Kromschroder BCM 400..B2/B3 PROFINET/EtherNet/IP Instrucciones de operación
- Tipo
- Instrucciones de operación

ÍNDICE
· Edition 04.23 · ES · 03251597
DE, EN, FR, NL, IT, ES, DA, SV, NO, PT, EL, TR, CS, PL, RU, HU – www.docuthek.com
Módulo bus BCM 400..B2/B3 PROFINET/EtherNet/IP/
Modbus TCP para BCU4xx
1 Seguridad.............................1
2 Comprobar el uso ......................2
3 Montaje ..............................2
4 Sustitución ............................3
5 Cableado .............................3
6 Puesta en funcionamiento ................3
7 Ayuda en caso de averías.................5
8 Datos técnicos .........................7
9 Logística .............................7
10 Certificación ..........................7
11 Eliminación de residuos .................7
1 SEGURIDAD
1.1 Leer y guardar
Leer detenidamente las instrucciones
antes del montaje y de la puesta en funcionamiento.
Después del montaje dar las instrucciones al explo-
tador. Este dispositivo debe ser instalado y puesto
en servicio observando las normativas y disposi-
ciones en vigor. Las instrucciones están también
disponibles en www.docuthek.com.
1.2 Explicación de símbolos
1, 2,3, a, b, c = Acción
➔= Indicación
1.3 Responsabilidad
No asumimos ninguna responsabilidad de los da-
ños causados por la inobservancia de las instruccio-
nes o por el uso no conforme.
1.4 Indicaciones de seguridad
Las informaciones importantes para la seguridad
son indicadas en las instrucciones como se mues-
tra a continuación:
PELIGRO
Advierte de peligro de muerte.
AVISO
Advierte de posible peligro de muerte o de lesión.
PRECAUCIÓN
Advierte de posibles daños materiales.
Solo un especialista en gas puede llevar a cabo
todos los trabajos. Los trabajos eléctricos solo los
puede realizar un especialista en electricidad.
1.5 Modificación, piezas de repuesto
Está prohibida cualquier modificación técnica. Usar
solamente las piezas de repuesto originales.
INSTRUCCIONES DE UTILIZACIÓN

BCM 400..B2/B3 · Edition 04.23
ES-2
2 COMPROBAR EL USO
El módulo bus BCM 400 es una interfaz de comu-
nicación para los controles de quemador BCU4xx
para conectar a una conexión de bus de campo a
través de PROFINET, EtherNet/IP o ModbusTCP.
Mediante la conexión por bus de campo, los
BCU4xx pueden ser controlados y vigilados por
un sistema de automatización (p.ej.,PLC). La red
de comunicación debe estar protegida contra el
acceso no autorizado.
Su función solo se garantiza dentro de los límites
indicados, ver página 7 (8 Datos técnicos).
Cualquier uso distinto se considera no conforme.
2.1 Código tipo
BCM Módulo bus
400 Serie 400
S0 Comunicación estándar
S1 SafetyLink
B1 PROFIBUS DP
B2 PROFINET
B3 EtherNet/IP
B4 Modbus TCP
/1 D-Sub 9 polos
/3 Dos conectores hembras RJ45
-0 –
-3 Control mediante señal progresiva de
tres puntos a través del bus
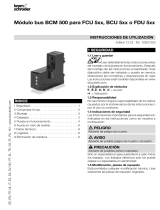
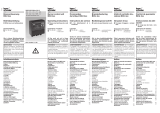
2.2 Denominación de las partes
4
5
2
3
7
8
1
1 BCM../3 con conectores hembras RJ45
2 Conector hembra RJ45 (puertoP1) para conec-
tar a la comunicación del bus
3 Conector hembra RJ45 (puertoP2) para conec-
tar a la comunicación del bus
4 LED verde
(para mostrar una conexión: apagado = sin co-
nexión, encendido = conexión, luz intermitente
= transmisión de datos)
5 LED amarillo
(para mostrar la velocidad de transmisión: en-
cendido = 100 Mbit, apagado = 10 Mbit)
6 Interruptores de codificación
7 Placa de características
Dirección MAC ( A) y temperatura ambiente ( B+
C)– ver placa de características.
Elster GmbH
Osnabrück, Made in Germany
-
A
B
C
3 MONTAJE
1 Desconectar y dejar sin tensión el BCU.
2 Abrir la tapa del BCU.
3 Insertar el módulo bus en la ranura prevista al
efecto.

BCM 400..B2/B3 · Edition 04.23
ES-3
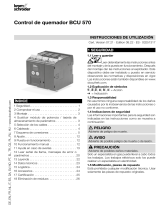
4 SUSTITUCIÓN
1 Desconectar y dejar sin tensión el BCU.
2 Abrir la tapa del BCU.
3 Retirar los conectores del módulo de potencia y
del módulo bus.
4 Para que la manipulación sea más fácil, retirar
los módulos en el siguiente orden:
1. Módulo de potencia,
2. Módulo bus.
2.
1.
➔Montaje de los módulos en el orden inverso.
5 CABLEADO
1 Desconectar y dejar sin tensión la instalación.
➔Para conductores y conectores utilizar solamen-
te componentes que cumplan con las especifi-
caciones correspondientes del bus de campo.
➔Utilizar conectores RJ45 con blindaje.
➔Longitud de cable: máx. 100m entre 2dispo-
sitivos.
➔Pautas de instalación de PROFINET, ver www.
profibus.com.
➔Pautas de instalación de Ethernet, ver www.
odva.org.
➔Especificaciones de Modbus, ver www.modbus.
org.
➔Instalación de la red de comunicación según
IEC61918.
2 Conectar el BCM400 al bus de campo de un
sistema de automatización.
➔Proteger la red de comunicación contra el acce-
so no autorizado.
6 PUESTA EN FUNCIONAMIENTO
AVISO
¡Peligro de explosión!
El BCM y el dispositivo de mando (BCU) solo se
deben poner en funcionamiento después de que
estén garantizados el correcto ajuste de los pará-
metros, el cableado y el perfecto procesamiento
de todas las señales de entrada y salida.
Cuando la comunicación por bus se perturba o
se interrumpe, los datos de comunicación son
inválidos o durante la inicialización, las señales
recibidas del controlador se interpretan como “0”.
Si durante este proceso se controla el dispositivo
de mando mediante las entradas de los bornes, el
programa se ejecutará de manera habitual. ¡Para
este fin, tener en cuenta el ajuste de los paráme-
tros A085 aA089!
AVISO
¡Peligro por arranque incontrolado del quemador!
Las señales de control para el arranque y para la
válvula de aire externa están conectadas entre el
bus y los bornes de entrada con un enlace OR. El
BCU puede arrancar el quemador si hay una señal
activa en el bus o en el borne.
La configuración de la comunicación por bus de
campo puede tener lugar en función de la variante
de módulo bus (BCM..B2, BCM..B3 o BCM..B4)
mediante la herramienta de ingeniería del sistema
de automatización o mediante BCSoft.
BCM..S1 solo se puede poner en funcionamiento
a través de BCSoft. Para más información, ver
Información Técnica BCU46x o BCU480.
➔Descarga de las instrucciones de utilización y
software BCSoft a través de www.docuthek.
com.
1 Para la comunicación entre BCSoft y el
dispositivo de mando por Ethernet comprobar la
posición de los interruptores de codificación
(de001 aFEF) en el BCM.
➔Cada combinación de ajuste de los interruptores
de codificación solo puede estar presente 1vez
dentro del sistema de bus de campo.
➔Cada nombre de dispositivo/nombre de red y
cada dirección IP se pueden otorgar solamente
1vez dentro del sistema de bus de campo.
➔PROFINET: con la prueba de parpadeo para
dispositivos se puede identificar un dispositivo
en el sistema de bus de campo (el indicador
muestra 00 con segmentos alternantes).
➔Indicaciones para la puesta en funcionamiento
del dispositivo de mando, ver las instruccio-
nes de utilización Controles de quemador
BCU46x,480.
➔Si en el indicador del dispositivo de mando par-
padea el mensaje de error n 1 hasta n 4, no se
puede poner en funcionamiento la comunicación
por bus de campo. El dispositivo de mando se

BCM 400..B2/B3 · Edition 04.23
ES-4
puede operar todavía a través de las entradas
digitales. ¡Para este fin, tener en cuenta el ajuste
de los parámetros A085 aA089!
6.1 BCM..B2 (PROFINET)
➔Todos los parámetros específicos del dispositi-
vo de mando (BCU) están almacenados en el
fichero de datos maestros del dispositivo (GSD):
descarga del fichero de los datos maestros del
dispositivo (GSD) a través de www.docuthek.
com.
➔Descargar el fichero GSD en la herramienta
de ingeniería del sistema de automatización y
configurar la red.
➔En las instrucciones de la herramienta de inge-
niería se encuentran los pasos necesarios.
1 Aplicar la tensión al BCU.
2 Configurar la comunicación por bus.
➔Mediante la herramienta de ingeniería del siste-
ma de automatización: introducir el nombre de
dispositivo para el dispositivo de mando.
➔Mediante BCSoft: introducir nombre de red,
dirección IP, máscara de subred y puerta de
enlace estándar para el dispositivo de mando.
➔Nada más introducir el nombre de dispositivo/
nombre de red, el dispositivo de mando queda
identificado inequívocamente en el sistema
PROFINETIO.
➔En el dispositivo de mando, tiene que estar
ajustado el parámetro A080= 1o2, para que
se pueda introducir un nombre de dispositivo/
nombre de red para el BCM, ver al respecto
página 4 (6.4 Configuración bus de campo
(parámetroA080)).
6.2 BCM..B3 (EtherNet/IP)
➔Todos los parámetros específicos del dispositivo
de mando (BCU) están almacenados en el fi-
chero Electronic Data Sheet (EDS): descarga del
fichero EDS a través de www.docuthek.com.
1 Descargar el fichero Electronic Data Sheet (EDS)
en la herramienta de ingeniería del sistema de
automatización y configurar la red.
➔En las instrucciones de la herramienta de inge-
niería se encuentran los pasos necesarios del
controlador.
2 Aplicar la tensión al BCU.
3 Configurar la comunicación por bus.
➔Introducir lo siguiente a través de la herramienta
de ingeniería del sistema de automatización o de
BCSoft: nombre de red, dirección IP, máscara
de subred y puerta de enlace estándar para el
dispositivo de mando.
6.3 BCM..B4 (Modbus TCP)
1 Aplicar la tensión al dispositivo de mando.
➔En caso de que el indicador del dispositivo de
mando parpadee y muestre n 3, la comunica-
ción por bus está mal configurada.
2 Configurar la comunicación por bus.
➔Introducir nombre de red, dirección IP, máscara
de subred y puerta de enlace estándar para el
dispositivo de mando.
➔En el dispositivo de mando, tiene que estar
ajustado el parámetro A080= 1o2, para que se
pueda introducir un nombre de red para el BCM,
ver al respecto página 4 (6.4 Configuración
bus de campo (parámetroA080)).
6.4 Configuración bus de campo (paráme-
troA080)
➔Según el ajuste del parámetro A080, la comuni-
cación por bus tiene lugar con o sin comproba-
ción de dirección.
➔Mediante BCSoft comprobar el valor para el
parámetroA080 y, si es necesario, adaptarlo.
Parámetro
N.º Nombre
Valores para la comunicación por bus
A080
Comunicación por bus de campo
0 = Descon.
1 = Con comprobación de dirección
2 = Sin comprobación de dirección
➔Ver otras indicaciones para el ajuste de
parámetros en las instrucciones de utilización
BCU46x,480, capítulo “Ajuste”.
Parámetro A080 = 0:
Comunicación por bus de campo desconec-
tada
➔La comunicación por bus de campo está desco-
nectada. Con BCSoft se puede acceder todavía
al dispositivo mediante Ethernet.
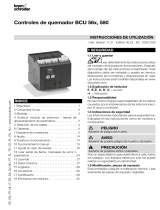
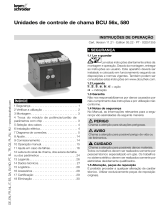
Parámetro A080 = 1:
Comunicación por bus de campo con compro-
bación de dirección
➔EtherNet/IP: asignar una dirección IP fija y
válida mediante el servidorDHCP, la herramienta
de ingeniería o BCSoft.
➔El nombre de dispositivo/nombre de red en el
estado de suministro es:
p.ej. para BCU460: “bcu-460-xxx” (“not-as-
signed-bcu-460-xxx” en caso de configuración
mediante la herramienta de ingeniería).
La secuencia de signos xxx está para indicar la
dirección ajustada del BCM400 en los interrup-
tores de codificación (xxx= dirección dentro del
intervalo 001 hastaFEF).

BCM 400..B2/B3 · Edition 04.23
ES-5
0
1
2
3
4
5
6
7
8
9
A
B
C
D
E
F
0
1
2
3
4
5
6
7
8
9
A
B
C
D
E
F
0
1
2
3
4
5
6
7
8
9
A
B
C
D
E
F
xxx = 02A
BCU: bcu-460-xxx
=> bcu-460-02A
S1
S2
S3
02A: S1 = 0
S2 = 2
S3 = A
➔Se debe borrar la expresión “not assigned”.
➔Al nombre de dispositivo/nombre de red (p.ej.,
bcu-460-xxx) se le puede anteponer un nombre
individual (p.ej., “zona1-bcu-460-xxx”).
➔El nombre de dispositivo debe constar al menos
de la expresión:
p.ej. para BCU465: “bcu-465-xxx”.
➔La dirección ajustada en el BCM mediante los
interruptores de codificación debe coincidir con
la dirección(xxx) introducida en la configuración
de red del sistema de automatización.
➔Tras modificar las posiciones de los interruptores
de codificación, el dispositivo de mando debe
desconectarse y volver a conectarse para acep-
tar la nueva configuración de dirección.
1 Poner en funcionamiento la comunicación por
red.
➔Se inicia el BCU. Si la dirección IP es válida, se
puede iniciar el desarrollo del programa.
Parámetro A080 = 2:
Comunicación por bus de campo sin compro-
bación de dirección
➔El nombre de dispositivo/nombre de red se
puede elegir libremente.
➔EtherNet/IP: si la dirección IP no es válida, el
BCU arranca automáticamente en el modo
DHCP para evitar conflictos de red. La dirección
IP se puede asignar mediante el servidorDHCP
o la herramienta de ingeniería.
1 Poner en funcionamiento la comunicación por
bus de campo.
7 AYUDA EN CASO DE AVERÍAS
PELIGRO
¡Peligro de muerte por electrocución!
¡Antes de comenzar los trabajos en las partes
eléctricas, desconectar las líneas eléctricas y
dejarlas sin tensión!
Resolución de las anomalías solo por personal
especializado autorizado.
➔Solucionar las averías solamente mediante las
medidas que aquí se describen.
➔Si no reacciona el dispositivo de mando BCU,
aunque estén subsanadas todas las averías:
desmontar el dispositivo y enviarlo al fabricante
para su comprobación.
➔En caso de un mensaje de error pendiente (n 0,
n 1, n 2, n 3 on 4), el dispositivo de mando se
puede controlar todavía a través de sus entradas
digitales.
? Averías
! Causa
• Remedio
? El indicador del dispositivo de mando par-
padea y muestra n 0.
! El dispositivo de mando espera conectarse con
el controlador del sistema de automatización.
• Comprobar si el controlador está activado.
• Comprobar el cableado de red.
• Comprobar la configuración de red del contro-
lador.
• Comprobar si el nombre de dispositivo/nom-
bre de red en la configuración de red coincide
con la configuración de dirección en elBCM.
• Comprobar si el nombre de dispositivo/nom-
bre de red en la configuración de red coincide
con el nombre de dispositivo introducido en el
dispositivo de mando.
? El indicador del dispositivo de mando par-
padea y muestra n 1.
! Se ha ajustado una dirección no válida en
elBCM.
! La comprobación de dirección está activada
en el dispositivo de mando con el parámetro
A080=1.
• Comprobar si la dirección del BCM se en-
cuentra en el intervalo de dirección válido (001
hastaFEF).
• Comprobar el valor para el parámetro A080 y,
si es necesario, adaptarlo.

BCM 400..B2/B3 · Edition 04.23
ES-6
PROFINET
• Adaptar el ajuste de los interruptores de
codificación del BCM al nombre de dispositivo
introducido en la configuración de red.
Modbus TCP
• Adaptar el ajuste de los interruptores de codifi-
cación del BCM al nombre de red.
? El indicador del dispositivo de mando par-
padea y muestra n 2.
! El BCM ha recibido una configuración errónea
del controlador PROFINET.
• Comprobar si se ha descargado el fichero
GSD/EDS correcto en la herramienta de inge-
niería del sistema de automatización.
• Comprobar la configuración del dispositivo.
? El indicador del dispositivo de mando par-
padea y muestra n 3.
PROFINET, EtherNet/IP
! El nombre de dispositivo para el dispositivo de
mando (BCU) no es válido o no se ha introduci-
do en la herramienta de ingeniería.
? La comprobación de dirección está ac-
tivada en el dispositivo de mando con el
parámetro A080=1.
➔Nombre del dispositivo en el estado de sumi-
nistro:
p.ej. para BCU460 = not-assigned-bcu-460-
xxx,
( xxx = dirección dentro del intervalo 001 hasta
FEF).
➔El nombre de dispositivo debe constar al menos
de la expresión:
p.ej. para BCU460 = bcu-460-xxx.
Dependiendo del dispositivo de mando utilizado
(BCU), se modifica el valor de la dirección por
defecto, ver al respecto página 4 (6.4 Confi-
guración bus de campo (parámetroA080)).
• En la herramienta de ingeniería, la expresión
“not-assigned-” debe eliminarse o sustituirse
por un nombre individual (p.ej., zona1-).
• Comprobar si el nombre de dispositivo en la
configuración de red coincide con el nombre
de dispositivo introducido en el dispositivo de
mando.
• Comprobar el valor para el parámetro A080 y,
si es necesario, adaptarlo.
Modbus TCP
! En BCSoft, el nombre de red para el dispositivo
de mando (BCU) no es válido o no se ha introdu-
cido.
! La comprobación de dirección está activada
en el dispositivo de mando con el parámetro
A080=1.
➔El nombre de red debe constar al menos de la
expresión:
p.ej. para BCU480 = bcu-480-xxx,
p.ej. para BCU465 = bcu-465-xxx
(xxx = dirección dentro del intervalo 001 has-
taFEF).
• En BCSoft, comprobar si el nombre de red
para el dispositivo de mando (BCU) es válido
o se ha introducido.
• Comprobar el valor para el parámetro A080 y,
si es necesario, adaptarlo.
? El indicador del dispositivo de mando par-
padea y muestra n 4.
! El controlador PROFINET se encuentra en esta-
do de parada.
• Iniciar el controlador PROFINET.
? El indicador del dispositivo de mando par-
padea y muestra E b E.
! Fallo de comunicación interna con módulo bus.
• Las válvulas de regulación conectadas se han
de dotar de circuitos de protección según las
indicaciones del fabricante.
➔De esta forma se evitan picos de tensión eleva-
dos que puedan causar una anomalía en el BCU.
• Emplear solo clavijas de electrodos desparasi-
tadas (1kΩ).
• Si el defecto no se subsana con esta medida,
desmontar el dispositivo y enviarlo al fabrican-
te para su comprobación.
! El módulo bus está defectuoso.
• Sustituir el módulo bus.
En caso de que aparezcan otros mensajes
de error en el dispositivo de mando, ver las
instrucciones de utilización BCU46x,480,
capítulo “Ayuda en caso de averías”.

BCM 400..B2/B3 · Edition 04.23
ES-7
8 DATOS TÉCNICOS
Datos eléctricos
Consumo de potencia: 1,2VA.
Pérdida de potencia: 0,7 W.
Datos mecánicos
Dimensiones (ancho × altura × profundidad):
96 × 63 × 23mm (3,78 × 2,48 × 0,91 pulgadas).
Peso: 0,3kg.
Condiciones ambientales
Evitar la radiación solar directa o la radiación de
superficies incandescentes en el dispositivo.
Evitar las influencias corrosivas como el aire am-
biente salino o el SO2.
El dispositivo solamente se puede guardar/instalar
en habitaciones/edificios cerrados.
El dispositivo no es apto para la limpieza con un
limpiador de alta presión y/o productos de limpieza.
Temperatura ambiente:
-20 hasta +70°C (-4 hasta +158°F).
Evitar la formación de agua de condensación.
Temperatura de transporte = temperatura ambiente.
Temperatura de almacenamiento: -20 hasta +70°C
(-4 hasta +158°F).
Grado de protección: IP 20 según IEC 529.
Lugar de montaje: mín. IP65 (para montaje en
BCU4xx).
Altitud de servicio permitida: < 2000m s.n.m.
8.1 Vida útil
Vida útil máx. en condiciones de servicio:
20años desde la fecha de producción.
9 LOGÍSTICA
Transporte
Proteger el dispositivo contra efectos externos
adversos (golpes, impactos, vibraciones).
Temperatura de transporte: ver página 7 (8
Datos técnicos).
Las condiciones ambientales descritas se aplican al
transporte.
Comunicar inmediatamente sobre cualquier daño
de transporte en el dispositivo o en el embalaje.
Comprobar los componentes del suministro.
Almacenamiento
Temperatura de almacenamiento: ver página 7
(8 Datos técnicos).
Las condiciones ambientales descritas se aplican al
almacenamiento.
Tiempo de almacenamiento: 6 meses antes del
primer uso en el embalaje original. Si el tiempo de
almacenamiento es mayor, la duración total de la
vida útil se reducirá de forma exactamente propor-
cional al periodo de tiempo adicional.
10 CERTIFICACIÓN
10.1 Conforme a ODVA
Versión escaneada de la declaración de conformi-
dad (GB)– ver www.docuthek.com
10.2 Organización de usuarios de PROFIBUS
El dispositivo PROFINET IO BCU4xx con BCM400
ha superado con éxito los tests de certificación,
conforme al número de certificación Z12594.
11 ELIMINACIÓN DE RESIDUOS
Dispositivos con componentes electrónicos:
Directiva RAEE 2012/19/UE – Directiva sobre
residuos de aparatos eléctricos y electrónicos
Tras el fin de la vida útil del producto (número
de maniobras alcanzado), este y su embalaje deben
depositarse en un centro de reciclado correspon-
diente. El dispositivo no puede desecharse con
los residuos domésticos normales. No quemar el
producto.
Si se desea, el fabricante recogerá los dispositivos
usados, en el marco de las disposiciones sobre
residuos, en caso de suministro franco domicilio.

BCM 400..B2/B3 · Edition 04.23
ES-8
© 2023 Elster GmbH
Se reserva el derecho a realizar modificaciones técnicas sin previo aviso.
La gama de productos de Honeywell Thermal Solutions engloba
Honeywell Combustion Safety, Eclipse, Exothermics, Hauck,
Kromschröder y Maxon. Para saber más sobre nuestros productos,
visite ThermalSolutions.honeywell.com o póngase en contacto con
su técnico de ventas de Honeywell.
Elster GmbH
Strotheweg 1, D-49504 Lotte
T +49 541 1214-0
www.kromschroeder.com
Dirección central de intervención del servicio de asistencia para todo
el mundo:
T +49 541 1214-365 o -555
Traducción del alemán
PARA MÁS INFORMACIÓN
-
 1
1
-
 2
2
-
 3
3
-
 4
4
-
 5
5
-
 6
6
-
 7
7
-
 8
8








Kromschroder BCM 400..B2/B3 PROFINET/EtherNet/IP Instrucciones de operación
- Tipo
- Instrucciones de operación
Artículos relacionados
-
 Kromschroder BCM 400..B1 PROFIBUS Instrucciones de operación
Kromschroder BCM 400..B1 PROFIBUS Instrucciones de operación
-
 Kromschroder BCU 46x, BCU 480 Instrucciones de operación
Kromschroder BCU 46x, BCU 480 Instrucciones de operación
-
 Kromschroder BCM 500 Instrucciones de operación
Kromschroder BCM 500 Instrucciones de operación
-
 Kromschroder FCU 500, FCU 505 Instrucciones de operación
Kromschroder FCU 500, FCU 505 Instrucciones de operación
-
 Kromschroder BCU 570 Instrucciones de operación
Kromschroder BCU 570 Instrucciones de operación
-
 Kromschroder BCU 460, 465 Ficha de datos
Kromschroder BCU 460, 465 Ficha de datos
-
 Kromschroder BCU 56x, 580 Instrucciones de operación
Kromschroder BCU 56x, 580 Instrucciones de operación
-
 Kromschroder BCU 4xx Instrucciones de operación
Kromschroder BCU 4xx Instrucciones de operación
-
 Kromschroder BCU 56x, 580 Instrucciones de operación
Kromschroder BCU 56x, 580 Instrucciones de operación
-
 Kromschroder UVC 1 Instrucciones de operación
Kromschroder UVC 1 Instrucciones de operación









