
www.furuno.com
Todas las marcas y nombres de productos son marcas comerciales,
marcas registradas o marcas de servicio de sus respectivos propietarios.
Manual de Instalación
PANTALLA MULTIFUNCIÓN
Modelo TZT2BB
INSTRUCCIONES DE SEGURIDAD................................................................................ i
CONFIGURACIÓN DEL SISTEMA ................................................................................. ii
LISTA DE EQUIPOS ......................................................................................................iii
1. MONTAJE................................................................................................................1-1
1.1 Consideraciones de montaje .............................................................................................1-1
1.2 Instalación de la unidad procesadora ................................................................................1-2
1.3 Instalación de la caja de conmutadores.............................................................................1-3
1.4 Instalación de transductores..............................................................................................1-4
2. CABLEADO.............................................................................................................2-1
2.1 Descripción de conexiones de la interfaz ..........................................................................2-1
2.2 Protección de las conexiones de la interfaz.......................................................................2-2
2.3 Cable MÚLTIPLE...............................................................................................................2-4
2.4 Conexiones del sensor de radar DRS ...............................................................................2-7
2.5 Conexiones de red.............................................................................................................2-8
2.6 Conexiones USB................................................................................................................2-8
2.7 Conexiones VIDEO IN, HDMI IN/OUT...............................................................................2-8
2.8 Bus CAN (conector NMEA2000)......................................................................................2-10
2.9 Ejemplos de configuraciones del sistema........................................................................2-15
3. CONFIGURACIÓN DEL EQUIPO ...........................................................................3-1
3.1 Establecer zona horaria, formato horario e idioma ............................................................3-3
3.2 Definir las unidades de medida..........................................................................................3-5
3.3 Ajuste Inicial.......................................................................................................................3-6
3.4 Configuración del radar....................................................................................................3-12
3.5 Configuración de la sonda ...............................................................................................3-15
3.6 Ajustes de LAN Inalámbrica.............................................................................................3-22
LISTAS DE EQUIPAMENTO....................................................................................... A-1
PLANOS DE DIMENSIONES ...................................................................................... D-1
DIAGRAMAS DE INTERCONEXION .......................................................................... S-1

Pub. No. IES-44960-B
DATE OF ISSUE: JAN. 2020

i
INSTRUCCIONES DE
SEGURIDAD
ADVERTENCIA
Indica la existencia de una situación
potencialmente peligrosa que, si no se evita,
puede ocasionar la muerte o lesiones graves.
PRECAUCIÓN
Indica la existencia de una situación potencialmente
peligrosa que, si no se evita, puede ocasionar
lesiones leves o moderadas.
Advertencia, Precaución Acción obligatoria Acción prohibida
El instalador y el operador deben leer las instrucciones de seguridad aplicables antes de
intentar instalar o manejar el equipo.
ADVERTENCIA
RIESGO DE DESCARGA
ELÉCTRICA
No abrir el equipo si no se está
perfectamente familiarizado con
los circuitos eléctricos.
Sólo técnicos cualificados.
Desconectar la alimentación en el
tablero de distribución antes de
iniciar la instalación.
Riesgo de incendio o electrocución
si se trabaja con la alimentación
conectada.
PRECAUCIÓN
Asegurarse de utilizar la fuente de
alimentación eléctrica y cables
designados.
El uso alimentación o cables
inadecuados puede provocar un
incendio o dañar el dispositivo.
Instalar una unidad de control (o un
botón de parada de emergencia) en
cada puesto de mando para poder
desactivar el piloto automático en
caso de emergencia.
Si el piloto automático no puede ser
desactivado, puede ocurrir un
accidente.
Use el fusible correcto.
El uso de un fusible inadecuado puede
dañar al dispositivo.
Respetar las distancias de seguridad al
compás magnético para evitar interfer-
encias en el mismo.:
Al compás
magistral
MPU-004
MCU-005
PSD-003
Al compás
de gobierno
0,50 m
0,30 m
0,35 m 0,30 m
0,55 m 0,45 m
Unidad
Conecte el equipo a tierra para evitar
cualquier descarga eléctrica e
interferencias mutuas.

ii
CONFIGURACIÓN DEL SISTEMA
Cámara CCD
Cámara CCD
Salida HDMI
FI-5002
SC-30
GP-330B
Serie NAVpilot
FI-50/70
IF-NMEA2K2
IF-NMEAFI
12/24 V CC
Suceso SW
Avisador externo
Salida NMEA0183
Alimentación SW
Ecosonda
(BBDS1, serie DFF)
Categoría ambiental
Antena de radar: Expuesta a la intemperie.
Todas las demás unidades: Protegidas de
la intemperie.
Transpondedor AIS
*
1
Sensores de radar distintos de DRS4DL, DRS4D-NXT, DRS6A-NXT y DRS6A
X-Class requieren una fuente de alimentación.
*
2
Serie FUSION Electronics MS-700 solamente (a partir de 12/2014).
*
3
Máximo 6 unidades NavNet TZtouch2 (conectadas vía un hub Ethernet). Para
las configuraciones con el TZT2BB incluido, se puede conectar hasta 4 unidades
NavNet TZtouch2 como máximo.
*
4
Monitor de pantalla Hatteland.
*
5
Usando un hub PoE de reserva se confirma la compatibilidad de NETGEAR GS108PE. Las pruebas de compatibili-
dad se limitan al uso general como parte de esta configuración y no indican la capacidad total. Además, FURUNO no
puede garantizar la funcionalidad de un hub de reserva.
HUB -101
FA-30/50
FAX-30
Equipo FUSION-Link*
2
Unidad de presentación
(pantalla táctil*
4
)
HD19T21-MMD-MA1-FHGP,
HD19T22-MMD-MA1-FHGP,
HD24T21-MMD-MA1-FHGP, o
HD24T22-MMD-MA1-FHGP
Unidad de presentación secundaria
(Los mismos modelos que arriba)
Mando a distancia
MCU-002 o MCU-004
Procesador*
3
MPU-004
Procesador*
3
MPU-004
Sonda
Sensores de radar
antena abierta
12-24 V CC
12-24 VCC
12-24 VCC
DRS2D, DRS4D
FUENTE DE
ALIMENTACIÓN*
1
PSU-012/PSU-013
Sensores de radar
radomo
DRS4A/DRS6A/DRS12A/DRS25A
FUENTE DE
ALIMENTACIÓN*
1
PSU-017
DRS4DL, DRS4DL+
12-24 VCC
DRS4D-NXT
24 V CC
Seleccione un radomo
o una antena abierta.
DRS6A Clase X, DRS6A-NXT,
DRS12A Clase X, DRS25A Clase X
: Suministro estándar
: Suministro opcional
o local
Sonar multihaz
(DFF-3D)
Cámara IP
Caja de
conmutación
PSD-003
Caja de
conmutación
PSD-003
Mando a distancia
MCU-005
HUB PoE*
5
Nota: No conecte ni desconecte el cable HDMI entre la MPU-004 y a pantalla táctil cuando el equipo está
funcionando.

iii
LISTA DE EQUIPOS
Suministro estándar
Suministro opcional
Nombre Tipo Nº de código Cantidad Observaciones
Unidad procesadora MPU-004 - 1
Caja de conmutación PSD-003 - 1
Materiales de instalación CP19-02100 000-034-826 1
Piezas de repuesto SP19-00601 001-023-040 1 Fusibles
Nombre Tipo Nº de código Observaciones
Caja de
conmutación
PSD-003 000-034-828
Caja de conexiones TL-CAT-012 000-167-140-10 Para extensión de cable
LAN
Unidad de control
remoto
MCU-002 -
MCU-004 -
MCU-005 -
Conversor de datos
de NMEA
IF-NMEA2K2 000-020-510
Hub Ethernet HUB-101 000-011-762
Caja de conexiones FI-5002 000-010-765
Unidad de
alimentación
PSU-017 000-022-997
Rectificador RU-3423 000-030-443 Para 100/110/115/220/230
V CA (Salida: 24 V CC, 7 A)
PR-62 000-013-484 Para 100 V CA
000-013-485 Para 110 V CA
000-013-486 Para 220 V CA
000-013-487 Para 230 V CA
RU-1746B-2 000-030-439 Para 100/110/115/220/230
V CA (Salida: 24 V CC, 13 A)
Conjunto de cables
bus CAN
M12-05BM+05BF-010 001-105-750-10 Longitud: 1 m
M12-05BM+05BF-020 001-105-760-10 Longitud: 2 m
M12-05BM+05BF-060 001-105-770-10 Longitud: 6 m
M12-05BFFM-010 001-105-780-10 Longitud: 1 m
M12-05BFFM-020 001-105-790-10 Longitud: 2 m
M12-05BFFM-060 001-105-800-10 Longitud: 6 m
CB-05PM+05BF-010 000-167-968-11 Longitud: 1 m
CB-05PM+05BF-020 000-167-969-11 Longitud: 2 m
CB-05PM+05BF-060 000-167-970-11 Longitud: 6 m
CB-05BFFM-010 000-167-971-11 Longitud: 1 m
CB-05BFFM-020 000-167-972-11 Longitud: 2 m
CB-05BFFM-060 000-167-973-11 Longitud: 6 m
Conjunto de cables
MJ
MJ-A6SPF0016-005C 000-159-689-11 Para FAX-30

LISTA DE EQUIPOS
iv
Alarma zumbador
externo
OP03-136 000-086-443 Zumbador: PKB5-3A40
Conjunto de cables
LAN
MOD-Z072-020+ 001-167-880-10 Longitud: 2 m
MOD-Z073-030+ 000-167-171-10 Longitud: 3 m
MOD-Z072-050+ 001-167-890-10 Longitud: 5 m
MOD-Z072-100+ 001-167-900-10 Longitud: 10 m
Conectores de bus
CAN
SS-050505-FMF-TS001 000-168-603-10 Microconector en T
NC-050505-FMF-TS001 000-160-507-10 Miniconector o
microconector en T
LTWMC-05BMMT-SL8001 000-168-604-10 Resistencia de terminación
(micro)
LTWMC-05BFFT-SL8001 000-168-605-10
LTWMN-05AMMT-SL8001 000-160-508-10 Resistencia de terminación
(mini)
LTWMN-05AFFT-SL8001 000-160-509-10
FRU-0505-FF-IS 001-077-830-10 Terminal en línea
Caja de adaptación MB-1100 000-027-226 Para transductores de 1 kW
Transductor 520-5PSD
000-015-204*
1
520-5MSD
000-015-212*
1
525-5PWD
000-027-447*
1
520-PLD
000-023-680*
1
525T-BSD
000-023-020*
1
525T-PWD
000-023-019*
1
SS60-SLTD/12
000-023-676*
1
SS60-SLTD/20
000-023-677*
1
525T-LTD/12
000-023-679*
1
525T-LTD/20
000-023-678*
1
526TID-HDD
000-023-021*
1
50/200-1T *10M*
000-015-170*
1
Requiere MB-1100 para la
conexión (disponible por
separado).
50B-6 *10M* 000-015-042
50B-6B *15M* 000-015-043
200B-5S *10M* 000-015-029
Triductor 525STID-MSD
000-011-783*
1
525STID-PWD
000-011-784*
1
Alargador de cable C332 10M
001-464-120*
2
Para alargar el cable del
transductor.
Kit de montaje para
interior de casco
22S0191 001-321-930
Kit de modificación
MCU-005
OP19-19 001-506-900 Para retroadaptación.
*
1
: Compatible con ACCU-FISH
™
, discriminación de fondo y el modo mejorado de RezBoost
™
.
Todos los transductores enumerados son compatibles con el modo estándar de RezBoost
™
.
*
2
: El uso de un prolongador de cable puede causar los siguientes problemas:
• Menor capacidad de detección
• Información de ACCU-FISH
™
incorrecta (longitud de los peces inferior a la real, menos
detecciones de peces, error en la detección de peces individuales).
• Datos de velocidad incorrectos
• Falta de reconocimiento de TD-ID
Nombre Tipo Nº de código Observaciones

1-1
1. MONTAJE
1.1 Consideraciones de montaje
Para escoger una ubicación de montaje, tenga en cuenta los puntos siguientes:
• Instale las unidades en un espacio interior.
• Sitúe las unidades en un lugar alejado de salpicaduras de agua.
• El margen de temperatura de funcionamiento de la unidad procesadora es de
-15 °C a 55 °C (de -27 °F a 99 °F). Asegúrese de que la ubicación de montaje
cumple con estos requisitos.
• Sitúe las unidades en un lugar apartado de conductos de escape o ventilación.
• Las ubicaciones de montaje deben estar bien ventiladas.
• Monte las unidades en lugares donde las sacudidas o vibraciones sean mínimas.
• Mantenga las unidades alejadas de equipos que generen campos
electromagnéticos, como motores y generadores.
• Consultando los esquemas al final de este manual, deje espacio suficiente para las
tareas de inspección y mantenimiento. Además, deje una reserva de longitud en los
cables para facilitar la inspección y el mantenimiento.
• El compás magnético podría recibir interferencias si se coloca demasiado cerca de
estas unidades. Respete las distancias de seguridad respecto a compases
indicadas en las instrucciones de seguridad para evitar interferencias en el compás
magnético.
• La unidad procesadora está equipada con una antena LAN interna y debe
instalarse en un lugar donde la señal no quede interrumpida o bloqueada por
obstáculos.
Si no puede instalar la unidad procesadora en una ubicación libre de
obstáculos, conéctela a un rúter LAN inalámbrico mediante un cable LAN para
establecer una conexión ETHERNET.

1. MONTAJE
1-2
1.2 Instalación de la unidad procesadora
La unidad procesadora (MPU-004) se puede instalar en una superficie plana (como
una mesa) o en un mamparo.
1.2.1 Instalación en mamparo
1. Consultando el esquema que aparece al final de este manual, taladre cuatro
orificios para los tornillos de montaje (tornillos autorroscantes 520,
suministrados como materiales de instalación).
2. Coloque dos tornillos en los orificios superiores, dejando suficiente rosca
expuesta para colgar la unidad procesadora.
3. Cuelgue la unidad procesadora de los dos tornillos prestando atención a que esté
orientada correctamente, con los cables y los conectores mirando hacia abajo.
4. Enrosque dos tornillos en los dos orificios inferiores sin apretar en exceso.
5. Apriete los cuatro tornillos de modo uniforme, fijando la unidad procesadora en la
ubicación de montaje.
1.2.2 Instalación en una superficie plana (mesa)
1. Consultando el esquema que aparece al final de este manual, taladre cuatro
orificios para los tornillos de montaje (tornillos autorroscantes 520,
suministrados como materiales de instalación).
2. Inserte dos tornillos en los orificios superiores, dejando suficiente rosca expuesta
para colocar la unidad procesadora.
3. Deslice la unidad procesadora en los dos tornillos insertados.
4. Enrosque dos tornillos en los dos orificios inferiores sin apretar en exceso.
5. Apriete los cuatro tornillos de modo uniforme, fijando la unidad procesadora en la
ubicación de montaje.

1. MONTAJE
1-3
1.3 Instalación de la caja de conmutadores
La caja de conmutadores (PSD-003) está diseñada para montarse empotrada en una
superficie plana, como un mamparo o una consola.
1. Consultando el esquema suministrado, realice una escotadura en la ubicación de
montaje.
2. Desenrosque los dos tornillos que conectan el soporte de montaje empotrado a
la PSD-003 y retire el soporte. El soporte y los tornillos se reutilizan.
3. Ajuste la almohadilla de montaje empotrado (incluida en los materiales de
instalación) a la parte trasera de la caja de conmutadores.
4. Introduzca la caja de conmutadores en la escotadura.
Nota: Preste atención a que los cables no queden pinzados o aplastados.
5. Acople el soporte de montaje empotrado (retirado en el paso 2) a la parte trasera
de la unidad, y a continuación fije el soporte con dos tornillos.
6. Apriete los tornillos de mariposa para fijar la caja de conmutadores.
7. Apriete las tuercas de mariposa para fijar el soporte de montaje empotrado,
asegurando la caja de conmutadores.
Perno de mariposa
Tuerca de mariposa
Protector
Panel de montaje
Soporte empotrado

1. MONTAJE
1-4
1.4 Instalación de transductores
Nota: Para configuraciones que utilizan el DFF-3D, consulte las instrucciones de
montaje del DFF-3D en el manual del operador (OME-13520-xx; xx indica la versión
de publicación).
1.4.1 Instalación de un transductor a través del casco
Ubicación de montaje del transductor
El transductor pasacascos proporciona el máximo rendimiento, ya que el transductor
sobresale del casco, con lo que se reduce el efecto de las turbulencias y de las
burbujas de aire en contacto con el casco. Si el barco tiene quilla, el transductor se
debe montar como mínimo a 30 cm de ella.
La ubicación de montaje del transductor influye directamente en el rendimiento de la
sonda de pesca, especialmente a altas velocidades. Se debe planificar la instalación,
considerando la longitud del cable del transductor y los siguientes factores:
• Las burbujas de aire y las turbulencias causadas por el movimiento del barco
degradan seriamente la capacidad de sondeo del transductor. Por lo tanto, el
transductor se debe situar en la posición en la que el flujo de agua sea más
uniforme. El rendimiento también se ve afectado por el ruido de las hélices, así que
el transductor se debe montar alejado de estas. Se sabe que los nervios de planeo
causan ruido acústico; para evitarlo, coloque el transductor a menor distancia de la
línea de crujía que ellos.
• El transductor debe estar siempre sumergido, independientemente del balanceo,
cabeceo o del planeo a alta velocidad del barco.
• Una elección práctica es un punto situado entre un tercio y la mitad del largo del
barco desde la popa. Para cascos de planeo, una posición práctica es bastante a
popa, de modo que el transductor permanezca sumergido independientemente del
ángulo de planeo.
● Dentro del área del casco sumergida
● Ángulo de inclinación dentro de 15°
● 1/2 a 1/3 de la longitud del casco desde la popa.
● 15 a 30 cm desde el eje longitudinal (dentro
primeros refuerzos).
CASCO EN V
PRONUNCIADA
CASCO EN V
ALTA VELOCIDAD
28
22
120
68
30
24
120
68
87
Unidad: mm
520-5PSD
520-5MSD
PROA

1. MONTAJE
1-5
Procedimiento de instalación
1. Con el barco en seco, marque en el fondo del casco la ubicación de montaje del
transductor elegida.
2. Si el casco no está nivelado dentro de 15°C en cualquier dirección, se deben
colocar bloques de asiento de teca entre el transductor y el casco, tanto en el
interior como en el exterior, para que la cara del transductor quede paralela a la
línea de flotación. Confeccione los bloques de asiento tal y como se muestra a
continuación y alise al máximo toda la superficie para que haya un flujo de agua
sin perturbaciones alrededor del transductor. El bloque de asiento debe ser más
pequeño que el transductor para que haya un canal que desvíe el flujo turbulento
por los lados del transductor, no por su fondo.
3. Taladre en el casco un orificio con el suficiente diámetro para que quepa el tubo
pasacascos roscado del transductor y asegúrese de que sea vertical.
4. Aplique suficiente compuesto de sellado de alta calidad en la superficie superior
del transductor, en la rosca del tubo pasacascos y en el interior del orificio de
montaje (y de los bloques de asiento, si se utilizan) para asegurar un montaje
estanco.
5. Monte el transductor y los bloques de asiento y apriete la tuerca de bloqueo.
Asegúrese de que la orientación del transductor sea correcta y que su cara activa
sea paralela a la línea de flotación.
Nota: No someta el tubo pasacascos ni la tuerca de bloqueo a sobreesfuerzos por un
apriete excesivo, puesto que el bloque de madera se hinchará cuando se ponga el
barco en el agua. Se aconseja apretar poco la tuerca durante la instalación y volver a
apretarla varios días después, tras poner el barco en el agua.
Preparación del transductor
Antes de poner el barco en el agua, limpie a conciencia el fondo del transductor con
detergente líquido. Así se reducirá el tiempo que necesita el transductor para tener
buen contacto con el agua. En caso contrario, el tiempo necesario para "la saturación"
total aumentará y el rendimiento se reducirá.
NO pinte el transductor. El rendimiento se reducirá.
Orificio para el tubo pasa cascos
Serrar según la pendiente del casco.
Mitad superior
Mitad inferior
PROA
Casco V profunda
Arandela plana
Arandela de goma
Bloque de
asiento
Casco
Casco plano
Casco
Arandela plana
Arandela
de goma
Arandela
de corcho

1. MONTAJE
1-6
1.4.2 Instalación de un transductor en el espejo de popa
La utilización del transductor opcional montado en el espejo de popa es bastante
habitual, especialmente en pequeños barcos fueraborda o dentro-fueraborda.
No utilice este método para barcos intraborda, pues la hélice crea turbulencias a proa
del transductor.
NO apriete excesivamente los tornillos para evitar que se dañe el transductor.
Procedimiento de instalación
Una ubicación de montaje adecuada es al menos a 50 cm del motor y donde el flujo
de agua sea uniforme.
1. Taladre cuatro orificios guía para tornillos autorroscantes (520) en la ubicación
de montaje.
2. Recubra las roscas de los tornillos autorroscantes (5x14) para el transductor con
sellante marino para impermeabilizarlo. Fije el transductor en la ubicación de
montaje con los tornillos autorroscantes.
3. Ajuste la posición del transductor de forma que la cara del transductor quede
paralelo al fondo. Si es necesario, para mejorar el flujo de agua y evitar que se
acumulen burbujas de aire en la cara del transductor, incline el transductor unos
5°C hacia abajo por su parte posterior. Puede que esto exija experimentar un
poco con el ajuste fino a altas velocidades.
4. Coloque cinta adhesiva en la ubicación que se muestra en la figura siguiente.
5. Rellene el hueco entre la cuña frontal del transductor y el espejo con un epoxi
para evitar que queden espacios con aire.
6. Cuando se endurezca el relleno de epoxi, retire la cinta.
Paralelo al casco
Menos de 10°Menos de 10°
Espejo de popaEspejo de popa
Refuerzo
Montar en el refuerzo
Más de 10°
Espejo de popaEspejo de popa
ø5x20
M5x14
5°
Cinta
Soporte
Transductor
2° a 5°
Material epoxi
Casco

1. MONTAJE
1-7
1.4.3 Instalación de un transductor desde el interior del casco
El transductor también se puede instalar dentro del casco en embarcaciones con
casco de FRP. Sin embargo, este método de instalación afecta a la capacidad para
detectar el fondo marino, los peces y otros objetos, ya que el pulso ultrasónico se
debilita al atravesar el casco.
Nota: Este método de montaje no se debe utilizar para montar transductores
compatibles con RezBoost
™
, ACCU-FISH
™
y/o la función de presentación de
discriminación de fondo, puesto que afecta gravemente al rendimiento.
Herramientas necesarias
Se necesitan las siguientes herramientas:
Notas acerca de la instalación
Procedimiento de instalación
La atenuación del pulso ultrasónico varía en función del grosor del casco. Seleccione
la ubicación donde la atenuación sea mínima.
1. Seleccione 2 o 3 ubicaciones teniendo en cuenta los cuatro puntos mencionados
más adelante.
2. Escoja la posición más adecuada entre las ubicaciones seleccionadas.
1) Conecte los cables de alimentación y del transductor a la unidad de
presentación.
2) Coloque el transductor en la bolsa de plástico llena de agua. Presione el
transductor contra la ubicación seleccionada.
3) Pulse (interruptor de encendido) para activar el encendido.
4) Una vez completado el procedimiento de arranque (aproximadamente 90
segundos), se mostrará la última pantalla utilizada. Toque el icono [Inicio]
para mostrar la pantalla de inicio y los ajustes del modo de presentación.
Consulte sección 3.3 para saber cómo utilizar el menú.
• Papel de lija (#100)
• Sellante marino
• Bolsa de plástico llena de
agua
• Realice la instalación con el barco amarrado a un muelle, etc. La profundidad del
agua debe ser de entre 2 y 10 metros (6,5 y 32 pies).
• Apague el motor.
• No encienda la unidad con el transductor fuera del agua, para evitar que resulte daña-
do.
• No utilice este método en cascos de doble capa.
• Antes de acoplar el transductor al casco, compruebe que la ubicación sea adecuada
siguiendo los pasos 1 a 3 del procedimiento de instalación siguiente.
• Monte el transductor en una ubicación situada entre la mitad y un tercio del largo del
barco desde la popa.
• La ubicación de montaje estará a una distancia de entre 15 y 50 cm de la línea de
crujía.
• No coloque el transductor sobre puntales o cuadernas que haya bajo el casco.
• Evite ubicaciones en las que la inclinación del fondo del casco sea mayor de 15°C,
para minimizar los efectos del balanceo.

1. MONTAJE
1-8
5) Arrastre el menú para mostrar [Sonda] en el menú y, a continuación, toque
[Sonda].
6) Arrastre el menú [Sonda] para mostrar el menú [AJUSTE INICIAL SONDA].
7) Toque [Fuente de sonda de pesca].
8) Compruebe la sonda de pesca disponible en la lista de sondas disponibles y,
a continuación, toque la sonda correspondiente. Para este ejemplo, se
selecciona el ajuste predeterminado [TZT2BB] (sonda interna) como fuente.
9) Toque el icono [<] para volver al menú [Sonda].
10) Arrastre el menú [Sonda] para mostrar el menú [AJUSTE INICIAL SONDA].
11) Toque [Ajuste Transductor] [Configurar Tipo Transductor].
12) Toque [Modelo] y, a continuación, toque el icono [<] para regresar al menú
[Ajuste Transductor].
13) Toque [Número de modelo], arrastre el menú para mostrar el modelo de su
transductor y toque el número del modelo del transductor.
14) Toque el icono [<] dos veces para regresar al menú [Sonda] y, a continuación,
arrastre el menú para mostrar el menú [AJUSTE INICIAL SONDA].
15) En el elemento de menú [Potencia de transmisión], ajuste la potencia de
transmisión al nivel [2].
16) Arrastre el menú para mostrar [Transmisión Sonda] y, a continuación, toque
[Transmisión Sonda]. Compruebe si aparece un eco del fondo a la derecha
de la pantalla en la zona de presentación.
Si no aparece un eco del fondo, repita el procedimiento hasta encontrar una
ubicación adecuada.
17) Cuando se encuentre una ubicación adecuada, apague la alimentación.
3. Extraiga el transductor de la bolsa de plástico y limpie la cara del transductor con
un trapo para eliminar el agua y cualquier material extraño. Lije someramente la
cara del transductor con papel de lija #100. Lije también la parte interior del casco
en la que se montará el transductor para mejorar la adherencia.
4. Limpie todos los residuos del lijado de la cara del transductor.
5. Seque la cara del transductor y el casco. Recubra la cara del transductor y la
ubicación
de montaje con sellante marino. El endurecimiento comienza transcurridos entre
15 y 20 minutos aproximadamente, por lo que debe aplicarlo sin demora.
6. Fije el transductor al casco. Presione fuertemente el transductor contra el casco
y gírelo suavemente en ambos sentidos de forma alternativa, para eliminar el aire
que pueda quedar atrapado en el sellante marino.
7. Sujete en su sitio el transductor con una madera mientras se seca el sellante.
Tardará entre 24 y 72 horas en endurecerse por completo.
8. Encienda la unidad y defina los ajustes del menú como se indica a continuación.
Consulte sección 3.3 para saber cómo utilizar el menú.
1) Toque el icono [Inicio] para mostrar la pantalla de inicio y los ajustes del modo
de presentación.
2) Arrastre el menú para mostrar [Sonda] en el menú y, a continuación, toque
[Sonda].
3) Arrastre el menú [Sonda] para mostrar el menú [AJUSTE INICIAL SONDA].

1. MONTAJE
1-9
4) En el elemento de menú [Potencia Transmisión], ajuste la potencia de
transmisión al nivel [10].
5) Defina los ajustes Nivel Fondo y Compensar Ganancia tal y como se muestra
en la tabla inferior.
1.4.4 Instalación de un triductor
NO apriete excesivamente los tornillos para evitar que se dañe el transductor.
525STID-MSD
El triductor opcional 525STID-MSD está diseñado para el montaje pasacascos.
525STID-PWD
El triductor opcional de montaje en espejo 525STID-PWD se puede instalar mediante
el método pasacascos o mediante el método de montaje en el interior del casco.
Prueba previa de velocidad y temperatura
Conecte el sensor al instrumento y haga girar la rueda de paletas. Compruebe la
lectura de la velocidad y la temperatura del aire aproximada. Si no se obtiene ninguna
lectura, devuelva el sensor al punto donde se ha efectuado la compra.
Herramientas y materiales necesarios
Elemento de menú Ajuste
Nivel Fondo AF -40
Nivel Fondo BF -40
Compensar Ganancia AF 20
Compensar Ganancia BF 20
• Tijeras • Cinta de enmascarar
• Gafas de seguridad • Mascarilla antipolvo
• Taladradora eléctrica • Destornilladores
• Broca:
Para orificios de soporte: 4 mm, #23 o 9/64”
Para casco de fibra de vidrio: broca de avellanar (preferentemente), 6 mm o 1/4”
Para los orificios en el espejo: 9 mm o 3/4” (opcional)
Para los orificios de la abrazadera de cables: 3 mm o 1/8”
ø79
133
Roscas UN
2,00"-12
ø51
7
27
140
Unidad: mm
PROA

1. MONTAJE
1-10
Ubicación de montaje
Para asegurar un rendimiento óptimo, el sensor debe quedar sumergido en agua sin
turbulencias ni aireación. Monte el sensor cerca de la línea de crujía del barco. En
cascos de desplazamiento más lento y pesado, se puede colocar algo más lejos de
la línea de crujía. Deje suficiente espacio sobre el soporte para liberarlo y girar hacia
arriba el sensor.
Nota 1: No monte el sensor en un
área donde se produzcan
turbulencias o burbujas: cerca de
tomas o salidas de agua, detrás de
tracas, puntales, accesorios o
irregularidades del casco; o detrás de
zonas que presenten erosión en la
pintura (indicación de turbulencias).
Nota 2: Evite montar el sensor en los puntos
en los que se pueda apoyar el barco durante
el remolque, la botadura, la elevación o el
almacenamiento.
Nota 3: En los barcos de una hélice,
móntelo a estribor, al menos a 5 mm (3”) de
la zona barrida por la hélice, como se
observa en la figura de la derecha.
Nota 4: En los barcos de dos hélices,
móntelo entre las hélices.
Instalación del soporte
1. Recorte la plantilla de instalación (suministrada con el transductor) por la línea de
puntos.
2. Coloque la plantilla en la ubicación seleccionada, con la flecha de la parte inferior
alineada con el borde inferior del espejo. Asegúrese de que la plantilla esté
paralela a la línea de flotación y fíjela con cinta adhesiva.
Advertencia: Lleve
siempre gafas de seguridad
y una mascarilla antipolvo.
3. Con una broca de 4 mm,
#23 o 9/64”, realice tres
orificios de 22 mm (7/8”) de
profundidad en los sitios
indicados. Para evitar
taladrar en exceso, envuelva la broca con cinta de enmascarar a 22 mm (7/8”) de
la punta.
Casco de fibra de vidrio: Minimice las grietas en la superficie avellanando el
recubrimiento. Si no se dispone de una broca para avellanar, empiece los orificios
con una broca de 6 mm o 1/4” hasta una profundidad de 1 mm (1/16”).
• Regla • Sellante marino
• Lápiz • Bridas de cable
• Pintura antiincrustante con base de agua (obligatoria para montajes en agua salada)
Altura sin sensor de
velocidad: 191 mm
(7-1/2")
Altura con sensor de
velocidad: 213 mm
(8-1/2")
AlturaAltura
75 mm (3") mínimo más
allá del radio de hélice
Alinear la plantilla verticalmente.
Ángulo de inclinación
Inclinación del casco
Paralela a la línea
de flotación
Alinear la flecha de la plantilla
con el borde inferior del espejo.

1. MONTAJE
1-11
4. Si sabe el ángulo del espejo, el soporte está diseñado para un ángulo estándar
de 13°.
• Ángulo de 11° a 18°: No se necesita cuña. Vaya al paso 3 de "Ajustes".
• Otros ángulos: Se necesita cuña. Vaya al paso 2 de "Ajustes".
Si no sabe el ángulo del espejo, fije temporalmente el soporte y el sensor al
espejo para ver si hace falta la cuña de plástico.
5. Atornille temporalmente el soporte al casco con los tres tornillos autorroscantes
#10 x 1-1/4”. NO apriete completamente los tornillos ahora. Siga los pasos 1-4
que se indican en "Cómo fijar el sensor al soporte", antes de proceder con
"Ajustes".
Ajustes
1. Con una regla, compruebe la alineación del sensor respecto al fondo del casco.
La popa del sensor debe estar a 1-3 mm (1/16-1/8”) por debajo de la proa del
mismo, o bien el fondo del sensor debe ser paralelo al fondo del casco.
Nota: No deje que la proa del sensor esté más baja que la popa, porque
penetraría aire.
2. Para ajustar el ángulo entre el sensor y el casco, utilice la cuña de plástico
suministrada. Si el soporte se ha fijado temporalmente al espejo de popa,
suéltelo. Coloque la cuña en la parte posterior del soporte.
Ángulo de espejo de 2°-10° (espejos escalonados y barcos con
hidrochorro): Coloque la cuña con la punta hacia abajo.
Ángulo de espejo de 19°-22° (barcos
pequeños de fibra de vidrio o de
aluminio): Coloque la cuña con la
punta hacia arriba.
3. Si el soporte se ha fijado
temporalmente al espejo de popa,
suéltelo. Aplique sellante marino a las
roscas de los tres tornillos
autorroscantes #10 x 1-1/4” para evitar
que se filtre agua al interior del espejo.
Atornille el soporte al casco. No apriete
completamente los tornillos ahora.
4. Repita el paso 1 para asegurarse de
que el ángulo del sensor es correcto.
Nota: No sumerja el sensor en el agua
más de lo necesario para evitar aumentar la resistencia al avance, las
salpicaduras, el ruido en el agua y la reducción de la velocidad del barco.
5. Deslice el sensor arriba o abajo por las ranuras del soporte hasta que el sensor
sobresalga 3 mm (1/8”). Apriete los tornillos.
Protector del cable
Grapas
50 mm (2")
Proyección del casco
3 mm (1/8")

1. MONTAJE
1-12
Cómo fijar el sensor al soporte
1. Si la tapa de retención de la parte superior del
soporte está cerrada, ábrala bajando el
pestillo y girándola hacia abajo.
2. Inserte los pivotes de articulación del sensor
en las ranuras que hay cerca de la parte
superior del soporte.
3. Presione hasta que los pivotes encajen con
un clic.
4. Gire el sensor hacia abajo hasta que la parte
inferior encaje en el soporte.
5. Cierre la tapa de retención para evitar que el
sensor se suelte durante la navegación.
Cómo tender el cable
Tienda el cable del sensor sobre el espejo y a
través de un orificio de desagüe o de un nuevo orificio realizado en el espejo de popa
por encima de la línea de flotación.
No corte el cable ni extraiga el conector, se anularía la garantía. Lleve siempre gafas
de seguridad y una mascarilla antipolvo.
1. Si debe taladrar un orificio, hágalo con margen suficiente, por encima de la
flotación. Compruebe que no haya obstáculos dentro del casco, como flaps,
bombas o cableado. Marque la ubicación con un lápiz. Taladre un orificio en el
espejo con una broca de 19 mm o 3/4” (para que pase el conector).
2. Tienda el cable sobre o a través del espejo.
3. En el exterior del casco fije el cable en el espejo con las abrazaderas de cables.
Coloque una abrazadera de cables a 50 mm (2”) sobre el soporte y marque el
orificio de montaje con un lápiz.
4. Coloque la segunda abrazadera de cables a mitad de camino entre la primera
abrazadera y el orificio del cable. Marque este orificio de montaje.
5. Si se ha realizado un orificio en el espejo de popa, abra la ranura adecuada en la
tapa de cable del espejo. Coloque la cubierta sobre el cable, en el lugar en el que
penetra en el casco. Marque los dos orificios de montaje.
6. Con una broca de 3 mm o 1/8”, realice un orificio de 10 mm (3/8”) de profundidad
en los sitios indicados. Para evitar taladrar en exceso, envuelva la broca con cinta
de enmascarar a 10 mm (3/8”) de la punta.
7. Aplique sellante marino a las roscas de los tornillos autorroscantes #6 x 1/2” para
evitar que se filtre agua al interior del espejo. Si ha realizado un orificio pasante
en el espejo, aplique sellante marino en el espacio libre alrededor del cable en el
lugar en el que penetra en el casco.
8. Sitúe las dos abrazaderas de cables y fíjelas. Presione la tapa del cable, si se
utiliza, sobre el cable y atorníllela.
9. Tienda el cable hasta la unidad de presentación y tenga cuidado de no romper la
cubierta del cable al pasarlo por los mamparos y otras partes del barco. Para re-
ducir las interferencias eléctricas, separe el cable del sensor de otros cables eléc-
tricos y "de fuentes" de ruido. Enrolle el cable sobrante y fíjelo con bridas para
cables a fin de evitar que sufra daños.
Paso 1 Paso 2
Paso 3
Paso 4
Pestillo
Brazo
del
pivote
Ranura
Cubierta de
retención

2-1
2. CABLEADO
2.1 Descripción de conexiones de la interfaz
La siguiente figura muestra las conexiones disponibles en la unidad procesadora.
Consulte el diagrama de interconexión situado al final del manual para obtener más
información sobre las conexiones.
Cable de tierra
IV-8sq.
Transductor
QZF-H032+
A la caja de
conmutación
Tierra del
barco
Panel superior (ver detalles abajo)Panel superior (ver detalles abajo)
Panel inferior
(ver detalles abajo)
Panel inferior
(ver detalles abajo)
Panel superior
Panel inferior
VÍDEO 1/2
Cable MULTI
Para avisador externo,
piloto automático, etc.
ENTRADA
HDMI
SALIDA HDMI
1/2
Para pantallas
táctiles
NMEA2000
USB para
pantallas
táctiles
USB para CAJA
DE CONMUTACIÓN
USB2
Para disco
duro externo*
USB1
Para MCU-002/004
*: También se utiliza para transmitir comandos táctiles a equipos externos.
RED 1/2/3
Para conexiones de red
(HUB-101, etc.)
MJ-A3SPF0019-035CMJ-A3SPF0019-035C
Alimentación
(12 a 24 V CC)

2. CABLEADO
2-2
2.2 Protección de las conexiones de la interfaz
Todas los conectores de cable que no se encuentren dentro del equipo, ya estén
expuestos a la intemperie o similar, deben impermeabilizarse y protegerse antes de
realizar la conexión. Protegiendo e impermeabilizando las conexiones puede
mantenerse el nivel IPx2. También se evitan conexiones flojas y desconexiones.
Para impermeabilizar y proteger todas las conexiones, consulte los procedimientos
que se describen a continuación.
Para conexiones efectuadas
Cinta auto vulcanizante
1) Envuelva la conexión, cubriéndola alrededor de 30 mm a cada lado, con cinta auto vulcanizante.
2) Envuelva una segunda capa de cinta de auto vulcanización en sentido contrario.
Cinta auto vulcanizante
3) Envuelva la cinta auto vulcanizable con cinta de vinilo.
La cinta de vinilo debe cubrir aproximadamente 50 mm a cada lado de la conexión.
Cinta de vinilo
4) Aplicar una segunda capa de cinta de vinilo en sentido contrario.
Cinta de vinilo
5) Enlazar los extremos de la cinta con bridas para cable para evitar que la cinta se desprenda.
Bridas para cables

2. CABLEADO
2-3
Para cables no utilizados
1) Cubra el extremo libre del cable con cinta de auto vulcanización.
3) Envuelva la cinta auto vulcanizable con cinta de vinilo sobre el conector.
2) Envuelva el conector con una capa de cinta vulcanizante
cubriendo unos 50 mm del cable conectado.
Nota
: Confirme que el conector está cubierto.
4) Rodee el conector con una capa de cinta vinilo.
5) Atar el extremo de la cinta con una brida de cable para evitar que la cinta se desprenda.
50 mm
Cinta de auto vulcanización
Cinta de auto vulcanización
Cinta de vinilo
Cinta de vinilo
Brida de cable

2. CABLEADO
2-4
2.3 Cable MÚLTIPLE
El cable MÚLTIPLE se utiliza para la conexión al botón de encendido, el interruptor
de sucesos y el zumbador externo. El cable tiene 11 hilos; conéctelos consultando la
tabla siguiente.
2.3.1 Cómo aislar y proteger los hilos no usados
1. Corte las cubiertas exterior e interior en dirección longitudinal. Asegúrese de no
cortar los hilos.
2. Pliegue hacia atrás la cubierta exterior y, a continuación, haga lo mismo con la
interior, de forma que cubra la cubierta exterior.
3. Aísle individualmente los hilos con cinta de vinilo y proteja los no usados tal y
como se muestra en la figura siguiente.
Color de hilo Conectar a...
Blanco NMEA - TD_A
Azul NMEA - TD_B
Gris Zumbador externo ON/OFF
Rojo Alimentación de zumbador externo (12 V)
Naranja Interruptor de sucesos (MOB, etc.)
Negro Tierra del interruptor de sucesos
Púrpura Botón de encendido
Marrón DC_N
Blanco/Rojo
No utilizado
Blanco/Negro
Negro (apantallamiento trenzado) Tierra del barco
Aislar los hilos con cinta de vinilo
Asegure los hilos no utilizados a la
cubierta exterior con cinta de vinilo
Cubierta exteriorCubierta exterior Cubierta exteriorCubierta exterior
Cubierta interior
Cubierta interior

2. CABLEADO
2-5
2.3.2 Configuración de la salida de datos NMEA0183
Nota: Para configurar la salida de datos del equipo NMEA0183, consulte la "Salida
de sentencia NMEA0183" de la página 2-14.
1. Corte el conector en el extremo del cable del equipo NMEA0183 hasta que tenga
una longitud adecuada para la instalación.
2. Consulte la siguiente figura para colocar tubos termorretráctiles en los hilos y
soldar el punto de conexión.
3. Desplace los tubos termorretráctiles hacia la conexión soldada y, a continuación,
aplique calor a los tubos.
4. Aísle y proteja los hilos sin usar tal y como se muestra en la sección 2.2.
5. Consultando "Menú [Ajuste Inicial] - [ADQUISICIÓN DE DATOS]" de la página 3-
8, configure la interfaz del modo requerido.
Soldar las conexiones y cubrirlas con macarrón
termo retráctil.
Asegure aquí con
cinta los hilos no
utilizados
Cable múltiple
Hilo TD-B
(azul)
Hilo RD-C
Hilo TD-A
(blanco)
Hilo RD-H
Equipo
NMEA0183
Equipo
NMEA0183

2. CABLEADO
2-6
2.3.3 Conexión del zumbador externo
Conecte el zumbador externo opcional (OP03-136) mediante el procedimiento
siguiente.
Nota: El zumbador externo no requiere ajustes de menú.
1. Corte el conector XH en el extremo del cable del zumbador externo hasta que
tenga una longitud adecuada para la instalación.
2. Consulte la siguiente figura para colocar tubos termorretráctiles en los hilos y
soldar el punto de conexión.
3. Desplace los tubos termorretráctiles hacia la conexión soldada y, a continuación,
aplique calor a los tubos.
4. Fije el zumbador con cinta adhesiva de doble cara (no suministrada) o dos
tornillos autorroscantes (315 o 320, no suministrados).
5. Asegure todos los hilos sin utilizar consultando la sección 2.3.1.
2.3.4 Conexión y configuración del interruptor de sucesos
Nota: El interruptor de sucesos no requiere ajustes de menú.
1. Consulte la figura siguiente para conectar y soldar el hilo naranja y el hilo negro
del cable MÚLTIPLE al interruptor de sucesos.
2. Asegure todos los hilos sin utilizar consultando la sección 2.3.1.
3. Consultando "Menú [Ajuste Inicial] (otros elementos de menú)" de la página 3-10,
configure el interruptor de sucesos.
Hilo rojo
Hilo gris Hilo negro
Soldar las conexiones y cubrirlas
con macarrón termo retráctil.
Asegure aquí con cinta
los hilos no utilizados
Avisador
externo
Avisador
externo
Ejemplo de conexión de avisador externo
Cable múltiple
Hilo negro
Soldar la conexión
Soldar la conexión
Interruptor
de suceso
Interruptor
de suceso
Asegure aquí con cinta los hilos no utilizados
Hilo naranja
Cable múltiple
Ejemplo de conexión de interruptor de suceso

2. CABLEADO
2-7
2.4 Conexiones del sensor de radar DRS
Dependiendo de su configuración, puede necesitar una fuente de alimentación
independiente para el sensor de radar.
Las figuras siguientes muestran ejemplos de conexión con sensores de radar que son
compatibles con TZT2BB.
Para obtener más información sobre la conexión y los cables requeridos para
conectar el sensor de radar, consulte el manual de instalación del sensor de radar.
Nota: El hub Ethernet HUB-101 (disponible como extra opcional) se necesita en
configuraciones que incluyen DRS4DL, DRS4DL+, DRS4D NXT, DRS6A Clase X,
DRS6A NXT, DRS12A Clase X o DRS25A Clase X, y está conectadas en red con
sensores mediante LAN.
DRS2D, DRS4D
Alimentación
(12 a 24 V CC)
PSU-017
Procesador
MPU-004
Procesador
MPU-004
DRS4DL, DRS4DL+, DRS4D NXT
Alimentación
(12 a 24 V CC)
Ejemplos de conexión de sensores de radar radomo
Procesador
MPU-004
*: Utilizar PSU-013 para DRS25A,
PSU-012 para DRS6A/12A
DRS6A, DRS12A,
DRS25A
Procesador
MPU-004
Alimentación
(12 a 24 V CC)
Alimentación
(24 V CC)
Ejemplos de conexión de sensores de radar antena abierta
PSU-012/013*
DRS6A Clase X, DRS6A-NXT,
DRS12A Clase X, DRS25A Clase X

2. CABLEADO
2-8
2.5 Conexiones de red
Al igual que los anteriores equipos de la serie NavNet, la TZT2BB puede compartir
imágenes del radar y la sonda de pesca, así como otros datos, mediante una
conexión Ethernet TCP/IP. Es posible conectar hasta cuatro unidades TZT2BB
simultáneamente a la misma red. La TZT2BB está equipada con tres conectores de
red (RJ45).
Las cámaras IP son dispositivos de red que se conectan directamente a un HUB o a
la TZT2BB. La cámara IP debe cumplir los siguientes requisitos.
Es posible conectar hasta cuatro cámaras IP a una red NavNet TZtouch2. En este
momento, solo las cámaras IP AXIS compatibles con el formato de vídeo MPEG4
funcionan en la red. Para obtener más información, consulte el manual del operador
de los modelos AXIS.
2.6 Conexiones USB
La TZT2BB tiene cinco conectores USB que pueden utilizarse en los siguientes
casos:
• USB para HDMI OUT1/2: Para monitores táctiles HDMI.
• USB para CAJA DE CONMUTACIÓN: Para conectar a PSD-003.
• USB1: Para conectar a las unidades de control MCU-002/004.
• USB2: Para conectar a un disco duro externo HDD (mediante conector Micro-USB)
o para la salida de comandos táctiles para el equipo externo.
2.7 Conexiones VIDEO IN, HDMI IN/OUT
La TZT2BB tiene dos conectores de salida HDMI OUT para monitores táctiles, un
conector de entrada HDMI IN y dos conectores de entrada VIDEO IN. Consulte la
figura en sección 2.1 para ver la ubicación de estos conectores.
Entrada de vídeo analógico
La TZT2BB puede utilizar entradas de vídeo analógico normales (PAL o NTSC) que
se conectan a la TZT2BB directamente mediante los conectores VIDEO IN1/2. El
vídeo analógico solo puede verse en el equipo al que está conectado.
Además se pueden conectar cámaras FLIR a la TZT2BB. Conecte el cable de salida
de vídeo de la cámara al conector de entrada de vídeo (VIDEO IN1/2) en la TZT2BB.
Nota: Algunos modelos de cámara pueden requerir un adaptador para la conexión.
Es posible configurar las cámaras mediante el elemento de menú correspondiente del
menú [Cámara], al que se accede desde el menú [Ajustes]. Para obtener información
detallada sobre la configuración de la cámara, consulte el manual del operador (OME-
44870-x).
Compresión de vídeo Resolución Nivel de compresión
H.264/MPEG-4 800600 30

2. CABLEADO
2-9
Entrada de vídeo digital (HDMI)
La TZT2BB admite y puede mostrar las siguientes configuraciones de señal HMDI.
Nota 1: Para configuraciones de monitor dual, solo uno de los monitores puede enviar
una señal de entrada HDMI a la TZT2BB.
Nota 2: La TZT2BB no admite señales de entrada entrelazada.
Conecte el cable HDMI del monitor externo al cable HDMI IN de la TZT2BB.
Es posible configurar la entrada HDMI mediante el elemento de menú
correspondiente del menú [Cámara], al que se accede desde el menú [Ajustes]. Para
obtener información detallada sobre la configuración de la cámara, consulte el
manual del operador (OME-44870-x).
Salida de vídeo (monitores HDMI externos)
Puede conectar un monitor HDMI a la TZT2BB. Si el monitor es un monitor táctil,
también puede manejar la TZT2BB desde el monitor.
La unidad TZT2BB es compatible con los monitores panorámicos que cumplen los
siguientes requisitos:
Conecte el cable HDMI IN del monitor a la salida HMDI OUT1 o HDMI OUT2 de la
TZT2BB. Para monitores táctiles, conecte el cable USB del monitor al cable USB
adecuado de la TZT2BB (USB para HMDI OUT1/2).
Resolución Frec. Vertical Frec. Horizontal Reloj de píxeles
19201080 60 Hz 67,5 kHz 148,5 MHz
12801024 60 Hz 64,0 kHz 108,0 MHz
1280720 60 Hz 45,0 kHz 74,25 MHz
1024768 60 Hz 48,4 kHz 65,0 MHz
Resolución Frec. Vertical Frec. Horizontal Reloj de píxeles
19201080 60 Hz 67,5 kHz 148,5 MHz
12801024 60 Hz 64,0 kHz 108,0 MHz
1024768 60 Hz 48,4 kHz 65,0 MHz

2. CABLEADO
2-10
2.8 Bus CAN (conector NMEA2000)
La TZT2BB tiene un conector de bus CAN (conector estilo micro). Todas las unidades
NavNet TZtouch2 deben conectarse al mismo cable dorsal del bus CAN. Para
conectar la TZT2BB y el DRS (sensor de radar), utilice un Puente Ethernet para
enlazar los datos del bus CAN del DRS y el de NavNet TZtouch2 (consulte la
sección 2.4).
¿Qué es un bus CAN?
El bus CAN es un protocolo de comunicación (compatible con NMEA2000) que
comparte varios datos y señales a través de un único cable dorsal. Solo tiene que
conectar cualquier dispositivo de bus CAN al cable dorsal para ampliar la red a bordo.
Con el bus CAN, se asignan identificadores (ID) a todos los dispositivos de la red y se
puede detectar el estado de cada sensor en la red. Todos los dispositivos de bus CAN
se pueden incorporar a la red NMEA2000. Para obtener más información acerca del
cableado del bus CAN, consulte la “FURUNO CAN bus Network Design Guide“ (Guía
de diseño de la red del bus CAN de FURUNO) (tipo: TIE-00170) en Tech-Net.
2.8.1 Conexión de la TZT2BB al equipo del bus CAN
A continuación se incluye un ejemplo de dos unidades TZT2BB, conectadas mediante
un bus CAN a sensores de bus CAN.
2.8.2 Conexión del motor(es) Yamaha
Cuando se conecta con un motor(es) fueraborda Yamaha compatibles con Command
Link
®
, Command Link Plus
®
y Helm Master
®
, la TZT2BB puede mostrar la
información del motor en una presentación particular del estado del motor Yamaha.
Conexión del motor
La NavNet TZtouch2 se conecta con la red del motor Yamaha mediante la unidad de
interfaz Yamaha (Yamaha Interface Unit). Obtenga la unidad de interfaz Yamaha a
través de un representante local de Yamaha.
Cable EthernetCable Ethernet
Cable de bus CANCable de bus CAN
a los sensores de bus CANa los sensores de bus CAN

2. CABLEADO
2-11
También se requiere el hub de motor Yamaha (Yamaha Engine Hub, suministrado por
Yamaha), que conecta el motor y la unidad de interfaz Yamaha.
Conexión a TZT2BB
Conecte la unidad de interfaz Yamaha al hub de motor Yamaha.
Configuración de la presentación de motor
Una vez que la TZT2BB ha detectado la red del motor Yamaha, el motor puede
configurarse en [Ajustes] [Ajuste Inicial] [CONFIG. MOTOR YAMAHA].
Vea xxx para obtener más información.
Unidad interfaz Yamaha
Al dorsal NMEA 2000
(cable Micro-C (macho))
Al dorsal NMEA 2000
(cable Micro-C (macho))
Al dorsal NMEA 2000
(cable Micro-C (macho))
Al Yamaha Engine Hub
(cable de enlace de comando)
Al Yamaha Engine Hub
(cable de enlace de comando)
Al Yamaha Engine Hub
(cable de enlace de comando)
Hub de motor Yamaha
Yamaha
Unidad
de interfaz
Yamaha
Hub de
motor
Yamaha
Motor
: NMEA 2000
: Command Link@/Command Link Plus@/Helm Master@

2. CABLEADO
2-12
2.8.3 Entrada de datos del equipo NMEA0183
Nota: Para emitir datos NMEA0183, consulte la sección 2.3.2.
Para conectar un equipo NMEA0183 a la TZT2BB, utilice la red del bus CAN con el
conversor de datos NMEA opcional IF-NMEA2K2 (o IF-NMEA2K1). Esta conexión
NMEA puede aceptar una velocidad de transmisión de 4800 o 38400.
La entrada del rumbo en la TZT2BB permite funciones como Superposición de Radar
y estabilización del rumbo (Norte arriba, Rumbo arriba, etc.) en los modos de
funcionamiento del radar. La velocidad de actualización del rumbo del NMEA0183 ha
de ser de 100 ms para que las funciones del radar funcionen correctamente. El rumbo
de NMEA0183 se puede aceptar en cualquier puerto de bus CAN con una velocidad
de transmisión de hasta 38400 bps. En otras palabras, los datos enviados (IF-NMEA)
y los recibidos (TZT2BB) deben utilizar la misma velocidad de transmisión en cada
puerto de datos individual.
Nota 1: Al usar la función ARPA, defina una velocidad de actualización de rumbo de
100 ms.
Nota 2: Para obtener más información sobre la conexión y el cableado de IF-
NMEA2K2 o IF-NMEA2K1, consulte sus manuales de instalación correspondientes.
2.8.4 Entrada/salida del bus CAN (NMEA2000)
PGN de entrada
PGN Descripción
059392 Reconocimiento ISO
059904 Solicitud ISO
060928 Reclamación de dirección ISO
126208
Función del grupo de solicitud NMEA
Función del grupo de comando NMEA
Función del grupo de reconocimiento NMEA
126464 Función de grupo de PGN de recepción/transmisión
126992 Hora del sistema
126996 Información del producto
127237 Control de rumbo/estela
127245 Timón
127250 Rumbo del barco
127251 Relación De Giro
127257 Actitud (inclinación)
127258 Variación magnética
127488 Parámetros de motor, actualización rápida
127489 Parámetros de motor, dinámicos
127493 Parámetros de transmisión, dinámicos
127505 Nivel de fluido
128259 Velocidad
128267 Profundidad del agua
129025 Posición, actualización rápida
129026 COG y SOG, actualización rápida
129029 Datos de posición GNSS
129033 Ajuste Hora Local

2. CABLEADO
2-13
PGN de salida
La configuración del PGN de salida del bus CAN (en el menú [Ajuste Inicial]) es
aplicable a toda la red. Tenga en cuenta que solo una NavNet TZtouch2 reproducirá
los datos del bus CAN en la red en un momento dado: la NavNet TZtouch2 que se
haya encendido primero. Si esa pantalla está apagada, será otra la encargada de
reproducir los datos.
129038 Informe de posición AIS Clase A
129039 Informe de posición AIS Clase B
129040 Informe de posición ampliado AIS Clase B
129041 Informe de ayudas AIS a la navegación (AtoN)
129291 Dirección y velocidad de deriva, actualización rápida
129538 Estado de control GNSS
129540 Satélites GNSS a la vista
129793 Informe de hora UTC y fecha AIS
129794 Datos estáticos y de viaje AIS Clase A
129798 Informe de posición de avión AIS SAR
129808 Información de llamada DSC
129809 Informe de datos estáticos “CS“ de AIS Clase B, Parte A
129810 Informe de datos estáticos “CS“ de AIS Clase B, Parte B
130306 Datos de viento
130310 Parámetros medioambientales
130311 Parámetros medioambientales
130312 Temperatura
130313 Humedad
130314 Presión real
130316 Temperatura, escala ampliada
130577 Datos de dirección
130578 Componente de velocidad del barco
PGN Descripción Observaciones
Ciclo de
salida (mseg)
059392 Reconocimiento ISO Para certificación de nivel A/B, rechazo de la
solicitud de salida
059904 Solicitud ISO Para certificación de nivel A/B, solicitud de salida
060928 Reclamación de
dirección ISO
Para certificación de nivel A/B
• Autonomía de direccionamiento
• Recepción de la solicitud de salida
126208
Función del grupo de
solicitud NMEA
Para certificación de nivel A/+
• Autonomía de direccionamiento
• Recepción de la solicitud de salida
Función del grupo de
comando NMEA
Para certificación de nivel A/+
Cambio de la configuración de otro equipo
Función del grupo de
reconocimiento NMEA
Para certificación de nivel A/+
Envío de confirmación de la función de los
grupos Solicitud NMEA y Comando NMEA
126464
Lista PGN - Función de
grupo PGN de
transmisión
Para certificación de nivel A/+
Recepción de la solicitud de salida
Lista PGN - Función de
grupo PGN de recepción
Para certificación de nivel A/+
Recepción de la solicitud de salida
PGN Descripción

2. CABLEADO
2-14
Salida de sentencia NMEA0183
La TZT2BB puede transmitir la siguiente sentencia NMEA0183 al equipo externo en
la misma red. Observe que todas las sentencias enumeradas aquí emplean emisor
GP.
126992 Hora del sistema - 1000
126993 Latido -
126996 Información del producto Para certificación de nivel A/B
Recepción de la solicitud de salida
127250 Rumbo del barco - 100
127251 Relación De Giro - 100
127257 Actitud (inclinación) - 1000
127258 Variación magnética - 1000
128259 Velocidad - 1000
128267 Profundidad del agua - 1000
129025 Posición, actualización
rápida
-100
129026 COG y SOG,
actualización rápida
-250
129029 Datos de posición GNSS - 1000
129033 Ajuste Hora Local - 1000
129283 Error de desviación - 1000
129284 Datos de navegación - 1000
129285 Información de ruta de
navegación/WP
• Aparece cuando un waypoint se establece/
cambia (se necesita la posición del barco
propio)
• Aparece cuando se recibe una solicitud ISO
130306 Datos de viento - 100
130310 Parámetros
medioambientales
-500
130312 Temperatura - 2000
130313
Humedad Aparece cuando se recibe la
solicitud ISO
2000
130314 Presión real - 2000
130316 Temperatura, escala
ampliada
- 2000
Sentencia Descripción
AAM Alarma de llegada a waypoint
APB Datos de sentencia del piloto automático B
BOD Demora de origen a destino
DBT Profundidad bajo el transductor
DPT Profundidad
GGA Datos de determinación del sistema de posicionamiento global
GLL Posición geográfica (latitud/longitud)
GNS Datos de determinación GNSS
GSA Datos de satélite generales
GSV Datos de satélite detallados
RMB Datos de navegación recomendados para GPS
RMC Datos mínimos recomendados para GPS
PGN Descripción Observaciones
Ciclo de
salida (mseg)

2. CABLEADO
2-15
2.9 Ejemplos de configuraciones del sistema
Instalación básica del plóter/sonda de pesca
El GP-330B de FURUNO se conecta al cable dorsal del bus CAN. La sonda de red
DFF1-UHD se conecta al puerto LAN de TZTBB mediante el cable estándar
suministrado MOD-WPAS0001-030+(3 m) y una caja de conexiones TL-CAT-012.
RTE Mensaje de ruta
TLL Latitud/longitud del blanco
TTM Mensaje de blanco con seguimiento
VTG Estela vector y velocidad respecto al fondo (SOG)
WPL Información de ubicación de waypoint
XTE Error de desviación medido
ZDA Fecha y hora
Sentencia Descripción
㻰㻲㻲㻟
㻿㻻㻺㻰㻭㻌㻰㻱㻌㻾㻱㻰
㻿㼀㻙㻮㼅
Dorsal CANbus
Procesador
MPU-004
Caja de conexión
TL-CAT-012
12 a 24
V CC
De 12 a
24 VCC
RECEPTOR
GPS
GP-330B
Cable LAN
MOD-WPAS0001-030+, 3 m
Cable LAN
MOD-Z072
Módulo sonda
DFF1-UHD
Conexión
de cable de
CANbus
Transductor
B/CM265LH, B/CM275LH-W

2. CABLEADO
2-16
Embarcaciones de tamaño medio/grande (GPS externo, sonda de pesca,
radar)
Esta es una instalación de una única estación de plóter/radar/sonda de pesca. La
conexión a múltiples sensores, como la serie DFF1-UHD y DRS, requiere un hub
Ethernet como el HUB101.
Puede necesitarse una unidad de alimentación PSU-012, PSU-013 o PSU-017
dependiendo del modelo de radar seleccionado para la instalación.
RECEPTOR GPS
GP-330B*
3
Sensor de radar
DRS2D/DRS4D
Sensor de radar
DRS6A/12A/25A
(Clase X)
Sensor de radar
DRS4DL/DRS4DL+
Fuente de alimentación*
4
PSU-012/013/017
De 12 a 24 VCC
De 12 a 24 VCC De 12 a 24 VCC
De 12 a 24 VCC
12 a 24
VCC
De 12 a 24 VCC
Cable bidireccional
(MOD-ASW0001/ASW002)
*1: Se requiere el HUB-101 cuando dos
o más partes del equipado de red
son conectadas a la unidad TZTL.
*2: Suministro local
*3: Respaldo
*4: DRS6A X-Class,
DRS12A X-Class y
DRS25A X-Class no
requieren Fuente de
alimentación.
(Para PSU-017)
Transductor
B/CM265LH, B/CM275LH-W
HUB-101*
1
O O
Cable dorsal CANbus
Conexión cable
CANbus
Hub USB*
2
Hub USB*
2
Control remoto
MCU-002
Unidad de tarjeta SD
SDU-001
Control remoto
MCU-002
Procesador
MPU-004
Procesador
MPU-004
Unidad de
tarjeta SD
SDU-001
Cable LAN opcional
MOD-Z072/Z073,
2 m, 3 m, 5 m, 10 m
Cable LAN
MOD-Z072
Módulo sonda
DFF1-UHD
Conjunto cables
FRU-2P5S-FF
Conexión
cable

3-1
3. CONFIGURACIÓN DEL EQUIPO
Este capítulo le muestra cómo ajustar su sistema de acuerdo con el equipo que ha
conectado.
Descripción de los controles táctiles
El control táctil depende del tipo de pantalla. Las operaciones básicas que se
utilizarán en la configuración de instalación aparecen en la siguiente tabla.
Manejo con dedos Función
Toque • Seleccionar un elemento de
menú.
• Seleccionar una opción de
ajuste donde hay varias
opciones.
• Seleccionar un objeto.
• Mostrar el menú emergente
cuando está disponible.
Arrastrar • Recorrer el menú.
Pellizcar Cambiar la escala del radar.
Aumentar escala Reducir escala

3. CONFIGURACIÓN DEL EQUIPO
3-2
Uso de los menús
El siguiente procedimiento muestra cómo utilizar el sistema de menús.
1. Pulse (botón de encendido) en la caja de conmutación para encender la
unidad.
2. Una vez finalizado el proceso de inicio, aparece la última pantalla usada y se
muestra un mensaje de advertencia. Después de leer el mensaje, toque [OK].
3. Toque el icono [Inicio] ( ) para mostrar la pantalla de inicio y los
ajustes del modo de presentación.
4. Toque [Ajustes] para abrir el menú [Ajustes].
5. Arrastre el menú para mostrar [Ajuste Inicial] y toque [Ajuste Inicial].
6. Según el elemento de menú seleccionado, están disponibles las siguientes
operaciones:
• Botón de alternancia [ON]/[OFF].
Toque para cambiar entre [ON] y [OFF]. [ON] activa la función, [OFF]
desactiva la función.
• Barra deslizante e icono de teclado.
Arrastre la barra deslizante para ajustar el parámetro. Los ajustes se pueden
definir también con el teclado de software para introducirlos directamente.
• Icono de teclado.
Tomando como referencia la figura de la página siguiente, utilice el teclado de
software para introducir caracteres alfabéticos o numéricos.
7. Toque [Cerrar] (se indica con una “X“) en el lado superior derecho de la pantalla
para salir.
Menú de inicio
Ajustes
Marea
A
ju
s
te
s
d
e
l
m
odo
d
e
Ajuste
s del
modo de
Ajuste
s del
modo de
p
r
es
e
nta
c
i
ón
pr
esentac
i
ón
pr
esentac
i
ón
Título del menú Icono de cierreRetorno
Pantalla de vista previa
Cambios realizados en el menú
pueden ser vistos aquí
Pantalla de vista previa
Cambios realizados en el menú
pueden ser vistos aquí
Ajuste Inicial
POSICIÓN GPS
INFORMACIÓN BARCO
Longitudinal (desde la proa)
Lateral (-Babor)
Eslora Barco
Tamaño de Iconos Estáticos
Pantalla de Profundidad
Externo Calado Transductor
Calado Quilla
Bajo Quilla
A
Aj
u
s
POSICIÓN GPS
P
OS
ICI
Ó
N
G
P
S
Ó
RCO
INF
O
RMACI
Ó
N BA
R
a
proa
)
L
on
g
itudinal
(
desde l
a
Lateral (-Babor)
L
ateral
(
-Bab
o
co
E
s
l
ora
B
ar
c
os
E
s
t
á
ti
cos
Ta
m
a
ñ
o
de
I
co
n
o
P
r
o
f
u
n
d
i
dad
Pa
nt
a
ll
a
de
P
uct
or
E
xterno Calado Transd
u
i
ll
a
C
alado Qu
i
Bajo
Qui
B
a
j
o
Q
uilla
Elementos
de menú
Elementos
de menú

3. CONFIGURACIÓN DEL EQUIPO
3-3
Uso del teclado de software
3.1 Establecer zona horaria, formato horario e
idioma
Antes de configurar el equipo, seleccione la zona horaria, el idioma y las unidades que
se van a utilizar tal y como se muestra a continuación.
1. Toque el icono [Inicio] para mostrar la pantalla de inicio y los ajustes del modo de
presentación.
2. Toque [Ajustes] para mostrar el menú [Ajustes].
3. Arrastre el menú para mostrar el elemento de menú [General] y luego toque
[General] en el menú principal para mostrar el menú [General].
4. Arrastre el menú para mostrar el elemento de menú [Ajuste Hora Local] y luego
toque [Ajuste Hora Local] para mostrar el teclado numérico.
5. Introduzca la diferencia horaria (usando intervalos de 15 minutos) y luego toque
[].
6. Arrastre el menú para mostrar el elemento de menú [Formato hora] y luego toque
[Formato hora] para mostrar la ventana de opciones.
7. Seleccione cómo debe mostrarse la hora, en formato de 12 o 24 horas. [Auto]
inserta automáticamente la indicación AM, PM en el reloj de 24 horas cuando el
idioma es Inglés.
8. Toque [<] en la parte superior izquierda de la pantalla para volver al menú
[General].
Nº Descripción
1 Se resalta la posición del cursor.
2 Retroceso/Borrar. Toque para borrar un carácter cada vez.
3 Tecla Enter. Toque para completar la introducción de caracteres y aplicar cambios.
4 Teclas de cursor. Toque para mover el cursor a izquierda/derecha.
5 Tecla Cancelar. Borra el carácter introducido. No se aplica ningún cambio.
6 Toque para cambiar entre teclado alfabético y numérico (cuando está disponible).
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Teclado de software alfabético Teclado de software numérico
ABC
1
2
3
4
6
3
5
5
4
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _

3. CONFIGURACIÓN DEL EQUIPO
3-4
9. Arrastre el menú para mostrar el elemento de menú [Lenguaje] y luego toque
[Lenguaje] en el menú principal para mostrar las opciones de idioma.
10. Toque el idioma adecuado que va a utilizar. La unidad mostrará un mensaje de
confirmación. Toque [OK] para reiniciar la unidad y aplicar la nueva configuración
de idioma. Este proceso tarda unos cinco minutos en optimizar el sistema para la
nueva configuración de idioma. Cuando el proceso finaliza, el color del botón de
encendido cambia a naranja. Toque el botón de encendido para iniciar el sistema.

3. CONFIGURACIÓN DEL EQUIPO
3-5
3.2 Definir las unidades de medida
1. Toque el icono [Inicio] para mostrar la pantalla de inicio y los ajustes del modo de
presentación.
2. Toque [Ajustes] para mostrar el menú [Ajustes].
3. Arrastre el menú principal para mostrar el elemento de menú [Unidades] y toque
[Unidades].
4. Tomando como referencia la siguiente tabla, defina las unidades que se
mostrarán en la pantalla.
Elemento de menú Descripción Opciones
[Pantalla Demora] Permite ajustar el formato de la
presentación de demora.
[Magnético], [Verdadero]
[True Wind Calculation
Reference]
Permite establecer la referencia
para calcular el ángulo y la
velocidad del viento verdadero.
[Fondo], [Superficie]
[Formato Posición] Permite establecer el formato de
presentación para la posición
(latitud/longitud).
[DDD°MM.mmmm’],
[DDD°MM.mmm’],
[DDD°MM.mm’],
[DDD°MM’SS.ss“],
[DDD.dddddd°],
[Loran-C], [MGRS]
[Loran C Estación y GRI] Disponibles cuando [Formato
Posición] está establecido como
[Loran-C].
Establece la combinación de
estación Loran C y GRI.
[Cambiar a Corto / largo] Permite ajustar la distancia a la que
se cambia de escala de distancia
corta a larga.
De [0,0] a [2,0] (NM)
[Escala (Larga)] Permite definir la unidad de medida
para distancias largas.
[Nautical Mile] (NM, milla
náutica), [Kilometer] (kilómetro),
[Mile] (milla)
[Escala (Corta)] Permite definir la unidad de medida
para distancias cortas.
[Foot] (pie), [Meter] (metro),
[Yard] (yarda)
[Profundidad] Permite definir la unidad de medida
para la profundidad.
[Foot] (pie), [Meter] (metro),
[Fathom] (braza), [Passi Braza]
(Passi Braza)
[Altura/Longitud] Permite establecer la unidad de
medida para la altura y la longitud.
[Foot] (pie), [Meter] (metro)
[Tamaño Pescado] Permite establecer la unidad de
medida para el tamaño de los
peces.
[Inch] (pulgada), [Centimeter]
(centímetro)
[Temperatura] Permite establecer la unidad de
medida para la temperatura.
[Fahrenheit Degree] (grados
Fahrenheit), [Celsius Degree]
(grados Celsius)
[Velocidad Barco] Permite establecer la unidad de
medida para la velocidad del barco.
[Knot] (nudo), [Kilometer per
Hour] (kilómetro por hora), [Mile
per Hour] (milla por hora), [Meter
per Second] (metro por segundo)
[Velocidad Viento] Permite establecer la unidad de
medida para la velocidad del viento.
[Knot] (nudo), [Kilometer per
Hour] (kilómetro por hora), [Mile
per Hour] (milla por hora), [Meter
per Second] (metro por segundo)

3. CONFIGURACIÓN DEL EQUIPO
3-6
3.3 Ajuste Inicial
Esta sección le muestra cómo ajustar su sistema de acuerdo con los sensores que ha
conectado.
Nota 1: En esta sección algunas unidades están establecidas en el sistema métrico,
pero los márgenes de ajuste reales varían en función de la unidad de medida definida
en el menú [Unidades].
Nota 2: Para configuraciones que utilizan el DFF-3D, consulte las instrucciones del
manual del operador (OME-13520-xx; xx indica la versión de publicación).
1. Toque el icono [Inicio] para mostrar la pantalla de inicio y los ajustes del modo de
presentación.
2. Toque [Ajustes] para mostrar el menú [Ajustes].
3. Arrastre el menú principal y luego toque [Ajuste Inicial] para mostrar el menú
[Ajuste Inicial].
4. Ajuste su equipo tomando como referencia las tablas de las siguientes páginas.
Menú [Ajuste Inicial] - [GPS POSICIÓN]
[Presión Atmosférica] Permite establecer la unidad de
medida para la presión atmosférica.
[HectoPascal] (HectoPascal),
[Millibar] (milibar), [Millimeter of
Mercury] (milímetro de mercurio),
[Inch of Mercury] (pulgada de
mercurio)
[Presión Oil] Permite establecer la unidad de
medida para la presión del aceite.
[KiloPascal] (kiloPascal), [Bar]
(bar), [Pound per Square Inch]
(libra por pulgada cuadrada)
[Volumen] Permite establecer la unidad de
medida para el volumen del tanque.
[Gallon] (galón y galón/hora),
[Litre] (litro y litro/hora)
[Reiniciar Ajustes por
Defecto]
Permite restablecer los ajustes de
unidades predeterminados.
[OK], [Cancelar]
Elemento de menú Descripción Opciones (margen de ajuste)
[Longitudinal (desde la
proa)]
Consultando la figura de la
derecha, introduzca la
posición proa-popa
(longitudinal) y babor-estribor
(lateral) de posicionamiento
de la antena GPS respecto
del origen.
De 0 (m) a 999 (m)
[Lateral (-Babor)] De -99 (m) a +99 (m)
El lado de babor es negativo,
el lado de estribor es positivo.
Elemento de menú Descripción Opciones (margen de ajuste)
[Eslora Barco] Permite definir la eslora de su barco. De 0 (m) a 999 (m)
[Tamaño de Iconos
Estáticos]
Permite definir el tamaño de los iconos
estáticos (como el del barco propio).
De 50 a 150
[Pantalla de
Profundidad]
Permite seleccionar el punto de inicio de
la medición de profundidad.
[Bajo Quilla],
[Bajo el Nivel del Mar]
Elemento de menú Descripción Opciones
OrigenOrigen

3. CONFIGURACIÓN DEL EQUIPO
3-7
Motor y tanque, configuración de instrumentos
Configuración de la gestión manual de combustible
Menú [Ajuste Inicial] - [CONFIG. MOTOR YAMAHA]
[Externo Calado
Transductor]
Permite establecer el calado de los
transductores externos aparte de la
sonda de pesca interna o en red y el
sonar multihaz.
Para transductores internos/en red,
establezca el calado desde la pantalla
de Inicio [Ajustes] [Sonda]
[Calado Transductor].
Para sonares multihaz, establezca el
calado desde la pantalla de Inicio
[Ajustes] [Sonda] [Calado
Transductor].
De 0,0 (m) a +99,9 (m)
[Selección Quilla] Permite definir el calado de la quilla. De 0,0 (m) a 99,9 (m)
Elemento de menú Descripción Opciones (margen de ajuste)
[Configuración del Motor y Tanque Automática] Consulte página 3-12.
[Configuración del Motor y Tanque Manual] Consulte página 3-12.
[Configuración de Instrumentos Gráficos] Consulte la página 3-10.
Elemento de menú Descripción Opciones (margen de ajuste)
[Capacidad total de
combustible]
Le permite introducir la capacidad total de
combustible de su tanque(s).
De 0 a 9999 (L).
[Gestión de
Combustible Manual]
Seleccione [ON] para la gestión manual
del combustible. Consulte el Manual del
operador.
[OFF], [ON].
Elemento de menú Descripción Opciones (margen de ajuste)
[Viaje y
Mantenimiento]
Pone a cero el combustible utilizado, la
distancia de viaje, las horas de viaje y de
mantenimiento del motor (hora de viaje,
hora estándar, hora opcional, hora total)
[Combust. viaje y Distancia]:
[Combust. utilizado], [Distancia
Viaje].
[Horas Viaje y Mantenimiento]:
[Babor], [Estribor].
[Calibración nivel
trim]
Ajusta todos los motores a la posición
inferior total (cero). Si el nivel de ajuste no
es cero, toque [SET] (establecer) para
establecer el nivel de ajuste en cero.
–
[Calibración nivel
flujo]
Si la indicación del flujo de combustible
(gph=galones por hora) es incorrecta,
puede calibrarla para que muestre el flujo
correcto. Introduzca un valor negativo si la
indicación es superior al valor real, y un
valor positivo si es inferior al valor real.
de -7 a +7
[Engine Interface
Software Ver. e ID]
Muestra la versión del software de la
interfaz del motor y el ID.
–
[Reset Engine
Interface]
Reinicia la interfaz del motor. –
[Reset Engine
Instance]
Reinicia la instancia del motor. –
[Resetear número
de motores]
Permite establecer el número de motores. [1], [2], [3], [4], [4P], [4S]
Elemento de menú Descripción Opciones (margen de ajuste)

3. CONFIGURACIÓN DEL EQUIPO
3-8
Menú [Ajuste Inicial] - [CONFIGURAR IF-NMEAFI]
Menú [Ajuste Inicial] - [ADQUISICIÓN DE DATOS]
[Trouble Codes] Muestra los códigos de error. Para más
detalles, consulte el Manual del operador
del motor Yamaha.
–
Elemento de menú Descripción
Opciones (margen de
ajuste)
[Select IF] Seleccione [IF-NMEAFI] para definir los datos analógicos que se reciben de
la IF-NMEAFI. El ajuste se realiza después de reiniciar la IF-NMEAFI.
[Categoría] Seleccione el uso (categoría) para este
sensor.
[Viento], [ST800_850],
[Combustible], [Agua Dulce],
[Aguas Residuales],
[LiveWell], [Aceite], [Aguas
Negras]
[Resistencia lleno] La resistencia, en ohmios, cuando el tanque
está lleno.
De 0 (ohm) a 500 (ohm)
[Resistencia medio] La resistencia, en ohmios, cuando el tanque
está a la mitad.
De 0 (ohm) a 500 (ohm)
[Resistencia vacío] La resistencia, en ohmios, cuando el tanque
está vacío.
De 0 (ohm) a 500 (ohm)
[Capacidad] La capacidad del tanque. De 0 (galones) a 2650
(galones)
[Test] Se muestran los resultados de la prueba.
[Set Hardware a
Ajustes de Fábrica]
Restablece los ajustes de fábrica del
convertidor seleccionado en [Select IF].
[OK], [Cancelar]
Elemento de menú Descripción
Opciones (margen de
ajuste)
[GP330B WAAS Modo] Seleccione [ON] para utilizar el modo WAAS
con la antena GPS correspondiente.
[ON], [OFF]
[WS200 WAAS Modo]
[Origen Datos] Seleccione el origen (fuente) de los datos que se introducirán en el
sistema. Si hay conectadas dos o más fuentes de datos, seleccione
una utilizando el cuadro de diálogo desplegable. Los productos
FURUNO se muestran en la parte superior de la lista.
[Lista de Sensores] Muestra la información de los sensores conectados al equipo. También
puede definir el sobrenombre (“Nickname“) aquí.
[NMEA0183 Output]
Nota: Si la sentencia TTM
se recibe al mismo tiempo
que otra sentencia, los
límites en el ancho de
banda de la comunicación
pueden provocar una
disminución del número
de blancos TTM.
[Configuración Puerto] - [Baud Rate]:
Seleccione la velocidad de transmisión de
salida.
[4,800] (4800), [9,600]
(9600), [38,400]
(38 400)
[Configuración Puerto] - [NMEA-0183
Versión]: Seleccione la versión de
NMEA0183 de salida.
[1.5], [2.0], [3.0]
[Sentencias]: Seleccione las sentencias de
salida.
[ON], [OFF]
[NMEA2000 PGN Output] Seleccione [ON] para los PGN (mensajes del Número de grupo de
parámetro, bus CAN (NMEA2000)) que se transmitirán desde el puerto
del bus CAN.
[Sky View] Muestra las condiciones de los satélites GPS y geoestacionarios
(WAAS). Aparecen el número, la demora y el ángulo de elevación de
todos los satélites GPS y geoestacionarios (si corresponde) a la vista
del receptor GPS.
Elemento de menú Descripción Opciones (margen de ajuste)

3. CONFIGURACIÓN DEL EQUIPO
3-9
Menú [Ajuste Inicial] - [SC-30 CONFIGURACIÓN]
Este menú solo está disponible con la conexión SC-30.
Menú [Ajuste Inicial] - [NETWORK SENSOR SETUP]
La sección [NETWORK SENSOR SETUP] (configuración sensores de red) le permite
configurar los sensores FURUNO NMEA2000 compatibles. Los valores de calibración
y compensación aplicados en este menú se aplican también al propio sensor.
Toque el sensor para acceder a sus menús y sus ajustes. Para obtener más
información sobre la estructura de menús y la configuración de cada sensor, consulte
el manual del operador correspondiente suministrado con el sensor.
Menú [Ajuste Inicial] - [CALIBRACIÓN]
Menú [Ajuste Inicial] - [DATO DE AMORTIGUAMIENTO]
Menú [Ajuste Inicial] - [FUSION]
Elemento de menú Descripción
Opciones (margen
de ajuste)
[Modo WAAS] Seleccione [ON] para utilizar el modo WAAS. [ON], [OFF]
[Ajuste Rumbo] Introduzca el valor de compensación de proa. De -180° a +180°
[Corrección Cabeceo] Introduzca el valor de compensación del cabeceo. De -90° a +90°
[Compensación
Balanceo]
Introduzca el valor de compensación del balanceo. De -90° a +90°
Elemento de
menú
Descripción
Opciones (margen
de ajuste)
[Rumbo] Datos de compensación de proa. De -180,0° a +180,0°
[Velocidad Sobre
Agua]
Calibre los datos de velocidad. Introduzca el valor en
porcentaje.
De -50% a +50%
[Velocidad Viento] Datos de compensación de la velocidad del viento.
Introduzca el valor en porcentaje.
De -50% a +50%
[Ángulo de Viento] Datos de compensación del ángulo del viento. De -180° a +180°
[Temperatura
Superficie de Mar]
Datos de compensación de la temperatura de la
superficie marina.
De -10° a +10°
Elemento de menú Descripción
Opciones (margen
de ajuste)
[COG Y SOG] Fije el valor de amortiguamiento de los
datos. Cuanto más bajo es el ajuste, más
rápida es la respuesta al cambio.
De 0 a 59 (segundos)
[Rumbo]
[Velocidad Sobre Agua]
[Velocidad y Ángulo del Viento]
[Velocidad De Giro]
Elemento de menú Descripción
Opciones (margen
de ajuste)
[Conectar a Fusion] Conecta con su equipo de Fusion.
[Volumen Auto Fusion] Establézcalo en [ON] para permitir que la unidad
NavNet TZtouch2 controle el volumen de
FUSION. El volumen se ajusta de acuerdo con la
velocidad del buque.
[ON], [OFF]
[Mínima Velocidad] Establezca el umbral de velocidad mínima. Si se
supera este umbral, se activa el control
automático del volumen.
De 0,0 (nudos) a
98,9 (nudos)

3. CONFIGURACIÓN DEL EQUIPO
3-10
Menú [Ajuste Inicial] - [INSTALACIÓN NAVEGADOR]
Menú [Ajuste Inicial] (otros elementos de menú)
Menú [Ajuste Inicial] - [CONFIGURACIÓN DE INSTRUMENTOS GRÁFICOS]
[Máxima Velocidad] Establezca el umbral de velocidad máxima. De 0,1 (nudos) a
99,0 (nudos)
[Volume Increase] Establezca la cantidad de volumen adicional que
se producirá cuando el buque alcance el valor de
[Máxima Velocidad].
De 10 % a 50 %
Elemento de menú Descripción Opción (margen de ajuste)
[FAX30 Buscador] Muestra la pantalla del receptor facsímil FAX-30.
[FA30 Buscador] Muestra la pantalla del receptor AIS FA-30.
[FA50 Buscador] Muestra la pantalla del receptor AIS FA-50.
Elemento de menú Descripción Opción (margen de ajuste)
[Equipo Máster de
Cartas]
Establézcalo en [ON] para usar esta unidad como maestra, o en [OFF] para
usar esta unidad como esclava. (Este menú no aparece en monitores
conectados al puerto HDMI OUT2).
[ID de Sistema] El ID de sistema de este dispositivo dentro de la red.
[Dirección IP] La dirección IP de esta unidad dentro de la red.
[Self Test Rápido] Muestra diversos detalles respecto a la unidad TZtouch2, el radar y la
sonda de pesca.
[Certification Mark] Muestra la certificación pertinente de este equipo.
[ServiceMan] Requiere contraseña de inicio de sesión. Para el servicio técnico.
[Update Network
Equipments]
Para el servicio técnico.
[Configuración
Entrada de Suceso]
Establece la función para el interruptor de
sucesos.
[OFF], [Suceso], [MOB]
[Remote Controller
Configuration]
Configuración del control remoto. Si hay varias unidades en la red NavNet,
la MCU-004 (o MCU-005) permite seleccionar la presentación que debe
mostrarse en la unidad conectada mediante el control remoto.
Además, se puede definir el orden cíclico de las presentaciones. Para más
detalles, consulte el Manual del operador.
[Sirius Radio
Diagnostic]
Diagnóstico de radio Sirius. Comprueba el funcionamiento correcto de la
radio de satélite del receptor de información meteorológica por satélite
FURUNO BBWX3 Sirius/XM. Consulte el Manual del operador.
[Sirius Weather
Diagnostic]
Diagnóstico de meteorología Sirius. Comprueba el funcionamiento
correcto de la sección de meteorología del receptor de información
meteorológica por satélite FURUNO BBWX3 Sirius/XM. Consulte el
Manual del operador.
[Adjust Display
Resolution]
Ajusta la resolución de salida para que coincida con la resolución del
monitor conectado.
[Reiniciar Ajustes por
Defecto]
Restablece los ajustes predeterminados
del sistema.
[OK], [Cancelar]
Elemento de menú Descripción
Opciones (margen de
ajuste)
Máxima Velocidad del
Barco
Establezca la velocidad máxima detectable
del transductor.
De 1 (nudo) a 99 (nudos)
Máxima Velocidad Del
Viento
Establezca la velocidad máxima detectable
del transductor.
De 1 (nudo) a 99 (nudos)
Elemento de menú Descripción
Opciones (margen
de ajuste)

3. CONFIGURACIÓN DEL EQUIPO
3-11
[CONFIGURACIÓN DE INSTRUMENTOS GRÁFICOS] - [PROFUNDIDAD]
[CONFIGURACIÓN DE INSTRUMENTOS GRÁFICOS] - [TEMPERATURA SUPERFICIE DE
MAR]
[CONFIGURACIÓN DE INSTRUMENTOS GRÁFICOS] - [MOTOR DE PROPULSIÓN] u [OTRO
MOTOR]
Gestión de Combustible Manual
CZone
Elemento de menú Descripción
Opciones (margen de
ajuste)
Profundidad mínima Establezca la profundidad mínima
detectable del transductor.
De 0 (m) a +1999 (m)
Profundidad máxima Establezca la profundidad máxima
detectable del transductor.
De 1 (m) a +2000 (m)
Elemento de menú Descripción
Opciones (margen de
ajuste)
Temperatura Superficie
de Mar Mínima
Establezca la temperatura mínima
detectable del transductor.
De 0,00° a +98,99°
Temperatura Superficie
de Mar Máxima
Establezca la temperatura máxima
detectable del transductor.
De 0,01° a +99,99°
Elemento de menú Descripción
Opciones (margen
de ajuste)
[RPM Máx.] Establezca el número máximo de RPM del
motor que se mostrará en la presentación RPM.
De 1 (rpm) a 20 000
(rpm)
[Zona Roja Presión
Aceite]
Establezca el valor de inicio de la zona roja del
medidor de presión de aceite.
De 0 (psi) a 143 (psi)
Presión Máx. De Aceite Establezca la presión máxima de aceite de su
motor.
De 1 (psi) a 144 (psi)
Mín. Temperatura Establezca la temperatura mínima de su motor. De 0,00° a 99,00°
[Zona Roja Temperatura] Establezca el valor de inicio de la zona roja del
indicador de temperatura del motor.
De 0,01° a 999,00°
Elemento de menú Descripción Opciones (margen de ajuste)
[Capacidad total de
combustible]
Le permite introducir la capacidad total
de combustible de su tanque(s).
De 0 a 9999 (L).
[Gestión de
Combustible Manual]
Seleccione [ON] para la gestión
manual del combustible. Consulte el
Manual del operador.
[OFF], [ON].
Elemento de menú Descripción
[Add Default CZone Pages] Para crear y editar páginas de C-Zone.
[CZone DIP Switch Settings] Para configurar los interruptores DIP de la unidad. Para el personal
de mantenimiento. No cambie estos ajustes.
Elemento de menú Descripción
[Reset Instrument
Pages]
Restablece los valores predeterminados de todas
las páginas de instrumentos.
[OK], [Cancelar]
[Reiniciar Ajustes por
Defecto]
Restablece los valores predeterminados de los
ajustes correspondientes.
[OK], [Cancelar]

3. CONFIGURACIÓN DEL EQUIPO
3-12
Menú [Ajuste Inicial] - [Configuración del Motor y Tanque Automática]
La unidad TZT2BB detectará automáticamente los motores y tanques conectados a
la misma red.
Este es el método recomendado para configurar los motores y tanques.
Menú [Ajuste Inicial] - [Configuración del Motor y Tanque Manual]
El método de configuración manual solo debe usarse si la configuración automática
no ha detectado correctamente los motores o tanques.
3.4 Configuración del radar
1. Toque el icono [Inicio] para mostrar la pantalla de inicio y los ajustes del modo de
presentación.
2. Toque [Radar] en el menú [Ajustes].
3. Toque [Origen Radar] y luego seleccione el sensor de radar adecuado.
Nota: Si hay conectado un sensor DRS pero no aparece en la lista [Origen
Radar], cierre la lista y vuelva a abrirla. El nombre del sensor DRS deberá
aparecer con una marca de verificación, tal y como aparece en el siguiente
ejemplo.
4. Arrastre el menú [Radar] para mostrar el elemento de menú [Ajuste Inicial Radar]
y luego toque [Ajuste Inicial Radar].
5. Tomando como referencia las tablas de las siguientes páginas, ajuste el radar.
Elemento de menú Descripción
Opciones (margen
de ajuste)
[Nickname] (Alias) Cambie el sobrenombre del motor o tanque.
[Usado Para Propulsión] Seleccione qué motor/tanque se utiliza para
calcular la distancia que puede viajarse usando el
combustible restante. [ON] utiliza el motor/tanque
para los cálculos, [OFF] lo ignora.
[ON], [OFF]
[Reset] (Reinicio) Restablece los datos del motor o tanque a los valores predeterminados.
Combustible
Combustible2
Combustible3
Combustible4
Configuración del Motor y Tanque
Petición
Petición
SENSOR TANQUE
SENSOR MOTOR
Reset
Origen Datos
Alias de amigo Tipo de Fluido
Usado Para Propulsión
Origen Datos
Alias de amigo
EST
Motor 2
Motor 3
Motor 4
Usado Para Propulsión
Combustible
Combustible
Combustible
Combustible
Radar
Origen Radar
Color Fondo Día Negro
Origen Radar

3. CONFIGURACIÓN DEL EQUIPO
3-13
Menú [Radar] - [Ajuste Inicial Radar]
Menú [Radar] - [Posición de Antena]
Elemento de menú Descripción
Opciones (margen de
ajuste)
[Rotación de Antena] Seleccione la velocidad de rotación de la
antena.
[Auto], [24 RPM]
[Antenna Heading Align] Alineación de proa de la antena. Consulte la
"Alineación de proa de la
antena" de la página 3-14.
De [-179.9°] a [+180.0°]
[Supresión Main Bang] Si el pulso inicial aparece en el centro de la
pantalla, deslice el icono circular de modo
que el pulso desaparezca mientras se
observa el eco del radar en el lado izquierdo
de la pantalla.
De [0] a [100]
[Permitir Sector Ciego 1] Se pueden seleccionar hasta dos sectores
ciegos (sin transmisión). Seleccione [ON]
para activar esta función. Establezca los
ángulos inicial y final (de 0° a 359°).
[ON], [OFF]
[Permitir Sector Ciego 2]
Elemento de menú Descripción
Opciones (margen de
ajuste)
[Longitudinal (desde
la proa)]
Consultando la figura de la
derecha, introduzca la posición
proa-popa (longitudinal) y babor-
estribor (lateral) de
posicionamiento de la antena de
radar respecto del origen.
De [0] m a [999] m
[Lateral (-Babor)] De [-99] m a [+99] m
El lado de babor es negativo,
el lado de estribor es positivo.
Elemento de menú Descripción
Opciones (margen de
ajuste)
[Altura de Antena] Seleccione la altura de la antena sobre la
línea de flotación. No disponible (aparece en
un tono más apagado) con el sensor de
radar DRS4DL, DRS4DL+.
[Under 3m] (por debajo
de 3 m), [3m-10m],
[Over 10m] (por encima
de 10 m)
[Auto Sintonización] Activa/desactiva la sintonización automática
del radar conectado. No disponible (aparece
en un tono más apagado) con el sensor de
radar DRS4D-NXT.
[ON], [OFF]
[Origen Tuning] Seleccione una pantalla en la presentación
de escala dual para la sintonización manual.
No disponible (aparece en un tono más
apagado) con el sensor de radar DRS4D-
NXT, DRS4DL, DRS4DL+.
[Escala1], [Escala2]
[Sintonía Manual] Sintonice el radar manualmente. Esta
opción no está disponible cuando está
activado [Auto Sintonización] o se utiliza el
sensor de radar DRS4D-NXT.
De [-50] a [50]
[Monitorización Radar] Muestra diversa información respecto al radar conectado.
[Optimización Radar] Ajusta automáticamente la salida del magnetrón y la sintonización del
radar conectado. Disponible cuando [TX/STBY] está en [ON]. No
cambie estos ajustes. No disponible (aparece en un tono más apagado)
con el sensor de radar DRS4D-NXT.
Nota 1: Solo para el técnico de mantenimiento.
Nota 2: Ejecute esta función siempre que se sustituya el magnetrón.
OrigenOrigen

3. CONFIGURACIÓN DEL EQUIPO
3-14
Alineación de proa de la antena
Ha montado la unidad de antena apuntando directamente hacia delante en dirección
a la proa. Por lo tanto, un blanco pequeño pero visible situado directamente a proa
debería aparecer en la línea de proa (cero grados).
En la práctica, probablemente observará algún pequeño error en la demora en la
pantalla, debido a la dificultad de obtener un posicionamiento inicial adecuado de la
unidad de antena. El siguiente ajuste compensará el error.
1. Configure su radar con una escala de 0,125 y 0,25 MN y el modo de proa arriba.
Puede seleccionar una escala mediante la acción de pellizcar. La escala aparece
en la esquina inferior derecha de la pantalla. La escala también se puede
[Ajustes Avanzados de
ARPA]
Solo para el técnico de mantenimiento. No cambie estos ajustes.
Este elemento está disponible cuando [TX/STBY] está en [ON].
No disponible (aparece en un tono más apagado) con el sensor de radar
DRS4DL, antena de radar de la serie FAR-2xx7.
[TX Channel] Seleccione [1], [2] o [3], el canal en el que la
interferencia sea mínima. Para más detalles,
consulte el Manual del operador. No
disponible (aparece en un tono más
apagado) con el sensor de radar DRS4D-
NXT.
[Auto], [1], [2], [3]
[Target Analyzer Mode] Cuando el analizador está activo, puede
enfatizar los ecos parásitos de lluvia o los
ecos de los blancos. Seleccione [Lluvia] o
[Target] (blanco) según corresponda. Para
más detalles, consulte el Manual del
operador. No disponible (aparece en un tono
más apagado) con el sensor de radar
DRS4D-NXT.
[Lluvia], [Target] (blanco)
[Auto acquire by Doppler] Si se selecciona [ON], los blancos que se
aproximan (barcos, parásitos de lluvia, etc.)
a 3 MN del barco propio se adquieren
automáticamente por el Doppler calculado a
partir del eco del radar. Para más detalles,
consulte el Manual del operador. Disponible
con el sensor de radar DRS4D-NXT.
[ON], [OFF]
[Set Hardware a Ajustes
de Fábrica]
Restablece los valores de fábrica en el radar
seleccionado en [Origen Radar].
[OK], [Cancelar]
[Reiniciar Ajustes por
Defecto]
Restablece los valores predeterminados de
los ajustes del menú [Radar]
[OK], [Cancelar]
Elemento de menú Descripción
Opciones (margen de
ajuste)
000
010
020
030
040
050
060
070
080
090
100
110
120
130
140
150
160
170
180
190
200
210
220
230
240
250
260
270
280
290
300
310
320
330
340
350
a
Blanco
Demora correcta
(relativa al rumbo)
Error de montaje de
antena hacia babor
(HDG SW avanzado)
La imagen aparece
desviada en sentido
horario.
000
010
020
030
040
050
060
070
080
090
100
110
120
130
140
150
160
170
180
190
200
210
220
230
240
250
260
270
280
290
300
310
320
330
340
350
b
Blanco
Posición aparente
del blanco
Demora correcta
(relativa al rumbo)
Demora correcta
(relativa al rumbo)
Posición aparente
del blanco
Posición aparente
del blanco
Error de montaje de
antena hacia estribor
(HDG SW retrasado)
La imagen aparece
desviada en sentido antihorario.
Frente de la antena
Frente de la antena
a
b

3. CONFIGURACIÓN DEL EQUIPO
3-15
seleccionar con la barra deslizante que se muestra en el lado derecho del área
de presentación del radar. Arrastre la barra hacia arriba para acercar o hacia
abajo para alejar.
2. Haga girar la proa del barco hacia un blanco.
3. Toque el icono [Inicio] para mostrar la pantalla de inicio y los ajustes del modo de
presentación.
4. Toque [Radar] para mostrar el menú [Radar].
5. Toque [Antenna Heading Align] (alineación proa de la antena).
6. Introduzca un valor de compensación (margen de ajuste: de +179,9° a -180°) que
sitúe al blanco exactamente en la parte superior de la pantalla, y entonces toque
el icono .
+: rota el eco en sentido horario
-: rota el eco en sentido antihorario
7. Compruebe que el eco del blanco aparece con la demora correcta en la pantalla.
3.5 Configuración de la sonda
Si cuenta con una sonda (serie BBDS1 o DFF), configúrela tal y como se indica en
esta sección.
Nota 1: Algunos elementos de menú están limitados a determinadas sondas de
profundidad externas y puede que no estén disponibles cuando se usa la sonda de
profundidad interna.
Nota 2: Para configuraciones que utilizan el DFF-3D, consulte las instrucciones del
manual del operador (OME-13520-xx; xx indica la versión de publicación).
1. Toque el icono [Inicio] para mostrar la pantalla de inicio y los ajustes del modo de
presentación.
2. Toque [Ajustes].
3. Arrastre el menú [Ajustes] para mostrar el elemento de menú [Sonda] y toque
[Sonda].
4. Arrastre el menú Sonda para mostrar el menú [AJUSTE INICIAL SONDA].
Menú Ajuste Inicial Sonda
Elemento de
menú
Descripción
Opciones (margen
de ajuste)
[Zero Line
Rejection]
(Supresión de
línea cero)
Al activar la supresión de la línea de cero (línea de
transmisión), la línea no se muestra, lo que permite ver
los ecos de pesca cerca de la superficie. El ancho de la
línea cambia en función del transductor utilizado y las
características de la instalación. Si el ancho de la línea
es 1,4 m o más, seleccione [ON].
[ON], [OFF]
Escala
Incrementa la escala
Incrementa la escala
Reduce la escala
Reduce la escala
Indicaciones del radar
HU
NM
Tx
3.650

3. CONFIGURACIÓN DEL EQUIPO
3-16
[Escala Línea de
Cero]
Ajuste el ancho de la línea de cero.
Nota: Solo en DFF3, todos los demás modelos de
transductor tienen el valor fijo de 2,0 m.
De [1,4 m] a [2,5 m]
[Calado
Transductor]
Establezca la distancia entre el transductor y la línea de
flotación, para que exprese la profundidad desde la
superficie marina.
De [0,0 m] a [99,9 m]
[Agua Salada] Seleccione [ON] para usar este equipo en aguas
saladas.
[ON], [OFF]
[Origen Sonda] Seleccione la sonda de pesca utilizada.
Nota: Cuando el sobrenombre de TZT2BB se ha
cambiado en [AJUSTE INICIAL] - [LISTA DE
SENSORES], la opción [Origen Sonda] refleja el cambio
de nombre.
[TZT2BB], [DFF1/
BBDS1], [DFF3],
[DFF1-UHD]
[Ajuste
Transductor]
Configure el transductor y el sensor de movimiento. Consulte "Menú de ajuste
del transductor" de la página 3-18.
[Potencia
Transmisión]
Establezca el nivel de potencia de transmisión.
Para más detalles, consulte el Manual del operador.
Nota: Para los usuarios de DFF1-UHD, los ajustes son
los siguientes:
[Off], [Mín], [Auto]. El valor predeterminado es [Auto].
De [0] a [10]
[KP Externo] Seleccione ON para sincronizar con el pulso de
codificación de la sonda externa.
Nota: Este elemento de menú no se encuentra
disponible cuando [Origen Sonda] está establecido en
[TZT2BB].
[ON], [OFF]
[Nivel Fondo AF] El ajuste predeterminado del nivel de fondo (0)
establece que si se reciben dos ecos fuertes
consecutivos se considerarán ecos de fondo. Si el
indicador de profundidad no se mantiene estable en el
valor predeterminado, ajuste el nivel de fondo aquí. Si
desde el eco del fondo aparecen líneas verticales hacia
arriba en la presentación de enganche de fondo,
reduzca el nivel del fondo para borrar las líneas
verticales.
Si no puede identificar los peces situados cerca del
fondo con el eco de fondo, incremente el nivel de fondo.
De [-40] a [40]
[Nivel Fondo BF]
[Compensar
Ganancia AF]
Si el ajuste de ganancia es incorrecto o existe una
diferencia en la ganancia entre las frecuencias alta y
baja, puede equilibrar la ganancia para las dos
frecuencias aquí.
De [-50] a [50]
[Compensar
Ganancia BF]
[Compensar Auto
Ganancia AF]
Si la compensación automática de la ganancia es
incorrecta o existe una diferencia en la ganancia entre
las frecuencias alta y baja, aquí puede establecer un
valor de compensación para equilibrar la ganancia en
ambas frecuencias.
De [-5] a [5]
[Compensar Auto
Ganancia BF]
[STC AF] Ajuste la frecuencia STC baja (BF) o alta (AF).
Para más detalles, consulte el Manual del operador.
Nota: Este elemento de menú solo está disponible para
los usuarios de las unidades DFF3 y DFF1-UHD.
De [0] a [10]
[STC BF]
Elemento de
menú
Descripción
Opciones (margen
de ajuste)

3. CONFIGURACIÓN DEL EQUIPO
3-17
[Ajuste
Frecuencia de AF]
Ajuste la frecuencia baja (BF) o alta (AF) para eliminar
la interferencia ocasionada por otras sondas de pesca
que operan en la misma frecuencia que la suya.
Para más detalles, consulte el Manual del operador.
Nota: Este elemento de menú solo está disponible para
los usuarios de las unidades DFF3.
De [-50] a [50]
[Ajuste
Frecuencia de BF]
[Pulso TX AF] La longitud del pulso se ajusta automáticamente según
la escala de profundidad y el desplazamiento. Utilice
pulsos cortos si busca una mejor resolución e pulsos
largos cuando lo importante sea la profundidad de
alcance de la detección. Para mejorar la resolución en
las presentaciones ampliadas con zoom, utilice [Corto1]
o [Corto2].
• [Corto1] mejora la resolución de la detección, pero el
alcance de detección es menor que con [Std] (la
longitud del pulso es 1/4 de la de [Std]).
• [Corto2] mejora la resolución de la detección, pero el
alcance de detección es menor que con [Std] (la
longitud del pulso es 1/2 de la de [Std]).
• [Std] es la longitud de pulso estándar y es adecuada
para un uso general.
• [Largo] aumenta el alcance de detección, pero
reduce la resolución (aproximadamente 1/2 en
comparación con la longitud de pulso [Std]).
Nota: Este elemento de menú solo está disponible para
los usuarios de las unidades DFF3.
[Corto1], [Corto2],
[Estándar], [Largo]
[Pulso TX BF]
[Banda RX AF] Ajuste el ancho de banda de la frecuencia baja (BF) o
alta (AF). El ancho de banda de recepción (RX) se
ajusta automáticamente en función de la longitud del
pulso. Para reducir el ruido, seleccione [Estrecha]. Para
una mejor resolución, seleccione [Ancho].
Nota: Este elemento de menú solo está disponible para
los usuarios de las unidades DFF3.
[Estrecho],
[Estándar], [Ancho]
[Banda RX BF]
[Entrada
Temperatura]
Ajuste el origen de los datos de temperatura del agua.
• [MJ Puerto]: Use el sensor de velocidad/temperatura
para los datos.
• [Baja Frecuencia]: Use el sensor de BF para los
datos.
• [Alta Frecuencia]: Use el sensor de AF para los datos.
Nota: Solamente disponible para los usuarios de las
unidades DFF3 y DFF1-UHD.
[MJ Puerto],
[Baja Frecuencia],
[Alta Frecuencia]
[Modo Demo
Sonda]
Active o desactive el modo de demostración de la
sonda.
• [OFF]: Desactiva el modo de demostración.
• [Superficie]: Activa el modo de demostración en
aguas poco profundas.
• [Profundo]: Activa el modo de demostración en aguas
profundas.
Nota: Este elemento de menú no se encuentra
disponible cuando [Origen Sonda] está establecido en
[TZT2BB].
[OFF], [Superficie],
[Profundo]
Elemento de
menú
Descripción
Opciones (margen
de ajuste)

3. CONFIGURACIÓN DEL EQUIPO
3-18
Menú de ajuste del transductor
*: Este elemento solo está disponible para los usuarios de DFF3.
Cuando [Configurar Tipo Transductor] está establecido en [Modelo] y está conectado a DFF3
Cuando [Configurar Tipo Transductor] está establecido en [Manual]
[Set Hardware a
Ajustes de
Fábrica]
Restablece la configuración predeterminada de fábrica
de la sonda de pesca externa.
[OK], [Cancelar]
[Restore Default
Settings]
Restablece los valores predeterminados de todos los
ajustes de menú.
[OK], [Cancelar]
Elemento de menú Descripción
Opciones
(margen de
ajuste)
[Configurar Tipo
Transductor]
Seleccione el tipo de transductor conectado.
Cuando la sonda conectada es una DFF1-UHD y el
transductor tiene un TDID compatible, se selecciona
automáticamente [TDID].
• [Manual]: Configure el transductor manualmente.
• [Modelo]: Seleccione el modelo de transductor
adecuado
(para transductores FURUNO o AIRMAR).
• [TDID]: Seleccione el TDID del transductor (para
transductores AIRMAR con un TDID)
[Manual],
[Modelo],
[TDID]
[Número Modelo] Seleccione el número de modelo adecuado de la lista.
Nota: Solo se encuentra disponible cuando Configurar Tipo Transductor
está establecido en [Modelo].
[Alta Frecuencia Mín] Muestra la alta frecuencia mínima.*
[Alta Frecuencia Máx] Muestra la alta frecuencia máxima.*
[Baja Frecuencia Mín] Muestra la baja frecuencia mínima.*
[Baja Frecuencia
Máx]
Muestra la baja frecuencia máxima.*
[Reiniciar Ajustes por
Defecto]
Restablece la configuración del menú Ajuste
Transductor a los valores predeterminados.
[OK], [Cancelar]
Elemento de menú Descripción
Opciones (margen
de ajuste)
[Alta Frecuencia] Seleccione el modelo y la frecuencia (AF y BF) del transductor conectado del
menú desplegable correspondiente.
[Baja Frecuencia]
Elemento de menú Descripción
Opciones (margen
de ajuste)
[Alta Frecuencia (KHz)] Establezca la frecuencia kHz para alta frecuencia. Los márgenes de
ajuste varían en función del transductor conectado.
Elemento de
menú
Descripción
Opciones (margen
de ajuste)

3. CONFIGURACIÓN DEL EQUIPO
3-19
[Potencia Transductor AF] Establezca la potencia de transmisión para alta
frecuencia.
Nota 1: Este elemento de menú solo se
encuentra disponible para usuarios de DFF1,
DFF1-UHD, BBDS1 y sondas de pesca
internas.
Nota 2: Para usuarios de DDF1-UHD, cuando
el TDID del transductor conectado no es
compatible con la unidad DFF1-UHD, el valor
se fija en [1000].
[600], [1000]
[Ancho De Banda (AF)] Establezca el ancho de banda para alta
frecuencia.
Nota: Este elemento solo se encuentra
disponible para los usuarios de DFF3 cuando
el tipo de transductor está establecido en
[Manual].
De [10] a [100]
[Baja Frecuencia (KHz)] Establezca la frecuencia kHz de la baja frecuencia. Los márgenes de
ajuste varían
en función del transductor conectado.
[Potencia Transductor BF] Establezca la potencia de transmisión para
baja frecuencia.
Nota 1: Este elemento de menú solo se
encuentra disponible para usuarios de DFF1,
DFF1-UHD, BBDS1 y sondas de pesca
internas.
Nota 2: Para usuarios de DDF1-UHD, cuando
el TDID del transductor conectado no es
compatible con la unidad DFF1-UHD, el valor
se fija en [1000].
[600], [1000]
[Ancho De Banda (BF)] Establezca el ancho de banda para baja
frecuencia.
Nota: Este elemento solo está disponible para
los usuarios de DFF3.
De [10] a [100]
Elemento de menú Descripción
Opciones (margen
de ajuste)

3. CONFIGURACIÓN DEL EQUIPO
3-20
Cuando [Configurar Tipo Transductor] está establecido en [TDID].
Elemento de menú Descripción
Opciones (margen
de ajuste)
[Alta Frecuencia] Establezca la frecuencia (kHz) para el transductor de alta frecuencia.
Nota: Este elemento se muestra cuando el transductor conectado tiene un
TDID que no es compatible.
[Potencia
Transductor AF]
Establezca la potencia de transmisión para alta
frecuencia.
Nota 1: Este elemento solo se encuentra
disponible para usuarios de DFF1, DFF1-UHD,
BBDS1 y sondas de pesca internas.
Nota 2: Para usuarios de DDF1-UHD, cuando el
TDID del transductor conectado no es compatible
con la unidad DFF1-UHD, el valor se fija en [1000].
[600], [1000]
[Baja Frecuencia] Establezca la frecuencia (kHz) para el transductor de baja frecuencia.
Nota: Este elemento se muestra cuando el transductor conectado tiene un
TDID que no es compatible.
[Potencia
Transductor BF]
Establezca la potencia de transmisión para baja
frecuencia.
Nota 1: Este elemento solo se encuentra
disponible para usuarios de DFF1, DFF1-UHD,
BBDS1 y sondas de pesca internas.
Nota 2: Para usuarios de DDF1-UHD, cuando el
TDID del transductor conectado no es compatible
con la unidad DFF1-UHD, el valor se fija en [1000].
[600], [1000]

3. CONFIGURACIÓN DEL EQUIPO
3-21
Menú del sensor de movimiento
Ajuste esta configuración para obtener una imagen más clara del fondo marino, los
bancos de peces, etc. cuando el estado del mar se encuentre entre fuerte marejada
y mar gruesa.
Nota 1: La unidad TZT2BB no tiene un sensor de movimiento interno. La
configuración del sensor de movimiento no es necesaria si [Origen Sonda] en el menú
[Sonda] está establecido en [Internal].
Nota 2: Para utilizar la función de elevación, deben aplicarse los siguientes ajustes
en el compás de satélite. Para obtener más información sobre el procedimiento de
ajuste, consulte el manual del operador del compás de satélite. Los ajustes para SC-
30 se realizan desde el menú [IF-NMEASC]; los ajustes para SC-50/110, desde el
menú [DATA OUT].
Cuando toca [Ajuste Transductor] en el menú [Sonda], se muestra el menú [Sensor
Movimiento] debajo del menú [Ajuste Transductor]. Si el compás de satélite SC-30 o
SC50/110 está conectado, establezca aquí la distancia entre la unidad de antena (o
sensor) del compás de satélite y el transductor (alta y baja si está conectado).
NMEA0183 Bus CAN
Sentencia ATT, HVE
Velocidad de transmisión 38400 BPS
Ciclo 25 ms
PGN Elevación: 65280
Actitud: 127257
Elemento de menú Descripción
Opciones
(margen de ajuste)
[Motion Sensor Type]
(Tipo de sensor de
movimiento)
Seleccione el sensor conectado a su unidad NavNet
TZtouch2. Para todos los sensores salvo SC-50/
110, seleccione [SC-30].
[SC30],
[SC50_SC110]
[Posición de Antena
HF (LF) Proa/popa]
Ajuste la distancia entre la unidad de antena y el
transductor en dirección proa-popa. Si el
transductor está situado a proa, establezca un valor
positivo.
De [-99.9] a [+99.9]
[Posición Antena
Arriba/Abajo AF (BF)]
Establezca la distancia entre el transductor y la
unidad de antena en dirección vertical.
De [-0.00] a [+99.9]
[Antena Babor/
Estribor AF (BF)]
Establezca la distancia entre la unidad de antena y
el transductor en dirección babor-estribor. Si el
transductor está situado a estribor, establezca un
valor positivo.
De [-99.9] a [+99.9]
SC-30/50/110
Arriba/AbajoArriba/Abajo
Proa/popa para AFProa/popa para AF
Proa/Popa para BFProa/Popa para BF
Babor/Estribor para AFBabor/Estribor para AF
Babor/Estribor para BFBabor/Estribor para BF
Transductor de AFTransductor de AF
Transductor de BFTransductor de BF

3. CONFIGURACIÓN DEL EQUIPO
3-22
3.6 Ajustes de LAN Inalámbrica
Nota: Los siguientes procedimientos no están disponibles desde un monitor
conectado al puerto HDMI OUT2.
3.6.1 Conexión de la red LAN existente
1. Abra la pantalla de inicio y toque [Ajustes] [General] [Conectar a Internet].
2. Toque [Cuando es Necesario]. Toque “<“ para retroceder una capa.
3. Toque [Ajustes de LAN Inalámbrica] [Modo Inalámbrico].
4. Toque [Conectar a LAN existente] Toque “<“ para retroceder una capa.
5. Active [Inalámbrica] para ver las redes WLAN disponibles en la parte inferior de
la pantalla.
Nunca
En Arranque
Cuando es Necesario
Conectar a LAN existente
Crear Network Local
ACTIVAR WIRELESS
Inalámbrica
Escanear
NETWORK CONECTADA ACTUALMENTE
Network No Conectada
REDES WLAN DISPONIBLES
Seguridad
Seguridad

3. CONFIGURACIÓN DEL EQUIPO
3-23
6. Toque la red que desea utilizar.
7. Toque [Conectar] para mostrar la ventana de introducción de la clave de red.
8. Introduzca la clave de red y luego toque [OK].
Nota: Si la clave de red es incorrecta, aparecerá un mensaje de error. Introduzca
la clave de red correcta y toque [OK] de nuevo.
9. Toque [X] en la barra del título para cerrar el menú.
CANCELAR
FORGET
CONNECT
ENTER WIRELESS NETWORK KEY
CANCELAR

3. CONFIGURACIÓN DEL EQUIPO
3-24
3.6.2 Creación de una red inalámbrica local
Nota 1: Realice el procedimiento con [Network Local] desactivada en [Ajustes de LAN
Inalámbrica].
Nota 2: Si la red es inestable, tal vez no pueda conectarse a una red local. En este
caso, desactive y active [Inalámbrica], o conéctese mediante una red LAN existente.
Nota 3: Compruebe que [Cuando es Necesario ] está seleccionado en [Conectar a
Internet] antes de realizar el procedimiento.
1. Abra la pantalla de inicio y toque [Ajustes] [General] [Ajustes de LAN
Inalámbrica] [Modo Inalámbrico].
2. Toque [Crear Network Local] y luego toque “<“ para retroceder una capa.
3. Toque [Nombre].
4. Introduzca el nombre de la red y luego toque [].
5. Toque [Contraseña].
6. Introduzca la contraseña y toque .
7. Active [Network Local] en [Ajustes de LAN Inalámbrica] para conectarse a la red.
8. Toque [X] en la barra del título para cerrar el menú.
9. Conéctese a NavNet TZtouch2 con su tablet o smartphone.
Utilice el nombre de red y la contraseña establecidos en este procedimiento
cuando se conecte a la TZT2BB mediante una tablet o un smartphone.
Nombre TZTL15F
Contraseña XXXXXXXX
AJUSTES NETWORK LOCAL

3. CONFIGURACIÓN DEL EQUIPO
3-25
Esta página se ha dejado en blanco a propósito.

㹎㹎㸿㹁㹉㹇㹌㹅ࠉ㹊㹇㹑㹒
%+;
003836'(&
1$0(
287/,1(
'(6&5,37,21&2'(θ
47<
ࣘࣘࢽࢵࢺ
881,7
㺛㺐㺍㺟㺬㺼㺍㺖㺛
6:,7&+%2;
36'
ไᚚ㒊
352&(662581,7
038
ணணഛရ
663$5(3$576
ணഛရ
63$5(3$576
63
ᕤᕤᮦᩱ
,,167$//$7,210$7(5,$/6
㺗㺎㺪㺼㺷㺖㺮㺩㺻0-
&$%/($66(0%/<
0-$63)&
ᕤᮦᩱ
,167$//$7,210$7(5,$/6
&3
ᅗᅗ᭩
''2&80(17
㺪㺵㺍㺚㺋㺭㺑㺻㺢ᆺ⣬
)/86+02817,1*7(03/$7(
&
ྲྀᢅㄝ᫂&'
23(5$72560$18$/&'
7=7/;;)20&'520
᧯సせ㡿᭩
23(5$7256*8,'(
26
ഛせ㡿᭩ⱥ
,167$//$7,210$18$/(1
,0(
䡶䡬䢀䢚ᮎᑿ䛻㼇㻖㻖㼉䛾䛔䛯䢑䢂䡫䢀䛿௦⾲䛾ᆺᘧ㻛䡶䡬䢀䢚䜢⾲♧䛧䛶䛔䜎䛩䚹
㻯㻻㻰㻱㻌㻺㼁㻹㻮㻱㻾㻌㻱㻺㻰㻵㻺㻳㻌㼃㻵㼀㻴㻌㻎㻖㻖㻎㻌㻵㻺㻰㻵㻯㻭㼀㻱㻿㻌㼀㻴㻱㻌㻯㻻㻰㻱㻌㻺㼁㻹㻮㻱㻾㻌㻻㻲㻌㻾㻱㻼㻾㻱㻿㻱㻺㼀㻭㼀㻵㼂㻱㻌㻹㻭㼀㻱㻾㻵㻭㻸㻚
䠄␎ᅗ䛾ᑍἲ䛿䚸ཧ⪃್䛷䛩䚹㻌㻌㻰㻵㻹㻱㻺㻿㻵㻻㻺㻿㻌㻵㻺㻌㻰㻾㻭㼃㻵㻺㻳㻌㻲㻻㻾㻌㻾㻱㻲㻱㻾㻱㻺㻯㻱㻌㻻㻺㻸㼅㻚䠅
&=%
A
-1

&2'(12
7<3(
&3
␎ࠉࠉᅗ
287/,1(
ྡࠉࠉ⛠
1$0(
ᩘ㔞
47<
⏝㏵㸭ഛ⪃
5(0$5.6
␒ྕ
12
ᆺྡ㸭つ᱁
'(6&5,37,216
,167$//$7,210$7(5,$/6
ᕤᮦᩱ⾲
%+;
(0,㺘㺏
(0,&25(
*5)&
&2'(
12
㺘㺦㺖㺞㺕㺊㺍㺪㺽
&211(&725&$3
&$3$
&2'(
12
㺘㺦㺖㺞㺕㺊㺍㺪㺽
&211(&725&$3
&$3%
&2'(
12
㺢㺵㺛㺞㺍㺩㺽㺻㺦㺚㺼ࠉ㺚㺋
6(/)7$33,1*6&5(:
;686
&2'(
12
㸦␎ᅗࡢᑍἲࡣࠊཧ⪃್࡛ࡍࠋࠉ',0(16,216,1'5$:,1*)255()(5(1&(21/<㸧
㹄㹓㹐㹓㹌㹍ࠉ㹃㹊㹃㹁㹒㹐㹇㹁ࠉ㹁㹍ࠉ㸬㸪㹊㹒㹂
&0$
A
-2
&2'(12
7<3(
)3
␎ࠉࠉᅗ
287/,1(
ྡࠉࠉ⛠
1$0(
ᩘ㔞
47<
⏝㏵㸭ഛ⪃
5(0$5.6
␒ྕ
12
ᆺྡ㸭つ᱁
'(6&5,37,216
$&&(6625,(6
ᒓရ⾲
%+;
6'㺔㺎㺢㺼᭩㎸ࡳရ
6'0(025<&$5'
&2'(
12
:,),B$5,%㺛㺡㺍㺔㺎
:,),B$5,%67,&.(5
&2'(
12
㸦␎ᅗࡢᑍἲࡣࠊཧ⪃್࡛ࡍࠋࠉ',0(16,216,1'5$:,1*)255()(5(1&(21/<㸧
㹄㹓㹐㹓㹌㹍ࠉ㹃㹊㹃㹁㹒㹐㹇㹁ࠉ㹁㹍ࠉ㸬㸪㹊㹒㹂
&)$
A
-3


D-2
1/Aug/2017 H.MAKI
1/Aug/2017 H.MAKI
1/Aug/2017 H.MAKI

%
$
'
&
1$0(
ྡ⛠
7,7/(
NJ
0$66
':* 1R
6&$/(
$33529('
&+(&.('
'5$:1
5()1R
,17(5&211(&7,21 ',$*5$0
┦⤖⥺ᅗ
࣐ࣝࢳࣇࣥࢡࢩࣙࣥࢹࢫࣉࣞ
08/7, )81&7,21 ',63/$<
7=7%%
7<$0$6$.,
5)8-,<$0$
237,21
6+,3<$5' 6833/<
127(
$&&8),6+ 3(5)250$1&( 0$< %( '(&/,1(' %< &$%/( (;7(16,21
ὀグ
㸨㸯㸧㐀⯪ᡤᡭ㓄ࠋ
㸨㸰㸧࢜ࣉࢩࣙࣥࠋ
㸨㸱㸧ࢣ࣮ࣈࣝᘏ㛗ࡢሙྜࠊ$&&8),6+ᛶ⬟పୗࡢᜍࢀ࠶ࡾࠋ
6+,(/'
㺖㺹
㺚㺹 :+7
%/.
0-$63) 32:(5
-
'& ,1387
'& ,1387
$
-
+'0, 287
ไᚚ㒊
352&(6625 81,7
038
+'0, &$%/(
P 0$;
7<3( $
86% &$%/(
P 0$;
-
+'0, 287
7<3( $
ࢱࢵࢳࣔࢽࢱ࣮
728&+ 021,725
+'0, &$%/(
P 0$;
7<3( $
86% &$%/(
P 0$;
7<3( $
ྠୖ
',772
-
1(7:25.
5-
02'=Pȭ
5-
P
9+30996[&
9'&
-
86%
-
86% IRU +'0, 287
-
86%
-
86% IRU 6:,7&+ %2;
-
6:,7&+ %2;
-
86% IRU +'0, 287
0LFUR%
86% &$%/(
P 0$;
86% &$%/(
P 0$;
7<3( $
እࡅ+''࣍ࢫࢺ3&
(;7(51$/ +''+267 3&
ࣜࣔࢥࣥ
0&8
5(027( &21752/ 81,7
ࡲࡓࡣ 25 86% '(9,&(
-
10($
0%))0P
6/
/7:%))0
08/7,
7'B$
7'B%
%8==
9B287
(9(17 6:
*1'
*1'
3:5B6:
'&B1
5HVHUYHG
5HVHUYHG
-
25*
:+7
%/8
*5<
5('
%/.
33/
%51
:+75('
:+7%/.
ࢲ
ࢩࣟ
࢜
ࣁ
࢝
ࢡࣟ
㺯㺵㺙㺕
ࢳࣕ
㺚㺹㺏㺔
㺚㺹㺖㺹
%8==(5
23
(9(17 6:,7&+
32:(5 6:,7&+
127 86('
$872 3,/27
6039%&
-81&7,21 %2;
),
ࡲࡓࡣ 25
,)10($.
'$7$ &219(57(5
76
66)0)
0&)0)
76
7ࢥࢿࢡࢱ
7&211(&725
P
-
-
1(7:25.
1(7:25.
5-
5-
9,'(2 ,1
9,'(2 ,1
-
-
&2$; &$%/(Ȑ
&2$; &$%/(Ȑ
5&$
5&$
9,'(2 (48,30(17
+'0, ,1
-
+'0, &$%/(
P 0$;
+'0, 6285&(
$ 7<3(
P
P
P
P
P
P
P
:,5(/(66 /$1
$17(11$
,17(51$/
L26 '(9,&(
$QGURLG '(9,&(
ᩚὶჾ
5(&7,),(5
58
58%
9'&
,9VT
0-$63)&P
'3<&
9'&
9$&
ȭ+]
63'
9B3
7(03
7'B,'
1&
7(039
;'5B6+,(/'
;'5B1
;'5B3
;'5
63'97'B,'967B6+,(/'
0-$63)
& 0P
-
67,'06'
67,'3:'
7,'+''
36'
3/'
7/7'
666/7'
73:'
7%6'
75$16'8&(5 :6(162575$16'8&(5 :6(1625
3:'
㏦ཷἼჾ㏦ཷἼჾ
75$16'8&(575$16'8&(5ࢭࣥࢧ࣮㏦ཷἼჾ
;'5B6+,(/'
;'5B1
;'5B3
;'5
-
-
7%
7%
N:
0%
0$7&+,1* %2;
P
5('
%/.
5('
%/.㺖㺹
㺏㺔
㺖㺹
㺏㺔
P
P%P
%%
%6
7
N:
0%
%/.㺖㺹
%/8㺏㺓
*51㺮㺢㺼㺶
5('㺏㺔
P
0-$63)
0-$63)
36'
㏦ཷἼჾ
3/'
75$16'8&(5706%
707%
Ỉ ࢭࣥࢧ࣮
7(03 6(1625
6706%
6736%
Ỉ ࣭⯪㏿ࢭࣥࢧ࣮
7(0363((' 6(1625
ࡲࡓࡣ 25
6
3:'
,9VT
P
P
P
P
P
P
P
P
7<3( $
4=)+P
ࢫࢵࢳ࣎ࢵࢡࢫ
6:,7&+ %2;
36'
,9VT
-XO
-XO
&& %
/$1[ 3257
ࢿࢵࢺ࣮࣡ࢡᶵჾ
1(7:25. (48,30(17
02'=
Pȭ
7/&$7
-2,17 %2;
ࢪࣙࣥࢺ࣎ࢵࢡࢫ
02'=
Pȭ
)$&6,0,/( 5(6&(,9(5 ,3 &$0(5$ (7&
)$; 27+(56
ࡑࡢࠊࣇࢡࢩ࣑ࣜཷಙᶵࠊ,3࣓࢝ࣛ ࡞
㸦᥋⥆ࡣಶูࡢ㈨ᩱࢆ☜ㄆࡢࡇ㸧
5()(5 72 ,1',9,'8$/ ,16758&7,216 )25 &211(&7,21
3R( +8%
02'=Pȭ
02'=
Pȭ
+8%
࣮ࢧࢿࢵࢺࣁࣈ
(7+(51(7 +8%
5-
02'=Pȭ
5-
02'=Pȭ
5-
)5836))Pȭ
࣮ࣞࢲ࣮ࢭࣥࢧ࣮
5$'$5 6(1625
'56 6(5,(6
02'$6:Pȭ
ࢿࢵࢺ࣮࣡ࢡ㨶᥈
1(7:25. 6281'(5
$,6ཷಙᶵ
$,6 5(&(,9(5
)$
'))%%'6'))8+''))'
5-
,9VT
0&8
᧯స㒊
&21752/ 81,7
1/Aug/2017 H.MAKI
:
DN : cn= , o= , ou= ,
[email protected], c=JP
: 2017.08.01 17:38:25 +09'00'
S-1
-
 1
1
-
 2
2
-
 3
3
-
 4
4
-
 5
5
-
 6
6
-
 7
7
-
 8
8
-
 9
9
-
 10
10
-
 11
11
-
 12
12
-
 13
13
-
 14
14
-
 15
15
-
 16
16
-
 17
17
-
 18
18
-
 19
19
-
 20
20
-
 21
21
-
 22
22
-
 23
23
-
 24
24
-
 25
25
-
 26
26
-
 27
27
-
 28
28
-
 29
29
-
 30
30
-
 31
31
-
 32
32
-
 33
33
-
 34
34
-
 35
35
-
 36
36
-
 37
37
-
 38
38
-
 39
39
-
 40
40
-
 41
41
-
 42
42
-
 43
43
-
 44
44
-
 45
45
-
 46
46
-
 47
47
-
 48
48
-
 49
49
-
 50
50
-
 51
51
-
 52
52
-
 53
53
-
 54
54
-
 55
55
-
 56
56
-
 57
57
-
 58
58
-
 59
59
-
 60
60
-
 61
61
-
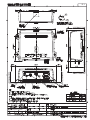 62
62
-
 63
63
-
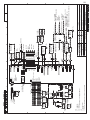 64
64
































































Artículos relacionados
-
Furuno GP1871F Guía de instalación
-
-
Furuno TZT2BB Manual de usuario
-
Furuno TZTL15F Guía de instalación
-
-
-
-
Furuno PG700 Manual de usuario
-
-
Furuno DRS4DL+ Guía de instalación
Otros documentos
-
Airmar H2183 Heading Sensor El manual del propietario
-
-
-
Sonel MPU-1 Manual de usuario
-
JL Audio fathom v2 El manual del propietario
-
Emerson STC DRS Data Signal Line Surge Protectors El manual del propietario
-
-
JL Audio f113 El manual del propietario