Schneider Electric Modicon M221 El manual del propietario
- Tipo
- El manual del propietario

EIO0000000979.03
www.se.com
SQL Gateway
EIO0000002417 04/2020
Modicon M221
Logic Controller
Guía del usuario
05/2023

EIO0000000979.03 05/2023 2
Tabla de materias
1 Modicon M221 Logic Controller
Guía de programación. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Parte I
2 Modicon M221 Logic Controller
Guía de la biblioteca de funciones avanzadas. . . . . . . . . . . . . . . Parte II
3 Modicon M221 Logic Controller
Guía de hardware. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Parte III
4 Modicon TMH2GDB - Visualización gráfica remota
Guía del usuario. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Parte IV
5 Modicon TMC2 - Cartuchos
Guía de programación. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Parte V
6 Modicon TMC2 - Cartuchos
Guía de hardware. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Parte VI

Modicon M221
Logic Controller
Guía de programación
EIO0000003300.02
11/2022
www.se.com

Información legal
La marca Schneider Electric y cualquier otra marca comercial de Schneider Electric
SE y sus filiales mencionadas en esta guía son propiedad de Schneider Electric SE o
sus filiales. Todas las otras marcas pueden ser marcas comerciales de sus
respectivos propietarios. Esta guía y su contenido están protegidos por las leyes de
copyright aplicables, y se proporcionan exclusivamente a título informativo. Ninguna
parte de este manual puede ser reproducida o transmitida de cualquier forma o por
cualquier medio (electrónico, mecánico, fotocopia, grabación u otro), para ningún
propósito, sin el permiso previo por escrito de Schneider Electric.
Schneider Electric no concede ningún derecho o licencia para el uso comercial de la
guía o su contenido, excepto por una licencia no exclusiva y personal para
consultarla "tal cual".
La instalación, utilización, mantenimiento y reparación de los productos y equipos de
Schneider Electric la debe realizar solo personal cualificado.
Debido a la evolución de las normativas, especificaciones y diseños con el tiempo, la
información contenida en esta guía puede estar sujeta a cambios sin previo aviso.
En la medida permitida por la ley aplicable, Schneider Electric y sus filiales no
asumen ninguna responsabilidad u obligación por cualquier error u omisión en el
contenido informativo de este material o por las consecuencias derivadas o
resultantes del uso de la información contenida en el presente documento.
Como parte de un grupo de empresas responsables e inclusivas, estamos
actualizando nuestras comunicaciones que contienen terminología no inclusiva. Sin
embargo, hasta que completemos este proceso, es posible que nuestro contenido
todavía contenga términos estandarizados del sector que pueden ser considerados
inapropiados para nuestros clientes.
© 2022 Schneider Electric. Todos los derechos reservados.

Tabla de contenido
Información de seguridad............................................................................7
Acerca de este libro ....................................................................................8
Introducción ...............................................................................................15
Acerca del Modicon M221 Logic Controller .................................................16
Descripción de TM221C Logic Controller ..............................................16
Descripción de TM221M Logic Controller..............................................20
Características de configuración................................................................25
Objetos ..............................................................................................25
Objetos ........................................................................................25
Tipos de objeto .............................................................................26
Direccionamiento de objetos de E/S ...............................................29
Número máximo de objetos ...........................................................32
Estructura de tareas............................................................................36
Tareas y modalidades de exploración .............................................36
Número máximo de tareas y prioridades .........................................38
Estados y comportamientos del controlador..........................................38
Diagrama de estados del controlador..............................................39
Descripción de los estados del controlador......................................40
Transiciones de estado del controlador...........................................43
Variables persistentes ...................................................................45
Comportamiento de la salida..........................................................47
Configuración de Post.........................................................................50
Configuración de Post ...................................................................51
Gestión de archivos de configuración de Post .................................52
Configuración del M221 Logic Controller ..............................................54
Cómo configurar un controlador.................................................................55
Compilación de una configuración........................................................55
Configuración de dispositivos de los módulos de extensión E/S
opcionales..........................................................................................59
Configuración del M221 Logic Controller ..............................................64
Actualización del firmware mediante el asistente de Executive
Loader ...............................................................................................65
Configuración de entrada/salida incrustada ................................................66
Configuración de entradas digitales......................................................66
Configuración de las entradas digitales...........................................66
Configuración de salidas digitales ........................................................70
Configuración de las salidas digitales .............................................70
Configuración de entradas analógicas..................................................71
Configuración de las entradas analógicas .......................................71
Configuración del contador de alta velocidad ........................................73
Configuración de contadores de alta velocidad................................73
Configuración de contadores monofásicos y de fase dual.................76
Configuración del medidor de frecuencia ........................................79
Configuración del generador de pulsos.................................................81
Configuración de los generadores de pulsos ...................................81
Configuración de pulsos (%PLS) ....................................................83
Configuración de la modulación de ancho de pulsos (%
PWM)...........................................................................................85
EIO0000003300.02 3

Configuración de la salida de tren de pulsos (%PTO).......................87
Configuración del generador de frecuencias (%FREQGEN) .............90
Configuración de bus de E/S .....................................................................91
Descripción general de la configuración de E/S.....................................91
Configuración máxima de hardware .....................................................95
Configuración de cartuchos y módulos de ampliación ............................98
Configuración de comunicaciones integradas ........................................... 100
Configuración Ethernet......................................................................100
Configuración de red Ethernet......................................................100
Configuración de Modbus TCP o Modbus TCP IOScanner ............. 106
Configuración de EtherNet/IP....................................................... 117
Configuración de línea serie ..............................................................131
Configuración de líneas serie .......................................................131
Configuración de los protocolos Modbus y ASCII........................... 134
Configuración del Visualización gráfica remota TMH2GDB............. 137
Configuración de IOScanner serie Modbus ................................... 137
Adición de un dispositivo en el IOScanner serie Modbus ................ 138
Códigos de función Modbus compatibles ............................................146
Códigos de función Modbus compatibles ...................................... 146
Diagrama de máquina de estado para Modbus IOscanner ...................148
Diagrama de máquina de estado para Modbus IOscanner .............148
Tarjeta SD..............................................................................................149
Operaciones de gestión de archivos................................................... 149
Tipos de archivos admitidos por la tarjeta SD ...................................... 151
Gestión de clones .............................................................................152
Gestión del firmware .........................................................................153
Gestión de la aplicación ....................................................................157
Gestión de la configuración de Post ...................................................158
Gestión del registro de errores ...........................................................161
Gestión de la memoria: Copia de seguridad y restauración de la
memoria del controlador....................................................................164
Programación del M221 Logic Controller............................................166
Objetos de E/S .......................................................................................167
Entradas digitales (%I) ......................................................................167
Salidas digitales (%Q).......................................................................168
Entradas analógicas (%IW) ............................................................... 169
Salidas analógicas (%QW) ................................................................170
Objetos de red........................................................................................172
Objetos Input Assembly (EtherNet/IP) (%QWE) ..................................172
Objetos de Output Assembly (EtherNet/IP) (%IWE).............................173
Objetos de registros de entrada (Modbus TCP) (%QWM) .................... 174
Objetos de registros de salida (Modbus TCP) (%IWM).........................176
Objetos de entradas digitales (IOScanner) (%IN) ................................ 177
Objetos de salidas digitales (IOScanner) (%QN) ................................. 178
Objetos de registro de entrada (IOScanner) (%IWN) ........................... 179
Objetos de registro de salida (IOScanner) (%QWN) ............................181
Códigos de diagnóstico de red de Modbus IOScanner (%
IWNS)..............................................................................................183
Objetos de sistema.................................................................................184
Bits de sistema (%S).........................................................................184
Palabras de sistema (%SW) ..............................................................192
4 EIO0000003300.02

Estado del canal de entrada (%IWS) .................................................. 208
Estado del canal de salida (%QWS) ...................................................210
Glosario ....................................................................................................213
Índice ........................................................................................................218
EIO0000003300.02 5


Información de seguridad
Información de seguridad
Información importante
Lea atentamente estas instrucciones y observe el equipo para familiarizarse con
el dispositivo antes de instalarlo, utilizarlo, revisarlo o realizar su mantenimiento.
Los mensajes especiales que se ofrecen a continuación pueden aparecer a lo
largo de la documentación o en el equipo para advertir de peligros potenciales, o
para ofrecer información que aclara o simplifica los distintos procedimientos.
Tenga en cuenta
La instalación, manejo, puesta en servicio y mantenimiento de equipos eléctricos
deberán ser realizados sólo por personal cualificado. Schneider Electric no se
hace responsable de ninguna de las consecuencias del uso de este material.
Una persona cualificada es aquella que cuenta con capacidad y conocimientos
relativos a la construcción, el funcionamiento y la instalación de equipos
eléctricos, y que ha sido formada en materia de seguridad para reconocer y evitar
los riesgos que conllevan tales equipos.
La inclusión de este icono en una etiqueta “Peligro” o “Advertencia” indica que existe
un riesgo de descarga eléctrica, que puede provocar lesiones si no se siguen las
instrucciones.
Éste es el icono de alerta de seguridad. Se utiliza para advertir de posibles riesgos
de lesiones. Observe todos los mensajes que siguen a este icono para evitar
posibles lesiones o incluso la muerte.
PELIGRO indica una situación de peligro que, si no se evita, provocará lesiones graves o
incluso la muerte.
!PELIGRO
ADVERTENCIA indica una situación de peligro que, si no se evita, podría provocar lesiones
graves o incluso la muerte.
ADVERTENCIA
!
ATENCIÓN indica una situación peligrosa que, si no se evita, podría provocar lesiones leves
o moderadas.
ATENCIÓN
!
AVISO indica una situación potencialmente peligrosa que, si no se evita, puede provocar
daños en el equipo.
AVISO
EIO0000003300.02 7

Acerca de este libro
Acerca de este libro
Alcance del documento
En este documento se describe la configuración y la programación del Modicon
M221 Logic Controller para EcoStruxure Machine Expert - Basic. Para obtener
más información, consulte los documentos independientes que se ofrecen en la
ayuda en línea de EcoStruxure Machine Expert - Basic.
Campo de aplicación
Este documento se ha actualizado para el lanzamiento de EcoStruxureTM
Machine Expert - Basic V1.2 SP1 Patch 1.
Las características descritas en el presente documento, así como las descritas en
los documentos incluidos a continuación en la sección Documentos relacionados,
pueden consultarse en línea. Para acceder a la información en línea, visite la
página de inicio de Schneider Electric www.se.com/ww/en/download/.
Las características descritas en el presente documento deben coincidir con las
características que aparecen en línea. De acuerdo con nuestra política de
mejoras continuas, es posible que a lo largo del tiempo revisemos el contenido
con el fin de elaborar documentos más claros y precisos. En caso de que detecte
alguna diferencia entre el documento y la información online, utilice esta última
para su referencia.
Documentos relacionados
Título de la documentación Número de referencia
EcoStruxure Machine Expert - Basic - Guía de
funcionamiento EIO0000003281 (ENG)
EIO0000003282 (FRA)
EIO0000003283 (GER)
EIO0000003284 (SPA)
EIO0000003285 (ITA)
EIO0000003286 (CHS)
EIO0000003287 (POR)
EIO0000003288 (TUR)
Funciones genéricas de EcoStruxure Machine Expert -
Basic - Guía de la biblioteca EIO0000003289 (ENG)
EIO0000003290 (FRE)
EIO0000003291 (GER)
EIO0000003292 (SPA)
EIO0000003293 (ITA)
EIO0000003294 (CHS)
EIO0000003295 (POR)
EIO0000003296 (TUR)
8 EIO0000003300.02

Acerca de este libro
Título de la documentación Número de referencia
Funciones avanzadas del Modicon M221 Logic Controller -
Guía de la biblioteca EIO0000003305 (ENG)
EIO0000003306 (FRE)
EIO0000003307 (GER)
EIO0000003308 (SPA)
EIO0000003309 (ITA)
EIO0000003310 (CHS)
EIO0000003311 (POR)
EIO0000003312 (TUR)
Modicon M221 Logic Controller - Guía de hardware EIO0000003313 (ENG)
EIO0000003314 (FRE)
EIO0000003315 (GER)
EIO0000003316 (SPA)
EIO0000003317 (ITA)
EIO0000003318 (CHS)
EIO0000003319 (POR)
EIO0000003320 (TUR)
TMH2GDB Visualización gráfica remota - Guía del usuario EIO0000003321 (ENG)
EIO0000003322 (FRA)
EIO0000003323 (GER)
EIO0000003324 (SPA)
EIO0000003325 (ITA)
EIO0000003326 (CHS)
EIO0000003327 (POR)
EIO0000003328 (TUR)
Cartucho Modicon TMC2 - Guía de programación EIO0000003329 (ENG)
EIO0000003330 (FRE)
EIO0000003331 (GER)
EIO0000003332 (SPA)
EIO0000003333 (ITA)
EIO0000003334 (CHS)
EIO0000003335 (POR)
EIO0000003336 (TUR)
Cartucho Modicon TMC2 - Guía de hardware EIO0000003337 (ENG)
EIO0000003338 (FRE)
EIO0000003339 (GER)
EIO0000003340 (SPA)
EIO0000003341 (ITA)
EIO0000003342 (CHS)
EIO0000003343 (POR)
EIO0000003344(TUR)
EIO0000003300.02 9

Acerca de este libro
Título de la documentación Número de referencia
Modicon TM3 Configuración de módulos de extensión -
Guía de programación EIO0000003345 (ENG)
EIO0000003346 (FRE)
EIO0000003347 (GER)
EIO0000003348 (SPA)
EIO0000003349 (ITA)
EIO0000003350 (CHS)
EIO0000003351 (POR)
EIO0000003352 (TUR)
Módulos de E/S digitales Modicon TM3 - Guía de hardware EIO0000003125 (ENG)
EIO0000003126 (FRE)
EIO0000003127 (GER)
EIO0000003128 (SPA)
EIO0000003129 (ITA)
EIO0000003130 (CHS)
EIO0000003424 (POR)
EIO0000003425 (TUR)
Módulos de E/S analógicas Modicon TM3 - Guía de
hardware EIO0000003131 (ENG)
EIO0000003132 (FRE)
EIO0000003133 (GER)
EIO0000003134 (SPA)
EIO0000003135 (ITA)
EIO0000003136 (CHS)
EIO0000003426 (POR)
EIO0000003427 (TUR)
Módulos expertos Modicon TM3 - Guía de hardware EIO0000003137 (ENG)
EIO0000003138 (FRE)
EIO0000003139 (GER)
EIO0000003140 (SPA)
EIO0000003141 (ITA)
EIO0000003142 (CHS)
EIO0000003428 (POR)
EIO0000003429 (TUR)
Módulos de seguridad Modicon TM3 - Guía de hardware EIO0000003353 (ENG)
EIO0000003354 (FRE)
EIO0000003355 (GER)
EIO0000003356 (SPA)
EIO0000003357 (ITA)
EIO0000003358 (CHS)
EIO0000003359 (POR)
EIO0000003360 (TUR)
10 EIO0000003300.02

Acerca de este libro
Título de la documentación Número de referencia
Módulos transmisores y receptores Modicon TM3 - Guía
de hardware EIO0000003143 (ENG)
EIO0000003144 (FRE)
EIO0000003145 (GER)
EIO0000003146 (SPA)
EIO0000003147 (ITA)
EIO0000003148 (CHS)
EIO0000003430 (POR)
EIO0000003431 (TUR)
Modicon TM2 Configuración de módulos de extensión -
Guía de programación EIO0000003432 (ENG)
EIO0000003433 (FRE)
EIO0000003434 (GER)
EIO0000003435 (SPA)
EIO0000003436 (ITA)
EIO0000003437 (CHS)
Módulos de E/S digitales Modicon TM2 - Guía de hardware EIO0000000028 (ENG)
EIO0000000029 (FRE)
EIO0000000030 (GER)
EIO0000000031 (SPA)
EIO0000000032 (ITA)
EIO0000000033 (CHS)
Módulos de E/S analógicas Modicon TM2 - Guía de
hardware EIO0000000034 (ENG)
EIO0000000035 (FRE)
EIO0000000036 (GER)
EIO0000000037 (SPA)
EIO0000000038 (ITA)
EIO0000000039 (CHS)
SR2MOD02 and SR2MOD03 Wireless Modem - User
Guide EIO0000001575 (ENG)
Puede descargar estas publicaciones técnicas e información técnica adicional de
nuestro sitio web https://www.se.com/ww/en/download/.
Las características descritas en este documento, así como en otros documentos
relacionados, deben ser las mismas que las características que aparecen online.
De acuerdo con nuestra política de mejoras continuas, es posible que a lo largo
del tiempo revisemos el contenido con el fin de elaborar documentos más claros y
precisos. En caso de que detecte alguna diferencia entre el documento y la
información online, utilice esta última para su referencia.
EIO0000003300.02 11

Acerca de este libro
Información relacionada con el producto
ADVERTENCIA
PÉRDIDA DE CONTROL
• El diseñador del esquema de control debe tener en cuenta las posibles
modalidades de fallo de rutas de control y, para ciertas funciones de control
críticas, proporcionar los medios para lograr un estado seguro durante y
después de un fallo de ruta. Algunas funciones de control críticas son, por
ejemplo, la parada de emergencia y la parada de sobrecarrera, un corte de
alimentación o un reinicio.
• Para las funciones críticas de control deben proporcionarse rutas de control
separadas o redundantes.
• Las rutas de control del sistema pueden incluir enlaces de comunicación.
Deben tenerse en cuenta las implicaciones de retardos de transmisión
imprevistos o fallos del enlace.
• Tenga en cuenta todas las reglamentaciones para la prevención de
accidentes y las normativas de seguridad locales.1
• Cada instalación de este equipo debe probarse de forma individual y
exhaustiva antes de entrar en servicio.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
1Para obtener información adicional, consulte NEMA ICS 1.1 (última edición),
"Safety Guidelines for the Application, Installation, and Maintenance of Solid State
Control" (Directrices de seguridad para la aplicación, la instalación y el
mantenimiento del control de estado estático) y NEMA ICS 7.1 (última edición),
"Safety Standards for Construction and Guide for Selection, Installation and
Operation of Adjustable-Speed Drive Systems" (Estándares de seguridad para la
construcción y guía para la selección, instalación y utilización de sistemas de
unidades de velocidad ajustable) o su equivalente aplicable a la ubicación
específica.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
• Utilice solo software aprobado por Schneider Electric para este equipo.
• Actualice el programa de aplicación siempre que cambie la configuración de
hardware física.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Normas y términos utilizados
Los términos técnicos, símbolos y las descripciones correspondientes del
presente manual o que aparecen en la parte interior o exterior de los propios
productos se derivan, por lo general, de los términos y las definiciones de
estándares internacionales.
En el área de los sistemas de seguridad funcional, unidades y automatización
general se incluyen, pero sin limitarse a ellos, términos como seguridad,función
de seguridad,estado de seguridad,fallo,reinicio tras fallo,avería,funcionamiento
incorrecto,error,mensaje de error,peligroso, etc.
12 EIO0000003300.02

Acerca de este libro
Estos estándares incluyen, entre otros:
Norma Descripción
IEC 61131-2:2007 Controladores programables, parte 2: Requisitos y ensayos de los
equipos.
ISO 13849-1:2015 Seguridad de la maquinaria: componentes de los sistemas de control
relacionados con la seguridad.
Principios generales del diseño.
EN 61496-1:2013 Seguridad de las máquinas: equipos de protección electrosensibles.
Parte 1: pruebas y requisitos generales.
ISO 12100:2010 Seguridad de las máquinas. Principios generales para el diseño.
Evaluación del riesgo y reducción del riesgo
EN 60204-1:2006 Seguridad de las máquinas. Equipo eléctrico de las máquinas. Parte 1:
Requisitos generales
ISO 14119:2013 Seguridad de la maquinaria. Dispositivos de bloqueo asociados con
protecciones: principios de diseño y selección
ISO 13850:2015 Seguridad de la maquinaria. Parada de emergencia: principios de
diseño
IEC 62061:2015 Seguridad de la maquinaria. Seguridad funcional de los sistemas de
control programable de seguridad eléctrica y electrónica
IEC 61508-1:2010 Seguridad funcional de los sistemas eléctricos/electrónicos/electrónicos
programables relacionados con la seguridad: requisitos generales.
IEC 61508-2:2010 Seguridad funcional de los sistemas eléctricos/electrónicos/electrónicos
programables relacionados con la seguridad: requisitos para los
sistemas eléctricos/electrónicos/electrónicos programables
relacionados con la seguridad.
IEC 61508-3:2010 Seguridad funcional de los sistemas eléctricos/electrónicos/electrónicos
programables relacionados con la seguridad: requisitos de software.
IEC 61784-3:2016 Redes de comunicación industrial - Perfiles - Parte 3: Buses de campo
de seguridad funcionales - Reglas generales y definiciones de perfiles.
2006/42/EC Directiva de maquinaria
2014/30/EU Directiva de compatibilidad electromagnética
2014/35/EU Directiva de baja tensión
Además, los términos utilizados en este documento se pueden usar de manera
tangencial porque se obtienen de otros estándares como:
Norma Descripción
Serie IEC 60034 Máquinas eléctricas giratorias
Serie IEC 61800 Accionamientos eléctricos de potencia de velocidad variable
Serie IEC 61158 Comunicación digital de datos para la medición y control: bus de campo
para su uso en sistemas de control.
Por último, el término zona de funcionamiento se puede utilizar junto con la
descripción de peligros específicos, y se define como tal para una zona de peligro
ozona peligrosa en la Directiva de maquinaria (2006/42/EC) y ISO 12100:2010.
NOTA: Los estándares mencionados anteriormente podrían o no aplicarse a
los productos específicos citados en la presente documentación. Para
obtener más información en relación con los diferentes estándares aplicables
a los productos descritos en este documento, consulte las tablas de
características de las referencias de dichos productos.
EIO0000003300.02 13


Introducción
Contenido de esta parte
Acerca del Modicon M221 Logic Controller.......................................................16
Características de configuración......................................................................25
Descripción general
Este apartado ofrece información general acerca del Modicon M221 Logic
Controller, así como de sus características de configuración y programación.
EIO0000003300.02 15

Acerca del Modicon M221 Logic Controller
Acerca del Modicon M221 Logic Controller
Contenido de este capítulo
Descripción de TM221C Logic Controller ........................................................16
Descripción de TM221M Logic Controller ........................................................20
Descripción de TM221C Logic Controller
Descripción general
TM221C Logic Controller tiene diferentes funciones potentes y puede servir para
una amplia gama de aplicaciones.
La configuración, programación y puesta en marcha por software se realizan con
el software EcoStruxure Machine Expert - Basic descrito en la Guía de
funcionamiento de EcoStruxure Machine Expert - Basic (consulte EcoStruxure
Machine Expert - Basic, Guía de funcionamiento) y la M221 Logic Controller -
Guía de programación, página 8.
Lenguajes de programación
El M221 Logic Controller se configura y programa con el software EcoStruxure
Machine Expert - Basic, que admite los siguientes lenguajes de programación IEC
61131-3:
• IL: Lista de instrucciones
• LD: Diagrama de contactos
• Grafcet (lista)
• Grafcet (SFC)
Fuente de alimentación
La fuente de alimentación del TM221C Logic Controller es de 24 V CC (consulte
Modicon M221 Logic Controller, Guía de hardware) o de 100...240 V CA (consulte
Modicon M221 Logic Controller, Guía de hardware).
Reloj en tiempo real
El M221 Logic Controller incluye un sistema de reloj en tiempo real (RTC)
(consulte Modicon M221 Logic Controller - Guía de hardware).
16 EIO0000003300.02

Acerca del Modicon M221 Logic Controller
Run/Stop
M221 Logic Controller puede utilizarse externamente con lo siguiente:
• Un conmutador Run/Stop (consulte Modicon M221 Logic Controller - Guía de
hardware).
• Una operación de Run/Stop (consulte Modicon M221 Logic Controller, Guía
de hardware) por una entrada digital dedicada, que se define en la
configuración del software (para obtener más información, consulte
Configuración de las entradas digitales, página 66).
• El software EcoStruxure Machine Expert - Basic (para obtener más
información, consulte Barra de herramientas [consulte EcoStruxure Machine
Expert - Basic, Guía de funcionamiento]).
• Un Visualización gráfica remota TMH2GDB (para obtener más información,
consulte Menú de estado del controlador [consulte Modicon TMH2GDB,
Terminal gráfico remoto, Guía del usuario]).
Memoria
En esta tabla se describen los distintos tipos de memoria:
Tipo de
memoria Tamaño Se utiliza para
RAM 512 kbytes de memoria RAM: 256 kbytes para
variables internas y 256 kbytes para aplicación y
datos.
ejecutar la aplicación y
contener datos
No volátil 1,5 Mbytes, de los cuales 256 kbytes se utilizan para
realizar una copia de seguridad de la aplicación y de
los datos en caso de corte de alimentación.
guardar la aplicación
Entradas/salidas incorporadas
En función de la referencia del controlador, están disponibles los siguientes tipos
de E/S incorporadas:
• Entradas normales
• Entradas rápidas asociadas con contadores
• Salidas transistorizadas normales (común negativo y positivo)
• Salidas transistorizadas rápidas (común negativo y positivo) asociadas con
generadores de pulsos
• Salidas de relé
• Entradas analógicas
Almacenamiento extraíble
Los M221 Logic Controller incluyen un ranura para tarjeta SD integrado (consulte
Modicon M221 Logic Controller - Guía de hardware).
EIO0000003300.02 17

Acerca del Modicon M221 Logic Controller
El Modicon M221 Logic Controller permite los siguientes tipos de gestión de
archivos mediante una tarjeta SD:
•Gestión de clonado, página 152: realice una copia de seguridad de la
aplicación, el firmware y la configuración de Post (si existe) del logic
controller.
•Gestión del firmware, página 153: descargue firmware en el Logic Controller,
en un Visualización gráfica remota TMH2GDB o en módulos de extensión
TM3
•Gestión de la aplicación, página 157: realice una copia de seguridad de la
aplicación del logic controller y restáurela, o bien cópiela en otro logic
controller de la misma referencia.
•Gestión de la configuración de Post, página 158: añada, cambie o elimine el
archivo de configuración de Post del logic controller.
•Gestión del registro de errores, página 161: realice una copia de seguridad
del archivo de registro de errores del Logic Controller o elimínelo
•Gestión de la memoria, página 164: realice una copia de seguridad de las
palabras y los bits de memoria de un controlador y restáurelos
Funciones de comunicación incorporadas
Están disponibles los siguientes tipos de puertos de comunicación, en función de
la referencia del controlador:
• Ethernet (consulte Modicon M221 Logic Controller, Guía de hardware)
• USB Mini-B (consulte Modicon M221 Logic Controller, Guía de hardware)
• Línea serie 1 (consulte Modicon M221 Logic Controller, Guía de hardware)
Visualización gráfica remota
Para obtener más información, consulte Modicon TMH2GDB Visualización gráfica
remota - Guía del usuario.
TM221C Logic Controller
Referencia Entradas digitales Salidas digitales Entradas
analógi-
cas
Puertos de
comunicaciones Fuente de
alimentación
TM221C16R 5 entradas normales
(1)
4 entradas rápidas
(HSC)(2)
7 salidas de relé Sí 1 puerto de línea serie
1 puerto de
programación USB
De 100 a 240 V
CA
TM221CE16R Sí 1 puerto de línea serie
1 puerto de
programación USB
1 puerto Ethernet
TM221C16T 5 entradas normales
(1)
4 entradas rápidas
(HSC)(2)
Salidas de común positivo
5 salidas de transistor normales
2 salidas rápidas (PLS/PWM/
PTO/FREQGEN)(3)
Sí 1 puerto de línea serie
1 puerto de
programación USB
24 V CC
TM221CE16T Sí 1 puerto de línea serie
1 puerto de
programación USB
1 puerto Ethernet
18 EIO0000003300.02

Acerca del Modicon M221 Logic Controller
Referencia Entradas digitales Salidas digitales Entradas
analógi-
cas
Puertos de
comunicaciones Fuente de
alimentación
TM221C16U 5 entradas normales
(1)
4 entradas rápidas
(HSC)(2)
Salidas de común negativo
5 salidas de transistor normales
2 salidas rápidas (PLS/PWM/
PTO/FREQGEN)(3)
Sí 1 puerto de línea serie
1 puerto de
programación USB
24 V CC
TM221CE16U 1 puerto de línea serie
1 puerto de
programación USB
1 puerto Ethernet
TM221C24R 10 entradas
normales(1)
4 entradas rápidas
(HSC)(2)
10 salidas de relé Sí 1 puerto de línea serie
1 puerto de
programación USB
De 100 a 240 V
CA
TM221CE24R Sí 1 puerto de línea serie
1 puerto de
programación USB
1 puerto Ethernet
TM221C24T Salidas de común positivo
8 salidas de transistor normales
2 salidas rápidas (PLS/PWM/
PTO/FREQGEN)(3)
Sí 1 puerto de línea serie
1 puerto de
programación USB
24 V CC
TM221CE24T Sí 1 puerto de línea serie
1 puerto de
programación USB
1 puerto Ethernet
TM221C24U 10 entradas
normales(1)
4 entradas rápidas
(HSC)(2)
Salidas de común negativo
8 salidas de transistor normales
2 salidas rápidas (PLS/PWM/
PTO/FREQGEN)(3)
Sí 1 puerto de línea serie
1 puerto de
programación USB
24 V CC
TM221CE24U Sí 1 puerto de línea serie
1 puerto de
programación USB
1 puerto Ethernet
TM221C40R 20 entradas
normales(1)
4 entradas rápidas
(HSC)(2)
16 salidas de relé Sí 1 puerto de línea serie
1 puerto de
programación USB
De 100 a 240 V
CA
TM221CE40R Sí 1 puerto de línea serie
1 puerto de
programación USB
1 puerto Ethernet
TM221C40T Salidas de común positivo
14 salidas de transistor normales
2 salidas rápidas (PLS/PWM/
PTO/FREQGEN)(3)
Sí 1 puerto de línea serie
1 puerto de
programación USB
24 V CC
TM221CE40T Sí 1 puerto de línea serie
1 puerto de
programación USB
1 puerto Ethernet
TM221C40U 20 entradas
normales(1)
4 entradas rápidas
(HSC)(2)
Salidas de común negativo
12 salidas de transistor normales
4 salidas rápidas (PLS/PWM/
PTO/FREQGEN)(3)
Sí 1 puerto de línea serie
1 puerto de
programación USB
24 V CC
TM221CE40U Sí 1 puerto de línea serie
1 puerto de
programación USB
1 puerto Ethernet
EIO0000003300.02 19

Acerca del Modicon M221 Logic Controller
Referencia Entradas digitales Salidas digitales Entradas
analógi-
cas
Puertos de
comunicaciones Fuente de
alimentación
NOTA: TM221C Logic Controller utiliza bloques de terminales de tornillo extraíble.
(1) Las entradas normales tienen una frecuencia máxima de 5 kHz.
(2) Las entradas rápidas se pueden utilizar como entradas normales o como entradas rápidas para funciones de conteo o de evento.
(3) Las salidas de transistor rápidas se pueden utilizar como salidas de transistor normales, para funciones PLS, PWM, PTO o FREQGEN
o como salidas reflejas para HSC.
Contenido que se entrega
En la siguiente figura se muestra el contenido de la entrega de TM221C Logic
Controller:
1
2 3 4
1Hoja de instrucciones de TM221C Logic Controller
2TM221C Logic Controller
3Soporte de batería con batería de botón de litio, tipo Panasonic BR2032 o
Murata CR2032X.
4Cable analógico
Descripción de TM221M Logic Controller
Descripción general
TM221M Logic Controller tiene diferentes funciones potentes y puede servir para
una amplia gama de aplicaciones.
La configuración, programación y puesta en marcha por software se realizan con
el software EcoStruxure Machine Expert - Basic descrito en la Guía de
funcionamiento de EcoStruxure Machine Expert - Basic (consulte EcoStruxure
Machine Expert - Basic, Guía de funcionamiento) y la M221 Logic Controller -
Guía de programación, página 8.
20 EIO0000003300.02

Acerca del Modicon M221 Logic Controller
Lenguajes de programación
El M221 Logic Controller se configura y programa con el software EcoStruxure
Machine Expert - Basic, que admite los siguientes lenguajes de programación IEC
61131-3:
• IL: Lista de instrucciones
• LD: Diagrama de contactos
• Grafcet (lista)
• Grafcet (SFC)
Fuente de alimentación
La fuente de alimentación del TM221M Logic Controller es de 24 V CC (consulte
Modicon M221 Logic Controller, Guía de hardware).
Reloj en tiempo real
El M221 Logic Controller incluye un sistema de reloj en tiempo real (RTC)
(consulte Modicon M221 Logic Controller - Guía de hardware).
Run/Stop
M221 Logic Controller puede utilizarse externamente con lo siguiente:
• Un conmutador Run/Stop (consulte Modicon M221 Logic Controller - Guía de
hardware).
• Una operación de Run/Stop (consulte Modicon M221 Logic Controller, Guía
de hardware) por una entrada digital dedicada, que se define en la
configuración del software (para obtener más información, consulte
Configuración de las entradas digitales, página 66).
• El software EcoStruxure Machine Expert - Basic (para obtener más
información, consulte Barra de herramientas [consulte EcoStruxure Machine
Expert - Basic, Guía de funcionamiento]).
• Un Visualización gráfica remota TMH2GDB (para obtener más información,
consulte Menú de estado del controlador).
Memoria
En esta tabla se describen los distintos tipos de memoria:
Tipo de
memoria Tamaño Se utiliza para
RAM 512 kbytes de memoria RAM: 256 kbytes para
variables internas y 256 kbytes para aplicación y
datos.
ejecutar la aplicación;
contiene datos
No volátil 1,5 Mbytes, de los cuales 256 kbytes se utilizan para
realizar una copia de seguridad de la aplicación y de
los datos en caso de corte de alimentación.
guardar la aplicación
EIO0000003300.02 21

Acerca del Modicon M221 Logic Controller
Entradas/salidas incorporadas
En función de la referencia del controlador, están disponibles los siguientes tipos
de E/S incorporadas:
• Entradas normales
• Entradas rápidas (HSC)
• Salidas de transistor normales
• Salidas de transistor rápidas (PLS/PWM/PTO/FREQGEN)
• Salidas de relé
• Entradas analógicas
Almacenamiento extraíble
Los M221 Logic Controller incluyen un ranura para tarjeta SD integrado (consulte
Modicon M221 Logic Controller - Guía de hardware).
El Modicon M221 Logic Controller permite los siguientes tipos de gestión de
archivos mediante una tarjeta SD:
•Gestión de clonado, página 152: realice una copia de seguridad de la
aplicación, el firmware y la configuración de Post (si existe) del logic
controller.
•Gestión del firmware, página 153: descargar actualizaciones del firmware
directamente en el Logic Controller y descargar firmware en un TMH2GDB
Visualización gráfica remota
•Gestión de la aplicación, página 157: realice una copia de seguridad de la
aplicación del logic controller y restáurela, o bien cópiela en otro logic
controller de la misma referencia.
•Gestión de la configuración de Post, página 158: añada, cambie o elimine el
archivo de configuración de Post del logic controller.
•Gestión del registro de errores, página 161: realice una copia de seguridad
del archivo de registro de errores del logic controller o elimínelo.
•Gestión de memoria, página 164: copia de seguridad/restauración de bits y
palabras de memoria de un controlador
Funciones de comunicación incorporadas
Los siguientes puertos de comunicación están disponibles en el panel frontal del
controlador, en función de la referencia del controlador:
• Ethernet (consulte Modicon M221 Logic Controller, Guía de hardware)
• USB Mini-B (consulte Modicon M221 Logic Controller, Guía de hardware)
• Tarjeta SD (consulte Modicon M221 Logic Controller, Guía de hardware)
• Línea serie 1 (consulte Modicon M221 Logic Controller, Guía de hardware)
• Línea serie 2 (consulte Modicon M221 Logic Controller, Guía de hardware)
Visualización gráfica remota
Para obtener más información, consulte Modicon TMH2GDB Visualización gráfica
remota - Guía del usuario.
22 EIO0000003300.02

Acerca del Modicon M221 Logic Controller
TM221M Logic Controller
Referencia Entrada digital Salida digital Entrada
analógica Puertos de
comunicaciones Tipo de terminal
TM221M16R 4 entradas normales(1)
4 entradas rápidas
(HSC)(2)
8 salidas de relé Sí 2 puertos de línea serie
1 puerto de
programación USB
Bloques de
terminales de
tornillos extraíbles
TM221M16RG 4 entradas normales(1)
4 entradas rápidas
(HSC)(2)
8 salidas de relé Sí 2 puertos de línea serie
1 puerto de
programación USB
Bloques de
terminales de resorte
extraíbles
TM221ME16R 4 entradas normales(1)
4 entradas rápidas
(HSC)(2)
8 salidas de relé Sí 1 puerto de línea serie
1 puerto de
programación USB
1 puerto Ethernet
Bloques de
terminales de
tornillos extraíbles
TM221ME16RG 4 entradas normales(1)
4 entradas rápidas
(HSC)(2)
8 salidas de relé Sí 1 puerto de línea serie
1 puerto de
programación USB
1 puerto Ethernet
Bloques de
terminales de resorte
extraíbles
TM221M16T 4 entradas normales(1)
4 entradas rápidas
(HSC)(2)
6 salidas de transistor
normales
2 salidas de transistor
rápidas (PLS/PWM/
PTO/FREQGEN)(3)
Sí 2 puertos de línea serie
1 puerto de
programación USB
Bloques de
terminales de
tornillos extraíbles
TM221M16TG 4 entradas normales(1)
4 entradas rápidas
(HSC)(2)
6 salidas de transistor
normales
2 salidas de transistor
rápidas (PLS/PWM/
PTO/FREQGEN)(3)
Sí 2 puertos de línea serie
1 puerto de
programación USB
Bloques de
terminales de resorte
extraíbles
TM221ME16T 4 entradas normales(1)
4 entradas rápidas
(HSC)(2)
6 salidas de transistor
normales
2 salidas de transistor
rápidas (PLS/PWM/
PTO/FREQGEN)(3)
Sí 1 puerto de línea serie
1 puerto de
programación USB
1 puerto Ethernet
Bloques de
terminales de
tornillos extraíbles
TM221ME16TG 4 entradas normales(1)
4 entradas rápidas
(HSC)(2)
6 salidas de transistor
normales
2 salidas de transistor
rápidas (PLS/PWM/
PTO/FREQGEN)(3)
Sí 1 puerto de línea serie
Puerto de
programación USB
1 puerto Ethernet
Bloques de
terminales de resorte
extraíbles
TM221M32TK 12 entradas normales
(1)
4 entradas rápidas
(HSC)(2)
14 salidas de
transistor normales
2 salidas rápidas
(PLS/PWM/PTO/
FREQGEN)(3)
Sí 2 puertos de línea serie
1 puerto de
programación USB
Conectores HE10
(MIL 20)
TM221ME32TK 12 entradas normales
(1)
4 entradas rápidas
(HSC)(2)
14 salidas normales
2 salidas rápidas
(PLS/PWM/PTO/
FREQGEN)(3)
Sí 1 puerto de línea serie
1 puerto de
programación USB
1 puerto Ethernet
Conectores HE10
(MIL 20)
NOTA: El TM221M Logic Controller utiliza una fuente de alimentación de 24 V CC (consulte Modicon M221 Logic Controller, Guía de
hardware).
(1) Las entradas normales I2, I3, I4 e I5 tienen una frecuencia máxima de 5 kHz. Las otras entradas normales tienen una frecuencia
máxima de 100 Hz.
(2) Las entradas rápidas se pueden utilizar como entradas normales o como entradas rápidas para funciones de conteo o de evento.
(3) Las salidas de transistor rápidas se pueden utilizar como salidas de transistor normales, para funciones PLS, PWM, PTO o FREQGEN,
o salidas reflejas para HSC.
EIO0000003300.02 23

Acerca del Modicon M221 Logic Controller
Contenido que se entrega
En la siguiente figura se muestra el contenido de la entrega de TM221M Logic
Controller:
1
2
3 4
1Hoja de instrucciones de TM221M Logic Controller
2TM221M Logic Controller
3Soporte de batería con batería de botón de litio, tipo Panasonic BR2032 o
Murata CR2032X.
4Cable analógico
24 EIO0000003300.02

Características de configuración
Características de configuración
Contenido de este capítulo
Objetos.........................................................................................................25
Estructura de tareas ......................................................................................36
Estados y comportamientos del controlador ....................................................38
Configuración de Post ...................................................................................50
Introducción
En este capítulo se proporciona información relacionada con la asignación de
memoria, la tarea, los estados, los comportamientos, los objetos y las funciones
de M221 Logic Controller. Los temas que se explican en este capítulo permiten al
operario entender las especificaciones destacadas de M221 Logic Controller que
se necesitan principalmente para configurar y programar el controlador en
EcoStruxure Machine Expert - Basic.
Objetos
Objetos
Descripción general
En EcoStruxure Machine Expert - Basic, el término objeto se utiliza para
representar un área de la memoria del controlador lógico reservada para que la
utilice una aplicación. Los objetos pueden ser:
• Variables de software simples, como bits de memoria y palabras.
• Direcciones de las entradas y salidas digitales o analógicas.
• Variables internas del controlador, como palabras y bits del sistema.
• Funciones predefinidas del sistema o de los bloques de funciones, como
temporizadores y contadores.
La memoria del controlador está preasignada para determinados tipos de objetos,
o bien se asigna automáticamente cuando una aplicación se descarga en el
controlador lógico.
Los objetos solo pueden ser direccionados por un programa una vez que se ha
asignado memoria. Los objetos se direccionan mediante el prefijo %. Por ejemplo,
%MW12 es la dirección de una palabra de memoria, %Q0.3 es la dirección de
una salida digital incrustada y %TM0 es la dirección de un bloque de funciones
Timer.
EIO0000003300.02 25

Características de configuración
Tipos de objeto
Introducción
Los tipos de objeto de lenguaje del M221 Logic Controller se describen en la
siguiente tabla:
Tipo de objeto Objeto Función del objeto Descripción
Objetos de memoria %M Bits de memoria Almacena el bit de memoria.
%MW Palabras de memoria Almacena la palabra de memoria de 16 bits.
%MD Palabras dobles de memoria Almacena la palabra de memoria de 32 bits.
%MF Coma flotante de memoria Almacena la coma flotante de memoria en un argumento
matemático que tiene un decimal en su expresión.
%KW Palabras constantes Almacena la palabra constante de 16 bits.
%KD Palabras dobles constantes Almacena la palabra constante de 32 bits.
%KF Comas flotantes constantes Almacena la coma flotante constante en un argumento
matemático que contiene un decimal en su expresión.
Objetos de sistema %S Bits de sistema, página 184 Almacena el bit de sistema.
%SW Palabras de sistema, página
192 Almacena la palabra de sistema.
%IWS Palabra de estado del canal de
entrada, página 208 Contiene información de diagnóstico relacionada con los
canales de entrada analógica.
%QWS Palabra de estado del canal de
salida, página 210 Contiene información de diagnóstico relacionada con los
canales de salida analógica.
objetos de E/S %I Bits de entrada, página 167 Almacena el valor de la entrada digital.
%Q Bits de salida, página 168 Almacena el valor de la salida digital.
%IW Palabras de entrada, página
169 Almacena el valor de la entrada analógica.
%QW Palabras de salida, página 170 Almacena el valor de la salida analógica.
%FC Contadores rápidos Ejecuta el conteo rápido de pulsos de sensores,
conmutadores, etc.
%HSC Contadores de alta velocidad Ejecuta el conteo rápido de pulsos de sensores,
conmutadores, etc., que están conectados a las entradas
rápidas.
%PLS Pulso Genera una señal de pulso de onda cuadrada en los canales
de salida dedicados.
%PWM Modulación de ancho de
pulsos Genera una señal de onda modulada en canales de salida
dedicados con un ciclo de servicio variable.
%PTO Salida de tren de pulsos Genera una salida de tren de pulsos para controlar un motor
paso a paso de un solo eje lineal o servounidad en
modalidad de bucle abierto.
%FREQGEN Generador de frecuencias Genera una señal de onda cuadrada en un canal de salida
especializado con una frecuencia programable y un ciclo de
servicio del 50%.
26 EIO0000003300.02

Características de configuración
Tipo de objeto Objeto Función del objeto Descripción
Objetos de red %QWE Input assembly (EtherNet/IP),
página 172 Valores de las tramas de Input assembly EtherNet/IP que
envía el Logic Controller.
NOTA: Para obtener más información sobre la
direccionalidad, consulte Configuración de EtherNet/IP,
página 118.
%IWE Output assembly (EtherNet/IP),
página 173 Valores de las tramas de Output assembly EtherNet/IP que
recibe el Logic Controller.
NOTA: Para obtener más información sobre la
direccionalidad, consulte Configuración de EtherNet/IP,
página 118.
%QWM Registros de entrada (Modbus
TCP), página 174
Valores de Input registers de la tabla de asignaciones
Modbus que envía el Logic Controller.
%IWM Registros de salida (Modbus
TCP), página 176 Valores de Output registers de la tabla de asignaciones
Modbus que recibe el Logic Controller.
%IN Entradas digitales (IOScanner),
página 177 Valores de los bits de entrada digital de IOScanner serie
Modbus o TCP.
%QN Salidas digitales (IOScanner),
página 178 Valores de los bits de salida digital de IOScanner serie
Modbus o TCP.
%IWN Registros de entrada
(IOScanner), página 179 Valores de las palabras de entrada digital de IOScanner serie
Modbus o TCP.
%QWN Registros de salida
(IOScanner), página 181 Valores de las palabras de salida digital de IOScanner serie
Modbus o TCP.
%IWNS Códigos de diagnóstico de red
de IOScanner, página 183 Valores de los bits de diagnóstico de red de IOScanner serie
Modbus o TCP.
Objetos de software %TM Temporizadores Especifica un tiempo antes de desencadenar una acción.
%C Contadores Proporciona conteos progresivos y regresivos de las
acciones.
%MSG Mensajes Almacena el mensaje de estado en el puerto de
comunicaciones.
%R Registros LIFO/FIFO Almacena en la memoria hasta 16 palabras de 16 bits cada
una, de dos formas diferentes: en cola y en pilas.
%DR Conmutadores de tambor Funciona según un principio similar a un controlador de
conmutador de tambor electromecánico con cambios de
pasos asociados a eventos externos.
%SBR Registros de bits de
desplazamiento Proporciona un desplazamiento a la izquierda o la derecha
de bits de datos binarios (0 o 1).
%SC Contadores de pasos Proporciona una serie de pasos a los que se pueden asignar
acciones.
SCH Fechadores Controla las acciones en un mes, día y hora predefinidos.
%RTC RTC Permite leer o escribir el valor del reloj en tiempo real (RTC)
en el Logic Controller.
PID PID Proporciona un mecanismo genérico de respuesta de bucle
de control en el que la salida es proporcional, integral y
derivada de la entrada.
%X Pasos de Grafcet Objetos de bit asociados con pasos individuales de Grafcet
(SFC). El objeto se establece en 1 cuando el paso
correspondiente está activo, y en 0 cuando el paso está
desactivado.
Tipo de objeto Objeto Función del objeto Descripción
Objetos PTO Consulte Salida de tren de pulsos.
Objetos de
accionamiento Consulte Objetos de accionamiento.
EIO0000003300.02 27

Características de configuración
Tipo de objeto Objeto Función del objeto Descripción
Objetos de
comunicación %READ_VAR Lectura de variables El bloque de funciones %READ_VAR se utiliza para leer
datos desde un dispositivo remoto en Modbus SL o Modbus
TCP.
%WRITE_VAR Escritura de variables El bloque de funciones %WRITE_VAR se utiliza para escribir
datos en un dispositivo externo utilizando el protocolo
Modbus SL o Modbus TCP.
%WRITE_READ_VAR Escritura y lectura de
variables El bloque de funciones %WRITE_READ_VAR se utiliza para
leer y escribir datos guardados en las palabras de memoria
internas en un dispositivo externo mediante el protocolo
Modbus SL o Modbus TCP.
%SEND_RECV_MSG Enviar/Recibir
mensaje El bloque de funciones %SEND_RECV_MSG se emplea
para enviar o recibir datos en una línea serie configurada
para el protocolo ASCII.
%SEND_RECV_SMS Enviar/Recibir SMS El bloque de funciones %SEND_RECV_SMS se emplea
para enviar o recibir mensajes SMS a través de un módem
GSM conectado a una línea serie.
Función definida por
el usuario y objetos
de bloque de
funciones definidos
por el usuario
%RET0 Valor de retorno Valor de retorno de una función definida por el usuario.
%PARAM Parámetro Parámetros de una función definida por el usuario o de un
bloque de funciones definido por el usuario.
Los parámetros son diferentes para cada tipo de objeto.
%VAR Variable local Variables locales de una función definida por el usuario o de
un bloque de funciones definido por el usuario.
Las variables locales son diferentes para cada tipo de objeto.
Los objetos de memoria y de software son los objetos genéricos utilizados en
EcoStruxure Machine Expert - Basic, mientras que los objetos de sistema y de E/
S son específicos del controlador. En la sección Programación, página 166 se
explican todos los objetos específicos del controlador.
Para obtener información sobre la programación de objetos de memoria, objetos
de software y objetos de comunicación, consulte EcoStruxure Machine Expert -
Basic Guía de la biblioteca de funciones genéricas.
Para ver los detalles de programación de los objetos PID, accionamiento y PTO,
consulte la Guía de la biblioteca de funciones avanzadas.
Para obtener más información sobre las funciones definidas por el usuario y los
bloques de funciones definidos por el usuario, consulte EcoStruxure Machine
Expert - Basic Guía de funcionamiento (consulte EcoStruxure Machine Expert -
Basic, Guía de funcionamiento).
28 EIO0000003300.02

Características de configuración
Direccionamiento de objetos de E/S
Ejemplos de direccionamiento
En esta tabla se muestran ejemplos de direccionamiento para varios tipos de
objeto:
Tipo de objeto Sintaxis Ejemplo Descripción
Objetos de memoria
Bits de memoria %Mi%M25 Bit 25 de memoria interna.
Palabras de memoria %MWi%MW15 Palabra 15 de memoria interna.
Palabras dobles de memoria %MDi%MD16 Palabra doble 16 de memoria interna.
Comas flotantes de memoria %MFi%MF17 Coma flotante 17 de memoria interna.
Palabras constantes %KWi%KW26 Palabra constante 26.
Palabras dobles constantes %KDi%KD27 Palabra doble 27 constante interna.
Comas flotantes constantes %KFi%KF28 Coma flotante 28 constante interna.
Objetos de sistema
Bits de sistema %Si%S8 Bit de sistema 8.
Palabras de sistema %SWi%SW30 Palabra de sistema 30.
objetos de E/S
Entradas digitales %Iy.z %I0.5 Entrada digital 5 en el controlador (E/S
incorporada).
Salidas digitales %Qy.z %Q3.4 Salida digital 4 en el módulo de
extensión en la dirección 3 (E/S del
módulo de extensión).
Entradas analógicas %IWy.z %IW0.1 Entrada analógica 1 en el controlador
(E/S incorporada).
Salidas analógicas %QW0.m0n%QW0.100 Salida analógica 0 en el cartucho 1.
Contadores rápidos %FCi%FC2 Contador rápido 2 en el controlador.
Contadores de alta velocidad %HSCi%HSC1 Contador de alta velocidad 1 en el
controlador.
Pulso %PLSi%PLS0 Salida de pulsos 0 en el controlador.
Modulación del ancho de
pulsos
%PWMi%PWM1 Salida de modulación de ancho de
pulsos 1 en el controlador.
Salida de tren de pulsos %PTOi%PTO1 Salida de tren de pulsos 1 en el
controlador.
Generador de frecuencias %FREQGENi%FREQGEN1 Generador de frecuencias 1 en el
controlador.
Objetos de red
Input assembly (EtherNet/IP) %QWEi%QWE8 Instancia 8 del Input assembly.
Output assembly (EtherNet/IP) %IWEi%IWE6 Instancia 6 del Output assembly.
Registros de entrada (Modbus
TCP)
%QWMi%QWM1 Instancia 1 del Input register.
Registros de salida (Modbus
TCP)
%IWMi%IWM0 Instancia 0 del Output register.
Entradas digitales (IOScanner) %INa.b.c %IN300.2.1 Dispositivo esclavo Modbus TCP
IOScanner 0 en ETH1, canal 2, entrada
digital 1.
Salidas digitales (IOScanner) %QNa.b.c %QN101.1.0 Dispositivo esclavo IOScanner serie
Modbus 1 en SL1, canal 1, salida digital
0.
Registros de entrada
(IOScanner) %IWNa.b.c %IWN302.3.0 Dispositivo esclavo Modbus TCP
IOScanner 2 en ETH1, canal 3, tamaño
ensamblado de entrada 0.
EIO0000003300.02 29

Características de configuración
Tipo de objeto Sintaxis Ejemplo Descripción
Registros de salida
(IOScanner) %QWNa.b.c %QWN205.0.4 Dispositivo esclavo IOScanner serie
Modbus 5 en SL2, canal 0, registro de
salida 4.
Códigos de diagnóstico de red
de IOScanner
%IWNSa%IWNS302 Estado del dispositivo esclavo Modbus
TCP IOScanner 2 en ETH1.
%IWNSa.b %IWNS205.3 Estado del canal 3 del dispositivo
esclavo IOScanner serie Modbus 5 en
la línea serie SL2
Objetos de software
Temporizadores %TMi%TM5 Instancia de temporizador 5.
Contadores %Ci%C2 Instancia de contador 2.
Mensaje %MSGi%MSG1 Mensaje de estado de compilación del
programa 1.
Registros LIFO/FIFO %Ri%R3 Instancia de registros FIFO/LIFO 3.
Conmutadores de tambor %DRi%DR6 Registro de conmutador de tambor 6 en
el controlador.
Registros de bits de
desplazamiento %SBRi%SBR5 Registro de bits de desplazamiento 5 en
el controlador.
Contadores de pasos %SCi%SC5 Contador de pasos 5 en el controlador.
Fechadores SCH iSCH 3 Fechador 3 en el controlador.
RTC RTCiRTC 1 Instancia 1 del reloj de tiempo real
(RTC).
PID PIDiPID 7 Objeto de respuesta PID 7 en el
controlador.
Pasos de Grafcet XiX1 Paso 1 de Grafcet.
Objetos PTO
MC_Power_PTO (bloque de
funciones de movimiento)
%MC_POWER_PTOi%MC_POWER_PTO1 Instancia del bloque de funciones MC_
POWER_PTO 1.
MC_Reset_PTO (bloque de
funciones administrativas)
%MC_RESET_PTOi%MC_RESET_PTO0 Instancia del bloque de funciones MC_
RESET_PTO 0.
Objetos de comunicación
Lectura de variables %READ_VARi%READ_VAR2 Instancia del bloque de funciones
READ_VAR 2.
Escritura de variables %WRITE_VARi%WRITE_VAR4 Instancia del bloque de funciones
WRITE_VAR 4.
Escritura y lectura de variables %WRITE_READ_VARi%WRITE_READ_VAR0 Instancia del bloque de funciones
WRITE_READ_VAR 0.
Enviar/Recibir mensaje %SEND_RECV_MSGi%SEND_RECV_MSG6 Instancia del bloque de funciones
SEND_RECV_MSG 6.
Enviar/Recibir SMS %SEND_RECV_SMSi%SEND_RECV_SMS0 Instancia del bloque de funciones
SEND_RECV_SMS 0.
Función definida por el usuario y objetos de bloque de funciones definidos por el usuario
Valor de retorno %RETi%RET0 Valor de retorno de una función definida
por el usuario.
Parámetros %PARAMi%PARAM0 Parámetro de una función definida por
el usuario.
30 EIO0000003300.02

Características de configuración
Tipo de objeto Sintaxis Ejemplo Descripción
Variables locales %VARi%VAR0 Variables locales de una función
definida por el usuario.
a: 100 + número de dispositivo en SL1, 200 + número de dispositivo en SL2, 300 + número de dispositivo en ETH1.
b: Número de canal del dispositivo Modbus Serial IOScanner o Modbus TCP IOScanner.
c: Identificador de instancia de objeto en el canal.
i: Identificador de instancia de objeto que indica la instancia del objeto en el controlador.
m: Número de cartucho en el controlador.
n: Número de canal en el cartucho.
y: Indica el tipo de E/S. Es 0 para el controlador y 1, 2, y así sucesivamente, para los módulos de extensión.
z: Número de canal en el controlador o en el módulo de extensión.
EIO0000003300.02 31

Características de configuración
Número máximo de objetos
Descripción del número máximo de objetos
En esta tabla se incluye información sobre el número máximo de objetos que
admite el M221 Logic Controller:
Objetos Referencias del M221 Logic Controller
Referencias de Modular Referencias de Compact
TM221M16R•
TM221ME16R•
TM221M16T•
TM221ME16T•
TM221M32TK
TM221ME32TK
TM221C••R
TM221CE••R
TM221C••T
TM221CE••T
TM221C••U
TM221CE••U
Objetos de memoria
%M(1) 512
1024
512
1024
512
1024
512
1024
%MW 8000 8000 8000 8000
%MD
%MF
7999 7999 7999 7999
%KW 512 512 512 512
%KD
%KF
511 511 511 511
Objetos de sistema
%S 160 160 160 160
%SW 234 234 234 234
%IWS 1 creado automáticamente por cada entrada analógica
%QWS 1 creado automáticamente por cada salida analógica
objetos de E/S
%I 8 8
(para TM221M16T• y
TM221ME16T•)
9
(para TM221C16• y
TM221CE16•)
9
(para TM221C16• y
TM221CE16•)
16
(para TM221M32TK y
TM221ME32TK)
14
(para TM221C24• y
TM221CE24•)
14
(para TM221C24• y
TM221CE24•)
24
(para TM221C40• y
TM221CE40•)
24
(para TM221C40• y
TM221CE40•)
%Q 8 8
(para TM221M16T• y
TM221ME16T•)
7
(para TM221C16• y
TM221CE16•)
7
(para TM221C16• y
TM221CE16•)
16
(para TM221M32TK y
TM221ME32TK)
10
(para TM221C24• y
TM221CE24•)
10
(para TM221C24• y
TM221CE24•)
16
(para TM221C40• y
TM221CE40•)
16
(para TM221C40• y
TM221CE40•)
%IW 2 2 2 2
32 EIO0000003300.02

Características de configuración
Objetos Referencias del M221 Logic Controller
Referencias de Modular Referencias de Compact
TM221M16R•
TM221ME16R•
TM221M16T•
TM221ME16T•
TM221M32TK
TM221ME32TK
TM221C••R
TM221CE••R
TM221C••T
TM221CE••T
TM221C••U
TM221CE••U
%QW 0 0 NOTA: Las salidas analógicas no están integradas
con el controlador. Utilice cartuchos TMC2AQ2V o
TMC2AQ2C para añadir salidas analógicas a la
configuración del controlador.
2 (si se utiliza 1 cartucho)
4 (si se utilizan 2
cartuchos con
TM221C40R o
TM221CE40R)
2 (si se utiliza 1 cartucho)
4 (si se utilizan 2
cartuchos con
TM221C40T,
TM221CE40T,
TM221C••U o
TM221CE••U)
%FC 4 4 4 4
%HSC Hasta 4 Hasta 4 Hasta 4 Hasta 4
%PLS
%PWM
%PTO
%FREQGEN
0 2 0 2
Objetos de red
%QWE 20
(para TM221ME16R•)
20
(para TM221ME16T• y
TM221ME32TK)
20
(para TM221CE16•)
20
(para TM221CE16•)
%IWE 20
(para TM221ME16R•)
20
(para TM221ME16T• y
TM221ME32TK)
20
(para TM221CE16•)
20
(para TM221CE16•)
%QWM 20
(para TM221ME16R•)
20
(para TM221ME16T• y
TM221ME32TK)
20
(para TM221CE16•)
20
(para TM221CE16•)
%IWM 20
(para TM221ME16R•)
20
(para TM221ME16T• y
TM221ME32TK)
20
(para TM221CE16•)
20
(para TM221CE16•)
%IN 128 128 128 128
%QN 128 128 128 128
%IWN 128(2) 128(2) 128(2) 128(2)
%QWN 128(2) 128(2) 128(2) 128(2)
%IWNS 1 para cada dispositivo Modbus TCP IOScanner o Modbus Serial IOScanner configurado, más 1 para cada
canal
%QWNS 1 para cada dispositivo Modbus TCP IOScanner o Modbus Serial IOScanner configurado, más 1 para cada
canal
Objetos de software
%TM 255 255 255 255
%C 255 255 255 255
EIO0000003300.02 33

Características de configuración
Objetos Referencias del M221 Logic Controller
Referencias de Modular Referencias de Compact
TM221M16R•
TM221ME16R•
TM221M16T•
TM221ME16T•
TM221M32TK
TM221ME32TK
TM221C••R
TM221CE••R
TM221C••T
TM221CE••T
TM221C••U
TM221CE••U
%MSG 2 2 1
(para TM221C••R)
1
(para TM221C••T y
TM221C••U)
2
(para TM221CE••R)
2
(para TM221CE••T y
TM221CE••U)
%R 4 4 4 4
%DR 8 8 8 8
%SBR 8 8 8 8
%SC 8 8 8 8
%SCH 16 16 16 16
%RTC 2 2 2 2
PID 14 14 14 14
Objetos de accionamiento
%DRV 16 16 16 16
Objetos de comunicación
%READ_VAR 32 (si el nivel funcional es ≥ 10.1) o 16 (si el nivel funcional es < 10.1).
%WRITE_VAR 32 (si el nivel funcional es ≥ 10.1) o 16 (si el nivel funcional es < 10.1).
%WRITE_READ_VAR 32 (si el nivel funcional es ≥ 10.1) o 16 (si el nivel funcional es < 10.1).
%SEND_RECV_MSG 16 16 16 16
%SEND_RECV_SMS 1 1 1 1
Objetos de función definidos por el usuario
%RET0 1 por función definida por el usuario
%PARAM 5 por función definida por el usuario
%VAR 48 (incluidos los %PARAM existentes)
Objetos de bloque de funciones definidos por el usuario
%Q_ 32 (si el nivel funcional ≥10.0) u 8 (si el nivel funcional <10.0).
%I_ 32 (si el nivel funcional ≥10.0) u 8 (si el nivel funcional <10.0).
%PARAM 48 (incluidos los %VAR existentes)
%VAR 48 (incluidos los %PARAM existentes)
(1) El valor 512 es para una versión de software <1.3.
(2) Si el nivel funcional es <6.0. Si el nivel funcional ≥ 6.0, el número máximo de objetos es 512.
34 EIO0000003300.02

Características de configuración
Descripción del número máximo de objetos PTO
En esta tabla se incluye información sobre el número máximo de objetos PTO que
admite el M221 Logic Controller:
Categorías/objetos Referencias del M221 Logic Controller
TM221M16R•
TM221ME16R•
TM221C••R
TM221CE••R
TM221M16T•
TM221ME16T•
TM221M32TK
TM221ME32TK
TM221C••T
TM221CE••T
TM221C16U
TM221CE16U
TM221C24U
TM221CE24U
TM221C40U
TM221CE40U
Movimiento/eje único
%MC_POWER_PTO 0 86
%MC_MOVEVEL_PTO
%MC_MOVEREL_PTO
%MC_MOVEABS_PTO
%MC_HOME_PTO
%MC_SETPOS_PTO
%MC_STOP_PTO
%MC_HALT_PTO
Movimiento/tarea de movimiento
%MC_MotionTask_PTO 0 2 4
Administrativo
%MC_READACTVEL_PTO 0 40
%MC_READACTPOS_PTO
%MC_READSTS_PTO
%MC_READMOTIONSTATE_PTO
%MC_READAXISERROR_PTO
%MC_RESET_PTO
%MC_TOUCHPROBE_PTO
%MC_ABORTTRIGGER_PTO
%MC_READPAR_PTO
%MC_WRITEPAR_PTO
EIO0000003300.02 35

Características de configuración
Estructura de tareas
Tareas y modalidades de exploración
Descripción general
El Modicon TM221M Logic Controller admite los siguientes tipos de tareas:
• Tarea maestra
• Tarea periódica
• Tarea de eventos
La tarea maestra se puede configurar en las modalidades de exploración
siguientes:
• Modalidad de ejecución libre
• Modalidad periódica
Para obtener más información, consulte Configuración de las tareas y el
comportamiento del programa (consulte EcoStruxure Machine Expert - Basic,
Guía de funcionamiento).
Tareas
Las tareas maestras se desencadenan por exploraciones cíclicas continuas o
temporizadores de software mediante la especificación del periodo de exploración
de 1 a 150 ms (valor predeterminado de 100 ms) en la modalidad periódica.
Las tareas periódicas se desencadenan por temporizadores de software, y se
configuran mediante la especificación del periodo de exploración de 1 a 255 ms
(valor predeterminado de 255 ms) en la modalidad periódica.
Las tareas de eventos se desencadenan por las entradas físicas o los bloques de
funciones HSC. Estos eventos están asociados con entradas digitales
incrustadas (de %I0.2 a %I0.5) (flancos ascendentes, descendentes o ambos) o
con los contadores de alta velocidad (cuando el conteo alcanza el umbral del
contador de alta velocidad). Dependiendo de la configuración, puede configurar
hasta dos eventos para cada bloque de funciones HSC.
Debe configurar una prioridad para cada tarea de eventos. El rango de prioridad
va de 0 a 7 y 0 tiene la prioridad más alta.
Modalidades de exploración
La modalidad de ejecución libre es una modalidad de exploración cíclica continua.
En esta modalidad, una nueva exploración se inicia inmediatamente después de
que la exploración previa se haya completado.
En esta figura se muestra la relación entre las tareas maestras y las tareas
periódicas cuando la tarea maestra está en modalidad de ejecución libre:
En la modalidad de ejecución libre, el tiempo de reposo para tarea maestra
representa al menos un 30 % del tiempo de ciclo total con un tiempo mínimo de 1
milisegundo. Este porcentaje puede ser mayor en función de la aplicación del
36 EIO0000003300.02

Características de configuración
usuario (tiempo de exploración de tarea periódica, tiempo de exploración de tarea
de evento, interacción en la comunicación, etc.).
En la modalidad periódica, el Logic Controller espera hasta que haya transcurrido
el tiempo de exploración configurado antes de iniciar una nueva exploración. Por
lo tanto, cada exploración tiene la misma duración.
En esta figura se muestra la relación entre las tareas maestras y las tareas
periódicas cuando la tarea maestra está en modalidad periódica:
Si el procesador pasa al estado HALTED cuando la tarea maestra está
configurada en modalidad de ejecución libre, compruebe si el tiempo de retardo
de exploración de tarea periódica es significativo en comparación con el periodo
de la tarea periódica. De ser así, intente:
• reconfigurar la tarea maestra de ejecución libre como tarea cíclica
• incrementar el periodo de la tarea periódica
Las prioridades de eventos controlan la relación entre las tareas de eventos, las
tareas maestras y las tareas periódicas. La tarea de eventos interrumpe la
ejecución de la tarea maestra y la tarea periódica.
En esta figura, se muestra la relación entre las tareas de eventos, las tareas
maestras y las tareas periódicas en modalidad periódica:
Las tareas de eventos se desencadenan por una interrupción del hardware que
envía un evento de tarea a la tarea de eventos.
Temporizador del watchdog
Puede configurar un temporizador del watchdog de la aplicación específico para
la tarea maestra y la tarea periódica. Si el tiempo de ejecución de la tarea
sobrepasa el periodo configurado en el temporizador del watchdog, el logic
controller pasa al estado HALTED.
Un temporizador de watchdog del sistema verifica si el programa utiliza más del
80% de la capacidad de procesamiento. En este caso, el logic controller pasa al
estado HALTED.
EIO0000003300.02 37

Características de configuración
Número máximo de tareas y prioridades
Descripción
En esta tabla se resumen los tipos de tareas, las modalidades de exploración
disponibles en cada tarea y sus condiciones de activación, los rangos
configurables por parte del operario, el número máximo de cada tarea y sus
prioridades de ejecución:
Tipo de tarea Modalidad de
exploración Condición de activación Rango configurable Cantidad
máxima de
tareas
Prioridad
Maestro Ejecución libre Normal No aplicable 1 La más baja
Periódica Temporizador del software 1...150 ms
Periódica Periódica Temporizador del software 1...255 ms 1 Superior a la tarea
maestra e inferior a las
tareas de eventos
Evento Periódica Entradas físicas %I0.2...%I0.5 4 La más alta
Bloques de funciones %
HSC
Hasta un máximo de dos
eventos por objeto %HSC
4
Estados y comportamientos del controlador
Introducción
En esta sección se proporciona información sobre los estados del controlador, las
transiciones de estado y los comportamientos en respuesta a los eventos del
sistema. Empieza con un detallado diagrama del estado del controlador y una
descripción de cada estado. Después se define la relación de los estados de
salida con los estados del controlador antes de explicar los comandos y eventos
que tienen como resultado las transiciones de estado. Concluye con información
sobre las variables persistentes y el efecto de las opciones de programación de
tareas de EcoStruxure Machine Expert - Basic en el comportamiento del sistema.
38 EIO0000003300.02


Características de configuración
Descripción de los estados del controlador
Introducción
En esta sección se proporciona una descripción detallada de los estados del
controlador.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
• Nunca asuma que el controlador se encuentra en un determinado estado
antes de ordenar una modificación de estado, configurar las opciones del
controlador, cargar un programa o modificar la configuración física del
controlador y de su equipo conectado.
• Antes de llevar a cabo cualquiera de estas operaciones, tenga en cuenta el
efecto que éstas tendrán en todos los equipos conectados.
• Antes de trabajar con un controlador, siempre debe confirmar positivamente
el estado del mismo viendo sus indicadores LED, confirmar el estado de la
entrada Run/Stop (Ejecutar/Detener), comprobar la presencia del forzado de
salida, así como revisar la información del estado del controlador a través de
EcoStruxure Machine Expert - Basic.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
NOTA: La palabra de sistema %SW6 indica el estado del Logic Controller
(EMPTY,STOPPED,RUNNING,HALTED yPOWERLESS).
Cuando utilice la función Inicio en ejecución, el controlador empezará a ejecutar la
lógica del programa cuando el equipo reciba alimentación. Es fundamental saber
por adelantado cómo afectará la reactivación automática de las salidas al proceso
o la máquina controlados. Configure la entrada Run/Stop para ayudar a controlar
la función Inicio en ejecución. Además, la entrada Run/Stop está diseñada para
dar control local sobre los comandos RUN. Para evitar que un comando RUN
remoto después de que el controlador haya sido detenido localmente por
EcoStruxure Machine Expert - Basic pueda tener consecuencias imprevistas,
debe configurar y conectar la entrada Run/Stop para ayudar a controlar esta
situación.
ADVERTENCIA
INICIO IMPREVISTO DE LA MÁQUINA
• Confirme que la reactivación automática de las salidas no produce
consecuencias imprevistas antes de utilizar la función Inicio en ejecución.
• Utilice la entrada Run/Stop para ayudar a controlar la función Inicio en
ejecución y para evitar activaciones no deseadas desde ubicaciones
remotas.
• Compruebe el estado de seguridad de su máquina o del entorno del proceso
antes de conectar la alimentación a la entrada Run/Stop o de enviar un
comando de ejecución desde una ubicación remota.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Si utiliza la función Inicio incondicional en ejecución, el controlador intentará
ejecutar la lógica del programa cuando el equipo reciba alimentación, con
independencia de la causa por la que se detuvo el controlador. Esto sucede
aunque la batería no esté cargada o aunque no esté presente. Por tanto, el
controlador se iniciará con todos los valores de la memoria reinicializados a cero
o a otros valores predeterminados. Es posible que si el controlador intenta
reiniciarse, por ejemplo, después de un corte de alimentación de poca duración,
los valores de la memoria en el momento del corte se pierdan, y reiniciar la
máquina puede tener consecuencias inesperadas a causa de la falta de batería
para mantener los valores de la memoria. Es fundamental saber por adelantado
40 EIO0000003300.02

Características de configuración
cómo afectará un inicio incondicional al proceso o la máquina controlados.
Configure la entrada Run/Stop para ayudar a controlar la función Inicio
incondicional en ejecución.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DE LA MÁQUINA
• Lleve a cabo un análisis de riesgos exhaustivo para determinar los efectos,
en cualquier condición, de configurar el controlador con la función Inicio
incondicional en ejecución.
• Utilice la entrada Run/Stop para evitar un reinicio incondicional no deseado.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Para obtener más información sobre la función de inicio incondicional en
ejecución, consulte Comportamiento de la aplicación (consulte EcoStruxure
Machine Expert - Basic, Guía de funcionamiento).
Tabla de estados del controlador
En esta tabla se proporciona una descripción detallada de los estados de
funcionamiento del controlador:
Estado del
controlador Descripción Comunicación Ejecución
de la
aplicación
Indicador LED
PWR RUN ERR
BOOTING El logic controller no tiene un firmware
válido.
Los canales de comunicación se
habilitan para permitir la actualización
del firmware de tiempo de ejecución.
No es posible iniciar sesión con
EcoStruxure Machine Expert - Basic.
Las salidas se establecen en valores
de inicialización, página 47.
Restringido No Encen-
dido Apagado Encendi-
do
EMPTY Este estado indica que no existe una
aplicación válida.
Es posible iniciar sesión con
EcoStruxure Machine Expert - Basic
(download/animation table).
Las entradas se fuerzan a 0.
Las salidas se establecen en valores
de inicialización, página 47.
Sí No Encen-
dido Apagado 1
parpadeo
STOPPED Este estado indica que el Logic
Controller tiene una aplicación válida
que está detenida.
Se leen las entradas.
Las salidas se establecen en valores
de recuperación, página 49 ovalores
forzados, página 49 desde
EcoStruxure Machine Expert - Basic.
La salida de la alarma de estado se
establece en 0.
Sí No Encen-
dido Parpadeo Apagado
EIO0000003300.02 41

Características de configuración
Estado del
controlador Descripción Comunicación Ejecución
de la
aplicación
Indicador LED
PWR RUN ERR
RUNNING Este estado indica que el Logic
Controller está ejecutando la
aplicación.
Las entradas se leen mediante las
tareas de la aplicación.
Las salidas se escriben mediante las
tareas de la aplicación o desde
EcoStruxure Machine Expert - Basic
en modalidad online (tabla de
animación, forzado de salida, página
49).
La salida de la alarma de estado se
establece en 1.
Sí Sí Encen-
dido Encendido Apagado
HALTED Este estado indica que la aplicación se
ha parado porque se ha detectado un
error de timeout de watchdog de la
aplicación o del sistema., página 161
Los objetos conservan sus valores y
permiten el análisis de la causa del
error detectado. Las tareas se
detienen en la última instrucción.
Las funciones de comunicación son
las mismas que en el estado
STOPPED (DETENIDO).
Las entradas no se leen y conservan
sus últimos valores.
Las salidas se establecen en los
valores de recuperación, página 49.
La salida de la alarma de estado se
establece en 0.
Sí No Encen-
dido Parpadeo Encendi-
do
POWERLESS Este estado indica que el Logic
Controller recibe alimentación
únicamente a través del cable USB.
Esta modalidad se puede utilizar para
actualizar el firmware (por USB) o para
cargar/descargar la aplicación de
usuario (por USB).
Para cambiar el estado del logic
controller, conecte la alimentación
principal para que arranque el logic
controller y recargue los componentes
instalados.
Es posible iniciar sesión con
EcoStruxure Machine Expert - Basic
(download/upload/animation table).
Las entradas se fuerzan a 0.
Las salidas se establecen en valores
de inicialización, página 47.
Sí (solo USB) No Apaga-
do Parpadeo Apagado
NOTA: La palabra de sistema %SW6 indica el estado del Logic Controller
(EMPTY,STOPPED,RUNNING,HALTED yPOWERLESS).
42 EIO0000003300.02

Características de configuración
Transiciones de estado del controlador
Controlador de arranque
Efecto: Da una orden de reinicio del Logic Controller. Para obtener más
información sobre la secuencia de activación, consulte el diagrama de estados
del controlador, página 39.
Métodos:
• Apagar y encender
• Reinicio por script
◦El script en una tarjeta SD puede emitir REBOOT como comando final.
Descarga de aplicaciones
Efecto: Descarga la aplicación en la memoria del Logic Controller.
Si lo prefiere, seleccione la opción Restablecer memorias para restablecer a 0
(opción predeterminada) o conservar el valor actual de todas las palabras y bits
de memoria al descargar la aplicación (consulte EcoStruxure Machine Expert -
Basic, Guía de funcionamiento).
Métodos:
• Botón online de EcoStruxure Machine Expert - Basic:
◦Seleccione el comando PC a controlador (descarga).
Efecto: Borra la aplicación del Logic Controller y establece el Logic
Controller en el estado EMPTY. Descarga la aplicación en la memoria del
logic controller. Si la descarga es correcta, se lleva a cabo un arranque en
frío y el logic controller se establece en el estado STOPPED.
• Transmisión de archivos de la aplicación mediante tarjeta SD:
◦Efecto: En el próximo reinicio, borra la aplicación del Logic Controller y
descarga los archivos de la aplicación de la tarjeta SD en la memoria del
controlador. Si la descarga es correcta, se lleva a cabo un arranque en frío
y el controlador se establece en el estado STOPPED.
Inicializar controlador
Efecto: Establece el controlador en el estado EMPTY y, tras un arranque en frío,
en el estado STOPPED.
Métodos:
• Botón online de EcoStruxure Machine Expert - Basic:
◦Seleccione el comando Inicializar controlador.
• Visualización gráfica remota.
EIO0000003300.02 43

Características de configuración
Controlador en modalidad RUN
Efecto: Envía una transición al estado del controlador RUNNING.
Métodos:
• Conmutador Run/Stop (consulte Logic Controller Modicon M221, Guía de
hardware) en la parte frontal:
◦Controla una transición al estado RUNNING en el flanco ascendente.
• Entrada Run/Stop (consulte Logic Controller Modicon M221, Guía de
hardware):
◦La entrada se debe configurar en la aplicación (Configuración de las
entradas digitales, página 66).
◦Controla una transición al estado RUNNING en el flanco ascendente.
• Botón online de EcoStruxure Machine Expert - Basic:
◦Seleccione el comando Ejecutar controlador.
• Ajuste Modalidad de inicio (consulte EcoStruxure Machine Expert - Basic,
Guía de funcionamiento) de la aplicación:
◦Inicio en ejecución,Inicio en estado anterior oInicio incondicional en
ejecución
• Visualización gráfica remota.
controlador en modalidad STOP
Efecto: Envía una transición al estado STOPPED.
Métodos:
• Conmutador Run/Stop (consulte Logic Controller Modicon M221, Guía de
hardware) en la parte frontal:
◦Fuerza una transición al estado STOPPED en un nivel bajo.
• Entrada Run/Stop (consulte Logic Controller Modicon M221, Guía de
hardware):
◦La entrada se debe configurar en la aplicación (Configuración de las
entradas digitales, página 66).
◦Fuerza una transición al estado STOPPED en un nivel bajo.
• Botón online de EcoStruxure Machine Expert - Basic:
◦Seleccione el comando Detener controlador.
• Ajuste Modalidad de inicio (consulte EcoStruxure Machine Expert - Basic,
Guía de funcionamiento) de la aplicación:
◦Inicio en parada oInicio en estado anterior.
• Comando Descargar:
◦Requiere que el controlador se establezca en el estado STOPPED (tras la
descarga, el controlador se encuentra en el estado STOPPED).
• Visualización gráfica remota.
Error detectado (transición al estado HALTED)
Efecto: Envía una transición al estado HALTED.
Motivos para cambiar al estado HALTED:
• Timeout del watchdog de la aplicación (configurado por el usuario) (consulte
EcoStruxure Machine Expert - Basic, Guía de funcionamiento)
•Timeout de watchdog del sistema (desborde del sistema si se utiliza más del
80 % de la capacidad de procesamiento), página 37
44 EIO0000003300.02

Características de configuración
Arranque en frío
El arranque en frío se define como un inicio con todos los datos inicializados a sus
valores predeterminados y el programa iniciado desde el comienzo con todas las
variables eliminadas. Los parámetros de software y hardware se inicializan.
Un arranque en frío se produce por los siguientes motivos:
• Arranque del controlador sin una modificación online de la aplicación
validada.
• Suministro de alimentación a un logic controller sin una batería de reserva
cargada.
• Descarga de aplicaciones
• Se inicializa un logic controller
Efectos del arranque en frío:
• Inicializa los bloques de funciones.
• Borra la memoria de usuario.
• Restablece los objetos de sistema %S y las palabras de sistema %SW a sus
valores iniciales.
• Vuelve a cargar los parámetros desde la configuración de Post (se aplican
los cambios realizados en la configuración de Post).
• Restaura la aplicación desde la memoria no volátil (se pierden los cambios
online no guardados).
• Reinicia los componentes internos del controlador.
Arranque en caliente
El arranque en caliente reanuda la ejecución del programa, en su estado de
funcionamiento previo, conservando los contadores, bloques de funciones y bits y
palabras de sistema.
Variables persistentes
Almacenamiento automático en caso de corte de corriente
El controlador guarda automáticamente las primeras 50 palabras de memoria (de
%MW0 a%MW49) en la memoria no volátil después de un corte de corriente. Los
datos se restauran en la región de palabras de memoria durante la inicialización,
aunque el controlador lleve a cabo un arranque en frío debido a batería ausente o
agotada.
Estas variables persistentes guardadas automáticamente se reinicializan:
• Después de cada nueva descarga, si se selecciona la casilla de verificación
Restablecer memorias en la configuración de descarga (consulte
EcoStruxure Machine Expert - Basic, Guía de funcionamiento).
• Después de un comando de inicialización.
• Tras la activación del bit de sistema %S0 (consulte Bits de sistema, página
184).
EIO0000003300.02 45

Características de configuración
Guardar por petición del usuario
Puede guardar las palabras de memoria en la memoria no volátil o en la tarjeta
SD. Para realizar la operación de guardar:
1. Seleccione el destino con %S90 (consulte Bits de sistema, página 184):
• Establecido en 0: memoria no volátil (predeterminada).
• Definido en 1: tarjeta SD
2. Establezca el número de palabras de memoria que deben guardarse en la
palabra de sistema %SW148 (consulte Palabras de sistema, página 192).
3. Establezca el bit de sistema %S93 en 1 (consulte Bits de sistema, página
184).
Cuando la operación de guardado ha finalizado:
• El bit de sistema %S93 se restablece en 0.
• El bit de sistema %S92 se establece en 1, lo que indica que las palabras de
memoria se han guardado correctamente en la memoria no volátil (%S90
establecido en 0).
• La palabra de sistema %SW147 indica el resultado de operación de la tarjeta
SD (%S90 establecido en 1).
NOTA: Puede iniciar una operación de guardar en memoria mientras el logic
controller esté en estado RUNNING. Sin embargo, en función del número de
variables de memoria que especifique, puede que la operación de guardar no
se complete en un único ciclo de exploración de lógica. Como consecuencia,
los valores de memoria no necesariamente serán coherentes debido a que el
valor de las variables de memoria puede cambiar de una exploración a otra.
Si desea tener un conjunto de valores coherente para las variables, puede
establecer primero el logic controller en estado STOPPED.
Restaurar por petición del usuario
Puede restaurar las palabras de memoria guardadas anteriormente. Para realizar
la operación de restauración:
1. Establezca el bit de sistema %S92 en 1.
La operación en la memoria no volátil no tiene efecto si %S92 es 0 (no se han
guardado valores anteriormente).
2. Seleccione el origen con %S90 (consulte Bits de sistema, página 184):
• Establecido en 0: memoria no volátil (predeterminada).
• Definido en 1: tarjeta SD
3. Para restaurar desde la memoria no volátil, seleccione el número de palabras
de memoria en la palabra de sistema %SW148 (consulte Palabras de
sistema, página 192). Al restaurar desde la tarjeta SD se procesa el archivo
Memory Variables.csv completo.
4. Establezca el bit de sistema %S94 en 1 (consulte Bits de sistema, página
184).
Cuando la operación de restauración ha finalizado:
• El sistema restablece el bit de sistema %S94 a 0.
• La palabra de sistema %SW148 se actualiza con el número de objetos
restaurados (por ejemplo, si especifica 100 palabras para restaurar y sólo se
habían guardado 50 antes, el valor de %SW148 será 50).
• La palabra de sistema %SW147 indica el resultado de operación de la tarjeta
SD (%S90 establecido en 1).
46 EIO0000003300.02

Características de configuración
Eliminar por petición del usuario
Puede eliminar las palabras de memoria guardadas anteriormente en la memoria
no volátil. Para realizar la operación de borrado:
• Establezca el bit de sistema %S91 en 1 (consulte Bits de sistema, página
184).
• Cuando la operación de borrado finalice, el logic controller restablecerá a 0
los bits de sistema %S91 y %S92 y la palabra de sistema %SW148.
Esta operación no borra las variables de la memoria RAM.
NOTA: No es posible borrar sólo variables seleccionadas: se borra el conjunto
completo de variables guardadas (lo que significa que %SW148 no tiene
efecto en la operación de borrado; la operación de borrado se realiza
independientemente del valor de %SW148).
Comportamiento de la salida
Introducción
El controlador define el comportamiento de la salida en respuesta a los comandos
y eventos de sistema de forma que permita una mayor flexibilidad. Es necesario
comprender este comportamiento antes de tratar los comandos y eventos que
afectan a los estados del controlador.
Los posibles comportamientos de salida y los estados del controlador a los que se
aplican son:
• Gestión a través de la aplicación
• Valores de inicialización
• Comportamiento de retorno (consulte EcoStruxure Machine Expert - Basic,
Guía de funcionamiento)
◦Valores de retorno
◦Mantener valores
• Forzado de salida
Gestión a través de la aplicación
La aplicación gestiona las salidas con normalidad. Esto se aplica en el estado
RUNNING.
Valores de inicialización del hardware
Este estado de salida se aplica en los estados BOOTING,EMPTY y
POWERLESS.
EIO0000003300.02 47

Características de configuración
En el estado de inicialización, las salidas asumen los siguientes valores:
• Para salidas incrustadas:
◦Salida rápida de transistor de común positivo: 0 V CC
◦Salida rápida de transistor de común negativo: 24 V CC
◦Salida normal de transistor de común positivo: 0 V CC
◦Salida normal de transistor de común negativo: 24 V CC
◦Salida de relé: Abierta
• Para salidas del módulo de extensión:
◦Salida normal de transistor de común positivo: 0 V CC
◦Salida normal de transistor de común negativo: 24 V CC
◦Salida de relé: Abierta
Valores de inicialización del software
Este estado de salida se aplica al descargar o al restablecer la aplicación. Se
aplica al final de la descarga o al final de un arranque en caliente o en frío.
Los objetos de entrada (%I y%IW), los objetos de red (%QWE y%QWM) y los
objetos de entrada de Modbus Serial IOScanner (%IN y%IWN) se establecen en
0. Los objetos de salida (%Q y%QW), los objetos de red (%IWE y%IWM) y los
objetos de salida de Modbus Serial IOScanner (%QN y%QWN) se establecen
según el comportamiento de retorno seleccionado.
Gestión de retorno
El objetivo del comportamiento de retorno es controlar las salidas cuando el
controlador sale del estado RUNNING.
Los valores de retorno se aplican en la transición de los estados de RUNNING a
STOPPED oHALTED, excepto en los casos especiales que se describen a
continuación.
Configuración del comportamiento de retorno
El comportamiento de retorno se configura en la ficha Programación, en la
ventana Tareas > Comportamiento:
• Si se selecciona Valores de retorno, en caso de ocurrencia de retorno, los
valores de salida toman los valores configurados en Valor de retorno.
• Si se selecciona Mantener valores, las salidas mantienen los valores en
caso de ocurrencia de retorno, excepto en el caso de las salidas
configuradas en el generador de pulsos (PWM, PLS, PTO y FREQGEN) o las
funciones reflejas.
Ejecución de retorno
En caso de ocurrencia de retorno:
• Si se selecciona Valores de retorno, las salidas toman los valores
configurados en Valor de retorno.
• Si se selecciona Mantener valores, las salidas mantienen los valores.
48 EIO0000003300.02

Características de configuración
Casos especiales:
• Salida de alarma, PTO y FREQGEN: El retorno nunca se aplica. Se fuerza el
valor de retorno 0.
• PLS, PWM y salidas reflejas:
◦Si se selecciona Valores de retorno, las salidas toman los valores
configurados en Valor de retorno.
◦Si se selecciona Mantener valores, las salidas se establecen en 0.
NOTA:
• Tras una descarga, las salidas se establecen en sus valores de retorno.
• En el estado EMPTY, las salidas están establecidas en 0.
• Puesto que la imagen de datos refleja los valores físicos, los valores de
retorno también se aplican a la imagen de datos. Sin embargo, el uso del
bit del sistema %S9 para aplicar códigos de valores de retorno no
modifica los valores de la imagen de datos.
Valores de retorno
Este estado de salida se aplica en los estados STOPPED yHALTED.
Durante el retorno, las salidas asumen los valores siguientes:
• Para salidas incrustadas:
◦Salida de transistor rápida: según el ajuste de recuperación
◦Salida de transistor normal: según el ajuste de recuperación
◦Salida de relé: según el ajuste de recuperación
◦Funciones de E/S expertas (HSC, PLS, PWM, PTO y FREQGEN):
- Salida de común positivo: 0 V CC
- Salida de común negativo: 24 V CC
• Para salidas del módulo de extensión:
◦Salida de transistor normal: según el ajuste de recuperación
◦Salida de relé: según el ajuste de recuperación
NOTA: En caso de error de bus de extensión de E/S se producirá una
excepción de aplicación de los valores de retorno. Para obtener más
información, consulte Descripción general de la configuración de E/S, página
91.
Forzado de salida
El controlador permite forzar el estado de las salidas seleccionadas a un valor
definido para realizar la puesta en marcha y pruebas del sistema, así como su
mantenimiento.
Puede forzar el valor de una salida con el controlador conectado a EcoStruxure
Machine Expert - Basic o con una Pantalla gráfica remota (consulte Modicon
TMH2GDB, Pantalla gráfica remota, Guía del usuario) TMH2GDB.
Para ello, utilice el comando Force en la tabla de animación o fuerce el valor
utilizando los botones F0 o F1 del editor del diagrama de contactos.
El forzado de salida invalida el resto de los comandos en una salida
independientemente de la lógica de la tarea que se esté ejecutando.
El forzado no se desactiva mediante ningún cambio online o cierre de sesión de
EcoStruxure Machine Expert - Basic.
El forzado se anula automáticamente mediante el comando Arranque en frío,
página 45 yDescarga de aplicaciones, página 43.
EIO0000003300.02 49

Características de configuración
El forzado no se aplica a las funciones de E/S expertas (HSC, PLS, PWM, PTO y
FREQGEN).
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
• Debe entender perfectamente cómo afectará el forzado a las salidas de las
tareas que se estén ejecutando.
• No intente forzar una E/S que se encuentre en tareas si no está seguro de
que dichas tareas se ejecutarán oportunamente, a menos que pretenda que
el forzado surta efecto en la próxima ejecución de la tarea,
independientemente de cuándo se produzca.
• Si fuerza una salida y aparentemente no tiene ningún efecto en la salida
física, no salga de EcoStruxure Machine Expert - Basic sin eliminar el
forzado.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Restablecimiento de salidas
En caso de un cortocircuito o una sobrecarga de corriente, el grupo común de
salidas pasa automáticamente a la modalidad de protección térmica (todas las
salidas del grupo se establecen en 0) y, a continuación, se rearman
periódicamente (cada segundo) para probar el estado de la conexión. Sin
embargo, debe ser consciente del efecto de este restablecimiento en la máquina
o el proceso que se controla.
NOTA: El restablecimiento de salidas no se aplica a salidas de común
negativo.
ADVERTENCIA
INICIO IMPREVISTO DE LA MÁQUINA
Inhiba el restablecimiento automático de salidas si esta función implica un
comportamiento no deseado para la máquina o el proceso.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
NOTA: Solo se detecta el cortocircuito entre una salida establecida en TRUE y
0 V. No se detecta el cortocircuito entre una salida establecida en FALSE y 24
V.
Si es necesario, puede utilizar bits y palabras de sistema para detectar si se ha
producido un cortocircuito o una sobrecarga y en qué clúster de salidas ha
sucedido. El bit de sistema %S10 puede utilizarse para detectar si se ha
producido un error de salida dentro del programa. Puede usar la palabra de
sistema %SW139 para determinar mediante programación en qué clúster de las
salidas se ha producido un cortocircuito o una sobrecarga.
La función de restablecimiento automático puede deshabilitarse estableciendo el
bit de sistema %S49 en 0 (%S49 se establece en 0 de manera predeterminada).
Configuración de Post
Introducción
En esta sección se describe cómo gestionar y configurar el archivo de la
configuración de Post del Modicon M221 Logic Controller.
50 EIO0000003300.02

Características de configuración
Configuración de Post
Introducción
La configuración de Post es una opción que permite modificar algunos
parámetros de la aplicación sin cambiar la aplicación. Los parámetros de
configuración de Post se definen en un archivo denominado Machine.cfg, que se
almacena en el controlador.
De forma predeterminada, todos los parámetros de comunicación se establecen
en la configuración de la aplicación. Sin embargo, en ciertas condiciones, algunos
o todos estos parámetros pueden modificarse de forma automática mediante el
mecanismo de configuración de Post. Uno o más parámetros de comunicación
pueden especificarse en el archivo de configuración de Post, y estos parámetros
pueden sobrescribir los parámetros especificados por la configuración. Por
ejemplo, un parámetro se puede almacenar en el archivo de configuración de
Post para cambiar la dirección IP de Ethernet del controlador mientras que deja
los otros parámetros de Ethernet, como la dirección de pasarela, sin cambios.
Parámetros
El archivo de configuración de Post permite modificar los parámetros de red.
Parámetros de Ethernet:
• Modalidad de la configuración de dirección
• Dirección IP
• Máscara de subred
• Dirección de pasarela
• Nombre del dispositivo
Los parámetros de línea serie, para cada línea serie de la aplicación (puerto
incorporado o cartucho TMC2SL1):
• Medio físico
• Velocidad de transmisión en baudios
• Paridad
• Bits de datos
• Bit de parada
• Dirección Modbus
• Polarización (para RS-485)
Modalidad de funcionamiento
El archivo de configuración de Post se lee y se aplica:
• después de un arranque en caliente, página 45
• después de un arranque en frío, página 45
• Después de un Reinicio, página 43.
• Después de descargar una aplicación, página 43
• Después de una reconfiguración de Ethernet provocada por una reconexión
del cable Ethernet (exclusivamente para la parte de Ethernet del archivo de
configuración de Post, página 100)
Para obtener más detalles sobre los estados y las transiciones del controlador,
consulte Estados y comportamientos del controlador, página 38.
EIO0000003300.02 51

Características de configuración
Gestión de archivos de configuración de Post
Introducción
El archivo de configuración de Post se puede transferir, modificar o eliminar
mediante una tarjeta SD. Consulte Gestión de la configuración de Post, página
158.
NOTA: Hay disponible un ejemplo de archivo de configuración de Post en el
directorio Firmwares & PostConfiguration\PostConfiguration
\add_change\usr\cfg del directorio de instalación de EcoStruxure
Machine Expert - Basic.
Formato de archivo de configuración de Post
Una configuración válida debe presentar el siguiente formato:
• El carácter "#" indica el inicio de un comentario; todo lo que aparece tras este
signo y hasta el final de la línea se ignora. Los comentarios no se guardan en
el área de configuración de Post del M221 Logic Controller.
• La regla es channel.parameter=value (sin dejar espacio alrededor del
signo "=").
• El Channel y el parameter distinguen entre mayúsculas y minúsculas.
• Los canales, parámetros y valores permitidos se muestran en la siguiente
tabla:
Canal Parámetro Descripción Valor
ETH IPMODE Modalidad de la configuración de
dirección
0 = Fijo
1 = BOOTP
2 = DHCP
IP Dirección IP Cadena decimal con puntos
MASK Máscara de subred Cadena decimal con puntos
GATEWAY Dirección de pasarela Cadena decimal con puntos
NETWORKNAME Nombre del dispositivo en la red Cadena ASCII (máximo 16 caracteres)
SL1
SL2
HW Medio físico 0 = RS-232
1 = RS-485
BAUDS Velocidad de transmisión de datos 1.200, 2.400, 4.800, 9.600, 19.200, 38.400,
57.600 o 115.200
PARITY Paridad para la detección de
errores 0 = Ninguno
1 = Impar
2 = Par
DATAFORMAT Formato de los datos 7 o 8
STOPBIT Bit de parada 1 o 2
MODBUSADDR Dirección Modbus De 1 a 247
POLARIZATION Polarización (solo para cartuchos) 0 = No
1 = Sí
52 EIO0000003300.02

Características de configuración
NOTA: Al usar un archivo de configuración de Post para la configuración de
Ethernet, no es obligatorio especificar todos los parámetros:
• Si el M221 Logic Controller está configurado (por la aplicación de
usuario) en modalidad DHCP o BOOTP, los parámetros de red IP
(dirección IP), MASK (máscara de subred) y GATEWAY (dirección de
puerta de enlace) no están configurados en el archivo.
• Si un parámetro no está configurado en el archivo de configuración de
Post, el M221 Logic Controller utiliza el valor configurado en la aplicación
de usuario (consulte Configuración de Ethernet, página 100).
• Si el M221 Logic Controller está configurado en modalidad DHCP o
BOOTP por la aplicación de usuario y se ha definido la modalidad de IP
fija (IPMODE=0) en el archivo de configuración de Post, configure los
parámetros de red (IP (dirección IP), MASK (máscara de subred) y
GATEWAY (dirección de puerta de enlace)), puesto que no están
configurados mediante la aplicación de usuario. De lo contrario, el M221
Logic Controller se inicia con la configuración predeterminada de
Ethernet.
Transferencia del archivo de configuración de Post
Tras crear y modificar el archivo de configuración de Post, se debe transferir al
Logic Controller. La transferencia se lleva a cabo copiando el archivo de
configuración de Post a una tarjeta de SD con un script.
Consulte Agregar o cambiar una configuración de Post, página 159.
Modificación de un archivo de configuración de Post
Utilice un editor de texto para modificar el archivo de configuración de Post en el
PC.
NOTA: No cambie la codificación del archivo de texto. La codificación
predeterminada es ANSI.
NOTA: Los parámetros de Ethernet del archivo de configuración de Post se
pueden modificar con EcoStruxure Machine Expert - Basic. Para obtener más
información, consulte Conexión a un Logic Controller (consulte EcoStruxure
Machine Expert - Basic, Guía de funcionamiento).
Supresión de un archivo de configuración de Post
Consulte Supresión de un archivo de configuración de Post, página 160.
NOTA: Se usarán los parámetros definidos en la aplicación, en lugar de los
parámetros correspondientes definidos en el archivo de configuración de
Post.
EIO0000003300.02 53

Configuración del M221 Logic Controller
Contenido de esta parte
Cómo configurar un controlador ......................................................................55
Configuración de entrada/salida incrustada......................................................66
Configuración de bus de E/S...........................................................................91
Configuración de comunicaciones integradas................................................. 100
Tarjeta SD ...................................................................................................149
Descripción general
En este apartado se proporciona información acerca de cómo configurar las
referencias del M221 Logic Controller.
54 EIO0000003300.02

Cómo configurar un controlador
Cómo configurar un controlador
Contenido de este capítulo
Compilación de una configuración ..................................................................55
Configuración de dispositivos de los módulos de extensión E/S
opcionales ....................................................................................................59
Configuración del M221 Logic Controller .........................................................64
Actualización del firmware mediante el asistente de Executive Loader ..............65
Descripción general
En este capítulo se describe cómo crear una configuración en EcoStruxure
Machine Expert - Basic y configurar el M221 Logic Controller.
Compilación de una configuración
Introducción
Configure un controlador mediante la creación de una configuración en
EcoStruxure Machine Expert - Basic. Para crear una configuración, primero debe
crear un nuevo proyecto o abrir un proyecto existente.
Consulte EcoStruxure Machine Expert - Basic - Guía de funcionamiento para
obtener información sobre cómo:
• Crear o abrir un proyecto existente
• Reemplazar el Logic Controller predeterminado
• Añadir un módulo de extensión al Logic Controller
• Añadir un cartucho al Logic Controller
• Guardar el proyecto
A continuación se proporciona información general sobre la interfaz del usuario
de EcoStruxure Machine Expert - Basic.
EIO0000003300.02 55

Cómo configurar un controlador
Ventana de EcoStruxure Machine Expert - Basic
Una vez que haya seleccionado un proyecto con el que trabajar, en EcoStruxure
Machine Expert - Basic se muestra la ventana principal.
En la parte superior de la ventana principal, la barra de herramientas (consulte
EcoStruxure Machine Expert - Basic, Guía de funcionamiento) contiene iconos
que permiten realizar tareas comunes, como abrir el menú Inicio.
Junto a la barra de herramientas, la barra de estado (consulte EcoStruxure
Machine Expert - Basic, Guía de funcionamiento) muestra mensajes informativos
sobre el estado de la conexión al Logic Controller.
Por debajo de la barra de herramientas y la barra de estado, la ventana principal
se divide en diferentes módulos. Cada módulo controla una etapa diferente del
ciclo de desarrollo, y se accede a él haciendo clic en la ficha del módulo.
En esta figura se muestra la barra de herramientas, la barra de estado y las fichas
del módulo de la ventana principal:
1Barra de herramientas
2Barra de estado
3Fichas
Elemento Descripción
Barra de
herramientas Proporciona un acceso fácil a las funciones más utilizadas.
Para obtener más información, consulte la barra de herramientas (consulte
EcoStruxure Machine Expert - Basic, Guía de funcionamiento).
Barra de
estado Muestra mensajes de información y de estado relativos al sistema.
Para obtener más información, consulte la barra de estado (consulte
EcoStruxure Machine Expert - Basic, Guía de funcionamiento).
Fichas Para desarrollar una aplicación, pase por todas las fichas del módulo de
izquierda a derecha:
•Propiedades
Configure las propiedades del proyecto.
•Configuración
Replique y configure la configuración de hardware del Logic Controller y de
los módulos de extensión asociados.
•Programación
Desarrolle su programa en uno de los lenguajes de programación
compatibles.
•Visualizador
Cree una interfaz de operador para un dispositivo Visualización gráfica
remota.
Para obtener más información, consulte la Guía del usuario del terminal
gráfico remoto TMH2GDB.
•Puesta en marcha
Gestione la conexión entre EcoStruxure Machine Expert - Basic y el Logic
Controller, cargue y descargue aplicaciones, pruebe la aplicación y póngala
en marcha.
56 EIO0000003300.02

Cómo configurar un controlador
Árbol de hardware
El árbol de hardware aparece en el lado izquierdo de la ventana Configuración.
Muestra una vista estructurada de la configuración del hardware. Al añadir un
controlador, un módulo de extensión o un cartucho al proyecto, se añaden varios
nodos automáticamente al árbol de hardware.
NOTA: Los nodos del árbol de hardware son específicos del controlador y de
la configuración de hardware. Estos nodos dependen de las funciones de E/S
proporcionadas por el controlador, los módulos de extensión y los cartuchos.
En esta figura se muestra el árbol de hardware de la configuración del
controlador:
Elemento Descripción
Entradas digitales Se utiliza para configurar las entradas digitales incorporadas del
Logic Controller.
Salidas digitales Se utiliza para configurar las salidas digitales incorporadas del Logic
Controller.
Entradas analógicas Se utiliza para configurar las entradas analógicas incorporadas del
Logic Controller.
Contadores de alta
velocidad Se utiliza para configurar las funciones de conteo de alta velocidad
(HSC) incorporadas.
Generadores de pulsos Se utiliza para configurar las funciones del generador de pulsos (PLS/
PWM/PTO/FREQGEN) incorporadas.
Bus de E/S Se utiliza para configurar los módulos de extensión y los cartuchos
conectados al Logic Controller.
ETH1 Se utiliza para configurar las comunicaciones Ethernet incorporadas.
Modbus TCP Se utiliza para configurar el protocolo Modbus TCP para las
comunicaciones Ethernet.
Adaptador EtherNet/IP Se utiliza para configurar el adaptador EtherNet/IP para las
comunicaciones Ethernet.
SLn(línea serie) Se utiliza para configurar la línea serie incorporada o la línea serie
añadida con un cartucho.
nNúmero de línea serie (1 o 2, específico del controlador).
EIO0000003300.02 57

Cómo configurar un controlador
Editor
El área del editor aparece en la parte central de la ventana Configuración.
Muestra la representación gráfica de la configuración de hardware de los
dispositivos. La configuración de hardware de un proyecto puede ser:
• Sólo un controlador
• Un controlador con cartuchos
• Un controlador con módulos de extensión
• Un controlador con cartuchos y módulos de extensión
El área del editor muestra:
• Una breve descripción sobre el dispositivo cuando se hace clic en la imagen
del dispositivo o en el nodo de dispositivo en el árbol de hardware.
• Las propiedades de configuración del elemento seleccionado en el árbol de
hardware.
Si añade un módulo de extensión a la configuración, el módulo de extensión
aparece en la parte derecha del controlador o el módulo de extensión añadido
previamente. Los cartuchos se añaden al controlador en el slot del cartucho.
Al configurar un controlador, un cartucho o un módulo de extensión, las
propiedades de configuración del nodo seleccionado en el árbol de hardware
aparecen debajo de la configuración gráfica. Estas propiedades permiten
configurar el dispositivo.
En esta figura se muestra la configuración de un controlador con un módulo de
extensión (se selecciona el controlador):
58 EIO0000003300.02

Cómo configurar un controlador
Catálogo
El área de catálogo aparece en el lado derecho de la ventana Configuración.
Muestra el rango completo de controladores lógicos, módulos de extensión y
cartuchos que se pueden configurar con EcoStruxure Machine Expert - Basic.
Asimismo, proporciona una breve descripción del dispositivo seleccionado.
Puede arrastrar y soltar objetos desde el área de catálogo hasta el área del editor.
También puede sustituir el controlador existente por otro controlador con sólo
arrastrar y soltar desde el catálogo.
En esta figura se muestra el catálogo de los logic controllers y los módulos de
extensión:
Configuración de dispositivos de los módulos de
extensión E/S opcionales
Presentación de los módulos de extensión de E/S opcionales
Los módulos de extensión de E/S se pueden marcar como opcionales en la
configuración. La función Módulo opcional proporciona una configuración más
flexible al aceptar la definición de módulos no conectados físicamente al logic
controller. Por lo tanto, una única aplicación puede admitir varias configuraciones
físicas de módulos de extensión de E/S, lo cual favorece un mayor grado de
escalabilidad sin la necesidad de mantener varios archivos de aplicación para la
misma aplicación.
Sin la función Módulo opcional, cuando el Logic Controller inicia el bus de
extensión de E/S (después de apagado y encendido, descarga de aplicaciones o
comando de inicialización), compara la configuración definida en la aplicación con
los módulos de E/S físicos conectados al bus de E/S. Entre otros diagnósticos
realizados, si el Logic Controller determina que hay módulos de E/S definidos en
EIO0000003300.02 59

Cómo configurar un controlador
la configuración que no están físicamente presentes en el bus de E/S, se detecta
un error y el bus de E/S no se inicia.
Con la función Módulo opcional, el Logic Controller ignora los módulos de
extensión de E/S ausentes que haya marcado como opcionales, lo que permite
que el Logic Controller inicie el bus de extensión de E/S.
El Logic Controller inicia el bus de extensión de E/S en el momento de la
configuración (después de apagar y encender, descargar una aplicación o
ejecutar un comando de inicialización) aunque los módulos de extensión
opcionales no estén conectados físicamente al Logic Controller.
Se pueden marcar como opcionales los siguientes tipos de módulo:
• Módulos de extensión de E/S TM3
• Módulos de extensión de E/S TM2
NOTA: Los módulos transmisores/receptores TM3 (TM3XTRA1 y
TM3XREC1) y los cartuchos TMC2 no se pueden marcar como opcionales.
La aplicación se debe configurar con un nivel funcional (consulte EcoStruxure
Machine Expert - Basic, Guía de funcionamiento) de, como mínimo, Nivel 3.2
para que el Logic Controller reconozca como tales a los módulos marcados como
opcionales.
Debe ser muy consciente de las implicaciones y los efectos de marcar módulos
de E/S como opcionales en su aplicación, tanto si estos módulos están presentes
como si están ausentes físicamente al ejecutar la máquina o el proceso.
Asegúrese de incluir esta función en el análisis de riesgos.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Incluya en el análisis de riesgos cada una de las variantes de configuración de
E/S que se pueden realizar marcando módulos de ampliación de E/S como
opcionales, y concretamente el establecimiento de módulos de seguridad TM3
(TM3S…) como módulos de E/S opcionales, y valore si es aceptable con
respecto a su aplicación.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Marcar un módulo de extensión de E/S como opcional en
modalidad offline
Para añadir un módulo y marcarlo como opcional en la configuración:
Paso Acción
1 Arrastre el módulo de extensión de E/S desde el catálogo y colóquelo en el editor.
2 En el área Información del dispositivo, seleccione la casilla de verificación Módulo
opcional.
Para marcar un módulo de extensión de E/S existente como opcional en la
configuración:
Paso Acción
1 Seleccione el módulo de extensión de E/S en el editor.
2 En el área Información del dispositivo, seleccione la casilla de verificación Módulo
opcional.
60 EIO0000003300.02

Cómo configurar un controlador
Módulos de extensión de E/S opcionales en modalidad online
EcoStruxure Machine Expert - Basic funciona en modalidad online cuando se ha
establecido una conexión física con un Logic Controller.
Cuando se trabaja en modalidad online de EcoStruxure Machine Expert - Basic, la
modificación de la función Módulo opcional está deshabilitada. Puede visualizar
la configuración descargada en la aplicación:
• Un módulo de extensión de E/S representado en color amarillo está marcado
como opcional y no se conecta físicamente al Logic Controller durante el
inicio. En el área Información del dispositivo se muestra un mensaje
informativo al respecto.
• Un módulo de extensión de E/S representado en color rojo no está marcado
como opcional y no se detecta durante el inicio. En el área Información del
dispositivo se muestra un mensaje informativo al respecto.
El Logic Controller utiliza la selección de la función Módulo opcional para iniciar
el bus de E/S. Las palabras del sistema siguientes se actualizan para indicar el
estado de la configuración del bus de E/S físicas:
Palabra de sistema Comentario
%SW118
Palabra de estado del
Logic Controller
Los bits 13 y 14 son relevantes para el estado del módulo de E/S en
relación con el bus de E/S.
El bit 13, si es FALSE, indica que faltan módulos obligatorios según la
definición de la configuración del bus de extensión de E/S o que, si
están, no funcionan cuando el Logic Controller intenta iniciar el bus de
extensión de E/S. En este caso, el bus de E/S no se inicia.
El bit 14, si es FALSE, indica que uno o varios módulos han
interrumpido la comunicación con el Logic Controller después de que
se iniciase el bus de extensión de E/S. Este es el caso si un módulo de
extensión de E/S se define como obligatorio o como módulo opcional,
pero está presente en el arranque.
%SW119
Configuración del módulo
de extensión de E/S
Cada uno de los bits, empezando por el bit 1 (el bit 0 está reservado),
está dedicado a un módulo de extensión de E/S configurado e indica si
el módulo es opcional (TRUE) u obligatorio (FALSE) cuando el
controlador intenta iniciar el bus de E/S.
%SW120
Estado del módulo de
extensión de E/S
Cada uno de los bits, empezando por el bit 1 (el bit 0 está reservado),
está dedicado a un módulo de extensión de E/S configurado e indica el
estado del módulo.
Cuando el Logic Controller intenta iniciar el bus de E/S, si el valor de %
SW120 no es cero (lo que indica que se ha detectado un error al menos
en uno de los módulos), el bus de extensión de E/S no se inicia a no
ser que el bit correspondiente de %SW119 se haya establecido en
TRUE (lo que indica que el módulo se ha marcado como opcional).
Cuando se inicia el bus de E/S, si el sistema modifica el valor de %
SW120, indica que se ha detectado un error en uno o varios módulos
de extensión de E/S (independientemente de la función Módulo
opcional).
Para obtener más información, consulte Palabras de sistema, página 192.
Selección de la modalidad funcional de un módulo de extensión
de E/S en la modalidad offline
La Modalidad funcional solo está disponible en los módulos de extensión
digitales con una versión del firmware ≥ 28 (versión del software ≥ 2.0), excepto
TM3DI8A, TM3DM16R y TM3DM32R.
EIO0000003300.02 61

Cómo configurar un controlador
Para seleccionar el módulo Modalidad funcional en la configuración:
Paso Acción
1 Seleccione el módulo de extensión de E/S en el editor.
2 En el área Información del dispositivo, seleccione la Modalidad funcional:
•Normal (valor predeterminado)
•Retención, filtro, retorno
NOTA: En la modalidad online de EcoStruxure Machine Expert - Basic, la
modificación de la Modalidad funcional está deshabilitada.
Códigos ID internos compartidos
Los Logic Controllers identifican los módulos de extensión mediante un sencillo
código ID interno. Este código ID no es específico de cada referencia, sino que
identifica la estructura del módulo de extensión. Por tanto, varias referencias
pueden compartir el mismo código ID.
Si declara dos módulos con el mismo código ID interno uno junto al otro en la
configuración y ambos están declarados como opcionales, aparece un mensaje
en la parte inferior de la ventana Configuración. Entre dos módulos opcionales
debe haber como mínimo un módulo que no sea opcional.
En esta tabla se agrupan las referencias de módulo que comparten el mismo
código ID interno:
Módulos que comparten el mismo código ID interno
TM2DDI16DT, TM2DDI16DK
TM2DRA16RT, TM2DDO16UK, TM2DDO16TK
TM2DDI8DT, TM2DAI8DT
TM2DRA8RT, TM2DDO8UT, TM2DDO8TT
TM2DDO32TK, TM2DDO32UK
TM3DI16K, TM3DI16/G
TM3DQ16R/G, TM3DQ16T/G, TM3DQ16TK, TM3DQ16U, TM3DQ16UG, TM3DQ16UK
TM3DQ32TK, TM3DQ32UK
TM3DI8/G, TM3DI8A
TM3DQ8R/G, TM3DQ8T/G, TM3DQ8U, TM3DQ8UG
TM3DM8R/G
TM3DM24R/G
TM3SAK6R/G
TM3SAF5R/G
TM3SAC5R/G
TM3SAFL5R/G
TM3AI2H/G
TM3AI4/G
TM3AI8/G
TM3AQ2/G
TM3AQ4/G
TM3AM6/G
TM3TM3/G
TM3TI4/G
TM3TI4D/G
TM3TI8T/G
62 EIO0000003300.02


Cómo configurar un controlador
Configuración del M221 Logic Controller
Configuración del controlador
La configuración del controlador depende del número y el tipo de puertos de
comunicación, objetos de E/S, y entradas y salidas incorporadas.
Utilice la ficha Configuración para configurar las propiedades del controlador y
los módulos de extensión. Seleccione un nodo del árbol de hardware para
configurar las propiedades del controlador.
En esta tabla se muestran las configuraciones disponibles del M221 Logic
Controller:
Referencia Entrada
digital Salida
digital Entrada
analógica Contador de alta
velocidad Generador de
pulsos Ethernet Línea serie
TM221M16R•
TM221C••R
X X X X – – X
TM221C••U X X X X X –X
TM221ME16R•
TM221CE••R
X X X X –X X
TM221M16T•
TM221M32TK
TM221C••T
X X X X X –X
TM221ME16T•
TM221ME32TK
TM221CE••T
TM221CE••U
X X X X X X X
XDisponible para la configuración en EcoStruxure Machine Expert - Basic. Para obtener información sobre cómo configurar:
• Entradas digitales, consulte Configuración de las entradas digitales, página 66.
• Salidas digitales, consulte Configuración de las salidas digitales, página 70.
• Entradas analógicas, consulte Configuración de las entradas analógicas, página 71.
• Contadores de alta velocidad, consulte Configuración de contadores de alta velocidad, página 73.
• Generadores de pulsos, consulte Configuración de los generadores de pulsos, página 81.
• Ethernet, consulte Configuración de Ethernet, página 100.
• Líneas serie, consulte Configuración de la línea serie, página 131.
64 EIO0000003300.02

Cómo configurar un controlador
Actualización del firmware mediante el asistente de
Executive Loader
Descripción general
Puede actualizar el firmware del controlador mediante el asistente de Executive
Loader.
Consulte Estados y comportamientos del controlador, página 38 para obtener
información relativa al estado del firmware en el controlador.
Actualización del firmware del controlador
Para iniciar el asistente ExecLoader, siga estos pasos:
Paso Acción
1 Cierre todas las aplicaciones de Windows, incluidas las máquinas virtuales.
2Haga clic en Inicio >Programas >Schneider Electric >EcoStruxure Machine
Expert - Basic >EcoStruxure Machine Expert - Basic Firmware Update o ejecute
ExecLoaderWizard.exe desde la carpeta de instalación de EcoStruxure Machine Expert
- Basic\Execloader.
Compatibilidad del firmware del controlador
En esta tabla se muestra la compatibilidad del firmware del controlador:
Tipo de hardware Ethernet Versión del firmware del
controlador
FW <1.12.1.1 FW ≥1.12.1.1
Herencia: Versión del software en la etiqueta del producto
sin el sufijo "A" (palabra de sistema %SW61, página 193 =
1)
Compatible Compatible
Tipo A: Versión del software en la etiqueta del producto
con el sufijo "A" (palabra de sistema %SW61, página 193
= 2)
No compatible Compatible
EIO0000003300.02 65

Configuración de entrada/salida incrustada
Configuración de entrada/salida incrustada
Contenido de este capítulo
Configuración de entradas digitales ................................................................66
Configuración de salidas digitales...................................................................70
Configuración de entradas analógicas ............................................................71
Configuración del contador de alta velocidad...................................................73
Configuración del generador de pulsos ...........................................................81
Descripción general
En este capítulo se describe cómo configurar los objetos de E/S incrustadas del
M221 Logic Controller.
El número de entradas y salidas incrustadas depende de la referencia del
controlador. Para obtener más información, consulte las tablas para:
•TM221C Logic Controller, página 18
•TM221M Logic Controller, página 23
Configuración de entradas digitales
Configuración de las entradas digitales
Introducción
Todas las entradas digitales se utilizan como entradas normales de forma
predeterminada. Algunas entradas digitales son rápidas y se pueden utilizar para
configurar los contadores de alta velocidad, página 73, mientras que otras
entradas se pueden configurar como orígenes de eventos.
66 EIO0000003300.02

Configuración de entrada/salida incrustada
Configuración de entradas digitales
En esta tabla se describe cómo configurar las entradas digitales:
Paso Acción
1 Haga clic en el nodo Entradas digitales del árbol de hardware para visualizar las propiedades de las entradas
digitales.
En esta figura se muestran las propiedades de las entradas digitales en el área del editor:
2 Edite las propiedades para configurar las entradas digitales.
Consulte la tabla siguiente para obtener más información sobre los parámetros de configuración de entradas digitales.
EIO0000003300.02 67

Configuración de entrada/salida incrustada
En esta tabla se describen todos los parámetros de la configuración de entradas
digitales:
Parámetro Editable Valor Valor
predetermi-
nado
Descripción
Utilizado No True/False False Indica si el canal de entrada se está utilizando o no en un
programa.
Dirección No %I0.x –Muestra la dirección de la entrada digital del controlador, donde x
representa el número de canal.
Si el controlador tiene 8 canales de entradas digitales, x varía de 0
a 7.
Si el controlador tiene 16 canales de entradas digitales, x varía de
0 a 15.
Por ejemplo, %I0.2 es el tercer canal de entrada digital del Logic
Controller.
Símbolo Sí – – Permite especificar un símbolo para asociarlo con el objeto de
entrada digital.
Haga doble clic en la columna Símbolo, escriba el nombre del
símbolo y pulse Intro.
Utilizado por No cualquiera Filtrado Muestra el nombre del componente que utiliza el canal de entrada.
Por ejemplo, si una subrutina utiliza el canal de entrada, este
campo muestra Lógica de aplicación. Los valores posibles para
este campo son:
•Lógica de usuario
•Filtrado
•Enclavamiento
•Run/Stop
•Evento
•%HSCx
donde x es la instancia de contador de alta velocidad del
controlador
•%FCy
donde y es la instancia de contador rápido del controlador
Si más de una operación está utilizando una entrada, se muestran
todos los valores separados por comas en este campo.
Filtrado Sí Sin filtro
3 ms
12 ms
3 ms Permite seleccionar la duración del filtro de ruido para el canal de
entrada.
Utilizar un filtro para las entradas digitales reduce el ruido de la
entrada del controlador.
Si selecciona un filtro para una entrada, no puede configurarla
para:
•Enclavamiento
•Evento
Enclavamiento Sí True/False False Permite habilitar o deshabilitar la retención de las entradas
configuradas como eventos (de %I0.2 a%I0.5).
De manera predeterminada, esta opción está deshabilitada debido
al valor predeterminado de Filtrado. Establezca Filtrado en Sin
filtro para habilitar la opción Retención.
La retención hace posible memorizar pulsos con una duración más
corta que el tiempo de exploración del controlador.
Cuando la duración de un pulso es más corta que un periodo de
exploración y su valor es igual o mayor que 1 ms, el controlador
retiene el pulso, que se actualiza en la exploración siguiente.
Si habilita Retención para una entrada, no puede configurarla
para:
•Filtrado
•Run/Stop
•Evento
68 EIO0000003300.02

Configuración de entrada/salida incrustada
Parámetro Editable Valor Valor
predetermi-
nado
Descripción
Run/Stop Sí True/False False Permite configurar una entrada digital como un conmutador Run/
Stop adicional.
Si configura una entrada digital como un conmutador Run/Stop
(Ejecutar/Detener), no puede utilizar la entrada en ningún otro
bloque de funciones (por ejemplo, el bloque de funciones del
contador de alta velocidad, el bloque de funciones del contador
rápido, etc.).
Si habilita Ejecutar/Detener para una entrada, no puede
configurarla para:
•Enclavamiento
•Evento
Evento Sí No se utiliza
Flanco
descendente
Flanco
ascendente
Ambos
flancos
No se utiliza Permite seleccionar un evento que desencadena las entradas %
I0.2 a%I0.5.
De manera predeterminada, esta opción está deshabilitada debido
al valor predeterminado de Filtrado. Establezca Filtrado en Sin
filtro para habilitar la opción Evento.
Cuando se selecciona un evento de la lista desplegable (distinto
de No se utiliza):
• El parámetro Prioridad se habilita para poder establecer la
prioridad del evento.
• Se crea una tarea de evento, que se muestra (consulte
EcoStruxure Machine Expert - Basic, Guía de
funcionamiento) en la ficha Configuración.
Prioridad Sí De 0 a 7 7 Permite establecer la prioridad del evento de activación para las
entradas %I0.2 a%I0.5.
Puede establecer la prioridad de cada evento mediante el
parámetro Prioridad que se puede editar sólo para las entradas
configuradas como evento.
Asigne una prioridad distinta a cada evento configurado: si 2
eventos tienen la misma prioridad, aparece un mensaje de error
detectado en la ventana.
Subrutina No cualquiera vacío Muestra el número de la subrutina asociada con una entrada
configurada como un evento.
Comentario Sí – – Permite especificar un comentario para asociarlo con el objeto de
entrada digital.
Haga doble clic en la columna Comentario, escriba el comentario
y pulse Intro.
En la ficha Programación se muestra más información sobre la configuración.
Para obtener más información, consulte Entradas digitales (%I), página 167.
EIO0000003300.02 69

Configuración de entrada/salida incrustada
Configuración de salidas digitales
Configuración de las salidas digitales
Introducción
Todas las salidas digitales se utilizan como salidas normales de forma
predeterminada. Los controladores equipados con salidas de transistor constan
de dos salidas rápidas y se pueden utilizar para configurar los generadores de
pulsos, página 81.
Configuración de salidas digitales
En esta tabla se describe cómo configurar las salidas digitales:
Paso Acción
1 Haga clic en el nodo Salidas digitales del árbol de hardware para visualizar las propiedades de las salidas
digitales.
En esta figura se muestran las propiedades de las salidas digitales en el área del editor:
2 Edite las propiedades para configurar las salidas digitales.
Consulte la tabla siguiente para obtener más información sobre los parámetros de configuración de las salidas
digitales.
70 EIO0000003300.02

Configuración de entrada/salida incrustada
En esta tabla se describen todos los parámetros de la configuración de salidas
digitales:
Parámetro Editable Valor Valor
predeterminado Descripción
Utilizado No True/False False Indica si el canal de salida se está utilizando o no en
un programa.
Dirección No %Q0.x –Muestra la dirección de la salida digital del
controlador, donde x representa el número de canal.
Si el controlador tiene 8 canales de salidas digitales,
x varía de 0 a 7.
Si el controlador tiene 16 canales de salidas digitales,
x varía de 0 a 15.
Por ejemplo, %Q0.2 es el tercer canal de salida
digital del controlador.
Símbolo Sí – – Permite especificar un símbolo para asociarlo con el
objeto de salida digital.
Haga doble clic en la columna Símbolo, escriba el
nombre del símbolo y pulse Intro.
Utilizado por No cualquiera vacío Muestra el nombre del componente que utiliza el
canal de salida.
Por ejemplo, si el canal de salida se utiliza como
alarma de estado, se muestra Alarma.
Alarma de estado Sí True/False False Permite habilitar o deshabilitar la alarma de estado de
la salida (%Q0.0 a%Q0.7).
Solo puede configurar un canal de salida para la
alarma de estado.
No puede configurar una salida como alarma de
estado si la salida se utiliza en un programa.
El valor de la alarma de estado es 1 cuando el
controlador está en el estado RUNNING y 0 en todos
los demás estados
Valor de retorno Sí 1 o 0 0 Especifica el valor para aplicar a esta salida (retorno
a 0 o 1) cuando el Logic Controller pasa a STOPPED
(Parado) o a un estado de excepción. El valor
predeterminado es 0. Si la modalidad de retorno
Mantener valores está configurada, la salida retiene
su valor actual cuando el Logic Controller pasa a
STOPPED (Parado) o a un estado de excepción.
El campo está deshabilitado para la salida
configurada como Alarma de estado.
Comentario Sí – – Permite especificar un comentario para asociarlo con
el objeto de salida digital.
Haga doble clic en la columna Comentario, escriba
el comentario y pulse Intro.
En la ficha Programación se muestra más información sobre la configuración.
Para obtener más información, consulte Salidas digitales (%Q), página 168.
Configuración de entradas analógicas
Configuración de las entradas analógicas
Introducción
Las entradas analógicas no tienen ninguna propiedad configurable en
EcoStruxure Machine Expert - Basic. De forma predeterminada, las entradas
analógicas se utilizan como entradas normales.
EIO0000003300.02 71

Configuración de entrada/salida incrustada
Configuración de entradas analógicas
En esta tabla se describe cómo configurar las entradas analógicas:
Paso Acción
1 Haga clic en el nodo Entradas analógicas del árbol de hardware para visualizar las propiedades de las entradas
analógicas.
En esta figura se muestran las propiedades de las entradas analógicas en el área del editor:
2 Edite las propiedades para configurar las entradas analógicas.
Para obtener información detallada sobre los parámetros de configuración de las entradas analógicas, consulte la
tabla siguiente.
En esta tabla se describen todos los parámetros de la configuración de las
entradas analógicas:
Parámetro Editable Valor Valor
predeterminado Descripción
Utilizado No True/False False Indica si el canal de entrada se está utilizando o no en un
programa.
Dirección No %IW0.x –Muestra la dirección de la entrada analógica del controlador,
donde x representa el número de canal.
Si el controlador tiene 2 canales de entradas analógicas, x es 0
o 1. Por ejemplo, %IW0.1 es el segundo canal de entrada
analógica del controlador.
Símbolo Sí – – Permite especificar un símbolo para asociarlo con el objeto de
entrada analógica.
Haga doble clic en la columna Símbolo, escriba el nombre del
símbolo y pulse Intro.
Tipo No De 0 a 10 V De 0 a 10 V Indica la modalidad de canal. Por ejemplo, De 0 a 10 V se
refiere al canal que se puede utilizar para una entrada eléctrica
con un tipo de tensión en el rango de 0 a 10 V.
Ámbito No Normal Normal Indica el rango de valores de un canal.
Mínimo No 0 0 Indica el límite de medida inferior.
Máximo No 1000 1000 Indica el límite de medida superior.
Nivel de filtro No 0 0 Indica el valor de filtrado. Multiplique por el valor de Unidad de
filtro para obtener el tiempo de filtrado.
Unidad de filtro No 100 ms vacío Especifica la unidad de tiempo del valor de filtrado.
Muestreo No –vacío –
Unidades No cualquiera vacío Indica la unidad de la entrada analógica.
Comentario Sí – – Permite especificar un comentario para asociarlo con el objeto
de entrada analógica.
Haga doble clic en la columna Comentario, escriba el
comentario y pulse Intro.
En la ficha Programación se muestra más información sobre la configuración.
Para obtener más información, consulte Entradas analógicas (%IW), página 169.
%IW0.00 - 10 V
%IW0.10 - 10 V
Used
Symbol Type
Analog inputs
Address
Normal
Normal
Scope
0
0
Minimum
1000
1000
Maximum
0
0
Filter level Filter Unit Sampling Units Comment
72 EIO0000003300.02

Configuración de entrada/salida incrustada
Configuración del contador de alta velocidad
Configuración de contadores de alta velocidad
Introducción
Puede configurar contadores de alta velocidad para ejecutar cualquiera de las
siguientes funciones:
•Single Phase
•Dual Phase [Pulse / Direction]
•Dual Phase [Quadrature X1]
•Dual Phase [Quadrature X2]
•Dual Phase [Quadrature X4]
•Frequency Meter
Para obtener información sobre cómo seleccionar una función, consulte Contador
de alta velocidad en modalidades de contador (consulte Logic Controller Modicon
M221, Guía de la biblioteca de funciones avanzadas) o Contador de alta
velocidad en modalidad de medidor de frecuencia (consulte Logic Controller
Modicon M221, Guía de la biblioteca de funciones avanzadas).
El bloque de funciones Contador de alta velocidad trabaja a una frecuencia
máxima de 100 kHz para todas las modalidades de conteo con un rango de 0 a
65535 en palabra simple y de 0 a 4294967295 en palabra doble.
Los bloques de funciones Contador de alta velocidad utilizan entradas
especializadas y entradas y salidas auxiliares. Estas entradas y salidas no están
reservadas únicamente para el uso exclusivo de bloques de funciones Contador
de alta velocidad:
• Si una instancia HSC no utiliza entradas/salidas especializadas, estas
estarán disponibles para aplicarse como una entrada/salida digital.
• Si la aplicación no utiliza una entrada/salida dedicada HSC como una
entrada/salida digital normal, estará disponible para la instancia HSC
correspondiente.
Asignación de E/S de Single Phase
Entradas principales Entradas auxiliares Salidas reflejas
%HSC0 %I0.0 -%I0.2 %I0.3 %Q0.2 %Q0.3
%HSC1 %I0.6 -%I0.5 %I0.4 %Q0.4 %Q0.5
%HSC2 %I0.1 ---%Q0.2 %Q0.3
%HSC3 %I0.7 ---%Q0.4 %Q0.5
Single Phase Entrada de
pulsos No se utiliza Entrada de
preajuste Entrada rápida Salida refleja 0 Salida refleja 1
Asignación de E/S de Dual PhasePulse / Direction
Entradas principales Entradas auxiliares Salidas reflejas
%HSC0 %I0.0 %I0.1 %I0.2 %I0.3 %Q0.2 %Q0.3
%HSC1 %I0.6 %I0.7 %I0.5 %I0.4 %Q0.4 %Q0.5
Pulse / Direction Entrada de
pulsos Entrada de
dirección Entrada de
preajuste Entrada rápida Salida refleja 0 Salida refleja 1
EIO0000003300.02 73

Configuración de entrada/salida incrustada
Asignación de E/S de Dual PhaseQuadrature
Entradas principales Entradas auxiliares Salidas reflejas
%HSC0 %I0.0 %I0.1 %I0.2 %I0.3 %Q0.2 %Q0.3
%HSC1 %I0.6 %I0.7 %I0.5 %I0.4 %Q0.4 %Q0.5
Cuadratura X1 Fase A de
entrada de
pulsos
Fase B de
entrada de
pulsos
Entrada de
preajuste Entrada rápida Salida refleja 0 Salida refleja 1
Cuadratura X2 Fase A de
entrada de
pulsos
Fase B de
entrada de
pulsos
Entrada de
preajuste Entrada rápida Salida refleja 0 Salida refleja 1
Cuadratura X4 Fase A de
entrada de
pulsos
Fase B de
entrada de
pulsos
Entrada de
preajuste Entrada rápida Salida refleja 0 Salida refleja 1
Asignación de E/S de Frequency Meter
Entradas principales Entradas auxiliares Salidas reflejas
%HSC0 %I0.0 - - - - -
%HSC1 %I0.6 - - - - -
Frequency Meter Entrada de
pulsos No se utiliza No se utiliza No se utiliza No se utiliza No se utiliza
Configuración de contadores de alta velocidad
En esta tabla se describe cómo configurar los contadores de alta velocidad:
Paso Descripción
1 Haga clic en el nodo Contadores de alta velocidad en Hardware.
Resultado: Se muestra la lista de Contadores de alta velocidad:
2 Haga clic en ... en Configuración para seleccionar el tipo de contador de alta velocidad para asignar y mostrar la ventana
Asistente del contador de alta velocidad.
Para obtener más información sobre los contadores de alta velocidad, consulte la siguiente tabla.
%HSC0Not Configured
Not Configured
Not Configured
%HSC1
%HSC2
%HSC3
Not Configured
...
Configured
Configuration CommentSymbol Type
High Speed Counters
Address
...
...
...
74 EIO0000003300.02

Configuración de entrada/salida incrustada
En esta tabla se describen todos los parámetros de la configuración de los
contadores de alta velocidad:
Parámetro Editable Valor Valor
predeterminado Descripción
Configurado No TRUE/FALSE FALSE Indica si el contador de alta velocidad se está
configurando o no en un programa.
Dirección No %HSCi Indica la dirección del contador de alta velocidad,
en la que ies el número de objeto.
Símbolo Sí – – Permite especificar un símbolo para asociarlo
con el objeto de contador de alta velocidad.
Haga doble clic en la columna Símbolo para
editar el campo.
Tipo No No configurado
Single Phase
Dual Phase
Frequency Meter
No configurado Indica la modalidad de funcionamiento del
contador.
Configuración Sí [...]
(Botón)
Deshabilitado Permite configurar los parámetros del contador
de alta velocidad mediante la ventana Asistente
del contador de alta velocidad.
Comentario Sí – – Permite especificar un comentario para asociarlo
con el objeto de contador de alta velocidad.
Haga doble clic en la columna Comentario para
editar el campo.
Para obtener información detallada sobre la configuración de Dual Phase
[Pulse / Direction],Dual Phase [Quadrature X1],Dual Phase
[Quadrature X2],Dual Phase [Quadrature X4] ySingle Phase, consulte
Configuración de fase dual y contadores individuales, página 76.
Para obtener información sobre la configuración del Frequency Meter, consulte
Configuración del medidor de frecuencias, página 79.
EIO0000003300.02 75

Configuración de entrada/salida incrustada
Configuración de contadores monofásicos y de fase dual
Asistente del contador de alta velocidad
En esta figura se muestra una instancia de la ventana de asistente para %HSC0
configurado como Dual Phase [Pulse / Direction]:
Elemento Descripción
1 Muestra el título del cuadro de diálogo del asistente para la instancia HSC
seleccionada %HSCi.
2 Permite seleccionar el tipo y la modalidad de HSC y el tipo de contador de fase dual.
3 Muestra las entradas dedicadas, las entradas auxiliares y las salidas reflejas.
Las propiedades en esta área de la ventana de asistente son diferentes para cada tipo
de controlador, así como para la instancia HSC. Para obtener más detalles, consulte
Asignaciones de E/S especializadas, página 73.
76 EIO0000003300.02

Configuración de entrada/salida incrustada
Parámetros comunes
En esta tabla se describen los parámetros comunes a todos los tipos de
contadores:
Parámetro Editable Valor Valor
predetermina-
do
Descripción
Tipo de HSC Sí No configurado
Single Phase
Dual Phase
Frequency Meter
-Indica la modalidad de funcionamiento del contador
seleccionado y permite cambiarla.
Las opciones dependen de la instancia y del tipo de
HSC en las otras instancias. Consulte Asignaciones
de E/S especializadas, página 73.
Modalidad de
conteo No Grande libre -Indica la modalidad de funcionamiento del contador
seleccionada.
Las opciones dependen de la instancia y del tipo de
HSC en las otras instancias. Consulte Asignaciones
de E/S especializadas, página 73.
Modalidad de
entrada Sí Pulse / Direction
Cuadratura X1
Cuadratura X2
Cuadratura X4
-Indica la modalidad de funcionamiento del contador
seleccionado y permite cambiarla.
Las opciones dependen de la instancia y del tipo de
HSC en las otras instancias. Consulte Asignaciones
de E/S especializadas, página 73.
Palabra doble Sí TRUE/FALSE FALSE Permite cambiar entre el tamaño de los datos de
entrada de Word (16 bits) y Double Word (32 bits).
Al habilitar este campo, se cambia el tamaño de los
datos de Word (16 bits) a Double Word (32 bits).
Preajuste Sí De 0 a 65535
(Word)
0
(Word)
Permite especificar los valores preestablecidos para
las funciones de conteo.
De 0 a 4294967295
(Double Word)
0
(Double Word)
Umbral S0 Sí De 0 a 65535
(Word)
65535
(Word)
Permite especificar el valor de indicador S0 del
HSC que contiene el valor del umbral TH0.
De 0 a 4294967295
(Double Word)
4294967295
(Double Word)
Umbral S1 Sí De 0 a 65535
(Word)
De 0 a 65535
(Word)
Permite especificar el valor de indicador S1 del
HSC que contiene el valor del umbral TH1.
De 0 a 4294967295
(Double Word)
De 0 a
4294967295
(Double Word)
Desencadenador Sí No se utiliza
Flanco descendente
Flanco ascendente
Ambos flancos
No se utiliza Permite seleccionar una función de activación para
un evento (para umbrales TH0 yTH1) de la lista.
Al seleccionar una función de activación hace que
el parámetro prioritario sea editable.
Prioridad Sí De 0 a 7 7 Permite establecer la prioridad de la función de
activación de un evento (para umbrales TH0 y
TH1).
Este campo aparece sombreado en gris hasta que
se seleccione una función de activación.
Subrutina No cualquiera vacío Muestra la subrutina asociada con la entrada
configurada como evento (para umbrales TH0 y
TH1).
Entrada normal Sí TRUE/FALSE FALSE Configurable como Entrada de preajuste al
seleccionar la casilla de verificación Utilizar como,
sólo en %HSC0 y%HSC1,%I0.2 y%I0.5
respectivamente.
EIO0000003300.02 77

Configuración de entrada/salida incrustada
Parámetro Editable Valor Valor
predetermina-
do
Descripción
Entrada normal Sí TRUE/FALSE FALSE Configurable como Entrada rápida al seleccionar la
casilla de verificación Utilizar como, sólo en %
HSC0 y%HSC1,%I0.3 y%I0.4 respectivamente.
Salida refleja 0 Sí TRUE/FALSE FALSE Configura la salida refleja 0 %Q0.2 para %HSC0 o
%HSC2.
Configura la salida refleja 0 %Q0.4 para %HSC1 o
%HSC3.
Salida refleja 1 Sí TRUE/FALSE FALSE Configura la salida refleja 1 %Q0.3 para %HSC0 o
%HSC2.
Configura la salida refleja 1 %Q0.5 para %HSC1 o
%HSC3.
Valor < S0 Sí TRUE/FALSE FALSE Permite habilitar o deshabilitar la condición en la
que el contador se compara constantemente con el
valor de salida para establecer la salida refleja
cuando el valor de salida es menor que el valor del
indicador S0 del HSC.
S0 <= Valor < S1 Sí TRUE/FALSE FALSE Permite habilitar o deshabilitar la condición en la
que el contador se compara constantemente con el
valor de salida para establecer la salida refleja
cuando el valor de salida es mayor o igual al valor
del indicador S0 y el valor de salida es menor que el
valor del indicador S1 del HSC.
Valor >= S1 Sí TRUE/FALSE FALSE Permite habilitar o deshabilitar la condición en la
que el contador se compara constantemente con el
valor de salida para establecer la salida refleja
cuando el valor de salida es mayor o igual al valor
del indicador S1 del HSC.
Parámetros de Dual Phase [Pulse / Direction]
En esta tabla se muestran los parámetros específicos para Dual Phase [Pulse
/ Direction]:
Parámetro Editable Valor Valor
predetermina-
do
Descripción
Entrada de
pulsos No TRUE/FALSE TRUE Se configura como entrada de pulsos, solo en %
HSC0 y%HSC1,%I0.0 y%I0.6, respectivamente.
Entrada de
dirección No TRUE/FALSE TRUE Se configura como entrada de dirección, solo en %
HSC0 y%HSC1,%I0.1 y%I0.7, respectivamente.
• TRUE = conteo regresivo
• FALSE = conteo progresivo
Parámetros Dual Phase [Quadrature X1],Dual Phase [Quadrature X2]
yDual Phase [Quadrature X4]
En esta tabla se describen los parámetros específicos para Dual Phase
[Quadrature X1],Dual Phase [Quadrature X2] yDual Phase
[Quadrature X4]:
Parámetro Editable Valor Valor
predetermina-
do
Descripción
Fase A de
entrada de
pulsos
No TRUE/FALSE TRUE Se configura como entrada de pulsos para la fase
A, solo en %HSC0 y%HSC1,%I0.0 y%I0.6,
respectivamente.
Fase B de
entrada de
pulsos
No TRUE/FALSE TRUE Se configura como entrada de pulsos para la fase
B, solo en %HSC0 y%HSC1,%I0.1 y%I0.7,
respectivamente.
78 EIO0000003300.02

Configuración de entrada/salida incrustada
Parámetros de Single Phase
En esta tabla se describe el parámetro específico para el Single Phase:
Parámetro Editable Valor Valor
predetermina-
do
Descripción
Entrada de
pulsos No TRUE/FALSE TRUE Puede configurar hasta cuatro HSC en Single
Phase de tipo HSC como entrada de pulsos:
•%I0.0 para %HSC0
•%I0.6 para %HSC1
•%I0.1 para %HSC2
•%I0.7 para %HSC3
Configuración del medidor de frecuencia
Asistente del contador de alta velocidad
En esta figura se muestra la ventana Asistente del contador de alta velocidad
(% HSC0) para el tipo de contador Frequency Meter:
EIO0000003300.02 79

Configuración de entrada/salida incrustada
Parámetros del medidor de frecuencias
En esta tabla se muestra cada parámetro de la ventana Asistente del contador
de alta velocidad (% HSCi) para el tipo de contador Frequency Meter:
Parámetro Editable Valor Valor
predeterminado Descripción
Tipo de HSC Sí No configurado
Single Phase
Dual Phase
Frequency Meter
Frequency
Meter
Indica la modalidad de funcionamiento del
contador seleccionado y permite cambiarla.
El Frequency Meter se configura en %
HSC0 y/o %HSC1. Consulte Asignación de E/
S del medidor de frecuencia, página 74.
Palabra doble Sí TRUE/FALSE FALSE Se utiliza una palabra preestablecida de 32
bits.
Al habilitar este campo se cambia el tamaño
de los datos de Palabra (16 bits) a Palabra
doble (32 bits).
Ventana de
tiempo Sí 100 ms
1 s
1 s Permite seleccionar la referencia de tiempo
para medir la frecuencia entre 100 Hz y 100
kHz.
Entrada de
pulsos No TRUE/FALSE TRUE Indica la entrada utilizada como entrada de
pulsos, %I0.0 para %HSC0 o%I0.6 para %
HSC1.
En la ficha Programación se muestra más información sobre la configuración.
Para obtener más información sobre el bloque de funciones High Speed Counter,
consulte la Guía de la biblioteca de funciones avanzadas del Modicon M221 Logic
Controller, capítulo Bloque de funciones del contador de alta velocidad (%HSC).
80 EIO0000003300.02

Configuración de entrada/salida incrustada
Configuración del generador de pulsos
Configuración de los generadores de pulsos
Introducción
Los bloques de funciones de generadores de pulsos, Pulse (PLS),Pulse Width
Modulation (PWM),Pulse Train Output (PTO) yFrequency Generator
(FREQGEN) se utilizan para generar señales de onda cuadrada o modulada en
los canales de salida especializada %Q0.0 o%Q0.1.
Las salidas PWM tienen una señal de onda modulada con un ancho variable y un
ciclo de servicio, mientras que las salidas PTO generan una onda cuadrada para
controlar un motor paso a paso de un solo eje lineal o servounidad en modalidad
de bucle abierto. El PLS también crea una onda cuadrada para un número
programado de pulsos.
Configuración de generadores de pulsos
En esta tabla se describe cómo configurar los generadores de pulsos:
Paso Acción
1 Haga clic en el nodo Generadores de pulsos del árbol de hardware para visualizar las propiedades de los generadores
de pulsos.
En esta figura se muestran las propiedades de los generadores de pulsos en el área del editor:
2 Edite las propiedades y haga clic en [...] para configurar la salida del generador de pulsos.
Para obtener información detallada sobre los parámetros de configuración de los generadores de pulsos, consulte la
tabla siguiente.
EIO0000003300.02 81

Configuración de entrada/salida incrustada
En esta tabla se muestran los parámetros del generador de pulsos:
Parámetro Editable Valor Valor
predeterminado Descripción
Configurado No True/False False Indica si la salida de pulsos generados se está configurando
o no en un programa.
Dirección No %PLSx
%PWMx
%PTOx
%FREQGENx
%PLSx/%PWMx/%
PTOx/%FREQGENx
Muestra la dirección de las salidas Pulse,Pulse Width
Modulation,Pulse Train Output oFrequency Generator en
las que x es el número de salida.
Símbolo Sí – – Permite especificar un símbolo para asociarlo con el objeto
del generador de pulsos.
Haga doble clic en la columna Símbolo para editar el
campo.
Tipo No No configurado
PLS
PWM
PTO
FREQGEN
No configurado Muestra el tipo del generador de pulsos utilizado para el
canal de salida.
Configuración Sí [...]
(Botón)
Habilitado Permite configurar el generador de pulsos mediante la
ventana Asistente del generador de pulsos.
Comentario Sí – – Permite especificar un comentario para asociarlo con el
objeto del generador de pulsos.
Haga doble clic en la columna Comentario para editar el
campo.
Configuración de PLS
Consulte Configuración de pulsos (%PLS), página 83.
Para obtener más información sobre el bloque de funciones Pulse, consulte la
Modicon M221 Logic Controller Guía de la biblioteca de funciones avanzadas,
capítulo Pulso (%PLS) (consulte Modicon M221 Logic Controller - Guía de la
biblioteca de funciones avanzadas).
Configuración de PWM
Consulte Configuración de la modulación de ancho de pulsos (%PWM), página
85.
Para obtener más información sobre el bloque de funciones Pulse Width
Modulation, consulte la Modicon M221 Logic Controller Guía de la biblioteca de
funciones avanzadas, capítulo Modulación del ancho de pulsos (%PWM)
(consulte Modicon M221 Logic Controller - Guía de la biblioteca de funciones
avanzadas).
Configuración de PTO
Consulte Configuración de la salida de tren de pulsos (%PTO), página 87.
Para obtener más información sobre el bloque de funciones Pulse Train Output,
consulte la Modicon M221 Logic Controller Guía de la biblioteca de funciones
avanzadas, capítulo Salida de tren de pulsos (%PTO) (consulte Modicon M221
Logic Controller - Guía de la biblioteca de funciones avanzadas).
82 EIO0000003300.02

Configuración de entrada/salida incrustada
Configuración del generador de frecuencias
Consulte Configuración del generador de frecuencias (%FREQGEN), página 87
Para obtener más información sobre el bloque de funciones FREQGEN, consulte
la Modicon M221 Logic Controller Guía de la biblioteca de funciones avanzadas,
capítulo Generador de frecuencias (%FREQGEN) (consulte Modicon M221 Logic
Controller - Guía de la biblioteca de funciones avanzadas).
Configuración de pulsos (%PLS)
Asistente del generador de pulsos para PLS
En este gráfico se muestra la ventana Asistente del generador de pulsos
cuando el Tipo de generador de pulsos se configura en PLS:
EIO0000003300.02 83

Configuración de entrada/salida incrustada
En esta tabla se describen todos los parámetros disponibles cuando se configura
el canal en modalidad PLS:
Parámetro Valor Valor
predeterminado Descripción
Tipo de
generador de
pulsos
No configurado
PLS
PWM
PTO
FREQGEN
PLS Permite elegir el tipo de generador de pulsos y configurar las
propiedades de salida.
Seleccionar:
•PLS para configurar los canales de salida en modalidad
PLS. Consulte Configuración de pulsos (%PLS), página 83.
•PWM para configurar los canales de salida en modalidad
PWM. Consulte Configuración de la modulación de ancho de
pulsos (%PWM), página 85.
•PTO para configurar los canales de salida en modalidad
PTO. Consulte Configuración de la salida de tren de pulsos
(%PTO), página 87.
•FREQGEN para configurar los canales de salida en
modalidad FREQGEN. Consulte Configuración del
generador de frecuencias (%FREQGEN), página 90.
Palabra doble True/False False Permite alternar entre el tamaño de los datos de Word (16 bits) y
Double Word (32 bits).
Este parámetro está deshabilitado de forma predeterminada, lo
que indica que el tamaño actual de los datos es Word (16 bits).
Al habilitar este campo, se cambia el tamaño de los datos por
Double Word (32 bits).
Referencia de
tiempo 0,1 ms
1 ms
10 ms
1 s
1 s Permite seleccionar la referencia de tiempo para la medición de la
frecuencia.
Preajuste Consulte la tabla siguiente
para ver el rango
completo de valores
preestablecidos para el
generador de pulsos de
tipo PLS.
0 Permite especificar el valor preestablecido para la salida de
pulsos.
En esta tabla se muestra el rango de los valores de los parámetros
preestablecidos:
Tipo Referencia de tiempo Rango del valor preestablecido
PLS 0,1 ms 1...20000
1 ms 1...2000
10 ms 1...200
1 s 1 o 2
En la ficha Programación se muestra más información sobre la configuración.
Para obtener más información sobre el bloque de funciones Pulse, consulte la
Modicon M221 Logic Controller Guía de la biblioteca de funciones avanzadas,
capítulo Pulso (%PLS) (consulte Modicon M221 Logic Controller - Guía de la
biblioteca de funciones avanzadas).
84 EIO0000003300.02


Configuración de entrada/salida incrustada
En esta tabla se describen todos los parámetros disponibles cuando el canal se
configura en modalidad PWM:
Parámetro Valor Valor
predeterminado Descripción
Tipo de
generador de
pulsos
No configurado
PLS
PWM
PTO
FREQGEN
PWM Permite elegir el tipo de generador de pulsos y configurar las
propiedades de salida.
Seleccionar:
•PLS para configurar los canales de salida en modalidad
PLS. Consulte Configuración de pulsos (%PLS), página
83.
•PWM para configurar los canales de salida en modalidad
PWM. Consulte Configuración de la modulación de ancho
de pulsos (%PWM), página 85.
•PTO para configurar los canales de salida en modalidad
PTO. Consulte Configuración de la salida de tren de
pulsos (%PTO), página 87.
•FREQGEN para configurar los canales de salida en
modalidad FREQGEN. Consulte Configuración del
generador de frecuencias (%FREQGEN), página 90.
Referencia de
tiempo 0,1 ms
1 ms
10 ms
1 s
1 s Permite seleccionar la referencia de tiempo para la medición de
la frecuencia.
Preajuste Consulte la tabla siguiente
para ver el rango completo
de valores preestablecidos
para el generador de pulsos
de tipo PWM.
0 Permite especificar el valor preestablecido para la salida PWM.
En esta tabla se muestra el rango de los valores de los parámetros
preestablecidos:
Tipo Referencia de tiempo Rango del valor preestablecido
PWM 0,1 ms 1...10000
1 ms 1...1000
10 ms 1...100
1 s 1
En la ficha Programación se muestra más información sobre la configuración.
Para obtener más información sobre el bloque de funciones Pulse Width
Modulation, consulte la Modicon M221 Logic Controller Guía de la biblioteca de
funciones avanzadas, capítulo Modulación del ancho de pulsos (%PWM)
(consulte Modicon M221 Logic Controller - Guía de la biblioteca de funciones
avanzadas).
86 EIO0000003300.02


Configuración de entrada/salida incrustada
En esta tabla se describen todos los parámetros disponibles cuando el canal se
configura en modalidad PTO:
Parámetro Valor Valor
predeterminado Descripción
General Tipo de
generador de
pulsos
No configurado
PLS
PWM
PTO
FREQGEN
PTO Permite elegir el tipo de generador de pulsos y
configurar las propiedades de salida.
Seleccionar:
•PLS para configurar los canales de salida en
modalidad PLS. Consulte Configuración de pulsos
(%PLS), página 83.
•PWM para configurar los canales de salida en
modalidad PWM. Consulte Configuración de la
modulación de ancho de pulsos (%PWM), página
85.
•PTO para configurar los canales de salida en
modalidad PTO. Consulte Configuración de la
salida de tren de pulsos (%PTO), página 87.
•FREQGEN para configurar los canales de salida
en modalidad FREQGEN. Consulte Configuración
del generador de frecuencias (%FREQGEN),
página 90.
Modalidad de
salida Sentido horario/
Sentido
antihorario
Pulso/Dirección
Pulso/Dirección Seleccione el pulso Modalidad de salida (consulte
Modicon M221 Logic Controller, Guía de la biblioteca de
funciones avanzadas).
NOTA: La modalidad de salida Sentido horario/
Sentido antihorario sólo es válida para PTO0.
Esta modalidad deshabilita PTO1.
Pulso %Q0.0 para PTO0,
%Q0.1 para PTO1 %Q0.0 para
PTO0, %Q0.1
para PTO1
Si se selecciona Pulso/Dirección en Modalidad de
salida, seleccione la salida que proporciona la
velocidad de funcionamiento del motor.
Dirección No se utiliza
%Q0.0...16 (en
función de la
referencia del
controlador)
%Q0.2 Si se selecciona Pulso/Dirección en Modalidad de
salida, seleccione la salida que proporciona la dirección
de rotación del motor.
Establezca el valor en No se utiliza (deshabilitado) si la
aplicación no necesita la salida direccional.
NOTA: La aplicación debe estar configurada con
un nivel funcional como mínimo del Nivel 5.0 para
habilitar la opción No se utiliza.
Sentido horario %Q0.0 %Q0.0 Si se selecciona Sentido horario/Sentido antihorario
en Modalidad de salida, seleccione la salida que
proporciona la velocidad y dirección de funcionamiento
del motor en modo de avance.
Sentido
antihorario %Q0.1 %Q0.1 Si se selecciona Sentido horario/Sentido antihorario
en Modalidad de salida, seleccione la salida que
proporciona la velocidad y dirección de funcionamiento
del motor en modo de retroceso.
Mecánica Compensación
de holgura 0...65535 0 Establece el valor de compensación de holgura. El
número especificado de pulsos de compensación de
holgura no se añade al contador de posición.
Consulte Compensación de holgura (consulte Modicon
M221 Logic Controller, Guía de la biblioteca de
funciones avanzadas).
Límites de
posición de
software
Habilitar los
límites de
posición de
software
Habilitado
Deshabilitado
Habilitado Selecciona si se utilizan los límites de posición de
software.
Límite bajo -2.147.483.648 a
2147483647 -2147483648 Establece que la posición de límite de software sea
detectada en dirección negativa.
Límite alto -2.147.483.648 a
2147483647 2147483647 Establece que la posición de límite de software sea
detectada en dirección positiva.
88 EIO0000003300.02

Configuración de entrada/salida incrustada
Parámetro Valor Valor
predeterminado Descripción
Movimiento Velocidad máx. De 0 a 100000 100000 Establece la velocidad máxima de salida de pulsos (en
Hz).
Velocidad de
inicio De 0 a 100000 0 Configure la velocidad de inicio (consulte Modicon M221
Logic Controller, Guía de la biblioteca de funciones
avanzadas) de la salida de pulsos (en Hz). 0 si no se
utiliza.
Velocidad de
detención De 0 a 100000 0 Configure la velocidad de detención (consulte Modicon
M221 Logic Controller, Guía de la biblioteca de
funciones avanzadas) de la salida de pulsos (en Hz). 0
si no se utiliza.
Acel. máx. 1...100000 100000 Establece el valor máximo de aceleración (en Hz/ms).
Deceleración de
parada ráp. 1...100000 5000 Establece el valor de deceleración si se detecta un error
(en Hz/ms).
Decel. máx. 1...100000 100000 Establece el valor máximo de deceleración (en Hz/ms).
Punto de
referencia Entrada REF No se utiliza
Entrada
No se utiliza Selecciona si se utiliza la entrada REF para establecer
la posición del punto de referencia.
Tipo de
contacto Normalmente
abierto
Normalmente
cerrado
Normalmente
abierto Selecciona si el estado predeterminado del contacto de
conmutador es abierto ocerrado.
NOTA: El tipo de entrada sólo está disponible
cuando la Entrada REF está seleccionada.
Activación
de sonda Entrada PROBE No se utiliza
Entrada
No se utiliza Selecciona si se utiliza la entrada PROBE.
NOTA: Consulte Características de entradas
normales para obtener información acerca de las
características físicas de la entrada seleccionada.
En la ficha Programación se muestra más información sobre la configuración.
Para obtener más información sobre el bloque de funciones Pulse Train Output,
consulte la Modicon M221 Logic Controller Guía de la biblioteca de funciones
avanzadas, capítulo Salida de tren de pulsos (%PTO) (consulte Modicon M221
Logic Controller - Guía de la biblioteca de funciones avanzadas).
EIO0000003300.02 89

Configuración de entrada/salida incrustada
Configuración del generador de frecuencias (%FREQGEN)
Asistente del generador de pulsos para FREQGEN
En este gráfico se muestra la ventana Asistente del generador de pulsos
cuando el Tipo de generador de pulsos se establece en FREQGEN:
La función Generador de frecuencias (FG) genera una señal de onda cuadrada
con frecuencia programable y un ciclo de servicio del 50%. El controlador utiliza
un generador de reloj interno y proporciona una señal de salida en un canal de
salida dedicado (%Q0.0). Esta señal de salida puede activar directamente un
movimiento constante del eje. La frecuencia de destino es siempre positiva.
Para obtener más información sobre el bloque de funciones FREQGEN, consulte
la Modicon M221 Logic Controller Guía de la biblioteca de funciones avanzadas,
capítulo Generador de frecuencias (%FREQGEN) (consulte Modicon M221 Logic
Controller - Guía de la biblioteca de funciones avanzadas).
90 EIO0000003300.02

Configuración de bus de E/S
Configuración de bus de E/S
Contenido de este capítulo
Descripción general de la configuración de E/S ...............................................91
Configuración máxima de hardware................................................................95
Configuración de cartuchos y módulos de ampliación ......................................98
Descripción general
En este capítulo se describe cómo configurar el bus de E/S (módulos de
ampliación) del M221 Logic Controller.
Descripción general de la configuración de E/S
Introducción
En su proyecto, puede añadir módulos de extensión de E/S a su M221 Logic
Controller para aumentar el número de entradas y salidas digitales y analógicas
con respecto a las que tiene de forma nativa el logic controller (E/S incrustadas).
Puede añadir módulos de extensión de E/S TM3 o TM2 al Logic Controller y
ampliar el número de E/S mediante módulos transmisores y receptores TM3 para
crear configuraciones de E/S remotas. En todos los casos, se aplican reglas
especiales al crear extensiones de E/S locales y remotas y al combinar módulos
de extensión de E/S TM2 y TM3 (consulte Configuración máxima de hardware,
página 95).
El bus de extensión de E/S del M221 Logic Controller se crea cuando monta
módulos de extensión de E/S en el Logic Controller. Los módulos de extensión de
E/S se consideran dispositivos externos en la arquitectura del logic controller y,
como tales, se tratan de manera diferente de las E/S incrustadas del logic
controller.
Errores de bus de extensión de E/S
Si el logic controller no se puede comunicar con uno o varios módulos de
extensión de E/S contenidos en la configuración del programa y dichos módulos
no se configuran como módulos opcionales (consulte Módulos de extensión de E/
S opcionales, página 59), logic controller lo considera un error de bus de
extensión de E/S. La comunicación no satisfactoria puede detectarse durante el
arranque del logic controller o durante la ejecución, y puede deberse a diversas
causas. Entre las diferentes causas de excepción de comunicación en el bus de
extensión de E/S se incluyen la desconexión de los módulos de E/S o su ausencia
física, una radiación electromagnética que sobrepasa las especificaciones
medioambientales publicadas, o bien puede deberse a que los módulos no están
operativos.
En tiempo de ejecución, si se detecta un error del bus de extensión de E/S, la
información de diagnóstico se encuentra en %SW118 y%SW120, y el indicador
LED rojo ERR parpadea.
Gestión de errores de bus de extensión de E/S activa
El bit del sistema %S106 se establece de forma predeterminada en 0 para
especificar el uso de la gestión de errores de E/S activa. Si es necesario, la
aplicación puede establecer este bit en 1 para utilizar la gestión de errores de E/S
pasiva.
EIO0000003300.02 91

Configuración de bus de E/S
De forma predeterminada, cuando el Logic Controller detecta un módulo TM3 con
un error de comunicación de bus, establece el bus en una condición de "bus
desactivado", donde las salidas del módulo de extensión de TM3, la imagen de
entrada y la imagen de salida se establecen en 0. Se considera que un módulo de
extensión de TM3 presenta un error de comunicación cuando no se ha podido
realizar un intercambio de E/S con el módulo de extensión como mínimo durante
dos ciclos consecutivos de tareas de bus. Cuando se produce un error de
comunicación de bus, el bit n de %SW120 se establece en 1, siendo n el número
de módulo de extensión, y el bit %SW118 14 se establece en 0.
La actividad normal del bus de extensión de E/S solo se puede restablecer
después de eliminar el origen del error y llevar a cabo una de las acciones
siguientes:
• Apagar y encender
• Descargar de nuevo la aplicación
• Realizar una solicitud de aplicación a través de un flanco ascendente en el bit
%S107
• Con EcoStruxure Machine Expert - Basic, seleccionar el comando Inicializar
controlador
Gestión de errores de bus de extensión de E/S pasiva
La aplicación puede establecer el bit del sistema %S106 en 1 para utilizar la
gestión de errores de E/S pasiva. Esta gestión de errores se proporciona para
garantizar la compatibilidad con versiones anteriores del firmware y con
controladores anteriores reemplazados por M221 Logic Controller.
Cuando se utiliza la gestión de errores de E/S pasiva, el controlador intenta seguir
intercambiando buses de datos con los módulos durante los errores de
comunicación de bus. Mientras el error del bus de extensión sigue presente, el
logic controller intenta restablecer la comunicación en el bus con módulos con los
que no se puede establecer comunicación, en función del tipo de módulo de
extensión de E/S, TM3 o TM2:
• Para los módulos de extensión de E/S TM3, el valor de los canales de E/S se
mantiene (Mantener valores) durante unos 10 segundos aproximadamente
mientras el logic controller intenta restablecer la comunicación. Si el Logic
Controller no puede restablecer la comunicación en ese tiempo, todas las
salidas de extensión de E/S TM3 afectadas se establecen en 0.
• Para los módulos de extensión de E/S TM2 que puedan formar parte de la
configuración, el valor de los canales de E/S se mantiene indefinidamente.
Es decir, las salidas de los módulos de extensión de E/S TM2 se establecen
en Mantener valores hasta que se realiza un ciclo de apagado y encendido
en el sistema del logic controller o el usuario emite un comando Inicializar
controlador con EcoStruxure Machine Expert - Basic.
En ambos casos, el logic controller continúa resolviendo la lógica y la aplicación
sigue gestionando las E/S incrustadas (Gestión a través de la aplicación, página
47) mientras intenta restablecer la comunicación con los módulos de extensión de
E/S con los que no se ha podido establecer comunicación. Si la comunicación es
satisfactoria, los módulos de extensión de E/S se reanudan para que los gestione
la aplicación. Si la comunicación con los módulos de extensión de E/S no es
satisfactoria, debe resolver el motivo de la comunicación no satisfactoria y, a
continuación, apagar y encender el sistema de Logic Controller o emitir un
comando Inicializar controlador con EcoStruxure Machine Expert - Basic.
El valor de la imagen de entrada de los módulos de extensión de E/S con los que
no se puede establecer la comunicación se mantiene, y el valor de imagen de
salida lo establece la aplicación.
Además, si los módulos de E/S con los que no se puede establecer comunicación
interrumpen la comunicación con los módulos no afectados, se considerará que
los módulos no afectados también presentan error y el bit correspondiente en %
SW120 se establecerá en 1. Sin embargo, con los intercambios de datos en curso
que caracterizan la Gestión de errores de bus de extensión de E/S pasiva, los
92 EIO0000003300.02

Configuración de bus de E/S
módulos no afectados aplicarán los datos enviados, y no aplicarán los valores de
retorno para el módulo con el que no se puede establecer comunicación.
Por consiguiente, es necesario supervisar en la aplicación el estado del bus y el
estado de error de los módulos del bus, y llevar a cabo la acción necesaria en
función de la aplicación que se utilice.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
• En la evaluación del riesgo, incluya la posibilidad de que se produzca un
error de comunicación entre el logic controller y uno de los módulos de
ampliación de E/S.
• Si la opción "Mantener valores" aplicada durante un error del bus de
ampliación de E/S no es compatible con la aplicación, use un método
alternativo para controlar la aplicación en estos casos.
• Supervise el estado del bus de ampliación de E/S utilizando las palabras de
sistema dedicadas y, de acuerdo con la evaluación del riesgo, lleve a cabo
las acciones que correspondan.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Para obtener más información sobre las acciones que se llevan a cabo después
del arranque del Logic Controller cuando se detecta un error de bus de extensión
de E/S, consulte Módulos de extensión de E/S opcionales, página 59.
Reinicio del bus de extensión de E/S
Cuando se aplica la gestión de errores de E/S activa (es decir, las salidas TM3 se
establecen en 0 cuando se detecta un error de comunicación), la aplicación
puede solicitar un reinicio del bus de extensión de E/S mientras el Logic Controller
sigue ejecutándose (sin que sea necesario llevar a cabo un arranque en frío o en
caliente, apagar y encender el equipo, ni descargar la aplicación).
El bit del sistema %S107 está disponible para solicitar reinicios del bus de
extensión de E/S. El valor predeterminado de este bit es 0. La aplicación puede
establecer %S107 en 1 para solicitar el reinicio del bus de extensión de E/S.
Cuando se detecta un flanco ascendente de este bit, el Logic Controller vuelve a
configurar y reinicia el bus de extensión de E/S si se cumplen todas las siguientes
condiciones:
• %S106 está establecido en 0 (la actividad del bus de extensión de E/S se
detiene)
• El bit %SW118 14 está establecido en 0 (error en bus de extensión de E/S)
• Como mínimo un bit de %SW120 está establecido en 1 (al menos un bus de
extensión presenta un error de comunicación de bus)
Si %S107 está establecido en 1 y no se cumple ninguna de las condiciones
anteriores, el Logic Controller no lleva a cabo acción alguna.
Coincidencia de configuración de software y hardware
La E/S que puede estar integrada en su controlador es independiente de la E/S
que puede haber añadido en forma de ampliación de E/S. Es importante que la
configuración de E/S lógica dentro de su programa coincida con la configuración
de E/S física de su instalación. Si añade o elimina cualquier E/S física desde o
hacia el bus de ampliación de E/S o, en función de la referencia del controlador,
desde o hacia el controlador (en forma de cartuchos), es obligatorio que actualice
la configuración de su aplicación. Esto también se aplica a cualquier dispositivo
de bus de campo que pueda tener en su instalación. En caso contrario, existe la
posibilidad de que el bus de ampliación o el bus de campo dejen de funcionar
EIO0000003300.02 93

Configuración de bus de E/S
mientras la E/S incrustada que puede haber en su controlador continúa
funcionando.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Actualice la configuración del programa cada vez que añada o elimine cualquier
tipo de ampliación de E/S en el bus de E/S, o si añade o elimina cualquier
dispositivo en el bus de campo.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Adición de un módulo de extensión de E/S
Para añadir un módulo a la configuración:
Paso Acción
1 Arrastre el módulo de extensión de E/S desde el catálogo y colóquelo en el editor.
2 Están disponibles las siguientes funciones:
• Función opcional para módulos de extensión de E/S; consulte Marcar un módulo
de extensión de E/S como opcional en modalidad offline, página 60
• Función de modalidad funcional para módulos de extensión de E/S; consulte
Selección de la modalidad funcional de un módulo de extensión de E/S en la
modalidad offline, página 61
En el área Información del dispositivo, seleccione la casilla de verificación Módulo
opcional oModalidad funcional:
Presentación de la función opcional de los módulos de extensión
de E/S
Los módulos de extensión de E/S se pueden marcar como opcionales en la
configuración. La función Módulo opcional proporciona una configuración más
flexible al aceptar la definición de módulos no conectados físicamente al logic
controller. Por lo tanto, una única aplicación puede admitir varias configuraciones
físicas de módulos de extensión de E/S, lo cual favorece un mayor grado de
escalabilidad sin la necesidad de mantener varios archivos de aplicación para la
misma aplicación.
Debe ser muy consciente de las implicaciones y los efectos de marcar módulos
de E/S como opcionales en su aplicación, tanto si estos módulos están presentes
como si están ausentes físicamente al ejecutar la máquina o el proceso.
Asegúrese de incluir esta función en el análisis de riesgos.
Device information
Optional moduleFunctional Mode
Latch, Filter, FallbackRequires module with software version SV2.0 or greater
Messages
94 EIO0000003300.02

Configuración de bus de E/S
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Incluya en el análisis de riesgos cada una de las variantes de configuración de
E/S que se pueden realizar marcando módulos de ampliación de E/S como
opcionales, y concretamente el establecimiento de módulos de seguridad TM3
(TM3S…) como módulos de E/S opcionales, y valore si es aceptable con
respecto a su aplicación.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
NOTA: Para obtener más información sobre esta función, consulte Módulos
de extensión de E/S opcionales, página 59.
Configuración máxima de hardware
Introducción
El sistema de control M221 Logic Controller ofrece una solución completa para
lograr configuraciones optimizadas y una arquitectura ampliable.
Principio de configuración local y remota
En la siguiente figura se definen las configuraciones local y remota:
(1) Configuración local
(2) Configuración remota
Arquitectura de configuración local de M221 Logic Controller
Se consigue una configuración local optimizada y flexibilidad mediante la
asociación de:
• M221 Logic Controller
• Módulos de extensión TM3
• Módulos de extensión TM2
Los requisitos de la aplicación determinan la arquitectura de la configuración de
M221 Logic Controller.
EIO0000003300.02 95

Configuración de bus de E/S
En la siguiente figura se representan los componentes de una configuración local:
(B) Módulos de extensión (consulte el número máximo de módulos)
NOTA: No puede montar un módulo TM2 antes de cualquier módulo TM3 tal y
como se indica en la siguiente figura:
Arquitectura de configuración remota de M221 Logic Controller
Se consigue una configuración remota optimizada y flexibilidad mediante la
asociación de los siguientes elementos:
• M221 Logic Controller
• Módulos de extensión TM3
• Módulos transmisores y receptores TM3
Los requisitos de la aplicación determinan la arquitectura de la configuración de
M221 Logic Controller.
NOTA: No puede utilizar módulos TM2 en configuraciones que incluyan
módulos TM3 transmisores y receptores.
En la siguiente figura se representan los componentes de una configuración
remota:
(1) Logic Controller y módulos
(C) Módulos de extensión (máximo 7)
96 EIO0000003300.02

Configuración de bus de E/S
Cantidad máxima de módulos
En la tabla siguiente se muestra la configuración máxima admitida:
Referencias Máximo Tipo de configuración
TM221C16•
TM221CE16•
TM221C24•
TM221CE24•
TM221C40•
TM221CE40•
TM221M16R•
TM221ME16R•
TM221M16T•
TM221ME16T•
TM221M32TK
TM221ME32TK
7 módulos de extensión
TM3 / TM2 Local
TM3XREC1 7 módulos de extensión
TM3 Remota
NOTA: Los módulos transmisores y receptores TM3 no se incluyen en el recuento del número
máximo de módulos de extensión.
NOTA: La configuración con los módulos de extensión TM3 y TM2 se valida
mediante el software de EcoStruxure Machine Expert - Basic en la ventana
Configuración teniendo en cuenta el consumo total de potencia de los
módulos instalados.
NOTA: En algunos entornos, la configuración máxima ocupada por módulos
de alto consumo, combinada con la distancia máxima permitida entre los
módulos TM3 transmisor y receptor, puede presentar problemas de
comunicación del bus aunque el software EcoStruxure Machine Expert - Basic
permita la configuración. En este caso, necesitará analizar el consumo de los
módulos elegidos para su configuración, así como las distancias de cable
mínimas que requiere su aplicación, y probablemente deberá optimizar sus
elecciones.
EIO0000003300.02 97

Configuración de bus de E/S
Corriente suministrada al bus de E/S
En la tabla siguiente se muestra la corriente máxima suministrada por los
controladores al bus de I/O:
Referencia Bus de E/S de 5 V CC Bus de E/S de 24 V CC
TM221C16R
TM221CE16R
325 mA 120 mA
TM221C16T
TM221CE16T
325 mA 148 mA
TM221C16U
TM221CE16U
325 mA 148 mA
TM221C24R
TM221CE24R
520 mA 160 mA
TM221C24T
TM221CE24T
520 mA 200 mA
TM221C24U
TM221CE24U
520 mA 200 mA
TM221C40R
TM221CE40R
520 mA 240 mA
TM221C40T
TM221CE40T
520 mA 304 mA
TM221C40U
TM221CE40U
520 mA 304 mA
TM221M16R•
TM221ME16R•
520 mA 460 mA
TM221M16T•
TM221ME16T•
520 mA 492 mA
TM221M32TK
TM221ME32TK
520 mA 484 mA
NOTA: Los módulos de extensión consumen corriente de 5 V CC y 24 V CC
suministrada al bus de I/O. Por lo tanto, la corriente proporcionada por el
Logic Controller al bus de I/O define el número máximo de módulos de
extensión que se pueden conectar al bus de I/O (validada por el software
EcoStruxure Machine Expert - Basic en la ventana Configuración).
Configuración de cartuchos y módulos de ampliación
Introducción
En su proyecto, puede añadir los siguientes dispositivos al controlador:
• Cartuchos TMC2
• Módulos de E/S digitales de TM3
• Módulos de E/S analógicas de TM3
• Módulos de E/S expertas de TM3
• Módulos de E/S digitales de TM2
• Módulos de E/S analógicas de TM2
98 EIO0000003300.02

Configuración de bus de E/S
Cartuchos TMC2
Para obtener más información sobre la configuración de cartuchos, consulte las
siguientes guías de programación y hardware:
Tipo de cartucho Guía de hardware Guía de programación
Cartuchos TMC2 TMC2 Cartuchos - Guía de hardware TMC2 Cartuchos - Guía de
programación
Módulos de ampliación TM3
Para obtener más información acerca de la configuración del módulo, consulte las
siguientes guías de hardware y programación de cada tipo de módulo de
ampliación:
Tipo de módulo de ampliación Guía de hardware Guía de programación
Módulos de ampliación de E/S digitales de
TM3 TM3 Módulos de ampliación de E/S digitales
- Guía de hardware TM3 Módulos de ampliación - Guía de
programación
Módulos de ampliación de E/S analógicas de
TM3 TM3 Módulos de ampliación de E/S
analógicas - Guía de hardware
Módulos de ampliación de E/S expertas de
TM3 TM3 Módulos de E/S expertas - Guía de
hardware
Módulos de seguridad TM3 TM3 Módulos de seguridad - Guía de
hardware
Módulos transmisores y receptores de TM3 TM3 Módulos transmisores y receptores -
Guía de hardware
Módulos de ampliación TM2
Para obtener más información acerca de la configuración del módulo, consulte las
guías de hardware y programación de cada tipo de módulo de ampliación:
Tipo de módulo de ampliación Guía de hardware Guía de programación
Módulos de E/S digitales de TM2 TM2 Módulos de E/S digitales - Guía de
hardware TM2 Módulos de ampliación - Guía de
programación
Módulos de E/S analógicas de TM2 TM2 Módulos de E/S analógicas - Guía de
hardware
EIO0000003300.02 99

Configuración de comunicaciones integradas
Configuración de comunicaciones integradas
Contenido de este capítulo
Configuración Ethernet ................................................................................100
Configuración de línea serie.........................................................................131
Códigos de función Modbus compatibles ......................................................146
Diagrama de máquina de estado para Modbus IOscanner..............................148
Descripción general
En este capítulo se describe cómo configurar las funciones de comunicación del
M221 Logic Controller.
Configuración Ethernet
Configuración de red Ethernet
Introducción
Puede configurar la conexión TCP/IP al Logic Controller mediante la
configuración de la red Ethernet. Ethernet establece una red de área local (LAN)
entre el Logic Controller y otros dispositivos. La configuración Ethernet le permite
configurar la dirección IP del dispositivo de red.
NOTA: La conexión controlador-PC usa el protocolo TCP/IP. Es necesario
que este protocolo esté instalado en el PC.
Puede obtener la dirección IP mediante los siguientes protocolos:
• Dynamic Host Configuration Protocol (Protocolo de configuración dinámica
de host) (DHCP)
• Bootstrap Protocol (Protocolo Bootstrap) (BOOTP)
También puede especificar la dirección IP mediante las siguientes direcciones:
• Dirección IP
• Máscara de subred
• Dirección de pasarela
NOTA: Schneider Electric sigue las prácticas recomendadas del sector en el
desarrollo y la implementación de sistemas de control. Esto incluye un
método de defensa exhaustivo para proteger un sistema de control industrial.
Este método sitúa los controladores detrás de uno o varios servidores de
seguridad para limitar el acceso únicamente a los protocolos y el personal
autorizado.
100 EIO0000003300.02

Configuración de comunicaciones integradas
ADVERTENCIA
ACCESO NO IDENTIFICADO Y POSTERIOR USO NO AUTORIZADO DE LA
MÁQUINA
• Evalúe si su entorno o sus máquinas están conectadas a su infraestructura
crítica y, de ser así, lleve a cabo los pasos necesarios en términos de
prevención, basándose en el método de defensa exhaustivo, antes de
conectar el sistema de automatización a una red.
• Limite el número de dispositivos conectados a una red al mínimo necesario.
• Aísle su red industrial de otras redes dentro de su empresa.
• Proteja cualquier red contra el acceso imprevisto utilizando servidores de
seguridad, VPN u otras medidas de seguridad demostradas.
• Monitorice las actividades dentro de sus sistemas.
• Evite el acceso o el enlace directos a los dispositivos en cuestión por parte
de personas no autorizadas o acciones sin identificación.
• Prepare un plan de recuperación que incluya una copia de seguridad de su
sistema y de información sobre los procesos.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Servicios Ethernet
El Logic Controller admite los siguientes servicios:
• Servidor Modbus TCP
• Cliente Modbus TCP
• EtherNet/IP Adapter
• Dispositivo esclavo Modbus TCP
En esta tabla se muestra el número máximo de conexiones de servidor TCP:
Tipo de conexión Número máximo de conexiones
Servidor 8
Cliente 1
Cada servidor basado en TCP administra su propio conjunto de conexiones.
Cuando un cliente intenta abrir una conexión que supera el tamaño de la
consulta, el logic controller cierra la conexión más antigua, excepto la conexión
con EcoStruxure Machine Expert - Basic.
Las conexiones de servidor permanecen abiertas siempre y cuando el logic
controller permanezca en su estado operativo actual (RUNNING,STOPPED o
HALTED).
Las conexiones de servidor se cierran cuando se cambia su estado operativo
actual (RUNNING,STOPPED oHALTED), excepto en caso de un corte de
alimentación (porque el controlador no tiene tiempo de cerrar las conexiones).
Las conexiones de servidor se pueden cerrar cuando el origen EtherNet/IP o
Modbus TCP maestro solicitan su cierre.
EIO0000003300.02 101

Configuración de comunicaciones integradas
Configuración de Ethernet
En esta tabla se describe cómo configurar la Ethernet:
Paso Acción
1 Haga clic en el nodo ETH1 del árbol de hardware para visualizar las propiedades Ethernet.
En esta figura se muestran las propiedades Ethernet en el área del editor:
2 Edite las propiedades para configurar la Ethernet.
Consulte la tabla siguiente para obtener más información sobre los parámetros de configuración de
Ethernet.
NOTA: Los Parámetros de seguridad mostrados dependen del nivel
funcional (consulte EcoStruxure Machine Expert - Basic, Guía de
funcionamiento) seleccionado para la aplicación.
102 EIO0000003300.02

Configuración de comunicaciones integradas
En esta tabla se describen todos los parámetros de la configuración de Ethernet:
Parámetro Editable Valor Valor
predeterminado Descripción
Ethernet
Nombre del dispositivo Sí cualquiera M221 (si el
controlador usado
en la
configuración es
M221 Logic
Controller)
Muestra el nombre del dispositivo que está
conectado a la red Ethernet.
Se permiten los caracteres de la a-z, A-Z, del 0 al 9 y
el carácter de subrayado (_).
Dirección IP de DHCP Sí(1) TRUE/FALSE FALSE Permite obtener la dirección IP del servidor DHCP
en la red.
Dirección IP de BOOTP Sí(1) TRUE/FALSE FALSE Permite obtener la dirección IP del servidor de
configuración Boot PROM en la red.
Dirección IP fija Sí(1) TRUE/FALSE TRUE Permite especificar la dirección IP de forma manual
para el host o la identificación de la interfaz de red.
Dirección IP Sí(2) w.x.y.z(3) 0.0.0.0 Permite especificar la dirección IP del dispositivo en
la red Ethernet. Consulte Clases de dirección,
página 105
La asignación de 0.0.0.0 (valor predeterminado)
como dirección IP para el M221 Logic Controller
hace que el firmware genere una dirección IP a
partir de la dirección MAC.
La dirección IP generada es 10.10.XXX.YYY, en la
que XXX e YYY son los valores decimales de los
últimos 2 bytes (EE.FF) de la dirección MAC (AA.
BB.CC.DD.EE.FF)
Ejemplo:
Dirección MAC: 00:80:78:19:19:73
EE (19 hex) = 25 decimal
FF (73 hex) = 155 decimal
Dirección IP generada: 10.10.25.155.
El firmware también genera una dirección IP a partir
de la dirección MAC si la dirección IP especificada
se identifica como dirección duplicada en la red.
El bit 9 de la palabra de sistema %SW118 se
establece en 1 (consulte Descripción de las palabras
de sistema, página 193) y la palabra de sistema %
SW62 se establece en 1 (consulte Descripción de
las palabras de sistema, página 193) cuando se
detecta una dirección IP duplicada.
La dirección MAC del logic controller se almacena
en %SW107-%SW109 (consulte Descripción de las
palabras de sistema, página 193).
Máscara de subred Sí(2) w.x.y.z(3) 0.0.0.0 Permite especificar la dirección de la subred para
autorizar un grupo de dispositivos para el
intercambio de datos. Determina qué bits de una
dirección IP corresponden a la dirección de red y
qué bits corresponden a la parte de subred de la
dirección. Consulte Máscara de subred, página 105
Dirección de pasarela Sí(2) w.x.y.z(3) 0.0.0.0 Permite especificar la dirección IP del nodo (un
enrutador) en una red TCP/IP que sirve como punto
de acceso a otra red. Consulte Dirección de
pasarela, página 106
Velocidad de transferencia No –Automático Muestra la modalidad seleccionada para la
velocidad Ethernet. Auto significa "Negociación
automática".
Parámetros de seguridad
Los parámetros de seguridad le permiten habilitar o deshabilitar los protocolos y las funciones de comunicación.
EIO0000003300.02 103

Configuración de comunicaciones integradas
Parámetro Editable Valor Valor
predeterminado Descripción
Protocolo de
programación habilitado Sí TRUE/FALSE FALSE Permite habilitar o deshabilitar la programación a
través del puerto Ethernet.
Asimismo, habilita o deshabilita el acceso de los
objetos de software por medio de tablas de
animación o dispositivos HMI.
Protocolo EtherNet/IP
habilitado Sí TRUE/FALSE FALSE Permite habilitar o deshabilitar el protocolo EtherNet/
IP a fin de conectarse a una red para el intercambio
de datos.
Servidor Modbus
habilitado Sí TRUE/FALSE FALSE Permite habilitar o deshabilitar el servidor Modbus
TCP.
En consecuencia, esto habilita o deshabilita el
acceso a objetos de memoria %M y%MW mediante
peticiones Modbus estándar.
Protocolo de
descubrimiento
automático habilitado
Sí TRUE/FALSE FALSE Permite habilitar o deshabilitar el protocolo de
descubrimiento automático para detectar
automáticamente dispositivos en buses de campo
Ethernet admitidos.
(1) Puede seleccionar una sola opción de su elección para el direccionamiento IP. Al seleccionar una opción se deshabilitan las otras.
(2) Estas opciones se habilitan solamente si se selecciona la opción Dirección IP fija para el direccionamiento IP.
(3) w,x,yyzson los bytes que almacenan la dirección y cada byte puede almacenar un valor del intervalo de 0 a 255.
NOTA: Cuando se deshabilita un protocolo incluido en la lista de Parámetros
de seguridad, las solicitudes del tipo de servidor correspondiente se ignoran.
La pantalla de configuración correspondiente permanece accesible. La
ejecución del programa no se ve afectada.
Gestión de direcciones
Este diagrama muestra los diferentes tipos de sistema de direcciones para el
M221 Logic Controller:
104 EIO0000003300.02

Configuración de comunicaciones integradas
NOTA: Si un dispositivo programado para utilizar los métodos de
direccionamiento DHCP o BOOTP no puede establecer contacto con su
servidor correspondiente, el controlador utilizará la dirección IP
predeterminada. No obstante, repetirá constantemente su petición.
El proceso de IP se reinicia en los siguientes casos:
• Reinicio del controlador
• Reconexión de cable Ethernet
• Descarga de aplicación (si los parámetros IP cambian)
• Se ha detectado el servidor DHCP o BOOTPdespués de que fallara el
intento de direccionamiento anterior o tras caducar el arrendamiento de
la dirección DHCP.
Clases de dirección
La dirección IP está vinculada:
• A un dispositivo (el host).
• A la red a la que está conectado el dispositivo.
Una dirección IP siempre se codifica con 4 bytes.
La distribución de estos bytes entre la dirección de red y la dirección del
dispositivo podría variar. Esta distribución se define mediante clases de
direcciones.
Las diferentes clases de direcciones IP se definen en esta tabla:
Clase de
dirección Byte1 Byte 2 Byte 3 Byte 4
Clase A 0 ID de red ID de host
Clase B 1 0 ID de red ID de host
Clase C 1 1 0 ID de red ID de host
Clase D 1 1 1 0 Dirección de multidifusión
Clase E 1 1 1 1 0 Dirección reservada para uso posterior
Máscara de subred
La máscara de subred se utiliza para dirigirse a varias redes físicas con una única
dirección de red. La máscara se utiliza para separar la dirección de subred y la del
dispositivo en el ID de host.
La dirección de subred se obtiene conservando los bits de la dirección IP que
corresponden a las posiciones de la máscara que contienen 1 y sustituyendo los
otros por 0.
En cambio, la dirección de subred del dispositivo host se obtiene conservando los
bits de la dirección IP que corresponden a las posiciones de la máscara que
contienen 0 y sustituyendo los otros por 1.
Ejemplo de una dirección de subred:
dirección IP 192 (11000000) 1 (00000001) 17 (00010001) 11 (00001011)
Máscara de
subred 255 (11111111) 255 (11111111) 240 (11110000) 0 (00000000)
Dirección de
subred 192 (11000000) 1 (00000001) 16 (00010000) 0 (00000000)
NOTA: El dispositivo no se comunica en su subred cuando no hay ninguna
pasarela.
EIO0000003300.02 105

Configuración de comunicaciones integradas
Dirección de pasarela
La pasarela permite que un mensaje se pueda enrutar a un dispositivo que no se
encuentra en la red actual.
Si no hay ninguna pasarela, la dirección de la pasarela es 0.0.0.0.
Configuración de Modbus TCP o Modbus TCP IOScanner
Introducción
Puede configurar el puerto Ethernet para Modbus TCP o Modbus TCP IOScanner
como:
•Modbus, página 106
•Modalidad de cliente, página 108
Solo se puede definir una instancia de IOScanner: si la configura en un puerto
serie, no puede configurarla en un puerto Ethernet, y viceversa. Consulte
Configuración de Modbus Serial IOScanner, página 137.
El número máximo de objetos TCP y Serial IOScanner depende del nivel
funcional. Para obtener más información, consulte .
Si se interrumpe la comunicación, el IOScanner se detiene. Si desea más
información sobre el estado, página 193, consulte %SW212.
Use los siguientes bits de sistema para restablecer o suspender Modbus TCP
IOScanner (consulte Descripción de los bits de sistema, página 186): %S112 y%
S115.
Configuración de Modbus TCP: asignación de Modbus
En esta tabla se describe cómo configurar la asignación de Modbus:
Paso Acción
1 En la ventana Configuración, haga clic en ETH1→ Modbus TCP para mostrar las propiedades de Modbus TCP.
En la siguiente ilustración se muestran las propiedades que aparecen en el área del editor:
2 Seleccione Habilitado para editar las propiedades para configurar la Asignación de Modbus.
NOTA: Si el botón Habilitado aparece atenuado, compruebe que el Nivel funcional de la aplicación (ficha
Programación >Tareas >Comportamiento) sea como mínimo Nivel 3.2.
3 Haga clic en Aplicar.
106 EIO0000003300.02

Configuración de comunicaciones integradas
En esta tabla se describen todos los parámetros de configuración de la
asignación de Modbus:
Parámetro Modificable(1) Valor Valor
predetermina-
do
Descripción
Habilitado Sí TRUE/FALSE FALSE Seleccione esta opción para habilitar la asignación de
Modbus.
NOTA: Si deselecciona la casilla de verificación
Habilitado y ha utilizado variables de red en el
programa, estas dejan de ser válidas y el programa ya
no puede compilarse. Si desea deshabilitar
temporalmente los servicios Modbus TCP/IP sin invalidar
el uso de las variables de red, puede desactivar los
Parámetros de seguridad del protocolo en la ventana
Propiedades Ethernet, página 100.
ID de unidad Sí De 1 a 247 -Especifique el ID de unidad del servidor local.
Las peticiones Modbus TCP procedentes de un dispositivo
con el mismo ID de unidad se envían a la tabla de
asignaciones Modbus en lugar de al servidor Modbus normal.
Registros de
salida (%IWM) Sí 1...20 10 El número de registros de salida disponibles.
Los registros de salida se utilizan para almacenar los valores
de los objetos Modbus TCP (%IWM), página 176.
Registros de
entrada (%QWM) Sí 1...20 10 El número de registros de entrada disponibles.
Los registros de entrada se utilizan para almacenar los
valores de los objetos Modbus TCP (%QWM), página 174.
(1) Solo si se ha seleccionado la opción Servidor Modbus habilitado en la sección Parámetros de seguridad de las ventanas de
propiedades de Ethernet, página 104.
Tabla de asignaciones de E/S de dispositivos Modbus TCP esclavos
Cuando se ha configurado el dispositivo Modbus TCP esclavo, los comandos
Modbus enviados a su ID de unidad (dirección Modbus) acceden a los objetos de
red (%IWM y%QWM) del controlador en lugar de a las palabras Modbus
normales accesibles cuando el ID de unidad es 255. De este modo se facilitan las
operaciones de lectura/escritura mediante una aplicación de explorador de E/S
del maestro Modbus.
Si el ID de unidad seleccionado en el maestro no es el que está configurado en el
esclavo M221 (o viceversa), los datos se leen o se escriben en palabras Modbus
convencionales %MWx en lugar de en los objetos de red %IWMx y%QWMx. No
se devuelve ningún error de Modbus.
El acceso a la tabla de asignaciones de E/S de esclavo Modbus TCP (%IWM/%
QWM) se realiza con la misma prioridad que el acceso a las palabras Modbus
convencionales (%MW).
EIO0000003300.02 107

Configuración de comunicaciones integradas
El dispositivo esclavo Modbus TCP responde a un subconjunto de códigos de
función Modbus, pero lo hace de manera distinta a los estándares Modbus, con el
objetivo de intercambiar datos con el explorador de E/S externo. Los siguientes
códigos de función Modbus son compatibles con el dispositivo esclavo Modbus
TCP:
Decimal de
código de
función (Hex)
Función Comentario
3 (3 hex) Leer registro de
salida Permite que el explorador de E/S maestro lea el objeto
de red %QWM del dispositivo.
4 (4 hex) Leer registros de
entrada Permite que el explorador de E/S maestro lea el objeto
de red %IWM del dispositivo.
6 (6 hex) Escribir registro único Permite que el explorador de E/S maestro escriba un
objeto de red único %IWM del dispositivo.
16 (10 hex) Escribir registros
múltiples Permite que el explorador de E/S maestro escriba varios
objetos de red %IWM del dispositivo.
23 (17 hex) Leer/escribir varios
registros Permite que el maestro de E/S maestro lea objetos de
red %QWM y escriba objetos de red %IWM del dispositivo.
Configuración de Modbus TCP: Modalidad de cliente
En esta tabla se describe cómo configurar la modalidad de cliente:
Paso Acción
1 En la ventana Configuración, haga clic en ETH1→ Modbus TCP para mostrar las propiedades de Modbus TCP.
En la siguiente ilustración se muestran las propiedades que aparecen en el área del editor:
2 Añadir un dispositivo remoto. Consulte Adición de dispositivos remotos, página 109.
3 Si desea configurar Modbus TCP IOScanner, seleccione Habilitar Modbus TCP IOScanner.
NOTA: Si el botón Habilitar Modbus TCP IOScanner está atenuado, compruebe que el Nivel funcional de
la aplicación (ficha Programación >Tareas >Comportamiento) sea al menos Nivel 6.0 y que no haya
ninguna instancia configurada en Línea serie >Modbus Serial IOScanner.
Puede configurar y añadir dispositivos remotos para Modbus TCP aunque Modbus TCP IOScanner esté
habilitado.
108 EIO0000003300.02

Configuración de comunicaciones integradas
Adición de dispositivos remotos
En la siguiente tabla se describen los parámetros de Modalidad de cliente: tabla
de dispositivos remotos (máx. 16) para añadir un dispositivo:
Parámetro Modificable
(1) Valor Valor
predeterminado Descripción
Dirección IP Sí w.x.y.z(2) –Permite especificar la dirección IP del dispositivo que
se va a añadir. Consulte también Adición de
dispositivos remotos.
Genérico
Accionamiento
Predefinido
Sí Selección Genérico Permite seleccionar el tipo de dispositivo que se va a
añadir. Accionamiento yPredefinido están
disponibles si se ha habilitado Modbus TCP
IOScanner.
NOTA: Los acopladores de bus TM3 forman parte
de Predefinido.
(1) Solo si se ha seleccionado la opción Servidor Modbus habilitado en la sección Parámetros de seguridad de la ventana Propiedades
Ethernet, página 100.
(2) w,x,yyzson los bytes que almacenan la dirección, y cada byte puede almacenar un valor del intervalo.
En esta tabla se describe cómo añadir un dispositivo remoto:
Paso Acción
1 Introduzca la dirección IP en el campo Dirección IP.
2 Seleccione Genérico,Accionamiento oPredefinido.
Accionamiento yPredefinido solo se habilitan si se ha seleccionado Habilitar Modbus TCP IOScanner.
3 Haga clic en el botón Añadir.
El botón Añadir está deshabilitado si:
• Ya se ha configurado el número máximo de 16 dispositivos.
• La dirección IP tiene un formato incorrecto.
Resultado: En la pantalla aparece una lista de los dispositivos remotos que ha añadido.
4 Haga clic en Aplicar.
EIO0000003300.02 109

Configuración de comunicaciones integradas
En esta tabla se describe cada columna de la tabla que ofrece la lista de los
dispositivos remotos:
Parámetro Editable Valor Valor
predeterminado Descripción
ID No 0...15 0Identificador de dispositivo exclusivo asignado por
EcoStruxure Machine Expert - Basic.
Nombre Sí 1-32 caracteres
El nombre del
dispositivo debe
ser exclusivo.
Dispositivo x (1) El nombre del dispositivo.
Dirección No –
%DRVn(2)
–
%DRVn
%DRVn se utiliza para configurar el dispositivo en la
aplicación utilizando Bloques de funciones de
accionamiento.
Tipo No Tipo de
dispositivo
–Para cambiar el tipo de dispositivo, debe eliminar el
dispositivo de la lista (haga clic con el botón derecho y
seleccione Eliminar) y, a continuación, añadir el tipo
de dispositivo correcto.
Índice No 1-16 –El número de índice de los dispositivos que están
conectados de forma remota.
Dirección IP Sí w.x.y.z(2) –Dirección utilizada para identificar el dispositivo en la
red. Pueden utilizarse direcciones de esclavo
duplicadas.
Timeout de
respuesta (x 100
ms)
Sí 0...65535 10 Duración del tiempo de espera de la conexión.
Periodo de tiempo (en unidades de 100 ms) durante el
cual el controlador intenta establecer una conexión
TCP con el dispositivo remoto. Si al final de este
período no se ha establecido una conexión TCP, el
controlador deja de realizar intentos de conexión hasta
la próxima petición de conexión con una instrucción
EXCH.
Restablecer variable Sí %Mn –Especifique la dirección del bit de memoria que se va a
utilizar para reiniciar el dispositivo (reenviar las
peticiones de inicialización). Cuando la aplicación
establece el bit de memoria especificado en 1, el
dispositivo se reinicia.
Explorado No TRUE/FALSE TRUE Permite ver qué dispositivo se ha configurado para
Modbus TCP IOScanner.
Inic solicitud ID
unidad Sí 0...255 255 Especifique el ID de unidad del dispositivo local.
Las peticiones Modbus TCP procedentes de un
dispositivo con el mismo ID de unidad se envían a la
tabla de asignaciones Modbus en lugar de al servidor
Modbus normal.
Peticiones inic. (3) Sí –Haga clic para abrir la ventana del Asistente para
peticiones de inicialización, página 110.
ID de unidad de los
canales Sí 0...255 255 Especifique el ID de unidad del dispositivo local.
Las peticiones Modbus TCP procedentes de un
dispositivo con el mismo ID de unidad se envían a la
tabla de asignaciones Modbus en lugar de al servidor
Modbus normal.
Canales (3) Sí –Haga clic para abrir la ventana Asistente de canales,
página 112.
(1) w,x,yyzson los bytes que almacenan la dirección y cada byte puede almacenar un valor del intervalo de 0 a 255.
(2) xynson enteros que se incrementan respectivamente cada vez que se añade un dispositivo o un dispositivo de accionamiento.
(3) Habilitado si Modbus Serial IOScanner no está configurado en el nodo Línea serie →Ajustes de protocolo.
Configuración de peticiones de inicialización
Las peticiones de inicialización son comandos específicos del dispositivo que el
IOScanner serie Modbus TCP IOScanner o Modbus envía para inicializar un
dispositivo esclavo. El IOScanner serie Modbus TCP IOScanner o Modbus no
inicia el intercambio de datos cíclicos con el dispositivo hasta que el dispositivo
110 EIO0000003300.02

Configuración de comunicaciones integradas
confirma todas las peticiones de inicialización. Durante la fase de inicialización,
los objetos de red no se actualizan.
Pueden definirse hasta 20 peticiones de inicialización para cada dispositivo
esclavo.
La ventana Asistente para peticiones de inicialización muestra las peticiones
de inicialización definidas:
Las peticiones de inicialización preconfiguradas se identifican por presentar un
símbolo de bloqueo y un fondo gris. Algunos parámetros no pueden
modificarse para las peticiones de inicialización predefinidas.
Según el tipo de dispositivo que seleccione, es posible configurar algunas
peticiones de inicialización.
EIO0000003300.02 111

Configuración de comunicaciones integradas
En esta tabla se describen las propiedades de las peticiones de inicialización:
Parámetro Editable Valor Valor predeterminado Descripción
ID No 0-19 0Identificador exclusivo de petición de
inicialización.
Tipo de mensaje Sí, si la petición
de
inicialización
no está
predefinida.
Consulte Códigos de
función Modbus
compatibles, página
147
Mbs 0x05 - Write
single bit (coil) Seleccione el código de función Modbus
para el tipo de intercambio que se va a
utilizar para esta petición de inicialización.
NOTA: Si la configuración de un
dispositivo genérico no admite el tipo
de petición Mbs 0x05 - Escritura de
un bit (bobina) predeterminado, debe
sustituir el valor predeterminado por
un tipo de petición admitida.
Offset Sí, si la petición
de
inicialización
no está
predefinida.
0 a 65.535 0 Offset del primer registro que se va a
inicializar.
Longitud Sí, si la petición
de
inicialización
no está
predefinida.
1 para Mbs 0x05 -
Write single bit (coil)
1 para Mbs 0x06 -
Write single word
(register)
128 para Mbs 0x0F -
Write multiple bits
(coils)
123 para Mbs 0x10 -
Write multiple words
(reg.)
1 Número de objetos (palabras o bits de
memoria) que se van a inicializar. Por
ejemplo, si escribe varias palabras con
Offset = 2 y Longitud = 3, %MW2,%MW3
y%MW4 se inicializan.
Valor de
inicialización Sí, si la petición
de
inicialización
no está
predefinida.
De 0 a 65535 si se van
a inicializar palabras
de memoria (registros)
0 a 1 si se van a
inicializar bits de
memoria (bobinas)
0 Valor con el que se van a inicializar los
registros de destino.
Comentario Sí, si la petición
de
inicialización
no está
predefinida.
-Vacío Opcionalmente, escriba un comentario para
asociarlo con esta petición.
Haga clic en Añadir para crear nuevas peticiones de inicialización.
Seleccione una entrada y utilice los botones de flecha arriba y flecha abajo para
cambiar el orden de envío de las peticiones de inicialización al dispositivo.
Cuando se hayan definido las peticiones de inicialización, haga clic en Aceptar
para guardar la configuración y cerrar el Asistente para peticiones de
inicialización.
Asistente de canales
Pueden definirse hasta 10 canales para cada dispositivo esclavo. Cada canal
representa una única petición Modbus.
NOTA: El número de objetos definido (elementos de datos leídos y escritos)
se valida al hacer clic en Aplicar en la ventana de propiedades.
112 EIO0000003300.02

Configuración de comunicaciones integradas
En la ventana Asistente de canales se muestran los canales definidos:
Haga clic en Configuración (1) para mostrar los detalles de la ventana
Asistente de canales (2):
Los canales preconfigurados se identifican mediante un símbolo de bloqueo y
un fondo gris. Algunos parámetros no pueden modificarse para los canales
predefinidos.
Channel assistant
Name : Device 0Address :Type : Generic deviceIP address : 10.125.126.125
Channels
IDNameConfigurationMessage typeTriggerComment
Device 0_Channel0
...Read/Write multiple words - Modbus 0x17Cyclic 200 ms
W Offset
0
W Length
1
Error managem...
Set to zero
R Length
1
R Offset
0
Add
CancelOk
Channel assistant
Name : Device 0Address :Type : Generic deviceIP address : 10.125.126.125
Channels
IDNameConfigurationMessage typeTriggerComment
Device 0_Channel0
...Read/Write multiple words - Modbus 0x17Cyclic 200 ms
W Offset
0
W Length
1
Error managem...
Set to zero
R Length
1
R Offset
0
Add
CancelOk
Channel assistant
Channel
Message type
Read/Write multiple words - Modbus 0x17
Name
Device 0_Channel0
TriggerCyclic
Comment
Cycle time (x 10 ms)
20
READ objects
Length
1
Offset0
Error managementSet to zero
WRITE objects
Length
1
Offset0
CancelOk
2
1
EIO0000003300.02 113

Configuración de comunicaciones integradas
En esta tabla se describen las propiedades de los canales:
Parámetro Editable Valor Valor predeterminado Descripción
ID No 0-19 0Identificador de inicialización exclusivo.
Nombre Sí 0-32 caracteres Device_channel0 Haga doble clic para editar el nombre del
canal.
Configuración Sí -Haga clic para visualizar la ventana de
detalles del Asistente de canales.
Tipo de mensaje No - - Código de función Modbus que se
seleccionó en la ventana de detalles del
Asistente de canales.
Desencadenador No - - Tipo de desencadenador y tiempo de ciclo
seleccionados en la ventana de detales del
Asistente de canales.
R Offset No - - Offset de objeto READ seleccionado en la
ventana de detalles del Asistente de
canales.
R Longitud No - - Longitud de objeto READ seleccionada en
la ventana de detalles del Asistente de
canales.
Gestión de errores No - - Política de gestión de errores seleccionada
en la ventana de detalles del Asistente de
canales.
W Offset No - - Offset de objeto WRITE seleccionado en la
ventana de detalles del Asistente de
canales.
W Longitud No - - Longitud de objeto WRITE seleccionada en
la ventana de detalles del Asistente de
canales.
Comentario Sí -Vacío Opcionalmente, escriba un comentario para
asociarlo con este canal.
Haga clic en Añadir para crear un nuevo canal.
Cuando se hayan definido los canales, haga clic en Aceptar para guardar la
configuración y cerrar el Asistente de canales.
Configuración de canales
Utilice la ventana de detalles del Asistente de canales para configurar los
canales.
114 EIO0000003300.02

Configuración de comunicaciones integradas
El ejemplo siguiente muestra un canal configurado para una petición Leer/Escribir
varias palabras (código de función Modbus 23). Lee una palabra del registro con
el offset 16#0C21 y escribe dos palabras en el registro con el offset 16#0C20.
Esta petición se ejecuta cuando existe un flanco ascendente del
desencadenador definido (consulte el gráfico siguiente):
Channel assistant
Channel
Message type
Read/Write multiple words - Modbus 0x17
Name
Device 0_Channel0
TriggerRising edge
Comment
Memory bit
%M8
READ objects
Length
1
Offset3105
Error managementSet to zero
WRITE objects
Length
2
Offset3014
CancelOk
EIO0000003300.02 115

Configuración de comunicaciones integradas
En esta tabla se describen las propiedades de los canales:
Parámetro Editable Valor Valor predeterminado Descripción
Name Sí 0-32 caracteres Device 0_Channel0 Introduzca un nombre para el canal.
Tipo de mensaje Sí Consulte Códigos de
función Modbus
compatibles, página 147
Mbs 0x17 - Read/Write
mult. words (reg.) Seleccione el código de función Modbus
para el tipo de intercambio que se va a
utilizar en este canal.
Desencadenador Sí Cíclico
Flanco ascendente
Cíclico Seleccione el tipo de desencadenador para
el intercambio de datos:
•Cíclico: la petición se desencadena
con la frecuencia definida en el
campo Tiempo de ciclo (x 10 ms).
•Flanco ascendente: la petición se
desencadena después de detectar un
flanco ascendente de un bit de
memoria. Especifique la dirección del
bit de memoria que se va a utilizar.
Tiempo de ciclo (x
10 ms)
(Si se ha
seleccionado
Cíclico)
Sí 1-6000 20 Especifique el tiempo de ciclo de
desencadenador periódico, en unidades de
10 ms.
Bit de memoria
(Si se ha
seleccionado
Flanco
ascendente)
Sí %Mn-Especifique una dirección de bit de
memoria, por ejemplo, %M8. El intercambio
de datos se desencadena cuando se
detecta un flanco ascendente de este bit de
memoria.
Comentario Sí -Vacío Opcionalmente, escriba un comentario para
describir el objetivo del canal.
READ objects
Offset Sí De 0 a 65.535 0 Dirección de la primera palabra de memoria
(registro) o bit de memoria (bobina) que se
va a leer.
Longitud Sí Consulte Códigos de
función Modbus
compatibles, página 147
para obtener información
sobre la longitud máxima.
-Número de palabras de memoria (registros)
o bits de memoria (bobinas) que se van a
leer.
Gestión de errores Sí Poner a CERO
Mantener último valor
Poner a CERO Especifique cómo gestionar la situación
cuando ya no pueden leerse datos del
dispositivo:
• Seleccione Poner a CERO para
establecer en cero los últimos valores
de datos recibidos.
• Seleccione Mantener último valor
para mantener los últimos valores de
datos recibidos.
WRITE objects
Offset Sí De 0 a 65.535 0 Dirección de la primera palabra de memoria
(registro) o bit de memoria (bobina) que se
va a escribir.
Longitud Sí Consulte Códigos de
función Modbus
compatibles, página 147
para obtener información
sobre la longitud máxima.
-Número de palabras de memoria (registros)
o bits de memoria (bobinas) que se van a
escribir.
Haga clic en Aceptar para completar la configuración del canal.
116 EIO0000003300.02

Configuración de comunicaciones integradas
Configuración de EtherNet/IP
Introducción
En esta sección se describe la configuración de la conexión EtherNet/IP al
controlador.
Para obtener más información sobre EtherNet/IP, consulte www.odva.org.
Configuración de EtherNet/IP Adapter
En la siguiente tabla se describe cómo mostrar la ventana de configuración del
EtherNet/IP Adapter:
Paso Acción
1 Haga clic en el nodo Adaptador EtherNet/IP situado debajo del nodo ETH1 en el árbol de hardware.
En esta figura se muestran las propiedades del EtherNet/IP Adapter en el área del editor:
2 Seleccione Habilitado para editar las propiedades para configurar el EtherNet/IP Adapter.
NOTA: Si el botón Habilitado aparece atenuado, compruebe que el Nivel funcional de la aplicación (ficha
Programación >Tareas >Comportamiento) sea como mínimo Nivel 3.2.
Para obtener información detallada sobre los parámetros de configuración del EtherNet/IP Adapter, consulte la
tabla siguiente.
3 Haga clic en Aplicar.
EIO0000003300.02 117

Configuración de comunicaciones integradas
Propiedades del adaptador EtherNet/IP
En esta tabla se describen todos los parámetros de configuración del EtherNet/IP
Adapter:
Parámetro Editable Valor Valor
predetermina-
do
Descripción
Habilitado Sí TRUE/FALSE FALSE Seleccione este valor para habilitar la configuración del
EtherNet/IP Adapter.
NOTA: Si deselecciona la casilla de verificación
Habilitado y ha utilizado variables de red en el
programa, estas dejan de ser válidas y el programa ya no
puede compilarse. Si desea deshabilitar temporalmente
los servicios del EtherNet/IP Adapter sin invalidar el uso
de las variables de red, puede desactivar los
Parámetros de seguridad del protocolo en la ventana
Propiedades Ethernet, página 100.
Si se ha deshabilitado, al desmarcar la casilla
Habilitado, se pierden los valores de retorno, página 172
de los objetos %QWE, así como los símbolos y los
comentarios.
Input assembly (destino –>origen, %QWE)
Instancia Sí De 1 a 255 100 Identificador del Input assembly.
Tamaño (palabras) Sí 1...20 20 Tamaño del Input assembly.
Output assembly (origen –> destino, %IWE)
Instancia Sí De 1 a 255 150 Identificador del Output assembly.
Tamaño (palabras) Sí 1...20 20 Tamaño del Output assembly.
NOTA: Salida significa salida del controlador del explorador (%IWE para el
adaptador).
Entrada significa entrada del controlador del explorador (%QWE para el
adaptador).
En el gráfico siguiente se muestra la direccionalidad del Input assembly y el
Output assembly en las comunicaciones EtherNet/IP:
Archivo EDS
Se proporciona un archivo de hoja de datos electrónica (EDS) de plantilla, M221_
EDS_Model.eds, en la carpeta de instalación de EcoStruxure Machine Expert -
Basic \Firmwares & PostConfiguration.
Modifique el archivo como se describe en la guía del usuario que se encuentra en
esa misma carpeta.
118 EIO0000003300.02

Configuración de comunicaciones integradas
Perfil
El controlador admite los siguientes objetos:
Clase del objeto ID de clase
(hex) Cat. Número de
instancias Efecto en el comportamiento de la
interfaz
Objeto, página 119 de identidad 01 1 1 Proporciona la identificación del dispositivo
e información general acerca de este.
Admite el servicio de restablecimiento.
Objeto, página 122 de enrutador de
mensajes
02 1 1 Proporciona una conexión de mensajes
que permite al cliente direccionar un
servicio a cualquier clase o instancia de
objeto del dispositivo físico.
Objeto, página 125 ensamblado 04 2 2 Enlaza atributos de varios objetos, lo que
permite el envío o recepción de los datos
de cada objeto a través de una única
conexión.
Objeto, página 127 de administrador de
conexiones
06 –1 Administra las características de una
conexión de comunicación.
Objeto, página 128 de interfaz TCP/IP F5 1 1 Proporciona el mecanismo para configurar
la interfaz de red TCP/IP de un dispositivo.
Objeto, página 130 de conexión
Ethernet
F6 1 1 Mantiene la información de estado y de
contadores de conexiones específicos
para una interfaz de comunicaciones IEEE
802.3.
Objeto de identidad (ID de clase = 01 hex)
En la siguiente tabla se describen los atributos de clase del objeto de identidad
(instancia 0):
ID de atributo Acceso Nombre Tipo de datos Valor
(hexade-
cimal)
Detalles
1 Get Revisión UINT 01 Revisión de la implementación del objeto de
identidad
2 Get Máximo de
instancias
UINT 01 El mayor número de instancias
3 Get Número de
instancias UINT 01 Número de instancias de objeto
4 Get Lista de atributos de
instancia opcionales UINT, UINT [ ] 00 Los 2 primeros bytes contienen el número
de atributos de instancia opcionales. Cada
par de bytes posterior representa el número
de otros atributos de instancia opcionales.
6 Get Máximo atributo de
clase UINT 07 El valor de los atributos de clase más
grandes
7Get Máximo atributo de
instancia UINT 07 El valor de los atributos de instancia más
grandes
En la siguiente tabla se describen los servicios de clase:
Código de servicio
(hex)
Nombre Descripción
01 Obtener todos los atributos Devuelve el valor de todos los atributos de clase
0E Obtener un único atributo Devuelve el valor del atributo especificado
EIO0000003300.02 119

Configuración de comunicaciones integradas
En la siguiente tabla se describen los servicios de instancia:
Código de servicio
(hex) Nombre Descripción
01 Obtener todos los atributos Devuelve el valor de todos los atributos de clase
05 Restablecimiento(1) Inicializa el componente EtherNet/IP (reinicio de controlador)
0E Obtener un único atributo Devuelve el valor del atributo especificado
(1) Descripción del servicio de restablecimiento:
Cuando el objeto de identidad recibe una solicitud de restablecimiento:
• Determina si puede proporcionar el tipo de restablecimiento solicitado.
• Responde a la solicitud.
• Intenta realizar el tipo de restablecimiento solicitado.
El servicio común de restablecimiento tiene un parámetro específico, Tipo de
restablecimiento (USINT), que tiene los siguientes valores:
Valor Tipo de restablecimiento
0 Reinicio del controlador
NOTA: Este valor es el valor predeterminado si se omite este parámetro.
1 Reset caliente
2 No compatible
3-99 reservado
100...199 No se utiliza
200...255 reservado
En la siguiente tabla se describen los atributos de instancia:
ID de atributo Acceso Nombre Tipo de datos Valor
(hexade-
cimal)
Detalles
1 Get ID del proveedor UINT F3 Identificador de automatización de Schneider
2 Get Tipo de dispositivo UINT 0E El dispositivo es un logic controller
3 Get Código de
producto
UINT 1003 Código de producto M221 Logic Controller
4 Get Revisión Struct de
USINT, USINT
–Revisión de producto del controlador (1)
Equivalente a los 2 bytes de menor valor de la
versión del controlador.
Ejemplo: Para la versión del firmware de
M221 Logic Controller 1.3.2.0, el valor leído es
1.3.
5Get Estado WORD (1) –Consulte la definición de la tabla siguiente
6 Get Número de serie UDINT –Número de serie del controlador
XX + 3 bytes menos significativos de la
dirección MAC
7Get Nombre del
producto Struct de
USINT,
STRING
–La longitud máxima es 32.
Ejemplo: TM221CE16T
(1) Asignado en WORD:
• MSB: Revisión secundaria (segundo USINT)
• LSB: revisión principal (primer USINT)
120 EIO0000003300.02

Configuración de comunicaciones integradas
Descripción del estado (atributo 5):
Bit Nombre Descripción
0 Con propietario no utilizado
1 reservado –
2 Configurado TRUE indica que la aplicación del dispositivo se ha reconfigurado.
3 reservado –
4-7 Estado de dispositivo ampliado • 0: autoverificación o indeterminado
• 1: actualización de firmware en curso
• 2: al menos un error de conexión de E/S no válida detectado
• 3: no se han establecido conexiones de E/S
• 4: la configuración no volátil no es válida
• 5: error no recuperable detectado
• 6: al menos una conexión de E/S en estado RUNNING
• 7: al menos una conexión de E/S establecida, todas en modalidad
inactiva
• 8: reservado
• 9-15: no se utiliza
8 Error menor recuperable TRUE indica que el dispositivo ha detectado un error, que, en la mayoría de los
casos, es recuperable.
Este tipo de evento no ocasiona un cambio en el estado del dispositivo.
9 Error menor irrecuperable TRUE indica que el dispositivo ha detectado un error, que, en la mayoría de los
casos, no es recuperable.
Este tipo de evento no ocasiona un cambio en el estado del dispositivo.
10 Error grave recuperable TRUE indica que el dispositivo ha detectado un error que requiere que el
dispositivo informe de una excepción y pase al estado HALT.
Este tipo de evento conlleva un cambio en el estado del dispositivo, pero, en la
mayoría de los casos, es recuperable.
11 Error grave irrecuperable TRUE indica que el dispositivo ha detectado un error que requiere que el
dispositivo informe de una excepción y pase al estado HALT.
Este tipo de evento conlleva un cambio en el estado del dispositivo, pero, en la
mayoría de los casos, no es recuperable.
12...15 reservado –
EIO0000003300.02 121

Configuración de comunicaciones integradas
Objeto del enrutador de mensajes (ID de clase = 02 hex)
En la siguiente tabla se describen los atributos de clase del objeto de enrutador
de mensajes (instancia 0):
ID de atributo Acceso Nombre Tipo de datos Valor
(hexade-
cimal)
Detalles
1 Get Revisión UINT 01 Revisión de la implementación del objeto
enrutador de mensajes
2 Get Máximo de
instancias UINT 01 El mayor número de instancias
3 Get Número de
instancia
UINT 01 Número de instancias de objeto
4 Get Lista de atributos
de instancia
opcionales
Struct de
UINT, UINT [ ]
–Los 2 primeros bytes contienen el número de
atributos de instancia opcionales. Cada par de
bytes posterior representa el número de otros
atributos de instancia opcionales (de 100 a
119).
5Get Lista de servicios
opcionales UINT 00 Número y lista de cualquier atributo de servicios
opcionales implementado (0: ningún servicio
opcional implementado)
6 Get Máximo atributo de
clase
UINT 07 El valor de los atributos de clase más grandes
7Get Máximo atributo de
instancia UINT 77 El valor de los atributos de instancia más
grandes
NOTA: Utilice la instancia 0 para leer la información de los atributos de clase.
En la siguiente tabla se describen los servicios de clase:
Código de
servicio (hex) Nombre Descripción
01 Obtener todos los atributos Devuelve el valor de todos los atributos de clase
0E Obtener un único atributo Devuelve el valor del atributo especificado
En la siguiente tabla se describen los servicios de instancia (instancia 1):
Código de
servicio (hex) Nombre Descripción
01 Obtener todos los atributos Devuelve el valor de todos los atributos de clase
0E Obtener un único atributo Devuelve el valor del atributo especificado
122 EIO0000003300.02

Configuración de comunicaciones integradas
En la siguiente tabla se describen los atributos de instancia:
ID de atributo Acceso Nombre Tipo de datos Valor
(hexade-
cimal)
Descripción
1 Get Lista de objetos
implementados Struct de UINT,
UINT [ ]
–Lista de objetos implementados. Los
primeros dos bytes contienen el número de
objetos implementados. Cada uno de los
siguientes pares de bytes representa otro
número de clase implementado.
Esta lista contiene los siguientes objetos:
• 01: Identidad
• 02: Enrutador de mensajes
• 04: Ensamblado
• 06: Administrador de la conexión
• F5: TCP/IP
• F6: Conexión Ethernet
2 Get Número disponible UINT 08 Número máximo de conexiones de CIP
simultáneas (clase 1 o clase 3) admitidas
100 Get Total de paquetes de
clase 1 entrantes
recibidos durante el
último segundo
UINT –Número total de paquetes entrantes
recibidos para todas las conexiones
implícitas (clase 1) durante el último
segundo
101 Get Total de paquetes de
clase 1 salientes
enviados durante el
último segundo
UINT –Número total de paquetes salientes
enviados para todas las conexiones
implícitas (clase 1) durante el último
segundo
102 Get Total de paquetes de
clase 3 entrantes
recibidos durante el
último segundo
UINT –Número total de paquetes entrantes
recibidos para todas las conexiones
explícitas (clase 3) durante el último
segundo
103 Get Total de paquetes de
clase 3 salientes
enviados durante el
último segundo
UDINT –Número total de paquetes salientes
enviados para todas las conexiones
explícitas (clase 3) durante el último
segundo
104 Get Total de paquetes
entrantes no
conectados
recibidos durante el
último segundo
UINT –Número total de paquetes entrantes no
conectados recibidos durante el último
segundo
105 Get Total de paquetes
salientes no
conectados
enviados durante el
último segundo
UINT –Número total de paquetes salientes no
conectados enviados durante el último
segundo
106 Get Total de paquetes
entrantes EtherNet/
IP recibidos durante
el último segundo
UINT –Total de paquetes de clase 1 o clase 3 no
conectados recibidos durante el último
segundo
107 Get Total de paquetes
salientes EtherNet/
IP enviados durante
el último segundo
UINT –Total de paquetes de clase 1 o clase 3 no
conectados enviados durante el último
segundo
108 Get Total de paquetes
entrantes de clase 1
recibidos
UINT –Número total de paquetes entrantes
recibidos para todas las conexiones
implícitas (clase 1)
109 Get Total de paquetes
salientes de clase 1
enviados
UINT –Número total de paquetes salientes
enviados para todas las conexiones
implícitas (clase 1)
110 Get Total de paquetes
entrantes de clase 3
recibidos
UINT –Número total de paquetes entrantes
recibidos para todas las conexiones
explícitas (clase 3). Este número incluye
los paquetes que se devolverían si se
hubiera detectado un error (indicado en las
dos filas siguientes).
EIO0000003300.02 123

Configuración de comunicaciones integradas
ID de atributo Acceso Nombre Tipo de datos Valor
(hexade-
cimal)
Descripción
111 Get Total de paquetes
entrantes de clase 3
Valor de parámetro
no válido
UINT –Número total de paquetes entrantes de
clase 3 dirigidos a un servicio/clase/
instancia/atributo/miembro no admitidos
112 Get Total de paquetes
entrantes de clase 3
Formato no válido
UINT –Número total de paquetes entrantes de
clase 3 con un formato no válido
113 Get Total de paquetes
salientes de clase 3
enviados
UINT –Número total de paquetes enviados para
todas las conexiones explícitas (clase 3)
114 Get Total de paquetes
entrantes no
conectados
recibidos
UINT –Número total de paquetes entrantes no
conectados. Este número incluye los
paquetes que se devolverían si se hubiera
detectado un error (indicado en las dos
filas siguientes).
115 Get Total de paquetes
entrantes no
conectados Valor de
parámetro no válido
UINT –Número total de paquetes entrantes no
conectados dirigidos a un servicio/clase/
instancia/atributo/miembro no admitidos
116 Get Total de paquetes
entrantes no
conectados Formato
no válido
UINT –Número total de paquetes entrantes no
conectados con un formato no válido
117 Get Total de paquetes
salientes no
conectados
enviados
UINT –Número total de paquetes no conectados
enviados
118 Get Total de paquetes
entrantes EtherNet/
IP
UINT –Número total de paquetes no conectados
(clase 1) o de clase 3 recibidos
119 Get Total de paquetes
salientes EtherNet/
IP
UINT –Número total de paquetes no conectados
(clase 1) o de clase 3 enviados
124 EIO0000003300.02

Configuración de comunicaciones integradas
Objeto ensamblado (ID de clase = 04 hex)
En la siguiente tabla se describen los atributos de clase del objeto de ensamblado
(instancia 0):
ID de atributo Acceso Nombre Tipo de datos Valor
(hexade-
cimal)
Detalles
1 Get Revisión UINT 02 Revisión de la implementación del objeto
ensamblado
2 Get Máximo de
instancias
UINT –El mayor número de instancias de objetos
creados de esta clase.
Ejemplo: Si instancias de entrada = 200 e
instancias de salida = 100, este atributo
devuelve 200.
3 Get Número de
instancias UINT 02 Número de instancias de objeto
4 Get Lista de atributos de
instancia opcionales Struct de:
UINT
UINT [ ]
–Los 2 primeros bytes contienen el número
de atributos de instancia opcionales. Cada
par de bytes posterior representa el
número de otros atributos de instancia
opcionales.
5Get Lista de servicios
opcionales UINT 00 Número y lista de cualquier atributo de
servicios opcionales implementado (0:
ningún servicio opcional implementado)
6 Get Máximo atributo de
clase
UINT 07 El valor de los atributos de clase más
grandes
7Get Máximo atributo de
instancia UINT 04 El valor de los atributos de instancia más
grandes
En la siguiente tabla se describen los servicios de clase:
Código de servicio (hex) Nombre Descripción
0E Obtener un único atributo Devuelve el valor del atributo especificado
En la siguiente tabla se describen los servicios de instancia:
Código de servicio (hex) Nombre Descripción
0E Obtener un único atributo Devuelve el valor del atributo especificado
10 Establecer un único atributo Modifica el valor del atributo especificado
18 Obtener miembro Lee un miembro de una instancia de objeto ensamblado
19 Configurar miembro Modifica un miembro de una instancia de objeto
ensamblado
Instancias admitidas
Salida significa SALIDA del controlador de origen (= %IWE para el M221 Logic
Controller).
Entrada significa ENTRADA del controlador de origen (= %QWE para el M221
Logic Controller).
El controlador admite 2 ensamblados:
Nombre Instancia Tamaño de los datos
Input Assembly (EtherNet/IP)
(%QWE) Configurable de 1 a 255 De 1 a 20 palabras
Output Assembly (EtherNet/
IP) (%IWE) Configurable de 1 a 255 De 1 a 20 palabras
EIO0000003300.02 125

Configuración de comunicaciones integradas
NOTA: El objeto de ensamblado enlaza los atributos de diversos objetos de
manera que la información enviada a o recibida de cada objeto o procedente
de este se puede comunicar a través de una sola conexión. Los objetos
ensamblados son estáticos.
Los ensamblados que se estén utilizando se pueden modificar mediante el
acceso de parámetro de la herramienta de configuración de la red
(RSNetWorx). Debe apagar y encender el logic controller para registrar una
nueva asignación de ensamblado.
En la siguiente tabla se describen los atributos de instancia:
ID de atributo Acceso Nombre Tipo de datos Valor Descripción
1 Get Número de lista de objetos
de miembro UINT 1...20 Número de miembros para este
ensamblado
2 Get Lista de miembros ARRAY de
Struct
–Matriz de 1 estructura donde cada
estructura representa un miembro
3 Get/Set Datos de instancia ARRAY de Byte –Servicio de conjunto de datos solo
disponible para la salida de
controlador
4 Get Tamaño de datos de
instancia UINT 2...40 Tamaño de datos en bytes
Contenido de la lista de miembros:
Nombre Tipo de datos Valor Tipo de restablecimiento
Tamaño de datos del miembro UINT 4...40 Tamaño de los datos del miembro en bits
Tamaño de la ruta del miembro UINT 6 Tamaño del EPATH (consulte la tabla siguiente)
Ruta del miembro EPATH –EPATH al miembro
El EPATH es:
Palabra Valor
(hexadecimal) Semántica
0 2004 Clase 4
1 24xx Instancia xx, donde xx es el valor de la instancia (por ejemplo: 2464 hex = instancia 100)
2xxxx Consulte Common Industrial Protocol Specification, Volume 1, Appendix C, para conocer el formato
de este campo.
126 EIO0000003300.02

Configuración de comunicaciones integradas
Objeto de administrador de conexiones (ID de clase = 06 hex)
En la siguiente tabla se describen los atributos de clase del objeto de ensamblado
(instancia 0):
ID de atributo Acceso Nombre Tipo de datos Valor
(hexade-
cimal)
Detalles
1 Get Revisión UINT 01 Revisión de la implementación del objeto de
administrador de conexión
2 Get Máximo de
instancias
UINT 01 El mayor número de instancias
3 Get Número de
instancias UINT 01 Número de instancias de objeto
4 Get Lista de
atributos de
instancia
opcionales
Struct de:
UINT
UINT [ ]
–El número y la lista de los atributos opcionales. La
primera palabra contiene el número de atributos que
se deben seguir y cada una de las palabras que
siguen contiene otro código de atributo.
Los siguientes atributos opcionales incluyen:
• El número total de peticiones de apertura de
conexión entrante.
• El número de peticiones rechazadas debido al
formato no conforme de Reenviar abrir.
• El número de peticiones rechazadas debido a
recursos insuficientes.
• El número de peticiones rechazadas debido al
valor de parámetro enviado con Reenviar abrir.
• El número de peticiones de Reenviar cerrar
recibidas.
• El número de peticiones de Reenviar cerrar
con formato no válido.
• El número de peticiones de Reenviar cerrar
que no se han podido asignar a una conexión
activa.
• El número de conexiones que han superado el
tiempo de espera porque el otro extremo ha
detenido la producción o se ha producido una
desconexión de la red.
6 Get Máximo
atributo de
clase
UINT 07 El valor de los atributos de clase más grandes
7Get Máximo
atributo de
instancia
UINT 08 El valor de los atributos de instancia más grandes
En la siguiente tabla se describen los servicios de clase:
Código de servicio (hex) Nombre Descripción
01 Obtener todos los atributos Devuelve el valor de todos los atributos de clase
0E Obtener un único atributo Devuelve el valor del atributo especificado
En la siguiente tabla se describen los servicios de instancia:
Código de servicio (hex) Nombre Descripción
01 Obtener todos los atributos Devuelve el valor de todos los atributos de la instancia
0E Obtener un único atributo Devuelve el valor del atributo especificado
4E Reenviar cerrar Cierra una conexión existente
52 Enviar no conectados Envía una solicitud multi-hop no conectada
54 Reenviar abrir Abre una conexión nueva
EIO0000003300.02 127

Configuración de comunicaciones integradas
En la siguiente tabla se describen los atributos de instancia (instancia 1):
ID de atributo Acceso Nombre Tipo de
datos Valor Descripción
1 Get Solicitudes de
apertura
UINT –Número de solicitudes de servicios de Reenviar abrir
recibidas
2 Get Rechazos de abrir
formato UINT –Número de solicitudes de servicios de Reenviar abrir
que se han rechazado debido a un formato no válido
3 Get Rechazos de abrir
recurso UINT –Número de solicitudes de servicios de Reenviar abrir
rechazadas debido a la falta de recursos
4 Get Rechazos de abrir
otros UINT –Número de solicitudes de servicios de Reenviar abrir
que se han rechazado por motivos diferentes a un
formato no válido o falta de recursos
5Get Solicitudes de cierre UINT –Número de solicitudes de servicios de Reenviar
cerrar recibidas
6 Get Solicitudes de cerrar
formato
UINT –Número de solicitudes de servicios de Reenviar
cerrar que se han rechazado debido a un formato no
válido
7Get Solicitudes de cerrar
otros
UINT –Número de solicitudes de servicios de Reenviar
cerrar que se han rechazado por motivos diferentes a
un formato no válido
8 Get Timeouts de la
conexión UINT –Número total de timeouts de la conexión que se han
producido en las conexiones controladas por este
administrador de conexión
Objeto de interfaz TCP/IP (ID de clase = F5 hex)
Este objeto proporciona el mecanismo para configurar un dispositivo de interfaz
de red TCP/IP.
En la siguiente tabla se describen los atributos de clase del objeto de interfaz
TCP/IP (instancia 0):
ID de atributo Acceso Nombre Tipo de
datos Valor
(hexadeci-
mal)
Detalles
1 Get Revisión UINT 02 Revisión de la implementación del objeto de
interfaz de TCP/IP
2 Get Máximo de
instancias UINT 01 El mayor número de instancias
3 Get Número de
instancia UINT 01 Número de instancias de objeto
6 Get Máximo atributo de
clase
UINT 07 El valor de los atributos de clase más grandes
7Get Máximo atributo de
instancia UINT 06 El valor de los atributos de instancia más grandes
En la siguiente tabla se describen los servicios de clase:
Código de servicio (hex) Nombre Descripción
01 Obtener todos los atributos Devuelve el valor de todos los atributos de clase
0E Obtener un único atributo Devuelve el valor del atributo especificado
Códigos de instancia
Solo se admite la instancia 1.
En la siguiente tabla se describen los servicios de instancia:
Código de servicio (hex) Nombre Descripción
01 Obtener todos los atributos Devuelve el valor de todos los atributos de la instancia
0E Obtener un único atributo Devuelve el valor del atributo de instancia especificado
128 EIO0000003300.02

Configuración de comunicaciones integradas
En la siguiente tabla se describen los atributos de instancia (instancia 1):
ID de atributo Acceso Nombre Tipo de
datos Valor Descripción
1 Get Estado DWORD Nivel de bit • 0: el atributo de configuración de la
interfaz no se ha configurado.
• 1: la configuración de la interfaz contiene
una configuración válida.
El resto de los bits están reservados y
establecidos en 0.
2 Get Capacidad de la
configuración DWORD Nivel de bit • 0: Cliente BOOTP
• 2: Cliente DHCP
El resto de los bits están reservados y
establecidos en 0.
3 Get Configuración DWORD Nivel de bit • 0: la configuración de la interfaz es válida.
• 1: la configuración de la interfaz se obtiene
con BOOTP.
• 2: la configuración de la interfaz se obtiene
con DHCP.
• 3: Reservado
• 4: Habilitar DNS
El resto de los bits están reservados y
establecidos en 0.
4 Get Conexión física UINT Tamaño de la
ruta Números de palabras de 16 bits en el elemento
de la ruta
EPATH
completa-
da
Ruta Segmentos lógicos que identifican el objeto de
conexión física. La ruta está limitada a un solo
segmento de clase lógico y un solo segmento
de instancia lógico. El tamaño máximo es de 12
bytes.
5Get Configuración de la
interfaz
UDINT Dirección IP Formato hexadecimal
Ejemplo: 55 DD DD DE = 85.221.221.222
UDINT Máscara de red Formato hexadecimal
Ejemplo: FF 0 0 0 = 255.0.0.0
UDINT Dirección de
pasarela Formato hexadecimal
Ejemplo: 55 DD DD DE = 85.221.221.222
UDINT Nombre
principal 0: no se ha configurado ninguna dirección de
servidor de nombres principal.
UDINT Nombre
secundario 0: no se ha configurado ninguna dirección de
servidor de nombres secundario. De lo
contrario, la dirección de servidor de nombre se
establecerá en una dirección válida de clase A,
B o C.
STRING Nombre de
dominio
predetermina-
do
Caracteres ASCII. La longitud máxima es de 16
caracteres. Completado hasta un número par
de caracteres (los caracteres para completar no
se incluyen en la longitud).
0: no se ha configurado ningún nombre de
dominio
6 Get Nombre de host UINT –Longitud del nombre de host
STRING –Caracteres ASCII. La longitud máxima es de 64
caracteres. Completado hasta un número par
de caracteres (los caracteres para completar no
se incluyen en la longitud).
0: no se ha configurado ningún nombre de host
EIO0000003300.02 129

Configuración de comunicaciones integradas
Objeto de conexión Ethernet (ID de clase = F6 hex)
Este objeto mantiene la información de estado y de contadores de conexiones
específicos para una interfaz de comunicaciones Ethernet 802.3.
En la siguiente tabla se describen los atributos de clase del objeto de conexión
Ethernet (instancia 0):
ID de atributo Acceso Nombre Tipo de datos Valor
(hexade-
cimal)
Detalles
1 Get Revisión UINT 03 Revisión de la implementación del
objeto de conexión Ethernet
2 Get Máximo de instancias UINT 01 El mayor número de instancias
3 Get Número de instancias UINT 01 Número de instancias de objeto
6 Get Máximo atributo de clase UINT 07 El valor de los atributos de clase más
grandes
7Get Máximo atributo de instancia UINT 03 El valor de atributo de instancia más
grande
En la siguiente tabla se describen los servicios de clase:
Código de servicio (hex) Nombre Descripción
01 Obtener todos los atributos Devuelve el valor de todos los atributos de clase
0E Obtener un único atributo Devuelve el valor del atributo especificado
Códigos de instancia
Solo se admite la instancia 1.
En la siguiente tabla se describen los servicios de instancia:
Código de servicio (hex) Nombre Descripción
01 Obtener todos los atributos Devuelve el valor de todos los atributos de la instancia
0E Obtener un único atributo Devuelve el valor del atributo de instancia especificado
En la siguiente tabla se describen los atributos de instancia (instancia 1):
ID de atributo Acceso Nombre Tipo de
datos Valor Descripción
1 Get Velocidad de la
interfaz UDINT –Velocidad en Mbps (10 o 100)
2 Get Indicadores de la
interfaz DWORD Nivel de bit • 0: estado de la conexión
• 1: semidúplex/dúplex completo
• 2-4: estado de la negociación
• 5: ajuste manual/requiere
restablecimiento
• 6: error de hardware local detectado
El resto de los bits están reservados y
establecidos en 0.
3 Get Dirección física ARRAY de 6
USINT
–Esta matriz contiene la dirección MAC del
producto.
Formato: XX-XX-XX-XX-XX-XX-XX
130 EIO0000003300.02

Configuración de comunicaciones integradas
Configuración de línea serie
Configuración de líneas serie
Introducción
Las referencias del M221 Logic Controller están equipadas con al menos 1 línea
serie. Las referencias del controlador sin la función Ethernet admiten 2 líneas
serie:
• SL1 (línea serie)
• SL2 (línea serie)
Cada línea serie se puede configurar para uno de los siguientes protocolos:
•Modbus (RTU o ASCII), página 134. De forma predeterminada, las líneas
serie están configuradas para el protocolo Modbus RTU.
•ASCII, página 134
•Modbus Serial IOScanner, página 137. Solo se puede configurar una
instancia: si se configura en una línea serie, no se puede utilizar en la otra
línea serie.
NOTA: Debe tener cuidado cuando se utilizan los bloques de funciones
Modbus Serial IOScanner y Message (%MSG) (consulte EcoStruxure
Machine Expert - Basic, Guía de la biblioteca de funciones genéricas) en
su aplicación, ya que esto podría comportar la cancelación de la
comunicación en curso de IOScannner.
La aplicación debe configurarse con un nivel funcional (consulte EcoStruxure
Machine Expert - Basic, Guía de funcionamiento) mínimo de Nivel 5.0 para
admitir el IOScanner serie Modbus.
NOTA: El protocolo TMH2GDB Visualización gráfica remota, página 137 solo
se puede configurar en SL1.
Compatibilidad de módem
Una conexión de modem le permite:
• Acceder de forma remota al controlador con fines de programación o
supervisión. En este caso, se debe conectar un módem local al PC que
ejecuta el software EcoStruxure Machine Expert - Basic, y se debe configurar
una conexión de módem (consulte SoMachine Basic, Guía de
funcionamiento).
• Realizar intercambios de datos entre controladores utilizando el protocolo
Modbus.
• Enviar o recibir mensajes con cualquier dispositivo que utilice el bloque de
funciones Send Receive Message.
• Enviar o recibir SMS con un teléfono móvil u otros dispositivos compatibles
con el envío o recepción de mensajes SMS.
Las líneas serie admiten las siguientes funciones para simplificar las conexiones
de módem:
• Un comando de inicialización (Init) para enviar la configuración inicial al
módem. El controlador envía automáticamente este comando después de
descargar una aplicación o tras el encendido.
• El bit de sistema %S105 para poder enviar el comando Init de nuevo al
módem.
• La palabra de sistema %SW167 para proporcionar el estado del
funcionamiento del comando Init.
EIO0000003300.02 131

Configuración de comunicaciones integradas
Configuración de línea serie
En esta tabla se describe cómo configurar la línea serie:
Paso Acción
1 Haga clic en el nodo SL1 (línea serie) oSL2 (línea serie) del árbol de hardware para mostrar la configuración de la
línea serie.
2 Seleccione el Protocolo que se debe utilizar en la línea serie.
Para obtener información detallada sobre los parámetros de configuración de la línea serie, consulte la tabla
siguiente.
3 Haga clic en Aplicar.
4 En el árbol de hardware, seleccione el nodo Modbus,ASCII,Visualización oModbus Serial IOScanner que
aparece debajo del nodo SL1 (línea serie) oSL2 (línea serie).
Serial line configuration
Protocol settings
Protocol
Modbus
Serial line settings
Baud rate
19200
Parity
Even
Data bits
Stop bits
1
8
Physical medium
4.7 kΩPolarization
RS-232
RS-485
CancelApply
132 EIO0000003300.02

Configuración de comunicaciones integradas
En esta tabla se describe la configuración de protocolo y línea serie de la línea
serie:
Parámetro Editable Valor Valor
predeterminado Descripción
Ajustes de protocolo
Protocolo Sí Modbus
ASCII
TMH2GDB
IOScanner serie
Modbus
Modbus Seleccione un protocolo en la lista desplegable.
NOTA: Si utiliza un módem SR2MOD03 y el bloque
de funciones Send Receive SMS, seleccione el
protocolo ASCII.
Ajustes de línea de serie
Velocidad de
transmisión en
baudios
Sí 1200
2400
4800
9600
19200
38400
57600
115200
19200 Permite seleccionar la velocidad de transmisión de datos
(bits por segundo) en la lista desplegable.
Paridad Sí Ninguno
Par
Impar.
Par Permite seleccionar la paridad de los datos transmitidos
para la detección de errores.
La paridad es un método de detección de errores en la
transmisión.
Cuando la paridad se utiliza con un puerto serie, se envía
un bit de datos adicional con cada carácter de datos,
dispuesto de manera que el número de bits establecidos
en 1 de cada carácter, incluido el bit de paridad, es
siempre impar o siempre par.
Si se recibe un byte con un número incorrecto de bits
establecidos en 1, el byte no es válido.
Bits de datos Sí
(únicamente
para el
protocolo
ASCII)
7
8
8Permite seleccionar los bits de datos en la lista
desplegable.
El número de bits de datos en cada carácter puede ser 7
(para ASCII verdadero) u 8.
Bits de parada Sí 1
2
1Permite seleccionar los bits de detención en la lista
desplegable.
El bit de detención es un bit que indica el final de un byte
de datos. Para los dispositivos electrónicos, se suele
utilizar 1 bit de detención. Para los dispositivos lentos,
como los teletipos electromecánicos, se utilizan 2 bits de
parada.
Medio físico Sí RS-485
RS-232
RS-485 Permite seleccionar el medio físico para la comunicación.
Puede seleccionar el medio RS-485 oRS-232. Para la
línea serie 2 incorporada, solo está disponible el medio
RS-485.
En las comunicaciones de datos, un medio físico es la
ruta de transmisión a través de la que se propaga una
señal. Se trata de una interfaz para la interconexión de
dispositivos con el Logic Controller.
NOTA: Al usar un SR2MOD03, seleccione la opción
RS-232.
Polarización (para
el controlador)
No No
4,7 kΩ
No (para RS232)
4,7 kΩ (para
RS485)
Este parámetro está deshabilitado para el controlador(1).
EIO0000003300.02 133

Configuración de comunicaciones integradas
Parámetro Editable Valor Valor
predeterminado Descripción
Polarización (para
cartuchos) Sí Sí
No
No Las resistencias de polarización se integran en módulos
de cartucho.
Este parámetro le permite activar o desactivar la
polarización.
(1) La SL1 incorporada y la SL2 incorporada del TM221 incluyen resistencias de red de polarización de alta impedancia internas fijas (4,7
kΩ). No use resistencias de terminación de línea externas (150 Ω estándar) sin resistencias de polarización de línea de baja impedancia
externas adicionales (450 Ω-650 Ω estándar) para garantizar un estado de tensión inactiva correcto de 200 mV como mínimo entre las
líneas de datos D1 y D0.
Configuración de los protocolos Modbus y ASCII
Configuración del dispositivo para los protocolos Modbus y ASCII
En esta tabla se describen los parámetros cuando se selecciona el protocolo
Modbus oASCII:
Parámetro Editable Valor Valor
predeterminado Descripción
Configuración del dispositivo
Dispositivo Sí Ninguno
Modem genérico
SR2MOD01
SR2MOD03
Ninguno Seleccione un dispositivo en la lista
desplegable.
Seleccione SR2MOD03 para utilizar el
bloque de funciones %SEND_RECV_
SMS.
comando Init Sí - - El comando Init es un conjunto de
comandos de Hayes enviado al módem
conectado en la línea serie. Se trata de
una cadena ASCII limitada a 128
caracteres.
El logic controller utiliza esta cadena para
configurar y comprobar el módem.
El comando Init se envía al módem en los
siguientes casos:
• Durante el encendido
• Si se establece el bit del sistema %
S105 en 1.
%SW167 proporciona el estado del
comando de inicialización enviado al
módem.
EcoStruxure Machine Expert - Basic utiliza
un comando Init predeterminado para el
módem SR2MOD03. Para obtener más
información, consulte .
NOTA: Para utilizar el bloque de
funciones SMS, cambie el comando
Init predeterminado por: AT&F;E0;
S0=2;Q0;V1;+WIND=0;+CBST=
0,0,1;&W;+CNMI=0,2,0,0,0;+CSAS;
+CMGF=0;+CMEE=1 (consulte
Bloque de funciones Recv_SMS
[consulte EcoStruxure Machine
Expert - Basic, Guía de la biblioteca
de funciones genéricas]).
Configuración del comando de inicialización del módem
El comando Init es un conjunto de comandos de Hayes que se envía para
inicializar un modem. El comando Init predeterminado proporcionado por la
pantalla de configuración de EcoStruxure Machine Expert - Basic se utiliza con un
módem para adecuarlo a la configuración de la línea serie predeterminada para el
134 EIO0000003300.02

Configuración de comunicaciones integradas
acceso remoto, los intercambios entre controladores o el envío o la recepción de
mensajes.
Si necesita adaptar el comando Init, use un software de terminal PC.
Comando Hayes de SR2MOD01
El comando Init predeterminado proporcionado por EcoStruxure Machine Expert -
Basic es: ate0\n0\v1&d0&k0s0=1s89=0$EB0#p0$sb19200n0s28=1s37=13&w0
Comando Hayes de SR2MOD03
El comando Init predeterminado proporcionado por EcoStruxure Machine Expert -
Basic es: AT&F;E0;S0=2;Q0;V1;+WIND=0;+CBST=0,0,1;&W;+CMGF=1;+CNMI=
0,2,0,0,0;+CSAS
Para enviar o recibir SMS, debe modificarse el comando por: AT&F;E0;S0=2;Q0;
V1;+WIND=0;+CBST=0,0,1;&W;+CNMI=0,2,0,0,0;+CSAS;+CMGF=0;+CMEE=1
Ajustes de protocolo para Modbus
En esta tabla se describen los parámetros para el protocolo Modbus:
Parámetro Editable Valor Valor
predeterminado Descripción
Modalidad de
transmisión Sí RTU
ASCII
RTU Permite seleccionar en la lista
desplegable la modalidad de transmisión
del protocolo para la comunicación.
Seleccione ASCII para utilizar el bloque
de funciones %SEND_RECV_SMS.
Los parámetros avanzados de protocolo
se muestran según el protocolo
seleccionado.
Direccionamiento Sí Esclavo
Maestro
Esclavo Permite seleccionar la modalidad de
direccionamiento. Únicamente se puede
seleccionar uno de los direccionamientos,
Esclavo oMaestro. Al seleccionar
cualquiera de los modos de
direccionamiento se borra el existente.
Un dispositivo configurado como esclavo
puede enviar peticiones Modbus.
Dirección [de 1 a 247] Sí De 1 a 247 1 Permite especificar el ID de dirección del
esclavo.
NOTA: Este campo solo se muestra
para el direccionamiento del esclavo.
En el maestro, este campo no
aparece en la pantalla.
Timeout de respuesta
(x 100 ms) Sí 0...255 10 Define el tiempo máximo que el
controlador espera una respuesta antes
de finalizar el intercambio con un error.
Introduzca 0 para deshabilitar el timeout.
Tiempo entre tramas
(ms) Sí De 1 a 255 10 Periodo de tiempo entre tramas
(corresponde al retardo entre tramas que
se utiliza en otros productos).
NOTA: El valor puede que se ajuste
automáticamente para cumplir el
retardo de 3,5 caracteres, estándar
de Modbus.
EIO0000003300.02 135

Configuración de comunicaciones integradas
Ajustes de protocolo para ASCII
En esta tabla se describen los parámetros para el protocolo ASCII:
Parámetro Editable Valor Valor
predeterminado Descripción
Timeout de respuesta
(x 100 ms) Sí 0...255 10 Define el tiempo máximo que el
controlador espera una respuesta antes
de finalizar el intercambio con un error.
Introduzca 0 para deshabilitar el timeout.
NOTA: Al usar un SR2MOD03 y el
bloque de funciones SMS, introduzca
0 para deshabilitar el timeout.
Condición de parada
Longitud recibida de
trama Sí (solo si la
casilla de
verificación está
seleccionada)
De 1 a 255 0 (si no se ha
seleccionado la
casilla de
verificación)
1 (si se ha
seleccionado la
casilla de
verificación)
Permite especificar la longitud de la trama
recibida.
NOTA: Solo puede configurar un
parámetro para la condición de
parada, que puede ser Longitud
recibida de trama oTimeout de
trama recibido (ms).
Timeout de trama
recibido (ms) Sí (solo si la
casilla de
verificación está
seleccionada)
De 1 a 255 0 (si no se ha
seleccionado la
casilla de
verificación)
10 (si se ha
seleccionado la
casilla de
verificación)
Permite especificar la duración del timeout
de la trama recibida.
NOTA: Al usar un SR2MOD03 y el
bloque de funciones SMS, seleccione
la casilla e introduzca 200.
Estructura de la trama
Carácter de inicio Sí (solo si la
casilla de
verificación está
seleccionada)
De 1 a 255 0 (si no se ha
seleccionado la
casilla de
verificación)
58 (si se ha
seleccionado la
casilla de
verificación)
Permite especificar el carácter de inicio de
la trama.
El carácter ASCII correspondiente al valor
del carácter de inicio se muestra a la
derecha del campo de valores.
Primer carácter de fin Sí De 1 a 255 0 (si no se ha
seleccionado la
casilla de
verificación)
10 (si se ha
seleccionado la
casilla de
verificación)
Permite especificar el primer carácter de
fin de la trama.
NOTA: Para poder deshabilitar el
Primer carácter de fin, configure al
menos un parámetro de condición de
parada.
El carácter ASCII correspondiente al valor
del primer carácter de fin se muestra a la
derecha del campo de valores.
Segundo carácter de fin Sí (solo si la
casilla de
verificación está
seleccionada)
De 1 a 255 0 (si no se ha
seleccionado la
casilla de
verificación)
10 (si se ha
seleccionado la
casilla de
verificación)
Permite especificar el segundo carácter
de fin de la trama.
NOTA: Este campo queda
deshabilitado al deshabilitar el
Primer carácter de fin.
El carácter ASCII correspondiente al valor
del segundo carácter de fin se muestra a
la derecha del campo de valores.
Enviar caracteres de
trama Sí TRUE/FALSE FALSE Le permite habilitar o deshabilitar la
adición automática de: carácter de inicio,
primer carácter de fin, segundo carácter
de fin (cuando se definen) en las tramas
enviadas.
136 EIO0000003300.02

Configuración de comunicaciones integradas
Configuración del Visualización gráfica remota TMH2GDB
Ajustes de protocolo para Display
En esta tabla se describen los parámetros para el protocolo Display:
Parámetro Editable Valor Valor
predeterminado Descripción
Tiempo entre tramas
(ms) Sí De 1 a 255 10 Periodo de tiempo entre tramas
(corresponde al retardo entre tramas que
se utiliza en otros productos).
NOTA: El valor puede que se ajuste
automáticamente para cumplir el
retardo de 3,5 caracteres, estándar
de Modbus.
Configuración de IOScanner serie Modbus
Descripción
Solo se puede definir una instancia de IOScanner: si la configura en un puerto
Ethernet, no puede configurarla en un puerto serie. Consulte .
El número máximo de objetos TCP y IOScanner serie es de:
• 128, si el nivel funcional <6.0.
• 512, si el nivel funcional ≥6.0.
Si se interrumpe la comunicación, el IOScanner se detiene. Si desea más
información sobre el estado, página 193, consulte %SW210 o%SW211.
Para restablecer o suspender el Modbus Serial IOScanner, consulte %S110,%
S111,%S113 y%S114 en la Descripción de los bits de sistema, página 186).
Ajustes de protocolo
En esta tabla se describen los parámetros cuando se selecciona el protocolo
IOScanner serie Modbus:
Parámetro Editable Valor Valor
predeterminado Descripción
Modalidad de
transmisión Sí RTU
ASCII
RTU Seleccione en la lista desplegable la
modalidad de transmisión del protocolo
para la comunicación.
Timeout de respuesta
(x 100 ms) Sí 0...255 10 Define el tiempo máximo que el
controlador espera una respuesta antes
de finalizar el intercambio con un error.
Introduzca 0 para deshabilitar el timeout.
Tiempo entre tramas
(ms) Sí De 1 a 255 10 Periodo de tiempo entre tramas
(corresponde al retardo entre tramas que
se utiliza en otros productos).
NOTA: El valor puede que se ajuste
automáticamente para cumplir el
retardo de 3,5 caracteres, estándar
de Modbus.
EIO0000003300.02 137

Configuración de comunicaciones integradas
Adición de un dispositivo en el IOScanner serie Modbus
Introducción
En esta sección se describe cómo añadir los dispositivos que se van a explorar
con el IOScanner serie Modbus.
Pueden añadirse hasta 16 dispositivos esclavos Modbus.
EcoStruxure Machine Expert - Basic se suministra con varios tipos de dispositivos
predefinidos. A fin de facilitar la integración de los dispositivos en la red, los tipos
de dispositivos predefinidos tienen peticiones de inicialización predefinidas y
canales preconfigurados.
También se proporciona un dispositivo esclavo genérico, para el que deben
configurarse canales y peticiones de inicialización.
Adición de un dispositivo en el IOScanner serie Modbus
Para añadir un dispositivo en el IOScanner serie Modbus:
Paso Acción
1 Seleccione una de estas opciones:
•Unidad y seleccione uno de los tipos de dispositivo admitidos de la lista desplegable.
•Otros y seleccione el tipo de dispositivo de la lista desplegable.
Si no encuentra su tipo de dispositivo en la lista, seleccione Dispositivo genérico y configúrelo.
2 Haga clic en Add.
3 Configure el dispositivo según se describe en Configuración del dispositivo, página 139.
4 Haga clic en Aplicar.
138 EIO0000003300.02

Configuración de comunicaciones integradas
Configuración del dispositivo
En esta tabla se describen los parámetros cuando se selecciona el protocolo
IOScanner serie Modbus:
Parámetro Editable Valor Valor
predeterminado Descripción
ID No 0...15 0Identificador de dispositivo exclusivo
asignado por EcoStruxure Machine Expert
- Basic.
Nombre Sí 1-32 caracteres
El nombre del
dispositivo debe ser
exclusivo.
Dispositivo x (1) Especifique un nombre exclusivo para el
dispositivo.
Dirección No –
%DRVn (1) (2)
–
%DRV0
%DRVn se utiliza para configurar el
dispositivo en la aplicación mediante
Bloques de funciones de accionamiento
(consulte Modicon M221 Logic Controller -
Guía de la biblioteca de funciones
avanzadas).
Tipo No Tipo de dispositivo –El tipo de dispositivo no se puede editar.
Para cambiar el tipo de dispositivo, debe
eliminar el dispositivo de la lista (haga clic
con el botón derecho y seleccione
Eliminar) y luego añadir el tipo de
dispositivo correcto.
Dirección de esclavo Sí De 1 a 247 1 Dirección utilizada para identificar el
dispositivo en la red. Pueden utilizarse
direcciones de esclavo duplicadas.
Timeout de respuesta
(x 100 ms) Sí 0...255 10 Timeout (en milisegundos) utilizado en los
intercambios de datos con el dispositivo.
Este valor puede adaptarse
individualmente al dispositivo reemplaza
el valor de Timeout de respuesta
establecido para el maestro en Ajustes
de protocolo.
Restablecer variable Sí %Mn –Especifique la dirección del bit de
memoria que se va a utilizar para reiniciar
el dispositivo (reenviar las peticiones de
inicialización). Cuando la aplicación
establece el bit de memoria especificado
en 1, el dispositivo se reinicia.
Peticiones inic. Sí -Haga clic para abrir la ventana del
Asistente para peticiones de inicialización,
página 140.
Canales Sí -Haga clic para abrir la ventana Asistente
de canales, página 142.
(1) xynson enteros que se incrementan cada vez que se añade un dispositivo o un dispositivo de accionamiento.
(2) Sólo si se selecciona Unidad como tipo de dispositivo.
EIO0000003300.02 139

Configuración de comunicaciones integradas
Configuración de peticiones de inicialización
Las peticiones de inicialización son comandos específicos del dispositivo que el
IOScanner serie Modbus TCP IOScanner o Modbus envía para inicializar un
dispositivo esclavo. El IOScanner serie Modbus TCP IOScanner o Modbus no
inicia el intercambio de datos cíclicos con el dispositivo hasta que el dispositivo
confirma todas las peticiones de inicialización. Durante la fase de inicialización,
los objetos de red no se actualizan.
Pueden definirse hasta 20 peticiones de inicialización para cada dispositivo
esclavo.
La ventana Asistente para peticiones de inicialización muestra las peticiones
de inicialización definidas:
Las peticiones de inicialización preconfiguradas se identifican por presentar un
símbolo de bloqueo y un fondo gris. Algunos parámetros no pueden
modificarse para las peticiones de inicialización predefinidas.
Según el tipo de dispositivo que seleccione, es posible configurar algunas
peticiones de inicialización.
140 EIO0000003300.02

Configuración de comunicaciones integradas
En esta tabla se describen las propiedades de las peticiones de inicialización:
Parámetro Editable Valor Valor predeterminado Descripción
ID No 0-19 0Identificador exclusivo de petición de
inicialización.
Tipo de mensaje Sí, si la petición
de
inicialización
no está
predefinida.
Consulte Códigos de
función Modbus
compatibles, página
147
Mbs 0x05 - Write
single bit (coil) Seleccione el código de función Modbus
para el tipo de intercambio que se va a
utilizar para esta petición de inicialización.
NOTA: Si la configuración de un
dispositivo genérico no admite el tipo
de petición Mbs 0x05 - Escritura de
un bit (bobina) predeterminado, debe
sustituir el valor predeterminado por
un tipo de petición admitida.
Offset Sí, si la petición
de
inicialización
no está
predefinida.
0 a 65.535 0 Offset del primer registro que se va a
inicializar.
Longitud Sí, si la petición
de
inicialización
no está
predefinida.
1 para Mbs 0x05 -
Write single bit (coil)
1 para Mbs 0x06 -
Write single word
(register)
128 para Mbs 0x0F -
Write multiple bits
(coils)
123 para Mbs 0x10 -
Write multiple words
(reg.)
1 Número de objetos (palabras o bits de
memoria) que se van a inicializar. Por
ejemplo, si escribe varias palabras con
Offset = 2 y Longitud = 3, %MW2,%MW3
y%MW4 se inicializan.
Valor de
inicialización Sí, si la petición
de
inicialización
no está
predefinida.
De 0 a 65535 si se van
a inicializar palabras
de memoria (registros)
0 a 1 si se van a
inicializar bits de
memoria (bobinas)
0 Valor con el que se van a inicializar los
registros de destino.
Comentario Sí, si la petición
de
inicialización
no está
predefinida.
-Vacío Opcionalmente, escriba un comentario para
asociarlo con esta petición.
Haga clic en Añadir para crear nuevas peticiones de inicialización.
Seleccione una entrada y utilice los botones de flecha arriba y flecha abajo para
cambiar el orden de envío de las peticiones de inicialización al dispositivo.
Cuando se hayan definido las peticiones de inicialización, haga clic en Aceptar
para guardar la configuración y cerrar el Asistente para peticiones de
inicialización.
EIO0000003300.02 141

Configuración de comunicaciones integradas
Asistente de canales
Pueden definirse hasta 10 canales para cada dispositivo esclavo. Cada canal
representa una única petición Modbus.
NOTA: El número de objetos definido (elementos de datos leídos y escritos)
se valida al hacer clic en Aplicar en la ventana de propiedades.
En la ventana Asistente de canales se muestran los canales definidos:
Haga clic en Configuración (1) para mostrar los detalles de la ventana
Asistente de canales (2):
Los canales preconfigurados se identifican mediante un símbolo de bloqueo y
un fondo gris. Algunos parámetros no pueden modificarse para los canales
predefinidos.
Channel assistant
Name : Device 0Address :Type : Generic deviceIP address : 10.125.126.125
Channels
IDNameConfigurationMessage typeTriggerComment
Device 0_Channel0
...Read/Write multiple words - Modbus 0x17Cyclic 200 ms
W Offset
0
W Length
1
Error managem...
Set to zero
R Length
1
R Offset
0
Add
CancelOk
Channel assistant
Name : Device 0Address :Type : Generic deviceIP address : 10.125.126.125
Channels
IDNameConfigurationMessage typeTriggerComment
Device 0_Channel0
...Read/Write multiple words - Modbus 0x17Cyclic 200 ms
W Offset
0
W Length
1
Error managem...
Set to zero
R Length
1
R Offset
0
Add
CancelOk
Channel assistant
Channel
Message type
Read/Write multiple words - Modbus 0x17
Name
Device 0_Channel0
TriggerCyclic
Comment
Cycle time (x 10 ms)
20
READ objects
Length
1
Offset0
Error managementSet to zero
WRITE objects
Length
1
Offset0
CancelOk
2
1
142 EIO0000003300.02

Configuración de comunicaciones integradas
En esta tabla se describen las propiedades de los canales:
Parámetro Editable Valor Valor predeterminado Descripción
ID No 0-19 0Identificador de inicialización exclusivo.
Nombre Sí 0-32 caracteres Device_channel0 Haga doble clic para editar el nombre del
canal.
Configuración Sí -Haga clic para visualizar la ventana de
detalles del Asistente de canales.
Tipo de mensaje No - - Código de función Modbus que se
seleccionó en la ventana de detalles del
Asistente de canales.
Desencadenador No - - Tipo de desencadenador y tiempo de ciclo
seleccionados en la ventana de detales del
Asistente de canales.
R Offset No - - Offset de objeto READ seleccionado en la
ventana de detalles del Asistente de
canales.
R Longitud No - - Longitud de objeto READ seleccionada en
la ventana de detalles del Asistente de
canales.
Gestión de errores No - - Política de gestión de errores seleccionada
en la ventana de detalles del Asistente de
canales.
W Offset No - - Offset de objeto WRITE seleccionado en la
ventana de detalles del Asistente de
canales.
W Longitud No - - Longitud de objeto WRITE seleccionada en
la ventana de detalles del Asistente de
canales.
Comentario Sí -Vacío Opcionalmente, escriba un comentario para
asociarlo con este canal.
Haga clic en Añadir para crear un nuevo canal.
Cuando se hayan definido los canales, haga clic en Aceptar para guardar la
configuración y cerrar el Asistente de canales.
Configuración de canales
Utilice la ventana de detalles del Asistente de canales para configurar los
canales.
EIO0000003300.02 143

Configuración de comunicaciones integradas
El ejemplo siguiente muestra un canal configurado para una petición Leer/Escribir
varias palabras (código de función Modbus 23). Lee una palabra del registro con
el offset 16#0C21 y escribe dos palabras en el registro con el offset 16#0C20.
Esta petición se ejecuta cuando existe un flanco ascendente del
desencadenador definido (consulte el gráfico siguiente):
Channel assistant
Channel
Message type
Read/Write multiple words - Modbus 0x17
Name
Device 0_Channel0
TriggerRising edge
Comment
Memory bit
%M8
READ objects
Length
1
Offset3105
Error managementSet to zero
WRITE objects
Length
2
Offset3014
CancelOk
144 EIO0000003300.02

Configuración de comunicaciones integradas
En esta tabla se describen las propiedades de los canales:
Parámetro Editable Valor Valor predeterminado Descripción
Name Sí 0-32 caracteres Device 0_Channel0 Introduzca un nombre para el canal.
Tipo de mensaje Sí Consulte Códigos de
función Modbus
compatibles, página 147
Mbs 0x17 - Read/Write
mult. words (reg.) Seleccione el código de función Modbus
para el tipo de intercambio que se va a
utilizar en este canal.
Desencadenador Sí Cíclico
Flanco ascendente
Cíclico Seleccione el tipo de desencadenador para
el intercambio de datos:
•Cíclico: la petición se desencadena
con la frecuencia definida en el
campo Tiempo de ciclo (x 10 ms).
•Flanco ascendente: la petición se
desencadena después de detectar un
flanco ascendente de un bit de
memoria. Especifique la dirección del
bit de memoria que se va a utilizar.
Tiempo de ciclo (x
10 ms)
(Si se ha
seleccionado
Cíclico)
Sí 1-6000 20 Especifique el tiempo de ciclo de
desencadenador periódico, en unidades de
10 ms.
Bit de memoria
(Si se ha
seleccionado
Flanco
ascendente)
Sí %Mn-Especifique una dirección de bit de
memoria, por ejemplo, %M8. El intercambio
de datos se desencadena cuando se
detecta un flanco ascendente de este bit de
memoria.
Comentario Sí -Vacío Opcionalmente, escriba un comentario para
describir el objetivo del canal.
READ objects
Offset Sí De 0 a 65.535 0 Dirección de la primera palabra de memoria
(registro) o bit de memoria (bobina) que se
va a leer.
Longitud Sí Consulte Códigos de
función Modbus
compatibles, página 147
para obtener información
sobre la longitud máxima.
-Número de palabras de memoria (registros)
o bits de memoria (bobinas) que se van a
leer.
Gestión de errores Sí Poner a CERO
Mantener último valor
Poner a CERO Especifique cómo gestionar la situación
cuando ya no pueden leerse datos del
dispositivo:
• Seleccione Poner a CERO para
establecer en cero los últimos valores
de datos recibidos.
• Seleccione Mantener último valor
para mantener los últimos valores de
datos recibidos.
WRITE objects
Offset Sí De 0 a 65.535 0 Dirección de la primera palabra de memoria
(registro) o bit de memoria (bobina) que se
va a escribir.
Longitud Sí Consulte Códigos de
función Modbus
compatibles, página 147
para obtener información
sobre la longitud máxima.
-Número de palabras de memoria (registros)
o bits de memoria (bobinas) que se van a
escribir.
Haga clic en Aceptar para completar la configuración del canal.
EIO0000003300.02 145

Configuración de comunicaciones integradas
Códigos de función Modbus compatibles
Códigos de función Modbus compatibles
Presentación
En esta sección se indican los códigos de función Modbus compatibles y su
efecto en las variables de memoria del controlador para:
•Serie Modbus, página 146
•IOScanner serie Modbus, página 147
•Modbus TCP, página 147
•Modbus TCP IOScanner, página 147
Serie Modbus
Se admiten las siguientes peticiones Modbus:
Decimal de códigos de
función Modbus
compatibles (hex)
Códigos de
subfunción
compatibles
Descripción
1 (1 hex) o 2 (2 hex) –Lectura de varios bits internos %M
3 (3 hex) o 4 (4 hex) –Lectura de varios registros internos %MW
5 (5 hex) –Escritura de un único bit interno %M
6 (6 hex) –Escritura de un único registro interno %MW
8 (8 hex) 0 (0 hex), 10 (0A
hex)...18 (12 hex)
Diagnostico
15 (0F hex) –Escritura de varios bits internos %M
16 (10 hex) –Escritura de varios registros internos %MW
23 (17 hex) –Lectura/escritura de varios registros internos %
MW
43 (2B hex) 14 (0E hex) Identificación del dispositivo de lectura (servicio
habitual)
NOTA: El impacto de los códigos de función Modbus que utiliza un M221
Logic Controller maestro depende del tipo de dispositivo esclavo. En la
mayoría de los tipos de dispositivo esclavo:
• Bit interno es %M
• Bit de entrada es %I
• Registro interno es %MW
• Registro de entrada es %IW
En función del tipo de esclavo y de la dirección del esclavo, un bit interno
puede ser %M o %Q; un bit de entrada puede ser %I o %S, un registro de
entrada puede ser %IW o %SW, y un registro interno puede ser %MW o %
QW.
Para obtener más información, consulte la documentación del dispositivo
esclavo.
146 EIO0000003300.02

Configuración de comunicaciones integradas
IOScanner serie Modbus y Modbus TCP IOScanner
En esta tabla se indican los códigos de función Modbus admitidos por el
IOScanner serie Modbus y Modbus TCP IOScanner:
Decimal de código
de función (Hex) Descripción Disponible para
configuración Longitud
máxima
(bits)
1 (1 hex) Lectura de varios bits (bobinas) Canal 128
2 (2 hex) Lectura de varios bits (entradas
binarias) Canal 128
3 (3 hex) Lectura de varias palabras (registros
de mantenimiento) Canal 125
4 (4 hex) Lectura de varias palabras (registros
de entrada) Canal 125
5 (5 hex) Escritura de un bit (bobina) Canal
Valor de
inicialización (tipo
de mensaje
predeterminado
para los valores de
inicialización)
1
6 (6 hex) Escritura de una palabra (registro) Canal
Valor de
inicialización
1
15 (0F hex) Escritura de varios bits (bobinas) Canal
Valor de
inicialización
128
16 (10 hex) Escritura de varias palabras (registros) Canal
Valor de
inicialización
123
23 (17 hex) Lectura/escritura de varias palabras
(registros) Canal (tipo de
mensaje
predeterminado
para la
configuración del
canal)
125
(lectura)
121
(escritura)
Tabla de asignaciones de Modbus para Modbus TCP
Los dispositivos esclavos Modbus TCP admiten un subconjunto de los códigos de
función Modbus. Los códigos de función procedentes de un maestro Modbus con
un ID de unidad coincidente se dirigen a la tabla de asignaciones de Modbus y
pueden acceder a los objetos de red (%IWM y%QWM) del controlador. Consulte
Tabla de asignaciones de E/S de dispositivos Modbus TCP esclavos, página 107.
EIO0000003300.02 147

Configuración de comunicaciones integradas
Diagrama de máquina de estado para Modbus IOscanner
Diagrama de máquina de estado para Modbus IOscanner
Descripción
El siguiente gráfico muestra los estados del Modbus IOScanner:
La siguiente tabla muestra los objetos de sistema para cada posición del
IOScanner:
Descripción del objeto SL1 SL2 Ethernet
Estado del IOScanner %SW210 %SW211 %SW212
IoScanReset %S110 %S111 %S112
IoScanSuspend %S113 %S114 %S115
IoScanResetDev %Mx definido en la configuración del dispositivo
148 EIO0000003300.02

Tarjeta SD
Tarjeta SD
Contenido de este capítulo
Operaciones de gestión de archivos ............................................................. 149
Tipos de archivos admitidos por la tarjeta SD ................................................ 151
Gestión de clones........................................................................................152
Gestión del firmware....................................................................................153
Gestión de la aplicación...............................................................................157
Gestión de la configuración de Post..............................................................158
Gestión del registro de errores .....................................................................161
Gestión de la memoria: Copia de seguridad y restauración de la memoria
del controlador ............................................................................................164
Introducción
Modicon M221 Logic Controller permite transferencias de archivos con una tarjeta
SD.
En este capítulo se describe cómo gestionar los archivos del Modicon M221 Logic
Controller mediante una tarjeta SD.
Si desea almacenar datos, puede utilizar la tarjeta SD. Consulte Registro de
datos.
Operaciones de gestión de archivos
Introducción
El Modicon M221 Logic Controller permite los siguientes tipos de gestión de
archivos mediante una tarjeta SD:
•Gestión de clonado, página 152: realice una copia de seguridad de la
aplicación, el firmware y la configuración de Post (si existe) del logic
controller.
•Gestión del firmware, página 153: descargue el firmware directamente en el
logic controller y cargue el firmware en el terminal gráfico remoto.
•Gestión de la aplicación, página 157: realice una copia de seguridad de la
aplicación del logic controller y restáurela, o bien cópiela en otro logic
controller de la misma referencia.
•Gestión de la configuración de Post, página 158: añada, cambie o elimine el
archivo de configuración de Post del logic controller.
•Gestión del registro de errores, página 161: realice una copia de seguridad
del archivo de registro de errores del logic controller o elimínelo.
•Gestión de la memoria, página 164: realice una copia de seguridad y restaure
objetos de memoria del controlador.
NOTA:
• La lógica de resolución del logic controller y la ejecución de servicios
continúa durante la transferencia de archivos.
• Algunos comandos requieren que se apague y se vuelva a encender el
logic controller. Consulte la descripción de los comandos para obtener
más información.
• El Modicon M221 Logic Controller solo acepta tarjetas SD formateadas
en FAT o FAT32.
Con el uso de la tarjeta SD, pueden realizarse potentes operaciones de forma
automática que afectan al comportamiento del Logic Controller y al de la
aplicación residente. Al insertar una tarjeta SD en un controlador, tenga en cuenta
el efecto que el contenido de la tarjeta SD pueden tener sobre el Logic Controller.
EIO0000003300.02 149

Tarjeta SD
NOTA: La gestión de archivos con tarjeta SD utiliza archivos de script. Estos
scripts se pueden crear automáticamente con la tarea Gestión de la
memoria (consulte EcoStruxure Machine Expert - Basic, Guía de
funcionamiento).
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
• Debe tener conocimientos sobre el funcionamiento de la máquina o del
proceso antes de conectar una tarjeta SD a un Logic Controller.
• Asegúrese de que las protecciones están instaladas, de modo que si se
viera afectado el contenido de la tarjeta SD, no provoque lesiones al
personal ni daños al propio equipo.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Si retira la alimentación del dispositivo o se produce un corte de alimentación o se
interrumpe la comunicación durante la transferencia de la aplicación, el
dispositivo podría quedar inoperativo. Si se produce una interrupción de la
comunicación o un corte de alimentación, intente volver a realizar la transferencia.
Si se produce un corte de alimentación o una interrupción de la comunicación
durante una actualización de firmware, o si se utiliza un firmware no válido, el
dispositivo quedará inoperativo. En este caso, utilice un firmware válido e intente
volver a realizar la actualización del firmware.
AVISO
EQUIPO INOPERATIVO
• No interrumpa la transferencia del programa de aplicación o un cambio del
firmware si se ha iniciado la transferencia.
• Reinicie la transferencia si se ha interrumpido por algún motivo.
• No intente poner en funcionamiento el dispositivo hasta que no haya
finalizado correctamente la transferencia de archivos.
Si no se siguen estas instrucciones, pueden producirse daños en el
equipo.
150 EIO0000003300.02

Tarjeta SD
Tipos de archivos admitidos por la tarjeta SD
Introducción
En esta tabla se muestran las ubicaciones y los tipos de archivo que se pueden
gestionar:
Carpeta de la
tarjeta SD Descripción Nombre de archivo
predeterminado
/Archivo de script Script.cmd
/Registro de script Script.log
/disp/ Archivo de firmware de Visualización
gráfica remota
TMH2GDB.mfw
/sys/os Archivo de firmware de logic
controller
M221.mfw
/TM3 Firmware de módulos de extensión
analógicos de TM3 TM3_Ana.mfw
/usr/app Archivo de aplicación *.smbk
/usr/cfg Archivo de configuración de Post Machine.cfg
/usr/mem Archivo de copia de seguridad de la
memoria Memories.csv
/sys/log Archivo de registro de errores
detectados PlcLog.csv
Comandos de archivo de script
Un archivo de script es un archivo de texto almacenado en el directorio raíz de
una tarjeta SD que contiene comandos para gestionar los intercambios con el
controlador. Los archivos de script deben estar codificados en formato ANSI.
En esta tabla se describen los comandos de script admitidos:
Comando Descripción
Descargar Descargue un archivo de la tarjeta SD en el controlador.
Cargar Carga los archivos contenidos en la memoria del
controlador en la tarjeta SD.
Eliminar Elimina los archivos contenidos en un controlador.
Ejemplos de archivos de script
Comandos de Descargar:
Download "/usr/cfg"
Download "/sys/os/M221.mfw"
Download "/disp/TMH2GDB.mfw"
Comandos de Cargar:
Upload "/usr/app/*"
Upload "/usr/cfg/Machine.cfg"
Comandos de Eliminar:
Delete "/usr/app/*"
Delete "/sys/log/PlcLog.csv"
NOTA: Los archivos de postconfiguración especificados en los comandos
Cargar oEliminar deben tener la extensión .cfg o.CFG.
Si no se especifica ningún archivo de postconfiguración, o si el nombre de
archivo especificado no existe, se utiliza el nombre de archivo predeterminado
Machine.cfg.
EIO0000003300.02 151

Tarjeta SD
Registro de script
En el directorio raíz de la tarjeta SD, se crea un archivo script.log de forma
automática tras las operaciones de script. El estado de las operaciones de script
se puede verificar leyendo este archivo.
Gestión de clones
Clonación
La clonación permite realizar una copia de seguridad de forma automática de la
aplicación, del firmware y de la configuración de Post (si existe) del Modicon
M221 Logic Controller de la tarjeta SD.
La tarjeta SD puede utilizarse entonces para restaurar posteriormente el firmware,
la aplicación y la configuración de Post (si existe) en el Logic Controller, o
copiarlos en otro Logic Controller con la misma referencia.
Antes de proceder con el clonado de un controlador, M221 Logic Controller
comprueba si la aplicación está protegida contra las copias. Para obtener más
detalles, consulte Protección de una aplicación con contraseñaProtección de una
aplicación con contraseña (consulte EcoStruxure Machine Expert - Basic, Guía de
funcionamiento).
NOTA:
• La tarjeta SD debe estar vacía y presentar un formato correcto para
realizar este procedimiento.
• El nombre de la tarjeta SD debe ser distinto a DATA; consulte Registro de
datos.
• El registro de errores detectados y la memoria de datos no se clonan.
• Si la aplicación está protegida con contraseña, la operación de clonado
se bloquea (el indicador LED SD parpadea).
Creación de un clon de una tarjeta SD
Este procedimiento describe cómo realizar una copia de la aplicación, del
firmware y de la configuración de Post (si existe) desde el controlador a una
tarjeta SD:
Paso Acción
1 Formatee una tarjeta SD en el PC.
2 Inserte la tarjeta SD en el controlador.
Resultado: La operación de clonación se inicia automáticamente y el indicador LED
SD se ilumina.
3 Espere a que termine la operación (hasta que se apague o parpadee el LED de la
tarjeta SD).
Si se detecta un error, los LED de SD parpadean y el error detectado se registra en el
archivo Script.log.
NOTA: La operación de clonado dura dos o tres minutos. La operación de
clonado tiene una prioridad baja para minimizar el impacto en la lógica del
usuario y en el rendimiento de comunicación del Logic Controller. Dependiendo
de la cantidad de tiempo libre en el programa, la operación podría necesitar más
tiempo para completarse si el logic controller se encuentra en el estado
RUNNING en comparación con el estado STOPPED.
4 Extraiga la tarjeta SD del controlador.
152 EIO0000003300.02

Tarjeta SD
Restauración o copia desde una tarjeta SD clonada
En este procedimiento se describe cómo descargar la aplicación, el firmware y la
configuración de Post (si existe) almacenados en la tarjeta SD al controlador:
Paso Acción
1 Desconecte la alimentación del controlador.
2 Inserte la tarjeta SD en el controlador.
3 Restaure la alimentación del controlador.
Resultado: La operación de clon está en curso.
NOTA: El indicador LED de la tarjeta SD permanece encendido durante la
operación.
4 Espere a que termine la operación (hasta que se apague o parpadee el LED de la
tarjeta SD).
Si se detecta un error, los LED SD yERR parpadean y el error detectado se registra
en el archivo Script.log.
5Extraiga la tarjeta SD para reiniciar el controlador.
NOTA: Si descarga una aplicación clonada en el controlador, se elimina en
primer lugar la aplicación existente de la memoria del controlador,
independientemente de los derechos de acceso de usuario que puedan estar
habilitados en el controlador de destino.
Gestión del firmware
Descripción general
Puede utilizar una tarjeta SD para descargar las actualizaciones de firmware
directamente en el logic controller, en un terminal gráfico remoto o en módulos de
expansión analógicos TM3.
Consulte Estados y comportamiento del controlador, página 38 para obtener
información sobre los estados de funcionamiento del logic controller y el estado
de los LED.
Para realizar la gestión del firmware, el nombre de la tarjeta SD debe ser distinto
aDATA; consulte Registro de datos.
EIO0000003300.02 153

Tarjeta SD
Descarga del firmware al controlador
En esta tabla se describe cómo realizar la descarga de un firmware al Logic
Controller mediante una tarjeta SD:
Paso Acción
1 Desconecte la alimentación del controlador.
2 Inserte una tarjeta SD vacía en el PC que está ejecutando EcoStruxure Machine Expert
- Basic.
3 Cree un archivo con el nombre script.cmd en el directorio raíz de la tarjeta SD.
4 Edite el archivo e inserte el siguiente comando:
Download "/sys/os"
5Cree la ruta \sys\os en el directorio raíz de la tarjeta SD y copie el archivo de firmware
en la carpeta os:
NOTA: Encontrará un ejemplo de archivo de firmware y el script en la carpeta
Firmwares & PostConfiguration\M221\ de la carpeta de instalación de EcoStruxure
Machine Expert - Basic.
El nombre del archivo de firmware para el M221 Logic Controller es M221.mfw.
6 Retire la tarjeta SD del PC e insértela en el slot para tarjeta SD del Logic Controller.
7 Restaure la alimentación del controlador.
Resultado: Se inicia la copia del archivo de firmware. Durante la operación, el LED del
sistema SD del logic controller se enciende.
NOTA: Procure no desconectar la alimentación del logic controller mientras la
operación esté en curso.
8 Espere a que termine la operación (hasta que se apague o parpadee el LED de la
tarjeta SD).
Si se detecta un error, los LED SD yERR parpadean y el error detectado se registra en
el archivo Script.log .
9 Extraiga la tarjeta SD.
10 Vuelva a conectar el cable de programación USB al logic controller e inicie sesión con el
software EcoStruxure Machine Expert - Basic.
Descarga de firmware en el Visualización gráfica remota
NOTA: Antes de descargarlo, compruebe que la versión de firmware que se
va a instalar sea compatible con la versión del software EcoStruxure Machine
Expert - Basic instalada y la versión de firmware del logic controller. Consulte
Compatibilidad del Visualización gráfica remota (consulte Modicon
TMH2GDB, Terminal gráfico remoto, Guía del usuario).
154 EIO0000003300.02

Tarjeta SD
En esta tabla se describe cómo descargar un firmware en el Visualización gráfica
remota mediante una tarjeta SD:
Paso Acción
1 Conecte la alimentación al Logic Controller.
2 Conecte el Visualización gráfica remota con el Logic Controller (consulte Modicon
TMH2GDB, Terminal gráfico remoto, Guía del usuario).
3 Inserte una tarjeta SD vacía en el PC que está ejecutando EcoStruxure Machine Expert
- Basic.
4 Cree un archivo con el nombre script.cmd en el directorio raíz de la tarjeta SD.
5 Edite el archivo e inserte el siguiente comando:
Download "/disp/TMH2GDB.mfw"
6 Cree la ruta /disp/ en el directorio raíz de la tarjeta SD y copie el archivo de firmware en
la carpeta disp:
NOTA: Encontrará el archivo de firmware y un ejemplo de script en la carpeta
Firmwares & PostConfiguration\TMH2GDB\ de la carpeta de instalación de
EcoStruxure Machine Expert - Basic.
El nombre del archivo de firmware para el Visualización gráfica remota es
TMH2GDB.mfw.
7Retire la tarjeta SD del PC e insértela en el slot para tarjeta SD del M221 Logic
Controller.
Resultado: El Logic Controller inicia la transferencia del archivo de firmware de la
tarjeta SD al Visualización gráfica remota. Durante esta operación:
• Se muestra el mensaje File Transfer en el Visualización gráfica remota.
• Se activa el LED del sistema SD en el M221 Logic Controller.
• La palabra del sistema %SW182 se establece en 5 (Transferencia de firmware
del terminal en curso).
NOTA: No desconecte el Visualización gráfica remota ni desconecte la
alimentación del M221 Logic Controller mientras la operación esté en curso. La
actualización del firmware dura de 5 a 6 minutos.
8 Espere a que termine la operación (hasta que se apague o parpadee el LED de la
tarjeta SD).
Si se detecta un error, los LED SD yERR parpadean y el error detectado se registra en
el archivo Script.log .
NOTA: Restaurar el sistema de archivos del terminal gráfico remoto
(retroiluminación roja) forma parte del proceso.
Descarga de firmware en módulos de extensión analógicos TM3
El firmware se puede actualizar en los módulos de ampliación analógicos TM3
que disponen de firmware versión 26 o superior. Si es necesario, la versión del
firmware puede confirmarse mediante EcoStruxure Machine Expert - Basic.
Las actualizaciones de firmware se realizan utilizando un archivo de script en una
tarjeta SD. Al insertar la tarjeta SD en la ranura para tarjeta SD de M221 Logic
Controller, el logic controller actualiza el firmware de los módulos de ampliación
analógicos de TM3 en el bus de E/S, incluidos los siguientes:
• Módulos que están conectados de forma remota, mediante un módulo
transmisor/receptor de TM3
• En configuraciones que constan de una combinación de módulos de
ampliación TM3 y TM2.
EIO0000003300.02 155

Tarjeta SD
En esta tabla se describe cómo descargar un firmware en uno o más módulos de
ampliación TM3 utilizando una tarjeta SD:
Paso Acción
1 Conecte la alimentación al controlador.
2 Elimine la aplicación del controlador para asegurarse de que el controlador presente el
estado EMPTY. Puede hacerlo con EcoStruxure Machine Expert utilizando uno de los
comandos de script siguientes:
Delete “usr/*”
Delete “usr/app”
3 Inserte una tarjeta SD vacía en el PC.
4 Cree un archivo con el nombre script.cmd en el directorio raíz de la tarjeta SD.
5 Edite el archivo e inserte el siguiente comando:
Download "/TM3/<filename>/*"
NOTA: <filename> es el nombre de archivo del firmware que desea actualizar. El
asterisco significa que se actualizarán todos los módulos .
Para descargar el firmware en un módulo de ampliación TM3 específico, sustituya el
asterisco por la posición del módulo de ampliación en la configuración. Por ejemplo,
para especificar el módulo en la posición 4:
Download "/TM3/<filename>/4"
6 Cree la ruta /TM3/ en el directorio raíz de la tarjeta SD y copie el archivo de firmware en
la carpeta TM3.
NOTA: Encontrará un archivo de firmware (válido en el momento de realizar la
instalación de EcoStruxure Machine Expert) y un script de ejemplo en la carpeta
Firmwares & PostConfiguration\TM3\ de la instalación de EcoStruxure Machine
Expert.
7Retire la tarjeta SD del PC e insértela en el slot para tarjeta SD del controlador.
Resultado: el controlador empieza a transferir el archivo de firmware de la tarjeta SD a
los módulos de ampliación TM3 que pueden utilizarse o al módulo especificado en el
paso 5. Durante esta operación se enciende el indicador LED del sistema SD del
controlador.
NOTA: La actualización del firmware tarda entre 10 y 15 segundos para cada
módulo de ampliación que se actualiza. No retire la alimentación del controlador ni
extraiga la tarjeta SD mientras se ejecuta la operación. De lo contrario, puede que
la actualización del firmware no se realice adecuadamente y que los módulos
dejen de funcionar de forma correcta. En este caso, ejecute el procedimiento de
recuperación (véase Modicon TM3 (EcoStruxure Machine Expert - Basic),
Configuración de los módulos de ampliación, Guía de programación) para
reinicializar el firmware en los módulos.
8 Espere a que termine la operación (hasta que se apague o parpadee el LED de la
tarjeta SD).
Si se detecta un error, los LED SD yERR parpadean y el error detectado se registra en
el archivo Script.log .
Si retira la alimentación del dispositivo o se produce un corte de alimentación o se
interrumpe la comunicación durante la transferencia de la aplicación, el
dispositivo podría quedar inoperativo. Si se produce una interrupción de la
comunicación o un corte de alimentación, intente volver a realizar la transferencia.
Si se produce un corte de alimentación o una interrupción de la comunicación
durante una actualización de firmware, o si se utiliza un firmware no válido, el
dispositivo quedará inoperativo. En este caso, utilice un firmware válido e intente
volver a realizar la actualización del firmware.
156 EIO0000003300.02

Tarjeta SD
AVISO
EQUIPO INOPERATIVO
• No interrumpa la transferencia del programa de aplicación o un cambio del
firmware si se ha iniciado la transferencia.
• Reinicie la transferencia si se ha interrumpido por algún motivo.
• No intente poner en funcionamiento el dispositivo hasta que no haya
finalizado correctamente la transferencia de archivos.
Si no se siguen estas instrucciones, pueden producirse daños en el
equipo.
Gestión de la aplicación
Descripción general
Puede utilizar una tarjeta SD para realizar una copia de seguridad y para
restaurar la aplicación del controlador, o puede copiarla en otro controlador con la
misma referencia.
Para realizar la gestión de la aplicación, el nombre de la tarjeta SD debe ser
distinto a DATA; consulte Registro de datos.
Copia de seguridad de una aplicación
En esta tabla se describe cómo realizar una copia de seguridad de una aplicación
del controlador mediante una tarjeta SD:
Paso Acción
1 Cree un archivo script.cmd con un editor de texto en el PC.
2 Edite el archivo e inserte la siguiente línea:
Upload "/usr/app"
3 Copie el archivo de script en el directorio raíz de la tarjeta SD.
4 Inserte la tarjeta SD preparada en el controlador.
Resultado: Se inicia la copia del archivo de la aplicación. Durante la operación, el LED
del sistema SD del logic controller se enciende.
NOTA: Procure no desconectar la alimentación del logic controller mientras la
operación esté en curso.
NOTA: El proceso de copia de seguridad de la aplicación tiene una prioridad baja
para minimizar el impacto en el rendimiento del programa y de la comunicación del
logic controller. Dependiendo de la cantidad de tiempo libre en el programa, la
operación podría necesitar bastante más tiempo para completarse si el logic
controller está en el estado RUNNING en comparación con el estado STOPPED.
5Espere a que termine la operación (hasta que se apague o parpadee el LED de la
tarjeta SD).
Si se detecta un error, los LED SD yERR parpadean y el error detectado se registra en
el archivo Script.log .
Resultado: El archivo de aplicación (*.smbk) se guarda en la tarjeta SD.
EIO0000003300.02 157

Tarjeta SD
Restauración de una aplicación o copia de una aplicación en otro
controlador
En esta tabla se describe cómo transferir la aplicación del controlador de la tarjeta
SD al controlador:
Paso Acción
1 Tome una tarjeta SD creada previamente y edite el archivo script.cmd en el directorio
raíz de la tarjeta SD con un editor de texto.
2 Sustituya el contenido del script por la siguiente línea:
Download "/usr/app"
3 Desconecte la alimentación del controlador.
4 Inserte la tarjeta SD preparada en el controlador.
5 Restaure la alimentación del controlador.
Resultado: Se inicia la copia del archivo de la aplicación. Durante la operación, el LED
del sistema SD del logic controller se enciende.
NOTA: Procure no desconectar la alimentación del logic controller mientras la
operación esté en curso.
6 Espere a que termine la operación (hasta que se apague o parpadee el LED de la
tarjeta SD).
Si se detecta un error, los LED SD yERR parpadean y el error detectado se registra en
el archivo Script.log .
7Extraiga la tarjeta SD para reiniciar el controlador.
Gestión de la configuración de Post
Descripción general
Puede utilizar una tarjeta SD para añadir, cambiar o eliminar el archivo de
configuración de Post del controlador.
Para realizar la gestión de la configuración de Post, el nombre de la tarjeta SD
debe ser distinto a DATA; consulte Registro de datos.
158 EIO0000003300.02

Tarjeta SD
Adición o cambio de una configuración de Post
En esta tabla se describe cómo agregar o cambiar la configuración de Post del
controlador:
Paso Acción
1 Cree un archivo llamado script.cmd.
2 Edite el archivo e inserte la siguiente línea:
Download “/usr/cfg”
3 Copie el archivo de configuración de Post (Machine.cfg) en el directorio \usr\cfg y
el archivo de script en el directorio raíz de la tarjeta SD:
NOTA: Un ejemplo de archivo de configuración de Post y el script asociado están
disponibles en el directorio Firmwares & PostConfiguration\PostConfiguration
\add_change\ del directorio de instalación de EcoStruxure Machine Expert - Basic.
4 Si es necesario, edite el archivo Machine.cfg para configurar los parámetros de
configuración de Post.
5Inserte la tarjeta SD preparada en el controlador.
Resultado: Se inicia la descarga del archivo de configuración de Post. Durante la
operación, el LED del sistema SD del logic controller se enciende.
NOTA: Procure no desconectar la alimentación del logic controller mientras la
operación esté en curso.
NOTA: Antes de llevarse a cabo la descarga, se comprueba el formato del
archivo, así como si todos los canales, parámetros y valores configurados son
válidos; en caso de detectarse algún error, se cancela la descarga.
NOTA: Si un parámetro postconfiguración no es compatible con la configuración
física, se ignora.
6 Espere a que termine la operación (hasta que se apague o parpadee el LED de la
tarjeta SD).
Si se detecta un error, los LED SD yERR parpadean y el error detectado se registra en
el archivo Script.log .
7 Apague y encienda el controlador o ejecute un comando de inicialización para aplicar el
nuevo archivo de configuración de Post.
EIO0000003300.02 159

Tarjeta SD
Lectura de un archivo de configuración de Post
En esta tabla se describe cómo leer el archivo de la configuración de Post del
controlador:
Paso Acción
1 Cree un archivo script.cmd con un editor de texto en el PC.
2 Edite el archivo e inserte la siguiente línea:
Upload “/usr/cfg”
3 Copie el archivo de script en el directorio raíz de la tarjeta SD.
4 Inserte la tarjeta SD preparada en el controlador.
Resultado: Se inicia la copia del archivo de configuración de Post. Durante la
operación, el LED del sistema SD del logic controller se enciende.
NOTA: Procure no desconectar la alimentación del logic controller mientras la
operación esté en curso.
NOTA: El proceso de copia de seguridad de la aplicación tiene una prioridad baja
para minimizar el impacto en el rendimiento del programa y de la comunicación
del logic controller. Dependiendo de la cantidad de tiempo libre en el programa, la
operación podría necesitar bastante más tiempo para completarse si el logic
controller está en el estado RUNNING en comparación con el estado STOPPED.
5Espere a que termine la operación (hasta que se apague o parpadee el LED de la
tarjeta SD).
Si se detecta un error, los LED SD yERR parpadean y el error detectado se registra en
el archivo Script.log .
Resultado: El archivo de configuración de Post se guarda en la tarjeta SD.
Eliminación de un archivo de configuración de Post
En esta tabla se describe cómo eliminar el archivo de la configuración de Post del
controlador:
Paso Acción
1 Inserte una tarjeta SD vacía en el PC que está ejecutando EcoStruxure Machine Expert
- Basic.
2 Cree un archivo llamado script.cmd.
3 Edite el archivo e inserte la siguiente línea:
Delete “/usr/cfg”
4 Copie el archivo de script disponible en el directorio Firmwares & PostConfiguration
\PostConfiguration\remove\ del directorio de instalación de EcoStruxure Machine
Expert - Basic al directorio raíz de la tarjeta SD.
5Inserte la tarjeta SD preparada en el controlador.
Resultado: Se elimina el archivo de configuración de Post. Durante la operación, el
LED del sistema SD del logic controller se enciende.
NOTA: Procure no desconectar la alimentación del logic controller mientras la
operación esté en curso.
6 Espere a que termine la operación (hasta que se apague o parpadee el LED de la
tarjeta SD).
Si se detecta un error, los LED SD yERR parpadean y el error detectado se registra en
el archivo Script.log .
7 Apague y encienda el controlador o ejecute un comando de inicialización para aplicar
los parámetros de la aplicación.
160 EIO0000003300.02

Tarjeta SD
Gestión del registro de errores
Descripción general
Puede utilizar la tarjeta SD para realizar una copia de seguridad o para eliminar el
archivo de registro de errores del Logic Controller.
Para realizar la gestión del registro de errores, el nombre de la tarjeta SD debe
ser distinto a DATA; consulte Registro de datos.
Copia de seguridad del registro de errores
En esta tabla se describe cómo realizar una copia de seguridad del archivo del
registro de errores del Logic Controller mediante una tarjeta SD:
Paso Acción
1 Cree un archivo script.cmd con un editor de texto en el PC.
2 Edite el archivo e inserte la siguiente línea:
Upload "/sys/log"
3 Copie el archivo de script en el directorio raíz de la tarjeta SD.
4 Inserte la tarjeta SD preparada en el Logic Controller.
Resultado: Se inicia la transferencia del archivo del registro de errores. Durante la
operación, el LED del sistema SD del logic controller se enciende.
NOTA: Procure no desconectar la alimentación del logic controller mientras la
operación esté en curso.
5Espere a que termine la operación (hasta que se apague o parpadee el LED de la
tarjeta SD).
Si se detecta un error, los LED SD yERR parpadean y el error detectado se registra en
el archivo Script.log .
Resultado: El archivo del registro de errores (PlcLog.csv) se guarda en la tarjeta SD.
Eliminación del registro de errores
En esta tabla se describe cómo eliminar el archivo del registro de errores en el
Logic Controller:
Paso Acción
1 Cree un archivo script.cmd con un editor de texto en el PC.
2 Edite el archivo e inserte la siguiente línea:
Delete "/sys/log"
3 Copie el archivo de script en el directorio raíz de la tarjeta SD.
4 Inserte la tarjeta SD preparada en el Logic Controller.
Resultado: Se inicia la eliminación del archivo del registro de errores. Durante la
operación, el LED del sistema SD del logic controller se enciende.
NOTA: Procure no desconectar la alimentación del logic controller mientras la
operación esté en curso.
5Espere a que termine la operación (hasta que se apague o parpadee el LED de la
tarjeta SD).
Si se detecta un error, los LED SD yERR parpadean y el error detectado se registra en
el archivo Script.log .
Resultado: El archivo del registro de errores (PlcLog.csv) se elimina del Logic
Controller.
EIO0000003300.02 161

Tarjeta SD
Formato del registro de errores
El logic controller proporciona una lista de errores que contiene los últimos diez
errores detectados en la memoria de registro. Cada entrada de error del archivo
del registro de errores se compone de las siguientes partes:
• Fecha y hora
• Nivel
• Contexto
• Código de error
• Prioridad (sólo para uso interno)
Después de una carga mediante la tarjeta SD, el código se representa como se
muestra a continuación:
02/06/14, 12:04:01, 0x0111000100
162 EIO0000003300.02

Tarjeta SD
En esta tabla se describe el significado de la representación del error
hexadecimal:
Grupo Código de error
(hex) Descripción del error Resultado
General 08000011xx Parámetros de calibración de hardware no
válidos Canal Ethernet no operativo
%SW118.bit10 establecido en 0
El indicador LED ERR parpadea
Sistema operativo 0F01xxxxxx Se ha detectado un error en el sistema
operativo Transición al estado HALTED
Gestión de la memoria 0F030009xx Se ha detectado un error de asignación de
memoria interna
Transición al estado HALTED
tarjeta SD 010C001Bxx Error al acceder a una tarjeta SD; la operación
ha excedido un timeout interno (3000 ms). La operación de la tarjeta SD se cancela.
Temporizador del
watchdog 0104000Axx Utilización de recursos del logic controller
superior al 80% - primera detección Se indica timeout del watchdog:
%S11 establecido en 1
El indicador LED ERR parpadea
0804000Bxx Utilización de recursos del logic controller
superior al 80% - segunda detección
consecutiva
Transición al estado HALTED
0804000Cxx Temporizador del watchdog de tarea en la
tarea maestra Transición al estado HALTED
0804000Dxx Temporizador del watchdog de tarea en la
tarea periódica Transición al estado HALTED
Batería 0105000Exx La batería se ha agotado Se indica que la batería se ha agotado:
%S75 establecido en 1
Indicador LED BAT encendido
RTC 01060012xx RTC no válido Se ha indicado que RTC no es válido:
%SW118.bit12 establecido en cero
%S51 establecido en 1
Aplicación de usuario 0807000Fxx La aplicación no es compatible con el firmware Transición al estado EMPTY
08070010xx Error de suma de control detectado Transición al estado EMPTY
Ethernet 010B0014xx Se ha detectado una dirección IP duplicada Se ha indicado una IP duplicada:
%SW62 establecido en 1
%SW118.bit9 establecido en 0
El indicador LED ERR parpadea
E/S incorporada 010D0013xx Cortocircuito detectado en salida protegida Se ha indicado una sobrecorriente:
%SW139 establecido en 1 (en función del
bloque de salida)
El indicador LED ERR parpadea
Leer memoria no
volátil 01110000xx Error de lectura detectado: archivo no
encontrado Operación de lectura incorrecta
01110001xx Error de lectura detectado: tipo de logic
controller no válido
01110002xx Error de lectura detectado: encabezado no
válido
01110003xx Error de lectura detectado: descriptor de área
no válido
01110004xx Error de lectura detectado: tamaño de
descriptor de área no válido
EIO0000003300.02 163

Tarjeta SD
Grupo Código de error
(hex) Descripción del error Resultado
Escribir en memoria
no volátil 01120002xx Error de escritura detectado: encabezado no
válido Operación de escritura incorrecta
01120004xx Error de escritura detectado: tamaño de
descriptor de área no válido
01120005xx Error de escritura detectado: operación de
borrado no válida
01120006xx Error de escritura detectado: tamaño de
encabezado no válido
Variable persistente 01130007xx Error de suma de control detectado en
variables persistentes Las variables persistentes no se pueden
restaurar
01130008xx Error de tamaño detectado en variables
persistentes
IP Ethernet 01140012xx Creación incorrecta de variable IP Ethernet La variable no se puede crear; operación
no válida
Gestión de la memoria: Copia de seguridad y restauración
de la memoria del controlador
Descripción general
Puede usar una tarjeta SD para realizar una copia seguridad de los objetos de
memoria del controlador y restaurarlos o copiar los objetos de memoria en otro
controlador.
Copia de seguridad de memoria del controlador
Paso Acción
1 Cree un archivo script.cmd con un editor de texto en el PC.
2 Edite el archivo e inserte la siguiente línea:
Upload "/usr/mem"
3 Copie el archivo de script en el directorio raíz de la tarjeta SD.
4 Inserte la tarjeta SD preparada en el controlador.
Resultado: Se inicia la copia de la memoria. Durante la operación, el LED del sistema
SD del logic controller se enciende.
NOTA: Procure no desconectar la alimentación del logic controller mientras la
operación esté en curso.
NOTA: El proceso de copia de seguridad de la memoria tiene una prioridad baja
para minimizar el impacto en el rendimiento del programa y de la comunicación del
logic controller. Dependiendo de la cantidad de tiempo libre en el programa, la
operación podría necesitar bastante más tiempo para completarse si el logic
controller está en el estado RUNNING en comparación con el estado STOPPED.
5Espere a que termine la operación (hasta que se apague o parpadee el LED de la
tarjeta SD).
Si se detecta un error, los LED SD yERR parpadean y el error detectado se registra en
el archivo Script.log .
Resultado: El archivo de memoria (*.csv) se guarda en la tarjeta SD.
164 EIO0000003300.02

Tarjeta SD
Restauración de la memoria del controlador o realización de copia en otro
controlador
Paso Acción
1 Edite el archivo script.cmd del directorio raíz de la tarjeta SD mediante un editor de
texto.
2 Sustituya el contenido del script por la siguiente línea:
Download "/usr/mem"
3 Inserte la tarjeta SD preparada en el controlador.
Resultado: Se inicia la copia del archivo de memoria. Durante la operación, el LED del
sistema SD del logic controller se enciende.
NOTA: Procure no desconectar la alimentación del logic controller mientras la
operación esté en curso.
4 Espere a que termine la operación (hasta que se apague o parpadee el LED de la
tarjeta SD).
Si se detecta un error, los LED SD yERR parpadean y el error detectado se registra en
el archivo Script.log .
EIO0000003300.02 165

Programación del M221 Logic Controller
Contenido de esta parte
Objetos de E/S.............................................................................................167
Objetos de red .............................................................................................172
Objetos de sistema.......................................................................................184
Descripción general
En esta sección se proporciona información sobre el sistema y los objetos de E/S
específicos para el M221 Logic Controller. Estos objetos se muestran en la ficha
Programación.
Para obtener información sobre las descripciones del resto de los objetos,
consulte EcoStruxure Machine Expert - Basic Funciones genéricas Guía de la
biblioteca.
166 EIO0000003300.02

Objetos de E/S
Objetos de E/S
Contenido de este capítulo
Entradas digitales (%I).................................................................................167
Salidas digitales (%Q) .................................................................................168
Entradas analógicas (%IW)..........................................................................169
Salidas analógicas (%QW)...........................................................................170
Entradas digitales (%I)
Introducción
Los objetos de bit de entradas digitales corresponden a la imagen de las entradas
digitales del Logic Controller.
Visualización de las propiedades de las entradas digitales
Siga estos pasos para visualizar las propiedades de las entradas digitales:
Paso Acción
1 Seleccione la ficha Herramientas en el área de la izquierda de la ventana
Programación.
2Haga clic en Objetos de E/S >Entradas digitales.
Resultado: Las propiedades de las entradas digitales aparecen en la pantalla.
EIO0000003300.02 167

Objetos de E/S
Propiedades de las entradas digitales
En esta tabla se describen todas las propiedades de la entrada digital:
Parámetro Editable Valor Valor
predeter-
minado
Descripción
Utilizado No True/False False Indica si el canal de entrada se referencia
en un programa.
Dirección No %I0.i –Muestra la dirección de la entrada digital
en el controlador, donde i representa el
número del canal.
Si el controlador tiene n canales de
entradas digitales, el valor de i viene dado
como 0...n-1.
Por ejemplo, %I0.2 es la entrada digital en
el canal de entrada digital número 2 del
Logic Controller.
Símbolo Sí – – El símbolo asociado con esta dirección.
Haga doble clic en la columna Símbolo y
escriba el nombre del símbolo para
asociar a esta entrada.
Si el símbolo ya existe, puede hacer clic
con el botón derecho del ratón en la
columna Símbolo y elegir Buscar y
reemplazar para buscar y reemplazar las
apariciones de este símbolo a lo largo del
programa o los comentarios referentes al
programa.
Comenta-
rio Sí – – Un comentario asociado con esta
dirección.
Haga doble clic en la columna
Comentario y escriba el comentario
opcional que desee asociar a este canal.
Salidas digitales (%Q)
Introducción
Los objetos de bit de salida digital corresponden a la imagen de las salidas
digitales del Logic Controller.
Visualización de las propiedades de las salidas digitales
Siga estos pasos para visualizar las propiedades de las salidas digitales:
Paso Acción
1 Seleccione la ficha Herramientas en el área de la izquierda de la ventana
Programación.
2Haga clic en Objetos de E/S >Salidas digitales.
Resultado: Las propiedades de las salidas digitales aparecen en la pantalla.
168 EIO0000003300.02

Objetos de E/S
Propiedades de salidas digitales
En esta tabla se describen todas las propiedades de la salida digital:
Parámetro Editable Valor Valor
predeter-
minado
Descripción
Utilizado No True/False False Indica si el canal de salida se referencia
en un programa.
Dirección No %Q0.i –Muestra la dirección de la salida digital
en el controlador, donde i representa el
número del canal.
Si el controlador tiene n canales de
salidas digitales, el valor de i viene dado
como 0...n-1.
Por ejemplo, %Q0.3 es la salida digital
en el canal de salida digital número 3 del
Logic Controller.
Símbolo Sí – – El símbolo asociado con esta dirección.
Haga doble clic en la columna Símbolo
y escriba el nombre del símbolo que
desee asociar a esta salida.
Si ya existe un símbolo, puede hacer clic
derecho en la columna Símbolo y
seleccionar Buscar y reemplazar para
buscar y reemplazar las coincidencias
de este símbolo a lo largo del programa
o los comentarios del programa.
Comenta-
rio Sí – – Comentario asociado a esta dirección.
Haga doble clic en la columna
Comentario y escriba el comentario
opcional que desee asociar a este canal.
Entradas analógicas (%IW)
Introducción
Los objetos de palabra de entrada analógica son los valores digitales de una
señal analógica conectada al Logic Controller.
El Logic Controller lleva incorporadas dos entradas analógicas de 0 a 10 V. Las
entradas analógicas incorporadas utilizan un convertidor de resolución de 10 bits
para que cada incremento tenga aproximadamente 10 mV (10 V/210-1). Tan
pronto como el sistema detecta el valor 1023, el canal se considera saturado.
Para obtener más información, consulte M221 Guía de hardware (consulte
Modicon M221 Logic Controller, Guía de hardware) y Cartuchos TMC2 Guía de
hardware, que se utilizan en la configuración.
Visualización de las propiedades de las entradas analógicas
Siga estos pasos para visualizar las propiedades de las entradas analógicas:
Paso Acción
1 Seleccione la ficha Herramientas en el área de la izquierda de la ventana
Programación.
2Haga clic en Objetos de E/S >Entradas analógicas.
Resultado: Las propiedades de las entradas analógicas aparecen en la pantalla.
EIO0000003300.02 169

Objetos de E/S
Propiedades de las entradas analógicas
En esta tabla se describen las propiedades de la entrada analógica:
Parámetro Edita-
ble Valor Valor
predetermi-
nado
Descripción
Utilizado No True/False False Indica si el canal de entrada se
referencia en un programa.
Dirección No %IW0.i –Muestra la dirección de la entrada
analógica incorporada en el
controlador, donde i representa el
número del canal.
Si el controlador tiene n canales de
entradas analógicas, el valor de i viene
dado como 0...n-1.
Por ejemplo, %IW0.1 es la entrada
analógica en el canal de entrada
analógica número 1 del Logic
Controller.
%IW0.x0y –Muestra la dirección del canal de la
salida analógica en el cartucho, donde
x es el número del cartucho e y es el
número del canal.
Símbolo Sí – – El símbolo asociado con esta dirección.
Haga doble clic en la columna Símbolo
y escriba el nombre del símbolo para
asociar a esta entrada.
Si ya existe un símbolo, puede hacer
clic derecho en la columna Símbolo y
seleccionar Buscar y reemplazar para
buscar y reemplazar las coincidencias
de este símbolo a lo largo del programa
o los comentarios del programa.
Comenta-
rio Sí – – Comentario asociado a esta dirección.
Haga doble clic en la columna
Comentario y escriba un comentario
para asociar a esta dirección.
Salidas analógicas (%QW)
Introducción
Los objetos de palabra de salidas analógicas son los valores digitales de las
señales analógicas recibidas desde el Logic Controller por medio de cartuchos.
Los cartuchos TMC2AQ2C y TMC2AQ2V llevan incorporadas dos salidas
analógicas de entre 0 y 10 V y dos salidas analógicas de entre 4 y 20 mA,
respectivamente.
Para obtener más detalles, consulte TMC2 Cartuchos Guía de hardware, utilizada
en la configuración.
170 EIO0000003300.02

Objetos de E/S
Visualización de las propiedades de las salidas analógicas
Siga estos pasos para visualizar las propiedades de las salidas analógicas:
Paso Acción
1 Seleccione la ficha Herramientas en el área de la izquierda de la ventana
Programación.
2Haga clic en Objetos de E/S >Salidas analógicas.
Resultado: Las propiedades de las salidas analógicas aparecen en la pantalla.
Propiedades de las salidas analógicas
En esta tabla se describen las propiedades de las salidas analógicas:
Parámetro Editable Valor Valor
predetermi-
nado
Descripción
Utilizado No True/False False Indica si el canal de salida se
referencia en un programa.
Dirección No %QW0.x0y –Muestra la dirección del canal de la
salida analógica en el cartucho, donde
x es el número del cartucho e y es el
número del canal.
Símbolo Sí – – El símbolo asociado con esta
dirección.
Haga doble clic en la columna
Símbolo y escriba el nombre del
símbolo que desee asociar a esta
salida.
Si ya existe un símbolo, puede hacer
clic derecho en la columna Símbolo y
seleccionar Buscar y reemplazar
para buscar y reemplazar las
coincidencias de este símbolo a lo
largo del programa o los comentarios
del programa.
Comenta-
rio Sí – – Comentario asociado a esta dirección.
Haga doble clic en la columna
Comentario y escriba un comentario
para asociar a esta dirección.
EIO0000003300.02 171

Objetos de red
Objetos de red
Contenido de este capítulo
Objetos Input Assembly (EtherNet/IP) (%QWE).............................................172
Objetos de Output Assembly (EtherNet/IP) (%IWE) ....................................... 173
Objetos de registros de entrada (Modbus TCP) (%QWM)............................... 174
Objetos de registros de salida (Modbus TCP) (%IWM) ...................................176
Objetos de entradas digitales (IOScanner) (%IN)........................................... 177
Objetos de salidas digitales (IOScanner) (%QN)............................................178
Objetos de registro de entrada (IOScanner) (%IWN)......................................179
Objetos de registro de salida (IOScanner) (%QWN)....................................... 181
Códigos de diagnóstico de red de Modbus IOScanner (%IWNS).....................183
Objetos Input Assembly (EtherNet/IP) (%QWE)
Introducción
Los objetos de Input assembly son los valores digitales de las tramas de Input
assembly EtherNet/IP recibidas en el logic controller.
Visualización de las propiedades de Input Assembly
Siga estos pasos para ver las propiedades de los objetos de Input assembly:
Paso Acción
1 Seleccione la ficha Herramientas en el área de la izquierda de la ventana
Programación.
2Haga clic en Objetos de red >Input assembly (EtherNet/IP).
Resultado: Aparece la ventana de propiedades.
172 EIO0000003300.02

Objetos de red
Propiedades de Input Assembly
En esta tabla se describe cada propiedad de un objeto de Input assembly:
Parámetro Editable Valor Valor
predetermi-
nado
Descripción
Utilizado No TRUE/FALSE FALSE Indica si se hace referencia al objeto
en un programa.
Dirección No %QWEi –Dirección del Input assembly, donde i
es el identificador de la instancia.
Para conocer el número máximo de
instancias, consulte Número máximo
de objetos, página 32.
Símbolo Sí – – El símbolo asociado con esta
dirección.
Haga doble clic en la columna
Símbolo y escriba el nombre del
símbolo que desee asociar a este
objeto.
Si ya existe un símbolo, puede hacer
clic derecho en la columna Símbolo y
seleccionar Buscar y reemplazar para
buscar y reemplazar las coincidencias
de este símbolo a lo largo del
programa o los comentarios del
programa.
Valor de
retorno Sí de -32768 a
32767 0 Especifique el valor que se va a aplicar
a este objeto cuando el logic controller
pasa a STOPPED o a un estado de
excepción.
NOTA: Si se ha configurado la
modalidad de recuperación
Mantener valores, el objeto
conserva su valor cuando el logic
controller pasa a STOPPED o a
un estado de excepción. Se
visualiza el valor 0 y no se puede
editar. Para obtener más
información, consulte
Comportamiento de retorno
(consulte EcoStruxure Machine
Expert - Basic, Guía de
funcionamiento).
Comenta-
rio Sí – – Comentario asociado con este objeto.
Haga doble clic en la columna
Comentario y escriba un comentario
opcional que desee asociar a este
objeto.
Objetos de Output Assembly (EtherNet/IP) (%IWE)
Introducción
Los objetos de Output assembly son los valores digitales de las tramas de Output
assembly EtherNet/IP recibidas en el logic controller.
EIO0000003300.02 173

Objetos de red
Visualización de las propiedades de Output Assembly
Siga estos pasos para ver las propiedades de los objetos de Output assembly:
Paso Acción
1 Seleccione la ficha Herramientas en el área de la izquierda de la ventana
Programación.
2Haga clic en Objetos de red >Output assembly (EtherNet/IP).
Resultado: Aparece la ventana de propiedades.
Propiedades de Output Assembly
En esta tabla se describe cada propiedad de un objeto de Output assembly:
Parámetro Editable Valor Valor
predetermi-
nado
Descripción
Utilizado No TRUE/FALSE FALSE Indica si se hace referencia al objeto
en un programa.
Dirección No %IWEi –Dirección del Output assembly, donde
i es el identificador de la instancia.
Para conocer el número máximo de
instancias, consulte Número máximo
de objetos, página 32.
Símbolo Sí – – El símbolo asociado con esta
dirección.
Haga doble clic en la columna
Símbolo y escriba el nombre del
símbolo que desee asociar a este
objeto.
Si ya existe un símbolo, puede hacer
clic derecho en la columna Símbolo y
seleccionar Buscar y reemplazar
para buscar y reemplazar las
coincidencias de este símbolo a lo
largo del programa o los comentarios
del programa.
Comenta-
rio Sí – – Comentario asociado con este objeto.
Haga doble clic en la columna
Comentario y escriba un comentario
opcional que desee asociar a este
objeto.
Objetos de registros de entrada (Modbus TCP) (%QWM)
Introducción
Los objetos de registros de entrada son los valores digitales de los registros de
entrada de la tabla de asignaciones Modbus TCP recibidos en el logic controller.
174 EIO0000003300.02

Objetos de red
Visualización de las propiedades de los registros de entrada
Siga estos pasos para ver las propiedades de los objetos de registros de entrada:
Paso Acción
1 Seleccione la ficha Herramientas en el área de la izquierda de la ventana
Programación.
2Haga clic en Objetos de red >Registros de entrada (Modbus TCP).
Resultado: Aparece la ventana de propiedades.
Propiedades de registros de entrada
En esta tabla se describe cada propiedad de un objeto de registros de entrada:
Parámetro Editable Valor Valor
predetermi-
nado
Descripción
Utilizado No TRUE/FALSE FALSE Indica si se hace referencia al objeto
en un programa.
Dirección No %QWMi –Dirección del objeto de registros de
entrada, donde i es el identificador de
la instancia.
Para conocer el número máximo de
instancias, consulte Número máximo
de objetos, página 32.
Símbolo Sí – – El símbolo asociado con esta
dirección.
Haga doble clic en la columna
Símbolo y escriba el nombre del
símbolo que desee asociar a este
objeto.
Si ya existe un símbolo, puede hacer
clic derecho en la columna Símbolo y
seleccionar Buscar y reemplazar
para buscar y reemplazar las
coincidencias de este símbolo a lo
largo del programa o los comentarios
del programa.
Valor de
retorno Sí de -32768 a
32767 0 Especifique el valor que se va a aplicar
a este objeto cuando el logic controller
pasa a STOPPED o a un estado de
excepción.
NOTA: Si se ha configurado la
modalidad de recuperación
Mantener valores, el objeto
conserva su valor cuando el logic
controller pasa a STOPPED o a
un estado de excepción. Se
visualiza el valor 0 y no se puede
editar. Para obtener más
información, consulte
Comportamiento de retorno
(consulte EcoStruxure Machine
Expert - Basic, Guía de
funcionamiento).
Comenta-
rio Sí – – Comentario asociado con este objeto.
Haga doble clic en la columna
Comentario y escriba un comentario
opcional que desee asociar a este
objeto.
EIO0000003300.02 175

Objetos de red
Objetos de registros de salida (Modbus TCP) (%IWM)
Introducción
Los objetos de registros de salida son los valores digitales de los registros de
salida de la tabla de asignaciones Modbus TCP recibidos en el logic controller.
Visualización de las propiedades de los registros de salida
Siga estos pasos para ver las propiedades de los objetos de registros de salida:
Paso Acción
1 Seleccione la ficha Herramientas en el área de la izquierda de la ventana
Programación.
2Haga clic en Objetos de red >Registros de salida (Modbus TCP).
Resultado: Aparece la ventana de propiedades.
Propiedades de registros de salida
En esta tabla se describe cada propiedad de un objeto de registros de salida:
Parámetro Editable Valor Valor
predetermi-
nado
Descripción
Utilizado No TRUE/FALSE FALSE Indica si se hace referencia al objeto
en un programa.
Dirección No %IWMi –Dirección del objeto de registros de
salida, donde i es el identificador de la
instancia.
Para conocer el número máximo de
instancias, consulte Número máximo
de objetos, página 32.
Símbolo Sí – – El símbolo asociado con esta
dirección.
Haga doble clic en la columna
Símbolo y escriba el nombre del
símbolo que desee asociar a este
objeto.
Si ya existe un símbolo, puede hacer
clic derecho en la columna Símbolo y
seleccionar Buscar y reemplazar
para buscar y reemplazar las
coincidencias de este símbolo a lo
largo del programa o los comentarios
del programa.
Comenta-
rio Sí – – Comentario asociado con este objeto.
Haga doble clic en la columna
Comentario y escriba un comentario
opcional que desee asociar a este
objeto.
176 EIO0000003300.02

Objetos de red
Objetos de entradas digitales (IOScanner) (%IN)
Introducción
Los objetos de entrada digital (IOScanner) son los valores digitales recibidos del
IOScanner serie Modbus o de los dispositivos Modbus TCP IOScanner.
Visualización de las propiedades de Entradas digitales (IOScanner)
Siga estos pasos para ver las propiedades de los objetos de Entradas digitales
(IOScanner):
Paso Acción
1 Seleccione la ficha Herramientas en el área de la izquierda de la ventana
Programación.
2Haga clic en Objetos de red >Entradas digitales (IOScanner).
Resultado: Aparece la ventana de propiedades.
Propiedades de Entradas digitales (IOScanner)
En esta tabla se describe cada propiedad de un objeto de Entradas digitales
(IOScanner):
Parámetro Editable Valor Valor
predeter-
minado
Descripción
Utilizado No TRUE/
FALSE FALSE Indica si se hace referencia al objeto en
el programa.
Dirección No %IN(i+x).y.z) –Dirección del objeto, donde:
• i: índice:
◦100 para SL1
◦200 para SL2
◦300 para ETH1 (Modbus TCP
IOScanner)
• x: ID de dispositivo
• y: ID de canal
• z: identificador de instancia de
objeto
Para conocer el número máximo de
instancias, consulte Número máximo de
objetos, página 32.
Canal No Nombre del
canal
configurado.
-Nombre del canal que se utiliza para
recibir los datos del dispositivo.
Símbolo Sí – – El símbolo asociado con esta dirección.
Haga doble clic en la columna Símbolo y
escriba el nombre del símbolo que desee
asociar a este objeto.
Si ya existe un símbolo, puede hacer clic
derecho en la columna Símbolo y
seleccionar Buscar y reemplazar para
buscar y reemplazar las coincidencias de
este símbolo a lo largo del programa o
los comentarios del programa.
Comentario Sí – – Comentario asociado con este objeto.
Haga doble clic en la columna
Comentario y escriba un comentario
opcional que desee asociar a este
objeto.
EIO0000003300.02 177

Objetos de red
Objetos de salidas digitales (IOScanner) (%QN)
Introducción
Los objetos de salida digital (IOScanner) son los valores digitales enviados al
IOScanner serie Modbus o los dispositivos Modbus TCP IOScanner.
Visualización de las propiedades de Salidas digitales (IOScanner)
Siga estos pasos para ver las propiedades de los objetos de Salidas digitales
(IOScanner):
Paso Acción
1 Seleccione la ficha Herramientas en el área de la izquierda de la ventana
Programación.
2Haga clic en Objetos de red >Salidas digitales (IOScanner).
Resultado: Aparece la ventana de propiedades.
178 EIO0000003300.02

Objetos de red
Propiedades de objeto de Salidas digitales (IOScanner)
En esta tabla se describen las propiedades de un objeto de Salidas digitales
(IOScanner):
Parámetro Editable Valor Valor
predeter-
minado
Descripción
Utilizado No TRUE/FALSE FALSE Indica si se hace referencia al objeto en
un programa.
Dirección No %QN(i+x).y.z –Dirección del objeto, donde:
• i: índice:
◦100 para SL1
◦200 para SL2
◦300 para ETH1 (Modbus TCP
IOScanner)
• x: ID de dispositivo
• y: ID de canal
• z: identificador de instancia de
objeto
Para conocer el número máximo de
instancias, consulte Número máximo de
objetos, página 32.
Canal Sí Nombre del
canal
configurado.
-Nombre del canal que se utiliza para
enviar los datos al dispositivo.
Valor de
retorno Sí 0 o 1 0 Especifique el valor que se va a aplicar a
este objeto cuando el logic controller
pasa a STOPPED o a un estado de
excepción.
NOTA: Si se ha configurado la
modalidad de recuperación
Mantener valores, el objeto
conserva su valor cuando el logic
controller pasa a STOPPED o a un
estado de excepción. Se visualiza
el valor 0 y no se puede editar. Para
obtener más información, consulte
Comportamiento de retorno.
Símbolo Sí – – El símbolo asociado con esta dirección.
Haga doble clic en la columna Símbolo
y escriba el nombre del símbolo que
desee asociar a este objeto.
Si ya existe un símbolo, puede hacer clic
derecho en la columna Símbolo y
seleccionar Buscar y reemplazar para
buscar y reemplazar las coincidencias
de este símbolo a lo largo del programa
o los comentarios del programa.
Comentario Sí – – Comentario asociado con este objeto.
Haga doble clic en la columna
Comentario y escriba un comentario
opcional que desee asociar a este
objeto.
Objetos de registro de entrada (IOScanner) (%IWN)
Introducción
Los objetos de tamaño ensamblado de entrada (IOScanner) son los valores de
registro recibidos del IOScanner serie Modbus o de los dispositivos Modbus TCP
IOScanner.
EIO0000003300.02 179

Objetos de red
Visualización de las propiedades de Registros de entrada (IOScanner)
Siga estos pasos para ver las propiedades de los objetos de Registros de entrada
(IOScanner):
Paso Acción
1 Seleccione la ficha Herramientas en el área de la izquierda de la ventana
Programación.
2Haga clic en Objetos de red >Registros de entrada (IOScanner).
Resultado: Aparece la ventana de propiedades.
Propiedades de Registros de entrada (IOScanner)
En esta tabla se describe cada propiedad de un objeto de Registros de entrada
(IOScanner):
Parámetro Editable Valor Valor
predeter-
minado
Descripción
Utilizado No TRUE/FALSE FALSE Indica si se hace referencia al objeto en
el programa.
Dirección No %IWN(i+x).y.z –Dirección del objeto, donde:
• i: índice:
◦100 para SL1
◦200 para SL2
◦300 para ETH1 (Modbus TCP
IOScanner)
• x: ID de dispositivo
• y: ID de canal
• z: identificador de instancia de
objeto
Para conocer el número máximo de
instancias, consulte Número máximo de
objetos, página 32.
Canal No Nombre del
canal
configurado.
-Nombre del canal que se utiliza para
recibir los datos del dispositivo.
Símbolo Sí – – El símbolo asociado con esta dirección.
Haga doble clic en la columna Símbolo
y escriba el nombre del símbolo que
desee asociar a este objeto.
Si ya existe un símbolo, puede hacer clic
derecho en la columna Símbolo y
seleccionar Buscar y reemplazar para
buscar y reemplazar las coincidencias
de este símbolo a lo largo del programa
o los comentarios del programa.
Comentario Sí – – Comentario asociado con este objeto.
Haga doble clic en la columna
Comentario y escriba un comentario
opcional que desee asociar a este
objeto.
180 EIO0000003300.02

Objetos de red
Objetos de registro de salida (IOScanner) (%QWN)
Introducción
Los objetos de registro de salida (IOScanner) son los valores de registro enviados
al IOScanner serie Modbus o a los dispositivos Modbus TCP IOScanner.
Visualización de las propiedades de Registros de salida (IOScanner)
Siga estos pasos para ver las propiedades de los objetos de Registros de salida
(IOScanner):
Paso Acción
1 Seleccione la ficha Herramientas en el área de la izquierda de la ventana
Programación.
2Haga clic en Objetos de red >Registros de salida (IOScanner).
Resultado: Aparece la ventana de propiedades.
EIO0000003300.02 181

Objetos de red
Propiedades de objeto de Registros de salida (IOScanner)
En esta tabla se describen las propiedades de un objeto de Registros de salida
(IOScanner):
Parámetro Editable Valor Valor
predeter-
minado
Descripción
Utilizado No TRUE/FALSE FALSE Indica si se hace referencia al objeto en
un programa.
Dirección No %QWN(i+x).y.
z
–Dirección del objeto, donde:
• i: índice:
◦100 para SL1
◦200 para SL2
◦300 para ETH1 (Modbus TCP
IOScanner)
• x: ID de dispositivo
• y: ID de canal
• z: identificador de instancia de
objeto
Para conocer el número máximo de
objetos, consulte Número máximo de
objetos, página 32.
Canal Sí Nombre del
canal
configurado.
-Nombre del canal que se utiliza para
enviar los datos al dispositivo.
Valor de
retorno Sí de -32768 a
32767 0 Especifique el valor que se va a aplicar a
este objeto cuando el logic controller
pasa a STOPPED o a un estado de
excepción.
NOTA: Si se ha configurado la
modalidad de recuperación
Mantener valores, el objeto
conserva su valor cuando el logic
controller pasa a STOPPED o a un
estado de excepción. Se visualiza
el valor 0 y no se puede editar. Para
obtener más información, consulte
Comportamiento de retorno
(consulte EcoStruxure Machine
Expert - Basic, Guía de
funcionamiento).
Símbolo Sí – – El símbolo asociado con esta dirección.
Haga doble clic en la columna Símbolo
y escriba el nombre del símbolo que
desee asociar a este objeto.
Si ya existe un símbolo, puede hacer clic
derecho en la columna Símbolo y
seleccionar Buscar y reemplazar para
buscar y reemplazar las coincidencias
de este símbolo a lo largo del programa
o los comentarios del programa.
Comentario Sí – – Comentario asociado con este objeto.
Haga doble clic en la columna
Comentario y escriba un comentario
opcional que desee asociar a este
objeto.
182 EIO0000003300.02

Objetos de red
Códigos de diagnóstico de red de Modbus IOScanner (%
IWNS)
Códigos de diagnóstico de dispositivo
En la tabla siguiente se muestran los posibles valores de los códigos de
diagnóstico devueltos por el dispositivo x en el objeto de diagnóstico de red de
Modbus IOScanner correspondiente (%IWNS(100+x) para SL1, %IWNS(200+x)
para SL2 o %IWNS(300+x) para ETH1):
Valor Descripción
0 El dispositivo no se ha explorado.
1 Modbus IOScanner está inicializando el dispositivo (se está enviando una petición de
inicialización del dispositivo).
2 El dispositivo está presente y está listo para ser explorado (peticiones de inicialización
enviadas, si procede).
3 El dispositivo no se ha explorado correctamente debido a un error de comunicación
detectado en un canal del dispositivo.
4 El dispositivo no se ha inicializado correctamente debido a un error de comunicación
detectado durante la petición de inicialización del dispositivo.
5El dispositivo no se ha identificado correctamente porque el nombre de fabricante o el
código de producto devueltos por el dispositivo no coinciden con los valores
esperados.
6 Se ha producido un error de comunicación durante la identificación e inicialización.
Posibles motivos: dispositivo ausente o sin comunicación, parámetros de
comunicación incorrectos o función Modbus incompatible.
Códigos de diagnóstico de canal
En la tabla siguiente se muestran los posibles valores de los códigos de
diagnóstico devueltos por el dispositivo x y el canal y en el objeto de diagnóstico
de red de Modbus IOScanner correspondiente (%IWNS(100+x).y para SL1, %
IWNS(200+x).y para SL2 o %IWNS(300+x).y para ETH1):
Valor Descripción
>0 Valor del código de excepción de Modbus. Código de error de funcionamiento (código
de excepción de Modbus) (consulte EcoStruxure Machine Expert - Basic, Guía de la
biblioteca de funciones genéricas)
0 El canal está activo
-1 El canal está inactivo
<-1 Valor del código de error de comunicación (CommError) (consulte EcoStruxure
Machine Expert - Basic, Guía de la biblioteca de funciones genéricas)
Ejemplos:
• Valor del código de diagnóstico = -15 = -(1 + código de error CommError 14) →
BadLength
• Valor del código de diagnóstico = -2 = -(1 + código de error CommError 1) →
TimeOut
EIO0000003300.02 183

Objetos de sistema
Objetos de sistema
Contenido de este capítulo
Bits de sistema (%S) ...................................................................................184
Palabras de sistema (%SW).........................................................................192
Estado del canal de entrada (%IWS).............................................................208
Estado del canal de salida (%QWS) .............................................................210
Bits de sistema (%S)
Introducción
Esta sección contiene información sobre la función de los bits de sistema.
Visualización de las propiedades de bits de sistema
Siga estos pasos para visualizar las propiedades de los bits de sistema:
Paso Acción
1 Seleccione la ficha Herramientas en el área de la izquierda de la ventana
Programación.
2Haga clic en Objetos de sistema >Bits de sistema.
Resultado: Las propiedades de bits de sistema aparecen en la pantalla.
184 EIO0000003300.02

Objetos de sistema
Propiedades de bits de sistema
En esta tabla se describen todas las propiedades del bit de sistema:
Parámetro Edita-
ble Valor Valor
predetermi-
nado
Descripción
Utilizado No TRUE/FALSE FALSE Indica si se hace referencia al bit de
sistema en un programa.
Dirección No %Si –Muestra la dirección del bit de sistema,
en la que i es el número de bit que
representa la posición secuencial del bit
de sistema en la memoria.
Si el controlador tiene un máximo de
bits de sistema n, el valor de i viene
dado como 0...n-1.
Por ejemplo, %S4 es el bit de sistema
4.
Símbolo Sí – – El símbolo asociado con el bit de
sistema.
Haga doble clic en la columna Símbolo
y escriba el nombre del símbolo para
asociarlo al bit de sistema.
Si ya existe un símbolo, puede hacer
clic con el botón derecho en la columna
Símbolo y seleccionar Buscar y
reemplazar para buscar y reemplazar
las apariciones del símbolo en el
programa o los comentarios del
programa.
Comenta-
rio Sí – – Un comentario asociado al bit de
sistema.
Haga doble clic en la columna
Comentario y escriba un comentario
opcional para asociarlo al bit de
sistema.
EIO0000003300.02 185

Objetos de sistema
Descripción de los bits de sistema
La tabla siguiente contiene una descripción de los bits de sistema y del modo en
el que se controlan:
Bit de
sistema Función Descripción Estado
inicial Con-
trol
%S0 Arranque en frío Normalmente está establecido en 0; se establece en 1 mediante:
• Una recuperación de la alimentación con pérdida de datos
(funcionamiento incorrecto de la batería).
• El programa o una tabla de animación.
Este bit se establece en 1 durante la primera exploración completa. El
sistema lo restablece en 0 antes de la siguiente exploración.
0 S o
U→S,
SIM
%S1 Arranque en caliente Normalmente se establece en 0. Lo establece en 1 una recuperación
de la alimentación con copia de seguridad de datos, mediante un
programa o una tabla de animación.
El sistema lo restablece en 0 al final de una exploración completa.
0 S y U
%S4
%S5
%S6
%S7
Referencia de tiempo: 10 ms
Referencia de tiempo: 100 ms
Referencia de tiempo: 1 s
Referencia de tiempo: 1 min
Un reloj interno mide los cambios en la tasa de estado. No están
sincronizados con la exploración del controlador.
Ejemplo: %S4
–S, SIM
(excep-
to %S4)
%S9 Salidas de valores de retorno Cuando %S9 se establece en 1:
• Para salidas configuradas como alarmas de estado, PTO o
FREQGEN, las salidas se establecen en 0.
• Los valores de retorno se aplican a las salidas digitales y
analógicas físicas (salidas incrustadas, salidas de módulo de
extensión TM2/TM3 y salidas de cartucho TMC2). La imagen de
datos no se ve afectada por %S9. La imagen de datos refleja la
lógica aplicada por la aplicación. Solo se ven afectadas las
salidas físicas.
• Los valores de retorno se aplican con independencia de la
modalidad de comportamiento de retorno (consulte EcoStruxure
Machine Expert - Basic, Guía de funcionamiento) configurada
para salidas específicas.
Cuando %S9 se establece en 0, los valores de la imagen de datos se
aplican de nuevo a las salidas físicas.
NOTA: Cuando el controlador presenta el estado STOPPED y se
ha configurado el comportamiento de valor de retorno Mantener
valores, un flanco ascendente en %S9 aplica valores de retorno
a las salidas físicas y a los valores de imagen de datos.
0 U
%S10 Estado de la comunicación de
E/S Normalmente establecido en 1 (TRUE en el panel de control). El
sistema puede establecer este bit en 0 (FALSE en el panel de control)
cuando se detecta una interrupción de la comunicación de E/S.
Cuando %S10 = 0, el indicador LED ERR parpadea.
1 S
%S11 Desborde de watchdog Normalmente se establece en 0. El sistema puede establecer este bit
en 1 cuando el tiempo de ejecución del programa (tiempo de
exploración) supera el tiempo máximo de exploración (watchdog de la
aplicación).
El estado del controlador cambia a HALTED para indicar el desborde
de watchdog.
El sistema también establece %S11 en 1 si la carga de procesamiento
supera el 80 % de la capacidad de procesamiento (consulte %SW75,
página 192). Si la carga del procesador es superior al 80 % en dos
mediciones consecutivas, el controlador pasa al estado HALTED. De
lo contrario, se restablece %S11.
0 S
%S12 Controlador lógico en estado
RUNNING
Este bit indica que el controlador está en estado RUNNING.
El sistema establece el bit en:
• 1 cuando el estado del controlador es RUNNING.
• 0 para STOPPED,BOOTING o cualquier otro estado.
0 S, SIM
%S13 Primer ciclo en estado
RUNNING
Normalmente se establece en 0. El sistema lo establece en 1 durante
la primera exploración después de que el estado del controlador haya
cambiado a RUNNING.
0 S, SIM
186 EIO0000003300.02

Objetos de sistema
Bit de
sistema Función Descripción Estado
inicial Con-
trol
%S14 Fuerza de E/S activada Normalmente se establece en 0. El sistema lo establece en 1 si se
fuerza como mínimo una entrada o salida. 0 S, SIM
%S15 Entrada forzada Normalmente se establece en 0. El sistema lo establece en 1 si se
fuerza como mínimo una entrada. 0 S, SIM
%S16 Salida forzada Normalmente se establece en 0. El sistema lo establece en 1 si se
fuerza como mínimo una salida. 0 S, SIM
%S17 Último bit expulsado Normalmente se establece en 0. Lo establece el sistema en función
del valor del último bit expulsado.
Indica el valor del último bit expulsado.
0 S→U,
SIM
%S18 Error o desborde aritmético Normalmente se establece en 0. Se establece en 1 en caso de
desborde cuando se realiza una operación de 16 bits, es decir:
• Un resultado mayor que +32767 o menor que -32768, en
longitud simple.
• Un resultado mayor que +2147483647 o menor que
-2147483648, en longitud doble.
• Un resultado mayor que +3,402824E+38 o menor que
-3,402824E+38, en coma flotante.
• División entre 0.
• La raíz cuadrada de un número negativo.
• Una conversión ITB o BTI no significativa: valor BCD fuera de
los límites.
Debe probarse con el programa después de cada operación que
entrañe un riesgo de desborde y, a continuación, debe restablecerse
en 0 con el programa si se produce un desborde.
0 S→U,
SIM
%S19 Desborde del período de
exploración (exploración
periódica)
Normalmente establecido en 0, el sistema establece este bit en 1 en
caso de desborde del período de exploración (tiempo de exploración
mayor que el período definido por el programa en la configuración o
programado en %SW0).
El programa restablece a 0 este bit.
0 S→U
%S20 Desborde de índice Normalmente establecido en 0, se establece en 1 cuando la dirección
del objeto indexado es menor que 0 o mayor que el tamaño máximo
de un objeto.
Debe probarse con el programa después de cada operación que
entrañe un riesgo de desborde y, a continuación, restablecerse a 0 si
se produce un desborde.
0 S→U,
SIM
%S21 Inicialización del Grafcet Normalmente está establecido en 0; se establece en 1 mediante:
• Un reinicio en frío, %S0 = 1.
• El programa, solo en la parte de procesamiento previo del
programa, mediante una instrucción Set (S %S21) o una bobina
Set –(S)– %S21.
• El terminal.
En estado 1, causa la inicialización del Grafcet. Los pasos activos se
desactivan y los pasos iniciales se activan.
El sistema lo establece en 0 después de la inicialización del Grafcet.
0 U→S,
SIM
%S22 Restablecimiento del Grafcet Normalmente está establecido en 0; solo se puede establecer en 1
mediante el programa durante el procesamiento previo.
En el estado 1, provoca la desactivación de los pasos activos de todo
el Grafcet. El sistema lo restablece en 0 cuando se inicia la ejecución
del procesamiento secuencial.
0 U→S,
SIM
%S23 Preajuste y congelación del
Grafcet (lista) Normalmente está establecido en 0; solo se puede establecer en 1
mediante el programa en el módulo de procesamiento previo del
programa.
En el estado 1, valida el posicionamiento previo del Grafcet (lista). Si
se mantiene este bit en 1, se congela la ejecución del Grafcet (lista).
El sistema lo restablece en 0 cuando se inicia la ejecución del
procesamiento secuencial.
0 U→S,
SIM
%S28 Desborde de cadena Establecido en 1, indica que hay un desborde en un objeto de
memoria al gestionar cadenas. 0 S→U,
SIM
EIO0000003300.02 187

Objetos de sistema
Bit de
sistema Función Descripción Estado
inicial Con-
trol
%S33 Selección de lectura o
escritura para cambio o
lectura de la configuración del
servidor Ethernet
Normalmente se establece en 0.
• Cuando se establece en 0, del %SW33 al %SW38 contienen los
parámetros Ethernet en uso (IP declarada o IP asignada por
BOOTP o IP automática autoasignada). Estos parámetros son
los que se configuran en la aplicación o los de la configuración
de Post en la tarjeta SD (en este caso, %SW98,%SW99 o%SW100
son distintos de 0).
• Cuando se establece en 1 (si no existe una configuración de
Post en uso), la nueva configuración la proporcionan del %SW33
al %SW38.
Tanto el sistema como el programa pueden establecer este bit en su
estado inicial 0 (durante un reinicio en frío). A continuación, Ethernet
se restablece para aplicar la configuración de la aplicación con
independencia de la configuración actual.
Este bit no se puede establecer en 1 si hay una configuración de Post
en uso.
0 U→S
%S34 Autonegociación Ethernet Se establece en 0 para permitir la autonegociación de la velocidad y la
modalidad dúplex completo o semidúplex.
Se establece en 1 para forzar una configuración específica
establecida en %S35 y%S36.
NOTA: Una modificación del estado de %S34,%S35 o%S36
provoca la reinicialización del canal Ethernet. Como
consecuencia, el canal Ethernet puede no estar disponible
durante varios segundos tras la modificación.
0 U
%S35 Modalidad dúplex completo/
semidúplex Ethernet Si %S34 = 0 (autonegociación), el sistema establecerá este bit y será
de solo lectura para el usuario. Sin embargo, si %S34 = 1, la
modalidad se forzará según el valor de este bit establecido por el
usuario:
• Se establece en 0 si es semidúplex.
• Se establece en 1 si es dúplex completo.
NOTA: Una modificación del estado de %S34,%S35 o%S36
provoca la reinicialización del canal Ethernet. Como
consecuencia, el canal Ethernet puede no estar disponible
durante varios segundos tras la modificación.
–U o S
%S36 Velocidad Ethernet Si %S34 = 0 (autonegociación), el sistema establecerá este bit y será
de solo lectura para el usuario. Sin embargo, si %S34 = 1, la
modalidad se forzará según el valor de este bit establecido por el
usuario:
• Se establece en 0 si es 10 Mbps.
• Se establece en 1 si es 100 Mbps.
NOTA: Una modificación del estado de %S34,%S35 o%S36
provoca la reinicialización del canal Ethernet. Como
consecuencia, el canal Ethernet puede no estar disponible
durante varios segundos tras la modificación.
–U o S
%S38 Permiso para colocar eventos
en la cola de eventos Normalmente se establece en 1.
• Establecido en 0, los eventos no se pueden colocar en la cola de
eventos.
• Establecido en 1, los eventos se colocan en la cola de eventos
en cuanto se detectan.
Tanto el sistema como el programa pueden establecer este bit en su
estado inicial 1 (durante un reinicio en frío).
1 U→S
%S39 Saturación de la cola de
eventos
Normalmente se establece en 0.
• Establecido en 0, se informa de todos los eventos.
• Establecido en 1, se pierde al menos un evento.
Tanto el sistema como el programa pueden establecer este bit en 0
(durante un reinicio en frío).
0 U→S
188 EIO0000003300.02

Objetos de sistema
Bit de
sistema Función Descripción Estado
inicial Con-
trol
%S49 Restablecimiento de salidas,
página 47 Aunque normalmente está establecido en 0, el programa puede
establecer este bit en 1 o 0.
• Establecido en 0, se deshabilita el restablecimiento automático
de salidas tras un cortocircuito.
• Establecido en 1, se habilita el restablecimiento automático de
salidas tras un cortocircuito.
NOTA: El bit se restablece a 0 en un arranque en frío; de lo
contrario, se retiene el valor del bit.
El bit del sistema %S10 puede usarse para detectar que en el
programa se ha producido un error de salida. Puede usar la palabra
de sistema %SW139 para determinar mediante programación en qué
clúster de las salidas se ha producido un cortocircuito o una
sobrecarga.
NOTA: %S10 y%SW139 se restablecen a su estado inicial cuando
%S49 se establece en 1.
0 U→S
%S50 Actualización de la fecha y la
hora mediante las palabras de
%SW49 a%SW53
Aunque normalmente está establecido en 0, el programa puede
establecer este bit en 1 o 0.
• Establecido en 0, se puede leer la fecha y la hora.
• Establecido en 1, la fecha y la hora se pueden actualizar, pero
no leer.
Mientras %S50 está establecido en 1, el sistema ya no actualiza la
fecha y la hora del controlador y el programa de usuario no puede
leerlas.
En el flanco descendente de %S50, se actualiza el controlador RTC
interno.
Detalles del proceso:
• Si %S50=0, el controlador actualiza periódicamente las palabras
de sistema %SW49-53 a partir de su reloj interno. Al leer %
SW49-53 se proporciona al controlador la fecha y la hora
internas.
• Establecer %S50 en 1 detiene esta actualización y permite
escribir en %SW49-53 sin que el proceso anterior lo
sobrescriba.
• Cuando el controlador detecta un flanco descendente de %S50
(de 1 a 0), aplica los valores de %SW49-53 a su reloj interno y
reinicia la actualización de %SW49-53.
Este proceso de %S50 es también el mecanismo que utiliza
EcoStruxure Machine Expert - Basic para actualizar la hora del
controlador desde la vista de gestión del RTC. De este modo, si
EcoStruxure Machine Expert - Basic detecta que %S50 ya está
establecido en 1, un mensaje informa de que EcoStruxure Machine
Expert - Basic no puede leer el valor exacto del reloj interno del
controlador. Sin embargo, esta situación no impide las actualizaciones
de la fecha y hora del controlador desde la vista de gestión del RTC,
pero, si se utiliza, EcoStruxure Machine Expert - Basic restablecerá %
S50.
0 U→S
%S51 Estado del reloj de hora del
día Aunque normalmente está establecido en 0, el programa puede
establecer este bit en 1 o 0.
• Establecido en 0, la fecha y la hora son coherentes.
• Establecido en 1, el programa debe inicializar la fecha y la hora.
Cuando este bit se establece en 1, los datos del reloj de hora del día
no son válidos. Es posible que no se haya configurado nunca la fecha
y la hora, que el nivel de la batería sea bajo o que la constante de
corrección del controlador no sea válida (que no se haya configurado
nunca, que el valor del reloj corregido y el valor guardado sean
diferentes o que el valor esté fuera de intervalo).
Cuando el estado 1 cambia al estado 0, se fuerza la escritura de la
constante de corrección en el RTC.
0 U→S,
SIM
%S52 Error de escritura del RTC
detectado
Este bit, gestionado por el sistema, se establece en 1 para indicar que
una escritura del RTC (solicitada por %S50) no se ha realizado debido
a valores no válidos en %SW49 para %SW53, página 193. Este bit se
establece en 0 si el cambio solicitado del RTC se ha aplicado
correctamente.
0 S, SIM
EIO0000003300.02 189

Objetos de sistema
Bit de
sistema Función Descripción Estado
inicial Con-
trol
%S59 Actualización de la fecha y la
hora mediante la palabra %
SW59
Aunque normalmente está establecido en 0, el programa puede
establecer este bit en 1 o 0.
• Si se establece en 0, la palabra de sistema %SW59 no se
gestiona.
• Si se establece en 1, la fecha y la hora aumentan o disminuyen
en función de los flancos ascendentes en los bits de control
establecidos en %SW59.
0 U
%S66 LED de batería Si falta la batería o tiene algún error, el LED de batería está
encendido. Establezca este bit en 1 para desactivar el LED de batería.
Este bit de sistema se establece en 0 durante el arranque.
0 U→S
%S75 Estado de la batería El sistema establece este bit de sistema y el usuario puede leerlo.
Indica el estado de la batería:
• Establecido en 0, la batería externa funciona con normalidad.
• Establecido en 1, la carga de la batería externa es baja o no se
detecta la batería externa.
0 S
%S90 Destino de copia de
seguridad/restauración/
borrado
Este bit de sistema selecciona el destino de la operación de copia de
seguridad/restauración/borrado de las palabras de memoria:
• Establecido en 0: memoria no volátil (valor predeterminado).
• Definido en 1: SD card.
0 U
%S91 Borrar variables de las que se
ha hecho copia de seguridad Establezca este bit en 1 para borrar las variables de las que se ha
hecho una copia de seguridad almacenadas en la memoria no volátil o
en la tarjeta SD, según %90.
–U→S
%S92 Variables %MW de las que se
ha hecho copia de seguridad
en la memoria no volátil
El sistema establece este bit de sistema en 1 si las variables de la
palabra de memoria (%MW) están disponibles en la memoria no volátil.
–S
%S93 Hacer copia de seguridad de %
MW
Establezca este bit en 1 para hacer una copia de seguridad de las
variables %MW en la memoria no volátil o en la tarjeta SD, según %S90.
–U→S
%S94 Restaurar %MW Establezca este bit en 1 para restaurar los datos de los que se ha
hecho copia de seguridad en la memoria no volátil o en la tarjeta SD,
según %S90.
–U→S
%S96 Programa de copia de
seguridad correcto Este bit se puede leer en cualquier momento (ya sea mediante el
programa o durante el ajuste), en especial después de un arranque en
frío o un reinicio en caliente.
• Establecido en 0, el programa de copia de seguridad no es
válido.
• Establecido en 1, el programa de copia de seguridad es válido.
0 S, SIM
%S101 Cambio de la dirección de un
puerto (protocolo Modbus) Se utiliza para cambiar la dirección del puerto de línea serie utilizando
las palabras de sistema %SW101 (SL1) y %SW102 (SL2). Para ello, %
S101 debe establecerse en 1.
• Establecido en 0, no se puede cambiar la dirección. El valor de %
SW101 y%SW102 coincide con la dirección de puerto actual.
• Si se establece en 1, puede cambiarse la dirección cambiando
los valores de %SW101 (SL1) y %SW102 (SL2).
NOTA: %S101 no se puede establecer en 1 si se define un
archivo de configuración de Post en SL1 o SL2.
0 U
%S103
%S104
Utilización del protocolo ASCII Permite el uso del protocolo ASCII en SL1 (%S103) o SL2 (%S104). El
protocolo ASCII se configura utilizando las palabras de sistema %
SW103 y%SW105 para SL1, y las palabras de sistema %SW104 y%
SW106 para SL2.
• Si se establece en 0, el protocolo utilizado es el que se ha
configurado en EcoStruxure Machine Expert - Basic o
especificado en la configuración de Post, página 51.
• Si se establece en 1, se utiliza el protocolo ASCII en SL1 (%
S103) o SL2 (%S104). En este caso, hay que configurar
previamente las palabras de sistema %SW103,%SW105 y%
SW121 para SL1, y %SW104,%SW106 y%SW122 para SL2.
Cualquier cambio de %SW se tendrá en cuenta tras un flanco
ascendente para %S103 o%S104.
NOTA: Un flanco ascendente o descendente en %S103 o%
S104 cancela cualquier intercambio en curso (instrucción
EXCH).
NOTA: Al establecer %S103 o%S104 en 0 se reconfigura la
línea serie con los parámetros de EcoStruxure Machine
Expert - Basic.
NOTA: %S103 y%S104 se ignoran si se configura un Modbus
Serial Line IOScanner en la línea serie correspondiente.
0 U
190 EIO0000003300.02

Objetos de sistema
Bit de
sistema Función Descripción Estado
inicial Con-
trol
%S105 Comando de inicialización del
módem Se establece en 1 para enviar el comando de inicialización al módem.
El sistema lo restablece a 0. Consulte también %SW167, página 192.
0 U/S
%S106 Comportamiento del bus de E/
SEl valor predeterminado es 0, lo que significa que un error de
comunicación del bus en un módulo de extensión, página 91 detiene
los intercambios del bus de extensión de E/S.
Establezca este bit en 1 para especificar que el controlador sigue
llevando a cabo intercambios de bus de extensión de E/S.
NOTA: Cuando se produce un error de comunicación de bus, el
bit n de %SW120 se establece en 1, donde n es el número de
módulo de extensión y el bit %SW118 14 se establece en 0.
Para obtener más información sobre la gestión de errores de bus,
consulte Descripción general de la configuración de E/S, página 91.
0 U/S
%S107 Reinicio de bus de E/S El valor predeterminado es 0. El sistema lo restablece a 0.
Establezca este bit en 1 para forzar un reinicio del bus de extensión
de E/S, página 93. Cuando se detecta un flanco ascendente de este
bit, el controlador lógico configura de nuevo y reinicia el bus de
extensión de E/S si:
• %S106 se ha establecido en 0 (es decir, los intercambios de E/S
se detienen)
• El bit %SW118 14 se ha establecido en 0 (el bus de E/S
presenta un error)
• Como mínimo un bit de %SW120 está establecido en 1
(identifica el módulo que presenta un error de comunicación en
bus)
Para obtener más información sobre la gestión de errores de bus,
consulte Descripción general de la configuración de E/S, página 91.
0 U/S
%S110 Reinicio de SL1 de IOScanner Se establece en 1 para reiniciar el Modbus Serial IOScanner en la
línea serie 1.
0 U/S
%S111 Reinicio de SL2 de IOScanner Se establece en 1 para reiniciar el Modbus Serial IOScanner en la
línea serie 2.
0 U/S
%S112 Reinicio de ETH1 de
IOScanner Se establece en 1 para reiniciar el Modbus TCP IOScanner en
Ethernet.
0 U/S
%S113 Suspensión de SL1 de
IOScanner Se establece en 1 para suspender el Modbus Serial IOScanner en la
línea serie 1.
0 U/S
%S114 Suspensión de SL2 de
IOScanner Se establece en 1 para suspender el Modbus Serial IOScanner en la
línea serie 2.
0 U/S
%S115 Suspensión de ETH1 de
IOScanner Se establece en 1 para suspender el Modbus TCP IOScanner en
Ethernet.
0 U/S
%S119 Error detectado de E/S local Normalmente se establece en 1. Este bit se puede establecer en 0 si
se detecta una interrupción de comunicación de E/S en el controlador
lógico. %SW118 determina la naturaleza de la interrupción de
comunicación. Se restablece en 1 cuando desaparece la interrupción
de comunicación.
1 S
%S122 Cambiar automáticamente a la
página Alarma Si se establece en 1, la Visualización gráfica remota cambia
automáticamente a la página Alarma cuando se detecta un flanco
ascendente en un bit de alarma.
0 U
%S123 Mostrar retroiluminación roja
en una alarma Si se establece en 1, la retroiluminación de la Visualización gráfica
remota es roja cuando se activa una alarma.
0 U
SControlado por el sistema
UControlado por el usuario
U→S Establecido en 1 por el usuario, restablecido en 0 por el sistema
S→U Establecido en 1 por el sistema, restablecido en 0 por el usuario
SIM Aplicado en el simulador
EIO0000003300.02 191

Objetos de sistema
Palabras de sistema (%SW)
Introducción
En esta sección se incluye información sobre la función de las palabras de
sistema.
Visualización de las propiedades de las palabras de sistema
Siga estos pasos para visualizar las propiedades de las palabras de sistema:
Paso Acción
1 Seleccione la ficha Herramientas en el área de la izquierda de la ventana
Programación.
2Haga clic en Objetos de sistema >Palabras de sistema.
Resultado: Las propiedades de las palabras de sistema aparecen en la pantalla.
Propiedades de las palabras de sistema
En esta tabla se describen las propiedades de la palabra de sistema:
Parámetro Edita-
ble Valor Valor
predetermi-
nado
Descripción
Utilizado No TRUE/FALSE FALSE Indica si se hace referencia a la palabra
de sistema en un programa.
Dirección No %SWi –Muestra la dirección de la palabra de
sistema, donde i es el número de la
palabra que representa la posición
secuencial de la palabra de sistema en
la memoria.
Si el controlador tiene un máximo de n
palabras de sistema, el valor de i viene
dado como 0...n-1.
Por ejemplo, %SW50 es la palabra de
sistema 50.
Símbolo Sí – – El símbolo asociado a la palabra de
sistema.
Haga doble clic en la columna Símbolo
y escriba el nombre del símbolo para
asociarlo a la palabra de sistema.
Si ya existe un símbolo, puede hacer
clic con el botón derecho en la columna
Símbolo y seleccionar Buscar y
reemplazar para buscar y reemplazar
las apariciones del símbolo en el
programa o los comentarios del
programa.
Comenta-
rio Sí – – Un comentario asociado a la palabra de
sistema.
Haga doble clic en la columna
Comentario y escriba un comentario
opcional para asociarlo a la palabra de
sistema.
192 EIO0000003300.02

Objetos de sistema
Descripción de las palabras de sistema
En esta tabla se presenta la descripción de las palabras de sistema y la forma en
que se controlan:
Palabras
de
sistema
Función Descripción Control
%SW0 Periodo de
exploración del
controlador (tarea
maestra
establecida en la
modalidad de
exploración
periódica)
Modifica el periodo de exploración del controlador (de 1 a 150 ms) definido en las
Propiedades de la tarea maestra (consulte EcoStruxure Machine Expert - Basic, Guía de
funcionamiento) o una tabla de animación.
U, SIM
%SW1 Periodo de la tarea
periódica Modifica el tiempo de ciclo [de 1 a 255 ms] de la tarea periódica, sin perder el valor de
Período especificado en la ventana de propiedades de la tarea periódica.
Permite recuperar el valor de Período guardado en la ventana de propiedades de la
tarea periódica:
• en caso de arranque en frío, o
• si el valor que ha escrito en %SW1 no está comprendido en el intervalo [1-255].
El valor %SW1 puede modificarse en el programa al final de cada ciclo, en el programa o
en la tabla de animación, sin tener que detener el programa. Los tiempos de ciclo se
pueden observar correctamente mientras se ejecuta el programa.
U, SIM
%SW6 Estado del
controlador
%MW60012
Estado del controlador:
0 = EMPTY
2 = STOPPED
3 = RUNNING
4 = HALTED
5 = POWERLESS
S, SIM
EIO0000003300.02 193

Objetos de sistema
Palabras
de
sistema
Función Descripción Control
%SW7 Estado del
controlador • Bit [0]: Copia de seguridad/restauración en curso:
◦Se establece en 1 si la copia de seguridad/restauración del programa está en
curso.
◦Se establece en 0 si la copia de seguridad/restauración del programa se ha
completado o está deshabilitada.
• Bit [1]: La configuración del controlador es correcta:
◦Se establece en 1 si la configuración es correcta.
• Bit [2]: Bits de estado de la tarjeta SD:
◦Se establece en 1 si la tarjeta SD está presente.
• Bit [3]: Bits de estado de la tarjeta SD:
◦Se establece en 1 si se está accediendo a la tarjeta SD.
• Bit [4]: Estado de la memoria de la aplicación:
◦Se establece en 1 si la aplicación que está en la memoria RAM es distinta de la
de la memoria no volátil.
• Bit [5]: Bits de estado de la tarjeta SD:
◦Se establece en 1 si la tarjeta SD tiene un error.
• Bit [6]: No se utiliza (estado 0)
• Bit [7]: Controlador reservado:
◦Se establece en 1 si el controlador está conectado a EcoStruxure Machine
Expert - Basic.
• Bit [8]: Aplicación en modalidad de escritura:
◦Se establece en 1 si la aplicación está protegida. En este caso, la operación de
clonado no replica la aplicación (consulte Gestión de clonado, página 152).
• Bit [9]: No se utiliza (estado 0)
• Bit [10]: Segundo puerto serie instalado como cartucho (solo Compact):
◦0 = sin cartucho serie
◦1 = cartucho serie instalado
• Bit [11]: Tipo del segundo puerto serie:
◦Se establece en 1 = EIA RS-485
• Bit [12]: Validez de la aplicación en la memoria interna:
◦Se establece en 1 si la aplicación es válida.
• Bit [14]: Validez de la aplicación en la memoria RAM:
◦Se establece en 1 si la aplicación es válida.
• Bit [15]: Preparado para ejecución:
◦Se establece en 1 si está preparado para ejecución.
S, SIM
%SW11 Valor del watchdog
del software Contiene el valor máximo del watchdog. El valor (de 10 a 500 ms) se define mediante la
configuración. U, SIM
%SW13 Versión del
cargador de
arranque
xx.yy
Por ejemplo, si %SW13=000E hex:
• 8 MSB=00 en hexadecimal y, por lo tanto, xx=0 en decimal
• 8 LSB=0E en hexadecimal y, por lo tanto, yy=14 en decimal
Como resultado, la versión del cargador de arranque es 0.14 y se visualiza como 14
decimal.
S, SIM
%SW14 Versión comercial,
xx.yy Por ejemplo, si %SW14=0232 hex:
• 8 MSB=02 en hexadecimal y, por lo tanto, xx=2 en decimal
• 8 LSB=32 en hexadecimal y, por lo tanto, yy=50 en decimal
Como resultado, la versión comercial es 2.50 y se visualiza como 250 decimal.
S, SIM
%SW15-%
SW16
Versión del
firmware
aa.bb.cc.dd
Por ejemplo, si:
%SW15=0003 hex:
• 8 MSB=00 en hexadecimal y, por lo tanto, aa=00 en decimal
• 8 LSB=03 en hexadecimal y, por lo tanto, bb=03 en decimal
%SW16=0B16 hex:
• 8 MSB=0B en hexadecimal y, por lo tanto, cc=11 en decimal
• 8 LSB=16 en hexadecimal y, por lo tanto, dd=22 en decimal
Como resultado, la versión de firmware es 0.3.11.22 y se visualiza como 00031122
decimal.
S, SIM
194 EIO0000003300.02

Objetos de sistema
Palabras
de
sistema
Función Descripción Control
%SW17 Estado
predeterminado en
una operación
flotante
Al detectar un error en una operación aritmética flotante, el bit %S18 se establece en 1 y
el estado predeterminado de %SW17 se actualiza según el código siguiente:
• Bit[0]: Operación no válida, el resultado no es un número (NaN)
• Bit[1]: Reservado
• Bit[2]: División entre 0, el resultado no es válido (–Infinito o +Infinito)
• Bit[3]: Resultado superior a +3,402824e+38 en valor absoluto, el resultado no es
válido (–Infinito o +Infinito)
Debe probarse con el programa después de cada operación que entrañe riesgo de
desborde y, a continuación, restablecerse a 0 con el programa si se produce un
desborde.
S y U,
SIM
%SW18-%
SW19
Contador del
temporizador
absoluto de 100 ms
Este contador funciona con 2 palabras:
•%SW18 representa la palabra menos significativa.
•%SW19 representa la palabra más significativa.
%SW18 aumenta de 0 a 32767 cada 100 ms. Cuando se alcanza 32767, %SW19 aumenta
y%SW18 se restablece a 0. Estas palabras dobles también se restablecen durante la fase
de inicialización y al restablecerse %S0.
S y U,
SIM
%SW30 Último periodo de
exploración (tarea
maestra)
Indica el tiempo de ejecución del último ciclo de exploración del controlador (en ms).
NOTA: Este tiempo corresponde al tiempo transcurrido entre el inicio (adquisición
de entradas) y la finalización (actualización de salidas) de un ciclo de exploración de
la tarea maestra. Si el tiempo de exploración es 2,250ms, %SW30 será 2 y %SW70
será 250.
S
%SW31 Tiempo máximo de
exploración (tarea
maestra)
Indica el tiempo de ejecución del ciclo de exploración más largo del controlador (en ms)
desde el último arranque en frío.
Este tiempo corresponde al tiempo transcurrido entre el inicio (adquisición de entradas) y
la finalización (actualización de salidas) de un ciclo de exploración. Si el tiempo de
exploración máximo es 2,250 ms, %SW31 será 2 y %SW71 será 250.
NOTA: Para detectar una señal de pulso cuando se ha seleccionado la opción de
entrada con enclavamiento, el ancho de pulso (TON) y el periodo (P) deben cumplir
los 2 requisitos siguientes:
• TON ≥ 1 ms
• El periodo de la señal de entrada (P) cumple la norma de muestreo Nyquist-
Shannon que establece que el periodo de señal de entrada (P) es como
mínimo el doble del tiempo máximo de exploración del programa (%SW31):
P ≥2 x %SW31.
S
%SW32 Peroiodo mínimo de
exploración (tarea
maestra)
Indica el tiempo de ejecución del ciclo de exploración más corto del controlador (en ms)
desde el último arranque en frío.
NOTA: Este tiempo corresponde al tiempo transcurrido entre el inicio (adquisición
de entradas) y la finalización (actualización de salidas) de un ciclo de exploración.
Si el tiempo mínimo de exploración es 2,250 ms, %SW32 será 2 y %SW72 será 250.
S
%SW33
%SW34
%SW35
%SW36
%SW37
%SW38
Dirección IP para
lectura/escritura de
la configuración del
servidor Ethernet
La configuración IP puede modificarse. La selección de lectura o escritura se realizará
con el bit de sistema %S33.
Las palabras de sistema %SW33...%SW38 contienen los parámetros de Ethernet:
• Dirección IP: %SW33 y%SW34
Para la dirección IP AA.BB.CC.DD: %SW33 = CC.DD y %SW34 = AA.BB
• Máscara de subred: %SW35 y%SW36
Para la máscara de subred AA.BB.CC.DD: %SW35 = CC.DD y %SW36 = AA.BB
• Dirección de pasarela: %SW37 y%SW38
Para la dirección de pasarela AA.BB.CC.DD: %SW37 = CC.DD y %SW38 = AA.BB
U
%SW39 Tiempo medio
periódico Indica el tiempo medio de ejecución en µs de la tarea periódica (últimas 5 veces). –
%SW40 Tiempo medio del
evento 0 Indica el tiempo medio de ejecución en µs de la tarea de evento asociada con la entrada
%I0.2 (últimas 5 veces).
–
%SW41 Tiempo medio del
evento 1 Indica el tiempo medio de ejecución en µs de la tarea de evento asociada con la entrada
%I0.3 (últimas 5 veces).
–
%SW42 Tiempo medio del
evento 2 Indica el tiempo medio de ejecución en µs de la tarea de evento asociada con la entrada
%I0.4 (últimas 5 veces).
–
%SW43 Tiempo medio del
evento 3 Indica el tiempo medio de ejecución en µs de la tarea de evento asociada con la entrada
%I0.5 (últimas 5 veces).
–
%SW44 Tiempo medio del
evento 4 Indica el tiempo medio de ejecución en µs de la tarea de evento asociada con el Umbral
0 de HSC0 oHSC2 (últimas 5 veces).
–
EIO0000003300.02 195

Objetos de sistema
Palabras
de
sistema
Función Descripción Control
%SW45 Tiempo medio del
evento 5 Indica el tiempo medio de ejecución en µs de la tarea de evento asociada con el Umbral
1 de HSC0 oHSC2 (últimas 5 veces).
–
%SW46 Tiempo medio del
evento 6 Indica el tiempo medio de ejecución en µs de la tarea de evento asociada con el Umbral
0 de HSC1 oHSC3 (últimas 5 veces).
–
%SW47 Tiempo medio del
evento 7 Indica el tiempo medio de ejecución en µs de la tarea de evento asociada con el Umbral
1 de HSC1 oHSC3 (últimas 5 veces).
–
%SW48 Número de eventos Indica cuántos eventos se han ejecutado desde el último arranque en frío. (Cuenta todos
los eventos excepto los eventos cíclicos).
NOTA: Establecido en 0 (después de cargar la aplicación y arrancar en frío),
aumenta en cada ejecución de evento.
S, SIM
%SW49
%SW50
%SW51
%SW52
%SW53
Reloj en tiempo real
(RTC) Funciones de RTC: palabras que contienen los valores de fecha y hora actuales (en
BCD): S y U,
SIM
%SW49 xN día de la semana (N = 1 para los
lunes)
NOTA: %SW49 es de solo lectura
(S).
%SW50 00SS segundos
%SW51 HHMM: hora y minutos
%SW52 MMDD: mes y día
%SW53 CCYY: siglo y año
Establezca el bit de sistema %S50 en 1 para permitir la actualización del valor RTC
utilizando las palabras de sistema de %SW49 a %SW53. En un flanco descendente de %
S50, se actualiza el controlador del RTC interno utilizando los valores escritos en estas
palabras. Para obtener más detalles, consulte bit de sistema%S50, página 186.
%SW54
%SW55
%SW56
%SW57
Fecha y hora de la
última detención Palabras de sistema que contienen la fecha y la hora del último corte de alimentación o
de la última detención del controlador (en BCD): S, SIM
%SW54 SS segundos
%SW55 HHMM: hora y minutos
%SW56 MMDD: mes y día
%SW57 CCYY: siglo y año
196 EIO0000003300.02

Objetos de sistema
Palabras
de
sistema
Función Descripción Control
%SW58 Código de la última
detención Muestra el código que indica la causa de la última transición desde el estado RUNNING
a otro estado: S, SIM
0 Valor inicial (después de un comando de descarga o de
inicialización)
1 La entrada Run/Stop o el conmutador Run/Stop se establecen
en 0. Se ha detectado un flanco descendente en la entrada Run/
Stop o en el conmutador Run/Stop mientras el controlador
presentaba el estado RUNNING, o el controlador se ha
encendido con la entrada Run/Stop o el conmutador Run/Stop
establecido en 0.
2 Se ha detectado un error en el programa. Se ha detectado un
error en el programa mientras el controlador presentaba el
estado RUNNING (en cuyo caso el controlador cambia al estado
HALTED), o el controlador presentaba el estado HALTED al
apagar y encender el aparato, lo que impide que se inicie en
modalidad RUN.
3 Comando Detención utilizando el botón online de EcoStruxure
Machine Expert - Basic o la Visualización gráfica remota.
4 Corte de alimentación. El controlador se inicia en modalidad
RUN después de apagarlo y encenderlo, o el controlador
presenta el estado STOPPED porque la modalidad de inicio es
Inicio en estado anterior y el controlador presentaba el estado
STOPPED cuando se produjo el corte de alimentación.
5 Error de hardware detectado.
6 No se utiliza.
7Encender con la modalidad de inicio configurada como Inicio en
parada.
8 El controlador no ha podido recuperar los datos anteriores que
tenía en el último corte de alimentación (por ejemplo, porque el
nivel de batería es bajo), lo que impide que se inicie en
modalidad RUN.
9 El controlador no puede ejecutarse debido a errores de la
memoria interna.
Los motivos de la última detención se priorizan en este orden (es decir, cuando el
controlador se encuentra en estado STOPPED después de apagarlo y encenderlo de
nuevo):
1, 7, 4, 8, 2
%SW59 Ajuste de la fecha
actual Ajusta la fecha actual.
Contiene 2 grupos de 8 bits para ajustar la fecha actual.
La operación siempre se realiza en el flanco ascendente del bit. Esta palabra se activa
mediante el bit %S59.
U
Aumentar Reducir Parámetro
Bit 0 Bit 8 Día de la semana
Bit 1 Bit 9 Segundos
Bit 2 Bit 10 Minutos
Bit 3 Bit 11 Horas
Bit 4 Bit 12 Días
Bit 5 Bit 13 Mes
Bit 6 Bit 14 Años
Bit 7 Bit 15 Siglos
%SW61 ID de hardware
Ethernet Los valores y la compatibilidad del firmware son los siguientes:
0: Reservado.
1: Antiguo. Compatible con todas las versiones del firmware.
2: Tipo A. Compatible con la versión del firmware 1.12.1.1 o posterior.
–
EIO0000003300.02 197

Objetos de sistema
Palabras
de
sistema
Función Descripción Control
%SW62 Detección de error
de Ethernet Indica el código de error:
0: no se ha detectado ningún error
1: IP duplicada: M221 Logic Controller se configura con su dirección IP predeterminada
(que se genera a partir de la dirección MAC)
2: DHCP en curso
3: BOOTP en curso
4: parámetros no válidos: el puerto está deshabilitado
5: inicialización de la dirección IP fija en curso
6: conexión Ethernet desactivada
S
%SW63 Código de error del
bloque EXCH1 Código de error EXCH1:
0: operación correcta
1: el número de bytes que se va a transmitir excede el límite (> 255)
2: tabla de envío insuficiente
3: tabla de palabras insuficiente
4: tabla de recepción desbordada
5: tiempo de inactividad transcurrido
6: envío
7: comando incorrecto en la tabla
8: puerto seleccionado no configurado/disponible
9: error de recepción: este código de error refleja una trama de recepción incorrecta o
dañada. Puede utilizarse debido a una configuración incorrecta en los parámetros físicos
(por ejemplo, paridad, bits de datos, velocidad en baudios, etc.) o a una conexión física
inestable que causa un empeoramiento de la señal.
10: no se puede utilizar %KW si se está recibiendo
11: offset de envío mayor que la tabla de envío
12: offset de recepción mayor que la tabla de recepción
13: procesamiento EXCH detenido por el controlador
S
%SW64 Código de error del
bloque EXCH2 Código de error EXCH2: Consulte %SW63. S
198 EIO0000003300.02

Objetos de sistema
Palabras
de
sistema
Función Descripción Control
%SW65 Código de error del
bloque EXCH3 1-4, 6-13: Consulte %SW63. (Tenga en cuenta que el código de error 5 no es válido y se
sustituye por los códigos de error 109 y 122 específicos de Ethernet que se describen a
continuación).
A continuación, se indican los códigos de error específicos de Ethernet:
101: dirección IP incorrecta
102: sin conexión TCP
103: no hay sockets disponibles (todos los canales de conexión están ocupados).
104: no hay red.
105: no se puede alcanzar la red.
106: la red perdió la conexión durante el restablecimiento.
107: conexión cancelada por el dispositivo del mismo nivel.
108: conexión restablecida por el dispositivo del mismo nivel.
109: temporización de conexión transcurrida.
110: intento de conexión rechazado.
111: el host no funciona.
120: índice incorrecto (el dispositivo remoto no está indexado en la tabla de
configuración)
121: error del sistema (MAC, chip)
122: ha finalizado el tiempo de conexión del proceso de recepción tras el envío de los
datos
123 - Inicio de Ethernet en curso.
S
%SW67 Función y tipo de
controlador Contiene el ID de código del Logic Controller. Para obtener más información, consulte la
tabla de ID de código del M221 Logic Controller, página 208.S, SIM
%SW70 Tiempo de
exploración
resolución en
microsegundos
Indica el tiempo de ejecución del último ciclo de exploración del controlador (en µs).
NOTA: Este tiempo corresponde al tiempo transcurrido entre el inicio (adquisición
de entradas) y la finalización (actualización de salidas) de un ciclo de exploración de
la tarea maestra. Si el tiempo de exploración es 2,250 ms, %SW30 será 2 y %SW70
será 250.
–
%SW71 Tiempo máximo de
exploración:
resolución en
microsegundos
Indica el tiempo de ejecución del ciclo de exploración más largo del controlador (en ms)
desde el último arranque en frío.
NOTA: Este tiempo corresponde al tiempo transcurrido entre el inicio (adquisición
de entradas) y la finalización (actualización de salidas) de un ciclo de exploración.
Si el tiempo de exploración es 2,250 ms, %SW31 será 2 y %SW71 será 250.
–
%SW72 Tiempo mínimo de
exploración:
resolución en
microsegundos
Indica el tiempo de ejecución del ciclo de exploración más corto del controlador (en ms)
desde el último arranque en frío.
NOTA: Este tiempo corresponde al tiempo transcurrido entre el inicio (adquisición
de entradas) y la finalización (actualización de salidas) de un ciclo de exploración.
Si el tiempo de exploración es 2,250 ms, %SW32 será 2 y %SW72 será 250.
–
%SW75 Carga del
procesador
Indica el porcentaje de carga de procesamiento.
La carga de procesamiento se define como el porcentaje del tiempo de procesamiento
total disponible que se usa para procesar las tareas del programa (este valor es un
promedio que se calcula cada segundo). En caso de que la carga de procesamiento sea
superior al 80 % en dos periodos de tiempo consecutivos, el controlador cambiará al
estado HALTED.
S
De %SW76
a%SW79
Contadores
regresivos 1-4
Estas cuatro palabras sirven como temporizadores de 1 ms. El sistema las hace
disminuir individualmente cada ms si su valor es positivo. Esto ofrece cuatro contadores
regresivos contando regresivamente en ms, lo que es igual a un intervalo operativo de 1
ms a 32 767 ms. Si se establece el bit 15 en 1, se puede detener la disminución.
S y U,
SIM
%SW80 Estado de las
entradas
analógicas
incrustadas
• Bit [0]: Se establece en 1 si las entradas analógicas incrustadas están operativas.
• Bit [6]: Se establece en 1 si se detecta un error en la entrada analógica 0.
• Bit [7]: Se establece en 1 si se detecta un error en la entrada analógica 1.
• El resto de los bits están reservados y establecidos en 1
S y U,
SIM
EIO0000003300.02 199

Objetos de sistema
Palabras
de
sistema
Función Descripción Control
%SW94
%SW95
Firma de la
aplicación
%MW60028-%
MW60034
Si la aplicación cambia en lo que se refiere a configuración o datos de programación, la
firma (suma de todas las sumas de comprobación) también cambia.
Si %SW94 = 91F3 en hexadecimal, la firma de la aplicación es 91F3 en hexadecimal.
S, SIM
%SW96 Diagnósticos para
la función guardar/
restaurar del
programa y %MW
• Bit [1]: El firmware establece este bit para indicar que el proceso de guardado ha
concluido:
◦Se establece en 1 si ha concluido la copia de seguridad.
◦Se establece en 0 si se solicita una nueva copia de seguridad.
• Bit [2]: Error detectado en la copia de seguridad; para obtener más información,
consulte los bits 8, 9, 10, 12 y 14:
◦Se establece en 1 si se detecta un error.
◦Se establece en 0 si se solicita una nueva copia de seguridad.
• Bit [6]: Se establece en 1 si el controlador contiene una aplicación válida en la
memoria RAM.
• Bit [10]: Se ha detectado una diferencia entre la memoria RAM y la memoria no
volátil.
◦Se establece en 1 si hay alguna diferencia.
• Bit [12]: Indica si se ha producido un error de restauración:
◦Se establece en 1 si se detecta un error.
• Bit [14]: Indica si se ha producido un error de escritura en una memoria no volátil:
◦Se establece en 1 si se detecta un error.
S, SIM
%SW98 Estado de
configuración de
Post (línea serie 1)
Los bits se establecen en 1 al aplicar la configuración de Post para el parámetro:
• Bit[0]: Opción de hardware (RS485 o RS232)
• Bit[1]: Velocidad en baudios
• Bit[2]: Paridad
• Bit[3]: Tamaño de datos
• Bit[4]: Número de bits de parada
• Bit[5]: Dirección Modbus
• Bit[6]: Polarización (si está disponible en el puerto)
S
%SW99 Estado de
configuración de
Post (línea serie 2)
Los bits se establecen en 1 al aplicar la configuración de Post para el parámetro:
• Bit[0]: Opción de hardware (RS485)
• Bit[1]: Velocidad en baudios
• Bit[2]: Paridad
• Bit[3]: Tamaño de datos
• Bit[4]: Número de bits de parada
• Bit[5]: Dirección Modbus
• Bit[6]: Polarización (si está disponible en el puerto)
S
%SW100 Estado de
configuración de
Post (Ethernet)
Los bits se establecen en 1 al aplicar la configuración de Post para el parámetro:
• Bit[0]: Modalidad IP (fija, DHCP o BOOTP)
• Bit[1]: Dirección IP
• Bit[2]: Submáscara de red
• Bit[3]: Pasarela predeterminada
• Bit[4]: Nombre del dispositivo
NOTA: La configuración de Post tiene prioridad frente a la configuración
proporcionada por la aplicación. La configuración de la aplicación no se tiene en
cuenta si M221 Logic Controller presenta una configuración de Post.
S
%SW101
%SW102
Valor del puerto de
la dirección Modbus Cuando el bit %S101 se establece en 1, puede modificar la dirección Modbus de SL1 o
SL2. La dirección de SL1 es %SW101. La dirección de SL2 es %SW102.
NOTA: La actualización se aplica inmediatamente después de escribir una dirección
nueva en %SW101 o%SW102.
U
200 EIO0000003300.02

Objetos de sistema
Palabras
de
sistema
Función Descripción Control
%SW103
%SW104
Configuración para
utilizar el protocolo
ASCII
Cuando el bit %S103 (SL1) o %S104 (SL2) está establecido en 1, se emplea el protocolo
ASCII. La palabra de sistema %SW103 (SL1) o %SW104 (SL2) se debe configurar según
los elementos descritos a continuación:
• Velocidad en baudios:
◦000: 1200 baudios,
◦001: 2400 baudios,
◦010: 4800 baudios,
◦011: 9600 baudios,
◦100: 19 200 baudios,
◦101: 38 400 baudios,
◦110: 57 600 baudios,
◦111: 115 200 baudios.
• RTS/CTS:
◦0: desactivado
◦1: activado
• Paridad:
◦00: ninguna
◦10: par
◦11: impar
• Bit de detención:
◦0: 1 bit de parada,
◦1: 2 bits de parada.
• Bits de datos:
◦0: 7 bits de datos,
◦1: 8 bits de datos.
S, U
%SW105
%SW106
Configuración para
utilizar el protocolo
ASCII
Cuando el bit %S103 (SL1) o %S104 (SL2) está establecido en 1, se emplea el protocolo
ASCII. La palabra de sistema %SW105 (SL1) o %SW106 (SL2) se debe configurar según
los elementos descritos a continuación:
S, U
%SW107
%SW108
%SW109
Dirección MAC Indica la dirección MAC del controlador (solo referencias con canal Ethernet).
Para la dirección MAC AA:BB:CC:DD:EE:FF:
•%SW107 = AA:BB
•%SW108 = CC:DD
•%SW109 = EE:FF
S
%SW114 Habilitación de
fechadores Habilita o deshabilita el funcionamiento de los fechadores mediante el programa:
• Bit [0]: Habilitar/deshabilitar el número de fechador 0
◦Establecido en 0: deshabilitado
◦Establecido en 1: habilitado
• ...
• Bit [15]: Habilitar/deshabilitar el número de fechador 15
◦Establecido en 0: deshabilitado
◦Establecido en 1: habilitado
Inicialmente, todos los fechadores están habilitados.
El valor predeterminado es FFFF hex (hexadecimal).
S y U,
SIM
EIO0000003300.02 201

Objetos de sistema
Palabras
de
sistema
Función Descripción Control
%SW115
%SW116
%SW117
Números de serie
de los componentes
del controlador 1, 2
y 3 respectivamente
(en BCD)
Permite obtener el número de serie del controlador.
Ejemplo con el número de serie 8A160400008:
•%SW115 : 16#0008
•%SW116 : 16#6040
•%SW117 : 16#0001
S
%SW118 Palabra de estado
del Logic Controller Indica los estados del Logic Controller.
Para que el controlador funcione con normalidad, el valor de esta palabra es FFFF hex.
• Bit [9]:
◦Definido en 0: Error externo detectado o interrupción de la comunicación (por
ejemplo, dirección IP duplicada).
◦Definido en 1: No se ha detectado ningún error.
• Bit [10]:
◦Definido en 0: Configuración interna no válida; póngase en contacto con el
servicio de atención al cliente de Schneider Electric.
◦Definido en 1: No se ha detectado ningún error.
• Bit [13]:
◦Definido en 0: Error de configuración detectado (faltan módulos obligatorios,
según la definición de la configuración del bus de extensión de E/S o, si están,
no funcionan cuando el Logic Controller intenta iniciar el bus de extensión de
E/S). En este caso, el bus de E/S no se inicia.
◦Definido en 1: No se ha detectado ningún error.
• Bit [14]:
◦Definido en 0: Uno o varios módulos han interrumpido la comunicación con el
Logic Controller después de que se iniciase el bus de extensión de E/S. Este
es el caso si un módulo de extensión de E/S se define como obligatorio u
opcional, pero está presente en el arranque.
◦Definido en 1: No se ha detectado ningún error.
Para obtener más información sobre la gestión de errores de bus, consulte
Descripción general de la configuración de E/S, página 91.
• Bit [15]:
◦Definido en 0: Error detectado en el cartucho (operación de tiempo de
ejecución o configuración).
◦Definido en 1: No se ha detectado ningún error.
NOTA: Todos los demás bits de esta palabra se establecen en 1 y están
reservados.
S, SIM
%SW119 Configuración de la
función Módulo
opcional
Un bit para cada módulo de extensión de la configuración:
• Bit [0]: Reservado para el Logic Controller
• Bit n: Módulo n
◦Definido en 1: El módulo se marca como opcional en la configuración.
◦Definido en 0: El módulo no se marca como opcional en la configuración.
S, SIM
%SW120 Estado del módulo
de E/S de extensión 1 bit para cada módulo de extensión de la configuración.
Bit 0: Reservado para el Logic Controller
Cuando el logic controller intenta iniciar el bus de E/S, bit n:
• 0 = no se ha detectado ningún error.
• 1 = error detectado o módulo no presente. El bus de extensión de E/S no se inicia a
menos que el bit correspondiente en %SW119 esté establecido en TRUE (que
indica que el módulo se ha marcado como opcional).
Una vez que se ha iniciado el bus y se ejecuta con intercambios de datos con el
controlador, el bit n:
• 0 = no se ha detectado ningún error.
• 1 = error detectado en el módulo de extensión de E/S (independientemente de si
es un módulo marcado como opcional).
Para obtener más información sobre la gestión de errores de bus, consulte Descripción
general de la configuración de E/S, página 91.
S, SIM
%SW121
%SW122
Configuración para
utilizar el protocolo
ASCII
Cuando el bit %S103 (SL1) o %S104 (SL2) está establecido en 1, se emplea el protocolo
ASCII. Puede cambiar el tamaño de la trama ASCII de SL1 o SL2. El tamaño de la trama
ASCII de SL1 es %SW121 y el de SL2 es %SW122.
U
202 EIO0000003300.02

Objetos de sistema
Palabras
de
sistema
Función Descripción Control
%SW128 Estado del cartucho
1Indica el código de estado para el cartucho:
• LSB: Presenta el estado del canal 1 de E/S
• MSB: Presenta el estado del canal 2 de E/S
Estado general:
• 0x80: El cartucho no está presente y no se ha configurado en EcoStruxure
Machine Expert - Basic.
• 0x81: El módulo está presente, pero no se ha configurado.
• 0x82: Error de comunicación interno con el cartucho.
• 0x83: Error de comunicación interno con el cartucho.
• 0x84: Detectado un cartucho diferente del de la configuración.
• 0x85: No se detecta el cartucho configurado.
Estado de funcionamiento del canal de entrada:
• 0x00: Normal.
• 0x01: Conversión en curso.
• 0x02: Inicialización.
• 0x03: Detectado error en la configuración de funcionamiento de la entrada o
módulo sin entrada.
• 0x04: Reservado.
• 0x05: Detectado error de cableado (por encima del límite superior).
• 0x06: Detectado error de cableado (por debajo del límite inferior).
• 0x07: Detectado error de memoria no volátil.
• Otros: Reservado.
Estado de funcionamiento del canal de salida:
• 0x00: Normal.
• 0x01: Reservado.
• 0x02: Inicialización.
• 0x03: Detectado error en la configuración de funcionamiento de la salida o módulo
sin salida.
• 0x04: Reservado.
• 0x05: Reservado.
• 0x06: Reservado.
• 0x07: Detectado error de memoria no volátil.
• Otros: Reservado.
S, SIM
%SW129 Estado del cartucho
2
%SW130 Tiempo de
ejecución del
evento
Indica el último tiempo de ejecución en µs de la tarea de evento asociada con la entrada
%I0.2.S
%SW131 Tiempo de
ejecución del
evento
Indica el último tiempo de ejecución en µs de la tarea de evento asociada con la entrada
%I0.3.S
%SW132 Tiempo de
ejecución del
evento
Indica el último tiempo de ejecución en µs de la tarea de evento asociada con la entrada
%I0.4.S
%SW133 Tiempo de
ejecución del
evento
Indica el último tiempo de ejecución en µs de la tarea de evento asociada con la entrada
%I0.5.S
%SW134 Tiempo de
ejecución del
evento
Indica el último tiempo de ejecución en µs de la tarea de evento asociada con el Umbral
0 de HSC0 oHSC2.S
%SW135 Tiempo de
ejecución del
evento
Indica el último tiempo de ejecución en µs de la tarea de evento asociada con el Umbral
1 de HSC0 oHSC2.S
%SW136 Tiempo de
ejecución del
evento
Indica el último tiempo de ejecución en µs de la tarea de evento asociada con el Umbral
0 de HSC1 oHSC3.S
%SW137 Tiempo de
ejecución del
evento
Indica el último tiempo de ejecución en µs de la tarea de evento asociada con el Umbral
1 de HSC1 oHSC3.S
%SW138 Tiempo de
ejecución de la
tarea periódica
Indica el último tiempo de ejecución en µs de la tarea periódica. S
EIO0000003300.02 203

Objetos de sistema
Palabras
de
sistema
Función Descripción Control
%SW139 Protección de la
salida digital
incrustada
Indica el estado de error de protección de los bloques de salidas:
Bit0 = 1 - error de protección Q0-Q3 - Bloque0
Bit1 = 1 - error de protección Q4-Q7 - Bloque1
Bit2 = 1 - error de protección Q8-Q11 - Bloque2
Bit3 = 1 - error de protección Q12-Q15 - Bloque3
NOTA: %SW139 no se utiliza para salidas de común positivo.
S
%SW140 Último código de
error del
controlador 1
Código de error más reciente escrito en PlcLog.csv: AABBCCCCDD:
%SW142 = AABB hex
%SW141 = CCCC hex
%SW140 = 00DD hex
Donde:
• AA = nivel de error
• BB = contexto de error
• CCCC = código de error
• DD = prioridad del error (solo para uso interno)
S
%SW141 Último código de
error del
controlador 2
%SW142 Último código de
error del
controlador 3
%SW143 Número de
entradas en
PlcLog.csv
Número de códigos de error incluidos en PlcLog.csv. S
%SW147 Código de
diagnóstico de
funcionamiento de
la tarjeta SD
Si %S90 se establece en 1, indica el resultado de funcionamiento de la tarjeta SD tras
guardar las palabras de memoria. Los códigos de diagnóstico son:
• 0: Sin errores
• 1: Operación en curso
• 10: Extraer la tarjeta SD
• 11: No se ha detectado ninguna tarjeta SD
• 12: Tarjeta SD protegida contra escritura
• 13: La tarjeta SD está llena
• 21: Número de palabras de memoria no válido
• 22: No hay palabras de memoria para guardar
• 30: Una línea del archivo CSV no es válida
• 31: Una línea del archivo CSV es demasiado larga
• 32: Formato del archivo CSV no válido
• 40: Error al crear el archivo CSV
• 50: Error del sistema interno
• 51: Error al abrir el archivo CSV
S
%SW148 Número de
variables
persistentes
• Si %S90 se establece en 0, puede guardar hasta 2000 palabras de memoria (de %
MW50 a%MW2049).
• Si %S90 se establece en 1, puede guardar todas las palabras de memoria de %MW0.
Para obtener más información, consulte Almacenamiento por petición del usuario de
variables persistentes, página 46.
U
%SW149 Tiempo de
ejecución del
evento
Indica el último tiempo de ejecución en ms de la tarea de evento asociada con la entrada
%I0.2.S
%SW150 Tiempo de
ejecución del
evento
Indica el último tiempo de ejecución en ms de la tarea de evento asociada con la entrada
%I0.3.S
%SW151 Tiempo de
ejecución del
evento
Indica el último tiempo de ejecución en ms de la tarea de evento asociada con la entrada
%I0.4.S
%SW152 Tiempo de
ejecución del
evento
Indica el último tiempo de ejecución en ms de la tarea de evento asociada con la entrada
%I0.5.S
%SW153 Tiempo de
ejecución del
evento
Indica el último tiempo de ejecución en ms de la tarea de evento asociada con el Umbral
0 de HSC0 oHSC2.S
204 EIO0000003300.02

Objetos de sistema
Palabras
de
sistema
Función Descripción Control
%SW154 Tiempo de
ejecución del
evento
Indica el último tiempo de ejecución en ms de la tarea de evento asociada con el Umbral
1 de HSC0 oHSC2.S
%SW155 Tiempo de
ejecución del
evento
Indica el último tiempo de ejecución en ms de la tarea de evento asociada con el Umbral
0 de HSC1 oHSC3.S
%SW156 Tiempo de
ejecución del
evento
Indica el último tiempo de ejecución en ms de la tarea de evento asociada con el Umbral
1 de HSC1 oHSC3.S
%SW157 Tiempo de
ejecución periódica Indica el último tiempo de ejecución de la tarea periódica en ms. S
%SW158 Tiempo medio
periódico Indica el tiempo medio de ejecución en ms de la tarea periódica (últimas 5 veces). S
%SW159 Tiempo medio del
evento 0 Indica el tiempo medio de ejecución en ms de la tarea de evento asociada con la entrada
%I0.2 (últimas 5 veces). S
%SW160 Tiempo medio del
evento 1 Indica el tiempo medio de ejecución en ms de la tarea de evento asociada con la entrada
%I0.3 (últimas 5 veces). S
%SW161 Tiempo medio del
evento 2 Indica el tiempo medio de ejecución en ms de la tarea de evento asociada con la entrada
%I0.4 (últimas 5 veces). S
%SW162 Tiempo medio del
evento 3 Indica el tiempo medio de ejecución en ms de la tarea de evento asociada con la entrada
%I0.5 (últimas 5 veces). S
%SW163 Tiempo medio del
evento 4 Indica el tiempo medio de ejecución en ms de la tarea de evento asociada con el Umbral
0 de HSC0 oHSC2 (últimas 5 veces). S
%SW164 Tiempo medio del
evento 5 Indica el tiempo medio de ejecución en ms de la tarea de evento asociada con el Umbral
1 de HSC0 oHSC2 (últimas 5 veces). S
%SW165 Tiempo medio del
evento 6 Indica el tiempo medio de ejecución en ms de la tarea de evento asociada con el Umbral
0 de HSC1 oHSC3 (últimas 5 veces). S
%SW166 Tiempo medio del
evento 7 Indica el tiempo medio de ejecución en ms de la tarea de evento asociada con el Umbral
1 de HSC1 oHSC3 (últimas 5 veces). S
%SW167 Estado del
comando de
inicialización del
módem
%SW167 indica el estado del comando de inicialización enviado al módem:
• Si después de 10 intentos el módem no responde al comando de inicialización, su
valor es FFFF; el módem no responde.
• Si después de 10 intentos el módem responde OK, el valor es 0; el módem está
presente y ha aceptado el comando de inicialización.
• Si después de 10 intentos el módem envía algo distinto, el valor es 4; respuesta
incorrecta del módem o el módem rechaza el comando de inicialización.
NOTA: %S105 se puede utilizar para reenviar el comando de inicialización del
módem.
S
%SW168 Modbus TCP –
Conexiones en uso Indica el número de conexiones de servidor para el Ethernet Modbus TCP en uso.
NOTA: Si desconecta el cable, la conexión no se cierra de forma inmediata. Cada
vez que el cable se vuelva a conectar a la red, se solicita una nueva conexión y
aumenta el número de conexiones en uso que indica %SW168.
S
%SW170 Tramas
transmitidas –
Línea serie 1
Indica la cuenta de tramas transmitidas por la línea serie 1. S
%SW171 Tramas
transmitidas –
Línea serie 2
Indica la cuenta de tramas transmitidas por la línea serie 2. S
%SW172 Tramas
transmitidas – USB Indica la cuenta de tramas transmitidas por el canal USB. S
%SW173 Tramas
transmitidas –
Modbus TCP
Indica la cuenta de tramas transmitidas por el Modbus TCP en Ethernet. S
%SW174 Tramas recibidas
correctamente –
Línea serie 1
Indica la cuenta de tramas recibidas correctamente por la línea serie 1. S
%SW175 Tramas recibidas
correctamente –
Línea serie 2
Indica la cuenta de tramas recibidas correctamente por la línea serie 2. S
EIO0000003300.02 205

Objetos de sistema
Palabras
de
sistema
Función Descripción Control
%SW176 Tramas recibidas
correctamente –
USB
Indica la cuenta de tramas recibidas correctamente por el canal USB. S
%SW177 Tramas recibidas
correctamente –
Modbus TCP
Indica la cuenta de tramas recibidas correctamente por el Modbus TCP en Ethernet. S
%SW178 Tramas recibidas
con error – Línea
serie 1
Indica la cuenta de tramas recibidas con algún error detectado por la línea serie 1. S
%SW179 Tramas recibidas
con error – Línea
serie 2
Indica la cuenta de tramas recibidas con algún error detectado por la línea serie 2. S
%SW180 Tramas recibidas
con error – USB Indica la cuenta de tramas recibidas con algún error detectado por el canal USB. S
%SW181 Tramas recibidas
con error – Modbus
TCP
Indica la cuenta de tramas recibidas con algún error detectado por el Modbus TCP en
Ethernet. S
%SW182 Estado de conexión
de la Visualización
gráfica remota
Indica el estado de conexión de la Visualización gráfica remota:
• 0: Pantalla no conectada
• 1: Aplicación de la pantalla no disponible
• 2: Transferencia de la aplicación de la pantalla
• 3: Aplicación de la pantalla en ejecución
• 4: Se requiere la actualización del firmware de la pantalla
• 5: Transferencia del firmware de la pantalla en curso
S
%SW183 Último error
detectado de la
Visualización
gráfica remota
Indica el último error detectado en la Visualización gráfica remota:
• 0: Ningún error detectado
• 1: Transferencia de la aplicación de la pantalla incorrecta
• 2: Versión incompatible de la pantalla
S
%SW184 Índice de página de
la Visualización
gráfica remota
Indica el índice de la página visualizada en la Visualización gráfica remota.
Cuando se escribe, especifica el índice de la página que se va a visualizar en la
Visualización gráfica remota, si existe. De lo contrario, se ignora el valor.
EcoStruxure Machine Expert - Basic genera un índice de página cuando el usuario crea
una nueva página Interfaz del operador.
Las siguientes páginas tienen valores de índice de página fijos:
• 112: Menú de configuración
• 113: Información del controlador
• 114: Configuración del controlador
• 117: Configuración de la pantalla
• 120: Estado del controlador
• 121: Estado del controlador
• 128: Visualización de alarmas
S, U
%SW185 Versión de firmware
de TMH2GDB xx.yy Versión de firmware de la pantalla de gráfico remoto TMH2GDB.
Por ejemplo, %SW185 = 0104 hex significa que la versión de firmware es V1.4.
S
%SW188 Tramas
transmitidas - Tabla
de asignaciones
Modbus
Número total de tramas transmitidas mediante la tabla de asignaciones Modbus. S
%SW189 Tramas recibidas -
Tabla de
asignaciones
Modbus
Número total de tramas recibidas sin error mediante la tabla de asignaciones Modbus. S
%SW190,
%SW191
Paquetes salientes
enviados de clase 1 Número total de paquetes salientes enviados para las conexiones implícitas (clase 1). S
%SW192,
%SW193
Paquetes entrantes
recibidos de clase 1 Número total de paquetes entrantes recibidos para las conexiones implícitas (clase 1). S
%SW194,
%SW195
Paquetes entrantes
recibidos no
conectados
Número total de paquetes entrantes no conectados, incluidos los paquetes que se
devuelven si se detecta un error. S
206 EIO0000003300.02

Objetos de sistema
Palabras
de
sistema
Función Descripción Control
%SW196,
%SW197
Paquetes entrantes
no conectados no
válidos
Número total de paquetes entrantes no conectados que tienen un formato no válido o
que se han dirigido a un servicio, clase, instancia, atributo o miembro no admitido. S
%SW198,
%SW199
Paquetes entrantes
recibidos para
conexiones
explícitas (clase 3)
Número total de paquetes entrantes para las conexiones explícitas (clase 3), incluidos
los paquetes que se devuelven si se detecta un error. S
%SW200,
%SW201
Paquetes entrantes
de clase 3 no
válidos
Número total de paquetes explícitos (clase 3) que tienen un formato no válido o que se
han dirigido a un servicio, clase, instancia, atributo o miembro no admitido. S
%SW202 Entrada de
instancia Entrada de instancia configurada en EcoStruxure Machine Expert - Basic. Valor
predeterminado: 0 S
%SW203 Tamaño de entrada Tamaño de entrada configurado en EcoStruxure Machine Expert - Basic. Valor
predeterminado: 0 S
%SW204 Salida de instancia Salida de instancia configurada en EcoStruxure Machine Expert - Basic. Valor
predeterminado: 0 S
%SW205 Tamaño de salida Tamaño de salida configurado en EcoStruxure Machine Expert - Basic. Valor
predeterminado: 0 S
%SW206 Timeout Número total de veces que se agota el timeout de conexión en las conexiones. Valor
predeterminado: 0 S, U
%SW207 Estado de la
conexión Ethernet/
IP de clase 1
Indica el estado de la conexión EtherNet/IP de clase 1:
• 0: Al menos una conexión está inactiva.
• 1: Las conexiones abiertas están en ejecución.
• 2: Al menos hay una conexión sin indicación o comunicación.
NOTA: El estado 2 reemplaza el estado 0.
NOTA: Para poder admitir esta palabra, la aplicación debe configurarse con un nivel
funcional (consulte EcoStruxure Machine Expert - Basic, Guía de funcionamiento)
de al menos Nivel 3.2.
S
%SW210 Estado de
IOScanner SL1 Contiene el estado del Modbus Serial IOScanner en la línea serie 1:
• 0: IOScanner está detenido
• 1: IOScanner envía una petición de inicialización al dispositivo
• 2: IOScanner está operativo
• 3: IOScanner está parcialmente operativo (algunos dispositivos no se exploran)
• 4: IOScanner está suspendido
S
%SW211 Estado de
IOScanner SL2 Contiene el estado del Modbus Serial IOScanner en la línea serie 2:
• 0: IOScanner está detenido
• 1: IOScanner envía una petición de inicialización
• 2: IOScanner está operativo
• 3: IOScanner está parcialmente operativo (algunos dispositivos no se exploran)
• 4: IOScanner está suspendido
S
%SW212 Estado del Modbus
TCP IOScanner Contiene el estado del Modbus TCP IOScanner en Ethernet:
• 0: IOScanner está detenido
• 1: IOScanner envía una petición de inicialización al dispositivo
• 2: IOScanner está operativo
• 3: IOScanner está parcialmente operativo (algunos dispositivos no se exploran)
• 4: IOScanner está suspendido
NOTA: Para poder admitir esta palabra de sistema, la aplicación debe configurarse
con un nivel funcional (consulte EcoStruxure Machine Expert - Basic, Guía de
funcionamiento) de al menos Nivel 6.0.
S
SControlado por el sistema
UControlado por el usuario
SIM Aplicado en el simulador
EIO0000003300.02 207

Objetos de sistema
ID de código del M221 Logic Controller
En esta tabla se muestran los ID de código de las referencias del M221 Logic
Controller:
Referencia ID de código
TM221M16R• 0x0780
TM221ME16R• 0x0781
TM221M16T• 0x0782
TM221ME16T• 0x0783
TM221M32TK 0x0784
TM221ME32TK 0x0785
TM221C16R 0x0786
TM221CE16R 0x0787
TM221C16U 0x0796
TM221CE16U 0x0797
TM221C16T 0x0788
TM221CE16T 0x0789
TM221C24R 0x078A
TM221CE24R 0x078B
TM221C24T 0x078C
TM221CE24T 078x0D
TM221C24U 0x0798
TM221CE24U 0x0799
TM221C40R 078x0E
TM221CE40R 0x078F
TM221C40T 0x0790
TM221CE40T 0x0791
TM221C40U 0x079A
TM221CE40U 0x079B
Estado del canal de entrada (%IWS)
Introducción
A continuación se proporciona información sobre las propiedades de las palabras
de estado de canal de entrada. Existe una palabra de estado de canal de entrada
dedicada por cada canal de entrada analógica añadido utilizando un módulo de
extensión de E/S o Cartucho TMC2.
208 EIO0000003300.02

Objetos de sistema
Visualización de las propiedades de las palabras de estado de canal de
entrada
Siga estos pasos para visualizar las propiedades de las palabras de estado de
canal de entrada:
Paso Acción
1 Seleccione la ficha Herramientas en el área de la izquierda de la ventana
Programación.
2Haga clic en Objetos de sistema >Palabra de estado de entrada.
Resultado: Se muestran las propiedades de la palabra de estado del canal de
entrada.
Propiedades de palabra de estado de canal de entrada
En esta tabla se describe cada propiedad de la palabra de estado de canal de
entrada:
Parámetro Editable Valor Valor
predeter-
minado
Descripción
Utilizado No TRUE/FALSE FALSE Indica si se hace referencia a la
palabra de estado de canal de
entrada en un programa.
Dirección No %IWSx.y o %
IWS0.x0y
–La dirección de la palabra de estado
de canal de entrada.
Módulos de extensión de E/S:
• x es el número de módulo
• y es el número de canal
Para cartuchos analógicos:
• x es el número de cartucho
• y es el número de canal
Por ejemplo, %IWS0.101 es la
dirección del segundo canal del
cartucho del primer slot del logic
controller.
Símbolo Sí – – El símbolo asociado a la palabra de
estado de canal de entrada.
Haga doble clic en la columna
Símbolo y escriba el nombre del
símbolo para asociarlo a la palabra
de estado de canal de entrada.
Si el símbolo ya existe, haga clic con
el botón derecho del ratón en la
columna Símbolo y elija Buscar y
reemplazar para buscar y
reemplazar las apariciones del
símbolo a lo largo del programa o en
los comentarios del programa.
Comenta-
rio Sí – – Un comentario asociado a la palabra
de estado de canal de entrada.
Haga doble clic en la columna
Comentario y escriba un comentario
opcional para asociarlo a la palabra
de estado de canal de entrada.
EIO0000003300.02 209

Objetos de sistema
Para obtener más información
Para ver los posibles valores de la palabra de estado de canal de entrada:
Para obtener más
información acerca de: consulte...
Módulos de extensión
TM3 Diagnóstico de módulos de E/S analógicas TM3 (consulte Modicon
TM3 [EcoStruxure Machine Expert - Basic], Configuración de los
módulos de extensión, Guía de programación)
Módulos de extensión
TM2 Diagnóstico de módulos de E/S analógicas TM2 (consulte Modicon
TM2 [SoMachine Basic], Configuración de los módulos de extensión,
Guía de programación)
Cartuchos TMC2 Diagnóstico de cartuchos analógicos TMC2 (consulte Modicon TMC2,
Cartuchos, Guía de programación)
Estado del canal de salida (%QWS)
Introducción
A continuación se proporciona información sobre las propiedades de las palabras
de estado de salida. Existe una palabra de estado de canal de salida dedicada
por cada canal de salida analógica añadido utilizando un módulo de extensión de
E/S o Cartucho TMC2.
Visualización de las propiedades de las palabras de estado de canal de
salida
Siga estos pasos para visualizar las propiedades de las palabras de estado de
canal de salida:
Paso Acción
1 Seleccione la ficha Herramientas en el área de la izquierda de la ventana
Programación.
2Haga clic en Objetos de sistema >Palabra de estado de salida.
Resultado: Las propiedades de la palabra de estado de canal de salida se
muestran en la ventana de propiedades.
210 EIO0000003300.02

Objetos de sistema
Propiedades de palabra de estado de canal de salida
En esta tabla se describe cada propiedad de la palabra de estado de canal de
salida:
Parámetro Editable Valor Valor
predeter-
minado
Descripción
Utilizado No TRUE/FALSE FALSE Indica si se hace referencia a la
palabra de estado de canal de salida
en un programa.
Dirección No %QWSx.y o
%QWS0.x0y
–La dirección de la palabra de estado
de canal de salida.
Módulos de extensión de E/S:
• x es el número de módulo
• y es el número de canal
Para cartuchos:
• x es el número de cartucho
• y es el número de canal
Por ejemplo, %QWS3.0 es la
dirección del primer canal de salida
del tercer módulo de extensión de E/
S conectado al logic controller.
Símbolo Sí – – El símbolo asociado a la palabra de
estado de canal de salida.
Haga doble clic en la columna
Símbolo y escriba el nombre del
símbolo para asociarlo a la palabra
de estado de canal de salida.
Si el símbolo ya existe, haga clic con
el botón derecho del ratón en la
columna Símbolo y elija Buscar y
reemplazar para buscar y
reemplazar las apariciones del
símbolo a lo largo del programa o en
los comentarios del programa.
Comenta-
rio Sí – – Un comentario asociado a la palabra
de estado de canal de salida.
Haga doble clic en la columna
Comentario y escriba un comentario
opcional para asociarlo a la palabra
de estado de canal de salida.
Para obtener más información
Para ver los posibles valores de la palabra de estado de canal de salida:
Para obtener más
información acerca de: consulte...
Módulos de extensión
TM3 Diagnóstico de módulos de E/S analógicas TM3 (consulte Modicon
TM3 [EcoStruxure Machine Expert - Basic], Configuración de los
módulos de extensión, Guía de programación)
Módulos de extensión
TM2 Diagnóstico de módulos de E/S analógicas TM2 (consulte Modicon
TM2 [SoMachine Basic], Configuración de los módulos de extensión,
Guía de programación)
Cartuchos TMC2 Diagnóstico de cartuchos analógicos TMC2 (consulte Modicon TMC2,
Cartuchos, Guía de programación)
EIO0000003300.02 211


Glosario
B
BOOTP:
(protocolo bootstrap) Un protocolo de red UDP que puede utilizar un cliente de
red para obtener de forma automática una dirección IP (y tal vez otros datos) de
un servidor. El cliente se identifica ante el servidor utilizando la dirección MAC del
cliente. El servidor, que mantiene una tabla preconfigurada de direcciones MAC
de los dispositivos cliente y las direcciones IP asociadas, envía al cliente su
dirección IP predefinida. BOOTP se utilizaba originariamente como un método
que permitía iniciar los hosts sin disco de forma remota por una red. El proceso
BOOTP asigna un arrendamiento infinito de una dirección IP. El servicio BOOTP
utiliza los puertos UDP 67 y 68.
C
CFC:
(diagrama de función continua) Un lenguaje de programación (una ampliación del
estándar IEC 61131-3) basado en el lenguaje de diagrama de bloque de
funciones (FBD) y que funciona como un diagrama de flujo. Sin embargo, no se
utiliza ninguna red y es posible un posicionamiento libre de elementos gráficos, lo
que permite bucles de realimentación. En cada bloque, las entradas se sitúan a
la izquierda y las salidas, a la derecha. Las salidas del bloque se pueden
conectar a las entradas de otros bloques para formar expresiones complejas.
configuración de Post:
(configuración de Post) Una opción que permite modificar algunos parámetros de
la aplicación sin cambiarla. Los parámetros de configuración de Post se definen
en un archivo que se almacena en el controlador. Sobrecargan los parámetros de
configuración de la aplicación.
configuración:
Organización e interconexión de los componentes de hardware en un sistema y
los parámetros del hardware y software que determina las características
operativas del sistema.
D
DHCP:
(protocolo de configuración dinámica del host) Una ampliación avanzada de
BOOTP. DHCP es más avanzado, pero tanto DHCP como BOOTP son
habituales. (DHCP puede manejar las solicitudes de clientes BOOTP).
E
EDS:
(hoja de datos electrónica) Un archivo para la descripción del dispositivo de bus
de campo que contiene, por ejemplo, las propiedades de un dispositivo, como los
parámetros y los ajustes.
ejecución periódica:
La tarea maestra se ejecuta de forma cíclica o periódica. En la modalidad
periódica, el usuario determina un tiempo específico (periodo) en el que se
ejecutará la tarea. Si se ejecuta dentro de este tiempo, se genera un tiempo de
espera antes del ciclo siguiente. Si se ejecuta cuando ya ha terminado este
tiempo, un sistema de control indica que se ha sobrepasado el límite de tiempo.
Si este rebasamiento es demasiado elevado, el controlador se detendrá.
EIO0000003300.02 213

entrada analógica:
Convierte los niveles de tensión o corriente recibidos en valores numéricos.
Puede almacenar y procesar estos valores en el controlador lógico.
E/S digitales:
(entrada/salida digital) Una conexión de circuito individual con el módulo que
corresponde directamente a un bit de la tabla de datos. El bit de la tabla de datos
contiene el valor de la señal en el circuito de E/S. Proporciona el acceso digital
lógico de control a los valores de E/S.
EtherNet/IP Adapter:
Un EtherNet/IP Adapter, a veces también llamado servidor, es un dispositivo final
en una red EtherNet/IP. Los bloques de E/S y los accionamientos pueden ser
dispositivos EtherNet/IP Adapter.
EtherNet/IP:
(protocolo industrial de Ethernet) Un protocolo de comunicaciones abiertas para
fabricar soluciones de automatización en sistemas industriales. EtherNet/IP se
incluye en una familia de redes que implementan el protocolo industrial común en
sus capas superiores. La organización de apoyo (ODVA) especifica EtherNet/IP
para cumplir la adaptabilidad y la independencia de los medios.
F
FBD:
(diagrama de bloques de funciones) Uno de los cinco lenguajes para lógica o
control que cumplen con el estándar IEC 61131-3 para sistemas de control. El
diagrama de bloques de funciones es un lenguaje de programación orientado
gráficamente. Funciona con una lista de redes en la que cada red contiene una
estructura gráfica de cuadros y líneas de conexión que representa una expresión
lógica o aritmética, la llamada de un bloque de funciones, un salto o una
instrucción de retorno.
FreqGen:
(generador de frecuencias) Función que genera una señal de onda cuadrada con
frecuencia programable.
G
GRAFCET:
El funcionamiento de una operación secuencial de forma gráfica y estructurada.
Método analítico que divide cualquier sistema de control secuencial en una serie
de pasos a los que se asocian acciones, transiciones y condiciones.
H
HMI:
(interfaz hombre-máquina) Una interfaz de operador (generalmente gráfica) para
el control de equipos industriales por parte de personas.
HSC:
(contador de alta velocidad) Una función que cuenta pulsos en el controlador o
en entradas del módulo de expansión.
214 EIO0000003300.02

I
IEC 61131-3:
Tercera parte de un estándar de tres partes de la IEC para los equipos de
automatización industriales. IEC 61131-3 se ocupa de los lenguajes de
programación del controlador y define dos estándares de lenguajes de
programación gráficos y dos textuales. Los lenguajes de programación gráficos
son un diagrama de contactos y un diagrama de bloque de funciones. Los
lenguajes de programación textuales incluyen texto estructurado y lista de
instrucciones.
IL:
(lista de instrucciones) Un programa escrito en lenguaje que se compone de una
serie de instrucciones basadas en texto y ejecutadas secuencialmente por el
controlador. Cada instrucción incluye un número de línea, un código de
instrucción y un operando (consulte IEC 61131-3).
Input Assembly:
Los ensamblados son bloques de datos intercambiados entre los dispositivos de
red y el Logic Controller. Habitualmente, un Input Assembly contiene información
de estado de un dispositivo de red que el controlador se encarga de leer.
L
LAN:
(red de área local) Una red de comunicaciones de corta distancia que se
implementa en un hogar, una oficina o un entorno institucional.
LD:
(diagrama de contactos) Una representación gráfica de instrucciones de un
programa de controlador con símbolos para contactos, bobinas y bloques en una
serie de escalones ejecutados de forma secuencial por un controlador (consulte
IEC 61131-3).
lenguaje de diagrama de contactos:
Una representación gráfica de instrucciones de un programa de controlador con
símbolos para contactos, bobinas y bloques en una serie de escalones
ejecutados de forma secuencial por un controlador (consulte IEC 61131-3).
lenguaje de gráfica de función continua:
Un lenguaje de programación gráfico (una ampliación del estándar IEC61131-3)
basado en el lenguaje de diagrama del bloque de funciones y que funciona como
un diagrama de flujo. Sin embargo, no se utiliza ninguna red y es posible un
posicionamiento libre de elementos gráficos, lo que permite bucles de
realimentación. En cada bloque, las entradas se sitúan a la izquierda y las
salidas, a la derecha. Las salidas del bloque se pueden conectar a las entradas
de otros bloques para formar expresiones complejas.
lenguaje de la lista de instrucciones:
Un programa escrito en el lenguaje de la lista de instrucciones que se compone
de una serie de instrucciones basadas en texto y ejecutadas secuencialmente
por el controlador. Cada instrucción incluye un número de línea, un código de
instrucción y un operando (consulte IEC 61131-3).
LSB:
(bit/byte menos significativo) La parte de un número, una dirección o un campo
que se escribe como el valor individual situado más a la derecha en notación
convencional hexadecimal o binaria.
EIO0000003300.02 215

M
Modbus:
El protocolo de comunicaciones que permite las comunicaciones entre muchos
dispositivos conectados a la misma red.
MSB:
(bit/byte más significativo) La parte de un número, una dirección o un campo que
se escribe como el valor individual situado más a la izquierda en notación
convencional hexadecimal o binaria.
N
N/C:
(normalmente cerrado) Un par de contacto que se cierra cuando el actuador se
queda sin energía (cuando no se le aplica alimentación) y abierto cuando el
actuador tiene energía (cuando se le aplica alimentación).
N/O:
(normalmente abierto) Un par de contacto que se abre cuando el actuador se
queda sin energía (cuando no se le aplica alimentación) y se cierra cuando el
actuador tiene energía (cuando se le aplica alimentación).
O
Output Assembly:
Los ensamblados son bloques de datos intercambiados entre los dispositivos de
red y el Logic Controller. Un Output Assembly generalmente contiene comandos
enviados por el controlador a los dispositivos de red.
P
parámetros de seguridad:
Conjunto de parámetros de configuración que se utiliza para habilitar o
deshabilitar funciones y protocolos específicos relacionados con la
ciberseguridad de una aplicación.
PID:
(proporcional, integral, derivativo) Un mecanismo genérico de retroalimentación
de bucle de control (controlador) ampliamente usado en los sistemas de control
industriales.
protocolo:
Una convención o una definición de norma que controla o habilita la conexión, la
comunicación y la transferencia de datos entre dos sistemas o dispositivos
informáticos.
PTO:
(salidas de tren de pulsos) Una salida rápida que oscila entre apagado y
encendido en un ciclo de servicio fijo 50-50, que produce una forma de onda
cuadrada. La PTO resulta especialmente útil para aplicaciones como motores
paso a paso, conversores de frecuencia, controles de servomotor, etc.
PWM:
(modulación de ancho de pulsos) Una salida rápida que oscila entre el apagado y
el encendido en un ciclo de servicio ajustable, que produce una forma de onda
rectangular (aunque se puede ajustar para que produzca una onda cuadrada).
216 EIO0000003300.02

R
RTC:
(reloj de tiempo real) Un reloj calendario de fecha/hora con respaldo de batería
que funciona de forma continua aunque el controlador no reciba alimentación,
mientras dure la batería.
S
salida analógica:
Convierte los valores numéricos del controlador lógico y envía niveles de tensión
o corriente proporcionales.
SFC:
(diagrama funcional secuencial) Un lenguaje formado por pasos con acciones
asociadas, transiciones con una condición lógica asociada y enlaces dirigidos
entre pasos y transiciones. (La norma SFC está definida en IEC 848. Es
conforme con IEC 61131-3.)
SMS:
(servicio de mensajes cortos) Un servicio de comunicación estándar para
teléfonos (u otros dispositivos) que envían mensajes breves de texto con el
sistema de comunicaciones móviles.
ST:
(texto estructurado) Un lenguaje que incluye instrucciones complejas y anidadas
(por ejemplo, bucles de repetición, ejecuciones condicionales o funciones). ST
cumple con IEC 61131-3.
T
tarea maestra:
Una tarea del procesador que se ejecuta en el software de programación. La
tarea maestra consta de dos secciones:
•IN: las entradas se copian en la sección IN antes de ejecutar la tarea
maestra.
•OUT: las salidas se copian en la sección OUT después de ejecutar la tarea
maestra.
tarea periódica:
La tarea periódica es una tarea periódica de alta prioridad de breve duración que
se ejecuta en un controlador lógico a través de su software de programación. La
breve duración de la tarea periódica impide que interfiera con la ejecución de
tareas más lentas de prioridad más baja. Una tarea periódica es útil cuando es
necesario monitorizar cambios periódicos rápidos de entradas digitales.
EIO0000003300.02 217

Índice
A
actualizaciones de firmware ...................................42
actualizar firmware ........................................ 65, 153
adaptador
EtherNet/IP ..................................................... 117
archivo EDS, Modbus TCP .................................. 118
Arranque en caliente .............................................45
Arranque en frío ....................................................45
asignación de E/S .................................................73
asistente de canales
IOScanner serie Modbus .................................. 142
Modbus TCP IOScanner................................... 112
asistente para peticiones de inicialización
IOScanner serie Modbus .................................. 140
Modbus TCP IOScanner................................... 110
B
bits de sistema
%S106..............................................................92
%S107..............................................................93
%S93................................................................46
%S94.......................................................... 46–47
bus de E/S
configuración.....................................................91
bus de extensión de E/S
reinicio ..............................................................93
C
%C.......................................................................29
canales
IOScanner serie Modbus .................................. 143
Modbus TCP IOScanner................................... 114
cargar aplicaciones ...............................................42
cartuchos
configuración.....................................................98
TMC2................................................................99
ciberseguridad ....................................................102
códigos de diagnóstico de red (%IWNS) ............... 183
comando Init .......................................................132
comportamiento de salida ................................ 47, 49
comunicación integrada
configuración...................................................100
configuración
compilar una configuración .................................55
HSC..................................................................76
introducción a la configuración ............................55
IOScanner serie Modbus .................................. 137
Medidor de frecuencia........................................79
configuración de Post
gestión de archivos ............................................52
Configuración de Post
Presentación .....................................................51
configuración del comportamiento de retorno ..........48
contadores de alta velocidad..................................73
configuración.....................................................74
introducción.......................................................73
controlador
características de configuración ..........................25
configuración............................................... 55, 64
controlador de arranque.........................................43
controlador en modalidad RUN...............................44
controlador en modalidad STOP.............................44
copia de seguridad de memoria de controlador...... 164
D
descarga de aplicaciones.......................................43
descargar aplicaciones ..........................................42
dispositivo esclavo genérico.................................138
dispositivos
añadir a IOScanner serie Modbus ..................... 138
dispositivos admitidos............................................98
dispositivos Altivar
añadir a IOScanner serie Modbus ..................... 138
dispositivos remotos
añadir a Modbus TCP.......................................109
%DR ....................................................................29
E
ejecución de retorno ..............................................48
entrada/salida incrustada
configuración.....................................................66
entradas analógicas ..............................................71
configuración.....................................................72
introducción.......................................................71
propiedades ....................................................169
entradas digitales ..................................................66
configuración.....................................................67
de IOScanner, propiedades ..............................177
introducción.......................................................66
propiedades ....................................................167
estado de canal de entrada (%IWS)......................208
estado de canal de salida (%QWS)....................... 210
estado del controlador ..................................... 39–40
BOOTING .........................................................41
EMPTY .............................................................41
HALTED............................................................42
POWERLESS....................................................42
RUNNING .........................................................42
STOPPED.........................................................41
estado HALTED ....................................................44
Ethernet
bits de diagnóstico de dispositivo y canal ...........183
ciberseguridad.................................................102
configuración...................................................102
introducción.....................................................100
EtherNet/IP
adaptador........................................................ 117
configuración................................................... 117
executive loader....................................................65
F
%FC.....................................................................29
firmware ...............................................................65
actualizar con executive loader ...........................65
actualizar con tarjeta SD................................... 153
forzado de salida...................................................49
%FREQGEN.........................................................29
funciones
funciones principales.................................... 16, 21
G
generador de frecuencias
configuración.....................................................90
generadores de pulsos ..........................................81
configuración.....................................................81
218 EIO0000003300.02

configuración de FREQGEN ...............................90
configuración de PLS .........................................83
configuración de PTO.........................................87
configuración de PWM .......................................85
introducción.......................................................81
gestión de errores bus de E/S
activa.......................................................... 91–92
gestión de errores de bus de E/S activa ..................91
gestión de errores de bus de E/S pasiva .................92
gestión de retorno .................................................48
H
%HSC..................................................................29
configuración.....................................................76
I
%I ................................................................ 29, 167
ID de unidad .......................................................107
%IN....................................................................177
Información general sobre la configuración de E/S
prácticas generales............................................91
inicializar controlador.............................................43
Input assembly
propiedades ....................................................172
IOScanner serie Modbus
añadir dispositivos en.......................................138
asistente de canales ........................................ 142
asistente para peticiones de inicialización..........140
bits de diagnóstico de dispositivo y canal ...........183
configurar........................................................137
configurar canales............................................ 143
IOScanner, serie Modbus.....................................137
%IW............................................................. 29, 169
%IWE........................................................... 29, 173
%IWM .......................................................... 29, 176
%IWM/%QWM....................................................107
%IWN.................................................................179
%IWNS (códigos de diagnóstico de red de
IOScanner) .......................................................183
%IWS (estado de canal de entrada)......................208
K
%KD ....................................................................29
%KF.....................................................................29
%KW....................................................................29
L
lenguajes de programación
IL, LD................................................................21
IL, LD, Grafcet ...................................................16
línea serie....................................................131, 137
configuración...................................................132
configurar IOScanner serie Modbus .................. 137
configurar para utilizar %SEND_RECV_SMS..... 132
introducción.....................................................131
M
%M ......................................................................29
Machine.cfg (archivo de configuración de Post) .......52
%MD....................................................................29
Medidor de frecuencia
configuración.....................................................79
%MF ....................................................................29
modalidad de retorno mantener valores .........172, 174
Modbus TCP
archivo EDS .................................................... 118
configurar asignación de Modbus...................... 106
configurar modalidad de cliente.........................108
dispositivos remotos.........................................109
tabla de asignaciones................................147, 174
Modbus TCP IOScanner
asistente de canales ........................................ 112
asistente para peticiones de inicialización .......... 110
bits de diagnóstico de dispositivo y canal ...........183
configurar asignación de Modbus...................... 106
configurar canales............................................ 114
configurar modalidad de cliente.........................108
módulos de ampliación
configuración.....................................................98
TM2 ..................................................................99
TM3 ..................................................................99
módulos de extensión TM3
actualizar firmware...........................................153
%MSG .................................................................29
%MW ...................................................................29
O
objetos
definición...........................................................25
direccionamiento................................................29
ejemplos de direccionamiento.............................29
introducción.......................................................26
número máximo permitido ..................................32
red..................................................................172
tipos de objeto ...................................................26
objetos de E/S
entradas analógicas.........................................169
Salidas analógicas ...........................................170
salidas digitales ...............................................168
Objetos de E/S
entradas digitales............................................. 167
objetos de memoria
realizar copia de seguridad y restaurar .............. 164
objetos de red ..............................................107, 172
%IN ................................................................177
Input assembly (EtherNet/IP) ............................172
Output assembly (EtherNet/IP) .........................173
%QN...............................................................178
Registros de entrada (IOScanner) ..................... 179
Registros de entrada (Modbus TCP).................. 174
Registros de salida (IOScanner)........................181
Registros de salida (Modbus TCP) ....................176
Output assembly (EtherNet/IP)
propiedades ....................................................173
P
palabras de sistema
%SW118 ...........................................................61
%SW119 ...........................................................61
%SW120...........................................................61
%SW148..................................................... 46–47
%PARAM .............................................................29
%PLS...................................................................29
Post Conf
Presentación .....................................................51
%PWM.................................................................29
EIO0000003300.02 219

Q
%Q .............................................................. 29, 168
%QN ..................................................................178
%QW ........................................................... 29, 170
%QWE ......................................................... 29, 172
%QWM......................................................... 29, 174
%QWN...............................................................181
%QWS (estado de canal de salida).......................210
R
%R.......................................................................29
registros de entrada
propiedades ....................................................174
Registros de entrada (IOScanner)
propiedades ....................................................179
registros de salida
propiedades ....................................................176
Registros de salida (IOScanner)
propiedades ....................................................181
reinicio del bus de extensión de E/S........................93
restablecer salidas ................................................50
restablecimiento de salidas ....................................50
restaurar memoria del controlador ........................164
retorno
valores, configuración ........................................70
Run/Stop ..............................................................69
configurar entrada digital como ...........................69
S
%S.......................................................................29
%S (bits de sistema)............................................184
%S93 ...................................................................46
%S94 ............................................................. 46–47
salidas analógicas
propiedades ....................................................170
salidas digitales.....................................................70
configuración.....................................................70
configuración de valores de retorno para .............70
de IOScanner, propiedades ..............................178
introducción.......................................................70
parámetros de configuración...............................70
propiedades ....................................................168
%SBR ..................................................................29
%SC ....................................................................29
servicios Ethernet................................................101
%SW....................................................................29
%SW (palabras de sistema) ................................. 192
%SW118 ..............................................................61
%SW119 ..............................................................61
%SW120 ..............................................................61
%SW148 ........................................................ 46–47
%SW6............................................................ 40, 42
T
tabla de asignaciones de Modbus..................106–107
tabla de asignaciones, Modbus TCP..... 107, 147, 174,
176
tarjeta SD ...........................................................153
actualizar firmware...........................................153
clonar..............................................................152
gestión de configuración de Post.......................158
gestión de la aplicación ....................................157
%TM ....................................................................29
V
valores de inicialización .........................................47
valores de inicialización del hardware .....................47
valores de inicialización del software ......................48
valores de retorno .................................. 49, 172, 174
%VAR ..................................................................29
variables persistentes............................................45
220 EIO0000003300.02


Schneider Electric
35 rue Joseph Monier
92500 Rueil Malmaison
France
+ 33 (0) 1 41 29 70 00
www.se.com
Debido a que las normas, especificaciones y diseños cambian
periódicamente, solicite la confirmación de la información dada en esta
publicación.
© 2022 Schneider Electric. Reservados todos los derechos.
EIO0000003300.02

Modicon M221
Logic Controller
Guía de la biblioteca de
funciones avanzadas
EIO0000003308.02
11/2022
www.se.com

Información legal
La marca Schneider Electric y cualquier otra marca comercial de Schneider Electric
SE y sus filiales mencionadas en esta guía son propiedad de Schneider Electric SE o
sus filiales. Todas las otras marcas pueden ser marcas comerciales de sus
respectivos propietarios. Esta guía y su contenido están protegidos por las leyes de
copyright aplicables, y se proporcionan exclusivamente a título informativo. Ninguna
parte de este manual puede ser reproducida o transmitida de cualquier forma o por
cualquier medio (electrónico, mecánico, fotocopia, grabación u otro), para ningún
propósito, sin el permiso previo por escrito de Schneider Electric.
Schneider Electric no concede ningún derecho o licencia para el uso comercial de la
guía o su contenido, excepto por una licencia no exclusiva y personal para
consultarla "tal cual".
La instalación, utilización, mantenimiento y reparación de los productos y equipos de
Schneider Electric la debe realizar solo personal cualificado.
Debido a la evolución de las normativas, especificaciones y diseños con el tiempo, la
información contenida en esta guía puede estar sujeta a cambios sin previo aviso.
En la medida permitida por la ley aplicable, Schneider Electric y sus filiales no
asumen ninguna responsabilidad u obligación por cualquier error u omisión en el
contenido informativo de este material o por las consecuencias derivadas o
resultantes del uso de la información contenida en el presente documento.
Como parte de un grupo de empresas responsables e inclusivas, estamos
actualizando nuestras comunicaciones que contienen terminología no inclusiva. Sin
embargo, hasta que completemos este proceso, es posible que nuestro contenido
todavía contenga términos estandarizados del sector que pueden ser considerados
inapropiados para nuestros clientes.
© 2022 - Schneider Electric. Todos los derechos reservados.

Tabla de contenido
Información de seguridad............................................................................7
Antes de empezar.................................................................................7
Iniciar y probar......................................................................................8
Funcionamiento y ajustes......................................................................9
Acerca de este libro ..................................................................................10
Introducción a las funciones avanzadas ...............................................15
Introducción .............................................................................................16
E/S experta ........................................................................................17
Asignación de E/S experta incorporada ................................................19
Información general sobre la gestión de bloques de funciones ...............21
Funciones avanzadas de entradas expertas........................................22
Contador rápido (%FC).............................................................................23
Descripción ........................................................................................23
Configuración .....................................................................................24
Ejemplo de programación....................................................................26
Contador de alta velocidad (%HSC)...........................................................28
Descripción ........................................................................................28
Contador de alta velocidad en modalidades de conteo...........................32
Contador de alta velocidad en modalidad de medidor de
frecuencias.........................................................................................38
Funciones avanzadas de salidas expertas...........................................40
Pulso (%PLS)...........................................................................................41
Descripción ........................................................................................41
Configuración de los bloques de función...............................................42
Ejemplo de programación....................................................................47
Modulación de ancho de pulsos (%PWM)...................................................48
Descripción ........................................................................................48
Configuración de los bloques de función...............................................49
Ejemplo de programación....................................................................53
Drive (%DRV) ..........................................................................................54
Descripción ........................................................................................54
Estados de la unidad y del controlador lógico ........................................56
Agregar un bloque de funciones de Drive..............................................58
Configuración de los bloques de función...............................................59
MC_Power_ATV: activar/desactivar la etapa de potencia.......................59
MC_Jog_ATV: iniciar la modalidad jog..................................................62
MC_MoveVel_ATV: mover a la velocidad especificada ..........................64
MC_Stop_ATV: detener el movimiento .................................................67
MC_ReadStatus_ATV: leer el estado del dispositivo..............................70
MC_ReadMotionState_ATV: leer el estado de movimiento.....................72
MC_Reset_ATV: confirmar y restablecer errores ...................................74
Códigos de error.................................................................................77
Salida de tren de pulsos (%PTO) ...............................................................80
Descripción ........................................................................................80
Salida de tren de pulsos (PTO).......................................................80
Modalidades de salida de pulsos....................................................82
Rampa de aceleración/deceleración...............................................83
Evento PROBE.............................................................................85
EIO0000003308.02 3

Compensación de holgura .............................................................87
Límites de posicionamiento............................................................88
Configuración .....................................................................................90
Configuración de PTO ...................................................................90
Motion Task Table .........................................................................90
Programación.....................................................................................99
Adición o eliminación de un bloque de funciones .............................99
Bloques de funciones PTO...........................................................100
Modalidades de toma de referencia.................................................... 101
Modalidades de toma de referencia ..............................................101
Ajuste de posición.......................................................................103
Referencia larga..........................................................................103
Referencia corta no invertida........................................................104
Referencia corta invertida ............................................................105
Offset de inicio ............................................................................107
Parámetros de datos.........................................................................107
Códigos de objetos de bloques de funciones................................. 107
Modalidades de funcionamiento......................................................... 112
Diagrama de estado de movimiento.............................................. 112
Modalidad de búfer...................................................................... 113
Bloques de funciones de Movimiento ............................................. 115
Bloque de funciones MC_MotionTask_PTO .................................. 115
Bloque de funciones MC_Power_PTO.......................................... 118
Bloque de funciones MC_MoveVel_PTO ......................................121
Bloque de funciones MC_MoveRel_PTO ......................................124
Bloque de funciones MC_MoveAbs_PTO .....................................127
Bloque de funciones MC_Home_PTO ..........................................131
Bloque de funciones MC_SetPos_PTO.........................................133
Bloque de funciones MC_Stop_PTO ............................................135
Bloque de funciones MC_Halt_PTO .............................................137
Bloques de funciones Administrative................................................139
Bloque de funciones MC_ReadActVel_PTO..................................139
Bloque de funciones MC_ReadActPos_PTO.................................141
Bloque de funciones MC_ReadSts_PTO.......................................142
Bloque de funciones MC_ReadMotionState_PTO..........................144
Bloque de funciones MC_ReadAxisError_PTO..............................145
Bloque de funciones MC_Reset_PTO...........................................147
Bloque de funciones MC_TouchProbe_PTO .................................148
Bloque de funciones MC_AbortTrigger_PTO .................................151
Bloque de funciones MC_ReadPar_PTO ......................................152
Bloque de funciones MC_WritePar_PTO ......................................153
Generador de frecuencias (%FREQGEN) ................................................155
Descripción ......................................................................................155
Configuración ...................................................................................157
Funciones avanzadas de software.......................................................159
Función PID ...........................................................................................160
Modalidades de funcionamiento de PID.............................................. 160
Modalidades de funcionamiento de PID ........................................ 160
Configuración de ajuste automático de PID......................................... 161
Configuración de ajuste automático del PID .................................. 161
Configuración estándar de PID ..........................................................164
4 EIO0000003308.02

Configuración de la dirección de palabra del PID........................... 164
Ajuste del PID mediante el ajuste automático (Auto-Tuning,
AT).............................................................................................167
Modalidad manual.......................................................................171
Determinación del periodo de muestreo (Ts) .................................172
Asistente de PID...............................................................................174
Acceso al Asistente de PID ..........................................................174
Ficha General .............................................................................175
Ficha Entrada .............................................................................177
Ficha PID ...................................................................................178
Ficha AT.....................................................................................180
Ficha Salida................................................................................181
Programación de PID........................................................................183
Descripción ................................................................................183
Programación y configuración ...................................................... 185
Estados del PID y códigos de error detectados.............................. 185
Apéndices ................................................................................................188
Parámetros del PID ................................................................................189
Papel principal e influencia de los parámetros del PID ......................... 189
Método de ajuste de los parámetros del PID .......................................190
Glosario ....................................................................................................193
Índice ........................................................................................................195
EIO0000003308.02 5


Información de seguridad
Información de seguridad
Información importante
Lea atentamente estas instrucciones y observe el equipo para familiarizarse con
el dispositivo antes de instalarlo, utilizarlo, revisarlo o realizar su mantenimiento.
Los mensajes especiales que se ofrecen a continuación pueden aparecer a lo
largo de la documentación o en el equipo para advertir de peligros potenciales, o
para ofrecer información que aclara o simplifica los distintos procedimientos.
Tenga en cuenta
La instalación, manejo, puesta en servicio y mantenimiento de equipos eléctricos
deberán ser realizados sólo por personal cualificado. Schneider Electric no se
hace responsable de ninguna de las consecuencias del uso de este material.
Una persona cualificada es aquella que cuenta con capacidad y conocimientos
relativos a la construcción, el funcionamiento y la instalación de equipos
eléctricos, y que ha sido formada en materia de seguridad para reconocer y evitar
los riesgos que conllevan tales equipos.
Antes de empezar
No utilice este producto en maquinaria sin protección de punto de funcionamiento.
La ausencia de protección de punto de funcionamiento en una máquina puede
provocar lesiones graves al operador de dicha máquina.
La inclusión de este icono en una etiqueta “Peligro” o “Advertencia” indica que existe
un riesgo de descarga eléctrica, que puede provocar lesiones si no se siguen las
instrucciones.
Éste es el icono de alerta de seguridad. Se utiliza para advertir de posibles riesgos
de lesiones. Observe todos los mensajes que siguen a este icono para evitar
posibles lesiones o incluso la muerte.
PELIGRO indica una situación de peligro que, si no se evita, provocará lesiones graves o
incluso la muerte.
!PELIGRO
ADVERTENCIA indica una situación de peligro que, si no se evita, podría provocar lesiones
graves o incluso la muerte.
ADVERTENCIA
!
ATENCIÓN indica una situación peligrosa que, si no se evita, podría provocar lesiones leves
o moderadas.
ATENCIÓN
!
AVISO indica una situación potencialmente peligrosa que, si no se evita, puede provocar
daños en el equipo.
AVISO
EIO0000003308.02 7

Información de seguridad
ADVERTENCIA
EQUIPO SIN PROTECCIÓN
• No utilice este software ni los equipos de automatización relacionados en
equipos que no dispongan de protección de punto de funcionamiento.
• No introduzca las manos u otras partes del cuerpo dentro de la maquinaria
mientras está en funcionamiento.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Este equipo de automatización y el software relacionado se utilizan para controlar
diversos procesos industriales. El tipo o modelo del equipo de automatización
adecuado para cada uso varía en función de factores tales como las funciones de
control necesarias, el grado de protección requerido, los métodos de producción,
la existencia de condiciones poco habituales, las normativas gubernamentales,
etc. En algunos usos, puede ser necesario más de un procesador, como en el
caso de que se requiera redundancia de respaldo.
Solamente el usuario, el fabricante de la máquina o el integrador del sistema
conocen las condiciones y los factores presentes durante la configuración, el
funcionamiento y el mantenimiento de la máquina y, por consiguiente, pueden
decidir el equipo asociado y las medidas de seguridad y los enclavamientos
relacionados que se pueden utilizar de forma adecuada. Al seleccionar los
equipos de automatización y control, así como el software relacionado para un
uso determinado, el usuario deberá consultar los estándares y las normativas
locales y nacionales aplicables. La publicación National Safety Council's Accident
Prevention Manual (que goza de un gran reconocimiento en los Estados Unidos
de América) también proporciona gran cantidad de información de utilidad.
En algunas aplicaciones, como en el caso de la maquinaria de embalaje, debe
proporcionarse protección adicional al operador, como la protección de punto de
funcionamiento. Esta medida es necesaria si existe la posibilidad de que las
manos y otras partes del cuerpo del operador puedan introducirse y quedar
atrapadas en áreas o puntos peligrosos, lo que puede provocar lesiones graves.
Los productos de software por sí solos no pueden proteger al operador frente a
posibles lesiones. Por este motivo, el software no se puede sustituir por la
protección de punto de funcionamiento ni puede realizar la función de esta.
Asegúrese de que las medidas de seguridad y los enclavamientos mecánicos/
eléctricos relacionados con la protección de punto de funcionamiento se hayan
instalado y estén operativos antes de que los equipos entren en funcionamiento.
Todos los enclavamientos y las medidas de seguridad relacionados con la
protección de punto de funcionamiento deben estar coordinados con la
programación del software y los equipos de automatización relacionados.
NOTA: La coordinación de las medidas de seguridad y los enclavamientos
mecánicos/eléctricos para la protección de punto de funcionamiento está
fuera del ámbito de la biblioteca de bloques de funciones, la guía de usuario
del sistema o de otras instalaciones mencionadas en esta documentación.
Iniciar y probar
Antes de utilizar los equipos eléctricos de control y automatización para su
funcionamiento normal tras la instalación, es necesario que personal cualificado
lleve a cabo una prueba de inicio del sistema para verificar que los equipos
funcionan correctamente. Es importante realizar los preparativos para una
comprobación de estas características y disponer de suficiente tiempo para llevar
a cabo las pruebas de forma completa y correcta.
8 EIO0000003308.02

Información de seguridad
ADVERTENCIA
PELIGRO DE FUNCIONAMIENTO DEL EQUIPO
• Compruebe que se hayan seguido todos los procedimientos de instalación y
configuración.
• Antes de realizar las pruebas de funcionamiento, retire de todos los
dispositivos todos los bloqueos u otros medios de sujeción temporales
utilizados para el transporte.
• Retire del equipo las herramientas, los medidores y el material de desecho
que pueda haber.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Realice todas las pruebas de inicio recomendadas en la documentación del
equipo. Guarde la documentación del equipo para consultarla en el futuro.
Las pruebas del software deben realizarse tanto en un entorno simulado
como en un entorno real.
Verifique que no existen cortocircuitos ni conexiones a tierra temporales en todo
el sistema que no estén instalados según la normativa local (de conformidad con
National Electrical Code de EE. UU., por ejemplo). Si fuera necesario realizar
pruebas de tensión de alto potencial, siga las recomendaciones de la
documentación del equipo para evitar dañar el equipo fortuitamente.
Antes de dar tensión al equipo:
• Retire del equipo las herramientas, los medidores y el material de desecho
que pueda haber.
• Cierre la puerta de la carcasa del equipo.
• Retire todas las conexiones a tierra temporales de las líneas de alimentación
de entrada.
• Realice todas las pruebas iniciales recomendadas por el fabricante.
Funcionamiento y ajustes
Las siguientes precauciones son de NEMA Standards Publication ICS 7.1-1995:
(En caso de divergencia o contradicción entre cualquier traducción y el original en
inglés, prevalecerá el texto original en inglés).
• Aunque se ha extremado la precaución en el diseño y la fabricación del
equipo o en la selección y las especificaciones de los componentes, existen
riesgos que pueden aparecer si el equipo se utiliza de forma inadecuada.
• En algunas ocasiones puede desajustarse el equipo, lo que provocaría un
funcionamiento incorrecto o poco seguro. Utilice siempre las instrucciones
del fabricante como guía para realizar los ajustes de funcionamiento. El
personal que tenga acceso a estos ajustes debe estar familiarizado con las
instrucciones del fabricante del equipo y con la maquinaria utilizada para los
equipos eléctricos.
• El operario solo debe tener acceso a los ajustes operativos que necesita. El
acceso a los demás controles debe restringirse para evitar cambios no
autorizados en las características de funcionamiento.
EIO0000003308.02 9

Acerca de este libro
Acerca de este libro
Alcance del documento
En este documento se describen las funciones avanzadas de EcoStruxure
Machine Expert - Basic y su relación con las E/S expertas de M221 Logic
Controller y el soporte de PID. Aquí puede encontrar descripciones de las
funcionalidades, las características y el rendimiento de las funciones avanzadas
de M221 Logic Controller.
Campo de aplicación
La información contenida en este manual solamente es aplicable a los productos
EcoStruxure Machine Expert - Basic.
Este documento se ha actualizado para el lanzamiento de EcoStruxureTM
Machine Expert - Basic V1.2 SP1 Patch 1.
Las características técnicas de los dispositivos que se describen en este
documento también se encuentran online. Si desea consultar la información
online, visite la página de inicio de Schneider Electric www.se.com/ww/en/
download/.
Las características que se indican en este manual deben coincidir con las que
figuran online. De acuerdo con nuestra política de mejoras continuas, es posible
que a lo largo del tiempo revisemos el contenido con el fin de elaborar
documentos más claros y precisos. En caso de que detecte alguna diferencia
entre el manual y la información online, utilice esta última para su referencia.
10 EIO0000003308.02

Acerca de este libro
Documentos relacionados
Título de la documentación Número de referencia
EcoStruxure Machine Expert - Basic - Guía de
funcionamiento EIO0000003281 (ENG)
EIO0000003282 (FRA)
EIO0000003283 (GER)
EIO0000003284 (SPA)
EIO0000003285 (ITA)
EIO0000003286 (CHS)
EIO0000003287 (POR)
EIO0000003288 (TUR)
EcoStruxure Machine Expert - Basic Funciones
genéricas - Guía de la biblioteca EIO0000003289 (ENG)
EIO0000003290 (FRA)
EIO0000003291 (GER)
EIO0000003292 (SPA)
EIO0000003293 (ITA)
EIO0000003294 (CHS)
EIO0000003295 (POR)
EIO0000003296 (TUR)
Modicon M221 Logic Controller - Guía de
programación EIO0000003297 (ENG)
EIO0000003298 (FRE)
EIO0000003299 (GER)
EIO0000003300 (SPA)
EIO0000003301 (ITA)
EIO0000003302 (CHS)
EIO0000003304 (TUR)
EIO0000003303 (POR)
Modicon M221 Logic Controller - Guía de
hardware EIO0000003313 (ENG)
EIO0000003314 (FRA)
EIO0000003315 (GER)
EIO0000003316 (SPA)
EIO0000003317 (ITA)
EIO0000003318 (CHS)
EIO0000003319 (POR)
EIO0000003320 (TUR)
EIO0000003308.02 11

Acerca de este libro
Información relacionada con el producto
ADVERTENCIA
PÉRDIDA DE CONTROL
• El diseñador del esquema de control debe tener en cuenta las posibles
modalidades de fallo de rutas de control y, para ciertas funciones de control
críticas, proporcionar los medios para lograr un estado seguro durante y
después de un fallo de ruta. Algunas funciones de control críticas son, por
ejemplo, la parada de emergencia y la parada de sobrecarrera, un corte de
alimentación o un reinicio.
• Para las funciones críticas de control deben proporcionarse rutas de control
separadas o redundantes.
• Las rutas de control del sistema pueden incluir enlaces de comunicación.
Deben tenerse en cuenta las implicaciones de retardos de transmisión
imprevistos o fallos del enlace.
• Tenga en cuenta todas las reglamentaciones para la prevención de
accidentes y las normativas de seguridad locales.1
• Cada instalación de este equipo debe probarse de forma individual y
exhaustiva antes de entrar en servicio.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
1Para obtener información adicional, consulte NEMA ICS 1.1 (última edición),
"Safety Guidelines for the Application, Installation, and Maintenance of Solid State
Control" (Directrices de seguridad para la aplicación, la instalación y el
mantenimiento del control de estado estático) y NEMA ICS 7.1 (última edición),
"Safety Standards for Construction and Guide for Selection, Installation and
Operation of Adjustable-Speed Drive Systems" (Estándares de seguridad para la
construcción y guía para la selección, instalación y utilización de sistemas de
unidades de velocidad ajustable) o su equivalente aplicable a la ubicación
específica.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
• Utilice solo software aprobado por Schneider Electric para este equipo.
• Actualice el programa de aplicación siempre que cambie la configuración de
hardware física.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Normas y términos utilizados
Los términos técnicos, símbolos y las descripciones correspondientes del
presente manual o que aparecen en la parte interior o exterior de los propios
productos se derivan, por lo general, de los términos y las definiciones de
estándares internacionales.
En el área de los sistemas de seguridad funcional, unidades y automatización
general se incluyen, pero sin limitarse a ellos, términos como seguridad,función
de seguridad,estado de seguridad,fallo,reinicio tras fallo,avería,funcionamiento
incorrecto,error,mensaje de error,peligroso, etc.
12 EIO0000003308.02

Acerca de este libro
Estos estándares incluyen, entre otros:
Estándar Descripción
EN 61131-2:2007 Controladores programables, parte 2: Requisitos y ensayos de los
equipos.
ISO 13849-1:2008 Seguridad de la maquinaria: partes de seguridad de los sistemas de
control.
Principios generales del diseño.
EN 61496-1:2013 Seguridad de la maquinaria: equipo de protección electrosensible.
Parte 1: Requisitos y ensayos generales.
ISO 12100:2010 Seguridad de las máquinas. Principios generales para el diseño.
Evaluación del riesgo y reducción del riesgo
EN 60204-1:2006 Seguridad de las máquinas. Equipo eléctrico de las máquinas. Parte 1:
Requisitos generales
EN 1088:2008
ISO 14119:2013
Seguridad de la maquinaria. Dispositivos de bloqueo asociados con
protecciones: principios de diseño y selección
ISO 13850:2006 Seguridad de la maquinaria. Parada de emergencia: principios de
diseño
EN/IEC 62061:2005 Seguridad de la maquinaria. Seguridad funcional de los sistemas de
control programable de seguridad eléctrica y electrónica
IEC 61508-1:2010 Seguridad funcional de sistemas de seguridad programable eléctricos y
electrónicos: requisitos generales.
IEC 61508-2:2010 Seguridad funcional de los sistemas de seguridad electrónicos
programables eléctricos y electrónicos: requisitos de los sistemas de
seguridad electrónicos programables eléctricos y electrónicos.
IEC 61508-3:2010 Seguridad funcional de los sistemas de seguridad electrónicos
programables eléctricos y electrónicos: requisitos de software.
IEC 61784-3:2008 Comunicación digital de datos para la medición y control: buses de
campo de seguridad funcional.
2006/42/EC Directiva de maquinaria
2014/30/EU Directiva de compatibilidad electromagnética
2014/35/EU Directiva de baja tensión
Además, los términos utilizados en este documento se pueden usar de manera
tangencial porque se obtienen de otros estándares como:
Estándar Descripción
Serie IEC 60034 Máquinas eléctricas giratorias
Serie IEC 61800 Accionamientos eléctricos de potencia de velocidad variable
Serie IEC 61158 Comunicación digital de datos para la medición y control - Bus de campo
para su uso en Sistemas de control
Por último, el término zona de funcionamiento se puede utilizar junto con la
descripción de peligros específicos, y se define como tal para una zona de peligro
ozona peligrosa en la Directiva de maquinaria (2006/42/EC) y ISO 12100:2010.
NOTA: Los estándares mencionados anteriormente podrían o no aplicarse a
los productos específicos citados en la presente documentación. Para
obtener más información en relación con los diferentes estándares aplicables
a los productos descritos en este documento, consulte las tablas de
características de las referencias de dichos productos.
EIO0000003308.02 13


Introducción a las funciones avanzadas
Contenido de esta parte
Introducción...................................................................................................16
Descripción general
En esta parte se proporciona una descripción general, las modalidades
disponibles, la funcionalidad y el rendimiento de las diferentes funciones
avanzadas.
EIO0000003308.02 15

Introducción
Introducción
Contenido de este capítulo
E/S experta...................................................................................................17
Asignación de E/S experta incorporada...........................................................19
Información general sobre la gestión de bloques de funciones..........................21
Descripción general
En este documento se describen las funciones avanzadas de EcoStruxure
Machine Expert - Basic y su relación con las E/S expertas de M221 y el soporte
de PID. Aquí puede encontrar la descripción de las funcionalidades, las
características y el rendimiento de las entradas y salidas del Contador rápido (%
FC), Contador de alta velocidad (%HSC), Pulso (%PLS), Modulación de ancho de
pulsos (%PWM) y Salida de tren de pulsos (%PTO). Además, encontrará una
descripción completa de la funcionalidad del software avanzado de PID. Para
obtener más información sobre las funciones definidas por el usuario y los
bloques de funciones definidos por el usuario, consulte Funciones definidas por el
usuario (véase EcoStruxure Machine Expert - Basic, Guía de funcionamiento) y
Bloques de funciones definidos por el usuario (véase EcoStruxure Machine
Expert - Basic, Guía de funcionamiento).
Las funciones proporcionan soluciones simples, aunque potentes, para la
aplicación. Sin embargo, el uso y la aplicación de la información contenida en el
presente documento requieren experiencia en diseño y programación de
sistemas de control automatizados.
Solamente el usuario, el fabricante o el integrador saben cuáles son las
condiciones y los factores presentes durante la instalación y la configuración, el
funcionamiento y el mantenimiento de la máquina o los procesos relacionados,
por lo que pueden decidir la automatización y el equipo asociado, así como las
medidas de seguridad y los enclavamientos relacionados que se pueden utilizar
de forma efectiva y correcta. Al seleccionar el equipo de control y automatización,
además de cualquier otro equipo o software relacionado, para una determinada
aplicación, también debe tener en cuenta todas las normativas y estándares
locales, regionales o nacionales.
ADVERTENCIA
INCOMPATIBILIDAD CON NORMATIVAS
Asegúrese de que todos los equipos que utilice y que los sistemas diseñados
cumplan con las normativas y los estándares locales, regionales y nacionales.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
La funcionalidad proporcionada por las funciones avanzadas de EcoStruxure
Machine Expert - Basic para los controladores M221 se ha pensado y diseñado
presuponiendo que usted ha incorporado el hardware de seguridad necesario a la
arquitectura de la aplicación, como interruptores de posición apropiados y
hardware de parada de emergencia y circuitos de control, entre otros sistemas.
Se acepta implícitamente que hay medidas de seguridad funcional presentes en
el diseño de la máquina para prevenir comportamientos indeseados de la
máquina como sobrerrecorrido u otros movimientos no controlados. Además, se
presupone que ha llevado a cabo análisis de seguridad funcional y de evaluación
del riesgo apropiados para su máquina o proceso.
16 EIO0000003308.02

Introducción
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Durante el diseño de la máquina, debe asegurarse de que se lleva a cabo y se
respeta una evaluación de riesgo según la norma EN/ISO 12100.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
E/S experta
Introducción
El M221 Logic Controller proporciona:
• Cuatro entradas rápidas (%I0.0, %I0.1, %I0.6 y%I0.7)
• Dos salidas rápidas en las referencias de los controladores que contienen
salidas de transistor (%Q0.0 y%Q0.1)
• Cuatro salidas rápidas en las referencias del controlador TM221C40U y
TM221CE40U (%Q0.0, %Q0.1, %Q0.2 y%Q0.3)
NOTA: Las referencias de los controladores que contienen salidas de relé no
soportan las funciones de salidas rápidas.
M221 Logic Controller es compatible con las siguientes funciones de E/S expertas
(según la referencia):
Funciones Descripción
Contadores Contador rápido,
página 23 La función FC puede ejecutar el conteo rápido de pulsos a
partir de los sensores, conmutadores, etc.
Contador de alta
velocidad, página 28 La función HSC puede ejecutar el conteo rápido de pulsos
a partir de sensores, conmutadores, etc., que están
conectados a entradas rápidas.
Generado-
res de
pulsos
Pulso, página 41 La función PLS genera una señal de pulso de onda
cuadrada en los canales de salida especializados.
Modulación de ancho
de pulsos, página 48 La función PWM genera una señal de onda modulada en
los canales de salida especializados con un ciclo de
servicio variable.
Salida de tren de
pulsos, página 80 La función PTO genera una salida de tren de pulsos para
controlar un motor paso a paso de un solo eje lineal o
servounidad en modalidad de bucle abierto.
Generador de
frecuencias, página
155
La función FREQGEN genera una señal de onda cuadrada
en un canal de salida dedicado con una frecuencia
programable y un ciclo de servicio del 50%.
NOTA:
• Cuando se utiliza una entrada como Run/Stop, no puede ser utilizada por
una función experta.
• Cuando se utiliza una entrada como Alarm, no puede ser utilizada por
una función experta.
Para obtener más información, consulte Configuración de entradas/salidas
incrustadas (consulte Modicon M221, Logic Controller, Guía de programación).
EIO0000003308.02 17

Introducción
Configuración de una función de entrada experta
Para configurar una función de entrada experta, siga estos pasos:
Paso Descripción
1 Haga clic en el nodo Contadores de alta velocidad en Hardware.
Resultado: Se muestra la lista de Contadores de alta velocidad:
2 Haga clic en ... en la columna Configuración para seleccionar el tipo de contador de alta
velocidad y mostrar la ventana Asistente del contador de alta velocidad.
Configuración de una función de salida experta
Para configurar una función de salida experta, siga estos pasos:
Paso Descripción
1 Haga clic en el nodo Generadores de pulsos en Hardware.
Resultado: Se muestra la lista de Generadores de pulsos:
2 Haga clic en [...] en la columna Configuración para seleccionar el tipo de generador de
pulsos y mostrar la ventana Asistente de salida de tren de pulsos.
Características de la configuración de funciones de E/S expertas
• Las entradas se pueden leer mediante variables de la memoria estándar
incluso si están configuradas en asociación con funciones de E/S expertas.
• La gestión de cortocircuitos se aplicará igualmente a todas las salidas
expertas.
• Todas las E/S no utilizadas por funciones de E/S expertas pueden utilizarse
como cualquier otra E/S normal.
• Solo se puede acceder a las salidas utilizadas por Pulse,Pulse Train Output,
Pulse Width Modulation yHigh Speed Counters a través del bloque de
funciones de E/S experto. No se puede leer ni escribir directamente en la
aplicación.
18 EIO0000003308.02

Introducción
Asignación de E/S experta incorporada
Asignación de entradas para funciones expertas en M221 Logic
Controller
Se pueden asignar entradas digitales incrustadas a funciones (Ejecutar/Detener,
Retención, Evento, Contador rápido, HSC, PTO). Las entradas no asignadas a
ninguna función se utilizan como entradas normales. La tabla siguiente presenta
las posibles asignaciones de las entradas digitales incrustadas de M221 Logic
Controller:
Función
Función de entrada simple Función de entrada avanzada
Run/Stop Reten-
ción Evento Contador
rápido HSC PTO(3)
Entrada
rápida %I0.0 X– – – %HSC0 –
%I0.1 X– – – %HSC0 o%HSC2(1) –
Entrada
normal %I0.2 X X X %FC0 Preajuste para %HSC0 Ref or probe for %PTO0
to %PTO3
%I0.3 X X X %FC1 Captura para %HSC0
%I0.4 X X X %FC2 Captura para %HSC1
%I0.5 X X X %FC3 Preajuste para %HSC1
Entrada
rápida %I0.6 X– – – %HSC1 –
%I0.7 X– – – %HSC1 or %HSC3(2) –
Entrada
normal
(en función de
la referencia
del
controlador)
%I0.8 X– – – – Ref o sonda de %PTO0
a%PTO3 en los
controladores
TM221C40U y
TM221CE40U
%I0.9 X– – – –
%I0.10 X– – – – –
%I0.11 X– – – – –
%I0.12 X– – – – –
%I0.13 X– – – – –
%I0.14 X– – – – –
%I0.15 X– – – – –
%I0.16 X– – – – –
%I0.17 X– – – – –
%I0.18 X– – – – –
%I0.19 X– – – – –
%I0.20 X– – – – –
%I0.21 X– – – – –
%I0.22 X– – – – –
%I0.23 X– – – – –
XSí
–No
(1) %HSC2 está disponible cuando %HSC0 está configurado como Monofásico oNot Configured.
(2) %HSC3 está disponible cuando %HSC1 está configurado como Monofásico oNot Configured.
(3) La función PTO está disponible en las referencias de los controladores que contienen salidas de transistor.
EIO0000003308.02 19


Introducción
Información general sobre la gestión de bloques de
funciones
Gestión de entradas de bloques de funciones y objetos de
entrada
Las variables (entradas de bloques de funciones y objetos de entrada) se utilizan
con el flanco ascendente de la entrada Execute. Para modificar una variable, es
necesario cambiar las variables de entrada y desencadenar de nuevo el bloque
de funciones. Sin embargo, algunos bloques de funciones proporcionan una
opción de actualización continua.
Gestión de salidas de bloques de funciones y objetos de salida
Las salidas Done,Error,Busy yCmdAborted son mutuamente exclusivas; es
decir, solo una de ellas puede ser TRUE en un bloque de funciones. Cuando la
entrada Execute es TRUE, una de estas salidas es TRUE.
En el flanco ascendente de la entrada Execute se establece la salida Busy en
TRUE. Permanece en TRUE durante la ejecución del bloque de funciones y se
restablece en el flanco ascendente de una de las otras salidas (Done,Error y
CmdAborted).
La salida Done es TRUE cuando se completa correctamente la ejecución del
bloque de funciones.
Si se detecta un error, el bloque de funciones finaliza estableciendo la salida Error
en TRUE y el código de error está contenido en la salida ErrId.
Las salidas Done,Error yCmdAborted se establecen en TRUE o FALSE con el
flanco descendente de la entrada Execute, de acuerdo con las siguientes
condiciones:
• se establecen para un ciclo de tarea si finaliza la ejecución del bloque de
funciones y la entrada Execute es FALSE y luego se restablece a sus valores
predeterminados.
• retienen su valor si finaliza la ejecución del bloque de funciones y la entrada
Execute es TRUE.
Cuando una instancia de un bloque de funciones recibe una nueva entrada
Execute antes de finalizar (como una serie de comandos en la misma instancia),
el bloque de funciones no devuelve información, como Done, para la acción
anterior. Sin embargo, el nuevo comando se inicia en el bloque de funciones (el
estado es Busy).
Gestión de errores
Todos los bloques tienen dos salidas que pueden notificar los errores detectados
durante la ejecución del bloque de funciones:
•Error= El flanco ascendente de esta salida indica que se detectó un error.
•ErrID= El código de error del error detectado.
EIO0000003308.02 21

Funciones avanzadas de entradas expertas
Contenido de esta parte
Contador rápido (%FC)...................................................................................23
Contador de alta velocidad (%HSC).................................................................28
Descripción general
En esta parte se describen las funciones avanzadas de entradas expertas.
22 EIO0000003308.02

Contador rápido (%FC)
Contador rápido (%FC)
Contenido de este capítulo
Descripción...................................................................................................23
Configuración ...............................................................................................24
Ejemplo de programación ..............................................................................26
Uso de los bloques de funciones del contador rápido
En este capítulo se proporcionan descripciones y directrices de programación
para utilizar bloques de funciones Fast Counter.
Descripción
Introducción
El bloque de funciones Fast Counter (contador rápido) sirve como contador
progresivo o regresivo. Puede contar el flanco ascendente de las entradas
digitales hasta frecuencias de 5 kHz en modalidad computacional de palabra
simple o de palabra doble. Debido a que los bloques de funciones Fast Counter
se gestionan mediante interrupciones de hardware específicas, el mantenimiento
de las tasas de muestreo máximo de las frecuencias puede variar en función de la
configuración específica del hardware y de la aplicación.
Los bloques de funciones Fast Counter %FC0,%FC1,%FC2 y%FC3 usan las
entradas dedicadas %I0.2,%I0.3,%I0.4 y%I0.5 respectivamente. Estos bits no
están reservados para el uso exclusivo de estos bloques de funciones. Para su
asignación se debe tener en cuenta el uso de estos recursos especializados por
parte de otros bloques de funciones.
Ilustración
En esta ilustración se muestra un bloque de funciones Fast Counter en modalidad
de palabra simple:
EIO0000003308.02 23

Contador rápido (%FC)
Entradas
El bloque de funciones Fast Counter contiene las siguientes entradas:
Etiqueta Descrip-
ción Valor
IN Enable En el estado 1, el valor se actualiza de acuerdo con los pulsos aplicados
a la entrada física.
En el estado 0, el valor se mantiene en su último valor.
RRestablecer
(opcional) Utilizado para inicializar el bloque.
En el estado 1:
• Se tienen en cuenta los valores %FC.P o%FC.PD.
• El valor actual se restablece en 0 si está configurado como
contador progresivo, o bien se establece en %FC.P o%FC.PD si
está configurado como regresivo.
• El bit de finalización %FC.D se restablece a su valor
predeterminado.
Salidas
El bloque de funciones Fast Counter contiene la siguiente salida:
Etiqueta Descrip-
ción Valor
DTerminado
(%FCi.D)Este bit se establece en 1 cuando:
•%FCi.V o%FCi.VD alcanzan el valor de preajuste con %FCi.P o
%FCi.PD configurados como contador progresivo.
• o cuando %FCi.V o%FCi.VD alcanzan 0 si están configurados
como contador regresivo.
Este bit de sólo lectura únicamente se restablece cuando %FCi.R se
configura en 1.
Configuración
Parámetros
Para configurar los parámetros, siga el procedimiento de configuración de un
bloque de funciones (véase EcoStruxure Machine Expert - Basic, Guía de la
biblioteca de funciones genéricas) y lea la descripción de las modalidades de
asignación de memoria en la Guía de funcionamiento de EcoStruxure Machine
Expert - Basic (véase EcoStruxure Machine Expert - Basic, Guía de
funcionamiento).
24 EIO0000003308.02

Contador rápido (%FC)
El bloque de funciones Fast Counter contiene los parámetros siguientes:
Parámetro Descripción Valor
Utilizado Dirección utilizada Si está seleccionada, esta dirección se está utilizando
actualmente en un programa.
Dirección Dirección Fast
Counter %FCi
El identificador de instancias, que va desde 0 hasta el
número de objetos disponibles en este controlador lógico.
Consulte la tabla Número máximo de objetos (consulte
Modicon M221, Logic Controller, Guía de programación)
para conocer el número máximo de contadores rápidos.
Entrada %IO.i Entrada dedicada asociada a esta instancia del bloque de
funciones.
%IO.2...%IO.5
Símbolo Símbolo El símbolo asociado con este objeto. Consulte
laEcoStruxure Machine Expert - Basic Guía de
funcionamiento (definición y uso de los símbolos) para
obtener más información.
Configurado Conteo de forma
progresiva o
regresiva
Se establece en una de las siguientes opciones:
•No se utiliza
•Contador progresivo
•Contador regresivo
Preajuste Valor de preajuste
(%FCi.P o%FCi.
PD)
El valor inicial se puede establecer:
• con un objeto asociado %FCi.P de 1 a 65535 en
modalidad de palabra simple;
• con un objeto asociado %FCi.PD de 1 a 4294967295
en modalidad de palabra doble.
Double Word Modalidad de
palabra doble Si está seleccionada, utilice la modalidad de palabra
doble. De lo contrario, utilice la modalidad de palabra
simple.
Comentario Comentario Se puede asociar un comentario opcional con este objeto.
Haga doble clic en la columna Comentario y escriba un
comentario.
Objetos
El bloque de funciones Fast Counter está asociado con los siguientes objetos:
Objeto Descripción Valor
%FCi.V
%FCi.VD
Valor actual El valor actual aumenta o disminuye según la función de
conteo (progresivo o regresivo) seleccionada. Para un
conteo progresivo, el valor de conteo actual se actualiza y
puede alcanzar el valor de 65535 en modalidad de palabra
simple (%FCi.V) y 4294967295 en modalidad de palabra
doble (%FCi.VD). Para el conteo regresivo, el valor actual
es el valor de preajuste %FC.P o%FC.PD y puede
disminuir hasta 0.
%FCi.P
%FCi.PD
Valor de preajuste Se tiene en cuenta un nuevo valor de preajuste solo si la
entrada R está activa. Consulte la descripción en la tabla
Parámetros anterior.
%FCi.D Done Consulte la descripción en la tabla Salidas anterior.
EIO0000003308.02 25

Contador rápido (%FC)
Operación
En esta tabla se describen las principales fases de las operaciones del bloque de
funciones Fast Counter:
Operación Acción Result
Conteo
progresivo Un flanco ascendente aparece
en la entrada Conteo progresivo. El valor actual %FCi.V se incrementa en 1
unidad.
Cuando se alcanza el valor de
preajuste %FCi.P o%FCi.PD.El bit de salida %FCi.D Terminado se
establece en 1.
Conteo regresivo Un flanco ascendente aparece
en la entrada Conteo regresivo. El valor actual %FCi.V disminuye en una
unidad.
Cuando el valor es 0. El bit de salida %FCi.D Terminado se
establece en 1.
Casos especiales
Esta tabla contiene una lista de casos especiales de funcionamiento del bloque
de funciones Fast Counter:
Caso especial Descripción
Efecto de un reinicio en frío (%S0=1) Restablece los atributos Fast Counter con los valores
configurados o la aplicación del usuario (consulte Modicon
M221, Logic Controller, Guía de programación).
Efecto de un reinicio en caliente (%
S1=1)Sin efecto (consulte Modicon M221, Logic Controller, Guía
de programación).
Efecto de detenciones del controlador Fast Counter detiene el conteo cuando el controlador se
establece en el estado STOPPED y reanuda el conteo
cuando vuelve al estado RUNNING. El contador reanuda
el conteo desde el último valor antes de entrar en el
estado STOPPED.
Ejemplo de programación
Introducción
En este ejemplo, la aplicación cuenta un número de elementos (hasta 5000),
mientras que %I0.1 está establecido en 1. La entrada de %FC1 es la entrada
dedicada %I0.3. Si se alcanza el valor de preajuste, %FC1.D se establece en 1 y
conserva el mismo valor hasta que %FC1.R reciba el comando del resultado de
AND en %I0.2 y%M0.
26 EIO0000003308.02

Contador rápido (%FC)
Programación
Este ejemplo es un bloque de funciones Fast Counter:
Escalón Instrucción
0BLK %FC1
LD %I0.1
IN
LD %I0.2
AND %M0
R
OUT_BLK
LD D
ST %Q0.0
END_BLK
NOTA: Consulte el procedimiento de reversibilidad (véase EcoStruxure
Machine Expert - Basic, Guía de la biblioteca de funciones genéricas) para
obtener el diagrama de contactos equivalente.
EIO0000003308.02 27

Contador de alta velocidad (%HSC)
Contador de alta velocidad (%HSC)
Contenido de este capítulo
Descripción...................................................................................................28
Contador de alta velocidad en modalidades de conteo .....................................32
Contador de alta velocidad en modalidad de medidor de frecuencias ................38
Uso de los bloques de funciones del contador de alta velocidad
En este capítulo se proporcionan descripciones y directrices de programación
para utilizar bloques de funciones High Speed Counter.
Descripción
Introducción
El bloque de funciones High Speed Counter (contador de alta velocidad)
puede configurarse en EcoStruxure Machine Expert - Basic para realizar
cualquiera de las siguientes funciones:
•Fase dual [Pulso/Dirección]
•Fase dual [Cuadratura X1]
•
•Fase dual [Cuadratura X4]
•Monofásico
•Medidor de frecuencias
El bloque de funciones High Speed Counter funciona a una frecuencia máxima de
100 kHz para todas las modalidades de conteo, con un rango de 0 a 65535 en
palabra simple y un rango de 0 a 4294967295 en palabra doble.
El bloque de funciones High Speed Counter utiliza entradas de E/S
especializadas y entradas y salidas auxiliares. Consulte M221 Logic Controller -
Guía de hardware para obtener más información sobre las entradas y salidas.
Debe inicializar la función High Speed Counter de la ficha Configuración con el
Asistente del contador de alta velocidad antes de utilizar una instancia del
bloque de funciones. Consulte Configuración de contadores de alta velocidad
(consulte Modicon M221, Logic Controller, Guía de programación).
28 EIO0000003308.02

Contador de alta velocidad (%HSC)
Representación gráfica
Entradas
El bloque de funciones High Speed Counter contiene las siguientes entradas:
Etique-
ta Descripción Valor
IN Habilitar (necesario)
En el estado 1, la función de conteo o las mediciones de frecuencia están
habilitadas.
En el estado 0, el valor actual se mantiene en su último valor.
0 o 1
SEntrada de preajuste.
En el estado 1:
• Inicializa el valor con el valor de preajuste para:
◦Fase dual [Cuadratura X1],
◦,
◦Fase dual [Cuadratura X4] o
◦Fase dual [Pulso/Dirección] con la función regresiva en
curso.
• Restablece el valor a 0 para:
◦Monofásico o
◦Fase dual [Pulso/Dirección] con la función progresiva en
curso.
Además, inicializa el funcionamiento de las salidas de umbral y tiene en
cuenta cualquier modificación por parte del usuario de los valores de
umbral definidos en la ventana de propiedades o el programa.
0 o 1
El bloque de funciones High Speed Counter está asociado a los objetos de
entrada siguientes:
Objeto Tipo Descripción Valor
%HSCi.P
%HSCi.PD
WORD
DOUBLE
WORD
Valor de preajuste Consulte Entradas auxiliares, página 33.
%HSCi.S0
%HSCi.S0D
WORD
DOUBLE
WORD
Umbral 0 Consulte Umbrales de salida en
modalidades de conteo, página 33.
%HSCi.S1 WORD Umbral 1 Consulte Umbrales de salida en
modalidades de conteo, página 33.
EIO0000003308.02 29

Contador de alta velocidad (%HSC)
Objeto Tipo Descripción Valor
%HSCi.S1D DOUBLE
WORD
%HSCi.T WORD Referencia de
tiempo Consulte Contador de alta velocidad en
modalidad de medidor de frecuencias,
página 38.
%HSCi.R BOOL Habilitar salida
refleja 0 En el estado 1, habilita la salida refleja 0.
%HSCi.S BOOL Habilitar salida
refleja 1 En el estado 1, habilita la salida refleja 1.
NOTA: Los bits %HSCi.R y%HSCi.S habilitan o deshabilitan respectivamente
las salidas reflejas sólo si el bloque de funciones HSC está habilitado; es
decir, si %HSCi.IN está establecido en 1.
Salidas
El bloque de funciones High Speed Counter contiene las siguientes salidas:
Etiqueta Descripción Valor
FDesborde
Se establece en 1 en caso de desborde aritmético.
0 o 1
UDirección de conteo
Este bit, establecido por el sistema, lo utiliza la función de
conteo Dual Phase para indicar al usuario la dirección de
conteo.
0: Conteo regresivo
1: Conteo progresivo
TH0 Bit del umbral 0
Se establece en 1 cuando el valor actual es mayor o igual
que el valor del umbral S0 (%HSCi.S0).
Es aconsejable probar este bit solo una vez en el programa,
ya que se actualiza en tiempo real. La aplicación de usuario
es la responsable de la validez del valor en el momento de su
uso.
0 o 1
TH1 Bit del umbral 1
Se establece en 1 cuando el valor actual es mayor o igual
que el valor del umbral S1 (%HSCi.S1).
Es aconsejable probar este bit solo una vez en el programa,
ya que se actualiza en tiempo real.
0 o 1
30 EIO0000003308.02

Contador de alta velocidad (%HSC)
El bloque de funciones High Speed Counter está asociado a los objetos de salida
siguientes:
Objeto Tipo Descripción Valor
%HSCi.V
%HSCi.VD
WORD
DOUBLE WORD
Valor actual Consulte Contador de alta velocidad
en modalidades de conteo, página 32
yContador de alta velocidad en
modalidad de medidor de frecuencias,
página 38.
NOTA: El valor actual se puede
actualizar de forma
independiente de la llamada al
bloque de funciones %HSC.%
HSCi.V/%HSCi.VD se puede leer
dos veces y ofrecer resultados
distintos en el mismo ciclo de
tarea.
%HSCi.C
%HSCi.CD
WORD
DOUBLE WORD
Valor de captura Consulte Entradas auxiliares, página
33.
%HSCi.U BOOL Dirección de
conteo 0: Conteo regresivo
1: Conteo progresivo
%HSCi.F BOOL Desborde 0: Sin desborde
1: Desborde del contador
Propiedades
El bloque de funciones High Speed Counter tiene las propiedades siguientes:
Propiedad Valor Descripción
Utilizado Casilla de verificación activada /
desactivada
Indica si se está utilizando la dirección.
Dirección %HSCi, donde ies de 0 a 3, en función
del tipo de contador configurado ies el identificador de instancia.
Para obtener el número máximo de
objetos%HSC, consulte la tabla Número
máximo de objetos (consulte Modicon
M221, Logic Controller, Guía de
programación).
Símbolo Texto definido por el usuario El símbolo que identifica unívocamente a
este objeto. Para obtener más
información, consulte Definición y uso de
los símbolos (consulte EcoStruxure
Machine Expert - Basic, Guía de
funcionamiento).
Preajuste • de 0 a 65535 para %HSCi.P
• de 0 a 4294967295 para %HSCi.
PD
Valor de preajuste para inicializar el valor
actual de HSC (%HSCi.P,%HSCi.PD).
No válido para el Medidor de
frecuencias.
S0 • de 1 a 65535 para %HSCi.S0
• de 1 a 4294967295 para %HSCi.
S0D
El valor de umbral 0 se utiliza como
comparador con el valor actual.
El valor de S0 debe ser inferior a S1 (%
HSCi.S1).
S1 • de 2 a 65535 para %HSCi.S1
• de 2 a 4294967295 para %HSCi.
S1D
El valor de umbral 1 se utiliza como
comparador con el valor actual.
El valor de S1 debe ser superior a S0 (%
HSCi.S0).
Referen-
cia de
tiempo
100 ms o 1 s para %HSCi.T Referencia de tiempo de mediciones de
frecuencia.
Comenta-
rio Texto definido por el usuario Un comentario para asociar a este objeto.
EIO0000003308.02 31

Contador de alta velocidad (%HSC)
Casos especiales
Esta tabla muestra una lista de casos especiales de funcionamiento del bloque de
funciones High Speed Counter:
Caso especial Descripción
Efecto de un reinicio en frío (%S0=1) Restablece los atributos del High Speed Counter con los
valores configurados por el programa.
Efecto de un reinicio en caliente (%
S1=1)No tiene ningún efecto.
Efecto de una detención del
controlador El bloque de funciones High Speed Counter deja de
funcionar y las salidas permanecen en su estado actual.
NOTA: Cuando el controlador se detiene, las salidas
reflejas se establecen en 0, si la opción Mantener
valores está seleccionada para las salidas. Si no es
así, y la opción Mantener valores no está
seleccionada, las salidas reflejas toman los valores
de retorno. Para obtener más información sobre la
configuración del comportamiento de retorno,
consulte Comportamiento de retorno (consulte
EcoStruxure Machine Expert - Basic, Guía de
funcionamiento).
Contador de alta velocidad en modalidades de conteo
Introducción
El bloque de funciones de High Speed Counter funciona a una frecuencia máxima
de 100 kHz para todas las modalidades de conteo, con un rango de 0 a 65535 en
palabra simple y un rango de 0 a 4294967295 en palabra doble.
Los pulsos que se cuentan se aplican de la siguiente manera:
Función Descripción Tipo de entrada %HSC0 %HSC1 %HSC2 %HSC3
Fase dual [Pulso/
Dirección]
Los pulsos se aplican a la entrada
física asociada a la Entrada de
pulsos.
Entrada de
pulsos %I0.0 %I0.6 – –
La operación actual (conteo
progresivo/regresivo) se define
mediante el estado de la Entrada de
dirección:
• 0 = conteo progresivo
• 1 = conteo regresivo
Entrada de
dirección %I0.1 %I0.7 – –
Fase dual
[Cuadratura X1], o
Fase dual
[Cuadratura X4]
Las dos fases del codificador se
aplican a las entradas físicas
asociadas a la Fase A de entrada de
pulsos y a la Fase B de entrada de
pulsos.
Fase A de
entrada de
pulsos
%I0.0 %I0.6 – –
Fase B de
entrada de
pulsos
%I0.1 %I0.7 – –
Monofásico Los pulsos se aplican a la entrada
física asociada a la Entrada de
pulsos.
Entrada de
pulsos %I0.0 %I0.6 %I0.1 %I0.7
NOTA: La asignación de E/S es diferente entre la plataforma Twido y la gama
M221 Logic Controller. En el M221 Logic Controller, la entrada de pulsos
principal es %I0.0 para %HSC0 y%I0.6 para %HSC1. En la plataforma Twido,
la entrada de pulsos principal es %I0.1 para %HSC0 y%I0.7 para %HSC1.
32 EIO0000003308.02

Contador de alta velocidad (%HSC)
Umbrales de salida
Durante el conteo, el valor actual se compara con dos umbrales: %HSCi.S0 o%
HSCi.S0D y%HSCi.S1 o%HSCi.S1D.
Se tienen en cuenta las modificaciones de estos valores de umbral
independientemente del valor de la entrada de Preajuste.
Las modificaciones del valor de umbral se guardan en el logic controller (objetos
%HSCi.S0,%HSCi.S1,%HSCi.S0D y%HSCi.S1D), pero no en la ventana
Configuración de EcoStruxure Machine Expert - Basic.
Según el resultado de las comparaciones, los objetos de bit, %HSCi.TH0 y%
HSCi.TH1:
• Se establecen en 1 si el valor actual es mayor o igual que el umbral
correspondiente.
• Se resetean en 0 si el valor actual es menor que el umbral correspondiente.
Las salidas reflejas físicas se pueden configurar para responder de manera
diferente en el contexto de los resultados de la comparación de los valores del
umbral y el valor actual de los contadores.
NOTA: Se puede configurar una, dos o ninguna salida refleja.
Para obtener más información sobre la configuración de las salidas reflejas,
consulte Configuración de contadores de fase doble y fase única (consulte
Modicon M221, Logic Controller, Guía de programación).
%HSCi.U es una salida del bloque de funciones que indica la dirección de la
variación de contador asociada (1 para PROGRESIVO, 0 para REGRESIVO).
Entradas auxiliares
Las operaciones de conteo se realizan en el flanco ascendente de los pulsos, y
sólo si el bloque de funciones de conteo está habilitado (entrada IN en estado 1).
Existen dos entradas opcionales que se utilizan en la modalidad de conteo:
Entrada de captura yEntrada de preajuste:
• Se usa un flanco ascendente de la Entrada de captura para capturar el valor
actual (%HSCi.V o%HSCi.VD) y almacenarlo en %HSCi.C o%HSCi.CD. Las
entradas de captura se especifican como %I0.3 para %HSC0 y%I0.4 para %
HSC1 si está disponible.
• Un flanco ascendente de la Entrada de preajuste inicializa el valor %HSCi.V
o%HSCi.VD con el valor de preajuste para:
◦Fase dual [Cuadratura X1]
◦
◦Fase dual [Cuadratura X4]
◦Fase dual [Pulso/Dirección] con la función regresiva en curso.
La Entrada de preajuste restablece el valor a 0 para:
◦Monofásico
◦Fase dual [Pulso/Dirección] con la función progresiva en curso.
Si la Entrada de preajuste auxiliar se establece en 1 con la entrada IN en 0
(se inhibe la función), las salidas no se supervisan y mantienen sus valores.
NOTA: %HSCi.F también se establece en 0. La entrada de preajuste se
especifica como %I0.2 para %HSC0 o%I0.5 para %HSC1.
EIO0000003308.02 33

Contador de alta velocidad (%HSC)
Operación
Esta ilustración es el diagrama de funcionamiento de la modalidad de conteo en modalidad de palabra simple (en
modalidad de palabra doble, se utilizan las variables de la función de palabra doble):
NOTA: Las salidas reflejas se gestionan independientemente del tiempo de
ciclo del controlador.
Diagrama de tiempos de Fase dual [Pulso/Dirección]
Ejemplo de configuración de salida refleja:
Salida refleja Valor < %HSC0.S0 %HSC0.S0 <= Valor < %HSC0.S1 Valor >= %HSC0.
S1
%Q0.2 0 0 1
%Q0.3 1 1 0
34 EIO0000003308.02

Contador de alta velocidad (%HSC)
Diagrama de tiempos:
(1) La entrada IN se establece en 1 para que se inicie la modalidad de conteo regresivo (%HSC0.U = 0, es decir,
IB = 1).
(2) El valor actual llega a 0, por tanto, el indicador de salida Fse establece en 1 y %HSC0.V se establece en
65535 para el próximo conteo.
(3) Cambio en la entrada IB: ahora el contador está en modalidad de conteo progresivo y %HSC0.U = 1.
(4) La entrada IB se establece en 1, de manera que el contador se encuentra en modalidad de conteo regresivo y
%HSC0.U se establece en 0.
(5) La entrada Sse establece en 1 mientras el conteo regresivo está en curso, por lo que %HSC0.V se inicializa
en el valor de preajuste %HSC0.P = 17.
(6) Sse restablece en 0 y el valor de preajuste %HSC0.P se cambia a 20.
(7) La entrada IN se establece en 0, por lo que la función se inhibe y %HSC0.V se mantiene.
(8) Sse establece en 1, por lo que se tiene en cuenta el nuevo valor de preajuste (%HSC0.P = 20) y se
actualizan las salidas reflejas. Nota: Si se usa una entrada de preajuste auxiliar en vez de S, no se actualizan las
salidas reflejas de acuerdo con la familia Twido de controladores.
(9) La entrada IN se establece en 1 y se reinicia el funcionamiento en modalidad de conteo regresivo.
(10) El valor de umbral de %HSC0.S1 se establece en 17.
(11) La entrada Sactiva permite el nuevo valor S1 de umbral en el siguiente conteo y restablece %HSC0.V en 0.
(12) Se realiza una captura del valor actual %HSC0.V de modo que %HSC0.C = 14.
NOTA: %HSC0.R y%HSC0.S se deben establecer en TRUE para tener
activas las salidas reflejas configuradas.
EIO0000003308.02 35

Contador de alta velocidad (%HSC)
Fase dual [Cuadratura X1], , Fase dual [Cuadratura X4]
Diagrama de tiempos
Un codificador físico proporciona 2 señales de desplazamiento de 90° que
permiten al contador contar pulsos y detectar el sentido:
X1 1 conteo para cada ciclo del codificador
X2 2 conteos para cada ciclo del codificador
X4 4 conteos para cada ciclo del codificador
Diagrama de tiempos:
Cuadratura X1: cuando el canal A adelanta al canal B, el contador aumenta en el flanco ascendente del canal A.
Cuando el canal B adelanta al canal A, el contador disminuye en el flanco descendente del canal A.
Cuadratura X2: el contador aumenta o disminuye en cada flanco del canal A, según qué canal sea el que
adelanta al otro. Cada ciclo provoca dos incrementos o disminuciones.
Cuadratura X4: el contador aumenta o disminuye en cada flanco de los canales A y B. El contador aumenta o
disminuye según qué canal sea el que adelanta al otro. Cada ciclo provoca 4 incrementos o disminuciones.
Diagrama de tiempos de Monofásico
Ejemplo de configuración de salida refleja:
Salida refleja Valor < %HSC0.S0 %HSC0.S0 <= Valor < %HSC0.S1 Valor >= %HSC0.
S1
%Q0.2 0 1 0
%Q0.3 1 0 1
36 EIO0000003308.02

Contador de alta velocidad (%HSC)
Diagrama de tiempos:
(1) IN se establece en 1: la función de conteo está activada (%HSC0.U = 1 porque %HSC0 es un contador
progresivo).
(2) %Q0.2 (salida refleja) y TH0 se establecen en 1.
(3) TH1 se establece en 1.
(4) Se alcanza el valor máximo para que en el siguiente conteo, %HSC0.V se restablezca a 0 y F se establezca
en 1.
(5) Sse establece en 1, y el valor actual, %HSC0.V, se establece en 0.
(6) La función actual se inhibe mientras que IN se establece en 0.
(7) Mientras que la función se inhibe, Sse establece en 1, de manera que el valor actual se restablece a 0.
(8) Cambio del valor de umbral S1 a 17.
(9) Sse establece en 1, por lo que el nuevo valor de S1 se permitirá en el siguiente conteo.
(10) La entrada de captura se establece en 1, por lo %HSC0.C = 17.
EIO0000003308.02 37

Contador de alta velocidad (%HSC)
Contador de alta velocidad en modalidad de medidor de
frecuencias
Introducción
La modalidad de medidor de frecuencias de un Contador de alta velocidad se
utiliza para medir la frecuencia de una señal periódica en Hz en la entrada IA
(fase A de entrada de pulsos).
El rango de frecuencias que puede medirse oscila entre 1 Hz y 100 kHz con un
rango de 0 a 4294967295 en la modalidad de palabra doble.
Es posible elegir entre dos referencias de tiempo; la elección la realiza el objeto %
HSC.T (referencia de tiempo):
Referencia de tiempo Precisión Actualizar
100 ms 0,01 % para 100 kHz
10% para 100 Hz
10 veces por segundo
1 s 0,001% para 100 kHz
10% para 10 Hz
Una vez por segundo
Medición de precisión
Operación
En esta ilustración se muestra el diagrama de funcionamiento de la modalidad del
medidor de frecuencias:
38 EIO0000003308.02

Contador de alta velocidad (%HSC)
Diagrama de tiempos
Este diagrama de tiempos es un ejemplo de cómo utilizar un contador de alta velocidad (High Speed Counter) en
la modalidad de medidor de frecuencias:
(1) La primera medición de frecuencias se inicia en un flanco ascendente de la señal TB.
(2) %HSC0.V (o %HSC0.VD) se actualiza tras un periodo de TB.
(3) La entrada IN y la entrada Sse establecen en 1, de modo que %HSC0.V (o %HSC0.VD) se establece en 0.
(4) %HSC0.T se establece en 100 ms, de modo que la medición se cancela y se inicia una nueva.
(5) La entrada IN se establece en 0, por lo que la función de medición de frecuencias se inhibe y %HSC0.V (o %
HSC0.VD) se mantiene.
(6) Sse establece en 1, por lo que el valor %HSC0.V (o %HSC0.VD) se establece en 0.
(7) Sse establece en 0 e IN se establece en 1, de modo que la medición comenzará en el siguiente flanco
ascendente de la señal TB.
EIO0000003308.02 39

Funciones avanzadas de salidas expertas
Contenido de esta parte
Pulso (%PLS) ................................................................................................41
Modulación de ancho de pulsos (%PWM) ........................................................48
Drive (%DRV) ................................................................................................54
Salida de tren de pulsos (%PTO).....................................................................80
Generador de frecuencias (%FREQGEN) ......................................................155
Descripción general
En esta parte se describen las funciones avanzadas de salidas expertas.
40 EIO0000003308.02

Pulso (%PLS)
Pulso (%PLS)
Contenido de este capítulo
Descripción...................................................................................................41
Configuración de los bloques de función .........................................................42
Ejemplo de programación ..............................................................................47
Uso de los bloques de funciones de pulsos
En este capítulo se proporcionan descripciones y directrices de programación
para utilizar bloques de funciones Pulse.
Descripción
Introducción
El bloque de funciones Pulse se utiliza para generar señales de onda
cuadrada.
Hay dos bloques de funciones Pulse disponibles en el canal de salida dedicado %
Q0.0 o%Q0.1. Los controladores lógicos con salidas de relé para estos dos
canales no admiten el bloque de funciones Pulse. Consulte M221 Logic Controller
- Guía de hardware para obtener más información sobre las entradas y salidas.
El bloque de funciones Pulse solamente permite un ancho de señal (o ciclo de
servicio) único del 50 %.
Puede optar por limitar el número de pulsos o el periodo en el que se ejecutará el
tren de pulsos. Estos factores se pueden determinar en el momento de la
configuración o de la actualización mediante el programa.
Debe configurar el bloque de funciones Pulse en Configuración > Generadores
de pulsos antes de utilizar una instancia del bloque de funciones. Consulte
Configuración de generadores de pulsos (consulte Modicon M221, Logic
Controller, Guía de programación).
La función PLS tiene las características siguientes:
Característica Valor
Número de canales 2
Frecuencia mínima 1 Hz
Frecuencia máxima 10000 Hz
Precisión en la frecuencia 1 %
Ilustración
Esta ilustración corresponde a un bloque de funciones Pulse:
EIO0000003308.02 41

Pulso (%PLS)
Entradas
El bloque de funciones Pulse contiene las siguientes entradas:
Etiqueta Descripción Valor
IN Enable En el estado 1, el pulso se realiza en el canal de salida
especializada.
En el estado 0, el canal de salida se establece en 0.
R Restablecer a 0
(opcional) En el estado 1, las salidas %PLSi.Q y%PLSi.D es
establecen en 0.
El número de pulsos generado en el periodo T se
establece en 0.
Salidas
El bloque de funciones Pulse contiene las siguientes salidas:
Etiqueta Objeto Descripción Valor
Q%PLSi.Q Generación en curso El estado 1 indica que la señal de Pulse se genera en el canal de
salida especializada configurado.
D%PLSi.D Generación completa
(opcional) En el estado 1, la generación de la señal ha concluido. Se ha
alcanzado el número de pulsos deseados.
Configuración de los bloques de función
Descripción general
Para configurar el recurso Pulse Generator, consulte Configuración de los
generadores de pulsos (consulte Modicon M221, Logic Controller, Guía de
programación).
Para configurar el recurso Pulse Generator como PLS, consulte Configuración de
pulso (consulte Modicon M221, Logic Controller, Guía de programación).
42 EIO0000003308.02

Pulso (%PLS)
Parámetros
El bloque de funciones Pulse contiene los parámetros siguientes:
Parámetro Descripción Valor
Utilizado Dirección
utilizada Si está seleccionada, esta dirección se está utilizando
actualmente en un programa.
Dirección %PLSi
Dirección
Pulse
El identificador de instancia, donde i va desde 0 hasta el
número de objetos disponibles en este Logic Controller. Para
obtener el número máximo de objetosPulse, consulte la tabla
Número máximo de objetos (consulte Modicon M221, Logic
Controller, Guía de programación).
Símbolo Símbolo El símbolo asociado con este objeto. Para obtener más
información, consulte Definición y uso de los símbolos
(consulte EcoStruxure Machine Expert - Basic, Guía de
funcionamiento).
Preajuste Preselección
del periodo
(%PLSi.P)
• Referencia de tiempo = 1 s, %PLSi.P = 1 o 2
• Referencia de tiempo = 10 ms, 1 ≤ %PLSi.P ≤ 200
• Referencia de tiempo = 1 ms, 1 ≤ %PLSi.P ≤ 2000
• Referencia de tiempo = 0,1 ms, 1 ≤ %PLSi.P ≤ 20000
Núm. Pulso Número de
pulsos (%
PLSi.N,%
PLSi.ND)
Para producir un número ilimitado de pulsos, establezca %
PLS.N o%PLS.ND en 0.
Corriente Salida de
corriente (%
PLSi.Q)
0 ó 1.
Done Pulso
finalizado (%
PLSi.D)
En el estado 1, la generación de la señal ha concluido. Se ha
alcanzado el número de pulsos deseados. Se restablece
configurando las entradas IN o R en 1.
Comentario Comentario Se puede asociar un comentario opcional con este objeto.
Haga doble clic en la columna Comentario y escriba un
comentario.
Objetos
El bloque de funciones Pulse está asociado con los siguientes objetos:
Objeto Descripción Tamaño
(bit) Valor
predetermi-
nado
Rango
%PLSi.P Valor de
preajuste 16 Preajuste (se
establece en
Configura-
ción >
Generadores
de pulsos)
Preajuste %PLSi.P Referencia
de tiempo
1...20000 0,1 ms
1...2000 1 ms
De 1 a 200 10 ms
1 o 2 1 s (valor
predetermi-
nado)
%PLSi.N Número de
pulsos 16 0 0...32767
%PLSi.ND 32 0 de 0 a 2147483647
Reglas de utilización
El periodo de la señal de salida Tse establece con los parámetros Preajuste y
Referencia de tiempo como T = %PLSi.P ×Referencia de tiempo.
EIO0000003308.02 43

Pulso (%PLS)
En esta tabla se muestra el rango de períodos disponibles:
Referencia de tiempo frecuencia
0,1 ms De 0,5 Hz a 10000 Hz
1 ms De 0,5 Hz a 1000 Hz
10 ms De 0,5 Hz a 100 Hz
1 s De 0,5 Hz a 1 Hz
La Referencia de tiempo se establece en Configuración > Generadores de
pulsos y no se puede modificar. Para obtener más detalles, consulte
Configuración de los generadores de pulsos (consulte Modicon M221, Logic
Controller, Guía de programación).
Si %PLSi.P:
• se modifica, el período de la señal de salida cambia al final del período
actual.
• se establece en 0, se detiene la función de generación de pulsos.
• se encuentra fuera de rango, el parámetro se fuerza a 0 y se detiene la
función de generación de pulsos.
Si %PLSi.N (o %PLSi.ND en la modalidad Palabra doble):
• se modifica, el número de pulsos que se va a generar se utiliza en la
siguiente ejecución de la función de generación de pulsos (%PLSi.D = 1 o
después de %PLSi.R = 1).
• se establece en 0, se genera un número ilimitado de pulsos.
• se encuentra fuera del rango, el parámetro se fuerza a 0.
44 EIO0000003308.02

Pulso (%PLS)
Diagrama de tiempos
El diagrama de tiempos muestra la temporización para el bloque de funciones
Pulse:
(1) La entrada IN se establece en 1, la señal de pulso se genera en la salida
especializada (%Q0.0), por lo que %PLSi.Q se establece en 1.
(2) El número de pulsos alcanza %PLS0.N (= 4), por lo que la salida del indicador
Finalizado (%PLS0.D) se establece en 1 y la generación de pulsos se detiene (%
PLS0.Q = 0).
(3) La entrada IN se establece en 1, de modo que %PLS0.D se restablece en 0.
(4) La entrada IN se establece en 0, de modo que el canal de salida se establece
en 0 y %PLS0.Q = 0 indica que la generación de la señal no está activa.
(5) %PLS0.D se establece en 0 mediante la configuración de la entrada Ren 1.
EIO0000003308.02 45

Pulso (%PLS)
Casos especiales
Caso especial Descripción
Efecto de un reinicio en frío (%
S0=TRUE)• Se detiene la generación de pulsos.
• Durante la inicialización del controlador, la salida se
restablece a 0.
• Si después de la inicialización del controlador:
◦el controlador entra en estado STOPPED, la estrategia
de recuperación configurada se aplica a la salida.
◦el controlador entra en estado RUNNING, se restauran
los parámetros de configuración.
Efecto de un reinicio en
caliente (%S1=TRUE)• Se detiene la generación de pulsos.
• Durante la inicialización del controlador, la salida se
restablece a 0.
• Si después de la inicialización del controlador:
◦el controlador entra en estado STOPPED, la estrategia
de recuperación configurada se aplica a la salida.
◦el controlador entra en estado RUNNING, se restauran
los parámetros de configuración; sin embargo, el
número de pulsos que puedan haberse enviado ya se
restablece en 0.(1)
Efecto en la detención del
controlador • Se detiene la generación de pulsos.
• El comportamiento de recuperación depende de la
estrategia de recuperación configurada:
◦Mantener valores: las salidas se restablecen a 0.
◦Valor de retorno: las salidas se establecen en los
valores de retorno configurados (consulte EcoStruxure
Machine Expert - Basic, Guía de funcionamiento).
Efecto de la modificación
online
Ninguno
Efecto de un cortocircuito o
sobrecorriente en una salida
direccionada por el bloque de
funciones Pulse mientras se
genera un número limitado de
pulsos
• Se detiene la generación de pulsos.
• Una vez que se ha corregido el cortocircuito o la
sobrecorriente, la generación de pulsos reanuda la
secuencia en el punto en que se detuvo.
(1) Si en el momento del reinicio en caliente hay una instrucción de salida de pulsos en curso
efectiva, la generación de pulsos tras el reinicio del controlador no tendrá en cuenta el número de
pulsos enviados antes del reinicio en caliente.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
• Evite emitir un comando de reinicio en caliente (%S1=TRUE) mientras haya
un comando PLS en curso activo.
• Si es inevitable un reinicio en caliente, debe tener en cuenta cualquier pulso
que haya sido enviado antes del reinicio en caliente.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
46 EIO0000003308.02

Pulso (%PLS)
Ejemplo de programación
Introducción
El bloque de funciones Pulse puede configurarse como en este ejemplo de
programación.
Programación
Este ejemplo es un bloque de funciones Pulse:
Escalón Instrucción
0BLK %PLS0
LD %M1
IN
LD %M0
R
OUT_BLK
LD Q
ST %Q0.5
LD D
ST %M10
END_BLK
NOTA: Consulte el procedimiento de reversibilidad (véase EcoStruxure
Machine Expert - Basic, Guía de la biblioteca de funciones genéricas) para
obtener el diagrama de contactos equivalente.
EIO0000003308.02 47

Modulación de ancho de pulsos (%PWM)
Modulación de ancho de pulsos (%PWM)
Contenido de este capítulo
Descripción...................................................................................................48
Configuración de los bloques de función .........................................................49
Ejemplo de programación ..............................................................................53
Uso de los bloques de funciones de modulación de ancho de pulsos
En este capítulo se proporcionan descripciones y directrices de programación
para utilizar bloques de funciones Pulse Width Modulation.
Descripción
Introducción
El bloque de funciones de Pulse Width Modulation genera una señal de
onda variable en un canal de salida especializada, %Q0.0 o%Q0.1, con un ancho
variable y, por lo tanto, un ciclo de servicio.
Los controladores con salidas de relé para estos dos canales no admiten esta
función.
%PWM0 utiliza la salida especializada %Q0.0 y%PMW1 utiliza la salida
especializada %Q0.1. Los bloques de funciones Pulse %PLS también se pueden
configurar para utilizar las mismas salidas especializadas. Puede configurar
cualquiera de estas dos funciones, pero no ambas, para cualquier salida
especializada.
Debe configurar el bloque de funciones Pulse Width Modulation en
Configuración > Generadores de pulsos antes de utilizar una instancia del
bloque de funciones. Consulte Configuración de generadores de pulsos (consulte
Modicon M221, Logic Controller, Guía de programación).
La función PWM tiene las características siguientes:
Característica Valor
Número de canales 2
Frecuencia mínima 1 Hz
Frecuencia máxima 10000 Hz
Precisión en la frecuencia 1 %
Ilustración
En esta ilustración se presenta el bloque de funciones Pulse Width Modulation:
48 EIO0000003308.02

Modulación de ancho de pulsos (%PWM)
Entradas
El bloque de funciones Pulse Width Modulation contiene la siguiente entrada:
Etiqueta Objeto Descripción Valor
IN %PWMi.IN Enable En el estado 1, la señal de Pulse Width Modulation se genera en
el canal de salida.
En el estado 0, el canal de salida se establece en 0.
Configuración de los bloques de función
Descripción general
Para configurar el recurso Pulse Generator, consulte Configuración de los
generadores de pulsos (consulte Modicon M221, Logic Controller, Guía de
programación).
Para configurar el recurso Pulse Generator como PWM, consulte Modulación de
ancho de pulsos (consulte Modicon M221, Logic Controller, Guía de
programación).
EIO0000003308.02 49

Modulación de ancho de pulsos (%PWM)
Propiedades
El bloque de funciones Pulse Width Modulation tiene las propiedades siguientes:
Propiedad Valor Descripción
Utilizado Casilla de verificación activada /
desactivada
Indica si se está utilizando la
dirección.
Dirección %PWMi donde ies 0 o 1 ies el identificador de instancia.
Para obtener el número máximo de
objetosPWM, consulte la tabla
Número máximo de objetos
(consulte Modicon M221, Logic
Controller, Guía de programación).
Símbolo Texto definido por el usuario El símbolo asociado con este objeto.
Para obtener más información,
consulte Definición y uso de los
símbolos (consulte EcoStruxure
Machine Expert - Basic, Guía de
funcionamiento).
Preajuste •%PWMi.P = 1 si Referencia de
tiempo = 1 s
• 1 ≤ %PWMi.P ≤ 100 si Referencia
de tiempo = 10 ms
• 1 ≤ %PWMi.P ≤ 1000 si Referencia
de tiempo = 1 ms
• 1 ≤ %PWMi.P ≤ 10000 si Referencia
de tiempo = 0,1 ms
Preselección del periodo
Ciclo de
servicio De 0 a 100
NOTA: Los valores superiores a 100
se consideran iguales a 100.
El Ciclo de servicio se controla por
el objeto %PWMi.R, y es el
porcentaje de la señal en estado 1
durante el periodo. El ancho del
estado 1 (Tp) es igual a:
TP = T x (%PWMi.R/100). La
aplicación de usuario escribe el
valor para %PWMi.R.
Comentario Texto definido por el usuario Un comentario para asociar a este
objeto.
NOTA: Las propiedades Núm. pulsos,Actual yFinalizado que aparecen en
la tabla de propiedades Generadores de pulsos en la ficha Programación
no se aplican a la función PWM.
Objetos
El bloque de funciones Pulse Width Modulation está asociado con los siguientes
objetos:
Objeto Descripción Tamaño
(bit) Valor
predetermi-
nado
Rango
%PWMi.P Valor de
preajuste 16 Preajuste (se
establece en
Configura-
ción >
Generadores
de pulsos)
Preajuste %PWMi.
P
Referencia
de tiempo
1...10000 0,1 ms
De 1 a 1000 1 ms
De 1 a 100 10 ms
1 1 s (valor
predetermi-
nado)
%PWMi.R Ciclo de
servicio
(Ratio)
16 0 de 0 a 100
50 EIO0000003308.02

Modulación de ancho de pulsos (%PWM)
Si %PWMi.P:
• se modifica, el periodo de la señal de salida cambia al final del periodo actual.
• se establece en 0, se detiene la función de generación de pulsos.
• se encuentra fuera de rango, el parámetro se fuerza a 0 y se detiene la
función de generación de pulsos.
Si %PWMi.R:
• se establece en 0, se detiene la función de generación de pulsos (la salida se
establece en 0).
• se establece en 100, la señal de la salida se establece en 1.
• se modifica, el coeficiente de la señal de salida cambia al final del período
actual.
• se encuentra fuera del rango, el parámetro se fuerza a 0.
Referencia de tiempo
La Referencia de tiempo se establece en Configuración > Generadores de
pulsos, y sólo se puede modificar en la ficha Configuración. Para obtener más
detalles, consulte Configuración de los generadores de pulsos (consulte Modicon
M221, Logic Controller, Guía de programación).
El periodo de la señal de salida Tse establece con los parámetros Preajuste y
Referencia de tiempo de tal manera que T = %PWMi.P ×Referencia de
tiempo.
Esta tabla presenta el rango de periodos disponibles:
Referencia de tiempo Intervalo de frecuencia
0,1 ms De 1 Hz a 10000 Hz
1 ms De 1 Hz a 1000 Hz
10 ms De 1 Hz a 100 Hz
1 s De 1 Hz a 1 Hz
EIO0000003308.02 51

Modulación de ancho de pulsos (%PWM)
Diagrama de tiempos
Este diagrama presenta la temporización del bloque de funciones Pulse Width Modulation:
(1) El coeficiente PWM (%PWMi.R) se establece en el 20%, IN = 0, por lo que la generación de pulsos no está
activa
(2) IN se establece en 1, por lo que la salida PWM está activa
(3) El ancho programable (Tp ) cambia con %PWM.R
(4) IN se establece en 0, por lo que la función PWM está inhibida
Casos especiales
Caso especial Descripción
Efecto de un reinicio en frío (%
S0=TRUE)• Se detiene la generación de pulsos.
• Durante la inicialización del controlador, la salida se
restablece a 0.
• Si después de la inicialización del controlador:
◦el controlador entra en estado STOPPED, la estrategia
de recuperación configurada se aplica a la salida.
◦el controlador entra en estado RUNNING, se restauran
los parámetros de configuración.
Efecto de un reinicio en
caliente (%S1=TRUE)• Se detiene la generación de pulsos.
• Durante la inicialización del controlador, la salida se
restablece a 0.
• Si, después de la inicialización del controlador, este entra
en estado STOPPED, la estrategia de recuperación
configurada se aplica a la salida.
Efecto en la detención del
controlador • Se detiene la generación de pulsos.
• El comportamiento de recuperación depende de la
estrategia de recuperación configurada:
◦Mantener valores: las salidas se restablecen a 0.
◦Valor de retorno: las salidas se establecen en los
valores de retorno configurados (consulte EcoStruxure
Machine Expert - Basic, Guía de funcionamiento).
Efecto de la modificación
online
Ninguno
52 EIO0000003308.02

Modulación de ancho de pulsos (%PWM)
Ejemplo de programación
Introducción
El bloque de funciones Pulse Width Modulation puede configurarse como en este
ejemplo de programación.
Ejemplo de programación
En este ejemplo:
• El programa modifica el ancho de señal de acuerdo con el estado de las
entradas del controlador %I0.0 y%I0.1.
• La referencia de tiempo se establece en 10 ms.
• El valor de preajuste %PWM0.P se establece en 50, por lo que el coeficiente
del paso es igual al 2%.
• El periodo configurable T es igual a 500 ms.
El resultado es:
• Si %I0.0 y%I0.1 se establecen en 0, el coeficiente %PWM0.R se ajusta al
20%, por lo que la duración de la señal en estado 1 será: 20% × 500 ms =
100 ms.
• Si %I0.0 se establece en 1 y %I0.1 se establece en 0, el coeficiente %PWM0.
Rse ajusta al 50% (duración de 250 ms).
• Si %I0.0 y%I0.1 se establecen en 1, el coeficiente %PWM0.R se ajusta al
80% (duración de 400 ms).
Ejemplos de instrucciones de Pulse Width Modulation:
Escalón Instrucción
0LDN %I0.0
ANDN %I0.1
[%PWM0.R:=20]
1LD %I0.0
ANDN %I0.1
[%PWM0.R:=50]
2LD %I0.0
AND %I0.1
[%PWM0.R:=80]
3BLK %PWM0
LD %I0.2
IN
END_BLK
NOTA: Consulte el procedimiento de reversibilidad (véase EcoStruxure
Machine Expert - Basic, Guía de la biblioteca de funciones genéricas) para
obtener el diagrama de contactos equivalente.
EIO0000003308.02 53

Drive (%DRV)
Drive (%DRV)
Contenido de este capítulo
Descripción...................................................................................................54
Estados de la unidad y del controlador lógico ..................................................56
Agregar un bloque de funciones de Drive ........................................................58
Configuración de los bloques de función .........................................................59
MC_Power_ATV: activar/desactivar la etapa de potencia .................................59
MC_Jog_ATV: iniciar la modalidad jog ............................................................62
MC_MoveVel_ATV: mover a la velocidad especificada.....................................64
MC_Stop_ATV: detener el movimiento............................................................67
MC_ReadStatus_ATV: leer el estado del dispositivo ........................................70
MC_ReadMotionState_ATV: leer el estado de movimiento ...............................72
MC_Reset_ATV: confirmar y restablecer errores .............................................74
Códigos de error ...........................................................................................77
Descripción
Presentación
Los bloques de funciones de Drive permiten que un M221 Logic
Controller controle dispositivos de Drive como, por ejemplo, las unidades de
velocidad Altivar. Ejemplo:
• Controlan la velocidad de un motor gestionado por una unidad ATV y lo
actualizan continuamente.
• Supervisan el estado de la unidad ATV y el motor.
• Gestionan los errores detectados en la unidad ATV.
Las comunicaciones se realizan con uno de los métodos siguientes:
• Configuración de una de las líneas serie del Logic Controller como
IOScanner serie Modbus (consulte Modicon M221, Logic Controller, Guía de
programación) con el protocolo Modbus RTU.
• Configurando el puerto Ethernet como Modbus TCP IOScanner.
En EcoStruxure Machine Expert - Basic, añada primero los tipos de unidad ATV
de destino al IOScanner serie Modbus o Modbus TCP IOScanner. De esta forma,
se configuran los canales predefinidos y las peticiones de inicialización que
permiten leer los datos de registros específicos y escribir datos en registros
específicos de la unidad ATV, como, por ejemplo:
• Palabras de estado ETA
• Palabras de estado ampliado ETI
• Velocidad de salida (RPM) RFRD
• Códigos de error del último error DP0
• Palabras de control CMD
Las transferencias de datos se efectúan con el tipo de petición Modbus FC23 -
Lectura/escritura de varios registros. De esta forma, el programa puede, por
ejemplo, leer los registros ETA,ETI yDP0 y escribir en el registro CMD usando
una única petición Modbus.
54 EIO0000003308.02

Drive (%DRV)
Los bloques de funciones de Drive de eje único siguientes están disponibles en la
ficha Programación de EcoStruxure Machine Expert - Basic:
Bloque de funciones Descripción
MC_Power_ATV, página 59 Habilita o deshabilita la fase de arranque de un dispositivo.
MC_Jog_ATV, página 62 Inicia la modalidad de funcionamiento Jog en un dispositivo.
MC_MoveVel_ATV, página 64 Especifica la velocidad de destino de un dispositivo.
MC_Stop_ATV, página 67 Detiene el movimiento actual en un dispositivo.
MC_ReadStatus_ATV, página 70 Recupera información de estado de un dispositivo.
MC_ReadMotionState_ATV, página
72 Recupera información de estado del movimiento actual de
un dispositivo.
MC_Reset_ATV, página 74 Restablece el error del dispositivo relativo al estado de la
unidad, página 56 y confirma los errores de MC_Power_
ATV, página 59.
En un programa, se puede usar un máximo de 16 instancias de cada bloque de
funciones de Drive en cualquier momento.
Cuando se añade un dispositivo al IOScanner serie Modbus o Modbus TCP
IOScanner, EcoStruxure Machine Expert - Basic asigna un eje al dispositivo
usando un objeto %DRVn, en el que nes el número de la unidad ATV. Siempre
que añada un bloque de funciones de Drive a su programa, deberá asociarlo a un
eje creando un enlace entre el bloque de funciones, el eje y el dispositivo de
destino definido en el IOScanner serie Modbus o el Modbus TCP IOScanner.
EIO0000003308.02 55

Drive (%DRV)
Estados de la unidad y del controlador lógico
Diagrama de estados de la unidad
La unidad siempre se encuentra en uno de los estados definidos en el diagrama
siguiente. Cuando se ejecuta un bloque de funciones de Drive o se produce un
error, puede generarse una transición del estado:
Nota 1 Desde cualquier estado, si se produce un error.
Nota 2 Desde cualquier estado (si no hay ErrorAxis) cuando %MC_Power_ATV.
status es 0.
Nota 3 Transición del estado ErrorStop al estado Disabled solo si %MC_Reset_
ATV.Done = 1 y %MC_Power_ATV.status = 0.
Nota 4 Transición del estado ErrorStop al estado Standstill solo si %MC_Reset_
ATV.Done = 1 y %MC_Power_ATV.Enable = 1 y %MC_Power_ATV.Status = 1.
Nota 5 Transición del estado DISABLED al estado Standstill solo si %MC_
Power_ATV.Enable = 1 y %MC_Power_ATV.Status = 1.
Nota 6 Transición del estado Stopping al estado Standstill solo si %MC_Stop_
ATV.Done = 1 y %MC_Stop._ATV.Execute = 0.
En la tabla siguiente se describen los estados de la unidad:
Estado Descripción
Deshabilitado Estado inicial. La unidad no se encuentra en estado operativo ni en un estado
de error.
Parada La unidad se encuentra en estado operativo (ETA = 16#xx37) y Velocity = 0
(RFRD = 0).
ErrorStop La unidad se encuentra en estado de error (ETA = 16#xxx8)
Movimiento
continuo
La unidad se encuentra en estado operativo (ETA = 16#xx37) y Velocity ≠ 0
(RFRD ≠ 0).
Detención El bloque de funciones MC_Stop_ATV se está ejecutando.
El bloque de funciones MC_ReadStatus_ATV, página 70 se puede usar para leer
el estado de la unidad ATV.
56 EIO0000003308.02

Drive (%DRV)
Transiciones de estado del controlador lógico
En la tabla siguiente se describe cómo los cambios en el estado del controlador
lógico repercuten en los bloques de funciones de Drive:
Estado del controlador
lógico Repercusión sobre los bloques de funciones de Drive
RUNNING Los bloques de funciones de Drive se ejecutan normalmente de
acuerdo con la lógica del usuario.
STOPPED Los ejes de la unidad configurados se detienen cuando el
controlador entra en el estado STOPPED, a menos que la opción
Comportamiento de recuperación se establezca en Mantener
valores.
Si la opción Comportamiento de recuperación está establecida
en Valores de recuperación, el comando 0x00 se envía a la
unidad ATV, lo que conduce a un estado Switch on Disabled (NST).
En los demás casos, si Comportamiento de recuperación está
establecido en Mantener valores, no se ejecuta ninguna acción
(no se cambia el comando).
HALTED (detenido) Los ejes de la unidad configurados se detienen cuando el
controlador entra en el estado HALTED, a menos que la opción
Comportamiento de recuperación se establezca en Mantener
valores.
Si la opción Comportamiento de recuperación está establecida
en Valores de recuperación, el comando 0x00 se envía a la
unidad ATV, lo que conduce a un estado Switch on Disabled (NST).
En los demás casos, si Comportamiento de recuperación está
establecido en Mantener valores, no se ejecuta ninguna acción
(no se cambia el comando).
POWERLESS,EMPTY Los bloques de funciones de Drive no se ejecutan (se detiene el
IOScanner serie Modbus o el Modbus TCP IOScanner).
Lo mismo ocurre cuando se actualiza la aplicación del controlador.
NOTA: Si el estado del controlador es HALTED oSTOPPED y no ha
seleccionado la opción Mantener valores, el controlador no ejecuta más
comandos para la unidad. Por consiguiente, la unidad debe determinar cuál
es el estado adecuado que debe asumir. Si elige la opción Mantener valores
para la unidad, debe incluir esto en el análisis de peligros y riesgos para el
caso en que se produzcan eventos posiblemente peligrosos que tengan
consecuencias.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Durante el diseño de la máquina, debe asegurarse de que se lleva a cabo y se
respeta una evaluación de riesgo según la norma EN/ISO 12100.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
EIO0000003308.02 57

Drive (%DRV)
Agregar un bloque de funciones de Drive
Requisitos previos
Requisitos previos para agregar un bloque de funciones de Drive:
• Un IOScanner serie Modbus o un Modbus TCP IOScanner debe configurarse
en una línea serie o en Ethernet.
• Las unidades ATV que se van a controlar deben añadirse y configurarse
(consulte Modicon M221, Logic Controller, Guía de programación) en
IOScanner serie Modbus o Modbus TCP IOScanner.
Agregar un bloque de funciones de Drive
Siga estos pasos para agregar una instancia de un bloque de funciones de Drive:
Paso Acción
1 Seleccione la ficha Programación.
2Seleccione Bloques de funciones >Drive, tal como se muestra en el gráfico siguiente:
3 Haga clic en el escalón para colocar el bloque de funciones seleccionado.
4 Asocie las entradas/salidas del bloque de funciones.
Eliminación de un bloque de funciones
Siga estos pasos para eliminar una instancia de un bloque de funciones de Drive:
Paso Acción
1 En la ficha Programación, haga clic en la instancia del bloque de funciones.
2 Pulse Eliminar para eliminar el bloque de funciones seleccionado.
58 EIO0000003308.02

Drive (%DRV)
Configuración de los bloques de función
Configuración de objetos de Drive
Cada bloque de funciones de Drive está asociado a un objeto de Drive (%DRV).
Para ver una lista de objetos de Drive configurados:
Paso Acción
1Seleccione la ficha Programación >Herramientas y haga clic en Objetos de Drive >
Drive para ver las propiedades del objeto de Drive.
2 Actualice las propiedades según sea necesario y haga clic en Aplicar.
Los bloques de funciones de Drive tienen las propiedades siguientes:
Parámetro Edita-
ble Valor Valor
predeter-
minado
Descripción
Utilizado No True/False False Indica si el objeto de Drive se está
usando en el programa.
Dirección No %DRVn %DRVn La dirección del objeto de Drive, donde
nes el número del objeto.
Símbolo Sí ––Permite especificar un símbolo para
asociarlo al objeto de Drive.
Haga doble clic en la celda para definir
o editar un símbolo.
Comentario Sí ––Permite especificar un comentario para
asociarlo al objeto de Drive.
Haga doble clic en la celda para definir
o editar un comentario.
MC_Power_ATV: activar/desactivar la etapa de potencia
Descripción
Este bloque de funciones habilita o deshabilita la fase de arranque de la unidad.
Un flanco ascendente de la entrada Enable habilita la fase de arranque. Cuando
dicha fase está habilitada, la salida Status se establece en 1.
Un flanco descendente de la entrada Enable deshabilita la fase de arranque
(comando Shutdown sin Error). Cuando la fase de arranque está deshabilitada, la
salida Status se restablece en 0.
EIO0000003308.02 59

Drive (%DRV)
Si el registro de estado interno ETA de la unidad ATV no ha alcanzado un estado
operativo antes de la caducidad del valor de timeout, se genera un Timeout Error.
El timeout se calcula como tiempo de ciclo del canal multiplicado por 4 o en
10 segundos, según el valor que sea superior. Se necesita un mínimo de
10 segundos para tener en cuenta el tiempo de reacción de la unidad.
Si se detectan errores durante la ejecución del bloque de funciones, el Error de
salida se establece en 1. Esto lleva a un comando de Shutdown (CMD =
16#0006) que deshabilita la unidad ATV (estado Ready to switch on, ETA =
16#xx21).
Si se produce un error, sólo se restaurará la fase de arranque si se ejecuta
correctamente el bloque de funciones MC_Reset_ATV, página 74.
Representación gráfica
Entradas
En esta tabla se describen las entradas del bloque de funciones:
Etiqueta Objeto Valor inicial Descripción
Enable -0 Establézcalo en 1 para empezar a ejecutar el bloque de
funciones y habilitar la fase de arranque.
Establézcalo en 0 para detener la ejecución del bloque de
funciones y deshabilitar la fase de arranque.
Eje %MC_POWER_ATVi.AXIS
donde i es un valor entre 0 y 15
-Identificador del eje (%DRV0 a%DRV15) para el que se
ejecutará el bloque de funciones.
60 EIO0000003308.02

Drive (%DRV)
Salidas
En esta tabla se describen las salidas del bloque de funciones:
Etiqueta Objeto Valor inicial Valor
Estado %MC_POWER_ATVi.STATUS
donde i es un valor entre 0 y 15
0 Valor predeterminado: 0
• 0: Se deshabilita la etapa de potencia.
• 1: Se habilita la etapa de potencia.
Establézcalo en 1 cuando la unidad ATV alcance el
estado operativo (ETA = 16#xx37)
Error %MC_POWER_ATVi.ERROR
donde i es un valor entre 0 y 15
0 Establézcalo en 0 cuando no se detecte ningún error.
Establézcalo en 1 si se produce un error durante la
ejecución. La ejecución del bloque de funciones ha
finalizado. El objeto de salida ErrorId indica la causa del
error.
ErrorId %MC_POWER_ATVi.ERRORID
donde i es un valor entre 0 y 15
0 (ningún
error) Código de error devuelto por el bloque de funciones
cuando la salida Error se establece en 1.
Para obtener información detallada sobre los errores,
consulte la sección Códigos de error, página 77.
Rango: De 0 a 65 535
Parámetros
Haga doble clic en el bloque de funciones para visualizar los parámetros del
bloque de funciones.
El bloque de funciones MC_Power_ATV contiene los parámetros siguientes:
Parámetro Valor Descripción
Utilizado Dirección
utilizada Si está seleccionada, esta dirección se está utilizando
actualmente en un programa.
Dirección %MC_Power_
ATVi
El identificador de instancia, donde i va desde 0 hasta el
número de objetos disponibles en este Logic Controller.
Para conocer el número máximo de objetos de Drive,
consulte la tabla Número máximo de objetos (consulte
Modicon M221, Logic Controller, Guía de programación).
Símbolo Símbolo El símbolo asociado con este objeto. Para obtener más
información, consulte Definición y uso de los símbolos
(consulte EcoStruxure Machine Expert - Basic, Guía de
funcionamiento).
Eje %DRVn, donde n
oscila entre 0 y
15
Ninguno
Seleccione el eje (instancia de objeto de Drive) para el que
se ejecutará el bloque de funciones.
El objeto de Drive debe haberse configurado previamente
en Modbus TCP IOScanner o IOScanner serie Modbus
(consulte Modicon M221, Logic Controller, Guía de
programación).
Comentario Comentario Se puede asociar un comentario opcional con este objeto.
Haga doble clic en la columna Comentario y escriba un
comentario.
Actualice los parámetros según sea necesario y haga clic en Aplicar.
EIO0000003308.02 61

Drive (%DRV)
MC_Jog_ATV: iniciar la modalidad jog
Descripción
Este bloque de funciones inicia la modalidad de funcionamiento Jog. Una
operación Jog manda a un dispositivo que se mueva hacia delante o hacia atrás a
una velocidad especificada.
Si el bloque de funciones MC_MoveVel_ATV, página 64 o el bloque de funciones
MC_Stop_ATV, página 67 está habilitado mientras se ejecuta este bloque de
funciones (salida Busy establecida en 1), el bloque de funciones MC_Jog_ATV
rige el movimiento. La salida Busy se restablece en 0 y la salida CmdAborted se
establece en 1.
Cuando hay una operación de Jog en curso, sólo se aplica un cambio del valor de
velocidad (Vel) al detectar un flanco descendente/ascendente de las entradas
Forward oBackward.
Si la salida Error o la salida CmdAborted están establecidas en 1, primero
deberán restablecerse las entradas Forward yBackward en 0 y después deberá
aplicarse un nuevo flanco ascendente a las entradas Forward oBackward para
reiniciar el movimiento.
Si se inicia una operación de Jog mientras el bloque de funciones MC_Stop_ATV,
página 67 está ejecutándose, se produce un Stop Active Error. Si se inicia una
operación de Jog y la unidad no se encuentra en estado operativo (ETA ≠
16#xx37), se producirá un Not Run Error.
Representación gráfica
62 EIO0000003308.02

Drive (%DRV)
Entradas
En esta tabla se describen las entradas del bloque de funciones:
Entrada Objeto Valor
inicial Descripción
Forward -0 Si se establece la entrada Forward o la entrada Backward en 1, se
iniciará el movimiento de jog.
Si las entradas Forward yBackward se establecen ambas en 1, la
modalidad de funcionamiento permanecerá activa, se detendrá el
movimiento de jog y la salida Busy seguirá establecida en 1.
Si las entradas Forward yBackward se establecen ambas en 0, la
modalidad de funcionamiento se termina y la salida Done se
establece en 1 para un ciclo.
Backward -0
Vel %MC_JOG_ATVi.VEL
donde i es un valor entre 0
y 15
0 Velocidad de destino para la modalidad de funcionamiento Jog, en
revoluciones por minuto (rpm).
Durante el movimiento jog, sólo se aplica un cambio en el valor de
velocidad Vel, si se detecta un flanco descendente/ascendente en
la entrada Forward oBackward.
Rango: De -32768 a 32767
Axis %MC_JOG_ATVi.AXIS
donde i es un valor entre 0
y 15
-Identificador del eje (%DRV0 a%DRV15) para el que se ejecutará
el bloque de funciones.
Primero debe declararse el eje en la ficha Configuración.
Salidas
En esta tabla se describen las salidas del bloque de funciones:
Salida Objeto de salida Valor
inicial Descripción
Done %MC_JOG_ATVi.DONE 0 Establézcalo en 1 para un ciclo cuando las entradas Forward y
Backward estén ambas establecidas en 0.
Establézcalo en 1 para indicar que la modalidad de
funcionamiento Jog ha terminado.
Busy %MC_JOG_ATVi.BUSY 0 Se establece en 1 cuando:
•Jog está en curso (Forward = 1 o Backward = 1
• Las entradas Forward yBackward se establecen ambas
en 1, lo que indica que la modalidad de funcionamiento
Jog permanece activa y se detiene el movimiento jog.
CmdAborted %MC_JOG_ATVi.CMDABORTED 0 Establézcalo en 1 si la ejecución del bloque de funciones
termina porque se está ejecutando otro comando.
Error %MC_JOG_ATVi.ERROR 0 Establézcalo en 0 cuando no se detecte ningún error.
Establézcalo en 1 si se produce un error durante la ejecución.
La ejecución del bloque de funciones ha finalizado. El objeto de
salida ErrorId indica la causa del error.
ErrorId %MC_JOG_ATVi.ERRORID 0 (ningún
error) Código de error devuelto por el bloque de funciones cuando la
salida Error se establece en 1.
Para obtener información detallada sobre los errores, consulte
la sección Códigos de error, página 77.
Rango: De 0 a 65 535
EIO0000003308.02 63

Drive (%DRV)
Parámetros
Haga doble clic en el bloque de funciones para visualizar los parámetros del
bloque de funciones.
El bloque de funciones MC_Jog_ATV contiene los parámetros siguientes:
Parámetro Valor Descripción
Utilizado Dirección utilizada Si está seleccionada, esta dirección se está utilizando
actualmente en un programa.
Dirección %MC_Jog_ATVi El identificador de instancia, donde i va desde 0 hasta
el número de objetos disponibles en este Logic
Controller. Para conocer el número máximo de objetos
de Drive, consulte la tabla Número máximo de objetos
(consulte Modicon M221, Logic Controller, Guía de
programación).
Símbolo Símbolo El símbolo asociado con este objeto. Para obtener
más información, consulte Definición y uso de los
símbolos (consulte EcoStruxure Machine Expert -
Basic, Guía de funcionamiento).
Eje %DRVn, donde n
oscila entre 0 y 15
Ninguno
Seleccione el eje (instancia de objeto de Drive) para el
que se ejecutará el bloque de funciones.
El objeto de Drive debe haberse configurado
previamente en Modbus TCP IOScanner o IOScanner
serie Modbus (consulte Modicon M221, Logic
Controller, Guía de programación).
Vel Velocidad de destino Especifique la velocidad de destino para la modalidad
de funcionamiento Jog y presione Entrar.
Valor predeterminado: 0
Rango: De -32768 a 32767
Comentario Comentario Se puede asociar un comentario opcional con este
objeto.
Haga doble clic en la columna Comentario y escriba
un comentario.
Actualice los parámetros según sea necesario y haga clic en Aplicar.
MC_MoveVel_ATV: mover a la velocidad especificada
Descripción
Este bloque de funciones inicia la modalidad de funcionamiento Profile Velocity
con una velocidad especificada. Cuando se llega a la velocidad de destino, la
salida de InVel se establece en 1.
Si los bloques de funciones MC_Jog_ATV, página 62 oMC_Stop_ATV, página 67
están habilitados mientras este bloque de funciones está ejecutándose (salida de
Busy establecida en 1), MC_MoveVel_ATV rige el movimiento. En dicho caso, la
salida Busy se restablece en 0 y la salida CmdAborted se establece en 1.
Los valores de salida ContUpdate yVel se aplican en un flanco ascendente de la
entrada Execute.
Si las salidas Error oCmdAborted de MC_MoveVel_ATV están establecidas en 1,
se necesita un flanco ascendente nuevo de Execute para reanudar el movimiento.
Si se inicia este bloque de funciones mientras el bloque de funciones MC_Stop_
ATV, página 67 está ejecutándose, se producirá un Stop Active Error.
Si se inicia este bloque de funciones cuando la unidad no se encuentra en estado
operativo (ETA ≠ 16#xx37), se producirá un Not Run Error.
64 EIO0000003308.02

Drive (%DRV)
Representación gráfica
Entradas
En esta tabla se describen las entradas del bloque de funciones:
Entrada Objeto Valor inicial Descripción
Execute -0 Establézcalo en 1 para iniciar la ejecución del bloque de
funciones.
ContUpdate -0 Establézcalo en 1 antes de ejecutar el bloque de funciones para
habilitar la actualización continua del valor de parámetro Vel.
Vel %MC_MOVEVEL_
ATVi.VEL
donde i es un valor
entre 0 y 15
0 Velocidad de destino para la modalidad de funcionamiento, en
unidades de revoluciones por minuto (rpm).
Rango: de –32 768 a 32 767. Un valor negativo obliga al
movimiento a seguir el sentido opuesto.
Axis %MC_MOVEVEL_
ATVi.AXIS
donde i es un valor
entre 0 y 15
-Identificador del eje (%DRV0 a%DRV15) para el que se
ejecutará el bloque de funciones.
Primero debe declararse el eje en la ficha Configuración.
EIO0000003308.02 65

Drive (%DRV)
Salidas
En esta tabla se describen las salidas del bloque de funciones:
Salida Objeto Valor
inicial Descripción
InVel 0 0 indica que no se ha alcanzado la velocidad de
destino (Vel).
Establézcalo en 1 cuando se alcance la velocidad de
destino (Vel).
Busy %MC_MOVEVEL_ATVi.BUSY 0 Establézcalo en 1 cuando se ejecute el bloque de
funciones.
Permanece en 1 aunque se haya alcanzado la
velocidad de destino. Restablézcalo en 0 cuando se
detenga o se anule el bloque de funciones.
CmdAborted %MC_MOVEVEL_ATVi.CMDABORTED 0 Establézcalo en 1 si la ejecución del bloque de
funciones termina porque se está ejecutando otro
comando.
Error %MC_MOVEVEL_ATVi.ERROR 0 Establézcalo en 0 cuando no se detecte ningún error.
Establézcalo en 1 si se produce un error durante la
ejecución. La ejecución del bloque de funciones ha
finalizado. El objeto de salida ErrorId indica la causa
del error.
ErrorId %MC_MOVEVEL_ATVi.ERRORID 0 (ningún
error) Código de error devuelto por el bloque de funciones
cuando la salida Error se establece en 1.
Para obtener información detallada sobre los errores,
consulte la sección Códigos de error, página 77.
Rango: De 0 a 65 535
NOTA: Cuando el comando de velocidad de la unidad ATV es bajo (<10),
puede que los parámetros InVel yConstantVel no sean válidos debido a que
es posible que el rango de velocidad de la misma unidad ATV sea inexacto.
Parámetros
Haga doble clic en el bloque de funciones para visualizar los parámetros del
bloque de funciones.
66 EIO0000003308.02

Drive (%DRV)
El bloque de funciones MC_MovelVel_ATV contiene los parámetros siguientes:
Parámetro Valor Descripción
Utilizado Dirección utilizada Si está seleccionada, esta dirección se está utilizando actualmente en un programa.
Dirección %MC_MovelVel_ATVi El identificador de instancia, donde i va desde 0 hasta el número de objetos
disponibles en este Logic Controller. Para conocer el número máximo de objetos de
Drive, consulte la tabla Número máximo de objetos (consulte Modicon M221, Logic
Controller, Guía de programación).
Símbolo Símbolo El símbolo asociado con este objeto. Para obtener más información, consulte
Definición y uso de los símbolos (consulte EcoStruxure Machine Expert - Basic, Guía
de funcionamiento).
Eje %DRVn, donde n oscila
entre 0 y 15
Ninguno
Seleccione el eje (instancia de objeto de Drive) para el que se ejecutará el bloque de
funciones.
El objeto de Drive debe haberse configurado previamente en Modbus TCP IOScanner
o IOScanner serie Modbus (consulte Modicon M221, Logic Controller, Guía de
programación).
Vel Velocidad de destino Especifique la velocidad de destino para la modalidad de funcionamiento y presione
Entrar.
Valor predeterminado: 0
Rango: de –32768 a 32767. Un valor negativo obliga al movimiento a seguir el sentido
opuesto.
Comentario Comentario Se puede asociar un comentario opcional con este objeto.
Haga doble clic en la columna Comentario y escriba un comentario.
Actualice los parámetros según sea necesario y haga clic en Aplicar.
MC_Stop_ATV: detener el movimiento
Descripción
Este bloque de funciones detiene el movimiento en curso de la unidad
especificado.
Los parámetros de detención específicos de Drive, como es el caso, por ejemplo,
de la deceleración, se proporcionan en la configuración de la unidad.
Una vez que un flanco ascendente en la entrada Execute lo haya iniciado, no se
tendrá en cuenta ninguna actividad de la entrada Execute hasta el
establecimiento de Done en TRUE. Si se ejecuta otro bloque de funciones de
Drive mientras MC_Stop_ATV está ocupado, no se anulará el procedimiento. El
bloque de funciones MC_Stop_ATV seguirá ocupado y el otro bloque de
funciones se detendrá con un error.
Sólo se puede interrumpir el procedimiento de detención deshabilitando la fase de
arranque o si se produce un error (por ejemplo, un error de ATV Not Run o
Modbus TCP IOScanner o un error de IOScanner serie Modbus).
EIO0000003308.02 67

Drive (%DRV)
Representación gráfica
Entradas
En esta tabla se describen las entradas del bloque de funciones:
Entrada Objeto Valor inicial Descripción
Execute -0 Establézcalo en 1 para iniciar la ejecución del bloque de
funciones.
No se puede ejecutar otro bloque de funciones de
movimiento cuando la salida Busy está establecida en 1. En
ese caso, el otro bloque de funciones devuelve un error.
Eje %MC_STOP_ATVi.AXIS
donde i es un valor entre 0 y
15
-Identificador del eje (%DRV0 a%DRV15) para el que se
ejecutará el bloque de funciones.
Salidas
En esta tabla se describen las salidas del bloque de funciones:
Salida Objeto de salida Valor
inicial Descripción
Done %MC_STOP_ATVi.DONE 0 Establézcalo en 1 para indicar que se ha completado la
ejecución del bloque de funciones.
Busy %MC_STOP_ATVi.BUSY 0 Establézcalo en 1 cuando se inicie la ejecución del
bloque de funciones.
Error %MC_STOP_ATVi.ERROR 0 Establézcalo en 0 cuando no se detecte ningún error.
Establézcalo en 1 si se produce un error durante la
ejecución. La ejecución del bloque de funciones ha
finalizado. El objeto de salida ErrorId indica la causa del
error.
ErrorId %MC_STOP_ATVi.ERRORID 0 (ningún
error Código de error devuelto por el bloque de funciones
cuando la salida Error se establece en 1.
Para obtener información detallada sobre los errores,
consulte la sección Códigos de error, página 77.
Rango: De 0 a 65 535
Parámetros
Haga doble clic en el bloque de funciones para visualizar los parámetros del
bloque de funciones.
68 EIO0000003308.02

Drive (%DRV)
El bloque de funciones MC_Stop_ATV contiene los parámetros siguientes:
Parámetro Valor Descripción
Utilizado Dirección utilizada Si está seleccionada, esta dirección se está utilizando
actualmente en un programa.
Dirección %MC_Stop_ATVi El identificador de instancia, donde i va desde 0 hasta el
número de objetos disponibles en este Logic Controller.
Para conocer el número máximo de objetos de Drive,
consulte la tabla Número máximo de objetos (consulte
Modicon M221, Logic Controller, Guía de programación).
Símbolo Símbolo El símbolo asociado con este objeto. Para obtener más
información, consulte Definición y uso de los símbolos
(consulte EcoStruxure Machine Expert - Basic, Guía de
funcionamiento).
Eje %DRVn, donde n
oscila entre 0 y 15
Ninguno
Seleccione el eje (instancia de objeto de Drive) para el
que se ejecutará el bloque de funciones.
El objeto de Drive debe haberse configurado previamente
en Modbus TCP IOScanner o IOScanner serie Modbus
(consulte Modicon M221, Logic Controller, Guía de
programación).
Comentario Comentario Se puede asociar un comentario opcional con este
objeto.
Haga doble clic en la columna Comentario y escriba un
comentario.
Actualice los parámetros según sea necesario y haga clic en Aplicar.
EIO0000003308.02 69

Drive (%DRV)
MC_ReadStatus_ATV: leer el estado del dispositivo
Descripción
El bloque de funciones lee el estado de la unidad ATV.
Consulte el Diagrama de estados de la unidad, página 56 para obtener
información detallada sobre los estados.
Representación gráfica
Entradas
En esta tabla se describen las entradas del bloque de funciones:
Etiqueta Objeto Valor
inicial Descripción
Enable -0 Establézcalo en 1 para habilitar el bloque de funciones.
Eje %MC_READSTATUS_ATVi.
AXIS
donde i es un valor entre 0 y
15
-Identificador del eje (%DRV0 a%DRV15) para el que se ejecutará el
bloque de funciones.
70 EIO0000003308.02

Drive (%DRV)
Salidas
En esta tabla se describen las salidas del bloque de funciones:
Etiqueta Objeto Valor inicial Descripción
Valid %MC_ READSATUS _ATVi.
VALID
0 Establézcalo en 1 mientras el bloque de funciones se ejecute
sin errores.
ErrorStop %MC_ READSTATUS _ATVi.
ERRORSTOP
0 Establézcalo en 1 si la unidad ATV se encuentra en estado de
error (ETA = 16#xxx8).
Disabled %MC_ READSTATUS _ATVi.
DISABLED
0 Establézcalo en 1 si la unidad ATV no se encuentra en estado
operativo ni en estado de error.
Stopping %MC_ READSTATUS _ATVi.
STOPPING
0 Establézcalo en 1 si el bloque de funciones MC_Stop_ATV se
está ejecutando o se está deteniendo el movimiento.
Standstill %MC_ READSTATUS _ATVi.
STANDSTILL
0 Establézcalo en 1 si la unidad ATV se encuentra en estado
operativo y la velocidad es 0 (ETA = 16#xx37 y RFRD = 0).
ContMotion %MC_ READSTATUS _ATVi.
CONTMOTION
0 Establézcalo en 1 si la unidad ATV se encuentra en estado
operativo y la velocidad no es igual a 0 (ETA = 16#xx37 y
RFRD ≠ 0).
Error %MC_ READSTATUS _ATVi.
ERROR
0 Establézcalo en 0 cuando no se detecte ningún error.
Establézcalo en 1 si se produce un error durante la ejecución.
La ejecución del bloque de funciones ha finalizado. El objeto
de salida ErrorId indica la causa del error.
ErrorId %MC_READSTATUS_ATVi.
ERRORID
0 (ningún
error) Código de error devuelto por el bloque de funciones cuando la
salida Error se establece en 1.
Para obtener información detallada sobre los errores, consulte
la sección Códigos de error, página 77.
Rango: De 0 a 65 535
Parámetros
Haga doble clic en el bloque de funciones para visualizar los parámetros del
bloque de funciones.
El bloque de funciones MC_ReadStatus_ATV contiene los parámetros siguientes:
Parámetro Valor Descripción
Utilizado Dirección utilizada Si está seleccionada, esta dirección se está utilizando
actualmente en un programa.
Dirección %MC_ReadStatus_
ATVi
El identificador de instancia, donde i va desde 0 hasta el
número de objetos disponibles en este Logic Controller.
Para conocer el número máximo de objetos de Drive,
consulte la tabla Número máximo de objetos (consulte
Modicon M221, Logic Controller, Guía de
programación).
Símbolo Símbolo El símbolo asociado con este objeto. Para obtener más
información, consulte Definición y uso de los símbolos
(consulte EcoStruxure Machine Expert - Basic, Guía de
funcionamiento).
Eje %DRVn, donde n
oscila entre 0 y 15
Ninguno
Seleccione el eje (instancia de objeto de Drive) para el
que se ejecutará el bloque de funciones.
El objeto de Drive debe haberse configurado
previamente en Modbus TCP IOScanner o IOScanner
serie Modbus (consulte Modicon M221, Logic
Controller, Guía de programación).
Comentario Comentario Se puede asociar un comentario opcional con este
objeto.
Haga doble clic en la columna Comentario y escriba un
comentario.
Actualice los parámetros según sea necesario y haga clic en Aplicar.
EIO0000003308.02 71

Drive (%DRV)
MC_ReadMotionState_ATV: leer el estado de movimiento
Descripción
Este bloque de funciones proporciona información de estado sobre la lectura de
movimiento de la unidad ATV.
Representación gráfica
Entradas
En esta tabla se describen las entradas del bloque de funciones:
Entrada Objeto Valor
inicial Descripción
Enable -0 Establézcalo en 1 para iniciar la ejecución del bloque de
funciones.
Axis %MC_READMOTIONSTATE_ATVi.
AXIS
donde i es un valor entre 0 y 15
-Identificador del eje (%DRV0 a%DRV15) para el que se
ejecutará el bloque de funciones.
72 EIO0000003308.02

Drive (%DRV)
Salidas
En esta tabla se describen las salidas del bloque de funciones:
Salida Objeto Valor
inicial Descripción
Valid %MC_ READMOTIONSTATE
_ATVi.VALID
0 Establézcalo en 1 mientras el bloque de
funciones se ejecute sin errores.
ConstantVel %MC_ READMOTIONSTATE
_ATVi.CONSTANTVEL
0 Establézcalo en 1 cuando se lleve a cabo un
movimiento a velocidad constante (registro
ETA).
Accelerating %MC_ READMOTIONSTATE
_ATVi.ACCELERATING
0 Establézcalo en 1 cuando el motor se acelere
(registro ETI).
Decelerating %MC_ READMOTIONSTATE
_ATVi.DECELERATING
0 Establézcalo en 1 cuando el motor se
desacelere (registro ETI).
Error %MC_ READMOTIONSTATE
_ATVi.ERROR
0 Establézcalo en 0 cuando no se detecte ningún
error. Establézcalo en 1 si se produce un error
durante la ejecución. La ejecución del bloque
de funciones ha finalizado. El objeto de salida
ErrorId indica la causa del error.
ActualVel %MC_READMOTIONSTATE_
ATVi.ACTUALVEL
0 Velocidad devuelta por la unidad ATV (registro
RFRD).
Rango: de -32768 a 32767
AxisErrorId %MC_READMOTIONSTATE_
ATVi.AXISERRORID
0 Identificador de error de eje devuelto por la
unidad ATV (registro DP0). Hay un error de eje
cuando la unidad tiene un estado de error.
Establézcalo en 0 si la unidad no tiene un
estado de error (registro ETA ≠ 16#xxx8)
Para obtener información detallada sobre los
errores de eje, consulte Códigos de error
AxisErrorId, página 77.
Rango: De -32768 a 32767
ErrorId %MC_READMOTIONSTATE_
ATVi.ERRORID
Ningún
error (nOF) Código de error devuelto por el bloque de
funciones cuando la salida Error se establece
en 1.
Para obtener información detallada sobre los
errores, consulte la sección Códigos de error,
página 77.
Rango: De 0 a 65 535
NOTA: Cuando el comando de velocidad de la unidad ATV es bajo (<10),
puede que los parámetros InVel yConstantVel no sean válidos debido a que
es posible que el rango de velocidad de la misma unidad ATV sea inexacto.
EIO0000003308.02 73

Drive (%DRV)
Parámetros
Haga doble clic en el bloque de funciones para visualizar los parámetros del
bloque de funciones.
El bloque de funciones MC_ReadMotionState_ATV contiene los parámetros
siguientes:
Parámetro Valor Descripción
Utilizado Dirección utilizada Si está seleccionada, esta dirección se está
utilizando actualmente en un programa.
Dirección %MC_ReadMotionState_
ATVi
El identificador de instancia, donde i va desde 0
hasta el número de objetos disponibles en este
Logic Controller. Para conocer el número
máximo de objetos de Drive, consulte la tabla
Número máximo de objetos (consulte Modicon
M221, Logic Controller, Guía de programación).
Símbolo Símbolo El símbolo asociado con este objeto. Para
obtener más información, consulte Definición y
uso de los símbolos (consulte EcoStruxure
Machine Expert - Basic, Guía de
funcionamiento).
Eje %DRVn, donde n oscila
entre 0 y 15
Ninguno
Seleccione el eje (instancia de objeto de Drive)
para el que se ejecutará el bloque de funciones.
El objeto de Drive debe haberse configurado
previamente en Modbus TCP IOScanner o
IOScanner serie Modbus (consulte Modicon
M221, Logic Controller, Guía de programación).
Comentario Comentario Se puede asociar un comentario opcional con
este objeto.
Haga doble clic en la columna Comentario y
escriba un comentario.
Actualice los parámetros según sea necesario y haga clic en Aplicar.
MC_Reset_ATV: confirmar y restablecer errores
Descripción
Este bloque de funciones se usa para confirmar un error y reiniciar la condición de
error en la unidad. Para obtener más información, consulte el Diagrama de
estados de la unidad, página 56.
Representación gráfica
74 EIO0000003308.02

Drive (%DRV)
Entradas
En esta tabla se describen las entradas del bloque de funciones:
Etiqueta Objeto Valor
inicial Descripción
Execute -0 Establézcalo en 1 para iniciar la ejecución del bloque de
funciones.
Eje %MC_RESET_ATVi.AXIS
donde i es un valor entre 0 y 15
-Identificador del eje (%DRV0 a%DRV15) para el que se
ejecutará el bloque de funciones.
Salidas
En esta tabla se describen las salidas del bloque de funciones:
Salida Objeto de salida Valor
inicial Descripción
Done %MC_RESET_ATVi.DONE 0 Establézcalo en 1 cuando Reset haya finalizado sin
errores.
Busy %MC_RESET_ATVi.BUSY 0 Establézcalo en 1 cuando el bloque de funciones empiece
a ejecutarse.
Error %MC_RESET_ATVi.ERROR 0 Establézcalo en 1 si el dispositivo sigue en estado de error
tras la caducidad del timeout. El timeout se calcula como el
tiempo de ciclo del canal multiplicado por 4, o 200 ms,
según el valor que sea superior. Se necesita un mínimo de
200 ms para tener en cuenta el tiempo de reacción de la
unidad.
Consulte Configuración de canales (consulte Modicon
M221, Logic Controller, Guía de programación) para
obtener información sobre la configuración del tiempo de
ciclo del canal.
ErrorId %MC_RESET_ATVi.ERRORID 0 (ningún
error) Código de error devuelto por el bloque de funciones
cuando la salida Error se establece en 1.
Para obtener información detallada sobre los errores,
consulte la sección Códigos de error, página 77.
Rango: De 0 a 65 535
Parámetros
Haga doble clic en el bloque de funciones para visualizar los parámetros del
bloque de funciones.
EIO0000003308.02 75

Drive (%DRV)
El bloque de funciones MC_Reset_ATV contiene los parámetros siguientes:
Parámetro Valor Descripción
Utilizado Dirección utilizada Si está seleccionada, esta dirección se está utilizando actualmente en un programa.
Dirección %MC_Reset_ATVi El identificador de instancia, donde i va desde 0 hasta el número de objetos
disponibles en este Logic Controller. Para conocer el número máximo de objetos de
Drive, consulte la tabla Número máximo de objetos (consulte Modicon M221, Logic
Controller, Guía de programación).
Símbolo Símbolo El símbolo asociado con este objeto. Para obtener más información, consulte
Definición y uso de los símbolos (consulte EcoStruxure Machine Expert - Basic, Guía
de funcionamiento).
Eje %DRVn, donde n oscila
entre 0 y 15
Ninguno
Seleccione el eje (instancia de objeto de Drive) para el que se ejecutará el bloque de
funciones.
El objeto de Drive debe haberse configurado previamente en Modbus TCP
IOScanner o IOScanner serie Modbus (consulte Modicon M221, Logic Controller,
Guía de programación).
Comentario Comentario Se puede asociar un comentario opcional con este objeto.
Haga doble clic en la columna Comentario y escriba un comentario.
Actualice los parámetros según sea necesario y haga clic en Aplicar.
76 EIO0000003308.02

Drive (%DRV)
Códigos de error
Códigos de error de ErrorId
En esta tabla se enumeran los posibles códigos de error de los bloques de
funciones:
Valor Nombre Descripción
0 Sin errores No se ha detectado ningún error.
1 Error de IOScanner Error detectado en IOScanner (1).
2 ATV está en un estado de error La unidad ATV se encuentra en un estado de
error (ETA = 16#xxx8).
3 Error de timeout El timeout ha vencido antes de que el bloque de
funciones MC_Power_ATV haya recibido el
estado correcto desde la unidad.
4 Estado ATV no válido La unidad ATV tiene un valor ETA no válido.
5 Error de reinicio Se solicita el bloque de funciones MC_Reset_
ATV, mientras la unidad ATV se encuentra en
estado de error.
6 Error de parada activa Se solicita el bloque de funciones MC_Jog_ATV o
MV_MoveVelocity_ATV, mientras MC_Stop está
activo.
7 Error de no ejecución de ATV Se solicita el bloque de funciones MC_Jog_ATV o
MV_MoveVelocity_ATV, mientras la unidad ATV
no está operativa.
8 Error de AxisRef no válida La entrada %DRV de AxisRef del bloque de
funciones no es válida (no está presente en la
configuración de Modbus TCP IOScanner ni en la
configuración de IOScanner serie Modbus
(consulte Modicon M221, Logic Controller, Guía
de programación)).
9 Error interno Se ha producido un error de firmware.
(1) Solo para Modbus TCP IOScanner.
Si el bloque de funciones %MC_Power_ATV genera un error de IOScanner mientras se explora el
dispositivo, puede deberse a una sobrecarga en la red Ethernet. Para identificar la causa del error,
puede:
• Verificar el estado de IOScanner: %SW212.
• Verificar el estado de la unidad: %IWNS (300+x).
• Verificar el estado del canal: %IWNS (300+x).y.
• Aumentar el Timeout de respuesta de la unidad.
Códigos de error AxisErrorId
En esta tabla se enumeran los posibles códigos de error del eje del bloque de
funciones devueltos por el bloque de funciones MC_ReadMotionStatus:
Valor Nombre
0 Ningún error (nOF)
2 Control EEPROM (EEF1)
3 Configuración incorrecta (CFF)
4 Configuración no válida (CFI)
5Interrupción de la comunicación Modbus (SLF1)
6 Error en la conexión interna (ILF)
7Interrupción de la comunicación del bus de campo (CnF)
8 Error externo (EPF1)
EIO0000003308.02 77

Drive (%DRV)
Valor Nombre
9 Sobrecorriente (OCF)
10 Precarga condensador (CrF)
13 AI2 Pérdida de 4-20 mA (LFF2)
15 Sobrecalentamiento de entrada (IHF)
16 Sobrecalentamiento de Drive (OHF)
17 Sobrecarga del motor (OLF)
18 Sobretensión en el bus de CC (ObF)
19 Sobretensión en red de alimentación (OSF)
20 Pérdida de fase de una salida (OPF1)
21 Pérdida de fase de red (PHF)
22 Infratensión en red de alimentación (USF)
23 Cortocircuito del motor (SCF1)
24 Exceso de velocidad del motor (SOF)
25 Error de ajuste automático
26 Error interno 1 (InF1)
27 Error interno 2 (InF2)
28 Error interno 3 (InF3)
29 Error interno 4 (InF4)
30 Alimentación ROM EEPROM (EEF2)
32 Cortocircuito de tierra (SCF3)
33 Pérdida de fase de salida (OPF2)
37 Error interno 7 (InF7)
38 Error de bus de campo (EPF2)
40 Error interno 8 (InF8)
42 Interrupción de comunicación de PC (SLF2)
45 Interrupción de comunicación de HMI (SLF3)
51 Error interno 9 (InF9)
52 Error interno 10 (InFA)
53 Error interno 11 (InFb)
54 Sobrecalentamiento de IGBT (tJF)
55 Cortocircuito de IGBT (SCF4)
56 Cortocircuito del motor (SCF5)
60 Error interno 12 (InFC)
64 Contador de entrada (LCF)
68 Error interno 6 (InF6)
69 Error interno 14 (InFE)
71 AI3 Pérdida 4-20 mA (LFF3)
72 AI4 Pérdida 4-20 mA (LFF4)
73 Compatibilidad de placas (HCF)
77 Error de transferencia de configuración (CFI2)
79 AI5 Pérdida 4-20 mA (LFF5)
99 Error de conmutación de canal (CSF)
78 EIO0000003308.02

Drive (%DRV)
Valor Nombre
100 Subcarga del proceso (ULF)
101 Sobrecarga del proceso (OLC)
105 Error de ángulo (ASF)
106 AI1 Pérdida 4-20 mA (LFF1)
107 Error de función de seguridad (SAFF)
110 AI2 Error Th detectado (tH2F)
111 AI2 Error de sensor térmico (t2CF)
112 AI3 Error Th detectado (tH3F)
113 AI3 Error de sensor térmico (t3CF)
114 Error de inicio de ciclo de bomba (PCPF)
119 Error de flujo de bomba bajo (PLFF)
120 AI4 Error Th detectado (tH4F)
121 AI4 Error de sensor térmico (t4CF)
122 AI5 Error Th detectado (tH5F)
123 AI5 Error de sensor térmico (t5CF)
126 Error marcha en vacío (drYF)
127 Error de retorno PID (PFMF)
128 Error de carga del programa (PGLF)
129 Error de ejecución del programa (PGrF)
130 Error de bomba principal (MPLF)
131 Error de bajo nivel (LCLF)
132 Error de alto nivel (LCHF)
142 Error interno 16 (InFG)
143 Error interno 17 (InFH)
144 Error interno 0 (InF0)
146 Error interno 13 (InFd)
149 Error interno 21 (InFL)
151 Error interno 15 (InFF)
152 Error de actualización de firmware (FEr)
153 Error interno 22 (InFM)
154 Error interno 25 (InFP)
155 Error interno 20 (InF)
157 Error interno 27 (InFr)
EIO0000003308.02 79

Salida de tren de pulsos (%PTO)
Salida de tren de pulsos (%PTO)
Contenido de este capítulo
Descripción...................................................................................................80
Configuración ...............................................................................................90
Programación ...............................................................................................99
Modalidades de toma de referencia .............................................................. 101
Parámetros de datos ...................................................................................107
Modalidades de funcionamiento ................................................................... 112
Bloques de funciones de Movimiento ....................................................... 115
Bloques de funciones Administrative ..........................................................139
Utilización de bloques de funciones de salida de tren de pulsos
En este capítulo se proporcionan descripciones y directrices de programación
para utilizar bloques de funciones Pulse Train Output.
Descripción
Descripción general
En esta sección se describe la función Pulse Train Output.
Salida de tren de pulsos (PTO)
Introducción
La función PTO de M221 proporciona dos canales de salida de tren de pulsos
para un número especificado de pulsos y una velocidad especificada (frecuencia).
La función PTO se utiliza para controlar el posicionamiento o la velocidad de
motores paso a paso de un solo eje lineales independientes o servounidades en
modalidad de bucle abierto. La función PTO no tiene información de
realimentación de posición del proceso. Así pues, la información de posición debe
integrarse en la unidad. Las funciones PLS (pulso), PWM (modulación de ancho
de pulsos), PTO (salida de tren de pulsos) y FREQGEN (generador de
frecuencias) utilizan las mismas salidas especializadas. Sólo se puede utilizar una
de estas cuatro funciones en el mismo canal.
Un canal PTO puede utilizar señales de interfaz opcionales para punto de
referencia (Ref), evento (Probe), límites (LimP,LimN) o interfaz de unidad
(DriveReady,DriveEnable).
El offset de origen automático y la compensación de holgura también se
gestionan para mejorar la exactitud de la posición. Los diagnósticos se pueden
utilizar para supervisar los estados.
80 EIO0000003308.02

Salida de tren de pulsos (%PTO)
Funciones compatibles
Los canales PTO son compatibles con las siguientes funciones:
• dos modalidades de salida (dos canales para pulso y dirección o un canal
para CW/CCW)
• movimientos de eje único (velocidad y posición)
• posicionamiento relativo y absoluto, con gestión de dirección automática
• aceleración y deceleración trapezoidal y de curva en S
• toma de referencia (cuatro modalidades con compensación de offset)
• aceleración dinámica, deceleración, velocidad y modificación de la posición
• cambio entre la modalidad de velocidad y la de posición
• cola de movimientos (búfer de un movimiento)
• captura de posición y desencadenador de movimientos en el evento
(utilizando una entrada PROBE)
• compensación de holgura
• límites (hardware y software)
• diagnóstico
NOTA: Los bloques de funciones de movimiento, página 115 y los bloques de
funciones administrativas, página 139 le ayudan a programar estas funciones.
Características de PTO
Hay hasta cinco entradas físicas para un canal PTO:
• Dos se asignan a la función PTO mediante configuración y son tenidas en
cuenta tras un flanco ascendente en la entrada:
◦Entrada REF
◦Entrada PROBE
• Tres se asignan al bloque de funciones MC_Power_PTO, página 118. No
tienen asignación fija (no están configuradas en la pantalla de configuración)
y se leen con todas las demás entradas:
◦Entrada DriveReady
◦Entrada positiva de límite
◦Entrada negativa de límite
NOTA: Estas entradas se gestionan como cualquier otra entrada normal, pero
las utiliza la función PTO al ser asignadas al bloque de funciones MC_Power_
PTO, página 118.
NOTA: Las entradas de límite positivo y negativo son necesarias para ayudar
a evitar el sobrerrecorrido.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
• Asegúrese de que los interruptores de posición de seguridad de hardware
del controlador estén integrados en el diseño y la lógica de la aplicación.
• Monte los conmutadores de límite de hardware del controlador en una
posición que permita una distancia de frenado adecuada.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
EIO0000003308.02 81

Salida de tren de pulsos (%PTO)
Hay hasta tres salidas físicas para un canal PTO:
• Dos salidas son obligatorias para gestionar la modalidad de salida de la
función PTO. Tienen una asignación fija y deben habilitarse mediante
configuración:
◦CW / CCW
◦Pulso/Dirección
• La otra salida, DriveEnable, se asocia con el bloque de funciones MC_
Power_PTO, página 118. No tiene asignación fija y se escribe al final del ciclo
MAST como salidas normales.
La función PTO tiene las siguientes características:
Característica Valor
Número de canales 2 o 4 dependiendo del módulo
Número de ejes 1 por canal
Intervalo de posición De –2 147 483 648 a 2 147 483 647 (32 bits)
Velocidad mínima 0 Hz
Velocidad máxima 100 kHz (para un ciclo de servicio de 40/60 y máx. 200 mA)
Paso mínimo 1 Hz
Precisión de velocidad 1 %
Aceleración/deceleración (mín.) 1 Hz/ms
Aceleración/deceleración (máx.) 100 kHz/ms
Offset de origen De –2 147 483 648 a 2 147 483 647 (32 bits)
Rango de límites de software De –2 147 483 648 a 2 147 483 647 (32 bits)
Modalidades de salida de pulsos
Descripción general
Hay dos posibles modalidades de salida:
• Sentido horario/Sentido antihorario
• Pulso/Dirección
Modalidad en sentido horario (CW)/Modalidad en sentido antihorario
(CCW)
Esta modalidad genera una señal que define la dirección y la velocidad de
funcionamiento del motor. Esta señal se implementa en el primer canal PTO (solo
PTO0).
NOTA: PTO1 no está disponible al escoger esta modalidad.
82 EIO0000003308.02

Salida de tren de pulsos (%PTO)
Modalidad de pulso/dirección
Esta modalidad genera dos señales en los canales PTO:
• La salida de pulsos proporciona la velocidad de funcionamiento del motor
(Pulses).
• La salida de dirección que proporciona la dirección de rotación del motor
(Direction).
NOTA: La salida de dirección se puede deshabilitar si no se necesita para la
aplicación.
Casos especiales
Caso especial Descripción
Efecto de un reinicio en frío (%
S0=TRUE)
• El eje se establece en estado Disabled.
• Se inicializan los bloques de funciones PTO.
Efecto de un reinicio en
caliente (%S1=TRUE)
• El eje se establece en estado Disabled.
• Se inicializan los bloques de funciones PTO.
Efecto en la detención del
controlador
• El eje se establece en estado ErrorStop.
• Las salidas se restablecen a 0.
Efecto de la modificación
online
Ninguno
Rampa de aceleración/deceleración
Velocidad de inicio
La Velocidad de inicio es la frecuencia mínima a la que un motor paso a paso
puede crear movimiento, con una carga aplicada, sin pérdida de pasos.
El parámetro Velocidad de inicio se utiliza al iniciar un movimiento desde la
velocidad 0.
La Velocidad de inicio debe estar dentro del rango de 0 a MaxVelocityAppl.
El valor 0 significa que el parámetro Velocidad de inicio no se utiliza. En este
caso, el movimiento empieza a una velocidad = tasa de aceleración x 1 ms.
Velocidad de detención
La Velocidad de detención es la frecuencia máxima a la que un motor paso a
paso deja de producir movimiento, con una carga aplicada, sin pérdida de pasos.
La Velocidad de detención solamente se utiliza cuando se realiza un
movimiento desde una velocidad superior a la Velocidad de detención hacia la
velocidad 0.
La Velocidad de detención debe estar dentro del rango de 0 a
MaxVelocityAppl.
EIO0000003308.02 83

Salida de tren de pulsos (%PTO)
El valor 0 significa que el parámetro Velocidad de detención no se utiliza. En
este caso, el movimiento se detiene a una velocidad = tasa de desaceleración ×
1 ms.
Aceleración/Deceleración
La aceleración es la tasa del cambio de velocidad, desde la Velocidad de inicio
hasta la velocidad de destino. La deceleración es la tasa del cambio de velocidad,
desde la velocidad de destino hasta la Velocidad de detención. Estos cambios
de velocidad se gestionan de forma implícita mediante la función PTO de acuerdo
con los parámetros Acceleration,Deceleration yJerkRatio, siguiendo un perfil de
curva en S otrapezoidal.
Rampa de aceleración / deceleración con un perfil trapezoidal
Cuando el parámetro JerkRatio se establece en 0, la rampa de aceleración/
deceleración tiene un perfil trapezoidal.
Los parámetros Acceleration yDeceleration, expresados en Hz/ms, representan
la variación del cambio de velocidad.
JerkRatio 0%: Aceleración/desaceleración constante.
Rampa de aceleración / deceleración con un perfil de curva en S
Cuando el parámetro JerkRatio es mayor que 0, la rampa de aceleración/
deceleración tiene un perfil de curva en S.
La rampa de curva en S se utiliza en aplicaciones que controlan la inercia alta, o
que manipulan objetos o líquidos frágiles. La rampa de curva en S habilita una
aceleración/deceleración más suave y progresiva, como se muestra en los
gráficos siguientes:
JerkRatio 66%: 2/3 del tiempo de aceleración y deceleración se emplean en aumentar y
disminuir el valor de aceleración y deceleración.
84 EIO0000003308.02

Salida de tren de pulsos (%PTO)
JerkRatio 100%: todo el tiempo se dedica a aumentar y disminuir el valor de aceleración y
deceleración.
NOTA: El valor del parámetro JerkRatio es común para la aceleración y la
deceleración, de manera que el tiempo cóncavo y el tiempo convexo son
iguales.
Afectación de la rampa de curva en S en la aceleración/deceleración
La duración de la aceleración/deceleración se mantiene, sea cual sea el
parámetro JerkRatio. Para mantener esta duración, la aceleración o la
deceleración es diferente de la configurada en el bloque de funciones
(parámetros Acceleration oDeceleration).
Cuando se aplica el JerkRatio, la aceleración/deceleración se ve afectada.
Cuando se aplica el JerkRatio al 100%, la aceleración/deceleración es el doble
que la Acceleration configurada / parámetros Deceleration.
NOTA: Si el valor del parámetro JerkRatio no es válido, se vuelve a calcular el
valor para respetar los parámetros MaxAccelerationAppl y
MaxDecelerationAppl.
JerkRatio no es válido si:
• Su valor es superior a 100. En dicho caso, se aplica un Jerkratio de 100.
• Su valor es inferior a 0. En dicho caso, se aplica un Jerkratio de 0.
Evento PROBE
Descripción
La entrada Probe se habilita mediante la configuración y se activa con el bloque
de funciones MC_TouchProbe_PTO.
La entrada Probe se utiliza como un evento para lo siguiente:
• capturar la posición
• iniciar un movimiento independiente de la tarea
Ambas funciones pueden estar activas al mismo tiempo, es decir, el mismo
evento captura la posición e inicia un bloque de funciones de movimiento, página
80.
NOTA: Solamente es válido el primer evento después del flanco ascendente
en la salida MC_TouchProbe_PTO del bloque de funciones Busy. Una vez
establecida la salida Done en TRUE, se ignorarán los eventos posteriores. Se
debe volver a activar el bloque de funciones para dar respuesta a otros
eventos.
Captura de posición
La posición capturada está disponible en %MC_TouchProbe_PTO.RecordedPos.
EIO0000003308.02 85

Salida de tren de pulsos (%PTO)
Desencadenador de movimiento
La entrada BufferMode de un bloque de funciones de movimiento debe
establecerse como seTrigger.
En este ejemplo se muestra un cambio en la velocidad de destino con ventana de
habilitación:
1Capturar el valor del contador de la posición
2Desencadenar el bloque de funciones Move Velocity
Este ejemplo muestra un movimiento de distancia programada previamente, con
un perfil simple y sin ventanas de habilitación:
1Capturar el valor del contador de la posición
2Desencadenar el bloque de funciones Move Relative
Este ejemplo muestra un movimiento de distancia programada previamente, con
un perfil complejo y ventanas de habilitación:
1Capturar el valor del contador de la posición
2Desencadenar el bloque de funciones Move Relative
86 EIO0000003308.02

Salida de tren de pulsos (%PTO)
Este ejemplo muestra un evento desencadenador fuera de la ventana de
habilitación:
Compensación de holgura
Descripción
El parámetro Backlash Compensation se define como la cantidad de movimiento
necesaria para compensar la distancia mecánica en engranajes (holgura) cuando
se invierte el movimiento:
NOTA: La función no tiene en cuenta las fuentes externas de movimiento,
como el movimiento de inercia u otras formas de movimiento inducido.
La compensación de holgura se establece en número de pulsos (de 0 a 65.535; el
valor predeterminado es 0). Al establecerse, en cada inversión de dirección, el
número especificado de pulsos se emite primero a la velocidad de inicio y
después se ejecuta el movimiento programado. Los pulsos de compensación de
holgura no se añaden al contador de posición.
En esta figura se muestra la compensación de holgura.
EIO0000003308.02 87

Salida de tren de pulsos (%PTO)
NOTA:
• Antes del movimiento inicial, la función no puede determinar la cantidad
de holgura que se debe compensar. Por tanto, la compensación de
holgura sólo es activa después de que se realice un primer movimiento y
se aplique la compensación al producirse la primera inversión de la
dirección.
• Si se recibe un comando de cancelación o se detecta un error antes de
que finalice la holgura, la posición absoluta permanecerá sin cambios.
• Después de ejecutarse un comando de cancelación, se reanuda la
compensación de la holgura desde la posición de la holgura actual
cuando se inicia un nuevo movimiento.
Para obtener más detalles, consulte la Configuración de la salida de tren de
pulsos (consulte Modicon M221, Logic Controller, Programming Guide).
Límites de posicionamiento
Introducción
Los límites positivos y negativos pueden establecerse para controlar los límites de
movimiento en ambas direcciones. Tanto los límites de hardware como los de
software se gestionan mediante el controlador.
Los conmutadores de límite de hardware y software solamente se utilizan para
gestionar los límites en la aplicación del controlador. No están diseñados para
reemplazar ningún conmutador de límite de seguridad funcional conectado a la
unidad. Es necesario activar los conmutadores de límite de la aplicación del
controlador antes que los conmutadores de límite de seguridad funcional
conectados a la unidad. En cualquier caso, el tipo de arquitectura de seguridad
funcional que despliegue, que no se contempla en este documento, depende de
su análisis de seguridad, incluido, aunque sin limitación:
• Evaluación del riesgo de acuerdo con EN/ISO 12100
• FMEA de acuerdo con EN 60812
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Durante el diseño de la máquina, debe asegurarse de que se lleva a cabo y se
respeta una evaluación de riesgo según la norma EN/ISO 12100.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
En la figura se muestra los conmutadores de límite de hardware y software:
88 EIO0000003308.02

Salida de tren de pulsos (%PTO)
Una vez se traspasan los límites de software o hardware del controlador, se
detecta un error y se lleva a cabo una deceleración de parada rápida:
• el eje cambia al estado ErrorStop, con AxisErrorId de 1002 a 1005. Consulte
MC_ReadAxisError_PTO, página 145 yAlertas informativas de control de
ejes, página 109.
• La dirección actual cambia a no válida y el sistema restablece a 0 el
parámetro de PTO asociado EnableDirPos (1004) o EnableDirNeg (1005).
• El bloque de funciones en ejecución detecta el estado de error.
• En otros bloques de funciones aplicables, las salidas CmdAborted se
establecen en TRUE.
Para desactivar el estado de error del eje y volver al estado Standstill, es
necesario ejecutar MC_Reset_PTO puesto que se rechazará cualquier comando
de movimiento (consulte los parámetros de PTO, página 108 EnableDirPos o
EnableDirNeg) mientras el eje permanezca fuera de los límites (el bloque de
funciones finaliza con ErrorId =InvalidDirectionValue). Solo es posible ejecutar un
comando de movimiento en dirección opuesta bajo estas circunstancias.
Una vez que el eje se encuentra dentro de los límites, el sistema restaura el
parámetro EnableDirPos oEnableDirNeg en 1 (válido).
NOTA: En el diagrama anterior, el retroceso del eje dentro de los límites es el
resultado de ejecutar MC_Reset_PTO (no se ejecuta de manera automática).
Límites de software
Los límites de software pueden establecerse para controlar los límites de
movimiento en ambas direcciones.
Los valores de límite se habilitan y establecen en la pantalla de configuración, por
ejemplo:
• Límite positivo > límite negativo
• Valores dentro del rango de -2.147.483.648 a 2.147.483.647
También pueden habilitarse, deshabilitarse o modificarse en el programa de
aplicación (MC_WritePar_PTO yparámetro PTO, página 108).
NOTA: Cuando están habilitados, los límites de software son válidos después
de una toma de referencia realizada con éxito (es decir, el eje ha vuelto al
punto de referencia, MC_Home_PTO).
Límites de hardware
Los límites de hardware son necesarios para el proceso de toma de referencia y
para ayudar a prevenir daños de la máquina. En las entradas %MC_Power_PTO.
LimP y%MC_Power_PTO.LimN se deben utilizar las entradas apropiadas. Los
dispositivos de límite de hardware deben ser de un tipo normalmente cerrado de
manera que la entrada al bloque de funciones sea FALSE cuando se alcanza el
límite correspondiente.
EIO0000003308.02 89

Salida de tren de pulsos (%PTO)
NOTA: Las restricciones sobre el movimiento son válidas mientras las
entradas de límite sean FALSE e independientemente del sentido de
dirección. Cuando vuelven a TRUE, se eliminan las restricciones de
movimiento y los límites de hardware se rearman de manera funcional. Así
pues, utilice contactos de flanco descendente para resetear las instrucciones
de salida anteriores al bloque de funciones. Después utilice esos bits para
controlar estas entradas de bloques de funciones. Cuando se completen las
operaciones, establezca los bits para restaurar el funcionamiento normal.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
• Asegúrese de que los interruptores de posición de seguridad de hardware
del controlador estén integrados en el diseño y la lógica de la aplicación.
• Monte los conmutadores de límite de hardware del controlador en una
posición que permita una distancia de frenado adecuada.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
NOTA: Una distancia de frenado adecuada depende de la velocidad máxima,
la carga máxima (masa) del equipo que se está moviendo y el valor del
parámetro de deceleración de parada rápida.
Configuración
Descripción general
En esta sección se describe cómo configurar un canal PTO y los parámetros
asociados.
Configuración de PTO
Descripción general
Para configurar el recurso Pulse Generator, consulte la Modicon M221 Logic
Controller - Guía de programación, Configuración de los generadores de pulsos
(véase Modicon M221, Controlador lógico, Guía de programación).
Para configurar el recurso Pulse Generator como un PTO, consulte la Modicon
M221 Logic Controller - Guía de programación, Configuración de PTO (véase
Modicon M221, Controlador lógico, Guía de programación).
Motion Task Table
Descripción general
La Motion Task Table es una opción de programación para bloques de funciones
de movimiento dedicada a secuencias de movimiento repetitivas. Se define una
secuencia de movimientos para un eje en el tiempo de configuración (una
secuencia se puede asemejar a una receta que mezcla varios movimientos).
La Motion Task Table puede estar dedicada a varios ejes y ofrece una descripción
general gráfica de la secuencia de movimiento configurada.
Use el bloque de funciones de MC_MotionTask_PTO para ejecutar una Motion
Task Table. Cuando el bloque de funciones MC_MotionTask_PTO llama a la tabla,
necesita que se asocie al eje específico. El bloque de funciones aplica la Motion
90 EIO0000003308.02

Salida de tren de pulsos (%PTO)
Task Table al eje MC_MotionTask_PTO. Varios bloques de funciones MC_
MotionTask_PTO pueden ejecutar simultáneamente las mismas instancias de
Motion Task Table %MT.
Características
El número máximo de instancias de Motion Task Table (%MT) es 4.
Una Motion Task Table contiene una secuencia de movimientos de eje único:
• Una secuencia es una sucesión de pasos.
• Cada paso define los parámetros de un movimiento.
• Cada paso utiliza una instancia de bloque de funciones de movimiento
dedicada.
Movimientos que se pueden usar en la Motion Task Table:
• Movimiento absoluto
• Movimiento relativo
• Detener
• Establecer posición
• Velocidad de movimiento
Configuración de una Motion Task Table
El Asistente Motion Task Table permite configurar cada movimiento en una
secuencia ordenada y visualizar un perfil de movimiento global estimado.
Para visualizar el Asistente Motion Task, realice lo siguiente:
Paso Acción
1Seleccione la ficha de módulo Programación >Herramientas y haga clic en Objetos
de PTO >Motion Task Tables en el árbol de hardware para visualizar las propiedades
de la Motion Task Table.
2 Haga clic en [...] para configurar la Motion Task Table.
EIO0000003308.02 91

Salida de tren de pulsos (%PTO)
Descripción de la ventana de propiedades de Motion Task Table:
Parámetro Edita-
ble Valor Valor
predeter-
minado
Descripción
Configurado No True/False False Indica si la Motion Task Table contiene
pasos configurados.
Dirección No %MTx %MTx Visualiza la dirección de la Motion Task
Table en la que xes el número de
tabla.
Símbolo Sí ––Permite especificar un símbolo para
asociarlo con la Motion Task Table.
Haga doble clic en la celda para editar
el campo.
Configuración Sí [...]
(Botón)
Habilitado Permite configurar la secuencia de
movimientos mediante el Asistente
Motion Task Table.
Comentario Sí ––Permite especificar un comentario para
asociarlo con la Motion Task Table.
Haga doble clic en la celda para editar
el campo.
Asistente Motion Task Table:
92 EIO0000003308.02

Salida de tren de pulsos (%PTO)
Áreas principales del Asistente Motion Task Table:
Parámetro Descripción
Pasos Enumera la secuencia de movimientos de un
solo eje y los parámetros de entrada para cada
movimiento.
Descripción general de movimiento Haga clic en el botón de actualización o pulse
F5 para generar una vista gráfica del
movimiento implementado por la secuencia de
pasos.
La curva proporciona una visión general del
movimiento. La curva está basada en los
supuestos siguientes:
• La posición inicial es 0.
• Los límites de posición no están
habilitados.
• Se utilizan los parámetros
predeterminados de configuración de
movimiento del eje.
• El evento (entrada PROBE, POU) se
produce una vez finalizado el paso y tras
un retardo de 100 ms.
• Un retardo de %MWx se representa
gráficamente mediante un retardo de
100 ms.
EIO0000003308.02 93

Salida de tren de pulsos (%PTO)
Descripción de la ventana Pasos:
Parámetro Valor Valor
prede-
termi-
nado
Descripción
Paso 1...16 –Número de movimiento de un solo eje en la
secuencia.
Tipo Ninguno
MC_MoveAbs_
PTO (Movimiento
absoluto)
MC_MoveRel_
PTO (Movimiento
relativo)
MC_Halt_PTO
(Parada)
MC_SetPos_PTO
(Establecer
posición)
MC_MoveVel_
PTO (Velocidad de
movimiento)
Nin-
guno Comando de movimiento.
El comando de movimiento utiliza una instancia de
bloque de funciones de movimiento que se indica en
el parámetro Objetos de software.
Pos Consulte cada
valor del
parámetro de
bloque de
funciones de
objeto de software.
vacío Los parámetros de movimiento son los parámetros
del objeto de software asignado al paso.
Descripción de parámetros:
•Pos: Posición
•Distancia: Distancia
•Vel: Velocidad
•Acc: Aceleración
•Dec: Deceleración
•Ratio jerk: Ratio jerk
NOTA: El parámetro Vel del comando de
movimiento de velocidad de movimiento es una
combinación de velocidad y dirección. En la
tabla, el rango de velocidad para el comando
de movimiento MC_MoveVel_PTO es: -
Velocidad máx....+ velocidad máx. Una
velocidad negativa indica una dirección
negativa, una velocidad positiva indica una
dirección positiva.
Distancia
Vel
Acc
Decimal
Ratio jerk
94 EIO0000003308.02

Salida de tren de pulsos (%PTO)
Parámetro Valor Valor
prede-
termi-
nado
Descripción
Siguiente
paso Done/In velocity
Transición
gradual con el
anterior
Probe input event
%M event
Retardo
vacío La condición que debe cumplirse para pasar al
siguiente paso de la secuencia de tabla.
Descripción de la condición:
•Done/In velocity:
◦Done: pasa al siguiente paso cuando
finaliza el paso actual.
Este parámetro está disponible para los
diferentes comandos de movimiento
excepto para la velocidad de movimiento.
◦In velocity: pasa al siguiente paso cuando
se alcanza la velocidad solicitada.
Este parámetro sólo está disponible para
el comando de movimiento de velocidad
de movimiento.
•Transición gradual con el anterior: la
velocidad del siguiente paso se combina con
la velocidad alcanzada en la posición final de
este paso.
•Probe input event: pasa al siguiente paso
cuando se detecta un evento definido en la
entrada PROBE.
El flanco se define en el parámetro Evento.
Se abre un campo de entrada en la parte
inferior de la ventana Pasos,Usar rango de
eventos PROBE, que se describe en la
siguiente tabla.
NOTA: Solo se puede usar una
ocurrencia de Probe input event para
cada Motion Task Table.
•%M event: pasa al siguiente paso cuando la
dirección de bit de memoria (%Mx) establecida
en el parámetro Evento está establecida en 1.
•Retardo: pasa al siguiente paso cuando
transcurre el retardo (que comienza al
principio del paso). El retardo se define en el
parámetro Delay.
NOTA: Cuando se produce el evento Probe
input event,%M event oDelay, se inicia el
siguiente paso aunque no se haya completado
el paso actual.
Evento –
0/1
%Mx
vacío El valor de Evento complementa las condiciones
descritas en el parámetro Siguiente paso.
Selección de Siguiente paso y selección de Evento
correspondiente:
•Probe input event:
◦0: Flanco descendente
◦1: Flanco ascendente
NOTA: El Probe input event (evento de
entrada PROBE) es independiente del
ciclo de tarea de la aplicación y del ciclo
de tarea de movimiento.
•%M event: Bit de memoria %Mx.
NOTA: %Mx se evalúa cada 4 ms.
EIO0000003308.02 95

Salida de tren de pulsos (%PTO)
Parámetro Valor Valor
prede-
termi-
nado
Descripción
Retardo 0...65535
%MWx
vacío El valor de Delay representa la cantidad de tiempo
antes de pasar al siguiente paso. Según el valor del
parámetro Siguiente paso, el parámetro Delay se
evalúa al principio o al final del paso:
•Done/In velocity: El retardo se inicia cuando
el paso actual es Done oIn velocity.
•Transición gradual con el anterior: No
disponible.
•Probe input event y%M event: el retardo se
inicia al principio del paso.
◦Un tiempo transcurrido genera un timeout
si no se ha producido el evento y se pasa
al siguiente paso.
◦Si el evento se produce al final del retardo,
se pasa al siguiente paso y se cancela el
timeout de retardo.
NOTA: Si Delay mantiene el valor
predeterminado (0), el comando de
movimiento espera que se produzca la
entrada PROBE o el evento de software,
sin timeout.
•Retardo: el retardo se inicia al principio del
paso. Se pasa al siguiente paso cuando
transcurre el retardo.
NOTA: Un valor inmediato no puede
modificarse en una aplicación POU, mientras
que un valor %MWx debe establecerlo una
aplicación POU. El parámetro Motion Task
Table Delay no se modifica si MC_ReadPar_
PTO oMC_WritePar_PTO se establecen
mediante ParNumber = 1000 (retardo).
Objetos de
software %MC_
MOVEABS_PTOx
%MC_MOVEREL_
PTOx
%MC_HALT_
PTOx
%MC_SETPOS_
PTOx
%MC_MOVEVEL_
PTOx
vacío Muestra el objeto de software asignado al paso. El
sistema lo asigna y es un parámetro de sólo lectura.
Estos objetos de software son instancias de bloques
de funciones.
Símbolo –vacío Permite especificar un símbolo para asociarlo con el
objeto de software de paso.
Haga doble clic en la celda para editar el campo.
96 EIO0000003308.02

Salida de tren de pulsos (%PTO)
El parámetro Usar rango de eventos PROBE de la ventana Pasos:
Parámetro Valor Valor
predetermi-
nado
Descripción
Usar rango
de eventos
PROBE
True/False False Cuando es TRUE, un evento
desencadenador solo se reconoce en el
rango de posición definido entre
Primera posición yÚltima posición.
El parámetro se puede modificar si Siguiente
paso se establece en Probe input event en
la Motion Task Table.
Última
posición
-
2147483648...
2147483647
%MDx
2147483647
Primera
posición
-
2147483648...
2147483647
%MDx
- 2147483648 NOTA: Primera posición debe ser
inferior a Última posición.
La figura de la influencia del rango de posición en la activación se proporciona en la sección de
Evento PROBE, página 85.
NOTA: La posición en la que se ha detectado el evento de activación no está registrada.
Administración de parámetros y eventos de paso
Los parámetros y eventos definidos en un paso sólo son válidos al inicio de la
ejecución del paso, por tanto:
• Un valor de parámetro de paso modificado por la aplicación sólo es válido si
se modifica antes de que se active el paso. El parámetro se puede modificar
mediante el parámetro de objeto de software asignado por el sistema en una
POU.
• Un valor de objeto de memoria (%MW o%MWx) sólo es válido si se ha
actualizado antes de que se active el paso.
• Un evento sólo se evalúa una vez que se activa el paso. En caso de un Probe
input event, no se podrá detectar un evento que se produzca antes de que se
active el paso.
EIO0000003308.02 97

Salida de tren de pulsos (%PTO)
Administración de instancias de bloque de funciones en una Motion Task
Table
Instancias de objeto de software asignadas por el sistema:
• no se pueden usar en una aplicación POU para controlar el movimiento de un
eje.
• El sistema no actualiza los parámetros de salida durante la ejecución de la
Motion Task Table. Es decir, los bits de salida y los parámetros de salida no
son válidos.
• Parámetros de entrada:
◦no se pueden modificar en el editor de instancias de objeto de software ni
en la ficha Programación.
◦se pueden usar para modificar dinámicamente la Motion Task Table en un
POU de la aplicación. Para modificar dinámicamente un parámetro de
entrada de instancia de objeto de software asignado por el sistema, utilice
la dirección de parámetro o su símbolo asociado.
NOTA: Es posible modificar el paso de ejecución, si bien las
modificaciones no se tendrán en cuenta hasta la siguiente ejecución del
paso.
Ejemplo de movimiento descrito en una Motion Task Table:
◦Paso: 2
◦Tipo de movimiento: Movimiento relativo
◦Objeto de software: %MC_MOVEREL_PTO1
◦Símbolo: Move_Relative_Label2
En el ejemplo anterior, el programa puede modificar el parámetro de entrada
de velocidad con una de las sintaxis siguientes:
◦%MC_MOVEREL_PTO1.Vel
◦Move_Relative_Label2.Vel
Administración de las instancias de bloques de funciones en una Motion Task
Table:
• Cuando se configura una Motion Task Table, las instancias de bloques de
funciones reservadas se establecen como Utilizado.
• Si todas las instancias de un bloque de funciones específico están
reservadas, ya no se podrá usar el tipo de movimiento asociado.
98 EIO0000003308.02

Salida de tren de pulsos (%PTO)
Programación
Descripción general
En esta sección se enumeran los bloques de funciones que se usan para
programar la función PTO y se describe cómo añadir o eliminar esos bloques de
funciones.
Adición o eliminación de un bloque de funciones
Adición de un bloque de funciones
Siga estos pasos para añadir una instancia de un bloque de funciones PTO:
Paso Acción
1 Seleccione la ficha Programación.
2Seleccione Bloques de funciones >PTO >Administrative oBloques de funciones >
PTO >Movimiento tal y como se muestra en el siguiente gráfico:
3 Haga clic en el escalón para colocar el bloque de funciones seleccionado.
4 Asocie las variables de entrada/salida del bloque de funciones.
NOTA: Establezca los parámetros en la ficha Configuración.
Para obtener más información, consulte Modicon M221 Logic Controller -
Guía de programación, Configuración de PTO.
Eliminación de un bloque de funciones
Siga estos pasos para eliminar una instancia de un bloque de funciones PTO:
Paso Acción
1 En la ficha Programación, haga clic en la instancia del bloque de funciones.
2 Pulse Eliminar para eliminar el bloque de funciones seleccionado.
EIO0000003308.02 99

Salida de tren de pulsos (%PTO)
Bloques de funciones PTO
Bloques de funciones
La función PTO se programa en EcoStruxure Machine Expert - Basic utilizando
los siguientes bloques de funciones:
Categoría Bloque de funciones Descripción
Movimiento (un
solo eje), página
115
MC_MotionTask_PTO,
página 115
Llama a una Motion Task Table.
MC_Power_PTO, página
118 Habilita la alimentación al eje y cambia el estado del eje de Disabled aStandstill.
Mientras el bit %MC_Power_PTO.Status es FALSE, no se puede ejecutar ningún bloque
de funciones de movimiento para ese eje.
MC_MoveVel_PTO,
página 121 Hace que el eje especificado se mueva a la velocidad especificada y transfiere el eje al
estado Continuous. Este movimiento continuo se mantiene hasta que se alcanza un
límite de software, se activa un movimiento de cancelación o se detecta una transición
al estado ErrorStop.
MC_MoveRel_PTO,
página 124 Mueve el eje especificado una distancia incremental a la velocidad especificada y
transfiere el eje al estado Discrete.
La posición de destino se referencia desde la posición actual en tiempo de ejecución,
incrementado por una distancia.
MC_MoveAbs_PTO,
página 127 Hace que el eje especificado se mueva hacia una posición determinada y a la velocidad
especificada, y transfiere el eje al estado Discrete.
El bloque de funciones finaliza con Error establecido en TRUE si el eje no ha vuelto al
punto de referencia (no se ha definido ninguna posición absoluta de referencia). En este
caso, ErrorId se establece en InvalidAbsolute.
MC_Home_PTO, página
131 Ordena que el eje realice la secuencia para definir la posición de referencia absoluta y
transfiere el eje al estado Punto de referencia, página 101. Los detalles de esta
secuencia dependen de los ajustes de los parámetros de configuración de Homing.
MC_SetPos_PTO, página
133 Modifica las coordenadas del eje sin ningún movimiento físico.
MC_Stop_PTO, página
135 Ordena una detención del movimiento controlado y transfiere el eje al estado Stopping.
Cancela la ejecución de cualquier movimiento en curso.
MC_Halt_PTO, página 137 Ordena una detención del movimiento controlado hasta que la velocidad sea cero y
transfiere el eje al estado Discrete. Con la salida Done establecida en TRUE, se
transfiere el estado a Standstill.
Administrativo,
página 139 MC_ReadActVel_PTO,
página 139
Devuelve el valor de la velocidad del eje.
MC_ReadActPos_PTO,
página 141 Devuelve el valor de la posición del eje.
MC_ReadSts_PTO,
página 142
Devuelve el estado del diagrama de estado, página 112 del eje.
MC_ReadMotionState_
PTO, página 144
Devuelve el estado de movimiento del eje.
MC_ReadAxisError_PTO,
página 145
Devuelve un error de control del eje, si hay alguno.
MC_Reset_PTO, página
147 Si las condiciones lo permiten, restablece todos los errores relacionados con el eje para
permitir una transición desde el estado ErrorStop aStandstill. No afecta a la salida de
las instancias de los bloques de funciones.
MC_TouchProbe_PTO,
página 148 Activa un evento desencadenador en la entrada PROBE. Este evento desencadenador
permite registrar la posición del eje y/o iniciar un movimiento almacenado en el búfer.
MC_AbortTrigger_PTO,
página 151 Cancela los bloques de funciones conectados a los eventos desencadenadores (por
ejemplo, MC_TouchProbe_PTO).
MC_ReadPar_PTO,
página 152 Obtiene parámetros desde la PTO.
MC_WritePar_PTO,
página 153 Escribe parámetros en la PTO.
100 EIO0000003308.02

Salida de tren de pulsos (%PTO)
NOTA: Los bloques de funciones de movimiento actúan en la posición del eje
de acuerdo con el diagrama de estado de movimiento. Los bloques de
funciones administrativas no influyen en el estado del movimiento.
NOTA: El bloque de funciones MC_Power_PTO, página 118 es obligatorio
antes de que pueda emitirse un comando de movimiento.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
• No utilice la misma instancia de bloque de funciones en diferentes tareas de
programas.
• No modifique la referencia del bloque de funciones (AXIS) mientras esté en
ejecución el bloque de funciones.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Modalidades de toma de referencia
Descripción general
En esta sección se describen las modalidades de toma de referencia de PTO.
Modalidades de toma de referencia
Descripción
Toma de referencia es el método utilizado para establecer el punto de referencia u
origen para el movimiento absoluto.
Un movimiento de toma de referencia puede realizarse utilizando diferentes
métodos. Los canales PTO de M221 proporcionan diversos tipos de movimientos
de toma de referencia estándar:
•Ajuste de posición, página 103
•Referencia larga, página 103
•Referencia corta invertida, página 105
•Referencia corta no invertida, página 104
Un movimiento de toma de referencia debe finalizar sin interrupciones para que el
nuevo punto de referencia sea válido.
•%MC_ReadSts_PTO.IsHomed se establece en TRUE cuando un
movimiento de toma de referencia finaliza correctamente. Si el movimiento
de toma de referencia se interrumpe, debe iniciarse de nuevo.
•%MC_ReadSts_PTO.IsHomed se establece en FALSE cuando el estado del
eje es DISABLED o cuando ningún movimiento de toma de referencia ha
finalizado correctamente.
Consulte MC_Home_PTO, página 131 ycódigos de objetos de bloques de
funciones de modalidades de toma de referencia, página 108.
Posición inicial
La toma de referencia finaliza con un conmutador externo y la posición del punto
de referencia se define en el flanco de conmutación. Después, se decelera el
movimiento hasta que se detiene.
EIO0000003308.02 101

Salida de tren de pulsos (%PTO)
La posición real del eje al final de la secuencia de movimientos puede diferir, por
lo tanto, del parámetro de posición establecido en el bloque de funciones:
REF (NO): punto de referencia (normalmente abierto)
1Posición al final del movimiento = %MC_HOME_PTO.Position + distancia de
"deceleración hasta la detención".
Para simplificar la representación de una parada en los diagramas de modalidad
de toma de referencia, la siguiente presentación se realiza para representar la
posición real del eje:
REF (NO): punto de referencia (normalmente abierto)
Límites
Los límites de hardware son necesarios para el correcto funcionamiento del
bloque de funciones MC_Home_PTO (Límites de posicionamiento, página 88 y
MC_Power_PTO). En función del tipo de movimiento que solicite con la
modalidad de toma de referencia, la ayuda del límite de hardware se asegura de
que el bloque de funciones respeta el fin de recorrido.
Cuando una acción de toma de referencia se inicia en una dirección alejada del
conmutador de referencia, los límites de hardware sirven para alguna de las
siguientes opciones:
• indicar que se necesita realizar una inversión del sentido para mover el eje
hacia el conmutador de referencia o
• Indicar que se ha detectado un error debido a que no se encontró el
conmutador de referencia antes de alcanzar el fin de recorrido.
Para tipos de movimientos de toma de referencia que permiten inversiones del
sentido, cuando el movimiento alcanza el límite de hardware, el eje se detiene
utilizando la deceleración configurada y retoma el movimiento en dirección
inversa.
En tipos de movimientos de toma de referencia que no permiten inversiones del
sentido, cuando el movimiento alcanza el límite de hardware se cancela el
procedimiento de toma de referencia y el eje se detiene con la deceleración de
parada rápida.
102 EIO0000003308.02

Salida de tren de pulsos (%PTO)
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
• Asegúrese de que los interruptores de posición de seguridad de hardware
del controlador estén integrados en el diseño y la lógica de la aplicación.
• Monte los conmutadores de límite de hardware del controlador en una
posición que permita una distancia de frenado adecuada.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
NOTA: Una distancia de frenado adecuada depende de la velocidad máxima,
la carga máxima (masa) del equipo que se está moviendo y el valor del
parámetro de deceleración de parada rápida.
Ajuste de posición
Descripción
En caso de un ajuste de posición, la posición actual se establece en el valor de
posición especificado. No se realiza ningún movimiento.
Referencia larga
Referencia larga: dirección positiva
Punto de referencia al flanco descendente del conmutador de referencia en
dirección inversa.
La dirección inicial del movimiento depende del estado del conmutador de
referencia
REF (NO) Punto de referencia (normalmente abierto)
Referencia larga: dirección negativa
Punto de referencia al flanco descendente del conmutador de referencia en
dirección de avance.
EIO0000003308.02 103

Salida de tren de pulsos (%PTO)
La dirección inicial del movimiento depende del estado del conmutador de
referencia
REF (NO) Punto de referencia (normalmente abierto)
Referencia corta no invertida
Referencia corta no invertida: dirección positiva
Punto de referencia a baja velocidad al flanco ascendente del conmutador de
referencia sin inversión:
REF (NO) Punto de referencia (normalmente abierto)
REF (NO) Punto de referencia (normalmente abierto)
104 EIO0000003308.02

Salida de tren de pulsos (%PTO)
Referencia corta no invertida: dirección negativa
Punto de referencia a baja velocidad al flanco ascendente del conmutador de
referencia en dirección inversa, sin inversión:
REF (NO) Punto de referencia (normalmente abierto)
REF (NO) Punto de referencia (normalmente abierto)
Referencia corta invertida
Referencia corta invertida: dirección positiva
Punto de referencia al flanco ascendente del conmutador de referencia en
dirección de avance.
La dirección inicial del movimiento depende del estado del conmutador de
referencia
REF (NO) Punto de referencia (normalmente abierto)
EIO0000003308.02 105

Salida de tren de pulsos (%PTO)
REF (NO) Punto de referencia (normalmente abierto)
Referencia corta invertida: dirección negativa
Punto de referencia al flanco ascendente del conmutador de referencia en
dirección de avance.
La dirección inicial del movimiento depende del estado del conmutador de
referencia
REF (NO) Punto de referencia (normalmente abierto)
REF (NO) Punto de referencia (normalmente abierto)
106 EIO0000003308.02

Salida de tren de pulsos (%PTO)
Offset de inicio
Descripción
Si el origen no puede ser definido por conmutadores con la precisión suficiente,
es posible mover el eje hasta una posición específica alejada del conmutador de
origen. El offset de inicio permite diferenciar entre origen mecánico y origen
eléctrico.
El offset de inicio se establece en número de pulsos (-2.147.483.648 a
2.147.483.647, el valor predeterminado es 0). Cuando se establece mediante
configuración, primero se ejecuta el comando MC_Home_PTO y luego se envía
el número especificado de pulsos a la velocidad baja de inicio en la dirección
especificada.
NOTA: El tiempo de espera entre la detención del comando MC_Home_PTO
en el conmutador de origen y el inicio del movimiento de offset es fijo y se
establece en 500 ms. El indicador de ocupado del comando MC_Home_PTO
solo se libera después de que se haya completado el offset de origen.
Parámetros de datos
Descripción general
En esta sección se describen los parámetros de datos de la función PTO.
Códigos de objetos de bloques de funciones
Direction
En esta tabla se muestran los valores para los códigos de objetos de bloques de
funciones de dirección:
Nombre Valor Descripción
mcPositiveDirection 1 CW, hacia delante, positivo (según el ajuste de la
configuración de Modalidad de salida).
mcNegativeDirection -1 CCW, hacia atrás, inverso, negativo (según el ajuste de
la configuración de Modalidad de salida).
EIO0000003308.02 107

Salida de tren de pulsos (%PTO)
Buffer Modes
En esta tabla se muestran los valores para los códigos de objetos de bloques de
funciones de modalidades del búfer:
Nombre Valor Descripción
mcAborting 0 Inicia el FB inmediatamente (modalidad
predeterminada).
Se cancela cualquier movimiento en curso. Se borra la
cola de movimientos.
mcBuffered 1 Inicia el FB después de que el movimiento actual haya
finalizado (se establece en TRUE el bit de Done o
InVel). No se produce una combinación.
mcBlendingPrevious 3 La velocidad se combina con la velocidad del primer
bloque de funciones (combinado con la velocidad de
FB1 en la posición final de FB1).
seTrigger 10 Inicia el FB inmediatamente cuando se detecta un
evento en la entrada PROBE.
Se cancela cualquier movimiento en curso. Se borra la
cola de movimientos.
seBufferedDelay 11 Inicia el FB después de que haya finalizado el
movimiento en curso (se establece en TRUE la salida
de Done oInVel) y haya transcurrido el retardo de
tiempo. No se produce una combinación.
El parámetro Delay se establece mediante MC_
WritePar_PTO, con ParameterNumber 1000.
Modalidades de toma de referencia
En esta tabla se muestran los valores para los códigos de objetos de bloques de
funciones de modalidades de toma de referencia:
Nombre Valor Descripción
PositionSetting 0 Ubicación.
LongReference 1 Referencia larga.
ShortReference_Reversal 20 Referencia corta.
ShortReference_NoReversal 21 Referencia corta no invertida.
Parámetro de PTO
En esta tabla se muestran los valores para los códigos de objetos de bloques de
funciones de parámetros PTO:
Nombre Número
del
paráme-
tro
R/W Descripción
CommandedPosition 1 R Posición solicitada
SWLimitPos (Límite alto) 2 R/W Límite de posición de software positivo.
SWLimitNeg (Límite bajo) 3 R/W Límite de posición de software negativo.
EnableLimitPos (Habilita los
límites de posición de
software)
4 R/W Habilita el interruptor de límite de software
positivo (de 0 a 1).
EnableLimitNeg (Habilita los
límites de posición de
software)
5R/W Habilita el interruptor de límite de software
negativo (de 0 a 1).
MaxVelocityAppl (Velocidad
máx.)
9 R/W Velocidad máxima permitida del eje en la
aplicación (de 0 a 100.000).
108 EIO0000003308.02

Salida de tren de pulsos (%PTO)
Nombre Número
del
paráme-
tro
R/W Descripción
ActualVelocity 10 R Velocidad del eje.
CommandedVelocity 11 R Velocidad solicitada
MaxAccelerationAppl (Acel.
máx.)
13 R/W Aceleración máxima permitida del eje en la
aplicación (de 0 a 100.000).
MaxDecelerationAppl (Decel.
máx.)
15 R/W Deceleración máxima permitida del eje en la
aplicación (de 0 a 100000).
Reservado De 16 a
999
-Reservado para el estándar PLCopen
Delay 1000 R/W Tiempo en ms (0 a 65.535)
Valor predeterminado: 0
EnableDirPos 1004 R/W Habilita la dirección positiva.
Cuando el valor = 0, no se permite la
dirección positiva en el eje. Los bloques de
funciones de movimiento que generarían un
movimiento en una dirección positiva
terminan con el error InvalidDirectionValue
detectado (3006). Si hay un movimiento en
curso en la dirección negativa y este se
interrumpe por un nuevo comando de
movimiento en la dirección positiva, el error
sólo se detectará al terminar la deceleración
del movimiento negativo en curso.
Valor predeterminado: 1
NOTA: Un cambio de valor sólo se
tiene en cuenta en el siguiente
comando de movimiento o en la
siguiente ocurrencia de velocidad = 0.
EnableDirNeg 1005 R/W Habilita la dirección negativa.
Cuando el valor = 0, no se permite la
dirección negativa en el eje. Los bloques de
funciones de movimiento que generarían un
movimiento en una dirección negativa
terminan con el error InvalidDirectionValue
detectado (3006). Si hay un movimiento en
curso en la dirección positiva y este se
interrumpe por un nuevo comando de
movimiento en la dirección negativa, el error
sólo se detectará al terminar la deceleración
del movimiento positivo en curso.
Valor predeterminado: 1
NOTA: Un cambio de valor sólo se
tiene en cuenta en el siguiente
comando de movimiento o en la
siguiente ocurrencia de velocidad = 0.
Códigos de error del eje PTO
En esta tabla se muestran los valores para los códigos de error del eje PTO:
Nombre Valor Descripción
NoError 0 No se ha detectado ningún error.
Alertas de control del eje
InternalError 1000 Error interno del Motion Controller detectado.
DisabledAxis 1001 No pudo iniciarse el movimiento o ha sido cancelado
porque el eje no estaba preparado.
HwPositionLimitP 1002 Límite de posición positivo limP de hardware
sobrepasado.
EIO0000003308.02 109

Salida de tren de pulsos (%PTO)
Nombre Valor Descripción
HwPositionLimitN 1003 Límite de posición negativo limN de hardware
sobrepasado.
SwPositionLimitP 1004 Límite de posición positivo de software sobrepasado.
SwPositionLimitN 1005 Límite de posición negativo de software
sobrepasado.
ApplicationStopped 1006 Se ha detenido la ejecución de la aplicación
(controlador en estado STOPPED oHALT).
OutputProtection 1007 La protección de salida de cortocircuito está activa en
los canales PTO. Consulte la descripción de %S10 y
%SW139 en Modicon M221 Logic Controller - Guía
de programación, Bits de sistema y palabras de
sistema (consulte Modicon M221, Logic Controller,
Guía de programación).
OutputReset 1008 %S9 fuerza todas las salidas a 0. Consulte Bits de
sistema.
Información de control del eje
WarningVelocityValue 1100 El parámetro de velocidad solicitado está fuera de
rango, por lo que la velocidad está limitada a la
velocidad máxima configurada.
WarningAccelerationValue 1101 El parámetro de aceleración solicitado está fuera de
rango, por lo que el límite de aceleración está
limitado a la aceleración máxima configurada.
WarningDecelerationValue 1102 El parámetro de deceleración solicitado está fuera de
rango, por lo que la deceleración está limitada a la
deceleración máxima configurada.
WarningJerkRatioValue 1103 El parámetro jerk ratio solicitado está limitado por la
aceleración o deceleración máxima configuradas. En
este caso, el jerk ratio se recalcula con respecto a
estos máximos.
Una Alerta de control del eje cambia el estado del eje a ErrorStop (MC_Reset_
PTO es obligatorio para salir del estado ErrorStop). El estado del eje resultante
se refleja en MC_ReadSts_PTO yMC_ReadAxisError_PTO.
Códigos de error del comando de movimiento de PTO
En esta tabla se muestran los valores para los códigos de error del comando de
movimiento de PTO:
Nombre Valor Descripción
NoError 0 No se ha detectado ningún error.
Alertas de información de estado del movimiento
ErrorStopActive 2000 No ha podido iniciarse el movimiento o se ha
cancelado debido a que una condición ErrorStop
prohíbe el movimiento.
StoppingActive 2001 El movimiento no ha podido iniciarse debido a que
MC_Stop_PTO prohíbe el movimiento y tiene el
control del eje (el eje está detenido o la entrada MC_
Stop_PTO.Execute está en TRUE).
InvalidTransition 2002 Transición no permitida, consulte el Diagrama de
estado del movimiento.
InvalidSetPosition 2003 MC_SetPos_PTO no se puede ejecutar mientras el
eje está en movimiento.
HomingError 2004 La secuencia de toma de referencia no se puede
iniciar en la leva de referencia en esta modalidad.
InvalidProbeConf 2005 La entrada PROBE debe configurarse.
InvalidHomingConf 2006 La entrada Ref debe configurarse para esta
modalidad de toma de referencia.
110 EIO0000003308.02

Salida de tren de pulsos (%PTO)
Nombre Valor Descripción
InvalidAbsolute 2007 Un movimiento absoluto no puede ejecutarse hasta
que el eje no haya vuelto con éxito a una posición de
origen. Una secuencia de toma de referencia debe
ejecutarse antes (MC_Home_PTO).
MotionQueueFull 2008 El movimiento no puede ser almacenado en el búfer
porque la cola de movimientos está completa.
InvalidTransitionMotionTask 2009 La tarea de movimiento y los otros bloques de
funciones de movimiento vinculados al mismo eje no
se pueden ejecutar de forma simultánea.
Alertas de información de rango
InvalidAxis 3000 No se puede aplicar el bloque de funciones en el eje
especificado.
InvalidPositionValue 3001 El parámetro de posición está fuera de los límites o el
parámetro de distancia indica una posición fuera de
los límites.
InvalidVelocityValue 3002 El parámetro de velocidad está fuera de rango
InvalidAccelerationValue 3003 El parámetro de aceleración está fuera de rango
InvalidDecelerationValue 3004 El parámetro de deceleración está fuera de rango
InvalidBufferModeValue 3005 La modalidad de búfer no se corresponde con un
valor válido.
InvalidDirectionValue 3006 La dirección no se corresponde con un valor válido, o
la dirección no es válida debido a que sobrepasa el
límite de posición del software o el hardware.
InvalidHomeMode 3007 La modalidad de toma de referencia no es aplicable.
InvalidParameter 3008 El número de parámetro no existe en el eje
especificado.
InvalidParameterValue 3009 El valor del parámetro está fuera de rango.
ReadOnlyParameter 3010 El parámetro es de solo lectura.
InvalidStepMotionTask 3011 No se ha definido el tipo de paso de tarea de
movimiento.
Una Alerta de estado del movimiento o una Alerta de rango no afectan al
estado del eje ni a cualquier otro movimiento actualmente en ejecución o a la cola
de movimientos. En este caso, el error sólo afecta localmente al bloque de
funciones aplicable: se establece en TRUE la salida ErrorError y la salida de
objeto ErrorId se establece en el código de error de comando de movimiento de
PTO apropiado.
EIO0000003308.02 111

Salida de tren de pulsos (%PTO)
Modalidades de funcionamiento
Descripción general
En esta sección se describen las modalidades de funcionamiento.
Diagrama de estado de movimiento
Diagrama de estado finito
El eje está siempre en alguno de los estados definidos en este diagrama:
Nota 1 En cualquiera de los estados, al detectarse un error.
Nota 2 En cualquiera de los estados excepto ErrorStop, cuando %MC_Power_
PTO.Status = FALSE.
Nota 3 %MC_Reset_PTO.Done = TRUE y %MC_Power_PTO.Status = FALSE.
Nota 4 %MC_Reset_PTO.Done = TRUE y %MC_Power_PTO.Status = TRUE.
Nota 5 %MC_Power_PTO.Status = VERDADERO.
Nota 6 %MC_Stop_PTO.Done = TRUE y %MC_Stop_PTO.Execute = FALSE.
Esta tabla describe los estados del eje:
Estado Descripción
Disabled Estado inicial del eje, no se permite ningún comando de movimiento. El eje no
ha vuelto al punto de referencia.
Standstill La alimentación está conectada, no se ha detectado ningún error y no hay
comandos de movimiento activos en el eje. Se permite un comando de
movimiento.
ErrorStop Prioridad máxima, aplicable cuando se ha detectado un error en el eje o en el
controlador. Cualquier movimiento en curso es cancelado por una
Deceleración de parada rápida. La salida Error se establece en TRUE en los
bloques de funciones aplicables y un ErrorId establece el código de error.
Mientras haya un error pendiente, el estado permanece en ErrorStop. No se
aceptarán más comandos de movimiento hasta que se haya restablecido
utilizando MC_Reset_PTO.
Homing Aplicable cuando MC_Home_PTO controla el eje.
Discrete Aplicable cuando MC_MoveRel_PTO,MC_MoveAbs_PTO oMC_Halt_PTO
controlan el eje.
Continuous Aplicable cuando MC_MoveVel_PTO controla el eje.
Stopping Aplicable cuando MC_Stop_PTO controla el eje.
112 EIO0000003308.02

Salida de tren de pulsos (%PTO)
NOTA: Los bloques de funciones que no se muestran en el diagrama de
estado no afectan a un cambio de estado del eje.
El comando de movimiento al completo, incluyendo las rampas de
aceleración y deceleración, no puede sobrepasar los 4.294.967.295 pulsos. A
la frecuencia máxima de 100 kHz, las rampas de aceleración y deceleración
están limitadas a 80 segundos.
Tabla de transición de movimientos
El canal PTO puede responder a un nuevo comando al ejecutar (y antes de que
se complete) el comando en curso según la tabla siguiente:
Comando Siguiente
Home MoveVel MoveRel MoveAbs Halt Stop
Corriente Standstill Permitido Permitido(1) Permitido(1) Permitido(1) Permitido Permitido
Home Rechazado Rechazado Rechazado Rechazado Rechazado Permitido
MoveVel Rechazado Permitido Permitido Permitido Permitido Permitido
MoveRel Rechazado Permitido Permitido Permitido Permitido Permitido
MoveAbs Rechazado Permitido Permitido Permitido Permitido Permitido
Halt Rechazado Permitido Permitido Permitido Permitido Permitido
Stop Rechazado Rechazado Rechazado Rechazado Rechazado Rechazado
(1) Cuando el eje está en parada, para las modalidades de búfer mcAborting/mcBuffered/mcBlendingPrevious, el movimiento se inicia
inmediatamente.
Permitido: el nuevo comando comienza la ejecución incluso si el comando previo no ha completado la ejecución.
Rechazado: se ignora el nuevo comando y esto da como resultado la declaración de un error.
NOTA: Cuando se detecta un error en la transición de movimiento, el eje
entra en estado ErrorStop.ErrorId se establece en InvalidTransition.
Modalidad de búfer
Descripción
Algunos de los bloques de funciones de movimiento tienen un objeto de entrada
llamado BufferMode. Con este objeto de entrada, el bloque de funciones puede
iniciarse inmediatamente, iniciarse en un evento Sonda o almacenarse en el
búfer.
Las opciones disponibles se definen en los códigos de objetos de bloques de
funciones de modalidades de búfer, página 108:
• Un movimiento de cancelación (mcAborting) se inicia inmediatamente,
cancela cualquier movimiento en curso y borra la cola de movimientos.
• Un movimiento de evento (seTrigger) es un movimiento de cancelación, que
se inicia en el evento Sonda, página 85.
• Un movimiento almacenado en el búfer (mcBuffered,mcBlendingPrevious,
seBufferedDelay) se pone en cola, es decir, se añade a cualquier movimiento
en ejecución o en espera para ser ejecutado, y se inicia al finalizar el
movimiento anterior.
EIO0000003308.02 113

Salida de tren de pulsos (%PTO)
Diagrama de cola de movimientos
En esta figura se muestra el diagrama de cola de movimientos:
El búfer solamente puede contener un bloque de funciones de movimiento.
La condición para la ejecución del bloque de funciones de movimiento en el búfer
es:
•mcBuffered: cuando el movimiento continuo actual es InVel o cuando el
movimiento binario actual se detiene.
•seBufferedDelay: cuando ha transcurrido el retardo especificado, desde que
el movimiento continuo actual es InVel, o desde que el movimiento binario
actual se detiene.
•mcBlendingPrevious: cuando se alcanzan los destinos de velocidad y
posición del bloque de funciones actual.
Se borra la cola de movimientos (se eliminan todos los movimientos almacenados
en el búfer):
• Cuando se activa un movimiento de interrupción (mcAborting oseTrigger): la
salida CmdAborted se establece en TRUE en los bloques de funciones en
búfer.
• Cuando se ejecuta una función MC_Stop_PTO: la salida Error se establece
en TRUE en los bloques de funciones en búfer desactivados, con ErrorId =
StoppingActive.
• Cuando se detecta una transición al estado ErrorStop: la salida Error se
establece en TRUE en los bloques de funciones en búfer, con ErrorId =
ErrorStopActive.
NOTA:
• Solamente se puede poner en cola un movimiento válido. Si la ejecución
del bloque de funciones finaliza estableciendo en TRUE la salida Error, el
movimiento no se pone en cola, ningún movimiento en ejecución resulta
afectado y la cola no se borra.
• Cuando la cola ya está completa, la salida Error se establece en TRUE
en el bloque de funciones aplicable y la salida ErrorId devuelve el error
MotionQueueFull.
114 EIO0000003308.02

Salida de tren de pulsos (%PTO)
Bloques de funciones de Movimiento
Descripción general
En esta sección se describen los bloques de funciones Movimiento.
Bloque de funciones MC_MotionTask_PTO
Descripción de la función
Tanto los bloques de funciones de un solo movimiento como el bloque de
funciones de Motion Task Table (MC_MotionTask_PTO) se pueden usar para un
eje.
Sin embargo, el bloque de funciones MC_MotionTask_PTO no se puede ejecutar
con otro bloque de funciones de movimiento. En tal caso se detecta un error y
ErrorId se establece en InvalidTransitionMotionTask (2009), página 110.
Representación gráfica
NOTA: La primera vez que introduzca el bloque de funciones deberá
configurarlo para utilizar el eje deseado y motion task table. Haga doble clic
en el bloque de funciones para mostrar las propiedades del bloque de
funciones, seleccione el eje y haga clic en Apply.
.
EIO0000003308.02 115

Salida de tren de pulsos (%PTO)
Entradas
En esta tabla se describen las entradas del bloque de funciones:
Entrada Valor
inicial Descripción
Start FALSE En el flanco ascendente, inicia la ejecución del bloque de funciones.
Las entradas Loop yPause se pueden cambiar durante la ejecución
del bloque de funciones y afectan a la ejecución en curso.
Los valores de los objetos de entrada Axis,Table,StartStep yEndStep
definen la secuencia de movimiento cuando aparece el flanco
ascendente. Un cambio posterior en estos objetos de entrada no afecta
a la ejecución en curso.
Las salidas se establecen al finalizar la ejecución del bloque de
funciones.
Cuando es FALSE:
• Cuando la ejecución está en curso (el movimiento es Busy y
Active), se actualizan las salidas.
• Cuando finaliza la ejecución, las salidas se restablecen un ciclo
más tarde.
Loop FALSE Cuando es TRUE, una vez que ya ha finalizado la ejecución del bloque
de funciones sin que se detecte un error, vuelve a iniciarse la
secuencia de la tarea de movimiento en StartStep. La salida Ended se
establece para un ciclo.
La entrada se prueba una vez que finaliza la ejecución del bloque de
funciones sin que se haya detectado ningún error (la salida Ended es
TRUE).
Pause FALSE Cuando es TRUE:
•Active = 1 y Busy = 1
• Fuerza el eje al estado Halt.
Para alcanzar el estado Halt, el eje se desacelera en el estado
Discrete motion y luego el eje vuelve al estado Standstill
cuando la velocidad = 0.
• El estado Halt se mantiene mientras la entrada Pause sea TRUE.
• Aunque la velocidad sea igual a 0, mantiene la salida Active
establecida.
Cuando se restablece a FALSE después de estar establecida en
TRUE, se reanuda la ejecución de la tarea de movimiento en las
siguientes condiciones:
• Se reanuda la tarea de movimiento con el valor de la velocidad
actual.
• Se utilizan los parámetros del paso activo.
• La posición de destino absoluta no cambia. Si la tarea de
movimiento es un tipo de movimiento relativo, no se añade
distancia.
• En el paso, se restablece la condición Siguiente paso (por
ejemplo: el retardo se reinicia desde 0, se habilita Probe input
event y se espera a que aparezca el flanco configurado).
116 EIO0000003308.02

Salida de tren de pulsos (%PTO)
En esta tabla se describen los objetos de entrada del bloque de funciones:
Objeto de
entrada Tipo Valor
inicial Descripción
Axis %PTOx –La instancia del eje PTO para la que se va ejecutar el
bloque de funciones. El parámetro se establece en la
instancia de bloque de funciones alcanzada en la ficha
del módulo Programación >Herramientas.
Seleccione el parámetro Eje en el cuadro de diálogo
Objetos de PTO >Movimiento >MC_MotionTask_
PTO >Propiedades de MC_MotionTask_PTO.
Table %MT –La instancia de tabla para la que se ejecuta el bloque
de funciones. El parámetro se establece en la instancia
de bloque de funciones alcanzada en la ficha del
módulo Programación >Herramientas. Seleccione el
parámetro Tabla en el cuadro de diálogo Objetos de
PTO >Movimiento >MC_MotionTask_PTO >
Propiedades de MC_MotionTask_PTO.
StartStep Byte 1 Número de paso que define el primer paso ejecutado
en la Motion Task Table.
La secuencia se ejecuta de StartStep aEndStep.
Restricción: StartStep ≤EndStep.
EndStep Byte 16 Número de paso que define el último paso ejecutado
en la Motion Task Table.
La secuencia se ejecuta de StartStep aEndStep.
Restricción: StartStep ≤EndStep.
NOTA: Si EndStep es mayor que el número
máximo de pasos definido en Motion Task Table,
se utiliza el último paso de la tabla.
Salidas
En esta tabla se describen las salidas del bloque de funciones:
Salida Valor inicial Descripción
Ended 0 Cuando es TRUE, la ejecución del bloque de funciones termina
sin ningún error detectado.
Comportamiento de salida Ended:
• Si el último paso de la secuencia de movimiento es un
movimiento binario, la salida se comporta como una salida
Done y el resto de las salidas (Busy,Active,CmdAborted,
Error) se restablece a 0.
• Si el último paso de la secuencia de movimiento es un
movimiento continuo (velocidad de movimiento), la salida
se comporta como una salida InVel.
Comportamiento de otras salidas:
◦Busy yActive son TRUE (1).
◦CmdAborted yError son FALSE (0).
Si se solicita un bucle (entrada Loop), la salida Ended es TRUE
para un ciclo de tarea.
Busy -Cuando es TRUE, la ejecución del bloque de funciones está en
progreso.
Cuando es FALSE, la ejecución del bloque de funciones ha
finalizado.
Active -Cuando es TRUE, la instancia del bloque de funciones tiene el
control del eje. Solamente un bloque de funciones cada vez
puede establecer Active en TRUE para un eje definido.
CmdAborted -Cuando es TRUE, finaliza la ejecución del bloque de funciones a
causa de otro comando de movimiento (MC_Stop_PTO) o la
detección de un error de eje.
Error FALSE Si es TRUE, indica que se ha detectado un error. La ejecución
del bloque de funciones ha finalizado.
EIO0000003308.02 117

Salida de tren de pulsos (%PTO)
En esta tabla se describen los objetos de salida del bloque de funciones:
Objeto de
salida Tipo Valor inicial Descripción
ActiveStep Byte 0 Número del paso que se está ejecutando en la
Motion Task Table.
ErrorId Word NoError Códigos de error de comandos de
movimiento, válidos cuando la salida Error es
TRUE. Consulte la tabla de códigos de error
de comandos de movimiento de PTO, página
110.
Modalidades de funcionamiento
La ejecución de una Motion Task Table llamada por el bloque de funciones MC
MotionTask PTO cumple con el diagrama de estado de movimiento, página 112.
Inicio de MC_MotionTask_PTO: el bloque de funciones solo se puede iniciar
desde el estado Standstill.
Detención de MC_MotionTask_PTO: una de las acciones siguientes puede
detener el bloque de funciones:
• Establecer la entrada Pause en TRUE.
• Ejecutar un MC_Stop_PTO.
El comportamiento del bloque de funciones en errores detectados:
• Si se detecta un estado de movimiento o un error de rango durante la
ejecución del bloque de funciones:
◦Se aplica un comando de detención·del movimiento a la tarea de
movimiento mediante el valor de parámetro de deceleración del paso
actual. Si el parámetro de deceleración de paso no es válido, se aplica
una deceleración de detención rápida.
◦Durante la detención del movimiento controlado, las salidas del bloque de
funciones Active yBusy siguen siendo TRUE, con el objeto de salida
ActiveStep = 0.
◦Cuando se detiene el movimiento, finaliza la ejecución del bloque de
funciones con Error = 1 y el objeto de salida ErrorId se establece en el
valor correspondiente al tipo de error detectado.
• Si se detecta un error de control de eje, el eje cambia al estado ErrorStop.
La ejecución del bloque de funciones finaliza con Error = 1 y ErrorId = 2000.
Bloque de funciones MC_Power_PTO
Comportamiento
El eje está deshabilitado cuando:
•%MC_Power_PTO.Enable = FALSE, o
•%MC_Power_PTO.DriveReady = FALSE, o
• se detecta un error de límite de hardware (HwPositionLimitP/
HwPositionLimitN)
Cuando el eje está deshabilitado:
• el eje pasa del estado Standstill aDisabled, o
desde cualquier movimiento en curso a ErrorStop y luego a Disabled (cuando
se restablece el error detectado).
•%MC_ReadSts_PTO.IsHomed se restablece en 0 (se requiere un nuevo
procedimiento de punto de referencia).
118 EIO0000003308.02

Salida de tren de pulsos (%PTO)
Representación gráfica
NOTA: La primera vez que introduzca el bloque de funciones deberá
configurarlo para utilizar el eje deseado. Haga doble clic en el bloque de
funciones para mostrar las propiedades del bloque de funciones, seleccione
el eje y haga clic en Apply.
Entradas
En esta tabla se describen las entradas del bloque de funciones:
Input Valor
inicial Descripción
Enable FALSE Cuando es TRUE se ejecuta el bloque de funciones. Los valores de las
entradas de otros bloques de funciones pueden ser modificados
continuamente y las salidas de bloques de funciones se actualizan
también continuamente.
Cuando es FALSE, finaliza la ejecución del bloque de funciones y se
restablecen sus salidas.
DriveReady FALSE Señal de la unidad que indica que está preparada.
Es TRUE cuando la unidad está lista para iniciar el movimiento de
ejecución.
Si la señal de la unidad está conectada al controlador, utilice la entrada
del controlador apropiada. Si la unidad no proporciona esta señal,
puede forzar el valor TRUE para esta entrada con cualquier valor
booleano TRUE.
LimP Verda-
dero Información del interruptor de límite de hardware, en dirección positiva.
Se establece en FALSE cuando se alcanza el interruptor de límite de
hardware.
Si la señal del interruptor de límite de hardware está conectada al
controlador, utilice la entrada del controlador apropiada. Si esta señal
no está disponible, puede forzar el valor TRUE para esta entrada con
cualquier valor booleano TRUE.
LimN Verda-
dero Información del interruptor de límite de hardware, en dirección
negativa.
Se establece en FALSE cuando se alcanza el interruptor de límite de
hardware.
Si la señal del interruptor de límite de hardware está conectada al
controlador, utilice la entrada del controlador apropiada. Si esta señal
no está disponible, puede forzar el valor TRUE para esta entrada con
cualquier valor booleano TRUE.
En esta tabla se describe el objeto de entrada del bloque de funciones:
Objeto de
entrada
Tipo Valor
inicial Descripción
Axis PTOx -Instancia para la que se va a ejecutar el bloque de
funciones. El nombre se declara en la configuración del
controlador.
EIO0000003308.02 119

Salida de tren de pulsos (%PTO)
Salidas
En esta tabla se describen las salidas del bloque de funciones:
Salida Valor inicial Descripción
Status FALSE Cuando es TRUE, se notifica que la unidad está lista para
aceptar comandos de movimiento.
DriveEnable FALSE Cuando es TRUE, indica a la unidad que puede aceptar
comandos de movimiento y que, por consiguiente, debería
habilitar la alimentación.
Si la entrada de la unidad está conectada al controlador, utilice la
salida del controlador apropiada. Si la unidad no tiene una
entrada para esta señal, puede dejar esta salida del bloque de
funciones sin utilizar.
Error FALSE Si es TRUE, indica que se ha detectado un error. La ejecución
del bloque de funciones ha finalizado.
En esta tabla se describe el objeto de salida del bloque de funciones:
Objeto de
salida
Tipo Valor inicial Descripción
ErrorId Word NoError Códigos de error de comandos de
movimiento, válidos cuando la salida Error es
TRUE. Consulte la tabla de códigos de error
de comandos de movimiento de PTO, página
110.
Ejemplo de diagrama de tiempos
En el diagrama se muestra el funcionamiento del bloque de funciones MC_Power_PTO:
120 EIO0000003308.02

Salida de tren de pulsos (%PTO)
Bloque de funciones MC_MoveVel_PTO
Representación gráfica
NOTA: La primera vez que introduzca el bloque de funciones deberá
configurarlo para utilizar el eje deseado. Haga doble clic en el bloque de
funciones para mostrar las propiedades del bloque de funciones, seleccione
el eje y haga clic en Apply.
Entradas
En esta tabla se describen las entradas del bloque de funciones:
Input Valor
inicial Descripción
Execute FALSE En el flanco ascendente, inicia la ejecución del bloque de funciones.
Los valores de las entradas de los otros bloques de funciones
controlan la ejecución del bloque de funciones en el flanco ascendente
de Execute. Una modificación posterior en estos parámetros no afecta
a la ejecución en curso a menos que la entrada ContUpdate sea TRUE.
Las salidas se establecen al finalizar el bloque de funciones.
Si se detecta un segundo flanco ascendente durante la ejecución del
bloque de funciones, se cancela la ejecución en curso y se ejecuta de
nuevo el bloque de funciones.
ContUpdate FALSE Cuando es TRUE, hace que el bloque de funciones utilice cualquier
valor modificado de los objetos de entrada (Vel,Acc,Dec yDirection), y
los aplica al comando en curso.
Esta entrada debe ser TRUE antes de que se tenga en cuenta el flanco
ascendente de la entrada Execute.
NOTA: No se tienen en cuenta las modificaciones de valor del
parámetro Axis. Debe establecer Execute en 0 y después en 1
para cambiar el Axis.
EIO0000003308.02 121

Salida de tren de pulsos (%PTO)
En esta tabla se describen los objetos de entrada del bloque de funciones:
Objeto de
entrada Tipo Valor
inicial Descripción
Axis PTOx -Instancia para la que se va a ejecutar el bloque de
funciones. El nombre se declara en la configuración del
controlador.
Vel DINT 0 Velocidad de destino.
Rango en Hz: De 0 aMaxVelocityAppl, página 108
Acc DINT 0 Aceleración en Hz/ms
Rango (Hz/ms): De 1 aMaxAccelerationAppl, página
108
Dec DINT 0 Deceleración en Hz/ms
Rango (Hz/ms): De 1 aMaxDecelerationAppl, página
108
JerkRatio INT 0 Porcentaje de ajuste de aceleración/deceleración
utilizado para crear el perfil de la curva en S, página 84.
Rango: de 0 a 100
Direction INT mcPosi-
tiveDi-
rection
Dirección del movimiento para el tipo de PTO CW/CCW
adelante (CW) = 1 (mcPositiveDirection)
atrás (CCW) = -1 (mcNegativeDirection)
BufferMode INT mcAbor-
ting
Modalidad de transición del movimiento en curso.
Consulte Tabla de modalidades de búfer, página 108.
Salidas
En esta tabla se describen las salidas del bloque de funciones:
Salida Valor inicial Descripción
InVel FALSE Cuando es TRUE, se ha alcanzado la velocidad de destino.
Busy -Cuando es TRUE, la ejecución del bloque de funciones está en
progreso.
Cuando es FALSE, la ejecución del bloque de funciones ha
finalizado.
El bloque de funciones debe mantenerse en una tarea activa del
programa de aplicación durante al menos tanto tiempo como
Busy sea TRUE.
Active -Cuando es TRUE, la instancia del bloque de funciones tiene el
control del eje. Solamente un bloque de funciones cada vez
puede establecer Active en TRUE para un eje definido.
CmdAborted -Cuando es TRUE, la ejecución del bloque de funciones finaliza
debido a otro comando de movimiento.
Error FALSE Si es TRUE, indica que se ha detectado un error. La ejecución
del bloque de funciones ha finalizado.
En esta tabla se describe el objeto de salida del bloque de funciones:
Objeto de
salida Tipo Valor inicial Descripción
ErrorId Word NoError Códigos de error de comandos de
movimiento, válidos cuando la salida Error es
TRUE. Consulte la tabla de códigos de error
de comandos de movimiento de PTO, página
110.
122 EIO0000003308.02

Salida de tren de pulsos (%PTO)
NOTA:
• Para detener el movimiento, el bloque de funciones tiene que ser
interrumpido por otro bloque de funciones emitiendo un nuevo comando.
• Si un movimiento está en curso y se invierte la dirección, primero se
detiene el movimiento con la deceleración del bloque de funciones MC_
MoveVel_PTO y después se reanuda el movimiento en la dirección
contraria.
• La duración de la aceleración/deceleración del bloque de segmento no
debe sobrepasar los 80 segundos.
Ejemplo de diagrama de tiempos
El diagrama muestra un perfil simple desde el estado Standstill:
El diagrama muestra un perfil complejo desde el estado Continuous:
El diagrama muestra un perfil complejo desde el estado Continuous con cambio
de dirección:
EIO0000003308.02 123

Salida de tren de pulsos (%PTO)
El diagrama muestra un perfil complejo desde el estado Discrete:
Bloque de funciones MC_MoveRel_PTO
Representación gráfica
NOTA: La primera vez que introduzca el bloque de funciones deberá
configurarlo para utilizar el eje deseado. Haga doble clic en el bloque de
funciones para mostrar las propiedades del bloque de funciones, seleccione
el eje y haga clic en Apply.
Entradas
En esta tabla se describe la entrada del bloque de funciones:
Input Valor
inicial Descripción
Execute FALSE En el flanco ascendente, inicia la ejecución del bloque de funciones.
Los valores de las entradas de los otros bloques de funciones
controlan la ejecución del bloque de funciones en el flanco ascendente
de Execute. Un cambio posterior en estos parámetros de entrada no
afecta a la ejecución en curso.
Las salidas se establecen al finalizar el bloque de funciones.
124 EIO0000003308.02

Salida de tren de pulsos (%PTO)
En esta tabla se describen los objetos de entrada del bloque de funciones:
Objeto de
entrada Tipo Valor
inicial Descripción
Axis PTOx -Instancia para la que se va a ejecutar el bloque de
funciones. El nombre se declara en la configuración del
controlador.
Distance DINT 0 Distancia relativa para el movimiento, en pulsos. El
signo especifica la dirección.
Vel DINT 0 Velocidad de destino.
Rango en Hz: De 0 aMaxVelocityAppl, página 108
Acc DINT 0 Aceleración en Hz/ms
Rango (Hz/ms): De 1 aMaxAccelerationAppl, página
108
Dec DINT 0 Deceleración en Hz/ms
Rango (Hz/ms): De 1 aMaxDecelerationAppl, página
108
JerkRatio INT 0 Porcentaje de ajuste de aceleración/deceleración
utilizado para crear el perfil de la curva en S, página 84.
Rango: de 0 a 100
BufferMode INT mcAbor-
ting
Modalidad de transición del movimiento en curso.
Consulte Tabla de modalidades de búfer, página 108.
Salidas
En esta tabla se describen las salidas del bloque de funciones:
Salida Valor inicial Descripción
Done FALSE Cuando es TRUE, la ejecución del bloque de funciones
termina sin ningún error detectado.
Cuando un movimiento de un eje es interrumpido por otro
movimiento del mismo eje antes de que la acción del
comando se haya completado, CmdAborted se establece en
TRUE y Done se establece en FALSE.
Busy -Cuando es TRUE, la ejecución del bloque de funciones está
en progreso.
Cuando es FALSE, la ejecución del bloque de funciones ha
finalizado.
El bloque de funciones debe mantenerse en una tarea activa
del programa de aplicación durante al menos tanto tiempo
como Busy sea TRUE.
Active -Cuando es TRUE, la instancia del bloque de funciones tiene
el control del eje. Solamente un bloque de funciones cada
vez puede establecer Active en TRUE para un eje definido.
CmdAborted -Cuando es TRUE, la ejecución del bloque de funciones
finaliza debido a otro comando de movimiento.
Error FALSE Si es TRUE, indica que se ha detectado un error. La
ejecución del bloque de funciones ha finalizado.
En esta tabla se describe el objeto de salida del bloque de funciones:
Objeto de
salida Tipo Valor inicial Descripción
ErrorId Word NoError Códigos de error de comandos de
movimiento, válidos cuando la salida Error es
TRUE. Consulte la tabla de códigos de error
de comandos de movimiento de PTO, página
110.
EIO0000003308.02 125

Salida de tren de pulsos (%PTO)
NOTA:
• El bloque de funciones se completa con velocidad cero si no hay más
bloques pendientes.
• Si la distancia es demasiado corta para alcanzar la velocidad de destino,
el perfil del movimiento es triangular en lugar de trapezoidal.
• Si hay un movimiento en curso y se sobrepasa la distancia solicitada
debido a los parámetros de movimiento actual, se invierte
automáticamente la dirección: primero se detiene el movimiento con la
deceleración del bloque de funciones MC_MoveRel_PTO y después se
reanuda el movimiento en dirección contraria.
• La duración de la aceleración/deceleración del bloque de segmento no
debe sobrepasar los 80 segundos.
Ejemplo de diagrama de tiempos
El diagrama muestra un perfil simple desde el estado Standstill:
El diagrama muestra un perfil complejo desde el estado Continuous:
El diagrama muestra un perfil complejo desde el estado Continuous con cambio
de dirección:
126 EIO0000003308.02

Salida de tren de pulsos (%PTO)
El diagrama muestra un perfil complejo desde el estado Discrete:
El diagrama muestra un perfil complejo desde el estado Discrete con cambio de
dirección:
Bloque de funciones MC_MoveAbs_PTO
Representación gráfica
NOTA: La primera vez que introduzca el bloque de funciones deberá
configurarlo para utilizar el eje deseado. Haga doble clic en el bloque de
funciones para mostrar las propiedades del bloque de funciones, seleccione
el eje y haga clic en Apply.
EIO0000003308.02 127

Salida de tren de pulsos (%PTO)
Entradas
En esta tabla se describe la entrada del bloque de funciones:
Input Valor
inicial Descripción
Execute FALSE En el flanco ascendente, inicia la ejecución del bloque de funciones.
Los valores de las entradas de los otros bloques de funciones
controlan la ejecución del bloque de funciones en el flanco ascendente
de Execute. Un cambio posterior en estos parámetros de entrada no
afecta a la ejecución en curso.
Las salidas se establecen al finalizar el bloque de funciones.
En esta tabla se describen los objetos de entrada del bloque de funciones:
Objeto de
entrada Tipo Valor
inicial Descripción
Axis PTOx -Instancia para la que se va a ejecutar el bloque de
funciones. El nombre se declara en la configuración del
controlador.
Pos DINT 0 Posición del eje.
Vel DINT 0 Velocidad de destino.
Rango en Hz: De 0 aMaxVelocityAppl, página 108
Acc DINT 0 Aceleración en Hz/ms
Rango (Hz/ms): De 1 aMaxAccelerationAppl, página
108
Dec DINT 0 Deceleración en Hz/ms
Rango (Hz/ms): De 1 aMaxDecelerationAppl, página
108
JerkRatio INT 0 Porcentaje de ajuste de aceleración/deceleración
utilizado para crear el perfil de la curva en S, página 84.
Rango: de 0 a 100
BufferMode INT mcAbor-
ting
Modalidad de transición del movimiento en curso.
Consulte Tabla de modalidades de búfer, página 108.
128 EIO0000003308.02

Salida de tren de pulsos (%PTO)
Salidas
En esta tabla se describen las salidas del bloque de funciones:
Salida Valor inicial Descripción
Done FALSE Cuando es TRUE, la ejecución del bloque de funciones
termina sin ningún error detectado.
Cuando un movimiento de un eje es interrumpido por otro
movimiento del mismo eje antes de que la acción del
comando se haya completado, CmdAborted se establece en
TRUE y Done se establece en FALSE.
Busy -Cuando es TRUE, la ejecución del bloque de funciones está
en progreso.
Cuando es FALSE, la ejecución del bloque de funciones ha
finalizado.
El bloque de funciones debe mantenerse en una tarea activa
del programa de aplicación durante al menos tanto tiempo
como Busy sea TRUE.
Active -Cuando es TRUE, la instancia del bloque de funciones tiene
el control del eje. Solamente un bloque de funciones cada
vez puede establecer Active en TRUE para un eje definido.
CmdAborted -Cuando es TRUE, la ejecución del bloque de funciones
finaliza debido a otro comando de movimiento.
Error FALSE Si es TRUE, indica que se ha detectado un error. La
ejecución del bloque de funciones ha finalizado.
En esta tabla se describe el objeto de salida del bloque de funciones:
Objeto de
salida Tipo Valor inicial Descripción
ErrorId Word NoError Códigos de error de comandos de
movimiento, válidos cuando la salida Error es
TRUE. Consulte la tabla de códigos de error
de comandos de movimiento de PTO, página
110.
NOTA:
• El bloque de funciones se completa con velocidad cero si no hay más
bloques pendientes.
• La dirección del movimiento se establece automáticamente, de acuerdo
con la posición actual y de destino.
• Si la distancia es demasiado corta para alcanzar la velocidad de destino,
el perfil del movimiento es triangular en lugar de trapezoidal.
• Si no se puede alcanzar la posición con la dirección actual, se invierte
automáticamente la dirección. Si hay un movimiento en curso, primero se
detiene con la deceleración del bloque de funciones MC_MoveAbsolute_
PTO y después se reanuda el movimiento en sentido contrario.
• La duración de la aceleración/deceleración del bloque de segmento no
debe sobrepasar los 80 segundos.
Ejemplo de diagrama de tiempos
El diagrama muestra un perfil simple desde el estado Standstill:
EIO0000003308.02 129


Salida de tren de pulsos (%PTO)
Bloque de funciones MC_Home_PTO
Representación gráfica
NOTA: La primera vez que introduzca el bloque de funciones deberá
configurarlo para utilizar el eje deseado. Haga doble clic en el bloque de
funciones para mostrar las propiedades del bloque de funciones, seleccione
el eje y haga clic en Apply.
Entradas
En esta tabla se describe la entrada del bloque de funciones:
Input Valor
inicial Descripción
Execute FALSE En el flanco ascendente, inicia la ejecución del bloque de funciones.
Los valores de las entradas de los otros bloques de funciones
controlan la ejecución del bloque de funciones en el flanco ascendente
de Execute. Un cambio posterior en estos parámetros de entrada no
afecta a la ejecución en curso.
Las salidas se establecen al finalizar el bloque de funciones.
EIO0000003308.02 131

Salida de tren de pulsos (%PTO)
En esta tabla se describen los objetos de entrada del bloque de funciones:
Objeto de
entrada Tipo Valor
inicial Descripción
Axis PTOx -Instancia para la que se va a ejecutar el bloque de
funciones. El nombre se declara en la configuración del
controlador.
Mode BYTE 0 Tipo de secuencia de toma de referencia, página 108
predefinido.
Pos DINT 0 Posición del eje.
HighVel DINT 0 Velocidad de toma de referencia de destino para
buscar la conmutación de límite o referencia.
Rango en Hz: De 1 aMaxVelocityAppl, página 108
LowVel DINT 0 Velocidad de toma de referencia de destino para
buscar la señal de conmutación de referencia. El
movimiento se detiene cuando se detecta la
conmutación de límite o referencia.
Rango en Hz: de 1 a HighVelocity
Acc DINT 0 Aceleración en Hz/ms
Rango (Hz/ms): De 1 aMaxAccelerationAppl, página
108
Dec DINT 0 Deceleración en Hz/ms
Rango (Hz/ms): De 1 aMaxDecelerationAppl, página
108
JerkRatio INT 0 Porcentaje de ajuste de aceleración/deceleración
utilizado para crear el perfil de la curva en S, página 84.
Rango: de 0 a 100
Direction INT mcPosi-
tiveDi-
rection
Dirección del movimiento para el tipo de PTO CW/CCW
adelante (CW) = 1 (mcPositiveDirection)
atrás (CCW) = -1 (mcNegativeDirection)
Offset DINT 0 Distancia al punto de origen. Al alcanzar el punto de
origen se reanuda el movimiento hasta cubrir la
distancia. La dirección depende del signo (offset de
toma de referencia, página 107).
Rango: De -2.147.483.648 a 2.147.483.647
132 EIO0000003308.02

Salida de tren de pulsos (%PTO)
Salidas
En esta tabla se describen las salidas del bloque de funciones:
Salida Valor inicial Descripción
Done FALSE Cuando es TRUE, la ejecución del bloque de funciones
termina sin ningún error detectado.
Cuando un movimiento de un eje es interrumpido por otro
movimiento del mismo eje antes de que la acción del
comando se haya completado, CmdAborted se establece en
TRUE y Done se establece en FALSE.
Busy -Cuando es TRUE, la ejecución del bloque de funciones está
en progreso.
Cuando es FALSE, la ejecución del bloque de funciones ha
finalizado.
El bloque de funciones debe mantenerse en una tarea activa
del programa de aplicación durante al menos tanto tiempo
como Busy sea TRUE.
Active -Cuando es TRUE, la instancia del bloque de funciones tiene
el control del eje. Solamente un bloque de funciones cada
vez puede establecer Active en TRUE para un eje definido.
CmdAborted -Cuando es TRUE, la ejecución del bloque de funciones
finaliza debido a otro comando de movimiento.
Error FALSE Si es TRUE, indica que se ha detectado un error. La
ejecución del bloque de funciones ha finalizado.
En esta tabla se describe el objeto de salida del bloque de funciones:
Objeto de
salida Tipo Valor inicial Descripción
ErrorId Word NoError Códigos de error de comandos de
movimiento, válidos cuando la salida Error es
TRUE. Consulte la tabla de códigos de error
de comandos de movimiento de PTO, página
110.
NOTA: La duración de la aceleración/deceleración del bloque de segmento
no debe sobrepasar los 80 segundos.
Ejemplo de diagrama de tiempos
Modalidades de toma de referencia, página 101
Bloque de funciones MC_SetPos_PTO
Comportamiento
Este bloque de funciones modifica las coordenadas de la posición actual del eje
sin ningún movimiento físico. Sólo puede utilizarse cuando el eje está en un
estado Standstill.
EIO0000003308.02 133

Salida de tren de pulsos (%PTO)
Representación gráfica
NOTA: La primera vez que introduzca el bloque de funciones deberá
configurarlo para utilizar el eje deseado. Haga doble clic en el bloque de
funciones para mostrar las propiedades del bloque de funciones, seleccione
el eje y haga clic en Apply.
Entradas
En esta tabla se describe la entrada del bloque de funciones:
Input Valor
inicial Descripción
Execute FALSE En el flanco ascendente, inicia la ejecución del bloque de funciones.
Los valores de las entradas de los otros bloques de funciones
controlan la ejecución del bloque de funciones en el flanco ascendente
de Execute. Un cambio posterior en estos parámetros de entrada no
afecta a la ejecución en curso.
Las salidas se establecen al finalizar el bloque de funciones.
En esta tabla se describen los objetos de entrada del bloque de funciones:
Objeto de
entrada Tipo Valor
inicial Descripción
Axis PTOx -Instancia para la que se va a ejecutar el bloque de
funciones. El nombre se declara en la configuración del
controlador.
Pos DINT 0 Posición del eje.
Salidas
En esta tabla se describen las salidas del bloque de funciones:
Salida Valor inicial Descripción
Done FALSE Cuando es TRUE, la ejecución del bloque de funciones termina
sin ningún error detectado.
Error FALSE Si es TRUE, indica que se ha detectado un error. La ejecución
del bloque de funciones ha finalizado.
En esta tabla se describe el objeto de salida del bloque de funciones:
Objeto de
salida
Tipo Valor inicial Descripción
ErrorId Word NoError Códigos de error de comandos de
movimiento, válidos cuando la salida Error es
TRUE. Consulte la tabla de códigos de error
de comandos de movimiento de PTO, página
110.
134 EIO0000003308.02

Salida de tren de pulsos (%PTO)
Bloque de funciones MC_Stop_PTO
Representación gráfica
NOTA: La primera vez que introduzca el bloque de funciones deberá
configurarlo para utilizar el eje deseado. Haga doble clic en el bloque de
funciones para mostrar las propiedades del bloque de funciones, seleccione
el eje y haga clic en Apply.
Entradas
En esta tabla se describe la entrada del bloque de funciones:
Input Valor
inicial Descripción
Execute FALSE En el flanco ascendente, inicia la ejecución del bloque de funciones.
Los valores de las entradas de los otros bloques de funciones
controlan la ejecución del bloque de funciones en el flanco ascendente
de Execute. Un cambio posterior en estos parámetros de entrada no
afecta a la ejecución en curso.
Las salidas se establecen al finalizar el bloque de funciones.
En esta tabla se describen los objetos de entrada del bloque de funciones:
Objeto de
entrada
Tipo Valor
inicial Descripción
Axis PTOx -Instancia para la que se va a ejecutar el bloque de
funciones. El nombre se declara en la configuración del
controlador.
Dec DINT 0 Deceleración en Hz/ms
Rango (Hz/ms): De 1 aMaxDecelerationAppl, página
108
JerkRatio INT 0 Porcentaje de ajuste de aceleración/deceleración
utilizado para crear el perfil de la curva en S, página 84.
Rango: de 0 a 100
EIO0000003308.02 135

Salida de tren de pulsos (%PTO)
Salidas
En esta tabla se describen las salidas del bloque de funciones:
Salida Valor inicial Descripción
Done FALSE Cuando es TRUE, la ejecución del bloque de funciones termina
sin ningún error detectado.
Cuando un movimiento de un eje es interrumpido por otro
movimiento del mismo eje antes de que la acción del comando
se haya completado, CmdAborted se establece en TRUE y Done
se establece en FALSE.
Busy -Cuando es TRUE, la ejecución del bloque de funciones está en
progreso.
Cuando es FALSE, la ejecución del bloque de funciones ha
finalizado.
El bloque de funciones debe mantenerse en una tarea activa del
programa de aplicación durante al menos tanto tiempo como
Busy sea TRUE.
CmdAborted -Cuando es TRUE, la ejecución del bloque de funciones finaliza
debido a otro comando de movimiento.
Error FALSE Si es TRUE, indica que se ha detectado un error. La ejecución
del bloque de funciones ha finalizado.
En esta tabla se describe el objeto de salida del bloque de funciones:
Objeto de
salida
Tipo Valor inicial Descripción
ErrorId Word NoError Códigos de error de comandos de
movimiento, válidos cuando la salida Error es
TRUE. Consulte la tabla de códigos de error
de comandos de movimiento de PTO, página
110.
NOTA:
• Llamar a este bloque de funciones en estado Standstill cambia el estado
aStopping, y lo devuelve a Standstill cuando Execute es FALSE.
• El estado Stopping se mantiene mientras la entrada Execute sea TRUE.
• La salida Done se establece cuando termina la rampa de detención.
• Si Deceleration = 0, se utiliza la deceleración de parada rápida.
• El bloque de funciones se completa con velocidad cero.
• La duración de la deceleración del bloque de segmento no debe
sobrepasar los 80 segundos.
Ejemplo de diagrama de tiempos
El diagrama muestra un perfil simple desde el estado Continuous:
136 EIO0000003308.02

Salida de tren de pulsos (%PTO)
El diagrama muestra un perfil simple desde el estado Discrete:
Bloque de funciones MC_Halt_PTO
Representación gráfica
NOTA: La primera vez que introduzca el bloque de funciones deberá
configurarlo para utilizar el eje deseado. Haga doble clic en el bloque de
funciones para mostrar las propiedades del bloque de funciones, seleccione
el eje y haga clic en Apply.
Entradas
En esta tabla se describe la entrada del bloque de funciones:
Input Valor
inicial Descripción
Execute FALSE En el flanco ascendente, inicia la ejecución del bloque de funciones.
Los valores de las entradas de los otros bloques de funciones
controlan la ejecución del bloque de funciones en el flanco ascendente
de Execute. Un cambio posterior en estos parámetros de entrada no
afecta a la ejecución en curso.
Las salidas se establecen al finalizar el bloque de funciones.
EIO0000003308.02 137

Salida de tren de pulsos (%PTO)
En esta tabla se describen los objetos de entrada del bloque de funciones:
Objeto de
entrada Tipo Valor
inicial Descripción
Axis PTOx -Instancia para la que se va a ejecutar el bloque de
funciones. El nombre se declara en la configuración del
controlador.
Dec DINT 0 Deceleración en Hz/ms
Rango (Hz/ms): De 1 aMaxDecelerationAppl, página
108
JerkRatio INT 0 Porcentaje de ajuste de aceleración/deceleración
utilizado para crear el perfil de la curva en S, página 84.
Rango: de 0 a 100
BufferMode INT mcAbor-
ting
Modalidad de transición del movimiento en curso.
Consulte Tabla de modalidades de búfer, página 108.
Salidas
En esta tabla se describen las salidas del bloque de funciones:
Salida Valor inicial Descripción
Done FALSE Cuando es TRUE, la ejecución del bloque de funciones
termina sin ningún error detectado.
Cuando un movimiento de un eje es interrumpido por otro
movimiento del mismo eje antes de que la acción del
comando se haya completado, CmdAborted se establece en
TRUE y Done se establece en FALSE.
Busy -Cuando es TRUE, la ejecución del bloque de funciones está
en progreso.
Cuando es FALSE, la ejecución del bloque de funciones ha
finalizado.
El bloque de funciones debe mantenerse en una tarea activa
del programa de aplicación durante al menos tanto tiempo
como Busy sea TRUE.
Active -Cuando es TRUE, la instancia del bloque de funciones tiene
el control del eje. Solamente un bloque de funciones cada
vez puede establecer Active en TRUE para un eje definido.
CmdAborted -Cuando es TRUE, la ejecución del bloque de funciones
finaliza debido a otro comando de movimiento.
Error FALSE Si es TRUE, indica que se ha detectado un error. La
ejecución del bloque de funciones ha finalizado.
En esta tabla se describe el objeto de salida del bloque de funciones:
Objeto de
salida Tipo Valor inicial Descripción
ErrorId Word NoError Códigos de error de comandos de
movimiento, válidos cuando la salida Error es
TRUE. Consulte la tabla de códigos de error
de comandos de movimiento de PTO, página
110.
NOTA: El bloque de funciones se completa con velocidad cero.
138 EIO0000003308.02

Salida de tren de pulsos (%PTO)
Ejemplo de diagrama de tiempos
El diagrama muestra un perfil simple desde el estado Continuous:
El diagrama muestra un perfil simple desde el estado Discrete:
Bloques de funciones Administrative
Descripción general
En esta sección se describen los bloques de funciones Administrative.
Bloque de funciones MC_ReadActVel_PTO
Descripción de la función
Este bloque de funciones devuelve el valor de velocidad real del eje.
Representación gráfica
NOTA: La primera vez que introduzca el bloque de funciones deberá
configurarlo para utilizar el eje deseado. Haga doble clic en el bloque de
funciones para mostrar las propiedades del bloque de funciones, seleccione
el eje y haga clic en Apply.
EIO0000003308.02 139

Salida de tren de pulsos (%PTO)
Entradas
En esta tabla se describe la entrada del bloque de funciones:
Input Valor
inicial Descripción
Enable FALSE Cuando es TRUE se ejecuta el bloque de funciones. Los valores de las
entradas de otros bloques de funciones pueden ser modificados
continuamente y las salidas de bloques de funciones se actualizan
también continuamente.
Cuando es FALSE, finaliza la ejecución del bloque de funciones y se
restablecen sus salidas.
En esta tabla se describe el objeto de entrada del bloque de funciones:
Objeto de
entrada
Tipo Valor
inicial Descripción
Axis PTOx -Instancia para la que se va a ejecutar el bloque de
funciones. El nombre se declara en la configuración del
controlador.
Salidas
En esta tabla se describen las salidas del bloque de funciones:
Salida Valor inicial Descripción
Valid -Si es TRUE, los datos del objeto del bloque de funciones son
válidos.
Error FALSE Si es TRUE, indica que se ha detectado un error. La ejecución
del bloque de funciones ha finalizado.
En esta tabla se describen los objetos de salida del bloque de funciones:
Objeto de
salida Tipo Valor inicial Descripción
Vel DINT -Velocidad del eje.
ErrorId Word NoError Códigos de error de comandos de
movimiento, válidos cuando la salida Error es
TRUE. Consulte la tabla de códigos de error
de comandos de movimiento de PTO, página
110.
140 EIO0000003308.02

Salida de tren de pulsos (%PTO)
Bloque de funciones MC_ReadActPos_PTO
Descripción de la función
Este bloque de funciones devuelve el valor de posición real del eje.
Representación gráfica
NOTA: La primera vez que introduzca el bloque de funciones deberá
configurarlo para utilizar el eje deseado. Haga doble clic en el bloque de
funciones para mostrar las propiedades del bloque de funciones, seleccione
el eje y haga clic en Apply.
Entradas
En esta tabla se describe la entrada del bloque de funciones:
Input Valor
inicial Descripción
Enable FALSE Cuando es TRUE se ejecuta el bloque de funciones. Los valores de las
entradas de otros bloques de funciones pueden ser modificados
continuamente y las salidas de bloques de funciones se actualizan
también continuamente.
Cuando es FALSE, finaliza la ejecución del bloque de funciones y se
restablecen sus salidas.
En esta tabla se describe el objeto de entrada del bloque de funciones:
Objeto de
entrada
Tipo Valor
inicial Descripción
Axis PTOx -Instancia para la que se va a ejecutar el bloque de
funciones. El nombre se declara en la configuración del
controlador.
Salidas
En esta tabla se describen las salidas del bloque de funciones:
Salida Valor inicial Descripción
Valid -Si es TRUE, los datos del objeto del bloque de funciones son
válidos.
Error FALSE Si es TRUE, indica que se ha detectado un error. La ejecución
del bloque de funciones ha finalizado.
EIO0000003308.02 141

Salida de tren de pulsos (%PTO)
En esta tabla se describen los objetos de salida del bloque de funciones:
Objeto de
salida Tipo Valor inicial Descripción
Pos DINT -Posición del eje.
ErrorId Word NoError Códigos de error de comandos de
movimiento, válidos cuando la salida Error es
TRUE. Consulte la tabla de códigos de error
de comandos de movimiento de PTO, página
110.
Bloque de funciones MC_ReadSts_PTO
Descripción de la función
Este bloque de funciones devuelve el estado del diagrama de estado del eje.
Representación gráfica
NOTA: La primera vez que introduzca el bloque de funciones deberá
configurarlo para utilizar el eje deseado. Haga doble clic en el bloque de
funciones para mostrar las propiedades del bloque de funciones, seleccione
el eje y haga clic en Apply.
Entradas
En esta tabla se describe la entrada del bloque de funciones:
Input Valor
inicial Descripción
Enable FALSE Cuando es TRUE se ejecuta el bloque de funciones. Los valores de las
entradas de otros bloques de funciones pueden ser modificados
continuamente y las salidas de bloques de funciones se actualizan
también continuamente.
Cuando es FALSE, finaliza la ejecución del bloque de funciones y se
restablecen sus salidas.
142 EIO0000003308.02

Salida de tren de pulsos (%PTO)
En esta tabla se describe el objeto de entrada del bloque de funciones:
Objeto de
entrada Tipo Valor
inicial Descripción
Axis PTOx -Instancia para la que se va a ejecutar el bloque de
funciones. El nombre se declara en la configuración del
controlador.
Salidas
En esta tabla se describen las salidas del bloque de funciones:
Salida Valor inicial Descripción
Valid -Si es TRUE, los datos del objeto del bloque de funciones son
válidos.
Error FALSE Si es TRUE, indica que se ha detectado un error. La ejecución
del bloque de funciones ha finalizado.
IsHomed FALSE Cuando es TRUE, indica que el eje ha vuelto al punto de
referencia, de modo que el punto de referencia absoluta es válido
y que se permiten los comandos de movimiento absoluto.
AxisWarning FALSE Cuando es TRUE, un comando de movimiento ha provocado una
alerta o información. Utilice el bloque de funciones MC_
ReadAxisError_PTO para obtener información detallada., página
145
QueueFull FALSE Cuando es TRUE, la cola de movimiento está completa y no se
permite almacenar comandos de movimiento adicionales en el
búfer.
En esta tabla se describen los objetos de salida del bloque de funciones:
Objeto de
salida
Tipo Valor inicial Descripción
AxisState - - Código para el estado del eje:
0 = el eje no está configurado
1 = ErrorStop
2 = deshabilitado
4 = detención
8 = toma de referencia
16 = parada
32 = movimiento binario
64 = movimiento continuo
Para obtener más información, consulte la
tabla de descripción de estados, página 112.
ErrorId Word NoError Códigos de error de comandos de
movimiento, válidos cuando la salida Error es
TRUE. Consulte la tabla de códigos de error
de comandos de movimiento de PTO, página
110.
EIO0000003308.02 143

Salida de tren de pulsos (%PTO)
Bloque de funciones MC_ReadMotionState_PTO
Descripción de la función
Este bloque de funciones devuelve el estado de movimiento real del eje.
Representación gráfica
NOTA: La primera vez que introduzca el bloque de funciones deberá
configurarlo para utilizar el eje deseado. Haga doble clic en el bloque de
funciones para mostrar las propiedades del bloque de funciones, seleccione
el eje y haga clic en Apply.
Entradas
En esta tabla se describe la entrada del bloque de funciones:
Input Valor
inicial Descripción
Enable FALSE Cuando es TRUE se ejecuta el bloque de funciones. Los valores de las
entradas de otros bloques de funciones pueden ser modificados
continuamente y las salidas de bloques de funciones se actualizan
también continuamente.
Cuando es FALSE, finaliza la ejecución del bloque de funciones y se
restablecen sus salidas.
En esta tabla se describe el objeto de entrada del bloque de funciones:
Objeto de
entrada
Tipo Valor
inicial Descripción
Axis PTOx -Instancia para la que se va a ejecutar el bloque de
funciones. El nombre se declara en la configuración del
controlador.
144 EIO0000003308.02

Salida de tren de pulsos (%PTO)
Salidas
En esta tabla se describen las salidas del bloque de funciones:
Salida Valor inicial Descripción
Valid -Si es TRUE, los datos del objeto del bloque de funciones son
válidos.
Error FALSE Si es TRUE, indica que se ha detectado un error. La ejecución
del bloque de funciones ha finalizado.
ConstantVel -Cuando es TRUE, la velocidad del eje es constante.
Accelerating -Cuando es TRUE, la velocidad del eje está aumentando.
Decelerating -Cuando es TRUE, la velocidad del eje está disminuyendo.
En esta tabla se describe el objeto de salida del bloque de funciones:
Objeto de
salida Tipo Valor inicial Descripción
ErrorId Word NoError Códigos de error de comandos de
movimiento, válidos cuando la salida Error es
TRUE. Consulte la tabla de códigos de error
de comandos de movimiento de PTO, página
110.
Bloque de funciones MC_ReadAxisError_PTO
Descripción de la función
Este bloque de funciones recupera el error de control de ejes. Si no hay ningún
error de control de ejes pendiente, el bloque de funciones devuelve AxisErrorId =
0.
Representación gráfica
NOTA: La primera vez que introduzca el bloque de funciones deberá
configurarlo para utilizar el eje deseado. Haga doble clic en el bloque de
funciones para mostrar las propiedades del bloque de funciones, seleccione
el eje y haga clic en Apply.
Entradas
En esta tabla se describe la entrada del bloque de funciones:
Input Valor
inicial Descripción
Enable FALSE Cuando es TRUE se ejecuta el bloque de funciones. Los valores de las
entradas de otros bloques de funciones pueden ser modificados
continuamente y las salidas de bloques de funciones se actualizan
también continuamente.
Cuando es FALSE, finaliza la ejecución del bloque de funciones y se
restablecen sus salidas.
EIO0000003308.02 145

Salida de tren de pulsos (%PTO)
En esta tabla se describe el objeto de entrada del bloque de funciones:
Objeto de
entrada Tipo Valor
inicial Descripción
Axis PTOx -Instancia para la que se va a ejecutar el bloque de
funciones. El nombre se declara en la configuración del
controlador.
Salidas
En esta tabla se describen las salidas del bloque de funciones:
Salida Valor inicial Descripción
Valid -Si es TRUE, los datos del objeto del bloque de funciones son
válidos.
Error FALSE Si es TRUE, indica que se ha detectado un error. La ejecución
del bloque de funciones ha finalizado.
En esta tabla se describen los objetos de salida del bloque de funciones:
Objeto de
salida Tipo Valor inicial Descripción
AxisErrorId - - Códigos de error del eje, válidos cuando la
salida AxisWarning es TRUE. Consulte la
tabla de códigos de error del eje PTO, página
109.
ErrorId Word NoError Códigos de error de comandos de
movimiento, válidos cuando la salida Error es
TRUE. Consulte la tabla de códigos de error
de comandos de movimiento de PTO, página
110.
146 EIO0000003308.02

Salida de tren de pulsos (%PTO)
Bloque de funciones MC_Reset_PTO
Comportamiento
Este bloque de funciones restablece todos los errores relacionados con el eje
para permitir una transición desde el estado ErrorStop aStandstill. No afecta a
la salida de las instancias de los bloques de funciones.
Representación gráfica
NOTA: La primera vez que introduzca el bloque de funciones deberá
configurarlo para utilizar el eje deseado. Haga doble clic en el bloque de
funciones para mostrar las propiedades del bloque de funciones, seleccione
el eje y haga clic en Apply.
Entradas
En esta tabla se describe la entrada del bloque de funciones:
Input Valor
inicial Descripción
Execute FALSE En el flanco ascendente, inicia la ejecución del bloque de funciones.
Los valores de las entradas de los otros bloques de funciones
controlan la ejecución del bloque de funciones en el flanco ascendente
de Execute. Un cambio posterior en estos parámetros de entrada no
afecta a la ejecución en curso.
Las salidas se establecen al finalizar el bloque de funciones.
En esta tabla se describe el objeto de entrada del bloque de funciones:
Objeto de
entrada
Tipo Valor
inicial Descripción
Axis PTOx -Instancia para la que se va a ejecutar el bloque de
funciones. El nombre se declara en la configuración del
controlador.
Salidas
En esta tabla se describen las salidas del bloque de funciones:
Salida Valor inicial Descripción
Done FALSE Cuando es TRUE, la ejecución del bloque de funciones termina
sin ningún error detectado.
Error FALSE Si es TRUE, indica que se ha detectado un error. La ejecución
del bloque de funciones ha finalizado.
EIO0000003308.02 147

Salida de tren de pulsos (%PTO)
En esta tabla se describe el objeto de salida del bloque de funciones:
Objeto de
salida Tipo Valor inicial Descripción
ErrorId Word NoError Códigos de error de comandos de
movimiento, válidos cuando la salida Error es
TRUE. Consulte la tabla de códigos de error
de comandos de movimiento de PTO, página
110.
Bloque de funciones MC_TouchProbe_PTO
Descripción de la función
Este bloque de funciones se utiliza para activar un evento desencadenador en la
entrada PROBE. Este evento desencadenador permite registrar la posición del
eje y/o iniciar un movimiento almacenado en el búfer.
Representación gráfica
NOTA: La primera vez que introduzca el bloque de funciones deberá
configurarlo para utilizar el eje deseado. Haga doble clic en el bloque de
funciones para mostrar las propiedades del bloque de funciones, seleccione
el eje y haga clic en Apply.
148 EIO0000003308.02

Salida de tren de pulsos (%PTO)
Entradas
En esta tabla se describen las entradas del bloque de funciones:
Input Valor
inicial Descripción
Execute FALSE En el flanco ascendente, inicia la ejecución del bloque de
funciones. Los valores de las entradas de los otros bloques
de funciones controlan la ejecución del bloque de funciones
en el flanco ascendente de Execute. Un cambio posterior en
estos parámetros de entrada no afecta a la ejecución en
curso.
Las salidas se establecen al finalizar el bloque de funciones.
Si se detecta un segundo flanco ascendente durante la
ejecución del bloque de funciones, se cancela la ejecución
en curso y se ejecuta de nuevo el bloque de funciones.
Si posteriormente la entrada Execute se establece en 0, se
registra la posición del eje y la salida Done se establece en 1
para un ciclo MAST. Entonces, se restablece la posición del
eje y la salida Done se establece en 0.
WindowOnly FALSE Cuando es TRUE, un evento desencadenador solo se
reconoce dentro del rango de posición (ventana) definido por
FirstPosition yLastPosition.
TriggerLevel FALSE Cuando es TRUE, se captura la posición o se desencadena
un evento en el flanco ascendente.
Cuando es FALSE, se captura la posición o se desencadena
un evento en el flanco descendente.
En esta tabla se describen los objetos de entrada del bloque de funciones:
Objeto de
entrada Tipo Valor
inicial Descripción
Axis PTOx -Instancia para la que se va a ejecutar el bloque de
funciones. El nombre se declara en la configuración del
controlador.
FirstPos DINT 0 Inicio de la posición absoluta desde donde se aceptan
los eventos desencadenadores (valor incluido en
ventana de habilitación).
LastPos DINT 0 Fin de la posición absoluta desde la que se aceptan los
eventos desencadenadores (valor incluido en ventana
de habilitación).
EIO0000003308.02 149

Salida de tren de pulsos (%PTO)
Salidas
En esta tabla se describen las salidas del bloque de funciones:
Salida Valor inicial Descripción
Done FALSE Cuando es TRUE, la ejecución del bloque de funciones termina
sin ningún error detectado.
Cuando un movimiento de un eje es interrumpido por otro
movimiento del mismo eje antes de que la acción del comando
se haya completado, CmdAborted se establece en TRUE y Done
se establece en FALSE.
Busy -Cuando es TRUE, la ejecución del bloque de funciones está en
progreso.
Cuando es FALSE, la ejecución del bloque de funciones ha
finalizado.
El bloque de funciones debe mantenerse en una tarea activa del
programa de aplicación durante al menos tanto tiempo como
Busy sea TRUE.
CmdAborted -Cuando es TRUE, la ejecución del bloque de funciones finaliza
debido a otro comando de movimiento.
Error FALSE Si es TRUE, indica que se ha detectado un error. La ejecución
del bloque de funciones ha finalizado.
En esta tabla se describen los objetos de salida del bloque de funciones:
Objeto de
salida
Tipo Valor inicial Descripción
RecordedPos - - Posición en la que se detectó un evento
desencadenador.
ErrorId Word NoError Códigos de error de comandos de
movimiento, válidos cuando la salida Error es
TRUE. Consulte la tabla de códigos de error
de comandos de movimiento de PTO, página
110.
NOTA:
• Solo se permite una instancia de este bloque de funciones en el mismo
eje.
• Solamente es válido el primer evento después del flanco ascendente en
la salida MC_TouchProbe_PTO del bloque de funciones Busy. Una vez
establecida la salida Done en TRUE, se ignorarán los eventos
posteriores. Se debe volver a activar el bloque de funciones para dar
respuesta a otros eventos.
150 EIO0000003308.02

Salida de tren de pulsos (%PTO)
Bloque de funciones MC_AbortTrigger_PTO
Descripción de la función
Este bloque de funciones se utiliza para anular bloques de funciones conectados
a eventos desencadenadores (por ejemplo, MC_TouchProbe_PTO).
Representación gráfica
NOTA: La primera vez que introduzca el bloque de funciones deberá
configurarlo para utilizar el eje deseado. Haga doble clic en el bloque de
funciones para mostrar las propiedades del bloque de funciones, seleccione
el eje y haga clic en Apply.
Entradas
En esta tabla se describe la entrada del bloque de funciones:
Input Valor
inicial Descripción
Execute FALSE En el flanco ascendente, inicia la ejecución del bloque de funciones.
Los valores de las entradas de los otros bloques de funciones
controlan la ejecución del bloque de funciones en el flanco ascendente
de Execute. Un cambio posterior en estos parámetros de entrada no
afecta a la ejecución en curso.
Las salidas se establecen al finalizar el bloque de funciones.
En esta tabla se describe el objeto de entrada del bloque de funciones:
Objeto de
entrada
Tipo Valor
inicial Descripción
Axis PTOx -Instancia para la que se va a ejecutar el bloque de
funciones. El nombre se declara en la configuración del
controlador.
Salidas
En esta tabla se describen las salidas del bloque de funciones:
Salida Valor inicial Descripción
Done FALSE Cuando es TRUE, la ejecución del bloque de funciones termina
sin ningún error detectado.
Error FALSE Si es TRUE, indica que se ha detectado un error. La ejecución
del bloque de funciones ha finalizado.
EIO0000003308.02 151

Salida de tren de pulsos (%PTO)
En esta tabla se describe el objeto de salida del bloque de funciones:
Objeto de
salida Tipo Valor inicial Descripción
ErrorId Word NoError Códigos de error de comandos de
movimiento, válidos cuando la salida Error es
TRUE. Consulte la tabla de códigos de error
de comandos de movimiento de PTO, página
110.
Bloque de funciones MC_ReadPar_PTO
Descripción de la función
Este bloque de funciones se utiliza para obtener parámetros desde el PTO.
Representación gráfica
NOTA: La primera vez que introduzca el bloque de funciones deberá
configurarlo para utilizar el eje deseado. Haga doble clic en el bloque de
funciones para mostrar las propiedades del bloque de funciones, seleccione
el eje y haga clic en Apply.
Entradas
En esta tabla se describe la entrada del bloque de funciones:
Input Valor
inicial Descripción
Enable FALSE Cuando es TRUE se ejecuta el bloque de funciones. Los valores de las
entradas de otros bloques de funciones pueden ser modificados
continuamente y las salidas de bloques de funciones se actualizan
también continuamente.
Cuando es FALSE, finaliza la ejecución del bloque de funciones y se
restablecen sus salidas.
En esta tabla se describen los objetos de entrada del bloque de funciones:
Objeto de entrada Tipo Valor
inicial Descripción
Axis PTOx -Instancia para la que se va a ejecutar el
bloque de funciones. El nombre se
declara en la configuración del
controlador.
ParNumber DINT 0 Código para el parámetro que desea leer
o escribir. Para más información, consulte
Tabla de parámetros de PTO, página 108.
152 EIO0000003308.02

Salida de tren de pulsos (%PTO)
Salidas
En esta tabla se describen las salidas del bloque de funciones:
Salida Valor inicial Descripción
Valid -Si es TRUE, los datos del objeto del bloque de funciones son
válidos.
Error FALSE Si es TRUE, indica que se ha detectado un error. La ejecución
del bloque de funciones ha finalizado.
En esta tabla se describen los objetos de salida del bloque de funciones:
Objeto de
salida Tipo Valor inicial Descripción
Value DINT 0 Valor del parámetro solicitado.
ErrorId Word NoError Códigos de error de comandos de
movimiento, válidos cuando la salida Error es
TRUE. Consulte la tabla de códigos de error
de comandos de movimiento de PTO, página
110.
Bloque de funciones MC_WritePar_PTO
Descripción de la función
Este bloque de funciones se utiliza para escribir parámetros al PTO.
Representación gráfica
NOTA: La primera vez que introduzca el bloque de funciones deberá
configurarlo para utilizar el eje deseado. Haga doble clic en el bloque de
funciones para mostrar las propiedades del bloque de funciones, seleccione
el eje y haga clic en Apply.
Entradas
En esta tabla se describe la entrada del bloque de funciones:
Input Valor
inicial Descripción
Execute FALSE En el flanco ascendente, inicia la ejecución del bloque de funciones.
Los valores de las entradas de los otros bloques de funciones
controlan la ejecución del bloque de funciones en el flanco ascendente
de Execute. Un cambio posterior en estos parámetros de entrada no
afecta a la ejecución en curso.
Las salidas se establecen al finalizar el bloque de funciones.
EIO0000003308.02 153

Salida de tren de pulsos (%PTO)
En esta tabla se describen los objetos de entrada del bloque de funciones:
Objeto de
entrada Tipo Valor
inicial Descripción
Axis PTOx -Instancia para la que se va a ejecutar el bloque de
funciones. El nombre se declara en la configuración del
controlador.
ParNumber DINT 0 Código para el parámetro que desea leer o escribir.
Para más información, consulte Tabla de parámetros
de PTO, página 108.
Value DINT 0 Valor para escribir en el parámetro elegido con el objeto
de entrada ParNumber.
Salidas
En esta tabla se describen las salidas del bloque de funciones:
Salida Valor inicial Descripción
Done FALSE Cuando es TRUE, la ejecución del bloque de funciones termina
sin ningún error detectado.
Error FALSE Si es TRUE, indica que se ha detectado un error. La ejecución
del bloque de funciones ha finalizado.
En esta tabla se describe el objeto de salida del bloque de funciones:
Objeto de
salida Tipo Valor inicial Descripción
ErrorId Word NoError Códigos de error de comandos de
movimiento, válidos cuando la salida Error es
TRUE. Consulte la tabla de códigos de error
de comandos de movimiento de PTO, página
110.
154 EIO0000003308.02

Generador de frecuencias (%FREQGEN)
Generador de frecuencias (%FREQGEN)
Contenido de este capítulo
Descripción.................................................................................................155
Configuración .............................................................................................157
Descripción
Introducción
El bloque de funciones del generador de frecuencias FREQGEN controla
una salida de ondas cuadradas en la frecuencia especificada.
La frecuencia es configurable de 0 Hz a 100 kHz con incrementos de 1 Hz.
La función FREQGEN tiene las características siguientes:
Característica Valor
Número de canales 2 o 4, según la referencia
Frecuencia mínima 0 Hz
Frecuencia máxima 100 kHz
Precisión en la frecuencia 1 %
Ilustración
Esta ilustración corresponde a un bloque de funciones FREQGEN:
Entradas
En esta tabla se describen las entradas del bloque de funciones:
Entrada Valor
inicial Descripción
ENABLE FALSE Cuando es TRUE, se ejecuta el bloque de funciones. Los valores de
las entradas de otros bloques de funciones pueden ser modificados
continuamente y las salidas de bloques de funciones se actualizan
también continuamente.
Cuando es FALSE, deja de ejecutarse el bloque de funciones y sus
salidas se restablecen.
SYNC FALSE Cuando se detecta un flanco ascendente, se emite la frecuencia de
destino sin esperar a que finalice la salida del período actual.
EIO0000003308.02 155

Generador de frecuencias (%FREQGEN)
En esta tabla se describe el objeto de entrada del bloque de funciones:
Objeto de
entrada Tipo Valor
inicial Descripción
bás DWORD -Frecuencia de la señal de salida del Frequency
Generator en Hz.
Especifique la frecuencia en la tabla de propiedades
Generadores de pulsos, página 157.
(Rango: de mínimo 0 (0 Hz) a máximo 100000 (100
kHz)
Salidas
En esta tabla se describen las salidas del bloque de funciones:
Salida Valor inicial Descripción
INFREQ -Si es TRUE, la señal del generador de frecuencias se emite con
la frecuencia especificada en el objeto de entrada Freq.
BUSY -Cuando es TRUE, está en curso la ejecución del bloque de
funciones.
Cuando es FALSE, se ha dejado de ejecutar el bloque de
funciones.
El bloque de funciones debe mantenerse en una tarea activa del
programa de aplicación durante al menos tanto tiempo como
BUSY sea TRUE.
ERROR FALSE Si es TRUE, indica que se ha detectado un error. La ejecución
del bloque de funciones ha finalizado.
En esta tabla se describe el objeto de salida del bloque de funciones:
Objeto de
salida Tipo Valor inicial Descripción
ErrorId Word NoError Códigos de error, válidos cuando la salida
ERROR es TRUE. Consulte la tabla de
códigos de error de ErrorId siguiente.
Códigos de error de ErrorId
En esta tabla se enumeran los valores para los códigos de error de bloques de
funciones.
Nombre Valor Descripción
NoError 0No se han detectado errores.
OutputProtection 1007 La salida de pulsos tiene una protección de salida digital activa. Consulte los
objetos de sistema %S10 y %SW139 (consulte Modicon M221, Logic
Controller, Guía de programación) para obtener más información.
OutputReset 1008 %S9 fuerza todas las salidas a 0. Consulte Bits de sistema (consulte Modicon
M221, Logic Controller, Guía de programación).
InvalidFrequencyValue 3002 El objeto de entrada Freq de frecuencia se encuentra fuera del rango
permitido.
156 EIO0000003308.02

Generador de frecuencias (%FREQGEN)
Configuración
Descripción general
Para configurar el recurso Pulse Generator, consulte Configuración de los
generadores de pulsos (consulte Modicon M221, Logic Controller, Guía de
programación).
Para configurar el recurso Pulse Generator como FREQGEN, consulte
Configuración del generador de frecuencias (consulte Modicon M221, Logic
Controller, Guía de Programación).
Propiedades
El bloque de funciones FREQGEN tiene las propiedades siguientes:
Propiedad Descripción Valor
Utilizado Dirección
utilizada Si se selecciona, esta dirección está en uso en un programa.
Dirección %FREQGENi
Dirección del
generador de
frecuencias
El identificador de instancia, donde i va desde 0 hasta el
número de objetos disponibles en este Logic Controller. Para
obtener el número máximo de objetosFREQGEN, consulte la
tabla Número máximo de objetos (consulte Modicon M221,
Logic Controller, Guía de programación).
Símbolo Símbolo El símbolo asociado con este objeto. Para obtener más
información, consulte Definición y uso de los símbolos
(consulte EcoStruxure Machine Expert - Basic, Guía de
funcionamiento).
bás frecuencia La frecuencia de la señal de salida del generador de
frecuencias en Hz.
Valor mínimo: 0 (0 Hz). Valor máximo: 100000 (100 kHz).
El valor predeterminado es 0.
Comentario Comentario Se puede asociar un comentario opcional con este objeto.
Haga doble clic en la columna Comentario y escriba un
comentario.
EIO0000003308.02 157

Generador de frecuencias (%FREQGEN)
Diagrama de tiempos
El diagrama de tiempos muestra la temporización para el bloque de funciones
FREQGEN:
(1) La entrada ENABLE se establece en 1. La señal del generador de frecuencias
se genera en la salida dedicada. La salida INFREQ se establece en 1. La salida
BUSY se establece en 1.
(2) Se modifica el valor de frecuencia. La salida INFREQ se establece en 0 hasta
que se genere la nueva frecuencia en la salida dedicada. La salida BUSY sigue
establecida en 1.
(3) La entrada SYNC se establece en 1. Se detiene el generador de frecuencias
actual y se inicia un nuevo ciclo. La salida INFREQ se establece en 1. La salida
BUSY sigue establecida en 1.
(4) La entrada ENABLE se establece en 0. Se detiene la generación de
frecuencias. La salida INFREQ se establece en 0. La salida BUSY se establece
en 0.
Cuando se detiene la aplicación, se detiene la generación de frecuencias sin
esperar a que finalice el ciclo de generación de pulsos. La salida Error se
mantiene en FALSE.
Si se detecta un error, se confirma automáticamente cuando se abandona la
condición de error.
158 EIO0000003308.02


Función PID
Función PID
Contenido de este capítulo
Modalidades de funcionamiento de PID ........................................................160
Configuración de ajuste automático de PID ...................................................161
Configuración estándar de PID.....................................................................164
Asistente de PID .........................................................................................174
Programación de PID ..................................................................................183
Modalidades de funcionamiento de PID
Modalidades de funcionamiento de PID
Introducción
El controlador PID de EcoStruxure Machine Expert - Basic ofrece 4 modalidades
de funcionamiento distintas que pueden configurarse en la ficha General, página
175 del Asistente de PID en EcoStruxure Machine Expert - Basic.
Las modalidades de funcionamiento de PID son:
• Modalidad PID
• Modalidad AT + PID
• Modalidad AT
• Dirección de palabra
Modalidad PID
La modalidad del controlador PID simple está activa de forma predeterminada
cuando se inicia el controlador PID. Los valores de ganancia Kp, Ti y Td que se
van especificar en la ficha PID, página 178 deben conocerse por adelantado para
controlar el proceso correctamente. Puede elegir el tipo de corrector del
controlador (PID o PI) en la ficha PID de la pantalla, página 174 Asistente de
PID. Si está seleccionado el tipo de corrector PI, el campo Td de tiempo
diferencial está deshabilitado.
Al utilizar la modalidad PID, la función de ajuste automático está deshabilitada y la
ficha AT, página 180 de la pantalla Assistant Configuration no está, por lo tanto,
disponible.
Modalidad AT + PID
En esta modalidad, la función de ajuste automático está activa cuando el
controlador PID se inicia. La función de ajuste automático calcula a continuación
los valores de ganancia Kp, Ti y Td, página 178 y el tipo de acción del PID, página
181. Al final de la secuencia de ajuste automático, el controlador pasa a la
modalidad PID para la consigna ajustada y utiliza los parámetros calculados por
el ajuste automático.
Si el algoritmo de ajuste automático detecta un error, página 185:
• No se calcula ningún parámetro PID.
• La salida de ajuste automático se establece en la salida que se haya aplicado
al proceso antes de iniciar el ajuste automático.
• Aparecerá un mensaje de error en la lista desplegable Lista de estados del
PID.
• El control del PID se cancela.
160 EIO0000003308.02

Función PID
En la modalidad AT + PID, la transición de ajuste automático a la modalidad PID
es automática y homogénea.
Modalidad AT
En esta modalidad, la función de ajuste automático está activa cuando el
controlador PID se inicia y calcula automáticamente los valores de ganancia Kp,
Ti y Td, página 178 y el tipo de acción del PID, página 181. Tras la convergencia
del proceso de ajuste automático y la finalización satisfactoria con la
determinación de los parámetros Kp,Ti yTd, y el tipo de acción del PID, página
181 (o tras la detección de un error en el algoritmo de ajuste automático), la salida
numérica de ajuste automático se establece en 0 y aparece el mensaje Ajuste
automático finalizado en la lista desplegable Lista de estados del PID, página
185. A continuación, el controlador PID se detiene y espera. Los coeficientes Kp,
Ti yTd calculados del PID están disponibles en sus respectivas palabras de
memoria (%MWx).
Dirección de palabra
Esta modalidad PID se selecciona asignando el valor deseado a la dirección de
palabra asociada a esta selección:
•%MWxx = 0: El controlador está deshabilitado.
•%MWxx = 1: El controlador funciona en modalidad PID simple.
•%MWxx = 2: El controlador funciona en modalidad AT+ PID.
•%MWxx = 3: El controlador solo funciona en modalidad AT.
•%MWxx = 4: El controlador funciona en modalidad PID simple, con el tipo de
corrector PI.
La modalidad de dirección de palabra permite gestionar la modalidad de
funcionamiento del controlador PID con la aplicación, lo que posibilita la
adaptación a requisitos concretos.
Configuración de ajuste automático de PID
Configuración de ajuste automático del PID
Introducción
Esta sección le guiará a través de todos los pasos necesarios para configurar el
controlador EcoStruxure Machine Expert - Basic de PID mediante el ajuste
automático (AT).
Esta sección contiene los siguientes pasos:
Paso Tema
1Configuración del canal analógico, página 161
2Requisitos previos para la configuración del PID, página 162
3Configuración del PID, página 162
4Configuración de control, página 163
Paso 1: Configuración del canal analógico
Un controlador PID utiliza una señal de respuesta analógica (conocida como el
valor de proceso) para calcular el algoritmo utilizado para controlar el proceso. El
EIO0000003308.02 161

Función PID
Logic Controller cuenta con una entrada analógica incrustada que se puede
utilizar para adquirir este valor de proceso. Consulte M221 Logic Controller - Guía
de programación para obtener más información sobre la configuración de
entradas analógicas.
Si se utiliza una salida analógica para accionar el sistema a controlar, asegúrese
de que esta salida analógica está configurada correctamente. Consulte el módulo
de extensión de salida analógica del controlador lógico.
Paso 2: Requisitos previos para la configuración del PID
Antes de configurar el controlador PID, asegúrese de que se han efectuado las
fases siguientes:
Phase Descripción
1Se ha habilitado el PID en el programa, página 183.
2Modalidad de exploración se ha establecido en periódica, página 185.
Paso 3: Configuración del PID
Utilice una salida de estado sólido en combinación con la función PID. El uso de
una salida de relé puede provocar que se superen rápidamente sus límites de
duración, lo que puede producir un relé inservible con contactos bloqueados en
posición de apertura o soldados en posición de cierre.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO O EQUIPO INOPERATIVO
• No utilice salidas de relé junto con la función PID.
• Utilice únicamente salidas estáticas si se necesita una salida digital para
controlar el sistema.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
162 EIO0000003308.02

Función PID
Para implementar un controlador PID con ajuste automático, lleve a cabo los
siguientes pasos:
Paso Acción
1 En la General tab, página 175 de la pantalla Asistente de PID (en modalidad offline), seleccione AT+PID (o AT) o
seleccione Dirección de palabra y establezca la palabra asociada en 2 o 3, desde los Operating Modes, página 160.
2 Active la casilla de verificación Estados del PID y escriba la dirección de la palabra de memoria en el campo.
3 En la Input tab, página 177, introduzca la dirección de la entrada analógica utilizada como una medida.
4 Si se necesitan las opciones Conversión oAlarmas, consulte la ficha Entrada, página 177 de la pantalla Asistente de
PID.
5En la ficha PID, página 178, introduzca el valor de la consigna. En general, este valor es una dirección de memoria o una
entrada analógica.
6 La opción Tipo de corrector de la ficha PID debe establecerse en PID oPI.
7Establezca los parámetros en la ficha PID:Kp (x0,01),Ti (x0,1s) yTd (x0,1s). Cuando AT+PID oAT son las Modalidades
de funcionamiento, página 160, los parámetros deben ser direcciones de palabras de memoria (%MWxx) para que el
algoritmo de ajuste automático rellene el valor calculado de los parámetros.
8 Introduzca el PIDPeriodo de muestreo del (Ts, página 167) en la ficha PID. El Periodo de muestreo es un parámetro
clave y se debe determinar cuidadosamente.
9 En la ficha AT, la Modalidad AT debe establecerse en Autorizar de forma predeterminada. Introduzca los valores Mín. y
Máx. si el Rango de medición está activado (casilla de verificación Autorizar). Seleccione el Corrector AT dinámico en
la lista que contiene el tipo de corrector Rápido,Medio,Lento oDirección de palabra. Para obtener más información,
consulte la ficha AT en Asistente de PID, página 174.
10 En la ficha AT, introduzca el bit de memoria Consigna de salida para almacenar el valor del cambio de paso durante el
ajuste automático. Para obtener más información, consulte la ficha AT en Asistente de PID, página 174.
11 En la Output tab, página 181, establezca la Acción seleccionándola en la lista.
Si se selecciona Dirección de bit, escriba la dirección de bit de memoria en el campo Bit.
Si es necesario, puede configurar Límites.
Si la Modalidad manual está habilitada, elija una palabra de memoria o una salida analógica. Si se selecciona Dirección
de bit, introduzca un Bit. Para obtener más información sobre el funcionamiento en modalidad manual, consulte la Output
tab, página 181.
En el campo Salida analógica, ajuste Output PWM, página 181 en Autorizar.
Ajuste una salida analógica o una palabra de memoria como dirección de la palabra.
Introduzca el valor en el campo Periodo (x0,1 s) y el bit de memoria o la salida digital.
12 Haga clic en Aceptar para confirmar la configuración del controlador PID.
Paso 4: Configuración de control
Utilice una salida de estado sólido en combinación con la función PID. El uso de
una salida de relé puede provocar que se superen rápidamente sus límites de
duración, lo que puede producir un relé inservible con contactos bloqueados en
posición de apertura o soldados en posición de cierre.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO O EQUIPO INOPERATIVO
• No utilice salidas de relé junto con la función PID.
• Utilice únicamente salidas estáticas si se necesita una salida digital para
controlar el sistema.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
EIO0000003308.02 163

Función PID
Para iniciar la modalidad de funcionamiento en la modalidad de funcionamiento,
página 160 de AT+PID, realice los pasos siguientes:
Paso Acción
1 Conecte el PC al controlador y transfiera la aplicación.
2 Cambie el controlador al estado RUNNING.
NOTA: Antes de cambiar el controlador al estado RUNNING, compruebe que
las condiciones de funcionamiento de la máquina permitan el estado
RUNNING para el resto de la aplicación.
Paso Acción
1 Cree una tabla de animación que contenga los objetos definidos durante la
configuración. Para obtener más información sobre la creación de tablas de
animación, consulte la Guía de funcionamiento de Ecostruxure Machine Expert -
Basic.
2 Verifique la coherencia del valor del proceso y los valores de la aplicación. Esta
prueba es importante debido a que el funcionamiento correcto del controlador PID
depende de la precisión de medición. En caso de tener alguna duda sobre la
precisión de la medida, establezca el Logic Controller en el estado STOP y verifique
el cableado de los canales analógicos.
Si el actuador no está controlado:
• Para una salida analógica, verifique la tensión o la corriente de salida del canal
analógico.
• Para una salida PWM, verifique que:
◦El LED de la salida dedicada está encendido.
◦El cableado de las fuentes de alimentación y del circuito de 0 V es correcto.
◦Se está aplicando la fuente de alimentación del actuador.
3 En la tabla de animación, verifique que:
• La modalidad Salida está establecida en automático.
• Todos los parámetros que precisa la aplicación se establecen en los valores
adecuados.
4 Ajuste el periodo de exploración del Logic Controller de modo que el valor de
Periodo de muestreo (Ts) del controlador PID sea un múltiplo exacto del periodo de
exploración. Para obtener más información sobre cómo determinar el periodo de
muestreo, consulte Ajuste del PID, página 167.
5Cuando se ha completado la secuencia de ajuste automático, los parámetros Kp,Ti y
Td se escriben en la memoria RAM del controlador lógico. Los valores se almacenan
mientras que la aplicación sea válida (desconexión durante menos de 30 días) y que
no se haya efectuado ningún arranque en frío.
El proceso de ajuste automático se repite cada vez que se detecta un flanco
ascendente en el bit de memoria Consigna de salida.
NOTA: Cuando el ajuste automático del PID se encuentra en proceso de
calibración para encontrar los nuevos parámetros de Kp,Ti yTd y está
activado el control de salida manual, vuelva a iniciar el ajuste automático del
PID una vez finalizado el control de salida manual para que se actualicen los
parámetros.
Configuración estándar de PID
Configuración de la dirección de palabra del PID
Introducción
Esta sección le guiará por todos los pasos necesarios para configurar
correctamente el controlador PID de EcoStruxure Machine Expert - Basic con la
modalidad de funcionamiento, página 160 Dirección de palabra. Esta modalidad
proporciona mayor flexibilidad de uso que las demás modalidades del PID.
164 EIO0000003308.02

Función PID
Esta sección contiene los siguientes pasos:
Paso Tema
1Requisitos previos para la configuración del PID, página 165
2Configuración del PID, página 165
3Configuración de control, página 166
Paso 1: Requisitos previos para la configuración del PID
Antes de configurar el PID, asegúrese de que se han efectuado las fases
siguientes:
Phase Descripción
1 Si es necesario, una entrada analógica se configura de la misma forma que una
salida analógica. Consulte la M221 Logic Controller - Guía de programación.
2Se ha habilitado el PID en el programa, página 183.
3 La modalidad de exploración se ha establecido en periódica, página 185.
Paso 2: Configuración del PID
Utilice una salida de estado sólido en combinación con la función PID. El uso de
una salida de relé puede provocar que se superen rápidamente sus límites de
duración, lo que puede producir un relé inservible con contactos bloqueados en
posición de apertura o soldados en posición de cierre.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO O EQUIPO INOPERATIVO
• No utilice salidas de relé junto con la función PID.
• Utilice únicamente salidas estáticas si se necesita una salida digital para
controlar el sistema.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
En los siguientes pasos se explica cómo implementar un controlador PID en la
modalidad Dirección de palabra. Para obtener más detalles sobre cómo
configurar el PID, consulte la sección Asistente de PID.
Para la modificación dinámica de los parámetros del PID (en modalidad online y
offline), introduzca las direcciones de memoria en los campos correspondientes,
para evitar así la necesidad de cambiar a la modalidad offline con el fin de
efectuar cambios en los valores sobre la marcha.
EIO0000003308.02 165

Función PID
Paso Acción
1 En la ficha General de la pantalla Asistente de PID (en modalidad offline), en la lista
desplegable Modalidades de funcionamiento seleccione Dirección de palabra.
Marque la casilla asociada a Estados del PID y escriba la dirección de la palabra de
memoria en el campo.
2 En la ficha Entrada, página 177, introduzca la dirección de la entrada analógica
utilizada como medida. Si se necesitan las opciones Conversión oAlarmas,
consulte la ficha Entrada, página 177 de la pantalla Asistente de PID, página 174.
3 En la ficha PID, introduzca el valor de la Consigna. En general, este valor es una
dirección de memoria o una entrada analógica. Los Parámetros (Kp, Ti y Td) deben
ser direcciones de palabras de memoria (%MWxx).
Introduzca el Periodo de muestreo del PID (Ts, página 179) en la ficha PID, página
178. Este parámetro también puede ser una palabra de memoria (el valor se puede
establecer mediante la tabla de animación).
En la modalidad de funcionamiento Dirección de palabra, el Tipo de corrector se
establece en Auto y está sombreado (no se puede modificar de forma manual).
4 En la ficha AT, debe estar seleccionada la opción Autorizar de la modalidad AT.
Introduzca el Corrector dinámico y la Consigna de salida. Para obtener más
información, consulte la ficha AT, página 180 en la pantalla Asistente de PID.
5En la ficha Salida,Acción se debe establecer en Dirección de bit. Introduzca una
dirección de bit de memoria. Si es necesario, Límites se puede configurar desde la
ficha Salida, página 181. En el campo Salida analógica, establezca la dirección de la
palabra: una salida analógica o una palabra de memoria. Si es necesario, establezca
la Salida PWM; consulte la ficha Salida, página 181 en Asistente de PID, página 174.
6 Haga clic en Aceptar para confirmar la configuración del controlador PID.
Paso 3: Verificación de la configuración
Paso Acción
1 Conecte el PC al controlador lógico y transfiera la aplicación.
2 Cambie el controlador lógico al estado RUNNING.
NOTA: Antes de cambiar el controlador lógico al estado RUNNING,
compruebe que las condiciones de funcionamiento de la máquina permitan el
estado RUNNING para el resto de la aplicación. El procedimiento es el mismo
que el utilizado en las modalidades de funcionamiento AT yAT+PID. La
configuración de la dirección de palabra le permite modificar las modalidades
de funcionamiento del PID por software. En el caso de la modalidad PID, el
procedimiento se simplifica considerablemente, suponiendo que se conocen
los parámetros (Kp, Ti, Td y Ts) y que no hay necesidad de efectuar el ajuste
automático.
166 EIO0000003308.02

Función PID
En esta tabla se muestra el procedimiento genérico para configurar el controlador
PID:
Paso Acción
1 Cree una tabla de animación que contenga los objetos definidos durante la
configuración. Consulte la Guía de funcionamiento de EcoStruxure Machine Expert -
Basic para obtener más detalles.
2 Verifique la coherencia del valor de proceso y otros valores definidos en la tabla de
animación. En caso de tener alguna duda sobre la precisión de la medida, establezca
el Logic Controller en STOP y verifique el cableado de los canales analógicos.
Si observa que el actuador no está siendo controlado:
• Para una salida analógica, verifique la tensión o la corriente de salida del canal
analógico.
• Para una salida PWM, verifique que:
◦El LED de la salida dedicada está encendido.
◦El cableado de las fuentes de alimentación y del circuito de 0 V es correcto.
◦Se está aplicando la fuente de alimentación del actuador.
3 Establezca el periodo de exploración del controlador lógico de modo que el valor de
Periodo de muestreo (Ts) del controlador PID sea un múltiplo exacto del periodo de
exploración. Para obtener más información sobre el periodo de muestreo, consulte
Determinación del periodo de muestreo, página 172.
4 Si pretende utilizar la función Ajuste automático, página 167, es posible que tenga
que ejecutar la Modalidad manual, página 171 para conocer el Corrector dinámico y
la Consigna de salida definida en la ficha AT, página 180 del Asistente de PID.
5 Arranque el controlador de bucle mediante la tabla de animación:
• Establezca la modalidad de funcionamiento, página 160.
•Habilite el controlador PID, página 185.
• Establezca los valores definidos durante la configuración, página 165 para
adecuar los valores en función de la modalidad de funcionamiento
seleccionada.
Ajuste del PID mediante el ajuste automático (Auto-Tuning, AT)
Introducción
La modalidad de ajuste automático permite ajustar automáticamente Kp, Ti, Td y
los parámetros de acción para conseguir una convergencia refinada de la función
PID. La función de ajuste automático proporcionada por EcoStruxure Machine
Expert - Basic está especialmente diseñada para el ajuste automático de los
procesos térmicos.
Esta sección contiene los siguientes temas:
• Requisitos del ajuste automático
• Descripción del proceso de ajuste automático
• Almacenamiento de coeficientes calculados
• Ajuste de parámetros del PID
• Inicio de ajuste automático
• Limitaciones del ajuste automático y el control del PID
EIO0000003308.02 167

Función PID
Requisitos del ajuste automático
Al utilizar la función de ajuste automático, asegúrese de que el proceso de control
y el controlador lógico cumplen con los requisitos siguientes:
• Requisitos del proceso:
◦El proceso debe ser un sistema de bucle abierto estable.
◦El proceso debe ser principalmente lineal en todo el rango de
funcionamiento.
◦La respuesta del proceso a un cambio de nivel de la salida analógica
sigue un patrón asintótico transitorio.
◦El proceso está en estado estable con una entrada nula al inicio de la
secuencia de ajuste automático.
◦El proceso debe estar libre de perturbaciones en su totalidad. De lo
contrario, los parámetros calculados podrían ser incorrectos o el proceso
de ajuste automático podría no funcionar correctamente.
• Requisitos de configuración:
◦Configure el controlador lógico en modalidad de exploración periódica
para asegurar una correcta ejecución de la función de ajuste automático.
◦Utilice la función de ajuste automático solo si no se están ejecutando otros
controladores PID.
◦Configure los coeficientes Kp, Ti y Td como direcciones de palabras de
memoria (%MWxx).
◦Establezca el tipo de acción en la ficha Salida en una dirección de bit de
memoria (%Mxx).
Descripción del proceso de ajuste automático
En la ilustración siguiente se describe el ajuste automático en el controlador y en
la aplicación:
168 EIO0000003308.02

Función PID
Descripción del proceso de calibración de ajuste automático
El proceso de calibración de ajuste automático se divide en cuatro fases
consecutivas. Se deben completar todas las fases del proceso para que el ajuste
automático se realice de forma satisfactoria. Las curvas de respuesta del proceso
y la tabla siguientes describen las cuatro fases de la función de ajuste automático
del PID de EcoStruxure Machine Expert - Basic:
PV: valor del proceso
Salida de PID
h= 1 % (valor Máx. – valor Mín.) del campo Rango de medición en la ficha AT
---- PID activo
1 a 4: fases de ajuste automático (consulte la tabla a continuación)
En la tabla siguiente se describen las fases de ajuste automático:
Fase de
ajuste
automáti-
co
Descripción
1 Para la salida de PID se fuerza el valor Máx. del campo Límites en la ficha, página
182 Salida hasta que el valor de proceso alcance la consigna + h.
2 En la fase 2 de ajuste automático hay dos pasos:
1. Para la salida de PID se fuerza el valor Mín. del campo Límites en la ficha,
página 182 Salida hasta que el valor de proceso alcance la consigna – h.
2. Para la salida de PID se fuerza el valor Máx. del campo Límites en la ficha,
página 182 Salida hasta que el valor de proceso alcance la consigna + h.
3 Para la salida de PID se fuerza el valor Mín. del campo Límites en la ficha, página
182 Salida hasta que el valor de proceso alcance la consigna – h.
4 En la fase 4 de ajuste automático hay dos pasos:
1. Para la salida de PID se fuerza el valor Máx. del campo Límites en la ficha,
página 182 Salida hasta que el valor de proceso alcance la consigna + h.
2. Para la salida de PID se fuerza el valor Mín. del campo Límites en la ficha,
página 182 Salida, los parámetros de PID se calculan y el PID se activa.
(1) La última salida aplicada al proceso antes de iniciar el ajuste automático se utiliza como punto
de inicio y punto de relajación del proceso de ajuste automático.
EIO0000003308.02 169

Función PID
NOTA: Los parámetros Kp, Ti y Td no se pueden calcular si se activa el
control de salida manual durante el proceso de calibración de ajuste
automático. Inicie de nuevo el proceso de calibración de ajuste automático
una vez que finalice el control manual de salidas.
Almacenamiento de coeficientes calculados
Una vez completada la secuencia de ajuste automático, las palabras de memoria
asignadas a los coeficientes Kp, Ti y Td y el tipo de acción se establecen a partir
de los valores calculados. Estos valores se escriben en la memoria RAM y se
guardan en el Logic Controller mientras la aplicación sea válida y no se realice un
arranque en frío (%S0).
Si el sistema no se ve afectado por perturbaciones externas, los valores
calculados pueden escribirse en la configuración del controlador PID (consulte la
ficha PID del Asistente de PID, página 181). De este modo, la modalidad de
funcionamiento del controlador PID se puede establecer en la modalidad PID.
Ajuste de los parámetros del PID
El método de ajuste automático produce un comando extremadamente dinámico
que puede provocar rebasamientos no deseados durante el cambio de paso de
consignas. Para restringir la regulación del proceso que proporcionan los
parámetros del PID (Kp, Ti, Td) obtenidos durante el ajuste automático, también
puede ajustar manualmente dichos valores de los parámetros, directamente
desde la ficha PID de la pantalla Asistente de PID o mediante las palabras de
memoria correspondientes (%MW). Para obtener más información acerca de los
ajustes de parámetros manuales, consulte los apéndices, página 189.
Inicio de ajuste automático
En la ficha AT, la Consigna de salida permite la repetición de la secuencia de
ajuste automático. El proceso de ajuste automático se ejecuta en cada flanco
ascendente de la señal vinculado a la Consigna de salida.
Para configurar el ajuste automático, consulte Ficha AT, página 180.
Limitaciones de la utilización del ajuste automático
Los procesos térmicos pueden a menudo asimilarse al primer orden del modelo
de retardo puro. Hay dos parámetros clave que describen este tipo de modelo:
• la constante de tiempo, τ
• el tiempo de retardo, θ
El Ajuste automático es más conveniente para procesos en los que la constante
de tiempo (τ) y el tiempo de retardo (θ) cumplen los requisitos siguientes:
• 10 s < (τ + θ) < 2700 s (es decir: 45 min)
• 2 < τ / θ < 20
170 EIO0000003308.02

Función PID
Modalidad manual
Introducción
Puede acceder a la modalidad manual a través de la pantalla Asistente de PID
(Output tab, página 181). Esta modalidad le permite eludir órdenes del PID. Hay
dos objetivos principales al utilizar la modalidad manual:
• Inicializar la configuración.
• Determinar el periodo de muestreo.
Descripción
La modalidad manual le permite especificar el Output value, página 181. Esta
operación puede ser especialmente adecuada para probar la respuesta del
sistema.
Al establecer la Dirección de bit de la ficha Salida, página 181 en 1 se activa la
modalidad manual. Si se ha establecido Habilitar, la modalidad manual será la
única modalidad accesible.
Aplicación
Cuando la modalidad manual se activa, se asigna a la salida un valor fijo que
define el usuario. Este valor de salida está comprendido entre 0 y 10.000 (de 0 a
100% para la salida PWM).
También puede usar la modalidad manual para hacer pruebas para determinar la
limitación de salida mínima/máxima.
La modalidad manual también se necesita para utilizar el método de la curva de
respuesta del proceso, página 172 que ayuda a encontrar el tiempo de muestreo
correcto (Ts).
Iniciar la modalidad manual
Antes de iniciar la modalidad manual, deberá asegurarse de que el conmutador
del controlador lógico RUN/STOP está en la posición RUN.
Para iniciar la modalidad manual con una tabla de animación:
Paso Descripción
1 Habilite la modalidad manual estableciendo el bit de memoria dedicada en 1. Para
obtener información detallada, consulte la ficha Salida, página 181.
2 Si utiliza PWM, ajuste el Periodo de PWM al valor deseado.
3 Establezca la palabra de memoria asociada con la modalidad de funcionamiento en
la ficha General, página 175 del Asistente PID en 1 (modalidad PID). Para obtener
más información sobre las modalidades de funcionamiento usando dirección de
palabra, consulte la descripción de la modalidad de funcionamiento, página 160.
4 Establezca la palabra de memoria asociada con la salida manual en la ficha Salida,
página 181 en el valor deseado. Este valor de consigna manual puede seleccionarse
varias veces, siempre que el sistema pueda volver a su estado inicial.
5 Habilite el controlador, página 164 de bucles.
EIO0000003308.02 171

Función PID
Detener la modalidad manual
Para detener la modalidad manual con una tabla de animación:
Paso Descripción
1 Deshabilite el controlador, página 164 de bucles.
2 Inhiba la modalidad manual estableciendo el bit de memoria dedicada en 0. Para
obtener información detallada, consulte la ficha Salida, página 181.
3 Establezca la palabra de memoria asociada con la modalidad de funcionamiento en
la ficha General, página 175 del controlador PID en 0. Para obtener más información
acerca de las modalidades de funcionamiento usando dirección de palabra, consulte
la descripción de la modalidad de funcionamiento, página 160.
4 Establezca la palabra de memoria asociada con la salida manual en la ficha Salida,
página 181 en 0.
Determinación del periodo de muestreo (Ts)
Introducción
El período de muestreo (Ts) es el parámetro clave para la regulación del PID. El
periodo de muestreo (Ts) debe establecerse con cuidado en la ficha PID, página
178 de la pantalla Asistente de PID. Este parámetro está muy correlacionado
con la constante de tiempo (τ) del proceso a controlar.
En esta sección se describe el uso de la modalidad online y dos métodos para
determinar el periodo de muestreo (Ts):
• Método de la curva de respuesta del proceso
• Método de prueba y error
Método de la curva de respuesta del proceso
Este método es un proceso de bucle abierto que tiene como objetivo determinar
la constante de tiempo del proceso que se va a controlar. En primer lugar, es
necesario asegurarse de que el proceso puede ser descrito por un primer orden
con modelo de retardo de tiempo. El principio es muy sencillo: aplicar un cambio
de paso en la entrada del proceso mientras se registra la curva de salida del
proceso. A continuación, utilice un método gráfico para determinar el retardo de
tiempo del proceso.
172 EIO0000003308.02

Función PID
Para determinar el periodo de muestreo (Ts) mediante el método de la curva de
respuesta del proceso:
Paso Acción
1 Se supone que ya se han configurado los diversos valores de las fichas General,
Entrada,PID,AT ySalida del PID.
2 Seleccione la ficha Salida, página 181 en la pantalla Asistente de PID.
3 Seleccione Habilitar oDirección de bit en la lista desplegable Modalidad manual
para autorizar la salida manual.
4 Establezca el campo Salida en un nivel alto (en el rango de 5000 a 10000).
5Descargue la aplicación al controlador lógico. Para obtener más información sobre
cómo descargar una aplicación, consulte la Guía de funcionamiento de EcoStruxure
Machine Expert - Basic .
6 Ejecute el PID y compruebe el ascenso de la curva de respuesta.
7Cuando la curva de respuesta haya alcanzado un estado estable, detenga la
medición del PID.
8 Use el método gráfico siguiente para determinar la constante de tiempo (τ) del
proceso de control:
1. Calcule la salida del valor de proceso con un ascenso del 63% (S[63%]) mediante
la fórmula siguiente: S[63%] = S[inicial] + (S[final]-S[inicial]) × 63%
2. Calcule gráficamente la abscisa de tiempo (t[63%]) que corresponde a S(63%).
3. Calcule gráficamente el tiempo inicial (t[inicial]) que corresponde al inicio del
ascenso de la respuesta del proceso.
4. Calcule la constante de tiempo (τ) del proceso de control mediante la relación
siguiente: τ = t[63%]-t[inicial]
9 Calcule el periodo de muestreo (Ts)(1) basado en el valor de (τ) que se ha
determinado en el paso anterior, mediante la regla siguiente: Ts = τ/75
10 Establezca el Periodo de exploración de la Modalidad de exploración periódica de
modo que el Periodo de muestreo (Ts) sea un múltiplo exacto del periodo de
exploración: Periodo de exploración = Ts / n, donde n es un entero positivo(2)
(1) La unidad de base del periodo de muestreo es 10 ms. Por lo tanto, el valor de Ts se debe
redondear hacia arriba o hacia abajo a los 10 ms más cercanos.
(2) Se debe seleccionar "n" de forma que el periodo de exploración sea un entero positivo en el
rango de 1 a 150 ms.
Método de prueba y error
El método de prueba y error consiste en proporcionar estimaciones aproximadas
sucesivas del periodo de muestreo a la función de ajuste automático hasta que el
algoritmo converja satisfactoriamente hacia los valores de Kp, Ti y Td.
NOTA: Al contrario de lo que ocurre con el método de la curva de respuesta
del proceso, el método de prueba y error no se basa en ninguna ley de
aproximación de la respuesta del proceso. Sin embargo, presenta la ventaja
de que converge hacia un valor del periodo de muestreo que está en el mismo
orden de magnitud que el valor real.
EIO0000003308.02 173

Función PID
Para realizar una estimación de prueba y error del ajuste automático:
Paso Acción
1 Seleccione la ficha AT en la ventana de configuración del PID.
2 Configure el Límite de salida de ajuste automático en 10000.
3 Descargue la aplicación al controlador lógico. Para obtener más información sobre
cómo descargar una aplicación, consulte la Guía de funcionamiento de EcoStruxure
Machine Expert - Basic (consulte EcoStruxure Machine Expert - Basic, Guía de
funcionamiento).
4 Seleccione la ficha PID en la pantalla Asistente de PID.
5Introduzca la primera o la enésima estimación en el campo Período de muestreo(1).
6 Realice el ajuste automático, página 161.
7Espere hasta que finalice el proceso de ajuste automático.
8 Pueden darse dos casos:
•Que el ajuste automático se realice correctamente: Continúe con el paso 10.
•Que el ajuste automático no se realice correctamente: Consulte Códigos de
error detectados del ajuste automático, página 187. Esto significa que la
estimación aproximada del periodo de muestreo (Ts) no es correcta. Inténtelo
con otra estimación aproximada del Ts y repita los pasos del 3 al 8 tantas veces
como sea necesario hasta que el proceso de ajuste automático converja
finalmente.
9 Siga estas directrices para proporcionar una nueva estimación aproximada del Ts:
• Ajuste automático termina con el código de error detectado 800C hex. Esto
significa que el período de muestreo (Ts) es demasiado largo. Disminuya el
valor de Ts para proporcionar una nueva estimación.
• Ajuste automático termina con el código de error detectado 800A hex. Esto
significa que el Periodo de muestreo (Ts) es demasiado corto. Aumente el valor
de Ts para proporcionar una nueva estimación.
10 Ajuste los parámetros de control(2) del PID (Kp, Ti y Td) en la ficha PID, página 178 de
la pantalla Asistente de PID, según sea necesario.
(1) Si no dispone de una primera indicación del posible rango del periodo de muestreo, configure
este valor en el mínimo permitido: 1 (1 unidad de 10 ms).
(2) Si la regulación del PID que proporciona este conjunto de parámetros de control no proporciona
resultados totalmente satisfactorios, restrinja aún más la evaluación por prueba y error del periodo
de muestreo hasta que obtenga el conjunto correcto de parámetros de control Kp, Ti y Td.
Modalidad en línea
En la modalidad online, cuando el Logic Controller está en la tarea periódica, el
valor mostrado en el campo Ts (en la pantalla, página 174 Asistente de PID)
puede ser diferente del parámetro introducido (%MW). El valor Ts es un múltiplo
de la tarea periódica, mientras que el valor %MW es el valor leído por el Logic
Controller.
Asistente de PID
Acceso al Asistente de PID
Introducción
Utilice la ventana Asistente de PID de EcoStruxure Machine Expert - Basic para
configurar el controlador PIDPID.
174 EIO0000003308.02

Función PID
Asistente de configuración
En la tabla de propiedades de PID, haga clic en el botón Configuración [...].
Aparecerá la pantalla Asistente de PID.
En el gráfico se muestra la pantalla Asistente de PID:
La pantalla Asistente de PID muestra varias fichas, en función de si está en la
modalidad offline u online:
Ficha Modalidad de acceso Enlace
Aspectos generales Offline Ficha General, página 175
Entrada Offline Ficha Entrada, página 177
PID Offline Ficha PID, página 178
AT Offline Ficha AT, página 180
Salida Offline Ficha Salida, página 181
Cuando se selecciona una modalidad de funcionamiento, las fichas con campos
vacíos que requieren valores se muestran como en y el borde del campo se
rellena de rojo.
Ficha General
Introducción
En esta sección se describe la ficha General del PID. La ficha General se
muestra de forma predeterminada cuando accede al Asistente de PID en la
modalidad offline.
EIO0000003308.02 175

Función PID
Descripción
En la tabla que hay a continuación se describe la configuración de la ficha
General.
Parámetro Descripción
Modalidad de
funcionamiento Representa la modalidad PID para utilizar:
• Sin configurar
• PID
• AT + PID
• AT
• Dirección de palabra
Para obtener información más detallada acerca de las modalidades de
funcionamiento, consulte Modalidad de funcionamiento del PID, página 160.
Dirección de
palabra Puede proporcionar una palabra de memoria en este cuadro de texto (%
MWxx) que se utiliza para establecer de forma programada la modalidad de
funcionamiento. La palabra de memoria puede tomar distintos valores en
función de la modalidad de funcionamiento que se desee establecer:
• %MWx = 0 (PID deshabilitado)
• %MWx = 1 (sólo para establecer PID)
• %MWx = 2 (para establecer AT + PID)
• %MWx = 3 (sólo para establecer AT)
• %MWx = 4 (sólo para establecer PI)
Estados del PID Si selecciona la casilla para habilitar esta opción, puede proporcionar una
palabra de memoria en el campo asociado (%MWxx) que utiliza el
controlador PID para almacenar el estado del PID actual mientras se ejecuta
el controlador PID y/o la función de ajuste automático. Para obtener
información más detallada, consulte Estados de PID y códigos de error
detectados, página 185.
Asistente gráfico
El asistente gráfico le ayuda a visualizar como se construye la función PID. Este
es un gráfico dinámico que se actualiza según la configuración.
176 EIO0000003308.02

Función PID
Los iconos que se muestran a continuación describen cuándo está accesible o
qué sucede cuando se hace clic en él:
Visualizador Descripción
Haga clic en este botón para mostrar el campo Consigna de la ficha PID, página
178.
Haga clic en este botón para mostrar la ficha PID, página 178.
Haga clic en este botón para mostrar la ficha Salida, página 181.
Haga clic en este botón para mostrar la ficha Entrada, página 177.
Haga clic en este botón para mostrar la ficha AT, página 180.
Haga clic en este botón para mostrar la ficha AT, página 180.
Este botón aparece cuando la opción Autorizar está seleccionada en la zona
Conversión de la ficha Entrada, página 177.
Este botón aparece cuando la opción Autorizar está seleccionada en la zona
Alarmas de la ficha Entrada, página 177.
Este botón aparece si Límites no es igual a Deshabilitar en la zona Límites de
la ficha Salida, página 181.
Este botón aparece si Modalidad manual no es igual a Deshabilitar en la zona
Modalidad manual de la ficha Salida, página 181.
Haga clic en este botón para mostrar la ficha Salida, página 181.
Este botón aparece cuando la opción Autorizar está seleccionada en la zona
Salida PWM de la ficha Salida, página 181.
Ficha Entrada
Introducción
En esta sección, se describe la ficha Entrada de PID. La ficha Entrada se utiliza
para introducir los parámetros de entrada de PID.
Solo se puede acceder a esta ficha en modalidad offline y si se ha seleccionado
una modalidad de funcionamiento en la ficha General.
EIO0000003308.02 177

Función PID
Descripción
La tabla que se presenta a continuación describe los ajustes que puede definir.
Parámetro Descripción
Medida Indique la variable que contiene el valor del proceso que se va a controlar.
La escala predeterminada oscila entre 0 y 10000. Puede introducir una palabra
de memoria (%MWxx) o una entrada analógica.
Conversión Autorizar Active esta casilla para convertir el valor de proceso
[0...10000] en un rango lineal Mín. ...Máx..
La conversión también se aplica al valor de consigna.
Mín.
Máx.
Indique los valores mínimo y máximo de la escala de
conversión. A continuación, el valor de proceso se vuelve a
escalar automáticamente dentro del intervalo Mín. ...Máx..
Mín. oMáx. pueden ser palabras de memoria (%MWxx),
palabras constantes (%KWxx) o un valor de –32768 a +32767.
NOTA: Nota: El Mín. debe ser inferior al Máx.
Filtro Autorizar Active esta casilla para aplicar un filtro a la entrada medida.
(100 ms) Especifique el valor del filtro de 0 a 10000 o una dirección de
palabra de memoria (%MWxx). La unidad base del tiempo de
filtro es 100 ms.
Alarmas Autorizar Active esta casilla para activar alarmas en las variables de
entrada.
Los valores de alarma se deben determinar según el valor del
proceso obtenido tras la fase de conversión. Los valores de
alarma deben ser de Mín. aMáx. cuando la conversión está
activa. De lo contrario, los valores de alarma oscilarán entre 0 y
10000.
Bajo
Salida
Indique el valor de la alarma baja en el campo Baja.
Este valor puede ser una palabra de memoria (%MWxx), una
constante (%KWxx) o un valor directo.
El campo Salida debe contener la dirección del bit, que se
establecerá en 1 cuando se alcance el límite inferior. Salida
puede ser un bit de memoria (%Mxx) o una salida.
Alto
Salida
Indique el valor de la alarma alta en el campo Alta.
Este valor puede ser una palabra de memoria (%MWxx), una
constante (%KWxx) o un valor directo.
El campo Salida debe contener la dirección del bit, que se
establecerá en 1 cuando se alcance el límite superior. Salida
puede ser un bit de memoria (%Mxx) o una salida.
Ficha PID
Introducción
Utilice la ficha PID para introducir los parámetros internos de PID.
Sólo se puede acceder a esta ficha en modalidad offline y si se ha seleccionado
una modalidad de funcionamiento en la ficha General.
178 EIO0000003308.02

Función PID
Descripción
En la tabla se describen los ajustes que puede definir:
Parámetro Descripción
Consigna Especifique el valor de consigna de PID. Este valor puede ser una palabra de
memoria (%MWxx), una palabra constante (%KWxx) o un valor directo.
Por lo tanto, este valor debe establecerse entre 0 y 10.000 cuando la conversión
esté bloqueada. De lo contrario, debe estar entre el valor Mín. y el valor Máx. de
la conversión.
Tipo de
corrector Si se ha seleccionado anteriormente la modalidad de funcionamiento de PID o
AT + PID en la tabla de propiedades de PID, puede seleccionar el tipo de
corrector deseado (PID oPI) en la lista desplegable. Si se han seleccionado
otras modalidades de funcionamiento (AT oDirección de palabra), el Tipo de
corrector se establece en Automático y aparece en gris (no se puede
modificar manualmente).
Si se selecciona PI en la lista desplegable, el parámetro Td se fuerza a un valor
0 y este campo se deshabilita.
Parámetros (1) Kp (x0,01 s) Especifique la ganancia proporcional de PID, multiplicada
por 100.
Este valor puede ser una palabra de memoria (%MWxx),
una palabra constante (%KWxx) o un valor directo.
El rango válido del parámetro Kp es: 0 < Kp < 10000.
NOTA: Si, por error, Kp se establece en 0 (Kp ≤ 0 no es
válido), la función PID asigna automáticamente el valor
predeterminado Kp =100.
Ti (x0,1 s) Especifique el tiempo integral para una referencia de tiempo
de 0,1 segundos.
Este valor puede ser una palabra de memoria (%MWxx),
una palabra constante (%KWxx) o un valor directo.
Debe estar entre 0 y 36000.
NOTA: Para deshabilitar la acción integral del PID,
establezca este coeficiente en 0.
Td (x0,1 s) Especifique el tiempo diferencial para una referencia de
tiempo de 0,1 segundos.
Este valor puede ser una palabra de memoria (%MWxx),
una palabra constante (%KWxx) o un valor directo.
Debe estar entre 0 y 10000.
NOTA: Para deshabilitar la acción derivada del PID,
establezca este coeficiente en 0.
Periodo de
muestreo Especifique el periodo de muestreo del PID aquí para una referencia de tiempo
de 10-2 segundos (10 ms).
Este valor puede ser una palabra de memoria (%MWxx), una palabra constante
(%KWxx) o un valor directo.
Debe estar entre 1 (0,01 s) y 10000 (100 s).
(1) Cuando el ajuste automático está habilitado, ya no necesita ajustar los parámetros Kp, Ti y Td,
ya que se establecen automática y programáticamente mediante el algoritmo de ajuste automático.
En este caso, solo se debe introducir en estos campos una dirección de palabra interna (%MW xx).
No introduzca una palabra constante ni un valor directo cuando el ajuste automático está habilitado.
EIO0000003308.02 179

Función PID
Ficha AT
Introducción
La ficha AT está relacionada con la función de ajuste automático. Para obtener
más información, consulte Ajuste del PID mediante ajuste automático, página
167.
Sólo se puede acceder a esta ficha en modalidad offline y si se ha seleccionado
una modalidad de funcionamiento en la ficha General.
Descripción
El ajuste automático del PID es un proceso de bucle abierto que actúa
directamente en el proceso de control sin regulación ni otras limitaciones más que
las proporcionadas por el límite del Valor de proceso (VP) y la consigna de salida.
Por lo tanto, ambos valores deben seleccionarse cuidadosamente en el rango
permitido, tal como se especifica en el proceso, para evitar una posible
sobrecarga del proceso.
Cuando se implementa el PID con ajuste automático, el parámetro Corrector AT
dinámico afecta al valor de la ganancia proporcional (Kp). El cálculo de la
ganancia proporcional en el proceso de ajuste automático depende de la
velocidad del corrector dinámico seleccionado. Puede seleccionar una de las
opciones siguientes:
•Rápido
•Mediano
•Lento
•Dirección de palabra
Consulte las descripciones de las opciones de la tabla siguiente:
ADVERTENCIA
FUNCIONAMIENTO DEL PID INESTABLE
• El límite de valor de proceso (PV) y los valores de consigna de salida deben
establecerse con una comprensión completa del efecto que tienen sobre la
máquina o el proceso.
• No supere el rango permitido de valor de proceso y los valores de consigna
de salida.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No utilice una salida de relé con la función PID.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
180 EIO0000003308.02

Función PID
En la tabla se describen los ajustes que puede definir:
Campo Descripción
Modalidad AT Autorizar Active esta casilla para habilitar la operación de ajuste automático.
Existen dos formas de utilizar esta casilla de verificación, dependiendo de si se establece la
modalidad de funcionamiento de forma manual o a través de una dirección de palabra en la
ficha General de la función PID:
• Si establece la modalidad de funcionamiento en PID + AT oAT desde la ficha General,
página 175, la opción Autorizar se activa y no es editable.
• Si se establece la modalidad de funcionamiento mediante una dirección de palabra %
MWx (%MWx = 2: PID + AT;%MWx = 3: AT), se debe activar la opción Autorizar
manualmente para permitir la configuración de los parámetros de ajuste automático.
Rango de
medición Autorizar Active esta casilla para habilitar las mediciones de rango.
NOTA: Si las mediciones de rango están desactivadas, el valor Mín. se establece en 0 y el
valor Máx. se establece en 10.000.
Mín.
Máx.
Establezca los valores Mín. yMáx. según el rango de mediciones correspondiente al 1 % por
encima o por debajo de la consigna.
Los valores pueden ser valores inmediatos de 1 a 10000 o una palabra de memoria %MWx.
NOTA: El valor Mín. debe ser inferior al valor Máx..
Ejemplo: Si el valor de proceso debe situarse en torno a 35 °C ± 3 °C:
• La consigna es 350.
• ± 3 °C es h, página 169 y debe ser 30.
• Por lo tanto, 1 % × (Máx. –Mín.) = 30
• Por lo tanto, 1 % × 3000 = 30
• Por Lo Tanto, Máx. = 3100 y Mín. = 100
Corrector AT
dinámico Rápido
Mediano
Lento
Dirección de
palabra
Este parámetro afecta al valor de ganancia proporcional (Kp) calculado por el proceso de AT.
•Rápido ofrece un tiempo de respuesta rápido con un rebasamiento superior a la media.
•Medio ofrece un tiempo de respuesta medio con un rebasamiento medio.
•Lento ofrece un tiempo de respuesta más lento con un rebasamiento inferior a la media.
•Dirección de palabra ofrece el tiempo de respuesta configurado en el objeto de palabra
especificado (%MW).
Consigna de
salida Consigna de
salida Este parámetro le permite iniciar el proceso de AT cada vez que se detecta un flanco
ascendente en el bit especializado (bit de memoria o bit de entrada digital).
Coeficientes Kp, Ti, Td calculados
Cuando se haya completado el proceso de ajuste automático, los coeficientes
calculados Kp, Ti y Td del PID estarán disponibles en sus respectivas palabras de
memoria (%MWx).
Ficha Salida
Introducción
Esta ficha permite introducir los parámetros de salida del PID.
Sólo se puede acceder a esta ficha en modalidad offline y si se ha seleccionado
una modalidad de funcionamiento en la ficha General.
EIO0000003308.02 181

Función PID
Descripción
En la tabla se describen los ajustes que puede definir:
Campo Descripción
Acción Indique aquí el tipo de acción del PID en el proceso. Hay tres opciones
disponibles: Inversa,Directa yDirección de bit. Si un incremento en la
salida provoca un aumento en la medición del valor de proceso, defina la
acción inversa (Inversa); por otro lado, si provoca una reducción en el valor
de proceso, haga que el PID sea directo (Directa).
Si selecciona Dirección de bit(1), puede modificar el tipo de acción
modificando el bit asociado, que puede ser un bit de memoria (%Mxx) o una
dirección de entrada (%Ix.y).
El bit de memoria se establece en 1 si la acción es Directa y en 0 si la acción
es Inversa.
Límites Especifique dónde establecer los límites de la salida del PID. Hay 3 opciones
disponibles: Habilitar,Deshabilitar yDirección de bit.
Seleccione Habilitar para establecer el Bit en 1 o seleccione Deshabilitar
para establecer el Bit en 0.
Seleccione Dirección de bit para gestionar los límites del bit modificando el
bit asociado, que puede ser un bit de memoria (%Mxx) o una dirección de
entrada (%Ix.y).
Indique los límites superior e inferior de la salida del PID.
Mín. oMáx. pueden ser palabras de memoria (%MWxx), palabras constantes
(%KWxx) o un valor de 1 a 10000 (de 0,01 % a 100 % del periodo PWM).
NOTA: El valor Mín. debe ser inferior al valor Máx..
Modalidad
manual Especifique si desea cambiar el PID a la modalidad manual. Hay 3 opciones
disponibles: Habilitar,Deshabilitar yDirección de bit.
Si ha seleccionado Dirección de bit, puede pasar a la modalidad manual (bit
en 1) o automática (bit en 0) a través del programa mediante la modificación
del bit asociado, que es un bit de memoria (%Mxx) o una entrada.
La Salida de la modalidad manual debe contener el valor que desee asignar
a la salida analógica cuando el PID está en modalidad manual, página 171.
Esta Salida puede ser una palabra (%MWxx) o un valor directo en el formato
[0...10000].
Salida analógica Especifique la salida de PID que desee utilizar en la modalidad de ajuste
automático.
Esta Salida analógica(2) puede ser una dirección de palabra de memoria o
una dirección de salida analógica. Al usar la función PWM de PID, sólo se
permiten direcciones de palabras de memoria.
182 EIO0000003308.02

Función PID
Campo Descripción
Salida PWM Marque esta casilla para utilizar la función PWM del PID.
Especifique el periodo de modulación en el cuadro de texto Periodo (x0,1 s).
Este período debe estar entre 1 y 500 y puede ser una palabra de memoria
(%MWxx) o una palabra constante (%KWxx). La precisión de PWM depende
del periodo PWM y del de exploración. La precisión mejora cuando el
coeficiente PWM (PWM.R) tiene el mayor número de valores. Por ejemplo,
con el periodo de exploración = 20 ms y el periodo PWM = 200 ms, PWM.R
puede adoptar los valores 0%, 10%, 20%, 30%, 40%, 50%, 60%, 70%, 80%,
90% y 100%. Con el periodo de exploración = 50 ms y el periodo PWM = 200
ms, PWM.R puede adoptar los valores 0%, 25%, 50%, 75%, y 100% del
periodo PWM.P.
Establezca el bit de salida PWM como el valor de Salida. Este puede ser un
bit de memoria (%Mxx) o una dirección de salida. Para obtener más
información sobre la función PWM, consulte el capítulo Modulación de ancho
de pulsos (%PWM), página 48.
(1) Cuando el ajuste automático está habilitado, el algoritmo de ajuste automático determina de
forma automática el tipo correcto de acción directa o inversa para el proceso de control.
Posteriormente, debe introducir en el cuadro de texto asociado Dirección de bit un bit de memoria
únicamente (%Mxx).
(2) Introduzca una dirección de memoria (%MWxx) o una dirección de salida analógica (%QWx.y).
Programación de PID
Uso de la función PID
Esta sección se ofrecen descripciones y directrices de programación para utilizar
la función PID.
Descripción
Introducción
Un control proporcional, integral, diferencial (PID) es un mecanismo de
retroalimentación de bucle de control (controlador) ampliamente usado en los
sistemas de control industriales. El controlador PID utiliza un algoritmo que
implica tres parámetros constantes independientes: los valores proporcional,
integral y diferencial, que se identifican como P, I y D respectivamente.
EIO0000003308.02 183

Función PID
Características principales
Las principales características de la función PID de EcoStruxure Machine Expert -
Basic son las siguientes:
• Entrada analógica
• Conversión lineal de la medida configurable
• Alarma alta o baja en entrada configurable
• Salida analógica o PWM
• Desconexión de la salida configurable
• Acción directa o inversa configurable
• Función de ajuste automático
Ilustración
Esta es la función PID en el editor de contactos de EcoStruxure Machine Expert -
Basic:
NOTA: Debe haber un espacio entre PID y el número PID (por ejemplo,
PID<espacio>0).
Parámetros
A diferencia de los bloques de funciones Timer oCounter, no existe un bloque de
funciones PID en EcoStruxure Machine Expert - Basic. La instrucción [PID x]
solamente habilita la función de bucle de control PID, donde x es el número PID.
Para configurar la función PID, vaya a la ventana Programación, haga clic en
Herramientas > PID y, a continuación, edite las propiedades de PID (consulte la
tabla siguiente para conocer los parámetros de configuración).
La función PID contiene los parámetros siguientes:
Parámetro Descripción Valor
Utilizada Seleccionado si la E/S se utiliza en
alguna parte del proyecto True/False
False (predeterminado)
PID Nombre del objeto PID actual Un programa puede contener solamente un
número limitado de funciones PID. Para
obtener el número máximo de objetosPID,
consulte la tabla Número máximo de
objetos (consulte Modicon M221, Logic
Controller, Guía de programación).
Símbolo Símbolo del objeto PID actual El símbolo asociado a este objeto PID.
Para obtener más información, consulte
Definición y uso de los símbolos (consulte
EcoStruxure Machine Expert - Basic, Guía
de funcionamiento).
[...] Un botón para iniciar el asistente Haga clic para visualizar la pantalla
Asistente de PID. Para obtener más
información, consulte Asistente de PID,
página 174.
Comentario Comentario Se puede asociar un comentario con este
objeto.
184 EIO0000003308.02

Función PID
Programación y configuración
Introducción
En esta sección se explica cómo programar y configurar el controlador
EcoStruxure Machine Expert - Basic de PID.
Habilitación del controlador PID
En el ejemplo siguiente se habilita el bucle del controlador PID 0 si el bit %M0 se
establece en 1:
Escalón Instrucción
0LD %M0
[PID 0]
NOTA: Consulte el procedimiento de reversibilidad (véase EcoStruxure
Machine Expert - Basic, Guía de la biblioteca de funciones genéricas) para
obtener el diagrama de contactos equivalente.
Medición analógica del PID
La función PID completa una corrección PID con una medición analógica y una
consigna y produce un comando analógico en el mismo formato o un PWM en
una salida digital.
Para usar el PID a escala completa (la máxima resolución), configure la entrada
analógica dedicada a la medición del controlador PID en el formato [0-10.000]. No
obstante, si utiliza la configuración predeterminada [0-4095], el controlador PID
seguirá funcionando correctamente.
Configuración del periodo de exploración
Cuando utilice controladores PID de EcoStruxure Machine Expert - Basic, debe
configurar la modalidad de exploración del Logic Controller en la modalidad de
exploración Periódica (ficha Programa,Tareas > Tarea maestra). En la
modalidad de exploración periódica, cada exploración del controlador lógico se
inicia a intervalos de tiempo regulares, de modo que la tasa de muestreo es
constante durante el periodo de medición. Para obtener más información sobre la
configuración de la modalidad de exploración, consulte la Guía de funcionamiento
de EcoStruxure Machine Expert - Basic.
En la modalidad de exploración periódica, el sistema establece en 1 el bit de
sistema %S19 si el tiempo de exploración del Logic Controller es mayor que el
periodo definido por el programa de usuario.
Estados del PID y códigos de error detectados
Introducción
El controlador EcoStruxure Machine Expert - Basic de PID dispone de la
capacidad de escribir el estado actual del controlador PID y del proceso de ajuste
automático en una palabra de memoria definida por el usuario. Para obtener más
información sobre cómo habilitar y configurar la palabra de memoria de los
estados del PID, consulte la ficha General, página 175 del Asistente de PID,
página 174.
EIO0000003308.02 185

Función PID
La palabra de memoria del estado del PID puede registrar los siguientes tipos de
información del PID:
• Estado actual del controlador PID
• Estado actual del proceso de ajuste automático
• Códigos de error detectados del PID
• Códigos de error detectados del ajuste automático
NOTA: La palabra de memoria de los estados del es de solo lectura.
Palabra de memoria de estados
Estados Descripción
0000 hex El control del PID está inactivo
2000 hex El control del PID está en curso
4000 hex Se ha alcanzado la consigna del PID
Palabra de memoria de estado de ajuste automático
Estado de ajuste automático Descripción
0100 hex Fase de ajuste automático 1, página 169 en
curso
0200 hex Fase de ajuste automático 2, página 169 en
curso
0400 hex Fase de ajuste automático 3, página 169 en
curso
0800 hex Fase de ajuste automático 4, página 169 en
curso
1000 hex Fase de ajuste automático completada
Códigos de error detectados del PID
En esta tabla se describen los posibles errores detectados que se pueden
encontrar al controlar el PID:
Código de error detectado Descripción
8001 hex Valor de modalidad de funcionamiento fuera de rango
8002 hex Mínimo y máximo de conversión lineal iguales
8003 hex Límite superior de la salida binaria inferior al límite inferior
8004 hex Límite de consigna fuera del rango de la conversión lineal
8005 hex El límite de consigna es inferior a 0 o superior a 10000.
8006 hex Consigna fuera del rango de la conversión lineal
8007 hex Consigna inferior a 0 o superior a 10.000
8008 hex Acción de control diferente a la acción determinada en el inicio del ajuste automático
186 EIO0000003308.02

Función PID
Códigos de error detectados del ajuste automático
En esta tabla se indican los mensajes de error detectado de ajuste automático y
se describen las causas posibles, así como las acciones de solución de
problemas:
Código de error detectado Descripción
8009 hex Se ha alcanzado el límite del valor de proceso (PV). Como el ajuste automático es un proceso de
bucle abierto, el límite del valor de proceso (PV) funciona como el valor máximo permitido.
800A hex O el periodo de muestreo es demasiado corto o la consigna de salida es demasiado baja.
Aumente el periodo de muestreo o el valor de la consigna de salida del ajuste automático.
800B hex Kp es igual a cero.
800C hex El tiempo constante es negativo, de modo que el periodo de muestreo puede ser demasiado largo.
Para obtener más información, consulte Limitaciones en el uso del ajuste automático, página 190.
800D hex El retardo es negativo.
800E hex Error detectado al calcular Kp. El algoritmo del ajuste automático es inestable (no hay
convergencia). Esto puede deberse a:
• Las interferencias en el proceso mientras se realiza el ajuste automático han causado una
distorsión de la evaluación de la ganancia estática del proceso.
• La respuesta transitoria del valor de proceso no es lo suficientemente grande para que el
ajuste automático determine la ganancia estática.
• Una combinación de los anteriores.
Compruebe los parámetros del PID y del ajuste automático, y realice ajustes para mejorar la
convergencia. Compruebe también que no haya interferencias que puedan afectar al valor de
proceso. Intente modificar:
• la consigna de salida y
• el periodo de muestreo.
Asegúrese de que no hay ninguna interferencia en el proceso mientras está en curso el ajuste
automático.
800F hex La constante del tiempo excede el coeficiente de retardo, τ/θ > 20. Puede que la regulación del
PID ya no sea estable. Para obtener más información, consulte Limitaciones en el uso del ajuste
automático, página 190.
8010 hex La constante del tiempo excede el coeficiente de retardo, τ/θ < 2. Puede que la regulación del PID
ya no sea estable. Para obtener más información, consulte Limitaciones en el uso del ajuste
automático, página 190.
8011 hex Se ha excedido el límite de la ganancia estática Kp, Kp >10000. La sensibilidad de medición de
algunas variables de la aplicación puede ser demasiado baja. El rango se debe volver a escalar
en el intervalo [de 0 a 10000].
8012 hex Se ha superado el valor calculado de la constante de tiempo integral Ti, Ti >20000.
8013 hex Se ha superado el valor calculado de la constante de tiempo diferencial Td, Td >10000.
8014 hex Valor de variables de entrada no válido (fuera del rango definido por las alarmas, página 178 de
salida alta y baja).
8015 hex Error de procesamiento de filtro:
• Tiempo de ciclo fuera de rango.
• Tiempo de filtro <10 × tiempo de ciclo
EIO0000003308.02 187

Apéndices
Contenido de esta parte
Parámetros del PID ......................................................................................189
Descripción general
Este apéndice contiene extractos de la guía de programación que ayudan a
obtener una comprensión técnica de la documentación de la biblioteca.
188 EIO0000003308.02

Parámetros del PID
Parámetros del PID
Contenido de este capítulo
Papel principal e influencia de los parámetros del PID.................................... 189
Método de ajuste de los parámetros del PID.................................................. 190
Papel principal e influencia de los parámetros del PID
Introducción
En esta sección se describe la función y la influencia de los parámetros del PID.
Modelo del controlador PID
El controlador PID de EcoStruxure Machine Expert - Basic implementa una
corrección PID (serie/paralelo) de tipo mixto. Las acciones integral y diferencial
actúan de forma independiente y en paralelo. La acción proporcional actúa en la
salida combinada de las acciones integral y diferencial.
Algoritmos computacionales
Se usan dos algoritmos computacionales distintos en función del valor de la
constante de tiempo integral (Ti):
• Si Ti ≠ 0, se usa un algoritmo incremental.
• Si Ti = 0, se usa un algoritmo posicional, junto con un offset de +5.000 que se
aplica a la salida del PID.
Influencia de las acciones
La acción proporcional se utiliza para influir en la velocidad de respuesta del
proceso. Un incremento de la acción proporcional supone:
• Una respuesta más rápida
• Un menor índice de errores estáticos
• Disminución de la estabilidad
La acción integral se utiliza para cancelar el error estático. Un aumento de la
acción de integración (es decir, una disminución del tiempo integral Ti) produce:
• Una respuesta más rápida
• Disminución de la estabilidad
La acción diferencial es anticipatoria. En la práctica, agrega un término que toma
en consideración la velocidad de variación de la desviación (lo que hace posible
anticipar los cambios acelerando los tiempos de respuesta del proceso cuando
aumenta la desviación, y reduciéndolos cuando la desviación disminuye). Un
aumento de la acción diferencial (es decir, un aumento del tiempo diferencial)
supone:
• Una respuesta más lenta
• Un rebasamiento reducido
NOTA: Teniendo en cuenta el tiempo diferencial, Td es el tiempo usado para
anticipar la variación de la desviación. Los valores de Td demasiado bajos o
demasiado altos pueden dar lugar a oscilaciones no deseadas.
EIO0000003308.02 189

Parámetros del PID
Para toda acción, es necesario encontrar un ajuste adecuado entre velocidad y
estabilidad.
Límites del bucle de control del PID
El proceso se asimila a un primer orden de retardo puro con una función de
transferencia:
donde:
τ: constante de tiempo de modelo
θ: retardo del modelo
El rendimiento del control de proceso depende del coeficiente .
El control de proceso del PID se alcanza en el dominio siguiente: 2 < < 20.
El control de proceso del PID es más conveniente para la regulación de procesos
que satisfagan la condición siguiente:
• Para <2, es decir, para bucles de control rápidos (θ bajo) o para procesos
con un gran retardo (τ alto), el control de proceso del PID ya no es adecuado.
En estos casos, deben utilizarse algoritmos más complejos.
• Para >20, basta con un control de proceso que utilice un umbral más
histéresis.
Método de ajuste de los parámetros del PID
Introducción
Existen varios métodos para ajustar los parámetros del PID. Se prefiere el método
Ziegler y Nichols, que cuenta con dos variantes:
• ajuste de bucle cerrado
• ajuste de bucle abierto
Antes de implementar uno de estos métodos, debe ajustar la acción, página 181
del PID.
190 EIO0000003308.02

Parámetros del PID
Ajuste de bucle cerrado
Este principio utiliza un comando proporcional (Ti = 0, Td = 0) para iniciar el
proceso con el incremento de un coeficiente proporcional hasta que empieza a
oscilar después de aplicar un nivel a la consigna del corrector PID. Todo lo que se
necesita es elevar la ganancia proporcional crítica (Kpc) que ha provocado la
oscilación no amortiguada y el periodo de oscilación (Tc) para reducir los valores,
con lo que se obtiene una regulación óptima.
Según el tipo de corrector utilizado (PID o PI), el ajuste de los coeficientes se
ejecuta con los siguientes valores:
Corrector Kp: Ganancia
proporcional
Ti: Tiempo de
integración Td: Contribución
PID Kpc/1,7 Tc/2 Tc/8
PI Kpc/2,22 0,83 x Tc –
Ajuste de bucle abierto
Puesto que el regulador está en modalidad manual, página 171, aplique un nivel a
la salida y haga que la respuesta del procedimiento se inicie de la misma manera
que el integrador con un tiempo de retardo puro.
El punto de intersección de la derecha, que representa el integrador con los ejes
temporales, determina el tiempo Tu. A continuación, el tiempo Tg se define como
EIO0000003308.02 191

Parámetros del PID
el tiempo necesario para que la variable controlada (medición) obtenga el mismo
tamaño de variación (% de la escala) que la salida del regulador.
Según el tipo de corrector utilizado (PID o PI), el ajuste de los coeficientes se
ejecuta con los siguientes valores:
Corrector Kp: Ganancia
proporcional
Ti: Tiempo de
integración Td: Contribución
PID -1,2 Tg/Tu 2 x Tu 0,5 x Tu
PI -0,9 Tg/Tu 3,3 x Tu –
NOTA: Para obtener información detallada acerca de las unidades de los
parámetros, consulte la ficha, página 178 PID.
Este método de ajuste también ofrece un comando muy dinámico que puede
expresarse a través de rebasamientos no deseados durante el cambio de pulsos
de las consignas. En este caso, reduzca el valor de la ganancia proporcional
hasta obtener el comportamiento deseado. El método no necesita ningún
supuesto relacionado con la naturaleza y el orden del procedimiento. Puede
aplicarlo tanto a procedimientos estables como a procedimientos de integración
real. En el caso de procedimientos lentos (por ejemplo, en la industria del vidrio),
el usuario solo necesita el comienzo de la respuesta para regular los coeficientes
Kp, Ti y Td.
192 EIO0000003308.02

Glosario
A
aceleración/deceleración:
La aceleración es la tasa del cambio de velocidad, desde la Velocidad de inicio
hasta la velocidad de destino. La deceleración es la tasa del cambio de
velocidad, desde la velocidad de destino hasta la Velocidad de detención. Estos
cambios de velocidad se gestionan de forma implícita mediante la función PTO
de acuerdo con los parámetros de aceleración, deceleración y ratio jerk
siguiendo un perfil de curva en S o trapezoidal.
C
curva en S rampa:
Una rampa de aceleración/deceleración con un parámetro de JerkRatio mayor
que 0%.
CW/CCW:
ClockWise/Counter ClockWise
D
DWORD:
(palabra doble) Con codificación en formato de 32 bits.
F
función:
Una unidad de programación que dispone de una entrada y devuelve un
resultado inmediato. No obstante, a diferencia de los FBs, se llama directamente
por su nombre (y no mediante una instancia), no tiene un estado persistente
desde una llamada hasta la siguiente y se puede utilizar como un operando en
otras expresiones de programación.
Ejemplos: operadores booleanos (AND), cálculos, conversiones (BYTE_TO_INT)
J
jerk ratio:
La proporción de cambio de la aceleración y deceleración como dependiente del
tiempo.
M
movimiento absoluto:
Un movimiento hacia una posición definida desde un punto de referencia.
P
POU:
(unidad de organización de programas) Una declaración variable en el código
fuente y el conjunto de instrucciones correspondiente. Las POUs facilitan la
reutilización modular de programas de software, funciones y bloques de
funciones. Una vez declaradas, cada una de las POUs está disponible para las
otras.
EIO0000003308.02 193

punto de referencia:
El método utilizado para establecer el punto de referencia para un movimiento
absoluto.
R
rampa trapezoidal:
Una rampa de aceleración/deceleración con un parámetro de JerkRatio en el
0%.
V
velocidad de detención:
La máxima frecuencia ante la cual un motor paso a paso deja de producir
movimiento con una carga aplicada, sin pérdida de pasos.
velocidad de inicio:
La mínima frecuencia a·la que·un motor paso a paso puede producir movimiento
con una carga aplicada y sin pérdida de pasos.
194 EIO0000003308.02

Índice
A
activación/desactivación de la etapa de potencia
MC_Power_ATV ................................................59
B
bloques de funciones
FC (Fast Counter) ..............................................23
frequency generator (%FREQGEN) .................. 155
HSC (high speed counter) ..................................28
MC_Halt_PTO .................................................137
MC_Home_PTO ..............................................131
MC_Jog_ATV ....................................................62
MC_Motion_PTO............................................. 115
MC_MoveAbs_PTO ......................................... 127
MC_MoveRel_PTO..........................................124
MC_MoveVel_ATV.............................................64
MC_MoveVel_PTO ..........................................121
MC_Power_ATV ................................................59
MC_Power_PTO.............................................. 118
MC_ReadMotionState_ATV................................72
MC_ReadStatus_ATV ........................................70
MC_Reset_ATV.................................................74
MC_SetPost_PTO ...........................................133
MC_Stop_ATV...................................................67
MC_Stop_PTO ................................................135
modulación de ancho de pulsos ..........................48
MV_AbortTrigger_PTO..................................... 151
MV_ReadActPos_PTO.....................................141
MV_ReadActVel_PTO...................................... 139
MV_ReadAxis_PTO......................................... 145
MV_ReadMotionState_PTO ............................. 144
MV_ReadPar_PTO..........................................152
MV_ReadSts_PTO ..........................................142
MV_Reset_PTO ..............................................147
MV_TouchProbe_PTO .....................................148
MV_WritePar_PTO .......................................... 153
pulso.................................................................41
Bloques de funciones de Drive
configuración.....................................................59
Bloques de funciones de Drive: códigos de error......77
BUFFER_MODE.................................................108
C
códigos de error
Bloques de funciones de Drive............................77
Códigos de objetos de bloques de funciones
BUFFER_MODE..............................................108
DIRECTION ....................................................107
HOMING_MODE .............................................108
PTO_PARAMETER.......................................... 108
configuring
Drive function blocks ..........................................59
confirmación y restablecimiento de errores
MC_Reset_ATV.................................................74
contador de alta velocidad
descripción........................................................28
modalidad de conteo..........................................32
modalidad de medidor de frecuencias .................38
contador rápido
configuración.....................................................24
descripción........................................................23
ejemplo de programación ...................................26
D
detención del movimiento
MC_Stop_ATV...................................................67
DIRECTION........................................................107
%DRV ..................................................................54
F
%FC.....................................................................23
FREQGEN
bloque de funciones .........................................155
configuración de los bloques de función............. 157
funciones
PTO..................................................................80
G
generador de frecuencias
bloque de funciones .........................................155
gestión de entradas de bloques de funciones y objetos
de entrada
Execute.............................................................21
gestión de errores
ErrID.................................................................21
Error .................................................................21
gestión de salidas de bloques de funciones y objetos
de salida
Busy .................................................................21
CmdAborted......................................................21
Done.................................................................21
ErrID.................................................................21
Error .................................................................21
H
holgura.................................................................87
HOMING_MODE ................................................108
%HSC
contador de alta velocidad ..................................28
I
inicio de la modalidad jog, MC_Jog_ATV.................62
J
JerkRatio..............................................................83
L
lectura del estado de movimiento
MC_ReadMotionState_ATV................................72
lectura del estado del dispositivo
%MC_ReadStatus_ATV .....................................70
M
MC_Halt_PTO
detención del movimiento controlado hasta que la
velocidad sea 0 ..............................................137
MC_Home_PTO
eje de comando para realizar la secuencia de toma
de referencia..................................................131
MC_Jog_ATV
inicio de la modalidad jog....................................62
EIO0000003308.02 195

MC_Motion_PTO
ejecución de una Motion Task Table .................. 115
MC_MoveAbs_PTO
movimiento del eje a una posición determinada a la
velocidad especificada.................................... 127
MC_MoveRel_PTO
movimiento del eje a una distancia incremental a la
velocidad especificada.................................... 124
MC_MoveVel_ATV
movimiento a la velocidad especificada ...............64
MC_MoveVel_PTO
movimiento de un eje a la velocidad
especificada...................................................121
MC_Power_ATV
activación/desactivación de la etapa de
potencia ..........................................................59
MC_Power_PTO
habilitación de la alimentación de un eje ............ 118
MC_ReadMotionState_ATV
lectura del estado de movimiento ........................72
MC_ReadStatus_ATV
lectura del estado del dispositivo.........................70
MC_Reset_ATV
confirmación y restablecimiento de errores ..........74
MC_SetPost_PTO
movimiento del eje a la posición especificada.....133
MC_Stop_ATV
detención del movimiento ...................................67
MC_Stop_PTO
ordenación de una detención del movimiento
controlado .....................................................135
modulación de ancho de pulsos
configuración de los bloques de función...............49
descripción........................................................48
ejemplo de programación ...................................53
motion task table
PTO..................................................................90
movimiento a la velocidad especificada
MC_MoveVel_ATV.............................................64
MV_AbortTrigger_PTO
cancelación de bloques de funciones conectados a
eventos desencadenadores ............................151
MV_ReadActPos_PTO
obtención de la posición del eje.........................141
MV_ReadActVel_PTO
obtención de la velocidad del eje....................... 139
MV_ReadAxisError_PTO
obtención de un error de control del eje ............. 145
MV_ReadMotionState_PTO
obtención del estado de movimiento del eje ....... 144
MV_ReadPar_PTO
obtención de parámetros de PTO......................152
MV_ReadSts_PTO
obtención del estado del eje..............................142
MV_Reset_PTO
restablecimiento de errores relacionados con el
eje.................................................................147
MV_TouchProbe_PTO
activación de un evento desencadenador en la
entrada PROBE .............................................148
MV_WritePar_PTO
escritura de parámetros en PTO .......................153
P
PID
ajuste automático............................................. 161
ajuste de bucle abierto ..................................... 191
ajuste de bucle cerrado ....................................191
asistente de configuración ................................ 174
configuración estándar .....................................164
descripción......................................................183
estados y códigos de error detectados...............185
Ficha AT..........................................................180
ficha Entrada ...................................................177
ficha General...................................................175
Ficha PID ........................................................178
ficha Salida......................................................181
modalidades de funcionamiento........................160
parámetro........................................................189
programación y configuración ........................... 185
%PLS...................................................................41
PTO
configuración.....................................................90
funciones ..........................................................80
motion task table................................................90
PTO_ERROR ..............................................109–110
PTO_PARAMETER.............................................108
pulso
configuración de los bloques de función...............42
descripción........................................................41
ejemplo de programación ...................................47
%PWM.................................................................48
R
rampa de aceleración ............................................83
rampa deceleración...............................................83
196 EIO0000003308.02


Schneider Electric
35 rue Joseph Monier
92500 Rueil Malmaison
France
+ 33 (0) 1 41 29 70 00
www.se.com
Debido a que las normas, especificaciones y diseños cambian
periódicamente, solicite la confirmación de la información dada en esta
publicación.
© 2022 Schneider Electric. Reservados todos los derechos.
EIO0000003308.02

Modicon M221
Logic Controller
Guía de hardware
EIO0000003316.02
11/2022
www.se.com

Información legal
La marca Schneider Electric y cualquier otra marca comercial de Schneider Electric
SE y sus filiales mencionadas en esta guía son propiedad de Schneider Electric SE o
sus filiales. Todas las otras marcas pueden ser marcas comerciales de sus
respectivos propietarios. Esta guía y su contenido están protegidos por las leyes de
copyright aplicables, y se proporcionan exclusivamente a título informativo. Ninguna
parte de este manual puede ser reproducida o transmitida de cualquier forma o por
cualquier medio (electrónico, mecánico, fotocopia, grabación u otro), para ningún
propósito, sin el permiso previo por escrito de Schneider Electric.
Schneider Electric no concede ningún derecho o licencia para el uso comercial de la
guía o su contenido, excepto por una licencia no exclusiva y personal para
consultarla "tal cual".
La instalación, utilización, mantenimiento y reparación de los productos y equipos de
Schneider Electric la debe realizar solo personal cualificado.
Debido a la evolución de las normativas, especificaciones y diseños con el tiempo, la
información contenida en esta guía puede estar sujeta a cambios sin previo aviso.
En la medida permitida por la ley aplicable, Schneider Electric y sus filiales no
asumen ninguna responsabilidad u obligación por cualquier error u omisión en el
contenido informativo de este material o por las consecuencias derivadas o
resultantes del uso de la información contenida en el presente documento.
Como parte de un grupo de empresas responsables e inclusivas, estamos
actualizando nuestras comunicaciones que contienen terminología no inclusiva. Sin
embargo, hasta que completemos este proceso, es posible que nuestro contenido
todavía contenga términos estandarizados del sector que pueden ser considerados
inapropiados para nuestros clientes.
© 2022 - Schneider Electric. Todos los derechos reservados.

Tabla de contenido
Información de seguridad............................................................................7
Cualificación del personal......................................................................7
Uso previsto .........................................................................................8
Acerca de este libro ....................................................................................9
Introducción a Modicon M221 Logic Controller....................................15
Descripción general de M221 ....................................................................16
Descripción de TM221C Logic Controller ..............................................17
Descripción de TM221M Logic Controller..............................................22
Configuración máxima de hardware .....................................................26
Cartuchos TMC2 ................................................................................29
Módulos de extensión TM3..................................................................30
Módulos de extensión de TM2 .............................................................38
Accesorios .........................................................................................41
Funciones de M221 ..................................................................................45
Reloj en tiempo real (RTC) ..................................................................45
Gestión de entradas............................................................................49
Gestión de salidas ..............................................................................52
Run/Stop............................................................................................55
Tarjeta SD ..........................................................................................57
Instalación de M221 .................................................................................62
Reglas generales para la implementación de M221 Logic
Controller ...........................................................................................62
Características ambientales...........................................................62
Certificaciones y estándares ..........................................................65
Instalación de M221 Logic Controller....................................................65
Requisitos de instalación y mantenimiento ......................................65
Distancias y posiciones de montaje de TM221C Logic
Controller .....................................................................................67
Distancias y posiciones de montaje de TM221M Logic
Controller .....................................................................................69
Riel DIN (segmento DIN) ...............................................................71
Instalación y desinstalación del controlador con extensiones............73
Montaje directo sobre la superficie de un panel ...............................76
Requisitos eléctricos de M221 .............................................................77
Prácticas recomendadas relativas al cableado ................................77
Cableado y características de la fuente de alimentación de
CC ...............................................................................................83
Cableado y características de la fuente de alimentación de
CA ...............................................................................................85
Puesta a tierra del sistema M221....................................................88
Modicon TM221C Logic Controller.........................................................91
TM221C16R ............................................................................................92
Presentación del modelo TM221C16R .................................................92
TM221CE16R ..........................................................................................96
Presentación de TM221CE16R............................................................96
TM221C16T.............................................................................................99
Presentación del modelo TM221C16T..................................................99
TM221CE16T.........................................................................................102
EIO0000003316.02 3

Presentación del modelo TM221CE16T..............................................102
TM221C16U ..........................................................................................105
Presentación del modelo TM221C16U ...............................................105
TM221CE16U ........................................................................................108
Presentación del modelo TM221CE16U .............................................108
TM221C24R .......................................................................................... 111
Presentación del modelo TM221C24R ............................................... 111
TM221CE24R ........................................................................................ 114
Presentación del modelo TM221CE24R ............................................. 114
TM221C24T........................................................................................... 117
Presentación del modelo TM221C24T................................................ 117
TM221CE24T.........................................................................................120
Presentación del modelo TM221CE24T..............................................120
TM221C24U ..........................................................................................123
Presentación del modelo TM221C24U ...............................................123
TM221CE24U ........................................................................................126
Presentación del modelo TM221CE24U .............................................126
TM221C40R ..........................................................................................129
Presentación del modelo TM221C40R ...............................................129
TM221CE40R ........................................................................................133
Presentación del modelo TM221CE40R .............................................133
TM221C40T...........................................................................................137
Presentación del modelo TM221C40T................................................137
TM221CE40T.........................................................................................141
Presentación del modelo TM221CE40T..............................................141
TM221C40U ..........................................................................................145
Presentación del modelo TM221C40U ...............................................145
TM221CE40U ........................................................................................148
Presentación del modelo TM221CE40U .............................................148
Canales de E/S incrustadas ....................................................................151
Entradas digitales .............................................................................151
Salidas de relé..................................................................................164
Salidas de transistores rápidas y normales ......................................... 170
Entradas analógicas .........................................................................178
Modicon TM221M Logic Controller ......................................................181
TM221M16R / TM221M16RG..................................................................182
Presentación del modelo TM221M16RTM221M16RG / ....................... 182
Entradas digitales de TM221M16R/TM221M16RG..............................185
Salidas digitales de TM221M16R/TM221M16RG ................................188
Entradas analógicas de TM221M16R/TM221M16RG .......................... 191
TM221ME16R / TM221ME16RG .............................................................195
Presentación de TM221ME16R/TM221ME16RG ................................195
Entradas digitales de TM221ME16R/TM221ME16RG .........................198
Salidas digitales de TM221ME16R/TM221ME16RG............................ 201
Entradas analógicas de TM221ME16R/TM221ME16RG......................204
TM221M16T / TM221M16TG ..................................................................208
Presentación de TM221M16T/TM221M16TG ..................................... 208
Entradas digitales de TM221M16T/TM221M16TG............................... 211
Salidas digitales de TM221M16T/TM221M16TG.................................215
Entradas analógicas de TM221M16T/TM221M16TG........................... 219
TM221ME16T / TM221ME16TG.............................................................. 222
4 EIO0000003316.02

Presentación de TM221ME16T/TM221ME16TG ................................. 222
Entradas digitales de TM221ME16T/TM221ME16TG ..........................225
Salidas digitales de TM221ME16T/TM221ME16TG ............................229
Entradas analógicas de TM221ME16T/TM221ME16TG ...................... 233
TM221M32TK ........................................................................................236
Presentación del modelo TM221M32TK .............................................236
Entradas digitales de TM221M32TK................................................... 239
Salidas digitales de TM221M32TK ..................................................... 243
Entradas analógicas de TM221M32TK ............................................... 246
TM221ME32TK......................................................................................250
Presentación del modelo TM221ME32TK...........................................250
Entradas digitales de TM221ME32TK ................................................ 253
Salidas digitales de TM221ME32TK...................................................257
Entradas analógicas de TM221ME32TK.............................................261
Comunicación de Modicon M221 Logic Controller ............................264
Puertos de comunicación integrados........................................................ 265
Puerto de programación USB mini-B ..................................................265
Puerto Ethernet ................................................................................266
Línea serie 1.....................................................................................268
Línea serie 2.....................................................................................271
Conexión del M221 Logic Controller a un PC ............................................ 274
Conexión del controlador a un PC ...................................................... 274
Glosario ....................................................................................................277
Índice ........................................................................................................282
EIO0000003316.02 5


Información de seguridad
Información de seguridad
Información importante
Lea atentamente estas instrucciones y observe el equipo para familiarizarse con
el dispositivo antes de instalarlo, utilizarlo, revisarlo o realizar su mantenimiento.
Los mensajes especiales que se ofrecen a continuación pueden aparecer a lo
largo de la documentación o en el equipo para advertir de peligros potenciales, o
para ofrecer información que aclara o simplifica los distintos procedimientos.
Tenga en cuenta
La instalación, manejo, puesta en servicio y mantenimiento de equipos eléctricos
deberán ser realizados sólo por personal cualificado. Schneider Electric no se
hace responsable de ninguna de las consecuencias del uso de este material.
Una persona cualificada es aquella que cuenta con capacidad y conocimientos
relativos a la construcción, el funcionamiento y la instalación de equipos
eléctricos, y que ha sido formada en materia de seguridad para reconocer y evitar
los riesgos que conllevan tales equipos.
Cualificación del personal
Sólo está autorizado para trabajar con este producto el personal que haya
recibido la formación adecuada, que esté familiarizado y entienda el contenido de
este manual y de cualquier otra documentación relacionada con el producto.
La persona cualificada debe ser capaz de detectar los peligros potenciales que
pueden surgir de la parametrización, la modificación de valores de parámetros y,
en general, de los equipos mecánicos, eléctricos o electrónicos. La persona
cualificada debe estar familiarizada con los estándares, disposiciones y
La inclusión de este icono en una etiqueta “Peligro” o “Advertencia” indica que existe
un riesgo de descarga eléctrica, que puede provocar lesiones si no se siguen las
instrucciones.
Éste es el icono de alerta de seguridad. Se utiliza para advertir de posibles riesgos
de lesiones. Observe todos los mensajes que siguen a este icono para evitar
posibles lesiones o incluso la muerte.
PELIGRO indica una situación de peligro que, si no se evita, provocará lesiones graves o
incluso la muerte.
!PELIGRO
ADVERTENCIA indica una situación de peligro que, si no se evita, podría provocar lesiones
graves o incluso la muerte.
ADVERTENCIA
!
ATENCIÓN indica una situación peligrosa que, si no se evita, podría provocar lesiones leves
o moderadas.
ATENCIÓN
!
AVISO indica una situación potencialmente peligrosa que, si no se evita, puede provocar
daños en el equipo.
AVISO
EIO0000003316.02 7

Información de seguridad
normativas para la prevención de accidentes industriales, que deberán seguir
cuando diseñen e implementen el sistema.
Uso previsto
Los productos descritos o afectados por este documento, junto con el software,
los accesorios y las opciones son controladores lógicos programables (referidos
en este documento como "Logic Controllers"), destinados a uso industrial según
las instrucciones, directrices, ejemplos e información de seguridad incluidos en el
presente documento y en la documentación adicional.
El producto sólo se puede utilizar si se cumplen todas las normativas y directivas
de seguridad, los requisitos especificados y los datos técnicos.
Antes de utilizar el producto, es necesario realizar una evaluación de riesgos en
función de la aplicación prevista. Según los resultados, se deberán implementar
las medidas de seguridad pertinentes.
Dado que el producto se utiliza como un componente de una máquina o de un
proceso general, es necesario garantizar la seguridad de las personas mediante
el diseño de este sistema general.
Utilice el producto solo con los cables y accesorios especificados. Utilice
únicamente accesorios y piezas de repuesto originales.
Cualquier uso distinto del permitido explícitamente está prohibido y puede
ocasionar riesgos imprevistos.
8 EIO0000003316.02

Acerca de este libro
Acerca de este libro
Ámbito del documento
Utilice este documento para:
• Instalar y utilizar M221 Logic Controller.
• Conectar M221 Logic Controller a un dispositivo de programación equipado
con el software EcoStruxure Machine Expert - Basic.
• Comunicar M221 Logic Controller con los módulos de extensión de E/S, la
HMI y otros dispositivos.
• Familiarizarse con las características de M221 Logic Controller.
NOTA: Lea y comprenda este documento y todos los documentos
relacionados, página 10 antes de instalar, utilizar o mantener el controlador.
Campo de aplicación
Este documento se ha actualizado para el lanzamiento de EcoStruxureTM
Machine Expert - Basic V1.2 SP1 Patch 1.
Las características descritas en el presente documento, así como las descritas en
los documentos incluidos a continuación en la sección Documentos relacionados,
pueden consultarse en línea. Para acceder a la información en línea, visite la
página de inicio de Schneider Electric www.se.com/ww/en/download/.
Las características descritas en el presente documento deben coincidir con las
características que aparecen en línea. De acuerdo con nuestra política de
mejoras continuas, es posible que a lo largo del tiempo revisemos el contenido
con el fin de elaborar documentos más claros y precisos. En caso de que detecte
alguna diferencia entre el documento y la información online, utilice esta última
para su referencia.
Para la conformidad de los productos y la información medioambiental (RoHS,
REACH, PEP, EOLI, etc.), vaya a www.se.com/ww/en/work/support/green-
premium/.
EIO0000003316.02 9

Acerca de este libro
Documentos relacionados
Título de la documentación Número de referencia
Modicon M221 Logic Controller - Guía de
programación EIO0000003297 (ENG)
EIO0000003298 (FRE)
EIO0000003299 (GER)
EIO0000003300 (SPA)
EIO0000003301 (ITA)
EIO0000003302 (CHS)
EIO0000003304 (TUR)
EIO0000003303 (POR)
Modicon TMH2GDB Visualización gráfica
remota - Guía de usuario EIO0000003321 (ENG)
EIO0000003322 (FRE)
EIO0000003323 (GER)
EIO0000003324 (SPA)
EIO0000003325 (ITA)
EIO0000003326 (CHS)
EIO0000003328 (TUR)
EIO0000003327 (POR)
Modicon TMC2 Cartuchos - Guía de hardware EIO0000003337 (ENG)
EIO0000003338 (FRE)
EIO0000003339 (GER)
EIO0000003340 (SPA)
EIO0000003341 (ITA)
EIO0000003342 (CHS)
EIO0000003344 (TUR)
EIO0000003343 (POR)
Módulos de E/S digitales Modicon TM3 - Guía
de hardware EIO0000003125 (ENG)
EIO0000003126 (FRE)
EIO0000003127 (GER)
EIO0000003128 (SPA)
EIO0000003129 (ITA)
EIO0000003130 (CHS)
EIO0000003425 (TUR)
EIO0000003424 (POR)
Módulos de E/S analógicas Modicon TM3 - Guía
de hardware EIO0000003131 (ENG)
EIO0000003132 (FRE)
EIO0000003133 (GER)
EIO0000003134 (SPA)
EIO0000003135 (ITA)
EIO0000003136 (CHS)
EIO0000003427 (TUR)
EIO0000003426 (POR)
10 EIO0000003316.02

Acerca de este libro
Título de la documentación Número de referencia
Módulos de E/S expertas Modicon TM3 - Guía
de hardware EIO0000003137 (ENG)
EIO0000003138 (FRE)
EIO0000003139 (GER)
EIO0000003140 (SPA)
EIO0000003141 (ITA)
EIO0000003142 (CHS)
EIO0000003429 (TUR)
EIO0000003428 (POR)
Módulos de seguridad Modicon TM3 - Guía de
hardware EIO0000003353 (ENG)
EIO0000003354 (FRE)
EIO0000003355 (GER)
EIO0000003356 (SPA)
EIO0000003357 (ITA)
EIO0000003358 (CHS)
EIO0000003360 (TUR)
EIO0000003359 (POR)
Módulos transmisores y receptores Modicon
TM3 - Guía de hardware EIO0000003143 (ENG)
EIO0000003144 (FRE)
EIO0000003145 (GER)
EIO0000003146 (SPA)
EIO0000003147 (ITA)
EIO0000003148 (CHS)
EIO0000003431 (TUR)
EIO0000003430 (POR)
TM221C DC Logic Controller - Hoja de
instrucciones EAV48550
TM221C AC Logic Controller - Hoja de
instrucciones
EAV58623
TM221M Logic Controller - Hoja de
instrucciones
HRB59602
EIO0000003316.02 11

Acerca de este libro
Información relacionada con el producto
PELIGRO
RIESGO DE DESCARGA ELÉCTRICA, EXPLOSIÓN O ARCO ELÉCTRICO
• Desconecte la alimentación de todos los equipos, incluidos los dispositivos
conectados, antes de retirar cualquier cubierta o compuerta, o bien antes de
instalar o retirar cualquier accesorio, hardware, cable o conductor salvo en
las condiciones indicadas en la guía de hardware de este equipo.
• Utilice siempre un dispositivo de detección de tensión de capacidad
adecuada para confirmar la ausencia de alimentación eléctrica cuando y
donde se indique.
• Vuelva a montar y fijar todas las cubiertas, accesorios, elementos de
hardware, cables y conductores y compruebe que haya una conexión a
tierra adecuada antes de aplicar alimentación eléctrica a la unidad.
• Aplique solo la tensión especificada cuando utilice este equipo y los
productos asociados.
Si no se siguen estas instrucciones, se producirán lesiones graves o la
muerte.
PELIGRO
POSIBILIDAD DE EXPLOSIÓN
• Este equipo se debe utilizar únicamente en ubicaciones no peligrosas o en
instalaciones conforme a Clase I, División 2, Grupos A, B, C y D.
• No sustituya componentes que puedan anular la conformidad con la Clase I,
División 2.
• No conecte ni desconecte el equipo a menos que haya quitado la
alimentación eléctrica o esté seguro de que la ubicación no es peligrosa.
• No utilice los puertos USB, si están incorporados, a menos que tenga la
certeza de que la ubicación no es peligrosa.
Si no se siguen estas instrucciones, se producirán lesiones graves o la
muerte.
ADVERTENCIA
PÉRDIDA DE CONTROL
• El diseñador del esquema de control debe tener en cuenta las posibles
modalidades de fallo de rutas de control y, para ciertas funciones de control
críticas, proporcionar los medios para lograr un estado seguro durante y
después de un fallo de ruta. Algunas funciones de control críticas son, por
ejemplo, la parada de emergencia y la parada de sobrecarrera, un corte de
alimentación o un reinicio.
• Para las funciones críticas de control deben proporcionarse rutas de control
separadas o redundantes.
• Las rutas de control del sistema pueden incluir enlaces de comunicación.
Deben tenerse en cuenta las implicaciones de retardos de transmisión
imprevistos o fallos del enlace.
• Tenga en cuenta todas las reglamentaciones para la prevención de
accidentes y las normativas de seguridad locales.1
• Cada instalación de este equipo debe probarse de forma individual y
exhaustiva antes de entrar en servicio.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
1Para obtener información adicional, consulte NEMA ICS 1.1 (última edición),
"Safety Guidelines for the Application, Installation, and Maintenance of Solid State
Control" (Directrices de seguridad para la aplicación, la instalación y el
12 EIO0000003316.02

Acerca de este libro
mantenimiento del control de estado estático) y NEMA ICS 7.1 (última edición),
"Safety Standards for Construction and Guide for Selection, Installation and
Operation of Adjustable-Speed Drive Systems" (Estándares de seguridad para la
construcción y guía para la selección, instalación y utilización de sistemas de
unidades de velocidad ajustable) o su equivalente aplicable a la ubicación
específica.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
• Utilice solo software aprobado por Schneider Electric para este equipo.
• Actualice el programa de aplicación siempre que cambie la configuración de
hardware física.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Normas y términos utilizados
Los términos técnicos, símbolos y las descripciones correspondientes del
presente manual o que aparecen en la parte interior o exterior de los propios
productos se derivan, por lo general, de los términos y las definiciones de
estándares internacionales.
En el área de los sistemas de seguridad funcional, unidades y automatización
general se incluyen, pero sin limitarse a ellos, términos como seguridad,función
de seguridad,estado de seguridad,fallo,reinicio tras fallo,avería,funcionamiento
incorrecto,error,mensaje de error,peligroso, etc.
EIO0000003316.02 13

Acerca de este libro
Estos estándares incluyen, entre otros:
Norma Descripción
IEC 61131-2:2007 Controladores programables, parte 2: Requisitos y ensayos de los
equipos.
ISO 13849-1:2015 Seguridad de la maquinaria: componentes de los sistemas de control
relacionados con la seguridad.
Principios generales del diseño.
EN 61496-1:2013 Seguridad de las máquinas: equipos de protección electrosensibles.
Parte 1: pruebas y requisitos generales.
ISO 12100:2010 Seguridad de las máquinas. Principios generales para el diseño.
Evaluación del riesgo y reducción del riesgo
EN 60204-1:2006 Seguridad de las máquinas. Equipo eléctrico de las máquinas. Parte 1:
Requisitos generales
ISO 14119:2013 Seguridad de la maquinaria. Dispositivos de bloqueo asociados con
protecciones: principios de diseño y selección
ISO 13850:2015 Seguridad de la maquinaria. Parada de emergencia: principios de
diseño
IEC 62061:2015 Seguridad de la maquinaria. Seguridad funcional de los sistemas de
control programable de seguridad eléctrica y electrónica
IEC 61508-1:2010 Seguridad funcional de los sistemas eléctricos/electrónicos/electrónicos
programables relacionados con la seguridad: requisitos generales.
IEC 61508-2:2010 Seguridad funcional de los sistemas eléctricos/electrónicos/electrónicos
programables relacionados con la seguridad: requisitos para los
sistemas eléctricos/electrónicos/electrónicos programables
relacionados con la seguridad.
IEC 61508-3:2010 Seguridad funcional de los sistemas eléctricos/electrónicos/electrónicos
programables relacionados con la seguridad: requisitos de software.
IEC 61784-3:2016 Redes de comunicación industrial - Perfiles - Parte 3: Buses de campo
de seguridad funcionales - Reglas generales y definiciones de perfiles.
2006/42/EC Directiva de maquinaria
2014/30/EU Directiva de compatibilidad electromagnética
2014/35/EU Directiva de baja tensión
Además, los términos utilizados en este documento se pueden usar de manera
tangencial porque se obtienen de otros estándares como:
Norma Descripción
Serie IEC 60034 Máquinas eléctricas giratorias
Serie IEC 61800 Accionamientos eléctricos de potencia de velocidad variable
Serie IEC 61158 Comunicación digital de datos para la medición y control: bus de campo
para su uso en sistemas de control.
Por último, el término zona de funcionamiento se puede utilizar junto con la
descripción de peligros específicos, y se define como tal para una zona de peligro
ozona peligrosa en la Directiva de maquinaria (2006/42/EC) y ISO 12100:2010.
NOTA: Los estándares mencionados anteriormente podrían o no aplicarse a
los productos específicos citados en la presente documentación. Para
obtener más información en relación con los diferentes estándares aplicables
a los productos descritos en este documento, consulte las tablas de
características de las referencias de dichos productos.
14 EIO0000003316.02

Introducción a Modicon M221 Logic Controller
Contenido de esta parte
Descripción general de M221..........................................................................16
Funciones de M221........................................................................................45
Instalación de M221 ......................................................................................62
EIO0000003316.02 15

Descripción general de M221
Descripción general de M221
Contenido de este capítulo
Descripción de TM221C Logic Controller ........................................................17
Descripción de TM221M Logic Controller ........................................................22
Configuración máxima de hardware................................................................26
Cartuchos TMC2...........................................................................................29
Módulos de extensión TM3 ............................................................................30
Módulos de extensión de TM2........................................................................38
Accesorios....................................................................................................41
Descripción general
En este capítulo encontrará información general sobre la arquitectura del sistema
del M221 Logic Controller y sus componentes.
16 EIO0000003316.02

Descripción general de M221
Descripción de TM221C Logic Controller
Descripción general
TM221C Logic Controller tiene diferentes funciones potentes y puede servir para
una amplia gama de aplicaciones.
La configuración del software, la programación y la puesta en servicio se realizan
con el software EcoStruxure Machine Expert - Basic descrito detalladamente en
EcoStruxure Machine Expert - Basic Guía de funcionamiento (consulte
EcoStruxure Machine Expert - Básico, Guía de funcionamiento) y M221 Logic
Controller - Guía de programación (consulte Modicon M221, Logic Controller -
Guía de programación).
Lenguajes de programación
El M221 Logic Controller se configura y programa con el software EcoStruxure
Machine Expert - Basic, que admite los siguientes lenguajes de programación IEC
61131-3:
• IL: Lista de instrucciones
• LD: Diagrama de contactos
• Grafcet (Lista)
• Grafcet (SFC)
Fuente de alimentación
La fuente de alimentación de TM221C Logic Controller es de 24 V CC, página 83
o de 100-240 V CA, página 85.
Reloj en tiempo real
M221 Logic Controller incluye un sistema de reloj en tiempo real (RTC), página
45.
Run/Stop
M221 Logic Controller puede utilizarse externamente con lo siguiente:
• un interruptor Run/Stop, página 55 de hardware
• una operación de Run/Stop, página 55 de una entrada digital dedicada,
definida en la configuración del software. Para obtener más información,
consulte Configuración de entradas digitales (consulte Modicon M221, Logic
Controller - Guía de programación).
• Software EcoStruxure Machine Expert - Basic. Para obtener más
información, consulte Barra de herramientas (consulte EcoStruxure Machine
Expert - Básico, Guía de funcionamiento).
• un TMH2GDB Visualización gráfica remota. Para obtener más información,
consulte Menú de estado del controlador (consulte Modicon TMH2GDB,
Pantalla gráfica remota, Guía del usuario).
EIO0000003316.02 17

Descripción general de M221
Memoria
En esta tabla se describen los distintos tipos de memoria:
Tipo de memoria Tamaño Se utiliza para
RAM 512 KB de memoria RAM: 256 KB
para variables internas y 256 KB para
aplicación y datos.
ejecutar la aplicación y contener
datos
No volátil 1,5 MB, de los cuales 256 KB se
utilizan para realizar una copia de
seguridad de la aplicación y de los
datos en caso de corte de
alimentación.
guardar la aplicación
Entradas/salidas incrustadas
En función de la referencia del controlador, están disponibles los siguientes tipos
de E/S incrustadas:
• Entradas normales
• Entradas rápidas asociadas con contadores
• Salidas transistorizadas normales (común negativo y positivo)
• Salidas transistorizadas rápidas (común negativo y positivo) asociadas con
generadores de pulsos
• Salidas de relé
• Entradas analógicas
Almacenamiento extraíble
Los M221 Logic Controller incorporan un slot para tarjeta SD, página 57.
El Modicon M221 Logic Controller permite los siguientes tipos de gestión de
archivos mediante una tarjeta SD:
• Gestión de clonaciones (consulte Modicon M221, Logic Controller - Guía de
programación): realice una copia de seguridad de la aplicación, el firmware y
la configuración posterior (si existe) del Logic Controller
• Gestión de firmware (consulte Modicon M221, Logic Controller - Guía de
programación): descargue el firmware para el Logic Controller, para un
TMH2GDB Visualización gráfica remota, o para los módulos de extensión
TM3
• Gestión de aplicaciones (consulte Modicon M221, Logic Controller - Guía de
programación): realice una copia de seguridad y restaure la aplicación del
Logic Controller, o cópielo en otro Logic Controller de la misma referencia
• Gestión de la configuración posterior (consulte Modicon M221, Logic
Controller - Guía de programación): añada, cambie o elimine el archivo de la
configuración posterior del Logic Controller
• Gestión de registro de errores (consulte Modicon M221, Logic Controller -
Guía de programación): realice una copia de seguridad o elimine el archivo
del registro de errores del Logic Controller
• Gestión de la memoria: realice una copia de seguridad de las palabras y los
bits de memoria de un controlador y restáurelos
Funciones de comunicación incrustadas
Están disponibles los siguientes tipos de puertos de comunicación, en función de
la referencia del controlador:
18 EIO0000003316.02

Descripción general de M221
•Ethernet, página 266
•USB mini-B, página 265
•Línea serie 1, página 268
Visualización gráfica remota
Para obtener más información, consulte Modicon TMH2GDB Visualización gráfica
remota - Guía del usuario.
TM221C Logic Controller
Referencia Entradas digitales Salidas digitales Entradas
analógi-
cas
Puertos de
comunicaciones Fuente de
alimentación
TM221C16R,
página 92
5 entradas normales
(1)
4 entradas rápidas
(HSC)(2)
7 salidas de relé Sí 1 puerto de línea serie
1 puerto de
programación USB
De 100 a 240 V
CA
TM221CE16R,
página 96 Sí 1 puerto de línea serie
1 puerto de
programación USB
1 puerto Ethernet
TM221C16T,
página 99
5 entradas normales
(1)
4 entradas rápidas
(HSC)(2)
Salidas de común positivo
5 salidas de transistor normales
2 salidas rápidas (PLS/PWM/
PTO/FREQGEN)(3)
Sí 1 puerto de línea serie
1 puerto de
programación USB
24 V CC
TM221CE16T,
página 102 Sí 1 puerto de línea serie
1 puerto de
programación USB
1 puerto Ethernet
TM221C16U,
página 105
5 entradas normales
(1)
4 entradas rápidas
(HSC)(2)
Salidas de común positivo
5 salidas de transistor normales
2 salidas rápidas (PLS/PWM/
PTO/FREQGEN)(3)
Sí 1 puerto de línea serie
1 puerto de
programación USB
24 V CC
TM221CE16U,
página 108 1 puerto de línea serie
1 puerto de
programación USB
1 puerto Ethernet
TM221C24R,
página 111
10 entradas
normales(1)
4 entradas rápidas
(HSC)(2)
10 salidas de relé Sí 1 puerto de línea serie
1 puerto de
programación USB
De 100 a 240 V
CA
TM221CE24R,
página 114 Sí 1 puerto de línea serie
1 puerto de
programación USB
1 puerto Ethernet
TM221C24T,
página 117 Salidas de común positivo
8 salidas de transistor normales
2 salidas rápidas (PLS/PWM/
PTO/FREQGEN)(3)
Sí 1 puerto de línea serie
1 puerto de
programación USB
24 V CC
TM221CE24T,
página 120 Sí 1 puerto de línea serie
1 puerto de
programación USB
1 puerto Ethernet
EIO0000003316.02 19

Descripción general de M221
Referencia Entradas digitales Salidas digitales Entradas
analógi-
cas
Puertos de
comunicaciones Fuente de
alimentación
TM221C24U,
página 123
10 entradas
normales(1)
4 entradas rápidas
(HSC)(2)
Salidas de común positivo
8 salidas de transistor normales
2 salidas rápidas (PLS/PWM/
PTO/FREQGEN)(3)
Sí 1 puerto de línea serie
1 puerto de
programación USB
24 V CC
TM221CE24U,
página 126 Sí 1 puerto de línea serie
1 puerto de
programación USB
1 puerto Ethernet
TM221C40R,
página 129
20 entradas
normales(1)
4 entradas rápidas
(HSC)(2)
16 salidas de relé Sí 1 puerto de línea serie
1 puerto de
programación USB
De 100 a 240 V
CA
TM221CE40R,
página 133 Sí 1 puerto de línea serie
1 puerto de
programación USB
1 puerto Ethernet
TM221C40T,
página 137 Salidas de común positivo
14 salidas de transistor normales
2 salidas rápidas (PLS/PWM/
PTO/FREQGEN)(3)
Sí 1 puerto de línea serie
1 puerto de
programación USB
24 V CC
TM221CE40T,
página 141 Sí 1 puerto de línea serie
1 puerto de
programación USB
1 puerto Ethernet
TM221C40U,
página 145
20 entradas
normales(1)
4 entradas rápidas
(HSC)(2)
Salidas de común positivo
12 salidas de transistor normales
4 salidas rápidas (PLS/PWM/
PTO/FREQGEN)(3)
Sí 1 puerto de línea serie
1 puerto de
programación USB
24 V CC
TM221CE40U,
página 148 Sí 1 puerto de línea serie
1 puerto de
programación USB
1 puerto Ethernet
NOTA: TM221C Logic Controller utiliza bloques de terminales de tornillo extraíble.
(1) Las entradas normales tienen una frecuencia máxima de 5 kHz.
(2) Las entradas rápidas se pueden utilizar como entradas normales o como entradas rápidas para funciones de conteo o de evento.
(3) Las salidas transistorizadas rápidas se pueden utilizar como salidas transistorizadas normales, para funciones PLS, PWM, PTO o
FREQGEN o como salidas Reflex para HSC.
20 EIO0000003316.02

Descripción general de M221
Contenido que se entrega
En la siguiente figura se muestra el contenido de la entrega de TM221C Logic
Controller:
1
2 3 4
1Hoja de instrucciones de TM221C Logic Controller
2TM221C Logic Controller
3Soporte de batería con pila de botón de litio, tipo Panasonic BR2032 o Murata
CR2032X.
4Cable analógico
EIO0000003316.02 21

Descripción general de M221
Descripción de TM221M Logic Controller
Descripción general
TM221M Logic Controller tiene diferentes funciones potentes y puede servir para
una amplia gama de aplicaciones.
La configuración del software, la programación y la puesta en servicio se realizan
con el software EcoStruxure Machine Expert - Basic descrito detalladamente en
EcoStruxure Machine Expert - Basic Guía de funcionamiento (consulte
EcoStruxure Machine Expert - Básico, Guía de funcionamiento) y M221 Logic
Controller - Guía de programación (consulte Modicon M221, Logic Controller -
Guía de programación).
Lenguajes de programación
El M221 Logic Controller se configura y programa con el software EcoStruxure
Machine Expert - Basic, que admite los siguientes lenguajes de programación IEC
61131-3:
• IL: Lista de instrucciones
• LD: Diagrama de contactos
• Grafcet (Lista)
• Grafcet (SFC)
Fuente de alimentación
La fuente de alimentación del TM221M Logic Controller es de 24 V CC, página
83.
Reloj en tiempo real
M221 Logic Controller incluye un sistema de reloj en tiempo real (RTC), página
45.
Run/Stop
M221 Logic Controller puede utilizarse externamente con lo siguiente:
• un interruptor Run/Stop, página 55 de hardware
• una operación de Run/Stop, página 55 de una entrada digital dedicada,
definida en la configuración del software. Para obtener más información,
consulte Configuración de entradas digitales (consulte Modicon M221, Logic
Controller - Guía de programación).
• Software EcoStruxure Machine Expert - Basic. Para obtener más
información, consulte Barra de herramientas (consulte EcoStruxure Machine
Expert - Básico, Guía de funcionamiento).
• un TMH2GDB Visualización gráfica remota. Para obtener más información,
consulte Menú de estado del controlador (consulte Modicon TMH2GDB,
Pantalla gráfica remota, Guía del usuario).
22 EIO0000003316.02

Descripción general de M221
Memoria
En esta tabla se describen los distintos tipos de memoria:
Tipo de memoria Tamaño Se utiliza para
RAM 512 KB de memoria RAM: 256 KB
para variables internas y 256 KB para
aplicación y datos.
ejecutar la aplicación; contiene
datos
No volátil 1,5 MB, de los cuales 256 KB se
utilizan para realizar una copia de
seguridad de la aplicación y de los
datos en caso de corte de
alimentación.
guardar la aplicación
Entradas/salidas incrustadas
En función de la referencia del controlador, están disponibles los siguientes tipos
de E/S incrustadas:
• Entradas normales
• Entradas rápidas (HSC)
• Salidas de transistor normales
• Salidas de transistor rápidas (PLS/PWM/PTO/FREQGEN)
• Salidas de relé
• Entradas analógicas
Almacenamiento extraíble
Los M221 Logic Controller incorporan un slot para tarjeta SD, página 57.
El Modicon M221 Logic Controller permite los siguientes tipos de gestión de
archivos mediante una tarjeta SD:
• Gestión de clonaciones (consulte Modicon M221, Logic Controller - Guía de
programación): realice una copia de seguridad de la aplicación, el firmware y
la configuración posterior (si existe) del Logic Controller
• Gestión de firmware (consulte Modicon M221, Logic Controller - Guía de
programación): descargue las actualizaciones del firmware directamente en
el Logic Controller, y descargue el firmware en una TMH2GDB Visualización
gráfica remota
• Gestión de aplicaciones (consulte Modicon M221, Logic Controller - Guía de
programación): realice una copia de seguridad y restaure la aplicación del
Logic Controller, o cópielo en otro Logic Controller de la misma referencia
• Gestión de la configuración posterior (consulte Modicon M221, Logic
Controller - Guía de programación): añada, cambie o elimine el archivo de la
configuración posterior del Logic Controller
• Gestión de registro de errores (consulte Modicon M221, Logic Controller -
Guía de programación): realice una copia de seguridad o elimine el archivo
del registro de errores del Logic Controller
• Gestión de la memoria: realice una copia de seguridad de las palabras y los
bits de memoria de un controlador y restáurelos
EIO0000003316.02 23

Descripción general de M221
Funciones de comunicación incrustadas
Los siguientes puertos de comunicación están disponibles en el panel frontal del
controlador, en función de la referencia del controlador:
•Ethernet, página 266
•USB mini-B, página 265
•Tarjeta SD, página 57
•Línea serie 1, página 268
•Línea serie 2, página 271
Visualización gráfica remota
Para obtener más información, consulte Modicon TMH2GDB Visualización gráfica
remota - Guía del usuario.
TM221M Logic Controller
Referencia Entrada digital Salida digital Entrada
analógica Puertos de
comunicaciones Tipo de terminal
TM221M16R,
página 182 4 entradas normales(1)
4 entradas rápidas
(HSC)(2)
8 salidas de relé Sí 2 puertos de línea serie
1 puerto de
programación USB
Bloques de
terminales de
tornillos extraíbles
TM221M16RG,
página 182
4 entradas normales(1)
4 entradas rápidas
(HSC)(2)
8 salidas de relé Sí 2 puertos de línea serie
1 puerto de
programación USB
Bloques de
terminales de resorte
extraíbles
TM221ME16R,
página 195 4 entradas normales(1)
4 entradas rápidas
(HSC)(2)
8 salidas de relé Sí 1 puerto de línea serie
1 puerto de
programación USB
1 puerto Ethernet
Bloques de
terminales de
tornillos extraíbles
TM221ME16RG,
página 195
4 entradas normales(1)
4 entradas rápidas
(HSC)(2)
8 salidas de relé Sí 1 puerto de línea serie
1 puerto de
programación USB
1 puerto Ethernet
Bloques de
terminales de resorte
extraíbles
TM221M16T,
página 208 4 entradas normales(1)
4 entradas rápidas
(HSC)(2)
6 salidas de transistor
normales
2 salidas de transistor
rápidas (PLS/PWM/
PTO/FREQGEN)(3)
Sí 2 puertos de línea serie
1 puerto de
programación USB
Bloques de
terminales de
tornillos extraíbles
TM221M16TG,
página 208
4 entradas normales(1)
4 entradas rápidas
(HSC)(2)
6 salidas de transistor
normales
2 salidas de transistor
rápidas (PLS/PWM/
PTO/FREQGEN)(3)
Sí 2 puertos de línea serie
1 puerto de
programación USB
Bloques de
terminales de resorte
extraíbles
TM221ME16T,
página 222 4 entradas normales(1)
4 entradas rápidas
(HSC)(2)
6 salidas de transistor
normales
2 salidas de transistor
rápidas (PLS/PWM/
PTO/FREQGEN)(3)
Sí 1 puerto de línea serie
1 puerto de
programación USB
1 puerto Ethernet
Bloques de
terminales de
tornillos extraíbles
TM221ME16TG,
página 222
4 entradas normales(1)
4 entradas rápidas
(HSC)(2)
6 salidas de transistor
normales
2 salidas de transistor
rápidas (PLS/PWM/
PTO/FREQGEN)(3)
Sí 1 puerto de línea serie
Puerto de
programación USB
1 puerto Ethernet
Bloques de
terminales de resorte
extraíbles
24 EIO0000003316.02

Descripción general de M221
Referencia Entrada digital Salida digital Entrada
analógica Puertos de
comunicaciones Tipo de terminal
TM221M32TK,
página 236 12 entradas normales
(1)
4 entradas rápidas
(HSC)(2)
14 salidas de
transistor normales
2 salidas rápidas
(PLS/PWM/PTO/
FREQGEN)(3)
Sí 2 puertos de línea serie
1 puerto de
programación USB
Conectores HE10
(MIL 20)
TM221ME32TK,
página 236 12 entradas normales
(1)
4 entradas rápidas
(HSC)(2)
14 salidas normales
2 salidas rápidas
(PLS/PWM/PTO/
FREQGEN)(3)
Sí 1 puerto de línea serie
1 puerto de
programación USB
1 puerto Ethernet
Conectores HE10
(MIL 20)
NOTA: El TM221M Logic Controller utiliza una fuente de alimentación de 24 V CC, página 83.
(1) Las entradas I2, I3, I4 e I5 tienen una frecuencia máxima de 5 kHz.
Las otras entradas normales tienen una frecuencia máxima de 100 Hz.
(2) Las entradas rápidas se pueden utilizar como entradas normales o como entradas rápidas para funciones de conteo o de evento.
(3) Las salidas de transistor rápidas se pueden utilizar como salidas de transistor normales, para funciones PLS, PWM, PTO o FREQGEN,
o salidas reflejas para HSC.
Contenido que se entrega
En la siguiente figura se muestra el contenido de la entrega de TM221M Logic
Controller:
1
2
3 4
1Hoja de instrucciones de TM221M Logic Controller
2TM221M Logic Controller
3Soporte de batería con pila de botón de litio, tipo Panasonic BR2032 o Murata
CR2032X.
4Cable analógico
EIO0000003316.02 25

Descripción general de M221
Configuración máxima de hardware
Introducción
El sistema de control M221 Logic Controller ofrece una solución completa para
lograr configuraciones optimizadas y una arquitectura ampliable.
Principio de configuración local y remota
En la siguiente figura se definen las configuraciones local y remota:
(1) Configuración local
(2) Configuración remota
Arquitectura de configuración local de M221 Logic Controller
Se consigue una configuración local optimizada y flexibilidad mediante la
asociación de:
• M221 Logic Controller
• Módulos de ampliación de TM3
• Módulos de ampliación de TM2
Los requisitos de la aplicación determinan la arquitectura de la configuración de
M221 Logic Controller.
En la siguiente figura se representan los componentes de una configuración local:
(B) Módulos de ampliación (consulte el número máximo de módulos)
26 EIO0000003316.02

Descripción general de M221
NOTA: No puede montar un módulo TM2 antes de cualquier módulo TM3 tal y
como se indica en la siguiente figura:
Arquitectura de configuración remota de M221 Logic Controller
Se consigue una configuración remota optimizada y flexibilidad mediante la
asociación de:
• M221 Logic Controller
• Módulos de ampliación de TM3
• Módulos transmisores y receptores de TM3
Los requisitos de la aplicación determinan la arquitectura de la configuración de
M221 Logic Controller.
NOTA: No puede utilizar módulos TM2 en configuraciones que incluyan
módulos TM3 transmisores y receptores.
En la siguiente figura se representan los componentes de una configuración
remota:
(1) Logic Controller y módulos
(C) Módulos de ampliación (máximo 7)
Cantidad máxima de módulos
En la tabla siguiente se muestra la configuración máxima admitida:
EIO0000003316.02 27

Descripción general de M221
Referencias Máxima Tipo de configuración
TM221C16•
TM221CE16•
TM221C24•
TM221CE24•
TM221C40•
TM221CE40•
TM221M16R•
TM221ME16R•
TM221M16T•
TM221ME16T•
TM221M32TK
TM221ME32TK
7 módulos de ampliación
TM3 / TM2 Local
TM3XREC1 7 módulos de ampliación
TM3
Remota
NOTA: Los módulos TM3 transmisores y receptores no se incluyen en el recuento del número
máximo de módulos de ampliación.
NOTA: La configuración con los módulos de ampliación TM3 y TM2 se valida
mediante el software de EcoStruxure Machine Expert - Basic en la ventana
Configuración teniendo en cuenta el consumo total de potencia de los
módulos instalados.
NOTA: En algunos entornos, la configuración máxima ocupada por módulos
de alto consumo, junto con la distancia máxima permitida entre los módulos
TM3 transmisor y receptor, puede presentar problemas de comunicación del
bus aunque el software EcoStruxure Machine Expert - Basic permita la
configuración. En este caso, necesitará analizar el consumo de los módulos
elegidos para su configuración, así como las distancias de cable mínimas que
requiere su aplicación, y probablemente deberá optimizar sus elecciones.
Corriente suministrada al bus de E/S
En la tabla siguiente se muestra la corriente máxima suministrada por los
controladores al bus de I/O:
Referencia Bus de E/S de 5 V CC Bus de E/S de 24 V CC
TM221C16R
TM221CE16R
325 mA 120 mA
TM221C16T
TM221CE16T
325 mA 148 mA
TM221C16U
TM221CE16U
325 mA 148 mA
TM221C24R
TM221CE24R
520 mA 160 mA
TM221C24T
TM221CE24T
520 mA 200 mA
TM221C24U
TM221CE24U
520 mA 200 mA
TM221C40R
TM221CE40R
520 mA 240 mA
TM221C40T 520 mA 304 mA
28 EIO0000003316.02

Descripción general de M221
Referencia Bus de E/S de 5 V CC Bus de E/S de 24 V CC
TM221CE40T
TM221C40U
TM221CE40U
520 mA 304 mA
TM221M16R•
TM221ME16R•
520 mA 460 mA
TM221M16T•
TM221ME16T•
520 mA 492 mA
TM221M32TK
TM221ME32TK
520 mA 484 mA
NOTA: Los módulos de ampliación consumen corriente entre 5 V CC y 24 V
CC que se suministra al bus de I/O. Por consiguiente, la corriente
suministrada por el logic controller al bus de I/O define el número máximo de
módulos de ampliación que se pueden conectar al bus de I/O (se valida
mediante el software de EcoStruxure Machine Expert - Basic en la ventana
Configuración).
Cartuchos TMC2
Descripción general
Puede ampliar el número de E/S o las opciones de comunicación del Modicon
TM221C Logic Controller añadiendo cartuchos de TMC2.
Para obtener más información, consulte TMC2 Cartuchos - Guía de hardware.
Cartuchos TMC2 estándar
En la tabla siguiente se muestran los cartuchos TMC2 de uso general con el tipo
de canal, el rango de corriente/tensión y el tipo de terminal correspondientes:
Referencia Canales Tipo de canal Tensión
Corriente
Tipo de terminal
TMC2AI2 2 Entradas analógicas
(tensión o corriente) De 0 a 10 V CC
De 0 a 20 mA o de 4 a 20 mA
3,81 mm (0,15 pulg.) de
paso, bloque de terminales
de tornillo no extraíble
TMC2TI2 2 Entradas analógicas
de temperatura Termoelemento tipo K, J, R, S,
B, E, T, N, C
3 conductores RTD tipo Pt100,
Pt1000, Ni100, Ni1000
3,81 mm (0,15 pulg.) de
paso, bloque de terminales
de tornillo no extraíble
TMC2AQ2V 2 Salidas analógicas de
tensión De 0 a 10 V CC 3,81 mm (0,15 pulg.) de
paso, bloque de terminales
de tornillo no extraíble
TMC2AQ2C 2 Salidas analógicas de
corriente De 4 a 20 mA 3,81 mm (0,15 pulg.) de
paso, bloque de terminales
de tornillo no extraíble
TMC2SL1 (1) 1 Línea serie RS232 o RS485 3,81 mm (0,15 pulg.) de
paso, bloque de terminales
de tornillo no extraíble
(1) Sólo se puede añadir un cartucho de línea serie (TMC2SL1, TMC2CONV01) a un Logic Controller.
EIO0000003316.02 29

Descripción general de M221
Cartuchos TMC2 de aplicación
En la tabla siguiente se muestran los cartuchos TMC2 de aplicación con el tipo de
canal, el rango de corriente/tensión y el tipo de terminal correspondientes:
Referencia Canales Tipo de canal Tensión
Corriente
Tipo de terminal
TMC2HOIS01 2 Entradas analógicas
(tensión o corriente) De 0 a 10 V CC
De 0 a 20 mA o de 4 a 20 mA
3,81 mm (0,15 pulg.) de
paso, bloque de terminales
de tornillo no extraíble
TMC2PACK01 2 Entradas analógicas
(tensión o corriente) De 0 a 10 V CC
De 0 a 20 mA o de 4 a 20 mA
3,81 mm (0,15 pulg.) de
paso, bloque de terminales
de tornillo no extraíble
TMC2CONV01 (1) 1 Línea serie RS232 o RS485 3,81 mm (0,15 pulg.) de
paso, bloque de terminales
de tornillo no extraíble
(1) Sólo se puede añadir un cartucho de línea serie (TMC2SL1, TMC2CONV01) a un Logic Controller.
Módulos de extensión TM3
Introducción
El rango de módulos de extensión de TM3 incluye:
• Módulos digitales, clasificados de la siguiente manera:
◦Módulos de entrada, página 30
◦Módulos de salida, página 31
◦Módulos mixtos de entrada/salida, página 32
• Módulos analógicos, que se clasifican del siguiendo modo:
◦Módulos de entrada, página 33
◦Módulos de salida, página 35
◦Módulos mixtos de entrada/salida, página 35
•Módulos expertos, página 36
•Módulos de seguridad, página 36
•Módulos transmisores y receptores, página 38
Consulte los siguientes documentos para obtener más información:
• Módulos de E/S digitales TM3 Guía de hardware
• Módulos TM3 de E/S analógicas - Guía de hardware
• Módulos de E/S expertas TM3 Guía de hardware
• Módulos de seguridad TM3 Guía de hardware
• Módulos transmisores y receptores TM3 Guía de hardware
Módulos de entradas digitales TM3
En la tabla siguiente se muestran los módulos de ampliación de entradas digitales
de TM3, con el tipo de canal, la tensión/corriente nominal y el tipo de terminal
correspondientes:
30 EIO0000003316.02

Descripción general de M221
Referencia Channels Tipo de canal Tensión
Corriente
Tipo de terminal / paso
TM3DI8A 8 Entradas normales 120 V CA
7,5 mA
Bloque de terminales de
tornillo extraíble / 5,08 mm
TM3DI8 8 Entradas normales 24 V CC
7 mA
Bloque de terminales de
tornillo extraíble / 5,08 mm
TM3DI8G 8 Entradas normales 24 V CC
7 mA
Bloque de terminales de
resorte extraíble / 5,08 mm
TM3DI16 16 Entradas normales 24 V CC
7 mA
Bloques de terminales de
tornillo extraíble / 3,81 mm
TM3DI16G 16 Entradas normales 24 V CC
7 mA
Bloques de terminales de
resorte extraíble / 3,81 mm
TM3DI16K 16 Entradas normales 24 V CC
5 mA
Conector HE10 (MIL 20)
TM3DI32K 32 Entradas normales 24 V CC
5 mA
Conector HE10 (MIL 20)
Módulos de salidas digitales TM3
En la siguiente tabla se muestran los módulos de ampliación de salidas digitales
de TM3, con el tipo de canal, la tensión/corriente nominal y el tipo de terminal
correspondientes:
Referencia Channels Tipo de canal Tensión
Corriente
Tipo de terminal / paso
TM3DQ8R 8 Salidas de relé 24 V CC / 240 V CA
7 A máximo por línea
común / 2 A máximo
por salida
Bloque de terminales de
tornillo extraíble / 5,08 mm
TM3DQ8RG 8 Salidas de relé 24 V CC / 240 V CA
7 A máximo por línea
común / 2 A máximo
por salida
Bloque de terminales de
resorte extraíble / 5,08 mm
TM3DQ8T 8 Salidas de transistor
normales (común
positivo)
24 V CC
4 A máximo por línea
común / 0,5 A máximo
por salida
Bloque de terminales de
tornillo extraíble / 5,08 mm
TM3DQ8TG 8 Salidas de transistor
normales (común
positivo)
24 V CC
4 A máximo por línea
común / 0,5 A máximo
por salida
Bloque de terminales de
resorte extraíble / 5,08 mm
TM3DQ8U 8 Salidas de transistor
normales (común
negativo)
24 V CC
4 A máximo por línea
común / 0,5 A máximo
por salida
Bloque de terminales de
tornillo extraíble / 5,08 mm
TM3DQ8UG 8 Salidas de transistor
normales (común
negativo)
24 V CC
4 A máximo por línea
común / 0,5 A máximo
por salida
Bloque de terminales de
resorte extraíble / 5,08 mm
EIO0000003316.02 31

Descripción general de M221
Referencia Channels Tipo de canal Tensión
Corriente
Tipo de terminal / paso
TM3DQ16R 16 Salidas de relé 24 V CC / 240 V CA
8 A máximo por línea
común / 2 A máximo
por salida
Bloques de terminales de
tornillo extraíble / 3,81 mm
TM3DQ16RG 16 Salidas de relé 24 V CC / 240 V CA
8 A máximo por línea
común / 2 A máximo
por salida
Bloques de terminales de
resorte extraíble / 3,81 mm
TM3DQ16T 16 Salidas
transistorizadas
normales (común
positivo)
24 V CC
8 A máximo por línea
común / 0,5 A máximo
por salida
Bloques de terminales de
tornillo extraíble / 3,81 mm
TM3DQ16TG 16 Salidas
transistorizadas
normales (común
positivo)
24 V CC
8 A máximo por línea
común / 0,5 A máximo
por salida
Bloques de terminales de
resorte extraíble / 3,81 mm
TM3DQ16U 16 Salidas
transistorizadas
normales (común
negativo)
24 V CC
8 A máximo por línea
común / 0,5 A máximo
por salida
Bloques de terminales de
tornillo extraíble / 3,81 mm
TM3DQ16UG 16 Salidas
transistorizadas
normales (común
negativo)
24 V CC
8 A máximo por línea
común / 0,5 A máximo
por salida
Bloques de terminales de
resorte extraíble / 3,81 mm
TM3DQ16TK 16 Salidas
transistorizadas
normales (común
positivo)
24 V CC
2 A máximo por línea
común / 0,1 A máximo
por salida
Conector HE10 (MIL 20)
TM3DQ16UK 16 Salidas
transistorizadas
normales (común
negativo)
24 V CC
2 A máximo por línea
común / 0,1 A máximo
por salida
Conector HE10 (MIL 20)
TM3DQ32TK 32 Salidas de transistor
normales (común
positivo)
24 V CC
2 A máximo por línea
común / 0,1 A máximo
por salida
Conectores HE10 (MIL 20)
TM3DQ32UK 32 Salidas de transistor
normales (común
negativo)
24 V CC
2 A máximo por línea
común / 0,1 A máximo
por salida
Conectores HE10 (MIL 20)
Módulos de entradas/salidas mixtas digitales TM3
En la siguiente tabla se muestran los módulos de E/S mixtas TM3, con el tipo de
canal, la tensión/corriente nominal y el tipo de terminal correspondientes:
32 EIO0000003316.02

Descripción general de M221
Referencia Canales Tipo de canal Tensión
Corriente
Tipo de terminal/paso
TM3DM8R 4 Entradas normales 24 V CC
7 mA
Bloque de terminales de
tornillo extraíble / 5,08 mm
4 Salidas de relé 24 V CC/240 V CA
7 A máximo por línea
común / 2 A máximo
por salida
TM3DM8RG 4 Entradas normales 24 V CC
7 mA
Bloque de terminales de
resorte extraíble / 5,08 mm
4 Salidas de relé 24 V CC/240 V CA
7 A máximo por línea
común / 2 A máximo
por salida
TM3DM24R 16 Entradas normales 24 V CC
7 mA
Bloques de terminales de
tornillo extraíble / 3,81 mm
8 Salidas de relé 24 V CC/240 V CA
7 A máximo por línea
común / 2 A máximo
por salida
TM3DM24RG 16 Entradas normales 24 V CC
7 mA
Bloques de terminales de
resorte extraíble / 3,81 mm
8 Salidas de relé 24 V CC/240 V CA
7 A máximo por línea
común / 2 A máximo
por salida
Módulos de entradas analógicas TM3
En la tabla siguiente se muestran los módulos de ampliación de entradas
analógicas de TM3, con la resolución, el tipo de canal, la tensión/corriente
nominal y el tipo de terminal correspondientes:
Referencia Resolución Channels Tipo de
canal Modalidad Tipo de terminal /
paso
TM3AI2H 16 bits o 15 bits
+ signo 2 entradas De 0 a 10 V CC
De -10 a +10 V CC
De 0 a 20 mA
De 4 a 20 mA
Bloque de terminales
de tornillo extraíble /
5,08 mm
TM3AI2HG 16 bits o 15 bits
+ signo 2 entradas De 0 a 10 V CC
De -10 a +10 V CC
De 0 a 20 mA
De 4 a 20 mA
Bloque de terminales
de resorte extraíble /
5,08 mm
TM3AI4 12 bits u 11 bits
+ signo 4 entradas De 0 a 10 V CC
De -10 a +10 V CC
De 0 a 20 mA
De 4 a 20 mA
Bloque de terminales
de tornillo extraíble /
3,81 mm
EIO0000003316.02 33

Descripción general de M221
Referencia Resolución Channels Tipo de
canal Modalidad Tipo de terminal /
paso
TM3AI4G 12 bits u 11 bits
+ signo 4 entradas De 0 a 10 V CC
De -10 a +10 V CC
De 0 a 20 mA
De 4 a 20 mA
Bloques de
terminales de resorte
extraíble / 3,81 mm
TM3AI8 12 bits u 11 bits
+ signo 8 entradas De 0 a 10 V CC
De -10 a +10 V CC
De 0 a 20 mA
De 4 a 20 mA
De 0 a 20 mA ampliado
De 4 a 20 mA ampliado
Bloque de terminales
de tornillo extraíble /
3,81 mm
TM3AI8G 12 bits u 11 bits
+ signo 8 entradas De 0 a 10 V CC
De -10 a +10 V CC
De 0 a 20 mA
De 4 a 20 mA
De 0 a 20 mA ampliado
De 4 a 20 mA ampliado
Bloques de
terminales de resorte
extraíble / 3,81 mm
TM3TI4 16 bits o 15 bits
+ signo 4 entradas De 0 a 10 V CC
De -10 a +10 V CC
De 0 a 20 mA
De 4 a 20 mA
Termoelemento
PT100/1000
NI100/1000
Bloque de terminales
de tornillo extraíble /
3,81 mm
TM3TI4G 16 bits o 15 bits
+ signo 4 entradas De 0 a 10 V CC
De -10 a +10 V CC
De 0 a 20 mA
De 4 a 20 mA
Termoelemento
PT100/1000
NI100/1000
Bloques de
terminales de resorte
extraíble / 3,81 mm
TM3TI4D 16 bits o 15 bits
+ signo 4 entradas Termoelemento Bloque de terminales
de tornillo extraíble /
3,81 mm
TM3TI4DG 16 bits o 15 bits
+ signo 4 entradas Termoelemento Bloques de
terminales de resorte
extraíble / 3,81 mm
TM3TI8T 16 bits o 15 bits
+ signo 8 entradas Termoelemento
NTC/PTC
Ohmímetro
Bloque de terminales
de tornillo extraíble /
3,81 mm
TM3TI8TG 16 bits o 15 bits
+ signo 8 entradas Termoelemento
NTC/PTC
Ohmímetro
Bloques de
terminales de resorte
extraíble / 3,81 mm
34 EIO0000003316.02

Descripción general de M221
Módulos de salidas analógicas TM3
En la tabla siguiente se muestran los módulos de salidas analógicas de TM3, con
la resolución, el tipo de canal, la tensión/corriente nominal y el tipo de terminal
correspondientes:
Referencia Resolución Channels Tipo de
canal Modalidad Tipo de terminal / paso
TM3AQ2 12 bits u 11 bits
+ signo 2 salidas De 0 a 10 V CC
De -10 a +10 V CC
De 0 a 20 mA
De 4 a 20 mA
Bloque de terminales de
tornillo extraíble / 5,08
mm
TM3AQ2G 12 bits u 11 bits
+ signo 2 salidas De 0 a 10 V CC
De -10 a +10 V CC
De 0 a 20 mA
De 4 a 20 mA
Bloque de terminales de
resorte extraíble / 5,08
mm
TM3AQ4 12 bits u 11 bits
+ signo
4 salidas De 0 a 10 V CC
De -10 a +10 V CC
De 0 a 20 mA
De 4 a 20 mA
Bloque de terminales de
tornillo extraíble / 5,08
mm
TM3AQ4G 12 bits u 11 bits
+ signo 4 salidas De 0 a 10 V CC
De -10 a +10 V CC
De 0 a 20 mA
De 4 a 20 mA
Bloque de terminales de
resorte extraíble / 5,08
mm
Módulos de entradas/salidas mixtas analógicas TM3
En la tabla siguiente se muestran los módulos de E/S mixtas analógicas de TM3,
con la resolución, el tipo de canal, la tensión/corriente nominal y el tipo de terminal
correspondientes:
Referencia Resolución Channels Tipo de
canal Modalidad Tipo de terminal / paso
TM3AM6 12 bits u 11 bits
+ signo 4 entradas De 0 a 10 V CC
–10...+10 V CC
De 0 a 20 mA
De 4 a 20 mA
Bloque de terminales de
tornillo extraíble / 3,81
mm
2 salidas
TM3AM6G 12 bits u 11 bits
+ signo 4 entradas De 0 a 10 V CC
–10...+10 V CC
De 0 a 20 mA
De 4 a 20 mA
Bloque de terminales de
resorte extraíble / 3,81
mm
2 salidas
EIO0000003316.02 35

Descripción general de M221
Referencia Resolución Channels Tipo de
canal Modalidad Tipo de terminal / paso
TM3TM3 16 bits o 15 bits
+ signo 2 entradas De 0 a 10 V CC
–10...+10 V CC
De 0 a 20 mA
De 4 a 20 mA
Termoelemento
PT100/1000
NI100/1000
Bloque de terminales de
tornillo extraíble / 5,08
mm
12 bits u 11 bits
+ signo 1 salidas De 0 a 10 V CC
–10...+10 V CC
De 0 a 20 mA
De 4 a 20 mA
TM3TM3G 16 bits o 15 bits
+ signo 2 entradas De 0 a 10 V CC
–10...+10 V CC
De 0 a 20 mA
De 4 a 20 mA
Termoelemento
PT100/1000
NI100/1000
Bloque de terminales de
resorte extraíble / 5,08
mm
12 bits u 11 bits
+ signo 1 salidas De 0 a 10 V CC
–10...+10 V CC
De 0 a 20 mA
De 4 a 20 mA
Módulo experto de TM3
En la siguiente tabla se muestra el módulo de extensión experto TM3 con los tipos
de terminales correspondientes:
Referencia Descripción Tipo de terminal/paso
TM3XTYS4 Módulo TeSys 4 conectores frontales RJ-45
1 conector de fuente de alimentación
extraíble/5,08 mm
Módulos de seguridad TM3
En esta tabla se muestran los Seguridad de TM3 módulos (consulte Modicon TM3
- Módulos de seguridad - Guía de hardware) con el tipo correspondiente de canal,
la tensión/corriente nominal y el tipo de terminal:
36 EIO0000003316.02

Descripción general de M221
Referencia Función
Categoría
Canales Tipo de canal Tensión
Corriente
Tipo de terminal
TM3SAC5R 1 función,
hasta la
categoría 3
1 o 2 (1) Entrada de
seguridad 24 V CC
100 mA máximo
3,81 mm (0,15 pulgadas) y
5,08 mm (0,20 pulgadas),
bloque de terminales de
tornillo extraíble
Inicio (2) Entrada
3 en paralelo Salidas de relé
Normalmente
abierto
24 V CC/230 V CA
6 A máximo por salida
TM3SAC5RG 1 función,
hasta la
categoría 3
1 o 2 (1) Entrada de
seguridad 24 V CC
100 mA máximo
3,81 mm (0,15 pulgadas) y
5,08 mm (0,20 pulgadas),
bloque de terminales de
resorte extraíble
Inicio (2) Entrada
3 en paralelo Salidas de relé
Normalmente
abierto
24 V CC/230 V CA
6 A máximo por salida
TM3SAF5R 1 función,
hasta la
categoría 4
2(1) Entradas de
seguridad 24 V CC
100 mA máximo
3,81 mm (0,15 pulgadas) y
5,08 mm (0,20 pulgadas),
bloque de terminales de
tornillo extraíble
Inicio Entrada
3 en paralelo Salidas de relé
Normalmente
abierto
24 V CC/230 V CA
6 A máximo por salida
TM3SAF5RG 1 función,
hasta la
categoría 4
2(1) Entradas de
seguridad 24 V CC
100 mA máximo
3,81 mm (0,15 pulgadas) y
5,08 mm (0,20 pulgadas),
bloque de terminales de
resorte extraíble
Inicio Entrada
3 en paralelo Salidas de relé
Normalmente
abierto
24 V CC/230 V CA
6 A máximo por salida
TM3SAFL5R 2 funciones,
hasta la
categoría 3
2(1) Entradas de
seguridad 24 V CC
100 mA máximo
3,81 mm (0,15 pulgadas) y
5,08 mm (0,20 pulgadas),
bloque de terminales de
tornillo extraíble
Inicio Entrada
3 en paralelo Salidas de relé
Normalmente
abierto
24 V CC/230 V CA
6 A máximo por salida
TM3SAFL5RG 2 funciones,
hasta la
categoría 3
2(1) Entradas de
seguridad 24 V CC
100 mA máximo
3,81 mm (0,15 pulgadas) y
5,08 mm (0,20 pulgadas),
bloque de terminales de
resorte extraíble
Inicio Entrada
3 en paralelo Salidas de relé
Normalmente
abierto
24 V CC/230 V CA
6 A máximo por salida
TM3SAK6R 3 funciones,
hasta la
categoría 4
1 o 2 (1) Entradas de
seguridad 24 V CC
100 mA máximo
3,81 mm (0,15 pulgadas) y
5,08 mm (0,20 pulgadas),
bloque de terminales de
tornillo extraíble
Inicio Entrada
3 en paralelo Salidas de relé
Normalmente
abierto
24 V CC/230 V CA
6 A máximo por salida
TM3SAK6RG 3 funciones,
hasta la
categoría 4
1 o 2 (1) Entradas de
seguridad 24 V CC
100 mA máximo
3,81 mm (0,15 pulgadas) y
5,08 mm (0,20 pulgadas),
bloque de terminales de
resorte extraíble
Inicio Entrada
3 en paralelo Salidas de relé
Normalmente
abierto
24 V CC/230 V CA
6 A máximo por salida
(1) En función del cableado externo
(2) Inicio no supervisado
EIO0000003316.02 37

Descripción general de M221
Módulos transmisores y receptores TM3
En la tabla siguiente se muestran los módulos de ampliación transmisores y
receptores de TM3:
Referencia Descripción Tipo de terminal / paso
TM3XTRA1 Módulo transmisor de datos para E/S remota 1 conector frontal RJ-45
1 tornillo de conexión a tierra
funcional
TM3XREC1 Módulo receptor de datos para E/S remota 1 conector frontal RJ-45
Conector de fuente de
alimentación / 5,08 mm
Módulos de extensión de TM2
Descripción general
Puede aumentar el número de E/S de su M221 Logic Controller agregando
módulos de extensión de E/S de TM2.
Se admiten los siguientes tipos de módulos electrónicos:
• Módulos de extensión de E/S digitales de TM2
• Módulos de extensión de E/S analógicas de TM2
Consulte los siguientes documentos para obtener más información:
• TM2 Módulos de extensión de E/S digitales - Guía de hardware
• TM2 Módulos de extensión de E/S analógicas - Guía de hardware
NOTA: Los módulos TM2 solamente se pueden usar en la configuración local,
y únicamente si no hay módulos TM3 transmisores y receptores en la
configuración.
NOTA: No está permitido montar un módulo TM2 después de cualquier
módulo TM3. Los módulos TM2 deben montarse y configurarse al final de la
configuración local.
Módulos de extensión de entradas digitales de TM2
En la tabla siguiente se muestran los TM2 módulos de extensión de entradas
digitales compatibles con el tipo de canal, la tensión/corriente nominal y el tipo de
terminal correspondientes:
Referencia Canales Tipo de canal Tensión
Corriente
Tipo de terminal
TM2DAI8DT 8 Entradas normales 120 VCA
7,5 mA
Bloque de terminales
de tornillo extraíble
TM2DDI8DT 8 Entradas normales 24 V CC
7 mA
Bloque de terminales
de tornillo extraíble
TM2DDI16DT 16 Entradas normales 24 V CC
7 mA
Bloque de terminales
de tornillo extraíble
TM2DDI16DK 16 Entradas normales 24 V CC
5 mA
Conector HE10 (MIL
20)
TM2DDI32DK 32 Entradas normales 24 V CC
5 mA
Conector HE10 (MIL
20)
38 EIO0000003316.02

Descripción general de M221
Módulos de extensión de salidas digitales de TM2
En la tabla siguiente se muestran los TM2 módulos de extensión de salidas
digitales compatibles con el tipo de canal, la tensión/corriente nominal y el tipo de
terminal correspondientes:
Referencia Canales Tipo de canal Tensión
Corriente
Tipo de terminal
TM2DRA8RT 8 Salidas de relé 30 V CC / 240 V CA
2 A máx.
Bloque de terminales
de tornillo extraíble
TM2DRA16RT 16 Salidas de relé 30 V CC / 240 V CA
2 A máx.
Bloque de terminales
de tornillo extraíble
TM2DDO8UT 8 Salidas de transistor
normales (común
negativo)
24 V CC
0,3 A máx. por salida
Bloque de terminales
de tornillo extraíble
TM2DDO8TT 8 Salidas de transistor
normales (común
positivo)
24 V CC
0,5 A máx. por salida
Bloque de terminales
de tornillo extraíble
TM2DDO16UK 16 Salidas de transistor
normales (común
negativo)
24 V CC
0,1 A máx. por salida
Conector HE10 (MIL
20)
TM2DDO16TK 16 Salidas de transistor
normales (común
positivo)
24 V CC
0,4 A máx. por salida
Conector HE10 (MIL
20)
TM2DDO32UK 32 Salidas de transistor
normales (común
negativo)
24 V CC
0,1 A máx. por salida
Conector HE10 (MIL
20)
TM2DDO32TK 32 Salidas de transistor
normales (común
positivo)
24 V CC
0,4 A máx. por salida
Conector HE10 (MIL
20)
Módulos de extensión mixtos de entradas/salidas digitales de
TM2
En la tabla siguiente se muestran los TM2 módulos de extensión de E/S mixtas
digitales compatibles con el tipo de canal, la tensión/corriente nominal y el tipo de
terminal correspondientes:
Referencia Canales Tipo de canal Tensión
Corriente
Tipo de terminal
TM2DMM8DRT 4 Entradas normales 24 V CC
7 mA
Bloque de terminales
de tornillo extraíble
4 Salidas de relé 24 V CC/240 V CA
7 A máximo por línea común /
2 A máximo por salida
TM2DMM24DRF 16 Entradas normales 24 V CC
7 mA
Bloque de terminales
de resorte no
extraíble
8 Salidas de relé 24 V CC/240 V CA
7 A máximo por línea común /
2 A máximo por salida
EIO0000003316.02 39

Descripción general de M221
Módulos de extensión de entradas analógicas de TM2
En la tabla siguiente se muestran los TM2 módulos de extensión de entradas
analógicas compatibles con el tipo de canal, la tensión/corriente nominal y el tipo
de terminal correspondientes:
Referencia Canales Tipo de canal Tensión
Corriente
Tipo de terminal
TM2AMI2HT 2 Entradas de alto nivel De 0 a 10 V CC
De 4 a 20 mA
Bloque de terminales de
tornillo extraíble
TM2AMI2LT 2 Entradas de bajo nivel Termoelemento tipo J,
K, T Bloque de terminales de
tornillo extraíble
TM2AMI4LT 4 Entradas analógicas De 0 a 10 V CC
De 0 a 20 mA
PT100/1000
Ni100/1000
Bloque de terminales de
tornillo extraíble
TM2AMI8HT 8 Entradas analógicas De 0 a 20 mA
De 0 a 10 V CC
Bloque de terminales de
tornillo extraíble
TM2ARI8HT 8 Entradas analógicas NTC / PTC Bloque de terminales de
tornillo extraíble
TM2ARI8LRJ 8 Entradas analógicas PT100/1000 Conector RJ 11
TM2ARI8LT 8 Entradas analógicas PT100/1000 Bloque de terminales de
tornillo extraíble
Módulos de extensión de entradas analógicas de TM2
En la tabla siguiente se muestran los TM2 módulos de extensión de salidas
analógicas compatibles con el tipo de canal, la tensión/corriente nominal y el tipo
de terminal correspondientes:
Referencia Canales Tipo de canal Tensión
Corriente
Tipo de terminal
TM2AMO1HT 1 Salidas analógicas De 0 a 10 V CC
De 4 a 20 mA
Bloque de terminales de
tornillo extraíble
TM2AVO2HT 2 Salidas analógicas +/- 10 V CC Bloque de terminales de
tornillo extraíble
Módulos de extensión de entradas/salidas mixtas analógicas de
TM2
En la tabla siguiente se muestran los TM2 módulos de extensión de E/S mixtas
analógicas compatibles con el tipo de canal, la tensión/corriente nominal y el tipo
de terminal correspondientes:
40 EIO0000003316.02

Descripción general de M221
Referencia Canales Tipo de canal Tensión
Corriente
Tipo de terminal
TM2AMM3HT 2 Entradas analógicas De 0 a 10 V CC, de 4 a
20 mA
Bloque de terminales de
tornillo extraíble
1 Salidas analógicas De 0 a 10 V CC, de 4 a
20 mA
TM2AMM6HT 4 Entradas analógicas De 0 a 10 V CC, de 4 a
20 mA
Bloque de terminales de
tornillo extraíble
2 Salidas analógicas De 0 a 10 V CC, de 4 a
20 mA
TM2ALM3LT 2 Entradas de bajo nivel Termoelemento J, K, T,
PT100 Bloque de terminales de
tornillo extraíble
1 Salidas analógicas De 0 a 10 V CC, de 4 a
20 mA
Accesorios
Descripción general
En esta sección se describen los accesorios, los cables y Telefast.
Accesorios
Referencia Descripción Uso Cantidad
TMASD1 Tarjeta SD, página 57 Utilícela para actualizar el firmware del controlador,
almacenar datos (registro de datos), inicializar un
controlador con una aplicación nueva o clonar un
controlador.
1
TMAT2MSET Conjunto de 8 bloques de
terminales de tornillo extraíbles:
• 4 bloques de terminales de
tornillo extraíbles (paso de
3,81 mm) con 11 terminales
para entradas/salidas
• 4 bloques de terminales de
tornillo extraíbles (paso de
3,81 mm) con 10 terminales
para entradas/salidas
Conecta las E/S incrustadas de M221 Logic Controller. 1
TMAT2MSETG Conjunto de 8 bloques de
terminales de resorte extraíbles:
• 4 bloques de terminales de
resorte extraíbles (paso de
3,81 mm) con 11 terminales
para entradas/salidas
• 4 bloques de terminales de
resorte extraíbles (paso de
3,81 mm) con 10 terminales
para entradas/salidas
Conecta las E/S incrustadas de M221 Logic Controller. 1
TMAT2PSET Conjunto de cinco bloques de
terminales de tornillo extraíbles Conecta una fuente de alimentación de 24 V CC. 1
TMAT2CSET16G Conjunto de 2 bloques de
terminales de resorte extraíbles:
• 1 bloque de terminales de
resorte extraíbles (paso de
5,08 mm) con 9 terminales
para entradas/salidas
• 1 bloque de terminales de
resorte extraíbles (paso de
5,08 mm) con 12 terminales
para entradas/salidas
Conecta las E/S incrustadas de M221 Logic Controller. 1
EIO0000003316.02 41

Descripción general de M221
Referencia Descripción Uso Cantidad
TMAT2CSET24G Conjunto de 3 bloques de
terminales de resorte extraíbles:
• 1 bloque de terminales de
resorte extraíbles (paso de
5,08 mm) con 8 terminales
para entradas/salidas
• 1 bloque de terminales de
resorte extraíbles (paso de
5,08 mm) con 9 terminales
para entradas/salidas
• 1 bloque de terminales de
resorte extraíbles (paso de
5,08 mm) con 13 terminales
para entradas/salidas
Conecta las E/S incrustadas de M221 Logic Controller. 1
TMAT2CSET40G Conjunto de 5 bloques de
terminales de resorte extraíbles:
• 3 bloque de terminales de
resorte extraíbles (paso de
5,08 mm) con 9 terminales
para entradas/salidas
• 2 bloque de terminales de
resorte extraíbles (paso de
5,08 mm) con 10 terminales
para entradas/salidas
Conecta las E/S incrustadas de M221 Logic Controller. 1
NSYTRAAB35 Soportes finales Ayuda a fijar el Logic Controller o módulo receptor y sus
módulos de extensión en un carril DIN (segmento DIN).
1
TM2XMTGB Barra de puesta a tierra Conecta el blindaje de cable y el módulo a la conexión a
tierra funcional.
1
TM200RSRCEMC Abrazadera de blindaje Monta y conecta la puesta a tierra al blindaje del cable. Paquete
de 25
TMAM2 Kit de montaje Monta el controlador y los módulos de E/S directamente
en un panel plano y vertical.
1
Cables
Referencia Descripción Detalles Longitud
BMXXCAUSBH018 Juego de cables de puerto de
terminal/puerto USB Del puerto USB mini-B del TM221C Logic Controller al
puerto USB del terminal PC.
NOTA: Este cable USB, con conexión a tierra y
blindado, es adecuado para conexiones de larga
duración.
1,8 m
(5,9 pies)
BMXXCAUSBH045 Juego de cables de puerto de
terminal/puerto USB Del puerto USB mini-B del TM221M Logic Controller al
puerto USB del terminal PC.
NOTA: Este cable USB, con conexión a tierra y
blindado, es adecuado para conexiones de larga
duración.
4,5 m
(14,8 ft)
TMACBL1 Cables analógicos Cable equipado con un conector 1 m
(3,28 ft)
TCSMCN3M4F3C2 Juego de cables de enlace serie
RS-232
1 conector RJ-45 y 1 conector SUB-
D 9
Para el terminal DTE (impresora) 3 m
(9,84 pies)
TCSMCN3M4M3S2 Juego de cables de enlace serie
RS-232
1 conector RJ-45 y 1 conector SUB-
D 9
Para el terminal DCE (modem, convertidor) 3 m
(9,84 pies)
TWDFCW30K Cables de E/S digitales con cables
sueltos para controlador modular
de 20 pins
Cable equipado en un extremo con un conector HE10.
(AWG 22/0,34 mm2)
3 m
(9,84 pies)
TWDFCW50K Cable equipado en un extremo con un conector HE10.
(AWG 22/0,34 mm2)
5 m
(16,4 ft)
42 EIO0000003316.02

Descripción general de M221
Descripción del cable TWDFCW••K
La tabla siguiente contiene especificaciones para TWDFCW30K/50K con cables
sueltos para conectores de 20 pins (HE10 o MIL20):
Ilustración de los
cables Conector de
pins Color del cable
1 Blanco
2 Marrón
3 Verde
4 Amarillo
5Gris
6 Rosa
7 Azul
8 Rojo
9 Negro
10 Violeta
11 Gris y rosa
12 Rojo y azul
13 Blanco y verde
14 Marrón y verde
15 Blanco y amarillo
16 Amarillo y marrón
17 Blanco y gris
18 Gris y marrón
19 Blanco y rosa
20 Rosa y marrón
EIO0000003316.02 43

Descripción general de M221
Subbases de precableado Telefast
En la ilustración siguiente se muestra el sistema Telefast:
1TM221M32TK/TM221ME32TK
2Cable equipado con un conector HE 10 de 20 vías en cada extremo.
3Subbase de 16 canales para módulos de extensión de entrada.
4Subbase de 16 canales para módulos de extensión de salida.
5Subbase de 16 canales para módulos de extensión de salida.
Consulte TM221M Logic Controller Instruction Sheet.
44 EIO0000003316.02

Funciones de M221
Funciones de M221
Contenido de este capítulo
Reloj en tiempo real (RTC).............................................................................45
Gestión de entradas ......................................................................................49
Gestión de salidas.........................................................................................52
Run/Stop ......................................................................................................55
Tarjeta SD.....................................................................................................57
Descripción general
En este capítulo se describen las funciones de Modicon M221 Logic Controller.
Reloj en tiempo real (RTC)
Descripción general
Los M221 Logic Controller incluyen un RTC que proporciona información de la
fecha y hora del sistema, además de admitir las funciones relacionadas que
requieren un reloj en tiempo real. Para mantener la hora cuando se interrumpa la
alimentación, se requiere una batería no recargable (consulte la siguiente
referencia). Un indicador LED de batería en el panel frontal del controlador indica
si la batería se ha agotado o no está presente.
En esta tabla se muestra cómo se gestiona la desviación del RTC:
Características del RTC Descripción
Desviación del RTC Menos de 30 segundos por mes a 25 °C (77 °F)
Batería
El controlador tiene una batería de reserva.
En caso de interrupción de la alimentación, la batería de reserva retendrá el RTC
del controlador.
En esta tabla se muestran las características de la batería:
Características Descripción
Uso En el caso de un corte de alimentación transitorio, la batería
alimentará al RTC y los datos del usuario.
Duración de reserva Al menos 1 año a un máximo de 25°C (77°F). Con temperaturas más
altas, se reduce el tiempo.
Monitorización de la
batería Sí
Reemplazable Sí
Duración de la batería 4 años a un máximo de 25°C (77°F). Con temperaturas más altas, se
reduce el tiempo.
Batería del controlador Pila de botón de litio, Panasonic BR2032 o Murata CR2032X.
EIO0000003316.02 45

Funciones de M221
Instalación y sustitución de la batería
Aunque se prefieren las baterías de litio por su descarga lenta y su vida útil
prolongada, pueden representar un peligro para el personal, los equipos y el
medio ambiente, por lo que deben manipularse de forma adecuada.
PELIGRO
PELIGRO DE EXPLOSIÓN, INCENDIO O QUEMADURAS QUÍMICAS
• Sustituya la batería por otra idéntica.
• Siga todas las instrucciones del fabricante de la batería.
• Retire todas las baterías sustituibles antes de desechar la unidad.
• Recicle o deseche correctamente las baterías usadas.
• Proteja las baterías de posibles cortocircuitos.
• No las recargue, desmonte, caliente a más de 100 °C (212 °F) ni incinere.
• Utilice las manos o herramientas aisladas para extraer o sustituir las
baterías.
• Mantenga la polaridad adecuada cuando inserte y conecte una batería
nueva.
Si no se siguen estas instrucciones, se producirán lesiones graves o la
muerte.
NOTA: La sustitución de la batería provocará la pérdida del RTC y no se
guardarán los datos en la memoria no volátil.
Consulte Variables persistentes (consulte Configuración de M221 Logic
Controller - Guía de programación).
Para instalar o sustituir la batería, siga estos pasos:
Paso Acción
1 Desconecte la alimentación de su controlador.
2 Utilice un destornillador aislado para quitar el soporte de la batería de TM221C Logic
Controller.
46 EIO0000003316.02


Funciones de M221
Paso Acción
5 Inserte la nueva batería en el soporte de la batería de acuerdo con las marcas de
polaridad.
6 Vuelva a colocar el soporte de la batería en el controlador y compruebe que el seguro
encaja.
7Inserte el soporte de la batería de TM221C Logic Controller.
Inserte el soporte de la batería de TM221M Logic Controller.
8 Arranque el M221 Logic Controller.
9 Ajuste el reloj interno. Para obtener más información sobre el reloj interno, consulte
EcoStruxure Machine Expert - Basic Guía de funcionamiento (consulte EcoStruxure
Machine Expert - Básico, Biblioteca de funciones genéricas Guía).
NOTA: Sustituir las baterías de los controladores por otras que no sean de los
tipos especificado en esta documentación puede representar un riesgo de
incendio o explosión.
48 EIO0000003316.02

Funciones de M221
ADVERTENCIA
UNA BATERÍA INADECUADA PUEDE PROVOCAR UN INCENDIO O UNA
EXPLOSIÓN
Sustituya la batería sólo por otra de tipo idéntico: Tipo Panasonic BR2032 o
Murata CR2032X.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Gestión de entradas
Descripción general
El M221 Logic Controller dispone de entradas digitales, incluidas 4 entradas
rápidas.
Se pueden configurar las funciones siguientes:
• Filtros (depende de la función asociada con la entrada).
• Para la función Run/Stop, se pueden utilizar entradas de I0 aI15.
• Se pueden retener o utilizar cuatro entradas rápidas para eventos (flanco
ascendente, flanco descendente o ambos) y, de este modo, se pueden
vincular a una tarea externa.
NOTA: Todas las entradas se pueden utilizar como entradas normales.
Principio de filtro integrador
El filtro está diseñado para reducir el efecto de rebote en las entradas. La
configuración de un valor de filtro ayuda al controlador a ignorar cambios
repentinos en los niveles de entrada causados por la inducción de interferencias
electromagnéticas.
En el siguiente diagrama de tiempos se muestran los efectos del filtro:
Disponibilidad del filtro de rebote
Este filtro se puede utilizar en una entrada rápida en los casos siguientes:
• Uso de un enclavamiento o un evento
• HSC está activado
Enclavamiento
La función de enclavamiento puede asignarse a las entradas rápidas de M221
Logic Controller. Esta función se utiliza para memorizar (o enclavar) cualquier
EIO0000003316.02 49

Funciones de M221
pulso con una duración inferior al tiempo de exploración del M221 Logic
Controller. Cuando un pulso es más corto que una exploración, el controlador
enclava el pulso, que se actualiza en la exploración siguiente. Este mecanismo de
enclavamiento solo reconoce los flancos ascendentes. Los flancos descendentes
no se pueden enclavar. La asignación de las entradas que se van a retener se
realiza en la ficha Configuración de EcoStruxure Machine Expert - Basic.
En el diagrama de tiempos siguiente se muestran los efectos del enclavamiento:
Evento
Una entrada configurada para un evento se puede asociar con una tarea externa.
Run/Stop
La función Run/Stop se emplea para iniciar o detener un programa de aplicación
mediante una entrada. Además del interruptor Run/Stop incrustado, puede
configurar una entrada (y solamente una) como comando adicional de Run/Stop.
Para obtener más información, consulte la sección Run/Stop, página 55.
ADVERTENCIA
INICIO NO DESEADO DE LA MÁQUINA O DEL PROCESO DE ACTIVACIÓN
• Compruebe el estado de seguridad de la máquina o del entorno de proceso
antes de aplicar electricidad a la entrada Run/Stop.
• Use la entrada Run/Stop para evitar activaciones no deseadas desde
ubicaciones remotas.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
50 EIO0000003316.02

Funciones de M221
Disponibilidad de las funciones de gestión de entradas
Se pueden asignar entradas digitales incrustadas a funciones (Run/Stop,
Retención, Evento, Contador rápido, HSC, PTO). Las entradas no asignadas a
ninguna función se utilizan como entradas normales. La tabla siguiente presenta
las posibles asignaciones de las entradas digitales incrustadas de M221 Logic
Controller:
Función
Función de entrada simple Función de entrada avanzada
Run/Stop Encla-
va-
miento
Evento Contador
rápido HSC PTO(3)
Entrada
rápida %I0.0 X– – – %HSC0 –
%I0.1 X– – – %HSC0 o%HSC2(1) –
Entrada
normal %I0.2 X X X %FC0 Preajuste para %HSC0 Ref o sonda de %PTO0
a%PTO3
%I0.3 X X X %FC1 Reanudación para %HSC0
%I0.4 X X X %FC2 Reanudación para %HSC1
%I0.5 X X X %FC3 Preajuste para %HSC1
Entrada
rápida %I0.6 X– – – %HSC1 –
%I0.7 X– – – %HSC1 o%HSC3(2) –
Entrada
normal
(en función de
la referencia
del
controlador)
%I0.8 X– – – – Ref o sonda de %PTO0
a%PTO3 en los
controladores
TM221C40U y
TM221CE40U
%I0.9 X– – – –
%I0.10 X– – – – –
%I0.11 X– – – – –
%I0.12 X– – – – –
%I0.13 X– – – – –
%I0.14 X– – – – –
%I0.15 X– – – – –
%I0.16 X– – – – –
%I0.17 X– – – – –
%I0.18 X– – – – –
%I0.19 X– – – – –
%I0.20 X– – – – –
%I0.21 X– – – – –
%I0.22 X– – – – –
%I0.23 X– – – – –
XSí
–No
(1) %HSC2 está disponible cuando %HSC0 se configura como Monofásico oNot Configured.
(2) %HSC3 está disponible cuando %HSC1 se configura como Monofásico oNot Configured.
(3) La función PTO está disponible en las referencias de los controladores que contienen salidas de transistor.
EIO0000003316.02 51

Funciones de M221
Gestión de salidas
Introducción
El M221 Logic Controller cuenta con salidas de transistor normales y rápidas
(PLS/PWM/PTO/FREQGEN).
Las siguientes funciones de salida se pueden configurar en las salidas de
transistor:
• Salida de alarma
• HSC (funciones reflejas en umbral de HSC)
• PLS
• PTO
• PWM
• FREQGEN
NOTA: Todas las salidas se pueden utilizar como salidas normales.
52 EIO0000003316.02

Funciones de M221
Disponibilidad de la gestión de salidas
La información que aparece a continuación hace referencia a las salidas de
transistor normales y rápidas en M221 Logic Controller:
Función Salida de
alarma HSC PLS/PWM/PTO/FREQGEN
Salida rápida
(1)
%Q0.0 X–•%PLS0
•%PWM0
•%PTO0
•%FREQGEN0
%Q0.1 X–•%PLS1
•%PWM1
•%PTO(2)
•%FREQGEN1
Salida normal
(3)
(en función de
la referencia
del controlador)
%Q0.2 X Salida refleja 0 para %HSC0 o%HSC2 •%PTO(4)
•%FREQGEN2
%Q0.3 X Salida refleja 1 para %HSC0 o%HSC2 •%PTO(5)
•%FREQGEN3
%Q0.4 X Salida refleja 0 para %HSC1 o%HSC3 %PTOx dirección
%Q0.5 X Salida refleja 1 para %HSC1 o%HSC3 %PTOx dirección
%Q0.6 X–%PTOx dirección
%Q0.7 X–%PTOx dirección
%Q0.8 – – %PTOx dirección
%Q0.9 – – %PTOx dirección
%Q0.10 – – %PTOx dirección
%Q0.11 – – %PTOx dirección
%Q0.12 – – %PTOx dirección
%Q0.13 – – %PTOx dirección
%Q0.14 – – %PTOx dirección
%Q0.15 – – %PTOx dirección
(1) Las funciones de las salidas rápidas solo están disponibles en las referencias del controlador que contienen salidas de transistor.
(2) Dirección %PTO0 en la modalidad de salida CW/CCW, o %PTO1 (no disponible cuando %PTO0 se configura en la modalidad de
salida CW/CCW), o la dirección %PTOx en otros casos.
(3) %Q0.2 y%Q0.3 son salidas rápidas en los controladores TM221C40U y TM221CE40U
(4) %PTO2 en los controladores TM221C40U y TM221CE40U, o la dirección %PTOx en otros casos.
(5) Dirección %PTO2 en la modalidad de salida CW/CCW en los controladores TM221C40U y TM221CE40U, o %PTO3 (no disponible
cuando %PTO2 se configura en la modalidad de salida CW/CCW) en los controladores TM221C40U y TM221CE40U o la dirección %
PTOx en otros casos.
Modalidades de retorno (Comportamiento de las salidas en
parada)
Cuando, por cualquier motivo, el controlador pasa al estado STOPPED
(Detenido) o a uno de los estados de excepción, las salidas locales (incrustadas y
de extensión) se establecen en el Valor predeterminado definido en la
aplicación.
En caso de salidas PTO, los valores de retorno se fuerzan a la lógica 0 (0 V CC) y
estos valores no se pueden modificar.
EIO0000003316.02 53

Funciones de M221
Cortocircuito o sobrecorriente en las salidas transistorizadas de
común negativo
Las salidas se agrupan en paquetes de cuatro salidas como máximo (menos
cuando el número total de salidas del controlador no es múltiplo de 4):
• De Q0 aQ3
• De Q4 aQ7
• De Q8 aQ11
• De Q12 aQ15
Cuando se detecta un cortocircuito o sobrecorriente y el bit de sistema %S49 se
establece en 1, la agrupación de cuatro salidas se establece en 0. Se realiza un
restablecimiento automático de forma periódica (1 s aproximadamente). Solo se
detecta el cortocircuito entre una salida establecida en 1 y 0 V. No se detecta el
cortocircuito entre una salida establecida en 0 y 24 V.
NOTA: %S49 se establece en 0 de forma predeterminada.
En la tabla siguiente se describen las acciones realizadas en cortocircuitos o
sobrecargas de salidas de transistor de Q0 a Q3:
Si... entonces...
Sufre un cortocircuito a 0 V en las
salidas transistorizadas
Las salidas de transistor pasan automáticamente a la
modalidad de protección térmica o protección contra
sobrecorriente.
Para obtener más información, consulte los diagramas
de cableado de las salidas de transistor.
En caso de un cortocircuito o una sobrecarga de corriente, el grupo común de
salidas pasa automáticamente a la modalidad de protección térmica (todas las
salidas del grupo se establecen en 0) y, a continuación, se rearman
periódicamente (cada segundo) para probar el estado de la conexión. Sin
embargo, debe ser consciente del efecto de este restablecimiento en la máquina
o el proceso que se controla.
ADVERTENCIA
INICIO IMPREVISTO DE LA MÁQUINA
Inhiba el restablecimiento automático de salidas si esta función implica un
comportamiento no deseado para la máquina o el proceso.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
NOTA: La función de restablecimiento automático puede deshabilitarse con el
bit de sistema %S49. Consulte la guía de programación del controlador para
obtener más información.
Cortocircuito o sobrecorriente en las salidas transistorizadas de
común positivo
Las salidas de transistor de común positivo no están protegidas internamente
contra sobrecargas o cortocircuitos.
En la tabla siguiente se describen las acciones realizadas en sobrecargas o
cortocircuitos de salidas de transistor de común negativo:
Si... entonces...
Sufre un cortocircuito o una sobrecarga a 0 V o
a 24 V en las salidas de transistor de común
negativo.
No se ejecuta ninguna acción y no se detecta
ningún error.
54 EIO0000003316.02

Funciones de M221
Para obtener más información, consulte los diagramas de cableado de las salidas
de transistor de común negativo, página 176.
Cortocircuito o sobrecorriente en las salidas de relé
Las salidas de relé no se protegen de forma interna contra sobrecargas o
cortocircuitos.
En la tabla siguiente se describen las acciones llevadas a cabo en cortocircuitos o
sobrecargas de salidas de relé:
Si... entonces...
Sufre un cortocircuito o una sobrecarga
a 0 V o 24 V en las salidas de relé No se ejecuta ninguna acción y no se detecta ningún
error.
Para obtener más información, consulte los diagramas
de cableado de las salidas de relé.
Las salidas de relé son conmutadores electromecánicos que admiten niveles
significativos de corriente y tensión. Todos los dispositivos electromecánicos
tienen una vida limitada y se deben instalar para minimizar la posibilidad de
consecuencias no deseadas.
ADVERTENCIA
SALIDAS NO OPERATIVAS
En caso de que exista riesgo para el personal o los equipos, utilice los
dispositivos de bloqueo de seguridad externos adecuados en las salidas.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Run/Stop
Descripción general
M221 Logic Controller puede utilizarse externamente con lo siguiente:
• un interruptor Run/Stop de hardware;
• una operación de Run/Stop, página 50 de una entrada digital dedicada,
definida en la configuración del software. Para obtener más información,
consulte Configuración de entradas digitales (consulte Modicon M221, Logic
Controller - Guía de programación).
• un comando del software EcoStruxure Machine Expert - Basic
• un Visualización gráfica remota (consulte Modicon TMH2GDB, Pantalla
gráfica remota, Guía del usuario).
M221 Logic Controller tiene un interruptor Run/Stop de hardware que pone el
controlador en el estado RUN o STOP.
EIO0000003316.02 55

Funciones de M221
En la figura siguiente se muestra la ubicación del interruptor Run/Stop en el TM221C Logic Controller:
En la figura siguiente se muestra la ubicación del interruptor Run/Stop en el
TM221M Logic Controller:
En la tabla siguiente se resume la interacción de distintos operadores externos en
el comportamiento del estado del controlador:
Interruptor Run/Stop de hardware incrustado
Interruptor en Stop Transición de Stop a Run Interruptor en Run
Entrada digital
Run/Stop
configurable
mediante
software
Ninguno STOP
Ignora los comandos externos
Run/Stop2.
Ordena una transición al
estado RUN1.
Permite los comandos externos
Run/Stop2.
Estado 0 STOP
Ignora los comandos externos
Run/Stop2.
STOP
Ignora los comandos externos
Run/Stop2.
STOP
Ignora los comandos externos
Run/Stop2.
Flanco
ascendente STOP
Ignora los comandos externos
Run/Stop2.
Ordena una transición al
estado RUN1.Ordena una transición al estado
RUN1.
Estado 1 STOP
Ignora los comandos externos
Run/Stop2.
Ordena una transición al
estado RUN1.
Permite los comandos externos
Run/Stop2.
1Si desea más información, consulte Estados y comportamientos del controlador (consulte Modicon M221, Logic Controller - Guía de
programación).
2Comandos externos Run/Stop que envía el botón online EcoStruxure Machine Expert - Basic o un Visualización gráfica remota.
56 EIO0000003316.02

Funciones de M221
ADVERTENCIA
INICIO NO DESEADO DE LA MÁQUINA O DEL PROCESO DE ACTIVACIÓN
• Compruebe el estado de seguridad de su máquina o del entorno del proceso
antes de conectar la alimentación a la entrada Run/Stop o accionar el
interruptor Run/Stop.
• Use la entrada Run/Stop para evitar activaciones no deseadas desde
ubicaciones remotas o accionar accidentalmente el interruptor Run/Stop.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Tarjeta SD
Descripción general
Cuando manipule la tarjeta SD, siga estas instrucciones a continuación para
evitar que se dañen o se pierdan datos internos de dicha tarjeta o que se
produzca un funcionamiento incorrecto de la tarjeta SD:
AVISO
PÉRDIDA DE DATOS DE APLICACIÓN
• No guarde la tarjeta SD en un lugar con electricidad estática o posibles
campos electromagnéticos.
• No guarde la tarjeta SD en lugares expuestos a la luz solar directa, cerca de
calentadores o en otros lugares con temperaturas elevadas.
• No doble la tarjeta SD.
• No deje caer la tarjeta SD ni la golpee contra otro objeto.
• Mantenga la tarjeta SD seca.
• No toque los conectores de la tarjeta SD.
• No desmonte ni modifique la tarjeta SD.
• Utilice únicamente tarjetas SD formateadas con FAT o FAT32.
Si no se siguen estas instrucciones, pueden producirse daños en el
equipo.
El M221 Logic Controller no reconoce tarjetas SD formateadas con NTFS.
Formatee la tarjeta SD de su equipo con FAT o FAT32.
Cuando utilice el M221 Logic Controller y una tarjeta SD, tenga en cuenta lo
siguiente para evitar la pérdida de datos valiosos:
• Pueden producirse pérdidas de datos accidentales en cualquier momento. Si
se pierden los datos, no se podrán recuperar.
• Si saca la tarjeta SD a la fuerza, los datos que contiene pueden resultar
dañados.
• Extraer una tarjeta SD a la que se está accediendo podría dañar la tarjeta o
sus datos.
• Si no se coloca correctamente la tarjeta SD al insertarla en el controlador, los
datos de la tarjeta y del controlador podrían resultar dañados.
EIO0000003316.02 57

Funciones de M221
AVISO
PÉRDIDA DE DATOS DE APLICACIÓN
• Haga copias de seguridad de la tarjeta SD con regularidad.
• No quite la alimentación ni resetee el controlador y no inserte ni extraiga la
tarjeta SD mientras se está accediendo a la tarjeta.
Si no se siguen estas instrucciones, pueden producirse daños en el
equipo.
En la siguiente figura se muestra el slot para tarjetas SD del TM221C Logic
Controller:
En la siguiente figura se muestra el slot para tarjetas SD del TM221M Logic
Controller:
Se puede activar la lengüeta de control de escritura para evitar las operaciones
de escritura en la tarjeta SD. Tal como se muestra en el ejemplo de la derecha,
empuje la lengüeta hacia arriba para liberar el bloqueo y habilitar la escritura en la
tarjeta SD. Antes de utilizar una tarjeta SD, debe leer las instrucciones del
fabricante.
58 EIO0000003316.02

Funciones de M221
Paso Acción
1 Inserte la tarjeta SD en el slot para tarjetas SD del TM221C Logic Controller:
Inserte la tarjeta SD en el slot para tarjetas SD del TM221M Logic Controller:
2 Presione hasta que se oiga un "clic" (TM221C Logic Controller):
Presione hasta que se oiga un "clic" (TM221M Logic Controller):
EIO0000003316.02 59

Funciones de M221
Características del slot para tarjeta SD
Tema Características Descripción
Tipo compatible Capacidad estándar SD (SDSC)
Alta capacidad SDHC
Memoria global Tamaño 32 GB máx.
Organización de la
memoria
Tamaño de la copia de seguridad
de la aplicación 64 MB
Tamaño del almacenamiento de
datos 1,93 GB
Solidez Ciclos de escritura/borrado (valor
típico)
100.000
Rango de temperatura de
funcionamiento De -40 a +85 °C (de -40 a +185
°F)
Tiempo de conservación de los
archivos 10 años
Características de TMASD1
Características Descripción
Durabilidad de la tarjeta ante la extracción 1000 veces como mínimo
Tiempo de conservación de los archivos 10 años a 25 °C (77 °F)
Tipo de flash SLC NAND
Tamaño de memoria 256 MB
Temperatura ambiente de funcionamiento De -10 a +85 °C (de 14 a 185 °F)
Temperatura de almacenamiento De -25 a +85 °C (de -13 a 185 °F)
Humedad relativa Máx. 95 % sin condensación
Ciclos de escritura/borrado 3 000 000 (aproximadamente)
NOTA: Se ha comprobado rigurosamente el TMASD1 asociado con el Logic
Controller. Para obtener más información sobre otras tarjetas disponibles en
el mercado, consulte a su representante de ventas local.
NOTA: La tarjeta SD se puede utilizar directamente en el PC.
Indicador LED de estado
En la figura siguiente se muestran los indicadores LED de estado del TM221C
Logic Controller:
60 EIO0000003316.02

Funciones de M221
En la figura siguiente se muestran los indicadores LED de estado del TM221M
Logic Controller:
En la tabla siguiente se describe el indicador LED de estado de la tarjeta SD:
Etiqueta Descripción Indicador LED
Color Estado Descripción
SD Tarjeta SD Verde Encendi-
do Indica que se está accediendo a
la tarjeta SD.
Apagado Indica que no se ha podido
acceder.
Parpadeo Indica que se ha detectado un
error durante la utilización de la
tarjeta SD.
EIO0000003316.02 61

Instalación de M221
Instalación de M221
Contenido de este capítulo
Reglas generales para la implementación de M221 Logic Controller .................62
Instalación de M221 Logic Controller ..............................................................65
Requisitos eléctricos de M221........................................................................77
Descripción general
En este capítulo se proporcionan instrucciones de seguridad para la instalación,
dimensiones de los dispositivos, instrucciones de montaje y especificaciones
ambientales.
Reglas generales para la implementación de M221 Logic
Controller
Características ambientales
Requisitos de la carcasa
Los componentes del sistema M221 Logic Controller están diseñados como
equipos industriales de zona B y clase A, según la publicación 11 de IEC/CISPR.
Si se utilizan en entornos distintos de los descritos en el estándar o en entornos
que no cumplen las especificaciones de este manual, pueden surgir dificultades
para garantizar la compatibilidad electromagnética, debido a interferencias
conducidas o radiadas.
Todos los componentes del sistema M221 Logic Controllercumplen los requisitos
de la Comunidad Europea (CE) para equipos abiertos, como se define en IEC/EN
61131-2. Deben instalarse en una carcasa diseñada para condiciones
ambientales específicas y para reducir la posibilidad de un contacto no deseado
con tensiones peligrosas. Utilice armarios metálicos para mejorar la inmunidad
electromagnética de su sistema M221 Logic Controller. Utilice armarios con un
mecanismo de bloqueo con clave para minimizar los accesos no autorizados.
Características ambientales
Todos los componentes del módulo M221 Logic Controller se aíslan
eléctricamente entre el circuito electrónico interno y los canales de entrada/salida
dentro de los límites establecidos y descritos por estas características
medioambientales. Para obtener más información sobre el aislamiento eléctrico,
consulte las especificaciones técnicas del controlador en particular, que aparecen
más adelante en este documento. Este equipo cumple los requisitos de la CE tal
como se indica en la tabla siguiente. Este equipo está diseñado para el uso en un
entorno industrial con un grado de contaminación 2.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No supere ninguno de los valores nominales que se especifican en las tablas
de características medioambientales y eléctricas.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
62 EIO0000003316.02

Instalación de M221
En la tabla siguiente se muestran las características ambientales generales:
Característica Especificación
mínima Intervalo comprobado
Cumplimiento de la norma IEC/EN 61010-2-
201
–
Temperatura ambiente de funcionamiento –Instalación horizontal De –10 a 55 °C (de 14 a 131 °F)
–Instalación vertical De –10 a 50 °C (de 14 a 122 °F)
De –10 a 35 °C (de 14 a 95 °F)
Temperatura de almacenamiento –De –25 a 70 °C (de -13 a 158 °F)
Humedad relativa –Transporte y
almacenamiento Del 10 al 95 % (sin condensación)
Funcionamiento Del 10 al 95 % (sin condensación)
Grado de contaminación IEC/EN 60664-1 2
Grado de protección IEC/EN 61131-2 IP20 con cubiertas de protección en su sitio
Inmunidad a la corrosión –Atmósfera sin gases corrosivos
Altitud de funcionamiento –De 0 a 2000 m (de 0 a 6560 ft)
Altitud de almacenamiento –De 0 a 3.000 m (de 0 a 9.843 pies)
Resistencia a las vibraciones IEC/EN 61131-2 Montaje del panel o
montado en un carril
DIN (segmento DIN)
3,5 mm (0,13 pulg.) de amplitud fija de 5
a 8,4 Hz
29,4 m/s2(96,45 pies/s2) (3 gn)
aceleración fija de 8,4 a 150 Hz
Resistencia a impactos mecánicos –147 m/s2o 482,28 pies/s2(15 gn) durante 11 ms
98 m/s² o 32,15 pies/s2(10 gn) durante 11 ms (para M221 Logic
Controller con salidas de relé)
NOTA: Los rangos comprobados pueden indicar valores que sobrepasen los de la norma IEC. No obstante, nuestras normas internas
definen los elementos necesarios para entornos industriales. En cada caso, recomendamos las especificaciones mínimas siempre
que se indiquen.
EIO0000003316.02 63

Instalación de M221
Susceptibilidad electromagnética
El sistema M221 Logic Controller cumple las especificaciones de susceptibilidad
electromagnética indicadas en la siguiente tabla:
Característica Especificación mínima Rango comprobado
Descarga electrostática IEC/EN 61000-4-2 8 kV (descarga en el aire)
4 kV (descarga por contacto)
Campo electromagnético radiado IEC/EN 61000-4-3 10 V/m (de 80 a 1.000 MHz)
3 V/m (de 1,4 a 2 GHz)
1 V/m (de 2 a 3 GHz)
Campo magnético IEC/EN 61000-4-8 30 A/m 50 Hz, 60 Hz
Impulsión rápida de corriente
momentánea IEC/EN 61000-4-4 –CM1y DM2
Líneas de
alimentación de CA/
CC
2 kV
Salidas de relé 2 kV
E/S de 24 V CC 1 kV
E/S analógicas 1 kV
Línea de
comunicación 1 kV
Inmunidad a sobretensión IEC/EN 61000-4-5
IEC/EN 61131-2
–CM1DM2
Líneas de
alimentación de CC 1 kV 0,5 kV
Líneas de
alimentación de CA 2 kV 1 kV
Salidas de relé 2 kV 1 kV
E/S de 24 V CC 1 kV –
Cable blindado
(entre blindaje y
conexión a tierra)
1 kV –
Campo electromagnético inducido IEC/EN 61000-4-6 10 Vrms (de 0,15 a 80 MHz)
Emisión conducida IEC 61000-6-4 Línea de alimentación de CA:
• De 0,15 a 0,5 MHz: 79 dBμV/m QP / 66 dBμV/m AV
• De 0,5 a 300 MHz: 73 dBμV/m QP / 60 dBµV/m AV
Línea de alimentación de CA/CC:
• De 10 a 150 kHz: de 120 a 69 dBμV/m QP
• De 150 a 1.500 kHz: de 79 a 63 dBμV/m QP
• De 1,5 a 30 MHz: 63 dBμV/m QP
Emisión radiada IEC 61000-6-4 de 30 a 230 MHz: 40 dBμV/m QP
De 230 a 1.000 MHz: 47 dBμV/m QP
1Modalidad común
2Modalidad diferencial
NOTA: Los rangos comprobados pueden indicar valores que sobrepasen los de la norma IEC. No obstante, nuestras normas internas
definen los elementos necesarios para entornos industriales. En cada caso, recomendamos las especificaciones mínimas siempre
que se indiquen.
64 EIO0000003316.02

Instalación de M221
Certificaciones y estándares
Introducción
Los controladores optimizados M221 están diseñados para adaptarse a las
principales normas nacionales e internacionales referentes a los dispositivos de
control industrial electrónico:
• IEC/EN 61131-2
• UL 508
Los M221 Logic Controllers han obtenido las distinciones de conformidad
siguientes:
• CE
• CSA (excepto para TM221C•••U)
• EAC
• RCM
• UL
• Ubicación peligrosa de cCSAus (excepto para TM221C•••U)
Para obtener información medioambiental y sobre la conformidad de los
productos (RoHS, REACH, PEP, EOLI, etc.), vaya a www.se.com/green-premium.
Instalación de M221 Logic Controller
Requisitos de instalación y mantenimiento
Antes de comenzar
Debe leer y comprender este capítulo antes de empezar a instalar el sistema.
El uso y la aplicación de la información contenida en el presente documento
requieren experiencia en diseño y programación de sistemas de control
automatizados. Solamente el usuario, el fabricante o el integrador saben cuáles
son las condiciones y los factores presentes durante la instalación y la
configuración, el funcionamiento y el mantenimiento de la máquina o del proceso,
por lo que pueden decidir la automatización y el equipo asociado, así como las
medidas de seguridad y los enclavamientos relacionados que se pueden utilizar
de forma efectiva y correcta. Al seleccionar el equipo de control y automatización,
y cualquier otro equipo o software relacionado, para una determinada aplicación,
también debe tener en cuenta todas las normativas y estándares locales,
regionales o nacionales.
Preste especial atención al cumplir la información sobre seguridad, los distintos
requisitos eléctricos y los estándares normativos que podrían aplicarse a su
máquina o proceso en el uso de este equipo.
Desconexión de la alimentación
Se deben montar e instalar todas las opciones y los módulos antes de instalar el
sistema de control en un segmento de montaje, una placa de montaje o un panel.
Retire el sistema de control de su segmento de montaje, placa de montaje o panel
antes de desmontar el equipo.
EIO0000003316.02 65

Instalación de M221
PELIGRO
RIESGO DE DESCARGA ELÉCTRICA, EXPLOSIÓN O ARCO ELÉCTRICO
• Desconecte la alimentación de todos los equipos, incluidos los dispositivos
conectados, antes de retirar cualquier cubierta o compuerta, o bien antes de
instalar o retirar cualquier accesorio, hardware, cable o conductor salvo en
las condiciones indicadas en la guía de hardware de este equipo.
• Utilice siempre un dispositivo de detección de tensión de capacidad
adecuada para confirmar la ausencia de alimentación eléctrica cuando y
donde se indique.
• Vuelva a montar y fijar todas las cubiertas, accesorios, elementos de
hardware, cables y conductores y compruebe que haya una conexión a
tierra adecuada antes de aplicar alimentación eléctrica a la unidad.
• Aplique solo la tensión especificada cuando utilice este equipo y los
productos asociados.
Si no se siguen estas instrucciones, se producirán lesiones graves o la
muerte.
Consideraciones sobre la programación
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
• Utilice solo software aprobado por Schneider Electric para este equipo.
• Actualice el programa de aplicación siempre que cambie la configuración de
hardware física.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Entorno operativo
Además de las Características ambientales, consulte Información relacionada
con el producto al inicio del presente documento para obtener información
importante sobre la instalación en ubicaciones peligrosas para este equipo
específico.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Instale y utilice este equipo de acuerdo con las condiciones descritas en las
características medioambientales.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
66 EIO0000003316.02

Instalación de M221
Consideraciones de instalación
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
• En caso de que exista riesgo para el personal o los equipos, utilice los
enclavamientos de seguridad adecuados.
• Instale y utilice este equipo en una carcasa adecuada para el entorno
correspondiente, y que esté protegida por un mecanismo de bloqueo que
use llaves o herramientas.
• Utilice las fuentes de alimentación del actuador y el sensor solo para
proporcionar alimentación a los sensores o actuadores conectados al
módulo.
• La línea de alimentación y los circuitos de salida deben estar equipados con
cables y fusibles que cumplan los requisitos normativos locales y nacionales
relativos a la corriente nominal y la tensión del equipo en cuestión.
• No utilice este equipo en funciones de maquinaria críticas para la seguridad
a no ser que esté diseñado como equipo de seguridad funcional y siga los
estándares y las normas correspondientes.
• No desmonte, repare ni modifique este equipo.
• No conecte ningún cable a conexiones reservadas y no utilizadas o a
conexiones designadas como No Connection (N.C.).
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
NOTA: Los tipos de fusibles JDYX2 o JDYX8 están reconocidos por UL y
aprobados por CSA.
Distancias y posiciones de montaje de TM221C Logic Controller
Introducción
En esta sección se describen las posiciones de montaje para el TM221C Logic
Controller.
NOTA: Mantenga una distancia adecuada para que la ventilación sea
correcta y se mantenga la temperatura de funcionamiento indicada en las
características medioambientales, página 62.
Posición de montaje correcta
Siempre que sea posible, el TM221C Logic Controller se deberá montar en
posición horizontal sobre un plano vertical, tal y como se muestra en la figura
siguiente:
EIO0000003316.02 67

Instalación de M221
Posiciones de montaje aceptables
El TM221C Logic Controller también se puede montar verticalmente con un
descenso de temperatura en un plano vertical, como se muestra a continuación.
NOTA: Los módulos de ampliación se deben montar sobre el Logic Controller.
Posición de montaje incorrecta
El TM221C Logic Controller sólo se debe colocar tal y como se muestra en la
figura Posición de montaje correcta, página 67. En las figuras siguientes se
muestran las posiciones de montaje incorrectas.
Distancias mínimas
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
• Coloque los dispositivos que disipen más calor en la parte superior del
armario y asegure una ventilación adecuada.
• Evite situar este equipo cerca o encima de dispositivos que puedan
provocar sobrecalentamiento.
• Instale el equipo en una ubicación que proporcione el mínimo de espacios
libres desde todas las estructuras adyacentes y todo el equipo, tal como se
indica en este documento.
• Instale todo el equipo según las especificaciones de la documentación
relacionada.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
El M221 Logic Controller se ha diseñado como un producto IP20 y se debe
instalar en una caja. Deben respetarse las distancias al instalar el producto.
68 EIO0000003316.02

Instalación de M221
Existen tres tipos de distancias entre:
• El M221 Logic Controller y todos los lados del armario (incluida la puerta del
panel).
• Los bloques de terminal del M221 Logic Controller y los conductos del
cableado. Esta distancia reduce la interferencia electromagnética entre el
controlador y los conductos de cables.
• El M221 Logic Controller y todos dispositivos que generan calor instalados en
el mismo armario.
En la siguiente figura se muestran las distancias mínimas que se aplican a todas
las referencias del TM221C Logic Controller:
Distancias y posiciones de montaje de TM221M Logic Controller
Introducción
En esta sección se describen las posiciones de montaje para el M221 Logic
Controller.
NOTA: Mantenga una distancia adecuada para que la ventilación sea
correcta y se mantenga la temperatura de funcionamiento indicada en las
características medioambientales, página 62.
Posición de montaje correcta
Para obtener unas características óptimas de funcionamiento, el M221 Logic
Controller se deberá montar en posición horizontal sobre un plano vertical, tal y
como se muestra en la figura siguiente:
EIO0000003316.02 69

Instalación de M221
Posiciones de montaje aceptables
El M221 Logic Controller también se puede montar verticalmente en un plano
vertical, como se muestra a continuación.
NOTA: Los módulos de ampliación deben montarse sobre el controlador.
Posición de montaje incorrecta
El M221 Logic Controller sólo se debe colocar tal y como se muestra en la figura
Posición de montaje correcta, página 69. En las figuras siguientes se muestran
las posiciones de montaje incorrectas.
Distancias mínimas
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
• Coloque los dispositivos que disipen más calor en la parte superior del
armario y asegure una ventilación adecuada.
• Evite situar este equipo cerca o encima de dispositivos que puedan
provocar sobrecalentamiento.
• Instale el equipo en una ubicación que proporcione el mínimo de espacios
libres desde todas las estructuras adyacentes y todo el equipo, tal como se
indica en este documento.
• Instale todo el equipo según las especificaciones de la documentación
relacionada.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
El M221 Logic Controller se ha diseñado como un producto IP20 y se debe
instalar en una caja. Deben respetarse las distancias al instalar el producto.
Se deben tener en cuenta tres tipos de distancias:
• El M221 Logic Controller y todos los lados del armario (incluida la puerta del
panel).
• Los bloques de terminales del M221 Logic Controller y los conductos del
cableado para ayudar a reducir las posibles interferencias electromagnéticas
entre el controlador y el cableado de los conductos.
• El M221 Logic Controller y todos dispositivos que generan calor instalados en
el mismo armario.
70 EIO0000003316.02

Instalación de M221
En la siguiente figura se muestran las distancias mínimas que se aplican a todas
las referencias del M221 Logic Controller:
Riel DIN (segmento DIN)
Dimensiones del riel DIN, segmento DIN
Puede montar el controlador o el receptor y sus extensiones en un riel DIN
(segmento DIN) de 35 mm (1,38 pulg.). Se puede adjuntar a una superficie de
montaje lisa o suspender de un bastidor EIA o en un armario NEMA.
Rieles DIN simétricos (segmento DIN)
En la ilustración y la tabla siguientes se muestran las referencias de los rieles DIN
(segmento DIN) para el rango de montaje en pared:
Referencia Tipo Longitud del segmento (B)
NSYSDR50A A 450 mm (17,71 pulg.)
NSYSDR60A A 550 mm (21,65 pulg.)
NSYSDR80A A 750 mm (29,52 pulg.)
NSYSDR100A A 950 mm (37,40 pulg.)
EIO0000003316.02 71

Instalación de M221
En la ilustración y la tabla siguientes se muestran las referencias de los rieles DIN
simétricos (segmento DIN) para el rango de las carcasas de metal:
Referencia Tipo Longitud del segmento (B-12 mm)
NSYSDR60 A 588 mm (23,15 pulg.)
NSYSDR80 A 788 mm (31,02 pulg.)
NSYSDR100 A 988 mm (38,89 pulg.)
NSYSDR120 A 1188 mm (46,77 pulg.)
En la ilustración y la tabla siguientes se muestran las referencias de los rieles DIN
simétricos (segmento DIN) de 2000 mm (78,74 pulg.):
Referencia Tipo Longitud del segmento
NSYSDR2001A 2000 mm (78,74 pulg.)
NSYSDR200D2A
1Acero galvanizado sin perforaciones
2Acero galvanizado perforado
Rieles DIN de doble perfil (segmento DIN)
En la ilustración y la tabla siguientes se muestran las referencias de los rieles DIN
de doble perfil (segmentos DIN) para el rango de montaje en pared:
72 EIO0000003316.02

Instalación de M221
Referencia Tipo Longitud del segmento (B)
NSYDPR25 W 250 mm (9,84 pulg.)
NSYDPR35 W 350 mm (13,77 pulg.)
NSYDPR45 W 450 mm (17,71 pulg.)
NSYDPR55 W 550 mm (21,65 pulg.)
NSYDPR65 W 650 mm (25,60 pulg.)
NSYDPR75 W 750 mm (29,52 pulg.)
En la ilustración y la tabla siguientes se muestran las referencias de los rieles DIN
de doble perfil (segmento DIN) para el rango de montaje en el suelo:
Referencia Tipo Longitud del segmento (B)
NSYDPR60 F 588 mm (23,15 pulg.)
NSYDPR80 F 788 mm (31,02 pulg.)
NSYDPR100 F 988 mm (38,89 pulg.)
NSYDPR120 F 1188 mm (46,77 pulg.)
Instalación y desinstalación del controlador con extensiones
Descripción general
En esta sección se explica cómo instalar y desmontar el controlador con sus
módulos de extensión desde un riel DIN (segmento DIN).
Para montar módulos de extensión en un controlador, módulo receptor u otros
módulos, consulte las guías de hardware de los módulos de extensión
correspondientes.
EIO0000003316.02 73

Instalación de M221
Instalación de un controlador con sus extensiones en un segmento DIN
En el siguiente procedimiento se describe cómo instalar un controlador con sus
módulos de extensión en un riel DIN (segmento DIN):
Paso Acción
1 Fije el riel DIN (segmento DIN) a la superficie de un panel mediante tornillos.
2 Coloque la ranura superior del controlador y sus módulos de extensión en el borde
superior del segmento DIN y presione el conjunto contra el riel DIN (segmento DIN)
hasta que oiga que el clip para riel DIN (segmento DIN) encaja en su sitio.
Activado TM221C Logic Controller:
Activado TM221M Logic Controller:
3 Coloque dos pinzas finales de bloque de terminales en ambos lados del conjunto de
controlador y módulo de extensión.
NOTA: Las pinzas finales de bloque de terminales de tipo NSYTRAAB35 o
equivalente ayudan a minimizar los movimientos laterales y mejoran las
características de impacto y vibración del conjunto de controlador y módulo de
extensión.
74 EIO0000003316.02

Instalación de M221
Desmontaje de un controlador con sus extensiones de un riel DIN
(segmento DIN)
En el siguiente procedimiento se describe cómo desmontar un controlador con
sus módulos de extensión de un riel DIN (segmento DIN):
Paso Acción
1 Desconecte toda la alimentación del controlador y los módulos de extensión.
2 Inserte un destornillador plano en el slot del clip para riel DIN (segmento DIN).
Activado TM221C Logic Controller:
Activado TM221M Logic Controller:
3 Presione hacia abajo el clip del segmento DIN.
4 Retire el controlador y sus módulos de extensión del riel DIN (segmento DIN)
comenzando por la parte inferior.
EIO0000003316.02 75

Instalación de M221
Montaje directo sobre la superficie de un panel
Descripción general
En esta sección se explica cómo instalar M221 Logic Controller con el kit de
montaje sobre panel. Esta sección también proporciona la ubicación de los
orificios de montaje de cada uno de los módulos.
Instalación del kit de montaje sobre panel
A continuación se muestra cómo instalar una regleta de montaje:
Paso Acción
1 Inserte la regleta de montaje TMAM2 en el slot en la parte superior del módulo.
Disposición de los orificios de montaje
En el siguiente diagrama se muestra la ubicación de los orificios de montaje para
TM221C Logic Controller con 16 canales de E/S:
En el siguiente diagrama se muestra la ubicación de los orificios de montaje para
TM221C Logic Controller con 24 canales de E/S:
76 EIO0000003316.02

Instalación de M221
En el siguiente diagrama se muestra la ubicación de los orificios de montaje para
TM221C Logic Controller con 40 canales de E/S:
En el siguiente diagrama se muestra la ubicación de los orificios de montaje para
TM221M Logic Controller:
Requisitos eléctricos de M221
Prácticas recomendadas relativas al cableado
Descripción general
En esta sección se describen las directrices de cableado y las prácticas
recomendadas asociadas que se deben respetar al utilizar el sistema M221 Logic
Controller.
PELIGRO
RIESGO DE DESCARGA ELÉCTRICA, EXPLOSIÓN O ARCO ELÉCTRICO
• Desconecte la alimentación de todos los equipos, incluidos los dispositivos
conectados, antes de retirar cualquier cubierta o compuerta, o bien antes de
instalar o retirar cualquier accesorio, hardware, cable o conductor salvo en
las condiciones indicadas en la guía de hardware de este equipo.
• Utilice siempre un dispositivo de detección de tensión de capacidad
adecuada para confirmar la ausencia de alimentación eléctrica cuando y
donde se indique.
• Vuelva a montar y fijar todas las cubiertas, accesorios, elementos de
hardware, cables y conductores y compruebe que haya una conexión a
tierra adecuada antes de aplicar alimentación eléctrica a la unidad.
• Aplique solo la tensión especificada cuando utilice este equipo y los
productos asociados.
Si no se siguen estas instrucciones, se producirán lesiones graves o la
muerte.
EIO0000003316.02 77

Instalación de M221
ADVERTENCIA
PÉRDIDA DE CONTROL
• El diseñador del esquema de control debe tener en cuenta las posibles
modalidades de fallo de rutas de control y, para ciertas funciones de control
críticas, proporcionar los medios para lograr un estado seguro durante y
después de un fallo de ruta. Algunas funciones de control críticas son, por
ejemplo, la parada de emergencia y la parada de sobrecarrera, un corte de
alimentación o un reinicio.
• Para las funciones críticas de control deben proporcionarse rutas de control
separadas o redundantes.
• Las rutas de control del sistema pueden incluir enlaces de comunicación.
Deben tenerse en cuenta las implicaciones de retardos de transmisión
imprevistos o fallos del enlace.
• Tenga en cuenta todas las reglamentaciones para la prevención de
accidentes y las normativas de seguridad locales.1
• Cada instalación de este equipo debe probarse de forma individual y
exhaustiva antes de entrar en servicio.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
1Para obtener información adicional, consulte NEMA ICS 1.1 (última edición),
"Safety Guidelines for the Application, Installation, and Maintenance of Solid State
Control" (Directrices de seguridad para la aplicación, la instalación y el
mantenimiento del control de estado estático) y NEMA ICS 7.1 (última edición),
"Safety Standards for Construction and Guide for Selection, Installation and
Operation of Adjustable-Speed Drive Systems" (Estándares de seguridad para la
construcción y guía para la selección, instalación y utilización de sistemas de
unidades de velocidad ajustable) o su equivalente aplicable a la ubicación
específica.
Directrices de cableado
Se deben aplicar las reglas siguientes al cablear un sistema M221 Logic
Controller:
• Los cables de E/S y comunicación deben estar separados de los cables de
alimentación. Realice estos dos tipos de cableado mediante conductos de
cable independientes.
• Compruebe que el entorno y las condiciones de funcionamiento cumplen los
valores de las especificaciones.
• Utilice los tamaños de cable correctos para cumplir los requisitos de tensión y
corriente.
• Utilice conductores de cobre (obligatorio).
• Utilice cables de par trenzado blindados para E/S analógicas o rápidas.
• Utilice cables de par trenzado blindados para redes y bus de campo.
Utilice cables blindados conectados correctamente a tierra para todas las salidas
o entradas analógicas y de alta velocidad, así como para las conexiones de
comunicación. Si no utiliza cable blindado para estas conexiones, las
interferencias electromagnéticas pueden causar la degradación de la señal. Las
señales degradadas pueden provocar que el controlador o los módulos y el
equipo conectados a él funcionen de manera inesperada.
78 EIO0000003316.02

Instalación de M221
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
• Utilice cables blindados para todas las E/S rápidas, las E/S analógicas y las
señales de comunicación.
• Conecte a tierra el blindaje de los cables para todas las E/S analógicas, las
E/S rápidas y las señales de comunicación en un único punto1.
• Enrute los cables de comunicación y de E/S por separado de los cables de
alimentación.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
1La conexión a tierra multipunto se admite si las conexiones se efectúan con una
placa de conexión a tierra equipotencial dimensionada para ayudar a evitar daños
en el blindaje del cable en caso de corrientes de cortocircuito del sistema de
alimentación.
Para obtener más información, consulte Conexión a tierra de cables blindados,
página 88.
NOTA: Las temperaturas de la superficie pueden superar los 60 °C (140 °F).
Para cumplir la norma IEC 61010, guíe el cableado primario (los cables
conectados a la red eléctrica) por separado y lejos del cableado secundario
(cableado de tensión extrabaja que proviene de las fuentes de tensión
intermedias). Si esto no es posible, será necesario un doble aislamiento como
mejora en el conducto o en los cables.
Reglas para el bloque de terminales de tornillo extraíble
En las tablas siguientes se muestran los tipos y los tamaños de cables para el
bloque de terminales de tornillo extraíble con 3,81 de paso (E/S y fuente de
alimentación):
En las tablas siguientes se muestran los tipos y los tamaños de cables para el
bloque de terminales de tornillo extraíble con 5,08 de paso (E/S y fuente de
alimentación):
Es obligatorio el uso de conductores de cobre.
PELIGRO
LOS CABLES SUELTOS CAUSAN DESCARGAS ELÉCTRICAS
Apriete las conexiones de conformidad con las especificaciones del par de
apriete.
Si no se siguen estas instrucciones, se producirán lesiones graves o la
muerte.
EIO0000003316.02 79

Instalación de M221
PELIGRO
PELIGRO DE INCENDIO
• Utilice únicamente los tamaños de cable recomendados para la capacidad
de corriente máxima de los canales de E/S y las fuentes de alimentación.
• Para el cableado de las salidas de relé (2 A), utilice conductores de al
menos 0,5 mm2(AWG 20) con una temperatura nominal de al menos 80 °C
(176 °F).
• Para los conductores comunes del cableado de salidas de relé (7 A) o
cableado de salidas de relé superior a 2 A, utilice conductores de al menos
1,0 mm2(AWG 16) con una temperatura nominal de como mínimo 80 °C
(176 °F).
Si no se siguen estas instrucciones, se producirán lesiones graves o la
muerte.
Reglas para el bloque de terminales de resorte extraíble
En las tablas siguientes se muestran los tipos y los tamaños de cables para el
bloque de terminales de resorte extraíble con 3,81 de paso (E/S y fuente de
alimentación):
En las tablas siguientes se muestran los tipos y los tamaños de cables para el
bloque de terminales de resorte extraíble con 5,08 de paso (E/S y fuente de
alimentación):
Es obligatorio el uso de conductores de cobre.
PELIGRO
PELIGRO DE INCENDIO
• Utilice únicamente los tamaños de cable recomendados para la capacidad
de corriente máxima de los canales de E/S y las fuentes de alimentación.
• Para el cableado de las salidas de relé (2 A), utilice conductores de al
menos 0,5 mm2(AWG 20) con una temperatura nominal de al menos 80 °C
(176 °F).
• Para los conductores comunes del cableado de salidas de relé (7 A) o
cableado de salidas de relé superior a 2 A, utilice conductores de al menos
1,0 mm2(AWG 16) con una temperatura nominal de como mínimo 80 °C
(176 °F).
Si no se siguen estas instrucciones, se producirán lesiones graves o la
muerte.
Los conectores de la abrazadera de resorte del bloque de terminales están
diseñados para un solo conductor o extremo de cable. En el caso de dos
conductores con un mismo conector, estos deberán instalarse con un extremo de
cable de doble conductor con el fin de evitar que se aflojen.
80 EIO0000003316.02

Instalación de M221
PELIGRO
LOS CABLES SUELTOS CAUSAN DESCARGAS ELÉCTRICAS
No inserte más de un conductor por cada conector de los bloques de terminales
de resorte a menos que utilice un extremo de cable de doble conductor
(puntera).
Si no se siguen estas instrucciones, se producirán lesiones graves o la
muerte.
Eliminación del bloque de terminales de E/S
En la siguiente figura se muestra la supresión del bloque de terminales de E/S del
TM221C Logic Controller:
Protección de salidas frente a daños por carga inductiva
En función de la carga, es posible que sea necesario un circuito de protección
para las salidas ubicadas en los controladores y determinados módulos. Las
cargas inductivas con tensiones de CC pueden crear reflexiones de tensión que
provocarán un rebasamiento que dañará o acortará la vida útil de los dispositivos
de salida.
ATENCIÓN
DAÑOS EN EL CIRCUITO DE SALIDA DEBIDOS A CARGAS INDUCTIVAS
Utilice un circuito o dispositivo de protección externo adecuado para reducir el
riesgo de daños por carga de corriente continua inductiva.
Si no se siguen estas instrucciones, pueden producirse lesiones o daños
en el equipo.
ADVERTENCIA
SALIDAS DE RELÉ SOLDADAS Y CERRADAS
• Proteja siempre las salidas de relé contra daños de carga de corriente
alterna inductiva utilizando un circuito o dispositivo protector externo
adecuado.
• No conecte salidas de relé a cargas capacitivas.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Las bobinas de contactor alimentadas por CA son, en determinadas
circunstancias, cargas inductivas que generan una interferencia de alta
frecuencia pronunciada y transitorios eléctricos al deenergizar la bobina del
contactor. Esta interferencia puede provocar que el controlador lógico detecte un
error de bus de E/S.
EIO0000003316.02 81

Instalación de M221
ADVERTENCIA
PÉRDIDA DE CONTROL CONSIGUIENTE
Instale un limitador de sobretensión de RC o un medio similar, como un relé de
interposición, en cada salida de relé de módulo de expansión de TM3 al
conectarse a contactores alimentados por CA o a otras formas de cargas
inductivas.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
circuito de protección A: este circuito de protección se puede utilizar para
circuitos de alimentación de cargas de CA y CC.
CValor de 0,1 a 1 μF
RResistencia que tiene aproximadamente el mismo valor de resistencia que la
carga
Circuito de protección B: este circuito de protección se puede utilizar para
circuitos de alimentación de cargas de CC.
Utilice un diodo con las siguientes características:
• Tensión inversa no disruptiva: tensión de alimentación del circuito de carga x
10.
• Corriente directa: superior a la corriente de carga.
Circuito de protección C: este circuito de protección se puede utilizar para
circuitos de alimentación de cargas de CA y CC.
En aplicaciones en las que la carga inductiva se conecta y desconecta con
frecuencia o rapidez, asegúrese de que la clasificación de energía continua (J) del
varistor sea al menos un 20% superior a la energía de la carga máxima.
82 EIO0000003316.02

Instalación de M221
Cableado y características de la fuente de alimentación de CC
Descripción general
En esta sección se proporcionan las características y los diagramas de cableado
de la fuente de alimentación de CC.
Rango de tensión de la fuente de alimentación de CC
Si no se mantiene el rango de tensión especificado, es posible que las salidas no
se activen como se espera. Utilice los dispositivos de bloqueo de seguridad y los
circuitos de control de la tensión apropiados.
PELIGRO
PELIGRO DE INCENDIO
• Utilice únicamente los tamaños de cable recomendados para la capacidad
de corriente máxima de los canales de E/S y las fuentes de alimentación.
• Para el cableado de las salidas de relé (2 A), utilice conductores de al
menos 0,5 mm2(AWG 20) con una temperatura nominal de al menos 80 °C
(176 °F).
• Para los conductores comunes del cableado de salidas de relé (7 A) o
cableado de salidas de relé superior a 2 A, utilice conductores de al menos
1,0 mm2(AWG 16) con una temperatura nominal de como mínimo 80 °C
(176 °F).
Si no se siguen estas instrucciones, se producirán lesiones graves o la
muerte.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No supere ninguno de los valores nominales que se especifican en las tablas
de características medioambientales y eléctricas.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Requisitos de la fuente de alimentación de CC
ADVERTENCIA
POSIBILIDAD DE SOBRECALENTAMIENTO E INCENDIO
• No conecte el equipo directamente a la tensión de línea.
• Utilice solo fuentes de alimentación y circuitos MBTP con aislamiento para
proporcionar alimentación al equipo1.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
1Para cumplir los requisitos de UL (Underwriters Laboratories), la fuente de
alimentación deberá cumplir también los diferentes criterios de NEC Class 2 y
tener la corriente limitada de forma inherente a una disponibilidad de salida de
potencia máxima de menos de 100 VA (unos 4 A con la tensión nominal), o bien
no limitada de forma inherente pero con un dispositivo de protección adicional
como un interruptor automático o un fusible que cumplan los requisitos de la
cláusula 9.4 Circuito de energía limitada de la norma UL 61010-1. En cualquiera
de los casos, el límite de corriente no deberá superar en ningún caso el de las
características eléctricas y los diagramas de cableado del equipo que se describe
en la presente documentación. En cualquiera de los casos, la fuente de
EIO0000003316.02 83

Instalación de M221
alimentación deberá contar con una conexión a tierra, y el usuario deberá separar
los circuitos de Class 2 de otros circuitos. Si el valor nominal especificado en las
características eléctricas o en los diagramas de cableado es superior al límite de
corriente especificado, podrán utilizarse varias fuentes de alimentación de Class
2.
Características de CC del controlador
En la siguiente tabla se muestran las características de la fuente de alimentación
de CC:
Característica Valor
Tensión nominal 24 V CC
Intervalo de tensión de la fuente de alimentación De 20,4 a 28,8 V CC
Tiempo de interrupción de la alimentación 10 ms a 24 V CC
Corriente de irrupción máxima 35 A
Consumo máximo de alimentación TM221C16T con 4 módulos de ampliación 10 W
TM221CE16T 11 W
TM221C16U 10 W
TM221CE16U 11 W
TM221C24T con 7 módulos de ampliación 13 W
TM221CE24T 14 W
TM221C24U 13 W
TM221CE24U 14 W
TM221C40T 16 W
TM221CE40T 17 W
TM221C40U 16 W
TM221CE40U 17 W
Consumo máximo de alimentación TM221M16R• con 7 módulos de ampliación 22,5 W
TM221ME16R• 23,3 W
TM221M16T• 22 W
TM221ME16T• 22,9 W
TM221M32TK 22,3 W
TM221ME32TK 23,2 W
Aislamiento entre la fuente de alimentación
de CC y la lógica interna TM221C Logic Controller 500 V CA
TM221M Logic Controller Sin aislamiento
entre la fuente de alimentación de CC y la conexión a tierra de
protección (PE) 500 V CA
Interrupción de la alimentación
El TM221M Logic Controller debe disponer de una fuente de alimentación externa
de 24 V. Durante las interrupciones de alimentación, el TM221M Logic Controller,
junto con la fuente de alimentación correspondiente, puede seguir funcionando
con normalidad durante un mínimo de 10 ms como se especifica en la normativa
IEC.
Al planificar la gestión de la alimentación suministrada al controlador, debe tener
en cuenta la duración de la interrupción de la alimentación debido al tiempo de
ciclo rápido del controlador.
Se podrían producir muchas exploraciones de la lógica y, como consecuencia,
actualizaciones de la tabla de imágenes de E/S durante la interrupción de la
84 EIO0000003316.02

Instalación de M221
alimentación, mientras no se suministre alimentación externa a las entradas, las
salidas, o a ambas, dependiendo de la arquitectura del sistema de alimentación y
de las circunstancias de las interrupciones de la alimentación.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
• Monitorice de forma individual todas las fuentes de alimentación utilizadas
en el sistema del controlador, incluidas las fuentes de alimentación de
entrada, de salida y del controlador para que el sistema se pueda apagar
correctamente durante las interrupciones del sistema de alimentación.
• Las entradas que controlan cada una de las fuentes de alimentación deben
ser entradas no filtradas.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Diagrama de cableado de la fuente de alimentación de CC
En la siguiente figura se muestra el procedimiento de desinstalación del bloque de
terminales de la fuente de alimentación:
En la figura siguiente se muestra el cableado de la fuente de alimentación de CC:
*Fusible tipo T
Para obtener más información, consulte Reglas para el bloque de terminales de
tornillo extraíble, página 79 con 5,08 de paso.
Cableado y características de la fuente de alimentación de CA
Descripción general
En esta sección se proporcionan los diagramas de cableado y las características
de la fuente de alimentación de CA.
EIO0000003316.02 85

Instalación de M221
Rango de tensión de la fuente de alimentación de CA
Si no se mantiene el rango de tensión especificado, es posible que las salidas no
se activen como se espera. Utilice los dispositivos de bloqueo de seguridad y los
circuitos de control de la tensión apropiados.
PELIGRO
PELIGRO DE INCENDIO
• Utilice únicamente los tamaños de cable recomendados para la capacidad
de corriente máxima de los canales de E/S y las fuentes de alimentación.
• Para el cableado de las salidas de relé (2 A), utilice conductores de al
menos 0,5 mm2(AWG 20) con una temperatura nominal de al menos 80 °C
(176 °F).
• Para los conductores comunes del cableado de salidas de relé (7 A) o
cableado de salidas de relé superior a 2 A, utilice conductores de al menos
1,0 mm2(AWG 16) con una temperatura nominal de como mínimo 80 °C
(176 °F).
Si no se siguen estas instrucciones, se producirán lesiones graves o la
muerte.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No supere ninguno de los valores nominales que se especifican en las tablas
de características medioambientales y eléctricas.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Características de CA del controlador
En la siguiente tabla se muestran las características de la fuente de alimentación
de CA:
Característica Valor
Tensión nominal De 100 a 240 V CA
límite (ondulación incluida) De 85 a 264 V CA
Frecuencia nominal 50/60 Hz
límite 45/66 Hz
Tiempo de interrupción de la alimentación 10 ms a 100 V CA
Corriente de irrupción
máxima a 240 V CA 40 A
Consumo máximo de
alimentación de 100 a
240 V CA
TM221C16R con 4 módulos de
ampliación 46 VA
TM221CE16R 49 VA
TM221C24R con 7 módulos de
ampliación 55 VA
TM221CE24R 58 VA
TM221C40R 67 VA
TM221CE40R 70 VA
Aislamiento entre la fuente de alimentación de CA y la lógica interna 2.300 V CA
entre la fuente de alimentación de CA y la conexión a tierra de protección (PE) 1500 V CA
86 EIO0000003316.02

Instalación de M221
Interrupción de la alimentación
La duración de las interrupciones de la alimentación en las que M221 Logic
Controller puede seguir funcionando con normalidad varía en función de la carga
de la fuente de alimentación del controlador, pero generalmente se mantiene en
10 ms, como mínimo, según lo especificado en la normativa IEC.
Si existe una carga mínima de la fuente de alimentación del controlador, la
interrupción puede ser superior a 400 ms.
Al planificar la gestión de la alimentación suministrada al controlador, debe tener
en cuenta la duración debida al tiempo de ciclo FAST.
Se podrían producir muchas exploraciones de la lógica y, como consecuencia,
actualizaciones de la tabla de imágenes de E/S durante la interrupción de la
alimentación, mientras no se suministre alimentación externa a las entradas, las
salidas, o a ambas, dependiendo de la arquitectura del sistema de alimentación y
de las circunstancias de las interrupciones de la alimentación.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
• Monitorice de forma individual todas las fuentes de alimentación utilizadas
en el sistema Modicon M221 Logic Controller, incluidas las fuentes de
alimentación de entrada, de salida y del controlador para que el sistema se
pueda apagar correctamente durante las interrupciones del sistema de
alimentación.
• Las entradas que controlan cada una de las fuentes de alimentación deben
ser entradas no filtradas.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Diagrama de cableado de la fuente de alimentación de CA
En la siguiente figura se muestra el procedimiento de desinstalación del bloque de
terminales de la fuente de alimentación:
En la figura siguiente se muestra el cableado de la fuente de alimentación de CA:
*Utilice un fusible externo de tipo T con retardo.
EIO0000003316.02 87

Instalación de M221
Puesta a tierra del sistema M221
Descripción general
Para contribuir a minimizar los efectos de interferencias electromagnéticas, los
cables que transportan la E/S rápida, la E/S analógica y las señales de
comunicación del bus de campo deben estar blindados.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
• Utilice cables blindados para todas las E/S rápidas, las E/S analógicas y las
señales de comunicación.
• Conecte a tierra los cables blindados para todas las E/S rápidas, las E/S
analógicas y las señales de comunicación en un único punto1.
• Enrute las comunicaciones y los cables de E/S por separado de los cables
de alimentación.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
1La conexión a tierra multipunto se admite si las conexiones se efectúan con una
placa de conexión a tierra equipotencial dimensionada para ayudar a evitar daños
en el blindaje del cable en caso de corrientes de cortocircuito del sistema de
alimentación.
El uso de cables blindados requiere el cumplimiento de las reglas de cableado
siguientes:
• Para las puestas a tierra de protección (PE), se pueden utilizar conductos
metálicos para toda la longitud del blindaje o una parte, siempre que no se
interrumpa la continuidad de las puestas a tierra. Para una conexión a tierra
funcional (FE), el blindaje pretende atenuar las interferencias
electromagnéticas y debe ser continuo en toda la longitud del cable. Si el
objetivo es tanto funcional como de protección, como suele ser el caso de los
cables de comunicación, el cable deberá disponer de un blindaje continuo.
• Siempre que sea posible, mantenga los cables que lleven un tipo de señal
separados de los cables con otros tipos de señales o de alimentación.
Conexión a tierra de protección (PE) en la placa de conexiones
La conexión a tierra de protección (PE) está conectada a la placa de conexiones
conductora mediante un cable de alta resistencia, normalmente un cable trenzado
de cobre con la sección de cable máxima permitida.
Conexiones de cables de blindaje
Los cables que transportan la E/S rápida, la E/S analógica y las señales de
comunicación del bus de campo deben estar blindados. El blindaje debe estar
puesto a tierra de un modo seguro. Los blindajes de E/S rápidas y E/S analógicas
pueden estar conectados a la puesta a tierra funcional (FE) o a la puesta a tierra
de protección (PE) del M221 Logic Controller. Los blindajes del cable de
comunicación del bus de campo deben estar conectados a la puesta a tierra de
protección (PE) con bornes de conexión fijados en la placa de conexiones
conductora de la instalación.
El blindaje del cable Modbus debe estar conectado a la puesta a tierra de
protección (PE).
88 EIO0000003316.02

Instalación de M221
PELIGRO
DESCARGA ELÉCTRICA
Asegúrese de que los cables Modbus están bien conectados a la conexión a
tierra de protección (PE).
Si no se siguen estas instrucciones, se producirán lesiones graves o la
muerte.
Blindaje del cable a tierra de protección (PE)
Para poner a tierra el blindaje de un cable mediante una abrazadera de puesta a
tierra:
Paso Descripción
1 Pele el blindaje en una longitud de 15
mm (0,59 pulg.).
2 Conecte el cable a la placa de
conexiones conductora apretando la
abrazadera de puesta a tierra con la
parte pelada del blindaje tan cerca
como pueda de la base del sistema del
M221 Logic Controller.
NOTA: El blindaje debe asegurarse bien a la placa de conexiones conductora
para lograr un contacto correcto.
EIO0000003316.02 89

Instalación de M221
Blindaje del cable de puesta a tierra funcional (FE)
Para conectar el blindaje de un cable mediante una barra de puesta a tierra:
Paso Descripción
1 Instale la barra de conexión a tierra
directamente en la placa de
conexiones conductora situada debajo
del sistema del M221 Logic Controller
como se indica.
2 Pele el blindaje en una longitud de
15 mm (0,59 in).
3 Fíjela firmemente al conector plano (1)
utilizando la abrazadera de nailon (2)
(ancho de 2,5 a 3 mm [de 0,1 a
0,12 in]) y una herramienta adecuada.
NOTA: Utilice la barra de conexión a tierra de TM2XMTGB exclusivamente
para conexiones a tierra funcionales (FE).
ADVERTENCIA
DESCONEXIÓN ACCIDENTAL DE LA CONEXIÓN A TIERRA DE
PROTECCIÓN (PE)
• No utilice la placa de conexión a tierra TM2XMTGB para proporcionar una
conexión a tierra de protección (PE).
• Utilice la placa de conexión a tierra TM2XMTGB solo para proporcionar una
conexión a tierra funcional (FE).
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
90 EIO0000003316.02

Modicon TM221C Logic Controller
Contenido de esta parte
TM221C16R ..................................................................................................92
TM221CE16R................................................................................................96
TM221C16T ..................................................................................................99
TM221CE16T ..............................................................................................102
TM221C16U ................................................................................................105
TM221CE16U..............................................................................................108
TM221C24R ................................................................................................ 111
TM221CE24R.............................................................................................. 114
TM221C24T ................................................................................................ 117
TM221CE24T ..............................................................................................120
TM221C24U ................................................................................................123
TM221CE24U..............................................................................................126
TM221C40R ................................................................................................129
TM221CE40R..............................................................................................133
TM221C40T ................................................................................................137
TM221CE40T ..............................................................................................141
TM221C40U ................................................................................................145
TM221CE40U..............................................................................................148
Canales de E/S incrustadas ..........................................................................151
EIO0000003316.02 91

TM221C16R
TM221C16R
Contenido de este capítulo
Presentación del modelo TM221C16R............................................................92
Descripción general
En este capítulo se describe el Logic Controller TM221C16R
Presentación del modelo TM221C16R
Descripción general
Las siguientes funciones se integran en el Logic Controller TM221C16R:
• 9 entradas digitales
◦4 entradas rápidas (HSC)
◦5 entradas normales
• 7 salidas digitales
◦7 salidas de relé
• 2 entradas analógicas
• Puertos de comunicación
◦1 puerto de línea serie
◦1 puerto de programación USB mini-B
En la siguiente figura se muestran los distintos componentes de los Logic Controllers:
Número Descripción Consulte
1 Indicadores LED de estado –
2 Bloque de terminales extraíble de la salida Reglas para el bloque de terminales de tornillo
extraíble, página 79
3 Cierre de clip para carril DIN (segmento DIN) de 35 mm (1,38 pulg.) Segmento DIN, página 71
4 Fuente de alimentación de 100 a 240 V CA Fuente de alimentación, página 87
5Puerto de programación USB mini-B / para la conexión de terminales a un
PC de programación (EcoStruxure Machine Expert - Basic) Puerto de programación USB mini-B , página
265
92 EIO0000003316.02

TM221C16R
Número Descripción Consulte
6 Puerto de línea serie 1 / conector RJ-45 (RS-232 o RS-485) Línea serie 1, página 268
7Slot para tarjeta SD Slot para tarjeta SD, página 57
8 2 entradas analógicas Entradas analógicas, página 178
9 Interruptor Run/Stop Interruptor Run/Stop , página 55
10 Bloque de terminales extraíble de entrada y fuente de alimentación
integrada utilizados para conectar los sensores con las entradas. (1)
Reglas para el bloque de terminales de tornillo
extraíble, página 79
11 Conector de extensión de E/S –
12 Slot para cartucho –
13 Cubierta de protección (slot para tarjeta SD, interruptor Run/Stop y puerto
de programación USB mini-B)
–
14 Gancho de sujeción –
15 Cubierta de entradas analógicas extraíble –
16 Soporte de la batería Instalación y sustitución de la batería, página
46
(1) Características de la fuente de alimentación integrada:
• Tensión: 24 V, de -15 % a +10 % aislada
• Imáx: 250 mA
• Sin protección ni detección de sobrecarga
Consulte Canales de E/S incrustadas, página 151.
Indicadores LED de estado
En la figura siguiente se muestran los indicadores LED de estado:
EIO0000003316.02 93

TM221C16R
En la tabla siguiente se describen los indicadores LED de estado:
Etiqueta Tipo de
función Color Estado Descripción
Estados del
controlador(1)
Comunicación del
puerto Prg Ejecución de
la aplicación
PWR Alimentación Verde Encendido indica que se aplica alimentación.
Apagado Indica que no recibe alimentación.
RUN Estado del
equipo Verde Encendido Indica que el controlador está ejecutando una aplicación válida.
Parpadeo Indica que el controlador tiene una aplicación válida que está
detenida.
Apagado Indica que el controlador no está programado.
ERR Error Rojo Encendido* EXCEPCIÓN Restringido NO
Intermitente (con
indicador LED de
estado RUN apagado)
ERROR INTERNO Restringido NO
Intermitencia lenta Error menor
detectado(2)
Sí Depende del
indicador LED
de estado RUN
Un parpadeo simple No hay aplicación Sí Sí
SD Acceso para
tarjeta SD,
página 57
Verde Encendido Indica que se está accediendo a la tarjeta SD.
Parpadeo Indica que se ha detectado un error durante la utilización de la
tarjeta SD.
Apagado Indica que no hay acceso (inactivo) o que no hay ninguna tarjeta.
BAT Batería, página
45 Rojo Encendido Indica que la batería debe sustituirse.
Parpadeo Indica que la batería está baja de carga.
Apagado Indica que la batería está en buen estado.
SL Línea serie 1,
página 268
Verde Encendido Indica el estado de la línea serie 1.
Parpadeo Indica actividad en la línea serie 1.
Apagado Indica que no existe comunicación serie.
*El indicador LED ERR está conectado durante el proceso de arranque.
NOTA: Para obtener información sobre los LED integrados en el conector Ethernet, consulte Indicadores LED de estado de la
Ethernet, página 268.
(1) Para obtener más información sobre la descripción del estado del controlador, consulte M221 Logic Controller - Guía de programación
(consulte Modicon M221, Logic Controller - Guía de programación).
(2) El controlador ha detectado un error pero permanece en estado RUNNING. El LED ERR del controlador parpadea. Para obtener más
información, consulte M221 Logic Controller - Guía de programación.
94 EIO0000003316.02


TM221CE16R
TM221CE16R
Contenido de este capítulo
Presentación de TM221CE16R ......................................................................96
Descripción general
En este capítulo se describe el Logic Controller TM221CE16R.
Presentación de TM221CE16R
Descripción general
Las siguientes funciones se integran en el Logic Controller TM221CE16R:
• 9 entradas digitales
◦4 entradas rápidas (HSC)
◦5 entradas normales
• 7 salidas digitales
◦7 salidas de relé
• 2 entradas analógicas
• Puertos de comunicación
◦1 puerto de línea serie
◦1 puerto de programación USB mini-B
◦1 puerto Ethernet
Descripción
En la siguiente figura se muestran los distintos componentes del Logic Controller:
Número Descripción Consulte
1 Indicadores LED de estado –
2 Bloque de terminales extraíble de la salida Reglas para el bloque de terminales de tornillo
extraíble, página 79
96 EIO0000003316.02

TM221CE16R
Número Descripción Consulte
3 Cierre de clip para carril DIN (segmento DIN) de 35 mm (1,38 pulg.) Segmento DIN, página 71
4 Puerto Ethernet / conector RJ-45 Puerto Ethernet, página 266
5Fuente de alimentación de 100 a 240 V CA Fuente de alimentación, página 87
6 Puerto de programación USB mini-B / para la conexión de terminales a un
PC de programación (EcoStruxure Machine Expert - Basic) Puerto de programación USB mini-B , página
265
7Puerto de línea serie 1 / conector RJ-45 (RS-232 o RS-485) Línea serie 1, página 268
8 Slot para tarjeta SD Slot para tarjeta SD, página 57
9 2 entradas analógicas Entradas analógicas, página 178
10 Interruptor Run/Stop Interruptor Run/Stop , página 55
11 Bloque de terminales extraíble de entrada y fuente de alimentación
integrada utilizados para conectar los sensores con las entradas.(1)
Reglas para el bloque de terminales de tornillo
extraíble, página 79
12 Conector de extensión de E/S –
13 Slot para cartucho –
14 Cubierta de protección (slot para tarjeta SD, interruptor Run/Stop y puerto
de programación USB mini-B)
–
15 Gancho de sujeción –
16 Cubierta de entradas analógicas extraíble –
17 Soporte de la batería Instalación y sustitución de la batería, página
46
(1) Características de la fuente de alimentación integrada:
• Tensión: 24 V, de -15 % a +10 % aislada
• Imáx: 250 mA
• Sin protección ni detección de sobrecarga
Consulte Canales de E/S incrustadas, página 151.
Indicadores LED de estado
En la figura siguiente se muestran los indicadores LED de estado:
En la tabla siguiente se describen los indicadores LED de estado:
Etiqueta Tipo de
función Color Estado Descripción
Estados del
controlador(1)
Comunicación del
puerto Prg Ejecución de
la aplicación
PWR Alimentación Verde Encendido indica que se aplica alimentación.
Apagado Indica que no recibe alimentación.
RUN Estado del
equipo Verde Encendido Indica que el controlador está ejecutando una aplicación válida.
Parpadeo Indica que el controlador tiene una aplicación válida que está
detenida.
Apagado Indica que el controlador no está programado.
EIO0000003316.02 97

TM221CE16R
Etiqueta Tipo de
función Color Estado Descripción
Estados del
controlador(1)
Comunicación del
puerto Prg Ejecución de
la aplicación
ERR Error Rojo Encendido* EXCEPCIÓN Restringido NO
Intermitente (con
indicador LED de
estado RUN apagado)
ERROR INTERNO Restringido NO
Intermitencia lenta Error menor
detectado(2)
Sí Depende del
indicador LED
de estado RUN
Un parpadeo simple No hay aplicación Sí Sí
SD Acceso para
tarjeta SD,
página 57
Verde Encendido Indica que se está accediendo a la tarjeta SD.
Parpadeo Indica que se ha detectado un error durante la utilización de la
tarjeta SD.
Apagado Indica que no hay acceso (inactivo) o que no hay ninguna tarjeta.
BAT Batería, página
45 Rojo Encendido Indica que la batería debe sustituirse.
Parpadeo Indica que la batería está baja de carga.
Apagado Indica que la batería está en buen estado.
SL Línea serie 1,
página 268 Verde Encendido Indica el estado de la línea serie 1.
Parpadeo Indica actividad en la línea serie 1.
Apagado Indica que no existe comunicación serie.
*El indicador LED ERR está conectado durante el proceso de arranque.
NOTA: Para obtener información sobre los LED integrados en el conector Ethernet, consulte Indicadores LED de estado de la
Ethernet, página 268.
(1) Para obtener más información sobre la descripción del estado del controlador, consulte M221 Logic Controller - Guía de programación
(consulte Modicon M221, Logic Controller - Guía de programación).
(2) El controlador ha detectado un error pero permanece en estado RUNNING. El LED ERR del controlador parpadea. Para obtener más
información, consulte M221 Logic Controller - Guía de programación.
Dimensiones
En la siguiente figura se muestran las dimensiones externas de los Logic
Controllers:
98 EIO0000003316.02

TM221C16T
TM221C16T
Contenido de este capítulo
Presentación del modelo TM221C16T ............................................................99
Descripción general
En este capítulo se describe el Logic Controller TM221C16•.
Presentación del modelo TM221C16T
Descripción general
Las siguientes funciones se integran en el Logic Controller TM221C16T:
• 9 entradas digitales
◦4 entradas rápidas (HSC)
◦5 entradas normales
• 7 salidas digitales
◦2 salidas rápidas de transistor de común positivo
◦5 salidas normales de transistor de común positivo
• 2 entradas analógicas
• Puertos de comunicación
◦1 puerto de línea serie
◦1 puerto de programación USB mini-B
Descripción
En la siguiente figura se muestran los distintos componentes de los Logic Controllers:
Número Descripción Consulte
1 Indicadores LED de estado –
2 Bloque de terminales extraíble de la salida Reglas para el bloque de terminales de tornillo
extraíble, página 79
EIO0000003316.02 99

TM221C16T
Número Descripción Consulte
3 Carril DIN (segmento DIN) de cierre de clip para 35 mm (1,38 in) Segmento DIN, página 71
4 Fuente de alimentación de 24 V CC Fuente de alimentación, página 83
5Puerto de programación USB mini-B / para la conexión de terminales a un
PC de programación (EcoStruxure Machine Expert - Basic) Puerto de programación USB mini-B, página
265
6 Puerto de línea serie 1 / conector RJ-45 (RS-232 o RS-485) Línea serie 1, página 268
7Slot para tarjeta SD Slot para tarjeta SD, página 57
8 2 entradas analógicas Entradas analógicas, página 178
9 Interruptor Run/Stop Interruptor Run/Stop, página 55
10 Bloque de terminales extraíble de la entrada Reglas para el bloque de terminales de tornillo
extraíble, página 79
11 Conector de ampliación de E/S –
12 Slot para cartucho –
13 Cubierta de protección (slot para tarjeta SD, interruptor Ejecutar/Detener
y puerto de programación USB mini-B)
–
14 Gancho de sujeción –
15 Cubierta de entradas analógicas extraíble –
16 Soporte de la batería Instalación y sustitución de la batería, página
46
Indicadores LED de estado
En la figura siguiente se muestran los indicadores LED de estado:
En la tabla siguiente se describen los indicadores LED de estado:
Etiqueta Tipo de
función Color Estado Descripción
Estados del
controlador(1)
Comunicación del
puerto Prg Ejecución de
la aplicación
PWR Alimentación Verde Encendido indica que se aplica alimentación.
Apagado Indica que no recibe alimentación.
RUN Estado del
equipo Verde Encendido Indica que el controlador está ejecutando una aplicación válida.
Parpadeo Indica que el controlador tiene una aplicación válida que está
detenida.
Apagado Indica que el controlador no está programado.
100 EIO0000003316.02

TM221C16T
Etiqueta Tipo de
función Color Estado Descripción
Estados del
controlador(1)
Comunicación del
puerto Prg Ejecución de
la aplicación
ERR Error Rojo Encendido* EXCEPCIÓN Restringido NO
Intermitente (con
indicador LED de
estado RUN apagado)
ERROR INTERNO Restringido NO
Intermitencia lenta Error menor
detectado(2)
Sí Depende del
indicador LED
de estado RUN
Un parpadeo simple No hay aplicación Sí Sí
SD Acceso para
tarjeta SD,
página 57
Verde Encendido Indica que se está accediendo a la tarjeta SD.
Parpadeo Indica que se ha detectado un error durante la utilización de la
tarjeta SD.
Apagado Indica que no hay acceso (inactivo) o que no hay ninguna tarjeta.
BAT Batería, página
45 Rojo Encendido Indica que la batería debe sustituirse.
Parpadeo Indica que la batería está baja de carga.
Apagado Indica que la batería está en buen estado.
SL Línea serie 1,
página 268 Verde Encendido Indica el estado de la línea serie 1.
Parpadeo Indica actividad en la línea serie 1.
Apagado Indica que no existe comunicación serie.
*El indicador LED ERR está conectado durante el proceso de arranque.
NOTA: Para obtener información sobre los LED integrados en el conector Ethernet, consulte Indicadores LED de estado de la
Ethernet, página 268.
(1) Para obtener más información sobre la descripción del estado del controlador, consulte M221 Logic Controller - Guía de programación
(consulte Modicon M221, Logic Controller - Guía de programación).
(2) El controlador ha detectado un error pero permanece en estado RUNNING. El LED ERR del controlador parpadea. Para obtener más
información, consulte M221 Logic Controller - Guía de programación.
Dimensiones
En la siguiente figura se muestran las dimensiones externas de los Logic
Controllers:
EIO0000003316.02 101

TM221CE16T
TM221CE16T
Contenido de este capítulo
Presentación del modelo TM221CE16T........................................................102
Descripción general
En este capítulo se describe el Logic Controller TM221CE16T.
Presentación del modelo TM221CE16T
Descripción general
Las siguientes funciones se integran en el Logic Controller TM221CE16T:
• 9 entradas digitales
◦4 entradas rápidas (HSC)
◦5 entradas normales
• 7 salidas digitales
◦2 salidas rápidas de transistor de común positivo
◦5 salidas normales de transistor de común positivo
• 2 entradas analógicas
• Puertos de comunicación
◦1 puerto de línea serie
◦1 puerto de programación USB mini-B
◦1 puerto Ethernet
Descripción
En la siguiente figura se muestran los distintos componentes de los Logic Controllers:
102 EIO0000003316.02

TM221CE16T
Número Descripción Consulte
1 Indicadores LED de estado –
2 Bloque de terminales extraíble de la salida Reglas para el bloque de terminales de tornillo
extraíble, página 79
3 Carril DIN (segmento DIN) de cierre de clip para 35 mm (1,38 in) Segmento DIN, página 71
4 Puerto Ethernet / conector RJ-45 Puerto Ethernet, página 266
5Fuente de alimentación de 24 V CC Fuente de alimentación, página 83
6 Puerto de programación USB mini-B / para la conexión de terminales a un
PC de programación (EcoStruxure Machine Expert - Basic) Puerto de programación USB mini-B, página
265
7Puerto de línea serie 1 / conector RJ-45 (RS-232 o RS-485) Línea serie 1, página 268
8 Slot para tarjeta SD Slot para tarjeta SD, página 57
9 2 entradas analógicas Entradas analógicas, página 178
10 Interruptor Run/Stop Interruptor Run/Stop, página 55
11 Bloque de terminales extraíble de la entrada Reglas para el bloque de terminales de tornillo
extraíble, página 79
12 Conector de ampliación de E/S –
13 Slot para cartucho –
14 Cubierta de protección (slot para tarjeta SD, interruptor Ejecutar/Detener
y puerto de programación USB mini-B)
–
15 Gancho de sujeción –
16 Cubierta de entradas analógicas extraíble –
17 Soporte de la batería Instalación y sustitución de la batería, página
46
Indicadores LED de estado
En la figura siguiente se muestran los indicadores LED de estado:
En la tabla siguiente se describen los indicadores LED de estado:
Etiqueta Tipo de
función Color Estado Descripción
Estados del
controlador(1)
Comunicación del
puerto Prg Ejecución de
la aplicación
PWR Alimentación Verde Encendido indica que se aplica alimentación.
Apagado Indica que no recibe alimentación.
RUN Estado del
equipo Verde Encendido Indica que el controlador está ejecutando una aplicación válida.
Parpadeo Indica que el controlador tiene una aplicación válida que está
detenida.
Apagado Indica que el controlador no está programado.
EIO0000003316.02 103

TM221CE16T
Etiqueta Tipo de
función Color Estado Descripción
Estados del
controlador(1)
Comunicación del
puerto Prg Ejecución de
la aplicación
ERR Error Rojo Encendido* EXCEPCIÓN Restringido NO
Intermitente (con
indicador LED de
estado RUN apagado)
ERROR INTERNO Restringido NO
Intermitencia lenta Error menor
detectado(2)
Sí Depende del
indicador LED
de estado RUN
Un parpadeo simple No hay aplicación Sí Sí
SD Acceso para
tarjeta SD,
página 57
Verde Encendido Indica que se está accediendo a la tarjeta SD.
Parpadeo Indica que se ha detectado un error durante la utilización de la
tarjeta SD.
Apagado Indica que no hay acceso (inactivo) o que no hay ninguna tarjeta.
BAT Batería, página
45 Rojo Encendido Indica que la batería debe sustituirse.
Parpadeo Indica que la batería está baja de carga.
Apagado Indica que la batería está en buen estado.
SL Línea serie 1,
página 268 Verde Encendido Indica el estado de la línea serie 1.
Parpadeo Indica actividad en la línea serie 1.
Apagado Indica que no existe comunicación serie.
*El indicador LED ERR está conectado durante el proceso de arranque.
NOTA: Para obtener información sobre los LED integrados en el conector Ethernet, consulte Indicadores LED de estado de la
Ethernet, página 268.
(1) Para obtener más información sobre la descripción del estado del controlador, consulte M221 Logic Controller - Guía de programación
(consulte Modicon M221, Logic Controller - Guía de programación).
(2) El controlador ha detectado un error pero permanece en estado RUNNING. El LED ERR del controlador parpadea. Para obtener más
información, consulte M221 Logic Controller - Guía de programación.
Dimensiones
En la siguiente figura se muestran las dimensiones externas de los Logic
Controllers:
104 EIO0000003316.02

TM221C16U
TM221C16U
Contenido de este capítulo
Presentación del modelo TM221C16U..........................................................105
Descripción general
En este capítulo se describe el TM221C16• Logic Controller.
Presentación del modelo TM221C16U
Descripción general
Las siguientes funciones se integran en el Logic Controller TM221C16U:
• 9 entradas digitales
◦4 entradas rápidas (HSC)
◦5 entradas normales
• 7 salidas digitales
◦2 salidas rápidas de transistor de común negativo
◦5 salidas normales de transistor de común negativo
• 2 entradas analógicas
• Puertos de comunicaciones
◦1 puerto de línea serie
◦1 puerto de programación USB mini-B
Descripción
En la siguiente figura se muestran los distintos componentes de los Logic
Controllers:
EIO0000003316.02 105

TM221C16U
Número Descripción Consulte
1 Indicadores LED de estado –
2 Bloque de terminales extraíble de la salida Reglas para el bloque de terminales de tornillo
extraíble, página 79
3 Carril DIN (segmento DIN) de cierre de clip para 35 mm (1,38 in) Segmento DIN, página 71
4 Fuente de alimentación de 24 V CC Fuente de alimentación, página 83
5Puerto de programación USB mini-B / para la conexión de terminales a un
PC de programación (EcoStruxure Machine Expert - Basic) Puerto de programación USB mini-B, página
265
6 Puerto de línea serie 1 / conector RJ-45 (RS-232 o RS-485) Línea serie 1, página 268
7Slot para tarjeta SD Slot para tarjeta SD, página 57
8 2 entradas analógicas Entradas analógicas, página 178
9 Interruptor Run/Stop Interruptor Run/Stop, página 55
10 Bloque de terminales extraíble de la entrada Reglas para el bloque de terminales de tornillo
extraíble, página 79
11 Conector de ampliación de E/S –
12 Slot para cartucho –
13 Cubierta de protección (slot para tarjeta SD, interruptor Ejecutar/Detener
y puerto de programación USB mini-B)
–
14 Gancho de sujeción –
15 Cubierta de entradas analógicas extraíble –
16 Soporte de la batería Instalación y sustitución de la batería, página
46
Indicadores LED de estado
En la figura siguiente se muestran los indicadores LED de estado:
En la tabla siguiente se describen los indicadores LED de estado:
106 EIO0000003316.02

TM221C16U
Etiqueta Tipo de
función Color Estado Descripción
Estados del
controlador(1)
Comunicación del
puerto Prg Ejecución de
la aplicación
PWR Alimentación Verde Encendido indica que se aplica alimentación.
Apagado Indica que no recibe alimentación.
RUN Estado del
equipo Verde Encendido Indica que el controlador está ejecutando una aplicación válida.
Parpadeo Indica que el controlador tiene una aplicación válida que está
detenida.
Apagado Indica que el controlador no está programado.
ERR Error Rojo Encendido* EXCEPCIÓN Restringido NO
Intermitente (con
indicador LED de
estado RUN apagado)
ERROR INTERNO Restringido NO
Intermitencia lenta Error menor
detectado(2)
Sí Depende del
indicador LED
de estado RUN
Un parpadeo simple No hay aplicación Sí Sí
SD Acceso para
tarjeta SD,
página 57
Verde Encendido Indica que se está accediendo a la tarjeta SD.
Parpadeo Indica que se ha detectado un error durante la utilización de la
tarjeta SD.
Apagado Indica que no hay acceso (inactivo) o que no hay ninguna tarjeta.
BAT Batería, página
45 Rojo Encendido Indica que la batería debe sustituirse.
Parpadeo Indica que la batería está baja de carga.
Apagado Indica que la batería está en buen estado.
SL Línea serie 1,
página 268 Verde Encendido Indica el estado de la línea serie 1.
Parpadeo Indica actividad en la línea serie 1.
Apagado Indica que no existe comunicación serie.
*El indicador LED ERR está conectado durante el proceso de arranque.
NOTA: Para obtener información sobre los LED integrados en el conector Ethernet, consulte Indicadores LED de estado de la
Ethernet, página 268.
(1) Para obtener más información sobre la descripción del estado del controlador, consulte M221 Logic Controller - Guía de programación
(consulte Modicon M221, Logic Controller - Guía de programación).
(2) El controlador ha detectado un error pero permanece en estado RUNNING. El LED ERR del controlador parpadea. Para obtener más
información, consulte M221 Logic Controller - Guía de programación.
Dimensiones
En la siguiente figura se muestran las dimensiones externas de los Logic
Controllers:
EIO0000003316.02 107

TM221CE16U
TM221CE16U
Contenido de este capítulo
Presentación del modelo TM221CE16U........................................................108
Descripción general
En este capítulo se describe el TM221CE16U Logic Controller.
Presentación del modelo TM221CE16U
Descripción general
Las siguientes funciones se integran en el Logic Controller TM221CE16U:
• 9 entradas digitales
◦4 entradas rápidas (HSC)
◦5 entradas normales
• 7 salidas digitales
◦2 salidas rápidas de transistor de común negativo
◦5 salidas normales de transistor de común negativo
• 2 entradas analógicas
• Puertos de comunicación
◦1 puerto de línea serie
◦1 puerto de programación USB mini-B
◦1 puerto Ethernet
Descripción
En la siguiente figura se muestran los distintos componentes de los Logic
Controllers:
108 EIO0000003316.02

TM221CE16U
Número Descripción Consulte
1 Indicadores LED de estado –
2 Bloque de terminales extraíble de la salida Reglas para el bloque de terminales de tornillo
extraíble, página 79
3 Carril DIN (segmento DIN) de cierre de clip para 35 mm (1,38 in) Segmento DIN, página 71
4 Puerto Ethernet / conector RJ-45 Puerto Ethernet, página 266
5Fuente de alimentación de 24 V CC Fuente de alimentación, página 83
6 Puerto de programación USB mini-B / para la conexión de terminales a un
PC de programación (EcoStruxure Machine Expert - Basic) Puerto de programación USB mini-B, página
265
7Puerto de línea serie 1 / conector RJ-45 (RS-232 o RS-485) Línea serie 1, página 268
8 Slot para tarjeta SD Slot para tarjeta SD, página 57
9 2 entradas analógicas Entradas analógicas, página 178
10 Interruptor Run/Stop Interruptor Run/Stop, página 55
11 Bloque de terminales extraíble de la entrada Reglas para el bloque de terminales de tornillo
extraíble, página 79
12 Conector de ampliación de E/S –
13 Slot para cartucho –
14 Cubierta de protección (slot para tarjeta SD, interruptor Ejecutar/Detener
y puerto de programación USB mini-B)
–
15 Gancho de sujeción –
16 Cubierta de entradas analógicas extraíble –
17 Soporte de la batería Instalación y sustitución de la batería, página
46
Indicadores LED de estado
En la figura siguiente se muestran los indicadores LED de estado:
En la tabla siguiente se describen los indicadores LED de estado:
EIO0000003316.02 109

TM221CE16U
Etiqueta Tipo de
función Color Estado Descripción
Estados del
controlador(1)
Comunicación del
puerto Prg Ejecución de
la aplicación
PWR Alimentación Verde Encendido indica que se aplica alimentación.
Apagado Indica que no recibe alimentación.
RUN Estado del
equipo Verde Encendido Indica que el controlador está ejecutando una aplicación válida.
Parpadeo Indica que el controlador tiene una aplicación válida que está
detenida.
Apagado Indica que el controlador no está programado.
ERR Error Rojo Encendido* EXCEPCIÓN Restringido NO
Intermitente (con
indicador LED de
estado RUN apagado)
ERROR INTERNO Restringido NO
Intermitencia lenta Error menor
detectado(2)
Sí Depende del
indicador LED
de estado RUN
Un parpadeo simple No hay aplicación Sí Sí
SD Acceso para
tarjeta SD,
página 57
Verde Encendido Indica que se está accediendo a la tarjeta SD.
Parpadeo Indica que se ha detectado un error durante la utilización de la
tarjeta SD.
Apagado Indica que no hay acceso (inactivo) o que no hay ninguna tarjeta.
BAT Batería, página
45 Rojo Encendido Indica que la batería debe sustituirse.
Parpadeo Indica que la batería está baja de carga.
Apagado Indica que la batería está en buen estado.
SL Línea serie 1,
página 268 Verde Encendido Indica el estado de la línea serie 1.
Parpadeo Indica actividad en la línea serie 1.
Apagado Indica que no existe comunicación serie.
*El indicador LED ERR está conectado durante el proceso de arranque.
NOTA: Para obtener información sobre los LED integrados en el conector Ethernet, consulte Indicadores LED de estado de la
Ethernet, página 268.
(1) Para obtener más información sobre la descripción del estado del controlador, consulte M221 Logic Controller - Guía de programación
(consulte Modicon M221, Logic Controller - Guía de programación).
(2) El controlador ha detectado un error pero permanece en estado RUNNING. El LED ERR del controlador parpadea. Para obtener más
información, consulte M221 Logic Controller - Guía de programación.
Dimensiones
En la siguiente figura se muestran las dimensiones externas de los Logic
Controllers:
110 EIO0000003316.02

TM221C24R
TM221C24R
Contenido de este capítulo
Presentación del modelo TM221C24R.......................................................... 111
Descripción general
En este capítulo se describe el Logic Controller TM221C24R.
Presentación del modelo TM221C24R
Descripción general
Las siguientes funciones se integran en el Logic Controller TM221C24R:
• 14 entradas digitales
◦4 entradas rápidas (HSC)
◦10 entradas normales
• 10 salidas digitales
◦10 salidas de relé
• 2 entradas analógicas
• Puertos de comunicación
◦1 puerto de línea serie
◦1 puerto de programación USB mini-B
Descripción
En la siguiente figura se muestran los distintos componentes del Logic Controller:
Número Descripción Consulte
1 Indicadores LED de estado –
2 Bloque de terminales extraíble de la salida Reglas para el bloque de terminales de tornillo
extraíble, página 79
3 Cierre de clip para carril DIN (segmento DIN) de 35 mm (1,38 pulg.) Segmento DIN, página 71
EIO0000003316.02 111

TM221C24R
Número Descripción Consulte
4 Fuente de alimentación de 100 a 240 V CA Fuente de alimentación, página 87
5Puerto de programación USB mini-B / para la conexión de terminales a un
PC de programación (EcoStruxure Machine Expert - Basic) Puerto de programación USB mini-B , página
265
6 Puerto de línea serie 1 / conector RJ-45 (RS-232 o RS-485) Línea serie 1, página 268
7Slot para tarjeta SD Slot para tarjeta SD, página 57
8 2 entradas analógicas Entradas analógicas, página 178
9 Interruptor Run/Stop Interruptor Run/Stop , página 55
10 Bloque de terminales extraíble de entrada y fuente de alimentación
integrada utilizados para conectar los sensores con las entradas. (1)
Reglas para el bloque de terminales de tornillo
extraíble, página 79
11 Conector de extensión de E/S –
12 Slot para cartucho –
13 Cubierta de protección (slot para tarjeta SD, interruptor Run/Stop y puerto
de programación USB mini-B)
–
14 Gancho de sujeción –
15 Cubierta de entradas analógicas extraíble –
16 Soporte de la batería Instalación y sustitución de la batería, página
46
(1) Características de la fuente de alimentación integrada:
• Tensión: 24 V, de -15 % a +10 % aislada
• Imáx: 250 mA
• Sin protección ni detección de sobrecarga
Consulte Canales de E/S incrustadas, página 151.
Indicadores LED de estado
En la figura siguiente se muestran los indicadores LED de estado:
En la tabla siguiente se describen los indicadores LED de estado:
Etiqueta Tipo de
función Color Estado Descripción
Estados del
controlador(1)
Comunicación del
puerto Prg Ejecución de
la aplicación
PWR Alimentación Verde Encendido indica que se aplica alimentación.
Apagado Indica que no recibe alimentación.
RUN Estado del
equipo Verde Encendido Indica que el controlador está ejecutando una aplicación válida.
Parpadeo Indica que el controlador tiene una aplicación válida que está
detenida.
Apagado Indica que el controlador no está programado.
112 EIO0000003316.02

TM221C24R
Etiqueta Tipo de
función Color Estado Descripción
Estados del
controlador(1)
Comunicación del
puerto Prg Ejecución de
la aplicación
ERR Error Rojo Encendido* EXCEPCIÓN Restringido NO
Intermitente (con
indicador LED de
estado RUN apagado)
ERROR INTERNO Restringido NO
Intermitencia lenta Error menor
detectado(2)
Sí Depende del
indicador LED
de estado RUN
Un parpadeo simple No hay aplicación Sí Sí
SD Acceso para
tarjeta SD,
página 57
Verde Encendido Indica que se está accediendo a la tarjeta SD.
Parpadeo Indica que se ha detectado un error durante la utilización de la
tarjeta SD.
Apagado Indica que no hay acceso (inactivo) o que no hay ninguna tarjeta.
BAT Batería, página
45 Rojo Encendido Indica que la batería debe sustituirse.
Parpadeo Indica que la batería está baja de carga.
Apagado Indica que la batería está en buen estado.
SL Línea serie 1,
página 268 Verde Encendido Indica el estado de la línea serie 1.
Parpadeo Indica actividad en la línea serie 1.
Apagado Indica que no existe comunicación serie.
*El indicador LED ERR está conectado durante el proceso de arranque.
NOTA: Para obtener información sobre los LED integrados en el conector Ethernet, consulte Indicadores LED de estado de la
Ethernet, página 268.
(1) Para obtener más información sobre la descripción del estado del controlador, consulte M221 Logic Controller - Guía de programación
(consulte Modicon M221, Logic Controller - Guía de programación).
(2) El controlador ha detectado un error pero permanece en estado RUNNING. El LED ERR del controlador parpadea. Para obtener más
información, consulte M221 Logic Controller - Guía de programación.
Dimensiones
En la siguiente figura se muestran las dimensiones externas de los Logic
Controllers:
EIO0000003316.02 113

TM221CE24R
TM221CE24R
Contenido de este capítulo
Presentación del modelo TM221CE24R........................................................ 114
Descripción general
En este capítulo se describe el Logic Controller TM221CE24R.
Presentación del modelo TM221CE24R
Descripción general
Las siguientes funciones se integran en el Logic Controller TM221CE24R:
• 14 entradas digitales
◦4 entradas rápidas (HSC)
◦10 entradas normales
• 10 salidas digitales
◦10 salidas de relé
• 2 entradas analógicas
• Puertos de comunicación
◦1 puerto de línea serie
◦1 puerto de programación USB mini-B
◦1 puerto Ethernet
Descripción
En la siguiente figura se muestran los distintos componentes de los Logic Controllers:
Número Descripción Consulte
1 Indicadores LED de estado –
2 Bloque de terminales extraíble de la salida Reglas para el bloque de terminales de tornillo
extraíble, página 79
114 EIO0000003316.02

TM221CE24R
Número Descripción Consulte
3 Cierre de clip para carril DIN (segmento DIN) de 35 mm (1,38 pulg.) Segmento DIN, página 71
4 Puerto Ethernet / conector RJ-45 Puerto Ethernet, página 266
5Fuente de alimentación de 100 a 240 V CA Fuente de alimentación, página 87
6 Puerto de programación USB mini-B / para la conexión de terminales a un
PC de programación (EcoStruxure Machine Expert - Basic) Puerto de programación USB mini-B , página
265
7Puerto de línea serie 1 / conector RJ-45 (RS-232 o RS-485) Línea serie 1, página 268
8 Slot para tarjeta SD Slot para tarjeta SD, página 57
9 2 entradas analógicas Entradas analógicas, página 178
10 Interruptor Run/Stop Interruptor Run/Stop , página 55
11 Bloque de terminales extraíble de entrada y fuente de alimentación
integrada utilizados para conectar los sensores con las entradas.(1)
Reglas para el bloque de terminales de tornillo
extraíble, página 79
12 Conector de extensión de E/S –
13 Slot para cartucho –
14 Cubierta de protección (slot para tarjeta SD, interruptor Run/Stop y puerto
de programación USB mini-B)
–
15 Gancho de sujeción –
16 Cubierta de entradas analógicas extraíble –
17 Soporte de la batería Instalación y sustitución de la batería, página
46
(1) Características de la fuente de alimentación integrada:
• Tensión: 24 V, de -15 % a +10 % aislada
• Imáx: 250 mA
• Sin protección ni detección de sobrecarga
Consulte Canales de E/S incrustadas, página 151.
Indicadores LED de estado
En la figura siguiente se muestran los indicadores LED de estado:
En la tabla siguiente se describen los indicadores LED de estado:
Etiqueta Tipo de
función Color Estado Descripción
Estados del
controlador(1)
Comunicación del
puerto Prg Ejecución de
la aplicación
PWR Alimentación Verde Encendido indica que se aplica alimentación.
Apagado Indica que no recibe alimentación.
RUN Estado del
equipo Verde Encendido Indica que el controlador está ejecutando una aplicación válida.
Parpadeo Indica que el controlador tiene una aplicación válida que está
detenida.
Apagado Indica que el controlador no está programado.
EIO0000003316.02 115

TM221CE24R
Etiqueta Tipo de
función Color Estado Descripción
Estados del
controlador(1)
Comunicación del
puerto Prg Ejecución de
la aplicación
ERR Error Rojo Encendido* EXCEPCIÓN Restringido NO
Intermitente (con
indicador LED de
estado RUN apagado)
ERROR INTERNO Restringido NO
Intermitencia lenta Error menor
detectado(2)
Sí Depende del
indicador LED
de estado RUN
Un parpadeo simple No hay aplicación Sí Sí
SD Acceso para
tarjeta SD,
página 57
Verde Encendido Indica que se está accediendo a la tarjeta SD.
Parpadeo Indica que se ha detectado un error durante la utilización de la
tarjeta SD.
Apagado Indica que no hay acceso (inactivo) o que no hay ninguna tarjeta.
BAT Batería, página
45 Rojo Encendido Indica que la batería debe sustituirse.
Parpadeo Indica que la batería está baja de carga.
Apagado Indica que la batería está en buen estado.
SL Línea serie 1,
página 268 Verde Encendido Indica el estado de la línea serie 1.
Parpadeo Indica actividad en la línea serie 1.
Apagado Indica que no existe comunicación serie.
*El indicador LED ERR está conectado durante el proceso de arranque.
NOTA: Para obtener información sobre los LED integrados en el conector Ethernet, consulte Indicadores LED de estado de la
Ethernet, página 268.
(1) Para obtener más información sobre la descripción del estado del controlador, consulte M221 Logic Controller - Guía de programación
(consulte Modicon M221, Logic Controller - Guía de programación).
(2) El controlador ha detectado un error pero permanece en estado RUNNING. El LED ERR del controlador parpadea. Para obtener más
información, consulte M221 Logic Controller - Guía de programación.
Dimensiones
En la siguiente figura se muestran las dimensiones externas de los Logic
Controllers:
116 EIO0000003316.02

TM221C24T
TM221C24T
Contenido de este capítulo
Presentación del modelo TM221C24T .......................................................... 117
Descripción general
En este capítulo se describe el Logic Controller TM221C24T.
Presentación del modelo TM221C24T
Descripción general
Las siguientes funciones se integran en el Logic Controller TM221C24T:
• 14 entradas digitales
◦4 entradas rápidas (HSC)
◦10 entradas normales
• 10 salidas digitales
◦2 salidas rápidas de transistor de común positivo
◦8 salidas normales de transistor de común positivo
• 2 entradas analógicas
• Puertos de comunicación
◦1 puerto de línea serie
◦1 puerto de programación USB mini-B
Descripción
En la siguiente figura se muestran los distintos componentes de los Logic Controllers:
Número Descripción Consulte
1 Indicadores LED de estado –
2 Bloque de terminales extraíble de la salida Reglas para el bloque de terminales de tornillo
extraíble, página 79
EIO0000003316.02 117

TM221C24T
Número Descripción Consulte
3 Carril DIN (segmento DIN) de cierre de clip para 35 mm (1,38 in) Segmento DIN, página 71
4 Fuente de alimentación de 24 V CC Fuente de alimentación, página 83
5Puerto de programación USB mini-B / para la conexión de terminales a un
PC de programación (EcoStruxure Machine Expert - Basic) Puerto de programación USB mini-B, página
265
6 Puerto de línea serie 1 / conector RJ-45 (RS-232 o RS-485) Línea serie 1, página 268
7Slot para tarjeta SD Slot para tarjeta SD, página 57
8 2 entradas analógicas Entradas analógicas, página 178
9 Interruptor Run/Stop Interruptor Run/Stop, página 55
10 Bloque de terminales extraíble de la entrada Reglas para el bloque de terminales de tornillo
extraíble, página 79
11 Conector de ampliación de E/S –
12 Slot para cartucho –
13 Cubierta de protección (slot para tarjeta SD, interruptor Ejecutar/Detener
y puerto de programación USB mini-B)
–
14 Gancho de sujeción –
15 Cubierta de entradas analógicas extraíble –
16 Soporte de la batería Instalación y sustitución de la batería, página
46
Indicadores LED de estado
En la figura siguiente se muestran los indicadores LED de estado:
En la tabla siguiente se describen los indicadores LED de estado:
Etiqueta Tipo de
función Color Estado Descripción
Estados del
controlador(1)
Comunicación del
puerto Prg Ejecución de
la aplicación
PWR Alimentación Verde Encendido indica que se aplica alimentación.
Apagado Indica que no recibe alimentación.
RUN Estado del
equipo Verde Encendido Indica que el controlador está ejecutando una aplicación válida.
Parpadeo Indica que el controlador tiene una aplicación válida que está
detenida.
Apagado Indica que el controlador no está programado.
118 EIO0000003316.02

TM221C24T
Etiqueta Tipo de
función Color Estado Descripción
Estados del
controlador(1)
Comunicación del
puerto Prg Ejecución de
la aplicación
ERR Error Rojo Encendido* EXCEPCIÓN Restringido NO
Intermitente (con
indicador LED de
estado RUN apagado)
ERROR INTERNO Restringido NO
Intermitencia lenta Error menor
detectado(2)
Sí Depende del
indicador LED
de estado RUN
Un parpadeo simple No hay aplicación Sí Sí
SD Acceso para
tarjeta SD,
página 57
Verde Encendido Indica que se está accediendo a la tarjeta SD.
Parpadeo Indica que se ha detectado un error durante la utilización de la
tarjeta SD.
Apagado Indica que no hay acceso (inactivo) o que no hay ninguna tarjeta.
BAT Batería, página
45 Rojo Encendido Indica que la batería debe sustituirse.
Parpadeo Indica que la batería está baja de carga.
Apagado Indica que la batería está en buen estado.
SL Línea serie 1,
página 268 Verde Encendido Indica el estado de la línea serie 1.
Parpadeo Indica actividad en la línea serie 1.
Apagado Indica que no existe comunicación serie.
*El indicador LED ERR está conectado durante el proceso de arranque.
NOTA: Para obtener información sobre los LED integrados en el conector Ethernet, consulte Indicadores LED de estado de la
Ethernet, página 268.
(1) Para obtener más información sobre la descripción del estado del controlador, consulte M221 Logic Controller - Guía de programación
(consulte Modicon M221, Logic Controller - Guía de programación).
(2) El controlador ha detectado un error pero permanece en estado RUNNING. El LED ERR del controlador parpadea. Para obtener más
información, consulte M221 Logic Controller - Guía de programación.
Dimensiones
En la siguiente figura se muestran las dimensiones externas de los Logic
Controllers:
EIO0000003316.02 119

TM221CE24T
TM221CE24T
Contenido de este capítulo
Presentación del modelo TM221CE24T........................................................120
Descripción general
En este capítulo se describe el Logic Controller TM221CE24T.
Presentación del modelo TM221CE24T
Descripción general
Las siguientes funciones se integran en el Logic Controller TM221CE24T:
• 14 entradas digitales
◦4 entradas rápidas (HSC)
◦10 entradas normales
• 10 salidas digitales
◦2 salidas rápidas de transistor de común positivo
◦8 salidas normales de transistor de común positivo
• 2 entradas analógicas
• Puertos de comunicación
◦1 puerto de línea serie
◦1 puerto de programación USB mini-B
◦1 puerto Ethernet
Descripción
En la siguiente figura se muestran los distintos componentes de los Logic Controllers:
120 EIO0000003316.02

TM221CE24T
Número Descripción Consulte
1 Indicadores LED de estado –
2 Bloque de terminales extraíble de la salida Reglas para el bloque de terminales de tornillo
extraíble, página 79
3 Carril DIN (segmento DIN) de cierre de clip para 35 mm (1,38 in) Segmento DIN, página 71
4 Puerto Ethernet / conector RJ-45 Puerto Ethernet, página 266
5Fuente de alimentación de 24 V CC Fuente de alimentación, página 83
6 Puerto de programación USB mini-B / para la conexión de terminales a un
PC de programación (EcoStruxure Machine Expert - Basic) Puerto de programación USB mini-B, página
265
7Puerto de línea serie 1 / conector RJ-45 (RS-232 o RS-485) Línea serie 1, página 268
8 Slot para tarjeta SD Slot para tarjeta SD, página 57
9 2 entradas analógicas Entradas analógicas, página 178
10 Interruptor Run/Stop Interruptor Run/Stop, página 55
11 Bloque de terminales extraíble de la entrada Reglas para el bloque de terminales de tornillo
extraíble, página 79
12 Conector de ampliación de E/S –
13 Slot para cartucho –
14 Cubierta de protección (slot para tarjeta SD, interruptor Ejecutar/Detener
y puerto de programación USB mini-B)
–
15 Gancho de sujeción –
16 Cubierta de entradas analógicas extraíble –
17 Soporte de la batería Instalación y sustitución de la batería, página
46
Indicadores LED de estado
En la figura siguiente se muestran los indicadores LED de estado:
En la tabla siguiente se describen los indicadores LED de estado:
Etiqueta Tipo de
función Color Estado Descripción
Estados del
controlador(1)
Comunicación del
puerto Prg Ejecución de
la aplicación
PWR Alimentación Verde Encendido indica que se aplica alimentación.
Apagado Indica que no recibe alimentación.
RUN Estado del
equipo Verde Encendido Indica que el controlador está ejecutando una aplicación válida.
Parpadeo Indica que el controlador tiene una aplicación válida que está
detenida.
Apagado Indica que el controlador no está programado.
EIO0000003316.02 121

TM221CE24T
Etiqueta Tipo de
función Color Estado Descripción
Estados del
controlador(1)
Comunicación del
puerto Prg Ejecución de
la aplicación
ERR Error Rojo Encendido* EXCEPCIÓN Restringido NO
Intermitente (con
indicador LED de
estado RUN apagado)
ERROR INTERNO Restringido NO
Intermitencia lenta Error menor
detectado(2)
Sí Depende del
indicador LED
de estado RUN
Un parpadeo simple No hay aplicación Sí Sí
SD Acceso para
tarjeta SD,
página 57
Verde Encendido Indica que se está accediendo a la tarjeta SD.
Parpadeo Indica que se ha detectado un error durante la utilización de la
tarjeta SD.
Apagado Indica que no hay acceso (inactivo) o que no hay ninguna tarjeta.
BAT Batería, página
45 Rojo Encendido Indica que la batería debe sustituirse.
Parpadeo Indica que la batería está baja de carga.
Apagado Indica que la batería está en buen estado.
SL Línea serie 1,
página 268 Verde Encendido Indica el estado de la línea serie 1.
Parpadeo Indica actividad en la línea serie 1.
Apagado Indica que no existe comunicación serie.
*El indicador LED ERR está conectado durante el proceso de arranque.
NOTA: Para obtener información sobre los LED integrados en el conector Ethernet, consulte Indicadores LED de estado de la
Ethernet, página 268.
(1) Para obtener más información sobre la descripción del estado del controlador, consulte M221 Logic Controller - Guía de programación
(consulte Modicon M221, Logic Controller - Guía de programación).
(2) El controlador ha detectado un error pero permanece en estado RUNNING. El LED ERR del controlador parpadea. Para obtener más
información, consulte M221 Logic Controller - Guía de programación.
Dimensiones
En la siguiente figura se muestran las dimensiones externas de los Logic
Controllers:
122 EIO0000003316.02

TM221C24U
TM221C24U
Contenido de este capítulo
Presentación del modelo TM221C24U..........................................................123
Descripción general
En este capítulo se describe el TM221C24• Logic Controller.
Presentación del modelo TM221C24U
Descripción general
Las siguientes funciones se integran en el Logic Controller TM221C24U:
• 14 entradas digitales
◦4 entradas rápidas (HSC)
◦10 entradas normales
• 10 salidas digitales
◦2 salidas rápidas de transistor de común negativo
◦8 salidas normales de transistor de común negativo
• 2 entradas analógicas
• Puertos de comunicación
◦1 puerto de línea serie
◦1 puerto de programación USB mini-B
Descripción
En la siguiente figura se muestran los distintos componentes de los Logic
Controllers:
EIO0000003316.02 123

TM221C24U
Número Descripción Consulte
1 Indicadores LED de estado –
2 Bloque de terminales extraíble de la salida Reglas para el bloque de terminales de tornillo
extraíble, página 79
3 Carril DIN (segmento DIN) de cierre de clip para 35 mm (1,38 in) Segmento DIN, página 71
4 Fuente de alimentación de 24 V CC Fuente de alimentación, página 83
5Puerto de programación USB mini-B / para la conexión de terminales a un
PC de programación (EcoStruxure Machine Expert - Basic) Puerto de programación USB mini-B, página
265
6 Puerto de línea serie 1 / conector RJ-45 (RS-232 o RS-485) Línea serie 1, página 268
7Slot para tarjeta SD Slot para tarjeta SD, página 57
8 2 entradas analógicas Entradas analógicas, página 178
9 Interruptor Run/Stop Interruptor Run/Stop, página 55
10 Bloque de terminales extraíble de la entrada Reglas para el bloque de terminales de tornillo
extraíble, página 79
11 Conector de ampliación de E/S –
12 Slot para cartucho –
13 Cubierta de protección (slot para tarjeta SD, interruptor Ejecutar/Detener
y puerto de programación USB mini-B)
–
14 Gancho de sujeción –
15 Cubierta de entradas analógicas extraíble –
16 Soporte de la batería Instalación y sustitución de la batería, página
46
Indicadores LED de estado
En la figura siguiente se muestran los indicadores LED de estado:
En la tabla siguiente se describen los indicadores LED de estado:
124 EIO0000003316.02

TM221C24U
Etiqueta Tipo de
función Color Estado Descripción
Estados del
controlador(1)
Comunicación del
puerto Prg Ejecución de
la aplicación
PWR Alimentación Verde Encendido indica que se aplica alimentación.
Apagado Indica que no recibe alimentación.
RUN Estado del
equipo Verde Encendido Indica que el controlador está ejecutando una aplicación válida.
Parpadeo Indica que el controlador tiene una aplicación válida que está
detenida.
Apagado Indica que el controlador no está programado.
ERR Error Rojo Encendido* EXCEPCIÓN Restringido NO
Intermitente (con
indicador LED de
estado RUN apagado)
ERROR INTERNO Restringido NO
Intermitencia lenta Error menor
detectado(2)
Sí Depende del
indicador LED
de estado RUN
Un parpadeo simple No hay aplicación Sí Sí
SD Acceso para
tarjeta SD,
página 57
Verde Encendido Indica que se está accediendo a la tarjeta SD.
Parpadeo Indica que se ha detectado un error durante la utilización de la
tarjeta SD.
Apagado Indica que no hay acceso (inactivo) o que no hay ninguna tarjeta.
BAT Batería, página
45 Rojo Encendido Indica que la batería debe sustituirse.
Parpadeo Indica que la batería está baja de carga.
Apagado Indica que la batería está en buen estado.
SL Línea serie 1,
página 268 Verde Encendido Indica el estado de la línea serie 1.
Parpadeo Indica actividad en la línea serie 1.
Apagado Indica que no existe comunicación serie.
*El indicador LED ERR está conectado durante el proceso de arranque.
NOTA: Para obtener información sobre los LED integrados en el conector Ethernet, consulte Indicadores LED de estado de la
Ethernet, página 268.
(1) Para obtener más información sobre la descripción del estado del controlador, consulte M221 Logic Controller - Guía de programación
(consulte Modicon M221, Logic Controller - Guía de programación).
(2) El controlador ha detectado un error pero permanece en estado RUNNING. El LED ERR del controlador parpadea. Para obtener más
información, consulte M221 Logic Controller - Guía de programación.
Dimensiones
En la siguiente figura se muestran las dimensiones externas de los Logic
Controllers:
EIO0000003316.02 125

TM221CE24U
TM221CE24U
Contenido de este capítulo
Presentación del modelo TM221CE24U........................................................126
Descripción general
En este capítulo se describe el TM221CE24U Logic Controller.
Presentación del modelo TM221CE24U
Descripción general
Las siguientes funciones se integran en el Logic Controller TM221CE24U:
• 14 entradas digitales
◦4 entradas rápidas (HSC)
◦10 entradas normales
• 10 salidas digitales
◦2 salidas rápidas de transistor de común negativo
◦8 salidas normales de transistor de común negativo
• 2 entradas analógicas
• Puertos de comunicación
◦1 puerto de línea serie
◦1 puerto de programación USB mini-B
◦1 puerto Ethernet
Descripción
En la siguiente figura se muestran los distintos componentes de los Logic
Controllers:
126 EIO0000003316.02

TM221CE24U
Número Descripción Consulte
1 Indicadores LED de estado –
2 Bloque de terminales extraíble de la salida Reglas para el bloque de terminales de tornillo
extraíble, página 79
3 Carril DIN (segmento DIN) de cierre de clip para 35 mm (1,38 in) Segmento DIN, página 71
4 Puerto Ethernet / conector RJ-45 Puerto Ethernet, página 266
5Fuente de alimentación de 24 V CC Fuente de alimentación, página 83
6 Puerto de programación USB mini-B / para la conexión de terminales a un
PC de programación (EcoStruxure Machine Expert - Basic) Puerto de programación USB mini-B, página
265
7Puerto de línea serie 1 / conector RJ-45 (RS-232 o RS-485) Línea serie 1, página 268
8 Slot para tarjeta SD Slot para tarjeta SD, página 57
9 2 entradas analógicas Entradas analógicas, página 178
10 Interruptor Run/Stop Interruptor Run/Stop, página 55
11 Bloque de terminales extraíble de la entrada Reglas para el bloque de terminales de tornillo
extraíble, página 79
12 Conector de ampliación de E/S –
13 Slot para cartucho –
14 Cubierta de protección (slot para tarjeta SD, interruptor Ejecutar/Detener
y puerto de programación USB mini-B)
–
15 Gancho de sujeción –
16 Cubierta de entradas analógicas extraíble –
17 Soporte de la batería Instalación y sustitución de la batería, página
46
Indicadores LED de estado
En la figura siguiente se muestran los indicadores LED de estado:
En la tabla siguiente se describen los indicadores LED de estado:
EIO0000003316.02 127

TM221CE24U
Etiqueta Tipo de
función Color Estado Descripción
Estados del
controlador(1)
Comunicación del
puerto Prg Ejecución de
la aplicación
PWR Alimentación Verde Encendido indica que se aplica alimentación.
Apagado Indica que no recibe alimentación.
RUN Estado del
equipo Verde Encendido Indica que el controlador está ejecutando una aplicación válida.
Parpadeo Indica que el controlador tiene una aplicación válida que está
detenida.
Apagado Indica que el controlador no está programado.
ERR Error Rojo Encendido* EXCEPCIÓN Restringido NO
Intermitente (con
indicador LED de
estado RUN apagado)
ERROR INTERNO Restringido NO
Intermitencia lenta Error menor
detectado(2)
Sí Depende del
indicador LED
de estado RUN
Un parpadeo simple No hay aplicación Sí Sí
SD Acceso para
tarjeta SD,
página 57
Verde Encendido Indica que se está accediendo a la tarjeta SD.
Parpadeo Indica que se ha detectado un error durante la utilización de la
tarjeta SD.
Apagado Indica que no hay acceso (inactivo) o que no hay ninguna tarjeta.
BAT Batería, página
45 Rojo Encendido Indica que la batería debe sustituirse.
Parpadeo Indica que la batería está baja de carga.
Apagado Indica que la batería está en buen estado.
SL Línea serie 1,
página 268 Verde Encendido Indica el estado de la línea serie 1.
Parpadeo Indica actividad en la línea serie 1.
Apagado Indica que no existe comunicación serie.
*El indicador LED ERR está conectado durante el proceso de arranque.
NOTA: Para obtener información sobre los LED integrados en el conector Ethernet, consulte Indicadores LED de estado de la
Ethernet, página 268.
(1) Para obtener más información sobre la descripción del estado del controlador, consulte M221 Logic Controller - Guía de programación
(consulte Modicon M221, Logic Controller - Guía de programación).
(2) El controlador ha detectado un error pero permanece en estado RUNNING. El LED ERR del controlador parpadea. Para obtener más
información, consulte M221 Logic Controller - Guía de programación.
Dimensiones
En la siguiente figura se muestran las dimensiones externas de los Logic
Controllers:
128 EIO0000003316.02

TM221C40R
TM221C40R
Contenido de este capítulo
Presentación del modelo TM221C40R..........................................................129
Descripción general
En este capítulo se describe el Logic Controller TM221C40R.
Presentación del modelo TM221C40R
Descripción general
Las siguientes funciones se integran en los Logic Controllers TM221C40R:
• 24 entradas digitales
◦4 entradas rápidas (HSC)
◦20 entradas normales
• 16 salidas digitales
◦16 salidas de relé
• 2 entradas analógicas
• Puertos de comunicaciones
◦1 puerto de línea serie
◦1 puerto de programación USB mini-B
EIO0000003316.02 129

TM221C40R
Descripción
En la siguiente figura se muestran los distintos componentes de los Logic
Controllers:
Número Descripción Consulte
1 Indicadores LED de estado –
2 Bloque de terminales extraíble de la salida Reglas para el bloque de terminales de tornillo
extraíble, página 79
3 Cierre de clip para carril DIN (segmento DIN) de 35 mm (1,38 pulg.) Segmento DIN, página 71
4 Fuente de alimentación de 100 a 240 V CA Fuente de alimentación, página 87
5Puerto de programación USB mini-B / para la conexión de terminales a un
PC de programación (EcoStruxure Machine Expert - Basic) Puerto de programación USB mini-B , página
265
6 Puerto de línea serie 1 / conector RJ-45 (RS-232 o RS-485) Línea serie 1, página 268
7Slot para tarjeta SD Slot para tarjeta SD, página 57
8 2 entradas analógicas Entradas analógicas, página 178
9 Interruptor Run/Stop Interruptor Run/Stop , página 55
10 Bloque de terminales extraíble de entrada y fuente de alimentación
integrada utilizados para conectar los sensores con las entradas.(1)
Reglas para el bloque de terminales de tornillo
extraíble, página 79
11 Conector de extensión de E/S –
12 Slot para cartucho 1 –
13 Slot para cartucho 2 –
14 Cubierta de protección (slot para tarjeta SD, interruptor Run/Stop y puerto
de programación USB mini-B)
–
15 Gancho de sujeción –
16 Cubierta de entradas analógicas extraíble –
130 EIO0000003316.02

TM221C40R
Número Descripción Consulte
17 Soporte de la batería Instalación y sustitución de la batería, página
46
(1) Características de la fuente de alimentación integrada:
• Tensión: 24 V, de -15 % a +10 % aislada
• Imáx: 250 mA
• Sin protección ni detección de sobrecarga
Consulte Canales de E/S incrustadas, página 151.
Indicadores LED de estado
En la figura siguiente se muestran los indicadores LED de estado:
En la tabla siguiente se describen los indicadores LED de estado:
Etiqueta Tipo de
función Color Estado Descripción
Estados del
controlador(1)
Comunicación del
puerto Prg Ejecución de
la aplicación
PWR Alimentación Verde Encendido indica que se aplica alimentación.
Apagado Indica que no recibe alimentación.
RUN Estado del
equipo Verde Encendido Indica que el controlador está ejecutando una aplicación válida.
Parpadeo Indica que el controlador tiene una aplicación válida que está
detenida.
Apagado Indica que el controlador no está programado.
ERR Error Rojo Encendido* EXCEPCIÓN Restringido NO
Intermitente (con
indicador LED de
estado RUN apagado)
ERROR INTERNO Restringido NO
Intermitencia lenta Error menor
detectado(2)
Sí Depende del
indicador LED
de estado RUN
Un parpadeo simple No hay aplicación Sí Sí
SD Acceso para
tarjeta SD,
página 57
Verde Encendido Indica que se está accediendo a la tarjeta SD.
Parpadeo Indica que se ha detectado un error durante la utilización de la
tarjeta SD.
Apagado Indica que no hay acceso (inactivo) o que no hay ninguna tarjeta.
BAT Batería, página
45 Rojo Encendido Indica que la batería debe sustituirse.
Parpadeo Indica que la batería está baja de carga.
Apagado Indica que la batería está en buen estado.
SL Línea serie 1,
página 268 Verde Encendido Indica el estado de la línea serie 1.
Parpadeo Indica actividad en la línea serie 1.
Apagado Indica que no existe comunicación serie.
EIO0000003316.02 131

TM221C40R
Etiqueta Tipo de
función Color Estado Descripción
Estados del
controlador(1)
Comunicación del
puerto Prg Ejecución de
la aplicación
*El indicador LED ERR está conectado durante el proceso de arranque.
NOTA: Para obtener información sobre los LED integrados en el conector Ethernet, consulte Indicadores LED de estado de la
Ethernet, página 268.
(1) Para obtener más información sobre la descripción del estado del controlador, consulte M221 Logic Controller - Guía de programación
(consulte Modicon M221, Logic Controller - Guía de programación).
(2) El controlador ha detectado un error pero permanece en estado RUNNING. El LED ERR del controlador parpadea. Para obtener más
información, consulte M221 Logic Controller - Guía de programación.
Dimensiones
En la siguiente figura se muestran las dimensiones externas de los Logic
Controllers:
132 EIO0000003316.02

TM221CE40R
TM221CE40R
Contenido de este capítulo
Presentación del modelo TM221CE40R........................................................133
Descripción general
En este capítulo se describe el Logic Controller TM221CE40R.
Presentación del modelo TM221CE40R
Descripción general
Las siguientes funciones se integran en los Logic Controllers TM221CE40R:
• 24 entradas digitales
◦4 entradas rápidas (HSC)
◦20 entradas normales
• 16 salidas digitales
◦16 salidas de relé
• 2 entradas analógicas
• Puertos de comunicación
◦1 puerto de línea serie
◦1 puerto de programación USB mini-B
◦1 puerto Ethernet
EIO0000003316.02 133

TM221CE40R
Descripción
En la siguiente figura se muestran los distintos componentes de los Logic
Controllers:
Número Descripción Consulte
1 Indicadores LED de estado –
2 Bloque de terminales extraíble de la salida Reglas para el bloque de terminales de tornillo
extraíble, página 79
3 Cierre de clip para carril DIN (segmento DIN) de 35 mm (1,38 pulg.) Segmento DIN, página 71
4 Puerto Ethernet / conector RJ-45 Puerto Ethernet, página 266
5Fuente de alimentación de 100 a 240 V CA Fuente de alimentación, página 87
6 Puerto de programación USB mini-B / para la conexión de terminales a un
PC de programación (EcoStruxure Machine Expert - Basic) Puerto de programación USB mini-B , página
265
7Puerto de línea serie 1 / conector RJ-45 (RS-232 o RS-485) Línea serie 1, página 268
8 Slot para tarjeta SD Slot para tarjeta SD, página 57
9 2 entradas analógicas Entradas analógicas, página 178
10 Interruptor Run/Stop Interruptor Run/Stop , página 55
11 Bloque de terminales extraíble de entrada y fuente de alimentación
integrada utilizados para conectar los sensores con las entradas.(1)
Reglas para el bloque de terminales de tornillo
extraíble, página 79
12 Conector de extensión de E/S –
13 Slot para cartucho 1 –
14 Slot para cartucho 2 –
15 Cubierta de protección (slot para tarjeta SD, interruptor Run/Stop y puerto
de programación USB mini-B)
–
16 Gancho de sujeción –
134 EIO0000003316.02

TM221CE40R
Número Descripción Consulte
17 Cubierta de entradas analógicas extraíble –
18 Soporte de la batería Instalación y sustitución de la batería, página
46
(1) Características de la fuente de alimentación integrada:
• Tensión: 24 V, de -15 % a +10 % aislada
• Imáx: 250 mA
• Sin protección ni detección de sobrecarga
Consulte Canales de E/S incrustadas, página 151.
Indicadores LED de estado
En la figura siguiente se muestran los indicadores LED de estado:
En la tabla siguiente se describen los indicadores LED de estado:
Etiqueta Tipo de
función Color Estado Descripción
Estados del
controlador(1)
Comunicación del
puerto Prg Ejecución de
la aplicación
PWR Alimentación Verde Encendido indica que se aplica alimentación.
Apagado Indica que no recibe alimentación.
RUN Estado del
equipo Verde Encendido Indica que el controlador está ejecutando una aplicación válida.
Parpadeo Indica que el controlador tiene una aplicación válida que está
detenida.
Apagado Indica que el controlador no está programado.
ERR Error Rojo Encendido* EXCEPCIÓN Restringido NO
Intermitente (con
indicador LED de
estado RUN apagado)
ERROR INTERNO Restringido NO
Intermitencia lenta Error menor
detectado(2)
Sí Depende del
indicador LED
de estado RUN
Un parpadeo simple No hay aplicación Sí Sí
SD Acceso para
tarjeta SD,
página 57
Verde Encendido Indica que se está accediendo a la tarjeta SD.
Parpadeo Indica que se ha detectado un error durante la utilización de la
tarjeta SD.
Apagado Indica que no hay acceso (inactivo) o que no hay ninguna tarjeta.
BAT Batería, página
45 Rojo Encendido Indica que la batería debe sustituirse.
Parpadeo Indica que la batería está baja de carga.
Apagado Indica que la batería está en buen estado.
SL Línea serie 1,
página 268 Verde Encendido Indica el estado de la línea serie 1.
Parpadeo Indica actividad en la línea serie 1.
Apagado Indica que no existe comunicación serie.
EIO0000003316.02 135

TM221CE40R
Etiqueta Tipo de
función Color Estado Descripción
Estados del
controlador(1)
Comunicación del
puerto Prg Ejecución de
la aplicación
*El indicador LED ERR está conectado durante el proceso de arranque.
NOTA: Para obtener información sobre los LED integrados en el conector Ethernet, consulte Indicadores LED de estado de la
Ethernet, página 268.
(1) Para obtener más información sobre la descripción del estado del controlador, consulte M221 Logic Controller - Guía de programación
(consulte Modicon M221, Logic Controller - Guía de programación).
(2) El controlador ha detectado un error pero permanece en estado RUNNING. El LED ERR del controlador parpadea. Para obtener más
información, consulte M221 Logic Controller - Guía de programación.
Dimensiones
En la siguiente figura se muestran las dimensiones externas de los Logic
Controllers:
136 EIO0000003316.02

TM221C40T
TM221C40T
Contenido de este capítulo
Presentación del modelo TM221C40T ..........................................................137
Descripción general
En este capítulo se describe el Logic Controller TM221C40T.
Presentación del modelo TM221C40T
Descripción general
Las siguientes funciones se integran en el Logic Controller TM221C40T:
• 24 entradas digitales
◦4 entradas rápidas (HSC)
◦20 entradas normales
• 16 salidas digitales
◦2 salidas rápidas de transistor de común positivo
◦14 salidas normales de transistor de común positivo
• 2 entradas analógicas
• Puertos de comunicación
◦1 puerto de línea serie
◦1 puerto de programación USB mini-B
EIO0000003316.02 137

TM221C40T
Descripción
En la siguiente figura se muestran los distintos componentes de los Logic
Controllers:
Número Descripción Consulte
1 Indicadores LED de estado –
2 Bloque de terminales extraíble de la salida Reglas para el bloque de terminales de tornillo
extraíble, página 79
3 Carril DIN (segmento DIN) de cierre de clip para 35 mm (1,38 in) Segmento DIN, página 71
4 Fuente de alimentación de 24 V CC Fuente de alimentación, página 83
5Puerto de programación USB mini-B / para la conexión de terminales a un
PC de programación (EcoStruxure Machine Expert - Basic) Puerto de programación USB mini-B, página
265
6 Puerto de línea serie 1 / conector RJ-45 (RS-232 o RS-485) Línea serie 1, página 268
7Slot para tarjeta SD Slot para tarjeta SD, página 57
8 2 entradas analógicas Entradas analógicas, página 178
9 Interruptor Run/Stop Interruptor Run/Stop, página 55
10 Bloque de terminales extraíble de la entrada Reglas para el bloque de terminales de tornillo
extraíble, página 79
11 Conector de ampliación de E/S –
12 Slot para cartucho 1 –
13 Slot para cartucho 2 –
14 Cubierta de protección (slot para tarjeta SD, interruptor Ejecutar/Detener
y puerto de programación USB mini-B)
–
15 Gancho de sujeción –
138 EIO0000003316.02

TM221C40T
Número Descripción Consulte
16 Cubierta de entradas analógicas extraíble –
17 Soporte de la batería Instalación y sustitución de la batería, página
46
Indicadores LED de estado
En la figura siguiente se muestran los indicadores LED de estado:
En la tabla siguiente se describen los indicadores LED de estado:
Etiqueta Tipo de
función Color Estado Descripción
Estados del
controlador(1)
Comunicación del
puerto Prg Ejecución de
la aplicación
PWR Alimentación Verde Encendido indica que se aplica alimentación.
Apagado Indica que no recibe alimentación.
RUN Estado del
equipo Verde Encendido Indica que el controlador está ejecutando una aplicación válida.
Parpadeo Indica que el controlador tiene una aplicación válida que está
detenida.
Apagado Indica que el controlador no está programado.
ERR Error Rojo Encendido* EXCEPCIÓN Restringido NO
Intermitente (con
indicador LED de
estado RUN apagado)
ERROR INTERNO Restringido NO
Intermitencia lenta Error menor
detectado(2)
Sí Depende del
indicador LED
de estado RUN
Un parpadeo simple No hay aplicación Sí Sí
SD Acceso para
tarjeta SD,
página 57
Verde Encendido Indica que se está accediendo a la tarjeta SD.
Parpadeo Indica que se ha detectado un error durante la utilización de la
tarjeta SD.
Apagado Indica que no hay acceso (inactivo) o que no hay ninguna tarjeta.
BAT Batería, página
45 Rojo Encendido Indica que la batería debe sustituirse.
Parpadeo Indica que la batería está baja de carga.
Apagado Indica que la batería está en buen estado.
SL Línea serie 1,
página 268 Verde Encendido Indica el estado de la línea serie 1.
Parpadeo Indica actividad en la línea serie 1.
Apagado Indica que no existe comunicación serie.
EIO0000003316.02 139

TM221C40T
Etiqueta Tipo de
función Color Estado Descripción
Estados del
controlador(1)
Comunicación del
puerto Prg Ejecución de
la aplicación
*El indicador LED ERR está conectado durante el proceso de arranque.
NOTA: Para obtener información sobre los LED integrados en el conector Ethernet, consulte Indicadores LED de estado de la
Ethernet, página 268.
(1) Para obtener más información sobre la descripción del estado del controlador, consulte M221 Logic Controller - Guía de programación
(consulte Modicon M221, Logic Controller - Guía de programación).
(2) El controlador ha detectado un error pero permanece en estado RUNNING. El LED ERR del controlador parpadea. Para obtener más
información, consulte M221 Logic Controller - Guía de programación.
Dimensiones
En la siguiente figura se muestran las dimensiones externas de los Logic
Controllers:
140 EIO0000003316.02

TM221CE40T
TM221CE40T
Contenido de este capítulo
Presentación del modelo TM221CE40T........................................................141
Descripción general
En este capítulo se describe el controlador TM221CE40T.
Presentación del modelo TM221CE40T
Descripción general
Las siguientes funciones se integran en los Logic Controllers TM221CE40T:
• 24 entradas digitales
◦4 entradas rápidas (HSC)
◦20 entradas normales
• 16 salidas digitales
◦2 salidas rápidas de transistor de común positivo
◦14 salidas normales de transistor de común positivo
• 2 entradas analógicas
• Puertos de comunicación
◦1 puerto de línea serie
◦1 puerto de programación USB mini-B
◦1 puerto Ethernet
EIO0000003316.02 141

TM221CE40T
Descripción
En la siguiente figura se muestran los distintos componentes de los Logic
Controllers:
Número Descripción Consulte
1 Indicadores LED de estado –
2 Bloque de terminales extraíble de la salida Reglas para el bloque de terminales de tornillo
extraíble, página 79
3 Carril DIN (segmento DIN) de cierre de clip para 35 mm (1,38 in) Segmento DIN, página 71
4 Puerto Ethernet / conector RJ-45 Puerto Ethernet, página 266
5Fuente de alimentación de 24 V CC Fuente de alimentación, página 83
6 Puerto de programación USB mini-B / para la conexión de terminales a un
PC de programación (EcoStruxure Machine Expert - Basic) Puerto de programación USB mini-B, página
265
7Puerto de línea serie 1 / conector RJ-45 (RS-232 o RS-485) Línea serie 1, página 268
8 Slot para tarjeta SD Slot para tarjeta SD, página 57
9 2 entradas analógicas Entradas analógicas, página 178
10 Interruptor Run/Stop Interruptor Run/Stop, página 55
11 Bloque de terminales extraíble de la entrada Reglas para el bloque de terminales de tornillo
extraíble, página 79
12 Conector de ampliación de E/S –
13 Slot para cartucho 1 –
14 Slot para cartucho 2 –
15 Cubierta de protección (slot para tarjeta SD, interruptor Ejecutar/Detener
y puerto de programación USB mini-B)
–
16 Gancho de sujeción –
142 EIO0000003316.02

TM221CE40T
Número Descripción Consulte
17 Cubierta de entradas analógicas extraíble –
18 Soporte de la batería Instalación y sustitución de la batería, página
46
Indicadores LED de estado
En la figura siguiente se muestran los indicadores LED de estado:
En la tabla siguiente se describen los indicadores LED de estado:
Etiqueta Tipo de
función Color Estado Descripción
Estados del
controlador(1)
Comunicación del
puerto Prg Ejecución de
la aplicación
PWR Alimentación Verde Encendido indica que se aplica alimentación.
Apagado Indica que no recibe alimentación.
RUN Estado del
equipo Verde Encendido Indica que el controlador está ejecutando una aplicación válida.
Parpadeo Indica que el controlador tiene una aplicación válida que está
detenida.
Apagado Indica que el controlador no está programado.
ERR Error Rojo Encendido* EXCEPCIÓN Restringido NO
Intermitente (con
indicador LED de
estado RUN apagado)
ERROR INTERNO Restringido NO
Intermitencia lenta Error menor
detectado(2)
Sí Depende del
indicador LED
de estado RUN
Un parpadeo simple No hay aplicación Sí Sí
SD Acceso para
tarjeta SD,
página 57
Verde Encendido Indica que se está accediendo a la tarjeta SD.
Parpadeo Indica que se ha detectado un error durante la utilización de la
tarjeta SD.
Apagado Indica que no hay acceso (inactivo) o que no hay ninguna tarjeta.
BAT Batería, página
45 Rojo Encendido Indica que la batería debe sustituirse.
Parpadeo Indica que la batería está baja de carga.
Apagado Indica que la batería está en buen estado.
SL Línea serie 1,
página 268 Verde Encendido Indica el estado de la línea serie 1.
Parpadeo Indica actividad en la línea serie 1.
Apagado Indica que no existe comunicación serie.
EIO0000003316.02 143

TM221CE40T
Etiqueta Tipo de
función Color Estado Descripción
Estados del
controlador(1)
Comunicación del
puerto Prg Ejecución de
la aplicación
*El indicador LED ERR está conectado durante el proceso de arranque.
NOTA: Para obtener información sobre los LED integrados en el conector Ethernet, consulte Indicadores LED de estado de la
Ethernet, página 268.
(1) Para obtener más información sobre la descripción del estado del controlador, consulte M221 Logic Controller - Guía de programación
(consulte Modicon M221, Logic Controller - Guía de programación).
(2) El controlador ha detectado un error pero permanece en estado RUNNING. El LED ERR del controlador parpadea. Para obtener más
información, consulte M221 Logic Controller - Guía de programación.
Dimensiones
En la siguiente figura se muestran las dimensiones externas de los Logic
Controllers:
144 EIO0000003316.02

TM221C40U
TM221C40U
Contenido de este capítulo
Presentación del modelo TM221C40U..........................................................145
Descripción general
En este capítulo se describe el TM221C40• Logic Controller.
Presentación del modelo TM221C40U
Descripción general
Las siguientes funciones se integran en el Logic Controller TM221C40U:
• 24 entradas digitales
◦4 entradas rápidas (HSC)
◦20 entradas normales
• 16 salidas digitales
◦4 salidas rápidas de transistor de común negativo
◦12 salidas normales de transistor de común negativo
• 2 entradas analógicas
• Puertos de comunicación
◦1 puerto de línea serie
◦1 puerto de programación USB mini-B
Descripción
En la siguiente figura se muestran los distintos componentes de los Logic
Controllers:
EIO0000003316.02 145

TM221C40U
Número Descripción Consulte
1 Indicadores LED de estado –
2 Bloque de terminales extraíble de la salida Reglas para el bloque de terminales de tornillo
extraíble, página 79
3 Carril DIN (segmento DIN) de cierre de clip para 35 mm (1,38 in) Segmento DIN, página 71
4 Fuente de alimentación de 24 V CC Fuente de alimentación, página 83
5Puerto de programación USB mini-B / para la conexión de terminales a un
PC de programación (EcoStruxure Machine Expert - Basic) Puerto de programación USB mini-B, página
265
6 Puerto de línea serie 1 / conector RJ-45 (RS-232 o RS-485) Línea serie 1, página 268
7Slot para tarjeta SD Slot para tarjeta SD, página 57
8 2 entradas analógicas Entradas analógicas, página 178
9 Interruptor Run/Stop Interruptor Run/Stop, página 55
10 Bloque de terminales extraíble de la entrada Reglas para el bloque de terminales de tornillo
extraíble, página 79
11 Conector de ampliación de E/S –
12 Slot para cartucho 1 –
13 Slot para cartucho 2 –
14 Cubierta de protección (slot para tarjeta SD, interruptor Ejecutar/Detener
y puerto de programación USB mini-B)
–
15 Gancho de sujeción –
16 Cubierta de entradas analógicas extraíble –
17 Soporte de la batería Instalación y sustitución de la batería, página
46
Indicadores LED de estado
En la figura siguiente se muestran los indicadores LED de estado:
En la tabla siguiente se describen los indicadores LED de estado:
146 EIO0000003316.02

TM221C40U
Etiqueta Tipo de
función Color Estado Descripción
Estados del
controlador(1)
Comunicación del
puerto Prg Ejecución de
la aplicación
PWR Alimentación Verde Encendido indica que se aplica alimentación.
Apagado Indica que no recibe alimentación.
RUN Estado del
equipo Verde Encendido Indica que el controlador está ejecutando una aplicación válida.
Parpadeo Indica que el controlador tiene una aplicación válida que está
detenida.
Apagado Indica que el controlador no está programado.
ERR Error Rojo Encendido* EXCEPCIÓN Restringido NO
Intermitente (con
indicador LED de
estado RUN apagado)
ERROR INTERNO Restringido NO
Intermitencia lenta Error menor
detectado(2)
Sí Depende del
indicador LED
de estado RUN
Un parpadeo simple No hay aplicación Sí Sí
SD Acceso para
tarjeta SD,
página 57
Verde Encendido Indica que se está accediendo a la tarjeta SD.
Parpadeo Indica que se ha detectado un error durante la utilización de la
tarjeta SD.
Apagado Indica que no hay acceso (inactivo) o que no hay ninguna tarjeta.
BAT Batería, página
45 Rojo Encendido Indica que la batería debe sustituirse.
Parpadeo Indica que la batería está baja de carga.
Apagado Indica que la batería está en buen estado.
SL Línea serie 1,
página 268 Verde Encendido Indica el estado de la línea serie 1.
Parpadeo Indica actividad en la línea serie 1.
Apagado Indica que no existe comunicación serie.
*El indicador LED ERR está conectado durante el proceso de arranque.
NOTA: Para obtener información sobre los LED integrados en el conector Ethernet, consulte Indicadores LED de estado de la
Ethernet, página 268.
(1) Para obtener más información sobre la descripción del estado del controlador, consulte M221 Logic Controller - Guía de programación
(consulte Modicon M221, Logic Controller - Guía de programación).
(2) El controlador ha detectado un error pero permanece en estado RUNNING. El LED ERR del controlador parpadea. Para obtener más
información, consulte M221 Logic Controller - Guía de programación.
Dimensiones
En la siguiente figura se muestran las dimensiones externas de los Logic
Controllers:
EIO0000003316.02 147

TM221CE40U
TM221CE40U
Contenido de este capítulo
Presentación del modelo TM221CE40U........................................................148
Descripción general
En este capítulo se describe el TM221CE40U Logic Controller.
Presentación del modelo TM221CE40U
Descripción general
Las siguientes funciones se integran en el Logic Controller TM221CE40U:
• 24 entradas digitales
◦4 entradas rápidas (HSC)
◦20 entradas normales
• 16 salidas digitales
◦4 salidas rápidas de transistor de común negativo
◦12 salidas normales de transistor de común negativo
• 2 entradas analógicas
• Puertos de comunicación
◦1 puerto de línea serie
◦1 puerto de programación USB mini-B
◦1 puerto Ethernet
Descripción
En la siguiente figura se muestran los distintos componentes de los Logic
Controllers:
148 EIO0000003316.02

TM221CE40U
Número Descripción Consulte
1 Indicadores LED de estado –
2 Bloque de terminales extraíble de la salida Reglas para el bloque de terminales de tornillo
extraíble, página 79
3 Carril DIN (segmento DIN) de cierre de clip para 35 mm (1,38 in) Segmento DIN, página 71
4 Puerto Ethernet / conector RJ-45 Puerto Ethernet, página 266
5Fuente de alimentación de 24 V CC Fuente de alimentación, página 83
6 Puerto de programación USB mini-B / para la conexión de terminales a un
PC de programación (EcoStruxure Machine Expert - Basic) Puerto de programación USB mini-B, página
265
7Puerto de línea serie 1 / conector RJ-45 (RS-232 o RS-485) Línea serie 1, página 268
8 Slot para tarjeta SD Slot para tarjeta SD, página 57
9 2 entradas analógicas Entradas analógicas, página 178
10 Interruptor Run/Stop Interruptor Run/Stop, página 55
11 Bloque de terminales extraíble de la entrada Reglas para el bloque de terminales de tornillo
extraíble, página 79
12 Conector de ampliación de E/S –
13 Slot para cartucho 1 –
14 Slot para cartucho 2 –
15 Cubierta de protección (slot para tarjeta SD, interruptor Ejecutar/Detener
y puerto de programación USB mini-B)
–
16 Gancho de sujeción –
17 Cubierta de entradas analógicas extraíble –
18 Soporte de la batería Instalación y sustitución de la batería, página
46
Indicadores LED de estado
En la figura siguiente se muestran los indicadores LED de estado:
En la tabla siguiente se describen los indicadores LED de estado:
EIO0000003316.02 149

TM221CE40U
Etiqueta Tipo de
función Color Estado Descripción
Estados del
controlador(1)
Comunicación del
puerto Prg Ejecución de
la aplicación
PWR Alimentación Verde Encendido indica que se aplica alimentación.
Apagado Indica que no recibe alimentación.
RUN Estado del
equipo Verde Encendido Indica que el controlador está ejecutando una aplicación válida.
Parpadeo Indica que el controlador tiene una aplicación válida que está
detenida.
Apagado Indica que el controlador no está programado.
ERR Error Rojo Encendido* EXCEPCIÓN Restringido NO
Intermitente (con
indicador LED de
estado RUN apagado)
ERROR INTERNO Restringido NO
Intermitencia lenta Error menor
detectado(2)
Sí Depende del
indicador LED
de estado RUN
Un parpadeo simple No hay aplicación Sí Sí
SD Acceso para
tarjeta SD,
página 57
Verde Encendido Indica que se está accediendo a la tarjeta SD.
Parpadeo Indica que se ha detectado un error durante la utilización de la
tarjeta SD.
Apagado Indica que no hay acceso (inactivo) o que no hay ninguna tarjeta.
BAT Batería, página
45 Rojo Encendido Indica que la batería debe sustituirse.
Parpadeo Indica que la batería está baja de carga.
Apagado Indica que la batería está en buen estado.
SL Línea serie 1,
página 268 Verde Encendido Indica el estado de la línea serie 1.
Parpadeo Indica actividad en la línea serie 1.
Apagado Indica que no existe comunicación serie.
*El indicador LED ERR está conectado durante el proceso de arranque.
NOTA: Para obtener información sobre los LED integrados en el conector Ethernet, consulte Indicadores LED de estado de la
Ethernet, página 268.
(1) Para obtener más información sobre la descripción del estado del controlador, consulte M221 Logic Controller - Guía de programación
(consulte Modicon M221, Logic Controller - Guía de programación).
(2) El controlador ha detectado un error pero permanece en estado RUNNING. El LED ERR del controlador parpadea. Para obtener más
información, consulte M221 Logic Controller - Guía de programación.
Dimensiones
En la siguiente figura se muestran las dimensiones externas de los Logic
Controllers:
150 EIO0000003316.02

Canales de E/S incrustadas
Canales de E/S incrustadas
Contenido de este capítulo
Entradas digitales........................................................................................151
Salidas de relé ............................................................................................164
Salidas de transistores rápidas y normales.................................................... 170
Entradas analógicas....................................................................................178
Descripción general
En este capítulo se describen los canales de E/S incrustadas.
Entradas digitales
Descripción general
El Modicon TM221C Logic Controller tiene entradas digitales incrustadas:
Referencia Número total de
entradas digitales Entradas rápidas
que pueden
utilizarse como
entradas HSC de 100
kHz
Entradas normales
TM221C16•
TM221CE16•
9 4 5
TM221C24•
TM221CE24•
14 4 10
TM221C40•
TM221CE40•
24 4 20
Para obtener más información, consulte Gestión de entradas, página 49.
PELIGRO
PELIGRO DE INCENDIO
• Utilice únicamente los tamaños de cable recomendados para la capacidad
de corriente máxima de los canales de E/S y las fuentes de alimentación.
• Para el cableado de las salidas de relé (2 A), utilice conductores de al
menos 0,5 mm2(AWG 20) con una temperatura nominal de al menos 80 °C
(176 °F).
• Para los conductores comunes del cableado de salidas de relé (7 A) o
cableado de salidas de relé superior a 2 A, utilice conductores de al menos
1,0 mm2(AWG 16) con una temperatura nominal de como mínimo 80 °C
(176 °F).
Si no se siguen estas instrucciones, se producirán lesiones graves o la
muerte.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No supere ninguno de los valores nominales que se especifican en las tablas
de características medioambientales y eléctricas.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
EIO0000003316.02 151

Canales de E/S incrustadas
Características de entradas normales
En la tabla siguiente se describen las características de las entradas normales del
TM221C Logic Controller:
Característica Valor
TM221C16•
TM221CE16•
TM221C24•
TM221CE24•
TM221C40•
TM221CE40•
Número de entradas normales 5 entradas (I2, I3, I4, I5,
I8) 10 entradas (de I2 a I5,
de I8 a I13) 20 entradas (de I2 a I5,
de I8 a I23)
Número de grupos de canales 1 línea común para I0 a
I8 1 línea común para I0 a
I13 1 línea común para I0 a
I23
Tipo de entrada Tipo 1 (IEC/EN 61131-2)
Tipo de lógica Común positivo/Común negativo
Rango de tensión de entrada 24 V CC
Tensión de entrada establecida De 19,2 a 28,8 V CC
Corriente de entrada nominal 7 mA
Impedancia de entrada 3,4 kΩ
Valores límite de entrada Tensión en estado 1 > 15 V CC (de 15 a 28,8 V CC)
Tensión en estado 0 < 5 V CC (de 0 a 5 V CC)
Corriente en estado 1 > 2,5 mA
Corriente en estado 0 < 1,0 mA
Descenso Consulte Curvas de descenso, página 154
Tiempo de encendido I2, I3, I4, I5 35 µs + valor del filtro(1)
De I8 a I23 100 µs + valor del filtro(1)
Tiempo de apagado I2, I3, I4, I5 35 µs + valor del filtro(1)
De I8 a I23 100 µs + valor del filtro(1)
Aislamiento Entre entrada y lógica
interna 500 V CA
Tipo de conexión Bloques de terminales de tornillos extraíbles
Durabilidad de conexiones y desconexiones del
conector Más de 100 veces
Cable Tipo No blindado
Longitud 30 m (98 pies) máximo
(1) Para obtener más información, consulte Principio de filtro integrador, página 49
152 EIO0000003316.02

Canales de E/S incrustadas
Características de entradas rápidas
En la tabla siguiente se describen las características de las entradas rápidas del
TM221C Logic Controller:
Característica Valor
Número de entradas rápidas 4 entradas (I0, I1, I6, I7)
Número de grupos de canales 1 línea común
Tipo de entrada Tipo 1 (IEC/EN 61131-2)
Tipo de lógica Común positivo/común negativo
Tensión de entrada establecida 24 V CC
Rango de tensión de entrada De 19,2 a 28,8 V CC
Corriente de entrada nominal 5 mA
Impedancia de entrada 4,9 kΩ
Valores límite de entrada Tensión en estado 1 > 15 V CC (de 15 a 28,8 V CC)
Tensión en estado 0 < 5 V CC (de 0 a 5 V CC)
Corriente en estado 1 > 2,6 mA
Corriente en estado 0 < 0,6 mA
Descenso Consulte Curvas de descenso, página 154
Tiempo de encendido 5 µs + valor del filtro(1)
Tiempo de apagado 5 µs + valor del filtro(1)
Frecuencia máxima del HSC Fase dual 100 kHz
Monofásica 100 kHz
Medidor de frecuencias 100 kHz
Modalidad de funcionamiento HSC admitida •Fase dual [Pulso/Dirección]
•Fase dual [Cuadratura X1]
•Fase dual [Cuadratura X2]
•Fase dual [Cuadratura X4]
•Monofásico
•Medidor de frecuencias
Aislamiento Entre entrada y lógica
interna 500 V CA
Entre grupos de canales 500 V CA
Tipo de conexión Bloque de terminales de tornillo extraíble
Durabilidad de conexiones y desconexiones del conector Más de 100 veces
Cable Tipo Blindado, incluida la fuente de alimentación de 24 V CC
Longitud 10 m (32,8 pies) máximo
(1) Para obtener más información, consulte Principio de filtro integrador, página 49
EIO0000003316.02 153

Canales de E/S incrustadas
Curvas de descenso (sin cartucho)
En las siguientes figuras se muestran las curvas de descenso de las entradas
digitales incrustadas en una configuración sin cartucho:
XRelación de entradas simultáneas en ON
YTensión de entrada
XTemperatura ambiente
YRelación de entradas simultáneas en ON
154 EIO0000003316.02

Canales de E/S incrustadas
Curvas de descenso (con cartucho)
En las siguientes figuras se muestran las curvas de descenso de las entradas
digitales incrustadas en una configuración con cartucho:
XRelación de entradas simultáneas en ON
YTensión de entrada
XTemperatura ambiente
YRelación de entradas simultáneas en ON
EIO0000003316.02 155

Canales de E/S incrustadas
Diagramas de cableado de TM221C16R/TM221CE16R
En la siguiente figura se muestra el diagrama de cableado de común positivo
(lógica positiva) de las entradas a los sensores de TM221C16R y TM221CE16R:
*Fusible tipo T
En la siguiente figura se muestra el diagrama de cableado de común negativo
(lógica negativa) de las entradas a los sensores de TM221C16R y TM221CE16R:
*Fusible tipo T
NOTA: El TM221C Logic Controller proporciona alimentación de 24 V CC a
las entradas.
En la figura siguiente se muestra la conexión de las entradas rápidas:
Ix I0, I1, I6, I7
Diagramas de cableado de TM221C24R/TM221CE24R
En la siguiente figura se muestra el diagrama de cableado de común positivo
(lógica positiva) de las entradas a los sensores de TM221C24R y TM221CE24R:
*Fusible tipo T
En la siguiente figura se muestra el diagrama de cableado de común negativo
(lógica negativa) de las entradas a los sensores de TM221C24R y TM221CE24R:
*Fusible tipo T
156 EIO0000003316.02

Canales de E/S incrustadas
NOTA: El TM221C Logic Controller proporciona alimentación de 24 V CC a
las entradas.
En la figura siguiente se muestra la conexión de las entradas rápidas:
Ix I0, I1, I6, I7
Diagramas de cableado de TM221C40R/TM221CE40R
En la siguiente figura se muestra el diagrama de cableado de común positivo
(lógica positiva) de las entradas a los sensores de TM221C40R y TM221CE40R:
*Fusible tipo T
En la siguiente figura se muestra el diagrama de cableado de común negativo
(lógica negativa) de las entradas a los sensores de TM221C40R y TM221CE40R:
*Fusible tipo T
NOTA: El TM221C Logic Controller proporciona alimentación de 24 V CC a
las entradas.
En la figura siguiente se muestra la conexión de las entradas rápidas:
Ix I0, I1, I6, I7
Ejemplos de diagramas de cableado de codificador TM221C••R /
TM221CE••R
En las siguientes figuras se muestran cuatro ejemplos de cableado para
TM221C••R y TM221CE••R:
• codificador de fase dual sin índice
• codificador de fase dual con un interruptor de fin de carrera y sin índice
• codificador de fase dual con índice
• codificador de fase dual con índice y sensor de PNP
EIO0000003316.02 157

Canales de E/S incrustadas
TM221C••R / TM221CE••R con un codificador de fase dual sin índice:
(1) Codificador de fase dual sin índice
TM221C••R / TM221CE••R con un codificador de fase dual con un interruptor de
fin de carrera y sin índice:
(1) Codificador de fase dual sin índice
(2) Interruptor de fin de carrera
TM221C••R / TM221CE••R con un codificador de fase dual con índice:
(1) Codificador de fase dual con índice
TM221C••R / TM221CE••R con un codificador de fase dual con índice y sensor de
PNP:
(1) Codificador de fase dual con índice
(2) Sensor de PNP
158 EIO0000003316.02

Canales de E/S incrustadas
Diagramas de cableado de TM221C16T / TM221CE16T
En la figura siguiente se muestra la conexión de las entradas con los sensores de
TM221C16T y TM221CE16T:
*Fusible tipo T
ACableado de común positivo (lógica positiva).
BCableado de común negativo (lógica negativa).
En la figura siguiente se muestra la conexión de las entradas rápidas:
Ix I0, I1, I6, I7
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No conecte ningún cable a conexiones reservadas y no utilizadas o a
conexiones designadas como "No Connection (N.C.)".
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Diagramas de cableado de TM221C24T / TM221CE24T
En la figura siguiente se muestra la conexión de las entradas con los sensores de
TM221C24T y TM221CE24T:
*Fusible tipo T
ACableado de común positivo (lógica positiva).
BCableado de común negativo (lógica negativa).
EIO0000003316.02 159

Canales de E/S incrustadas
En la figura siguiente se muestra la conexión de las entradas rápidas:
Ix I0, I1, I6, I7
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No conecte ningún cable a conexiones reservadas y no utilizadas o a
conexiones designadas como "No Connection (N.C.)".
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Diagramas de cableado de TM221C40T / TM221CE40T
En la figura siguiente se muestra la conexión de las entradas con los sensores de
TM221C40T y TM221CE40T:
*Fusible tipo T
ACableado de común positivo (lógica positiva).
BCableado de común negativo (lógica negativa).
En la figura siguiente se muestra la conexión de las entradas rápidas:
Ix I0, I1, I6, I7
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No conecte ningún cable a conexiones reservadas y no utilizadas o a
conexiones designadas como "No Connection (N.C.)".
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
160 EIO0000003316.02

Canales de E/S incrustadas
Ejemplos de diagramas de cableado de codificador TM221C••T /
TM221CE••T
En las siguientes figuras se muestran cuatro ejemplos de cableado para
TM221C••T y TM221CE••T:
• codificador de fase dual sin índice
• codificador de fase dual con un interruptor de fin de carrera y sin índice
• codificador de fase dual con índice
• codificador de fase dual con índice y sensor de PNP
TM221C••T / TM221CE••T con un codificador de fase dual sin índice:
(1) Codificador de fase dual sin índice
TM221C••T / TM221CE••T con un codificador de fase dual con un interruptor de
fin de carrera y sin índice:
(1) Codificador de fase dual sin índice
(2) Interruptor de fin de carrera
TM221C••T / TM221CE••T con un codificador de fase dual con índice:
(1) Codificador de fase dual con índice
EIO0000003316.02 161

Canales de E/S incrustadas
TM221C••T / TM221CE••T con un codificador de fase dual con índice y sensor de
PNP:
(1) Codificador de fase dual con índice
(2) Sensor de PNP
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No conecte ningún cable a conexiones reservadas y no utilizadas o a
conexiones designadas como "No Connection (N.C.)".
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Diagramas de cableado de TM221C16U/TM221CE16U
En la figura siguiente se muestra la conexión de las entradas con los sensores de
TM221C16U y TM221CE16U:
*Fusible tipo T
ACableado de común positivo (lógica positiva).
BCableado de común negativo (lógica negativa).
En la figura siguiente se muestra la conexión de las entradas rápidas:
Ix I0, I1, I6, I7
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No conecte ningún cable a conexiones reservadas y no utilizadas o a
conexiones designadas como "No Connection (N.C.)".
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
162 EIO0000003316.02

Canales de E/S incrustadas
Diagramas de cableado de TM221C24U/TM221CE24U
En la figura siguiente se muestra la conexión de las entradas con los sensores de
TM221C24U y TM221CE24U:
*Fusible tipo T
ACableado de común positivo (lógica positiva).
BCableado de común negativo (lógica negativa).
En la figura siguiente se muestra la conexión de las entradas rápidas:
Ix I0, I1, I6, I7
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No conecte ningún cable a conexiones reservadas y no utilizadas o a
conexiones designadas como "No Connection (N.C.)".
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Diagramas de cableado de TM221C40U/TM221CE40U
En la figura siguiente se muestra la conexión de las entradas con los sensores de
TM221C40U y TM221CE40U:
*Fusible tipo T
ACableado de común positivo (lógica positiva).
BCableado de común negativo (lógica negativa).
EIO0000003316.02 163

Canales de E/S incrustadas
En la figura siguiente se muestra la conexión de las entradas rápidas:
Ix I0, I1, I6, I7
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No conecte ningún cable a conexiones reservadas y no utilizadas o a
conexiones designadas como "No Connection (N.C.)".
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Salidas de relé
Descripción general
El Modicon TM221C Logic Controller tiene 7, 10 o 16 salidas de relé incrustadas:
Referencia Número de salidas de relé
TM221C16R/TM221CE16R 7
TM221C24R/TM221CE24R 10
TM221C40R/TM221CE40R 16
Para obtener más información, consulte Gestión de salidas, página 52.
PELIGRO
PELIGRO DE INCENDIO
• Utilice únicamente los tamaños de cable recomendados para la capacidad
de corriente máxima de los canales de E/S y las fuentes de alimentación.
• Para el cableado de las salidas de relé (2 A), utilice conductores de al
menos 0,5 mm2(AWG 20) con una temperatura nominal de al menos 80 °C
(176 °F).
• Para los conductores comunes del cableado de salidas de relé (7 A) o
cableado de salidas de relé superior a 2 A, utilice conductores de al menos
1,0 mm2(AWG 16) con una temperatura nominal de como mínimo 80 °C
(176 °F).
Si no se siguen estas instrucciones, se producirán lesiones graves o la
muerte.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No supere ninguno de los valores nominales que se especifican en las tablas
de características medioambientales y eléctricas.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
164 EIO0000003316.02

Canales de E/S incrustadas
Características de salidas de relé
En la tabla siguiente se describen las características del TM221C Logic Controller
con salidas de relé:
Característica Valor
TM221C16R / TM221CE16R TM221C24R / TM221CE24R TM221C40R / TM221CE40R
Número de salidas de relé 7 salidas 10 salidas 16 salidas
Número de grupos de canales 1 línea común para Q0 a Q3
1 línea común para Q4 a Q6
1 línea común para Q0 a Q3
1 línea común para Q4 a Q7
1 línea común para Q8, Q9
1 línea común para Q0 a Q3
1 línea común para Q4 a Q7
1 línea común para Q8 a Q11
1 línea común para Q12 a
Q15
Tipo de salida Relé
Tipo de contacto NO (normalmente abierto)
Tensión de salida nominal 24 V CC / 240 V CA
Tensión máxima a 2 A 30 V CC / 264 V CA
Carga de conmutación mínima 5 V CC a 10 mA
Corriente de salida nominal 2 A
Corriente de salida máxima 2 A por salida
7 A para común 0 (de Q0 a
Q3)
6 A para común 1 (de Q4 a
Q6)
7 A para común 0 (de Q0 a
Q3)
7 A para común 1 (de Q4 a
Q7)
4 A para común 2 (de Q8 a
Q9)
7 A por línea común
Frecuencia de salida máxima con carga
máxima 20 operaciones por minuto
Reajuste Sin descenso
Tiempo de encendido Máx. 10 ms
Tiempo de apagado Máx. 10 ms
Resistencia de contacto 30 mΩ máx.
Vida útil mecánica 20 millones de operaciones
Vida útil
eléctrica Con carga resistiva Consulte las limitaciones de alimentación, página 166
Con carga inductiva
Protección contra cortocircuitos No
Aislamiento Entre salida y lógica
interna 500 V CA
Entre grupos de
canales 500 V CA
Tipo de conexión Bloques de terminales de tornillo extraíbles
Durabilidad de conexiones y
desconexiones del conector Más de 100 veces
Cable Tipo No blindado
Longitud Máx. 30 m (98 pies)
NOTA: Para obtener más información sobre la protección de las salidas, consulte Protección de las salidas contra daños de carga
inductiva, página 81.
EIO0000003316.02 165

Canales de E/S incrustadas
Limitación de alimentación
En la tabla siguiente se describen las limitaciones de potencia de las salidas de
relé en función de la tensión, el tipo de carga y el número de operaciones
requeridas.
Estos controladores no admiten cargas capacitivas.
ADVERTENCIA
SALIDAS DE RELÉ SOLDADAS Y CERRADAS
• Proteja siempre las salidas de relé contra daños de carga de corriente
alterna inductiva utilizando un circuito o dispositivo protector externo
adecuado.
• No conecte salidas de relé a cargas capacitivas.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Limitaciones de alimentación
Tensión 24 V CC 120 V CA 240 V CA Número de
operaciones
Alimentación de cargas resistivas
AC-12
–240 VA
80 VA
480 VA
160 VA
100.000
300.000
Alimentación de cargas inductivas
AC-15 (cos ϕ = 0,35)
–60 VA
18 VA
120 VA
36 VA
100.000
300.000
Alimentación de cargas inductivas
AC-14 (cos ϕ = 0,7)
–120 VA
36 VA
240 VA
72 VA
100.000
300.000
Alimentación de cargas resistivas
DC-12
48 W
16 W
– – 100.000
300.000
Alimentación de cargas inductivas
DC-13 L/R = 7 ms
24 W
7,2 W
– – 100.000
300.000
166 EIO0000003316.02

Canales de E/S incrustadas
Diagramas de cableado de salidas de relé - Lógica negativa
(común negativo)
En la siguiente figura se muestra el diagrama de cableado de común negativo
(lógica negativa) de las salidas de la carga de TM221C16R/TM221CE16R:
*Fusible tipo T
(1) Los terminales COM1 y COM2 no están conectados internamente.
(2) Para mejorar la vida útil de los contactos y como protección contra posibles
daños por carga inductiva, debe conectar en paralelo un diodo de ejecución libre
a cada una de las cargas inductivas de CC o en paralelo una supresión RC a
cada una de las cargas inductivas de CA.
BCableado de común negativo (lógica negativa)
En la siguiente figura se muestra el diagrama de cableado de común negativo
(lógica negativa) de las salidas de la carga de TM221C24R/TM221CE24R:
*Fusible tipo T
(1) Los terminales COM0, COM1 y COM2 no están conectados internamente.
(2) Para mejorar la vida útil de los contactos y como protección contra posibles
daños por carga inductiva, debe conectar en paralelo un diodo de ejecución libre
a cada una de las cargas inductivas de CC o en paralelo una supresión RC a
cada una de las cargas inductivas de CA.
BCableado de común negativo (lógica negativa)
EIO0000003316.02 167

Canales de E/S incrustadas
En la siguiente figura se muestra el diagrama de cableado de común negativo
(lógica negativa) de las salidas de la carga de TM221C40R/TM221CE40R:
*Fusible tipo T
(1) Los terminales COM0, COM1, COM2 y COM3 no están conectados
internamente.
(2) Para mejorar la vida útil de los contactos y como protección contra posibles
daños por carga inductiva, debe conectar en paralelo un diodo de ejecución libre
a cada una de las cargas inductivas de CC o en paralelo una supresión RC a
cada una de las cargas inductivas de CA.
BCableado de común negativo (lógica negativa)
NOTA: Los valores de fusibles asignados se han especificado para las
características máximas actuales de E/S del controlador y los elementos
comunes asociados. Puede tener otras consideraciones que sean de
aplicación según los tipos de dispositivos de entrada y salida que conecte, por
lo que deberá medir sus fusibles en consonancia.
Diagramas de cableado de salidas de relé - Lógica positiva
(común positivo)
En la siguiente figura se muestra el diagrama de cableado de común positivo
(lógica positiva) de las salidas de la carga de TM221C16R/TM221CE16R:
*Fusible tipo T
(1) Los terminales COM1 y COM2 no están conectados internamente.
(2) Para mejorar la vida útil de los contactos y como protección contra posibles
daños por carga inductiva, debe conectar en paralelo un diodo de ejecución libre
a cada una de las cargas inductivas de CC o en paralelo una supresión RC a
cada una de las cargas inductivas de CA.
ACableado de común positivo (lógica positiva)
168 EIO0000003316.02

Canales de E/S incrustadas
En la siguiente figura se muestra el diagrama de cableado de común positivo
(lógica positiva) de las salidas de la carga de TM221C24R/TM221CE24R:
*Fusible tipo T
(1) Los terminales COM0, COM1 y COM2 no están conectados internamente.
(2) Para mejorar la vida útil de los contactos y como protección contra posibles
daños por carga inductiva, debe conectar en paralelo un diodo de ejecución libre
a cada una de las cargas inductivas de CC o en paralelo una supresión RC a
cada una de las cargas inductivas de CA.
ACableado de común positivo (lógica positiva)
En la siguiente figura se muestra el diagrama de cableado de común positivo
(lógica positiva) de las salidas de la carga de TM221C40R/TM221CE40R:
*Fusible tipo T
(1) Los terminales COM0, COM1, COM2 y COM3 no están conectados
internamente.
(2) Para mejorar la vida útil de los contactos y como protección contra posibles
daños por carga inductiva, debe conectar en paralelo un diodo de ejecución libre
a cada una de las cargas inductivas de CC o en paralelo una supresión RC a
cada una de las cargas inductivas de CA.
ACableado de común positivo (lógica positiva)
NOTA: Los valores de fusibles asignados se han especificado para las
características máximas actuales de E/S del controlador y los elementos
comunes asociados. Puede tener otras consideraciones que sean de
aplicación según los tipos de dispositivos de entrada y salida que conecte, por
lo que deberá medir sus fusibles en consonancia.
EIO0000003316.02 169

Canales de E/S incrustadas
Salidas de transistores rápidas y normales
Descripción general
El Modicon TM221C Logic Controller tiene salidas de transistores rápidas y
normales incrustadas:
Referencia Número total de
salidas digitales Salidas de
transistor Salidas rápidas
TM221C16T/TM221CE16T 7 5 2
TM221C16U/TM221CE16U 7 5 2
TM221C24T/TM221CE24T 10 8 2
TM221C24U/TM221CE24U 10 8 2
TM221C40T/TM221CE40T 16 14 2
TM221C40U/TM221CE40U 16 12 4
Para obtener más información, consulte Gestión de salidas, página 52.
PELIGRO
PELIGRO DE INCENDIO
• Utilice únicamente los tamaños de cable recomendados para la capacidad
de corriente máxima de los canales de E/S y las fuentes de alimentación.
• Para el cableado de las salidas de relé (2 A), utilice conductores de al
menos 0,5 mm2(AWG 20) con una temperatura nominal de al menos 80 °C
(176 °F).
• Para los conductores comunes del cableado de salidas de relé (7 A) o
cableado de salidas de relé superior a 2 A, utilice conductores de al menos
1,0 mm2(AWG 16) con una temperatura nominal de como mínimo 80 °C
(176 °F).
Si no se siguen estas instrucciones, se producirán lesiones graves o la
muerte.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No supere ninguno de los valores nominales que se especifican en las tablas
de características medioambientales y eléctricas.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
170 EIO0000003316.02

Canales de E/S incrustadas
Características de salidas de transistor normales
En la tabla siguiente se describen las características de las salidas de transistor
normales del TM221C Logic Controller:
Característica Valor
TM221C16T / TM221CE16T /
TM221C16U / TM221CE16U TM221C24T / TM221CE24T /
TM221C24U / TM221CE24U TM221C40T / TM221CE40T
/ TM221C40U /
TM221CE40U
Número de salidas de transistor
normales 5 salidas (de Q2 a Q6) 8 salidas (de Q2 a Q9) 14 salidas (de Q2 a Q15)
(TM221C40T /
TM221CE40T)
12 salidas (de Q4 a Q15)
(TM221C40U /
TM221CE40U)
Número de grupos de canales 1 línea común para Q0 a Q6 1 línea común para Q0 a .Q9 1 línea común de Q0 a Q7
1 línea común para Q8 a
Q15
Tipo de salida Transistor
Tipo de lógica Común positivo para TM221•••T
Común negativo para TM221•••U
Tensión de salida nominal 24 V CC
Rango de tensión de salida De 19,2 a 28,8 V CC
Corriente de salida nominal 0,5 A
Corriente de salida total 3,5 A para grupos de canales
Q0 a Q6
5 A para grupos de canales
Q0 a Q9 4 A para grupos de canales
Q0 a Q7
4 A para grupos de canales
Q8 a Q15
Caída de tensión 1 V CC máx.
Corriente de fuga cuando está apagado 0,1 mA
Potencia máxima de lámpara de
filamento 12 W máx.
Reajuste Consulte Curvas de desclasificación, página 173
Tiempo de
encendido Q2, Q3 50 µs máx.
Otras salidas normales 300 µs máx.
Tiempo de
apagado Q2, Q3 50 µs máx.
Otras salidas normales 300 µs máx.
Protección contra cortocircuitos Sí (TM221C•••T sólo)
Pico de corriente de salida de
cortocircuito 1,3 A
Restablecimiento automático después
de cortocircuito o sobrecarga Sí, cada 1 s
Tensión de bloqueo Máx. 39 V CC ± 1 V CC
Frecuencia
de
conmutación
Con carga resistiva 100 Hz máx.
Aislamiento Entre salida y lógica
interna 500 V CA
Tipo de conexión Bloques de terminales de tornillo extraíbles
Durabilidad de conexiones y
desconexiones del conector Más de 100 veces
Cable Tipo No blindado
Longitud Máx. 30 m (98 pies)
EIO0000003316.02 171

Canales de E/S incrustadas
Característica Valor
TM221C16T / TM221CE16T /
TM221C16U / TM221CE16U TM221C24T / TM221CE24T /
TM221C24U / TM221CE24U TM221C40T / TM221CE40T
/ TM221C40U /
TM221CE40U
NOTA: Para obtener más información sobre la protección de las salidas, consulte Protección de las salidas contra daños de carga
inductiva, página 81.
Características de salidas de transistor rápidas
En la tabla siguiente se describen las características de las salidas de transistor
rápidas del TM221C Logic Controller:
Característica Valor
Número de salidas de transistor rápidas 2 salidas rápidas (Q0, Q1)
4 salidas rápidas (Q0, Q1, Q2 y Q3) para
TM221•••40U
Número de grupos de canales Una línea común
Tipo de salida Transistor
Tipo de lógica Común positivo para TM221•••T
Común negativo para TM221•••U
Tensión de salida nominal 24 V CC
Rango de tensión de salida De 19,2 a 28,8 V CC
Corriente de salida nominal 0,5 A
Corriente de salida total TM221C16T / TM221CE16T
TM221C16U / TM221CE16U
3,5 A para grupos de canales Q0 a Q6
TM221C24T / TM221CE24T
TM221C24U / TM221CE24U
5 A para grupos de canales Q0 a Q9
TM221C40T / TM221CE40T
TM221C40U / TM221CE40U
4 A para grupos de canales Q0 a Q7
4 A para grupos de canales Q8 a Q15
Potencia máxima de lámpara de filamento 12 W máx.
Reajuste Consulte Curvas de desclasificación, página 173
Tiempo de encendido (10 mA < corriente de salida < 100 mA) 5 µs máx.
Tiempo de apagado (10 mA < corriente de salida < 100 mA) 5 µs máx.
Protección contra cortocircuitos Sí (TM221C•••T sólo)
Pico de corriente de salida de cortocircuito 1,3 A máx.
Restablecimiento automático después de cortocircuito o sobrecarga Sí, cada 1 s
Protección contra polaridad inversa Sí
Tensión de bloqueo Tipo De 39 V CC +/- 1 V CC
Frecuencia de salida
máxima PLS/PWM/PTO/FREQGEN 100 kHz
Aislamiento Entre salida y lógica interna 500 V CA
Tipo de conexión Bloques de terminales de tornillo extraíbles
Durabilidad de conexiones y desconexiones del conector Más de 100 veces
Cable Tipo Blindado, incluida la fuente de alimentación de
24 V CC
Longitud 3 m (9,84 pies) máximo
NOTA: Para obtener más información sobre la protección de las salidas, consulte Protección de las salidas contra daños de carga
inductiva, página 81.
172 EIO0000003316.02

Canales de E/S incrustadas
Curvas de descenso (sin cartucho)
En las siguientes figuras se muestran las curvas de descenso de las salidas
digitales incrustadas en una configuración sin cartucho:
XRelación de salidas simultáneas en ON
YTensión de salida
XTemperatura ambiente
YRelación de salidas simultáneas en ON
EIO0000003316.02 173

Canales de E/S incrustadas
Curvas de descenso (con cartucho)
En las siguientes figuras se muestran las curvas de descenso de las salidas
digitales incrustadas en una configuración con cartucho:
XRelación de salidas simultáneas en ON
YTensión de salida
XTemperatura ambiente
YRelación de salidas simultáneas en ON
174 EIO0000003316.02

Canales de E/S incrustadas
Diagramas de cableado de salidas de transistor
En la figura siguiente se muestra la conexión de las salidas a la carga del
TM221C16T / TM221CE16T:
*Fusible tipo T
En la figura siguiente se muestra la conexión de las salidas rápidas:
Qx Q0, Q1
En la figura siguiente se muestra la conexión de las salidas a la carga del
TM221C24T / TM221CE24T:
*Fusible tipo T
(1) Los terminales V+ están conectados internamente.
En la figura siguiente se muestra la conexión de las salidas rápidas:
Qx Q0, Q1
En la figura siguiente se muestra la conexión de las salidas a la carga del
TM221C40T / TM221CE40T:
*Fusible tipo T
(1) Los terminales V0+ y V1+ no están conectados internamente.
(2) Los terminales V0- y V1- no están conectados internamente.
EIO0000003316.02 175

Canales de E/S incrustadas
En la figura siguiente se muestra la conexión de las salidas rápidas:
Qx Q0, Q1
Diagramas de cableado de salidas de transistor de común
negativo
En la figura siguiente se muestra la conexión de las salidas a la carga del
TM221C16U / TM221CE16U:
*Fusible tipo T
En la figura siguiente se muestra la conexión de las salidas rápidas:
Qx Q0, Q1
En la figura siguiente se muestra la conexión de las salidas a la carga del
TM221C24U / TM221CE24U:
*Fusible tipo T
(1) Los terminales V- están conectados internamente.
En la figura siguiente se muestra la conexión de las salidas rápidas:
Qx Q0, Q1
176 EIO0000003316.02

Canales de E/S incrustadas
En la figura siguiente se muestra la conexión de las salidas a la carga del
TM221C40U / TM221CE40U:
*Fusible tipo T
(1) Los terminales V0- y V1- no están conectados internamente.
(2) Los terminales V0+ y V1+ no están conectados internamente.
En la figura siguiente se muestra la conexión de las salidas rápidas:
Qx Q0, Q1, Q2, Q3
EIO0000003316.02 177

Canales de E/S incrustadas
Entradas analógicas
Descripción general
El Modicon M221 Logic Controller tiene 2 entradas analógicas incrustadas.
PELIGRO
PELIGRO DE INCENDIO
• Utilice únicamente los tamaños de cable recomendados para la capacidad
de corriente máxima de los canales de E/S y las fuentes de alimentación.
• Para el cableado de las salidas de relé (2 A), utilice conductores de al
menos 0,5 mm2(AWG 20) con una temperatura nominal de al menos 80 °C
(176 °F).
• Para los conductores comunes del cableado de salidas de relé (7 A) o
cableado de salidas de relé superior a 2 A, utilice conductores de al menos
1,0 mm2(AWG 16) con una temperatura nominal de como mínimo 80 °C
(176 °F).
Si no se siguen estas instrucciones, se producirán lesiones graves o la
muerte.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No supere ninguno de los valores nominales que se especifican en las tablas
de características medioambientales y eléctricas.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
178 EIO0000003316.02

Canales de E/S incrustadas
Montaje de los cables analógicos
En el siguiente procedimiento se explica cómo montar los cables analógicos:
Paso Acción
1 Utilice un destornillador para quitar la cubierta de protección.
2 Presione hasta que oiga un clic.
3 Sustituya la cubierta de protección.
EIO0000003316.02 179

Canales de E/S incrustadas
Características de entradas analógicas
En la tabla siguiente se describen las características del M221 Logic Controller
con entradas analógicas:
Característica Entrada de tensión
Número de entradas máximas 2 entradas
Tipo de entrada Terminación única
Rango de entrada nominal De 0 a 10 V CC
Resolución digital 10 bits
Valor de entrada del LSB 10 mV
Impedancia de entrada 100 kΩ
Tiempo de retardo de entrada 12 ms
Duración del muestreo 1 ms por canal + 1 tiempo de exploración
Precisión ±1 % de la escala completa
Resistencia a ruidos: desviación temporal máxima durante
perturbaciones ±5 % máximo de la escala completa cuando la perturbación EMC se aplica al
cableado de E/S y alimentación
Aislamiento Entre entrada y lógica interna No aislado
Tipo de conexión Conector y cable específicos (incluidos)
Durabilidad de conexiones y desconexiones del conector Más de 100 veces
Cable Tipo Propietario (incluido)
Longitud 1 m (3,3 pies)
Diagrama de cableado de entradas analógicas
En la figura siguiente se muestra el diagrama de cableado de las entradas
analógicas de M221 Logic Controller:
Los polos (-) se conectan internamente.
Pin Color del cable
0 V Negro
AN1 Rojo
0 V Negro
AN0 Rojo
Para obtener más información, consulte la sección Prácticas recomendadas
relativas al cableado, página 77.
180 EIO0000003316.02

Modicon TM221M Logic Controller
Contenido de esta parte
TM221M16R / TM221M16RG .......................................................................182
TM221ME16R / TM221ME16RG...................................................................195
TM221M16T / TM221M16TG........................................................................208
TM221ME16T / TM221ME16TG....................................................................222
TM221M32TK..............................................................................................236
TM221ME32TK............................................................................................250
EIO0000003316.02 181

TM221M16R / TM221M16RG
TM221M16R / TM221M16RG
Contenido de este capítulo
Presentación del modelo TM221M16RTM221M16RG / ................................. 182
Entradas digitales de TM221M16R/TM221M16RG ........................................ 185
Salidas digitales de TM221M16R/TM221M16RG........................................... 188
Entradas analógicas de TM221M16R/TM221M16RG .................................... 191
Descripción general
En este capítulo se describen los controladores TM221M16R/TM221M16RG.
Presentación del modelo TM221M16RTM221M16RG /
Descripción general
Las siguientes características se integran en los controladores TM221M16R
(tornillo) y TM221M16RG (resorte):
• 8 entradas digitales
◦4 entradas normales
◦4 entradas rápidas (HSC)
• 8 salidas digitales
◦8 salidas de relé
• 2 entradas analógicas
• Puerto de comunicación
◦2 puertos de línea serie
◦1 puerto de programación USB mini-B
182 EIO0000003316.02

TM221M16R / TM221M16RG
Descripción
En la siguiente figura se muestran los distintos componentes de los controladores:
Número Descripción Consulte
1 Indicadores LED de estado –
2 Bloque de terminales extraíble de la entrada Reglas para el bloque de terminales de tornillo
extraíble, página 79
Reglas para el bloque de terminales de
resorte extraíble, página 80
3 Bloque de terminales extraíble de la salida
4 Cierre de clip para segmentos DIN de 35 mm (1,38 pulg.) Segmento DIN, página 71
5Puerto de programación USB mini-B / para la conexión de terminales a un
PC de programación (EcoStruxure Machine Expert - Basic) Puerto de programación USB mini-B, página
265
6 Fuente de alimentación de 24 V CC Fuente de alimentación, página 83
7Puerto de línea serie 2 / conector RJ-45 (RS-485) Línea serie 2, página 271
8 Puerto de línea serie 1 / conector RJ-45 (RS-232 o RS-485) Línea serie 1, página 268
9 Interruptor Run/Stop Interruptor Run/Stop, página 55
10 Cubierta de entradas analógicas extraíble –
11 2 entradas analógicas Entradas analógicas, página 191
12 Slot para tarjeta SD Slot para tarjeta SD, página 57
13 Conector de ampliación de E/S –
14 Cubierta de protección (slot para tarjeta SD, interruptor Ejecutar/Detener
y puerto de programación USB mini-B)
–
15 Gancho de sujeción –
16 Soporte de la batería Instalación y sustitución de la batería, página
46
EIO0000003316.02 183

TM221M16R / TM221M16RG
Indicadores LED de estado
En la figura siguiente se muestran los indicadores LED de estado:
En la tabla siguiente se describen los indicadores LED de estado:
Etiqueta Tipo de
función Color Estado Descripción
Estados del
controlador(1)
Comunicación del
puerto Prg Ejecución de
la aplicación
PWR Alimentación Verde Encendido indica que se aplica alimentación.
Apagado Indica que no recibe alimentación.
RUN Estado del
equipo Verde Encendido Indica que el controlador está ejecutando una aplicación válida.
Parpadeo Indica que el controlador tiene una aplicación válida que está
detenida.
Apagado Indica que el controlador no está programado.
ERR Error Rojo Encendido* EXCEPCIÓN Restringido NO
Intermitente (con
indicador LED de
estado RUN apagado)
ERROR INTERNO Restringido NO
Parpadeo lento Error menor
detectado(2)
Sí Depende del
indicador LED
de estado RUN
Un parpadeo simple No hay aplicación Sí Sí
SD Acceso para
tarjeta SD,
página 57
Verde Encendido Indica que se está accediendo a la tarjeta SD.
Parpadeo Indica que se ha detectado un error durante la utilización de la
tarjeta SD.
Apagado Indica que no hay acceso (inactivo) o que no hay ninguna tarjeta.
BAT Batería, página
45
Rojo Encendido Indica que la batería debe sustituirse.
Parpadeo Indica que la batería está baja de carga.
Apagado Indica que la batería está en buen estado.
SL1 Línea serie 1,
página 268 Verde Encendido Indica el estado de la línea serie 1.
Parpadeo Indica actividad en la línea serie 1.
Apagado Indica que no existe comunicación serie.
SL2 Línea serie 2,
página 271 Verde Encendido Indica el estado de la línea serie 2.
Parpadeo Indica actividad en la línea serie 2.
Apagado Indica que no existe comunicación serie.
184 EIO0000003316.02

TM221M16R / TM221M16RG
Etiqueta Tipo de
función Color Estado Descripción
Estados del
controlador(1)
Comunicación del
puerto Prg Ejecución de
la aplicación
*El indicador LED ERR está conectado durante el proceso de arranque.
(1) Para obtener más información sobre la descripción del estado del controlador, consulte M221 Logic Controller - Guía de programación
(consulte Modicon M221, Logic Controller - Guía de programación).
(2) El controlador ha detectado un error pero permanece en estado RUNNING. El LED ERR del controlador parpadea. Para obtener más
información, consulte M221 Logic Controller - Guía de programación.
Dimensiones
En la ilustración siguiente se muestran las dimensiones externas de los
controladores:
Entradas digitales de TM221M16R/TM221M16RG
Descripción general
Este M221 Logic Controller tiene entradas digitales incrustadas:
• 4 entradas normales
• 4 entradas rápidas que pueden utilizarse como entradas del HSC de 100 kHz
Para obtener más información, consulte Gestión de entradas, página 49.
PELIGRO
PELIGRO DE INCENDIO
• Utilice únicamente los tamaños de cable recomendados para la capacidad
de corriente máxima de los canales de E/S y las fuentes de alimentación.
• Para el cableado de las salidas de relé (2 A), utilice conductores de al
menos 0,5 mm2(AWG 20) con una temperatura nominal de al menos 80 °C
(176 °F).
• Para los conductores comunes del cableado de salidas de relé (7 A) o
cableado de salidas de relé superior a 2 A, utilice conductores de al menos
1,0 mm2(AWG 16) con una temperatura nominal de como mínimo 80 °C
(176 °F).
Si no se siguen estas instrucciones, se producirán lesiones graves o la
muerte.
EIO0000003316.02 185

TM221M16R / TM221M16RG
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No supere ninguno de los valores nominales que se especifican en las tablas
de características medioambientales y eléctricas.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Características de entradas normales
En la tabla siguiente se describen las características de las entradas normales del
TM221M Logic Controller:
Característica Valor
Número de entradas normales 4 entradas (I2, I3, I4, I5)
Número de grupos de canales 1 línea común para I0 a I7
Tipo de entrada Tipo 1 (IEC/EN 61131-2)
Tipo de lógica Común positivo/Común negativo
Rango de tensión de entrada 24 V CC
Tensión de entrada establecida De 19,2 a 28,8 V CC
Corriente de entrada nominal 7 mA
Impedancia de entrada 3,4 kΩ
Valores límite de entrada Tensión en estado 1 > 15 V CC (de 15 a 28,8 V CC)
Tensión en estado 0 < 5 V CC (de 0 a 5 V CC)
Corriente en estado
1
> 2,5 mA
Corriente en estado
0
< 1,0 mA
Descenso Sin descenso
Tiempo de encendido 35 µs + valor del filtro(1)
Tiempo de apagado 35 µs + valor del filtro(1)
Aislamiento Entre entrada y
lógica interna 500 V CA
Tipo de conexión TM221M16R Bloques de terminales de tornillos extraíbles
TM221M16RG Bloques de terminales de resorte extraíbles
Durabilidad de conexiones y desconexiones del
conector Más de 100 veces
Cable Tipo No blindado
Longitud 30 m (98 pies) máximo
(1) Para obtener más información, consulte Principio de filtro integrador, página 49
186 EIO0000003316.02

TM221M16R / TM221M16RG
Características de entradas rápidas
En la tabla siguiente se describen las características de las entradas rápidas del
TM221M Logic Controller:
Característica Valor
Número de entradas rápidas 4 entradas (I0, I1, I6, I7)
Número de grupos de canales 1 línea común para I0 a I7
Tipo de entrada Tipo 1 (IEC/EN 61131-2)
Tipo de lógica Común positivo/común negativo
Tensión de entrada establecida 24 V CC
Rango de tensión de entrada De 19,2 a 28,8 V CC
Corriente de entrada nominal 4,5 mA
Impedancia de entrada 4,9 kΩ
Valores límite de entrada Tensión en estado
1> 15 V CC (de 15 a 28,8 V CC)
Tensión en estado
0< 5 V CC (de 0 a 5 V CC)
Corriente en
estado 1
> 2,5 mA
Corriente en
estado 0
< 1,0 mA
Descenso Sin descenso
Tiempo de encendido 5 µs + valor del filtro(1)
Tiempo de apagado 5 µs + valor del filtro(1)
Frecuencia máxima del
HSC
Fase dual 100 kHz
Monofásica 100 kHz
Medidor de
frecuencias 100 kHz
Modalidad de funcionamiento admitida por HSC •Fase dual [Pulso/Dirección]
•Fase dual [Cuadratura X1]
•Fase dual [Cuadratura X2]
•Fase dual [Cuadratura X4]
•Monofásico
•Medidor de frecuencias
Aislamiento Entre entrada y
lógica interna 500 V CA
Tipo de conexión TM221M16R Bloque de terminales de tornillo extraíble
TM221M16RG Bloque de terminales de resorte extraíble
Durabilidad de conexiones y desconexiones del
conector Más de 100 veces
Cable Tipo Blindado, incluida la fuente de alimentación
de 24 V CC
Longitud 10 m (32,8 pies) máximo
(1) Para obtener más información, consulte Principio de filtro integrador, página 49
EIO0000003316.02 187

TM221M16R / TM221M16RG
Diagrama de cableado
En la figura siguiente se muestra la conexión de las entradas a los sensores:
(1) Los terminales COM0 están conectados internamente.
ACableado de común positivo (lógica positiva).
BCableado de común negativo (lógica negativa).
Ix I0, I1, I6, I7
Salidas digitales de TM221M16R/TM221M16RG
Descripción general
M221 Logic Controller con 8 salidas de relé incrustadas.
Para obtener más información sobre Gestión de salidas, página 52.
PELIGRO
PELIGRO DE INCENDIO
• Utilice únicamente los tamaños de cable recomendados para la capacidad
de corriente máxima de los canales de E/S y las fuentes de alimentación.
• Para el cableado de las salidas de relé (2 A), utilice conductores de al
menos 0,5 mm2(AWG 20) con una temperatura nominal de al menos 80 °C
(176 °F).
• Para los conductores comunes del cableado de salidas de relé (7 A) o
cableado de salidas de relé superior a 2 A, utilice conductores de al menos
1,0 mm2(AWG 16) con una temperatura nominal de como mínimo 80 °C
(176 °F).
Si no se siguen estas instrucciones, se producirán lesiones graves o la
muerte.
188 EIO0000003316.02

TM221M16R / TM221M16RG
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No supere ninguno de los valores nominales que se especifican en las tablas
de características medioambientales y eléctricas.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Características de salidas de relé
En la tabla siguiente se describen las características del TM221M Logic Controller
con salidas de relé:
Característica Valor
Número de salidas de relé 8 salidas
Número de grupos de canales 1 línea común para Q0 a Q3
1 línea común para Q4 a Q7
Tipo de salida Relé
Tipo de contacto NO (normalmente abierto)
Tensión de salida nominal 24 V CC / 240 V CA
Tensión máxima a 2 A 30 V CC / 264 V CA
Carga de conmutación mínima 5 V CC a 10 mA
Corriente de salida nominal 2 A
Corriente de salida máxima 2 A por salida
7 A por línea común
Frecuencia de salida máxima con carga máxima 20 operaciones por minuto
Reajuste Sin descenso
Tiempo de encendido Máx. 10 ms
Tiempo de apagado Máx. 10 ms
Resistencia de contacto 30 mΩ máx.
Vida útil mecánica 20 millones de operaciones
Vida útil eléctrica Con carga resistiva Consulte las limitaciones de
alimentación, página 190
Con carga inductiva
Protección contra cortocircuitos No
Aislamiento Entre salida y lógica
interna 500 V CA
Entre grupos de
canales 500 V CA
Tipo de conexión TM221M16R Bloques de terminales de tornillo
extraíbles
TM221M16RG Bloques de terminales de resorte
extraíbles
Durabilidad de conexiones y desconexiones del
conector Más de 100 veces
Cable Tipo No blindado
Longitud Máx. 30 m (98 pies)
NOTA: Para obtener más información sobre la protección de las salidas, consulte Protección
de las salidas contra daños de carga inductiva, página 81.
EIO0000003316.02 189

TM221M16R / TM221M16RG
Limitación de alimentación
En la tabla siguiente se describen las limitaciones de alimentación de las salidas
de relé de TM221M16R/TM221M16RG dependiendo de la tensión, el tipo de
carga y el número de operaciones necesarias.
Estos controladores no admiten cargas capacitivas.
ADVERTENCIA
SALIDAS DE RELÉ SOLDADAS Y CERRADAS
• Proteja siempre las salidas de relé contra daños de carga de corriente
alterna inductiva utilizando un circuito o dispositivo protector externo
adecuado.
• No conecte salidas de relé a cargas capacitivas.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Limitaciones de alimentación
Tensión 24 V CC 120 V CA 240 V CA Número de
operaciones
Alimentación de cargas resistivas
AC-12
–240 VA
80 VA
480 VA
160 VA
100.000
300.000
Alimentación de cargas inductivas
AC-15 (cos ϕ = 0,35)
–60 VA
18 VA
120 VA
36 VA
100.000
300.000
Alimentación de cargas inductivas
AC-14 (cos ϕ = 0,7)
–120 VA
36 VA
240 VA
72 VA
100.000
300.000
Alimentación de cargas resistivas
DC-12
48 W
16 W
– – 100.000
300.000
Alimentación de cargas inductivas
DC-13 L/R = 7 ms
24 W
7,2 W
– – 100.000
300.000
190 EIO0000003316.02

TM221M16R / TM221M16RG
Diagrama de cableado
En la figura siguiente se muestra la conexión de las salidas a la carga:
*Fusible tipo T
(1) Los terminales COM1 y COM2 no están conectados internamente.
(2) Para mejorar la vida útil de los contactos y como protección contra posibles
daños por carga inductiva, debe conectar en paralelo un diodo de ejecución libre
a cada una de las cargas inductivas de CC o en paralelo una supresión RC a
cada una de las cargas inductivas de CA.
ACableado de común positivo (lógica positiva).
BCableado de común negativo (lógica negativa).
NOTA: Los valores de fusibles asignados se han especificado para las
características máximas actuales de E/S del controlador y los elementos
comunes asociados. Puede tener otras consideraciones que sean de
aplicación según los tipos de dispositivos de entrada y salida que conecte, o
conforme a las regulaciones y estándares de certificación aplicables,
nacionales o locales, por lo que deberá medir sus fusibles en consonancia.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No conecte ningún cable a conexiones reservadas y no utilizadas o a
conexiones designadas como "No Connection (N.C.)".
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Entradas analógicas de TM221M16R/TM221M16RG
Descripción general
El M221 Logic Controller tiene dos entradas analógicas incrustadas.
EIO0000003316.02 191

TM221M16R / TM221M16RG
PELIGRO
PELIGRO DE INCENDIO
• Utilice únicamente los tamaños de cable recomendados para la capacidad
de corriente máxima de los canales de E/S y las fuentes de alimentación.
• Para el cableado de las salidas de relé (2 A), utilice conductores de al
menos 0,5 mm2(AWG 20) con una temperatura nominal de al menos 80 °C
(176 °F).
• Para los conductores comunes del cableado de salidas de relé (7 A) o
cableado de salidas de relé superior a 2 A, utilice conductores de al menos
1,0 mm2(AWG 16) con una temperatura nominal de como mínimo 80 °C
(176 °F).
Si no se siguen estas instrucciones, se producirán lesiones graves o la
muerte.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No supere ninguno de los valores nominales que se especifican en las tablas
de características medioambientales y eléctricas.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
192 EIO0000003316.02

TM221M16R / TM221M16RG
En el siguiente procedimiento se explica cómo montar los cables analógicos:
Paso Acción
1 Utilice un destornillador para quitar la cubierta de protección.
2 Presione hasta que oiga un clic.
3 Sustituya la cubierta de protección.
Características de entradas analógicas
En la tabla siguiente se describen las características del M221 Logic Controller
con entradas analógicas:
Característica Entrada de tensión
Número de entradas máximas 2 entradas
Tipo de entrada Terminación única
Rango de entrada nominal De 0 a 10 V CC
Resolución digital 10 bits
Valor de entrada del LSB 10 mV
Impedancia de entrada 100 kΩ
Tiempo de retardo de entrada 12 ms
Duración del muestreo 1 ms por canal + 1 tiempo de exploración
Precisión ±1 % de la escala completa
EIO0000003316.02 193

TM221M16R / TM221M16RG
Característica Entrada de tensión
Resistencia a ruidos: desviación temporal
máxima durante perturbaciones ±5 % máximo de la escala completa cuando la
perturbación EMC se aplica al cableado de E/S y
alimentación
Aislamiento Entre entrada y
lógica interna No aislado
Tipo de conexión Conector y cable específicos (incluidos)
Durabilidad de conexiones y
desconexiones del conector Más de 100 veces
Cable Tipo Propietario (incluido)
Longitud 1 m (3,3 pies)
Diagrama de cableado
En la figura siguiente se muestra el diagrama de cableado de las entradas
analógicas de M221 Logic Controller:
Los polos (-) se conectan internamente.
Pin Color del cable
AN0 Rojo
0 V Negro
AN1 Rojo
0 V Negro
Para obtener más información, consulte la sección Prácticas recomendadas
relativas al cableado, página 77.
194 EIO0000003316.02

TM221ME16R / TM221ME16RG
TM221ME16R / TM221ME16RG
Contenido de este capítulo
Presentación de TM221ME16R/TM221ME16RG...........................................195
Entradas digitales de TM221ME16R/TM221ME16RG....................................198
Salidas digitales de TM221ME16R/TM221ME16RG ...................................... 201
Entradas analógicas de TM221ME16R/TM221ME16RG ................................ 204
Descripción general
En este capítulo se describen los controladores TM221ME16R/TM221ME16RG.
Presentación de TM221ME16R/TM221ME16RG
Descripción general
Las siguientes características se integran en los controladores TM221ME16R
(tornillo) y TM221ME16RG (resorte):
• 8 entradas digitales
◦4 entradas normales
◦4 entradas rápidas (HSC)
• 8 salidas digitales
◦8 salidas de relé
• 2 entradas analógicas
• Puerto de comunicación
◦1 puerto de línea serie
◦1 puerto de programación USB mini-B
◦1 puerto Ethernet
EIO0000003316.02 195

TM221ME16R / TM221ME16RG
Descripción
En la siguiente figura se muestran los distintos componentes de los controladores:
Número Descripción Consulte
1 Indicadores LED de estado –
2 Bloque de terminales extraíble de la entrada Reglas para el bloque de terminales de tornillo
extraíble, página 79
Reglas para el bloque de terminales de
resorte extraíble, página 80
3 Bloque de terminales extraíble de la salida
4 Cierre de clip para segmentos DIN de 35 mm (1,38 pulg.) Segmento DIN, página 71
5Puerto de programación USB mini-B / para la conexión de terminales a un
PC de programación (EcoStruxure Machine Expert - Basic) Puerto de programación USB mini-B, página
265
6 Fuente de alimentación de 24 V CC Fuente de alimentación, página 83
7Puerto Ethernet / conector RJ-45 Puerto Ethernet, página 266
8 Puerto de línea serie 1 / conector RJ-45 (RS-232 o RS-485) Línea serie 1, página 268
9 Interruptor Run/Stop Interruptor Run/Stop, página 55
10 Cubierta de entradas analógicas extraíble –
11 2 entradas analógicas Entradas analógicas, página 204
12 Slot para tarjeta SD Slot para tarjeta SD, página 57
13 Conector de ampliación de E/S –
14 Cubierta de protección (slot para tarjeta SD, interruptor Ejecutar/Detener
y puerto de programación USB mini-B)
–
15 Gancho de sujeción –
16 Soporte de la batería Instalación y sustitución de la batería, página
46
196 EIO0000003316.02

TM221ME16R / TM221ME16RG
Indicadores LED de estado
En la figura siguiente se muestran los indicadores LED de estado:
En la tabla siguiente se describen los indicadores LED de estado:
Etiqueta Tipo de
función Color Estado Descripción
Estados del
controlador(1)
Comunicación del
puerto Prg Ejecución de
la aplicación
PWR Alimentación Verde Encendido indica que se aplica alimentación.
Apagado Indica que no recibe alimentación.
RUN Estado del
equipo Verde Encendido Indica que el controlador está ejecutando una aplicación válida.
Parpadeo Indica que el controlador tiene una aplicación válida que está
detenida.
Apagado Indica que el controlador no está programado.
ERR Error Rojo Encendido* EXCEPCIÓN Restringido NO
Intermitente (con
indicador LED de
estado RUN apagado)
ERROR INTERNO Restringido NO
Intermitencia lenta Error menor
detectado(2)
Sí Depende del
indicador LED
de estado RUN
Un parpadeo simple No hay aplicación Sí Sí
SD Acceso para
tarjeta SD,
página 57
Verde Encendido Indica que se está accediendo a la tarjeta SD.
Parpadeo Indica que se ha detectado un error durante la utilización de la
tarjeta SD.
Apagado Indica que no hay acceso (inactivo) o que no hay ninguna tarjeta.
BAT Batería, página
45
Rojo Encendido Indica que la batería debe sustituirse.
Parpadeo Indica que la batería está baja de carga.
Apagado Indica que la batería está en buen estado.
SL Línea serie 1,
página 268 Verde Encendido Indica el estado de la línea serie 1.
Parpadeo Indica actividad en la línea serie 1.
Apagado Indica que no existe comunicación serie.
*El indicador LED ERR está conectado durante el proceso de arranque.
NOTA: Para obtener información sobre los LED integrados en el conector Ethernet, consulte Indicadores LED de estado de la
Ethernet, página 268.
(1) Para obtener más información sobre la descripción del estado del controlador, consulte M221 Logic Controller - Guía de programación
(consulte Modicon M221, Logic Controller - Guía de programación).
(2) El controlador ha detectado un error pero permanece en estado RUNNING. El LED ERR del controlador parpadea. Para obtener más
información, consulte M221 Logic Controller - Guía de programación.
EIO0000003316.02 197

TM221ME16R / TM221ME16RG
Dimensiones
En la ilustración siguiente se muestran las dimensiones externas de los
controladores:
Entradas digitales de TM221ME16R/TM221ME16RG
Descripción general
Este M221 Logic Controller tiene entradas digitales incrustadas:
• 4 entradas normales
• 4 entradas rápidas que pueden utilizarse como entradas del HSC de 100 kHz
Para obtener más información, consulte Gestión de entradas, página 49.
PELIGRO
PELIGRO DE INCENDIO
• Utilice únicamente los tamaños de cable recomendados para la capacidad
de corriente máxima de los canales de E/S y las fuentes de alimentación.
• Para el cableado de las salidas de relé (2 A), utilice conductores de al
menos 0,5 mm2(AWG 20) con una temperatura nominal de al menos 80 °C
(176 °F).
• Para los conductores comunes del cableado de salidas de relé (7 A) o
cableado de salidas de relé superior a 2 A, utilice conductores de al menos
1,0 mm2(AWG 16) con una temperatura nominal de como mínimo 80 °C
(176 °F).
Si no se siguen estas instrucciones, se producirán lesiones graves o la
muerte.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No supere ninguno de los valores nominales que se especifican en las tablas
de características medioambientales y eléctricas.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
198 EIO0000003316.02

TM221ME16R / TM221ME16RG
Características de entradas normales
En la tabla siguiente se describen las características de las entradas normales del
TM221M Logic Controller:
Característica Valor
Número de entradas normales 4 entradas (I2, I3, I4, I5)
Número de grupos de canales 1 línea común para I0 a I7
Tipo de entrada Tipo 1 (IEC/EN 61131-2)
Tipo de lógica Común positivo/Común negativo
Rango de tensión de entrada 24 V CC
Tensión de entrada establecida De 19,2 a 28,8 V CC
Corriente de entrada nominal 7 mA
Impedancia de entrada 3,4 kΩ
Valores límite de entrada Tensión en estado 1 > 15 V CC (de 15 a 28,8 V CC)
Tensión en estado 0 < 5 V CC (de 0 a 5 V CC)
Corriente en estado
1
> 2,5 mA
Corriente en estado
0
< 1,0 mA
Descenso Sin descenso
Tiempo de encendido 35 µs + valor del filtro(1)
Tiempo de apagado 35 µs + valor del filtro(1)
Aislamiento Entre entrada y
lógica interna 500 V CA
Tipo de conexión TM221ME16R Bloques de terminales de tornillos extraíbles
TM221ME16RG Bloques de terminales de resorte extraíbles
Durabilidad de conexiones y desconexiones del
conector Más de 100 veces
Cable Tipo No blindado
Longitud 30 m (98 pies) máximo
(1) Para obtener más información, consulte Principio de filtro integrador, página 49
Características de entradas rápidas
En la tabla siguiente se describen las características de las entradas rápidas del
TM221M Logic Controller:
Característica Valor
Número de entradas rápidas 4 entradas (I0, I1, I6, I7)
Número de grupos de canales 1 línea común para I0 a I7
Tipo de entrada Tipo 1 (IEC/EN 61131-2)
Tipo de lógica Común positivo/común negativo
Tensión de entrada establecida 24 V CC
Rango de tensión de entrada De 19,2 a 28,8 V CC
Corriente de entrada nominal 4,5 mA
Impedancia de entrada 4,9 kΩ
EIO0000003316.02 199

TM221ME16R / TM221ME16RG
Característica Valor
Valores límite de entrada Tensión en estado
1> 15 V CC (de 15 a 28,8 V CC)
Tensión en estado
0< 5 V CC (de 0 a 5 V CC)
Corriente en
estado 1 > 2,5 mA
Corriente en
estado 0
< 1,0 mA
Descenso Sin descenso
Tiempo de encendido 5 µs + valor del filtro(1)
Tiempo de apagado 5 µs + valor del filtro(1)
Frecuencia máxima del
HSC Fase dual 100 kHz
Monofásica 100 kHz
Medidor de
frecuencias 100 kHz
Modalidad de funcionamiento admitida por HSC •Fase dual [Pulso/Dirección]
•Fase dual [Cuadratura X1]
•Fase dual [Cuadratura X2]
•Fase dual [Cuadratura X4]
•Monofásico
•Medidor de frecuencias
Aislamiento Entre entrada y
lógica interna 500 V CA
Entre grupos de
canales 500 V CA
Tipo de conexión TM221ME16R Bloque de terminales de tornillo extraíble
TM221ME16RG Bloque de terminales de resorte extraíble
Durabilidad de conexiones y desconexiones del
conector Más de 100 veces
Cable Tipo Blindado, incluida la fuente de alimentación
de 24 V CC
Longitud 10 m (32,8 pies) máximo
(1) Para obtener más información, consulte Principio de filtro integrador, página 49
200 EIO0000003316.02

TM221ME16R / TM221ME16RG
Diagrama de cableado
En la figura siguiente se muestra la conexión de las entradas a los sensores:
(1) Los terminales COM0 están conectados internamente.
ACableado de común positivo (lógica positiva).
BCableado de común negativo (lógica negativa).
Ix I0, I1, I6, I7
Salidas digitales de TM221ME16R/TM221ME16RG
Descripción general
M221 Logic Controller con 8 salidas de relé incrustadas.
Para obtener más información sobre Gestión de salidas, página 52.
PELIGRO
PELIGRO DE INCENDIO
• Utilice únicamente los tamaños de cable recomendados para la capacidad
de corriente máxima de los canales de E/S y las fuentes de alimentación.
• Para el cableado de las salidas de relé (2 A), utilice conductores de al
menos 0,5 mm2(AWG 20) con una temperatura nominal de al menos 80 °C
(176 °F).
• Para los conductores comunes del cableado de salidas de relé (7 A) o
cableado de salidas de relé superior a 2 A, utilice conductores de al menos
1,0 mm2(AWG 16) con una temperatura nominal de como mínimo 80 °C
(176 °F).
Si no se siguen estas instrucciones, se producirán lesiones graves o la
muerte.
EIO0000003316.02 201

TM221ME16R / TM221ME16RG
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No supere ninguno de los valores nominales que se especifican en las tablas
de características medioambientales y eléctricas.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Características de salidas de relé
En la tabla siguiente se describen las características del TM221M Logic Controller
con salidas de relé:
Característica Valor
Número de salidas de relé 8 salidas
Número de grupos de canales 1 línea común para Q0 a Q3
1 línea común para Q4 a Q7
Tipo de salida Relé
Tipo de contacto NO (normalmente abierto)
Tensión de salida nominal 24 V CC / 240 V CA
Tensión máxima a 2 A 30 V CC / 264 V CA
Carga de conmutación mínima 5 V CC a 1 mA
Corriente de salida nominal 2 A
Corriente de salida máxima 2 A por salida
7 A por línea común
Frecuencia de salida máxima con carga máxima 20 operaciones por minuto
Reajuste Sin descenso
Tiempo de encendido Máx. 10 ms
Tiempo de apagado Máx. 10 ms
Resistencia de contacto 30 mΩ máx.
Vida útil mecánica 20 millones de operaciones
Vida útil eléctrica Con carga resistiva Consulte las limitaciones de
alimentación, página 203
Con carga inductiva
Protección contra cortocircuitos No
Aislamiento Entre salida y lógica
interna 500 V CA
Entre grupos de
canales 500 V CA
Tipo de conexión TM221ME16R Bloques de terminales de tornillo
extraíbles
TM221ME16RG Bloques de terminales de resorte
extraíbles
Durabilidad de conexiones y desconexiones del
conector Más de 100 veces
Cable Tipo No blindado
Longitud Máx. 30 m (98 pies)
NOTA: Para obtener más información sobre la protección de las salidas, consulte Protección
de las salidas contra daños de carga inductiva, página 81.
202 EIO0000003316.02

TM221ME16R / TM221ME16RG
Limitación de alimentación
En la tabla siguiente se describen las limitaciones de alimentación de los
controladores de salidas de relé de TM221ME16R/TM221ME16RG dependiendo
de la tensión, el tipo de carga y el número de operaciones necesarias.
Estos controladores no admiten cargas capacitivas.
ADVERTENCIA
SALIDAS DE RELÉ SOLDADAS Y CERRADAS
• Proteja siempre las salidas de relé contra daños de carga de corriente
alterna inductiva utilizando un circuito o dispositivo protector externo
adecuado.
• No conecte salidas de relé a cargas capacitivas.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Limitaciones de alimentación
Tensión 24 V CC 120 V CA 240 V CA Número de
operaciones
Alimentación de cargas resistivas
AC-12
–240 VA
80 VA
480 VA
160 VA
100.000
300.000
Alimentación de cargas inductivas
AC-15 (cos ϕ = 0,35)
–60 VA
18 VA
120 VA
36 VA
100.000
300.000
Alimentación de cargas inductivas
AC-14 (cos ϕ = 0,7)
–120 VA
36 VA
240 VA
72 VA
100.000
300.000
Alimentación de cargas resistivas
DC-12
48 W
16 W
– – 100.000
300.000
Alimentación de cargas inductivas
DC-13 L/R = 7 ms
24 W
7,2 W
– – 100.000
300.000
EIO0000003316.02 203

TM221ME16R / TM221ME16RG
Diagrama de cableado
En la figura siguiente se muestra la conexión de las salidas a la carga:
*Fusible tipo T
(1) Los terminales COM1 y COM2 no están conectados internamente.
(2) Para mejorar la vida útil de los contactos y como protección contra posibles
daños por carga inductiva, debe conectar en paralelo un diodo de ejecución libre
a cada una de las cargas inductivas de CC o en paralelo una supresión RC a
cada una de las cargas inductivas de CA.
ACableado de común positivo (lógica positiva).
BCableado de común negativo (lógica negativa).
NOTA: Los valores de fusibles asignados se han especificado para las
características máximas actuales de E/S del controlador y los elementos
comunes asociados. Puede tener otras consideraciones que sean de
aplicación según los tipos de dispositivos de entrada y salida que conecte, o
conforme a las regulaciones y estándares de certificación aplicables,
nacionales o locales, por lo que deberá medir sus fusibles en consonancia.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No conecte ningún cable a conexiones reservadas y no utilizadas o a
conexiones designadas como "No Connection (N.C.)".
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Entradas analógicas de TM221ME16R/TM221ME16RG
Descripción general
El M221 Logic Controller tiene dos entradas analógicas incrustadas.
204 EIO0000003316.02

TM221ME16R / TM221ME16RG
PELIGRO
PELIGRO DE INCENDIO
• Utilice únicamente los tamaños de cable recomendados para la capacidad
de corriente máxima de los canales de E/S y las fuentes de alimentación.
• Para el cableado de las salidas de relé (2 A), utilice conductores de al
menos 0,5 mm2(AWG 20) con una temperatura nominal de al menos 80 °C
(176 °F).
• Para los conductores comunes del cableado de salidas de relé (7 A) o
cableado de salidas de relé superior a 2 A, utilice conductores de al menos
1,0 mm2(AWG 16) con una temperatura nominal de como mínimo 80 °C
(176 °F).
Si no se siguen estas instrucciones, se producirán lesiones graves o la
muerte.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No supere ninguno de los valores nominales que se especifican en las tablas
de características medioambientales y eléctricas.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
EIO0000003316.02 205

TM221ME16R / TM221ME16RG
En el siguiente procedimiento se explica cómo montar los cables analógicos:
Paso Acción
1 Utilice un destornillador para quitar la cubierta de protección.
2 Presione hasta que oiga un clic.
3 Sustituya la cubierta de protección.
Características de entradas analógicas
En la tabla siguiente se describen las características del M221 Logic Controller
con entradas analógicas:
Característica Entrada de tensión
Número de entradas máximas 2 entradas
Tipo de entrada Terminación única
Rango de entrada nominal De 0 a 10 V CC
Resolución digital 10 bits
Valor de entrada del LSB 10 mV
Impedancia de entrada 100 kΩ
Tiempo de retardo de entrada 12 ms
Duración del muestreo 1 ms por canal + 1 tiempo de exploración
Precisión ±1 % de la escala completa
206 EIO0000003316.02

TM221ME16R / TM221ME16RG
Característica Entrada de tensión
Resistencia a ruidos: desviación temporal
máxima durante perturbaciones ±5 % máximo de la escala completa cuando la
perturbación EMC se aplica al cableado de E/S y
alimentación
Aislamiento Entre entrada y
lógica interna No aislado
Tipo de conexión Conector y cable específicos (incluidos)
Durabilidad de conexiones y
desconexiones del conector Más de 100 veces
Cable Tipo Propietario (incluido)
Longitud 1 m (3,3 pies)
Diagrama de cableado
En la figura siguiente se muestra el diagrama de cableado de las entradas
analógicas de Modicon M221 Logic Controller:
Los polos (-) se conectan internamente.
Pin Color del cable
AN0 Rojo
0 V Negro
AN1 Rojo
0 V Negro
Para obtener más información, consulte la sección Prácticas recomendadas
relativas al cableado, página 77.
EIO0000003316.02 207

TM221M16T / TM221M16TG
TM221M16T / TM221M16TG
Contenido de este capítulo
Presentación de TM221M16T/TM221M16TG................................................ 208
Entradas digitales de TM221M16T/TM221M16TG ......................................... 211
Salidas digitales de TM221M16T/TM221M16TG ...........................................215
Entradas analógicas de TM221M16T/TM221M16TG .....................................219
Descripción general
En este capítulo se describen los controladores TM221M16T/TM221M16TG.
Presentación de TM221M16T/TM221M16TG
Descripción general
Las siguientes características se integran en los controladores TM221M16T
(tornillo) y TM221M16TG (resorte):
• 8 entradas digitales
◦4 entradas normales
◦4 entradas rápidas (HSC)
• 8 salidas digitales
◦6 salidas de transistor normales
◦2 salidas de transistor rápidas
• 2 entradas analógicas
• Puerto de comunicación
◦2 puertos de línea serie
◦1 puerto de programación USB mini-B
208 EIO0000003316.02

TM221M16T / TM221M16TG
Descripción
En la siguiente figura se muestran los distintos componentes de los controladores:
Número Descripción Consulte
1 Indicadores LED de estado –
2 Bloque de terminales extraíble de la entrada Reglas para el bloque de terminales de tornillo
extraíble, página 79
Reglas para el bloque de terminales de
resorte extraíble, página 80
3 Bloque de terminales extraíble de la salida
4 Cierre de clip para segmentos DIN de 35 mm (1,38 pulg.) Segmento DIN, página 71
5Puerto de programación USB mini-B / para la conexión de terminales a un
PC de programación (EcoStruxure Machine Expert - Basic) Puerto de programación USB mini-B, página
265
6 Fuente de alimentación de 24 V CC Fuente de alimentación, página 83
7Puerto de línea serie 2 / conector RJ-45 (RS-485) Línea serie 2, página 271
8 Puerto de línea serie 1 / conector RJ-45 (RS-232 o RS-485) Línea serie 1, página 268
9 Interruptor Run/Stop Interruptor Run/Stop, página 55
10 Cubierta de entradas analógicas extraíble –
11 2 entradas analógicas Entradas analógicas, página 219
12 Slot para tarjeta SD Slot para tarjeta SD, página 57
13 Conector de ampliación de E/S –
14 Cubierta de protección (slot para tarjeta SD, interruptor Ejecutar/Detener
y puerto de programación USB mini-B)
–
15 Gancho de sujeción –
16 Soporte de la batería Instalación y sustitución de la batería, página
46
EIO0000003316.02 209

TM221M16T / TM221M16TG
Indicadores LED de estado
En la figura siguiente se muestran los indicadores LED de estado:
En la tabla siguiente se describen los indicadores LED de estado:
Etiqueta Tipo de
función Color Estado Descripción
Estados del
controlador(1)
Comunicación del
puerto Prg Ejecución de
la aplicación
PWR Alimentación Verde Encendido indica que se aplica alimentación.
Apagado Indica que no recibe alimentación.
RUN Estado del
equipo Verde Encendido Indica que el controlador está ejecutando una aplicación válida.
Parpadeo Indica que el controlador tiene una aplicación válida que está
detenida.
Apagado Indica que el controlador no está programado.
ERR Error Rojo Encendido* EXCEPCIÓN Restringido NO
Intermitente (con
indicador LED de
estado RUN apagado)
ERROR INTERNO Restringido NO
Parpadeo lento Error menor
detectado(2)
Sí Depende del
indicador LED
de estado RUN
Un parpadeo simple No hay aplicación Sí Sí
SD Acceso para
tarjeta SD,
página 57
Verde Encendido Indica que se está accediendo a la tarjeta SD.
Parpadeo Indica que se ha detectado un error durante la utilización de la
tarjeta SD.
Apagado Indica que no hay acceso (inactivo) o que no hay ninguna tarjeta.
BAT Batería, página
45 Rojo Encendido Indica que la batería debe sustituirse.
Parpadeo Indica que la batería está baja de carga.
Apagado Indica que la batería está en buen estado.
SL1 Línea serie 1,
página 268 Verde Encendido Indica el estado de la línea serie 1.
Parpadeo Indica actividad en la línea serie 1.
Apagado Indica que no existe comunicación serie.
SL2 Línea serie 2,
página 271 Verde Encendido Indica el estado de la línea serie 2.
Parpadeo Indica actividad en la línea serie 2.
Apagado Indica que no existe comunicación serie.
210 EIO0000003316.02

TM221M16T / TM221M16TG
Etiqueta Tipo de
función Color Estado Descripción
Estados del
controlador(1)
Comunicación del
puerto Prg Ejecución de
la aplicación
*El indicador LED ERR está conectado durante el proceso de arranque.
(1) Para obtener más información sobre la descripción del estado del controlador, consulte M221 Logic Controller - Guía de programación
(consulte Modicon M221, Logic Controller - Guía de programación).
(2) El controlador ha detectado un error pero permanece en estado RUNNING. El LED ERR del controlador parpadea. Para obtener más
información, consulte M221 Logic Controller - Guía de programación.
Dimensiones
En la ilustración siguiente se muestran las dimensiones externas de los
controladores:
Entradas digitales de TM221M16T/TM221M16TG
Descripción general
Este M221 Logic Controller tiene entradas digitales incrustadas:
• 4 entradas normales
• 4 entradas rápidas que pueden utilizarse como entradas del HSC de 100 kHz
Para obtener más información, consulte Gestión de entradas, página 49.
PELIGRO
PELIGRO DE INCENDIO
• Utilice únicamente los tamaños de cable recomendados para la capacidad
de corriente máxima de los canales de E/S y las fuentes de alimentación.
• Para el cableado de las salidas de relé (2 A), utilice conductores de al
menos 0,5 mm2(AWG 20) con una temperatura nominal de al menos 80 °C
(176 °F).
• Para los conductores comunes del cableado de salidas de relé (7 A) o
cableado de salidas de relé superior a 2 A, utilice conductores de al menos
1,0 mm2(AWG 16) con una temperatura nominal de como mínimo 80 °C
(176 °F).
Si no se siguen estas instrucciones, se producirán lesiones graves o la
muerte.
EIO0000003316.02 211

TM221M16T / TM221M16TG
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No supere ninguno de los valores nominales que se especifican en las tablas
de características medioambientales y eléctricas.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Características de entradas normales
En la tabla siguiente se describen las características de las entradas normales del
TM221M Logic Controller:
Característica Valor
Número de entradas normales 4 entradas (I2, I3, I4, I5)
Número de grupos de canales 1 línea común para I0 a I7
Tipo de entrada Tipo 1 (IEC/EN 61131-2)
Tipo de lógica Común positivo/Común negativo
Rango de tensión de entrada 24 V CC
Tensión de entrada establecida De 19,2 a 28,8 V CC
Corriente de entrada nominal 7 mA
Impedancia de entrada 3,4 kΩ
Valores límite de entrada Tensión en estado 1 > 15 V CC (de 15 a 28,8 V CC)
Tensión en estado 0 < 5 V CC (de 0 a 5 V CC)
Corriente en estado
1
> 2,5 mA
Corriente en estado
0
< 1,0 mA
Descenso Consulte Curva de descenso, página 214
Tiempo de encendido 35 µs + valor del filtro(1)
Tiempo de apagado 35 µs + valor del filtro(1)
Aislamiento Entre entrada y
lógica interna 500 V CA
Tipo de conexión TM221M16T Bloques de terminales de tornillos extraíbles
TM221M16TG Bloques de terminales de resorte extraíbles
Durabilidad de conexiones y desconexiones del
conector Más de 100 veces
Cable Tipo No blindado
Longitud 30 m (98 pies) máximo
(1) Para obtener más información, consulte Principio de filtro integrador, página 49
212 EIO0000003316.02

TM221M16T / TM221M16TG
Características de entradas rápidas
En la tabla siguiente se describen las características de las entradas rápidas del
TM221M Logic Controller:
Característica Valor
Número de entradas rápidas 4 entradas (I0, I1, I6, I7)
Número de grupos de canales 1 línea común para I0 a I7
Tipo de entrada Tipo 1 (IEC/EN 61131-2)
Tipo de lógica Común positivo/común negativo
Tensión de entrada establecida 24 V CC
Rango de tensión de entrada De 19,2 a 28,8 V CC
Corriente de entrada nominal 4,5 mA
Impedancia de entrada 4,9 kΩ
Valores límite de entrada Tensión en estado
1> 15 V CC (de 15 a 28,8 V CC)
Tensión en estado
0< 5 V CC (de 0 a 5 V CC)
Corriente en
estado 1
2,6 mA
Corriente en
estado 0
< 1,0 mA
Descenso Consulte Curva de descenso, página 214
Tiempo de encendido 5 µs + valor del filtro(1)
Tiempo de apagado 5 µs + valor del filtro(1)
Frecuencia máxima del
HSC Fase dual 100 kHz
Monofásica 100 kHz
Medidor de
frecuencias 100 kHz
Modalidad de funcionamiento admitida por HSC •Fase dual [Pulso/Dirección]
•Fase dual [Cuadratura X1]
•Fase dual [Cuadratura X2]
•Fase dual [Cuadratura X4]
•Monofásico
•Medidor de frecuencias
Aislamiento Entre entrada y
lógica interna 500 V CA
Entre grupos de
canales 500 V CA
Tipo de conexión TM221M16T Bloque de terminales de tornillo extraíble
TM221M16TG Bloque de terminales de resorte extraíble
Durabilidad de conexiones y desconexiones del
conector Más de 100 veces
Cable Tipo Blindado, incluida la fuente de alimentación
de 24 V CC
Longitud 10 m (32,8 pies) máximo
(1) Para obtener más información, consulte Principio de filtro integrador, página 49
EIO0000003316.02 213


TM221M16T / TM221M16TG
Diagrama de cableado
En la figura siguiente se muestra la conexión de las entradas a los sensores:
(1) Los terminales COM0 están conectados internamente.
ACableado de común positivo (lógica positiva).
BCableado de común negativo (lógica negativa).
Ix I0, I1, I6, I7
Salidas digitales de TM221M16T/TM221M16TG
Descripción general
El TM221M16T y el TM221M16TG tienen salidas digitales incrustadas:
• 6 salidas de transistor normales
• 2 salidas de transistor rápidas
Para obtener más información, consulte Gestión de salidas, página 52.
PELIGRO
PELIGRO DE INCENDIO
• Utilice únicamente los tamaños de cable recomendados para la capacidad
de corriente máxima de los canales de E/S y las fuentes de alimentación.
• Para el cableado de las salidas de relé (2 A), utilice conductores de al
menos 0,5 mm2(AWG 20) con una temperatura nominal de al menos 80 °C
(176 °F).
• Para los conductores comunes del cableado de salidas de relé (7 A) o
cableado de salidas de relé superior a 2 A, utilice conductores de al menos
1,0 mm2(AWG 16) con una temperatura nominal de como mínimo 80 °C
(176 °F).
Si no se siguen estas instrucciones, se producirán lesiones graves o la
muerte.
EIO0000003316.02 215

TM221M16T / TM221M16TG
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No supere ninguno de los valores nominales que se especifican en las tablas
de características medioambientales y eléctricas.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Características de salidas de transistor normales
En la tabla siguiente se describen las características de las salidas de transistor
normales del TM221M Logic Controller:
Característica Valor
Número de salidas de transistor normales 6 salidas normales (Q2 a Q7)
Número de grupos de canales 1 línea común para Q0 a Q7
Tipo de salida Transistor
Tipo de lógica Común positivo
Tensión de salida nominal 24 V CC
Rango de tensión de salida De 19,2 a 28,8 V CC
Corriente de salida nominal 0,5 A
Corriente de salida total 4 A
Caída de tensión 1 V CC máx.
Corriente de fuga cuando está apagado 0,1 mA
Potencia máxima de lámpara de filamento 12 W máx.
Descenso Consulte Curva de descenso, página 218
Tiempo de encendido De Q2 a Q3 50 µs máx.
De Q4 a Q7 300 µs máx.
Tiempo de apagado De Q2 a Q3 50 µs máx.
De Q4 a Q7 300 µs máx.
Protección contra cortocircuitos Sí
Pico de corriente de salida de cortocircuito 1,3 A
Restablecimiento automático después de cortocircuito
o sobrecarga Sí, cada 1 s
Tensión de bloqueo Máx. 39 V CC ± 1 V CC
Frecuencia de conmutación Con carga resistiva 100 Hz máx.
Aislamiento Entre salida y lógica
interna 500 V CA
Tipo de conexión TM221M16T Bloques de terminales de tornillo
extraíbles
TM221M16TG Bloques de terminales de resorte
extraíbles
Durabilidad de conexiones y desconexiones del
conector Más de 100 veces
Cable Tipo No blindado
Longitud Máx. 30 m (98 pies)
NOTA: Para obtener más información sobre la protección de las salidas, consulte Protección
de las salidas contra daños de carga inductiva, página 81.
216 EIO0000003316.02

TM221M16T / TM221M16TG
Características de salidas de transistor rápidas
En la tabla siguiente se describen las características de las salidas de transistor
rápidas de TM221M Logic Controller:
Característica Valor
Número de salidas de transistor rápidas 2 salidas (Q0, Q1)
Número de grupos de canales 1 línea común para Q0 a Q7
Tipo de salida Transistor
Tipo de lógica Origen
Tensión de salida nominal 24 V CC
Rango de tensión de salida De 19,2 a 28,8 V CC
Corriente de salida nominal 0,5 A
Corriente de salida total 4 A
Potencia máxima de la lámpara de filamento 12 W máx.
Descenso Consulte Curva de descenso,
página 218
Tiempo de encendido (10 mA < corriente de salida < 100 mA) 5 µs máx.
Tiempo de apagado (10 mA < corriente de salida < 100 mA) 5 µs máx.
Protección contra cortocircuitos Sí
Pico de corriente de salida de cortocircuito 1,3 A máx.
Restablecimiento automático después de cortocircuito o
sobrecarga Sí, cada 1 s
Protección contra polaridad inversa Sí
Tensión de límite Tipo 39 V CC +/-1 V CC
Frecuencia de salida
máxima PLS/PWM/PTO/FREQGEN 100 kHz
Aislamiento Entre salida y lógica interna 500 V CA
Tipo de conexión TM221M16T Bloques de terminales de tornillos
extraíbles
TM221M16TG Bloques de terminales de resorte
extraíbles
Durabilidad de conexiones y desconexiones del conector Más de 100 veces
Cable Tipo Blindado, incluida la fuente de
alimentación de 24 V CC
Longitud 3 m (9,84 pies) máximo
NOTA: Para obtener más información sobre la protección de las salidas, consulte Protección
de salidas frente a daños por carga inductiva, página 81.
EIO0000003316.02 217


TM221M16T / TM221M16TG
Diagrama de cableado
En la figura siguiente se muestra la conexión de las salidas a la carga:
*Fusible tipo T
(1) Los terminales V+ están conectados internamente.
Qx Q0, Q1
Entradas analógicas de TM221M16T/TM221M16TG
Descripción general
El M221 Logic Controller tiene dos entradas analógicas incrustadas.
PELIGRO
PELIGRO DE INCENDIO
• Utilice únicamente los tamaños de cable recomendados para la capacidad
de corriente máxima de los canales de E/S y las fuentes de alimentación.
• Para el cableado de las salidas de relé (2 A), utilice conductores de al
menos 0,5 mm2(AWG 20) con una temperatura nominal de al menos 80 °C
(176 °F).
• Para los conductores comunes del cableado de salidas de relé (7 A) o
cableado de salidas de relé superior a 2 A, utilice conductores de al menos
1,0 mm2(AWG 16) con una temperatura nominal de como mínimo 80 °C
(176 °F).
Si no se siguen estas instrucciones, se producirán lesiones graves o la
muerte.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No supere ninguno de los valores nominales que se especifican en las tablas
de características medioambientales y eléctricas.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
EIO0000003316.02 219

TM221M16T / TM221M16TG
En el siguiente procedimiento se explica cómo montar los cables analógicos:
Paso Acción
1 Utilice un destornillador para quitar la cubierta de protección.
2 Presione hasta que oiga un clic.
3 Sustituya la cubierta de protección.
Características de entradas analógicas
En la tabla siguiente se describen las características del M221 Logic Controller
con entradas analógicas:
Característica Entrada de tensión
Número de entradas máximas 2 entradas
Tipo de entrada Terminación única
Rango de entrada nominal De 0 a 10 V CC
Resolución digital 10 bits
Valor de entrada del LSB 10 mV
Impedancia de entrada 100 kΩ
Tiempo de retardo de entrada 12 ms
Duración del muestreo 1 ms por canal + 1 tiempo de exploración
Precisión ±1 % de la escala completa
220 EIO0000003316.02

TM221M16T / TM221M16TG
Característica Entrada de tensión
Resistencia a ruidos: desviación temporal
máxima durante perturbaciones ±5 % máximo de la escala completa cuando la
perturbación EMC se aplica al cableado de E/S y
alimentación
Aislamiento Entre entrada y
lógica interna No aislado
Tipo de conexión Conector y cable específicos (incluidos)
Durabilidad de conexiones y
desconexiones del conector Más de 100 veces
Cable Tipo Propietario (incluido)
Longitud 1 m (3,3 pies)
Diagrama de cableado
En la figura siguiente se muestra el diagrama de cableado de las entradas
analógicas de Modicon M221 Logic Controller:
Los polos (-) se conectan internamente.
Pin Color del cable
AN0 Rojo
0 V Negro
AN1 Rojo
0 V Negro
Para obtener más información, consulte la sección Prácticas recomendadas
relativas al cableado, página 77.
EIO0000003316.02 221

TM221ME16T / TM221ME16TG
TM221ME16T / TM221ME16TG
Contenido de este capítulo
Presentación de TM221ME16T/TM221ME16TG ........................................... 222
Entradas digitales de TM221ME16T/TM221ME16TG .................................... 225
Salidas digitales de TM221ME16T/TM221ME16TG.......................................229
Entradas analógicas de TM221ME16T/TM221ME16TG................................. 233
Descripción general
En este capítulo se describen los controladores TM221ME16T/TM221ME16TG.
Presentación de TM221ME16T/TM221ME16TG
Descripción general
Las siguientes características se integran en los controladores TM221ME16T
(tornillo) y TM221ME16TG (resorte):
• 8 entradas digitales
◦4 entradas normales
◦4 entradas rápidas (HSC)
• 8 salidas digitales
◦6 salidas de transistor normales
◦2 salidas de transistor rápidas
• 2 entradas analógicas
• Puerto de comunicación
◦1 puerto de línea serie
◦1 puerto de programación USB mini-B
◦1 puerto Ethernet
222 EIO0000003316.02

TM221ME16T / TM221ME16TG
Descripción
En la siguiente figura se muestran los distintos componentes de los controladores:
Número Descripción Consulte
1 Indicadores LED de estado –
2 Bloque de terminales extraíble de la entrada Reglas para el bloque de terminales de tornillo
extraíble, página 79
Reglas para el bloque de terminales de
resorte extraíble, página 80
3 Bloque de terminales extraíble de la salida
4 Cierre de clip para segmentos DIN de 35 mm (1,38 pulg.) Segmento DIN, página 71
5Puerto de programación USB mini-B / para la conexión de terminales a un
PC de programación (EcoStruxure Machine Expert - Basic) Puerto de programación USB mini-B, página
265
6 Fuente de alimentación de 24 V CC Fuente de alimentación, página 83
7Puerto Ethernet / conector RJ-45 Puerto Ethernet, página 266
8 Puerto de línea serie 1 / conector RJ-45 (RS-232 o RS-485) Línea serie 1, página 268
9 Interruptor Run/Stop Interruptor Run/Stop, página 55
10 Cubierta de entradas analógicas extraíble –
11 2 entradas analógicas Entradas analógicas, página 233
12 Slot para tarjeta SD Slot para tarjeta SD, página 57
13 Conector de ampliación de E/S –
14 Cubierta de protección (slot para tarjeta SD, interruptor Ejecutar/Detener
y puerto de programación USB mini-B)
–
15 Gancho de sujeción –
16 Soporte de la batería Instalación y sustitución de la batería, página
46
EIO0000003316.02 223

TM221ME16T / TM221ME16TG
Indicadores LED de estado
En la figura siguiente se muestran los indicadores LED de estado:
En la tabla siguiente se describen los indicadores LED de estado:
Etiqueta Tipo de
función Color Estado Descripción
Estados del
controlador(1)
Comunicación del
puerto Prg Ejecución de
la aplicación
PWR Alimentación Verde Encendido indica que se aplica alimentación.
Apagado Indica que no recibe alimentación.
RUN Estado del
equipo Verde Encendido Indica que el controlador está ejecutando una aplicación válida.
Parpadeo Indica que el controlador tiene una aplicación válida que está
detenida.
Apagado Indica que el controlador no está programado.
ERR Error Rojo Encendido* EXCEPCIÓN Restringido NO
Intermitente (con
indicador LED de
estado RUN apagado)
ERROR INTERNO Restringido NO
Intermitencia lenta Error menor
detectado(2)
Sí Depende del
indicador LED
de estado RUN
Un parpadeo simple No hay aplicación Sí Sí
SD Acceso para
tarjeta SD,
página 57
Verde Encendido Indica que se está accediendo a la tarjeta SD.
Parpadeo Indica que se ha detectado un error durante la utilización de la
tarjeta SD.
Apagado Indica que no hay acceso (inactivo) o que no hay ninguna tarjeta.
BAT Batería, página
45 Rojo Encendido Indica que la batería debe sustituirse.
Parpadeo Indica que la batería está baja de carga.
Apagado Indica que la batería está en buen estado.
SL Línea serie 1,
página 268 Verde Encendido Indica el estado de la línea serie 1.
Parpadeo Indica actividad en la línea serie 1.
Apagado Indica que no existe comunicación serie.
*El indicador LED ERR está conectado durante el proceso de arranque.
NOTA: Para obtener información sobre los LED integrados en el conector Ethernet, consulte Indicadores LED de estado de la
Ethernet, página 268.
(1) Para obtener más información sobre la descripción del estado del controlador, consulte M221 Logic Controller - Guía de programación
(consulte Modicon M221, Logic Controller - Guía de programación).
(2) El controlador ha detectado un error pero permanece en estado RUNNING. El LED ERR del controlador parpadea. Para obtener más
información, consulte M221 Logic Controller - Guía de programación.
224 EIO0000003316.02

TM221ME16T / TM221ME16TG
Dimensiones
En la ilustración siguiente se muestran las dimensiones externas de los
controladores:
Entradas digitales de TM221ME16T/TM221ME16TG
Descripción general
Este M221 Logic Controller tiene entradas digitales incrustadas:
• 4 entradas normales
• 4 entradas rápidas que pueden utilizarse como entradas del HSC de 100 kHz
Para obtener más información, consulte Gestión de entradas, página 49.
PELIGRO
PELIGRO DE INCENDIO
• Utilice únicamente los tamaños de cable recomendados para la capacidad
de corriente máxima de los canales de E/S y las fuentes de alimentación.
• Para el cableado de las salidas de relé (2 A), utilice conductores de al
menos 0,5 mm2(AWG 20) con una temperatura nominal de al menos 80 °C
(176 °F).
• Para los conductores comunes del cableado de salidas de relé (7 A) o
cableado de salidas de relé superior a 2 A, utilice conductores de al menos
1,0 mm2(AWG 16) con una temperatura nominal de como mínimo 80 °C
(176 °F).
Si no se siguen estas instrucciones, se producirán lesiones graves o la
muerte.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No supere ninguno de los valores nominales que se especifican en las tablas
de características medioambientales y eléctricas.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
EIO0000003316.02 225

TM221ME16T / TM221ME16TG
Características de entradas normales
En la tabla siguiente se describen las características del TM221M Logic Controller
con entradas normales de transistor:
Característica Valor
Número de entradas normales 4 entradas (I2, I3, I4, I5)
Número de grupos de canales 1 línea común para I0 a I7
Tipo de entrada Tipo 1 (IEC/EN 61131-2)
Tipo de lógica Común positivo/común negativo
Tensión de entrada establecida 24 V CC
Rango de tensión de entrada De 19,2 a 28,8 V CC
Corriente de entrada nominal 7 mA
Impedancia de entrada 3,4 kΩ
Valores límite de entrada Tensión en estado 1 > 15 V CC (de 15 a 28,8 V CC)
Tensión en estado 0 < 5 V CC (de 0 a 5 V CC)
Corriente en estado
1
> 2,5 mA
Corriente en estado
0
< 1,0 mA
Descenso Consulte Curva de descenso, página 228
Tiempo de encendido 35 µs + valor del filtro(1)
Tiempo de apagado 35 µs + valor del filtro(1)
Aislamiento Entre entrada y
lógica interna 500 V CA
Tipo de conexión TM221ME16T Bloques de terminales de tornillos extraíbles
TM221ME16TG Bloques de terminales de resorte extraíbles
Durabilidad de conexiones y desconexiones del
conector Más de 100 veces
Cable Tipo No blindado
Longitud 30 m (98 pies) máximo
(1) Para obtener más información, consulte Principio de filtro integrador, página 49
Características de entradas rápidas
En la tabla siguiente se describen las características de las entradas rápidas del
TM221M Logic Controller:
Característica Valor
Número de entradas rápidas 4 entradas (I0, I1, I6, I7)
Número de grupos de canales 1 línea común para I0 a I7
Tipo de entrada Tipo 1 (IEC/EN 61131-2)
Tipo de lógica Común positivo/común negativo
Tensión de entrada establecida 24 V CC
Rango de tensión de entrada De 19,2 a 28,8 V CC
Corriente de entrada nominal 4,5 mA
Impedancia de entrada 4,9 kΩ
226 EIO0000003316.02

TM221ME16T / TM221ME16TG
Característica Valor
Valores límite de entrada Tensión en estado
1> 15 V CC (de 15 a 28,8 V CC)
Tensión en estado
0< 5 V CC (de 0 a 5 V CC)
Corriente en
estado 1 > 2,5 mA
Corriente en
estado 0
< 1,0 mA
Descenso Consulte Curva de descenso, página 228
Tiempo de encendido 5 µs + valor del filtro(1)
Tiempo de apagado 5 µs + valor del filtro(1)
Frecuencia máxima del
HSC Fase dual 100 kHz
Monofásica 100 kHz
Medidor de
frecuencias 100 kHz
Modalidad de funcionamiento admitida por HSC •Fase dual [Pulso/Dirección]
•Fase dual [Cuadratura X1]
•Fase dual [Cuadratura X2]
•Fase dual [Cuadratura X4]
•Monofásico
•Medidor de frecuencias
Aislamiento Entre entrada y
lógica interna 500 V CA
Entre grupos de
canales 500 V CA
Tipo de conexión TM221ME16T Bloque de terminales de tornillo extraíble
TM221ME16TG Bloque de terminales de resorte extraíble
Durabilidad de conexiones y desconexiones del
conector Más de 100 veces
Cable Tipo Blindado, incluida la fuente de alimentación
de 24 V CC
Longitud 10 m (32,8 pies) máximo
(1) Para obtener más información, consulte Principio de filtro integrador, página 49
EIO0000003316.02 227


TM221ME16T / TM221ME16TG
Diagrama de cableado
En la figura siguiente se muestra la conexión de las entradas a los sensores:
(1) Los terminales COM0 están conectados internamente.
ACableado de común positivo (lógica positiva).
BCableado de común negativo (lógica negativa).
Ix I0, I1, I6, I7
Salidas digitales de TM221ME16T/TM221ME16TG
Descripción general
El TM221ME16T y el TM221ME16TG tienen 8 salidas digitales incrustadas:
• 6 salidas de transistor normales
• 2 salidas de transistor rápidas
Para obtener más información, consulte Gestión de salidas, página 52.
PELIGRO
PELIGRO DE INCENDIO
• Utilice únicamente los tamaños de cable recomendados para la capacidad
de corriente máxima de los canales de E/S y las fuentes de alimentación.
• Para el cableado de las salidas de relé (2 A), utilice conductores de al
menos 0,5 mm2(AWG 20) con una temperatura nominal de al menos 80 °C
(176 °F).
• Para los conductores comunes del cableado de salidas de relé (7 A) o
cableado de salidas de relé superior a 2 A, utilice conductores de al menos
1,0 mm2(AWG 16) con una temperatura nominal de como mínimo 80 °C
(176 °F).
Si no se siguen estas instrucciones, se producirán lesiones graves o la
muerte.
EIO0000003316.02 229

TM221ME16T / TM221ME16TG
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No supere ninguno de los valores nominales que se especifican en las tablas
de características medioambientales y eléctricas.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Características de salidas de transistor normales
En la tabla siguiente se describen las características de las salidas de transistor
normales del TM221M Logic Controller:
Característica Valor
Número de salidas de transistor normales 6 salidas normales (Q2 a Q7)
Número de grupos de canales 1 línea común para Q0 a Q7
Tipo de salida Transistor
Tipo de lógica Común positivo
Tensión de salida nominal 24 V CC
Rango de tensión de salida De 19,2 a 28,8 V CC
Corriente de salida nominal 0,5 A
Corriente de salida total 3 A
Caída de tensión 1 V CC máx.
Corriente de fuga cuando está apagado 0,1 mA
Potencia máxima de lámpara de filamento 12 W máx.
Descenso Consulte Curva de descenso, página 232
Tiempo de encendido De Q2 a Q3 50 µs máx.
De Q4 a Q7 300 µs máx.
Tiempo de apagado De Q2 a Q3 50 µs máx.
De Q4 a Q7 300 µs máx.
Protección contra cortocircuitos Sí
Pico de corriente de salida de cortocircuito 1,3 A
Restablecimiento automático después de cortocircuito
o sobrecarga Sí, cada 1 s
Tensión de bloqueo Máx. 39 V CC ± 1 V CC
Frecuencia de conmutación Con carga resistiva 100 Hz máx.
Aislamiento Entre salida y lógica
interna 500 V CA
Tipo de conexión TM221ME16T Bloques de terminales de tornillo
extraíbles
TM221ME16TG Bloques de terminales de resorte
extraíbles
Durabilidad de conexiones y desconexiones del
conector Más de 100 veces
Cable Tipo No blindado
Longitud Máx. 30 m (98 pies)
NOTA: Para obtener más información sobre la protección de las salidas, consulte Protección
de las salidas contra daños de carga inductiva, página 81.
230 EIO0000003316.02

TM221ME16T / TM221ME16TG
Características de salidas de transistor rápidas
En la tabla siguiente se describen las características de las salidas de transistor
rápidas del TM221M Logic Controller:
Característica Valor
Número de salidas de transistor rápidas 2 salidas (Q0, Q1)
Número de grupos de canales 1 línea común para Q0 a Q7
Tipo de salida Transistor
Tipo de lógica Común positivo
Tensión de salida nominal 24 V CC
Rango de tensión de salida De 19,2 a 28,8 V CC
Corriente de salida nominal 0,5 A
Corriente de salida total 4 A
Potencia máxima de lámpara de filamento 12 W máx.
Descenso Consulte Curva de descenso, página 232
Tiempo de encendido (10 mA < corriente de salida <
100 mA)
5 µs máx.
Tiempo de apagado (10 mA < corriente de salida <
100 mA)
5 µs máx.
Protección contra cortocircuitos Sí
Pico de corriente de salida de cortocircuito 1,3 A máx.
Restablecimiento automático después de
cortocircuito o sobrecarga Sí, cada 1 s
Protección contra polaridad inversa Sí
Tensión de bloqueo Tipo De 39 V CC +/- 1 V CC
Frecuencia de salida máxima PLS/PWM/PTO/
FREQGEN
100 kHz
Aislamiento Entre salida y
lógica interna 500 V CA
Tipo de conexión TM221ME16T Bloques de terminales de tornillo extraíbles
TM221ME16TG Bloques de terminales de resorte
extraíbles
Durabilidad de conexiones y desconexiones del
conector Más de 100 veces
Cable Tipo Blindado, incluida la fuente de
alimentación de 24 V CC
Longitud 3 m (9,84 pies) máximo
NOTA: Para obtener más información sobre la protección de las salidas, consulte Protección
de las salidas contra daños de carga inductiva, página 81.
EIO0000003316.02 231


TM221ME16T / TM221ME16TG
Diagrama de cableado
En la figura siguiente se muestra la conexión de las salidas a la carga:
*Fusible tipo T
(1) Los terminales V+ están conectados internamente.
Qx Q0, Q1
Entradas analógicas de TM221ME16T/TM221ME16TG
Descripción general
El M221 Logic Controller tiene dos entradas analógicas incrustadas.
PELIGRO
PELIGRO DE INCENDIO
• Utilice únicamente los tamaños de cable recomendados para la capacidad
de corriente máxima de los canales de E/S y las fuentes de alimentación.
• Para el cableado de las salidas de relé (2 A), utilice conductores de al
menos 0,5 mm2(AWG 20) con una temperatura nominal de al menos 80 °C
(176 °F).
• Para los conductores comunes del cableado de salidas de relé (7 A) o
cableado de salidas de relé superior a 2 A, utilice conductores de al menos
1,0 mm2(AWG 16) con una temperatura nominal de como mínimo 80 °C
(176 °F).
Si no se siguen estas instrucciones, se producirán lesiones graves o la
muerte.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No supere ninguno de los valores nominales que se especifican en las tablas
de características medioambientales y eléctricas.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
EIO0000003316.02 233

TM221ME16T / TM221ME16TG
En el siguiente procedimiento se explica cómo montar los cables analógicos:
Paso Acción
1 Utilice un destornillador para quitar la cubierta de protección.
2 Presione hasta que oiga un clic.
3 Sustituya la cubierta de protección.
Características de entradas analógicas
En la tabla siguiente se describen las características del M221 Logic Controller
con entradas analógicas:
Característica Entrada de tensión
Número de entradas máximas 2 entradas
Tipo de entrada Terminación única
Rango de entrada nominal De 0 a 10 V CC
Resolución digital 10 bits
Valor de entrada del LSB 10 mV
Impedancia de entrada 100 kΩ
Tiempo de retardo de entrada 12 ms
Duración del muestreo 1 ms por canal + 1 tiempo de exploración
Precisión ±1 % de la escala completa
234 EIO0000003316.02

TM221ME16T / TM221ME16TG
Característica Entrada de tensión
Resistencia a ruidos: desviación temporal
máxima durante perturbaciones ±5 % máximo de la escala completa cuando la
perturbación EMC se aplica al cableado de E/S y
alimentación
Aislamiento Entre entrada y
lógica interna No aislado
Tipo de conexión Conector y cable específicos (incluidos)
Durabilidad de conexiones y
desconexiones del conector Más de 100 veces
Cable Tipo Propietario (incluido)
Longitud 1 m (3,3 pies)
Diagrama de cableado
En la figura siguiente se muestra el diagrama de cableado de las entradas
analógicas de Modicon M221 Logic Controller:
Los polos (-) se conectan internamente.
Pin Color del cable
AN0 Rojo
0 V Negro
AN1 Rojo
0 V Negro
Para obtener más información, consulte la sección Prácticas recomendadas
relativas al cableado, página 77.
EIO0000003316.02 235

TM221M32TK
TM221M32TK
Contenido de este capítulo
Presentación del modelo TM221M32TK........................................................236
Entradas digitales de TM221M32TK ............................................................. 239
Salidas digitales de TM221M32TK................................................................243
Entradas analógicas de TM221M32TK .........................................................246
Descripción general
En este capítulo se describen los controladores TM221M32TK.
Presentación del modelo TM221M32TK
Descripción general
Las siguientes funciones se integran en los controladores (HE10) de
TM221M32TK:
• 16 entradas digitales
◦12 entradas normales
◦4 entradas rápidas (HSC)
• 16 salidas digitales
◦14 salidas de transistor normales
◦2 salidas de transistor rápidas
• 2 entradas analógicas
• Puerto de comunicación
◦2 puertos de línea serie
◦1 puerto de programación USB mini-B
Descripción
En la siguiente figura se muestran los distintos componentes del controlador:
236 EIO0000003316.02

TM221M32TK
Número Descripción Consulte
1 Indicadores LED de estado –
2 Conector de entrada HE10 (MIL 20) Lista de cables del conector HE10 (MIL 20)
3 Conector de salida HE10 (MIL 20)
4 Cierre de clip para segmentos DIN de 35 mm (1,38 pulg.) Segmento DIN, página 71
5Puerto de programación USB mini-B / para la conexión de terminales a un
PC de programación (EcoStruxure Machine Expert - Basic) Puerto de programación USB mini-B, página
265
6 Fuente de alimentación de 24 V CC Fuente de alimentación, página 83
7Puerto de línea serie 2 / conector RJ-45 (RS-485) Línea serie 2, página 271
8 Puerto de línea serie 1 / conector RJ-45 (RS-232 o RS-485) Línea serie 1, página 268
9 Interruptor Run/Stop Interruptor Run/Stop, página 55
10 Cubierta de entradas analógicas extraíble –
11 2 entradas analógicas Entradas analógicas, página 246
12 Slot para tarjeta SD Slot para tarjeta SD, página 57
13 Conector de ampliación de E/S –
14 Cubierta de protección (slot para tarjeta SD, interruptor Ejecutar/Detener
y puerto de programación USB mini-B)
–
15 Gancho de sujeción –
16 Soporte de la batería Instalación y sustitución de la batería, página
46
Indicadores LED de estado
En la figura siguiente se muestran los indicadores LED de estado:
En la tabla siguiente se describen los indicadores LED de estado:
Etiqueta Tipo de
función Color Estado Descripción
Estados del
controlador(1)
Comunicación del
puerto Prg Ejecución de
la aplicación
PWR Alimentación Verde Encendido indica que se aplica alimentación.
Apagado Indica que no recibe alimentación.
RUN Estado del
equipo Verde Encendido Indica que el controlador está ejecutando una aplicación válida.
Parpadeo Indica que el controlador tiene una aplicación válida que está
detenida.
Apagado Indica que el controlador no está programado.
EIO0000003316.02 237

TM221M32TK
Etiqueta Tipo de
función Color Estado Descripción
Estados del
controlador(1)
Comunicación del
puerto Prg Ejecución de
la aplicación
ERR Error Rojo Encendido* EXCEPCIÓN Restringido NO
Intermitente (con
indicador LED de
estado RUN apagado)
ERROR INTERNO Restringido NO
Parpadeo lento Error menor
detectado(2)
Sí Depende del
indicador LED
de estado RUN
Un parpadeo simple No hay aplicación Sí Sí
SD Acceso para
tarjeta SD,
página 57
Verde Encendido Indica que se está accediendo a la tarjeta SD.
Parpadeo Indica que se ha detectado un error durante la utilización de la
tarjeta SD.
Apagado Indica que no hay acceso (inactivo) o que no hay ninguna tarjeta.
BAT Batería, página
45 Rojo Encendido Indica que la batería debe sustituirse.
Parpadeo Indica que la batería está baja de carga.
Apagado Indica que la batería está en buen estado.
SL1 Línea serie 1,
página 268 Verde Encendido Indica el estado de la línea serie 1.
Parpadeo Indica actividad en la línea serie 1.
Apagado Indica que no existe comunicación serie.
SL2 Línea serie 2,
página 271 Verde Encendido Indica el estado de la línea serie 2.
Parpadeo Indica actividad en la línea serie 2.
Apagado Indica que no existe comunicación serie.
*El indicador LED ERR está conectado durante el proceso de arranque.
(1) Para obtener más información sobre la descripción del estado del controlador, consulte M221 Logic Controller - Guía de programación
(consulte Modicon M221, Logic Controller - Guía de programación).
(2) El controlador ha detectado un error pero permanece en estado RUNNING. El LED ERR del controlador parpadea. Para obtener más
información, consulte M221 Logic Controller - Guía de programación.
Dimensiones
En la ilustración siguiente se muestran las dimensiones externas del controlador:
238 EIO0000003316.02

TM221M32TK
Entradas digitales de TM221M32TK
Descripción general
Este M221 Logic Controller tiene entradas digitales incrustadas:
• 12 entradas normales
• 4 entradas rápidas que pueden utilizarse como entradas del HSC de 100 kHz
Para obtener más información, consulte Gestión de entradas, página 49.
PELIGRO
PELIGRO DE INCENDIO
• Utilice únicamente los tamaños de cable recomendados para la capacidad
de corriente máxima de los canales de E/S y las fuentes de alimentación.
• Para el cableado de las salidas de relé (2 A), utilice conductores de al
menos 0,5 mm2(AWG 20) con una temperatura nominal de al menos 80 °C
(176 °F).
• Para los conductores comunes del cableado de salidas de relé (7 A) o
cableado de salidas de relé superior a 2 A, utilice conductores de al menos
1,0 mm2(AWG 16) con una temperatura nominal de como mínimo 80 °C
(176 °F).
Si no se siguen estas instrucciones, se producirán lesiones graves o la
muerte.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No supere ninguno de los valores nominales que se especifican en las tablas
de características medioambientales y eléctricas.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Características de entradas normales
En la tabla siguiente se describen las características de las entradas normales del
TM221M Logic Controller:
Característica Valor
Número de entradas normales 12 entradas
Número de grupos de canales 1 línea común para I0 a I7
1 línea común para I8 a I15
Tipo de entrada Tipo 1 (IEC/EN 61131-2)
Tipo de lógica Común positivo/común negativo
Tensión de entrada establecida 24 V CC
Rango de tensión de entrada De 19,2 a 28,8 V CC
Corriente de entrada nominal 7 mA
Impedancia de entrada 3,4 kΩ
EIO0000003316.02 239

TM221M32TK
Característica Valor
Valores límite de entrada Tensión en estado 1 > 15 V CC (de 15 a 28,8 V CC)
Tensión en estado 0 < 5 V CC (de 0 a 5 V CC)
Corriente en estado
1
> 2,5 mA
Corriente en estado
0
< 1,0 mA
Descenso Consulte Curva de descenso, página 241
Tiempo de encendido 35 µs + valor del filtro(1)
Tiempo de apagado 35 µs + valor del filtro(1)
Aislamiento Entre entrada y
lógica interna 500 V CA
Tipo de conexión Conectores HE10 (MIL 20)
Durabilidad de conexiones y desconexiones del
conector Más de 100 veces
Cable Tipo No blindado
Longitud 30 m (98 pies) máximo
(1) Para obtener más información, consulte Principio de filtro integrador, página 49
Características de entradas rápidas
En la tabla siguiente se describen las características de las entradas rápidas del
TM221M Logic Controller:
Característica Valor
Número de entradas rápidas 4 entradas (I0, I1, I6, I7)
Número de grupos de canales 1 línea común para I0 a I7
Tipo de entrada Tipo 1 (IEC/EN 61131-2)
Tipo de lógica Común positivo/común negativo
Tensión de entrada establecida 24 V CC
Rango de tensión de entrada De 19,2 a 28,8 V CC
Corriente de entrada nominal 4,5 mA
Impedancia de entrada 4,9 kΩ
Valores límite de entrada Tensión en estado
1> 15 V CC (de 15 a 28,8 V CC)
Tensión en estado
0< 5 V CC (de 0 a 5 V CC)
Corriente en
estado 1
> 2,5 mA
Corriente en
estado 0
< 1,0 mA
Descenso Consulte Curva de descenso, página 241
Tiempo de encendido 5 µs + valor del filtro(1)
Tiempo de apagado 5 µs + valor del filtro(1)
Frecuencia máxima del
HSC Fase dual 100 kHz
Monofásica 100 kHz
Medidor de
frecuencias 100 kHz
240 EIO0000003316.02

TM221M32TK
Característica Valor
Modalidad de funcionamiento admitida por HSC •Fase dual [Pulso/Dirección]
•Fase dual [Cuadratura X1]
•Fase dual [Cuadratura X2]
•Fase dual [Cuadratura X4]
•Monofásico
•Medidor de frecuencias
Aislamiento Entre entrada y
lógica interna 500 V CA
Entre grupos de
canales 500 V CA
Tipo de conexión TM221M32TK Conector HE10 (MIL 20)
Durabilidad de conexiones y desconexiones del
conector Más de 100 veces
Cable Tipo Blindado, incluida la fuente de alimentación
de 24 V CC
Longitud 10 m (32,8 pies) máximo
(1) Para obtener más información, consulte Principio de filtro integrador, página 49
Curvas de descenso
En las siguientes figuras se muestran las curvas de descenso de las entradas
digitales incrustadas:
XRelación de entradas simultáneas en ON
YTensión de entrada
EIO0000003316.02 241

TM221M32TK
XTemperatura ambiente
YRelación de entradas simultáneas en ON
Diagrama de cableado con cable sin conductores
En la figura siguiente se muestra la conexión de las entradas a los sensores:
(1) Los terminales COM no están conectados internamente.
ACableado de común positivo (lógica positiva).
BCableado de común negativo (lógica negativa).
Ix I0, I1, I6, I7
Para obtener más información sobre el color del cable de TWDFCW30K/
TWDFCW50K, consulte Descripción del cable TWDFCW••K, página 43.
242 EIO0000003316.02

TM221M32TK
Salidas digitales de TM221M32TK
Descripción general
El TM221M32TK tiene 16 salidas digitales incrustadas:
• 14 salidas de transistor normales
• 2 salidas de transistor rápidas
Para obtener más información, consulte Gestión de salidas, página 52.
PELIGRO
PELIGRO DE INCENDIO
• Utilice únicamente los tamaños de cable recomendados para la capacidad
de corriente máxima de los canales de E/S y las fuentes de alimentación.
• Para el cableado de las salidas de relé (2 A), utilice conductores de al
menos 0,5 mm2(AWG 20) con una temperatura nominal de al menos 80 °C
(176 °F).
• Para los conductores comunes del cableado de salidas de relé (7 A) o
cableado de salidas de relé superior a 2 A, utilice conductores de al menos
1,0 mm2(AWG 16) con una temperatura nominal de como mínimo 80 °C
(176 °F).
Si no se siguen estas instrucciones, se producirán lesiones graves o la
muerte.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No supere ninguno de los valores nominales que se especifican en las tablas
de características medioambientales y eléctricas.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Características de salidas de transistor normales
En la tabla siguiente se describen las características de las salidas de transistor
normales del TM221M Logic Controller:
Característica Valor
Número de salidas de transistor normales 14 salidas normales (Q2 a Q15)
Número de grupos de canales 1 línea común para Q0 a Q15
Tipo de salida Transistor
Tipo de lógica Común positivo
Tensión de salida nominal 24 V CC
Rango de tensión de salida De 19,2 a 28,8 V CC
Corriente de salida nominal 0,1 A
Corriente de salida total (De Q0 a Q15) 1,6 A
Caída de tensión 1 V CC máx.
Corriente de fuga cuando está apagado 0,1 mA
Potencia máxima de lámpara de filamento 2,4 W máx.
Descenso Consulte Curvas de descenso, página
245
EIO0000003316.02 243

TM221M32TK
Característica Valor
Tiempo de encendido De Q2 a Q3 50 µs máx.
De Q4 a Q15 300 µs máx.
Tiempo de apagado De Q2 a Q3 50 µs máx.
De Q4 a Q15 300 µs máx.
Protección contra cortocircuitos Sí
Pico de corriente de salida de cortocircuito 0,25 A
Restablecimiento automático después de cortocircuito
o sobrecarga Sí, cada 1 s
Tensión de bloqueo Máx. 39 V CC ± 1 V CC
Frecuencia de conmutación Con carga resistiva 100 Hz máx.
Aislamiento Entre salida y lógica
interna 500 V CA
Tipo de conexión TM221M32TK Conectores HE10 (MIL 20)
Durabilidad de conexiones y desconexiones del
conector Más de 100 veces
Cable Tipo No blindado
Longitud Máx. 30 m (98 pies)
NOTA: Para obtener más información sobre la protección de las salidas, consulte Protección
de las salidas contra daños de carga inductiva, página 81.
Características de salidas de transistor rápidas
En la tabla siguiente se describen las características de las salidas de transistor
rápidas del TM221M Logic Controller:
Característica Valor
Número de salidas de transistor rápidas 2 salidas (Q0, Q1)
Número de grupos de canales 1 línea común para Q0 a Q15
Tipo de salida Transistor
Tipo de lógica Común positivo
Tensión de salida nominal 24 V CC
Rango de tensión de salida De 19,2 a 28,8 V CC
Corriente de salida nominal 0,1 A
Corriente de salida total (De Q0 a Q15) 1,6 A
Potencia máxima de lámpara de filamento 2,4 W máx.
Descenso Consulte Curvas de descenso, página 245
Tiempo de encendido (10 mA < corriente de salida <
100 mA)
5 µs máx.
Tiempo de apagado (10 mA < corriente de salida <
100 mA)
5 µs máx.
Protección contra cortocircuitos Sí
Pico de corriente de salida de cortocircuito 1,3 A máx.
Restablecimiento automático después de
cortocircuito o sobrecarga Sí, cada 1 s
Protección contra polaridad inversa Sí
Tensión de bloqueo Tipo De 39 V CC +/- 1 V CC
244 EIO0000003316.02

TM221M32TK
Característica Valor
Frecuencia de salida máxima PWM 100 kHz
PLS 100 kHz
Aislamiento Entre salida y
lógica interna 500 V CA
Tipo de conexión TM221M32TK Conectores HE10 (MIL 20)
Durabilidad de conexiones y desconexiones del
conector Más de 100 veces
Cable Tipo Blindado, incluida la fuente de
alimentación de 24 V CC
Longitud 3 m (9,84 pies) máximo
NOTA: Para obtener más información sobre la protección de las salidas, consulte Protección
de las salidas contra daños de carga inductiva, página 81.
Curvas de descenso
En las siguientes figuras se muestran las curvas de descenso de las salidas
digitales incrustadas:
XRelación de salidas simultáneas en ON
YTensión de salida
EIO0000003316.02 245

TM221M32TK
XTemperatura ambiente
YRelación de salidas simultáneas en ON
Diagrama de cableado con cable sin conductores
En la figura siguiente se muestra la conexión de las salidas a la carga:
*Fusible tipo T
Qx Q0, Q1
Para obtener más información sobre el color del cable de TWDFCW30K/
TWDFCW50K, consulte Descripción del cable TWDFCW••K, página 43.
Entradas analógicas de TM221M32TK
Descripción general
El M221 Logic Controller tiene dos entradas analógicas incrustadas.
246 EIO0000003316.02

TM221M32TK
PELIGRO
PELIGRO DE INCENDIO
• Utilice únicamente los tamaños de cable recomendados para la capacidad
de corriente máxima de los canales de E/S y las fuentes de alimentación.
• Para el cableado de las salidas de relé (2 A), utilice conductores de al
menos 0,5 mm2(AWG 20) con una temperatura nominal de al menos 80 °C
(176 °F).
• Para los conductores comunes del cableado de salidas de relé (7 A) o
cableado de salidas de relé superior a 2 A, utilice conductores de al menos
1,0 mm2(AWG 16) con una temperatura nominal de como mínimo 80 °C
(176 °F).
Si no se siguen estas instrucciones, se producirán lesiones graves o la
muerte.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No supere ninguno de los valores nominales que se especifican en las tablas
de características medioambientales y eléctricas.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
EIO0000003316.02 247

TM221M32TK
En el siguiente procedimiento se explica cómo montar los cables analógicos:
Paso Acción
1 Utilice un destornillador para quitar la cubierta de protección.
2 Presione hasta que oiga un clic.
3 Sustituya la cubierta de protección.
Características de entradas analógicas
En la tabla siguiente se describen las características del M221 Logic Controller
con entradas analógicas:
Característica Entrada de tensión
Número de entradas máximas 2 entradas
Tipo de entrada Terminación única
Rango de entrada nominal De 0 a 10 V CC
Resolución digital 10 bits
Valor de entrada del LSB 10 mV
Impedancia de entrada 100 kΩ
Tiempo de retardo de entrada 12 ms
Duración del muestreo 1 ms por canal + 1 tiempo de exploración
Precisión ±1 % de la escala completa
248 EIO0000003316.02

TM221M32TK
Característica Entrada de tensión
Resistencia a ruidos: desviación temporal
máxima durante perturbaciones ±5 % máximo de la escala completa cuando la
perturbación EMC se aplica al cableado de E/S y
alimentación
Aislamiento Entre entrada y
lógica interna No aislado
Tipo de conexión Conector y cable específicos (incluidos)
Durabilidad de conexiones y
desconexiones del conector Más de 100 veces
Cable Tipo Propietario (incluido)
Longitud 1 m (3,3 pies)
Diagrama de cableado
En la figura siguiente se muestra el diagrama de cableado de las entradas
analógicas de Modicon M221 Logic Controller:
Los polos (-) se conectan internamente.
Pin Color del cable
AN0 Rojo
0 V Negro
AN1 Rojo
0 V Negro
Para obtener más información, consulte la sección Prácticas recomendadas
relativas al cableado, página 77.
EIO0000003316.02 249

TM221ME32TK
TM221ME32TK
Contenido de este capítulo
Presentación del modelo TM221ME32TK .....................................................250
Entradas digitales de TM221ME32TK........................................................... 253
Salidas digitales de TM221ME32TK .............................................................257
Entradas analógicas de TM221ME32TK .......................................................261
Descripción general
En este capítulo se describe el controlador TM221ME32TK.
Presentación del modelo TM221ME32TK
Descripción general
Las siguientes funciones se integran en los controladores (HE10) de
TM221ME32TK:
• 16 entradas digitales
◦12 entradas normales
◦4 entradas rápidas (HSC)
• 16 salidas digitales
◦14 salidas de transistor normales
◦2 salidas de transistor rápidas
• 2 entradas analógicas
• Puerto de comunicación
◦1 puerto de línea serie
◦1 puerto de programación USB mini-B
◦1 puerto Ethernet
Descripción
En la siguiente figura se muestran los distintos componentes del controlador:
250 EIO0000003316.02

TM221ME32TK
Número Descripción Consulte
1 Indicadores LED de estado –
2 Conector de entrada HE10 (MIL 20) Lista de cables del conector HE10 (MIL 20)
3 Conector de salida HE10 (MIL 20)
4 Cierre de clip para segmentos DIN de 35 mm (1,38 pulg.) Segmento DIN, página 71
5Puerto de programación USB mini-B / para la conexión de terminales a un
PC de programación (EcoStruxure Machine Expert - Basic) Puerto de programación USB mini-B, página
265
6 Fuente de alimentación de 24 V CC Fuente de alimentación, página 83
7Puerto Ethernet / conector RJ-45 Puerto Ethernet, página 266
8 Puerto de línea serie 1 / conector RJ-45 (RS-232 o RS-485) Línea serie 1, página 268
9 Interruptor Run/Stop Interruptor Run/Stop, página 55
10 Cubierta de entradas analógicas extraíble –
11 2 entradas analógicas Entradas analógicas, página 261
12 Slot para tarjeta SD Slot para tarjeta SD, página 57
13 Conector de ampliación de E/S –
14 Cubierta de protección (slot para tarjeta SD, interruptor Ejecutar/Detener
y puerto de programación USB mini-B)
–
15 Gancho de sujeción –
16 Soporte de la batería Instalación y sustitución de la batería, página
46
Indicadores LED de estado
En la figura siguiente se muestran los indicadores LED de estado:
EIO0000003316.02 251

TM221ME32TK
En la tabla siguiente se describen los indicadores LED de estado:
Etiqueta Tipo de
función Color Estado Descripción
Estados del
controlador(1)
Comunicación del
puerto Prg Ejecución de
la aplicación
PWR Alimentación Verde Encendido indica que se aplica alimentación.
Apagado Indica que no recibe alimentación.
RUN Estado del
equipo Verde Encendido Indica que el controlador está ejecutando una aplicación válida.
Parpadeo Indica que el controlador tiene una aplicación válida que está
detenida.
Apagado Indica que el controlador no está programado.
ERR Error Rojo Encendido* EXCEPCIÓN Restringido NO
Intermitente (con
indicador LED de
estado RUN apagado)
ERROR INTERNO Restringido NO
Intermitencia lenta Error menor
detectado(2)
Sí Depende del
indicador LED
de estado RUN
Un parpadeo simple No hay aplicación Sí Sí
SD Acceso para
tarjeta SD,
página 57
Verde Encendido Indica que se está accediendo a la tarjeta SD.
Parpadeo Indica que se ha detectado un error durante la utilización de la
tarjeta SD.
Apagado Indica que no hay acceso (inactivo) o que no hay ninguna tarjeta.
BAT Batería, página
45 Rojo Encendido Indica que la batería debe sustituirse.
Parpadeo Indica que la batería está baja de carga.
Apagado Indica que la batería está en buen estado.
SL Línea serie 1,
página 268
Verde Encendido Indica el estado de la línea serie 1.
Parpadeo Indica actividad en la línea serie 1.
Apagado Indica que no existe comunicación serie.
*El indicador LED ERR está conectado durante el proceso de arranque.
NOTA: Para obtener información sobre los LED integrados en el conector Ethernet, consulte Indicadores LED de estado de la
Ethernet, página 268.
(1) Para obtener más información sobre la descripción del estado del controlador, consulte M221 Logic Controller - Guía de programación
(consulte Modicon M221, Logic Controller - Guía de programación).
(2) El controlador ha detectado un error pero permanece en estado RUNNING. El LED ERR del controlador parpadea. Para obtener más
información, consulte M221 Logic Controller - Guía de programación.
Dimensiones
En la siguiente figura se muestra el controlador externo de dimensiones:
252 EIO0000003316.02

TM221ME32TK
Entradas digitales de TM221ME32TK
Descripción general
Este M221 Logic Controller tiene entradas digitales incrustadas:
• 12 entradas normales
• 4 entradas rápidas que pueden utilizarse como entradas del HSC de 100 kHz
Para obtener más información, consulte Gestión de entradas, página 49.
PELIGRO
PELIGRO DE INCENDIO
• Utilice únicamente los tamaños de cable recomendados para la capacidad
de corriente máxima de los canales de E/S y las fuentes de alimentación.
• Para el cableado de las salidas de relé (2 A), utilice conductores de al
menos 0,5 mm2(AWG 20) con una temperatura nominal de al menos 80 °C
(176 °F).
• Para los conductores comunes del cableado de salidas de relé (7 A) o
cableado de salidas de relé superior a 2 A, utilice conductores de al menos
1,0 mm2(AWG 16) con una temperatura nominal de como mínimo 80 °C
(176 °F).
Si no se siguen estas instrucciones, se producirán lesiones graves o la
muerte.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No supere ninguno de los valores nominales que se especifican en las tablas
de características medioambientales y eléctricas.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
EIO0000003316.02 253

TM221ME32TK
Características de entradas normales
En la tabla siguiente se describen las características de las entradas normales del
TM221M Logic Controller:
Característica Valor
Número de entradas normales 12 entradas
Número de grupos de canales 1 línea común para I0 a I7
1 línea común para I8 a I15
Tipo de entrada Tipo 1 (IEC/EN 61131-2)
Tipo de lógica Común positivo/común negativo
Tensión de entrada establecida 24 V CC
Rango de tensión de entrada De 19,2 a 28,8 V CC
Corriente de entrada nominal 7 mA
Impedancia de entrada 3,4 kΩ
Valores límite de entrada Tensión en estado 1 > 15 V CC (de 15 a 28,8 V CC)
Tensión en estado 0 < 5 V CC (de 0 a 5 V CC)
Corriente en estado
1
> 2,5 mA
Corriente en estado
0
< 1,0 mA
Descenso Consulte Curva de descenso, página 255
Tiempo de encendido 35 µs + valor del filtro(1)
Tiempo de apagado De I2 a I5: 35 µs(1)
De I8 a I15: 100 µs(1)
Aislamiento Entre entrada y
lógica interna 500 V CA
Tipo de conexión Conectores HE10 (MIL 20)
Durabilidad de conexiones y desconexiones del
conector Más de 100 veces
Cable Tipo No blindado
Longitud 30 m (98 pies) máximo
(1) Para obtener más información, consulte Principio de filtro integrador, página 49
254 EIO0000003316.02

TM221ME32TK
Características de entradas rápidas
En la tabla siguiente se describen las características de las entradas rápidas del
TM221M Logic Controller:
Característica Valor
Número de entradas rápidas 4 entradas (I0, I1, I6, I7)
Número de grupos de canales 1 línea común para I0 a I7
Tipo de entrada Tipo 1 (IEC/EN 61131-2)
Tipo de lógica Común positivo/común negativo
Tensión de entrada establecida 24 V CC
Rango de tensión de entrada De 19,2 a 28,8 V CC
Corriente de entrada nominal 4,5 mA
Impedancia de entrada 4,9 kΩ
Valores límite de entrada Tensión en estado
1> 15 V CC (de 15 a 28,8 V CC)
Tensión en estado
0< 5 V CC (de 0 a 5 V CC)
Corriente en
estado 1
> 2,5 mA
Corriente en
estado 0
< 1,0 mA
Descenso Consulte Curva de descenso, página 256
Tiempo de encendido 5 µs + valor del filtro(1)
Tiempo de apagado 5 µs + valor del filtro(1)
Frecuencia máxima del
HSC Fase dual 100 kHz
Monofásica 100 kHz
Medidor de
frecuencias 100 kHz
Modalidad de funcionamiento admitida por HSC •Fase dual [Pulso/Dirección]
•Fase dual [Cuadratura X1]
•Fase dual [Cuadratura X2]
•Fase dual [Cuadratura X4]
•Monofásico
•Medidor de frecuencias
Aislamiento Entre entrada y
lógica interna 500 V CA
Entre grupos de
canales 500 V CA
Tipo de conexión TM221ME32TK Conector HE10 (MIL 20)
Durabilidad de conexiones y desconexiones del
conector Más de 100 veces
Cable Tipo Blindado, incluida la fuente de alimentación
de 24 V CC
Longitud 10 m (32,8 pies) máximo
(1) Para obtener más información, consulte Principio de filtro integrador, página 49
EIO0000003316.02 255


TM221ME32TK
Diagrama de cableado con cable sin conductores
En la figura siguiente se muestra la conexión de las entradas a los sensores:
(1) Los terminales COM no están conectados internamente.
ACableado de común positivo (lógica positiva).
BCableado de común negativo (lógica negativa).
Ix I0, I1, I6, I7
Para obtener más información sobre el color del cable de TWDFCW30K/
TWDFCW50K, consulte Descripción del cable TWDFCW••K, página 44.
Salidas digitales de TM221ME32TK
Descripción general
El TM221ME32TK tiene 16 salidas digitales incrustadas:
• 14 salidas de transistor normales
• 2 salidas de transistor rápidas
Para obtener más información, consulte Gestión de salidas, página 52.
PELIGRO
PELIGRO DE INCENDIO
• Utilice únicamente los tamaños de cable recomendados para la capacidad
de corriente máxima de los canales de E/S y las fuentes de alimentación.
• Para el cableado de las salidas de relé (2 A), utilice conductores de al
menos 0,5 mm2(AWG 20) con una temperatura nominal de al menos 80 °C
(176 °F).
• Para los conductores comunes del cableado de salidas de relé (7 A) o
cableado de salidas de relé superior a 2 A, utilice conductores de al menos
1,0 mm2(AWG 16) con una temperatura nominal de como mínimo 80 °C
(176 °F).
Si no se siguen estas instrucciones, se producirán lesiones graves o la
muerte.
EIO0000003316.02 257

TM221ME32TK
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No supere ninguno de los valores nominales que se especifican en las tablas
de características medioambientales y eléctricas.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
Características de salidas de transistor normales
En la tabla siguiente se describen las características de las salidas de transistor
normales del TM221M Logic Controller:
Característica Valor
Número de salidas de transistor normales 14 salidas normales (Q2 a Q15)
Número de grupos de canales 1 línea común para Q0 a Q15
Tipo de salida Transistor
Tipo de lógica Común positivo
Tensión de salida nominal 24 V CC
Rango de tensión de salida De 19,2 a 28,8 V CC
Corriente de salida nominal 0,1 A
Corriente de salida total (De Q0 a Q15) 1,6 A
Caída de tensión 1 V CC máx.
Corriente de fuga cuando está apagado 0,1 mA
Potencia máxima de lámpara de filamento 2,4 W máx.
Descenso Consulte Curvas de descenso, página
260
Tiempo de encendido De Q2 a Q3 50 µs máx.
De Q4 a Q15 300 µs máx.
Tiempo de apagado De Q2 a Q3 50 µs máx.
De Q4 a Q15 300 µs máx.
Protección contra cortocircuitos Sí
Pico de corriente de salida de cortocircuito 0,25 A
Restablecimiento automático después de cortocircuito
o sobrecarga Sí, cada 1 s
Tensión de bloqueo Máx. 39 V CC ± 1 V CC
Frecuencia de conmutación Con carga resistiva 100 Hz máx.
Aislamiento Entre salida y lógica
interna 500 V CA
Tipo de conexión TM221ME32TK Conectores HE10 (MIL 20)
Durabilidad de conexiones y desconexiones del
conector Más de 100 veces
Cable Tipo No blindado
Longitud Máx. 30 m (98 pies)
NOTA: Para obtener más información sobre la protección de las salidas, consulte Protección
de las salidas contra daños de carga inductiva, página 81.
258 EIO0000003316.02

TM221ME32TK
Características de salidas de transistor rápidas
En la tabla siguiente se describen las características de las salidas de transistor
rápidas del TM221M Logic Controller:
Característica Valor
Número de salidas de transistor rápidas 2 salidas (Q0, Q1)
Número de grupos de canales 1 línea común para Q0 a Q15
Tipo de salida Transistor
Tipo de lógica Común positivo
Tensión de salida nominal 24 V CC
Rango de tensión de salida De 19,2 a 28,8 V CC
Corriente de salida nominal 0,1 A
Corriente de salida total (De Q0 a Q15) 1,6 A
Potencia máxima de lámpara de filamento 2,4 W máx.
Descenso Consulte Curvas de descenso, página 260
Tiempo de encendido (10 mA < corriente de salida <
100 mA) 5 µs máx.
Tiempo de apagado (10 mA < corriente de salida <
100 mA)
5 µs máx.
Protección contra cortocircuitos Sí
Pico de corriente de salida de cortocircuito 1,3 A máx.
Restablecimiento automático después de cortocircuito
o sobrecarga Sí, cada 1 s
Protección contra polaridad inversa Sí
Tensión de bloqueo Tipo De 39 V CC +/- 1 V CC
Frecuencia de salida máxima PLS/PWM/PTO/
FREQGEN
100 kHz
Aislamiento Entre salida y
lógica interna 500 V CA
Tipo de conexión TM221ME32TK Conectores HE10 (MIL 20)
Durabilidad de conexiones y desconexiones del
conector Más de 100 veces
Cable Tipo Blindado, incluida la fuente de
alimentación de 24 V CC
Longitud 3 m (9,84 pies) máximo
NOTA: Para obtener más información sobre la protección de las salidas, consulte Protección
de las salidas contra daños de carga inductiva, página 81.
EIO0000003316.02 259


TM221ME32TK
Diagrama de cableado con cable sin conductores
En la figura siguiente se muestra la conexión de las salidas a la carga:
*Fusible tipo T
Qx Q0, Q1
Para obtener más información sobre el color del cable de TWDFCW30K/
TWDFCW50K, consulte Descripción del cable TWDFCW••K, página 43.
Entradas analógicas de TM221ME32TK
Descripción general
El M221 Logic Controller tiene dos entradas analógicas incrustadas.
PELIGRO
PELIGRO DE INCENDIO
• Utilice únicamente los tamaños de cable recomendados para la capacidad
de corriente máxima de los canales de E/S y las fuentes de alimentación.
• Para el cableado de las salidas de relé (2 A), utilice conductores de al
menos 0,5 mm2(AWG 20) con una temperatura nominal de al menos 80 °C
(176 °F).
• Para los conductores comunes del cableado de salidas de relé (7 A) o
cableado de salidas de relé superior a 2 A, utilice conductores de al menos
1,0 mm2(AWG 16) con una temperatura nominal de como mínimo 80 °C
(176 °F).
Si no se siguen estas instrucciones, se producirán lesiones graves o la
muerte.
EIO0000003316.02 261

TM221ME32TK
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No supere ninguno de los valores nominales que se especifican en las tablas
de características medioambientales y eléctricas.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
En el siguiente procedimiento se explica cómo montar los cables analógicos:
Paso Acción
1 Utilice un destornillador para quitar la cubierta de protección.
2 Presione hasta que oiga un clic.
3 Sustituya la cubierta de protección.
Características de entradas analógicas
En la tabla siguiente se describen las características del M221 Logic Controller
con entradas analógicas:
Característica Entrada de tensión
Número de entradas máximas 2 entradas
Tipo de entrada Terminación única
Rango de entrada nominal De 0 a 10 V CC
262 EIO0000003316.02

TM221ME32TK
Característica Entrada de tensión
Resolución digital 10 bits
Valor de entrada del LSB 10 mV
Impedancia de entrada 100 kΩ
Tiempo de retardo de entrada 12 ms
Duración del muestreo 1 ms por canal + 1 tiempo de exploración
Precisión ±1 % de la escala completa
Resistencia a ruidos: desviación temporal
máxima durante perturbaciones ±5 % máximo de la escala completa cuando la
perturbación EMC se aplica al cableado de E/S y
alimentación
Aislamiento Entre entrada y
lógica interna No aislado
Tipo de conexión Conector y cable específicos (incluidos)
Durabilidad de conexiones y
desconexiones del conector Más de 100 veces
Cable Tipo Propietario (incluido)
Longitud 1 m (3,3 pies)
Diagrama de cableado
En la figura siguiente se muestra el diagrama de cableado de las entradas
analógicas de Modicon M221 Logic Controller:
Los polos (-) se conectan internamente.
Pin Color del cable
AN0 Rojo
0 V Negro
AN1 Rojo
0 V Negro
Para obtener más información, consulte la sección Prácticas recomendadas
relativas al cableado, página 77.
EIO0000003316.02 263


Puertos de comunicación integrados
Puertos de comunicación integrados
Contenido de este capítulo
Puerto de programación USB mini-B ............................................................265
Puerto Ethernet ..........................................................................................266
Línea serie 1...............................................................................................268
Línea serie 2...............................................................................................271
Puerto de programación USB mini-B
Descripción general
El puerto USB mini-B es el puerto de programación que pueden utilizar para
conectar un PC con un puerto host USB mediante el software de EcoStruxure
Machine Expert - Basic. Con un cable USB normal, esta conexión es adecuada
para las actualizaciones rápidas del programa o las conexiones de corta duración
para realizar el mantenimiento e inspeccionar los valores de los datos. No es
adecuada para las conexiones a largo plazo, como la puesta en marcha o la
supervisión, sin el uso de cables adaptados especialmente para ayudar a
minimizar los efectos de las interferencias electromagnéticas.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO O EQUIPO INOPERATIVO
• Deberá usar un cable USB como BMX XCAUSBH0•• asegurado a la
conexión a tierra funcional (FE) del sistema para cualquier conexión a largo
plazo.
• No conecte más de un controlador o acoplador de bus a la vez mediante
conexiones USB.
• No utilice los puertos USB, si están incorporados, a menos que tenga la
certeza de que la ubicación no es peligrosa.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
En la figura siguiente se muestra la ubicación del puerto de programación USB
mini-B del TM221C Logic Controller:
EIO0000003316.02 265

Puertos de comunicación integrados
En la figura siguiente se muestra la ubicación del puerto de programación USB
mini-B del TM221M Logic Controller:
Características
En esta tabla se describen las características del puerto de programación USB
Mini-B:
Parámetro Puerto de programación USB
Función Compatible con USB 2.0
Tipo de conector Mini-B
Aislamiento Ninguno
Tipo de cable Blindado
Puerto Ethernet
Descripción general
El TM221•E••• está equipado con un puerto de comunicaciones Ethernet.
En la figura siguiente se muestra la ubicación del puerto Ethernet en el TM221C
Logic Controller:
266 EIO0000003316.02

Puertos de comunicación integrados
En la figura siguiente se muestra la ubicación del puerto Ethernet en el TM221M
Logic Controller:
Características
En la siguiente tabla se describen las características de Ethernet:
Característica Descripción
Función Modbus TCP/IP
Tipo de conector RJ45
Controlador • 10 M semidúplex (negociación automática)
• 100 M dúplex completo (negociación automática)
Tipo de cable Blindado
Detección cruzada automática Sí
Asignación de pins
En la siguiente figura se muestra la asignación de pins del conector Ethernet
RJ45:
En la tabla siguiente se describen los pins del conector Ethernet RJ45:
N.° de pin Señal
1 TD+
2 TD-
3 RD+
4-
5-
6 RD-
7-
8-
EIO0000003316.02 267

Puertos de comunicación integrados
NOTA: El controlador admite la función de cable de cruce automático MDI/
MDIX. No es necesario utilizar cable cruzado especial para conectar
dispositivos directamente a este puerto (conexiones sin un concentrador o un
conmutador Ethernet).
Indicador LED de estado
En las siguientes figuras se muestra el indicador LED de estado del conector
RJ45:
En la tabla siguiente se describen los indicadores LED de estado de Ethernet:
Etiqueta Descripción LED
Color Estado Descripción
1: ACT Actividad
Ethernet Verde Desactivado No hay actividad o el controlador
lógico está conectado a un
concentrador.
Intermitente Actividad
2: LINK Conexión
Ethernet
Amari-
llo Desactivado Sin enlace
Activado Conexión
Un cambio en el valor de los bits del sistema %S34,%S35 o%S36 puede dar lugar
a la reinicialización del canal Ethernet. Como consecuencia, es posible que el
canal Ethernet no esté disponible durante varios segundos después de realizar un
cambio en los valores de estos bits del sistema.
Línea serie 1
Descripción general
La línea serie 1:
• Se puede utilizar para comunicarse con dispositivos compatibles con el
protocolo Modbus como maestro o esclavo o el protocolo ASCII (impresora,
módem, etc.).
• Proporciona una distribución de la alimentación de 5 V CC.
268 EIO0000003316.02

Puertos de comunicación integrados
En la figura siguiente se muestra la ubicación del puerto de línea serie 1 del
TM221C Logic Controller:
En la figura siguiente se muestra la ubicación del puerto de línea serie 1 del
TM221M Logic Controller:
Características
Característica Descripción
Función RS485 o RS232 configurada mediante
software
Tipo de conector RJ45
Aislamiento No aislado
Velocidad máx. en baudios De 1200 a 115 200 bps
Cable Tipo Blindado
Longitud máxima
(entre el controlador
y una caja de
conexiones aislada)
15 m (49 ft) para RS485
3 m (9,84 ft) para RS232
Polarización No (1)
Fuente de alimentación de 5 V CC para RS485 Sí
(1) La SL1 incrustada y la SL2 incrustada del TM221 contienen resistencias de red de polarización
de alta impedancia internas fijas (4,7 kΩ). No use resistencias de terminación de línea externas
(150 Ω estándar) sin resistencias de polarización de línea de baja impedancia externas adicionales
(450 Ω-650 Ω estándar) para garantizar un estado de tensión inactiva correcto de 200 mV como
mínimo entre las líneas de datos D1 y D0.
NOTA: Algunos dispositivos proporcionan tensión en conexiones serie
RS485. No conecte estas líneas de tensión al controlador, ya que pueden
dañar la electrónica del puerto serie del controlador y dejarlo inoperativo.
EIO0000003316.02 269

Puertos de comunicación integrados
AVISO
EQUIPO INOPERATIVO
Utilice solo el cable serie VW3A8306R•• para conectar los dispositivos RS485
al controlador.
Si no se siguen estas instrucciones, pueden producirse daños en el
equipo.
Asignación de pins
En la siguiente figura se muestran los pines del conector RJ45:
En la siguiente tabla se describe la asignación de pines del conector RJ45:
Pin RS232 RS485
1 RxD N. C.
2 TxD N. C.
3 RTS N. C.
4 N. C. D1
5N. C. D0
6 CTS N. C.
7N. C.* 5 V CC
8 Generalidades Generalidades
* 5 V CC proporcionados por el controlador. No conectar.
CTS: listo para enviar
N. C.: No hay conexión
RTS: preparado para enviar
RxD: datos recibidos
TxD: datos transmitidos
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No conecte ningún cable a conexiones reservadas y no utilizadas o a
conexiones designadas como "No Connection (N.C.)".
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
270 EIO0000003316.02

Puertos de comunicación integrados
Indicador LED de estado
En la figura siguiente se muestra el LED de estado de la línea serie 1 del TM221C
Logic Controller:
En la figura siguiente se muestra el LED de estado de la línea serie 1 del TM221M
Logic Controller:
En la tabla siguiente se describe el LED de estado de la línea serie 1:
Etiqueta Descripción Indicador LED
Color Estado Descripción
SL1 Línea serie 1 Verde Encendido Indica la actividad de la línea serie 1.
Apagado Indica la ausencia de comunicación serie
Línea serie 2
Descripción general
La línea serie 2 se emplea para comunicarse con dispositivos que admiten el
protocolo Modbus como maestro o esclavo y el protocolo ASCII (impresora,
módem, etc.) y admite RS485 y el bloque de terminales.
EIO0000003316.02 271

Puertos de comunicación integrados
Características
Característica Descripción
Función RS485 configurado mediante software
Tipo de conector RJ45
Aislamiento No aislado
Velocidad máx. en baudios De 1200 a 115 200 bps
Cable Tipo Blindado
Longitud máxima 15 m (49 ft) para RS485
Polarización No (1)
Fuente de alimentación de 5 V CC para
RS485
No
(1) La SL1 incrustada y la SL2 incrustada del TM221 contienen resistencias de red de polarización
de alta impedancia internas fijas (4,7 kΩ). No use resistencias de terminación de línea externas
(150 Ω estándar) sin resistencias de polarización de línea de baja impedancia externas adicionales
(450 Ω-650 Ω estándar) para garantizar un estado de tensión inactiva correcto de 200 mV como
mínimo entre las líneas de datos D1 y D0.
Asignación de pins
En la siguiente figura se muestran los pines del conector RJ45:
En la siguiente tabla se describe la asignación de pines para RS485:
Pin RS485 Descripción
1 N. C. No hay conexión
2 N. C. No hay conexión
3 N. C. No hay conexión
4 D1 Modbus SL: D1 (+/B) RS-485 de 2 cables
5 D0 Modbus SL: D0 (-/A) RS-485 de 2 cables
6 N. C. No hay conexión
7N. C. No hay conexión
8 Generalidades Generalidades
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No conecte ningún cable a conexiones reservadas y no utilizadas o a
conexiones designadas como "No Connection (N.C.)".
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
272 EIO0000003316.02

Puertos de comunicación integrados
Indicador LED de estado
En el siguiente gráfico se muestra el indicador LED de estado:
En la tabla siguiente se describe el indicador LED de estado de la línea serie 2:
Etiqueta Descripción Indicador LED
Color Estado Descripción
SL2 Línea serie 2 Verde Encendido Indica la actividad de la línea serie 2.
Apagado Indica que no existe comunicación serie.
EIO0000003316.02 273

Conexión del M221 Logic Controller a un PC
Conexión del M221 Logic Controller a un PC
Contenido de este capítulo
Conexión del controlador a un PC ................................................................274
Conexión del controlador a un PC
Descripción general
Para transferir, ejecutar y monitorizar las aplicaciones, conecte el controlador a un
equipo que tenga instalado EcoStruxure Machine Expert - Basic 1.0 o posterior
mediante un cable USB o una conexión Ethernet (para referencias compatibles
con puertos Ethernet).
AVISO
EQUIPO INOPERATIVO
Conecte siempre el cable de comunicación al PC antes de conectarlo al
controlador.
Si no se siguen estas instrucciones, pueden producirse daños en el
equipo.
Conexión a través del puerto USB mini-B
Referencia de cableado Detalles
TCSXCNAMUM3P: Este cable USB es adecuado para conexiones
de corta duración, como actualizaciones rápidas
o recuperación de valores de datos.
BMXXCAUSBH018: Con conexión a tierra y blindado, este cable
USB es adecuado para conexiones de larga
duración en un TM221C Logic Controller.
BMXXCAUSBH045: Con conexión a tierra y blindado, este cable
USB es adecuado para conexiones de larga
duración en un TM221M Logic Controller.
NOTA: Solo se puede conectar un controlador o cualquier otro dispositivo
asociado con el EcoStruxure Machine Expert - Basic y su componente al PC
de forma simultánea.
ADVERTENCIA
ALIMENTACIÓN INSUFICIENTE PARA DESCARGA USB
No utilice un cable USB de más de 3 m (9,8 pies) para la descarga USB con
alimentación.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
El puerto USB mini-B es el puerto de programación que pueden utilizar para
conectar un PC con un puerto host USB mediante el software de EcoStruxure
Machine Expert - Basic. Con un cable USB normal, esta conexión es adecuada
para las actualizaciones rápidas del programa o las conexiones de corta duración
para realizar el mantenimiento e inspeccionar los valores de los datos. No es
adecuada para las conexiones a largo plazo, como la puesta en marcha o la
274 EIO0000003316.02

Conexión del M221 Logic Controller a un PC
supervisión, sin el uso de cables adaptados especialmente para ayudar a
minimizar los efectos de las interferencias electromagnéticas.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO O EQUIPO INOPERATIVO
• Deberá usar un cable USB como BMX XCAUSBH0•• asegurado a la
conexión a tierra funcional (FE) del sistema para cualquier conexión a largo
plazo.
• No conecte más de un controlador o acoplador de bus a la vez mediante
conexiones USB.
• No utilice los puertos USB, si están incorporados, a menos que tenga la
certeza de que la ubicación no es peligrosa.
Si no se siguen estas instrucciones, pueden producirse lesiones graves,
muerte o daños en el equipo.
El cable de comunicación debe conectarse primero al PC para minimizar la
posibilidad de que una descarga electrostática afecte al controlador.
En la siguiente ilustración se muestra la conexión USB a un PC en un TM221C
Logic Controller:
En la siguiente ilustración se muestra la conexión USB a un PC en un TM221M
Logic Controller:
Para conectar el cable USB al controlador, siga estos pasos:
Paso Acción
11a. Si se está realizando una conexión de larga duración con el cable
BMXXCAUSBH045 u otro cable con una conexión con toma de tierra y blindada,
asegúrese de conectar bien el conector blindado a la toma de tierra funcional (FE) o a la
toma de tierra de protección (PE) de su sistema antes de conectar el cable al
controlador y al PC.
1b Si está realizando una conexión de corta duración con el cable TCSXCNAMUM3P u
otro cable USB sin puesta a tierra, vaya al paso 2.
2 Conecte el cable USB al equipo.
3 Abra la cubierta de protección de la ranura USB mini-B del controlador.
4 Conecte el conector mini-B del cable USB al conector USB del controlador.
Conexión al puerto Ethernet
También puede conectar el controlador a un PC mediante un cable Ethernet.
EIO0000003316.02 275

Conexión del M221 Logic Controller a un PC
En la siguiente ilustración se muestra la conexión Ethernet a un PC en un
TM221C Logic Controller:
En la siguiente ilustración se muestra la conexión Ethernet a un PC en un
TM221M Logic Controller:
Para conectar el controlador al PC, haga lo siguiente:
Paso Acción
1 Conecte el cable Ethernet al PC.
2 Conecte el cable Ethernet al puerto Ethernet del controlador.
276 EIO0000003316.02

Glosario
A
ASCII:
(Código estándar estadounidense para el intercambio de información) Un
protocolo que representa caracteres alfanuméricos (letras, números y algunos
caracteres gráficos y de control).
B
bastidor EIA:
(bastidor de Electronic Industries Alliance) Sistema estandarizado (EIA 310-D,
IEC 60297 y DIN 41494 SC48D) para montar varios módulos electrónicos en una
pila o un bastidor de 19 pulgadas (482,6 mm) de ancho.
bloque de terminales:
(bloque de terminales) El componente que se monta en un módulo electrónico y
proporciona las conexiones eléctricas entre el controlador y los dispositivos de
campo.
bps:
(bits por segundo) Una definición de velocidad de transmisión, también
proporcionada en combinación con los multiplicadores kilo (kbps) y mega (mbps).
C
CFC:
(diagrama de función continua) Un lenguaje de programación (una ampliación del
estándar IEC 61131-3) basado en el lenguaje de diagrama de bloque de
funciones (FBD) y que funciona como un diagrama de flujo. Sin embargo, no se
utiliza ninguna red y es posible un posicionamiento libre de elementos gráficos, lo
que permite bucles de realimentación. En cada bloque, las entradas se sitúan a
la izquierda y las salidas, a la derecha. Las salidas del bloque se pueden
conectar a las entradas de otros bloques para formar expresiones complejas.
CTS:
(listo para enviar) Una señal de transmisión de datos que reconoce la señal RDS
desde la estación transmisora.
CW/CCW:
ClockWise/Counter ClockWise
D
DIN:
(Deutsches Institut für Normung) Una institución alemana que establece
estándares de ingeniería y dimensiones.
E
EN:
EN identifica uno de los muchos estándares europeos apoyados por el CEN
(Comité Europeo de Normalización), el CENELEC (Comité Europeo de
Normalización Eléctrica) o el ETSI (Instituto Europeo de Normas de
Telecomunicación).
EIO0000003316.02 277

entrada analógica:
Convierte los niveles de tensión o corriente recibidos en valores numéricos.
Puede almacenar y procesar estos valores en el controlador lógico.
F
FBD:
(diagrama de bloques de funciones) Uno de los cinco lenguajes para lógica o
control que cumplen con el estándar IEC 61131-3 para sistemas de control. El
diagrama de bloques de funciones es un lenguaje de programación orientado
gráficamente. Funciona con una lista de redes en la que cada red contiene una
estructura gráfica de cuadros y líneas de conexión que representa una expresión
lógica o aritmética, la llamada de un bloque de funciones, un salto o una
instrucción de retorno.
FE:
(conexión a tierra funcional) Una toma de tierra común para mejorar o, si no,
permitir el funcionamiento normal de equipos accionados con electricidad
(también llamada Functional Ground en Norteamérica).
A diferencia de una conexión a tierra de protección, una conexión a tierra
funcional sirve para un objetivo distinto de la protección contra descargas
eléctricas y normalmente puede llevar corriente. Entre los dispositivos que
emplean conexiones a tierra funcionales se encuentran los limitadores de
tensión, los filtros de interferencia electromagnética, algunas antenas y los
instrumentos de medición.
FreqGen:
(generador de frecuencias) Función que genera una señal de onda cuadrada con
frecuencia programable.
G
GRAFCET:
El funcionamiento de una operación secuencial de forma gráfica y estructurada.
Método analítico que divide cualquier sistema de control secuencial en una serie
de pasos a los que se asocian acciones, transiciones y condiciones.
H
HE10:
Conector rectangular para señales eléctricas con frecuencias inferiores a 3 MHz,
conforme a IEC 60807-2.
HSC:
(contador de alta velocidad) Una función que cuenta pulsos en el controlador o
en entradas del módulo de expansión.
I
IEC 61131-3:
Tercera parte de un estándar de tres partes de la IEC para los equipos de
automatización industriales. IEC 61131-3 se ocupa de los lenguajes de
programación del controlador y define dos estándares de lenguajes de
programación gráficos y dos textuales. Los lenguajes de programación gráficos
son un diagrama de contactos y un diagrama de bloque de funciones. Los
lenguajes de programación textuales incluyen texto estructurado y lista de
instrucciones.
278 EIO0000003316.02

IEC:
(International Electrotechnical Commission) Una organización de estándares
internacional sin ánimo de lucro y no gubernamental que prepara y publica
estándares internacionales para todas las tecnologías eléctricas, electrónicas y
relacionadas.
IL:
(lista de instrucciones) Un programa escrito en lenguaje que se compone de una
serie de instrucciones basadas en texto y ejecutadas secuencialmente por el
controlador. Cada instrucción incluye un número de línea, un código de
instrucción y un operando (consulte IEC 61131-3).
IP 20:
(protección de entrada) La clasificación de protección según IEC 60529 ofrecida
por una carcasa, identificada con la letra IP y dos dígitos. El primer dígito indica
dos factores: ayudar a la protección de las personas y del equipo. El segundo
dígito, la protección contra el agua. Los dispositivos IP 20 sirven de protección
contra el contacto eléctrico de objetos de más de 12,5 mm de tamaño pero no
contra el agua.
L
LD:
(diagrama de contactos) Una representación gráfica de instrucciones de un
programa de controlador con símbolos para contactos, bobinas y bloques en una
serie de escalones ejecutados de forma secuencial por un controlador (consulte
IEC 61131-3).
lenguaje de diagrama de contactos:
Una representación gráfica de instrucciones de un programa de controlador con
símbolos para contactos, bobinas y bloques en una serie de escalones
ejecutados de forma secuencial por un controlador (consulte IEC 61131-3).
lenguaje de gráfica de función continua:
Un lenguaje de programación gráfico (una ampliación del estándar IEC61131-3)
basado en el lenguaje de diagrama del bloque de funciones y que funciona como
un diagrama de flujo. Sin embargo, no se utiliza ninguna red y es posible un
posicionamiento libre de elementos gráficos, lo que permite bucles de
realimentación. En cada bloque, las entradas se sitúan a la izquierda y las
salidas, a la derecha. Las salidas del bloque se pueden conectar a las entradas
de otros bloques para formar expresiones complejas.
lenguaje de la lista de instrucciones:
Un programa escrito en el lenguaje de la lista de instrucciones que se compone
de una serie de instrucciones basadas en texto y ejecutadas secuencialmente
por el controlador. Cada instrucción incluye un número de línea, un código de
instrucción y un operando (consulte IEC 61131-3).
M
Modbus:
El protocolo de comunicaciones que permite las comunicaciones entre muchos
dispositivos conectados a la misma red.
EIO0000003316.02 279

N
NEMA:
(National Electrical Manufacturers Association) El estándar para el rendimiento
de diversas clases de carcasas eléctricas. Los estándares de NEMA abarcan la
resistencia a la corrosión, la capacidad de protección contra la lluvia y la
inmersión, etc. Para los países adheridos a IEC, la norma IEC 60529 clasifica el
grado de protección contra la entrada de las carcasas.
P
PE:
(tierra de protección) Una conexión a tierra común para riesgos de descargas
eléctricas al exponer las superficies conductoras de un dispositivo al potencial de
tierra. Para evitar posibles caídas de tensión, en este conductor no circula
corriente (conocido también como conexión a tierra de protección en
Norteamérica o como conexión a tierra del equipo según el US National Electrical
Code).
PTO:
(salidas de tren de pulsos) Una salida rápida que oscila entre apagado y
encendido en un ciclo de servicio fijo 50-50, que produce una forma de onda
cuadrada. La PTO resulta especialmente útil para aplicaciones como motores
paso a paso, conversores de frecuencia, controles de servomotor, etc.
PWM:
(modulación de ancho de pulsos) Una salida rápida que oscila entre el apagado y
el encendido en un ciclo de servicio ajustable, que produce una forma de onda
rectangular (aunque se puede ajustar para que produzca una onda cuadrada).
R
RJ45:
Un conector estándar de 8 pins para cables de red definido para Ethernet.
RS-232:
Un tipo estándar de bus de comunicación serie basado en tres cables (también
conocido como EIA RS-232C o V.24).
RS-485:
Un tipo estándar de bus de comunicación serie basado en dos cables (también
conocido como EIA RS-485).
RTS:
(petición de envío) Una señal de transmisión de datos y señal CTS que reconoce
la señal RTS desde el nodo de destino.
RxD:
La línea que recibe datos de un origen a otro.
S
SFC:
(diagrama funcional secuencial) Un lenguaje formado por pasos con acciones
asociadas, transiciones con una condición lógica asociada y enlaces dirigidos
entre pasos y transiciones. (La norma SFC está definida en IEC 848. Es
conforme con IEC 61131-3.)
280 EIO0000003316.02

ST:
(texto estructurado) Un lenguaje que incluye instrucciones complejas y anidadas
(por ejemplo, bucles de repetición, ejecuciones condicionales o funciones). ST
cumple con IEC 61131-3.
T
TxD:
La línea que envía datos de un origen a otro.
EIO0000003316.02 281

Índice
A
accesorios ............................................................41
C
cableado...............................................................77
Características ambientales ...................................62
carga inductiva, protección de salida
protección de salida, carga inductiva ...................81
certificaciones y estándares ...................................65
conexión del controlador a un PC
M221 ..............................................................274
cortocircuito o sobrecorriente en las salidas de
relé.....................................................................55
cortocircuito o sobrecorriente en las salidas
transistorizadas de común negativo ......................54
Cortocircuito o sobrecorriente en las salidas
transistorizadas de común positivo........................54
cualificación del personal .........................................7
E
Enclavamiento ......................................................49
especificaciones
módulos ............................................................36
módulos de E/S digitales ....................................38
Especificaciones técnicas
Módulos de E/S digitales ....................................39
F
Filtro
Filtro de rebote ..................................................49
Fuente de alimentación.................................... 83, 85
funciones
funciones principales.................................... 17, 22
G
Gestión de entradas ..............................................49
gestión de salidas..................................................52
I
Instalación ............................................................62
Instalación de controlador lógico .........................65
Requisitos eléctricos ..........................................77
Instalación de controlador lógico
Instalación.........................................................65
L
lenguajes de programación
IL, LD................................................................22
IL, LD, Grafcet ...................................................17
Línea serie 1
Puertos de comunicaciones .............................. 268
Línea serie 2
Puertos de comunicaciones .............................. 271
M
M221
conexión del controlador a un PC......................274
TM221C16R......................................................92
TM221C16T ......................................................99
TM221C16U....................................................105
TM221C24R.................................................... 111
TM221C24T .................................................... 117
TM221C24U....................................................123
TM221C40R....................................................129
TM221C40T ....................................................137
TM221C40U....................................................145
TM221CE16R....................................................96
TM221CE16T..................................................102
TM221CE16U..................................................108
TM221CE24R.................................................. 114
TM221CE24T..................................................120
TM221CE24U..................................................126
TM221CE40R..................................................133
TM221CE40T..................................................141
TM221CE40U..................................................148
TM221M16R / TM221M16RG ........................... 182
TM221M16T....................................................208
TM221M32TK..................................................236
TM221ME16R / TM221ME16RG....................... 195
TM221ME16T / TM221ME16TG .......................222
TM221ME32TK ...............................................250
módulos de E/S digitales
especificaciones .......................................... 38–39
Módulos de E/S digitales
Especificaciones técnicas...................................39
módulos Tesys
especificaciones ................................................36
P
posiciones de montaje ..................................... 67, 69
presentation
TM221M16R / TM221M16RG ........................... 182
TM221M16T / TM221M16TG............................208
TM221M32TK..................................................236
TM221ME16R / TM221ME16RG....................... 195
TM221ME16T / TM221ME16TG .......................222
TM221ME32TK ...............................................250
Puerto de programación USB
Puertos de comunicaciones .............................. 265
Puertos de comunicación.....................................265
Puerto Ethernet ............................................... 266
Puertos de comunicaciones
Línea serie 1....................................................268
Línea serie 2....................................................271
Puerto de programación USB ...........................265
Puesta a tierra.......................................................88
R
reloj en tiempo real ................................................45
Requisitos eléctricos
Instalación.........................................................77
retorno
modos de configuración .....................................53
Run/Stop ..............................................................55
S
Susceptibilidad electromagnética ...........................64
282 EIO0000003316.02

T
Tarjeta SD.............................................................57
TM221C16R .........................................................92
TM221C16T.................................................. 99, 145
TM221C16U .......................................................105
TM221C24R ....................................................... 111
TM221C24T........................................................ 117
TM221C24U .......................................................123
TM221C40R .......................................................129
TM221C40T........................................................137
TM221C40U .......................................................145
TM221CE16R.......................................................96
TM221CE16T .....................................................102
TM221CE16U.....................................................108
TM221CE24R.............................................. 111, 114
TM221CE24T .....................................................120
TM221CE24U.....................................................126
TM221CE40R.....................................................133
TM221CE40T .....................................................141
TM221CE40U.....................................................148
TMC2...................................................................29
U
uso previsto ............................................................8
EIO0000003316.02 283

Schneider Electric
35 rue Joseph Monier
92500 Rueil Malmaison
France
+ 33 (0) 1 41 29 70 00
www.se.com
Debido a que las normas, especificaciones y diseños cambian
periódicamente, solicite la confirmación de la información dada en esta
publicación.
© 2022 Schneider Electric. Reservados todos los derechos.
EIO0000003316.02

EIO0000003324.01
www.se.com
Modicon TMH2GDB
EIO0000003324 09/2020
Modicon TMH2GDB
Visualización gráfica remota
Guía del usuario
09/2020

2EIO0000003324 09/2020
La información que se ofrece en esta documentación contiene descripciones de carácter general
y/o características técnicas sobre el rendimiento de los productos incluidos en ella. La presente
documentación no tiene como objeto sustituir dichos productos para aplicaciones de usuario
específicas, ni debe emplearse para determinar su idoneidad o fiabilidad. Los usuarios o
integradores tienen la responsabilidad de llevar a cabo un análisis de riesgos adecuado y
completo, así como la evaluación y las pruebas de los productos en relación con la aplicación o el
uso de dichos productos en cuestión. Ni Schneider Electric ni ninguna de sus filiales o asociados
asumirán responsabilidad alguna por el uso inapropiado de la información contenida en este
documento. Si tiene sugerencias de mejoras o modificaciones o ha hallado errores en esta
publicación, le rogamos que nos lo notifique.
Usted se compromete a no reproducir, salvo para su propio uso personal, no comercial, la
totalidad o parte de este documento en ningún soporte sin el permiso de Schneider Electric, por
escrito. También se compromete a no establecer ningún vínculo de hipertexto a este documento
o su contenido. Schneider Electric no otorga ningún derecho o licencia para el uso personal y no
comercial del documento o de su contenido, salvo para una licencia no exclusiva para consultarla
"tal cual", bajo su propia responsabilidad. Todos los demás derechos están reservados.
Al instalar y utilizar este producto es necesario tener en cuenta todas las regulaciones sobre
seguridad correspondientes, ya sean regionales, locales o estatales. Por razones de seguridad y
para garantizar que se siguen los consejos de la documentación del sistema, las reparaciones solo
podrá realizarlas el fabricante.
Cuando se utilicen dispositivos para aplicaciones con requisitos técnicos de seguridad, siga las
instrucciones pertinentes.
Si con nuestros productos de hardware no se utiliza el software de Schneider Electric u otro
software aprobado, pueden producirse lesiones, daños o un funcionamiento incorrecto del equipo.
Si no se tiene en cuenta esta información, se pueden causar daños personales o en el equipo.
© 2020 Schneider Electric. Reservados todos los derechos.

EIO0000003324 09/2020 3
Tabla de materias
Información de seguridad . . . . . . . . . . . . . . . . . . . . . . . . 5
Acerca de este libro . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
Capítulo 1 Presentación. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Descripción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
Presentación técnica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
Certificaciones y estándares . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
Compatibilidad de la Visualización gráfica remota . . . . . . . . . . . . . . . 19
Capítulo 2 Instalación. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
Requisitos de instalación y mantenimiento . . . . . . . . . . . . . . . . . . . . . 22
Dimensiones y distancias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
Montaje . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
Conexión de Visualización gráfica remota . . . . . . . . . . . . . . . . . . . . . 31
Actualización del firmware. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
Capítulo 3 Cómo utilizar Visualización gráfica remota. . . . . . . . . . . 39
Descripción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
Navegación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
Protección con contraseña . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
Capítulo 4 Funcionalidad del menú de configuración . . . . . . . . . . . 45
Presentación del menú de configuración . . . . . . . . . . . . . . . . . . . . . . 46
Menú de configuración del controlador . . . . . . . . . . . . . . . . . . . . . . . . 48
Menú del estado del controlador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
Menú de alarma. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
Menú de la tabla de datos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
Capítulo 5 Crear una interfaz del operador con EcoStruxure Machine
Expert - Basic . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
Requisito previo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
Ficha de visualización de EcoStruxure Machine Expert - Basic . . . . . 62
Propiedades generales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
Añadir/eliminar una página . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66

4EIO0000003324 09/2020
Configurar una página . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
Exportar/importar una página. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
Acciones. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
Definición de alarmas. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
Glosario . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
Índice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87

EIO0000003324 09/2020 5
Información de seguridad
Información importante
AVISO
Lea atentamente estas instrucciones y observe el equipo para familiarizarse con el dispositivo
antes de instalarlo, utilizarlo, revisarlo o realizar su mantenimiento. Los mensajes especiales que
se ofrecen a continuación pueden aparecer a lo largo de la documentación o en el equipo para
advertir de peligros potenciales, o para ofrecer información que aclara o simplifica los distintos
procedimientos.

6EIO0000003324 09/2020
TENGA EN CUENTA LO SIGUIENTE:
La instalación, el manejo, las revisiones y el mantenimiento de equipos eléctricos deberán ser
realizados sólo por personal cualificado. Schneider Electric no se hace responsable de ninguna
de las consecuencias del uso de este material.
Una persona cualificada es aquella que cuenta con capacidad y conocimientos relativos a la
construcción, el funcionamiento y la instalación de equipos eléctricos, y que ha sido formada en
materia de seguridad para reconocer y evitar los riesgos que conllevan tales equipos.

EIO0000003324 09/2020 7
Acerca de este libro
Presentación
Objeto
Utilizar este documento para aprender a:
Conectar su Visualización gráfica remota al controlador.
Ponga en marcha y mantenga su Visualización gráfica remota.
Utilice su interfaz de la Visualización gráfica remota con EcoStruxure Machine Expert - Basic.
NOTA: Lea y comprenda este documento y todos los documentos relacionados antes de instalar,
utilizar o realizar el mantenimiento de Visualización gráfica remota.
Campo de aplicación
Este documento se ha actualizado para la publicación de EcoStruxureTM Machine Expert - Basic
V1.1.
Para la conformidad de los productos y la información medioambiental (RoHS, REACH, PEP,
EOLI, etc.), vaya a
www.schneider-electric.com/green-premium
.
Las características técnicas de los dispositivos que se describen en este documento también se
encuentran online. Para acceder a esta información online:
Paso Acción
1 Vaya a la página de inicio de Schneider Electric
www.schneider-electric.com
.
2 En el cuadro Search, escriba la referencia del producto o el nombre del rango de productos.
No incluya espacios en blanco en la referencia ni en el rango de productos.
Para obtener información sobre cómo agrupar módulos similares, utilice los asteriscos (
*
).
3 Si ha introducido una referencia, vaya a los resultados de búsqueda de Product Datasheets y
haga clic en la referencia deseada.
Si ha introducido el nombre de un rango de productos, vaya a los resultados de búsqueda de
Product Ranges y haga clic en la gama deseada.
4 Si aparece más de una referencia en los resultados de búsqueda Products, haga clic en la
referencia deseada.
5 En función del tamaño de la pantalla, es posible que deba desplazar la página hacia abajo para
consultar la hoja de datos.
6 Para guardar o imprimir una hoja de datos como archivo .pdf, haga clic en Download XXX
product datasheet.

8EIO0000003324 09/2020
Las características que se indican en este documentación deben coincidir con las que figuran
online. De acuerdo con nuestra política de mejoras continuas, es posible que a lo largo del tiempo
revisemos el contenido con el fin de elaborar documentos más claros y precisos. En caso de que
detecte alguna diferencia entre el documentación y la información online, utilice esta última para
su referencia.
Documentos relacionados
Puede descargar estas publicaciones técnicas y otra información técnica de nuestro sitio web
https://www.se.com/ww/en/download/ .
Título de la documentación Número de referencia
EcoStruxure Machine Expert - Basic - Guía de funcionamiento
EIO0000003281 (ENG)
EIO0000003282 (FRE)
EIO0000003283 (GER)
EIO0000003284 (SPA)
EIO0000003285 (ITA)
EIO0000003286 (CHS)
EIO0000003287 (POR)
EIO0000003288 (TUR)
EcoStruxure Machine Expert - Basic Guía de la biblioteca de funciones genéricas
EIO0000003289 (ENG)
EIO0000003290 (FRE)
EIO0000003291 (GER)
EIO0000003292 (SPA)
EIO0000003293 (ITA)
EIO0000003294 (CHS)
EIO0000003295 (POR)
EIO0000003296 (TUR)

EIO0000003324 09/2020 9
Información relativa al producto
Este equipo ha sido diseñado para funcionar fuera de cualquier ubicación peligrosa. Instale el
equipo únicamente en zonas sin atmósfera peligrosa.
PELIGRO
RIESGO DE DESCARGA ELÉCTRICA, EXPLOSIÓN O ARCO ELÉCTRICO
Desconecte la alimentación de todos los equipos, incluidos los dispositivos conectados, antes
de retirar cualquier cubierta o compuerta, o bien antes de instalar o retirar cualquier accesorio,
hardware, cable o conductor salvo en las condiciones indicadas en la guía de hardware de
este equipo.
Utilice siempre un dispositivo de detección de tensión de capacidad adecuada para confirmar
la ausencia de alimentación eléctrica cuando y donde se indique.
Vuelva a montar y fijar todas las cubiertas, accesorios, elementos de hardware, cables y
conductores y compruebe que haya una conexión a tierra adecuada antes de aplicar
alimentación eléctrica a la unidad.
Aplique solo la tensión especificada cuando utilice este equipo y los productos asociados.
El incumplimiento de estas instrucciones podrá causar la muerte o lesiones serias.
PELIGRO
POSIBILIDAD DE EXPLOSIÓN
Instale y utilice el equipo únicamente en ubicaciones no peligrosas.
El incumplimiento de estas instrucciones podrá causar la muerte o lesiones serias.

10 EIO0000003324 09/2020
1 Para obtener información adicional, consulte NEMA ICS 1.1 (última edición), "Safety Guidelines
for the Application, Installation, and Maintenance of Solid State Control" (Directrices de seguridad
para la aplicación, la instalación y el mantenimiento del control de estado estático) y NEMA ICS
7.1 (última edición), "Safety Standards for Construction and Guide for Selection, Installation and
Operation of Adjustable-Speed Drive Systems" (Estándares de seguridad para la construcción y
guía para la selección, instalación y utilización de sistemas de unidades de velocidad ajustable) o
su equivalente aplicable a la ubicación específica.
ADVERTENCIA
PÉRDIDA DE CONTROL
El diseñador del esquema de control debe tener en cuenta las posibles modalidades de fallo
de rutas de control y, para ciertas funciones de control críticas, proporcionar los medios para
lograr un estado seguro durante y después de un fallo de ruta. Algunas funciones de control
críticas son, por ejemplo, la parada de emergencia y la parada de sobrecarrera, un corte de
alimentación o un reinicio.
Para las funciones críticas de control deben proporcionarse rutas de control separadas o
redundantes.
Las rutas de control del sistema pueden incluir enlaces de comunicación. Deben tenerse en
cuenta las implicaciones de retardos de transmisión imprevistos o fallos del enlace.
Tenga en cuenta todas las reglamentaciones para la prevención de accidentes y las
normativas de seguridad locales.1
Cada instalación de este equipo debe probarse de forma individual y exhaustiva antes de
entrar en servicio.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Utilice solo software aprobado por Schneider Electric para este equipo.
Actualice el programa de aplicación siempre que cambie la configuración de hardware física.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.

EIO0000003324 09/2020 11
Terminología derivada de los estándares
Los términos técnicos, símbolos y las descripciones correspondientes del presente manual o que
aparecen en la parte interior o exterior de los propios productos se derivan, por lo general, de los
términos y las definiciones de estándares internacionales.
En el área de los sistemas de seguridad funcional, unidades y automatización general se incluyen,
pero sin limitarse a ellos, términos como
seguridad
,
función de seguridad
,
estado de seguridad
,
fallo
,
reinicio tras fallo
,
avería
,
funcionamiento incorrecto
,
error
,
mensaje de error
,
peligroso
, etc.
Estos estándares incluyen, entre otros:
Estándar Descripción
EN 61131-2:2007 Controladores programables, parte 2: Requisitos y ensayos de los equipos.
ISO 13849-1:2008 Seguridad de la maquinaria: partes de seguridad de los sistemas de control.
Principios generales del diseño.
EN 61496-1:2013 Seguridad de la maquinaria: equipo de protección electrosensible.
Parte 1: Requisitos y ensayos generales.
ISO 12100:2010 Seguridad de las máquinas. Principios generales para el diseño. Evaluación del
riesgo y reducción del riesgo
EN 60204-1:2006 Seguridad de las máquinas. Equipo eléctrico de las máquinas. Parte 1:
Requisitos generales
EN 1088:2008
ISO 14119:2013
Seguridad de la maquinaria. Dispositivos de bloqueo asociados con
protecciones: principios de diseño y selección
ISO 13850:2006 Seguridad de la maquinaria. Parada de emergencia: principios de diseño
EN/IEC 62061:2005 Seguridad de la maquinaria. Seguridad funcional de los sistemas de control
programable de seguridad eléctrica y electrónica
IEC 61508-1:2010 Seguridad funcional de sistemas de seguridad programable eléctricos y
electrónicos: requisitos generales.
IEC 61508-2:2010 Seguridad funcional de los sistemas de seguridad electrónicos programables
eléctricos y electrónicos: requisitos de los sistemas de seguridad electrónicos
programables eléctricos y electrónicos.
IEC 61508-3:2010 Seguridad funcional de los sistemas de seguridad electrónicos programables
eléctricos y electrónicos: requisitos de software.
IEC 61784-3:2008 Comunicación digital de datos para la medición y control: buses de campo de
seguridad funcional.
2006/42/EC Directiva de maquinaria
2014/30/EU Directiva de compatibilidad electromagnética
2014/35/EU Directiva de baja tensión

12 EIO0000003324 09/2020
Además, los términos utilizados en este documento se pueden usar de manera tangencial porque
se obtienen de otros estándares como:
Por último, el término
zona de funcionamiento
se puede utilizar junto con la descripción de peligros
específicos, y se define como tal para una
zona de peligro
o
zona peligrosa
en la
Directiva de
maquinaria
(
2006/42/EC
) y
ISO 12100:2010
.
NOTA: Los estándares mencionados anteriormente podrían o no aplicarse a los productos
específicos citados en la presente documentación. Para obtener más información en relación con
los diferentes estándares aplicables a los productos descritos en este documento, consulte las
tablas de características de las referencias de dichos productos.
Estándar Descripción
Serie IEC 60034 Máquinas eléctricas giratorias
Serie IEC 61800 Accionamientos eléctricos de potencia de velocidad variable
Serie IEC 61158 Comunicación digital de datos para la medición y control - Bus de campo para
su uso en Sistemas de control

EIO0000003324 09/2020 13
Modicon TMH2GDB
Presentac ión
EIO0000003324 09/2020
Presentac ión
Capítulo 1
Presentación
Introducción
En este capítulo se ofrece información relacionada con la descripción, la presentación técnica, las
certificaciones y los estándares de la Visualización gráfica remota.
Contenido de este capítulo
Este capítulo contiene los siguientes apartados:
Apartado Página
Descripción 14
Presentación técnica 16
Certificaciones y estándares 18
Compatibilidad de la Visualización gráfica remota 19

Presentación
14 EIO0000003324 09/2020
Descripción
Descripción general
La Visualización gráfica remota es una unidad de control local. Se utiliza junto al Modicon M221
Logic Controller para actividades de monitorización, puesta en marcha, operación y
mantenimiento.
Descripción del sistema
Al conectar la Visualización gráfica remota al·Logic Controller, podrá acceder a la página del Menú
de configuración
(véase página 45)
.
También puede definir páginas personalizadas
(véase página 59)
mediante EcoStruxure Machine
Expert - Basic.
La Visualización gráfica remota se puede conectar al Logic Controller empleando la línea serie
(Serial o Serial 1). Si desea obtener más información, consulte Conectar la·Visualización gráfica
remota
(véase página 31)
.
Descripción física
En esta ilustración se muestra el contenido que se entrega con la·Visualización gráfica remota:
1 Hoja de instrucciones de Visualización gráfica remota
2 Visualización gráfica remota
3 Separador antirrotación
4 Tuerca de instalación
5 Llave de tubo (ZB5AZ905), herramienta de fijación para la tuerca de instalación

Presentación
EIO0000003324 09/2020 15
Descripción de la Visualización gráfica remota
En esta ilustración se muestra la Visualización gráfica remota:
1 Tecla F1
2 Tecla MOD
3 Tecla ESC
4 Teclas de R1 a R4
5 Pantalla gráfica
6 Tecla Inicio
7 Tecla Información
8 Tecla F2
9 Rueda táctil/OK/flechas
10 Separador antirrotación
11 Tuerca de instalación
12 Llave de tubo (ZB5AZ905)
13 Línea serie RJ45 (RS-485)
14 Conexión a tierra funcional (tierra)

Presentación
16 EIO0000003324 09/2020
Presentación técnica
Requisitos de cerramiento
Los componentes de Visualización gráfica remota están diseñados como equipos industriales de
zona B y clase A según la publicación 11 de IEC/CISPR. Si se utilizan en entornos distintos de los
descritos en estos estándares o en entornos que no cumplen las especificaciones de este manual,
pueden surgir dificultades para garantizar la compatibilidad electromagnética, debido a
interferencias conducidas y/o radiadas.
Todos los componentes de Visualización gráfica remotacumplen los requisitos de la Comunidad
Europea (CE) para equipos abiertos, tal como se define en la directiva EN 61131-2.
Características ambientales
Este equipo cumple los requisitos de la CE tal como se indica en la siguiente tabla. Este equipo
está diseñado para su uso en un entorno industrial con un grado de contaminación 2.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No supere ninguno de los valores nominales que se especifican en las tablas de características
medioambientales y eléctricas.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.
Característica Especificación
Cumplimiento de la norma IEC/EN 61131-2
IEC/EN 61010-2-201
Temperatura ambiente de funcionamiento De -15 a 50 °C (de 5 a 122 °F)
Temperatura de almacenamiento De -40 a 70 °C (de -40 a 158 °F)
Humedad relativa Transporte y almacenamiento 95 % (sin condensación)
Operación
Grado de contaminación IEC/EN 60664-1 2
Grado de protección IEC/EN 61131-2 Cara frontal: IP65 (cuando se instala
correctamente siguiendo las
instrucciones)
Cara posterior: IP20
Inmunidad a la corrosión Atmósfera sin gases corrosivos
Altitud de funcionamiento De 0 a 2.000 m (de 0 a 6.560 pies)
Altitud de almacenamiento De 0 a 2.000 m (de 0 a 6.560 pies)

Presentación
EIO0000003324 09/2020 17
Susceptibilidad electromagnética
Los componentes de Visualización gráfica remota cumplen las especificaciones de susceptibilidad
electromagnética tal como se indica en esta tabla:
Resistencia a las vibraciones 2 g 3-150 Hz máximo 1,5 mm
Resistencia a impactos mecánicos 147 m/s2 (482,285 pies/s2), 15 g para una
duración de 11 ms
Característica Especificación
Característica Diseñado según las
especificaciones
Rango
Descarga electrostática IEC/EN 61000-4-2 8 kV (descarga en el aire)
4 kV (descarga por contacto)
Campo
electromagnético
radiado
IEC/EN 61000-4-3 10 V/m (de 80 MHz a 1 GHz)
3 V/m (de 1,4 GHz a 2 GHz)
1 V/m (de 2 a 3 GHz)
Campo magnético IEC/EN 61000-4-8 30 A/m 50 Hz, 60 Hz
Ráfaga de transitorios
rápidos
IEC/EN 61000-4-4 1 kV
Inmunidad a
sobretensión
IEC/EN 61000-4-5
IEC/EN 61131-2 CM(1) DM(2)
0,5 kV 0,5 kV
Campo
electromagnético
inducido
IEC/EN 61000-4-6 10 Vrms (de 0,15 a 80 MHz)
Emisión conducida IEC/EN 55011 (IEC/CISPR
Publicación 11)
Línea de alimentación de CC:
De 10 a 150 kHz: de 120 a 69 dBμV/m QP
De 150 a 1.500 kHz: de 79 a 63 dBμV/m QP
De 1,5 a 30 MHz: 63 dBμV/m QP
Emisión radiada IEC/EN 55011 (IEC/CISPR
Publicación 11)
Clase A, distancia de 10 m:
de 30 a 230 MHz: 40 dBμV/m QP
De 230 MHz a 1 GHz: 47 dBμV/m QP
(1) Modalidad común
(2) Modalidad diferencial

Presentación
18 EIO0000003324 09/2020
Certificaciones y estándares
Introducción
El Visualización gráfica remota está diseñado para adaptarse a las principales normas nacionales
e internacionales referentes a los dispositivos de control industrial electrónico:
IEC/EN 61131-2
UL 508C
La Visualización gráfica remota ha obtenido las distinciones de conformidad siguientes:
CE
UL

Presentación
EIO0000003324 09/2020 19
Compatibilidad de la Visualización gráfica remota
Descripción general
Antes de utilizar la Visualización gráfica remota, verifique la compatibilidad de la Visualización
gráfica remota con la versión de EcoStruxure Machine Expert - Basic, la versión del firmware del
controlador y el nivel funcional de la aplicación.
Compatibilidad con EcoStruxure Machine Expert - Basic
La versión instalada de EcoStruxure Machine Expert - Basic debe ser igual o superior a la 1.0.
NOTA: Para ver la versión instalada de EcoStruxure Machine Expert - Basic, haga clic en Acerca
de en el menú Inicio.
Compatibilidad con el firmware del controlador
La versión del firmware del M221 Logic Controller debe ser igual o superior a la 1.3.x.y.
NOTA: Para ver la versión del firmware, haga clic en Puesta en funcionamiento → Conectar,
seleccione M221 Logic Controller y haga clic en Inicio de sesión. Debajo del Controlador
seleccionado, se identifican la versión del firmware y el controlador.
Puede actualizar el firmware mediante alguno de los métodos siguientes:
Actualizaciones del controlador
(véase EcoStruxure Machine Expert - Basic, Guía de funciona
-
miento)
en EcoStruxure Machine Expert - Basic
ExecLoader (Actualización de firmware mediante el asistente de Executive Loader
(véase Modicon M221, Controlador lógico, Guía de programación)
)
Tarjeta SD (Administración de firmware
(véase Modicon M221, Controlador lógico, Guía de
programación)
)
Compatibilidad con el nivel funcional de la aplicación
El nivel funcional de la aplicación debe ser igual o superior al nivel 3.0.
NOTA: Para obtener más información, consulte el nivel funcional
(véase EcoStruxure Machine
Expert - Basic, Guía de funcionamiento)
.

Presentación
20 EIO0000003324 09/2020
Detección de incompatibilidades
Si se detecta una incompatibilidad entre la Visualización gráfica remota y el nivel funcional de la
aplicación, se producirán los siguientes casos de uso:
Versión del
firmware del
Logic Controller
Versión del firmware
de la Visualización
gráfica remota
Consecuencia Actualizaciones de
objetos del sistema
>= V1.4.x.y V1.1IE40 for M221
aparece en
TMH2GDB durante
el encendido
%SW185 = 0100 hex
La Visualización gráfica remota
muestra la pantalla Dispositivo
incompatible o nivel de aplicación
incompatible.
%SW182 = 4: Visualización gráfica
remota es necesario actualizar el
firmware(1)
%SW183 = 2: versión incompatible
de la visualización(1)
No es posible actualizar el
firmware de la
Visualización gráfica
remota con esta versión
del firmware de la
Visualización gráfica
remota.
>= V1.4.x.y V1.3IEx for M221
aparece en
TMH2GDB durante
el encendido
%SW185 = 0103 hex
La Visualización gráfica remota
muestra la pantalla Dispositivo
incompatible o nivel de aplicación
incompatible.
%SW182 = 4: Visualización gráfica
remota es necesario actualizar el
firmware(1)
%SW183 = 2: versión incompatible
de la visualización(1)
Es posible actualizar el
firmware de la
Visualización gráfica
remota mediante una
secuencia de comandos
de tarjeta SD.
(1) Consulte %SW182 y %SW183 para obtener más información.

EIO0000003324 09/2020 21
Modicon TMH2GDB
Instalació n
EIO0000003324 09/2020
Instalació n
Capítulo 2
Instalación
Introducción
En este capítulo se ofrece información sobre la instalación de Visualización gráfica remota.
Contenido de este capítulo
Este capítulo contiene los siguientes apartados:
Apartado Página
Requisitos de instalación y mantenimiento 22
Dimensiones y distancias 24
Montaje 27
Conexión de Visualización gráfica remota 31
Actualización del firmware 37

Instalación
22 EIO0000003324 09/2020
Requisitos de instalación y mantenimiento
Antes de comenzar
Debe leer y comprender este capítulo antes de empezar a instalar el sistema.
El uso y la aplicación de la información contenida en el presente documento requieren experiencia
en diseño y programación de sistemas de control automatizados. Solamente el usuario, el
fabricante o el integrador saben cuáles son las condiciones y los factores presentes durante la
instalación y la configuración, el funcionamiento y el mantenimiento de la máquina o del proceso,
por lo que pueden decidir la automatización y el equipo asociado, así como las medidas de
seguridad y los enclavamientos relacionados que se pueden utilizar de forma efectiva y correcta.
Al seleccionar el equipo de control y automatización para una determinada aplicación junto con
cualquier otro equipo o software relacionado, también debe tener en cuenta todas las normativas
y/o estándares locales, regionales o nacionales.
Preste especial atención al cumplir la información sobre seguridad, los distintos requisitos
eléctricos y los estándares normativos que podrían aplicarse a su máquina o proceso en el uso de
este equipo.
Consideraciones sobre la programación
PELIGRO
RIESGO DE DESCARGA ELÉCTRICA, EXPLOSIÓN O ARCO ELÉCTRICO
Vuelva a montar y fijar todas las cubiertas, todos los accesorios, elementos de hardware y cables
del sistema y compruebe que haya una conexión a tierra adecuada antes de aplicar alimentación
eléctrica a la unidad.
El incumplimiento de estas instrucciones podrá causar la muerte o lesiones serias.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Utilice solo software aprobado por Schneider Electric para este equipo.
Actualice el programa de aplicación siempre que cambie la configuración de hardware física.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.

Instalación
EIO0000003324 09/2020 23
Entorno operativo
Este equipo ha sido diseñado para funcionar fuera de cualquier ubicación peligrosa. Instale el
equipo únicamente en zonas sin atmósfera peligrosa.
Consideraciones de instalación
PELIGRO
POSIBILIDAD DE EXPLOSIÓN
Instale y utilice el equipo únicamente en ubicaciones no peligrosas.
El incumplimiento de estas instrucciones podrá causar la muerte o lesiones serias.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Instale y utilice este equipo de acuerdo con las condiciones descritas en la sección de la
presentación técnica.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
En caso de que exista riesgo para el personal o los equipos, utilice los enclavamientos de
seguridad adecuados.
No utilice este equipo en funciones de maquinaria críticas para la seguridad a no ser que esté
diseñado como equipo de seguridad funcional y siga los estándares y las normas
correspondientes.
No desmonte, repare ni modifique este equipo.
No conecte ningún cable a conexiones reservadas y no utilizadas o a conexiones designadas
como No Connection (N.C.).
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.

Instalación
24 EIO0000003324 09/2020
Dimensiones y distancias
Introducción
En esta sección se describen las dimensiones y las distancias de montaje de la Visualización
gráfica remota.
Dimensiones
En esta ilustración se describen·las dimensiones externas de la Visualización gráfica remota:

Instalación
EIO0000003324 09/2020 25
Distancias mínimas
La Visualización gráfica remota se ha diseñado como un producto IP65 si se instala de forma
correcta, salvo por el conector RJ45. La Visualización gráfica remota debe instalarse en el panel
frontal del armario o la carcasa para alcanzar la puntuación de IP65. Deben respetarse las
distancias al instalar el producto.
Existen cuatro tipos de distancias entre:
El Visualización gráfica remota y todos los lados del armario (incluida la puerta del panel).
El conector de Visualización gráfica remota y los conductos del cableado. Esta distancia reduce
la interferencia electromagnética entre la·Visualización gráfica remota y los conductos de
cables.
El Visualización gráfica remota y todos dispositivos que generan calor instalados en el mismo
armario.
La Visualización gráfica remota y otra Visualización gráfica remota en la misma puerta del
panel.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Coloque los dispositivos que disipen más calor en la parte superior del armario y asegure una
ventilación adecuada.
Evite situar este equipo cerca o encima de dispositivos que puedan provocar
sobrecalentamiento.
Instale el equipo en una ubicación que proporcione el mínimo de espacios libres desde todas
las estructuras adyacentes y todo el equipo, tal como se indica en este documento.
Instale todo el equipo según las especificaciones de la documentación relacionada.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.


Instalación
EIO0000003324 09/2020 27
Montaje
Descripción general
En esta sección se explica cómo instalar la Visualización gráfica remota en el panel del armario.
Disposición·de los orificios de montaje
Este diagrama presenta la plantilla de taladrado para la Visualización gráfica remota:
Requisitos previos·antes de instalar la Visualización gráfica remota
Antes de instalar la·Visualización gráfica remota, compruebe que:
La junta debe ser uniforme y encontrarse en perfectas condiciones.
La superficie del armario o panel de la instalación debe ser plana y lisa con una tolerancia de
0,5 mm (0,019 pulg).
El grosor del panel debe ser de 1,5 mm a 6 mm si el panel del armario es de chapa de acero,
o de 3 mm a 6 mm si el panel del armario es de plástico reforzado con fibra de vidrio.

Instalación
28 EIO0000003324 09/2020
Instalación de laVisualización gráfica remota
Este procedimiento explica cómo instalar la Visualización gráfica remota:
Paso Acción
1 Inserte el separador antirrotación·en la Visualización gráfica remota.
NOTA: El par de rotación que puede soportar la Visualización gráfica remota es de 6 N.m.
(53,10 pulg.-lb).
2 Inserte la Visualización gráfica remota en el panel del armario.

Instalación
EIO0000003324 09/2020 29
3 Coloque la tuerca y apriétela con la llave de tubo (ZB5AZ905).
(1) De 1,5 a 6 mm (de 0,06 a 0,24 pulg.) si es chapa de acero o de 3 a 6 mm (de 0,12 a
0,24 pulg.) si es plástico reforzado con fibra de vidrio (mínimo GF30)
Paso Acción

Instalación
30 EIO0000003324 09/2020
Limpieza de la Visualización gráfica remota
Cuando el panel frontal de la Visualización gráfica remota necesite una limpieza, frótela con un
paño suave. Si es necesario, utilice un detergente neutro.
Debe tener cuidado al frotar la superficie de la Visualización gráfica remota. Si se pulsan inadverti-
damente·las teclas mientras se limpia, se puede provocar que la máquina se programe para
realizar operaciones indeseadas.
AVISO
EQUIPO INOPERATIVO
No utilice ningún líquido que contenga ácidos, disolventes orgánicos, alcohol o materiales
abrasivos para limpiar la unidad.
El incumplimiento de estas instrucciones puede causar daño al equipo.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No pulse ninguna de las teclas durante la limpieza de la superficie del equipo.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.

Instalación
EIO0000003324 09/2020 31
Conexión de Visualización gráfica remota
Descripción general
La Visualización gráfica remota debe estar conectada solamente al puerto Serial o Serial 1 del
Logic Controller. Estos puertos serie de los Logic Controllers ofrecen una fuente de alimentación
de 5 V CC a la Visualización gráfica remota. La Visualización gráfica remota debe ser el único
dispositivo conectado a estos puertos serie (no utilice un derivador). La conexión entre la
Visualización gráfica remota y el Logic Controller es RS-485 (protocolo Modbus).

Instalación
32 EIO0000003324 09/2020
Conexión del Logic Controller
En estos gráficos se muestra la ubicación del puerto Serial o Serial 1, dependiendo de la
referencia del Logic Controller:

Instalación
EIO0000003324 09/2020 33

Instalación
34 EIO0000003324 09/2020
Asignación de pins
En esta ilustración se presenta la asignación de pins del conector RJ45:
Pin Señal Descripción
1 N. C. Sin conexión
2 N. C. Sin conexión
3 N. C. Sin conexión
4 D1 Modbus SL: D1 (+/B), RS-485 a 2 hilos
5 D0 Modbus SL: D0 (-/A), RS-485 a 2 hilos
6 N. C. Sin conexión
7 5 V CC Alimentación proporcionada por el Logic Controller
8 0 V CC -
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No conecte ningún cable a conexiones reservadas y no utilizadas o a conexiones designadas
como "No Connection (N.C.)".
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.

Instalación
EIO0000003324 09/2020 35
Conexión a tierra
El punto de conexión a tierra de la Visualización gráfica remota debe estar conectado al tornillo
del terminal terrestre del armario.
En esta tabla se presentan las características de la conexión a tierra:
Conexión de cables
Puede utilizar el siguiente cable para conectar la Visualización gráfica remota al Logic Controller:
En esta ilustración se muestra el cableado interno de la conexión RJ45:
Característica Descripción
Mínimo calibre de los conductores 2,5 mm² (AWG 14)
Tamaño del punto de conexión 6,35 x 0,81 mm (0,25 x 0,032 pulg.)
Conexión Terminal hembra de horquilla (AMP 6392-1 o similar)
Referencia Descripción Longitud
XBTZ9980 Cable de la conexión serie de Modbus (2 conectores macho RJ45) 2,5 m (8,20 pies)
VW3A1104R10 Cable de la conexión serie de Modbus (2 conectores macho RJ45) 1,0 m (3.28 ft)

Instalación
36 EIO0000003324 09/2020
1 Sin conexión 1
2 Sin conexión 2
3 Sin conexión 3
4D1 4
5D0 5
6 Sin conexión 6
75V CC7
8 0 V CC 8
Blindaje Blindaje Blindaje
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No conecte ningún cable a conexiones reservadas y no utilizadas o a conexiones designadas
como "No Connection (N.C.)".
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.

Instalación
EIO0000003324 09/2020 37
Actualización del firmware
Presentación
Las actualizaciones del firmware se pueden descargar a Visualización gráfica remota desde el PC
en el que se ejecute EcoStruxure Machine Expert - Basic.
Para obtener información detallada, consulte Descarga de firmware en el terminal gráfico remoto
(véase Modicon M221, Controlador lógico, Guía de programación)
.

Instalación
38 EIO0000003324 09/2020

EIO0000003324 09/2020 39
Modicon TMH2GDB
Cómo utilizar la pantalla
EIO0000003324 09/2020
Cómo util izar Visualizació n gráfica remota
Capítulo 3
Cómo utilizar Visualización gráfica remota
Introducción
En este capítulo se ofrece información relacionada con las presentaciones de la pantalla gráfica,
la navegación y la protección mediante·contraseña de la Visualización gráfica remota.
Contenido de este capítulo
Este capítulo contiene los siguientes apartados:
Apartado Página
Descripción 40
Navegación 41
Protección con contraseña 43

Cómo utilizar la pantalla
40 EIO0000003324 09/2020
Descripción
Descripción de la pantalla gráfica
Este es un ejemplo de la pantalla gráfica de la Visualización gráfica remota:
En esta tabla se describen las áreas de la pantalla gráfica:
Página de inicio
Tras conectar la Visualización gráfica remota, se muestra la página de inicio que se ha elegido en
EcoStruxure Machine Expert - Basic
(véase página 59)
.
La página de inicio predeterminada es el Menú de configuración, que permite configurar y
supervisar los parámetros generales del Logic Controller
(véase página 45)
.
Elemento Nombre Etiqueta Descripción
1 Encabezado Alarma Le informa de que al menos 1 alarma está activa en
la Página de visualización de alarmas
(véase página 52)
.
NOTA: Este campo estará vacío si no hay alarmas
activas o si la página de Visualización de alarmas
(véase página 82)
no se ha definido.
Título de página –
Fecha y hora –
2 Menús o páginas – Menús, submenús, parámetros, valores y otros
contenidos también se mostrarán en una ventana
por la que se podrá desplazar para visualizar las
cinco líneas.
3 Pie de página R1 a R4 Las etiquetas corresponden a acciones si las
configuramos a nivel de página. Si desea obtener
más información, consulte Acciones
(véase página 79)
.

Cómo utilizar la pantalla
EIO0000003324 09/2020 41
Navegación
Descripción general
En esta tabla se describen los controles de navegación de la Visualización gráfica remota:
Nombre Función Comentario
Tecla F1 Ejecuta acciones definidas con
EcoStruxure Machine Expert - Basic para
esa tecla.
Si desea obtener más información, consulte
Acciones
(véase página 79)
.
Tecla MOD Se·desplaza hasta el siguiente objeto
seleccionable.
En una página con barra de desplazamiento,
esta tecla estará deshabilitada.
Tecla ESC Se desplaza hasta la página anterior. Puede retroceder hasta las anteriores 12
páginas.
Teclas de R1
a R4
Ejecutar una acción. Las acciones son fijas, como las que se
encuentran en las páginas de Configuración, o
definidas/asignadas con EcoStruxure Machine
Expert - Basic mediante las páginas de la
Interfaz del operador. Si desea obtener más
información, consulte Acciones
(véase página 79)
.
Tecla Inicio Se desplaza hasta la página de inicio. Si desea obtener más información, consulte la
Página de inicio
(véase página 40)
.
Tecla
Información
Muestra una página de ayuda contextual. Las páginas de ayuda son fijas, como las que
se encuentran en las páginas de
Configuración, o las definidas/asignadas con
EcoStruxure Machine Expert - Basic mediante
las páginas de la Interfaz del operador. Si
desea obtener más información sobre las
páginas de ayuda, consulte las Páginas de
plantilla
(véase página 66)
.
Tecla F2 Ejecuta acciones definidas con
EcoStruxure Machine Expert - Basic para
esa tecla.
Si desea obtener más información, consulte
Acciones
(véase página 79)
.
Rueda táctil
Flechas
arriba/abajo
En función de la página, puede:
Seleccionar los siguientes/anteriores
elementos que se muestren o hayan
mostrado
Aumentar/reducir el objeto
seleccionado
–

Cómo utilizar la pantalla
42 EIO0000003324 09/2020
Protección de acceso
El acceso a algunas de las páginas puede estar restringido mediante una contraseña. Si desea
obtener más información, consulte Protección mediante contraseña
(véase página 43)
.
Flechas
derecha/
izquierda
Selecciona el siguiente/anterior objeto
seleccionable.
En una página con barra de desplazamiento,
las flechas derecha/izquierda están
deshabilitadas.
OK Abre un menú, submenú o una página.
Habilita la modificación del valor
numérico de un parámetro.
Si desea obtener más información, consulte
Editar páginas
(véase página 49)
.
AVISO
EQUIPO INOPERATIVO
No emplee objetos duros ni puntiagudos cuando utilice el dispositivo.
El incumplimiento de estas instrucciones puede causar daño al equipo.
Nombre Función Comentario

Cómo utilizar la pantalla
EIO0000003324 09/2020 43
Protección con contraseña
Descripción general
Puede utilizar el software EcoStruxure Machine Expert - Basic para definir una contraseña. Si se
habilita esta opción, esta peculiar contraseña ayuda a proteger:
las páginas seleccionadas de la Interfaz del operador
Las páginas de Configuración que pueden realizar acciones en el Logic Controller:
Configuración del controlador
Estado del controlador
Tabla de datos
Reinicio de la alarma
Si desea obtener más información, consulte Establecer parámetros generales
(véase página 65)
.
Gestión de contraseñas en el Visualización gráfica remota
Cuando intente acceder a una página protegida mediante Visualización gráfica remota, deberá
introducir la contraseña:
Si... Entonces... Comentario
La contraseña que ha
introducido es correcta
Puede consultar las páginas. La contraseña es válida durante
10 minutos o hasta que pulse la tecla
Inicio.
La contraseña que ha
introducido es incorrecta
Aparece un mensaje de error Cuando salga de la página de error,
podrá introducir la contraseña de nuevo.
Si pulsa Cancelar, irá a la página de
inicio.

Cómo utilizar la pantalla
44 EIO0000003324 09/2020

EIO0000003324 09/2020 45
Modicon TMH2GDB
Funcional idad del menú de c onfiguración
EIO0000003324 09/2020
Funcional idad del menú de c onfiguración
Capítulo 4
Funcionalidad del menú de configuración
Introducción
En este capítulo se ofrece información sobre los menús presentes en la Configuración de la
Visualización gráfica remota.
Contenido de este capítulo
Este capítulo contiene los siguientes apartados:
Apartado Página
Presentación del menú de configuración 46
Menú de configuración del controlador 48
Menú del estado del controlador 50
Menú de alarma 52
Menú de la tabla de datos 54

Funcionalidad del menú de configuración
46 EIO0000003324 09/2020
Presentación del menú de configuración
Estructura del menú
En esta tabla se enumeran los menús y submenús presentes en el Menú de configuración de la
Visualización gráfica remota:
Menú Submenú Comentario
Información del controlador Nombre de dispositivo
Versión de firmware
Último ciclo MAST
Ciclo MAST mín.
Ciclo MAST máx.
–
Configuración del
controlador
Fecha y hora
Serie 2
Ethernet
Si desea obtener más información, consulte el
Menú de configuración del controlador
(véase página 48)
.
Configuración de la
pantalla
Idioma
Contraste
Timeout de la luz de fondo
Dentro de la Visualización gráfica remota se
guardarán los valores del idioma, el contraste y el
timeout de la luz de fondo.
El timeout predeterminado de la luz de fondo es de
10 minutos y se puede definir entre 0 (sin timeout)
o un máximo de 10 minutos.
Estado del controlador – Si desea obtener más información, consulte el
Menú del estado del controlador
(véase página 50)
.
Estado del controlador Aplicación
Arrancar app
Bus de E/S
Cartucho
Cada estado puede tener los siguientes valores:
Correcto
Incorrecto
Menú de alarma Ver
Historial
Eliminar Historial
Si desea obtener más información, consulte el
Menú de alarma
(véase página 52)
.
Tabla de datos – Si desea obtener más información, consulte el
menú de la Tabla de datos
(véase página 54)
.
Información de la tarjeta SD – Una página de ayuda que explica cómo transferir
firmware, aplicaciones y configuraciones de post
desde:
El Logic Controller a la tarjeta SD
La tarjeta SD al Logic Controller

Funcionalidad del menú de configuración
EIO0000003324 09/2020 47
NOTA: Mantener siempre encendida la luz de fondo reduce la vida útil del dispositivo.
AVISO
EQUIPO INOPERATIVO
Establezca el valor de tiempo límite de retroiluminación para el dispositivo entre 1 y 10 minutos.
El incumplimiento de estas instrucciones puede causar daño al equipo.

Funcionalidad del menú de configuración
48 EIO0000003324 09/2020
Menú de configuración del controlador
Descripción general
En esta tabla se indican los submenús presentes en el menú de la Configuración del controlador
de la Configuración.
NOTA: Si desea obtener más información sobre cómo modificar los parámetros Serial 2 o
Ethernet, consulte Editar Páginas
(véase página 49)
.
Submenú Función Comentario
Fecha y hora Permite definir la hora y fecha internas del
Logic Controller.
El formato de fecha y hora solo se puede
configurar mediante EcoStruxure Machine
Expert - Basic. Consulte Definir los
parámetros generales
(véase página 65)
.
Serie 2
(depende de la
referencia del Logic
Controller)
Permite configurar los parámetros de
Serial 2 (1):
Medio físico
Velocidad en baudios
Paridad
Formato
Bits de parada
Dirección Modbus
Polarización
Serial 1 no se puede configurar, puesto
que interrumpe la comunicación actual
con la Visualización gráfica remota.
Ethernet
(depende de la
referencia del Logic
Controller)
Permite configurar el parámetro de
Ethernet (1):
Modalidad de IP
Dirección IP
Máscara
Pasarela
Nombre del dispositivo
Si la Dirección IP y la Máscara son
incorrectas, su Logic Controller se
configurará automáticamente empleando
sus valores predeterminados.
(1) Los parámetros que se han introducido se guardan dentro del archivo de Configuración de Post. Los
parámetros se guardan tras apagar y encender.

Funcionalidad del menú de configuración
EIO0000003324 09/2020 49
Editar Páginas
Esta gráfica presenta la página de Editar IP:
Este procedimiento explica cómo modificar los parámetros seleccionados en los submenús Serie
2 y Ethernet:
Paso Acción
1 Seleccione Configuración → Configuración del controlador.
2 Seleccione Serie 2 o Ethernet.
Resultado: Aparece la página de Serie 2 o Ethernet.
3 Seleccione el parámetro con la rueda táctil y pulse Aceptar para modificarlo.
Resultado: Se muestra una de estas páginas:
Editar parámetro
Editar IP
Editar nombre
4 Seleccione el dígito con la tecla MOD o con las flechas derecha/izquierda.
5 Aumente o disminuya el dígito seleccionado empleando la rueda táctil o las flechas arriba/abajo.
Gire la rueda táctil en la misma dirección durante más de 2 segundos para acelerar el
desplazamiento de los dígitos.
6Pulse:
R1 (Validar) para aplicar la modificación.
R4 (Cancelar) para descartar la modificación.
NOTA: Pulse la tecla ESC para descartar la modificación y volver a la página anterior.

Funcionalidad del menú de configuración
50 EIO0000003324 09/2020
Menú del estado del controlador
Descripción general
El menú del Estado del controlador permite ver el estado actual del Logic Controller y ejecutar los
comandos en el Logic Controller.
Consideraciones del control remoto
Se debe tener cuidado y adoptar las medidas adecuadas para utilizar este producto como
dispositivo de control, con el fin de evitar consecuencias no deseadas en el funcionamiento
solicitado de máquinas, cambios de estado, o alteración de la memoria de datos o de los
parámetros de funcionamiento de la máquina.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Coloque los dispositivos del sistema de control del operador cerca de la máquina o en un lugar
en el que tenga una vista completa de la máquina.
Proteja los comandos de operador contra el acceso sin autorización.
Si el control remoto es un aspecto de diseño necesario en la aplicación, asegúrese de que un
observador local, competente y cualificado esté presente al utilizarlo desde una ubicación
remota.
Configure e instale la entrada Ejecutar/Detener, si la tiene, u otros medios externos en la
aplicación con el objetivo de mantener el control local sobre el inicio o la detención del
dispositivo independientemente de los comandos remotos que se le hayan enviado.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.
ADVERTENCIA
INICIO NO DESEADO DE LA MÁQUINA O DEL PROCESO DE ACTIVACIÓN
Compruebe el estado de seguridad de la máquina o del entorno de proceso antes de aplicar
electricidad a la entrada Run/Stop.
Use la entrada Run/Stop para evitar activaciones no deseadas desde ubicaciones remotas.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.

Funcionalidad del menú de configuración
EIO0000003324 09/2020 51
Comandos del Logic Controller
Este procedimiento explica cómo realizar los comandos del Logic Controller:
Si desea obtener más información, consulte la parte de Estados y comportamientos del
controlador en su guía de programación del Logic Controller.
Paso Acción
1 Seleccione Configuración → Estado del controlador.
2Pulse:
R1 (Ejecutar) para iniciar el Logic Controller
R2 (Detener) para detener el Logic Controller
R3 (Inicializar) para inicializar el Logic Controller
3 Cuando aparezca una página de confirmación, seleccione Sí o No.
4Pulse:
R1 (Válido)
R4 (Cancelar)

Funcionalidad del menú de configuración
52 EIO0000003324 09/2020
Menú de alarma
Descripción general
El Menú de alarmas contiene estos submenús:
Visualizar
Historial
Eliminar Historial
Visualización de alarmas
La página de Visualización de·alarmas muestra las alarmas activadas. Los mensajes de la alarma
de configuran en EcoStruxure Machine Expert - Basic. Si desea obtener más información, consulte
la·definición de alarma
(véase página 82)
.
Las alarmas están asociadas con bits de memoria específicos dentro del Logic Controller. Estos
bits son monitorizados y, cuando son TRUE, se incluyen en la Visualización de alarmas.
Cuando el bit de sistema %S122 se establece en 1, la página de Visualización de alarmas se
muestra automáticamente al detectar un flanco ascendente en un bit de alarma.
Cuando el bit de sistema %S123 se establece en 1, la luz de fondo en la Visualización gráfica
remota se vuelve de color rojo cuando una alarma está activa. Para obtener más información,
consulte la descripción
(véase Modicon M221, Controlador lógico, Guía de programación)
de bit
de sistema (%S122 y %S123) .
NOTA: El bit de alarma debe estar encendido durante al menos 50 ms antes de que se incluya en
la Visualización de alarmas .
NOTA: Las alarmas no se guardan tras apagar y encender el controlador.

Funcionalidad del menú de configuración
EIO0000003324 09/2020 53
Historial de alarmas
La página Historial muestra un máximo de 40 mensajes de alarma con la fecha y la hora de cuándo
se activó o se resolvió la alarma, junto con una flecha arriba para indicar cuándo se activó la
alarma y una flecha abajo para indicar cuándo se resolvió. La alarma más reciente se encuentra
al principio de la lista.
Reinicio de·la alarma
La página Reinicio de la alarma se utiliza para eliminar el historial de la alarma:
Paso Acción
1 Seleccione Configuración → Menú de alarmas → Eliminar historial.
Resultado: Se abre la página Reinicio de la alarma.
2Pulse R1 (Eliminar) para eliminar el historial de alarmas.
Resultado: La página Historial de alarmas está vacía.

Funcionalidad del menú de configuración
54 EIO0000003324 09/2020
Menú de la tabla de datos
Descripción general
En la página Tabla de datos, puede agregar/eliminar o modificar el valor de una variable:
Objetos de memoria
Objetos de sistema
Objetos de E/S
En esta página se muestra un máximo de 20 entradas.
NOTA: Esta tabla no se guarda tras apagar y encender su Logic Controller.
Consideraciones del control remoto
Se debe tener cuidado y adoptar las medidas adecuadas para utilizar este producto como
dispositivo de control, con el fin de evitar consecuencias no deseadas en el funcionamiento
solicitado de máquinas, cambios de estado, o alteración de la memoria de datos o de los
parámetros de funcionamiento de la máquina.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Coloque los dispositivos del sistema de control del operador cerca de la máquina o en un lugar
en el que tenga una vista completa de la máquina.
Proteja los comandos de operador contra el acceso sin autorización.
Si el control remoto es un aspecto de diseño necesario en la aplicación, asegúrese de que un
observador local, competente y cualificado esté presente al utilizarlo desde una ubicación
remota.
Configure e instale la entrada Ejecutar/Detener, si la tiene, u otros medios externos en la
aplicación con el objetivo de mantener el control local sobre el inicio o la detención del
dispositivo independientemente de los comandos remotos que se le hayan enviado.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.

Funcionalidad del menú de configuración
EIO0000003324 09/2020 55
Tipos de objeto
Estos objetos de memoria están disponibles:
Bit del sistema (%S)
Palabra del sistema (%SW)
Bit de memoria (%M)
Palabra de memoria (%MW)
Palabra constante (%KW)
Palabra doble de memoria (%MD)
Estos objetos de E/S están disponibles:
Bit de entrada (%I)
Bit de salida (%Q)
Palabra de entrada (%IW)
Palabra de salida (%QW)
Palabra de estado de entrada (%IWS)
Palabra de estado de salida (%QWS)
Agregar/eliminar una variable
Este procedimiento explica cómo agregar una variable en la página de Tabla de datos:
NOTA: Puede eliminar una variable de la tabla pulsando R2 (Eliminar).
Paso Acción
1 Seleccione Configuración → Tabla de datos.
2Pulse R1 (Agregar).
Resultado: Se muestra la página del Tipo de objeto.
3 Seleccione los tipos de objeto.
Si desea obtener más información sobre los tipos de objeto, consulte la lista
(véase página 55)
.
4Pulse R1 (Seleccionar).
5 Introduzca:
La dirección de un objeto de memoria.
Los valores del módulo y del canal de un objeto E/S.
6Pulse R3 (Editar) o utilice la rueda táctil.
7 Seleccione la representación que se mostrará (decimal o hexadecimal).
8Pulse R1 (Agregar) para agregar la variable a la tabla de datos.
9 Repita desde el paso 2 al 8 para agregar otra variable a su lista de monitorización.

Funcionalidad del menú de configuración
56 EIO0000003324 09/2020
Editar una variable
Puede modificar el valor de una variable ya existente.
NOTA: No se permite editar una variable con el estado del Logic Controller EMPTY.
Siga este procedimiento al editar:
Una variable de palabra o de palabra doble
Una variable del bit de memoria
Una variable del bit de E/S
Editar una variable de palabra o de palabra doble
Este procedimiento explica cómo se modifica el valor de una variable de palabra o de doble
palabra en la página Tabla de datos:
Paso Acción
1 Seleccione Configuración → Tabla de datos.
2 Seleccione la variable de palabra o de palabra doble para modificar.
3Pulse R3 (Editar) para modificar la variable.
Resultado: Aparece la página Cambiar %MW o Cambiar %MD.
4 Seleccione el dígito con la tecla MOD o con las flechas derecha/izquierda.
5 Aumente o disminuya el dígito seleccionado empleando la rueda táctil o las flechas arriba/abajo.
6Pulse:
R1 (Aplicar) para aplicar la modificación.
R4 (Cancelar) para descartar la modificación.
NOTA: Pulse la tecla ESC para descartar la modificación y volver a la página anterior.
7 Repita desde el paso 2 al 6 para modificar otra variable de palabra o de doble palabra.

Funcionalidad del menú de configuración
EIO0000003324 09/2020 57
Editar una variable de bit de memoria
Este procedimiento explica cómo se modifica el valor de una variable de bit de memoria en la
página Tabla de datos:
Editar una variable de bit de E/S
El forzado de valores de entrada y salida en un Logic Controller en ejecución puede tener
consecuencias graves para el funcionamiento de una máquina o de un proceso. Solo deben
utilizar esta función las personas que comprendan las implicaciones de la lógica de control y que
entiendan las consecuencias de una E/S forzada en la máquina o el proceso.
Este procedimiento explica cómo se modifica el valor de una variable de bit de E/S en la página
Tabla de datos:
Paso Acción
1 Seleccione Configuración → Tabla de datos.
2 Seleccione la variable del bit de memoria que desea modificar.
3Pulse R3 (Editar) para modificar la variable.
Resultado: Se muestra la página Cambiar %M.
4 Seleccione Desconectado o Conectado con la rueda táctil o con las flechas arriba/abajo.
5Pulse:
R1 (Aplicar) para aplicar la modificación.
R4 (Cancelar) para descartar la modificación.
NOTA: Pulse la tecla ESC para descartar la modificación y volver a la página anterior.
6 Repita desde el paso 2 al 5 para modificar otra variable de bit de memoria.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Debe tener conocimientos previos sobre el proceso y sobre el equipo controlado antes de
intentar forzar físicamente las entradas/salidas del Logic Controller o de escribir valores en las
ubicaciones de la memoria del Logic Controller.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.
Paso Acción
1 Seleccione Configuración → Tabla de datos.
2 Seleccione la variable del bit de E/S que desea modificar.
3Pulse R3 (Editar) para modificar la variable.
Resultado: Se muestra la página de bit Cambiar %I / %Q.
4 Seleccione Desconectado o Conectado con la rueda táctil o con las flechas arriba/abajo.

Funcionalidad del menú de configuración
58 EIO0000003324 09/2020
5Pulse:
R1 (Aplicar) para aplicar la modificación.
R2 (Forzar) para forzar el valor E/S.
R3 (Cancelar forzado) para cancelar el forzado del valor E/S.
R4 (Cancelar) para descartar la modificación.
NOTA: Pulse la tecla ESC para descartar la modificación y volver a la página anterior.
6 Repita desde el paso 2 al 5 para modificar otra variable de bit de E/S.
Paso Acción

EIO0000003324 09/2020 59
Modicon TMH2GDB
Crear una interfaz del operador
EIO0000003324 09/2020
Crear una interfaz del operador con EcoStruxure Machine Expert - Basic
Capítulo 5
Crear una interfaz del operador con EcoStruxure Machine
Expert - Basic
Introducción
Este capítulo ofrece información sobre cómo construir una Interfaz del operador en la ficha
Visualización de EcoStruxure Machine Expert - Basic.
Contenido de este capítulo
Este capítulo contiene los siguientes apartados:
Apartado Página
Requisito previo 60
Ficha de visualización de EcoStruxure Machine Expert - Basic 62
Propiedades generales 64
Añadir/eliminar una página 66
Configurar una página 75
Exportar/importar una página 78
Acciones 79
Definición de alarmas 82

Crear una interfaz del operador
60 EIO0000003324 09/2020
Requisito previo
Configuración de línea serie
Para configurar la línea Serial/Serial 1 en EcoStruxure Machine Expert - Basic:
Paso Acción
1 Seleccione la ficha Configuración.
2 Haga clic en el nodo SL1 (línea serie) del árbol de hardware.
3 Seleccione TMH2GDB en el campo Protocolo.
La Visualización gráfica remota utiliza parámetros de comunicación de línea serie fija:
4 Haga clic en Aplicar.
Resultado: La línea serie se configura para comunicarse con la Visualización gráfica remota y
se activa la ficha Visualización.
5 Haga clic en el nodo Visualización que aparece debajo del nodo SL1 (línea serie) en el árbol de
hardware para mostrar la configuración del dispositivo.

Crear una interfaz del operador
EIO0000003324 09/2020 61
En este gráfico se muestra la Configuración del dispositivo en la ficha Configuración de
EcoStruxure Machine Expert - Basic:

Crear una interfaz del operador
62 EIO0000003324 09/2020
Ficha de visualización de EcoStruxure Machine Expert - Basic
Descripción general
La Interfaz del operador es un componente de la aplicación.
Si desea obtener más información sobre la creación de proyectos, consulte la creación de
proyectos con EcoStruxure Machine Expert - Basic
(véase EcoStruxure Machine Expert -
Basic, Guía de funcionamiento)
.
Si desea obtener más información sobre las aplicaciones de transferencia, consulte Carga y
descarga de aplicaciones
(véase EcoStruxure Machine Expert - Basic, Guía de
funcionamiento)
.
La Interfaz del operador está construida mediante la ficha Visualización en EcoStruxure Machine
Expert - Basic:
1 Árbol
2 Botones
3 Área de visualización
4 Área editable

Crear una interfaz del operador
EIO0000003324 09/2020 63
Descripción del botón
Los botones se aplican a las páginas de la Interfaz del operador:
Descripción del árbol
En esta tabla se indican los menús y submenús que se encuentran en el árbol de la ficha
Visualización:
Botón Menú Función
Agregar página Agrega una página
(véase página 66)
.
Eliminar página Eliminar una página personalizada
(véase página 74)
.
ExportPage Exportar una página
(véase página 78)
.
ImportPage Importar una página
(véase página 78)
.
Menú Submenú Comentario
Mensajes – Si se detecta un error, aparecerá un mensaje.
Propiedades
generales
Tecla F1
Tecla F2
Definir los parámetros generales
(véase página 64)
.
Configuración Visualización de alarmas Definir un conjunto de alarmas
(véase página 82)
.
Interfaz del
operador
– Crear menús, submenús y páginas personalizadas
con las Plantillas predefinidas
(véase página 66)
.

Crear una interfaz del operador
64 EIO0000003324 09/2020
Propiedades generales
Descripción general
El nodo de Propiedades generales permite definir los parámetros generales de la Visualización
gráfica remota.
Puede seleccionar los formatos de hora y fecha, la página de inicio para la interfaz del operador
que ha definido, y la contraseña empleada para Visualización gráfica remota. La contraseña es
eficaz para ayudar a proteger las páginas del operador que ha seleccionado para protegerlas y, si
así lo desea, las páginas de configuración que afectan al estado y a los datos del Logic Controller.
NOTA: La página definida como página de inicio no puede estar protegida mediante contraseña.
Si se define una página protegida mediante contraseña como página de inicio, se eliminará
automáticamente la protección mediante contraseña.
Cada vez que cree una nueva aplicación, se asignará automáticamente como predeterminada una
contraseña, seleccionada de forma aleatoria. Además, la opción Configuración de protección
mediante contraseña viene seleccionada de forma predeterminada.

Crear una interfaz del operador
EIO0000003324 09/2020 65
Definir las propiedades generales
Este procedimiento explica cómo definir las propiedades generales de la ficha Visualización:
Asignación de las teclas F1 y F2
Este procedimiento explica cómo asignar acciones a la tecla F1 y a la tecla F2:
Paso Acción Comentarios
1 Seleccione el nodo Propiedades generales en el árbol. –
2 Seleccione el formato de la fecha en el campo Formato
de la fecha.
Los formatos de fecha y hora se emplean en los
encabezados estándar y en el historial de
alarmas.
3 Seleccione el formato de la hora en el campo Formato de
la hora.
4 Introduzca una contraseña para proteger las páginas de
Interfaz del operador seleccionadas y, si lo desea, la
Configuración.
NOTA: Puede cambiar la contraseña
predeterminada, o anular la selección de la
protección de configuración opcional.
Si desea obtener más información, consulte
Protección mediante contraseña
(véase página 43)
.
5 Activar la casilla Configuración de la protección de la
contraseña para emplear la contraseña que protege la
Configuración.
6 Seleccione la página de inicio. La página de inicio es la
primera página que se muestra una vez que se ha
descargado la aplicación en el controlador y también al
pulsar el botón Inicio en la Visualización gráfica remota.
La página del Menú de configuración está
seleccionada de forma predeterminada.
También se puede seleccionar cualquier otra
página de la interfaz del operador que haya
creado. Si desea obtener más información,
consulte Agregar una página
(véase página 66)
.
Paso Acción
1 Seleccione el nodo de la tecla F1 o de la tecla F2 en el árbol.
2 Seleccione el Tipo de acción que desea asociar a esta tecla. Si desea obtener más información,
consulte Acción
(véase página 79)
.

Crear una interfaz del operador
66 EIO0000003324 09/2020
Añadir/eliminar una página
Descripción general
Para construir una Interfaz del operador, necesita crear páginas en la ficha Visualización mediante
plantillas.
Agregar una Página
En esta tabla se explica cómo agregar una página a la Interfaz del operador:
Paso Acción
1
Haga clic en el botón (Agregar página).
Resultado: Aparece la ventana Seleccionar una plantilla de página.
2 Seleccione la página de plantilla:
Plantilla del menú
(véase página 67)
Plantilla de supervisión
(véase página 68)
Plantilla de tabla de control
(véase página 69)
Plantilla de gráfico de barras
(véase página 70)
Plantilla de gráfico de barras doble
(véase página 71)
Plantilla de indicador de volumen
(véase página 72)
Plantilla de tabla de control de conmutación
(véase página 73)
3 Haga clic en Aceptar para validar.
Resultado: Se agrega la página al árbol
(véase página 63)
.
4 Configure las propiedades de la página tal como se describe en el apartado Configurar una
página
(véase página 75)
.
5 Repita los pasos del 1 al 3 para añadir otra página a la Interfaz del operador.

Crear una interfaz del operador
EIO0000003324 09/2020 67
Plantilla de menús
La página de menús permite al usuario navegar por diversas páginas.
El usuario puede pulsar el botón Seleccionar (R1) para mostrar la página seleccionada.
Para configurar una página de menús:
Ejemplo de TMH2GDB:
Nodo Elementos en un ejemplo de EcoStruxure Machine Expert - Basic:
Paso Acción
1 Seleccione el nodo Elementos en el árbol.
2 Introduzca el texto que se mostrará.
3 Seleccione una Página de destino.
4 Haga clic en Añadir.
5 Repita los pasos 2 a 4 para configurar otras páginas de destino. Puede añadir como máximo 30
elementos a la página.
6 Configure las asignaciones de las teclas R2, R3 y R4
(véase página 77)
.

Crear una interfaz del operador
68 EIO0000003324 09/2020
Plantilla del monitor
La página del monitor permite al usuario supervisar las variables de memoria o de E/S.
Si está activado el Acceso de escritura, el usuario podrá pulsar el botón Editar (R1) para modificar
el valor de variable seleccionado.
Para configurar la página del monitor:
Vista de TMH2GDB:
Nodo Elementos en un ejemplo de EcoStruxure Machine Expert - Basic:
Paso Acción
1 Seleccione el nodo Elementos en el árbol.
2 Introduzca el texto que se mostrará.
3 Introduzca la variable que supervisar.
Consulte el tipo de variable disponible
(véase página 76)
o el texto que aparece al colocar el
puntero del ratón en Variable.
4 Haga clic en Añadir.
5 En la línea que ha creado, active la casilla de verificación Acceso de escritura para permitir que
el usuario modifique el valor de la variable.
6 Repita los pasos del 2 al 5 para configurar otras variables que supervisar. Puede añadir como
máximo 30 elementos a la página.
7 Configure las asignaciones de las teclas R2, R3 y R4
(véase página 77)
.

Crear una interfaz del operador
EIO0000003324 09/2020 69
Plantilla de la tabla de control
La página de control permite al usuario controlar los valores de la memoria o del bit de E/S.
En esta página se puede asociar una cadena de texto a cada valor de bit.
Si está activado el Acceso de escritura, el usuario podrá pulsar los botones On (R1) u Off (R2)
para cambiar el valor de bit seleccionado.
Para configurar la página de control:
Vista de TMH2GDB:
Nodo Elementos en un ejemplo de EcoStruxure Machine Expert - Basic:
Paso Acción
1 Seleccione el nodo Elementos en el árbol.
2 Introduzca la variable que se controlará.
Consulte el tipo de variable disponible
(véase página 76)
o el texto que aparece al colocar el
puntero del ratón en Variable.
3 Introduzca el Texto cuando el valor es TRUE.
4 Introduzca el Texto cuando el valor es FALSE.
5 Haga clic en Añadir.
6 En la línea que ha creado, active la casilla de verificación Acceso de escritura para permitir que
el usuario modifique el valor de la variable.
7 Repita los pasos del 2 al 6 para configurar otras variables que supervisar. Puede añadir como
máximo 30 elementos a la página.
8 Configure las asignaciones de las teclas R3 y R4
(véase página 77)
.

Crear una interfaz del operador
70 EIO0000003324 09/2020
Plantilla del gráfico de barras
La página de gráfico de barras permite al usuario controlar un valor de variable de memoria o de
E/S mediante una representación de gráfico de barras del valor de la variable.
Si está activado el Acceso de escritura, el usuario podrá pulsar el botón Editar (R1) para cambiar
el valor.
Para configurar la página de gráfico de barras:
Vista de TMH2GDB:
Nodo Elementos en un ejemplo de EcoStruxure Machine Expert - Basic:
Paso Acción
1 Seleccione el nodo Elementos en el árbol.
2 Introduzca la variable que se controlará.
Consulte el tipo de variable disponible
(véase página 76)
o el texto que aparece al colocar el
puntero del ratón en Variable.
3 Introduzca la Unidad.
4 Introduzca el valor de escala Mínimo.
5 Introduzca el valor de escala Máximo.
6 Active la casilla de verificación Acceso de escritura para permitir que el usuario modifique el
valor de la variable.
7 Configure las asignaciones de las teclas R2, R3 y R4
(véase página 77)
.

Crear una interfaz del operador
EIO0000003324 09/2020 71
Plantilla de gráfico de barras doble
La página de gráfico de barras doble permite al usuario controlar el valor de 2 variables de
memoria o E/S mediante una representación de gráfico de barras del valor de cada variable.
Si está activado el Acceso de escritura, el usuario podrá editar la variable BarGraph1 mediante el
botón Editar.1 (R1) y la variable BarGraph2 mediante el botón Editar.2 (R2).
Para configurar la página de gráfico de barras doble:
Vista de TMH2GDB:
Paso Acción
1 Seleccione el nodo Elementos en el árbol.
2 Introduzca la variable que se controlará.
Consulte el tipo de variable disponible
(véase página 76)
o el texto que aparece al colocar el
puntero del ratón en Variable.
3 Introduzca la Unidad.
4 Introduzca el valor de escala Mínimo.
5 Introduzca el valor de escala Máximo.
6 Active la casilla de verificación Acceso de escritura para permitir que el usuario modifique el
valor de la variable.
7 Repita los pasos del 2 al 6 para configurar la segunda variable. Puede añadir como máximo 30
elementos a la página.
8 Configure las asignaciones de las teclas R3 y R4
(véase página 77)
.

Crear una interfaz del operador
72 EIO0000003324 09/2020
Nodo Elementos en un ejemplo de EcoStruxure Machine Expert - Basic:
Plantilla de indicador de volumen
La página de indicador de volumen permite al usuario controlar un valor de variable de memoria
o de E/S mediante una representación de indicador de volumen del valor de la variable.
Si está activado el Acceso de escritura, el usuario podrá pulsar el botón Editar (R1) para cambiar
el valor.
Para configurar la página de indicador de volumen:
Paso Acción
1 Seleccione el nodo Elementos en el árbol.
2 Introduzca la variable que se controlará.
Consulte el tipo de variable disponible
(véase página 76)
o el texto que aparece al colocar el
puntero del ratón en Variable.
3 Introduzca la Unidad.
4 Introduzca el valor de escala Mínimo.
5 Introduzca el valor de escala Máximo.
6 Active la casilla de verificación Acceso de escritura para permitir que el usuario modifique el
valor de la variable.
7 Configure las asignaciones de las teclas R2, R3 y R4
(véase página 77)
.

Crear una interfaz del operador
EIO0000003324 09/2020 73
Vista de TMH2GDB:
Nodo Elementos en un ejemplo de EcoStruxure Machine Expert - Basic:
Plantilla de tabla de control de conmutación
La página de control de conmutación permite al usuario controlar el valor de la memoria o del bit
de E/S.
En esta página se puede asociar una cadena de texto a cada valor de bit.
Si está activado el Acceso de escritura, el usuario podrá pulsar Not (R1) para alternar el valor del
bit seleccionado (de TRUE a FALSE o de FALSE a TRUE).
Para configurar la página de control de conmutación:
Paso Acción
1 Seleccione el nodo Elementos en el árbol.
2 Introduzca la variable que se controlará.
Consulte el tipo de variable disponible
(véase página 76)
o el texto que aparece al colocar el
puntero del ratón en Variable.
3 Introduzca el Texto cuando el valor es TRUE.
4 Introduzca el Texto cuando el valor es FALSE.
5 Haga clic en Añadir.
6 En la línea que ha creado, active la casilla de verificación Acceso de escritura para permitir que
el usuario modifique el valor de la variable.

Crear una interfaz del operador
74 EIO0000003324 09/2020
Vista de TMH2GDB:
Nodo Elementos en un ejemplo de EcoStruxure Machine Expert - Basic:
Eliminar una página
En esta tabla se explica cómo eliminar una página de la ficha Visualización:
7 Repita los pasos del 2 al 6 para configurar otras variables que se controlarán. Puede añadir
como máximo 30 elementos a la página.
8 Configure las asignaciones de las teclas R2, R3 y R4
(véase página 77)
.
Paso Acción
Paso Acción
1 Haga clic en la página que desee eliminar debajo del nodo de la Interfaz del operador en el árbol.
2
Haga clic en el botón (Eliminar página) o bien haga clic con el botón derecho del ratón
y seleccione Eliminar página.
Resultado: aparece una ventana de confirmación.
3 Haga clic en Sí.
Resultado: Se elimina la página.

Crear una interfaz del operador
EIO0000003324 09/2020 75
Configurar una página
Descripción general
En el árbol, la página agregada se representa así:
ID de la página
Elementos
Tecla R1 (si está disponible)
Tecla R2 (si está disponible)
Tecla R3
Tecla R4 (si está disponible)
Propiedades de la página
Este procedimiento explica cómo definir las Propiedades de la página:
El Índice de página que se muestra es generado automáticamente por EcoStruxure Machine
Expert - Basic y se puede escribir en un programa de usuario para mostrar la página, o bien se
puede leer mediante un programa de usuario para detectar la página que se está mostrando
actualmente.
Para obtener más información, consulte la descripción
(véase Modicon M221, Controlador lógico,
Guía de programación)
de palabra de sistema (%SW184).
Paso Acción Comentario
1 Haga clic en el nodo de ID de la página en el árbol.
Resultado: Aparecen las Propiedades de la página.
Para cambiar el nombre del ID de la página,
haga doble clic en él o bien haga clic con el
botón derecho del ratón y seleccione
Cambiar nombre de la página.
2 Introduzca un título para la página en el campo
Título.
–
3 Introduzca un texto de ayuda en el campo Texto de
ayuda si lo ve necesario.
El texto de ayuda se muestra al pulsar la
tecla Información en el Visualización gráfica
remota. (1)
4 Activar/desactivar la casilla Protección por
contraseña para proteger esta página con la
contraseña o para excluir esta página de esa
protección.
Si desea obtener más información, consulte
Protección mediante contraseña
(véase página 43)
.
(1) Si no se introduce ningún texto, la tecla Información no tiene ningún efecto en esta página.

Crear una interfaz del operador
76 EIO0000003324 09/2020
Elementos
La configuración de los elementos depende de la plantilla.
Introduzca un texto personalizado y/o valores apropiados según cada plantilla. Si desea obtener
más información, consulte Páginas de plantilla
(véase página 66)
.
Puede añadir como máximo 30 elementos a cada página.
En esta tabla se describen los tipos de objeto que se pueden introducir en los campos Variable,
Unidad, Mínimo y Máximo de la plantilla:
%I %Q %IW %QW %IWS %QWS %M o
%MWi.
Xk
%S %MW %KW %MD %SW Valor
numé-
rico
Texto
Variable/Variable1
Supervisión x x x x x x x x x x x x – –
Tabla de
control
xx – – – – x x – – – – – –
Tabla de
control de
conmutación
xx – – – – x x – – – – – –
Gráfico de
barras
–– x x – – – – x – x x – –
Gráfico de
barras doble
–– x x – – – – x – x x – –
Vúmetro – – x x – – – – x – x x – –
Variable/Variable2
Gráfico de
barras doble
–– x x – – – – x – x x – –
Unidad
Gráfico de
barras
–– – – – – – – – – – – – x
Gráfico de
barras doble
–– – – – – – – – – – – – x
Vúmetro – – – – – – – – – – – – – x

Crear una interfaz del operador
EIO0000003324 09/2020 77
Rellene los campos siguiendo las reglas descritas en el apartado Objetos de lenguaje
(véase EcoStruxure Machine Expert - Basic, Guía de la biblioteca de funciones genéricas)
.
Asignación de las teclas R1, R2, R3 y R4
Cuando aparece una tecla en el árbol, significa que puede asignarle una acción y una etiqueta:
NOTA: Las plantillas tienen una tecla configurada de manera predeterminada para ir a la página
Visualización de alarma. Si lo desea, puede cambiar la acción predeterminada y la etiqueta de la
tecla.
Mínimo/máximo
Gráfico de
barras
–– – – – – – – – – – – x –
Gráfico de
barras doble
–– – – – – – – – – – – x –
Vúmetro – – – – – – – – – – – – x –
%I %Q %IW %QW %IWS %QWS %M o
%MWi.
Xk
%S %MW %KW %MD %SW Valor
numé-
rico
Texto
Paso Acción
1 Seleccione el nodo de la tecla en el árbol.
2 Seleccione el Tipo de acción que desea asociar a esta tecla. Si desea obtener más información,
consulte acción
(véase página 79)
.
3 Si lo desea, también puede cambiar el nombre de la etiqueta predeterminada que aparece
encima de la tecla correspondiente de la Visualización gráfica remota. Para ello, haga doble clic
en el nodo o bien haga clic con el botón derecho del ratón y seleccione Cambiar nombre.

Crear una interfaz del operador
78 EIO0000003324 09/2020
Exportar/importar una página
Descripción general
Las páginas de la Interfaz del operador pueden ser:
Exportadas al PC
Importadas desde el PC
Exportar una página
Para exportar una página, haga clic en el botón (Exportar Página).
La página se ha guardado en el PC en un formato específico.
Importar una página
Para importar una página, haga clic en el botón (Importar página).
Luego se puede importar la página desde la misma aplicación, o desde otra aplicación con
EcoStruxure Machine Expert - Basic.

Crear una interfaz del operador
EIO0000003324 09/2020 79
Acciones
Descripción general
Una acción se puede asociar a algunas teclas:
Tecla R1, R2, R3 o R4 (si está disponible) para cada página. Consulte Asignación de las teclas
R1, R2, R3 y R4
(véase página 77)
.
Tecla F1 o tecla F2 para todas las páginas. Consulte Asignación de las teclas F1 y F2
(véase página 65)
.
La acción se ejecutará al pulsar las teclas.
Definir acciones
Se distingue entre dos tipos de acciones:
Función
Navegación
Función
El forzado de valores de entrada y salida en un Logic Controller en ejecución puede tener
consecuencias graves para el funcionamiento de una máquina o de un proceso. Solo deben
utilizar esta función las personas que comprendan las implicaciones de la lógica de control y que
entiendan las consecuencias de una E/S forzada en la máquina o el proceso.
Estas funciones están disponibles:
WRITE_VALUE
FORCE
UNFORCE
INCREMENTO
NOT
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Debe tener conocimientos previos sobre el proceso y sobre el equipo controlado antes de
intentar forzar físicamente las entradas/salidas del Logic Controller o de escribir valores en las
ubicaciones de la memoria del Logic Controller.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.

Crear una interfaz del operador
80 EIO0000003324 09/2020
En esta gráfica se muestra un ejemplo de una función en la ficha Visualización:
Función de los tipos de objeto
En esta tabla se describen los tipos de objeto que se pueden introducir en los campos Variables,
Valor, Incrementos, Mínimo y Máximo para las funciones, en caso de ser·apropiado:
Rellene los campos siguiendo las reglas descritas en el apartado Objetos de lenguaje
(véase EcoStruxure Machine Expert - Basic, Guía de la biblioteca de funciones genéricas)
.
%I %Q %IW %QW %IWS %QWS %M o
%MWi.
Xk
%S %MW %KW %MD %SW Valor
numé-
rico
Texto
Variable
WRITE_
VALUE
–x – x – – x x x – x x – –
FORCE xx – – – – – – – – – – – –
UNFOR-
CE
xx – – – – – – – – – – – –
INCRE-
MENT
–– – x – – – – x – x – – –
NOT –x – – – – x x – – – – – –
Valor
WRITE_
VALUE
xx x x x x x x x x x x x –
Incrementos
INCRE-
MENT
–– – – – – – – x – – – x –
Mínimo/máximo
INCRE-
MENT
–– – – – – – – – – – – x –

Crear una interfaz del operador
EIO0000003324 09/2020 81
Navegación
La acción Navegación permite ir a otra página.
En una lista desplegable, puede escoger una Página de destino que corresponde a:
Cualquier página definida en la Interfaz del operador
Una página de la Configuración

Crear una interfaz del operador
82 EIO0000003324 09/2020
Definición de alarmas
Descripción general
La Visualización de alarmas permite definir un conjunto personalizado de mensajes de alarma
asociados con bits de memoria o de E/S. Después, el texto de la alarma se muestra en
Visualización gráfica remota cuando se detecta un flanco ascendente en el bit asociado. Puede
definir hasta un máximo de 20 mensajes de alarma.
NOTA: Las alarmas no se guardan tras apagar y encender el controlador.
Si desea obtener más información sobre la alarma de Visualización gráfica remota, consulte el
Menú de alarma
(véase página 52)
.
Las alarmas tienen que configurarse primero en la página Visualización alarma > Elementos de la
ficha Visualización de EcoStruxure Machine Expert - Basic.
Configuración de alarmas
En este gráfico se muestra la página Visualización alarma > Elementos de la ficha Visualización:
Introduzca Texto de alarma y valores de Variables personalizados.
Los tipos de objeto que puede introducir en el campo Variables son:
%I
%Q
%M
%S
%MWi.Xk
Rellene el campo siguiendo las reglas descritas en el apartado Objetos de lenguaje
(véase EcoStruxure Machine Expert - Basic, Guía de la biblioteca de funciones genéricas)
.

EIO0000003324 09/2020 83
Modicon TMH2GDB
Glosario
EIO0000003324 09/2020
Glosario
!
%I
Según el estándar IEC, %I representa un bit de entrada (por ejemplo, un objeto de lenguaje de
tipo IN digital).
%IW
Según el estándar IEC, %IW representa un registro de palabra de entrada (por ejemplo, un objeto
de lenguaje de tipo IN analógico).
%KW
Según el estándar IEC, %KW representa una palabra constante.
%MW
Según el estándar IEC, %MW representa un registro de palabra de memoria (por ejemplo, un
objeto de lenguaje del tipo palabra de memoria).
%Q
Según el estándar IEC, %Q representa un bit de salida (por ejemplo, un objeto de lenguaje de tipo
OUT digital).
%QW
Según el estándar IEC, %QW representa un registro de palabra de salida (por ejemplo, un objeto
de lenguaje de tipo OUT analógico).
%S
Según el estándar IEC, %S representa un bit del sistema.
%SW
Según el estándar IEC, %SW representa una palabra del sistema.
A
Aplicación de arranque
(
aplicación de arranque
) El archivo binario que contiene la aplicación. Normalmente está
guardada en el controlador y permite que este arranque en la aplicación generada por el usuario.
D
DWORD
(
palabra doble
) Con codificación en formato de 32 bits.

Glosario
84 EIO0000003324 09/2020
E
E/S
(
entrada/salida
)
EN
EN identifica uno de los muchos estándares europeos apoyados por el CEN (
Comité Europeo de
Normalización
), el CENELEC (
Comité Europeo de Normalización Eléctrica
) o el ETSI (
Instituto
Europeo de Normas de Telecomunicación
).
Ethernet
Una tecnología de capas física y de conexión de datos para LANs, también conocida como
IEEE 802.3.
I
ID
(
identificador/identificación
)
IEC
(
International Electrotechnical Commission
) Una organización de estándares internacional sin
ánimo de lucro y no gubernamental que prepara y publica estándares internacionales para todas
las tecnologías eléctricas, electrónicas y relacionadas.
IP
(
protocolo de Internet
) Parte de la familia de protocolos TCP/IP que hace un seguimiento de las
direcciones de Internet de los dispositivos, encamina los mensajes salientes y reconoce los
mensajes entrantes.
M
ms
(
milisegundo
)
R
RJ45
Un conector estándar de 8 pins para cables de red definido para Ethernet.
RS-485
Un tipo estándar de bus de comunicación serie basado en dos cables (también conocido como
EIA RS-485).

Glosario
EIO0000003324 09/2020 85
T
tarea maestra
Una tarea del procesador que se ejecuta en el software de programación. La tarea maestra consta
de dos secciones:
IN: las entradas se copian en la sección IN antes de ejecutar la tarea maestra.
OUT: las salidas se copian en la sección OUT después de ejecutar la tarea maestra.
W
WORD
Un tipo codificado en formato de 16 bits.

Glosario
86 EIO0000003324 09/2020

EIO0000003324 09/2020 87
Modicon TMH2GDB
Índice
EIO0000003324 09/2020
Índice
Symbols
asignación de pins,
34
A
acción
asignaciones de teclas,
65
,
77
definición,
79
función,
79
navegación,
81
tipos de objeto,
80
actualizar firmware de Visualización gráfica
remota,
37
alarma
configuración,
82
reinicio de la alarma,
53
alarmas, definir,
82
añadir/eliminar páginas en la interfaz del ope-
rador,
66
C
características ambientales,
16
certificaciones y estándares,
18
conexión,
31
conexión a tierra,
35
configuración de línea serie,
60
contraseña
gestión,
43
D
descripción
física,
14
sistema,
14
visualización,
15
dimensiones,
24
distancias,
24
F
ficha de visualización
botón de descripción,
63
descripción del árbol,
63
ficha visualización
definir propiedades,
65
requisito previo,
60
firmware de Visualización gráfica remota, ac-
tualizar,
37
función,
79
tipos de objeto,
80
G
generales, propiedades,
64
H
historial de alarmas,
53
I
interfaz del operador
añadir/eliminar páginas,
66
asignar teclas,
79
crear,
59
definir alarmas,
82
M
menús de configuración,
45
montaje,
27

Índice
88 EIO0000003324 09/2020
P
página
agregar,
66
configurar,
75
editar,
49
eliminar,
74
exportar,
78
importar,
78
inicio,
40
propiedades,
75
página de inicio,
40
pantalla gráfica,
40
plantilla
elementos,
76
plantilla de tabla de control de conmutación,
73
plantillas de gráfico de barras doble,
71
plantillas de indicador de volumen,
72
plantillas de la tabla de control,
69
plantillas de menús,
67
plantillas del gráfico de barras,
70
plantillas del monitor,
68
propiedades generales,
64
protección con contraseña de Visualización
gráfica remota,
43
R
requisitos de cerramiento,
16
S
susceptibilidad electromagnética,
17
T
teclas, asignar en interfaz del operador,
79
tipos de objeto,
55
TMH2GDB
conexión de Visualización gráfica remota,
31
crear una interfaz del operador,
59
interfaz del operador, añadir/eliminar pá-
ginas,
66
menús de configuración,
45
propiedades generales,
64
protección con contraseña de Visualiza-
ción gráfica remota,
43
uso de Visualización gráfica remota,
39
V
variable
agregar,
55
editar,
56
,
56
,
57
,
57
eliminar,
55
visualización de alarmas,
52

EIO0000003332.00
www.se.com
Modicon TMC2
EIO0000003332 12/2018
Modicon TMC2
Cartuchos
Guía de programación
12/2018

2EIO0000003332 12/2018
La información que se ofrece en esta documentación contiene descripciones de carácter general
y/o características técnicas sobre el rendimiento de los productos incluidos en ella. La presente
documentación no tiene como objeto sustituir dichos productos para aplicaciones de usuario
específicas, ni debe emplearse para determinar su idoneidad o fiabilidad. Los usuarios o
integradores tienen la responsabilidad de llevar a cabo un análisis de riesgos adecuado y
completo, así como la evaluación y las pruebas de los productos en relación con la aplicación o el
uso de dichos productos en cuestión. Ni Schneider Electric ni ninguna de sus filiales o asociados
asumirán responsabilidad alguna por el uso inapropiado de la información contenida en este
documento. Si tiene sugerencias de mejoras o modificaciones o ha hallado errores en esta
publicación, le rogamos que nos lo notifique.
Usted se compromete a no reproducir, salvo para su propio uso personal, no comercial, la
totalidad o parte de este documento en ningún soporte sin el permiso de Schneider Electric, por
escrito. También se compromete a no establecer ningún vínculo de hipertexto a este documento
o su contenido. Schneider Electric no otorga ningún derecho o licencia para el uso personal y no
comercial del documento o de su contenido, salvo para una licencia no exclusiva para consultarla
"tal cual", bajo su propia responsabilidad. Todos los demás derechos están reservados.
Al instalar y utilizar este producto es necesario tener en cuenta todas las regulaciones sobre
seguridad correspondientes, ya sean regionales, locales o estatales. Por razones de seguridad y
para garantizar que se siguen los consejos de la documentación del sistema, las reparaciones solo
podrá realizarlas el fabricante.
Cuando se utilicen dispositivos para aplicaciones con requisitos técnicos de seguridad, siga las
instrucciones pertinentes.
Si con nuestros productos de hardware no se utiliza el software de Schneider Electric u otro
software aprobado, pueden producirse lesiones, daños o un funcionamiento incorrecto del equipo.
Si no se tiene en cuenta esta información, se pueden causar daños personales o en el equipo.
© 2018 Schneider Electric. Reservados todos los derechos.

EIO0000003332 12/2018 3
Tabla de materias
Información de seguridad . . . . . . . . . . . . . . . . . . . . . . . . 5
Acerca de este libro . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
Capítulo 1 Información general sobre la configuración de E/S . . . . 11
Prácticas generales de la configuración de E/S . . . . . . . . . . . . . . . . . 12
Descripción general. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Utilización de cartuchos en una configuración . . . . . . . . . . . . . . . . . . 14
Configuración de cartuchos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
Capítulo 2 Configuración de cartuchos TMC2 estándar . . . . . . . . . 19
TMC2AI2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
TMC2TI2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
TMC2AQ2V . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
TMC2AQ2C . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
TMC2SL1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
Capítulo 3 Configuración de cartuchos TMC2 de aplicaciones . . . . 33
TMC2HOIS01 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
TMC2PACK01 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
TMC2CONV01 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
Capítulo 4 Diagnóstico de cartuchos analógicos de TMC2 . . . . . . . 43
Diagnóstico de cartuchos analógicos TMC2 . . . . . . . . . . . . . . . . . . . . 43
Índice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45

4EIO0000003332 12/2018

EIO0000003332 12/2018 5
Información de seguridad
Información importante
AVISO
Lea atentamente estas instrucciones y observe el equipo para familiarizarse con el dispositivo
antes de instalarlo, utilizarlo, revisarlo o realizar su mantenimiento. Los mensajes especiales que
se ofrecen a continuación pueden aparecer a lo largo de la documentación o en el equipo para
advertir de peligros potenciales, o para ofrecer información que aclara o simplifica los distintos
procedimientos.

6EIO0000003332 12/2018
TENGA EN CUENTA LO SIGUIENTE:
La instalación, el manejo, las revisiones y el mantenimiento de equipos eléctricos deberán ser
realizados sólo por personal cualificado. Schneider Electric no se hace responsable de ninguna
de las consecuencias del uso de este material.
Una persona cualificada es aquella que cuenta con capacidad y conocimientos relativos a la
construcción, el funcionamiento y la instalación de equipos eléctricos, y que ha sido formada en
materia de seguridad para reconocer y evitar los riesgos que conllevan tales equipos.

EIO0000003332 12/2018 7
Acerca de este libro
Presentación
Objeto
En este documento se describe la configuración del software de los cartuchos TMC2 para
controladores optimizados compatibles con EcoStruxure Machine Expert – Basic. Para obtener
más información, consulte los documentos independientes que se ofrecen en la ayuda en línea de
EcoStruxure Machine Expert – Basic.
Campo de aplicación
Este documento se ha actualizado para la publicación de EcoStruxureTM Machine Expert - Basic
V1.0.
Documentos relacionados
Título de la documentación Número de referencia
EcoStruxure Machine Expert - Basic - Guía de funcionamiento
EIO0000003281 (ENG)
EIO0000003282 (FRA)
EIO0000003283 (GER)
EIO0000003284 (SPA)
EIO0000003285 (ITA)
EIO0000003286 (CHS)
EIO0000003287 (POR)
EIO0000003288 (TUR)
Modicon M221 Logic Controller - Guía de programación
EIO0000003297 (ENG)
EIO0000003298 (FRA)
EIO0000003299 (GER)
EIO0000003300 (SPA)
EIO0000003301 (ITA)
EIO0000003302 (CHS)
EIO0000003303 (POR)
EIO0000003304 (TUR)

8EIO0000003332 12/2018
Puede descargar estas publicaciones técnicas y otra información técnica de nuestro sitio web
https://www.schneider-electric.com/en/download
Modicon M221 Logic Controller - Guía de hardware
EIO0000003313 (ENG)
EIO0000003314 (FRA)
EIO0000003315 (GER)
EIO0000003316 (SPA)
EIO0000003317 (ITA)
EIO0000003318 (CHS)
EIO0000003319 (POR)
EIO0000003320 (TUR)
Modicon TMC2 Cartuchos - Guía de hardware
EIO0000003337 (ENG)
EIO0000003338 (FRA)
EIO0000003339 (GER)
EIO0000003340 (SPA)
EIO0000003341 (ITA)
EIO0000003342 (CHS)
EIO0000003343 (POR)
EIO0000003344 (TUR)
Título de la documentación Número de referencia

EIO0000003332 12/2018 9
Información relativa al producto
1 Para obtener información adicional, consulte NEMA ICS 1.1 (última edición), "Safety Guidelines
for the Application, Installation, and Maintenance of Solid State Control" (Directrices de seguridad
para la aplicación, la instalación y el mantenimiento del control de estado estático) y NEMA ICS
7.1 (última edición), "Safety Standards for Construction and Guide for Selection, Installation and
Operation of Adjustable-Speed Drive Systems" (Estándares de seguridad para la construcción y
guía para la selección, instalación y utilización de sistemas de unidades de velocidad ajustable) o
su equivalente aplicable a la ubicación específica.
ADVERTENCIA
PÉRDIDA DE CONTROL
El diseñador del esquema de control debe tener en cuenta las posibles modalidades de fallo
de rutas de control y, para ciertas funciones de control críticas, proporcionar los medios para
lograr un estado seguro durante y después de un fallo de ruta. Algunas funciones de control
críticas son, por ejemplo, la parada de emergencia y la parada de sobrecarrera, un corte de
alimentación o un reinicio.
Para las funciones críticas de control deben proporcionarse rutas de control separadas o
redundantes.
Las rutas de control del sistema pueden incluir enlaces de comunicación. Deben tenerse en
cuenta las implicaciones de retardos de transmisión imprevistos o fallos del enlace.
Tenga en cuenta todas las reglamentaciones para la prevención de accidentes y las
normativas de seguridad locales.1
Cada instalación de este equipo debe probarse de forma individual y exhaustiva antes de
entrar en servicio.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Utilice solo software aprobado por Schneider Electric para este equipo.
Actualice el programa de aplicación siempre que cambie la configuración de hardware física.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.

10 EIO0000003332 12/2018

EIO0000003332 12/2018 11
Modicon TMC2
Información general sobre la configuración de E/S
EIO0000003332 12/2018
Información general sobre la configuración de E/S
Capítulo 1
Información general sobre la configuración de E/S
Introducción
En este capítulo encontrará información general para ayudarle a configurar los cartuchos TMC2
para EcoStruxure Machine Expert – Basic.
Contenido de este capítulo
Este capítulo contiene los siguientes apartados:
Apartado Página
Prácticas generales de la configuración de E/S 12
Descripción general 13
Utilización de cartuchos en una configuración 14
Configuración de cartuchos 16

Información general sobre la configuración de E/S
12 EIO0000003332 12/2018
Prácticas generales de la configuración de E/S
Hacer coincidir la configuración de hardware y software
La E/S que puede estar integrada en su controlador es independiente de la E/S que puede haber
añadido en forma de ampliación de E/S. Es importante que la configuración de E/S lógica dentro
de su programa coincida con la configuración de E/S física de su instalación. Si añade o elimina
cualquier E/S física desde o hacia el bus de ampliación de E/S o, en función de la referencia del
controlador, desde o hacia el controlador (en forma de cartuchos), es obligatorio que actualice la
configuración de su aplicación. Esto también se aplica a cualquier dispositivo de bus de campo
que pueda tener en su instalación. En caso contrario, existe la posibilidad de que el bus de
ampliación o el bus de campo dejen de funcionar mientras la E/S incrustada que puede haber en
su controlador continúe funcionando.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Actualice la configuración del programa cada vez que añada o elimine cualquier tipo de
ampliación de E/S en el bus de E/S, o si añade o elimina cualquier dispositivo en el bus de
campo.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.

Información general sobre la configuración de E/S
EIO0000003332 12/2018 13
Descripción general
Introducción
Los cartuchos TMC2 conectan con Modicon TM221C Logic Controller para aumentar el número
de E/S o líneas serie disponibles en el controlador.
Los cartuchos pueden ser:
Cartuchos analógicos
Cartucho de línea serie
Funciones de los cartuchos
En la tabla siguiente se describen las funciones de los cartuchos TMC2:
Referencia Descripción
TMC2AI2
(véase página 20)
Cartucho TMC2 con 2 entradas analógicas de corriente o tensión (de 0 a 10 V, de 0 a
20 mA, de 4 a 20 mA), 12 bits
TMC2TI2
(véase página 22)
Cartucho TMC2 con 2 entradas analógicas de temperatura (termoelemento, RTD),
14 bits
TMC2AQ2V
(véase página 25)
Cartucho TMC2 con 2 salidas analógicas de tensión (de 0 a 10 V), 12 bits
TMC2AQ2C
(véase página 26)
Cartucho TMC2 con 2 salidas analógicas de corriente (de 4 a 20 mA), 12 bits
TMC2SL1
(véase página 27)
Cartucho TMC2 con 1 línea serie (RS232 o RS485)
TMC2HOIS01
(véase página 34)
Cartucho de aplicación TMC2 con 2 entradas analógicas de corriente o tensión para
la elevación de las celdas de carga
TMC2PACK01
(véase página 36)
Cartucho de aplicación TMC2 con 2 entradas analógicas de corriente o tensión para
el empaquetado
TMC2CONV01
(véase página 38)
Cartucho de aplicación TMC2 con 1 línea serie para el transporte

Información general sobre la configuración de E/S
14 EIO0000003332 12/2018
Utilización de cartuchos en una configuración
Adición de un cartucho
Se pueden conectar cartuchos TMC2 a Modicon TM221C Logic Controller con uno o dos slots
para cartucho.
NOTA: No es posible añadir dos cartuchos de línea serie al mismo controlador lógico. Para
obtener más información sobre la compatibilidad de los cartuchos con controladores específicos,
consulte la Guía de hardware de su controlador lógico.
En los pasos siguientes se explica cómo añadir un cartucho a un controlador lógico en una
configuración de EcoStruxure Machine Expert - Basic:
Reemplazo de un cartucho existente
Para reemplazar un cartucho existente por una referencia distinta, arrastre y suelte el nuevo
cartucho en el cartucho que se va a reemplazar.
Aparecerá un mensaje pidiéndole que confirme la operación. Haga clic en Sí para continuar.
Paso Descripción Resultado
1 Haga clic en la ficha Configuración de la ventana
de EcoStruxure Machine Expert - Basic.
–
2 En el área del catálogo de hardware de la
ventana, seleccione Cartuchos M221.
–
3 Seleccione una referencia de cartucho. En la esquina inferior derecha de la ventana de
EcoStruxure Machine Expert - Basic aparecerá
una descripción de las características físicas del
cartucho seleccionado.
4 Arrastre y suelte el cartucho en un slot para
cartucho vacío de un controlador lógico Modicon
TM221C Logic Controller.
El cartucho se añadirá al área MyController →
Bus de E/S del árbol de dispositivos.
Para los cartuchos de línea serie, aparecerá el
nodo SL2 (línea serie). Para los cartuchos
analógicos, aparecerá inmediatamente el
subnodo Entradas analógicas o Salidas
analógicas bajo la referencia del cartucho.
La información siguiente sobre los cartuchos
seleccionados aparecerá en la parte inferior
central de la ventana de EcoStruxure Machine
Expert - Basic:
Información acerca del estado actual del
cartucho.
Para los cartuchos de aplicaciones, una lista
de plantillas de proyecto disponibles para el
cartucho.

Información general sobre la configuración de E/S
EIO0000003332 12/2018 15
Cómo quitar un cartucho
Para quitar un cartucho de un controlador, haga clic en el cartucho y pulse la tecla Eliminar o haga
clic con el botón derecho sobre el cartucho y haga clic en Quitar en el menú contextual que
aparece.
Si el cartucho contiene al menos una dirección que se usa en la lógica del usuario del programa,
aparecerá un mensaje en el que se le solicitará que confirme la operación. Haga clic en Sí para
continuar.

Información general sobre la configuración de E/S
16 EIO0000003332 12/2018
Configuración de cartuchos
Descripción general
Puede configurar cartuchos desde:
La ficha Configuración
La ficha Programación
Visualización de los detalles de la configuración
En la ficha Configuración podrá configurar módulos de cartuchos.
Los siguientes pasos describen cómo ver la configuración de entradas digitales en la ficha
Configuración:
Paso Descripción
1 Seleccione la ficha Configuración.
2 Para los cartuchos analógicos, seleccione Cartucho 1 o Cartucho 2 en el árbol de
dispositivos a la izquierda de la ventana de EcoStruxure Machine Expert - Basic y, a
continuación, haga clic en el subnodo Entradas analógicas o Salidas analógicas.
Para los cartuchos de línea serie, seleccione SL2 (línea serie) en el árbol de dispositivos a
la izquierda de la ventana de EcoStruxure Machine Expert - Basic.
Aparecerán las propiedades del cartucho seleccionado.
3 Consulte Configuración de cartuchos TMC2 estándar
(véase página 19)
o Configuración de
cartuchos TMC2 de aplicaciones
(véase página 33)
para obtener detalles sobre la
configuración.

Información general sobre la configuración de E/S
EIO0000003332 12/2018 17
Visualización de las propiedades de programación
En la ficha Programación podrá configurar las propiedades relacionadas con la programación de
cartuchos analógicos, tales como símbolos y comentarios.
Para visualizar las propiedades de los cartuchos analógicos en la ficha Programación:
Paso Descripción
1 Seleccione la ficha Programación.
2 Haga clic en Herramientas → Objetos de E/S → Entradas analógicas o Herramientas →
Objetos de E/S → Salidas analógicas.
Aparecerá una lista de direcciones de E/S en la parte inferior central de la ventana de
EcoStruxure Machine Expert - Basic.
3 Baje hasta el rango de direcciones correspondientes al cartucho que esté configurando.
Aparecerán las siguientes propiedades:
Utilizado. Indica si la dirección está siendo utilizada en el programa.
Dirección. La dirección de entrada analógica o salida analógica. Consulte
Direccionamiento de E/S
(véase EcoStruxure Machine Expert - Basic, Guía de la
biblioteca de funciones genéricas)
para obtener más detalles.
Símbolo. Un símbolo opcional asociado con la dirección.
Haga doble clic en la columna Símbolo y escriba el nombre de un símbolo que asociar
con esta entrada.
Si el símbolo ya existe, haga clic con el botón derecho del ratón en la columna Símbolo
y elija Buscar y reemplazar para buscar y reemplazar las apariciones de este símbolo en
la aplicación.
Comentario. Un comentario opcional asociado con la dirección.
Haga doble clic en la columna Comentario y escriba un comentario que desee asociar
con esta dirección.

Información general sobre la configuración de E/S
18 EIO0000003332 12/2018

EIO0000003332 12/2018 19
Modicon TMC2
Configura ción de cartuchos TMC2 estándar
EIO0000003332 12/2018
Configura ción de cartuchos TMC2 estándar
Capítulo 2
Configuración de cartuchos TMC2 estándar
Introducción
En este capítulo se explica cómo configurar los cartuchos TMC2 estándar.
Contenido de este capítulo
Este capítulo contiene los siguientes apartados:
Apartado Página
TMC2AI2 20
TMC2TI2 22
TMC2AQ2V 25
TMC2AQ2C 26
TMC2SL1 27

Configuración de cartuchos TMC2 estándar
20 EIO0000003332 12/2018
TMC2AI2
Introducción
TMC2AI2 es un cartucho estándar con dos canales de tensión analógicos o de entrada de
corriente y resolución de 12 bits.
Los tipos de entrada de canal son:
De 0 a 10 V
De 0 a 20 mA
De 4 a 20 mA
Para obtener más información sobre hardware, consulte TMC2AI2
(véase Modicon TMC2,
Cartuchos, Guía de hardware)
.
Si ha conectado físicamente el canal analógico para una señal de tensión y configura el canal para
una señal de corriente en EcoStruxure Machine Expert - Basic, puede dañar el circuito analógico.
AVISO
EQUIPO NO OPERATIVO
Verifique que el cableado físico del circuito analógico es compatible con la configuración de
software del canal analógico.
El incumplimiento de estas instrucciones puede causar daño al equipo.

Configuración de cartuchos TMC2 estándar
EIO0000003332 12/2018 21
Configuración del módulo
Para cada entrada se puede definir:
Parámetro Valor Valor
predeterminado
Descripción
Utilizado Verdadero/Falso Falso Indica si la dirección está siendo utilizada
en el programa.
Dirección %IW0.x0y - La dirección del canal de entrada, en la que
x
es el número de módulo e
y
es el número
de canal.
Tipo Sin utilizar
De 0 a 10 V
De 0 a 20 mA
De 4 a 20 mA
Sin utilizar Elija la modalidad del canal.
Ámbito Normal Normal El rango de valores para un canal.
Mín. De 0 a 10 V De -32.768 a
32.767
0 Especifica el límite de medida inferior.
De 0 a 20 mA 0
De 4 a 20 mA 4.000
Máx. De 0 a 10 V De -32.768 a
32.767
10.000 Especifica el límite de medida superior.
De 0 a 20 mA 20.000
De 4 a 20 mA 20.000
Filtro 0...100 0 Especifica el valor de filtrado. Multiplique
por el valor de Unidad de filtro para obtener
el tiempo de filtrado.
Unidad de filtro 100 ms 100 ms Especifica la unidad de tiempo del valor de
filtrado.
Unidades ---

Configuración de cartuchos TMC2 estándar
22 EIO0000003332 12/2018
TMC2TI2
Introducción
TMC2TI2 es un cartucho estándar con dos canales de entrada analógica y resolución de 14 bits.
Los tipos de entrada de canal son:
Termoelemento K
Termoelemento J
Termoelemento R
Termoelemento S
Termoelemento B
Termoelemento E
Termoelemento T
Termoelemento N
Termoelemento C
PT100
PT1000
NI100
NI1000
Para obtener más información sobre hardware, consulte TMC2TI2
(véase Modicon TMC2,
Cartuchos, Guía de hardware)
.
Si ha conectado físicamente el canal analógico para una señal de tensión y configura el canal para
una señal de corriente en EcoStruxure Machine Expert - Basic, puede dañar el circuito analógico.
AVISO
EQUIPO NO OPERATIVO
Verifique que el cableado físico del circuito analógico es compatible con la configuración de
software del canal analógico.
El incumplimiento de estas instrucciones puede causar daño al equipo.

Configuración de cartuchos TMC2 estándar
EIO0000003332 12/2018 23
Configuración del módulo
Para cada entrada se puede definir:
Parámetro Valor Valor
predeterminado
Descripción
Utilizado Verdadero/Falso Falso Indica si la dirección está siendo
utilizada en el programa.
Dirección %IW0.x0y - La dirección del canal de entrada, en la
que
x
es el número de módulo e
y
es el
número de canal.
Tipo Termoelemento K
Termoelemento J
Termoelemento R
Termoelemento S
Termoelemento B
Termoelemento E
Termoelemento T
Termoelemento N
Termoelemento C
PT100
PT1000
NI100
NI1000
Termoelemento K Elija la modalidad del canal.
Ámbito Normal
Centígrados (0,1 °C)
Fahrenheit (0,1 °F) (excepto
Termoelemento B y C)
Fahrenheit (0,2 °F)
(solamente para
Termoelemento B y C)
Normal Elija las unidades de temperatura de un
canal.
Mín. Temperatura Consulte la siguiente tabla. Especifica el límite de medida inferior.
Máx. Temperatura Consulte la siguiente tabla. Especifica el límite de medida superior.
Filtro 0...100 0 Especifica el valor de filtrado.
Multiplique por el valor de Unidad de
filtro para obtener el tiempo de filtrado.
Unidad de filtro 100 ms 100 ms Especifica la unidad de tiempo del valor
de filtrado.
Unidades Consulte la siguiente tabla. Muestra la unidad de temperatura
configurada.

Configuración de cartuchos TMC2 estándar
24 EIO0000003332 12/2018
Tipo Personalizada Centígrados Fahrenheit
Mín. Máx. Mín. Máx. Unidades Mín. Máx. Unidades
Termoelemento
K
-32.768 32.767 -2.000 13.000 0,1 °C -3.280 23.720 0,1 °F
Termoelemento
J
-32.768 32.767 -2.000 10.000 0,1 °C -3.280 18.320 0,1 °F
Termoelemento
R
-32.768 32.767 0 17600 0,1 °C 320 32.000 0,1 °F
Termoelemento
S
-32.768 32.767 0 17600 0,1 °C 320 32.000 0,1 °F
Termoelemento
B
-32.768 32.767 0 18200 0,1 °C 160 16.540 0,2 °F
Termoelemento
E
-32.768 32.767 -2.000 8.000 0,1 °C -3.280 14.720 0,1 °F
Termoelemento
T
-32.768 32.767 -2.000 4.000 0,1 °C -3.280 7.520 0,1 °F
Termoelemento
N
-32.768 32.767 -2.000 13.000 0,1 °C -3.280 23.720 0,1 °F
Termoelemento
C
-32.768 32.767 0 23150 0,1 °C 160 20.995 0,2 °F
PT100 -32.768 32.767 -2.000 8.500 0,1 °C -3.280 15.620 0,1 °F
PT1000 -32.768 32.767 -2.000 6.000 0,1 °C -3.280 11.120 0,1 °F
NI100 -32.768 32.767 -600 1800 0,1 °C -760 3.560 0,1 °F
NI1000 -32.768 32.767 -600 1800 0,1 °C -760 3.560 0,1 °F

Configuración de cartuchos TMC2 estándar
EIO0000003332 12/2018 25
TMC2AQ2V
Introducción
TMC2AQ2V es un cartucho estándar con dos canales de salida de tensión analógicos y resolución
de 12 bits.
Los tipos de salida de canal son:
De 0 a 10 V
Para obtener más información sobre el hardware, consulte TMC2AQ2V
(véase Modicon TMC2,
Cartuchos, Guía de hardware)
.
Si ha conectado físicamente el canal analógico para una señal de tensión y configura el canal para
una señal de corriente en EcoStruxure Machine Expert - Basic, puede dañar el circuito analógico.
Configuración del módulo de cartucho
Para cada salida, puede definir:
AVISO
EQUIPO NO OPERATIVO
Verifique que el cableado físico del circuito analógico es compatible con la configuración de
software del canal analógico.
El incumplimiento de estas instrucciones puede causar daño al equipo.
Parámetro Valor Valor
predeterminado
Descripción
Utilizado Verdadero/Falso Falso Indica si la dirección está siendo utilizada
en el programa.
Dirección %QW0.x0y - Muestra la dirección del canal de salida,
donde
x
es el número de cartucho e
y
es el
número de canal.
Tipo 0-10 V 0-10 V La modalidad del canal.
Ámbito Normal Normal El rango de valores para un canal.
Mín. De 0 a 10 V De -32.768 a
32.767
0 Especifica el límite de medida inferior.
Máx. De 0 a 10 V De -32.768 a
32.767
10.000 Especifica el límite de medida superior.
Valor de retorno Mín....Máx. 0 (Mín. si 0 no
está en el rango)
Especifica el valor de retorno del canal de
salida.
Unidades ---

Configuración de cartuchos TMC2 estándar
26 EIO0000003332 12/2018
TMC2AQ2C
Introducción
TMC2AQ2C es un cartucho estándar con dos canales de salida analógicos y resolución de 12 bits.
Los tipos de salida de canal son:
De 4 a 20 mA
Para obtener más información sobre el hardware, consulte TMC2AQ2C
(véase Modicon TMC2,
Cartuchos, Guía de hardware)
.
Si ha conectado físicamente el canal analógico para una señal de tensión y configura el canal para
una señal de corriente en EcoStruxure Machine Expert - Basic, puede dañar el circuito analógico.
Configuración del módulo de cartucho
Para cada salida, puede definir:
AVISO
EQUIPO NO OPERATIVO
Verifique que el cableado físico del circuito analógico es compatible con la configuración de
software del canal analógico.
El incumplimiento de estas instrucciones puede causar daño al equipo.
Parámetro Valor Valor
predeterminado
Descripción
Utilizado Verdadero/Falso Falso Indica si la dirección está siendo utilizada
en el programa.
Dirección %QW0.x0y - Muestra la dirección del canal de salida,
donde
x
es el número de cartucho e
y
es el
número de canal.
Tipo 4-20 mA 4-20 mA La modalidad del canal.
Ámbito Normal Normal El rango de valores para un canal.
Mín. 4-20 mA De -32.768 a
32.767
4.000 Especifica el límite de medida inferior.
Máx. 4-20 mA De -32.768 a
32.767
20.000 Especifica el límite de medida superior.
Valor de retorno Mín....Máx. 0 (Mín. si 0 no
está en el rango)
Especifica el valor de retorno del canal de
salida.
Unidades --

Configuración de cartuchos TMC2 estándar
EIO0000003332 12/2018 27
TMC2SL1
Introducción
TMC2SL1 es un módulo de cartuchos estándar con una línea serie.
Para obtener más información sobre el hardware, consulte TMC2SL1
(véase Modicon TMC2,
Cartuchos, Guía de hardware)
.
Esta línea serie se puede configurar para cualquiera de los protocolos siguientes:
Modbus RTU
Modbus ASCII
ASCII
Puede configurar los ajustes físicos y de protocolo para la línea serie. De forma predeterminada,
las líneas serie están configuradas para el protocolo Modbus RTU.
NOTA: Solo puede añadir un cartucho de línea serie al controlador.

Configuración de cartuchos TMC2 estándar
28 EIO0000003332 12/2018
Configuración de línea serie
En esta tabla se describe cómo configurar la línea serie:
Paso Acción
1 Haga clic en el nodo SL2 (línea serie) del Árbol de hardware para visualizar las propiedades de la
línea serie.
En esta figura se muestran las propiedades de la línea serie para los protocolos Modbus RTU y
Modbus ASCII:
En esta figura se muestran las propiedades de la línea serie para el protocolo ASCII:

Configuración de cartuchos TMC2 estándar
EIO0000003332 12/2018 29
En esta tabla se describen todos los parámetros de configuración de la línea serie:
2 Edite las propiedades para configurar la línea serie.
Para obtener información detallada sobre los parámetros de configuración de la línea serie,
consulte la tabla siguiente.
Paso Acción
Parámetro Editable Valor Valor
predeterminado
Descripción
Ajustes físicos
Velocidad de
transmisión
Sí 1.200
2.400
4.800
9.600
19.200
38.400
57.600
115.200
19.200 Permite seleccionar la velocidad de
transmisión de datos (bits por
segundo) para el modem en la lista
desplegable.
Paridad Sí Ninguna
Par
Impar
Par Permite seleccionar la paridad de
los datos transmitidos para la
detección de errores.
La paridad es un método de
detección de errores en la
transmisión.
Cuando se utiliza la paridad con un
puerto serie, se envía un bit de datos
adicional con cada carácter de datos
y se dispone de manera que el
número de 1 bit de cada carácter,
incluido el bit de paridad, es siempre
impar o siempre par.
Si se recibe un byte con un número
incorrecto de 1 bits, el byte está
dañado. Sin embargo, un número
par de errores detectados puede
pasar la comprobación de paridad.
Bits de datos Sí
(únicamente
para el
protocolo
ASCII)
7
8
7 para Modbus
ASCII, 8 para
Modbus RTU
Permite seleccionar el número de
bits de datos de la lista desplegable.
El número de bits de datos de cada
carácter puede ser de 7 (para ASCII
verdadero) o 8 (para cualquier tipo
de datos, ya que esto coincide con el
tamaño de un byte). En todas las
aplicaciones se utilizan casi
universalmente 8 bits de datos.

Configuración de cartuchos TMC2 estándar
30 EIO0000003332 12/2018
Bits de parada Sí 1
2
1Permite seleccionar el número de
bits de parada de la lista
desplegable.
Un bit de parada es un bit que indica
el final de un byte de datos. Para los
dispositivos electrónicos, se suele
utilizar un bit de parada. Para los
dispositivos lentos, como los
teletipos electromecánicos, se
utilizan 2 bits de parada.
Medio físico Sí RS485
Verdadero/Falso
RS232
Verdadero/Falso
RS485
Verdadero
Permite seleccionar el medio físico
para la comunicación.
Solamente puede seleccionar el
medio RS485 o RS232. Al habilitar
uno de los medios, se deshabilita el
otro.
En las comunicaciones de datos, un
medio físico es la ruta de
transmisión a través de la cual se
propaga una señal. Se trata de una
interfaz para la interconexión de
dispositivos con el controlador
lógico.
Polarización Sí Yes
No
No El módulo del cartucho tiene
integradas resistencias de
polarización. Especifique si desea
conectar o desconectar la
polarización.
Ajustes de protocolo
Protocolo Sí Modbus RTU
Modbus ASCII
ASCII
Modbus RTU Permite seleccionar en la lista
desplegable la modalidad de
transmisión del protocolo para la
comunicación.
Los parámetros avanzados de
protocolo se muestran según el
protocolo seleccionado. Consulte
las siguientes figuras y tablas.
Parámetro Editable Valor Valor
predeterminado
Descripción

Configuración de cartuchos TMC2 estándar
EIO0000003332 12/2018 31
Configuración de los protocolos Modbus RTU y Modbus ASCII:
Direccionamiento Sí Esclavo
Maestro
Esclavo Permite seleccionar la modalidad de
direccionamiento. Únicamente se
puede seleccionar uno de los
direccionamientos, Esclavo o
Maestro. Al habilitar uno de los
modos de dirección, se deshabilita
el otro.
Dirección [de 1 a 247] Sí De 1 a 247 1 Permite especificar el ID de
dirección del esclavo.
NOTA: Este campo solo se muestra
para el direccionamiento del
esclavo. En el maestro, este campo
no aparece en la pantalla.
Tiempo de respuesta
(× 100 ms)
Sí De 10 a 255 ms 10 Permite especificar el tiempo de
respuesta del protocolo de las
consultas.
Tiempo entre tramas
(ms)
Sí 3...255 ms 10 Permite especificar el tiempo entre
las tramas del protocolo.
Configuración del protocolo ASCII:
Condición de parada
Tiempo de respuesta
(× 100 ms)
Sí De 1 a 255 10 Permite especificar el tiempo de
respuesta del protocolo de las
consultas.
Longitud recibida de
trama
Sí De 0 a 255 0 Permite especificar la longitud de la
trama recibida.
Timeout de trama
recibido (ms)
Sí De 0 a 255 10 Permite especificar el timeout de la
trama recibida.
Estructura de trama
Carácter de inicio Sí De 0 a 255 58 (si está
seleccionada la
casilla de
verificación)
Permite especificar el carácter de
inicio de la trama.
Primer carácter de fin Sí De 0 a 255 10 (si está
seleccionada la
casilla de
verificación)
Permite especificar el primer
carácter de fin de la trama.
Parámetro Editable Valor Valor
predeterminado
Descripción

Configuración de cartuchos TMC2 estándar
32 EIO0000003332 12/2018
Segundo carácter de
fin
Sí De 0 a 255 10 (si está
seleccionada la
casilla de
verificación)
Permite especificar el segundo
carácter de fin de la trama.
Enviar caracteres de
trama
Sí Verdadero/Falso Falso Le permite habilitar o deshabilitar el
envío del primer carácter de fin de la
trama al protocolo ASCII.
Parámetro Editable Valor Valor
predeterminado
Descripción

EIO0000003332 12/2018 33
Modicon TMC2
Configura ción de cartuchos TMC2 de aplicaciones
EIO0000003332 12/2018
Configura ción de cartuchos TMC2 de aplicaciones
Capítulo 3
Configuración de cartuchos TMC2 de aplicaciones
Introducción
En este capítulo se explica cómo configurar los cartuchos TMC2 de aplicaciones.
Contenido de este capítulo
Este capítulo contiene los siguientes apartados:
Apartado Página
TMC2HOIS01 34
TMC2PACK01 36
TMC2CONV01 38

Configuración de cartuchos TMC2 de aplicaciones
34 EIO0000003332 12/2018
TMC2HOIS01
Introducción
TMC2HOIS01 es un módulo de cartuchos de aplicaciones para elevación con dos canales de
tensión analógicos o de entrada de corriente y resolución de 12 bits.
Los tipos de entrada de canal son:
De 0 a 10 V
De 0 a 20 mA
De 4 a 20 mA
Para obtener más información sobre hardware, consulte TMC2HOIS01
(véase Modicon TMC2,
Cartuchos, Guía de hardware)
.
Si ha conectado físicamente el canal analógico para una señal de tensión y configura el canal para
una señal de corriente en EcoStruxure Machine Expert - Basic, puede dañar el circuito analógico.
AVISO
EQUIPO NO OPERATIVO
Verifique que el cableado físico del circuito analógico es compatible con la configuración de
software del canal analógico.
El incumplimiento de estas instrucciones puede causar daño al equipo.

Configuración de cartuchos TMC2 de aplicaciones
EIO0000003332 12/2018 35
Configuración del módulo
Para cada entrada se puede definir:
Parámetro Valor Valor
predeterminado
Descripción
Utilizado Verdadero/Falso Falso Indica si la dirección está siendo utilizada
en el programa.
Dirección %IW0.x0y - La dirección del canal de entrada, en la que
x
es el número de módulo e
y
es el número
de canal.
Tipo Sin utilizar
De 0 a 10 V
De 0 a 20 mA
De 4 a 20 mA
Sin utilizar Elija la modalidad del canal.
Ámbito Personalizado Personalizado El rango de valores de un canal.
Mín. De 0 a 10 V De -32.768 a
32.767
0 Especifica el límite de medida inferior.
De 0 a 20 mA 0
De 4 a 20 mA 4.000
Máx. De 0 a 10 V De -32.768 a
32.767
10.000 Especifica el límite de medida superior.
De 0 a 20 mA 20.000
De 4 a 20 mA 20.000
Filtro 0...100 0 Especifica el valor de filtrado. Multiplique
por el valor de Unidad de filtro para obtener
el tiempo de filtrado.
Unidad de filtro 100 ms 100 ms Especifica la unidad de tiempo del valor de
filtrado.
Unidades) ---

Configuración de cartuchos TMC2 de aplicaciones
36 EIO0000003332 12/2018
TMC2PACK01
Introducción
TMC2PACK01 es un módulo de cartuchos de aplicaciones para empaquetado con dos canales de
tensión analógicos o de entrada de corriente y resolución de 12 bits.
Los tipos de entrada de canal son:
De 0 a 10 V
De 0 a 20 mA
De 4 a 20 mA
Para obtener más información sobre hardware, consulte TMC2PACK01
(véase Modicon TMC2,
Cartuchos, Guía de hardware)
.
Si ha conectado físicamente el canal analógico para una señal de tensión y configura el canal para
una señal de corriente en EcoStruxure Machine Expert - Basic, puede dañar el circuito analógico.
AVISO
EQUIPO NO OPERATIVO
Verifique que el cableado físico del circuito analógico es compatible con la configuración de
software del canal analógico.
El incumplimiento de estas instrucciones puede causar daño al equipo.

Configuración de cartuchos TMC2 de aplicaciones
EIO0000003332 12/2018 37
Configuración del módulo
Para cada entrada se puede definir:
Parámetro Valor Valor
predeterminado
Descripción
Utilizado Verdadero/Falso Falso Indica si la dirección está siendo utilizada
en el programa.
Dirección %IW0.x0y - La dirección del canal de entrada, en la que
x
es el número de módulo e
y
es el número
de canal.
Tipo Sin utilizar
De 0 a 10 V
De 0 a 20 mA
De 4 a 20 mA
Sin utilizar Elija la modalidad del canal.
Ámbito Personalizado Personalizado El rango de valores de un canal.
Mín. De 0 a 10 V De -32.768 a
32.767
0 Especifica el límite de medida inferior.
De 0 a 20 mA 0
De 4 a 20 mA 4.000
Máx. De 0 a 10 V De -32.768 a
32.767
10.000 Especifica el límite de medida superior.
De 0 a 20 mA 20.000
De 4 a 20 mA 20.000
Filtro (x 100 ms) 0...100 0 Especifica el tiempo de filtrado (de 0 a
10 s).
Unidades) ---

Configuración de cartuchos TMC2 de aplicaciones
38 EIO0000003332 12/2018
TMC2CONV01
Introducción
TMC2CONV01 es un módulo de cartucho de aplicaciones con una línea serie para su transporte.
Para obtener más información sobre el hardware, consulte TMC2CONV01
(véase Modicon TMC2, Cartuchos, Guía de hardware)
.
Esta línea serie se puede configurar para cualquiera de los protocolos siguientes:
Modbus RTU
Modbus ASCII
ASCII
Puede configurar los ajustes físicos y de protocolo para la línea serie. De forma predeterminada,
las líneas serie están configuradas para el protocolo Modbus RTU.
NOTA: Solo puede añadir un cartucho de línea serie al controlador.

Configuración de cartuchos TMC2 de aplicaciones
EIO0000003332 12/2018 39
Configuración de línea serie
En esta tabla se describe cómo configurar la línea serie:
Paso Acción
1 Haga clic en el nodo SL2 (línea serie) del Árbol de hardware para visualizar las propiedades de la
línea serie.
En esta figura se muestran las propiedades de la línea serie para los protocolos Modbus RTU y
Modbus ASCII:
En esta figura se muestran las propiedades de la línea serie para el protocolo ASCII:

Configuración de cartuchos TMC2 de aplicaciones
40 EIO0000003332 12/2018
En esta tabla se describen todos los parámetros de configuración de la línea serie:
2 Edite las propiedades para configurar la línea serie.
Para obtener información detallada sobre los parámetros de configuración de la línea serie,
consulte la tabla siguiente.
Paso Acción
Parámetro Editable Valor Valor
predeterminado
Descripción
Ajustes físicos
Velocidad de
transmisión
Sí 1.200
2.400
4.800
9.600
19.200
38.400
57.600
115.200
19.200 Permite seleccionar la velocidad de
transmisión de datos (bits por segundo)
para el modem en la lista desplegable.
Paridad Sí Ninguna
Par
Impar
Par Permite seleccionar la paridad de los
datos transmitidos para la detección de
errores.
La paridad es un método de detección de
errores en la transmisión.
Cuando se utiliza la paridad con un puerto
serie, se envía un bit de datos adicional
con cada carácter de datos y se dispone
de manera que el número de 1 bit de cada
carácter, incluido el bit de paridad, es
siempre impar o siempre par.
Si se recibe un byte con un número
incorrecto de 1 bits, el byte está dañado.
Sin embargo, un número par de errores
detectados puede pasar la comprobación
de paridad.
Bits de datos Sí
(única-
mente
para el
protocolo
ASCII)
7
8
7 para Modbus
ASCII, 8 para
Modbus RTU
Permite seleccionar el número de bits de
datos de la lista desplegable.
El número de bits de datos de cada
carácter puede ser de 7 (para ASCII
verdadero) o 8 (para cualquier tipo de
datos, ya que esto coincide con el tamaño
de un byte). En todas las aplicaciones se
utilizan casi universalmente 8 bits de
datos.

Configuración de cartuchos TMC2 de aplicaciones
EIO0000003332 12/2018 41
Bits de parada Sí 1
2
1Permite seleccionar el número de bits de
parada de la lista desplegable.
Un bit de parada es un bit que indica el
final de un byte de datos. Para los
dispositivos electrónicos, se suele utilizar
un bit de parada. Para los dispositivos
lentos, como los teletipos
electromecánicos, se utilizan 2 bits de
parada.
Medio físico Sí RS485
Verdadero/Falso
RS232
Verdadero/Falso
RS485
Verdadero
Permite seleccionar el medio físico para
la comunicación.
Solamente puede seleccionar el medio
RS485 o RS232. Al habilitar uno de los
medios, se deshabilita el otro.
En las comunicaciones de datos, un
medio físico es la ruta de transmisión a
través de la cual se propaga una señal.
Se trata de una interfaz para la
interconexión de dispositivos con el
controlador lógico.
Polarización Sí Yes
No
No El módulo del cartucho tiene integradas
resistencias de polarización. Especifique
si desea conectar o desconectar la
polarización.
Ajustes de protocolo
Protocolo Sí Modbus RTU
Modbus ASCII
ASCII
Modbus RTU Permite seleccionar en la lista
desplegable la modalidad de transmisión
del protocolo para la comunicación.
Los parámetros avanzados de protocolo
se muestran según el protocolo
seleccionado. Consulte las siguientes
figuras y tablas.
Parámetro Editable Valor Valor
predeterminado
Descripción

Configuración de cartuchos TMC2 de aplicaciones
42 EIO0000003332 12/2018
Configuración de los protocolos Modbus RTU y Modbus ASCII:
Direccionamiento Sí Esclavo
Maestro
Esclavo Permite seleccionar la modalidad de
direccionamiento. Únicamente se puede
seleccionar uno de los direccionamientos,
Esclavo o Maestro. Al habilitar uno de los
modos de dirección, se deshabilita el otro.
Dirección [de 1 a 247] Sí De 1 a 247 1 Permite especificar el ID de dirección del
esclavo.
NOTA: Este campo solo se muestra para
el direccionamiento del esclavo. En el
maestro, este campo no aparece en la
pantalla.
Tiempo de respuesta
(× 100 ms)
Sí De 10 a 255 ms 10 Permite especificar el tiempo de
respuesta del protocolo de las consultas.
Tiempo entre tramas
(ms)
Sí 3...255 ms 10 Permite especificar el tiempo entre las
tramas del protocolo.
Configuración del protocolo ASCII:
Condición de parada
Tiempo de respuesta
(× 100 ms)
Sí De 1 a 255 10 Permite especificar el tiempo de
respuesta del protocolo de las consultas.
Longitud recibida de
trama
Sí De 0 a 255 0 Permite especificar la longitud de la trama
recibida.
Timeout de trama
recibido (ms)
Sí De 0 a 255 10 Permite especificar el timeout de la trama
recibida.
Estructura de trama
Carácter de inicio Sí De 0 a 255 58 (si está
seleccionada la
casilla de
verificación)
Permite especificar el carácter de inicio
de la trama.
Primer carácter de fin Sí De 0 a 255 10 (si está
seleccionada la
casilla de
verificación)
Permite especificar el primer carácter de
fin de la trama.
Segundo carácter de
fin
Sí De 0 a 255 10 (si está
seleccionada la
casilla de
verificación)
Permite especificar el segundo carácter
de fin de la trama.
Enviar caracteres de
trama
Sí Verdadero/Falso Falso Le permite habilitar o deshabilitar el envío
del primer carácter de fin de la trama al
protocolo ASCII.
Parámetro Editable Valor Valor
predeterminado
Descripción

EIO0000003332 12/2018 43
Modicon TMC2
Diagnóst ico de cartuchos a nalógicos de TMC2
EIO0000003332 12/2018
Diagnóst ico de cartuchos a nalógicos de TMC2
Capítulo 4
Diagnóstico de cartuchos analógicos de TMC2
Diagnóstico de cartuchos analógicos TMC2
Introducción
En los cartuchos analógicos, el estado operativo de cada canal de E/S viene determinado por los
objetos:
%IWS0.x0y para el canal de entrada y del cartucho x
%QWS0.x0y para el canal de salida y del cartucho x
Los valores en tiempo real de estos objetos se pueden leer en modalidad online, mediante una
tabla de animación
(véase EcoStruxure Machine Expert - Basic, Guía de funcionamiento)
o la
aplicación.
Descripción del estado de canal de entrada
Esta tabla describe los valores posibles de la palabra de estado de canal de entrada de %IWS:
Valor del byte Descripción
0Normal
1 Conversión de datos en curso
2 Inicialización
3 Error de configuración de operación de entrada, o cartucho sin entrada
4 No definido
5 Error de escritura detectado (se ha superado el límite máximo de corriente o tensión de
entrada).
6 Error de escritura detectado (se ha superado el límite mínimo de corriente o tensión de
entrada).
7 Error de memoria no volátil
De 8 a 255 No definido

Diagnóstico de cartuchos analógicos de TMC2
44 EIO0000003332 12/2018
Descripción del estado de canal de salida
Esta tabla describe los valores posibles de la palabra de estado de canal de salida de %QWS:
Valor del byte Descripción
0Normal
1 No definido
2 Inicialización
3 Error de configuración de operación de salida, o cartucho sin salida
4 No definido
5 No definido
6 No definido
7 Error de memoria no volátil
De 8 a 255 No definido

EIO0000003332 12/2018 45
Modicon TMC2
Índice
EIO0000003332 12/2018
Índice
Symbols
%IWS estado de canal de entrada ,
43
%QWS estado de canal de salida,
43
A
árbol de dispositivos,
14
B
bytes de diagnóstico (%IWS, %QWS)),
43
C
cartucho
añadir a unaEcoStruxure Machine Expert
- Basic configuración,
14
configurar,
16
descripción,
13
funciones,
13
quitar,
15
reemplazar,
14
cartucho de línea serie,
13
cartuchos analógicos,
13
cartuchos de aplicaciones
TMC2CONV01,
38
TMC2HOIS01,
34
TMC2PACK01,
36
cartuchos de aplicaciones de empaquetado,
36
cartuchos de línea serie,
27
,
38
comentarios
visualizar,
17
configurar
cartuchos,
16
D
descripción
cartucho,
13
detalles de programación
visualizar,
17
E
EcoStruxure Machine Expert - Basic
árbol de dispositivos,
14
proyecto,
14
elevar cartuchos de aplicaciones,
34
estado de canal de entrada (%IWS),
43
estado de canal de salida (%QWS),
43
F
funciones
cartucho,
13
I
información general sobre la configuración
de E/S
prácticas generales,
12
L
línea serie
configuración,
28
,
39
introducción,
27
,
38
Q
quitar un cartucho,
15
R
reemplazar
un cartucho,
14
S
símbolos, visualizar,
17

Índice
46 EIO0000003332 12/2018
T
TMC2 cartuchos
añadir a una configuración ,
14
TMC2 cartuchos analógicos
diagnóstico,
43
TMC2 módulos de E/S analógicas
TMC2AI2,
20
TMC2AQ2C ,
26
TMC2AQ2V ,
25
TMC2HOIS01,
34
TMC2PACK01,
36
TMC2TI2 ,
22
TMC2AI2,
20
TMC2AQ2C,
26
TMC2AQ2V,
25
TMC2CONV01,
38
TMC2HOIS01,
34
TMC2PACK01,
36
TMC2SL1,
27
TMC2TI2,
22
transportar cartuchos de aplicaciones,
38
V
visualizar
detalles de programación,
17

EIO0000003340.00
www.se.com
Modicon TMC2
EIO0000003340 12/2018
Modicon TMC2
Cartuchos
Guía de hardware
12/2018

2EIO0000003340 12/2018
La información que se ofrece en esta documentación contiene descripciones de carácter general
y/o características técnicas sobre el rendimiento de los productos incluidos en ella. La presente
documentación no tiene como objeto sustituir dichos productos para aplicaciones de usuario
específicas, ni debe emplearse para determinar su idoneidad o fiabilidad. Los usuarios o
integradores tienen la responsabilidad de llevar a cabo un análisis de riesgos adecuado y
completo, así como la evaluación y las pruebas de los productos en relación con la aplicación o el
uso de dichos productos en cuestión. Ni Schneider Electric ni ninguna de sus filiales o asociados
asumirán responsabilidad alguna por el uso inapropiado de la información contenida en este
documento. Si tiene sugerencias de mejoras o modificaciones o ha hallado errores en esta
publicación, le rogamos que nos lo notifique.
Usted se compromete a no reproducir, salvo para su propio uso personal, no comercial, la
totalidad o parte de este documento en ningún soporte sin el permiso de Schneider Electric, por
escrito. También se compromete a no establecer ningún vínculo de hipertexto a este documento
o su contenido. Schneider Electric no otorga ningún derecho o licencia para el uso personal y no
comercial del documento o de su contenido, salvo para una licencia no exclusiva para consultarla
"tal cual", bajo su propia responsabilidad. Todos los demás derechos están reservados.
Al instalar y utilizar este producto es necesario tener en cuenta todas las regulaciones sobre
seguridad correspondientes, ya sean regionales, locales o estatales. Por razones de seguridad y
para garantizar que se siguen los consejos de la documentación del sistema, las reparaciones solo
podrá realizarlas el fabricante.
Cuando se utilicen dispositivos para aplicaciones con requisitos técnicos de seguridad, siga las
instrucciones pertinentes.
Si con nuestros productos de hardware no se utiliza el software de Schneider Electric u otro
software aprobado, pueden producirse lesiones, daños o un funcionamiento incorrecto del equipo.
Si no se tiene en cuenta esta información, se pueden causar daños personales o en el equipo.
© 2018 Schneider Electric. Reservados todos los derechos.

EIO0000003340 12/2018 3
Tabla de materias
Información de seguridad . . . . . . . . . . . . . . . . . . . . . . . . 5
Acerca de este libro . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
Parte I Descripción general de TMC2 . . . . . . . . . . . . . . . . . 13
Capítulo 1 Descripción de TMC2 . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Descripción general. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Capítulo 2 Instalación de TMC2. . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.1 Reglas generales para la implementación de TMC2. . . . . . . . . . . . . . 18
Características ambientales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Certificaciones y estándares . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.2 Instalación de TMC2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
Requisitos de instalación y mantenimiento . . . . . . . . . . . . . . . . . . . . . 22
Instalación de TMC2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
2.3 Requisitos eléctricos de TMC2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
Prácticas recomendadas relativas al cableado . . . . . . . . . . . . . . . . . . 31
Conexión a tierra del sistema M221 . . . . . . . . . . . . . . . . . . . . . . . . . . 35
Parte II Cartuchos TMC2 estándar . . . . . . . . . . . . . . . . . . . . 39
Capítulo 3 Entradas analógicas de tensión y corriente de TMC2AI2 41
Presentación de TMC2AI2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
Características de TMC2AI2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
Diagrama de cableado de TMC2AI2 . . . . . . . . . . . . . . . . . . . . . . . . . . 45
Capítulo 4 Entradas de temperatura analógicas de TMC2TI2. . . . . 47
Presentación de TMC2TI2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
Características de TMC2TI2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
Diagrama de cableado de TMC2TI2 . . . . . . . . . . . . . . . . . . . . . . . . . . 52
Capítulo 5 Salidas de tensión analógicas de TMC2AQ2V. . . . . . . . 53
Presentación de TMC2AQ2V . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
Características de TMC2AQ2V . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
Diagrama de cableado de TMC2AQ2V. . . . . . . . . . . . . . . . . . . . . . . . 57
Capítulo 6 Salidas de corriente analógicas de TMC2AQ2C . . . . . . 59
Presentación de TMC2AQ2C . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
Características de TMC2AQ2C . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
Diagrama de cableado de TMC2AQ2C. . . . . . . . . . . . . . . . . . . . . . . . 63

4EIO0000003340 12/2018
Capítulo 7 Línea serie de TMC2SL1 . . . . . . . . . . . . . . . . . . . . . . . . . 65
Presentación de TMC2SL1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
Características de TMC2SL1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
Diagrama de cableado de TMC2SL1. . . . . . . . . . . . . . . . . . . . . . . . . . 69
Parte III Cartuchos de aplicaciones TMC2 . . . . . . . . . . . . . . 71
Capítulo 8 Elevación de TMC2HOIS01 . . . . . . . . . . . . . . . . . . . . . . . 73
Presentación de TMC2HOIS01 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
Características de TMC2HOIS01. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
Diagrama de cableado de TMC2HOIS01 . . . . . . . . . . . . . . . . . . . . . . 77
Capítulo 9 Empaquetado de TMC2PACK01 . . . . . . . . . . . . . . . . . . . 79
Presentación de TMC2PACK01. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
Características de TMC2PACK01 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
Diagrama de cableado de TMC2PACK01 . . . . . . . . . . . . . . . . . . . . . . 83
Capítulo 10 Transporte de TMC2CONV01 . . . . . . . . . . . . . . . . . . . . . 85
Presentación de TMC2CONV01 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
Características de TMC2CONV01 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
Diagrama de cableado de TMC2CONV01. . . . . . . . . . . . . . . . . . . . . . 89
Glosario . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
Índice . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93

EIO0000003340 12/2018 5
Información de seguridad
Información importante
AVISO
Lea atentamente estas instrucciones y observe el equipo para familiarizarse con el dispositivo
antes de instalarlo, utilizarlo, revisarlo o realizar su mantenimiento. Los mensajes especiales que
se ofrecen a continuación pueden aparecer a lo largo de la documentación o en el equipo para
advertir de peligros potenciales, o para ofrecer información que aclara o simplifica los distintos
procedimientos.

6EIO0000003340 12/2018
TENGA EN CUENTA LO SIGUIENTE:
La instalación, el manejo, las revisiones y el mantenimiento de equipos eléctricos deberán ser
realizados sólo por personal cualificado. Schneider Electric no se hace responsable de ninguna
de las consecuencias del uso de este material.
Una persona cualificada es aquella que cuenta con capacidad y conocimientos relativos a la
construcción, el funcionamiento y la instalación de equipos eléctricos, y que ha sido formada en
materia de seguridad para reconocer y evitar los riesgos que conllevan tales equipos.

EIO0000003340 12/2018 7
Acerca de este libro
Presentación
Objeto
En esta guía se describe la instalación del hardware de TMC2. Se proporciona la descripción de
los componentes, las características, los diagramas de cableado y los detalles de la instalación de
TMC2.
Campo de aplicación
La información contenida en este manual solamente es aplicable a los productos TMC2.
Este documento se ha actualizado para la publicación de EcoStruxureTM Machine Expert - Basic
V1.0.
Para la conformidad de los productos y la información medioambiental (RoHS, REACH, PEP,
EOLI, etc.), vaya a
www.schneider-electric.com/green-premium
.
Las características técnicas de los dispositivos que se describen en este documento también se
encuentran online. Para acceder a esta información online:
Las características que se indican en este documentación deben coincidir con las que figuran
online. De acuerdo con nuestra política de mejoras continuas, es posible que a lo largo del tiempo
revisemos el contenido con el fin de elaborar documentos más claros y precisos. En caso de que
detecte alguna diferencia entre el documentación y la información online, utilice esta última para
su referencia.
Paso Acción
1 Vaya a la página de inicio de Schneider Electric
www.schneider-electric.com
.
2 En el cuadro Search, escriba la referencia del producto o el nombre del rango de productos.
No incluya espacios en blanco en la referencia ni en el rango de productos.
Para obtener información sobre cómo agrupar módulos similares, utilice los asteriscos (
*
).
3 Si ha introducido una referencia, vaya a los resultados de búsqueda de Product Datasheets y
haga clic en la referencia deseada.
Si ha introducido el nombre de un rango de productos, vaya a los resultados de búsqueda de
Product Ranges y haga clic en la gama deseada.
4 Si aparece más de una referencia en los resultados de búsqueda Products, haga clic en la
referencia deseada.
5 En función del tamaño de la pantalla, es posible que deba desplazar la página hacia abajo para
consultar la hoja de datos.
6 Para guardar o imprimir una hoja de datos como archivo .pdf, haga clic en Download XXX
product datasheet.

8EIO0000003340 12/2018
Documentos relacionados
Puede descargar estas publicaciones técnicas y otra información técnica de nuestro sitio web
https://www.schneider-electric.com/en/download
Información relativa al producto
Título de la documentación Número de referencia
Modicon TMC2 Cartuchos - Guía de programación
EIO0000003329 (ENG)
EIO0000003330 (FRA)
EIO0000003331 (GER)
EIO0000003332 (SPA)
EIO0000003333 (ITA)
EIO0000003334 (CHS)
EIO0000003335 (POR)
EIO0000003336 (TUR)
Modicon M221 Logic Controller - Guía de hardware
EIO0000003313 (ENG)
EIO0000003314 (FRA)
EIO0000003315 (GER)
EIO0000003316 (SPA)
EIO0000003317 (ITA)
EIO0000003318 (CHS)
EIO0000003319 (POR)
EIO0000003320 (TUR)
PELIGRO
RIESGO DE DESCARGA ELÉCTRICA, EXPLOSIÓN O ARCO ELÉCTRICO
Desconecte la alimentación de todos los equipos, incluidos los dispositivos conectados, antes
de retirar cualquier cubierta o compuerta, o bien antes de instalar o retirar cualquier accesorio,
hardware, cable o conductor salvo en las condiciones indicadas en la guía de hardware de
este equipo.
Utilice siempre un dispositivo de detección de tensión de capacidad adecuada para confirmar
la ausencia de alimentación eléctrica cuando y donde se indique.
Vuelva a montar y fijar todas las cubiertas, accesorios, elementos de hardware y cables del
sistema, y compruebe que haya una conexión a tierra adecuada antes de aplicar alimentación
eléctrica a la unidad.
Aplique solo la tensión especificada cuando utilice este equipo y los productos asociados.
El incumplimiento de estas instrucciones podrá causar la muerte o lesiones serias.

EIO0000003340 12/2018 9
1 Para obtener información adicional, consulte NEMA ICS 1.1 (última edición), "Safety Guidelines
for the Application, Installation, and Maintenance of Solid State Control" (Directrices de seguridad
para la aplicación, la instalación y el mantenimiento del control de estado estático) y NEMA ICS
7.1 (última edición), "Safety Standards for Construction and Guide for Selection, Installation and
Operation of Adjustable-Speed Drive Systems" (Estándares de seguridad para la construcción y
guía para la selección, instalación y utilización de sistemas de unidades de velocidad ajustable) o
su equivalente aplicable a la ubicación específica.
PELIGRO
POSIBILIDAD DE EXPLOSIÓN
Este equipo se debe utilizar únicamente en ubicaciones no peligrosas o en instalaciones
conforme a Clase I, División 2, Grupos A, B, C y D.
No sustituya componentes que puedan anular la conformidad con la Clase I, División 2.
No conecte ni desconecte el equipo a menos que se haya desconectado la alimentación
eléctrica o esté seguro de que la ubicación no es peligrosa.
No utilice los puertos USB, si están incorporados, a menos que tenga la certeza de que la
ubicación no es peligrosa.
El incumplimiento de estas instrucciones podrá causar la muerte o lesiones serias.
ADVERTENCIA
PÉRDIDA DE CONTROL
El diseñador del esquema de control debe tener en cuenta las posibles modalidades de fallo
de rutas de control y, para ciertas funciones de control críticas, proporcionar los medios para
lograr un estado seguro durante y después de un fallo de ruta. Algunas funciones de control
críticas son, por ejemplo, la parada de emergencia y la parada de sobrecarrera, un corte de
alimentación o un reinicio.
Para las funciones críticas de control deben proporcionarse rutas de control separadas o
redundantes.
Las rutas de control del sistema pueden incluir enlaces de comunicación. Deben tenerse en
cuenta las implicaciones de retardos de transmisión imprevistos o fallos del enlace.
Tenga en cuenta todas las reglamentaciones para la prevención de accidentes y las
normativas de seguridad locales.1
Cada instalación de este equipo debe probarse de forma individual y exhaustiva antes de
entrar en servicio.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.

10 EIO0000003340 12/2018
Terminología derivada de los estándares
Los términos técnicos, símbolos y las descripciones correspondientes del presente manual o que
aparecen en la parte interior o exterior de los propios productos se derivan, por lo general, de los
términos y las definiciones de estándares internacionales.
En el área de los sistemas de seguridad funcional, unidades y automatización general se incluyen,
pero sin limitarse a ellos, términos como
seguridad
,
función de seguridad
,
estado de seguridad
,
fallo
,
reinicio tras fallo
,
avería
,
funcionamiento incorrecto
,
error
,
mensaje de error
,
peligroso
, etc.
Estos estándares incluyen, entre otros:
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Utilice solo software aprobado por Schneider Electric para este equipo.
Actualice el programa de aplicación siempre que cambie la configuración de hardware física.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.
Estándar Descripción
EN 61131-2:2007 Controladores programables, parte 2: Requisitos y ensayos de los equipos.
ISO 13849-1:2008 Seguridad de la maquinaria: partes de seguridad de los sistemas de control.
Principios generales del diseño.
EN 61496-1:2013 Seguridad de la maquinaria: equipo de protección electrosensible.
Parte 1: Requisitos y ensayos generales.
ISO 12100:2010 Seguridad de las máquinas. Principios generales para el diseño. Evaluación del
riesgo y reducción del riesgo
EN 60204-1:2006 Seguridad de las máquinas. Equipo eléctrico de las máquinas. Parte 1:
Requisitos generales
EN 1088:2008
ISO 14119:2013
Seguridad de la maquinaria. Dispositivos de bloqueo asociados con
protecciones: principios de diseño y selección
ISO 13850:2006 Seguridad de la maquinaria. Parada de emergencia: principios de diseño
EN/IEC 62061:2005 Seguridad de la maquinaria. Seguridad funcional de los sistemas de control
programable de seguridad eléctrica y electrónica
IEC 61508-1:2010 Seguridad funcional de sistemas de seguridad programable eléctricos y
electrónicos: requisitos generales.
IEC 61508-2:2010 Seguridad funcional de los sistemas de seguridad electrónicos programables
eléctricos y electrónicos: requisitos de los sistemas de seguridad electrónicos
programables eléctricos y electrónicos.
IEC 61508-3:2010 Seguridad funcional de los sistemas de seguridad electrónicos programables
eléctricos y electrónicos: requisitos de software.

EIO0000003340 12/2018 11
Además, los términos utilizados en este documento se pueden usar de manera tangencial porque
se obtienen de otros estándares como:
Por último, el término
zona de funcionamiento
se puede utilizar junto con la descripción de peligros
específicos, y se define como tal para una
zona de peligro
o
zona peligrosa
en la
Directiva de
maquinaria
(
2006/42/EC
) y
ISO 12100:2010
.
NOTA: Los estándares mencionados anteriormente podrían o no aplicarse a los productos
específicos citados en la presente documentación. Para obtener más información en relación con
los diferentes estándares aplicables a los productos descritos en este documento, consulte las
tablas de características de las referencias de dichos productos.
IEC 61784-3:2008 Comunicación digital de datos para la medición y control: buses de campo de
seguridad funcional.
2006/42/EC Directiva de maquinaria
2014/30/EU Directiva de compatibilidad electromagnética
2014/35/EU Directiva de baja tensión
Estándar Descripción
Serie IEC 60034 Máquinas eléctricas giratorias
Serie IEC 61800 Accionamientos eléctricos de potencia de velocidad variable
Serie IEC 61158 Comunicación digital de datos para la medición y control - Bus de campo para
su uso en Sistemas de control
Estándar Descripción

12 EIO0000003340 12/2018


Descripción general de TMC2
14 EIO0000003340 12/2018

EIO0000003340 12/2018 15
Modicon TMC2
Descripc ión de TMC2
EIO0000003340 12/2018
Descripc ión de TMC2
Capítulo 1
Descripción de TMC2
Descripción general
Introducción
Los cartuchos están diseñados para conectarlos a la gama de Modicon TM221C Logic Controller.
Funciones de los cartuchos
En la tabla siguiente se describen las funciones de los cartuchos TMC2:
Referencia Descripción
TMC2AI2
(véase página 41)
Cartucho TMC2 con 2 entradas analógicas de corriente o tensión (de 0 a 10 V, de 0
a 20 mA, de 4 a 20 mA), 12 bits
TMC2TI2
(véase página 47)
Cartucho TMC2 con 2 entradas analógicas de temperatura (termoelemento, RTD),
14 bits
TMC2AQ2V
(véase página 53)
Cartucho TMC2 con 2 salidas analógicas de tensión (de 0 a 10 V), 12 bits
TMC2AQ2C
(véase página 59)
Cartucho TMC2 con 2 salidas analógicas de corriente (de 4 a 20 mA), 12 bits
TMC2SL1
(véase página 65)
Cartucho TMC2 con 1 línea serie (RS232 o RS485)
TMC2HOIS01
(véase página 73)
Cartucho de aplicación TMC2 con 2 entradas analógicas de corriente o tensión para
la elevación de las celdas de carga
TMC2PACK01
(véase página 79)
Cartucho de aplicación TMC2 con 2 entradas analógicas de corriente o tensión para
el empaquetado
TMC2CONV01
(véase página 85)
Cartucho de aplicación TMC2 con 1 línea serie para el transporte

Descripción de TMC2
16 EIO0000003340 12/2018
Compatibilidad del Logic Controller
NOTA: Para obtener más información sobre la compatibilidad de los cartuchos con controladores
específicos, consulte la guía de hardware específica del controlador.
En la tabla siguiente se describe el número de cartuchos TMC2 que se pueden instalar en un
Modicon TM221C Logic Controller:
Referencia Slots de cartucho Combinación de cartuchos compatibles
TMC2AI2
TMC2TI2
TMC2AQ2V
TMC2AQ2C
TMC2HOIS01
TMC2PACK01
TMC2SL1
TMC2CONV01
TM221C16R
TM221CE16R
TM221C16T
TM221CE16T
TM221C24R
TM221CE24R
TM221C24T
TM221CE24T
11 0
01
TM221C40R
TM221CE40R
TM221C40T
TM221CE40T
2 (1) 10
01
11
20
(1) Sólo se puede añadir un cartucho de línea serie (TMC2SL1, TMC2CONV01) a un Logic Controller.
AVISO
DESCARGA ELECTROSTÁTICA
Verifique que las ranuras vacías del cartucho tienen las cubiertas en su sitio antes de aplicar
electricidad al controlador.
No toque los contactos del cartucho.
Manipule el cartucho únicamente en la carcasa.
Adopte las medidas de protección necesarias contra descargas electrostáticas.
El incumplimiento de estas instrucciones puede causar daño al equipo.

EIO0000003340 12/2018 17
Modicon TMC2
Instalació n de TMC2
EIO0000003340 12/2018
Instalació n de TMC2
Capítulo 2
Instalación de TMC2
Contenido de este capítulo
Este capítulo contiene las siguientes secciones:
Sección Apartado Página
2.1 Reglas generales para la implementación de TMC2 18
2.2 Instalación de TMC2 21
2.3 Requisitos eléctricos de TMC2 30


Instalación de TMC2
EIO0000003340 12/2018 19
Características ambientales
TMC2
Las características ambientales del cartucho TMC2 son las mismas que las de Modicon TM221C
Logic Controller
(véase Modicon M221 Logic Controller, Guía de hardware)
.

Instalación de TMC2
20 EIO0000003340 12/2018
Certificaciones y estándares
Introducción
Los controladores optimizados M221 están diseñados para adaptarse a las principales normas
nacionales e internacionales referentes a los dispositivos de control industrial electrónico:
IEC/EN 61131-2
UL 508
Los M221 Logic Controllers han obtenido las distinciones de conformidad siguientes:
CE
CSA (excepto para TM221C•••U)
EAC
RCM
UL
Ubicación peligrosa de cCSAus (excepto para TM221C•••U)
Para obtener información medioambiental y sobre la conformidad de los productos (RoHS,
REACH, PEP, EOLI, etc.), vaya a
www.schneider-electric.com/green-premium
.


Instalación de TMC2
22 EIO0000003340 12/2018
Requisitos de instalación y mantenimiento
Antes de comenzar
Debe leer y comprender este capítulo antes de empezar a instalar el sistema.
El uso y la aplicación de la información contenida en el presente documento requieren experiencia
en diseño y programación de sistemas de control automatizados. Solamente el usuario, el
fabricante o el integrador saben cuáles son las condiciones y los factores presentes durante la
instalación y la configuración, el funcionamiento y el mantenimiento de la máquina o del proceso,
por lo que pueden decidir la automatización y el equipo asociado, así como las medidas de
seguridad y los enclavamientos relacionados que se pueden utilizar de forma efectiva y correcta.
Al seleccionar el equipo de control y automatización, y cualquier otro equipo o software
relacionado, para una determinada aplicación, también debe tener en cuenta todas las normativas
y estándares locales, regionales o nacionales.
Preste especial atención al cumplir la información sobre seguridad, los distintos requisitos
eléctricos y los estándares normativos que podrían aplicarse a su máquina o proceso en el uso de
este equipo.
Desconexión de la alimentación
Se deben montar e instalar todas las opciones y los módulos antes de instalar el sistema de control
en un segmento de montaje, una placa de montaje o un panel. Retire el sistema de control de su
segmento de montaje, placa de montaje o panel antes de desmontar el equipo.
PELIGRO
RIESGO DE DESCARGA ELÉCTRICA, EXPLOSIÓN O ARCO ELÉCTRICO
Desconecte la alimentación de todos los equipos, incluidos los dispositivos conectados, antes
de retirar cualquier cubierta o compuerta, o bien antes de instalar o retirar cualquier accesorio,
hardware, cable o conductor salvo en las condiciones indicadas en la guía de hardware de
este equipo.
Utilice siempre un dispositivo de detección de tensión de capacidad adecuada para confirmar
la ausencia de alimentación eléctrica cuando y donde se indique.
Vuelva a montar y fijar todas las cubiertas, accesorios, elementos de hardware y cables del
sistema, y compruebe que haya una conexión a tierra adecuada antes de aplicar alimentación
eléctrica a la unidad.
Aplique solo la tensión especificada cuando utilice este equipo y los productos asociados.
El incumplimiento de estas instrucciones podrá causar la muerte o lesiones serias.

Instalación de TMC2
EIO0000003340 12/2018 23
Consideraciones sobre la programación
Entorno operativo
Además de las Características ambientales, consulte Información relacionada con el producto al
inicio del presente documento para obtener información importante sobre la instalación en
ubicaciones peligrosas para este equipo específico.
NOTA: Para obtener información importante sobre la seguridad y las características del entorno
de Cartucho TMC2, consulte M221 Logic Controller - Guía de hardware.
Consideraciones de instalación
NOTA: Los tipos de fusibles JDYX2 o JDYX8 están reconocidos por UL y aprobados por CSA.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Utilice solo software aprobado por Schneider Electric para este equipo.
Actualice el programa de aplicación siempre que cambie la configuración de hardware física.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
En caso de que exista riesgo para el personal o los equipos, utilice los dispositivos de bloqueo
de seguridad adecuados.
Instale y utilice este equipo en una carcasa adecuada para el entorno correspondiente, y que
esté protegida por un mecanismo de bloqueo que use llaves o herramientas.
Utilice las fuentes de alimentación del actuador y el sensor solo para proporcionar
alimentación a los sensores o actuadores conectados al módulo.
La línea de alimentación y los circuitos de salida deben estar equipados con cables y fusibles
que cumplan los requisitos normativos locales y nacionales relativos a la corriente nominal y
la tensión del equipo en cuestión.
No utilice este equipo en funciones de maquinaria críticas para la seguridad a no ser que esté
diseñado como equipo de seguridad funcional y siga los estándares y las normas
correspondientes.
No desmonte, repare ni modifique este equipo.
No conecte ningún cable a conexiones reservadas y no utilizadas o a conexiones designadas
como No Connection (N.C.).
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.

Instalación de TMC2
24 EIO0000003340 12/2018
Instalación de TMC2
Consideraciones de instalación
El cartucho TMC2 está diseñado para funcionar dentro del mismo rango de temperaturas que los
controladores, incluido el reajuste del controlador para funcionamiento con aumento de
temperatura, así como las restricciones de temperatura asociadas a las posiciones de montaje.
Para obtener más información, consulte distancias y posiciones de montaje del controlador
(véase Modicon M221 Logic Controller, Guía de hardware)
.
Instalación
PELIGRO
DESCARGA ELÉCTRICA O ARCO ELÉCTRICO
Desconecte la alimentación del equipo, incluidos los dispositivos conectados, antes de quitar
las cubiertas o puertas, o bien, de instalar o quitar cualquier accesorio, hardware, cable o
conductor.
Utilice siempre un dispositivo de detección de tensión de capacidad adecuada para confirmar
la ausencia de alimentación eléctrica cuando y donde se indique.
Use guantes protectores cuando instale o quite los cartuchos.
Vuelva a montar y fijar todas las cubiertas, accesorios, elementos de hardware y cables del
sistema, y compruebe que haya una conexión a tierra adecuada antes de aplicar alimentación
eléctrica a la unidad.
Aplique solo la tensión especificada cuando utilice este equipo y los productos asociados.
El incumplimiento de estas instrucciones podrá causar la muerte o lesiones serias.
AVISO
DESCARGA ELECTROSTÁTICA
Verifique que las ranuras vacías del cartucho tienen las cubiertas en su sitio antes de aplicar
electricidad al controlador.
No toque los contactos del cartucho.
Manipule el cartucho únicamente en la carcasa.
Adopte las medidas de protección necesarias contra descargas electrostáticas.
El incumplimiento de estas instrucciones puede causar daño al equipo.

Instalación de TMC2
EIO0000003340 12/2018 25
En la tabla siguiente se describen los diversos pasos para instalar un cartucho TMC2 en el
controlador:
Paso Acción
1 Desconecte cualquier fuente de alimentación de todo el equipo antes de desmontar las cubiertas o
instalar un cartucho.
2 Extraiga el cartucho del empaquetado.
3 Presione el clip de bloqueo de la parte superior de la cubierta del cartucho con un destornillador
aislado y, con cuidado, tire la cubierta hacia arriba.
4 Quite la cubierta del slot del cartucho del controlador con la mano.
NOTA: Guarde la cubierta para volver a utilizarla para la desinstalación.

Instalación de TMC2
26 EIO0000003340 12/2018
5 Coloque el cartucho en el slot del controlador.
6 Presione el cartucho en el slot hasta que se oiga un clic.
Paso Acción

Instalación de TMC2
EIO0000003340 12/2018 27
Desinstalación
PELIGRO
DESCARGA ELÉCTRICA O ARCO ELÉCTRICO
Desconecte la alimentación del equipo, incluidos los dispositivos conectados, antes de quitar
las cubiertas o puertas, o bien, de instalar o quitar cualquier accesorio, hardware, cable o
conductor.
Utilice siempre un dispositivo de detección de tensión de capacidad adecuada para confirmar
la ausencia de alimentación eléctrica cuando y donde se indique.
Use guantes protectores cuando instale o quite los cartuchos.
Vuelva a montar y fijar todas las cubiertas, accesorios, elementos de hardware y cables del
sistema, y compruebe que haya una conexión a tierra adecuada antes de aplicar alimentación
eléctrica a la unidad.
Aplique solo la tensión especificada cuando utilice este equipo y los productos asociados.
El incumplimiento de estas instrucciones podrá causar la muerte o lesiones serias.
AVISO
DESCARGA ELECTROSTÁTICA
Verifique que las ranuras vacías del cartucho tienen las cubiertas en su sitio antes de aplicar
electricidad al controlador.
No toque los contactos del cartucho.
Manipule el cartucho únicamente en la carcasa.
Adopte las medidas de protección necesarias contra descargas electrostáticas.
El incumplimiento de estas instrucciones puede causar daño al equipo.

Instalación de TMC2
28 EIO0000003340 12/2018
En la tabla siguiente se describen los diversos pasos para desinstalar un cartucho TMC2 del
controlador:
Paso Acción
1 Desconecte cualquier fuente de alimentación de todo el equipo, incluidos los dispositivos
conectados, antes de extraer un cartucho.
2 Presione el clip de bloqueo de la parte superior del cartucho con un destornillador aislado y, con
cuidado, tire el cartucho hacia arriba.
3 Quite el cartucho del controlador con la mano.

Instalación de TMC2
EIO0000003340 12/2018 29
4 Coloque la cubierta del slot del cartucho en el slot del controlador.
5 Presione la cubierta del slot del cartucho en el slot hasta que se oiga un clic.
Paso Acción


Instalación de TMC2
EIO0000003340 12/2018 31
Prácticas recomendadas relativas al cableado
Descripción general
En esta sección se describen las directrices de cableado y las prácticas recomendadas asociadas
que se deben respetar al utilizar el sistema M221 Logic Controller.
PELIGRO
RIESGO DE DESCARGA ELÉCTRICA, EXPLOSIÓN O ARCO ELÉCTRICO
Desconecte la alimentación de todos los equipos, incluidos los dispositivos conectados, antes
de retirar cualquier cubierta o compuerta, o bien antes de instalar o retirar cualquier accesorio,
hardware, cable o conductor salvo en las condiciones indicadas en la guía de hardware de
este equipo.
Utilice siempre un dispositivo de detección de tensión de capacidad adecuada para confirmar
la ausencia de alimentación eléctrica cuando y donde se indique.
Vuelva a montar y fijar todas las cubiertas, accesorios, elementos de hardware y cables del
sistema, y compruebe que haya una conexión a tierra adecuada antes de aplicar alimentación
eléctrica a la unidad.
Aplique solo la tensión especificada cuando utilice este equipo y los productos asociados.
El incumplimiento de estas instrucciones podrá causar la muerte o lesiones serias.

Instalación de TMC2
32 EIO0000003340 12/2018
1 Para obtener información adicional, consulte NEMA ICS 1.1 (última edición), "Safety Guidelines
for the Application, Installation, and Maintenance of Solid State Control" (Directrices de seguridad
para la aplicación, la instalación y el mantenimiento del control de estado estático) y NEMA ICS
7.1 (última edición), "Safety Standards for Construction and Guide for Selection, Installation and
Operation of Adjustable-Speed Drive Systems" (Estándares de seguridad para la construcción y
guía para la selección, instalación y utilización de sistemas de unidades de velocidad ajustable) o
su equivalente aplicable a la ubicación específica.
Directrices de cableado
Se deben aplicar las reglas siguientes al cablear un sistema M221 Logic Controller:
Los cables de E/S y comunicación deben estar separados de los cables de alimentación.
Realice estos dos tipos de cableado mediante conductos de cable independientes.
Compruebe que el entorno y las condiciones de funcionamiento cumplen los valores de las
especificaciones.
Utilice los tamaños de cable correctos para cumplir los requisitos de tensión y corriente.
Utilice conductores de cobre (obligatorio).
Utilice cables de par trenzado blindados para E/S analógicas o rápidas.
Utilice cables de par trenzado blindados para redes y bus de campo.
ADVERTENCIA
PÉRDIDA DE CONTROL
El diseñador del esquema de control debe tener en cuenta las posibles modalidades de fallo
de rutas de control y, para ciertas funciones de control críticas, proporcionar los medios para
lograr un estado seguro durante y después de un fallo de ruta. Algunas funciones de control
críticas son, por ejemplo, la parada de emergencia y la parada de sobrecarrera, un corte de
alimentación o un reinicio.
Para las funciones críticas de control deben proporcionarse rutas de control separadas o
redundantes.
Las rutas de control del sistema pueden incluir enlaces de comunicación. Deben tenerse en
cuenta las implicaciones de retardos de transmisión imprevistos o fallos del enlace.
Tenga en cuenta todas las reglamentaciones para la prevención de accidentes y las
normativas de seguridad locales.1
Cada instalación de este equipo debe probarse de forma individual y exhaustiva antes de
entrar en servicio.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.

Instalación de TMC2
EIO0000003340 12/2018 33
Utilice cables blindados conectados correctamente a tierra para todas las salidas o entradas
analógicas y de alta velocidad, así como para las conexiones de comunicación. Si no utiliza cable
blindado para estas conexiones, las interferencias electromagnéticas pueden causar la
degradación de la señal. Las señales degradadas pueden provocar que el controlador o los
módulos y el equipo conectados a él funcionen de manera inesperada.
1La conexión a tierra multipunto se admite si las conexiones se efectúan con una placa de
conexión a tierra equipotencial dimensionada para ayudar a evitar daños en el blindaje del cable
en caso de corrientes de cortocircuito del sistema de alimentación.
Para obtener más información, consulte Conexión a tierra de cables blindados
(véase página 35)
.
NOTA: Las temperaturas de la superficie pueden superar los 60 °C (140 °F). Para cumplir la
norma IEC 61010, guíe el cableado primario (los cables conectados a la red eléctrica) por
separado y lejos del cableado secundario (cableado de tensión extrabaja que proviene de las
fuentes de tensión intermedias). Si esto no es posible, será necesario un doble aislamiento como
mejora en el conducto o en los cables.
Los conectores del cartucho no son extraíbles.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Utilice cables blindados para todas las E/S rápidas, las E/S analógicas y las señales de
comunicación.
Conecte a tierra el blindaje de los cables para todas las E/S analógicas, las E/S rápidas y las
señales de comunicación en un único punto1.
Enrute los cables de comunicación y de E/S separados de los cables de alimentación.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.
AVISO
EQUIPO NO OPERATIVO
No intente quitar los conectores del cartucho.
El incumplimiento de estas instrucciones puede causar daño al equipo.

Instalación de TMC2
34 EIO0000003340 12/2018
Reglas para el bloque de terminales de tornillo no extraíble
En la siguiente tabla se muestran los tipos de cable y los tamaños de conductor de un bloque de
terminales de tornillo no extraíble con 3,81 mm (0,15 pulg.) de paso:
Es obligatorio el uso de conductores de cobre.
PELIGRO
LOS CABLES SUELTOS CAUSAN DESCARGAS ELÉCTRICAS
Apriete las conexiones de conformidad con las especificaciones del par de apriete.
El incumplimiento de estas instrucciones podrá causar la muerte o lesiones serias.
PELIGRO
PELIGRO DE INCENDIO
Utilice únicamente los tamaños de cable adecuados para la capacidad de corriente de los
canales de E/S y las fuentes de alimentación.
Para el cableado de las salidas de relé (2 A), utilice conductores de al menos 0,5 mm2
(AWG 20) con una temperatura nominal de al menos 80 °C (176 °F).
Para los conductores comunes del cableado de salidas de relé (7 A) o cableado de salidas de
relé superior a 2 A, utilice conductores de al menos 1,0 mm2 (AWG 16) con una temperatura
nominal de como mínimo 80 °C (176 °F).
El incumplimiento de estas instrucciones podrá causar la muerte o lesiones serias.

Instalación de TMC2
EIO0000003340 12/2018 35
Conexión a tierra del sistema M221
Descripción general
Para contribuir a minimizar los efectos de interferencias electromagnéticas, los cables que
transportan la E/S rápida, la E/S analógica y las señales de comunicación del bus de campo deben
estar blindados.
1La conexión a tierra multipunto se admite si las conexiones se efectúan con una placa de
conexión a tierra equipotencial dimensionada para ayudar a evitar daños en el blindaje del cable
en caso de corrientes de cortocircuito del sistema de alimentación.
El uso de cables blindados requiere el cumplimiento de las reglas de cableado siguientes:
Para las conexiones a tierra de protección (PE), se pueden utilizar conductos metálicos para
toda la longitud del blindaje o una parte, siempre que no se interrumpa la continuidad de las
conexiones a tierra. Para una conexión a tierra funcional (FE), el blindaje pretende atenuar las
interferencias electromagnéticas y debe ser continuo en toda la longitud del cable. Si el objetivo
es tanto funcional como de protección, como suele ser el caso de los cables de comunicación,
el cable deberá disponer de un blindaje continuo.
Siempre que sea posible, mantenga los cables que lleven un tipo de señal separado de los
cables con otros tipos de señales o de alimentación.
Conexión a tierra de protección (PE) en la placa de conexiones
La conexión a tierra de protección (PE) está conectada a la placa de conexiones conductora
mediante un cable pesado, normalmente un cable trenzado de cobre con la sección de cable
máxima permitida.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
Utilice cables blindados para todas las E/S rápidas, las E/S analógicas y las señales de
comunicación.
Conecte a tierra los cables blindados para todas las E/S rápidas, las E/S analógicas y las
señales de comunicación en un único punto1.
Enrute las comunicaciones y los cables de E/S separados de los cables de alimentación.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.

Instalación de TMC2
36 EIO0000003340 12/2018
Conexiones de cables de blindaje
Los cables que transportan la E/S rápida, la E/S analógica y las señales de comunicación del bus
de campo deben estar blindados. El blindaje debe estar conectado a tierra de un modo seguro.
Los blindajes de E/S rápidas y E/S analógicas pueden estar conectados a la conexión a tierra
funcional (FE) o a la conexión a tierra de protección (PE) del M221 Logic Controller. Los blindajes
del cable de comunicación del bus de campo deben estar conectados a la conexión a tierra de
protección (PE) con bornes de conexión fijados en la placa de conexiones conductora de la
instalación.
El blindaje del cable Modbus debe estar conectado a la conexión a tierra de protección (PE).
Blindaje del cable a tierra de protección (PE)
Para conectar a tierra el blindaje de un cable mediante una abrazadera de conexión a tierra:
NOTA: El blindaje debe asegurarse bien a la placa de conexiones conductora para lograr un
contacto correcto.
PELIGRO
DESCARGA ELÉCTRICA
Asegúrese de que los cables Modbus están bien conectados a la conexión a tierra de protección
(PE).
El incumplimiento de estas instrucciones podrá causar la muerte o lesiones serias.
Paso Descripción
1 Pele el blindaje en una longitud de 15 mm (0,59 pulg.).
2 Conecte el cable a la placa de conexiones conductora
apretando la abrazadera de conexión a tierra con la parte
pelada del blindaje tan cerca como pueda de la base del
sistema del M221 Logic Controller.

Instalación de TMC2
EIO0000003340 12/2018 37
Blindaje del cable de conexión a tierra funcional (FE)
Para conectar el blindaje de un cable mediante una barra de conexión a tierra:
Paso Descripción
1 Instale la barra de conexión a tierra directamente
en la placa de conexiones conductora situada
debajo del sistema del M221 Logic Controller
como se indica.
2 Pele el blindaje en una longitud de 15 mm
(0,59 pulg.).
3 Fije firmemente el conector plano (1) utilizando la
abrazadera de nailon (2)(ancho de 2,5 a 3 mm (de
0,1 a 0,12 pulg.)) y una herramienta adecuada.

Instalación de TMC2
38 EIO0000003340 12/2018
NOTA: Utilice la barra de conexión a tierra de TM2XMTGB exclusivamente para conexiones a
tierra funcionales (FE).
ADVERTENCIA
DESCONEXIÓN ACCIDENTAL DE CONEXIÓN A TIERRA DE PROTECCIÓN (PE)
No utilice la placa de conexión a tierra TM2XMTGB para proporcionar una conexión a tierra
de protección (PE).
Utilice la placa de conexión a tierra TM2XMTGB sólo para proporcionar una conexión a tierra
funcional (FE).
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.

EIO0000003340 12/2018 39
Modicon TMC2
Cartuchos TMC2 estándar
EIO0000003340 12/2018
Cartuchos TMC2 estándar
Parte II
Cartuchos TMC2 estándar
Contenido de esta parte
Esta parte contiene los siguientes capítulos:
Capítulo Nombre del capítulo Página
3 Entradas analógicas de tensión y corriente de TMC2AI2 41
4 Entradas de temperatura analógicas de TMC2TI2 47
5 Salidas de tensión analógicas de TMC2AQ2V 53
6 Salidas de corriente analógicas de TMC2AQ2C 59
7 Línea serie de TMC2SL1 65

Cartuchos TMC2 estándar
40 EIO0000003340 12/2018

EIO0000003340 12/2018 41
Modicon TMC2
Entradas analógicas de tensión y corriente de TMC2AI2
EIO0000003340 12/2018
Entradas analógicas de tensión y corriente de TMC2AI2
Capítulo 3
Entradas analógicas de tensión y corriente de TMC2AI2
Descripción general
En este capítulo se describe el cartucho TMC2AI2, así como sus características y conexiones.
Contenido de este capítulo
Este capítulo contiene los siguientes apartados:
Apartado Página
Presentación de TMC2AI2 42
Características de TMC2AI2 43
Diagrama de cableado de TMC2AI2 45

Entradas analógicas de tensión y corriente de TMC2AI2
42 EIO0000003340 12/2018
Presentación de TMC2AI2
Descripción general
Las siguientes funciones se integran en el cartucho TMC2AI2:
2 entradas analógicas (tensión o corriente)
bloque de terminales de tornillo no extraíbles, 3,81 mm (0,15 pulg.) de paso
Características principales
Característica Valor
Tipo de señal Tensión Corriente
Número de canales de entrada 2
Rango de entrada De 0 a 10 V CC De 0 a 20 mA
De 4 a 20 mA
Resolución 12 bits (4.096 pasos)
Tipo de conexión 3,81 mm (0,15 pulg.) de paso, bloque de terminales de tornillo no
extraíble
Peso 15 g (0,53 onzas)

Entradas analógicas de tensión y corriente de TMC2AI2
EIO0000003340 12/2018 43
Características de TMC2AI2
Introducción
En esta sección se proporciona una descripción general de las características del cartucho
TMC2AI2.
NOTA: Para obtener información importante sobre la seguridad y las características del entorno
de Cartucho TMC2, consulte M221 Logic Controller - Guía de hardware.
Conectores
En el siguiente diagrama se muestran los conectores y las marcas del cartucho TMC2AI2:
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No supere ninguno de los valores nominales que se especifican en las tablas de características
medioambientales y eléctricas.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.

Entradas analógicas de tensión y corriente de TMC2AI2
44 EIO0000003340 12/2018
Características de las entradas
En la tabla siguiente se describen las características de entrada del cartucho:
Características Valor
Tipo de señal Tensión Corriente
Rango de entrada nominal De 0 a 10 V CC De 0 a 20 mA
De 4 a 20 mA
Impedancia de entrada > 1 MΩ < 250 Ω
Duración del muestreo 10 ms por canal habilitado
Tipo de entrada terminación única
Modalidad de funcionamiento exploración automática
Modalidad de conversión Tipo SAR
Precisión máxima a temperatura
ambiente: 25 °C (77 °F)
±0,1% de la escala completa
Deriva de temperatura ±0,02% de la escala completa por 1 °C (1,8 °F)
Repetibilidad tras el tiempo de
estabilización
±0,5% de la escala completa
Sin linealidad ±0,01% de la escala completa
Desviación máxima de entrada ±1,0% de la escala completa
Resolución digital 12 bits (4.096 pasos)
Valor de entrada del LSB 2,44 mV (rango de 0 a
10 V CC)
4,88 μA (rango de 0 a 20 mA)
3,91 μA (rango de 4 a 20 mA)
Tipo de datos del programa de aplicación escalable de -32.768 a 32.767
Datos de entrada fuera del rango de
detección
sí
Resistencia
a ruidos
desviación temporal
máxima durante
perturbaciones
±4,0% de la escala completa como máximo cuando la
perturbación EMC se aplica al cableado de E/S y la alimentación
tipo de cable y longitud
máxima
par trenzado blindado
< 30 m (98,4 pies)
diafonía (máxima) 1 LSB
Aislamiento entre entradas y lógica
interna
sin aislamiento
Sobrecarga máxima continua permitida
(sin daños)
13 V CC 40 mA
Filtro de entrada filtro de software: de 0 a 10 s (con incrementos de 0,1 s)

Entradas analógicas de tensión y corriente de TMC2AI2
EIO0000003340 12/2018 45
Diagrama de cableado de TMC2AI2
Introducción
Para conectar las entradas, este cartucho tiene un bloque de terminales de tornillo no extraíble.
Cableado
Consulte la sección Prácticas recomendadas relativas al cableado
(véase página 31)
.
Diagrama de cableado
En la siguiente figura aparece un ejemplo de la conexión de entrada de corriente y tensión:
(1): Dispositivo de salida analógica de tensión y corriente
NOTA: Cada entrada se puede conectar a una entrada de tensión o corriente.

Entradas analógicas de tensión y corriente de TMC2AI2
46 EIO0000003340 12/2018

EIO0000003340 12/2018 47
Modicon TMC2
Entradas de temperatura analógicas de TM C2TI2
EIO0000003340 12/2018
Entradas de temperatura analógicas de TM C2TI2
Capítulo 4
Entradas de temperatura analógicas de TMC2TI2
Descripción general
En este capítulo se describe el cartucho TMC2TI2, así como sus características y conexiones.
Contenido de este capítulo
Este capítulo contiene los siguientes apartados:
Apartado Página
Presentación de TMC2TI2 48
Características de TMC2TI2 49
Diagrama de cableado de TMC2TI2 52

Entradas de temperatura analógicas de TMC2TI2
48 EIO0000003340 12/2018
Presentación de TMC2TI2
Descripción general
Las siguientes funciones se integran en el cartucho TMC2TI2:
2 entradas de temperatura analógicas (termoelemento o RTD)
bloque de terminales de tornillo no extraíbles, 3,81 mm (0,15 pulg.) de paso
Características principales
Característica Valor
Tipo de señal Termoelemento RTD de 3 conductores
Número de canales de entrada 2
Rango de entrada tipo: K, J, R, S, B, E, T, N, C tipo: Pt100, Pt1000, Ni100, Ni1000
Resolución 14 bits
Tipo de conexión 3,81 mm (0,15 pulg.) de paso, bloque de terminales de tornillo no extraíble
Peso 15 g (0,53 onzas)

Entradas de temperatura analógicas de TMC2TI2
EIO0000003340 12/2018 49
Características de TMC2TI2
Introducción
En esta sección se proporciona una descripción general de las características del cartucho
TMC2TI2.
NOTA: Para obtener información importante sobre la seguridad y las características del entorno
de Cartucho TMC2, consulte M221 Logic Controller - Guía de hardware.
Conectores
En el siguiente diagrama se muestran los conectores y las marcas del cartucho TMC2TI2:
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No supere ninguno de los valores nominales que se especifican en las tablas de características
medioambientales y eléctricas.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.

Entradas de temperatura analógicas de TMC2TI2
50 EIO0000003340 12/2018
Características de las entradas
En la tabla siguiente se describen las características de entrada del cartucho:
Características Valor
Tipo de señal Termoelemento RTD de 3 conductores
Rango de entrada nominal tipo de termoelemento:
K: de –200 a +1.300 °C
(de –328 a +2.372 °F)
J: de –200 a +1.000 °C
(de –328 a +1.832 °F)
R: de 0 a +1.760 °C
(de +32 a +3.200 °F)
S: de 0 a +1.760 °C
(de +32 a +3.200 °F)
B: de 0 a +1.820 °C
(de +32 a +3.308 °F)
E: de –200 a +800 °C
(de –328 a +1.472 °F)
T: de –200 a +400 °C
(de –328 a +752 °F)
N: de –200 a +1.300 °C
(de –328 a +2.372 °F)
C: de 0 a +2.315 °C
(de +32 a +4.199 °F)
Tipo de RTD:
Pt100: de –200 a +850 °C
(de –328 a +1.562 °F)
Pt1000: de –200 a +600 °C
(de –328 a +1.112 °F)
Ni100: de –60 a +180 °C
(de –76 a +356 °F)
Ni1000: de –60 a +180 °C
(de –76 a +356 °F)
Impedancia de entrada > 1 MΩ
Duración del muestreo 125 ms por canal habilitado 250 ms por canal habilitado
Tipo de entrada terminación única
Modalidad de funcionamiento exploración automática
Modalidad de conversión Tipo SAR
Precisión máxima K, J, E, T, N: ±0,1% de la
escala completa a
temperatura ambiente:
25 °C (77 °F)
±0,4% de la escala
completa a temperatura
< 0 °C (32 °F)
R, S: ±6 °C (10,8 °F) de la
escala completa para el
rango de temperatura
medida: de 0 a 200 °C (de
32 a 392 °F)
B: no indicado
C: ±0,1% de la escala
completa a temperatura
ambiente: 25 °C (77 °F)
±0,1% de la escala completa a
temperatura ambiente: 25 °C
(77 °F)
Deriva de temperatura ±0,02% de la escala completa por 1 °C (1,8 °F)

Entradas de temperatura analógicas de TMC2TI2
EIO0000003340 12/2018 51
Repetibilidad tras el tiempo de
estabilización
±0,5% de la escala completa
Sin linealidad ±0,01% de la escala completa
Desviación máxima de entrada ±1,0% de la escala completa
Resolución digital tipo de termoelemento:
K: 15.000 pasos
J: 12.000 pasos
R: 17.600 pasos
S: 17.600 pasos
B: 18.200 pasos
E: 10.000 pasos
T: 6.000 pasos
N: 15.000 pasos
C: 23.150 pasos
Tipo de RTD:
Pt100: 10.500 pasos
Pt1000: 8.000 pasos
Ni100: 2.400 pasos
Ni1000: 2.400 pasos
Valor de entrada del LSB 0,1 °C (0,18 °F)
Tipo de datos del programa de aplicación escalable de -32.768 a 32.767
Datos de entrada fuera del rango de
detección
sí
Resistencia
a ruidos
desviación temporal
máxima durante
perturbaciones
±4,0% de la escala completa como máximo cuando la
perturbación EMC se aplica al cableado de E/S y la alimentación
tipo de cable y longitud
máxima
blindado
< 30 m (98,4 pies)
diafonía (máxima) 1 LSB
Aislamiento entre entradas y lógica
interna
sin aislamiento
Sobrecarga máxima continua permitida
(sin daños)
13 V CC 40 mA
Filtro de entrada filtro de software: de 0 a 10 s (con incrementos de 0,1 s)
Comportamiento cuando el sensor de
temperatura está roto o desconectado
valor de entrada = límite superior
Características Valor
Tipo de señal Termoelemento RTD de 3 conductores

Entradas de temperatura analógicas de TMC2TI2
52 EIO0000003340 12/2018
Diagrama de cableado de TMC2TI2
Introducción
Para conectar las entradas, este cartucho tiene un bloque de terminales de tornillo no extraíble.
Cableado
Consulte la sección Prácticas recomendadas relativas al cableado
(véase página 31)
.
Diagrama de cableado
En la siguiente figura se muestra un ejemplo de la conexión de sondas de termoelemento y RTD:
(1): Termoelemento
NOTA: Cada entrada se puede conectar tanto a una sonda de termoelemento como a un RTD.
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No conecte ningún cable a conexiones reservadas y no utilizadas o a conexiones designadas
como "No Connection (N.C.)".
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.

EIO0000003340 12/2018 53
Modicon TMC2
Salidas de tensión anal ógicas de TMC2AQ2 V
EIO0000003340 12/2018
Salidas de tensión anal ógicas de TMC2AQ2 V
Capítulo 5
Salidas de tensión analógicas de TMC2AQ2V
Descripción general
En este capítulo se describe el cartucho TMC2AQ2V, así como sus características y conexiones.
Contenido de este capítulo
Este capítulo contiene los siguientes apartados:
Apartado Página
Presentación de TMC2AQ2V 54
Características de TMC2AQ2V 55
Diagrama de cableado de TMC2AQ2V 57

Salidas de tensión analógicas de TMC2AQ2V
54 EIO0000003340 12/2018
Presentación de TMC2AQ2V
Descripción general
Las siguientes funciones se integran en el cartucho TMC2AQ2V:
2 salidas de tensión analógicas
bloque de terminales de tornillo no extraíbles, 3,81 mm (0,15 pulg.) de paso
Características principales
Característica Valor
Tipo de señal Tensión
Número de canales de salida 2
Rango de salida De 0 a 10 V CC
Resolución 12 bits (4.096 pasos)
Tipo de conexión 3,81 mm (0,15 pulg.) de paso, bloque de terminales de tornillo no extraíble
Peso 15 g (0,53 onzas)

Salidas de tensión analógicas de TMC2AQ2V
EIO0000003340 12/2018 55
Características de TMC2AQ2V
Introducción
En esta sección se ofrece una descripción general de las características del cartucho TMC2AQ2V.
NOTA: Para obtener información importante sobre la seguridad y las características del entorno
de Cartucho TMC2, consulte M221 Logic Controller - Guía de hardware.
Conectores
En el siguiente diagrama se muestran los conectores y las marcas del cartucho TMC2AQ2V:
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No supere ninguno de los valores nominales que se especifican en las tablas de características
medioambientales y eléctricas.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.

Salidas de tensión analógicas de TMC2AQ2V
56 EIO0000003340 12/2018
Características de las salidas
En la tabla siguiente se describen las características de salida del cartucho:
Características Valor
Tipo de señal Tensión
Rango de salida nominal De 0 a 10 V CC
Impedancia de carga > 2 KΩ
Tipo de carga de aplicación carga resistiva
Tiempo de conversión 20 ms
Tiempo total de transferencia del sistema
de salida
40 ms
Precisión máxima a temperatura
ambiente: 25 °C (77 °F)
±0,3% de la escala completa
Deriva de temperatura ±0,02% de la escala completa por 1 °C (1,8 °F)
Repetibilidad tras el tiempo de
estabilización
±0,4% de la escala completa
Sin linealidad ±0,01% de la escala completa
Rebasamiento superior 0%
Desviación máxima de salida ±1,0% de la escala completa (ondulación incluida)
Resolución digital 12 bits (4.096 pasos)
Valor de salida del LSB 2,44 mV
Tipo de datos del programa de aplicación De 0 a 4.095 escalable de –32.768 a 32.767
Resistencia
a ruidos
desviación temporal
máxima durante
perturbaciones
±4,0% de la escala completa como máximo cuando la
perturbación EMC se aplica al cableado de E/S y la alimentación
tipo de cable y longitud
máxima
par trenzado blindado
< 30 m (98,4 pies)
diafonía (máxima) 1 LSB
Aislamiento entre salidas y lógica interna sin aislamiento

Salidas de tensión analógicas de TMC2AQ2V
EIO0000003340 12/2018 57
Diagrama de cableado de TMC2AQ2V
Introducción
Para conectar las salidas, este cartucho tiene un bloque de terminales de tornillo no extraíble.
Cableado
Consulte la sección Prácticas recomendadas relativas al cableado
(véase página 31)
.
Diagrama de cableado
En la siguiente figura aparece un ejemplo de la conexión de salida de la tensión:
(1): Dispositivo de entrada analógica de tensión
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No conecte ningún cable a conexiones reservadas y no utilizadas o a conexiones designadas
como "No Connection (N.C.)".
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.

Salidas de tensión analógicas de TMC2AQ2V
58 EIO0000003340 12/2018

EIO0000003340 12/2018 59
Modicon TMC2
Salidas de corriente analógicas de TMC2AQ2C
EIO0000003340 12/2018
Salidas de corriente analógicas de TMC2AQ2C
Capítulo 6
Salidas de corriente analógicas de TMC2AQ2C
Descripción general
En este capítulo se describe el cartucho TMC2AQ2C, así como sus características y conexiones.
Contenido de este capítulo
Este capítulo contiene los siguientes apartados:
Apartado Página
Presentación de TMC2AQ2C 60
Características de TMC2AQ2C 61
Diagrama de cableado de TMC2AQ2C 63

Salidas de corriente analógicas de TMC2AQ2C
60 EIO0000003340 12/2018
Presentación de TMC2AQ2C
Descripción general
Las siguientes funciones se integran en el cartucho TMC2AQ2C:
2 salidas de corriente analógicas
bloque de terminales de tornillo no extraíbles, 3,81 mm (0,15 pulg.) de paso
Características principales
Característica Valor
Tipo de señal Corriente
Número de canales de salida 2
Rango de salida De 4 a 20 mA
Resolución 12 bits (4.096 pasos)
Tipo de conexión 3,81 mm (0,15 pulg.) de paso, bloque de terminales de tornillo no
extraíble
Peso 15 g (0,53 onzas)

Salidas de corriente analógicas de TMC2AQ2C
EIO0000003340 12/2018 61
Características de TMC2AQ2C
Introducción
En esta sección se proporciona una descripción general de las características del cartucho
TMC2AQ2C.
NOTA: Para obtener información importante sobre la seguridad y las características del entorno
de Cartucho TMC2, consulte M221 Logic Controller - Guía de hardware.
Conectores
En el siguiente diagrama se muestran los conectores y las marcas del cartucho TMC2AQ2C:
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No supere ninguno de los valores nominales que se especifican en las tablas de características
medioambientales y eléctricas.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.

Salidas de corriente analógicas de TMC2AQ2C
62 EIO0000003340 12/2018
Características de las salidas
En la tabla siguiente se describen las características de salida del cartucho:
Características Valor
Tipo de señal Corriente
Rango de salida nominal De 4 a 20 mA
Impedancia de carga < 500 Ω
Tipo de carga de aplicación carga resistiva
Tiempo de conversión 20 ms
Tiempo total de transferencia del sistema
de salida
40 ms
Precisión máxima a temperatura
ambiente: 25 °C (77 °F)
±0,3% de la escala completa
Deriva de temperatura ±0,02% de la escala completa por 1 °C (1,8 °F)
Repetibilidad tras el tiempo de
estabilización
±0,4% de la escala completa
Sin linealidad ±0,01% de la escala completa
Rebasamiento superior 0%
Desviación máxima de salida ±1,0% de la escala completa (ondulación incluida)
Resolución digital 12 bits (4.096 pasos)
Valor de salida del LSB 3,91 μA
Tipo de datos del programa de aplicación De 0 a 4.095 escalable de –32.768 a 32.767
Resistencia
a ruidos
desviación temporal
máxima durante
perturbaciones
±4,0% de la escala completa como máximo cuando la
perturbación EMC se aplica al cableado de E/S y la alimentación
tipo de cable y longitud
máxima
par trenzado blindado
< 30 m (98,4 pies)
diafonía (máxima) 1 LSB
Aislamiento entre salidas y lógica interna sin aislamiento

Salidas de corriente analógicas de TMC2AQ2C
EIO0000003340 12/2018 63
Diagrama de cableado de TMC2AQ2C
Introducción
Para conectar las salidas, este cartucho tiene un bloque de terminales de tornillo no extraíble.
Cableado
Consulte la sección Prácticas recomendadas relativas al cableado
(véase página 31)
.
Diagrama de cableado
En la siguiente figura aparece un ejemplo de la conexión de salida de la corriente:
(1): Dispositivo de entrada analógica de corriente
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No conecte ningún cable a conexiones reservadas y no utilizadas o a conexiones designadas
como "No Connection (N.C.)".
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.

Salidas de corriente analógicas de TMC2AQ2C
64 EIO0000003340 12/2018

EIO0000003340 12/2018 65
Modicon TMC2
Línea serie de TMC2SL1
EIO0000003340 12/2018
Línea serie de TMC2SL1
Capítulo 7
Línea serie de TMC2SL1
Descripción general
En este capítulo se describe el cartucho TMC2SL1, así como sus características y conexiones.
Contenido de este capítulo
Este capítulo contiene los siguientes apartados:
Apartado Página
Presentación de TMC2SL1 66
Características de TMC2SL1 67
Diagrama de cableado de TMC2SL1 69

Línea serie de TMC2SL1
66 EIO0000003340 12/2018
Presentación de TMC2SL1
Descripción general
Las siguientes funciones se integran en el cartucho TMC2SL1:
1 línea serie (RS232 o RS485)
bloque de terminales de tornillo no extraíbles, 3,81 mm (0,15 pulg.) de paso
Características principales
Característica Valor
Estándar Línea serie RS232 Línea serie RS485
Número de canales 1
Tipo de conexión 3,81 mm (0,15 pulg.) de paso, bloque de terminales de tornillo no extraíble
Peso 15 g (0,53 onzas)

Línea serie de TMC2SL1
EIO0000003340 12/2018 67
Características de TMC2SL1
Introducción
En esta sección se proporciona una descripción general de las características del cartucho
TMC2SL1.
NOTA: Para obtener información importante sobre la seguridad y las características del entorno
de Cartucho TMC2, consulte M221 Logic Controller - Guía de hardware.
Conectores
En el siguiente diagrama se muestran los conectores y las marcas del cartucho TMC2SL1:
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No supere ninguno de los valores nominales que se especifican en las tablas de características
medioambientales y eléctricas.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.

Línea serie de TMC2SL1
68 EIO0000003340 12/2018
Características de la línea serie
En la tabla siguiente se describen las características de la línea serie del cartucho:
Características Valor
Estándar configurable mediante software RS232 RS485
Velocidad de transmisión De 1.200 a 115.200 bps
Conductores Rx, Tx, común DA, DB, común
Selección de protocolo programable mediante software
Polarización de línea – programable mediante
software
Adaptador de extremo de línea en el
cartucho
no
cable tipo blindado
longitud < 3 m (9,8 pies) < 15 m (49,2 pies)
Aislamiento entre líneas y lógica interna sin aislamiento

Línea serie de TMC2SL1
EIO0000003340 12/2018 69
Diagrama de cableado de TMC2SL1
Introducción
Para conectar los conductores de la línea serie, este cartucho tiene un bloque de terminales de
tornillo no extraíble.
Cableado
Consulte la sección Prácticas recomendadas relativas al cableado
(véase página 31)
.
Diagrama de cableado
En la siguiente figura se muestra un ejemplo de conexión de la línea serie RS232:
En la siguiente figura se muestra un ejemplo de conexión de la línea serie RS485:
NOTA: Al cartucho solo se le puede conectar una línea serie (RS232 o RS485).
NOTA: Solo se gestiona un cartucho TMC2SL1 por Logic Controller.

Línea serie de TMC2SL1
70 EIO0000003340 12/2018

EIO0000003340 12/2018 71
Modicon TMC2
Cartuchos de aplicaciones TMC2
EIO0000003340 12/2018
Cartuchos de aplicaciones TMC2
Parte III
Cartuchos de aplicaciones TMC2
Contenido de esta parte
Esta parte contiene los siguientes capítulos:
Capítulo Nombre del capítulo Página
8 Elevación de TMC2HOIS01 73
9 Empaquetado de TMC2PACK01 79
10 Transporte de TMC2CONV01 85

Cartuchos de aplicaciones TMC2
72 EIO0000003340 12/2018

EIO0000003340 12/2018 73
Modicon TMC2
Elevación de TMC2HOIS01
EIO0000003340 12/2018
Elevación de TMC2HOIS01
Capítulo 8
Elevación de TMC2HOIS01
Descripción general
En este capítulo se describe el cartucho TMC2HOIS01, así como sus características y
conexiones.
Contenido de este capítulo
Este capítulo contiene los siguientes apartados:
Apartado Página
Presentación de TMC2HOIS01 74
Características de TMC2HOIS01 75
Diagrama de cableado de TMC2HOIS01 77

Elevación de TMC2HOIS01
74 EIO0000003340 12/2018
Presentación de TMC2HOIS01
Descripción general
Las siguientes funciones se integran en el cartucho TMC2HOIS01:
2 entradas analógicas (tensión o corriente) para la elevación de las celdas de carga
bloque de terminales de tornillo no extraíbles, 3,81 mm (0,15 pulg.) de paso
Características principales
Característica Valor
Tipo de señal Tensión Corriente
Número de canales de entrada 2
Rango de entrada De 0 a 10 V CC De 0 a 20 mA
De 4 a 20 mA
Resolución 12 bits (4.096 pasos)
Tipo de conexión 3,81 mm (0,15 pulg.) de paso, bloque de terminales de tornillo no extraíble
Peso 15 g (0,53 onzas)

Elevación de TMC2HOIS01
EIO0000003340 12/2018 75
Características de TMC2HOIS01
Introducción
En esta sección se proporciona una descripción general de las características del cartucho
TMC2HOIS01.
NOTA: Para obtener información importante sobre la seguridad y las características del entorno
de Cartucho TMC2, consulte M221 Logic Controller - Guía de hardware.
Conectores
En el siguiente diagrama se muestran los conectores y las marcas del cartucho TMC2HOIS01:
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No supere ninguno de los valores nominales que se especifican en las tablas de características
medioambientales y eléctricas.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.

Elevación de TMC2HOIS01
76 EIO0000003340 12/2018
Características de las entradas
En la tabla siguiente se describen las características de entrada del cartucho:
Características Valor
Tipo de señal Tensión Corriente
Rango de entrada nominal De 0 a 10 V CC De 0 a 20 mA
De 4 a 20 mA
Impedancia de entrada > 1 MΩ < 250 Ω
Duración del muestreo 10 ms por canal habilitado
Tipo de entrada terminación única
Modalidad de funcionamiento exploración automática
Modalidad de conversión Tipo SAR
Precisión máxima a temperatura
ambiente: 25 °C (77 °F)
±0,1% de la escala completa
Deriva de temperatura ±0,02% de la escala completa por 1 °C (1,8 °F)
Repetibilidad tras el tiempo de
estabilización
±0,5% de la escala completa
Sin linealidad ±0,01% de la escala completa
Desviación máxima de entrada ±1,0% de la escala completa
Resolución digital 12 bits (4.096 pasos)
Valor de entrada del LSB 2,44 mV (rango de 0 a
10 V CC)
4,88 μA (rango de 0 a 20 mA)
3,91 μA (rango de 4 a 20 mA)
Tipo de datos del programa de aplicación escalable de -32.768 a 32.767
Datos de entrada fuera del rango de
detección
sí
Resistencia
a ruidos
desviación temporal
máxima durante
perturbaciones
±4,0% de la escala completa como máximo cuando la
perturbación EMC se aplica al cableado de E/S y la alimentación
tipo de cable y longitud
máxima
par trenzado blindado
< 30 m (98,4 pies)
diafonía (máxima) 1 LSB
Aislamiento entre entradas y lógica
interna
sin aislamiento
Sobrecarga máxima continua permitida
(sin daños)
13 V CC 40 mA
Filtro de entrada filtro de software: de 0 a 10 s (con incrementos de 0,1 s)

Elevación de TMC2HOIS01
EIO0000003340 12/2018 77
Diagrama de cableado de TMC2HOIS01
Introducción
Para conectar las entradas, este cartucho tiene un bloque de terminales de tornillo no extraíble.
Cableado
Consulte la sección Prácticas recomendadas relativas al cableado
(véase página 31)
.
Diagrama de cableado
En la siguiente figura aparece un ejemplo de la conexión de entrada de corriente y tensión:
(1): Dispositivo de salida analógica de tensión y corriente
NOTA: Cada entrada se puede conectar a una entrada de tensión o corriente.

Elevación de TMC2HOIS01
78 EIO0000003340 12/2018

EIO0000003340 12/2018 79
Modicon TMC2
Empaquetado de TMC2PACK01
EIO0000003340 12/2018
Empaquetado de TMC2PACK01
Capítulo 9
Empaquetado de TMC2PACK01
Descripción general
En este capítulo se describe el cartucho TMC2PACK01, así como sus características y
conexiones.
Contenido de este capítulo
Este capítulo contiene los siguientes apartados:
Apartado Página
Presentación de TMC2PACK01 80
Características de TMC2PACK01 81
Diagrama de cableado de TMC2PACK01 83

Empaquetado de TMC2PACK01
80 EIO0000003340 12/2018
Presentación de TMC2PACK01
Descripción general
Las siguientes funciones se integran en el cartucho TMC2PACK01:
2 entradas analógicas (tensión o corriente) para el empaquetado
bloque de terminales de tornillo no extraíbles, 3,81 mm (0,15 pulg.) de paso
Características principales
Característica Valor
Tipo de señal Tensión Corriente
Número de canales de entrada 2
Rango de entrada De 0 a 10 V CC De 0 a 20 mA
De 4 a 20 mA
Resolución 12 bits (4.096 pasos)
Tipo de conexión 3,81 mm (0,15 pulg.) de paso, bloque de terminales de tornillo no extraíble
Peso 15 g (0,53 onzas)

Empaquetado de TMC2PACK01
EIO0000003340 12/2018 81
Características de TMC2PACK01
Introducción
En esta sección se proporciona una descripción general de las características del cartucho
TMC2PACK01.
NOTA: Para obtener información importante sobre la seguridad y las características del entorno
de Cartucho TMC2, consulte M221 Logic Controller - Guía de hardware.
Conectores
En el siguiente diagrama se muestran los conectores y las marcas del cartucho TMC2PACK01:
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No supere ninguno de los valores nominales que se especifican en las tablas de características
medioambientales y eléctricas.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.

Empaquetado de TMC2PACK01
82 EIO0000003340 12/2018
Características de las entradas
En la tabla siguiente se describen las características de entrada del cartucho:
Características Valor
Tipo de señal Tensión Corriente
Rango de entrada nominal De 0 a 10 V CC De 0 a 20 mA
De 4 a 20 mA
Impedancia de entrada > 1 MΩ < 250 Ω
Duración del muestreo 10 ms por canal habilitado
Tipo de entrada terminación única
Modalidad de funcionamiento exploración automática
Modalidad de conversión Tipo SAR
Precisión máxima a temperatura
ambiente: 25 °C (77 °F)
±0,1% de la escala completa
Deriva de temperatura ±0,02% de la escala completa por 1 °C (1,8 °F)
Repetibilidad tras el tiempo de
estabilización
±0,5% de la escala completa
Sin linealidad ±0,01% de la escala completa
Desviación máxima de entrada ±1,0% de la escala completa
Resolución digital 12 bits (4.096 pasos)
Valor de entrada del LSB 2,44 mV (rango de 0 a
10 V CC)
4,88 μA (rango de 0 a 20 mA)
3,91 μA (rango de 4 a 20 mA)
Tipo de datos del programa de aplicación escalable de -32.768 a 32.767
Datos de entrada fuera del rango de
detección
sí
Resistencia
a ruidos
desviación temporal
máxima durante
perturbaciones
±4,0% de la escala completa como máximo cuando la
perturbación EMC se aplica al cableado de E/S y la alimentación
tipo de cable y longitud
máxima
par trenzado blindado
< 30 m (98,4 pies)
diafonía (máxima) 1 LSB
Aislamiento entre entradas y lógica
interna
sin aislamiento
Sobrecarga máxima continua permitida
(sin daños)
13 V CC 40 mA
Filtro de entrada filtro de software: de 0 a 10 s (con incrementos de 0,1 s)

Empaquetado de TMC2PACK01
EIO0000003340 12/2018 83
Diagrama de cableado de TMC2PACK01
Introducción
Para conectar las entradas, este cartucho tiene un bloque de terminales de tornillo no extraíble.
Cableado
Consulte la sección Prácticas recomendadas relativas al cableado
(véase página 31)
.
Diagrama de cableado
En la siguiente figura aparece un ejemplo de la conexión de entrada de corriente y tensión:
(1): Dispositivo de salida analógica de tensión y corriente
NOTA: Cada entrada se puede conectar a una entrada de tensión o corriente.

Empaquetado de TMC2PACK01
84 EIO0000003340 12/2018

EIO0000003340 12/2018 85
Modicon TMC2
Transport e de TMC2CONV01
EIO0000003340 12/2018
Transport e de TMC2CONV01
Capítulo 10
Transporte de TMC2CONV01
Descripción general
En este capítulo se describe el cartucho TMC2CONV01, así como sus características y
conexiones.
Contenido de este capítulo
Este capítulo contiene los siguientes apartados:
Apartado Página
Presentación de TMC2CONV01 86
Características de TMC2CONV01 87
Diagrama de cableado de TMC2CONV01 89

Transporte de TMC2CONV01
86 EIO0000003340 12/2018
Presentación de TMC2CONV01
Descripción general
Las siguientes funciones se integran en el cartucho TMC2CONV01:
1 línea serie (RS232 o RS485) para el transporte
bloque de terminales de tornillo no extraíbles, 3,81 mm (0,15 pulg.) de paso
Características principales
Característica Valor
Estándar Línea serie RS232 Línea serie RS485
Número de canales 1
Tipo de conexión 3,81 mm (0,15 pulg.) de paso, bloque de terminales de tornillo no extraíble
Peso 15 g (0,53 onzas)

Transporte de TMC2CONV01
EIO0000003340 12/2018 87
Características de TMC2CONV01
Introducción
En esta sección se proporciona una descripción general de las características del cartucho
TMC2CONV01.
NOTA: Para obtener información importante sobre la seguridad y las características del entorno
de Cartucho TMC2, consulte M221 Logic Controller - Guía de hardware.
Conectores
En el siguiente diagrama se muestran los conectores y las marcas del cartucho TMC2CONV01:
ADVERTENCIA
FUNCIONAMIENTO IMPREVISTO DEL EQUIPO
No supere ninguno de los valores nominales que se especifican en las tablas de características
medioambientales y eléctricas.
El incumplimiento de estas instrucciones puede causar la muerte, lesiones serias o daño al
equipo.

Transporte de TMC2CONV01
88 EIO0000003340 12/2018
Características de la línea serie
En la tabla siguiente se describen las características de la línea serie del cartucho:
Características Valor
Estándar configurable mediante software RS232 RS485
Velocidad de transmisión De 1.200 a 115.200 bps
Conductores Rx, Tx, común DA, DB, común
Selección de protocolo programable mediante software
Polarización de línea – programable mediante
software
Adaptador de extremo de línea en el
cartucho
no
cable tipo blindado
longitud < 3 m (9,8 pies) < 15 m (49,2 pies)
Aislamiento entre líneas y lógica interna sin aislamiento

Transporte de TMC2CONV01
EIO0000003340 12/2018 89
Diagrama de cableado de TMC2CONV01
Introducción
Para conectar los conductores de la línea serie, este cartucho tiene un bloque de terminales de
tornillo no extraíble.
Cableado
Consulte la sección Prácticas recomendadas relativas al cableado
(véase página 31)
.
Diagrama de cableado
En la siguiente figura se muestra un ejemplo de conexión de la línea serie RS232:
En la siguiente figura se muestra un ejemplo de conexión de la línea serie RS485:
NOTA: Al cartucho solo se le puede conectar una línea serie (RS232 o RS485).
NOTA: Solo se gestiona un cartucho TMC2CONV01 por Logic Controller.

Transporte de TMC2CONV01
90 EIO0000003340 12/2018

EIO0000003340 12/2018 91
Modicon TMC2
Glosario
EIO0000003340 12/2018
Glosario
M
Modbus
El protocolo de comunicaciones que permite las comunicaciones entre muchos dispositivos
conectados a la misma red.
P
PE
(
tierra de protección
) Una conexión a tierra común para riesgos de descargas eléctricas al exponer
las superficies conductoras de un dispositivo al potencial de tierra. Para evitar posibles caídas de
tensión, en este conductor no circula corriente (conocido también como
conexión a tierra de
protección
en Norteamérica o como conexión a tierra del equipo según el US National Electrical
Code).

Glosario
92 EIO0000003340 12/2018

EIO0000003340 12/2018 93
Modicon TMC2
Índice
EIO0000003340 12/2018
Índice
C
cableado,
31
cartucho
compatibilidad,
16
descripción,
15
funciones,
15
TMC2,
39
,
71
TMC2AI2,
41
TMC2AQ2C,
59
TMC2AQ2V,
53
TMC2CONV01,
85
TMC2HOIS01,
73
TMC2PACK01,
79
TMC2SL1,
65
TMC2TI2,
47
certificaciones y estándares,
20
compatibilidad
cartucho,
16
Conexión a tierra,
35
D
descripción
cartucho,
15
E
entorno,
19
F
funciones
cartucho,
15
R
RS232,
65
RS485,
65
T
TMC2
cartucho,
39
,
71
TMC2AI2
cartucho,
41
TMC2AQ2C
cartucho,
59
TMC2AQ2V
cartucho,
53
TMC2CONV01
cartucho,
85
TMC2HOIS01
cartucho,
73
TMC2PACK01
cartucho,
79
TMC2SL1
cartucho,
65
TMC2TI2
cartucho,
47

Índice
94 EIO0000003340 12/2018
-
 1
1
-
 2
2
-
 3
3
-
 4
4
-
 5
5
-
 6
6
-
 7
7
-
 8
8
-
 9
9
-
 10
10
-
 11
11
-
 12
12
-
 13
13
-
 14
14
-
 15
15
-
 16
16
-
 17
17
-
 18
18
-
 19
19
-
 20
20
-
 21
21
-
 22
22
-
 23
23
-
 24
24
-
 25
25
-
 26
26
-
 27
27
-
 28
28
-
 29
29
-
 30
30
-
 31
31
-
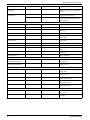 32
32
-
 33
33
-
 34
34
-
 35
35
-
 36
36
-
 37
37
-
 38
38
-
 39
39
-
 40
40
-
 41
41
-
 42
42
-
 43
43
-
 44
44
-
 45
45
-
 46
46
-
 47
47
-
 48
48
-
 49
49
-
 50
50
-
 51
51
-
 52
52
-
 53
53
-
 54
54
-
 55
55
-
 56
56
-
 57
57
-
 58
58
-
 59
59
-
 60
60
-
 61
61
-
 62
62
-
 63
63
-
 64
64
-
 65
65
-
 66
66
-
 67
67
-
 68
68
-
 69
69
-
 70
70
-
 71
71
-
 72
72
-
 73
73
-
 74
74
-
 75
75
-
 76
76
-
 77
77
-
 78
78
-
 79
79
-
 80
80
-
 81
81
-
 82
82
-
 83
83
-
 84
84
-
 85
85
-
 86
86
-
 87
87
-
 88
88
-
 89
89
-
 90
90
-
 91
91
-
 92
92
-
 93
93
-
 94
94
-
 95
95
-
 96
96
-
 97
97
-
 98
98
-
 99
99
-
 100
100
-
 101
101
-
 102
102
-
 103
103
-
 104
104
-
 105
105
-
 106
106
-
 107
107
-
 108
108
-
 109
109
-
 110
110
-
 111
111
-
 112
112
-
 113
113
-
 114
114
-
 115
115
-
 116
116
-
 117
117
-
 118
118
-
 119
119
-
 120
120
-
 121
121
-
 122
122
-
 123
123
-
 124
124
-
 125
125
-
 126
126
-
 127
127
-
 128
128
-
 129
129
-
 130
130
-
 131
131
-
 132
132
-
 133
133
-
 134
134
-
 135
135
-
 136
136
-
 137
137
-
 138
138
-
 139
139
-
 140
140
-
 141
141
-
 142
142
-
 143
143
-
 144
144
-
 145
145
-
 146
146
-
 147
147
-
 148
148
-
 149
149
-
 150
150
-
 151
151
-
 152
152
-
 153
153
-
 154
154
-
 155
155
-
 156
156
-
 157
157
-
 158
158
-
 159
159
-
 160
160
-
 161
161
-
 162
162
-
 163
163
-
 164
164
-
 165
165
-
 166
166
-
 167
167
-
 168
168
-
 169
169
-
 170
170
-
 171
171
-
 172
172
-
 173
173
-
 174
174
-
 175
175
-
 176
176
-
 177
177
-
 178
178
-
 179
179
-
 180
180
-
 181
181
-
 182
182
-
 183
183
-
 184
184
-
 185
185
-
 186
186
-
 187
187
-
 188
188
-
 189
189
-
 190
190
-
 191
191
-
 192
192
-
 193
193
-
 194
194
-
 195
195
-
 196
196
-
 197
197
-
 198
198
-
 199
199
-
 200
200
-
 201
201
-
 202
202
-
 203
203
-
 204
204
-
 205
205
-
 206
206
-
 207
207
-
 208
208
-
 209
209
-
 210
210
-
 211
211
-
 212
212
-
 213
213
-
 214
214
-
 215
215
-
 216
216
-
 217
217
-
 218
218
-
 219
219
-
 220
220
-
 221
221
-
 222
222
-
 223
223
-
 224
224
-
 225
225
-
 226
226
-
 227
227
-
 228
228
-
 229
229
-
 230
230
-
 231
231
-
 232
232
-
 233
233
-
 234
234
-
 235
235
-
 236
236
-
 237
237
-
 238
238
-
 239
239
-
 240
240
-
 241
241
-
 242
242
-
 243
243
-
 244
244
-
 245
245
-
 246
246
-
 247
247
-
 248
248
-
 249
249
-
 250
250
-
 251
251
-
 252
252
-
 253
253
-
 254
254
-
 255
255
-
 256
256
-
 257
257
-
 258
258
-
 259
259
-
 260
260
-
 261
261
-
 262
262
-
 263
263
-
 264
264
-
 265
265
-
 266
266
-
 267
267
-
 268
268
-
 269
269
-
 270
270
-
 271
271
-
 272
272
-
 273
273
-
 274
274
-
 275
275
-
 276
276
-
 277
277
-
 278
278
-
 279
279
-
 280
280
-
 281
281
-
 282
282
-
 283
283
-
 284
284
-
 285
285
-
 286
286
-
 287
287
-
 288
288
-
 289
289
-
 290
290
-
 291
291
-
 292
292
-
 293
293
-
 294
294
-
 295
295
-
 296
296
-
 297
297
-
 298
298
-
 299
299
-
 300
300
-
 301
301
-
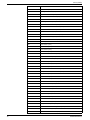 302
302
-
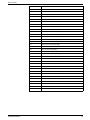 303
303
-
 304
304
-
 305
305
-
 306
306
-
 307
307
-
 308
308
-
 309
309
-
 310
310
-
 311
311
-
 312
312
-
 313
313
-
 314
314
-
 315
315
-
 316
316
-
 317
317
-
 318
318
-
 319
319
-
 320
320
-
 321
321
-
 322
322
-
 323
323
-
 324
324
-
 325
325
-
 326
326
-
 327
327
-
 328
328
-
 329
329
-
 330
330
-
 331
331
-
 332
332
-
 333
333
-
 334
334
-
 335
335
-
 336
336
-
 337
337
-
 338
338
-
 339
339
-
 340
340
-
 341
341
-
 342
342
-
 343
343
-
 344
344
-
 345
345
-
 346
346
-
 347
347
-
 348
348
-
 349
349
-
 350
350
-
 351
351
-
 352
352
-
 353
353
-
 354
354
-
 355
355
-
 356
356
-
 357
357
-
 358
358
-
 359
359
-
 360
360
-
 361
361
-
 362
362
-
 363
363
-
 364
364
-
 365
365
-
 366
366
-
 367
367
-
 368
368
-
 369
369
-
 370
370
-
 371
371
-
 372
372
-
 373
373
-
 374
374
-
 375
375
-
 376
376
-
 377
377
-
 378
378
-
 379
379
-
 380
380
-
 381
381
-
 382
382
-
 383
383
-
 384
384
-
 385
385
-
 386
386
-
 387
387
-
 388
388
-
 389
389
-
 390
390
-
 391
391
-
 392
392
-
 393
393
-
 394
394
-
 395
395
-
 396
396
-
 397
397
-
 398
398
-
 399
399
-
 400
400
-
 401
401
-
 402
402
-
 403
403
-
 404
404
-
 405
405
-
 406
406
-
 407
407
-
 408
408
-
 409
409
-
 410
410
-
 411
411
-
 412
412
-
 413
413
-
 414
414
-
 415
415
-
 416
416
-
 417
417
-
 418
418
-
 419
419
-
 420
420
-
 421
421
-
 422
422
-
 423
423
-
 424
424
-
 425
425
-
 426
426
-
 427
427
-
 428
428
-
 429
429
-
 430
430
-
 431
431
-
 432
432
-
 433
433
-
 434
434
-
 435
435
-
 436
436
-
 437
437
-
 438
438
-
 439
439
-
 440
440
-
 441
441
-
 442
442
-
 443
443
-
 444
444
-
 445
445
-
 446
446
-
 447
447
-
 448
448
-
 449
449
-
 450
450
-
 451
451
-
 452
452
-
 453
453
-
 454
454
-
 455
455
-
 456
456
-
 457
457
-
 458
458
-
 459
459
-
 460
460
-
 461
461
-
 462
462
-
 463
463
-
 464
464
-
 465
465
-
 466
466
-
 467
467
-
 468
468
-
 469
469
-
 470
470
-
 471
471
-
 472
472
-
 473
473
-
 474
474
-
 475
475
-
 476
476
-
 477
477
-
 478
478
-
 479
479
-
 480
480
-
 481
481
-
 482
482
-
 483
483
-
 484
484
-
 485
485
-
 486
486
-
 487
487
-
 488
488
-
 489
489
-
 490
490
-
 491
491
-
 492
492
-
 493
493
-
 494
494
-
 495
495
-
 496
496
-
 497
497
-
 498
498
-
 499
499
-
 500
500
-
 501
501
-
 502
502
-
 503
503
-
 504
504
-
 505
505
-
 506
506
-
 507
507
-
 508
508
-
 509
509
-
 510
510
-
 511
511
-
 512
512
-
 513
513
-
 514
514
-
 515
515
-
 516
516
-
 517
517
-
 518
518
-
 519
519
-
 520
520
-
 521
521
-
 522
522
-
 523
523
-
 524
524
-
 525
525
-
 526
526
-
 527
527
-
 528
528
-
 529
529
-
 530
530
-
 531
531
-
 532
532
-
 533
533
-
 534
534
-
 535
535
-
 536
536
-
 537
537
-
 538
538
-
 539
539
-
 540
540
-
 541
541
-
 542
542
-
 543
543
-
 544
544
-
 545
545
-
 546
546
-
 547
547
-
 548
548
-
 549
549
-
 550
550
-
 551
551
-
 552
552
-
 553
553
-
 554
554
-
 555
555
-
 556
556
-
 557
557
-
 558
558
-
 559
559
-
 560
560
-
 561
561
-
 562
562
-
 563
563
-
 564
564
-
 565
565
-
 566
566
-
 567
567
-
 568
568
-
 569
569
-
 570
570
-
 571
571
-
 572
572
-
 573
573
-
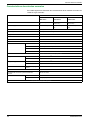 574
574
-
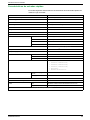 575
575
-
 576
576
-
 577
577
-
 578
578
-
 579
579
-
 580
580
-
 581
581
-
 582
582
-
 583
583
-
 584
584
-
 585
585
-
 586
586
-
 587
587
-
 588
588
-
 589
589
-
 590
590
-
 591
591
-
 592
592
-
 593
593
-
 594
594
-
 595
595
-
 596
596
-
 597
597
-
 598
598
-
 599
599
-
 600
600
-
 601
601
-
 602
602
-
 603
603
-
 604
604
-
 605
605
-
 606
606
-
 607
607
-
 608
608
-
 609
609
-
 610
610
-
 611
611
-
 612
612
-
 613
613
-
 614
614
-
 615
615
-
 616
616
-
 617
617
-
 618
618
-
 619
619
-
 620
620
-
 621
621
-
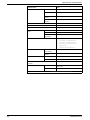 622
622
-
 623
623
-
 624
624
-
 625
625
-
 626
626
-
 627
627
-
 628
628
-
 629
629
-
 630
630
-
 631
631
-
 632
632
-
 633
633
-
 634
634
-
 635
635
-
 636
636
-
 637
637
-
 638
638
-
 639
639
-
 640
640
-
 641
641
-
 642
642
-
 643
643
-
 644
644
-
 645
645
-
 646
646
-
 647
647
-
 648
648
-
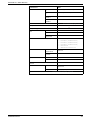 649
649
-
 650
650
-
 651
651
-
 652
652
-
 653
653
-
 654
654
-
 655
655
-
 656
656
-
 657
657
-
 658
658
-
 659
659
-
 660
660
-
 661
661
-
 662
662
-
 663
663
-
 664
664
-
 665
665
-
 666
666
-
 667
667
-
 668
668
-
 669
669
-
 670
670
-
 671
671
-
 672
672
-
 673
673
-
 674
674
-
 675
675
-
 676
676
-
 677
677
-
 678
678
-
 679
679
-
 680
680
-
 681
681
-
 682
682
-
 683
683
-
 684
684
-
 685
685
-
 686
686
-
 687
687
-
 688
688
-
 689
689
-
 690
690
-
 691
691
-
 692
692
-
 693
693
-
 694
694
-
 695
695
-
 696
696
-
 697
697
-
 698
698
-
 699
699
-
 700
700
-
 701
701
-
 702
702
-
 703
703
-
 704
704
-
 705
705
-
 706
706
-
 707
707
-
 708
708
-
 709
709
-
 710
710
-
 711
711
-
 712
712
-
 713
713
-
 714
714
-
 715
715
-
 716
716
-
 717
717
-
 718
718
-
 719
719
-
 720
720
-
 721
721
-
 722
722
-
 723
723
-
 724
724
-
 725
725
-
 726
726
-
 727
727
-
 728
728
-
 729
729
-
 730
730
-
 731
731
-
 732
732
-
 733
733
-
 734
734
-
 735
735
-
 736
736
-
 737
737
-
 738
738
-
 739
739
-
 740
740
-
 741
741
-
 742
742
-
 743
743
-
 744
744
-
 745
745
-
 746
746
-
 747
747
-
 748
748
-
 749
749
-
 750
750
-
 751
751
-
 752
752
-
 753
753
-
 754
754
-
 755
755
-
 756
756
-
 757
757
-
 758
758
-
 759
759
-
 760
760
-
 761
761
-
 762
762
-
 763
763
-
 764
764
-
 765
765
-
 766
766
-
 767
767
-
 768
768
-
 769
769
-
 770
770
-
 771
771
-
 772
772
-
 773
773
-
 774
774
-
 775
775
-
 776
776
-
 777
777
-
 778
778
-
 779
779
-
 780
780
-
 781
781
-
 782
782
-
 783
783
-
 784
784
-
 785
785
-
 786
786
-
 787
787
-
 788
788
-
 789
789
-
 790
790
-
 791
791
-
 792
792
-
 793
793
-
 794
794
-
 795
795
-
 796
796
-
 797
797
-
 798
798
-
 799
799
-
 800
800
-
 801
801
-
 802
802
-
 803
803
-
 804
804
-
 805
805
-
 806
806
-
 807
807
-
 808
808
-
 809
809
-
 810
810
-
 811
811
-
 812
812
-
 813
813
-
 814
814
-
 815
815
-
 816
816
-
 817
817
-
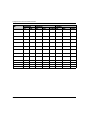 818
818
-
 819
819
-
 820
820
-
 821
821
-
 822
822
-
 823
823
-
 824
824
-
 825
825
-
 826
826
-
 827
827
-
 828
828
-
 829
829
-
 830
830
-
 831
831
-
 832
832
-
 833
833
-
 834
834
-
 835
835
-
 836
836
-
 837
837
-
 838
838
-
 839
839
-
 840
840
-
 841
841
-
 842
842
-
 843
843
-
 844
844
-
 845
845
-
 846
846
-
 847
847
-
 848
848
-
 849
849
-
 850
850
-
 851
851
-
 852
852
-
 853
853
-
 854
854
-
 855
855
-
 856
856
-
 857
857
-
 858
858
-
 859
859
-
 860
860
-
 861
861
-
 862
862
-
 863
863
-
 864
864
-
 865
865
-
 866
866
-
 867
867
-
 868
868
-
 869
869
-
 870
870
-
 871
871
-
 872
872
-
 873
873
-
 874
874
-
 875
875
-
 876
876
-
 877
877
-
 878
878
-
 879
879
-
 880
880
-
 881
881
-
 882
882
-
 883
883
-
 884
884
-
 885
885
-
 886
886
-
 887
887
-
 888
888
-
 889
889
-
 890
890
-
 891
891
-
 892
892
-
 893
893
-
 894
894
-
 895
895
-
 896
896
-
 897
897
-
 898
898
-
 899
899
-
 900
900
-
 901
901
-
 902
902
-
 903
903
-
 904
904
-
 905
905
-
 906
906
-
 907
907
-
 908
908
-
 909
909
-
 910
910
-
 911
911
-
 912
912
-
 913
913
-
 914
914
-
 915
915
-
 916
916
-
 917
917
-
 918
918
-
 919
919
-
 920
920
-
 921
921
-
 922
922
-
 923
923
-
 924
924
-
 925
925
-
 926
926
-
 927
927
-
 928
928
-
 929
929
-
 930
930
-
 931
931
-
 932
932
-
 933
933
-
 934
934






































































































































































































































































































































































































































































































































































































































































































































































































































































































































































Schneider Electric Modicon M221 El manual del propietario
- Tipo
- El manual del propietario
Documentos relacionados
-
Schneider Electric Modicon M241 El manual del propietario
-
-
-
Eurotherm TCSMCNAM3M002P USB to RS485 converter El manual del propietario
-
-
-
Otros documentos
-
IFM AC012S Instrucciones de operación
-
CARLO GAVAZZI SD2DUG24 El manual del propietario
-
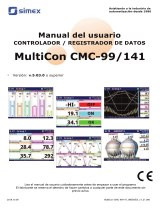 Simex MultiCon CMC-99 El manual del propietario
Simex MultiCon CMC-99 El manual del propietario
-
Pro-face STC6000 Series Manual de usuario
-
 Irai Automgen 7 Manual de usuario
Irai Automgen 7 Manual de usuario
-
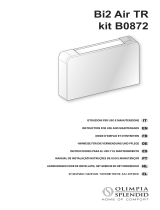 Olimpia Splendid naked - slim Manual de usuario
Olimpia Splendid naked - slim Manual de usuario
-
Mettler Toledo IND331 Series Guía de instalación
-
Task Force Tips CC-605 Instrucciones de operación
-
Samsung SP-M251 Manual de usuario
-
CARLO GAVAZZI YN115CEI8RPIO El manual del propietario


