
Quick‐
start
Q U I C K S T A R T e n
1 About this document
The purpose of this Quickstart is to allow you to commission the product quickly
and easily.
Supplementary and other relevant documents:
•
Safety notes, printed copy included
•
RMS1000 operating instructions, available for download
•
RMS1000 “Regulatory Notes” technical information, printed copy included
and available for download
•
RMS1000 Telegram Listing, available for download
Documents available for download and additional information, such as applica‐
tion examples and associated software, can be found on the SICK product page
on the Internet at: www.sick.com/RMS1000
All rights reserved. Subject to change without notice.
2 Safety information
2.1 Intended use
The RMS1000 radar sensor is used for area monitoring. Within a defined detec‐
tion area, the sensor detects static and moving objects, and triggers a switching
signal upon detection of a corresponding object.
Distance zones can be defined and these zones can be assigned various func‐
tions.
The distance and speed of the objects within the detection area are determined
and provided via the data telegram.
All object data can be provided via Ethernet. The ability to provide it via
CAN J1939 is under development.
The device is operated via the SOPASair software from SICK AG.
NOTE
The radar sensor is approved for operation in countries listed in the
RMS1000 “Regulatory Notes” technical information (no. 8026123). This
document is included with the device. The operation of the device in other
countries can interfere with protected frequency ranges.
•
Only use the device in countries in which it has been approved.
•
When reselling the device, inform the buyer about the regional approval
restrictions.
SICK AG assumes no liability for losses or damage arising from the use of the
product, either directly or indirectly. This applies in particular to use of the product
that does not conform to its intended purpose and is not described in this docu‐
mentation.
3 Product description
3.1 Scope of delivery
The delivery of the device includes the following components:
No. of
units
Component Remarks
1 Device in the version ordered Without connecting cables and brackets
1 SOPASair configuration soft‐
ware
integrated into the device, access via web browser
1 Set of protective caps for elec‐
trical connections
Included or possibly attached to the device
1 Printed RMS1000 “Regulatory
Notes” technical information
(no. 8026123)
Informs about the countries for which an approval
exists. Names country-specific aspects which are
to be taken into account during operation of the
device.
1 Printed safety notes, multilin‐
gual
Brief information and general safety notes
3.2 Connections and LEDs
5
4
3
2
1
1
2
Figure 1: Connections and LEDs
1
LED 1 Device (Dev)
2
LED 2 Application (App)
3
Connection Ethernet
4
Connection CAN I/O
5
Connection Power
Connections
For details, see Connection diagram, page 2.
LEDs
The LEDs indicate the following status information.
Device status LED 1 Device (Dev)
1
LED 2 Application (App)
1
Description
Device off Off
Off
Initialization
phase
Permanently red
Permanently red
Parameteriza‐
tion
Permanently red
Permanently red
Field clear
2
Permanently green
Permanently green
Object detec‐
tion
2
Permanently green
Permanently yellow
No field created Permanently green
Off
Error (can be
remedied by the
customer)
Slowly flashing red
Slowly flashing red
Synchronous
Serious error
(contact SICK
Service)
Quickly flashing red
Quickly flashing red
Synchronous
Standby/save
electricity
Permanently yellow
Permanently red
Firmware update Slowly flashing red
Slowly flashing green
Asynchronous
1
Colors:
•
Red
•
Yellow
•
Green
Patterns:
•
Off
•
Permanently lit
•
Flashing slowly (1 Hz)
•
Flashing quickly (8 Hz)
2
The LEDs indicate the status of the detection or evaluation in a field and not the status
of the digital output. If the result of the field evaluation is inverted before being placed on
the digital output, this has no effect on the LEDs.
4 Mounting
4.1 Mounting instructions
•
Observe the technical data.
•
Protect the sensor from direct sunlight.
•
To prevent condensation, avoid exposing the device to rapid changes in
temperature.
•
The mounting site has to be designed for the weight of the device.
•
It should be mounted so that it is exposed to as little shock and vibration
as possible. Optional mounting accessories are available, see Accessories,
page 2.
8026121//2021-02-23/en, de, es, pt, ko RMS1000 (Model RMS-A) | SICK 1
8026121//2021-02-23
www.sick.com
RMS1000 (Model RMS-A)
SICK AG
E
rwin-Sick
-Straße 1
D-79183 Waldkirch

•
The 4 threaded mounting holes on the left and right side of the housing are
used to mount the device on a bracket. Only use screws with M5 thread and
screw them into the thread by max. 9 mm.
•
Use of a weather hood and a mounting bracket is recommended for
outdoor installations. Information about optional accessories, Accessories,
page 2.
•
Do not mount device tilted toward the ground in order to prevent ground
reflections, which could be detected as objects.
•
Observe sensor blind zone. No detection is possible in the range up to
0.4 m.
5 Electrical installation
5.1 Wiring instructions
NOTE
Pre-assembled cables can be found online at:
•
www.sick.com/RMS1000
NOTICE
Faults during operation and device or system defects!
Incorrect wiring may result in operational faults and defects.
•
Follow the wiring notes precisely.
The enclosure rating stated in the technical data is achieved only with screwed
plug connectors or protective caps.
Isolate the wires of unused digital outputs at the control cabinet.
All circuits connected to the device must be designed as ES1 circuits. The voltage
source must meet the requirements of ES1 and PS2 (EN 62368-1).
Connect the connecting cables in a de-energized state. Do not switch on the
supply voltage until installation is complete and all connection work on the device
and controller has been finished.
Use proper connecting cables and male connectors for the application or environ‐
mental conditions, see Accessories, page 2.
The supply voltage must be as specified in the technical data.
The voltage supply via a power supply unit must be capable of buffering a brief
power failure of up to 20 ms.
Prevent product damage caused by short-circuit: The device supply voltage input
is equipped with reverse polarity protection. The internal functional earth is
directly connected to the metal housing of the device. The internal functional
earth also corresponds to the negative pole of the supply voltage.
5.2 Connection diagram
Ethernet
Pin assignment for Ethernet connection
Male/female
connector
Pin Short form Signal description
M12 female
connector, 4-pin
D-coded
1
43
2
1 TX+ Transmit data positive
2 RX+ Receive data positive
3 TX- Transmit data negative
4 RX- Receive data negative
CAN I/O
Pin assignment for CAN I/O connection
Male/female
connector
Pin Short form Signal description
M12 male con‐
nector, 8-pin A-
coded
1
7
2
6
3
4
5
8
1 CAN H CAN high
2 CAN L CAN low
3 IN2 Input 2
4 GND IN1/2 Earth input 1/2
5 OUT2 Output 2
6 OUT3 Output 3
7 GND Earth
8 OUT4 Output 4
Power
Pin assignment Power connection
Male/female
connector
Pin Short form Signal description
M12 male con‐
nector, 5-pin A-
coded
1
4 3
5
2
1 L+ Supply voltage: +9.5 … +36 V DC
2 IN1 Input 1
3 GND Earth
4 OUT1 Output 1
5 GND IN1/2 Earth input 1/2
5.3 Connecting the device electrically
1. Ensure the voltage supply is not connected.
2. Connect the device according to the connection diagram, Connection dia‐
gram, page 2.
3. Switch on the supply voltage.
6 Operation
6.1 General advice
The device works fully automatically in normal operation and requires no operator
intervention.
6.2 Switching off and on
1. To switch off the device, disconnect the device from the voltage supply.
✓ The device switches off. The device configuration remains unchanged, meas‐
ured values are lost.
2. Connect the device to the voltage supply.
✓ The device starts with the last saved configuration data.
7 Technical data (excerpt)
NOTE
The relevant online data sheet for your product, including technical data,
dimensional drawing, and connection diagrams, can be downloaded, saved,
and printed from the Internet:
•
www.sick.com/RMS1000
7.1 Features
Measurement principle FMCW
Radio equipment appro‐
val
For country-specific restrictions see “Regulatory Compliance
Information” (no. 8021596) technical information (downloads),
also included with the product
Frequency band 61 GHz … 61.5 GHz
Transmitting power < 20 dBm (e.i.r.p.)
Aperture angle Horizontal: ± 60°
Vertical: ± 4°
Working range 0.4 m … 100 m
Detection capability At 1 m² RCS
1
: 50 m
At 10 m² RCS
2
: 100 m
Distance accuracy 1 m² RCS
1
to 20 m: 0.04 m
1 m² RCS
2
to 50 m: 0.1 m
Distance resolution 0.4 m
Speed Range -30 m/s … +30 m/s
Speed resolution 0.625 m/s
Speed accuracy 1 m² to 20 m: 0.0625 m/s
1 m² to 50 m: 0.15 m/s
1
Typical radar cross section value for a pedestrian.
2
Typical radar cross section value for a car.
Working ranges based on distance
Distance [m]
1 5 10 20 40 60 80 100
Vertical 0.1 0.7 1.4 2.8 5.6 8.4 11.2 14.0
Horizontal 3.5 17.3 34.6 69.3 138.6 207.8 277.1 346.4
7.2 Mechanics/electronics
Dimensional drawing
Dimensional drawing RMS1000: A
8 Accessories
NOTE
Accessories and where applicable mounting information can be found online
at:
•
www.sick.com/RMS1000
Q U I C K S T A R T d e
1 Zu diesem Dokument
Dieser Quickstart dient dazu, das Produkt schnell und einfach in Betrieb zu neh‐
men.
Ergänzende und mitgeltende Dokumente:
•
Safety Notes, gedruckt beiliegend
•
Betriebsanleitung RMS1000, zum Download
•
Technische Information RMS1000 "Regulatorische Hinweise", gedruckt bei‐
liegend und zum Download
•
Telegram Listing RMS1000, zum Download
Zum Download verfügbare Dokumente und weitere Informationen wie z. B.
Anwendungsbeispiele und zugehörige Software finden Sie auf der SICK-Produkt‐
seite im Internet unter: www.sick.com/RMS1000
8026121//2021-02-23/en, de, es, pt, ko RMS1000 (Model RMS-A) | SICK 2

Alle Rechte vorbehalten. Irrtümer und Änderungen vorbehalten.
2 Zu Ihrer Sicherheit
2.1 Bestimmungsgemäße Verwendung
Der Radarsensor RMS1000 dient zur Bereichsüberwachung. Der Sensor erkennt
in einem definierten Erfassungsfeld statische und bewegte Objekte und löst bei
Erkennung eines entsprechenden Objekts ein Schaltsignal aus.
Distanzzonen können definiert werden und diesen Zonen verschiedene Funktio‐
nen zugewiesen werden.
Die Distanz und die Geschwindigkeit der Objekte innerhalb des Erfassungsbe‐
reichs werden ermittelt und über das Datentelegramm bereitgestellt.
Alle Objektdaten können über Ethernet bereitgestellt werden. Eine Bereitstellung
über CAN J1939 ist in Vorbereitung.
Die Bedienung des Geräts erfolgt über die Software SOPASair der SICK AG.
HINWEIS
Der Radarsensor ist zum Betrieb in den Ländern zugelassen, die in der
Technischen Information RMS1000 "Regulatorische Hinweise" (Nr. 8026123)
gelistet sind. Dieses Dokument liegt dem Gerät bei. Bei Betrieb des Geräts in
anderen Ländern können geschützte Frequenzbereiche gestört werden.
•
Gerät nur in Ländern betreiben für die eine Zulassung vorliegt.
•
Beim Weiterverkauf des Geräts den Käufer über die regionalen Zulas‐
sungsbeschränkungen informieren.
Die SICK AG übernimmt keine Haftung für direkte oder indirekte Verluste oder
Schäden, die aus der Benutzung des Produkts resultieren. Dies gilt insbesondere
für eine andersartige Verwendung des Produkts, die nicht mit dem beabsichtigten
Zweck übereinstimmt und die nicht in dieser Dokumentation beschrieben ist.
3 Produktbeschreibung
3.1 Lieferumfang
Die Lieferung des Geräts umfasst folgende Komponenten:
Stück Komponente Bemerkung
1 Gerät in der bestellten Ausfüh‐
rung
Ohne Anschlussleitungen und Halterungen
1 Konfigurationssoftware
SOPASair
Im Gerät integriert, Zugriff über Webbrowser
1 Satz Schutzkappen für elektri‐
sche Anschlüsse
Beigelegt oder ggf. angebracht
1 Gedruckte Technische Infor‐
mation RMS1000 "Regulatori‐
sche Hinweise" (Nr. 8026123)
Informiert über die Länder, für die eine Zulassung
vorliegt. Nennt länderspezifische Besonderheiten,
die beim Betrieb des Geräts zu berücksichtigen
sind.
1 Gedruckte Safety Notes, mehr‐
sprachig
Kurzinformationen und allgemeine Sicherheitshin‐
weise
3.2 Anschlüsse und LEDs
5
4
3
2
1
1
2
Abbildung 1: Anschlüsse und LEDs
1
LED 1 Gerät (Dev)
2
LED 2 Applikation (App)
3
Anschluss Ethernet
4
Anschluss CAN I/O
5
Anschluss Power
Anschlüsse
Details siehe Anschlussschema, Seite 4.
LEDs
Die LEDs zeigen folgende Statusinformationen.
Gerätestatus LED 1 Gerät (Dev)
1
LED 2 Applikation (App)
1
Beschreibung
Gerät aus Aus
Aus
Initialisierungs‐
phase
Permanent Rot
Permanent Rot
Gerätestatus LED 1 Gerät (Dev)
1
LED 2 Applikation (App)
1
Beschreibung
Parametrierung Permanent Rot
Permanent Rot
Feld frei
2
Permanent Grün
Permanent Grün
Objektdetek‐
tion
2
Permanent Grün
Permanent Gelb
Kein Feld ange‐
legt
Permanent Grün
Aus
Fehler (kunden‐
seitig behebbar)
Langsam blinkend Rot
Langsam blinkend Rot
Synchron
Schwerer Fehler
(SICK Service
kontaktieren)
Schnell blinkend Rot
Schnell blinkend Rot
Synchron
Standby/ Strom
sparen
Permanent Gelb
Permanent Rot
Firmware-
Update
Langsam blinkend Rot
Langsam blinkend Grün
Asynchron
1
Farben:
•
Rot
•
Gelb
•
Grün
Muster:
•
Aus
•
Permanent leuchtend
•
Langsam blinkend (1 Hz)
•
Schnell blinkend (8 Hz)
2
Die LEDs zeigen den Status der Detektion bzw. Auswertung in einem Feld und nicht den
Status des Digitalausgangs. Wenn das Ergebnis der Feldauswertung invertiert auf den
Digitalausgang gegeben wird, hat dies keine Auswirkung auf die LEDs.
4 Montage
4.1 Montagehinweise
•
Technische Daten einhalten.
•
Sensor vor direkter Sonneneinstrahlung schützen.
•
Um Kondenswasser zu vermeiden, das Gerät keinem schnellen Temperatur‐
wechsel aussetzen.
•
Der Montageort muss für das Gewicht des Geräts geeignet sein.
•
Gerät möglichst erschütterungs- und schwingungsfrei befestigen. Montage‐
zubehör ist optional erhältlich, siehe Zubehör, Seite 4.
•
Die 4 Befestigungsgewinde an der linken und rechten Gehäuseseite dienen
zur Montage des Geräts an einer Halterung. Nur Schrauben mit Gewinde M5
verwenden und diese max. 9 mm in das Gewinde eindrehen.
•
Bei Montage im Außenbereich wird die Verwendung einer Wetterschutz‐
haube und eines Montagewinkels empfohlen. Informationen zu optional
erhältlichem Zubehör, Zubehör, Seite 4.
•
Gerät nicht in Richtung Boden gekippt montieren, um Bodenreflektionen zu
vermeiden, welche eventuell als Objekt erkannt werden.
•
Blindzone des Sensors beachten. Im Bereich bis 0,4 m ist keine Detektion
möglich.
5 Elektrische Installation
5.1 Verdrahtungshinweise
HINWEIS
Vorkonfektionierte Leitungen finden Sie im Internet unter:
•
www.sick.com/RMS1000
WICHTIG
Störungen im Betrieb und Defekte am Gerät oder der Anlage!
Eine unsachgemäße Verdrahtung kann zu Störungen im Betrieb und zu
Defekten führen.
•
Verdrahtungshinweise genau befolgen.
Die in den Technischen Daten angegebene Schutzart wird nur mit verschraubten
Steckverbindern oder Schutzkappen erreicht.
Die Adern unbenutzter Digitalausgänge schaltschrankseitig isolieren.
Alle am Gerät angeschlossenen Stromkreise als ES1-Stromkreise ausführen. Die
Spannungsquelle muss die Anforderungen gemäß ES1 und PS2 (EN 62368-1)
erfüllen.
Anschlussleitungen im spannungslosen Zustand anschließen. Versorgungsspan‐
nung erst nach vollständiger Installation bzw. Anschluss aller Anschlussleitungen
an Gerät und Steuerung einschalten.
Für die Anwendung bzw. Umgebungsbedingungen passende Anschlussleitungen
und -Stecker verwenden, siehe Zubehör, Seite 4.
Versorgungsspannung entsprechend Angaben in den technischen Daten ausle‐
gen.
Die Spannungsversorgung durch ein Netzteil muss einen kurzen Stromausfall bis
zu 20 ms puffern können.
8026121//2021-02-23/en, de, es, pt, ko RMS1000 (Model RMS-A) | SICK 3

Produktschäden durch Kurzschluss verhindern: Der Versorgungsspannungsein‐
gang des Geräts verfügt über einen Verpolungsschutz. Die interne Funktionserde
ist direkt mit dem Metallgehäuse des Geräts verbunden. Die interne Funktions‐
erde entspricht gleichzeitig auch dem Minuspol der Versorgungsspannung.
5.2 Anschlussschema
Ethernet
Pinbelegung Anschluss Ethernet
Stecker/Dose Kontakt Kurzzeichen Signalbeschreibung
M12-Dose, 4pol.
D-Kodiert
1
43
2
1 TX+ Transmit data positiv
2 RX+ Receive data positiv
3 TX- Transmit data negativ
4 RX- Receive data negativ
CAN I/O
Pinbelegung Anschluss CAN I/O
Stecker/Dose Kontakt Kurzzeichen Signalbeschreibung
M12-Stecker,
8pol. A-Kodiert
1
7
2
6
3
4
5
8
1 CAN H Can high
2 CAN L CAN low
3 IN2 Eingang 2
4 GND IN1/2 Erde Eingang 1/2
5 OUT2 Ausgang 2
6 OUT3 Ausgang 3
7 GND Erde
8 OUT4 Ausgang 4
Power
Pinbelegung Anschluss Power
Stecker/Dose Kontakt Kurzzeichen Signalbeschreibung
M12-Stecker,
5pol. A-Kodiert
1
4 3
5
2
1 L+ Versorgungsspannung: +9,5 … +36 V DC
2 IN1 Eingang 1
3 GND Erde
4 OUT1 Ausgang 1
5 GND IN1/2 Erde Eingang 1/2
5.3 Gerät elektrisch anschließen
1. Spannungsfreiheit sicherstellen.
2. Gerät gemäß Anschlussschema anschließen, Anschlussschema, Seite 4.
3. Versorgungsspannung einschalten.
6 Bedienung
6.1 Allgemeine Hinweise
Das Gerät arbeitet im Normalbetrieb vollautomatisch ohne Eingriff eines Bedie‐
ners.
6.2 Ausschalten und Einschalten
1. Um das Gerät auszuschalten, das Gerät von der Spannungsversorgung tren‐
nen.
✓ Das Gerät schaltet sich aus. Die Gerätekonfiguration bleibt erhalten, Mess‐
werte gehen verloren.
2. Gerät an die Spannungsversorgung anschließen.
✓ Das Gerät startet mit den zuletzt gespeicherten Konfigurationsdaten.
7 Technische Daten (Auszug)
HINWEIS
Über das Internet können Sie sich für Ihr Produkt das zugehörige Online-
Datenblatt mit technischen Daten, Maßzeichnung und Anschlussschemata
herunterladen, speichern und drucken:
•
www.sick.com/RMS1000
7.1 Merkmale
Messprinzip FMCW
Funkzulassung Für spezifische Ländereinschränkungen siehe Technische Infor‐
mation (Downloads) "Regulatory Compliance Information"
(Nr. 8021596), liegt auch dem Produkt bei
Frequenzband 61 GHz … 61,5 GHz
Sendeleistung < 20 dBm (e.i.r.p.)
Öffnungswinkel Horizontal: ± 60°
Vertikal: ± 4°
Arbeitsbereich 0,4 m … 100 m
Detektionsfähigkeit Bei 1 m² RCS
1
: 50 m
Bei 10 m² RCS
2
: 100 m
Entfernungsgenauigkeit 1 m² RCS
1
bis 20 m: 0,04 m
1 m² RCS
2
bis 50 m: 0,1 m
Entfernungsauflösung 0,4 m
Geschwindigkeitsbereich -30 m/s … +30 m/s
Geschwindigkeitsauflö‐
sung
0,625 m/s
Geschwindigkeitsgenau‐
igkeit
1 m² bis 20 m: 0,0625 m/s
1m² bis 50 m: 0,15 m/s
1
Typischer Radarquerschnittwert für einen Fußgänger.
2
Typischer Radarquerschnittwert für einen PKW.
Arbeitsbereiche nach Distanz
Distanz [m]
1 5 10 20 40 60 80 100
Vertikal 0,1 0,7 1,4 2,8 5,6 8,4 11,2 14,0
Horizontal 3,5 17,3 34,6 69,3 138,6 207,8 277,1 346,4
7.2 Mechanik/Elektrik
Maßzeichnung
Maßzeichnung RMS1000: A
8 Zubehör
HINWEIS
Zubehör und gegebenenfalls Montageinformationen finden Sie im Internet
unter:
•
www.sick.com/RMS1000
Q U I C K S T A R T e s
1 Acerca de este documento
La finalidad de esta guía de inicio rápido es permitir la puesta en servicio rápida y
sencilla del producto.
Documentación adicional y otros documentos aplicables:
•
Notas de seguridad, impresas adjuntas
•
Instrucciones de uso RMS1000, para descargar
•
Información técnica RMS1000 “Indicaciones regulatorias”, impresa adjunta
y para descargar
•
Telegram Listing RMS1000, para descargar
Podrá encontrar los documentos disponibles para descargar y otras informacio‐
nes como, por ejemplo, los ejemplos de aplicación y el software correspondiente
en la página de producto SICK y en Internet en: www.sick.com/RMS1000
Todos los derechos reservados. Sujeto a cambio sin previo aviso.
2 Para su seguridad
2.1 Uso conforme a lo previsto
El sensor de radar RMS1000 sirve para la supervisión de zona. El sensor detecta
en un campo de detección definido objetos estáticos y en movimiento, y activa
una señal de conmutación cuando detecta los objetos correspondientes.
Pueden definirse zonas de distancia y asignarse a las mismas diferentes funcio‐
nes.
Se determina la distancia y la velocidad de los objetos dentro del área de detec‐
ción y se facilitan a través del telegrama de datos.
Todos los datos de objeto pueden disponerse mediante Ethernet. Se encuentra
en preparación una disposición mediante CAN J1939.
El manejo del dispositivo se efectúa a través del software SOPASair de SICK AG.
INDICACIÓN
El sensor de radar está autorizado para funcionar en los países listados en
la Información Técnica RMS1000 “Indicaciones Regulatorias” (Nº 8026123).
Este documento se adjunta al dispositivo. Si se utiliza el dispositivo en otros
países puede interferir con las gamas de frecuencias protegidas.
•
El dispositivo solo debe utilizarse en países para los que existe una
homologación.
•
Si se revende el dispositivo, informe al comprador sobre las limitaciones
regionales de homologación.
SICK AG no se responsabiliza de las pérdidas directas o indirectas ni de los
daños resultantes del uso del producto. Esto es aplicable en particular a un uso
diferente del producto que no se corresponda con el uso previsto y que no se
describa en la presente documentación.
3 Descripción del producto
3.1 Volumen de suministro
El suministro del dispositivo incluye los componentes siguientes:
Unida‐
des
Componente Observación
1 Dispositivo en la ejecución
solicitada
Sin soportes ni cables de conexión
1 Software de configuración
SOPASair
Integrado en el equipo, acceso mediante navega‐
dor web
8026121//2021-02-23/en, de, es, pt, ko RMS1000 (Model RMS-A) | SICK 4

Unida‐
des
Componente Observación
1 Juego de tapas protectoras
para conexiones eléctricas
Adjunto o, si conviene, instalado
1 Información técnica RMS1000
“Indicaciones regulatorias” (N.º
8026123) impresa
Informa sobre los países para los que existe una
homologación. Indica las particularidades espe‐
cíficas de los países que se deben considerar
durante el funcionamiento del dispositivo.
1 Notas de seguridad impresas,
multilingües
Información abreviada e indicaciones generales
de seguridad
3.2 Conexiones y LED
5
4
3
2
1
1
2
Figura 1: Conexiones y LED
1
LED 1 dispositivo (Dev)
2
LED 2 aplicación (App)
3
Conexión Ethernet
4
Conexión CAN I/O
5
Conexión “Power”
Conexiones
Detalles véase Esquema de conexión, página 5.
LED
Los LED muestran la siguiente información de estado.
Estado del dis‐
positivo
LED 1 dispositivo (Dev)
1
LED 2 aplicación (App)
1
Descripción
Dispositivo apa‐
gado
Apagado
Apagado
Fase de iniciali‐
zación
Permanentemente rojo
Permanentemente rojo
Parametrización Permanentemente rojo
Permanentemente rojo
Campo libre
2
Permanentemente verde
Permanentemente verde
Detección de
objetos
2
Permanentemente verde
Permanentemente amarillo
No se ha creado
ningún campo
Permanentemente verde
Apagado
Error (subsana‐
ble por el
cliente)
Parpadeo lento rojo
Parpadeo lento rojo
Síncrono
Error grave
(ponerse en con‐
tacto con el ser‐
vicio de atención
al cliente de
SICK)
Parpadeo rápido rojo
Parpadeo rápido rojo
Síncrono
Standby/ ahorro
de energía
Permanentemente amarillo
Permanentemente rojo
Actualización del
firmware
Parpadeo lento rojo
Parpadeo lento verde
Asíncrono
1
Colores:
•
Rojo
•
Amarillo
•
Verde
Patrón:
•
Apagado
•
Permanentemente iluminado
•
Parpadeo lento (1 Hz)
•
Parpadeo rápido (8 Hz)
2
Los LED muestran el estado de la detección o la evaluación en un campo y no el estado
de la salida digital. Cuando el resultado de la evaluación del campo se da invertido en la
salida digital, no tiene ningún efecto sobre los LED.
4 Montaje
4.1 Indicaciones de montaje
•
Deben cumplirse los datos técnicos.
•
Proteja el sensor contra la radiación directa.
•
Para evitar la formación de agua condensada, no exponga el dispositivo a un
cambio brusco de temperatura.
•
El lugar de montaje debe poder soportar el peso del dispositivo.
•
El dispositivo debe fijarse sin sacudidas ni vibraciones en la medida de lo
posible. Accesorios de montaje obtenibles opcionalmente, véase Accesorios,
página 6.
•
Las 4 roscas de fijación en el lado izquierdo y derecho del lateral de la
carcasa sirven para montar el dispositivo en un soporte. Emplear solamente
tornillos con rosca M5 y enroscarlos solo 9 mm, como máximo, en la rosca.
•
Si se monta en exterior, se recomienda utilizar una cubierta de protección
contra la intemperie y una escuadra de fijación. Informaciones sobre acce‐
sorios opcionales, Accesorios, página 6.
•
El dispositivo no debe montarse inclinado en dirección al suelo a fin de
evitar reflejos en el suelo que pudieran detectarse como un objeto.
•
Tenga en cuenta la zona ciega del sensor. En un rango hasta 0,4 m no es
posible la detección.
5 Instalación eléctrica
5.1 Indicaciones de cableado
INDICACIÓN
Puede encontrar cables preconfeccionados en la página web:
•
www.sick.com/RMS1000
IMPORTANTE
¡Fallos durante el funcionamiento y defectos en el dispositivo o la instalación!
Un cableado inadecuado puede causar fallos durante el funcionamiento y
defectos.
•
Deben seguirse exactamente las indicaciones de cableado.
El grado de protección indicado en los datos técnicos solo se obtiene con conec‐
tores de enchufe atornillados o tapas de protección.
Los conductores de las salidas digitales que no se empleen deben aislarse en el
lado del armario de distribución.
Todos los circuitos conectados al dispositivo deben diseñarse como circuitos
ES1. La fuente de tensión debe cumplir los requisitos conforme a ES1 y PS2
(EN 62368-1).
Conectar los cables de conexión en estado sin tensión. La tensión de alimenta‐
ción solo debe activarse después de la instalación/conexión completa de todos
los cables de conexión al dispositivo y al controlador.
Emplear cables de conexión y conectores macho apropiados para la aplicación y
para las condiciones del entorno, véase Accesorios, página 6.
Diseñar la tensión de alimentación según los datos técnicos.
Cuando se emplea un adaptador de corriente como fuente de alimentación, este
debe ser capaz de amortiguar una caída de tensión corta de hasta 20 ms de
duración.
Deben evitarse los daños en el producto debidos a cortocircuito: la entrada
de tensión de alimentación del dispositivo cuenta con una protección contra
polarización inversa. La tierra de función interna está conectada directamente a
la carcasa metálica del dispositivo. La tierra de función interna corresponde, al
mismo tiempo, al polo negativo de la tensión de alimentación.
5.2 Esquema de conexión
Ethernet
Asignación de terminales de conexión Ethernet
Conectores
macho/hembra
Contacto Abreviación Descripción de señal
Conector hem‐
bra M12, 4pol.
Con codificación
D
1
43
2
1 TX+ Transmit data positiv
2 RX+ Receive data positiv
3 TX- Transmit data negativ
4 RX- Receive data negativ
CAN I/O
Asignación de pins de la conexión CAN I/O
Conectores
macho/hembra
Contacto Abreviación Descripción de señal
Conector macho
M12, 8pol. Con
codificación A
1
7
2
6
3
4
5
8
1 CAN H Can high
2 CAN L CAN low
3 IN2 Entrada 2
4 GND IN1/2 Entrada tierra 1/2
5 OUT2 Salida 2
6 OUT3 Salida 3
7 GND Tierra
8 OUT4 Salida 4
8026121//2021-02-23/en, de, es, pt, ko RMS1000 (Model RMS-A) | SICK 5

Alim.
Asignación de terminales de conexión Alim.
Conectores
macho/hembra
Contacto Abreviación Descripción de señal
Conector macho
M12, 5pol. Con
codificación A
1
4 3
5
2
1 L+ Tensión de alimentación: +9,5 … +36 V CC
2 IN1 Entrada 1
3 GND Tierra
4 OUT1 Salida 1
5 GND IN1/2 Entrada tierra 1/2
5.3 Conexión eléctrica del dispositivo
1. Verifique la ausencia de tensión.
2. Conecte el dispositivo según el esquema de conexión, Esquema de cone‐
xión, página 5.
3. Conecte la tensión de alimentación.
6 Manejo
6.1 Indicaciones generales
En el modo normal, el dispositivo funciona automáticamente, sin intervención del
operador.
6.2 Desconexión y conexión
1. Para desconectar el dispositivo, soltarlo de la fuente de alimentación.
✓ El dispositivo se desconecta. La configuración del dispositivo se mantiene,
los valores medidos se pierden.
2. Conectar el dispositivo a la fuente de alimentación.
✓ El dispositivo se inicia con los últimos datos de configuración guardados.
7 Datos técnicos (extracto)
INDICACIÓN
A través de Internet puede descargar, guardar e imprimir la hoja de datos
online correspondiente a su producto, que incluye datos técnicos, dimensio‐
nes y esquemas de conexión:
•
www.sick.com/RMS1000
7.1 Características
Principio de medición FMCW
Homologación de radio Para las limitaciones por países, véase la información
técnica (descargas) "Regulatory Compliance Information"
(Nº 8021596), suministrada también con el producto
Banda de frecuencias 61 GHz … 61,5 GHz
Potencia de transmisión < 20 dBm (PIRE)
Ángulo de apertura Horizontal: ± 60°
Vertical: ± 4°
Rango de trabajo 0,4 m … 100 m
Capacidad de detección Para 1 m² de RCS
1
: 50 m
Para 10 m² de RCS
2
: 100 m
Precisión de la distancia 1 m² de RCS
1
hasta 20 m: 0,04 m
1 m² de RCS
2
hasta 50 m: 0,1 m
Resolución de la distan‐
cia
0,4 m
Gama de velocidades -30 m/s … +30 m/s
Resolución de la veloci‐
dad
0,625 m/s
Precisión de la velocidad 1 m² hasta 20 m: 0,0625 m/s
1 m² hasta 50 m: 0,15 m/s
1
Valor típico de sección transversal de radar para un peatón.
2
Valor típico de sección transversal de radar para un automóvil.
Rangos de trabajo según distancia
Distancia [m]
1 5 10 20 40 60 80 100
Vertical 0,1 0,7 1,4 2,8 5,6 8,4 11,2 14,0
Horizontal 3,5 17,3 34,6 69,3 138,6 207,8 277,1 346,4
7.2 Sistema mecánico y eléctrico
Dibujo acotado
Dibujo acotado RMS1000: A
8 Accesorios
INDICACIÓN
Puede encontrar accesorios y, si conviene, informaciones de montaje en la
página web:
•
www.sick.com/RMS1000
Q U I C K S T A R T p t
1 Sobre este documento
Este guia de início rápido visa facilitar e agilizar a colocação em operação do
produto.
Outros documentos complementares e aplicáveis:
•
Safety Notes (Notas de Segurança), impresso em anexo
•
Manual de instruções RMS1000 para download
•
Informações Técnicas RMS1000 “Informações regulamentares”, impresso
em anexo e para download
•
Telegram Listing (Listagem de Telegramas) RMS1000, para download
Estes documentos disponíveis para download e outras informações, como, p.ex.,
exemplos de aplicação e software associado podem ser encontrados na página
de produtos da SICK na internet, em: www.sick.com/RMS1000
Todos os direitos reservados. Sujeito a alterações sem aviso prévio.
2 Para a sua segurança
2.1 Utilização correta
O sensor de radares RMS1000 é usado para monitoramento de áreas. O sensor
detecta, num campo de detecção definido, objetos estáticos e móveis e aciona
um sinal de comutação no caso de detecção de um respectivo objeto.
As zonas de distância podem ser definidas e podem ser atribuídas diferentes
funções a estas zonas.
A distância e a velocidade dos objetos dentro da área de detecção são calculadas
e disponibilizados através do telegrama de dados.
Todos os dados do objeto podem ser disponibilizados pela Ethernet. A disponibili‐
zação via CAN J1939 está em preparação.
A operação do dispositivo é realizada pelo software SOPASair da SICK AG.
NOTA
O sensor radar está aprovado para operação nos países listados nas
Informações Técnicas RMS1000 “Informações sobre regulamentação” (n.º
8026123). Este documento está anexado ao dispositivo. Operar o dispositivo
em outros países pode interferir nas gamas de frequência protegidas.
•
Operar o dispositivo somente em países onde existe uma licença para
isso.
•
Ao revender o dispositivo a terceiros, informar o comprador sobre as
restrições regionais da licença.
A SICK AG se isenta de qualquer responsabilidade por perdas ou danos ou
perdas resultantes da utilização do produto. Isto é especialmente válido para
uma utilização do produto que seja diferente da finalidade prevista e que não
esteja descrita nesta documentação.
3 Descrição do produto
3.1 Material fornecido
O fornecimento do dispositivo abrange os seguintes componentes:
Uni‐
dade
Componente Observação
1 Dispositivo no modelo enco‐
mendado
Sem cabos de conexão e suportes
1 Software de configuração
SOPASair
Integrado no dispositivo, acesso com browser da
web
1 Conjunto de tampas de prote‐
ção para ligações elétricas
Incluído ou anexado, se necessário
1 Informações Técnicas
RMS1000 “Informações
de regulamentação” (n.º
8026123) impressas
O documento informa os países em que a licença
está disponível. Menciona as particularidades
específicas de cada país, a serem consideradas
na operação do dispositivo.
1 Safety Notes (Notas de Segu‐
rança) impressas, vários idio‐
mas
Informações resumidas e orientações gerais de
segurança
8026121//2021-02-23/en, de, es, pt, ko RMS1000 (Model RMS-A) | SICK 6

3.2 Conexões e LEDs
5
4
3
2
1
1
2
Figura 1: Conexões e LEDs
1
LED 1 dis (Dev)
2
LED 2 aplicativo (App)
3
Conexão Ethernet
4
Conexão CAN E/S
5
Conexão Power
Conexões
Detalhes ver Esquema de conexões, página 7.
LEDs
Os LEDs indicam as seguintes informações de status:
status do dispo‐
sitivo
LED 1 dispositivo (Dev)
1
LED 2 aplicativo (App)
1
Descrição
Dispositivo des‐
ligado
Desl.
Desl.
Fase de iniciali‐
zação
Permanentemente vermelho
Permanentemente vermelho
Parametrização Permanentemente vermelho
Permanentemente vermelho
Campo livre
2
Permanentemente verde
Permanentemente verde
Detecção do
objeto
2
Permanentemente verde
Permanentemente amarelo
Nenhum campo
criado
Permanentemente verde
Desl.
Falha (pode ser
solucionada
pelo cliente)
Piscando lentamente em vermelho
Piscando lentamente em vermelho
Sincronizado
Falha grave
(entrar em con‐
tato com o Ser‐
viço SICK)
Piscando rapidamente em vermelho
Piscando rapidamente em vermelho
Sincronizado
Standby / eco‐
nomizar energia
Permanentemente amarelo
Permanentemente vermelho
Atualização de
firmware
Piscando lentamente em vermelho
Piscando lentamente em verde
Assíncrono
1
Cores:
•
Vermelho
•
Amarelo
•
Verde
Padrão:
•
Desl.
•
Aceso permanentemente
•
Piscando lentamente (1 Hz)
•
Piscando rapidamente (8 Hz)
2
Os LEDs mostram o status da detecção ou a avaliação num campo, não o status da
saída digital. Se o resultado da avaliação do campo for exibido de modo invertido na
saída digital, isso não exerce influência sobre os LEDs.
4 Montagem
4.1 Orientações para montagem
•
Cumprir dados técnicos.
•
Proteger o sensor da radiação solar direta.
•
Para evitar a formação de água condensada, não expor o dispositivo a
mudanças rápidas de temperatura.
•
O local de montagem deve ser adequado ao peso do dispositivo.
•
Fixar o dispositivo tão livre de vibrações e oscilações quanto possível.
Estão disponíveis acessórios de montagem, opcionalmente, ver Acessórios,
página 8.
•
As 4 roscas de fixação no lado esquerdo e direito da carcaça servem
para montagem do dispositivo num suporte. Utilizar somente parafusos com
rosca M5 e introduzir os mesmos na rosca até, no máximo, 9 mm.
•
Ao montar numa área exterior, recomenda-se a utilização de uma capa
protetora contra intempéries e um ângulo de montagem. Informações sobre
os acessórios disponíveis opcionalmente, Acessórios, página 8.
•
Não montar o dispositivo virado na direção do piso, a fim de evitar reflexões
vindas do piso, pois estas podem ser reconhecidas como sendo objetos.
•
Observar a zona morta do sensor. Na faixa até 0,4 m, a detecção não é
possível.
5 Instalação elétrica
5.1 Indicações para cabeamento
NOTA
Encontrará cabos pré-montados na Internet, em:
•
www.sick.com/RMS1000
IMPORTANTE
Problemas de funcionamento e defeitos no dispositivo ou na instalação!
Um cabeamento incorreto pode resultar em problemas de funcionamento e
defeitos.
•
Seguir as instruções para cablagem de forma precisa.
O grau de proteção especificado nos dados técnicos só é alcançado com conecto‐
res encaixáveis roscados ou tampões cegos.
Os fios das saídas de digitais não utilizadas devem estar isolados no lado do
armário de distribuição.
Executar todos os circuitos de corrente conectados ao dispositivo como circuitos
de corrente ES1. A fonte de tensão deve cumprir as exigências conforme ES1 e
PS2 (norma EN 62368-1).
Ligar os cabos de conexão no status desenergizado. Ligar a tensão de alimen‐
tação somente após a instalação ou conexão completa de todos os cabos de
conexão ao dispositivo e ao controle.
Utilizar cabos de conexão e conectores apropriados à aplicação e a ao ambiente,
ver Acessórios, página 8.
Dimensionar a tensão de alimentação de acordo com as especificações nos
dados técnicos.
A alimentação de tensão por meio de uma fonte de alimentação deve suportar
uma falha de energia breve de até 20 ms.
Evitar danos ao produto causados por curto-circuito: a entrada de tensão de
alimentação do dispositivo possui uma proteção contra inversão de polaridade. A
terra funcional interna está ligada diretamente com a carcaça metálica do dispo‐
sitivo. A terra funcional interna corresponde ao mesmo tempo ao polo negativo da
tensão de alimentação.
5.2 Esquema de conexões
Ethernet
Ocupação de pinos conexão Ethernet
Conector
macho/conec‐
tor fêmea
Contato Símbolo Descrição do sinal
Conector macho
M12, 4pinos
Codificação D
1
43
2
1 TX+ Transmitir dados positivos
2 RX+ Receber dados positivos
3 TX- Transmitir dados negativos
4 RX- Receber dados negativos
CAN E/S
Ocupação de pinos conexão CAN E/S
Conector
macho/conec‐
tor fêmea
Contato Símbolo Descrição do sinal
Conector macho
M12, 8pinos
Codificado A
1
7
2
6
3
4
5
8
1 CAN H CAN high
2 CAN L CAN low
3 IN2 Entrada 2
4 GND IN1/2 Entrada terra 1/2
5 OUT2 Saída 2
6 OUT3 Saída 3
7 GND Terra
8 OUT4 Saída 4
Power
Ocupação de pinos conexão Power
Conector
macho/conec‐
tor fêmea
Contato Símbolo Descrição do sinal
Conector macho
M12, 5pinos
Codificado A
1 L+ Tensão de alimentação: +9,5 … +36 V CC
2 IN1 Entrada 1
3 GND Terra
8026121//2021-02-23/en, de, es, pt, ko RMS1000 (Model RMS-A) | SICK 7

Conector
macho/conec‐
tor fêmea
Contato Símbolo Descrição do sinal
1
4 3
5
2
4 OUT1 Saída 1
5 GND IN1/2 Entrada terra 1/2
5.3 Ligar o dispositivo à eletricidade
1. Garantir que não há tensão.
2. Conectar o dispositivo de acordo com o esquema de conexões, Esquema de
conexões, página 7.
3. Ligar a tensão de alimentação.
6 Operação
6.1 Observações gerais
O dispositivo opera de forma totalmente automática na operação normal, sem a
intervenção de um operador.
6.2 Desligar e ligar
1. Para desligar o dispositivo, desconectar o dispositivo da alimentação de
tensão.
✓ O dispositivo desliga-se. A configuração do dispositivo é mantida, os valores
medidos perdem-se.
2. Conectar o dispositivo da alimentação de tensão.
✓ O dispositivo começa com os últimos dados de configuração salvos.
7 Dados técnicos (resumo)
NOTA
Você pode baixar, salvar e imprimir a data Sheet online associada com dados
técnicos, desenho dimensional e esquema de conexões para o seu produto
através da Internet:
•
www.sick.com/RMS1000
7.1 Características
Princípio de medição FMCW (Frequency-Modulated Continuous Wave - Onda Contínua
Modulada por Frequência)
Autorização de uso de
radiofrequência
Sobre restrições específicas de cada país, ver Informação
Técnica (Downloads) "Regulatory Compliance Information" (nº
8021596), também está anexada ao produto
Faixa de frequência 61 GHz a 61,5 GHz
Potência de transmissão < 20 dBm (e.i.r.p.)
Ângulo de abertura Horizontal: ± 60°
Vertical: ± 4°
Área de trabalho 0,4 m a 100 m
Poder de detecção Em 1 m² RCS
1
: 50 m
Em 10 m² RCS
2
: 100 m
Precisão de distancia‐
mento
1 m² RCS
1
a 20 m: 0,04 m
1 m² RCS
2
a 50 m: 0,1 m
Resolução de distancia‐
mento
0,4 m
Faixa de velocidade -30 m/s a +30 m/s
Resolução da velocidade 0,625 m/s
Precisão da velocidade 1 m² a 20 m: 0,0625 m/s
1 m² a 50 m: 0,15 m/s
1
Valor típico da seção transversal do radar para um pedestre.
2
Valor típico da seção transversal do radar para um veículo de passeio.
Faixas de trabalho de acordo com a distância
Distância [m]
1 5 10 20 40 60 80 100
Vertical 0,1 0,7 1,4 2,8 5,6 8,4 11,2 14,0
Horizontal 3,5 17,3 34,6 69,3 138,6 207,8 277,1 346,4
7.2 Mecânica/sistema elétrico
Desenho dimensional
Desenho dimensional RMS1000: A
8 Acessórios
NOTA
Pode se encontrar acessórios e, eventualmente, informações de montagem
na Internet, em:
•
www.sick.com/RMS1000
Q U I C K S T A R T k o
1 본 문서에 관하여
이 퀵 스타트의 목적은 제품을 쉽고 빠르게 작동하게 함에 있습니다.
보완 및 추가 문서:
•
Safety Notes, 인쇄본 동봉
•
RMS1000 작동 지침서, 다운로드
•
RMS1000 기술 정보 “규제 관련 공지”, 인쇄본 동봉 및 다운로드
•
RMS1000 Telegram Listing, 다운로드
다운로드로 제공되는 문서 그리고 예를 들어 애플리케이션 예와 해당 소프트웨
어 같은 기타 정보는 다음 인터넷 주소의 SICK 제품 페이지에 있습니다.
www.sick.com/RMS1000
All rights reserved 예고 없이 변경 가능
2 안전 수칙
2.1 규정에 맞는 사용
레이더 센서 RMS1000은 구역 감시에 사용됩니다. 이 센서는 정의된 감지 필드
에서 고정 또는 유동 물체를 식별하고, 해당 물체를 식별하면 신호를 내보냅니
다.
거리 구역을 지정하고 이 구역에 다양한 기능을 할당할 수 있습니다.
감지 범위 내 물체의 거리와 속도가 측정되고 데이터 텔레그램으로 제공됩니
다.
모든 물체 데이터를 Ethernet을 통해 제공할 수 있습니다. CAN J1939를 통한 제
공은 준비 중입니다.
SICK AG의 프트웨어 SOPASair를 이용하여 장치를 조작합니다.
주
이 레이더 센서는 RMS1000 기술 정보 “규제 관련 공지”(No. 8026123)에
열거된 국가에서만 사용이 허가됩니다. 본 문서는 장치에 동봉되어 있습니
다. 다른 국가에서 장치를 작동할 경우 보호 주파수가 방해를 받을 수 있습
니다.
•
승인된 국가에서만 장치를 사용하십시오.
•
장치를 재판매하는 경우에는 구매자에게 지역에 따른 허가 제한을 알
리십시오.
SICK AG는 제품의 사용으로 인한 직간접적 손실 및 손해에 대해 책임을 지지 않
습니다. 특히 제품의 본래 목적에서 벗어나며 본 문서에 기술되지 않은 사용 방
법이 이에 해당됩니다.
3 제품 설명
3.1 공급 범위
장치는 다음과 같은 내용물로 구성되어 있습니다:
개수 구성품 비고
1 주문한 사양의 장치 연결 케이블 및 브래킷 미포함
1 구성 소프트웨어 SOPASair 장치에 내장, 웹 브라우저를 통해 접근
1 전기 연결부 보호용 캡 동봉 혹은 필요시 부착된 상태로
1 RMS1000 기술 정보 “규제
관련 공지” 인쇄본(No.
8026123)
사용이 허가된 국가에 대해 알려줌. 장치
작동 시 고려해야 하는 국가별 특이사항을
언급함.
1 Safety Notes 인쇄본, 다국어 간략 정보 및 일반 안전 지침
3.2 연결부 및 LED
5
4
3
2
1
1
2
그림
1:
연결부
및
LED
1
LED 1 장치(Dev)
2
LED 2 애플리케이션(App)
3
Ethernet 연결부
4
CAN I/O 연결부
5
Power 연결부
연결부
자세한 사항 참조 결선도, 페이지 9.
8026121//2021-02-23/en, de, es, pt, ko RMS1000 (Model RMS-A) | SICK 8

LED
LED는 다음과 같은 상태 정보를 나타냅니다.
장치 상태 LED 1 장치(Dev)
1
LED 2 애플리케이션(App)
1
설명
장치 꺼짐 OFF
OFF
초기화 단계 계속 빨간색
계속 빨간색
매개 변수 설
정
계속 빨간색
계속 빨간색
필드가 비어
있음
2
계속 초록색
계속 초록색
물체 감지
2
계속 초록색
계속 노란색
필드가 생성
되지 않음
계속 초록색
OFF
오류(고객이
해결 가능)
천천히 깜빡이는 빨간색
천천히 깜빡이는 빨간색
동기
심각한 오류
(SICK 서비스
에 연락)
빠르게 깜빡이는 빨간색
빠르게 깜빡이는 빨간색
동기
대기/절전 계속 노란색
계속 빨간색
펌웨어 업데
이트
천천히 깜빡이는 빨간색
천천히 깜빡이는 초록색
비동기
1
색상:
•
빨간색
•
노란색
•
초록색
패턴:
•
OFF
•
계속 켜짐
•
천천히 깜빡임(1Hz)
•
빠르게 깜빡임(8Hz)
2
LED는 필드 내 감지 또는 평가 상태를 나타내며 디지털 출력의 상태는 표시하지 않습
니다. 필드 평가 결과가 반전된 상태로 디지털 출력에 주어지는 경우 LED는 영향을 받
지 않습니다.
4 장착
4.1 마운팅 지침
•
장치 제원을 숙지하십시오.
•
센서를 직사광선으로부터 보호하십시오.
•
결로 현상을 피하기 위해 급격한 온도 변화에 장치를 노출시키지 마십시
오.
•
마운팅 장소는 장치의 무게에 적합해야 합니다.
•
흔들리거나 움직이지 않도록 장치를 최대한 고정하십시오. 마운팅 관련 부
속품은 옵션으로 제공됩니다. 참조 부속품, 페이지 10
•
하우징 좌우 측면의 고정 나사산 4개는 장치를 브래킷에 마운팅하는 데 사
용됩니다. M5 나사만 사용하고 이 나사를 나사산에 최대 9mm 돌려 넣으
십시오.
•
실외 마운팅의 경우 내후성 후드와 고정 브래킷 사용을 권장합니다. 옵션
액세서리에 대한 정보. 부속품, 페이지 10
•
대상으로 감지될 수도 있는 바닥 반사를 막기 위해 장치를 바닥 방향으로
기울지 않게 마운팅하십시오.
•
센서의 사각지대에 유의하십시오. 0.4m까지 범위에서는 감지가 불가능합
니다.
5 전기 설치
5.1 배선 지침
주
사전 조립된 케이블에 대해 다음 인터넷 페이지를 참조하십시오.
•
www.sick.com/RMS1000
중요
장치 또는 설비의 동작 이상 및 결함!
부적절하게 배선하면 동작 이상 및 결함이 발생할 수 있습니다.
•
배선 지침을 정확히 따르십시오.
기술 데이터에 제시된 보호 등급은 플러그 커넥터를 체결하거나 보호 캡을 장
착했을 때만 보장됩니다.
제어함 쪽에서 사용하지 않는 디지털 출력부의 심선을 절연하십시오.
장치에 연결된 모든 전기 회로를 ES1 회로로 구성하십시오. 전원은 ES1 및
PS2(EN 62368-1)에 따른 요건을 충족해야 합니다.
연결 케이블들을 전기가 흐르지 않는 상태에서 연결합니다. 장치와 제어기의
모든 연결 케이블을 전부 설치 또는 연결한 후에 공급 전압을 공급하십시오.
용도 또는 환경 조건에 맞는 연결 케이블과 수 커넥터를 사용하십시오. 참조 부
속품, 페이지 10.
공급 전압을 제원에 안내된 사양에 맞게 연결하십시오.
전원 어댑터로 전압을 공급하는 경우 최대 20ms의 짧은 정전 시간에 전기를 공
급할 수 있어야 합니다.
단락에 의한 제품 손상을 피하기 위해 장치의 공급 전압 입력부에 역 극성 보호
기능이 있습니다. 내부 기능 접지는 장치의 금속 하우징과 직접 연결되어 있습
니다. 내부 기능 접지는 이와 동시에 공급 전압의 음극에도 해당합니다.
5.2 결선도
Ethernet
Ethernet
연결부
핀
배치
수 커넥터/암
커넥터
접촉부 약어 신호 설명
M12 암 커넥
터, 4핀 D 코드
1
43
2
1 TX+ 데이터 정방향 송신
2 RX+ 데이터 정방향 수신
3 TX- 데이터 역방향 송신
4 RX- 데이터 역방향 수신
CAN I/O
CAN I/O
연결부
핀
할당
수 커넥터/암
커넥터
접촉부 약어 신호 설명
M12 수 커넥
터, 8핀 A 코드
1
7
2
6
3
4
5
8
1 CAN H Can high
2 CAN L CAN low
3 IN2 입력부 2
4 GND IN1/2 접지 입력부 1/2
5 OUT2 출력부 2
6 OUT3 출력부 3
7 GND 접지
8 OUT4 출력부 4
전원
전원
연결부
핀
배치
수 커넥터/암
커넥터
접촉부 약어 신호 설명
M12 수 커넥
터, 5핀 A 코드
1
4 3
5
2
1 L+ 공급 전압: +9.5 … +36V DC
2 IN1 입력부 1
3 GND 접지
4 OUT1 출력부 1
5 GND IN1/2 접지 입력부 1/2
5.3 장치 전기 연결
1. 전원이 차단되었는지 확인하십시오.
2. 결선도에 따라 장치를 연결하십시오. 결선도, 페이지 9.
3. 공급 전압을 공급합니다.
6 조작
6.1 일반 지침
일반적으로 장치는 작동자의 개입 없이 완전히 자동적으로 작동합니다.
6.2 끄기 및 켜기
1. 장치를 끄려면 전원 공급 장치에서 장치를 분리하십시오.
✓ 장치가 꺼집니다. 장치 설정은 유지되며, 측정값은 손실됩니다.
2. 장치를 전압 공급 장치에 연결하십시오.
✓ 최근 저장한 설정 데이터와 함께 장치가 켜집니다.
7 기술 데이터(발췌)
주
인터넷에서 제품의 제원, 치수 도면 및 결선도가 포함된 온라인 데이터시트
를 다운로드, 저장 및 인쇄할 수 있습니다.
•
www.sick.com/RMS1000
7.1 특징
측정 원리 FMCW
무선 통신 인가 국가별 제한은 기술 정보(다운로드) “Regulatory
Compliance Information”(No. 8021596) 참조, 제품에 동봉
주파수 대역 61GHz … 61.5GHz
송출력 < 20dBm(e.i.r.p.)
구경각 수평: ± 60°
수직: ± 4°
작동 범위 0.4m … 100m
감지 능력 1m² RCS에서
1
: 50m
10m² RCS에서
2
: 100m
거리 정확도 1m² RCS
1
, 20m까지: 0.04m
1m² RCS
2
, 50m까지: 0.1m
거리 해상도 0.4m
8026121//2021-02-23/en, de, es, pt, ko RMS1000 (Model RMS-A) | SICK 9

속도 범위 -30m/s … +30m/s
속도 해상도 0.625m/s
속도 정확도 1m², 20m까지: 0.0625m/s
1m², 50m까지: 0.15m/s
1
보행자의 경우 적용되는 전형적인 레이더 단면적 값.
2
승용차의 경우 적용되는 전형적인 레이더 단면적 값.
거리에 따른 작동 범위
거리[m]
1 5 10 20 40 60 80 100
수직 0.1 0.7 1.4 2.8 5.6 8.4 11.2 14.0
수평 3.5 17.3 34.6 69.3 138.6 207.8 277.1 346.4
7.2 기계/전기
치수 도면
RMS1000 치수 도면: A
8 부속품
주
부속품과 필요시 마운팅 정보는 다음 인터넷 페이지에서 확인할 수 있습니
다.
•
www.sick.com/RMS1000
8026121//2021-02-23/en, de, es, pt, ko RMS1000 (Model RMS-A) | SICK 10

A
8026121//2021-02-23/en, de, es, pt, ko RMS1000 (Model RMS-A) | SICK 11
Transcripción de documentos
8026121//2021-02-23 3.2 Connections and LEDs 1 2 SICK AG Erwin-Sick-Straße 1 D-79183 Waldkirch www.sick.com RMS1000 (Model RMS-A) QUICKSTART 1 en Safety information 2.1 Intended use The RMS1000 radar sensor is used for area monitoring. Within a defined detec‐ tion area, the sensor detects static and moving objects, and triggers a switching signal upon detection of a corresponding object. Distance zones can be defined and these zones can be assigned various func‐ tions. The distance and speed of the objects within the detection area are determined and provided via the data telegram. All object data can be provided via Ethernet. The ability to provide it via CAN J1939 is under development. The device is operated via the SOPASair software from SICK AG. 3 LEDs The LEDs indicate the following status information. Device status Product description No. of units Component 1 Device in the version ordered Without connecting cables and brackets 1 SOPASair configuration soft‐ ware integrated into the device, access via web browser 1 Set of protective caps for elec‐ trical connections Included or possibly attached to the device 1 Printed RMS1000 “Regulatory Notes” technical information (no. 8026123) Informs about the countries for which an approval exists. Names country-specific aspects which are to be taken into account during operation of the device. Printed safety notes, multilin‐ gual Brief information and general safety notes 1 LED 1 Device (Dev) 1 LED 2 Application (App) 1 Description Device off Off Off Initialization phase Permanently red Permanently red Parameteriza‐ tion Permanently red Permanently red Field clear 2 Permanently green Permanently green Object detec‐ tion 2 Permanently green Permanently yellow No field created Permanently green Off Error (can be remedied by the customer) Slowly flashing red Slowly flashing red Synchronous Serious error (contact SICK Service) Quickly flashing red Quickly flashing red Synchronous Standby/save electricity Permanently yellow Permanently red Firmware update Slowly flashing red Slowly flashing green Asynchronous 1 Remarks Colors: • Red • Yellow • Green Patterns: • Off • Permanently lit • Flashing slowly (1 Hz) • 2 Flashing quickly (8 Hz) The LEDs indicate the status of the detection or evaluation in a field and not the status of the digital output. If the result of the field evaluation is inverted before being placed on the digital output, this has no effect on the LEDs. 4 Mounting 4.1 • • • Mounting instructions Observe the technical data. Protect the sensor from direct sunlight. To prevent condensation, avoid exposing the device to rapid changes in temperature. The mounting site has to be designed for the weight of the device. It should be mounted so that it is exposed to as little shock and vibration as possible. Optional mounting accessories are available, see Accessories, page 2. • • 8026121//2021-02-23/en, de, es, pt, ko 5 Connections For details, see Connection diagram, page 2. SICK AG assumes no liability for losses or damage arising from the use of the product, either directly or indirectly. This applies in particular to use of the product that does not conform to its intended purpose and is not described in this docu‐ mentation. 3.1 Scope of delivery The delivery of the device includes the following components: 4 Figure 1: Connections and LEDs LED 1 Device (Dev) 1 LED 2 Application (App) 2 Connection Ethernet 3 Connection CAN I/O 4 Connection Power 5 NOTE The radar sensor is approved for operation in countries listed in the RMS1000 “Regulatory Notes” technical information (no. 8026123). This document is included with the device. The operation of the device in other countries can interfere with protected frequency ranges. • Only use the device in countries in which it has been approved. • When reselling the device, inform the buyer about the regional approval restrictions. 3 2 About this document The purpose of this Quickstart is to allow you to commission the product quickly and easily. Supplementary and other relevant documents: • Safety notes, printed copy included • RMS1000 operating instructions, available for download • RMS1000 “Regulatory Notes” technical information, printed copy included and available for download • RMS1000 Telegram Listing, available for download Documents available for download and additional information, such as applica‐ tion examples and associated software, can be found on the SICK product page on the Internet at: www.sick.com/RMS1000 All rights reserved. Subject to change without notice. 2 1 RMS1000 (Model RMS-A) | SICK 1 The 4 threaded mounting holes on the left and right side of the housing are used to mount the device on a bracket. Only use screws with M5 thread and screw them into the thread by max. 9 mm. Use of a weather hood and a mounting bracket is recommended for outdoor installations. Information about optional accessories, Accessories, page 2. Do not mount device tilted toward the ground in order to prevent ground reflections, which could be detected as objects. Observe sensor blind zone. No detection is possible in the range up to 0.4 m. • • • • 5 Electrical installation 5.1 Wiring instructions NOTE Pre-assembled cables can be found online at: • www.sick.com/RMS1000 NOTICE Faults during operation and device or system defects! Incorrect wiring may result in operational faults and defects. • Follow the wiring notes precisely. The enclosure rating stated in the technical data is achieved only with screwed plug connectors or protective caps. Isolate the wires of unused digital outputs at the control cabinet. All circuits connected to the device must be designed as ES1 circuits. The voltage source must meet the requirements of ES1 and PS2 (EN 62368-1). Connect the connecting cables in a de-energized state. Do not switch on the supply voltage until installation is complete and all connection work on the device and controller has been finished. Use proper connecting cables and male connectors for the application or environ‐ mental conditions, see Accessories, page 2. The supply voltage must be as specified in the technical data. The voltage supply via a power supply unit must be capable of buffering a brief power failure of up to 20 ms. Prevent product damage caused by short-circuit: The device supply voltage input is equipped with reverse polarity protection. The internal functional earth is directly connected to the metal housing of the device. The internal functional earth also corresponds to the negative pole of the supply voltage. 5.3 Connecting the device electrically 1. Ensure the voltage supply is not connected. 2. Connect the device according to the connection diagram, Connection dia‐ gram, page 2. 3. Switch on the supply voltage. 6 6.2 Switching off and on 1. To switch off the device, disconnect the device from the voltage supply. ✓ The device switches off. The device configuration remains unchanged, meas‐ ured values are lost. 2. Connect the device to the voltage supply. ✓ The device starts with the last saved configuration data. 7 7.1 Features Ethernet Pin assignment for Ethernet connection Pin Short form Signal description M12 female 1 connector, 4-pin 2 D-coded 3 4 3 TX+ Transmit data positive RX+ Receive data positive TX- Transmit data negative 1 4 RX- Receive data negative 2 Measurement principle FMCW Radio equipment appro‐ val For country-specific restrictions see “Regulatory Compliance Information” (no. 8021596) technical information (downloads), also included with the product Frequency band 61 GHz … 61.5 GHz Transmitting power < 20 dBm (e.i.r.p.) Aperture angle Horizontal: ± 60° Vertical: ± 4° Working range 0.4 m … 100 m Detection capability At 1 m² RCS 1: 50 m At 10 m² RCS 2: 100 m Distance accuracy 1 m² RCS 1 to 20 m: 0.04 m 1 m² RCS 2 to 50 m: 0.1 m Distance resolution 0.4 m Speed Range -30 m/s … +30 m/s Speed resolution 0.625 m/s Speed accuracy 1 m² to 20 m: 0.0625 m/s 1 m² to 50 m: 0.15 m/s Typical radar cross section value for a pedestrian. Typical radar cross section value for a car. Working ranges based on distance 1 2 Technical data (excerpt) NOTE The relevant online data sheet for your product, including technical data, dimensional drawing, and connection diagrams, can be downloaded, saved, and printed from the Internet: • www.sick.com/RMS1000 5.2 Connection diagram Male/female connector Operation 6.1 General advice The device works fully automatically in normal operation and requires no operator intervention. Distance [m] CAN I/O Pin assignment for CAN I/O connection Male/female connector Pin Short form Signal description M12 male con‐ nector, 8-pin Acoded 1 CAN H CAN high 2 CAN L CAN low 3 IN2 Input 2 GND IN1/2 Earth input 1/2 OUT2 Output 2 6 5 4 8 3 4 7 5 1 2 6 OUT3 Output 3 7 GND Earth 8 OUT4 Output 4 1 5 10 20 40 60 80 100 Vertical 0.1 0.7 1.4 2.8 5.6 8.4 11.2 14.0 Horizontal 3.5 17.3 34.6 69.3 138.6 207.8 277.1 346.4 7.2 Mechanics/electronics Dimensional drawing Dimensional drawing RMS1000: A 8 Accessories NOTE Accessories and where applicable mounting information can be found online at: • www.sick.com/RMS1000 Power QUICKSTART Pin assignment Power connection Male/female connector Pin Short form Signal description M12 male con‐ nector, 5-pin Acoded 1 L+ Supply voltage: +9.5 … +36 V DC 2 IN1 Input 1 3 GND Earth 4 OUT1 Output 1 5 GND IN1/2 Earth input 1/2 4 3 5 1 2 8026121//2021-02-23/en, de, es, pt, ko 1 de Zu diesem Dokument Dieser Quickstart dient dazu, das Produkt schnell und einfach in Betrieb zu neh‐ men. Ergänzende und mitgeltende Dokumente: • Safety Notes, gedruckt beiliegend • Betriebsanleitung RMS1000, zum Download • Technische Information RMS1000 "Regulatorische Hinweise", gedruckt bei‐ liegend und zum Download • Telegram Listing RMS1000, zum Download Zum Download verfügbare Dokumente und weitere Informationen wie z. B. Anwendungsbeispiele und zugehörige Software finden Sie auf der SICK-Produkt‐ seite im Internet unter: www.sick.com/RMS1000 RMS1000 (Model RMS-A) | SICK 2 Alle Rechte vorbehalten. Irrtümer und Änderungen vorbehalten. Gerätestatus 2 Parametrierung Permanent Rot Permanent Rot Feld frei 2 Permanent Grün Permanent Grün Objektdetek‐ tion 2 Permanent Grün Permanent Gelb Kein Feld ange‐ legt Permanent Grün Aus Fehler (kunden‐ seitig behebbar) Langsam blinkend Rot Langsam blinkend Rot Synchron Schwerer Fehler (SICK Service kontaktieren) Schnell blinkend Rot Schnell blinkend Rot Synchron Standby/ Strom sparen Permanent Gelb Permanent Rot FirmwareUpdate Langsam blinkend Rot Langsam blinkend Grün Asynchron Zu Ihrer Sicherheit 2.1 Bestimmungsgemäße Verwendung Der Radarsensor RMS1000 dient zur Bereichsüberwachung. Der Sensor erkennt in einem definierten Erfassungsfeld statische und bewegte Objekte und löst bei Erkennung eines entsprechenden Objekts ein Schaltsignal aus. Distanzzonen können definiert werden und diesen Zonen verschiedene Funktio‐ nen zugewiesen werden. Die Distanz und die Geschwindigkeit der Objekte innerhalb des Erfassungsbe‐ reichs werden ermittelt und über das Datentelegramm bereitgestellt. Alle Objektdaten können über Ethernet bereitgestellt werden. Eine Bereitstellung über CAN J1939 ist in Vorbereitung. Die Bedienung des Geräts erfolgt über die Software SOPASair der SICK AG. HINWEIS Der Radarsensor ist zum Betrieb in den Ländern zugelassen, die in der Technischen Information RMS1000 "Regulatorische Hinweise" (Nr. 8026123) gelistet sind. Dieses Dokument liegt dem Gerät bei. Bei Betrieb des Geräts in anderen Ländern können geschützte Frequenzbereiche gestört werden. • Gerät nur in Ländern betreiben für die eine Zulassung vorliegt. • Beim Weiterverkauf des Geräts den Käufer über die regionalen Zulas‐ sungsbeschränkungen informieren. 1 Die SICK AG übernimmt keine Haftung für direkte oder indirekte Verluste oder Schäden, die aus der Benutzung des Produkts resultieren. Dies gilt insbesondere für eine andersartige Verwendung des Produkts, die nicht mit dem beabsichtigten Zweck übereinstimmt und die nicht in dieser Dokumentation beschrieben ist. 3 Produktbeschreibung 3.1 Lieferumfang Die Lieferung des Geräts umfasst folgende Komponenten: LED 1 Gerät (Dev) 1 LED 2 Applikation (App) 1 Farben: • Rot • Gelb • Grün Muster: • Aus • Permanent leuchtend • Langsam blinkend (1 Hz) Beschreibung • Schnell blinkend (8 Hz) Die LEDs zeigen den Status der Detektion bzw. Auswertung in einem Feld und nicht den Status des Digitalausgangs. Wenn das Ergebnis der Feldauswertung invertiert auf den Digitalausgang gegeben wird, hat dies keine Auswirkung auf die LEDs. Stück Komponente Bemerkung 1 Gerät in der bestellten Ausfüh‐ rung Ohne Anschlussleitungen und Halterungen 1 Konfigurationssoftware SOPASair Im Gerät integriert, Zugriff über Webbrowser 4 Montage Beigelegt oder ggf. angebracht 4.1 • • • Montagehinweise Technische Daten einhalten. Sensor vor direkter Sonneneinstrahlung schützen. Um Kondenswasser zu vermeiden, das Gerät keinem schnellen Temperatur‐ wechsel aussetzen. Der Montageort muss für das Gewicht des Geräts geeignet sein. Gerät möglichst erschütterungs- und schwingungsfrei befestigen. Montage‐ zubehör ist optional erhältlich, siehe Zubehör, Seite 4. Die 4 Befestigungsgewinde an der linken und rechten Gehäuseseite dienen zur Montage des Geräts an einer Halterung. Nur Schrauben mit Gewinde M5 verwenden und diese max. 9 mm in das Gewinde eindrehen. Bei Montage im Außenbereich wird die Verwendung einer Wetterschutz‐ haube und eines Montagewinkels empfohlen. Informationen zu optional erhältlichem Zubehör, Zubehör, Seite 4. Gerät nicht in Richtung Boden gekippt montieren, um Bodenreflektionen zu vermeiden, welche eventuell als Objekt erkannt werden. Blindzone des Sensors beachten. Im Bereich bis 0,4 m ist keine Detektion möglich. 1 Satz Schutzkappen für elektri‐ sche Anschlüsse 1 Gedruckte Technische Infor‐ Informiert über die Länder, für die eine Zulassung mation RMS1000 "Regulatori‐ vorliegt. Nennt länderspezifische Besonderheiten, sche Hinweise" (Nr. 8026123) die beim Betrieb des Geräts zu berücksichtigen sind. 1 Gedruckte Safety Notes, mehr‐ Kurzinformationen und allgemeine Sicherheitshin‐ sprachig weise • • • 3.2 Anschlüsse und LEDs 1 2 2 • • • 5 1 Elektrische Installation 5.1 Verdrahtungshinweise 2 HINWEIS Vorkonfektionierte Leitungen finden Sie im Internet unter: • www.sick.com/RMS1000 3 4 WICHTIG Störungen im Betrieb und Defekte am Gerät oder der Anlage! Eine unsachgemäße Verdrahtung kann zu Störungen im Betrieb und zu Defekten führen. • Verdrahtungshinweise genau befolgen. 5 Abbildung 1: Anschlüsse und LEDs LED 1 Gerät (Dev) 1 LED 2 Applikation (App) 2 Anschluss Ethernet 3 Anschluss CAN I/O 4 Anschluss Power 5 Anschlüsse Details siehe Anschlussschema, Seite 4. LEDs Die LEDs zeigen folgende Statusinformationen. Gerätestatus LED 1 Gerät (Dev) 1 LED 2 Applikation (App) 1 Beschreibung Gerät aus Aus Aus Initialisierungs‐ phase Permanent Rot Permanent Rot 8026121//2021-02-23/en, de, es, pt, ko Die in den Technischen Daten angegebene Schutzart wird nur mit verschraubten Steckverbindern oder Schutzkappen erreicht. Die Adern unbenutzter Digitalausgänge schaltschrankseitig isolieren. Alle am Gerät angeschlossenen Stromkreise als ES1-Stromkreise ausführen. Die Spannungsquelle muss die Anforderungen gemäß ES1 und PS2 (EN 62368-1) erfüllen. Anschlussleitungen im spannungslosen Zustand anschließen. Versorgungsspan‐ nung erst nach vollständiger Installation bzw. Anschluss aller Anschlussleitungen an Gerät und Steuerung einschalten. Für die Anwendung bzw. Umgebungsbedingungen passende Anschlussleitungen und -Stecker verwenden, siehe Zubehör, Seite 4. Versorgungsspannung entsprechend Angaben in den technischen Daten ausle‐ gen. Die Spannungsversorgung durch ein Netzteil muss einen kurzen Stromausfall bis zu 20 ms puffern können. RMS1000 (Model RMS-A) | SICK 3 Produktschäden durch Kurzschluss verhindern: Der Versorgungsspannungsein‐ gang des Geräts verfügt über einen Verpolungsschutz. Die interne Funktionserde ist direkt mit dem Metallgehäuse des Geräts verbunden. Die interne Funktions‐ erde entspricht gleichzeitig auch dem Minuspol der Versorgungsspannung. 5.2 Anschlussschema Ethernet Pinbelegung Anschluss Ethernet Stecker/Dose Kontakt Entfernungsauflösung 0,4 m Geschwindigkeitsbereich -30 m/s … +30 m/s Geschwindigkeitsauflö‐ sung 0,625 m/s Geschwindigkeitsgenau‐ igkeit 1 m² bis 20 m: 0,0625 m/s 1m² bis 50 m: 0,15 m/s Typischer Radarquerschnittwert für einen Fußgänger. Typischer Radarquerschnittwert für einen PKW. 1 Kurzzeichen Signalbeschreibung 2 M12-Dose, 4pol. 1 D-Kodiert 2 3 4 TX+ Transmit data positiv Arbeitsbereiche nach Distanz RX+ Receive data positiv 3 TX- Transmit data negativ 4 RX- Receive data negativ 1 2 CAN I/O Stecker/Dose Kontakt Kurzzeichen Signalbeschreibung M12-Stecker, 8pol. A-Kodiert 1 CAN H Can high 2 CAN L CAN low 5 4 8 3 3 IN2 Eingang 2 7 4 GND IN1/2 Erde Eingang 1/2 5 OUT2 Ausgang 2 6 OUT3 Ausgang 3 7 GND Erde 8 OUT4 Ausgang 4 2 1 5 10 20 40 60 80 Vertikal 0,1 0,7 1,4 2,8 5,6 8,4 11,2 100 14,0 Horizontal 3,5 17,3 34,6 69,3 138,6 207,8 277,1 346,4 7.2 Mechanik/Elektrik Pinbelegung Anschluss CAN I/O 6 Distanz [m] 1 Maßzeichnung Maßzeichnung RMS1000: A 8 Zubehör HINWEIS Zubehör und gegebenenfalls Montageinformationen finden Sie im Internet unter: • www.sick.com/RMS1000 QUICKSTART es Power 1 Pinbelegung Anschluss Power La finalidad de esta guía de inicio rápido es permitir la puesta en servicio rápida y sencilla del producto. Documentación adicional y otros documentos aplicables: • Notas de seguridad, impresas adjuntas • Instrucciones de uso RMS1000, para descargar • Información técnica RMS1000 “Indicaciones regulatorias”, impresa adjunta y para descargar • Telegram Listing RMS1000, para descargar Podrá encontrar los documentos disponibles para descargar y otras informacio‐ nes como, por ejemplo, los ejemplos de aplicación y el software correspondiente en la página de producto SICK y en Internet en: www.sick.com/RMS1000 Todos los derechos reservados. Sujeto a cambio sin previo aviso. Stecker/Dose Kontakt Kurzzeichen Signalbeschreibung M12-Stecker, 5pol. A-Kodiert 1 L+ Versorgungsspannung: +9,5 … +36 V DC 3 2 4 5 6 Eingang 1 GND Erde 4 OUT1 Ausgang 1 GND IN1/2 Erde Eingang 1/2 2 5 1 5.3 1. 2. 3. IN1 3 Gerät elektrisch anschließen Spannungsfreiheit sicherstellen. Gerät gemäß Anschlussschema anschließen, Anschlussschema, Seite 4. Versorgungsspannung einschalten. Bedienung 6.1 Allgemeine Hinweise Das Gerät arbeitet im Normalbetrieb vollautomatisch ohne Eingriff eines Bedie‐ ners. 6.2 Ausschalten und Einschalten 1. Um das Gerät auszuschalten, das Gerät von der Spannungsversorgung tren‐ nen. ✓ Das Gerät schaltet sich aus. Die Gerätekonfiguration bleibt erhalten, Mess‐ werte gehen verloren. 2. Gerät an die Spannungsversorgung anschließen. ✓ Das Gerät startet mit den zuletzt gespeicherten Konfigurationsdaten. 7 2 INDICACIÓN El sensor de radar está autorizado para funcionar en los países listados en la Información Técnica RMS1000 “Indicaciones Regulatorias” (Nº 8026123). Este documento se adjunta al dispositivo. Si se utiliza el dispositivo en otros países puede interferir con las gamas de frecuencias protegidas. • El dispositivo solo debe utilizarse en países para los que existe una homologación. • Si se revende el dispositivo, informe al comprador sobre las limitaciones regionales de homologación. HINWEIS Über das Internet können Sie sich für Ihr Produkt das zugehörige OnlineDatenblatt mit technischen Daten, Maßzeichnung und Anschlussschemata herunterladen, speichern und drucken: • www.sick.com/RMS1000 Messprinzip FMCW Funkzulassung Für spezifische Ländereinschränkungen siehe Technische Infor‐ mation (Downloads) "Regulatory Compliance Information" (Nr. 8021596), liegt auch dem Produkt bei Para su seguridad 2.1 Uso conforme a lo previsto El sensor de radar RMS1000 sirve para la supervisión de zona. El sensor detecta en un campo de detección definido objetos estáticos y en movimiento, y activa una señal de conmutación cuando detecta los objetos correspondientes. Pueden definirse zonas de distancia y asignarse a las mismas diferentes funcio‐ nes. Se determina la distancia y la velocidad de los objetos dentro del área de detec‐ ción y se facilitan a través del telegrama de datos. Todos los datos de objeto pueden disponerse mediante Ethernet. Se encuentra en preparación una disposición mediante CAN J1939. El manejo del dispositivo se efectúa a través del software SOPASair de SICK AG. Technische Daten (Auszug) 7.1 Merkmale Acerca de este documento SICK AG no se responsabiliza de las pérdidas directas o indirectas ni de los daños resultantes del uso del producto. Esto es aplicable en particular a un uso diferente del producto que no se corresponda con el uso previsto y que no se describa en la presente documentación. 3 Descripción del producto 3.1 Volumen de suministro El suministro del dispositivo incluye los componentes siguientes: Frequenzband 61 GHz … 61,5 GHz Sendeleistung < 20 dBm (e.i.r.p.) Öffnungswinkel Horizontal: ± 60° Vertikal: ± 4° Unida‐ des Componente Observación Arbeitsbereich 0,4 m … 100 m 1 Bei 1 m² RCS 1: 50 m Bei 10 m² RCS 2: 100 m Dispositivo en la ejecución solicitada Sin soportes ni cables de conexión Detektionsfähigkeit 1 Entfernungsgenauigkeit 1 m² RCS 1 bis 20 m: 0,04 m 1 m² RCS 2 bis 50 m: 0,1 m Software de configuración SOPASair Integrado en el equipo, acceso mediante navega‐ dor web 8026121//2021-02-23/en, de, es, pt, ko RMS1000 (Model RMS-A) | SICK 4 Unida‐ des Componente Observación 1 Juego de tapas protectoras para conexiones eléctricas 1 Información técnica RMS1000 Informa sobre los países para los que existe una “Indicaciones regulatorias” (N.º homologación. Indica las particularidades espe‐ 8026123) impresa cíficas de los países que se deben considerar durante el funcionamiento del dispositivo. 1 Notas de seguridad impresas, multilingües Adjunto o, si conviene, instalado Información abreviada e indicaciones generales de seguridad 3.2 Conexiones y LED 1 4 Montaje 4.1 • • • Indicaciones de montaje Deben cumplirse los datos técnicos. Proteja el sensor contra la radiación directa. Para evitar la formación de agua condensada, no exponga el dispositivo a un cambio brusco de temperatura. El lugar de montaje debe poder soportar el peso del dispositivo. El dispositivo debe fijarse sin sacudidas ni vibraciones en la medida de lo posible. Accesorios de montaje obtenibles opcionalmente, véase Accesorios, página 6. Las 4 roscas de fijación en el lado izquierdo y derecho del lateral de la carcasa sirven para montar el dispositivo en un soporte. Emplear solamente tornillos con rosca M5 y enroscarlos solo 9 mm, como máximo, en la rosca. Si se monta en exterior, se recomienda utilizar una cubierta de protección contra la intemperie y una escuadra de fijación. Informaciones sobre acce‐ sorios opcionales, Accesorios, página 6. El dispositivo no debe montarse inclinado en dirección al suelo a fin de evitar reflejos en el suelo que pudieran detectarse como un objeto. Tenga en cuenta la zona ciega del sensor. En un rango hasta 0,4 m no es posible la detección. • • • 2 • • • 5 1 2 Instalación eléctrica 5.1 Indicaciones de cableado INDICACIÓN Puede encontrar cables preconfeccionados en la página web: • www.sick.com/RMS1000 3 4 IMPORTANTE ¡Fallos durante el funcionamiento y defectos en el dispositivo o la instalación! Un cableado inadecuado puede causar fallos durante el funcionamiento y defectos. • Deben seguirse exactamente las indicaciones de cableado. 5 Figura 1: Conexiones y LED LED 1 dispositivo (Dev) 1 LED 2 aplicación (App) 2 Conexión Ethernet 3 Conexión CAN I/O 4 Conexión “Power” 5 Conexiones Detalles véase Esquema de conexión, página 5. LED Los LED muestran la siguiente información de estado. Estado del dis‐ positivo 1 LED 1 dispositivo (Dev) 1 LED 2 aplicación (App) 1 Dispositivo apa‐ gado Apagado Apagado Fase de iniciali‐ zación Permanentemente rojo Permanentemente rojo Parametrización Permanentemente rojo Permanentemente rojo Campo libre 2 Permanentemente verde Permanentemente verde Detección de objetos 2 Permanentemente verde Permanentemente amarillo No se ha creado ningún campo Permanentemente verde Apagado Error (subsana‐ ble por el cliente) Parpadeo lento rojo Parpadeo lento rojo Síncrono Error grave (ponerse en con‐ tacto con el ser‐ vicio de atención al cliente de SICK) Parpadeo rápido rojo Parpadeo rápido rojo Síncrono Standby/ ahorro de energía Permanentemente amarillo Permanentemente rojo Actualización del firmware Parpadeo lento rojo Parpadeo lento verde Asíncrono 5.2 Esquema de conexión Ethernet Asignación de terminales de conexión Ethernet Conectores macho/hembra Contacto Abreviación Descripción de señal Conector hem‐ 1 bra M12, 4pol. Con codificación 2 D 3 3 4 TX+ Transmit data positiv RX+ Receive data positiv TX- Transmit data negativ 4 RX- Receive data negativ 1 2 CAN I/O Asignación de pins de la conexión CAN I/O Colores: • Rojo • Amarillo • Verde Patrón: • Apagado • Permanentemente iluminado • Parpadeo lento (1 Hz) • 2 Descripción El grado de protección indicado en los datos técnicos solo se obtiene con conec‐ tores de enchufe atornillados o tapas de protección. Los conductores de las salidas digitales que no se empleen deben aislarse en el lado del armario de distribución. Todos los circuitos conectados al dispositivo deben diseñarse como circuitos ES1. La fuente de tensión debe cumplir los requisitos conforme a ES1 y PS2 (EN 62368-1). Conectar los cables de conexión en estado sin tensión. La tensión de alimenta‐ ción solo debe activarse después de la instalación/conexión completa de todos los cables de conexión al dispositivo y al controlador. Emplear cables de conexión y conectores macho apropiados para la aplicación y para las condiciones del entorno, véase Accesorios, página 6. Diseñar la tensión de alimentación según los datos técnicos. Cuando se emplea un adaptador de corriente como fuente de alimentación, este debe ser capaz de amortiguar una caída de tensión corta de hasta 20 ms de duración. Deben evitarse los daños en el producto debidos a cortocircuito: la entrada de tensión de alimentación del dispositivo cuenta con una protección contra polarización inversa. La tierra de función interna está conectada directamente a la carcasa metálica del dispositivo. La tierra de función interna corresponde, al mismo tiempo, al polo negativo de la tensión de alimentación. Parpadeo rápido (8 Hz) Los LED muestran el estado de la detección o la evaluación en un campo y no el estado de la salida digital. Cuando el resultado de la evaluación del campo se da invertido en la salida digital, no tiene ningún efecto sobre los LED. 8026121//2021-02-23/en, de, es, pt, ko Conectores macho/hembra Contacto Abreviación Descripción de señal Conector macho 1 M12, 8pol. Con 2 codificación A 5 6 3 4 CAN H Can high CAN L CAN low IN2 Entrada 2 8 GND IN1/2 Entrada tierra 1/2 5 OUT2 Salida 2 6 OUT3 Salida 3 7 GND Tierra 8 OUT4 Salida 4 3 4 7 1 2 RMS1000 (Model RMS-A) | SICK 5 Alim. QUICKSTART pt Asignación de terminales de conexión Alim. Conectores macho/hembra Contacto Abreviación Descripción de señal 1 Conector macho 1 M12, 5pol. Con 2 codificación A 4 3 3 L+ Tensión de alimentación: +9,5 … +36 V CC IN1 Entrada 1 GND Tierra 5 4 OUT1 Salida 1 5 GND IN1/2 Entrada tierra 1/2 1 2 5.3 Conexión eléctrica del dispositivo 1. Verifique la ausencia de tensión. 2. Conecte el dispositivo según el esquema de conexión, Esquema de cone‐ xión, página 5. 3. Conecte la tensión de alimentación. 6 Manejo 6.1 Indicaciones generales En el modo normal, el dispositivo funciona automáticamente, sin intervención del operador. 6.2 Desconexión y conexión 1. Para desconectar el dispositivo, soltarlo de la fuente de alimentación. ✓ El dispositivo se desconecta. La configuración del dispositivo se mantiene, los valores medidos se pierden. 2. Conectar el dispositivo a la fuente de alimentación. ✓ El dispositivo se inicia con los últimos datos de configuración guardados. 7 2 Para a sua segurança 2.1 Utilização correta O sensor de radares RMS1000 é usado para monitoramento de áreas. O sensor detecta, num campo de detecção definido, objetos estáticos e móveis e aciona um sinal de comutação no caso de detecção de um respectivo objeto. As zonas de distância podem ser definidas e podem ser atribuídas diferentes funções a estas zonas. A distância e a velocidade dos objetos dentro da área de detecção são calculadas e disponibilizados através do telegrama de dados. Todos os dados do objeto podem ser disponibilizados pela Ethernet. A disponibili‐ zação via CAN J1939 está em preparação. A operação do dispositivo é realizada pelo software SOPASair da SICK AG. NOTA O sensor radar está aprovado para operação nos países listados nas Informações Técnicas RMS1000 “Informações sobre regulamentação” (n.º 8026123). Este documento está anexado ao dispositivo. Operar o dispositivo em outros países pode interferir nas gamas de frequência protegidas. • Operar o dispositivo somente em países onde existe uma licença para isso. • Ao revender o dispositivo a terceiros, informar o comprador sobre as restrições regionais da licença. Datos técnicos (extracto) INDICACIÓN A través de Internet puede descargar, guardar e imprimir la hoja de datos online correspondiente a su producto, que incluye datos técnicos, dimensio‐ nes y esquemas de conexión: • www.sick.com/RMS1000 7.1 Características Sobre este documento Este guia de início rápido visa facilitar e agilizar a colocação em operação do produto. Outros documentos complementares e aplicáveis: • Safety Notes (Notas de Segurança), impresso em anexo • Manual de instruções RMS1000 para download • Informações Técnicas RMS1000 “Informações regulamentares”, impresso em anexo e para download • Telegram Listing (Listagem de Telegramas) RMS1000, para download Estes documentos disponíveis para download e outras informações, como, p.ex., exemplos de aplicação e software associado podem ser encontrados na página de produtos da SICK na internet, em: www.sick.com/RMS1000 Todos os direitos reservados. Sujeito a alterações sem aviso prévio. A SICK AG se isenta de qualquer responsabilidade por perdas ou danos ou perdas resultantes da utilização do produto. Isto é especialmente válido para uma utilização do produto que seja diferente da finalidade prevista e que não esteja descrita nesta documentação. Principio de medición FMCW Homologación de radio Para las limitaciones por países, véase la información técnica (descargas) "Regulatory Compliance Information" (Nº 8021596), suministrada también con el producto Banda de frecuencias 61 GHz … 61,5 GHz 3 Potencia de transmisión < 20 dBm (PIRE) Ángulo de apertura Horizontal: ± 60° Vertical: ± 4° 3.1 Material fornecido O fornecimento do dispositivo abrange os seguintes componentes: Rango de trabajo 0,4 m … 100 m Uni‐ dade Componente Observação Capacidad de detección Para 1 m² de RCS 1: 50 m Para 10 m² de RCS 2: 100 m 1 Dispositivo no modelo enco‐ mendado Sem cabos de conexão e suportes Precisión de la distancia 1 m² de RCS 1 hasta 20 m: 0,04 m 1 m² de RCS 2 hasta 50 m: 0,1 m 1 Software de configuração SOPASair Integrado no dispositivo, acesso com browser da web Resolución de la distan‐ cia 0,4 m 1 Conjunto de tampas de prote‐ ção para ligações elétricas Incluído ou anexado, se necessário Gama de velocidades -30 m/s … +30 m/s 1 Resolución de la veloci‐ dad 0,625 m/s Informações Técnicas RMS1000 “Informações de regulamentação” (n.º 8026123) impressas O documento informa os países em que a licença está disponível. Menciona as particularidades específicas de cada país, a serem consideradas na operação do dispositivo. Precisión de la velocidad 1 m² hasta 20 m: 0,0625 m/s 1 m² hasta 50 m: 0,15 m/s 1 Safety Notes (Notas de Segu‐ rança) impressas, vários idio‐ mas Informações resumidas e orientações gerais de segurança Valor típico de sección transversal de radar para un peatón. Valor típico de sección transversal de radar para un automóvil. 1 2 Descrição do produto Rangos de trabajo según distancia Distancia [m] 1 5 10 20 40 60 80 Vertical 0,1 0,7 1,4 2,8 5,6 8,4 11,2 100 14,0 Horizontal 3,5 17,3 34,6 69,3 138,6 207,8 277,1 346,4 7.2 Sistema mecánico y eléctrico Dibujo acotado Dibujo acotado RMS1000: A 8 Accesorios INDICACIÓN Puede encontrar accesorios y, si conviene, informaciones de montaje en la página web: • www.sick.com/RMS1000 8026121//2021-02-23/en, de, es, pt, ko RMS1000 (Model RMS-A) | SICK 6 3.2 Conexões e LEDs 1 As 4 roscas de fixação no lado esquerdo e direito da carcaça servem para montagem do dispositivo num suporte. Utilizar somente parafusos com rosca M5 e introduzir os mesmos na rosca até, no máximo, 9 mm. Ao montar numa área exterior, recomenda-se a utilização de uma capa protetora contra intempéries e um ângulo de montagem. Informações sobre os acessórios disponíveis opcionalmente, Acessórios, página 8. Não montar o dispositivo virado na direção do piso, a fim de evitar reflexões vindas do piso, pois estas podem ser reconhecidas como sendo objetos. Observar a zona morta do sensor. Na faixa até 0,4 m, a detecção não é possível. • 2 • • • 5 1 2 Instalação elétrica 5.1 Indicações para cabeamento NOTA Encontrará cabos pré-montados na Internet, em: • www.sick.com/RMS1000 3 4 IMPORTANTE Problemas de funcionamento e defeitos no dispositivo ou na instalação! Um cabeamento incorreto pode resultar em problemas de funcionamento e defeitos. • Seguir as instruções para cablagem de forma precisa. 5 Figura 1: Conexões e LEDs LED 1 dis (Dev) 1 LED 2 aplicativo (App) 2 Conexão Ethernet 3 Conexão CAN E/S 4 Conexão Power 5 Conexões Detalhes ver Esquema de conexões, página 7. LEDs Os LEDs indicam as seguintes informações de status: status do dispo‐ LED 1 dispositivo (Dev) 1 sitivo LED 2 aplicativo (App) 1 Descrição Dispositivo des‐ ligado Desl. Desl. Fase de iniciali‐ zação Permanentemente vermelho Permanentemente vermelho Parametrização Permanentemente vermelho Permanentemente vermelho Campo livre 2 Permanentemente verde Permanentemente verde Detecção do objeto 2 Permanentemente verde Permanentemente amarelo Nenhum campo criado Permanentemente verde Desl. Falha (pode ser solucionada pelo cliente) Piscando lentamente em vermelho Piscando lentamente em vermelho Sincronizado Falha grave (entrar em con‐ tato com o Ser‐ viço SICK) Piscando rapidamente em vermelho Piscando rapidamente em vermelho Sincronizado Standby / eco‐ nomizar energia Permanentemente amarelo Permanentemente vermelho Atualização de firmware Piscando lentamente em vermelho Piscando lentamente em verde Assíncrono 1 2 5.2 Esquema de conexões Ethernet Ocupação de pinos conexão Ethernet Conector macho/conec‐ tor fêmea Contato Símbolo Descrição do sinal Conector macho 1 M12, 4pinos 2 Codificação D 3 4 3 TX+ Transmitir dados positivos RX+ Receber dados positivos TX- Transmitir dados negativos 4 RX- Receber dados negativos 1 2 CAN E/S Cores: • Vermelho • Amarelo • Verde Padrão: • Desl. • Aceso permanentemente • Piscando lentamente (1 Hz) • Piscando rapidamente (8 Hz) Os LEDs mostram o status da detecção ou a avaliação num campo, não o status da saída digital. Se o resultado da avaliação do campo for exibido de modo invertido na saída digital, isso não exerce influência sobre os LEDs. 4 Montagem 4.1 • • • Orientações para montagem Cumprir dados técnicos. Proteger o sensor da radiação solar direta. Para evitar a formação de água condensada, não expor o dispositivo a mudanças rápidas de temperatura. O local de montagem deve ser adequado ao peso do dispositivo. Fixar o dispositivo tão livre de vibrações e oscilações quanto possível. Estão disponíveis acessórios de montagem, opcionalmente, ver Acessórios, página 8. • • O grau de proteção especificado nos dados técnicos só é alcançado com conecto‐ res encaixáveis roscados ou tampões cegos. Os fios das saídas de digitais não utilizadas devem estar isolados no lado do armário de distribuição. Executar todos os circuitos de corrente conectados ao dispositivo como circuitos de corrente ES1. A fonte de tensão deve cumprir as exigências conforme ES1 e PS2 (norma EN 62368-1). Ligar os cabos de conexão no status desenergizado. Ligar a tensão de alimen‐ tação somente após a instalação ou conexão completa de todos os cabos de conexão ao dispositivo e ao controle. Utilizar cabos de conexão e conectores apropriados à aplicação e a ao ambiente, ver Acessórios, página 8. Dimensionar a tensão de alimentação de acordo com as especificações nos dados técnicos. A alimentação de tensão por meio de uma fonte de alimentação deve suportar uma falha de energia breve de até 20 ms. Evitar danos ao produto causados por curto-circuito: a entrada de tensão de alimentação do dispositivo possui uma proteção contra inversão de polaridade. A terra funcional interna está ligada diretamente com a carcaça metálica do dispo‐ sitivo. A terra funcional interna corresponde ao mesmo tempo ao polo negativo da tensão de alimentação. 8026121//2021-02-23/en, de, es, pt, ko Ocupação de pinos conexão CAN E/S Conector macho/conec‐ tor fêmea Símbolo Descrição do sinal Conector macho 1 M12, 8pinos 2 Codificado A 5 6 3 4 CAN H CAN high CAN L CAN low IN2 Entrada 2 8 3 4 GND IN1/2 Entrada terra 1/2 7 5 OUT2 Saída 2 6 OUT3 Saída 3 7 GND Terra 8 OUT4 Saída 4 1 2 Contato Power Ocupação de pinos conexão Power Conector macho/conec‐ tor fêmea Contato Conector macho 1 M12, 5pinos 2 Codificado A 3 Símbolo Descrição do sinal L+ Tensão de alimentação: +9,5 … +36 V CC IN1 Entrada 1 GND Terra RMS1000 (Model RMS-A) | SICK 7 Conector macho/conec‐ tor fêmea 4 Contato 3 4 5 5 1 Símbolo Descrição do sinal OUT1 Saída 1 1 GND IN1/2 Entrada terra 1/2 이 퀵 스타트의 목적은 제품을 쉽고 빠르게 작동하게 함에 있습니다. 보완 및 추가 문서: • Safety Notes, 인쇄본 동봉 • RMS1000 작동 지침서, 다운로드 • RMS1000 기술 정보 “규제 관련 공지”, 인쇄본 동봉 및 다운로드 • RMS1000 Telegram Listing, 다운로드 다운로드로 제공되는 문서 그리고 예를 들어 애플리케이션 예와 해당 소프트웨 어 같은 기타 정보는 다음 인터넷 주소의 SICK 제품 페이지에 있습니다. www.sick.com/RMS1000 All rights reserved 예고 없이 변경 가능 QUICKSTART 2 5.3 Ligar o dispositivo à eletricidade 1. Garantir que não há tensão. 2. Conectar o dispositivo de acordo com o esquema de conexões, Esquema de conexões, página 7. 3. Ligar a tensão de alimentação. 6 Operação 6.1 Observações gerais O dispositivo opera de forma totalmente automática na operação normal, sem a intervenção de um operador. 6.2 Desligar e ligar 1. Para desligar o dispositivo, desconectar o dispositivo da alimentação de tensão. ✓ O dispositivo desliga-se. A configuração do dispositivo é mantida, os valores medidos perdem-se. 2. Conectar o dispositivo da alimentação de tensão. ✓ O dispositivo começa com os últimos dados de configuração salvos. 7 2 FMCW (Frequency-Modulated Continuous Wave - Onda Contínua Modulada por Frequência) Autorização de uso de radiofrequência Sobre restrições específicas de cada país, ver Informação Técnica (Downloads) "Regulatory Compliance Information" (nº 8021596), também está anexada ao produto Faixa de frequência 61 GHz a 61,5 GHz Potência de transmissão < 20 dBm (e.i.r.p.) Ângulo de abertura Horizontal: ± 60° Vertical: ± 4° 안전 수칙 주 이 레이더 센서는 RMS1000 기술 정보 “규제 관련 공지”(No. 8026123)에 열거된 국가에서만 사용이 허가됩니다. 본 문서는 장치에 동봉되어 있습니 다. 다른 국가에서 장치를 작동할 경우 보호 주파수가 방해를 받을 수 있습 니다. • 승인된 국가에서만 장치를 사용하십시오. • 장치를 재판매하는 경우에는 구매자에게 지역에 따른 허가 제한을 알 리십시오. NOTA Você pode baixar, salvar e imprimir a data Sheet online associada com dados técnicos, desenho dimensional e esquema de conexões para o seu produto através da Internet: • www.sick.com/RMS1000 Princípio de medição 본 문서에 관하여 2.1 규정에 맞는 사용 레이더 센서 RMS1000은 구역 감시에 사용됩니다. 이 센서는 정의된 감지 필드 에서 고정 또는 유동 물체를 식별하고, 해당 물체를 식별하면 신호를 내보냅니 다. 거리 구역을 지정하고 이 구역에 다양한 기능을 할당할 수 있습니다. 감지 범위 내 물체의 거리와 속도가 측정되고 데이터 텔레그램으로 제공됩니 다. 모든 물체 데이터를 Ethernet을 통해 제공할 수 있습니다. CAN J1939를 통한 제 공은 준비 중입니다. SICK AG의 프트웨어 SOPASair를 이용하여 장치를 조작합니다. Dados técnicos (resumo) 7.1 Características ko SICK AG는 제품의 사용으로 인한 직간접적 손실 및 손해에 대해 책임을 지지 않 습니다. 특히 제품의 본래 목적에서 벗어나며 본 문서에 기술되지 않은 사용 방 법이 이에 해당됩니다. 3 제품 설명 3.1 공급 범위 장치는 다음과 같은 내용물로 구성되어 있습니다: Área de trabalho 0,4 m a 100 m Poder de detecção Em 1 m² RCS 1: 50 m Em 10 m² RCS 2: 100 m Precisão de distancia‐ mento 1 m² RCS 1 a 20 m: 0,04 m 1 m² RCS 2 a 50 m: 0,1 m Resolução de distancia‐ mento 0,4 m Faixa de velocidade -30 m/s a +30 m/s Resolução da velocidade 0,625 m/s Precisão da velocidade 1 m² a 20 m: 0,0625 m/s 1 m² a 50 m: 0,15 m/s 개수 구성품 비고 1 주문한 사양의 장치 연결 케이블 및 브래킷 미포함 1 구성 소프트웨어 SOPASair 장치에 내장, 웹 브라우저를 통해 접근 1 전기 연결부 보호용 캡 동봉 혹은 필요시 부착된 상태로 1 RMS1000 기술 정보 “규제 관련 공지” 인쇄본(No. 8026123) 사용이 허가된 국가에 대해 알려줌. 장치 작동 시 고려해야 하는 국가별 특이사항을 언급함. 1 Safety Notes 인쇄본, 다국어 간략 정보 및 일반 안전 지침 3.2 연결부 및 LED 1 2 Valor típico da seção transversal do radar para um pedestre. Valor típico da seção transversal do radar para um veículo de passeio. 1 2 Faixas de trabalho de acordo com a distância Distância [m] 1 5 10 20 40 60 80 100 Vertical 0,1 0,7 1,4 2,8 5,6 8,4 11,2 14,0 Horizontal 3,5 17,3 34,6 69,3 138,6 207,8 277,1 346,4 1 2 7.2 Mecânica/sistema elétrico Desenho dimensional Desenho dimensional RMS1000: A 8 Acessórios NOTA Pode se encontrar acessórios e, eventualmente, informações de montagem na Internet, em: • www.sick.com/RMS1000 3 4 5 그림 1: 연결부 및 LED LED 1 장치(Dev) 1 LED 2 애플리케이션(App) 2 Ethernet 연결부 3 CAN I/O 연결부 4 Power 연결부 5 연결부 자세한 사항 참조 결선도, 페이지 9. 8026121//2021-02-23/en, de, es, pt, ko RMS1000 (Model RMS-A) | SICK 8 LED LED는 다음과 같은 상태 정보를 나타냅니다. 장치 상태 LED 1 장치(Dev) 1 LED 2 애플리케이션(App) 1 설명 장치 꺼짐 OFF OFF 초기화 단계 계속 빨간색 계속 빨간색 매개 변수 설 정 계속 빨간색 계속 빨간색 필드가 비어 있음 2 계속 초록색 계속 초록색 물체 감지 2 계속 초록색 계속 노란색 필드가 생성 되지 않음 계속 초록색 OFF 오류(고객이 해결 가능) 천천히 깜빡이는 빨간색 천천히 깜빡이는 빨간색 동기 심각한 오류 (SICK 서비스 에 연락) 빠르게 깜빡이는 빨간색 빠르게 깜빡이는 빨간색 동기 대기/절전 계속 노란색 계속 빨간색 펌웨어 업데 이트 1 천천히 깜빡이는 빨간색 천천히 깜빡이는 초록색 비동기 • 5 접촉부 약어 신호 설명 M12 암 커넥 터, 4핀 D 코드 1 TX+ 데이터 정방향 송신 2 RX+ 데이터 정방향 수신 3 TX- 데이터 역방향 송신 4 RX- 데이터 역방향 수신 3 4 1 2 CAN I/O CAN I/O 연결부 핀 할당 수 커넥터/암 커넥터 접촉부 약어 신호 설명 M12 수 커넥 터, 8핀 A 코드 1 CAN H Can high 2 CAN L CAN low IN2 입력부 2 5 6 4 3 3 4 8 접지 입력부 1/2 출력부 2 빨간색 6 OUT3 출력부 3 • 노란색 7 GND • 접지 초록색 8 OUT4 출력부 4 패턴: • OFF • 계속 켜짐 • 천천히 깜빡임(1Hz) 빠르게 깜빡임(8Hz) LED는 필드 내 감지 또는 평가 상태를 나타내며 디지털 출력의 상태는 표시하지 않습 니다. 필드 평가 결과가 반전된 상태로 디지털 출력에 주어지는 경우 LED는 영향을 받 지 않습니다. 마운팅 지침 장치 제원을 숙지하십시오. 센서를 직사광선으로부터 보호하십시오. 결로 현상을 피하기 위해 급격한 온도 변화에 장치를 노출시키지 마십시 오. 마운팅 장소는 장치의 무게에 적합해야 합니다. 흔들리거나 움직이지 않도록 장치를 최대한 고정하십시오. 마운팅 관련 부 속품은 옵션으로 제공됩니다. 참조 부속품, 페이지 10 하우징 좌우 측면의 고정 나사산 4개는 장치를 브래킷에 마운팅하는 데 사 용됩니다. M5 나사만 사용하고 이 나사를 나사산에 최대 9mm 돌려 넣으 십시오. 실외 마운팅의 경우 내후성 후드와 고정 브래킷 사용을 권장합니다. 옵션 액세서리에 대한 정보. 부속품, 페이지 10 대상으로 감지될 수도 있는 바닥 반사를 막기 위해 장치를 바닥 방향으로 기울지 않게 마운팅하십시오. 센서의 사각지대에 유의하십시오. 0.4m까지 범위에서는 감지가 불가능합 니다. • 수 커넥터/암 커넥터 OUT2 4.1 • • • • Ethernet 연결부 핀 배치 GND IN1/2 장착 • Ethernet 7 2 1 4 • • 5.2 결선도 5 색상: • • 2 전원 어댑터로 전압을 공급하는 경우 최대 20ms의 짧은 정전 시간에 전기를 공 급할 수 있어야 합니다. 단락에 의한 제품 손상을 피하기 위해 장치의 공급 전압 입력부에 역 극성 보호 기능이 있습니다. 내부 기능 접지는 장치의 금속 하우징과 직접 연결되어 있습 니다. 내부 기능 접지는 이와 동시에 공급 전압의 음극에도 해당합니다. 전기 설치 5.1 배선 지침 주 사전 조립된 케이블에 대해 다음 인터넷 페이지를 참조하십시오. • www.sick.com/RMS1000 중요 장치 또는 설비의 동작 이상 및 결함! 부적절하게 배선하면 동작 이상 및 결함이 발생할 수 있습니다. • 배선 지침을 정확히 따르십시오. 기술 데이터에 제시된 보호 등급은 플러그 커넥터를 체결하거나 보호 캡을 장 착했을 때만 보장됩니다. 제어함 쪽에서 사용하지 않는 디지털 출력부의 심선을 절연하십시오. 장치에 연결된 모든 전기 회로를 ES1 회로로 구성하십시오. 전원은 ES1 및 PS2(EN 62368-1)에 따른 요건을 충족해야 합니다. 연결 케이블들을 전기가 흐르지 않는 상태에서 연결합니다. 장치와 제어기의 모든 연결 케이블을 전부 설치 또는 연결한 후에 공급 전압을 공급하십시오. 용도 또는 환경 조건에 맞는 연결 케이블과 수 커넥터를 사용하십시오. 참조 부 속품, 페이지 10. 공급 전압을 제원에 안내된 사양에 맞게 연결하십시오. 8026121//2021-02-23/en, de, es, pt, ko 전원 전원 연결부 핀 배치 수 커넥터/암 커넥터 접촉부 약어 신호 설명 M12 수 커넥 터, 5핀 A 코드 1 L+ 공급 전압: +9.5 … +36V DC IN1 입력부 1 GND 접지 OUT1 출력부 1 GND IN1/2 접지 입력부 1/2 3 2 3 4 5 4 2 5 1 5.3 1. 2. 3. 장치 전기 연결 전원이 차단되었는지 확인하십시오. 결선도에 따라 장치를 연결하십시오. 결선도, 페이지 9. 공급 전압을 공급합니다. 6 조작 6.1 일반 지침 일반적으로 장치는 작동자의 개입 없이 완전히 자동적으로 작동합니다. 6.2 1. ✓ 2. ✓ 7 끄기 및 켜기 장치를 끄려면 전원 공급 장치에서 장치를 분리하십시오. 장치가 꺼집니다. 장치 설정은 유지되며, 측정값은 손실됩니다. 장치를 전압 공급 장치에 연결하십시오. 최근 저장한 설정 데이터와 함께 장치가 켜집니다. 기술 데이터(발췌) 주 인터넷에서 제품의 제원, 치수 도면 및 결선도가 포함된 온라인 데이터시트 를 다운로드, 저장 및 인쇄할 수 있습니다. • www.sick.com/RMS1000 7.1 특징 측정 원리 FMCW 무선 통신 인가 국가별 제한은 기술 정보(다운로드) “Regulatory Compliance Information”(No. 8021596) 참조, 제품에 동봉 주파수 대역 61GHz … 61.5GHz 송출력 < 20dBm(e.i.r.p.) 구경각 수평: ± 60° 수직: ± 4° 작동 범위 0.4m … 100m 감지 능력 1m² RCS에서 1: 50m 10m² RCS에서 2: 100m 거리 정확도 1m² RCS 1, 20m까지: 0.04m 1m² RCS 2, 50m까지: 0.1m 거리 해상도 0.4m RMS1000 (Model RMS-A) | SICK 9 1 2 속도 범위 -30m/s … +30m/s 7.2 기계/전기 속도 해상도 0.625m/s 속도 정확도 1m², 20m까지: 0.0625m/s 1m², 50m까지: 0.15m/s 치수 도면 RMS1000 치수 도면: A 8 보행자의 경우 적용되는 전형적인 레이더 단면적 값. 승용차의 경우 적용되는 전형적인 레이더 단면적 값. 주 부속품과 필요시 마운팅 정보는 다음 인터넷 페이지에서 확인할 수 있습니 다. • www.sick.com/RMS1000 거리에 따른 작동 범위 거리[m] 1 5 10 20 40 60 80 100 수직 0.1 0.7 1.4 2.8 5.6 8.4 11.2 14.0 수평 3.5 17.3 34.6 69.3 138.6 207.8 277.1 346.4 8026121//2021-02-23/en, de, es, pt, ko 부속품 RMS1000 (Model RMS-A) | SICK 10 A 8026121//2021-02-23/en, de, es, pt, ko RMS1000 (Model RMS-A) | SICK 11-
 1
1
-
 2
2
-
 3
3
-
 4
4
-
 5
5
-
 6
6
-
 7
7
-
 8
8
-
 9
9
-
 10
10
-
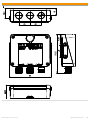 11
11











En otros idiomas
- English: SICK RMS1000 (Model RMS-A)
- Deutsch: SICK RMS1000 (Model RMS-A)
- português: SICK RMS1000 (Model RMS-A)
Documentos relacionados
-
SICK RMS3xx Quickstart
-
-
-
-
-
-
-
-