
CPD-56088
ROBOT SCARA
Serie T
MANUAL DEL MANIPULADOR
Rev.7 EM183R3633F

MANUAL DEL MANIPULADOR Serie T Rev. 7

ÍNDICE
ROBOT SCARA
Manual del manipulador de la serie T
Rev.7
Copyright 2017-2018 SEIKO EPSON CORPORATION. Todos los derechos reservados.

ÍNDICE
PRÓLOGO
Gracias por comprar nuestros productos de robot.
Este manual contiene la información necesaria para el uso correcto del manipulador.
Lea atentamente este manual y otros manuales relacionados antes de instalar el sistema de
robot.
Mantenga este manual a la mano para un acceso fácil en todo momento.
MARCAS COMERCIALES
Microsoft, Windows y el logotipo de Windows son marcas registradas o marcas
comerciales de Microsoft Corporation en los Estados Unidos y/o en otros países. Otras
marcas y productos son marcas comerciales o marcas registradas de sus respectivos
propietarios.
AVISO
Ninguna parte de este manual se puede copiar o reproducir sin autorización.
El contenido de este manual está sujeto a cambios sin previo aviso.
Notifíquenos si encuentra errores en este manual o si tiene comentarios con respecto a su
contenido.
FABRICANTE

ÍNDICE
En relación con la eliminación de la batería
La etiqueta con el basurero con ruedas tachado que se puede encontrar en el producto
indica que este producto y las baterías incorporadas no se deben eliminar en el flujo
normal de desechos domésticos. Para evitar los posibles daños ambientales o a la salud
humana, separe este producto y las baterías de otros flujos de desechos para garantizar que
se puedan reciclar de una manera ambientalmente correcta. Para conocer más detalles
acerca de las instalaciones de recolección, comuníquese con la oficina gubernamental local
o con el vendedor minorista donde compró este producto. El uso de los símbolos químicos
Pb, Cd o Hg indica si estos metales se usan en la batería.
Esta información solo se aplica a los clientes de la Unión Europea, de acuerdo con la
DIRECTIVA 2006/66/EC DEL PARLAMENTO EUROPEO Y DEL CONSEJO DEL 6
de septiembre de 2006 acerca de las baterías y acumuladores y de las baterías y
acumuladores de desecho y por la que se deroga la Directiva 91/157/EEC y la legislación,
transponiéndose e implementándose en diversos sistemas legales nacionales.
Para otros países, comuníquese con su gobierno local para investigar la posibilidad de
reciclar su producto.
El procedimiento de retiro y reemplazo de la batería se describe en los siguientes
manuales:
Manual del manipulador - Serie T Mantenimiento: 14.2 Reemplazo de la batería de litio

ÍNDICE
Antes de leer este manual
Esta sección describe lo que debería saber antes de leer este manual.
Estructura del sistema de robot
Los manipuladores de la serie T se pueden usar con las siguientes combinaciones de
software.
T3-401S
Firmware del controlador
Versión 7.3.51.1 o posterior
EPSON RC+ 7.0
Anterior a la
versión 7.3.0
!!!
Versión 7.3.1 o
posterior
OK
T6-602S
Firmware del controlador
Versión 7.3.53.0 o posterior
EPSON RC+ 7.0
Anterior a la
versión 7.3.3
!!!
Versión 7.3.4 o
posterior
OK
OK: Compatible Todas las funciones de EPSON RC+ 7.0 y el sistema de robot están
disponibles.
!!!: Compatible La conexión está bien.
Se recomienda utilizar las siguientes versiones o versiones
posteriores. Es posible que la pantalla o el control no funcionen
correctamente.
T3-401S: EPSON RC+7.0 Ver.7.3.1
T6-602S: EPSON RC+7.0 Ver.7.3.4
Forma de los motores
Es posible que la forma de los motores que se usan para el manipulador que está usando
sea distinta a la forma de los motores que se describen en este manual debido a las
especificaciones.
Configuración con el software
Este manual contiene procedimientos de configuración mediante el uso de software. Están
marcados con el siguiente ícono.
EPSON
RC+

ÍNDICE
Configuración y operación
1. Seguridad 3
1.1 Convenciones ...................................................................................... 3
1.2 Seguridad en el diseño y la instalación ............................................... 3
1.2.1 Resistencia de la ranura de tornillo esférico ........................... 4
1.3 Seguridad en la operación .................................................................. 5
1.4 Parada de emergencia ........................................................................ 7
1.5 Movimiento de emergencia sin fuerza motriz ..................................... 9
1.6 Configuración ACCELS para movimientos de CP ............................ 10
1.7 Etiquetas ............................................................................................ 11
2. Especificaciones 13
2.1 Características de los manipuladores de la serie T .......................... 13
2.2 Número de modelo ............................................................................ 14
2.3 Nombres de piezas ........................................................................... 15
2.3.1 T3 ........................................................................................... 15
2.3.2 T6 ........................................................................................... 16
2.4 Dimensiones exteriores ..................................................................... 17
2.4.1 T3 ........................................................................................... 17
2.4.2 T6 ........................................................................................... 18
2.5 Ejemplo de sistema ........................................................................... 19
2.6 Especificaciones ................................................................................ 20
2.7 Cómo configurar el modelo ............................................................... 24
3. Entornos e instalación 25
3.1 Condiciones ambientales .................................................................. 25
3.2 Mesa base ......................................................................................... 26
3.3 Dimensiones de montaje ................................................................... 27
3.4 Desembalaje y transporte ................................................................. 29
3.5 Procedimiento de instalación ............................................................ 30
3.6 Fuente de alimentación ..................................................................... 31
3.6.1 Especificaciones .................................................................... 31
3.6.2 Cable de alimentación de CA ................................................ 31
3.6.3 Disyuntor ................................................................................ 32
3.6.4 Unidad de alimentación ......................................................... 33
3.6.5 Conexión a tierra ................................................................... 34
3.7 Conexión de los cables ..................................................................... 35
3.7.1 Ejemplo de conexión ............................................................. 36
3.7.2 Medidas contra el ruido ......................................................... 37
3.8 Tubos neumáticos ............................................................................. 38

ÍNDICE
3.9 Reubicación y almacenamiento ......................................................... 40
3.9.1 Precauciones para la reubicación y el almacenamiento ....... 40
3.9.2 Reubicación ............................................................................ 41
4. Configuración de los efectores finales 42
4.1 Instalación de un efector final ............................................................ 42
4.2 Instalación de cámaras y válvulas ..................................................... 43
4.3 Configuración de peso e inercia ........................................................ 44
4.3.1 Configuración de peso ........................................................... 44
4.3.2 Configuración de inercia ........................................................ 47
4.4 Precauciones para la aceleración/desaceleración automática
de la articulación n.º 3 ................................................................................. 52
5. Rango de movimiento 54
5.1 Configuración del rango de movimiento por rango de pulsos (para
todas las articulaciones) ............................................................................. 54
5.1.1 Rango de pulsos máximo de la articulación n.º 1 .................. 55
5.1.2 Rango de pulsos máximo de la articulación n.º 2 .................. 56
5.1.3 Rango de pulsos máximo de la articulación n.º 3 .................. 57
5.1.4 Rango de pulsos máximo de la articulación n.º 4 .................. 57
5.2 Ajuste del margen de movimiento con paradas mecánicas .............. 58
5.2.1 Configuración de los topes mecánicos de las
articulaciones n.º 1 y n.º 2.................................................................. 58
5.2.2 Configuración de la parada mecánica de la articulación
n.º 3 ....................................................................................................61
5.3 Configuración del rango cartesiano (rectangular) en el sistema
de coordenadas X, Y del manipulador (para las articulaciones
n.º 1 y n.º 2) ......................................................................................... 63
5.4 Rango de movimiento estándar ......................................................... 63
6. Modo de funcionamiento y LED 64
6.1 Descripción general ........................................................................... 64
6.2 Modo de funcionamiento del interruptor ............................................ 64
6.3 Modo Program (AUTO) ...................................................................... 65
6.3.1 ¿Qué es el modo Program (AUTO)? ..................................... 65
6.3.2 Configuración desde EPSON RC+ 7.0 .................................. 65
6.4 Modo automático (AUTO) .................................................................. 66
6.4.1 ¿Qué es el modo automático (AUTO)? ................................. 66
6.4.2 Configuración desde EPSON RC+ 7.0 .................................. 66
6.4.3 Configuración desde el dispositivo de control ....................... 67
6.5 LED ..................................................................................................... 67

ÍNDICE
7. Puerto de conexión de la computadora de desarrollo 69
7.1 ¿Qué es el puerto de conexión de la computadora de desarrollo? .. 69
7.2 Precaución ......................................................................................... 70
7.3 Verificación de conexión y configuración de software ...................... 70
7.4 Desconexión de la computadora de desarrollo y el manipulador ..... 74
8. Puerto de memoria 72
8.1 ¿Qué es la función de almacenamiento de estado del
controlador? ............................................................................................... 72
8.2 Antes de usar la función de almacenamiento del estado
del controlador ........................................................................................... 72
8.2.1 Precauciones ......................................................................... 72
8.2.2 Memoria USB adoptable ....................................................... 72
8.3 Función de almacenamiento del estado del controlador .................. 73
8.3.1 Almacenamiento del estado del controlador ......................... 73
8.3.2 Carga de datos con EPSON RC+ 7.0 ................................... 74
8.3.3 Transferencia con correo electrónico .................................... 75
8.4 Detalles de los datos ......................................................................... 76
9. Puerto LAN (comunicación Ethernet) 77
9.1 Qué es el puerto LAN (comunicación Ethernet) ............................... 77
9.2 Dirección IP ....................................................................................... 77
9.3 Cambio de la dirección IP del manipulador ...................................... 78
9.4 Conexión de la computadora de desarrollo y el manipulador
mediante Ethernet ...................................................................................... 79
9.5 Desconexión de la computadora de desarrollo y el manipulador
mediante Ethernet ...................................................................................... 81
10. Puerto TP 82
10.1 ¿Qué es el puerto TP? .................................................................... 82
10.2 Conexión de la caja de comandos (Teach Pendant) ...................... 82
11. EMERGENCIA 83
11.1 Interruptor de protección y de liberación de enganche................... 83
11.1.1 Interruptor de protección ..................................................... 84
11.1.2 Interruptor de liberación de enganche ................................ 84
11.1.3 Comprobación del funcionamiento del interruptor
de liberación de enganche ................................................................ 85
11.2 Conexión del interruptor de parada de emergencia ....................... 85
11.2.1 Interruptor de parada de emergencia .................................. 85
11.2.2 Comprobación del funcionamiento del interruptor
de parada de emergencia ................................................................. 86
11.2.3 Recuperación desde la parada de emergencia .................. 86

ÍNDICE
11.3 Asignaciones de pines ..................................................................... 87
11.4 Diagramas de circuitos..................................................................... 89
11.4.1 Ejemplo 1: Aplicación típica del interruptor de parada
de emergencia externo ...................................................................... 89
11.4.2 Ejemplo 2: Aplicación típica de relé de seguridad
externo.............................................................................................. 90
12. Conector de E/S estándar 91
12.1 Circuito de entrada ........................................................................... 91
12.1.1
Aplicación típica del circuito de entrada............................... 92
12.1.2 Aplicación típica 2 del circuito de entrada ........................... 92
12.1.3 Asignaciones de pines del circuito de entrada .................... 93
12.2 Circuito de salida .............................................................................. 93
12.2.1 Aplicación típica 1 del circuito de salida .............................. 94
12.2.2 Aplicación típica 2 del circuito de salida .............................. 94
12.2.3 Asignaciones de pines del circuito de salida ....................... 95
12.3 Procedimiento para productos del cable de E/S ............................. 96
12.3.1 Método de conexión del cable de E/S ................................. 96
12.3.2 Cómo fijar el cable de E/S .................................................... 96
13. Conector de E/S de la mano 97
13.1 Especificaciones de la fuente de alimentación ................................ 97
13.2 Circuito de entrada ........................................................................... 98
13.2.1 Aplicación típica 1 del circuito de entrada ........................... 98
13.2.2 Aplicación típica 2 del circuito de entrada ........................... 98
13.3 Circuito de salida .............................................................................. 99
13.3.1 Aplicación típica 1 del circuito de salida .............................. 99
13.3.2 Aplicación típica 2 del circuito de salida .............................. 99
13.4 Asignaciones de pines ....................................................................100
13.5 Cómo controlar la E/S manual ........................................................100
14. Configuración remota de E/S
102
14.1 Descripción de la señal de E/S ...................................................... 103
14.1.1 Señales de entrada remota ................................................ 103
14.1.2 Señales de salida remota ................................................... 108
14.2 Especificaciones de temporización ................................................ 111
14.2.1 Precauciones sobre las señales de entrada remota ......... 111
14.2.2 Diagrama de temporización para la secuencia de
ejecución de la operación ................................................................ 112
14.2.3 Diagrama de temporización para la secuencia de
ejecución del programa .................................................................... 112

ÍNDICE
14.2.4 Diagrama de temporización para la secuencia de
entrada de la puerta de seguridad .................................................. 113
14.2.5 Diagrama de temporización para la secuencia de
la parada de emergencia ................................................................ 113
15. Ranuras para tarjeta SD 114
16. Interruptor RESET 115
17. E/S de bus de campo 116
Mantenimiento
1. Mantenimiento de seguridad 121
2. Mantenimiento general 123
2.1 Inspección de mantenimiento ......................................................... 123
2.1.1 Programa de inspección de mantenimiento ........................ 123
2.1.2 Punto de inspección ............................................................ 124
2.2 Revisión (Reemplazo de piezas) .................................................... 125
2.3 Engrase ........................................................................................... 126
2.4 Apretar pernos de cabeza hueca hexagonal .................................. 128
2.5 Orígenes coincidentes ..................................................................... 128
2.6 Distribución de las piezas de mantenimiento.................................. 129
3. Estructura del manipulador 131
4. Alarma 133
4.1 Mantenimiento ................................................................................. 134
4.1.1 Información de mantenimiento del manipulador ................. 134
4.1.2 Información de mantenimiento del manipulador ................. 134
4.2 Información de mantenimiento ........................................................ 135
4.2.1 Cómo ver la información de mantenimiento........................ 135
4.2.2 Cómo editar la información de mantenimiento ................... 136
4.2.3 Método de notificación de alarma ....................................... 137
4.2.4 Cómo cancelar la alarma..................................................... 137
5. Copia de seguridad y restauración 138
5.1 Qué es la función Backup Controller............................................... 138
5.2 Tipos de datos de copia de seguridad ............................................ 139
5.3 Copia de seguridad ......................................................................... 140
5.4 Restauración ................................................................................... 141

ÍNDICE
6. Actualización del firmware 144
6.1 Actualización del firmware ............................................................... 144
6.2 Procedimiento de actualización de firmware ................................... 144
6.3 Recuperación del manipulador ........................................................ 147
6.4 Procedimiento de inicialización de firmware .................................... 147
7. Cubiertas 150
7.1 Cubierta superior del brazo .............................................................. 151
7.2 Cubierta inferior del brazo ................................................................ 152
7.3 Cubierta del cable de alimentación .................................................. 152
7.4 Placa de conectores ......................................................................... 154
7.5 Cubierta de la unidad de alimentación ............................................ 156
7.6 Cubierta lateral de la base ............................................................... 157
7.7 Placa del usuario .............................................................................. 158
8. Cable 159
8.1 Reemplazo de la unidad de cable.................................................... 160
8.2 Insertar o tirar del cable de alimentación ......................................... 168
9. Articulación n.° 1 169
9.1 Reemplazo del motor de la articulación n.° 1 .................................. 170
9.2 Reemplazo de la unidad de engranaje reductor de la
articulación n.° 1 ....................................................................................... 181
10. Articulación n.° 2 184
10.1 Reemplazo del motor de la articulación n.° 2 ................................ 185
10.2 Reemplazo de la unidad de engranaje reductor de la
articulación n.° 2 ....................................................................................... 189
11. Articulación n.° 3 193
11.1 Reemplazo del motor de la articulación n.° 3 ................................ 194
11.2 Reemplazo de la correa de regulación .......................................... 201
11.3 Reemplazo del freno ...................................................................... 202
11.4 Comprobación de la tensión de la correa de regulación
(Correa Z).................................................................................................. 203

ÍNDICE
12. Articulación n.° 4 204
12.1 Reemplazo del motor de la articulación n.° 4 ............................... 205
12.2 Reemplazo de la correa de regulación ......................................... 211
12.2.1 Correa U2 (T6) .................................................................. 212
12.2.2 Correa U1 (T6) .................................................................. 217
12.2.3 Correa U (T3)..................................................................... 218
12.3 Comprobación de la tensión de la correa de regulación .............. 219
13. Unidad de ranura de tornillo esférico 220
13.1 Engrase de la unidad de ranura de tornillo esférico ..................... 221
13.2 Reemplazo de la unidad de ranura de tornillo esférico ................ 222
14. Batería de litio, tarjeta SD, placas y filtro 225
14.1 Reemplazo de las placas de CPU/DPB ........................................ 226
14.2 Reemplazo de la batería de litio ...................................................... 229
14.3 Reemplazo de la tarjeta SD .......................................................... 230
14.4 Reemplazo de la placa de alimentación ....................................... 231
14.4.1 Reemplazo del filtro de aire ............................................... 231
14.4 Reemplazo de la placa de alimentación .............................. 232
15. Unidad de lámpara LED 234
16. Calibración 236
16.1 Acerca de la calibración ................................................................ 236
16.2 Procedimiento de calibración ........................................................ 237
16.3 Calibración precisa de la articulación n.° 2 ................................... 246
16.4 Referencia: Procedimiento de calibración sin usar el
asistente de calibración ................................................................. 249
17. Restricción 254
17.1 Comandos inutilizables ................................................................. 254
17.2 Los comandos causan errores de movimiento si se especifica
RS-232C ................................................................................................... 254
17.3 Comandos causan errores ............................................................ 255
17.3.1 Comando de robot de 6 ejes ............................................. 255
17.3.2 Comandos de seguimiento del transportador ................... 255
17.3.3 Comandos PG ................................................................... 256
17.3.4 Comandos de R-E/S .......................................................... 256
17.3.5 Comandos de detección de fuerza ................................... 256
17.3.6 Otros (FineDist) ................................................................. 257
17.3.7 Otros (HealthCalcPeriod) .................................................. 257
17.3.8 Otros (ChDisk) ................................................................... 257

ÍNDICE
17.4 Restricciones de funciones ............................................................ 257
17.4.1 TP3 ..................................................................................... 257
17.4.2 Procesamiento de bucle ..................................................... 257
17.4.3 Búsqueda de cámara por CV1/CV2 ..................................... 259
17.4.4 Restauración de los datos de la función del
controlador de respaldo ................................................................. 259
18. Tabla de códigos de errores 260
19. Lista de piezas de mantenimiento 260
19.1 T3 ................................................................................................... 261
19.2 T6 ................................................................................................... 262
Apéndice A: Licencia del software de código abierto
para la serie T 264

Configuración y
operación
Este volumen contiene información para la configuración y
operación de los manipuladores de la serie T.
Lea meticulosamente este volumen antes de configurar y
operar los manipuladores.


Configuración y operación
Manual del manipulador de la serie T Rev.7 3
1. Seguridad
Personal calificado deberá realizar la instalación y el transporte de los manipuladores y
equipos de robot, y cumplir todos los códigos nacionales y locales. Lea este manual y
otros manuales relacionados antes de instalar el sistema de robot o antes de conectar los
cables.
Mantenga este manual a la mano para un acceso fácil en todo momento.
1.1 Convenciones
En todo este manual se indican consideraciones importantes de seguridad con los
siguientes símbolos. Asegúrese de leer las descripciones que se muestran con cada
símbolo.
ADVERTENCIA
Este símbolo indica que existe un peligro de posibles lesiones
graves o la muerte si no se siguen adecuadamente las
instrucciones asociadas.
ADVERTENCIA
Este símbolo indica que existe un peligro de posibles lesiones
graves o la muerte debido a descarga eléctrica si no se siguen
adecuadamente las instrucciones asociadas.
PRECAUCIÓN
Este símbolo indica que existe un peligro de posibles daños a
las personas o daños físicos a los equipos e instalaciones si no
se siguen adecuadamente las instrucciones asociadas.
1.2 Seguridad en el diseño y la instalación
Solo personal capacitado debe diseñar e instalar el sistema de robot. El personal
capacitado se define como aquellos quienes hayan tomado clases de capacitación en
sistemas de robot y capacitación en mantenimiento proporcionadas por un fabricante,
distribuidor o empresa representante local, o aquellos quienes comprendan cabalmente los
manuales y tengan el mismo nivel de conocimiento y habilidades que aquellos que hayan
completado los cursos de capacitación.
Para garantizar la seguridad, se debe instalar una protección para el sistema de robot. Para
conocer detalles acerca de la protección, consulte las Precauciones de diseño e instalación
en el capítulo Seguridad del Manual del usuario de EPSON RC+.
Los siguientes elementos son precauciones de seguridad para el personal de diseño:
ADVERTENCIA
■
El personal que diseñe o construya el sistema de robot con este producto debe
leer el capítulo Seguridad en el Manual del usuario de EPSON RC+ para
comprender los requisitos de seguridad antes de diseñar o construir el sistema
de robot. Diseñar o construir el sistema de robot sin comprender los requisitos de
seguridad es extremadamente peligroso y puede provocar lesiones corporales
graves o daños graves en el sistema de robot, además de causar problemas
graves de seguridad.

Configuración y operación
4 Manual del manipulador de la serie T Rev.7
■
El sistema de robot se debe usar en las condiciones ambientales que se
describen en sus respectivos manuales. Este producto se ha diseñado y
fabricado estrictamente para su uso en un entorno normal en interiores. El uso
del producto en un entorno que exceda las condiciones ambientales
especificadas no solo acortará la vida útil del producto, sino que además puede
causar graves problemas de seguridad.
ADVERTENCIA
■
El sistema de robot se debe usar dentro de los requisitos de instalación descritos
en los manuales. El uso del sistema de robot fuera de los requisitos de
instalación no solo acortará la vida útil del producto, sino que además puede
causar graves problemas de seguridad.
En el capítulo Configuración y operación se mencionan precauciones adicionales para la
instalación: 3. Entornos e instalación. Lea atentamente estos capítulos para comprender los
procedimientos de instalación segura antes de instalar los robots y los equipos robóticos.
1.2.1 Resistencia de la ranura de tornillo esférico
Si se aplica a la ranura de tornillo esférico una carga que supere el valor permisible, es
posible que no funcione correctamente debido a la deformación o el quiebre del mango. Si
se aplica a la ranura de tornillo esférico la carga que supera el valor permisible, es
necesario reemplazar la unidad de ranura de tornillo esférico.
Las cargas permisibles varían según la distancia donde se aplica la carga.
Para calcular la carga permisible, consulte la fórmula de cálculo a continuación.
[Momento flector admisible]
T3: M=13,000 N
∙
mm
T6: M=27,000 N
∙
mm
Ejemplo: Si se aplica una carga de
100 N load a 200 mm de
distancia del extremo de la
tuerca de la ranura
[Momento]
M=F
∙
L
=
200
∙
100
=
20,000 N
∙
mm
Extremo
de la
tuerca de
la ranura
F
L

Configuración y operación
Manual del manipulador de la serie T Rev.7 5
1.3 Seguridad en la operación
Los siguientes elementos son precauciones de seguridad para el personal operador
calificado:
ADVERTENCIA
■
Lea atentamente la sección 1.3 Requisitos relacionados con la seguridad en el
capítulo Seguridad del manual Seguridad e instalación antes de operar el
sistema de robot. Operar el sistema de robot sin comprender los requisitos de
seguridad es extremadamente peligroso y puede provocar lesiones corporales
graves o daños graves en el sistema de robot.
■
No ingrese al área de funcionamiento del manipulador mientras la energía hacia
el sistema de robot esté ENCENDIDA. Ingresar al área de funcionamiento con la
energía ENCENDIDA es extremadamente peligroso y puede provocar graves
problemas de seguridad, ya que es posible que el manipulador se mueva,
incluso si parece estar detenido.
■
Antes de operar el sistema de robot, asegúrese de que no haya nadie dentro del
área protegida. El sistema de robot se puede operar en el modo de enseñanza,
incluso cuando alguien está dentro del área protegida.
El movimiento del manipulador siempre está en estado restringido (baja
velocidad y baja potencia) para garantizar la seguridad de un operador. Sin
embargo, operar el sistema de robot mientras alguien está dentro del área
protegida es extremadamente peligroso y puede provocar problemas graves de
seguridad en caso de que el manipulador se mueva de manera inesperada.
■
Presione inmediatamente el interruptor de parada de emergencia siempre que el
manipulador se mueva de manera anormal mientras se opera el sistema de
robot. Continuar con la operación mientras el manipulador se mueve de manera
anormal es extremadamente peligroso y puede provocar lesiones corporales
graves o daños graves en el sistema de robot.
ADVERTENCIA
■
Para cortar la energía hacia el sistema de robot, desconecte el enchufe de la
fuente de alimentación. Asegúrese de conectar el cable de alimentación de CA a
un receptor de energía.
NO lo conecte directamente a la fuente de alimentación de la fábrica.
■
Antes de realizar cualquier procedimiento de reemplazo, APAGUE el controlador
y los equipos relacionados, luego desconecte el enchufe de la fuente de
alimentación.
Realizar cualquier procedimiento de reemplazo con la energía ENCENDIDA es
extremadamente peligroso y puede provocar una descarga eléctrica o el mal
funcionamiento del sistema de robot.
■
No conecte o desconecte los conectores del motor mientras el sistema de robot
esté ENCENDIDO. Conectar o desconectar los conectores del motor con la
energía ENCENDIDA es extremadamente peligroso y puede provocar lesiones
corporales graves, ya que el manipulador puede moverse de manera anormal;
además, puede provocar descargas eléctricas y el mal funcionamiento del
sistema de robot.

Configuración y operación
6 Manual del manipulador de la serie T Rev.7
PRECAUCIÓN
■
Cuando sea posible, solo una persona debería operar el sistema de robot. Si es
necesario operar el sistema de robot con más de una persona, asegúrese de que
todas las personas que participen se comuniquen entre sí con respecto a lo que
están haciendo y tomen todas las precauciones de seguridad necesarias.
■
Articulación n.° 1, n.° 2 y n.° 4:
Si las articulaciones se operan repetidamente con un ángulo de funcionamiento
inferior a 5 grados, es posible que se dañen prematuramente, ya que es
probable que los cojinetes provoquen una escasez de la capa de aceite en dicha
situación. Para evitar las averías tempranas, mueva las articulaciones en más de
50 grados aproximadamente cinco a diez veces por día.
Articulación n.° 3:
Si el movimiento hacia arriba y hacia abajo de la mano es de menos de 10 mm,
mueva la articulación la mitad de la carrera máxima cinco a diez veces por día.
■
La oscilación (resonancia) puede ocurrir continuamente en el movimiento a baja
velocidad del manipulador (Velocidad: aprox. 5 a 20 %), dependiendo de la
combinación de orientación del brazo y carga del efector final. La oscilación
surge de la frecuencia de oscilación natural del brazo y se puede controlar con
las siguientes medidas.
Cambiar la velocidad del manipulador
Cambiar los puntos de enseñanza
Cambiar la carga del efector final
■
La oscilación (resonancia) puede ocurrir continuamente en el movimiento a baja
velocidad del manipulador (Velocidad: aprox. 5 a 20 %), dependiendo de la
combinación de orientación del brazo y carga del efector final. La oscilación
surge de la frecuencia de oscilación natural del brazo y se puede controlar con
las siguientes medidas.
■
Es posible que el manipulador se caliente debido al calor del motor o a causas
similares. No toque el manipulador hasta que baje la temperatura. Confirme que
la temperatura del manipulador baje y no se sienta caliente cuando lo toque.
Luego, realice la enseñanza o el mantenimiento.

Configuración y operación
Manual del manipulador de la serie T Rev.7 7
1.4 Parada de emergencia
Si el manipulador se mueve de manera anormal durante su funcionamiento, presione
inmediatamente el interruptor de parada de emergencia. Presionar el interruptor de parada
de emergencia inmediatamente cambia el manipulador al movimiento de desaceleración y
lo detiene a la velocidad máxima de desaceleración.
Sin embargo, evite presionar el interruptor de parada de emergencia innecesariamente
cuando el manipulador funciona normalmente. Presionar el interruptor de parada de
emergencia bloquea el freno y puede causar desgaste en la placa de fricción del freno, lo
que acortará la vida útil del freno.
Ciclo de vida útil normal del freno: Aproximadamente 2 años (cuando los frenos se
usan 100 veces/día)
Para colocar el sistema en modo de emergencia durante el funcionamiento normal,
presione el interruptor de parada de emergencia cuando el manipulador no esté en
movimiento.
Consulte Configuración y operación: 11. EMERGENCIA para obtener instrucciones
acerca de cómo conectar el circuito del interruptor de parada de emergencia.
No corta la energía mientras el manipulador esté funcionando.
Si intenta detener el manipulador en situaciones de emergencia, como “Protección abierta”,
asegúrese de detener el manipulador con el interruptor de parada de emergencia.
Si el manipulador se detiene cuando corta la energía mientras está funcionando, pueden
ocurrir los siguientes problemas.
Reducción de la vida útil y daños a la unidad del engranaje reductor
Espacio de posición en las articulaciones
Además, si se forzó el apagado del manipulador por un corte de energía o sucesos
similares mientras estaba en funcionamiento, asegúrese de revisar los siguientes puntos
después de restaurar la energía.
Si el engranaje reductor está dañado o no
Si las articulaciones están en las posiciones correctas o no
Si hay una separación de posición, realice una calibración con el procedimiento descrito en
la sección Mantenimiento 16. Calibración de este manual. Además, los mismos
problemas pueden ocurrir si ocurre un error y el manipulador se detiene por una
emergencia durante el funcionamiento. Revise la condición del manipulador y realice la
calibración, si es necesario.
Antes de usar el interruptor de parada de emergencia, tenga en cuenta lo siguiente.
- El interruptor de parada de emergencia (E-STOP) se debe usar para detener el
manipulador solo en caso de emergencias.
- Para detener el manipulador que opera el programa, excepto en caso de emergencia,
utilice los comandos Pause (parada) o STOP (detención del programa). Los
comandos Pause y STOP no apagan los motores. Por lo tanto, el freno no funciona.
- Para el sistema de protección, no utilice el circuito para E-STOP.
Para conocer detalles acerca del sistema de protección, consulte los siguientes manuales.
Manual del usuario de EPSON RC+
2. Seguridad - Precauciones de diseño e instalación - Sistema de protección

Configuración y operación
8 Manual del manipulador de la serie T Rev.7
Seguridad e instalación
2.6 Conexión al conector EMERGENCY
Para revisar problemas con el freno, consulte los siguientes manuales.
Manual del manipulador Mantenimiento
2.1.2 Punto de inspección - Inspección mientras la energía está ENCENDIDA
(El manipulador está en funcionamiento).
Seguridad e instalación
5.1.1 Manipulador - Inspección mientras la energía está ENCENDIDA
(El manipulador está en funcionamiento).
Distancia de funcionamiento libre en una emergencia
El manipulador en funcionamiento no puede detenerse inmediatamente después de
presionar el interruptor de parada de emergencia.
A continuación, se muestra el tiempo, el ángulo y la distancia de funcionamiento libre del
manipulador. Sin embargo, recuerde que los valores dependen de las siguientes
condiciones.
Peso del efector final Peso de la pieza de trabajo Pose de funcionamiento
Peso Velocidad Aceleración etc.
Condiciones de
medición
T3-401S
T6-602S
Valor de Accel
100
100
Config. de velocidad
100
100
Carga [kg]
3
6
Config. de peso
3
6
Articulación n.° 1
Punto de detención
Punto de entrada
de señal de parada
de emergencia
Punto objetivo
Punto de inicio
de la operación
Articulación n.° 2
T3-401S
T6-602S
Tiempo de
funcionamiento libre
Articulación n.º 1 +
Articulación n.º 2
[s]
0,5
0,4
Articulación n.º 3 [s]
0,2
0,2
Ángulo de
funcionamiento libre
Articulación n.º 1 [grados]
50
60
Articulación n.º 2 [grados]
50
30
Articulación n.º 1 +
Articulación n.º 2 [grados]
100
90
Distancia de
funcionamiento libre
Articulación n.º 3
[mm]
20
40

Configuración y operación
Manual del manipulador de la serie T Rev.7 9
1.5 Movimiento de emergencia sin fuerza motriz
Cuando se coloca el sistema en modo de emergencia, empuje el brazo o la articulación del
manipulador con la mano, tal como se muestra a continuación:
Brazo n.° 1 Empuje el brazo con la mano.
Brazo n.° 2 Empuje el brazo con la mano.
Articulación n.° 3 La articulación no se puede mover con la mano hacia
arriba o hacia abajo hasta que se haya liberado el freno de
solenoide que se aplicó a la articulación. Mueva la articulación
hacia arriba y hacia abajo mientras presiona el interruptor de
desbloqueo del freno.
Articulación n.° 4 Gire el mango con la mano.
Articulación n.° 3
Interruptor de
desbloqueo del freno
Articulación n.° 1
(girando)
Articulación n.° 2
(girando)
Articulación n.°3
(arriba y abajo)
Articulación n.° 4 (girando)
Brazo n.° 1
Brazo n.° 2
+
+
+
+
Mango
(Ilustración: T3-401S)
El interruptor de desbloqueo del freno solo afecta a la articulación n.° 3. Cuando se
presiona el interruptor de desbloqueo del freno en modo de emergencia, se libera el freno
de la articulación n.° 3. Tenga cuidado con el mango mientras se presiona el interruptor de
desbloqueo del freno, ya que es posible que el mango baje debido al peso del efector final.
Cuando ocurren los siguientes errores, no se libera el freno del manipulador aún se está
presionando el interruptor de desbloqueo del freno.
Revise las conexiones de los cables y elimine los errores. Luego, vuelva a conectar los
cables y libere el freno.
Errores: 1552, 2118, 4003, 4004, 4009, 4100, 4101, 4103, 4187, 4188, 4189, 4191, 4192,
4233, 4240, 4285-4292, 9633, 9640, 9691, 9685-9692
NOTA
NOTA

Configuración y operación
10 Manual del manipulador de la serie T Rev.7
1.6 Configuración ACCELS para movimientos de CP
Para hacer que el manipulador se mueva en movimiento CP, consulte las siguientes
secciones y configure ACCELS correctamente según la carga de la punta y la altura del
eje Z.
La configuración incorrecta puede causar los siguientes problemas.
- Disminución de la vida útil y daños de la ranura de tornillo esférico
Configure ACCELS tal como se indica a continuación según la altura del eje Z.
Valores de la configuración ACCELS por altura del eje Z y carga de la punta
T3
Altura del eje Z
[mm]
Carga de la punta
1 kg o menos
2 kg o menos
3 kg o menos
__- 0 > Z >= _- 50
25000 o
menos
25000 o menos
22500 o menos
__- 50 > Z >= _- 100
22500 o menos
15000 o menos
__- 100 > Z >= _- 150
17500 o menos
10000 o menos
T6
Altura del eje Z
[mm]
Carga de la punta
2kg o menos
4kg o menos
6kg o menos
__- 0 > Z >= _- 50
25000 o
menos
25000 o menos
25000 o menos
__- 50 > Z >= _- 100
15000 o menos
__- 100 > Z >= _- 150
17500 o menos
12500 o menos
__- 150 > Z >= _- 200
15000 o menos
10000 o menos
Z
Altura 0 eje Z
(Posición de
origen)
Si el manipulador se opera en movimiento CP con los valores incorrectos, asegúrese de
revisar los siguientes puntos.
- Si el mango de ranura de tornillo esférico está deformado o doblado
NOTA

Configuración y operación
Manual del manipulador de la serie T Rev.7 11
1.7 Etiquetas
El manipulador tiene las siguientes etiquetas de advertencia.
Las etiquetas de advertencia están adheridas en los lugares donde existen riesgos
específicos.
Asegúrese de acatar las descripciones y advertencias de las etiquetas para operar y realizar
mantenimiento al manipulador de manera segura.
No rasgue, dañe o retire las etiquetas de advertencia. Sea meticuloso cuando manipule las
piezas o unidades a las que están adheridas las siguientes etiquetas de advertencia, además
de sus áreas circundantes:
Ubicación
Etiqueta de advertencia
NOTA
A
Antes de soltar los tornillos de la base de montaje,
afirme el brazo y fíjelo firmemente con una correa
para evitar que las manos o dedos queden
atrapados en el manipulador.
B
No ingrese al área de funcionamiento mientras el
manipulador esté en movimiento. El brazo del
robot puede chocar contra el operador. Esto es
extremadamente peligroso y puede provocar
problemas graves de seguridad.
C
Hay voltaje peligroso mientras el manipulador
está ENCENDIDO. Para evitar las descargas
eléctricas, no toque las piezas eléctricas internas.
D
Puede atrapar su mano o sus dedos entre el mango
y la cubierta si coloca su mano cerca de piezas
móviles.
E
Etiqueta de signatura
Etiqueta de N/S (Número de serie)

Configuración y operación
12 Manual del manipulador de la serie T Rev.7
T3
D
B
C
C
C
C
C
A
E
T6
D
B
C
C
C
C
A
E

Configuración y operación
Manual del manipulador de la serie T Rev.7 13
2. Especificaciones
2.1 Características de los manipuladores de la serie T
Los manipuladores de la serie T son manipuladores integrados con controlador.
Las características de los manipuladores de la serie T son las siguientes:
Para el diseño y las herramientas del dispositivo
- No hay controlador externo
El controlador viene integrado con el robot.
No se necesita espacio de instalación para un controlador externo.
No se necesita diseño para la instalación del controlador externo o las
herramientas.
- Sin cables desde el robot hasta el controlador
No hay cables externos necesarios entre el robot y el controlador.
- La mano (efector final) se puede controlar directamente con la E/S manual y CC 24V
manual
No se necesita cableado entre el controlador y el efector final del manipulador.
- Estructura de reducción de vibración del conducto
Cables externos fáciles de enrutar.
Para mantenimiento
- No hay baterías de la unidad del motor para el robot
Ya no se necesita conectar dispositivos externos para el reemplazo de la batería.
- El manipulador es fácil de reemplazar
- Enfriamiento de aire sin ventilador
No se necesita mantenimiento del ventilador de enfriamiento de aire.
Otros
- Ahorro de energía
T3: Aprox. 1/4 de LS3/RC90
T6: Aprox. 1/3 de LS6/RC90

Configuración y operación
14 Manual del manipulador de la serie T Rev.7
2.2 Número de modelo
T3-40 1 S
Entorno
S
: Estándar
Longitud del brazo
40
: 400 mm
60
: 600 mm
Carga útil
3
: 3 kg
6
: 6 kg
Para conocer detalles acerca de las especificaciones, consulte Configuración y operación:
2.6 Especificaciones.
Carrera de articulación n.° 3
1
: 150 mm
2
: 200 mm

Configuración y operación
Manual del manipulador de la serie T Rev.7 15
2.3 Nombres de piezas
2.3.1 T3
Articulación n.° 3
Interruptor de desbloqueo del freno
Brazo n.° 1
Brazo n.° 2
Base
Mango
Etiqueta de firma
(Número de serie
del manipulador)
Conector rápido
(azul) para tubo
neumático de ø4 mm
Luz LED
Etiqueta CE
Conector rápido
(azul) para tubo
neumático de ø6 mm
Conector TP
Conector
EMERGENCY
Cubierta de fuente de alimentación
(Conector de CA en el interior)
Conector E/S (Salida)
Conector E/S (Entrada)
Conector LAN (Ethernet)
Puerto de PC de desarrollo
Interruptor RESET
Conector rápido
(blanco) para tubo
neumático de ø6 mm
Unidad de alimentación
Puerto MEMORY
Conector E/S manual
- El interruptor de desbloqueo del freno solo afecta a la articulación n.° 3. Cuando se
presiona el interruptor de desbloqueo del freno en modo de emergencia, se libera el freno
de la articulación n.° 3.
- Mientras la luz LED esté encendida, se aplica corriente al manipulador. Realizar trabajos
con la energía ENCENDIDA es extremadamente peligroso y puede provocar una descarga
eléctrica o el mal funcionamiento del sistema de robot. Asegúrese de APAGAR el
manipulador antes de realizar trabajos de mantenimiento.
NOTA

Configuración y operación
16 Manual del manipulador de la serie T Rev.7
2.3.2 T6
Articulación n.° 3
Interruptor de desbloqueo del freno
Brazo n.° 1
Brazo n.° 2
Base
Mango
Etiqueta de firma
(Número de serie
del manipulador)
Conector rápido (azul)
para tubo neumático
de ø4 mm
Luz LED
Etiqueta CE
Conector rápido
(azul) para tubo
neumático de ø6 mm
Conector TP
Conector
EMERGENCY
Cubierta de fuente de alimentación
(Conector de CA en el interior)
Conector E/S (Entrada)
Conector E/S (Salida)
Conector LAN (Ethernet)
Puerto de PC de desarrollo
Interruptor RESET
Conector rápido
(blanco) para tubo
neumático de ø6
mm
Unidad de energía
Puerto MEMORY
Conector E/S manual
- El interruptor de desbloqueo del freno solo afecta a la articulación n.° 3. Cuando se
presiona el interruptor de desbloqueo del freno en modo de emergencia, se libera el freno
de la articulación n.° 3.
- Mientras la luz LED esté encendida, se aplica corriente al manipulador. Realizar trabajos
con la energía ENCENDIDA es extremadamente peligroso y puede provocar una descarga
eléctrica o el mal funcionamiento del sistema de robot. Asegúrese de APAGAR el
manipulador antes de realizar trabajos de mantenimiento.
NOTA

Configuración y operación
Manual del manipulador de la serie T Rev.7 17
2.4 Dimensiones exteriores
2.4.1 T3

Configuración y operación
18 Manual del manipulador de la serie T Rev.7
2.4.2 T6

Configuración y operación
Manual del manipulador de la serie T Rev.7 19
2.5 Ejemplo de sistema
T3 / T6
Estándar
E/S Estándar
E/S Remota
Ethernet
E/S Manual
USB (para guardar)
USB (para desarrollo)
ModBus
Bus de campo
Esclavo
Opcional
(Ilustración: T3-401S)
*1 EPSON RC+ 7.0 es compatible con los siguientes sistemas operativos:
Windows XP Professional Service Pack 3 (anterior a EPSON RC+7.0 versión 7.2.0)
Windows Vista Business Service Pack 2
Windows 7 Professional Service Pack 1
Windows 8.1 Pro (EPSON RC+7.0 versión 7.1.0 o posterior)
Windows 10 Pro (EPSON RC+7.0 versión 7.2.0 o posterior)
*2 Cualquiera de las cajas de comandos (Teach Pendant) está disponible.
*3 Cuando se conecta a T3 / T6, se necesita el cable de conversión especificado.

Configuración y operación
20 Manual del manipulador de la serie T Rev.7
2.6 Especificaciones
Elemento
T3-401S
T6-602S
Longitud del brazo
Brazo n.° 1,
n.° 2
400 mm
600 mm
Brazo n.° 1
225 mm
325 mm
Brazo n.° 2
175 mm
175 mm
Peso (sin incluir los cables)
16 kg: 35 lb
22 kg: 49 lb
Método de transmisión
Todas las
articulaciones
Servomotor de CA
Velocidad máx. de
funcionamiento*1
Articulaciones
n.° 1, n.° 2
3700 mm/s
4180 mm/s
Articulación
n.° 3:
1000 mm/s
1000 mm/s
Articulación
n.° 4:
2600 grados/s
1800 grados/s
Repetitividad
Articulaciones
n.° 1, n.° 2
0,02 mm
0,04 mm
Articulación
n.° 3:
0,02 mm
0,02 mm
Articulación
n.° 4:
0,02 grados
0,02 grados
Margen máx.
de movimiento
Articulación
n.° 1:
132 grados
132 grados
Articulación
n.° 2:
141 grados
150 grados
Articulación
n.° 3:
150 mm
200 mm
Articulación
n.° 4:
360 grados
360 grados
Margen máx.
de pulso
Articulación
n.° 1:
95574 ~ 505174
152918 ~ 808278
Articulación
n.° 2:
320854
341334
Articulación
n.° 3:
187734 ~ 0
245760 ~ 0
Articulación
n.° 4:
71760
245760
Resolución
Articulación
n.° 1:
0,000439 grados/pulso
0,000275
grados/pulso
Articulación
n.° 2:
0,000439 grados/pulso
0,000439
grados/pulso
Articulación
n.° 3:
0,000799 mm/pulso
0,000814 mm/pulso
Articulación
n.° 4:
0,005017 grados/pulso
0,01465
grados/pulso
Consumo de energía
del motor
Articulación
n.° 1:
200 W
300 W

Configuración y operación
Manual del manipulador de la serie T Rev.7 21
Elemento
T3-401S
T6-602S
Articulación
n.° 2:
100 W
200 W
Articulación
n.° 3:
100 W
Articulación
n.° 4:
100 W
Carga útil (Carga)
Nominal
1 kg
2 kg
Máx.
3 kg
6 kg
Momento de inercia
permisible
de la articulación n.° 4
*2
Nominal
0,003 kg·m
2
0,01 kg·m
2
Máx.
0,01 kg·m
2
0,08 kg·m
2
Mano
Diámetro del
mango
ø 16 mm
ø 20 mm
Agujero
pasado
ø 11 mm
ø 14 mm
Fuerza hacia abajo de la articulación n.° 3
83 N
Conector de E/S manual
15 pines: D-sub
Tubo neumático instalado
para uso del cliente
2 tubos neumáticos (ø6 mm):
0,59 MPa (6 kgf/cm
2
: 86 psi)
1 tubo neumático (ø4 mm):
0,59 MPa (6 kgf/cm
2
: 86 psi)
Orificio de montaje
120 120 mm
150 150 mm
4-M8
5 a 40 grados C
(con variación mínima de temperatura)
Requisitos ambientales
Temp.
ambiente
Humedad
ambiental
relativa
20 a 80 % (sin condensación)
Nivel de ruido *3
L
Aeq
= 80 dB (A) o inferior

Configuración y operación
22 Manual del manipulador de la serie T Rev.7
Elemento
T3-401S
T6-602S
Valor
asignable ( )
Valores
predet.
Speed (Velocidad)
1 ~ (5) ~ 100
1 ~ (5) ~ 100
Accel (Aceleración) *4
1 ~ (10) ~ 120
1 ~ (10) ~ 120
SpeedS
0.1 ~ (50) ~ 2000
0.1 ~ (40) ~ 2000
AccelS
0.1 ~ (200) ~ 10000
0.1 ~ (200) ~ 10000
Fine
0 ~ (1250) ~ 65000
0 ~ (1250) ~ 65000
Weight (Peso)
0,175 ~ (1,175) ~ 3,175
0,275 ~ (2,275) ~ 6,275
Control de
movimiento
Entorno de desarrollo
EPSON RC+ 7.0
Lenguaje de
programación
SPEL+ (lenguaje de robot multitarea)
Control de articulación
Control estándar simultáneo de 4 articulaciones
Servocontrol digital de CA
Control de
posicionamiento
PTP (control punto a punto)
CP (control de ruta continua)
Control de velocidad
Movimiento de PTP: Programable en el
intervalo de 1 a 100 %
Movimiento de CP: Programable (el valor real se
debe ingresar manualmente).
Control de
aceleración/desacelerac
ión
Movimiento de PTP: Programable en el
intervalo de 1 a 100 %; Automático
Movimiento de CP: Programable (el valor real se
debe ingresar manualmente).
Interfaz
externa
EMERGENCY
(Emergencia)
EMERGENCY STOP (Parada de emergencia):
Redundante (Categoría 3) Compatible con fuente
de alimentación interna y externa
Sistema de protección:
Redundante (Categoría 3) Compatible con fuente
de alimentación externa
E/S
E/S estándar
(Lado posterior
del
manipulador)
Entrada: 18 puntos
Salida: 12 puntos
No polar, compatible con receptor y fuente
E/S remota
(Las
funciones
remotas se
aplican a E/S
estándar)
Entrada: 8 puntos
Programa, 3 puntos
Start, Stop, Pause, Continue, Reset (Iniciar,
Detener, Pausa, Continuar, Reiniciar)
Salida: 8 puntos
Ready, Running, Paused, ErrorEStopOn,
SafeguardOn, SError, Warning (Listo, En
funcionamiento, En pausa, Error Parada de
emergencia activada, Protección activada, SError,
Advertencia)
E/S de la mano
(Lado superior
del brazo n.° 2)
Entrada: 6 puntos
Salida: 4 puntos
No polar, compatible con receptor y fuente
Fuente de alimentación: disponible hasta 24 V, 500
mA
Energía 24V
Máx. 500mA
Energía 24V
Máx. 700mA
Interfaz
externa
Subordinado de fieldbus
(Opción)
Entrada: 256 puntos
Salida: 256 puntos
Permite agregar solo un módulo más
Puerto de conexión TP
Compatible con caja de comandos (Teach Pendant)
(Opción: TP2, TP3)
Puerto de conexión PC
Conector USB B
Compatible con USB 2.0 alta velocidad / velocidad
plena

Configuración y operación
Manual del manipulador de la serie T Rev.7 23
Elemento
T3-401S
T6-602S
Puerto de conexión
de memoria USB
Conector USB A
Compatible con USB 2.0 alta velocidad / velocidad
plena
Puerto Ethernet
Compatible con 10/100 Mbps
Hasta 8 puertos disponibles
Interruptor RESET
Habilite para el restablecimiento del sistema
Pantalla
Indicador LED de
pantalla de modo
TEACH, AUTO, PROGRAM, TestMode, Error,
E-STOP
Guardado de estado del controlador
Guardar a memoria USB
Guardar en RC+ (PC)
Voltaje
100 V ~ 240 V CA
Fase
Monofásico
Frecuencia
50 / 60 Hz
Interrupción de energía momentánea
Menos de 10 ms
Consumo de energía
660 VA
1,200 VA
Corriente máxima
(Cuando la corriente de CA está
ENCENDIDA)
Máx. 30A
(Menos de 2 ms)
Máx. 60A
(Menos de 2 ms)
Corriente de fuga
Máx. 10 mA
Resistencia de tierra
Menos de 100
Norma de seguridad
Marca CE
Directiva CEM, Directiva de maquinaria, Directiva
RoHS
ANSI/RIA R15.06-2012
NFPA 79 (Edición 2007)
*1: En caso de un comando PTP. La velocidad máxima de funcionamiento para el
comando CP es de 2000 mm/s en un plano horizontal.
*2: En el caso donde el centro de gravedad esté en el centro de la articulación n.° 4. Si el
centro de gravedad no está en el centro de la articulación n.° 4, ajuste el parámetro con
el comando Inertia (Inercia).
*3: Las condiciones del manipulador durante la medición son las siguientes:
Condiciones de funcionamiento: Bajo carga nominal, movimiento simultáneo con 4
articulaciones, velocidad máxima, aceleración
máxima y trabajo al 50 %.
Punto de medición: Frente al manipulador, a 1000 mm de distancia del rango de
movimiento, 50 mm sobre la superficie instalada en la base.
*4: En el uso general, el ajuste Accel 100 es el ajuste óptimo que mantiene el equilibrio de
la aceleración y la vibración cuando se ajusta la posición. Aunque se pueden establecer
valores mayores que 100 en Accel, se recomienda minimizar el uso de valores grandes
a movimientos necesarios, ya que el operar el manipulador continuamente con un
ajuste de Accel grande puede reducir considerablemente la vida útil del producto.

Configuración y operación
24 Manual del manipulador de la serie T Rev.7
2.7 Cómo configurar el modelo
El modelo del manipulador para su sistema se ha configurado antes del envío desde la
fábrica. Normalmente no es necesario cambiar el modelo cuando recibe el sistema.
PRECAUCIÓN
■
Cuando necesite cambiar la configuración del modelo del manipulador, asegúrese
de configurar el
modelo del manipulador correctamente. La configuración incorrecta del modelo
del manipulador puede provocar un funcionamiento anormal del manipulador o
que este no funcione, y causar problemas de seguridad.
Si se describe el número de especificaciones personalizadas (MT***) en MODEL
(Modelo) en la etiqueta de signatura (etiqueta de N/S), el manipulador tiene
especificaciones personalizadas. Es posible que las especificaciones personalizadas
requieran un procedimiento de configuración distinto; verifique el número de
especificaciones personalizadas (MT***) y comuníquese con nosotros cuando sea
necesario.
El modelo del manipulador se puede configurar desde el software.
Consulte el capítulo Configuración del robot en el Manual del usuario EPSON RC+.
NOTA

Configuración y operación
Manual del manipulador de la serie T Rev.7 25
3. Entornos e instalación
3.1 Condiciones ambientales
Es necesario un entorno adecuado para que el sistema de robot funcione de forma correcta
y segura. Asegúrese de instalar el sistema de robot en un entorno que cumpla las siguientes
condiciones:
Elemento
Condiciones
Temperatura ambiente
5 a 40 °C (con variación mínima de temperatura)
Humedad ambiental
relativa
20 a 80 % (sin condensación)
Primera ráfaga de ruido
transitoria
2 kV o menos
Ruido electrostático
4 kV o menos
Entorno
· Instalar en interiores.
· Mantener lejos de la luz solar directa.
· Mantener lejos del polvo, humo grasiento, salinidad, polvo
metálico u otros contaminantes.
· Mantener lejos de solventes y gases inflamables o
corrosivos.
· Mantener lejos del agua.
· Mantener lejos de golpes o vibraciones.
· Mantener lejos de fuentes de ruido eléctrico.
- Mantener lejos de campos magnéticos o eléctricos fuertes.
Los manipuladores no son adecuados para su operación en entornos adversos, como áreas
de pintura, etc. Cuando use manipuladores en entornos inadecuados que no cumplan las
condiciones anteriores, comuníquese con nosotros.
Condiciones ambientales especiales
La superficie del manipulador tiene una resistencia general al aceite. Sin embargo, si sus
requisitos especifican que el manipulador debe soportar ciertos tipos de aceite, consulte
con su distribuidor.
Los cambios rápidos en la temperatura y la humedad pueden causar condensación dentro
del manipulador.
Si sus requisitos especifican que el manipulador manipule alimentos, consulte con su
distribuidor para comprobar si el manipulador dañará los alimentos o no.
El manipulador no se puede usar en entornos corrosivos donde se usen sustancias ácidas o
alcalinas. El manipulador es susceptible a la oxidación en entornos salados donde se puede
acumular óxido.
ADVERTENCIA
■
Use un disyuntor de fuga a tierra en el cable de alimentación de CA de los
manipuladores para evitar descargas eléctricas y averías del circuito causadas
por cortocircuitos.
NOTA

Configuración y operación
26 Manual del manipulador de la serie T Rev.7
PRECAUCIÓN
■
Cuando limpie el manipulador, no lo frote con fuerza con alcohol o benceno.
Puede perder el lustre de la superficie recubierta.
3.2 Mesa base
No se incluye una mesa base para fijar el manipulador. Fabrique u obtenga la mesa base
para su manipulador. La forma y el tamaño de la mesa base difiere según el uso del
sistema de robot. Para su referencia, incluimos algunos requisitos para la mesa del
manipulador aquí.
La mesa base es necesaria para soportar no solo el peso del manipulador, sino que también
el movimiento dinámico cuando se opera a la velocidad más rápida. Proporciona las vigas
suficientes para ofrecer la resistencia suficiente.
El torque y la fuerza de reacción producidos por el movimiento del manipulador son los
siguientes:
T3
T6
Torque de reacción máx. en la placa horizontal
150
N·m
350
N·m
Fuerza de reacción horizontal máx.
500
N
750
N
Fuerza de reacción vertical máx.
900
N
1500
N
Los orificios roscados necesarios para el montaje de la base del manipulador son M8. Use
pernos de montaje con especificaciones que cumplan con la clase de propiedad ISO 898-1:
10.9 o 12.9.
Para conocer las dimensiones, consulte Configuración y operación: 3.3 Dimensiones de
montaje.
La placa para la superficie de montaje del manipulador debe tener 20 mm de grosor o más
y estar hecha de acero para reducir la vibración. La dureza de la superficie de la placa de
acero debe ser de 25 μm o menos.
La mesa se debe fijar al suelo o a la pared para impedir que se mueva.
El manipulador se debe instalar horizontalmente.
Cuando use un nivel para ajustar la altura de la mesa base, use un tornillo con diámetro
M16 o superior.
Si pasará cables a través de los orificios en la mesa base, consulte las figuras a
continuación.
Conector E/S (Entrada)
11
54
37
13
(Unit: mm)
11
24
Conector E/S (Salida)
Conector EMERGENCY
9
34
Conector de
alimentación CA
ADVERTENCIA
■
Para garantizar la seguridad, se debe instalar una protección para el sistema de
robot.
Para conocer detalles acerca de la protección, consulte el Manual del usuario
EPSON RC+.

Configuración y operación
Manual del manipulador de la serie T Rev.7 27
3.3 Dimensiones de montaje
El espacio máximo descrito en las figuras muestra que el radio del efector final es de 60
mm o menos. Si el radio del efector final supera los 60 mm, defina el radio como la
distancia hasta el borde exterior del espacio máximo.
Si una cámara o válvula de solenoide se extiende fuera del brazo, configure el rango
máximo, lo que incluye el espacio que puedan alcanzar.
Asegúrese de permitir los siguientes espacios adicionales, además del espacio necesario
para el montaje del manipulador y los equipos periféricos.
Espacio para la enseñanza
Espacio para mantenimiento e inspección
(Asegúrese de tener un espacio para abrir las cubiertas y placas para realizar
mantenimiento).
Espacio para los cables
El radio mínimo de curva del cable de alimentación es de 90 mm. Cuando instale el cable,
asegúrese de mantener suficiente distancia con respecto a los obstáculos. Además, deje
suficiente espacio para otros cables, de modo que no se doblen a la fuerza.
Asegúrese de que la distancia de la protección hasta el rango máximo de movimiento sea
mayor que 100 mm.
T3
Centro de articulación n.° 3
Espacio máximo
Rango de
movimiento
Área limitada por parade mecánica
Superficie de montaje de base

Configuración y operación
28 Manual del manipulador de la serie T Rev.7
T6
Centro de articulación n.° 3
Espacio máximo
Rango de movimiento
Área limitada por
parade mecánica
Superficie de montaje de base

Configuración y operación
Manual del manipulador de la serie T Rev.7 29
3.4 Desembalaje y transporte
PERSONAL DE INSTALACIÓN CALIFICADO DEBERÁ REALIZAR LA
INSTALACIÓN
Y ESTA DEBERÁ CUMPLIR CON TODOS LOS CÓDIGOS NACIONALES Y
LOCALES.
ADVERTENCIA
■
Solo personal autorizado debe realizar trabajo de eslinga y operar una grúa o un
montacargas. Es extremadamente peligroso que personal no autorizado realice
estas operaciones, ya que se pueden provocar lesiones corporales graves o
daños importantes a los equipos del sistema de robot.
PRECAUCIÓN
■
Use una carretilla o un equipo similar para transportar el manipulador de la
misma manera en que lo recibió.
■
Después de retirar los pernos que fijan el manipulador al equipo de entrega, el
manipulador se puede caer. Tenga cuidado de que sus manos o dedos no
queden atrapados.
■
El brazo está fijado con una hoja. Deje la hoja fija hasta que termine la
instalación para impedir que sus manos o dedos queden atrapados.
■
Para transportar el manipulador, solicite que dos o más
personas trabajen en él y lo fijen al equipo de entrega, o
sostengan la parte inferior del brazo n.° 1 y la parte
inferior de las áreas base (indicada en gris en la imagen)
manualmente.
Cuando sostenga la parte inferior de la base
manualmente, tenga cuidado de que sus manos o dedos
no queden atrapados.
T3-401S: aprox. 16 kg: 35 lb.
T6-602S: aprox. 22 kg: 49 lb
(Ilustración: T3-401S)
■
No sostenga la unidad de alimentación cuando transporte el manipulador.
■
Estabilice el manipulador con sus manos cuando lo eleve.
■
Cuando transporte el manipulador una gran distancia, fíjelo directamente al
equipo de entrega, de modo que nunca se caiga.
Si es necesario, embale el manipulador de la misma manera en la que se
entregó.

Configuración y operación
30 Manual del manipulador de la serie T Rev.7
3.5 Procedimiento de instalación
PRECAUCIÓN
■
Se debe instalar el manipulador para evitar interferencia con edificios,
estructuras, servicios públicos, otras máquinas y equipos que puedan crear un
peligro de atrapamiento o puntos de apriete.
■
Se puede producir oscilación (resonancia) durante el funcionamiento, según la
rigidez de la mesa de instalación.
Si se produce oscilación, mejore la rigidez de la mesa o cambie la configuración
de velocidad o de aceleración y desaceleración.
■
Instale el manipulador de montaje en sobremesa con dos o más personas.
Los pesos del manipulador son los siguientes. Tenga cuidado de que sus manos,
dedos o pies no queden atrapados, o de que los equipos sufran daños por la
caída del manipulador.
T3-401S: aprox.16 kg: 35 lb.
T6-602S: aprox. 22 kg: 49 lb
Fije la base a la mesa base con cuatro pernos.
Use pernos con especificaciones que cumplan con la clase de propiedad ISO 898-1: 10.9 o
12.9.
Torque de ajuste: 32,01,6 N·m
Asegúrese de retirar el amarracables del protector de parada mecánica.
10 mm
Agujero roscado
(profundidad de
20 mm o más)
4-M830
Arandela
de resorte
Arandela plana
(Ilustración: T3-401S)
NOTA
NOTA

Configuración y operación
Manual del manipulador de la serie T Rev.7 31
3.6 Fuente de alimentación
ADVERTENCIA
■
El manipulador no cuenta con un interruptor de encendido. Inmediatamente
después de insertar el enchufe en el suministro, se enciende el sistema de
robot.
Tenga cuidado con las descargas eléctricas cuando inserte el enchufe.
3.6.1 Especificaciones
Asegúrese de que la energía disponible cumpla con las siguientes especificaciones.
Elemento
Especificación
Voltaje
100 a 240 V CA
(El voltaje de entrada idebe estar dentro de 10 del voltaje
nominal).
Fase
Monofásico
Frecuencia
50/60 Hz
Interrupción de energía
momentánea
Menos de 10 ms
Consumo de energía
T3: 660 VA
T6: 1-200VA
Corriente máxima
(Cuando la corriente de CA está
ENCENDIDA)
T3: aprox. 30 A (menos de 2 ms)
T6: aprox. 60A (menos de 2 ms)
Voltaje
Máx. 10 mA
Resistencia de tierra
100 o menos
3.6.2 Cable de alimentación de CA
ADVERTENCIA
■
Asegúrese de que personal calificado realice las operaciones.
■
Asegúrese de conectar el cable a tierra )verde/amarillo) al cable de
alimentación de CA al terminal de tierra de la fuente de alimentación de la
fábrica.
También se recomienda que lo conecte a tierra directamente a través de un
agujero en la base para poner a tierra el manipulador completamente.
El equipo debe estar conectado a tierra de forma correcta en todo momento
para evitar el riesgo de descargas eléctricas.
■
Siempre use un enchufe o un dispositivo de desconexión para el cable
conector de energía. Nunca conecte el controlador de forma directa a la
fuente de alimentación de la fábrica.
■
Seleccione un enchufe o un dispositivo de desconexión que cumpla con las
normas de seguridad de cada país.
Cuando conecte el conector del cable de CA al manipulador, asegúrese de insertarlo
completamente.
Especificaciones de conexión del cable
Elemento
Especificación
Cable de alimentación de
CA (2 cables)
Negro, blanco
Cable a tierra
Verde/amarillo
Longitud de cable
5 m
Terminal
Terminal redonda M4 sin
soldadura

Configuración y operación
32 Manual del manipulador de la serie T Rev.7
Utilice el sujetador de cable en el lado posterior del manipulador para fijar el cable de
alimentación de CA.
Sujetor del cable de alimentación CA
(Ilustración: T3-401S)
3.6.3 Disyuntor
Instale un disyuntor de fuga a tierra o un disyuntor en la línea del cable de alimentación de
CA.
Para la corriente eléctrica nominal del disyuntor, consulte los valores en la siguiente tabla.
Manipulador
Energía
Corriente eléctrica
nominal
T3
100 V de CA
10 A
200 V de CA
5A
T6
100 V de CA
20A
200 V de CA
10 A
Si instala un disyuntor, seleccione uno que soporte la “corriente máxima” indicada
anteriormente
Configuración y operación 3.6.1 Especificaciones
El tomacorriente debe estar instalado cerca del equipo y debe tener un acceso fácil.

Configuración y operación
Manual del manipulador de la serie T Rev.7 33
3.6.4 Unidad de alimentación
ADVERTENCIA
■
Antes de realizar mantenimiento a la unidad de alimentación, APAGUE el
sistema de robot y los equipos relacionados, luego desconecte el enchufe de
la fuente de alimentación.
Realizar cualquier procedimiento de reemplazo con la energía ENCENDIDA
es extremadamente peligroso y puede provocar una descarga eléctrica o el
mal funcionamiento del sistema de robot.
■
No aplique peso a la unidad de alimentación para aplicar una carga. Hacerlo
puede provocar deformación o daños en las piezas.
■
NUNCA conecte una unidad de alimentación deformada o dañada al sistema
de robot o a equipos relacionados. Puede provocar un incendio o descarga
eléctrica.
T3
T6
Unidad de
alimentación
Unidad de
alimenación

Configuración y operación
34 Manual del manipulador de la serie T Rev.7
3.6.5 Conexión a tierra
ADVERTENCIA
■
La resistencia de tierra debe ser de 100 Ω o menos. La resistencia de tierra
incorrecta puede provocar un incendio o descarga eléctrica.
■
No use la línea de conexión a tierra del manipulador en conjunto con otras líneas
o electrodos de conexión a tierra para otros dispositivos de energía eléctrica,
energía mecánica, soldadura, etc. Usar la línea de conexión a tierra del
manipulador en conjunto con otras líneas o electrodos de conexión a tierra
puede provocar descargas eléctricas o el mal funcionamiento del sistema de
robot.
■
Cuando use conductos metálicos o racks de distribución para los cables,
conéctelos a tierra de acuerdo con las normas técnicas para equipos eléctricos
nacionales y locales. La conexión a tierra que no cumpla con las normas puede
provocar descargas eléctricas o el mal funcionamiento del sistema de robot.
Siga los reglamentos locales para la conexión a tierra. Se recomienda que el tamaño del
centro del cable de conexión a tierra sea de 5,5 mm
2
o más.
Conecte de forma directa la línea de conexión a tierra al manipulador a través del orificio
para pernos que se muestra en la figura a continuación.
Orificios para pernos
(conexión a tierra)
(Ilustración: T3-401S)

Configuración y operación
Manual del manipulador de la serie T Rev.7 35
3.7 Conexión de los cables
ADVERTENCIA
■
Para cortar la energía hacia el sistema de robot, desconecte el enchufe de la
fuente de alimentación. Asegúrese de conectar el cable de alimentación de CA a
un receptor de energía.
NO lo conecte directamente a la fuente de alimentación de la fábrica.
■
Antes de realizar cualquier procedimiento de reemplazo, APAGUE el controlador
y los equipos relacionados, luego desconecte el enchufe de la fuente de
alimentación.
Realizar cualquier procedimiento de reemplazo con la energía ENCENDIDA es
extremadamente peligroso y puede provocar una descarga eléctrica o el mal
funcionamiento del sistema de robot.
■
Asegúrese de conectar los cables correctamente. No permita una tensión
innecesaria en los cables. (No coloque objetos pesados en los cables. No doble
o tire de los cables por la fuerza). La tensión innecesaria en los cables puede
provocar daños en los cables, desconexión o falla de contacto.
Los cables dañados, la desconexión o la falla de contacto son extremadamente
peligrosos y pueden provocar descargas eléctricas o el mal funcionamiento del
sistema de robot.
■
La conexión a tierra del manipulador se realiza mediante la conexión con el cable
de alimentación. Asegúrese de que el cable de alimentación y el cable de
conexión a tierra estén conectados correctamente. Si el cable de conexión a
tierra se conecta incorrectamente a tierra, puede provocar incendio o descarga
eléctrica.
PRECAUCIÓN
■
Asegúrese de que coincidan los números de serie en cada equipo. La
conexión incorrecta entre el manipulador y el controlador no solo pueden
causar el mal funcionamiento del sistema de robot, sino que además pueden
causar graves problemas de seguridad.
■
Antes de conectar el conector, asegúrese de que los pines no estén doblados.
Si lo conecta con los pines doblados, se puede dañar el conector y causar un
mal funcionamiento en el sistema de robot.

Configuración y operación
36 Manual del manipulador de la serie T Rev.7
3.7.1 Ejemplo de conexión
Dispositivo de
entrada/salida
Conector accessible
Cable suministrado
Cable no suministrado (debe obtener)
CA 100V-240V
Bus de campo E/S
Disp. de salida
PC de desarrollo
(1) Conector E/S manual
Memoria USB
Parada de emergencia, Puerta de seguridad
Manipulador
Teach
Pendant
Disp. de entrada
Opcional
(2) Conector TP
(3) Conector EMERGENCY
(4) Puerto de memoria
(5) Puerto de PC para desarrollo
(6) LAN (Ethernet)
(7) Conector E/S (Entrada)
(8) Conector E/S (Salida)
(9) Conector alimentación CA
(1) Conector de E/S manual
Sirve para conectar los dispositivos de entrada y salida de los usuarios.
Cuando haya dispositivos de entrada y salida, use este conector.
Tenga cuidado con la corriente permisible cuando use el conector de E/S manual.
Para conocer detalles, consulte Configuración y operación 13. Conector de E/S
manual.
(2) Conector de TP
Sirve para conectar la opción de caja de comandos (Teach Pendant).
Para conocer detalles, consulte Configuración y operación 10. Puerto TP.
(3) Conector EMERGENCY
El conector EMERGENCY (Emergencia) tiene entradas para conectar el interruptor
de parada de emergencia y el interruptor de la puerta de seguridad. Por motivos de
seguridad, conecte los interruptores adecuados para estos dispositivos de entrada.
Para conocer detalles, consulte Configuración y operación 11. EMERGENCIA.
(4) Puerto de memoria
Sirve para conectar la memoria USB.
Para conocer detalles, consulte Configuración y operación 8. Puerto de memoria.
(5) Computadora de desarrollo
Sirve para conectar la computadora de desarrollo.
Para conocer detalles, consulte Configuración y operación 7. Puerto de conexión de
la computadora de desarrollo
(6) LAN (comunicación EtherNet)
Sirve para conectar el cable EtherNet.
Para conocer detalles, consulte Configuración y operación 9. Puerto LAN
(comunicación Ethernet).

Configuración y operación
Manual del manipulador de la serie T Rev.7 37
(7) Conector de E/S (Entrada)
Este conector de entrada sirve para un dispositivo de salida del usuario.
Cuando haya un dispositivo de salida, use este conector.
Para conocer detalles, consulte Configuración y operación 12. Conector de E/S
estándar.
(8) Conector de E/S (Salida)
Este conector de salida sirve para un dispositivo de entrada del usuario.
Cuando haya un dispositivo de entrada, use este conector.
Para conocer detalles, consulte Configuración y operación 12. Conector de E/S
estándar.
(9) Conector de alimentación de CA
Conector de la fuente de alimentación de CA al manipulador.
3.7.2 Medidas contra el ruido
Para minimizar las condiciones de ruido eléctrico, se deben observar los siguientes
elementos en el cableado del sistema:
- El cable a tierra de la fuente de alimentación debe estar conectado a tierra. (Resistencia
de tierra: 100 o menos) Es importante conectar a tierra la estructura del manipulador,
no solo con fines de prevención de descargas eléctricas, sino que además para reducir
la influencia del ruido eléctrico alrededor del manipulador. Por lo tanto, asegúrese de
conectar el cable a tierra (amarillo/verde) del cable de alimentación del manipulador al
terminal de conexión a tierra de la fuente de alimentación de la fábrica. Para conocer
detalles acerca del enchufe y el cable de alimentación de CA, consulte Configuración y
operación 3.6 Fuente de alimentación.
- No extraiga energía de una línea de alimentación que se conecte a cualquier equipo que
pueda causar ruido.
- No pase las líneas de alimentación de CA y las líneas de alimentación de CC por los
mismos conductos de cableado y sepárelas lo más posible. Por ejemplo, separe la línea
de alimentación del motor de CA y la línea de alimentación del manipulador lo más
posible de las líneas de E/S del sensor o de la válvula; no agrupe ambos conjuntos de
cableado con el mismo amarracables. Si uno o más conductos o cables se deben cruzar,
deben hacerlo de manera perpendicular. El ejemplo preferido se muestra en la figura a
la derecha.
Conducto de línea de CA
Conducto de línea de CC
Lo más lejo posible
- Conecte con los cables lo más cortos posibles al conector de E/S y al conector
EMERGENCY. Use un cable blindado y afirme el blindaje al interior del conector adjunto.
Asegúrese de mantenerse lo más alejado posible de fuentes de ruido periféricas.
- Asegúrese de que los elementos de inducción que se usan para conectar a la E/S del
manipulador (como relés y válvulas de solenoide) sean piezas de supresión de ruido. Si se
usa un elemento de inducción sin protección contra ruido, asegúrese de conectar una pieza
de supresión de ruido, como un diodo, ubicada en paralelo al elemento de inducción.
Cuando seleccione piezas de supresión de ruido, asegúrese de que puedan soportar el
voltaje y la corriente en la que incurre la carga de inducción
- Mantenga los cables como USB, Ethernet o de bus de campo alejados de fuentes de ruido
periféricas, ya que se influencian fácilmente con estas.

Configuración y operación
38 Manual del manipulador de la serie T Rev.7
3.8 Tubos neumáticos
Los tubos neumáticos se contienen en la unidad de cable.
Presión neumática máx. utilizable Tubos neumáticos
Diámetro exterior × Diámetro
interior
0,59 MPa (6 kgf/cm
2
: 86 psi)
2
ø 6 mm ø 4 mm
1 ø 4 mm ø 2,5 mm
Se proporcionan conectores rápidos para los tubos neumáticos de ø6 mm y ø4 mm
(diámetro exterior) en ambos extremos de los mismos.
T3
Conector rápido (azul) para
tubo neumático de Ø4 mm
A
Conector rápido (blanco) para
tubo neumático de ø6 mm
B
Vista detallada desde B
Vista detallada desde A
Conector rápido (azul) para
tubo neumático de Ø4 mm
Conector rápido (blanco)
para tubo neumático de ø6mm
Conector rápido (azul)
para tubo neumático de ø6mm
Conector rápido (azul) para
tubo neumático de ø6 mm

Configuración y operación
Manual del manipulador de la serie T Rev.7 39
T6
Conector rápido (azul) para
tubo neumático de Ø4 mm
A
Conector rápido (blanco) para
tubo neumático de ø6 mm
B
Vista detallada desde B
Vista detallada desde A
Conector rápido (azul) para
tubo neumático de Ø4 mm
Conector rápido (blanco)
para tubo neumático de ø6mm
Conector rápido (azul)
para tubo neumático de ø6mm
Conector rápido (azul) para tubo
neumático de ø6 mm

Configuración y operación
40 Manual del manipulador de la serie T Rev.7
3.9 3.9 Reubicación y almacenamiento
3.9.1 Precauciones para la reubicación y el almacenamiento
Observe lo siguiente cuando reubique, almacene y transporte los manipuladores.
PERSONAL DE INSTALACIÓN CALIFICADO DEBERÁ REALIZAR LA
INSTALACIÓN, Y ESTA DEBERÁ CUMPLIR CON TODOS LOS CÓDIGOS
NACIONALES Y LOCALES.
ADVERTENCIA
■
Solo personal autorizado debe realizar trabajo de eslinga y operar una grúa o un
montacargas. Es extremadamente peligroso que personal no autorizado realice
estas operaciones, ya que se pueden provocar lesiones corporales graves o
daños importantes a los equipos del sistema de robot.
PRECAUCIÓN
■
Antes de reubicar el manipulador, pliegue el brazo y fíjelo firmemente con un fleje
para evitar que las manos o dedos queden atrapados en el manipulador.
■
Cuando retire los pernos de anclaje, proporcione soporte al manipulador para
evitar que caiga. Retirar los pernos de anclaje sin un soporte puede provocar la
caída del manipulador y que queden atrapados manos, dedos o pies.
■
Para transportar el manipulador, solicite que dos o más personas trabajen en él y
lo fijen al equipo de entrega, o sostengan la parte inferior del brazo n.° 1 y la
parte inferior de la base de forma manual. Cuando sostenga la parte inferior de la
base de forma manual, tenga cuidado de que sus manos o dedos no queden
atrapados.
■
Estabilice el manipulador con sus manos cuando lo eleve. Una elevación
inestable es extremadamente peligrosa y puede provocar la caída del
manipulador.
Cuando transporte el manipulador una gran distancia, fíjelo al equipo de entrega, de
modo que no se pueda caer.
Si es necesario, embale el manipulador de la misma manera en la que se entregó.
Cuando se usa el manipulador para un sistema de robot después de un almacenamiento
prolongado, realice un funcionamiento de prueba para verificar que funcione
correctamente y luego hágalo funcionar de principio a fin.
Transporte y almacene el manipulador dentro del rango de 25 °C a +55 °C.
Se recomienda una humedad entre el 10 % y el 90 %.
Cuando ocurre condensación en el manipulador durante el transporte, ENCIENDA la
energía solo después de que se seque la condensación.
No golpee o agite el manipulador durante el transporte.

Configuración y operación
Manual del manipulador de la serie T Rev.7 41
3.9.2 Reubicación
PRECAUCIÓN
■
Instale o reubique el manipulador con dos o más personas. Los pesos del
manipulador son los siguientes. Tenga cuidado de que sus manos, dedos o pies
no queden atrapados, o de que los equipos sufran daños por la caída del
manipulador.
T3-401S: aprox. 16 kg: 35 lb.
T6-602S: aprox. 22 kg: 49 lb
(1) CORTE la energía en todos los dispositivos y desenchufe los cables.
Retire todos los topes mecánicos, si los usa para limitar el rango de movimiento de
las articulaciones n.° 1 y n.° 2. Para conocer detalles acerca del rango de movimiento,
consulte Configuración y operación: 5.2 Configuración del rango de movimiento con
topes mecánicos.
(2) Cubra el brazo n.° 2 y la unidad de fuente de alimentación con un fleje de modo que
no se dañe el brazo.
Unidad de fuente de
alimentación
Brazo
n.°2
Ejemplo de postura de retención de brazo
Brazo
n.°1
(Ilustración: T3-401S)
(3) Sujete la parte inferior del brazo n.° 1 con la mano para destornillar los pernos de
anclaje.
Luego, retire el manipulador de la mesa base.
NOTA

Configuración y operación
42 Manual del manipulador de la serie T Rev.7
4. Configuración de los efectores finales
4.1 Instalación de un efector final
Los usuarios son responsables de hacer sus propios efectores finales. Antes de instalar un
efector final, respete las siguientes pautas.
PRECAUCIÓN
■
Si usa un efector final equipado con grippers o un manguito portaherramientas,
conecte los cables o tubos neumáticos correctamente para que los grippers no
suelten la pieza de trabajo cuando se apague la alimentación del sistema de robot.
Una conexión incorrecta de los cables o tubos neumáticos podría dañar al sistema
de robot o la pieza de trabajo, en caso de que esta última se suelte cuando presiona
el interruptor de parada de emergencia.
Las salidas de E/S se configuran de fábrica para que se apaguen automáticamente
(0) mediante la desconexión de la alimentación, el interruptor de parada de
emergencia o las características de seguridad del sistema de robot.
Mango
- Conecte un efector final en la parte inferior del mango.
Para conocer las dimensiones del mango, y las dimensiones generales del manipulador,
consulte Configuración y operación: 2. Especificaciones.
- No mueva la parada mecánica del límite superior en el lado inferior del mango. De lo
contrario, cuando se realice el “movimiento de salto”, la parada mecánica del límite
superior podría golpear al manipulador y el sistema de robot podría no funcionar
correctamente.
- Use un acoplamiento de manguito con un perno M4 o más grande para fijar el efector
final en el mango.
Interruptor de desbloqueo del freno
-
La articulación n.º 3 no puede moverse
hacia arriba/abajo con la mano porque se
aplicó el freno de solenoide en la
articulación mientras la alimentación del
sistema de robot estaba apagada.
Esto evita que el mango golpee al equipo
periférico en caso de que el mango baje
debido al peso del efector final cuando se
desconecta la alimentación durante el
funcionamiento, o cuando se apaga el
motor incluso estando encendida la
alimentación.
Para mover la articulación n.º 3 hacia
arriba/abajo mientras instala un efector
final, encienda el manipulador y
presione el interruptor de desbloqueo
del freno.
Este interruptor de botón es de tipo
momentáneo; el freno se suelta
solamente mientras presiona este
botón.
Interruptor de desbloqueo del freno
Es posible que el mango
baje debido al peso del
efector final.

Configuración y operación
Manual del manipulador de la serie T Rev.7 43
-
Tenga cuidado con el mango mientras se presiona el interruptor de desbloqueo del freno,
ya que es posible que el mango baje debido al peso del efector final.
Diseños
- Cuando hace funcionar el manipulador con un efector final, este puede interferir con el
manipulador debido al diámetro exterior del efector final, el tamaño de la pieza de
trabajo o la posición de los brazos. Cuando determine el diseño del sistema, preste
atención al área de la interfaz del efector final.
4.2 Instalación de cámaras y válvulas
La parte inferior del brazo n.º 2 tiene orificios roscados, como se muestra en la siguiente
figura. Úselos para instalar cámaras, válvulas y otro tipo de equipo.
T3
Desde la superficie de montaje de la base

Configuración y operación
44 Manual del manipulador de la serie T Rev.7
T6
Desde la superficie de montaje de la
base
4.3 Configuración de peso e inercia
Para asegurarse de obtener un rendimiento óptimo del manipulador, es importante
asegurarse de que la carga (el peso del efector final y la pieza de trabajo) y el momento de
inercia de la carga estén dentro del valor nominal máximo del manipulador, y que la
articulación n.º 4 no se vuelva excéntrica.
Si la carga o el momento de inercia superan este valor nominal, o si la carga se vuelve
excéntrica, siga los siguientes pasos, Configuración y operación: 4.3.1 Configuración de
peso y 4.3.2 Configuración de inercia para establecer los parámetros.
Configurar los parámetros permite que el movimiento PTP del manipulador sea óptimo,
reduce las vibraciones para acortar el tiempo de funcionamiento y mejora la capacidad
para cargas más grandes. Asimismo, reduce la vibración persistente que se produce cuando
el momento de inercia del efector final y la pieza de trabajo es más grande que la
configuración predeterminada.
4.3.1 Configuración de peso
PRECAUCIÓN
■
El peso total del efector final y la pieza de trabajo no deben superar: T3: 3kg / T6:
6kg Los manipuladores de la serie T no están diseñados para trabajar con
cargas superiores a: T3: 3kg / T6: 6kg
Siempre configure los parámetros Weight (Peso) en función de la carga.
Configurar un valor que sea inferior a la carga real puede generar errores,
impactos excesivos, función insuficiente del manipulador o acortar el ciclo de
vida útil de las piezas o los mecanismos.

Configuración y operación
Manual del manipulador de la serie T Rev.7 45
La capacidad de peso aceptable (efector final y pieza de trabajo) en la serie T:
T3: valor nominal predeterminado es 1 kg, 3 kg como máximo.
T6: valor nominal predeterminado es 2 kg, 6 kg como máximo.
Cuando la carga (peso del efector final y la pieza de trabajo) supera el valor nominal,
cambie la configuración del parámetro de peso “Weight”.
Después de haber cambiado la configuración, se establece automáticamente la velocidad
de aceleración/desaceleración máxima del sistema de robot en el movimiento PTP que
corresponde al parámetro de peso.
Carga en el mango
La carga (peso del efector final y la pieza de trabajo) en el mango puede configurarse
mediante el parámetro de peso.
Ingrese un valor en el cuadro de texto [Load inertia:] en el panel [Inertia], [Tools]-[Robot
Manager]. (También puede ejecutar el comando Inertia en la ventana [Command
Window]).
Carga en el brazo
Cuando instale una cámara u otro dispositivo en el brazo, calcule el peso como un valor
equivalente del mango. Luego, agregue este cálculo a la carga e ingrese el peso total en el
parámetro de peso.
Fórmula de peso equivalente
Cuando instala el equipo cerca del brazo n.º 2:
Cuando instala el equipo cerca al final del brazo n.º 2:
WM = M (L1)
2
/(L1+L2)
2
WM = M (LM)
2
/(L2)
2
WM
M
L1
L2
LM
: peso equivalente
: peso de la cámara, etc.
: largo del brazo n.º 1
: largo del brazo n.º 2
: distancia desde el centro de giro de la articulación n.º 2 hasta el centro
de gravedad de la cámara, etc.
<Ejemplo>
Una cámara de “1 kg” se instala el final del brazo de la serie T3 (180 mm del centro de
rotación de la articulación n.º 2) con un peso de carga de “1 kg”.
M=1
L2=175
LM=225
WM=1225
2
/175
2
=1,653 1,7 (redondeo ascendente)
W+WM=1+1,7=2,7
Ingrese “2.7” como el parámetro de peso.
Mango
Peso de la
cámara
M=1kg
W=1kg
L
2
=175 mm
L
M
=225 mm
Articulación
n.° 2
EPSON
RC+

Configuración y operación
46 Manual del manipulador de la serie T Rev.7
Configuración de velocidad automática por peso
T3
120
100
80
60
40
20
0 1 2 3 (kg)
(%)
100
100
100
Config. de peso de efector final
100
* El porcentaje del gráfico se basa en la velocidad a un peso nominal (1 kg) como el 100 %.
T6
120
100
80
60
40
20
0 1 2 3 4 5 6 (kg)
(%)
100
100
100
100
Config. de peso de efector final
100
* El porcentaje del gráfico se basa en la velocidad a un peso nominal (2 kg) como el 100 %.
Configuración de aceleración/desaceleración automática por peso
T3
120
100
80
60
40
20
0 1 2 3 (kg)
(%)
100
110
80
Config. de peso de efector final
60
* El porcentaje del gráfico se basa en la velocidad a un peso nominal (1 kg) como el 100 %.
T6
120
100
80
60
40
20
0 1 2 3 4 5 6 (kg)
(%)
100
110
93
50
Config. de peso de efector final
70
45
* El porcentaje del gráfico se basa en la velocidad a un peso nominal (2 kg) como el 100 %.

Configuración y operación
Manual del manipulador de la serie T Rev.7 47
4.3.2 Configuración de inercia
Momento de inercia y la configuración de inercia
El momento de inercia se define como “la relación de torque aplicado a un cuerpo rígido y
su resistencia al movimiento”. Este valor se conoce comúnmente como “el momento de
inercia”, “inercia”, o “GD2”. Cuando el manipulador funciona con objetos adicionales
(como un efector final) instalados en el mango, se debe considerar el momento de inercia
de la carga.
PRECAUCIÓN
■
El momento de inercia de la carga (peso del efector final y la pieza de trabajo)
debe ser de T3. 0,01 kg·m
2
/ T6: 0,08 kg·m
2
o menos. Los manipuladores de la
serie T no están diseñados para trabajar con un momento de inercia superior a
T3. 0,01 kg·m
2
/ T6: 0,08 kg·m
2
. Siempre configure el parámetro del momento de
inercia correcto. Configurar un valor que sea inferior al momento de inercia real
puede generar errores, impactos excesivos, función insuficiente del manipulador
o acortar el ciclo de vida útil de las piezas o los mecanismos.
El momento de inercia aceptable de la carga para un manipulador de serie T:
T3: valor nominal predeterminado es 0,003 kg·m
2
, 0,01 kg·m
2
como máximo.
T6: valor nominal predeterminado es 0,01 kg·m
2
, 0,08 kg·m
2
como máximo.
Cuando el momento de inercia de la carga supera el valor nominal, cambie la
configuración del parámetro de momento de inercia del comando Inertia. Después de
haber cambiado la configuración, se establece automáticamente la velocidad de
aceleración/desaceleración máxima de la articulación n.º 4 en el movimiento PTP que
corresponde al valor de “movimiento de inercia”.
Momento de inercia de la carga en el mango
El momento de inercia de la carga (peso del efector final y la pieza de trabajo) en el mango
se puede configurar mediante el parámetro de “momento de inercia” del comando Inertia.
EPSON
RC+
Ingrese un valor en el cuadro de texto [Load inertia:] en el panel [Inertia], [Tools]-[Robot
Manager]. (También puede ejecutar el comando Inertia en la ventana [Command
Window]).

Configuración y operación
48 Manual del manipulador de la serie T Rev.7
Configuración de aceleración/desaceleración automática de la articulación n.º 4
por inercia (momento de inercia)
T3
0 0.002 0.004 0.006 0.008 0.01 0.012 (kg·m
2
)
120
100
80
60
40
20
(%)
100
100
30
75
Config. de momento de inercia
T6
0 0.020 0.040 0.060 0.080 0.1 (kg·m
2
)
120
100
80
60
40
20
(%)
100
Config. de momento de inercia
75
60
35

Configuración y operación
Manual del manipulador de la serie T Rev.7 49
Cantidad excéntrica y configuración de inercia
PRECAUCIÓN
■
La cantidad excéntrica de la carga (peso del efector final y la pieza de trabajo)
debe ser: T3: 100mm / T6: 150mm o menos. Los manipuladores de la serie T
están diseñados para trabajar con una cantidad excéntrica que supere: T3:
100mm / T6: 150mm.
Siempre configure el parámetro de cantidad excéntrica en función de la cantidad
excéntrica. Configurar un valor que sea inferior a la cantidad excéntrica real
puede generar errores, impactos excesivos, función insuficiente del manipulador
o acortar el ciclo de vida útil de las piezas o los mecanismos.
La cantidad excéntrica aceptable de la carga en la serie T:
T3: valor nominal predeterminado es 0 mm, como máximo: 100 mm
T6: valor nominal predeterminado es 0 mm, como máximo: 150 mm
Cuando la cantidad excéntrica de la carga supera el valor nominal, cambie la
configuración del parámetro de cantidad excéntrica del comando Inertia. Después de haber
cambiado la configuración, se establece automáticamente la velocidad de
aceleración/desaceleración máxima del manipulador en el movimiento PTP que
corresponde a la “cantidad excéntrica”.
Posición del centro de gravedad de la carga
Centro de rotación
Cantidad excéntrica
(T3: 100 / T6: 150 mm o menos)
Cantidad excéntrica
Cantidad excéntrica de la carga en el mango
La cantidad excéntrica de la carga (peso del efector final y la pieza de trabajo) en el mango
se puede configurar mediante el parámetro de “cantidad excéntrica” del comando Inertia.
EPSON
RC+
Ingrese un valor en el cuadro de texto [Eccentricity:] (Excentricidad) en el panel [Inertia],
[Tools]-[Robot Manager]. (También puede ejecutar el comando Inertia en la ventana
[Command Window]).

Configuración y operación
50 Manual del manipulador de la serie T Rev.7
Configuración de aceleración/desaceleración automática por inercia (cantidad
excéntrica)
T3
120
100
80
60
40
20
0 50 75 100 (mm)
60
40
25
(%)
100
Config. de excentricidad
T6
120
100
80
60
40
20
0 50 75 100 150 (mm)
70
30
20
(%)
100
Config. de excentricidad
* El porcentaje del gráfico se basa en la aceleración/desaceleración a una excentricidad
nominal (0 mm) como el 100 %.

Configuración y operación
Manual del manipulador de la serie T Rev.7 51
Cálculo del momento de inercia
Consulte los siguientes ejemplos de las fórmulas para calcular el momento de inercia de la
carga (efector final con pieza de trabajo).
El momento de inercia de toda la carga se calcula mediante la suma de cada parte (a), (b) y
(c).
Pieza de trabajo (b)
Pieza de trabajo (c)
Efector final (a)
Mango de articulación n.° 3
Centro de rotación
Momento de inercia
de efector final (a)
=
Momento de inercia
de pieza de trabajo
+
Momento de inercia
de pieza de trabajo
+
Momento de
inercia total
Los métodos para calcular el momento de inercia de (a), (b) y (c) aparecen a continuación.
Calcule el momento de inercia total mediante las fórmulas básicas.
(a) Momento de inercia de un paralelepípedo rectangular
h
b
L
Masa (m)
Centro de gravedad de paralelepípedo rectangular
Centro de rotación
m
+ m L
2
b
2
+ h
2
12
(b) Momento de inercia de un cilindro
m
+ m L
2
r
2
2
Masa (m)
L
r
Centro de gravedad del
cilindro
Centro de rotación

Configuración y operación
52 Manual del manipulador de la serie T Rev.7
(c) Momento de inercia de una esfera
m
r
2
+ m L
2
2
5
Centro de gravedad de la esfera
r
Masa (m)
L
Centro de rotación
4.4 Precauciones para la aceleración/desaceleración automática de la
articulación n.º 3
Cuando mueve el manipulador en el movimiento PTP horizontal con la articulación n.º 3
(Z) en la posición alta, el tiempo de movimiento será más rápido.
Cuando la articulación n.º 3 queda por debajo de un punto determinado, se usa la
aceleración/desaceleración automática para reducir la aceleración y desaceleración.
(Consulte las siguientes figuras). Mientras más alta sea la posición del mango, más rápida
será la aceleración/desaceleración del movimiento. Sin embargo, el movimiento
ascendente o descendente de la articulación n.º 3 demora más tiempo. Ajuste la posición
de la articulación n.º 3 para el movimiento del manipulador después de considerar la
relación entre la posición actual y la posición de destino.
Con el comando LimZ, se puede configurar el límite superior de la articulación n.º 3
durante el movimiento horizontal que usa el comando Jump (Saltar).
Aceleración/desaceleración automática vs. posición de la articulación n.º 3
T3
100
100
50
50
120
100
80
60
40
20
0 -50 -100 -150 -200 (mm)
(%)
Altura de mango

Configuración y operación
Manual del manipulador de la serie T Rev.7 53
T6
100
100
60
120
100
80
60
40
20
0 -50 -100 -150 -200 (mm)
(%)
Altura de mango
* Las cifras en el gráfico (%) corresponden a la proporción según la velocidad de
aceleración/desaceleración en la posición de límite superior del mango.
Cuando mueve horizontalmente el manipulador mientras se baja el mango, puede
sobrepasarse al momento del posicionamiento final.
NOTA

Configuración y operación
54 Manual del manipulador de la serie T Rev.7
5. Rango de movimiento
PRECAUCIÓN
■
Cuando configura el rango de movimiento para la seguridad, tanto el rango de
pulsos como los topes mecánicos se deben configurar al mismo tiempo.
El rango de movimiento está predeterminado de fábrica como se explica en Configuración
y operación: 5.4 Rango de movimiento estándar. Este es el rango de movimiento máximo
del manipulador.
Existen tres métodos para configurar el rango de movimiento, tal como se describen a
continuación:
1. Configuración mediante el rango de pulsos (para todas las articulaciones)
2. Configuración mediante los topes mecánicos (para las articulaciones n.º 1 a
n.º 3)
3. Configuración del rango cartesiano (rectangular) en el sistema de coordenadas X,
Y del manipulador (para las articulaciones n.º 1 y n.º 2)
Parada
mecánica
Configuración del rango
rectangular
Rango de
pulsos
Rango de
movimiento
Parada
mecánica
Cuando se cambia el rango de movimiento por temas de eficiencia o seguridad del diseño,
siga las descripciones en 5.1 a 5.3 para configurar el rango.
5.1 Configuración del rango de movimiento por rango de pulsos (para
todas las articulaciones)
Los pulsos corresponden a la unidad básica del movimiento de un manipulador. El rango
de movimiento del manipulador se controla mediante el rango de pulsos entre el límite
inferior y el límite superior del pulso de cada articulación.
Los valores de pulsos se leen desde la salida del codificador del servomotor.
Para conocer el rango de pulsos máximo, consulte las siguientes secciones.
El rango de pulsos se debe configurar dentro del rango de la parada mecánica.
5.1.1 Rango de pulsos máximo de la articulación n.º 1
5.1.2 Rango de pulsos máximo de la articulación n.º 2
5.1.3 Rango de pulsos máximo de la articulación n.º 3
5.1.4 Rango de pulsos máximo de la articulación n.º 4
Una vez que el manipulador recibe el comando de operación, comprueba si la posición
objetivo que especifica el comando está dentro del rango de pulsos antes de comenzar a
operar. Si la posición objetivo está fuera del rango de pulsos establecido, ocurre un error y
el manipulador no se mueve.
El rango de pulsos se puede configurar en el panel [Range] (Rango) que aparece cuando
selecciona [Tools]-[Robot Manager]. (También puede ejecutar el comando Range en la
ventana [Command Window]).
EPSON
RC+
NOTA

Configuración y operación
Manual del manipulador de la serie T Rev.7 55
5.1.1 Rango de pulsos máximo de la articulación n.º 1
La posición de pulso 0 (cero) de la articulación n.º 1 es la posición donde el brazo n.º 1 se
orienta hacia la dirección positiva (+) en el eje de la coordenada X.
Cuando el pulso 0 se encuentra en el punto de inicio, el valor del pulso hacia la izquierda
se define como positivo (+) y el valor de pulso hacia la derecha se define como negativo
(-).
+Y
+X Pulso 0
+ B
B
+ A
A
A: Rango de movimiento
máximo
B: Rango de pulsos
máximo
T3
132 grados
95574 a 505174 de pulso
T6
152918 a 808278 de
pulso

Configuración y operación
56 Manual del manipulador de la serie T Rev.7
5.1.2 Rango de pulsos máximo de la articulación n.º 2
La posición de pulso 0 (cero) de la articulación n.º 2 es la posición donde el brazo n.º 2 se
encuentra en línea con el brazo n.º 1. Con el pulso 0 en el punto de inicio, el valor del
pulso hacia la izquierda se define como positivo (+) y el valor de pulso hacia la derecha se
define como negativo (-).
B
+ B
Pulse 0
A
+ A
A: Rango de movimiento
máximo
B: Rango de pulsos máximo
T3
141 grados
320854 de pulso
T6
150 grados
341334 de pulso

Configuración y operación
Manual del manipulador de la serie T Rev.7 57
5.1.3 Rango de pulsos máximo de la articulación n.º 3
La posición de pulso 0 (cero) de la articulación n.º 3 es la posición donde el mango se
encuentra en su límite superior.
El valor de pulso siempre será negativo, porque la articulación n.º 3 siempre se mueve más
abajo que la posición del pulso 0.
Límite superior: pulso 0
Carrera de la
articulación n.º 3
Pulso del límite inferior
T3
150 mm
187734 de pulso
T6
200 mm
245760 de pulso
5.1.4 Rango de pulsos máximo de la articulación n.º 4
La posición de pulso 0 (cero) de la articulación n.º 4 es la posición donde la parte plana
cerca del mango se orienta hacia el extremo del brazo n.º 2. Con el pulso 0 en el punto de
inicio, el valor del pulso hacia la izquierda se define como positivo (+) y el valor de pulso
hacia la derecha se define como negativo (-).
+X T3: pulso 0 71760
T6: pulso 0 245760
+Y
Hacia la derecha (valor -)
Hacia la izquierda (valor +)

Configuración y operación
58 Manual del manipulador de la serie T Rev.7
5.2 Ajuste del margen de movimiento con detenciones mecánicas
Los topes mecánicos limitan físicamente el área absoluta en la que se puede mover el
manipulador.
Las articulaciones n.° 1 y n.° 2 tienen orificios roscados en las posiciones que
corresponden a los ángulos de los ajustes de parada mecánica. Instale los pernos en los
orificios correspondientes al ángulo que desea establecer.
Las articulaciones n.° 3 se pueden establecer en cualquier longitud inferior a la carrera
máxima.
Parada mecánica de
articulación n.° 2 (Fijo)
Parada mecánica de
articulación n.° 1
(Ajustable)
Parada mecánica de
articulación n.° 3
(Límite inferior de la
parada mecánica)
(No mueva la parada
mecánica de límite
superior).
Parada mecánica de
articulación n.° 1
(Fjio)
Parada mecánica
de articulación n.° 2
(Ajustable)
5.2.1 Configuración de las paradas mecánicas de las articulaciones
n.º 1 y n.º 2
Las articulaciones n.° 1 y n.° 2 tienen orificios roscados en las posiciones que
corresponden a los ángulos de los ajustes de parada mecánica. Instale los pernos en los
orificios correspondientes al ángulo que desea establecer.
Instale los pernos para la parada mecánica en la siguiente posición.
Paradas mecánicas de la articulación n.º 1 (vistas desde la parte inferior del brazo
n.º 1)
a
b
a
b
T3
Ángulo de configuración
110
110
Valor de pulso
455112 de pulso
45512 de pulso
T6
Ángulo de configuración
115
115
Valor de pulso
466489 de pulso
56889 de pulso

Configuración y operación
Manual del manipulador de la serie T Rev.7 59
Paradas mecánicas de la articulación n.º 2 (vistas desde la parte superior del
brazo n.º 1)
b
a
a
b
T3
Ángulo de configuración
120
120
Valor de pulso
273066 de pulso
273066 de pulso
T6
Ángulo de configuración
125
125
Valor de pulso
284444 de pulso
284444 de pulso
(1)
APAGUE el manipulador.
(2)
Instale un perno de cabeza hueca hexagonal en el orificio correspondiente al ángulo
de configuración y apriételo.
T3: Solamente la
articulación n.º 2
Saque la placa del usuario en la cubierta del brazo.
Para conocer detalles, consulte Mantenimiento: 7. Cubierta.
Articulación
Perno de cabeza
hueca hexagonal
(completamente
roscado)
Número
de pernos
Torque de ajuste
recomendado
1
M810
Todos los tornillos
Uno para
cada lado
12,3 Nm (125 kgfcm)
(3)
ENCIENDA el manipulador.
(4)
Configure el rango de pulsos que corresponda a las nuevas posiciones de los topes
mecánicos.
Asegúrese de configurar el rango de pulsos dentro de las posiciones del rango de la
parada mecánica.
Ejemplo: Con T3-401S
El ángulo de la articulación n.º 1 se configura desde -110 grados hasta +110
grados.
El ángulo de la articulación n.º 2 se configura desde -120 grados hasta +120
grados.
NOTA

Configuración y operación
60 Manual del manipulador de la serie T Rev.7
Ejecute los siguientes comandos en [Command Window]
>JRANGE 1, -45512, 455112 ' Configura el rango de pulsos de la
articulación n.º 1
>JRANGE 2,- 273066, 273066 ' Configura el rango de pulsos de la
articulación n.º 2
>RANGE ' Comprueba la configuración
mediante Range
-45512, 455112, -273066, 273066, -187734
,0, -71760, 71760
(5)
Mueva el brazo con la mano hasta que toque los topes mecánicos y asegúrese de que
el brazo no golpee ningún equipo periférico durante la operación.
(6)
Haga funcionar la articulación cambiada a baja velocidad hasta que llegue a las
posiciones del rango de pulsos mínimo y máximo. Asegúrese de que el brazo no
golpee los topes mecánicos. (Revise la posición de la parada mecánica y el rango de
movimiento que configuró).
Ejemplo: Con T3-401S
El ángulo de la articulación n.º 1 se configura desde -110 grados hasta +110
grados.
El ángulo de la articulación n.º 2 se configura desde -120 grados hasta +120
grados.
Ejecute los siguientes comandos en [Command Window]
>MOTOR ON ' Enciende el motor
>LP ON ' Ingresa al modo de baja potencia
>SPEED 5 ' Se configura a baja velocidad
>PULSE -45512,0,0,0 ' Se mueve a la posición del pulso mínimo
de la articulación n.º 1
>PULSE 455112,0,0,0 ' Se mueve a la posición del pulso
máximo de la articulación n.º 1
>PULSE 204800,-273066,0,0 ' Se mueve a la posición del pulso mínimo
de la articulación n.º 2
>PULSE 204800,273066,0,0 ' Se mueve a la posición del pulso
máximo de la articulación n.º 2
El comando Pulse (comando Go Pulse) mueve todas las articulaciones hasta las
posiciones especificadas al mismo tiempo. Especifique las posiciones seguras después
de considerar el movimiento no solo de las articulaciones cuyos rangos de pulsos
hayan cambiado, sino también de las otras articulaciones.
En este ejemplo, la articulación n.º 1 se movió hasta el centro de su rango de
movimiento (valor de pulso: 204800) cuando se comprobaba la articulación n.º 2.
Si el brazo golpea los topes mecánicos o si ocurre un error después de que el brazo
golpea los topes mecánicos, restablezca el rango de pulsos a una configuración más
acotada o extienda las posiciones de los topes mecánicos dentro del límite.
EPSON
RC+
EPSON
RC+

Configuración y operación
Manual del manipulador de la serie T Rev.7 61
5.2.2 Configuración de la parada mecánica de la articulación n.º 3
(1)
Encienda el manipulador y apague los motores usando el comando Motor OFF
(Apagar motor).
(2)
Mueva el mango mientras presiona el
interruptor de desbloqueo del freno.
No empuje el mango hacia arriba hasta su
límite superior o será difícil sacar la cubierta
superior del brazo. Empuje el mango hacia
arriba hasta una posición donde se pueda
cambiar el tope mecánico de la articulación
n.º 3.
Tornillo de
parada
mecánica de
límite inferior
T3:M3×10
T6:M4×15
Interruptor de
desbloqueo del freno
Mango
Cuando presiona el interruptor de desbloqueo del freno, el mango puede bajar debido
al peso del efector final. Asegúrese de retener el mango con la mano mientras presiona
el botón.
(3)
APAGUE el manipulador.
(4)
Suelte el tornillo de la parada mecánica del límite inferior (T3: M310, T6: M415).
Hay un tope mecánico montado en la parte superior e inferior de la articulación n.º 3.
No obstante, solo se puede cambiar la parada mecánica del límite inferior que está en
la parte superior. No saque la parada mecánica del límite superior que está en la parte
inferior porque el punto de calibración de la articulación n.º 3 se especifica con la
parada.
(5)
El extremo superior del mango define la
carrera máxima. Mueva la parada
mecánica del límite inferior hacia abajo
hasta la posición donde desea limitar la
carrera.
Por ejemplo, cuando configura la parada
mecánica del límite inferior en una
carrera de “150 mm”, el valor de la
coordenada Z del límite inferior es
“-150”. Para cambiar el valor a “-130”,
mueva el tope mecánico del límite
inferior hacia abajo “20 mm”. Use
calibradores para medir la distancia
cuando ajuste la parada mecánica.
Mida esta
distancia.
(6)
Apriete firmemente el tornillo de la parada mecánica del límite inferior (T3: M310,
T6: M415).
Torque de ajuste recomendado:
T3: 2,40,1 Nm
T6: 5,50,25 Nm
NOTA
NOTA

Configuración y operación
62 Manual del manipulador de la serie T Rev.7
(7)
ENCIENDA el manipulador.
(8)
Mueva la articulación n.º 3 a su límite inferior mientras presiona el interruptor de
desbloqueo del freno y luego revise la posición del límite inferior. No baje demasiado
el tope mecánico. De lo contrario, la articulación podría no alcanzar la posición de
destino.
(9)
Calcule el valor de los pulsos del rango de pulsos para el límite inferior mediante la
fórmula que se muestra a continuación y configure el valor.
El resultado del cálculo siempre es negativo porque el valor de la coordenada Z de
límite inferior es negativo.
Límite inferior del pulso
= valor de coordenada Z de límite inferior (mm) / resolución de la articulación n.º 3
(mm/pulso)**
** Para conocer la resolución de la articulación n.º 3, consulte la sección
Configuración y operación 2.4 Especificaciones.
Ejecute los siguientes comandos en [Command Window].
Ingrese el valor calculado en X.
>JRANGE 3,X,0 ' Configura el rango de pulsos de la articulación n.º 3
(10)
Use el comando Pulse (comando Go Pulse), mueva la articulación n.º 3 a la posición
del límite inferior del rango de pulsos a baja velocidad. Si el rango de la parada
mecánica es inferior al rango de pulsos, la articulación n.º 3 golpea la parada mecánica
y ocurre un error. Cuando se genera el error, cambie el rango de pulsos a una
configuración inferior o extienda la posición de la parada mecánica dentro del límite.
Si es difícil comprobar si la articulación n.º 3 ha golpeado la parada mecánica, apague
el manipulador y levante la cubierta superior del brazo para comprobar la condición
que produjo el problema desde el costado.
Ejecute los siguientes comandos en la ventana [Command Window].
Ingrese el valor calculado en el paso (9) en X.
>MOTOR ON ' Enciende el motor
>SPEED 5 ' Configura una baja velocidad
>PULSE 0,0,X,0 ' Se mueve a la posición de límite inferior de la articulación
n.º 3.
(En este ejemplo, todos los pulsos, excepto aquellos para la
articulación n.º 3, son “0”. Reemplace estos “0” con los
otros valores de pulsos que especifican una posición donde
no existe interferencia, incluso cuando se baja la
articulación n.º 3).
EPSON
RC+
EPSON
RC+
NOTA

Configuración y operación
Manual del manipulador de la serie T Rev.7 63
5.3 Configuración del rango cartesiano (rectangular) en el sistema de
coordenadas X, Y del manipulador (para las articulaciones n.º 1 y n.º 2)
Use este método para configurar los límites superior e inferior de las coordenadas X e Y.
Esta configuración solo la aplica el software. Por lo tanto, no cambia el rango físico. El
rango físico máximo se basa en la posición de los topes mecánicos.
Ajuste la configuración XYLim en el panel [XYZ Limits] (Límites XYZ) que se muestran
cuando selecciona [Tools]-[Robot Manager].
(También puede ejecutar el comando XYLim en la ventana [Command Window]).
5.4 Rango de movimiento estándar
Los siguientes diagramas de “rango de movimiento” muestran las especificaciones
estándar (máximas). Cuando el motor de cada articulación se encuentra bajo servocontrol,
el centro del punto más bajo de la articulación n.º 3 (del mango) se mueve a las áreas que
aparecen en la figura.
El “área limitada por la parada mecánica” es el área donde el centro del punto más bajo de
la articulación n.º 3 puede moverse cuando el motor de cada articulación no se encuentra
bajo servocontrol.
La “parada mecánica” configura el rango de movimiento limitado para que el centro de la
articulación n.º 3 no pueda moverse más allá del área mecánicamente.
El “espacio máximo” es el área que incluye el punto de alcance más lejano de los brazos.
Si el radio máximo del efector final es superior a 60 mm, agregue el “área limitada por la
parada mecánica” y el “radio del efector final”. El valor total queda especificado como el
área máxima.
Para las figuras del área de movimiento, consulte Configuración y operación 3.3
Dimensiones de montaje.
EPSON
RC+

Configuración y operación
64 Manual del manipulador de la serie T Rev.7
6. Modo de operación y LED
6.1 Descripción general
El sistema de robot tiene tres modos de funcionamiento.
Modo TEACH
(Enseñar)
Este modo permite enseñar y revisar datos de puntos cercanos al
manipulador con la caja de comandos (Teach Pendant).
En este modo, el manipulador funciona en estado de potencia baja.
Modo AUTO
(Automático)
Este modo permite el funcionamiento automático (ejecución del
programa) del sistema de robot para las actividades de fabricación y,
además, para la programación, depuración, ajuste y mantenimiento
del sistema de robot.
Este modo no puede accionar los manipuladores o ejecutar programas
con la puerta de seguridad abierta.
Modo TEST
(Prueba)
Este modo permite la verificación del programa mientras se mantiene
presionado el interruptor de activación y la protección está abierta.
Esta es una función de verificación del programa de baja seguridad
(T1: modo de desaceleración manual), la que se define en las normas
de seguridad.
Este modo puede accionar la función especificada con varias tareas /
una sola tarea, varios manipuladores / un solo manipulador a baja
velocidad.
6.2 Modos de operación del interruptor
Cambie el modo de operación con el interruptor de llave selector de modo en la caja de
comandos (Teach Pendant).
Modo TEACH
(Enseñar)
Gire el interruptor de llave selector de modo a “Teach” para el modo
TEACH.
Si cambia al modo TEACH, se pausa el programa si estaba
ejecutándose.
El manipulador operativo se detiene con Quick Pause (Pausa rápida).
Modo AUTO
(Automático)
Gire el interruptor de llave selector de modo a “Auto” y active la señal
de entrada de liberación del enganche para el modo AUTO.
Modo TEST
(Prueba)
Gire el interruptor de llave selector de modo a “Teach” para el modo
TEACH. Presione la tecla <F1> [Test Mode] (Modo de prueba) en el
cuadro de diálogo [Jog & Teach] (Desplazar y enseñar) del modo
TEACH. El modo se cambia a TEST

Configuración y operación
Manual del manipulador de la serie T Rev.7 65
6.3 Modo Program (AUTO)
6.3.1 ¿Qué es el modo Program (AUTO)?
El modo Program (Programar) sirve para la programación, depuración, ajuste y
mantenimiento del sistema de robot.
Siga los siguientes procedimientos para cambiar al modo Program.
6.3.2 Configuración desde EPSON RC+ 7.0
Cambie al modo Program desde EPSON RC+ 7.0.
(1) En EPSON RC+ 7.0, seleccione el menú-[Setup]-[System Configuration] para mostrar
el diálogo [System Configuration].
(2)
(5)
(3)
(4)
(2) Seleccione [Startup] (Inicio).
(3) Seleccione [Start mode]-botón <Program> (Modo de inicio - botón Programar).
(4) Haga clic en el botón <Apply> (Aplicar).
(5) Haga clic en el botón <Close> (Cerrar).

Configuración y operación
66 Manual del manipulador de la serie T Rev.7
6.4 Modo automático (AUTO)
6.4.1 ¿Qué es el modo automático (AUTO)?
El modo automático (AUTO) sirve para la operación automática del sistema de robot.
Los siguientes corresponden a los procedimientos para cambiar al modo automático
(AUTO).
A : Configure el modo de inicio de EPSON RC+ 7.0 en “Auto” e inicie EPSON
RC+ 7.0.
(Consulte Configuración y operación 6.3.2 Configuración desde EPSON RC+
7.0.)
B : Desconecte de Internet el programa EPSON RC+ 7.0.
Ejecute y detenga el programa desde el dispositivo de control que especifica EPSON RC+.
(Consulte Configuración y operación 6.4.3 Configuración del dispositivo de control).
6.4.2 Configuración desde EPSON RC+ 7.0
Cambie al modo automático (AUTO) desde EPSON RC+ 7.0.
(1) En EPSON RC+ 7.0, seleccione el menú-[Setup]-[System Configuration] para mostrar
el diálogo [System Configuration].
(2)
(5)
(3)
(4)
(2) Seleccione [Startup] (Inicio).
(3) Seleccione [Start mode]-botón <Auto> (Modo de inicio - botón Automático).
(4) Haga clic en el botón <Apply> (Aplicar).
(5) Haga clic en el botón <Close> (Cerrar).
NOTA

Configuración y operación
Manual del manipulador de la serie T Rev.7 67
6.4.3 Configuración desde el dispositivo de control
Configure el dispositivo de control desde EPSON RC+ 7.0.
(1) En EPSON RC+ 7.0, seleccione el menú-[Setup]-[System Configuration] para mostrar
el diálogo [System Configuration].
(2)
(5)
(3)
(4)
(2) Seleccione [Controller]-[Configuration] (Controlador - Configuración).
(3) Seleccione [Control Device] (Dispositivo de control) para seleccionar el dispositivo
de control desde los siguientes dos tipos.
- PC
- Remoto (E/S)
(4) Haga clic en el botón <Apply> (Aplicar).
(5) Haga clic en el botón <Close> (Cerrar).
6.5 Luces LED
Existen seis luces LED instaladas en el panel delantero del manipulador.
Las luces LED (ERROR, E-STOP, TEACH, TEST, AUTO, PROGRAM [Error, Parada de
emergencia, Enseñar, Prueba, Automático, Programar]) se encienden de acuerdo con el
estado del controlador (error, parada de emergencia, modo TEACH, modo Auto, modo
Program).
LED
(Ilustración: T3-401S)

Configuración y operación
68 Manual del manipulador de la serie T Rev.7
Estado del
controlador
Pantalla LED
Inicio
(El tiempo
requerido es
diferente según el
estado de conexión
del dispositivo).
1. TEST, TEACH, AUTO y PROGRAM parpadean (15
segundos)
2. Todos se apagan (10 segundos)
3. Todos se encienden (10 segundos)
4. Todos se apagan (10-30 segundos)
5. Cualquiera de las luces TEACH, AUTO o PROGRAM se
enciende.
Ejecute la función
de almacenamiento
del estado del
controlador en la
memoria USB
TEACH AUTO, PROGRAM parpadean.
Complete el
almacenamiento del
estado del
controlador en la
memoria USB
TEACH, AUTO, PROGRAM se encienden (durante 2 segundos).
ERROR se apaga incluso si ocurre un error.
Error en el
almacenamiento del
estado del
controlador en la
memoria USB
ERROR, TEACH, AUTO, PROGRAM se encienden (durante 2
segundos).
Error
ERROR se enciende
Advertencia
ERROR parpadea.
Parada de
emergencia
E-STOP se enciende.
Modo TEACH
(Enseñar)
TEACH parpadea.
Modo automático
(modo AUTO)
AUTO parpadea.
Modo Program
(modo AUTO)
PROGRAM parpadea.
Caída de la fuente
de alimentación de
CA
TEACH, AUTO se encienden.
Modo de prueba
TEACH parpadea.

Configuración y operación
Manual del manipulador de la serie T Rev.7 69
7. Puerto de conexión de la computadora de desarrollo
Puerto de conexión de
computadora de desarrollo
(Ilustración: T3-401S)
- Para mayor información acerca de la conexión de la computadora de desarrollo y el
manipulador, consulte Manual del usuario de EPSON RC+ 7.0, 5.12.1 Comando PC to
Controller Communications.
- Asegúrese de instalar el software EPSON RC+ 7.0 en la computadora de desarrollo
primero, y luego conectar la computadora de desarrollo y el manipulador con el cable
USB. Si el manipulador y la computadora de desarrollo se conectan sin instalar
EPSON RC+ 7.0 en la computadora de desarrollo, aparecerá [Add New Hardware
Wizard] (Asistente para agregar nuevo hardware). Si aparece este asistente, haga clic
en el botón <Cancel>.
7.1 ¿Qué es el puerto de conexión de la computadora de desarrollo?
El puerto de conexión de la computadora de desarrollo es compatible con los siguientes
tipos de USB.
- USB2.0 de alta velocidad/velocidad completa (selección de velocidad automática o modo
de velocidad completa)
- USB 1.1 de velocidad completa
Estándar de interfaz: Especificación de USB compatible con versión 2.0
(compatible con USB versión 1.1 y superior)
Conecte el manipulador y la computadora de desarrollo mediante un cable USB para
desarrollar el sistema de robot o ajustar la configuración del manipulador con el software
EPSON RC+ 7.0 instalado en la computadora de desarrollo.
El puerto de conexión de la computadora de desarrollo es compatible con la conexión
directa. La inserción y retiro de los cables desde la computadora de desarrollo y el
manipulador están disponibles cuando la alimentación está encendida. Sin embargo, se
produce una detención cuando el cable USB se saca del manipulador o la computadora de
desarrollo durante una conexión.
NOTA

Configuración y operación
70 Manual del manipulador de la serie T Rev.7
7.2 Precaución
Cuando conecte la computadora de desarrollo y el manipulador, asegúrese de lo siguiente:
- Conecte la computadora de desarrollo y el manipulador con un cable USB de 5 m o
menos.
No utilice un concentrador USB o un cable de extensión.
- Asegúrese de que el puerto de conexión de la computadora de desarrollo no se use con
ningún dispositivo que no sea la computadora de desarrollo.
- Use un cable de computadora y USB que sea compatible con el modo de alta
velocidad de USB 2.0 para operar en modo de alta velocidad de USB 2.0.
- No tire del cable con fuerza y no lo doble.
- No aplique presiones innecesarias al cable.
- Cuando la computadora de desarrollo y el manipulador están conectados, no inserte o
retire otros dispositivos USB de la computadora de desarrollo. La conexión con el
manipulador se puede desconectar.
7.3 Verificación de conexión y configuración de software
Se indica la conexión de la computadora de desarrollo con el manipulador.
(1) Asegúrese de que el software EPSON RC+ 7.0 esté instalado en el manipulador
conectado a la computadora de desarrollo.
(Si el software no está instalado, instálelo). Consulte Seguridad e instalación del
sistema de robot o el Manual del usuario de EPSON RC+ 7.0.
(2) Conecte la computadora de desarrollo y el manipulador con un cable USB.
(3) ENCIENDA el manipulador.
(4) Inicie EPSON RC+ 7.0.
(5) En el software EPSON RC+ 7.0, seleccione el menú [Setup] - [PC to Controller
Communications] para mostrar el cuadro de diálogo [PC to Controller
Communications].
(6) Seleccione “No.1 USB” (USB n.°1) y haga clic en el botón <Connect> (Conectar).

Configuración y operación
Manual del manipulador de la serie T Rev.7 71
(7) Después de que la conexión de la computadora de desarrollo con el manipulador está
completa, aparecerá “Connected” (Conectado) en el [Connection status:] (Estado de
conexión). Asegúrese de que aparezca “Connected” y haga clic en el botón <Close>
para cerrar la ventana [PC to Controller Communications].
Se completó la conexión entre la computadora de desarrollo y el manipulador. Ahora se
puede usar el sistema de robot desde EPSON RC+ 7.0.
7.4 Desconexión de la computadora de desarrollo y el manipulador
Se indica la desconexión de la computadora de desarrollo y el manipulador.
(1) En el software EPSON RC+ 7.0, seleccione el menú [Setup] - [PC to Controller
Communications] para mostrar el cuadro de diálogo [PC to Controller
Communications].
(2) Haga clic en el botón <Disconnect>.
La comunicación entre el manipulador y la computadora de desarrollo está
desconectada y se puede retirar el cable USB.
Si se retira el cable USB mientras el manipulador y la computadora de desarrollo se
encuentran conectados, el manipulador se detendrá. Asegúrese de hacer clic en el botón
<Disconnect> en el diálogo [PC to Controller Communications] antes de retirar el cable
USB.
NOTA

Configuración y operación
72 Manual del manipulador de la serie T Rev.7
8. Puerto de memoria
Conecte una memoria USB comercial al puerto de memoria del manipulador para usar la
función de almacenamiento del estado del controlador en la memoria USB.
8.1 ¿Qué es la función de almacenamiento de estado del controlador?
Esta función guarda diversos tipos de datos del manipulador en la memoria USB. Los
datos guardados en la memoria USB se cargan en EPSON RC+ 7.0 para obtener el estado
del manipulador y el programa de forma simple y precisa.
Los datos guardados también se pueden usar para restaurar el manipulador.
No puede ejecutar el almacenamiento de estado en la memoria USB cuando hace
funcionar al manipulador.
8.2 Antes de usar la función de almacenamiento del estado del
controlador
8.2.1 Precauciones
PRECAUCIÓN
■
La función de almacenamiento del estado del controlador está disponible en
cualquier momento y en cualquier estado del manipulador después de iniciarlo.
Sin embargo, las operaciones desde la consola, como la detención y pausa, no
están disponibles mientras ejecuta esta función.
Asimismo, esta función influye en el tiempo de ciclo del manipulador y la
comunicación con EPSON RC+ 7.0. Aparte de cuando es estrictamente
necesario, no ejecute esta función mientras esté funcionando el manipulador.
- Asegúrese de que el puerto USB se usa solamente para la memoria USB, incluso si el
puerto del controlador sea uno universal.
- Inserte la memoria USB directamente en el puerto de memoria de manipulador. No se
garantiza que se establezca la conexión con cables o cubos entre el manipulador y la
memoria USB.
- Asegúrese de insertar y sacar lentamente la memoria USB.
- No edite los archivos guardados con un editor. No se garantiza la operación del
sistema de robot después de restaurar los datos en el manipulador.
8.2.2 Memoria USB adoptable
Use una memoria USB que cumpla las siguientes condiciones.
- Compatibilidad con USB 2.0
- Sin función de seguridad
No se puede usar una memoria USB con función de entrada de contraseña.
- No se necesita instalar un driver o software para Windows XP, Windows Vista,
Windows 7, Windows 8 o Windows 10, Linux.
(Para conocer los sistemas operativos compatibles con EPSON RC+ 7.0, consulte
Configuración y operación 2.5 Ejemplo de sistema).

Configuración y operación
Manual del manipulador de la serie T Rev.7 73
8.3 Función de almacenamiento del estado del controlador
8.3.1 Almacenamiento del estado del controlador
PRECAUCIÓN
■
La función de almacenamiento del estado del controlador está disponible en
cualquier momento y en cualquier estado del manipulador después de iniciarlo.
Sin embargo, las operaciones desde la consola, como la detención y pausa, no
están disponibles mientras ejecuta esta función.
Asimismo, esta función influye en el tiempo de ciclo del manipulador y la
comunicación con EPSON RC+ 7.0. Aparte de cuando es estrictamente
necesario, no ejecute esta función mientras esté funcionando el manipulador.
Use este procedimiento para guardar el estado del manipulador en la memoria USB.
(1) Inserte la memoria USB en el puerto de memoria.
Cuando se inicie la transferencia de datos, los LED TEACH, AUTO y PROGRAM
comienzan a parpadear. Espere hasta que el estado de los LED cambie.
(El tiempo de transferencia de datos varía según el tamaño de los datos, así como el de
los proyectos).
(2) Cuando el almacenamiento de estado del manipulador termina satisfactoriamente, las
luces LED TEACH, AUTO y PROGRAM se encienden durante dos segundos.
Observe que la luz LED ERROR se apaga, incluso en el estado de error.
Si termina con errores, las luces LED ERROR, TEACH, AUTO y PROGRAM se
encienden durante dos segundos.
(3) Saque la memoria USB del manipulador.
- Se recomienda usar una memoria USB con LED para comprobar los cambios de
estado.
- Cuando el almacenamiento se ejecuta durante un estado de motor encendido, podría no
almacenarse el estado. Use otra memoria USB o ejecute el almacenamiento durante el
estado de motor apagado.
NOTA

Configuración y operación
74 Manual del manipulador de la serie T Rev.7
8.3.2 Carga de datos con EPSON RC+ 7.0
Lo siguiente corresponde al procedimiento para cargar datos almacenados en una memoria
USB mediante EPSON RC+ 7.0 y la visualización del estado del controlador.
(1) Inserte la memoria USB en la computadora con EPSON RC+ 7.0.
(2) Asegúrese de que la siguiente carpeta aparezca en la memoria USB.
B_T_número de serie_fecha en que se guardó el estado de datos
Ejemplo: B_T_12345_2013-10-29_092951
(3) Copie la carpeta confirmada en el procedimiento (2) en la carpeta
“¥EpsonRC70¥Backup”.
(4) En EPSON RC+ 7.0, seleccione el menú-[Tools]-[Controller] para mostrar el diálogo
[Controller Tools] (Herramientas de controlador).
(5) Haga clic en el botón <View Controller Status…> (Ver estado del controlador…).
(6) Aparece el cuadro de diálogo [Browse For Folder] (Navegar hasta carpeta). Seleccione
la carpeta copiada en el procedimiento (3) y haga clic en el botón <OK> (Aceptar).

Configuración y operación
Manual del manipulador de la serie T Rev.7 75
(7) Aparece el cuadro de diálogo [Controller Status Viewer] (Visor de estado del
controlador) para confirmar el estado del controlador.
Para conocer detalles, consulte Ver estado del controlador en Manual del usuario de
EPSON RC+ 7.0, 5.11.8 Comando Controller (menú Tools).
8.3.3 Transferencia con correo electrónico
Siga este procedimiento para transferir los datos que se guardaron en la memoria USB por
correo electrónico.
(1) Inserte la memoria USB en una computadora compatible con el envío de correo
electrónico.
(2) Asegúrese de que la memoria USB tenga las siguientes carpetas.
B_T_número de serie_fecha en que se guardó el estado de datos
Ejemplo: B_T_12345_2013-10-29_092951
(3) Envíe todas las carpetas por correo electrónico.
Elimine los archivos que no se relacionen con el proyecto antes de la transferencia.
Esta función se usa para enviar los datos al director del sistema y EPSON desde los
usuarios finales para el análisis de problemas.
NOTA

Configuración y operación
76 Manual del manipulador de la serie T Rev.7
8.4 Detalles de los datos
Los siguientes archivos de datos se crearon mediante la función de almacenamiento del estado del
controlador.
File Name
(Nombre de archivo)
Descripción
Backup.txt
Archivo de
información para
restauración
Archivo con información para restaurar el manipulador.
CurrentMnp01.PRM
Parámetro del robot
Guarda información como ToolSet.
CurrentStatus.txt
Estado guardado
Guarda el estado del programa y E/S.
ErrorHistory.csv
Historial de errores
InitFileSrc.txt
Configuración
inicial
Guarda diversas configuraciones del controlador.
MCSys01.MCD
Configuración del
robot
Guarda información del manipulador conectado.
SrcmcStat.txt
Información de
hardware
Guarda información de instalación del hardware.
ProjectName.obj
Archivo OBJ
Resultado de la compilación del proyecto.
El archivo Prg no se incluye.
GlobalPreserves.dat
Variables globales
conservadas
Guarda los valores de las variables globales conservadas.
WorkQueues.dat
Información de
WorkQue
Guarda información de las colas de WorkQue.
MCSRAM.bin
MCSYSTEMIO.bin
MCTABLE.bin
MDATA.bin
SERVOSRAM.bin
VXDWORK.bin
Información interna
del manipulador
Todos los archivos
relacionados con el
proyecto, excepto
NombreDeProyecto.obj
*1
Proyecto
Cuando está marcada la casilla de verificación [Include
project files when status exported] (Incluir archivos de
proyecto cuando se exporta el estado) en EPSON RC+ 7.0,
menú-[Setup]-[System
Configuration]-[Controller]-Preference] (Configuración -
Configuración del sistema - Controlador - Preferencia), se
almacena el archivo del proyecto.
Incluye los archivos de programa.
*1 El almacenamiento de “Todos los archivos relacionados con el proyecto, excepto NombreDeProyecto.obj”
se puede especificar con una configuración.

Configuración y operación
Manual del manipulador de la serie T Rev.7 77
9. Puerto LAN (comunicación Ethernet)
- Consulte el Manual del usuario de EPSON RC+ 7.0, 5.12.1 Comando [PC to Controller
Communications] (menú Setup) para conocer detalles sobre la conexión entre la
computadora de desarrollo y el manipulador.
- Para conocer la comunicación Ethernet (TCP/IP) con el software de la aplicación del
robot, consulte la Ayuda en línea de EPSON RC+ 7.0 o el Manual del usuario 14.
Comunicaciones TCP/IP. Comunicaciones TCP/IP.
9.1 Qué es el puerto LAN (comunicación Ethernet)
El puerto de comunicación Ethernet admite 100BASE-TX / 10 BASE-T.
Este puerto se usa para dos fines distintos.
Conexión con la computadora de desarrollo
El puerto LAN (comunicación Ethernet) se usa para conectar el manipulador y la
computadora de desarrollo.
Existe una operación equivalente para realizar la conexión entre el manipulador y la
computadora de desarrollo con el puerto de conexión de la computadora de desarrollo.
(Consulte Configuración y operación 7. Puerto de conexión de la computadora de
desarrollo)
Conexión con otro manipulador, controlador o computadora
El puerto LAN (comunicación Ethernet) se puede usar como un puerto de
comunicaciones Ethernet (TCP/IP) para comunicarse entre varios controladores desde
el software de la aplicación del robot.
9.2 Dirección IP
Configure la dirección IP correspondiente o la máscara de subred, según la configuración
de manipulador y la computadora de desarrollo que usará el puerto LAN.
No ingrese un valor aleatorio como dirección IP para el valor de TCP/IP configurado de la
red. Esta es la única dirección que identifica a la computadora que usa una conexión a
Internet.
La dirección IP se asigna desde la empresa u organización que tiene control de la dirección
IP.
Use una dirección del siguiente entorno privado de Internet, como P2P o en línea.
Asegúrese de que la dirección no esté asignada de forma redundante dentro de la red
cerrada.
Lista de dirección privada
10.0.0.1
a
10.255.255.254
172.16.0.1
a
172.31.255.254
192.168.0.1
a
192.168.255.254
NOTA

Configuración y operación
78 Manual del manipulador de la serie T Rev.7
A continuación, se encuentra la configuración del manipulador del controlador al momento
del envío.
Dirección IP:192.168.0.1
Máscara IP: 255.255.255.0
Puerta de enlace de IP: 0.0.0.0
9.3 Cambio de la dirección IP del manipulador
En esta sección, se indica el procedimiento para cambiar la dirección IP del manipulador
cuando realiza la conexión entre el manipulador y la computadora de desarrollo con el
puerto de conexión y el cable USB.
(1) Para la conexión entre la computadora de desarrollo y el manipulador.
Consulte Configuración y operación: 7. Puerto de conexión de la computadora de
desarrollo.
(2) En EPSON RC+ 7.0, seleccione el menú-[Setup]-[Controller] para abrir el siguiente
cuadro de diálogo.
(3) Seleccione [Controller]-[Configuration] (Controlador - Configuración).
(4) Ingrese la dirección IP correspondiente y la máscara de subred, y luego haga clic en el
botón <Apply>.
(5) Haga clic en el botón <Close> (Cerrar). El manipulador se reinicia automáticamente.
La configuración de la dirección IP se completa y vuelve a aparecer el diálogo
Manipulator reboot (Reinicio del manipulador).

Configuración y operación
Manual del manipulador de la serie T Rev.7 79
Cuando el manipulador y la computadora de desarrollo están conectados mediante
Ethernet, la dirección IP del manipulador también puede cambiarse. Sin embargo, el
manipulador y la computadora de desarrollo no se conectan automáticamente después de
reiniciar el manipulador en la conexión Ethernet.
9.4 Conexión de la computadora de desarrollo y el manipulador
mediante Ethernet
A continuación, se muestra la conexión entre la computadora de desarrollo y el
manipulador.
(1) Conecte la computadora de desarrollo y el manipulador con el cable Ethernet.
(2) Encienda el manipulador.
(3) Inicie EPSON RC+ 7.0.
(4) Muestre el diálogo [PC to Controller Communication] en [Setup] en el menú de
EPSON RC+ 7.0.
(5) Haga clic en el botón <Add>.
(6) Se agrega la conexión “No.2”. Configure lo siguiente y haga clic en el botón <Apply>.
Nombre: Valor válido para identificar el manipulador que desea conectar
Dirección IP: Dirección IP del manipulador que desea conectar
(7) Aparece el [Name] (Nombre) y [IP Address] (Dirección IP) especificados en el
NOTA

Configuración y operación
80 Manual del manipulador de la serie T Rev.7
procedimiento (6).
(8) Asegúrese de que esté seleccionado “No.2” y haga clic en el botón <Connect>
(Conectar).
(9) Después de que la conexión de la computadora de desarrollo con el manipulador está
completa, aparecerá “Connected” en [Connection status:]. Asegúrese de que aparezca
“Connected” y haga clic en el botón <Close> para cerrar la ventana [PC to Controller
Communications].
Se completó la conexión entre la computadora de desarrollo y el manipulador. Ahora se
puede usar el sistema de robot desde EPSON RC+ 7.0 mediante la conexión Ethernet.

Configuración y operación
Manual del manipulador de la serie T Rev.7 81
manipulador.
(1) Muestre el diálogo [PC-Controller Connection] en [Setup] en el menú de EPSON
RC+ 7.0.
(2) Haga clic en el botón <Disconnect>.
La comunicación entre el manipulador y la computadora de desarrollo está
desconectada y se puede retirar el cable Ethernet.
Si se retira el cable Ethernet mientras el manipulador y la computadora de desarrollo se
encuentran conectados, se produce una parada de emergencia y el manipulador se detiene.
Asegúrese de hacer clic en el botón <Disconnect> en el diálogo [PC to Controller
Communications] antes de retirar el cable Ethernet.
NOTA
9.5 Desconexión de la computadora de desarrollo y el manipulador
mediante Ethernet
A continuación, se muestra la desconexión entre la computadora de desarrollo y el

Configuración y operación
82 Manual del manipulador de la serie T Rev.7
10. Puerto TP
10.1 ¿Qué es el puerto TP?
El puerto TP conecta la caja de comandos (Teach Pendant) al manipulador. Puede conectar
la caja de comandos (Teach Pendant) (TP2, TP3).
Se necesita el cable de conversión dedicado* si conecta TP2 al manipulador de la serie T.
Comuníquese con la oficina regional si solo necesita el cable de conversión.
* Cable de intercambio TP: R12NZ900L6
Cuando no hay nada conectado al puerto TP, se genera un estado de parada de emergencia
en el manipulador. Cuando no está conectada la caja de comandos (Teach Pendant),
conecte el enchufe de derivación TP.
No conecte los dispositivos, excepto TP2, TP3 al puerto TP. Conectar estos dispositivos
puede provocar el mal funcionamiento del dispositivo, ya que las asignaciones de los pines
son distintas.
10.2 Conexión de la caja de comandos (Teach Pendant)
Se instala un cable dedicado en la caja de comandos (Teach Pendant). Conecte este
conector de cable al puerto TP.
La comunicación se configura de manera automática. Habilite la caja de comandos (Teach
Pendant) mediante uno de los siguientes procedimientos.
- Inserte el conector de la caja de comandos (Teach Pendant) en el manipulador y
encienda este último.
- Inserte el conector de la caja de comandos (Teach Pendant) mientras el manipulador
está encendido.
La conexión y desconexión de la caja de comandos (Teach Pendant) desde el controlador
se permite cuando el manipulador está encendido.
Cuando se saca el conector de la caja de comandos (Teach Pendant) desde el manipulador,
con el interruptor de llave selector de modo de dicho dispositivo en la posición “Teach”, el
modo de operación seguirá en TEACH. El modo de operación no se puede cambiar a
AUTO. Asegúrese de retirar la caja de comandos (Teach Pendant) después de cambiar el
modo de operación a “Auto”.
Para conocer detalles, consulte el manual
Robot Controller RC700/RC90 Option Teach Pendant TP2 (disponible solamente en
inglés).
Robot Controller RC700-A Option Teach Pendant TP3 (disponible solamente en inglés).
NOTA
NOTA

Configuración y operación
Manual del manipulador de la serie T Rev.7 83
11. EMERGENCY (Emergencia)
Los detalles sobre los requisitos de seguridad de esta sección se describen en el Manual
del usuario de EPSON RC+ 7.0, 2. Seguridad. Consulte este manual para mantener seguro
el sistema de robot.
ADVERTENCIA
Asegúrese de que la parada de emergencia o la protección funcionen
correctamente antes de su operación; no solo el arranque, sino que también los
cambios de uso, como opciones agregadas o piezas reemplazadas por
mantenimiento.
Antes de conectar el conector, asegúrese de que los pines no estén doblados.
Si lo conecta con los pines doblados, se puede dañar el conector y causar un
mal funcionamiento en el sistema de robot.
Conecte un interruptor de protección o un interruptor de parada de emergencia al conector
EMERGENCY (emergencia) por motivos de seguridad.
Cuando no hay nada conectado al conector EMERGENCY, el sistema de robot no
funciona de forma normal.
Conector EMERGENCY
(Ilustración: T3-401S)
11.1 Interruptor de protección y de liberación de enganche
El conector EMERGENCY tiene terminales de entrada para el interruptor de protección y
el interruptor de parada de emergencia. Asegúrese de usar estos terminales de entrada para
mantener el sistema seguro.
Conector
Estándar
Conector EMERGENCY (lado del
manipulador)
D-Sub de 25 pines hembra (lado del
tablero)
D-Sub de 25 pines macho (lado del
cable)
* La CAJA DE PARADA DE EMERGENCIA, el cable del conector EMERGENCY, el
bloque de terminales y el kit del conector EMERGENCY se ofrecen como opciones.
NOTA

Configuración y operación
84 Manual del manipulador de la serie T Rev.7
11.1.1 Interruptor de protección
ADVERTENCIA
El enclavamiento de la protección debe estar en funcionamiento cuando se
opere el sistema de robot. No opere el sistema si no se puede encender o
apagar el interruptor (por ejemplo, si el interruptor está envuelto con cinta).
Operar el sistema de robot cuando el interruptor no funciona correctamente es
extremadamente peligroso y puede causar problemas de seguridad graves, ya
que la entrada de la protección no puede cumplir su función designada.
Con el fin de mantener una zona de trabajo segura, se debe construir una protección
alrededor del manipulador. La protección debe tener un interruptor de enclavamiento en la
entrada de la zona de trabajo. La protección que se describe en este manual es una de las
protecciones, y uno de los enclavamientos de esta se denomina interruptor de protección.
Conecte el interruptor de protección al terminal de entrada de la protección en el conector
EMERGENCY.
El interruptor de protección cuenta con características de seguridad, como una retención
temporal del programa o el estado de operación prohibida, que se activan siempre que se
abre la protección.
Respete las siguientes instrucciones en el diseño del interruptor y la protección.
- Para el interruptor de protección, seleccione un interruptor que se abra cuando se abra la
protección, y no con el resorte del propio interruptor.
- La señal de la protección (entrada de protección) está diseñada para producir dos señales
redundantes. Si las señales de las dos entradas difieren en dos segundos o más, el sistema
lo reconoce como un error crítico. Por lo tanto, asegúrese de que el interruptor de
protección tenga dos circuitos redundantes separados y que cada uno se conecte a los
pines especificados en el conector EMERGENCY en el controlador.
- La protección se debe diseñar e instalar de modo que no se cierre la puerta de forma
accidental.
11.1.2 Interruptor de liberación de enganche
El software del controlador engancha estas condiciones:
- La protección está abierta.
- El modo de operación está ajustado en “TEACH” (Enseñar).
El conector EMERGENCY cuenta con un terminal de entrada para un interruptor de
liberación de enganche que cancela las condiciones de bloqueo.
Abierto: El interruptor de liberación de enganche engancha las condiciones de que la
protección esté abierta o el modo de operación esté en “TEACH”.
Cerrado: El interruptor de liberación de enganche libera las condiciones de bloqueo.
Cuando el modo TEACH enganchado se libera mientras la protección está abierta, el
estado de la energía del manipulador es operación prohibida, ya que en ese momento la
protección está abierta.
Para ejecutar una operación del manipulador, vuelva a cerrar la protección y cierre la
entrada de liberación de enganche.
NOTA

Configuración y operación
Manual del manipulador de la serie T Rev.7 85
11.1.3 Comprobación del funcionamiento del interruptor de liberación de enganche
Después de conectar el interruptor de protección y el interruptor de liberación de enganche
al conector EMERGENCY, asegúrese de comprobar el funcionamiento seguro del
interruptor con los procedimientos descritos a continuación, antes de operar el
manipulador.
(1) Encienda el controlador mientras la protección está abierta para iniciar el software del
controlador.
(2) Asegúrese de que se muestre “Safety” (Seguridad) en la barra de estado de la ventana
principal.
(3) Cierre la protección y encienda el interruptor que se conecta a la entrada de liberación
de enganche.
Asegúrese de que “Safety” esté atenuado en la barra de estado.
La información de que la protección está abierta se puede enganchar con el software,
según la condición de entrada de la liberación de enganche.
Abierto: El interruptor de liberación de enganche engancha la condición de que la
protección está abierta.
Para cancelar la condición, cierre la protección y luego cierre la entrada de
liberación de enganche de la protección.
Cerrado: El interruptor de liberación de enganche no engancha la condición de que la
protección está abierta.
La entrada de liberación de enganche también sirve para reconocer el cambio al modo
TEACH.
Con el fin de cambiar la condición enganchada del modo TEACH, coloque el interruptor
de llave selector de modo de la caja de comandos (Teach Pendant) en “Auto”
(Automático). Luego, cierre la entrada de liberación de enganche.
11.2 Conexión del interruptor de parada de emergencia
11.2.1 Interruptor de parada de emergencia
Si se desea agregar interruptores de parada de emergencia externos, además de la parada
de emergencia en la caja de comandos (Teach Pendant) y el panel del operador, asegúrese
de conectar estos interruptores de parada de emergencia al terminal de entrada de parada
de emergencia en el conector EMERGENCY.
El interruptor de parada de emergencia conectado debe cumplir con las siguientes normas
de seguridad y otras normas relacionadas (IEC60947-5-5, etc.):
- Debe ser un interruptor de botón que esté “normalmente cerrado”.
- Un botón que no regrese o reanude el funcionamiento automáticamente.
- El botón debe tener forma de hongo y debe ser rojo.
- El botón debe tener un contacto doble que esté “normalmente cerrado”.
La señal del interruptor de parada de emergencia está diseñada para usar dos circuitos
redundantes.
NOTA
NOTA

Configuración y operación
86 Manual del manipulador de la serie T Rev.7
Si las señales de los dos circuitos difieren en dos segundos o más, el sistema lo reconoce
como un error crítico. Por lo tanto, asegúrese de que el interruptor de parada de
emergencia tenga dos contactos y que cada circuito se conecte a los pines especificados en
el conector EMERGENCY en el controlador. Consulte Configuración y operación 11.4
Diagramas de circuitos.
11.2.2 Comprobación del funcionamiento del interruptor de parada de emergencia
Una vez que el interruptor de parada de emergencia esté conectado al conector
EMERGENCY, continúe con el siguiente procedimiento para asegurarse de que el
interruptor funcione correctamente. Para la seguridad del operador, NO se debe encender
el manipulador hasta que se complete la siguiente prueba.
(1) Encienda el manipulador para iniciar el software del controlador mientras presiona el
interruptor de parada de emergencia.
(2) Asegúrese de que el indicador E-STOP (Parada de emergencia) del manipulador esté
encendido.
(3) Asegúrese de que “E.Stop” aparezca en la barra de estado de la ventana principal.
(4) Suelte el interruptor de parada de emergencia.
(5) Ejecute el comando RESET (Restablecer).
(6) Asegúrese de que el indicador E-STOP esté APAGADO y que “E-Stop” esté
atenuado en la barra de estado de la ventana principal.
11.2.3 Recuperación desde la parada de emergencia
Para recuperarse desde la condición de parada de emergencia, siga el procedimiento de
comprobación de seguridad como lo requiere el sistema.
Después de la comprobación de seguridad, se necesitan las siguientes operaciones para
recuperarse de una condición de parada de emergencia.
- Suelte el interruptor de parada de emergencia
- Ejecute el comando RESET

Configuración y operación
Manual del manipulador de la serie T Rev.7 87
11.3 Asignaciones de pines
Las asignaciones de pines del conector EMERGENCY son las siguientes: (D-Sub de 25
pines macho)
N.° de
pin
Señal
Función
N.° de
pin
Señal
Función
1
ESW11
Contacto del interruptor parada de
emergencia (1)
*3
14
ESW21
Contacto del interruptor parada de
emergencia (2)
*3
2
ESW12
Contacto del interruptor parada de
emergencia (1)
*3
15
ESW22
Contacto del interruptor parada de
emergencia (2)
*3
3
ESTOP1+
Circuito de parada de emergencia 1
(+)
*4
16
ESTOP2+
Circuito de parada de emergencia 2
(+)
*4
4
ESTOP1-
Circuito de parada de emergencia 1
(-)
*4
17
ESTOP2-
Circuito de parada de emergencia 2
(-)
*4
5
Sin uso
*1
18
SDLATCH1
Liberación de enganche de la
protección
6
Sin uso
*1
19
SDLATCH2
Liberación de enganche de la
protección
7
SD11
Entrada de la protección (1)
*2
20
SD21
Entrada de la protección (2)
*2
8
SD12
Entrada de la protección (1)
*2
21
SD22
Entrada de la protección (2)
*2
9
24 V
Salida de +24 V
22
24 V
Salida de +24 V
10
24 V
Salida de +24 V
23
24 V
Salida de +24 V
11
24VGND
Salida de +24 V a tierra
24
24VGND
Salida de +24 V a tierra
12
24VGND
Salida de +24 V a tierra
25
24VGND
Salida de +24 V a tierra
13
Sin uso
*1
*1 No conecte nada a estos pines.
*2 Ocurre un error crítico si los valores de entrada desde la protección 1 y la protección
2 son distintos en dos o más segundos. Deben estar conectadas al mismo interruptor
con dos grupos de contactos.
*3 Ocurre un error crítico si los valores de entrada desde el contacto de interruptor de
parada de emergencia 1 y el contacto de interruptor de parada de emergencia 2 son
distintos en dos o más segundos. Deben estar conectados al mismo interruptor con
dos grupos de contactos.
*4 No aplique voltaje inverso al circuito de parada de emergencia.

Configuración y operación
88 Manual del manipulador de la serie T Rev.7
Carga nominal de salida del interruptor de parada de
emergencia
+30 V 0,3 A o inferior
Pines 1-2, 14-15
Margen de voltaje de entrada nominal de parada de
emergencia
Corriente de entrada nominal de parada de emergencia
+24 V 10%
37,5 mA 10% /Entrada de
+24 V
Pines 3-4, 16-17
Margen de voltaje de entrada nominal de la protección
Corriente de entrada nominal de la protección
+24 V 10 %
10 mA / Entrada de +24 V
Pines 7-8, 20-21
Margen de voltaje de entrada nominal de liberación de
enganche
Corriente de entrada nominal de liberación de enganche
+24 V 10 %
10 mA / Entrada de +24 V
Pines 18-19
La resistencia eléctrica total de los interruptores de parada de emergencia y sus circuitos
debe ser de 1 o menos.
PRECAUCIÓN
■
La salida de 24 V es para la parada de emergencia. No la utilice para otros
propósitos. De hacerlo, puede causar un mal funcionamiento del sistema.
■
No aplique voltaje inverso al circuito de parada de emergencia. De hacerlo,
puede causar un mal funcionamiento del sistema.
NOTA

Configuración y operación
Manual del manipulador de la serie T Rev.7 89
11.4 Diagramas de circuitos
11.4.1 Ejemplo 1: Aplicación típica de interruptor de parada de emergencia externa
+24V
+5V
Entrada de puerta
de seguridad 1
Externo
+24V
Entrada de puerta de
seguridad 1
Entrada de liberación
de enganche
Entrada de liberación de enganche Cerrado :Enganche desactivado
Abierto :Enganche activado
Control del
circuito principal
Entrada de CA
Interruptor de
parada de
emergencia de
una unidad de
operación (TP)
Externo+24V
GND
Interruptores externos de
parada de emergencia
Driver del motor
+
Manipulador
9
10
22
23
1
2
14
15
3
16
4
17
11
12
24
25
7
8
20
21
18
19
+
Detección de parada
de emergencia
NOTA:+24V GND
+ 5V GND
ESTOP1+
ESTOP2+
ESTOP1
ESTOP2
Cuidado con la
dirección de
aplicación de
voltaje

Configuración y operación
90 Manual del manipulador de la serie T Rev.7
11.4.2 Ejemplo 2: Aplicación típica de relé de seguridad externo
Ent. puerta seguridad
* Para fines de protección del
circuito de parada de
emergencia, la capacidad del
fusible debe ser la siguiente:
- Igual a la capacidad del relé
de seguridad externo
- 0,4 A o menos
Relé de seguridad externo
(el diagrama anterior se
ha simplificado para fines
de representación)
Externo
+24V
GND
+24V
+5V
Ent. puerta seguridad 2
Ent. Liberación enganche
Entrada de CA
Driver del motor
Externo +24V
Fusible
+
Externo
+24V
Manipulador
09
10
22
23
1
2
14
15
3
16
4
17
11
12
24
25
7
8
20
21
18
19
+
Control del circuito
principal
Interruptor de
parada de
emergencia
de una
unidad de
operación
(TP)
Detección de
parada de
emergencia
Externo
+24V
Entrada de liberación de enganche Cerrado: Enganche desactivado
Abierto: Enganche activado
Externo
+24V
GND
Externo
+24V GND

Configuración y operación
Manual del manipulador de la serie T Rev.7 91
12. Conector E/S estándar
PRECAUCIÓN
Tenga cuidado de no superar el margen de corriente nominal o la corriente
nominal definida en el manual.
Si supera la corriente nominal, el manipulador podría funcionar en su peor
condición.
El conector de E/S estándar es un conector montado en el lado posterior del manipulador
que sirve para conectar el equipo de entrada o salida al sistema.
Nombre del conector
Pines
Número de
bit
Conector de E/S (entrada)
18
0-17
Conector de E/S (salida)
12
0-11
Para conocer detalles sobre el cableado, Consulte Configuración y operación 3.7.2
Medidas contra el ruido para evitar el ruido.
La función remota se asigna inicialmente tanto para la entrada como para la salida, de 0 a
7. Para mayor información, consulte Configuración y Operación 14. Configuración
remota de E/S.
Asimismo, para conocer detalles de la E/S manual, consulte Configuración y operación 13.
Conector de E/S manual
12.1 Circuito de entrada
Margen de voltaje de entrada: +12 V a 24 V 10 %
Voltaje de encendido: +10,8 V (mín.)
Voltaje de apagado: +5 V (máx.)
Corriente de entrada: 10 mA (TYP) en la entrada de +24 V
Hay disponibles dos tipos de cableados para usar con el optoacoplador bidireccional en el
circuito de entrada.

Configuración y operación
92 Manual del manipulador de la serie T Rev.7
12.1.1 Aplicación típica del circuito de entrada
(Igual)
(Igual)
(Igual)
(Igual)
(Igual)
(Igual)
(Igual)
(Igual)
(Igual)
5 Entrada N.° 0 a 7 común
1 Entrada N.° 0
15 Entrada N.° 1
2 Entrada N.° 2
16 Entrada N.° 3
3 Entrada N.° 4
17 Entrada N.° 5
4 Entrada N.° 6
18 Entrada N.° 7
Omitir
GND +CC
19 Entrada N.° 8 a 15 común
6 Entrada N.° 8
20 Entrada N.° 9
14 Entrada N.° 16 a 17 común
Conector estándar E/S (Entrada)
12.1.2 Aplicación típica 2 del circuito de entrada
(Igual)
(Igual)
(Igual)
(Igual)
(Igual)
(Igual)
(Igual)
(Igual)
(Igual)
5 Entrada N.° 0 a 7 común
1 Entrada N.° 0
15 Entrada N.° 1
2 Entrada N.° 2
16 Entrada N.° 3
3 Entrada N.° 4
17 Entrada N.° 5
4 Entrada N.° 6
18 Entrada N.° 7
Omitir
GND +CC
19 Entrada N.° 8 a 15 común
6 Entrada N.° 8
20 Entrada N.° 9
Conector estándar E/S (Entrada)
14 Entrada N.° 16 a 17 común

Configuración y operación
Manual del manipulador de la serie T Rev.7 93
12.1.3 Asignaciones de pines del circuito de entrada
N.° de pin
Nombre de señal
N.° de
pin
Nombre de señal
1
Entrada n.° 0 (Iniciar)
15
Entrada n.° 1 (SelProg1)
2
Entrada n.° 2 (SelProg2)
16
Entrada n.° 3 (SelProg4)
3
Entrada n.° 4 (Parar)
17
Entrada n.° 5 (Pausar)
4
Entrada n.° 6 (Continuar)
18
Entrada n.° 7 (Restablecer)
5
Entrada común n.° 0 a 7
19
Entrada común n.° 8 a 15
6
Entrada n.° 8
20
Entrada n.° 9
7
Entrada n.° 10
21
Entrada n.° 11
8
Entrada n.° 12
22
Entrada n.° 13
9
Entrada n.° 14
23
Entrada n.° 15
10
Entrada n.° 16
24
Entrada n.° 17
11
Sin uso
25
Sin uso
12
Sin uso
26
Sin uso
13
Sin uso
27
Sin uso
14
Entrada común n.° 16 a 17
28
Sin uso
La función remota dentro de los paréntesis ( ) en la tabla anterior se asigna inicialmente a
la entrada de 0 a 7. Para mayor información, consulte Configuración y Operación 14.
Configuración remota de E/S.
Conector
Modelo del conector
Conector de E/S (entrada)
DMC 0,5/14-G1-2,54 P20THR R72 (lado del tablero)
DFMC 0,5/ 14-ST-2,54 (lado del cable)
(PHOENIX CONTACT)
* El conector de E/S se incluye con el envío.
Asignación de pines del conector de E/S (entrada)
14
1
28
15
12.2 Circuito de salida
Voltaje nominal de salida: +12 V a +24 V 10 %
Corriente máxima de salida: Salida TYP de 100 mA/1
Dispositivo de salida: Relé PhotoMOS
Resistencia de encendido: Menos de 0,7
Los siguientes dos cableados están disponibles dado que el relé PhotoMOS no polarizado
se usa para el circuito de salida.
PRECAUCIÓN
Asegúrese de cablear el circuito de salida correctamente, porque no cuenta con
circuitos de protección contra cortocircuitos y conexión inversa. Un cableado
inadecuado puede provocar un mal funcionamiento de las piezas del tablero y
una función incorrecta del sistema de robot posteriormente.

Configuración y operación
94 Manual del manipulador de la serie T Rev.7
12.2.1 Aplicación típica 1 del circuito de salida
1 Salida n.° 0
(Igual)
Omitir
+CC
6 Salida n.° 8
15 Salida n.° 9
10 Salida n.° 1
2 Salida n.° 2
11 Salida n.° 3
3 Salida n.° 4
12 Salida n.° 5
4 Salida n.° 6
13 Salida n.° 7
5 Salida n.° 0 a 7 común (GND)
Carga
L
GND
L
14 Salida n.° 8 a 11 común (GND)
Conector estándar E/S (Salida)
(Igual)
(Igual)
(Igual)
(Igual)
(Igual)
(Igual)
(Igual)
(Igual)
12.2.2 Aplicación típica 2 del circuito de salida
1 Salida n.° 0
(Igual)
Omitir
+CC
6 Salida n.° 8
15 Salida n.° 9
10 Salida n.° 1
2 Salida n.° 2
11 Salida n.° 3
3 Salida n.° 4
12 Salida n.° 5
4 Salida n.° 6
13 Output No.7
5 Salida n.° 0 to 7 común (+CC)
Carga
L
GND
L
14 Salida n.° 8 a 11 común (+CC)
Conector estándar E/S (Salida)
(Igual)
(Igual)
(Igual)
(Igual)
(Igual)
(Igual)
(Igual)
(Igual)

Configuración y operación
Manual del manipulador de la serie T Rev.7 95
12.2.3 Asignaciones de pines del circuito de salida
N.° de pin
Nombre de señal
N.° de pin
Nombre de señal
1
Salida n.° 0 (Ready)
10
Salida n.° 1 (Running)
2
Salida n.° 2 (Paused)
11
Salida n.° 3 (Error)
3
Salida n.° 4 (EstopOn)
12
Salida n.° 5 (SafeguardOn)
4
Salida n.° 6 (SError)
13
Salida n.° 7 (Warning)
5
Salida común n.° 0 a 7
14
Salida común n.° 8 a 11
6
Salida n.° 8
15
Salida n.° 9
7
Salida n.° 10
16
Salida n.° 11
8
Sin uso
17
Sin uso
9
Sin uso
18
Sin uso
La función remota dentro de los paréntesis ( ) en la tabla anterior se asigna inicialmente a
la salida de 0 a 7. Para mayor información, consulte Configuración y Operación 14.
Configuración remota de E/S.
Conector
Modelo del conector
Conector de E/S (salida)
DMC 0,5/9-G1-2,54 P20THR R44 (lado del tablero)
DFMC 0,5/ 9-ST-2,54 (lado del cable)
(PHOENIX CONTACT)
* El conector de E/S se incluye con el envío.
Asignación de pines del conector de E/S (salida)
9
1
18
10

Configuración y operación
96 Manual del manipulador de la serie T Rev.7
12.3 Procedimiento para productos del cable de E/S
Lo siguiente describe el procedimiento para productos del cable de E/S sobre la conexión
de los dispositivos de entrada/salida del usuario.
12.3.1 Método de conexión del cable de E/S
(1) Prepárese para el conector de E/S y el cable que vienen incluidos con el envío.
Cable para adaptación:
Capacidad del cable eléctrico: 0,14 a 0,5mm
2
Tipo de cable: cable único, cable trenzado, cable trenzado con terminal de varilla.
(2) Empuje el borde del cable hacia la ranura de inserción para cables.
Para cable único y cable trenzado, retire la
cubierta del cable.
Si usa un cable torcido o un cable único más delgado, insértelo mientras presiona el
botón de apertura de color naranja.
- Los botones de apertura anaranjados se retiran fácilmente. Tenga cuidado durante
la operación.
- Sobre el botón de apertura hay un orificio de comprobación del cable. Puede
comprobar los cables mediante un medidor.
12.3.2 Cómo fijar el cable de E/S
Puede fijar los cables de E/S con el sujetador de cable en la parte posterior del
manipulador.
Sujetador de cable
(Ilustración: T3-401S)
Fije los cables con el sujetador de cable E/S, ya que resulta difícil desconectar el cableado
de los cables de E/S.
NOTA
NOTA

Configuración y operación
Manual del manipulador de la serie T Rev.7 97
13. Conector de E/S manual
PRECAUCIÓN
Tenga cuidado de no superar el margen de corriente nominal o la corriente
nominal definida en el manual.
Si supera la corriente nominal, el manipulador podría funcionar en su peor
condición.
El conector de E/S manual es un conector que sirve para conectar el equipo de entrada o
salida al sistema. Se encuentra montado en la parte superior del brazo n.º 2.
Para conocer detalles sobre el cableado, consulte Configuración y operación 3.7.2
Medidas contra el ruido para evitar el ruido.
Asimismo, para conocer detalles sobre la E/S estándar montada en la parte posterior del
manipulador, consulte Configuración y operación 12. Conector de E/S estándar.
13.1 Especificaciones de la fuente de alimentación
El conector de E/S manual tiene una fuente de alimentación que puede utilizar el usuario.
Habilite el uso de esta fuente para operar dispositivos externos.
Tenga cuidado y no supere la corriente permitida cuando use la fuente de alimentación.
Voltaje: 24 V 5 %
Corriente permitida: T3: 500mA
T6: 700mA
Nombre del conector
Polaridad
Pines
Número de
bit
Conector de E/S manual
Entrada
6
18-23
Salida
4
12-15

Configuración y operación
98 Manual del manipulador de la serie T Rev.7
13.2 Circuito de entrada
Margen de voltaje de entrada: +12 V a 24 V 10 %
Voltaje de encendido: +10,8 V (mín.)
Voltaje de apagado: +5 V (máx.)
Corriente de entrada: 10 mA (TYP) en la entrada de +24 V
Hay disponibles dos tipos de cableados para usar con el optoacoplador bidireccional en el
circuito de entrada.
13.2.1 Aplicación típica 1 del circuito de entrada
4 Entrada n.° 18 a 23 común
1 Entrada n.° 18
9 Entrada n.° 19
2 Entrada n.° 20
10 Entrada n.° 21
3 Entrada n.° 22
11 Entrada n.° 23
Conector E/S manual
(Igual)
GND +CC
(Igual)
(Igual)
(Igual)
(Igual)
13.2.2 Aplicación típica 2 del circuito de entrada
4 Entrada n.° 18 a 23 común
1 Entrada n.° 18
9 Entrada n.° 19
2 Entrada n.° 20
10 Entrada n.° 21
3 Entrada n.° 22
11 Entrada n.° 23
(Igual)
GND +CC
Conector E/S manual
(Igual)
(Igual)
(Igual)
(Igual)

Configuración y operación
Manual del manipulador de la serie T Rev.7 99
13.3 Circuito de salida
Voltaje nominal de salida: +12 V a +24 V 10 %
Corriente máxima de salida: Salida TYP de 100 mA/1
Dispositivo de salida: Relé PhotoMOS
Resistencia de encendido: Menos de 0,7
Los siguientes dos cableados están disponibles dado que el relé PhotoMOS no polarizado
se usa para el circuito de salida.
PRECAUCIÓN
Asegúrese de cablear el circuito de salida correctamente, porque no cuenta
con circuitos de protección contra cortocircuitos y conexión inversa. Un
cableado inadecuado puede provocar un mal funcionamiento de las piezas del
tablero y una función incorrecta del sistema de robot posteriormente.
13.3.1 Aplicación típica 1 del circuito de salida
6 Salida n.° 12
(Igual)
+CC
14 Salida n.° 13
7 Salida n.° 14
15 Salida n.° 15
Carga
GND
8 Salida n.° 12 a 15 común (GND)
Conector E/S manual
(Igual)
(Igual)
13.3.2 Aplicación típica 2 del circuito de salida
6 Salida n.° 12
(Igual)
+CC
14 Salida n.° 13
7 Salida n.° 14
15 Salida n.° 15
Carga
GND
8 Salida n.° 12 a 15 común (GND)
Conector E/S manual
(Igual)
(Igual)

Configuración y operación
100 Manual del manipulador de la serie T Rev.7
13.4 Asignaciones de pines
Lo siguiente corresponde a las asignaciones de pines del conector de E/S manual (D-sub
de 15 pines macho).
N.° de pin
Nombre de señal
N.° de pin
Nombre de señal
1
Entrada n.° 18
9
Entrada n.° 19
2
Entrada n.° 20
10
Entrada n.° 21
3
Entrada n.° 22
11
Entrada n.° 23
4
Entrada común
n.° 18 a 23
12
Sin uso
5
+24 V
13
GND
6
Salida n.° 12
14
Salida n.° 13
7
Salida n.° 14
15
Salida n.° 15
8
Salida común
n.° 12 a 15
Conector
Estándar
Conector de E/S manual
D-Sub de 15 pines hembra (lado del
manipulador)
D-Sub de 15 pines macho (lado del cable)
* El conector de E/S se incluye con el envío.
13.5 Cómo controlar la E/S manual
La serie T tiene la E/S (entrada: 6 bits; salida: 4 bits) para el control de la mano.
Puerto del bit de entrada: 18, 19, 20, 21, 22, 23
Puerto del bit de salida: 12, 13, 14, 15
Cómo operar
La E/S manual solo es compatible con los comandos de operación del puerto del bit. No se
admiten los comandos de bytes o palabras.
Comandos disponibles
Comando
Función
Sw
E/S de puerto del bit de entrada.
SetSw
Establece una entrada de la E/S
virtual.
Encendido
Activa el bit de salida.
Apagado
Desactiva el bit de salida.
Restricción 1: E/S remota
La E/S manual no puede establecerse en Remote I/O (E/S remota).
Restricción 2: Entrada/salida por puerto de byte o puerto de palabra
Existen restricciones para operar la entrada/salida de la E/S estándar mediante el puerto
de byte o el puerto de palabra, dado que la E/S manual se incluye en el puerto de byte y
el puerto de palabra.

Configuración y operación
Manual del manipulador de la serie T Rev.7 101
Entrada: Se lee siempre “0” para el bit de la E/S manual.
Salida: Sucede un error de ejecución cuando se especifica “1” para el bit de la E/S
de la mano.
Ejemplo de entrada:
Cuando se opera la entrada de byte mediante las siguientes condiciones E/S manual de
entrada 23:
E/S manual de entrada 23: ACTIVADA
Bit de E/S estándar de entrada: 16=DESACTIVADO, 17=ACTIVADO
In(2)---> 0x02 (0000 0010B)
Ejemplo de salida:
Cuando se opera la salida de byte mediante las siguientes condiciones
Puerto de bit de E/S estándar de salida 11=ACTIVADO, 10~8 = DESACTIVADO
Out 1,'H08
Ejemplo de salida de error:
Cuando se opera la salida de byte mediante las siguientes condiciones
Puerto de bit de E/S estándar de salida 11=ACTIVADO, 10~8 = DESACTIVADO
Out 1,'H18 <--- Es un error dado que el bit de E/S manual está ACTIVADO
Puerto de byte
Puerto de palabra
Puerto
Descripción
Puerto
Descripción
Entrada
2
Se lee “0” para los 6 bits superiores
0000 00xx
1
Se lee “0” para los 6 bits superiores
0000 00xx
0000 00xx xxxx xxxx
Salida
1
Siempre especifique “0” para los 4
bits superiores.
0000 xxxx
0
Siempre especifique “0” para los 4
bits superiores.
0000 xxxx xxxx xxxx

Configuración y operación
102 Manual del manipulador de la serie T Rev.7
14. Configuración remota de E/S
En esta sección se describen las funciones y temporizaciones de las señales de entrada y
salida.
Las funciones remotas se pueden asignar a sus placas de E/S estándar, o las placas de E/S
del bus de campo, para mejorar el control del sistema de robot; ya sea desde una unidad
operativa de su elección o un secuenciador.
La función remota se asigna inicialmente tanto para la entrada como para la salida,
de 0 a 7.
Para aceptar las entradas remotas externas, asigne las funciones remotas y el dispositivo de
control debe ser remoto. Para mayor información, consulte la sección Configuración de
software del control remoto en el Manual del usuario de EPSON RC+ 7.0 - Control
remoto.
El usuario define el número de E/S que se asigna a la función remota mediante la
configuración de software. Para mayor información, consulte la sección Configuración de
software del control remoto en el Manual del usuario de EPSON RC+ 7.0 - Control
remoto.
Para conocer detalles sobre la conexión del cable de E/S, consulte las secciones de
Configuración y operación 12: Conector de E/S estándar, 13. Conector de E/S estándar y
17. E/S del bus de campo.
Para conocer detalles sobre la comunicación con el equipo externo, consulte el Manual del
usuario de EPSON RC+ 7.0 - 12. Control remoto.
PRECAUCIÓN
Cuando use la E/S remota, siempre asegúrese de lo siguiente. Usar el
sistema de robot en condiciones poco satisfactorias puede provocar un mal
funcionamiento del sistema o problemas de seguridad.
- Asigne funciones remotas correctamente a las entradas/salidas y realice un
cableado adecuado cuando configure las señales de E/S remota.
- Asegúrese de que las funciones corresponden a las señales de
entrada/salida correspondiente antes de encender el sistema.
Cuando verifique el funcionamiento del sistema de robot, prepárese para
enfrentar fallas con la configuración inicial o el cableado. Si el manipulador
funciona de forma inusual a causa de las fallas con la configuración inicial o el
cableado, presione el interruptor de parada de emergencia de inmediato para
detener el manipulador.
La función remota está disponible cuando está activada la E/S virtual.
Cuando configura una señal de E/S remota, mantenga un registro escrito de la
configuración o guarde los datos en un archivo como referencia futura.
Cuando configura la señal de E/S de un bus de campo a la función remota, la respuesta
dependerá de la velocidad de baudios del bus de campo. Para conocer detalles sobre la
respuesta del bus de campo, consulte E/S de bus de campo opcional del controlador de
robot RC700 / RC90.
El conector de E/S manual no puede establecerse en la señal remota.
NOTA

Configuración y operación
Manual del manipulador de la serie T Rev.7 103
14.1 Descripción de la señal de E/S
La función remota se asigna inicialmente tanto para la entrada como para la salida,
de 0 a 7.
Para cambiar la asignación de la función a partir de la configuración inicial, use EPSON
RC+ 7.0.
Para usar todas las señales, necesitará agregar un módulo de E/S de bus de campo.
14.1.1 Señales de entrada remota
Las entradas remotas se usan para controlar los manipuladores e iniciar programas. Ciertas
condiciones se deben cumplir antes de poder habilitar las entradas, como se muestra en la
siguiente tabla.
Para aceptar entradas remotas externas, asigne la función remota y ajuste el dispositivo de
control en Remoto. Cuando está disponible la entrada remota externa, se enciende la
“salida AutoMode”.
Excepto para “SelProg”, las señales ejecutan cada función cuando la señal se inicia en la
condición de aceptación de la entrada. La función se ejecuta automáticamente. Por lo tanto,
no se necesita programación especial.
Cuando ocurre un error, debe ejecutar un “Restablecimiento” para borrar la condición de
error antes de poder ejecutar cualquier otro comando de entrada remota. Use la “salida
Error” y la “entrada Reset” (Restablecer) para monitorear el estado de error y borrar las
condiciones de error del dispositivo remoto.
Nombre
Inicial
Descripción
Condición de aceptación
de entrada (*1)
Start
0
Ejecuta la función seleccionada en SelProg.
(*2)
Salida Ready ACTIVADA
Salida Error
DESACTIVADA
Salida EStopOn
DESACTIVADA
Salida SafeguardOn
DESACTIVADA
Entrada Pause
DESACTIVADA
Entrada Stop
DESACTIVADA
SelProg1
SelProg2
SelProg4
SelProg8
SelProg16
SelProg32
1
2
3
No config.
No config.
No config.
Especifica la ejecución de número Main
function (Función principal). (*2)
Stop
4
Se detienen todas las tareas y comandos.
Pause
5
Todas las tareas se pausan. (*3)
Salida Running
ACTIVADA
Continue
6
Continuar la tarea pausada.
Salida Paused ACTIVADA
Entrada Pause
DESACTIVADA
Entrada Stop
DESACTIVADA
NOTA

Configuración y operación
104 Manual del manipulador de la serie T Rev.7
Nombre
Inicial
Descripción
Condición de aceptación
de entrada (*1)
Reset
7
Restablece la parada de emergencia y el
error. (*4)
Salida Ready ACTIVADA
Shutdown
No config.
Finaliza el sistema
ForcePowerLow
(*6)
No config.
Funciona como la función de baja potencia
forzada.
El manipulador se hace funcionar en el
modo de baja potencia.
No se acepta el control de alta potencia
desde el comando.
Ejecuta lo siguiente de acuerdo con las
preferencias del manipulador.
Se detiene o detiene temporalmente todas
las tareas y comandos. (*12)
En cualquier momento
Esta entrada es aceptable
incluso cuando la salida
AutoMode está apagada.
SelRobot
No config.
Cambios a la condición de salida de
MotorsOn, AtHome, PowerHigh y
MCalReqd. (*9)
SelRobot1
SelRobot2
SelRobot4
SelRobot8
SelRobot16
No config.
Especifica el número del manipulador que
ejecuta un comando. (*5)
SetMotorsOn
No config.
Activa los motores del manipulador. (*5)
(*6)
Salida Ready ACTIVADA
Salida EStopOn
DESACTIVADA
Salida SafeguardOn
DESACTIVADA
Entrada SetMotorOff
DESACTIVADA
SetMotorsOff
No config.
Desactiva los motores del manipulador.
Salida Ready ACTIVADA
SetPowerHigh
No config.
Ajusta el modo de potencia del
manipulador en Alta
(*5)
Salida Ready ACTIVADA
Salida EStopOn
DESACTIVADA
Salida SafeguardOn
DESACTIVADA
Entrada SetPowerLow
DESACTIVADA
SetPowerLow
No config.
Ajusta el modo de potencia del
manipulador en Baja. (*5)
Salida Ready ACTIVADA
Home
No config.
Mueve el brazo del manipulador a la
posición de reposo definida por el usuario.
Salida Ready ACTIVADA
Salida Error
DESACTIVADA
Salida EStopOn
DESACTIVADA
Salida SafeguardOn
DESACTIVADA
Salida MotorsOn
ACTIVADA
Entrada Pause
DESACTIVADA
Entrada Stop
DESACTIVADA

Configuración y operación
Manual del manipulador de la serie T Rev.7 105
Nombre
Inicial
Descripción
Condición de aceptación
de entrada (*1)
MCal
No config.
Ejecuta MCal (*5) (*7)
Salida Ready ACTIVADA
Salida Error
DESACTIVADA
Salida EStopOn
DESACTIVADA
Salida SafeguardOn
DESACTIVADA
Salida MotorsOn
ACTIVADA
Entrada Pause
DESACTIVADA
Entrada Stop
DESACTIVADA
Recover
No config.
Después de que se cierra la protección,
recupera la posición donde la protección
estaba abierta.
Salida Paused ACTIVADA
Salida Error
DESACTIVADA
Salida EStopOn
DESACTIVADA
Salida SafeguardOn
DESACTIVADA
Salida RecoverReqd
ACTIVADA
Entrada Pause
DESACTIVADA
Entrada Stop
DESACTIVADA
ResetAlarm
No
config.
Cancela la alarma (*11)
SelAlarm1
SelAlarm2
SelAlarm4
SelAlarm8
No config.
Especifica el número de alarma que se debe
cancelar. (*10)
ALIVE
No config.
Señal de entrada para el monitoreo en vivo
del manipulador. Para la salida ALIVE, se
generan las mismas señales que las de
entrada. El equipo maestro puede realizar
monitoreo en vivo del manipulador,
mediante el cambio periódico de la entrada
y la revisión de la señal de salida.
(*1) La “salida AutoMode output” activada se omite de la tabla. Esta es una condición de aceptación de la
entrada para todas las funciones.
(*2) La “entrada Start” (Iniciar) ejecuta la función especificada mediante los siguientes seis bits: SelProg 1, 2, 4,
8, 16 y 32.

Configuración y operación
106 Manual del manipulador de la serie T Rev.7
Nombre de la
función
SelProg1
SelProg2
SelProg4
SelProg8
SelProg16
SelProg32
Main
0
0
0
0
0
0
Main1
1
0
0
0
0
0
Main2
0
1
0
0
0
0
Main3
1
1
0
0
0
0
Main60
0
0
1
1
1
1
Main61
1
0
1
1
1
1
Main62
0
1
1
1
1
1
Main63
1
1
1
1
1
1
0=DESACTIVADO, 1=ACTIVADO
(*3) La “tarea NoPause” y la “tarea NoEmgAbort” no se pausan.
Para conocer detalles, consulte la Ayuda en línea de EPSON RC+ 7.0 o Pausa en la Referencia del
lenguaje SPEL+.
(*4) Desactiva la salida de E/S e inicia el parámetro del manipulador.
Para conocer detalles, consulte la Ayuda en línea de EPSON RC+ 7.0 o Restablecimiento en la Referencia
del lenguaje SPEL+.
(*5) La serie T no es válida.
(*6) Inicia el parámetro del manipulador.
Para conocer detalles, consulte la Ayuda en línea de EPSON RC+ 7.0 o Motor en la Referencia del
lenguaje SPEL+.
(*7) Para conocer detalles, consulte la Ayuda en línea de EPSON RC+ 7.0 o MCal en la Referencia del
lenguaje SPEL+.
(*8) Esto solo es para usuarios experimentados. Asegúrese de que comprende completamente la especificación
de entrada antes de usarla.
La salida CmdRunning y la salida CmdError no cambian para esta entrada.
La “tarea NoEmgAbort” no se detendrá con esta entrada.
Cuando cambia la entrada de ON (Activado) a OFF (Desactivado), se detienen todas las tareas y los
comandos.
(*9) Esta función cambia la condición de salida de MotorsOn, AtHome, PowerHigh y MCalReqd.
Cuando configura esta señal con la condición seleccionada mediante SelRobot1 - SelRobot16, puede cambiar
la condición de salida.
Luego de seleccionar la condición, se mantendrá hasta que la cambie o desactive/reinicie el controlador. Todos
los manipuladores se han seleccionado de manera predeterminada.
(*10) Los valores especificados mediante “SelAlarm1, 2, 4 y 8” corresponden a los números de la alarma.

Configuración y operación
Manual del manipulador de la serie T Rev.7 107
N.º de alarma
Destino
SelAlarm1
SelAlarm2
SelAlarm4
SelAlarm8
1
Batería del controlador
1
0
0
0
2
-
0
1
0
0
3
Grasa del manipulador
1
1
0
0
4
-
0
0
1
0
5
-
1
0
1
0
6
-
0
1
1
0
7
-
1
1
1
0
8
-
0
0
0
1
9
-
1
0
0
1
0=DESACTIVADO, 1=ACTIVADO
Las siguientes piezas están sujetas al engrase.
Unidad de ranura de tornillo esférico en la articulación n.° 3
(*11) Podrá cancelar la alarma especificada si selecciona las condiciones mediante SelAlarm1-SelAlarm8 y
configura esta señal.
(*12) Operación de todas las tareas y comandos, modo de potencia del manipulador y comando PowerHigh
mediante la configuración de las preferencias del manipulador.
Preferencias (1): "Motor power low when ForcePowerLow signal OFF" (Potencia baja del motor cuando
la señal ForcePowerLow está DESACTIVADA)
Preferencias (2): "ForcePowerLow signal change pauses all tasks" (El cambio en la señal
ForcePowerLow pausa todas las tareas)
Para conocer detalles de las preferencias del manipulador, consulte el Manual del
usuario de EPSON RC+ 7.0 [Setup]-[System
Configuration]-[Controller]-[Preferences] en 5.12.2 Comando [System
Configuration] (menú Setup).
Preferencias (1)
Preferencias (2)
ForcePowerLow
Todas las
tareas y
comandos
Modo de
potencia
PowerHigh
0
0
1→0
Detener
Solo bajo
Aceptar
0
0
0→1
Detener
Solo bajo
No aceptar
0
1
1→0
Continuar
Alto/Bajo
Aceptar
0
1
0→1
Detener temp.
Solo bajo
No aceptar
1
0
1→0
Detener
Solo bajo
No aceptar
1
0
0→1
Detener
Solo bajo
Aceptar
1
1
1→0
Detener temp.
Solo bajo
No aceptar
1
1
0→1
Continuar
Alto/Bajo
Aceptar

Configuración y operación
108 Manual del manipulador de la serie T Rev.7
14.1.2 Señales de salida remota
La salida remota es una función para generar un estado del manipulador o el modo de
operación.
Las salidas remotas suministran las funciones asignadas que se usan con cualquier
dispositivo de control. Las salidas se ejecutan automáticamente. Por lo tanto, no se
necesita programación especial.
Nombre
Inicial
Descripción
Ready
0
Se activa cuando el inicio del manipulador se completa y
no se ejecuta ninguna tarea.
Running
1
Se activa cuando hay una tarea en ejecución.
Sin embargo, se desactiva cuando la “salida Paused” está
desactivada.
Paused
2
Se activa cuando existe una tarea de pausa.
Error
3
Se activa cuando ocurre un error.
Use la “entrada Reset” para recuperarse del error.
EStopOn
4
Se activa en la parada de emergencia.
SafeguardOn
5
Se activa cuando la protección está abierta.
SError
6
Se activa cuando ocurre un error crítico.
Cuando ocurre un error crítico, la “entrada Reset” no
funciona. Reinicie el controlador para recuperarse.
Advertencia
7
Se activa cuando ocurre una advertencia.
La tarea funciona de forma normal con la advertencia. No
obstante, asegúrese de eliminar la causa de la advertencia
lo antes posible.
MotorsOn
No
config.
Se activa cuando el motor del manipulador está activado.
(*5)
AtHome
No
config.
Se activa cuando el manipulador está en la posición de
reposo. (*5)
PowerHigh
No
config.
Se activa cuando el modo de potencia del manipulador es
Alto. (*5)
MCalReqd
No
config.
Se activa cuando el manipulador no ha ejecutado MCal.
(*5)
RecoverReqd
No
config.
Se activa cuando hay al menos un manipulador esperando
la recuperación después de que se cierra la protección.
RecoverInCycle
No
config.
Se activa cuando hay al menos un manipulador ejecutando
la recuperación.
CmdRunning
No
config.
Se activa cuando se ejecuta un comando de entrada.
CmdError
No
config.
Se activa cuando no se puede aceptar un comando de
entrada.
CurrProg1
CurrProg2
CurrProg4
CurrProg8
CurrProg16
CurrProg32
No
config.
Indica la ejecución del último número de main function
(función principal) (*1)
AutoMode
No
config.
Se activa en el estado aceptable de la entrada remota. (*2)
TeachMode
No
Se activa en modo TEACH.

Configuración y operación
Manual del manipulador de la serie T Rev.7 109
config.
ErrorCode1
ErrorCode8192
No
config.
Indica el número de error.
InsideBox1
InsideBox15
No
config.
Se activa cuando el manipulador está en el área de control
de acercamiento. (*3)
InsidePlane1
InsidePlane15
No
config.
Se activa cuando el manipulador está en el plano de
control de acercamiento. (*4)
Alarma
No
config.
Se activa cuando sucede alguna de las alarmas. (*9)
Alarm1
No
config.
Se activa cuando sucede una alarma de la batería del
manipulador.
Alarm2
No
config.
Se activa cuando sucede una alarma de la batería del
manipulador conectado a CU.
Alarm3
No
config.
Se activa cuando sucede una alarma de engrase del
manipulador conectado a CU. (*10)
Alarm4
No
config.
Se activa cuando sucede una alarma de la batería del
manipulador conectado a DU1.
Alarm5
No
config.
Se activa cuando sucede una alarma de engrase del
manipulador conectado a DU1. (*10)
Alarm6
No
config.
Se activa cuando sucede una alarma de la batería del
manipulador conectado a DU2.
Alarm7
No
config.
Se activa cuando sucede una alarma de engrase del
manipulador conectado a DU2. (*10)
Alarm8
No
config.
Se activa cuando sucede una alarma de la batería del
manipulador conectado a DU3.
Alarm9
No
config.
Se activa cuando sucede una alarma de engrase del
manipulador conectado a DU3. (*10)
PositionX
No
config.
Genera la coordenada X actual en el sistema de coordenadas
World (Mundial) (*6) (*7)
PositionY
No
config.
Genera la coordenada Y actual en el sistema de coordenadas
World (*6) (*7)
PositionZ
No
config.
Genera la coordenada Z actual en el sistema de coordenadas
World (*6) (*7)
PositionU
No
config.
Genera la coordenada U actual en el sistema de coordenadas
World (*6) (*7)
PositionV
No
config.
Genera la coordenada V actual en el sistema de coordenadas
World (*6) (*7)
PositionW
No
config.
Genera la coordenada W actual en el sistema de coordenadas
World (*6) (*7)
Torque1
No
config.
Produce el valor de torque actual de la articulación n.° 1(*6)
(*7)
Torque2
No
config.
Produce el valor de torque actual de la articulación n.° 2(*6)
(*7)

Configuración y operación
110 Manual del manipulador de la serie T Rev.7
Nombre
Inicial
Descripción
Torque3
No
config.
Produce el valor de torque actual de la articulación n.° 3(*6)
(*7)
Torque4
No
config.
Produce el valor de torque actual de la articulación n.° 4(*6)
(*7)
Torque5
No
config.
Produce el valor de torque actual de la articulación n.° 5(*6)
(*7)
Torque6
No
config.
Produce el valor de torque actual de la articulación n.° 6(*6)
(*7)
CPU
No
config.
Genera el factor de carga de la CPU del programa del
usuario (*8)
ESTOP
No
config.
Genera la cantidad de veces que se han ejecutado las paradas
de emergencia.
ALIVE
No
config.
Señal de salida para el monitoreo en vivo del
manipulador. Se genera la entrada de señal mediante la
entrada ALIVE. El equipo maestro puede realizar
monitoreo en vivo del manipulador, mediante el cambio
periódico de la entrada y la revisión de la señal de salida.
(*1) Genera el último número de función o el actual de CurrProg1, 2, 4, 8, 16 o 32.
Nombre de la
función
CurrProg1
CurrProg2
CurrProg4
CurrProg8
CurrProg16
CurrProg32
Main
0
0
0
0
0
0
Main1
1
0
0
0
0
0
Main2
0
1
0
0
0
0
Main3
1
1
0
0
0
0
Main60
0
0
1
1
1
1
Main61
1
0
1
1
1
1
Main62
0
1
1
1
1
1
Main63
1
1
1
1
1
1
0=DESACTIVADO, 1=ACTIVADO
(*2) La función remota está disponible en las siguientes condiciones.
La configuración es el modo Auto y el dispositivo de control es remoto.
La configuración es el modo Program (Programar) y la E/S remota está habilitada.
(*3) Para conocer detalles, consulte la Ayuda en línea de EPSON RC+ 7.0 o Caja en la Referencia del
lenguaje SPEL+.
(*4) Para conocer detalles, consulte la Ayuda en línea de EPSON RC+ 7.0 o Plano en la Referencia del
lenguaje SPEL+.
(*5) Se genera el estado del manipulador de la siguiente manera, de acuerdo con la condición seleccionada en
SelRobot.

Configuración y operación
Manual del manipulador de la serie T Rev.7 111
Espere al menos 40 ms antes de ingresar la señal después de cambiar la condición en SelRobot.
Nombre
La condición (SelRobot1- SelRobot16) cuando se ingresa SelRobot
0: Todos los robots están
seleccionados
1 - 16: Se seleccione el número de robot
en particular
MotorsOn
Se activa cuando hay al menos un
motor del manipulador encendido.
Se activa cuando el motor del manipulador
seleccionado está encendido.
AtHome
Se activa cuando todos los
manipuladores están en la posición de
reposo.
Se activa cuando el manipulador seleccionado
está en la posición de reposo.
PowerHigh
Se activa cuando al menos un modo de
potencia del manipulador es Alto.
Se activa cuando el modo de potencia del
manipulador seleccionado es Alto.
MCalReqd
Se activa cuando existe al menos un
manipulador que no ha ejecutado
MCal.
Se activa cuando el manipulador seleccionado
no ha ejecutado MCal.
(*6) La serie T no es válida.
(*7) Genera la información en el formato real.
(*8) Genera el factor de carga de las tareas creadas por el usuario. Para conocer detalles sobre el factor de
carga de la CPU, consulte el administrador de tareas.
(*9) La señal se activa cuando sucede la alarma en la información de alarma del manipulador.
(*10) Las siguientes piezas están sujetas a engrase.
Unidad de ranura de tornillo esférico en la articulación n.° 3
14.2 Especificaciones de temporización
14.2.1 Precauciones sobre las señales de entrada remota
Las siguientes tablas indican las secuencias de temporización para las operaciones
principales del controlador.
Los lapsos de tiempo señalados (duraciones) se deben consultar solo como valores de
referencia, dado que los valores de temporización actuales varían en función de la cantidad
de tareas en ejecución, así como la velocidad de CPU del manipulador. Revise
cuidadosamente y consulte las siguientes tablas para conocer la interrelación de
temporización cuando ingrese una señal de entrada.
Durante el diseño del sistema, asegúrese de que acciona solamente una operación de
entrada remota a la vez, de lo contrario, se generará un error.
El ancho del pulso de una señal de entrada debe ser de 25 o más milisegundos para que se
pueda detectar.

Configuración y operación
112 Manual del manipulador de la serie T Rev.7
[Unidad: ms]
14.2.2 Diagrama de temporización para la secuencia de ejecución de la operación
940
1250
Depende de
movimiento HOME
Salida
MotorsOn
Salida
AtHome
Entrada
SetMotorsOn
Entrada
SetMotorsOff
Entrada
Home
14.2.3 Diagrama de temporización para la secuencia de ejecución de la operación
34
34
34
110
110
34
34
410
Salida
Ready
Salida
CurrProg1
Salida
Running
* Salida
Paused
Entrada
SelProg1
Entrada
Start
Entrada
Pause
Entrada
Continue
Entrada
Stop
410
* La duración varía en función de la configuración de Quick Pause (QP, Pausa rápida)
y el estado de funcionamiento del programa en el momento de la entrada Pause
(Pausar)

Configuración y operación
Manual del manipulador de la serie T Rev.7 113
14.2.4 Diagrama de temporización para la secuencia de entrada de la puerta de
seguridad
12
1066
1066
600
9
17
17
940
Salida
Running
Salida
Paused
Salida
SafeguardOn
Salida
MotorsOn
Entrada
Safety
Entrada
Latch
Entrada
Continue
14.2.5 Diagrama de temporización para la secuencia de la parada de emergencia
65
12
10
10
Salida
Running
Salida
MotorsOut
Salida
EStopOn
Entrada
Emergency
Entrada
Reset

Configuración y operación
114 Manual del manipulador de la serie T Rev.7
15. Ranuras para tarjeta SD
PRECAUCIÓN
No use ninguna tarjeta SD distinta a la de los accesorios.
Si utiliza otra tarjeta SD, el sistema podría no funcionar correctamente.
La tarjeta SD solo está disponible para el sistema de robot.
Se escribe en la tarjeta SD solo para el sistema de robot. No se puede usar para
leer o escribir datos.
Si escribe datos en la tarjeta SD, el sistema de robot podría no funcionar
correctamente.
Ranura de la tarjeta SD
(Ranura Option: al interior)
(Ilustración: T3-401S)
La ranura de la tarjeta SD es una ranura para insertar tarjetas SD.
El firmware para hacer funcionar el manipulador está escrito en la tarjeta SD.
Para conocer un método de reemplazo, consulte Mantenimiento: 14.3 Reemplazo de la
tarjeta SD.

Configuración y operación
Manual del manipulador de la serie T Rev.7 115
16. Interruptor RESET
Interruptor RESET
(Ilustración: T3-401S)
El interruptor RESET tiene la siguiente función.
Reinicio del manipulador
Presione el interruptor RESET por tres segundos cuando inicia el manipulador.
El manipulador se reinicia.
La forma del interruptor RESET es difícil de presionar. Utilice un objeto puntiagudo,
como se muestra en la siguiente imagen, cuando presione el interruptor RESET.

Configuración y operación
116 Manual del manipulador de la serie T Rev.7
17. Fieldbus I/O (E/S de bus de campo)
La E/S de bus de campo de la serie T admite el siguiente modelo.
DeviceNet™
PROFIBUS-DP
EtherNet/IP™
CC-Link
PROFINET
EtherCAT®
Para obtener más detalles, consulte el siguiente manual.
Robot Controller RC700 / RC90 Option Fieldbus I/O (disponible solamente en inglés)
ADVERTENCIA
■
No conecte o desconecte los conectores del motor mientras el sistema de robot
esté ENCENDIDO. Conectar o desconectar los conectores del motor con la
energía ENCENDIDA es extremadamente peligroso y puede provocar lesiones
corporales graves, ya que el manipulador puede moverse de manera anormal;
además, puede provocar descargas eléctricas y el mal funcionamiento del
sistema de robot.
■
Para cortar la energía hacia el sistema de robot, desconecte el enchufe de la
fuente de alimentación. Asegúrese de conectar el cable de alimentación de CA a
un receptor de energía.
NO lo conecte directamente a la fuente de alimentación de la fábrica.
■
Asegúrese de realizar el procedimiento de instalación con el sistema de robot y
el equipo relacionado APAGADOS, y desconecte en enchufe de alimentación.
Realizar cualquier procedimiento de reemplazo con la energía ENCENDIDA es
extremadamente peligroso y puede provocar una descarga eléctrica o el mal
funcionamiento del sistema de robot.
PRECAUCIÓN
Revise que las lengüetas del módulo de E/S de bus de campo queden
correctamente enganchadas en el tablero cuando instale dicho módulo. Si las
lengüetas no se enganchan correctamente, puede que se produzcan daños en
el conector o el módulo de E/S de bus de campo.

Configuración y operación
Manual del manipulador de la serie T Rev.7 117
Instalación de
módulo de E/S
de bus de campo
(1)
APAGUE el manipulador.
(2)
Saque la cubierta de la ranura opcional en la parte
posterior del manipulador.
Perno Sem: 2-M3×6
(Ilustración: T3-401S)
(3)
Inserte el módulo de E/S de bus de campo en la ranura opcional.
PRECAUCIÓN
Revise que las lengüetas del módulo de E/S de bus de campo queden
correctamente enganchadas en el tablero cuando instale dicho módulo. Si las
lengüetas no se enganchan correctamente, puede que se produzcan daños en
el conector o el módulo de E/S de bus de campo.
(4)
Apriete los tornillos con una herramienta especial
hasta que el módulo de E/S de bus de campo esté fijo
completamente.
Imagen de la instalación
Parte frontal
Parte posterior
Retiro de módulo
de E/S de bus de
campo
(1)
Destornille los tornillos con una herramienta especial hasta que el módulo de E/S
de bus de campo esté suelto.
(2)
Saque el módulo de E/S de bus de campo.
Puede sacar el módulo mientras tira hacia delante los tornillos sueltos.
(3)
Monte la cubierta de la ranura opcional.

Configuración y operación
118 Manual del manipulador de la serie T Rev.7

Mantenimiento
Este volumen contiene procedimientos con precauciones
de seguridad para los manipuladores de la serie T.


Mantenimiento
Manual del manipulador de la serie T Rev.7 121
1. Mantenimiento de seguridad
Lea atentamente este capítulo, este manual y otros manuales relacionados para comprender
los procedimientos de mantenimiento seguro antes de realizar cualquier tipo de
mantenimiento de rutina.
Solo se debe permitir que personal autorizado que ha realizado una capacitación
en seguridad realice mantenimiento al sistema de robot.
La capacitación en seguridad es el programa para los operadores de robots
industriales que cumple con las leyes y reglamentos de cada país.
El personal que ha realizado la capacitación en seguridad adquiere conocimiento
acerca de robots industriales (operaciones, enseñanza, etc.), conocimiento
acerca de las inspecciones y conocimiento de normas y reglamentos
relacionados.
Se permite que el personal que haya completado las clases de capacitación en
sistemas robóticos y en mantenimiento que ha realizado el fabricante, el
distribuidor o la empresa incorporada localmente, realice mantenimiento al
sistema de robot.
ADVERTENCIA
■
No retire las piezas que no están cubiertas en este manual. Siga estrictamente
el procedimiento de mantenimiento, como se describe en este manual. El retiro
incorrecto de piezas o el mantenimiento inadecuado no solo pueden causar el
mal funcionamiento del sistema de robot, sino que además pueden causar
graves problemas de seguridad.
■
Manténgase alejado del manipulador mientras la energía esté ENCENDIDA si
no ha tomado cursos de capacitación. No ingrese al área de funcionamiento
mientras la energía esté ENCENDIDA. Ingresar al área de funcionamiento con
la energía ENCENDIDA es extremadamente peligroso y puede provocar graves
problemas de seguridad, ya que es posible que el manipulador se mueva,
incluso si parece estar detenido.
■
Cuando revise el funcionamiento del manipulador después de reemplazar
piezas, asegúrese de revisarlo desde fuera del área protegida. Revisar el
funcionamiento del manipulador mientras está dentro del área protegida puede
causar problemas graves de seguridad, ya que el manipulador se puede mover
de improviso.
■
Antes de operar el sistema de robot, asegúrese de que tanto los interruptores de
parada de emergencia como el interruptor de protección funcionen
correctamente. Operar el sistema de robot cuando los interruptores no
funcionan correctamente es extremadamente peligroso y puede provocar
lesiones corporales graves o daños graves al sistema de robot, ya que los
interruptores no pueden cumplir las funciones para las que están diseñados en
una emergencia.

Mantenimiento
122 Manual del manipulador de la serie T Rev.7
ADVERTENCIA
■
Para cortar la energía hacia el sistema de robot, desconecte el enchufe de la
fuente de alimentación. Asegúrese de conectar el cable de alimentación de CA a
un receptor de energía.
NO lo conecte directamente a la fuente de alimentación de la fábrica.
■
Antes de realizar cualquier procedimiento de reemplazo, APAGUE el
controlador y los equipos relacionados, luego desconecte el enchufe de la
fuente de alimentación.
Realizar cualquier procedimiento de reemplazo con la energía ENCENDIDA es
extremadamente peligroso y puede provocar una descarga eléctrica o el mal
funcionamiento del sistema de robot.
ADVERTENCIA
■
Asegúrese de conectar los cables correctamente. No permita una tensión
innecesaria en los cables. (No coloque objetos pesados en los cables. No doble
o tire de los cables por la fuerza). La tensión innecesaria en los cables puede
provocar daños en los cables, desconexión o falla de contacto. Los cables
dañados, la desconexión o la falla de contacto son extremadamente peligrosos
y pueden provocar descargas eléctricas o el mal funcionamiento del sistema de
robot.
PRECAUCIÓN
■
Es posible que el manipulador se caliente debido al calor del motor o a causas
similares. No toque el manipulador hasta que baje la temperatura. Además,
asegúrese de que la temperatura del manipulador baje y no se sienta caliente
cuando lo toque. Luego, realice la enseñanza o el mantenimiento.

Mantenimiento
Manual del manipulador de la serie T Rev.7 123
2. Mantenimiento general
Este capítulo describe las inspecciones y procedimientos de mantenimiento. Realizar
inspecciones y procedimientos de mantenimiento es esencial para prevenir problemas y
garantizar la seguridad.
Asegúrese de realizar las inspecciones de mantenimiento en conformidad con el programa.
2.1 Inspección de mantenimiento
2.1.1 Programa de inspección de mantenimiento
Los puntos de inspección se dividen en cinco etapas: diaria, mensual, trimestral, semestral
y anual. Los puntos de inspección se agregan en cada etapa.
Si el manipulador se opera por 250 horas o más por mes, se debe agregar puntos de
inspección cada 250 horas, 750 horas, 1500 horas y 3000 horas de operación.
Punto de inspección
Inspección
diaria
Inspección
mensual
Inspección
trimestral
Inspección
semestral
Inspección
anual
Revisión
(reemplazo)
1 mes (250 h)
Inspeccionar todos los días
√
2 meses (500 h)
√
3 meses (750 h)
√
√
4 meses (1000 h)
√
5 meses (1250 h)
√
6 meses (1500 h)
√
√
√
7 meses (1750 h)
√
8 meses (2000 h)
√
9 meses (2250 h)
√
√
10 meses (2500 h)
√
11 meses (2750 h)
√
12 meses (3000 h)
√
√
√
√
13 meses (3250 h)
√
20.000 h
√
h = hora

Mantenimiento
124 Manual del manipulador de la serie T Rev.7
2.1.2 Punto de inspección
Inspección mientras está APAGADO (el manipulador no está en funcionamiento)
Punto de inspección
Lugar de inspección
Diario
Mensual
Trimestral
Semestral
Anual
Verifique la soltura o juego de los
pernos y tornillos.
Apriételos, de ser necesario.
(Para el torque de ajuste, consulte
Mantenimiento: 2.4 Apretar pernos
de cabeza hueca hexagonal).
Pernos de montaje del
efector final
√
√
√
√
√
Pernos de montaje del
manipulador
√
√
√
√
√
Pernos de bloqueo de cada
brazo
√
√
√
√
√
Pernos, tornillos alrededor
del mango
√
Pernos, tornillos que fijan
motores, unidades de
engranaje reductor, etc.
√
Verifique si los conectores están
sueltos.
Si los conectores están sueltos,
presiónelos o apriételos de forma
segura.
Conectores externos del
manipulador (en las placas
del conector, etc.).
√
√
√
√
√
Unidad de cable del
manipulador
√
√
√
√
Verifique visualmente si hay
defectos externos.
Límpielos, de ser necesario.
Apariencia externa del
manipulador
√
√
√
√
√
Cables externos
√
√
√
√
Verifique si están doblados o en
posición incorrecta. Repárelos o
colóquelos correctamente, de ser
necesario.
Protecciones, etc.
√
√
√
√
√
Verifique la tensión de las correas
de regulación.
Ténselas, de ser necesario.
Interior del brazo n.° 2
√
√
Condiciones de engrase
Consulte Mantenimiento: 2.3 Engrase.
Batería de litio
Consulte Mantenimiento: 14. Batería de litio, tarjeta SD, placas y filtro
Inspeccionar mientras está ENCENDIDO (el manipulador está en operación)
Punto de inspección
Lugar de inspección
Diario
Mensual
Trimestral
Semestral
Anual
Verifique el margen de movimiento.
Cada articulación
√
Mueva los cables hacia adelante y
atrás suavemente para verificar si
hay cables desconectados.
Cables externos (incluida la
unidad de cable del
manipulador)
√
√
Empuje cada brazo en el estado
MOTOR ON (Encender motor) para
verificar si hay algún contragolpe.
Cada brazo
√
Verifique si ocurren sonidos o
vibraciones inusuales.
Completo
√
√
√
√
√

Mantenimiento
Manual del manipulador de la serie T Rev.7 125
Mida la precisión varias veces con
un reloj comparador cuando
ocurren espacios.
Completo
√
Active y desactive el interruptor de
desbloqueo del freno y verifique el
sonido del freno de solenoide. Si
no produce un sonido, reemplace
el freno.
Freno
√
√
√
√
√
2.2 Revisión (Reemplazo de piezas)
PRECAUCIÓN
■
El tiempo de revisión se basa en la suposición de que todas las articulaciones se
operan para una distancia equivalente. Si una unidad en particular tiene mucho
trabajo o una carga alta, recomendamos revisar todas las articulaciones (tantas
como sea posible) antes de superar las 20.000 horas de operación con la
articulación como base.
Las piezas de las articulaciones del manipulador pueden causar una disminución en la
precisión o un mal funcionamiento debido al deterioro del manipulador causado por el uso
a largo plazo. A fin de usar el manipulador a largo plazo, recomendamos revisar las piezas
(reemplazo de piezas).
Una indicación general para el lapso entre revisiones es de 20.000 horas de operación del
manipulador.
Sin embargo, el lapso puede variar según las condiciones de uso y el grado de carga (como
cuando se opera con la velocidad de movimiento y la aceleración/desaceleración máximas
en funcionamiento continuo) aplicado en el manipulador.
Para EPSON RC+ 7.0, el lapso de reemplazo recomendado para las piezas sujetas a
mantenimiento (motores, unidades de engranaje reductor y correas de regulación) se puede
comprobar en el cuadro de diálogo [Maintenance] (Mantenimiento).
Consulte Mantenimiento: 4. Alarma.
Nota:
El lapso de reemplazo recomendado para las piezas de mantenimiento es cuando alcanzan
una vida útil de L10 (tiempo para un 10 % de probabilidad de falla). En el cuadro de
diálogo [Maintenance], la vida útil de L10 se muestra como 100 %.
NOTA

Mantenimiento
126 Manual del manipulador de la serie T Rev.7
Las horas de operación del manipulador se pueden verificar en el cuadro de diálogo
[Controller Status Viewer] - [Motor On Hours].
(1) En el software EPSON RC+, seleccione el menú [Tools]-[Controller] para abrir el
cuadro de diálogo [Controller Tools].
(2) Haga clic en el botón <View Controller Status> para abrir el cuadro de diálogo
[Browse For Folder].
(3) Seleccione la carpeta en la que se almacena la información.
(4) Haga clic en <OK> (Aceptar) para ver el diálogo [Controller Status Viewer] (Visor
de estado del controlador).
(5) Seleccione [Robot] desde el menú de árbol a la izquierda.
Para las piezas sujetas a revisión, consulte Mantenimiento: 19. Lista de piezas de
mantenimiento.
Para conocer detalles sobre el reemplazo de cada pieza, consulte la sección
Mantenimiento.
Comuníquese con el distribuidor de su región para obtener más información.

Mantenimiento
Manual del manipulador de la serie T Rev.7 127
2.3 Engrase
La flecha del tornillo esférico y las unidades de engranaje de reducción se deben engrasar
regularmente. Use solo la grasa que se especifica en la siguiente tabla.
PRECAUCIÓN
■
Mantenga el manipulador con suficiente grasa. Operar el manipulador sin
suficiente grasa dañará las piezas deslizantes o causará un rendimiento
insuficiente del mismo. Si se dañan las piezas, se necesitará mucho tiempo y
dinero para repararlas.
PRECAUCIÓN
■
Si le entra grasa en los ojos, la boca o cae en su piel, siga las instrucciones a
continuación.
Si le entra grasa en los ojos
: Enjuáguelos a fondo con agua limpia y, luego, consulte a un médico
de inmediato.
Si le entra grasa en la boca
: Si se ingiere, no induzca el vómito. Consulte a un médico de
inmediato.
: Si la grasa solo entra en su boca, enjuáguese la boca a fondo con
agua.
Si le cae grasa en la piel
: Enjuague el área a fondo con agua y jabón.
Pieza de engrase
Intervalo de engrase
Grasa
Consulte Mantenimiento:
Articulación
n.° 1:
Unidades de engranaje
de reducción
Tiempo de revisión
T3: SK-2
T6: SK-1A
9. Articulación n.° 1:
Articulación
n.° 2:
10. Articulación n.° 2:
Articulación
n.° 3:
Unidad de ranura de
tornillo esférico
A los 100 km de
operación
(50 km para el primer
engrase)
AFB
13. Engrase de la unidad de ranura de
tornillo esférico
Articulación n.° 1, 2 unidades de engranaje de reducción
Como indicación general, realice el engrase en los mismos lapsos que las revisiones.
Sin embargo, el lapso puede variar según las condiciones de uso y el grado de carga (como
cuando se opera con la velocidad de movimiento y la aceleración/desaceleración máximas
en funcionamiento continuo) aplicado en el manipulador.
Articulación n.° 3, unidad de flecha de tornillo esférico
El intervalo de engrase recomendado es a los 100 km de operación. Sin embargo, los
lapsos de engrase también se pueden verificar a partir de la condición de engrase. Realice
el engrase si la grasa está descolorida o seca.
Grasa normal Grasa descolorida
Realice el engrase a los 50 km de operación para el primer engrase.

Mantenimiento
128 Manual del manipulador de la serie T Rev.7
Para EPSON RC+ 7.0, el lapso de reemplazo recomendado para la grasa de la unidad de
ranura de tornillo esférico se puede comprobar en el cuadro de diálogo [Maintenance].
Para obtener más detalles, consulte el siguiente manual.
Consulte Mantenimiento 4. Alarma
2.4 Apretar pernos de cabeza hueca hexagonal
Los pernos de cabeza hueca hexagonal (“pernos”) se usan en lugares en los que se necesita
fuerza mecánica. Estos pernos se aprietan con los pares de sujeción que se muestran en la
siguiente tabla.
Cuando es necesario volver a apretar los pernos en algunos procedimientos en este manual
(excepto en casos especiales, según se indica), use un torquímetro para que los pernos
queden apretados con los torques de ajuste correctos que se muestran a continuación.
Tornillo
Torque de ajuste
Consulte la tabla a continuación para obtener
información acerca del tornillo de fijación.
M3
2,0 ± 0,1 Nm
(21 ± 1 kgfcm)
Tornillo de
fijación
Torque de ajuste
M4
4,0 ± 0,2 Nm
(41 ± 2 kgfcm)
M4
2,4 ± 0,1 Nm
(26 ± 1 kgfcm)
M5
8,0 ± 0,4 Nm
(82 ± 4 kgfcm)
M5
4,0 ± 0,2 Nm
(41 ± 2 kgfcm)
M6
13,0 ± 0,6 Nm
(133 ± 6 kgfcm)
M8
32,0 ± 1,6 Nm
(326 ± 16 kgfcm)
M10
58,0 ± 2,9 Nm
(590 ± 30 kgfcm)
M12
100,0 ± 5,0 Nm
(1,020 ± 51 kgfcm)
Los pernos alineados en una circunferencia se deben apretar en un patrón entrecruzado,
como se muestra en la figura a continuación.
1
5
3
7
2
6
4
8
Orificio
de perno
No apriete todos los pernos de forma segura a la
vez. Divida la cantidad de veces que se aprietan los
pernos en dos o tres y apriete los pernos de forma
segura con una llave hexagonal. Luego, use un
torquímetro para apretar los pernos con los torques
de ajuste que se muestran en la tabla anterior.
2.5 Orígenes coincidentes
Después de reemplazar las piezas (motores, unidades de engranaje reductor, un freno,
correas de regulación, una unidad de ranura de tornillo esférico, etc.), el manipulador no
puede operar correctamente, ya que el origen almacenado en cada motor y el origen
correspondiente almacenado en el sistema de robot no coinciden.
Por lo tanto, es necesario realizar una calibración (descanso y calibración de codificador)
para hacer coincidir estos orígenes.
Para realizar la calibración, es necesario registrar los valores del pulso para una posición
específica.
Antes de reemplazar piezas, seleccione datos de pose del dato del punto registrado para
verificar la precisión. Luego, siga los pasos a continuación para mostrar los valores del
pulso y regístrelos.
NOTA

Mantenimiento
Manual del manipulador de la serie T Rev.7 129
Ejecute los siguientes comandos en [Command Window]
>PULSE
PULSE: [Valor de pulso de articulación n.° 1] pls [Valor de pulso de articulación
n.° 2] pls [Valor de pulso de articulación n.° 3] pls [Valor de pulso de articulación
n.° 4] pls
2.6 Distribución de las piezas de mantenimiento
Unidad de cable
Freno de la
articulación n.° 3
‘Batería de litio
Interruptor de desbloqueo del freno
Luz LED
Unidad de
ranura de
tornillo esférico
Cubierta
superior del
brazo
Motor de articulación n.° 4
Correa Z
Correa U
Motor de la
articulación
n.° 2
Engranaje
reductor de la
articulación n.° 3
Engranaje reductor de la
articulación n.° 1
Motor de la
articulación n.° 1
Motor de la
articulación
n.° 3
Unidad CPU/DPB
Placa de alimentación
Filtro de aire
Cubierta inferior
del brazo
Tarjeta SD
T3
EPSON
RC+

Mantenimiento
130 Manual del manipulador de la serie T Rev.7
Unidad de cable
Freno de la
articulación
n.° 3
Batería de litio
Luz LED
Unidad de ranura
de tornillo esférico
Cubierta superior
del brazo
Motor de la
articulación n.° 4
4
Correa
U2
Correa U1
Motor de la
articulación n.° 2
Engranaje reductor de la
articulación n.° 2
Engranaje reductor de la
articulación n.° 1
Motor de la articulación n.° 1
Motor de la
articulación n.° 3
Unidad CPU/DPB
Unidad CPU/DPB
Unit
Placa de alimentación
Filtro de aire
Cubierta inferior
del brazo
Tarjeta SD
T6
Suministro de
alimentación
especial
Unidad de placa del
AMP para articulaciones
n.° 2, 3 y 4
Correa Z
Interruptor de
bloqueo del freno

Mantenimiento
Manual del manipulador de la serie T Rev.7 131
3. Estructura del manipulador
T3

Mantenimiento
132 Manual del manipulador de la serie T Rev.7
T6

Mantenimiento
Manual del manipulador de la serie T Rev.7 133
4. Alarma
Cuando se agotan las baterías de litio, ocurre una alarma de advertencia de reducción
de voltaje. Sin embargo, la alarma no garantiza que la batería dure hasta su reemplazo,
y es necesario reemplazarlas de inmediato. Si la batería se agota, se perderán los
parámetros del manipulador, y se deberá volver a calibrar el manipulador.
Además, las piezas de las articulaciones del manipulador pueden causar una
disminución en la precisión o un mal funcionamiento debido al deterioro de las piezas
causado por el uso a largo plazo. Si el manipulador se avería a causa del deterioro de
las piezas, se necesitará mucho tiempo y dinero para repararlo.
Las siguientes secciones describen el funcionamiento de la alarma, lo que anuncia los
siguientes lapsos de mantenimiento para realizar el mantenimiento antes de tiempo
antes de la advertencia de error.
- Reemplazo de la batería
- Engrase
- Reemplazo de la correa de regulación
- Reemplazo del motor
- Reemplazo de la unidad de engranaje reductor
- Reemplazo de la unidad de ranura de tornillo esférico

Mantenimiento
134 Manual del manipulador de la serie T Rev.7
4.1 Mantenimiento
Los lapsos de reemplazo recomendados se pueden configurar para las baterías, la grasa, las
correas de regulación, los motores, las unidades de engranaje reductor y las unidades de
ranura de tornillo esférico.
PRECAUCIÓN
■
Asegúrese de que la fecha y hora del manipulador estén configuradas
correctamente. El mantenimiento no se puede realizar correctamente si la
fecha y hora no están configuradas correctamente.
■
Si se reemplaza la placa del procesador/DPB o la tarjeta SD, es posible que se
pierda la información de mantenimiento. Cuando reemplace estas piezas,
confirme la fecha y hora del manipulador y la información de mantenimiento.
La configuración del mantenimiento varía según los métodos de instalación para actualizar
desde el firmware.
Instalación inicial: El mantenimiento está activada.
Actualizaciones: El mantenimiento hereda los datos anteriores.
(Está desactivado de forma predeterminada)
Para conocer detalles sobre cómo activar o desactivar el mantenimiento, consulte Manual
del usuario de EPSON RC+ 7.0 5.12.2 Comando [System Configuration] (Menú Setup) -
Página [Setup]-[System Configuration]-[Controller]-[Preferences].
El mantenimiento está activado al momento de envío.
4.1.1 Información de mantenimiento del manipulador
Si esto se encuentra activado, la información de mantenimiento de la batería, las correas de
regulación, los motores, las unidades de engranaje reductor, las unidades de ranura de
tornillo esférico y el engrase se configurarán automáticamente cuando se configure o
modifique el robot.
Las siguientes piezas están sujetas al engrase:
Unidad de ranura de tornillo esférico en la articulación n.° 3
Cuando el manipulador se elimina de la configuración, la información de mantenimiento
también se eliminará automáticamente.
Para conocer detalles de la configuración del manipulador, consulte Manual del usuario de
EPSON RC+ 7.0 10.1 Configuración del modelo robótico.
PRECAUCIÓN
■
El cambio del
manipulador
se debe realizar con mucho cuidado. La
configuración de la alarma se restablecerá cuando se cambie
el
manipulador.
4.1.2 Información de mantenimiento del manipulador
Si el mantenimiento está activado, la batería se configura automáticamente en su primera
conexión.
NOTA
NOTA

Mantenimiento
Manual del manipulador de la serie T Rev.7 135
4.2 Información de mantenimiento
4.2.1 Cómo ver la información de mantenimiento
La información de mantenimiento configurada se puede revisar en EPSON RC+.
(1) En EPSON RC+ 7.0, seleccione el menú-[Tools]-[Maintenance] para mostrar el
cuadro diálogo [Controller Tools].
(2) Para verificar la información de mantenimiento del controlador, haga clic en el botón
<Maintenance> y muestre el cuadro de diálogo [Maintenance].
(3) Seleccione “General” o especifique el eje en el árbol para mostrar información sobre
las piezas de objetivo.
El lapso de reemplazo recomendado para la batería se calcula según la capacidad de
batería y el tiempo de ENCENDIDO del manipulador. La batería puede agotarse si pasa el
lapso de reemplazo recomendado.
NOTA

Mantenimiento
136 Manual del manipulador de la serie T Rev.7
El lapso de reemplazo recomendado para el engrase se calcula según los días que han
pasado desde la fecha del engrase. El tiempo de reemplazo puede ser más corto o largo
según la condición de uso, como la carga aplicada por el robot.
El lapso de reemplazo recomendado para las piezas (correas reguladoras, motores,
unidades de engranaje reductor y unidades de ranura de tornillo esférico) es cuando
alcanza una vida útil de L10 (tiempo para alcanzar un 10 % de probabilidad de falla).
En la ventana de diálogo, la vida útil de L10 se muestra como 100 %.
4.2.2 Cómo editar la información de mantenimiento
La información de mantenimiento configurada se puede editar en EPSON RC+.
(1) En EPSON RC+ 7.0, seleccione el menú-[Tools]-[Maintenance] para mostrar el
cuadro diálogo [Controller Tools].
(2) Para editar la información de mantenimiento, muestre el cuadro de diálogo
[Maintenance].
(3) Seleccione “General” o especifique el eje en el árbol para mostrar información sobre
las piezas de objetivo.
(4) Seleccione la alarma que cambiará y haga clic en el botón <Change> (Cambiar).
(5) Muestre el cuadro de diálogo [Change Alarm] (Cambiar alarma) e ingrese cualquiera
de las siguientes opciones.
Fecha de compra o reemplazo de la batería
Fecha de engrase
Fecha de compra o reemplazo de la correa de regulación
Fecha de compra o reemplazo del motor
Fecha de compra o reemplazo de la unidad de engranaje reductor
Fecha de compra o reemplazo de la unidad de ranura de tornillo esférico
(6) Haga clic en el botón <OK> para restaurar la información del sistema.
La compensación se puede configurar para la tasa de consumo de las piezas ya instaladas.
Siga los pasos a continuación para calcular un valor aproximado de configuración de
compensación.
1. Mida los meses utilizables para la operación anterior según HealthRBAnalysis.
2. Confirme el tiempo anterior de ENCENDIDO del motor en el visor de estado del
controlador.
NOTA
NOTA
NOTA

Mantenimiento
Manual del manipulador de la serie T Rev.7 137
3. Calcule un valor de compensación aproximado con la siguiente fórmula.
Compensación=100
Tiempo encendido del motor
2430.4375 Meses en los
que se utiliza
Para conocer detalles, consulte la Referencia del lenguaje SPEL+ de EPSON RC+ 7.0.
4.2.3 Método de notificación de alarma
El estado del manipulador se convierte en una advertencia y muestra un mensaje de
advertencia si alguna pieza requiere que se realice un reemplazo o engrase.
Para obtener más detalles, consulte el siguiente manual.
Referencia del lenguaje SPEL+ Error de mensaje SPEL+
El método de notificación de alarma se puede configurar según el bit de salida de la E/S
remota.
La E/S remota se puede configurar en EPSON RC+ 7.0- [Setup] - [System Configuration]
- [Controller] - [Remote Control] (Configuración - Configuración de sistema - Controlador
- Control remoto).
Para conocer detalles, consulte Manual del usuario EPSON RC+ 7.0 12.1 E/S remota.
El controlador entra en el estado de advertencia si ocurre una alarma.
4.2.4 Cómo cancelar la alarma
Ocurre una alarma cuando la tasa de consumo de las piezas alcanza un 100 %.
No se puede cancelar la alarma con la ejecución del comando Reset (Restablecer) o si se
reinicia el controlador.
La alarma se puede cancelar con el siguiente método.
Operación desde el cuadro de diálogo [Maintenance] de EPSON RC+ 7.0
Comando HealthCtrlReset
Comando HealthRBReset
Consulte Mantenimiento 4.2.2 Cómo editar la información de mantenimiento para cambiar
la información de alarma en los mismos pasos.
NOTA
NOTA

Mantenimiento
138 Manual del manipulador de la serie T Rev.7
5. Copia de seguridad y restauración
5.1 Qué es la función Backup Controller
La configuración del manipulador definida por EPSON RC+ 7.0 se puede almacenar con
la función “Backup Controller” (Realizar copia de seguridad del controlador).
La configuración del manipulador se puede restaurar fácilmente usando los datos
anteriormente almacenados con “Backup Controller” después de un error de configuración
o un problema del manipulador.
Asegúrese de ejecutar “Backup Controller” antes de cambiar la configuración del
manipulador, antes del mantenimiento o después de enseñar.
Para algunos problemas, es posible que la copia de seguridad no esté disponible antes de
realizar el mantenimiento. Asegúrese de realizar una copia de seguridad de los datos
después de realizar cambios, antes de que ocurran problemas.
“Controller Status Storage” (Almacenamiento de estado del controlador) es una de las
funciones de la serie T. Guarda la configuración del controlador del mismo modo que
“Backup Controller”.
Los datos se pueden usar como datos de copia de seguridad en la restauración.
Los métodos para “Controller Status Storage” son los siguientes:
A : “Controller status storage to USB memory” (Almacenamiento de estado del
controlador a memoria USB)
Para conocer detalles, consulte Configuración y operación 8. Puerto de memoria.
B : “Export Controller Status function” (Función Exportar estado del controlador) en
EPSON RC+ 7.0.
Para conocer detalles, consulte Manual del usuario EPSON RC+ 7.0 5.9.9
Comando Import (Importar) (Menú Project).
NOTA

Mantenimiento
Manual del manipulador de la serie T Rev.7 139
5.2 Tipos de datos de copia de seguridad
La tabla a continuación muestra los archivos creados con “Backup Controller”.
File Name
(Nombre de
archivo)
Descripción general
Backup.txt
Archivo de
información para
restauración
Archivo que incluye información para
restaurar el manipulador.
CurrentMnp01.PRM
Parámetros del
Manipulador
Almacena la información como ToolSet.
InitFileSrc.txt
Configuración
inicial
Almacena varios parámetros del
manipulador.
MCSys01.MCD
Configuración del
manipulador
Almacena información del manipulador
conectado.
Todos los archivos
relacionados con el
proyecto
Relacionados con el
proyecto
Todos los archivos del proyecto
transferidos al controlador. Incluye
archivos de programa cuando se
configura EPSON RC+ 7.0 para transferir
el código fuente al controlador.
GlobalPreserves.dat
Variables globales
conservadas
Guarda los valores de las variables
globales conservadas.
WorkQueues.dat
Información de
WorkQue
Guarda información de las colas de
WorkQue.

Mantenimiento
140 Manual del manipulador de la serie T Rev.7
5.3 Copia de seguridad
Realiza una copia de seguridad del estado del manipulador desde EPSON RC+ 7.0.
(1) En EPSON RC+ 7.0, seleccione el menú-[Tools]-[Controller] para mostrar el diálogo
[Controller Tools].
(2) < Haga clic en el botón <Backup Controller…> para mostrar el diálogo [Browse For
Folder].
(3) Especifique la carpeta en la que desea guardar los datos de copia de seguridad. Cree
una nueva carpeta si lo desea.
(4) Haga clic en el botón <OK>. Se crea una carpeta en la carpeta especificada que
contiene los datos de copia de seguridad en el siguiente formato.
Se guardó el estado de B_T_ número de serie_ fecha
Ejemplo: B_T_12345_2016-04-03_092941
PRECAUCIÓN
■
No edite los archivos de copia de seguridad. De lo contrario, no se garantiza el
funcionamiento del sistema de robot después de la restauración del
manipulador.

Mantenimiento
Manual del manipulador de la serie T Rev.7 141
5.4 Restauración
Restaura el estado del manipulador desde EPSON RC+ 7.0.
PRECAUCIÓN
■
Asegúrese de que los se hayan guardado anteriormente los datos utilizados
para la restauración para el mismo manipulador.
■
No edite los archivos de copia de seguridad. De lo contrario, no se garantiza el
funcionamiento del sistema de robot después de la restauración del
manipulador.
(1) En EPSON RC+ 7.0, seleccione el menú-[Tools]-[Controller] para mostrar el diálogo
[Controller Tools] (Herramientas de controlador).
(2) Haga clic en el botón <Restore Controller…> para mostrar el diálogo [Browse For
Folder].
(3) Especifique la carpeta que contiene los datos de copia de seguridad. Las carpetas de
datos de copia de seguridad se nombran con el siguiente formato:
Se guardó el estado de B_T_ número de serie_ fecha
Ejemplo: B_T_12345_2016-04-03_092941
También se puede especificar la función “Controller status backup to USB memory” para
su restauración.
Especifique la siguiente carpeta.
NOTA

Mantenimiento
142 Manual del manipulador de la serie T Rev.7
(4) Haga clic en el botón <OK> para mostrar el diálogo para seleccionar los datos de
restauración.
Robot name, serial #, calibration (Nombre de robot, n.° de serie, calibración)
Esta casilla de verificación le permite restaurar el nombre del robot (manipulador),
el número de serie del manipulador, los datos de Hofs y los datos de CalPls.
Asegúrese de que se restauren los datos de Hofs correctos. Si se restauran los
datos de Hofs incorrectos, es posible que el manipulador se mueva a las
posiciones incorrectas.
De forma predeterminada, la casilla no se está marcada.
Robot maintenance configuration (Configuración de mantenimiento del robot)
Esta casilla de verificación le permite restaurar los archivos relacionados con la
alarma del robot.
Para conocer detalles, consulte Mantenimiento 4. Alarma.
De forma predeterminada, la casilla no se está marcada.
Proyecto
Esta casilla de verificación le permite restaurar los archivos relacionados con los
proyectos.
De forma predeterminada, la casilla no se está marcada.
Cuando se restaura un proyecto, se restauran los valores de las variables globales
conservadas.
Para conocer detalles acerca de la copia de seguridad de las variables globales
conservadas, consulte Manual del usuario de EPSON RC+ 7.0 5.10.10 Comando
[Display Variables] (Menú Run).
Vision hardware configuration (Configuración del hardware de visión)
Esta casilla de verificación le permite restaurar la configuración de hardware de
visión.
Para conocer detalles, consulte Opción Vision Guide 7.0 de EPSON RC+ 7.0.
De forma predeterminada, la casilla no se está marcada.
Security configuration (Configuración de seguridad)
Esta casilla de verificación le permite restaurar la configuración de seguridad.
Para conocer detalles, consulte Manual del usuario de EPSON RC+ 7.0. 15.
Seguridad.
De forma predeterminada, la casilla no se está marcada.
(5) Haga clic en el botón <OK> para restaurar la información del sistema.

Mantenimiento
Manual del manipulador de la serie T Rev.7 143
Restaure la configuración del sistema que se guardó con Backup Controller solo para el
mismo sistema.
Cuando se restaura una información del sistema diferente, aparece el siguiente mensaje de
advertencia.
Haga clic en el botón <No> (no restaurar datos) excepto para situaciones especiales como
el reemplazo del manipulador.
Cuando restaura la copia de seguridad incluyendo información de robot que no sea de la
serie T, se produce un error.
No puede restaurar la copia de seguridad incluyendo el robot de la serie T creado en el
controlador virtual de EPSON RC+ 7.0 al robot de la serie T.
NOTA
NOTA
NOTA

Mantenimiento
144 Manual del manipulador de la serie T Rev.7
6. Actualización del firmware
Este capítulo describe el procedimiento de actualización de firmware y la inicialización de
archivo de datos cuando los errores de firmware o de configuración del manipulador
causan una falla en el inicio o la operación del manipulador.
6.1 Actualización del firmware
El firmware (software almacenado en memoria no volátil) y los archivos de datos
necesarios para controlar el manipulador vienen preinstalados en el manipulador. La
configuración del controlador definida desde EPSON RC+ 7.0 siempre se guarda en el
Manipulador.
El firmware se proporciona en un CD-ROM, según sea necesario. Comuníquese con
nosotros para obtener información.
Debe usar una computadora que ejecute EPSON RC+7.0 conectada al manipulador con
USB para actualizar el firmware del manipulador. No se puede actualizar el firmware con
una conexión Ethernet.
6.2 Procedimiento de actualización de firmware
El procedimiento de actualización de firmware se describe del siguiente modo:
PRECAUCIÓN
■
No desconecte el cable USB o apague el manipulador o la computadora de
desarrollo durante la actualización del firmware. De lo contrario, puede causar
un malfuncionamiento del sistema de robot.
(1) Conecte la computadora de desarrollo y el manipulador con un cable USB (el
firmware no se puede cambiar con una conexión Ethernet).
(2) ENCIENDA el manipulador. (No inicie el software de desarrollo EPSON RC+ 7.0
hasta que se haya completado la actualización del firmware).
(3) Inserte el “CD-ROM de firmware” en la unidad de CD-ROM de la computadora de
desarrollo
(4) Ejecute “CtrlsetupT.exe”. Aparece el siguiente diálogo.
(5) Seleccione el botón de la opción <Upgrade> (Actualizar) y haga clic en el botón
<Next> (Siguiente).

Mantenimiento
Manual del manipulador de la serie T Rev.7 145
(6) Asegúrese de que la computadora de desarrollo esté conectada con el manipulador con
un cable USB y haga clic en el botón <Next>.
(7) Compruebe la versión de firmware actual y la versión de firmware nueva y haga clic
en el botón <Install> (Instalar).
(8) Comienza la actualización de firmware. Se demora varios minutos.
(9) Comienza la transferencia continua del archivo de datos.

Mantenimiento
146 Manual del manipulador de la serie T Rev.7
(10) Aparece el siguiente diálogo cuando se completa la transferencia. Haga clic en el
botón <Next> para reiniciar el manipulador.
(11) El siguiente diálogo aparece después del reinicio del controlador. Haga clic en el
botón <Finish>.
Se completó la actualización de firmware.

Mantenimiento
Manual del manipulador de la serie T Rev.7 147
6.3 Recuperación del manipulador
Si el manipulador se vuelve inoperable, use los procedimientos descritos en esta sección
para recuperarlo.
Se recomienda Controller Backup para recuperar fácilmente la operación del controlador.
Para conocer detalles acerca de Controller Backup, consulte Mantenimiento 5. Copia de
seguridad y restauración.
NOTA
6.4 Procedimiento de inicialización de firmware
En esta sección se describen los procedimientos de inicialización de firmware.
PRECAUCIÓN
■
No desconecte el cable USB o apague el manipulador o la computadora de
desarrollo durante la actualización del firmware. De lo contrario, puede causar
un malfuncionamiento del sistema de robot.
(1) Conecte la computadora de desarrollo al manipulador con un cable USB (el firmware
no se puede cambiar con una conexión Ethernet).
(2) ENCIENDA el manipulador. No inicie el software de desarrollo EPSON RC+ 7.0
hasta que se haya completado la inicialización de firmware.
(3) Inserte el “CD-ROM de firmware” en la unidad de CD-ROM de la computadora de
desarrollo
(4) Ejecute “Ctrlsetup.exe”.
(5) Seleccione la opción <Initialize> y haga clic en el botón <Next>.

Mantenimiento
148 Manual del manipulador de la serie T Rev.7
(6) Asegúrese de que la computadora de desarrollo esté conectada al controlador con un
cable USB y haga clic en el botón <Next>.
(7) Compruebe la información de versión y haga clic en el botón <Install>.
(8) Comienza la transferencia del firmware y del archivo de datos. Se demora varios
minutos.
(9) El siguiente diálogo aparece cuando se completa la transferencia. Haga clic en el
botón <Next> para reiniciar el manipulador.

Mantenimiento
Manual del manipulador de la serie T Rev.7 149
(10) El siguiente diálogo aparece después del reinicio del manipulador. Haga clic en el
botón <Finish>.
Se completó la actualización de firmware.
Inicie EPSON RC+ 7.0 y restaure la configuración del controlador.
Para conocer detalles acerca de la restauración del sistema operativo, consulte
Mantenimiento 5. Copia de seguridad y restauración.

Mantenimiento
150 Manual del manipulador de la serie T Rev.7
7. Cubiertas
En este capítulo se describen todos los procedimientos para retirar e instalar cubiertas
durante el mantenimiento.
ADVERTENCIA
■
No conecte o desconecte los conectores del motor mientras el sistema de robot
esté ENCENDIDO. Conectar o desconectar los conectores del motor con la
energía ENCENDIDA es extremadamente peligroso y puede provocar lesiones
corporales graves, ya que el manipulador puede moverse de manera anormal;
además, puede provocar descargas eléctricas y el mal funcionamiento del
sistema de robot.
■
Para cortar la energía hacia el sistema de robot, desconecte el enchufe de la
fuente de alimentación. Asegúrese de conectar el cable de alimentación de CA a
un receptor de energía.
NO lo conecte directamente a la fuente de alimentación de la fábrica.
■
Antes de realizar cualquier procedimiento de reemplazo, APAGUE el controlador
y los equipos relacionados, luego desconecte el enchufe de la fuente de
alimentación.
Realizar cualquier procedimiento de reemplazo con la energía ENCENDIDA es
extremadamente peligroso y puede provocar una descarga eléctrica o el mal
funcionamiento del sistema de robot.
■
Tenga cuidado de no introducir sustancias externas en el manipulador, los
conectores y los pines durante el mantenimiento. ENCENDER la alimentación
del sistema de robot cuando hay sustancias externas en su interior es
extremadamente peligroso y puede causar descargas eléctricas o el mal
funcionamiento del sistema de robot.

Mantenimiento
Manual del manipulador de la serie T Rev.7 151
T3
Cubierta inferior
del brazo
Placa de conectores
Cubierta del cable de
alimentación
Cubierta superior
del brazo
Cubierta lateral
de la base
Placa del usuario
Cubierta de unidad
de alimentación
T6
Cubierta inferior
del brazo
Placa de conectores
Cubierta del cable de
alimentación
Cubierta de unidad
de alimentación
Cubierta
superior del
brazo
Placa del usuario

Mantenimiento
152 Manual del manipulador de la serie T Rev.7
7.1 Cubierta superior del brazo
PRECAUCIÓN
■
No retire la cubierta superior del brazo a la fuerza. Retirar la cubierta a la fuerza
puede provocar daños en los cables, desconexión o falla de contacto. Los cables
dañados, la desconexión o la falla de contacto son extremadamente peligrosos y
pueden provocar descargas eléctricas o el mal funcionamiento del sistema de
robot.
■
Cuando instale la cubierta, tenga cuidado de no permitir que los cables
interfieran con el montaje de la cubierta y no doble los cables a la fuerza para
empujarlos al interior de la cubierta. Una tensión innecesaria en los cables puede
provocar daños en los cables, desconexión o falla de contacto. Los cables
dañados, la desconexión o la falla de contacto son extremadamente peligrosos y
pueden provocar descargas eléctricas o el mal funcionamiento del sistema de
robot.
Cuando enrute los cables, observe la ubicación de los cables después de retirar
la cubierta. Asegúrese de colocar los cables de vuelta en sus ubicaciones
originales.
T3: 6-M48 Sems
T6: 4-M48 Sems
4-M412
Sems
Cubierta superior
del brazo
Retiro de la
cubierta superior
del brazo
Destornille los pernos de montaje de la cubierta superior del brazo y luego levante la
cubierta.
Tenga cuidado con los cables y tubos del usuario cuando retire la cubierta.
Instalación de la
cubierta superior
del brazo
Coloque la cubierta superior del brazo y fíjela con los pernos de montaje de la cubierta
superior del brazo. Después de fijar la cubierta superior del brazo, asegúrese de que la
parada mecánica del límite inferior no toque la parte cilíndrica de la cubierta superior del
brazo.
NOTA

Mantenimiento
Manual del manipulador de la serie T Rev.7 153
7.2 Cubierta inferior del brazo
T3: 3-M412 Sems
T6: 4-M412
Cubierta inferior del brazo
Destornille los pernos de montaje de la cubierta inferior del brazo y luego retire la
cubierta.
Tenga cuidado con el efector final. Cuando el efector final está instalado, no se podrá
retirar la cubierta inferior del brazo del mango.
Cuando reemplace la unidad de ranura de tornillo esférico, deberá retirar el efector final
para retirar completamente la cubierta inferior del brazo.
Cuando pueda trabajar (mantenimiento, inspección) sin retirar la cubierta completamente,
mueva el mango al límite inferior y baje la cubierta inferior del brazo.
7.3 Cubierta del cable de alimentación
2-M48
Sems
Cubierta del
cable de
alimentación
Destornille los pernos de montaje de la cubierta del cable de alimentación y luego retire la
cubierta del cable de alimentación.
NOTA

Mantenimiento
154 Manual del manipulador de la serie T Rev.7
7.4 Placa de conectores
PRECAUCIÓN
■
No retire la placa de conectores a la fuerza. Retirar la placa de conectores a la
fuerza puede provocar daños en los cables, desconexión o falla de contacto. Los
cables dañados, la desconexión o la falla de contacto son extremadamente
peligrosos y pueden provocar descargas eléctricas o el mal funcionamiento del
sistema de robot.
■
Cuando instale la placa de conectores, tenga cuidado de no permitir que los
cables interfieran con el montaje de la placa y no doble los cables a la fuerza
para empujarlos al interior de la cubierta.
Una tensión innecesaria en los cables puede provocar daños en los cables,
desconexión o falla de contacto. Los cables dañados, la desconexión o la falla de
contacto son extremadamente peligrosos y pueden provocar descargas
eléctricas o el mal funcionamiento del sistema de robot.
Cuando enrute los cables, observe la ubicación de los cables después de retirar
la placa de conectores. Asegúrese de colocar los cables de vuelta en sus
ubicaciones originales.
Placa de
conectores
T3: 2-M46 Truss
+ 4-M410
T6: 4-M410
Perno de cabeza hueca hexagonal
M48 Sems
(para fijación de sujetador)
)
Retiro de la
placa de
conectores
(1)
Retire la cubierta del cable de alimentación.
Consulte Mantenimiento: 7.3 Cubierta del cable de alimentación.
(2)
Retire el sujetador del cable de alimentación y luego retire el conector del cable de
alimentación.
Cuando retire el conector del cable de alimentación, retírelo presionando los ganchos
en ambos lados del conector.
(3)
Destornille los pernos de montaje de la placa de conectores y retire la placa.
Algunos pernos fijos son los mismos que los pernos de fijación de la cubierta de la
unidad de alimentación.
La posición de los conectores rápidos y el tamaño de la placa de conectores son
diferentes entre el T6 y el T3. La posición y el tamaño de los tornillos son iguales. La
ilustración muestra el T3.
NOTA
NOTA
NOTA

Mantenimiento
Manual del manipulador de la serie T Rev.7 155
Instalación de
la placa de
conectores
(1)
Coloque la placa de conectores en la base y fíjela con los pernos de montaje.
Perno de cabeza hueca hexagonal
Torque de ajuste 2,0 ± 0,1 N·m
(2)
Conecte el conector del cable de alimentación e instale el sujetador del cable de
alimentación.
(3)
Monte la cubierta del cable de alimentación.
Consulte Mantenimiento: 7.3 Cubierta del cable de alimentación.
Cuando monte la placa de conectores, tenga cuidado con lo
siguiente.
No permita que el tubo de aire se doble considerablemente
dentro del manipulador. Tampoco bloquee el flujo de aire.
Si hay una torcedura en el tubo de aire, el flujo de aire se
bloqueará cuando el manipulador esté funcionando, y esto
puede causar problemas.
NOTA

Mantenimiento
156 Manual del manipulador de la serie T Rev.7
7.5 Cubierta de la unidad de alimentación
T3
9-M46
Truss
Cubierta de
unidad de
alimentación
Destornille los pernos de montaje de la cubierta de la unidad de alimentación y luego retire
la cubierta de la unidad de alimentación.
Algunos pernos fijos son los mismos que los pernos de fijación de la placa de conectores.
T6
6-M410 Pernos de fijación
Cubierta de unidad
de alimentación
Destornille los pernos de montaje de la cubierta de la unidad de alimentación y luego retire
la cubierta de la unidad de alimentación.
Después de destornillar los pernos, tire de la cubierta de la unidad de alimentación hacia la
parte frontal del robot y retírela.
NOTA
NOTA

Mantenimiento
Manual del manipulador de la serie T Rev.7 157
7.6 Cubierta lateral de la base
PRECAUCIÓN
■
No retire la cubierta lateral de la base a la fuerza. Retirar la cubierta lateral de la
base a la fuerza puede provocar daños en los cables, desconexión o falla de
contacto. Los cables dañados, la desconexión o la falla de contacto son
extremadamente peligrosos y pueden provocar descargas eléctricas o el mal
funcionamiento del sistema de robot.
■
Cuando instale la cubierta lateral de la base, tenga cuidado de no permitir que
los cables interfieran con el montaje de la placa y no doble los cables a la fuerza
para empujarlos al interior de la cubierta.
Una tensión innecesaria en los cables puede provocar daños en los cables,
desconexión o falla de contacto. Los cables dañados, la desconexión o la falla de
contacto son extremadamente peligrosos y pueden provocar descargas
eléctricas o el mal funcionamiento del sistema de robot.
Cuando enrute los cables, observe la ubicación de los cables después de retirar
la placa de conectores. Asegúrese de colocar los cables de vuelta en sus
ubicaciones originales.
T3
4-M36
Cubierta lateral
de la base
Destornille los pernos de montaje de la cubierta lateral de la base y luego retire la cubierta
lateral de la base.
T6
No tiene una cubierta lateral de la base.
NOTA

Mantenimiento
158 Manual del manipulador de la serie T Rev.7
7.7 Placa del usuario
PRECAUCIÓN
■
No retire la placa del usuario a la fuerza. Retirar la placa del usuario a la fuerza
puede provocar daños en los cables, desconexión o falla de contacto. Los cables
dañados, la desconexión o la falla de contacto son extremadamente peligrosos y
pueden provocar descargas eléctricas o el mal funcionamiento del sistema de
robot.
■
Cuando instale la placa del usuario, tenga cuidado de no permitir que los cables
interfieran con el montaje de la placa y no doble los cables a la fuerza para
empujarlos al interior de la cubierta.
Una tensión innecesaria en los cables puede provocar daños en los cables,
desconexión o falla de contacto. Los cables dañados, la desconexión o la falla de
contacto son extremadamente peligrosos y pueden provocar descargas
eléctricas o el mal funcionamiento del sistema de robot.
Cuando enrute los cables, observe la ubicación de los cables después de retirar
la placa de conectores. Asegúrese de colocar los cables de vuelta en sus
ubicaciones originales.
2-M410
Retiro de la
placa del
usuario
(1)
Retire la cubierta superior del brazo.
Consulte Mantenimiento: 7.1 Cubierta superior del brazo.
(2)
Destornille los pernos de montaje de la placa del usuario y retire la placa.
Retiro de la
placa del
usuario
(1)
Coloque la placa del usuario en el brazo y fíjela con los pernos de montaje.
(2)
Monte la cubierta superior del brazo.
Consulte Mantenimiento: 7.1 Cubierta superior del brazo.

Mantenimiento
Manual del manipulador de la serie T Rev.7 159
8. Cable
ADVERTENCIA
■
No conecte o desconecte los conectores del motor mientras el sistema de robot
esté ENCENDIDO. Conectar o desconectar los conectores del motor con la
energía ENCENDIDA es extremadamente peligroso y puede provocar lesiones
corporales graves, ya que el manipulador puede moverse de manera anormal;
además, puede provocar descargas eléctricas y el mal funcionamiento del
sistema de robot.
■
Para cortar la energía hacia el sistema de robot, desconecte el enchufe de la
fuente de alimentación. Asegúrese de conectar el cable de alimentación de CA a
un receptor de energía.
NO lo conecte directamente a la fuente de alimentación de la fábrica.
■
Antes de realizar cualquier procedimiento de reemplazo, APAGUE el
controlador y los equipos relacionados, luego desconecte el enchufe de la
fuente de alimentación.
Realizar cualquier procedimiento de reemplazo con la energía ENCENDIDA es
extremadamente peligroso y puede provocar una descarga eléctrica o el mal
funcionamiento del sistema de robot.
■
Tenga cuidado de no introducir sustancias externas en el manipulador, los
conectores y los pines durante el mantenimiento. ENCENDER la alimentación
del sistema de robot cuando hay sustancias externas en su interior es
extremadamente peligroso y puede causar descargas eléctricas o el mal
funcionamiento del sistema de robot.
PRECAUCIÓN
■
Asegúrese de conectar los cables correctamente. No permita una tensión
innecesaria en los cables. (No coloque objetos pesados en los cables. No doble
o tire de los cables por la fuerza). La tensión innecesaria en los cables puede
provocar daños en los cables, desconexión o falla de contacto. Los cables
dañados, la desconexión o la falla de contacto son extremadamente peligrosos y
pueden provocar descargas eléctricas o el mal funcionamiento del sistema de
robot.

Mantenimiento
160 Manual del manipulador de la serie T Rev.7
8.1 Reemplazo de la unidad de cable
Nombre
Cantidad
Nota
Pieza de
mantenimiento
Unidad de cable
1
T3: 2182565
T6: 2190924
Herramientas
Llave
hexagonal
ancho a lo largo de
superficies planas: 2 mm
1
Para perno de botón M3
ancho a lo largo de
superficies planas: 2,5 mm
1
Para tornillo M3, perno de botón
M4
ancho a lo largo de
superficies planas: 3 mm
1
Para tornillo M4
Llave de tuercas
ancho a lo largo de
superficies planas: 5 mm
1
Para retirar el conector de E/S
de la mano
Destornillador
de tuercas
ancho a lo largo de
superficies planas: 5 mm
1
Para retirar el conector de E/S
de la mano
Torquímetro
1
Destornillador de cruz (n.° 2)
1
Para tornillos con ranura en cruz
Alicates de corte
1
Para cortar amarracables
Material
Amarracables
-
Unidad de cable
(Ilustración: T3-401S)

Mantenimiento
Manual del manipulador de la serie T Rev.7 161
PRECAUCIÓN
■
Si los conectores se desconectaron durante el reemplazo de la unidad de cable,
asegúrese de volver a conectar los conectores en sus posiciones correctas.
Consulte los diagramas de cableado.
La conexión incorrecta de los conectores puede provocar un mal funcionamiento
del sistema de robot.
Para conocer detalles acerca de las conexiones, consulte Mantenimiento: 3.
Estructura del manipulador.
■
Cuando instale la cubierta, tenga cuidado de no permitir que los cables interfieran
con el montaje de la cubierta y no doble los cables a la fuerza para empujarlos al
interior de la cubierta. Una tensión innecesaria en los cables puede provocar
daños en los cables, desconexión o falla de contacto. Los cables dañados, la
desconexión o la falla de contacto son extremadamente peligrosos y pueden
provocar descargas eléctricas o el mal funcionamiento del sistema de robot.
Cuando enrute los cables, observe la ubicación de los cables después de retirar la
cubierta. Asegúrese de colocar los cables de vuelta en sus ubicaciones originales.
■
Asegúrese de conectar los cables correctamente. No permita una tensión
innecesaria en los cables. (No coloque objetos pesados en los cables. No doble o
tire de los cables por la fuerza). La tensión innecesaria en los cables puede
provocar daños en los cables, desconexión o falla de contacto. Los cables
dañados, la desconexión o la falla de contacto son extremadamente peligrosos y
pueden provocar descargas eléctricas o el mal funcionamiento del sistema de
robot.
Hay un freno montado en el motor de la articulación n.° 3 para evitar que el mango baje
debido al peso del efector final mientras la alimentación del manipulador está APAGADA o
mientras el motor está en el estado MOTOR OFF.
Baje el mango hasta su límite inferior antes del procedimiento de reemplazo después de los
pasos de retiro.
Retiro de la
unidad de cable
(1)
APAGUE el manipulador y cambie el motor al estado APAGADO (MOTOR OFF).
(2)
Mantenga presionado el interruptor de desbloqueo del freno para bajar el mango.
Asegúrese de mantener suficiente espacio y evitar que el efector final golpee algún
equipo periférico.
El interruptor de desbloqueo del freno solo afecta a la articulación n.° 3. Cuando se
presiona el interruptor de desbloqueo del freno, se libera el freno de la articulación n.°
3.
Tenga cuidado con el mango mientras está presionado el interruptor de desbloqueo del
freno, ya que es posible que el mango baje debido al peso del efector final.
(3)
APAGUE el manipulador.
(4)
Retire la cubierta de la unidad de alimentación.
Para conocer detalles, consulte Mantenimiento: 7.5 Cubierta de la unidad de
alimentación.
(5)
Retire el cable de conexión a tierra que está fijo en la placa de fijación del cable
lateral de la carcasa.
(6)
Corte los amarracables que atan los cables en el lado de la base.
NOTA

Mantenimiento
162 Manual del manipulador de la serie T Rev.7
(7)
Retire la placa de conectores.
Referencia: Mantenimiento: 7.4 Placa de conectores
(8)
Retire las siguientes piezas que están conectadas a la placa de conectores (interior).
Tubo de aire
Conector TP
(9)
T3: Retire la cubierta lateral de la base.
Para conocer detalles, consulte Mantenimiento: 7.6 Cubierta lateral de la
base.
T6: Retire el conector del cable de distribución
del resistor regenerativo.
Destornille los pernos de montaje de la
articulación n.° 1 de la placa del AMP y la
placa resistor regenerativa.
Pernos de montaje: 4-M48 Sems
(10)
Retire el conector de la placa del AMP.
A: Conector del cable de
alimentación
B: Conector del cable de señal
C: Conector del motor
A
B
C
T3
A
B
C
T6
(11)
Destornille el tornillo de montaje de la placa del
procesador/DPB.
Perno de cabeza hueca hexagonal: 5-M35
Retire la placa del procesador/DPB de la base.
La lámina de radiación se encuentra en la parte
posterior de las placas de procesador/DPB. Tenga
cuidado de no romperla o perderla.
Placa
CPU/DPB
NOTA

Mantenimiento
Manual del manipulador de la serie T Rev.7 163
(12)
Retire el conector de la placa del procesador/DPB.
A: Conector de alimentación (ENTRADA/SALIDA
1 para cada uno)
B: Conector del cable de alimentación (2)
C: Conector del cable de señal
D: Conector de E/S de la mano
E: Conector LED
F: Conector resistor regenerativo 1 (T6 solamente)
G: Conector resistor regenerativo 2 (T6 solamente)
Recuerde la distribución de los cables para volver a
conectarlos correctamente después de realizar el
reemplazo.
E
B
D
B
C
A-OUT
A-IN
T3
E
E
B
D
B
C
A-OUT
A-IN
F
G
T6
E
(13)
Retire la cubierta superior del brazo.
Para conocer detalles, consulte Mantenimiento: 7.1 Cubierta superior del brazo.
(14)
Retire la placa del usuario.
Para conocer detalles, consulte Mantenimiento: 7.7 Placa del usuario.
NOTA

Mantenimiento
164 Manual del manipulador de la serie T Rev.7
(15)
T3: Retire los conectores de la unidad del motor de las
articulaciones 2, 3 y 4.
A: Conector del cable de alimentación
B: Conector de cable de señal (ENTRADA/SALIDA
1 para cada uno)
A
B-OUT
B-IN
Cable de señal para la articulación n.° 4 es ENTRADA solamente.
T6: Retire el conector de la unidad de la placa del AMP y
los conectores de la unidad del motor de las
articulaciones 2, 3 y 4.
Unidad del motor
Conector de cable de señal (ENTRADA/SALIDA
1 para cada uno)
OUT
IN
Cable de señal para la articulación n.° 4 es ENTRADA solamente.
Unidad de la placa del AMP
Conector del cable de alimentación (total: 3
conectores)
(16)
Desconecte el cable de E/S de la mano y el tubo de aire de la placa del usuario.
Los tornillos de montaje del cable de E/S de la mano son muy pequeños. Asegúrese
de conservar los tornillos.
Presione el anillo sobre los conectores para sacar el tubo de aire. (ø62, ø41)
Recuerde la distribución de los cables para volver a conectar las piezas desconectadas
después de realizar el reemplazo.
(17)
Retire el cable de conexión a tierra que está fijo en la placa del usuario.
(18)
Corte los amarracables que atan los cables en el lado del brazo.
(19)
Retire la tuerca que fija los conectores del conducto de cable a la placa del usuario y
saque los cables de la placa del usuario.
(20)
Retire la tuerca que fija los conectores del conducto del cable a la base.
Lado de la base
Lado del brazo n.° 2
Tuerca
Tuerca
NOTA
NOTA
NOTA

Mantenimiento
Manual del manipulador de la serie T Rev.7 165
Instalación de la
unidad de cable
(1)
Pase los nuevos cables a través de la base, la placa de fijación de cable y la tuerca, y
gire los conectores para fijar los cables.
(2)
Pase los cables en la placa del usuario a través de la placa del usuario y la tuerca, y gire
los conectores para fijar los cables.
(3)
Conecte las siguientes piezas a la placa del usuario.
Tubo de aire
Cable de E/S manual
(4)
T3: Conecte los conectores de la unidad del motor de las
articulaciones 2, 3 y 4.
A: Conector del cable de alimentación
B: Conector de cable de señal (ENTRADA/SALIDA 1
para cada uno)
A
B-OUT
B-IN
Cable de señal para la articulación n.° 4 es ENTRADA solamente.
T6: Conecte el conector de la unidad de la placa del AMP y
los conectores de la unidad del motor de las
articulaciones 2, 3 y 4.
Unidad del motor
Conector de cable de señal (ENTRADA/SALIDA
1 para cada uno)
OUT
IN
Cable de señal para la articulación n.° 4 es ENTRADA solamente.
Unidad de la placa del AMP
Conector del cable de alimentación (total: 3
conectores)
(5)
Monte la placa del usuario.
Para conocer detalles, consulte Mantenimiento: 7.7 Placa del usuario.
(6)
Conecte el cable de conexión a tierra al lado del brazo de la placa del usuario.
(7)
Ate los cables con un amarracables, tal como estaban antes de retirarlos en el paso de
retiro (18).
(8)
Conecte el cable de conexión a tierra en el lado de la base a la placa de fijación del
cable en el lado de la base.
NOTA
NOTA

Mantenimiento
166 Manual del manipulador de la serie T Rev.7
(9)
Conecte el conector de la placa del procesador/DPB.
A: Conector de alimentación (ENTRADA/SALIDA
1 para cada uno)
B: Conector del cable de alimentación (2)
C: Conector del cable de señal
D: Conector de E/S de la mano
E: Conector LED
F: Conector resistor regenerativo 1 (T6 solamente)
G: Conector resistor regenerativo 2 (T6 solamente)
E
B
D
B
C
A-OUT
A-IN
T3
E
E
B
D
B
C
A-OUT
A-IN
F
G
T6
E
(10)
Monte la placa del procesador/DPB de la base.
Perno de cabeza hueca hexagonal: 5-M3×5
Torque de ajuste: 0,45 ± 0,1 N·m
Coloque la lámina de radiación en la parte posterior de las
placas del procesador/DPB cuando la monte.
Placa
CPU/DPB
(11)
Conecte las siguientes piezas que se conectan a la placa de conectores.
Tubo de aire
Conector TP
(12)
Conecte el conector de la placa del AMP.
A: Conector del cable de alimentación
B: Conector del cable de señal
C: Conector del motor
A
B
C
T3
A
B
C
T6
NOTA

Mantenimiento
Manual del manipulador de la serie T Rev.7 167
(13)
T3: Monte la cubierta lateral de la base.
Para conocer detalles, consulte Mantenimiento: 7.6 Cubierta lateral de la base.
T6: Monte la articulación n.° 1 de la placa del AMP y la placa
resistor regenerativa.
Conecte el conector del cable de distribución del resistor
regenerativo.
Pernos de montaje: 4-M48 Sems
(14)
Ate los cables con un amarracables, tal como estaban antes de retirarlos en el paso de
retiro (6).
(15)
Coloque y fije la cubierta superior del brazo sin que se atasquen los cables.
Para conocer detalles, consulte Mantenimiento: 7.1 Cubierta superior del brazo.
(16)
Monte la cubierta de la unidad de alimentación.
Para conocer detalles, consulte Mantenimiento: 7.5 Cubierta de la unidad de
alimentación.
(17)
Monte la placa de conectores.
Para conocer detalles, consulte Mantenimiento: 7.4 Placa de conectores.

Mantenimiento
168 Manual del manipulador de la serie T Rev.7
8.2 Insertar o tirar del cable de alimentación
Nombre
Cantidad
Nota
Herramientas
Destornillador de cruz
(n.° 2)
1
Para tornillos con ranura
en cruz
Cable de
alimentación
Retiro del cable
de alimentación
(1)
APAGUE el manipulador.
(2)
Retire la cubierta del cable de alimentación.
Para conocer detalles, consulte Mantenimiento: 7.3 Cubierta del cable de
alimentación.
(3)
Retire el sujetador del cable de alimentación y luego retire el conector del cable de
alimentación.
Cuando retire el conector del cable de alimentación, retírelo presionando los ganchos
en ambos lados del conector.
Instalación del
cable de
alimentación
(1)
Conecte el conector del cable de alimentación y monte el sujetador del cable de
alimentación.
(2)
Monte la cubierta del cable de alimentación.
Para conocer detalles, consulte Mantenimiento: 7.3 Cubierta del cable de
alimentación.
NOTA

Mantenimiento
Manual del manipulador de la serie T Rev.7 169
9. Articulación n.° 1
ADVERTENCIA
■
No conecte o desconecte los conectores del motor mientras el sistema de robot
esté ENCENDIDO. Conectar o desconectar los conectores del motor con la
energía ENCENDIDA es extremadamente peligroso y puede provocar lesiones
corporales graves, ya que el manipulador puede moverse de manera anormal;
además, puede provocar descargas eléctricas y el mal funcionamiento del
sistema de robot.
■
Para cortar la energía hacia el sistema de robot, desconecte el enchufe de la
fuente de alimentación. Asegúrese de conectar el cable de alimentación de CA a
un receptor de energía.
NO lo conecte directamente a la fuente de alimentación de la fábrica.
■
Antes de realizar cualquier procedimiento de reemplazo, APAGUE el controlador
y los equipos relacionados, luego desconecte el enchufe de la fuente de
alimentación.
Realizar cualquier procedimiento de reemplazo con la energía ENCENDIDA es
extremadamente peligroso y puede provocar una descarga eléctrica o el mal
funcionamiento del sistema de robot.
PRECAUCIÓN
■
Tenga cuidado de no aplicar descargas eléctricas excesivas al mango del motor
cuando reemplace los motores. Las descargas eléctricas pueden reducir el ciclo
de vida de los motores y el codificador o dañarlos.
■
Nunca desarme el motor y el codificador. Un motor y codificador desarmado
causará una brecha de posición y no se puede volver a usar.
Después de reemplazar las piezas (motores, unidades de engranaje reductor, un freno,
correas de regulación, unidad de ranura de tornillo esférico, etc.), el manipulador no puede
operar correctamente, ya que el origen almacenado en cada motor y el origen
correspondiente almacenado en el sistema de robot no coinciden.
Por lo tanto, es necesario realizar una calibración (descanso y calibración de codificador)
para hacer coincidir estos orígenes.
Consulte Mantenimiento 16. Calibración para ejecutar la calibración.
Engranaje reductor de
la articulación n.° 1
Motor de la
articulación
n.° 1
T3
Engranaje reductor de
la articulación n.° 1
Motor de la
articulación n.° 1
T6

Mantenimiento
170 Manual del manipulador de la serie T Rev.7
9.1 Reemplazo del motor de la articulación n.° 1
Nombre
Cantidad
Nota
Piezas de
mantenimiento
Motor
200W
1
T3: 2182560
300W
1
T6: 2190962
Junta
tórica
Entre la unidad de engranaje
reductor y el brazo n.° 1
1
T3: 1213266
T6: 1510528
Entre la unidad de engranaje
reductor y la brida
1
T3: 1653819
T6: 1650901
Entre bridas
1
T6: 1213266
Entre el motor y la brida
1
T3: 1709549
T6: 1520371
Herramientas
Llave
hexagonal
ancho a lo largo de superficies
planas: 2 mm
1
Para tornillo de fijación M4
Para perno de botón M3
ancho a lo largo de superficies
planas: 2,5 mm
1
Para tornillo de fijación M3
Para perno de botón M4
ancho a lo largo de superficies
planas: 3 mm
1
Para tornillo M4
ancho a lo largo de superficies
planas: 3 mm
1
Para tornillo M5
Torquímetro
1
Destornillador de cruz (n.° 2)
1
Para tornillos con ranura en
cruz
Paño de limpieza
1
Para limpiar grasa
Grasa
Grasa
SK-2
-
Para T3
SK-1A
-
Para T6
Retiro de motor
de articulación
n.° 1
(1)
APAGUE el manipulador.
(2)
Retire la cubierta de la unidad de alimentación.
Para conocer detalles, consulte Mantenimiento: 7.5 Cubierta de la unidad de
alimentación.
(3)
Retire la placa de conectores.
Para conocer detalles, consulte Mantenimiento: 7.4 Placa de conectores
(4)
Retire las siguientes piezas que están conectadas a la placa de conectores (interior).
Tubo de aire
Conector TP

Mantenimiento
Manual del manipulador de la serie T Rev.7 171
(5)
T3: Retire la cubierta lateral de la base.
Para conocer detalles, consulte Mantenimiento: 7.6 Cubierta lateral de la base.
T6: Retire la placa del AMP de la articulación n.° 1.
2-M48 Sems
(6)
Retire el conector de la placa del AMP.
A: Conector del cable de alimentación
B: Conector del cable de señal
C: Conector del motor
A
B
C
T3
A
B
C
T6
(7)
Retire la placa del AMP.
3-M36 Sems
Placa del
AMP
T3
T3: No tiene lámina de radiación.
T6: La lámina de radiación se encuentra en la
parte posterior de la placa del AMP. Tenga
cuidado de no perderla o romperla.
Placa del AMP
T6
T6: Desconecte el conector del cable de
distribución del resistor regenerativo. Luego,
retire la placa de fijación del resistor
regenerativo.
2-M48 Sems
NOTA

Mantenimiento
172 Manual del manipulador de la serie T Rev.7
(8)
Destornille los tornillos de montaje de la placa del
procesador/DPB.
Perno de cabeza hueca hexagonal: 5-M35
Retire la placa del procesador/DPB de una base.
La lámina de radiación se encuentra en la parte
posterior de la placa del procesador/DPB. Tenga
cuidado de no romperla o perderla.
Placa
CPU/DPB
(9)
Retire el conector de la placa del procesador/DPB.
A: Conector de alimentación
(ENTRADA/SALIDA 1 para cada uno)
B: Conector del cable de alimentación (2)
C: Conector del cable de señal
D: Conector de E/S de la mano
E: Conector LED
F: Resistor regenerativo 1 (T6 solamente)
G: Resistor regenerativo 2 (T6 solamente)
Recuerde la distribución de los cables para volver
a conectarlos correctamente después de realizar el
reemplazo.
E
B
D
B
C
A-OUT
A-IN
T3
E
E
B
D
B
C
A-OUT
A-IN
F
G
T6
E
(10)
Retire el conector de la unidad del motor de la
articulación n.° 1.
Conector de cable de señal
(ENTRADA/SALIDA 1 para cada uno)
OUT
IN
NOTE
あ
NOTA

Mantenimiento
Manual del manipulador de la serie T Rev.7 173
(11)
T3: Retire la cubierta de la placa de alimentación.
T6: Retire el conector de la placa LED.
A: LED - Conector de placa LED.
A
Corte los amarracables que atan los cables
internos. Luego, retire la placa superior.
Perno de cabeza hueca hexagonal: 4-M4×10
(12)
Destornille los tornillos de montaje de la unidad
de alimentación.
T3: 3-M410
T6: 4-M410
Retire la unidad de alimentación desde la base.
(13)
Retire el perno de montaje del brazo n.° 1 en el
lado de la articulación n.° 1 y retire el brazo.
T3: A: 8-M330
B: 4-M315
T6: A: 8-M440
B: 4-M320
Hay una junta tórica (entre la unidad de engranaje
reductor y el brazo n.° 1) entre la articulación n.°
1 y el brazo. Asegúrese de conservar la junta
tórica.
A
Unidad de engranaje reductor
B
Junta tórica

Mantenimiento
174 Manual del manipulador de la serie T Rev.7
(14)
Retire los tornillos de montaje de la brida de la
articulación n.° 1 en la base.
T3: 8-M415
T6: 6-M515
Retire la unidad del motor de la articulación n.° 1
desde la base.
Cuando retire la unidad del motor de la
articulación n. 1, tire hacia arriba lentamente para
evitar golpear la base.
(15)
T3: Suelte los tornillos de montaje del motor en
la brida del motor de la articulación n.° 1 y
retire la unidad del motor.
Arandela pequeña 4-M415+
Hay una junta tórica (entre el motor y las
bridas) entre el motor y la brida del motor de
la articulación n.° 1. Asegúrese de conservar
la junta tórica.
Unidad del
motor de
articulación n.° 1
Junta tórica
T3
T6: Suelte los tornillos de montaje del motor en
la brida del motor de la articulación n.° 1 y
retire la unidad del motor.
4-M412
Hay una junta tórica (entre las bridas) entre el
motor y la brida del motor de la articulación
n.° 1. Asegúrese de conservar la junta tórica.
Unidad del motor
de la articulación
n.° 1
Junta tórica
T6
NOTA

Mantenimiento
Manual del manipulador de la serie T Rev.7 175
(16)
Retire el generador de forma de onda desde el
motor de la articulación n.° 1.
Hay un casquillo de bronce en uno de los orificios
de tornillo de fijación. Asegúrese de conservar el
casquillo.
T3: A: Casquillo de bronce M4
B: Tornillo de fijación 2-M46
B: Tornillo de
fijación
A: Casquillo
de bronce
Generador de forma de onda
Unidad del motor de
la articulación n.° 1
T3
T6: A: Casquillo de bronce M5
B: Tornillo de fijación 2-M56
B: Tornillo
de fijación
A: Casquillo
de bronce
Generador de forma de onda
Motor de la articulación n.° 1
T6
(17)
T6: Destornille los tornillos de montaje del
motor. Luego, retire la brida del motor y la
junta tórica.
Arandela pequeña 4-M412+
Hay una junta tórica (entre el motor y la
brida) entre el motor y la brida del motor.
Asegúrese de conservar la junta tórica.
Brida del motor
Motor de la
articulación
n.° 1
T6
T3: No tiene una brida del motor.
(18)
Retire el cable a tierra del motor.
Perno de cabeza hueca hexagonal con arandela: 2-M25
NOTA

Mantenimiento
176 Manual del manipulador de la serie T Rev.7
Instalación del
motor de
articulación n.° 1
(1)
Conecte el cable a tierra del motor al motor.
Perno de cabeza hueca hexagonal con arandela: 2-M25
Torque de ajuste: 0.2 ± 0.05 N·
(2)
T6: Coloque una junta tórica (entre el motor
y la brida) en la superficie de montaje
del motor e instale la brida de motor.
Arandela pequeña 4-M412+
T3: No tiene una brida del motor.
4-M412
Arandela pequeña
Brida del motor
Motor de la
articulación n.° 1
T6
(3)
Aplique grasa entre el generador de forma de onda y el motor. Monte el generador
de forma de onda en el motor de la articulación n.° 1.
Asegúrese de alinear el lado del extremo del generador de forma de onda con el
lado del extremo del mango del motor. Apriete uno de los tornillos de fijación
verticalmente en el lado plano del mango del motor. Inserte un casquillo en el otro
orificio de tornillo de fijación para evitar daños al mango del motor.
T3: Volumen de grasa: SK-2: 4 g
A: Casquillo de bronce: M4
B: Tornillo de fijación: 2-M46
B: Tornillo de
fijación
A: Casquillo de bronce
Generador de forma de onda
Motor de la
articulación n.° 1
T3
T6: Volumen de grasa: SK1-A: 13g
A: Casquillo de bronce: M5
B: Tornillo de fijación: 2-M56
B: Tornillo de
fijación
A: Casquillo de bronce
Generador de forma de onda
Motor de la
articulación n.° 1
T6
PRECAUCIÓN
■
Consulte las figuras anteriores para conocer la orientación del generador de
forma de onda. Asegúrese de instalar el generador de forma de onda
correctamente. Una instalación incorrecta del generador de forma de onda
tendrá como resultado un mal funcionamiento del manipulador.
NOTA

Mantenimiento
Manual del manipulador de la serie T Rev.7 177
(4)
T3: Coloque una junta tórica (entre el motor y
la brida) en la superficie de montaje del
motor y arme el motor con la brida de la
articulación n.° 1.
Arandela pequeña 4-M415+
T6: Coloque una junta tórica (entre las bridas)
en la superficie de montaje del motor e
instale la brida de motor.
4-M412
Unidad del
motor de la
articulación
n.° 1
Muesca de
la brida
Junta tórica
Tenga cuidado con la ranura de la brida y la posición del motor cuando monte la
brida.
Para insertar el motor, gírelo lentamente de lado a lado manualmente y presione.
Reemplace la junta tórica con una nueva si se hincha, raya o desgasta.
(5)
Monte la unidad de la articulación n.° 1 en la base.
Fije los cables del motor en la articulación n.° 1 en la dirección de la parte posterior
de la base.
(6)
Coloque la junta tórica del paso de retiro (10) en la ranura de la junta tórica (entre la
unidad de engranaje reductor y el brazo n.° 1) del brazo.
Reemplace la junta tórica con una nueva si se hincha, raya o desgasta.
(7)
Monte el brazo de la unidad de la articulación n.°
1.
Apriete parcialmente todos los pernos en un
patrón entrecruzado, para poder apretar de forma
pareja todos los pernos.
T3: A: 8-M330
B: 4-M315
T6: A: 8-M440
B: 4-M320
Luego, con un torquímetro, apriete cada perno de
forma segura en un patrón entrecruzado al torque
especificado en la siguiente tabla.
Torque de ajuste:
M3: 2,4 0,1 N·m
M4: 5,5 0,25 N·m
A
Unidad de
engranaje reductor
B
Junta
tórica
(8)
Monte la unidad de alimentación a la base.
NOTA

Mantenimiento
178 Manual del manipulador de la serie T Rev.7
(9)
T3: Monte una cubierta de la placa de
alimentación.
T6: Monte la placa superior de la unidad de
alimentación.
Perno de cabeza hueca hexagonal:
4-M4×10
Torque de ajuste: 2,0 0,1 N·m
Ate los cables internos con un amarracables,
tal como estaban antes de retirarlos en el
procedimiento de retiro (11).
Conecte el conector de la placa LED.
A: LED - Conector de placa LED.
A
(10)
Conecte el conector de la unidad del motor de la articulación n.° 1.
Conector de cable de señal (ENTRADA/SALIDA 1 para cada uno)

Mantenimiento
Manual del manipulador de la serie T Rev.7 179
(11)
Conecte el conector de la placa del procesador/DPB.
A: Conector de alimentación
(ENTRADA/SALIDA 1 para cada uno)
B: Conector del cable de alimentación (2)
C: Conector del cable de señal
D: Conector de E/S de la mano
E: Conector LED
F: Resistor regenerativo 1 (T6 solamente)
G: Resistor regenerativo 1 (T6 solamente)
E
B
D
B
C
A-OUT
A-IN
T3
E
E
B
D
B
C
A-OUT
A-IN
F
G
T6
E
(12)
Monte la placa del procesador/DPB a la base.
Perno de cabeza hueca hexagonal: 5-M3×5
Torque de ajuste: 0,450,1 N·m
Coloque la lámina de radiación en la parte posterior
de las placas del procesador/DPB al montarla.
Placa
CPU/DPB
(13)
Monte la placa del AMP.
T6: Adjunte la lámina de radiación en la parte posterior de la placa del AMP.
T3: La lámina de radiación no se requiere.
(14)
Conecte el conector de la placa del AMP.
A: Conector del cable de alimentación
B: Conector del cable de señal
C: Conector del motor
A
B
C
T3
A
B
C
T6
(15)
T3: Monte la cubierta lateral de la base.
Para conocer detalles, consulte Mantenimiento: 7.6 Cubierta lateral de la
base.
T6: Monte la articulación n.° 1 de la placa del AMP.
NOTA
NOTA

Mantenimiento
180 Manual del manipulador de la serie T Rev.7
(16)
Conecte las siguientes piezas que se conectan a la placa de conectores.
Tubo de aire
Conector TP
(17)
Monte la cubierta de la unidad de alimentación.
Para conocer detalles, consulte Mantenimiento: 7.5 Cubierta de la unidad de
alimentación.
(18)
Monte la placa de conectores.
Para conocer detalles, consulte Mantenimiento: 7.4 Placa de conectores.
(19)
ENCIENDA el manipulador.
Para conocer detalles, consulte Configuración y operación 6.5. LED.
No corte la energía hasta que el manipulador se inicie.
(20)
Ejecute la calibración para la articulación n.° 1.
Para conocer detalles, consulte Mantenimiento: 16. Calibración.
NOTA

Mantenimiento
Manual del manipulador de la serie T Rev.7 181
9.2 Reemplazo de la unidad de engranaje reductor de la
articulación n.° 1.
Una unidad de engranaje reductor consta de las siguientes tres piezas. Cuando reemplace
la unidad de engranaje reductor, asegúrese siempre de reemplazar el generador, la lámina
flexible y la brida circular juntas como un conjunto.
Generador de forma de onda, lámina flexible, brida circular
Para conocer detalles acerca de la unidad de engranaje reductor, consulte Mantenimiento
19. Lista de piezas de mantenimiento.
Nombre
Cantidad
Nota
Pieza de
mantenimiento
Unidad de engranaje reductor
1
T3: 1718303
T6: 1750570
Herramientas
Llave hexagonal
ancho a lo largo de
superficies planas: 2 mm
1
Para tornillo de fijación M4
ancho a lo largo de
superficies planas: 2,5 mm
1
Para tornillo M3
ancho a lo largo de
superficies planas: 3 mm
1
Para tornillo M4
Torquímetro
1
Alicates de corte
1
Espátula
1
Para aplicar grasa
Paño de limpieza
1
Para limpiar grasa (Brida)
1
Para limpiar grasa (Perno)
Tornillo (M4)
2
Alrededor de 20 mm en
longitud
Para retirar lámina flexible
Grasa
Grasa
SK-2
-
Para T3
SK-1A
-
Para T6
Retiro de unidad
de engranaje
reductor de la
articulación n.° 1
(1)
Retire la unidad del motor de la articulación n.° 1.
Para conocer detalles, consulte Mantenimiento:
9.1 Reemplazo del motor de la articulación n.° 1 "Procedimiento de retiro”.
(2)
Retire el engranaje reductor de la brida de la
articulación n.° 1
T3: 10-M320
T6: 16-M425
Ranura
Unidad de engranaje
reductor

Mantenimiento
182 Manual del manipulador de la serie T Rev.7
Instalación de
unidad de
engranaje
reductor de la
articulación n.° 1
(1)
Una nueva unidad de engranaje reductor
contiene las piezas que se muestran en la
figura a la derecha cuando se desembala.
Las ranuras del engranaje de la lámina
flexible, la brida circular y los cojinetes
del generador de forma de onda están
engrasadas. Limpie el exceso de grasa de
la superficie de montaje.
Lámina flexible y unid. de
cojinete de rodillo cruzado
Brida circular
Generador de forma de onda
Junta tórica
PRECAUCIÓN
■
Nunca ajuste (suelte o apriete) los pernos de montaje entre la lámina flexible y la
unidad de cojinete de rodillo cruzado. Si se ajustan los pernos de montaje , la
lámina flexible y la unidad de cojinete de rodillo cruzado deben ser alineados por
el fabricante de la unidad de cojinete de rodillo.
(2)
Coloque las juntas tóricas (entre la unidad
de engranaje reductor y la brida) en las
ranuras de ambos lados de la nueva brida
circular.
Asegúrese de que las juntas no se salgan
de las ranuras.
Lado convexo
Ranuras
El otro lado
(3)
Coloque el lado convexo de la brida
circular hacia abajo y encájela en la
lámina flexible.
(4)
Haga coincidir los orificios del círculo
interno de la unidad de cojinete de rodillo
cruzado y los agujeros pasados de la
brida circular.

Mantenimiento
Manual del manipulador de la serie T Rev.7 183
(5)
Fije la brida del engranaje reductor a la brida
circular.
10-M320
Apriete parcialmente todos los pernos en un
patrón entrecruzado, para poder apretar de forma
pareja todos los pernos. Luego, con un
torquímetro, apriete cada perno de forma segura
en un patrón entrecruzado al torque especificado
en la siguiente tabla.
Brida
Unidad de
engranaje
reductor
Elemento
Modelo
Tipo de perno
Pernos
Torque de ajuste
Unidad de
engranaje reductor
de la articulación
n.° 1
T3
M320
10
2,40,1Nm
T6
M425
16
5,5 0,25 Nm
Tenga cuidado de no aplicar demasiada fuerza ya que puede dañar las piezas.
(6)
Aplique grasa dentro de la lámina flexible.
Volumen de grasa T3: SK-2 13 g
T6: SK-1A 37 g
(7) Monte el motor de la articulación n.° 1.
Para conocer detalles, consulte Mantenimiento:
9.1 Reemplazo del motor de la articulación n.° 1 "Procedimiento de instalación".
NOTA

Mantenimiento
184 Manual del manipulador de la serie T Rev.7
10. Articulación n.° 2:
ADVERTENCIA
■
No conecte o desconecte los conectores del motor mientras el sistema de robot
esté ENCENDIDO. Conectar o desconectar los conectores del motor con la
energía ENCENDIDA es extremadamente peligroso y puede provocar lesiones
corporales graves, ya que el manipulador puede moverse de manera anormal;
además, puede provocar descargas eléctricas y el mal funcionamiento del
sistema de robot.
■
Para cortar la energía hacia el sistema de robot, desconecte el enchufe de la
fuente de alimentación. Asegúrese de conectar el cable de alimentación de CA a
un receptor de energía.
NO lo conecte directamente a la fuente de alimentación de la fábrica.
■
Antes de realizar cualquier procedimiento de reemplazo, APAGUE el
controlador y los equipos relacionados, luego desconecte el enchufe de la
fuente de alimentación.
Realizar cualquier procedimiento de reemplazo con la energía ENCENDIDA es
extremadamente peligroso y puede provocar una descarga eléctrica o el mal
funcionamiento del sistema de robot.
PRECAUCIÓN
■
Tenga cuidado de no aplicar descargas eléctricas excesivas al mango del motor
cuando reemplace los motores. Las descargas eléctricas pueden reducir el ciclo
de vida de los motores y el codificador o dañarlos.
■
Nunca desarme el motor y el codificador. Un motor y codificador desarmado
causará una brecha de posición y no se puede volver a usar.
Después de reemplazar las piezas (motores, unidades de engranaje reductor, un freno,
correas de regulación, unidad de ranura de tornillo esférico, etc.), el manipulador no puede
operar correctamente, ya que el origen almacenado en cada motor y el origen
correspondiente almacenado en el sistema de robot no coinciden.
Por lo tanto, es necesario realizar una calibración (descanso y calibración de codificador)
para hacer coincidir estos orígenes.
Consulte Mantenimiento: 16. Calibración para ejecutar la calibración.
Motor de la
articulación n.° 2
Unidad de engranaje
reductor de
articulación n.° 2
T3
Unidad de engranaje reductor
de articulación n.° 2
Motor de la
articulación n.° 2
T6

Mantenimiento
Manual del manipulador de la serie T Rev.7 185
10.1 Reemplazo del motor de la articulación n.° 2
Nombre
Cantidad
Nota
Piezas de
mantenimiento
Motor
100W(J2/J3)
1
T3: 2182562
200W
1
T6: 2190963
Junta tórica
Entre la unidad de
engranaje reductor y el
brazo n.° 2
1
T3: 1653819
T6: 1653181
Herramientas
Llave hexagonal
ancho a lo largo de
superficies planas: 2
mm
1
Para tornillo de fijación M4
ancho a lo largo de
superficies planas: 3
mm
1
Para tornillo M4
Destornillador de cruz (n.° 2)
1
Para tornillos con ranura en
cruz
Torquímetro
1
Paño de limpieza
1
Para limpiar grasa
Grasa
Grasa
SK-2
-
Para T3
SK-1A
-
Para T6
Hay un freno montado en el motor de la articulación n.° 3 para evitar que el mango baje
debido al peso del efector final mientras la alimentación del manipulador está APAGADA o
mientras el motor está en el estado MOTOR OFF.
Baje el mango hasta su límite inferior antes del procedimiento de reemplazo después de
los pasos de retiro.
Retiro de motor
de articulación
n.° 2
(1)
ENCIENDA el manipulador.
(2)
Empuje el mango hasta su límite inferior mientras presiona el interruptor de
desbloqueo del freno. Asegúrese de mantener suficiente espacio y evitar que el efector
final golpee algún equipo periférico.
El interruptor de desbloqueo del freno solo afecta a la articulación n.° 3. Cuando se
presiona el interruptor de desbloqueo del freno, se libera el freno de la articulación
n.° 3.
Tenga cuidado con el mango mientras está presionado el interruptor de desbloqueo del
freno, ya que es posible que el mango baje debido al peso del efector final.
(3)
APAGUE el manipulador.
(4)
Retire la cubierta superior del brazo.
Para conocer detalles, consulte Mantenimiento: 7.1 Cubierta superior del brazo.
(5)
Retire la placa del usuario.
Para conocer detalles, consulte Mantenimiento: 7.7 Placa del usuario.
NOTA

Mantenimiento
186 Manual del manipulador de la serie T Rev.7
(6)
Retire el conector de la unidad del motor de la
articulación n.° 2.
A: Conector del cable de alimentación (T3
solamente)
B: Conector de cable de señal
(ENTRADA/SALIDA 1 para cada uno)
C: Conector del cable del AMP (T6 solamente)
A
B-OUT
B-IN
C
T6: Retire el conector de la unidad de la placa del
AMP en la articulación n.° 2.
D: Conector del cable del motor (T6
solamente)
D
(7)
Destornille los tornillos de montaje de la unidad
del motor.
T3: Tornillos de montaje de la brida del motor
3-M410
T6: Tornillos de montaje del motor 4-M412
Retire la unidad del motor de la articulación n.° 2
del brazo n.° 2.
Para sacar el motor sin problemas, mueva
manualmente el brazo n.° 2 lentamente mientras
tira del motor.
Unidad de motor de
la articulación n.° 2
Brazo
n.° 2
(8)
Retire el generador de forma de onda desde el
motor de la articulación n.° 2.
Tornillo de fijación 2-M46
Casquillo de bronce M4
Hay un casquillo de bronce en uno de los orificios
de tornillo de fijación. Asegúrese de conservar el
casquillo.
Tornillo de fijación
Casquillo de bronce
Motor
de la
articulación
n.° 2
Generador de forma de onda
(9)
T3: Retire la brida del motor desde el motor de la
articulación n.° 2.
Arandela pequeña 2-M455+M4
Volverá a necesitar la arandela cuando monte
la brida del motor. Asegúrese de conservar la
arandela.
T6: No tiene una brida del motor.
Brida de
motor
Motor de la
articulación
n.° 2
NOTA
NOTA

Mantenimiento
Manual del manipulador de la serie T Rev.7 187
(10)
T6: Retire el cable a tierra del motor.
Perno de cabeza hueca hexagonal con arandela:
2-M25
T3: No tiene un cable a tierra del motor.
Instalación del
motor de la
articulación n.° 2
(1)
T6: Instale el cable a tierra del motor.
Perno de cabeza hueca hexagonal con arandela:
2-M25
Torque de ajuste: 0.2 ± 0.05 N·
T3: No tiene un cable a tierra del motor.
(2)
T3: Monte la brida del motor en el motor de la
articulación n.° 2.
Arandela pequeña 2-M455+M4
Tenga cuidado con la posición de la brida y el
motor cuando monte la brida.
T6: No tiene una brida del motor.
Brida de
motor
Motor de
articulación
n.° 2
(3)
Monte el generador de forma de onda en el motor
de la articulación n.° 2.
Tornillo de fijación 2-M46
Casquillo de bronce M4
Apriete uno de los tornillos de fijación
verticalmente en el lado plano del mango del motor.
Inserte un casquillo en el otro orificio de tornillo de
fijación para evitar daños al mango del motor.
Tornillo de fijación
Casquillo de bronce
Motor de la
articulación
n.° 2
Generador de forma de onda
T3: Asegúrese de alinear el lado del extremo del generador de forma de onda con
el lado del extremo del mango del motor.
T6: Asegúrese de fijar el lado del extremo del generador de forma de onda en una
posición que sea 0,5 mm sobre el lado del extremo del mango del motor.
PRECAUCIÓN
■
Consulte las figuras anteriores para conocer la orientación del generador de
forma de onda. Asegúrese de instalar el generador de forma de onda
correctamente. Una instalación incorrecta del generador de forma de onda
tendrá como resultado un mal funcionamiento del manipulador.
(4)
Aplique grasa entre el generador de forma de onda y la brida del motor.
Volumen de grasa T3: SK-2 4 g
T6: SK-1A 6 g
NOTA
NOTA
NOTA
NOTA
NOTA

Mantenimiento
188 Manual del manipulador de la serie T Rev.7
(5)
Monte la unidad del motor de la articulación n.° 2
en el brazo n.° 2.
T3: Tornillos de montaje de la brida del motor
3-M410
T6: Tornillos de montaje del motor 4-M412
Para insertar el motor, mueva manualmente el
brazo n.° 2 de forma manual y presiónelo hacia
adentro.
Unidad de motor de
la articulación n.° 2
Brazo
n.° 2
(6)
Monte un conector de la unidad del motor de la
articulación n.° 2.
A: Conector del cable de alimentación (T3 solamente)
B: Conector de cable de señal (ENTRADA/SALIDA
1 para cada uno)
C: Conector del cable del AMP (T6 solamente)
A
B-OUT
B-IN
C
T6: Instale el conector de la placa del AMP de la
articulación n.° 2.
D: Conector del cable del motor (T6 solamente)
D
(7)
Monte la placa del usuario.
Para conocer detalles, consulte Mantenimiento: 7.7 Placa del usuario.
(8)
Monte la cubierta superior del brazo.
Para conocer detalles, consulte Mantenimiento: 7.1 Cubierta superior del brazo.
(9)
ENCIENDA el manipulador.
Para conocer detalles, consulte Configuración y operación 6.5. LED.
Cuando inicie el manipulador por primera vez después de reemplazar la unidad del
motor, el firmware de la unidad del motor se actualiza automáticamente. No apague
el manipulador hasta que se inicie.
(10)
Ejecute la calibración para la articulación n.° 2.
Para conocer detalles, consulte Mantenimiento: 16. Calibración.
NOTA

Mantenimiento
Manual del manipulador de la serie T Rev.7 189
10.2 Reemplazo de la unidad de engranaje reductor de la
articulación n.° 2.
Una unidad de engranaje reductor consta de las siguientes tres piezas. Cuando reemplace
la unidad de engranaje reductor, asegúrese siempre de reemplazar el generador, la lámina
flexible y la brida circular juntas como un conjunto.
Generador de forma de onda, lámina flexible, brida circular
Para conocer detalles acerca de la unidad de engranaje reductor, consulte Mantenimiento
19. Lista de piezas de mantenimiento
Nombre
Cantidad
Nota
Piezas de
mantenimiento
Unidad de engranaje reductor
1
T3: 1718304
T6: 1750571
Herramientas
Llave hexagonal
ancho a lo largo de
superficies planas: 2 mm
1
Para tornillo de fijación M4
ancho a lo largo de
superficies planas: 2,5 mm
1
Para tornillo M3
ancho a lo largo de
superficies planas: 3 mm
1
Para tornillo M4
Torquímetro
1
Destornillador de cruz (n.° 2)
1
Para tornillos con ranura en
cruz
Espátula
1
Para aplicar grasa
Paño de limpieza
1
Para limpiar grasa (Brida)
1
Para limpiar grasa (Perno)
Material
Tornillo (M3: longitud alrededor de 20 mm)
2
Para retirar la lámina flexible
Amarracables
-
Grasa
Grasa
SK-2
-
Para T3
SK-1A
-
Para T6
Hay un freno montado en el motor de la articulación n.° 3 para evitar que el mango baje
debido al peso del efector final mientras la alimentación del manipulador está APAGADA o
mientras el motor está en el estado MOTOR OFF.
Baje el mango hasta su límite inferior antes del procedimiento de reemplazo después de los
pasos de retiro.
NOTA

Mantenimiento
190 Manual del manipulador de la serie T Rev.7
Retiro de unidad
de engranaje
reductor de la
articulación n.° 2
(1)
Retire el generador de forma de onda desde el motor de la articulación n.° 2.
Para conocer detalles, consulte Mantenimiento:
10.1 Reemplazo del motor de la articulación n.° 2 "Procedimiento de retiro".
(2)
Retire los tornillos que montan el brazo
n.° 2 en la unidad del engranaje reductor
para retirar el brazo n.° 2.
T3: A: 10-M318
B: Arandela pequeña 8-M330+M3
C: Arandela pequeña 4-M315+M3
T6: A: 16-M328
B: Arandela pequeña 8-M332+8-M3
C: Arandela pequeña 4-M312+4-M3
Retire el brazo n.° 2.
A
Brazo n.° 2
Unidad de
engranaje
reductor
Brazo n.° 1
B
C
Junta
tórica
(3)
Retire los tornillos que montan la unidad de engranaje reductor del brazo n.° 1 para
retirar el engranaje reductor del brazo n.° 1.
Hay una junta tórica entre el brazo n.° 1 y la unidad de engranaje reductor.
Asegúrese de conservar la junta tórica.
Instalación de
unidad de
engranaje
reductor de la
articulación n.° 2
(1)
Una nueva unidad de engranaje reductor
contiene las piezas que se muestran en la
figura a la derecha cuando se desembala.
Las ranuras del engranaje de la lámina
flexible, la brida circular y los cojinetes
del generador de forma de onda están
engrasadas. Limpie el exceso de grasa de
la superficie de montaje.
Junta tórica
Lámina flexible y unidad de
cojinete de rodillocruzado
Brida circular
Generador de forma de onda
PRECAUCIÓN
■
Nunca ajuste (suelte o apriete) los pernos de montaje entre la lámina flexible y la
unidad de cojinete de rodillo cruzado. Si se ajustan los pernos de montaje , la
lámina flexible y la unidad de cojinete de rodillo cruzado deben ser alineados por
el fabricante de la unidad de cojinete de rodillo.

Mantenimiento
Manual del manipulador de la serie T Rev.7 191
(2)
Coloque las juntas tóricas en las ranuras
de ambos lados de la nueva brida circular.
Asegúrese de que las juntas no se salgan
de las ranuras.
Lado
convexo
Ranuras
El otro lado
(3)
Coloque el lado convexo de la brida
circular hacia abajo y encájela en la
lámina flexible.
(4)
Haga coincidir los orificios del círculo
interno de la unidad de cojinete de
rodillo cruzado y los agujeros pasados de
la brida circular.

Mantenimiento
192 Manual del manipulador de la serie T Rev.7
(5)
Coloque la junta tórica del paso de
retiro (6) en la ranura de junta tórica
(entre el brazo n.° 1 y la unidad de
engranaje reductor) del brazo n.° 1 e
instale la lámina flexible en el brazo
n.° 1.
T3: A: 10-M318
B: Arandela pequeña 8-M330+M3
C: Arandela pequeña 4-M315+M3
T6: A: 16-M328
B: Arandela pequeña 8-M332+8-M3
C: Arandela pequeña 4-M312+4-M3
A
Brazo n.° 2
Unidad de
engranaje
reductor
Brazo n.° 1
B
C
Junta
tórica
Fije parcialmente todos los pernos en un patrón entrecruzado, para poder apretar de
forma pareja todos los pernos. Luego, con un torquímetro, apriete cada perno de
forma segura en un patrón entrecruzado al torque especificado en la siguiente tabla.
Elemento
Tipo de perno
Torque de ajuste
Unidad de engranaje
reductor de la articulación
n.° 2
M3
2,40,1Nm
Tenga cuidado de no aplicar demasiada fuerza ya que puede dañar las piezas
(6)
Aplique grasa entre la brida del motor y el generador de forma de onda y en el
interior de la lámina flexible.
Entre la brida del motor y el generador de forma de onda
Volumen de grasa T3: SK-2 4 g
T6: SK-1A 6 g
Dentro de la lámina flexible
Volumen de grasa T3: SK-2 11 g
T6: SK-1A 16 g
(7)
Coloque la junta tórica incluida en la ranura de junta tórica de la brida circular.
Fije el brazo n.° 2 en la brida circular.
(8)
Monte el motor de la articulación n.° 2.
Para conocer detalles, consulte Mantenimiento:
10.1 Reemplazo del motor de la articulación n.° 2 "Procedimiento de
instalación".
NOTA

Mantenimiento
Manual del manipulador de la serie T Rev.7 193
11. Articulación n.° 3:
ADVERTENCIA
■
No conecte o desconecte los conectores del motor mientras el sistema de robot
esté ENCENDIDO. Conectar o desconectar los conectores del motor con la
energía ENCENDIDA es extremadamente peligroso y puede provocar lesiones
corporales graves, ya que el manipulador puede moverse de manera anormal;
además, puede provocar descargas eléctricas y el mal funcionamiento del
sistema de robot.
■
Para cortar la energía hacia el sistema de robot, desconecte el enchufe de la
fuente de alimentación. Asegúrese de conectar el cable de alimentación de CA a
un receptor de energía.
NO lo conecte directamente a la fuente de alimentación de la fábrica.
■
Antes de realizar cualquier procedimiento de reemplazo, APAGUE el
controlador y los equipos relacionados, luego desconecte el enchufe de la
fuente de alimentación.
Realizar cualquier procedimiento de reemplazo con la energía ENCENDIDA es
extremadamente peligroso y puede provocar una descarga eléctrica o el mal
funcionamiento del sistema de robot.
PRECAUCIÓN
■
Tenga cuidado de no aplicar descargas eléctricas excesivas al mango del motor
cuando reemplace los motores. Las descargas eléctricas pueden reducir el ciclo
de vida de los motores y el codificador o dañarlos.
■
Nunca desarme el motor y el codificador. Un motor y codificador desarmado
causará una brecha de posición y no se puede volver a usar.
Después de reemplazar las piezas (motores, unidades de engranaje reductor, frenos,
correas de regulación, unidad de ranura de tornillo esférico, etc.), el manipulador no puede
operar correctamente, ya que el origen almacenado en cada motor y el origen
correspondiente almacenado en el sistema de robot no coinciden.
Por lo tanto, es necesario realizar una calibración (descanso y calibración de codificador)
para hacer coincidir estos orígenes.
Consulte Mantenimiento: 16. Calibración para ejecutar la calibración.
Freno de la
articulación n.° 3
Correa Z
Motor de la
articulación n.° 3
T3
T6
Freno de la
articulación n.° 3
Correa Z
Motor de la
articulación n.° 3

Mantenimiento
194 Manual del manipulador de la serie T Rev.7
11.1 Reemplazo del motor de la articulación n.° 3
Nombre
Cantidad
Nota
Piezas de
mantenimiento
Motor
100W(J2/J3)
1
T3: 2182562
100W
1
T6: 2182601
Herramientas
Llave hexagonal
ancho a lo largo de
superficies planas: 1.5 mm
1
Para tornillo de fijación M3
ancho a lo largo de
superficies planas: 2.5 mm
1
Para tornillo de fijación M5
ancho a lo largo de
superficies planas: 3 mm
1
Para tornillo M4
Torquímetro
1
Destornillador de cruz (n.° 2)
1
Para tornillos con ranura en
cruz
Alicates de corte
1
Para cortar amarracables
Dinamómetro
1
Z: Tensión de correa
69 N (7,0 0,5 kgfcm)
Cable adecuado (longitud de alrededor de 800
mm)
1
Para tensión de correa
Material
Amarracables
-
Hay un freno montado en el motor de la articulación n.° 3 para evitar que el mango baje
debido al peso del efector final mientras la alimentación del manipulador está APAGADA o
mientras el motor está en el estado MOTOR OFF.
Baje el mango hasta su límite inferior antes del procedimiento de reemplazo después de los
pasos de retiro.
Retiro de motor
de articulación
n.° 3
(1)
ENCIENDA el manipulador.
(2)
Empuje el mango hasta su límite inferior mientras presiona el interruptor de
desbloqueo del freno. Asegúrese de mantener suficiente espacio y evitar que el efector
final golpee algún equipo periférico.
El interruptor de desbloqueo del freno solo afecta a la articulación n.° 3. Cuando se
presiona el interruptor de desbloqueo del freno, se libera el freno de la articulación n.°
3.
Tenga cuidado con el mango mientras está presionado el interruptor de desbloqueo del
freno, ya que es posible que el mango baje debido al peso del efector final.
(3)
APAGUE el manipulador.
(4)
Retire la cubierta superior del brazo.
Para conocer detalles, consulte Mantenimiento: 7.1 Cubierta superior del brazo.
(5)
Corte los amarracables que atan los cables.
NOTA

Mantenimiento
Manual del manipulador de la serie T Rev.7 195
(6)
Retire la placa del usuario.
Para conocer detalles, consulte Mantenimiento: 7.7 Placa del usuario.
(7)
T6:
Retire la placa del AMP.
Perno Sem: 2-M3×6
Retire todos los conectores de la unidad
del amplificador. Retire los siguientes
conectores de la placa del AMP.
A: Conector del cable de alimentación
(3 conectores)
B: Conector del cable del AMP
(3 conectores)
C: Conector del cable del motor
(3 conectores)
B: Conector del cable de frenos
(1 conector)
B:
A
C
B
D
(8)
Retire los conectores de la unidad del
motor de la articulación n.° 3.
A: Conector del cable de alimentación
(T3 solamente)
B: Conector de cable de señal
(ENTRADA/SALIDA 1 para cada
uno)
C: Conector del cable de frenos
(T3 solamente)
A
C
B-OUT
B-IN
(9)
Destornille los pernos de montaje de la
unidad del motor de la articulación n.° 3 y
retire la arandela.
T3: a: Arandela del agujero ovulado
2-M415M4
b: Arandela del agujero ovulado
M312M3
T6: ab: Arandela 3-M415M4
Volverá a necesitar la arandela cuando
monte la correa Z. Asegúrese de guardar la
arandela del agujero ovalado.
Unid.de motor de
articulación n.°3
a
b
NOTA

Mantenimiento
196 Manual del manipulador de la serie T Rev.7
(10)
T3: Destornille los pernos de montaje del
freno del motor de la articulación n.°
3.
3-M312
Retire la unidad del motor de la
articulación n.° 3 y el freno de
solenoide.
Motor de
articulación
n.° 3
La polea transporta la correa. Incline un poco el motor de la articulación n.° 3 y tire de
él hacia arriba, evitando la correa. Luego, retire el motor.
(11)
Retire la placa del motor desde el motor de
la articulación n.° 3.
Arandela pequeña 2-M455+M4
Volverá a necesitar la arandela cuando
monte la placa del motor. Asegúrese de
guardar la arandela.
Motor de
articulación
n.° 3
(12)
Suelte los tornillos de la polea y el cubo del
freno y retírelos del motor de la
articulación n.° 3.
a: Tornillo de fijación M58
b: Tornillo de fijación M58 + Casquillo M5
c: T3: Tornillo de fijación M33
T6: Tornillo de fijación M34
d: T3: Tornillo de fijación M33 + Casquillo
M3
T6: Tornillo de fijación M34 + Casquillo
M3
Motor de
articulación
n.° 3
b
Polea
Cubo de freno
a
d
c
Hay un casquillo de bronce en uno de los orificios de tornillo de fijación. Asegúrese de
conservar el casquillo.
(13)
T6: Retire el cable a tierra del motor.
Perno de cabeza hueca hexagonal con arandela:
2-M2×5
T3: No tiene un cable a tierra del motor.
NOTA
NOTA

Mantenimiento
Manual del manipulador de la serie T Rev.7 197
Instalación del
motor de
articulación n.° 3
(1)
T6: Conecte el cable a tierra del motor al motor.
Perno de cabeza hueca hexagonal con arandela: 2-M2×5
Torque de ajuste: 0,2 ± 0,05 N·m
T3: No tiene un cable a tierra del motor.
(2)
Monte la polea y el cubo de freno al motor de
articulación n.° 3.
a: Tornillo de fijación M58
b: Tornillo de fijación M58 + Casquillo M5
c: T3: Tornillo de fijación M33
T6: Tornillo de fijación M34
d: T3: Tornillo de fijación M33 + Casquillo M3
T6: Tornillo de fijación M34 + Casquillo M3
Motor de
articulación n.° 3
b
Polea
Cubo de freno
a
d
c
T3: Fije la polea dejando 5,5 mm de espacio
del motor.
Asegúrese de dejar 5,5 mm entre el motor y
la polea.
5.5
T3
T6: Fije la polea dejando 0,5 mm de espacio
del motor.
Asegúrese de dejar 0,5 mm entre el la placa
del motor y la polea cuando monte la placa
del motor.
Articulación n.° 3
Freno de
solenoide
Polea
Placa del motor
T6
0.5
Apriete uno de los tornillos de fijación verticalmente en el lado plano del mango del
motor.
Inserte un casquillo en el otro orificio de tornillo de fijación para evitar daños al mango
del motor.
NOTA
NOTA

Mantenimiento
198 Manual del manipulador de la serie T Rev.7
(3)
Monte la unidad del motor de la articulación n.°
3 en la placa del motor.
Arandela pequeña 2-M455+M4
Tenga cuidado con la posición de la placa del
motor y el motor cuando monte la placa del
motor.
Motor de
articulación n.° 3
(4)
T3: Pase la polea a través de la correa Z y
coloque el disco de freno en el cubo.
Cuando pase la correa, asegúrese de que
no salga de la polea.
Monte el freno del motor de la articulación
n.° 3.
3-M312
Fije los cables del motor hacia la parte
delantera del brazo.
Unidad de motor
de articulación
n.° 3
(5)
Fije parcialmente la unidad del motor de la articulación n.° 3 al brazo n.° 2.
Verifique que la unidad del motor se pueda mover manualmente, y que no se incline
cuando se tire de ella.
Si la unidad está asegurada demasiado suelta o demasiado apretada, la correa no
tendrá la tensión correcta.
NOTA
NOTA
NOTA

Mantenimiento
Manual del manipulador de la serie T Rev.7 199
(6)
Aplique la tensión correcta a la correa Z y
fije la unidad del motor de la articulación
n.° 3.
T3: a: Arandela del agujero ovulado
2-M415M4
b: Arandela del agujero ovulado
M312M3
T6: ab: Arandela 3-M415M4
Pase un cable o una cuerda adecuada
alrededor del orificio de la placa de la
unidad del motor de la articulación n.° 3.
Luego, tire del cable usando un
dinamómetro o una herramienta similar
para aplicar la tensión especificada que se
muestra en la figura a la derecha.
Tensión de correa Z:
34.5 N (3,5 0,5 kgf)
Fuerza axial (al tirar):
69 N (7,0 0,5 kgf)
Unidad de motor de
articulación n.° 3
a
b
Dinamómetro
Correa Z
Para comprobar la tensión de la correa con un tensiómetro, consulte a continuación.
Mantenimiento: 11.4 Comprobar la tensión de la correa de regulación (Correa Z).
(7)
Conecte los conectores de la unidad del motor
de la articulación n.° 3.
A: Conector del cable de alimentación
(T3 solamente)
B: Conector de cable de señal
(ENTRADA/SALIDA) Conector del cable
de frenos (T3 solamente)
A
C
B-OUT
B-IN
(8)
T6: Instale la placa del AMP.
Perno Sem: 2-M3×6
Conecte todos los conectores a la placa del
AMP.
A: Conector del cable de alimentación
(3 conectores)
B: Conector del cable del AMP
(3 conectores)
C: Conector del cable del motor
(3 conectores)
D: Conector del cable de frenos
(1 conector)
A
C
B
D
NOTA

Mantenimiento
200 Manual del manipulador de la serie T Rev.7
(9)
Monte la placa del usuario.
Para conocer detalles, consulte Mantenimiento: 7.7 Placa del usuario.
(10)
Amarre los cables del freno con un amarracables en las posiciones originales en las que
estaban antes de retirarlos en el paso de retiro (5).
(11)
Monte la cubierta superior del brazo.
Para conocer detalles, consulte Mantenimiento: 7.1 Cubierta superior del brazo.
(12)
ENCIENDA el manipulador.
Para conocer detalles, consulte Configuración y operación 6.5 LED.
Cuando inicie el manipulador por primera vez después de reemplazar la unidad del
motor, el firmware de la unidad del motor se actualiza automáticamente. No apague el
manipulador hasta que se inicie.
(13)
Ejecute la calibración de las articulaciones n.° 3 y n.° 4.
Para conocer detalles, consulte Mantenimiento: 16. Calibración
NOTA

Mantenimiento
Manual del manipulador de la serie T Rev.7 201
11.2 Reemplazo de la correa de regulación
Nombre
Cantidad
Nota
Pieza de
mantenimiento
Correa Z
Ancho: 9 mm
1
T3: 1554773
ancho:10 mm
1
T6: 1563316
Herramientas
Llave hexagonal
ancho a lo largo de superficies
planas: 2.5 mm
1
Para tornillo M3
ancho a lo largo de superficies
planas: 3 mm
1
Para tornillo M4
Torquímetro
1
Destornillador de cruz (n.° 2)
1
Para tornillos con ranura
en cruz
Dinamómetro
1
Z: Tensión de correa
69 N (7,0 0,5 kgf)
Cable adecuado (longitud de alrededor de 800 mm)
1
Para tensión de correa
Material
Amarracables
-
Hay un freno montado en el motor de la articulación n.° 3 para evitar que el mango baje
debido al peso del efector final mientras la alimentación del manipulador está APAGADA
o mientras el motor está en el estado MOTOR OFF.
Baje el mango hasta su límite inferior antes del procedimiento de reemplazo después de
los pasos de retiro.
Retiro de
correa Z
(1)
Retire la unidad del motor de la articulación n.° 3.
Para conocer detalles, consulte Mantenimiento:
11.1 Reemplazo del motor de la articulación n.° 3 "Procedimiento de retiro".
(2)
Retire los tornillos de la placa de la ranura.
3-M412
Tire de la correa Z para sacarla mientras
sostiene la placa de la brida hacia arriba.
Correa Z
Placa de la brida
Mango
Instalación de
correa Z
(1)
Pase una nueva correa Z a través del mango.
(2)
Baje la placa de la brida con la correa Z ubicada alrededor de la polea de la placa de
la brida.
Fije la placa de la brida con 3 tornillos.
Fije parcialmente la placa de la brida en el brazo n.° 2 y mueva el mango hacia
arriba y hacia abajo varias veces antes de fijar firmemente la placa de la brida.
(3)
Monte la unidad del motor de la articulación n.° 3.
Para conocer detalles, consulte Mantenimiento:
11.1 Reemplazo del motor de la articulación n.° 3 "Procedimiento de
instalación".
NOTA

Mantenimiento
202 Manual del manipulador de la serie T Rev.7
11.3 Reemplazo del freno
Nombre
Cantidad
Nota
Pieza de
mantenimiento
Unidad de freno de solenoide
1
T3: 2182694
1
T6: 1750573
Herramientas
Llave hexagonal
ancho a lo largo de
superficies planas: 2 mm
1
Para tornillo de fijación
M2.5
ancho a lo largo de
superficies planas: 2.5 mm
1
Para tornillo M3
ancho a lo largo de
superficies planas: 3 mm
1
Para tornillo M4
ancho a lo largo de
superficies planas: 4 mm
1
Para tornillo M5
Torquímetro
1
Destornillador de cruz (n.° 2)
1
Para tornillos con ranura
en cruz
Dinamómetro
1
Z: Tensión de correa
69 N (7,0 0,5 kgf)
Cable adecuado (longitud de alrededor de 800
mm)
1
Para tensión de correa
Material
Amarracables
-
Hay un freno montado en el motor de la articulación n.° 3 para evitar que el mango baje
debido al peso del efector final mientras la alimentación del manipulador está APAGADA
o mientras el motor está en el estado MOTOR OFF.
Baje el mango hasta su límite inferior antes del procedimiento de reemplazo después de
los pasos de retiro.
Retiro del freno
de la articulación
n.° 3
(1)
Retire la unidad del motor de la articulación n.° 3.
Para conocer detalles, consulte Mantenimiento:
11.1 Reemplazo del motor de la articulación n.° 3 "Procedimiento de retiro".
(2)
T3: Retire el freno del soporte del freno.
3-M2.512
Freno
T6: Retire el freno de la placa del motor y de la
placa del freno.
4-M38
Freno
NOTA

Mantenimiento
Manual del manipulador de la serie T Rev.7 203
Instalación del
freno de la
articulación n.° 3
(1)
T3: Monte el soporte del freno en el freno.
3-M2.512
T6: Monte el freno en la placa del motor y en la placa del freno.
4-M38
(2)
Monte la unidad del motor de la articulación n.° 3 y el freno de solenoide.
Para conocer detalles, consulte Mantenimiento:
11.1 Reemplazo del motor de la articulación n.° 3 "Procedimiento de
instalación".
11.4 Comprobación de la tensión de la correa de regulación (Correa Z)
Nombre
Cantida
d
Nota
Herramient
a
Tensiómetro
sónico
1
Para obtener los detalles de uso y los métodos de medición
del tensiómetro, consulte el manual de instrucciones del
tensiómetro.
Articulación
n.° 3:
Comprobación
de la tensión de
la correa
(1)
Ingrese los valores de configuración adecuados para el tensiómetro.
Modelo
Correa
Masa de unidad M
[g/ (1 mm de ancho ×1 m de
longitud)]
Ancho W
[mm]
[mm]
Alcance S
[mm]
T3
Correa
Z
1,9
9
127
T6
Correa
Z
1,9
10
212
(2)
Toque la correa y mida la tensión.
Puede ocurrir una falla en la medición si el micrófono
toca la correa durante la medición.
NOTA

Mantenimiento
204 Manual del manipulador de la serie T Rev.7
12. Articulación n.° 4:
ADVERTENCIA
■
No conecte o desconecte los conectores del motor mientras el sistema de robot
esté ENCENDIDO. Conectar o desconectar los conectores del motor con la
energía ENCENDIDA es extremadamente peligroso y puede provocar lesiones
corporales graves, ya que el manipulador puede moverse de manera anormal;
además, puede provocar descargas eléctricas y el mal funcionamiento del
sistema de robot.
■
Para cortar la energía hacia el sistema de robot, desconecte el enchufe de la
fuente de alimentación. Asegúrese de conectar el cable de alimentación de CA a
un receptor de energía.
NO lo conecte directamente a la fuente de alimentación de la fábrica.
■
Antes de realizar cualquier procedimiento de reemplazo, APAGUE el
controlador y los equipos relacionados, luego desconecte el enchufe de la
fuente de alimentación.
Realizar cualquier procedimiento de reemplazo con la energía ENCENDIDA es
extremadamente peligroso y puede provocar una descarga eléctrica o el mal
funcionamiento del sistema de robot.
PRECAUCIÓN
■
Tenga cuidado de no aplicar descargas eléctricas excesivas al mango del motor
cuando reemplace los motores. Las descargas eléctricas pueden reducir el ciclo
de vida de los motores y el codificador o dañarlos.
■
No monte la unidad del motor de la articulación
n.° 4 en las otras articulaciones ya que la
especificación es distinta que la de las unidades de
motor de las articulaciones n.° 2 o n.° 3. Se aplican
las marcas de la caja del motor de la unidad del
motor de la articulación n.° 4.
Marca
■
Nunca desarme el motor y el codificador. Un motor y codificador desarmado
causará una brecha de posición y no se puede volver a usar.
Después de reemplazar las piezas (motores, unidades de engranaje reductor, un freno,
correas de regulación, unidad de ranura de tornillo esférico, etc.), el manipulador no puede
operar correctamente, ya que el origen almacenado en cada motor y el origen
correspondiente almacenado en el sistema de robot no coinciden. Por lo tanto, es necesario
realizar una calibración (descanso y calibración de codificador) para hacer coincidir estos
orígenes.
Consulte Mantenimiento: 16. Calibración para ejecutar la calibración.

Mantenimiento
Manual del manipulador de la serie T Rev.7 205
Motor de la
articulación n.° 4
Correa U
T3
T6
Correa U1
Motor de la
articulación n.° 4
Correa U2
12.1 Reemplazo del motor de la articulación n.° 4
Nombre
Cantidad
Nota
Pieza de
mantenimiento
Motor
100W(J4)
1
T3: 2182669
1
T6: 2182670
Herramientas
Llave hexagonal
ancho a lo largo de
superficies planas: 2 mm
1
Para tornillo de fijación
M4
ancho a lo largo de
superficies planas: 3 mm
1
Para tornillo M4
Torquímetro
1
Destornillador de cruz (n.° 2)
1
Para tornillos con ranura
en cruz
Dinamómetro
1
U: Tensión de correa
69N (7,0 0,5 kgf)
Cable adecuado (longitud de alrededor de 800
mm)
1
Para tensión de correa
PRECAUCIÓN
■
La correa se debe instalar con la tensión correcta; de lo contrario, pueden ocurrir
los siguientes problemas.
Si es menor al límite inferior: Salto de los engranajes de la correa (separación
de posición)
Si es mayor que el límite superior: Ruidos o vibraciones anormales
(oscilación), disminución de la vida útil de las
piezas accionadoras
Hay un freno montado en el motor de la articulación n.° 3 para evitar que el mango baje
debido al peso del efector final mientras la alimentación del manipulador está APAGADA
o mientras el motor está en el estado MOTOR OFF.
Baje el mango hasta su límite inferior antes del procedimiento de reemplazo después de
los pasos de retiro.
NOTA

Mantenimiento
206 Manual del manipulador de la serie T Rev.7
Retiro de motor
de la articulación
n.° 4
(1)
ENCIENDA el manipulador.
(2)
Empuje el mango hasta su límite inferior mientras presiona el interruptor de
desbloqueo del freno. Asegúrese de mantener suficiente espacio y evitar que el efector
final golpee algún equipo periférico.
El interruptor de desbloqueo del freno solo afecta a la articulación n.° 3. Cuando se
presiona el interruptor de desbloqueo del freno, se libera el freno de la articulación n.°
3.
Tenga cuidado con el mango mientras está presionado el interruptor de desbloqueo del
freno, ya que es posible que el mango baje debido al peso del efector final.
(3)
APAGUE el manipulador.
(4)
Retire la cubierta superior del brazo.
Para conocer detalles, consulte Mantenimiento: 7.1 Cubierta superior del brazo.
(5)
Retire la placa del usuario.
Para conocer detalles, consulte Mantenimiento: 7.7 Placa del usuario.
(6)
T6: Retire la placa del AMP.
Perno Sem: 2-M3×6
Retire los siguientes conectores de la
placa del AMP.
A: Conector del cable de alimentación (3
conectores)
B: Conector del cable del AMP (3
conectores)
C: Conector del cable del motor (3
conectores)
D: Conector del cable de frenos (1
conector)
B:
A
C
B
D
(7)
Retire los conectores de la unidad del motor
de la articulación n.° 4.
A: Conector del cable de alimentación (T3
solamente)
B: Conector del cable de señal (ENTRADA
solamente)
C:
A
B

Mantenimiento
Manual del manipulador de la serie T Rev.7 207
(8)
Retire la unidad del motor de la articulación
n.° 4 desde el brazo n.° 2.
Retire los pernos que fijan el motor de la
articulación n.° 4 de la placa del motor y
saque el motor.
T3: Arandela del agujero ovulado 3-M4x20+M4
T6: Arandela 3-M4x20+M4
Unidad de motor de
la articulación n.° 4
La polea transporta la correa. Incline un poco el motor de la articulación n.° 4 y tírela
hacia arriba, evitando la correa cuando retire el motor. Volverá a necesitar la arandela
cuando monte la correa U. Asegúrese de guardar la arandela.
(9)
Retire la polea y el cojinete del motor de la
articulación n.° 4.
Tornillo de fijación M48
Tornillo de fijación M48 + Casquillo M4
Hay un casquillo de bronce en uno de los
orificios de tornillo de fijación. Asegúrese de
conservar el casquillo.
Casquillo M4
Polea
Cojinete
(10)
Retire la placa del motor desde el motor de la
articulación n.° 4.
Arandela pequeña 2-M455+M4
Volverá a necesitar la arandela cuando monte la
placa del motor. Asegúrese de guardar la
arandela.
Placa del motor
(11)
T6: Retire el cable a tierra del motor.
Perno de cabeza hueca hexagonal con
arandela: 2-M2×5
T3: No tiene un cable a tierra del motor.
NOTA

Mantenimiento
208 Manual del manipulador de la serie T Rev.7
Instalación del
motor de
articulación n.° 4
(1)
T6: Conecte el cable a tierra del motor al
motor.
Perno de cabeza hueca hexagonal con
arandela: 2-M2×5
Torque de ajuste: 0,2 ± 0,05 N·m
T3: No tiene un cable a tierra del motor.
(2)
Fije parcialmente la unidad del motor de la
articulación n.° 4.
Arandela pequeña 2-M455+M4
Tenga cuidado con la posición de la placa
del motor y el motor.
Verifique que la unidad del motor se pueda
mover manualmente, y que no se incline
cuando se tire de ella.
Placa del motor
(3)
Monte la polea y el cojinete al motor de la
articulación n.° 4.
Tornillo de fijación M48
Tornillo de fijación M48 + Casquillo M4
Apriete uno de los tornillos de fijación
verticalmente en el lado plano del mango
del motor.
Inserte un casquillo en el otro orificio de
tornillo de fijación para evitar daños al
mango del motor. Luego apriete ambos
tornillos de fijación.
Asegúrese de que el cojinete esté insertado
completamente cuando monte la polea. Si
las caras de los extremos de la placa del
motor y el cojinete encajan, el cojinete está
completamente insertado.
Además, aplique presión al cojinete cuando
apriete.
presión: 2,90,1 kg
Casquillo M4
Polea
Cojinete
Al apretar el tornillo
Carga útil:
2,90.1kg
Cojinete
+ Polea
(4)
Fije la brida del motor en el motor de la articulación n.° 4.
(5)
Coloque la polea alrededor de la correa U y fíjela parcialmente al brazo n.° 2.
NOTA
NOTA

Mantenimiento
Manual del manipulador de la serie T Rev.7 209
Asegúrese de que la unidad del motor se pueda mover manualmente, y que no se
incline cuando se tire de ella. Si la unidad está asegurada demasiado suelta o
demasiado apretada, la correa no tendrá la tensión correcta.
Asegúrese de que las ranuras del engranaje de la correa encajen en las de la polea
completamente.
(6)
Aplique la tensión correcta a la correa U y
fije la unidad del motor n.° 4.
T3: Arandela del agujero ovulado
3-M4x20+M4
T6: Arandela 3-M4x20+M4
Pase un cable o una cuerda adecuada
alrededor del orificio de la placa de la
unidad del motor de la articulación n.° 4
cerca de su placa de montaje.
Luego, tire del cable usando un
dinamómetro o una herramienta similar para
aplicar la tensión especificada que se
muestra en la figura.
Tensión de correa U:
T3: 34,5 N (3,5 0,5 kgf) 58,0 N (5,9
0,5 kgf)
Fuerza axial (al tirar):
T3: 34.5 N (3,5 0,5 kgf) 58,0 N (5,9
0,5 kgf)
Unidad de motor de la
articulación n.° 4
Dinamómetro
Correa U
Para comprobar la tensión de la correa con un tensiómetro, consulte a continuación.
Mantenimiento: 8.4 Comprobación de la tensión de la correa de regulación (Correa
U).
(7)
Conecte los conectores de la unidad del motor
de la articulación n.° 4.
A: Conector del cable de alimentación (T3
solamente)
B: Conector del cable de señal
A
B
NOTA
NOTA

Mantenimiento
210 Manual del manipulador de la serie T Rev.7
(8)
T6: Monte la placa del AMP.
Perno Sem: 2-M3×6
Conecte los siguientes conectores a la placa
del AMP.
A: Conector del cable de alimentación (3
conectores)
B: Conector del cable del AMP (3
conectores)
C: Conector del cable del motor (3
conectores)
B: Conector del cable de frenos (1
conector)
B:
A
C
B
D
(9)
Monte la placa del usuario.
Para conocer detalles, consulte Mantenimiento: 7.7 Placa del usuario.
(10)
Monte la cubierta superior del brazo.
Para conocer detalles, consulte Mantenimiento: 7.1 Cubierta superior del brazo.
(11)
Ejecute la calibración para las articulaciones n.° 3 y 4.
Para conocer detalles acerca de los métodos de calibración, consulte Mantenimiento:
16. Calibración.

Mantenimiento
Manual del manipulador de la serie T Rev.7 211
12.2 Reemplazo de la correa de regulación
Nombre
Cantidad
Nota
Pieza de
mantenimiento
Correa U
Ancho de 17 mm
1
T3: 1709608
Correa U1
ancho 10 mm
1
T6: 1674797
Correa U2
ancho 15 mm
1
T6: 1674798
Herramientas
Llave
hexagonal
ancho a lo largo de
superficies planas: 2.5 mm
1
Para tornillo M3
ancho a lo largo de
superficies planas: 3 mm
1
Para tornillo M4
Torquímetro
1
Destornillador de cruz (n.° 2)
1
Para tornillos con ranura en cruz
Dinamómetro
1
Tensión
U: 69N (7,0 0,5 kgf)
U1: 58 N (5,9 0,5 kgf)
U2: 102 N (10,4 0,75 kgf)
Cable adecuado (longitud de alrededor de
800 mm)
1
Para tensión de correa
PRECAUCIÓN
■
La correa se debe instalar con la tensión correcta; de lo contrario, pueden ocurrir
los siguientes problemas.
Si es menor al límite inferior: Salto de los engranajes de la correa
(separación de posición)
Si es mayor que el límite superior: Ruidos o vibraciones anormales
(oscilación), disminución de la vida útil de
las piezas accionadoras
Hay un freno montado en el motor de la articulación n.° 3 para evitar que el mango baje
debido al peso del efector final mientras la alimentación del manipulador está APAGADA o
mientras el motor está en el estado MOTOR OFF.
Baje el mango hasta su límite inferior antes del procedimiento de reemplazo después de los
pasos de retiro.
NOTA

Mantenimiento
212 Manual del manipulador de la serie T Rev.7
12.2.1 Correa U2 (T6)
Retiro de
correa U2
(1)
ENCIENDA el manipulador.
(2)
Empuje el mango hasta su límite inferior mientras presiona el interruptor de
desbloqueo del freno. Asegúrese de mantener suficiente espacio y evitar que el efector
final golpee algún equipo periférico.
El interruptor de desbloqueo del freno solo afecta a la articulación n.° 3. Cuando se
presiona el interruptor de desbloqueo del freno, se libera el freno de la articulación n.°
3.
Tenga cuidado con el mango mientras está presionado el interruptor de desbloqueo del
freno, ya que es posible que el mango baje debido al peso del efector final.
(3)
APAGUE el manipulador.
(4)
Retire la cubierta superior del brazo.
Para conocer detalles, consulte Mantenimiento: 7.1 Cubierta superior del brazo.
(5)
Retire la placa del usuario.
Para conocer detalles, consulte Mantenimiento: 7.7 Placa del usuario.
(6)
Retire la placa del AMP.
Perno Sem: 2-M3×6
Retire los siguientes conectores de la placa
del AMP.
A: Conector del cable de alimentación (3
conectores)
B: Conector del cable del AMP (3
conectores)
C: Conector del cable del motor (3
conectores)
B: Conector del cable de frenos (1
conector)
B:
(7)
Suelte los pernos de montaje de la unidad del
motor de la articulación n.° 3.
Arandela 3-M415M4
A
C
B
D

Mantenimiento
Manual del manipulador de la serie T Rev.7 213
(8)
Suelte los pernos de montaje de la unidad del
motor de la articulación n.° 4.
Arandela 3-M4x20+M4
(9)
Destornille los tornillos de montaje de la
unidad intermedia de la articulación n.° 4.
Tire de la unidad intermedia de la
articulación n.° 4 y la correa U1 hacia arriba.
Arandela 3-M4x12+M4
Volverá a necesitar la arandela cuando monte
la unidad intermedia. Asegúrese de guardar
la arandela.
(10)
Retire los tornillos de la placa de la ranura.
Tire de la correa Z y la correa U2 para sacarlas
mientras sostiene la placa de la brida.
3-M4x12
Placa de la brida
Correa Z
Correa U2

Mantenimiento
214 Manual del manipulador de la serie T Rev.7
Instalación de
correa U2
(1)
Sostenga la placa de la brida y coloque la
correa U2 alrededor de la polea U3.
Asegúrese de que las ranuras del engranaje de
la correa encajen en las de la polea
completamente.
Placa de la brida
Correa Z
Correa U2
(2)
Sostenga la placa de la brida y coloque la correa Z alrededor de la polea Z2.
Asegúrese de que las ranuras del engranaje de la correa encajen en las de la polea
completamente.
(3)
Fije parcialmente la placa de la brida en el brazo n.° 2 y mueva el mango hacia arriba y
hacia abajo varias veces antes de fijar firmemente la placa de la brida.
3-M4x12
(4)
Mientras la correa U1 está alrededor de la
polea grande de la unidad intermedia de la
articulación n.° 4, coloque la correa U2 dentro
del brazo n.° 2 alrededor de la polea pequeña y
colóquela en la superficie superior del brazo
n.° 2.
Asegúrese de que las ranuras del engranaje de
la correa encajen en las poleas completamente.
Unidad intermedia de
la articulación n.° 4
Correa U1
Correa U2
Polea grande
Polea pequeña
(5)
Fije parcialmente la unidad intermedia de la articulación n.° 4 con los tornillos.
Arandela 3-M4x12+M4
Asegúrese de que la unidad intermedia de la articulación n.° 4 se pueda mover
manualmente y que no se incline cuando se tire de ella. Si la unidad está asegurada
demasiado suelta o demasiado apretada, la correa no tendrá la tensión correcta.
(6)
Aplique la tensión correcta a la correa
U2 y fije la unidad intermedia de la
articulación n.° 4.
Coloque un cable o una cuerda
adecuada alrededor de la parte cerca de
la placa de la unidad del motor de la
articulación n.° 4 cerca de su placa de
montaje.
Tensión de correa U2:
51 N (5,2 0,75 kgf)
Fuerza axial (al tirar):
102.0 N (10,4 0,75 kgf)
3-M4×12
+Arandela plana
Correa U2
Unidad intermedia de la
articulación n.° 4
Dinamómetro

Mantenimiento
Manual del manipulador de la serie T Rev.7 215
(7)
Aplique la tensión correcta a la correa U1 y
fije la unidad del motor de la articulación
n.° 4.
Pase un cable o una cuerda adecuada
alrededor de la unidad del motor de la
articulación n.° 4 cerca de su placa de
montaje. Luego, tire del cable usando un
dinamómetro o una herramienta similar para
aplicar la tensión especificada que se
muestra en la figura a la derecha.
Tensión de correa U1:
29,0 N (2,95 0,5 kgf)
Fuerza axial (al tirar):
58 N (5,9 0,5 kgf)
3-M412
arandela
Dinamómetro
Unidad intermedia de
la articulación n.° 4
Para comprobar la tensión de la correa con un tensiómetro, consulte a continuación.
Mantenimiento: 12.3 Comprobación de la tensión de la correa de regulación
(8)
Aplique la tensión correcta a la correa Z y
fije la unidad del motor de la articulación
n.° 3.
Pase un cable o una cuerda adecuada
alrededor de la unidad del motor de la
articulación n.° 3 cerca de su placa de
montaje. Luego, tire del cable usando un
dinamómetro o una herramienta similar
para aplicar la tensión especificada que se
muestra en la figura a la derecha.
Tensión de correa Z:
34,5 N (3,5 0,5 kgf)
Fuerza axial (al tirar):
69,0 N (7,0 0,5 kgf)
3-M412 arandela
Dinamómetro
Unidad de motor de
la articulación n.° 3
Correa Z
Para comprobar la tensión de la correa con un tensiómetro, consulte a continuación.
Mantenimiento: 11.4 Comprobación de la tensión de la correa de regulación
(Correa Z)
NOTA
NOTA

Mantenimiento
216 Manual del manipulador de la serie T Rev.7
(9)
Monte la placa del AMP.
Perno Sem: 2-M3×6
Conecte la placa del AMP a los conectores.
A: Conector del cable de alimentación (3
conectores)
B: Conector del cable del AMP (3
conectores)
C: Conector del cable del motor (3
conectores)
B: Conector del cable de frenos (1 conector)
B:
(10)
Monte la placa del usuario.
Para conocer detalles, consulte Mantenimiento: 7.7 Placa del usuario.
(11)
Monte la cubierta superior del brazo.
Para conocer detalles, consulte Mantenimiento: 7.1 Cubierta superior del brazo.
(12)
Ejecute la calibración de las articulaciones n.° 3 y n.° 4.
Para conocer detalles, consulte Mantenimiento: 16. Calibración
A
C
B
D

Mantenimiento
Manual del manipulador de la serie T Rev.7 217
12.2.2 Correa U1 (T6)
Retiro de
correa U1
(1)
Retire la unidad del motor de la articulación n.° 4.
Para obtener más detalles, consulte lo siguiente.
Mantenimiento: 12.1 Reemplazo del motor de la articulación n.° 4
“Retiro de motor de la articulación n.° 4”
(2)
Retire la unidad intermedia de la articulación n.° 4 y la correa U1.
Para obtener más detalles, consulte lo siguiente.
Mantenimiento: 12.2.1 Correa U2 (T6) “Retiro de correa U2”
Instalación de
correa U1
(1)
Aplique la tensión correcta a la correa U2 y fije la unidad intermedia.
Para obtener más detalles, consulte lo siguiente.
Mantenimiento: 12.2.1 Correa U2 (T6) “Instalación de correa U2”
(2)
Aplique la tensión correcta a la correa U1 y fije la unidad del motor de la articulación
n.° 4.
Para obtener más detalles, consulte lo siguiente.
Mantenimiento: 12.1 Reemplazo del motor de la articulación n.° 4
“Instalación del motor de la articulación n.° 4”
(3)
Ejecute la calibración de la articulación n.° 4.
Para obtener más detalles, consulte lo siguiente.
Mantenimiento: 16. Calibración

Mantenimiento
218 Manual del manipulador de la serie T Rev.7
12.2.3 Correa U (T3)
Retiro de
correa U
(1)
Retire la unidad del motor de la articulación n.° 4.
Para conocer detalles, consulte Mantenimiento:
12.1 Reemplazo del motor de la articulación n.° 4 "Procedimiento de retiro".
(2)
Suelte los pernos de montaje de la unidad
del motor de la articulación n.° 3.
a: Arandela del agujero ovulado 2-M415M4
b: Arandela del agujero ovulado M312M3
Unidad de motor
de la articulación
n.° 3
a
b
(3)
Retire el tornillo de montaje de la placa de la
brida.
3-M412
Tire de la correa Z y la correa U al lado
superior mientras sostiene la placa de la
brida.
Correa Z
Placa de
la brida
Mango
Correa U
Instalación de
correa U
(1)
Sostenga la placa de la brida y coloque la correa U alrededor de la polea U2.
3-M412
Asegúrese de que las ranuras del engranaje de la correa encajen en las poleas
completamente.
(2)
Sostenga la placa de la brida y coloque la correa Z alrededor de la polea Z2.
Asegúrese de que las ranuras del engranaje de la correa encajen en las poleas
completamente.
(3)
Fije parcialmente la placa de la brida en el brazo n.° 2 y mueva el mango hacia
arriba y hacia abajo varias veces antes de fijar firmemente la placa de la brida.
(4)
Monte la unidad del motor de la articulación n.° 4.
Para conocer detalles, consulte Mantenimiento:
12.1 Reemplazo del motor de la articulación n.° 4 "Procedimiento de instalación".
(5)
Aplique la tensión correcta a la correa Z y fije la unidad del motor de la articulación
n.° 3.
Para conocer detalles, consulte Mantenimiento:
11.1 Reemplazo del motor de la articulación n.° 3 "Procedimiento de instalación".
(6)
Ejecute la calibración de las articulaciones n.° 3 y 4.
Para conocer detalles acerca de los métodos de calibración, consulte Mantenimiento:
16. Calibración.

Mantenimiento
Manual del manipulador de la serie T Rev.7 219
12.3 Comprobación de la tensión de la correa de regulación
Nombre
Cantidad
Nota
Herramienta
Tensiómetro
sónico
1
Para obtener los detalles de uso y los métodos de medición
del tensiómetro, consulte el manual de instrucciones del
tensiómetro.
Articulación
n.° 4:
Comprobación
de la tensión
de la correa
(1)
Ingrese los valores de configuración adecuados para el tensiómetro.
Modelo
Correa
Masa de unidad M
[g/ (1 mm de ancho ×1 m de
longitud)]
Ancho W
[mm]
[mm]
Alcance
S
[mm]
T3
Correa
U
1,3
17
127
T6
Correa
U1
2,0
10
54
Correa
U2
2,0
15
170
(2)
T3: Toque la correa U y mida la tensión.
T6: Toque la correa U2 y mida la tensión.
Puede ocurrir una falla en la medición si el micrófono
toca la correa durante la medición.
(3)
T6: Retire el tapón de caucho del orificio
en el brazo n.° 2.
Toque la correa U1 y mida la tensión.
Inserte el micrófono del tensiómetro en el
orificio del brazo para medir la tensión.
Puede ocurrir una falla en la medición si el
micrófono toca la correa durante la
medición.
NOTA
NOTA

Mantenimiento
220 Manual del manipulador de la serie T Rev.7
13. Unidad de ranura de tornillo esférico
ADVERTENCIA
■
No conecte o desconecte los conectores del motor mientras el sistema de robot
esté ENCENDIDO. Conectar o desconectar los conectores del motor con la
energía ENCENDIDA es extremadamente peligroso y puede provocar lesiones
corporales graves, ya que el manipulador puede moverse de manera anormal;
además, puede provocar descargas eléctricas y el mal funcionamiento del
sistema de robot.
■
Para cortar la energía hacia el sistema de robot, desconecte el enchufe de la
fuente de alimentación. Asegúrese de conectar el cable de alimentación de CA a
un receptor de energía.
NO lo conecte directamente a la fuente de alimentación de la fábrica.
■
Antes de realizar cualquier procedimiento de reemplazo, APAGUE el
controlador y los equipos relacionados, luego desconecte el enchufe de la
fuente de alimentación.
Realizar cualquier procedimiento de reemplazo con la energía ENCENDIDA es
extremadamente peligroso y puede provocar una descarga eléctrica o el mal
funcionamiento del sistema de robot.
Después de reemplazar las piezas (motores, unidades de engranaje reductor, frenos, correas
de regulación, unidad de ranura de tornillo esférico, etc.), el manipulador no puede operar
correctamente, ya que el origen almacenado en cada motor y el origen correspondiente
almacenado en el sistema de robot no coinciden.
Por lo tanto, es necesario realizar una calibración (descanso y calibración de codificador)
para hacer coincidir estos orígenes.
Consulte Mantenimiento: 16. Calibración para realizar la calibración.
NOTA

Mantenimiento
Manual del manipulador de la serie T Rev.7 221
13.1 Engrase de la unidad de ranura de tornillo esférico
Nombre
Cantidad
Nota
Grasa
Para unidad de ranura de tornillo esférico
(grasa AFB)
Cantidad
correcta
Herramientas
Paño de limpieza
1
Para limpiar grasa (Mango de
ranura)
El interruptor de desbloqueo del freno solo afecta a la articulación n.° 3. Cuando se
presiona el interruptor de desbloqueo del freno, se libera el freno de la articulación n.° 3.
Tenga cuidado con el mango mientras se presiona el interruptor de desbloqueo del freno,
ya que es posible que el mango baje debido al peso del efector final
Cubra el área circundante como el efector final y los equipos periféricos, por si gotea la
grasa.
(1)
ENCIENDA el manipulador. Detenga la activación del motor. (MOTOR OFF
[Motor apagado])
(2)
Mueva el brazo a la posición en la que la articulación n.° 3 se pueda mover realizando
la carrera completa.
(3)
Mueva el mango hasta su límite superior
manualmente mientras presiona el interruptor de
desbloqueo del freno.
Interruptor de
desbloqueo del freno
(4)
APAGUE el manipulador.
(5)
Limpie la grasa antigua de la parte superior del
mango y aplíquele grasa nueva.
Cuando aplique la nueva grasa a la parte superior
del mango, llene directamente las ranuras de forma
manual. Limpie el exceso de grasa del mango.
(6)
ENCIENDA el manipulador.
(7)
Empuje el mango hasta su límite superior manualmente mientras presiona el
interruptor de desbloqueo del freno.
(8)
Limpie la grasa vieja de la parte inferior del mango y aplíquele grasa nueva.
Cuando aplique la nueva grasa a la parte inferior del mango, llene directamente las
ranuras de forma manual. Limpie el exceso de grasa del mango.
(9)
Mueva el mango hacia arriba y abajo varias veces mientras presiona el interruptor de
desbloqueo del freno para suavizar la grasa del mango. Limpie el exceso de grasa del
mango.
Cuando limpie el exceso de grasa de la parte superior del mango, APAGUE el
manipulador y retire la cubierta superior del brazo.
Para conocer detalles, consulte Mantenimiento: 7.1 Cubierta superior del brazo.
NOTA

Mantenimiento
222 Manual del manipulador de la serie T Rev.7
13.2 Reemplazo de la unidad de ranura de tornillo esférico
Hay un freno montado en el motor de la articulación n.° 3 para evitar que el mango baje
debido al peso del efector final mientras la alimentación del manipulador está APAGADA
o mientras el motor está en el estado MOTOR OFF.
Sin embargo, el freno no funciona durante la operación de reemplazo. Baje el mango hasta
su límite inferior antes de operar el reemplazo después de realizar el procedimiento de
retiro (1) a (3).
Nombre
Cantidad
Nota
Pieza de
mantenimiento
Unidad de ranura de tornillo
esférico
150st
1
T3: 1718877
200st
1
T6: 1750572
Grasa
Para unidad de ranura de tornillo esférico
(grasa AFB)
Cantidad
correcta
Herramientas
Llave hexagonal (ancho a lo largo de
superficies planas: 3 mm)
1
Para tornillo M4
Torquímetro
1
Destornillador de cruz (n.° 2)
1
Para tornillos con ranura en cruz
Dinamómetro
1
Tensión de correa:
Z, U: 69N (7,0 0,5 kgf)
U1: 58 N (5,9 0,5 kgf)
U2: 102 N (10,4 0,75 kgf)
Cable adecuado (longitud de alrededor de
1000 mm)
1
Para tensión de correa
Paño de limpieza
1
Para limpiar grasa (Mango de
ranura)
Material
Amarracables
-
NOTA

Mantenimiento
Manual del manipulador de la serie T Rev.7 223
Retiro de unidad
de ranura de
tornillo esférico
(1)
ENCIENDA el manipulador.
(2)
Empuje el mango hasta su límite inferior mientras presiona el interruptor de
desbloqueo del freno. Asegúrese de mantener suficiente espacio y evitar que el efector
final golpee algún equipo periférico.
El interruptor de desbloqueo del freno solo afecta a la articulación n.° 3. Cuando se
presiona el interruptor de desbloqueo del freno, se libera el freno de la articulación n.°
3.
Tenga cuidado con el mango mientras está presionado el interruptor de desbloqueo del
freno, ya que es posible que el mango baje debido al peso del efector final.
(3)
APAGUE el manipulador.
(4)
Desconecte los cables/tubos desde el efector final y retire el efector final.
(5)
Retire la cubierta superior del brazo y la cubierta inferior del brazo.
Para conocer detalles, consulte Mantenimiento: 7. Cubiertas.
(6)
Retire los tres tornillos que montan la placa
de la ranura.
a: 3-M4×12
a
b
(7)
Retire los cuatro tornillos que montan la
tuerca estriada.
b: T3: 4-M4×10
T6: 4-M4×12
(8)
Tire de lo siguiente hacia el lado superior del brazo n.° 2.
Unidad de ranura de tornillo esférico Correa Z Correa U (T3) Correa U2 (T6)

Mantenimiento
224 Manual del manipulador de la serie T Rev.7
Instalación de
unidad de ranura
de tornillo esférico
(1)
Inserte una nueva unidad de ranura de tornillo esférico en el brazo n.° 2.
(2)
Fije la tuerca estriada desde el lado inferior
del brazo n.° 2.
T3: 4-M4×10
T6: 4-M4×12
(3)
Monte lo siguiente.
Correa Ut (T3) Correa U2 (T6) Correa Z
Para conocer detalles, consulte Mantenimiento:
12.2 Reemplazo de la correa de regulación, “Instalación”.
(4)
Monte la cubierta superior del brazo y la cubierta inferior del brazo.
Para conocer detalles, consulte Mantenimiento: 7. Cubiertas.
(5)
Engrase el mango.
Para conocer detalles, consulte Mantenimiento 13.1: Engrase de la unidad de
ranura de tornillo esférico.
(6)
Monte el efector final, los cables y tubos.
(7)
Realice la calibración de las articulaciones n.° 3 y 4.
Para conocer detalles, consulte Mantenimiento: 16. Calibración.

Mantenimiento
Manual del manipulador de la serie T Rev.7 225
14. Batería de litio, tarjeta SD, placas y filtro
ADVERTENCIA
■
No conecte o desconecte los conectores del motor mientras el sistema de robot
esté ENCENDIDO. Conectar o desconectar los conectores del motor con la
energía ENCENDIDA es extremadamente peligroso y puede provocar lesiones
corporales graves, ya que el manipulador puede moverse de manera anormal;
además, puede provocar descargas eléctricas y el mal funcionamiento del
sistema de robot.
■
Para cortar la energía hacia el sistema de robot, desconecte el enchufe de la
fuente de alimentación. Asegúrese de conectar el cable de alimentación de CA a
un receptor de energía.
NO lo conecte directamente a la fuente de alimentación de la fábrica.
■
Antes de realizar cualquier procedimiento de reemplazo, APAGUE el
controlador y los equipos relacionados, luego desconecte el enchufe de la
fuente de alimentación.
Realizar cualquier procedimiento de reemplazo con la energía ENCENDIDA es
extremadamente peligroso y puede provocar una descarga eléctrica o el mal
funcionamiento del sistema de robot.
ADVERTENCIA
■
Sea meticuloso y cuidadoso cuando manipula la batería de litio. Como se
menciona a continuación, la manipulación incorrecta de las baterías de litio es
extremadamente peligrosa y puede causar generación de calor, filtraciones,
explosiones o inflamación, y puede causar problemas graves de seguridad.
<Manejo incorrecto>
- Carga de batería
- Desmontaje
- Instalación incorrecta
- Exposición al fuego
- Descarga forzosa
- Deformación por presión
- Cortocircuito (polaridad; positiva/negativa)
- Calefacción (85C o más)
- Soldar el terminal de la batería de litio directamente
■
Cuando elimine la batería, consulte con servicios de eliminación profesionales o
cumpla los reglamentos locales.
Sin importar si las baterías están gastadas o no, asegúrese de que su terminal
esté aislado. Si los terminales hacen contacto con otros metales, pueden hacer
cortocircuito y generar calor, fugas, explosiones o inflamación.
La duración de una batería de litio varía según las horas de energización y el entorno de
instalación del manipulador. Como guía general, es de alrededor de 7 años (cuando el
manipulador está conectado a la energía por 8 horas al día).
Cuando el manipulador no está conectado a la energía, el consumo de batería será
significativamente mayor que cuando el manipulador está energizado. Si ocurren
advertencias de reducción de voltaje, reemplace la batería de litio, incluso si no ha
alcanzado la vida útil de producto indicada anteriormente.
Para EPSON RC+ 7.0, el lapso de reemplazo recomendado para la batería se puede revisar
en el cuadro de diálogo [Maintenance] de EPSON RC+ 7.0.
Para conocer detalles, consulte Mantenimiento: 4. Alarma.
NOTA

Mantenimiento
226 Manual del manipulador de la serie T Rev.7
La batería puede agotarse si pasa el lapso de reemplazo recomendado.
Si no ocurren advertencias de reducción de voltaje, no es necesario calibrar todas las
articulaciones. Deberá realizar una calibración si la posición se mueve desde la original
después de reemplazar la batería.
Use siempre la batería de litio y la placa de baterías que designamos.
Consulte Mantenimiento: 19. Lista de piezas de mantenimiento.
Tenga cuidado con la polaridad de la batería para conectarla correctamente.
14.1 Reemplazo de las placas de CPU/DPB
ADVERTENCIA
■
Asegúrese de que el indicador LED de confirmación de carga de color naranjo en
el DPB se apague cuando retire el procesador o el DPB. Si opera sin apagar el
indicador LED, pueden ocurrir descargas eléctricas y otros problemas de
seguridad graves.
LED de confirmación de carga
T3
LED de confirmación de carga
T6
Nombre
Cantidad
Nota
Pieza de
mantenimiento
Placas de CPU/DPB
1
T3: 2182747
T6: 2191143
Herramientas
Llave hexagonal
ancho a lo largo de
superficies planas: 2 mm
1
Para perno de botón M3
Destornillador de cruz
1
Reemplazo de
placas de
CPU/DPB
(1)
APAGUE el manipulador.
(2)
Retire la placa del conector.
Para conocer detalles, consulte Mantenimiento 7.4 Placa del conector
(3)
Retire las siguientes piezas que están conectadas a la placa del conector.
Tubo de aire
Conector TP

Mantenimiento
Manual del manipulador de la serie T Rev.7 227
(4)
Retire los tornillos de montaje de la placa del CPU/DPB.
Perno de cabeza hueca hexagonal: 5-M3x5
Retire las placas de CPU/DPB de la base.
Placa
CPU/DPB
T6: Desconecte el conector del cable de distribución del
resistor regenerativo. Luego, retire la placa de
fijación del resistor regenerativo.
2-M48 Sems
(5)
Retire el conector de la placa del procesador/DPB.
A: Conector de alimentación
(ENTRADA/SALIDA1 para cada uno)
B: Conector del cable de alimentación (2)
C: Conector del cable de señal
D: Conector de E/S de la mano
E: Conector LED
F: Resistor regenerativo 1 (T6 solamente)
G: Resistor regenerativo 2 (T6 solamente)
Recuerde la distribución de los cables para volver a
conectarlos después de realizar el reemplazo.
E
B
D
B
C
A-OUT
A-IN
T3
E
E
B
D
B
C
A-OUT
A-IN
F
G
T6
E
NOTA

Mantenimiento
228 Manual del manipulador de la serie T Rev.7
(6)
Retire la lámina de radiación que se encuentra en la
placa del procesador.
La lámina de radiación se volverá a utilizar.
Asegúrese de conservar la lámina.
Tenga cuidado de no romper la lámina de radiación.
Hoja de
radiación
(7)
Coloque la lámina de radiación en la cara de los
nuevos conectores de la placa del procesador/DPB
para que no se salgan.
Tenga cuidado de no colocar la lámina en la cara
incorrecta.
(8)
Conecte los conectores de la placa del
procesador/DPB.
A: Conector de alimentación
(ENTRADA/SALIDA1 para cada uno)
B: Conector del cable de alimentación (2)
C: Conector del cable de señal
D: Conector de E/S de la mano
E: Conector LED
F: Resistor regenerativo 1 (T6 solamente)
G: Resistor regenerativo 2 (T6 solamente)
E
B
D
B
C
A-OUT
A-IN
T3
E
E
B
D
B
C
A-OUT
A-IN
F
G
T6
E
(9)
Monte la placa del procesador/DPB de una base.
Perno de cabeza hueca hexagonal: 5-M3x5
Torque de ajuste: 0,45 0,1 N·m
Placa
CPU/DPB
NOTA

Mantenimiento
Manual del manipulador de la serie T Rev.7 229
(10)
T6: Monte la placa de fijación del resistor
regenerativo y conecte el conector del cable de
distribución del resistor regenerativo.
2-M48 Sems
(11)
Conecte la siguiente pieza al interior de la placa del conector.
Tubo de aire
Conector TP
(12)
Monte la placa del conector.
Para conocer detalles, consulte Mantenimiento 7.4 Placa del conector
14.2 Reemplazo de la batería de litio
Nombre
Cantidad
Nota
Pieza de
mantenimiento
Batería de litio
1
2113554
Herramientas
Llave hexagonal
ancho a lo largo de
superficies planas: 2 mm
1
Para perno de botón
M3
Destornillador de cruz
1
Reemplace la batería dentro de 30 minutos de APAGARLA.
Si pasan más de 30 minutos después de retirar la batería, el voltaje del capacitor disminuye
y se puede restablecer el tiempo.
Reemplazo de
unidad de batería
(batería de litio)
(1)
Retire la placa de CPU/DPB de la base.
Para obtener detalles, consulte Mantenimiento 14.1. Reemplazo de las placas de
CPU/DPB
(2)
Retire el conector de la batería y conecte la batería
nueva.
(3)
Monte la placa de procesador/DPB a la base.
Para obtener detalles, consulte Mantenimiento 14.1. Reemplazo de las placas de
CPU/DPB
NOTA

Mantenimiento
230 Manual del manipulador de la serie T Rev.7
14.3 Reemplazo de la tarjeta SD
Nombre
Cantidad
Nota
Pieza de mantenimiento
Tarjeta SD
1
2182748
Herramienta
Destornillador de cruz (n.° 2)
1
Retire la tarjeta SD después de retirar el módulo de E/S de bus de campo si este está
insertado en la ranura opcional. También instale el módulo de E/S bus de campo
después de instalar la tarjeta SD.
Para obtener más detalles acerca del módulo de E/S de bus de campo, consulte los
temas a continuación.
Configuración y operación 17. E/S de bus de campo.
Retiro de tarjeta
SD
(1)
APAGUE el manipulador.
(2)
Retire el enchufe de alimentación.
(3)
Saque la cubierta de la ranura opcional en la cara posterior del manipulador.
Perno Sem: 2-M3×6
Cubierta de la
ranura opcional
(Ilustración: T3-401S)
(4)
Presione la tarjeta SD que está insertada cerca de la ranura opcional para extraerla.
Instalación de
tarjeta SD
(1)
Presione la tarjeta SD e insértela en la ranura para tarjeta SD cerca de la ranura
opcional.
(2)
Monte la cubierta de la ranura opcional con tornillos.
Perno Sem: 2-M3×6
NOTA

Mantenimiento
Manual del manipulador de la serie T Rev.7 231
14.4 Reemplazo de la placa de alimentación
14.4.1 Reemplazo del filtro de aire
Nombre
Cantidad
Nota
Pieza de
mantenimiento
Filtro de aire
1
T3: 1713720
T6: 1743656
Herramienta
Llave hexagonal
Ancho a lo largo de
superficies planas:
2,5 mm
1
Para perno de botón M4
Destornillador de cruz (n.° 2)
1
Para tornillo Truss
Reemplazo de
filtro de aire
(1)
APAGUE el manipulador.
(2)
Retire la cubierta de la unidad de alimentación.
Para conocer detalles, consulte Mantenimiento: 7.5 Cubierta de la unidad de
alimentación.
(3)
Retire el filtro.
T3: Perno Sem: 2-M4×8
Cubierta de la unidad de alimentación
T3
Cubierta del filtro
Filtro
T6: Perno de cabeza hueca hexagonal:
2-M4×10
T6
Cubierta del filtro
Filtro
(4)
Retire el filtro.
(5)
Coloque un filtro nuevo o limpio en la cubierta del filtro y monte la cubierta de filtro.
T6: Perno de cabeza hueca hexagonal
Torque de ajuste 2,0 0,1 N·m
(6)
Monte la cubierta de la unidad de alimentación.
Para conocer detalles, consulte Mantenimiento: 7.5 Cubierta de la unidad de
alimentación.

Mantenimiento
232 Manual del manipulador de la serie T Rev.7
14.4.2 Reemplazo de la placa de alimentación
Nombre
Cantidad
Nota
Pieza de
mantenimiento
Placa de alimentación
1
T3: 2182749
2
T6: 2188638
Herramienta
Destornillador de cruz (n.° 2)
1
Para tornillos con ranura en cruz
Llave (ancho a lo largo de
superficies planas: 5,5 mm)
1
Para postes hexagonales
Reemplazo de
placa de
alimentación
(1)
APAGUE el manipulador.
(2)
Retire la cubierta de la unidad de alimentación.
Para conocer detalles, consulte Mantenimiento: 7.5 Cubierta de la unidad de
alimentación.
(3)
Retire la cubierta de la placa de alimentación.
T3: Tornillo Truss: 2-M46
T3
T6: Tornillo de cabeza fijadora 2-M36
T6
(4)
Retire los conectores de la placa de
alimentación.
Conector de alimentación
(ENTRADA/SALIDA ×1 para cada uno)
T6: La placa de alimentación es una estructura
de dos etapas.
Retire el conector superior.
IN
OUT
N
NOTA

Mantenimiento
Manual del manipulador de la serie T Rev.7 233
(5)
T3: Retire la placa de alimentación.
Tornillo pequeño de cabeza fijadora:
4-M3×10
T6: Primero, retire la placa de alimentación
superior.
Tornillo de cabeza fijadora: 4-M3×10
Después, retire los postes hexagonales.
Luego, retire la placa de alimentación
inferior y el conector.
(6)
Monte la nueva placa de alimentación.
Tornillo pequeño de cabeza fijadora: 4-M3×10
(7)
Conecte el conector de la placa de alimentación.
Conector de alimentación (ENTRADA/SALIDA ×1 para cada uno)
(8)
Monte la cubierta de la placa de alimentación.
T3: Tornillo Truss: 2-M46
T6: Tornillo de cabeza fijadora 2-M36
(9)
Monte la cubierta de la unidad de alimentación.
Para conocer detalles, consulte Mantenimiento: 7.5 Cubierta de la unidad de
alimentación.

Mantenimiento
234 Manual del manipulador de la serie T Rev.7
15. Unidad de lámpara LED
ADVERTENCIA
■
No conecte o desconecte los conectores del motor mientras el sistema de robot
esté ENCENDIDO. Conectar o desconectar los conectores del motor con la
energía ENCENDIDA es extremadamente peligroso y puede provocar lesiones
corporales graves, ya que el manipulador puede moverse de manera anormal;
además, puede provocar descargas eléctricas y el mal funcionamiento del
sistema de robot.
■
Para cortar la energía hacia el sistema de robot, desconecte el enchufe de la
fuente de alimentación. Asegúrese de conectar el cable de alimentación de CA a
un receptor de energía.
NO lo conecte directamente a la fuente de alimentación de la fábrica.
■
Antes de realizar cualquier procedimiento de reemplazo, APAGUE el
controlador y los equipos relacionados, luego desconecte el enchufe de la
fuente de alimentación.
Realizar cualquier procedimiento de reemplazo con la energía ENCENDIDA es
extremadamente peligroso y puede provocar una descarga eléctrica o el mal
funcionamiento del sistema de robot.
Nombre
Cantidad
Nota
Pieza de
mantenimiento
Unidad de lámpara LED
1
2182673
Herramientas
Destornillador de cruz (n.° 2)
1
Para tornillos con ranura
en cruz
Alicates de corte
1
Material
Amarracables
1

Mantenimiento
Manual del manipulador de la serie T Rev.7 235
Reemplazo de
unidad de
lámpara LED
(1)
APAGUE el manipulador.
(2)
Retire la cubierta de la unidad de alimentación.
Para conocer detalles, consulte Mantenimiento: 7.5 Cubierta de la unidad de
alimentación.
(3)
Retire el conector de la placa LED.
A: LED - Conector de placa LED.
A
(4)
Desconecte los terminales X1 y X2 del
indicador LED.
Terminal X2
Terminal X1
Lente
Soporte de la lente
Anillo
LED
(5)
Gire la lente hacia la izquierda para
extraerlo. Luego gire el soporte de la
lente hacia la izquierda para extraerlo.
(6)
Retire el indicador LED y el anillo de la
unidad de alimentación.
(7)
Conecte los terminales X1 y X2 al nuevo
indicador LED.
Cada terminal debe estar conectado al
mismo número de terminal del indicador
LED.
(8)
Coloque la placa del usuario entre el
anillo y el soporte de la lente y fije el
indicador LED a la cubierta.
(9)
Monte la lente.
(10)
Conecte el conector de la placa LED.
LED - Conector de placa LED.
(11)
Retire la cubierta de la unidad de alimentación.
Para conocer detalles, consulte Mantenimiento: 7.5 Cubierta de la unidad de
alimentación.

Mantenimiento
236 Manual del manipulador de la serie T Rev.7
16. Calibración
16.1 Acerca de la calibración
Después de reemplazar las piezas (motores, unidades de engranaje reductor, un freno,
correas de regulación, unidad de ranura de tornillo esférico, etc.), el manipulador no puede
ejecutar el posicionamiento correctamente, ya que el origen almacenado en cada motor y
el origen correspondiente almacenado en el sistema de robot no coinciden.
Por lo tanto, es necesario realizar una calibración (descanso y calibración de codificador)
para hacer coincidir estos orígenes. Tenga en cuenta que la calibración no es lo mismo que
la enseñanza*.
*: "Enseñanza" significa enseñar al manipulador los puntos de coordenada (incluidas las
poses) en cualquier lugar del área de operación del manipulador.
ADVERTENCIA
■
Para garantizar la seguridad, se debe instalar una protección para el sistema de
robot.
Para conocer detalles sobre la protección, consulte el Manual del usuario de
EPSON RC+: 2.4 Precauciones de diseño e instalación.
■
Antes de operar el sistema de robot, asegúrese de que no haya nadie dentro del
área protegida. El sistema de robot se puede operar en el modo de enseñanza,
incluso cuando alguien está dentro del área protegida.
El movimiento del manipulador siempre está en estado restringido (bajas
velocidades y baja potencia) para garantizar la seguridad de un operador. Sin
embargo, operar el sistema de robot mientras alguien está dentro del área
protegida es extremadamente peligroso y puede provocar problemas graves de
seguridad en caso de que el manipulador se mueva de manera inesperada.
Ingreso de comando
Los procedimientos de calibración incluyen el proceso para ingresar comandos. En
EPSON RC+, seleccione el menú-[Tools]-[Command Window] para usar la ventana
Command.
La información anterior se omite en el procedimiento de calibración.
Movimiento de desplazamiento
El proceso para definir el movimiento de desplazamiento se incluye en la página [Jog &
Teach] de Robot Manager. En EPSON RC+, seleccione el menú-[Tools]-[Robot Manager]
y seleccione la pestaña [Jog & Teach] para usar la página [Jog & Teach].
La página anterior se indica como [Jog & Teach] en el procedimiento de calibración.

Mantenimiento
Manual del manipulador de la serie T Rev.7 237
16.2 Procedimiento de calibración
EPSON RC+ tiene un asistente para la calibración.
Esta sección indica la calibración usando el asistente de calibración de EPSON RC+.
Se usa el mismo procedimiento de calibración para cada articulación.
Los pasos a continuación son una calibración que usa la articulación n.° 1. Para calibrar las
otras articulaciones, siga el procedimiento detallado a continuación.
Cuando las coordenadas para el punto de trabajo del manipulador requieren cálculos, es
importante que la articulación n.° 2 esté calibrada de forma precisa. Ejecute el
procedimiento en "Calibration Using Right / Left Arm Orientations" (Calibración con
orientaciones de brazo derecho/brazo izquierdo) para calibrar la articulación n.° 2 de
forma precisa. Para conocer detalles, consulte Mantenimiento: 16.3 Calibración precisa de
la articulación n.° 2.
Cuando calibre la articulación n.° 4, debe calibrar la articulación n.° 3 y 4 al mismo tiempo.
No puede calibrar la articulación n.° 4 por sí sola, debido a la estructura del manipulador.
Si ocurre el error Err9716 o 5016 (Falla de suministro de alimentación del codificador
absoluto. Reemplace la batería. Compruebe el cableado interno del robot), aplique el
procedimiento de Mantenimiento: 16.4 Procedimiento de calibración sin usar el asistente
de calibración - 3. Inicialización de codificador, y luego inicie el asistente de calibración.
Se debe especificar el punto de referencia (un punto para comprobar la precisión) para la
calibración.
(1) Inicie el asistente de calibración.
i. En EPSON RC+ 7.0, seleccione el menú-[Setup]-[System Configuration] para
mostrar el diálogo [System Configuration].
ii. Seleccione [Robot]-[Robot**]-[Calibration] para mostrar [Robot**:
Calibration].
iii. Seleccione la articulación y haga clic en el botón <Calibrate...>.
NOTA

Mantenimiento
238 Manual del manipulador de la serie T Rev.7
(2) Confirme el mensaje de advertencia y haga clic en el botón <Yes> (Sí).
(3) Mueva manualmente la articulación que desea calibrar hasta aproximadamente la
posición cero, como se muestra en el diálogo. Después de mover la articulación, haga
clic en el botón <Next>.

Mantenimiento
Manual del manipulador de la serie T Rev.7 239
Posición de pulso 0 de la
articulación n.° 1:
posición alineada con el eje X en el
sistema de coordenadas del robot
Pulso 0
+
Posición de pulso 0 de la
articulación n.° 2:
posición en la que los brazos n.° 1 y 2
están en línea recta
(sin importar la dirección de la
articulación n.° 1)
Pulso 0
+
Posición de pulso 0 de la
articulación n.° 3:
posición de límite superior en el rango
de movimiento
La altura de la articulación n.° 3
depende del manipulador.
T3
T6
Posición de pulso 0 de la
articulación n.° 4:
posición en la que la superficie plana
(o ranura en la parada mecánica
superior/inferior) en las caras del
mango hacia la punta del brazo n.° 2
Ranura
Superficie plana
Pulso 0
+

Mantenimiento
240 Manual del manipulador de la serie T Rev.7
(4) Haga clic en el botón <Yes> para restablecer el codificador.
(5) Reinicie el controlador (manipulador).
* Esta ventana desaparecerá cuando el controlador se inicie.
(6) Seleccione el punto de referencia a usar para la calibración y haga clic en el botón
<Next>.
Seleccione un punto de los
puntos actuales para
comprobar la precisión.
(7) Luego haga clic en el botón <Jog...> para mostrar el cuadro de diálogo [Jog & Teach]
(Desplazar y enseñar).

Mantenimiento
Manual del manipulador de la serie T Rev.7 241
(8) Desplace el efector final hasta aproximadamente el punto de referencia en el diálogo
[Jog & Teach] para una calibración aproximada. Haga clic en el botón <OK>.
Antes de operar el robot, abra [Control Panel] (Panel de control) y haga clic en el
botón <Motor ON> (Motor ENCENDIDO).
Mueva el efector final desde la posición de pulso cero hasta el punto de referencia
aproximado en el que se ejecutará una calibración general al realizar el movimiento
de desplazamiento. Puede producirse una separación de posición si el movimiento de
desplazamiento no mueve el efector final.
(9) Haga clic en el botón <Next>.
NOTA

Mantenimiento
242 Manual del manipulador de la serie T Rev.7
(10) El manipulador se mueve al punto de referencia. Haga clic en el botón <Execute>
(Ejecutar).
Ingrese JUMP P0:z(0).
Punto seleccionado en el paso (6)
(11) Confirme el mensaje y haga clic en el botón <Yes>.
(12) Después de que el manipulador se mueva al punto de referencia, haga clic en el botón
<Next>.

Mantenimiento
Manual del manipulador de la serie T Rev.7 243
(13) Desplace a la posición de referencia precisa.
(14) Desplace el efector final hasta aproximadamente el punto de referencia en el diálogo
[Jog & Teach] para una calibración aproximada. Haga clic en el botón <OK>.
* Posicione solo la articulación n.° 2 y mueva la articulación n.° 3 a cerca del pulso 0.

Mantenimiento
244 Manual del manipulador de la serie T Rev.7
(15) Haga clic en el botón <Next>.
(16) Ejecute el procedimiento en "Calibration Using Right / Left Arm Orientations"
(Calibración con orientaciones de brazo derecho/brazo izquierdo) para calibrar la
articulación n.° 2 de forma precisa.
Vaya al paso (17) para la calibración de las otras articulaciones.
i. Mueva a otro punto que tenga una pose diferente (de derecha a izquierda) con el
comando Jump. Haga clic en el botón <Yes>.
ii. Desplace a la posición de referencia precisa.

Mantenimiento
Manual del manipulador de la serie T Rev.7 245
iii. Desplace a la posición de referencia precisa y ajuste la posición. Haga clic en el
botón <OK>.
iv. Haga clic en el botón <Next>.

Mantenimiento
246 Manual del manipulador de la serie T Rev.7
(17) La calibración está completa. Haga clic en el botón <Finish>.
(18) Mueva el manipulador a otros puntos y compruebe si puede moverlo sin problemas.
Enseñe puntos cuando corresponda.
16.3 Calibración precisa de la articulación n.° 2
Cuando las coordenadas para el punto de trabajo del manipulador requieren cálculos, es
importante que la articulación n.° 2 esté calibrada de forma precisa.
Si no se logra la precisión de la articulación n.° 2 al usar los pasos en la sección
Mantenimiento: 16.2 Procedimiento de calibración, siga el procedimiento en "Calibration
Using Right / Left Arm Orientations" para calibrar la articulación n.° 2 de forma precisa.
El punto de referencia es el centro del mango de
ranura de tornillo esférico.
Cuando se produce una alineación incorrecta
entre el centro del efector final y el centro del
mango de ranura de tornillo esférico, retire el
efector final y ejecute la calibración del mango.
Centro del mango
Hay una alineación
incorrecta entre el
centro del efector final y
el centro del mango.
NOTA

Mantenimiento
Manual del manipulador de la serie T Rev.7 247
Cree una plantilla de calibración como se
muestra en la figura de la derecha y ubíquela en
el extremo del mango para dejar en claro el
centro del mango.
Decida un punto de objetivo y márquelo con una
cruz () para poder verificar el centro del mango
fácilmente después de cambiar la pose del brazo
entre derecha e izquierda.
Plantilla de calibración
en el extremo del
mango (ejemplo)
Punto objetivo
Centro del mango
Después de retirar el efector final y ejecutar la calibración, instale el efector final y mueva
el manipulador al punto de enseñanza para verificar si hay una brecha de posición. Si la
hay, ajuste la posición de instalación al final del efector y vuelva a enseñar el punto.
En los siguientes casos es necesario realizar cálculos para obtener las
coordenadas del punto de trabajo:
· Enseñar el punto de trabajo ingresando los valores de coordenada (enseñanza MDI)
· Cambiar la orientación del brazo entre derecha e izquierda en un punto determinado
· Usar el comando Pallet
· Ejecutar el control CP (como una interpolación lineal o circular)
· Usar el comando Local
· Datos de pose especificados con coordenadas relativas <Ejemplo: P1+X(100) >
· Calibraciones de cámara de Vision Guide

Mantenimiento
248 Manual del manipulador de la serie T Rev.7
Calibración con orientación de brazo derecho/izquierdo
(1)
Compruebe los datos de punto para la calibración
Use un punto cuya precisión puede verificar fácilmente dentro del envolvente de
trabajo del brazo derecho e izquierdo. Luego verifique la cantidad de puntos que
desea usar.
(2)
Abra el menú Tools | Robot Manager | Control Panel y haga clic en MOTOR ON.
(3)
Haga clic en el botón <Free All> para liberar todas las articulaciones del servocontrol.
Ahora puede mover los brazos manualmente.
(4)
Mueva los brazos a la posición de los datos de punto para la calibración en la
orientación del brazo derecho.
(5)
Desde la posición actual, enseñe cualquier número sin utilizar de datos de punto.
Este punto ahora se llama P1.
Especifique el número de punto "1" y haga clic en el botón <Teach> en [Jog &
Teach].
(6)
Haga clic en Lock All (Bloquear todos) en [Control Panel] para bloquear todas las
articulaciones en el servocontrol.
(7)
Cambie a la orientación del brazo zurdo. Luego mueva el brazo al mismo punto.
>Jump P1/L:Z(0) ' Cambie la orientación del brazo de diestro a zurdo Z es
la posición máxima
* Si hay interferencia en el camino de diestro a zurdo, haga clic en Free All (Liberar
todos) en [Control Panel] y cambie la orientación del brazo a zurdo manualmente.
Luego, vaya al paso (6) y (7).
(8)
Las articulaciones están levemente fuera de posición.
Ajuste la separación con Z en el grupo de Jogging (Desplazamiento) en [Jog &
Teach]. Luego, enseñe otro número de datos de punto sin utilizar. Este punto ahora se
llama P2.
Especifique el número de punto "P2" y haga clic en el botón <Teach> en [Jog &
Teach].
(9)
Ingrese el nuevo valor Hofs.
> Hofs (1), Hofs (2) + (Ppls(P1,2) + Ppls(P2,2)) /
2, Hofs(3), Hofs(4)
(10)
Desde la orientación zurda actual del brazo (la posición en el paso (8)), enseñe el
número de datos de punto utilizado en el paso (8). Este punto se llama P2.
Especifique el número de punto "P2" y haga clic en el botón <Teach> en [Jog &
Teach].

Mantenimiento
Manual del manipulador de la serie T Rev.7 249
(11)
Cambie a la orientación del brazo diestra. Luego, asegúrese de que el manipulador se
mueva en la posición correcta.
>Jump P2/R ' Cambie la orientación del brazo de zurdo a diestro
* Si hay alguna interferencia en el camino de zurdo a diestro, haga clic en Free All en
[Control Panel] y cambie la orientación del brazo a diestro manualmente. Luego,
vaya al paso (6) y (11).
(12)
Mueva el manipulador al otro dato de punto y asegúrese de que se mueva a la
posición correcta. Enseñe dos puntos más, de ser necesario.
* Elimine los dos puntos enseñados para la calibración de la articulación n.° 2.
16.4 Referencia: Procedimiento de calibración sin usar el asistente de
calibración
Esta sección indica la calibración sin usar el asistente de calibración de EPSON RC+. Para
conocer detalles de la calibración usando el asistente de calibración, consulte
Mantenimiento: 16.2 Procedimiento de calibración.
Cuando las coordenadas para el punto de trabajo del manipulador requieren cálculos, es
importante que la articulación n.° 2 esté calibrada de forma precisa. Ejecute el
procedimiento en "Calibration Using Right / Left Arm Orientations" (Calibración con
orientaciones de brazo derecho/brazo izquierdo) para calibrar la articulación n.° 2 de
forma precisa. Para conocer detalles, consulte Mantenimiento: 16.3 Calibración precisa de
la articulación n.° 2.
No puede calibrar la articulación n.° 4 por sí sola, debido a la estructura del manipulador.
Cuando calibre la articulación n.° 4, debe calibrar la articulación n.° 3 y 4 al mismo
tiempo.
Se debe especificar el punto de referencia (un punto para identificar la posición del
manipulador) para la calibración.
Siga los pasos 1 al 6 que se describen a continuación para calibrar el origen.
1.
Confirmación de pose básica
(1)-1 Después del reemplazo de la pieza, ejecute la calibración con los datos de
punto que están registrados actualmente.
Confirme el número de datos de punto (P*) para volver a construir la posición
correcta del manipulador.
* Se necesitan los puntos de dato antes del reemplazo de la pieza (motor,
engranaje reductor, correa, etc.) para la calibración.
2.
Reemplazo de pieza
(2)-1 Reemplace las piezas según se indica en este manual.
* Tenga cuidado de no lesionarse o dañar las piezas cuando las reemplace.
NOTA
NOTA

Mantenimiento
250 Manual del manipulador de la serie T Rev.7
3.
Inicialización del codificador
(3)-1 ENCIENDA el manipulador cuando todas las articulaciones estén en el rango
de movimiento.
(3)-2 Mueva manualmente la articulación que necesite alinear el origen a su
posición de pulso 0 aproximada.
Posición de pulso 0 de la
articulación n.° 1:
posición alineada con el eje X en el
sistema de coordenadas del robot
Pulso 0
+
Posición de pulso 0 de la
articulación n.° 2:
posición en la que los brazos n.° 1 y 2
están en línea recta
(sin importar la dirección de la
articulación n.° 1)
Pulso 0
+
Posición de pulso 0 de la
articulación n.° 3:
posición de límite superior en el rango
de movimiento
La altura de la articulación n.° 3 es
diferente según el manipulador.
T3
T6

Mantenimiento
Manual del manipulador de la serie T Rev.7 251
Posición de pulso 0 de la
articulación n.° 4:
posición en la que la superficie plana
(o ranura en la parada mecánica
superior/inferior) en las caras del
mango hacia la punta del brazo n.° 2
Ranura
Superficie plana
Pulso 0
+
(3)-3 Conecte EPSON RC+ al manipulador.
Seleccione un manipulador para calibrar. Ingrese el comando que se indica a
continuación en [Command Window].
(Este ejemplo usa "robot 1").
> robot 1
(3)-4 Ejecute el comando de inicialización del codificador absoluto.
Ingrese uno de los siguientes comandos en [Command Window] según la
articulación que está calibrando.
Articulación n.° 1: >EncReset 1
Articulación n.° 2: >EncReset 2
Articulación n.° 3: >EncReset 3
Articulación n.° 4: >EncReset 3, 4
(3)-5 Reinicie el controlador (manipulador).
En EPSON RC+, seleccione el menú-[Tools]-[Controller] y haga clic en el
botón <Reset Controller> (Restablecer controlador).
* Esta ventana desaparecerá cuando el controlador se inicie.

Mantenimiento
252 Manual del manipulador de la serie T Rev.7
4.
Calibración aproximada
(4)-1 Ejecute el siguiente comando desde el menú-[Tool]-[Command Window].
>calpls 0,0,0,0
* El manipulador no se mueve.
(4)-2 Ejecute los siguientes comandos según la articulación que desea calibrar desde
el menú-[Tool]-[Command Window].
Articulación n.° 1 >calib 1
Articulación n.° 2 >calib 2
Articulación n.° 3 >calib 3
Articulación n.° 4 >calib 3, 4
5.
Calibración (Posicionamiento preciso)
(5)-1 ENCIENDA los motores desde EPSON RC+, en el menú-[Tools]-[Robot
Manager]-[Control Panel].
(5)-2 Haga clic en el botón <Free All> para liberar todas las articulaciones del
servocontrol. Ahora puede mover los brazos manualmente.
(5)-3 Mueva el manipulador manualmente a una posición/postura aproximada de los
datos de punto de calibración.
(5)-4 Cree los datos a partir de los datos de punto de calibración.
Ingrese y ejecute el siguiente comando en [Command Window].
(En este ejemplo, se usa P1 como dato de punto de calibración).
> Calpls Ppls(P1,1), Ppls(P1,2), Ppls(P1,3), Ppls(P1,4)
(5)-5 Mueve la articulación al punto especificado con un comando de movimiento.
Por ejemplo, cuando los datos de punto especificados son "P1",
ejecute “Jump P1:Z(0)” desde [Jog & Teach].
* La articulación que NO se está calibrando se mueve a la posición original.
(5)-6 Alinee de forma precisa la articulación* que se está calibrando al punto
especificado con un comando de desplazamiento.
* Debe mover la articulación n.° 3 y 4 a la posición cuando calibre la
articulación n.° 4.
Seleccione el modo de desplazamiento [Jog] desde [Jog & Teach] para
ejecutar el movimiento de desplazamiento.

Mantenimiento
Manual del manipulador de la serie T Rev.7 253
(5)-7 Ejecute la calibración.
Ingrese y ejecute uno de los siguientes comandos en [Command Window]
según la articulación que está calibrando.
Articulación n.° 1: >Calib 1
Articulación n.° 2: >Calib 2
Articulación n.° 3: >Calib 3
Articulación n.° 4: >Calib 3, 4
6.
Prueba de precisión
(6)-1 Mueva el manipulador a otro punto para confirmar que se mueva a la misma
posición.
Si no se mueve a la misma posición, vuelva a calibrarlo usando otro punto.
Debe volver a definir el punto si no se puede asegurar la reproducibilidad a
través de la calibración.

Mantenimiento
254 Manual del manipulador de la serie T Rev.7
17. Restricciones
Para el manipulador de la serie T, hay comandos con restricciones o que pueden causar un
error si se ejecutan. Sin embargo, el error no ocurre al compilar un programa.
Además, algunas funciones tienen restricciones.
17.1 Comandos inutilizables
Los siguientes comandos/funciones no están disponibles.
AbortMotion Cancela un comando de movimiento y coloca la tarea en ejecución en el
estado de error.
Toff Desactiva la pantalla de la línea de ejecución en la pantalla LCD.
Ton Especifica una tarea que muestra una línea de ejecución en la pantalla
LCD.
ShutDown Cierra EPSON RC+ y, opcionalmente, cierra o reinicia Windows.
WindowsStatus Arroja el estado de inicio de Windows.
17.2 Los comandos causan errores de movimiento si se especifica
RS-232C
Si se especifica RS-232C, los siguientes comandos/funciones causan errores de
movimiento.
Input # Permite que se reciban datos de cadena o numéricos desde un archivo,
puerto de comunicaciones o base de datos, y se almacenan en una o más
variables.
Print # Genera datos en el archivo, puerto de comunicaciones, base de datos o
dispositivo especificado.
Line Input # Lee datos de una línea desde un archivo, puerto de comunicaciones o el
dispositivo.
Lof Verifica si el RS-232 o puerto TCP/IP especificado tiene líneas de datos
en su búfer.
Print # Genera datos en el archivo, puerto de comunicaciones, base de datos o
dispositivo especificado.
Line Input # Lee datos de una línea desde un archivo, puerto de
comunicaciones o el dispositivo.
Read Lee los caracteres desde un archivo o puerto de comunicaciones.
ReadBin Lee datos binarios desde un archivo o puerto de comunicaciones.
Write Escribe caracteres en un archivo o puerto de comunicación sin un
terminador de final de línea.
WriteBin Escribe datos binarios en un archivo o puerto de comunicaciones.

Mantenimiento
Manual del manipulador de la serie T Rev.7 255
17.3 Comandos causan errores
17.3.1 Comando de robot de 6 ejes
Si ejecuta el comando de robot de 6 ejes, ocurre un error de movimiento.
17.3.2 Comandos de seguimiento del transportador
Si ejecuta comandos/funciones de seguimiento de transportador, ocurre un error de
movimiento.
Cnv_AbortTrack Cancela un movimiento de seguimiento a un punto de la
cola del transportador.
Cnv_Accel Function Restaura la aceleración y desaceleración del transportador.
Cnv_Accel Define la aceleración y desaceleración para el
transportador.
Cnv_Downstream Function Restaura el límite de bajada del transportador
especificado.
Cnv_Downstream Define el límite de bajada del transportador especificado.
Cnv_Fine Function Restaura la configuración Cnv_Fine actual.
Cnv_Fine Define el valor de Cnv_Fine para un transportador.
Cnv_Flag Function Restaura el estado de seguimiento del robot.
Cnv_Mode Function Restaura el valor del modo de configuración del
transportador.
Cnv_Mode Define el valor del modo de configuración del
transportador.
Cnv_Name$ Function Restaura el nombre del transportador especificado.
Cnv_Number Function Restaura el número de un transportador especificado por
nombre.
Cnv_OffsetAngle Define el valor de compensación para los datos de cola del
transportador.
Cnv_OffsetAngle Function Restaura el valor de compensación de los datos de cola del
transportador.
Cnv_Point Function Restaura un punto robótico en el sistema de coordenadas
del transportador especificado, derivado de las
coordenadas del sensor.
Cnv_PosErr Function Restaura la desviación en la posición de seguimiento
actual, en comparación con el objetivo de seguimiento.
Cnv_Pulse Function Restaura la posición actual de un transportador en pulsos.
Cnv_QueAdd Agrega un punto robótico a una cola de transportador.
Cnv_QueGet Function Restaura un punto desde la cola del transportador
especificado.
Cnv_QueLen Function Arroja el número de elementos en la cola del transportador
especificado.
Cnv_QueList Muestra una lista de elementos en la cola del transportador
especificado.
Cnv_QueMove Mueve los datos desde la cola del transportador de subida
a la cola del transportador de bajada.

Mantenimiento
256 Manual del manipulador de la serie T Rev.7
Cnv_QueReject Define y muestra la distancia de rechazo de la cola para un
transportador.
Cnv_QueReject Function Restaura la distancia de rechazo de piezas actual para un
transportador.
Cnv_QueRemove Elimina elementos de la cola de un transportador.
Cnv_QueUserData Define y muestra los datos de usuario asociados con una
entrada de cola.
Cnv_QueUserData Function Restaura el valor de datos de usuario asociado con un
elemento en una cola de transportador.
Cnv_RobotConveyor
Function Restaura el transportador que está siendo seguido por un
robot.
Cnv_Speed Function Restaura la velocidad actual de un transportador.
Cnv_Trigger Engancha la posición actual del transportador para la
próxima instrucción Cnv_QueAdd.
Cnv_Upstream Function Restaura el límite de subida para el transportador
especificado.
Cnv_Upstream Define el límite de subida del transportador especificado.
17.3.3 Comandos PG
Si ejecuta comandos PG, ocurre un error de movimiento.
PG_FastStop Detiene los ejes PG de inmediato.
PG_LSpeed Define la velocidad de pulso del tiempo cuando el eje PG
comienza a acelerar y termina de desacelerar.
PG_Scan Inicia el movimiento giratorio continuo de los ejes de robot
PG.
PG_SlowStop Detiene lentamente el giro continuo del eje PG.
17.3.4 Comandos de R-E/S
Si ejecuta comandos/funciones de R-E/S, ocurre un error de movimiento.
LatchEnable Activa/desactiva la función de enganche para la posición del
robot con la entrada R-E/S.
LatchState Function Restaura el estado de enganche de la posición del robot con el
R-E/S.
LatchPos Function Restaura la posición del robot enganchada con la entrada
R-E/S.
SetLatch Define la función de enganche de la posición de robot con la
entrada R-E/S.
17.3.5 Comandos de detección de fuerza
Si ejecuta comandos/funciones de detección de fuerza, ocurre un error de movimiento.
Force_Calibrate Define cero compensaciones para todos los ejes para el sensor
de fuerza actual.
Force_ClearTrigger Borra todas las condiciones del desencadenador del sensor de
fuerza actual.

Mantenimiento
Manual del manipulador de la serie T Rev.7 257
Force_GetForces Arroja las fuerzas y pares para todos los ejes con detección de
fuerza en una matriz.
Force_GetForce
Function Arroja la fuerza para un eje especificado.
Force_Sensor Define el sensor de fuerza actual para la tarea actual.
Force_Sensor Function Arroja el sensor de fuerza actual para la tarea actual.
Force_SetTrigger Define el desencadenador de fuerza para el comando Till.
17.3.6 Otros (FineDist)
No puede usar el comando: FineDist
El robot determina la posición según el valor definido de Fine incluso si usa FineDist.
Fine Especifica y muestra los límites de error de posicionamiento.
(Unidad: pulso)
FineDist Especifica y muestra los límites de error de posicionamiento.
(Unidad: mm)
17.3.7 Otros (HealthCalcPeriod)
No puede usar el comando: HealthCalcPeriod
Un período de información de comandos de consumo de piezas para calcular los “meses
restantes” es de un día y no se puede cambiar.
HealthCalcPeriod Define el período de cálculo de los comandos de consumo
de piezas.
HealthCalcPeriod Function Arroja el período de cálculo de los comandos de consumo
de piezas.
17.3.8 Otros (ChDisk)
No puede especificar la opción USB al comando: ChDisk.
17.4 Restricciones de funciones
Algunas de las funciones a continuación no están disponibles.
17.4.1 TP3
No puede usar la versión del programa. Ocurre un error que termina el programa si lo
ejecuta. Hay otras funciones disponibles.
17.4.2 Procesamiento de bucle
Si el programa de control de robot creado consta de tareas múltiples y también hay algunas
tareas con un bucle infinito, el sistema se puede volver inestable y la conexión con EPSON
RC+ se desconecta.
El controlador detecta las tareas de bucle infinito. Si se detecta la posibilidad de afectar el
sistema, ocurre el siguiente error y se detiene el programa.
Si ocurre el error, modifique el programa y asegúrese de no configurar el bucle infinito.
Código de error: 2556
Mensaje de error: An excessive loop was detected. (Se ha detectado un bucle
excesivo).
Reduzca el número de tareas de bucle o seleccione Wait.

Mantenimiento
258 Manual del manipulador de la serie T Rev.7
No realice ningún procesamiento como bucles infinitos u otros tipos de procesamiento
similares.
Ejecute el comando de espera o un comando similar en el procesamiento de bucle y evite
ocupar el procesador si está realizando cálculos que requieran bucles o esperar señales de
E/S.
No hay problema si se ejecutan comandos con Wait en el bucle, como el comando Wait, el
comando de operación de robot, el comando Print y el comando NetWait.
NOTA: Acerca del bucle infinito
Un bucle infinito es cuando los comandos se crean solo con comandos sin Wait en
el bucle como una instrucción de operación, un comando de asignación o un
comando de verificación de E/S.
Ejemplo 1: ACTIVA el puerto de salida “2” cuando el puerto de entrada “0” está
ACTIVADO
Ejemplo de un programa que puede causar errores
Do
If Sw(0) = On Then
On(2)
Exit Do
EndIf
Loop
Ejemplo de corrección
Wait Sw(0) = On
On(2)
Ejemplo 2: Cuando realice una gran cantidad de cálculos con una estructura de
bucle.
Ejemplo de un programa que puede causar errores
For i = 0 To 10000
For j = 0 To 10000
a = a + 1
Next
Next
Ejemplo de corrección
For i = 0 To 10000
For j = 0 To 10000
a = a + 1
Next
Wait 0.01 ' Ejectar Wait para evitar ocupar el procesador
Next

Mantenimiento
Manual del manipulador de la serie T Rev.7 259
17.4.3 Búsqueda con cámara por CV1/CV2
Es posible que no pueda usar la función de búsqueda con cámara con el manipulador de la
serie T si CV1/CV2 se utiliza y se cumplen las siguientes dos condiciones.
- Cuando conecta la computadora y el manipulador de la serie T a través de una
conexión USB.
- Cuando la configuración de la puerta de entrada predeterminada del manipulador de
la serie T es None o “0.0.0.0”.
Introduzca la dirección IP para CV1/CV2 manualmente cuando no puede usar la función
de búsqueda con cámara.
Para obtener más detalles acerca de la función de búsqueda con cámara, consulte los temas
a continuación.
Vision Guide 7.0 Hardware & Setup
Setup: 2.3.2 CV1/CV2 Camera Configuration (solamente disponible en inglés)
17.4.4 Restauración de los datos de la función del controlador de
respaldo
La función del controlador de respaldo adquirida por un controlador virtual no se puede
restaurar al manipulador de la serie T.
NOTA: La función del controlador de respaldo adquirida por el equipo actual si se puede
restaurar al manipulador de la serie T.

Mantenimiento
260 Manual del manipulador de la serie T Rev.7
18. Tabla de códigos de errores
Para los códigos de error, consulte el siguiente manual.
EPSON RC+ +7.0 Referencia del lenguaje SPEL+ Error de mensaje SPEL+
19. Lista de piezas de mantenimiento
*1 Unidad de engranaje reductor
Una unidad de engranaje reductor consta de las siguientes tres piezas. Cuando reemplace la unidad de
engranaje reductor, asegúrese siempre de reemplazar el generador, la lámina flexible y la brida circular juntas
como un conjunto.
Generador de forma de onda
Este generador de forma de onda consta de una leva elipsoidal con
cojinetes de bolas en su circunferencia externa.
El círculo interno de cojinetes está fijo en la leva, mientras que el
círculo externo es capaz de deformarse flexiblemente mediante los
cojinetes de bolas.
Brida circular
Lámina flexible
Generador de forma de onda
Lámina flexible
Un cuerpo metálico delgado, elástico y con forma de copa con
dientes de engranaje en la circunferencia externa de la abertura.
Brida circular
Un cuerpo rígido y circular con dientes de engranaje en la
circunferencia interior.
La brida circular tiene dos dientes más que la lámina flexible.
Las bridas están engrasadas. Tenga cuidado de no permitir que la grasa se adhiera a su ropa.
*2 Con respecto a la compra de grasa
Debido a los reglamentos sobre productos químicos de los países individuales (GHS de la ONU), pedimos
que nuestros clientes compren la grasa requerida para el mantenimiento desde los fabricantes que se indican
en la siguiente tabla, con fecha de abril de 2015. Con respecto a la compra de la grasa, comuníquese con los
siguientes fabricantes. Si tiene alguna duda, comuníquese con nuestros proveedores.
Nombre del producto
Fabricante
URL
Grasa THK AFB-LF
THK CO., LTD.
http://www.thk.com/
Grasa Harmonic SK-1A
Grasa Harmonic SK-2
Harmonic Drive Systems Inc.
http://www.harmonicdrive.net/
*3 Revisión
Como instrucción aproximada, realice la revisión (reemplazo de piezas) antes de alcanzar las 20.000 horas de
funcionamiento del manipulador. Las horas de operación se pueden revisar en el diálogo [Controller Status
Viewer] (Visor de estado del controlador) -[Motor On Hours] (Horas de motor encendido).
Para conocer detalles, consulte Mantenimiento 2.2. Revisión (Reemplazo de piezas).

Mantenimiento
Manual del manipulador de la serie T Rev.7 261
19.1 T3
Nombre de pieza
Código
Nota
Referencia:
Mantenimiento
Revisión
*3
Unidad de conducto de cable
2182565
8.1
Unidad del motor
Articulación
n.° 1
2182560
200 W
9.1
Articulación
n.° 2, 3
2182562
100 W
10.1, 11.1
Articulación
n.° 4
2182669
100 W
12.1
Unidad de engranaje
reductor *1
Articulación
n.° 1
1718303
9.2
Articulación
n.° 2
1718304
10.2
Junta tórica
Articulación
n.° 1
1213266
Entre la unidad de engranaje reductor
y el brazo n.° 1
9.2
1653819
Entre la unidad de engranaje reductor
y la brida
1709549
Entre el motor y la brida
Articulación
n.° 2
1213266
Entre la unidad de engranaje reductor
y el brazo n.° 1
10.2
1653819
Entre la unidad de engranaje reductor
y el brazo n.° 2
Correa de regulación
Articulación
n.° 3
1554773
Z
11.2
Articulación
n.° 4
1709608
U
12.2
Unidad de freno de solenoide
2182694
Eje Z
11.3
Interruptor de desbloqueo del freno
2167711
-
Ranura de tornillo esférico (150 st)
1718877
13.2
Batería de litio
2113554
14.2
Placa de procesador/DPB
2182747
14.1
Placa de alimentación
2182749
14.4.2
Unidad de lámpara LED
2182673
15
Grasa *2
Ranura de tornillo
esférico: AFB
-
Para comprar grasa, comuníquese con
el proveedor de su región.
13
Unidad de engranaje
reductor: SK-2
9.2, 10.2
Cubierta del brazo
1718126
Cubierta superior del brazo (Blanca)
7.1
Cubierta inferior
1625284
Cubierta inferior del brazo (Blanca)
7.2
Tarjeta SD
2182748
14.3
Filtro de aire
1713720
14.4.1
Enchufe de TP
2171258
-

Mantenimiento
262 Manual del manipulador de la serie T Rev.7
19.2 T6
Nombre de pieza
Código
Nota
Referencia:
Mantenimiento
Revisión
*3
Unidad de conducto de cable
2190924
8.1
Unidad del motor
Articulación
n.° 1
2190962
300 W
9.1
Articulación
n.° 2
2190963
200 W
10.1
Articulación
n.° 3
2182601
100 W
11.1
Articulación
n.° 4
2182670
100 W
12.1
Unidad de engranaje
reductor *1
Articulación
n.° 1
1750570
9.2
Articulación
n.° 2
1750571
10.2
Junta tórica
Articulación
n.° 1
1510528
Entre la unidad de engranaje
reductor y el brazo n.° 1
9.2
1650901
Entre la unidad de engranaje
reductor y la brida
1213266
Entre bridas
1520371
Entre el motor y la brida
Articulación
n.° 2
1213267
Entre la unidad de engranaje
reductor y el brazo n.° 1
10.2
1653181
Entre la unidad de engranaje
reductor y el brazo n.° 2
Correa de regulación
Articulación
n.° 3
1563316
Z
11.2
Articulación
n.° 4
1674797
U1
12.2
1674798
U2
Unidad de freno de solenoide
1750573
Eje Z
11.3
Interruptor de desbloqueo del freno
2167711
-
Ranura de tornillo esférico (200 st)
1750572
13.2
Batería de litio
2113554
14.2
Placa de procesador/DPB
2191143
14.1
Placa de alimentación
2188638
14.4.2
Placa del AMP
2189027
-
Unidad de lámpara LED
2182673
15
Grasa *2
Ranura de tornillo esférico:
AFB
-
Para comprar grasa, comuníquese
con el proveedor de su región.
13
Unidad de engranaje
reductor: SK-2
9.2, 10.2
Cubierta del brazo
1750683
Cubierta superior del brazo
(Blanca)
7.1

Mantenimiento
Manual del manipulador de la serie T Rev.7 263
Cubierta inferior
1737896
Cubierta inferior del brazo
(Blanca)
7.2
Tarjeta SD
2182748
14.3
Filtro de aire
1743656
14.4.1
Enchufe de TP
2171258
-

Apéndice A
264 Manual del manipulador de la serie T Rev.7
Apéndice A: Licencia del software de código abierto para
la serie T
(1) The T series product includes open source software programs listed in Section (6) according to
the license terms of each open source software program.
(2) We provide the source code of the Open Source Programs (each is defined in Section (6)) until
five (5) years after the discontinuation of same model of this option product. If you desire to
receive the source code above, please contact the "SUPPLIER" in the first pages of the Robot
System Safety and Installation manual. You shall comply with the license terms of each open
source software program.
(3) The open source software programs are WITHOUT ANY WARRANTY; without even the
implied warranty of MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE.
See the license agreements of each open source software program for more details, which are
described on Section (7).
(4) OpenSSL toolkit
The T series product includes software developed by the OpenSSL project for use in the
OpenSSL Toolkit (http://www.openssl.org/).
This product includes cryptographic software written by Eric Young ([email protected]).
(5) The license terms of each open source software program are described on Section (7).
(6) The list of open source software programs which the T series product includes are as follows.
bash
dash
libc-bin
libc6
libcomerr2
libdevmapper 1.02.1
libgcc1
libstdc++6
libudev1
login
Logrotate
makedev
mount
mountall
net-tools
netbase
rsyslog
ssh
sudo
tzdata
ubuntu-minimal
udev
Linux
Xenomai

Apéndice A
Manual del manipulador de la serie T Rev.7 265
(7) For the each open source license, please refer to the URLs as follows.
bash
http://tiswww.case.edu/php/chet/bash/bashtop.html
dash
http://packages.ubuntu.com/ja/precise/dash
libc-bin
http://www.eglibc.org/home
libc6
http://www.eglibc.org/home
libcomerr2
http://packages.ubuntu.com/ja/precise/libcomerr2
libdevmapper1.02.1
ftp://sources.redhat.com/pub/lvm2/
libgcc1
ftp://gcc.gnu.org/pub/gcc/releases/
libstdc++6
ftp://gcc.gnu.org/pub/gcc/releases/
libudev0
http://packages.ubuntu.com/ja/precise/libudev0
login
http://packages.ubuntu.com/ja/precise/login
logrotate
https://fedorahosted.org/logrotate/
makedev
ftp.redhat.com
mount
ftp://ftp.us.kernel.org/pub/linux/utils/util-linux-ng/
mountall
http://packages.ubuntu.com/ja/precise/mountall
net-tools
https://developer.berlios.de/projects/net-tools/
netbase
http://packages.ubuntu.com/ja/precise/netbase
rsyslog
http://www.rsyslog.com
ssh
http://www.openssh.com/ftp.html
sudo
http://www.sudo.ws/
tzdata
http://www.iana.org/time-zones
ubuntu-minimal
http://packages.ubuntu.com/ja/precise/ubuntu-minimal
udev
http://packages.ubuntu.com/ja/precise/udev
Linux
http://www.kernel.org/
Xenomai
http://www.xenomai.org/
-
 1
1
-
 2
2
-
 3
3
-
 4
4
-
 5
5
-
 6
6
-
 7
7
-
 8
8
-
 9
9
-
 10
10
-
 11
11
-
 12
12
-
 13
13
-
 14
14
-
 15
15
-
 16
16
-
 17
17
-
 18
18
-
 19
19
-
 20
20
-
 21
21
-
 22
22
-
 23
23
-
 24
24
-
 25
25
-
 26
26
-
 27
27
-
 28
28
-
 29
29
-
 30
30
-
 31
31
-
 32
32
-
 33
33
-
 34
34
-
 35
35
-
 36
36
-
 37
37
-
 38
38
-
 39
39
-
 40
40
-
 41
41
-
 42
42
-
 43
43
-
 44
44
-
 45
45
-
 46
46
-
 47
47
-
 48
48
-
 49
49
-
 50
50
-
 51
51
-
 52
52
-
 53
53
-
 54
54
-
 55
55
-
 56
56
-
 57
57
-
 58
58
-
 59
59
-
 60
60
-
 61
61
-
 62
62
-
 63
63
-
 64
64
-
 65
65
-
 66
66
-
 67
67
-
 68
68
-
 69
69
-
 70
70
-
 71
71
-
 72
72
-
 73
73
-
 74
74
-
 75
75
-
 76
76
-
 77
77
-
 78
78
-
 79
79
-
 80
80
-
 81
81
-
 82
82
-
 83
83
-
 84
84
-
 85
85
-
 86
86
-
 87
87
-
 88
88
-
 89
89
-
 90
90
-
 91
91
-
 92
92
-
 93
93
-
 94
94
-
 95
95
-
 96
96
-
 97
97
-
 98
98
-
 99
99
-
 100
100
-
 101
101
-
 102
102
-
 103
103
-
 104
104
-
 105
105
-
 106
106
-
 107
107
-
 108
108
-
 109
109
-
 110
110
-
 111
111
-
 112
112
-
 113
113
-
 114
114
-
 115
115
-
 116
116
-
 117
117
-
 118
118
-
 119
119
-
 120
120
-
 121
121
-
 122
122
-
 123
123
-
 124
124
-
 125
125
-
 126
126
-
 127
127
-
 128
128
-
 129
129
-
 130
130
-
 131
131
-
 132
132
-
 133
133
-
 134
134
-
 135
135
-
 136
136
-
 137
137
-
 138
138
-
 139
139
-
 140
140
-
 141
141
-
 142
142
-
 143
143
-
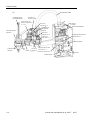 144
144
-
 145
145
-
 146
146
-
 147
147
-
 148
148
-
 149
149
-
 150
150
-
 151
151
-
 152
152
-
 153
153
-
 154
154
-
 155
155
-
 156
156
-
 157
157
-
 158
158
-
 159
159
-
 160
160
-
 161
161
-
 162
162
-
 163
163
-
 164
164
-
 165
165
-
 166
166
-
 167
167
-
 168
168
-
 169
169
-
 170
170
-
 171
171
-
 172
172
-
 173
173
-
 174
174
-
 175
175
-
 176
176
-
 177
177
-
 178
178
-
 179
179
-
 180
180
-
 181
181
-
 182
182
-
 183
183
-
 184
184
-
 185
185
-
 186
186
-
 187
187
-
 188
188
-
 189
189
-
 190
190
-
 191
191
-
 192
192
-
 193
193
-
 194
194
-
 195
195
-
 196
196
-
 197
197
-
 198
198
-
 199
199
-
 200
200
-
 201
201
-
 202
202
-
 203
203
-
 204
204
-
 205
205
-
 206
206
-
 207
207
-
 208
208
-
 209
209
-
 210
210
-
 211
211
-
 212
212
-
 213
213
-
 214
214
-
 215
215
-
 216
216
-
 217
217
-
 218
218
-
 219
219
-
 220
220
-
 221
221
-
 222
222
-
 223
223
-
 224
224
-
 225
225
-
 226
226
-
 227
227
-
 228
228
-
 229
229
-
 230
230
-
 231
231
-
 232
232
-
 233
233
-
 234
234
-
 235
235
-
 236
236
-
 237
237
-
 238
238
-
 239
239
-
 240
240
-
 241
241
-
 242
242
-
 243
243
-
 244
244
-
 245
245
-
 246
246
-
 247
247
-
 248
248
-
 249
249
-
 250
250
-
 251
251
-
 252
252
-
 253
253
-
 254
254
-
 255
255
-
 256
256
-
 257
257
-
 258
258
-
 259
259
-
 260
260
-
 261
261
-
 262
262
-
 263
263
-
 264
264
-
 265
265
-
 266
266
-
 267
267
-
 268
268
-
 269
269
-
 270
270
-
 271
271
-
 272
272
-
 273
273
-
 274
274
-
 275
275
-
 276
276
-
 277
277
-
 278
278
-
 279
279























































































































































































































































































Epson T6 SCARA Robots Manual de usuario
- Tipo
- Manual de usuario
- Este manual también es adecuado para
Artículos relacionados
-
Epson T6 SCARA Robots Manual de usuario
-
-
Epson T3-401S Manual de usuario
-
-
Epson LS6-B SCARA Robot Guía de instalación
-
-
Epson RS4 SCARA Robots Guía del usuario
-
Epson LS10-B SCARA Robot Manual de usuario
-
-