
www.furuno.com
A
ll brand and product names are trademarks, registered trademarks or service marks of their respective holders.
Manual de Instalación
PILOTO AUTOMÁTICO
Modelo NAVpilot-300
INSTRUCCIONES DE SEGURIDAD................................................................................ i
CONFIGURACIÓN DEL SISTEMA ................................................................................. ii
ALCANCE DEL SUMINISTRO....................................................................................... iii
1. MONTAJE................................................................................................................1-1
1.1 Unidad de control...............................................................................................................1-1
1.2 Unidad procesadora...........................................................................................................1-5
1.3 Unidad de referencia del timón (opcional) .........................................................................1-8
2. CABLEADO.............................................................................................................2-1
2.1 Unidad procesadora...........................................................................................................2-2
2.2 Unidad de control...............................................................................................................2-4
2.3 Caja de conexiones (opcional)...........................................................................................2-5
2.4 PGN de entrada/salida.......................................................................................................2-7
3. CONFIGURACIÓN INICIAL ....................................................................................3-1
3.1 Menú [Inicializar]................................................................................................................3-1
3.2 Menú [Configuración de Pantalla]......................................................................................3-3
3.3 Menú [Características del Barco].......................................................................................3-3
3.4 Menú [Configuración en Puerto] ........................................................................................3-5
3.5 Menú [NMEA2000]...........................................................................................................3-18
3.6 Menú [Servo por Puerto Cables]......................................................................................3-19
3.7 Menús [Selección de Sensor] ..........................................................................................3-20
3.8 Menú [Pruebas de Mar] ...................................................................................................3-21
3.9 Menú [Configurar Parametros].........................................................................................3-24
3.10 Menú [Piloto Auto.]...........................................................................................................3-27
3.11 Menú [Opcion de Pesca]..................................................................................................3-29
3.12 Menú [Configurar Sistema] ..............................................................................................3-32
3.13 Emparejamiento del control de gestos (menú [RC sin Cable])........................................3-34
3.14 Menú [Alerta]....................................................................................................................3-36
APÉNDICE 1 GUÍA SOBRE CABLES JIS ............................................................AP-1
LISTA DE EQUIPAMIENTO......................................................................................... A-1
PLANOS DE DIMENSIONES....................................................................................... D-1
DIAGRAMA DE INTERCONEXION............................................................................. S-1

Pub. No. IES-72840-A
DATE OF ISSUE: FEB. 2019

i
INSTRUCCIONES DE SEGURIDAD
El instalador debe leer las instrucciones de seguridad adecuadas antes de proceder a instalar el
equipo.
Nota: Para ver las instrucciones de seguridad del Controlador gestual (GC-001), consulte la Guía
del usuario (C72-01603).
Indica una situación que, si no se evita, puede causar
lesiones graves o incluso la muerte.
Indica una situación que, si no se evita, puede causar
lesiones leves o moderadas.
ADVERTENCIA
PRECAUCIÓN
Advertencia, precauciónAcción prohibida
Acción obligatoria
ADVERTENCIAADVERTENCIA
PRECAUCIÓNPRECAUCIÓN
Desconecte la alimentación del cuadro
eléctrico principal antes de comenzar
con la instalación.
Pueden producirse incendios, descargas
eléctricas o lesiones graves si se deja
encendida la alimentación o si se activa
mientras se está instalando el equipo.
PELIGRO DE DESCARGA ELÉCTRICA
No abra el equipo a menos que esté
completamente familiarizado con los
circuitos eléctricos y el manual de servicio.
Solo personal cualificado debe trabajar en
el interior del equipo.
Para el personal de mantenimiento:
Antes de cerrar la cubierta, compruebe
que la junta impermeable esté bien
colocada en la ranura del chasis.
Al conectar un sensor de rumbo de
detección geomagnética, corrija la
desviación del campo magnético.
Si se utiliza un sistema de piloto automático
sin compensación, se puede producir un
cambio de rumbo inesperado.
Asegúrese de ninguna persona esté cerca del
timón al purgar el aire del cilindro de aceite.
El timón puede moverse inesperadamente,
lo que podría causar daños corporales.
Asegúrese de que la tensión de la fuente
de alimentación sea compatible con la
tensión nominal del equipo.
Si se conectase una fuente de alimentación
incorrecta, se podrían provocar incendios
o daños materiales en el equipo.
Deje las siguientes distancias de
seguridad para evitar interferencias con
el compás magnético:
Unidad
0,55 m 0,35 mm
0,30 m 0,30 m
Compás
estándar
Compás de
gobierno
Unidad de control
FAP-3011
Unidad
procesadora
FAP-3012
Separe la bomba reversible, al menos,
a un metro de distancia del equipo,
la antena y el cable de comunicaciones
para evitar interferencias.
Introduzca los datos de velocidad
correctos del barco.
El piloto NAV no puede controlar el timón
adecuadamente si se introduce una velocidad
del barco incorrecta.
ADVERTENCIAADVERTENCIA
Instale una unidad de control (o botón de
parada de emergencia) en cada puesto
de mando para poder desactivar el piloto
automático en caso de emergencia.
Si no puede desactivar el piloto automático,
podría producirse un accidente.

ii
CONFIGURACIÓN DEL SISTEMA
12/24 V CC
Bomba reversible
Caja de
conexiones
Sensor lineal
Sistema de timón
seguro
Interruptor de sucesos
Unidad de referencia del timón
FAP-6112
Controlador gestual
GC-001 (máx. 3 unidades)
Unidad procesadora
FAP-3012
Caja de
conexiones
*
1
: Las resistencias de terminación se deben instalar a ambos extremos del cable dorsal.
*
2
: Los sistemas EVC compatibles con el piloto NAV son los siguientes:
Resistencia de
terminación*
1
Unidad de control
FAP-3011 (máx. 3 unidades)
15 V CC
: Suministro estándar
: Suministro opcional o local
Caja de conexiones
FI-5002
Resistencia de
terminación*
1
Sensor de rumbo integrado
PG-700
Dispositivo de CAN
bus (NMEA2000)
Sistema EVC*
2
Sistema EVC Observaciones
VOLVO PENTA IPS
YAMAHA Helm Master
YANMAR VC10
SEASTAR SOLUTIONS OPTIMUS
Requiere puerta de enlace VOLVO IPS (disponible como extra opcional).
Requiere puerta de enlace YAMAHA HM (disponible como extra opcional).
-
La versión del software del PCM (Módulo de control de la bomba)
principal debe ser «Rev. T» o posterior.

iii
ALCANCE DEL SUMINISTRO
Suministro estándar
Opcionales
Nombre Tipo
N.º de
código
Cantidad Observaciones
Unidad de control FAP-3011 - 1
Unidad procesadora FAP-3012 - 1
Controlador gestual GC-001 - 1
Materiales de instalación
CP64-03400 001-472-360 1 Para la unidad de control
CP64-02501 009-000-880 1 Para la unidad procesadora
Accesorios FP64-01501 001-482-130 1 Baterías para GC-001
Piezas de repuesto SP64-01701 001-485-540 1
Para la unidad procesadora,
fusibles
Nombre Tipo N.º de código Observaciones
Unidad de control FAP-3011 -
Controlador gestual GC-001 -
Caja de conexiones FI-5002 - Para conexión CAN bus
Unidad de referencia
del timón
FAP-6112-200 -
Gateway VOLVO
IPS
AUTOPILOT-GATEWAY -
Para conexión del sistema
VOLVO PENTA IPS
Gateway YAMAHA
HM
YAMAHA-HM-GATEWAY -
Para conexión del sistema
YAMAHA Helm Master
Kit de soporte OP64-13 000-033-337 Para la unidad de control
Conjunto de cables
FI-70-0600 001-490-200
Con conectores micro (un
lado: conector de tipo L),
6m
M12-05BM+05BF-010 001-105-750-10 Con conectores micro, 1 m
M12-05BM+05BF-020 001-105-760-10 Con conectores micro, 2 m
M12-05BM+05BF-060 001-105-770-10 Con conectores micro, 6 m
M12-05BFFM-010 001-105-780-10 Con conector micro, 1 m
M12-05BFFM-020 001-105-790-10 Con conector micro, 2 m
M12-05BFFM-060 001-105-800-10 Con conector micro, 6 m
CB-05PM+05BF-010 000-167-968-11 Con conectores mini, 1 m
CB-05PM+05BF-020 000-167-969-11 Con conectores mini, 2 m
CB-05PM+05BF-060 000-167-970-11 Con conectores mini, 6 m
CB-05BFFM-010 000-167-971-11 Con conector mini, 1 m
CB-05BFFM-020 000-167-972-11 Con conector mini, 2 m
Conjunto de cables CB-05BFFM-060 000-167-973-11 Con conector mini, 6 m
Microconector en T SS-050505-FMF-TS001 000-168-603-10
Miniconector o
microconector en T
NC-050505-FMF-TS001 000-160-507-10
Resistencia de
terminación (micro)
LTWMC-05BMMT-
SL8001
000-168-604-10 Macho
LTWMC-05BFFT-SL8001 000-168-605-10 Hembra
Resistencia de
terminación (mini)
LTWMN-05AMMT-
SL8001
000-160-508-10 Macho
LTWMN-05AFFT-SL8001 000-160-509-10 Hembra

ALCANCE DEL SUMINISTRO
iv
Esta página se ha dejado en blanco a propósito.

1-1
1. MONTAJE
El instalador de este equipo debe estar familiarizado con el sistema hidráulico y contar
con la experiencia de haber instalado el equipo de gobierno del barco.
El NAVpilot-300 está diseñado para utilizarlo en embarcaciones de 25 pies o más
grandes con motores intraborda, fueraborda, intra/fueraborda o DBW.*
1.1 Unidad de control
La unidad de control se puede instalar de tres maneras:
• Montaje empotrado: fijado en la parte posterior del orificio de montaje.
• Montaje frontal: fijado en la parte delantera del orificio de montaje.
• Montaje encima de una mesa: requiere kit de soporte opcional (OP64-13). Para ver
las instrucciones de instalación del montaje encima de una mesa, consulte las
instrucciones de instalación (C72-01605) suministradas con el kit de soporte.
Consideraciones de montaje
Seleccione una ubicación de montaje teniendo en cuenta los siguientes aspectos:
• Elija una ubicación donde sea fácil utilizar la unidad.
• No instale la unidad en el exterior.
Aunque el grado de protección es IP56, la unidad de control se ha diseñado para
instalarse en el interior.
• No instale la unidad debajo de plexiglás u otro tipo de material de aislamiento.
El plexiglás puede capturar el calor y la humedad o aumentar el impacto de la luz
del sol en la superficie de la pantalla.
• Coloque la unidad lejos de los lugares que puedan recibir salpicaduras de agua y
lluvia.
• Sitúe la unidad en un lugar apartado de conductos de escape y ventiladores.
• La ubicación de montaje debe estar bien ventilada.
*: Los sistemas DBW (Conducción por cable) compatibles con el NAVpilot-300 son los
siguientes:
• VOLVO PENTA IPS • YAMAHA Helm Master
• YANMAR VC10 • SEASTAR SOLUTIONS OPTIMUS
(La versión del software del ?PCM [Módulo de control de
la bomba] principal debe ser «Rev. T» o posterior).
AVISO
No se debe aplicar pintura, sellante anticorrosivo
o spray de contacto al revestimiento o las piezas
de plástico del equipo.
Estos elementos contienen disolventes orgánicos
que pueden dañar el revestimiento y las piezas de
plástico, en especial los conectores de plástico.

1. MONTAJE
1-2
• Escoja una ubicación en la que las vibraciones y sacudidas sean mínimas.
• Consulte los esquemas que aparecen al final de este manual y observará que debe
dejar suficiente espacio para reparaciones y mantenimiento.
• Seleccione una ubicación de montaje teniendo en cuenta la longitud de los cables
que se van a conectar a la unidad.
• Si la unidad se coloca demasiado cerca de un compás magnético, este se verá
afectado. Respete las distancias de seguridad de los compases que aparecen al
principio de este manual para evitar que se produzcan interferencias con ellos.
1.1.1 Montaje empotrado
Materiales para la instalación incluidos
Herramientas necesarias
Prepare las siguientes herramientas antes de la instalación.
1. Perfore un orificio de montaje en la ubicación de montaje y dos orificios para los
espárragos, utilizando la plantilla de montaje suministrada.
Nota: Asegúrese de que utiliza la «Plantilla de montaje empotrado».
2. Ajuste los espárragos suministrados (M340) a la parte trasera de la unidad.
Nota: No utilice herramientas para ajustar o insertar los espárragos.
3. Ajuste la esponja de montaje empotrado suministrada a la parte trasera de la
unidad.
4. Pase el cable por el orificio de montaje y, a continuación, conéctelo a la unidad.
5. Coloque la unidad en el orificio de montaje.
Nombre Observaciones
Taladradora eléctrica Para hacer los orificios para los pernos roscados.
Broca 3,5
Sierra de corona Para realizar el orificio de montaje (90 mm).
Lima Para suavizar el borde cortado del orificio de montaje.
Nota: Estos materiales de instalación se utilizan
para el montaje frontal.
Materiales de instalación sin utilizar (CP64-03401)
Materiales de instalación para
montaje empotrado (CP26-02001)
• Esponja para montaje
empotrado X 1
• Arandela de presión × 2
• Arandela plana × 2
• Perno roscado × 2
• Tuerca de mariposa × 2
• Conjunto de base
de montaje × 1
• Tornillo autorroscante × 4
• Arandela plana × 2
• Pasador de seguridad x 2
• Conjunto de cables (FI-70-0600) × 1
NAVpilot-300
Plantilla de montaje empotrado
䝣䝷䝑䝅䝳䝬䜴䞁䝖⏝㻌ᆺ⣬
30±0,5 mm (1,18")
㻠㻡
㼼
㻜㻘㻡㻌mm
(1,
77"
)
30±0,5 mm
(1,18")
㻠㻡㼼㻜㻘㻡㻌mm (1,77")
ø90
+2
-0
mm
(
3,54"
)
Cortar solo la zona sombreada
ᩳ⥺㒊ษྲྀ䜚
Enero 2017 Impreso en Japón
Nº de pub.
C72-01602-A
Nota: Es posible ampliar o reducir ligeramente esta plantilla.
Confirme las dimensiones antes de utilizarla.
ὀព㻦㻌ᮏᆺ⣬䛿ಖᏑ≧ែ䛻䜘䜚ⱝᖸఙ⦰䛩䜛ሙྜ䛜䛒䜚䜎䛩䚹
㻌㻌㻌㻌㻌㻌㻌㻌⏝䛾㝿䛻䛿ᑍἲ䜢☜ㄆ䛧䛶䛟䛰䛥䛔䚹
Plantilla de montaje frontal
䝣䝻䞁䝖䝬䜴䞁䝖⏝㻌ᆺ⣬
30
±0,
5
mm
(1,18")
30±0,5 mm (1,18")
㻠㻡㼼㻜㻘㻡㻌mm (1,77")
㻠㻡㼼
㻜㻘
㻡
㻌
m
m (1,77"
)
Cortar solo la zona sombreada
ᩳ⥺㒊ษྲྀ䜚
㻥
㻜
㼼㻜㻘㻡㻌mm
(3,54"
)
㻥㻜㼼㻜㻘㻡㻌mm (3,54")
ø90
+
2
-0
m
m
(3,
54
")
䢲䢲䢲䢳䢻䢵䢴䢻䢻䢳䢲
ø3,5
• Plantilla de montaje × 1

1. MONTAJE
1-3
6. Coloque las arandelas planas, arandelas de presión y tuercas de mariposa
suministradas en espárrago y ajuste las tuercas de mariposa para fijar la unidad.
Cuando se utilicen materiales suministrados localmente
Al utilizar tornillos suministrados localmente para
asegurar la unidad de control, la profundidad de la rosca
debe ser de 5 mm aproximadamente, tal como se indica
en la figura de la derecha.
1.1.2 Montaje frontal
Materiales para la instalación incluidos
Espárrago
Consola
Esponja para montaje empotrado
Arandela plana
Arandela de presión
Tuerca de mariposa
Consola
Unidad de control
Unos 5 mm
Nota: Estos materiales de instalación se
utilizan para el montaje empotrado.
Materiales de instalación que se utilizan
para montaje frontal (CP64-03401)
• Esponja para montaje
empotrado X 1
• Arandela de presión × 2
• Arandela plana × 2
• Perno roscado × 2
• Tuerca de mariposa × 2
• Conjunto de base
de montaje × 1
• Tornillo autorroscante × 4
• Arandela plana × 2
• Broche de presión x 2
Materiales de instalación sin utilizar
(CP26-02001)
• Conjunto de cables (FI-70-0600) × 1
NAVpilot-300
Plantilla de montaje empotrado
䝣䝷䝑䝅䝳䝬䜴䞁䝖⏝㻌ᆺ⣬
30±0,5 mm (1,18")
㻠㻡
㼼
㻜㻘㻡㻌
mm
(1,
77"
)
30±0,5 mm (1,18")
㻠㻡㼼㻜㻘㻡㻌mm (1,77")
ø90
+2
-0
mm
(3,54")
Cortar solo la zona sombreada
ᩳ⥺㒊ษྲྀ䜚
Enero 2017 Impreso en Japón
Nº de pub.
C72-01602-A
Nota: Es posible ampliar o reducir ligeramente esta plantilla.
Confirme las dimensiones antes de utilizarla.
ὀព㻦㻌ᮏᆺ⣬䛿ಖᏑ≧ែ䛻䜘䜚ⱝᖸఙ⦰䛩䜛ሙྜ䛜䛒䜚䜎䛩䚹
㻌㻌㻌㻌㻌㻌㻌㻌⏝䛾㝿䛻䛿ᑍἲ䜢☜ㄆ䛧䛶䛟䛰䛥䛔䚹
Plantilla de montaje frontal
䝣䝻䞁䝖䝬䜴䞁䝖⏝㻌ᆺ⣬
30
±0,
5
mm
(1,18")
30±0,5 mm (1,18")
㻠㻡㼼㻜㻘㻡㻌mm (1,77")
㻠㻡㼼
㻜㻘
㻡
㻌m
m (1,77"
)
Cortar solo la zona sombreada
ᩳ⥺㒊ษྲྀ䜚
㻥
㻜
㼼㻜㻘㻡㻌mm
(3,54"
)
㻥㻜㼼㻜㻘㻡㻌mm (3,54")
ø90
+
2
-0
m
m
(3,
54
")
䢲䢲䢲䢳䢻䢵䢴䢻䢻䢳䢲
ø3,5
• Plantilla de montaje × 1

1. MONTAJE
1-4
Herramientas necesarias
Prepare las siguientes herramientas antes de la instalación.
1. Practique un orificio de montaje en la ubicación de montaje y cuatro orificios guía
para los tornillos autorroscantes, utilizando la plantilla de montaje suministrada.
Nota: Asegúrese de que utiliza la «Plantilla de montaje frontal».
2. Inserte las arandelas planas y los broches de presión suministrados en la parte
trasera de la unidad.
3. Fije el conjunto de base de montaje suministrado en el
orificio de montaje con los tornillos autorroscantes
incluidos (320).
Nota: Compruebe que el conjunto de base de montaje
está orientado de la manera correcta, consultando la
figura de la derecha.
4. Pase el cable por el orificio de montaje y, a continuación,
conéctelo a la unidad.
5. Fije la unidad de control al conjunto de base de montaje
mediante los broches de presión y las ranuras de estos
como guías.
Empuje la unidad en el conjunto de base de montaje hasta oír un clic, lo cual
indica que la unidad ya está fijada.
Nombre Observaciones
Taladradora eléctrica Para realizar los orificios guía para los tornillos
autorroscantes.
Broca 2,5
Sierra de corona Para realizar el orificio de montaje (90 mm).
Sierra de corona (19 mm) Para realizar orificios para la ranura de los broches de
presión.
Lima Para suavizar el borde cortado del orificio de montaje.
Destornillador Phillips N.º 2
Ranuras para
broches de
presión
Broche de
presión
Tornillo
autorroscante
(Ø3x20)
Conjunto de base
de montaje
Consola
Arandela plana

1. MONTAJE
1-5
Cómo extraer una unidad de control con instalación frontal
Para extraer la unidad de control del
conjunto de la base de montaje,abrir las
lengüetas de retención de los broches de
presión de la parte posterior del panel y
extraiga la unidad. Una extracción
forzada podría dañar los soportes para
patillas, broches de presión, el conjunto
de base de montaje o la unidad de
control.
1.2 Unidad procesadora
La unidad procesadora se puede instalar en un mamparo o sobre una mesa.
Consideraciones de montaje
Seleccione una ubicación de montaje teniendo en cuenta los siguientes aspectos:
• Realice una prueba de comunicación entre la unidad procesadora y el controlador
gestual, antes de montar la unidad procesadora. Para llevar a cabo la prueba de
comunicación, consulte la sección 1.2.1.
• No instale la unidad en un apantallamiento de metal, que podría obstruir la
comunicación con el controlador gestuals.
• Seleccione una ubicación donde las obstrucciones entre la unidad procesadora y
el controlador gestual sean mínimas.
Las obstrucciones entre la unidad procesadora y el controlador gestual reducen la
distancia de comunicación.
• Seleccione una ubicación donde el controlador gestual sea visible desde la
ubicación de montaje de la unidad procesadora (p. ej., el puente superior).
• Mantenga la unidad alejada de la luz directa del sol.
• Coloque la unidad lejos de los lugares que puedan recibir salpicaduras de agua y
lluvia.
• Sitúe la unidad en un lugar apartado de conductos de escape y ventiladores.
• La ubicación de montaje debe estar bien ventilada.
• Escoja una ubicación en la que las vibraciones y sacudidas sean mínimas.
• Si realiza la instalación sobre mamparo, asegúrese de que la ubicación de montaje
sea lo bastante sólida como para soportar la unidad, con el cabeceo y el balance
que normalmente se producen a bordo de la embarcación.
• Consulte los esquemas que aparecen al final de este manual y observará que debe
dejar suficiente espacio para reparaciones y mantenimiento.
• Seleccione una ubicación de montaje teniendo en cuenta la longitud de los cables
que se van a conectar a la unidad.
Parte trasera de la consolaParte trasera de la consola
Lengüetas
de retención
Broche de presiónBroche de presión
Apertura de las
lengüetas de retención
Apertura de las
lengüetas de retención

1. MONTAJE
1-6
• Si la unidad se coloca demasiado cerca de un compás magnético, este se verá
afectado. Respete las distancias de seguridad a los compases que aparecen al
principio de este manual para evitar que se produzcan interferencias con ellos.
• Para instalación en un mamparo, fije la unidad de modo que la entrada de cables
quede en la parte de abajo.
1.2.1 Prueba de comunicación por Bluetooth
®
antes del montaje
La unidad procesadora se comunica con el control de gestos a través de la tecnología
inalámbrica Bluetooth
®
*. Antes de montar la unidad, realice una prueba de
comunicación en la ubicación de montaje prevista para comprobar que la
comunicación por Bluetooth
®
se establece correctamente. Si no se establece la
comunicación por Bluetooth, cambie la ubicación de montaje y realice de nuevo la
prueba de comunicación.
*: La denominación y los logotipos de Bluetooth
®
son marcas registradas de Bluetooth
SIG, Inc.
1. Conecte las unidades. Para ello, consulte la siguiente figura.
2. Encienda la unidad procesadora, la unidad de control y el controlador gestual.
3. Vincule el controlador gestual con la unidad procesadora. Para ello, consulte
sección 3.13.
4. Desplácese a la ubicación donde utiliza el controlador gestual.
5. Dé la espalda a la ubicación donde se encuentra la unidad procesadora.
Su cuerpo debería estar situado entre la unidad procesadora y el controlador
gestual durante la prueba de comunicación.
OK
ARRIBA
12/24 V CC
Unidad procesadora
15 V CC
Unidad de control
Cable dorsal CAN bus/NMEA2000

1. MONTAJE
1-7
6. Pulse en el controlador gestual para abrir el menú y seleccione [SYSTEM
MENU] (MENÚ SISTEMA)[DIAGNOSTIC] (DIAGNÓSTICO)[BT TEST]
(PRUEBA BT).
7. Confirme el resultado de la prueba.
1.2.2 Montaje
Monte la unidad sobre un mamparo o escritorio.
Materiales para la instalación incluidos
• Tornillo autorroscante 4
Herramientas necesarias
Prepare las siguientes herramientas antes de la instalación.
1. Taladre cuatro orificios guía en el mamparo o en escritorio para tornillos
autorroscantes.
2. Fije dos tornillos autorroscantes (4x20) en los orificios guía superiores, dejando
que sobresalgan 5 mm.
3. Cuelgue (o fije) las ranuras de la unidad en los tornillos apretados en el paso 2.
4. Fije dos tornillos autorroscantes (420) en los orificios guía inferiores.
5. Apriete bien todos los tornillos para fijar la unidad en su sitio.
• Cuando [BLE] es «-80 DBM» o superior, la
comunicación es estable. La ubicación de
instalación prevista para la unidad procesadora es
correcta.
• Cuando [BLE] es inferior a «-80 DBM», la
comunicación es inestable. En este caso, es más
probable que se produzca un error de
comunicación. Cambie la ubicación de instalación
y repita la prueba de comunicación.
Nombre Observaciones
Taladradora eléctrica Para realizar los orificios guía para los tornillos autorroscantes.
Broca 3,5
Destornillador Phillips N.º 2
BT MODULE S
(MÓDULO BT S):
6454031-EF.02
BLE: -58DBM
Resultado de
la prueba
Compruebe
este valor.
Tornillos
autorroscantes
(Ø4×20, 4 uds.)
Superior

1. MONTAJE
1-8
1.3 Unidad de referencia del timón (opcional)
Nota 1: Esta unidad no es necesaria para Fantum Feedback
™
ni para embarcaciones
equipadas con el sistema EVC. Para ver más información sobre Fantum Feedback
™
,
consulte sección 1.3.5.
Nota 2: El sensor lineal SEASTAR SOLUTIONS AR4502 está disponible con el
NAVpilot, en lugar de la unidad de referencia del timón. Para obtener instrucciones de
instalación, consulte el manual del operador del sensor lineal.
Consideraciones de montaje
Seleccione una ubicación de montaje teniendo en cuenta los siguientes aspectos:
• Deje suficiente espacio alrededor de las piezas móviles.
• La unidad debe fijarse al timón, como se muestra a continuación, cuando se den
las siguientes condiciones:
350 mm (13,8“) <Y2 <540 mm (21,3“)
X1 = X2
Y1 = Y2
1.3.1 Montaje
Materiales para la instalación incluidos
Herramientas necesarias
Prepare las siguientes herramientas antes de la instalación.
Nombre Observaciones
Taladradora eléctrica Para realizar los orificios guía para el tornillo autorroscante.
Broca 3,5
Destornillador Phillips N.º 2
Llave Para M6 (tamaño hexagonal 10 mm)
X1
X2
Y1
Y2
90°
Vista superior
URT
Timón
90°
El URT debe estar instalado
a cualquier lado del timón.
• Varilla de conexión x 1
• Rodamiento con espárrago x 2
• Espaciador x 1
• Perno hexagonal × 2
• Arandela plana × 6
• Arandela de presión × 2
• Tuerca hexagonal x 4
• Tornillo autorroscante × 3

1. MONTAJE
1-9
Monte el URT. Para ello, consulte la siguiente figura. Los materiales de instalación
para montar el URT se suministran con el mismo. El URT se puede instalar en
cualquier lado del timón.
1.3.2 Ajuste después del montaje
Después de montar el URT, ajústelo de la siguiente forma:
1. Centre el timón.
2. Con el timón centrado, compruebe si la ranura está alineada con la marca de
flecha. Si lo está, no se requieren más ajustes. De lo contrario, vaya al paso 3.
3. Afloje el tornillo del brazo del URT y alinee la ranura con la marca de flecha.
4. Apriete el tornillo.
1.3.3 Cómo seleccionar una bomba reversible
Se recomienda la bomba reversible de la serie HRP Accu-Seer. Al utilizar la bomba
reversible de la serie HRP, calcule la cantidad de descarga óptima de la bomba entre
los siguiente parámetros, para seleccionar la bomba reversible apropiada.
Perno hexagonal (M6×40)
Arandela de presión
Arandela plana
Rodamiento con espárrago
Varilla de conexión
Espaciador
Tuerca hexagonal
Perno hexagonal (M6×40)
Arandela de presión
Arandela plana
Tuerca hexagonal
Rodamiento con espárrago
Arandela plana
Arandela plana
Tuerca hexagonal
Arandela plana
Arandela
plana
Tornillos autorroscantes
(Ø4×20, 3 uds.)
Brazo del timón
Ranura
Marca de flecha
Alinee la ranura del eje
con la marca de flecha.

1. MONTAJE
1-10
• Capacidad del cilindro (cc o pulg. cúb.): Póngase
en contacto con el fabricante del cilindro.
• Ángulo operativo máximo del cilindro (°):
Póngase en contacto con el fabricante del cilindro.
• Velocidad del timón (°/s): de 5 a 7°/s es adecuado.
La fórmula de cálculo para la cantidad de descarga óptima de la bomba se muestra a
continuación. Seleccione la fórmula adecuada en función de la unidad de capacidad
del cilindro ("cc" o bien "pulg. cúb.").
Nota: Utilice la siguiente fórmula independientemente del número de motores.
Seleccione una bomba reversible adecuada. Para ello, consulte la siguiente tabla. Por
ejemplo, cuando la cantidad de descarga óptima calculada es «0,6 pulg. cúb./seg» y
el largo del barco es «28 pies», la adecuada es «HRP-11».
1.3.4 Caudal de la bomba reversible y capacidad del cilindro de
dirección
En la siguiente tabla se muestran directrices aproximadas para determinar el caudal
correcto de la bomba reversible a fin de adaptarlo a la capacidad del cilindro de
dirección hidráulico. Es posible que su experiencia con diseños de embarcaciones
específicos le incline a seleccionar una relación de bomba/cilindro fuera del margen
de estas directrices.
Si la capacidad del cilindro hidráulico es bastante inferior a los valores recomendados
en la tabla, es posible que la velocidad de giro del timón sea demasiado rápida para
que el piloto pueda proporcionar el rendimiento adecuado. La banda muerta del timón
aumentará y es posible que NAVpilot no pueda aplicar suficiente tensión para
arrancar el motor de la bomba debido a que el «ciclo de trabajo» aplicado será
demasiado bajo.
Accu-Steer
Bomba reversible
Cantidad óptima de descarga de
la bomba
Largo del barco
HRP-05 de 0,25 a 0,5 pulg. cúb./seg 20 pies
HRP-11 de 0,5 a 1 pulg. cúb./seg de 25 a 35 pies
HRP-17 de 0,8 a 1,6 pulg. cúb./seg de 30 a 50 pies
HRP-100 de 3,2 a 6,4 pulg. cúb./seg 50 pies o más
Especificaciones de la bomba 70°; de banda a banda 90°; de banda a banda
Bomba 1,0 pulg. cúb./seg de 5,85 a 17,5 pulg. cúb. de 7,5 a 22,5 pulg. cúb.
Bomba 1,6 pulg. cúb./seg de 9,36 a 28,0 pulg. cúb. de 12,0 a 36,0 pulg. cúb.
Á
ngulo operativo
máximo del cilindro
Capacidad del cilindro (cc) x Velocidad del timón (º/seg)
Cantidad óptima de descarga de la bomba (pulg. cúb./seg) =
La unidad de capacidad del cilindro es «cc»:
Ángulo operativo máximo del cilindro (°) × 16,387064
Capacidad del cilindro (pulg. cúb.) x Velocidad del timón (º/seg)
Cantidad óptima de descarga de la bomba (pulg. cúb./seg) =
La unidad de capacidad del cilindro es «pulg. cúb.»:
Ángulo operativo máximo del cilindro (°)

1. MONTAJE
1-11
Si la capacidad del cilindro hidráulico es bastante superior a los valores
recomendados de la tabla, es posible que la velocidad de giro del timón sea
demasiado lenta para que NAVpilot pueda controlar de forma eficaz la embarcación.
Avisos acerca de la bomba reversible
• Cuando se ha instalado recientemente una bomba reversible, es necesario bifurcar
la línea hidráulica entre la bomba y el cilindro de dirección para conectar la bomba
reversible. Por lo tanto, prepare los materiales de instalación para bifurcar la línea
hidráulica (empalme del tubo, manguera de presión hidráulica, cinta sellante, etc.).
Si el diámetro del tubo de la bomba reversible es diferente del diámetro del tubo
existente, también será necesario un conector de conversión de inclinación.
• La línea hidráulica de la bomba reversible debe ser tan corta y gruesa como sea
posible.
• Instale la bomba reversible horizontal al suelo.
• Lleve a cabo un purgado (consulte la sección 3.4) después de instalar la bomba
reversible.
1.3.5 ¿Qué es Fantum Feedback
™
?
Fantum Feedback
™
permite una instalación sencilla al tiempo que proporciona un
control de gobierno mejorado. Gracias a Fantum Feedback
™
, las instalaciones
fueraborda de NAVpilot ya no requieren el uso de una unidad de referencia de timón
física.
Fantum Feedback
™
obtiene un control preciso del rumbo, desde velocidades bajas a
velocidades de crucero rápidas, gracias al uso de un proceso de ganancia
recientemente desarrollado en lugar del control tradicional basado en el ángulo del
timón.
Para utilizar Fantum Feedback
™
, tenga en cuenta lo siguiente.
• El motor de la embarcación es fueraborda o intra/fueraborda.
• La longitud de la embarcación es de 40 pies o menos.
• [Unidad Servo], en el menú [Configuracion en Puerto] debe establecerse en
[Reversible 24 V (o 12 V)] (consulte la sección 3.4).
• El indicador del ángulo de timón no está disponible. El indicador de dirección de
gobierno aparece en lugar del indicador de ángulo de timón.
• Centre el timón antes de activar el modo SABIKI
™
. Si el modo SABIKI
™
está
activado con el timón girado, el piloto automático no puede controlar
adecuadamente la embarcación.

1. MONTAJE
1-12
Esta página se ha dejado en blanco a propósito.

2-1
2. CABLEADO
La ilustración siguiente muestra la conexión general del NAVpilot-300. Consulte el
diagrama de interconexión situado al final del manual para obtener más información.
12/24 V CC
Bomba reversible
Caja de
conexiones
Sensor lineal
Sistema de timón
seguro
Interruptor de
sucesos
Unidad de referencia
del timón FAP-6112
Controlador gestual
GC-001 (máx. 3 unidades)
Unidad procesadora
FAP-3012
Caja de
conexiones
Unidad de control
FAP-3011 (máx. 3 unidades)
15 V CC
Caja de conexiones
FI-5002
Resistencia de
terminación*
1
LTWMC-05BMMT-SL8001
Sensor de rumbo integrado
PG-700
Dispositivo de CAN
bus (NMEA2000)
M12-05BM+BF, 1/2/6 m
FI-70-0600,
6 m
Resistencia de
terminación*
1
LTWMC-05BFFTT-SL8001
M12-05BM+BF, 1/2/6 m
M12-05BFFM, 1/2/6 m
M12-05BM+05BF-060, 6 m
DPYC-1.5
1 m
1 m
1 m
1 m
0,6 m
Bluetooth
®
: Suministro estándar
: Suministro opcional o local
0,6 m
Disyuntor
Sistema EVC
*2
*
1
: Las resistencias de terminación se deben instalar en ambos extremos del cable dorsal.
*
2
: Los sistemas EVC compatibles con el piloto NAV son los siguientes:
Sistema EVC
Observaciones
VOLVO PENTA IPS
YAMAHA Helm Master
YANMAR VC10
SEASTAR SOLUTIONS OPTIMUS
Requiere puerta de enlace VOLVO IPS (disponible como extra opcional).
Requiere puerta de enlace YAMAHA HM (disponible como extra opcional).
-
La versión del software del PCM (Módulo de control de la bomba)
principal debe ser «Rev. T» o posterior.

2. CABLEADO
2-2
2.1 Unidad procesadora
Hay dos cables pigtail unidos a la unidad procesadora. Todos los dispositivos
externos se pueden conectar a la unidad procesadora a través de los cables pigtail.
Cada cable está etiquetado con su nombre de puerto y sus señales. Encontrará con
facilidad un puerto apropiado en los cables pigtail.
Nota: Aunque el grado de protección de la unidad procesadora es IP55, los extremos
de los cables no son impermeables. Instale la unidad procesadora en una zona
impermeable o impermeabilice los extremos de los cables si estos pueden quedar
expuestos a salpicaduras o lluvia.
N.º Etiqueta Observaciones
1 Alimentación Para alimentación (12/24 V CC). Conecte la red eléctrica del
barco por medio de un disyuntor (no suministrado), para
desconectar la alimentación en caso de emergencia. Utilice un
disyuntor con una tensión nominal aceptable para el motor.
2 Motor Para conexión con motor (bomba reversible)
3 URT Para conexión con la unidad de referencia del timón FAP-6112.
Se requiere una caja de conexiones (no suministrada) para
conectar con el URT.
4 General IN Para conexión con bloqueo de timón seguro y botón de parada
de emergencia (interruptor de sucesos). El conector está
incorporado en el extremo del cable General IN, para evitar
cortocircuitos. Cuando se utiliza el cable General IN, corte el
conector en el extremo del cable y conéctelo con el bloqueo de
timón seguro y el interruptor de sucesos mediante una caja de
conexiones (no suministrada).
12
34 5 6

2. CABLEADO
2-3
2.1.1 Cables de alimentación y motor
Para seleccionar los cables de alimentación y de línea del motor, consulte la tabla
siguiente.
*: No se incluye la longitud del cable pigtail (1 m).
2.1.2 Botón de parada de emergencia
Instale la unidad de control o el botón de parada de emergencia (no suministrado) en
cada puesto de mando para que el piloto automático desactive el timón en caso de
emergencia.
Cuando instale un botón de parada de emergencia, conecte el interruptor de sucesos
(no suministrado) al General IN de la unidad procesadora mediante una caja de
conexiones (no suministrada).
Cuando se pulsa el botón de emergencia, el control del timón del piloto automático se
desactiva y el modo de gobierno cambia a modo STBY (gobierno manual).
2.1.3 ¿Qué es CAN bus?
CAN bus es un protocolo de comunicación (compatible con NMEA2000) que
comparte varios datos y señales a través de un único cable dorsal. Solo tiene que
conectar cualquier dispositivo CAN bus al cable dorsal para ampliar la red a bordo.
5 DBW Para conexión con el gateway VOLVO IPS, YAMAHA HM,
YANMAR VC10 o con el sistema SEASTAR SOLUTIONS
OPTIMUS.
Nota 1: La cubierta del conector está adherida al cable DBW para
impermeabilizar el conector. No retire la cubierta del conector
cuando no se utiliza el cable DBW.
Nota 2: En el caso del sistema SEASTAR SOLUTIONS
OPTIMUS, la versión del software del PCM (Módulo de control de
la bomba) principal debe ser «Rev. T» o posterior.
6 NMEA2000 Para conexión con la red CAN bus/NMEA2000.
Corriente nominal del motor 10 A
Longitud del cable* Sección del núcleo (mm
2
)AWG
2 m o menos 1,00 16
5 m o menos 1,25 16
9 m o menos 2,00 14
15 m o menos 4,00 10
N.º Etiqueta Observaciones
Unidad procesadora
Botón de parada de
emergencia (interruptor
de sucesos)
Caja de conexiones
㻹㻭㻾
㻺㻱㻳
㻭㼆㼁
㻹㻭㻾㻛㻮㻸㻭
㻺㻱㻳㻛㻮㻸㻭
㻭㼆㼁㻛㻮㻸㻭
㻹㻻㻾
㻳㻾㻵
1
2
3
4
5
6
7
8
SW1_PWR+
SW1_SIG
SW1_PWR-
SW2_PWR+
SW2_SIG
SW2_PWR-
SW3_SIG
SW3_GND
J105
GENERAL IN
㻹㻭
㻾
㻺
㻱
㻳
㻭
㼆㼁
㻹
㻭㻾㻛㻮㻸㻭
㻺
㻱㻳㻛㻮㻸㻭
㻭㼆㼁㻛㻮㻸㻭
Usados en la conexión del
sistema de timón seguro.

2. CABLEADO
2-4
Con CAN bus, se asignan identificadores (ID) a todos los dispositivos de la red, y se
puede detectar el estado de cada sensor en la red. Todos los dispositivos CAN bus
se pueden incorporar a la red CAN bus.
Para uso del personal técnico: Consulte «Furuno CAN bus Network Design Guide»
(TIE-00170) si desea obtener información más detallada acerca de la red de CAN
bus.
2.1.4 Resistencias de terminación para la red de CAN bus/
NMEA2000
Las resistencias de terminación son necesarias para cerrar los extremos de la red
CAN bus/NME2000 y así completar dicha red.
Están disponibles las siguientes resistencias de terminación opcionales:
2.2 Unidad de control
La unidad de control forma parte de una red, conectada a través del cable dorsal de
CAN bus/NMEA2000. La alimentación también se suministra a la unidad de control a
través del cable dorsal de CAN bus/NMEA2000. Se puede conectar un máximo de
tres unidades de control en la misma red.
Nota: A diferencia de la serie NAVpilot-700, la unidad de control NAVpilot-300 no se
puede conectar en serie. Al actualizar desde la serie NAVpilot-700, conecte cada
unidad de control al cable dorsal de CAN bus (NMEA2000).
Nombre Tipo N.º de código Observaciones
Resistencia
de
terminación
LTWMN-05AMMT-SL8001 000-160-508-10 Miniconector, macho
LTWMN-05AFFT-SL8001 000-160-509-10 Miniconector, hembra
LTWMC-05BMMT-SL8001 000-168-604-10 Microconector, macho
LTWMC-05BFFT-SL8001 000-168-605-10 Microconector, hembra
Resistencia de
terminación
Cable dorsal de CAN bus/NMEA2000
Unidad de control
Unidad procesadora
Resistencia de
terminación
Antes de la actualización
serie NAVpilot-700
NAVpilot-300
Después de la actualización
Cable dorsal de CAN bus (NMEA2000)
Unidad procesadora

2. CABLEADO
2-5
Conexión
Mediante el conjunto de cables suministrado, conecte la unidad de control al cable
dorsal de red de CAN bus/NMEA2000. La unidad de control debe estar en la misma
red que la unidad procesadora.
2.3 Caja de conexiones (opcional)
La caja de conexiones FI-5002 opcional cuenta con dos puertos de cable dorsal y
acepta hasta seis dispositivos CAN bus/NMEA2000 en red. La FI-5002 está
disponible para conectar entre la unidad procesadora y el transductor.
Al utilizar la FI-5002 para conectar entre la unidad procesadora y la unidad de control,
prepare el cable de bajada y conecte el cable a los conectores MC internos de la FI-
5002 (CN3 a CN5).
Para obtener más información acerca de la instalación de la FI-5002, consulte las
instrucciones de instalación (C72-00702) suministradas con la FI-5002.
Puerto NMEA2000
con
s
ola
Conjunto de cables
(FI-70-0600, 6 m)
Al cable dorsal de red
de CAN bus/NMEA2000
Par
te
t
ra
s
e
ra
d
e la
Red eléctrica del barco*
2
Blanco
Negro
+
–
CN1*
2
Red eléctrica
del barco
CN3 - CN5
CAÍDA
Caja de conexiones FI-5002 (Vista inferior)
Fije el cable con
las bridas de cable
proporcionadas.
FI-5002
Cable de alimentación (2 m)
CN2
CABLE DORSAL
Conector MC
Vista interna de FI-5002
FI-70-0600*
1
(6 m)
Unidad de control
Unidad procesadora
M12-05BFFM
(1/2/6 m, opcional)
*
1
: El cable FI-70-0600, suministrado con la
unidad de control, cuenta con conectores en
los dos extremos del cable. Corte el conector
en el extremo de la caja de conexiones para
conectar los conectores MC.
*
2
: Cuando se añade el FI-5002 a la red de CAN
bus existente, no se requiere suministro de
alimentación al CN1. La alimentación se
suministra a través del cable principal de
CAN bus (CN2).

2. CABLEADO
2-6
2.3.1 Instalación adicional a la red de CAN bus existente
Cuando se añade la FI-5002 a la red de CAN bus existente, no es necesario conectar
la alimentación a la FI-5002 (CN1). La alimentación se suministra a través del cable
dorsal de CAN bus de la FI-5002 (CN2).
2.3.2 Cómo preparar el cable de bajada
Prepare el cable de bajada como se muestra en la siguiente figura para conectar el
conector MC. Cuando utilice el cable de bajada con conectores en ambos extremos,
es necesario que corte uno de los conectores para conectar el conector MC.
2.3.3 Resistencia de terminación en la FI-5002
La caja FI-5002 dispone de dos resistencias de terminación (R1 y R2). Las
resistencias están configuradas de la siguiente forma:
• Si no se conecta ningún cable principal, R1 y R2 se colocan en la posición ON.
• Si se conecta un cable dorsal, se coloca uno de los dos, R1 o R2, en la posición ON.
• Si se conectan dos cables dorsales, R1 y R2 se colocan en posición OFF.
㻯㼍㼎㼘㼑㻌㼜㼞㼕㼚㼏㼕㼜㼍㼘㻌㼐㼑㻌㻯㻭㻺㻌㼎㼡㼟
Unidad de control
Unidad procesadora
FI-5002
Red eléctrica del barco
eléctrica del ba
Red eléctrica del barco
Tornillo
Núcleo
Trenzar
Conector MC
Conductor
de retorno
Cómo insertar los cables:
1. Trence los conductores.
2. Afloje el tornillo con un destornillador de cabeza plana.
3. Inserte el núcleo conductor del cable en el orificio.
4. Apriete el tornillo.
5. Tire del cable para confirmar que está bien conectado.
CubiertaCubierta
6 mm
CableN.º de pin
Señal
Retorno
Rojo
Negro
Blanco
Azul
TIERRA
NET-S
NET-C
NET-H
NET-L
1
2
3
4
5
CN1CN1
CN3CN3 CN4CN4 CN5CN5 CN2CN2
R2 R1
: La resistencia está
desconectada. (OFF)
: La resistencia está
conectada. (ON)
Ajuste del bloque de puentes

2. CABLEADO
2-7
2.4 PGN de entrada/salida
2.4.1 PGN de entrada/salida para la unidad procesadora
La unidad procesadora puede recibir las siguientes PGN de entrada/salida:
PGN de entrada para la unidad procesadora
PGN de salida para la unidad procesadora
PGN Descripción
059392 Reconocimiento ISO
059904 Solicitud ISO
060160 Protocolo de transporte ISO, transferencia de datos
060416 Protocolo de transporte, gestión de conexiones ISO; función grupo BAM
060928 Reclamación de dirección ISO
061184 PGN propiedad de FURUNO
065240 Dirección comandada ISO
126208
Función del grupo de solicitud NMEA
Función de grupo de comando NMEA
Función del grupo de reconocimiento NMEA
126464 Lista de PGN: Función de grupo de PGN de transmisión
126720 PGN propiedad de FURUNO
126992 Tiempo del sistema
126996 Información del producto
127250 Rumbo de la embarcación
127258 Variación magnética
128259 Velocidad, respecto al agua
129025 Posición, actualización rápida
129026 COG y SOG, actualización rápida
129029 Datos de posición GNSS
129033 Ajuste hora local
129283 Error de desviación
129284 Datos de navegación
129285 Navegación - Información sobre ruta/WP
130577 Datos de dirección
130818 PGN propiedad de FURUNO
130821 PGN propiedad de FURUNO
130823 PGN propiedad de FURUNO
130827 PGN propiedad de FURUNO
130841 PGN propiedad de FURUNO
PGN Descripción Ciclo de envío
059392 Reconocimiento ISO No periódico
059904 Solicitud ISO No periódico
060928 Reclamación de dirección ISO No periódico
126208
Función del grupo de solicitud NMEA No periódico
Función de grupo de comando NMEA No periódico
Función del grupo de reconocimiento NMEA No periódico
126464
Lista de PGN: Función de grupo de PGN de transmisión No periódico
Lista de PGN: Función de grupo de PGN de recepción No periódico

2. CABLEADO
2-8
2.4.2 PGN de entrada/salida para la unidad de control
La unidad de control puede recibir las siguientes PGN de entrada/salida:
PGN de entrada para la unidad de control
126720 PGN propiedad de FURUNO No periódico
126993 Latido 60 000 ms
126996 Información del producto No periódico
126998 Información de configuración No periódico
127237 Control de rumbo/derrota 250 ms
127245 Timón 100 ms
130816 PGN propiedad de FURUNO No periódico
130821 PGN propiedad de FURUNO No periódico
130822 PGN propiedad de FURUNO No periódico
130823 PGN propiedad de FURUNO No periódico
130825 PGN propiedad de FURUNO No periódico
130827 PGN propiedad de FURUNO No periódico
130841 PGN propiedad de FURUNO No periódico
PGN Descripción
059392 Reconocimiento ISO
059904 Solicitud ISO
060160 Protocolo de transporte ISO, transferencia de datos
060416 Protocolo de transporte, gestión de conexiones ISO; función grupo BAM
060928 Reclamación de dirección ISO
065240 Dirección comandada ISO
126208
Función del grupo de solicitud NMEA
Función de grupo de comando NMEA
Función del grupo de reconocimiento NMEA
126464 Lista de PGN: Función de grupo de PGN de transmisión
126720 PGN propiedad de FURUNO
126992 Tiempo del sistema
126996 Información del producto
127245 Timón
127250 Rumbo de la embarcación
127258 Variación magnética
128259 Velocidad, respecto al agua
129025 Posición, actualización rápida
129026 COG y SOG, actualización rápida
129029 Datos de posición GNSS
129033 Ajuste hora local
129283 Error de desviación
129284 Datos de navegación
129285 Navegación - Información sobre ruta/WP
130577 Datos de dirección
130816 PGN propiedad de FURUNO
130818 PGN propiedad de FURUNO
130821 PGN propiedad de FURUNO
130823 PGN propiedad de FURUNO
PGN Descripción Ciclo de envío

2. CABLEADO
2-9
PGN de salida para la unidad de control
130825 PGN propiedad de FURUNO
130827 PGN propiedad de FURUNO
130841 PGN propiedad de FURUNO
PGN Descripción Ciclo de envío
059392 Reconocimiento ISO No periódico
059904 Solicitud ISO No periódico
060928 Reclamación de dirección ISO No periódico
061184 PGN propiedad de FURUNO No periódico
126208
Función del grupo de solicitud NMEA No periódico
Función de grupo de comando NMEA No periódico
Función del grupo de reconocimiento NMEA No periódico
126464
Lista de PGN: Función de grupo de PGN de transmisión No periódico
Lista de PGN: Función de grupo de PGN de recepción No periódico
126720 PGN propiedad de FURUNO No periódico
126993 Latido 6000 ms
126996 Información del producto No periódico
126998 Información de configuración No periódico
130825 PGN propiedad de FURUNO No periódico
130827 PGN propiedad de FURUNO No periódico
130841 PGN propiedad de FURUNO No periódico
PGN Descripción

2. CABLEADO
2-10
Esta página se ha dejado en blanco a propósito.

3-1
3. CONFIGURACIÓN INICIAL
Este capítulo le muestra cómo introducir la configuración inicial. Es posible que el
menú contenga algunos elementos que no se apliquen a su sistema. Como mínimo,
se deben realizar ajustes en los siguientes menús:
• Menú de [Características del Barco]
• Menú de [Configuracion en Puerto]
Nota: El menú [Configuracion en Puerto] no se muestra en el caso de barcos
equipados con sistema EVC.
3.1 Menú [Inicializar]
Después del montaje y de haber completado el cableado, pulse la tecla para
encender el sistema. La primera vez que el sistema recibe alimentación, aparece el
menú [Inicializar].
Para configurar el NAVpilot-300, siga el procedimiento que se indica a continuación.
1. Se selecciona [Idioma], pulse la tecla .
2. Pulse la tecla para seleccionar el idioma adecuado y, a continuación, pulse
la tecla para aplicar el ajuste.
Inicialización
Idioma:
Configuracion de Unidades
Modo Funcionamiento
English
ANT. Ent.
▼
10
Inicialización
Idioma:
Configuracion de Unidades
Modo Funcionamiento
English
ANT. Ent.
▼
Francais
Español
Deutsche
English
1
10

3. CONFIGURACIÓN INICIAL
3-2
3. Pulse la tecla para seleccionar [Configuracion de Unidades] y luego, .
4. Seleccione la unidad que desea ajustar y, a continuación, pulse la tecla .
La siguiente tabla muestra las opciones disponibles para cada unidad.
5. Seleccione las unidades según sea necesario y pulse la tecla .
6. Pulse la tecla para volver al menú [Inicializar].
7. Pulse la tecla para seleccionar [Modo Funcionamiento] y luego, .
8. Se selecciona [Instalacion]; pulse la tecla para abrir el [Menu Instalacion].
Nota 1: [Simulador] y [Presentación] no se utilizan en el funcionamiento normal.
Nota 2: El [Menu Instalacion] se puede abrir desde el modo STBY, pulsando la
tecla tres veces mientras mantiene pulsada la tecla .
9. Siga los procedimientos de las próximas secciones (en el orden que se indica) de
este capítulo para configurar el NAVpilot.
Unidad Opciones disponibles
Velocidad [kn] (nudo), [km/h] (kilómetros por hora), [MPH] (millas por hora)
Escala [NM] (millas náuticas), [km] (kilómetros), [SM] (millas terrestres), [NM, yd]
(millas náuticas, yardas), [NM, m] (millas náuticas, metros), [km, m]
(kilómetros, metros), [SM, yd] (millas terrestres, yardas)
1
10
Configuracion de Unidades
Unidad Velocidad:
Unidad de Escala:
kn
ANT.
▼
NM
Ent.
10
10
1
10
Modo Funcionamiento
Instalación
Simulador
ANT.
▼
Presentación
Ent.
10
Menu Instalacion
Idioma:
Configuracion de Unidades
ANT.
▼
Configuracion de Pantalla
Ent.
Prueba de Timon
Calib. Compás
NO
NO
English
STBY

3. CONFIGURACIÓN INICIAL
3-3
3.2 Menú [Configuracion de Pantalla]
El menú [Configuracion de Pantalla] le permite configurar las indicaciones en función
de sus necesidades como, por ejemplo, el formato de fecha y hora. Para abrir el menú
[Configuracion de Pantalla], seleccione [Configuracion de Pantalla] en el [Menu
Instalacion].
3.3 Menú [Características del Barco]
El menú [Características del Barco] configura el NAVpilot de cuerdo con el tipo de
barco, etc. Para abrir el menú [Características del Barco], seleccione [Características
del Barco] en el [Menu Instalacion].
Elemento de
menú
Descripción
[Formato Posicion] Permite seleccionar la forma en que se muestra la indicación de
posición, en grados, minutos o segundos.
Escala de ajuste: [DD°MM.MM’], [DD°MM.MMM],
[DD°MM.MMMM’], [DD°MM’SS.S]
[Pantalla Rumbo] Permite seleccionar la forma en que se muestra el rumbo,
verdadero o magnético.
• [Magneti.]: utiliza el rumbo magnético.
• [Verdadero]: utiliza el rumbo verdadero.
[Present. Compás] Selecciona el modo de orientación de la presentación de compás.
• [Rumbo Arriba]: el compás rota para mantener la proa del barco
(indicador gris) en la parte superior de la pantalla.
• [Curso Arriba]: el compás rota para mantener el rumbo
establecido (indicador rojo) en la parte superior de la pantalla.
[Compens. Hora] Introduzca la diferencia de tiempo entre la hora local y la hora
UTC.
Margen de ajuste: de -14:00 a +14:00
Configuracion de Pantalla
Formato Posición:
Pantalla Rumbo:
ANT.
▼
Present. Compás:
Ent.
DD°MM.MMM’
Magneti.
Rumbo Arriba
Compens. Hora:
0:00
Características del Barco
Tipo de Barco:
Sensor de Timon*:
ANT.
▼
Veloc. Crucero:
Ent.
Fuera Borda
Fantum Feedback
30kn
Velocidad Giro:
5°/s
*: [Sensor de Timon] cambia a [EVCS
Alimentac.] cuando [Tipo de Barco]
se establece en [EVCS-Ser.Pod],
[EVCS-Fuera], [EVCS-Den/Fue]
o [EVCS-A Bordo].

3. CONFIGURACIÓN INICIAL
3-4
Elemento de
menú
Descripción
[Tipo de Barco] Seleccione su tipo de barco.
• [Fuera Borda]: barco de motor fueraborda
• [Dentro/Fuera]: barco de motor intraborda/fueraborda
• [A Bordo]: barco de motor intraborda
• [EVCS-Ser.Pod]: barco equipado con servo POD EVC (Control
electrónico de embarcaciones)
• [EVCS-Fuera]: barco equipado con sistema EVC fueraborda
• [EVCS-Den/Fue]: barco equipado con sistema EVC en motor
intraborda/fueraborda
• [EVCS-A Bordo]: barco equipado con sistema EVC intraborda
[Sensor de Timon] Seleccione su tipo de sensor de timón (unidad de referencia de
timón).
• [Fantum Feedback]: el sensor de timón no está instalado. Para
ver más información sobre Fantum Feedback
™
, consulte
sección 1.3.5.
• [Sen. Giratrio]: para la unidad de referencia de timón FAP-6112
de FURUNO.
• [Sensor Lineal]: para sensor lineal SEASTAR SOLUTIONS
AR4502.
Nota: Se muestra [Sensor de Timon] cuando [Tipo de Barco] está
establecido en [Fuera Borda], [Dentro/Fuera] o [A Bordo].
[EVCS Alimentac.] Seleccione si la alimentación se suministra o no desde el sistema
EVC, de acuerdo con las especificaciones del sistema EVC
conectado al NAVpilot (puerto DBW).
• [Entrada]: la alimentación se suministra desde el sistema EVC
al NAVpilot (puerto DBW). Seleccione esta opción cuando el
NAVpilot esté conectado con el sistema YANMAR VC10.
• [Salida]: la alimentación se suministra desde el NAVpilot (puerto
DBW) al sistema EVC. Seleccione esta opción cuando el
NAVpilot esté conectado con el sistema VOLVO PENTA IPS,
YAMAHA Helm Master o SEASTAR SOLUTIONS OPTIMUS.
Nota: Se muestra [EVCS Alimentac.] cuando [Tipo de Barco] está
establecido en [EVCS-Ser.Pod], [EVCS-Fuera], [EVCS-Den/Fue]
o [EVCS-A Bordo].
[Veloc. Crucero] Introduzca la velocidad de crucero de su barco.
[Velocidad Giro] Introduzca la velocidad de giro de su barco.
Nota: Introduzca la [Velocidad Giro] en función de las
especificaciones del barco. Si la velocidad se configura en un valor
superior a las especificaciones del barco, es posible que el timón
gire de forma brusca en un waypoint, lo que provocaría una
situación peligrosa. Además, es posible que no pueda cambiar
correctamente el rumbo si la velocidad es superior a la velocidad
real de giro del barco.

3. CONFIGURACIÓN INICIAL
3-5
3.4 Menú [Configuracion en Puerto]
Los menús [Configuracion en Puerto] de la unidad de referencia del timón (sensor de
timón) y de Fantum Feedback
™
son diferentes. Para abrir el menú [Configuracion en
Puerto], seleccione [Configuracion en Puerto] en el [Menu Instalacion].
Nota: El menú [Configuracion en Puerto] no se muestra cuando [Tipo de Barco] está
establecido en [EVCS-Ser.Pod], [EVCS-Fuera], [EVCS-Den/Fue] o [EVCS-A Bordo].
3.4.1 Menú [Configuracion en Puerto] de la unidad de referencia del
timón
[Unidad Servo]
1. [Unidad Servo] está seleccionado en el menú
[Configuracion en Puerto], seleccione la tecla .
2. Pulse la tecla para seleccionar la unidad de servo y
luego, .
• [Reversible 24 V]: bomba reversible 24 V
• [Reversible 12 V]: bomba reversible 12 V
• [Safe-Helm 24 V]: unidad de servo Accu-Steer FPS 24V
• [Safe-Helm 12 V]: unidad de servo Accu-Steer FPS 12V
[Alineacion de Sensor URT]
1. Pulse la tecla para seleccionar [Alineacion de Sensor URT] en el menú
[Configuracion en Puerto] y luego, .
Aparecerá el mensaje siguiente.
Configuracion en Puerto
Unidad Servo:
Alineacion de Sensor URT
ANT.
▼
Purgar Hidrau.
Ent.
No seleccionado
Configu. Limite de Timon
Reversible 12 V
Safe-Helm 24 V
Safe-Helm 12 V
Reversible 24 V
10
1
10
1
10
Mida posición de centro de
timón y confirme que valor
de visualización es < 5º,
Si no ajuste brazo o imán
URT. El piloto NAV cambiará
indicación BABOR y
ESTRIBOR más tarde. Pulse
cualquier tecla para seguir.

3. CONFIGURACIÓN INICIAL
3-6
2. Pulse una tecla cualquiera para cerrar el mensaje e inicie la alineación del sensor
URT.
3. Con el timón centrado físicamente, confirme que la indicación de ángulo del timón
mostrada es inferior o igual a ±5°. De lo contrario, debe ajustar el cuerpo del
sensor del timón o la posición del imán (si utiliza el sensor lineal SEASTAR
SOLUTIONS AR4502) para que el indicador se encuentre en el intervalo de ±5°
antes de continuar.
• [Tono Alineación]: existe un tono de alineación que puede utilizar para ayudarle
a realizar este ajuste de forma remota. Sonará de forma continua un pitido
cuando el indicador se encuentre en el intervalo de ±5°. Si no necesita utilizar
el tono de alineación, establezca el [Tono Alineación] en [OFF].
4. Pulse la tecla para cerrar la ventana [Alineacion de Sensor URT] y volver
al menú [Configuracion en Puerto].
[Purgar Hidrau.]
1. Pulse la tecla para seleccionar [Purgar Hidrau.] en el menú [Configuracion
en Puerto] y luego, .
2. Pulse la tecla hasta que el indicador del ángulo de timón se rellene por
completo.
3. Retire el tapón de goma adecuado del cilindro para realizar el purgado de aire y
vuelva a colocarlo.
4. Pulse la tecla hasta que el indicador del ángulo de timón se rellene por
completo.
5. Retire el tapón de goma adecuado del cilindro para realizar el purgado de aire y
vuelva a colocarlo.
6. Repita paso 2 a paso 5 para purgar por competo el aire.
7. Pulse la tecla para finalizar el purgado de aire.
8. Pulse la tecla para cerrar la ventana [Purgar Hidrau.] y volver al menú
[Configuracion en Puerto].
Alineacion de Sensor URT
Tono Alineación:
ANT.
Off
9°
Ent.
1
10
Purgar Hidrau.
Temp. FET:
29.7°C (85.5°F)
9°
Voltaje Entrada:
24.0V
Servo Motor:
0.0A
Mover timón
Mover timón
FIN
Indicador del
ángulo de timón
1
1

3. CONFIGURACIÓN INICIAL
3-7
[Configu. Limite de Timon]
Ajuste la posición central del timón y, a continuación, los límites máximos o puntos de
giro máximo del timón. No es relevante el sentido en el que esté instalado el soporte
de la unidad de referencia del timón o la barra del sensor lineal, ya que está corrección
se realizará automáticamente. Por lo tanto, es recomendable que utilice los mismos
valores de babor y estribor del timón.
1. Pulse la tecla para seleccionar [Configu. Limite de Timon] en el menú
[Configuracion en Puerto] y luego, .
2. Se selecciona [Configu. Timon a la Via], pulse la tecla .
Aparecerá el mensaje siguiente.
3. Gire la dirección para centrar el timón y pulse la tecla .
4. Pulse la tecla para seleccionar [ESTRIB Límite Timón] y luego, .
5. Gire al máximo la rueda del timón a estribor y, a continuación, mida el ángulo del
timón.
6. Pulse la tecla o para introducir el límite de timón de estribor y luego
pulse la tecla .
7. Pulse la tecla para seleccionar [Babor Limte de Timon] y luego, .
8. Gire al máximo la rueda del timón a babor y, a continuación, mida el ángulo del
timón.
9. Pulse la tecla o para introducir el límite de timón de babor y luego
pulse la tecla .
10. Pulse la tecla para cerrar el menú [Configu. Limite de Timon] y volver al
menú [Configuracion en Puerto].
Nota 1: Si aparece uno de los siguientes mensajes, vuelva a intentar realizar la
configuración del límite de timón. Si vuelve a aparecer el mensaje, ajuste la unidad de
referencia de timón.
• Centro URT no alineado. Gire dirección o ajuste URT y vuelva a intentarlo.
• Posición ESTRIBOR PRU fuera de rango. Gire dirección o ajuste PRU y vuelva a
intentarlo.
• Error ajustes potenciómetro en dirección a BABOR/ESTRIBOR. ¿Volver a intentar?
1
10
Configu. Limite de Timon
Configu. Timon a la Via
ESTRIB Límite Timón:
ANT.
▼
Ent.
??°
Centre timón y pulse [10>>].
10
Centre timón
(aprox.) y pulse
Sí para establecer.
¿Está centrado el timón?
SI
NO
10
1
10
1
1
10
1
10
1
1
10

3. CONFIGURACIÓN INICIAL
3-8
Nota 2: Cuando intenta salir del menú [Configu. Limite de Timon] y quedan elementos
de configuración sin completar, aparece el mensaje a continuación. Confirme los
elementos que aparecen en el mensaje y complete dichos elementos.
Nota 3: Después de completar la configuración en el menú [Configu. Limite de
Timon], [Configu. Limite de Timon] en el menú [Configuracion en Puerto] cambia a
[Configu. Limite de Timon (Done)].
[Limite Auto de Timon]
El límite de timón automático determina el movimiento de timón máximo en grados
desde la posición media en los modos AUTO, NAV, Turn (Giro), FishHunter
™
y
Dodge.
Nota: Complete los elementos de configuración en el menú [Configu. Limite de
Timon] antes de introducir el límite de timón automático.
1. Pulse la tecla para seleccionar [Limite Auto de Timon] en el menú
[Configuracion en Puerto] y luego, .
2. Pulse la tecla o para ajustar el límite de timón automático y luego
pulse la tecla .
El valor establecido aquí debe ser inferior a los límites de timón máximos
establecidos en el menú [Configu. Limite de Timon]. Se recomienda que el [Limite
Auto de Timon] sea 5° inferior a los límites de timón máximos establecidos en el
menú [Configu. Limite de Timon].
[Limite Manual Timon]
En el modo de esquiva, se suelen utilizar un amplio abanico de ángulos de timón y,
por lo tanto, debe introducirse un número más alto. Sin embargo, el ajuste no debe
exceder el ángulo de límite de timón inherente al barco.
No establezca un límite más alto que el límite de timón. Se recomienda establecer un
límite de timón manual igual o superior al límite de timón automático. Si el límite de
timón manual establecido es inferior al automático, es posible que el timón vuelva a
la posición de centro demasiado rápido cuando la embarcación esté girando
automáticamente.
Nota: Complete los elementos de configuración en el menú [Configu. Limite de
Timon] antes de introducir el límite de timón manual.
1. Pulse la tecla para seleccionar [Limite Manual Timon] en el menú
[Configuracion en Puerto] y luego, .
2. Pulse la tecla o para ajustar el límite de timón manual y luego pulse
la tecla .
Configuración
incompleta de:
Centro timón
Límite BABOR
Límite ESTRIBOR
¿Volver a intentar?
SI
NO
Elementos de
configuración
incompletos
1
10
1
1
10
1
10
1
1
10

3. CONFIGURACIÓN INICIAL
3-9
[Test timón]
En las embarcaciones con dirección hidráulica y una bomba de dirección hidráulica
asistida por motor, los motores deben estar en marcha con una velocidad ligeramente
superior a la de ralentí antes de realizar esta prueba.
Nota 1: La prueba de timón no se puede realizar si la unidad de servo no se ha
seleccionado.
Nota 2: ANTES de realizar esta prueba, compruebe que [Ban. Muerta Tim.] en el
menú [Pruebas de Mar] (consulte la sección 3.8) está establecida en [Auto].
1. Pulse la tecla para seleccionar [Test timón] en el menú [Configuracion en
Puerto] y luego, .
2. Centre el timón y pulse la tecla .
Durante la prueba de timón, aparecerá el mensaje siguiente.
Una vez que la prueba se ha completado, aparece el mensaje siguiente.
Nota: Si la prueba del timón no se pudo completar satisfactoriamente, aparecerá
uno de los mensajes siguientes. Reinicie la prueba de timón después de resolver
el problema.
• Error en Prueba de timón. Pulse cualquier tecla para seguir.
• Error ángulo de timón Compruebe circuito servo. Pulse cualquier tecla para
seguir.
• Error servo de timón Compruebe circuito servo. Pulse cualquier tecla para
seguir.
3. Pulse cualquier tecla para mostrar el resultado de la prueba de timón.
• [Unidad Servo]: tipo de servo utilizado por
NAVpilot: [Reversible 12 V (o 24 V)] o
[Safe-Helm 12 V (o 24 V)].
• [Ban. Muerta Tim.]: banda muerta del timón
([OK] o [Big] [Grande])
• [Velocidad Sensor]: velocidad del sensor
([OK], [Fast] [Rápida], o [Slow] [Lenta])
• [Voltaje Entrada:] voltaje de entrada de la
unidad procesadora.
1
10
Prueba de Timon
Unidad Servo:
Safe-Helm 24 V
0°
Timón DB:
--
Velocidad timón:
--
Voltaje Entrada:
12.1V
Utilice dirección para
centrar timón antes de
comenzar esta prueba.
¿Iniciar prueba?
SI
NO
10
Probando timón. Espere.
Pulse una tecla para cancelar.
Prueba de timón finalizada.
Pulse cualquier tecla para seguir.
Prueba de Timon
Unidad Servo:
Safe-Helm 24 V
0°
Timón DB:
OK
Velocidad timón:
Fast (Rápido)
Voltaje Entrada:
12.1V
ANT.

3. CONFIGURACIÓN INICIAL
3-10
Nota 1: Si [Ban. Muerta Tim.] es [Big] (Grande), el barco no se podrá controlar
correctamente. Compruebe si hay aire en el sistema de gobierno y si [Velocidad
Sensor] es [OK].
Nota 2: No apague el equipo hasta que pasen dos segundos de la finalización de
la prueba de timón. Si se apaga accidentalmente, vuelva a realizar la prueba de
timón.
4. Pulse la tecla para cerrar el resultado de la prueba de timón.
Nota: Después de completar la prueba de timón, [Prueba de Timon] en el menú
[Configuracion en Puerto] cambia a [Configu. Limite de Timon (Done)].
3.4.2 Menú [Configuracion en Puerto] para Fantum Feedback
™
[Unidad Servo]
1. [Unidad Servo] está seleccionado en el menú
[Configuracion en Puerto], seleccione la tecla .
2. Pulse la tecla para seleccionar la unidad de servo y
luego, .
• [Reversible 24 V]: bomba reversible 24 V
• [Reversible 12 V]: bomba reversible 12 V
• [Safe-Helm 24 V]: unidad de servo Accu-Steer FPS 24V
• [Safe-Helm 12 V]: unidad de servo Accu-Steer FPS 12V
[Purgar Hidrau.]
1. Pulse la tecla para seleccionar [Purgar Hidrau.] en el menú [Configuracion
en Puerto] y luego, .
2. Pulse la tecla hasta que el indicador de la dirección de gobierno se rellene
por completo.
3. Retire el tapón de goma adecuado del cilindro para realizar el purgado de aire y
vuelva a colocarlo.
Configuracion en Puerto
Unidad Servo:
Purgar Hidrau.
ANT.
▼
Prueba de Timon
Ent.
No seleccionado
Nivel Servo Timon:
6
Reversible 12 V
Safe-Helm 24 V
Safe-Helm 12 V
Reversible 24 V
10
1
10
1
10
Purgar Hidrau.
Temp. FET:
ANT.
29.7°C (85.5°F)
Voltaje Entrada:
24.0V
Servo Motor:
0.0A
Mover timón
Mover timón
FIN
Indicador de dirección
de gobierno
1

3. CONFIGURACIÓN INICIAL
3-11
4. Pulse la tecla hasta que el indicador de la dirección de gobierno se rellene
por completo.
5. Retire el tapón de goma adecuado del cilindro para realizar el purgado de aire y
vuelva a colocarlo.
6. Repita paso 2 a paso 5 para purgar por competo el aire.
7. Pulse la tecla para finalizar el purgado de aire.
8. Pulse la tecla para cerrar la ventana [Purgar Hidrau.] y volver al menú
[Configuracion en Puerto].
[Test timón]
Nota: La prueba de timón no se puede realizar si la unidad de servo no se ha
seleccionado.
1. Pulse la tecla para seleccionar [Test timón] en el menú [Configuracion en
Puerto] y luego, .
2. Centre el timón y pulse la tecla .
3. Pulse la tecla y confirme la dirección en la que se mueve el timón.
4. Suelte la tecla .
5. Pulse la tecla o de acuerdo con la dirección en la que se mueve el
timón que se ha establecido en el paso 3.
1
1
10
Prueba de Timon
Unidad Servo:
Safe-Helm 24 V
Velocidad timón:
--
Nivel Servo Timon:
--
Voltaje Entrada:
12.1V
Utilice dirección para
centrar timón antes de
comenzar esta prueba.
¿Iniciar prueba?
SI
NO
10
Mantenga pulsada la tecla de
flecha de ESTRIBOR hasta
que el timón se mueva.
Mover timón
Abortar
1
1
¿Hacia qué lado se mueve
el timón?
PORT (BABOR)
STBD (ESTRI.)
No Mover/Abortar
1
1
Utilice las teclas dirección o flecha
para mover timón al límite de
BABOR o ESTRIBOR.
PORT (BABOR)
STBD (ESTRI.)
Limite del timon
Abortar

3. CONFIGURACIÓN INICIAL
3-12
6. Gire el timón o pulse la tecla o al máximo a BABOR o ESTRIBOR y
pulse la tecla .
7. Mantenga pulsada la tecla o al máximo en la dirección opuesta a la
del paso 6.
Mientras pulsa una tecla, aparecerá el mensaje siguiente.
8. Cuando el timón alcanza su límite, suelte la tecla o para que
aparezca el siguiente mensaje.
9. Lleve a cabo una de las siguientes acciones:
• Si el timón ha alcanzado su límite correctamente
: pulse la tecla . Después
de pulsar la tecla, aparecerá uno de los siguientes mensajes, según la tecla
que haya pulsado en el paso 7.
• Si el timón no ha alcanzado su límite correctamente
: pulse la tecla para
mostrar el siguiente mensaje.
Pulse la tecla para volver a intentar la prueba de timón desde el paso 6. Si
pulsa la tecla , se cancela la prueba de timón.
10. Mantenga pulsada la tecla o al máximo en la dirección opuesta a la
del paso 7.
Mientras pulsa una tecla, aparecerá el mensaje siguiente.
11. Cuando el timón alcanza su límite, suelte la tecla o para que
aparezca el siguiente mensaje.
1
1
10
Mantenga pulsada la tecla
de flecha para mover el
timón al límite opuesto.
Mover a BABOR
Mover a ESTRIBOR
Abortar
1
1
No suelte la tecla hasta
que el timón se encuentre
en el límite.
1
1
¿Ha alcanzado el timón
su límite?
SI
NO
10
Mantenga pulsada la tecla de
flecha para mover el timón al
límite opuesto.
Mover a BABOR
Abortar
Abortar se pulsa en el paso 7
Mantenga pulsada la tecla de
flecha para mover el timón al
límite opuesto.
Mover a ESTRIBOR
Abortar
1
1
Abortar se pulsa en el paso 7
Prueba de timón no completada.
¿Volver a iniciar?
SI
NO
10
1
1
No suelte la tecla hasta
que el timón se encuentre
en el límite.
1
1
¿Ha alcanzado el timón
su límite?
SI
NO

3. CONFIGURACIÓN INICIAL
3-13
12. Lleve a cabo una de las siguientes acciones:
• Si el timón ha alcanzado su límite correctamente
: Pulse la tecla para
finalizar la prueba de timón. Cuando se haya completado la prueba de timón,
aparecerá el siguiente mensaje.
Nota: Si fuese necesario ajustar la velocidad de gobierno, aparecería el
siguiente mensaje. Pulse la tecla para volver a intentar la prueba de timón
desde el paso 6. Si pulsa la tecla , se cancela la prueba de timón.
• Si el timón no ha alcanzado su límite correctamente
: pulse la tecla para
mostrar el siguiente mensaje.
Pulse la tecla para volver a intentar la prueba de timón desde el paso 6. Si
pulsa la tecla , se cancela la prueba de timón.
13. Pulse cualquier tecla para mostrar el resultado de la prueba de timón.
Nota: No apague el equipo hasta que pasen dos segundos de la finalización de
la prueba de timón. Si se apaga accidentalmente, vuelva a realizar la prueba de
timón.
14. Pulse la tecla para cerrar el resultado de la prueba de timón.
Nota: Después de completar la prueba de timón, [Prueba de Timon] en el menú
[Configuracion en Puerto] cambia a [Configu. Limite de Timon (Done)].
• [Unidad Servo]: tipo de servo utilizado por
NAVpilot: [Reversible 12 V (o 24 V)] o
[Safe-Helm 12 V (o 24 V)].
• [Velocidad Sensor]: velocidad del sensor
([OK], [Fast] [Rápida], o [Slow] [Lenta])
• [Nivel Servo Timon]: cantidad de opera-
ciones con la dirección necesarias para
mover el timón.
• [Voltaje Entrada:] voltaje de entrada de la
unidad procesadora.
10
Prueba de timón finalizada.
Pulse cualquier tecla para seguir.
10
Puede que ajustes sean
incorrectos, velocidad de
timón inadecuada.
¿Reiniciar prueba de timón?
SI
NO
Prueba de timón no completada.
¿Volver a iniciar?
SI
NO
10
Prueba de Timon
Unidad Servo:
Safe-Helm 24 V
Velocidad timón:
OK
Nivel Servo Timon:
5
Voltaje Entrada:
12.1V
ANT.

3. CONFIGURACIÓN INICIAL
3-14
3.4.3 Cómo ajustar el modo de timón seguro y el modo de gobierno
Las funciones de timón seguro y de gobierno están disponibles con la unidad de servo
Accu-Steer FPS 12V (o 24V). Si su unidad de servo es distinta, vaya a la
sección 3.4.4.Lleve a cabo la prueba del sensor de timón antes de la configuración de
timón seguro y de gobierno.
Prueba del sensor de timón (para servo Accu-Steer FPS 12V [o 24V])
La prueba del sensor de timón comprueba la conexión entre la unidad procesadora y
el servo Accu-Steer FPS 12V (o 24V).
1. Pulse la tecla para seleccionar [Test Sensor de Timon] en el menú
[Configuracion en Puerto] y luego, .
2. Centre el timón y pulse la tecla .
Aparecerá uno de los siguientes mensajes.
3. Cuando está instalado el URT: gire el timón en dirección BABOR o ESTRIBOR.
Con Fantum Feedback
™
: gire el timón en dirección ESTRIBOR.
4. Cuando está instalado el URT: Gire el timón en la dirección opuesta a la
escogida en el paso 3.
Con Fantum Feedback
™
: gire el timón en dirección BABOR.
Si la conexión es normal, aparece el mensaje "Prueba sensor dirección completa.
Pulse cualquier tecla para seguir." . En caso de error, aparece el mensaje "Error
de prueba sensor dirección. Compruebe el sensor. Pulse cualquier tecla para
seguir." . Verifique que su sensor de timón es el Accu-Drive FPS 12V/24V.
Compruebe también que el sensor de timón está bien conectado a la unidad
procesadora.
5. Pulse cualquier tecla para mostrar el resultado de la prueba del sensor de timón.
El siguiente ejemplo de pantalla pertenece a Fantum Feedback
™
. Con el URT
instalado, el aspecto del indicador de la parte inferior de la pantalla cambia.
1
10
Utilice dirección para
centrar timón antes de
comenzar esta prueba.
¿Iniciar prueba?
SI
NO
10
Cuando está instalado el URT
Con Fantum Feedback
TM
Gire dirección a BABOR
o ESTRIBOR.
Pulse una tecla para cancelar.
Gire dirección para mover timón
a ESTRIBOR.
Pulse una tecla para cancelar.
Cuando está instalado el URT
Con Fantum Feedback
TM
Gire dirección a lado opuesto.
Pulse una tecla para cancelar.
Gire dirección para mover timón
a BABOR.
Pulse una tecla para cancelar.
Test Sensor de Timon
Input 1 Universal:
STBD* (ESTRI.*)
Input 2 Universal:
PORT* (BABOR*)
ANT.
*: aparece «--» si la prueba falla.

3. CONFIGURACIÓN INICIAL
3-15
6. Pulse la tecla para cerrar el resultado de la prueba.
Nota: Después de completar la prueba del sensor de timón, [Test Sensor de Timon]
en el menú [Configuracion en Puerto] cambia a [Test Sensor de Timon (Done)].
Configuración de timón seguro (para servo Accu-Steer FPS 12V [o 24V])
Configure la función de timón seguro desde el menú [Configuración Timón Seguro].
Para abrir el menú [Configuración Timón Seguro], seleccione [Configuración Timón
Seguro] en el [Configuracion en Puerto].
Nota: La configuración de timón seguro no se puede llevar a cabo si no se ha
completado la prueba de timón seguro.
Elemento de
menú
Descripción
[Timon Seguro] Activa o desactiva el modo de timón seguro. El modo de timón
seguro, disponible con la unidad del servo Accu-Steer FPS 12V/
24V, cambia temporalmente el NAVpilot a gobierno manual
durante el intervalo de tiempo especificado cuando el timón se
gobierna con un modo de gobierno automático. Esto evita el giro
constante del timón. Las indicaciones de modo y curso parpadean
cuando se activa el modo de timón seguro.
[Retraso Vuelta] Establece el intervalo de tiempo hasta restablecer el modo de
gobierno anterior.
• Modo NAV: cuando los datos del sensor de timón no se
introducen para el tiempo establecido, el modo NAV se
restablece.
• Otro modo que no sea el modo NAV: cuando se navega
directamente hacia delante y los datos del sensor de timón no
se introducen para el tiempo establecido, se restablece el modo
de gobierno anterior.
[Respuesta Timon
Seguro]
Abra la ventana [Respuesta Timon Seguro] para ajustar el valor
de respuesta de timón seguro. Cuanto más alto es el valor, más
rápida es la respuesta.
[Pitido Safe Helm] Activa o desactiva el pitido cuando el modo de timón seguro está
activado.
Configuración Timón Seguro
Timon Seguro:
Retraso Vuelta:
ANT.
▼
Respuesta Timon Seguro
Ent.
ON
5sec
Pitido Safe Helm:
ON
Respuesta Timon Seguro
Respuesta:
ANT.
5
Gire dirección BABOR/ESTRIBOR
tiempo de respuesta timón seguro.
Valor más alto = Respuesta
más rápida.
Ent.
----
Al girar el timón, «EST.»
o «BAB.» se muestran en
función de la dirección
de aquel.

3. CONFIGURACIÓN INICIAL
3-16
Configuración de gobierno (para servo Accu-Steer FPS 12V [o 24V])
Configure la función de gobierno desde el menú [Configurar Gobierno]. Para abrir el
menú [Configurar Gobierno], seleccione [Configurar Gobierno] en el [Configuracion
en Puerto].
Nota: La configuración de gobierno no se puede llevar a cabo si no se ha completado
la prueba de timón seguro.
3.4.4 Confirmación de la configuración en puerto
Al entrar en la configuración en puerto, confirme que esta se ha completado
correctamente y que las funciones de timón seguro y gobierno funcionan
adecuadamente.
Elemento de
menú
Descripción
[Gobierno] Activa y desactiva el modo de gobierno. El modo de gobierno,
disponible con la unidad de tipo Accu-Steer FPS 12V/24V,
personaliza el gobierno manual para que se ajuste a sus
preferencias. El modo está disponible durante el modo de timón
seguro y el modo STBY.
[Para Veloc. Baja] Establezca la velocidad más alta a partir de la cual se activa el
gobierno.
Nota: Cuando el gobierno se activa a una velocidad alta, puede
que el barco gire más rápido de lo que se pretendía. Configure
[Para Veloc. Baja] de acuerdo con la embarcación y la función de
timón.
[Power Assist Stby] Si quiere configurar el gobierno en el modo STBY, seleccione
[ON]. Si no, seleccione [OFF].
[Gobierno
Velocidad Timón]
Abra la ventana [Gobierno Velocidad Timón] para establecer la
velocidad de timón cuando se active el gobierno. Cuanto más alto
sea el ajuste, mayor será el gobierno.
El siguiente ejemplo de pantalla pertenece a Fantum Feedback
™
.
Con el URT instalado, el aspecto del indicador de la parte inferior
de la pantalla cambia.
Configurar Gobierno
Gobierno:
Para Veloc. Baja:
ANT.
▼
Power Assist Stby:
Ent.
ON
10.0kn
OFF
Gobierno Velocidad Timón
Gobierno Velocidad Timón
Velocidad Sensor:
ANT.
10
Gire dirección BABOR/ESTRIBOR
para establecer velocidad timón.
Valor más alto = Resp. más rápida
Ent.

3. CONFIGURACIÓN INICIAL
3-17
Confirmación de la configuración de límite de timón (cuando está instalado
el URT)
Nota: El siguiente procedimiento no es necesario para Fantum Feedback
™
.
1. Muestre el indicador de ángulo de timón.
2. Gire al máximo la rueda del timón a babor en puerto.
3. Confirme que el indicador de ángulo de timón muestra el valor establecido en
[ESTRIB Límite Timón].
4. Gire al máximo la rueda del timón a estribor en puerto.
5. Confirme que el indicador de ángulo de timón muestra el valor establecido en
[Babor Limte de Timon].
Confirmación del gobierno del timón
1. Muestre el indicador de ángulo de timón o el indicador de dirección de gobierno.
2. Seleccione el modo AUTO en puerto.
3. Pulse la tecla para establecer el rumbo.
4. Con el URT instalado, confirme que el timón gira a estribor con el indicador de
ángulo de timón. Para Fantum Feedback
™
, confirme visualmente que el timón
gira a estribor.
5. Pulse para establecer el rumbo.
6. Con el URT instalado, confirme que el timón gira a babor con el indicador de
ángulo de timón. Para Fantum Feedback
™
, confirme visualmente que el timón
gira a babor.
Confirmación del modo AUTO en el mar
1. Seleccione una zona segura y navegue a velocidad lenta.
2. Seleccione el modo AUTO y confirme que el NAVpilot controla la embarcación
correctamente.
Prueba del sensor de timón
Nota: Confirme que el barco está equipado con la unidad de servo Accu-Steer FPS
12V (o 24V).
1. Realice una pulsación larga de la tecla para abrir el menú, seleccione
[Otros Menus] [Configurar Sistema] [Diagnóstico] [Test Sensor de
Timon].
2. Realice la prueba del sensor de timón, consultando las página 3-14.
Confirmación de la activación de la función de gobierno
Nota: Cuando [Gobierno] está establecido en [ON], lleve a cabo el siguiente
procedimiento.
1. Cuando [Power Assist Stby] está establecido en [ON] en el menú [Configurar
Gobierno], seleccione el modo STBY. Cuando [Power Assist Stby] está
establecido en [OFF], seleccione el modo AUTO.
2. Gire el timón a estribor lentamente y, a continuación, confirme que el gobierno
está activado y que el timón gira a estribor.
3. Gire el timón a babor lentamente y, a continuación, confirme que el gobierno está
activado y que el timón gira a babor.
1
1

3. CONFIGURACIÓN INICIAL
3-18
Confirmación de las funciones de timón seguro y de gobierno
Nota: Cuando [Timon Seguro] y [Gobierno] están establecidos en [ON], lleve a cabo
el siguiente procedimiento.
1. Seleccione una zona segura y navegue a la velocidad mínima.
2. Seleccione el modo AUTO.
3. Gire el timón y ajuste la respuesta en [Respuesta Timon Seguro].
4. Mientras gira el timón, confirme que la función de gobierno no funciona con
demasiada fuerza. Si fuese necesario, ajuste el valor en [Gobierno Velocidad
Timón].
5. Centre el timón y deje el gobierno. El modo de gobierno cambia automáticamente
al modo AUTO. Ajuste el retraso vuelta en [Retraso Vuelta].
6. Establezca la velocidad del barco en el valor configurado en [Para Veloc. Baja].
7. Gire el timón y confirme que las funciones de timón seguro y de gobierno se
activan correctamente.
Nota: No gire el timón de golpe. Cuando la función de gobierno funciona con
fuerza, puede que el barco gire más rápido de lo que se pretendía.
8. Gire el timón y ajuste la respuesta en [Respuesta Timon Seguro].
9. Cuando es difícil navegar a la velocidad establecida en el paso 6, ajuste el valor
de configuración en [Para Veloc. Baja] para que pueda controlar la embarcación
con más facilidad.
3.5 Menú [NMEA2000]
El menú [NMEA2000] permite configurar el equipo conectado a la red NMEA2000/
CAN bus. Para abrir el menú [NMEA2000], seleccione [NMEA2000] en el [Menu
Instalacion].
NMEA2000
Lista de Dispositivos
Lista PGN Entrante
ANT.
▼
Actualizar
Ent.
NO

3. CONFIGURACIÓN INICIAL
3-19
3.6 Menú [Servo por Puerto Cables]
Puede comprobar los datos entrantes desde el puerto DBW (Conducción por cable)
en el menú [Servo por Puerto Cables]. Para abrir el menú [Servo por Puerto Cables],
seleccione [Servo por Puerto Cables] en el [Menu Instalacion].
Nota: [Servo por Puerto Cables] solo aparece en el [Menu Instalacion] cuando [Tipo
de Barco] está establecido en [EVCS-Ser.Pod], [EVCS-Fuera], [EVCS-Den/Fue] o
[EVCS-A Bordo] en el menú [Características del Barco].
Elemento de menú Descripción
[Lista de
Dispositivos]
Muestra una lista de dispositivos conectados a la misma red
NMEA2000/CAN bus que el NAVpilot.
[Lista PGN
Entrante]
Muestra una lista de PGN que NAVpilot puede recibir. Los
elementos de la lista de PGN que están disponibles se muestran
en negro y los elementos no disponibles en gris.
[Actualizar] Actualiza los elementos que aparecen en la [Lista de
Dispositivos] y en la [Lista PGN Entrante]. Las listas se deben
actualizar cuando se agregan o se eliminan dispositivos en la
misma red NMEA2000. Para actualizar las listas, seleccione
[Actualizar] y pulse la tecla . A continuación, seleccione [SI] y
pulse la tecla .
Lista de Dispositivos
PG-700
ANT.
▼
Ent.
: 0: 14958
NAVpilot-300(Processor)
(NAVpilot-300 (Procesador))
: 0: 0
Nombre del dispositivo Instancia del dispositivo
ID de CAN exclusivo
Lista PGN Entrante
ANT.
►
059392 059904 060160 060416 060928
065240 065283 065284 126208 126464
126720 126992 126996 127245 127250
127258 128259 129025 129026 129029
ISO Acknowledgement (Reconocimiento ISO)
10
10

3. CONFIGURACIÓN INICIAL
3-20
Seleccione [Datos Entrantes] para supervisar los datos que se introducen. Los
elementos de la lista de [Datos Entrantes] que están disponibles se muestran en
negro y los elementos no disponibles en gris.
3.7 Menús [Selección de Sensor]
El menú [Selección de Sensor] selecciona la fuente de datos para los datos de rumbo,
STW, SOG y posición. Además, puede abrir la pantalla [View Sensors in Use] (Ver
sensores en uso) en el menú [Selección de Sensor]. La pantalla [View Sensors in
Use] muestra una lista con los sensores actualmente utilizados como fuente de datos.
Para abrir el menú [Selección de Sensor], seleccione [Selección de Sensor] en el
[Menu Instalacion].
Pantalla [View Sensors in Use] (Ver sensores en uso)
La pantalla [View Sensors in Use] muestra una lista con los sensores actualmente
utilizados como fuente de datos. Para abrir la pantalla [View Sensors in Use] (Ver
sensores en uso), seleccione[View Sensors in Use] (Ver sensores en uso) en el menú
[Selección de Sensor] y pulse la tecla .
Los guiones «--------» indican que no hay conexión o que el sensor no está activo en
esos momentos.
Para cerrar la pantalla [View Sensors in Use] (Ver sensores en uso) pulse la tecla
.
Servo por Puerto Cables
Datos Entrantes
ANT.
Datos Entrantes
ANT.
►
065280 127237 127245
CPAC Proprietary Rudder
(Timón propietario CPAC)
Ent.
Selección de Sensor
View Sensors in Use
(Ver sensores en uso)
HDG:
ANT.
▼
STW:
Ent.
SOG:
----------------------
----------------------
----------------------
10
View Sensors in Use
(Ver sensores en uso)
Sensor en Uso
HDG:
ANT.
▼
POSN:
STW:
PG-700 : 0: 14958
----------------------
----------------------
SOG:
----------------------
Nombre del dispositivo
Instancia del dispositivo
ID de CAN exclusivo
Origen actual de los datos

3. CONFIGURACIÓN INICIAL
3-21
Cómo seleccionar el origen de datos
Por defecto, el NAVpilot detecta automáticamente los orígenes de datos de la red y
se conecta a ellos. Si desea utilizar un sensor específico como origen de datos, lleve
a cabo el siguiente procedimiento:
1. Active todos los sensores conectados al NAVpilot.
2. Pulse la tecla o para seleccionar los
datos del menú [Selección de Sensor] y pulse la
tecla .
Aparece la ventana de selección de origen de datos.
El ejemplo de pantalla que aparece a la derecha
muestra la ventana de selección de origen de datos
para los datos de rumbo.
3. Pulse la tecla o para seleccionar el sensor y pulse la tecla .
Con «-----------» seleccionado, el NAVpilot detecta automáticamente los orígenes
de datos de la red y se conecta a ellos.
Nota: Aparece [No utilizado] en la ventana de selección de datos para los datos
STW. Cuando se selecciona [No utilizado], el NAVpilot no utiliza datos STW.
4. Pulse la tecla para cerrar el menú [Selección de Sensor] y volver al [Menu
Instalacion].
3.8 Menú [Pruebas de Mar]
Los ajustes en el menú [Pruebas de Mar] requieren realizar una prueba de mar corta
en la embarcación. Esto requiere que la embarcación deje el puerto. Para abrir el
menú [Pruebas de Mar], seleccione [Pruebas de Mar] en el [Menu Instalacion].
3.8.1 Ajuste para información de variación magnética ([Variaci.
Magnt.])
Con un sensor de rumbo magnético (PG-500/PG-700, etc.), se necesita la
información de variación magnética para mostrar los datos de rumbo verdadero. En
casi todos los casos, se conecta un dispositivo GPS a NAVpilot, que envía
automáticamente esta información de variación a la unidad. Por lo tanto, establezca
[Variaci. Magnt.] en [Auto]. En los casos especiales en los que se requiere una
variación manual, se pueden introducir manualmente estos valores. Tenga en cuenta
que esta selección solo es aplicable cuando la [Pantalla Rumbo] está establecida en
[Verdadero] en el menú [Configuracion de Pantalla].
Cuando [Pantalla Rumbo] está establecida en [Verdadero] en el menú [Configuracion
de Pantalla], NAVpilot mostrará la información de rumbo verdadero, incluso aunque
-------------------------
PG-700 : 0: 14958
Nombre del dispositivo
Instancia del dispositivo
ID de CAN exclusivo
1
1
10
1
1
10
Pruebas de Mar
Variaci. Magnt.:
Configuracion de Compas
ANT.
▼
Ent.
Auto
HDG M: 180° COG: 135°
0.0°

3. CONFIGURACIÓN INICIAL
3-22
NAVpilot esté conectado a un sensor de rumbo magnético. Esto resulta muy valioso
al conectar el radar de la serie FAR- 21X7 de FURUNO a NAVpilot, ya que estos
radares no pueden configurarse para una entrada de rumbo magnético y la marca en
forma de piruleta del waypoint solo se alineará correctamente cuando se utilice el
rumbo verdadero.
3.8.2 Cómo calibrar el sensor de rumbo (menú [Configuracion de
Compas])
Puede calibrar el sensor de rumbo conectado (PG-700 o SC-30 de FURUNO) desde
el menú [Configuracion de Compas].
• Este procedimiento no es aplicable a los sensores de rumbo que no sean PG-700
y SC-30.
• No es necesario realizar de forma local ningún ajuste en el PG-700 ni en el SC-30.
NAVpilot asumirá el control completo de estos sensores de rumbo.
Para abrir el menú [Configuracion de Compas], seleccione [Configuracion de
Compas] en el menú [Pruebas de Mar]. Los elementos del menú [Configuracion de
Compas] cambian de acuerdo con el sensor de rumbo (PG-700 o SC-30). El siguiente
ejemplo de pantalla pertenece al PG-700.
Elemento de menú Descripción
[Select Compass]
(Seleccionar compás)
Seleccione el sensor de rumbo que se configurará.
[Informacion de
Compas]
Muestra el nombre del modelo y la versión del software del
sensor.
Configuracion de Compas
Select Compass
(Seleccionar Compás):
Informacion de Compas
ANT.
▼
Ent.
PG-700 : 0
HDG M: 180° COG: 135°
Borrar Compas:
NO
Informacion de Compas
Model ID (ID Model):
ANT.
PG-700
Software Version
(Version de Software):
01.02:02.02

3. CONFIGURACIÓN INICIAL
3-23
*
1
: Se muestra cuando PG-700 está seleccionado en [Select Compass] (Seleccionar
compás).
*
2
: Se muestra cuando SC-30 está seleccionado en [Select Compass] (Seleccionar
compás).
3.8.3 Cómo establecer la posición central del timón durante la
navegación
Lleve a cabo el siguiente procedimiento para establecer la posición de timón en 0° a
una velocidad de navegación normal. Si este ajuste no se realiza por completo, es
posible que se produzca un abatimiento del barco. En los barcos con dos motores,
asegúrese de que se sincronicen los motores y de que mantengan una velocidad de
crucero normal.
Nota: Cuando la unidad de referencia del timón no está instalada o el barco está
equipado con el sistema EVC, el siguiente procedimiento no es necesario.
[Calib. Compás]*
1
Seleccione el modo de calibración.
• [NO]: no se realiza la calibración.
• [Auto]: el barco gira a estribor aproximadamente tres o
cuatro círculos completos para realizar la calibración.
Tenga en cuenta que el barco girará a estribor los grados
establecidos en la opción [Limite Manual Timon] del menú
[Configu. Limite de Timon]. En el caso de barcos
equipados con el sistema EVC, el barco girará a estribor
26°.
Nota: [Auto] no se muestra para Fantum Feedback
™
.
• [Manual]: utilice la rueda del timón para girar el barco a
babor o a estribor tres o cuatro círculos completos a una
velocidad de aproximadamente un minuto/círculo para
realizar la calibración.
[WAAS Mode] (Modo
WAAS)*
2
Encienda y apague la búsqueda por satélite WAAS (SBAS).
• [Auto]: busca el satélite WAAS (SBAS) automáticamente.
• [SBAS Apagado]: desactiva la posición de fijación WAAS
(SBAS).
[Compensacion
Compas]*
1
*
2
Si los datos de rumbo mostrados en la pantalla son diferentes
a la indicación del sensor de rumbo, aplique una
compensación en [Compensacion Compas]. Esta
compensación se aplica a los datos del sensor de rumbo. Por
ejemplo, si la indicación en la unidad de control muestra 125°
pero la lectura del sensor de rumbo es 120°, introduzca «5°».
[Borrar Compas]*
1
Seleccione [SI] para restaurar los ajustes de fábrica por
defecto del sensor. Para recalibrar el sensor de rumbo.
[Reiniciar PG-700]*
1
Seleccione [SI] para reiniciar el PG-700. Gire el modo de
gobierno al modo STBY antes de reiniciar el PG-700.
[Compens. Cabeco]*
2
Compensa el valor de cabeceo.
[Compens.Balanceo]*
2
Compensa el valor de balanceo.
Elemento de menú Descripción

3. CONFIGURACIÓN INICIAL
3-24
1. Pulse la tecla para seleccionar [Pos. Esti. Timon Central] en el menú
[Pruebas de Mar] y pulse la tecla .
Aparecerá el mensaje siguiente.
2. Gire la dirección para centrar el timón y acelere el barco entre 10 y 15 nudos.
3. Pulse la tecla con el barco acelerando en línea recta para establecer la
posición central del timón durante la navegación.
3.8.4 Cómo establecer la banda muerta del timón
Puede ajustar la banda muerta del timón automáticamente o de forma manual.
1. Pulse la tecla para seleccionar [Ban. Muerta Tim.] en el menú [Pruebas de
Mar] y luego, .
2. Pulse la tecla o para seleccionar [Manual] o [Auto] y pulse la tecla
.
3. Para Manual, proceda como se indica a continuación:
1) Pulse la tecla para seleccionar el valor de banda muerta actual, y luego
.
2) Pulse la tecla o para ajustar el valor de banda muerta y luego
pulse la tecla .
Nota: Cuando la prueba de timón se realiza después de ajustar la banda muerta del
timón de forma manual, vuelva a establecer la banda muerta del timón.
3.8.5 Cómo compensar el valor STW
Para aplicar una compensación a los datos STW, siga estos pasos.
1. Pulse la tecla para seleccionar [Ajustar STW] en el menú [Pruebas de Mar]
y luego, .
2. Pulse la tecla o para ajustar el valor de compensación y luego pulse
la tecla .
Introduzca un 99 % o menos si la indicación es superior al valor real y un 101 %
o más si es inferior al valor real. Si la indicación de la pantalla muestra el valor
actual, mantenga el ajuste en «100 %».
3.9 Menú [Configurar Parametros]
NAVpilot cuenta con una función de ajuste automático que permite configurar el
equipo en función de las características del barco y la condición de la mar para
obtener un rendimiento óptimo en el control de la embarcación. Además, se ha
incorporado un algoritmo de aprendizaje automático; se optimizan constantemente
los parámetros de las ganancias de reglaje automático, contratimón y relación del
timón, en función de los datos históricos de gobierno del barco y se almacenan para
la futura navegación.
1
10
Siga un curso recto y pulse
[10>>] para establecer
¿Está seguro?
SI
NO
10
1
10
1
1
10
1
10
1
1
10
1
10
1
1
10

3. CONFIGURACIÓN INICIAL
3-25
Establezca cómo gobierna el NAVpilot su barco en el menú [Configurar Parametros]
como se indica a continuación: Para abrir el menú [Configurar Parametros],
seleccione [Configurar Parametros] en el [Menu Instalacion].
Elemento de menú Descripción
[Autoaprendizaje] Activa/desactiva la función de autoaprendizaje del NAVpilot. La
función de autoaprendizaje ajusta los parámetros de las
ganancias de reglaje automático, contratimón y relación del
timón, en función de los datos históricos de gobierno del barco y
los almacena para la futura navegación.
[Nivel Desviacion] Puede ajustar el nivel de desviación automáticamente o de forma
manual. Seleccione [Manual] para establecer el nivel de
desviación manualmente y, a continuación, introduzca el valor de
nivel de desviación. Un valor inferior mantiene el rumbo con
mayor precisión, pero el timón gira más frecuentemente. Con un
valor más alto, el timón se mueve menos y está más fijo, pero el
rumbo no se mantendrá con tanta precisión.
Nota: Establezca [Autoaprendizaje] en [ON] para ajustar el [Nivel
Desviacion].
[Parametro Manual] Abra el menú [Parametro Manual] y ajuste los parámetros de
gobierno manualmente.
Para obtener información detallada acerca de cada elemento de
configuración, consulte "Directrices para ajustar los parámetros
de gobierno manualmente" de la página 3-26.
Nota: Establezca [Autoaprendizaje] en [OFF] para ajustar el
[Parametro Manual].
[Cálculo velocidad] Normalmente, el navegador indica la velocidad de forma
automática. Si el navegador falla, indique la velocidad
manualmente. Cuando introduzca la velocidad manualmente,
establezca [Cálculo velocidad] en [Manual] e introduzca el valor
de velocidad del barco.
Configurar Parametros
Autoaprendizaje:
Nivel Desviacion:
ANT.
▼
Ent.
ON
Parametro Manual:
Auto
5
Parametro Manual
Meteorologia:
Gananc Timon:
ANT.
▼
Ent.
1°
Contra Timón:
3
1
Ajus. Manual:
0.0°

3. CONFIGURACIÓN INICIAL
3-26
Directrices para ajustar los parámetros de gobierno manualmente
• [Meteorologia]: con mala mar, la proa del barco cae a babor y a estribor. Si se
acciona el timón con mucha frecuencia para mantener el rumbo deseado, el
mecanismo del timón se desgasta rápidamente. Para evitarlo, el ajuste por
condiciones meteorológicas insensibiliza el NAVpilot frente a pequeñas
desviaciones de rumbo. Mientras la desviación del rumbo no supere el valor
seleccionado, no se gobernará para corregir el rumbo.
La ilustración siguiente muestra la derrota del barco con ajuste por condiciones
meteorológicas de 3° y de 7°. Por ejemplo, cuando se ajusta en 7°, el timón no se
acciona hasta que la desviación del rumbo es mayor de 7°. Si se aumenta el ajuste
se reduce la utilización del mecanismo del timón, pero el barco tiende a navegar en
zigzag. Con la mar en calma, establezca a un valor inferior.
• [Gananc Timon]: cuando el rumbo del barco se desvía del fijado, NAVpilot ajusta
el timón para corregirlo. Al ángulo del timón (en grados) con el que se gobierna por
cada grado de desviación de rumbo se le denomina ganancia del timón.
Ajuste la ganancia del timón para que el barco no realice demasiadas guiñadas. La
figura siguiente proporciona directrices generales para ajustar la ganancia del
timón.
• [Contra Timón]: si el barco lleva mucha carga, el rumbo de proa puede cambiar
excesivamente debido a la inercia. Este fenómeno provoca que la embarcación
«sobrevire» respecto al rumbo previsto. Si esto ocurre, NAVpilot gobernará el timón
al costado opuesto y la proa caerá, de nuevo demasiado, hacia la banda contraria.
En un caso límite, la proa oscilará varias veces hasta estabilizarse en el nuevo
rumbo. Un ajuste, llamado «contratimón» evita este tipo de oscilaciones.
Los barcos pequeños no suelen necesitar contratimón. Si el barco realiza muchos
zigzags antes de estabilizarse en un nuevo rumbo, aumente el ajuste de
contratimón.
7°
3°
[Meteorologia] = 3° [Meteorologia] = 7°
Velocidad
Condición de la mar
Carga
[Gananc Timon]
Rápido
Calma
Ligera
Bajo
Lenta
Gruesa
Pesada
Alto

3. CONFIGURACIÓN INICIAL
3-27
• [Ajus. Manual]: este ajuste compensa las guiñadas causadas por el mar agitado o
por cargas pesadas. Si el barco muestra una guiñada a babor, ajuste el reglaje a
estribor. A la inversa, si el barco muestra una guiñada a estribor, ajuste el reglaje a
babor.
Nota: Para barcos con Fantum Feedback
™
, la configuración de [Ajus. Manual] no
se utiliza. Los elementos de menú están disponibles, pero los cambios en la
configuración se ignoran.
3.10 Menú [Piloto Auto.]
Las funciones de los modos AUTO y NAV se configuran desde el menú [Piloto Auto.]
Para abrir el menú [Piloto Auto.], seleccione [Piloto Auto.] en el [Menu Instalacion].
Elemento de menú Descripción
[Auto Avanzado] El modo AUTO permite mantener un rumbo establecido, pero la
marea o el viento pueden desplazar la embarcación. Para
compensar los efectos de los vientos y las mareas, ajuste [Auto
Avanzado] en [ON]. Su unidad NAVpilot debe estar conectada a
un navegador GPS que facilite datos de posición (latitud y
longitud) en formato NMEA2000/CAN bus.
Contratimón:
con poco ajuste
Contratimón:
ajuste correcto
Error grave de rumbo
Rumbo
previsto
La función de contratimón retorna suavemente
el rumbo de proa del barco al previsto.
Rápido
Pesada
Alto
Lenta
Ligera
Bajo
Velocidad
Carga
[Contra Timón]
Piloto Auto.
Auto Avanzado:
Modo NAV:
ANT.
▼
Ent.
OFF
Cambio Waypoint:
Económico
----------------------
Origen Datos Navegacion:
Auto

3. CONFIGURACIÓN INICIAL
3-28
[Modo NAV] La embarcación puede desviarse del rumbo entre dos waypoints
en el modo NAV. Para volver al rumbo fijado, hay dos métodos
disponibles: [Precisión] y [Económico]. Tanto [Precisión] como
[Económico] son opciones que usan el valor (error transversal)
XTE para gobernar el barco hacia el rumbo original antes de
esquivar el obstáculo correspondiente.
• [Precisión]: mantiene la derrota dentro de 0,01 millas
náuticas. La opción [Precisión] permite gobernar el barco de
forma más precisa que [Económico].
• [Económico]: mantiene la derrota dentro de 0,03 millas
náuticas. La opción [Económico] permite gobernar el barco de
forma más económica que [Precisión].
[Origen Datos
Navegacion]
Abre la ventana de selección de origen de datos y selecciona el
origen de los datos de navegación que se usarán en el modo
NAV. Con «-----------» seleccionado, el NAVpilot detecta
automáticamente los orígenes de datos de la red y se conecta a
ellos.
Nota: La resolución XTE (del error transversal) del origen de
datos de navegación debe ser de 0,001 millas náuticas o más
precisa. De lo contrario, el rendimiento de gobierno del NAVpilot
podría verse reducido.
[Cambio Waypoint] Cuando llegue a un waypoint de una ruta en el modo NAV, podrá
cambiar al siguiente waypoint de forma automática o manual.
• [Auto]: cambia al siguiente waypoint de destino
automáticamente cuando el barco esté dentro del área de
alarma de arribada (fijada en el plóter de cartas).
• [Manual]: es necesaria la confirmación del operador
(pulsando cualquier tecla) antes de cambiar al waypoint
siguiente.
[A la Llegada] Ajuste cómo se gobernará el barco tras arribar al último waypoint
de la ruta en el modo NAV.
• [Ir Recto]: navegue en línea recta después de llegar al último
waypoint.
• [Orbitar a Babor]: orbita a BABOR en torno al waypoint.
• [Orb. a Estribor]: orbita a ESTRIBOR en torno al waypoint.
• [Fig. Ocho BABOR]: gira a BABOR con un patrón de figura en
ocho.
• [Fig. Ocho ESTRI.]: gira a ESTRIBOR con un patrón de figura
en ocho.
[Angulo de Giro1]/
[Angulo de Giro2]
Establece el ángulo de giro del Usuario en el modo de giro.
Elemento de menú Descripción
El ajuste [Angulo de Giro1] se aplica a los
dos siguientes iconos de giro de usuario.
El ajuste [Angulo de Giro2] se aplica a los
dos siguientes iconos de giro de usuario.

3. CONFIGURACIÓN INICIAL
3-29
3.11 Menú [Opcion de Pesca]
El modo FishHunter
™
es una función exclusiva de la serie NAVpilot de FURUNO.
Encuentre un banco de peces y fíjelo como objetivo de su sonar o sonda de eco de
FURUNO, o bien un blanco de pájaros como objetivo de su radar FURUNO, e
introduzca los datos en NAVpilot. NAVpilot activará el modo FishHunter
™
para
ejecutar varios giros en torno al objetivo especificado.
Puede establecer los parámetros para los giros de FishHunter
™
desde el menú
[Opcion de Pesca]. Para abrir el menú [Opcion de Pesca], seleccione [Opcion de
Pesca] desde el [Menu Instalacion].
Establezca los parámetros para cada giro FishHunter
™
consultando la siguiente
descripción.
Giro en órbita
El barco orbita alrededor de su posición actual. Esta función requiere un plóter de
cartas o un navegador GPS.
Opcion de Pesca
Orbita
Espiral
ANT.
▼
Ent.
Zigzag
Figura en Ocho
Orbita
Radio Orbita:
ANT.
[Radio Orbita]
0.10NM
Ent.

3. CONFIGURACIÓN INICIAL
3-30
Giro en espiral
El barco maniobrará en espiral en la dirección actual del rumbo de proa (STBY), del
rumbo establecido (AUTO) o del rumbo al siguiente waypoint (NAV) que estaba activo
en el momento en el que se seleccionó el giro en espiral.
Nota: En el modo NAV, si el barco no llega a entrar en el área de alarma de arribada,
NAVpilot no se podrá cambiar al siguiente waypoint. Para evitarlo, establezca una
distancia de alarma de arribada los más extensa posible y active la función de
perpendicularidad en el plóter conectado.
Giro en forma de 8
Después de que el barco haya recorrido el radio establecido en el menú, empezará a
maniobrar describiendo un ocho y volverá automáticamente a la posición en la que se
inició el ocho.
Espiral
Espiral Velocid.:
ANT.
0.5kn
䠙
[Espiral Radio]
Distancia entre los centros de las espirales
Distancia entre los centros
de las espirales (NM)
6,28 × [Espiral Radio]
[Espiral Velocid.]
Espiral Radio:
0.10NM
▼
Ent.
Figura en Ocho
Radio Fig. Ocho:
ANT.
0.10NM
[Radio Fig. Ocho]
Ent.

3. CONFIGURACIÓN INICIAL
3-31
Giro en zigzag
El giro en zigzag se inicia desde la posición actual. La distancia entre las líneas y el
ángulo de giro se puede establecer en el menú. Esta opción de viraje se presenta en
los modos AUTO y NAV.
Modo SABIKI
Nota: Este elemento de menú no se muestra cuando [Tipo de Barco] está establecido
en [A Bordo], [EVCS-Ser.Pod] o [EVCS-A Bordo] en el menú [Características del
Barco].
El modo SABIKI
™
controla el timón mientras la
embarcación está utilizando el inversor de
empuje, de forma que mantiene la popa a
barlovento (o hacia la corriente) y la proa a
sotavento (o con la corriente).
Gracias a la habilidad del modo SABIKI
™
para
controlar el timón, solo el acelerador requiere un
ajuste periódico para mantener la embarcación
orientada en la misma dirección. La reducción de
los ajustes necesarios le permite centrarse más en la pesca, incluso con poca
tripulación a bordo.
Cuando el ajuste de la dirección de la embarcación durante el modo SABIKI
™
es
problemático, ajuste el nivel de respuesta para el modo SABIKI
™
.
• Cuando el modo SABIKI
™
corrige en exceso la dirección: aumente el nivel de
respuesta. Si la dirección se corrige en exceso con este ajuste, reduzca el
acelerador inverso.
• Cuando el modo SABIKI
™
no corrige lo suficiente la dirección: reduzca el nivel de
respuesta. Si la dirección no se corrige lo suficiente con este ajuste, aumente el
acelerador inverso.
Zigzag
Angulo Giro:
ANT.
90°
Ancho:
0.10NM
▼
N
[Angulo Giro][Angulo Giro][Angulo Giro]
[Ancho]
Ent.
TM
SABIKI
Resp. SABIKI:
ANT.
3
Ent.

3. CONFIGURACIÓN INICIAL
3-32
3.12 Menú [Configurar Sistema]
El menú [Configurar Sistema] permite establecer la configuración del sistema como,
por ejemplo, el sonido del teclado, los ajustes compartidos en red, etc. Para abrir el
menú [Configurar Sistema], seleccione [Configurar Sistema] en el [Menu Instalacion].
Elemento de menú Descripción
[Pitido Safe Helm] [Pitido Safe Helm] aparece en las siguientes condiciones:
• [Tipo de Barco] está establecido en [EVCS-Ser.Pod],
[EVCS-Fuera], [EVCS-Den/Fue] o [EVCS-A Bordo] en el menú
[Características del Barco].
• NAVpilot está conectado con el sistema SEASTAR
SOLUTIONS OPTIMUS.
Activa o desactiva el sonido de pitido que se emite cuando el
sistema cambia al modo OVRD (anulación).
[ON]: suena el pitido, [OFF]: sin pitido
[Pitido Teclado] Permite activar o desactivar el pitido del teclado.
[ON]: suena el teclado, [OFF]: sin pitido de teclado
[BLQ. TCLA] Activa o desactiva el bloqueo de teclas de la unidad de control.
• [BLOQU.]: teclas bloqueadas.
Cuando se pulsa cualquier tecla
que no sea la tecla en la
unidad de control bloqueada,
aparece el mensaje de la derecha.
Además, aparece el icono de
bloqueo ( ).
Para desbloquear, pulse la tecla mientras mantiene
pulsada la tecla . Si se apaga la unidad de control
mientras está bloqueada, cuando se vuelva a encender, las
teclas estarán bloqueadas.
• [Desbloquear]: las teclas no están bloqueadas.
Configurar Sistema
Pitido Safe Helm:
Pitido Teclado:
ANT.
▼
Ent.
ON
Compartiendo:
ON
Desbloquear
BLQ. TCLA:
Unica
Controlador bloqueado.
Para desbloquear,
mantenga pulsada tecla
[menú] y pulse tecla [10>>].
10

3. CONFIGURACIÓN INICIAL
3-33
[Compartiendo] La siguiente configuración de instalación, realizada en una unidad
maestra dentro de la red, se puede compartir y traspasar a las
subunidades de la misma red.
• Configuración de origen de datos en el menú [Selección de
Sensor] (consulte la sección 3.7)
• Configuración de unidad de la escala y de velocidad en el menú
[Unit] (Unidad) (consulte la página 3-2)
• Ajuste [Pantalla Rumbo] en el menú [Configuracion de
Pantalla] (consulte la sección 3.2)
• Ajuste [Compens. Hora] en el menú [Configuracion de Pantalla]
(consulte la sección 3.2)
• Ajuste [Variaci. Magnt] en el menú [Pruebas de Mar] (consulte
la sección 3.8.1)
• Ajuste[Ajustar STW] en el menú [Pruebas de Mar] (consulte la
sección 3.8.1)
Seleccione el nivel de uso compartido apropiado entre las
siguientes opciones.
• [Unica]: desactiva los ajustes compartidos.
• [Sub]: asigna la unidad de control como subunidad.
• [Maestro]: los ajustes de esta unidad se pasan a todas las
subunidades. Cuando una pantalla multifunción (MFD)
FURUNO se encuentra en la misma red, la MFD se asigna
automáticamente como [Maestro] y esta opción no está
disponible.
[Grupo] Los ajustes de idiomas y brillo se pueden compartir dentro de un
grupo de unidades de control NAVpilot-300 y FI-70. Si se ajusta
esta configuración en una unidad de control o FI-70 del grupo,
todas las demás unidades del mismo grupo también se ajustan,
pero los ajustes de la MFD no se ajustan. Se pueden realizar tres
agrupaciones: [A],[ B] y [C]. Seleccione un grupo apropiado para
asignar un grupo a una unidad de control.
[Ajustes Fabrica] Seleccione [SI] para restaurar los ajustes de fábrica. El sistema se
reinicia automáticamente después de seleccionar [SI].
[Guardar Config.] Seleccione [SI] para guardar los datos de ajuste actuales como
ajustes de usuario por defecto en la memoria interna. Los ajustes
de usuario por defecto en la memoria interna se sobrescriben con
los ajustes actuales.
[Cargar Config.] Seleccione [SI] para cargar los datos de ajuste de la memoria
interna. Los ajustes actuales se sobrescribirán con los ajustes de
usuario por defecto en la memoria interna.
[Registro Alertas] Puede ver qué alerta o alertas se han infringido. Se muestran un
máximo de 10 alertas. Cuando se supera la capacidad, se borra
la alerta más antigua para dejar espacio a la más reciente.
Elemento de menú Descripción
Registro Alertas
ANT.
2017/04/01 15:16:26 1003
Hora y fecha en que se produjo
Código de alerta
Error de comunicación entre unidad
de control y unidad procesadora.
Descripción de la alerta

3. CONFIGURACIÓN INICIAL
3-34
3.13 Vinculación del control gestual (menú [RC sin
Cable])
La unidad procesadora se comunica con el control gestual (GC-001) a través de
Bluetooth
®
. Hasta tres GC-001 se pueden conectar a la unidad procesadora.
Vincule el control gestual con la unidad procesadora desde el menú [RC sin Cable].
1. Pulse la tecla para seleccionar [RC sin Cable] en el [Menu Instalacion] y
luego, .
[Sim/Pres] Activa o desactiva el modo de simulación. NO seleccione ninguna
otra opción que no sea [OFF] a bordo del barco. Las opciones que
no son [OFF] se destinan a mantenimiento o con fines
promocionales.
[Diagnóstico] Realice varios diagnósticos en el sistema de NAVpilot. Disponible
solo en el modo STBY. Para obtener información más detallada,
consulte el manual del operador (OME-72840).
[Datos del Sistema] Muestra los datos del sistema.
• [Voltaje Entrada:] voltaje de entrada a NAVpilot.
• [Unidad Servo]*: tipo de servo utilizado por NAVpilot.
• [Temp. FET]: temperatura de la placa de circuitos de la unidad
procesadora.
• [Cor. Servo Motor]*: corriente del servo motor.
*: No se muestra en el caso de embarcaciones equipadas con el
sistema EVC.
Elemento de menú Descripción
Datos del Sistema
Voltaje Entrada:
ANT.
24.0V
Unidad Servo: Safe-Helm 12 V
Temp. FET: 29.7°C(85.5°F)
Cor. Servo Motor: 0.0A
1
10
RC sin Cable
Remoto1:
Remoto2:
ANT.
▼
Ent.
---------------------------------
---------------------------------
---------------------------------
Remoto3:

3. CONFIGURACIÓN INICIAL
3-35
2. Pulse la tecla o para seleccionar [Remoto1], [Remoto2] o [Remoto3]
y pulse la tecla .
Aparece la ventana de selección de dispositivo.
3. En el control gestual, para activar el modo de vinculación, proceda de la siguiente
manera.
1) Mantenga pulsada la tecla para encender el GC-001.
2) Pulse la tecla para abrir el menú.
3) Seleccione [SYSTEM MENU] (MENÚ SISTEMA) y, a continuación, pulse la
tecla .
4) Seleccione [PAIRING] (EMPAREJAMIENTO) y, a continuación, pulse la tecla
.
5) Seleccione [SI] y, a continuación, pulse la tecla .
El modo de vinculación quedará activado y aparecerá el mensaje
"PAIRING..." en el GC-001. Después de activar el modo de vinculación en el
GC-001, el nombre del dispositivo aparecerá en la ventana de selección de
dispositivo de la unidad de control.
4. Pulse la tecla para seleccionar el GC-001 en la ventana
de selección del dispositivo y, a continuación, la tecla .
Tras completar la vinculación, aparecerá la ventana de modo
STBY en el GC-001.
Nota: Si el GC-001 que desea vincular no se selecciona en 20
segundos, aparece el mensaje "TIME OUT!" en el GC-001 y se
cierra la ventana de selección de dispositivo del NAVpilot-300. En este caso,
vuelva a activar el modo de vinculación en el GC-001 y seleccione el
GC-001 en la ventana de selección de dispositivo.
1
1
10
RC sin Cable
Remoto1:
Remoto2:
ANT.
▼
Ent.
---------------------------------
---------------------------------
---------------------------------
Remoto3:
----------------------------------------------------
Ventana de selección de dispositivo
SYSTEM MENU (MENÚ DEL SISTEMA)
BLQ. TCLA
ALARM (ALARMA)
DIRECT (DIRECTO)
BACKLIGHT (RETROILUMINACIÓN)
PAIR IN G
NO
SI
PAIRING. . .
RC sin Cable
Remoto1:
Remoto2:
ANT.
▼
Ent.
---------------------------------
---------------------------------
---------------------------------
Remoto3:
----------------------------------------------------
GC-001 : 5DF00173D00
El nombre del dispositivo aparece después de
activar el modo de vinculación en el GC-001.
NP300-RC
STBY
HDG M
112
1
10

3. CONFIGURACIÓN INICIAL
3-36
3.14 Menú [Alerta]
Todos los ajustes de alerta se realizan desde el menú [Alerta]. Para abrir el menú
[Alerta], seleccione [Alerta] en el [Menu Instalacion].
Elemento de
menú
Descripción
[Ver alerta] La alerta de vigilancia advierte periódicamente al timonel de que
compruebe el NAVpilot cuando esté en los modos AUTO o NAV.
Seleccione [ON] para activar la alerta de vigilancia e introduzca el
intervalo de tiempo. Si el tiempo indicado transcurre y no se ha
realizado ninguna operación, sonará el zumbador y aparecerá el
mensaje «¡Ver alerta!». Además, tres minutos después de que
suene la alarma de vigilancia, el sonido aumenta. Pulse cualquier
tecla para detener la alerta.
[Aler. Desviación] La alerta de desviación sonará en los modos AUTO y NAV si el
rumbo se desvía más que el valor establecido para dicha alerta.
Nota 1: El valor de configuración de la alerta de desviación se
puede cambiar, pero la alerta no se puede desactivar.
Nota 2: Cuando el NAVpilot no puede mover el timón con Fantum
Feedback
™
, la alerta de desviación suena independientemente del
valor de configuración. En este caso, cambie al modo STBY y gire
la dirección para mover el timón.
Alerta
Ver alerta:
ANT.
▼
Ent.
OFF
5min
30°
Aler. Desviación:

AP-1
APÉNDICE 1 GUÍA SOBRE CABLES
JIS
Núcleo
Tipo Área Diámetro
En la lista de referencia que aparece a continuación se indican las medidas de los cables JIS que se usan habitualmente
con los productos de Furuno:
TTYCSLA-4
MPYC-4
TPYCY
DPYCY
Diámetro
del cable
EX: TTYCYSLA - 4 MPYC - 4
Tipo de designación
N.º de pares
trenzados
Tipo de designación
N.º de núcleos
1 2 3 4 5 6 1 2 3 4
Los cables citados en el manual normalmente aparecen como Japanese Industrial Standard (JIS). Utilice la siguiente
guía para buscar un cable equivalente para su región.
Los nombres de los cables JIS pueden contener hasta 6 caracteres alfanuméricos seguidos por un guión y un valor
numérico (ejemplo: DPYC-2.5). Para los tipos de núcleo D y T, la designación numérica indica el área transversal
(mm
2
) de los hilos del núcleo contenidos en el cable.
Para los tipos M y TT, la designación numérica indica el número de hilos del núcleo contenidos en el cable.
1. Tipo de núcleo
D: Línea de alimentación
de doble núcleo
T: Línea de alimentación
de tres núcleos
M: Múltiples núcleos
TT: Cable de comunicaciones
de par trenzado
(1Q=cable cuádruple)
2. Tipo de
aislamiento
P: Caucho
etileno-propileno
3. Tipo de cubierta
Y: PVC (Vinilo)
4.Tipo de armadura
C: Acero
5. Tipo de cubierta
Y: Cubierta de vinilo
anticorrosión
6. Tipo de
apantallamiento
SLA: Todos los núcleos en un
apantallamiento, cinta de
plástico con cinta de aluminio
noc soelcúN :ALS-
apantallamiento individual,
cinta de plástico con cinta
de aluminio
Núcleo
Tipo Área Diámetro
Diámetro
del cable
DPYC-1.5 1.5mm
2
1.56mm 11.7mm
DPYC-2.5 2.5mm
2
2.01mm 12.8mm
DPYC-4 4.0mm
2
2.55mm 13.9mm
DPYC-6 6.0mm
2
3.12mm 15.2mm
DPYC-10 10.0mm
2
4.05mm 17.1mm
DPYC-16 16.0mm
2
5.10mm 19.4mm
DPYCY-1.5 1.5mm
2
1.56mm 13.7mm
DPYCY-2.5 2.5mm
2
2.01mm 14.8mm
DPYCY-4 4.0mm
2
2.55mm 15.9mm
DPYCYSLA-1.5 1.5mm
2
1.56mm 11.9mm
DPYCYSLA-2.5 2.5mm
2
2.01mm 13.0mm
MPYC-2 1.0mm
2
1.29mm 10.0mm
MPYC-4 1.0mm
2
1.29mm 11.2mm
MPYC-7 1.0mm
2
1.29mm 13.2mm
MPYCY-12 1.0mm
2
1.29mm 19.0mm
MPYCY-19 1.0mm
2
1.29mm 22.0mm
TPYCY-1.5 1.5mm
2
1.56mm 14.5mm
TPYCY-2.5 2.5mm
2
2.01mm 15.5mm
TPYCY-4 4.0mm
2
2.55mm 16.9mm
TPYCYSLA-1.5 1.5mm
2
1.56mm 13.9mm
TTYC-7SLA 0.75mm
2
1.11mm 20.8mm
TTYCSLA-1 0.75mm
2
1.11mm 9.4mm
TTYCSLA-1Q 0.75mm
2
1.11mm 10.8mm
TTYCSLA-4 0.75mm
2
1.11mm 15.7mm
TTYCY-4SLA 0.75mm
2
1.11mm 19.5mm
TTYCYSLA-1 0.75mm
2
1.11mm 11.2mm
TTYCYSLA-4 0.75mm
2
1.11mm 17.9mm

1$0(
287/,1(
47<
'(6&5,37,21&2'(θ
㹎㸿㹁㹉㹇㹌㹅ࠉ㹊㹇㹑㹒
%&;
1$93,/27$
1$0(
287/,1(
47<
'(6&5,37,21&2'(θ
ࣘࢽࢵࢺ
81,7
ไᚚ㒊
352&(662581,7
)$3
᧯స㒊
&21752/81,7
)$3
㺚㺼㺈㺛㺟㺊㺎㺘㺻㺢㺹㺎㺵
*(6785(&21752//(5
*&
ணഛရ
63$5(3$576
ணഛရ
63$5(3$576
63
ᒓရ
$&&(6625,(6
ᒓရ
$&&(6625,(6
)3
ᕤᮦᩱ
,167$//$7,210$7(5,$/6
㺗㺎㺪㺼㺷㺖㺮㺩㺻
&$%/($66(0%/<
),
ᕤᮦᩱ
,167$//$7,210$7(5,$/6
&3
ᕤᮦᩱ
,167$//$7,210$7(5,$/6
&3
ᕤᮦᩱ
,167$//$7,210$7(5,$/6
&3
ᅗ᭩
'2&80(17
㺪㺵㺍㺚㺋㺭㺑㺻㺢ᆺ⣬
)/86+02817,0*7(03/$7(
&
㺳㺎㺙㺼㺎㺔㺼㺐㺢㺼
86(56*8,'(
&
ྲྀᢅㄝ᫂᭩
23(5$72560$18$/
20
ྲྀせ㡿᭩
,167$//$7,21,16758&7,216
&
᧯సせ㡿᭩ከゝ
23(5$7256*8,'(0/*
0/*
᧯సせ㡿᭩^㸧
23(5$72560$18$/-3
26-
ഛせ㡿᭩
,167$//$7,210$18$/
,0
䡶㻙䢀䢚␒ྕᮎᑿ䛾㼇㻖㻖㼉䛿䚸㑅ᢥရ䛾௦⾲ᆺᘧ㻛䡶䡬䢀䢚䜢⾲䛧䜎䛩䚹
㻯㻻㻰㻱㻌㻺㼁㻹㻮㻱㻾㻌㻱㻺㻰㻵㻺㻳㻌㼃㻵㼀㻴㻌㻎㻖㻖㻎㻌㻵㻺㻰㻵㻯㻭㼀㻱㻿㻌㼀㻴㻱㻌㻯㻻㻰㻱㻌㻺㼁㻹㻮㻱㻾㻌㻻㻲㻌㻾㻱㻼㻾㻱㻿㻱㻺㼀㻭㼀㻵㼂㻱㻌㻹㻭㼀㻱㻾㻵㻭㻸
㻔㻖㻝㻕䛿䚸䛭䜜䛮䜜ᵝ㑅ᢥရ䜢⾲䛧䜎䛩䚹
㻔㻖㻝㻕㻵㻺㻰㻵㻯㻭㼀㻱㻌㻿㻼㻱㻯㻵㻲㻵㻯㻭㼀㻵㻻㻺㻌㻿㻱㻸㻱㻯㼀㻵㼂㻱㻌㻵㼀㻱㻹㻚
㸦␎ᅗࡢᑍἲࡣࠊཧ⪃್࡛ࡍࠋ',0(16,216,1'5$:,1*)255()(5(1&(21/<㸧
&='
A
-1
1$0(
287/,1(
47<
'(6&5,37,21&2'(θ
㹎㸿㹁㹉㹇㹌㹅ࠉ㹊㹇㹑㹒
%&;
1$93,/27(51
1$0(
287/,1(
47<
'(6&5,37,21&2'(θ
ࣘࢽࢵࢺ
81,7
ไᚚ㒊
352&(662581,7
)$3
᧯స㒊
&21752/81,7
)$3
ணഛရ
63$5(3$576
ணഛရ
63$5(3$576
63
ᕤᮦᩱ
,167$//$7,210$7(5,$/6
㺗㺎㺪㺼㺷㺖㺮㺩㺻
&$%/($66(0%/<
),
ᕤᮦᩱ
,167$//$7,210$7(5,$/6
&3
ᕤᮦᩱ
,167$//$7,210$7(5,$/6
&3
ᕤᮦᩱ
,167$//$7,210$7(5,$/6
&3
ᅗ᭩
'2&80(17
㺪㺵㺍㺚㺋㺭㺑㺻㺢ᆺ⣬
)/86+02817,0*7(03/$7(
&
ྲྀᢅㄝ᫂᭩ⱥ
23(5$72560$18$/
20(
ྲྀせ㡿᭩
,167$//$7,21,16758&7,216
&
᧯సせ㡿᭩ከゝ
23(5$7256*8,'(0/*
0/*
ഛせ㡿᭩ⱥ
,167$//$7,210$18$/
,0(
㸦␎ᅗࡢᑍἲࡣࠊཧ⪃್࡛ࡍࠋ',0(16,216,1'5$:,1*)255()(5(1&(21/<㸧
&=%
A
-2

㹎㸿㹁㹉㹇㹌㹅ࠉ㹊㹇㹑㹒
%&;
1$93,/271
1$0(
287/,1(
'(6&5,37,21&2'(θ
47<
ࣘࢽࢵࢺ
81,7
ไᚚ㒊
352&(662581,7
)$3
ணഛရ
63$5(3$576
ணഛရ
63$5(3$576
63
ᕤᮦᩱ
,167$//$7,210$7(5,$/6
ᕤᮦᩱ
,167$//$7,210$7(5,$/6
&3
ᅗ᭩
'2&80(17
ྲྀᢅㄝ᫂᭩
23(5$72560$18$/
20
᧯సせ㡿᭩ከゝ
23(5$7256*8,'(0/*
0/*
᧯సせ㡿᭩^㸧
23(5$72560$18$/-3
26-
ഛせ㡿᭩
,167$//$7,210$18$/
,0
䡶㻙䢀䢚␒ྕᮎᑿ䛾㼇㻖㻖㼉䛿䚸㑅ᢥရ䛾௦⾲ᆺᘧ㻛䡶䡬䢀䢚䜢⾲䛧䜎䛩䚹
㻯㻻㻰㻱㻌㻺㼁㻹㻮㻱㻾㻌㻱㻺㻰㻵㻺㻳㻌㼃㻵㼀㻴㻌㻎㻖㻖㻎㻌㻵㻺㻰㻵㻯㻭㼀㻱㻿㻌㼀㻴㻱㻌㻯㻻㻰㻱㻌㻺㼁㻹㻮㻱㻾㻌㻻㻲㻌㻾㻱㻼㻾㻱㻿㻱㻺㼀㻭㼀㻵㼂㻱㻌㻹㻭㼀㻱㻾㻵㻭㻸㻚
㻔㻖㻝㻕䛿䚸䛭䜜䛮䜜ᵝ㑅ᢥရ䜢⾲䛧䜎䛩䚹
㻔㻖㻝㻕㻵㻺㻰㻵㻯㻭㼀㻱㻌㻿㻼㻱㻯㻵㻲㻵㻯㻭㼀㻵㻻㻺㻌㻿㻱㻸㻱㻯㼀㻵㼂㻱㻌㻵㼀㻱㻹㻚
䠄␎ᅗ䛾ᑍἲ䛿䚸ཧ⪃್䛷䛩䚹㻌㻌㻰㻵㻹㻱㻺㻿㻵㻻㻺㻿㻌㻵㻺㻌㻰㻾㻭㼃㻵㻺㻳㻌㻲㻻㻾㻌㻾㻱㻲㻱㻾㻱㻺㻯㻱㻌㻻㻺㻸㼅㻚䠅
&=%
A
-3
㹎㸿㹁㹉㹇㹌㹅ࠉ㹊㹇㹑㹒
%&;
)$3
1$0(
287/,1(
'(6&5,37,21&2'(θ
47<
ࣘࢽࢵࢺ
81,7
᧯స㒊
&21752/81,7
)$3
ᕤᮦᩱ
,167$//$7,210$7(5,$/6
㺗㺎㺪㺼㺷㺖㺮㺩㺻
&$%/($66(0%/<
),
ᕤᮦᩱ
,167$//$7,210$7(5,$/6
&3
ᕤᮦᩱ
,167$//$7,210$7(5,$/6
&3
ᅗ᭩
'2&80(17
㺪㺵㺍㺚㺋㺭㺑㺻㺢ᆺ⣬
)/86+02817,0*7(03/$7(
&
ྲྀせ㡿᭩
,167$//$7,21,16758&7,216
&
䠄␎ᅗ䛾ᑍἲ䛿䚸ཧ⪃್䛷䛩䚹㻌㻌㻰㻵㻹㻱㻺㻿㻵㻻㻺㻿㻌㻵㻺㻌㻰㻾㻭㼃㻵㻺㻳㻌㻲㻻㻾㻌㻾㻱㻲㻱㻾㻱㻺㻯㻱㻌㻻㻺㻸㼅㻚䠅
&=$
A
-4

㹎㸿㹁㹉㹇㹌㹅ࠉ㹊㹇㹑㹒
%&;
*&
1$0(
287/,1(
'(6&5,37,21&2'(θ
47<
ࣘࢽࢵࢺ
81,7
㺚㺼㺈㺛㺟㺊㺎㺘㺻㺢㺹㺎㺵
*(6785(&21752//(5
*&
ᒓရ
$&&(6625,(6
ᒓရ
$&&(6625,(6
)3
ᅗ᭩
'2&80(17
㺳㺎㺙㺼㺎㺔㺼㺐㺢㺼
86(56*8,'(
&
䠄␎ᅗ䛾ᑍἲ䛿䚸ཧ⪃್䛷䛩䚹㻌㻌㻰㻵㻹㻱㻺㻿㻵㻻㻺㻿㻌㻵㻺㻌㻰㻾㻭㼃㻵㻺㻳㻌㻲㻻㻾㻌㻾㻱㻲㻱㻾㻱㻺㻯㻱㻌㻻㻺㻸㼅㻚䠅
&='
$
%
%1&'01
6;2'
%2
⇛ޓޓ࿑
176.+0'
ฬޓޓ⒓
0#/'
ᢙ㊂
36;
↪ㅜ㧛⠨
4'/#4-5
⇟ภ
01
ဳฬ㧛ⷙᩰ
&'5%4+26+105
+056#..#6+10/#6'4+#.5
Ꮏ᧚ᢱ
#.:
(㩙㨽㩧㩎㩇㩘㩩㩧㩆㩨
(/17065210)'
%1&'01
㩚㩀㩨㩁ਣᐔᐳ㊄
(.#69#5*'4
/575
%1&'01
㩔㩨㩒ᐳ㊄
524+0)9#5*'4
/575
%1&'01
Ⲕ㩏㨹㩎
9+0)076
/575
%1&'01
ኸಾ㩘㩨㩣㩎
$1.6
/:575
%1&'01
㧔⇛࿑ߩኸᴺߪޔෳ⠨୯ߢߔޕޓ&+/'05+105+0&4#9+0)(144'('4'0%'10.;㧕
㧲㨁㧾㨁㧺㧻ޓ㧱㧸㧱㧯㨀㧾㧵㧯ޓ㧯㧻ޓ㧚㧘㧸㨀㧰
ဳᑼ㩄㨺㩎㩨⇟ภ߇㧞Ბߩ႐วޔਅᲑࠃࠅᲑߦઍࠊࠆㆊᷰᦼຠߢࠅޔߤߜࠄ߆߇ߞߡ߹ߔޕޓߥ߅ޔຠ⾰ߪᄌࠊࠅ߹ߖࠎޕ
6916;2'5#0&%1&'5/#;$'.+56'&(14#0+6'/6*'.19'4241&7%6/#;$'5*+22'&+02.#%'1(6*'722'4241&7%6
37#.+6;+56*'5#/'
%/#
A
-6

&2'(12
7<3(
&3
␎ࠉࠉᅗ
287/,1(
ྡࠉࠉ⛠
1$0(
ᩘ㔞
47<
⏝㏵㸭ഛ⪃
5(0$5.6
␒ྕ
12
ᆺྡ㸭つ᱁
'(6&5,37,216
,167$//$7,210$7(5,$/6
ᕤᮦᩱ⾲
%&;
㺭㺑㺻㺢㺫㺼㺎㺛⤌ရ
02817%$6(7$66(0%/<
23
&2'(
12
㺛㺣㺍㺪㺽㺩㺽㺻
61$33,1
&2'(
12
─㺞㺍㺩㺽㺻㺦㺚㺼
)/$7+($'7$33,1*
6&5(:
;686;0
&2'(
12
㺮㺔㺼㺕ᖹᗙ㔠
)/$7:$6+(5
0686
&2'(
12
㸦␎ᅗࡢᑍἲࡣࠊཧ⪃್࡛ࡍࠋࠉ',0(16,216,1'5$:,1*)255()(5(1&(21/<㸧
㹄㹓㹐㹓㹌㹍ࠉ㹃㹊㹃㹁㹒㹐㹇㹁ࠉ㹁㹍ࠉ㸬㸪㹊㹒㹂
&0$
A
-7
A
-8

&2'(12
7<3(
)3
␎ࠉࠉᅗ
287/,1(
ྡࠉࠉ⛠
1$0(
ᩘ㔞
47<
⏝㏵㸭ഛ⪃
5(0$5.6
␒ྕ
12
ᆺྡ㸭つ᱁
'(6&5,37,216
$&&(6625,(6
ᒓရ⾲
%&;
%$77$/㺤㺬㺻㺐㺶
$/.$/,1('5<&(//
/5*'(37
&2'(
12
㸦␎ᅗࡢᑍἲࡣࠊཧ⪃್࡛ࡍࠋࠉ',0(16,216,1'5$:,1*)255()(5(1&(21/<㸧
㹄㹓㹐㹓㹌㹍ࠉ㹃㹊㹃㹁㹒㹐㹇㹁ࠉ㹁㹍ࠉ㸬㸪㹊㹒㹂
&)$
A
-9
&2'(12
7<3(
63
,7(0
12
1$0(2)
3
3$57
287/,1(
':*12
25
3(5
6
6(7
3(5
9
9(6
63$5(
:25.,1*
48$17,7<
5(0$5.6&2'(12
%2;123
6+,312
63$5(3$576/,67)25
86(
6(763(5
9
9(66(/
7<3(12
%&;
㺜㺐㺕㺼㺌㺪㺼㺚㺕ࠉ)$3
352&(662581,7)$3
㺩㺋㺎㺛㺼
)*0%$9
$3%)
*/$6678%(
)86(
0)561$0(
)85812(/(&75,&&2/7'
':*12
㸦␎ᅗࡢᑍἲࡣࠊཧ⪃್࡛ࡍࠋࠉ',0(16,216,1'5$:,1*ࠉ)255()(5(1&(21/<㸧
&3%
A
-10

D-1
29/May/2017 H.MAKI
29/May/2017 H.MAKI
29/May/2017 H.MAKI

D-2
29/May/2017 H.MAKI
29/May/2017 H.MAKI
29/May/2017 H.MAKI

D-3
29/May/2017 H.MAKI
29/May/2017 H.MAKI
29/May/2017 H.MAKI

D-4
15/Nov/2017 H.MAKI
15/Nov/2017 H.MAKI

D-5
Y. Hatai
Y. Hatai

Y. Hatai
D-6

%
$
'
&
1$0(
ྡ⛠
7,7/(
NJ
0$66
':* 1R
6&$/(
$33529('
&+(&.('
'5$:1
5()1R
,17(5&211(&7,21 ',$*5$0
┦⤖⥺ᅗ
$8723,/27
⮬ື᧯⯦⨨
5)8-,<$0$
7<$0$6$.,
1$9SLORW
-
6+,(/'
1(7&
1(76
1(7/
1(7+
6+,(/'
'%:B1(76
'%:B1(7&
'%:B1(7/
'%:B1(7B+
10($'%:
)$3
03
%/.ࢡࣟ
ࢩࣟ :+7
6+,(/'
1(76
1(7&
1(7+
1(7/
&1 '523B8
ࢪࣕࣥࢡࢩࣙࣥ࣎ࢵࢡࢫ
),
-81&7,21 %2;
6+,(/'
1(76
1(7&
1(7+
1(7/
&1 '523B/
6+,(/'
1(76
1(7&
1(7+
1(7/
6+,(/'
1(76
1(7&
1(7+
1(7/
6+,(/'
1(76
1(7&
1(7+
1(7/
6+,(/'
1(76
1(7&
1(7+
1(7/
&1 '523B8
&1 '523B/
&1 '523B8
&1 '523B/
6+,(/'
1(76
1(7&
1(7+
1(7/
6+,(/'
1(76
1(7&
1(7+
1(7/
&1 %$&.%21(B8
&1 %$&.%21(B/
6+,(/'
&1 9'&
-%
-
6+,(/'
558
࣋ࣥࢺࢫࢵࢳ
(9(17 6:,7&+
+(/0 6(1625
+(/0 6(1625B6,*
+(/0 6(1625
+(/0 6(1625
+(/0 6(1625B6,*
+(/0 6(1625
-
*(1(5$/ ,1
02725
1&
86%
-
9%86
'B1
'B3
*1'
)25 0$,17(1$1&(
ಖᏲ⏝
$
%
6:B3:5
6:B6,*
6:B3:5
6:B6,*
6:B3:5
6:B6,*
6:B*1'
3:5
6,*
6,*
3:5
-
32:(5
-
*51㺮㺢㺼㺶
<(/࢟
ࢡࣟ
ࢩࣟ :+7
%/.
ࢭ࣮ࣇ࣒࣊ࣝࢩࢫࢸ࣒
6$)( +(/0 %/2&.
'3<&
-%
&$1 EXV 1(7:25.
&$1 EXV 1(7:25.
996$[&
),32:(5&$%/(P
0%))0P
0%0%)Pȭ
9'&
%$&.%21(
%$&.%21(
ྠୖ
',772
',772
ྠୖ
3
%/8(7227+
02'8/(
%51ࢳࣕ
ࢡࣟ
࢜
%/.
%/8
㺯㺵㺙㺕
ࣁ
㺖㺹㺚㺹
㺏㺓㺚㺹
33/
*5<
㺟㺊㺚㺹 %51:+7
%/.:+7
%/8:+7
P
P
P
*51㺮㺢㺼㺶
<(/࢟
ࢡࣟ
ࢩࣟ :+7
%/.
P
P
ไᚚ㒊
352&(6625 81,7
㏣ᚑⓎಙჾ
)$3
58''(5 5()(5(1&( 81,7
ࣜࢽࢭࣥࢧ࣮
/,1($5 6(1625
P
6+,(/'
࢝
࢜
࢝
ࢡࣟ
5('
%/8
5('
%/.
)$3
/7:%))0
6/
ࣂࢵࢡ࣮࣎ࣥࢣ࣮ࣈࣝ
%$&.%21( &$%/(
ࡲࡓࡣ 25
⤊➃ჾ 7(50,1$725
/7:0&%))76/
Pȭ
ࣂࢵࢡ࣮࣎ࣥࢣ࣮ࣈࣝ
%$&.%21( &$%/(
⤊➃ჾ 7(50,1$725
/7:0&%0076/
7&211(&725
7ࢥࢿࢡࢱ
)0)76
66
7&211(&725
7ࢥࢿࢡࢱ
)0)76
66
7&211(&725
7ࢥࢿࢡࢱ
)0)76
66
0%0%)
9'&
0%0%)
Pȭ
㸨 㸨 㸨
ࡲࡓࡣ 25
/7:%000
6/
),Pȭ
5('
%/.
࢝
ࢡࣟ
ࢩࣟ
࢜
:+7
%/8
6+,(/'
1(76
1(7&
1(7+
1(7/
10($
6/
᧯స㒊
&21752/ 81,7
)$3
/7:%))0
),Pȭ
P
ࣁࣈࣜࢵࢻ࣊ࢹࣥࢢࢭࣥࢧ࣮
,17(*5$7(' +($',1* 6(1625
3*
5('
%/.
࢝
ࢡࣟ
ࢩࣟ
࢜
:+7
%/8
0%0%)Pȭ
/7:$))0
65
0%))0P
&$1 EXV '(9,&(
6:B3:5
-%
02725$
02725%
5(9(56,%/( 3803
ࣜࣂ࣮ࢩࣈ࣏ࣝࣥࣉ
9'&
㸨
237,21
6+,3<$5' 6833/<
127(
7$%/( ,1',&$7(6 5(/$7,216+,3 $021* &$%/( 7&211(&725 $1' 7(50,1$725
5(029( 7+( &211(&725 )25 )$%5,&$7,21
0$; 81,76 &$1 %( &211(&7('
㸨㸰㸧࢜ࣉࢩࣙࣥࠋ
㸨㸯㸧㐀⯪ᡤᡭ㓄ࠋ
ὀグ
㸨㸲㸧ࢣ࣮ࣈࣝࠊ7ࢥࢿࢡࢱࠊ⤊➃ჾࡢ㛵ಀࡣ⾲ࡼࡿࠋ
㸨㸱㸧ࢥࢿࢡࢱࢆษࡾ㞳ࡋ࡚᥋⥆ࡍࡿࠋ
㸨㸳㸧᭱ྎࡲ࡛᥋⥆ྍ⬟ࠋ
%5($.(5
9'& ,6 127 5(48,5(' :+(1 ), ,6 &211(&7(' 72 7+( (;,67,1* &$1 %86 1(7:25.
㸨㸴㸧᪤Ꮡࡢ&$1 EXVࢿࢵࢺ࣮࣡ࢡ᥋⥆ࡍࡿሙྜࠊ'&9ධຊࡣせࠋ
1RY
1RY
&& (
*(6785( &21752//(5
㺚㺼㺈㺛㺟㺊㺎㺘㺻㺢㺹㺎㺵
*&
*(6785( &21752//(5
㺚㺼㺈㺛㺟㺊㺎㺘㺻㺢㺹㺎㺵
*&
7ࢥࢿࢡࢱ
7&211(&725
⤊➃ჾ
7(50,1$725
7$%/( ⾲
%$&.%21( &$%/(
ࣂࢵࢡ࣮࣎ࣥࢣ࣮ࣈࣝ
/7:0&%0076/ 0$/(㸦࢜ࢫ㸧
/7:0&%))76/ )(0$/(㸦࣓ࢫ㸧
66)0)760%0%)
1&)0)76
/7:01$0076/ 0$/(㸦࢜ࢫ㸧
&%30%)
/7:01$))76/ )(0$/(㸦࣓ࢫ㸧
92/92 ,36 6<67(0
<$0$+$ +0 6<67(0
92/92 ,36 *$7(:$<
$8723,/27 *$7(:$<
92/92 ,36ࢤ࣮ࢺ࢙࢘
<$0$+$ +0ࢤ࣮ࢺ࢙࢘
<$0$+$ +0 *$7(:$<
<$10$5 9& 6<67(0
6($67$5 237,086 6<67(0
㑅ᢥ
$1< 6<67(0 0$< %( 6(/(&7('
S-1
9/Nov/2017 H.MAKI
9/Nov/2017 H.MAKI
-
 1
1
-
 2
2
-
 3
3
-
 4
4
-
 5
5
-
 6
6
-
 7
7
-
 8
8
-
 9
9
-
 10
10
-
 11
11
-
 12
12
-
 13
13
-
 14
14
-
 15
15
-
 16
16
-
 17
17
-
 18
18
-
 19
19
-
 20
20
-
 21
21
-
 22
22
-
 23
23
-
 24
24
-
 25
25
-
 26
26
-
 27
27
-
 28
28
-
 29
29
-
 30
30
-
 31
31
-
 32
32
-
 33
33
-
 34
34
-
 35
35
-
 36
36
-
 37
37
-
 38
38
-
 39
39
-
 40
40
-
 41
41
-
 42
42
-
 43
43
-
 44
44
-
 45
45
-
 46
46
-
 47
47
-
 48
48
-
 49
49
-
 50
50
-
 51
51
-
 52
52
-
 53
53
-
 54
54
-
 55
55
-
 56
56
-
 57
57
-
 58
58
-
 59
59
-
 60
60
-
 61
61
-
 62
62
-
 63
63
-
 64
64
-
 65
65
-
 66
66
-
 67
67
-
 68
68
-
 69
69
-
 70
70
-
 71
71
-
 72
72
-
 73
73
-
 74
74
-
 75
75
-
 76
76
-
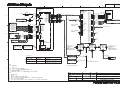 77
77













































































Furuno NAVPILOT 300/PG-M Guía de instalación
- Tipo
- Guía de instalación
- Este manual también es adecuado para
Artículos relacionados
-
Furuno NAVPILOT 711C/OB Manual de usuario
-
Furuno NAVPILOT 711 Manual de usuario
-
Furuno PG700 Manual de usuario
-
-
-
-
Furuno TZT2BB Guía de instalación
-
-
-
Otros documentos
-
Lowrance FishHunter Manual de usuario
-
 Volvo Penta Easy Connect Interface Installation Instructions Manual
Volvo Penta Easy Connect Interface Installation Instructions Manual
-
Jensen OCTANE J12W El manual del propietario
-
 ALGE-Timing TIMY Series Guía del usuario
ALGE-Timing TIMY Series Guía del usuario
-
Electro-Voice EVC-VI EN54 Ficha de datos
-
Torqeedo Display Gateway / Twin TQ-CAN Instrucciones de operación
-
 ALGE-Timing TIMY Series Guía del usuario
ALGE-Timing TIMY Series Guía del usuario


