instrucciones de programación para realizar una acción específica y normalizada, por ejemplo, el
control de velocidad, el control de intervalo o el conteo. Un bloque de funciones se puede
componer de datos de configuración, un conjunto de parámetros de funcionamiento internos o
externos y, normalmente, una o diversas entradas y salidas de datos.
función
Una unidad de programación que dispone de una entrada y devuelve un resultado inmediato. No
obstante, a diferencia de los FBs, se llama directamente por su nombre (y no mediante una
instancia), no tiene un estado persistente desde una llamada hasta la siguiente y se puede utilizar
como un operando en otras expresiones de programación.
Ejemplos: operadores booleanos (AND), cálculos, conversiones (BYTE_TO_INT)
I
IEC 61131-3
Tercera parte de un estándar de tres partes de la IEC para los equipos de automatización
industriales. IEC 61131-3 se ocupa de los lenguajes de programación del controlador y define dos
estándares de lenguajes de programación gráficos y dos textuales. Los lenguajes de
programación gráficos son un diagrama de contactos y un diagrama de bloque de funciones. Los
lenguajes de programación textuales incluyen texto estructurado y lista de instrucciones.
IL
(
lista de instrucciones
) Un programa escrito en lenguaje que se compone de una serie de
instrucciones basadas en texto y ejecutadas secuencialmente por el controlador. Cada instrucción
incluye un número de línea, un código de instrucción y un operando (consulte IEC 61131-3).
INT
(
entero
) Un número entero con codificación de 16 bits.

Glosario
EIO0000003080 12/2019 221
J
jerk ratio
La proporción de cambio de la aceleración y deceleración como dependiente del tiempo.
L
LD
(
diagrama de contactos
) Una representación gráfica de instrucciones de un programa de
controlador con símbolos para contactos, bobinas y bloques en una serie de escalones ejecutados
de forma secuencial por un controlador (consulte IEC 61131-3).
M
movimiento absoluto
Un movimiento hacia una posición definida desde un punto de referencia.
P
POU
(
unidad de organización de programas
) Una declaración variable en el código fuente y el conjunto
de instrucciones correspondiente. Las POUs facilitan la reutilización modular de programas de
software, funciones y bloques de funciones. Una vez declaradas, cada una de las POUs está
disponible para las otras.
punto de referencia
El método utilizado para establecer el punto de referencia para un movimiento absoluto.
R
rampa trapezoidal
Una rampa de aceleración/deceleración con un parámetro de JerkRatio en el 0%.
S
ST
(
texto estructurado
) Un lenguaje que incluye instrucciones complejas y anidadas (por ejemplo,
bucles de repetición, ejecuciones condicionales o funciones). ST cumple con IEC 61131-3.

Glosario
222 EIO0000003080 12/2019
V
variable
Una unidad de memoria direccionada y modificada por un programa.
velocidad de detención
La máxima frecuencia ante la cual un motor paso a paso deja de producir movimiento con una
carga aplicada, sin pérdida de pasos.
velocidad de inicio
La mínima frecuencia a·la que·un motor paso a paso puede producir movimiento con una carga
aplicada y sin pérdida de pasos.

EIO0000003080 12/2019 223
Modicon M241 Logic Controller
Índice
EIO0000003080 12/2019
Índice
A
AXIS_REF_PTO,
76
B
bloques de funciones
FrequencyGenerator_M241,
203
PWM_M241,
187
E
eje
MC_AbortTrigger_PTO,
169
MC_Halt_PTO,
143
MC_Home_PTO,
129
MC_MoveAbsolute_PTO,
122
MC_MoveRelative_PTO,
115
MC_MoveVelocity_PTO,
107
MC_Power_PTO,
102
MC_ReadActualPosition_PTO,
151
MC_ReadActualVelocity_PTO,
149
MC_ReadAxisError_PTO,
171
MC_ReadBoolParameter_PTO,
162
MC_ReadMotionState_PTO,
155
MC_ReadParameter_PTO,
158
MC_ReadStatus_PTO,
153
MC_Reset_PTO,
173
MC_SetPosition_PTO,
135
MC_Stop_PTO,
138
MC_TouchProbe_PTO,
167
MC_WriteBoolParameter_PTO,
164
MC_WriteParameter_PTO,
160
F
FreqGen
FrequencyGenerator_M241,
203
programar FrequencyGenerator_M241,
205
FREQGEN_PWM_ERR_TYPE,
191
FrequencyGenerator_M241
control de una señal de onda cuadrada ,
203
programar,
205
funciones
cómo utilizar una función o un bloque de
funciones en lenguaje IL,
211
cómo utilizar una función o un bloque de
funciones en lenguaje ST,
215
diferencias entre una función y un bloque
de funciones,
210
habilitar,
181
PTO,
33
sincronizar,
181
funciones específicas,
27
G
generador de frecuencias
configuración,
200
descripción,
196
programar FrequencyGenerator_M241,
205
gestión de variables de estado
Busy,
28
CommandAborted,
28
Done,
28
ejecutar,
28
ErrID,
28
Error,
28

Índice
224 EIO0000003080 12/2019
M
M241 PTOPWM
FrequencyGenerator_M241,
203
MC_AbortTrigger_PTO,
169
MC_Halt_PTO,
143
MC_Home_PTO,
129
MC_MoveAbsolute_PTO,
122
MC_MoveRelative_PTO,
115
MC_MoveVelocity_PTO,
107
MC_Power_PTO,
102
MC_ReadActualPosition_PTO,
151
MC_ReadActualVelocity_PTO,
149
MC_ReadAxisError_PTO,
171
MC_ReadBoolParameter_PTO,
162
MC_ReadMotionState_PTO,
155
MC_ReadParameter_PTO,
158
MC_ReadStatus_PTO,
153
MC_Reset_PTO,
173
MC_SetPosition_PTO,
135
MC_Stop_PTO,
138
MC_TouchProbe_PTO,
167
MC_WriteBoolParameter_PTO,
164
MC_WriteParameter_PTO,
160
programar FrequencyGenerator_M241,
205
programar PWM_M241,
189
MC_AbortTrigger_PTO
anular o desactivar los bloques de funcio-
nes PTO,
169
MC_BUFFER_MODE,
77
MC_DIRECTION,
79
MC_Halt_PTO
controlar una detención del movimiento
PTO controlado,
143
MC_Home_PTO
controlar el eje para moverlo a una posi-
ción de referencia,
129
MC_MoveAbsolute_PTO
controlar el eje a la posición absoluta,
122
MC_MoveRelative_PTO
controlar el movimiento del eje relativo,
115
MC_MoveVelocity_PTO
controlar la velocidad del eje,
107
MC_Power_PTO
gestionar la alimentación del estado del
eje,
102
MC_ReadActualPosition_PTO
obtener la posición del eje,
151
MC_ReadActualVelocity_PTO
obtener la velocidad del eje,
149
MC_ReadAxisError_PTO
obtener el error de control del eje,
171
MC_ReadBoolParameter_PTO
obtener parámetros booleanos del PTO,
162
MC_ReadMotionState_PTO
obtener el estado de movimiento del eje,
155
MC_ReadParameter_PTO
obtener parámetros del PTO,
158
MC_ReadStatus_PTO
obtener el estado de movimiento del eje,
153
MC_Reset_PTO
restablecer errores relacionados con el
eje,
173
MC_SetPosition_PTO
forzar la posición de referencia del eje,
135
MC_Stop_PTO
controlar una detención del movimiento
controlado,
138
MC_TouchProbe_PTO
activar un evento desencadenador en la
entrada PROBE del PTO,
167
MC_WriteBoolParameter_PTO
configurar parámetros booleanos en el
PTO,
164
MC_WriteParameter_PTO
configurar parámetros en el PTO,
160
modulación de ancho de pulsos
configuración,
184
descripción,
178
programar PWM_M241,
189
PWM_M241,
187

Índice
EIO0000003080 12/2019 225
P
programar
PWM,
189
PTO
configuración,
39
funciones,
33
MC_AbortTrigger_PTO,
169
MC_Halt_PTO,
143
MC_Home_PTO,
129
MC_MoveAbsolute_PTO,
122
MC_MoveRelative_PTO,
115
MC_MoveVelocity_PTO,
107
MC_Power_PTO,
102
MC_ReadActualPosition_PTO,
151
MC_ReadActualVelocity_PTO,
149
MC_ReadAxisError_PTO,
171
MC_ReadBoolParameter_PTO,
162
MC_ReadMotionState_PTO,
155
MC_ReadParameter_PTO,
158
MC_ReadStatus_PTO,
153
MC_Reset_PTO,
173
MC_SetPosition_PTO,
135
MC_Stop_PTO,
138
MC_TouchProbe_PTO,
167
MC_WriteBoolParameter_PTO,
164
MC_WriteParameter_PTO,
160
PTO_ERROR,
82
PTO_HOMING_MODE,
80
PTO_PARAMETER,
81
PWM
programar PWM_M241,
189
PWM_M241,
187
PWM_M241
control de una señal de modulación de
ancho de pulsos,
187
programar,
189
R
rampa de aceleración,
47
rampa de deceleración,
47
Ratio de jerk,
47
T
tipos de unidades de datos
AXIS_REF_PTO,
76
FREQGEN_PWM_ERR_TYPE,
191
MC_BUFFER_MODE,
77
MC_DIRECTION,
79
PTO_ERROR,
82
PTO_HOMING_MODE,
80
PTO_PARAMETER,
81
tratamiento de errores
ErrID,
29
error,
29

Índice
226 EIO0000003080 12/2019

Modicon M241
Logic Controller
Guía de hardware
EIO0000003086.04
11/2022
www.se.com

Información legal
La marca Schneider Electric y cualquier otra marca comercial de Schneider Electric
SE y sus filiales mencionadas en esta guía son propiedad de Schneider Electric SE o
sus filiales. Todas las otras marcas pueden ser marcas comerciales de sus
respectivos propietarios. Esta guía y su contenido están protegidos por las leyes de
copyright aplicables, y se proporcionan exclusivamente a título informativo. Ninguna
parte de este manual puede ser reproducida o transmitida de cualquier forma o por
cualquier medio (electrónico, mecánico, fotocopia, grabación u otro), para ningún
propósito, sin el permiso previo por escrito de Schneider Electric.
Schneider Electric no concede ningún derecho o licencia para el uso comercial de la
guía o su contenido, excepto por una licencia no exclusiva y personal para
consultarla "tal cual".
La instalación, utilización, mantenimiento y reparación de los productos y equipos de
Schneider Electric la debe realizar solo personal cualificado.
Debido a la evolución de las normativas, especificaciones y diseños con el tiempo, la
información contenida en esta guía puede estar sujeta a cambios sin previo aviso.
En la medida permitida por la ley aplicable, Schneider Electric y sus filiales no
asumen ninguna responsabilidad u obligación por cualquier error u omisión en el
contenido informativo de este material o por las consecuencias derivadas o
resultantes del uso de la información contenida en el presente documento.
Como parte de un grupo de empresas responsables e inclusivas, estamos
actualizando nuestras comunicaciones que contienen terminología no inclusiva. Sin
embargo, hasta que completemos este proceso, es posible que nuestro contenido
todavía contenga términos estandarizados del sector que pueden ser considerados
inapropiados para nuestros clientes.
© 2022 - Schneider Electric. Todos los derechos reservados.

Tabla de contenido
Información de seguridad............................................................................5
Cualificación del personal......................................................................5
Uso previsto .........................................................................................6
Acerca de este libro ....................................................................................7
Introducción a Modicon M241 Logic Controller....................................13
Descripción general de M241 ....................................................................14
Descripción de M241 Logic Controller ..................................................14
Configuración máxima de hardware .....................................................18
Cartuchos de TMC4............................................................................21
Módulos de extensión de TM2 .............................................................21
Módulos de extensión TM3..................................................................25
Acopladores de bus TM3.....................................................................34
Módulos de extensión TM4..................................................................35
Interfaces de bus de campo TM5 .........................................................35
Interfaces de bus de campo TM5 CANopen ..........................................35
Interfaces de bus de campo TM7 CANopen ..........................................36
Accesorios .........................................................................................36
Funciones de M241 ..................................................................................38
Reloj en tiempo real (RTC) ..................................................................38
Gestión de entradas............................................................................41
Gestión de salidas ..............................................................................43
Run/Stop............................................................................................48
Tarjeta SD ..........................................................................................49
Instalación de M241 .................................................................................53
Reglas generales para la implementación de M241 Logic
Controller ...........................................................................................53
Características ambientales...........................................................53
Certificaciones y normas................................................................55
Instalación del M241 Logic Controller ...................................................56
Requisitos de instalación y mantenimiento ......................................56
Distancias y posiciones de montaje M241 Logic Controller ...............58
Riel DIN (segmento DIN) ...............................................................61
Instalación y desinstalación del controlador con extensiones............63
Montaje directo sobre la superficie de un panel ...............................65
Requisitos eléctricos de M241 .............................................................65
Prácticas recomendadas de cableado ............................................65
Cableado y características de la fuente de alimentación de
CC ...............................................................................................71
Cableado y características de la fuente de alimentación de
CA ...............................................................................................74
Puesta a tierra del sistema M241....................................................77
Modicon M241 Logic Controller..............................................................80
TM241C24R ............................................................................................81
Presentación de TM241C24R..............................................................81
TM241CE24R ..........................................................................................86
Presentación de TM241CE24R............................................................86
TM241CEC24R........................................................................................91
Presentación de TM241CEC24R .........................................................91
EIO0000003086.04 3

TM241C24T.............................................................................................96
Presentación de TM241C24T ..............................................................96
TM241CE24T.........................................................................................101
Presentación de TM241CE24T ..........................................................101
TM241CEC24T ......................................................................................106
Presentación de TM241CEC24T........................................................106
TM241C24U .......................................................................................... 111
Presentación de TM241C24U............................................................ 111
TM241CE24U ........................................................................................ 116
Presentación de TM241CE24U.......................................................... 116
TM241CEC24U......................................................................................121
Presentación de TM241CEC24U ....................................................... 121
TM241C40R ..........................................................................................126
Presentación de TM241C40R............................................................ 126
TM241CE40R ........................................................................................130
Presentación de TM241CE40R.......................................................... 130
TM241C40T...........................................................................................135
Presentación de TM241C40T ............................................................135
TM241CE40T.........................................................................................139
Presentación de TM241CE40T ..........................................................139
TM241C40U ..........................................................................................144
Presentación de TM241C40U............................................................ 144
TM241CE40U ........................................................................................148
Presentación de TM241CE40U.......................................................... 148
Canales de E/S incrustadas ....................................................................153
Entradas digitales .............................................................................153
Salidas de relé..................................................................................160
Salidas de transistor normales ........................................................... 165
Salidas de transistor rápidas.............................................................. 171
Comunicación de Modicon M241 Logic Controller ............................177
Puertos de comunicación integrados........................................................ 178
Puerto CANopen ..............................................................................178
Puerto Ethernet ................................................................................181
Puerto de programación USB mini-B .................................................. 183
Línea serie 1.....................................................................................184
Línea serie 2.....................................................................................187
Conexión del M241 Logic Controller a un PC ............................................ 189
Conexión del controlador a un PC ...................................................... 189
Glosario ....................................................................................................193
Índice ........................................................................................................198
4 EIO0000003086.04

Información de seguridad
Información de seguridad
Información importante
Lea atentamente estas instrucciones y observe el equipo para familiarizarse con
el dispositivo antes de instalarlo, utilizarlo, revisarlo o realizar su mantenimiento.
Los mensajes especiales que se ofrecen a continuación pueden aparecer a lo
largo de la documentación o en el equipo para advertir de peligros potenciales, o
para ofrecer información que aclara o simplifica los distintos procedimientos.
Tenga en cuenta
La instalación, manejo, puesta en servicio y mantenimiento de equipos eléctricos
deberán ser realizados sólo por personal cualificado. Schneider Electric no se
hace responsable de ninguna de las consecuencias del uso de este material.
Una persona cualificada es aquella que cuenta con capacidad y conocimientos
relativos a la construcción, el funcionamiento y la instalación de equipos
eléctricos, y que ha sido formada en materia de seguridad para reconocer y evitar
los riesgos que conllevan tales equipos.
Cualificación del personal
Sólo está autorizado para trabajar con este producto el personal que haya
recibido la formación adecuada, que esté familiarizado y entienda el contenido de
este manual y de cualquier otra documentación relacionada con el producto.
La persona cualificada debe ser capaz de detectar los peligros potenciales que
pueden surgir de la parametrización, la modificación de valores de parámetros y,
en general, de los equipos mecánicos, eléctricos o electrónicos. La persona
cualificada debe estar familiarizada con los estándares, disposiciones y
La inclusión de este icono en una etiqueta “Peligro” o “Advertencia” indica que existe
un riesgo de descarga eléctrica, que puede provocar lesiones si no se siguen las
instrucciones.
Éste es el icono de alerta de seguridad. Se utiliza para advertir de posibles riesgos
de lesiones. Observe todos los mensajes que siguen a este icono para evitar
posibles lesiones o incluso la muerte.
PELIGRO indica una situación de peligro que, si no se evita, provocará lesiones graves o
incluso la muerte.
!PELIGRO
ADVERTENCIA indica una situación de peligro que, si no se evita, podría provocar lesiones
graves o incluso la muerte.
ADVERTENCIA
!
ATENCIÓN indica una situación peligrosa que, si no se evita, podría provocar lesiones leves
o moderadas.
ATENCIÓN
!
AVISO indica una situación potencialmente peligrosa que, si no se evita, puede provocar
daños en el equipo.
AVISO
EIO0000003086.04 5

Información de seguridad
normativas para la prevención de accidentes industriales, que deberán seguir
cuando diseñen e implementen el sistema.
Uso previsto
Los productos descritos o afectados por este documento, junto con el software,
los accesorios y las opciones son controladores lógicos programables (referidos
en este documento como "Logic Controllers"), destinados a uso industrial según
las instrucciones, directrices, ejemplos e información de seguridad incluidos en el
presente documento y en la documentación adicional.
El producto sólo se puede utilizar si se cumplen todas las normativas y directivas
de seguridad, los requisitos especificados y los datos técnicos.
Antes de utilizar el producto, es necesario realizar una evaluación de riesgos en
función de la aplicación prevista. Según los resultados, se deberán implementar
las medidas de seguridad pertinentes.
Dado que el producto se utiliza como un componente de una máquina o de un
proceso general, es necesario garantizar la seguridad de las personas mediante
el diseño de este sistema general.
Utilice el producto solo con los cables y accesorios especificados. Utilice
únicamente accesorios y piezas de repuesto originales.
Cualquier uso distinto del permitido explícitamente está prohibido y puede
ocasionar riesgos imprevistos.
6 EIO0000003086.04

Acerca de este libro
Acerca de este libro
Ámbito del documento
Utilice este documento para:
• Instalar y utilizar M241 Logic Controller.
• Conectar M241 Logic Controller a un dispositivo de programación equipado
con el software EcoStruxure Machine Expert.
• Comunicar M241 Logic Controller con los módulos de extensión de E/S, la
HMI y otros dispositivos.
• Familiarizarse con las características de M241 Logic Controller.
NOTA: Lea y comprenda este documento y todos los documentos
relacionados, página 7 antes de instalar, utilizar o mantener el controlador.
Campo de aplicación
Este documento se ha actualizado para la publicación de EcoStruxureTM Machine
Expert V2.1.
Este documento se ha actualizado para el lanzamiento de los controladores
lógicos TM241C••R y TM241CE••R con una versión de producto (PV) ≥ 12.
Para la conformidad de los productos y la información medioambiental (RoHS,
REACH, PEP, EOLI, etc.), vaya a www.se.com/ww/en/work/support/green-
premium/.
Las características descritas en el presente documento, así como las descritas en
los documentos incluidos a continuación en la sección Documentos relacionados,
pueden consultarse en línea. Para acceder a la información en línea, visite la
página de inicio de Schneider Electric www.se.com/ww/en/download/.
Las características descritas en el presente documento deben coincidir con las
características que aparecen en línea. De acuerdo con nuestra política de
mejoras continuas, es posible que a lo largo del tiempo revisemos el contenido
con el fin de elaborar documentos más claros y precisos. En caso de que detecte
alguna diferencia entre el documento y la información online, utilice esta última
para su referencia.
Documentos relacionados
Título de la documentación Número de referencia
Modicon M241 Logic Controller - Guía de
programación EIO0000003059 (ENG)
EIO0000003060 (FRE)
EIO0000003061 (GER)
EIO0000003062 (SPA)
EIO0000003063 (ITA)
EIO0000003064 (CHS)
Cartuchos Modicon TMC4 - Guía de hardware EIO0000003113 (ENG)
EIO0000003114 (FRE)
EIO0000003115 (GER)
EIO0000003116 (SPA)
EIO0000003117 (ITA)
EIO0000003118 (CHS)
EIO0000003086.04 7

Acerca de este libro
Título de la documentación Número de referencia
Módulos de ampliación Modicon TM4 - Guía de
hardware EIO0000003155 (ENG)
EIO0000003156 (FRE)
EIO0000003157 (GER)
EIO0000003158 (SPA)
EIO0000003159 (ITA)
EIO0000003160 (CHS)
Módulos de E/S digitales Modicon TM3 - Guía
de hardware EIO0000003125 (ENG)
EIO0000003126 (FRE)
EIO0000003127 (GER)
EIO0000003128 (SPA)
EIO0000003129 (ITA)
EIO0000003130 (CHS)
EIO0000003425 (TUR)
EIO0000003424 (POR)
Módulos de E/S analógicas Modicon TM3 - Guía
de hardware EIO0000003131 (ENG)
EIO0000003132 (FRE)
EIO0000003133 (GER)
EIO0000003134 (SPA)
EIO0000003135 (ITA)
EIO0000003136 (CHS)
EIO0000003427 (TUR)
EIO0000003426 (POR)
Módulos de E/S expertas Modicon TM3 - Guía
de hardware EIO0000003137 (ENG)
EIO0000003138 (FRE)
EIO0000003139 (GER)
EIO0000003140 (SPA)
EIO0000003141 (ITA)
EIO0000003142 (CHS)
EIO0000003429 (TUR)
EIO0000003428 (POR)
Módulos de seguridad Modicon TM3 - Guía de
hardware EIO0000003353 (ENG)
EIO0000003354 (FRE)
EIO0000003355 (GER)
EIO0000003356 (SPA)
EIO0000003357 (ITA)
EIO0000003358 (CHS)
EIO0000003359 (POR)
EIO0000003360 (TUR)
8 EIO0000003086.04

Acerca de este libro
Título de la documentación Número de referencia
Módulos transmisores y receptores Modicon
TM3 - Guía de hardware EIO0000003143 (ENG)
EIO0000003144 (FRE)
EIO0000003145 (GER)
EIO0000003146 (SPA)
EIO0000003147 (ITA)
EIO0000003148 (CHS)
EIO0000003431 (TUR)
EIO0000003430 (POR)
Acoplador de bus Modicon TM3 - Guía de
hardware EIO0000003635 (ENG)
EIO0000003636 (FRE)
EIO0000003637 (GER)
EIO0000003638 (SPA)
EIO0000003639 (ITA)
EIO0000003640 (CHS)
EIO0000003641 (POR)
EIO0000003642 (TUR)
Modicon TM5 Interfaz de bus de campo - Guía
de hardware EIO0000003715 (ENG)
EIO0000003716 (FRE)
EIO0000003717 (GER)
EIO0000003718 (SPA)
EIO0000003719 (ITA)
EIO0000003720 (CHS)
M241 DC Logic Controller - Hoja de
instrucciones
HRB59603
M241 AC Logic Controller - Hoja de
instrucciones
EAV48551
Puede descargar estas publicaciones técnicas y otra información técnica de
nuestro sitio www.se.com/ww/en/download/.
Información relacionada con el producto
PELIGRO
PELIGRO DE DESCARGA ELÉCTRICA, EXPLOSIÓN O DESTELLO DE
ARCO VOLTAICO
• Desconecte la alimentación de todos los equipos, incluidos los dispositivos
conectados, antes de retirar cualquier cubierta o compuerta, o bien antes de
instalar o retirar cualquier accesorio, hardware, cable o conductor salvo en
las condiciones indicadas en la guía de hardware de este equipo.
• Utilice siempre un dispositivo de detección de tensión de capacidad
adecuada para confirmar la ausencia de alimentación eléctrica cuando y
donde se indique.
• Vuelva a montar y fijar todas las cubiertas, accesorios, elementos de
hardware y cables del sistema y compruebe que haya una conexión a tierra
adecuada antes de aplicar alimentación eléctrica a la unidad.
• Utilice este equipo y los productos asociados solo con la tensión indicada.
Si no se siguen estas instrucciones, se producirán lesiones graves o la
muerte.
EIO0000003086.04 9

Acerca de este libro
PELIGRO
POSIBILIDAD DE EXPLOSIÓN
• Este equipo se debe utilizar únicamente en ubicaciones no peligrosas o en
instalaciones de conformidad con Clase I, División 2, Grupos A, B, C y D.
• No sustituya componentes que puedan anular la conformidad con la Clase I,
División 2.
• No conecte ni desconecte el equipo a menos que se haya desconectado la
alimentación eléctrica o esté seguro de que la ubicación no es peligrosa.
• No utilice los puertos USB, si están incorporados, a menos que tenga la
certeza de que la ubicación no es peligrosa.
Si no se siguen estas instrucciones, se producirán lesiones graves o la
muerte.
ADVERTENCIA
PÉRDIDA DE CONTROL
• El diseñador del esquema de control debe tener en cuenta los posibles
modos de fallo de rutas de control y, para ciertas funciones de control
críticas, proporcionar los medios para lograr un estado seguro durante y
después de un fallo de ruta. Funciones de control críticas son, por ejemplo,
una parada de emergencia y una parada de sobrerrecorrido, un corte de
alimentación y un reinicio.
• Para las funciones críticas de control deben proporcionarse rutas de control
separadas o redundantes.
• Las rutas de control del sistema pueden incluir enlaces de comunicación.
Deben tenerse en cuenta las implicaciones de los retrasos de transmisión
no esperados o los fallos en el enlace.
• Tenga en cuenta todas las reglamentaciones para la prevención de
accidentes y las directrices de seguridad locales.1
• Cada implementación de este equipo debe probarse de forma individual y
exhaustiva antes de entrar en servicio.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
1Para obtener información adicional, consulte NEMA ICS 1.1 (última edición),
"Safety Guidelines for the Application, Installation, and Maintenance of Solid State
Control" (Directrices de seguridad para la aplicación, la instalación y el
mantenimiento del control de estado estático) y NEMA ICS 7.1 (última edición),
"Safety Standards for Construction and Guide for Selection, Installation and
Operation of Adjustable-Speed Drive Systems" (Estándares de seguridad para la
construcción y guía para la selección, instalación y utilización de sistemas de
unidades de velocidad ajustable) o su equivalente aplicable a la ubicación
específica.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
• Utilice sólo software aprobado por Schneider Electric para este equipo.
• Actualice el programa de aplicación siempre que cambie la configuración de
hardware física.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Normas y términos utilizados
Los términos técnicos, símbolos y las descripciones correspondientes del
presente manual o que aparecen en la parte interior o exterior de los propios
10 EIO0000003086.04

Acerca de este libro
productos se derivan, por lo general, de los términos y las definiciones de
estándares internacionales.
En el área de los sistemas de seguridad funcional, unidades y automatización
general se incluyen, pero sin limitarse a ellos, términos como seguridad,función
de seguridad,estado de seguridad,fallo,reinicio tras fallo,avería,funcionamiento
incorrecto,error,mensaje de error,peligroso, etc.
Estos estándares incluyen, entre otros:
Norma Descripción
IEC 61131-2:2007 Controladores programables, parte 2: requisitos y ensayos de los
equipos.
ISO 13849-1:2015 Seguridad de la maquinaria: componentes de los sistemas de control
relacionados con la seguridad.
Principios generales del diseño.
EN 61496-1:2013 Seguridad de las máquinas: equipos de protección electrosensibles.
Parte 1: pruebas y requisitos generales.
ISO 12100:2010 Seguridad de las máquinas. Principios generales para el diseño.
Evaluación del riesgo y reducción del riesgo
EN 60204-1:2006 Seguridad de las máquinas. Equipo eléctrico de las máquinas. Parte 1:
requisitos generales
ISO 14119:2013 Seguridad de las máquinas. Dispositivos de bloqueo asociados con
protecciones: principios de diseño y selección
ISO 13850:2015 Seguridad de las máquinas. Parada de emergencia: principios de
diseño
IEC 62061:2015 Seguridad de las máquinas. Seguridad funcional de los sistemas de
control eléctricos, electrónicos y electrónicos programables
relacionados con la seguridad
IEC 61508-1:2010 Seguridad funcional de los sistemas eléctricos/electrónicos/electrónicos
programables relacionados con la seguridad: requisitos generales.
IEC 61508-2:2010 Seguridad funcional de los sistemas eléctricos/electrónicos/electrónicos
programables relacionados con la seguridad: requisitos para los
sistemas eléctricos/electrónicos/electrónicos programables
relacionados con la seguridad.
IEC 61508-3:2010 Seguridad funcional de los sistemas eléctricos/electrónicos/electrónicos
programables relacionados con la seguridad: requisitos de software.
IEC 61784-3:2016 Redes de comunicación industrial - Perfiles - Parte 3: Buses de campo
de seguridad funcionales - Reglas generales y definiciones de perfiles.
2006/42/EC Directiva de maquinaria
2014/30/EU Directiva de compatibilidad electromagnética
2014/35/EU Directiva de baja tensión
Además, los términos utilizados en este documento se pueden usar de manera
tangencial porque se obtienen de otros estándares como:
Norma Descripción
Serie IEC 60034 Máquinas eléctricas giratorias
Serie IEC 61800 Accionamientos eléctricos de potencia de velocidad variable
Serie IEC 61158 Comunicación digital de datos para la medición y control: bus de campo
para su uso en sistemas de control.
Por último, el término zona de funcionamiento se puede utilizar junto con la
descripción de peligros específicos, y se define como tal para una zona de peligro
o una zona peligrosa en la Directiva de maquinaria (2006/42/EC) e ISO
12100:2010.
EIO0000003086.04 11

Acerca de este libro
NOTA: Los estándares mencionados anteriormente podrían o no aplicarse a
los productos específicos citados en la presente documentación. Para
obtener más información en relación con los diferentes estándares aplicables
a los productos descritos en este documento, consulte las tablas de
características de las referencias de dichos productos.
12 EIO0000003086.04

Introducción a Modicon M241 Logic Controller
Contenido de esta parte
Descripción general de M241..........................................................................14
Funciones de M241........................................................................................38
Instalación de M241 ......................................................................................53
EIO0000003086.04 13

Descripción general de M241
Descripción general de M241
Contenido de este capítulo
Descripción de M241 Logic Controller.............................................................14
Configuración máxima de hardware................................................................18
Cartuchos de TMC4 ......................................................................................21
Módulos de extensión de TM2........................................................................21
Módulos de extensión TM3 ............................................................................25
Acopladores de bus TM3 ...............................................................................34
Módulos de extensión TM4 ............................................................................35
Interfaces de bus de campo TM5....................................................................35
Interfaces de bus de campo TM5 CANopen ....................................................35
Interfaces de bus de campo TM7 CANopen ....................................................36
Accesorios....................................................................................................36
Descripción general
En este capítulo encontrará información general sobre la arquitectura del sistema
del M241 Logic Controller y sus componentes.
Descripción de M241 Logic Controller
Descripción general
M241 Logic Controller tiene diferentes funciones potentes y puede servir para una
amplia gama de aplicaciones.
La configuración del software, la programación y la puesta en servicio se realizan
con el software EcoStruxure Machine Expert descrito detalladamente en
EcoStruxure Machine Expert - Guía de programación (consulte EcoStruxure
Machine Expert - Guía de programación) y M241 Logic Controller - Guía de
programación (consulte Modicon M241 Logic Controller - Guía de programación).
Lenguajes de programación
El M241 Logic Controller se configura y programa con el software EcoStruxure
Machine Expert, que admite los siguientes lenguajes de programación IEC 61131-
3:
• IL: Lista de instrucciones
• ST: Texto estructurado
• FBD: Diagrama de bloques de funciones
• SFC: Diagrama funcional secuencial
• LD: Diagrama de contactos
El software EcoStruxure Machine Expert también se puede utilizar para
programar estos controladores utilizando el lenguaje CFC (Continuous Function
Chart).
Fuente de alimentación
La fuente de alimentación de M241 Logic Controller es de 24 V CC, página 71 o
de 100-240 V CA, página 74.
14 EIO0000003086.04

Descripción general de M241
Reloj en tiempo real
M241 Logic Controller incluye un sistema de reloj en tiempo real (RTC), página
38.
Run/Stop
El M241 Logic Controller se puede utilizar externamente mediante los métodos
siguientes:
• un interruptor Run/Stop, página 48 de hardware
• Un comando de software de EcoStruxure Machine Expert
• Una operación de Run/Stop, página 41 de una entrada digital dedicada,
definida en la configuración del software
• La variable del sistema PLC_W en una tabla de reubicación
• El servidor web
Memoria
En esta tabla se describen los distintos tipos de memoria:
Tipo de memoria Tamaño Se utiliza para
RAM 64 Mbytes, de los cuales 8
Mbytes están disponibles para la
aplicación
Ejecutar la aplicación.
No volátil 128 Mbytes Guardar el programa y los datos en caso
de corte de electricidad.
Entradas/salidas incrustadas
En función de la referencia del controlador, están disponibles los siguientes tipos
de E/S incrustadas:
• Entradas normales
• Entradas rápidas asociadas con contadores
• Salidas transistorizadas normales (común negativo y positivo)
• Salidas transistorizadas rápidas (común negativo y positivo) asociadas con
generadores de pulsos
• Salidas de relé
Almacenamiento extraíble
Los M241 Logic Controller incorporan un slot para tarjeta SD, página 49.
Los usos principales de la tarjeta SD son:
• Inicialización del controlador con una aplicación nueva
• Actualización del firmware del controlador
• Aplicación de archivos de configuración de Post al controlador
• Aplicación de fórmulas
• Recepción de archivos de registro de datos
EIO0000003086.04 15

Descripción general de M241
Funciones de comunicación incrustadas
Están disponibles los siguientes tipos de puertos de comunicación, en función de
la referencia del controlador:
•Maestro CANopen, página 178
•Ethernet, página 181
•USB mini-B, página 183
•Línea serie 1, página 184
•Línea serie 2, página 187
Compatibilidad de acoplador de bus y módulo de extensión
Consulte las tablas de compatibilidad de la EcoStruxure Machine Expert -
Compatibilidad y migración - Guía del usuario.
M241 Logic Controller
Referencia Entradas digitales Salidas digitales Puertos de
comunicaciones Tipo de terminal Fuente de
alimentación
TM241C24R,
página 81
6 entradas normales
(1)
8 entradas rápidas
(contadores)(2)
6 salidas de relé de 2 A
4 salidas rápidas de
común negativo
(generadores de pulsos)
(3)
2 puertos de línea serie
1 puerto de
programación USB
Bloques de
terminales de
tornillos extraíbles
De 100 a 240 V
CA
TM241CE24R,
página 148 6 entradas normales
(1)
8 entradas rápidas
(contadores)(2)
6 salidas de relé de 2 A
4 salidas rápidas de
común negativo
(generadores de pulsos)
(3)
2 puertos de línea serie
1 puerto de
programación USB
1 puerto Ethernet
Bloques de
terminales de
tornillos extraíbles
De 100 a 240 V
CA
TM241CEC24R,
página 91
6 entradas normales
(1)
8 entradas rápidas
(contadores)(2)
6 salidas de relé de 2 A
4 salidas rápidas de
común negativo
(generadores de pulsos)
(3)
2 puertos de línea serie
1 puerto Ethernet
1 puerto maestro
CANopen
1 puerto de
programación USB
Bloques de
terminales de
tornillos extraíbles
De 100 a 240 V
CA
TM241C24T,
página 96
6 entradas normales
(1)
8 entradas rápidas
(contadores)(2)
Salidas de común
negativo
6 salidas de transistor
normales
4 salidas rápidas
(generadores de pulsos)
(3)
2 puertos de línea serie
1 puerto de
programación USB
Bloques de
terminales de
tornillos extraíbles
24 V CC
TM241CE24T,
página 101 6 entradas normales
(1)
8 entradas rápidas
(contadores)(2)
Salidas de común
negativo
6 salidas de transistor
normales
4 salidas rápidas
(generadores de pulsos)
(3)
2 puertos de línea serie
1 puerto de
programación USB
1 puerto Ethernet
Bloques de
terminales de
tornillos extraíbles
24 V CC
TM241CEC24T,
página 106
6 entradas normales
(1)
8 entradas rápidas
(contadores)(2)
Salidas de común
negativo
6 salidas de transistor
normales
4 salidas rápidas
(generadores de pulsos)
(3)
2 puertos de línea serie
1 puerto de
programación USB
1 puerto Ethernet
1 puerto maestro
CANopen
Bloques de
terminales de
tornillos extraíbles
24 V CC
16 EIO0000003086.04

Descripción general de M241
Referencia Entradas digitales Salidas digitales Puertos de
comunicaciones Tipo de terminal Fuente de
alimentación
TM241C24U,
página 111 6 entradas normales
(1)
8 entradas rápidas
(contadores)(2)
Salidas de común
positivo
6 salidas de transistor
normales
4 salidas rápidas
(generadores de pulsos)
(3)
2 puertos de línea serie
1 puerto de
programación USB
Bloques de
terminales de
tornillos extraíbles
24 V CC
TM241CE24U,
página 116
6 entradas normales
(1)
8 entradas rápidas
(contadores)(2)
Salidas de común
positivo
6 salidas de transistor
normales
4 salidas rápidas
(generadores de pulsos)
(3)
2 puertos de línea serie
1 puerto de
programación USB
1 puerto Ethernet
Bloques de
terminales de
tornillos extraíbles
24 V CC
TM241CEC24U,
página 121
6 entradas normales
(1)
8 entradas rápidas
(contadores)(2)
Salidas de común
positivo
6 salidas de transistor
normales
4 salidas rápidas
(generadores de pulsos)
(3)
2 puertos de línea serie
1 puerto de
programación USB
1 puerto Ethernet
1 puerto maestro
CANopen
Bloques de
terminales de
tornillos extraíbles
24 V CC
TM241C40R,
página 126
16 entradas
normales(1)
8 entradas rápidas
(contadores)(2)
12 salidas de relé de 2 A
4 salidas rápidas de
común negativo
(generadores de pulsos)
(3)
2 puertos de línea serie
1 puerto de
programación USB
Bloques de
terminales de
tornillos extraíbles
De 100 a 240 V
CA
TM241CE40R,
página 130
16 entradas
normales(1)
8 entradas rápidas
(contadores)(2)
12 salidas de relé de 2 A
4 salidas rápidas de
común negativo
(generadores de pulsos)
(3)
2 puertos de línea serie
1 puerto de
programación USB
1 puerto Ethernet
Bloques de
terminales de
tornillos extraíbles
De 100 a 240 V
CA
TM241C40T,
página 135
16 entradas
normales(1)
8 entradas rápidas
(contadores)(2)
Salidas de común
negativo
12 salidas de transistor
normales
4 salidas rápidas
(generadores de pulsos)
(3)
2 puertos de línea serie
1 puerto de
programación USB
Bloques de
terminales de
tornillos extraíbles
24 V CC
TM241CE40T,
página 139 16 entradas
normales(1)
8 entradas rápidas
(contadores)(2)
Salidas de común
negativo
12 salidas de transistor
normales
4 salidas rápidas
(generadores de pulsos)
(3)
2 puertos de línea serie
1 puerto de
programación USB
1 puerto Ethernet
Bloques de
terminales de
tornillos extraíbles
24 V CC
TM241C40U,
página 144
16 entradas
normales(1)
8 entradas rápidas
(contadores)(2)
Salidas de común
positivo
12 salidas de transistor
normales
4 salidas rápidas
(generadores de pulsos)
(3)
2 puertos de línea serie
1 puerto de
programación USB
Bloques de
terminales de
tornillos extraíbles
24 V CC
EIO0000003086.04 17

Descripción general de M241
Referencia Entradas digitales Salidas digitales Puertos de
comunicaciones Tipo de terminal Fuente de
alimentación
TM241CE40U,
página 148 16 entradas
normales(1)
8 entradas rápidas
(contadores)(2)
Salidas de común
positivo
12 salidas de transistor
normales
4 salidas rápidas
(generadores de pulsos)
(3)
2 puertos de línea serie
1 puerto de
programación USB
1 puerto Ethernet
Bloques de
terminales de
tornillos extraíbles
24 V CC
1) Las entradas normales tienen una frecuencia máxima de 1 kHz.
2) Las entradas rápidas se pueden utilizar como entradas normales o como entradas rápidas para funciones de conteo o de evento.
3) Las salidas transistorizadas rápidas se pueden utilizar como salidas transistorizadas normales, como salidas Reflex para la función de
recuento (HSC) o como salidas transistorizadas rápidas para las funciones del generador de pulsos (FreqGen/PTO/PWM).
Contenido que se entrega
En la siguiente figura se muestra el contenido de la entrega de M241 Logic
Controller:
1Hoja de instrucciones de M241 Logic Controller
2M241 Logic Controller
3Batería de monofluoruro de carbono-litio, tipo Panasonic BR2032.
Configuración máxima de hardware
Introducción
El sistema de control M241 Logic Controller ofrece una solución completa para
lograr configuraciones optimizadas y una arquitectura ampliable.
18 EIO0000003086.04

Descripción general de M241
Principio de configuración local y remota
En la siguiente figura se definen las configuraciones local y remota:
(1) Configuración local
(2) Configuración remota
Arquitectura de configuración local de M241 Logic Controller
Se consigue una configuración local optimizada y flexibilidad mediante la
asociación de:
• M241 Logic Controller
• Módulos de extensión TM4
• Módulos de extensión TM3
• Módulos de extensión TM2
Los requisitos de la aplicación determinan la arquitectura de la configuración de
M241 Logic Controller.
En la siguiente figura se representan los componentes de una configuración local:
(A) Módulos de extensión (máximo 3)
(B) Módulos de extensión (máximo 7)
NOTA: Está prohibido montar un módulo TM2 después de cualquier módulo
TM3, según se indica en la siguiente figura:
EIO0000003086.04 19

Descripción general de M241
Arquitectura de configuración remota de M241 Logic Controller
Se consigue una configuración remota optimizada y flexibilidad mediante la
asociación de los siguientes elementos:
• M241 Logic Controller
• Módulos de extensión TM4
• Módulos de extensión TM3
• Módulos transmisores y receptores TM3
Los requisitos de la aplicación determinan la arquitectura de la configuración de
M241 Logic Controller.
NOTA: No puede utilizar módulos TM2 en configuraciones que incluyan
módulos TM3 transmisores y receptores.
En la siguiente figura se representan los componentes de una configuración
remota:
(1) Logic Controller y módulos
(C) Módulos de extensión TM3 (máximo 7)
Cantidad máxima de módulos
En la tabla siguiente se muestra la configuración máxima admitida:
Referencias Máximo Tipo de configuración
TM241•••• 7 módulos de extensión
TM3 / TM2
Local
TM241•••• 3 módulos de ampliación
TM4 Local
TM3XREC1 7 módulos de extensión
TM3 Remota
NOTA: Los módulos transmisores y receptores TM3 no se incluyen en el recuento del número
máximo de módulos de extensión.
NOTA: La configuración de sus módulos de extensión TM4, TM3 y TM2 se
valida mediante el software de EcoStruxure Machine Expert en la ventana
Configuración.
NOTA: En algunos entornos, la configuración máxima rellenada por módulos
de alto consumo, combinada con la distancia máxima permitida entre los
módulos TM3 transmisor y receptor, puede presentar problemas de
comunicación del bus aunque el software EcoStruxure Machine Expert esté
permitido para la configuración. En este caso, necesitará analizar el consumo
de los módulos escogidos para su configuración, así como las distancias de
cable mínimas que requiere su aplicación y posiblemente busque optimizar
sus elecciones.
20 EIO0000003086.04

Descripción general de M241
Cartuchos de TMC4
Descripción general
Puede ampliar el número de E/S de su Modicon M241 Logic Controller añadiendo
cartuchos TMC4.
Para obtener más información, consulte la Guía de hardware de cartuchos de
TMC4.
Cartuchos TMC4 estándar
En la tabla siguiente se muestran los cartuchos TMC4 de uso general con el tipo
de canal, el rango de corriente/tensión y el tipo de terminal correspondientes:
Referencia Canales Tipo de canal Tensión
Corriente
Tipo de terminal
TMC4AI2 2 Entradas analógicas
(tensión o corriente) De 0 a 10 V CC
De 0 a 20 mA o de 4 a 20 mA
3,81 mm (0,15 pulg.) de
paso, bloque de terminales
de resorte extraíble
TMC4TI2 2 Entradas analógicas
de temperatura Termoelemento tipo K, J, R, S,
B, E, T, N, C
3 conductores RTD tipo Pt100,
Pt1000, Ni100, Ni1000
3,81 mm (0,15 pulg.) de
paso, bloque de terminales
de resorte extraíble
TMC4AQ2 2 Salidas analógicas
(tensión o corriente) De 0 a 10 V CC
De 4 a 20 mA
3,81 mm (0,15 pulg.) de
paso, bloque de terminales
de resorte extraíble
Cartuchos TMC4 de aplicación
En la tabla siguiente se muestran los cartuchos TMC4 de aplicación con el tipo de
canal, el rango de corriente/tensión y el tipo de terminal correspondientes:
Referencia Canales Tipo de canal Tensión
Corriente
Tipo de terminal
TMC4HOIS01 2 Entradas analógicas
(tensión o corriente) De 0 a 10 V CC
De 0 a 20 mA o de 4 a 20 mA
3,81 mm (0,15 pulg.) de
paso, bloque de terminales
de resorte extraíble
TMC4PACK01 2 Entradas analógicas
(tensión o corriente) De 0 a 10 V CC
De 0 a 20 mA o de 4 a 20 mA
3,81 mm (0,15 pulg.) de
paso, bloque de terminales
de resorte extraíble
Módulos de extensión de TM2
Descripción general
Puede aumentar el número de E/S de su M241 Logic Controller agregando
módulos de extensión de E/S de TM2.
Se admiten los siguientes tipos de módulos electrónicos:
• Módulos de extensión de E/S digitales de TM2
• Módulos de extensión de E/S analógicas de TM2
EIO0000003086.04 21

Descripción general de M241
Consulte los siguientes documentos para obtener más información:
• TM2 Módulos de extensión de E/S digitales - Guía de hardware
• TM2 Módulos de extensión de E/S analógicas - Guía de hardware
NOTA: Los módulos TM2 solamente se pueden usar en la configuración local,
y únicamente si no hay módulos TM3 transmisores y receptores en la
configuración.
NOTA: No está permitido montar un módulo TM2 después de cualquier
módulo TM3. Los módulos TM2 deben montarse y configurarse al final de la
configuración local.
Módulos de extensión de entradas digitales de TM2
En la tabla siguiente se muestran los TM2 módulos de extensión de entradas
digitales compatibles con el tipo de canal, la tensión/corriente nominal y el tipo de
terminal correspondientes:
Referencia Canales Tipo de canal Tensión
Corriente
Tipo de terminal
TM2DAI8DT 8 Entradas normales 120 VCA
7,5 mA
Bloque de terminales
de tornillo extraíble
TM2DDI8DT 8 Entradas normales 24 V CC
7 mA
Bloque de terminales
de tornillo extraíble
TM2DDI16DT 16 Entradas normales 24 V CC
7 mA
Bloque de terminales
de tornillo extraíble
TM2DDI16DK 16 Entradas normales 24 V CC
5 mA
Conector HE10 (MIL
20)
TM2DDI32DK 32 Entradas normales 24 V CC
5 mA
Conector HE10 (MIL
20)
22 EIO0000003086.04

Descripción general de M241
Módulos de extensión de salidas digitales de TM2
En la tabla siguiente se muestran los TM2 módulos de extensión de salidas
digitales compatibles con el tipo de canal, la tensión/corriente nominal y el tipo de
terminal correspondientes:
Referencia Canales Tipo de canal Tensión
Corriente
Tipo de terminal
TM2DRA8RT 8 Salidas de relé 30 V CC / 240 V CA
2 A máx.
Bloque de terminales
de tornillo extraíble
TM2DRA16RT 16 Salidas de relé 30 V CC / 240 V CA
2 A máx.
Bloque de terminales
de tornillo extraíble
TM2DDO8UT 8 Salidas de transistor
normales (común
negativo)
24 V CC
0,3 A máx. por salida
Bloque de terminales
de tornillo extraíble
TM2DDO8TT 8 Salidas de transistor
normales (común
positivo)
24 V CC
0,5 A máx. por salida
Bloque de terminales
de tornillo extraíble
TM2DDO16UK 16 Salidas de transistor
normales (común
negativo)
24 V CC
0,1 A máx. por salida
Conector HE10 (MIL
20)
TM2DDO16TK 16 Salidas de transistor
normales (común
positivo)
24 V CC
0,4 A máx. por salida
Conector HE10 (MIL
20)
TM2DDO32UK 32 Salidas de transistor
normales (común
negativo)
24 V CC
0,1 A máx. por salida
Conector HE10 (MIL
20)
TM2DDO32TK 32 Salidas de transistor
normales (común
positivo)
24 V CC
0,4 A máx. por salida
Conector HE10 (MIL
20)
Módulos de extensión mixtos de entradas/salidas digitales de
TM2
En la tabla siguiente se muestran los TM2 módulos de extensión de E/S mixtas
digitales compatibles con el tipo de canal, la tensión/corriente nominal y el tipo de
terminal correspondientes:
Referencia Canales Tipo de canal Tensión
Corriente
Tipo de terminal
TM2DMM8DRT 4 Entradas normales 24 V CC
7 mA
Bloque de terminales
de tornillo extraíble
4 Salidas de relé 24 V CC/240 V CA
7 A máximo por línea común /
2 A máximo por salida
TM2DMM24DRF 16 Entradas normales 24 V CC
7 mA
Bloque de terminales
de resorte no
extraíble
8 Salidas de relé 24 V CC/240 V CA
7 A máximo por línea común /
2 A máximo por salida
EIO0000003086.04 23

Descripción general de M241
Módulos de extensión de entradas analógicas de TM2
En la tabla siguiente se muestran los TM2 módulos de extensión de entradas
analógicas compatibles con el tipo de canal, la tensión/corriente nominal y el tipo
de terminal correspondientes:
Referencia Canales Tipo de canal Tensión
Corriente
Tipo de terminal
TM2AMI2HT 2 Entradas de alto nivel De 0 a 10 V CC
De 4 a 20 mA
Bloque de terminales de
tornillo extraíble
TM2AMI2LT 2 Entradas de bajo nivel Tipo de termoelemento
J, K, T Bloque de terminales de
tornillo extraíble
TM2AMI4LT 4 Entradas analógicas De 0 a 10 V CC
De 0 a 20 mA
PT100/1000
Ni100/1000
Bloque de terminales de
tornillo extraíble
TM2AMI8HT 8 Entradas analógicas De 0 a 10 V CC
De 0 a 20 mA
Bloque de terminales de
tornillo extraíble
TM2ARI8HT 8 Entradas analógicas NTC / PTC Bloque de terminales de
tornillo extraíble
TM2ARI8LRJ 8 Entradas analógicas PT100/1000 Conector RJ 11
TM2ARI8LT 8 Entradas analógicas PT100/1000 Bloque de terminales de
tornillo extraíble
Módulos de extensión de entradas analógicas de TM2
En la tabla siguiente se muestran los TM2 módulos de extensión de salidas
analógicas compatibles con el tipo de canal, la tensión/corriente nominal y el tipo
de terminal correspondientes:
Referencia Canales Tipo de canal Tensión
Corriente
Tipo de terminal
TM2AMO1HT 1 Salidas analógicas De 0 a 10 V CC
De 4 a 20 mA
Bloque de terminales de
tornillo extraíble
TM2AVO2HT 2 Salidas analógicas +/- 10 V CC Bloque de terminales de
tornillo extraíble
24 EIO0000003086.04

Descripción general de M241
Módulos de extensión de entradas/salidas mixtas analógicas de
TM2
En la tabla siguiente se muestran los TM2 módulos de extensión de E/S mixtas
analógicas compatibles con el tipo de canal, la tensión/corriente nominal y el tipo
de terminal correspondientes:
Referencia Canales Tipo de canal Tensión
Corriente
Tipo de terminal
TM2AMM3HT 2 Entradas analógicas De 0 a 10 V CC
De 4 a 20 mA
Bloque de terminales de
tornillo extraíble
1 Salidas analógicas De 0 a 10 V CC
De 4 a 20 mA
TM2AMM6HT 4 Entradas analógicas De 0 a 10 V CC
De 4 a 20 mA
Bloque de terminales de
tornillo extraíble
2 Salidas analógicas De 0 a 10 V CC
De 4 a 20 mA
TM2ALM3LT 2 Entradas de bajo nivel Tipo de termoelemento
J, K, T
PT100
Bloque de terminales de
tornillo extraíble
1 Salidas analógicas De 0 a 10 V CC
De 4 a 20 mA
Módulos de extensión TM3
Introducción
El rango de módulos de extensión de TM3 incluye:
• Módulos digitales, clasificados de la siguiente manera:
◦Módulos de entrada, página 26
◦Módulos de salida, página 26
◦Módulos mixtos de entrada/salida, página 28
• Módulos analógicos, que se clasifican del siguiendo modo:
◦Módulos de entrada, página 29
◦Módulos de salida, página 30
◦Módulos mixtos de entrada/salida, página 31
•Módulos expertos, página 32
•Módulos de seguridad, página 33
•Módulos transmisores y receptores, página 34
Si desea más información, consulte los siguientes documentos en Documentos
relacionados, página 7:
• Módulos TM3 de E/S digitales - Guía de hardware
• Módulos TM3 de E/S analógicas - Guía de hardware
• Módulos de E/S expertas TM3 Guía de hardware
• Módulos de seguridad TM3 Guía de hardware
• Módulos transmisores y receptores TM3 Guía de hardware
EIO0000003086.04 25

Descripción general de M241
Módulos de entradas digitales TM3
En la tabla siguiente se muestran los módulos de extensión de entradas digitales
TM3, con el tipo de canal, la tensión/corriente nominal y el tipo de terminal
correspondientes:
Referencia Canales Tipo de canal Tensión
Corriente
Tipo de terminal/paso
TM3DI8A 8 Entradas normales 120 VCA
7,5 mA
Bloque de terminales de tornillo extraíble / 5,08
mm
TM3DI8 8 Entradas normales 24 V CC
7 mA
Bloque de terminales de tornillo extraíble / 5,08
mm
TM3DI8G 8 Entradas normales 24 V CC
7 mA
Bloque de terminales de resorte extraíble / 5,08
mm
TM3DI16 16 Entradas normales 24 V CC
7 mA
Bloques de terminales de tornillo extraíble / 3,81
mm
TM3DI16G 16 Entradas normales 24 V CC
7 mA
Bloques de terminales de resorte extraíble / 3,81
mm
TM3DI16K 16 Entradas normales 24 V CC
5 mA
Conector HE10 (MIL 20)
TM3DI32K 32 Entradas normales 24 V CC
5 mA
Conector HE10 (MIL 20)
Módulos de salidas digitales TM3
En la tabla siguiente se muestran los módulos de extensión de salidas digitales
TM3, con el tipo de canal, la tensión/corriente nominal y el tipo de terminal
correspondientes:
Referencia Canales Tipo de canal Tensión
Corriente
Tipo de terminal/paso
TM3DQ8R 8 Salidas de relé 24 V CC/240 V CA
7 A máximo por línea
común / 2 A máximo
por salida
Bloque de terminales de
tornillo extraíble / 5,08 mm
TM3DQ8RG 8 Salidas de relé 24 V CC/240 V CA
7 A máximo por línea
común / 2 A máximo
por salida
Bloque de terminales de
resorte extraíble / 5,08 mm
TM3DQ8T 8 Salidas de transistor
normales (común
positivo)
24 V CC
4 A máximo por línea
común / 0,5 A máximo
por salida
Bloque de terminales de
tornillo extraíble / 5,08 mm
TM3DQ8TG 8 Salidas de transistor
normales (común
positivo)
24 V CC
4 A máximo por línea
común / 0,5 A máximo
por salida
Bloque de terminales de
resorte extraíble / 5,08 mm
TM3DQ8U 8 Salidas de transistor
normales (común
negativo)
24 V CC
4 A máximo por línea
común / 0,5 A máximo
por salida
Bloque de terminales de
tornillo extraíble / 5,08 mm
26 EIO0000003086.04

Descripción general de M241
Referencia Canales Tipo de canal Tensión
Corriente
Tipo de terminal/paso
TM3DQ8UG 8 Salidas de transistor
normales (común
negativo)
24 V CC
4 A máximo por línea
común / 0,5 A máximo
por salida
Bloque de terminales de
resorte extraíble / 5,08 mm
TM3DQ16R 16 Salidas de relé 24 V CC/240 V CA
8 A máximo por línea
común / 2 A máximo
por salida
Bloques de terminales de
tornillo extraíble / 3,81 mm
TM3DQ16RG 16 Salidas de relé 24 V CC/240 V CA
8 A máximo por línea
común / 2 A máximo
por salida
Bloques de terminales de
resorte extraíble / 3,81 mm
TM3DQ16T 16 Salidas de transistor
normales (común
positivo)
24 V CC
8 A máximo por línea
común / 0,5 A máximo
por salida
Bloques de terminales de
tornillo extraíble / 3,81 mm
TM3DQ16TG 16 Salidas de transistor
normales (común
positivo)
24 V CC
8 A máximo por línea
común / 0,5 A máximo
por salida
Bloques de terminales de
resorte extraíble / 3,81 mm
TM3DQ16U 16 Salidas de transistor
normales (común
negativo)
24 V CC
8 A máximo por línea
común / 0,5 A máximo
por salida
Bloques de terminales de
tornillo extraíble / 3,81 mm
TM3DQ16UG 16 Salidas de transistor
normales (común
negativo)
24 V CC
8 A máximo por línea
común / 0,5 A máximo
por salida
Bloques de terminales de
resorte extraíble / 3,81 mm
TM3DQ16TK 16 Salidas de transistor
normales (común
positivo)
24 V CC
2 A máximo por línea
común / 0,1 A máximo
por salida
Conector HE10 (MIL 20)
TM3DQ16UK 16 Salidas de transistor
normales (común
negativo)
24 V CC
2 A máximo por línea
común / 0,1 A máximo
por salida
Conector HE10 (MIL 20)
TM3DQ32TK 32 Salidas de transistor
normales (común
positivo)
24 V CC
2 A máximo por línea
común / 0,1 A máximo
por salida
Conectores HE10 (MIL 20)
TM3DQ32UK 32 Salidas de transistor
normales (común
negativo)
24 V CC
2 A máximo por línea
común / 0,1 A máximo
por salida
Conectores HE10 (MIL 20)
EIO0000003086.04 27

Descripción general de M241
Módulos de entradas/salidas mixtas digitales TM3
En la siguiente tabla se muestran los módulos de E/S mixtas TM3, con el tipo de
canal, la tensión/corriente nominal y el tipo de terminal correspondientes:
Referencia Canales Tipo de canal Tensión
Corriente
Tipo de terminal/paso
TM3DM8R 4 Entradas normales 24 V CC
7 mA
Bloque de terminales de tornillo
extraíble / 5,08 mm
4 Salidas de relé 24 V CC/240 V CA
7 A máximo por línea común / 2 A
máximo por salida
TM3DM8RG 4 Entradas normales 24 V CC
7 mA
Bloque de terminales de resorte
extraíble / 5,08 mm
4 Salidas de relé 24 V CC/240 V CA
7 A máximo por línea común / 2 A
máximo por salida
TM3DM16R (1) 8 Entradas normales 24 V CC
5 mA
Bloque de terminales de tornillo
extraíble / 3,81 mm
8 Salidas de relé 24 V CC/240 V CA
4 A máximo por línea común / 2 A
máximo por salida
TM3DM24R 16 Entradas normales 24 V CC
7 mA
Bloque de terminales de tornillo
extraíble / 3,81 mm
8 Salidas de relé 24 V CC/240 V CA
7 A máximo por línea común / 2 A
máximo por salida
TM3DM24RG 16 Entradas normales 24 V CC
7 mA
Bloque de terminales de resorte
extraíble / 3,81 mm
8 Salidas de relé 24 V CC/240 V CA
7 A máximo por línea común / 2 A
máximo por salida
TM3DM32R (1) 16 Entradas normales 24 V CC
5 mA
Bloque de terminales de tornillo
extraíble / 3,81 mm
16 Salidas de relé 24 V CC/240 V CA
4 A máximo por línea común / 2 A
máximo por salida
(1) Este módulo de extensión solo está disponible en determinados países.
28 EIO0000003086.04

Descripción general de M241
Módulos de entradas analógicas TM3
En la tabla siguiente se muestran los módulos de extensión de entradas
analógicas TM3, con la resolución, el tipo de canal, la tensión/corriente nominal y
el tipo de terminal correspondientes:
Referencia Resolución Canales Tipo de
canal Modalidad Tipo de terminal/
paso
TM3AI2H 16 bits o 15 bits
+ signo 2 entradas De 0 a 10 V CC
De -10 a +10 V CC
De 0 a 20 mA
De 4 a 20 mA
Bloque de terminales
de tornillo extraíble /
5,08 mm
TM3AI2HG 16 bits o 15 bits
+ signo 2 entradas De 0 a 10 V CC
De -10 a +10 V CC
De 0 a 20 mA
De 4 a 20 mA
Bloque de terminales
de resorte extraíble /
5,08 mm
TM3AI4 12 bits o 11 bits
+ signo 4 entradas De 0 a 10 V CC
De -10 a +10 V CC
De 0 a 20 mA
De 4 a 20 mA
Bloque de terminales
de tornillo extraíble /
3,81 mm
TM3AI4G 12 bits o 11 bits
+ signo 4 entradas De 0 a 10 V CC
De -10 a +10 V CC
De 0 a 20 mA
De 4 a 20 mA
Bloques de
terminales de resorte
extraíble / 3,81 mm
TM3AI8 12 bits o 11 bits
+ signo 8 entradas De 0 a 10 V CC
De -10 a +10 V CC
De 0 a 20 mA
De 4 a 20 mA
De 0 a 20 mA ampliado
De 4 a 20 mA ampliado
Bloque de terminales
de tornillo extraíble /
3,81 mm
TM3AI8G 12 bits o 11 bits
+ signo 8 entradas De 0 a 10 V CC
De -10 a +10 V CC
De 0 a 20 mA
De 4 a 20 mA
De 0 a 20 mA ampliado
De 4 a 20 mA ampliado
Bloques de
terminales de resorte
extraíble / 3,81 mm
TM3TI4 16 bits o 15 bits
+ signo
4 entradas De 0 a 10 V CC
De -10 a +10 V CC
De 0 a 20 mA
De 4 a 20 mA
Termoelemento
PT100/1000
NI100/1000
Bloque de terminales
de tornillo extraíble /
3,81 mm
EIO0000003086.04 29

Descripción general de M241
Referencia Resolución Canales Tipo de
canal Modalidad Tipo de terminal/
paso
TM3TI4G 16 bits o 15 bits
+ signo 4 entradas De 0 a 10 V CC
De -10 a +10 V CC
De 0 a 20 mA
De 4 a 20 mA
Termoelemento
PT100/1000
NI100/1000
Bloques de
terminales de resorte
extraíble / 3,81 mm
TM3TI4D 16 bits o 15 bits
+ signo 4 entradas Termoelemento Bloque de terminales
de tornillo extraíble /
3,81 mm
TM3TI4DG 16 bits o 15 bits
+ signo 4 entradas Termoelemento Bloques de
terminales de resorte
extraíble / 3,81 mm
TM3TI8T 16 bits o 15 bits
+ signo 8 entradas Termoelemento
NTC/PTC
Ohmímetro
Bloque de terminales
de tornillo extraíble /
3,81 mm
TM3TI8TG 16 bits o 15 bits
+ signo 8 entradas Termoelemento
NTC/PTC
Ohmímetro
Bloques de
terminales de resorte
extraíble / 3,81 mm
Módulos de salidas analógicas TM3
En la tabla siguiente se muestran los módulos de salidas analógicas TM3, con la
resolución, el tipo de canal, la tensión/corriente nominal y el tipo de terminal
correspondientes:
Referencia Resolución Canales Tipo de
canal Modalidad Tipo de terminal/paso
TM3AQ2 12 bits o 11 bits + signo 2 salidas De 0 a 10 V CC
De -10 a +10 V CC
De 0 a 20 mA
De 4 a 20 mA
Bloque de terminales de
tornillo extraíble / 5,08 mm
TM3AQ2G 12 bits o 11 bits + signo 2 salidas De 0 a 10 V CC
De -10 a +10 V CC
De 0 a 20 mA
De 4 a 20 mA
Bloque de terminales de
resorte extraíble / 5,08 mm
TM3AQ4 12 bits o 11 bits + signo 4 salidas De 0 a 10 V CC
De -10 a +10 V CC
De 0 a 20 mA
De 4 a 20 mA
Bloque de terminales de
tornillo extraíble / 5,08 mm
TM3AQ4G 12 bits o 11 bits + signo 4 salidas De 0 a 10 V CC
De -10 a +10 V CC
De 0 a 20 mA
De 4 a 20 mA
Bloque de terminales de
resorte extraíble / 5,08 mm
30 EIO0000003086.04

Descripción general de M241
Módulos de entradas/salidas mixtas analógicas TM3
En la siguiente tabla se muestran los módulos de E/S mixtas analógicas TM3, con
la resolución, el tipo de canal, la tensión/corriente nominal y el tipo de terminal
correspondientes:
Referencia Resolución Canales Tipo de
canal Modalidad Tipo de terminal/paso
TM3AM6 12 bits o 11 bits + signo 4 entradas De 0 a 10 V CC
De -10 a +10 V CC
De 0 a 20 mA
De 4 a 20 mA
Bloque de terminales de
tornillo extraíble / 3,81 mm
2 salidas
TM3AM6G 12 bits o 11 bits + signo 4 entradas De 0 a 10 V CC
De -10 a +10 V CC
De 0 a 20 mA
De 4 a 20 mA
Bloque de terminales de
resorte extraíble / 3,81 mm
2 salidas
TM3TM3 16 bits o 15 bits + signo 2 entradas De 0 a 10 V CC
De -10 a +10 V CC
De 0 a 20 mA
De 4 a 20 mA
Termoelemento
PT100/1000
NI100/1000
Bloque de terminales de
tornillo extraíble / 5,08 mm
12 bits o 11 bits + signo 1 salidas De 0 a 10 V CC
De -10 a +10 V CC
De 0 a 20 mA
De 4 a 20 mA
TM3TM3G 16 bits o 15 bits + signo 2 entradas De 0 a 10 V CC
De -10 a +10 V CC
De 0 a 20 mA
De 4 a 20 mA
Termoelemento
PT100/1000
NI100/1000
Bloque de terminales de
resorte extraíble / 5,08 mm
12 bits o 11 bits + signo 1 salidas De 0 a 10 V CC
De -10 a +10 V CC
De 0 a 20 mA
De 4 a 20 mA
EIO0000003086.04 31

Descripción general de M241
Módulos expertos TM3
En la siguiente tabla se muestran los módulos de extensión expertos TM3, con los
correspondientes tipos de terminal:
Referencia Descripción Tipo de terminal/paso
TM3XTYS4 Módulo TeSys 4 conectores frontales RJ-45
1 conector de fuente de alimentación
extraíble/5,08 mm
TM3XHSC202 Módulo de contador de alta velocidad (HSC) Bloques de terminales de tornillo
extraíble/3,81 mm
TM3XHSC202G Módulo de contador de alta velocidad (HSC) Bloques de terminales de resorte
extraíble/3,81 mm
32 EIO0000003086.04

Descripción general de M241
Módulos de seguridad TM3
En esta tabla se muestran los Seguridad de TM3 módulos con el tipo
correspondiente de canal, la tensión/corriente nominal y el tipo de terminal:
Referencia Función
Categoría
Canales Tipo de canal Tensión
Corriente
Tipo de terminal
TM3SAC5R 1 función,
hasta la
categoría 3
1 o 2 (1) Entrada de
seguridad 24 V CC
100 mA máximo
3,81 mm (0,15 pulgadas) y
5,08 mm (0,20 pulgadas),
bloque de terminales de
tornillo extraíble
Inicio (2) Entrada
3 en paralelo Salidas de relé
Normalmente
abierto
24 V CC/230 V CA
6 A máximo por salida
TM3SAC5RG 1 función,
hasta la
categoría 3
1o2(1) Entrada de
seguridad 24 V CC
100 mA máximo
3,81 mm (0,15 pulgadas) y
5,08 mm (0,20 pulgadas),
bloque de terminales de
resorte extraíble
Inicio (2) Entrada
3 en paralelo Salidas de relé
Normalmente
abierto
24 V CC/230 V CA
6 A máximo por salida
TM3SAF5R 1 función,
hasta la
categoría 4
2(1) Entradas de
seguridad 24 V CC
100 mA máximo
3,81 mm (0,15 pulgadas) y
5,08 mm (0,20 pulgadas),
bloque de terminales de
tornillo extraíble
Inicio Entrada
3 en paralelo Salidas de relé
Normalmente
abierto
24 V CC/230 V CA
6 A máximo por salida
TM3SAF5RG 1 función,
hasta la
categoría 4
2(1) Entradas de
seguridad 24 V CC
100 mA máximo
3,81 mm (0,15 pulgadas) y
5,08 mm (0,20 pulgadas),
bloque de terminales de
resorte extraíble
Inicio Entrada
3 en paralelo Salidas de relé
Normalmente
abierto
24 V CC/230 V CA
6 A máximo por salida
TM3SAFL5R 2 funciones,
hasta la
categoría 3
2(1) Entradas de
seguridad 24 V CC
100 mA máximo
3,81 mm (0,15 pulgadas) y
5,08 mm (0,20 pulgadas),
bloque de terminales de
tornillo extraíble
Inicio Entrada
3 en paralelo Salidas de relé
Normalmente
abierto
24 V CC/230 V CA
6 A máximo por salida
TM3SAFL5RG 2 funciones,
hasta la
categoría 3
2(1) Entradas de
seguridad 24 V CC
100 mA máximo
3,81 mm (0,15 pulgadas) y
5,08 mm (0,20 pulgadas),
bloque de terminales de
resorte extraíble
Inicio Entrada
3 en paralelo Salidas de relé
Normalmente
abierto
24 V CC/230 V CA
6 A máximo por salida
TM3SAK6R 3 funciones,
hasta la
categoría 4
1o2(1) Entradas de
seguridad 24 V CC
100 mA máximo
3,81 mm (0,15 pulgadas) y
5,08 mm (0,20 pulgadas),
bloque de terminales de
tornillo extraíble
Inicio Entrada
3 en paralelo Salidas de relé
Normalmente
abierto
24 V CC/230 V CA
6 A máximo por salida
EIO0000003086.04 33

Descripción general de M241
Referencia Función
Categoría
Canales Tipo de canal Tensión
Corriente
Tipo de terminal
TM3SAK6RG 3 funciones,
hasta la
categoría 4
1 o 2 (1) Entradas de
seguridad 24 V CC
100 mA máximo
3,81 mm (0,15 pulgadas) y
5,08 mm (0,20 pulgadas),
bloque de terminales de
resorte extraíble
Inicio Entrada
3 en paralelo Salidas de relé
Normalmente
abierto
24 V CC/230 V CA
6 A máximo por salida
(1) En función del cableado externo
(2) Inicio no supervisado
Módulos transmisores y receptores TM3
En la siguiente tabla se muestran los módulos de extensión transmisores y
receptores TM3:
Referencia Descripción Tipo de terminal/paso
TM3XTRA1 Módulo transmisor de datos para E/S remota 1 conector frontal RJ-45
1 tornillo de puesta a tierra funcional
TM3XREC1 Módulo receptor de datos para E/S remota 1 conector frontal RJ-45
Conector de fuente de alimentación / 5,08 mm
Acopladores de bus TM3
Introducción
El dispositivo Acoplador de bus TM3 está diseñado para gestionar la
comunicación de bus de campo al utilizar los módulos de extensión TM2 y TM3
en una arquitectura distribuida.
Para obtener más información, consulte Acoplador de bus Modicon TM3 - Guía
de hardware.
Acopladores de bus TM3 de Modicon
En la siguiente tabla se muestran los acopladores de bus TM3, con los puertos y
los tipos de terminales:
Referencia Puerto Tipo de comunicación Tipo de terminal
TM3BCEIP 2 puertos Ethernet
conmutados aislados EtherNet/IP
Modbus TCP
RJ45
1 puerto USB USB 2.0 USB mini-B
TM3BCSL 2 puertos RS-485
aislados (con cadena
margarita)
Línea serie
Modbus
RJ45
1 puerto USB USB 2.0 USB mini-B
TM3BCCO 2 puertos CANopen
aislados (con cadena
margarita)
CANopen RJ45
1 puerto USB USB 2.0 USB mini-B
34 EIO0000003086.04

Descripción general de M241
Módulos de extensión TM4
Introducción
El rango de módulos de extensión TM4 incluye módulos de comunicación.
Para obtener más información, consulte la Módulos de extensión TM4 - Guía de
hardware.
Módulos de extensión TM4
En la tabla siguiente se muestran las características de los módulos de extensión
TM4:
Referencia del
módulo Tipo Tipo de terminal
TM4ES4 Comunicación Ethernet 4 conectores RJ45
1 tornillo de puesta a tierra funcional
TM4PDPS1 Comunicación de esclavo
PROFIBUS DP 1 conector hembra SUB-D de 9 pins
1 tornillo de puesta a tierra funcional
NOTA: El módulo TM4ES4 tiene dos aplicaciones: extensión o autónomo. Para obtener más
información, consulte Compatibilidad con TM4.
Interfaces de bus de campo TM5
Introducción
Las interfaces de bus de campo TM5 son dispositivos diseñados para gestionar
las comunicaciones EtherNet/IP cuando se utilizan los módulos de extensión
Sistema TM5 y TM7 con un controlador en una arquitectura distribuida.
Para obtener más información, consulte Interfaz Modicon Sistema TM5 - Guía de
hardware.
Interfaces de bus de campo TM5
En la siguiente tabla se muestran las interfaces de bus de campo TM5 con los
puertos y el tipo de terminal:
Referencia Puerto Tipo de comunicación Tipo de
terminal
TM5NEIP1 2 puertos conmutados
Ethernet EtherNet/IP RJ45
Interfaces de bus de campo TM5 CANopen
Introducción
El módulo de bus de campo TM5 es una interfaz CANopen con distribución de
alimentación incorporada y es la primera isla TM5 de E/S distribuidas.
EIO0000003086.04 35

Descripción general de M241
Para obtener más información, consulte la Guía de hardware de la interfaz
CANopen de Modicon TM5.
Interfaces de bus de campo Modicon TM5 CANopen
En la siguiente tabla se muestran las interfaces de bus de campo TM5 CANopen:
Referencia Tipo de comunicación Tipo de terminal
TM5NCO1 CANopen 1 SUB-D 9, macho
Interfaces de bus de campo TM7 CANopen
Introducción
Los módulos de bus de campo TM7 son interfaces CANopen con entrada o salida
configurable digital de 24 V CC en 8 o 16 canales.
Para obtener más información, consulte la Guía de hardware de bloques de E/S
de la interfaz CANopen de Modicon TM7.
Interfaces de bus de campo Modicon TM7 CANopen
En la siguiente tabla se muestran las interfaces de bus de campo TM7 CANopen:
Referencia Número de canales Tensión/corriente Tipo de comunicación Tipo de terminal
TM7NCOM08B 8 entradas
8 salidas
24 V CC/4 mA
24 V CC/500 mA
CANopen Conector M8
TM7NCOM16A 16 entradas
16 salidas
24 V CC/4 mA
24 V CC/500 mA
CANopen Conector M8
TM7NCOM16B 16 entradas
16 salidas
24 V CC/4 mA
24 V CC/500 mA
CANopen Conector M12
Accesorios
Descripción general
En esta sección se describen los accesorios y los cables.
36 EIO0000003086.04

Descripción general de M241
Accesorios
Referencia Descripción Uso Cantidad
TMASD1 Tarjeta SD, página 49 Utilícela para actualizar el firmware del controlador,
inicializar un controlador con una aplicación nueva, clonar
un controlador, administrar archivos de usuario, etc.
1
TMAT4CSET Conjunto de cinco
bloques de terminales
de tornillo extraíbles
Conecta las E/S incrustadas de M241 Logic Controller. 1
TMAT2PSET Conjunto de cinco
bloques de terminales
de tornillo extraíbles
Conecta una fuente de alimentación de 24 V CC. 1
NSYTRAAB35 Soportes finales Ayudan a fijar el Controller o módulo receptor y sus
módulos de extensión en un carril DIN (segmento DIN).
1
TM2XMTGB Barra de puesta a tierra Conecta el blindaje de cable y el módulo a la conexión a
tierra funcional.
1
TM200RSRCEMC Abrazadera de blindaje Monta y conecta la puesta a tierra al blindaje del cable. Paquete de 25
Cables
Referencia Descripción Detalles Longitud
TCSXCNAMUM3P Juego de cables de
puerto de terminal/
puerto USB
Del puerto USB mini-B del M241 Logic Controller al
puerto USB del terminal PC.
3 m
(10 pies)
BMXXCAUSBH018 Juego de cables de
puerto de terminal/
puerto USB
Del puerto USB mini-B del M241 Logic Controller al
puerto USB del terminal PC.
NOTA: Este cable USB, con puesta a tierra y
blindado, es adecuado para conexiones de larga
duración.
1,8 m
(5,9 pies)
490NTW000•• Cable blindado
Ethernet para
conexiones DTE
Cable estándar, equipado con conectores RJ45 en
cada extremo para DTE.
De conformidad con la normativa CE.
2, 5, 12, 40 u 80 m
(6,56, 16,4, 39,37, 131,23 o
262,47 pies)
490NTW000••U Cable estándar, equipado con conectores RJ45 en
cada extremo para DTE.
De conformidad con la normativa UL.
2, 5, 12, 40 u 80 m
(6,56, 16,4, 39,37, 131,23 o
262,47 pies)
TCSECE3M3M••S4 Cable para entorno severo, equipado con conectores
RJ45 en cada extremo.
De conformidad con la normativa CE.
1, 2, 3, 5 o 10 m
(3,28, 6,56, 9,84, 16,4, 32,81
pies)
TCSECU3M3M••S4 Cable para entorno severo, equipado con conectores
RJ45 en cada extremo.
De conformidad con la normativa UL.
1, 2, 3, 5 o 10 m
(3,28, 6,56, 9,84, 16,4, 32,81
ft)
VW3A8306R•• 2 conectores RJ45 Cable equipado con conectores RJ45 en cada extremo
para la conexión serie Modbus.
0,3, 1 o 3 m
(0,98, 3,28 o 9,84 ft)
EIO0000003086.04 37

Funciones de M241
Funciones de M241
Contenido de este capítulo
Reloj en tiempo real (RTC).............................................................................38
Gestión de entradas ......................................................................................41
Gestión de salidas.........................................................................................43
Run/Stop ......................................................................................................48
Tarjeta SD.....................................................................................................49
Descripción general
En este capítulo se describen las funciones de Modicon M241 Logic Controller.
Reloj en tiempo real (RTC)
Descripción general
Los M241 Logic Controller incluyen un RTC que proporciona información de la
fecha y hora del sistema, además de admitir las funciones relacionadas que
requieren un reloj en tiempo real. Para mantener la hora cuando se interrumpa la
alimentación, se requiere una batería no recargable (consulte la siguiente
referencia). Un indicador LED de batería en el panel frontal del controlador indica
si la batería se ha agotado o no está presente.
En esta tabla se muestra cómo se gestiona la desviación del RTC:
Características del RTC Descripción
Desviación del RTC Menos de 60 segundos por mes sin ninguna calibración por
parte del usuario a 25 °C (77 °F)
Batería
El controlador tiene una batería.
En caso de interrupción de la alimentación, la batería de reserva retendrá el RTC
del controlador.
En esta tabla se muestran las características de la batería:
Características Descripción
Uso En el caso de un corte de corriente transitorio, la batería alimentará al
RTC.
Duración de reserva Al menos 2 años a un máximo de 25 °C (77 °F). Con temperaturas
más altas, se reduce el tiempo.
Monitorización de la
batería Sí
Reemplazable Sí
Tipo de batería del
controlador Monofluoruro de carbono-litio, tipo Panasonic BR2032
38 EIO0000003086.04

Funciones de M241
Instalación y sustitución de la batería
Aunque se prefieren las baterías de litio por su descarga lenta y su vida útil
prolongada, pueden representar un peligro para el personal, los equipos y el
medio ambiente, por lo que deben manipularse de forma adecuada.
PELIGRO
PELIGRO DE EXPLOSIÓN, INCENDIO O QUEMADURAS QUÍMICAS
• Sustituya la batería por otra idéntica.
• Siga todas las instrucciones del fabricante de la batería.
• Retire todas las baterías sustituibles antes de desechar la unidad.
• Recicle o deseche correctamente las baterías usadas.
• Proteja las baterías de posibles cortocircuitos.
• No las recargue, desmonte o caliente a más de 100 °C (212 °F) ni las
incinere.
• Utilice las manos o herramientas aisladas para extraer o sustituir la batería.
• Mantenga la polaridad adecuada cuando inserte y conecte una batería
nueva.
Si no se siguen estas instrucciones, se producirán lesiones graves o la
muerte.
Para instalar o sustituir la batería, siga estos pasos:
Paso Acción
1 Desconecte la alimentación de su controlador.
2 Utilice un destornillador aislado para extraer el soporte de la batería.
3 Retire el soporte de la batería del controlador.
EIO0000003086.04 39

Funciones de M241
Paso Acción
4 Saque la batería de su soporte.
5 Inserte la nueva batería en el soporte de la batería de acuerdo con las marcas de
polaridad.
6 Vuelva a colocar el soporte de la batería en el controlador y compruebe que el seguro
encaja.
7Arranque el M241 Logic Controller.
8 Ajuste el reloj interno. Si desea más información sobre el reloj interno, consulte M241
Logic Controller - Guía de programación (consulte Modicon M241 Logic Controller - Guía
de programación).
NOTA: Sustituir las baterías de los controladores por otras que no sean del
tipo especificado en esta documentación puede representar un riesgo de
incendio o explosión.
ADVERTENCIA
UNA BATERÍA INADECUADA PUEDE PROVOCAR UN INCENDIO O UNA
EXPLOSIÓN
Sustituya la batería sólo por otra de tipo idéntico: Panasonic tipo BR2032.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
40 EIO0000003086.04

Funciones de M241
Gestión de entradas
Descripción general
El M241 Logic Controller dispone de entradas digitales, incluidas 8 entradas
rápidas.
Se pueden configurar las funciones siguientes:
• Filtros (depende de la función asociada con la entrada).
• Para la función Run/Stop, se pueden utilizar todas las entradas.
• Se pueden enclavar o utilizar 8 entradas rápidas para eventos (flanco
ascendente, flanco descendente o ambos) y, de este modo, se pueden
vincular a una tarea externa.
NOTA: Todas las entradas se pueden utilizar como entradas normales.
Disponibilidad de las funciones de gestión de entradas
Las entradas digitales incrustadas pueden configurarse como funciones (Run/
Stop, eventos, HSC).
Las entradas no configuradas como funciones se usan como entradas normales.
En la siguiente tabla se muestran los posibles usos de las entradas digitales de
M241 Logic Controller:
Función
Función de entrada HSC
Ninguno RUN/STOP Encla-
vamien-
to
Even-
to
Tipo de filtro Integrador Integrador Rebote Rebo-
te
Entradas rápidas 1I0...I7
Entradas normales I8...I13 2
I8...I23 3
I8...I13 2
I8...I23 3
– – I8...I13 2, 4
I8...I15 3, 4
–No
1También se pueden utilizar como entradas normales
2Para M241 con 24 canales de E/S
3Para M241 con 40 canales de E/S
4Limitado a 1 kHz
Principio de filtro integrador
El filtro integrador está diseñado para reducir el efecto de ruido. La configuración
de un valor de filtro permite al Logic Controller ignorar algunos cambios
repentinos de los niveles de entrada causados por el ruido.
EIO0000003086.04 41

Funciones de M241
En el siguiente diagrama de tiempos se muestran los efectos del filtro integrador
para un valor de 4 ms:
NOTA: El valor seleccionado para el parámetro de tiempo del filtro especifica
el tiempo total en ms que debe transcurrir antes de que la entrada pueda ser
1.
Principio de filtro de rebote
El filtro de rebote está diseñado para reducir el efecto de rebote en las entradas.
La configuración de un valor de filtro de rebote permite al controlador ignorar
algunos cambios repentinos de los niveles de entrada causados por el ruido
eléctrico. El filtro de rebote solo está disponible en las entradas rápidas.
En el siguiente diagrama de tiempos se muestran los efectos del filtro antirrebote:
Disponibilidad del filtro de rebote
Este filtro se puede utilizar en una entrada rápida en los casos siguientes:
• Uso de un enclavamiento o un evento
• HSC está activado
Enclavamiento
La función de enclavamiento puede asignarse a las entradas rápidas de M241
Logic Controller. Esta función se utiliza para memorizar (o enclavar) cualquier
pulso con una duración inferior al tiempo de exploración del M241 Logic
Controller. Cuando un pulso es más corto que una exploración, el controlador
enclava el pulso, que se actualiza en la exploración siguiente. Este mecanismo de
42 EIO0000003086.04

Funciones de M241
enclavamiento solo reconoce los flancos ascendentes. Los flancos descendentes
no se pueden enclavar. La asignación de las entradas que se van a enclavar se
realiza en la ficha Configuración de E/S de EcoStruxure Machine Expert.
En el diagrama de tiempos siguiente se muestran los efectos del enclavamiento:
Evento
Una entrada configurada para evento se puede asociar a una Tarea externa
(consulte Modicon M241 Logic Controller - Guía de programación).
Run/Stop
La función Run/Stop se emplea para iniciar o detener un programa de aplicación
mediante una entrada. Además del interruptor Run/Stop incrustado, se permite
configurar una entrada (y solamente una) como comando adicional de Run/Stop.
Para obtener más información, consulte Run/Stop, página 48.
ADVERTENCIA
INICIO NO DESEADO DE LA MÁQUINA O DEL PROCESO DE ACTIVACIÓN
• Compruebe el estado de seguridad de la máquina o del entorno de proceso
antes de aplicar electricidad a la entrada Run/Stop.
• Use la entrada Run/Stop para evitar activaciones no deseadas desde
ubicaciones remotas.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Utilice la fuente de alimentación del actuador y el sensor sólo para proporcionar
alimentación a los sensores o actuadores conectados al módulo.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Gestión de salidas
Introducción
M241 Logic Controller incluye salidas de transistor normales y rápidas (PTO/
PWM/FreqGen).
EIO0000003086.04 43

Funciones de M241
Las siguientes funciones de salida se pueden configurar en las salidas de
transistor:
• Salida de alarma
• HSC (funciones reflejas en umbral de HSC)
• PTO
• PWM
• FreqGen
NOTA: Todas las salidas se pueden utilizar como salidas normales.
Disponibilidad de la gestión de salidas
En la siguiente tabla se muestran los posibles usos de las salidas digitales M241
Logic Controller en referencias con salidas de transistor:
Referencia Función Salida de
alarma HSC FreqGen PWM PTO
TM241C•40T/TM241C•40U
TM241C••24T/TM241C••24U
Salida
rápida
Q0 X Salida refleja 0 o 1 Salida A Salida A Salida A o B
Q1 X Salida refleja 0 o 1 Salida A Salida A Salida A o B
Q2 X Salida refleja 0 o 1 Salida A Salida A Salida A o B
Q3 X Salida refleja 0 o 1 Salida A Salida A Salida A o B
Salida
normal
Q4 X Salida refleja 0 o 1 Salida A Salida A Salida A o B
Q5 X Salida refleja 0 o 1 Salida A Salida A Salida A o B
Q6 X Salida refleja 0 o 1 Salida A Salida A Salida A o B
Q7 X Salida refleja 0 o 1 Salida A Salida A Salida A o B
Q8 X – – – –
Q9 X – – – –
Q10 X – – – –
Q11 X – – – –
Q12 X – – – –
Q13 X – – – –
Q14 X – – – –
Q15 X – – – –
44 EIO0000003086.04

Funciones de M241
En la siguiente tabla se muestran los posibles usos de M241 Logic Controller en
referencias con salidas de relé:
Referencia Función Salida de
alarma HSC FreqGen PWM PTO
TM241C•40R
TM241C••24R
Salida
rápida
Q0 X Salida refleja 0 o 1 Salida A Salida A Salida A o B
Q1 X Salida refleja 0 o 1 Salida A Salida A Salida A o B
Q2 X Salida refleja 0 o 1 Salida A Salida A Salida A o B
Q3 X Salida refleja 0 o 1 Salida A Salida A Salida A o B
Salida
normal
Q4 X Salida refleja 0 o 1 – – –
Q5 X Salida refleja 0 o 1 – – –
Q6 X Salida refleja 0 o 1 – – –
Q7 X Salida refleja 0 o 1 – – –
Q8 X – – – –
Q9 X – – – –
Q10 X – – – –
Q11 X – – – –
Q12 X – – – –
Q13 X – – – –
Q14 X – – – –
Q15 X – – – –
Modalidades de retorno (Comportamiento de las salidas en
parada)
Cuando, por cualquier motivo, el controlador pasa al estado STOPPED
(Detenido) o a uno de los estados de excepción, las salidas locales (incrustadas y
de extensión) se establecen en el Valor predeterminado definido en la
aplicación.
En caso de salidas PTO, los valores de retorno se fuerzan a la lógica 0 (0 V CC) y
estos valores no se pueden modificar.
Cortocircuito o sobrecorriente en las salidas transistorizadas de
común negativo
Las salidas se agrupan en paquetes de cuatro salidas como máximo (menos
cuando el número total de salidas del controlador no es múltiplo de 4):
• De Q0 aQ3
• De Q4 aQ7
• De Q8 aQ11
• De Q12 aQ15
Cuando se detecta un cortocircuito o una sobrecarga, la agrupación de cuatro
salidas se establece en 0. Se realiza un restablecimiento automático de forma
periódica (1 s aproximadamente).
EIO0000003086.04 45

Funciones de M241
En la tabla siguiente se describen las acciones realizadas en cortocircuitos o
sobrecargas de las salidas de transistor Q0 a Q3:
Si... entonces...
Sufre un cortocircuito a 0 V en las
salidas transistorizadas Las salidas de transistor pasan automáticamente a la
modalidad de protección térmica o protección contra
sobrecorriente.
Para obtener más información, consulte los diagramas
de cableado de las salidas de transistor.
Sufre un cortocircuito a 24 V en las
salidas transistorizadas
Las salidas de transistor pasan automáticamente a la
modalidad de protección contra sobrecorriente.
Para obtener más información, consulte los diagramas
de cableado de las salidas de transistor.
En la tabla siguiente se describen las acciones realizadas en cortocircuitos o
sobrecargas de salidas de transistor de Q4 a Q15:
Si... entonces...
Sufre un cortocircuito a 0 V en las salidas
transistorizadas
Las salidas de transistor pasan
automáticamente a la modalidad de protección
térmica.
Para obtener más información, consulte los
diagramas de cableado de las salidas de
transistor.
Sufre un cortocircuito a 24 V en las salidas
transistorizadas
No se ejecuta ninguna acción y no se detecta
ningún error. Un cortocircuito o una
sobretensión de más de 24 V pueden dañar el
equipo.
En caso de un cortocircuito o una sobrecarga de corriente, el grupo común de
salidas pasa automáticamente a la modalidad de protección térmica (todas las
salidas del grupo se establecen en 0) y, a continuación, se rearman
periódicamente (cada segundo) para probar el estado de la conexión. Sin
embargo, debe ser consciente del efecto de este restablecimiento en la máquina
o el proceso que se controla.
ADVERTENCIA
INICIO IMPREVISTO DE LA MÁQUINA
Inhiba el restablecimiento automático de salidas si esta función implica un
comportamiento no deseado para la máquina o el proceso.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
NOTA: La función de restablecimiento automático puede inhibirse. Consulte
la guía de programación de su controlador para obtener más información.
Cortocircuito o sobrecorriente en las salidas transistorizadas de
común positivo
Las salidas de transistor de común positivo no están protegidas internamente
contra sobrecargas o cortocircuitos.
46 EIO0000003086.04

Funciones de M241
En la tabla siguiente se describen las acciones realizadas en cortocircuitos o
sobrecargas de salidas de transistor de común positivo de Q0 a Q3:
Si... entonces...
Sufre un cortocircuito a 0 V en las salidas
transistorizadas
Las salidas de transistor pasan
automáticamente a la modalidad de protección
térmica o protección contra sobrecorriente.
Para obtener más información, consulte los
diagramas de cableado de las salidas de
transistor.
Sufre un cortocircuito a 24 V en las salidas
transistorizadas
Las salidas de transistor pasan
automáticamente a la modalidad de protección
contra sobrecorriente.
Para obtener más información, consulte los
diagramas de cableado de las salidas de
transistor.
En la tabla siguiente se describen las acciones realizadas en cortocircuitos o
sobrecargas de salidas de transistor de común positivo de Q4 a Q15:
Si... entonces...
Sufre un cortocircuito a 0 V en las salidas
transistorizadas
No se ejecuta ninguna acción y no se detecta
ningún error. Un cortocircuito o una infratensión
inferior a 0 V pueden dañar el equipo.
Sufre un cortocircuito a 24 V en las salidas
transistorizadas
Las salidas de transistor pasan
automáticamente a la modalidad de protección
térmica.
Para obtener más información, consulte los
diagramas de cableado de las salidas de
transistor.
Cortocircuito o sobrecorriente en las salidas de relé
Las salidas de relé no se protegen de forma interna contra sobrecargas o
cortocircuitos.
En la tabla siguiente se describen las acciones llevadas a cabo en cortocircuitos o
sobrecargas de salidas de relé:
Si... entonces...
Sufre un cortocircuito o una sobrecarga
a 0 V o 24 V en las salidas de relé
No se ejecuta ninguna acción y no se detecta ningún
error.
Para obtener más información, consulte los diagramas
de cableado de las salidas de relé.
Las salidas de relé son conmutadores electromecánicos que admiten niveles
significativos de corriente y tensión. Todos los dispositivos electromecánicos
tienen una vida limitada y se deben instalar para minimizar la posibilidad de
consecuencias no deseadas.
ADVERTENCIA
SALIDAS NO OPERATIVAS
En caso de que exista riesgo para el personal o los equipos, utilice los
dispositivos de bloqueo de seguridad externos adecuados en las salidas.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
EIO0000003086.04 47

Funciones de M241
Run/Stop
Descripción general
El M241 Logic Controller se puede utilizar externamente mediante los métodos
siguientes:
• Un interruptor Run/Stop de hardware.
• Un comando de software de EcoStruxure Machine Expert.
• Una operación de Run/Stop de una entrada digital dedicada, definida en la
configuración del software (si desea más información, consulte Configuración
de E/S incrustadas (consulte Modicon M241 Logic Controller - Guía de
programación).
• La variable del sistema PLC_W en una Tabla de reubicación (consulte
Modicon M241 Logic Controller - Guía de programación).
• El Servidor web (consulte Modicon M241 Logic Controller - Guía de
programación).
El M241 Logic Controller tiene un interruptor Run/Stop de hardware que pone el
controlador en el estado RUNNING o STOPPED.
En la siguiente tabla se resume la interacción de los dos operadores externos en
el comportamiento del estado del controlador:
Interruptor Run/Stop de hardware incrustado
Interruptor en Stop Transición de Stop a Run Interruptor en Run
Entrada digital
Run/Stop
configurable
mediante
software
Ninguno STOPPED
Ignora los comandos externos
Run/Stop.
Ordena una transición al
estado RUNNING(1).
Permite los comandos externos
Run/Stop.
Estado 0 STOPPED
Ignora los comandos externos
Run/Stop.
STOPPED
Ignora los comandos externos
Run/Stop.
Flanco
ascenden-
te
Ordena una transición al
estado RUNNING(1).Ordena una transición al
estado RUNNING.
Estado 1 Ordena una transición al
estado RUNNING(1).
Permite los comandos externos
Run/Stop.
(1) Si desea más información, consulte Estados y comportamientos del controlador (consulte Modicon M241 Logic Controller - Guía de
programación).
48 EIO0000003086.04

Funciones de M241
ADVERTENCIA
INICIO NO DESEADO DE LA MÁQUINA O DEL PROCESO DE ACTIVACIÓN
• Compruebe el estado de seguridad de su máquina o del entorno del proceso
antes de conectar la alimentación a la entrada Run/Stop o accionar el
interruptor Run/Stop.
• Use la entrada Run/Stop para evitar activaciones no deseadas desde
ubicaciones remotas o accionar accidentalmente el interruptor Run/Stop.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Tarjeta SD
Descripción general
Cuando manipule la tarjeta SD, siga estas instrucciones a continuación para
evitar que se dañen o se pierdan datos internos de dicha tarjeta o que se
produzca un funcionamiento incorrecto de la tarjeta SD:
AVISO
PÉRDIDA DE DATOS DE APLICACIÓN
• No guarde la tarjeta SD en un lugar con electricidad estática o posibles
campos electromagnéticos.
• No guarde la tarjeta SD en lugares expuestos a la luz solar directa, cerca de
calentadores o en otros lugares con temperaturas elevadas.
• No doble la tarjeta SD.
• No deje caer la tarjeta SD ni la golpee contra otro objeto.
• Mantenga la tarjeta SD seca.
• No toque los conectores de la tarjeta SD.
• No desmonte ni modifique la tarjeta SD.
• Utilice únicamente tarjetas SD formateadas con FAT o FAT32.
Si no se siguen estas instrucciones, pueden producirse daños en el
equipo.
El M241 Logic Controller no reconoce tarjetas SD formateadas con NTFS.
Formatee la tarjeta SD de su equipo con FAT o FAT32.
Cuando utilice el M241 Logic Controller y una tarjeta SD, tenga en cuenta lo
siguiente para evitar la pérdida de datos valiosos:
• Pueden producirse pérdidas de datos accidentales en cualquier momento. Si
se pierden los datos, no se podrán recuperar.
• Si saca la tarjeta SD a la fuerza, los datos que contiene pueden resultar
dañados.
• Extraer una tarjeta SD a la que se está accediendo podría dañar la tarjeta o
sus datos.
• Si no se coloca correctamente la tarjeta SD al insertarla en el controlador, los
datos de la tarjeta y del controlador podrían resultar dañados.
EIO0000003086.04 49

Funciones de M241
AVISO
PÉRDIDA DE DATOS DE APLICACIÓN
• Haga copias de seguridad de la tarjeta SD con regularidad.
• No quite la alimentación ni resetee el controlador y no inserte ni extraiga la
tarjeta SD mientras se está accediendo a la tarjeta.
Si no se siguen estas instrucciones, pueden producirse daños en el
equipo.
En la siguiente figura se muestra el slot para tarjetas SD:
Se puede activar la lengüeta de control de escritura para evitar las operaciones
de escritura en la tarjeta SD. Tal como se muestra en el ejemplo de la derecha,
empuje la lengüeta hacia arriba para liberar el bloqueo y habilitar la escritura en la
tarjeta SD. Antes de utilizar una tarjeta SD, debe leer las instrucciones del
fabricante.
50 EIO0000003086.04

Funciones de M241
Paso Acción
1 Inserte la tarjeta SD en el slot para tarjeta SD:
2 Presione hasta que oiga un clic:
RUN
STOP
Características del slot para tarjeta SD
Tema Características Descripción
Tipo compatible Capacidad estándar SD (SDSC)
Alta capacidad SDHC
Memoria global Tamaño 16 GB máx.
Características de TMASD1
Características Descripción
Durabilidad de la tarjeta ante la extracción 1000 veces como mínimo
Tiempo de conservación de los archivos 10 años a 25 °C (77 °F)
Tipo de flash SLC NAND
Tamaño de memoria 256 MB
Temperatura ambiente de funcionamiento De -10 a +85 °C (de 14 a 185 °F)
Temperatura de almacenamiento De -25 a +85 °C (de -13 a 185 °F)
Humedad relativa Máx. 95 % sin condensación
Ciclos de escritura/borrado 3 000 000 (aproximadamente)
EIO0000003086.04 51

Funciones de M241
Indicador LED de estado
En la figura siguiente se muestran los indicadores LED de estado:
En la tabla siguiente se describe el indicador LED de estado de la tarjeta SD:
Etiqueta Descripción Indicador LED
Color Estado Descripción
SD Tarjeta SD Verde Encendi-
do Indica que se está accediendo a
la tarjeta SD.
Apagado Indica que no se ha podido
acceder.
52 EIO0000003086.04

Instalación de M241
Instalación de M241
Contenido de este capítulo
Reglas generales para la implementación de M241 Logic Controller .................53
Instalación del M241 Logic Controller..............................................................56
Requisitos eléctricos de M241........................................................................65
Descripción general
En este capítulo se proporcionan instrucciones de seguridad para la instalación,
dimensiones de los dispositivos, instrucciones de montaje y especificaciones
ambientales.
Reglas generales para la implementación de M241 Logic
Controller
Características ambientales
Requisitos de la carcasa
Los componentes del sistema M241 Logic Controller están diseñados como
equipos industriales de zona B y clase A, según la publicación 11 de IEC/CISPR.
Si se utilizan en entornos distintos de los descritos en el estándar o en entornos
que no cumplen las especificaciones de este manual, pueden surgir dificultades
para garantizar la compatibilidad electromagnética, debido a interferencias
conducidas o radiadas.
Todos los componentes del sistema M241 Logic Controllercumplen los requisitos
de la Comunidad Europea (CE) para equipos abiertos, como se define en IEC/EN
61131-2. Deben instalarse en una carcasa diseñada para condiciones
ambientales específicas y para reducir la posibilidad de un contacto no deseado
con tensiones peligrosas. Utilice armarios metálicos para mejorar la inmunidad
electromagnética de su sistema M241 Logic Controller. Utilice armarios con un
mecanismo de bloqueo con clave para minimizar los accesos no autorizados.
Características ambientales
Todos los componentes del módulo M241 Logic Controller se aíslan
eléctricamente entre el circuito electrónico interno y los canales de entrada/salida
dentro de los límites establecidos y descritos por estas características
medioambientales. Para obtener más información sobre el aislamiento eléctrico,
consulte las especificaciones técnicas del controlador en particular, que aparecen
más adelante en este documento. Este equipo cumple los requisitos de la CE tal
como se indica en la tabla siguiente. Este equipo está diseñado para el uso en un
entorno industrial con un grado de contaminación 2.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No supere ninguno de los valores nominales que se especifican en las tablas
de características medioambientales y eléctricas.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
EIO0000003086.04 53

Instalación de M241
En la tabla siguiente se muestran las características ambientales generales:
Característica Especificación
mínima Intervalo comprobado
Cumplimiento de la norma IEC/EN 61131-2
IEC/EN 61010-2-
201
–
Temperatura ambiente de funcionamiento –Instalación horizontal De –10 a 55 °C (de 14 a 131 °F)
–Instalación vertical De –10 a 50 °C (de 14 a 122 °F)
Temperatura de almacenamiento –De –25 a 70 °C (de -13 a 158 °F)
Humedad relativa –Transporte y
almacenamiento Del 10 al 95 % (sin condensación)
Funcionamiento Del 10 al 95 % (sin condensación)
Grado de contaminación IEC/EN 60664-1 2
Grado de protección IEC/EN 61131-2 IP20 con cubiertas de protección en su sitio
Inmunidad a la corrosión –Atmósfera sin gases corrosivos
Altitud de funcionamiento –De 0 a 2000 m (de 0 a 6560 ft)
Altitud de almacenamiento –De 0 a 3.000 m (de 0 a 9.843 pies)
Resistencia a las vibraciones IEC/EN 61131-2 Montaje del panel o
montado en un carril
DIN (segmento DIN)
3,5 mm (0,13 pulg.) de amplitud fija de 5
a 8,4 Hz
9,8 m/s2(32,15 pies/s2) (1 gn)
aceleración fija de 8,4 a 150 Hz
10 mm (0,39 pulg.) de amplitud fija de 5
a 8,7 Hz
29,4 m/s2(96,45 pies/s2) (3 gn)
aceleración fija de 8,7 a 150 Hz
Resistencia a impactos mecánicos –147 m/s2o 482,28 pies/s2(15 gn) durante 11 ms
NOTA: Los rangos comprobados pueden indicar valores que sobrepasen los de la norma IEC. No obstante, nuestras normas internas
definen los elementos necesarios para entornos industriales. En cada caso, recomendamos las especificaciones mínimas siempre
que se indiquen.
54 EIO0000003086.04

Instalación de M241
Susceptibilidad electromagnética
El sistema M241 Logic Controller cumple las especificaciones de susceptibilidad
electromagnética indicadas en la siguiente tabla:
Característica Especificación mínima Intervalo comprobado
Descarga electrostática IEC/EN 61000-4-2
IEC/EN 61131-2
8 kV (descarga en el aire)
4 kV (descarga por contacto)
Campo electromagnético radiado IEC/EN 61000-4-3
IEC/EN 61131-2
10 V/m (de 80 a 1000 MHz)
3 V/m (de 1,4 a 2 GHz)
1 V/m (de 2 a 3 GHz)
Ráfaga de transitorios rápidos IEC/EN 61000-4-4
IEC/EN 61131-2
Líneas de
alimentación
principal de 24 V CC
2 kV (CM1y DM2)
E/S de 24 V CC 2 kV (abrazadera)
Salida de relé 1 kV (abrazadera)
E/S digitales 1 kV (abrazadera)
Línea de
comunicación 1 kV (abrazadera)
Inmunidad a sobretensión IEC/EN 61000-4-5
IEC/EN 61131-2
–CM1DM2
Líneas de
alimentación de CC 0,5 kV 0,5 kV
Salidas de relé – –
E/S de 24 V CC – –
Cable blindado
(entre blindaje y
conexión a tierra)
1 kV –
Campo electromagnético inducido IEC/EN 61000-4-6
IEC/EN 61131-2
10 Vrms (de 0,15 a 80 MHz)
Emisión conducida IEC 61000-6-4
IEC/EN 61131-2
• De 10 a 150 kHz: De 120 a 69 dBμV/m QP
• De 150 a 1500 kHz: De 79 a 63 dBμV/m QP
• De 1,5 a 30 MHz: 63 dBμV/m QP
Emisión radiada IEC 61000-6-4
IEC/EN 61131-2
De 30 a 230 MHz: 40 dBμV/m QP
De 230 a 1000 MHz: 47 dBμV/m QP
1Modalidad común
2Modalidad diferencial
NOTA: Los rangos comprobados pueden indicar valores que sobrepasen los de la norma IEC. No obstante, nuestras normas internas
definen los elementos necesarios para entornos industriales. En cada caso, recomendamos las especificaciones mínimas siempre
que se indiquen.
Certificaciones y normas
Introducción
Para obtener información sobre los certificados y conformidad con los estándares,
vaya a www.se.com.
Para obtener información sobre la conformidad de los productos y la información
medioambiental (RoHS, REACH, PEP, EOLI, etc.), vaya a www.se.com/green-
premium.
EIO0000003086.04 55

Instalación de M241
Instalación del M241 Logic Controller
Requisitos de instalación y mantenimiento
Antes de comenzar
Debe leer y comprender este capítulo antes de empezar a instalar el sistema.
El uso y la aplicación de la información contenida en el presente documento
requieren experiencia en diseño y programación de sistemas de control
automatizados. Solamente el usuario, el fabricante o el integrador saben cuáles
son las condiciones y los factores presentes durante la instalación y la
configuración, el funcionamiento y el mantenimiento de la máquina o del proceso,
por lo que pueden decidir la automatización y el equipo asociado, así como las
medidas de seguridad y los enclavamientos relacionados que se pueden utilizar
de forma efectiva y correcta. Al seleccionar el equipo de control y automatización,
y cualquier otro equipo o software relacionado, para una determinada aplicación,
también debe tener en cuenta todas las normativas y estándares locales,
regionales o nacionales.
Preste especial atención al cumplir la información sobre seguridad, los distintos
requisitos eléctricos y los estándares normativos que podrían aplicarse a su
máquina o proceso en el uso de este equipo.
Desconexión de la alimentación
Se deben montar e instalar todas las opciones y los módulos antes de instalar el
sistema de control en un segmento de montaje, una placa de montaje o un panel.
Retire el sistema de control de su segmento de montaje, placa de montaje o panel
antes de desmontar el equipo.
PELIGRO
PELIGRO DE DESCARGA ELÉCTRICA, EXPLOSIÓN O DESTELLO DE
ARCO VOLTAICO
• Desconecte la alimentación de todos los equipos, incluidos los dispositivos
conectados, antes de retirar cualquier cubierta o compuerta, o bien antes de
instalar o retirar cualquier accesorio, hardware, cable o conductor salvo en
las condiciones indicadas en la guía de hardware de este equipo.
• Utilice siempre un dispositivo de detección de tensión de capacidad
adecuada para confirmar la ausencia de alimentación eléctrica cuando y
donde se indique.
• Vuelva a montar y fijar todas las cubiertas, accesorios, elementos de
hardware y cables del sistema y compruebe que haya una conexión a tierra
adecuada antes de aplicar alimentación eléctrica a la unidad.
• Utilice este equipo y los productos asociados solo con la tensión indicada.
Si no se siguen estas instrucciones, se producirán lesiones graves o la
muerte.
56 EIO0000003086.04

Instalación de M241
Consideraciones sobre la programación
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
• Utilice sólo software aprobado por Schneider Electric para este equipo.
• Actualice el programa de aplicación siempre que cambie la configuración de
hardware física.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Entorno operativo
Además de las Características ambientales, consulte Información relacionada
con el producto al inicio del presente documento para obtener información
importante sobre la instalación en ubicaciones peligrosas para este equipo
específico.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Instale y utilice este equipo de acuerdo con las condiciones descritas en las
características medioambientales.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Consideraciones sobre la instalación
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
• En caso de que exista riesgo para el personal o los equipos, utilice los
dispositivos de bloqueo de seguridad adecuados.
• Instale y utilice este equipo en una carcasa adecuada para el entorno
correspondiente, y que esté protegida por un mecanismo de bloqueo que
use llaves o herramientas.
• Utilice las fuentes de alimentación del actuador y el sensor sólo para
proporcionar alimentación a los sensores o actuadores conectados al
módulo.
• La línea de alimentación y los circuitos de salida deben estar equipados con
cables y fusibles que cumplan los requisitos normativos locales y nacionales
relativos a la corriente nominal y la tensión del equipo en cuestión.
• No utilice este equipo en funciones de maquinaria críticas para la seguridad
a no ser que esté diseñado como equipo de seguridad funcional y siga los
estándares y las normas correspondientes.
• No desmonte, repare ni modifique este equipo.
• No conecte ningún cable a conexiones reservadas y no utilizadas o a
conexiones designadas como No Connection (N.C.).
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
NOTA: Los tipos de fusibles JDYX2 o JDYX8 están reconocidos por UL y
aprobados por CSA.
EIO0000003086.04 57

Instalación de M241
Distancias y posiciones de montaje M241 Logic Controller
Introducción
En esta sección se describen las posiciones de montaje para el M241 Logic
Controller.
NOTA: Mantenga una distancia adecuada para que la ventilación sea
correcta y se mantenga la temperatura de funcionamiento indicada en las
características medioambientales, página 53.
Posición de montaje correcta
Siempre que sea posible, el M241 Logic Controller se deberá montar en posición
horizontal sobre un plano vertical, tal y como se muestra en la figura siguiente:
Posiciones de montaje aceptables
El M241 Logic Controller también se puede montar verticalmente con un
descenso de temperatura en un plano vertical, como se muestra a continuación.
NOTA: Los módulos de extensión se deben montar sobre el Logic Controller.
58 EIO0000003086.04

Instalación de M241
Posición de montaje incorrecta
El M241 Logic Controller sólo se debe colocar tal y como se muestra en la figura
Posición de montaje correcta, página 58. En las figuras siguientes se muestran
las posiciones de montaje incorrectas.
Distancias mínimas
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
• Coloque los dispositivos que disipen más calor en la parte superior del
armario y asegure una ventilación adecuada.
• Evite situar este equipo cerca o encima de dispositivos que puedan
provocar sobrecalentamiento.
• Instale el equipo en una ubicación que proporcione el mínimo de espacios
libres desde todas las estructuras adyacentes y todo el equipo, tal como se
indica en este documento.
• Instale todo el equipo según las especificaciones de la documentación
relacionada.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
El M241 Logic Controller se ha diseñado como un producto IP20 y se debe
instalar en una caja. Deben respetarse las distancias al instalar el producto.
Existen tres tipos de distancias entre:
• El M241 Logic Controller y todos los lados del armario (incluida la puerta del
panel).
• Los bloques de terminales del M241 Logic Controller y los conductos del
cableado. Esta distancia reduce la interferencia electromagnética entre el
controlador y los conductos de cables.
• El M241 Logic Controller y todos dispositivos que generan calor instalados en
el mismo armario.
EIO0000003086.04 59


Instalación de M241
Riel DIN (segmento DIN)
Dimensiones del riel DIN, segmento DIN
Puede montar el controlador o el receptor y sus extensiones en un riel DIN
(segmento DIN) de 35 mm (1,38 pulg.). Se puede adjuntar a una superficie de
montaje lisa o suspender de un bastidor EIA o en un armario NEMA.
Rieles DIN simétricos (segmento DIN)
En la ilustración y la tabla siguientes se muestran las referencias de los rieles DIN
(segmento DIN) para el rango de montaje en pared:
Referencia Tipo Longitud del segmento (B)
NSYSDR50A A 450 mm (17,71 pulg.)
NSYSDR60A A 550 mm (21,65 pulg.)
NSYSDR80A A 750 mm (29,52 pulg.)
NSYSDR100A A 950 mm (37,40 pulg.)
En la ilustración y la tabla siguientes se muestran las referencias de los rieles DIN
simétricos (segmento DIN) para el rango de las carcasas de metal:
Referencia Tipo Longitud del segmento (B-12 mm)
NSYSDR60 A 588 mm (23,15 pulg.)
NSYSDR80 A 788 mm (31,02 pulg.)
NSYSDR100 A 988 mm (38,89 pulg.)
NSYSDR120 A 1188 mm (46,77 pulg.)
EIO0000003086.04 61

Instalación de M241
En la ilustración y la tabla siguientes se muestran las referencias de los rieles DIN
simétricos (segmento DIN) de 2000 mm (78,74 pulg.):
Referencia Tipo Longitud del segmento
NSYSDR2001A 2000 mm (78,74 pulg.)
NSYSDR200D2A
1Acero galvanizado sin perforaciones
2Acero galvanizado perforado
Rieles DIN de doble perfil (segmento DIN)
En la ilustración y la tabla siguientes se muestran las referencias de los rieles DIN
de doble perfil (segmentos DIN) para el rango de montaje en pared:
Referencia Tipo Longitud del segmento (B)
NSYDPR25 W 250 mm (9,84 pulg.)
NSYDPR35 W 350 mm (13,77 pulg.)
NSYDPR45 W 450 mm (17,71 pulg.)
NSYDPR55 W 550 mm (21,65 pulg.)
NSYDPR65 W 650 mm (25,60 pulg.)
NSYDPR75 W 750 mm (29,52 pulg.)
62 EIO0000003086.04

Instalación de M241
En la ilustración y la tabla siguientes se muestran las referencias de los rieles DIN
de doble perfil (segmento DIN) para el rango de montaje en el suelo:
Referencia Tipo Longitud del segmento (B)
NSYDPR60 F 588 mm (23,15 pulg.)
NSYDPR80 F 788 mm (31,02 pulg.)
NSYDPR100 F 988 mm (38,89 pulg.)
NSYDPR120 F 1188 mm (46,77 pulg.)
Instalación y desinstalación del controlador con extensiones
Descripción general
En esta sección se explica cómo instalar y desmontar el controlador con sus
módulos de extensión desde un riel DIN (segmento DIN).
Para montar módulos de extensión en un controlador, módulo receptor u otros
módulos, consulte las guías de hardware de los módulos de extensión
correspondientes.
EIO0000003086.04 63

Instalación de M241
Instalación de un controlador con sus extensiones en un segmento DIN
En el siguiente procedimiento se describe cómo instalar un controlador con sus
módulos de extensión en un riel DIN (segmento DIN):
Paso Acción
1 Fije el riel DIN (segmento DIN) a la superficie de un panel mediante tornillos.
2 Coloque la ranura superior del controlador y sus módulos de extensión en el borde
superior del segmento DIN y presione el conjunto contra el riel DIN (segmento DIN)
hasta que oiga que el clip para riel DIN (segmento DIN) encaja en su sitio.
1
2
3 Coloque dos pinzas finales de bloque de terminales en ambos lados del conjunto de
controlador y módulo de extensión.
NOTA: Las pinzas finales de bloque de terminales de tipo NSYTRAAB35 o
equivalente ayudan a minimizar los movimientos laterales y mejoran las
características de impacto y vibración del conjunto de controlador y módulo de
extensión.
Desmontaje de un controlador con sus extensiones de un riel DIN
(segmento DIN)
En el siguiente procedimiento se describe cómo desmontar un controlador con
sus módulos de extensión de un riel DIN (segmento DIN):
Paso Acción
1 Desconecte toda la alimentación del controlador y los módulos de extensión.
2 Inserte un destornillador plano en el slot del clip para riel DIN (segmento DIN).
3 Presione hacia abajo el clip del segmento DIN.
4 Retire el controlador y sus módulos de extensión del riel DIN (segmento DIN)
comenzando por la parte inferior.
64 EIO0000003086.04

Instalación de M241
Montaje directo sobre la superficie de un panel
Ubicación de los orificios de montaje
En el siguiente diagrama se muestra la ubicación de los orificios de montaje para
M241 Logic Controller con 24 canales de E/S:
En el siguiente diagrama se muestra la ubicación de los orificios de montaje para
M241 Logic Controller con 40 canales de E/S:
Requisitos eléctricos de M241
Prácticas recomendadas de cableado
Descripción general
En esta sección se describen las directrices de cableado y las prácticas
recomendadas asociadas que se deben respetar al utilizar el sistema M241 Logic
Controller.
EIO0000003086.04 65

Instalación de M241
PELIGRO
PELIGRO DE DESCARGA ELÉCTRICA, EXPLOSIÓN O DESTELLO DE
ARCO VOLTAICO
• Desconecte la alimentación de todos los equipos, incluidos los dispositivos
conectados, antes de retirar cualquier cubierta o compuerta, o bien antes de
instalar o retirar cualquier accesorio, hardware, cable o conductor salvo en
las condiciones indicadas en la guía de hardware de este equipo.
• Utilice siempre un dispositivo de detección de tensión de capacidad
adecuada para confirmar la ausencia de alimentación eléctrica cuando y
donde se indique.
• Vuelva a montar y fijar todas las cubiertas, accesorios, elementos de
hardware y cables del sistema y compruebe que haya una conexión a tierra
adecuada antes de aplicar alimentación eléctrica a la unidad.
• Utilice este equipo y los productos asociados solo con la tensión indicada.
Si no se siguen estas instrucciones, se producirán lesiones graves o la
muerte.
ADVERTENCIA
PÉRDIDA DE CONTROL
• El diseñador del esquema de control debe tener en cuenta los posibles
modos de fallo de rutas de control y, para ciertas funciones de control
críticas, proporcionar los medios para lograr un estado seguro durante y
después de un fallo de ruta. Funciones de control críticas son, por ejemplo,
una parada de emergencia y una parada de sobrerrecorrido, un corte de
alimentación y un reinicio.
• Para las funciones críticas de control deben proporcionarse rutas de control
separadas o redundantes.
• Las rutas de control del sistema pueden incluir enlaces de comunicación.
Deben tenerse en cuenta las implicaciones de los retrasos de transmisión
no esperados o los fallos en el enlace.
• Tenga en cuenta todas las reglamentaciones para la prevención de
accidentes y las directrices de seguridad locales.1
• Cada implementación de este equipo debe probarse de forma individual y
exhaustiva antes de entrar en servicio.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
1Para obtener información adicional, consulte NEMA ICS 1.1 (última edición),
"Safety Guidelines for the Application, Installation, and Maintenance of Solid State
Control" (Directrices de seguridad para la aplicación, la instalación y el
mantenimiento del control de estado estático) y NEMA ICS 7.1 (última edición),
"Safety Standards for Construction and Guide for Selection, Installation and
Operation of Adjustable-Speed Drive Systems" (Estándares de seguridad para la
construcción y guía para la selección, instalación y utilización de sistemas de
unidades de velocidad ajustable) o su equivalente aplicable a la ubicación
específica.
66 EIO0000003086.04

Instalación de M241
Directrices de cableado
Se deben aplicar las reglas siguientes al cablear un sistema M241 Logic
Controller:
• Los cables de E/S y comunicación deben estar separados de los cables de
alimentación. Enrute estos dos tipos de cableado mediante conductos de
cable independientes.
• Compruebe que el entorno y las condiciones de funcionamiento cumplan los
valores de las especificaciones.
• Utilice los tamaños de cable correctos para cumplir los requisitos de tensión y
corriente.
• Utilice conductores de cobre (obligatorio).
• Utilice cables de par trenzado blindados para E/S analógicas o rápidas.
• Utilice cables de par trenzado blindados para redes y bus de campo.
Utilice cables blindados conectados correctamente a tierra para todas las salidas
o entradas analógicas y de alta velocidad, así como para las conexiones de
comunicación. Si no utiliza cable blindado para estas conexiones, las
interferencias electromagnéticas pueden causar la degradación de la señal. Las
señales degradadas pueden provocar que el controlador o los módulos y el
equipo conectados a él funcionen de manera inesperada.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
• Utilice cables blindados para todas las E/S rápidas, las E/S analógicas y las
señales de comunicación.
• Conecte a tierra el blindaje de los cables para todas las E/S analógicas, las
E/S rápidas y las señales de comunicación en un único punto1.
• Enrute los cables de comunicación y de E/S por separado de los cables de
alimentación.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
1La conexión a tierra multipunto se admite (y, en ocasiones, es inevitable) si las
conexiones se efectúan con una placa de conexión a tierra equipotencial
dimensionada para ayudar a evitar daños en el blindaje del cable en caso de
corrientes de cortocircuito del sistema de alimentación.
Para obtener más información, consulte Puesta a tierra de cables blindados,
página 77.
NOTA: Las temperaturas de la superficie pueden superar los 60 °C (140 °F).
Para cumplir la norma IEC 61010, guíe el cableado primario (los cables
conectados a la red eléctrica) por separado y lejos del cableado secundario
(cableado de tensión extrabaja que proviene de las fuentes de tensión
intermedias). Si esto no es posible, será necesario un doble aislamiento como
mejora en el conducto o en los cables.
Reglas para el bloque de terminales de tornillo extraíble
En las siguientes tablas se muestran los tipos y los tamaños de cables para el
bloque de terminales de tornillo extraíble con 5,08 de paso (E/S y fuente de
alimentación):
EIO0000003086.04 67

Instalación de M241
Se requiere el uso de conductores de cobre.
PELIGRO
LOS CABLES SUELTOS CAUSAN DESCARGAS ELÉCTRICAS
Apriete las conexiones de conformidad con las especificaciones del par de
apriete.
Si no se siguen estas instrucciones, se producirán lesiones graves o la
muerte.
PELIGRO
PELIGRO DE INCENDIO
• Utilice únicamente los tamaños de cable recomendados para la capacidad
de corriente máxima de los canales de E/S y las fuentes de alimentación.
• Para el cableado de las salidas de relé (2 A), utilice conductores de al
menos 0,5 mm2(AWG 20) con una temperatura nominal de al menos 80 °C
(176 °F).
• Para los conductores comunes del cableado de salidas de relé (7 A) o el
cableado de salidas de relé superior a 2 A, utilice conductores de al menos
1,0 mm2(AWG 16) con una temperatura nominal de al menos 80 °C (176 °
F).
Si no se siguen estas instrucciones, se producirán lesiones graves o la
muerte.
68 EIO0000003086.04

Instalación de M241
Eliminación del bloque de terminales de E/S
En la siguiente figura se muestra la supresión del bloque de terminales de E/S del
M241 Logic Controller:
Paso Acción
1 Desconecte la alimentación de su controlador.
2 Baje la banda de protección:
3 Presione con un destornillador a través del orificio frontal del bloque de terminales:
4 Retire el bloque de terminales:
Protección de salidas frente a daños por carga inductiva
En función de la carga, es posible que sea necesario un circuito de protección
para las salidas ubicadas en los controladores y determinados módulos. Las
cargas inductivas con tensiones de CC pueden crear reflexiones de tensión que
provocarán un rebasamiento que dañará o acortará la vida útil de los dispositivos
de salida.
ATENCIÓN
DAÑOS EN EL CIRCUITO DE SALIDA DEBIDOS A CARGAS INDUCTIVAS
Utilice un circuito o dispositivo de protección externo adecuado para reducir el
riesgo de daños por carga de corriente continua inductiva.
Si no se siguen estas instrucciones, pueden producirse lesiones o daños
en el equipo.
EIO0000003086.04 69

Instalación de M241
Si el controlador o el módulo contienen salidas de relé, estos tipos de salidas
pueden soportar hasta 240 V CA. El daño inductivo a este tipo de salidas puede
provocar contactos soldados y pérdida de control. Todas las cargas inductivas
deben incluir un dispositivo de protección, como un limitador de picos, un circuito
RC o un diodo de retorno. Estos relés no soportan cargas capacitivas.
ADVERTENCIA
SALIDAS DE RELÉ SOLDADAS Y CERRADAS
• Proteja siempre las salidas de relé contra daños de carga de corriente
alterna inductiva utilizando un circuito o dispositivo protector externo
adecuado.
• No conecte salidas de relé a cargas capacitivas.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Las bobinas de contactor alimentadas por CA son, en determinadas
circunstancias, cargas inductivas que generan una interferencia de alta
frecuencia pronunciada y transitorios eléctricos al deenergizar la bobina del
contactor. Esta interferencia puede provocar que el controlador lógico detecte un
error de bus de E/S.
ADVERTENCIA
PÉRDIDA DE CONTROL CONSIGUIENTE
Instale un limitador de sobretensión de RC o un medio similar, como un relé de
interposición, en cada salida de relé de módulo de extensión de TM3 al
conectarse a contactores alimentados por CA o a otras formas de cargas
inductivas.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Circuito de protección A: este circuito de protección se puede utilizar para
circuitos de alimentación de cargas de CA y CC.
CValor de 0,1 a 1 μF
RResistencia que tiene aproximadamente el mismo valor de resistencia que la
carga
Circuito de protección B: este circuito de protección se puede utilizar para
circuitos de alimentación de cargas de CC.
70 EIO0000003086.04

Instalación de M241
Utilice un diodo con las siguientes características:
• Tensión inversa no disruptiva: tensión de alimentación del circuito de carga ×
10.
• Corriente directa: superior a la corriente de carga.
Circuito de protección C: este circuito de protección se puede utilizar para
circuitos de alimentación de cargas de CA y CC.
En aplicaciones en las que la carga inductiva se conecta y desconecta con
frecuencia o rapidez, asegúrese de que la clasificación de energía continua (J) del
varistor sea al menos un 20 % superior a la energía de la carga máxima.
Cableado y características de la fuente de alimentación de CC
Descripción general
En esta sección se proporcionan las características y los diagramas de cableado
de la fuente de alimentación de CC.
Rango de tensión de la fuente de alimentación de CC
Si no se mantiene el rango de tensión especificado, es posible que las salidas no
se activen como se espera. Utilice los dispositivos de bloqueo de seguridad y los
circuitos de control de la tensión apropiados.
PELIGRO
PELIGRO DE INCENDIO
• Utilice únicamente los tamaños de cable recomendados para la capacidad
de corriente máxima de los canales de E/S y las fuentes de alimentación.
• Para el cableado de las salidas de relé (2 A), utilice conductores de al
menos 0,5 mm2(AWG 20) con una temperatura nominal de al menos 80 °C
(176 °F).
• Para los conductores comunes del cableado de salidas de relé (7 A) o el
cableado de salidas de relé superior a 2 A, utilice conductores de al menos
1,0 mm2(AWG 16) con una temperatura nominal de al menos 80 °C (176 °
F).
Si no se siguen estas instrucciones, se producirán lesiones graves o la
muerte.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No supere ninguno de los valores nominales que se especifican en las tablas
de características medioambientales y eléctricas.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
EIO0000003086.04 71

Instalación de M241
Requisitos de la fuente de alimentación de CC
M241 Logic Controller y las E/S asociadas (TM2, TM3 y E/S incrustadas)
requieren fuentes de alimentación con una tensión nominal de 24 V CC. Las
fuentes de alimentación de 24 V CC deben tener la clasificación de muy baja
tensión de seguridad (MBTS) o muy baja tensión de protección (MBTP) según la
norma IEC 61140. Estas fuentes de alimentación están aisladas entre los circuitos
eléctricos de entrada y salida de la fuente de alimentación.
ADVERTENCIA
POSIBILIDAD DE SOBRECALENTAMIENTO E INCENDIO
• No conecte el equipo directamente a la tensión de línea.
• Utilice solo fuentes de alimentación y circuitos MBTP con aislamiento para
proporcionar alimentación al equipo1.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
1Para cumplir los requisitos de UL (Underwriters Laboratories), la fuente de
alimentación deberá cumplir también los diferentes criterios de NEC Class 2 y
tener la corriente limitada de forma inherente a una disponibilidad de salida de
potencia máxima de menos de 100 VA (unos 4 A con la tensión nominal), o bien
no limitada de forma inherente pero con un dispositivo de protección adicional
como un interruptor automático o un fusible que cumplan los requisitos de la
cláusula 9.4 Circuito de energía limitada de la norma UL 61010-1. En cualquiera
de los casos, el límite de corriente no deberá superar en ningún caso el de las
características eléctricas y los diagramas de cableado del equipo que se describe
en la presente documentación. En cualquiera de los casos, la fuente de
alimentación deberá contar con una conexión a tierra, y el usuario deberá separar
los circuitos de Class 2 de otros circuitos. Si el valor nominal especificado en las
características eléctricas o en los diagramas de cableado es superior al límite de
corriente especificado, podrán utilizarse varias fuentes de alimentación de Class
2.
Características de CC del controlador
En la siguiente tabla se muestran las características de la fuente de alimentación
de CC requeridas para el controlador:
Característica Valor
Tensión nominal 24 V CC
Rango de tensión de la fuente de alimentación 20,4 a 28,8 V CC
Tiempo de interrupción de la alimentación 1 ms a 24 V CC
Corriente de irrupción máxima 50 A
Consumo de energía 32,6 W máx. 40,4 W(1)
Aislamiento entre la fuente de alimentación de CC
y la lógica interna Sin aislamiento
entre la fuente de alimentación de CC
y la conexión a tierra de protección
(PE)
500 V CA
(1) Controlador + 7 módulos de extensión TM3
Interrupción de la alimentación
TM241C••24T/TM241C•40T/TM241C••24U y TM241C•40U deben disponer de
una fuente de alimentación externa de 24 V. Durante las interrupciones de
alimentación, el M241 Logic Controller, junto con la fuente de alimentación
72 EIO0000003086.04

Instalación de M241
correspondiente, puede seguir funcionando con normalidad durante un mínimo de
10 ms como se especifica en la normativa IEC.
TM241C••24T/TM241C•40T/TM241C••24U y TM241C•40U deben disponer de
una fuente de alimentación externa de 24 V. Durante las interrupciones de
alimentación, el M241 Logic Controller, junto con la fuente de alimentación
correspondiente, puede seguir funcionando con normalidad durante un mínimo de
10 ms como se especifica en la normativa IEC.
Al planificar la gestión de la alimentación suministrada al controlador, debe tener
en cuenta la duración de la interrupción de la alimentación debido al tiempo de
ciclo rápido del controlador.
Se podrían producir muchas exploraciones de la lógica y, como consecuencia,
actualizaciones de la tabla de imágenes de E/S durante la interrupción de la
alimentación, mientras no se suministre alimentación externa a las entradas, las
salidas, o a ambas, dependiendo de la arquitectura del sistema de alimentación y
de las circunstancias de las interrupciones de la alimentación.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
• Monitorice de forma individual todas las fuentes de alimentación utilizadas
en el sistema del controlador, incluidas las fuentes de alimentación de
entrada, de salida y del controlador para que el sistema se pueda apagar
correctamente durante las interrupciones del sistema de alimentación.
• Las entradas que controlan cada una de las fuentes de alimentación deben
ser entradas no filtradas.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Diagrama de cableado de la fuente de alimentación de CC
En la siguiente figura se muestra el procedimiento de desinstalación del bloque de
terminales de la fuente de alimentación:
En la figura siguiente se muestra el cableado de la fuente de alimentación de CC:
*Fusible tipo T
Para obtener más información, consulte Reglas para el bloque de terminales de
tornillo extraíble, página 67 con 5,08 de paso.
EIO0000003086.04 73

Instalación de M241
Cableado y características de la fuente de alimentación de CA
Descripción general
En esta sección se proporcionan los diagramas de cableado y las características
de la fuente de alimentación de CA.
Rango de tensión de la fuente de alimentación de CA
Si no se mantiene el rango de tensión especificado, es posible que las salidas no
se activen como se espera. Utilice los dispositivos de bloqueo de seguridad y los
circuitos de control de la tensión apropiados.
PELIGRO
PELIGRO DE INCENDIO
• Utilice únicamente los tamaños de cable recomendados para la capacidad
de corriente máxima de los canales de E/S y las fuentes de alimentación.
• Para el cableado de las salidas de relé (2 A), utilice conductores de al
menos 0,5 mm2(AWG 20) con una temperatura nominal de al menos 80 °C
(176 °F).
• Para los conductores comunes del cableado de salidas de relé (7 A) o el
cableado de salidas de relé superior a 2 A, utilice conductores de al menos
1,0 mm2(AWG 16) con una temperatura nominal de al menos 80 °C (176 °
F).
Si no se siguen estas instrucciones, se producirán lesiones graves o la
muerte.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No supere ninguno de los valores nominales que se especifican en las tablas
de características medioambientales y eléctricas.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Características de CA del controlador
En la siguiente tabla se muestran las características de la fuente de alimentación
de CA:
Característica Valor
Tensión nominal De 100 a 240 V
CA
límite (ondulación incluida) De 85 a
264 VCA
Frecuencia 50/60 Hz
Tiempo de interrupción de
la alimentación a 100 VCA 10 ms
Corriente de irrupción
máxima a 240 VCA 56,2 A
Consumo normal de
corriente a 100 VCA 93,7 VA
a 240 VCA 122,6 VA
Aislamiento entre la fuente de alimentación de CA y la lógica
interna 1780 VCA
74 EIO0000003086.04

Instalación de M241
Característica Valor
entre la fuente de alimentación de CA y la
conexión a tierra de protección (PE) 2500 VCC
NOTA: El controlador está destinado a la conexión de sistemas de alimentación monofásicos
TN, TT o IT (redes en estrella), tensión de entrada derivada de la tensión de línea a neutro.
NOTA: Las temperaturas de la superficie pueden superar los 120 °C (248 °F).
ADVERTENCIA
SUPERFICIES CALIENTES
• Evite el contacto sin protección con las superficies calientes.
• No coloque ninguna pieza inflamable o sensible al calor en la cercanía de
las superficies calientes.
• Realice un funcionamiento de prueba con carga máxima para asegurarse de
que la disipación de calor es suficiente.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Interrupción de la alimentación
La duración de las interrupciones de la alimentación en las que M241 Logic
Controller puede seguir funcionando con normalidad varía en función de la carga
de la fuente de alimentación del controlador, pero generalmente se mantiene en
10 ms, como mínimo, según lo especificado en la normativa IEC.
Al planificar la gestión de la alimentación suministrada al controlador, debe tener
en cuenta la duración debida al tiempo de ciclo FAST.
Se podrían producir muchas exploraciones de la lógica y, como consecuencia,
actualizaciones de la tabla de imágenes de E/S durante la interrupción de la
alimentación, mientras no se suministre alimentación externa a las entradas, las
salidas, o a ambas, dependiendo de la arquitectura del sistema de alimentación y
de las circunstancias de las interrupciones de la alimentación.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
• Monitorice de forma individual todas las fuentes de alimentación utilizadas
en el sistema Modicon M241 Logic Controller, incluidas las fuentes de
alimentación de entrada, de salida y del controlador para que el sistema se
pueda apagar correctamente durante las interrupciones del sistema de
alimentación.
• Las entradas que controlan cada una de las fuentes de alimentación deben
ser entradas no filtradas.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
EIO0000003086.04 75


Instalación de M241
Puesta a tierra del sistema M241
Descripción general
Para contribuir a minimizar los efectos de interferencias electromagnéticas, los
cables que transportan la E/S rápida, la E/S analógica y las señales de
comunicación del bus de campo deben estar blindados.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
• Utilice cables blindados para todas las E/S rápidas, las E/S analógicas y las
señales de comunicación.
• Conecte a tierra los cables blindados para todas las E/S rápidas, las E/S
analógicas y las señales de comunicación en un único punto1.
• Enrute las comunicaciones y los cables de E/S por separado de los cables
de alimentación.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
1La conexión a tierra multipunto se admite (y, en ocasiones, es inevitable) si las
conexiones se efectúan con una placa de conexión a tierra equipotencial
dimensionada para ayudar a evitar daños en el blindaje del cable en caso de
corrientes de cortocircuito del sistema de alimentación.
El uso de cables blindados requiere el cumplimiento de las reglas de cableado
siguientes:
• Para las puestas a tierra de protección (PE), se pueden utilizar conductos
metálicos para toda la longitud del blindaje o una parte, siempre que no se
interrumpa la continuidad de las puestas a tierra. Para una conexión a tierra
funcional (FE), el blindaje pretende atenuar las interferencias
electromagnéticas y debe ser continuo en toda la longitud del cable. Si el
objetivo es tanto funcional como de protección, como suele ser el caso de los
cables de comunicación, el cable deberá disponer de un blindaje continuo.
• Siempre que sea posible, mantenga los cables que lleven un tipo de señal
separados de los cables con otros tipos de señales o de alimentación.
Puesta a tierra de protección (PE) en la placa de conexiones
La puesta a tierra de protección (PE) se debe conectar a la placa de conexiones
conductora mediante un cable de alta resistencia, normalmente un cable trenzado
de cobre con la sección de cable máxima permitida.
Conexiones de cables de blindaje
Los cables que transportan la E/S rápida, la E/S analógica y las señales de
comunicación del bus de campo deben estar blindados. El blindaje debe estar
puesto a tierra de un modo seguro. Los blindajes de E/S rápidas y E/S analógicas
pueden estar conectados a la puesta a tierra funcional (FE) o a la puesta a tierra
de protección (PE) del M241 Logic Controller. Los blindajes del cable de
comunicación del bus de campo deben estar conectados a la puesta a tierra de
protección (PE) con bornes de conexión fijados en la placa de conexiones
conductora de la instalación.
EIO0000003086.04 77

Instalación de M241
ADVERTENCIA
DESCONEXIÓN ACCIDENTAL DE LA PUESTA A TIERRA DE PROTECCIÓN
(PE)
• No utilice la placa de conexión a tierra TM2XMTGB para proporcionar una
puesta a tierra de protección (PE).
• Utilice la placa de puesta a tierra TM2XMTGB solo para proporcionar una
puesta a tierra funcional (FE).
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
El blindaje del cable Modbus debe estar conectado a la puesta a tierra de
protección (PE).
PELIGRO
PELIGRO DE DESCARGA ELÉCTRICA
• Se debe utilizar la conexión de terminal de puesta a tierra (PE) para
proporcionar una puesta a tierra de protección en todo momento.
• Asegúrese de que haya un cable trenzado de tierra apropiado conectado al
terminal de tierra PE/PG antes de conectar el cable de red al equipo o de
desconectarlo de este.
Si no se siguen estas instrucciones, se producirán lesiones graves o la
muerte.
Blindaje del cable a tierra de protección (PE)
Para poner a tierra el blindaje de un cable mediante una abrazadera de puesta a
tierra:
Paso Descripción
1 Pele el blindaje unos 15 mm (0,59
pulg.).
2 Conecte el cable a la placa de
conexiones conductora apretando
la abrazadera de puesta a tierra
con la parte pelada del blindaje tan
cerca como pueda de la base del
sistema del M241 Logic Controller.
NOTA: El blindaje debe asegurarse bien a la placa de conexiones conductora
para lograr un contacto correcto.
78 EIO0000003086.04

Instalación de M241
Blindaje del cable de puesta a tierra funcional (FE)
Para conectar el blindaje de un cable mediante una barra de puesta a tierra:
Paso Descripción
1 Instale la Barra de puesta a tierra
(consulte Modicon TM2 - Módulos
de E/S digitales, Guía de hardware)
directamente en la placa de
conexiones conductora bajo el
sistema M241 Logic Controller
como se indica en la ilustración.
2 Pele el blindaje unos 15 mm (0,59
pulg.).
3 Fíjela firmemente al conector plano
(1) utilizando la abrazadera de
nailon (2) (ancho de 2,5 a 3 mm [de
0,1 a 0,12 in]) y una herramienta
adecuada.
NOTA: Use la barra de puesta a tierra TM2XMTGB para puestas a tierra
funcionales (FE).
EIO0000003086.04 79

Modicon M241 Logic Controller
Contenido de esta parte
TM241C24R ..................................................................................................81
TM241CE24R................................................................................................86
TM241CEC24R .............................................................................................91
TM241C24T ..................................................................................................96
TM241CE24T ..............................................................................................101
TM241CEC24T............................................................................................106
TM241C24U ................................................................................................ 111
TM241CE24U.............................................................................................. 116
TM241CEC24U ...........................................................................................121
TM241C40R ................................................................................................126
TM241CE40R..............................................................................................130
TM241C40T ................................................................................................135
TM241CE40T ..............................................................................................139
TM241C40U ................................................................................................144
TM241CE40U..............................................................................................148
Canales de E/S incrustadas ..........................................................................153
80 EIO0000003086.04

TM241C24R
TM241C24R
Contenido de este capítulo
Presentación de TM241C24R ........................................................................81
Descripción general
En este capítulo se describe el TM241C24R Logic Controller.
Presentación de TM241C24R
Descripción general
TM241C24R Logic controller:
• 14 entradas digitales
◦8 entradas rápidas
◦6 entradas normales
• 10 salidas digitales
◦4 salidas rápidas
◦6 salidas de relé (2 A)
• Puerto de comunicación
◦2 puertos de línea serie
◦1 puerto de programación USB mini-B
Descripción
En la siguiente figura se muestran los distintos componentes del controlador
lógico TM241C24R:
EIO0000003086.04 81

TM241C24R
Número Descripción Consulte
1 Interruptor Run/Stop Run/Stop, página 48
2 Slot para tarjeta SD Tarjeta SD, página 49
3 Soporte de la batería Reloj en tiempo real (RTC), página 38
4 Slot para cartucho Cartuchos TMC4, página 21
5Indicadores LED para indicar los estados de E/S Indicadores LED de estado de las entradas
digitales, página 154
Indicadores LED de estado de las salidas de
relé, página 161
Indicadores LED de estado de las salidas
rápidas, página 172
6 Puerto de programación USB mini-B / para la conexión de terminales a un
PC de programación (EcoStruxure Machine Expert) Puerto de programación USB mini-B , página
183
7Cierre de clip para carril DIN (segmento DIN) de 35 mm (1,38 pulg.) Carril DIN, página 61
8 Salidas de relé incrustadas Salidas de relé, página 160
Salidas de transistor rápidas incrustadas Salidas de transistor rápidas, página 171
Bloque de terminales extraíble de la salida Reglas para el bloque de terminales de tornillo
extraíble, página 67
9 Fuente de alimentación de 50/60 Hz de 100 a 240 V CA Cableado y características de la fuente de
alimentación de CA, página 74
10 Indicadores LED de estado –
11 Conector de bus de TM4 Módulos de extensión TM4, página 35
12 Puerto de la línea serie 1 / Tipo RJ45 (RS-232 o RS-485) Línea serie 1, página 184
13 Puerto de la línea serie 2 / Tipo del bloque de terminales de tornillo (RS-
485)
Línea serie 2, página 187
14 Entradas digitales incrustadas Entradas digitales incrustadas, página 153
Bloque de terminales extraíble de la entrada Reglas para el bloque de terminales de tornillo
extraíble, página 67
15 Conector de bus TM3/TM2 Módulos de extensión TM3, página 25
16 Cubierta de protección (slot para tarjeta SD, interruptor Run/Stop y puerto
de programación USB mini-B)
–
17 Gancho de sujeción (gancho no incluido) –
82 EIO0000003086.04


TM241C24R
En la tabla siguiente se describen los indicadores LED de estado del sistema:
Etiqueta Tipo de
función Color Estado Descripción
Estados del controlador1Comunicación
del puerto Prg Ejecución
de la
aplicación
PWR Alimentación Verde Encendido indica que se aplica alimentación.
Apagado indica que se quita la alimentación.
RUN Estado del
equipo Verde Encendido Indica que el controlador está ejecutando una aplicación válida.
Parpadeo Indica que el controlador tiene una aplicación válida que está detenida.
1 parpadeo Indica que el controlador se ha detenido en el PUNTO DE
INTERRUPCIÓN.
Apagado Indica que el controlador no está
programado.
- -
ERR Error Rojo Encendido Indica que se ha detectado un
error en el funcionamiento del
sistema.
Restringido No
Parpadeo
rápido Indica que el controlador ha
detectado un error interno. Restringido No
Parpadeo lento Indica que se ha detectado un
error menor, si el LED RUN está
iluminado, o bien que no se ha
detectado ninguna aplicación.
Sí No
I/O Error de E/S Rojo Encendido Indica errores del dispositivo en las E/S incrustadas, la línea serie 1 o 2,
la tarjeta SD, el cartucho, el bus TM4 y el bus TM3.
SD Acceso para
tarjeta SD Verde Encendido Indica que se está accediendo a la tarjeta SD.
BAT Batería Rojo Encendido Indica que la batería debe sustituirse.
Parpadeo Indica que la batería está baja de carga.
SL1 Línea serie 1 Verde Parpadeo Indica el estado de la línea serie 1, página 186.
Apagado Indica que no existe comunicación serie.
SL2 Línea serie 2 Verde Parpadeo Indica el estado de la línea serie 2, página 188.
Apagado Indica que no existe comunicación serie.
TM4 Error en bus
TM4 Rojo Encendido Indica que se ha detectado un error en el bus TM4.
Apagado Indica que no se ha detectado ningún error en el bus TM4.
1Para obtener más información sobre la descripción del estado del controlador,
consulte M241 Logic Controller - Guía de programación.
84 EIO0000003086.04


TM241CE24R
TM241CE24R
Contenido de este capítulo
Presentación de TM241CE24R ......................................................................86
Descripción general
En este capítulo se describe el TM241CE24R Logic Controller.
Presentación de TM241CE24R
Descripción general
TM241CE24R Logic controller:
• 14 entradas digitales
◦8 entradas rápidas
◦6 entradas normales
• 10 salidas digitales
◦4 salidas rápidas
◦6 salidas de relé (2 A)
• Puerto de comunicación
◦2 puertos de línea serie
◦1 puerto Ethernet
◦1 puerto de programación USB mini-B
Descripción
En la siguiente figura se muestran los distintos componentes del controlador
lógico TM241CE24R:
86 EIO0000003086.04

TM241CE24R
Número Descripción Consulte
1 Interruptor Run/Stop Run/Stop, página 48
2 Slot para tarjeta SD Tarjeta SD, página 49
3 Soporte de la batería Reloj en tiempo real (RTC), página 38
4 Slot para cartucho Cartuchos TMC4, página 21
5Indicadores LED para indicar los estados de E/S Indicadores LED de estado de las entradas
digitales, página 154
Indicadores LED de estado de las salidas de
relé, página 161
Indicadores LED de estado de las salidas
rápidas, página 172
6 Puerto de programación USB mini-B / para la conexión de terminales a un
PC de programación (EcoStruxure Machine Expert) Puerto de programación USB mini-B , página
183
7Cierre de clip para carril DIN (segmento DIN) de 35 mm (1,38 pulg.) Carril DIN, página 61
8 Salidas de relé incrustadas Salidas de relé, página 160
Salidas de transistor rápidas incrustadas Salidas de transistor rápidas, página 171
Bloque de terminales extraíble de la salida Reglas para el bloque de terminales de tornillo
extraíble, página 67
9 Fuente de alimentación de 50/60 Hz de 100 a 240 V CA Cableado y características de la fuente de
alimentación de CA, página 74
10 Puerto Ethernet / Tipo RJ45 (RS-232 o RS-485) Puerto Ethernet, página 181
11 Indicadores LED de estado –
12 Conector de bus de TM4 Módulos de extensión TM4, página 35
13 Puerto de la línea serie 1 / Tipo RJ45 (RS-232 o RS-485) Línea serie 1, página 184
14 Puerto de la línea serie 2 / Tipo del bloque de terminales de tornillo (RS-
485) Línea serie 2, página 187
15 Entradas digitales incrustadas Entradas digitales incrustadas, página 153
Bloque de terminales extraíble de la entrada Reglas para el bloque de terminales de tornillo
extraíble, página 67
16 Conector de bus TM3/TM2 Módulos de extensión TM3, página 25
17 Cubierta de protección (slot para tarjeta SD, interruptor Run/Stop y puerto
de programación USB mini-B)
–
18 Gancho de sujeción (gancho no incluido) –
EIO0000003086.04 87


TM241CE24R
En la tabla siguiente se describen los indicadores LED de estado del sistema:
Etiqueta Tipo de
función Color Estado Descripción
Estados del controlador1Comunicación
del puerto Prg Ejecución
de la
aplicación
PWR Alimentación Verde Encendido indica que se aplica alimentación.
Apagado indica que se quita la alimentación.
RUN Estado del
equipo Verde Encendido Indica que el controlador está ejecutando una aplicación válida.
Parpadeo Indica que el controlador tiene una aplicación válida que está detenida.
1 parpadeo Indica que el controlador se ha detenido en el PUNTO DE
INTERRUPCIÓN.
Apagado Indica que el controlador no está
programado.
- -
ERR Error Rojo Encendido Se ha detectado un error del
sistema operativo.
Restringido No
Parpadeo
rápido El controlador ha detectado un
error interno. Restringido No
Parpadeo lento Indica que se ha detectado un
error menor, si el LED RUN está
iluminado, o bien que no se ha
detectado ninguna aplicación.
Sí No
I/O Error de E/S Rojo Encendido Indica errores del dispositivo en las E/S incrustadas, la línea serie 1 o 2,
la tarjeta SD, el cartucho, el bus TM4, el bus TM3 o el puerto Ethernet.
SD Acceso para
tarjeta SD Verde Encendido Indica que se está accediendo a la tarjeta SD.
BAT Batería Rojo Encendido Indica que la batería debe sustituirse.
Parpadeo Indica que la batería está baja de carga.
SL1 Línea serie 1 Verde Parpadeo Indica el estado de la línea serie 1, página 186.
Apagado Indica que no existe comunicación serie.
SL2 Línea serie 2 Verde Parpadeo Indica el estado de la línea serie 2, página 188.
Apagado Indica que no existe comunicación serie.
TM4 Error en bus
TM4 Rojo Encendido Indica que se ha detectado un error en el bus TM4.
Apagado Indica que no se ha detectado ningún error en el bus TM4.
ETH Estado de
puertos
Ethernet
Verde Encendido Indica que el puerto Ethernet está conectado y que la dirección IP está
definida.
3 parpadeos Indica que el puerto Ethernet no está conectado.
4 parpadeos Indica que la dirección IP ya está en uso.
5 parpadeos Indica que el módulo espera la secuencia BOOTP o DHCP.
6 parpadeos Indica que la dirección IP configurada no es válida.
1Para obtener más información sobre la descripción del estado del controlador,
consulte M241 Logic Controller - Guía de programación.
EIO0000003086.04 89


TM241CEC24R
TM241CEC24R
Contenido de este capítulo
Presentación de TM241CEC24R....................................................................91
Descripción general
En este capítulo se describe el TM241CEC24R Logic Controller.
Presentación de TM241CEC24R
Descripción general
El TM241CEC24R Logic Controller tiene:
• 14 entradas digitales
◦8 entradas rápidas
◦6 entradas normales
• 10 salidas digitales
◦4 salidas rápidas
◦6 salidas de relé (2 A)
• Puerto de comunicación
◦2 puertos de línea serie
◦1 puerto Ethernet
◦1 puerto CANopen
◦1 puerto de programación USB mini-B
Descripción
En la siguiente figura se muestran los distintos componentes del controlador
lógico TM241CEC24R:
EIO0000003086.04 91

TM241CEC24R
Número Descripción Consulte
1 Interruptor Run/Stop Run/Stop, página 48
2 Slot para tarjeta SD Tarjeta SD, página 49
3 Soporte de la batería Reloj en tiempo real (RTC), página 38
4 Slot para cartucho Cartuchos TMC4, página 21
5Indicadores LED para indicar los estados de E/S Indicadores LED de estado de las entradas
digitales, página 154
Indicadores LED de estado de las salidas de
relé, página 161
Indicadores LED de estado de las salidas
rápidas, página 172
6 Puerto de programación USB mini-B / para la conexión de terminales a un
PC de programación (EcoStruxure Machine Expert) Puerto de programación USB mini-B , página
183
7Cierre de clip para carril DIN (segmento DIN) de 35 mm (1,38 pulg.) Carril DIN, página 61
8 Salidas de relé incrustadas Salidas de relé, página 160
Salidas de transistor rápidas incrustadas Salidas de transistor rápidas, página 171
Bloque de terminales extraíble de la salida Reglas para el bloque de terminales de tornillo
extraíble, página 67
9 Conmutador de final de línea CANopen Puerto CANopen, página 178
10 Fuente de alimentación de 50/60 Hz de 100 a 240 V CA Cableado y características de la fuente de
alimentación de CA, página 74
11 Puerto CANopen / Tipo de bloque de terminales de tornillo Puerto CANopen, página 178
12 Puerto Ethernet / Tipo RJ45 (RS-232 o RS-485) Puerto Ethernet, página 181
13 Indicadores LED de estado –
14 Conector de bus de TM4 Módulos de extensión TM4, página 35
15 Puerto de la línea serie 1 / Tipo RJ45 (RS-232 o RS-485) Línea serie 1, página 184
16 Puerto de la línea serie 2 / Tipo del bloque de terminales de tornillo (RS-
485)
Línea serie 2, página 187
17 Entradas digitales incrustadas Entradas digitales incrustadas, página 153
Bloque de terminales extraíble de la entrada Reglas para el bloque de terminales de tornillo
extraíble, página 67
18 Conector de bus TM3/TM2 Módulos de extensión TM3, página 25
19 Cubierta de protección (slot para tarjeta SD, interruptor Run/Stop y puerto
de programación USB mini-B)
–
20 Gancho de sujeción (gancho no incluido) –
92 EIO0000003086.04


TM241CEC24R
En la tabla siguiente se describen los indicadores LED de estado del sistema:
Etiqueta Tipo de
función Color Estado Descripción
Estados del controlador1Comunicación
del puerto Prg Ejecución
de la
aplicación
PWR Alimentación Verde Encendido indica que se aplica alimentación.
Apagado indica que se quita la alimentación.
RUN Estado del
equipo Verde Encendido Indica que el controlador está ejecutando una aplicación válida.
Parpadeo Indica que el controlador tiene una aplicación válida que está detenida.
1 parpadeo Indica que el controlador se ha detenido en el PUNTO DE
INTERRUPCIÓN.
Apagado Indica que el controlador no está
programado.
- -
ERR Error Rojo Encendido Se ha detectado un error del
sistema operativo.
Restringido No
Parpadeo
rápido El controlador ha detectado un
error interno. Restringido No
Parpadeo lento Indica que se ha detectado un
error menor, si el LED RUN está
iluminado, o bien que no se ha
detectado ninguna aplicación.
Sí No
I/O Error de E/S Rojo Encendido Indica errores del dispositivo en las E/S incrustadas, la línea serie 1 o 2,
la tarjeta SD, el cartucho, el bus TM4, el bus TM3, el puerto Ethernet o
el puerto CANopen.
SD Acceso para
tarjeta SD Verde Encendido Indica que se está accediendo a la tarjeta SD.
BAT Batería Rojo Encendido Indica que la batería debe sustituirse.
Parpadeo Indica que la batería está baja de carga.
SL1 Línea serie 1 Verde Parpadeo Indica el estado de la línea serie 1, página 186.
Apagado Indica que no existe comunicación serie.
SL2 Línea serie 2 Verde Parpadeo Indica el estado de la línea serie 2, página 188.
Apagado Indica que no existe comunicación serie.
TM4 Error en bus
TM4 Rojo Encendido Indica que se ha detectado un error en el bus TM4.
Apagado Indica que no se ha detectado ningún error en el bus TM4.
ETH Estado de
puertos
Ethernet
Verde Encendido Indica que el puerto Ethernet está conectado y que la dirección IP está
definida.
3 parpadeos Indica que el puerto Ethernet no está conectado.
4 parpadeos Indica que la dirección IP ya está en uso.
5 parpadeos Indica que el módulo espera la secuencia BOOTP o DHCP.
6 parpadeos Indica que la dirección IP configurada no es válida.
CAN R Estado de
ejecución de
CANopen
Verde Encendido Indica que el bus CANopen está operativo.
Apagado Indica que el maestro CANopen está configurado.
Parpadeo Indica que el bus CANopen se está inicializando.
1 parpadeo por
segundo Indica que el bus CANopen está parado.
94 EIO0000003086.04

TM241CEC24R
Etiqueta Tipo de
función Color Estado Descripción
Estados del controlador1Comunicación
del puerto Prg Ejecución
de la
aplicación
CAN E Error de
CANopen Rojo Encendido Indica que el bus CANopen está parado (BUS DESACTIVADO).
Apagado Indica que no se ha detectado ningún error de CANopen.
Parpadeo Indica que el bus CANopen no es válido.
1 parpadeo por
segundo Indica que el controlador ha detectado que se ha alcanzado o superado
el número máximo de tramas con errores.
2 parpadeos por
segundo Indica que el controlador ha detectado un evento de Node Guarding o
de Heartbeat.
1Para obtener más información sobre la descripción del estado del controlador,
consulte M241 Logic Controller - Guía de programación.
Dimensiones
En la figura siguiente se muestran las dimensiones externas del Logic Controller:
EIO0000003086.04 95

TM241C24T
TM241C24T
Contenido de este capítulo
Presentación de TM241C24T.........................................................................96
Descripción general
En este capítulo se describe el TM241C24T Logic Controller.
Presentación de TM241C24T
Descripción general
TM241C24T Logic controller:
• 14 entradas digitales
◦8 entradas rápidas
◦6 entradas normales
• 10 salidas digitales
◦4 salidas rápidas
◦6 salidas normales
• Puerto de comunicación
◦2 puertos de línea serie
◦1 puerto de programación USB mini-B
Descripción
En la siguiente figura se muestran los distintos componentes del controlador
lógico TM241C24T:
96 EIO0000003086.04

TM241C24T
Número Descripción Consulte
1 Interruptor Run/Stop Run/Stop, página 48
2 Slot para tarjeta SD Tarjeta SD, página 49
3 Soporte de la batería Reloj en tiempo real (RTC), página 38
4 Slot para cartucho Cartuchos TMC4, página 21
5Indicadores LED para indicar los estados de E/S Indicadores LED de estado de las entradas
digitales, página 154
Indicadores LED de estado de las salidas de
transistor, página 166
Indicadores LED de estado de las salidas
rápidas, página 172
6 Puerto de programación USB mini-B / para la conexión de terminales a un
PC de programación (EcoStruxure Machine Expert) Puerto de programación USB mini-B , página
183
7Cierre de clip para carril DIN (segmento DIN) de 35 mm (1,38 pulg.) Carril DIN, página 61
8 Salidas de transistor normales incrustadas Salidas de transistor normales, página 165
Salidas de transistor rápidas incrustadas Salidas de transistor rápidas, página 171
Bloque de terminales extraíble de la salida Reglas para el bloque de terminales de tornillo
extraíble, página 67
9 Fuente de alimentación de 24 V CC Cableado y características de la fuente de
alimentación de CC, página 71
10 Indicadores LED de estado –
11 Conector de bus de TM4 Módulos de extensión TM4, página 35
12 Puerto de la línea serie 1 / Tipo RJ45 (RS-232 o RS-485) Línea serie 1, página 184
13 Puerto de la línea serie 2 / Tipo del bloque de terminales de tornillo (RS-
485)
Línea serie 2, página 187
14 Entradas digitales incrustadas Entradas digitales incrustadas, página 153
Bloque de terminales extraíble de la entrada Reglas para el bloque de terminales de tornillo
extraíble, página 67
15 Conector de bus TM3/TM2 Módulos de extensión TM3, página 25
16 Cubierta de protección (slot para tarjeta SD, interruptor Run/Stop y puerto
de programación USB mini-B)
–
17 Gancho de sujeción (gancho no incluido) –
EIO0000003086.04 97


TM241C24T
En la tabla siguiente se describen los indicadores LED de estado del sistema:
Etiqueta Tipo de
función Color Estado Descripción
Estados del controlador1Comunicación
del puerto Prg Ejecución
de la
aplicación
PWR Alimentación Verde Encendido indica que se aplica alimentación.
Apagado indica que se quita la alimentación.
RUN Estado del
equipo Verde Encendido Indica que el controlador está ejecutando una aplicación válida.
Parpadeo Indica que el controlador tiene una aplicación válida que está detenida.
1 parpadeo Indica que el controlador se ha detenido en el PUNTO DE
INTERRUPCIÓN.
Apagado Indica que el controlador no está
programado.
- -
ERR Error Rojo Encendido Indica que se ha detectado un
error en el funcionamiento del
sistema.
Restringido No
Parpadeo
rápido Indica que el controlador ha
detectado un error interno. Restringido No
Parpadeo lento Indica que se ha detectado un
error menor, si el LED RUN está
iluminado, o bien que no se ha
detectado ninguna aplicación.
Sí No
I/O Error de E/S Rojo Encendido Indica errores del dispositivo en las E/S incrustadas, la línea serie 1 o 2,
la tarjeta SD, el cartucho, el bus TM4 y el bus TM3.
SD Acceso para
tarjeta SD Verde Encendido Indica que se está accediendo a la tarjeta SD.
BAT Batería Rojo Encendido Indica que la batería debe sustituirse.
Parpadeo Indica que la batería está baja de carga.
SL1 Línea serie 1 Verde Parpadeo Indica el estado de la línea serie 1, página 186.
Apagado Indica que no existe comunicación serie.
SL2 Línea serie 2 Verde Parpadeo Indica el estado de la línea serie 2, página 188.
Apagado Indica que no existe comunicación serie.
TM4 Error en bus
TM4 Rojo Encendido Indica que se ha detectado un error en el bus TM4.
Apagado Indica que no se ha detectado ningún error en el bus TM4.
1Para obtener más información sobre la descripción del estado del controlador,
consulte M241 Logic Controller - Guía de programación.
EIO0000003086.04 99


TM241CE24T
TM241CE24T
Contenido de este capítulo
Presentación de TM241CE24T ....................................................................101
Descripción general
En este capítulo se describe el TM241CE24T Logic Controller.
Presentación de TM241CE24T
Descripción general
TM241CE24T Logic controller:
• 14 entradas digitales
◦8 entradas rápidas
◦6 entradas normales
• 10 salidas digitales
◦4 salidas rápidas
◦6 salidas normales
• Puerto de comunicación
◦2 puertos de línea serie
◦1 puerto Ethernet
◦1 puerto de programación USB mini-B
Descripción
En la siguiente figura se muestran los distintos componentes del controlador
lógico TM241CE24T:
EIO0000003086.04 101

TM241CE24T
Número Descripción Consulte
1 Interruptor Run/Stop Run/Stop, página 48
2 Slot para tarjeta SD Tarjeta SD, página 49
3 Soporte de la batería Reloj en tiempo real (RTC), página 38
4 Slot para cartucho Cartuchos TMC4, página 21
5Indicadores LED para indicar los estados de E/S Indicadores LED de estado de las entradas
digitales, página 154
Indicadores LED de estado de las salidas de
transistor, página 166
Indicadores LED de estado de las salidas
rápidas, página 172
6 Puerto de programación USB mini-B / para la conexión de terminales a un
PC de programación (EcoStruxure Machine Expert) Puerto de programación USB mini-B , página
183
7Cierre de clip para carril DIN (segmento DIN) de 35 mm (1,38 pulg.) Carril DIN, página 61
8 Salidas de transistor normales incrustadas Salidas de transistor normales, página 165
Salidas de transistor rápidas incrustadas Salidas de transistor rápidas, página 171
Bloque de terminales extraíble de la salida Reglas para el bloque de terminales de tornillo
extraíble, página 67
9 Fuente de alimentación de 24 V CC Cableado y características de la fuente de
alimentación de CC, página 71
10 Puerto Ethernet / Tipo RJ45 (RS-232 o RS-485) Puerto Ethernet, página 181
11 Indicadores LED de estado –
12 Conector de bus de TM4 Módulos de extensión TM4, página 35
13 Puerto de la línea serie 1 / Tipo RJ45 (RS-232 o RS-485) Línea serie 1, página 184
14 Puerto de la línea serie 2 / Tipo del bloque de terminales de tornillo (RS-
485) Línea serie 2, página 187
15 Entradas digitales incrustadas Entradas digitales incrustadas, página 153
Bloque de terminales extraíble de la entrada Reglas para el bloque de terminales de tornillo
extraíble, página 67
16 Conector de bus TM3/TM2 Módulos de extensión TM3, página 25
17 Cubierta de protección (slot para tarjeta SD, interruptor Run/Stop y puerto
de programación USB mini-B)
–
18 Gancho de sujeción (gancho no incluido) –
102 EIO0000003086.04


TM241CE24T
En la tabla siguiente se describen los indicadores LED de estado del sistema:
Etiqueta Tipo de
función Color Estado Descripción
Estados del controlador1Comunicación
del puerto Prg Ejecución
de la
aplicación
PWR Alimentación Verde Encendido indica que se aplica alimentación.
Apagado indica que se quita la alimentación.
RUN Estado del
equipo Verde Encendido Indica que el controlador está ejecutando una aplicación válida.
Parpadeo Indica que el controlador tiene una aplicación válida que está detenida.
1 parpadeo Indica que el controlador se ha detenido en el PUNTO DE
INTERRUPCIÓN.
Apagado Indica que el controlador no está
programado.
- -
ERR Error Rojo Encendido Se ha detectado un error del
sistema operativo.
Restringido No
Parpadeo
rápido El controlador ha detectado un
error interno. Restringido No
Parpadeo lento Indica que se ha detectado un
error menor, si el LED RUN está
iluminado, o bien que no se ha
detectado ninguna aplicación.
Sí No
I/O Error de E/S Rojo Encendido Indica errores del dispositivo en las E/S incrustadas, la línea serie 1 o 2,
la tarjeta SD, el cartucho, el bus TM4, el bus TM3 o el puerto Ethernet.
SD Acceso para
tarjeta SD Verde Encendido Indica que se está accediendo a la tarjeta SD.
BAT Batería Rojo Encendido Indica que la batería debe sustituirse.
Parpadeo Indica que la batería está baja de carga.
SL1 Línea serie 1 Verde Parpadeo Indica el estado de la línea serie 1, página 186.
Apagado Indica que no existe comunicación serie.
SL2 Línea serie 2 Verde Parpadeo Indica el estado de la línea serie 2, página 188.
Apagado Indica que no existe comunicación serie.
TM4 Error en bus
TM4 Rojo Encendido Indica que se ha detectado un error en el bus TM4.
Apagado Indica que no se ha detectado ningún error en el bus TM4.
ETH Estado de
puertos
Ethernet
Verde Encendido Indica que el puerto Ethernet está conectado y que la dirección IP está
definida.
3 parpadeos Indica que el puerto Ethernet no está conectado.
4 parpadeos Indica que la dirección IP ya está en uso.
5 parpadeos Indica que el módulo espera la secuencia BOOTP o DHCP.
6 parpadeos Indica que la dirección IP configurada no es válida.
1Para obtener más información sobre la descripción del estado del controlador,
consulte M241 Logic Controller - Guía de programación.
104 EIO0000003086.04


TM241CEC24T
TM241CEC24T
Contenido de este capítulo
Presentación de TM241CEC24T ..................................................................106
Descripción general
En este capítulo se describe el TM241CEC24T Logic Controller.
Presentación de TM241CEC24T
Descripción general
TM241CEC24T Logic controller:
• 14 entradas digitales
◦8 entradas rápidas
◦6 entradas normales
• 10 salidas digitales
◦4 salidas rápidas
◦6 salidas normales
• Puerto de comunicación
◦2 puertos de línea serie
◦1 puerto Ethernet
◦1 puerto CANopen
◦1 puerto de programación USB mini-B
Descripción
En la siguiente figura se muestran los distintos componentes del controlador
lógico TM241CEC24T:
106 EIO0000003086.04

TM241CEC24T
Número Descripción Consulte
1 Interruptor Run/Stop Run/Stop, página 48
2 Slot para tarjeta SD Tarjeta SD, página 49
3 Soporte de la batería Reloj en tiempo real (RTC), página 38
4 Slot para cartucho Cartuchos TMC4, página 21
5Indicadores LED para indicar los estados de E/S Indicadores LED de estado de las entradas
digitales, página 154
Indicadores LED de estado de las salidas de
transistor, página 166
Indicadores LED de estado de las salidas
rápidas, página 172
6 Puerto de programación USB mini-B / para la conexión de terminales a un
PC de programación (EcoStruxure Machine Expert) Puerto de programación USB mini-B , página
183
7Cierre de clip para carril DIN (segmento DIN) de 35 mm (1,38 pulg.) Carril DIN, página 61
8 Salidas de transistor normales incrustadas Salidas de transistor normales, página 165
Salidas de transistor rápidas incrustadas Salidas de transistor rápidas, página 171
Bloque de terminales extraíble de la salida Reglas para el bloque de terminales de tornillo
extraíble, página 67
9 Conmutador de final de línea CANopen Puerto CANopen, página 178
10 Fuente de alimentación de 24 V CC Cableado y características de la fuente de
alimentación de CC, página 71
11 Puerto CANopen / Tipo de bloque de terminales de tornillo Puerto CANopen, página 178
12 Puerto Ethernet / Tipo RJ45 (RS-232 o RS-485) Puerto Ethernet, página 181
13 Indicadores LED de estado –
14 Conector de bus de TM4 Módulos de extensión TM4, página 35
15 Puerto de la línea serie 1 / Tipo RJ45 (RS-232 o RS-485) Línea serie 1, página 184
16 Puerto de la línea serie 2 / Tipo del bloque de terminales de tornillo (RS-
485)
Línea serie 2, página 187
17 Entradas digitales incrustadas Entradas digitales incrustadas, página 153
Bloque de terminales extraíble de la entrada Reglas para el bloque de terminales de tornillo
extraíble, página 67
18 Conector de bus TM3/TM2 Módulos de extensión TM3, página 25
19 Cubierta de protección (slot para tarjeta SD, interruptor Run/Stop y puerto
de programación USB mini-B)
–
20 Gancho de sujeción (gancho no incluido) –
EIO0000003086.04 107


TM241CEC24T
En la tabla siguiente se describen los indicadores LED de estado del sistema:
Etiqueta Tipo de
función Color Estado Descripción
Estados del controlador1Comunicación
del puerto Prg Ejecución
de la
aplicación
PWR Alimentación Verde Encendido indica que se aplica alimentación.
Apagado indica que se quita la alimentación.
RUN Estado del
equipo Verde Encendido Indica que el controlador está ejecutando una aplicación válida.
Parpadeo Indica que el controlador tiene una aplicación válida que está detenida.
1 parpadeo Indica que el controlador se ha detenido en el PUNTO DE
INTERRUPCIÓN.
Apagado Indica que el controlador no está
programado.
- -
ERR Error Rojo Encendido Se ha detectado un error del
sistema operativo.
Restringido No
Parpadeo
rápido El controlador ha detectado un
error interno. Restringido No
Parpadeo lento Indica que se ha detectado un
error menor, si el LED RUN está
iluminado, o bien que no se ha
detectado ninguna aplicación.
Sí No
I/O Error de E/S Rojo Encendido Indica errores del dispositivo en las E/S incrustadas, la línea serie 1 o 2,
la tarjeta SD, el cartucho, el bus TM4, el bus TM3, el puerto Ethernet o
el puerto CANopen.
SD Acceso para
tarjeta SD Verde Encendido Indica que se está accediendo a la tarjeta SD.
BAT Batería Rojo Encendido Indica que la batería debe sustituirse.
Parpadeo Indica que la batería está baja de carga.
SL1 Línea serie 1 Verde Parpadeo Indica el estado de la línea serie 1, página 186.
Apagado Indica que no existe comunicación serie.
SL2 Línea serie 2 Verde Parpadeo Indica el estado de la línea serie 2, página 188.
Apagado Indica que no existe comunicación serie.
TM4 Error en bus
TM4 Rojo Encendido Indica que se ha detectado un error en el bus TM4.
Apagado Indica que no se ha detectado ningún error en el bus TM4.
ETH Estado de
puertos
Ethernet
Verde Encendido Indica que el puerto Ethernet está conectado y que la dirección IP está
definida.
3 parpadeos Indica que el puerto Ethernet no está conectado.
4 parpadeos Indica que la dirección IP ya está en uso.
5 parpadeos Indica que el módulo espera la secuencia BOOTP o DHCP.
6 parpadeos Indica que la dirección IP configurada no es válida.
CAN R Estado de
ejecución de
CANopen
Verde Encendido Indica que el bus CANopen está operativo.
Apagado Indica que el maestro CANopen está configurado.
Parpadeo Indica que el bus CANopen se está inicializando.
1 parpadeo por
segundo Indica que el bus CANopen está parado.
EIO0000003086.04 109

TM241CEC24T
Etiqueta Tipo de
función Color Estado Descripción
Estados del controlador1Comunicación
del puerto Prg Ejecución
de la
aplicación
CAN E Error de
CANopen Rojo Encendido Indica que el bus CANopen está parado (BUS DESACTIVADO).
Apagado Indica que no se ha detectado ningún error de CANopen.
Parpadeo Indica que el bus CANopen no es válido.
1 parpadeo por
segundo Indica que el controlador ha detectado que se ha alcanzado o superado
el número máximo de tramas con errores.
2 parpadeos por
segundo Indica que el controlador ha detectado un evento de Node Guarding o
de Heartbeat.
1Para obtener más información sobre la descripción del estado del controlador,
consulte M241 Logic Controller - Guía de programación.
Dimensiones
En la figura siguiente se muestran las dimensiones externas del Logic Controller:
110 EIO0000003086.04

TM241C24U
TM241C24U
Contenido de este capítulo
Presentación de TM241C24U ...................................................................... 111
Descripción general
En este capítulo se describe el TM241C24U Logic Controller.
Presentación de TM241C24U
Descripción general
TM241C24U Logic controller:
• 14 entradas digitales
◦8 entradas rápidas
◦6 entradas normales
• 10 salidas digitales
◦4 salidas rápidas
◦6 salidas normales
• Puerto de comunicación
◦2 puertos de línea serie
◦1 puerto de programación USB mini-B
Descripción
En la siguiente figura se muestran los distintos componentes del controlador
lógico TM241C24U:
EIO0000003086.04 111

TM241C24U
Número Descripción Consulte
1 Interruptor Run/Stop Run/Stop, página 48
2 Slot para tarjeta SD Tarjeta SD, página 49
3 Soporte de la batería Reloj en tiempo real (RTC), página 38
4 Slot para cartucho Cartuchos TMC4, página 21
5Indicadores LED para indicar los estados de E/S Indicadores LED de estado de las entradas
digitales, página 154
Indicadores LED de estado de las salidas de
transistor, página 166
Indicadores LED de estado de las salidas
rápidas, página 172
6 Puerto de programación USB mini-B / para la conexión de terminales a un
PC de programación (EcoStruxure Machine Expert) Puerto de programación USB mini-B , página
183
7Cierre de clip para carril DIN (segmento DIN) de 35 mm (1,38 pulg.) Carril DIN, página 61
8 Salidas de transistor normales incrustadas Salidas de transistor normales, página 165
Salidas de transistor rápidas incrustadas Salidas de transistor rápidas, página 171
Bloque de terminales extraíble de la salida Reglas para el bloque de terminales de tornillo
extraíble, página 67
9 Fuente de alimentación de 24 V CC Cableado y características de la fuente de
alimentación de CC, página 71
10 Indicadores LED de estado –
11 Conector de bus de TM4 Módulos de extensión TM4, página 35
12 Puerto de la línea serie 1 / Tipo RJ45 (RS-232 o RS-485) Línea serie 1, página 184
13 Puerto de la línea serie 2 / Tipo del bloque de terminales de tornillo (RS-
485)
Línea serie 2, página 187
14 Entradas digitales incrustadas Entradas digitales incrustadas, página 153
Bloque de terminales extraíble de la entrada Reglas para el bloque de terminales de tornillo
extraíble, página 67
15 Conector de bus TM3/TM2 Módulos de extensión TM3, página 25
16 Cubierta de protección (slot para tarjeta SD, interruptor Run/Stop y puerto
de programación USB mini-B)
–
17 Gancho de sujeción (gancho no incluido) –
112 EIO0000003086.04


TM241C24U
En la tabla siguiente se describen los indicadores LED de estado del sistema:
Etiqueta Tipo de
función Color Estado Descripción
Estados del controlador1Comunicación
del puerto Prg Ejecución
de la
aplicación
PWR Alimentación Verde Encendido indica que se aplica alimentación.
Apagado indica que se quita la alimentación.
RUN Estado del
equipo Verde Encendido Indica que el controlador está ejecutando una aplicación válida.
Parpadeo Indica que el controlador tiene una aplicación válida que está detenida.
1 parpadeo Indica que el controlador se ha detenido en el PUNTO DE
INTERRUPCIÓN.
Apagado Indica que el controlador no está
programado.
- -
ERR Error Rojo Encendido Indica que se ha detectado un
error en el funcionamiento del
sistema.
Restringido No
Parpadeo
rápido Indica que el controlador ha
detectado un error interno. Restringido No
Parpadeo lento Indica que se ha detectado un
error menor, si el LED RUN está
iluminado, o bien que no se ha
detectado ninguna aplicación.
Sí No
I/O Error de E/S Rojo Encendido Indica errores del dispositivo en las E/S incrustadas, la línea serie 1 o 2,
la tarjeta SD, el cartucho, el bus TM4 y el bus TM3.
SD Acceso para
tarjeta SD Verde Encendido Indica que se está accediendo a la tarjeta SD.
BAT Batería Rojo Encendido Indica que la batería debe sustituirse.
Parpadeo Indica que la batería está baja de carga.
SL1 Línea serie 1 Verde Parpadeo Indica el estado de la línea serie 1, página 186.
Apagado Indica que no existe comunicación serie.
SL2 Línea serie 2 Verde Parpadeo Indica el estado de la línea serie 2, página 188.
Apagado Indica que no existe comunicación serie.
TM4 Error en bus
TM4 Rojo Encendido Indica que se ha detectado un error en el bus TM4.
Apagado Indica que no se ha detectado ningún error en el bus TM4.
1Para obtener más información sobre la descripción del estado del controlador,
consulte M241 Logic Controller - Guía de programación.
114 EIO0000003086.04


TM241CE24U
TM241CE24U
Contenido de este capítulo
Presentación de TM241CE24U .................................................................... 116
Descripción general
En este capítulo se describe el TM241CE24U Logic Controller.
Presentación de TM241CE24U
Descripción general
TM241CE24U Logic controller:
• 14 entradas digitales
◦8 entradas rápidas
◦6 entradas normales
• 10 salidas digitales
◦4 salidas rápidas
◦6 salidas normales
• Puerto de comunicación
◦2 puertos de línea serie
◦1 puerto Ethernet
◦1 puerto de programación USB mini-B
Descripción
En la siguiente figura se muestran los distintos componentes del controlador
lógico TM241CE24U:
116 EIO0000003086.04

TM241CE24U
Número Descripción Consulte
1 Interruptor Run/Stop Run/Stop, página 48
2 Slot para tarjeta SD Tarjeta SD, página 49
3 Soporte de la batería Reloj en tiempo real (RTC), página 38
4 Slot para cartucho Cartuchos TMC4, página 21
5Indicadores LED para indicar los estados de E/S Indicadores LED de estado de las entradas
digitales, página 154
Indicadores LED de estado de las salidas de
transistor, página 166
Indicadores LED de estado de las salidas
rápidas, página 172
6 Puerto de programación USB mini-B / para la conexión de terminales a un
PC de programación (EcoStruxure Machine Expert) Puerto de programación USB mini-B , página
183
7Cierre de clip para carril DIN (segmento DIN) de 35 mm (1,38 pulg.) Carril DIN, página 61
8 Salidas de transistor normales incrustadas Salidas de transistor normales, página 165
Salidas de transistor rápidas incrustadas Salidas de transistor rápidas, página 171
Bloque de terminales extraíble de la salida Reglas para el bloque de terminales de tornillo
extraíble, página 67
9 Fuente de alimentación de 24 V CC Cableado y características de la fuente de
alimentación de CC, página 71
10 Puerto Ethernet / Tipo RJ45 (RS-232 o RS-485) Puerto Ethernet, página 181
11 Indicadores LED de estado –
12 Conector de bus de TM4 Módulos de extensión TM4, página 35
13 Puerto de la línea serie 1 / Tipo RJ45 (RS-232 o RS-485) Línea serie 1, página 184
14 Puerto de la línea serie 2 / Tipo del bloque de terminales de tornillo (RS-
485) Línea serie 2, página 187
15 Entradas digitales incrustadas Entradas digitales incrustadas, página 153
Bloque de terminales extraíble de la entrada Reglas para el bloque de terminales de tornillo
extraíble, página 67
16 Conector de bus TM3/TM2 Módulos de extensión TM3, página 25
17 Cubierta de protección (slot para tarjeta SD, interruptor Run/Stop y puerto
de programación USB mini-B)
–
18 Gancho de sujeción (gancho no incluido) –
EIO0000003086.04 117


TM241CE24U
En la tabla siguiente se describen los indicadores LED de estado del sistema:
Etiqueta Tipo de
función Color Estado Descripción
Estados del controlador1Comunicación
del puerto Prg Ejecución
de la
aplicación
PWR Alimentación Verde Encendido indica que se aplica alimentación.
Apagado indica que se quita la alimentación.
RUN Estado del
equipo Verde Encendido Indica que el controlador está ejecutando una aplicación válida.
Parpadeo Indica que el controlador tiene una aplicación válida que está detenida.
1 parpadeo Indica que el controlador se ha detenido en el PUNTO DE
INTERRUPCIÓN.
Apagado Indica que el controlador no está
programado.
- -
ERR Error Rojo Encendido Se ha detectado un error del
sistema operativo.
Restringido No
Parpadeo
rápido El controlador ha detectado un
error interno. Restringido No
Parpadeo lento Indica que se ha detectado un
error menor, si el LED RUN está
iluminado, o bien que no se ha
detectado ninguna aplicación.
Sí No
I/O Error de E/S Rojo Encendido Indica errores del dispositivo en las E/S incrustadas, la línea serie 1 o 2,
la tarjeta SD, el cartucho, el bus TM4, el bus TM3, el puerto Ethernet o
el puerto CANopen.
SD Acceso para
tarjeta SD Verde Encendido Indica que se está accediendo a la tarjeta SD.
BAT Batería Rojo Encendido Indica que la batería debe sustituirse.
Parpadeo Indica que la batería está baja de carga.
SL1 Línea serie 1 Verde Parpadeo Indica el estado de la línea serie 1, página 186.
Apagado Indica que no existe comunicación serie.
SL2 Línea serie 2 Verde Parpadeo Indica el estado de la línea serie 2, página 188.
Apagado Indica que no existe comunicación serie.
TM4 Error en bus
TM4 Rojo Encendido Indica que se ha detectado un error en el bus TM4.
Apagado Indica que no se ha detectado ningún error en el bus TM4.
ETH Estado de
puertos
Ethernet
Verde Encendido Indica que el puerto Ethernet está conectado y que la dirección IP está
definida.
3 parpadeos Indica que el puerto Ethernet no está conectado.
4 parpadeos Indica que la dirección IP ya está en uso.
5 parpadeos Indica que el módulo espera la secuencia BOOTP o DHCP.
6 parpadeos Indica que la dirección IP configurada no es válida.
CAN R Estado de
ejecución de
CANopen
Verde Encendido Indica que el bus CANopen está operativo.
Apagado Indica que el maestro CANopen está configurado.
Parpadeo Indica que el bus CANopen se está inicializando.
1 parpadeo por
segundo Indica que el bus CANopen está parado.
EIO0000003086.04 119

TM241CE24U
Etiqueta Tipo de
función Color Estado Descripción
Estados del controlador1Comunicación
del puerto Prg Ejecución
de la
aplicación
CAN E Error de
CANopen Rojo Encendido Indica que el bus CANopen está parado (BUS DESACTIVADO).
Apagado Indica que no se ha detectado ningún error de CANopen.
Parpadeo Indica que el bus CANopen no es válido.
1 parpadeo por
segundo Indica que el controlador ha detectado que se ha alcanzado o superado
el número máximo de tramas con errores.
2 parpadeos por
segundo Indica que el controlador ha detectado un evento de Node Guarding o
de Heartbeat.
1Para obtener más información sobre la descripción del estado del controlador,
consulte M241 Logic Controller - Guía de programación.
Dimensiones
En la figura siguiente se muestran las dimensiones externas del Logic Controller:
120 EIO0000003086.04

TM241CEC24U
TM241CEC24U
Contenido de este capítulo
Presentación de TM241CEC24U..................................................................121
Descripción general
En este capítulo se describe el TM241CEC24U Logic Controller.
Presentación de TM241CEC24U
Descripción general
TM241CEC24U Logic controller:
• 14 entradas digitales
◦8 entradas rápidas
◦6 entradas normales
• 10 salidas digitales
◦4 salidas rápidas
◦6 salidas normales
• Puerto de comunicación
◦2 puertos de línea serie
◦1 puerto Ethernet
◦1 puerto CANopen
◦1 puerto de programación USB mini-B
Descripción
En la siguiente figura se muestran los distintos componentes del controlador
lógico TM241CEC24U:
EIO0000003086.04 121

TM241CEC24U
Número Descripción Consulte
1 Interruptor Run/Stop Run/Stop, página 48
2 Slot para tarjeta SD Tarjeta SD, página 49
3 Soporte de la batería Reloj en tiempo real (RTC), página 38
4 Slot para cartucho Cartuchos TMC4, página 21
5Indicadores LED para indicar los estados de E/S Indicadores LED de estado de las entradas
digitales, página 154
Indicadores LED de estado de las salidas de
transistor, página 166
Indicadores LED de estado de las salidas
rápidas, página 172
6 Puerto de programación USB mini-B / para la conexión de terminales a un
PC de programación (EcoStruxure Machine Expert) Puerto de programación USB mini-B , página
183
7Cierre de clip para carril DIN (segmento DIN) de 35 mm (1,38 pulg.) Carril DIN, página 61
8 Salidas de transistor normales incrustadas Salidas de transistor normales, página 165
Salidas de transistor rápidas incrustadas Salidas de transistor rápidas, página 171
Bloque de terminales extraíble de la salida Reglas para el bloque de terminales de tornillo
extraíble, página 67
9 Conmutador de final de línea CANopen Puerto CANopen, página 178
10 Fuente de alimentación de 24 V CC Cableado y características de la fuente de
alimentación de CC, página 71
11 Puerto CANopen / Tipo de bloque de terminales de tornillo Puerto CANopen, página 178
12 Puerto Ethernet / Tipo RJ45 (RS-232 o RS-485) Puerto Ethernet, página 181
13 Indicadores LED de estado –
14 Conector de bus de TM4 Módulos de extensión TM4, página 35
15 Puerto de la línea serie 1 / Tipo RJ45 (RS-232 o RS-485) Línea serie 1, página 184
16 Puerto de la línea serie 2 / Tipo del bloque de terminales de tornillo (RS-
485)
Línea serie 2, página 187
17 Entradas digitales incrustadas Entradas digitales incrustadas, página 153
Bloque de terminales extraíble de la entrada Reglas para el bloque de terminales de tornillo
extraíble, página 67
18 Conector de bus TM3/TM2 Módulos de extensión TM3, página 25
19 Cubierta de protección (slot para tarjeta SD, interruptor Run/Stop y puerto
de programación USB mini-B)
–
20 Gancho de sujeción (gancho no incluido) –
122 EIO0000003086.04


TM241CEC24U
En la tabla siguiente se describen los indicadores LED de estado del sistema:
Etiqueta Tipo de
función Color Estado Descripción
Estados del controlador1Comunicación
del puerto Prg Ejecución
de la
aplicación
PWR Alimentación Verde Encendido indica que se aplica alimentación.
Apagado indica que se quita la alimentación.
RUN Estado del
equipo Verde Encendido Indica que el controlador está ejecutando una aplicación válida.
Parpadeo Indica que el controlador tiene una aplicación válida que está detenida.
1 parpadeo Indica que el controlador se ha detenido en el PUNTO DE
INTERRUPCIÓN.
Apagado Indica que el controlador no está
programado.
- -
ERR Error Rojo Encendido Se ha detectado un error del
sistema operativo.
Restringido No
Parpadeo
rápido El controlador ha detectado un
error interno. Restringido No
Parpadeo lento Indica que se ha detectado un
error menor, si el LED RUN está
iluminado, o bien que no se ha
detectado ninguna aplicación.
Sí No
I/O Error de E/S Rojo Encendido Indica errores del dispositivo en las E/S incrustadas, la línea serie 1 o 2,
la tarjeta SD, el cartucho, el bus TM4, el bus TM3, el puerto Ethernet o
el puerto CANopen.
SD Acceso para
tarjeta SD Verde Encendido Indica que se está accediendo a la tarjeta SD.
BAT Batería Rojo Encendido Indica que la batería debe sustituirse.
Parpadeo Indica que la batería está baja de carga.
SL1 Línea serie 1 Verde Parpadeo Indica el estado de la línea serie 1, página 186.
Apagado Indica que no existe comunicación serie.
SL2 Línea serie 2 Verde Parpadeo Indica el estado de la línea serie 2, página 188.
Apagado Indica que no existe comunicación serie.
TM4 Error en bus
TM4 Rojo Encendido Indica que se ha detectado un error en el bus TM4.
Apagado Indica que no se ha detectado ningún error en el bus TM4.
ETH Estado de
puertos
Ethernet
Verde Encendido Indica que el puerto Ethernet está conectado y que la dirección IP está
definida.
3 parpadeos Indica que el puerto Ethernet no está conectado.
4 parpadeos Indica que la dirección IP ya está en uso.
5 parpadeos Indica que el módulo espera la secuencia BOOTP o DHCP.
6 parpadeos Indica que la dirección IP configurada no es válida.
CAN R Estado de
ejecución de
CANopen
Verde Encendido Indica que el bus CANopen está operativo.
Apagado Indica que el maestro CANopen está configurado.
Parpadeo Indica que el bus CANopen se está inicializando.
1 parpadeo por
segundo Indica que el bus CANopen está parado.
124 EIO0000003086.04

TM241CEC24U
Etiqueta Tipo de
función Color Estado Descripción
Estados del controlador1Comunicación
del puerto Prg Ejecución
de la
aplicación
CAN E Error de
CANopen Rojo Encendido Indica que el bus CANopen está parado (BUS DESACTIVADO).
Apagado Indica que no se ha detectado ningún error de CANopen.
Parpadeo Indica que el bus CANopen no es válido.
1 parpadeo por
segundo Indica que el controlador ha detectado que se ha alcanzado o superado
el número máximo de tramas con errores.
2 parpadeos por
segundo Indica que el controlador ha detectado un evento de Node Guarding o
de Heartbeat.
1Para obtener más información sobre la descripción del estado del controlador,
consulte M241 Logic Controller - Guía de programación.
Dimensiones
En la figura siguiente se muestran las dimensiones externas del Logic Controller:
EIO0000003086.04 125

TM241C40R
TM241C40R
Contenido de este capítulo
Presentación de TM241C40R ......................................................................126
Descripción general
En este capítulo se describe el TM241C40R Logic Controller.
Presentación de TM241C40R
Descripción general
TM241C40R Logic controller:
• 24 entradas digitales
◦8 entradas rápidas
◦16 entradas normales
• 16 salidas digitales
◦4 salidas rápidas
◦12 salidas de relé (2 A)
• Puerto de comunicación
◦2 puertos de línea serie
◦1 puerto de programación USB mini-B
Descripción
En la siguiente figura se muestran los distintos componentes del controlador lógico TM241C40R:
126 EIO0000003086.04

TM241C40R
Número Descripción Consulte
1 Interruptor Run/Stop Run/Stop, página 48
2 Slot para tarjeta SD Tarjeta SD, página 49
3 Soporte de la batería Reloj en tiempo real (RTC), página 38
4 Slot para cartucho Cartuchos TMC4, página 21
5Indicadores LED para indicar los estados de E/S Indicadores LED de estado de las entradas
digitales, página 154
Indicadores LED de estado de las salidas de
relé, página 161
Indicadores LED de estado de las salidas
rápidas, página 172
6 Puerto de programación USB mini-B / para la conexión de terminales a un
PC de programación (EcoStruxure Machine Expert) Puerto de programación USB mini-B , página
183
7Cierre de clip para carril DIN (segmento DIN) de 35 mm (1,38 pulg.) Carril DIN, página 61
8 Salidas de relé incrustadas Salidas de relé, página 160
Salidas de transistor rápidas incrustadas Salidas de transistor rápidas, página 171
Bloque de terminales extraíble de la salida Reglas para el bloque de terminales de tornillo
extraíble, página 67
9 Fuente de alimentación de 50/60 Hz de 100 a 240 V CA Cableado y características de la fuente de
alimentación de CA, página 74
10 Indicadores LED de estado –
11 Conector de bus de TM4 Módulos de extensión TM4, página 35
12 Puerto de la línea serie 1 / Tipo RJ45 (RS-232 o RS-485) Línea serie 1, página 184
13 Puerto de la línea serie 2 / Tipo del bloque de terminales de tornillo (RS-
485)
Línea serie 2, página 187
14 Entradas digitales incrustadas Entradas digitales incrustadas, página 153
Bloque de terminales extraíble de la entrada Reglas para el bloque de terminales de tornillo
extraíble, página 67
15 Conector de bus TM3/TM2 Módulos de extensión TM3, página 25
16 Cubierta de protección (slot para tarjeta SD, interruptor Run/Stop y puerto
de programación USB mini-B)
–
17 Gancho de sujeción (gancho no incluido) –
EIO0000003086.04 127


TM241C40R
En la tabla siguiente se describen los indicadores LED de estado del sistema:
Etiqueta Tipo de
función Color Estado Descripción
Estados del controlador1Comunicación
del puerto Prg Ejecución
de la
aplicación
PWR Alimentación Verde Encendido indica que se aplica alimentación.
Apagado indica que se quita la alimentación.
RUN Estado del
equipo Verde Encendido Indica que el controlador está ejecutando una aplicación válida.
Parpadeo Indica que el controlador tiene una aplicación válida que está detenida.
1 parpadeo Indica que el controlador se ha detenido en el PUNTO DE
INTERRUPCIÓN.
Apagado Indica que el controlador no está
programado.
- -
ERR Error Rojo Encendido Indica que se ha detectado un
error en el funcionamiento del
sistema.
Restringido No
Parpadeo
rápido Indica que el controlador ha
detectado un error interno. Restringido No
Parpadeo lento Indica que se ha detectado un
error menor, si el LED RUN está
iluminado, o bien que no se ha
detectado ninguna aplicación.
Sí No
I/O Error de E/S Rojo Encendido Indica errores del dispositivo en las E/S incrustadas, la línea serie 1 o 2,
la tarjeta SD, el cartucho, el bus TM4 y el bus TM3.
SD Acceso para
tarjeta SD Verde Encendido Indica que se está accediendo a la tarjeta SD.
BAT Batería Rojo Encendido Indica que la batería debe sustituirse.
Parpadeo Indica que la batería está baja de carga.
SL1 Línea serie 1 Verde Parpadeo Indica el estado de la línea serie 1, página 186.
Apagado Indica que no existe comunicación serie.
SL2 Línea serie 2 Verde Parpadeo Indica el estado de la línea serie 2, página 188.
Apagado Indica que no existe comunicación serie.
TM4 Error en bus
TM4 Rojo Encendido Indica que se ha detectado un error en el bus TM4.
Apagado Indica que no se ha detectado ningún error en el bus TM4.
1Para obtener más información sobre la descripción del estado del controlador,
consulte M241 Logic Controller - Guía de programación.
Dimensiones
En la figura siguiente se muestran las dimensiones externas del Logic Controller:
EIO0000003086.04 129

TM241CE40R
TM241CE40R
Contenido de este capítulo
Presentación de TM241CE40R ....................................................................130
Descripción general
En este capítulo se describe el TM241CE40R Logic Controller.
Presentación de TM241CE40R
Descripción general
TM241CE40R Logic controller:
• 24 entradas digitales
◦8 entradas rápidas
◦16 entradas normales
• 16 salidas digitales
◦4 salidas rápidas
◦12 salidas de relé (2 A)
• Puerto de comunicación
◦2 puertos de línea serie
◦1 puerto Ethernet
◦1 puerto de programación USB mini-B
Descripción
En la siguiente figura se muestran los distintos componentes del controlador lógico TM241CE40R:
130 EIO0000003086.04

TM241CE40R
Número Descripción Consulte
1 Interruptor Run/Stop Run/Stop, página 48
2 Slot para tarjeta SD Tarjeta SD, página 49
3 Soporte de la batería Reloj en tiempo real (RTC), página 38
4 Slot para cartucho Cartuchos TMC4, página 21
5Indicadores LED para indicar los estados de E/S Indicadores LED de estado de las entradas
digitales, página 154
Indicadores LED de estado de las salidas de
relé, página 161
Indicadores LED de estado de las salidas
rápidas, página 172
6 Puerto de programación USB mini-B / para la conexión de terminales a un
PC de programación (EcoStruxure Machine Expert) Puerto de programación USB mini-B , página
183
7Cierre de clip para carril DIN (segmento DIN) de 35 mm (1,38 pulg.) Carril DIN, página 61
8 Salidas de relé incrustadas Salidas de relé, página 160
Salidas de transistor rápidas incrustadas Salidas de transistor rápidas, página 171
Bloque de terminales extraíble de la salida Reglas para el bloque de terminales de tornillo
extraíble, página 67
9 Fuente de alimentación de 50/60 Hz de 100 a 240 V CA Cableado y características de la fuente de
alimentación de CA, página 74
10 Puerto Ethernet / Tipo RJ45 (RS-232 o RS-485) Puerto Ethernet, página 181
11 Indicadores LED de estado –
12 Conector de bus de TM4 Módulos de extensión TM4, página 35
13 Puerto de la línea serie 1 / Tipo RJ45 (RS-232 o RS-485) Línea serie 1, página 184
14 Puerto de la línea serie 2 / Tipo del bloque de terminales de tornillo (RS-
485) Línea serie 2, página 187
15 Entradas digitales incrustadas Entradas digitales incrustadas, página 153
Bloque de terminales extraíble de la entrada Reglas para el bloque de terminales de tornillo
extraíble, página 67
16 Conector de bus TM3/TM2 Módulos de extensión TM3, página 25
17 Cubierta de protección (slot para tarjeta SD, interruptor Run/Stop y puerto
de programación USB mini-B)
–
18 Gancho de sujeción (gancho no incluido) –
EIO0000003086.04 131


TM241CE40R
En la tabla siguiente se describen los indicadores LED de estado del sistema:
Etiqueta Tipo de
función Color Estado Descripción
Estados del controlador1Comunicación
del puerto Prg Ejecución
de la
aplicación
PWR Alimentación Verde Encendido indica que se aplica alimentación.
Apagado indica que se quita la alimentación.
RUN Estado del
equipo Verde Encendido Indica que el controlador está ejecutando una aplicación válida.
Parpadeo Indica que el controlador tiene una aplicación válida que está detenida.
1 parpadeo Indica que el controlador se ha detenido en el PUNTO DE
INTERRUPCIÓN.
Apagado Indica que el controlador no está
programado.
- -
ERR Error Rojo Encendido Se ha detectado un error del
sistema operativo.
Restringido No
Parpadeo
rápido El controlador ha detectado un
error interno. Restringido No
Parpadeo lento Indica que se ha detectado un
error menor, si el LED RUN está
iluminado, o bien que no se ha
detectado ninguna aplicación.
Sí No
I/O Error de E/S Rojo Encendido Indica errores del dispositivo en las E/S incrustadas, la línea serie 1 o 2,
la tarjeta SD, el cartucho, el bus TM4, el bus TM3 o el puerto Ethernet.
SD Acceso para
tarjeta SD Verde Encendido Indica que se está accediendo a la tarjeta SD.
BAT Batería Rojo Encendido Indica que la batería debe sustituirse.
Parpadeo Indica que la batería está baja de carga.
SL1 Línea serie 1 Verde Parpadeo Indica el estado de la línea serie 1, página 186.
Apagado Indica que no existe comunicación serie.
SL2 Línea serie 2 Verde Parpadeo Indica el estado de la línea serie 2, página 188.
Apagado Indica que no existe comunicación serie.
TM4 Error en bus
TM4 Rojo Encendido Indica que se ha detectado un error en el bus TM4.
Apagado Indica que no se ha detectado ningún error en el bus TM4.
ETH Estado de
puertos
Ethernet
Verde Encendido Indica que el puerto Ethernet está conectado y que la dirección IP está
definida.
3 parpadeos Indica que el puerto Ethernet no está conectado.
4 parpadeos Indica que la dirección IP ya está en uso.
5 parpadeos Indica que el módulo espera la secuencia BOOTP o DHCP.
6 parpadeos Indica que la dirección IP configurada no es válida.
1Para obtener más información sobre la descripción del estado del controlador,
consulte M241 Logic Controller - Guía de programación.
EIO0000003086.04 133


TM241C40T
TM241C40T
Contenido de este capítulo
Presentación de TM241C40T.......................................................................135
Descripción general
En este capítulo se describe el TM241C40T Logic Controller.
Presentación de TM241C40T
Descripción general
TM241C40T Logic controller:
• 24 entradas digitales
◦8 entradas rápidas
◦16 entradas normales
• 16 salidas digitales
◦4 salidas rápidas
◦12 salidas normales
• Puerto de comunicación
◦2 puertos de línea serie
◦1 puerto de programación USB mini-B
Descripción
En la siguiente figura se muestran los distintos componentes del controlador lógico TM241C40T:
EIO0000003086.04 135

TM241C40T
Número Descripción Consulte
1 Interruptor Run/Stop Run/Stop, página 48
2 Slot para tarjeta SD Tarjeta SD, página 49
3 Soporte de la batería Reloj en tiempo real (RTC), página 38
4 Slot para cartucho Cartuchos TMC4, página 21
5Indicadores LED para indicar los estados de E/S Indicadores LED de estado de las entradas
digitales, página 154
Indicadores LED de estado de las salidas de
transistor, página 166
Indicadores LED de estado de las salidas
rápidas, página 172
6 Puerto de programación USB mini-B / para la conexión de terminales a un
PC de programación (EcoStruxure Machine Expert) Puerto de programación USB mini-B , página
183
7Cierre de clip para carril DIN (segmento DIN) de 35 mm (1,38 pulg.) Carril DIN, página 61
8 Salidas de transistor normales incrustadas Salidas de transistor normales, página 165
Salidas de transistor rápidas incrustadas Salidas de transistor rápidas, página 171
Bloque de terminales extraíble de la salida Reglas para el bloque de terminales de tornillo
extraíble, página 67
9 Fuente de alimentación de 24 V CC Cableado y características de la fuente de
alimentación de CC, página 71
10 Indicadores LED de estado –
11 Conector de bus de TM4 Módulos de extensión TM4, página 35
12 Puerto de la línea serie 1 / Tipo RJ45 (RS-232 o RS-485) Línea serie 1, página 184
13 Puerto de la línea serie 2 / Tipo del bloque de terminales de tornillo (RS-
485)
Línea serie 2, página 187
14 Entradas digitales incrustadas Entradas digitales incrustadas, página 153
Bloque de terminales extraíble de la entrada Reglas para el bloque de terminales de tornillo
extraíble, página 67
15 Conector de bus TM3/TM2 Módulos de extensión TM3, página 25
16 Cubierta de protección (slot para tarjeta SD, interruptor Run/Stop y puerto
de programación USB mini-B)
–
17 Gancho de sujeción (gancho no incluido) –
136 EIO0000003086.04


TM241C40T
En la tabla siguiente se describen los indicadores LED de estado del sistema:
Etiqueta Tipo de
función Color Estado Descripción
Estados del controlador1Comunicación
del puerto Prg Ejecución
de la
aplicación
PWR Alimentación Verde Encendido indica que se aplica alimentación.
Apagado indica que se quita la alimentación.
RUN Estado del
equipo Verde Encendido Indica que el controlador está ejecutando una aplicación válida.
Parpadeo Indica que el controlador tiene una aplicación válida que está detenida.
1 parpadeo Indica que el controlador se ha detenido en el PUNTO DE
INTERRUPCIÓN.
Apagado Indica que el controlador no está
programado.
- -
ERR Error Rojo Encendido Indica que se ha detectado un
error en el funcionamiento del
sistema.
Restringido No
Parpadeo
rápido Indica que el controlador ha
detectado un error interno. Restringido No
Parpadeo lento Indica que se ha detectado un
error menor, si el LED RUN está
iluminado, o bien que no se ha
detectado ninguna aplicación.
Sí No
I/O Error de E/S Rojo Encendido Indica errores del dispositivo en las E/S incrustadas, la línea serie 1 o 2,
la tarjeta SD, el cartucho, el bus TM4 y el bus TM3.
SD Acceso para
tarjeta SD Verde Encendido Indica que se está accediendo a la tarjeta SD.
BAT Batería Rojo Encendido Indica que la batería debe sustituirse.
Parpadeo Indica que la batería está baja de carga.
SL1 Línea serie 1 Verde Parpadeo Indica el estado de la línea serie 1, página 186.
Apagado Indica que no existe comunicación serie.
SL2 Línea serie 2 Verde Parpadeo Indica el estado de la línea serie 2, página 188.
Apagado Indica que no existe comunicación serie.
TM4 Error en bus
TM4 Rojo Encendido Indica que se ha detectado un error en el bus TM4.
Apagado Indica que no se ha detectado ningún error en el bus TM4.
1Para obtener más información sobre la descripción del estado del controlador,
consulte M241 Logic Controller - Guía de programación.
Dimensiones
En la figura siguiente se muestran las dimensiones externas del Logic Controller:
138 EIO0000003086.04

TM241CE40T
TM241CE40T
Contenido de este capítulo
Presentación de TM241CE40T ....................................................................139
Descripción general
En este capítulo se describe el TM241CE40T Logic Controller.
Presentación de TM241CE40T
Descripción general
TM241CE40T Logic controller:
• 24 entradas digitales
◦8 entradas rápidas
◦16 entradas normales
• 16 salidas digitales
◦4 salidas rápidas
◦12 salidas normales
• Puerto de comunicación
◦2 puertos de línea serie
◦1 puerto Ethernet
◦1 puerto de programación USB mini-B
Descripción
En la siguiente figura se muestran los distintos componentes del controlador lógico TM241CE40T:
EIO0000003086.04 139

TM241CE40T
Número Descripción Consulte
1 Interruptor Run/Stop Run/Stop, página 48
2 Slot para tarjeta SD Tarjeta SD, página 49
3 Soporte de la batería Reloj en tiempo real (RTC), página 38
4 Slot para cartucho Cartuchos TMC4, página 21
5Indicadores LED para indicar los estados de E/S Indicadores LED de estado de las entradas
digitales, página 154
Indicadores LED de estado de las salidas de
transistor, página 166
Indicadores LED de estado de las salidas
rápidas, página 172
6 Puerto de programación USB mini-B / para la conexión de terminales a un
PC de programación (EcoStruxure Machine Expert) Puerto de programación USB mini-B , página
183
7Cierre de clip para carril DIN (segmento DIN) de 35 mm (1,38 pulg.) Carril DIN, página 61
8 Salidas de transistor normales incrustadas Salidas de transistor normales, página 165
Salidas de transistor rápidas incrustadas Salidas de transistor rápidas, página 171
Bloque de terminales extraíble de la salida Reglas para el bloque de terminales de tornillo
extraíble, página 67
9 Fuente de alimentación de 24 V CC Cableado y características de la fuente de
alimentación de CC, página 71
10 Puerto Ethernet / Tipo RJ45 (RS-232 o RS-485) Puerto Ethernet, página 181
11 Indicadores LED de estado –
12 Conector de bus de TM4 Módulos de extensión TM4, página 35
13 Puerto de la línea serie 1 / Tipo RJ45 (RS-232 o RS-485) Línea serie 1, página 184
14 Puerto de la línea serie 2 / Tipo del bloque de terminales de tornillo (RS-
485) Línea serie 2, página 187
15 Entradas digitales incrustadas Entradas digitales incrustadas, página 153
Bloque de terminales extraíble de la entrada Reglas para el bloque de terminales de tornillo
extraíble, página 67
16 Conector de bus TM3/TM2 Módulos de extensión TM3, página 25
17 Cubierta de protección (slot para tarjeta SD, interruptor Run/Stop y puerto
de programación USB mini-B)
–
18 Gancho de sujeción (gancho no incluido) –
140 EIO0000003086.04


TM241CE40T
En la tabla siguiente se describen los indicadores LED de estado del sistema:
Etiqueta Tipo de
función Color Estado Descripción
Estados del controlador1Comunicación
del puerto Prg Ejecución
de la
aplicación
PWR Alimentación Verde Encendido indica que se aplica alimentación.
Apagado indica que se quita la alimentación.
RUN Estado del
equipo Verde Encendido Indica que el controlador está ejecutando una aplicación válida.
Parpadeo Indica que el controlador tiene una aplicación válida que está detenida.
1 parpadeo Indica que el controlador se ha detenido en el PUNTO DE
INTERRUPCIÓN.
Apagado Indica que el controlador no está
programado.
- -
ERR Error Rojo Encendido Se ha detectado un error del
sistema operativo.
Restringido No
Parpadeo
rápido El controlador ha detectado un
error interno. Restringido No
Parpadeo lento Indica que se ha detectado un
error menor, si el LED RUN está
iluminado, o bien que no se ha
detectado ninguna aplicación.
Sí No
I/O Error de E/S Rojo Encendido Indica errores del dispositivo en las E/S incrustadas, la línea serie 1 o 2,
la tarjeta SD, el cartucho, el bus TM4, el bus TM3 o el puerto Ethernet.
SD Acceso para
tarjeta SD Verde Encendido Indica que se está accediendo a la tarjeta SD.
BAT Batería Rojo Encendido Indica que la batería debe sustituirse.
Parpadeo Indica que la batería está baja de carga.
SL1 Línea serie 1 Verde Parpadeo Indica el estado de la línea serie 1, página 186.
Apagado Indica que no existe comunicación serie.
SL2 Línea serie 2 Verde Parpadeo Indica el estado de la línea serie 2, página 188.
Apagado Indica que no existe comunicación serie.
TM4 Error en bus
TM4 Rojo Encendido Indica que se ha detectado un error en el bus TM4.
Apagado Indica que no se ha detectado ningún error en el bus TM4.
ETH Estado de
puertos
Ethernet
Verde Encendido Indica que el puerto Ethernet está conectado y que la dirección IP está
definida.
3 parpadeos Indica que el puerto Ethernet no está conectado.
4 parpadeos Indica que la dirección IP ya está en uso.
5 parpadeos Indica que el módulo espera la secuencia BOOTP o DHCP.
6 parpadeos Indica que la dirección IP configurada no es válida.
1Para obtener más información sobre la descripción del estado del controlador,
consulte M241 Logic Controller - Guía de programación.
142 EIO0000003086.04


TM241C40U
TM241C40U
Contenido de este capítulo
Presentación de TM241C40U ......................................................................144
Descripción general
En este capítulo se describe el TM241C40U Logic Controller.
Presentación de TM241C40U
Descripción general
TM241C24U Logic controller:
• 24 entradas digitales
◦8 entradas rápidas
◦16 entradas normales
• 16 salidas digitales
◦4 salidas rápidas
◦12 salidas normales
• Puerto de comunicación
◦2 puertos de línea serie
◦1 puerto de programación USB mini-B
Descripción
En la siguiente figura se muestran los distintos componentes del controlador lógico TM241C40U:
144 EIO0000003086.04

TM241C40U
Número Descripción Consulte
1 Interruptor Run/Stop Run/Stop, página 48
2 Slot para tarjeta SD Tarjeta SD, página 49
3 Soporte de la batería Reloj en tiempo real (RTC), página 38
4 Slot para cartucho Cartuchos TMC4, página 21
5Indicadores LED para indicar los estados de E/S Indicadores LED de estado de las entradas
digitales, página 154
Indicadores LED de estado de las salidas de
transistor, página 166
Indicadores LED de estado de las salidas
rápidas, página 172
6 Puerto de programación USB mini-B / para la conexión de terminales a un
PC de programación (EcoStruxure Machine Expert) Puerto de programación USB mini-B , página
183
7Cierre de clip para carril DIN (segmento DIN) de 35 mm (1,38 pulg.) Carril DIN, página 61
8 Salidas de transistor normales incrustadas Salidas de transistor normales, página 165
Salidas de transistor rápidas incrustadas Salidas de transistor rápidas, página 171
Bloque de terminales extraíble de la salida Reglas para el bloque de terminales de tornillo
extraíble, página 67
9 Fuente de alimentación de 24 V CC Cableado y características de la fuente de
alimentación de CC, página 71
10 Indicadores LED de estado –
11 Conector de bus de TM4 Módulos de extensión TM4, página 35
12 Puerto de la línea serie 1 / Tipo RJ45 (RS-232 o RS-485) Línea serie 1, página 184
13 Puerto de la línea serie 2 / Tipo del bloque de terminales de tornillo (RS-
485)
Línea serie 2, página 187
14 Entradas digitales incrustadas Entradas digitales incrustadas, página 153
Bloque de terminales extraíble de la entrada Reglas para el bloque de terminales de tornillo
extraíble, página 67
15 Conector de bus TM3/TM2 Módulos de extensión TM3, página 25
16 Cubierta de protección (slot para tarjeta SD, interruptor Run/Stop y puerto
de programación USB mini-B)
–
17 Gancho de sujeción (gancho no incluido) –
EIO0000003086.04 145


TM241C40U
En la tabla siguiente se describen los indicadores LED de estado del sistema:
Etiqueta Tipo de
función Color Estado Descripción
Estados del controlador1Comunicación
del puerto Prg Ejecución
de la
aplicación
PWR Alimentación Verde Encendido indica que se aplica alimentación.
Apagado indica que se quita la alimentación.
RUN Estado del
equipo Verde Encendido Indica que el controlador está ejecutando una aplicación válida.
Parpadeo Indica que el controlador tiene una aplicación válida que está detenida.
1 parpadeo Indica que el controlador se ha detenido en el PUNTO DE
INTERRUPCIÓN.
Apagado Indica que el controlador no está
programado.
- -
ERR Error Rojo Encendido Indica que se ha detectado un
error en el funcionamiento del
sistema.
Restringido No
Parpadeo
rápido Indica que el controlador ha
detectado un error interno. Restringido No
Parpadeo lento Indica que se ha detectado un
error menor, si el LED RUN está
iluminado, o bien que no se ha
detectado ninguna aplicación.
Sí No
I/O Error de E/S Rojo Encendido Indica errores del dispositivo en las E/S incrustadas, la línea serie 1 o 2,
la tarjeta SD, el cartucho, el bus TM4 y el bus TM3.
SD Acceso para
tarjeta SD Verde Encendido Indica que se está accediendo a la tarjeta SD.
BAT Batería Rojo Encendido Indica que la batería debe sustituirse.
Parpadeo Indica que la batería está baja de carga.
SL1 Línea serie 1 Verde Parpadeo Indica el estado de la línea serie 1, página 186.
Apagado Indica que no existe comunicación serie.
SL2 Línea serie 2 Verde Parpadeo Indica el estado de la línea serie 2, página 188.
Apagado Indica que no existe comunicación serie.
TM4 Error en bus
TM4 Rojo Encendido Indica que se ha detectado un error en el bus TM4.
Apagado Indica que no se ha detectado ningún error en el bus TM4.
1Para obtener más información sobre la descripción del estado del controlador,
consulte M241 Logic Controller - Guía de programación.
Dimensiones
En la figura siguiente se muestran las dimensiones externas del Logic Controller:
EIO0000003086.04 147

TM241CE40U
TM241CE40U
Contenido de este capítulo
Presentación de TM241CE40U ....................................................................148
Descripción general
En este capítulo se describe el TM241CE40U Logic Controller.
Presentación de TM241CE40U
Descripción general
Controladores optimizados TM241CE40U:
• 24 entradas digitales
◦8 entradas rápidas
◦16 entradas normales
• 16 salidas digitales
◦4 salidas rápidas
◦12 salidas normales
• Puerto de comunicación
◦2 puertos de línea serie
◦1 puerto Ethernet
◦1 puerto de programación USB mini-B
Descripción
En la siguiente figura se muestran los distintos componentes del controlador lógico TM241CE40U:
148 EIO0000003086.04

TM241CE40U
Número Descripción Consulte
1 Interruptor Run/Stop Run/Stop, página 48
2 Slot para tarjeta SD Tarjeta SD, página 49
3 Soporte de la batería Reloj en tiempo real (RTC), página 38
4 Slot para cartucho Cartuchos TMC4, página 21
5Indicadores LED para indicar los estados de E/S Indicadores LED de estado de las entradas
digitales, página 154
Indicadores LED de estado de las salidas de
transistor, página 166
Indicadores LED de estado de las salidas
rápidas, página 172
6 Puerto de programación USB mini-B / para la conexión de terminales a un
PC de programación (EcoStruxure Machine Expert) Puerto de programación USB mini-B , página
183
7Cierre de clip para carril DIN (segmento DIN) de 35 mm (1,38 pulg.) Carril DIN, página 61
8 Salidas de transistor normales incrustadas Salidas de transistor normales, página 165
Salidas de transistor rápidas incrustadas Salidas de transistor rápidas, página 171
Bloque de terminales extraíble de la salida Reglas para el bloque de terminales de tornillo
extraíble, página 67
9 Fuente de alimentación de 24 V CC Cableado y características de la fuente de
alimentación de CC, página 71
10 Puerto Ethernet / Tipo RJ45 (RS-232 o RS-485) Puerto Ethernet, página 181
11 Indicadores LED de estado –
12 Conector de bus de TM4 Módulos de extensión TM4, página 35
13 Puerto de la línea serie 1 / Tipo RJ45 (RS-232 o RS-485) Línea serie 1, página 184
14 Puerto de la línea serie 2 / Tipo del bloque de terminales de tornillo (RS-
485) Línea serie 2, página 187
15 Entradas digitales incrustadas Entradas digitales incrustadas, página 153
Bloque de terminales extraíble de la entrada Reglas para el bloque de terminales de tornillo
extraíble, página 67
16 Conector de bus TM3/TM2 Módulos de extensión TM3, página 25
17 Cubierta de protección (slot para tarjeta SD, interruptor Run/Stop y puerto
de programación USB mini-B)
–
18 Gancho de sujeción (gancho no incluido) –
EIO0000003086.04 149


TM241CE40U
En la tabla siguiente se describen los indicadores LED de estado del sistema:
Etiqueta Tipo de
función Color Estado Descripción
Estados del controlador1Comunicación
del puerto Prg Ejecución
de la
aplicación
PWR Alimentación Verde Encendido indica que se aplica alimentación.
Apagado indica que se quita la alimentación.
RUN Estado del
equipo Verde Encendido Indica que el controlador está ejecutando una aplicación válida.
Parpadeo Indica que el controlador tiene una aplicación válida que está detenida.
1 parpadeo Indica que el controlador se ha detenido en el PUNTO DE
INTERRUPCIÓN.
Apagado Indica que el controlador no está
programado.
- -
ERR Error Rojo Encendido Se ha detectado un error del
sistema operativo.
Restringido No
Parpadeo
rápido El controlador ha detectado un
error interno. Restringido No
Parpadeo lento Indica que se ha detectado un
error menor, si el LED RUN está
iluminado, o bien que no se ha
detectado ninguna aplicación.
Sí No
I/O Error de E/S Rojo Encendido Indica errores del dispositivo en las E/S incrustadas, la línea serie 1 o 2,
la tarjeta SD, el cartucho, el bus TM4, el bus TM3 o el puerto Ethernet.
SD Acceso para
tarjeta SD Verde Encendido Indica que se está accediendo a la tarjeta SD.
BAT Batería Rojo Encendido Indica que la batería debe sustituirse.
Parpadeo Indica que la batería está baja de carga.
SL1 Línea serie 1 Verde Parpadeo Indica el estado de la línea serie 1, página 186.
Apagado Indica que no existe comunicación serie.
SL2 Línea serie 2 Verde Parpadeo Indica el estado de la línea serie 2, página 188.
Apagado Indica que no existe comunicación serie.
TM4 Error en bus
TM4 Rojo Encendido Indica que se ha detectado un error en el bus TM4.
Apagado Indica que no se ha detectado ningún error en el bus TM4.
ETH Estado de
puertos
Ethernet
Verde Encendido Indica que el puerto Ethernet está conectado y que la dirección IP está
definida.
3 parpadeos Indica que el puerto Ethernet no está conectado.
4 parpadeos Indica que la dirección IP ya está en uso.
5 parpadeos Indica que el módulo espera la secuencia BOOTP o DHCP.
6 parpadeos Indica que la dirección IP configurada no es válida.
1Para obtener más información sobre la descripción del estado del controlador,
consulte M241 Logic Controller - Guía de programación.
EIO0000003086.04 151


Canales de E/S incrustadas
Canales de E/S incrustadas
Contenido de este capítulo
Entradas digitales........................................................................................153
Salidas de relé ............................................................................................160
Salidas de transistor normales .....................................................................165
Salidas de transistor rápidas ........................................................................171
Descripción general
En este capítulo se describen los canales de E/S incrustadas.
Entradas digitales
Descripción general
El Modicon M241 Logic Controller tiene entradas digitales incrustadas:
Referencia Número total de
entradas digitales Entradas rápidas que
pueden utilizarse como
entradas HSC de
200 kHz
Número total de
entradas normales
Entradas normales que
pueden utilizarse como
entradas HSC de 1 kHz
TM241C••24R
TM241C••24T
TM241C••24U
14 8 6 6
TM241C•40R
TM241C•40T
TM241C•40U
24 8 16 8
Para obtener más información, consulte Gestión de entradas, página 41.
PELIGRO
PELIGRO DE INCENDIO
• Utilice únicamente los tamaños de cable recomendados para la capacidad
de corriente máxima de los canales de E/S y las fuentes de alimentación.
• Para el cableado de las salidas de relé (2 A), utilice conductores de al
menos 0,5 mm2(AWG 20) con una temperatura nominal de al menos 80 °C
(176 °F).
• Para los conductores comunes del cableado de salidas de relé (7 A) o el
cableado de salidas de relé superior a 2 A, utilice conductores de al menos
1,0 mm2(AWG 16) con una temperatura nominal de al menos 80 °C (176 °
F).
Si no se siguen estas instrucciones, se producirán lesiones graves o la
muerte.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No supere ninguno de los valores nominales que se especifican en las tablas
de características medioambientales y eléctricas.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
EIO0000003086.04 153

Canales de E/S incrustadas
Indicadores LED de estado de entradas digitales
En la siguiente figura se muestran los indicadores LED de estado para el
controlador TM241C••24• (los controladores TM241C•40• son similares con 40
LED):
Indicador
LED Color Estado Descripción
De 0 a 13 Verde Encendido El canal de entrada está activado.
Apagado El canal de entrada está
desactivado.
Características de entradas normales
En la tabla siguiente se describen las características del M241 Logic Controller
con entradas normales:
Característica Valores
TM241C••24• TM241C•40•
Número de entradas normales 6 entradas (de I8 a I13) 16 entradas (de I8 a I23)
Número de grupos de canales 1 línea común para I8 a I13 1 línea común para I8 a I23
Tipo de entrada Tipo 1 (IEC 61131-2, edición 3)
Tipo de lógica Común positivo/Común negativo
Rango de tensión de entrada 24 V CC
Tensión de entrada nominal De 0 a 28,8 V CC
Corriente de entrada nominal 5 mA 7 mA
Impedancia de entrada 4,7 kΩ
Valores límite de entrada Tensión en estado 1 > 15 V CC (de 15 a 28,8 V CC)
Tensión en estado 0 < 5 V CC (de 0 a 5 V CC)
Corriente en estado 1 > 2,5 mA
Corriente en estado 0 < 1,0 mA
Descenso Sin descenso
Tiempo de encendido 50 µs + valor del filtro1
Tiempo de apagado 50 µs + valor del filtro1
Aislamiento Entre entrada y lógica interna 500 V CA
Entre los terminales de entrada Sin aislamiento
Tipo de conexión Bloque de terminales de tornillo extraíble
Durabilidad de conexiones y desconexiones del conector Más de 100 veces
Cable Tipo No blindado
154 EIO0000003086.04

Canales de E/S incrustadas
Característica Valores
TM241C••24• TM241C•40•
Longitud 50 m (164 pies) máximo
1Para obtener más información, consulte Principio de filtro integrador, página 41
Características de entradas rápidas
En la tabla siguiente se describen las características del M241 Logic Controller
con entradas rápidas:
Característica Valor
Número de entradas de transistor rápidas 8 entradas (de I0 a I7)
Número de grupos de canales 1 línea común para I0 a I3
1 línea común para I4 a I7
Tipo de entrada Tipo 1 (IEC 61131-2, edición 3)
Tipo de lógica Común positivo/común negativo
Tensión de entrada nominal 24 V CC
Rango de tensión de entrada De 0 a 28,8 V CC
Corriente de entrada nominal 10,7 mA
Impedancia de entrada 2,81 kΩ
Valores límite de entrada Tensión en estado 1 > 15 V CC (de 15 a 28,8 V CC)
Tensión en estado 0 < 5 V CC (de 0 a 5 V CC)
Corriente en estado 1 > 5 mA
Corriente en estado 0 < 1,5 mA
Descenso Sin descenso
Tiempo de encendido 2 µs + valor del filtro1
Tiempo de apagado 2 µs + valor del filtro1
Frecuencia máxima del
HSC Fase A/B 100 kHz
Pulso/Dirección 200 kHz
Monofásica 200 kHz
Modalidad de funcionamiento admitida del HSC • Contador de fase A/B
• Contador de pulso/dirección
• Contador monofásico/bifásico
Aislamiento Entre entrada y lógica
interna 500 V CA
Entre los terminales de
entrada No aislado
Tipo de conexión Bloque de terminales de tornillo
extraíble
Durabilidad de conexiones y desconexiones del conector Más de 100 veces
Cable Tipo Blindado, incluida la fuente de
alimentación de 24 V CC
Longitud 10 m (32,8 pies) máximo
1Para obtener más información, consulte Principio de filtro integrador, página 41
EIO0000003086.04 155

Canales de E/S incrustadas
Eliminación del bloque de terminales
Consulte Eliminación del bloque de terminales, página 69.
Diagramas de cableado TM241C••24R
En la siguiente figura se muestra el cableado de común positivo (lógica positiva)
de las entradas digitales del controlador:
*Fusible tipo T
(1) Los terminales COM0, COM1 y COM2 no están conectados internamente.
En la siguiente figura se muestra el cableado de común negativo (lógica negativa)
de las entradas digitales del controlador:
*Fusible tipo T
(1) Los terminales COM0, COM1 y COM2 no están conectados internamente.
Cableado de entrada rápida de I0 a I7:
156 EIO0000003086.04

Canales de E/S incrustadas
Diagramas de cableado TM241C•40R
En la siguiente figura se muestra el cableado de común positivo (lógica positiva)
de las entradas digitales del controlador:
*Fusible tipo T
(1) Los terminales COM0, COM1 y COM2 no están conectados internamente.
En la siguiente figura se muestra el cableado de común negativo (lógica negativa)
de las entradas digitales del controlador:
*Fusible tipo T
(1) Los terminales COM0, COM1 y COM2 no están conectados internamente.
Cableado de entrada rápida de I0 a I7:
EIO0000003086.04 157

Canales de E/S incrustadas
Diagramas de cableado TM241C••24T/TM241C••24U
En la siguiente figura se muestra la conexión de las entradas digitales del
controlador:
*Fusible tipo T
(1) Los terminales COM0, COM1 y COM2 no están conectados internamente.
ACableado de común positivo (lógica positiva).
BCableado de común negativo (lógica negativa).
Cableado de entrada rápida de I0 a I7:
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No conecte ningún cable a conexiones reservadas y no utilizadas o a
conexiones designadas como "No Connection (N.C.)".
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
158 EIO0000003086.04

Canales de E/S incrustadas
Diagramas de cableado TM241C•40T/TM241C•40U
En la siguiente figura se muestra la conexión de las entradas digitales del
controlador:
*Fusible tipo T
(1) Los terminales COM0, COM1 y COM2 no están conectados internamente.
ACableado de común positivo (lógica positiva).
BCableado de común negativo (lógica negativa).
Cableado de entrada rápida de I0 a I7:
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No conecte ningún cable a conexiones reservadas y no utilizadas o a
conexiones designadas como "No Connection (N.C.)".
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
EIO0000003086.04 159

Canales de E/S incrustadas
Salidas de relé
Descripción general
El Modicon M241 Logic Controller tiene salidas digitales incrustadas:
Referencia Número total de
salidas digitales Salidas de transistor
rápidas, página 172 (1)
Salidas de relé,
página 161 Salidas de
transistor
normales, página
166
TM241C••24R 10 4 6 0
TM241C••24T
TM241C••24U
10 4 0 6
TM241C•40R 16 4 12 0
TM241C•40T
TM241C•40U
16 4 0 12
(1) Salidas de transistor rápidas que se pueden utilizar como salidas PTO de 100 kHz
Para obtener más información, consulte Gestión de salidas, página 43.
PELIGRO
PELIGRO DE INCENDIO
• Utilice únicamente los tamaños de cable recomendados para la capacidad
de corriente máxima de los canales de E/S y las fuentes de alimentación.
• Para el cableado de las salidas de relé (2 A), utilice conductores de al
menos 0,5 mm2(AWG 20) con una temperatura nominal de al menos 80 °C
(176 °F).
• Para los conductores comunes del cableado de salidas de relé (7 A) o el
cableado de salidas de relé superior a 2 A, utilice conductores de al menos
1,0 mm2(AWG 16) con una temperatura nominal de al menos 80 °C (176 °
F).
Si no se siguen estas instrucciones, se producirán lesiones graves o la
muerte.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No supere ninguno de los valores nominales que se especifican en las tablas
de características medioambientales y eléctricas.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
160 EIO0000003086.04

Canales de E/S incrustadas
Indicadores LED de estado de las salidas de relé
En la siguiente figura se muestran los indicadores LED de estado para el
controlador TM241C••24• (los controladores TM241C•40• son similares con 40
LED):
Indicador
LED Color Estado Descripción
De 0 a 9 Verde Encendido El canal de salida está activado.
Apagado El canal de salida está desactivado.
EIO0000003086.04 161

Canales de E/S incrustadas
Características de las salidas de relé
En la tabla siguiente se describen las características de las salidas de relé de
M241 Logic Controller:
Característica Valor
TM241C••24R TM241C•40R
Número de canales de las salidas de relés 6 salidas (de Q4 a Q9) 12 salidas (de Q4 a
Q15)
Número de grupos de canales 1 línea común para Q4
y Q5
1 línea común para Q6
y Q7
1 línea para Q8
1 línea para Q9
1 línea común para Q4 a
Q7
1 línea común para Q8,
Q9
1 línea común para Q10
y Q11
1 línea común para Q12
y Q13
1 línea para Q14
1 línea para Q15
Tipo de salida Relé
Tipo de contacto NO (normalmente abierto)
Tensión de salida nominal 24 V CC, 240 V CA
Tensión máxima 30 V CC / 264 V CA
Carga de conmutación mínima 5 V CC a 10 mA
Descenso Sin descenso Descenso de Q4 a Q7,
consulte la nota 2.
Corriente de salida nominal 2 A
Corriente de salida máxima 2 A por salida
4 A por línea común
Frecuencia de salida máxima con carga
máxima 20 operaciones por minuto
Tiempo de encendido Máx. 10 ms
Tiempo de apagado Máx. 10 ms
Resistencia de contacto 30 mΩ máx.
Vida útil mecánica 20 millones de operaciones
Vida útil eléctrica Con carga
resistiva Consulte las limitaciones de alimentación
Con carga
inductiva
Protección contra cortocircuitos No
Aislamiento Entre salida y
lógica interna 500 V CA
Entre grupos de
canales 1500 V CA
Tipo de conexión Bloques de terminales de tornillos extraíbles
Durabilidad de conexiones y desconexiones
del conector Más de 100 veces
Cable Tipo No blindado
Longitud Máx. 30 m (98 ft)
(1) Consulte Protección de salidas frente a daños por carga inductiva, página 69 para obtener más
información sobre la protección de las salidas.
(2) Cuando Q4, Q5, Q6 y Q7 están en la misma línea común (corriente de salida máxima 4 A), las
cuatro salidas usadas simultáneamente presentan un descenso del 50 %.
162 EIO0000003086.04

Canales de E/S incrustadas
Limitación de alimentación
En la tabla siguiente se describen las limitaciones de potencia de las salidas de
relé en función de la tensión, el tipo de carga y el número de operaciones
requeridas.
Estos controladores no admiten cargas capacitivas.
ADVERTENCIA
SALIDAS DE RELÉ SOLDADAS Y CERRADAS
• Proteja siempre las salidas de relé contra daños de carga de corriente
alterna inductiva utilizando un circuito o dispositivo protector externo
adecuado.
• No conecte salidas de relé a cargas capacitivas.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Limitaciones de alimentación
Tensión 24 V CC 120 V CA 240 V CA Número de
operaciones
Alimentación de cargas resistivas
AC-12
–240 VA
80 VA
480 VA
160 VA
100.000
300.000
Alimentación de cargas inductivas
AC-15 (cos ϕ = 0,35)
–60 VA
18 VA
120 VA
36 VA
100.000
300.000
Alimentación de cargas inductivas
AC-14 (cos ϕ = 0,7)
–120 VA
36 VA
240 VA
72 VA
100.000
300.000
Alimentación de cargas resistivas
DC-12
48 W
16 W
– – 100.000
300.000
Alimentación de cargas inductivas
DC-13 L/R = 7 ms
24 W
7,2 W
– – 100.000
300.000
Eliminación del bloque de terminales
Consulte Eliminación del bloque de terminales, página 69.
EIO0000003086.04 163

Canales de E/S incrustadas
Diagramas de cableado de salidas de relé TM241C••24R
En la ilustración siguiente se muestra el cableado de las salidas:
*Fusible tipo T
(1) Los terminales del COM1 al COM4 no están conectados internamente.
(2) Para mejorar la vida útil de los contactos y como protección contra posibles
daños por carga inductiva, debe conectar en paralelo un diodo de ejecución libre
a cada una de las cargas inductivas de CC o en paralelo una supresión RC a
cada una de las cargas inductivas de CA.
Para obtener más información sobre la protección de las salidas, consulte
Protección de salidas frente a daños por carga inductiva, página 69.
NOTA: Los valores de fusibles asignados se han especificado para las
características máximas actuales de E/S del controlador y los elementos
comunes asociados. Puede tener otras consideraciones que sean de
aplicación según los tipos de dispositivos de entrada y salida que conecte, por
lo que deberá medir sus fusibles en consonancia.
164 EIO0000003086.04

Canales de E/S incrustadas
Diagramas de cableado de salidas de relé TM241C•40R
En la ilustración siguiente se muestra el cableado de las salidas:
*Fusible tipo T
(1) Los terminales del COM1 al COM6 no están conectados internamente.
(2) Para mejorar la vida útil de los contactos y como protección contra posibles daños por carga inductiva, debe
conectar en paralelo un diodo de ejecución libre a cada una de las cargas inductivas de CC o en paralelo una
supresión RC a cada una de las cargas inductivas de CA.
Para obtener más información sobre la protección de las salidas, consulte
Protección de salidas frente a daños por carga inductiva, página 69.
NOTA: Los valores de fusibles asignados se han especificado para las
características máximas actuales de E/S del controlador y los elementos
comunes asociados. Puede tener otras consideraciones que sean de
aplicación según los tipos de dispositivos de entrada y salida que conecte, por
lo que deberá medir sus fusibles en consonancia.
Salidas de transistor normales
Descripción general
El Modicon M241 Logic Controller tiene salidas digitales incrustadas:
Referencia Número total de
salidas digitales Salidas de transistor
rápidas, página 172 (1)
Salidas de relé,
página 161 Salidas de
transistor
normales, página
166
TM241C••24R 10 4 6 0
TM241C••24T
TM241C••24U
10 4 0 6
TM241C•40R 16 4 12 0
TM241C•40T
TM241C•40U
16 4 0 12
(1) Salidas de transistor rápidas que se pueden utilizar como salidas PTO de 100 kHz
Para obtener más información, consulte Gestión de salidas, página 43.
EIO0000003086.04 165

Canales de E/S incrustadas
PELIGRO
PELIGRO DE INCENDIO
• Utilice únicamente los tamaños de cable recomendados para la capacidad
de corriente máxima de los canales de E/S y las fuentes de alimentación.
• Para el cableado de las salidas de relé (2 A), utilice conductores de al
menos 0,5 mm2(AWG 20) con una temperatura nominal de al menos 80 °C
(176 °F).
• Para los conductores comunes del cableado de salidas de relé (7 A) o el
cableado de salidas de relé superior a 2 A, utilice conductores de al menos
1,0 mm2(AWG 16) con una temperatura nominal de al menos 80 °C (176 °
F).
Si no se siguen estas instrucciones, se producirán lesiones graves o la
muerte.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No supere ninguno de los valores nominales que se especifican en las tablas
de características medioambientales y eléctricas.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Indicadores LED de estado de las salidas transistorizadas
normales
En la siguiente figura se muestran los indicadores LED de estado para el
controlador TM241C••24• (los controladores TM241C•40• son similares con 40
LED):
Indicador
LED Color Estado Descripción
De 0 a 9 Verde Encendido El canal de salida está activado.
Apagado El canal de salida está desactivado.
166 EIO0000003086.04

Canales de E/S incrustadas
Características de las salidas transistorizadas normales
En la tabla siguiente se describen las características de las salidas de transistor
normales de M241 Logic Controller:
Característica TM241-
C••24T TM241-
C••24U TM241C•40-
TTM241C•40-
U
Número de salidas de transistor
normales 6 salidas (de Q4 a Q9) 12 salidas (de Q4 a Q15)
Número de grupos de canales 1 línea común para Q4 a Q7
Línea común para Q8 y Q9
1 línea común para Q4 a Q7
línea común para Q8 a Q11
línea común para Q12 a Q15
Tipo de salida Transistor
Tipo de lógica Común
positivo Común
negativo Común
positivo Común
negativo
Tensión de salida nominal 24 V CC
Rango de tensión de salida De 19,2 a 28,8 V CC
Corriente de salida nominal 0,5 A
Corriente de salida total por grupo 0,5 A x número de salidas del grupo
Caída de tensión 1 V CC máx.
Corriente de fuga cuando está
apagado
< 5 µA
Potencia máxima de lámpara de
filamento 2,4 W máx.
Descenso Sin descenso
Tiempo de encendido 34 µs máx.
Tiempo de apagado 250 µs máx.
Protección contra cortocircuitos Sí
Pico de corriente de salida de
cortocircuito 1,3 A
Restablecimiento automático
después de cortocircuito o
sobrecarga
Sí, cada 10 ms
Tensión de bloqueo Máx. 39 V CC +/- 1 V CC
Frecuencia de salida máxima 1 kHz
Aislamiento Entre salida y
lógica interna 500 V CA
Entre
terminales de
salidas
No aislado
Tipo de conexión Bloque de terminales de tornillo extraíble
Durabilidad de conexiones y
desconexiones del conector Más de 100 veces
Cable Tipo No blindado
Longitud Máx. 50 m (164 pies)
Retirada del bloque de terminales
Consulte Eliminación del bloque de terminales, página 69.
EIO0000003086.04 167

Canales de E/S incrustadas
Diagrama de cableado de común negativo de salidas
transistorizadas normales TM241C••24T
En la ilustración siguiente se muestra el cableado de común negativo (lógica
negativa) de las salidas:
*Fusible tipo T
(1) Los terminales V1+ y V2+ no están conectados internamente.
(2) Los terminales V1- y V2- no están conectados internamente.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Asegúrese de que el cableado físico respete las conexiones indicadas en el
diagrama de cableado y, en particular, que tanto V•+ como V•- estén
conectados, que los terminales V•+ estén conectados únicamente a una
alimentación de 24 V CC y que los terminales V•- estén conectados únicamente
a una alimentación de 0 V CC.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
168 EIO0000003086.04

Canales de E/S incrustadas
Diagrama de cableado de común negativo de salidas
transistorizadas normales TM241C•40T
En la ilustración siguiente se muestra el cableado de común negativo (lógica
negativa) de las salidas:
*Fusible tipo T
(1) Los terminales V1+, V2+ y V3+ no están conectados internamente.
(2) Los terminales V1-, V2- y V3- no están conectados internamente.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Asegúrese de que el cableado físico respete las conexiones indicadas en el
diagrama de cableado y, en particular, que tanto V•+ como V•- estén
conectados, que los terminales V•+ estén conectados únicamente a una
alimentación de 24 V CC y que los terminales V•- estén conectados únicamente
a una alimentación de 0 V CC.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
EIO0000003086.04 169

Canales de E/S incrustadas
Diagramas de cableado de común positivo de salidas
transistorizadas normales TM241C••24U
En la ilustración siguiente se muestra el cableado de común positivo (lógica
positiva) de las salidas:
*Fusible tipo T
(1) Los terminales V1+ y V2+ no están conectados internamente.
(2) Los terminales V1- y V2- no están conectados internamente.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Asegúrese de que el cableado físico respete las conexiones indicadas en el
diagrama de cableado y, en particular, que tanto V•+ como V•- estén
conectados, que los terminales V•+ estén conectados únicamente a una
alimentación de 24 V CC y que los terminales V•- estén conectados únicamente
a una alimentación de 0 V CC.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
170 EIO0000003086.04

Canales de E/S incrustadas
Diagramas de cableado de común positivo de salidas
transistorizadas normales TM241C•40U
En la ilustración siguiente se muestra el cableado de común positivo (lógica
positiva) de las salidas:
*Fusible tipo T
(1) Los terminales V1+, V2+ y V3+ no están conectados internamente.
(2) Los terminales V1-, V2- y V3- no están conectados internamente.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Asegúrese de que el cableado físico respete las conexiones indicadas en el
diagrama de cableado y, en particular, que tanto V•+ como V•- estén
conectados, que los terminales V•+ estén conectados únicamente a una
alimentación de 24 V CC y que los terminales V•- estén conectados únicamente
a una alimentación de 0 V CC.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Salidas de transistor rápidas
Descripción general
El Modicon M241 Logic Controller tiene salidas digitales incrustadas:
Referencia Número total de
salidas digitales Salidas de transistor
rápidas, página 172 (1)
Salidas de relé,
página 161 Salidas de
transistor
normales, página
166
TM241C••24R 10 4 6 0
TM241C••24T
TM241C••24U
10 4 0 6
TM241C•40R 16 4 12 0
TM241C•40T
TM241C•40U
16 4 0 12
(1) Salidas de transistor rápidas que se pueden utilizar como salidas PTO de 100 kHz
Para obtener más información, consulte Gestión de salidas, página 43.
EIO0000003086.04 171

Canales de E/S incrustadas
PELIGRO
PELIGRO DE INCENDIO
• Utilice únicamente los tamaños de cable recomendados para la capacidad
de corriente máxima de los canales de E/S y las fuentes de alimentación.
• Para el cableado de las salidas de relé (2 A), utilice conductores de al
menos 0,5 mm2(AWG 20) con una temperatura nominal de al menos 80 °C
(176 °F).
• Para los conductores comunes del cableado de salidas de relé (7 A) o el
cableado de salidas de relé superior a 2 A, utilice conductores de al menos
1,0 mm2(AWG 16) con una temperatura nominal de al menos 80 °C (176 °
F).
Si no se siguen estas instrucciones, se producirán lesiones graves o la
muerte.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No supere ninguno de los valores nominales que se especifican en las tablas
de características medioambientales y eléctricas.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Indicadores LED de estado de las salidas transistorizadas
rápidas
En la siguiente figura se muestran los indicadores LED de estado para el
controlador TM241C••24• (los controladores TM241C•40• son similares con 40
LED):
Indicador
LED Color Estado Descripción
De 0 a 9 Verde Encendido El canal de salida está activado.
Apagado El canal de salida está desactivado.
172 EIO0000003086.04

Canales de E/S incrustadas
Características de las salidas transistorizadas rápidas
En la tabla siguiente se describen las características de las salidas de transistor
rápidas de M241 Logic Controller:
Característica Valor
TM241C•••R TM241C•••T TM241C•••U
Número de salidas de transistor rápidas 4 salidas (TR0 a TR3) 4 salidas (de Q0 a Q3)
Número de grupos de canales 1 línea común de TR0
a TR3 1 línea común de Q0 a Q3
Tipo de salida Transistor
Tipo de lógica Común positivo Común positivo Común negativo
Tensión de salida nominal 24 V CC
Rango de tensión de salida De 19,2 a 28,8 V CC
Corriente de salida nominal 0,1 A cuando está configurado para una función rápida
0,5 A cuando se usa como una salida normal
Corriente de fuga Origen ≤ 0,3 mA
Común positivo ≤ 2 mA
Corriente de salida total por grupo 2 A
Potencia máxima de lámpara de filamento 2,4 W máx.
Descenso Sin descenso
Tiempo de encendido 2 µs máx.
Tiempo de apagado 2 µs máx.
Protección contra cortocircuitos Sí
Pico de corriente de salida de cortocircuito 1,3 A máx.
Restablecimiento automático después de cortocircuito o
sobrecarga Sí, 12 s
Protección contra polaridad inversa Sí
Tensión de bloqueo Normalmente 39 V CC +/- 1 V CC
Frecuencia de salida máxima PTO 100 kHz
PWM 20 kHz
Paso de velocidad en servicio para la modalidad PWM 0,1% de 20 Hz a 1 kHz
Rango de velocidad de servicio De 1 a 99%
Aislamiento Entre salida y lógica
interna 500 V CA
Entre grupos de
canales 500 V CA
Tipo de conexión Bloque de terminales de tornillo extraíble
Durabilidad de conexiones y desconexiones del conector Más de 100 veces
Cable Tipo Blindado, incluida la fuente de alimentación de 24 V CC
Longitud 3 m (9,84 pies) máximo
Retirada del bloque de terminales
Consulte Eliminación del bloque de terminales, página 69.
EIO0000003086.04 173

Canales de E/S incrustadas
Diagramas de cableado de las salidas transistorizadas rápidas
TM241C••24R/TM241C•40R
En la figura siguiente se muestra la conexión de las salidas de transistor rápidas:
*Fusible de 2 A de acción rápida
Cableado de salidas rápidas para TR0 a TR3:
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Asegúrese de que el cableado físico respete las conexiones indicadas en el
diagrama de cableado y, en particular, que tanto V•+ como V•- estén
conectados, que los terminales V•+ estén conectados únicamente a una
alimentación de 24 V CC y que los terminales V•- estén conectados únicamente
a una alimentación de 0 V CC.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
174 EIO0000003086.04

Canales de E/S incrustadas
Diagramas de cableado de las salidas transistorizadas rápidas
TM241C••••T
En la figura siguiente se muestra la conexión de las salidas de transistor rápidas:
*Fusible tipo T
(1) Los terminales V0+, V1+, V2+ y V3+ no están conectados internamente.
(2) Los terminales V0-, V1-, V2- y V3- no están conectados internamente.
Cableado de salidas rápidas para Q0 a Q3:
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Asegúrese de que el cableado físico respete las conexiones indicadas en el
diagrama de cableado y, en particular, que tanto V•+ como V•- estén
conectados, que los terminales V•+ estén conectados únicamente a una
alimentación de 24 V CC y que los terminales V•- estén conectados únicamente
a una alimentación de 0 V CC.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
EIO0000003086.04 175

Canales de E/S incrustadas
Diagramas de cableado de las salidas transistorizadas rápidas
TM241C••••U
En la figura siguiente se muestra la conexión de las salidas de transistor rápidas:
*Fusible tipo T
(1) Los terminales V0+, V1+, V2+ y V3+ no están conectados internamente.
(2) Los terminales V0-, V1-, V2- y V3- no están conectados internamente.
Cableado de salidas rápidas para Q0 a Q3:
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Asegúrese de que el cableado físico respete las conexiones indicadas en el
diagrama de cableado y, en particular, que tanto V•+ como V•- estén
conectados, que los terminales V•+ estén conectados únicamente a una
alimentación de 24 V CC y que los terminales V•- estén conectados únicamente
a una alimentación de 0 V CC.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
176 EIO0000003086.04


Puertos de comunicación integrados
Puertos de comunicación integrados
Contenido de este capítulo
Puerto CANopen.........................................................................................178
Puerto Ethernet...........................................................................................181
Puerto de programación USB mini-B ............................................................183
Línea serie 1...............................................................................................184
Línea serie 2...............................................................................................187
Puerto CANopen
Funciones de CANopen
El maestro CANopen de Modicon M241 Logic Controller tiene las funciones
siguientes:
Función Descripción
Número máximo de esclavos del bus 63 dispositivos esclavos CANopen
Longitud máxima de cables del bus de campo
CANopen Conforme a la especificación CAN (consulte
Velocidad de transmisión y longitud de cable,
página 180).
Número máximo de PDO gestionados por el
maestro 252 TPDO + 252 RPDO
Para cada esclavo CANopen adicional:
• De media, el tamaño de la aplicación aumenta 10 kbytes, lo que puede
provocar que se superen los límites de memoria.
• Aumenta el tiempo de inicialización de la configuración al inicio, lo que puede
provocar que se supere el tiempo de espera del watchdog.
Aunque EcoStruxure Machine Expert no se lo impide, no sobrepase la cantidad
de 63 módulos esclavos CANopen (o 252 TPDO y 252 RPDO) con el fin de tener
suficiente tolerancia de rendimiento y evitar la pérdida de rendimiento.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No conecte más de 63 dispositivos esclavos CANopen con el controlador para
evitar la sobrecarga del sistema que conduce a la condición de watchdog.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
AVISO
PÉRDIDA DE RENDIMIENTO
No supere los 252 TPDO ni los 252 RPDO para el Modicon M241 Logic
Controller.
Si no se siguen estas instrucciones, pueden producirse daños en el
equipo.
178 EIO0000003086.04

Puertos de comunicación integrados
Funciones de J1939
El maestro J1939 de Modicon M241 Logic Controller tiene las funciones
siguientes:
Función Descripción
Número máximo de ECU (esclavos) en
el bus
Limitado únicamente por el intervalo de direcciones de
0 a 253 para unidades de control electrónicas (ECU).
Longitud máxima de cables del bus de
campo J1939 Conforme a la especificación CAN (consulte Velocidad
de transmisión y longitud de cable, página 180). Para
J1939, el bus CAN debe estar configurado para
ejecutarse a 250 kbps.
Número máximo de PGN gestionados
por el maestro Proporcionado de forma implícita por el número
máximo de bits de entrada (%I) y bits de salida (%Q)
disponibles en Modicon M241 Logic Controller: 4096
bits de entrada y 4096 bits de salida. Esto da como
resultado un máximo de 512 PGN de paquete único (la
mayoría de los PGN son de paquete único, con 8 bytes
de datos).
Para cada ECU adicional con aproximadamente 10 números de grupo de
parámetros (PGN) configurados (trama única):
• El tamaño de la aplicación aumenta en una media de 15 kbytes. Esta cifra
incluye la memoria consumida por variables generadas implícitamente para
los números de parámetros sospechosos (SPN) configurados. Este aumento
del tamaño de la aplicación podría provocar que se superaran los límites de
memoria.
• El número de bits de entrada (%I) usado en el controlador lógico aumenta en
proporción al número y el tamaño de los PGN configurados como "Señales
TX" en una ECU no local o como "Señales RX" en una ECU local.
• El número de bits de salida (%Q) usado en el controlador lógico aumenta en
proporción al número y el tamaño de los PGN configurados como "Señales
TX" en una ECU local.
NOTA: Pruebe minuciosamente en su aplicación el número de ECU J1939
configuradas conectadas al controlador y el número de PGN configurados en
cada ECU para evitar un estado de watchdog debido a una sobrecarga del
sistema o un rendimiento menor.
Para obtener más información, consulte Configuración de interfaz J1939
(consulte Modicon M241 Logic Controller - Guía de programación).
Retirada del bloque de terminales
Consulte Eliminación del bloque de terminales, página 69.
EIO0000003086.04 179

Puertos de comunicación integrados
Diagrama de cableado CAN
Pa-
sa-
dor
Señal Descripción Marca Color del cable
1 No se utiliza Reservado NC RD: rojo
2 CAN_H Línea de bus CAN_L (dominante
baja) CAN_H WH: blanco
3 CAN_SHLD Blindaje CAN opcional Blindaje -
4 CAN_L Línea de bus CAN_L (dominante
baja) CAN_L BU: azul
5CAN_GND Puesta a tierra CAN GND BK: negro
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No conecte ningún cable a conexiones reservadas y no utilizadas o a
conexiones designadas como "No Connection (N.C.)".
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Velocidad de transmisión y longitud de cable
La velocidad de transmisión está limitada por la longitud del bus y el tipo de cable
utilizado.
En la siguiente tabla se describe la relación entre la velocidad de transmisión
máxima y la longitud del bus (en un segmento CAN sin repetidor):
Velocidad máxima de transmisión en baudios Longitud del bus
1000 kbps 20 m (65 ft)
800 kbps 40 m (131 ft)
500 kbps 100 m (328 ft)
250 kbps 250 m (820 ft)
125 kbps 500 m (1640 ft)
50 kbps 1000 m (3280 ft)
20 kbps 2500 m (16 400 ft)
NOTA: El cable CAN debe ser blindado.
180 EIO0000003086.04

Puertos de comunicación integrados
Puerto Ethernet
Descripción general
El TM241CE••• está equipado con un puerto de comunicaciones Ethernet.
En la figura siguiente se muestra la ubicación del puerto Ethernet en el
controlador:
Características
En la tabla siguiente se describen las características de Ethernet:
Característica Descripción
Función Modbus TCP/IP
Tipo de conector RJ45
Negociación automática Desde 10 Mbps semidúplex hasta 100 Mbps dúplex completo
Tipo de cable Blindado
Detección cruzada automática Sí
EIO0000003086.04 181

Puertos de comunicación integrados
Asignación de pines
En la siguiente figura se muestra la asignación de pins del conector Ethernet
RJ45:
En la tabla siguiente se describen los pins del conector Ethernet RJ45:
N.° de pin Señal
1 TD+
2 TD-
3 RD+
4-
5-
6 RD-
7-
8-
NOTA: El controlador admite la función de cable de cruce automático MDI/
MDIX. No es necesario utilizar cables cruzados especiales para conectar
dispositivos directamente a este puerto (conexiones sin un concentrador o un
conmutador Ethernet).
NOTA: La desconexión del cable Ethernet se detecta a cada segundo.
Cuando se producen desconexiones de corta duración (< 1 segundo), es
posible que el estado de la red no indique la desconexión.
Indicadores LED de estado
En la siguiente figura se muestran los indicadores LED de estado del conector
RJ45:
En la tabla siguiente se describen los indicadores LED de estado de Ethernet:
Etiqueta Descripción Indicador LED
Color Estado Descripción
1 Enlace/
velocidad
Ethernet
Verde/
amarillo
Apagado Sin enlace
Amarillo fijo Conexión a 10 Mbps
Verde fijo Conexión a 100 Mbps
2 Actividad
Ethernet Verde Apagado Sin actividad ni conexión
182 EIO0000003086.04

Puertos de comunicación integrados
Etiqueta Descripción Indicador LED
Color Estado Descripción
Encendido Se ha detectado la conexión,
pero no hay actividad alguna.
Parpadeo Transmisión o recepción de
datos
Puerto de programación USB mini-B
Descripción general
El puerto USB mini-B es el puerto de programación que pueden utilizar para
conectar un PC con un puerto host USB mediante el software de EcoStruxure
Machine Expert. Con un cable USB típico, esta conexión es adecuada para las
actualizaciones rápidas del programa o las conexiones de corta duración para
realizar el mantenimiento e inspeccionar los valores de los datos. No es adecuada
para las conexiones a largo plazo, como la puesta en marcha o la supervisión, sin
el uso de cables adaptados especialmente para ayudar a minimizar los efectos de
las interferencias electromagnéticas.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO O EQUIPO INOPERATIVO
• Deberá usar un cable USB como BMX XCAUSBH0•• asegurado a la puesta
a tierra funcional (FE) del sistema para cualquier conexión a largo plazo.
• No conecte más de un controlador o acoplador de bus a la vez mediante
conexiones USB.
• No utilice los puertos USB, si están incorporados, a menos que tenga la
certeza de que la ubicación no es peligrosa.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
En la figura siguiente se muestra la ubicación del puerto de programación USB
mini-B:
EIO0000003086.04 183

Puertos de comunicación integrados
Características
En esta tabla se describen las características del puerto de programación USB
Mini-B:
Parámetro Puerto de programación USB
Función Compatible con USB 2.0
Tipo de conector Mini-B
Aislamiento Ninguno
Tipo de cable Blindado
Línea serie 1
Descripción general
La línea serie 1:
• Se puede utilizar para comunicarse con dispositivos compatibles con el
protocolo Modbus como maestro o esclavo, el protocolo ASCII (impresora,
módem, etc.) y el protocolo Machine Expert (HMI, etc.).
• Proporciona una distribución de la alimentación de 5 V CC.
En la figura siguiente se muestra la ubicación del puerto de línea serie 1:
184 EIO0000003086.04

Puertos de comunicación integrados
Características
Característica Descripción
Función RS485 o RS232 configurada mediante
software
Tipo de conector RJ45
Aislamiento No aislado
Velocidad máx. en baudios De 1200 a 115 200 bps
Cable Tipo Blindado
Longitud máxima
(entre el controlador
y una caja de
conexiones aislada)
15 m (49 ft) para RS485
3 m (9,84 ft) para RS232
Polarización La configuración de software se emplea para
conectar cuando el nodo se configura como
maestro.
Las resistencias de 560 Ω son opcionales.
Fuente de alimentación de 5 V CC para RS485 Sí
NOTA: Algunos dispositivos proporcionan tensión en conexiones serie
RS485. No conecte estas líneas de tensión al controlador, ya que pueden
dañar la electrónica del puerto serie del controlador y dejarlo inoperativo.
AVISO
EQUIPO INOPERATIVO
Utilice solo el cable serie VW3A8306R•• para conectar los dispositivos RS485
al controlador.
Si no se siguen estas instrucciones, pueden producirse daños en el
equipo.
Asignación de pines
En la siguiente figura se muestran los pines del conector RJ45:
EIO0000003086.04 185

Puertos de comunicación integrados
En la siguiente tabla se describe la asignación de pines del conector RJ45:
Pin RS232 RS485
1 RxD N. C.
2 TxD N. C.
3 N. C. N. C.
4 N. C. D1
5N. C. D0
6 N. C. N. C.
7N. C.* 5 V CC
8 Común Común
* 5 V CC proporcionados por el controlador. No conectar.
N. C.: sin conexión
RxD: datos recibidos
TxD: datos transmitidos
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No conecte ningún cable a conexiones reservadas y no utilizadas o a
conexiones designadas como "No Connection (N.C.)".
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Indicador LED de estado
En la figura siguiente se muestra el LED de estado de la línea serie 1:
En la tabla siguiente se describe el LED de estado de la línea serie 1:
Etiqueta Descripción Indicador LED
Color Estado Descripción
SL1 Línea serie 1 Verde Parpadeo Indica la actividad de la línea
serie 1.
Apagado Indica la ausencia de
comunicación serie
186 EIO0000003086.04

Puertos de comunicación integrados
Línea serie 2
Descripción general
La línea serie 2 se emplea para comunicarse con dispositivos que admiten el
protocolo Modbus como maestro o esclavo y el protocolo ASCII (impresora,
módem, etc.) y admite RS485 solamente.
Características
Característica Descripción
Función RS485
Tipo de conector Bloque de terminales de tornillo extraíble
Aislamiento No aislado
Velocidad máx. en baudios De 1200 a 115 200 bps
Cable Tipo Blindado
Longitud máxima 15 m (49 ft) para RS485
Polarización La configuración de software se emplea para
conectar cuando el nodo se configura como
maestro.
Las resistencias de 560 Ω son opcionales.
Fuente de alimentación de 5 V CC para
RS485
No
EIO0000003086.04 187

Puertos de comunicación integrados
Asignación de pines
En la figura siguiente se muestran los pines del bloque de terminales extraíble:
Pin RS485
COM 0 V com.
Shield Blindaje
D0 D0 (B-)
D1 D1 (A+)
Consulte Eliminación del bloque de terminales, página 69.
Indicador LED de estado
En el siguiente gráfico se muestra el indicador LED de estado:
En la tabla siguiente se describe el indicador LED de estado de la línea serie 2:
Etiqueta Descripción Indicador LED
Color Estado Descripción
SL2 Línea serie 2 Verde Parpadeo Indica la actividad de la línea
serie 2.
Apagado Indica que no existe
comunicación serie.
188 EIO0000003086.04

Conexión del M241 Logic Controller a un PC
Conexión del M241 Logic Controller a un PC
Contenido de este capítulo
Conexión del controlador a un PC ................................................................189
Conexión del controlador a un PC
Descripción general
Para transferir, ejecutar y monitorizar las aplicaciones, conecte el controlador a un
equipo que tenga instalado EcoStruxure Machine Expert mediante un cable USB
o una conexión Ethernet (para referencias compatibles con puertos Ethernet).
AVISO
EQUIPO INOPERATIVO
Conecte siempre el cable de comunicación al PC antes de conectarlo al
controlador.
Si no se siguen estas instrucciones, pueden producirse daños en el
equipo.
Descarga USB con alimentación
Para ejecutar operaciones limitadas, el M241 Logic Controller tiene la capacidad
de recibir alimentación a través del puerto USB mini-B. Un mecanismo de diodos
evita que el controlador lógico reciba alimentación por USB y por la fuente de
alimentación normal o que suministre tensión en el puerto USB.
Cuando solo recibe alimentación por USB, el controlador lógico ejecuta el
firmware y el proyecto de inicio (si existe), y el panel de E/S no recibe
alimentación durante el arranque (la misma duración que un arranque normal). La
descarga USB con alimentación inicializa la memoria flash interna con algunos
firmwares o algunas aplicaciones y parámetros cuando el controlador recibe
alimentación por USB. La herramienta preferida para conectarse al controlador es
el Asistente del controlador. Consulte la Guía de usuario del Asistente del
controlador de EcoStruxure Machine Expert .
El empaquetado del controlador permite un acceso rápido al puerto USB mini-B
sin necesidad de abrir demasiado el empaquetado. Puede conectar el controlador
al PC con un cable USB. Los cables largos no son adecuados para la descarga
USB con alimentación.
ADVERTENCIA
ALIMENTACIÓN INSUFICIENTE PARA DESCARGA USB
No utilice un cable USB de más de 3 m (9,8 pies) para la descarga USB con
alimentación.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
NOTA: La descarga USB con alimentación no está diseñada para utilizarse
en un controlador instalado. En función del número de módulos de extensión
de E/S en la configuración física del controlador instalado, es posible que no
se reciba la potencia suficiente desde el puerto USB del PC para completar la
descarga.
EIO0000003086.04 189

Conexión del M241 Logic Controller a un PC
Conexión a través del puerto USB mini-B
Referencia de cableado Detalles
BMXXCAUSBH018: Este cable USB, con puesta a tierra y blindado,
es adecuado para conexiones de larga
duración.
TCSXCNAMUM3P: Este cable USB es adecuado para conexiones
de corta duración, como actualizaciones rápidas
o recuperación de valores de datos.
NOTA: Solo se puede conectar un controlador o cualquier otro dispositivo
asociado con el EcoStruxure Machine Expert y su componente al PC de
forma simultánea.
El puerto USB mini-B es el puerto de programación que pueden utilizar para
conectar un PC con un puerto host USB mediante el software de EcoStruxure
Machine Expert. Con un cable USB típico, esta conexión es adecuada para las
actualizaciones rápidas del programa o las conexiones de corta duración para
realizar el mantenimiento e inspeccionar los valores de los datos. No es adecuada
para las conexiones a largo plazo, como la puesta en marcha o la supervisión, sin
el uso de cables adaptados especialmente para ayudar a minimizar los efectos de
las interferencias electromagnéticas.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO O EQUIPO INOPERATIVO
• Deberá usar un cable USB como BMX XCAUSBH0•• asegurado a la puesta
a tierra funcional (FE) del sistema para cualquier conexión a largo plazo.
• No conecte más de un controlador o acoplador de bus a la vez mediante
conexiones USB.
• No utilice los puertos USB, si están incorporados, a menos que tenga la
certeza de que la ubicación no es peligrosa.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
El cable de comunicación debe conectarse primero al PC para minimizar la
posibilidad de que una descarga electrostática afecte al controlador.
Para conectar el cable USB al controlador, siga estos pasos:
Paso Acción
11a Si está realizando una conexión de larga duración con el cable BMXXCAUSBH018 u
otro cable con una conexión con puesta a tierra y blindada, asegúrese de conectar bien
el conector blindado a la puesta a tierra funcional (FE) o a la puesta a tierra de
protección (PE) de su sistema antes de conectar el cable al controlador y al PC.
1b Si está realizando una conexión de corta duración con el cable TCSXCNAMUM3P u
otro cable USB sin puesta a tierra, vaya al paso 2.
2 Conecte el cable USB al equipo.
3 Abra la cubierta de protección de la ranura USB mini-B del controlador.
4 Conecte el conector del cable USB mini-B al conector USB del controlador.
190 EIO0000003086.04

Conexión del M241 Logic Controller a un PC
Conexión al puerto Ethernet
También puede conectar el controlador a un PC mediante un cable Ethernet.
Para conectar el controlador al PC, haga lo siguiente:
Paso Acción
1 Conecte el cable Ethernet al PC.
2 Conecte el cable Ethernet al puerto Ethernet del controlador.
EIO0000003086.04 191


Glosario
A
aplicación:
Un programa que incluye datos de configuración, símbolos y documentación.
ASCII:
(Código estándar estadounidense para el intercambio de información) Un
protocolo que representa caracteres alfanuméricos (letras, números y algunos
caracteres gráficos y de control).
B
bastidor EIA:
(bastidor de Electronic Industries Alliance) Sistema estandarizado (EIA 310-D,
IEC 60297 y DIN 41494 SC48D) para montar varios módulos electrónicos en una
pila o un bastidor de 19 pulgadas (482,6 mm) de ancho.
bloque de terminales:
(bloque de terminales) El componente que se monta en un módulo electrónico y
proporciona las conexiones eléctricas entre el controlador y los dispositivos de
campo.
bps:
(bits por segundo) Una definición de velocidad de transmisión, también
proporcionada en combinación con los multiplicadores kilo (kbps) y mega (mbps).
C
CANopen:
Un protocolo de comunicaciones y una especificación de perfiles de dispositivos
(EN 50325-4) abiertos estándar en el sector.
CFC:
(diagrama de función continua) Un lenguaje de programación (una ampliación del
estándar IEC 61131-3) basado en el lenguaje de diagrama de bloque de
funciones (FBD) y que funciona como un diagrama de flujo. Sin embargo, no se
utiliza ninguna red y es posible un posicionamiento libre de elementos gráficos, lo
que permite bucles de realimentación. En cada bloque, las entradas se sitúan a
la izquierda y las salidas, a la derecha. Las salidas del bloque se pueden
conectar a las entradas de otros bloques para formar expresiones complejas.
configuración:
Organización e interconexión de los componentes de hardware en un sistema y
los parámetros del hardware y software que determina las características
operativas del sistema.
controlador:
Automatiza procesos industriales (también conocido como controlador lógico
programable o controlador programable).
CTS:
(listo para enviar) Una señal de transmisión de datos que reconoce la señal RDS
desde la estación transmisora.
EIO0000003086.04 193

D
DIN:
(Deutsches Institut für Normung) Una institución alemana que establece
estándares de ingeniería y dimensiones.
E
entrada analógica:
Convierte los niveles de tensión o corriente recibidos en valores numéricos.
Puede almacenar y procesar estos valores en el controlador lógico.
E/S:
(entrada/salida)
EN:
EN identifica uno de los muchos estándares europeos apoyados por el CEN
(Comité Europeo de Normalización), el CENELEC (Comité Europeo de
Normalización Eléctrica) o el ETSI (Instituto Europeo de Normas de
Telecomunicación).
F
FBD:
(diagrama de bloques de funciones) Uno de los cinco lenguajes para lógica o
control que cumplen con el estándar IEC 61131-3 para sistemas de control. El
diagrama de bloques de funciones es un lenguaje de programación de
orientación gráfica. Funciona con una lista de redes en la que cada red contiene
una estructura gráfica de cuadros y líneas de conexión que representa una
expresión lógica o aritmética, la llamada de un bloque de funciones, un salto o
una instrucción de retorno.
FE:
(conexión a tierra funcional) Una toma de tierra común para mejorar o, si no,
permitir el funcionamiento normal de equipos accionados con electricidad
(también llamada Functional Ground en Norteamérica).
A diferencia de una conexión a tierra de protección, una conexión a tierra
funcional sirve para un objetivo distinto de la protección contra descargas
eléctricas y normalmente puede llevar corriente. Entre los dispositivos que
emplean conexiones a tierra funcionales se encuentran los limitadores de
tensión, los filtros de interferencia electromagnética, algunas antenas y los
instrumentos de medición.
FreqGen:
(generador de frecuencias) Función que genera una señal de onda cuadrada con
frecuencia programable.
G
GRAFCET:
El funcionamiento de una operación secuencial de forma gráfica y estructurada.
Método analítico que divide cualquier sistema de control secuencial en una serie
de pasos a los que se asocian acciones, transiciones y condiciones.
H
HE10:
Conector rectangular para señales eléctricas con frecuencias inferiores a 3 MHz,
conforme a IEC 60807-2.
194 EIO0000003086.04

HSC:
(contador de alta velocidad) Una función que cuenta pulsos en el controlador o
en entradas del módulo de extensión.
I
IEC 61131-3:
Tercera parte de un estándar de tres partes de la IEC para los equipos de
automatización industriales. IEC 61131-3 se ocupa de los lenguajes de
programación del controlador y define dos estándares de lenguajes de
programación gráficos y dos textuales. Los lenguajes de programación gráficos
son un diagrama de contactos y un diagrama de bloque de funciones. Los
lenguajes de programación textuales incluyen texto estructurado y lista de
instrucciones.
IEC:
(International Electrotechnical Commission) Una organización de estándares
internacional sin ánimo de lucro y no gubernamental que prepara y publica
estándares internacionales para todas las tecnologías eléctricas, electrónicas y
relacionadas.
IL:
(lista de instrucciones) Un programa escrito en lenguaje que se compone de una
serie de instrucciones basadas en texto y ejecutadas secuencialmente por el
controlador. Cada instrucción incluye un número de línea, un código de
instrucción y un operando (consulte IEC 61131-3).
IP 20:
(protección de entrada) La clasificación de protección según IEC 60529 ofrecida
por una carcasa, identificada con la letra IP y dos dígitos. El primer dígito indica
dos factores: ayudar a la protección de las personas y del equipo. El segundo
dígito, la protección contra el agua. Los dispositivos IP 20 sirven de protección
contra el contacto eléctrico de objetos de más de 12,5 mm de tamaño pero no
contra el agua.
L
LD:
(diagrama de contactos) Una representación gráfica de instrucciones de un
programa de controlador con símbolos para contactos, bobinas y bloques en una
serie de escalones ejecutados de forma secuencial por un controlador (consulte
IEC 61131-3).
lenguaje de diagrama de contactos:
Una representación gráfica de instrucciones de un programa de controlador con
símbolos para contactos, bobinas y bloques en una serie de escalones
ejecutados de forma secuencial por un controlador (consulte IEC 61131-3).
lenguaje de gráfica de función continua:
Un lenguaje de programación gráfico (una ampliación del estándar IEC61131-3)
basado en el lenguaje de diagrama del bloque de funciones y que funciona como
un diagrama de flujo. Sin embargo, no se utiliza ninguna red y es posible un
posicionamiento libre de elementos gráficos, lo que permite bucles de
realimentación. En cada bloque, las entradas se sitúan a la izquierda y las
salidas, a la derecha. Las salidas del bloque se pueden conectar a las entradas
de otros bloques para formar expresiones complejas.
lenguaje de la lista de instrucciones:
Un programa escrito en el lenguaje de la lista de instrucciones que se compone
de una serie de instrucciones basadas en texto y ejecutadas secuencialmente
por el controlador. Cada instrucción incluye un número de línea, un código de
instrucción y un operando (consulte IEC 61131-3).
EIO0000003086.04 195

M
maestro/esclavo:
La única dirección de control en una red que implementa la modalidad maestro/
esclavo.
Modbus:
El protocolo de comunicaciones que permite las comunicaciones entre muchos
dispositivos conectados a la misma red.
N
NEMA:
(National Electrical Manufacturers Association) El estándar para el rendimiento
de diversas clases de carcasas eléctricas. Los estándares de NEMA abarcan la
resistencia a la corrosión, la capacidad de protección contra la lluvia y la
inmersión, etc. Para los países adheridos a IEC, la norma IEC 60529 clasifica el
grado de protección contra la entrada de las carcasas.
P
PDO:
(objeto de datos de proceso) Un mensaje de difusión sin confirmar o enviado
desde un dispositivo productor a un dispositivo consumidor en una red basada en
CAN. El PDO transmitido desde el dispositivo productor tiene un identificador
específico que corresponde al PDO recibido de los dispositivos consumidores.
PE:
(tierra de protección) Una conexión a tierra común para riesgos de descargas
eléctricas al exponer las superficies conductoras de un dispositivo al potencial de
tierra. Para evitar posibles caídas de tensión, en este conductor no circula
corriente (conocido también como conexión a tierra de protección en
Norteamérica o como conexión a tierra del equipo según el US National Electrical
Code).
programa:
El componente de una aplicación consistente en código fuente compilado capaz
de poder ser instalado en la memoria de un controlador lógico.
PTO:
(salidas de tren de pulsos) Una salida rápida que oscila entre apagado y
encendido en un ciclo de servicio fijo 50-50, que produce una forma de onda
cuadrada. La PTO resulta especialmente útil para aplicaciones como motores
paso a paso, conversores de frecuencia, controles de servomotor, etc.
PWM:
(modulación de ancho de pulsos) Una salida rápida que oscila entre el apagado y
el encendido en un ciclo de servicio ajustable, que produce una forma de onda
rectangular (aunque se puede ajustar para que produzca una onda cuadrada).
R
RJ45:
Un conector estándar de 8 pins para cables de red definido para Ethernet.
RPDO:
(objeto de datos de proceso de recepción) Mensaje de difusión sin confirmar o
enviado desde un dispositivo productor a un dispositivo consumidor en una red
basada en CAN. El PDO transmitido desde el dispositivo productor tiene un
identificador específico que corresponde al PDO recibido de los dispositivos
consumidores.
196 EIO0000003086.04

RS-232:
Un tipo estándar de bus de comunicación serie basado en tres cables (también
conocido como EIA RS-232C o V.24).
RS-485:
Un tipo estándar de bus de comunicación serie basado en dos cables (también
conocido como EIA RS-485).
RTS:
(petición de envío) Una señal de transmisión de datos y señal CTS que reconoce
la señal RTS desde el nodo de destino.
RxD:
La línea que recibe datos de un origen a otro.
S
SFC:
(diagrama funcional secuencial) Un lenguaje formado por pasos con acciones
asociadas, transiciones con una condición lógica asociada y enlaces dirigidos
entre pasos y transiciones. (La norma SFC está definida en IEC 848. Es
conforme con IEC 61131-3.)
ST:
(texto estructurado) Un lenguaje que incluye instrucciones complejas y anidadas
(por ejemplo, bucles de repetición, ejecuciones condicionales o funciones). ST
cumple con IEC 61131-3.
T
TPDO:
(objeto de datos de proceso de transmisión) Un mensaje de difusión sin confirmar
o enviado desde un dispositivo productor a un dispositivo consumidor en una red
basada en CAN. El PDO transmitido desde el dispositivo productor tiene un
identificador específico que corresponde al PDO recibido de los dispositivos
consumidores.
TxD:
La línea que envía datos de un origen a otro.
EIO0000003086.04 197

Índice
A
accesorios ............................................................36
acoplador de bus
especificaciones ................................................34
C
cableado...............................................................65
Características ambientales ...................................53
carga inductiva, protección de salidas
protección de salidas, carga inductiva .................69
certificaciones y normas ........................................55
comunicación
CANopen ........................................................178
Comunicación CANopen......................................178
conexiones
a ECU J1939 ...................................................179
a esclavos CANopen........................................178
cortocircuito o sobrecorriente en las salidas de
relé.....................................................................47
cortocircuito o sobrecorriente en las salidas
transistorizadas...................................................45
Cortocircuito o sobrecorriente en las salidas
transistorizadas de común positivo........................46
cualificación del personal .........................................5
E
ECU, número máx. de J1939 ............................... 179
Enclavamiento ......................................................42
F
Filtro
Filtro de rebote ..................................................41
Fuente de alimentación.................................... 71, 74
funciones
funciones principales..........................................14
G
Gestión de entradas ..............................................41
gestión de salidas..................................................43
I
instalación
instalación del logic/motion controller...................56
Instalación ............................................................53
Requisitos eléctricos ..........................................65
instalación del logic/motion controller......................56
interfaz de bus de campo
especificaciones ................................................35
J
J1939
funciones ........................................................179
L
lenguajes de programación
IL, LD, Grafcet ...................................................14
Línea serie 1
Puertos de comunicaciones .............................. 184
Línea serie 2
Puertos de comunicaciones .............................. 187
M
M241
TM241C24R......................................................81
TM241C24T ......................................................96
TM241C24U.................................................... 111
TM241C40R....................................................126
TM241C40T ....................................................135
TM241C40U....................................................144
TM241CE24R....................................................86
TM241CE24T..................................................101
TM241CE24U.................................................. 116
TM241CE40R..................................................130
TM241CE40T..................................................139
TM241CE40U..................................................148
TM241CEC24R .................................................91
TM241CEC24T................................................106
TM241CEC24U ...............................................121
P
PGN, número máx. de J1939 ............................... 179
posiciones de montaje ...........................................58
presentation
TM241C24R......................................................81
TM241C24T ......................................................96
TM241C24U.................................................... 111
TM241C40R....................................................126
TM241C40T ....................................................135
TM241C40U....................................................144
TM241CE24R....................................................86
TM241CE24T..................................................101
TM241CE24U.................................................. 116
TM241CE40R..................................................130
TM241CE40T..................................................139
TM241CE40U..................................................148
TM241CEC24R .................................................91
TM241CEC24T................................................106
TM241CEC24U ...............................................121
Puerto de programación USB
Puertos de comunicaciones .............................. 183
Puertos de comunicación.....................................178
Puertos de comunicaciones
Línea serie 1....................................................184
Línea serie 2....................................................187
Puerto de programación USB ...........................183
Puerto Ethernet ............................................... 181
Puesta a tierra.......................................................77
R
reloj en tiempo real ................................................38
Requisitos eléctricos
Instalación.........................................................65
retorno
modos de configuración .....................................45
Run/Stop ..............................................................48
198 EIO0000003086.04

S
Susceptibilidad electromagnética ...........................55
T
Tarjeta SD.............................................................49
TMC4...................................................................21
U
uso previsto ............................................................6
EIO0000003086.04 199

Schneider Electric
35 rue Joseph Monier
92500 Rueil Malmaison
France
+ 33 (0) 1 41 29 70 00
www.se.com
Debido a que las normas, especificaciones y diseños cambian
periódicamente, solicite la confirmación de la información dada en esta
publicación.
© 2022 Schneider Electric. Reservados todos los derechos.
EIO0000003086.04

EIO0000003110.00
www.se.com
Modicon TMC4
EIO0000003110 05/2019
Modicon TMC4
Cartuchos
Guía de programación
05/2019

2EIO0000003110 05/2019
La información que se ofrece en esta documentación contiene descripciones de carácter general
y/o características técnicas sobre el rendimiento de los productos incluidos en ella. La presente
documentación no tiene como objeto sustituir dichos productos para aplicaciones de usuario
específicas, ni debe emplearse para determinar su idoneidad o fiabilidad. Los usuarios o
integradores tienen la responsabilidad de llevar a cabo un análisis de riesgos adecuado y
completo, así como la evaluación y las pruebas de los productos en relación con la aplicación o el
uso de dichos productos en cuestión. Ni Schneider Electric ni ninguna de sus filiales o asociados
asumirán responsabilidad alguna por el uso inapropiado de la información contenida en este
documento. Si tiene sugerencias de mejoras o modificaciones o ha hallado errores en esta
publicación, le rogamos que nos lo notifique.
Usted se compromete a no reproducir, salvo para su propio uso personal, no comercial, la
totalidad o parte de este documento en ningún soporte sin el permiso de Schneider Electric, por
escrito. También se compromete a no establecer ningún vínculo de hipertexto a este documento
o su contenido. Schneider Electric no otorga ningún derecho o licencia para el uso personal y no
comercial del documento o de su contenido, salvo para una licencia no exclusiva para consultarla
"tal cual", bajo su propia responsabilidad. Todos los demás derechos están reservados.
Al instalar y utilizar este producto es necesario tener en cuenta todas las regulaciones sobre
seguridad correspondientes, ya sean regionales, locales o estatales. Por razones de seguridad y
para garantizar que se siguen los consejos de la documentación del sistema, las reparaciones solo
podrá realizarlas el fabricante.
Cuando se utilicen dispositivos para aplicaciones con requisitos técnicos de seguridad, siga las
instrucciones pertinentes.
Si con nuestros productos de hardware no se utiliza el software de Schneider Electric u otro
software aprobado, pueden producirse lesiones, daños o un funcionamiento incorrecto del equipo.
Si no se tiene en cuenta esta información, se pueden causar daños personales o en el equipo.
© 2019 Schneider Electric. Reservados todos los derechos.

EIO0000003110 05/2019 3
Tabla de materias
Información de seguridad . . . . . . . . . . . . . . . . . . . . . . . . 5
Acerca de este libro . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
Capítulo 1 Información general de la configuración de cartuchos . . 11
Prácticas generales de la configuración de E/S . . . . . . . . . . . . . . . . . 12
Descripción general. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Adición de cartuchos a una configuración. . . . . . . . . . . . . . . . . . . . . . 15
Configuración de cartuchos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
Actualización del firmware de los cartuchos . . . . . . . . . . . . . . . . . . . . 19
Capítulo 2 Cartuchos TMC4 estándar . . . . . . . . . . . . . . . . . . . . . . . 21
TMC4AI2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
TMC4TI2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
TMC4AQ2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
Capítulo 3 Cartuchos de aplicaciones TMC4. . . . . . . . . . . . . . . . . . 31
TMC4HOIS01 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
TMC4PACK01 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
Glosario . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
Índice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41

4EIO0000003110 05/2019

EIO0000003110 05/2019 5
Información de seguridad
Información importante
AVISO
Lea atentamente estas instrucciones y observe el equipo para familiarizarse con el dispositivo
antes de instalarlo, utilizarlo, revisarlo o realizar su mantenimiento. Los mensajes especiales que
se ofrecen a continuación pueden aparecer a lo largo de la documentación o en el equipo para
advertir de peligros potenciales, o para ofrecer información que aclara o simplifica los distintos
procedimientos.

6EIO0000003110 05/2019
TENGA EN CUENTA LO SIGUIENTE:
La instalación, el manejo, las revisiones y el mantenimiento de equipos eléctricos deberán ser
realizados sólo por personal cualificado. Schneider Electric no se hace responsable de ninguna
de las consecuencias del uso de este material.
Una persona cualificada es aquella que cuenta con capacidad y conocimientos relativos a la
construcción, el funcionamiento y la instalación de equipos eléctricos, y que ha sido formada en
materia de seguridad para reconocer y evitar los riesgos que conllevan tales equipos.

EIO0000003110 05/2019 7
Acerca de este libro
Presentación
Objeto
En este documento se describe la configuración del software de los cartuchos de TMC4 para
EcoStruxure Machine Expert. Para obtener más información, consulte los documentos
independientes que se ofrecen en la ayuda en línea de EcoStruxure Machine Expert.
Campo de aplicación
Este documento se ha actualizado para la publicación de EcoStruxureTM Machine Expert V1.1.
Documentos relacionados
Título de la documentación Número de referencia
EcoStruxure Machine Expert - Guía de programación
EIO0000002854 (ENG)
EIO0000002855 (FRE)
EIO0000002856 (GER)
EIO0000002858 (SPA)
EIO0000002857 (ITA)
EIO0000002859 (CHS)
Modicon M241 Logic Controller - Guía de programación
EIO0000003059 (ENG)
EIO0000003060 (FRE)
EIO0000003061 (GER)
EIO0000003062 (SPA)
EIO0000003063 (ITA)
EIO0000003064 (CHS)
Modicon TMC4 Cartuchos - Guía de hardware
EIO0000003113 (ENG)
EIO0000003114 (FRE)
EIO0000003115 (GER)
EIO0000003116 (SPA)
EIO0000003117 (ITA)
EIO0000003118 (CHS)

8EIO0000003110 05/2019
Puede descargar estas publicaciones técnicas y otra información técnica de nuestro sitio web
https://www.schneider-electric.com/en/download
Información relativa al producto
1 Para obtener información adicional, consulte NEMA ICS 1.1 (última edición), "Safety Guidelines
for the Application, Installation, and Maintenance of Solid State Control" (Directrices de seguridad
para la aplicación, la instalación y el mantenimiento del control de estado estático) y NEMA ICS
7.1 (última edición), "Safety Standards for Construction and Guide for Selection, Installation and
Operation of Adjustable-Speed Drive Systems" (Estándares de seguridad para la construcción y
guía para la selección, instalación y utilización de sistemas de unidades de velocidad ajustable) o
su equivalente aplicable a la ubicación específica.
Modicon M241 Logic Controller - Guía de hardware
EIO0000003083 (ENG)
EIO0000003084 (FRE)
EIO0000003085 (GER)
EIO0000003086 (SPA)
EIO0000003087 (ITA)
EIO0000003088 (CHS)
Título de la documentación Número de referencia
ADVERTENCIA
PÉRDIDA DE CONTROL
El diseñador del esquema de control debe tener en cuenta las posibles modalidades de fallo
de rutas de control y, para ciertas funciones de control críticas, proporcionar los medios para
lograr un estado seguro durante y después de un fallo de ruta. Algunas funciones de control
críticas son, por ejemplo, la parada de emergencia y la parada de sobrecarrera, un corte de
alimentación o un reinicio.
Para las funciones críticas de control deben proporcionarse rutas de control separadas o
redundantes.
Las rutas de control del sistema pueden incluir enlaces de comunicación. Deben tenerse en
cuenta las implicaciones de retardos de transmisión imprevistos o fallos del enlace.
Tenga en cuenta todas las reglamentaciones para la prevención de accidentes y las
normativas de seguridad locales.1
Cada instalación de este equipo debe probarse de forma individual y exhaustiva antes de
entrar en servicio.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.

EIO0000003110 05/2019 9
Terminología derivada de los estándares
Los términos técnicos, símbolos y las descripciones correspondientes del presente manual o que
aparecen en la parte interior o exterior de los propios productos se derivan, por lo general, de los
términos y las definiciones de estándares internacionales.
En el área de los sistemas de seguridad funcional, unidades y automatización general se incluyen,
pero sin limitarse a ellos, términos como
seguridad
,
función de seguridad
,
estado de seguridad
,
fallo
,
reinicio tras fallo
,
avería
,
funcionamiento incorrecto
,
error
,
mensaje de error
,
peligroso
, etc.
Estos estándares incluyen, entre otros:
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Utilice solo software aprobado por Schneider Electric para este equipo.
Actualice el programa de aplicación siempre que cambie la configuración de hardware física.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.
Norma Descripción
IEC 61131-2:2007 Controladores programables, parte 2: Requisitos y ensayos de los equipos.
ISO 13849-1:2015 Seguridad de la maquinaria: componentes de los sistemas de control
relacionados con la seguridad.
Principios generales del diseño.
EN 61496-1:2013 Seguridad de las máquinas: equipos de protección electrosensibles.
Parte 1: pruebas y requisitos generales.
ISO 12100:2010 Seguridad de las máquinas. Principios generales para el diseño. Evaluación del
riesgo y reducción del riesgo
EN 60204-1:2006 Seguridad de las máquinas. Equipo eléctrico de las máquinas. Parte 1:
Requisitos generales
ISO 14119:2013 Seguridad de la maquinaria. Dispositivos de bloqueo asociados con
protecciones: principios de diseño y selección
ISO 13850:2015 Seguridad de la maquinaria. Parada de emergencia: principios de diseño
IEC 62061:2015 Seguridad de la maquinaria. Seguridad funcional de los sistemas de control
programable de seguridad eléctrica y electrónica
IEC 61508-1:2010 Seguridad funcional de los sistemas eléctricos/electrónicos/electrónicos
programables relacionados con la seguridad: requisitos generales.
IEC 61508-2:2010 Seguridad funcional de los sistemas eléctricos/electrónicos/electrónicos
programables relacionados con la seguridad: requisitos para los sistemas
eléctricos/electrónicos/electrónicos programables relacionados con la
seguridad.

10 EIO0000003110 05/2019
Además, los términos utilizados en este documento se pueden usar de manera tangencial porque
se obtienen de otros estándares como:
Por último, el término
zona de funcionamiento
se puede utilizar junto con la descripción de peligros
específicos, y se define como tal para una
zona de peligro
o
zona peligrosa
en la
Directiva de
maquinaria
(
2006/42/EC
) y
ISO 12100:2010
.
NOTA: Los estándares mencionados anteriormente podrían o no aplicarse a los productos
específicos citados en la presente documentación. Para obtener más información en relación con
los diferentes estándares aplicables a los productos descritos en este documento, consulte las
tablas de características de las referencias de dichos productos.
IEC 61508-3:2010 Seguridad funcional de los sistemas eléctricos/electrónicos/electrónicos
programables relacionados con la seguridad: requisitos de software.
IEC 61784-3:2016 Redes de comunicación industrial - Perfiles - Parte 3: Buses de campo de
seguridad funcionales - Reglas generales y definiciones de perfiles.
2006/42/EC Directiva de maquinaria
2014/30/EU Directiva de compatibilidad electromagnética
2014/35/EU Directiva de baja tensión
Norma Descripción
Serie IEC 60034 Máquinas eléctricas giratorias
Serie IEC 61800 Accionamientos eléctricos de potencia de velocidad variable
Serie IEC 61158 Comunicación digital de datos para la medición y control: bus de campo para su
uso en sistemas de control.
Norma Descripción

EIO0000003110 05/2019 11
Modicon TMC4
Información general de la configuració n de cartuchos
EIO0000003110 05/2019
Información general de la configuració n de cartuchos
Capítulo 1
Información general de la configuración de cartuchos
Introducción
En este capítulo se ofrece información general para ayudarle a configurar los cartuchos TMC4
para EcoStruxure Machine Expert.
Contenido de este capítulo
Este capítulo contiene los siguientes apartados:
Apartado Página
Prácticas generales de la configuración de E/S 12
Descripción general 13
Adición de cartuchos a una configuración 15
Configuración de cartuchos 16
Actualización del firmware de los cartuchos 19

Información general de la configuración de cartuchos
12 EIO0000003110 05/2019
Prácticas generales de la configuración de E/S
Hacer coincidir la configuración de hardware y software
La E/S que puede estar integrada en su controlador es independiente de la E/S que puede haber
añadido en forma de ampliación de E/S. Es importante que la configuración de E/S lógica dentro
de su programa coincida con la configuración de E/S física de su instalación. Si añade o elimina
cualquier E/S física desde o hacia el bus de ampliación de E/S o, en función de la referencia del
controlador, desde o hacia el controlador (en forma de cartuchos), es obligatorio que actualice la
configuración de su aplicación. Esto también se aplica a cualquier dispositivo de bus de campo
que pueda tener en su instalación. En caso contrario, existe la posibilidad de que el bus de
ampliación o el bus de campo dejen de funcionar mientras la E/S incrustada que puede haber en
su controlador continúa funcionando.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Actualice la configuración del programa cada vez que añada o elimine cualquier tipo de
ampliación de E/S en el bus de E/S, o si añade o elimina cualquier dispositivo en el bus de
campo.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.

Información general de la configuración de cartuchos
EIO0000003110 05/2019 13
Descripción general
Introducción
Los cartuchos TMC4 se conectan a Modicon M241 Logic Controller para aumentar el número de
E/S disponibles en el controlador.
Funciones de los cartuchos
En la tabla siguiente se describen las funciones de los cartuchos TMC4:
Referencia Descripción
TMC4AI2 Cartucho TMC4 con 2 entradas analógicas de corriente o tensión (de 0 a 10 V, de 0 a
20 mA, de 4 a 20 mA), 12 bits
TMC4TI2 Cartucho TMC4 con 2 entradas analógicas de temperatura (termoelemento, RTD),
14 bits
TMC4AQ2 Cartucho TMC4 con 2 salidas analógicas de corriente o tensión (de 0 a 10 V, de 4 a
20 mA), 16 bits
TMC4HOIS01 Cartucho de aplicación TMC4 con 2 entradas analógicas de corriente o tensión para
la elevación de las celdas de carga
TMC4PACK01 Cartucho de aplicación TMC4 con 2 entradas analógicas de corriente o tensión para
el empaquetado

Información general de la configuración de cartuchos
14 EIO0000003110 05/2019
Compatibilidad del Logic Controller
NOTA: Para obtener más información sobre la compatibilidad de los cartuchos con controladores
específicos, consulte la guía de hardware específica del controlador.
En la tabla siguiente se describe el número de cartuchos TMC4 que se pueden instalar en un
Modicon M241 Logic Controller:
Referencia Slots de cartucho
TM241C24R 1
TM241CE24R 1
TM241CEC24R 1
TM241C24T 1
TM241CE24T 1
TM241CEC24T 1
TM241C24U 1
TM241CE24U 1
TM241CEC24U 1
TM241C40R 2
TM241CE40R 2
TM241C40T 2
TM241CE40T 2
TM241C40U 2
TM241CE40U 2

Información general de la configuración de cartuchos
EIO0000003110 05/2019 15
Adición de cartuchos a una configuración
Adición de un cartucho
Los cartuchos TMC4 se pueden conectar a Modicon M241 Logic Controller con uno o dos slots
del cartucho disponibles.
Para añadir un cartucho a la configuración, seleccione el cartucho en el Catálogo de hardware,
arrástrelo hasta Dispositivos y suéltelo en uno de los nodos seleccionados.
Para obtener más información sobre cómo añadir un dispositivo al proyecto, consulte:
• Uso del método de arrastrar y colocar
(véase EcoStruxure Machine Expert, Guía de
programación)
• Uso del menú contextual o el botón Más
(véase EcoStruxure Machine Expert, Guía de
programación)

Información general de la configuración de cartuchos
16 EIO0000003110 05/2019
Configuración de cartuchos
Configuración de E/S
La configuración de un cartucho se lleva a cabo a través de las fichas Asignación de E/S y
Configuración de E/S del módulo del cartucho.
Para visualizar las fichas de configuración:
Descripción de la ficha Asignación de E/S
La ficha Asignación de E/S permite:
Asignar canales de entradas y salidas en variables.
Ver la información de diagnóstico relacionada con el estado actual del cartucho.
En esta figura se muestra un ejemplo de la ficha Asignación de E/S:
Paso Action
1 En el árbol Dispositivos, haga doble clic en el cartucho. Aparece la ficha Asignación de E/S.
2 Edite los parámetros de la ficha Asignación de E/S para configurar las direcciones utilizadas por el
módulo del cartucho y la información de diagnóstico.
3 Haga clic en la ficha Configuración de E/S para configurar el cartucho. Para obtener información
sobre la ficha Configuración de E/S, consulte la descripción de los módulos individuales.

Información general de la configuración de cartuchos
EIO0000003110 05/2019 17
Asignación de E/S para entradas y salidas
En esta tabla se describen todos los parámetros de la ficha Asignación de E/S para entradas y
salidas:
Parámetro Descripción
Variable Permite asignar el canal en una variable.
NOTA: Expanda la lista de variables de la categoría Entradas o Salidas.
Puede asignar un canal creando una nueva variable o asignándolo a una variable existente.
Crear nueva variable:
Haga doble clic en la variable para introducir el nombre de la nueva variable. Se crea una
nueva variable si la variable todavía no existe.
Asignar a la variable ya existente:
Haga doble clic en la variable y haga clic en [...] para abrir la ventana Accesibilidad.
Seleccione la variable de la lista y pulse Aceptar.
En esta figura se muestra la ventana Accesibilidad:

Información general de la configuración de cartuchos
18 EIO0000003110 05/2019
Asignación Indica si el canal se ha asignado a una variable nueva o a una variable existente.
Canal Muestra el nombre del canal del dispositivo.
Dirección Muestra la dirección del canal.
NOTA: Si el canal se asigna a una variable existente, aparece la dirección correspondiente
como texto tachado en la tabla.
Tipo Muestra el tipo de datos del canal.
Valor
predeterminado
Indica el valor que adopta la salida cuando el controlador se encuentra en un estado
STOPPED o HALT.
Haga doble clic en la celda para cambiar el valor predeterminado.
Unidad Muestra la unidad del valor del canal.
Descripción Permite introducir una breve descripción del canal.
Parámetro Descripción

Información general de la configuración de cartuchos
EIO0000003110 05/2019 19
Actualización del firmware de los cartuchos
Introducción
Los cartuchos TMC4 cuentan con un firmware que se puede actualizar. El firmware únicamente
se puede actualizar cuando el cartucho está montado en el controlador.
La versión del firmware del cartucho se puede ver en la variable i_uifirmwareVersion del
CART_R_STRUCT
(véase Modicon M241 Logic Controller, Funciones y variables del sistema,
Guía de la biblioteca PLCSystem)
en la guía de la biblioteca M241 PLCSystem.
El firmware del cartucho se entrega en los archivos .bin.
Descripción
Cuando se inicia, el controlador comprueba si hay un archivo denominado cart1.bin o
cart2.bin en el directorio /sys/OS del sistema interno de archivos. Si se encuentra este
archivo y hay un cartucho instalado y configurado en el controlador, comenzará la actualización
del firmware del cartucho.
NOTA: El firmware solo se actualizará si el archivo del firmware es distinto al firmware actual del
cartucho. El archivo del firmware no se elimina automáticamente desde el directorio /sys/OS.
La operación de actualización del firmware dura aproximadamente 10 segundos por cartucho.
Procedimiento
Lleve a cabo este procedimiento para actualizar el firmware del cartucho:
Paso Acción
1 Copie el archivo .bin en la tarjeta SD
(véase Modicon M241 Logic Controller, Programming
Guide)
.
2 Genere un script con el editor de Almacenamiento masivo en tarjeta SD
(véase Modicon M241
Logic Controller, Programming Guide)
y el comando Descargar para almacenar el archivo
cart1.bin en el directorio /sys/OS del controlador.
3 Inserte la tarjeta SD en el controlador.
4 Reinicie el controlador.
NOTA: El indicador LED PWR del cartucho está desactivado para indicar que la actualización
del firmware está en progreso.
5 Espere hasta que el indicador LED PWR del cartucho se active o parpadee, lo cual significa que
la actualización del firmware ha terminado.

Información general de la configuración de cartuchos
20 EIO0000003110 05/2019


Cartuchos TMC4 estándar
22 EIO0000003110 05/2019
TMC4AI2
Introducción
El cartucho TMC4AI2 presenta dos canales de entradas analógicas de corriente o tensión con una
resolución de 12 bits.
Los tipos de entradas de canales son:
De 0 a 10 V
De 0 a 20 mA
De 4 a 20 mA
Para obtener más información sobre hardware, consulte TMC4AI2
(véase Modicon TMC4,
Cartuchos, Guía de hardware)
.
Si ha conectado físicamente el canal analógico para una señal de tensión y configura el canal para
una señal de corriente en EcoStruxure Machine Expert, puede dañar el circuito analógico.
AVISO
EQUIPO INOPERATIVO
Verifique que el cableado físico del circuito analógico es compatible con la configuración de
software del canal analógico.
El incumplimiento de estas instrucciones puede causar daño al equipo.

Cartuchos TMC4 estándar
EIO0000003110 05/2019 23
Ficha Asignación de E/S
Consulte Configuración de cartuchos
(véase página 16)
para obtener una descripción sobre cómo
configurar las entradas y salidas del módulo.
Las variables pueden definirse y denominarse en la ficha Asignación de E/S. También estará
disponible en esta ficha información adicional, como el direccionamiento topológico.
En esta tabla se describe la ficha Asignación E/S:
Para obtener más información genérica, consulte Descripción de la ficha Asignación de E/S
(véase página 16)
.
Variable Canal Tipo Descripción
Entradas iiTMC4AI2_IWO INT Valor actual de la entrada 0
iiTMC4AI2_IW1 INT Valor actual de la entrada 1
Diagnóstico ibTMC4AI2_IW2 BYTE Estado del cartucho
Reservado BOOL Reservado
Reservado BOOL Reservado
24VFault BOOL Fuente de alimentación de +24 V deshabilitada
Reservado BOOL Reservado
Reservado BOOL Reservado
OutOfRange0 BOOL Entrada fuera de rango (canal 0)
OutOfRange1 BOOL Entrada fuera de rango (canal 1)
Reservado BOOL Reservado

Cartuchos TMC4 estándar
24 EIO0000003110 05/2019
Ficha Configuración de E/S
Para cada entrada se puede definir:
Parámetro Valor Valor
predeterminado
Descripción
Tipo Sin utilizar
De 0 a 10 V
De 0 a 20 mA
De 4 a 20 mA
Sin utilizar Elija la modalidad del canal.
Mín. De 0 a 10 V De -32.768 a 32.767 0 Especifica el límite de medida inferior.
De 0 a 20 mA 0
De 4 a 20 mA 4.000
Máx. De 0 a 10 V De -32.768 a 32.767 10.000 Especifica el límite de medida superior.
De 0 a 20 mA 20.000
De 4 a 20 mA 20.000
Nivel de filtro Sin filtro
Filtro 1 (más corto)
a
Filtro 6 (más largo)
Sin filtro Especifica el nivel de filtrado digital que
se aplicará en este canal.

Cartuchos TMC4 estándar
EIO0000003110 05/2019 25
TMC4TI2
Introducción
El cartucho TMC4TI2 presenta dos canales de entradas analógicas con una resolución de 14 bits.
Los tipos de entradas del canal son:
Termoelemento K
Termoelemento J
Termoelemento R
Termoelemento S
Termoelemento B
Termoelemento E
Termoelemento T
Termoelemento N
PT100
PT1000
NI100
NI1000
Para obtener más información sobre hardware, consulte TMC4TI2
(véase Modicon TMC4,
Cartuchos, Guía de hardware)
.

Cartuchos TMC4 estándar
26 EIO0000003110 05/2019
Ficha Asignación de E/S
Consulte Configuración de cartuchos
(véase página 16)
para obtener una descripción sobre cómo
configurar las entradas y salidas del módulo.
Las variables pueden definirse y nombrarse en la ficha Asignación E/S. En esta ficha también hay
disponible información adicional, como el direccionamiento topológico.
En esta tabla se describe la ficha Asignación E/S:
Para obtener más información genérica, consulte Descripción de la ficha Asignación de E/S
(véase página 16)
.
Variable Canal Tipo Descripción
Entradas iiTMC4TI2_IWO INT Valor actual de la entrada 0
iiTMC4TI2_IW1 INT Valor actual de la entrada 1
iiTMC4TI2_IW2 INT Soldadura fría (canal 0)
iiTMC4TI2_IW3 INT Soldadura fría (canal 1)
Diagnóstico ibTMC4TI2_IW4 BYTE Estado del cartucho
BrokenWire0 BOOL Advertencia de conductor interrumpido de entrada
(canal 0)
BrokenWire1 BOOL Advertencia de conductor interrumpido de entrada
(canal 1)
24VFault BOOL Fuente de alimentación de +24 V deshabilitada
ADCreinitialization BOOL 0: los valores de entrada son válidos.
1: los valores de entrada no son válidos.
Reservado BOOL Reservado
OutOfRange0 BOOL Entrada fuera de rango (canal 0)
OutOfRange1 BOOL Entrada fuera de rango (canal 1)
Reservado BOOL Reservado

Cartuchos TMC4 estándar
EIO0000003110 05/2019 27
Ficha Configuración de E/S
Para cada entrada, puede definir:
Parámetro Rango Valor
predeterminado
Descripción
Tipo Termoelemento K
Termoelemento J
Termoelemento R
Termoelemento S
Termoelemento B
Termoelemento E
Termoelemento T
Termoelemento N
Termoelemento C
PT100
PT1000
NI100
NI1000
Termoelemento K Elija la modalidad del canal.
Ámbito Personalizado
Centígrados (0,1 °C)
Fahrenheit (0,1 °F)
Centígrados (0,1 °C) Seleccione las unidades de
temperatura de un canal.
Mínimo Consulte la tabla siguiente. Especifica el límite de medida inferior.
Máximo Consulte la tabla siguiente. Especifica el límite de medida superior.
WireBrakeDetection No
Sí
No Si se activa o no la detección de
conductor interrumpido en este canal.
ColdJunctionEnable No
Sí
Sí Para entradas de termoelemento, si se
activa la compensación interna de unión
en frío en este canal.
La compensación de unión en frío
corrige automáticamente las
variaciones de temperatura en la unión
de referencia del termoelemento.
Modalidad de
conductor RTD
2 conductores
3 conductores
4 conductores
3 conductores Para tipos de entradas PT100, PT100,
NI100 y NI1000, seleccione la
modalidad de cableado del detector de
temperatura de resistencia (RTD) que
se va a utilizar.

Cartuchos TMC4 estándar
28 EIO0000003110 05/2019
Tipo Centígrados (0,1 °C) Personalizado Fahrenheit (0,1 °F)
Mínima Máxima Mínima Máxima Mínima Máxima
Termoelemento K -2.000 13.000 -32.768 32.767 -3.280 23720
Termoelemento J -2.000 10000 -32.768 32.767 -3.280 18.320
Termoelemento R 0 17.600 -32.768 32.767 320 32000
Termoelemento S 0 17.600 -32.768 32.767 320 32000
Termoelemento T -2.000 4.000 -32.768 32.767 -3.280 7.520
Termoelemento B 0 18.200 -32.768 32.767 7.520 32.720
Termoelemento E -2.000 8.000 -32.768 32.767 -3.280 14.720
Termoelemento N -2.000 13.000 -32.768 32.767 -3.280 23720
PT100 -2.000 8.500 -32.768 32.767 -3.280 15.620
PT1000 -2.000 8.500 -32.768 32.767 -3.280 15.620
NI100 -600 1.800 -32.768 32.767 -760 3.560
NI1000 -600 1.800 -32.768 32.767 -760 3.560

Cartuchos TMC4 estándar
EIO0000003110 05/2019 29
TMC4AQ2
Introducción
El cartucho TMC4AQ2 presenta dos canales de salidas analógicas de corriente o tensión con una
resolución de 16 bits.
Los tipos de salidas del canal son:
De 0 a 10 V
De 4 a 20 mA
Para obtener más información sobre hardware, consulte TMC4AQ2
(véase Modicon TMC4,
Cartuchos, Guía de hardware)
.
Si ha conectado físicamente el canal analógico para una señal de tensión y configura el canal para
una señal de corriente en EcoStruxure Machine Expert, puede dañar el circuito analógico.
AVISO
EQUIPO INOPERATIVO
Verifique que el cableado físico del circuito analógico es compatible con la configuración de
software del canal analógico.
El incumplimiento de estas instrucciones puede causar daño al equipo.

Cartuchos TMC4 estándar
30 EIO0000003110 05/2019
Ficha Asignación de E/S
Consulte Configuración de cartuchos
(véase página 16)
para obtener una descripción sobre cómo
configurar las entradas y salidas del módulo.
Las variables pueden definirse y nombrarse en la ficha Asignación E/S. En esta ficha también hay
disponible información adicional, como el direccionamiento topológico.
En esta tabla se describe la ficha Asignación E/S:
Para obtener más información genérica, consulte Descripción de la ficha Asignación de E/S
(véase página 16)
.
Ficha Configuración de E/S
Para cada salida, puede definir:
Variable Canal Tipo Descripción
Salidas qiTMC4AQ2_QWO INT Valor actual de la salida 0
qiTMC4AQ2_QW1 INT Valor actual de la salida 1
Diagnóstico ibTMC4AQ2_IWO BYTE Estado del cartucho
BrokenWire0 BOOL Advertencia de conductor interrumpido en la
salida de corriente (canal 0)
BrokenWire1 BOOL Advertencia de conductor interrumpido en la
salida de corriente (canal 1)
24VFault BOOL Fuente de alimentación de +24 V deshabilitada
Reservado BOOL Reservado
Reservado BOOL Reservado
Reservado BOOL Reservado
Reservado BOOL Reservado
Reservado BOOL Reservado
Parámetro Valor Valor
predeterminado
Descripción
Tipo No utilizado
De 0 a 10 V
De 4 a 20 mA
No utilizado La modalidad del canal.
Mín. De 0 a 10 V
De 4 a 20 mA
De -32.768 a 32.767
De -32.768 a 32.767
0
4.000
Especifica el límite de medida inferior.
Máx. De 0 a 10 V
De 4 a 20 mA
De -32.768 a 32.767
De -32.768 a 32.767
10.000
20.000
Especifica el límite de medida superior.


Cartuchos de aplicaciones TMC4
32 EIO0000003110 05/2019
TMC4HOIS01
Introducción
El cartucho TMC4HOIS01 presenta dos canales de entradas analógicas de corriente o tensión con
una resolución de 12 bits.
Los tipos de entradas del canal son:
De 0 a 10 V
De 0 a 20 mA
De 4 a 20 mA
Para obtener más información sobre hardware, consulte TMC4HOIS01
(véase Modicon TMC4,
Cartuchos, Guía de hardware)
.
Si ha conectado físicamente el canal analógico para una señal de tensión y configura el canal para
una señal de corriente en EcoStruxure Machine Expert, puede dañar el circuito analógico.
AVISO
EQUIPO INOPERATIVO
Verifique que el cableado físico del circuito analógico es compatible con la configuración de
software del canal analógico.
El incumplimiento de estas instrucciones puede causar daño al equipo.

Cartuchos de aplicaciones TMC4
EIO0000003110 05/2019 33
Ficha Asignación de E/S
Consulte Configuración de cartuchos
(véase página 16)
para obtener una descripción sobre cómo
configurar las entradas y salidas del módulo.
Las variables pueden definirse y denominarse en la ficha Asignación de E/S. También estará
disponible en esta ficha información adicional, como el direccionamiento topológico.
En esta tabla se describe la ficha Asignación E/S:
Para obtener más información genérica, consulte Descripción de la ficha Asignación de E/S
(véase página 16)
.
Variable Canal Tipo Descripción
Entradas iiTMC4HOIS01_IW0 INT Valor actual de la entrada 0
iiTMC4HOIS01_IW1 INT Valor actual de la entrada 1
Diagnóstico ibTMC4HOIS01_IW2 BYTE Estado del cartucho
Reservado BOOL Reservado
Reservado BOOL Reservado
24VFault BOOL Fuente de alimentación de +24 V deshabilitada
Reservado BOOL Reservado
Reservado BOOL Reservado
OutOfRange0 BOOL Entrada fuera de rango (canal 0)
OutOfRange1 BOOL Entrada fuera de rango (canal 1)
Reservado BOOL Reservado

Cartuchos de aplicaciones TMC4
34 EIO0000003110 05/2019
Ficha Configuración de E/S
Para cada entrada se puede definir:
Parámetro Valor Valor
predeterminado
Descripción
Tipo Sin utilizar
De 0 a 10 V
De 0 a 20 mA
De 4 a 20 mA
Sin utilizar Elija la modalidad del canal.
Mín. De 0 a 10 V De -32.768 a 32.767 0 Especifica el límite de medida inferior.
De 0 a 20 mA 0
De 4 a 20 mA 4.000
Máx. De 0 a 10 V De -32.768 a 32.767 10.000 Especifica el límite de medida superior.
De 0 a 20 mA 20.000
De 4 a 20 mA 20.000
Nivel de filtro Sin filtro
Filtro 1 (más corto)
a
Filtro 6 (más largo)
Sin filtro Especifica el nivel de filtrado digital que
se aplicará en este canal.

Cartuchos de aplicaciones TMC4
EIO0000003110 05/2019 35
TMC4PACK01
Introducción
El módulo del cartucho TMC4PACK01 presenta dos canales de entradas analógicas de corriente
o tensión con una resolución de 12 bits.
Los tipos de entradas de canales son:
De 0 a 10 V
De 0 a 20 mA
De 4 a 20 mA
Para obtener más información sobre hardware, consulte TMC4PACK01
(véase Modicon TMC4,
Cartuchos, Guía de hardware)
.
Si ha conectado físicamente el canal analógico para una señal de tensión y configura el canal para
una señal de corriente en EcoStruxure Machine Expert, puede dañar el circuito analógico.
AVISO
EQUIPO INOPERATIVO
Verifique que el cableado físico del circuito analógico es compatible con la configuración de
software del canal analógico.
El incumplimiento de estas instrucciones puede causar daño al equipo.

Cartuchos de aplicaciones TMC4
36 EIO0000003110 05/2019
Ficha Asignación de E/S
Consulte Configuración de cartuchos
(véase página 16)
para obtener una descripción sobre cómo
configurar las entradas y salidas del módulo.
Las variables pueden definirse y denominarse en la ficha Asignación de E/S. También estará
disponible en esta ficha información adicional, como el direccionamiento topológico.
En esta tabla se describe la ficha Asignación E/S:
Para obtener más información genérica, consulte Descripción de la ficha Asignación de E/S
(véase página 16)
.
Variable Canal Tipo Descripción
Entradas iiTMC4PACK01_IW0 INT Valor actual de la entrada 0
iiTMC4PACK01_IW1 INT Valor actual de la entrada 1
Diagnóstico ibTMC4PACK01_IW2 BYTE Estado del cartucho
Reservado BOOL Reservado
Reservado BOOL Reservado
24VFault BOOL Fuente de alimentación de +24 V deshabilitada
Reservado BOOL Reservado
Reservado BOOL Reservado
OutOfRange0 BOOL Entrada fuera de rango (canal 0)
OutOfRange1 BOOL Entrada fuera de rango (canal 1)
Reservado BOOL Reservado

Cartuchos de aplicaciones TMC4
EIO0000003110 05/2019 37
Ficha Configuración de E/S
Para cada entrada se puede definir:
Parámetro Valor Valor
predeterminado
Descripción
Tipo Sin utilizar
De 0 a 10 V
De 0 a 20 mA
De 4 a 20 mA
Sin utilizar Elija la modalidad del canal.
Mín. De 0 a 10 V De -32.768 a 32.767 0 Especifica el límite de medida inferior.
De 0 a 20 mA 0
De 4 a 20 mA 4.000
Máx. De 0 a 10 V De -32.768 a 32.767 10.000 Especifica el límite de medida superior.
De 0 a 20 mA 20.000
De 4 a 20 mA 20.000
Nivel de filtro Sin filtro
Filtro 1 (más corto)
a
Filtro 6 (más largo)
Sin filtro Especifica el nivel de filtrado digital que
se aplicará en este canal.

Cartuchos de aplicaciones TMC4
38 EIO0000003110 05/2019

EIO0000003110 05/2019 39
Modicon TMC4
Glosario
EIO0000003110 05/2019
Glosario
E
entrada analógica
Convierte los niveles de tensión o corriente recibidos en valores numéricos. Puede almacenar y
procesar estos valores en el controlador lógico.
S
salida analógica
Convierte los valores numéricos del controlador lógico y envía niveles de tensión o corriente
proporcionales.

Glosario
40 EIO0000003110 05/2019

EIO0000003110 05/2019 41
Modicon TMC4
Índice
EIO0000003110 05/2019
Índice
C
cartucho
compatibilidad,
14
descripción,
13
funciones,
13
cartuchos
añadir,
15
configuración,
16
configurar,
16
propiedades,
16
compatibilidad
cartucho,
14
D
descripción
cartucho,
13
F
funciones
cartucho,
13
I
información general sobre la configuración
de E/S
prácticas generales,
12
M
módulos de E/S analógicas TMC4
TMC4AI2,
22
TMC4HOIS01,
32
TMC4PACK01,
35
T
TMC4 módulos de E/S analógicas
TMC4AQ2,
29
TMC4TI2,
25

Índice
42 EIO0000003110 05/2019

EIO0000003116.00
www.se.com
Modicon TMC4
EIO0000003116 05/2019
Modicon TMC4
Cartuchos
Guía de hardware
05/2019

2EIO0000003116 05/2019
La información que se ofrece en esta documentación contiene descripciones de carácter general
y/o características técnicas sobre el rendimiento de los productos incluidos en ella. La presente
documentación no tiene como objeto sustituir dichos productos para aplicaciones de usuario
específicas, ni debe emplearse para determinar su idoneidad o fiabilidad. Los usuarios o
integradores tienen la responsabilidad de llevar a cabo un análisis de riesgos adecuado y
completo, así como la evaluación y las pruebas de los productos en relación con la aplicación o el
uso de dichos productos en cuestión. Ni Schneider Electric ni ninguna de sus filiales o asociados
asumirán responsabilidad alguna por el uso inapropiado de la información contenida en este
documento. Si tiene sugerencias de mejoras o modificaciones o ha hallado errores en esta
publicación, le rogamos que nos lo notifique.
Usted se compromete a no reproducir, salvo para su propio uso personal, no comercial, la
totalidad o parte de este documento en ningún soporte sin el permiso de Schneider Electric, por
escrito. También se compromete a no establecer ningún vínculo de hipertexto a este documento
o su contenido. Schneider Electric no otorga ningún derecho o licencia para el uso personal y no
comercial del documento o de su contenido, salvo para una licencia no exclusiva para consultarla
"tal cual", bajo su propia responsabilidad. Todos los demás derechos están reservados.
Al instalar y utilizar este producto es necesario tener en cuenta todas las regulaciones sobre
seguridad correspondientes, ya sean regionales, locales o estatales. Por razones de seguridad y
para garantizar que se siguen los consejos de la documentación del sistema, las reparaciones solo
podrá realizarlas el fabricante.
Cuando se utilicen dispositivos para aplicaciones con requisitos técnicos de seguridad, siga las
instrucciones pertinentes.
Si con nuestros productos de hardware no se utiliza el software de Schneider Electric u otro
software aprobado, pueden producirse lesiones, daños o un funcionamiento incorrecto del equipo.
Si no se tiene en cuenta esta información, se pueden causar daños personales o en el equipo.
© 2019 Schneider Electric. Reservados todos los derechos.

EIO0000003116 05/2019 3
Tabla de materias
Información de seguridad . . . . . . . . . . . . . . . . . . . . . . . . 5
Acerca de este libro . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
Parte I Descripción general de TMC4 . . . . . . . . . . . . . . . . . 13
Capítulo 1 Descripción de TMC4 . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Descripción general. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Capítulo 2 Instalación de TMC4. . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.1 Reglas generales para la implementación de TMC4. . . . . . . . . . . . . . 18
Características ambientales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Certifications and Standards . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.2 Instalación de TMC4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
Requisitos de instalación y mantenimiento . . . . . . . . . . . . . . . . . . . . . 22
Instalación de TMC4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
2.3 Requisitos eléctricos de TMC4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Prácticas recomendadas relativas al cableado . . . . . . . . . . . . . . . . . . 32
Conexión a tierra del sistema M241 . . . . . . . . . . . . . . . . . . . . . . . . . . 36
Parte II Cartuchos TMC4 estándar . . . . . . . . . . . . . . . . . . . . 41
Capítulo 3 Entradas de tensión analógicas/de corriente de TMC4AI243
Presentación de TMC4AI2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
Características de TMC4AI2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
Diagrama de cableado de TMC4AI2 . . . . . . . . . . . . . . . . . . . . . . . . . . 49
Capítulo 4 Entradas analógicas de temperatura de TMC4TI2. . . . . 51
Presentación de TMC4TI2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
Características de TMC4TI2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
Diagrama de cableado de TMC4TI2 . . . . . . . . . . . . . . . . . . . . . . . . . . 57
Capítulo 5 Salidas de tensión analógicas/de corriente de TMC4AQ2 59
Presentación de TMC4AQ2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
Características de TMC4AQ2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
Diagrama de cableado de TMC4AQ2 . . . . . . . . . . . . . . . . . . . . . . . . . 65
Parte III Cartucho de aplicaciones TMC4. . . . . . . . . . . . . . . . 67
Capítulo 6 Elevación de TMC4HOIS01 . . . . . . . . . . . . . . . . . . . . . . 69
Presentación de TMC4HOIS01. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
Características de TMC4HOIS01 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
Diagrama de cableado de TMC4HOIS01 . . . . . . . . . . . . . . . . . . . . . . 75

4EIO0000003116 05/2019
Capítulo 7 Empaquetado de TMC4PACK01 . . . . . . . . . . . . . . . . . . . 77
Presentación de TMC4PACK01. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
Características de TMC4PACK01 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
Diagrama de cableado de TMC4PACK01 . . . . . . . . . . . . . . . . . . . . . . 83
Glosario . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
Índice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87

EIO0000003116 05/2019 5
Información de seguridad
Información importante
AVISO
Lea atentamente estas instrucciones y observe el equipo para familiarizarse con el dispositivo
antes de instalarlo, utilizarlo, revisarlo o realizar su mantenimiento. Los mensajes especiales que
se ofrecen a continuación pueden aparecer a lo largo de la documentación o en el equipo para
advertir de peligros potenciales, o para ofrecer información que aclara o simplifica los distintos
procedimientos.

6EIO0000003116 05/2019
TENGA EN CUENTA LO SIGUIENTE:
La instalación, el manejo, las revisiones y el mantenimiento de equipos eléctricos deberán ser
realizados sólo por personal cualificado. Schneider Electric no se hace responsable de ninguna
de las consecuencias del uso de este material.
Una persona cualificada es aquella que cuenta con capacidad y conocimientos relativos a la
construcción, el funcionamiento y la instalación de equipos eléctricos, y que ha sido formada en
materia de seguridad para reconocer y evitar los riesgos que conllevan tales equipos.
CUALIFICACIÓN DEL PERSONAL
Sólo está autorizado para trabajar con este producto el personal que haya recibido la formación
adecuada, que esté familiarizado y entienda el contenido de este manual y de cualquier otra
documentación relacionada con el producto.
La persona cualificada debe ser capaz de detectar los peligros potenciales que pueden surgir de
la parametrización, la modificación de valores de parámetros y, en general, de los equipos
mecánicos, eléctricos o electrónicos. La persona cualificada debe estar familiarizada con los
estándares, disposiciones y normativas para la prevención de accidentes industriales, que
deberán seguir cuando diseñen e implementen el sistema.
USO PREVISTO
Los productos descritos o afectados por este documento, junto con el software, los accesorios y
las opciones son cartuchos destinados a uso industrial según las instrucciones, directrices,
ejemplos e información de seguridad incluidos en el presente documento y en la documentación
adicional.
El producto sólo se puede utilizar si se cumplen todas las normativas y directivas de seguridad,
los requisitos especificados y los datos técnicos.
Antes de utilizar el producto, es necesario realizar una evaluación de riesgos en función de la
aplicación prevista. Según los resultados, se deberán implementar las medidas de seguridad
pertinentes.
Dado que el producto se utiliza como un componente de una máquina o de un proceso general,
es necesario garantizar la seguridad de las personas mediante el diseño de este sistema general.
Utilice el producto sólo con los cables y accesorios especificados. Utilice únicamente accesorios
y piezas de repuesto originales.
Cualquier uso distinto del permitido explícitamente está prohibido y puede ocasionar riesgos
imprevistos.

EIO0000003116 05/2019 7
Acerca de este libro
Presentación
Objeto
En esta guía se describe la instalación del hardware de TMC4. Se proporciona la descripción de
los componentes, las características, los diagramas de cableado y los detalles de la instalación de
TMC4.
Campo de aplicación
La información contenida en este manual solamente es aplicable a los productos TMC4.
Este documento se ha actualizado para la publicación de EcoStruxureTM Machine Expert V1.1.
Para la conformidad de los productos y la información medioambiental (RoHS, REACH, PEP,
EOLI, etc.), vaya a
www.schneider-electric.com/green-premium
.
Las características técnicas de los dispositivos que se describen en este documento también se
encuentran online. Para acceder a esta información online:
Las características que se indican en este documentación deben coincidir con las que figuran
online. De acuerdo con nuestra política de mejoras continuas, es posible que a lo largo del tiempo
revisemos el contenido con el fin de elaborar documentos más claros y precisos. En caso de que
detecte alguna diferencia entre el documentación y la información online, utilice esta última para
su referencia.
Paso Acción
1 Vaya a la página de inicio de Schneider Electric
www.schneider-electric.com
.
2 En el cuadro Search, escriba la referencia del producto o el nombre del rango de productos.
No incluya espacios en blanco en la referencia ni en el rango de productos.
Para obtener información sobre cómo agrupar módulos similares, utilice los asteriscos (
*
).
3 Si ha introducido una referencia, vaya a los resultados de búsqueda de Product Datasheets y
haga clic en la referencia deseada.
Si ha introducido el nombre de un rango de productos, vaya a los resultados de búsqueda de
Product Ranges y haga clic en la gama deseada.
4 Si aparece más de una referencia en los resultados de búsqueda Products, haga clic en la
referencia deseada.
5 En función del tamaño de la pantalla, es posible que deba desplazar la página hacia abajo para
consultar la hoja de datos.
6 Para guardar o imprimir una hoja de datos como archivo .pdf, haga clic en Download XXX
product datasheet.

8EIO0000003116 05/2019
Documentos relacionados
Puede descargar estas publicaciones técnicas y otra información técnica de nuestro sitio web
https://www.schneider-electric.com/en/download
Título de la documentación Número de referencia
Modicon TMC4 Cartuchos - Guía de programación
EIO0000003107 (ENG)
EIO0000003108 (FRE)
EIO0000003109 (GER)
EIO0000003110 (SPA)
EIO0000003111 (ITA)
EIO0000003112 (CHS)
Modicon M241 Logic Controller - Guía de hardware
EIO0000003083 (ENG)
EIO0000003084 (FRE)
EIO0000003085 (GER)
EIO0000003086 (SPA)
EIO0000003087 (ITA)
EIO0000003088 (CHS)

EIO0000003116 05/2019 9
Información relativa al producto
PELIGRO
RIESGO DE DESCARGA ELÉCTRICA, EXPLOSIÓN O ARCO VOLTAICO
Desconecte la alimentación de todos los equipos, incluidos los dispositivos conectados, antes
de retirar cualquier cubierta o compuerta, o bien antes de instalar o retirar cualquier accesorio,
hardware, cable o conductor salvo en las condiciones indicadas en la guía de hardware de
este equipo.
Utilice siempre un dispositivo de detección de tensión de capacidad adecuada para confirmar
la ausencia de alimentación eléctrica cuando y donde se indique.
Vuelva a montar y fijar todas las cubiertas, accesorios, elementos de hardware, cables y
conductores y compruebe que haya una conexión a tierra adecuada antes de aplicar
alimentación eléctrica a la unidad.
Aplique sólo la tensión especificada cuando utilice este equipo y los productos asociados.
El incumplimiento de estas instrucciones podrá causar la muerte o lesiones serias.
PELIGRO
POSIBILIDAD DE EXPLOSIÓN
Este equipo se debe utilizar únicamente en ubicaciones no peligrosas o en instalaciones
conforme a Clase I, División 2, Grupos A, B, C y D.
No sustituya componentes que puedan anular la conformidad con la Clase I, División 2.
No conecte ni desconecte el equipo a menos que haya quitado la alimentación eléctrica o esté
seguro de que la ubicación no es peligrosa.
No utilice los puertos USB, si están incorporados, a menos que tenga la certeza de que la
ubicación no es peligrosa.
El incumplimiento de estas instrucciones podrá causar la muerte o lesiones serias.

10 EIO0000003116 05/2019
1 Para obtener información adicional, consulte NEMA ICS 1.1 (última edición), "Safety Guidelines
for the Application, Installation, and Maintenance of Solid State Control" (Directrices de seguridad
para la aplicación, la instalación y el mantenimiento del control de estado estático) y NEMA ICS
7.1 (última edición), "Safety Standards for Construction and Guide for Selection, Installation and
Operation of Adjustable-Speed Drive Systems" (Estándares de seguridad para la construcción y
guía para la selección, instalación y utilización de sistemas de unidades de velocidad ajustable) o
su equivalente aplicable a la ubicación específica.
ADVERTENCIA
PÉRDIDA DE CONTROL
El diseñador del esquema de control debe tener en cuenta las posibles modalidades de fallo
de rutas de control y, para ciertas funciones de control críticas, proporcionar los medios para
lograr un estado seguro durante y después de un fallo de ruta. Algunas funciones de control
críticas son, por ejemplo, la parada de emergencia y la parada de sobrecarrera, un corte de
alimentación o un reinicio.
Para las funciones críticas de control deben proporcionarse rutas de control separadas o
redundantes.
Las rutas de control del sistema pueden incluir enlaces de comunicación. Deben tenerse en
cuenta las implicaciones de retardos de transmisión imprevistos o fallos del enlace.
Tenga en cuenta todas las reglamentaciones para la prevención de accidentes y las
normativas de seguridad locales.1
Cada instalación de este equipo debe probarse de forma individual y exhaustiva antes de
entrar en servicio.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Utilice solo software aprobado por Schneider Electric para este equipo.
Actualice el programa de aplicación siempre que cambie la configuración de hardware física.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.

EIO0000003116 05/2019 11
Terminología derivada de los estándares
Los términos técnicos, símbolos y las descripciones correspondientes del presente manual o que
aparecen en la parte interior o exterior de los propios productos se derivan, por lo general, de los
términos y las definiciones de estándares internacionales.
En el área de los sistemas de seguridad funcional, unidades y automatización general se incluyen,
pero sin limitarse a ellos, términos como
seguridad
,
función de seguridad
,
estado de seguridad
,
fallo
,
reinicio tras fallo
,
avería
,
funcionamiento incorrecto
,
error
,
mensaje de error
,
peligroso
, etc.
Estos estándares incluyen, entre otros:
Norma Descripción
IEC 61131-2:2007 Controladores programables, parte 2: Requisitos y ensayos de los equipos.
ISO 13849-1:2015 Seguridad de la maquinaria: componentes de los sistemas de control
relacionados con la seguridad.
Principios generales del diseño.
EN 61496-1:2013 Seguridad de las máquinas: equipos de protección electrosensibles.
Parte 1: pruebas y requisitos generales.
ISO 12100:2010 Seguridad de las máquinas. Principios generales para el diseño. Evaluación del
riesgo y reducción del riesgo
EN 60204-1:2006 Seguridad de las máquinas. Equipo eléctrico de las máquinas. Parte 1:
Requisitos generales
ISO 14119:2013 Seguridad de la maquinaria. Dispositivos de bloqueo asociados con
protecciones: principios de diseño y selección
ISO 13850:2015 Seguridad de la maquinaria. Parada de emergencia: principios de diseño
IEC 62061:2015 Seguridad de la maquinaria. Seguridad funcional de los sistemas de control
programable de seguridad eléctrica y electrónica
IEC 61508-1:2010 Seguridad funcional de los sistemas eléctricos/electrónicos/electrónicos
programables relacionados con la seguridad: requisitos generales.
IEC 61508-2:2010 Seguridad funcional de los sistemas eléctricos/electrónicos/electrónicos
programables relacionados con la seguridad: requisitos para los sistemas
eléctricos/electrónicos/electrónicos programables relacionados con la
seguridad.
IEC 61508-3:2010 Seguridad funcional de los sistemas eléctricos/electrónicos/electrónicos
programables relacionados con la seguridad: requisitos de software.
IEC 61784-3:2016 Redes de comunicación industrial - Perfiles - Parte 3: Buses de campo de
seguridad funcionales - Reglas generales y definiciones de perfiles.
2006/42/EC Directiva de maquinaria
2014/30/EU Directiva de compatibilidad electromagnética
2014/35/EU Directiva de baja tensión

12 EIO0000003116 05/2019
Además, los términos utilizados en este documento se pueden usar de manera tangencial porque
se obtienen de otros estándares como:
Por último, el término
zona de funcionamiento
se puede utilizar junto con la descripción de peligros
específicos, y se define como tal para una
zona de peligro
o
zona peligrosa
en la
Directiva de
maquinaria
(
2006/42/EC
) y
ISO 12100:2010
.
NOTA: Los estándares mencionados anteriormente podrían o no aplicarse a los productos
específicos citados en la presente documentación. Para obtener más información en relación con
los diferentes estándares aplicables a los productos descritos en este documento, consulte las
tablas de características de las referencias de dichos productos.
Norma Descripción
Serie IEC 60034 Máquinas eléctricas giratorias
Serie IEC 61800 Accionamientos eléctricos de potencia de velocidad variable
Serie IEC 61158 Comunicación digital de datos para la medición y control: bus de campo para su
uso en sistemas de control.


Descripción general de TMC4
14 EIO0000003116 05/2019

EIO0000003116 05/2019 15
Modicon TMC4
Descripc ión de TMC4
EIO0000003116 05/2019
Descripc ión de TMC4
Capítulo 1
Descripción de TMC4
Descripción general
Introducción
Los cartuchos están diseñados para conectarlos a la gama de Modicon M241 Logic Controller.
Funciones de los cartuchos
En la tabla siguiente se describen las funciones de los cartuchos TMC4:
Referencia Descripción
TMC4AI2
(véase página 43)
Cartucho TMC4 con 2 entradas analógicas de corriente o tensión (de 0 a 10 V, de 0
a 20 mA, de 4 a 20 mA), 12 bits
TMC4TI2
(véase página 51)
Cartucho TMC4 con 2 entradas analógicas de temperatura (termoelemento, RTD),
14 bits
TMC4AQ2
(véase página 59)
Cartucho TMC4 con 2 salidas analógicas de corriente o tensión (de 0 a 10 V, de 4 a
20 mA), 16 bits
TMC4HOIS01
(véase página 69)
Cartucho de aplicación TMC4 con 2 entradas analógicas de corriente o tensión para
la elevación de las celdas de carga
TMC4PACK01
(véase página 77)
Cartucho de aplicación TMC4 con 2 entradas analógicas de corriente o tensión para
el empaquetado

Descripción de TMC4
16 EIO0000003116 05/2019
Compatibilidad del Logic Controller
NOTA: Para obtener más información sobre la compatibilidad de los cartuchos con controladores
específicos, consulte la guía de hardware específica del controlador.
En la tabla siguiente se describe el número de cartuchos TMC4 que se pueden instalar en un
Modicon M241 Logic Controller:
Referencia Slots de cartucho
TM241C24R 1
TM241CE24R 1
TM241CEC24R 1
TM241C24T 1
TM241CE24T 1
TM241CEC24T 1
TM241C24U 1
TM241CE24U 1
TM241CEC24U 1
TM241C40R 2
TM241CE40R 2
TM241C40T 2
TM241CE40T 2
TM241C40U 2
TM241CE40U 2
AVISO
DESCARGA ELECTROSTÁTICA
Verifique que las ranuras vacías del cartucho tienen las cubiertas en su sitio antes de aplicar
electricidad al controlador.
No toque los contactos del cartucho.
Manipule el cartucho únicamente en la carcasa.
Adopte las medidas de protección necesarias contra descargas electrostáticas.
El incumplimiento de estas instrucciones puede causar daño al equipo.

EIO0000003116 05/2019 17
Modicon TMC4
Instalació n de TMC4
EIO0000003116 05/2019
Instalació n de TMC4
Capítulo 2
Instalación de TMC4
Contenido de este capítulo
Este capítulo contiene las siguientes secciones:
Sección Apartado Página
2.1 Reglas generales para la implementación de TMC4 18
2.2 Instalación de TMC4 21
2.3 Requisitos eléctricos de TMC4 31


Instalación de TMC4
EIO0000003116 05/2019 19
Características ambientales
TMC4
Las características ambientales del cartucho TMC4 son las mismas que las del Modicon M241
Logic Controller
(véase Modicon M241 Logic Controller, Hardware Guide)
.

Instalación de TMC4
20 EIO0000003116 05/2019
Certifications and Standards
Introduction
The M241 Logic Controllers are designed to conform to the main national and international
standards concerning electronic industrial control devices:
IEC/EN 61131-2
UL 508
The M241 Logic Controllers have obtained the following conformity marks:
CE
cULus
CSA
For product compliance and environmental information (RoHS, REACH, PEP, EOLI, etc.), go to
www.schneider-electric.com/green-premium
.


Instalación de TMC4
22 EIO0000003116 05/2019
Requisitos de instalación y mantenimiento
Antes de comenzar
Debe leer y comprender este capítulo antes de empezar a instalar el sistema.
El uso y la aplicación de la información contenida en el presente documento requieren experiencia
en diseño y programación de sistemas de control automatizados. Solamente el usuario, el
fabricante o el integrador saben cuáles son las condiciones y los factores presentes durante la
instalación y la configuración, el funcionamiento y el mantenimiento de la máquina o del proceso,
por lo que pueden decidir la automatización y el equipo asociado, así como las medidas de
seguridad y los enclavamientos relacionados que se pueden utilizar de forma efectiva y correcta.
Al seleccionar el equipo de control y automatización, y cualquier otro equipo o software
relacionado, para una determinada aplicación, también debe tener en cuenta todas las normativas
y estándares locales, regionales o nacionales.
Preste especial atención al cumplir la información sobre seguridad, los distintos requisitos
eléctricos y los estándares normativos que podrían aplicarse a su máquina o proceso en el uso de
este equipo.
Desconexión de la alimentación
Se deben montar e instalar todas las opciones y los módulos antes de instalar el sistema de control
en un segmento de montaje, una placa de montaje o un panel. Retire el sistema de control de su
segmento de montaje, placa de montaje o panel antes de desmontar el equipo.
PELIGRO
RIESGO DE DESCARGA ELÉCTRICA, EXPLOSIÓN O ARCO VOLTAICO
Desconecte la alimentación de todos los equipos, incluidos los dispositivos conectados, antes
de retirar cualquier cubierta o compuerta, o bien antes de instalar o retirar cualquier accesorio,
hardware, cable o conductor salvo en las condiciones indicadas en la guía de hardware de
este equipo.
Utilice siempre un dispositivo de detección de tensión de capacidad adecuada para confirmar
la ausencia de alimentación eléctrica cuando y donde se indique.
Vuelva a montar y fijar todas las cubiertas, accesorios, elementos de hardware, cables y
conductores y compruebe que haya una conexión a tierra adecuada antes de aplicar
alimentación eléctrica a la unidad.
Aplique sólo la tensión especificada cuando utilice este equipo y los productos asociados.
El incumplimiento de estas instrucciones podrá causar la muerte o lesiones serias.

Instalación de TMC4
EIO0000003116 05/2019 23
Consideraciones sobre la programación
Entorno operativo
Además de las Características ambientales, consulte Información relacionada con el producto al
inicio del presente documento para obtener información importante sobre la instalación en
ubicaciones peligrosas para este equipo específico.
NOTA: Para obtener información importante sobre la seguridad y las características del entorno
de Cartucho TMC4, consulte M241 Logic Controller - Guía de hardware.
Consideraciones de instalación
NOTA: Los tipos de fusibles JDYX2 o JDYX8 están reconocidos por UL y aprobados por CSA.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Utilice solo software aprobado por Schneider Electric para este equipo.
Actualice el programa de aplicación siempre que cambie la configuración de hardware física.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
En caso de que exista riesgo para el personal o los equipos, utilice los dispositivos de bloqueo
de seguridad adecuados.
Instale y utilice este equipo en una carcasa adecuada para el entorno correspondiente, y que
esté protegida por un mecanismo de bloqueo que use llaves o herramientas.
Utilice las fuentes de alimentación del actuador y el sensor solo para proporcionar
alimentación a los sensores o actuadores conectados al módulo.
La línea de alimentación y los circuitos de salida deben estar equipados con cables y fusibles
que cumplan los requisitos normativos locales y nacionales relativos a la corriente nominal y
la tensión del equipo en cuestión.
No utilice este equipo en funciones de maquinaria críticas para la seguridad a no ser que esté
diseñado como equipo de seguridad funcional y siga los estándares y las normas
correspondientes.
No desmonte, repare ni modifique este equipo.
No conecte ningún cable a conexiones reservadas y no utilizadas o a conexiones designadas
como No Connection (N.C.).
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.

Instalación de TMC4
24 EIO0000003116 05/2019
Instalación de TMC4
Consideraciones de instalación
El cartucho TMC4 está diseñado para funcionar dentro del mismo rango de temperaturas que los
controladores, incluido el reajuste del controlador para funcionamiento con aumento de
temperatura, así como las restricciones de temperatura asociadas a las posiciones de montaje.
Para obtener más información, consulte distancias y posiciones de montaje del controlador
(véase Modicon M241 Logic Controller, Hardware Guide)
.
Instalación
PELIGRO
DESCARGA ELÉCTRICA O ARCO ELÉCTRICO
Desconecte la alimentación del equipo, incluidos los dispositivos conectados, antes de quitar
las cubiertas o puertas, o bien, de instalar o quitar cualquier accesorio, hardware, cable o
conductor.
Utilice siempre un dispositivo de detección de tensión de capacidad adecuada para confirmar
la ausencia de alimentación eléctrica cuando y donde se indique.
Use guantes protectores cuando instale o quite los cartuchos.
Vuelva a montar y fijar todas las cubiertas, accesorios, elementos de hardware, cables y
conductores y compruebe que haya una conexión a tierra adecuada antes de aplicar
alimentación eléctrica a la unidad.
Aplique solo la tensión especificada cuando utilice este equipo y los productos asociados.
El incumplimiento de estas instrucciones podrá causar la muerte o lesiones serias.
AVISO
DESCARGA ELECTROSTÁTICA
Verifique que las ranuras vacías del cartucho tienen las cubiertas en su sitio antes de aplicar
electricidad al controlador.
No toque los contactos del cartucho.
Manipule el cartucho únicamente en la carcasa.
Adopte las medidas de protección necesarias contra descargas electrostáticas.
El incumplimiento de estas instrucciones puede causar daño al equipo.

Instalación de TMC4
EIO0000003116 05/2019 25
En la tabla siguiente se describen los distintos pasos para instalar un cartucho TMC4 en el
controlador:
Paso Acción
1 Desconecte cualquier fuente de alimentación de todo el equipo antes de desmontar las cubiertas o
instalar un cartucho.
2 Extraiga el cartucho del empaquetado.
3 Presione con los dedos los clips de bloqueo de la parte superior e inferior de la cubierta y tire de la
cubierta del slot del cartucho hacia arriba con suavidad.
Quite la cubierta del slot del cartucho del controlador con la mano.
NOTA: Guarde la cubierta para volver a utilizarla para la desinstalación.

Instalación de TMC4
26 EIO0000003116 05/2019
4 Coloque el cartucho en el slot del controlador.
Presione el cartucho en el slot hasta que se oiga un clic.
NOTA: No inserte el cartucho cuando esté conectado el bloque de terminales de resorte extraíble.
Paso Acción

Instalación de TMC4
EIO0000003116 05/2019 27
5 Gire la cubierta superior de las conexiones del controlador para tener más espacio para insertar el
bloque de terminales de resorte extraíble del cartucho.
Presione el clip de bloqueo de la parte lateral de la cubierta del bloque de terminales con un
destornillador aislado y tire de la cubierta hacia arriba con cuidado. Retire la cubierta del slot del
controlador.
NOTA: Guarde la cubierta para volver a utilizarla para la desinstalación.
6 Inserte el bloque de terminales de resorte extraíble en el cartucho hasta que se oiga un clic.
Paso Acción

Instalación de TMC4
28 EIO0000003116 05/2019
Desinstalación
PELIGRO
DESCARGA ELÉCTRICA O ARCO ELÉCTRICO
Desconecte la alimentación del equipo, incluidos los dispositivos conectados, antes de quitar
las cubiertas o puertas, o bien, de instalar o quitar cualquier accesorio, hardware, cable o
conductor.
Utilice siempre un dispositivo de detección de tensión de capacidad adecuada para confirmar
la ausencia de alimentación eléctrica cuando y donde se indique.
Use guantes protectores cuando instale o quite los cartuchos.
Vuelva a montar y fijar todas las cubiertas, accesorios, elementos de hardware, cables y
conductores y compruebe que haya una conexión a tierra adecuada antes de aplicar
alimentación eléctrica a la unidad.
Aplique solo la tensión especificada cuando utilice este equipo y los productos asociados.
El incumplimiento de estas instrucciones podrá causar la muerte o lesiones serias.
AVISO
DESCARGA ELECTROSTÁTICA
Verifique que las ranuras vacías del cartucho tienen las cubiertas en su sitio antes de aplicar
electricidad al controlador.
No toque los contactos del cartucho.
Manipule el cartucho únicamente en la carcasa.
Adopte las medidas de protección necesarias contra descargas electrostáticas.
El incumplimiento de estas instrucciones puede causar daño al equipo.

Instalación de TMC4
EIO0000003116 05/2019 29
En la tabla siguiente se describen los distintos pasos para desinstalar un cartucho TMC4 del
controlador.
Paso Acción
1 Desconecte cualquier fuente de alimentación de todo el equipo, incluidos los dispositivos
conectados, antes de extraer el cartucho.
2 Quite el bloque de terminales de resorte extraíble del cartucho con la mano.
3 Coloque la cubierta del slot del bloque de terminales en el slot de la parte superior del controlador.
Presione la cubierta en el slot hasta que se oiga un clic.
4 Presione con los dedos los clips de bloqueo de la parte superior e inferior del cartucho y tire del
cartucho hacia arriba con suavidad.
Quite el cartucho del controlador con la mano.

Instalación de TMC4
30 EIO0000003116 05/2019
5 Coloque la cubierta del slot del cartucho en el slot del controlador.
Presione la cubierta del slot del cartucho en el slot hasta que se oiga un clic.
Paso Acción


Instalación de TMC4
32 EIO0000003116 05/2019
Prácticas recomendadas relativas al cableado
Descripción general
En esta sección se describen las directrices de cableado y las prácticas recomendadas asociadas
que se deben respetar al utilizar el sistema M241 Logic Controller.
PELIGRO
RIESGO DE DESCARGA ELÉCTRICA, EXPLOSIÓN O ARCO VOLTAICO
Desconecte la alimentación de todos los equipos, incluidos los dispositivos conectados, antes
de retirar cualquier cubierta o compuerta, o bien antes de instalar o retirar cualquier accesorio,
hardware, cable o conductor salvo en las condiciones indicadas en la guía de hardware de
este equipo.
Utilice siempre un dispositivo de detección de tensión de capacidad adecuada para confirmar
la ausencia de alimentación eléctrica cuando y donde se indique.
Vuelva a montar y fijar todas las cubiertas, accesorios, elementos de hardware, cables y
conductores y compruebe que haya una conexión a tierra adecuada antes de aplicar
alimentación eléctrica a la unidad.
Aplique sólo la tensión especificada cuando utilice este equipo y los productos asociados.
El incumplimiento de estas instrucciones podrá causar la muerte o lesiones serias.

Instalación de TMC4
EIO0000003116 05/2019 33
1 Para obtener información adicional, consulte NEMA ICS 1.1 (última edición), "Safety Guidelines
for the Application, Installation, and Maintenance of Solid State Control" (Directrices de seguridad
para la aplicación, la instalación y el mantenimiento del control de estado estático) y NEMA ICS
7.1 (última edición), "Safety Standards for Construction and Guide for Selection, Installation and
Operation of Adjustable-Speed Drive Systems" (Estándares de seguridad para la construcción y
guía para la selección, instalación y utilización de sistemas de unidades de velocidad ajustable) o
su equivalente aplicable a la ubicación específica.
ADVERTENCIA
PÉRDIDA DE CONTROL
El diseñador del esquema de control debe tener en cuenta las posibles modalidades de fallo
de rutas de control y, para ciertas funciones de control críticas, proporcionar los medios para
lograr un estado seguro durante y después de un fallo de ruta. Algunas funciones de control
críticas son, por ejemplo, la parada de emergencia y la parada de sobrecarrera, un corte de
alimentación o un reinicio.
Para las funciones críticas de control deben proporcionarse rutas de control separadas o
redundantes.
Las rutas de control del sistema pueden incluir enlaces de comunicación. Deben tenerse en
cuenta las implicaciones de retardos de transmisión imprevistos o fallos del enlace.
Tenga en cuenta todas las reglamentaciones para la prevención de accidentes y las
normativas de seguridad locales.1
Cada instalación de este equipo debe probarse de forma individual y exhaustiva antes de
entrar en servicio.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.

Instalación de TMC4
34 EIO0000003116 05/2019
Directrices de cableado
Se deben aplicar las reglas siguientes al cablear un sistema M241 Logic Controller:
Los cables de E/S y comunicación deben estar separados de los cables de alimentación.
Realice estos dos tipos de cableado mediante conductos de cable independientes.
Compruebe que el entorno y las condiciones de funcionamiento cumplen los valores de las
especificaciones.
Utilice los tamaños de cable correctos para cumplir los requisitos de tensión y corriente.
Utilice conductores de cobre (obligatorio).
Utilice cables de par trenzado blindados para E/S analógicas o rápidas.
Utilice cables de par trenzado blindados para redes y bus de campo.
Utilice cables blindados conectados correctamente a tierra para todas las salidas o entradas
analógicas y de alta velocidad, así como para las conexiones de comunicación. Si no utiliza cable
blindado para estas conexiones, las interferencias electromagnéticas pueden causar la
degradación de la señal. Las señales degradadas pueden provocar que el controlador o los
módulos y el equipo conectados a él funcionen de manera inesperada.
1La conexión a tierra multipunto se admite si las conexiones se efectúan con una placa de
conexión a tierra equipotencial dimensionada para ayudar a evitar daños en el blindaje del cable
en caso de corrientes de cortocircuito del sistema de alimentación.
Para obtener más información, consulte Conexión a tierra de cables blindados
(véase página 36)
.
NOTA: Las temperaturas de la superficie pueden superar los 60 °C (140 °F). Para cumplir la
norma IEC 61010, guíe el cableado primario (los cables conectados a la red eléctrica) por
separado y lejos del cableado secundario (cableado de tensión extrabaja que proviene de las
fuentes de tensión intermedias). Si esto no es posible, será necesario un doble aislamiento como
mejora en el conducto o en los cables.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Utilice cables blindados para todas las E/S rápidas, las E/S analógicas y las señales de
comunicación.
Conecte a tierra el blindaje de los cables para todas las E/S analógicas, las E/S rápidas y las
señales de comunicación en un único punto1.
Enrute los cables de comunicación y de E/S por separado de los cables de alimentación.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.

Instalación de TMC4
EIO0000003116 05/2019 35
Reglas para el bloque de terminales de resorte extraíble
En la tabla siguiente se muestran los tipos de cable y los tamaños de conductor de un bloque de
terminales de resorte extraíble de 3,81 mm (0,15 pulgadas) de paso:
Es obligatorio el uso de conductores de cobre.
Los conectores de la abrazadera de resorte del bloque de terminales están diseñados para un solo
conductor o extremo de cable. En el caso de dos conductores con un mismo conector, estos
deberán instalarse con un extremo de cable de doble conductor con el fin de evitar que se aflojen.
PELIGRO
PELIGRO DE INCENDIO
Utilice solamente los tamaños de cable correctos para la capacidad de corriente de los
canales de E/S y fuentes de alimentación.
Para el cableado de las salidas de relé (2 A), utilice conductores de al menos 0,5 mm2
(AWG 20) con una temperatura nominal de al menos 80 °C (176 °F).
Para los conductores comunes del cableado de salidas de relé (7 A) o cableado de salidas de
relé superior a 2 A, utilice conductores de al menos 1,0 mm2 (AWG 16) con una temperatura
nominal de como mínimo 80 °C (176 °F).
El incumplimiento de estas instrucciones podrá causar la muerte o lesiones serias.
PELIGRO
LOS CABLES SUELTOS CAUSAN DESCARGAS ELÉCTRICAS
No inserte más de un conductor por cada conector de los bloques de terminales de resorte a
menos que utilice un extremo de cable de doble conductor (puntera).
El incumplimiento de estas instrucciones podrá causar la muerte o lesiones serias.

Instalación de TMC4
36 EIO0000003116 05/2019
Conexión a tierra del sistema M241
Descripción general
Para contribuir a minimizar los efectos de interferencias electromagnéticas, los cables que
transportan la E/S rápida, la E/S analógica y las señales de comunicación del bus de campo deben
estar blindados.
1La conexión a tierra multipunto se admite si las conexiones se efectúan con una placa de
conexión a tierra equipotencial dimensionada para ayudar a evitar daños en el blindaje del cable
en caso de corrientes de cortocircuito del sistema de alimentación.
El uso de cables blindados requiere el cumplimiento de las reglas de cableado siguientes:
Para las conexiones a tierra de protección (PE), se pueden utilizar conductos metálicos para
toda la longitud del blindaje o una parte, siempre que no se interrumpa la continuidad de las
conexiones a tierra. Para una conexión a tierra funcional (FE), el blindaje pretende atenuar las
interferencias electromagnéticas y debe ser continuo en toda la longitud del cable. Si el objetivo
es tanto funcional como de protección, como suele ser el caso de los cables de comunicación,
el cable deberá disponer de un blindaje continuo.
Siempre que sea posible, mantenga los cables que lleven un tipo de señal separados de los
cables con otros tipos de señales o de alimentación.
Conexión a tierra de protección (PE) en la placa de conexiones
La conexión a tierra de protección (PE) se debe conectar a la placa de conexiones conductora
mediante un cable de alta resistencia, normalmente un cable trenzado de cobre con la sección de
cable máxima permitida.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Utilice cables blindados para todas las E/S rápidas, las E/S analógicas y las señales de
comunicación.
Conecte a tierra los cables blindados para todas las E/S rápidas, las E/S analógicas y las
señales de comunicación en un único punto1.
Enrute las comunicaciones y los cables de E/S por separado de los cables de alimentación.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.

Instalación de TMC4
EIO0000003116 05/2019 37
Conexiones de cables de blindaje
Los cables que transportan la E/S rápida, la E/S analógica y las señales de comunicación del bus
de campo deben estar blindados. El blindaje debe estar conectado a tierra de un modo seguro.
Los blindajes de E/S rápidas y E/S analógicas pueden estar conectados a la conexión a tierra
funcional (FE) o a la conexión a tierra de protección (PE) del M241 Logic Controller. Los blindajes
del cable de comunicación del bus de campo deben estar conectados a la conexión a tierra de
protección (PE) con bornes de conexión fijados en la placa de conexiones conductora de la
instalación.
El blindaje del cable Modbus debe estar conectado a la conexión a tierra de protección (PE).
ADVERTENCIA
DESCONEXIÓN ACCIDENTAL DE CONEXIÓN A TIERRA DE PROTECCIÓN (PE)
No utilice la placa de conexión a tierra TM2XMTGB para proporcionar una conexión a tierra
de protección (PE).
Utilice la placa de conexión a tierra TM2XMTGB solo para proporcionar una conexión a tierra
funcional (FE).
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.
PELIGRO
PELIGRO DE DESCARGA ELÉCTRICA
Se debe utilizar la conexión de borne de puesta a tierra (PE) para proporcionar una puesta a
tierra de protección en todo momento.
Asegúrese de que haya un cable trenzado de tierra apropiado conectado al terminal de tierra
PE/PG antes de conectar el cable de red al equipo o de desconectarlo de éste.
El incumplimiento de estas instrucciones podrá causar la muerte o lesiones serias.

Instalación de TMC4
38 EIO0000003116 05/2019
Blindaje del cable a tierra de protección (PE)
Para conectar a tierra el blindaje de un cable mediante una abrazadera de conexión a tierra:
NOTA: El blindaje debe asegurarse bien a la placa de conexiones conductora para lograr un
contacto correcto.
Paso Descripción
1 Pele el blindaje en una longitud de
15 mm (0,59 pulg.).
2 Conecte el cable a la placa de
conexiones conductora apretando la
abrazadera de conexión a tierra con la
parte pelada del blindaje tan cerca como
pueda de la base del sistema del M241
Logic Controller.

Instalación de TMC4
EIO0000003116 05/2019 39
Blindaje del cable de conexión a tierra funcional (FE)
Para conectar el blindaje de un cable mediante una barra de conexión a tierra:
NOTA: Use la barra de conexión a tierra TM2XMTGB para conexiones a tierra funcional (FE).
Paso Descripción
1 Instale la barra de conexión a tierra
directamente en la placa de
conexiones conductora situada
debajo del sistema del M241 Logic
Controller como se indica.
2 Pele el blindaje en una longitud de
15 mm (0,59 pulg.).
3 Fije firmemente el conector plano (1)
utilizando la abrazadera de nailon (2)
(ancho de 2,5 a 3 mm (de 0,1 a
0,12 pulg.)) y una herramienta
adecuada.

Instalación de TMC4
40 EIO0000003116 05/2019

EIO0000003116 05/2019 41
Modicon TMC4
Cartuchos TMC4 estándar
EIO0000003116 05/2019
Cartuchos TMC4 estándar
Parte II
Cartuchos TMC4 estándar
Contenido de esta parte
Esta parte contiene los siguientes capítulos:
Capítulo Nombre del capítulo Página
3 Entradas de tensión analógicas/de corriente de TMC4AI2 43
4 Entradas analógicas de temperatura de TMC4TI2 51
5 Salidas de tensión analógicas/de corriente de TMC4AQ2 59

Cartuchos TMC4 estándar
42 EIO0000003116 05/2019

EIO0000003116 05/2019 43
Modicon TMC4
Entradas analógicas de tensión y corriente de TMC4AI2
EIO0000003116 05/2019
Entradas de tensión analóg icas/de corriente de TMC4AI2
Capítulo 3
Entradas de tensión analógicas/de corriente de TMC4AI2
Descripción general
En este capítulo se describe el cartucho TMC4AI2, así como sus características y conexiones.
Contenido de este capítulo
Este capítulo contiene los siguientes apartados:
Apartado Página
Presentación de TMC4AI2 44
Características de TMC4AI2 46
Diagrama de cableado de TMC4AI2 49

Entradas analógicas de tensión y corriente de TMC4AI2
44 EIO0000003116 05/2019
Presentación de TMC4AI2
Descripción general
Las siguientes funciones se integran en el cartucho TMC4AI2:
2 entradas analógicas (tensión o corriente)
bloque de terminales de resorte extraíble, 3,81 mm (0,15 pulg.) de paso
Características principales
Característica Valor
Tipo de señal Tensión Corriente
Número de canales de entrada 2
Rango de entrada De 0 a 10 V CC De 0 a 20 mA
De 4 a 20 mA
Resolución 12 bits (4.096 pasos)
Tipo de conexión 3,81 mm (0,15 pulg.) de paso, bloque de terminales de resorte
extraíble
Peso 55 g (1,94 onzas)

Entradas analógicas de tensión y corriente de TMC4AI2
EIO0000003116 05/2019 45
Indicador LED de alimentación
En el diagrama siguiente se muestra un cartucho TMC4AI2 con su indicador LED de alimentación
etiquetado PWR:
Indicador LED Color Estado Descripción
PWR Verde Activado El cartucho se alimenta a través del Logic Controller y se
aplica la fuente de alimentación externa (24 V CC).
Intermitente El cartucho se alimenta a través del Logic Controller, pero
no se aplica la fuente de alimentación externa (24 V CC).
Desactivado El cartucho no se alimenta a través del Logic Controller.

Entradas analógicas de tensión y corriente de TMC4AI2
46 EIO0000003116 05/2019
Características de TMC4AI2
Introducción
En esta sección se proporciona una descripción general de las características del cartucho
TMC4AI2.
NOTA: Para obtener información importante sobre la seguridad y las características del entorno
de Cartucho TMC4, consulte M241 Logic Controller - Guía de hardware.
Conectores
En el siguiente diagrama se muestran los conectores y las marcas del cartucho TMC4AI2:
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No supere ninguno de los valores nominales que se especifican en las tablas de características
medioambientales y eléctricas.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.

Entradas analógicas de tensión y corriente de TMC4AI2
EIO0000003116 05/2019 47
Características de las entradas
En la tabla siguiente se describen las características de entrada del cartucho:
Características Valor
Tipo de señal Tensión Corriente
Rango de entrada nominal De 0 a 10 V CC De 0 a 20 mA
De 4 a 20 mA
Impedancia de entrada > 1 MΩ < 250 Ω
Duración del muestreo 1 ms por canal habilitado
Tipo de entrada terminación única
Modalidad de funcionamiento exploración automática
Modalidad de conversión Tipo SAR
Precisión máxima a temperatura ambiente:
25 °C (77 °F)
±0,2% de la escala completa
Máxima precisión en el rango completo de
temperaturas de funcionamiento
±0,5% de la escala completa
Deriva de temperatura ±0,006% de la escala completa por 1 °C (1,8 °F)
Repetibilidad tras el tiempo de estabilización ±0,2% de la escala completa
Sin linealidad ±0,05% de la escala completa
Resolución digital 12 bits (4096 pasos)
Valor de entrada del LSB 2,44 mV 4,88 μV
Tipo de datos del programa de aplicación escalable de -32.768 a 32.767
Datos de entrada fuera del rango de detección sí
Resistencia a
ruidos
desviación temporal
máxima durante
perturbaciones
±2,0% de la escala completa
tipo de cable y longitud
máxima
blindado
< 30 m (98,4 pies)
diafonía (mínima) 80 dB
relación de rechazo de
modalidad común (mínima)
65 dB
Aislamiento aislamiento entre entradas
y lógica interna
500 V CC
aislamiento entre entradas sin aislamiento
Sobrecarga máxima continua permitida (sin
daños)
30 V CC 40 mA CC
Filtro de entrada filtro de software: seis niveles

Entradas analógicas de tensión y corriente de TMC4AI2
48 EIO0000003116 05/2019
Fuente de
alimentación
externa
tensión de alimentación 24 V CC ±15%
consumo de energía 2 W
Características Valor
Tipo de señal Tensión Corriente

Entradas analógicas de tensión y corriente de TMC4AI2
EIO0000003116 05/2019 49
Diagrama de cableado de TMC4AI2
Introducción
Para conectar las entradas, este cartucho tiene un bloque de terminales de resorte extraíble.
Cableado
Consulte la sección Prácticas recomendadas relativas al cableado
(véase página 32)
.
Diagrama de cableado
En la siguiente figura aparece un ejemplo de la conexión de entrada de corriente y tensión:
(1): Dispositivo de salida analógica de tensión y corriente
A: Fuente de alimentación externa
NOTA: Cada entrada se puede conectar a una entrada de tensión o corriente.

Entradas analógicas de tensión y corriente de TMC4AI2
50 EIO0000003116 05/2019

EIO0000003116 05/2019 51
Modicon TMC4
Entradas analógicas de temperatura de TMC4TI2
EIO0000003116 05/2019
Entradas analógicas de temperatura de TMC4TI2
Capítulo 4
Entradas analógicas de temperatura de TMC4TI2
Descripción general
En este capítulo se describe el cartucho TMC4TI2, así como sus características y conexiones.
Contenido de este capítulo
Este capítulo contiene los siguientes apartados:
Apartado Página
Presentación de TMC4TI2 52
Características de TMC4TI2 54
Diagrama de cableado de TMC4TI2 57

Entradas analógicas de temperatura de TMC4TI2
52 EIO0000003116 05/2019
Presentación de TMC4TI2
Descripción general
Las siguientes funciones están integradas en el cartucho TMC4TI2:
2 entradas analógicas de temperatura (termoelemento o RTD)
bloque de terminales de resorte extraíble, 3,81 mm (0,15 pulg.) de paso
Características principales
Característica Valor
Tipo de señal Termoelemento RTD
Número de canales de entrada 2
Rango de entrada tipo: K, J, R, S, B, E, T, N tipo: Pt100, Pt1000, Ni100,
Ni1000
Resolución 14 bits (16384 pasos)
Tipo de conexión 3,81 mm (0,15 pulg.) de paso, bloque de terminales de resorte
extraíble
Peso 55 g (1,94 onzas)

Entradas analógicas de temperatura de TMC4TI2
EIO0000003116 05/2019 53
Indicador LED de alimentación
En el diagrama siguiente se muestra un cartucho TMC4TI2 con su indicador LED de alimentación
etiquetado PWR:
Indicador LED Color Estado Descripción
PWR Verde Activado El cartucho se alimenta a través del Logic Controller y se
aplica la fuente de alimentación externa (24 V CC).
Intermitente El cartucho se alimenta a través del Logic Controller, pero
no se aplica la fuente de alimentación externa (24 V CC).
Desactivado El cartucho no se alimenta a través del Logic Controller.

Entradas analógicas de temperatura de TMC4TI2
54 EIO0000003116 05/2019
Características de TMC4TI2
Introducción
En esta sección se proporciona una descripción general de las características del cartucho
TMC4TI2.
NOTA: Para obtener información importante sobre la seguridad y las características del entorno
de Cartucho TMC4, consulte M241 Logic Controller - Guía de hardware.
Conectores
En el siguiente diagrama se muestran los conectores y las marcas del cartucho TMC4TI2:
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No supere ninguno de los valores nominales que se especifican en las tablas de características
medioambientales y eléctricas.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.

Entradas analógicas de temperatura de TMC4TI2
EIO0000003116 05/2019 55
Características de las entradas
En la tabla siguiente se describen las características de entrada del cartucho:
Características Valor
Tipo de señal Termoelemento RTD (2, 3 o 4 conductores)
Rango de entrada nominal tipo de termoelemento:
K: de –200 a +1.300 °C
(de –328 a +2.372 °F)
J: de –200 a +1.000 °C
(de –328 a +1.832 °F)
R: de 0 a +1.760 °C
(de +32 a +3.200 °F)
S: de 0 a +1.760 °C
(de +32 a +3.200 °F)
B: de +250 a +1.820 °C
(de +482 a +3.308 °F)
E: de –200 a +800 °C
(de –328 a +1.472 °F)
T: de –200 a +400 °C
(de –328 a +752 °F)
N: de –200 a +1.300 °C
(de –328 a +2.372 °F)
Tipo de RTD:
Pt100: de –200 a +850 °C
(de –328 a +1.562 °F)
Pt1000: de –200 a +850 °C
(de –328 a +1.562 °F)
Ni100: de –60 a +180 °C
(de –76 a +356 °F)
Ni1000: de –60 a +180 °C
(de –76 a +356 °F)
Compensación de unión en frío compensación interna –
Impedancia de entrada > 1 MΩ
Duración del muestreo 100 ms por canal habilitado + 1 tiempo de exploración
Tipo de entrada terminación única
Modalidad de funcionamiento exploración automática
Modalidad de conversión Tipo SAR
Precisión máxima a temperatura ambiente:
25 °C (77 °F)
K, J, R, S, E, T, N: ±0,2%
de la escala completa +
precisión de
compensación de la
unión (±4 °C (±7,2 °F))
B: ±0,2% de la escala
completa para el rango
de temperatura medido:
de 250 a 400 °C (de 482
a 752 °F)
±0,1% de la escala
completa para el rango
de temperatura medido:
de 400 a 1.280 °C (de
752 a 2.336 °F)
±0,5 °C (±0,9 °F)
Deriva de temperatura ±0,008% de la escala completa por 1 °C (1,8 °F)
Repetibilidad tras el tiempo de estabilización ±0,1% de la escala completa

Entradas analógicas de temperatura de TMC4TI2
56 EIO0000003116 05/2019
Sin linealidad ±0,05% de la escala completa
Resolución digital 14 bits (16384 pasos)
Valor de entrada del LSB 0,1 °C (0,18 °F)
Tipo de datos del programa de aplicación escalable de -32.768 a 32.767
Datos de entrada fuera del rango de detección sí
Resistencia a
ruidos
desviación temporal
máxima durante
perturbaciones
±2% de la escala completa
tipo, longitud y resistencia
totales del cable
par trenzado blindado
< 100 m (328,1 pies)
< 100 Ω < 30 Ω
diafonía externa (mínima) 80 dB
relación de rechazo de
modalidad común de
50/60 Hz (mínima)
90 dB
relación de rechazo de
modalidad diferencial de
50/60 Hz (mínima)
60 dB
Aislamiento aislamiento entre entradas
y lógica interna
500 V CC
aislamiento entre entradas sin aislamiento
Sobrecarga máxima continua permitida (sin
daños)
6V CC
Comportamiento cuando el sensor de
temperatura está roto o desconectado
detectado
Fuente de
alimentación
externa
tensión de alimentación 24 V CC ±15%
consumo de energía 2 W
Características Valor
Tipo de señal Termoelemento RTD (2, 3 o 4 conductores)

Entradas analógicas de temperatura de TMC4TI2
EIO0000003116 05/2019 57
Diagrama de cableado de TMC4TI2
Introducción
Para conectar las entradas, este cartucho tiene un bloque de terminales de resorte extraíble.
Cableado
Consulte la sección Prácticas recomendadas relativas al cableado
(véase página 32)
.
Diagrama de cableado
En la figura siguiente se muestra un ejemplo de las conexiones de la sonda de termoelemento y
RTD de tres conductores:
(1): RTD
(2): Termoelemento
A: Fuente de alimentación externa
En la figura siguiente se muestra un ejemplo de un par de conexiones RTD de tres conductores:
(1): RTD
A: Fuente de alimentación externa

Entradas analógicas de temperatura de TMC4TI2
58 EIO0000003116 05/2019
En la figura siguiente se muestra un ejemplo de un par de conexiones de termoelemento:
(2): Termoelemento
A: Fuente de alimentación externa
En la figura siguiente se muestra un ejemplo de las conexiones de termoelemento y RTD de cuatro
conductores:
(1): RTD
(2): Termoelemento
A: Fuente de alimentación externa
NOTA: Cada entrada se puede conectar tanto a una sonda de termoelemento como a un RTD.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No conecte ningún cable a conexiones reservadas y no utilizadas o a conexiones designadas
como "No Connection (N.C.)".
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.

EIO0000003116 05/2019 59
Modicon TMC4
Salidas analógicas de t ensión y corriente de TMC4AQ2
EIO0000003116 05/2019
Salidas de tensión anal ógicas/de corrient e de TMC4AQ2
Capítulo 5
Salidas de tensión analógicas/de corriente de TMC4AQ2
Descripción general
En este capítulo se describe el cartucho TMC4AQ2, así como sus características y conexiones.
Contenido de este capítulo
Este capítulo contiene los siguientes apartados:
Apartado Página
Presentación de TMC4AQ2 60
Características de TMC4AQ2 62
Diagrama de cableado de TMC4AQ2 65

Salidas analógicas de tensión y corriente de TMC4AQ2
60 EIO0000003116 05/2019
Presentación de TMC4AQ2
Descripción general
Las siguientes funciones están integradas en el cartucho TMC4AQ2:
2 salidas analógicas (tensión o corriente)
bloque de terminales de resorte extraíble, 3,81 mm (0,15 pulg.) de paso
Características principales
Característica Valor
Tipo de señal Tensión Corriente
Número de canales de salida 2
Rango de salida De 0 a 10 V CC De 4 a 20 mA (CC)
Resolución 16 bits (65.536 pasos)
Tipo de conexión 3,81 mm (0,15 pulg.) de paso, bloque de terminales de resorte
extraíble
Peso 55 g (1,94 onzas)

Salidas analógicas de tensión y corriente de TMC4AQ2
EIO0000003116 05/2019 61
Indicador LED de alimentación
En el diagrama siguiente se muestra un cartucho TMC4AQ2 con su indicador LED de alimentación
etiquetado PWR:
Indicador LED Color Estado Descripción
PWR Verde Activado El cartucho se alimenta a través del Logic Controller y se
aplica la fuente de alimentación externa (24 V CC).
Intermitente El cartucho se alimenta a través del Logic Controller, pero
no se aplica la fuente de alimentación externa (24 V CC).
Desactivado El cartucho no se alimenta a través del Logic Controller.

Salidas analógicas de tensión y corriente de TMC4AQ2
62 EIO0000003116 05/2019
Características de TMC4AQ2
Introducción
En esta sección se proporciona una descripción general de las características del cartucho
TMC4AQ2.
NOTA: Para obtener información importante sobre la seguridad y las características del entorno
de Cartucho TMC4, consulte M241 Logic Controller - Guía de hardware.
Conectores
En el siguiente diagrama se muestran los conectores y las marcas del cartucho TMC4AQ2:
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No supere ninguno de los valores nominales que se especifican en las tablas de características
medioambientales y eléctricas.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.

Salidas analógicas de tensión y corriente de TMC4AQ2
EIO0000003116 05/2019 63
Características de las salidas
En la tabla siguiente se describen las características de salida del cartucho:
Características Valor
Tipo de señal Tensión Corriente
Rango de salida nominal De 0 a 10 V CC De 4 a 20 mA (CC)
Impedancia de carga > 2 KΩ < 500 Ω
Tipo de carga de aplicación carga resistiva
Tiempo de ajuste 10 ms
Tiempo total de transferencia del sistema de
salida
10 ms + 1 tiempo de exploración
Precisión máxima a temperatura ambiente sin
perturbación de EMC: 25 °C (77 °F)
±0,2% de la escala completa
Deriva de temperatura ±0,006% de la escala completa por 1 °C (1,8 °F)
Repetibilidad tras el tiempo de estabilización ±0,5% de la escala completa
Sin linealidad ±0,05% de la escala completa
Ondulación de salida ±20 mV
Caída de tensión de salida 1%
Rebasamiento superior 0%
Desviación máxima de salida ±0,5% de la escala completa
Resolución digital 16 bits (65.536 pasos)
Valor de salida del LSB 0,153 mV 0,305 μA
Tipo de datos del programa de aplicación De 0 a 4.095
Resistencia a
ruidos
desviación temporal
máxima durante
perturbaciones
±2% de la escala completa
tipo de cable y longitud
máxima
blindado
< 30 m (98,4 pies)
diafonía externa (mínima) 80 dB
relación de rechazo de
modalidad común de
50/60 Hz (mínima)
90 dB
Aislamiento aislamiento entre salidas y
lógica interna
500 V CC
aislamiento entre salidas sin aislamiento
Protección de salida protección frente a
cortocircuitos
protección frente a circuito
abierto
Comportamiento cuando el nivel de la fuente de
alimentación interna es menor que el umbral
las salidas se establecen en 0

Salidas analógicas de tensión y corriente de TMC4AQ2
64 EIO0000003116 05/2019
Comportamiento cuando no se aplica la
alimentación externa
Indicador LED PWR intermitente
Fuente de
alimentación
externa
tensión de alimentación 24 V CC ±15%
consumo de energía 2 W
Características Valor
Tipo de señal Tensión Corriente

Salidas analógicas de tensión y corriente de TMC4AQ2
EIO0000003116 05/2019 65
Diagrama de cableado de TMC4AQ2
Introducción
Para conectar las salidas, este cartucho tiene un bloque de terminales de resorte extraíble.
Cableado
Consulte la sección Prácticas recomendadas relativas al cableado
(véase página 32)
.
Diagrama de cableado
En la figura siguiente se muestra un ejemplo de la conexión de salidas de corriente y tensión:
(1): Dispositivo de entrada analógica de tensión y corriente
A: Fuente de alimentación externa
NOTA: Cada salida se puede conectar como salida de tensión o de corriente.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No conecte ningún cable a conexiones reservadas y no utilizadas o a conexiones designadas
como "No Connection (N.C.)".
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.

Salidas analógicas de tensión y corriente de TMC4AQ2
66 EIO0000003116 05/2019

EIO0000003116 05/2019 67
Modicon TMC4
Cartucho de aplicaciones TMC4
EIO0000003116 05/2019
Cartucho de aplicaciones TMC4
Parte III
Cartucho de aplicaciones TMC4
Contenido de esta parte
Esta parte contiene los siguientes capítulos:
Capítulo Nombre del capítulo Página
6 Elevación de TMC4HOIS01 69
7 Empaquetado de TMC4PACK01 77

Cartucho de aplicaciones TMC4
68 EIO0000003116 05/2019

EIO0000003116 05/2019 69
Modicon TMC4
Elevación de TMC4HOIS01
EIO0000003116 05/2019
Elevación de TMC4HOIS01
Capítulo 6
Elevación de TMC4HOIS01
Descripción general
En este capítulo se describe el cartucho TMC4HOIS01, así como sus características y
conexiones.
Contenido de este capítulo
Este capítulo contiene los siguientes apartados:
Apartado Página
Presentación de TMC4HOIS01 70
Características de TMC4HOIS01 72
Diagrama de cableado de TMC4HOIS01 75

Elevación de TMC4HOIS01
70 EIO0000003116 05/2019
Presentación de TMC4HOIS01
Descripción general
Las siguientes funciones están integradas en el cartucho TMC4HOIS01:
2 entradas analógicas (tensión o corriente) para la elevación de la celda de carga
bloque de terminales de resorte extraíble, 3,81 mm (0,15 pulg.) de paso
Características principales
Característica Valor
Tipo de señal Tensión Corriente
Número de canales de entrada 2
Rango de entrada De 0 a 10 V CC De 0 a 20 mA
De 4 a 20 mA
Resolución 12 bits (4.096 pasos)
Tipo de conexión 3,81 mm (0,15 pulg.) de paso, bloque de terminales de resorte
extraíble
Peso 55 g (1,94 onzas)

Elevación de TMC4HOIS01
EIO0000003116 05/2019 71
Indicador LED de alimentación
En el diagrama siguiente se muestra un cartucho TMC4HOIS01 con su indicador LED de
alimentación etiquetado PWR:
Indicador LED Color Estado Descripción
PWR Verde Activado El cartucho se alimenta a través del Logic Controller y se
aplica la fuente de alimentación externa (24 V CC).
Intermitente El cartucho se alimenta a través del Logic Controller, pero
no se aplica la fuente de alimentación externa (24 V CC).
Desactivado El cartucho no se alimenta a través del Logic Controller.

Elevación de TMC4HOIS01
72 EIO0000003116 05/2019
Características de TMC4HOIS01
Introducción
En esta sección se proporciona una descripción general de las características del cartucho
TMC4HOIS01.
NOTA: Para obtener información importante sobre la seguridad y las características del entorno
de Cartucho TMC4, consulte M241 Logic Controller - Guía de hardware.
Conectores
En el siguiente diagrama se muestran los conectores y las marcas del cartucho TMC4HOIS01:
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No supere ninguno de los valores nominales que se especifican en las tablas de características
medioambientales y eléctricas.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.

Elevación de TMC4HOIS01
EIO0000003116 05/2019 73
Características de las entradas
En la tabla siguiente se describen las características de entrada del cartucho:
Características Valor
Tipo de señal Tensión Corriente
Rango de entrada nominal De 0 a 10 V CC De 0 a 20 mA
De 4 a 20 mA
Impedancia de entrada > 1 MΩ < 250 Ω
Duración del muestreo 1 ms por canal habilitado
Tipo de entrada terminación única
Modalidad de funcionamiento exploración automática
Modalidad de conversión Tipo SAR
Precisión máxima a temperatura ambiente:
25 °C (77 °F)
±0,2% de la escala completa
Máxima precisión en el rango completo de
temperaturas de funcionamiento
±0,5% de la escala completa
Deriva de temperatura ±0,006% de la escala completa por 1 °C (1,8 °F)
Repetibilidad tras el tiempo de estabilización ±0,2% de la escala completa
Sin linealidad ±0,05% de la escala completa
Resolución digital 12 bits (4096 pasos)
Valor de entrada del LSB 2,44 mV 4,88 μV
Tipo de datos del programa de aplicación escalable de -32.768 a 32.767
Datos de entrada fuera del rango de detección sí
Resistencia a
ruidos
desviación temporal
máxima durante
perturbaciones
±2,0% de la escala completa
tipo de cable y longitud
máxima
blindado
< 30 m (98,4 pies)
diafonía (mínima) 80 dB
relación de rechazo de
modalidad común (mínima)
65 dB
Aislamiento aislamiento entre entradas
y lógica interna
500 V CC
aislamiento entre entradas sin aislamiento
Sobrecarga máxima continua permitida (sin
daños)
30 V CC 40 mA CC
Filtro de entrada filtro de software: seis niveles

Elevación de TMC4HOIS01
74 EIO0000003116 05/2019
Fuente de
alimentación
externa
tensión de alimentación 24 V CC ±15%
consumo de energía 2 W
Características Valor
Tipo de señal Tensión Corriente

Elevación de TMC4HOIS01
EIO0000003116 05/2019 75
Diagrama de cableado de TMC4HOIS01
Introducción
Para conectar las entradas, este cartucho tiene un bloque de terminales de resorte extraíble.
Cableado
Consulte la sección Prácticas recomendadas relativas al cableado
(véase página 32)
.
Diagrama de cableado
En la figura siguiente se muestra un ejemplo de la conexión de entrada de corriente y tensión:
(1): Dispositivo de salida analógica de tensión y corriente
A: Fuente de alimentación externa
NOTA: Cada entrada se puede conectar a una entrada de tensión o corriente.

Elevación de TMC4HOIS01
76 EIO0000003116 05/2019

EIO0000003116 05/2019 77
Modicon TMC4
Empaquetado de TMC4PACK01
EIO0000003116 05/2019
Empaquetado de TMC4PACK01
Capítulo 7
Empaquetado de TMC4PACK01
Descripción general
En este capítulo se describe el cartucho TMC4PACK01, así como sus características y
conexiones.
Contenido de este capítulo
Este capítulo contiene los siguientes apartados:
Apartado Página
Presentación de TMC4PACK01 78
Características de TMC4PACK01 80
Diagrama de cableado de TMC4PACK01 83

Empaquetado de TMC4PACK01
78 EIO0000003116 05/2019
Presentación de TMC4PACK01
Descripción general
Las siguientes funciones están integradas en el cartucho TMC4PACK01:
2 entradas analógicas (tensión o corriente) para el empaquetado
bloque de terminales de resorte extraíble, 3,81 mm (0,15 pulg.) de paso
Características principales
Característica Valor
Tipo de señal Tensión Corriente
Número de canales de entrada 2
Rango de entrada De 0 a 10 V CC De 0 a 20 mA
De 4 a 20 mA
Resolución 12 bits (4.096 pasos)
Tipo de conexión 3,81 mm (0,15 pulg.) de paso, bloque de terminales de resorte
extraíble
Peso 55 g (1,94 onzas)

Empaquetado de TMC4PACK01
EIO0000003116 05/2019 79
Indicador LED de alimentación
En el diagrama siguiente se muestra un cartucho TMC4PACK01 con su indicador LED de
alimentación etiquetado PWR:
Indicador LED Color Estado Descripción
PWR Verde Activado El cartucho se alimenta a través del Logic Controller y se
aplica la fuente de alimentación externa (24 V CC).
Intermitente El cartucho se alimenta a través del Logic Controller, pero
no se aplica la fuente de alimentación externa (24 V CC).
Desactivado El cartucho no se alimenta a través del Logic Controller.

Empaquetado de TMC4PACK01
80 EIO0000003116 05/2019
Características de TMC4PACK01
Introducción
En esta sección se proporciona una descripción general de las características del cartucho
TMC4PACK01.
NOTA: Para obtener información importante sobre la seguridad y las características del entorno
de Cartucho TMC4, consulte M241 Logic Controller - Guía de hardware.
Conectores
En el siguiente diagrama se muestran los conectores y las marcas del cartucho TMC4PACK01:
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No supere ninguno de los valores nominales que se especifican en las tablas de características
medioambientales y eléctricas.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.

Empaquetado de TMC4PACK01
EIO0000003116 05/2019 81
Características de las entradas
En la tabla siguiente se describen las características de entrada del cartucho:
Características Valor
Tipo de señal Tensión Corriente
Rango de entrada nominal De 0 a 10 V CC De 0 a 20 mA
De 4 a 20 mA
Impedancia de entrada > 1 MΩ < 250 Ω
Duración del muestreo 1 ms por canal habilitado
Tipo de entrada terminación única
Modalidad de funcionamiento exploración automática
Modalidad de conversión Tipo SAR
Precisión máxima a temperatura ambiente:
25 °C (77 °F)
±0,2% de la escala completa
Máxima precisión en el rango completo de
temperaturas de funcionamiento
±0,5% de la escala completa
Deriva de temperatura ±0,006% de la escala completa por 1 °C (1,8 °F)
Repetibilidad tras el tiempo de estabilización ±0,2% de la escala completa
Sin linealidad ±0,05% de la escala completa
Resolución digital 12 bits (4096 pasos)
Valor de entrada del LSB 2,44 mV 4,88 μV
Tipo de datos del programa de aplicación escalable de -32.768 a 32.767
Datos de entrada fuera del rango de detección sí
Resistencia a
ruidos
desviación temporal
máxima durante
perturbaciones
±2,0% de la escala completa
tipo de cable y longitud
máxima
blindado
< 30 m (98,4 pies)
diafonía (mínima) 80 dB
relación de rechazo de
modalidad común (mínima)
65 dB
Aislamiento aislamiento entre entradas
y lógica interna
500 V CC
aislamiento entre entradas sin aislamiento
Sobrecarga máxima continua permitida (sin
daños)
30 V CC 40 mA CC
Filtro de entrada filtro de software: seis niveles

Empaquetado de TMC4PACK01
82 EIO0000003116 05/2019
Fuente de
alimentación
externa
tensión de alimentación 24 V CC ±15%
consumo de energía 2 W
Características Valor
Tipo de señal Tensión Corriente

Empaquetado de TMC4PACK01
EIO0000003116 05/2019 83
Diagrama de cableado de TMC4PACK01
Introducción
Para conectar las entradas, este cartucho tiene un bloque de terminales de resorte extraíble.
Cableado
Consulte la sección Prácticas recomendadas relativas al cableado
(véase página 32)
.
Diagrama de cableado
En la figura siguiente se muestra un ejemplo de la conexión de entrada de corriente y tensión:
(1): Dispositivo de salida analógica de tensión y corriente
A: Fuente de alimentación externa
NOTA: Cada entrada se puede conectar a una entrada de tensión o corriente.

Empaquetado de TMC4PACK01
84 EIO0000003116 05/2019

EIO0000003116 05/2019 85
Modicon TMC4
Glosario
EIO0000003116 05/2019
Glosario
M
Modbus
El protocolo de comunicaciones que permite las comunicaciones entre muchos dispositivos
conectados a la misma red.
P
PE
(
tierra de protección
) Una conexión a tierra común para riesgos de descargas eléctricas al exponer
las superficies conductoras de un dispositivo al potencial de tierra. Para evitar posibles caídas de
tensión, en este conductor no circula corriente (conocido también como
conexión a tierra de
protección
en Norteamérica o como conexión a tierra del equipo según el US National Electrical
Code).

Glosario
86 EIO0000003116 05/2019

EIO0000003116 05/2019 87
Modicon TMC4
Índice
EIO0000003116 05/2019
Índice
C
cableado,
32
cartucho
compatibilidad,
16
descripción,
15
funciones,
15
TMC4,
41
,
67
TMC4AI2,
43
TMC4AQ2,
59
TMC4HOIS01,
69
TMC4PACK01,
77
TMC4TI2,
51
certifications and standards,
20
compatibilidad
cartucho,
16
Conexión a tierra,
36
cualificación del personal,
6
D
descripción
cartucho,
15
E
entorno,
19
F
funciones
cartucho,
15
T
TMC4
cartucho,
41
,
67
TMC4AI2
cartucho,
43
TMC4AQ2
cartucho,
59
TMC4HOIS01
cartucho,
69
TMC4PACK01
cartucho,
77
TMC4TI2
cartucho,
51
U
uso previsto,
6

Índice
88 EIO0000003116 05/2019
-
 1
1
-
 2
2
-
 3
3
-
 4
4
-
 5
5
-
 6
6
-
 7
7
-
 8
8
-
 9
9
-
 10
10
-
 11
11
-
 12
12
-
 13
13
-
 14
14
-
 15
15
-
 16
16
-
 17
17
-
 18
18
-
 19
19
-
 20
20
-
 21
21
-
 22
22
-
 23
23
-
 24
24
-
 25
25
-
 26
26
-
 27
27
-
 28
28
-
 29
29
-
 30
30
-
 31
31
-
 32
32
-
 33
33
-
 34
34
-
 35
35
-
 36
36
-
 37
37
-
 38
38
-
 39
39
-
 40
40
-
 41
41
-
 42
42
-
 43
43
-
 44
44
-
 45
45
-
 46
46
-
 47
47
-
 48
48
-
 49
49
-
 50
50
-
 51
51
-
 52
52
-
 53
53
-
 54
54
-
 55
55
-
 56
56
-
 57
57
-
 58
58
-
 59
59
-
 60
60
-
 61
61
-
 62
62
-
 63
63
-
 64
64
-
 65
65
-
 66
66
-
 67
67
-
 68
68
-
 69
69
-
 70
70
-
 71
71
-
 72
72
-
 73
73
-
 74
74
-
 75
75
-
 76
76
-
 77
77
-
 78
78
-
 79
79
-
 80
80
-
 81
81
-
 82
82
-
 83
83
-
 84
84
-
 85
85
-
 86
86
-
 87
87
-
 88
88
-
 89
89
-
 90
90
-
 91
91
-
 92
92
-
 93
93
-
 94
94
-
 95
95
-
 96
96
-
 97
97
-
 98
98
-
 99
99
-
 100
100
-
 101
101
-
 102
102
-
 103
103
-
 104
104
-
 105
105
-
 106
106
-
 107
107
-
 108
108
-
 109
109
-
 110
110
-
 111
111
-
 112
112
-
 113
113
-
 114
114
-
 115
115
-
 116
116
-
 117
117
-
 118
118
-
 119
119
-
 120
120
-
 121
121
-
 122
122
-
 123
123
-
 124
124
-
 125
125
-
 126
126
-
 127
127
-
 128
128
-
 129
129
-
 130
130
-
 131
131
-
 132
132
-
 133
133
-
 134
134
-
 135
135
-
 136
136
-
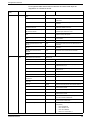 137
137
-
 138
138
-
 139
139
-
 140
140
-
 141
141
-
 142
142
-
 143
143
-
 144
144
-
 145
145
-
 146
146
-
 147
147
-
 148
148
-
 149
149
-
 150
150
-
 151
151
-
 152
152
-
 153
153
-
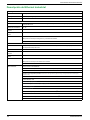 154
154
-
 155
155
-
 156
156
-
 157
157
-
 158
158
-
 159
159
-
 160
160
-
 161
161
-
 162
162
-
 163
163
-
 164
164
-
 165
165
-
 166
166
-
 167
167
-
 168
168
-
 169
169
-
 170
170
-
 171
171
-
 172
172
-
 173
173
-
 174
174
-
 175
175
-
 176
176
-
 177
177
-
 178
178
-
 179
179
-
 180
180
-
 181
181
-
 182
182
-
 183
183
-
 184
184
-
 185
185
-
 186
186
-
 187
187
-
 188
188
-
 189
189
-
 190
190
-
 191
191
-
 192
192
-
 193
193
-
 194
194
-
 195
195
-
 196
196
-
 197
197
-
 198
198
-
 199
199
-
 200
200
-
 201
201
-
 202
202
-
 203
203
-
 204
204
-
 205
205
-
 206
206
-
 207
207
-
 208
208
-
 209
209
-
 210
210
-
 211
211
-
 212
212
-
 213
213
-
 214
214
-
 215
215
-
 216
216
-
 217
217
-
 218
218
-
 219
219
-
 220
220
-
 221
221
-
 222
222
-
 223
223
-
 224
224
-
 225
225
-
 226
226
-
 227
227
-
 228
228
-
 229
229
-
 230
230
-
 231
231
-
 232
232
-
 233
233
-
 234
234
-
 235
235
-
 236
236
-
 237
237
-
 238
238
-
 239
239
-
 240
240
-
 241
241
-
 242
242
-
 243
243
-
 244
244
-
 245
245
-
 246
246
-
 247
247
-
 248
248
-
 249
249
-
 250
250
-
 251
251
-
 252
252
-
 253
253
-
 254
254
-
 255
255
-
 256
256
-
 257
257
-
 258
258
-
 259
259
-
 260
260
-
 261
261
-
 262
262
-
 263
263
-
 264
264
-
 265
265
-
 266
266
-
 267
267
-
 268
268
-
 269
269
-
 270
270
-
 271
271
-
 272
272
-
 273
273
-
 274
274
-
 275
275
-
 276
276
-
 277
277
-
 278
278
-
 279
279
-
 280
280
-
 281
281
-
 282
282
-
 283
283
-
 284
284
-
 285
285
-
 286
286
-
 287
287
-
 288
288
-
 289
289
-
 290
290
-
 291
291
-
 292
292
-
 293
293
-
 294
294
-
 295
295
-
 296
296
-
 297
297
-
 298
298
-
 299
299
-
 300
300
-
 301
301
-
 302
302
-
 303
303
-
 304
304
-
 305
305
-
 306
306
-
 307
307
-
 308
308
-
 309
309
-
 310
310
-
 311
311
-
 312
312
-
 313
313
-
 314
314
-
 315
315
-
 316
316
-
 317
317
-
 318
318
-
 319
319
-
 320
320
-
 321
321
-
 322
322
-
 323
323
-
 324
324
-
 325
325
-
 326
326
-
 327
327
-
 328
328
-
 329
329
-
 330
330
-
 331
331
-
 332
332
-
 333
333
-
 334
334
-
 335
335
-
 336
336
-
 337
337
-
 338
338
-
 339
339
-
 340
340
-
 341
341
-
 342
342
-
 343
343
-
 344
344
-
 345
345
-
 346
346
-
 347
347
-
 348
348
-
 349
349
-
 350
350
-
 351
351
-
 352
352
-
 353
353
-
 354
354
-
 355
355
-
 356
356
-
 357
357
-
 358
358
-
 359
359
-
 360
360
-
 361
361
-
 362
362
-
 363
363
-
 364
364
-
 365
365
-
 366
366
-
 367
367
-
 368
368
-
 369
369
-
 370
370
-
 371
371
-
 372
372
-
 373
373
-
 374
374
-
 375
375
-
 376
376
-
 377
377
-
 378
378
-
 379
379
-
 380
380
-
 381
381
-
 382
382
-
 383
383
-
 384
384
-
 385
385
-
 386
386
-
 387
387
-
 388
388
-
 389
389
-
 390
390
-
 391
391
-
 392
392
-
 393
393
-
 394
394
-
 395
395
-
 396
396
-
 397
397
-
 398
398
-
 399
399
-
 400
400
-
 401
401
-
 402
402
-
 403
403
-
 404
404
-
 405
405
-
 406
406
-
 407
407
-
 408
408
-
 409
409
-
 410
410
-
 411
411
-
 412
412
-
 413
413
-
 414
414
-
 415
415
-
 416
416
-
 417
417
-
 418
418
-
 419
419
-
 420
420
-
 421
421
-
 422
422
-
 423
423
-
 424
424
-
 425
425
-
 426
426
-
 427
427
-
 428
428
-
 429
429
-
 430
430
-
 431
431
-
 432
432
-
 433
433
-
 434
434
-
 435
435
-
 436
436
-
 437
437
-
 438
438
-
 439
439
-
 440
440
-
 441
441
-
 442
442
-
 443
443
-
 444
444
-
 445
445
-
 446
446
-
 447
447
-
 448
448
-
 449
449
-
 450
450
-
 451
451
-
 452
452
-
 453
453
-
 454
454
-
 455
455
-
 456
456
-
 457
457
-
 458
458
-
 459
459
-
 460
460
-
 461
461
-
 462
462
-
 463
463
-
 464
464
-
 465
465
-
 466
466
-
 467
467
-
 468
468
-
 469
469
-
 470
470
-
 471
471
-
 472
472
-
 473
473
-
 474
474
-
 475
475
-
 476
476
-
 477
477
-
 478
478
-
 479
479
-
 480
480
-
 481
481
-
 482
482
-
 483
483
-
 484
484
-
 485
485
-
 486
486
-
 487
487
-
 488
488
-
 489
489
-
 490
490
-
 491
491
-
 492
492
-
 493
493
-
 494
494
-
 495
495
-
 496
496
-
 497
497
-
 498
498
-
 499
499
-
 500
500
-
 501
501
-
 502
502
-
 503
503
-
 504
504
-
 505
505
-
 506
506
-
 507
507
-
 508
508
-
 509
509
-
 510
510
-
 511
511
-
 512
512
-
 513
513
-
 514
514
-
 515
515
-
 516
516
-
 517
517
-
 518
518
-
 519
519
-
 520
520
-
 521
521
-
 522
522
-
 523
523
-
 524
524
-
 525
525
-
 526
526
-
 527
527
-
 528
528
-
 529
529
-
 530
530
-
 531
531
-
 532
532
-
 533
533
-
 534
534
-
 535
535
-
 536
536
-
 537
537
-
 538
538
-
 539
539
-
 540
540
-
 541
541
-
 542
542
-
 543
543
-
 544
544
-
 545
545
-
 546
546
-
 547
547
-
 548
548
-
 549
549
-
 550
550
-
 551
551
-
 552
552
-
 553
553
-
 554
554
-
 555
555
-
 556
556
-
 557
557
-
 558
558
-
 559
559
-
 560
560
-
 561
561
-
 562
562
-
 563
563
-
 564
564
-
 565
565
-
 566
566
-
 567
567
-
 568
568
-
 569
569
-
 570
570
-
 571
571
-
 572
572
-
 573
573
-
 574
574
-
 575
575
-
 576
576
-
 577
577
-
 578
578
-
 579
579
-
 580
580
-
 581
581
-
 582
582
-
 583
583
-
 584
584
-
 585
585
-
 586
586
-
 587
587
-
 588
588
-
 589
589
-
 590
590
-
 591
591
-
 592
592
-
 593
593
-
 594
594
-
 595
595
-
 596
596
-
 597
597
-
 598
598
-
 599
599
-
 600
600
-
 601
601
-
 602
602
-
 603
603
-
 604
604
-
 605
605
-
 606
606
-
 607
607
-
 608
608
-
 609
609
-
 610
610
-
 611
611
-
 612
612
-
 613
613
-
 614
614
-
 615
615
-
 616
616
-
 617
617
-
 618
618
-
 619
619
-
 620
620
-
 621
621
-
 622
622
-
 623
623
-
 624
624
-
 625
625
-
 626
626
-
 627
627
-
 628
628
-
 629
629
-
 630
630
-
 631
631
-
 632
632
-
 633
633
-
 634
634
-
 635
635
-
 636
636
-
 637
637
-
 638
638
-
 639
639
-
 640
640
-
 641
641
-
 642
642
-
 643
643
-
 644
644
-
 645
645
-
 646
646
-
 647
647
-
 648
648
-
 649
649
-
 650
650
-
 651
651
-
 652
652
-
 653
653
-
 654
654
-
 655
655
-
 656
656
-
 657
657
-
 658
658
-
 659
659
-
 660
660
-
 661
661
-
 662
662
-
 663
663
-
 664
664
-
 665
665
-
 666
666
-
 667
667
-
 668
668
-
 669
669
-
 670
670
-
 671
671
-
 672
672
-
 673
673
-
 674
674
-
 675
675
-
 676
676
-
 677
677
-
 678
678
-
 679
679
-
 680
680
-
 681
681
-
 682
682
-
 683
683
-
 684
684
-
 685
685
-
 686
686
-
 687
687
-
 688
688
-
 689
689
-
 690
690
-
 691
691
-
 692
692
-
 693
693
-
 694
694
-
 695
695
-
 696
696
-
 697
697
-
 698
698
-
 699
699
-
 700
700
-
 701
701
-
 702
702
-
 703
703
-
 704
704
-
 705
705
-
 706
706
-
 707
707
-
 708
708
-
 709
709
-
 710
710
-
 711
711
-
 712
712
-
 713
713
-
 714
714
-
 715
715
-
 716
716
-
 717
717
-
 718
718
-
 719
719
-
 720
720
-
 721
721
-
 722
722
-
 723
723
-
 724
724
-
 725
725
-
 726
726
-
 727
727
-
 728
728
-
 729
729
-
 730
730
-
 731
731
-
 732
732
-
 733
733
-
 734
734
-
 735
735
-
 736
736
-
 737
737
-
 738
738
-
 739
739
-
 740
740
-
 741
741
-
 742
742
-
 743
743
-
 744
744
-
 745
745
-
 746
746
-
 747
747
-
 748
748
-
 749
749
-
 750
750
-
 751
751
-
 752
752
-
 753
753
-
 754
754
-
 755
755
-
 756
756
-
 757
757
-
 758
758
-
 759
759
-
 760
760
-
 761
761
-
 762
762
-
 763
763
-
 764
764
-
 765
765
-
 766
766
-
 767
767
-
 768
768
-
 769
769
-
 770
770
-
 771
771
-
 772
772
-
 773
773
-
 774
774
-
 775
775
-
 776
776
-
 777
777
-
 778
778
-
 779
779
-
 780
780
-
 781
781
-
 782
782
-
 783
783
-
 784
784
-
 785
785
-
 786
786
-
 787
787
-
 788
788
-
 789
789
-
 790
790
-
 791
791
-
 792
792
-
 793
793
-
 794
794
-
 795
795
-
 796
796
-
 797
797
-
 798
798
-
 799
799
-
 800
800
-
 801
801
-
 802
802
-
 803
803
-
 804
804
-
 805
805
-
 806
806
-
 807
807
-
 808
808
-
 809
809
-
 810
810
-
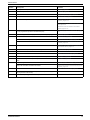 811
811
-
 812
812
-
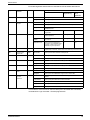 813
813
-
 814
814
-
 815
815
-
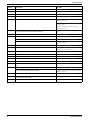 816
816
-
 817
817
-
 818
818
-
 819
819
-
 820
820
-
 821
821
-
 822
822
-
 823
823
-
 824
824
-
 825
825
-
 826
826
-
 827
827
-
 828
828
-
 829
829
-
 830
830
-
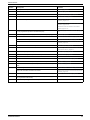 831
831
-
 832
832
-
 833
833
-
 834
834
-
 835
835
-
 836
836
-
 837
837
-
 838
838
-
 839
839
-
 840
840
-
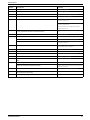 841
841
-
 842
842
-
 843
843
-
 844
844
-
 845
845
-
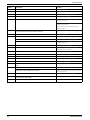 846
846
-
 847
847
-
 848
848
-
 849
849
-
 850
850
-
 851
851
-
 852
852
-
 853
853
-
 854
854
-
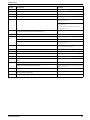 855
855
-
 856
856
-
 857
857
-
 858
858
-
 859
859
-
 860
860
-
 861
861
-
 862
862
-
 863
863
-
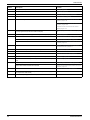 864
864
-
 865
865
-
 866
866
-
 867
867
-
 868
868
-
 869
869
-
 870
870
-
 871
871
-
 872
872
-
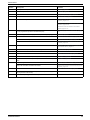 873
873
-
 874
874
-
 875
875
-
 876
876
-
 877
877
-
 878
878
-
 879
879
-
 880
880
-
 881
881
-
 882
882
-
 883
883
-
 884
884
-
 885
885
-
 886
886
-
 887
887
-
 888
888
-
 889
889
-
 890
890
-
 891
891
-
 892
892
-
 893
893
-
 894
894
-
 895
895
-
 896
896
-
 897
897
-
 898
898
-
 899
899
-
 900
900
-
 901
901
-
 902
902
-
 903
903
-
 904
904
-
 905
905
-
 906
906
-
 907
907
-
 908
908
-
 909
909
-
 910
910
-
 911
911
-
 912
912
-
 913
913
-
 914
914
-
 915
915
-
 916
916
-
 917
917
-
 918
918
-
 919
919
-
 920
920
-
 921
921
-
 922
922
-
 923
923
-
 924
924
-
 925
925
-
 926
926
-
 927
927
-
 928
928
-
 929
929
-
 930
930
-
 931
931
-
 932
932
-
 933
933
-
 934
934
-
 935
935
-
 936
936
-
 937
937
-
 938
938
-
 939
939
-
 940
940
-
 941
941
-
 942
942
-
 943
943
-
 944
944
-
 945
945
-
 946
946
-
 947
947
-
 948
948
-
 949
949
-
 950
950
-
 951
951
-
 952
952
-
 953
953
-
 954
954
-
 955
955
-
 956
956
-
 957
957
-
 958
958
-
 959
959
-
 960
960
-
 961
961
-
 962
962
-
 963
963
-
 964
964
-
 965
965
-
 966
966
-
 967
967
-
 968
968
-
 969
969
-
 970
970
-
 971
971
-
 972
972
-
 973
973
-
 974
974
-
 975
975
-
 976
976
-
 977
977
-
 978
978
-
 979
979
-
 980
980
-
 981
981
-
 982
982
-
 983
983
-
 984
984
-
 985
985
-
 986
986
-
 987
987
-
 988
988
-
 989
989
-
 990
990
-
 991
991
-
 992
992
-
 993
993
-
 994
994
-
 995
995
-
 996
996
-
 997
997
-
 998
998
-
 999
999
-
 1000
1000
-
 1001
1001
-
 1002
1002
-
 1003
1003
-
 1004
1004
-
 1005
1005
-
 1006
1006
-
 1007
1007
-
 1008
1008
-
 1009
1009
-
 1010
1010
-
 1011
1011
-
 1012
1012
-
 1013
1013
-
 1014
1014
-
 1015
1015
-
 1016
1016
-
 1017
1017
-
 1018
1018
-
 1019
1019
-
 1020
1020
-
 1021
1021
-
 1022
1022
-
 1023
1023
-
 1024
1024
-
 1025
1025
-
 1026
1026
-
 1027
1027
-
 1028
1028
-
 1029
1029
-
 1030
1030
-
 1031
1031
-
 1032
1032
-
 1033
1033
-
 1034
1034
-
 1035
1035
-
 1036
1036
-
 1037
1037
-
 1038
1038
-
 1039
1039
-
 1040
1040
-
 1041
1041
-
 1042
1042
-
 1043
1043
-
 1044
1044
-
 1045
1045
-
 1046
1046
-
 1047
1047
-
 1048
1048
-
 1049
1049
-
 1050
1050
-
 1051
1051
-
 1052
1052
-
 1053
1053
-
 1054
1054






























































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































Schneider Electric Modicon M241 El manual del propietario
- Tipo
- El manual del propietario
Documentos relacionados
-
Schneider Electric Modicon M221 El manual del propietario
-
-
-
-
-
-
Eurotherm TCSMCNAM3M002P USB to RS485 converter El manual del propietario
-
-
-
Otros documentos
-
IFM VOS050 El manual del propietario
-
-
IFM AC012S Instrucciones de operación
-
CARLO GAVAZZI SD2DUG24 El manual del propietario
-
 Simex MultiCon CMC-99 El manual del propietario
Simex MultiCon CMC-99 El manual del propietario
-
CAME PSA Guía de instalación
-
Pro-face STC6000 Series Manual de usuario
-
CARLO GAVAZZI YN115CEI8RPIO El manual del propietario
-
 Irai Automgen 7 Manual de usuario
Irai Automgen 7 Manual de usuario
-
Casio XJ-M141, XJ-M146, XJ-M151, XJ-M156, XJ-M241, XJ-M246, XJ-M251, XJ-M256 Guía de configuración

