
Mod.1 EM208S4467F
EPSON RC+ 7.0
Referencia del lenguaje
SPEL
+
Ver.7.5
CPD-60426

Referencia del lenguaje SPEL
+
de EPSON RC+ 7.0 (Ver.7.5) Mod.1

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 i
EPSON RC+ 7.0 (Ver.7.5)
Referencia del lenguaje SPEL
+
Mod.1
Copyright 2012-2020 SEIKO EPSON CORPORATION. Todos los derechos reservados.

ii
Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
PRÓLOGO
Gracias por comprar nuestros productos de robot.
Este manual contiene la información necesaria para el uso correcto del software EPSON
RC+ 7.0.
Lea atentamente este manual y otros manuales relacionados antes de instalar el sistema de
robot.
Mantenga este manual a la mano para un acceso fácil en todo momento.
GARANTÍA
El robot y sus piezas opcionales se envían a nuestros clientes solo después de ser sometidos
a los controles de calidad, pruebas e inspecciones más estrictos para certificar su
cumplimiento con nuestras exigentes normas de rendimiento.
Los productos que tengan un mal funcionamiento como resultado de la manipulación u
operación normales se repararán en forma gratuita durante el período normal de la garantía.
(Comuníquese con el proveedor de su región para obtener información sobre el período de
garantía).
Sin embargo, se cobrarán al cliente las reparaciones en los siguientes casos (aunque sucedan
dentro del período de garantía):
1.
Daño o mal funcionamiento provocados por un uso inadecuado que no se describe en
este manual o por uso descuidado.
2.
Mal funcionamiento provocado por el desmontaje no autorizado del producto por parte
de los clientes.
3.
Daños debido a ajustes inadecuados o a intentos de reparación no autorizados.
4.
Daño provocado por desastres naturales, como terremotos, inundaciones, etc.
Advertencias, precauciones, uso:
1.
Si el robot o equipos relacionados se usan fuera de las condiciones de uso y las
especificaciones del producto descritas en los manuales, esta garantía queda nula.
2.
Si no sigue las ADVERTENCIAS y PRECAUCIONES de este manual, no podemos
hacernos responsables de ningún mal funcionamiento o accidente, incluso si tienen como
resultado lesiones o la muerte.
3.
No podemos prever todos los posibles peligros y consecuencias. Por lo tanto, este manual
no puede advertir al usuario de todos los posibles peligros.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 iii
MARCAS COMERCIALES
Microsoft, Windows, el logotipo de Windows, Visual Basic y Visual C++ son marcas
registradas o marcas comerciales de Microsoft Corporation en los Estados Unidos y en otros
países. Pentium es una marca comercial de Intel Corporation. Otras marcas y nombres de
productos son marcas comerciales o marcas registradas de sus respectivos titulares.
NOTACIÓN DE MARCAS COMERCIALES EN ESTE MANUAL
Sistema operativo Microsoft® Windows® 8
Sistema operativo Microsoft® Windows® 10
En todo este manual, Windows 8 y Windows 10 se refieren a los respectivos sistemas
operativos ya citados. En algunos casos, Windows se refiere en forma genérica a Windows
8 y Windows 10.
AVISO
Ninguna parte de este manual se puede copiar o reproducir sin autorización.
El contenido de este manual está sujeto a cambios sin previo aviso.
Notifíquenos si encuentra errores en este manual o si tiene comentarios con respecto a su
contenido.
FABRICANTE
INFORMACIÓN DE CONTACTO
La información de contacto se describe en “PROVEEDORES” en las primeras páginas del
siguiente manual:
Seguridad e instalación del sistema de robot Lea primero este manual

iv
Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
PRECAUCIONES DE SEGURIDAD
Solamente personal calificado deberá realizar la instalación de los robots y equipos
robóticos en conformidad con todos los códigos nacionales y locales. Lea atentamente
este manual y otros manuales relacionados cuando use este software.
Mantenga este manual a la mano para un acceso fácil en todo momento.
ADVERTENCIA
Este símbolo indica que existe un peligro de posibles
lesiones graves o la muerte si no se siguen
adecuadamente las instrucciones asociadas.
PRECAUCIÓN
Este símbolo indica que existe un peligro de posibles
daños a las personas o daños físicos a los equipos e
instalaciones si no se siguen adecuadamente las
instrucciones asociadas.

Índice
Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 v
Resumen de comandos SPEL+ 1
Comandos de administración del sistema .................................................... 1
Comandos de control del robot .................................................................... 2
Comandos de torque ................................................................................... 7
Comandos de entrada/salida ....................................................................... 8
Comandos de administración de punto ...................................................... 11
Comandos de cambio de coordenada ....................................................... 11
Comandos de control de programa ............................................................ 12
Comandos de ejecución de programa ....................................................... 13
Pseudo instrucciones ................................................................................. 14
Comandos de administración de archivo ................................................... 15
Comandos de bus de campo ...................................................................... 16
Comandos de valor numérico .................................................................... 16
Comandos de cadena ................................................................................ 17
Operadores lógicos .................................................................................... 17
Comandos variables ................................................................................... 18
Comandos de seguridad ............................................................................. 18
Comandos de seguimiento del transportador ............................................ 18
Comandos de detección de fuerza ............................................................. 19
Comandos DB ............................................................................................ 19
Comandos PG ........................................................................................... 19
Comandos de detección de colisión .......................................................... 20
Comando de consumo de piezas ................................................................ 20
Comandos de simulador ............................................................................. 21
Referencia del lenguaje SPEL+ 22
Mensajes de error de SPEL+ 798
Apéndice A: Lista de condiciones de uso de comandos de SPEL+951
Apéndice B: Precaución de compatibilidad 961
B-1: Precaución de compatibilidad de EPSON RC+ 6.0 ........................... 961
B-2: Precaución de compatibilidad de EPSON RC+ 5.0 ........................... 971
B-3: Precaución de EPSON RC+ Ver.4.* Compatibilidad ......................... 982

Índice
vi Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Apéndice C: Comandos de EPSON RC+7.0 993
C-1: Lista de comandos agregados EPSON RC+4.0 o superior .............. 993
C-2: Lista de comandos agregados para cada ......................................... 996
versión de EPSON RC+ 7.0
C-3: Comandos de eliminación (Ordenar por versión) ........................... 1001

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 1
Resumen de comandos SPEL
+
A continuación, encontrará un resumen de los comandos SPEL+.
Comandos de administración del sistema
Reset Restablece el controlador.
SysConfig Muestra la configuración del controlador.
SysErr Arroja el último estado de error o estado de advertencia.
Date Define la fecha del sistema.
Time Define la hora del sistema.
Date$ Arroja la fecha del sistema como una cadena.
Time$ Arroja la hora del sistema como una cadena.
Hour Muestra/arroja la hora de operación del controlador.
Stat Arroja los bits de estado del controlador.
CtrlInfo Arroja la información del controlador.
RobotInfo Arroja la información del robot.
RobotInfo$ Arroja la información de texto del robot.
TaskInfo Arroja la información de tarea.
TaskInfo$ Arroja la información de texto de la tarea.
DispDev Define el dispositivo de presentación actual.
EStopOn Arroja el estado de parada de emergencia.
CtrlDev Arroja el número del dispositivo de control actual.
Cls Borra el área de texto de las ventanas Run, Operator o Command
(Ejecutar, Operador o Comando) de EPSON RC+ 6.0.
Borra la información en el panel de impresión TP.
Toff Desactiva la pantalla de la línea de ejecución en la pantalla LCD.
Ton Especifica una tarea que muestra una línea de ejecución en la pantalla
LCD.
SafetyOn Arroja el estado de apertura de la puerta de seguridad.
Eval Ejecuta una instrucción de la ventana Command desde un programa
y arroja el estado de error.
ShutDown Apaga EPSON RC+ y, opcionalmente, apaga o reinicia Windows.
TeachOn Arroja el estado del modo Teach (Enseñar).
WindowsStatus Arroja el estado de inicio de Windows.

2 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Comandos de control del robot
AIO_TrackingSet Define la función de seguimiento de distancia.
AIO_TrackingSet Inicia la función de seguimiento de distancia.
AIO_TrackingSet Finaliza la función de seguimiento de distancia.
Función AIO_TrackingOn Arroja el estado de la función de seguimiento de distancia.
AtHome Vuelve a ajustar si la orientación actual del robot es la posición Home
(Reposo) o no.
Calib Arroja los valores de pulso de postura del brazo actual con los valores
CalPls actuales.
CalPls Especifica y muestra los valores de pulso de posición y orientación
para la calibración.
Hofs Arroja los pulsos de compensación utilizados para la corrección de
punto cero del software.
MCal Ejecuta la calibración de máquina para robots con codificadores
incrementales.
MCalComplete Arroja el estado de MCal.
MCordr Especifica y muestra el orden de movimiento de las articulaciones
para el valor Mcal de calibración de máquina. Solo se requiere para
robots con codificadores incrementales.
Power Define/arroja el modo de alimentación del servo.
Motor Define/arroja el estado del motor.
Función MHour Arroja el tiempo acumulado de encendido de los motores del robot.
SFree Retira la alimentación del servo del eje / servo especificado.
SLock Devuelve la alimentación del servo al eje / servo especificado.
SyncRobots Inicia el movimiento del robot reservado.
Jump Salta a un punto con un movimiento de punto a punto.
Jump3 Salta a un punto con un movimiento de compuerta 3D.
Jump3CP Salta a un punto con un movimiento 3D en una ruta continua.
JumpTLZ Salta a un punto con un movimiento de compuerta 3D.
Arch Define/arroja los parámetros de arco para el movimiento de salto.
LimZ Define el límite Z superior para el comando Jump (Salto).
LimZMargin Define/arroja el margen de detección de errores cuando comienza la
operación en una posición más alta que el valor Limz.
Sense Define/arroja la condición para detener el manipulador sobre la
coordenada de destino cuando el comando Jump especifica Sense
(Detectar).
JS Arroja los estados de la operación Sense.
JT Arroja el estado del comando Jump más reciente para el robot actual.
Go Mueve el robot a un punto con un movimiento de punto a punto.
Pass Ejecuta un movimiento de punto a punto simultáneamente en cuatro
articulaciones, que pasa cerca, pero no a través de los puntos
especificados.
Pulse Mueve el robot a una posición definida en pulsos.
BGo Ejecuta un movimiento relativo de punto a punto, en el sistema de
coordenadas local seleccionado.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 3
BMove Ejecuta un movimiento relativo de interpolación lineal, en el sistema
de coordenadas local seleccionado.
TGo Ejecuta un movimiento relativo de punto a punto, en el sistema de
coordenadas de la herramienta actual.
TMove Ejecuta un movimiento relativo de interpolación lineal, en el sistema
de coordenadas de herramienta seleccionado.
Till Especifica la detención de movimiento cuando ocurre la entrada.
TillOn Arroja el estado Till actual.
!…! Instrucciones de procesos durante el movimiento.
Speed Define/arroja la velocidad para los comandos de movimiento de
punto a punto.
Accel Define/arroja la aceleración y desaceleración para el movimiento de
punto a punto.
SpeedFactor Define/arroja la velocidad para comandos de movimiento de punto a
punto.
Inertia Especifica o muestra la configuración de inercia del brazo del robot.
Weight Especifica o muestra la configuración de peso del brazo del robot.
Arc Mueve el brazo con interpolación circular.
Arc3 Mueve el brazo en 3D con interpolación circular.
Move Mueve el robot con interpolación lineal.
Curve Define los datos y puntos requeridos para mover el brazo a lo largo
de una ruta curva. Es posible definir muchos puntos de datos en la
ruta para mejorar la precisión de la ruta.
CVMove Realiza el movimiento de ruta de Spline definido por la orden Curve.
SpeedS Define/arroja la velocidad para los comandos de movimiento lineal.
AccelS Define/arroja la aceleración y desaceleración para el movimiento
lineal.
SpeedR Define/arroja la velocidad para el giro de la herramienta.
AccelR Define/arroja la aceleración y desaceleración para el giro de la
herramienta.
AccelMax Arroja el límite de valor de aceleración máximo disponible para
Accel.
Brake Activa o desactiva el freno para la articulación especificada para el
robot actual.
Home Mueve el robot a la posición de reposo definida por el usuario.
HomeClr Borra la definición de la posición de reposo.
HomeDef Arroja el estado de la definición de la posición de reposo.
HomeSet Define la posición de reposo definida por el usuario.
Hordr Define el orden de movimiento para el comando Home.
InPos Comprueba si el robot está en posición (no se mueve).
CurPos Arroja la posición actual mientras se mueve.
TCPSpeed Arroja la velocidad calculada del punto central de la herramienta
actual.

4 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Pallet Define un pallet o arroja un punto de pallet.
PalletClr Borra una definición de pallet.
Fine Especifica y muestra los límites de error de posicionamiento.
(Unidad: pulso)
FineDist Especifica y muestra los límites de error de posicionamiento (Unidad:
mm)
Función FineStatus Arroja si el número entero usa Fine o FineDist.
QP Define/arroja el estado de Quick Pause (Pausa rápida).
QPDecelR Define la velocidad de desaceleración de la pausa rápida para el
cambio de la orientación de la herramienta durante el movimiento
CP.
QPDecelS Define la velocidad de desaceleración de la pausa rápida en el
movimiento CP.
CP Define el modo de movimiento CP (Ruta continua).
Box Especifica y muestra el área de comprobación de acercamiento.
BoxClr Borra la definición del área de comprobación de acercamiento.
BoxDef Arroja si Box (Caja) está definido o no.
Plane Especifica y muestra el plano de comprobación de acercamiento.
PlaneClr Borra (anula la definición) de una definición de Plane (Plano).
PlaneDef Arroja la configuración del plano de comprobación de acercamiento.
InsideBox Arroja el estado de comprobación del área de control de
acercamiento.
InsidePlane Arroja el estado de comprobación del plano de comprobación de
acercamiento.
GetRobotInsideBox Arroja un robot que se encuentra en el área de comprobación de
acercamiento.
GetRobotInsidePlane Arroja un robot que se encuentra en el plano de comprobación de
acercamiento.
Find Especifica o muestra la condición para almacenar las coordenadas
durante el movimiento.
FindPos Arroja un punto de robot almacenado por Find (Buscar) durante un
comando de movimiento.
PosFound Arroja los estados de la operación Find.
WaitPos Espera que el robot reduzca su aceleración y se detenga en la
posición antes de ejecutar la siguiente instrucción mientras el
movimiento de ruta está activo.
Robot Selecciona el robot actual. (Arroja el número del robot según la
Función Robot)
RobotModel$ Arroja el nombre del modelo del robot.
RobotName$ Arroja el nombre del robot.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 5
RobotSerial$ Arroja el número de serie del robot.
RobotType Arroja el tipo de robot.
TargetOK Arroja un estado que indica si es posible o no el movimiento PTP
(Punto a punto) desde la posición actual a la posición objetivo.
JRange Define/arroja los límites de articulación para una articulación.
Range Define los límites para todas las articulaciones.
XYLim Define o muestra los límites del rango de movimiento permisibles de
XY para el robot.
XYLimClr Borra la definición XYLim.
XYLimDef Arroja si XYLim está definido o no.
XY Arroja un punto desde coordenadas individuales que se pueden usar
en una expresión de punto.

6 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Dist Arroja la distancia entre dos puntos de robots.
PTPBoost Especifica o muestra el parámetro de impulso algorítmico de
aceleración, desaceleración y velocidad para movimientos PTP
(punto a punto).
PTPBoostOK Arroja si el movimiento PTP (Punto a punto) desde una posición
actual a la posición objetivo es o no una distancia de
desplazamiento pequeña.
PTPTime Arroja el tiempo estimado para un comando de movimiento de punto
a punto sin ejecutarlo.
CX Define/arroja la coordenada del eje X de un punto.
CY Define/arroja la coordenada del eje Y de un punto.
CZ Define/arroja la coordenada del eje Z de un punto.
CU Define/arroja la coordenada del eje U de un punto.
CV Define/arroja la coordenada del eje V de un punto.
CW Define/arroja la coordenada del eje W de un punto.
CR Define/arroja la coordenada del eje R de un punto.
CS Define/arroja la coordenada del eje S de un punto.
CT Define/arroja la coordenada del eje T de un punto.
Pls Arroja el valor de pulso de una articulación.
Agl Arroja el ángulo de la articulación en la posición actual.
PAgl Arroja un valor de articulación desde un punto especificado.
JA Arroja un punto de robot especificado en los ángulos de articulación.
AglToPls Convierte los ángulos de robot a pulsos.
DegToRad Convierte grados en radianes.
RadToDeg Convierte radianes en grados.
Joint Muestra la posición actual del robot en las coordenadas de
articulación.
JTran Realiza el movimiento relativo de una articulación.
PTran Realiza el movimiento relativo de una articulación en pulsos.
RealPls Arroja el valor de pulso de la articulación especificada.
RealPos Arroja la posición actual del robot especificado.
Función RealAccel Arroja el valor Accel (Aceleración) ajustado automáticamente por
OLAccel.
PPls Arroja la posición del pulso de un valor de articulación especificado
desde un punto especificado.
Función LJM Arroja los datos de punto con los indicadores de orientación
convertidos para permitir el movimiento de al menos una
articulación cuando se mueve a un punto especificado basado en el
punto de referencia.
AutoLJM Define Auto LJM.
Función AutoLJM Arroja el estado de Auto LJM.
AutoOrientationFlag Cambia el indicador de orientación de N6-A1000**.
Función AutoOrientationFlag Arroja el estado de AutoOrientationFlag.
AvoidSingularity Define la función de evasión de singularidad.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 7
Función AvoidSingularity Arroja el estado de la función de evasión de singularidad.
SingularityAngle Define el ángulo de aproximación al entorno de singularidad para
la función de evasión de singularidad.
Función SingularityAngle Arroja el ángulo de aproximación al entorno de singularidad para
la función de evasión de singularidad.
SingularitySpeed Define la velocidad de aproximación al entorno de singularidad
para la función de evasión de singularidad.
Función SingularitySpeed Arroja la velocidad de aproximación al entorno de singularidad
para la función de evasión de singularidad.
SingularityDist Define la distancia del entorno de singularidad necesaria para la
función de evasión de singularidad.
Función SingularityDist Arroja la distancia del entorno de singularidad necesaria para la
función de evasión de singularidad.
AbortMotion Anula un comando de movimiento y coloca la tarea en ejecución en
el estado de error.
Función Align Arroja los datos de punto convertidos para alinear la orientación del
robot con el eje de coordenadas más cercano en el sistema de
coordenadas local.
Función AlignECP Arroja los datos de punto convertidos para alinear la orientación del
robot con el eje de coordenadas más cercano en el sistema de
coordenadas ECP.
SoftCP Define/arroja el modo de movimiento SoftCP.
Función SoftCP Arroja el estado del modo de movimiento SoftCP.
Here Enseña un punto de robot en la posición actual.
Where Muestra los datos de posición actuales del robot.
PerformMode Define el modo del robot.
Función PerformMode Arroja el número del modo de rendimiento del robot.
VSD Define el movimiento CP de velocidad variable para robots
SCARA.
Función VSD Arroja la configuración de movimiento CP de velocidad variable
para robots SCARA.
CP_Offset Define el tiempo de compensación para iniciar el comando de
movimiento posterior cuando se ejecuta CP On.
Función CP_Offset Arroja el tiempo de compensación para iniciar el comando de
movimiento posterior cuando se ejecuta CP On.
AvgSpeedClear Borra e inicializa el promedio de la velocidad de la articulación.
AvgSpeed Muestra el promedio de la velocidad de la articulación.
Función AvgSpeed Arroja el valor promedio de la velocidad de la articulación.
PeakSpeedClear Borra e inicializa la velocidad máxima para una o más
articulaciones.
PeakSpeed Muestra los valores de velocidad máxima para la articulación
especificada.
Función PeakSpeed Arroja la velocidad máxima para la articulación especificada.

8 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Comandos de torque
TC Arroja la configuración del modo de control de torque y el modo
actual.
TCSpeed Especifica el límite de velocidad en el control de torque.
TCLim Especifica el límite de torque de cada articulación para el modo de
control de torque.
RealTorque Arroja el valor de instrucción de torque actual de la articulación
especificada.
ATCLR Borra e inicializa el torque promedio para una o más
articulaciones.
ATRQ Muestra el torque promedio para la articulación especificada.
PTCLR Borra e inicializa el torque máximo para una o más
articulaciones.
PTRQ Muestra el torque máximo para la articulación especificada.
OLAccel Configura el ajuste automático de la aceleración/desaceleración
que se está ajustando.
OLRate Muestra la calificación de sobrecarga para una o todas las
articulaciones para el robot actual.
LimitTorque Define/arroja el valor de torque superior en el modo de alta
potencia.
Función LimitTorque Arroja el valor de la configuración de LimitTorque.
LimitTorqueLP Define/arroja el valor de torque límite superior en el modo de
baja potencia.
Función LimitTorqueLP Arroja el valor de la configuración de LimitTorqueLP.
LimitTorqueStop Especifica/arroja si se detendrá o no el robot cuando el torque
alcance el límite superior en el modo de alta potencia.
Función LimitTorqueStop Arroja el valor de la configuración de LimitTorqueStop.
LimitTorqueStopLP Especifica/arroja si se detendrá o no el robot cuando el torque
alcance el límite superior en el modo de baja potencia.
Función LimitTorqueStopLP Arroja el valor de la configuración de LimitTorqueStopLP.
Comandos de entrada/salida
On Activa una salida.
Off Desactiva una salida.
Oport Lee el estado de un bit de salida.
Sw Arroja el estado de entrada.
In Lee 8 bits de entradas.
InW Arroja el estado del puerto de palabra de entrada especificado.
InBCD Lee 8 bits de entradas en el formato BCD.
Out Define/arroja 8 bits de salidas.
OutW Define simultáneamente 16 bits de salida.
OpBCD Define simultáneamente 8 bits de salida con el formato BCD.
MemOn Activa un bit de memoria.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 9
MemOff Desactiva un bit de memoria.
MemSw Arroja el estado de un bit de memoria.
MemIn Lee 8 bits de E/S de memoria.
MemOut Define/arroja 8 bits de memoria.
MemInW Arroja el estado del puerto de palabra E/S de memoria
especificado.
Cada puerto de palabra contiene 16 bits de E/S de memoria.
MemOutW Define simultáneamente 16 bits de E/S de memoria.
Wait Espera la condición o el tiempo.
TMOut Define el tiempo de inactividad predeterminado para la
instrucción Wait (Esperar).
Tw Arroja el estado de la condición Wait y el intervalo de
temporización Wait.
Input Recibe datos de entrada desde el dispositivo de presentación y
almacenados en variables.
InReal Lee un dato de entrada de 2 palabras (32 bits) como un dato de
punto flotante (en cumplimiento con IEEE754) de 32 bits.
Print Muestra caracteres en la ventana de visualización actual.
Line Input Ingresa una cadena desde la ventana de visualización actual.
Input # Permite que se reciban datos de cadena o numéricos desde un
archivo, puerto de comunicación o base de datos, y se almacenen
en una o más variables.
Print # Genera datos en el archivo, puerto de comunicación, base de
datos o dispositivo especificado.
Line Input # Lee datos de una línea desde un archivo, puerto de comunicación,
base de datos o el dispositivo.
Lof Verifica si el RS-232 o puerto TCP/IP especificado tiene líneas
de datos en su búfer.
SetIn Para la E/S virtual, define un puerto de entrada especificado (8
bits) en el valor especificado.
SetInW Para la E/S virtual, define una palabra de entrada especificada (16
bits) en el valor especificado.
SetSw Para la E/S virtual, define un bit de entrada especificado en el
valor especificado.
IOLabel$ Arroja la etiqueta de E/S para un bit, byte o palabra de entrada o
salida especificado.
IONumber Arroja el número de E/S de la etiqueta de E/S especificada.
IODef Arroja si la etiqueta de E/S especificada está definida.
OpenCom Abre un puerto de comunicación RS-232.
Función OpenCom Adquiere el número de tarea que ejecuta OpenCom.
CloseCom Cierra el puerto RS-232C que se abrió con OpenCom.
SetCom Define o muestra los parámetros para el puerto RS-232C.
ChkCom Arroja el número de caracteres en el búfer de recepción de un
puerto de comunicación.

10 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
OpenNet Abre un puerto de red TCP/IP.
Función OpenNet Adquiere el número de tarea que ejecuta OpenNet.
OutReal Genera los datos de salida del valor real (en cumplimiento con
IEEE754) de 32 bits al puerto de salida de palabras 2 (32 bits).
CloseNet Cierra el puerto TCP/IP que se abrió anteriormente con OpenNet.
SetNet Define los parámetros para un puerto TCP/IP.
ChkNet Arroja el número de caracteres en el búfer de recepción de un
puerto de red.
WaitNet Espera que se establezca una conexión de puerto TCP/IP.
Read Lee los caracteres desde un archivo o puerto de comunicación.
ReadBin Lee datos binarios desde un archivo o puerto de comunicación.
Write Escribe caracteres en un archivo o puerto de comunicación sin un
terminador de final de línea.
WriteBin Escribe datos binarios en un archivo o puerto de comunicación.
InputBox Muestra un mensaje en un cuadro de diálogo, espera que el
operador ingrese texto o elija un botón y arroja los contenidos del
cuadro.
MsgBox Muestra un mensaje en un cuadro de diálogo y espera que el
operador elija un botón.
RunDialog Ejecuta un diálogo EPSON RC+ desde un programa SPEL
+
.
LatchEnable Activa/desactiva la función de enganche de la posición del robot
según la entrada R-E/S.
Función LatchState Arroja el estado de enganche de la posición del robot con la R-
E/S.
Función LatchPos Arroja la posición del robot enganchada con la señal de entrada
R-E/S.
SetLatch Define la función de enganche de la posición de robot con la
entrada R-E/S.
AIO_In Function Lee el valor analógico desde el canal de entrada de E/S
analógica.
AIO_InW Function Lee un dato de entrada de palabra desde el canal de entrada de
E/S analógica.
AIO_Out Genera un valor analógico en el canal de salida de E/S
analógica.
AIO_Out Function Arroja el estado de salida del canal de salida de E/S analógica.
AIO_OutW Genera un dato de palabra en el canal de salida de E/S
analógica.
Función AIO_OutW Arroja el estado de salida según una palabra del canal de salida
de E/S analógica.
AIO_Set Genera la información de velocidad en el canal de salida de E/S
analógica.
Función AIO_Set Arroja la información de configuración de la velocidad del
robot que está definida en el canal de salida de E/S analógica
opcional.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 11
Comandos de administración de punto
ClearPoints Borra todos los datos de punto de la memoria.
LoadPoints Carga los datos de punto desde un archivo en la memoria.
SavePoints Guarda los datos de punto en un archivo en la memoria.
ImportPoints Importa un archivo de punto en el proyecto actual para el robot
especificado.
ExportPoints Exporta un archivo de punto a la ruta especificada en la PC.
P# Define un punto especificado.
PDef Arroja el estado de definición de un punto especificado.
PDel Elimina los datos de posición especificados.
PLabel Define una etiqueta para un punto especificado.
PLabel$ Arroja la etiqueta de punto asociada con un número de punto.
PNumber$ Arroja el número de punto asociado con una etiqueta de punto.
PList Muestra los datos de punto en la memoria para el robot actual.
PLocal Define el atributo local para un punto.
PDescription Define una descripción de datos del punto especificado.
PDescription$ Arroja la descripción de punto que definió en el número de
punto especificado.
WorkQue_Add Agrega los datos de cola de trabajo (datos de punto y datos
de usuario) a la cola de trabajo especificada.
WorkQue_AutoRemove Define la función de eliminación automática en la cola de
trabajo especificada.
Función WorkQue_AutoRemove Arroja el estado de la función de eliminación automática
definida en la cola de trabajo.
Función WorkQue_Get Arroja los datos de punto desde la cola de trabajo
especificada.
Función WorkQue_Len Arroja el número de los datos de cola de trabajo válidos
registrados en la cola de trabajo especificada.
WorkQue_List Muestra la lista de datos (datos de punto y datos de usuario)
de la cola de trabajo especificada.
WorkQue_Reject Define y muestra la distancia mínima para prevenir el doble
registro de los datos de punto en la cola de trabajo
especificada.
Función WorkQue_Reject Arroja la distancia de la función de prevención de doble
registro definida en la cola de trabajo especificada.
WorkQue_Remove Elimina los datos de cola de trabajo (datos de punto y datos
de usuario) de la cola de trabajo especificada.
WorkQue_Sort Define y muestra el tipo de orden para la cola de trabajo
especificada.
Función WorkQue_Sort Arroja el tipo de orden de la cola de trabajo especificada.
WorkQue_UserData Restablece y muestra los datos de usuario (número real)
registrados en la cola de trabajo especificada.
Función WorkQue_UserData Arroja los datos de usuario (número real) registrados en la
cola de trabajo especificada.
Comandos de cambio de coordenada

12 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Arm Define/arroja el brazo actual.
ArmSet Define un brazo.
ArmDef Arroja el estado de la definición de un brazo.
ArmClr Borra la definición de un brazo.
Tool Define/arroja el número de la herramienta actual.
TLSet Define o muestra un sistema de coordenadas de herramienta.
TLDef Arroja el estado de la definición de herramienta.
TLClr Borra una definición de herramienta.
ECP Define/arroja el número de ECP actual.
ECPSet Define o muestra un punto de control externo.
ECPDef Arroja el estado de la definición de ECP.
ECPClr Borra una definición de ECP.
Base Define y muestra el sistema de coordenadas base.
Local Define el sistema de coordenadas local.
LocalDef Arroja el estado de la definición local.
LocalClr Borra (anula la definición) un sistema de coordenadas.
Elbow Define/arroja la orientación del codo de un punto.
Hand Define/arroja la orientación de la mano de un punto.
Wrist Define/arroja la orientación de la muñeca de un punto.
J4Flag Define/arroja la configuración de J4Flag de un punto.
J6Flag Define/arroja la orientación de J6Flag de un punto.
J1Flag Define/arroja la configuración de J1Flag de un punto.
J2Flag Define/arroja la orientación de J2Flag de un punto.
J1Angle Arroja el atributo de J1Angle de un punto.
J4Angle Arroja el atributo de J4Angle de un punto.
VxCalib Crea los datos de calibración.
VxTrans Convierte las coordenadas de pixel a coordenadas de robot y
arroja los datos de punto convertidos.
VxCalInfo Arroja el estado de finalización de calibración/los datos de
calibración.
VxCalDelete Elimina los datos de calibración.
VxCalSave Guarda los datos de calibración en el archivo.
VxCalLoad Carga los datos de calibración del archivo.
Comandos de control de programa
Function Declara una función.
For...Next Ejecuta una o más instrucciones un número específico de
veces.
GoSub Ejecuta una subrutina.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 13
Return Vuelve de una subrutina.
GoTo Crea una bifurcación incondicional a un número de línea o
etiqueta.
Call Llama una función de usuario.
If..Then..Else..EndIf Ejecución de instrucciones condicionales.
Else Se usa con la instrucción If para permitir que se ejecuten
instrucciones cuando la condición que se usa con la
instrucción If es falsa. Else es una opción para la instrucción
If/Then.
Select ... Send Ejecuta uno de varios grupos de instrucciones, según el valor
de una expresión.
Do...Loop Construcción Do...Loop.
Declare Declara una función externa en una biblioteca de enlace
dinámico (DLL).
Trap Especifica un controlador de captura.
OnErr Define un controlador de error.
Era Arroja un número de articulación del robot para el último
error.
Erf$ Arroja el nombre de la función para el último error.
Erl Arroja el número de línea del error.
Err Arroja el número del error.
Ert Arroja el número de tarea del error.
Errb Arroja el número de robot del error.
ErrMsg$ Arroja el mensaje de error.
Signal Envía una señal a las tareas que ejecutan WaitSig.
SyncLock Sincroniza tareas usando un bloqueo de exclusión mutuo.
SynUnlock Desbloquea una ID de sincronización que se bloqueó
anteriormente con SyncLock.
WaitSig Espera una señal de otra tarea.
ErrorOn Arroja el estado de error del controlador.
Error Genera un error de usuario.
EResume Reanuda la ejecución después de la finalización de la rutina
del controlador de errores.
PauseOn Arroja el estado de pausa.
Exit Sale de una construcción o función loop.
Comandos de ejecución de programa
Xqt Ejecuta una tarea.
Pause Pausa todas las tareas que tienen la pausa activada.
Cont Reanuda el controlador después de ejecutar una instrucción
Pause (Pausa) y continúa la ejecución de todas las tareas.
Halt Suspende una tarea.
Quit Detiene una tarea.
Resume Reanuda una tarea en el estado de suspensión.
MyTask Arroja la tarea actual.
TaskDone Arroja el estado de finalización de la tarea.

14 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
TaskState Arroja el estado actual de una tarea.
TaskWait Espera que una tarea termine.
Restart Reinicia el grupo de programa principal actual.
Recover Ejecuta una recuperación de posición de protección y arroja
el estado.
RecoverPos Arroja la posición en la que estaba el robot cuando se abrió
la protección.
StartMain Ejecuta la función principal desde una tarea en segundo
plano.
Pseudo instrucciones
#define Define una macro.
#ifdef ... #endif Compilación condicional.
#ifndef ... #endif Compilación condicional.
#include Incluye un archivo.
#undef Anula la definición de un identificador definido
anteriormente con #define.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 15
Comandos de administración de archivo
ChDir Cambia y muestra la carpeta actual.
ChDisk Define el disco de objeto para operaciones de archivo.
MkDir Crea una subcarpeta en una unidad de disco de controlador.
RmDir Elimina una subcarpeta vacía de una unidad de disco de
controlador.
RenDir Cambia el nombre de una carpeta.
FileDateTime$ Arroja la fecha y la hora de un archivo.
FileExists Verifica si existe un archivo.
FileLen Arroja la longitud de un archivo.
FolderExists Verifica si existe una carpeta.
Del Elimina uno o más archivos.
Copy Copia un archivo a otra ubicación.
Rename Cambia el nombre de un archivo.
AOpen Abre un archivo en el modo de anexar.
BOpen Abre un archivo en el modo binario.
ROpen Abre un archivo para lectura.
ROpen Abre un archivo para acceso de lectura/escritura.
WOpen Abre un archivo para escritura.
Input # Permite que se reciban datos de cadena o numéricos desde
un archivo, puerto de comunicación o base de datos, y se
almacenen en una o más variables.
Print # Genera datos en el archivo, puerto de comunicación, base
de datos o dispositivo especificado.
Line Input # Lee datos de una línea desde un archivo, puerto de
comunicación, base de datos o el dispositivo.
Read Lee los caracteres desde un archivo o puerto de
comunicación.
ReadBin Lee datos binarios desde un archivo o puerto de
comunicación.
Write Escribe caracteres en un archivo o puerto de comunicación
sin un terminador de final de línea.
WriteBin Escribe datos binarios en un archivo o puerto de
comunicación.
Seek Cambia la posición del puntero del archivo para un archivo
especificado.
Close Cierra un archivo.
Eof Arroja el estado del fin de archivo.
ChDrive Cambia la unidad de disco actual para operaciones de
archivo.
CurDir$ Arroja una cadena que representa la carpeta actual.
CurDrive$ Arroja una cadena que representa la unidad de disco actual.
CurDisk$ Arroja una cadena que representa el disco actual.
Flush Escribe el búfer de un archivo en el archivo.

16 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Comandos de bus de campo
FbusIO_GetBusStatus Arroja el estado del bus de campo especificado.
FbusIO_GetDeviceStatus Arroja el estado del dispositivo de bus de campo
especificado.
FbusIO_SendMsg Envía un mensaje explícito a un dispositivo de bus de campo
y arroja la respuesta.
Comandos de valor numérico
Ctr Arroja el valor de un contador.
CTReset Restablece un contador.
ElapsedTime Mide un tiempo takt.
ResetElapsedTime Restablece e inicia un temporizador de medición de tiempo
takt.
Tmr Arroja el valor de un temporizador.
TmReset Restablece un temporizador en 0.
Sin Arroja el seno de un ángulo.
Cos Arroja el coseno de un ángulo.
Tan Arroja la tangente de un ángulo.
Acos Arroja el arcocoseno.
Asin Arroja el arcoseno.
Atan Arroja la arcotangente.
Atan2 Arroja la arcotangente según la posición X, Y.
Sqr Arroja la raíz cuadrada de un número.
Abs Arroja el valor absoluto de un número.
Sgn Arroja el signo de un número.
Int Convierte un número real en un número entero.
BClr Borra un bit en un número y arroja el nuevo valor.
BSet Define un bit en un número y arroja el nuevo valor.
BTst Arroja el estado de 1 bit en un número.
BClr64 Borra un bit en un número y arroja el nuevo valor.
BSet64 Define un bit en un número y arroja el nuevo valor.
BTst64 Arroja el estado de 1 bit en un número.
Fix Arroja la porción de número entero de un número real.
Hex Arroja una cadena que representa un número especificado en
formato hexadecimal.
Randomize Inicializa el generador de números aleatorios.
Redim Cambia las dimensiones de una matriz en el tiempo de
ejecución.
Rnd Arroja un número aleatorio.
UBound Arroja el subíndice más grande disponible para la dimensión
indicada de una matriz.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 17
Comandos de cadena
Asc Arroja el valor ASCII de un carácter.
Chr$ Arroja el carácter de un valor ASCII numérico.
Left$ Arroja una subcadena desde el lado izquierdo de una cadena.
Mid$ Arroja una subcadena.
Right$ Arroja una subcadena desde el lado derecho de una cadena.
Len Arroja la longitud de una cadena.
LSet$ Arroja una cadena rellenada con espacios finales.
RSet$ Arroja una cadena rellenada con espacios iniciales.
Space$ Arroja una cadena que contiene caracteres de espacio.
Str$ Convierte un número en una cadena.
Val Convierte una cadena numérica en un número.
LCase$ Convierte una cadena a minúsculas.
UCase$ Convierte una cadena a mayúsculas.
LTrim$ Elimina los espacios al inicio de una cadena.
RTrim$ Elimina los espacios al final de una cadena.
Trim$ Elimina los espacios al inicio y al final de una cadena.
ParseStr Descompone una cadena y arroja una matriz de tokens.
FmtStr Aplica formato a un número o cadena.
FmtStr$ Aplica formato a un número o cadena.
InStr Arroja la posición de una cadena dentro de otra.
Tab$ Arroja una cadena que contiene el número especificado de
caracteres de pestaña.
Operadores lógicos
And Realiza una operación AND (Y) lógica y bitwise.
Or Operador Or (O).
LShift Desplaza bits a la izquierda.
LShift64 Desplaza bits a la izquierda.
Mod Operador Modulus (Módulo).
Not Operador Not (No).
RShift Desplaza bits a la derecha.
RShift64 Desplaza bits a la derecha.
Xor Operador exclusivo Or.
Mask Realiza la operación AND bitwise en las instrucciones Wait.

18 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Comandos de variables
Boolean Declara variables booleanas.
Byte Declara variables de bytes.
Double Declara variables dobles.
Global Declara variables globales.
Int32 Declara variables de 4 bytes.
Integer Declara variables de número entero de 2 bytes.
Long Declara variables de número entero largo.
Int64 Declara variables de 8 bytes.
Real Declara variables reales.
Short Declara variables de número entero de 2 bytes.
String Declara variables de cadena.
UByte Declara variables de número entero sin signo
UInt32 Declara variables de número entero de 4 bytes sin signo
UShort Declara variables de número entero de 2 bytes sin signo
UInt64 Declara variables de número entero de 8 bytes sin signo
Comandos de seguridad
GetCurrentUser$ Arroja el usuario actual de EPSON RC+.
Login Inicia sesión en EPSON RC+ 6.0 como un usuario distinto.
Comandos de seguimiento del transportador
Cnv_AbortTrack Anula un movimiento de seguimiento a un punto de la cola
del transportador.
Función Cnv_Accel Arroja la aceleración y desaceleración del transportador.
Cnv_Accel Define la aceleración y desaceleración para el transportador.
Función Cnv_Downstream Arroja el límite de bajada del transportador especificado.
Cnv_Downstream Function Define el límite de bajada del transportador especificado.
Cnv_Fine Function Arroja la configuración Cnv_Fine actual.
Cnv_Fine Define el valor de Cnv_Fine para un transportador.
Cnv_Flag Function Arroja el estado de seguimiento del robot.
Cnv_Mode Function Arroja el modo valor del modo de configuración del
transportador.
Cnv_Mode Define el valor del modo de configuración del transportador.
Función Cnv_Name$ Arroja el nombre del transportador especificado.
Función Cnv_Number Arroja el número de un transportador especificado por
nombre.
Cnv_OffsetAngle Define el valor de compensación para los datos de cola del
transportador.
Función Cnv_OffsetAngle Arroja el valor de compensación de los datos de cola del
transportador.
Función Cnv_Point Arroja un punto de robot en el sistema de coordenadas del
transportador especificado, derivado de las coordenadas del
sensor.
Función Cnv_PosErr Arroja la desviación en la posición de seguimiento actual, en
comparación con el objetivo de seguimiento.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 19
Función Cnv_Pulse Arroja la posición actual de un transportador en pulsos.
Cnv_QueAdd Agrega un punto de robot a una cola de transportador.
Función Cnv_QueGet Arroja un punto desde la cola del transportador especificado.
Función Cnv_QueLen Arroja el número de elementos en la cola del transportador
especificado.
Cnv_QueList Muestra una lista de elementos en la cola del transportador
especificado.
Cnv_QueMove Mueve los datos desde la cola del transportador de subida a
la cola del transportador de bajada.
Cnv_QueReject Define y muestra la distancia de rechazo de la cola para un
transportador.
Función Cnv_QueReject Arroja la distancia de rechazo de piezas actual para un
transportador.
Cnv_QueRemove Elimina elementos de la cola de un transportador.
Cnv_QueUserData Define y muestra los datos de usuario asociados con una
entrada de cola.
Función Cnv_QueUserData Arroja el valor de datos de usuario asociado a un elemento en
la cola de un transportador.
Función Cnv_RobotConveyor Arroja el transportador que un robot está siguiendo.
Función Cnv_Speed Arroja la velocidad actual de un transportador.
Cnv_Trigger Engancha la posición actual del transportador para la próxima
instrucción Cnv_QueAdd.
Función Cnv_Upstream Arroja el límite de subida para el transportador especificado.
Cnv_Upstream Define el límite de subida para el transportador especificado.
Comandos de detección de fuerza
Force_Calibrate Define cero compensaciones para todos los ejes para el sensor
de fuerza actual.
Force_ClearTrigger Borra todas las condiciones del disparador del sensor de
fuerza actual.
Force_GetForces Arroja las fuerzas y torques para todos los ejes de sensores de
fuerza en una matriz.
Función Force_GetForce Arroja la fuerza para un eje especificado.
Force_Sensor Define el sensor de fuerza actual para la tarea actual.
Función Force_Sensor Arroja el sensor de fuerza actual para la tarea actual.
Force_SetTrigger Define el disparador de fuerza para el comando Till.
Comandos DB
CloseDB Cierra la base de datos que se abrió con el comando OpenDB
y libera el número de archivo.
DeleteDB Elimina datos desde la tabla en la base de datos abierta.
OpenDB Abre una base de datos o libro de Excel.
SelectDB Busca los datos en la tabla en una base de datos abierta.
UpdateDB Actualiza los datos de una tabla en la base de datos abierta.
Comandos PG

20 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
PG_FastStop Detiene los ejes PG de inmediato.
PG_LSpeed Define la velocidad de pulso del tiempo cuando el eje PG
comienza a acelerar y termina de desacelerar.
PG_Scan Inicia el movimiento giratorio continuo de los ejes de robot
PG.
PG_SlowStop Detiene lentamente el giro continuo del eje PG.
Comandos de detección de colisión
CollisionDetect Activa o desactiva la detección de colisión.
Función CollisionDetect Arroja el valor de la configuración del comando
CollisionDetect.
Comando de consumo de piezas
HealthCalcPeriod Define el período de cálculo de los comandos de consumo
de piezas.
Función HealthCalcPeriod Arroja el período de cálculo de los comandos de consumo
de piezas.
Función HealthCtrlAlarmOn Arroja el estado de la alarma de consumo de piezas para las
piezas del controlador especificado.
HealthCtrlInfo Muestra los meses restantes antes del plazo de reemplazo
para las piezas del controlador especificado.
Función HealthCtrlInfo Arroja los meses restantes antes del plazo de reemplazo para
las piezas del controlador especificado.
HealthCtrlRateOffset Define la compensación para la tasa de consumo de las
piezas especificadas.
HealthCtrlReset Borra la tasa de consumo de las piezas del controlador
especificado.
HealthCtrlWarningEnable Define la activación o desactivación de la notificación de
alarma de consumo de piezas de las piezas del controlador.
Función HealthCtrlWarningEnable Define la activación o desactivación de la notificación de
alarma de consumo de piezas de la pieza del controlador.
Función HealthRateCtrlInfo Arroja la tasa de consumo de las piezas del controlador
especificado.
Función HealthRateRBInfo Borra la tasa de consumo de las piezas especificadas del
robot.
Función HealthRBAlarmOn Arroja el estado de la alarma de consumo de piezas para las
piezas especificadas del robot.
HealthRBAnalysis Muestra el resultado del análisis con respecto al consumo de
piezas (meses restantes antes del plazo de reemplazo de
piezas recomendado) para las piezas especificadas del robot.
Función HealthRBAnalysis Arroja el resultado del análisis con respecto al consumo de
piezas (meses restantes antes del plazo de reemplazo de
piezas recomendado) para las piezas especificadas del robot.
HealthRBDistance Muestra la cantidad de accionamiento de la articulación
especificada.
Función HealthRBDistance Arroja la cantidad de accionamiento de la articulación
especificada.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 21
HealthRBInfo Muestra los meses restantes antes del plazo de reemplazo
recomendado para las piezas especificadas del robot.
Función HealthRBInfo Arroja los meses restantes antes del plazo de reemplazo
recomendado para las piezas especificadas del robot.
HealthRBRateOffset Define la compensación para la tasa de consumo de las
piezas especificadas.
HealthRBReset Borra la tasa de consumo para las piezas especificadas del
robot.
HealthRBSpeed Muestra la velocidad promedio de la articulación
especificada.
Función HealthRBSpeed Arroja el promedio de la velocidad absoluta de la
articulación especificada.
Función HealthRBStart Inicia el análisis del consumo de piezas para las piezas
especificadas del robot.
HealthRBStop Detiene el análisis del consumo de piezas para las piezas
especificadas del robot.
HealthRBTRQ Muestra el valor de torque de la articulación especificada.
Función HealthRBTRQ Arroja el valor de torque de la articulación especificada.
HealthRBWarningEnable Define la activación o desactivación de la notificación de
alarma de consumo de piezas de las piezas del robot.
Función HealthRBWarningEnable Define la activación o desactivación de la notificación de
alarma de consumo de piezas de las piezas del robot.
Comandos del simulador
SimSet Define las configuraciones de objetos, operaciones y
movimientos del robot del simulador.
SimGet Adquiere los valores de configuración del objeto del
simulador.

22 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Referencia del lenguaje SPEL
+
Esta sección describe cada comando SPEL
+
según se indica a continuación:
Sintaxis
La sintaxis describe el formato utilizado para cada comando. Para algunos comandos, se
muestra más de
una sintaxis, junto con un número al que se hace referencia en la
descripción del comando. Los parámetros se muestran en cursiva.
Parámetros
Describe cada uno de los parámetros para este comando.
Valores devueltos
Describe cualquier valor que arroje el comando.
Descripción
Entrega detalles acerca del funcionamiento del comando.
Nota
Entrega información adicional que puede ser importante acerca de este comando.
Consulte también
Muestra otros comandos relacionados con este comando. Consulte el Índice para obtener
el número de página de los comandos relacionados.
Ejemplo
Proporciona uno o más ejemplos del uso de este comando.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 23
Operadores
La siguiente tabla muestra los operadores para el lenguaje SPEL
+
.
Palabra clave o
símbolo
Ejemplo Descripción
+
A+B
Suma
−
A-B
Resta
*
A*B
Multiplicación
/
A/B
División
**
A**B
Exponenciación
=
A=B
Igual
>
A>B
Mayor que
<
A<B
Menor que
>=
A>=B
Mayor o igual
<=
A<=B
Menor o igual
<>
A<>B
No igual
And
A And B
Realiza una operación AND lógica y bitwise
Mod A Mod B
Arroja el restante obtenido al dividir una expresión numérica
por otra expresión numérica.
Not
Not A
Realiza una negación lógica o bitwise del operando.
Or A Or B
Realiza la operación Or bitwise sobre los valores de los
operandos.
Xor A Xor B
Realiza la operación Xor bitwise sobre los valores de los
operandos.
Orden de prioridad de los operadores
Los operadores se procesan en programas en el siguiente orden.
Nivel de
prioridad
Operador Ejemplo Descripción
1
()
( A+B )
Paréntesis
2
**
A**B
Exponenciación
3
*
A*B
Multiplicación
/
A/B
División
4 Mod A Mod B
Arroja el restante obtenido al dividir una expresión
numérica por otra expresión numérica.
5
+
A+B
Suma
-
A-B
Resta
6
=
A=B
Igual
<>
A<>B
No igual
<
A<B
Menor que
>
A>B
Mayor que
<=
A<=B
Menor o igual
>=
A>=B
Mayor o igual
7
Not
Not A
Realiza una negación lógica o bitwise del operando.
8
And
A And B
Realiza una operación AND lógica y bitwise.
9 Or A Or B
Realiza la operación Or bitwise sobre los valores de los
operandos.
10 Xor A Xor B
Realiza la operación Xor bitwise sobre los valores de
los operandos.

24 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
!...! Procesamiento paralelo
Procesa las instrucciones de entrada/salida en paralelo con movimiento.
Sintaxis
motion cmd !statements !
Parámetros
motion cmd Cualquier comando de movimiento válido incluido en la siguiente lista: Arc, Arc3, Go,
Jump, Jump3, Jump3CP, Move, BGo, BMove, TGo, TMove.
statements Cualquier instrucción de E/S de procesamiento paralelo que se puede ejecutar durante
el movimiento. (Consulte la tabla a continuación)
Descripción
Los comandos de procesamiento paralelo se agregan a los comandos de movimiento para permitir que se
ejecuten instrucciones de E/S simultáneamente con el comienzo del desplazamiento de movimiento. Esto
significa que se puede ejecutar E/S mientras el brazo se mueve, en lugar de esperar siempre que el
desplazamiento del brazo se detenga para luego ejecutar E/S. Incluso existe un recurso para definir cuándo
deberá comenzar la ejecución de E/S dentro del movimiento. (Consulte el parámetro "Dn" que se describe
en la tabla a continuación).
La tabla a continuación muestra todas las instrucciones de procesamiento paralelo válidas. Cada una de estas
instrucciones se puede usar como una instrucción individual o en grupo para permitir que las instrucciones
de E/S se ejecuten durante una instrucción de movimiento.
Dn
Se usa para especificar %travel (desplazamiento) antes de que se ejecute la siguiente
instrucción paralela. “n” es un porcentaje entre 0 y 100 que representa la posición
dentro del movimiento, donde deben comenzar las instrucciones de procesamiento
paralelo. Las instrucciones que siguen el parámetro Dn comenzarán su ejecución
después de que se haya completado un n% del desplazamiento de movimiento.
Cuando se usa con los comandos Jump, Jump3 y Jump3CP, %travel no incluye el
movimiento de alejamiento y acercamiento. Para ejecutar instrucciones después de
que se haya completado el movimiento de alejamiento, incluya D0 (cero) al principio
de la instrucción.
"Dn" puede aparecer un máximo de 16 veces en una instrucción de procesamiento
paralelo.
On / Off n
Activa o desactiva el número de bit de salida "n".
MemOn / MemOff
n
Activa o desactiva el número de bit de E/S de memoria "n".
Out p,d
OpBCD p,q
OutW p,d
Genera datos "d" en el puerto de salida "p".
MemOut p, d
MemOutW p,d
Genera datos "d" en el puerto de E/S de memoria "p".
Signal s
Genera una señal de sincronización.
Wait t
Retrasa en "t" segundos la ejecución de la siguiente instrucción de procesamiento
paralelo.
WaitSig s
Espera la señal "s" antes de procesar la siguiente instrucción.
Wait Sw(n) = j
Retrasa la ejecución de la siguiente instrucción de procesamiento paralelo hasta que
el bit de entrada "n" sea igual a la condición definida por "j". (Activado o desactivado)
Wait MemSw(n) = j
Retrasa la ejecución de la siguiente instrucción de procesamiento paralelo hasta que
el bit de E/S de memoria "n" sea igual a la condición definida por "j". (Activado o
desactivado)
Wait
other conditions
Espera que patrones que no sean los dos anteriores estén disponibles. Consulte
Instrucción Wait (Esperar) para conocer detalles.
Print
Imprime datos al dispositivo de presentación.
Print #
Imprime datos al puerto de comunicación especificado.
Funciones externas
Ejecuta las funciones externas declaradas con la instrucción Declare (Declarar).

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 25
Notas
Cuando el movimiento se realiza antes de que se completen todos los comandos de E/S
Si, después de realizar el movimiento para un comando de movimiento específico, no se ha completado la
ejecución de todas las instrucciones de procesamiento paralelo, la ejecución posterior de programas se retrasa hasta
que se haya completado la ejecución de todas las instrucciones de procesamiento paralelo. Es más probable que
esta situación ocurra con movimientos cortos con muchos comandos de E/S que ejecutar en paralelo.
Cuando se usa Till para detener el brazo antes de completar el movimiento deseado
Si se usa Till para detener el brazo en una posición de desplazamiento intermedio, el sistema considera que
el movimiento se completó. La siguiente ejecución de instrucción se retrasa hasta que la ejecución de todas
las instrucciones de procesamiento paralelo se haya completado.
Cuando se usa la instrucción AbortMotion o Trap (Captura) para detener el brazo antes de
completar el movimiento
Después de que el brazo se detiene en una posición de desplazamiento intermedio, no se puede ejecutar la
instrucción D.
Si se especifica "n" cerca de un 100 %, es posible que el movimiento de ruta se desacelere
Si se usa un valor grande de “n” durante el movimiento CP, es posible que el robot se desacelere para terminar
el movimiento actual. Esto se debe a que la posición especificada normalmente sería durante la desaceleración
si no se estuviera usando CP. Para evitar la desaceleración, considere colocar la instrucción de procesamiento
después del comando de movimiento. Por ejemplo, en el siguiente ejemplo, la instrucción On 1 se traslada desde
el procesamiento paralelo durante el salto a P1 después del salto.
CP On
Jump P1 !D96; On 1!
Go P2
CP On
Jump P1
On 1
Go P2
La instrucción Jump y el procesamiento paralelo
Se debe tener en cuenta que la ejecución de instrucciones de procesamiento paralelo que se usan con la instrucción
Jump comienza después de completar el movimiento ascendente y termina al final del movimiento descendente.
Se debe tener en cuenta que la ejecución de instrucciones de procesamiento paralelo que se usan con la instrucción
Jump3 comienza después de completar el movimiento de alejamiento y termina al final del movimiento de
acercamiento.
La instrucción Here y el procesamiento paralelo
No es posible usar la instrucción Here y el procesamiento paralelo juntos en un comando de movimiento como este:
Go Here :Z(0) ! D10; MemOn 1 !
Asegúrese de cambiar el programa de la siguiente forma:
P999 = Here
Go P999 Here :Z(0) ! D10; MemOn 1 !
Consulte también
Arc, Arc3, Go, Jump, Jump3, Jump3CP, Move, BGo, BMove, TGo, TMove
!...! Ejemplo de procesamiento paralelo
Los siguientes ejemplos muestran varias formas de usar la característica de procesamiento paralelo con
comandos de movimiento:
El procesamiento paralelo con el comando Jump causa que el bit de salida 1 se active al final del desplazamiento
ascendente de la articulación Z, y cuando los ejes 1, 2 y 4 comienzan a moverse. Luego, el bit de salida 1 se
vuelve a desactivar después de que se haya completado un 50 % del desplazamiento de movimiento Jump.
Function test
Jump P1 !D0; On 1; D50; Off 1!
Fend
El procesamiento paralelo con el comando Move causa que el bit de salida 5 se active cuando las articulaciones
hayan completado un 10 % de su movimiento hacia el punto P1. Luego de 0,5 segundos, desactive el bit de
salida 5.
Function test2
Move P1 !D10; On 5; Wait 0.5; Off 5!
Fend

26 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
#define
Define el identificador para que sea reemplazado por la cadena de reemplazo especificada.
Sintaxis
#define identifier [(parameter [, parameter ])] string
Parámetros
identifier Palabra clave definida por el usuario, que es una abreviatura del parámetro string. Las reglas
para identificadores son las siguientes:
- El primer carácter debe ser alfabético, mientras que los caracteres posteriores pueden ser
alfanuméricos o un guion bajo ( _ ).
- No se permiten los caracteres de espacio o tabulación como parte de identifier .
parameter Normalmente se usa para especificar una variable (o variables múltiples) que puede ser
utilizada por la cadena de reemplazo. Esto proporciona un mecanismo de definición dinámico
que se puede usar como una macro. Es posible usar un máximo de hasta 8 parámetros con el
comando #define (definir). Sin embargo, cada parámetro debe estar separado por una coma y
la lista de parámetros debe estar entre paréntesis.
string Esta es la cadena de reemplazo que reemplaza el identificador cuando se compila el programa.
Las reglas con respecto a las cadenas de reemplazo son las siguientes:
- Se permiten espacios o tabulaciones en las cadenas de reemplazo.
- Los identificadores utilizados con otras instrucciones #define no pueden ser utilizadas
como cadenas de reemplazo.
- Si se incluye el símbolo de comentario ( ' ), los caracteres que lo siguen se tratarán como
un comentario y no se incluirán en la cadena de reemplazo.
- La cadena de reemplazo se puede omitir. En este caso, el identificador especificado se
reemplaza con "nada" o la cadena nula. Esto elimina el identificador del programa.
Descripción
La instrucción #define causa que se produzca un reemplazo dentro de un programa para el identificador
especificado. Cada vez que se encuentre el identificador especificado, la cadena de reemplazo lo reemplaza
antes de la compilación. Sin embargo, el código fuente permanecerá con el identificador en lugar de la cadena
de reemplazo. Esto permite que el código sea más fácil de leer, en muchos casos, con nombres de
identificador significativos en lugar de cadenas de código largas y difíciles de leer.
El identificador definido se puede usar para realizar compilaciones condicionales en combinación con los
comandos #ifdef o #indef.
Si se especifica un parámetro, se puede usar el nuevo identificador como una macro.
Nota
Si usa #define para declarar variables o sustituir etiquetas, se producirá un error:
Se debe tener en cuenta que el uso de la instrucción #define para declarar variables, se producirá un error.
Consulte también
#ifdef, #ifndef

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 27
Ejemplo de #define
' Quita la marca de comentario de la siguiente línea para el modo Debug.
' #define DEBUG
Input #1, A$
#ifdef DEBUG
Print "A$ = ", A$
#endif
Print "The End"
#define SHOWVAL(x) Print "var = ", x
Integer a
a = 25
SHOWVAL(a)

28 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
#ifdef...#else...#endif
Proporciona capacidades de compilación condicional.
Sintaxis
#ifdef identifier
.
.coloque aquí el código fuente seleccionado para la compilación condicional.
[#else
.
.coloque aquí el código fuente seleccionado para la condición falsa].
#endif
Parámetros
identifier Palabra clave definida por el usuario que, cuando está definida, permite definir el código fuente
entre #ifdef y #else o #endif que se compilará. Por lo tanto, el identificador actúa como la
condición para la compilación condicional.
Descripción
#ifdef...#else...#endif permiten realizar compilaciones condicionales de código fuente seleccionado. La
condición con respecto a si ocurrirá la compilación o no se determinará según el identifier. #ifdef primero
comprueba si el identificador especificado está definido actualmente por #define. La instrucción #else es
opcional.
Si está definido, y no se usa la instrucción #else, se compilan las instrucciones entre #ifdef y #endif. De lo
contrario, si se usa #else, se compilan las instrucciones entre #ifdef y #else.
Si no está definido, y no se usa la instrucción #else, se ignoran las instrucciones entre #ifdef y #endif sin
compilarlas. De lo contrario, si se usa #else, se compilan las instrucciones entre #else y #endif.
Consulte también
#define, #ifndef
Ejemplo de #ifdef
A continuación, se muestra una sección de código desde un programa de muestra que usa #ifdef. En el
siguiente ejemplo, la impresión del valor de la variable A$ se ejecutará según la presencia o ausencia de la
definición de la pseudo instrucción #define DEBUG. Si la pseudo instrucción #define DEBUG se usó antes
en esta fuente, la línea Print A$ se compilará y se ejecutará posteriormente cuando se ejecute el programa.
Sin embargo, la impresión de la cadena "The End" ocurrirá sin importar la pseudo instrucción #define
DEBUG.
' Quita la marca de comentario de la siguiente línea para el modo Debug.
' #define DEBUG
Input #1, A$
#ifdef DEBUG
Print "A$ = ", A$
#endif
Print "The End"

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 29
#ifndef...#endif
Proporciona capacidades de compilación condicional.
Sintaxis
#ifndef identifier
.
.Coloque aquí el código fuente seleccionado para la compilación condicional.
[#else
.
.coloque aquí el código fuente seleccionado para la condición verdadera.]
#endif
Parámetros
identifier Palabra clave definida por el usuario que, cuando no está definida, permite definir el código
fuente entre #ifndef y #else o #endif que se compilará. Por lo tanto, el identificador actúa como
la condición para la compilación condicional.
Descripción
Esta instrucción se llama la instrucción "If not defined" (Si no está definida). #ifndef...#else...#endif permiten
realizar compilaciones condicionales de código fuente seleccionado. La instrucción #else es opcional.
Si está definido, y no se usa la instrucción #else, no se compilan las instrucciones entre #ifndef y #endif. De
lo contrario, si se usa #else, se compilan las instrucciones entre #else y #endif.
Si no está definido, y no se usa la instrucción #else, se compilan las instrucciones entre #ifndef y #endif. De
lo contrario, si se usa #else, no se compilan las instrucciones entre #else y #endif.
Nota
La diferencia entre #ifdef y #ifndef
La diferencia fundamental entre #ifdef y #ifndef es que la instrucción #ifdef compila el código fuente
especificado si el identificador se encuentra identificado. La instrucción #ifndef compila el código fuente si
el identificador no se encuentra identificado.
Consulte también
#define, #ifdef
Ejemplo de #ifndef
A continuación, se muestra una sección de código desde un programa de muestra que usa #ifndef. En el
siguiente ejemplo, la impresión del valor de la variable A$ se ejecutará según la presencia o ausencia de la
definición de la pseudo instrucción #define NODELAY. Si la pseudo instrucción #define NODELAY se
utilizó anteriormente en esta fuente, la línea Wait 1 NO se compilará junto con el resto de la fuente para este
programa cuando se compile. (es decir, se envió para su ejecución). Si la pseudo instrucción #define
NODELAY no se usó (es decir, NODELAY no está definido) antes en esta fuente, la línea Wait 1 se
compilará y se ejecutará posteriormente cuando se ejecute el programa. La impresión de la cadena "The
End" ocurrirá sin importar la pseudo instrucción #define NODELAY.
' Comenta la siguiente línea para forzar un retraso.
#define NODELAY 1
Input #1, A$
#ifndef NODELAY
Wait 1
#endif
Print "The End"

30 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
#include
Incluye el archivo especificado cuando se usa la instrucción #include.
Sintaxis
#include "fileName.INC"
Parámetros
fileName fileName debe ser el nombre de un archivo de inclusión en el proyecto actual. Todos los
archivos de inclusión tienen la extensión ".inc". El nombre de archivo especifica el archivo que
se incluirá en el archivo actual.
Descripción
#include inserta los contenidos del archivo de inclusión especificado con el archivo actual cuando se usa la
instrucción #include.
Los archivos de inclusión se usan para contener instrucciones #define y declaraciones globales de variables.
La instrucción #include se debe usar fuera de cualquier definición de funciones.
Un archivo de inclusión puede contener un archivo de inclusión secundario. Por ejemplo, FILE2 puede
incluirse dentro de FILE1, y FILE3 puede incluirse dentro de FILE2. Esto se llama anidamiento.
Consulte también
#define, #ifdef, #ifndef
Ejemplo de #include
Archivo de inclusión (Defs.inc)
#define DEBUG 1
#define MAX_PART_COUNT 20
Archivo de programa (main.prg)
#include "defs.inc"
Function main
Integer i
Integer Parts(MAX_PART_COUNT)
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 31
#undef
Anula la definición de un identificador definido anteriormente con #define.
Sintaxis
#undef identifier
Parámetros
identifier Palabra clave utilizada en una instrucción #define anterior.
Consulte también
#define, #ifdef, #ifndef

32 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción AbortMotion
Anula un comando de movimiento y coloca la tarea en ejecución en el estado de error.
Este comando es para usuarios experimentados y se debe comprender la especificación del comando antes
de usarla.
Sintaxis
AbortMotion {robotNumber | All }
Parámetros
robotNumber Número del robot cuyo movimiento desea detener.
All Anula el movimiento para todos los robots.
Descripción
Según el estado del robot cuando se ejecuta AbortMotion, el resultado es diferente, como se indica a
continuación.
En cada caso, enganche un error y maneje el procesamiento del error con OnErr para continuar el
procesamiento.
El error 2999 puede usar la constante ERROR_DOINGMOTION.
El error 2998 puede usar la constante ERROR_NOMOTION.
Escriba un programa que no ejecute AbortMotion más de dos veces antes de ejecutar la ejecución continua
(Cont).
Cuando el robot está ejecutando el comando de movimiento
El robot pausa el movimiento del brazo de inmediato y cancela los movimientos restantes.
El error 2999 (ERROR_DOINGMOTION) ocurre en la tarea que estaba ejecutando el comando de
movimiento para el robot.
Para los siguientes comandos de movimiento, el robot se mueve directamente a la siguiente posición desde
el punto en el que se pausó.
Cuando el robot se pausa inmediatamente
Cuando se ejecuta AbortMotion, se cancela el movimiento restante.
El error 2999 (ERROR_DOINGMOTION) ocurre en la tarea que estaba ejecutando el comando de
movimiento para el robot cuando se especifique la instrucción Cont.
Para los siguientes comandos de movimiento, el robot se mueve directamente a la siguiente posición desde
el punto en el que se pausó.
Cuando el robot está en el estado WaitRecover (Protección abierta)
Cuando se ejecuta AbortMotion, se cancela el movimiento restante.
Los siguientes movimientos se pueden seleccionar con los indicadores del comando Recover (Recuperar).
Cuando se ejecuta "Recover robotNumber, WithMove" (Recuperar número de robot, con movimiento),
los motores del robot se encienden y se ejecuta el movimiento de recuperación.
Cuando se ejecuta Cont, ocurre el error 2999 (ERROR_DOINGMOTION) en la tarea que estaba
ejecutando el comando de movimiento para el robot.
Para los siguientes comandos de movimiento, el robot se mueve directamente a la siguiente posición
desde el punto en el que se pausó.
Cuando se ejecuta "Recover robotNumber, WithoutMove" (Recuperar número de robot, sin
movimiento), los motores del robot se encienden.
Cuando se ejecuta Cont, ocurre el error 2999 (ERROR_DOINGMOTION) en la tarea que estaba
ejecutando el comando de movimiento para el robot.
Para los siguientes comandos de movimiento, el robot se mueve directamente a la siguiente posición
desde el punto en el que se pausó, sin el movimiento de recuperación.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 33
Cuando el robot está ejecutando comandos que no sean comandos de movimiento
El error 2998 (ERROR_NOMOTION) ocurre en la tarea que estaba ejecutando anteriormente el comando de
movimiento para el robot. Cuando la tarea está esperando con los comandos Wait o Input, la tarea se anula
oportunamente y ocurre el error 2998.
Cuando ejecute un comando de movimiento con CP On y un programa no tiene más comandos de
movimiento, ocurre el error 2998, incluso si el robot está en funcionamiento.
Cuando el robot no se está ejecutando desde un programa (tarea)
Ocurre un error.
Consulte también
OnErr, Recover, Till
Ejemplo de instrucción AbortMotion
Cuando la E/S de memoria #0 se activa, se ejecuta AbortMotion y el robot vuelve a la posición de reposo.
Function main
Motor On
Xqt sub, NoEmgAbort
OnErr GoTo errhandle
Go P0
Wait Sw(1)
Go P1
Quit sub
Exit Function
errstart:
Home
Quit sub
Exit Function
errhandle:
Print Err
If Err = ERROR_DOINGMOTION Then
Print "Robot is moving" ' Ejecutando Ir a P0 o Ir a P1
EResume errstart
ElseIf Err = ERROR_NOMOTION Then
Print " Robot is not moving " ' Ejecuta Wait Sw(1)
EResume errstart
EndIf
Print "Error Stop" ' Ocurren otros errores
Quit All
Fend
Function sub
MemOff 0
Wait MemSw(0)
AbortMotion 1
MemOff 0
Fend

34 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función Abs
Arroja el valor absoluto de un número.
Sintaxis
Abs(number)
Parámetros
number Cualquier expresión numérica válida.
Valores devueltos
El valor absoluto de un número.
Descripción
El valor absoluto de un número es su magnitud sin signo Por ejemplo, Abs(-1) y Abs(1) arrojan 1.
Consulte también
Atan, Atan2, Cos, Int, Mod, Not, Sgn, Sin, Sqr, Str$, Tan, Val
Ejemplo de función Abs
Los siguientes ejemplos se llevan a cabo desde la ventana Command con la instrucción Print.
> print abs(1)
1
> print abs(-1)
1
> print abs(-3.54)
3.54
>

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 35
Instrucción Accel
Define (o muestra) la tasa de aceleración y desaceleración para las instrucciones de movimiento de punto a
punto Go, Jump y Pulse.
Sintaxis
(1) Accel accel, decel [, departAccel, departDecel, approAccel, approDecel]
(2) Accel
Parámetros
accel Expresión entera de 1 o más que representa un porcentaje de la tasa de aceleración máxima.
decel Expresión entera de 1 o más que representa un porcentaje de la tasa de desaceleración
máxima.
departAccel Aceleración de alejamiento para Jump. Las entradas válidas son 1 o más.
Opcional. Solo está disponible con el comando Jump.
departDecel Desaceleración de alejamiento para Jump. Las entradas válidas son 1 o más.
Opcional. Solo está disponible con el comando Jump.
approAccel Aceleración de acercamiento para Jump. Las entradas válidas son 1 o más.
Opcional. Solo está disponible con el comando Jump.
approDecel Desaceleración de acercamiento para Jump. Las entradas válidas son 1 o más.
Opcional. Solo está disponible con el comando Jump.
Valores devueltos
Cuando se omiten los parámetros, se muestran los parámetros Accel actuales.
Descripción
Accel especifica la aceleración y desaceleración para todos los movimientos de tipo punto a punto. Esto
incluye el movimiento causado por las instrucciones de movimiento del robot Go, Jump y Pulse.
Cada parámetro de aceleración y desaceleración definido por la instrucción Accel puede ser un valor entero
de 1 o más. Este número representa un porcentaje de la aceleración (o desaceleración) máxima permitida.
Normalmente, el valor máximo es de 100. Sin embargo, algunos robots permiten configurar valores mayores
que 100. Use la función AccelMax para obtener el máximo valor disponible para Accel.
La instrucción Accel se puede usar para definir nuevos valores de aceleración y desaceleración o simplemente
para imprimir los valores actuales. Cuando se usa la instrucción Accel para definir nuevos valores accel y
decel, se necesitan los primeros 2 parámetros (accel y decel) en la instrucción Accel.
Los parámetros departAccel, departDecel, approAccel y approDecel son válidos solo para la instrucción
Jump y especifican los valores de aceleración y desaceleración para el movimiento de alejamiento al principio
de Jump y el movimiento de acercamiento de Jump.
El valor Accel se inicializa a los valores predeterminados (baja aceleración) cuando ocurre una de las
siguientes condiciones:
Inicio del controlador
Motor On
SFree, SLock, Brake
Reset, Reset Error
El botón Stop o QuitAll detiene las
tareas

36 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Notas
Ejecutar el comando Accel en el modo de baja potencia (Power Low)
Si se ejecuta Accel cuando el robot está en el modo de baja potencia (Power Low), se almacenan los nuevos
valores, pero los valores actuales están limitados a valores bajos.
Los valores de aceleración actuales tienen validez cuando Power está configurado en High y el modo Teach
está DESACTIVADO.
Comparación de Accel y AccelS
Es importante tener en cuenta que la instrucción Accel no define las tasas de aceleración y desaceleración
para los movimientos de línea recta y de arco. La instrucción AccelS se usa para definir las tasas de
aceleración y desaceleración para los movimientos de línea recta y arco.
Configuración Accel mayor que 100
Normalmente, el valor máximo es de 100. Sin embargo, algunos robots permiten configurar valores mayores
que 100.
En el uso general, el valor de Accel 100 es la configuración óptima que mantiene el equilibrio de la
aceleración y la vibración cuando se ajusta la posición. Sin embargo, es posible que requiera una operación
con aceleración alta para reducir el tiempo del ciclo reduciendo la vibración en la posición. En este caso,
defina Accel a un valor mayor que 100. Excepto en algunas condiciones operativas, el tiempo del ciclo no
cambiará al configurar Accel en un valor mayor que 100.
Consulte también
AccelR, AccelS, Go, Jump, Jump3, Power, Pulse, Speed, TGo
Ejemplo de instrucción Accel
El siguiente ejemplo muestra un programa de movimiento simple en el que la aceleración (Accel) y la
velocidad (Speed) se definen con variables predefinidas.
<Ejemplo 1>
Function acctest
Integer slow, accslow, decslow, fast, accfast, decfast
slow = 20 'define la variable de baja velocidad
fast = 100 'define la variable de alta velocidad
accslow = 20 'define la variable de aceleración lenta
decslow = 20 'define la variable de desaceleración lenta
accfast = 100 'define la variable de aceleración rápida
decfast = 100 'define la variable de desaceleración rápida
Accel accslow, decslow
Speed slow
Jump pick
On gripper
Accel accfast, decfast
Speed fast
Jump place
.
.
.
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 37
<Ejemplo 2>
Defina la desaceleración de descenso de la articulación Z en lenta para permitir que la pieza se coloque
suavemente cuando se use la instrucción Jump. Esto significa que debemos definir el parámetro Zdnd en un
valor bajo cuando se configuren los valores Accel.
>Accel 100,100,100,100,100,35
>Accel
100 100
100 100
100 35
>

38 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función Accel
Arroja un valor de aceleración especificado.
Sintaxis
Accel(paramNumber)
Parámetros
paramNumber Expresión entera que puede tener los siguientes valores:
1: valor de especificación de aceleración
2: valor de especificación de desaceleración
3: valor de especificación de aceleración de alejamiento para Jump
4: valor de especificación de desaceleración de alejamiento para Jump
5: valor de especificación de aceleración de acercamiento para Jump
6: valor de especificación de desaceleración de acercamiento para Jump
Valores devueltos
Número entero 1 % o mayor
Consulte también
Instrucción Accel
Ejemplo de función Accel
Este ejemplo usa la función Accel en un programa:
Integer currAccel, currDecel
' Obtiene la aceleración y desaceleración actual
currAccel = Accel(1)
currDecel = Accel(2)
Accel 50, 50
SRVJump pick
' Restaura los valores anteriores
Accel currAccel, currDecel

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 39
Función AccelMax
Arroja el límite de valor de aceleración máximo disponible para Accel.
Sintaxis
AccelMax(maxValueNumber)
Parámetros
maxValueNumber Expresión entera que puede tener los siguientes valores:
1: valor de aceleración máximo
2: valor de desaceleración máximo
3: valor de aceleración de alejamiento máximo para Jump
4: valor de desaceleración de alejamiento máximo para Jump
5: valor de aceleración de acercamiento máximo para Jump
6: valor de desaceleración de acercamiento máximo para Jump
Valores devueltos
Número entero 1 % o mayor
Consulte también
Accel
Ejemplo de función AccelMax
Este ejemplo usa la función AccelMax en un programa:
' Obtiene la aceleración y desaceleración máximas
Print AccelMax(1), AccelMax(2)

40 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción AccelR
Define o muestra los valores de aceleración y desaceleración para el control de rotación de la herramienta
del movimiento CP.
Sintaxis
(1) AccelR accel [, decel]
(2) AccelR
Parámetros
accel Expresión real en grados/segundos
2
(0,1 a 5000).
decel Expresión real en grados/segundos
2
(0,1 a 5000).
Rango de entradas válidas de los parámetros
accel / decel
VT6L 0,1 a 1000
C4, C8, C12, N2, N6
serie T, serie G, serie RS
serie LS, serie LS-B
X5
0,1 a 5000
(grad/s
2
)
Valores devueltos
Cuando se omiten los parámetros, se muestra la configuración AccelR actual.
Descripción
AccelR es efectivo cuando se usa el modificador ROT en los comandos de movimiento Move, Arc (Arco),
Arc3, BMove, TMove y Jump3CP.
El valor AccelR se inicializa a los valores predeterminados cuando ocurre una de las siguientes condiciones:
Inicio del controlador
Motor On
SFree, SLock, Brake
Reset, Reset Error
El botón Stop o QuitAll detiene las
tareas
Consulte también
Arc, Arc3, BMove, Jump3CP, Power, SpeedR, TMove
Ejemplo de instrucción AccelR
AccelR 360, 200

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 41
Función AccelR
Arroja un valor de aceleración de giro de herramienta especificado.
Sintaxis
AccelR(paramNumber)
Parámetros
paramNumber Expresión entera que puede tener los siguientes valores:
1: valor de especificación de aceleración
2: valor de especificación de desaceleración
Valores devueltos
Valor real en grados/segundos
2
Consulte también
Instrucción AccelR
Ejemplo de función AccelR
Real currAccelR, currDecelR
' Obtiene la aceleración y desaceleración actual
currAccelR = AccelR(1)
currDecelR = AccelR(2)

42 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción AccelS
Define las tasas de aceleración y desaceleración para las instrucciones de movimiento del robot de línea
recta y ruta continua como Move, Arc, Arc3, Jump3, CVMove, etc.
Sintaxis
(1) AccelS accel [, decel ] [, departAccel, departDecel, approAccel, approDecel]
(2) AccelS
Parámetros
accel Expresión real representada en unidades mm/s
2
para definir los valores de aceleración y
desaceleración de los movimientos de línea recta y ruta continua. Si se omite decel, se usa
accel para especificar las tasas de aceleración y desaceleración.
decel Opcional. Expresión real representada en unidades mm/c
2 para definir el valor de
desaceleración.
departAccel Opcional. Expresión real para el valor de aceleración de alejamiento para Jump3, Jump3CP.
departDecel Opcional. Expresión real para el valor de desaceleración de alejamiento para Jump3,
Jump3CP.
approAccel Opcional. Expresión real para el valor de aceleración de acercamiento para Jump3,
Jump3CP.
approDecel Opcional. Expresión real para el valor de desaceleración de acercamiento para Jump3,
Jump3CP.
Rango válido de entradas de los parámetros (mm/s
2
)
accel / decel
departAccel / departDecel
approAccel / approDecel
N2, X5
0,1 a 5000
LS20, LS20-B, T3, T6, VT6L
0,1 a 10000
C4-A901**
0,1 a 15000
C4-A601**, C8-A1401**,
G1, G3, G6, G10, G20, RS,
LS3, LS6, LS3-B, LS6-B, LS10-B
C8-A701**W, C8-A901**W, N6, C12
0,1 a 25000
C8-A701**, C8-A701**R,
C8-A901**, C8-A901**R
0,1 a 35000
Valores devueltos
Muestra los valores de Accel y Decel cuando se usan sin parámetros
Descripción
AccelS especifica la aceleración y desaceleración para todos los tipos de movimiento interpolados, incluidas
las interpolaciones lineales y curvas. Esto incluye el movimiento causado por las instrucciones de
movimiento Move y Arc.
El valor AccelS se inicializa a los valores predeterminados cuando ocurre una de las siguientes condiciones:
Inicio del controlador
Motor On
SFree, SLock, Brake
Reset, Reset Error
El botón Stop o QuitAll detiene las
tareas

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 43
Notas
Ejecutar el comando AccelS en el modo de baja potencia (Power Low):
Si se ejecuta AccelS cuando el robot está en el modo de baja potencia (Power Low), se almacenan los nuevos
valores, pero los valores actuales están limitados a valores bajos.
Los valores de aceleración actuales tienen validez cuando Power está configurado en High y el modo Teach
está DESACTIVADO.
Comparación de Accel y AccelS:
Es importante tener en cuenta que la instrucción AccelS no define las tasas de aceleración y desaceleración
para los movimientos de tipo de punto a punto. (Es decir, movimientos iniciados por las instrucciones Go,
Jump y Pulse). La instrucción Accel se usa para definir las tasas de aceleración y desaceleración para los
movimientos de tipo de punto a punto.
Valor de límite superior
El valor de límite superior de AccelS de los robots SCARA (incluidos los manipuladores de la serie RS)
varía según la configuración de peso y la posición de la unidad de ranura. Para conocer detalles, consulte
los manuales del Manipulador (configuración ACCELS para movimientos CP).
El valor de límite superior de AccelS de robots de 6 ejes varía según la configuración de peso. Para conocer
detalles, consulte los manuales del Manipulador (Especificaciones).
Consulte también
Accel, Arc, Arc3, Jump3, Jump3CP, Power, Move, TMove, SpeedS
Ejemplo de instrucción AccelS
El siguiente ejemplo muestra un programa de movimiento simple en el que la aceleración de línea recta/ruta
continua (AccelS) y la velocidad de línea recta/ruta continua (SpeedS) se definen con variables predefinidas.
Function acctest
Integer slow, accslow, fast, accfast
slow = 20 'define la variable de baja velocidad
fast = 100 'define la variable de alta velocidad
accslow = 200 'define la variable de aceleración lenta
accfast = 5000 'define la variable de aceleración rápida
AccelS accslow
SpeedS slow
Move P1
On 1
AccelS accfast
SpeedS fast
Jump P2
.
.
.
Fend

44 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función AccelS
Arroja la aceleración o desaceleración para comandos de movimiento CP.
Sintaxis
AccelS(paramNumber)
Parámetros
paramNumber Expresión entera que puede tener los siguientes valores:
1: valor de aceleración
2: valor de desaceleración
3: valor de aceleración de alejamiento para Jump3, Jump3CP
4: valor de desaceleración de alejamiento para Jump3, Jump3CP
5: valor de aceleración de acercamiento para Jump3, Jump3CP
6: valor de desaceleración de acercamiento para Jump3, Jump3CP
Valores devueltos
Valor real de 0 a 5000 mm/s/s
Consulte también
Instrucción AccelS, Arc3, SpeedS, Jump3, Jump3CP
Ejemplo de función AccelS
Real savAccelS
savAccelS = AccelS(1)

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 45
Función Acos
Arroja el arcocoseno de una expresión numérica.
Sintaxis
Acos(number)
Parámetros
number Expresión numérica que representa el coseno de un ángulo.
Valores devueltos
Valor real, en radianes, que representa el arcocoseno del parámetro number.
Descripción
Acos arroja el arcocoseno de la expresión numérica. El rango de valores es de -1 a 1. El valor devuelto por
Acos varía entre 0 a PI radianes. Si number es < -1 o > 1, ocurre un error.
Para convertir de radianes a grados, use la función RadToDeg.
Consulte también
Abs, Asin, Atan, Atan2, Cos, DegToRad, RadToDeg, Sgn, Sin, Tan, Val
Ejemplo de función Acos
Function acostest
Double x
x = Cos(DegToRad(30))
Print "Acos of ", x, " is ", Acos(x)
Fend

46 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función Agl
Arroja el ángulo de la articulación para la articulación rotacional seleccionada, o la posición de la articulación
lineal seleccionada.
Sintaxis
Agl(jointNumber)
Parámetros
jointNumber Expresión entera que representa el número de articulación. Los valores van desde 1
al número de articulaciones del robot. El eje S adicional es 8 y el eje T es 9.
Valores devueltos
El ángulo de la articulación para la articulación rotacional seleccionada, o la posición de las articulaciones
lineales seleccionadas.
Descripción
La función Agl se usa para obtener el ángulo de la articulación para la articulación rotacional seleccionada,
o la posición de la articulación lineal seleccionada.
Si la articulación seleccionada es rotacional, Agl arroja el ángulo actual, medido desde la posición 0 de la
articulación seleccionada, en grados. El valor devuelto es un número real.
Si la articulación seleccionada es lineal, Agl arroja la posición actual, medida desde la posición 0 de la
articulación seleccionada, en mm. El valor devuelto es un número real.
Si se selecciona un brazo auxiliar con la instrucción Arm, Agl arroja el ángulo (o posición) desde la posición
del pulso 0 de brazo estándar del brazo seleccionado.
Consulte también
PAgl, Pls, PPls
Ejemplo de función Agl
Los siguientes ejemplos se llevan a cabo desde la ventana Command con la instrucción Print.
> print agl(1), agl(2)
17.234 85.355

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 47
Función AglToPls
Convierte los ángulos de robot a pulsos.
Sintaxis
AglToPls( j1, j2, j3, j4 [, j5, j6 ] [, j7 ] [, j8, j9 ] )
Parámetros
j1 – j6 Expresiones reales que representan los ángulos de articulación.
j7 Expresión real que representa el ángulo de la articulación n.° 7. Para robots de tipo de
articulación de 7 ejes.
j8 Expresión real que representa el ángulo del eje S adicional.
j9 Expresión real que representa el ángulo del eje T adicional.
Valores devueltos
Un punto de robot cuya ubicación es determinada por los ángulos de articulación convertidos en pulsos.
Descripción
Use AglToPls para crear un punto desde los ángulos de articulación.
Nota
La asignación a un punto puede causar que se pierda parte de la posición de la articulación.
En ciertos casos, cuando el resultado de AglToPls se asigna a una variable de datos de punto, el brazo se
mueve a una posición diferente de la posición de la articulación especificada por AglToPls.
Por ejemplo:
P1 = AglToPls(0, 0, 0, 90, 0, 0)
Go P1 ' se mueve a la posición de la articulación AglToPls(0, 0, 0, 0, 0, 90)
De forma similar, cuando se usa la función AglToPls como parámetro en un comando de movimiento CP, el
brazo se puede mover a una posición de la articulación distinta de la posición de articulación especificada
por AglToPls.
Move AglToPls(0, 0, 0, 90, 0, 0) ' se mueve a la posición de la articulación AglToPls(0,
0, 0, 0, 0, 90)
Cuando se usa la función AglToPls como un parámetro en un comando de movimiento PTP, ese problema
no ocurre.
Consulte también
Agl, JA, Pls
Ejemplo de función AglToPls
Go AglToPls(0, 0, 0, 90, 0, 0)

48 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función AIO_In
Lee el valor analógico desde el canal de entrada de E/S analógica opcional.
Sintaxis
AIO_In(Channel Number)
Parámetros
Channel Number Especifica el número de canal para la E/S analógica.
Valores devueltos
Arroja el valor de entrada analógica del canal de E/S analógica que se especifica en el número de canal en
números reales. El rango de valores devueltos varía según la configuración del rango de entradas de la placa de
E/S analógica.
Descripción
InFunction
Consulte también
Función AIO_InW, AIO_Out, AIO_OutW, Función AIO_Out, Función AIO_OutW, AIO_Set, Wait
Ejemplo de función AIO_In
Function main
Real var1
var1 = AIO_In(2) 'Adquiere el estado de entrada de la entrada del canal analógico 2
If var1 > 5.0 Then
Go P1
Go P2
'Ejecuta otro comando de movimiento aquí
'.
'.
Else
Print "Error in initialization!"
Print "Sensory Inputs not ready for cycle start"
Print "Please check analog inputs 2."
EndIf
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 49
Función AIO_InW
Lee el valor analógico desde el canal de entrada de E/S analógica opcional.
Sintaxis
AIO_InW(Channel Number)
Parámetros
Channel Number Especifica el número de canal para la E/S analógica.
Valores devueltos
Arroja los estados de entrada (números enteros largos de 0 a 65535) del canal de E/S analógica
especificado.
La siguiente tabla muestra el voltaje (corriente) de entrada y el valor devuelto de cada canal de entrada según
la configuración del rango de entrada de la placa de E/S analógica.
Datos de entrada
Configuración de rango de entrada
Hexadecimal
Decimal
±10,24 (V)
±5,12 (V)
0 a 5,12 (V)
0 a 10,24(V)
0 a 24 (mA)
0xFFFF
65535
10,23969
5,11984
5,12000
10,24000
24,00000
0x8001
32769
0,00031
0,00016
2,56008
5,12016
12,00037
0x8000
32768
0,00000
0,00000
2,56000
5,12000
12,00000
0x0000
0
-10,24000
-5,12000
0,00000
0,00000
0,00000
Consulte también
AIO_InFunction, AIO_Out, AIO_OutW, AIO_OutFunction, AIO_OutWFunction, AIO_Set, Wait
Ejemplo de función AIO_In
Long word0
word0 = AIO_InW(1)

50 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
AIO_Out
Genera un valor analógico desde el canal de salida de E/S analógica opcional.
Sintaxis
AIO_Out Channel Number, Outputdata [, Forced]
Parámetros
Channel Number Especifica el número de canal para la E/S analógica.
Output data Especifica el número real de tipo Real que indica el voltaje de salida [V] o el valor de
corriente [mA] en una fórmula o valor.
Forced Opcional. Normalmente se omite.
Descripción
Genera el valor Real que indica el voltaje [V] o la corriente [mA] especificados para el puerto de salida
analógica que se especificó en el puerto de canal. Define el rango de salida de voltaje del puerto de salida
analógica o la selección de salida de voltaje y corriente con el interruptor de la placa. Si se configura un valor
que está fuera del rango del puerto de E/S analógica, genera el valor límite (valores máximo y mínimo) que
no se encuentra fuera del rango.
El comando AIO_Out se convierte en un error si se está generando la información de velocidad con el canal
especificado. Detiene la generación de información de velocidad y ejecuta el comando AIO_Out.
Nota
Indicador Forced
Especifica el indicador si se está generando la E/S analógica cuando se opera la parada de emergencia o se
abre la puerta de seguridad con las tareas NoPause y NoEmgAbort (se especifica una tarea especial para que
NoPause o NoEmgAbort se inicien al ejecutar Xqt).
Debe tener cuidado con el diseño del sistema ya que la salida de E/S analógica cambia al operar la parada de
emergencia o al abrir la puerta de seguridad.
Consulte también
Función AIO_In, AIO_OutW, Función AIO_Out, Función AIO_OutW, AIO_Set
Ejemplo de AIO_Out
Genera 7,0 [V] desde el canal 1 de E/S analógica.
AIO_Out 1, 7.0

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 51
Función AIO_Out
Arroja el valor análogo en un número real que se genera en el canal de salida de E/S analógica opcional.
Sintaxis
AIO_Out(Channel Number)
Parámetros
Channel Number Especifica el número de canal para la E/S analógica.
Valores devueltos
Arroja el voltaje del canal de E/S analógica y el estado de salida de corriente especificados en un número
real. La unidad de salida de voltaje es [V] y la de salida de corriente es [mA].
Esta función está disponible cuando se genera la información de velocidad del robot en el canal
especificado.
Consulte también
AIO_InFunction, AIO_Out, AIO_OutW, AIO_OutWFunction, AIO_Set, Wait
Ejemplo de función AIO_Out
Real rdata01
rdata01 = AIO_Out(1)

52 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
AIO_OutW
Genera el valor analógico de 16 bits desde el canal de salida de E/S analógica opcional.
Sintaxis
AIO_OutW Channel Number, Output data [, Forced]
Parámetros
Channel Number Especifica el número de canal para la E/S analógica.
Output data Especifica los datos de salida (la expresión entera es de 0 a 65535) en una fórmula o
valor.
Forced Opcional. Normalmente se omite.
Descripción
Salida a un canal de E/S analógica que se especifica con un número de canal.
Para los datos de salida, especifica una expresión entera de 0 a 65535 en una fórmula o valor.
El voltaje de salida (corriente) es el siguiente, según la configuración del rango de salida que se define con
el interruptor de la placa.
Datos de salida
Configuración de rango de salida
Hexadecimal
Decimal
±10 (V)
±5 (V)
0 a 5 (V)
0 a 10 (V)
4 a 20 (mA)
0 a 20 (mA)
0xFFFF
65535
9,99970
4,99985
5,00000
10,00000
20,00000
20,00000
0x8001
32769
0,00031
0,00015
2,50008
5,00015
12,00024
10,00031
0x8000
32768
0,00000
0,00000
2,50000
5,00000
12,00000
10,00000
0x0000
0
-10,00000
-5,00000
0,00000
0,00000
4,00000
0,00000
Nota
Indicador Forced
Especifica el indicador si se está generando la E/S analógica cuando se opera la parada de emergencia o se
abre la puerta de seguridad con las tareas NoPause y NoEmgAbort (se especifica una tarea especial para que
NoPause o NoEmgAbort se inicien al ejecutar Xqt) y una tarea en segundo plano.
Debe tener cuidado con el diseño del sistema ya que la salida de E/S analógica cambia al operar la parada de
emergencia o al abrir la puerta de seguridad.
Consulte también
AIO_InFunction, AIO_Out, AIO_OutFunction, AIO_OutWFunction, AIO_Set, Wait
Ejemplo de AIO_OutW
AIO_OutW 1, &H8000

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 53
Función AIO_OutW
Arroja el valor de salida analógica en números enteros largos de 0 a 65535, que se genera en un canal de
E/S analógica opcional.
Sintaxis
AIO_OutW(Channel Number)
Parámetros
Channel Number Especifica el número de canal para la E/S analógica.
Valores devueltos
Arroja el estado de salida del canal de E/S analógica que se especifica en números enteros largos desde 0 a
65535.
La siguiente tabla muestra el voltaje (corriente) de salida y el valor devuelto de cada canal de salida según
la configuración del rango de salida de la placa de E/S analógica.
Datos de salida
Configuración de rango de salida
Hexadecimal
Decimal
±10 (V)
±5 (V)
0 a 5 (V)
0 a 10 (V)
4 a 20 (mA)
0 a 20 (mA)
0xFFFF
65535
9,99970
4,99985
5,00000
10,00000
20,00000
20,00000
0x8001
32769
0,00031
0,00015
2,50008
5,00015
12,00024
10,00031
0x8000
32768
0,00000
0,00000
2,50000
5,00000
12,00000
10,00000
0x0000
0
-10,00000
-5,00000
0,00000
0,00000
4,00000
0,00000
Esta función está disponible cuando se genera la información de velocidad del robot en el canal
especificado.
Consulte también
AIO_InFunction, AIO_Out, AIO_OutW, AIO_OutFunction, AIO_Set, Wait
Ejemplo de función AIO_OutW
Long word0
word0 = AIO_OutW(1)

54 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
AIO_Set
Genera la información de velocidad del robot al canal de salida de E/S analógica opcional.
Sintaxis
(1) AIO_Set channelNumber, On, {RefTCPSpeed | RealTCPSpeed | RefECPSpeed |
RealECPSpeed }, MaximumOutputSpeed [, MiminumOutputSpeed]
(2) AIO_Set Channel Number, Off
(3) AIO_Set [Channel Number]
Parámetros
Channel Number Especifica el número de canal para la E/S analógica.
On Especifica los datos de salida (la expresión entera es de 0 a 65535) en una
fórmula o valor.
Off Finaliza la salida analógica de la información de velocidad e inicializa la salida
a “0”.
RefTCPSpeed Genera la velocidad ordenada del TCP que está seleccionado actualmente.
RealTCPSpeed Genera la velocidad real del TCP que está seleccionado actualmente.
RefECPSpeed Genera la velocidad ordenada del ECP que está seleccionado actualmente.
RealECPSpeed Genera la velocidad real del ECP que está seleccionado actualmente.
MaximumOutputSpeed Especifica el número real de tipo Real (unidad [mm/s]) que indica la velocidad
cuando se genera el valor máximo del rango de salida en una fórmula o valor.
MinimumOutputSpeed Especifica el número real de tipo Real (unidad [mm/s]) que indica la velocidad
cuando se genera el valor mínimo del rango de salida en una fórmula o valor.
El valor es "0" [0 mm/s] cuando se omite.
Descripción
Realiza la salida en tiempo real de la velocidad de TCP (punto central de herramienta) o ECP (punto de
control externo) con el voltaje o la corriente analógicos al canal de E/S analógica especificado por el
número de canal. Define la selección del voltaje o la corriente analógicos y la configuración del rango de
salida con un interruptor y un puente en la placa de E/S analógica.
La velocidad del robot, que corresponde a un valor mínimo y máximo del rango de salida, es determinada
por la interpolación lineal según la velocidad de salida mínima y máxima, como se muestran en la figura a
continuación.
Velocidad de salida mínima
Velocidad de salida máxima
Salida mínima
Salida máxima
Salida
[V o mA]
Velocidad de punta [mm/s]
Si se especifica la velocidad ordenada (RefTCPSpeed o RefECPSpeed), genera la forma de onda de
velocidad ideal según el valor del comando que se está aplicando al robot.
Si se especifica la velocidad real (RealTCPSpeed y RealECPSpeed), genera la forma de onda de velocidad
calculada según el movimiento real del robot.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 55
Si se especifica el TCP (RefTCPSpeed o RealTCPSpeed), genera la velocidad del punto central de la
herramienta seleccionada actualmente (de forma predeterminada: Herramienta 0).
Si especifica el ECP (RefECPSpeed o RealECPSpeed), genera la velocidad del punto de control externo
(ECP) que está seleccionado actualmente. Si ECP no está seleccionado (cuando ECP = 0), genera la salida
mínima.
Si solo se especifica el número del canal, muestra la información de configuración de salida de la E/S del
canal analógico especificado. Si se omiten todos los argumentos, muestra la información de configuración
de salida de la E/S de todos los canales analógicos especificados.
Consulte también
AIO_InFunction, AIO_Out, AIO_OutFunction, AIO_Out, AIO_OutWFunction, AIO_Set, Wait
Ejemplo de AIO_Set
Define la salida de velocidad real del TCP del robot 1 y la herramienta 1 al canal de la salida analógica.
Realiza la salida analógica de la velocidad de funcionamiento del robot y desactiva la configuración de
salida de velocidad.
Robot 1
Tool 1
Motor On
Power High
SpeedS 2000
AccelS 5000
AIO_Set 1, On, RealTCPSpeed, 2000.0, 0.0
Move P1
AIO_Set 1, Off

56 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función AIO_Set
Arroja la información de configuración de la salida de velocidad del robot que está definida en el canal de
salida de E/S analógica opcional.
Sintaxis
AIO_Set(channelNumber, Index)
Parámetros
Channel number Especifica el número de canal para la E/S analógica.
Index Especifica el índice de información de configuración de adquisición en un número
entero.
Valores devueltos
La siguiente tabla muestra la información que está disponible desde la función AIO_Set:
Índice
Información
1
On(1) / Off(0)
2
RefTCPSpeed(0)/ RealTCPSpeed(1)/ RefECPSpeed(2)/ RealECPSpeed(3)
3
Velocidad de salida máxima [mm/s]
4
Velocidad de salida mínima [mm/s]
Consulte también
AIO_InFunction, AIO_Out, AIO_OutW, AIO_OutFunction, AIO_OutWFunction, AIO_Set, Wait
Ejemplo de función AIO_Set
Print ‘‘Analog Ch#1 speed output is: ’’, AIO_Set(1, 1)

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 57
AIO_TrackingSet
Define la función de seguimiento de distancia.
Sintaxis
(1) AIO_TrackingSet channelNumber, Conversion coefficient of measured value and distance,
Measured value at 0mm, Lower limit of available range for tracking, Upper
limit of available range for tracking, [, Robot motions out of the available
range for tracking [,Axis to execute the distance tracking function]]
(2) AIO_TrackingSet channelNumber
Parámetros
Channel Number Expresión entera de 1 a 8 que representa el número de canal para la E/S
analógica a la cual se conecta el sensor de distancia que se usará.
Conversion coefficient of measured value and distance
Convierte el valor medido (V, mA) del sensor de distancia en distancia
(mm). Especifica el coeficiente en el número de lectura entre −500 y 500
salvo 0. (Unidad: mm/V, mm/mA)
Measured value at 0mm
Especifica el valor del voltaje o la corriente cuando la distancia es 0 mm (en
caso de medidor de desplazamiento: cantidad de desplazamiento). (Unidad:
V, mA)
Define el valor en la configuración del rango de entrada de la placa E/S
analógica.
Configuración de
rango de entrada
Valor mínimo
Valor máximo
±10,24 V
−10,24 V
10,24 V
±5,12 V
−5,12 V
5,12 V
0 a 5,12 V
0 V
5,12 V
0-10,24 V
0 V
10,24 V
0-24 mA
0 mA
24 mA
Lower limit of available range for tracking
El límite inferior del rango disponible para seguimiento es el mismo que el
límite inferior de la cantidad de desplazamiento permitida cuando se ejecuta
la función de seguimiento de distancia. Especifique el límite entre −300 y
300 en un número real. (Unidad: mm)
Asegúrese de especificar un valor mayor que el límite inferior del rango
medible del sensor de distancia.
Para el límite inferior del rango disponible para seguimiento, especifique un
valor más bajo que su límite superior.
Upper limit of available range for tracking
El límite superior del rango disponible para seguimiento es el mismo que el
límite superior de la cantidad de desplazamiento permitida cuando se ejecuta
la función de seguimiento de distancia. Especifique el límite entre −300 y
300 en un número real. (Unidad: mm)
Asegúrese de especificar un valor menor que el límite superior del rango
medible del sensor de distancia.
Para el límite superior del rango disponible para seguimiento, especifique un
valor mayor que su límite inferior.

58 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Robot motions out of the available range for tracking
Cuando el robot está fuera del rango de seguimiento (entre los límites
superior e inferior como se describe en la página anterior), especifique 0 o 1
para detener/continuar el movimiento del robot.
El valor se puede omitir. Si se omite, se establece en "0".
Las constantes son las siguientes:
Constante
Valor
Descripción
AIOTRACK_ERRSTOP 0
El robot se detiene debido a un error
fuera del rango disponible para
seguimiento.
AIOTRACK_CONTINUE 1
El robot continúa su movimiento
fuera del rango disponible para
seguimiento.
Axis to execute the distance tracking function
Especifica un eje (el valor entero es de 0 a 5) para ejecutar la función de
seguimiento de distancia. Especifica el eje que se asocia con la dirección
medida del sensor de distancia que se utilizará.
El valor se puede omitir. Si se omite, se establece en "2".
Las constantes son las siguientes:
Constante
Valor
Descripción
AIOTRACK_TOOL_X 0
Eje X de las
coordenadas de la
herramienta
AIOTRACK_TOOL_Y 1
Eje Y de las
coordenadas de la
herramienta
AIOTRACK_TOOL_Z 2
Eje Z de las
coordenadas de la
herramienta
AIOTRACK_ECP_X 3
Eje X de las
coordenadas de ECP
AIOTRACK_ECP_Y 4
Eje Y de las
coordenadas de ECP
AIOTRACK_ECP_Z 5
Eje Z de las
coordenadas de ECP
Valores: Se pueden especificar de 3 a 5 cuando se activa la opción de punto
de control externo (ECP).
Valores devueltos
La sintaxis (2) muestra el valor definido actual en la consola.
La siguiente es una tabla de correspondencia de los nombres de los parámetros antes mencionados y los
nombres de los parámetros que aparecen en la consola.
Nombres de los parámetros
Nombres que
aparecen en la
consola
Conversion coefficient of measured value and
distance
ScaleFactor
Measured value at 0mm
RefVoltage
Lower limit of available range for tracking
ThresholdMin
Upper limit of available range for tracking
ThresholdMax
Robot motions out of the available range for tracking
OutOfRangeMode
Axis to execute the distance tracking function
TrackingAxis
Se muestran los siguientes ejemplos:

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 59
Ej. 1: Cuando se define el canal n.º 1
Ch1:
ScaleFactor 1.000[V/mm or mA/mm]
RefVoltage 0.000 [V or mA]
ThresholdMin −10.000[mm]
ThresholdMax 10.000[mm]
OutOfRangeMode AIOTRACK_ERRSTOP
TrackingAxis AIOTRACK_TOOL_Z
Ej. 2: Cuando no se define el canal n.º 1
Ch1: No definido
Descripción
AIO_TrackingSet define los parámetros para la función de seguimiento de distancia. Los parámetros que se
deberán definir los determina el sensor de distancia o el entorno de trabajo. Después de arrancar el
controlador, se debe ejecutar AIO_TrackingSet antes de ejecutar AIO_TrackingStart. Los parámetros
definidos mantienen los valores hasta que se apaga o se reinicia el controlador de robot.
Las siguientes son descripciones detalladas de los parámetros:
Conversion coefficient of measured value and distance:
Cuando el sensor de distancia indica un desplazamiento: +2 mm por +1 V, el coeficiente de
conversión es 2. En este momento, +2 mm es el desplazamiento en la dirección donde la distancia se hace
más larga. Dependiendo del medidor de desplazamiento, se define el voltaje en positivo para la dirección
donde la distancia se hace más corta. En este caso, el coeficiente conversión será negativo.
Measured value at 0mm:
Para el sensor de distancia, especialmente el medidor de desplazamiento, el valor del voltaje o de la
corriente a una distancia: 0 mm difiere dependiendo de los productos. Además, algunos de los productos
pueden definir cualquier valor para el valor de voltaje o corriente a una distancia: 0 mm según la
configuración del usuario. Especifique los valores según el uso del sensor de distancia. Si el voltaje de
salida output del sensor de distancia es 0 V cuando la distancia (o desplazamiento) es 0 mm, este
parámetro es “0”.
Upper/lower limit of available range for tracking:
Defina los límites superior e inferior dependiendo de las variaciones permitidas por las aplicaciones.
Los valores definidos deben estar dentro del rango medible del sensor de distancia. El rango medible del
sensor de distancia difiere dependiendo de cada sensor y la configuración del usuario. Asegúrese de definir
los límites antes de ejecutar la función de seguimiento de distancia. Si este parámetro se establece fuera
del rango medible del sensor de distancia, la función de seguimiento de distancia no podrá ejecutarse
correctamente y el robot puede moverse de manera no intencional.
Robot motions out of the available range for tracking:
Las siguientes figuras indican la trayectoria de movimiento del robot cuando se ejecuta la función de
seguimiento de distancia en la dirección Z en la herramienta (cuando se establece el parámetro “Robot
motions out of the available range for tracking” en “0” o “1”).
P1: punto de inicio de la función de seguimiento de distancia
P2: punto objetivo
Las figuras indican un objeto que se moverá fuera del rango medible en el punto A y volverá al punto B
dentro del rango.
Defina el valor medido (desplazamiento) en la dirección Z de la herramienta en P1 (punto de inicio de la
función) como valor de referencia. La función de seguimiento de distancia controla al robot para que el
valor medido siempre se convierta en el valor de referencia. Por consiguiente, cuando el robot se mueve
desde P1 hasta P2, serán constantes los valores medidos entre P1 y el punto A.
Cuando el robot llega al punto A, se detiene debido a un error si el parámetro se establece en “0”. Si el
parámetro se establece en “1”, el robot se sigue moviendo hacia P2 desde el punto A. Sin embargo, se
desactiva la función de seguimiento de distancia mientras el robot está fuera del rango disponible.
Cuando el robot se mueve al punto B, se activa la función porque el robot está dentro del rango
disponible. El robot se mueve al igual que con el movimiento desde P1 hasta el punto A para que el valor
medido sea constante.

60 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Dirección Z de la herramienta
0: Detener el movimiento del robot
debido a que está fuera de rango
1: Continuar el movimiento del robot a
pesar de estar fuera de rango
Función Distance Tracking
(Seguimiento de distancia)
Activado
Desactivado
Activado
Fuera de rango
Cuando se establece el parámetro en “1” y el robot se mueve fuera del rango, el robot se mueve en la
trayectoria desde el punto de inicio (P1) hasta el punto objetivo (P2) con movimiento CP. Como se
muestra en las figuras a continuación, la trayectoria entre A y B (fuera del rango disponible) será paralela
a la de P1 a P2. Cuando el robot llega al punto B, el robot volvió a estar dentro del rango disponible. Por
lo tanto, el robot se controla según el valor medido y puede moverse repentinamente.
Dirección Z de la
herramienta
0: Detener el movimiento del robot
debido a que está fuera de rango
1: Continuar el movimiento del robot a
pesar de estar fuera de rango
1: Continuar el movimiento del robot a
pesar de estar fuera de rango
0: Detener el movimiento del robot
debido a que está fuera de rango
PRECAUCIÓN
■
Si no se establece cada parámetro correctamente, el robot puede moverse de
manera no intencional cuando se ejecute AIO_TrackingStart.
Asegúrese de definir los parámetros correctamente dependiendo del dispositivo
y el
entorno de trabajo.
Si el robot se mueve de manera anormal, presione inmediatamente y mantenga
presionado el pulsador de emergencia.
Consulte también
AIO_TrackingStart, AIO_TrackingEnd, Función AIO_TrackingOn

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 61
Ejemplo de función AIO_TrackingSet
A continuación, se indica un programa de ejemplo que mueve el robot con la función de seguimiento de distancia.
(P1: punto de inicio, P2: punto final)
PRECAUCIÓN
■
Los parámetros establecidos en el ejemplo son valores de referencia.
Tenga en cuenta que la
operación puede no ser correcta o que el movimiento
puede ser vibratorio dependiendo de los parámetros definidos y algunas
condiciones de operación.
Si el robot se mueve de manera anormal, presione inmediatamente y mantenga
presionado el pulsador de emerg
encia.
Function Main
Motor On
Power High
SpeedS 30
AccelS 300,300
Go P1 ‘ Mover a P1: punto de inicio
AIO_TrackingSet 1,1,0,-5,5,0,2 ‘ Definir la función de seguimiento de distancia
AIO_TrackingStart 1,5,5,5 ‘ Iniciar la función de seguimiento de distancia
Move P2 ‘ Mover a P2 mediante la ejecución de la función
de seguimiento de distancia
AIO_TrackingEnd ‘ Finalizar la función de seguimiento de distancia
Motor Off
Fend

62 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
AIO_TrackingStart
Inicia la función de seguimiento de distancia.
Sintaxis
AIO_TrackingStart channelNumber,ProportionalGain [,IntegralGain [,DifferentialGain]]
Parámetros
Channel Number Expresión entera de 1 a 8 que representa el número de canal para la E/S
analógica a la cual se conecta el sensor de distancia que se usará.
ProportionalGain Valor real (menor que 50 excepto 0) que representa una ganancia
proporcional de la función de seguimiento de distancia.
El valor óptimo difiere dependiendo de la velocidad del movimiento del
robot o la forma de la pieza de trabajo. Por lo tanto, se debe definir el valor
según el entorno de uso.
IntegralGain Valor real (menor que 100) que representa una ganancia integral de la
función de seguimiento de distancia.
Opcional. Si se omite, se establece en "0".
Para aumentar la precisión del seguimiento de distancia, ajuste la ganancia
integral.
DifferentialGain Valor real (menor que 100) que representa una ganancia diferencial de la
función de seguimiento de distancia.
Opcional. Si se omite, se establece en "0".
Para aumentar la precisión del seguimiento de distancia, ajuste la ganancia
diferencial.
Descripción
La función de seguimiento de distancia controla al robot para que se pueda mantener una distancia constante
entre el robot y la pieza de trabajo mediante un valor medido por el sensor de distancia que está conectado a
la E/S analógica.
La dirección del eje del robot que se controlará está especificada por el parámetro “Axis to execute the
distance tracking function” de AIO_TrackingSet. Si la distancia mantenida se define como “valor de
referencia”, el valor medido por el sensor de distancia cuando se ejecuta el comando será el valor de
referencia.
Ejecute AIO_TrackingStart para iniciar la función de seguimiento de distancia y finalice la función
ejecutando AIO_TrackingEnd. La función sigue activa hasta que se ejecuta AIO_TrackingEnd. Si no usa
la función, ejecute AIO_TrackingEnd inmediatamente para finalizar la función.
Si ejecuta AIO_TrackingStart antes de AIO_TrackingSet, se producirá un error. Asegúrese de ejecutar
AIO_TrackingSet antes de ejecutar AIO_TrackingStart.
La función de seguimiento de distancia está disponible para los robots SCARA (incluidos los manipuladores
de la serie RS) y los robots de 6 ejes (incluidos los manipuladores de la serie N).
El robot se puede mover mientras la función esté activa. Sin embargo, el robot solo se mueve con movimiento
CP y no está disponible el movimiento PTP.
Si el robot pasa por el entorno de singularidad mientras está activa la función de seguimiento de distancia, se
produce un error.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 63
No se pueden usar los siguientes comandos mientras se ejecuta la función de seguimiento de distancia.
Comando para apagar el motor
Apagado del motor, SFree
Comandos de movimiento PTP
BGo, Go, JTran, Jump, Jump3, Jump3CP, JumpTLZ, Pass, Ptran,
Pulse, TGo
Comandos de Force Control
FCKeep, comandos de movimiento con FC, FS#.Reset,
FS.Reboot
Comando de control de torque
TC
Comandos de seguimiento del
transportador
Comando de movimiento + Cnv_QueGet
Comandos de VRT
VRT, VRT_CPMotion
Comandos de configuración
AIO_TrackingSet, Arm, ArmSet, Base, Calib, CalPls, ECP,
ECPSet, Hofs, Inertia, MCal, Power, TLSet, Tool, Weight
(Para AIO_TrackingSet, ArmSet, ECPSet y TLSet, se produce
un error cuando se cambia el número de uso).
Otros
Brake, Here, Home, VCal, WaitPos
Configuración de ProportionalGain, IntegralGain y DifferentialGain
En ProportionalGain, cuanto más alto sea el valor que defina, más rápido hace el seguimiento el robot. Sin
embargo, si el valor definido es demasiado alto, el robot se moverá muy rápidamente y puede ocasionar un error.
Se pueden omitir IntegralGain y DifferentialGain. Para aumentar la precisión de la corrección, la configuración
es obligatoria.
Si la configuración no está correcta, el robot puede moverse rápido o vibrar.
Para conocer detalles acerca de cada configuración de ganancia, consulte el siguiente manual.
Manual del usuario de EPSON RC+: 19. Función de seguimiento de distancia
Consulte también
AIO_TrackingSet, AIO_TrackingEnd, Función AIO_TrackingOn
PRECAUCIÓN
■
Si se define un valor demasiado alto para ProportionalGain, IntegralGain y
DifferentialGain, el robot puede moverse de manera no intencional.
Aumente los valores d
e cada parámetro gradualmente. Cambiar el valor a uno
mayor de una vez es extremadamente peligroso y el robot se puede mover de
manera no intencional.
Si el robot se mu
eve de manera anormal, presione inmediatamente y mantenga
presionado el pulsador de emergencia.

64 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Ejemplo de instrucción AIO_TrackingStart
A continuación, se indica un programa de ejemplo que mueve el robot con la función de seguimiento de distancia.
(P1: punto de inicio, P2: punto de relevo, P3: punto final)
Function Main
Motor On
Power High
SpeedS 30
AccelS 300,300
Go P1 ‘ Mover a P1: punto de inicio
AIO_TrackingSet 1,1,0,-5,5,0,2 ‘ Definir la función de seguimiento de distancia
AIO_TrackingStart 1,1,0,0 ‘ Iniciar la función de seguimiento de distancia
Move P2 ‘ Mover a P2 mediante la ejecución de la función de
seguimiento de distancia
Move P3 ‘ Mover a P3 mediante la ejecución de la función de
seguimiento de distancia
AIO_TrackingEnd ‘ Finalizar la función de seguimiento de distancia
Motor Off
Fend
PRECAUCIÓN
■
Los parámetros establecidos en el ejemplo son valores de referencia.
Tenga en cuenta que la operación puede
no ser correcta o que el movimiento
puede ser vibratorio dependiendo de los parámetros definidos y algunas
condiciones de operación.
Si el robot se mueve de manera anormal, presione inmediatamente y mantenga
presionado el pulsador de emergencia.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 65
AIO_TrackingEnd
Finaliza la función de seguimiento de distancia.
Sintaxis
AIO_TrackingEnd
Descripción
Finaliza la función de seguimiento de distancia iniciada por AIO_TrackingStart.
Consulte también
AIO_TrackingSet, AIO_TrackingStart, Función AIO_TrackingOn
Ejemplo de instrucción AIO_TrackingEnd
A continuación, se indica un programa de ejemplo que mueve el robot con la función de seguimiento de distancia.
(P1: punto de inicio, P2: punto de relevo, P3: punto final)
Function Main
Integer ChNo
Motor On
Power High
SpeedS 30
AccelS 300,300
ChNo=1
Go P1 ‘ Mover a P1: punto de inicio
AIO_TrackingSet ChNo,10,0,-3,3,0,2 ‘ Definir la función de seguimiento de distancia
AIO_TrackingStart ChNo,1,0,0 ‘ Iniciar la función de seguimiento de distancia
Move P2 ‘ Mover a P2 mediante la ejecución de la
función de seguimiento de distancia
Move P3 ‘ Mover a P3 mediante la ejecución de la
función de seguimiento de distancia
AIO_TrackingEnd ‘ Finalizar la función de seguimiento de
distancia
Motor Off
Fend
PRECAUCIÓN
■
Los
parámetros establecidos en el ejemplo son valores de referencia.
Tenga en cuenta que la operación puede no ser correcta o que el movimiento
puede ser vibratorio dependiendo de los parámetros definidos y algunas
condiciones de operación.
Si el robot se muev
e de manera anormal, presione inmediatamente y mantenga
presionado el pulsador de emergencia.

66 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
AIO_TrackingOnFunction
Arroja si el robot especificado está ejecutando o no la función de seguimiento de distancia.
Sintaxis
AIO_TrackingOn(robotNumber)
Parámetros
robotNumber Expresión entera que representa el número del robot que desea adquirir.
Valores devueltos
True (−1) cuando se ejecuta la función de seguimiento de distancia, False(0) cuando se detiene.
Consulte también
AIO_TrackingSet, AIO_TrackingStart, AIO_TrackingEnd
Ejemplo de función AIO_TrackingOn
Function Main
Integer i
i = AIO_TrackingOn(1)
print i
Fend
Ejemplo en la ventana Command
>print AIO_TrackingOn(1)
0

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 67
Función Align
Arroja los datos de punto convertidos para alinearse con la orientación del robot (U, V, W) en el punto
especificado en el sistema de coordenadas de la herramienta con el eje más cercano o especificado del
sistema de coordenadas local.
Sintaxis
(1) Align (Point[, localNumber[, axisNumber] ])
Parámetros
Point Los datos de punto.
localNumber El número del sistema de coordenadas local al que se hará referencia para la
alineación de la orientación.
Si se omite, se usa el sistema de coordenadas base.
axisNumber Especifica el número del eje para alinear la orientación del robot. Si se omite, la
orientación del robot se alineará con el eje con las coordenadas más cercanas.
Constante Valor
COORD_X_PLUS 1: Eje +X
COORD_Y_PLUS 2: Eje +Y
COORD_Z_PLUS 3: Eje +Z
COORD_X_MINUS 4: Eje -X
COORD_Y_MINUS 5: Eje -Y
COORD_Z_MINUS 6: Eje -Z
Descripción
Cuando opere el robot de 6 ejes (incluida la serie N), es posible que sea necesario alinear la orientación del
robot con un eje del sistema de coordenadas local sin cambiar la posición del sistema de coordenadas de
herramienta (origen) definido con los datos de punto.
La función Align convierte los datos de orientación (U, V, W) de los datos de punto especificados y se alinea
con el eje más cercano o especificado del sistema de coordenadas local especificado.
Para los robots, excepto los robots de 6 ejes (incluida la serie N), arroja un punto especificado.
Consulte también
Función AlignECP, Función LJM
Ejemplo de función Align
Move Align(P0) ROT
P1 = Align(P0, 1)
Move P1 ROT
P2 = Align(P0, 1, 3)
Move P2 ROT

68 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función AlignECP
Arroja los datos de punto convertidos para alinearse con la orientación del robot (U, V, W) en el punto
especificado en el sistema de coordenadas de herramienta con el eje más cercano del sistema de
coordenadas ECP.
Sintaxis
(1) AlignECP (Point, ECPNumber)
Parámetros
Point Los datos de punto.
ECPNumber El número del sistema de coordenadas ECP que será una referencia para la alineación
de la orientación.
Descripción
Cuando opere el robot de 6 ejes (incluida la serie N), es posible que sea necesario alinear la orientación del
robot con un eje del sistema de coordenadas local sin cambiar la posición del sistema de coordenadas de
herramienta (origen) definido con los datos de punto.
La función AlignECP convierte los datos de orientación (U, V, W) de los datos de punto especificados y se
alinea con el eje más cercano del sistema de coordenadas local especificado.
Para los robots, excepto los robots de 6 ejes (incluida la serie N), arroja un punto especificado.
Consulte también
Función Align, Función LJM
Ejemplo de función AlignECP
Move AlignECP(P0) ROT
P1 = AlignECP(P0, 1)
Move P1 ROT

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 69
Operador And
Operador que se usa para realizar una función And lógica o bitwise de 2 expresiones.
Sintaxis
result = expr1 And expr2
Parámetros
expr1, expr2 Para la función lógica And, cualquier expresión válida que arroja un resultado booleano. Para
la función bitwise And, una expresión entera.
result Para la función lógica And, el resultado es un valor booleano. Para la función bitwise And,
el resultado es un valor entero.
Descripción
Se usa una función lógica And para combinar los resultados de 2 o más expresiones en 1 resultado booleano
único. La siguiente tabla indica las posibles combinaciones.
expr1
expr2
Resultado
Verdadero
Verdadero
Verdadero
Verdadero
Falso
Falso
Falso
Verdadero
Falso
Falso
Falso
Falso
Una función bitwise And realiza una comparación bitwise de bits posicionados de forma idéntica en dos
expresiones numéricas y define el bit correspondiente en result según la siguiente tabla:
Si el bit en expr1 es
Y el bit en expr2 es
El resultado es:
0
0
0
0
1
0
1
0
0
1
1
1
Consulte también
LShift, Mask, Not, Or, RShift, Xor
Ejemplo del operador And
Function LogicalAnd(x As Integer, y As Integer)
If x = 1 And y = 2 Then
Print "The values are correct"
EndIf
Fend
Function BitWiseAnd()
If (Stat(0) And &H800000) = &H800000 Then
Print "The enable switch is open"
EndIf
Fend
>print 15 and 7
7
>

70 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción AOpen
Abre un archivo en el modo de anexar.
Sintaxis
AOpen fileName As #fileNumber
.
.
Close #fileNumber
Parámetros
fileName Expresión de cadena que especifica una ruta y nombre de archivo válidos. Si se
especifica solo un nombre de archivo, el archivo debe estar en la carpeta actual.
Consulte ChDisk para conocer detalles.
fileNumber Expresión entera que representa valores desde 30 a 63.
Descripción
Abre el archivo especificado y lo identifica según el número de archivo especificado. Esta instrucción se
usa para agregar datos al archivo especificado. Si no se encuentra el archivo especificado, crea un nuevo
archivo.
El fileNumber especificado identifica el archivo mientras está abierto y no se puede usar para referirse a un
archivo diferente hasta que el archivo actual esté cerrado. fileNumber es utilizado por otras operaciones
como Print#, Write, Flush y Close.
Use la instrucción Close para cerrar el archivo y liberar el número de archivo.
Recomendamos que use la función FreeFile para obtener el número de archivo para que el mismo número
no sea utilizado por más de una tarea.
Notas
Hay una ruta de red disponible.
Búfer de escritura en archivo
La escritura en archivo se almacena en el búfer. Los datos almacenados en el búfer se pueden escribir con la
instrucción Flush. También, al cerrar un archivo con la instrucción Close, los datos almacenados en el búfer
se pueden escribir.
Consulte también
Close, Print #, BOpen, ROpen, UOpen, WOpen, FreeFile, Flush
Ejemplo de instrucción AOpen
Integer fileNum, i
FileNum = FreeFile
WOpen "TEST.TXT" As #fileNum
For i = 0 To 100
Print #fileNum, i
Next I
Close #fileNum
....
....
....
FileNum = FreeFile
AOpen "TEST.TXT" As #FileNum
For i = 101 to 200
Print #FileNum, i
Next i
Close #FileNum

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 71
Instrucciones Arc y Arc3
Arc mueve el brazo al punto especificado mediante la interpolación circular en el plano XY.
Arc3 mueve el brazo hasta el punto especificado mediante una interpolación circular en tres dimensiones.
Estos dos comandos están disponibles para robots SCARA (incluida la serie RS) y de 6 ejes (incluida la serie
N).
Sintaxis
(1) Arc midPoint, endPoint [ROT] [CP] [ searchExpr ] [!...!] [SYNC]
(2) Arc3 midPoint, endPoint [ROT] [ECP] [CP] [ searchExpr ] [!...!] [SYNC]
Parámetros
midPoint Expresión de punto. El punto medio (que el usuario enseñó anteriormente) por el cual de
desplaza el brazo de camino al endPoint desde el punto actual.
endPoint Expresión de punto. El punto final (que el usuario enseñó anteriormente) hasta el cual se
desplaza el brazo durante el movimiento de tipo arco. Esta es la posición final al terminar el
movimiento circular.
ROT Opcional. Decide la velocidad/aceleración/desaceleración en favor de la rotación de la
herramienta.
ECP Opcional. Movimiento de punto de control externo. Este parámetro es válido cuando se activa
la opción ECP.
CP Opcional. Especifica un movimiento de ruta continua.
searchExpr Opcional. Una expresión Till o Find.
Till | Find
Till Sw(expr) = {On | Off}
Find Sw(expr) = {On | Off}
!...! Puede que se usen instrucciones de procesamiento paralelo con la instrucción Arc. Estas son
opcionales. (Consulte la descripción del procesamiento paralelo para conocer más detalles).
SYNC Reserva un comando de movimiento. El robot no se moverá hasta que se ejecute SyncRobots.
Descripción
Arc y Arc3 se usan para mover el brazo en un movimiento de tipo circular desde la posición actual hasta
endPoint mediante midPoint. El sistema calcula automáticamente una curva basado en los tres puntos
(posición actual, endPoint y midPoint) y luego se mueve a lo largo de esa curva hasta llegar al punto que
define endPoint. Las coordenadas de midPoint y endPoint se deben enseñar previamente antes de ejecutar la
instrucción. Las coordenadas no se pueden especificar en la instrucción en sí.
Arc y Arc3 usan el valor de velocidad SpeedS y los valores de aceleración y desaceleración AccelS. Consulte
Uso de Arc3 con CP a continuación para conocer la relación entre la velocidad/aceleración y la
aceleración/desaceleración. No obstante, si se usa el parámetro modificador ROT, Arc y Arc3 usan el valor
de velocidad SpeedR y los valores de aceleración y desaceleración AccelR. En este caso, el valor de velocidad
SpeedS y el valor de aceleración y desaceleración AccelS no tienen efecto.
Normalmente, cuando la distancia de movimiento es 0 y solo cambia la orientación de la herramienta, ocurrirá
un error. Sin embargo, mediante el uso del parámetro ROT y la priorización de la aceleración y la
desaceleración del giro de la herramienta, es posible realizar el movimiento sin un error. Cuando no hay un
cambio de orientación con el parámetro modificador ROT y la distancia de movimiento no es "0", ocurrirá
un error.
También, cuando el giro de la herramienta es grande en comparación con la distancia de movimiento, y
cuando la velocidad de giro supera la velocidad especificada del manipulador, ocurrirá un error. En este caso,
reduzca la velocidad o agregue el parámetro modificador ROT para dar prioridad a la velocidad
rotacional/aceleración/desaceleración.

72 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Cuando se usa ECP (solo Arc3), la trayectoria del punto de control externo que corresponde al número ECP
especificado con la instrucción ECP se mueve en forma circular respecto del sistema de coordenadas de la
herramienta. En este caso, la trayectoria del punto central de la herramienta no sigue una línea circular.
ECP
Work
TCP
Configuración de velocidad y aceleración para el movimiento de arco
SpeedS y AccelS se usan para configurar la velocidad y aceleración de las instrucciones Arc y Arc3. SpeedS
y AccelS le permiten al usuario especificar una velocidad en mm/s y la aceleración en mm/s
2.
Notas
La instrucción Arc funciona solo en el plano horizontal
El recorrido del arco es un arco verdadero en el plano horizontal. El recorrido se interpola mediante los
valores de endPoint como su base para Z y U. Use Arc3 para los arcos tridimensionales.
Verificación de rango para la instrucción Arc
Las instrucciones Arc y Arc3 no pueden calcular una verificación de rango de la trayectoria antes del
movimiento de arco. Por lo tanto, incluso para las posiciones objetivo que están dentro del rango permitido,
mientras está desplazándose, el robot podría atravesar un recorrido que no tiene un rango válido y se detendría
con un impacto grave que podría dañar el brazo. Para evitar que esto suceda, asegúrese de realizar
verificaciones de rango mediante la ejecución del programa a baja velocidad antes de ejecutarlo a mayor
velocidad.
Configuración de movimiento sugerido para el movimiento de arco
Dado que el movimiento de arco comienza desde la posición actual, puede que sea necesario usar Go, Jump
u otro comando de movimiento relacionado para llevar el robot hasta la posición deseada antes de ejecutar
Arc o Arc3.
Uso de Arc, Arc3 con CP
El parámetro CP provoca que el brazo se mueva hasta el punto final sin desacelerar ni detenerse en el punto
que se define con endPoint. Esto se hace para permitir al usuario enlazar una serie de instrucciones de
movimiento que causan que el brazo se mueva a lo largo de una ruta continua mientras mantiene una
velocidad especificada durante todo el movimiento. Las instrucciones Arc y Arc3 sin CP siempre provocan
que el brazo desacelere hasta detenerse antes de llegar al punto final.
Posibles errores
Cambio de los atributos Hand
Preste mucha atención a los atributos HAND (Mano) de los puntos usados con la instrucción Arc. Si la
orientación de la mano cambia (de derecha a izquierda, o viceversa) durante el movimiento de interpolación
circular, se genera un error. Esto significa que los valores del atributo de brazo (/L Lefty [a la izquierda] o
/R Righty [a la derecha]) deben ser iguales para la posición actual y los puntos midPoint y endPoint.
Intento de mover el brazo fuera del envolvente de trabajo
Si el movimiento circular especificado intenta mover el brazo fuera del envolvente de trabajo del brazo, se
genera un error.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 73
Consulte también
!Parallel Processing!, AccelS, Move, SpeedS
Ejemplo de instrucciones Arc, Arc3
El siguiente diagrama muestra el movimiento de arco que se originó en el punto P100 y luego se movió por
P101 hasta llegar a P102. La siguiente función podría generar este tipo de arco:
Function ArcTest
Go P100
Arc P101, P102
Fend
P101
P100
P102
Consejo
Cuando trata de usar la instrucción Arc por primera vez, se sugiere que pruebe un arco simple que apunte
directamente a la parte delantera del robot, casi al medio del envolvente de trabajo. Trate de visualizar el arco
que se puede generar y asegúrese de que no está enseñando puntos de una manera que el brazo del robot trate
de moverse fuera del envolvente de trabajo normal.

74 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción Arch
Define o muestra los parámetros Arch (Arco) para usarlos con las instrucciones Jump, Jump3, Jump3CP.
Sintaxis
(1) Arch archNumber, departDist, approDist
(2) Arch archNumber
(3) Arch
Parámetros
archNumber Expresión entera que representa el número de arco que debe definir. Los números de arco
válidos son de 0 a 6, lo que crea un total de 7 entradas en la tabla Arch. (consulte la siguiente
tabla Arch predeterminada)
departDist La distancia vertical que se movió (Z) al inicio del movimiento Jump antes de comenzar el
movimiento horizontal. (especificada en milímetros)
Para Jump3 y Jump3CP, especifica la distancia de alejamiento antes de un movimiento de
alcance. (especificado en milímetros)
approDist La distancia vertical necesaria (como se midió desde la posición Z del punto hacia donde se
mueve el brazo) para moverse completamente de forma vertical con todo el movimiento
horizontal completo. (especificado en milímetros)
Para Jump3 y Jump3CP, especifica la distancia de acercamiento antes de un movimiento de
alcance. (especificado en milímetros)
Valores devueltos
Muestra la tabla Arch (Arco) cuando se usa sin los parámetros.
La tabla Arch del número de arco especificado aparecerá solo cuando se especifique el número de arco.
Descripción
El principal objetivo de la instrucción Arch es definir los valores de la tabla Arch que son necesarios para
usarse con la instrucción de movimiento Jump. El movimiento Arch se realiza según los parámetros que
corresponden al número de arco seleccionado en el modificador Jump C. (Para entender completamente la
instrucción Arch, el usuario debe primero comprender la instrucción Jump).
Las definiciones de Arch le permiten al usuario "redondear las esquinas" en la dirección Z cuando usa la
instrucción Jump C. Mientras la instrucción Jump especifica el punto hacia el cual se moverá (incluida la
posición final de la articulación Z), las entradas de la tabla Arch especifican la distancia en que se moverá
hacia arriba antes de que inicie el movimiento horizontal (riseDist) y la distancia ascendente desde la posición
final de la articulación Z para completar todo el movimiento horizontal (fallDist). (Consulte el siguiente
diagrama)
Distancia de
alejamiento
Distancia de
acercamiento

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 75
Existe un total de 8 entradas en la tabla Arch Definition con (Definición de arco) y el usuario puede definir
7 de ellas (0-6). La octava entrada (Arch 7) es el arco predeterminado que no especifica realmente ningún
arco en absoluto y se conoce como "movimiento de compuerta". (Consulte el siguiente diagrama de
Movimiento de compuerta). La instrucción Jump usada con la entrada de arco predeterminada (entrada 8)
genera que el brazo haga lo siguiente:
1) Comienza a moverse solo con el movimiento de la articulación Z hasta que alcanza el valor de
coordenadas Z especificado con el comando LimZ. (El valor Z superior)
2) Después, se mueve de manera horizontal hasta la posición del punto objetivo hasta alcanzar las
posiciones finales X, Y y U.
3) Para completar la instrucción Jump mueva el brazo hacia abajo solo con el movimiento de la
articulación Z hasta alcanzar la posición objetivo de la articulación Z.
Movimiento de compuerta
(Jump con Arch 7)
P0
P1
Valores predeterminados de la tabla Arch
Número
de arco
Distancia de
alejamiento
Distancia de
acercamiento
0
30
30
1
40
40
2
50
50
3
60
60
4
70
70
5
80
80
6
90
90
Notas
Otra causa para el movimiento de compuerta
Cuando el valor especificado de la distancia de elevación o de la distancia de caída es mayor que la distancia
real de la articulación Z, distancia que el robot debe recorrer para llegar a la posición objetivo, se genera el
movimiento de compuerta (es decir, no ocurre ningún movimiento de tipo arco).
Los valores Arch se mantienen
Los valores de la tabla Arch se guardan permanentemente y no cambian hasta que el usuario los modifica.

76 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Precaución para el movimiento de arco
La trayectoria del movimiento Jump consiste en el movimiento vertical y el movimiento horizontal. No es
una trayectoria de ruta continua. La trayectoria real de Jump de movimiento de arco no se determina solo por
los parámetros de Arch. También depende del movimiento y la velocidad.
En una trayectoria de Jump, la distancia de alejamiento aumenta y la distancia de acercamiento disminuye
cuando la velocidad de movimiento está configurada a un valor alto. Cuando la distancia de caída de la
trayectoria es más corta que la esperada, reduzca la velocidad o la desaceleración, o aumente la distancia de
caída.
Siempre tenga cuidado al optimizar la trayectoria de Jump en sus aplicaciones. Ejecute Jump con el
movimiento y la velocidad deseados para verificar la trayectoria real.
Cuando la velocidad es menor, la trayectoria será menor. Si se ejecuta Jump con una alta velocidad para
verificar una trayectoria de movimiento de arco, el efector final puede chocar con un objeto con menor
velocidad.
Incluso si se ejecutan los comandos Jump con la misma distancia y velocidad, la trayectoria se ve afectada
por el movimiento de los brazos del robot. Como ejemplo general, para el robot SCARA, la distancia vertical
ascendente aumenta y la distancia vertical descendente disminuye cuando el movimiento del primer brazo es
grande. Cuando la distancia de caída vertical disminuye y la trayectoria es menor que la esperada, reduzca la
velocidad o la desaceleración, o cambie la distancia de caída para que sea mayor.
Consulte también
Jump, Jump3, JumpCP
Ejemplo de instrucción Arch
Los siguientes son ejemplos de la configuración Arch hecha desde la ventana Command.
> arch 0, 15, 15
> arch 1, 25, 50
> jump p1 c1
> arch
arch0 = 15.000 15.000
arch1 = 25.000 50.000
arch2 = 50.000 50.000
arch3 = 60.000 60.000
arch4 = 70.000 70.000
arch5 = 80.000 80.000
arch6 = 90.000 90.000
>

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 77
Función Arch
Arroja la configuración de arcos.
Sintaxis
Arch(archNumber, paramNumber)
Parámetros
archNumber Expresión entera que representa la configuración del arco desde la cual se puede
recuperar el parámetro (0 a 6).
paramNumber 1: distancia de alejamiento
2: distancia de acercamiento
Valores devueltos
Número real que incluye la distancia.
Consulte también
Instrucción Arch
Ejemplo de función Arch
Real archValues(6, 1)
Integer i
' Guarda los valores del arco actual
For i = 0 to 6
archValues(i, 0) = Arch(i, 1)
archValues(i, 1) = Arch(i, 2)
Next i

78 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción Arm
Selecciona o muestra el número de brazo que se usará.
Sintaxis
(1) Arm armNumber
(2) Arm
Parámetros
armNumber Expresión entera opcional. El rango válido es de 0 a 15. El usuario puede seleccionar
hasta 16 brazos diferentes. El brazo 0 es el brazo de robot estándar (predeterminado).
Los brazos 1 a 15 son auxiliares y se definen con la instrucción ArmSet. Cuando se
omiten, se muestra el número de brazo actual.
Valores devueltos
Cuando se ejecuta una instrucción Arm sin parámetros, el sistema muestra el número de brazo actual.
Descripción
Le permite al usuario especificar qué brazo se debe usar para las instrucciones del robot. El brazo permite
que cada brazo auxiliar use los datos de posición comunes. Si no hay ningún brazo auxiliar instalado, funciona
el brazo estándar (número de brazo 0). Ya que al momento de la entrega el número de brazo se especificó
como “0”, no es necesario usar la instrucción Arm para seleccionar un brazo. Sin embargo, si se usan brazos
auxiliares, primero se deben definir con la instrucción ArmSet.
La capacidad de configuración del brazo auxiliar se ofrece para permitir a los usuarios configurar los
parámetros correctos del robot cuando la configuración del robot real es levemente diferente de la del robot
estándar. Por ejemplo, si el usuario montó una segunda articulación de orientación al segundo eslabón del
robot, es probable que el usuario desee definir los eslabones del robot adecuados para el nuevo brazo auxiliar
que se forma. Esto permite que el brazo auxiliar funcione correctamente bajo las siguientes condiciones:
- Especificar que 2 o más brazos se muevan a través de un punto de datos único.
- Usar Pallet.
- Usar el movimiento de ruta continua.
- Usar especificaciones de posición relativa.
- Usar coordenadas locales.
Para los robots SCARA (incluida la serie RS) con articulaciones giratorias utilizados con un sistema de
coordenadas cartesianas, los cálculos de ángulo de articulación se basan en los parámetros definidos por el
parámetro ArmSet. Por lo tanto, este comando es esencial si se requiere una definición de brazo o mano
auxiliar.
Los datos de los parámetros del robot se almacenan en la memoria Compact Flash en el controlador. Por
tanto, la memoria flash de comandos se escribe cuando se ejecuta este comando. La escritura frecuente en
la memoria Compact Flash afecta su vida útil. Recomendamos que el uso de este comando sea mínimo.
Notas
Arm 0
El usuario no puede definir ni cambiar Arm 0 mediante la instrucción ArmSet. Se reserva ya que se usa para
definir la configuración estándar del robot. Cuando el usuario configura el brazo en “0”, esto significa usar
los parámetros estándar del brazo de robot.
Número de brazo no definido
Cuando se seleccionan los números del brazo auxiliar sin que el comando ArmSet los defina, se genera un
error.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 79
Consulte también
ArmClr, ArmSet, ECPSet, TLSet
Ejemplo de instrucción Arm
Los siguientes ejemplos son definiciones de brazos auxiliares potenciales que usan las instrucciones ArmSet
y Arm. ArmSet define el brazo auxiliar y Arm define qué brazo usar como el brazo actual. (Arm 0 es el brazo
de robot predeterminado y no puede ser ajustado por el usuario).
Desde la ventana Command:
> ArmSet 1, 300, -12, -30, 300, 0
> ArmSet
arm0 250 0 0 300 0
arm1 300 -12 -30 300 0
> Arm 0
> Jump P1 'Salta a P1 con la configuración de brazo estándar
> Arm 1
> Jump P1 'Salta a P1 con el brazo auxiliar 1

80 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función Arm
Arroja el número de brazo actual del robot actual.
Sintaxis
Arm
Valores devueltos
Número entero que incluye el número de brazo actual.
Consulte también
Instrucción Arm
Ejemplo de función Arm
Print "The current arm number is: ", Arm

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 81
Instrucción ArmClr
Borra (anula) una definición de brazo.
Sintaxis
ArmClr armNumber
Parámetros
armNumber Expresión entera que representa cuál de los 15 brazos se debe borrar (anular definición).
(Arm 0 es el brazo predeterminado y no se puede borrar).
Descripción
Los datos de los parámetros del robot se almacenan en la memoria Compact Flash en el controlador. Por
tanto, la memoria flash de comandos se escribe cuando se ejecuta este comando. La escritura frecuente en
la memoria Compact Flash afecta su vida útil. Recomendamos que el uso de este comando sea mínimo.
Consulte también
Arm, ArmSet, ECPSet, Local, LocalClr, Tool, TLSet
Ejemplo de instrucción ArmClr
ArmClr 1

82 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función ArmDef
Arroja el estado de definición del brazo.
Sintaxis
ArmDef (armNumber)
Parámetros
armNumber Expresión entera que representa el brazo para el cual se arroja el estado.
Valores devueltos
Es True si se definió el brazo especificado, de lo contrario es False.
Consulte también
Arm, ArmClr, ArmSet, ECPSet, Local, LocalClr, Tool, TLClr, TLSet
Ejemplo de función ArmDef
Function DisplayArmDef(armNum As Integer)
Integer i
If ArmDef(armNum) = False Then
Print "Arm ", ArmNum, "is not defined"
Else
Print "Arm ", armNum, " Definition:"
For i = 1 to 5
Print ArmSet(armNum, i)
Next i
EndIf
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 83
Instrucción ArmSet
Especifica y arroja los brazos auxiliares.
Sintaxis
(1) ArmSet armNumber, link2Dist, joint2Offset, zOffset [, link1Dist] [, orientAngOffset]
(2) ArmSet armNumber
(3) ArmSet
Parámetros
armNumber Expresión entera: El rango válido es de 1 a 15. El usuario puede definir hasta 15 brazos
auxiliares distintos.
paramNumber
Robots SCARA (incluida la serie RS)
1
Distancia horizontal desde la articulación n.º 2 hasta el centro
de orientación (mm)
2
Compensación de ángulo de la articulación n.º 2 (grados)
3
Compensación de altura (mm)
4
Distancia horizontal desde la articulación n.º 1 hasta la
articulación n.º 2 (mm)
5
Compensación de ángulo de la articulación de orientación en
grados.
Valores devueltos
Cuando se inicia la instrucción ArmSet sin parámetros, el sistema muestra todos los números y parámetros
del brazo auxiliar.
Se muestran los números y parámetros del brazo especificado solo cuando se especifica el número de brazo.
Descripción
Permite al usuario especificar los parámetros del brazo auxiliar que se usarán además de la configuración del
brazo estándar. Esto no resulta útil cuando está instalado en el robot un brazo o mano auxiliar. Cuando usa
un brazo auxiliar, la instrucción Arm se encarga de seleccionar el brazo.
Los parámetros link1Dist y orientAngOffset son opcionales. Si se omiten, los valores predeterminados son
los valores del brazo estándar.
La capacidad de configuración del brazo auxiliar se ofrece para permitir a los usuarios configurar los
parámetros correctos del robot cuando la configuración del robot real es levemente diferente de la del robot
estándar. Por ejemplo, si el usuario montó una segunda articulación de orientación al segundo eslabón del
robot, es probable que el usuario desee definir los eslabones del robot adecuados para el nuevo brazo auxiliar
que se forma. Esto permite que el brazo auxiliar funcione correctamente bajo las siguientes condiciones:
- Especificar que 2 o más brazos se muevan a través de un punto de datos único.
- Usar Pallet.
- Usar el movimiento de ruta continua.
- Usar especificaciones de posición relativa.
- Usar coordenadas locales.
Para los robots SCARA (incluida la serie RS) con articulaciones giratorias utilizados con un sistema de
coordenadas cartesianas, los cálculos de ángulo de articulación se basan en los parámetros definidos por el
parámetro ArmSet. Por lo tanto, este comando es esencial si se requiere una definición de brazo o mano
auxiliar.
Los datos de los parámetros del robot se almacenan en la memoria Compact Flash en el controlador. Por
tanto, la memoria flash de comandos se escribe cuando se ejecuta este comando. La escritura frecuente en
la memoria Compact Flash afecta su vida útil. Recomendamos que el uso de este comando sea mínimo.

84 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Nota
Arm 0
El usuario no puede definir ni cambiar Arm 0. Se reserva ya que se usa para definir la configuración estándar
del robot. Cuando el usuario configura el brazo en 0, significa que utiliza los parámetros estándar del brazo
de robot.
Brazo auxiliar
Eje X
Eje Y
Brazo auxiliar
Brazo
auxiliar
Articulación n.º 2
Articulación n.º 2
Articulación n.º 1
Articulación n.º 1
Robot SCARA
Robot cartesiano
Serie RS
:
Vista desde
esta dirección
Robots SCARA (serie RS)
Consulte también
Arm, ArmClr
Ejemplo de instrucción ArmSet
Los siguientes ejemplos son definiciones de brazos auxiliares potenciales que usan las instrucciones ArmSet
y Arm. ArmSet define el brazo auxiliar y Arm define qué brazo usar como el brazo actual. (Arm 0 es el brazo
de robot predeterminado y no puede ser ajustado por el usuario).
Desde la ventana Command:
> ArmSet 1, 300, -12, -30, 300, 0
> ArmSet
Arm 0: 125.000, 0.000, 0.000, 225.000, 0.000
Arm 1: 300.000, -12.000, -30.000, 300.000, 0.000
> Arm 0
> Jump P1 'Salta a P1 con la configuración de brazo estándar
> Arm 1
> Jump P1 'Salta a P1 con el brazo auxiliar 1

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 85
Función ArmSet
Arroja un parámetro de ArmSet.
Sintaxis
ArmSet(armNumber, paramNumber)
Parámetros
armNumber Expresión entera que representa el número de brazo para el cual se recuperan los
valores.
paramNumber Expresión entera que representa el parámetro que se debe recuperar (0 a 5), como se
describe a continuación.
Robots SCARA (incluida la serie RS)
paramNumber Valor devuelto
1 Distancia horizontal desde la articulación n.º 2 hasta el centro de orientación (mm)
2 Compensación de ángulo de la articulación n.º 2 (grados)
3 Compensación de altura (mm)
4 Distancia horizontal desde la articulación n.º 1 hasta la articulación n.º 2 (mm)
5 Compensación de ángulo de la articulación de orientación en grados.
Valores devueltos
Número real que incluye el valor del parámetro especificado, como se describió anteriormente.
Brazo auxiliar
Eje X
Eje Y
Brazo auxiliar
Brazo
auxiliar
Articulación n.º 2
Articulación n.º 2
Articulación n.º 1
Articulación n.º 1
Robot SCARA
Robot cartesiano
Serie RS:
Vista desde
esta dirección
Robots SCARA (serie RS)
Consulte también
ArmClr, Instrucción ArmSet
Ejemplo de función ArmSet
Real x
x = ArmSet(1, 1)

86 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función Asc
Arroja el código ASCII del primer carácter en una cadena de caracteres.
(Arroja el código de carácter en un número decimal).
Sintaxis
Asc(string)
Parámetros
string Cualquier expresión de cadena válida de un carácter de largo como mínimo.
Valores devueltos
Arroja un número entero que representa el código ASCII del primer carácter en la cadena enviada a la función
Asc.
Descripción
La función Asc se usa para convertir un carácter a su representación numérica ASCII. La cadena de caracteres
enviada a la función ASC puede ser una constante o una variable.
Nota
Solamente se arroja el valor ASCII del primer carácter
Aunque la instrucción Asc permite cadenas de caracteres de más de 1 carácter de largo, esta instrucción usa
solo el primer carácter en realidad. Asc solamente arroja el valor ASCII del primer carácter.
Consulte también
Chr$, InStr, Left$, Len, Mid$, Right$, Space$, Str$, Val
Ejemplo de función Asc
En este ejemplo se utiliza la instrucción Asc en un programa y desde la ventana Command, de la siguiente
forma:
Function asctest
Integer a, b, c
a = Asc("a")
b = Asc("b")
c = Asc("c")
Print "The ASCII value of a is ", a
Print "The ASCII value of b is ", b
Print "The ASCII value of c is ", c
Fend
Desde la ventana Command:
>print asc("a")
97
>print asc("b")
98
>

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 87
Función Asin
Arroja el valor de arcoseno de una expresión numérica.
Sintaxis
Asin(number)
Parámetros
number Expresión numérica que representa el seno de un ángulo.
Valores devueltos
Valor real, en radianes, que representa el seno del arco del parámetro number.
Descripción
Asin arroja valor de arcoseno de la expresión numérica. El rango de valores es de -1 a 1. El valor que arroja
Asin varía de -PI / 2 a PI / 2 radianes. Si number es < -1 o > 1, ocurre un error.
Para convertir de radianes a grados, use la función RadToDeg.
Consulte también
Abs, Acos, Atan, Atan2, Cos, DegToRad, RadToDeg, Sgn, Sin, Tan, Val
Ejemplo de función Asin
Function asintest
Double x
x = Sin(DegToRad(45))
Print "Asin of ", x, " is ", Asin(x)
Fend

88 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función AtHome
Se arroja esta función si el robot actual se encuentra en su posición de reposo o no.
Sintaxis
AtHome
Valores devueltos
Es True si el robot actual está en su posición de reposo, de lo contrario es False.
Descripción
La función AtHome se arroja si el robot actual se encuentra en su posición de reposo o no. Para registrar la
posición de reposo, use el comando HomeSet o Robot Manager (Administrador de robot). Para mover la
posición de reposo, use el comando Home.
Consulte también
Home, HomeClr, HomeDef, HomeSet, Hordr, MCalComplete

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 89
Función Atan
Arroja el valor de la arcotangente de una expresión numérica.
Sintaxis
Atan(number)
Parámetros
number Expresión numérica que representa la tangente de un valor angular.
Valores devueltos
Valor real, en radianes, que representa el valor de la arcotangente del parámetro number.
Descripción
Atan arroja el valor de la arcotangente de la expresión numérica. La expresión numérica (number) puede ser
cualquier valor numérico. El valor que arroja Atan varía de -PI a PI radianes.
Para convertir de radianes a grados, use la función RadToDeg.
Consulte también
Abs, Acos, Asin, Atan2, Cos, DegToRad, RadToDeg, Sgn, Sin, Tan, Val
Ejemplo de función Atan
Function atantest
Real x, y
x = 0
y = 1
Print "Atan of ", x, " is ", Atan(x)
Print "Atan of ", y, " is ", Atan(y)
Fend

90 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función Atan2
Arroja el ángulo de los puntos de conexión de la línea imaginaria (0,0) y (X, Y) en radianes.
Sintaxis
Atan2(X, Y)
Parámetros
X Expresión numérica que representa la coordenada X.
Y Expresión numérica que representa la coordenada Y.
Valores devueltos
Valor numérico en radianes (-PI a +PI).
Descripción
Atan2(X, Y) arroja el ángulo de la línea que conecta los puntos (0, 0) y (X, Y). Esta función trigonométrica
arroja un ángulo de arcotangente en los cuatro cuadrantes.
Consulte también
Abs, Acos, Asin, Atan, Cos, DegToRad, RadToDeg, Sgn, Sin, Tan, Val
Ejemplo de función Atan2
Function at2test
Real x, y
Print "Please enter a number for the X Coordinate:"
Input x
Print "Please enter a number for the Y Coordinate:"
Input y
Print "Atan2 of ", x, ", ", y, " is ", Atan2(x, y)
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 91
Instrucción ATCLR
Borra e inicializa el torque promedio para una o más articulaciones.
Sintaxis
ATCLR [j1 [,j2 [, j3 [, j4 [, j5 [, j6 [, j7 [, j8 [, j9]]]]]]]]]
Parámetros
j1 – j9 Expresión entera que representa el número de articulación. Si no se suministra
ningún parámetro, entonces se borran los valores del torque promedio de todas las
articulaciones.
El eje S adicional es 8 y el eje T es 9. Si se proporciona un número de articulación
no existente, ocurre un error.
Descripción
ATCLR borra los valores del torque promedio de todas las articulaciones especificadas.
Debe ejecutar ATCLR antes de ejecutar ATRQ.
Consulte también
ATRQ, PTRQ
Ejemplo de instrucción ATCLR
<Ejemplo 1>
El siguiente es un ejemplo que sirve para mostrar los valores de torque de las articulaciones especificadas
después de borrar los valores de torque reales de todas las articulaciones.
> atclr
> go p1
> atrq 1
0.028
> atrq
0.028 0.008
0.029 0.009
0.000 0.000
>
<Ejemplo 2>
El siguiente es un ejemplo que sirve para mostrar los valores de torque de las articulaciones especificadas
después de borrar los valores de torque reales de J1, J4 y J5 para los robots de varios ejes verticales.
> atclr 4, 1, 5
> go p1
> ptrq 1
0.227
> ptrq 4
0.083

92 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción ATRQ
Muestra el torque promedio de la articulación especificada.
Sintaxis
ATRQ [jointNumber]
Parámetros
jointNumber Opcional. Expresión entera que representa el número de articulación.
El eje S adicional es 8 y el eje T es 9.
Valores devueltos
Muestra los valores de torque promedio de todas las articulaciones.
Descripción
ATRQ muestra el torque promedio del RMS (valor cuadrático medio) de la articulación especificada. Se
puede obtener el estado de carga del motor con esta instrucción. El resultado es un valor real desde 0 a 1,
donde 1 es el torque promedio máximo.
Debe ejecutar ATCLR antes de ejecutar este comando.
Esta instrucción tiene restricción de tiempo. Debe ejecutar ATRQ dentro de 60 segundos después de ejecutar
ATCLR. Cuando se supera este tiempo, ocurre el error 4030.
Consulte también
ATCLR, Función ATRQ, PTRQ
Ejemplo de instrucción ATRQ
> atclr
> go p1
> atrq 1
0.028
> atrq
0.028 0.008
0.029 0.009
0.000 0.000
>

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 93
Función ATRQ
Arroja el torque promedio de la articulación especificada.
Sintaxis
ATRQ (jointNumber)
Parámetros
jointNumber Expresión entera que representa el número de articulación
El eje S adicional es 8 y el eje T es 9.
Valores devueltos
Valor real de 0 a 1.
Descripción
La función ATRQ arroja el torque promedio del RMS (valor cuadrático medio) de la articulación
especificada. Se puede obtener el estado de carga del motor con esta instrucción. El resultado es un valor real
desde 0 a 1, donde 1 es el torque promedio máximo.
Debe ejecutar ATCLR antes de ejecutar esta función.
Esta instrucción tiene restricción de tiempo. Debe ejecutar ATRQ dentro de 60 segundos después de ejecutar
ATCLR. Cuando se supera este tiempo, ocurre el error 4030.
Consulte también
Instrucción ATRQ, PTCLR, PTRQ
Ejemplo de función ATRQ
Este ejemplo usa la función ATRQ en un programa:
Function CheckAvgTorque
Integer i
Go P1
ATCLR
Go P2
Print "Average torques:"
For i = 1 To 4
Print "Joint ", i, " = ", ATRQ(i)
Next i
Fend

94 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción AutoLJM
Configura la función LJM automática.
Sintaxis
AutoLJM { On | Off }
Parámetros
On | Off On: Activa la función LJM automática.
Off: Desactiva la función LJM automática.
Descripción
AutoLJM está disponible para los siguientes comandos:
Arc, Arc3, Go, Jump3, Jump3CP, Move
Cuando AutoLJM está activado (On), el manipulador funciona con el movimiento mínimo de la articulación,
al igual que la función LJM, ya sea que se haya aplicado o no la función LJM a los datos de posición para
que se transfieran a cada comando. Por ejemplo, para obtener el mismo efecto que Go LJM(P1), puede
escribir un programa de la siguiente manera:
AutoLJM On
Go P1
AutoLJM Off
Dado que AutoLJM puede activar LJM dentro de una sección en particular de un programa, no es necesario
editar cada comando de movimiento.
Cuando AutoLJM está desactivado (Off), la función LJM solo se activa cuando se aplica a los datos de
posición para que se transfieran a cada comando de movimiento.
En cualquiera de los siguientes casos, AutoLJM tiene la configuración especificada en la configuración del
controlador (valor predeterminado de fábrica: Off).
de operación
Inicio del controlador
Reset
Todas las tareas se detienen.
Motor On
Cambio del modo
automático/programación
Notas
Doble aplicación de AutoLJM y función LJM
Si se aplica la función LJM a los datos de puntos para que se transfieran al comando de movimiento
mientras AutoLJM está activado, LJM se aplicará dos veces cuando se ejecute el comando.
Para Move LJM(P1, Here) y Move LJM(P1), activar AutoLJM no tendrá un efecto en el movimiento. No
obstante, si AutoLJM está activado para Move LJM(P1, P0), puede existir una diferencia en las posiciones
de finalización del movimiento de Move LJM(LJM(P1, P0), Here), que activaron AutoLJM, y las
posiciones de Move LJM(P1, P0), que no activaron AutoLJM.
Se recomienda escribir un programa para no duplicar las funciones AutoLJM y LJM.
Precaución de uso de AutoLJM
Puede configurar la función AutoLJM para que esté activada al inicio del controlador gracias a la
configuración de las preferencias del controlador. Sin embargo, si Auto LJM está activado en todo
momento gracias a las preferencias o comandos del controlador, esta función ajusta automáticamente la
postura del manipulador para reducir la distancia de movimiento, incluso cuando trata de mover la
articulación ampliamente. Por lo tanto, se recomienda crear un programa para aplicar la función LJM solo
cuando sea necesario, mediante la función LJM o el comando AutoLJM.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 95
Consulte también
Función AutoLJM, Función LJM
Ejemplo de instrucción AutoLJM
AutoLJM On
Go P1
Go P2
AutoLJM Off

96 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función AutoLJM
Arroja el estado de AutoLJM.
Sintaxis
AutoLJM
Valores devueltos
0 = LJM automático desactivado
1 = LJM automático activado
Consulte también
AutoLJM
Ejemplo de función AutoLJM
If AutoLJM = Off Then
Print "AutoLJM is off"
EndIf

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 97
AutoOrientationFlag
Cambia el indicador de orientación de N6-A1000**.
Sintaxis
AutoOrientationFlag { On | Off }
Parámetros
On | Off On: Activa AutoOrientationFlag.
Off: Desactiva AutoOrientationFlag. (Predeterminado)
Descripción
AutoOrientationFlag está disponible para los siguientes comandos:
Go, BGo, TGo, Jump3, JumpTLZ
Cambia el siguiente indicador de orientación:
Modelo
Parámetro
OFF/ON
Indicador de orientación
Observación
Hand
Elbow
Wrist
N6-A1000**
OFF - - -
Se mueve con el indicador de orientación
que selecciona el usuario. (Predeterminado)
ON -
*1
Definir “ON” cuando no pueda seleccionar
el indicador de orientación.
: Cuando define AutoOrientationFlag en “ON”, cambia el indicador de orientación.
*1: El indicador de orientación Wrist (muñeca) cambia solo cuando cambia el indicador de orientación
Elbow (codo). Cuando cambia el indicador de orientación Wrist, será el indicador de orientación el
que minimizará el movimiento de la articulación n.º 4
Use AutoOrientationFlag con la Función LJM.
Cuando usa el comando con la Función LJM, Wrist Flag, J4Flag y J6Flag serán la orientación seleccionada
por la Función LJM.
Por ejemplo, cuando define el indicador de orientación de la Función LJM en “3”, se seleccionan “Wrist
Flag”, “J4Flag” y “J6Flag” de modo que la articulación n.º 5 tenga el movimiento más corto. Cuando no
usa la Función LJM, se seleccionan “Wrist Flag”, “J4Flag” y “J6Flag” de modo que la articulación n.º 4
tenga el movimiento más corto.
Ejemplo de AutoOrientationFlag
Motor On
Power High
AutoOrientationFlag On
Go P1
Go P2
Cuando se define AutoOrientationFlag en “ON”:
cambia el indicador de la siguiente manera debido a la
posición del punto P y la línea roja.
El punto P está sobre la línea roja: Above (Arriba)
El punto P está debajo de la línea roja: Below (Debajo)
Above (Sobre)
Below (Debajo)
NOTA

98 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función AutoOrientationFlag
Arroja el estado de AutoOrientationFlag
Sintaxis
AutoOrientationFlag
Valores devueltos
0 = AutoOrientationFlag OFF
1 = AutoOrientationFlag ON
Consulte también
AutoOrientationFlag
Ejemplo de función AutoOrientationFlag
If AutoOrientationFlag = Off Then
Print "AutoOrientationFlag is off"
EndIf

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 99
Instrucción AvgSpeedClear
Borra e inicia el promedio de los valores de velocidad absolutos para una o más articulaciones.
Sintaxis
AvgSpeedClear [j1 [,j2 [, j3 [, j4 [, j5 [, j6 [, j7 [, j8 [, j9]]]]]]]]]
Parámetros
j1 – j9 Expresión entera que representa el número de articulación. Si no se suministra ningún
parámetro, entonces se borran los valores promedio de todas las articulaciones.
El eje S adicional es 8 y el eje T es 9. Si se proporciona un número de articulación no
existente, ocurre un error.
Descripción
AvgSpeedClear borra el promedio de los valores de velocidad absolutos de las articulaciones especificadas.
Debe ejecutar AvgSpeedClear antes de ejecutar AvgSpeed.
Este comando no admite los ejes adicionales PG.
Consulte también
AvgSpeed, PeakSpeed
Ejemplo de instrucción AvgSpeedClear
<Ejemplo 1>
El siguiente es un ejemplo que sirve para mostrar los valores de velocidad promedio de las articulaciones
especificadas después de borrar los valores de velocidad promedio de todas las articulaciones.
> AvgSpeedClear
> Go P1
> AvgSpeed 1
0.073
> AvgSpeed
0.073 0.044
0.021 0.069
0.001 0.108
0.000 0.000
0.000
>
<Ejemplo 2>
El siguiente es un ejemplo que sirve para mostrar los valores de velocidad promedio de las articulaciones
especificadas después de borrar los valores de velocidad promedio de J1, J4 y J5 para los robots de varios
ejes verticales.
> AvgSpeedClear 4, 1, 5
> Go P1
> AvgSpeed 1
0.226
> AvgSpeed 4
0.207

100 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción AvgSpeed
Muestra el promedio de los valores de velocidad absolutos de las articulaciones especificadas.
Sintaxis
AvgSpeed [jointNumber]
Parámetros
jointNumber Opcional. Expresión entera que representa el número de articulación.
El eje S adicional es 8 y el eje T es 9.
Valores devueltos
Muestra el promedio de los valores absolutos de la velocidad actual para las articulaciones especificadas. Si
no se especifica ninguna articulación, aparece el promedio de los valores de velocidad absolutos de todas las
articulaciones.
Descripción
AvgSpeed muestra el valor promedio de los valores de velocidad absolutos de las articulaciones
especificadas. Se puede obtener el estado de carga del motor con esta instrucción. El resultado es un valor
real desde 0 a 1, donde 1 es el valor de velocidad promedio máximo.
Si el valor promedio es inferior a 0,001, el resultado aparecerá como 0.
Debe ejecutar AvgSpeedClear antes de la ejecución de este comando.
Esta instrucción tiene restricción de tiempo. Debe ejecutar AvgSpeed dentro de 60 segundos después de haber
ejecutado AvgSpeedClear. Cuando se supera este tiempo, ocurre el error 4088.
Cuando use este controlador virtual o realice un simulacro, el promedio de los valores de velocidad absoluta
se calcula a partir de la velocidad ordenada en lugar de la velocidad real.
Este comando no admite los ejes adicionales PG.
Consulte también
AvgSpeedClear, Función AvgSpeed, PeakSpeed
Ejemplo de instrucción AvgSpeed
> AvgSpeedClear
> Go P1
> AvgSpeed 1
0.226
> AvgSpeed
0.226 0.133
0.064 0.207
0.003 0.314
0.000 0.000
0.000
>

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 101
Función AvgSpeed
Arroja el valor promedio de los valores de velocidad absolutos de las articulaciones especificadas.
Sintaxis
AvgSpeed (jointNumber)
Parámetros
jointNumber Expresión entera que representa el número de articulación.
El eje S adicional es 8 y el eje T es 9.
Valores devueltos
Valor real de 0 a 1.
Descripción
La función AvgSpeed arroja el valor promedio de los valores de velocidad absolutos de las articulaciones
especificadas. Con esta función se puede obtener el estado de carga del motor. El resultado es un valor real
desde 0 a 1, donde 1 es el valor de velocidad promedio máximo.
Debe ejecutar AvgSpeedClear antes de la ejecución de este comando.
Esta instrucción tiene restricción de tiempo. Debe ejecutar la función AvgSpeed dentro de 60 segundos
después de ejecutar la instrucción AvgSpeed. Cuando se supera este tiempo, ocurre el error 4088.
Cuando use este controlador virtual o realice un simulacro, el promedio de los valores de velocidad absoluta
se calcula a partir de la velocidad ordenada en lugar de la velocidad real.
Este comando no admite los ejes adicionales PG.
Consulte también
AvgSpeed, AvgSpeedClear, PeakSpeed
Ejemplo de función AvgSpeed
En este ejemplo se usa la función AvgSpeed en un programa:
Function CheckAvgSpeed
Integer i
Go P1
AvgSpeedClear
Go P2
Print "Average speeds:"
For i = 1 To 6
Print "Joint ", i, " = ", AvgSpeed (i)
Next i
Fend

102 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción AvoidSingularity
Configura la función de evasión de singularidad.
Sintaxis
AvoidSingularity { mode }
Parámetros
mode Expresión entera que representa un modo de evasión de singularidad que se puede usar
Constante
Valor
Modo
SING_NONE 0
Desactiva la función de evasión de
singularidad.
SING_THRU 1
Activa la función de evasión de
singularidad.
SING_THRUROT 2
Activa la función de evasión de
singularidad en movimientos CP con un
modificador ROT.
SING_VSD 3
Activa la función de movimiento CP de
velocidad variable.
SING_AUTO 4
Selecciona automáticamente la función de
evasión de singularidad o la función de
movimiento CP de velocidad variable.
SING_AVOID 5
Activa la función de evasión de
singularidad de codo.
Descripción
AvoidSingularity está disponible para los siguientes comandos:
Move, Arc, Arc3, Jump3, Jump3CP, JumpTLZ
Una función de evasión de singularidad sirve para evitar errores de aceleración cuando el robot de 6 ejes
verticales (incluida la serie N) o de la serie RS se acerca a la singularidad en el movimiento CP, gracias a
que cambia a una trayectoria distinta y, posteriormente, regresa a la trayectoria original una vez pasada la
singularidad. Dado que la función de evasión de singularidad se configura normalmente en “1: Enabled”
(activado) en el inicio del controlador, no es necesario cambiar esta configuración. Si no desea tener la
función de evasión de singularidad para asegurarse de que exista compatibilidad con software que no admite
dicha función, o para evitar una brecha en la trayectoria, desactive esta función.
Una función de movimiento CP de velocidad variable controla automáticamente la velocidad, mientras
mantiene la trayectoria, cuando el robot de 6 ejes verticales (incluida la serie N) o de la serie RS se acerca a
la singularidad, con el fin de evitar el error de aceleración o el error de sobreaceleración, y regresa al comando
de velocidad normal después de dejar la singularidad. Para sobrepasar la singularidad mientras se mantiene
la trayectoria, las articulaciones n.º 1, n.º 2, n.º 4 y n.º 6 puede moverse bastante.
Si se cambia el parámetro de AvoidSingularity, esta función permanece activada hasta el siguiente inicio del
controlador.
En el inicio del controlador, AvoidSingularity tiene la configuración que se especifica en la configuración
del controlador (valor predeterminado de fábrica: 1). Además, los parámetros de SingularityAngle,
SingularitySpeed y SingularityDist se restablecen a sus valores predeterminados cuando se cambia la
configuración de AvoidSingularity.
El modo SING_AUTO es la combinación de los modos SING_THRU y SING_VSD. Se selecciona
SING_THRU o SING_VSD dependiendo del movimiento o la velocidad.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 103
Notas
Configuración de la condición del entorno de singularidad para el robot de 6 ejes verticales y
el robot de la serie N
Para determinar si el manipulador se acerca al entorno de singularidad de la muñeca, se usa el ángulo de la
articulación n.º 5 y la velocidad angular de la articulación n.º 4. De forma predeterminada, el ángulo de la
articulación n.º 5 se configura en ±10 grados y el ángulo de la articulación n.º 4 se configura en ±10 %
respecto de la velocidad máxima de la articulación. Para cambiar esta configuración, use los comandos
SingularityAngle y SingularitySpeed.
Además, para determinar si el manipulador se acerca al entorno de singularidad de la mano, se usan las
coordenadas del punto P. De forma predeterminada, la distancia entre el punto P y el eje de rotación de la
articulación n.º 1 se configura en 30 mm. Para cambiar esta configuración, use el comando SingularityDist.
Configuración de la condición del entorno de singularidad del robot de la serie RS
Para determinar si el manipulador se acerca al entorno de singularidad de la mano, se usan las coordenadas
del punto de origen en el sistema de coordenadas de la herramienta predeterminada 0. De forma
predeterminada, la distancia entre el punto de origen y el eje de rotación de la articulación n.º 1 se
configura en 30 mm. Para cambiar esta configuración, use el comando SingularityDist.
Precauciones para el robot de la serie N
Para la serie N2, a diferencia de otros modelos, la configuración predeterminada de la función de evasión
de singularidad es “3: Activa la función de movimiento CP de velocidad variable”.
Para la serie N6, al igual que otros modelos, la configuración predeterminada de la función de evasión de
singularidad es “1: Activa la función de evasión de singularidad”.
Los robots de la serie N tienen una singularidad de codo distinta de las singularidades de muñeca y mano.
El área de singularidad de codo es el lugar donde la articulación n.º 3 se encuentra en 0 grados (la
articulación n.º 3 y n.º 2 se superponen entre sí). Para conocer detalles del movimiento de evasión cerca del
área de singularidad de codo, consulte el Manual del usuario de EPSON RC+.
Diferencia entre SING_THRU y SING_AVOID
SING_THRU evita las singularidades de muñeca y hombro, pero no la singularidad de codo.
Para evitar la singularidad de codo, use SING_AVOID. No obstante, tenga presente que el movimiento de
evasión de la singularidad de codo cambia ampliamente la trayectoria a diferencia de otros movimientos de
evasión de singularidad.
Cuando se selecciona SING_AVOID para los modelos de manipuladores que no son de la serie N, se
genera el error 4002.
Consulte también
Función AvoidSingularity, SingualrityAngle, SingularitySpeed, SingularityDist
Ejemplo de instrucción AvoidSingularity
AvoidSingularity 0 ‘Desactiva la evasión de singularidad y opera el manipulador
Move P1
Move P2
AvoidSingularity 1

104 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función AvoidSingularity
Arroja el estado de AvoidSingularity.
Sintaxis
AvoidSingularity
Valores devueltos
0 = Función de evasión de singularidad desactivada
1 = Función de evasión de singularidad activada
2 = Función de evasión de singularidad activada para los comandos del movimiento CP con un
identificador ROT
3 = Función de movimiento CP de velocidad variable activada
4 = Selección automática de la función de evasión de singularidad o la función de movimiento CP de
velocidad variable
5 = Función de evasión de singularidad de codo activada
Consulte también
AvoidSingularity
Ejemplo de función AvoidSingularity
If AvoidSingularity = Off Then
Print "AvoidSingularity is off"
EndIf

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 105
Instrucción Base
Define y muestra el sistema de coordenadas base.
Sintaxis
(1) Base pCoordinateData
(2) Base pOrigin, pXaxis, pYaxis [, { X | Y } ]
Parámetros
pCoordinateData Los datos de punto que representan los datos de coordenada del origen y la dirección.
pOrigin Expresión entera que representa el punto de origen con el sistema de coordenadas del
robot.
pXaxis Expresión entera que representa un punto a lo largo del eje X mediante el sistema de
coordenadas del robot, en caso de especificarse la alineación X.
pYaxis Expresión entera que representan un punto a lo largo del eje Y mediante el sistema de
coordenadas del robot, en caso de especificarse la alineación Y.
X | Y Opcional. Si se especifica la alineación X, entonces pXaxis se encuentra en el eje X
del nuevo sistema de coordenadas y solamente se usa la coordenada Z de pYaxis. Si se
especifica la alineación Y, entonces pYaxis se encuentra en el eje Y del nuevo sistema
de coordenadas y solamente se usa la coordenada Z de pXaxis. Si se omite, se supone
la alineación X.
Descripción
Define el sistema de coordenadas base mediante la especificación del origen de dicho sistema y el ángulo de
rotación, en relación con el sistema de coordenadas absolutas del robot.
Para restablecer el sistema de coordenadas base al valor predeterminado, ejecute la siguiente instrucción.
Esto permitirá que el sistema de coordenadas base sea igual al sistema de coordenadas absolutas del robot.
Base XY(0, 0, 0, 0)
Los datos de los parámetros del robot se almacenan en la memoria Compact Flash en el controlador. Por
tanto, la memoria flash de comandos se escribe cuando se ejecuta este comando. La escritura frecuente en
la memoria Compact Flash afecta su vida útil. Recomendamos que el uso de este comando sea mínimo.
Nota
El cambio del sistema de coordenadas base afecta a todas las definiciones locales
Cuando se cambian las coordenadas base, se deben redefinir todos los sistemas de coordenadas locales.
Consulte también
Local
Ejemplo de instrucción Base
Define el origen del sistema de coordenadas base en 100 mm en el eje X y 100 mm en el eje Y
> Base XY(100, 100, 0, 0)

106 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función BClr
Borra un bit en un número y arroja el nuevo valor
Sintaxis
BClr (number, bitNum)
Parámetros
number Especifica el valor numérico para borrar el bit según una expresión o valor numérico.
bitNum Especifica el bit (número entero de 0 a 31) que se borrará según una expresión o valor numérico.
Valores devueltos
Arroja el nuevo valor del valor numérico especificado (número entero).
Consulte también
BClr64, BSet, BSet64, BTst, BTst64
Ejemplo de función BClr
flags = BClr(flags, 1)

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 107
Función BClr64
Borra un bit en un número y arroja el nuevo valor.
Sintaxis
BClr64 (number, bitNum)
Parámetros
number Especifica el valor numérico para borrar el bit según una expresión o valor numérico.
bitNum Especifica el bit (número entero de 0 a 63) que se borrará según una expresión o valor numérico.
Valores devueltos
Arroja el nuevo valor del valor numérico especificado (número entero).
Consulte también
BClr, BSet, BSet64, BTst, BTst64
Ejemplo de función BClr64
flags = BClr64(flags, 1)

108 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción BGo
Ejecuta el movimiento relativo de punto a punto, en el sistema de coordenadas locales seleccionado.
Sintaxis
BGo destination [CP] [PerformMode modeNumber] [searchExpr] [!...!] [SYNC]
Parámetros
destination El destino objetivo del movimiento que usa una expresión de punto.
CP Opcional. Especifica un movimiento de ruta continua.
PerformMode Opcional. Especifique el modo de rendimiento del robot.
modeNumber Especifica el modo de operación asignado a PerformMode con un valor de número entero
(1 a 3) o con la siguiente constante. Si se especifica PerformMode, no se puede omitir
este parámetro.
Constante
Valor
Descripción
MODE_STANDARD
1
Define el modo estándar.
MODE_HIGH_SPEED
2
Define el modo de alta velocidad.
MODE_LOW_OSCILLATION
3
Define el modo de oscilación baja.
searchExpr Opcional. Una expresión Till o Find.
Till | Find
Till Sw(expr) = {On | Off}
Find Sw(expr) = {On | Off}
!...! Opcional. Es posible agregar las instrucciones de procesamiento paralelo para ejecutar
E/S y otros comandos durante el movimiento.
SYNC Reserva un comando de movimiento. El robot no se moverá hasta que se ejecute
SyncRobots.
Descripción
Ejecuta el movimiento relativo de punto a punto, en el sistema de coordenadas locales seleccionado, en la
expresión de punto destination.
Si no se especifica un sistema de coordenadas locales, ocurrirá un movimiento relativo en Local 0 (sistema
de coordenadas base).
Los atributos de la orientación del brazo especificados en la expresión de punto de destino se ignoran. El
manipulador mantiene los atributos de orientación actual del brazo. Sin embargo, para manipuladores de 6
ejes (incluida la serie N), los atributos de orientación del brazo se cambian automáticamente de modo que la
distancia de desplazamiento de la articulación sea la menor posible. Esto es equivalente a especificar el
parámetro modificador LJM para la instrucción Move. Por lo tanto, si desea cambiar la orientación del brazo
más de 180 grados, se debe ejecutar varias veces.
El modificador Till también se usa para completar BGo mediante la desaceleración y detención del robot en
una posición de desplazamiento intermedio, si se cumple la condición actual Till.
El modificador Find se usa para almacenar un punto en FindPos cuando la condición Find se vuelve verdadera
durante el movimiento.
Cuando se usa el procesamiento paralelo, es posible ejecutar otros procesamientos en paralelo con el
comando de movimiento.
El parámetro CP causa que comience la aceleración del siguiente comando de movimiento cuando comienza
la desaceleración para el comando de movimiento actual. En este caso, el robot no se detendrá en la
coordenada de destino y continuará moviéndose al siguiente punto.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 109
Los modos de movimiento de desaceleración y movimiento de aceleración se pueden combinar cuando se
define PerformMode mientras el movimiento de ruta está activado. Algunas combinaciones no están
disponibles según los modos de operación. Para conocer detalles, consulte Instrucción PerformMode.
Consulte también
Accel, BMove, Find, !....! Parallel Processing, Point Assignment, PerformMode, Speed, Till, TGo,
TMove, Tool
Ejemplo de instrucción BGo
> BGo XY(100, 0, 0, 0) 'Se mueve 100 mm en la dirección X (en el sistema de coordenadas
locales)
Function BGoTest
Speed 50
Accel 50, 50
Power High
P1 = XY(300, 300, -20, 0)
P2 = XY(300, 300, -20, 0) /L
Local 1, XY(0, 0, 0, 45)
GoP1
Print Here
BGo XY(0, 50, 0, 0)
Print Here
Go P2
Print Here
BGo XY(0, 50, 0, 0)
Print Here
BGo XY(0, 50, 0, 0) /1
Print Here
Fend
[Output]
X: 300.000 Y: 300.000 Z: -20.000 U: 0.000 V: 0,000 W: 0.000 /R /0
X: 300.000 Y: 350.000 Z: -20.000 U: 0.000 V: 0,000 W: 0.000 /R /0
X: 300.000 Y: 300.000 Z: -20.000 U: 0.000 V: 0,000 W: 0.000 /L /0
X: 300.000 Y: 350.000 Z: -20.000 U: 0.000 V: 0,000 W: 0.000 /L /0
X: 264.645 Y: 385.355 Z: -20.000 U: 0.000 V: 0,000 W: 0.000 /L /0

110 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción BMove
Ejecuta el movimiento relativo de interpolación lineal, en el sistema de coordenadas locales seleccionado.
Sintaxis
BMove destination [ROT] [CP] [ searchExpr ] [ !...! ] [SYNC]
Parámetros
destination El destino objetivo del movimiento que usa una expresión de punto.
ROT Opcional. Decide la velocidad/aceleración/desaceleración en favor del giro de
la herramienta.
CP Opcional. Especifica un movimiento de ruta continua.
searchExpr Opcional. Una expresión Till o Find.
Till | Find
Till Sw(expr) = {On | Off}
Find Sw(expr) = {On | Off}
!...! Opcional. Es posible agregar las instrucciones de procesamiento paralelo para
ejecutar E/S y otros comandos durante el movimiento.
SYNC Reserva un comando de movimiento. El robot no se moverá hasta que se
ejecute SyncRobots.
Descripción
Ejecuta el movimiento relativo interpolado lineal, en el sistema de coordenadas locales seleccionado que se
especifica en la expresión de punto destination.
Si no se especifica un sistema de coordenadas locales, ocurrirá un movimiento relativo en Local 0 (sistema
de coordenadas base).
Los atributos de la orientación del brazo especificados en la expresión de punto de destino se ignoran. El
manipulador mantiene los atributos de orientación actual del brazo. Sin embargo, para manipuladores de 6
ejes (incluida la serie N), los atributos de orientación del brazo se cambian automáticamente de modo que la
distancia de desplazamiento de la articulación sea la menor posible. Esto es equivalente a especificar el
parámetro modificador LJM para la instrucción Move. Por lo tanto, si desea cambiar la orientación del brazo
más de 180 grados, se debe ejecutar varias veces.
BMove utiliza el valor de velocidad SpeedS y los valores de aceleración y desaceleración AccelS. Consulte
Uso de BMove con CP, a continuación, para conocer la relación entre velocidad/aceleración y
aceleración/desaceleración. No obstante, si se usó el parámetro modificar ROT, BMove usa el valor de
velocidad SpeedR y los valores de aceleración y desaceleración AccelR. En este caso, el valor de velocidad
SpeedS y el valor de aceleración y desaceleración AccelS no tienen efecto.
Normalmente, cuando la distancia de movimiento es "0" y solo cambia la orientación de la herramienta,
ocurrirá un error. Sin embargo, mediante el uso del parámetro ROT y la priorización de la aceleración y la
desaceleración del giro de la herramienta, es posible realizar el movimiento sin un error. Cuando no hay un
cambio de orientación con el parámetro modificador ROT y la distancia de movimiento no es "0", ocurrirá
un error.
También, cuando el giro de la herramienta es grande en comparación con la distancia de movimiento, y
cuando la velocidad de giro supera la velocidad especificada del manipulador, ocurrirá un error. En este caso,
reduzca la velocidad o agregue el parámetro modificador ROT para dar prioridad a la velocidad
rotacional/aceleración/desaceleración.
El modificador Till se usa para completar BMove mediante la desaceleración y detención del robot en una
posición de desplazamiento intermedio, si se cumple la condición actual Till.
El modificador Find se usa para almacenar un punto en FindPos cuando la condición Find se vuelve verdadera
durante el movimiento.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 111
Cuando se usa Till y se cumple la condición Till, el manipulador se suspende de inmediato y finaliza el
comando de movimiento. Si no se cumple la condición Till, el manipulador se mueve hasta el punto de
destino.
Cuando se usa Find y se cumple la condición Find, se almacena la posición actual. Consulte Find para conocer
detalles.
Cuando se usa el procesamiento paralelo, es posible ejecutar otros procesamientos en paralelo con el
comando de movimiento.
Nota
Uso de BMove con CP
El parámetro CP causa que el brazo se mueva al destino sin desacelerar o detenerse en el punto definido
según el destino. Esto se hace para permitir al usuario enlazar una serie de instrucciones de movimiento que
causan que el brazo se mueva a lo largo de una ruta continua mientras mantiene una velocidad especificada
durante todo el movimiento. La instrucción BMove sin CP siempre provoca que el brazo desacelere hasta
detenerse antes de llegar al punto destination.
Consulte también
AccelS, BGo, Find, !....! Parallel Processing, Point Assignment, SpeedS, TGo, Till, TMove, Tool
Ejemplo de instrucción BMove
> BMove XY(100, 0, 0, 0)'Se mueve 100 mm en la dirección X (en el sistema de coordenadas
locales)
Function BMoveTest
Speed 50
Accel 50, 50
SpeedS 100
AccelS 1000, 1000
Power High
P1 = XY(300, 300, -20, 0)
P2 = XY(300, 300, -20, 0) /L
Local 1, XY(0, 0, 0, 45)
Go P1
Print Here
BMove XY(0, 50, 0, 0)
Print Here
Go P2
Print Here
BMove XY(0, 50, 0, 0)
Print Here
BMove XY(0, 50, 0, 0) /1
Print Here
Fend
[Output]
X: 300.000 Y: 300.000 Z: -20.000 U: 0.000 V: 0,000 W: 0.000 /R /0
X: 300.000 Y: 350.000 Z: -20.000 U: 0.000 V: 0,000 W: 0.000 /R /0
X: 300.000 Y: 300.000 Z: -20.000 U: 0.000 V: 0,000 W: 0.000 /L /0
X: 300.000 Y: 350.000 Z: -20.000 U: 0.000 V: 0,000 W: 0.000 /L /0
X: 264.645 Y: 385.355 Z: -20.000 U: 0.000 V: 0,000 W: 0.000 /L /0

112 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción Boolean
Declara variables de tipo booleano. (Número entero de 2 bytes).
Sintaxis
Boolean varName [(subscripts)] [, varName [(subscripts)]...]
Parámetros
varName Nombre de la variable que el usuario desea declarar como de tipo booleano.
subscripts Opcional. Las dimensiones de una matriz son variables; es posible declarar hasta 3
dimensiones. La sintaxis del subíndice es la siguiente
(ubound1, [ubound2], [ubound3])
ubound1, ubound2, ubound3 especifican, cada una, el límite superior máximo para la
dimensión asociada.
Los elementos en cada dimensión de una matriz se numeran desde 0 y el número
disponible de elementos de matriz es el valor de límite superior + 1.
Cuando especifique el valor del límite superior, asegúrese de que el número total de
elementos esté dentro del rango que se muestra a continuación:
Variable local 2.000
Variables globales conservadas 4.000
Variable global y variable de módulo 100.000
Descripción
Boolean se usa para declarar variables como de tipo booleano. Las variables de tipo booleano pueden incluir
uno de dos valores, False y True. Las variables locales se deben declarar al inicio de una función. Las
variables globales y de módulo se deben declarar fuera de las funciones.
Consulte también
Byte, Double, Global, Int32, Int64, Integer, Long, Real, Short, String, UByte, UInt32, UINT64,
UShort
Ejemplo de instrucción Boolean
Boolean partOK
Boolean A(10) 'Matriz de una dimensión del valor booleano
Boolean B(10, 10) 'Matriz de dos dimensiones de valor booleano
Boolean C(5, 5, 5) 'Matriz de tres dimensiones de valor booleano
partOK = CheckPart()
If Not partOK Then
Print "Part check failed"
EndIf

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 113
Instrucción BOpen
Abre un archivo el modo binario.
Sintaxis
BOpen fileName As #fileNumber
.
.
Close #fileNumber
Parámetros
fileName Expresión de cadena que especifica una ruta y nombre de archivo válidos.
Si se especifica solo un nombre de archivo, el archivo debe estar en la carpeta actual.
Consulte ChDisk para conocer detalles.
fileNumber Expresión entera que representa valores desde 30 a 63.
Descripción
Abre el archivo especificado y lo identifica según el número de archivo especificado. Esta instrucción se
usa para acceder al archivo especificado en modo binario. Si no se encuentra el archivo especificado, se
crea un nuevo archivo. Si el archivo existe, leerá y escribirá los datos desde el inicio.
Use los comandos ReadBin y WriteBin para leer y escribir los datos en modo binario.
Nota
Hay una ruta de red disponible.
El fileNumber especificado identifica el archivo mientras está abierto y no se puede usar para referirse a un
archivo diferente hasta que el archivo actual esté cerrado. fileNumber lo usan otras operaciones del archivo,
como ReadBin, WriteBin, Seek, Eof, Flush y Close.
La posición de lectura/escritura (puntero) del archivo se puede cambiar con el comando Seek. Cuando se
cambia entre el acceso de lectura y escritura, use Seek para volver a ubicar el puntero del archivo.
Use la instrucción Close para cerrar el archivo y liberar el número de archivo.
Recomendamos que use la función FreeFile para obtener el número de archivo para que el mismo número
no sea utilizado por más de una tarea.
Consulte también
Close, AOpen, FreeFile, ReadBin, ROpen, UOpen, WOpen, WriteBin
Ejemplo de instrucción BOpen
Integer fileNum, i
fileNum = FreeFile
BOpen "TEST.DAT" As #fileNum
For i = 0 To 100
WriteBin #fileNum, i
Next i
Flush #fileNum
Seek #fileNum, 10
ReadBin #fileNum, i
Print "data = ", i
Close #fileNum

114 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción Box
Especifica y muestra el área de control de acercamiento.
Sintaxis
(1) Box AreaNum [, robotNumber], minX, maxX, mixY, maxY, minZ, maxZ [localNumber]
(2) Box AreaNum, robotNumber, minX, maxX, mixY, maxY, minZ, maxZ, remote OutLogic
[localNumber]
(3) Box AreaNum, robotNumber
(4) Box
Parámetros
AreaNum Expresión entera que representa el número de área desde 1 a 15.
robotNumber Expresión entera que especifica el robot que desea configurar.
Si se omite robotNumber en la sintaxis (1), se usa el número de robot actual.
No puede omitir robotNumber en la sintaxis (2) y (3).
minX La posición de coordenada X mínima que se puede configurar en el área de control
de acercamiento.
maxX La posición de coordenada X máxima que se puede configurar en el área de control
de acercamiento.
minY La posición de coordenada Y mínima que se puede configurar en el área de control
de acercamiento.
maxY La posición de coordenada Y máxima que se puede configurar en el área de control
de acercamiento.
minZ La posición de coordenada Z mínima que se puede configurar en el área de control
de acercamiento.
maxZ La posición de coordenada Z máxima que se puede configurar en el área de control
de acercamiento.
Remote OutLogic On | Off (Activado, desactivado)
Configure la lógica de salida remota. Para configurar la salida E/S en On
(Activado) cuando se acerque Box, use On. Para configurar la salida E/S en Off
(Desactivado) cuando se acerque Box, use Off. Cuando se omite el parámetro, se
usa On.
localNumber Especifique el número del sistema de coordenadas locales de 0 a 15.
Asegúrese de agregar “/LOCAL” antes del número. Cuando se omite el
parámetro, se usa el número del sistema de coordenadas locales “0”.
Valores devueltos
Cuando se usa la sintaxis (3), aparece la configuración del área especificada.
Cuando se usa la sintaxis (4), aparece la configuración de área para todos los números de área del robot
actual.
Descripción
Box se usa para configurar el área de control de acercamiento. El área de control de acercamiento sirve para
comprobar los acercamientos del efector final del robot en esta área. La posición del efector final se calcula
según la herramienta actual. El área de control de acercamiento se configura en el sistema de coordenadas
base del robot o el sistema de coordenadas locales mediante localNumber, y se encuentra entre los valores
máximo y mínimo de X, Y y Z del sistema de coordenadas especificado.
Cuando se usa el área de control de acercamiento, el sistema detecta acercamientos en cualquier estado de
potencia del motor mientras esté activado el controlador.
También puede usar la función GetRobotInsideBox o la función InsideBox para obtener el resultado del
control de acercamiento. La función GetRobotInsideBox se puede usar para la condición de espera del
comando Wait. Puede ofrecer el resultado de control para la E/S mediante la configuración de la salida
remota.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 115
Cuando varios robots usan un área, debe definir el área desde cada sistema de coordenadas del robot.
Caja 1
Límite inferior de los ejes X, Y, Z
Límite superior de los ejes X, Y, Z
Robot 2
Robot 1
Configure Box 1 desde la posición de Robot 1
Box 1, 1, 100, 200, 0, 100, 0, 100
El límite inferior de los ejes X, Y, Z es (100, 0, 0) y el límite superior es (200, 100, 100)
Configure Box 1 desde Robot 2
Box 1, 2, -200, -100, 0, 100, 0, 100
El límite inferior de los ejes X, Y, Z es (−200, 0, 0) y el límite superior es (−100, 100, 100)
Los datos de los parámetros del robot se almacenan en la memoria Compact Flash en el controlador. Por
tanto, la memoria flash de comandos se escribe cuando se ejecuta este comando. La escritura frecuente en
la memoria Compact Flash afecta su vida útil. Recomendamos que el uso de este comando sea mínimo.
Notas
Desactivación del área de control de acercamiento mediante el eje de coordenadas
Puede desactivar el área de control de acercamiento de cada eje de coordenadas. Para desactivar solamente
el eje Z, defina minZ y maxZ en 0. Por ejemplo, Box 1, 200, 300, 0, 500, 0, 0.
En este caso, se comprueba si el efector final del robot se encuentra en el área dimensional XY.
Valores predeterminados del área de control de acercamiento
Los valores predeterminados de la instrucción Box “0, 0, 0, 0, 0, 0”. (La comprobación del área de control
de acercamiento está desactivada).
Selección de herramienta
Se ejecuta la comprobación de acercamiento para la herramienta actual. Cuando cambia la herramienta, el
control de acercamiento podría mostrar el acercamiento de la herramienta de adentro hacia afuera del área, o
al revés, aunque el robot no esté funcionando.
Eje adicional
Para el robot que tiene el eje ST adicional (incluido el eje de funcionamiento), el plano de control de
acercamiento que se configurará no depende de la posición del eje adicional, sino que se basa en el sistema
de coordenadas base del robot.
Consejo
Configuración de la instrucción Box desde Robot Manager
EPSON RC+ cuenta con un cuadro de diálogo para señalar y activar que permite definir el área de control de
acercamiento. El método más simple de configurar los valores Box es mediante el uso de la página de Box
de Robot Manager.
Consulte también
BoxClr, BoxDef, GetRobotInsideBox, InsideBox, Plane

116 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Ejemplo de instrucción Box
<Ejemplo 1>
Estos son ejemplos que sirven para configurar el área de control de acercamiento mediante la instrucción
Box.
> Box 1, -200, 300, 0, 500, -100, 0
> Box
Box 1: 1, -200.000, 300.000, 0.000, 500.000, -100.000, 0.000, ON
/LOCAL0
<Ejemplo 2>
Lo siguiente corresponde a un programa sencillo para configurar los valores Box mediante la
especificación de los números 1 y 2 del sistema de coordenadas locales.
Function SetBox
Integer i
Box 1, -200, 300, 0, 500, -100, 0 /LOCAL1
i = 2
Box 2, 100, 200, 0, 100, -200, 100 /LOCAL(i)
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 117
Función Box
Arroja el área de control de acercamiento especificada.
Sintaxis
Box(AreaNum[, robotNumber], limit)
Parámetros
AreaNum Expresión entera que representa el número de área.
robotNumber Opcional. Expresión entera que especifica el robot que desea configurar.
Si se omite, se usa el número del robot actual.
limit Expresión entera que especificará el límite que se arrojará.
1: Límite inferior
2: Límite superior
Valores devueltos
Cuando selecciona 1 para limit, el punto incluye el límite inferior de las coordenadas X, Y, Z.
Cuando selecciona 2 para limit, el punto incluye el límite superior de las coordenadas X, Y, Z.
Consulte también
Box, BoxClr, BoxDef, GetRobotInsideBox, InsideBox
Ejemplo de función Box
P1 = Box(1,1)
P2 = Box(1,2)

118 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción BoxClr
Borra la definición del área de control de acercamiento.
Sintaxis
BoxClr AreaNum[, robotNumber]
Parámetros
AreaNum Expresión entera que representa el número de área desde 1 a 15.
robotNumber Opcional. Expresión entera que especifica el robot que desea configurar.
Si se omite, se usa el número del robot actual.
Descripción
Los datos de los parámetros del robot se almacenan en la memoria Compact Flash en el controlador. Por
tanto, la memoria flash de comandos se escribe cuando se ejecuta este comando. La escritura frecuente en
la memoria Compact Flash afecta su vida útil. Recomendamos que el uso de este comando sea mínimo.
Consulte también
Box, BoxDef, GetRobotInsideBox, InsideBox
Ejemplo de instrucción BoxClr
En este ejemplo se usa la función BoxClr en un programa.
Function ClearBox
If BoxDef(1) = True Then
BoxClr 1
EndIf
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 119
Función BoxDef
Indica si se definió o no Box.
Sintaxis
BoxDef(AreaNum) [, robotNumber]
Parámetros
AreaNum Expresión entera que representa un número de área de 1 a 15.
robotNumber Expresión entera que representa el número de robot que desea configurar.
Si se omite, se especificará el número del robot actual.
Valores devueltos
Es True si el área de control de acercamiento se define para el número de área especificado, de lo contrario
es False.
Consulte también
Box, BoxClr, GetRobotInsideBox, InsideBox
Ejemplo de función BoxDef
En este ejemplo se usa la función BoxDef en un programa.
Function ClearBox
If BoxDef(1) = True Then
BoxClr 1
EndIf
Fend

120 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción Brake
Activa o desactiva el freno de la articulación especificada del robot actual.
Sintaxis
Brake status, jointNumber
Parámetros
status La palabra clave On se usa para activar el freno. La palabra clave Off se usa para desactivar
el freno.
jointNumber El número de la articulación de 1 a 6.
Descripción
El comando Brake se usa para activar o desactivar los frenos de una articulación del robot de 6 ejes (incluida
la serie N). Solo se puede usar mediante entrada en la ventana Comando. Este comando tiene como fin que
lo use solamente el personal de mantenimiento.
Cuando se ejecuta la instrucción Brake, se inicia el parámetro de control del robot.
Consulte Motor On para conocer detalles.
ADVERTENCIA
■
Sea sumamente precav
ido cuando desactive un freno. Asegúrese de que la
articulación cuente con un soporte adecuado, de lo contrario, puede caerse y
generar daños al robot y al personal.
Nota
Antes de liberar el freno, prepárese para usar el interruptor de parada de emergencia
Cuando el controlador está en el estado de parada de emergencia, los frenos del motor se bloquean. Tenga
presente que el brazo del robot podría caerse por su propio peso cuando se desactiva el freno con el comando
Brake.
Consulte también
Motor, Power, Reset, SFree, SLock
Ejemplo de instrucción Brake
> brake on, 1
> brake off, 1

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 121
Función Brake
Arroja el estado del freno de una articulación especificada.
Sintaxis
Brake (jointNumber)
Parámetros
jointNumber Expresión entera que representa el número de articulación. El valor varía desde 1 hasta el
número de articulaciones en el robot.
Valores devueltos
0 = Freno desactivado, 1 = Freno activado.
Consulte también
Freno
Ejemplo de función Brake
If brake(1) = Off Then
Print “Joint 1 brake is off”
EndIf

122 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función BSet
Define un bit en un número y arroja el nuevo valor.
Sintaxis
BSet (number, bitNum)
Parámetros
number Especifica el valor para definir el bit con una expresión o valor numérico.
bitNum Especifica el bit (número entero de 0 a 31) que se definirá según una expresión o valor
numérico.
Valores devueltos
Arroja el valor definido del bit del valor numérico especificado (número entero).
Consulte también
BClr, BClr64, BSet64, BTst, BTst64
Ejemplo de función BSet
flags = BSet(flags, 1)

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 123
Función BSet64
Define un bit en un número y arroja el nuevo valor.
Sintaxis
BSet64 (number, bitNum)
Parámetros
number Especifica el valor para definir el bit con una expresión o valor numérico.
bitNum Especifica el bit (número entero de 0 a 63) que se definirá según una expresión o valor
numérico.
Valores devueltos
Arroja el valor definido del bit del valor numérico especificado (número entero).
Consulte también
BClr, BClr64, BSet, BTst, BTst64
Ejemplo de función BSet64
flags = BSet64(flags, 1)

124 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función BTst
Arroja el estado de 1 bit en un número.
Sintaxis
BTst (number, bitNum)
Parámetros
number Especifica el número para la prueba de bit con una expresión o valor numérico.
bitNum Especifica el bit (número entero de 0 a 31) que se probará.
Valores devueltos
Arroja los resultados de la prueba de bit (número entero 1 o 0) del valor numérico especificado.
Consulte también
BClr, BClr64, BSet, BSet64, BTst64
Ejemplo de función BTst
If BTst(flags, 1) Then
Print "Bit 1 is set"
EndIf

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 125
Función BTst64
Arroja el estado de 1 bit en un número.
Sintaxis
BTst64 (number, bitNum)
Parámetros
number Especifica el número para la prueba de bit con una expresión o valor numérico.
bitNum Especifica el bit (número entero de 0 a 63) que se probará.
Valores devueltos
Arroja los resultados de la prueba de bit (número entero 1 o 0) del valor numérico especificado.
Consulte también
BClr, BClr64, BSet, BSet64, BTst
Ejemplo de función BTst64
If BTst64(flags, 1) Then
Print "Bit 1 is set"
EndIf

126 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción Byte
Declara las variables de tipo byte. (Número entero de 2 bytes).
Sintaxis
Byte varName [(subscripts)] [, varName [(subscripts)]...]
Parámetros
varName Nombre de variable que el usuario desea declarar como de tipo byte.
subscripts Opcional. Las dimensiones de una matriz son variables; es posible declarar hasta 3
dimensiones. La sintaxis del subíndice es la siguiente
(ubound1, [ubound2], [ubound3])
ubound1, ubound2, ubound3 especifican, cada una, el límite superior máximo para la
dimensión asociada.
Los elementos en cada dimensión de una matriz se numeran desde 0 y el número
disponible de elementos de matriz es el valor de límite superior + 1.
Cuando especifique el valor del límite superior, asegúrese de que el número total de
elementos esté dentro del rango que se muestra a continuación:
Variable local 2.000
Variables globales conservadas 4.000
Variable global y variable de módulo 100.000
Descripción
Byte se usa para declarar variables como de tipo byte. Las variables de tipo byte pueden incluir números
enteros que varían de -128 a +127. Las variables locales se deben declarar al inicio de una función.
Las variables globales y de módulo se deben declarar fuera de las funciones.
Consulte también
Boolean, Double, Global, Int32, Int64, Integer, Long, Real, Short, String, UByte, UInt32, UInt64,
UShort
Ejemplo de instrucción Byte
En los siguientes ejemplos se declara una variable de tipo byte y luego se le asigna un valor. Entonces se
realiza una operación And bitwise para ver si el bit alto del valor en la variable test_ok está activado (1) o
desactivado (0). El resultado se imprime en la pantalla. (Desde luego, en este ejemplo, el bit alto de la variable
test_ok siempre estará configurado dado que le asignamos el valor 15 a la variable).
Function Test
Byte A(10) 'Matriz de una dimensión del byte
Byte B(10, 10) 'Matriz de dos dimensiones del byte
Byte C(5, 5, 5) 'Matriz de tres dimensiones del byte
Byte test_ok
test_ok = 15
Print "Initial Value of test_ok = ", test_ok
test_ok = (test_ok And 8)
If test_ok <> 8 Then
Print "test_ok high bit is ON"
Else
Print "test_ok high bit is OFF"
EndIf
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 127
Instrucción Calib
Reemplaza a los valores de pulso de la postura del brazo actual con los valores CalPls actuales.
Sintaxis
Calib joint1[, joint2 ][, joint3][, joint4][, joint5][, joint6][, joint7][, joint8][, joint9]
Parámetros
joint Número entero de 1 a 9 que especifica el número de articulación que se calibrará.
Aunque, de forma normal, solamente una articulación necesitaría de calibración al
mismo tiempo, se pueden calibrar hasta nueve articulaciones al mismo tiempo con el
comando Calib.
El eje S adicional es el octavo y el eje adicional T es el noveno.
Descripción
Calcula y especifica automáticamente el valor de compensación (Hofs). Esta compensación es necesaria para
hacer coincidir el origen de cada uno de los motores de las articulaciones del robot con el origen mecánico
del robot correspondiente.
El comando Calib se debe usar cuando el valor de pulso del motor ha cambiado. El evento más común para
usarlo es después de un cambio de motor. Normalmente, los valores de pulso de la posición de calibración
coincidirían con los valores de pulso de CalPls. Sin embargo, después de las operaciones de mantenimiento,
como el cambio de motores, estos dos conjuntos de valores ya no coincidirán y, por lo tanto, la calibración
se vuelve innecesaria.
La calibración se puede conseguir cuando mueve el brazo hasta la posición de calibración que desea y ejecuta
posteriormente el comando Calib. Mediante la ejecución de Calib, el valor de pulso de la posición de
calibración cambia al valor CalPls (el valor de pulso correcto para la posición de calibración).
Para poder realizar una calibración adecuada, debe determinar los valores de Hofs. Para que se calculen
automáticamente los valores de Hofs, mueva el brazo a la posición de calibración deseada y ejecute Calib.
El controlador calcula automáticamente los valores de Hofs según los valores de pulso de la calibración y
según los valores de pulso de CalPls.
Nota
Tenga precaución cuando use el comando Calib
Calib está diseñado para usarse solo para fines de mantenimiento. Ejecute Calib solo cuando sea necesario.
Ejecutar Calib genera el reemplazo del valor de Hofs. Debido a que los cambios inesperados del valor de
Hofs pueden generar un movimiento impredecible del robot, tenga precaución y ejecute Calib solo cundo
sea necesario.
Posible error
Error de ningún número de articulación especificado
Si el número de articulación no se especifica con el comando Calib, se genera un error.
Consulte también
CalPls, Hofs

128 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Ejemplo de instrucción Calib
Ejemplo desde la ventana Command.
> CalPls 'Muestra los valores CalPls actuales
65523, 43320, -1550, 21351
> Pulse 'Muestra los valores Pulse actuales
PULSE: 1: 65526 pls 2: 49358 pls 3: 1542 pls 4: 21299 pls
> Calib 2 'Ejecuta la calibración solo para la articulación 2
> Pulse 'Muestra los valores de pulso (cambiados)
PULSE: 1: 65526 pls 2: 43320 pls 3: 1542 pls 4: 21299 pls
>

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 129
Instrucción Call
Llama a una función del usuario.
Sintaxis
Call funcName [(argList)]
Parámetros
funcName El nombre de una función que se está llamando.
argList Opcional. Lista de argumentos que se especificaron en la declaración de la función.
Para el argumento, use la siguiente sintaxis:
[ByRef] varName [( )], o expresión numérica
ByRef Opcional. Especifique ByRef cuando haga referencia a la variable que será
vista por la función que realiza la llamada. En este caso, el cambio de
argumento en una función se puede reflejar a la variable del lado que llama.
Se pueden cambiar los valores recibidos como referencia.
Descripción
La instrucción Call genera la transferencia del control del programa a una función (definida en
Function...Fend). Esto significa que la instrucción Call ordena que el programa se ejecute fuera de la función
actual y se transfiera a la función especificada por Call. Entonces, la ejecución del programa sigue en esa
función hasta que se llega a una función Exit o a una instrucción Fend. Posteriormente se transfiere el control
de vuelta a la función de llamada original en la siguiente instrucción, después de la instrucción Call.
Puede omitir la palabra clave Call y los paréntesis del argumento. Por ejemplo, aquí puede ver una instrucción
de llamada usada con o sin la palabra clave Call:
Call MyFunc(1, 2)
MyFunc 1, 2
Puede llamar una función externa en una biblioteca de enlace dinámico (DLL). Para conocer detalles,
consulte Instrucción Declare.
Para ejecutar una subrutina dentro de una función, use GoSub...Return.
Puede especificar una variable como un argumento. Cuando se especifica el parámetro ByRef, puede reflejar
el cambio de argumento en la función en la variable de la sección de llamada.
Cuando se especifica el parámetro ByRef, necesita especificar también ByRef para la lista de argumentos de
la definición de función (instrucción Function) y la definición de la función de DLL (instrucción Declare).
ByRef es necesario cuando se entrega una variable de matriz como un argumento.
Consulte también
Function, GoSub
Ejemplo de instrucción Call
<Archivo1: MAIN.PRG>
Function main
Call InitRobot
Fend
<Archivo2: INIT.PRG>
Function InitRobot
If Motor = Off Then
Motor On
EndIf
Power High
Speed 50
Accel 75, 75
Fend

130 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción CalPls
Especifica y muestra la posición y los valores de pulso de la orientación para la calibración.
Sintaxis
(1) CalPls j1Pulses, j2Pulses, j3Pulses, j4Pulses[, j5Pulses, j6Pulses] [, j7Pulses] [, j8Pulses,
j9Pulses]
(2) CalPls
Parámetros
j1Pulses Valor de pulso de la primera articulación. Esta es una expresión entera larga.
j2Pulses Valor de pulso de la segunda articulación. Esta es una expresión entera larga.
j3Pulses Valor de pulso de la tercera articulación. Esta es una expresión entera larga.
j4Pulses Valor de pulso de la cuarta articulación. Esta es una expresión entera larga.
j5Pulses Opcional. Valor de pulso de la quinta articulación. Esta es una expresión entera larga.
j6Pulses Opcional. Valor de pulso de la sexta articulación. Esta es una expresión entera larga.
j7Pulses Opcional. Valor de pulso de la séptima articulación. Esta es una expresión entera larga.
j8Pulses Opcional. Valor de pulso de la octava articulación. Esta es una expresión entera larga.
j9Pulses Opcional. Valor de pulso de la novena articulación. Esta es una expresión entera larga.
Valores devueltos
Cuando se omiten los parámetros, aparecen los valores CalPls actuales.
Descripción
Especifica y mantiene los valores de pulso correctos de la posición para la calibración.
CalPls está diseñado para usarse para el mantenimiento, como después de cambiar motores o cuando la
posición cero del motor necesita coincidir con la posición cero mecánica correspondiente del brazo. Esta
coincidencia de la posición cero del motor con la posición cero mecánica correspondiente del brazo se
denomina calibración.
Normalmente, los valores de pulso de la posición de calibración coinciden con los valores de pulso de
CalPls. No obstante, después de realizar las operaciones de mantenimiento, como el cambio de motores,
estos dos conjuntos de valores dejan de coincidir, por lo que se necesita realizar una calibración.
Para realizar la calibración mueva el brazo hasta una posición de calibración determinada y luego ejecute
Calib. Mediante la ejecución de Calib, el valor de pulso de la posición de calibración cambia al valor CalPls
(el valor de pulso correcto para la posición de calibración).
Debe determinar los valores Hofs para ejecutar la calibración. Para que se calculen automáticamente los
valores de Hofs, mueva el brazo a la posición de calibración deseada y ejecute Calib. El controlador calcula
automáticamente los valores Hofs según los valores de pulso de la posición de calibración y según los
valores CalPls.
Nota
Los valores CalPls no se pueden cambiar con el apagado y encendido de alimentación
Los valores CalPls no se inician cuando se apaga y se vuelve a encender la alimentación principal del
controlador. El único método para modificar los valores CalPls es ejecutar el comando Calib.
Consulte también
Calib, Hofs

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 131
Ejemplo de instrucción CalPls
Operación de la ventana Monitor
> CalPls 'Muestra los valores CalPls actuales
65523, 43320, -1550, 21351
> Pulse
PULSE: 1: 65526 pls 2: 49358 pls 3: -1542 pls 4: 21299 pls
> Calib 4
> Pulse
PULSE: 1: 65526 pls 2: 49358 pls 3: -1542 pls 4: 21351 pls
>

132 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función CalPls
Arroja el valor de pulso de la calibración que especifica la instrucción CalPls.
Sintaxis
CalPls(joint)
Parámetros
joint Expresión entera que representa un número de articulación del robot o 0 en el estado de
CalPls devuelto.
El eje S adicional es 8 y el eje T es 9.
Valores devueltos
Valor entero que incluye el número de pulsos de calibración. Cuando joint es 0, arroja 1 o 0, dependiendo
de si CalPls se ejecutó.
Consulte también
CalPls
Ejemplo de función CalPls
En este ejemplo se usa la función CalPls en un programa:
Function DisplayCalPlsValues
Integer i
Print "CalPls Values:"
For i = 1 To 4
Print "Joint ", i, " CalPls = ", CalPls(i)
Next i
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 133
Instrucción ChDir
Cambia y muestra el directorio actual.
Sintaxis
(1) ChDir pathName
(2) ChDir
Parámetros
pathName Expresión de cadena que representa el nombre de la nueva ruta predeterminada.
Consulte ChDisk para conocer detalles.
Descripción
(1) Cambia al directorio especificado mediante la especificación del parámetro.
(2) Cuando se omite el parámetro, se muestra el directorio actual. Se usa esto para mostrar el directorio
actual cuando no se conoce.
ChDir está disponible solo con el disco de PC.
Cuando un programa ejecutará este comando, encierre el nombre de la ruta con ["].
Cuando está encendido, el directorio de raíz será el directorio actual si no hay ningún proyecto abierto,
pero si se abre un proyecto, el directorio del proyecto será el directorio actual.
Si cambia la unidad de disco con ChDrive, el directorio raíz será el directorio actual.
El parámetro se almacena en la memoria Compact Flash en el controlador. Por tanto, la memoria flash de
comandos se escribe cuando se ejecuta este comando. La escritura frecuente en la memoria Compact Flash
afecta su vida útil. Recomendamos que el uso de este comando sea mínimo.
Consulte también
ChDrive, ChDisk, CurDir$
Ejemplo de instrucción ChDir
Los siguientes ejemplos se llevan a cabo desde la ventana Command.
> ChDir \ 'Cambia el directorio actual al directorio de raíz
> ChDir.. 'Cambia el directorio actual al directorio principal
> Cd \TEST\H55 'Cambia el directorio actual a \H55 en \TEST
> Cd 'Muestra el directorio actual
A:\TEST\H55\
Ejemplo de ejecución de programa
ChDir "\" 'Cambia el directorio actual al directorio de raíz
ChDir ".." 'Cambia el directorio actual al directorio principal

134 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción ChDisk
Configura el disco de objeto para las operaciones del archivo.
Sintaxis
ChDisk PC|USB|RAM
Parámetros
PC Carpetas (como disco duro) en la parte de Windows
USB Memoria USB en la parte Real
RAM Memoria en la parte Real
Descripción
Especifica qué disco debe usar para las operaciones de archivos. Lo predeterminado es el disco de PC.
El controlador de robot admite los siguientes discos como el objeto de las operaciones de archivos.
PC
Carpetas en la parte de Windows
La configuración inicial es PC y, normalmente, no tiene que cambiar esta
configuración.
Tiene acceso a los archivos en las carpetas del proyecto.
USB
Memoria USB conectada al puerto de memoria del controlador
Esto es útil para intercambiar archivos cuando no usa la parte de Windows
(RC+).
RAM
Archivos temporales en la memoria
Estos archivos no se guardan cuando apaga el controlador.
Esto resulta útil para guardar temporalmente los datos.
Algunos de los comandos SPEL
+
cambian el objeto de las operaciones de archivos de acuerdo con la
configuración ChDisk. Asimismo, la configuración ChDisk está disponible solamente con el disco de PC
para algunos comandos.
ChDisk
ChDrive
ChDir
no afecta...
Curve
CVMove
LoadPoints
SavePoints
Nombre de archivo ImportPoints
El objeto es siempre las carpetas del proyecto.
Se puede especificar el nombre del archivo.
Si se especifica la ruta, sucede un error.
ChDisk
no afecta...
Access, nombre de archivo Excel de
OpenDB
Ruta de origen de ImportPoints
VLoadModel
VSaveImage
VSaveModel
El objeto es siempre las carpetas de Windows.
Si se
especifica solamente el nombre del
archivo, se puede ver afectado por la unidad de
disco y carpeta actuales.
También puede especificar una ruta completa.
Es ejecutable
cuando ChDisk es
PC
ChDir
FolderExists
MkDir
RenDir
RmDir
Si lo ejecuta sin la configuración ChDisk en
PC, se genera un error.
Si solo se especifican el nombre del archivo y
de la carpeta, puede verse afectado por la
unidad de disco y carpeta actuales.
También puede especificar una ruta completa.
USB y RAM no cuentan con directorios.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 135
Es ejecutable
cuando ChDisk es
USB o RAM
Copy
Del
FileDataTime
FileExist
FileLen
AOpen, BOpen, ROpen, UOpen,
WOpen
Rename
Cuando ChDisk es PC:
Si solo se especifican el nombre del archivo y
de la carpeta, puede verse afectado por la
unidad de disco y carpeta actuales.
También puede especificar una ruta completa.
Cuando ChDisk es USB o RAM:
Solo se puede especificar el nombre de archivo
y si se especifica la ruta, se genera un error.
Special
Declare
Consulte Declare para conocer detalles.
Se puede aceptar cualquier nombre de archivo
especificado.
No puede verse afectado por la unidad de disco
y carpeta actuales
Para decidir una ruta completa cuando ChDisk es PC, realice lo siguiente:
Solo nombre de archivo
“abc.txt”
Unidad de disco actual + Directorio actual + Nombre
de archivo especificado
“C:\EpsonRC70\Projects\ProjectName\abc.txt”
Ruta completa sin unidad
de disco
“\abc.txt”
Unidad de disco actual + Ruta completa especificada
“C:\abc.txt”
Ruta completa con unidad
de disco
“d:\abc.txt”
Ruta completa especificada
“d:\abc.txt”
La unidad de disco es una
carpeta de red
“k:\abc.txt”
Ruta completa especificada
“k:\abc.txt”
Ruta de red
“\\Epson\data\abc.txt”
Ruta completa especificada
“\\Epson\data\abc.txt”
Puede tener una configuración ChDisk por controlador.
Si desea configurar más de un disco como un sistema, tome un control excepcional para cambiar la
configuración ChDisk.
Consulte también
ChDir, ChDrive, CurDisk$
Ejemplo de instrucción ChDisk
Ejemplos de la ventana Command.
> ChDisk PC

136 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción ChDrive
Cambios a la unidad de disco actual para las operaciones de archivos.
Sintaxis
ChDrive drive
Parámetros
drive Expresión de cadena o literal que incluye una letra de unidad de disco válida.
Descripción
ChDrive está disponible solamente con el disco para PC.
Cuando se enciende el equipo, la unidad “C” aparecerá como unidad de disco actual si hay un proyecto
cerrado. Si hay un proyecto abierto, la unidad del proyecto abierto será la unidad de disco actual.
Consulte ChDisk para conocer detalles.
El parámetro se almacena en la memoria Compact Flash en el controlador. Por tanto, la memoria flash de
comandos se escribe cuando se ejecuta este comando. La escritura frecuente en la memoria Compact Flash
afecta su vida útil. Recomendamos que el uso de este comando sea mínimo.
Consulte también
ChDir, ChDisk, CurDrive$
Ejemplo de instrucción ChDrive
Los siguientes ejemplos se llevan a cabo desde la ventana Command.
> ChDrive d

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 137
Función ChkCom
Arroja el número de caracteres en el búfer de recepción de un puerto de comunicación.
Sintaxis
ChkCom ( portNumber As Integer )
Parámetros
portNumber Valor entero que especifica el número de puerto RS-232C
Parte Real 1 a 8
Parte de Windows 1001 a 1008
Valores devueltos
Cantidad de caracteres recibida (número entero).
Si el puerto no puede recibir caracteres, se arrojan los siguientes valores negativos para informar el estado
actual del puerto:
-2 El puerto está en uso por otra tarea
-3 El puerto no está abierto
Consulte también
CloseCom, OpenCom, Read, Write
Ejemplo de función ChkCom
Integer numChars
numChars = ChkCom(1)

138 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función ChkNet
Arroja el número de caracteres en el búfer de recepción de un puerto de red.
Sintaxis
ChkNet ( portNumber As Integer )
Parámetros
portNumber Número de puerto TCP/IP (201 a 216)
Valores devueltos
Cantidad de caracteres recibida (número entero).
Si el puerto no puede recibir caracteres, se arrojan los siguientes valores negativos para informar el estado
actual del puerto:
-1 El puerto está abierto, pero no se ha establecido la comunicación
-2 El puerto está en uso por otra tarea
-3 El puerto no está abierto
Consulte también
CloseNet, OpenNet, Read, Write
Ejemplo de función ChkNet
Integer numChars
numChars = ChkNet(201)

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 139
Función Chr$
Arroja el carácter que especifica el valor numérico ASCII.
Sintaxis
Chr$(number)
Parámetros
number Expresión entera entre 1 y 255.
Valores devueltos
Arroja un carácter que corresponde al código ASCII especificado con el valor number.
Descripción
Chr$ arroja una cadena de caracteres (1 carácter) que tiene el valor ASCII del parámetro number. Cuando el
number especificado está fuera del rango de 1 a 255, se genera un error.
Consulte también
Asc, Instr, Left$, Len, Mid$, Right$, Space$, Str$, Val
Ejemplo de función Chr$
En el siguiente ejemplo se declara una variable de tipo cadena y luego se asigna la cadena "ABC" a esta. Se
usa la instrucción Chr$ para convertir los valores numéricos ASCII en caracteres "A", "B" y "C". &H
significa que el número que sigue está representado en formato hexadecimal. (&H41 significa Hex 41)
Function Test
String temp$
temp$ = Chr$(&H41) + Chr$(&H42) + Chr$(&H43)
Print "The value of temp = ", temp$
Fend

140 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción ClearPoints
Borra la memoria de datos de la posición del robot.
Sintaxis
ClearPoints
Descripción
ClearPoints inicia el área de datos de la posición del robot. Use esta instrucción para borrar las definiciones
de puntos que residen en la memoria antes de enseñar nuevos puntos.
Consulte también
Plist, LoadPoints, SavePoints
Ejemplo de instrucción ClearPoints
En el siguiente ejemplo se muestran ejemplos sencillos del uso del comando ClearPoints (desde la ventana
Command). Tenga presente que no se muestra ningún punto enseñado cuando se inicia el comando Plist
luego de ejecutar el comando ClearPoints.
>P1=100,200,-20,0/R
>P2=0,300,0,20/L
>plist
P1=100,200,-20,0/R
P2=0,300,0,20/L
>clearpoints
>plist
>

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 141
Instrucción Close
Cierra un archivo que se abrió con AOpen, BOpen, ROpen, UOpen o WOpen.
Sintaxis
Close #fileNumber
Parámetros
fileNumber Expresión entera cuyo valor varía de 30 a 63.
Descripción
Cierra el archivo mencionado con el identificador de archivo fileNumber y lo libera.
Consulte también
AOpen, BOpen, Flush, FreeFile, Input #, Print #, ROpen, UOpen, WOpen
Ejemplo de instrucción Close
En este ejemplo se abre un archivo, se escriben datos en él, luego se abre el mismo archivo y se leen los
datos en una variable de matriz.
Integer fileNumber, i, j
fileNumber = FreeFile
WOpen "TEST.DAT" As #fileNum
For i = 0 To 100
Print #fileNum, i
Next i
Close #fileNum
FileNum = FreeFile
ROpen "TEST.DAT" As #fileNum
For i = 0 to 100
Input #fileNum, j
Print j
Next i
Close #fileNum

142 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción CloseCom
Cierra el puerto RS-232C que se abrió con OpenCom.
Sintaxis
CloseCom #portNumber | All
Parámetros
portNumber Número de puerto RS-232C que debe cerrar.
Parte real 1 a 8
Parte de Windows 1001 a 1008
Si se especifica All, la tarea cerrará todos los puertos RS-232C abiertos.
Consulte también
ChkCom, OpenCom
Ejemplo de instrucción CloseCom
CloseCom #1

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 143
Instrucción CloseDB
Cierra la base de datos que se abrió con el comando OpenDB y libera el número de archivo.
Sintaxis
CloseDB #fileNumber
Parámetros
fileNumber Número de base de datos especificado con OpenDB de 501 a 508
Descripción
CloseDB cierra la base de datos en el libro de Excel y libera el número de la base de datos.
Nota
- Se requiere la conexión de una PC con RC+ instalado.
Consulte también
OpenDB, SelectDB, UpdateDB, DeleteDB, Input #, Print #
Ejemplo de instrucción CloseDB
Consulte el ejemplo de uso de OpenDB.

144 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción CloseNet
Cierra el puerto TCP/IP abierto anteriormente con OpenNet.
Sintaxis
CloseNet #portNumber | All
Parámetros
portNumber Número de puerto TCP/IP que debe cerrar (201 a 216)
Si se especifica All, la tarea cierra todos los puertos TCP/IP abiertos.
Consulte también
ChkNet, OpenNet
Ejemplo de instrucción CloseNet
CloseNet #201

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 145
Instrucción Cls
Borra el área de texto de la ventana Run, Operator o Command de EPSON RC+. También borra el panel de
impresión TP.
Sintaxis
(1) Cls #deviceID
(2) Cls
Parámetros
deviceID 21 RC+
24 TP (solo TP1)
20 TP3
Cuando se omite deviceID, se borra el dispositivo de presentación.
Descripción
Cls borra el área de texto de la ventana Run u Operator de EPSON RC+, dependiendo desde dónde se inició
el programa.
Si se ejecuta Cls desde un programa que se inició desde la ventana Command, se borra el área de texto de la
ventana Command.
Cuando se omite deviceID, se borra la pantalla del dispositivo de presentación actual.
Ejemplo de instrucción Cls
Si este ejemplo se ejecuta desde la ventana Run o la ventana Operator, el área de texto de la ventana se borrará
cuando se ejecute Cls.
Function main
Integer i
Do
For i = 1 To 10
Print i
Next i
Wait 3
Cls
Loop
Fend

146 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción Cnv_AbortTrack
Anula el movimiento de seguimiento hacia un punto de cola del transportador.
Sintaxis
Cnv_AbortTrack [ stopZheight ]
Parámetros
stopZheight Opcional. Expresión real que especifica que la posición Z del robot no debería
moverse después de anular el seguimiento.
Descripción
Cuando hay un comando de movimiento hacia un punto de cola del transportador en curso, se puede
ejecutar Cnv_AbortTrack para anularlo.
Si se especifica stopZHeight, el robot se moverá hacia arriba hasta este valor solamente si la posición del
eje Z al momento de la anulación es inferior a stopZHeight, y desacelerará hasta detenerse.
Si se omite stopZHeight, el robot desacelera hasta detenerse sin el movimiento de alejamiento en la
dirección Z.
Nota
Este comando solo funcionará si la opción Conveyor Tracking está activada.
Consulte también
Instrucción Cnv_RobotConveyor
Ejemplo de instrucción Cnv_AbortTrack
' Tarea para monitorear el robot, cuya pieza que se está siguiendo ha pasado al área de bajada
Function WatchDownstream
Robot 1
Do
If g_TrackInCycle And Cnv_QueLen(1, CNV_QUELEN_DOWNSTREAM) > 0 Then
' Anula el seguimiento del robot actual y mueve el eje Z del robot a 0
g_AbortTrackInCycle = TRUE
Cnv_AbortTrack 0
g_AbortTrackInCycle = FALSE
EndIf
Wait 0.01
Loop
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 147
Instrucción Cnv_Accel
Configura la aceleración y desaceleración del movimiento de seguimiento en Conveyor Tracking.
Sintaxis
Cnv_Accel (conveyorNumber) , accel/decel
Parámetros
conveyorNumber Expresión entera que representa el número de transportador (de 1 a 16)
accel/decel Aceleración y desaceleración del movimiento de seguimiento
Descripción
Configura la aceleración y desaceleración del movimiento de seguimiento en Conveyor Tracking.
La aceleración y desaceleración no se pueden configurar por separado.
Cambie los parámetros cuando la configuración de aceleración genere un error o cuando sea necesario
reducir el tiempo de recogida de trabajo. El valor predeterminado es 2000 [mm/seg
2
].
Nota
Este comando solo funcionará si la opción Conveyor Tracking está activada.
Consulte también
Función Cnv_Accel
Ejemplo de instrucción Cnv_Accel
Cnv_Accel 1,2000

148 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función Cnv_Accel
Arroja la aceleración y la desaceleración del movimiento de seguimiento en el Conveyor Tracking.
Sintaxis
Cnv_Accel (conveyorNumber)
Parámetros
conveyorNumber Expresión entera que representa el número de transportador (de 1 a 16)
Valores devueltos
Valor real en milímetros.
Nota
Este comando solo funcionará si la opción Conveyor Tracking está activada.
Consulte también
Cnv_Accel
Ejemplo de función Cnv_Accel
Print Cnv_Accel (1)

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 149
Instrucción Cnv_Downstream
Define el límite de bajada del transportador especificado.
Sintaxis
Cnv_Downstream (conveyorNumber) , lowerLimit
Parámetros
conveyorNumber Expresión entera que representa el número de transportador (de 1 a 16)
lowerLimit Un borde del lado de bajada del área de seguimiento
Valores devueltos
Con el uso de Cnv_Downstream, se puede cambiar el límite de bajada que se determinó con el asistente de
calibración. Sin embargo, si se utiliza un límite de bajada sesgado, no se puede cambiar el valor con
Cnv_Downstream.
Nota
Este comando solo funcionará si la opción Conveyor Tracking está activada.
Consulte también
Cnv_Upstream
Ejemplo de instrucción Cnv_Downstream
Cnv_Downstream 1,500

150 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función Cnv_Downstream
Arroja el límite de bajada del transportador especificado.
Sintaxis
Cnv_Downstream (conveyorNumber )
Parámetros
conveyorNumber Expresión entera que representa el número de transportador (de 1 a 16)
Valores devueltos
Valor real en milímetros.
Nota
Este comando solo funcionará si la opción Conveyor Tracking está activada.
Consulte también
Cnv_Upstream
Ejemplo de función Cnv_Downstream
Print "Downstream limit: ", Cnv_Downstream(1)

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 151
Instrucción Cnv_Fine
Define el valor de Cnv_Fine para un transportador.
Sintaxis
Cnv_Fine conveyorNumber [, fineValue]
Parámetros
conveyorNumber Expresión entera que representa el número de transportador (de 1 a 16)
fineValue Opcional. Expresión real que especifica la distancia en la que se realiza el
seguimiento en milímetros. Un valor de 0 significa que no se utiliza Cnv_Fine.
Si se omite, aparece la configuración actual de Cnv_Fine.
Descripción
Después de confirmar que se ha realizado la operación de seguimiento, especifique la distancia desde la
pieza que sea aceptable para el comando siguiente. Cuando se especifica “0”, no se utilizará la
configuración de Cnv_Fine y se aceptará el siguiente comando cuando se complete el comando de
movimiento.
El valor predeterminado de “0” mm se define automáticamente cuando se presentan las siguientes
condiciones:
Se crea el transportador.
Se inicia el controlador.
Nota
Este comando solo funcionará si la opción Conveyor Tracking está activada.
Consulte también
Función Cnv_Fine
Ejemplo de instrucción Cnv_Fine
Cnv_Fine 1, 5

152 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función Cnv_Fine
Arroja la configuración Cnv_Fine actual.
Sintaxis
Cnv_Fine (conveyorNumber)
Parámetros
conveyorNumber Expresión entera que representa el número de transportador (de 1 a 16).
Valores devueltos
Valor real de Cnv_Fine en milímetros.
Nota
Este comando solo funcionará si la opción Conveyor Tracking está activada.
Consulte también
Instrucción Cnv_Fine
Ejemplo de función Cnv_Fine
f real
f = Cnv_Fine(1)

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 153
Función Cnv_Flag
Arroja el estado de seguimiento del robot.
Sintaxis
Cnv_Flag (conveyorNumber)
Parámetros
conveyorNumber Expresión entera que representa el número de transportador (de 1 a 16).
Valores devueltos
0: No se cancela ni anula el seguimiento.
1: El seguimiento se detuvo.
La posición del límite de bajada no es la correcta. Defina el límite de bajada más cerca del de subida
que la posición actual.
2: El seguimiento se anuló.
La posición del límite de bajada o la posición de espera del robot no son las correctas. Defina el límite
de bajada más cerca del de subida que la posición actual, o mueva la posición de espera del robot más
cerca del límite de bajada.
3: El seguimiento se anuló.
La posición del límite de bajada o el tiempo de recogida no son los correctos. Defina el límite de bajada
más cerca del de subida que la posición actual o reduzca el tiempo de recogida de trabajo.
4: El seguimiento se detuvo.
La cantidad de las piezas de trabajo excede la capacidad de procesamiento del robot.
Los valores devueltos distintos a “0” se arrojan solo cuando se define la línea de anulación de seguimiento.
Cuando aparece el valor distinto a “0”, se recomienda tomar las medidas antes descritas para cada valor
devuelto.
Para conocer detalles sobre la línea de anulación de seguimiento, consulte el Manual del usuario.
Nota
Este comando solo funcionará si la opción Conveyor Tracking está activada.
Ejemplo de función Cnv_Flag
Print Cnv_Flag (1)

154 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función Cnv_LPulse
Arroja el valor de pulso enganchado por un disparador de trasportador.
Sintaxis
Cnv_LPulse (conveyorNumber)
Parámetros
ConveyorNumber Expresión entera que especifica el número de transportador (de 1 a 16)
Descripción
Arroja los últimos pulsos del transportador enganchados por los cables del disparador de hardware o
Cnv_Trigger.
Valores devueltos
Los valores largos que contienen los pulsos enganchados del transportador especificado.
Nota
Este comando solo funcionará si la opción Conveyor Tracking está activada.
Consulte también
Cnv_Trigger, Cnv_Pulse
Ejemplo de función Cnv_LPulse
Print "Latched conveyor position: ", Cnv_LPulse(1)

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 155
Instrucción Cnv_Mode
Define un modo de seguimiento de seguimiento del transportador.
Sintaxis
Cnv_Mode (conveyorNumber, modeNumber)
Parámetros
conveyorNumber Expresión entera que especifica el número de transportador (de 1 a 16)
modeNumber 0: Modo de prioridad de cantidad de recogida
1: Modo de prioridad de precisión de recogida
2: Modo de transportador de velocidad variable
Descripción
Define un modo de seguimiento de seguimiento del transportador.
Cnv_Mode solo está disponible para los transportadores lineales.
Define el modo de seguimiento antes de empezar el movimiento de seguimiento. Si no se definen los
parámetros o la velocidad del transportador es de 350 mm/s o superior, se definirá el modo de prioridad de
la cantidad de recogida.
Modo de prioridad de cantidad de recogida: Aunque este modo sea inferior en cuanto a la precisión de
recogida al modo de prioridad de precisión de recogida, requiere menos
tiempo para alcanzar las piezas de trabajo en movimiento. Por ende, este
modo es adecuado para los sistemas de transportadores donde el espacio
entre las piezas de trabajo es angosto o los sistemas de transportadores de
alta velocidad.
Modo de prioridad de precisión de recogida: Aunque este modo tarda más tiempo para alcanzar las
piezas de trabajo si se compara con el modo de prioridad de cantidad de
recogida, esto mejora la precisión de recogida. Por ende, este modo es
adecuado para los sistemas de transportadores para piezas de trabajo
pequeñas.
Modo de transportador de velocidad variable: Este modo se puede usar para los transportadores que
repiten detenciones o se mueven de manera aleatoria. También se puede
utilizar para que los transportadores se muevan a una velocidad
constante. No obstante, este modo es inferior en cuanto a la cantidad de
recogida que el modo de prioridad de cantidad de recogida y tiene menor
precisión que el modo de prioridad de precisión de recogida.
Los modos “0” y “1” solo son compatibles con los transportadores circulares. Cuando se especifica “2”, el
manipulador se mueve igual que en el modo “0”.
Nota
Este comando solo funcionará si la opción Conveyor Tracking está activada.
Consulte también
Función Cnv_Mode
Ejemplo de instrucción Cnv_Mode
Cnv_Mode 1, 1

156 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función Cnv_Mode
Arroja un modo de seguimiento de seguimiento del transportador.
Sintaxis
Cnv_Mode (conveyorNumber)
Parámetros
conveyorNumber Expresión entera que especifica el número de transportador (de 1 a 16)
Valores devueltos
Arroja un valor real de 0 a 2.
0: Modo de prioridad de cantidad de recogida
1: Modo de prioridad de precisión de recogida
2: Modo de transportador de velocidad variable
Nota
Este comando solo funcionará si la opción Conveyor Tracking está activada.
Consulte también
Instrucción Cnv_Mode
Ejemplo de función Cnv_Mode
Print Cnv_Mode (1)

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 157
Función Cnv_Name$
Arroja el nombre del transportador especificado.
Sintaxis
Cnv_Name$ (conveyorNumber)
Parámetros
conveyorNumber Expresión entera que especifica el número de transportador (de 1 a 16)
Valores devueltos
Una cadena que contiene el nombre del transportador.
Nota
Este comando solo funcionará si la opción Conveyor Tracking está activada.
Consulte también
Cnv_Number
Ejemplo de función Cnv_Name$
Print "Conveyor 1 Name: ", Cnv_Name$(1)

158 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función Cnv_Number
Arroja el número de un transportador especificado por nombre.
Sintaxis
Cnv_Number (conveyorName)
Parámetros
conveyorName Expresión de cadena que representa el nombre del transportador.
Valores devueltos
Número de transportador de número entero.
Nota
Este comando solo funcionará si la opción Conveyor Tracking está activada.
Consulte también
Cnv_Name$
Ejemplo de función Cnv_Number
Integer cnvNum
cnvNum = Cnv_Number("Main Conveyor")

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 159
Instrucción Cnv_OffsetAngle
Define el valor de compensación para los datos de cola del transportador.
Sintaxis
Cnv_OffsetAngle conveyorNumber [, offsetAngle]
Parámetros
conveyorNumber Expresión entera que especifica el número de transportador (de 1 a 16)
offsetAngle Valor real que representa el valor de compensación para los datos de cola del
transportador (unidad: grado).
Opcional. Si se omite, aparece la compensación actual.
Descripción
Define el valor de compensación para los datos de cola del transportador.
Cnv_OffsetAngle está disponible solo para el transportador circular.
Conveyor Tracking puede provocar retraso en el seguimiento según cuál sea la velocidad del transportador.
Si ocurre el retraso en el seguimiento, el robot entrega las piezas en la posición incorrecta, que se mueven
por el retraso.
Cnv_OffsetAngle entrega el valor de compensación a la cola a fin de regresar el robot a la posición correcta.
Nota
Este comando solo funcionará si la opción Conveyor Tracking está activada.
Consulte también
Función Cnv_OffsetAngle
Ejemplo de instrucción Cnv_OffsetAngle
Cnv_OffsetAngle 1, 5

160 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función Cnv_OffsetAngle
Arroja el valor de compensación para los datos de cola del transportador.
Sintaxis
Cnv_OffsetAngle (conveyorNumber)
Parámetros
conveyorNumber Expresión entera que especifica el número de transportador (de 1 a 16)
Valores devueltos
Valor entero (unidad: grado).
Nota
Este comando solo funcionará si la opción Conveyor Tracking está activada.
Consulte también
Instrucción Cnv_OffsetAngle
Ejemplo de función Cnv_OffsetAngle
OffsetAngle real
offsetAngle = Cnv_OffsetAngle (1)

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 161
Función Cnv_Point
Arroja un punto de robot en el sistema de coordenadas del transportador especificado, derivado de las
coordenadas del sensor.
Sintaxis
Cnv_Point (conveyorNumber, sensorX, sensorY [, sensorU])
Parámetros
conveyorNumber Expresión entera que especifica el número de transportador (de 1 a 16)
sensorX Expresión real para la coordenada X del sensor.
sensorY Expresión real para la coordenada Y del sensor.
sensorU Opcional. Expresión real para la coordenada U del sensor.
Valores devueltos
Punto de robot en el sistema de coordenadas del transportador.
Descripción
La función Cnv_Point se debe utilizar para crear los puntos que se puedan agregar a la cola del
transportador. Para los transportadores de visión, sensorX y sensorY son las coordenadas de visión desde la
cámara. Para los transportadores de sensores, sensorX y sensorY pueden estar en 0, puesto que estos son el
origen del sistema de coordenadas del transportador.
Nota
Este comando solo funcionará si la opción Conveyor Tracking está activada.
Consulte también
Cnv_Speed
Ejemplo de función Cnv_Point
Boolean found
Integer i, numFound
Real x, y, u
Cnv_Trigger 1
VRun FindParts
VGet FindParts.Part.NumberFound, numFound
For i = 1 To numFound
VGet FindParts.Part.CameraXYU(i), found, x, y, u
Cnv_QueAdd 1, Cnv_Point(1, x, y)
Next i

162 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función Cnv_PosErr
Arroja la desviación en la posición de seguimiento actual, si se compara con el objetivo de seguimiento.
Sintaxis
Cnv_PosErr (conveyorNumber)
Parámetros
conveyorNumber Expresión entera que especifica el número de transportador (de 1 a 16)
Valores devueltos
Valor real en milímetros.
Nota
Este comando solo funcionará si la opción Conveyor Tracking está activada.
Consulte también
Cnv_MakePoint
Ejemplo de función Cnv_PosErr
Print "Conveyor 1 position error: ", Cnv_PosErr(1)

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 163
Función Cnv_Pulse
Arroja la posición actual de un transportador en pulsos.
Sintaxis
Cnv_Pulse (conveyorNumber)
Parámetros
conveyorNumber Expresión entera que especifica el número de transportador (de 1 a 16)
Valores devueltos
El valor largo de los pulsos actuales para el transportador especificado.
Nota
Este comando solo funcionará si la opción Conveyor Tracking está activada.
Consulte también
Cnv_Trigger, Cnv_LPulse
Ejemplo de función Cnv_Pulse
Print "Current conveyor position: ", Cnv_Pulse(1)

164 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción Cnv_QueAdd
Agrega un punto de robot a la cola de un transportador.
Sintaxis
Cnv_QueAdd conveyorNumber, pointData [, userData ]
Parámetros
conveyorNumber Expresión entera que especifica el número de transportador (de 1 a 16)
pointData El punto de robot que se va a agregar a la cola del transportador.
userData Opcional. Expresión real utilizada para guardar la información del usuario junto con
el punto.
Descripción
pointData se agrega al final de la cola del transportador especificado. Se registra junto con la posición del
pulso actual del transportador enganchado.
Si la distancia entre pointData y el punto previo en la cola se encuentra en o por debajo de lo especificado
por Cnv_QueReject, no se pueden agregar los datos del punto a la cola y no se producirá ningún error.
El valor máximo de datos en cola es de 1000.
Nota
Este comando solo funcionará si la opción Conveyor Tracking está activada.
Consulte también
Cnv_RobotConveyor
Ejemplo de instrucción Cnv_QueAdd
Boolean found
Integer i, numFound
Real x, y, u
Cnv_Trigger 1
VRun FindParts
VGet FindParts.Part.NumberFound, numFound
For i = 1 To numFound
VGet FindParts.Part.CameraXYU(i), found, x, y, u
Cnv_QueAdd 1, Cnv_Point(1, x, y)
Next i

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 165
Función Cnv_QueGet
Arroja un punto desde la cola del transportador especificado.
Sintaxis
Cnv_QueGet (conveyorNumber [, index ] )
Parámetros
conveyorNumber Expresión entera que especifica el número de transportador (de 1 a 16)
index Opcional. La expresión entera que representa el índice de los datos de la cola que
desea recuperar.
Valores devueltos
Un punto de robot en el sistema de coordenadas del transportador especificado.
Descripción
Utilice Cnv_QueGet para recuperar los puntos de la cola del transportador. Cuando se omite queNumber,
se arroja el primer punto en la cola. De otro modo, se arroja el punto del queNumber especificado.
Cnv_QueGet no borra el punto de la cola. En cambio, debe usar Cnv_QueRemove para borrarlo.
Para seguir una pieza a medida que se mueve el transportador, se debe usar Cnv_QueGet en una instrucción
de comando de movimiento.
Por ejemplo:
Jump Cnv_QueGet(1) ' esto sigue la pieza
No puede asignar el resultado de Cnv_QueGet a un punto y moverse al punto para seguirlo.
P1 = Cnv_QueGet(1)
Jump P1 ' esto no realiza un seguimiento de la pieza.
Cuando asigna el resultado de Cnv_QueGet a un punto, los valores de coordenadas corresponden a la
posición de la pieza en la que se ejecutó la asignación del punto.
Nota
Este comando solo funcionará si la opción Conveyor Tracking está activada.
Consulte también
Cnv_QueLen, Cnv_QueRemove
Ejemplo de función Cnv_QueGet
' Salta a la primera pieza en la cola y la sigue
Jump Cnv_QueGet(1)
On gripper
Wait .1
Jump place
Off gripper
Wait .1
Cnv_QueRemove 1

166 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función Cnv_QueLen
Arroja el número de elementos en la cola del transportador especificado.
Sintaxis
Cnv_QueLen (conveyorNumber [, paramNumber ] )
Parámetros
conveyorNumber Expresión entera que especifica el número de transportador (de 1 a 16)
paramNumber Opcional. La expresión entera que especifica qué datos arrojará para la longitud.
Constante simbólica Valor Significado
CNV_QUELEN_ALL 0 Arroja el número total de elementos en cola.
CNV_QUELEN_UPSTREAM 1 Arroja el número de elementos de subida.
CNV_QUELEN_PICKUPAREA 2 Arroja el número de elementos en el área de recogida.
CNV_QUELEN_DOWNSTREAM 3 Arroja el número de elementos de bajada.
Valores devueltos
Número entero de elementos.
Descripción
Cnv_QueLen se utiliza para averiguar cuántos elementos están disponibles en la cola. Normalmente, para
el que quiera saber cuántos elementos hay en el área de recogida.
También se puede utilizar Cnv_QueLen como argumento para la instrucción de espera.
Nota
Este comando solo funcionará si la opción Conveyor Tracking está activada.
Consulte también
Cnv_QueGet
Ejemplo de función Cnv_QueLen
Do
Do While Cnv_QueLen(1, CNV_QUELEN_DOWNSTREAM) > 0
Cnv_QueRemove 1, 0
Loop
If Cnv_QueLen(1, CNV_QUELEN_PICKUPAREA) > 0 Then
Jump Cnv_QueGet(1, 0) C0
On gripper
Wait .1
Cnv_QueRemove 1, 0
Jump place
Off gripper
Jump idlePos
EndIf
Loop

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 167
Instrucción Cnv_QueList
Muestra una lista de elementos en la cola del transportador especificado.
Sintaxis
Cnv_QueList conveyorNumber[, numOfItems ]
Parámetros
conveyorNumber Expresión entera que especifica el número de transportador (de 1 a 16)
numOfItems Opcional. Expresión entera para especificar la cantidad de elementos que desea
mostrar. Si se omite, se muestran todos los elementos.
Nota
Este comando solo funcionará si la opción Conveyor Tracking está activada.
Consulte también
Cnv_QueGet
Ejemplo de instrucción Cnv_QueList
Cnv_QueList 1

168 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción Cnv_QueMove
Mueve los datos desde la cola del transportador de subida a la cola del transportador de bajada.
Sintaxis
Cnv_QueMove conveyorNumber [, index ] [, userData ]
Parámetros
conveyorNumber Expresión entera que especifica el número de transportador (de 1 a 16)
index Opcional. La expresión entera que especifica el índice de los datos de la cola que se
moverá.
(El primer elemento en la cola está indizado como #0.)
userData Opcional. Expresión real utilizada para guardar la información del usuario junto con
el elemento.
Descripción
Cnv_QueMove se usa para mover uno o más elementos desde la cola de un transportador a la cola de
transportador de bajada asociada. Si se especifica el índice, se mueve el primer elemento (índice #0) de la
cola.
Nota
Este comando solo funcionará si la opción Conveyor Tracking está activada.
Consulte también
Cnv_QueGet
Ejemplo de instrucción Cnv_QueMove
Cnv_QueMove 1

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 169
Instrucción Cnv_QueReject
Define y muestra la distancia de rechazo de la cola para un transportador.
Sintaxis
Cnv_QueReject conveyorNumber [, rejectDistance ]
Parámetros
conveyorNumber Expresión entera que especifica el número de transportador (de 1 a 16)
rejectDistance Opcional. Expresión real que especifica la distancia mínima permitida entre piezas en
la cola en milímetros. Si se especifica un valor negativo, se definirá 0 mm. Si se
omite, aparece la rejectDistance actual.
Descripción
Utilice Cnv_QueReject para especificar la distancia mínima entre las piezas a fin de evitar el doble registro
en la cola. Como las piezas son escaneadas por el sistema de visión, será encontradas más de una vez, pero
solo se deben registrar una vez. Cnv_QueReject ayuda a que el sistema filtre el doble registro.
Nota
Este comando solo funcionará si la opción Conveyor Tracking está activada.
Consulte también
Función Cnv_QueReject
Ejemplo de instrucción Cnv_QueReject
Cnv_QueReject 1, 20

170 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función Cnv_QueReject
Arroja la distancia de rechazo de piezas actual para un transportador.
Sintaxis
Cnv_QueReject (conveyorNumber)
Parámetros
conveyorNumber Expresión entera que especifica el número de transportador (de 1 a 16)
Valores devueltos
Valor real en milímetros.
Nota
Este comando solo funcionará si la opción Conveyor Tracking está activada.
Consulte también
Instrucción Cnv_QueReject
Ejemplo de función Cnv_QueReject
Real rejectDist
RejectDist = Cnv_QueReject(1)

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 171
Instrucción Cnv_QueRemove
Elimina elementos de la cola de un transportador.
Sintaxis
Cnv_QueRemove conveyorNumber [, index | All ]
Parámetros
conveyorNumber Expresión entera que especifica el número de transportador (de 1 a 16)
index Opcional. La expresión entera que especifica el índice del primer elemento para
eliminarlo o especificar All (Todos) para eliminarlos todos.
Descripción
Utiliza Cnv_QueRemove para eliminar uno o más elementos de la cola de un transportador. Normalmente,
se eliminan elementos de la cola después de terminar con los datos.
Nota
Este comando solo funcionará si la opción Conveyor Tracking está activada.
Consulte también
Cnv_QueAdd
Ejemplo de instrucción Cnv_QueRemove
Jump Cnv_QueGet(1)
On gripper
Wait .1
Jump place
Off gripper
Wait .1
' Elimina los datos del transportador
Cnv_QueRemove 1

172 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción Cnv_QueUserData
Define y muestra los datos de usuario asociados con una entrada de cola.
Sintaxis
Cnv_QueUserData conveyorNumber [, index ] [, userData ]
Parámetros
conveyorNumber Expresión entera que especifica el número de transportador (de 1 a 16)
index Opcional. Expresión entera que especifica el índice del número de elemento en la
cola.
userData Opcional. Expresión real que especifica los datos de usuario.
Descripción
Cnv_QueUserData se utiliza para guardar su propia información con cada elemento en una cola de
transportador. Los datos de usuario son opcionales. No es necesario para la operación normal.
Nota
Este comando solo funcionará si la opción Conveyor Tracking está activada.
Consulte también
Función Cnv_QueUserData
Ejemplo de instrucción Cnv_QueUserData
Cnv_QueUserData 1, 1, angle

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 173
Función Cnv_QueUserData
Arroja el valor de datos de usuario asociado con un elemento en la cola de un transportador.
Sintaxis
Cnv_QueUserData (conveyorNumber [, index])
Parámetros
conveyorNumber Expresión entera que especifica el número de transportador (de 1 a 16)
index Opcional. Expresión entera que especifica el índice del número de elemento en la
cola.
Valores devueltos
Valor real.
Nota
Este comando solo funcionará si la opción Conveyor Tracking está activada.
Consulte también
Instrucción Cnv_QueUserData
Ejemplo de función Cnv_QueUserData
' Agrega a la cola
Cnv_QueAdd 1, Cnv_Point(1, x, y), angle
' Elimina de la cola
angle = Cnv_QueUserData(1) ' cambia al valor predeterminado para el índice de la cola
de 0
Jump Cnv_QueGet(1) :U(angle)
Cnv_QueRemove 1

174 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función Cnv_RobotConveyor
Arroja el transportador que está siendo seguido por un robot.
Sintaxis
Cnv_RobotConveyor [ ( robotNumber ) ]
Parámetros
robotNumber Expresión entera que representa el número de robot.
Valores devueltos
Número de transportador de número entero. 0 = no se está siguiendo ningún transportador.
Descripción
Cuando se utilizan varios robots, se puede usar Cnv_RobotConveyor para ver a qué transportador está
siguiendo actualmente un robot.
Nota
Este comando solo funcionará si la opción Conveyor Tracking está activada.
Consulte también
Instrucción Cnv_MakePoint
Ejemplo de función Cnv_RobotConveyor
Integer cnvNum
cnvNum = Cnv_RobotConveyor(1)

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 175
Función Cnv_Speed
Arroja la velocidad actual de un transportador.
Sintaxis
Cnv_Speed (conveyorNumber)
Parámetros
conveyorNumber Expresión entera que especifica el número de transportador (de 1 a 16)
Valores devueltos
Para transportadores rectos, un valor real en milímetros por segundo. Para transportadores circulares, un
valor real en grados por segundo.
Nota
Este comando solo funcionará si la opción Conveyor Tracking está activada.
Consulte también
Cnv_Pulse
Ejemplo de instrucción Cnv_Speed
Print "Conveyor speed: ", Cnv_Speed(1)

176 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción Cnv_Trigger
Engancha la posición actual del transportador para la instrucción Cnv_QueAdd siguiente.
Sintaxis
Cnv_Trigger conveyorNumber
Parámetros
conveyorNumber Expresión entera que especifica el número de transportador (de 1 a 16)
Descripción
Cnv_Trigger es un comando disparador de software que se debe utilizar si no existe un disparador de
hardware conectado a la placa PG para el nuevo codificador del transportador.
Nota
Este comando solo funcionará si la opción Conveyor Tracking está activada.
Consulte también
Cnv_QueAdd
Ejemplo de instrucción Cnv_Trigger
Boolean found
Integer i, numFound
Real x, y, u
Cnv_Trigger 1
VRun FindParts
VGet FindParts.Part.NumberFound, numFound
For i = 1 To numFound
VGet FindParts.Part.CameraXYU(i), found, x, y, u
Cnv_QueAdd 1, Cnv_Point(1, x, y)
Next i

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 177
Instrucción Cnv_Upstream
Define el límite de subida del transportador especificado.
Sintaxis
Cnv_Upstream (conveyorNumber), upperLimit
Parámetros
conveyorNumber Expresión entera que representa el número de transportador (de 1 a 16)
upperLimit Un borde del lado de subida del área de seguimiento
Valores devueltos
Con el uso de Cnv_Upstream, puede cambiar el límite de subida que se determinó con el asistente de
calibración. Sin embargo, si se utiliza un límite de subida sesgado, no se puede cambiar el valor con
Cnv_Upstream.
Nota
Este comando solo funcionará si la opción Conveyor Tracking está activada.
Consulte también
Cnv_Downstream
Ejemplo de instrucción Cnv_Upstream
Cnv_Upstream 1,200

178 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función Cnv_Upstream
Arroja el límite de subida del transportador especificado.
Sintaxis
Cnv_Upstream (conveyorNumber)
Parámetros
conveyorNumber Expresión entera que especifica el número de transportador (de 1 a 16)
Valores devueltos
Valor real en milímetros.
Nota
Este comando solo funcionará si la opción Conveyor Tracking está activada.
Consulte también
Cnv_Downstream
Ejemplo de Función Cnv_Upstream
Print "Upstream limit: ", Cnv_Upstream(1)

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 179
Instrucción CollisionDetect
Activa o desactiva la detección de colisión (detección del error de movimiento del robot) del robot actual.
Sintaxis
(1) CollisionDetect status
(2) CollisionDetect status, jointNumber
(3) CollisionDetect
Parámetros
status On: Activa la detección de colisión (detección del error de movimiento del robot).
Off: Desactiva la detección de colisión (detección del error de movimiento del robot).
jointNumber Robots SCARA (incluida la serie RS): Especificar la articulación mediante un úmero
de articulación entre 1 y 4
Robots de 6 ejes verticales (incluida la serie N): Especificar la articulación mediante un
número de articulación entre 1 y 6.
Resultado
Arroja el estado actual de CollisionDetect cuando se omiten los parámetros.
Descripción
Detecte el error de movimiento del robot a partir de la diferencia entre la velocidad deseada y la velocidad
real (valor de desviación de velocidad). Los errores que se pueden detectar con esta función se clasifican en
A y B.
A: Ocurre una colisión o contacto del brazo o mano del robot
B: Errores de movimiento del robot diferentes a una colisión o contacto
Asimismo, el error B se clasifica a continuación de acuerdo con la condición de la potencia.
Error de alta potencia
Saturación de torque debido a una configuración deficiente de Weight (Peso) o Inertia (Inercia).
Saturación de torque debido a un movimiento combinado de varias articulaciones y rodeo de un objeto
largo.
Saturación de torque debido a la reducción del voltaje de suministro.
Movimiento erróneo debido a error de hardware o mal funcionamiento de software.
Error de baja potencia
Movimiento erróneo debido a error de hardware o mal funcionamiento de software.
Saturación de torque en baja potencia debido a que sostiene una mano o un objeto largo que sobrepasa
el peso descrito en las especificaciones.
La detección de colisión está disponible para los robots de uso general compatibles con EPSON RC+ 7.0
Ver. 7.2 o superior (robots SCARA y de 6 ejes verticales). Si este comando se utiliza mientras está conectado
un robot no compatible (serie X5, etc.), ocurre un error.
La ejecución de este comando tarda un poco. Si se le da prioridad al tiempo del ciclo, reduzca al mínimo el
uso de este comando en el programa.
Esta función se puede activar o desactivar para cada articulación o para todas. El valor predeterminado es
“all joints on” (todas las articulaciones activadas).
(El valor predeterminado es "desactivado" si la versión de firmware es anterior a la Ver. 7.2.0.x.)
La configuración vuelve al valor predeterminado cuando se apaga el controlador. En otros casos, la
configuración no cambia a menos que se configure explícitamente lo contrario con este comando.
Genere los siguientes mensajes y detenga el robot cuando se detecte la colisión.

180 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Error 5057 “Se detectó una colisión en el modo de alta potencia” (detección del error de movimiento del
robot).
Error 5058 “Se detectó una colisión en el modo de baja potencia” (detección del error de movimiento del
robot).
A fin de reducir los daños en el modo de alta potencia, también es efectivo utilizar el comando junto con la
restricción de torque del límite superior mediante LimitTorque. A fin de reducir los daños en el modo de baja
potencia, también es efectivo utilizar el comando junto con la restricción de torque del límite superior
mediante LimitTorqueLP.
También consulte el Manual del usuario EPSON RC+ 7.0 “6.18.10 Función de detección de colisión
(detección del error de movimiento del robot)”.
Consulte también
LimitTorque, Función LimitTorque, LimitTorqueLP, Función LimitTorqueLP
Ejemplo de instrucción CollisionDetect
CollisionDetect On ' Activa la detección de colisión de todas las articulaciones
CollisionDetect Off, 5 ' Activa la detección de colisión solo para la articulación n.º 5
CollisionDetect ' Aparecerá el resultado como “on, on, on, on, off, on”.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 181
Función CollisionDetect
Arroja el valor de configuración del comando CollisionDetect.
Sintaxis
CollisionDetect(jointNumber)
Parámetros
jointNumber Especifica la articulación mediante un número de articulación entre 1 y 6.
Valores devueltos
Arroja el valor de configuración del comando CollisionDetect mediante un entero.
1 = ON
0 = OFF
Consulte también
CollisionDetect
Ejemplo de función CollisionDetect
Print CollisionDetect(1) 'Muestra el valor de CollisionDetect para la articulación n.º 1.

182 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción Cont
Reanuda el controlador después de que se ha ejecutado la instrucción de pausa y continúa la ejecución de
todas las tareas.
Este comando es para usuarios experimentados y se debe comprender la especificación del comando
antes de usarla.
Sintaxis
Cont
Descripción
A fin de ejecutar la instrucción Cont desde un programa, se debe configurar la casilla de verificación [Enable
advanced task commands] (Habilitar comandos de tarea avanzados) en la página de Setup | System
Configuration | Controller | Preferences (Configuración - Configuración del sistema - Controlador -
Preferencias) de EPSON RC+. Sin embargo, incluso si esta preferencia está activada, no se puede ejecutar la
instrucción Cont desde una tarea ejecutada mediante Trap SGClose.
El comando Cont reanuda las tareas del controlador detenidas con la instrucción de pausa o con protección
abierta y continúa la ejecución de todas las tareas. Tiene la misma función que el botón <Continue>
(Continuar) en la ventana Run (Ejecutar), la ventana Operator (Operador) y la entrada remota continua.
Si ejecuta el comando Cont durante el estado WaitRecover (a la espera de la recuperación después de la
protección abierta), activará los motores del robot y ejecutará el movimiento de recuperación. Entonces, se
reanudará el programa.
Si solo se desea activar los motores y ejecutar el movimiento de recuperación, utilice el comando Recover.
PRECAUCIÓN
■
Cuando se ejecuta el comando Cont desde un programa, se debe comprender
la especificación del comando y confirmar que el sistema cuenta con las
condiciones adecuadas para el comando Cont. El uso incorrecto, como la
ejecución continua de un comando dentro de un bucle, puede deteriorar la
seguridad del sistema.
Consulte también
Pause, Recover
Ejemplo de instrucción Cont
Function main
Xqt 2, monitor, NoPause
Do
Jump P1
Jump P2
Loop
Fend
Function monitor
Do
If Sw(pswitch) = On then
Pausa
Wait Sw(pswitch) = Off and Sw(cswitch) = On
Cont
EndIf
Loop
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 183
Instrucción Copy
Copia un archivo a otra ubicación.
Sintaxis
Copy source, destination
Parámetros
source Nombre de la ruta y nombre del archivo de la ubicación de origen del archivo que se
copiará.
Consulte ChDisk para conocer detalles.
destination Nombre de la ruta y nombre del archivo del destino en que se copiará el archivo de
origen.
Consulte ChDisk para conocer detalles.
Descripción
Copia el nombre del archivo source en el nombre de archivo de destination especificado.
No se puede especificar el mismo nombre de ruta y nombre de archivo para los archivos de origen y de
destino.
Si el destino ya existe, ocurrirá un error.
Nota
Hay una ruta de red disponible.
No están permitidos los caracteres comodines (*, ?) en los nombres de archivos especificados.
Cuando se utiliza en la ventana Command (Comando), se pueden omitir las comillas y las comas.
Consulte también
ChDir, MkDir
Ejemplo de comando Copy (Copiar)
El siguiente ejemplo se lleva a cabo desde la ventana Command.
>copy TEST.DAT TEST2.DAT
>Copy TEST.DAT c: 'NG
!! Error: 7203 Access is denied.
> Copy TEST.DAT c:\ 'OK
>

184 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función Cos
Arroja el coseno de una expresión numérica.
Sintaxis
Cos(number)
Parámetros
number Expresión numérica en radianes.
Valores devueltos
Valor numérico en radianes que representa el coseno de la expresión numérica number.
Descripción
Cos arroja el coseno de la expresión numérica. La expresión numérica (number) debe estar en unidades de
radianes. El valor arrojado por la función Cos se encontrará entre -1 y 1
Para convertir los grados a radianes, utilice la función DegToRad.
Consulte también
Abs, Atan, Atan2, Int, Mod, Not, Sgn, Sin, Sqr, Str$, Tan, Val
Ejemplo de función Cos
El siguiente ejemplo muestra un programa simple que utiliza Cos.
Función costest
Real x
Print "Please enter a value in radians"
Input x
Print "COS of ", x, " is ", Cos(x)
Fend
En los siguientes ejemplos se utiliza Cos desde la ventana Command.
Mostrar el coseno de 0.55:
>print cos(0.55)
0.852524522059506
>
Mostrar cel coseno de 30 º:
>print cos(DegToRad(30))
0.866025403784439
>

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 185
Instrucción CP
Define el modo de movimiento CP (Continuous Path [Ruta continua]).
Sintaxis
CP { On | Off }
Parámetros
On | Off Se utiliza la palabra clave On para activar el movimiento de la ruta. Se utiliza la palabra clave
Off para desactivar el modo CP.
Descripción
Se puede utilizar el modo de movimiento CP (Continuous Path) para las instrucciones de movimiento del
robot Arc, Arc3, Go, Jump, Jump3, Jump3CP, JumpTLZ y Move.
Cuando el modo CP está activado, cada comando de movimiento ejecuta la siguiente instrucción en cuanto
empieza la desaceleración. El movimiento Continuous Path continuará sin importar si se especifica o no el
parámetro CP en cada movimiento. Cuando CP está desactivado, esta función solo estará activa cuando se
especifique el parámetro CP en cada comando de movimiento.
Iniciar aceleración
Movimiento de ruta
0
tiempo
velocidad
Movimiento normal
0
tiempo
velocidad
Cuando CP está activado, el movimiento de la ruta continuará sin una desaceleración completa entre los
dos movimientos CP (Arc, Arc3, Jump3, Jump3CP, JumpTLZ y Move), o los dos movimientos PTP (Go,
Jump).
En contraste, se producirá una desaceleración completa entre un movimiento CP y un movimiento PTP.
Se definirá como desactivado CP en los siguientes casos
Inicio del controlador
Motor On
SFree, SLock, Brake
Reset, Reset Error
El botón Stop o QuitAll detiene las
tareas
Consulte también
Función CP, Arc, Arc3, Go, Jump, Jump3, Jump3CP, JumpTLZ, Move
Ejemplo de instrucción CP
CP On
Move P1
Move P2
CP Off

186 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función CP
Arroja el estado del movimiento de la ruta.
Sintaxis
CP
Valores devueltos
0 = Movimiento de la ruta desactivado, 1 = Movimiento de la ruta activado.
Consulte también
Instrucción CP
Ejemplo de función CP
If CP = Off Then
Print "CP is off"
EndIf

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 187
Instrucción CP_Offset
Define el tiempo de compensación para iniciar el comando de movimiento siguiente cuando se ejecuta CP On.
Sintaxis
(1) CP_Offset [ On [, OffsetTime ] ]
(2) CP_Offset Off
Parámetros
On | Off On: Activa la función de compensación de inicio del comando de movimiento en CP On. Si
se omite, aparecerá la configuración actual.
Off: Desactiva la función de compensación de inicio del comando de movimiento en CP On.
OffsetTime Especifica el tiempo de compensación para empezar el comando siguiente en CP On con un
valor real entre 10 y 24 (unidad: ms). Si se omite, se definirá el valor predeterminado (10 ms).
Descripción
CP_Offset está disponible para los siguientes comandos.
Move, Arc, Arc3, CVMove
Si se agrega el parámetro CP a CP On o a los comandos de movimiento, se ejecutará el comando siguiente
al mismo tiempo en que empieza a desacelerar el movimiento anterior.
Como resultado, los movimientos se vuelven un movimiento de ruta, como se muestra a continuación,
donde se superponen la desaceleración del primer comando y la aceleración del comando siguiente.
En este momento, el inicio de la desaceleración del primer comando y el inicio de la aceleración del
comando siguiente no son estrictamente simultáneos, debido al tiempo de sobrecarga de procesamiento
para empezar la instrucción. Por lo tanto, la velocidad se reduce en el punto de conmutación en el
movimiento de la ruta, y el movimiento no tendrá una velocidad constante.
CP_Offset soluciona este problema mediante la aceleración del tiempo de inicio del comando de
movimiento siguiente.
0
Mediante la activación de CP_Offset, el inicio del procesamiento del comando del movimiento siguiente se
acelerará según el tiempo especificado para el parámetro OffsetTime, y se sincronizará el inicio de la
desaceleración de robot real y el inicio de la aceleración del comando siguiente. Como resultado, se puede
mejorar la velocidad constante.
Se define el parámetro OffsetTime de manera predeterminada. Ajuste el parámetro según su aplicación.
En especial, cuando el comando siguiente tiene “!Parallel Processing!” (Procesamiento paralelo), se alarga
el tiempo de sobrecarga necesario para iniciar el movimiento. Por lo tanto, se debe definir el parámetro
OffsetTime en un valor más alto que el valor predeterminado, aproximadamente a 16 ms.
Para definir el parámetro OffsetTime para CP_Offset, mida la velocidad del punto central de la herramienta
para el movimiento objetivo mediante TCPSpeed. La configuración de un valor adecuado para el parámetro
OffsetTime mejoró el movimiento en el punto de conmutación para que se acerque a un movimiento
constante.
TCPSpeed aumenta cuando el OffsetTime es demasiado largo, y TCPSpeed disminuye cuando el
OffsetTime es demasiado corto. El ajuste de CP_Offset debe realizarse en el sistema real. El ajuste
adecuado no se puede hacer en el simulador, puesto que el tiempo de procesamiento para iniciar el
comando difiere del controlador real.

188 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Programa de muestra para medir el uso de TCPSpeed
Function main
Motor On
Power High
SpeedS 250; AccelS 1500
Speed 50; Accel 50, 50
Go XY(300, 500, 500, 90, 0, 180)
CP_Offset On
Xqt printTcPSpeed
Move XY(0, 500, 500, 90, 0, 180) CP
Move XY(-300, 500, 500, 90, 0, 180)
Quit printTcPSpeed
CP_Offset Off
Fend
Function printTcPSpeed
Do
Print TCPSpeed
Loop
Fend
Ejemplo del ajuste de OffsetTime
TCPSpeed [mm/s]
300
250
200
150
100
50
0
1
12
23
34
45
56
67
78
89
100
111
122
133
OffsetTime adecuado
OffsetTime=0
OffsetTime demasiado
largo
Este comando no está diseñado para el movimiento PTP. En el movimiento PTP, el movimiento será un
movimiento de ruta habitual.
CP_Offset se desactiva cuando ocurre alguna de las siguientes condiciones:
Inicio del controlador
Motor On
SFree, SLock, Brake
Reset, Reset Error
El botón Stop o Quit All detiene las tareas

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 189
Consulte también
Función CP_Offset, CP, Move, Arc, Arc3, CVMove
Ejemplo de instrucción CP_Offset
CP_Offset On
Move P1
Move P2
CP_Offset Off

190 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función CP_Offset
Arroja el tiempo de compensación para iniciar el comando de movimiento siguiente cuando se ejecuta CP
On.
Sintaxis
CP_Offset
Valores devueltos
El número real que representa el tiempo de compensación para iniciar el comando de movimiento.
Consulte también
Instrucción CP_Offset
Ejemplo de Función CP_Offset
Si CP_Offset = O entonces
Print "CP_Offset is off"
EndIf

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 191
Función Ctr
Arroja el valor de contador del contador de entrada de hardware especificado.
Sintaxis
Ctr(bitNumber)
Parámetros
bitNumber Número de bit de entrada de hardware definido como contador. Solo puede haber 16
contadores activos a la vez.
Valores devueltos
El número actual del contador de entrada de hardware especificado. (Expresión entera desde 0-65535)
Descripción
Ctr funciona con la instrucción CTReset para permitir que sean usadas las entradas de hardware como
contadores.
Cada vez que se especifica una entrada de hardware como contador se conmuta del estado desactivado a
activado, lo que provoca que el contador aumente en 1.
Se puede usar la función Ctr en cualquier momento para obtener el valor del contador actual para toda entrada
del contador. Cualquier entrada de hardware se puede usar como contador. Sin embargo, solo puede haber
16 contadores activos a la vez.
Gráfico de regulación de pulso de contador
4 ms o más
4 ms o más
Alto (
ACTIVADO
)
Bajo (
DESACTIVADO
)
Consulte también
CTReset
Ejemplo de función Ctr
El siguiente ejemplo muestra un código que se puede usar para obtener un valor de contador de entrada de
hardware.
CTReset 3 'Restablece el contador de la entrada 3 a 0
On 0 'Activa un interruptor de salida
Wait Ctr(3) >= 5
Off 0 'Cuando los ciclos de la entrada 5 son contados para desactivar el interruptor de la
entrada 3 (salida 0 desactivada)

192 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción CTReset
Restablece el valor de contador del contador de entrada especificado y permite que la entrada sea un
contador.
Sintaxis
CTReset(bitNumber)
Parámetros
bitNumber Número de bit de entrada definido como contador. Esto debe ser una expresión entera
que representa un bit de entrada válida. Solo puede haber 16 contadores activos a la
vez.
Descripción
CTReset funciona con la función CTR para permitir que sean usadas las entradas como contadores. CTReset
define el bit de entrada especificada como contador y luego inicia el contador. Si la entrada especificada ya
se usa como contador, se vuelve a restablecer e iniciar.
Notas
Desconexión de la alimentación y sus efectos en los contadores
La desconexión de la alimentación principal desconecta todos los contadores.
Uso de la función Ctr
Utilice la función Ctr para recuperar los valores de los contadores de la entrada de hardware.
Consulte también
Ctr
Ejemplo de instrucción CTReset
El siguiente ejemplo muestra un código que se puede usar para obtener un valor de contador de entrada de
hardware.
CTReset 3 'Restablece el contador 3 a 0
On 0 'Activa un interruptor de salida
Wait Ctr(3) >= 5
Off 0 'Cuando los ciclos de la entrada 5 son contados para desactivar el interruptor de la
entrada 3 (salida 0 desactivada)

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 193
Función CtrlDev
Arroja el número de dispositivo de control actual.
Sintaxis
CtrlDev
Valores devueltos
21 PC
22 E/S remota
26 Ethernet remoto
29 RS232C remoto
20 TP3
Consulte también
Función CtrlInfo
Ejemplo de función CtrlDev
Print "The current control device is: ", CtrlDev

194 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función CtrlInfo
Arroja la información del controlador.
Sintaxis
CtrlInfo (index)
Parámetros
index Expresión entera que representa el índice de la información que desea recuperar.
Descripción
En la tabla siguiente se muestra la información que está disponible desde la función CtrlInfo:
Índice
Bit
Valor
Descripción
0
No
disponible
Obtenido para la compatibilidad.
Use el índice 9 para obtener la versión de firmware del controlador.
1
Estado del controlador
0
&H1
Estado Ready
1
&H2
Estado Start
2
&H4
Estado Pause
3-7
No definido
8
&H100
Estado Estop
9
&H200
Protección abierta
10
&H400
Estado Error
11
&H800
Estado Critical error
12
&H1000
Advertencia
13
&H2000
Estado WaitRecover (a la espera de la recuperación de la protección
abierta)
14
&H4000
Estado Recover (recuperación de la protección abierta)
15-31
No definido
2
0
&H1
Interruptor de activación está encendido
1-31
No definido
3
0
&H1
Se detectó un problema en el circuito del modo Teach
1
&H2
Se detectó un problema en el circuito de protección
2
&H4
Se detectó un problema en el circuito Estop
3-31
No definido
4
No
disponible
0 - Modo normal
1 - Modo Dry Run (Simulacro)
5
No
disponible
Dispositivo de control:
21 - RC+
22 - Remoto
26 - Ethernet remoto
29 - RS232C remoto
20 – TP3
6
No
disponible
Número de robots definidos
7
No
disponible
Modo de operación:
0 - Modo Program
1 - Modo Auto
8
No
disponible
No definido
9
No
disponible
Versión de firmware del controlador
N.º principal *1000000 + N.º secundario *10000 + N.º de rev. *100 +
N.º de compilación
(Ejemplo) La versión 1.6.2.4 es 1060204

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 195
Índice
Bit
Valor
Descripción
10
No
disponible
Estado SMART del disco duro
0 : El estado SMART es normal
1 : El estado SMART no es normal
Si el estado SMART no es normal, puede estar descompuesto el disco
duro. Debe respaldar los datos inmediatamente y reemplazar el disco
duro por uno nuevo.
Cuando se usa la opción RAID, no se puede usar el estado SMART;
siempre arrojará que está normal.
15
No
disponible
Voltaje de CC de entrada
El programa arroja el valor 100 veces mayor que el valor de entrada.
Por ejemplo, cuando el valor de entrada es 48,01 V, arroja 4801.
Tenga presente que ocurre un error si el controlador no es compatible
con una fuente de alimentación de CC.
16
No
disponible
Tipo de proveedor de PLC
0: Ninguno
1: Allen Bradley
Valores devueltos
El valor largo de los datos deseados
Consulte también
RobotInfo, TaskInfo
Ejemplo de función CtrlInfo
Print "The controller version: ", CtrlInfo(6)

196 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función CurDir$
Arroja una cadena que representa el directorio actual.
Sintaxis
CurDir$
Valores devueltos
Una cadena que incluye la unidad de disco actual y la ruta.
Consulte también
ChDir, CurDrive$ , CurDisk$
Ejemplo de función CurDir$
Print "The current directory is: ", CurDir$

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 197
Función CurDisk$
Arroja una cadena que representa el disco actual.
Sintaxis
CurDisk$
Valores devueltos
Una cadena que contiene la letra del disco actual.
Consulte también
ChDisk, CurDir$, CurDrive$
Ejemplo de función CurDisk$
Print "The current disk is: ", CurDisk$

198 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función CurDrive$
Arroja una cadena que representa la unidad de disco actual.
Sintaxis
CurDrive$
Valores devueltos
Una cadena que contiene la letra de la unidad de disco actual.
Consulte también
ChDrive, CurDir$, CurDisk$
Ejemplo de función CurDrive$
Print "The current drive is: ", CurDrive$

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 199
Función CurPos
Arroja la posición objetivo actual del robot especificado.
Sintaxis
CurPos
Valores devueltos
Un punto de robot que representa la posición objetivo actual del robot especificado.
Consulte también
InPos, FindPos, RealPos
Ejemplo de función CurPos
Function main
Xqt showPosition
Do
Jump P0
Jump P1
Loop
Fend
Function showPosition
Do
P99 = CurPos
Print CX(P99), CY(P99)
Loop
Fend

200 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción Curve
Define los datos y los puntos necesarios para mover el brazo a lo largo de la ruta curva. Es posible definir
muchos puntos de datos en la ruta para mejorar la precisión de la ruta.
Sintaxis
Curve fileName, closure, mode, numAxes, pointList
Parámetros
fileName Una expresión de cadena para el nombre del archivo en el que se guardan los datos del punto.
El nombre del archivo especificado tendrá la extensión .CVT al final, por lo que el usuario no
debe especificar la extensión. Cuando se ejecuta la instrucción Curve, se creará un archivo.
No puede especificar una ruta de archivo y fileName no tiene efecto de ChDisk.
Consulte ChDisk para conocer detalles.
closure Especifica si la curva definida está cerrada o no, o si se dejó abierta al final del movimiento
curvo. Se debe definir este parámetro en uno de los dos valores posibles, como se muestra a
continuación.
C - Curva cerrada
O - Curva abierta
Cuando se especifica la curva abierta, la instrucción Curve crea los datos para detener el brazo
en el último punto de la serie de puntos especificados. Cuando se especifica la curva cerrada,
la instrucción Curve crea los datos necesarios para continuar el movimiento hasta el punto final
especificado y luego detener el movimiento después de regresar el brazo al punto de inicio de
la serie de puntos especificados por la instrucción Curve.
mode Especifica si se interpola o no automáticamente el brazo en la dirección tangencial del eje U.
También puede especificar el número ECP en los cuatro bits superiores.
Configuración de modo
Corrección
tangencial
Número
ECP
Hexadecimal
Decimal
&H00
0
No
0
&H10
16
1
&H20
32
2
…
…
…
&HA0
160
10
&HB0
176
11
&HC0
192
12
&HD0
208
13
&HE0
224
14
&HF0
240
15
&H02
2
Yes
0
&H12
18
1
&H22
34
2
…
…
…
&HA2
162
10
&HB2
178
11
&HC2
194
12
&HD2
210
13
&HE2
226
14
&HF2
242
15

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 201
Cuando se especifica la corrección tangencial, Curve utiliza solo la coordenada del eje U del
punto de inicio de la serie de puntos. La corrección tangencial continuamente mantiene la
alineación de la herramienta tangente a la curva del plano XY. Se especifica al instalar las
herramientas como cortadores que requieren la alineación tangencial continua. Cuando se
especifica una curva cerrada (mediante el parámetro closure [Cierre]) con una interpolación
automática en la dirección tangencial del eje U, este gira 360 ° desde el punto de inicio. Por lo
tanto, antes de ejecutar la instrucción CVMove, se debe definir el rango de movimiento del eje
U mediante la instrucción Range (Rango), de manera que la rotación de 360 ° del eje U no
provoque un error.
Cuando se use ECP, se debe especificar el número ECP en los cuatro bits superiores.
Cuando se genera una curva que considere la posición del eje adicional incluida en los datos
del punto, se debe especificar el noveno bit como 1. Por ejemplo, cuando no se use ninguna
compensación de orientación o ECP y se genere una curva que considere la posición del eje
adicional, especifique &H100.
Cuando se genera una curva para el eje adicional, una los datos de los puntos continuos del eje
S y eje T de manera separada al sistema de coordenadas del robot.
Sin embargo, si el eje adicional consta del eje PG, no genera una curva con el punto continuo,
sino que crea los datos para moverse hasta el punto final.
numAxes Número entero 2, 3, 4 o 6 que especifica el número de los ejes controlados durante el
movimiento curvo de la manera siguiente:
2 - Genera una curva en el plano XY sin movimiento del eje Z o rotación del eje U.
(excepto para robots de 6 ejes [incluida la serie N])
3 - Genera una curva en el espacio XYZ sin rotación del eje U.
(excepto para robots de 6 ejes [incluida la serie N])
4 - Genera una curva en el espacio XYZ con rotación del eje U.
(excepto para robots de 6 ejes [incluida la serie N])
6 - Genera una curva en el espacio XYZ con rotación de los ejes U, V y W
(exclusivamente para robots de 6 ejes [incluida la serie N]).
Los ejes no seleccionados que se controlarán durante el movimiento Curve mantienen sus
posiciones de pulso del codificador anterior y no se mueven durante el movimiento Curve.
pointList { point expression | P(start:finish) } [, output command ] ...
Este parámetro es en realidad una serie de números de puntos e instrucciones de salida
opcionales, ya sea separados por comas o un rango ascendente de puntos separados por dos
puntos. Normalmente las series de puntos están separados por comas, como se muestra a
continuación:
Curve "MyFile", O, 0, 4, P1, P2, P3, P4
Algunas veces el usuario define una serie de puntos mediante un rango ascendente de puntos
como se muestra a continuación:
Curve "MyFile", O, 0, 4, P(1:4)
En el caso que se muestra más arriba, el usuario definió una curva con los puntos P1, P2, P3 y
P4.
output command es opcional y se usa para controlar la operación de salida durante el
movimiento curvo. El comando puede estar activado o desactivado para las salidas digitales o
salidas de memoria. Al escribir un comando de salida después de algún número de punto en la
serie de puntos se provoca la ejecución del comando de salida cuando el brazo llega al punto
justo antes del comando de salida. Se pueden incluir un máximo de 16 comandos de salida en
una instrucción Curve. En el ejemplo siguiente, se ejecuta el comando "On 2" justo cuando el
brazo llega al punto P2, entonces el brazo pasa por todos los puntos entre P3 y P10, ambos
incluidos.
Curve "MyFile", C, 0, 4, P1, P2, ON 2, P(3:10)

202 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Descripción
Curve crea los datos que mueven el brazo manipulador a lo largo de la curva definida por la serie de puntos
pointList y guarda los datos en un archivo del controlador. La instrucción CVMove usa los datos en el archivo
creado por Curve para mover el manipulador como ruta continua.
El archivo de la curva se guarda en la memoria Compact Flash dentro del controlador. Por lo tanto, Curve
empieza a escribir en la memoria Compact Flash. La escritura frecuente en la memoria Compact Flash
reducirá su vida útil. Recomendamos usar Curve solo para guardar los datos del punto.
Curve calcula los valores independientes de las coordenadas X, Y, Z, U, V, W para cada punto que utilice
una función Spline cúbica para crear la trayectoria. Por ende, si los puntos están bastante separados entre sí
o si se cambia la orientación del robot repentinamente de punto a punto, es posible que no se complete la
trayectoria deseada.
No es necesario especificar las necesidades o las aceleraciones antes de ejecutar la instrucción Curve. Los
parámetros de velocidad y aceleración del brazo se pueden cambiar en cualquier momento antes de ejecutar
CVMove con el uso de las instrucciones SpeedS o AccelS.
Los puntos definidos en un sistema de coordenadas local se pueden usar en la serie para ubicar la curva en
la posición deseada. Al definir todos los puntos especificados en la serie de puntos para la instrucción Curve
como puntos con atributos locales, se pueden cambiar los puntos en el sistema de coordenadas local mediante
la instrucción Local posterior a la instrucción Curve.
Notas
Use la corrección tangencial cuando sea posible
Se recomienda que se utilice la corrección tangencial cuando sea posible, en especial al utilizar CVMove en
un bucle continuo a través de los mismos puntos. Si no se usa la corrección tangencial, es posible que el robot
no siga la ruta correcta a velocidades más altas.
Número máx. y mín. de puntos permitidos para la curva abierta
Se pueden especificar las curvas abiertas mediante el uso de entre 3 y 200 puntos.
Número máx. y mín. de puntos permitidos para la curva cerrada
Se pueden especificar las curvas cerradas mediante el uso de entre 3 y 50 puntos.
Posible error
Intento de mover el brazo fuera del envolvente de trabajo
La instrucción Curve no puede revisar el rango de movimiento para la ruta de la curva definida. Esto significa
que la ruta definida por un usuario puede provocar que el brazo del robot se mueva hacia afuera del
envolvente de trabajo normal. En este caso se producirá un error de "fuera de rango".
Consulte también
Función AccelS, Arc, CVMove, ECP, Move, SpeedS
Ejemplo de instrucción Curve
El siguiente ejemplo asigna el nombre MYCURVE.CVT al archivo de datos de curva libre, crea un trazado
de curva de P1 a P7, activa el puerto de salida 2 en P2 y desacelera el brazo en P7.
Configura la curva
> curve "mycurve", O, 0, 4, P1, P2, On 2, P(3:7)
Mueve el brazo a P1 en una línea recta
> jump P1
Mueve el brazo según la definición de curva llamada “mycurve”
> cvmove "mycurve"

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 203
Instrucción CVMove
Realiza el movimiento de ruta continua de Spline definido por la instrucción Curve.
Sintaxis
CVMove fileName [CP] [searchExpr] [SYNC]
Parámetros
fileName Una expresión de cadena para el nombre del archivo. Se debe crear este archivo antes de la
instrucción Curve y se debe guardar en el disco duro de una PC.
No puede especificar una ruta de archivo y fileName no tiene efecto de ChDisk.
Consulte ChDisk para conocer detalles.
CP Opcional. Especifica el movimiento de la ruta continua después del último punto.
searchExpr Opcional. Una expresión Till o Find.
Till | Find
Till Sw(expr) = {On | Off}
Find Sw(expr) = {On | Off}
SYNC Reserva un comando de movimiento. Un robot no se moverá hasta que SyncRobots dé
instrucciones.
Descripción
CVMove realiza el movimiento de ruta continua Spline definido por los datos en el archivo fileName, que se
encuentra en la memoria del controlador. El archivo se debe crear antes mediante el comando Curve.
Es posible que existan múltiples archivos al mismo tiempo en el sistema. Si el nombre del archivo no tiene
una extensión, se agrega automáticamente la extensión .CVT.
El usuario puede cambiar la velocidad y la aceleración del movimiento de la ruta continua para CVMove
mediante las instrucciones SpeedS y AccelS.
Cuando la instrucción Curve se ha ejecutado previamente con definiciones locales, se puede cambiar la
posición de operación con el uso de la instrucción local.
Al ejecutar CVMove, tenga cuidado de que el robot no choque con los equipos periféricos. Cuando intenta
cambiar la orientación de la mano del robot de 6 ejes (incluida la serie N) entre los puntos adyacentes de
manera repentina, debido a la naturaleza de la función Spline cúbica, el robot de 6 ejes puede empezar a
cambiar la orientación de los puntos anteriores y siguientes y moverse en una trayectoria inesperada.
Verifique la trayectoria atentamente antes de ejecutar un CVMove y tenga cuidado de que el robot no choque
con los equipos periféricos.
Especifique los puntos para que estén cercanos entre sí y con un intervalo equidistante. No cambie
repentinamente la orientación de la mano entre los puntos adyacentes.
El parámetro CP causa que comience la aceleración del siguiente comando de movimiento cuando comienza
la desaceleración para el comando de movimiento actual. En este caso, el robot no se detendrá en la
coordenada de destino y continuará moviéndose al siguiente punto.
Consulte también
Función AccelS, Arc, Curve, Move, SpeedS, Till, TillOn
Ejemplo de instrucción CVMove
El siguiente ejemplo asigna el nombre MYCURVE.CVT al archivo de datos de curva libre, crea un trazado
de curva de P1 a P7, activa el puerto de salida 2 en P2 y desacelera el brazo en P7.
Configura la curva
> curve "mycurve", O, 0, 4, P1, P2, On 2, P(3:7)
Mueve el brazo a P1 en una línea recta
> jump P1
Mueve el brazo según la definición de curva llamada “mycurve”
> cvmove "mycurve"

204 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucciones CX, CY, CZ, CU, CV, CW, CR, CS y
CT
Define el valor de coordenada de los datos de un punto.
CV, CW solo son para robots de 6 ejes (incluida la serie N).
CR solo es para los robots de tipo articulado.
CS y CT son solo para robots con ejes adicionales.
Sintaxis
CX(point) = value
CY(point) = value
CZ(point) = value
CU(point) = value
CV(point) = value
CW(point) = value
CR(point) = value
CS(point) = value
CT(point) = value
Parámetros
point Pnumber o P(expr) o etiqueta de punto.
value Expresión real que representa el nuevo valor de coordenada en milímetros.
Consulte también
Funciones CX, CY, CZ, CU, CV, CW, CR, CS y CT
Ejemplo de instrucciones CX, CY, CZ, CU, CV, CW, CR, CS y CT
CX(pick) = 25.34

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 205
Funciones CX, CY, CZ, CU, CV, CW, CR, CS y CT
Recupera un valor de coordenada desde un punto
Las funciones CV, CW solo son para los robots de 6 ejes (incluida la serie N).
CS y CT son solo para robots con ejes adicionales.
Sintaxis
CX (point)
CY (point)
CZ (point)
CU (point)
CV (point)
CW (point)
CR (point)
CS (point)
CT (point)
Parámetros
point Expresión de punto.
Valores devueltos
Arroja el valor de coordenada especificado. Los valores devueltos para CX, CY, CZ son números reales en
milímetros. Los valores devueltos para CU, CV, CW son números reales en grados.
Arroja valores de las funciones CS, CT: Valores reales en mm o grados. Depende de la configuración de ejes
adicionales.
Descripción
Se usa para recuperar un valor de coordenada individual de un punto.
A fin de obtener la coordenada de la posición actual del robot, utilice el parámetro "Here for the point" (Aquí
para el punto).
Consulte también
Instrucciones CX, CY, CZ, CU, CV, CW, CR, CS y CT
Ejemplo de funciones CX, CY, CZ, CU, CV, CW, CR, CS y CT
En el siguiente ejemplo se extrae el valor de la coordenada del eje X del punto “pick” (Recoger) y se pone el
valor de coordenada en la variable x.
Función cxtest
Real x
x = CX(pick)
Print "The X Axis Coordinate of point 'pick' is", x
Fend

206 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción Date
Muestra la fecha.
Sintaxis
Fecha
Valores devueltos
Aparece la fecha actual.
Consulte también
Time, Date$
Ejemplo de instrucción Date
Ejemplo desde la ventana Command.
>Date
2009/08/01

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 207
Función Date$
Arroja la fecha del sistema.
Sintaxis
Date$
Valores devueltos
Una cadena que contiene la fecha en formato aaaa/mm/dd.
Consulte también
Date, Time, Time$
Ejemplo de función Date$
Print "Today's date: ", Date$

208 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción Declare
Declara una función externa en una biblioteca de enlace dinámico (DLL).
Sintaxis
Declare funcName, “dllFile” “, alias” [, (argList)] As type
Parámetros
funcName El nombre de la función como será llamada desde su programa.
dllFile La ruta y el nombre del archivo de la biblioteca. Debe ser una cadena literal
(caracteres delimitados por comillas). También puede utilizar una macro definida por
#define. Si no existe alguna ruta especificada, entonces RC+ buscará el archivo en el
directorio del proyecto actual. Si no lo encuentra, entonces se supone que el archivo
está en el directorio System32 de Windows. Se puede omitir la extensión del archivo,
pero siempre se supondrá que es .DLL.
alias Opcional. El nombre real de la función en la DLL o en el índice de funciones. El
nombre distingue entre mayúsculas y minúsculas. El alias debe ser una cadena literal
(caracteres delimitados por comillas). Si se utiliza un índice, se debe usar el carácter
# antes del índice. Si se omite, se puede utilizar un nombre de función especificado
por funcName como nombre de la función en DLL.
arglist Opcional. Lista de argumentos en DLL. Consulte la sintaxis siguiente.
[ {ByRef | ByVal} ] varName [( )] As type
ByRef Opcional. Especifique ByRef cuando haga referencia a la variable que
será vista por la función que realiza la llamada. En este caso, el cambio
de argumento en una función se puede reflejar a la variable del lado que
llama. Se pueden cambiar los valores recibidos como referencia.
ByVal Opcional. Especifique ByVal cuando no desee que los cambios en el
valor de la variable sean vistos por la función de llamada. Este es el valor
predeterminado.
varName Obligatorio. Nombre de la variable que representa el argumento; sigue
las convenciones de nomenclatura de variables estándar. Si se utiliza una
variable de la matriz como argumento, se debe especificar ByRef.
type Obligatorio. Debe declarar el tipo de argumento.
Descripción
Utilice Declare para llamar las funciones DLL desde el programa actual. Se debe usar Declare fuera de las
funciones.
La instrucción Declare revisa que exista el archivo DLL y la función en el tiempo de compilación.
Pasar las variables numéricas ByVal
SPEL: Declare MyDLLFunc, "mystuff.dll", "MyDLLFunc", (a As Long) As Long
VC++ long _stdcall MyDllFunc(long a);
Pasar las variables de cadena ByVal
SPEL: Declare MyDLLFunc, "mystuff.dll", "MyDLLFunc", (a$ As String) As
Long
VC++ long _stdcall MyDllFunc(char *a);

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 209
Pasar las variables numéricas ByRef
SPEL: Declare MyDLLFunc, "mystuff.dll", "MyDLLFunc", (ByRef a As Long) As
Long
VC++ long _stdcall MyDllFunc(long *a);
Pasar las variables de cadena ByRef
SPEL: Declare MyDLLFunc, "mystuff.dll", "MyDLLFunc", (ByRef a$ As String)
As Long
VC++ long _stdcall MyDllFunc(char *a);
Cuando se pasa una cadena con ByRef, se puede cambiar la cadena en la DLL. Longitud máxima de cadena
es de 255 caracteres. Debe asegurarse de no exceder la longitud máxima.
Pasar las matrices numéricas ByRef
SPEL: Declare MyDLLFunc, "mystuff.dll", "MyDLLFunc", (ByRef a() As Long)
As Long
VC++ long _stdcall MyDllFunc(long *a);
Arrojar los valores de la función DLL
La función DLL puede arrojar un valor para algún tipo de dato, lo que incluye la cadena. Sin embargo, para
una cadena, se debe devolver un puntero a una cadena asignada en la función DLL. Y el nombre de la
función debe terminar con el signo de moneda, como sucede con todas las variables y las funciones de la
cadena SPEL
+
. Observe que el alias no lleva el sufijo del signo de moneda.
Por ejemplo:
Declare ReturnLong, "mystuff.dll", "ReturnLong", As Long
Declare ReturnString$, "mystuff.dll", "ReturnString", As String
Function main
Print "ReturnLong = ", ReturnLong
Print "ReturnString$ = ", ReturnString$
Fend
Consulte también
Function...Fend

210 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Ejemplo de instrucción Declare
' Declara una función DLL. Puesto que no se especifica una ruta, el archivo puede estar en el
directorio del proyecto actual
' o en el directorio System32 de Windows
Declare MyDLLTest, "mystuff.dll", "MyDLLTest" As Long
Function main
Print MyDLLTest
Fend
' Declara una función DLL con dos argumentos enteros y utiliza un #define para definir el nombre
del archivo DLL
#define MYSTUFF "mystuff.dll"
Declare MyDLLCall, MYSTUFF, "MyTestFunc", (var1 As Integer, var2 As
Integer) As Integer
' Declara una función DLL mediante una ruta o índice.
Declare MyDLLTest, "c:\mydlls\mystuff.dll", "#1" As Long

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 211
Función DegToRad
Convierte grados en radianes.
Sintaxis
DegToRad(degrees)
Parámetros
degrees Expresión real que representa los grados que se convertirán en radianes.
Valores devueltos
Un valor doble que contiene la cantidad de radianes.
Consulte también
ATan, ATan2, función RadToDeg
Ejemplo de función DegToRad
s = Cos(DegToRad(x))

212 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción Del
Elimina uno o más archivos.
Sintaxis
Del fileName
Parámetros
fileName La ruta y el nombre de los archivos que se eliminarán. Se debe especificar el nombre del archivo
con una extensión. Consulte ChDisk para conocer detalles.
Descripción
Elimina el archivo o los archivos especificados.
Ejemplo de instrucción Del
Ejemplo desde la ventana Command.
> Del TEST.PTS ' Elimina el archivo de punto del directorio actual.
> Del c:TEST.PTS ' NG
!! Error: 7213 The file specified by path does not exist.
> Del c:\TEST.PTS ' OK

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 213
Instrucción DeleteDB
Elimina los datos de la tabla en la base de datos abierta.
Sintaxis
DeleteDB #databaseNum,tableNumber [, condition]
Parámetros
databaseNum Especifica el número de la base de datos (entero de 501 a 508) especificada
en OpenDB.
tableNumber Especifica el nombre de la tabla, cuyos datos se eliminarán.
condition Especifica la condición para eliminar los datos.
Se puede especificar una condición compuesta, mediante AND (Y) y OR (O).
Si no se especifica la condición, se eliminarán todos los datos de la tabla.
Descripción
Elimina los datos que coinciden con la condición de eliminación de la tabla especificada en la base de datos
abierta.
Si la base de datos es un libro de Excel, no se puede ejecutar este comando.
Nota
- Se requiere la conexión de una PC con RC+ instalado.
Consulte también
OpenDB, CloseDB, SelectDB, UpdateDB

214 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función DiffToolOrientation
Arroja el ángulo de los ejes de coordenadas de los sistemas de coordenadas para herramientas, a fin de
mostrar la diferencia entre las orientaciones de la herramienta y los dos puntos especificados.
Sintaxis
DiffToolOrientation (pointData1, pointData2 , axisNumber)
Parámetros
pointData1 Especifica los datos del primer punto.
pointData2 Especifica los datos del segundo punto.
axisNumber Especifica el eje de coordenadas del sistema de coordenadas para herramientas.
Constante Valor
COORD_X_PLUS 1: Eje +X
COORD_Y_PLUS 2: Eje +Y
COORD_Z_PLUS 3: Eje +Z
Valores devueltos
Ángulo (valor real de 0 a 180 grados)
Descripción
Arroja el ángulo (valor real, de 0 a 180 grados) entre el eje de coordenadas especificado de los sistemas de
coordenadas para herramientas, lo que indica la diferencia entre las orientaciones de la herramienta de los
dos puntos especificados. Los resultados no se ven afectados por el orden de los parámetros: pointData1 y
pointData2. Los resultados tampoco se ven afectados por la relación de posición (valores de coordenadas
de X, Y y Z) entre los puntos de origen de los dos puntos.
Ejemplo de función DiffToolOrientation
'Muestra el ángulo entre los ejes Z de coordenadas de la herramienta del punto 1 y el punto 2.
Print DiffToolOrientation(P1, P2, COORD_Z_PLUS)

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 215
Instrucción DispDev
Define el dispositivo de presentación actual.
Sintaxis
DispDev (deviceID)
Parámetros
deviceID La ID del dispositivo para el dispositivo de presentación deseado.
21 RC+
24 TP (solo TP1)
20 TP3
También están disponibles los siguientes parámetros.
21 DEVID_SELF
24 DEVID_TP
20 DEVID_TP3
Consulte también
Función DispDev
Ejemplo de instrucción DispDev
DispDev DEVID_TP

216 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función DispDev
Arroja el dispositivo de presentación actual.
Sintaxis
DispDev
Valores devueltos
Valor entero que contiene deviceID.
21 RC+
24 TP (solo TP1)
20 TP3
Consulte también
Instrucción DispDev
Ejemplo de función DispDev
Print "The current display device is ", DispDev

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 217
Función Dist
Arroja la distancia entre dos puntos de robot.
Sintaxis
Dist (point1, point2)
Parámetros
point1, point2 Especifica dos expresiones de puntos de robot.
Valores devueltos
Arroja la distancia entre ambos puntos (valor real en mm).
Descripción
Incluso si está usando el eje adicional, solo se arroja la distancia de desplazamiento del robot.
No incluye la distancia de desplazamiento del eje adicional mientras se usa el eje adicional como eje de
ejecución.
Para el robot de tipo articulado, no significa nada el valor devuelto de esta función.
Consulte también
CU, CV, CW, CX, CY, CZ
Ejemplo de función Dist
Distancia real
distancia = Dist(P1, P2)

218 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción Do...Loop
Repite un bloque de instrucciones cuando una condición es verdadera o hasta que una condición se vuelva
verdadera.
Sintaxis
Do [ { While | Until } condition ]
[statements]
[Exit Do]
[statements]
Loop
O bien se puede usar esta sintaxis:
Do
[statements]
[Exit Do]
[statements]
Loop [ { While | Until } condition ]
La sintaxis de la instrucción Do Loop (Hacer bucle) tiene estas partes:
Parte Descripción
condition Opcional. Expresión numérica o expresión de cadena que es verdadera o falsa. Si la condición
es Null (valor nulo), se trata a la condición como falsa.
statements Una o más instrucciones que están repetidas durante o hasta que la condición sea verdadera.
Descripción
Cualquier número de las instrucciones Exit Do (Salir hacer) se puede poner en cualquier parte de Do...Loop
como una manera alternativa para salir de un Do...Loop. A menudo Exit Do se utiliza después de evaluar
alguna condición, por ejemplo, If...Then (Si... entonces), en cuyo caso la instrucción Exit Do traspasa el
control a la instrucción inmediatamente posterior a Loop (Bucle).
Cuando se usa dentro de instrucciones anidadas de tipo Do...Loop, Exit Do transfiere el control al bucle que
está un nivel de anidamiento por encima del bucle en el que ocurre Exit Do.
Nota
NO use el comando XQT en forma reiterada en las instrucciones Loop.
No use el comando XQT en forma reiterada en las instrucciones Loop como Do…Loop.
El controlador podría quedar inmovilizado. Si usa las instrucciones Loop en forma reiterada, asegúrese de
agregar el comando Wait (Wait 0.1).
Consulte también
For...Next, Select...Send
Ejemplo de instrucción Do...Loop
Do While Not Lof(1)
Line Input #1, tLine$
Print tLine$
Loop

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 219
Instrucción doble
Declara las variables de tipo doble. (Número de doble precisión de 8 bytes).
Sintaxis
Double varName [(subscripts)] [, varName [(subscripts)]...]
Parámetros
varName Nombre de la variable que el usuario desea declarar como de tipo doble.
subscripts Opcional. Las dimensiones de una matriz son variables; es posible declarar hasta 3
dimensiones. La sintaxis del subíndice es la siguiente
(ubound1, [ubound2], [ubound3])
ubound1, ubound2, ubound3 especifican, cada una, el límite superior máximo para la
dimensión asociada.
Los elementos en cada dimensión de una matriz se numeran desde 0 y el número
disponible de elementos de matriz es el valor de límite superior + 1.
Cuando especifique el valor del límite superior, asegúrese de que el número total de
elementos esté dentro del rango que se muestra a continuación:
Variable local 2.000
Variables globales conservadas 4.000
Variable global y variable de módulo 100.000
Descripción
Se usa Double para declarar las variables como de tipo doble. Las variables locales se deben declarar al inicio
de una función. Las variables globales y de módulo se deben declarar fuera de las funciones.
El número de dígitos válido para Double es 14.
Consulte también
Boolean, Byte, Global, Int32, Int64, Integer, Long, Real, Short, String, UByte, UInt32, UInt64,
UShort
Ejemplo de instrucción Double
El siguiente ejemplo muestra un programa simple que declara algunas variables que utilizan Double.
Función doubletest
Double var1
Double A(10) 'Matriz de una sola dimensión de Double
Double B(10, 10) 'Matriz de dos dimensiones de Double
Double C(5, 5, 5) 'Matriz de tres dimensiones de Double
Double arrayvar(10)
Integer i
Print "Please enter a Number:"
Input var1
Print "The variable var1 = ", var1
For i = 1 To 5
Print "Please enter a Number:"
Input arrayvar(i)
Print "Value Entered was ", arrayvar(i)
Next i
Fend

220 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción ECP
Selecciona o muestra el ECP (punto de control externo) actual.
Sintaxis
(1) ECP ECPNumber
(2) ECP
Parámetros
ECPNumber Opcional. Expresión entera de 0 a 15 que representa cuál de las 16 definiciones de ECP
se debe utilizar con las siguientes instrucciones movimiento. ECP 0 hace que la
selección de ECP no sea válida.
Valores devueltos
Muestra el ECP actual cuando se utiliza sin parámetros.
Descripción
ECP selecciona el punto de control externo especificado por ECPnumber (ECPNumber).
Nota
Este comando solo funcionará si la opción External Control Point está activada.
Desconexión y su efecto en la selección de ECP
Desconectar la alimentación principal borra la selección de ECP.
Consulte también
ECPSet
Ejemplo de instrucción ECP
>ecpset 1, 100, 200, 0, 0
>ecp 1

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 221
Función ECP
Arroja el número de ECP (punto de control externo) actual.
Sintaxis
ECP
Valores devueltos
Entero que contiene el número de ECP actual.
Nota
Este comando solo funcionará si la opción External Control Point está activada.
Consulte también
Instrucción ECP
Ejemplo de función ECP
Integer savECP
savECP = ECP
ECP 2
Call Dispense
ECP savECP

222 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción ECPClr
Borra (anula definición) un punto de control externo.
Sintaxis
ECPClr ECPNumber
Parámetros
ECPNumber Expresión entera que representa cuál de los 15 puntos de control externo se debe borrar
(anular definición). (ECP0 es el valor predeterminado y no se puede borrar).
Descripción
Los datos de los parámetros del robot se almacenan en la memoria Compact Flash en el controlador. Por
tanto, la memoria flash de comandos se escribe cuando se ejecuta este comando. La escritura frecuente en
la memoria Compact Flash afecta su vida útil. Recomendamos que el uso de este comando sea mínimo.
Nota
Este comando solo funcionará si la opción External Control Point está activada.
Consulte también
Arm, ArmClr, ArmSet, ECPSet, Local, LocalClr, Tool, TLSet
Ejemplo de instrucción ECPClr
ECPClr 1

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 223
Función ECPDef
Arroja el estado de la definición de ECP.
Sintaxis
ECPDef (ECPNumber)
Parámetros
ECPNumber Expresión entera que representa para cuál ECP se debe arrojar el estado.
Valores devueltos
True (Verdadero) si se ha definido el ECP especificado, o de lo contrario, False (Falso).
Consulte también
Arm, ArmClr, ArmSet, ECPSet, Local, LocalClr, Tool, TLClr, TLSet
Ejemplo de instrucción ECPDef
Function DisplayECPDef(ecpNum As Integer)
If ECPDef(ecpNum) = False Then
Print "ECP ", ecpNum, "is not defined"
Else
Print "ECP ", ecpNum, ": ",
Print ECPSet(ecpNum)
EndIf
Fend

224 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción ECPSet
Define o muestra un punto de control externo.
Sintaxis
(1) ECPSet ECPNum, ECPPoint
(2) ECPSet ECPNum
(3) ECPSet
Parámetros
ECPNum Número entero del 1 al 15 que representa a cuál de los 15 puntos de control externo se
define.
ECPPoint Pnumber o P(expr) o etiqueta de punto o expresión de punto.
Valores devueltos
Cuando se omiten los parámetros, aparecen las definiciones actuales de ECPSet.
Cuando solo se especifica el número de ECP, aparecen las definiciones del ECPSet especificado.
Descripción
Define un punto de control externo.
Los datos de los parámetros del robot se almacenan en la memoria Compact Flash en el controlador. Por
tanto, la memoria flash de comandos se escribe cuando se ejecuta este comando. La escritura frecuente en
la memoria Compact Flash afecta su vida útil. Recomendamos que el uso de este comando sea mínimo.
Nota
Este comando solo funcionará si la opción External Control Point está activada.
Ejemplo de instrucción ECPSet
ECPSet 1, P1
ECPSet 2, 100, 200, 0, 0

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 225
Función ECPSet
Arroja un punto que contiene la definición de un punto de control externo para el ECP especificado.
Sintaxis
ECPSet(ECPNumber)
Parámetros
ECPNumber Expresión entera que representa el número del ECP que desea recuperar.
Valores devueltos
Un punto que contiene la definición de ECP.
Nota
Este comando solo funcionará si la opción External Control Point está activada.
Consulte también
Instrucción ECPSet
Ejemplo de función ECPSet
P1 = ECPSet(1)

226 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función ElapsedTime
Arroja el tiempo transcurrido desde que empieza el temporizador de medición de tiempo takt en segundos.
Sintaxis
ElapsedTime
Valores devueltos
Un valor real que representa el tiempo transcurrido de un temporizador de medición de tiempo takt. (Unidad:
segundos)
El rango válido es desde 0 a aproximadamente 1,7E+31. La resolución del temporizador es de 0,001
segundos.
Descripción
Arroja el tiempo transcurrido desde que empieza el temporizador de medición de tiempo takt. A diferencia
de la función Tmr, la función ElapsedTime no cuenta el tiempo mientras el programa está en estado de pausa.
Se puede restablecer el temporizador de medición de tiempo takt con la instrucción ResetElapsedTime.
Real overhead
ResetElapsedTime
overHead = ElapsedTime
Consulte también
ResetElapsedTime, función Tmr
Ejemplo de función ElapsedTime
ResetElapsedTime 'Restablece el temporizador de medición de tiempo takt
For i = 1 To 10 'Se ejecuta 10 veces
GoSub Cycle
Next
Print ElapsedTime / 10 'Mide un tiempo takt y lo muestra

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 227
Instrucción Elbow
Define la orientación del codo de un punto.
Sintaxis
(1) Elbow point [, value]
(2) Elbow
Parámetros
point Pnumber o P(expr) o etiqueta de punto.
value Expresión entera.
1 = Arriba (/A)
2 = Debajo (/B)
Valores devueltos
Cuando se omiten ambos parámetros, aparece la orientación del codo para la posición del robot actual.
Si se omite value, aparece la orientación del codo para el punto especificado.
Consulte también
Función Elbow, Hand, J4Flag, J6Flag, Wrist
Ejemplo de instrucción Elbow
Elbow P0, Below
Elbow pick, Above
Elbow P(myPoint), myElbow
P1 = 0.000, 490.000, 515.000, 90.000, -40.000, 180.000
Elbow P1,
Below
Go P1
Elbow P1, Above
Go P1

228 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función Elbow
Arroja la orientación del codo de un punto.
Sintaxis
Elbow [(point)]
Parámetros
point Opcional. Expresión de punto. Si se omite point, entonces arroja la orientación del codo de la
posición actual del robot.
Valores devueltos
1 Above (/A)
2 Below (/B)
Consulte también
Instrucción Elbow, Hand, Wrist, J4Flag, J6Flag
Ejemplo de Función Elbow
Print Elbow(pick)
Print Elbow(P1)
Print Elbow
Print Elbow(P1 + P2)

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 229
Función Eof
Arroja el estado del fin de archivo.
Sintaxis
Eof (fileNumber)
Parámetros
fileNumber Número entero entre 30 y 60 o expresión que representa el número del archivo que se debe
revisar.
Valores devueltos
Verdadero si el puntero del archivo está al final del archivo, de lo contrario es falso.
Descripción
Eof solo es funcional si se abre el archivo en modo de lectura.
Se produce un error si se abrió el archivo con las instrucciones AOpen o WOpen.
Consulte también
Lof
Ejemplo de función Eof
Integer fileNum
String data$
fileNum = FreeFile
UOpen "TEST.DAT" As #fileNum
Do While Not Eof(fileNum)
Line Input #fileNum, data$
Print "data = ", data$
Loop
Close #fileNum

230 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función Era
Arroja el número de las articulaciones en las que se produjo un error.
Sintaxis
Era[(taskNum)]
Parámetros
taskNum Expresión entera que representa un número de tarea entre 0 y 32.
Si se omite el número de tarea o se usa "0", se especifica la tarea actual.
Valores devueltos
El número de articulación que provocó el error en el rango entre 0 y 9, como se describe a continuación:
0 - El error actual no fue causado por un eje / servo.
1 - El error fue causado por la articulación número 1
2 - El error fue causado por la articulación número 2
3 - El error fue causado por la articulación número 3
4 - El error fue causado por la articulación número 4
5 - El error fue causado por la articulación número 5
6 - El error fue causado por la articulación número 6
7 - El error fue causado por la articulación número 7
8 - El error fue causado por la articulación número 8 (eje S adicional)
9 - El error fue causado por la articulación número 9 (eje T adicional)
Descripción
Se utiliza Era cuando se produce un error a fin de determinar si el error fue provocado por una de las
articulaciones del robot y para arrojar el número de la articulación que causó el error. Si el error actual no
fue provocado por ninguna articulación, Era arroja “0”.
Cuando se produce el evento “Error durante el modo Auto”, se detiene la ejecución de la tarea normal y de
la tarea NoPause del modo AUTO y se terminan las tareas.
Si ya ha terminado la tarea objetivo al usar esta función para la tarea NoEmgAbort o en la tarea en segundo
plano, se generará el “Error 2261”. Use OnErr para adquirir información antes de que termine la tarea.
Consulte también
Erl, Err, ErrMsg$, Ert, OnErr, Trap
Ejemplo de función Era
Function main
OnErr Goto eHandler
Do
Call PickPlace
Loop
Exit Function
eHandler:
Print "The Error code is ", Err
Print "The Error Message is ", ErrMsg$(Err)
errTask = Ert
If errTask > 0 Then
Print "Task number in which error occurred is ", errTask
Print "The line where the error occurred is Line ", Erl(errTask)
If Era(errTask) > 0 Then
Print "Joint which caused the error is ", Era(errTask)
EndIf
EndIf
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 231
Instrucción EResume
Reanuda la ejecución después de la finalización de la rutina del controlador de errores.
Sintaxis
EResume [{ label | Next }]
Descripción
EResume
Si el error se produjo en el mismo procedimiento que el controlador de errores, se reanuda la ejecución con
la instrucción que provocó el error. Si el error se produjo en un procedimiento llamado, se reanuda la
ejecución en la instrucción Call en el procedimiento que contiene el controlador de errores.
EResume Next
Si el error se produjo en el mismo procedimiento que el controlador de errores, se reanuda la ejecución con
la instrucción inmediatamente posterior a la instrucción que provocó el error. Si el error se produjo en un
procedimiento llamado, se reanuda la ejecución con la instrucción inmediatamente posterior a la última
instrucción Call en el procedimiento que contiene el controlador de errores.
EResume { label }
Si el error se produjo en el mismo procedimiento que el controlador de errores, se reanuda la ejecución en la
instrucción que contiene la etiqueta.
Consulte también
OnErr
Ejemplo de instrucción EResume
Function main
Integer retry
OnErr GoTo eHandler
Do
RunCycle
Loop
Exit Function
eHandler:
Select Err
Case MyError
retry = retry + 1
If retry < 3 Then
EResume ' try again
Else
Print "MyError has occurred ", retry, " times
EndIf
Send
Fend

232 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función Erf$
Arroja el nombre de la función en que se produjo el error.
Sintaxis
Erf$[(taskNumber)]
Parámetros
taskNumber Expresión entera que representa un número de tarea de 0 a 32.
Si se omite el número de tarea o se usa "0", se especifica la tarea actual.
Valores devueltos
El nombre de la función donde se produjo el último error.
Descripción
Erf$ se utiliza junto con OnErr. Erf$ arroja el nombre de la función en que se produjo el último error. El uso
de Erf$ en combinación con Err, Ert, Erl y Era permite que el usuario determine mucho más sobre el error.
Cuando se produce el evento “Error durante el modo Auto”, se detiene la ejecución de la tarea normal y de
la tarea NoPause del modo AUTO y se terminan las tareas.
Si ya ha terminado la tarea objetivo al usar esta función para la tarea NoEmgAbort o en la tarea en segundo
plano, se generará el “Error 2261”. Use OnErr para adquirir información antes de que termine la tarea.
Consulte también
Era, Erl, Err, ErrMsg$, Ert, OnErr
Ejemplo de función Erf$
Los siguientes elementos se arrojan en el ejemplo de programa que aparece a continuación.
En qué tarea ocurrió el error (función Ert)
En qué función se produjo el error (función Erf$)
Dónde ocurrió el error (función Erl)
En qué articulación ocurrió el error (función Era)
Function main
OnErr Goto eHandler
Do
Call PickPlace
Loop
Exit Function
eHandler:
Print "The Error code is ", Err
Print "The Error Message is ", ErrMsg$(Err)
errTask = Ert
If errTask > 0 Then
Print "Task number in which error occurred is ", errTask
Print "Function at which error occurred is ", Erf$(errTask)
Print "The line where the error occurred is Line ", Erl(errTask)
If Era(errTask) > 0 Then
Print "Joint which caused the error is ", Era(errTask)
EndIf
EndIf
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 233
Función Erl
Arroja el número de línea donde se produjo el error.
Sintaxis
Erl[(taskNumber)]
Parámetros
taskNumber Expresión entera que representa un número de tarea de 0 a 32.
Si se omite el número de tarea o se usa "0", se especifica la tarea actual.
Valores devueltos
El número de la tarea donde se produjo el último error.
Descripción
Erl se utiliza junto con OnErr. Erl arroja el número de línea donde se produjo el error. El uso de Erl en
combinación con Err, Ert, y Era permite que el usuario determine mucho más sobre el error.
Cuando se produce el evento “Error durante el modo Auto”, se detiene la ejecución de la tarea normal y de
la tarea NoPause del modo AUTO y se terminan las tareas.
Si ya ha terminado la tarea objetivo al usar esta función para la tarea NoEmgAbort o en la tarea en segundo
plano, se generará el “Error 2261”. Use OnErr para adquirir información antes de que termine la tarea.
Consulte también
Era, Erf$, Err, ErrMsg$, Ert, OnErr
Ejemplo de función Erl
Los siguientes elementos se arrojan en el ejemplo de programa que aparece a continuación.
En qué tarea ocurrió el error (función Ert)
Dónde ocurrió el error (función Erl)
Qué error ocurrió (función Err)
En qué articulación ocurrió el error (función Era)
Function main
OnErr Goto eHandler
Do
Call PickPlace
Loop
Exit Function
eHandler:
Print "The Error code is ", Err
Print "The Error Message is ", ErrMsg$(Err)
errTask = Ert
If errTask > 0 Then
Print "Task number in which error occurred is ", errTask
Print "The line where the error occurred is Line ", Erl(errTask)
If Era(errTask) > 0 Then
Print "Joint which caused the error is ", Era(errTask)
EndIf
EndIf
Fend

234 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función Err
Arroja el estado de error más reciente.
Sintaxis
Err [ (taskNumber) ]
Parámetros
taskNumber Opcional. Expresión entera que representa un número de tarea desde 0 a 32.
“0” especifica la tarea actual.
Valores devueltos
Arroja un código de error numérico en forma de entero.
Descripción
Err permite que el usuario lea el código de error actual. Esto junto con las capacidades del controlador de
errores de SPEL
+
le permiten al usuario determinar qué error se produjo y reaccionar como corresponda. Err
se utiliza junto con OnErr.
Para obtener el error del controlador, use la función SysErr.
Cuando se produce el evento “Error durante el modo Auto”, se detiene la ejecución de la tarea normal y de
la tarea NoPause del modo AUTO y se terminan las tareas.
Si ya ha terminado la tarea objetivo al usar esta función para la tarea NoEmgAbort o en la tarea en segundo
plano, se generará el “Error 2261”. Use OnErr para adquirir información antes de que termine la tarea.
Consulte también
Era, Erf$, Erl, ErrMsg$, EResume, Ert, OnErr, Return, SysErr
Ejemplo de función Err
El siguiente ejemplo muestra un programa de utilidad simple que comprueba si existen los puntos P0 a P399.
Si el punto no existe, se mostrará un mensaje en la pantalla para informar al usuario de que el punto no existe.
El programa usa la instrucción CX para comprobar si se definió o no cada punto. Cuando un punto no está
definido, el control se traslada al controlador de errores y se muestra un mensaje en la pantalla para indicar
al usuario el punto que no estaba definido.
Función errtest
Integer i, errnum
Real x
OnErr GoTo eHandle
For i = 0 To 399
x = CX(P(i))
Next i
Exit Function
'
'
'*********************************************
'* Error Handler *
'*********************************************
eHandle:
errnum = Err
' Comprueba si se está usando un punto no definido
If errnum = 78 Then
Print "Point number P", i, " is undefined!"
Else
Print "ERROR: Error number ", errnum, " Occurred."
EndIf
EResume Next
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 235
Función Errb
Arroja el número del robot en el que ocurrió el error.
Sintaxis
Errb
Valores devueltos
Arroja el número del robot en el que ocurrió el error.
Descripción
Errb busca y arroja el número de robot donde se produjo el error. Si el robot no es la causa del error, se
arrojará “0”.
Consulte también
Era, Erl, Err, ErrMsg$, OnErr, Trap
Ejemplo de función Errb
Los siguientes elementos se arrojan en el ejemplo de programa que aparece a continuación.
En qué tarea ocurrió el error (función Ert)
Dónde ocurrió el error (función Erl)
Qué error ocurrió (función Err)
En qué articulación ocurrió el error (función Era)
En qué robot ocurrió el error (función Errb)
Function main
OnErr Goto eHandler
Do
Call PickPlace
Loop
Exit Function
eHandler:
Print "The Error code is ", Err
Print "The Error Message is ", ErrMsg$(Err)
errTask = Ert
If errTask > 0 Then
Print "Task number in which error occurred is ", errTask
Print "The line where the error occurred is Line ", Erl(errTask)
If Era(errTask) > 0 Then
Print "Joint which caused the error is ", Era(errTask)
EndIf
Print “Robot number in which error occurred is “, errb
EndIf
Fend

236 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función ErrMsg$
Arroja el mensaje de error que corresponde al número de error especificado.
Sintaxis
ErrMsg$(errNumber, langID)
Parámetros
errNumber Expresión entera que contiene el número de error por el cual se recibe el mensaje.
langID Opcional. Expresión entera que contiene la ID del idioma según los siguientes valores.
0 - Inglés
1 - Japonés
2 - Alemán
3 - Francés
4 - Chino simplificado
5 - Chino tradicional
Si se omite, se usa inglés.
Valores devueltos
Arroja el mensaje de error que se describe en la tabla de códigos de error.
Consulte también
Era, Erl, Err, Ert, OnErr, Trap
Ejemplo de función ErrMsg$
Los siguientes elementos se arrojan en el ejemplo de programa que aparece a continuación.
En qué tarea ocurrió el error (función Ert)
Dónde ocurrió el error (función Erl)
En qué articulación ocurrió el error (función Era)
Function main
OnErr Goto eHandler
Do
Call PickPlace
Loop
Exit Function
eHandler:
Print "The Error code is ", Err
Print "The Error Message is ", ErrMsg$(Err)
errTask = Ert
If errTask > 0 Then
Print "Task number in which error occurred is ", errTask
Print "The line where the error occurred is Line ", Erl(errTask)
If Era(errTask) > 0 Then
Print "Joint which caused the error is ", Era(errTask)
EndIf
EndIf
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 237
Instrucción Error
Genera un error de usuario.
Sintaxis
(1) Error task Number, errorNumber
(2) Error errorNumber
Parámetros
taskNumber Opcional. Expresión entera que representa un número de tarea desde 0 a 32.
“0” especifica la tarea actual.
errorNumber Expresión entera que representa un número de error válido. El rango de los números
de error de usuario está entre 8000 y 8999.
Descripción
Utilice la instrucción Error para generar los errores de sistema o definidos por el usuario. Se pueden definir
las etiquetas de error de usuario con el User Error Editor (Editor de errores de usuario) en el entorno de
desarrollo de EPSON RC+.
Consulte también
Era, Erl, Err, OnErr
Ejemplo de instrucción Error
#define ER_VAC 8000
If Sw(vacuum) = Off Then
Error ER_VAC
EndIf

238 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función ErrorOn
Arroja el estado de error del controlador.
Sintaxis
ErrorOn
Valores devueltos
Verdadero si el estado del controlador tiene errores, de lo contrario falso.
Descripción
La función ErrorOn solo se utiliza para la tarea NoEmgAbort (tarea especial que utiliza NoEmgAbort en
Xqt) y tarea en segundo plano.
Consulte también
ErrorOn, SafetyOn, SysErr, Wait, Xqt
Ejemplo de función ErrorOn
El siguiente ejemplo muestra un programa que monitorea el error del controlador y activa o desactiva la E/S
según el número del error cuando este ocurre.
Notas
Indicador Forced
Este ejemplo de programa usa el indicador Forced para el comando On/Off.
Al diseñar el sistema, asegúrese de que las salidas E/S cambien durante el error o una parada de emergencia
o apertura de la puerta de seguridad.
Después del error
Como este programa, termine la tarea rápidamente después de completar el control de errores.
Function main
Xqt ErrorMonitor, NoEmgAbort
:
:
Fend
Function ErrorMonitor
Wait ErrorOn
If 4000 < SysErr Then
Print "Motion Error = ", SysErr
Off 10, Forced
On 12, Forced
Else
Print "Other Error = ", SysErr
Off 11, Forced
On 13, Forced
EndIf
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 239
Función Ert
Arroja el número de tarea donde se produjo un error.
Sintaxis
Ert
Valores devueltos
El número de tarea donde se produjo el error.
Descripción
Se usa Ert cuando se produce un error para determinar en qué tarea se produjo.
Ert arroja el número de la manera siguiente:
Ninguna tarea con error (0), tarea normal (1 a 32), tarea en segundo plano (65 a 80), tarea TRAP (257 a 267).
Consulte también
Era, Erl, Err, ErrMsg$, OnErr, Trap
Ejemplo de función Ert
Los siguientes elementos se arrojan en el ejemplo de programa que aparece a continuación.
En qué tarea ocurrió el error (función Ert)
Dónde ocurrió el error (función Erl)
En qué articulación ocurrió el error (función Era)
Function main
OnErr Goto eHandler
Do
Call PickPlace
Loop
Exit Function
eHandler:
Print "The Error code is ", Err
Print "The Error Message is ", ErrMsg$(Err)
errTask = Ert
If errTask > 0 Then
Print "Task number in which error occurred is ", errTask
Print "The line where the error occurred is Line ", Erl(errTask)
If Era(errTask) > 0 Then
Print "Joint which caused the error is ", Era(errTask)
EndIf
EndIf
Fend

240 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función EStopOn
Arroja el estado de parada de emergencia.
Sintaxis
EStopOn
Valores devueltos
Verdadero si el estado está en parada de emergencia, de lo contrario, falso.
Descripción
La función EStopOn solo se utiliza para la tarea NoEmgAbort (tarea especial que utiliza NoEmgAbort en
Xqt).
Consulte también
ErrorOn, SafetyOn, Wait, Xqt
Ejemplo de función EStopOn
En el siguiente ejemplo se muestra un programa que monitorea la parada de emergencia y activa o desactiva
la E/S cuando se produce una parada de emergencia.
Notas
Indicador Forced
Este ejemplo de programa usa el indicador Forced para el comando On/Off.
Al diseñar el sistema, asegúrese de que las salidas E/S cambien durante el error o en una parada de emergencia
o protección abierta.
Control de errores
Como este programa, termine la tarea rápidamente después de completar el control de errores.
Salidas desactivadas durante parada de emergencia
Como este ejemplo de programa, cuando la tarea ejecuta la activación y desactivación de E/S después de la
parada de emergencia, se debe desmarcar la casilla de verificación [Setup]-[System Configuration]-
[Controller]-[Preferences]-[Outputs off during emergency stop] (Salidas desactivadas durante parada de
emergencia). Si esta casilla permanece marcada, no se garantiza el orden de ejecución de la desactivación
con el controlador o de la activación con la tarea.
Function main
Xqt EStopMonitor, NoEmgAbort
:
:
Fend
Function EStopMonitor
Wait EStopOn
Print "EStop !!!"
Off 10, Forced
On 12, Forced
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 241
Función Eval
Ejecuta una instrucción de la ventana Command desde un programa y arroja el estado de error.
Sintaxis
Eval( command [, reply$ ] )
Parámetros
command Una expresión de cadena que contiene un comando que desea ejecutar.
reply$ Opcional. Una variable de cadena que contiene la respuesta del comando.
Si el comando está en estado de error, arrojará “!Error: error code” (Error: Código de
error).
Si la respuesta tiene más de 255 caracteres, se truncarán los caracteres adicionales.
Valores devueltos
El código de error devuelto al ejecutar el comando.
Incluso si la ejecución del comando provoca un error, la función misma no será un error. Tampoco se
ingresa en el registro del sistema.
Cuando el comando se finaliza con éxito, arroja “0”.
Descripción
Se puede ejecutar cualquier comando (comandos ejecutables desde la ventana Command) desde el puerto
de comunicación como TCP/IP mediante Eval. Se requiere más tiempo para ejecutar esta función que
cuando se usa una instrucción normal.
Utilice el parámetro reply$ para obtener la respuesta del comando. Por ejemplo, si el comando era “Print
Sw(1)”, entonces reply$ sería un “1” o un “0”.
Consulte también
Códigos de error
Ejemplo de función Eval
En este ejemplo se muestra cómo ejecutar un comando que se lee en RS-232. Después de ejecutar el
comando, se arroja un código de error al host. Por ejemplo, host podría enviar un comando como "motor
on" (motor encendido).
Integer errCode
String cmd$
OpenCom #1
Do
Line Input #1, cmd$
errCode = Eval(cmd$)
Print #1, errCode
Loop

242 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción Exit
Sale de una construcción o función de bucle.
Sintaxis
Exit { Do | For | Function }
Descripción
La sintaxis de la instrucción Exit (salir) tiene estas formas:
Instrucción Descripción
Exit Do Proporciona una forma de salir de una instrucción Do... Loop. Solo se puede usar en una
instrucción Do... Loop. Exit Do traspasa el control a la instrucción que sigue a la
instrucción Loop. Cuando se usa dentro de instrucciones anidadas de tipo Do...Loop, Exit
Do transfiere el control al bucle que está un nivel de anidamiento por encima del bucle en
el que ocurre Exit Do.
Exit For Proporciona una forma de salir de un bucle For. Solo se puede usar en un bucle For...Next.
Exit For transfiere el control a la instrucción a continuación de la instrucción Next. Cuando
se usa dentro de bucles anidados For, Exit For transfiere el control al bucle que está un
nivel de anidamiento por encima del bucle en el que ocurre Exit For.
Función Exit Sale inmediatamente del procedimiento de función en el que aparece. La ejecución
continúa con la instrucción que sigue a la instrucción que llamó a la función.
Consulte también
Do...Loop, For...Next, Function...Fend
Ejemplo de instrucción Exit
For i = 1 To 10
If Sw(1) = On Then
Exit For
EndIf
Jump P(i)
Next i

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 243
Instrucción ExportPoints
Exporta un archivo de punto a la ruta especificada.
Sintaxis
ExportPoints fileName, destination
Parámetros
fileName Expresión de cadena que contiene el archivo específico que se exportará.
La extensión debe ser ".pts". No puede especificar una ruta de archivo y fileName no tiene
efecto de ChDisk. Consulte ChDisk para conocer detalles.
destination Especifica la ruta y el nombre del archivo para guardar el archivo.
La extensión debe ser ".pts". Consulte ChDisk para conocer detalles.
Descripción
ExportPoints copia un archivo de punto especificado a una carpeta en la PC.
Si el archivo ya existe en la carpeta, se sobrescribirá.
Posibles errores
El archivo no existe
Si la ruta especificada no existe, ocurrirá un error.
No se puede especificar una ruta
Si fileName contiene una ruta, ocurrirá un error.
Consulte también
Dir, LoadPoints, SavePoints, FileExists, FolderExists
Ejemplo de instrucción ExportPoints
Function main
LoadPoints "robot1.pts"
:
SavePoints "robot1.pts"
If FolderExists("c:\mypoints\") Then
ExportPoints "robot1.pts", "c:\mypoints\model1.pts"
EndIf
Fend

244 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función FbusIO_GetBusStatus
Arroja el estado del bus de campo especificado.
Sintaxis
FbusIO_GetBusStatus(busNumber)
Parámetros
busNumber Expresión entera que representa el número del sistema de bus de campo. Este número debe
ser 16. Esta es la ID del bus conectado a la placa maestra del bus de campo en el lado de la
PC del controlador.
Valores devueltos
0 - OK
1 - Desconectado
2 - Apagado
Descripción
FbusIO_GetBusStatus puede usarse para verificar el estado general del bus de campo.
Nota
Este comando solo funcionará si la opción Fieldbus Master está activada.
Consulte también
FbusIO_GetDeviceStatus, FbusIO_SendMsg
Ejemplo de función FbusIO_GetBusStatus
Long sts
sts = FbusIO_GetBusStatus(16)

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 245
Función FbusIO_GetDeviceStatus
Arroja el estado del dispositivo de bus de campo especificado.
Sintaxis
FbusIO_GetDeviceStatus(busNumber, deviceID)
Parámetros
busNumber Expresión entera que representa el número del sistema de bus de campo. Este número debe
ser 16. Esta es la ID del bus conectado a la placa maestra del bus de campo en el lado de la
PC del controlador.
deviceID Expresión entera que representa la ID de bus de campo del dispositivo.
Valores devueltos
0 - OK
1 - Desconectado
2 - Apagado
3 - Error de sincronización. El dispositivo está arrancando o tiene una velocidad en baudios incorrecta.
Descripción
FbusIO_GetDeviceStatus puede usarse para verificar el estado general de un dispositivo de bus campo.
Nota
Este comando solo funcionará si la opción Fieldbus Master está activada.
Consulte también
FbusIO_GetBusStatus, FbusIO_SendMsg
Ejemplo de función FbusIO_GetDeviceStatus
Long sts
sts = FbusIO_GetDeviceStatus(16, 10)

246 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción FbusIO_SendMsg
Envía un mensaje explícito a un dispositivo de bus de campo y devuelve la respuesta.
Sintaxis
FbusIO_SendMsg (busNumber, deviceID, msgParam, sendData(), recvData())
Parámetros
busNumber Expresión entera que representa el número del sistema de bus de campo.
Este número debe ser 16. Esta es la ID del bus conectado a la placa maestra del bus de
campo en el lado de la PC del controlador.
deviceID Expresión entera que representa la ID de bus de campo del dispositivo.
msgParam Expresión entera para el parámetro del mensaje. No se usa con DeviceNet.
sendData Matriz de tipo Byte que contiene datos que se envían al dispositivo. Esta matriz debe
dimensionarse de acuerdo con el número de bytes que se enviarán. Si no hay bytes para
enviar, especifique 0.
recvData Matriz de tipo Byte que contiene los datos recibidos del dispositivo. Esta matriz se
redimensionará automáticamente de acuerdo con el número de bytes recibidos.
Descripción
FBusIO_SendMsg se usa para consultar un dispositivo de bus de campo. Consulte al fabricante del
dispositivo para obtener información sobre la compatibilidad para mensajes.
Nota
Este comando solo funcionará si la opción Fieldbus Master está activada.
Consulte también
FbusIO_GetBusStatus, FbusIO_GetDeviceStatus

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 247
Ejemplo de instrucción FbusIO_SendMsg
' Envía un mensaje explícito al dispositivo DeviceNet
Byte sendData(5)
Byte recvData(0)
Integer i
sendData(0) = &H0E ' Comando
sendData(1) = 1 ' Clase
sendData(3) = 1 ' Instancia
sendData(5) = 7 ' Atributo
' msgParam es 0 para DeviceNet
FbusIO_SendMsg 16, 1, 0, sendData(), recvData()
' Muestra la respuesta
For i = 0 to UBound(recvData)
Print recvData(i)
Next i
' Envía el mensaje al dispositivo Profibus
Byte recvData(0)
Integer i
' msgParam es el número de servicio
FbusIO_SendMsg 16, 1, 56, 0, recvData()
' Muestra la respuesta
For i = 0 to UBound(recvData)
Print recvData(i)
Next i

248 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función FileDateTime$
Arroja la fecha y la hora de un archivo.
Sintaxis
FileDateTime$(filename)
Parámetros
fileName Una expresión de cadena que contiene el nombre del archivo que se va a comprobar.
También se pueden incluir la unidad de disco y la ruta.
Si solo se especifica el nombre del archivo, se muestra el archivo en el directorio
actual.
Consulte ChDisk para conocer detalles.
Nota
Hay una ruta de red disponible.
Valores devueltos
Arroja la fecha y hora de la última actualización en el siguiente formato:
m/d/aaaa hh:mm:ss
Consulte también
FileExists, FileLen
Ejemplo de función FileDateTime$
String myPath$
myPath$ = "c:\TEST\TEST.DAT"
If FileExists(myPath$) Then
Print "Last access date and time: ", FileDateTime$(myPath$)
Print "Size: ", FileLen(myPath$)
EndIf

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 249
Función FileExists
Comprueba si existe un archivo.
Sintaxis
FileExists ( filename )
Parámetros
fileName Una expresión de cadena que contiene el nombre del archivo que se va a comprobar.
También se pueden incluir la unidad de disco y la ruta.
Si solo se especifica el nombre del archivo, el archivo se comprueba en el directorio
actual.
Consulte ChDisk para conocer detalles.
Nota
Hay una ruta de red disponible.
Valores devueltos
True si el archivo existe, False si no es así.
Consulte también
FolderExists, FileLen, FileDateTime$
Ejemplo de función FileExists
String myPath$
myPath$ = "c:\TEST\TEST.DAT"
If FileExists(myPath$) Then
Print "Last access date and time: ", FileDateTime$(myPath$)
Print "Size: ", FileLen(myPath$)
EndIf

250 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función FileLen
Arroja la longitud de un archivo.
Sintaxis
FileLen ( filename )
Parámetros
fileName Una expresión de cadena que contiene el nombre del archivo que se va a comprobar.
Esto incluye el nombre de la unidad de disco y el nombre de la ruta.
Si solo se especifica el nombre del archivo, el archivo se comprueba en el directorio
actual.
Consulte ChDisk para conocer detalles.
Nota
Hay una ruta de red disponible.
Valores devueltos
Arroja la cantidad de bytes en el archivo.
Consulte también
FileDateTime$, FileExists
Ejemplo de función FileLen
String myPath$
myPath$ = "c:\TEST\TEST.DAT"
If FileExists(myPath$) Then
Print "Last access date and time: ", FileDateTime$(myPath$)
Print "Size: ", FileLen(myPath$)
EndIf

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 251
Instrucción Find
Especifica o muestra la condición para almacenar las coordenadas durante el movimiento.
Sintaxis
Find [condition]
Parámetros
condition Ingrese el estado especificado como disparador
[Event] operador comparativo ( =, <>, >=, >, <, <=) [Expresión entera]
Se pueden usar las siguientes funciones y variables en Event:
Funciones : Sw, In, InW, Oport, Out, OutW, MemSw, MemIn, MemInW, Ctr
GetRobotInsideBox, GetRobotInsidePlane, AIO_In, AIO_InW,
AIO_Out, AIO_OutW
Variables : Byte, Inr32, Integer, Long, Short, UByte, UInt32, UShort global
preserve variable, Global variable, module variable
También, puede especificar múltiples condiciones de evento si usa los siguientes
operadores.
Operador : And, Or, Xor
Ejemplo : Find Sw(5) = On
Find Sw(5) = On And Sw(6) = Off
Descripción
La instrucción Find puede usarse por sí sola o como modificador de un comando de movimiento.
La condición Find debe incluir como mínimo una de las funciones anteriores.
Cuando las variables están incluidas en la condición Find, sus valores se calculan cuando se configura la
condición Find. Se recomienda no usar variables. De lo contrario, la condición puede ser una condición no
intencional. Se permiten múltiples instrucciones Find. La condición Find más reciente es la que será la actual.
Cuando los parámetros se omiten, se muestra la definición actual de Find.
Notas
Configuración de Find al encenderse la alimentación principal
Al encenderse, la condición Find es:
Find Sw(0) = On 'Input bit 0 is on
Uso de la función PosFound para verificar Find
Use la función PosFound para verificar si se cumplió la condición Find después de ejecutar un comando de
movimiento mediante un modificador Find.
Uso de variables en la expresión de la condición del evento
- Las variables disponibles son del tipo de número entero (Byte, Int32, Integer, Long, Short, UByte, UInt32,
UShort)
- Las variables de matriz no están disponibles
- Las variables locales no están disponibles
- Si el valor de una variable no puede cumplir la condición del evento por más de 0,01 segundos, el sistema
no puede recuperar el cambio en las variables.
- Hasta 64 pueden esperar a las variables en un sistema (incluidas las que se usan en las expresiones de la
condición del evento, como Wait). Si es superior a 64, ocurre un error durante la compilación del proyecto.
- Si trata de trasladar una variable que espera variables como referencia con Byref, ocurrirá un error.
- Cuando se incluye una variable en el miembro del lado derecho de la expresión de la condición del evento,
el valor se calcula al iniciar el comando de movimiento. Recomendamos no usar variables en una expresión
entera para evitar crear condiciones no intencionales.

252 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Consulte también
FindPos, Go, Jump, PosFound
Ejemplo de instrucción Find
Find Sw(5) = On
Go P10 Find
If PosFound Then
Go FindPos
Else
Print "Cannot find the sensor signal."
EndIf

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 253
Función FindPos
Arroja un punto de robot almacenado por Fine durante un comando de movimiento.
Sintaxis
FindPos
Valores devueltos
Un punto de robot que se almacenó durante un comando de movimiento mediante Find.
Consulte también
Find, Go, Jump, PosFound, CurPos, InPos
Ejemplo de función FindPos
Find Sw(5) = On
Go P10 Find
If PosFound Then
Go FindPos
Else
Print "Cannot find the sensor signal."
EndIf

254 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción Fine
Especifica y muestra la precisión de posicionamiento de los puntos objetivo.
Sintaxis
(1) Fine axis1, axis2, axis3, axis4 [, axis5, axis6] [, axis7] [, axis8, axis9]
(2) Fine
Parámetros
axis1 Expresión entera que va de (0 a 65535) que representa el error de posicionamiento permisible
para la primera articulación.
axis2 Expresión entera que va de (0 a 65535) que representa el error de posicionamiento permisible
para la segunda articulación.
axis3 Expresión entera que va de (0 a 65535) que representa el error de posicionamiento permisible
para la tercera articulación.
axis4 Expresión entera que va de (0 a 65535) que representa el error de posicionamiento permisible
para la cuarta articulación.
axis5 Opcional. Expresión entera que va de (0 a 65535) que representa el error de posicionamiento
permisible para la quinta articulación. Solo para robots de 6 ejes (incluida la serie N).
axis6 Opcional. Expresión entera que va de (0 a 65535) que representa el error de posicionamiento
permisible para la sexta articulación. Solo para robots de 6 ejes (incluida la serie N).
axis 7 Opcional. Expresión entera que va de (0 a 65535) que representa el error de posicionamiento
permisible para la séptima articulación. Solo para el robot de 7 ejes de tipo con articulaciones.
axis 8 Opcional. Expresión entera que va de (0 a 65535) que representa el error de posicionamiento
permisible para la séptima articulación. Solo para el eje S adicional.
axis 9 Opcional. Expresión entera que va de (0 a 65535) que representa el error de posicionamiento
permisible para la séptima articulación. Solo para el eje T adicional.
* Para los manipuladores de la serie C8 y C12, el error de posicionamiento permisible es de 0 a 131070.
Valores devueltos
Cuando se usa sin parámetros, Fine muestra los valores actuales de Fine para cada eje.
Descripción
Fine especifica, para cada articulación, el error de posicionamiento permisible para detectar la finalización
de cualquier movimiento determinado.
Esta comprobación de finalización del posicionamiento comienza después de que la CPU ha completado el
envío del pulso de posición objetivo al sistema servo. Debido al retardo servo, el robot no habrá alcanzado
aún la posición objetivo. Esta comprobación sigue ejecutándose cada ciertos milisegundos hasta que cada
articulación haya llegado dentro de la configuración de rango especificada. El posicionamiento se considera
finalizado cuando todos los ejes han llegado a los rangos especificados. Cuando ha finalizado el
posicionamiento, el control del programa pasa a la siguiente instrucción, no obstante, el sistema servo
mantiene el control de la posición objetivo del robot.
Cuando se usan rangos relativamente grandes con la instrucción Fine, el posicionamiento se confirmará de
forma relativamente temprana en el movimiento, y ejecuta la siguiente instrucción.
La configuración Fine predeterminada depende del tipo de robot. Consulte su manual del robot para conocer
detalles.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 255
Notas
Tiempos de ciclo y la instrucción Fine
El valor Fine no afecta el control de aceleración o desaceleración del brazo del manipulador. Sin embargo,
valores Fine menores pueden provocar que el sistema funcione más lento porque puede al sistema servo
puede tomarle más tiempo (algunos milisegundos) ubicarse en el rango de posición aceptable. Una vez que
el brazo está ubicado dentro del rango de posición aceptable (definido por la instrucción Fine), la CPU ejecuta
la siguiente instrucción del usuario.
Inicialización de Fine (por Motor On, SLock, SFree)
Cuando se usa cualquiera de los siguientes comandos, el valor Fine se inicializará en el valor
predeterminado:
Instrucciones SLock, SFree, Motor.
Asegúrese de restablecer los valores Fine después de ejecutar uno de los comandos anteriores.
Posible error
Si no ha finalizado el posicionamiento de Fine en alrededor de 2 segundos, ocurrirá el Error 4024. Este error
normalmente significa que se debe ajustar el balance del sistema servo. (Llame a su distribuidor para obtener
asistencia).
Consulte también
Accel, AccelR, AccelS, Arc, Go, Jump, Move, Speed, SpeedR, SpeedS, Pulse, FineDist,
FineStatus
Ejemplo de instrucción Fine
Los siguientes ejemplos muestran la instrucción Fine usada en una función del programa y desde la ventana
del monitor.
Function finetest
Fine 5, 5, 5, 5 'reduce la precisión a +/- 5 Pulso
Go P1
Go P2
Fend
> Fine 10, 10, 10, 10
>
> Fine
10, 10, 10, 10

256 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función Fine
Arroja la configuración de Fine para una articulación especificada.
Sintaxis
Fine(joint)
Parámetros
joint Expresión entera que representa el número de articulación cuya configuración de Fine se
recuperará.
El eje S adicional es 8 y el eje T es 9.
Valores devueltos
Valor real.
Consulte también
Accel, AccelS, Arc, Go, Jump, Move, Speed, SpeedS, Pulse
Ejemplo de función Fine
Este ejemplo usa la función Fine en un programa:
Function finetst
Integer a
a = Fine(1)
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 257
Instrucción FineDist
Especifica y muestra los límites de error de posicionamiento. La unidad del valor de configuración es “mm”.
Sintaxis
(1) FineDist value
(2) FineDist
Parámetros
value Los valores permitidos de posicionamiento van de 0,001 [mm] a 10 [mm].
Valores devueltos
Si el parámetro no se especifica, FineDist muestra el valor actual configurado.
Fine y FineDist
La diferencia entre Fine y FineDist es la unidad de la comprobación del posicionamiento.
La instrucción Fine configura el valor de comprobación del posicionamiento en el pulso, y se realiza la
comprobación del posicionamiento en cada eje.
La instrucción Fine configura el valor de comprobación del posicionamiento en mm, y se realiza la
comprobación del posicionamiento en el sistema de coordenadas de la Herramienta número 0.
Fine y FineDist se pueden usar al mismo tiempo. Si Fine y FineDist se usan en el programa como se muestra
a continuación, la comprobación del posicionamiento la realizará FineDist. (Si se invierte el orden de Fine y
FineDist, Fine ejecutará la comprobación de posicionamiento).
Function test
Fine 5, 5, 5, 5
FineDist 0.1
Go P1
Go P2
Fend

258 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Nota
Inicialización de Fine (por Motor On, SLock, SFree, Till)
Cuando se usa cualquiera de los siguientes comandos, el valor FineDist se inicializará en el valor
predeterminado y Fine ejecutará la comprobación del posicionamiento:
SLock, SFree, Motor, Till
Asegúrese de restablecer el valor FineDist después de ejecutar uno de los comandos anteriores.
Posible error
Si el posicionamiento de FineDist no finaliza en alrededor de 2 segundos, ocurrirá el Error 4024. Este error
normalmente significa que se debe ajustar el balance del sistema servo.
Consulte también
Accel, AccelR, AccelS, Arc, Go, Jump, Move, Speed, SpeedR, SpeedS, Pulse, Fine, FineStatus
Ejemplo de instrucción FineDist
El siguiente ejemplo muestra la instrucción FineDist usada en una función del programa y desde la ventana
del monitor.
Function fineDisttest
Fine 0.1 'Ajustar precisión a +/- 0,1 mm
Go P1
Go P2
Fend
> FineDist 0.1
>
> FineDist
0.1

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 259
Función FineStatus
Arroja si Fine o FineDist son usadas por un número entero.
Sintaxis
FineStatus
Valores devueltos
Arroja si se usa Fine o no o si FineDist es usada por un número entero.
0 = Se usa Fine
1= Se usa FineDist
Consulte también
Fine, FineDist
Ejemplo de función FineStatus
Print FineStatus

260 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función Fix
Arroja la parte de número entero de un número real.
Sintaxis
Fix(number)
Parámetros
number Expresión real que contiene el número que se debe corregir.
Valores devueltos
Un valor entero que contiene la parte de número entero del número real.
Consulte también
Int
Ejemplo de función Fix
>print Fix(1.123)
1
>

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 261
Instrucción Flush
Escribe el búfer de un archivo en el archivo.
Sintaxis
Flush #fileNumber
Parámetros
#fileNumber Valor entero de 30 a 63 o una expresión
Descripción
Escribe el búfer de un archivo en el archivo especificado.
No se puede usar Flush si el archivo se abrió con ROpen.
Ejemplo de instrucción Flush
Integer fileNum, i
fileNum = FreeFile
UOpen "TEST.DAT" As #fileNum
For i = 0 To 100
Print #fileNum, i
Next i
Flush #fileNum
Close #fileNum

262 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción FmtStr
Aplica un formato a una expresión numérica o de fecha/hora.
Sintaxis
FmtStr expFormat, strFormat, stringVar
Parámetros
expression Expresión numérica o de fecha/hora a la que se aplicará formato.
Especifique la expresión de fecha/hora en “yyyy/mm/dd”.
strFormat Cadena de especificación de formato.
stringVar Variable de cadena de salida.
Descripción
Arroja la cadena con formato de acuerdo con strFormat.
Especificadores de formato numérico
Carácter Descripción
Ninguno Muestra el número sin formato.
(0) Marcador de posición de dígito. Muestra un dígito o un cero. Si la expresión tiene un dígito en
la posición en la que aparece "0" en la cadena de formato, lo muestra; de lo contrario, muestra
un cero en esa posición. Si el número tiene menos dígitos que ceros (en cualquier lado del
decimal) en la expresión de formato, muestra el primer o último "0". Si el número tiene más
dígitos a la derecha del separador de decimales que ceros a la derecha del separador de
decimales en la expresión del formato, redondea el número a tantos puestos decimales como
hay ceros. Si el número tiene más dígitos a la izquierda del separador de decimales que ceros a
la izquierda del separador de decimales en la expresión del formato, muestra los dígitos
adicionales sin modificarlos.
(#) Marcador de posición de dígito. Muestra un dígito o nada. Si la expresión tiene un dígito en la
posición en la que aparece "#" en la cadena de formato, lo muestra; de lo contrario, no muestra
nada en esa posición. Este símbolo funciona como el marcador de posición del dígito 0, excepto
que el primer y último cero no se muestran si el número tiene la misma cantidad de dígitos, o
menos, que caracteres "#" en cada lado del separador decimal en la expresión de formato.
(.) Marcador de posición decimal. En algunas localidades, se usa una coma como separador
decimal. El marcador de posición decimal determina la cantidad de dígitos que se muestra a la
izquierda y a la derecha del separador decimal. Si la expresión del formato solo contiene signos
numéricos a la izquierda de este símbolo, los números menores que 1 comienzan con un
separador decimal. Para mostrar un cero al principio que se representa con fracciones, use "0"
como el marcador de posición del primer dígito a la izquierda del separador decimal. El carácter
real utilizado como marcador de posición decimal en la salida con formato depende del formato
de número reconocido por su sistema.
(,) Separador de miles. En algunas localidades, se usa un punto como separador de miles. El
separador de miles separa los miles de las centenas dentro de un número que tiene cuatro o más
espacios a la izquierda del separador decimal. El uso del separador de miles se especifica si el
formato contiene un separador de miles rodeado por marcadores de posición de dígito (0 o #).
Dos separadores de miles adyacentes o un separador de miles inmediatamente a la izquierda
del separador decimal (sin importar si se especifica un decimal) significa "dividir el número
por 1000 para escalarlo, redondearlo de ser necesario". Por ejemplo, puede usar la cadena de
formato "##0,," para representar 100 millones como "100". Los números menores que 1 millón
se muestran como "0". Si hay dos separadores de miles adyacentes en cualquier posición que
no sea inmediatamente a la izquierda del separador decimal, simplemente se considera que
especifica el uso del separador de miles. El carácter real utilizado como separador de miles en
la salida con formato depende el formato de número reconocido por su sistema.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 263
Especificadores de expresión de fecha/hora
Carácter Descripción
(:) Separador de hora. En algunas variables locales, es posible que se usen otros caracteres.
El separador de hora separa horas, minutos y segundos cuando se aplica el formato a los
valores de tiempo. El carácter real utilizado como separador de horas en la salida con
formato depende de la configuración de Windows.
(/) Separador de fecha. En algunas variables locales, es posible que se usen otros caracteres.
El separador de fecha separa el día, el mes y el año cuando se aplica el formato a los
valores de fecha. El carácter real utilizado como separador de fecha en la salida con
formato depende de la configuración de Windows.
c Muestra la fecha en “ddddd” y la hora en “ttttt”, en este orden. Si el número de serie no
tiene una fracción, solo muestra la fecha. Si la información de temporización no tiene el
número entero, solo muestra la información de temporización.
d Muestra la fecha con el primer día sin “0”. (1 a 31)
dd Muestra la fecha con el primer día con “0”. (01 a 31)
ddd Muestra la abreviatura del día de la semana. (Dom a Sáb)
dddd Muestra el día de la semana sin abreviar. (Domingo a sábado)
ddddd Muestra el día, el mes y el año en el formato de la configuración corta de datos de
Windows. La configuración predeterminada del formato de visualización corta de datos es
m/d/aa.
dddddd Muestra los valores de serie de la fecha como día, mes y año en la configuración de
visualización larga de datos de Windows. La configuración predeterminada de la
visualización larga de datos es mmmm dd, aaaa.
w Muestra el día de la semana con un número. (1: Domingo ~ 7: Sábado)
ww Muestra la cantidad de semanas en un año con un número (1 a 54).
m Muestra el mes con el primer día sin un "0". (1 a 12)
Incluso si este carácter se coloca inmediatamente después de “h” o “hh”, no muestra
“minutos”. Para mostrar "minutos", use "n" o "nn".
mm Muestra el mes con el primer día con "0" (01 a 12).
Incluso si este carácter se coloca inmediatamente después de “h” o “hh”, no muestra
“minutos”. Para mostrar "minutos", use "n" o "nn".
mmm Muestra el nombre del mes abreviado (Ene a Dic)
mmmm Muestra el nombre del mes sin abreviar (Enero a diciembre).
q Muestra la cantidad de trimestres en un año (1 a 4).
y Muestra el día de un año. (1 a 366)
yy Muestra el año en 2 dígitos. (00 a 99)
yyy Muestra el año en 4 dígitos. (100 a 9999)
h Muestra la hora en un reloj de 24 horas sin “0” al principio (0 a 23)
hh Muestra la hora en un reloj de 24 horas con “0” al principio (00 a 23)
n Muestra el minuto sin “0” al principio. (0 a 59)
nn Muestra el minuto con “0” al principio (00 a 59)
s Muestra el segundo sin “0” al principio (0 a 59)
ss Muestra el segundo con “0” al principio. (00 a 59)
t t t t t Muestra el tiempo (hora, minuto, segundo) con el separador de tiempo de la configuración
de Windows. Si se usa la opción “initial zero”, el tiempo antes de las 10:00 am/pm se
muestra con “0” al principio. El formato de hora predeterminado de Windows es h:nn:ss.
AM/PM Muestra la hora en un reloj de 12 horas y la mañana y tarde con AM/PM (mayúsculas).
am/pm Muestra la hora en un reloj de 12 horas y la mañana y tarde con am/pm (minúsculas).
A/P Muestra la hora en un reloj de 12 horas y la mañana y tarde con A/P (mayúsculas).
a/p Muestra la hora en un reloj de 12 horas y la mañana y tarde con a/p (minúsculas).

264 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
AMPM Muestra la hora en un reloj de 12 horas. Para la mañana, muestra AM con una cadena y,
para la tarde, muestra PM con una cadena, cada una con la configuración de formato de
Windows. Si la cadena especificada coincide con la configuración de Windows, es posible
usar mayúsculas y minúsculas para AM/PM. La configuración predeterminada de
Windows es AM/PM.
Nota
Una combinación de especificadores de formato numérico y especificadores de hora/fecha
Ocurre un error si se especifican el especificador de formato numérico y el especificador de
hora/fecha.
Consulte también
Left$, Right$, Str$
Ejemplo de instrucción FmtStr
Function SaveData
String d$, f$, t$
' Crea el nombre del archivo con el formato
' mes, día, hora, minuto
d$ = Date$
t$ = Time$
d$ = d$ + " " + t$
FmtStr d$, "mmddhhnn", f$
f$ = f$ + ".dat"
WOpen f$ as #30
Print #30, "data"
Close #30
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 265
Función FmtStr$
Aplica formato a una expresión numérica.
Sintaxis
FmtStr$ (expFormat, strFormat)
Parámetros
expFormat Expresión numérica o de fecha/hora a la que se aplicará formato.
Especifique la expresión de fecha/hora en “yyyy/mm/dd”.
strFormat Cadena de especificación de formato.
Valores devueltos
Una cadena que contiene la expresión con formato.
Descripción
Use FmtStr$ para dar formato de cadena a una expresión numérica.
Especificadores de formato numérico
Carácter Descripción
Ninguno Muestra el número sin formato.
(0) Marcador de posición de dígito. Muestra un dígito o un cero. Si la expresión tiene un dígito en
la posición en la que aparece "0" en la cadena de formato, lo muestra; de lo contrario, muestra
un cero en esa posición. Si el número tiene menos dígitos que ceros (en cualquier lado del
decimal) en la expresión de formato, muestra el primer o último "0". Si el número tiene más
dígitos a la derecha del separador de decimales que ceros a la derecha del separador de
decimales en la expresión del formato, redondea el número a tantos puestos decimales como
hay ceros. Si el número tiene más dígitos a la izquierda del separador de decimales que ceros a
la izquierda del separador de decimales en la expresión del formato, muestra los dígitos
adicionales sin modificarlos.
(#) Marcador de posición de dígito. Muestra un dígito o nada. Si la expresión tiene un dígito en la
posición en la que aparece "#" en la cadena de formato, lo muestra; de lo contrario, no muestra
nada en esa posición. Este símbolo funciona como el marcador de posición del dígito 0, excepto
que el primer y último cero no se muestran si el número tiene la misma cantidad de dígitos, o
menos, que caracteres "#" en cada lado del separador decimal en la expresión de formato.
(.) Marcador de posición decimal. En algunas localidades, se usa una coma como separador
decimal. El marcador de posición decimal determina la cantidad de dígitos que se muestra a la
izquierda y a la derecha del separador decimal. Si la expresión del formato solo contiene signos
numéricos a la izquierda de este símbolo, los números menores que 1 comienzan con un
separador decimal. Para mostrar un cero al principio que se representa con fracciones, use "0"
como el marcador de posición del primer dígito a la izquierda del separador decimal. El carácter
real utilizado como marcador de posición decimal en la salida con formato depende del formato
de número reconocido por su sistema.
(,) Separador de miles. En algunas localidades, se usa un punto como separador de miles. El
separador de miles separa los miles de las centenas dentro de un número que tiene cuatro o más
espacios a la izquierda del separador decimal. El uso del separador de miles se especifica si el
formato contiene un separador de miles rodeado por marcadores de posición de dígito (0 o #).
Dos separadores de miles adyacentes o un separador de miles inmediatamente a la izquierda
del separador decimal (sin importar si se especifica un decimal) significa "dividir el número
por 1000 para escalarlo, redondearlo de ser necesario". Por ejemplo, puede usar la cadena de
formato "##0,," para representar 100 millones como "100". Los números menores que 1 millón
se muestran como "0". Si hay dos separadores de miles adyacentes en cualquier posición que
no sea inmediatamente a la izquierda del separador decimal, simplemente se considera que
especifica el uso del separador de miles. El carácter real utilizado como separador de miles en
la salida con formato depende el formato de número reconocido por su sistema.

266 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Especificadores de expresión de fecha/hora
Carácter Descripción
(:) Separador de hora. En algunas variables locales, es posible que se usen otros caracteres.
El separador de hora separa horas, minutos y segundos cuando se aplica el formato a los
valores de tiempo. El carácter real utilizado como separador de horas en la salida con
formato depende de la configuración de Windows.
(/) Separador de fecha. En algunas variables locales, es posible que se usen otros caracteres.
El separador de fecha separa el día, el mes y el año cuando se aplica el formato a los
valores de fecha. El carácter real utilizado como separador de fecha en la salida con
formato depende de la configuración de Windows.
c Muestra la fecha en “ddddd” y la hora en “ttttt”, en este orden. Si el número de serie no
tiene una fracción, solo muestra la fecha. Si la información de temporización no tiene el
número entero, solo muestra la información de temporización.
d Muestra la fecha con el primer día sin “0”. (1 a 31)
dd Muestra la fecha con el primer día con “0”. (01 a 31)
ddd Muestra la abreviatura del día de la semana. (Dom a sáb)
dddd Muestra el día de la semana sin abreviar. (Domingo a sábado)
ddddd Muestra el día, el mes y el año en el formato de la configuración corta de datos de
Windows. La configuración predeterminada del formato de visualización corta de datos es
m/d/aa.
dddddd Muestra los valores de serie de la fecha como día, mes y año en la configuración de
visualización larga de datos de Windows. La configuración predeterminada de la
visualización larga de datos es mmmm dd, aaaa.
w Muestra el día de la semana con un número. (1: Domingo ~ 7: Sábado)
ww Muestra la cantidad de semanas en un año con un número (1 a 54).
m Muestra el mes con el primer día sin un "0". (1 a 12)
Incluso si este carácter se coloca inmediatamente después de “h” o “hh”, no muestra
“minutos”. Para mostrar "minutos", use "n" o "nn".
mm Muestra el mes con el primer día con "0" (01 a 12).
Incluso si este carácter se coloca inmediatamente después de “h” o “hh”, no muestra
“minutos”. Para mostrar "minutos", use "n" o "nn".
mmm Muestra el nombre del mes abreviado (Ene a Dic)
mmmm Muestra el nombre del mes sin abreviar (Enero a diciembre).
q Muestra la cantidad de trimestres en un año (1 a 4).
y Muestra el día de un año. (1 a 366)
yy Muestra el año en 2 dígitos. (00 a 99)
yyy Muestra el año en 4 dígitos. (100 a 9999)
h Muestra la hora en un reloj de 24 horas sin “0” al principio (0 a 23)
hh Muestra la hora en un reloj de 24 horas con “0” al principio (00 a 23)
n Muestra el minuto sin “0” al principio. (0 a 59)
nn Muestra el minuto con “0” al principio (00 a 59)
s Muestra el segundo sin “0” al principio (0 a 59)
ss Muestra el segundo con “0” al principio. (00 a 59)
t t t t t Muestra el tiempo (hora, minuto, segundo) con el separador de tiempo de la configuración
de Windows. Si se usa la opción “initial zero”, el tiempo antes de las 10:00 am/pm se
muestra con “0” al principio. El formato de hora predeterminado de Windows es h:nn:ss.
AM/PM Muestra la hora en un reloj de 12 horas y la mañana y tarde con AM/PM (mayúsculas).
am/pm Muestra la hora en un reloj de 12 horas y la mañana y tarde con am/pm (minúsculas).
A/P Muestra la hora en un reloj de 12 horas y la mañana y tarde con A/P (mayúsculas).
a/p Muestra la hora en un reloj de 12 horas y la mañana y tarde con a/p (minúsculas).

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 267
AMPM Muestra la hora en un reloj de 12 horas. Para la mañana, muestra AM con una cadena y,
para la tarde, muestra PM con una cadena, cada una con la configuración de formato de
Windows. Si la cadena especificada coincide con la configuración de Windows, es posible
usar mayúsculas y minúsculas para AM/PM. La configuración predeterminada de
Windows es AM/PM.
Nota
Una combinación de especificadores de formato numérico y especificadores de hora/fecha
Ocurre un error si se especifican el especificador de formato numérico y el especificador de hora/fecha.
Consulte también
Left$, Right$, Str$
Ejemplo de función FmtStr$
Function SendDateCode
String d$, f$
f$ = FmtStr$(10, "000.00")
OpenCom #1
Print #1, f$
CloseCom #1
Fend

268 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función FolderExists
Comprueba si existe una carpeta.
Sintaxis
FolderExists(pathName)
Parámetros
pathName Una expresión de cadena que contiene la ruta de la carpeta que se comprobará.
También se pueden incluir la unidad de disco. Consulte ChDisk para conocer
detalles.
Nota
- Esta función es ejecutable solo con el disco de la PC.
Valores devueltos
True si la carpeta existe, False si no es así.
Consulte también
FileExists, MkDir
Ejemplo de función FolderExists
If Not FolderExists("c:\TEST") Then
MkDir "c:\TEST"
EndIf

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 269
Instrucción For...Next
Las instrucciones For...Next se usan juntas para crear un bucle en que las instrucciones ubicadas
entre For y Next se ejecutan múltiples veces según lo que especifique el usuario.
Sintaxis
For var = initValue To finalValue [Step increment ]
statements
Next [var]
Parámetros
var La variable de recuento usada con el bucle For...Next. Esta variable normalmente se
define como un número entero, pero también se puede definir como una variable
Real.
initValue El valor inicial para la var de contador.
finalValue El valor final para la var de contador. Cuando se cumple este valor, se completa el
bucle For...Next y la ejecución continúa a partir de la instrucción que sigue a la
instrucción Next.
increment Un parámetro opcional que define el incremento de recuento para cada vez que la
instrucción Next se ejecuta dentro del bucle For...Next. Esta variable puede ser positiva
o negativa. Sin embargo, si el valor es negativo, el valor inicial de la variable debe ser
mayor que el valor final de la variable. Si se excluye el valor de incremento, el sistema
automáticamente incrementa en “1”.
statements Se puede insertar cualquier instrucción SPEL
+
válida dentro del bucle For...Next.
Descripción
For...Next ejecuta un conjunto de instrucciones dentro de un bucle una cantidad especificada de veces. El
inicio del bucle es la instrucción For. El final del bucle es la instrucción Next. Se usa una variable para contar
el número de veces que se ejecutan las instrucciones dentro del bucle.
La primera expresión numérica (initValue ) es el valor inicial del contador. Este valor puede ser positivo o
negativo siempre que la variable finalValue y el incremento Step correspondan correctamente.
La segunda expresión numérica (finalValue ) es el valor final del contador. Este es el valor que una vez
alcanzado provoca que termine el bucle For...Next y el control del programa pasa a la siguiente instrucción
a continuación de la instrucción Next.
Las instrucciones del programa después de la instrucción For se ejecutan hasta que se alcanza la instrucción
Next. Luego la variable (var) del contador se incrementa en el valor Step definido por el parámetro increment.
Si no se usa la opción Step, el contador se incrementa en “1 (uno)”.
A continuación, la variable (var) del contador se compara con el valor final. Si el contador es menor o igual
que el valor final, se ejecutan nuevamente las instrucciones a continuación de la instrucción For. Si la variable
del contador es mayor que el valor final, la ejecución se bifurca fuera del bucle For...Next y continúa con la
instrucción inmediatamente posterior a la instrucción Next.

270 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Notas
Valores Step negativos:
Si el valor del incremento Step (increment) es negativo, la variable (var) del contador disminuye (reduce)
cada vez que pasa por el bucle y el valor inicial debe ser mayor que el valor final para que el bucle funcione.
No se requiere la variable a continuación de Next:
Se puede omitir el nombre de la variable a continuación de la instrucción Next. Sin embargo, para los
programas que contienen bucles anidados For...Next, se recomienda incluir el nombre de la variable a
continuación de la instrucción Next para ayudar a identificar rápidamente los bucles.
Cuando una variable se sale del bucle, el valor no es un valor final.
Function forsample
Integer i
For i = 0 To 3
Next
Print i ' Displays 4
Fend
Cuando sale del bucle mediante GoTo sin usar Exit For
Ocurrirá el error 2020 cuando ejecute el programa de manera reiterada para salir del bucle mediante el
comando GoTo, no el comando Exit For. Asegúrese de usar el comando Exit For para salir del bucle.
Consulte también
Do...Loop
Ejemplo de instrucción For...Next
Function fornext
Integer counter
For counter = 1 to 10
Go Pctr
Next counter
For counter = 10 to 1 Step -1
Go Pctr
Next counter
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 271
Instrucción Force_Calibrate
Define cero compensaciones para todos los ejes para el sensor de fuerza actual.
Sintaxis
Force_Calibrate
Parámetros
On | Off El Control de torque puede ser On u Off.
Descripción
Debe llamar a Force_Calibrate para cada sensor cuando se inicie su aplicación. Esto tomará en cuenta el
peso de los componentes montados en el sensor.
Nota
Este comando solo funcionará si la opción Force Sensing está activada.
Consulte también
Force_Sensor
Ejemplo de instrucción Force_Calibrate
Force_Calibrate

272 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Force_ClearTrigger
Borra todas las condiciones del disparador del sensor de fuerza actual.
Sintaxis
Force_ClearTrigger
Descripción
Use Force_ClearTrigger para borrar todas las condiciones para el disparador del sensor de fuerza actual.
Nota
Este comando solo funcionará si la opción Force Sensing está activada.
Consulte también
Force_Sensor, Force_SetTrigger
Ejemplo de instrucción Force_ClearTrigger
Force_ClearTrigger

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 273
Instrucción Force_GetForces
Arroja las fuerzas y torques para todos los ejes de sensores de fuerza en una matriz.
Sintaxis
Force_GetForces array()
Parámetros
array() Matriz real con un límite máximo de 6.
Valores devueltos
Los elementos de la matriz se completan como sigue:
Index Axis Constant
1 X Force FORCE_XFORCE
2 Y Force FORCE_YFORCE
3 Z Force FORCE_ZFORCE
4 X Torque FORCE_XTORQUE
5 Y Torque FORCE_YTORQUE
6 Z Torque FORCE_ZTORQUE
Descripción
Use Force_GetForces para leer todos los valores de fuerza y torque de una vez.
Nota
Este comando solo funcionará si la opción Force Sensing está activada.
Consulte también
Función Force_GetForce
Ejemplo de instrucción Force_GetForces
Real fValues(6)
Force_GetForces fValues()

274 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función Force_GetForce
Arroja la fuerza para un eje especificado.
Sintaxis
Force_GetForce (axis)
Parámetros
axis Expresión entera que representa al eje.
Eje Constante Valor
X Force FORCE_XFORCE 1
Y Force FORCE_YFORCE 2
Z Force FORCE_ZFORCE 3
X Torque FORCE_XTORQUE 4
Y Torque FORCE_YTORQUE 5
Z Torque FORCE_ZTORQUE 6
Valores devueltos
Arroja un valor real.
Descripción
Use Force_GetForce para leer la configuración de la fuerza actual para un eje. Las unidades se determinan
según el tipo de sensor de fuerza.
Nota
Este comando solo funcionará si la opción Force Sensing está activada.
Consulte también
Force_GetForces
Ejemplo de función Force_GetForce
Print Force_GetForce(1)

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 275
Instrucción Force_Sensor
Define el sensor de fuerza actual para la tarea actual.
Sintaxis
Force_Sensor sensorNumber
Parámetros
sensorNumber Expresión entera que representa el número del sensor.
Descripción
Cuando se usan varios sensores de fuerza en el mismo sistema, debe establecer el sensor de fuerza actual
antes de usar otros comandos de detección de fuerza.
Si su sistema tiene solo un sensor, no es necesario que use Force_Sensor porque el número predeterminado
del sensor es 1.
Nota
Este comando solo funcionará si la opción Force Sensing está activada.
Consulte también
Función Force_Sensor
Ejemplo de instrucción Force_Sensor
Force_Sensor 1

276 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función Force_Sensor
Arroja el sensor de fuerza actual para la tarea actual.
Sintaxis
Force_Sensor
Descripción
Force_Sensor arroja el sensor actual para la tarea actual. Cuando se inicia una tarea, el número del sensor
se configura automáticamente en 1.
Nota
Este comando solo funcionará si la opción Force Sensing está activada.
Consulte también
Force_Sensor
Ejemplo de función Force_Sensor
var = Force_Sensor

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 277
Instrucción Force_SetTrigger
Define el disparador de fuerza para el comando Till.
Sintaxis
Force_SetTrigger axis, Threshold, CompareType
Parámetros
axis Expresión entera que contiene el eje del sensor de fuerza deseado.
Eje Constante Valor
X Force FORCE_XFORCE 1
Y Force FORCE_YFORCE 2
Z Force FORCE_ZFORCE 3
X Torque FORCE_XTORQUE 4
Y Torque FORCE_YTORQUE 5
Z Torque FORCE_ZTORQUE 6
Threshold Expresión real que contiene el umbral deseado en las unidades para el sensor que se
utiliza.
CompareType Comparación Constante Valor
Menor o igual que FORCE_LESS 0
Mayor o igual que FORCE_GREATER 1
Descripción
Para detener el movimiento con un sensor de fuerza, debe definir el disparador para el sensor, luego usar
Till Force en la instrucción de movimiento.
Puede definir el disparador con varios ejes. Llame a Force_SetTrigger para cada eje. Para desactivar un
eje, defina el umbral en 0.
Nota
Este comando solo funcionará si la opción Force Sensing está activada.
Consulte también
Force_Calibrate
Ejemplo de instrucción Force_SetTrigger
'Configure al disparador para que detenga el movimiento cuando la fuerza sea menor que −1 en el eje
Z.
Force_SetTrigger 3, -1, 0
SpeedS 3
AccelS 5000
Move Place Till Force

278 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función FreeFile
Arroja/reserva un número de archivo que actualmente no está en uso.
Sintaxis
FreeFile
Valores devueltos
Número entero entre 30 y 63.
Consulte también
AOpen, BOpen, ROpen, UOpen, WOpen, Close
Ejemplo de función FreeFile
Integer fileNum, i, j
fileNum = FreeFile
WOpen "TEST.DAT" As #fileNum
For i = 0 To 100
Print #fileNum, i
Next i
Close #fileNum
fileNum = FreeFile
ROpen "TEST.DAT" As #fileNum
For i = 0 to 100
Input #fileNum, j
Print "data = ", j
Next i
Close #fileNum

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 279
Instrucción Function...Fend
Una función es un grupo de instrucciones de programa que incluye una instrucción Function como la
primera instrucción y una instrucción Fend como la última instrucción.
Sintaxis
Function funcName [(argList)] [As type(function)]
statements
Fend
Parámetros
funcName El nombre que se da al grupo específico de instrucciones limitadas entre las
instrucciones Function y Fend. El nombre de la función debe contener caracteres
alfanuméricos y puede tener una longitud de hasta 64 caracteres. También se permiten
los guiones bajos.
argList Opcional. Lista de variables que representan argumentos que se transfieren al
procedimiento de Function cuando se lo llama. Múltiples variables se separan con
comas.
El argumento arglist tiene la siguiente sintaxis:
[ {ByRef | ByVal} ] varName [( )] As type(argument)
ByRef Opcional. Especifique ByRef cuando haga referencia a la
variable que será vista por la función que realiza la llamada.
En este caso, el cambio de argumento en una función se puede
reflejar a la variable del lado que llama.
ByVal Opcional. Especifique ByVal cuando no desee que los cambios
en el valor de la variable sean vistos por la función de llamada.
Este es el valor predeterminado.
varName [( )] Obligatorio. Nombre de la variable que representa el
argumento; sigue las convenciones de nomenclatura de
variables estándar. Si usa una variable de matriz como
argumento, debe especificar ByRef y agregar paréntesis vacíos
“()” que representan la matriz después del nombre de variable.
As type (argument) Obligatorio. Debe declarar el tipo de argumento.
As type (function) Use este parámetro si desea obtener valores devueltos. Debe declarar el tipo de valores
devueltos.
Valores devueltos
Valor cuyo tipo de datos se especifica como la cláusula As al final de la declaración de función (As
type(function)).
Descripción
La instrucción Function indica el comienzo de un grupo de instrucciones SPEL
+
. Para indicar donde finaliza
una función, usamos la instrucción Fend. Todas las instrucciones ubicadas entre las instrucciones Function y
Fend se consideran parte de la función.
La combinación de instrucciones Function...Fend podría considerarse como un recipiente donde todas las
instrucciones ubicadas entre las instrucciones Function y Fend corresponden a esa función. Pueden existir
múltiples funciones en un archivo de programa.
Si desea usar el valor devuelto, asigne el valor al nombre de la variable que tiene el mismo nombre que la
función y luego termine la función.
Consulte también
Call, Fend, Halt, Quit, Return, Xqt

280 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Ejemplo de instrucción Function...Fend
<Ejemplo 1>
El siguiente ejemplo muestra 3 funciones que están dentro de un único archivo. Las funciones llamadas task2
y task3 se ejecutan como tareas en segundo plano mientras que la tarea principal llamada main se ejecuta en
primer plano.
Function main
Xqt 2, task2 'Ejecuta task2 en segundo plano
Xqt 3, task3 'Ejecuta task3 en segundo plano
'....más instrucciones aquí
Fend
Function task2
Do
On 1
On 2
Off 1
Off 2
Loop
Fend
Function task3
Do
On 10
Wait 1
Off 10
Loop
Fend
<Ejemplo 2>
En el siguiente ejemplo, la secuencia del control de presión para los dispositivos periféricos se proporciona
como un argumento y el resultado enviado al dispositivo externo se muestra como un valor devuelto.
Function main
Integer iResult
Real Sequence1(200)
.
.
iResult = PressureControl(ByRef Sequence1()) 'El argumento es una matriz
.
Print "Result:", iResult
.
Fend
Function PressureControl(ByRef Array1() As Real) As Integer
.
(Presión de control para los periféricos de acuerdo con Array1)
.
PressureControl = 3 'Valor devuelto
.
.
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 281
Función GetCurrentUser$
Arroja el usuario actual de EPSON RC+.
Sintaxis
GetCurrentUser$
Valores devueltos
Cadena que contiene la logID del usuario actual.
Nota
Este comando solo funcionará si la opción Security está activada.
Consulte también
Instrucción LogIn
Ejemplo de función GetCurrentUser$
String currUser$
currUser$ = GetCurrentUser$

282 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función GetRobotInsideBox
Arroja un robot que está en el área de comprobación de acercamiento.
Sintaxis
GetRobotInsideBox(AreaNum)
Parámetros
AreaNum Valor de número entero (1 a 15) que representa el área de comprobación de
acercamiento cuyo estado desea que se arroje.
Valores devueltos
Arroja el robot que está en el área de comprobación de acercamiento especificada con AreaNum en bit.
Bit 0 : Robot 1 ……… Bit 15 : Robot 16
Si el robot no configura el área de comprobación de acercamiento, bit siempre es 0.
Por ejemplo, Robot 1, Robot 3 están en el área de comprobación de acercamiento, bit 0, bit 2 será On y se
arrojará 5.
Consulte también
Box, InsideBox
Ejemplo de función GetRobotInsideBox
El siguiente programa usa la función GetRobotInsideBox.
Espere a que el estado sea que no hay robots en el área de comprobación de acercamiento.
Function WaitNoBox
Wait GetRobotInsideBox(1) = 0
Espere a que el estado sea que solo el Robot 2 está en el área de comprobación de acercamiento.
Function WaitInBoxRobot2
Wait GetRobotInsideBox(1) = &H2
El siguiente programa usa la función GetRobotInsideBox en el procesamiento paralelo del comando de
movimiento. Cuando un robot esté en el área de comprobación de acercamiento específica mientras está
ejecutándose, activa la E/S. En este caso, hay un robot conectado al controlador.
Function Main
Motor On
Power High
Speed 30; Accel 30, 30
Go P1 !D0; Wait GetRobotInsideBox(1) = 1; On 1!
Fend
Nota
Se debe describir D0.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 283
Función GetRobotInsidePlane
Arroja un robot que está en el plano de comprobación de acercamiento.
Sintaxis
GetRobotInsidePlane (PlaneNum)
Parámetros
PlaneNum Valor de número entero (1 a 15) que representa el plano de comprobación de
acercamiento cuyo estado desea que se arroje.
Valores devueltos
Arroja el número del robot que está en el plano de comprobación de acercamiento especificado con PlaneNum
en bit.
Bit 0 : Robot 1 ……… Bit 15 : Robot 16
Si el robot no configura el plano de comprobación de acercamiento, siempre arroja un bit de 0.
Por ejemplo, Robot 1, Robot 3 están en el plano de comprobación de acercamiento, bit 0, bit 2 será On y se
arrojará 5.
Consulte también
InsidePlane, Plane
Ejemplo de función GetRobotInsidePlane
El siguiente programa usa la función GetRobotInsidePlane.
Espere a que el estado sea que no hay robots en el plano de comprobación de acercamiento.
Function WaitNoPlane
Wait GetRobotInsidePlane(1) = 0
Espere a que el estado sea que solo el Robot 2 está en el plano de comprobación de acercamiento.
Function WaitInPlaneRobot2
Wait GetRobotInsidePlane(1) = &H2
El siguiente programa usa la función GetRobotInsidePlane en el procesamiento paralelo del comando de
movimiento. Cuando un robot está en el plano de comprobación de acercamiento específico mientras está
ejecutándose, activa la E/S. En este caso, hay un robot conectado al controlador.
Function Main
Motor On
Power High
Speed 30; Accel 30, 30
Go P1 !D0; Wait GetRobotInsidePlane(1) = 1; On 1!
Fend
Nota
Se debe describir D0.

284 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción Global
Declara variables con alcance global. Se puede acceder a las variables globales desde cualquier lugar.
Sintaxis
Global [ Preserve ] dataType varName [(subscripts)] [, varName [(subscripts)] , ...]
Parámetros
Preserve Si se especifica Preserve, la variable conserva sus valores. Los valores son borrados
por los cambios del proyecto. Si se omite Preserve, la variable no conserva sus valores.
dataType Tipo de datos que incluye Boolean, Byte, Double, Int32, Integer, Long, Real, Short,
String, UByte, UInt32 o UShort.
varName Nombre de variable. Los nombres pueden tener hasta 32 caracteres de longitud.
subscripts Opcional. Las dimensiones de una matriz son variables; es posible declarar hasta 3
dimensiones. La sintaxis del subíndice es la siguiente
(ubound1, [ubound2], [ubound3])
ubound1, ubound2, ubound3 especifican, cada una, el límite superior máximo para la
dimensión asociada.
Los elementos en cada dimensión de una matriz se numeran desde 0 hasta el valor de
límite máximo.
La cantidad total de elementos de matriz disponibles para las variables globales es de
10000 para las cadenas y 100000 para todos los otros tipos.
La cantidad total de elementos de matriz disponibles para las variables globales
conservadas es de 400 para las cadenas y 4000 para todos los otros tipos.
Para calcular el total de elementos utilizado en una matriz, use la siguiente fórmula.
(Si no se usa una dimensión, substituya 0 por el valor ubound)
elementos totales = (ubound1 + 1) * (ubound2 + 1) * (ubound3 + 1)
Descripción
Las variables globales son variables que se pueden usar en más de 1 archivo dentro del mismo proyecto. Se
borran cada vez que se inicia una función desde la ventana Run o la ventana Operator a menos que se declaren
con la opción Preserve.
Cuando se declara en la opción Preserve, la variable conserva el valor al desactivar el controlador.
Las variables Global Preserve se pueden usar con la opción RC+ Connectivity.
Se recomienda que los nombres de las variables globales comiencen con un prefijo "g_" para reconocer
fácilmente dichas variables en un programa. Por ejemplo:
Global Long g_PartsCount
Consulte también
Boolean, Byte, Double, Int32, Int64, Integer, Long, Real, Short, String, UByte, UInt32, UInt64,
UShort

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 285
Ejemplo de instrucción Global
El siguiente ejemplo muestra 2 archivos de programa separados. El primer archivo de programa define
algunas variables globales y las inicializa. El segundo archivo a continuación también usa estas variables
globales.
FILE1 (MAIN.PRG)
Global Integer g_Status
Global Real g_MaxValue
Function Main
g_Status = 10
g_MaxValue = 1.1
.
.
Fend
FILE2 (TEST.PRG)
Function Test
Print "status1 =" , g_Status
Print "MaxValue =" , g_MaxValue
.
.
Fend

286 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción Go
Mueve el brazo usando un movimiento de punto a punto desde la posición actual hasta el punto
especificado o la posición X, Y, Z, U, V, W. La instrucción Go puede mover cualquier combinación de
articulaciones de 1 a 6 al mismo tiempo.
Sintaxis
Go destination [CP] [LJM [orientationFlag]] [PerformMode modeNumber]
[searchExpr] [!...!] [SYNC]
Parámetros
destination El destino objetivo del movimiento que usa una expresión de punto.
CP Opcional. Especifica un movimiento de ruta continua.
LJM Opcional. Convierte el destino objetivo con la función LJM.
orientationFlag Opcional. Especifica un parámetro que selecciona un indicador de orientación para la
función LJM.
PerformMode Opcional. Especifique el modo de rendimiento del robot.
modeNumber Especifica el modo de operación asignado a PerformMode con un valor de número entero
(1 a 3) o con la siguiente constante. Si se especifica PerformMode, no se puede omitir
este parámetro.
Constante Valor Descripción
Mode_Standard 1 Define el modo estándar
Mode_High_Speed 2 Define el modo de alta velocidad
Mode_Low_Oscillation 3 Define el modo de baja oscilación
searchExpr Opcional. Una expresión Till o Find.
Till | Find
Till Sw(expr) = {On | Off}
Find Sw(expr) = {On | Off}
!...! Opcional. Es posible agregar las instrucciones de procesamiento paralelo para ejecutar
E/S y otros comandos durante el movimiento.
SYNC Reserva un comando de movimiento. El robot no se moverá hasta que se ejecute
SyncRobots.
Descripción
Go mueve de forma simultánea todas las articulaciones del brazo del robot mediante movimiento de punto a
punto. El destino para la instrucción Go puede definirse de diversas formas:
- Mediante el uso de un punto específico hacia el cual moverse. Por ejemplo: Go P1.
- Mediante el uso de una posición de coordenadas explícita hacia la cual moverse. Por ejemplo: Go
XY(50, 400, 0, 0).
- Mediante el uso de un punto con una compensación de coordenadas. Por ejemplo: Go P1 +X(50).
- Mediante el uso de un punto, pero con un valor de coordenadas diferente. Por ejemplo: Go P1 :X(50).
La ruta no es predecible porque cada articulación se interpola entre el punto actual y el punto objetivo. Tenga
cuidado con la interferencia con los dispositivos periféricos.
La instrucción Speed determina la velocidad del brazo para el movimiento iniciado por la instrucción Go.
La instrucción Accel define la aceleración.
Con el parámetro CP, el brazo puede acelerar para el siguiente comando de movimiento mientras que el brazo
comienza a desacelerar hasta detenerse. En este caso, el brazo no se posiciona en el punto objetivo.
Con el parámetro LJM, el brazo se mueve al punto en el que el punto objetivo se convierte mediante una
función LJM, con el punto actual como punto de referencia.
Go LJM (P1, Here, 1) puede ser Go P1 LJM 1.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 287
En este punto, los datos del punto original P1 no cambian.
El parámetro LJM está disponible para los robots de 6 ejes (incluida la serie N) y los robots de la serie RS.
Cuando use orientationFlag con el valor predeterminado, se puede omitir.
Go P1 LJM
Los modos de movimiento de desaceleración y movimiento de aceleración se pueden combinar cuando se
define PerformMode mientras el movimiento de ruta está activado. Algunas combinaciones no están
disponibles según los modos de operación. Para conocer detalles, consulte Instrucción PerformMode.
Notas
Diferencia entre Go y Move
La instrucción Move y la instrucción Go ambas provocan que el brazo del robot se mueva. Sin embargo, la
diferencia principal entre las 2 instrucciones es que la instrucción Go genera un movimiento de punto a punto,
mientras que la instrucción provoca que el brazo se mueva en línea recta. La instrucción Go se usa cuando al
usuario le interesa principalmente la orientación del brazo cuando llega al punto. La instrucción Move se usa
cuando es importante controlar la ruta del brazo del robot mientras se mueve.
Diferencia entre Go y Jump
La instrucción Jump y la instrucción Go ambas provocan que el brazo del robot se mueva de un punto a otro
punto. Sin embargo, la instrucción JUMP tiene una característica adicional. Jump genera que el efector final
del robot se mueva primero hacia arriba al valor LimZ, luego en dirección horizontal hasta estar sobre el
punto objetivo, para luego finalmente bajar al punto objetivo. Esto permite que Jump se use para garantizar
esquivar objetos y lo que es más importante, mejorar los tiempos de ciclo para los movimientos de recoger y
colocar.
Instrucciones apropiadas Speed y Acceleration con Go
Las instrucciones Speed y Accel se usan para especificar la velocidad y aceleración del manipulador durante
el movimiento causado por la instrucción Go. Preste suma atención al hecho de que las instrucciones Speed
y Accel se aplican a movimiento del tipo de punto a punto (como el de la instrucción Go) mientras que el
movimiento de interpolación lineal y circular usa las instrucciones SpeedS y AccelS.
Usar Go con el modificador opcional Till
El modificador opcional Till permite al usuario especificar una condición para hacer que el robot desacelere
hasta detenerse en una posición intermedia antes de completar el movimiento causado por la instrucción Go.
Si la condición Till no se cumple, el robot se desplaza hacia la posición objetivo. Go con el modificador Till
se puede usar de 2 formas como se describe a continuación:
(1) Go con el modificador Till
Comprueba si la condición Till actual se llega a cumplir. Si se cumple, este comando se completa
al desacelerar y detener el robot en una posición intermedia antes de completar el movimiento
causado por la instrucción Go.
(2) Go con el modificador Till, el modificador Sw(Input bit number) y la condición Input
Esta versión de Go con el modificador Till permite al usuario especificar la condición Till en la
misma línea con la instrucción Go en lugar de usar la definición actual anteriormente definida para
Till. La condición especificada es simplemente una comprobación contra una de las entradas. Esto
se logra mediante la instrucción Sw. El usuario puede comprobar si la entrada está activada o
desactivada y causar que el brazo se detenga según la condición especificada. Esta característica
actúa casi como un bloqueo en que el movimiento se interrumpe (detiene) una vez que se cumple
la condición Input. Si la condición input nunca se cumple durante el movimiento del robot, el brazo
logra llegar al punto especificado por destination.
Usar Go con el modificador opcional Find
El modificador opcional Find permite al usuario especificar una condición para hacer que el robot registre
una posición durante el movimiento causado por la instrucción Go. Go con el modificador Find se puede usar
de 2 formas como se describe a continuación:
(1) Go con el modificador Find:
Comprueba si la condición Find actual se llega a cumplir. Si se cumple, la posición actual se
almacena en el punto especial FindPos.
(2) Go con el modificador Find, el modificador Sw(Input bit number) y la condición Input:
Esta versión de Go con el modificador Find permite al usuario especificar la condición Find en la
misma línea con la instrucción Go en lugar de usar la definición actual anteriormente definida para

288 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Find. La condición especificada es simplemente una comprobación contra una de las entradas. Esto
se logra mediante la instrucción Sw. El usuario puede comprobar si la entrada está activada o
desactivada y causar que la posición actual se almacene en el punto especial FindPos.
La instrucción Go siempre desacelera hasta detenerse
La instrucción Go siempre causa que el brazo se desacelere hasta detenerse antes de llegar al destino final
del movimiento.
Posible error
Intento de movimiento fuera del envolvente de trabajo de los robots
Cuando se usen coordenadas explícitas con la instrucción Go, debe asegurarse de que las coordenadas
definidas estén dentro del envolvente de trabajo válido de los robots. Cualquier intento de mover el robot
fuera del envolvente de trabajo válido ocasionará un error.
Consulte también
!...! Parallel Processing, Accel, Find, Jump, Move, Pass, P#= (Point Assignment), PerformMode,
Pulse, Speed, Sw, Till
Ejemplo de Go
El ejemplo a continuación muestra un movimiento simple de punto a punto entre los puntos P0 y P10. Luego,
en el programa, el brazo se mueve en línea recta hacia el punto P2 hasta que se activa la entrada n.° 2. Si la
entrada 2 se activa durante Go, el brazo se desacelera hasta detenerse antes de llegar al punto P2 y se ejecuta
la siguiente instrucción del programa.
Ejemplo de función
Integer i
Home
Go P0
Go P1
For i = 1 to 10
Go P(i)
Next i
Go P2 Till Sw(2) = On
If Sw(2) = On Then
Print "Input #2 came on during the move and"
Print "the robot stopped prior to arriving on"
Print "point P2."
Else
Print "The move to P2 completed successfully."
Print "Input #2 never came on during the move."
EndIf
Fend
A continuación, se muestran algunos ejemplos desde la ventana de comandos:
>Go Here +X(50) ' Mover solamente en la dirección X a 50 mm de la posición actual
>Go P1 ' Ejemplo simple de mover al punto P1
>Go P1 :U(30) ' Mover a P1, pero usar +30 como la posición hacia la cual se mueva la
articulación U
>Go P1 /L ' Mover a P1, pero asegurarse de que el brazo termine en una posición a
la izquierda
>Go XY(50, 450, 0, 30) ' Mover a la posición X=50, Y=450, Z=0, U=30
<Otro ejemplo de codificación>
Till Sw(1) = Off And Sw(2) = On ' Especifica las condiciones Till para las entradas 1 y 2
Go P1 Till ' Detener si se cumple la condición Till actual definida en la línea anterior
Go P2 Till Sw(2) = On ' Detener si el bit 2 de entrada está activado
Go P3 Till ' Detener si se cumple la condición Till actual definida en la línea
anterior

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 289
GoSub...Return
GoSub transfiere el control del programa a una subrutina. Una vez que se completa la subrutina, el control
del programa vuelve a la línea a continuación de la instrucción GoSub que inició la subrutina.
Sintaxis
GoSub { label }
{ label:}
statements
Return
Parámetros
label Cuando el usuario especifica una etiqueta, la ejecución del programa saltará a la línea
en la que reside la etiqueta. La etiqueta puede tener hasta 32 caracteres de longitud.
Sin embargo, el primer carácter debe ser un carácter alfabético (no numérico).
Descripción
La instrucción GoSub causa que el control del programa se bifurque a la etiqueta de instrucción especificada
por el usuario. El programa luego ejecuta la instrucción en esa línea y continúa la ejecución por los números
subsiguientes de la línea hasta que se encuentre la instrucción Return. Luego, la instrucción Return causa que
el control del programa se transfiera de vuelta a la línea inmediatamente posterior a la línea con la que se
inició GoSub en primer lugar. (es decir, la instrucción GoSub provoca la ejecución de una subrutina y luego
la ejecución se devuelve a la instrucción que sigue a la instrucción GoSub). Asegúrese de siempre terminar
cada subrutina con Return. Esto ordena a la ejecución del programa que vuelva a la línea siguiente a la
instrucción GoSub.
Posibles errores
Bifurcación a una instrucción no existente
Si la instrucción GoSub intenta bifurcar el control a una etiqueta no existente, se emitirá un error 3108.
Se encontró Return sin GoSub
Se usa una instrucción Return para "volver" desde una subrutina al programa original que emitió la
instrucción GoSub. Si se encuentra una instrucción Return sin que primero se haya emitido una instrucción
GoSub, ocurrirá un error 2383. Una instrucción Return autónoma significa nada, ya que el sistema no sabe
a dónde volver.
Consulte también
GoTo, OnErr, Return

290 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Ejemplo de instrucción GoSub
El siguiente ejemplo muestra una función simple que usa una instrucción GoSub para bifurcarse a una
etiqueta y ejecutar algunas instrucciones E/S y luego volver.
Function main
Integer var1, var2
GoSub checkio 'GoSub con etiqueta
On 1
On 2
Exit Function
checkio: 'La subrutina comienza aquí
var1 = In(0)
var2 = In(1)
If var1 = 1 And var2 = 1 Then
On 1
Else
Off 1
EndIf
Return 'La subrutina termina aquí
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 291
Instrucción GoTo
La instrucción GoTo causa que el control del programa se bifurque incondicionalmente a una etiqueta de
instrucción designada.
Sintaxis
GoTo { label }
Parámetros
label La ejecución del programa saltará a la línea en la que reside la etiqueta. La etiqueta puede tener
hasta 32 caracteres. Sin embargo, el primer carácter debe ser un carácter alfabético (no
numérico).
Descripción
La instrucción GoTo causa que el control del programa se bifurque a la etiqueta especificada por el usuario.
El programa luego ejecuta la instrucción en esa línea y continúa la ejecución a partir de esa línea. GoTo se
usa más comúnmente para saltar a una etiqueta de salida debido a un error.
Nota
Usar demasiadas instrucciones GoTo
Tenga cuidado con la instrucción GoTo porque usar demasiadas instrucciones GoTo en un programa puede
hacer que este sea difícil de entender. La regla general es intentar usar la menor cantidad posible de
instrucciones GoTo. Casi siempre son necesarias algunas instrucciones GoTo. Sin embargo, saltar por todo
el código fuente mediante el uso de demasiadas instrucciones GoTo es una forma fácil de crear problemas.
Consulte también
GoSub, OnErr
Ejemplo de instrucción GoTo
El siguiente ejemplo muestra una función simple que usa una instrucción GoTo para bifurcarse a una etiqueta
de línea.
Function main
If Sw(1) = Off Then
GoTo mainAbort
EndIf
Print "Input 1 was On, continuing cycle"
.
.
Exit Function
mainAbort:
Print "Input 1 was OFF, cycle aborted!"
Fend

292 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción Halt
Suspende temporalmente la ejecución de una tarea especificada.
Sintaxis
Halt taskIdentifier
Parámetros
taskIdentifier El nombre de la tarea o la expresión entera que representa el número de tarea.
El nombre de la tarea corresponde al nombre de la función usada en una instrucción
Xqt o una función iniciada desde la ventana Run o la ventana Operator. Si se usa una
expresión entera, el rango es de 1 a 16 para tareas normales y de 257 a 261 para
tareas de captura.
Descripción
Halt suspende temporalmente la tarea en ejecución tal como especifica el nombre o el número de la tarea.
Para reanudar la tarea donde quedó, use Resume. Para detener completamente la ejecución de la tarea, use
Quit. Para mostrar el estado de la tarea, haga clic en el icono del administrador de tareas en la barra de
herramientas de EPSON RC+ para ejecutar el Administrador de tareas.
Halt también detiene la tarea cuando la tarea especificada es una tarea NoPause, una tarea NoEmgAbort
(tarea especial que usa NoPause o NoEmgAbort en Xqt), tareas de captura o las tareas en segundo plano.
Sin embargo, detener estas tareas requiere una consideración suficiente. Normalmente, no se recomienda
Halt para la tarea especial.
Consulte también
Quit, Resume, Xqt
Ejemplo de instrucción Halt
El ejemplo a continuación muestra una función llamada “flicker” (parpadeo) que es iniciada por Xqt, luego
es suspendida temporalmente por Halt y reanudada nuevamente por Resume.
Function main
Xqt flicker 'Ejecutar la función flicker
Do
Wait 3 'Ejecutar la tarea flicker durante 3 segundos
Halt flicker
Wait 3 'Suspender la tarea flicker durante 3 segundos
Resume flicker
Loop
Fend
Function flicker
Do
On 1
Wait 0.2
Off 1
Wait 0.2
Loop
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 293
Instrucción Hand
Define la orientación de la mano de un punto.
Sintaxis
(1) Hand point [, Lefty | Righty]
(2) Hand
Parámetros
point Pnumber o P(expr) o etiqueta de punto.
Lefty | Righty Orientación de la mano.
Valores devueltos
Cuando se omiten ambos parámetros, se muestra la orientación de la mano para la posición actual del robot.
Si se omite Lefty | Righty, se muestra la orientación de la mano para el punto especificado.
Consulte también
Elbow, Hand Function, J4Flag, J6Flag, Wrist, J1Flag, J2Flag
Ejemplo de instrucción Hand
Hand P0, Lefty
Hand pick, Righty
Hand P(myPoint), myHand
P1 = -364.474, 120.952, 469.384, 72.414, 1.125, -79.991
Hand P1, Righty
Go P1
Hand P1, Lefty
Go P1

294 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función Hand
Arroja la orientación de la mano de un punto.
Sintaxis
Hand [(point)]
Parámetros
point Opcional. Expresión de punto. Si se omite point, se arroja la orientación de la mano de la
posición actual del robot.
Valores devueltos
1 Righty (/R)
2 Lefty (/L)
Consulte también
Elbow, Wrist, J4Flag, J6Flag, J1Flag, J2Flag
Ejemplo de función Hand
Print Hand(pick)
Print Hand(P1)
Print Hand
Print Hand(P1 + P2)

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 295
HealthCalcPeriod
Define y muestra un período que calcula los “meses restantes” de la información de comandos de consumo
de piezas.
Sintaxis
(1) HealthCalcPeriod Period
(2) HealthCalcPeriod
Parámetros
Period Especifica un período para calcular en números enteros (1 a 7). (Unidad: día) El valor
predeterminado es “7”.
Valores devueltos
Muestra el valor de configuración actual de HealthCalcPeriod si se omite el parámetro.
Descripción
La información de los meses restantes de comandos de consumo de piezas se calcula automáticamente
basándose en la condición operativa pasada. El comando HealthCalcPeriod define y muestra un período
operativo para este cálculo.
Si se define un período más largo, se calculan los meses restantes que suprimen la influencia de variaciones.
Sin embargo, tómese un tiempo para mostrar el “tiempo restante” correctamente después de cambiar el
movimiento o la velocidad.
El valor de configuración de HealthCalcPeriod se aplica a todos los robots, las articulaciones y piezas
controlados por el controlador ejecutado.
Nota
Configurar el período
El período que se define en el comando HealthCalcPeriod es el período de ejecución del controlador.
Tenga cuidado de que no sea el mismo que el tiempo real.
Cálculo de los “meses restantes” y la “tasa de consumo” cuando se borran.
Calcule los meses restantes cada día a pesar del valor de configuración de HealthCalcPeriod hasta que supere
el período de configuración por primera vez después de borrar la “información de comandos de consumo de
piezas” de EPSON RC+, los “meses restantes” y la “tasa de consumo” de HealthCtrlReset o HealthRBReset
Consulte también
HealthCalcPeriod Function, HealthCtrlInfo, HealthRBInfo, HealthCtrlReset, HealthRBReset
HealthCalcPeriod en el ejemplo funcional
> HealthCalcPeriod 3
> HealthCalcPeriod
3

296 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función HealthCalcPeriod
Arroja el período de cálculo de los “meses restantes” de la información de los comandos de consumo de
piezas que está actualmente definida.
Sintaxis
HealthCalcPeriod
Valores devueltos
Arroja el período de cálculo en un número entero. (Unidad: día)
Consulte también
HealthCalcPeriod
HealthCalcPeriod en el ejemplo funcional
Ejemplo para mostrar el período de cálculo.
Print "period is", HealthCalcPeriod

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 297
Función HealthCtrlAlarmOn
Arroja el estado de la alarma de consumo de piezas para las piezas del controlador especificado.
Sintaxis
HealthCtrlAlarmOn(partType)
Parámetros
partType Expresión entera (1) o la siguiente constante que representa las piezas cuyo estado de alarma
desea obtener.
Constante
Valor
Modo
HEALTH_CONTROLLER_TYPE_BATTERY
1
Especifica las baterías.
Valores devueltos
Es True si la alarma de consumo de piezas se activa para las piezas específicas, de lo contrario es False.
La alarma de consumo de piezas ocurre cuando la tasa de consumo de piezas obtenida por HealthRateCtrlInfo
supera el 100 %.
Consulte también
HealthCtrlInfo, HealthRateCtrlInfo
Ejemplo de función HealthCtrlAlarmOn
El ejemplo a continuación determina si la alarma de consumo de piezas ocurre para las baterías del
controlador.
Function PrintAlarm
If HealthCtrlAlarmOn(HEALTH_CONTROLLER_TYPE_BATTERY) = True Then
Print "Controller Battery NG"
Else
Print "Controller Battery OK"
EndIf
Fend

298 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción HealthCtrlInfo
Muestra los meses restantes antes del plazo de reemplazo recomendado para las piezas especificadas del
controlador.
Sintaxis
HealthCtrlInfo partType
Parámetros
partType Expresión entera (1) o la siguiente constante que representa las piezas de las cuales desea
obtener los meses restantes antes del plazo de reemplazo recomendado.
Constante
Valor
Modo
HEALTH_CONTROLLER_TYPE_BATTERY
1
Especifica las baterías.
Descripción
Muestra los meses restantes antes del plazo de reemplazo recomendado para las piezas especificadas del
controlador.
Los meses restantes se calculan en función de la tasa de consumo de las piezas a partir del uso pasado y la
cantidad de cambio en la tasa de consumo que se obtiene en cada operación de un período, el que se establece
en HealthCalcPeriod del controlador.
Notas
Dado que los meses restantes se calculan en función de la cantidad de cambio en la tasa de consumo que se
obtiene en cada operación de un período, el que se establece en HealthCalcPeriod del controlador, no se
pueden calcular adecuadamente en los siguientes casos:
- Si el comando se ejecuta cuando el tiempo de funcionamiento es menor que cada operación de un período
que se configura en HealthCalcPeriod
- Si se ejecuta el comando después del período de detención de la operación prolongada del robot.
- Si se ejecuta el comando después de restablecer la alarma de consumo de piezas debido al reemplazo de
las piezas.
- Si se cambia la hora y fecha del controlador.
En los casos anteriores, ejecute el comando después de operar el controlador más de dos veces en el período
configurado en HealthCalcPeriod para mostrar el valor exacto.
Consulte también
HealthCtrlAlarmOn, HealthRateCtrlInfo
Ejemplo de instrucción HealthCtrlInfo
El ejemplo a continuación muestra los meses restantes antes del plazo de reemplazo recomendado para las
baterías del controlador.
> HealthCtrlInfo HEALTH_CONTROLLER_TYPE_BATTERY
BATTERY 240.000
>

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 299
Función HealthCtrlInfo
Arroja los meses restantes antes del plazo de reemplazo recomendado para las piezas del controlador
especificado.
Sintaxis
HealthCtrlInfo(partType)
Parámetros
partType Expresión entera (1) o la siguiente constante que representa las piezas de las cuales desea
obtener los meses restantes antes del plazo de reemplazo recomendado.
Constante
Valor
Modo
HEALTH_CONTROLLER_TYPE_BATTERY
1
Especifica las baterías.
Valores devueltos
Número real que representa los meses restantes antes del plazo de reemplazo recomendado. (Unidad: mes)
Descripción
Los meses restantes se calculan en función de la tasa de consumo de las piezas a partir del uso pasado y la
cantidad de cambio en la tasa de consumo que se obtiene en cada operación de un período, el que se establece
en HealthCalcPeriod del controlador.
Notas
Dado que los meses restantes se calculan en función de la cantidad de cambio en la tasa de consumo que se
obtiene en cada operación de un período, el que se establece en HealthCalcPeriod del controlador, no se
pueden calcular adecuadamente en los siguientes casos:
- Si el comando se ejecuta cuando el tiempo de funcionamiento es menor que cada operación de un período
que se configura en HealthCalcPeriod.
- Si se ejecuta el comando después del período de detención de la operación prolongada del robot.
- Si se ejecuta el comando después de restablecer la alarma de consumo de piezas debido al reemplazo de
las piezas.
- Si se cambia la hora y fecha del controlador.
En los casos anteriores, ejecute el comando después de operar el controlador más de dos veces en el período
configurado en HealthCalcPeriod para mostrar el valor exacto.
Consulte también
HealthCtrlAlarmOn, HealthRateCtrlInfo
Ejemplo de función HealthCtrlInfo
El ejemplo a continuación genera la alarma cuando el plazo de reemplazo recomendado es en menos de un
mes.
Function AlarmCheck
Real month
month = HealthCtrlInfo(HEALTH_CONTROLLER_TYPE_BATTERY)
If month < 1 Then
Print "Alarm ON"
EndIf
Fend

300 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción HealthCtrlRateOffset
Configura la compensación de la tasa de consumo de las piezas especificadas.
Sintaxis
HealthCtrlRateOffset partType, offset
Parámetros
partType Expresión entera (1) o la siguiente constante que representa las piezas relacionadas con el
controlador.
Constante
Valor
Modo
HEALTH_CONTROLLER_TYPE_BATTERY
1
Especifica las baterías.
offset Expresión entera que especifica el valor de compensación agregado a la tasa de consumo.
(Unidad: %)
Descripción
Configura la compensación de la tasa de consumo de las piezas especificadas.
Consulte también
HealthRBAlarmOn, HealthRateRBInfo, HealthRBInfo
Ejemplo de instrucción HealthCtrlRateOffset
El siguiente es el ejemplo para agregar 10 % a la tasa de consumo de las piezas de las baterías del controlador.
> HealthRBRateOffset HEALTH_CONTROLLER_TYPE_BATTERY,10
>

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 301
Instrucción HealthCtrlReset
Borra los meses restantes antes de alcanzar el plazo de reemplazo recomendado y la tasa de consumo de las
piezas especificadas.
Sintaxis
HealthCtrlReset partType
Parámetros
partType Expresión entera (1) o la siguiente constante que representa las piezas relacionadas con el
controlador.
Constante
Valor
Modo
HEALTH_CONTROLLER_TYPE_BATTERY
1
Especifica las baterías.
Descripción
Borra los meses restantes antes de alcanzar el plazo de reemplazo recomendado y la tasa de consumo de las
piezas especificadas.
Las advertencias también se cancelan.
Consulte también
HealthCtrlAlarmOn, HealthRateCtrlInfo, HealthCtrlInfo
Ejemplo de instrucción HealthCtrlReset
> HealthCtrlReset HEALTH_CONTROLLER_TYPE_BATTERY
>

302 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
HealthCtrlWarningEnable
Active o desactive la notificación de alarma de consumo de piezas de una pieza especificada en relación con
el controlador.
Sintaxis
HealthCtrlWarningEnable partType [, On/Off]
Parámetros
partType Expresión entera o la siguiente constante que representa el controlador.
Constante
Valor
Modo
HEALTH_CONTROLLER_TYPE_BATTERY
1
Especifica las baterías.
On/Off On: Active la notificación de alarma de consumo de piezas.
Off: Desactive la notificación de alarma de consumo de piezas.
Valores devueltos
Si se omiten los parámetros On/Off, se muestra la configuración actual de On/Off.
Descripción
Cuando se active la alarma de consumo de piezas para la pieza especificada, defina si se va a notificar la
alarma de consumo de piezas.
Notas
Si se desactiva la alarma de consumo de piezas para la pieza especificada, no se notificará la alarma de
consumo de piezas cuando transcurra el plazo de reemplazo recomendado. Use las configuraciones de este
comando con precaución.
Consulte también
HealthCtrlAlarmOn
Ejemplo de HealthCtrlWarningEnable
Ejemplo para desactivar la alarma de consumo de piezas de las baterías del controlador.
> HealthCtrlWarningEnable HEALTH_CONTROLLER_TYPE_BATTERY, Off
Ejemplo para mostrar la configuración de la alarma de consumo de piezas de las baterías del controlador.
> HealthCtrlWarningEnable HEALTH_CONTROLLER_TYPE_BATTERY
BATTERY Off
>

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 303
Función HealthCtrlWarningEnable
Arroja el estado de la configuración de la notificación de alarma de consumo de piezas de una pieza
especificada en relación con el controlador.
Sintaxis
HealthCtrlWarningEnable(partType)
Parámetros
partType Expresión entera o la siguiente constante que representa el controlador.
Constante
Valor
Modo
HEALTH_CONTROLLER_TYPE_BATTERY
1
Especifica las baterías.
Valores devueltos
Arroja los valores de configuración de la alarma de consumo de piezas en un entero.
1: On
0: Off
Consulte también
HealthCtrlAlarmOn
Ejemplo de función HealthCtrlWarningEnable
Ejemplo para mostrar la alarma de consumo de piezas de las baterías del controlador.
Print HealthCtrlWarningEnable(HEALTH_CONTROLLER_TYPE_BATTERY )

304 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función HealthRateCtrlInfo
Arroja la tasa de consumo de las piezas del controlador especificado.
Sintaxis
HealthRateCtrlInfo(partType)
Parámetros
partType Expresión entera (1) o la siguiente constante que representa las piezas de las cuales desea
obtener los meses restantes antes del plazo de reemplazo recomendado.
Constante
Valor
Modo
HEALTH_CONTROLLER_TYPE_BATTERY
1
Especifica las baterías.
Valores devueltos
Número real que representa la tasa de consumo de las piezas actuales, cuando se considera el plazo de
reemplazo recomendado como un 100 %. (Unidad: %)
Descripción
Este comando calcula la tasa de consumo de las piezas en función de la condición de operación actual.
Notas
El plazo de reemplazo recomendado es el tiempo recomendado para reemplazar las piezas basado en las
estadísticas.
Puede que se necesite el reemplazo antes de que la tasa de consumo llegue al 100 %.
Asimismo, las piezas no quedarán inutilizables de inmediato cuando la tasa de consumo llegue al 100 %.
Sin embargo, se recomienda reemplazar las piezas tan pronto aumente la posibilidad de quiebre después de
que la tasa de consumo llegue al 100 %.
Consulte también
HealthCtrlAlarmOn, HealthCtrlInfo
Ejemplo de función HealthRateCtrlInfo
El ejemplo a continuación genera la alarma cuando la tasa de consumo para las baterías del controlador llega
al 90 %.
Function AlarmCheck
Real HealthRate
HealthRate = HealthRateCtrlInfo (HEALTH_CONTROLLER_TYPE_BATTERY)
If HealthRate > 90 Then
Print "Alarm ON"
EndIf
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 305
Función HealthRateRBInfo
Arroja la tasa de consumo para las piezas especificadas de robot.
Sintaxis
HealthRateRBInfo(robotNumber, partType, jointNumber)
Parámetros
robotNumber Expresión entera (1 a 16) que representa el número de robot cuya tasa de consumo de piezas
desea obtener.
partType Expresión entera (1 a 6) o las siguientes constantes que representan las piezas cuya tasa de
consumo desea obtener.
Constante
Valor
Modo
HEALTH_ROBOT_TYPE_BATTERY 1
Especifica las
baterías.
HEALTH_ROBOT_TYPE_BELT 2
Especifica las
correas de
regulación.
HEALTH_ROBOT_TYPE_GREASE
3
Especifica la grasa.
HEALTH_ROBOT_TYPE_MOTOR 4
Especifica los
motores.
HEALTH_ROBOT_TYPE_GEAR 5
Especifica las
unidades del
engranaje reductor.
HEALTH_ROBOT_TYPE_BALL_SCREW_SPLINE 6
Especifica la ranura
del tornillo
esférico.
jointNumber Expresión entera (1 a 9) que representa la articulación cuya tasa de consumo de piezas
desea obtener.
Este comando no está disponible para los ejes adicionales.
Valores devueltos
Número real que representa la tasa de consumo de las piezas actuales, cuando se considera el plazo de
reemplazo recomendado como un 100 %. (Unidad: %)
Arroja “-1” cuando el robot no tiene las piezas especificadas.
Descripción
Este comando calcula la tasa de consumo de las piezas en función de la condición de operación actual.
Notas
El plazo de reemplazo recomendado es el tiempo recomendado para reemplazar las piezas basado en las
estadísticas.
Puede que se necesite el reemplazo antes de que la tasa de consumo llegue al 100 %.
Asimismo, las piezas no quedarán inutilizables de inmediato cuando la tasa de consumo llegue al 100 %.
Sin embargo, se recomienda reemplazar las piezas tan pronto aumente la posibilidad de quiebre después de
que la tasa de consumo llegue al 100 %.
Consulte también
HealthRBAlarmOn, HealthRBInfo

306 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Ejemplo de función HealthRateRBInfo
El ejemplo a continuación genera la alarma cuando la tasa de consumo de la unidad de engranaje reductor de
la articulación n.° 3 en el robot 1 llega al 90 %.
Function AlarmCheck
Real HealthRate
HealthRate = HealthRateRBInfo(1,HEALTH_ROBOT_TYPE_GEAR,3)
If HealthRate > 90 Then
Print "Alarm ON"
EndIf
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 307
Función HealthRBAlarmOn
Arroja el estado de la alarma de consumo de piezas para las piezas especificadas del robot.
Sintaxis
HealthRBAlarmOn(robotNumber, partType, jointNumber)
Parámetros
robotNumber Expresión entera (1 a 16) que representa el número de robot cuyo estado de alarma desea
obtener.
partType Expresión entera (1 a 6) o las siguientes constantes que representan las piezas cuyo estado
de alarma desea obtener.
Constante
Valor
Modo
HEALTH_ROBOT_TYPE_BATTERY 1
Especifica las
baterías.
HEALTH_ROBOT_TYPE_BELT 2
Especifica las
correas de
regulación.
HEALTH_ROBOT_TYPE_GREASE
3
Especifica la grasa.
HEALTH_ROBOT_TYPE_MOTOR 4
Especifica los
motores.
HEALTH_ROBOT_TYPE_GEAR 5
Especifica las
unidades del
engranaje reductor.
HEALTH_ROBOT_TYPE_BALL_SCREW_SPLINE 6
Especifica la ranura
del tornillo
esférico.
jointNumber Expresión entera (1 a 9) que representa la articulación cuyo estado de alarma desea obtener.
Cuando se seleccionan las baterías para partType, se arrojará el mismo valor cuando se
especifique cualquier articulación porque las baterías son comunes a todas las
articulaciones. Este comando no está disponible para los ejes adicionales.
Valores devueltos
Es True si la alarma de consumo de piezas se activa para las piezas específicas, de lo contrario es False.
La alarma de consumo de piezas ocurre cuando la tasa de consumo de piezas obtenida por HealthRateRBInfo
supera el 100 %.
Arroja “-1” cuando el robot no tiene las piezas especificadas.
Consulte también
HealthRBInfo, HealthRateRBInfo
Ejemplo de función HealthRBAlarmOn
El ejemplo a continuación determina si la alarma de consumo de piezas ocurre para la grasa en la articulación
n.° 3 del robot 1.
Function PrintAlarm4
If HealthRBAlarmOn(1, HEALTH_ROBOT_TYPE_GREASE, 3) = True Then
Print "Robot1 Joint3 Grease NG"
Else
Print "Robot1 Joint3 Grease OK"
EndIf
Fend

308 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción HealthRBAnalysis
Simula y muestra los meses utilizables de las piezas especificadas en el ciclo de operación de un robot en
particular.
Sintaxis
HealthRBAnalysis robotNumber, partType[, jointNumber]
Parámetros
robotNumber Expresión entera (1-16) que representa el número del robot.
partType Expresión entera o las siguientes constantes que representan las piezas del robot.
Constante
Valor
Modo
HEALTH_ROBOT_TYPE_ALL 0
Especifica todas las
piezas.
HEALTH_ROBOT_TYPE_BELT 2
Especifica las
correas de
regulación.
HEALTH_ROBOT_TYPE_GREASE
3
Especifica la grasa.
HEALTH_ROBOT_TYPE_MOTOR 4
Especifica los
motores.
HEALTH_ROBOT_TYPE_GEAR 5
Especifica las
unidades del
engranaje reductor.
HEALTH_ROBOT_TYPE_BALL_SCREW_SPLINE 6
Especifica la ranura
del tornillo esférico.
jointNumber Expresión entera (1-6) que representa la articulación. Si el número de la articulación no
se especifica, arroja los valores de todas las articulaciones. Este comando no está
disponible para los ejes adicionales.
Descripción
Simula y muestra los meses utilizables de las piezas especificadas en el ciclo de operación de un robot en
particular. Este comando calcula y muestra por cuántos meses se pueden usar las piezas si son nuevas y se
usan durante 24 horas al día. No se considera el uso pasado.
Arroja “-1” cuando las piezas especificadas no están instaladas en la articulación especificada
Notas
- Este comando no funciona en el modo Auto (Automático).
- Este comando no funciona en el modo Dry Run (Simulacro) (incluido el controlador virtual).
Consulte también
HealthRBStart, HealthRBStop
Ejemplo de instrucción HealthRBAnalysis
El ejemplo a continuación muestra los meses utilizables para todas las piezas de todas las articulaciones en
el robot SCARA.
> HealthRBAnalysis 1, HEALTH_ROBOT_TYPE_ALL
BELT -1.000, -1.000, 38.689, 95.226
GREASE -1.000, -1.000, 21.130, -1.000
MOTOR 240.000, 240.000, 240.000, 240.000
GEAR 240.000, 224.357, -1.000, -1.000
BALL_SCREW_SPLINE -1.000, -1.000, 240.000, -1.000
>

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 309
El ejemplo a continuación muestra los meses utilizables para las unidades de engranaje reductor de todas las
articulaciones en el robot SCARA.
> HealthRBAnalysis 1, HEALTH_ROBOT_TYPE_GEAR
GEAR 240.000, 224.357, -1.000, -1.000
>
El ejemplo a continuación muestra los meses utilizables para el motor de la articulación n.° 2 en el robot de
6 ejes.
> HealthRBAnalysis 1, HEALTH_ROBOT_TYPE_MOTOR, 2
MOTOR 224.357
>

310 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función HealthRBAnalysis
Arroja los meses utilizables para las piezas especificadas en el ciclo de operación de un robot específico.
Sintaxis
HealthRBAnalysis(robotNumber, partType, jointNumber)
Parámetros
robotNumber Expresión entera (1-16) que representa el número del robot.
partType Expresión entera (2-6) o las siguientes constantes que representan las piezas del robot.
Constante
Valor
Modo
HEALTH_ROBOT_TYPE_BELT 2
Especifica las
correas de
regulación.
HEALTH_ROBOT_TYPE_GREASE
3
Especifica la grasa.
HEALTH_ROBOT_TYPE_MOTOR 4
Especifica los
motores.
HEALTH_ROBOT_TYPE_GEAR 5
Especifica las
unidades del
engranaje reductor.
HEALTH_ROBOT_TYPE_BALL_SCREW_SPLINE 6
Especifica la ranura
del tornillo
esférico.
jointNumber Expresión entera (1-6) que representa la articulación. Este comando no está disponible para
los ejes adicionales.
Valores devueltos
Número real que representa los meses utilizables.
Arroja “-1” cuando las piezas especificadas no están instaladas en la articulación especificada
Descripción
Simula los meses utilizables para las piezas especificadas en el ciclo de operación de un robot en particular.
Este comando calcula por cuántos meses se pueden usar las piezas si son nuevas y se usan durante 24 horas
al día. No se considera el uso pasado.
Notas
- Este comando no funciona en el modo Auto (Automático).
- Este comando no funciona en el modo Dry Run.
Consulte también
HealthRBStart, HealthRBStop

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 311
Ejemplo de función HealthRBAnalysis
Function RobotPartAnalysis
Real month
Robot 1
HealthRBStart 1
Motor On
Go P0
Go P1
Motor Off
HealthRBStop 1
month = HealthRBAnalysis(1, HEALTH_ROBOT_TYPE_BALL_SCREW_SPLINE, 3)
Print "Ball Screw Spline analysis =", Str$(month)
Fend

312 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción HealthRBDistance
Muestra la cantidad de accionamiento (rotación) del motor de la articulación especificada.
Sintaxis
HealthRBDistance [robotNumber] [,jointNumber]
Parámetros
robotNumber Opcional. Expresión entera (1-16) que representa el número del robot.
Si se omite, se usará el número del robot actual.
jointNumber Expresión entera (1-6) que representa la articulación. Si el número de la articulación no
se especifica, arroja los valores de todas las articulaciones. Este comando no está
disponible para los ejes adicionales.
Descripción
Calcula y muestra la cantidad de accionamiento (rotación) del motor de la articulación especificada en la
operación del robot de HealthRBStart a HealthRBStop. No se considera el uso pasado.
Notas
- Este comando no funciona en el modo Auto (Automático).
- Este comando no funciona en el modo Dry Run.
Consulte también
HealthRBStart, HealthRBStop
Ejemplo de instrucción HealthRBDistance
El ejemplo a continuación muestra la cantidad de accionamiento de la articulación n.° 1 del robot SCARA.
> HealthRBDistance 1, 1
1.000
>

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 313
Función HealthRBDistance
Arroja la cantidad de accionamiento (rotación) del motor de la articulación especificada.
Sintaxis
HealthRBDistance([robotNumber,] jointNumber)
Parámetros
robotNumber Opcional. Expresión entera (1-16) que representa el número del robot.
Si se omite, se usará el número del robot actual.
jointNumber Expresión entera (1-6) que representa la articulación. Este comando no está disponible
para los ejes adicionales.
Valores devueltos
Número real que representa la cantidad de accionamiento.
Descripción
Arroja la cantidad de accionamiento (rotación) del motor de la articulación especificada en la operación del
robot de HealthRBStart a HealthRBStop. No se considera el uso pasado.
Notas
- Este comando no funciona en el modo Auto (Automático).
- Este comando no funciona en el modo Dry Run.
Consulte también
HealthRBStart, HealthRBStop
Ejemplo de función HealthRBDistance
Function RobotPartAnalysis
Real healthDistance
Robot 1
HealthRBStart 1
Motor On
Go P0
Go P1
Motor Off
HealthRBStop 1
healthDistance = HealthRBDistance(1,1)
Print "Distance =", Str$(healthDistance)
Fend

314 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción HealthRBInfo
Muestra los meses restantes antes del plazo de reemplazo recomendado para las piezas especificadas del
robot.
Sintaxis
HealthRBInfo robotNumber, partType[, jointNumber]
Parámetros
robotNumber Expresión entera (1-16) que representa el número de robot del cual desea obtener los meses
restantes antes del plazo de reemplazo recomendado.
partType Expresión entera (0-6) o las siguientes constantes que representan las piezas de las cuales
desea obtener los meses restantes antes del plazo de reemplazo recomendado.
Constante
Valor
Modo
HEALTH_ROBOT_TYPE_ALL 0
Especifica todas las
piezas.
HEALTH_ROBOT_TYPE_BATTERY 1
Especifica las
baterías.
HEALTH_ROBOT_TYPE_BELT 2
Especifica las
correas de
regulación.
HEALTH_ROBOT_TYPE_GREASE
3
Especifica la grasa.
HEALTH_ROBOT_TYPE_MOTOR 4
Especifica los
motores.
HEALTH_ROBOT_TYPE_GEAR 5
Especifica las
unidades del
engranaje reductor.
HEALTH_ROBOT_TYPE_BALL_SCREW_SPLINE 6
Especifica la ranura
del tornillo esférico.
jointNumber Expresión entera (1-9) que representa la articulación de la cual desea obtener los meses
restantes antes del plazo de reemplazo recomendado. Cuando se seleccionan las baterías
para partType, se arrojará el mismo valor cuando se especifique cualquier articulación
porque las baterías son comunes a todas las articulaciones. Si el número de la articulación
no se especifica, arroja los valores de todas las articulaciones. Este comando no está
disponible para los ejes adicionales.
Descripción
Muestra los meses restantes antes del plazo de reemplazo recomendado para las piezas especificadas del
robot.
Los meses restantes se calculan en función de la tasa de consumo de las piezas a partir del uso pasado y la
cantidad de cambio en la tasa de consumo que se obtiene en cada operación de un período, el que se establece
en HealthCalcPeriod del controlador.
Arroja “-1” cuando la articulación del robot no tiene las piezas especificadas.
Notas
Dado que los meses restantes se calculan en función de la cantidad de cambio en la tasa de consumo que se
obtiene en cada operación de un período, el que se establece en HealthCalcPeriod del controlador, no se
pueden calcular adecuadamente en los siguientes casos:
- Si este comando se ejecuta cuando el tiempo de funcionamiento es menor que cada operación de un
período que se configura en HealthCalcPeriod.
- Si se ejecuta este comando después del período de detención de la operación prolongada del robot.
- Si se ejecuta este comando después de restablecer la alarma de consumo de piezas después del reemplazo
de las piezas.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 315
- Si se cambia la hora y fecha del controlador.
En los casos anteriores, ejecute el comando después de operar el controlador más de dos veces en el período
configurado
en HealthCalcPeriod para mostrar el valor exacto.
Consulte también
HealthRBAlarmOn, HealthRateRBInfo
Ejemplo de instrucción HealthRBInfo
El siguiente ejemplo muestra los meses restantes para todas las piezas de todas las articulaciones del robot 1.
> HealthRBInfo 1, HEALTH_ROBOT_TYPE_ALL
BATTERY 240.000
BELT -1.000, -1.000, 38.689, 95.226
GREASE -1.000, -1.000, 21.130, -1.000
MOTOR 240.000, 240.000, 240.000, 240.000
GEAR 240.000, 224.357, -1.000, -1.000
BALL_SCREW_SPLINE -1.000, -1.000, 240.000, -1.000
>
El siguiente ejemplo muestra los meses restantes para las unidades de engranaje reductor de todas las
articulaciones del robot 1.
> HealthRBInfo 1, HEALTH_ROBOT_TYPE_GEAR
GEAR 240.000, 224.357, -1.000, -1.000
>
El siguiente ejemplo muestra los meses restantes para el motor de la articulación n.° 2 del robot 1.
> HealthRBInfo 1, HEALTH_ROBOT_TYPE_MOTOR, 2
MOTOR 224.357
>

316 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función HealthRBInfo
Arroja los meses restantes antes del plazo de reemplazo recomendado para las piezas especificadas del robot.
Sintaxis
HealthRBInfo(robotNumber, partType, jointNumber)
Parámetros
robotNumber Expresión entera (1-16) que representa el número de robot del cual desea obtener los meses
restantes antes del plazo de reemplazo recomendado.
partType Expresión entera (1-6) o las siguientes constantes que representan las piezas de las cuales
desea obtener los meses restantes antes del plazo de reemplazo recomendado.
Constante
Valor
Modo
HEALTH_ROBOT_TYPE_BATTERY 1
Especifica las
baterías.
HEALTH_ROBOT_TYPE_BELT 2
Especifica las
correas de
regulación.
HEALTH_ROBOT_TYPE_GREASE
3
Especifica la grasa.
HEALTH_ROBOT_TYPE_MOTOR 4
Especifica los
motores.
HEALTH_ROBOT_TYPE_GEAR 5
Especifica las
unidades del
engranaje reductor.
HEALTH_ROBOT_TYPE_BALL_SCREW_SPLINE 6
Especifica la ranura
del tornillo
esférico.
jointNumber Expresión entera (1-9) que representa la articulación de la cual desea obtener los meses
restantes antes del plazo de reemplazo recomendado. Cuando se seleccionan las baterías
para partType, se arrojará el mismo valor cuando se especifique cualquier articulación
porque las baterías son comunes a todas las articulaciones. Este comando no está disponible
para los ejes adicionales.
Valores devueltos
Número real que representa los meses restantes antes del plazo de reemplazo recomendado. (Unidad: mes)
Arroja “-1” cuando el robot no tiene las piezas especificadas.
Descripción
Los meses restantes se calculan en función de la tasa de consumo de las piezas a partir del uso pasado y la
cantidad de cambio en la tasa de consumo que se obtiene en cada operación de un período, el que se establece
en HealthCalcPeriod del controlador.
Notas
Dado que los meses restantes se calculan en función de la cantidad de cambio en la tasa de consumo que se
obtiene en cada operación de un período, el que se establece en HealthCalcPeriod del controlador, no se
pueden calcular adecuadamente en los siguientes casos:
- Si el comando se ejecuta cuando el tiempo de funcionamiento es menor que cada operación de un período,
el que se establece
en HealthCalcPeriod.
- Si se ejecuta este comando después del período de detención de la operación prolongada del robot.
- Si se ejecuta este comando después de restablecer la alarma de consumo de piezas después del reemplazo
de las piezas.
- Si se cambia la hora y fecha del controlador.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 317
En los casos anteriores, ejecute el comando después de operar el controlador más de dos veces en el período
configurado
en HealthCalcPeriod para mostrar el valor exacto.
Consulte también
HealthRBAlarmOn, HealthRateRBInfo
Ejemplo de función HealthRBInfo
El siguiente ejemplo genera la alarma cuando el plazo de reemplazo recomendado para la ranura de tornillo
esférico de la articulación n.° 3 en el robot 1 es menos de un mes.
Function AlarmCheck
Real month
month = HealthRBInfo(1, HEALTH_ROBOT_TYPE_BALL_SCREW_SPLINE, 3)
If month < 1 Then
Print "Alarm ON"
EndIf
Fend

318 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción HealthRBRateOffset
Configura la compensación de la tasa de consumo de las piezas especificadas.
Sintaxis
HealthRBRateOffset robotNumber, partType, jointNumber, offset
Parámetros
robotNumber Expresión entera (1-16) que representa el número del robot.
partType Expresión entera (1-6) o las siguientes constantes que representan la pieza del robot.
Constante
Valor
Modo
HEALTH_ROBOT_TYPE_BATTERY 1
Especifica las
baterías.
HEALTH_ROBOT_TYPE_BELT 2
Especifica las
correas de
regulación.
HEALTH_ROBOT_TYPE_GREASE
3
Especifica la grasa.
HEALTH_ROBOT_TYPE_MOTOR 4
Especifica los
motores.
HEALTH_ROBOT_TYPE_GEAR 5
Especifica las
unidades del
engranaje reductor.
HEALTH_ROBOT_TYPE_BALL_SCREW_SPLINE 6
Especifica la ranura
del tornillo
esférico.
jointNumber Expresión entera (1-6) que representa la articulación. Cuando se seleccionan las baterías
para partType, se establecerá la compensación cuando se especifica cualquier
articulación, dado que las baterías son comunes para todas las articulaciones. Este
comando no está disponible para los ejes adicionales.
offset Expresión entera que especifica el valor de compensación agregado a la tasa de consumo.
(Unidad: %)
Descripción
Configura la compensación de la tasa de consumo de las piezas y articulaciones especificadas.
Consulte también
HealthRBAlarmOn, HealthRateRBInfo, HealthRBInfo
Ejemplo de HealthRBRateOffset
El siguiente ejemplo agrega 10 % a la tasa de consumo de la unidad de engranaje reductor de la articulación
n.° 1 en el robot 1.
> HealthRBRateOffset 1,HEALTH_ROBOT_TYPE_GEAR,1,10
>

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 319
Instrucción HealthRBReset
Borra los meses restantes antes de alcanzar el plazo de reemplazo recomendado y la tasa de consumo de las
piezas especificadas.
Sintaxis
HealthRBReset robotNumber, partType, jointNumber
Parámetros
robotNumber Expresión entera (1-16) que representa el número del robot.
partType Expresión entera (1-6) o las siguientes constantes que representan las piezas del robot.
Constante
Valor
Modo
HEALTH_ROBOT_TYPE_BATTERY 1
Especifica las
baterías.
HEALTH_ROBOT_TYPE_BELT 2
Especifica las
correas de
regulación.
HEALTH_ROBOT_TYPE_GREASE
3
Especifica la grasa.
HEALTH_ROBOT_TYPE_MOTOR 4
Especifica los
motores.
HEALTH_ROBOT_TYPE_GEAR 5
Especifica las
unidades del
engranaje reductor.
HEALTH_ROBOT_TYPE_BALL_SCREW_SPLINE 6
Especifica la ranura
del tornillo
esférico.
jointNumber Expresión entera (1-6) que representa la articulación de la cual desea obtener los meses
restantes antes del plazo de reemplazo recomendado. Cuando se seleccionan las baterías
para partType, se borrarán los meses restantes cuando se especifica cualquier
articulación, dado que las baterías son comunes para todas las articulaciones. Este
comando no está disponible para los ejes adicionales.
Descripción
Borra los meses restantes antes del plazo de reemplazo recomendado y la tasa de consumo de las piezas y
articulaciones especificadas.
Las advertencias también se cancelan.
Consulte también
HealthRBAlarmOn, HealthRateRBInfo, HealthRBInfo
Ejemplo de instrucción HealthRBReset
> HealthRBReset 1,HEALTH_ROBOT_TYPE_GEAR,1
>

320 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción HealthRBSpeed
Muestra la velocidad promedio de la articulación especificada.
Sintaxis
HealthRBSpeed [robotNumber] [, jointNumber]
Parámetros
robotNumber Opcional. Expresión entera (1-16) que representa el número del robot.
Si se omite, se usará el número del robot actual.
jointNumber Expresión entera (1-6) que representa la articulación. Si el número de la articulación no se
especifica, arroja los valores de todas las articulaciones. Este comando no está disponible
para los ejes adicionales.
Descripción
Arroja el promedio de los valores absolutos de la velocidad de la articulación especificada en la operación
del robot, desde HealthRBStart a HealthRBStop. El resultado es un número real de 0 a 1.
La velocidad promedio máxima es "1".
El valor es “0” cuando el valor promedio es 0,001 o menos.
Notas
- Este comando no funciona en el modo Auto (Automático).
- Este comando no funciona en el modo Dry Run.
Consulte también
HealthRBStart, HealthRBStop, AveSpeed
Ejemplo de instrucción HealthRBSpeed
El siguiente ejemplo muestra la velocidad de la articulación n.° 1 del robot SCARA.
> HealthRBSpeed 1, 1
0.100
>

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 321
Función HealthRBSpeed
Arroja el promedio de los valores absolutos de la velocidad de la articulación especificada.
Sintaxis
HealthRBSpeed ([robotNumber,] jointNumber)
Parámetros
robotNumber Opcional. Expresión entera (1-16) que representa el número del robot.
Si se omite, se usará el número del robot actual.
jointNumber Expresión entera (1-6) que representa la articulación. Este comando no está disponible para
los ejes adicionales.
Valores devueltos
El resultado es un número real de 0 a 1.
Descripción
Arroja el promedio de los valores absolutos de la velocidad de la articulación especificada en la operación
del robot, desde HealthRBStart a HealthRBStop. El resultado es un número real de 0 a 1. La velocidad
promedio máxima es "1".
Notas
- Este comando no funciona en el modo Auto (Automático).
- Este comando no funciona en el modo Dry Run (Simulacro) (incluido el controlador virtual).
Consulte también
HealthRBStart, HealthRBStop, AveSpeed
Ejemplo de función HealthRBSpeed
Function RobotPartAnalysis
Real healthSpeed
Robot 1
HealthRBStart 1
Motor On
Go P0
Go P1
Motor Off
HealthRBStop 1
healthSpeed = HealthRBSpeed(1,1)
Print "AveSpeed =", Str$(healthSpeed)
Fend

322 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción HealthRBStart
Inicia el cálculo de los meses utilizables y los elementos de las piezas en el ciclo de operación de un robot en
particular.
Sintaxis
HealthRBStart robotNumber
Parámetros
robotNumber Expresión entera (1-16) que representa el número del robot.
Descripción
Inicia el cálculo de los meses utilizables y los elementos (torque, velocidad y cantidad de accionamiento) de
las piezas en el robot especificado en un ciclo de operación de un robot en particular.
Si se ejecuta este comando nuevamente cuando ya ha comenzado el cálculo, se inicializará el resultado del
cálculo anterior.
Notas
- Este comando no funciona en el modo Auto (Automático).
- Este comando no funciona en el modo Dry Run (Simulacro) (incluido el controlador virtual).
Consulte también
HealthRBAnalysis, HealthRBStop, HealthRBTRQ, HealthRBSpeed, HealthRBDistance
Ejemplo de instrucción HealthRBStart
Function RobotPartAnalysis
Real month
Robot 1
HealthRBStart 1
Motor On
Go P0
Go P1
Motor Off
HealthRBStop 1
month = HealthRBAnalysis(1, HEALTH_ROBOT_TYPE_BALL_SCREW_SPLINE, 3)
Print "Ball Screw Spline analysis =", Str$(month)
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 323
Instrucción HealthRBStop
Detiene el cálculo de los meses utilizables y los elementos de las piezas en el ciclo de operación de un robot
en particular.
Sintaxis
HealthRBStop robotNumber
Parámetros
robotNumber Expresión entera (1-16) que representa el número del robot.
Descripción
Detiene el cálculo de los meses utilizables y los elementos (torque, velocidad y cantidad de accionamiento)
de las piezas en el robot especificado en un ciclo de operación de un robot en particular.
Notas
- Este comando no funciona en el modo Auto (Automático).
- Este comando no funciona en el modo Dry Run (Simulacro) (incluido el controlador virtual).
- El cálculo termina automáticamente cuando pasa una hora desde que se inicia el cálculo.
- Si se ejecuta el comando después de la finalización automática, ocurrirá un error.
- Si se ejecuta el comando sin ejecutar el comando HealthRBStart, ocurrirá un error.
- Si se ejecuta el comando nuevamente sin ejecutar el comando HealthRBStart después del comando
HealthRBStop anterior, ocurrirá un error.
Consulte también
HealthRBAnalysis, HealthRBStart, HealthRBTRQ, HealthRBSpeed, HealthRBDistance
Ejemplo de instrucción HealthRBStop
Function RobotPartAnalysis
Real month
Robot 1
HealthRBStart 1
Motor On
Go P0
Go P1
Motor Off
HealthRBStop 1
month = HealthRBAnalysis(1, HEALTH_ROBOT_TYPE_BALL_SCREW_SPLINE, 3)
Print "Ball Screw Spline analysis =", Str$(month)
Fend

324 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción HealthRBTRQ
Muestra el valor de torque que afecta la vida útil de las piezas de la articulación especificada.
Sintaxis
HealthRBTRQ [robotNumber] [, jointNumber]
Parámetros
robotNumber Opcional. Expresión entera (1-16) que representa el número del robot.
Si se omite, se usará el número del robot actual.
jointNumber Expresión entera (1-6) que representa la articulación. Si el número de la articulación no se
especifica, arroja los valores de todas las articulaciones. Este comando no está disponible
para los ejes adicionales.
Descripción
Muestra el valor de torque que afecta la vida útil de las piezas de la articulación especificada en la operación
del robot desde HealthRBStart hasta HealthRBStop. El resultado es un número real de 0 a 1. El valor de
torque máximo es de "1".
Notas
- Este comando no funciona en el modo Auto (Automático).
- Este comando no funciona en el modo Dry Run (Simulacro) (incluido el controlador virtual).
Consulte también
HealthRBStart, HealthRBStop, ATRQ
Ejemplo de instrucción HealthRBTRQ
El siguiente ejemplo muestra el valor de torque que afecta la vida útil de las piezas de la articulación n.° 1
del robot SCARA.
> HealthRBTRQ 1, 1
0.020
>

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 325
Función HealthRBTRQ
Arroja el valor de torque que afecta la vida útil de las piezas de la articulación especificada.
Sintaxis
HealthRBTRQ ([robotNumber,] jointNumber)
Parámetros
robotNumber Opcional. Expresión entera (1-16) que representa el número del robot.
Si se omite, se usará el número del robot actual.
jointNumber Expresión entera (1-6) que representa la articulación. Este comando no está disponible
para los ejes adicionales.
Valores devueltos
El resultado es un número real de 0 a 1.
Descripción
Arroja el valor de torque que afecta la vida útil de las piezas de la articulación especificada en la operación
del robot desde HealthRBStart hasta HealthRBStop. El resultado es un valor real de 0 a 1. El valor de torque
máximo es de "1".
Notas
- Este comando no funciona en el modo Auto (Automático).
- Este comando no funciona en el modo Dry Run (Simulacro) (incluido el controlador virtual).
Consulte también
HealthRBStart, HealthRBStop, ATRQ
Ejemplo de función HealthRBTRQ
Function RobotPartAnalysis
Real healthTRQ
Robot 1
HealthRBStart 1
Motor On
Go P0
Go P1
Motor Off
HealthRBStop 1
healthTRQ = HealthRBTRQ(1,1)
Print "Torque =", Str$(healthTRQ)
Fend

326 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
HealthRBWarningEnable
Active o desactive la notificación de alarma de consumo de piezas de una pieza especificada en relación con
el robot.
Sintaxis
HealthRBWarningEnable robotNumber, partType [, On/Off]
Parámetros
robotNumber Expresión entera (1-16) que representa el número del robot.
partType Expresión entera (1-6) o las siguientes constantes que representan las piezas del robot.
Constante
Valor
Modo
HEALTH_ROBOT_TYPE_BATTERY 1
Especifica las
baterías.
HEALTH_ROBOT_TYPE_BELT 2
Especifica las
correas de
regulación.
HEALTH_ROBOT_TYPE_GREASE
3
Especifica la grasa.
HEALTH_ROBOT_TYPE_MOTOR 4
Especifica los
motores.
HEALTH_ROBOT_TYPE_GEAR 5
Especifica las
unidades del
engranaje reductor.
HEALTH_ROBOT_TYPE_BALL_SCREW_SPLINE 6
Especifica la ranura
del tornillo
esférico.
On/Off On: Active la notificación de alarma de consumo de piezas.
Off: Desactive la notificación de alarma de consumo de piezas.
Valores devueltos
Si se omiten los parámetros On/Off, se muestra la configuración actual de On/Off.
Descripción
Cuando se active la alarma de consumo de piezas para la pieza especificada, defina si se va a notificar la
alarma de consumo de piezas.
Notas
Si se desactiva la alarma de consumo de piezas para la pieza especificada, no se notificará la alarma de
consumo de piezas cuando transcurra el plazo de reemplazo recomendado. Use las configuraciones de este
comando con precaución.
Consulte también
HealthRBAlarmOn

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 327
Ejemplo de HealthRBWarningEnable
Ejemplo para desactivar la alarma de consumo de piezas para la pieza de engrase del robot SCARA 1.
> HealthRBWarningEnable 1, HEALTH_ROBOT_TYPE_GREASE, Off
Ejemplo para visualizar la configuración de la alarma de consumo de piezas para la pieza de engrase del
robot SCARA 1.
> HealthRBWarningEnable 1, HEALTH_ROBOT_TYPE_GREASE
GREASE Off
>

328 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función HealthRBWarningEnable
Arroja el estado de la configuración de la notificación de alarma de consumo de piezas de una pieza
especificada en relación con el robot.
Sintaxis
HealthRBWarningEnable(robotNumber, partType)
Parámetros
robotNumber Expresión entera (1-16) que representa el número de robot del cual desea obtener los meses
restantes antes del plazo de reemplazo recomendado.
partType Expresión entera (1-6) o las siguientes constantes que representan las piezas de las cuales
desea obtener los meses restantes antes del plazo de reemplazo recomendado.
Constante
Valor
Modo
HEALTH_ROBOT_TYPE_BATTERY 1
Especifica las
baterías.
HEALTH_ROBOT_TYPE_BELT 2
Especifica las
correas de
regulación.
HEALTH_ROBOT_TYPE_GREASE
3
Especifica la grasa.
HEALTH_ROBOT_TYPE_MOTOR 4
Especifica los
motores.
HEALTH_ROBOT_TYPE_GEAR 5
Especifica las
unidades del
engranaje reductor.
HEALTH_ROBOT_TYPE_BALL_SCREW_SPLINE 6
Especifica la ranura
del tornillo
esférico.
Valores devueltos
Arroja los valores de configuración de la alarma de consumo de piezas en un entero.
1: On
0: Off
Consulte también
HealthRBAlarmOn
Ejemplo de función HealthRBWarningEnable
Ejemplo para visualizar la configuración de la alarma de consumo de piezas para la pieza de engrase del
robot SCARA 1.
Print HealthRBWarningEnable(1, HEALTH_ROBOT_TYPE_GREASE )

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 329
Instrucción Here
Enseña un punto de robot en la posición actual.
Sintaxis
Here point
Parámetros
point Pnumber o P(expr) o etiqueta de punto.
Notas
La instrucción Here y el procesamiento paralelo
No es posible usar la instrucción Here y el procesamiento paralelo juntos en un comando de movimiento
como este:
Go Here :Z(0) ! D10; MemOn 1 !
Asegúrese de cambiar el programa de la siguiente forma:
P999 = Here
Go P999 Here :Z(0) ! D10; MemOn 1 !
La instrucción Here y tareas múltiples
Si se ejecuta la instrucción Here en una función de tareas múltiples ejecutada por Xqt mientras el robot se
mueve con Move, Go, etc., en la tarea principal, se detendrá la tarea debido a un error.
La posición actual del robot se puede recuperar con CurPos.
Ejemplo
Function Xqt_PrintHere
Do
Print CurPOS
Wait 0.1
Loop
Fend
Function main
Xqt 10, Xqt_PrintHere
Go P0
Fend
Consulte también
Función Here, CurPos
Ejemplo de instrucción Here
Here P1
Here pick

330 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función Here
Arroja la posición actual del robot como un punto.
Sintaxis
Here
Valores devueltos
Un punto representa la posición actual del robot.
Descripción
Use Here para recuperar la posición actual del manipulador actual.
Consulte también
Instrucción Here
Ejemplo de función Here
P1 = Here

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 331
Función Hex$
Arroja una cadena que representa un número especificado en formato hexadecimal.
Sintaxis
Hex$(number)
Parámetros
number Expresión entera.
Valores devueltos
Arroja una cadena que contiene la representación ASCII del número en formato hexadecimal.
Descripción
Hex$ arroja una cadena que representa el número especificado en formato hexadecimal. Cada carácter va de
0 a 9 o de A a F. Hex$ es especialmente útil para examinar los resultados de la función Stat.
Consulte también
Str$, Stat, Val
Ejemplo de función Hex$
> print hex$(stat(0))
A00000
> print hex$(255)
FF

332 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción Hofs
Muestra o establece los pulsos de compensación entre el origen del codificador y el sensor de reposo.
Sintaxis
(1) Hofs j1Pulses, j2Pulses, j3Pulses, j4Pulses [, j5pulses, j6pulses] [, j7pulses] [, j8pulses,
j9pulses]
(2) Hofs
Parámetros
j1Pulses Expresión entera que representa los pulsos de compensación de la articulación 1.
j2Pulses Expresión entera que representa los pulsos de compensación de la articulación 2.
j3Pulses Expresión entera que representa los pulsos de compensación de la articulación 3.
j4Pulses Expresión entera que representa los pulsos de compensación de la articulación 4.
j5Pulses Para robots de 6 ejes (incluida la serie N).
Expresión entera que representa los pulsos de compensación de la articulación 5.
j6Pulses Para robots de 6 ejes (incluida la serie N).
Expresión entera que representa los pulsos de compensación de la articulación 6.
j7Pulses Para robots de 7 ejes. Expresión entera que representa los pulsos de compensación de
la articulación 7.
j8Pulses Para el eje S adicional. Expresión entera que representa los pulsos de compensación
de la articulación 8 (eje S adicional).
j9Pulses Para el eje T adicional. Expresión entera que representa los pulsos de compensación
de la articulación 9 (eje T adicional).
Valores devueltos
Muestra los valores de Hofs actuales cuando se usan sin parámetros.
Descripción
Hofs muestra o establece los pulsos de compensación de la posición de reposo. Hofs especifica la
compensación desde el punto 0 del codificador (fase Z) al punto 0 mecánico.
Aunque el control de movimiento del robot se basa en el punto cero del codificador montado en el motor de
cada articulación, es posible que el punto cero del codificador no coincida necesariamente con el punto cero
mecánico del robot. El pulso de corrección del pulso de compensación de Hofs se usa para realizar una
corrección de software al punto 0 mecánico según el punto 0 del codificador.
Notas
Los valores de Hofs NO SE DEBEN cambiar, a menos que sea absolutamente necesario
Los valores de Hofs se especifican correctamente antes del envío. Existe el peligro de que el cambio
innecesario del valor de Hofs pueda provocar errores de posición y un movimiento impredecible. Por lo tanto,
se recomienda encarecidamente que no se cambien los valores de Hofs a menos que sea absolutamente
necesario.
Cálculo automático de los valores de Hofs
Para que se calculen automáticamente los valores de Hofs, mueva el brazo a la posición de calibración
deseada y ejecute Calib. Entonces, el controlador calcula automáticamente los valores de Hofs basado en los
valores de pulso de CalPls y los valores de pulso de posición de calibración.
Guardar y restaurar Hofs
Hofs se puede guardar y restaurar con los comandos Save y Load en el diálogo [System Configuration]-
[Robot]-[Calibration] (Configuración del sistema - Robot - Calibración) en el menú System Configuration.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 333
Consulte también
Calib, CalPls, Home, Hordr, MCal, SysConfig
Ejemplo de instrucción Hofs
Estos son ejemplos simples en la ventana de monitor que establece primero el valor de compensación de
reposo de la articulación 1 en -545, el valor de compensación de reposo de la articulación 2 en 514 y los
valores de compensación de reposo de las articulaciones 3 y 4 en 0. Entonces, muestra los valores de
compensación de reposo actuales.
> hofs -545, 514, 0, 0
> hofs
-545, 514, 0, 0
>

334 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función Hofs
Arroja los pulsos de compensación usados por la corrección de punto cero de software.
Sintaxis
Hofs(jointNumber)
Parámetros
jointNumber Expresión entera que representa el número de articulación para el que se recuperará el
valor de Hofs.
El eje S adicional es 8 y el eje T es 9.
Valores devueltos
El valor de pulso de compensación (valor entero, en pulsos).
Consulte también
Calib, CalPls, Home, Hordr, MCal, SysConfig
Ejemplo de función Hofs
Este ejemplo usa la función Hofs en un programa:
Function DisplayHofs
Integer i
Print "Hofs settings:"
For i = 1 To 4
Print "Joint ", i, " = ", Hofs(i)
Next i
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 335
Instrucción Home
Mueve el brazo del robot a la posición de reposo definida por el usuario.
Sintaxis
Home
Descripción
Ejecuta el movimiento de punto a punto de baja velocidad hacia la posición de reposo (espera) especificada
en HomeSet, en el orden de volver a la posición de reposo definida en Hordr.
Normalmente, para los robots SCARA (incluso la serie RS), la articulación Z (J3) primero vuelve a la
posición de HomeSet; luego, las articulaciones J1, J2 y J4 vuelven simultáneamente a las posiciones de
coordenadas de HomeSet respectivas. La instrucción Hordr puede cambiar este orden en que los ejes vuelven
a sus posiciones de reposo.
Nota
Salida de estado de reposo:
Cuando el robot está en la posición de reposo, la salida de reposo del sistema del controlador está activada.
Posible error
Intento de volver a la posición de reposo sin los valores de HomeSet definidos
Tratar de dejar en reposo el robot sin configurar los valores de HomeSet generará el Error 2228.
Consulte también
HomeClr, HomeDef, HomeSet, Hordr
Ejemplo de instrucción Home
La instrucción Home se puede usar en un programa como este:
Function InitRobot
Reset
If Motor = Off Then
Motor On
EndIf
Home
Fend
O bien, se puede emitir desde la ventana Command de esta manera:
> home
>

336 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función HomeClr
Borra la definición de la posición de reposo.
Sintaxis
HomeClr
Descripción
Los datos de los parámetros del robot se almacenan en la memoria Compact Flash en el controlador. Por
tanto, la memoria flash de comandos se escribe cuando se ejecuta este comando. La escritura frecuente en
la memoria Compact Flash afecta su vida útil. Recomendamos que el uso de este comando sea mínimo.
Consulte también
HomeDef, HomeSet
Ejemplo de función HomeClr
Este ejemplo usa la función HomeClr en un programa:
Function ClearHome
If HomeDef = True Then
HomeClr
EndIf
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 337
Función HomeDef
Arroja si se ha definido o no la posición de reposo.
Sintaxis
HomeDef
Valores devueltos
Es True (Verdadero) si se ha definido o no la posición de reposo, de lo contrario es False (Falso).
Consulte también
HomeClr, HomeSet
Ejemplo de función HomeDef
Este ejemplo usa la función HomeDef en un programa:
Function DisplayHomeSet
Integer i
If HomeDef = False Then
Print "Home is not defined"
Else
Print "Home values:"
For i = 1 To 4
Print "J", i, " = ", HomeSet(i)
Next i
EndIf
Fend

338 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción HomeSet
Especifica y muestra la posición de reposo.
Sintaxis
(1) HomeSet j1Pulses, j2Pulses, j3Pulses, j4Pulses
[, j5Pulses, j6Pulses] [, j7Pulses] [, j8Pulses, j9Pulses]
(2) HomeSet
Parámetros
j1Pulses El valor de pulso del codificador de posición de reposo para la articulación 1.
j2Pulses El valor de pulso del codificador de posición de reposo para la articulación 2.
j3Pulses El valor de pulso del codificador de posición de reposo para la articulación 3.
j4Pulses El valor de pulso del codificador de posición de reposo para la articulación 4.
j5Pulses Opcional para los robots de 6 ejes (incluida la serie N).
El valor de pulso del codificador de posición de reposo para la articulación 5.
j6Pulses Opcional para los robots de 6 ejes (incluida la serie N).
El valor de pulso del codificador de posición de reposo para la articulación 6.
j7Pulses Opcional para los robots de 7 ejes de tipo articulación. El valor de pulso del codificador de
posición de reposo para la articulación 7.
j8Pulses Opcional para el eje S adicional.
El valor de pulso del codificador de posición de reposo para la articulación 8 (eje S
adicional).
j9Pulses Opcional para el eje T adicional.
El valor de pulso del codificador de posición de reposo para la articulación 9 (eje T
adicional).
Valores devueltos
Muestra los valores de pulso definidos para la posición de reposo actual cuando se omiten los parámetros.
Descripción
Permite que el usuario defina una nueva posición de reposo (espera) mediante la especificación de valores
de pulso del codificador para cada una de las articulaciones del robot.
Los datos de los parámetros del robot se almacenan en la memoria Compact Flash en el controlador. Por
tanto, la memoria flash de comandos se escribe cuando se ejecuta este comando. La escritura frecuente en
la memoria Compact Flash afecta su vida útil. Recomendamos que el uso de este comando sea mínimo.
Posibles errores
Intento de volver a la posición de reposo sin los valores de HomeSet definidos:
Tratar de dejar en reposo el robot sin configurar los valores de HomeSet generará el Error 2228.
Intento de mostrar los valores de HomeSet sin los valores de HomeSet definidos:
Tratar de mostrar los valores de pulso de la posición de reposo son los valores de HomeSet definidos
genera un Error 2228.
Consulte también
Home, HomeClr, HomeDef, Hordr, Pls

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 339
Ejemplo de instrucción HomeSet
Los siguientes ejemplos se llevan a cabo desde la ventana Monitor:
> homeset 0,0,0,0 'Establece la posición de reposo en 0,0,0,0
> homeset
0 0
0 0
> home 'El robot vuelve a la posición de reposo 0,0,0,0
Con la función Pls, especifique la posición actual del brazo como la posición de reposo.
> homeset Pls(1), Pls(2), Pls(3), Pls(4)

340 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función HomeSet
Arroja los valores de pulso de la posición de reposo para la articulación especificada.
Sintaxis
HomeSet(jointNumber)
Parámetros
jointNumber Expresión entera que representa el número de articulación para el que se recuperará el
valor de HomeSet.
El eje S adicional es 8 y el eje T es 9.
Valores devueltos
Arroja el valor de pulso de la posición de reposo de la articulación. Cuando jointNumber es “0”, arroja “1”
cuando HomeSet se ha establecido, o “0” si no se ha hecho.
Consulte también
Instrucción HomeSet
Ejemplo de función HomeSet
Este ejemplo usa la función HomeSet en un programa:
Function DisplayHomeSet
Integer i
If HomeSet(0) = 0 Then
Print "HomeSet is not defined"
Else
Print "HomeSet values:"
For i = 1 To 4
Print "J", i, " = ", HomeSet(i)
Next i
EndIf
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 341
Instrucción Hordr
Especifica o muestra el orden de los ejes que vuelven a sus posiciones de reposo.
Sintaxis
(1) Hordr step1, step2, step3, step4 [, step5] [, step6] [, step7] [, step8] [, step9]
(2) Hordr
Parámetros
step1 Patrón de bits que define las articulaciones que deberían volver a la posición de reposo durante el
primer paso del proceso de volver a la posición de reposo.
step2 Patrón de bits que define las articulaciones que deberían volver a la posición de reposo durante el
segundo paso del proceso de volver a la posición de reposo.
step3 Patrón de bits que define las articulaciones que deberían volver a la posición de reposo durante el
tercer paso del proceso de volver a la posición de reposo.
step4 Patrón de bits que define las articulaciones que deberían volver a la posición de reposo durante el
cuarto paso del proceso de volver a la posición de reposo.
step5 Patrón de bits que define las articulaciones que deberían volver a la posición de reposo durante el
quinto paso del proceso de volver a la posición de reposo.
step6 Patrón de bits que define las articulaciones que deberían volver a la posición de reposo durante el
sexto paso del proceso de volver a la posición de reposo.
step7 Patrón de bits que define las articulaciones que deberían volver a la posición de reposo durante el
séptimo paso del proceso de volver a la posición de reposo.
step8 Patrón de bits que define las articulaciones que deberían volver a la posición de reposo durante el
octavo paso del proceso de volver a la posición de reposo.
step9 Patrón de bits que define las articulaciones que deberían volver a la posición de reposo durante el
noveno paso del proceso de volver a la posición de reposo.
Valores devueltos
Muestra la configuración de orden de reposo actual cuando se omiten los parámetros.
Descripción
Hordr especifica el orden de movimiento de las articulaciones para el comando Home. (Es decir, define qué
articulación volverá a la posición de reposo primero, cuál lo hará en segundo lugar, tercer lugar, etc.)
El fin de la instrucción Hordr es permitir que el usuario cambie el orden de volver a la posición de reposo. El
orden de volver a la posición de reposo se divide en 4, 6 o 9 pasos separados, dependiendo del tipo de robot.
Entonces, el usuario utiliza Hordr para definir las articulaciones específicas que se moverán a la posición de
reposo durante cada paso. Es importante darse cuenta de que se puede definir más de una articulación para
moverse a la posición de reposo durante un solo paso. Esto significa que todas las articulaciones posiblemente
pueden volver a la posición de reposo al mismo tiempo. Para los robots SCARA (incluidos los robots de la
serie RS y de 4 ejes), se recomienda que se defina la articulación Z normalmente para que se mueva a la
posición de reposo primero (en el Paso 1), y luego permita que las demás articulaciones sigan en pasos
posteriores.
La instrucción Hordr espera que se defina un patrón de bits para cada uno de los pasos. Cada articulación
tiene asignada un bit específico. Cuando el bit se establece en “1” para un paso específico, entonces la
articulación correspondiente volverá a la posición de reposo. Cuando el bit se borra y queda en “0”, entonces
el eje correspondiente no volverá a la posición de reposo durante ese paso. Los patrones del bit de la
articulación están asignados de la siguiente manera:
Articulación: 1 2 3 4 5 6 7 8 9
Número de bit:
bit 0
bit 1
bit 2
bit 3
bit 4
bit 5
bit 6
bit 7
bit 8
Código binario:
&B0001 &B0010 &B0100 &B1000
&B100
00
&B100
000
&B100
0000
&B100
00000
&B100
000000

342 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Los datos de los parámetros del robot se almacenan en la memoria Compact Flash en el controlador. Por
tanto, la memoria flash de comandos se escribe cuando se ejecuta este comando. La escritura frecuente en
la memoria Compact Flash afecta su vida útil. Recomendamos que el uso de este comando sea mínimo.
Consulte también
Home, HomeSet
Ejemplo de instrucción Hordr
A continuación, se muestran algunos ejemplos de la ventana Command para los robots SCARA (incluidos
los robots de 4 ejes de la serie RS):
Este ejemplo define el orden de reposo como J3 en el primer paso, J1 en el segundo paso, J2 en el tercer paso
y J4 en el cuarto paso. El orden se especifica con valores binarios.
>hordr &B0100, &B0001, &B0010, &B1000
Este ejemplo define el orden de reposo como J3 en el primer paso, luego las articulaciones J1, J2 y J4
simultáneamente en el segundo paso. El orden se especifica con valores decimales.
>hordr 4, 11, 0, 0
Este ejemplo muestra el orden de reposo actual en números decimales.
>hordr
4, 11, 0, 0
>

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 343
Función Hordr
Arroja el valor Hordr para un paso especificado.
Sintaxis
Hordr(stepNumber)
Parámetros
stepNumber Expresión entera que representa el paso de Hordr que se recuperará.
Valores devueltos
Valor entero que contiene el valor de Hordr para el paso especificado.
Consulte también
Home, HomeSet
Ejemplo de función Hordr
Integer a
a = Hordr(1)

344 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción Hour
Muestra el tiempo de funcionamiento acumulado del controlador.
Sintaxis
Hour
Descripción
Muestra la cantidad de tiempo que ha estado activado el controlador y ha estado ejecutando SPEL. (Tiempo
de funcionamiento acumulado) El tiempo siempre se muestra en unidades de horas.
Consulte también
Tiempo
Ejemplo de instrucción Hour
El siguiente ejemplo se realizó en la ventana Command:
> hour
2560
>

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 345
Función Hour
Arroja el tiempo de funcionamiento acumulado del controlador.
Sintaxis
Hour
Valores devueltos
Arroja el tiempo de funcionamiento acumulado del controlador (tiempo real, en horas).
Consulte también
Tiempo
Ejemplo de función Hour
Print "Number of controller operating hours: ", Hour

346 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción If…Then…Else…EndIf
Ejecuta las instrucciones, basada en una condición especificada.
Sintaxis
(1) If condition Then
stmtT1
.
.
[ElseIf condition Then]
stmtT1
.
.
[Else]
stmtF1
.
.
EndIf
(2) If condition Then stmtT1 [; stmtT2...] [Else stmtF1 [; stmtF2...]]
Parámetros
condition Cualquier condición de prueba válida que arroje un resultado True (cualquier número que no
sea “0”) o False (devuelto como “0”). (Consulte las condiciones de muestra a continuación)
stmtT1 Se ejecuta cuando la condición es True. (Aquí se pueden ingresar varias instrucciones en un
estilo bloqueado If...Then...Else).
stmtF1 Se ejecuta cuando la condición es False. (Aquí se pueden ingresar varias instrucciones en un
estilo bloqueado If...Then...Else).
Descripción
(1) If...Then...Else ejecuta stmtT1, etc. cuando la instrucción condicional es True. Si la condición es False,
entonces se ejecuta stmtF1, etc. La parte Else de la instrucción If...Then...Else es opcional. Si omite la
instrucción Else y la instrucción condicional es False, se ejecutará la instrucción posterior a la instrucción
EndIf. En caso de instrucciones If...Then...Else bloqueadas, se necesita la instrucción EndIf para cerrar
el bloqueo, independiente de si se usa Else o no.
(2) También se puede usar If...Then...Else en un estilo no bloqueado. Esto permite que todas las instrucciones
de If...Then...Else se coloquen en la misma línea. Tenga en cuenta que, cuando use If...Then...Else de
manera no bloqueada, no se necesita la instrucción EndIf. Si se cumple (True) la condición If especificada
en esta línea, se ejecutan las instrucciones entre Then y Else. Si no se cumple la condición (False), se
ejecutan las instrucciones a continuación de Else. No se necesita la sección Else de If...Then...Else. Si no
hay una palabra clave Else, entonces el control pasa a la siguiente instrucción en el programa si la
condición If es False.
La salida lógica de la instrucción condicional es cualquier número que no sea “1” cuando es True, y “0”
cuando es False.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 347
Notas
Condiciones de muestra:
a = b :a es igual a b
a < b :b es mayor que a
a >= b :a es mayor que o igual a b
a <> b :a no es igual a b
a > b :b es menor que a
a <= b :a es menor o igual que b
También se pueden usar las operaciones lógicas And, Or y Xor.
True en las condiciones:
True constante es −1 y el tipo es booleano, por lo que debe tener cuidado cuando lo use en una condición de
comparación con otro tipo de variable.
Function main
Integer i
i = 3
If i = True Then
Print "i=TRUE"
EndIf
Fend
Cuando ejecuta el programa anterior, se muestra “i=TRUE”.
El juicio de la condición, lo que incluye el tipo booleano, se realiza con “0” o “no 0”.
Si el valor de “i” no es “0”, se considera que se estableció la condición y se muestra “i=TRUE”.
Consulte también
Else, Select...Case, Do...Loop
Ejemplo de instrucción If/Then/Else
<Single Line If...Then...Else>
El siguiente ejemplo muestra una función simple que revisa una entrada para determinar si activar o
desactivar una salida específica. Esta tarea puede ser una tarea de E/S de fondo que se ejecuta continuamente.
Function main
Do
If Sw(0) = 1 Then On 1 Else Off 1
Loop
Fend

348 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
<Blocked If...Then...Else>
El siguiente ejemplo muestra una función simple que revisa algunas entradas e imprime el estado de estas
entradas.
If Sw(0) = 1 Then Print "Input0 ON" Else Print "Input0 OFF"
'
If Sw(1) = 1 Then
If Sw(2) = 1 Then
Print "Input1 On and Input2 ON"
Else
Print "Input1 On and Input2 OFF"
EndIf
Else
If Sw(2) = 1 Then
Print "Input1 Off and Input2 ON"
Else
Print "Input1 Off and Input2 OFF"
EndIf
EndIf
<Otros ejemplos de sintaxis>
If x = 10 And y = 3 Then GoTo 50
If test <= 10 Then Print "Test Failed"
If Sw(0) = 1 Or Sw(1) = 1 Then Print "Everything OK"

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 349
Instrucción ImportPoints
Importa un archivo de punto en el proyecto actual del robot especificado.
Sintaxis
ImportPoints sourcePath, filename [, robotNumber]
Parámetros
sourcePath Expresión de cadena que contiene la ruta y archivo específicos para importar al
proyecto actual. La extensión puede ser “.pts” o “.pnt” (formato EPSON RC+ 3.x y
4.x).
Consulte ChDisk para conocer detalles.
fileName Expresión de cadena que contiene el archivo específico que se importará en el
proyecto actual del robot actual. La extensión debe ser ".pts".
No puede especificar una ruta de archivo y fileName no tiene efecto de ChDisk.
Consulte ChDisk para conocer detalles.
robotNumber Opcional. Expresión entera que especifica el robot con el que se debería asociar el
archivo de punto. Si robotNumber = 0, entonces el archivo de punto se importa como
un archivo de punto común. Si se omite robotNumber, se usa el número de robot
actual.
Descripción
ImportPoints copia un archivo de punto en el archivo del proyecto actual y lo agrega a los archivos del
proyecto del robot especificado. Entonces, se compila el archivo de punto el cual está listo para cargarlo con
el comando LoadPoint. Si ya existe el archivo para el robot actual, se sobrescribirá y volverá a compilar.
Los datos de punto se guardan en la memoria Compact Flash dentro del controlador. Por lo tanto,
ImportPoints comienza a escribir en la memoria Compact Flash. La escritura frecuente en la memoria
Compact Flash reducirá su vida útil. Recomendamos usar ImportPoints solo para guardar los datos de punto.
Posibles errores
El archivo no existe
Si sourcePath no existe, ocurrirá un error.
No se puede especificar una ruta
Si fileName contiene una ruta, ocurrirá un error.
Archivo de punto para otro robot.
Si fileName es un archivo de punto de otro robot, se genera un error.
Consulte también
LoadPoints, Robot, SavePoints
Ejemplo de instrucción ImportPoints
Function main
Robot 1
ImportPoints "c:\mypoints\model1.pts", "robot1.pts"
LoadPoints "robot1.pts"
Fend

350 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función In
Arroja el estado del puerto de bytes especificado. Cada puerto contiene 8 canales de entrada.
Sintaxis
In(byteportNumber)
Parámetros
byteportNumber Número entero que representa un puerto de ocho bits (un byte).
Valores devueltos
Arroja un valor entero entre 0 y 255. El valor devuelto es 8 bits, donde cada bit corresponde a 1 canal de
entrada.
Descripción
In proporciona la capacidad de ver el valor de 8 canales de entrada al mismo tiempo. La instrucción In se
puede usar para guardar el estado de los 8 canales de E/S en una variable, o bien, se puede usar con la
instrucción Wait para esperar hasta que se cumpla una condición específica que involucre más de 1 canal de
E/S.
Ya que se revisan 8 canales al mismo tiempo, los valores devueltos varían entre 0 y 255. Revise la siguiente
tabla para ver cómo corresponden los valores enteros devueltos a los canales de entrada individuales.
Resultado del canal de entrada (mediante el puerto de bytes n.º 0)
Valores devueltos
7
6
5
4
3
2
1
0
1
Off
Off
Off
Off
Off
Off
Off
On
5
Off
Off
Off
Off
Off
On
Off
On
15
Off
Off
Off
Off
On
On
On
On
255
On
On
On
On
On
On
On
On
Resultado del canal de entrada (mediante el puerto de bytes n.º 2)
Valores devueltos
23
22
21
20
19
18
17
16
3
Off
Off
Off
Off
Off
Off
On
On
7
Off
Off
Off
Off
Off
On
On
On
32
Off
Off
On
Off
Off
Off
Off
Off
255
On
On
On
On
On
On
On
On
Consulte también
InBCD, MemIn, MemOff, MemOn, MemSw, Off, On, OpBCD, Oport, Out, Sw, Wait

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 351
Ejemplo de función In
Para el siguiente ejemplo, supongamos que los canales de entrada 20, 21, 22 y 23 están conectados a
dispositivos de detección, de modo que no se debería iniciar la aplicación hasta que cada uno de los
dispositivos arroje una señal On que indique que todo está listo para comenzar. El ejemplo de programa
obtiene el estado de los 8 canales de entrada del puerto de bytes 2 y se asegura de que los canales 20, 21, 22
y 23 tengan el estado On antes de continuar. Si no tienen el estado On (es decir, no arrojan un valor de 1),
aparece un mensaje de error para el operador y se detiene la tarea.
En el programa, la variable “var1” se compara con el número 239, ya que, para que las entradas 20, 21, 22 y
23 estén todas en estado On, el resultado de In(2) será 240 o mayor. (No nos importan las entradas 16, 17,
18 y 19 en este caso, por lo que cualquier valor entre 240 y 255 permitirá que el programa continúe).
Function main
Integer var1
var1 = In(2) 'Obtiene el estado de los 8 canales de entrada del puerto de bytes 2
If var1 > 239 Then
Go P1
Go P2
'Execute other motion statements here
'.
'.
Else
Print "Error in initialization!"
Print "Sensory Inputs not ready for cycle start"
Print "Please check inputs 20,21,22, and 23 for"
Print "proper state for cycle start and then"
Print "start program again"
EndIf
Fend
No podemos establecer entradas en la ventana Command, pero podemos revisarlas. Para los ejemplos que se
muestran a continuación, asumiremos que los canales de entrada 1, 5 y 15 están On. Todas las demás entradas
están Off.
> print In(0)
34
> print In(1)
128
> print In(2)
0

352 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función InBCD
Arroja el estado de entrada de las 8 entradas con el formato BCD. (Decimal codificado binariamente)
Sintaxis
InBCD(portNumber)
Parámetros
portNumber Número entero que representa un puerto de ocho bits (un byte).
Valores devueltos
Arroja el estado de entrada del puerto de entrada (0 a 9) como un decimal codificado binariamente (0 a 99).
Descripción
InBCD lee simultáneamente 8 líneas de entrada con el formato BCD. El parámetro portNumber de la
instrucción InBCD define el grupo de 8 entradas que se leerá, donde portNumber = 0 significa las entradas 0
a 7, portNumber = 1 significa las entradas 8 a 15, etc.
El valor resultante de las 8 entradas se arroja en formato BCD. El valor devuelto puede tener 1 o 2 dígitos
entre 0 y 99. El primer dígito (o dígito de las decenas) corresponde a las 4 salidas superiores del grupo de 8
salidas que selecciona portNumber. El segundo dígito (o dígito de las unidades) corresponde a las 4 salidas
inferiores del grupo de 8 salidas que selecciona portNumber.
Dado que las entradas válidas en el formato BCD varían entre 0 y 9 para cada dígito, no se puede obtener
cada combinación de E/S. La siguiente tabla muestra algunas de las combinaciones posibles de E/S y sus
valores devueltos asociados, asumiendo que portNumber es 0.
Configuración de entrada (Número de entrada)
Valores
devueltos
7
6
5
4
3
2
1
0
01
Off
Off
Off
Off
Off
Off
Off
On
02
Off
Off
Off
Off
Off
Off
On
Off
03
Off
Off
Off
Off
Off
Off
On
On
08
Off
Off
Off
Off
On
Off
Off
Off
09
Off
Off
Off
Off
On
Off
Off
On
10
Off
Off
Off
On
Off
Off
Off
Off
11
Off
Off
Off
On
Off
Off
Off
On
99
On
Off
Off
On
On
Off
Off
On
Tenga en cuenta que el formato de decimal codificado binariamente solo permite especificar valores
decimales. Esto significa que, mediante el uso del formato de decimal codificado binariamente, es imposible
recuperar un valor válido si todas las entradas de un puerto específico se activan al mismo tiempo cuando se
usa la instrucción InBCD. El valor más grande posible que arrojará InBCD es 99. En la tabla anterior, es fácil
ver que, cuando el valor devuelto para InBCD es 99, no están todas las entradas activadas. En el caso de un
valor devuelto de 99, las entradas 0, 3, 4 y 7 están en estado On y todas las demás están en Off.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 353
Nota
Diferencia entre InBCD e In
Las instrucciones InBCD e In son muy similares en el lenguaje SPEL
+
. Sin embargo, existe una gran
diferencia entre ambos, la cual se muestra a continuación:
- La instrucción InBCD utiliza un formato de decimal codificado binariamente para especificar el
formato del valor devuelto para las 8 entradas. Dado que el formato de decimal codificado
binariamente excluye el uso de los valores &HA, &HB, &HC, &HD, &HE o &HF, no se pueden
cumplir todas las combinaciones para las 8 entradas.
- La instrucción In funciona de manera muy similar a la instrucción InBCD, excepto que In permite usar
el valor devuelto para todas las 8 entradas. (Es decir, 0 a 255 contra 0 a 99 para InBCD). Esto permite
leer todas las combinaciones posibles para los grupos de entradas de 8 bits.
Consulte también
In, MemOff, MemOn, MemOut, MemSw, Off, On, OpBCD, Oport, Out, Sw, Wait
Ejemplo de función InBCD
Algunos ejemplos simples de la ventana Command incluyen los siguientes:
Asume que las entradas 0, 4, 10, 16, 17 y 18 están en On (el resto de las entradas están en Off).
> Print InBCD(0)
11
> Print InBCD(1)
04
> Print InBCD(2)
07
>

354 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción Inertia
Especifica la inercia de carga y la excentricidad del robot actual.
Sintaxis
Inertia [ loadInertia ] [, eccentricity ]
Inertia
Parámetros
loadInertia Opcional. Expresión real que especifica el momento total de inercia en kg m
2
alrededor
del centro de la articulación del efector final, lo que incluye el efector final y la pieza.
eccentricity Opcional. Expresión real que especifica la excentricidad en mm alrededor del centro de
la articulación del efector final, lo que incluye el efector final y la pieza.
Valores devueltos
Cuando se omiten los parámetros, se muestran los parámetros actuales de Inertia.
Descripción
Use la instrucción Inertia para especificar el momento total de inercia para la carga en la articulación del
efector final. Esto permite que el sistema compense de manera más precisa la aceleración, la desaceleración
y las ganancias del servo para la articulación del efector final. También puede especificar la distancia desde
el centro de la articulación del efector final al centro de gravedad del efector final y la pieza con el parámetro
eccentricity.
Los datos de los parámetros del robot se almacenan en la memoria Compact Flash en el controlador. Por
tanto, la memoria flash de comandos se escribe cuando se ejecuta este comando. La escritura frecuente en
la memoria Compact Flash afecta su vida útil. Recomendamos que el uso de este comando sea mínimo.
Consulte también
Función Inertia
Ejemplo de instrucción Inertia
Inertia 0.02, 1

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 355
Función Inertia
Arroja el valor del parámetro de inercia.
Sintaxis
Inertia(paramNumber)
Parámetros
paramNumber Expresión entera que puede tener los siguientes valores:
0: Genera que la función arroje “1” si el robot es compatible con los parámetros de inercia
o “0” si no lo es.
1: Genera que la función arroje la inercia de carga en kg m
2
.
2: Genera que la función arroje la excentricidad en mm.
Valores devueltos
El valor real de la configuración especificada.
Consulte también
Instrucción Inertia
Ejemplo de función Inertia
Real loadInertia, eccentricity
loadInertia = Inertia(1)
eccentricity = Inertia(2)

356 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función InPos
Arroja el estado de posición del robot especificado.
Sintaxis
InPos
Valores devueltos
True si la posición se ha completado correctamente; de lo contrario, False.
Consulte también
CurPos, FindPos, WaitPos
Ejemplo de función InPos
Function main
P0 = XY(0, -100, 0, 0)
P1 = XY(0, 100, 0, 0)
Xqt MonitorPosition
Do
Jump P0
Wait .5
Jump P1
Wait .5
Loop
Fend
Function MonitorPosition
Boolean oldInPos, pos
Do
Pos = InPos
If pos <> oldInPos Then
Print "InPos = ", pos
EndIf
oldInPos = pos
Loop
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 357
Instrucción Input
Recibe los datos de entrada del dispositivo de presentación y los almacena en variables.
Sintaxis
Input varName [ , varName, varName,... ]
Parámetros
varName Nombre de variable. Se pueden usar múltiples variables con el comando Input, siempre
que estén separados por comas.
Descripción
Input recibe datos desde el dispositivo de presentación y asigna los datos a las variables que se usan con la
instrucción Input.
Cuando se ejecuta la instrucción Input, aparece una indicación “?” en el dispositivo de presentación. Después
de ingresar los datos, presione la tecla de entrada (Enter) en el teclado.
Notas
Reglas para la entrada numérica
Cuando se ingresan valores numéricos y se encuentran datos no numéricos en la entrada que son distintos del
delimitador (coma), la instrucción Input descarta los datos no numéricos y todos los datos posteriores a los
datos no numéricos.
Reglas para la entrada de cadena
Cuando se ingresan cadenas, se permiten caracteres numéricos y alfabéticos como datos.
Otras reglas para la instrucción Input
- Cuando se especifica más de una variable en la instrucción, las entradas de datos numéricos destinada para
cada variable deben estar separadas por un carácter de coma (“,”).
- Se permiten nombres de variable numérica y nombres de variable de cadena. Sin embargo, el tipo de datos
de entrada debe coincidir con el tipo de variable.
Posible error
Diferencia entre el número de variables y los datos de entrada
Para múltiples variables, la cantidad de datos de entrada deben coincidir con la cantidad de nombres de
variable de entrada. Cuando la cantidad de variables especificada en la instrucción es distinta a la cantidad
de datos numéricos recibidos desde el teclado, ocurrirá un Error 2505.
Consulte también
Input #, Line Input, Line Input #, Print, String

358 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Ejemplo de instrucción Input
Este es un ejemplo de programa simple que usa la instrucción Input.
Function InputNumbers
Integer A, B, C
Print "Please enter 1 number"
Input A
Print "Please enter 2 numbers separated by a comma"
Input B, C
Print "A = ", A
Print "B = ", B, "C = ", C
Fend
A continuación, se muestra una sesión de muestra del programa anterior en ejecución:
(Use el menú Run [Ejecutar] o la tecla F5 para iniciar el programa)
Please enter 1 number
?-10000
Please enter 2 numbers separated by a comma
?25.1, -99
-10000
25.1 -99
B = 25.1 C = -99
>

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 359
Instrucción Input #
Permite que se reciban datos de cadena o numéricos desde un archivo, puerto de comunicación o base de
datos, y se almacenen en una o más variables.
Sintaxis
Input #portNumber, varName [ , varName, varName,... ]
Parámetros
#portNumber Número de ID que especifica un archivo, puerto de comunicación, base de datos o
dispositivo. El número de archivo se puede especificar en las instrucciones ROpen,
WOpen y AOpen. El número del puerto de comunicación se puede especificar en las
instrucciones OpenCom (RS-232C) y OpenNet (TCP/IP).
El número de la base de datos se puede especificar en la instrucción OpenDB.
La ID del dispositivo es:
21 RC+
24 TP (solo TP1)
20 TP3
varName Nombre de la variable que recibirá los datos.
Descripción
La instrucción Input # recibe los datos numéricos o de cadena desde el dispositivo especificado por handle,
y asigna los datos a las variables.
Notas
Reglas para la entrada numérica
Cuando se ingresan valores numéricos y se encuentran datos no numéricos en la entrada que son distintos del
delimitador (coma), la instrucción Input descarta los datos no numéricos y todos los datos posteriores a los
datos no numéricos.
Reglas para la entrada de cadena
Cuando se ingresan cadenas, se permiten caracteres numéricos y alfabéticos como datos.
Longitud máxima de datos
Este comando puede manejar hasta 256 bytes.
Sin embargo, el objetivo es la base de datos, la que puede manejar hasta 4096 bytes.
Si el objetivo es el puerto de comunicación (TCP/IP), puede manejar hasta 1024 bytes.
Otras reglas para la instrucción Input
- Cuando se especifica más de una variable en la instrucción, las entradas de datos numéricos destinada
para cada variable deben estar separadas por un carácter de coma (“,”) o en blanco (“ ”).
- Cuando hay más de una variable de cadena o si se especifica tanto la variable numérica como la variable de
cadena, los datos numéricos deben estar separados por un carácter de coma (“,”) o en blanco (“ ”).
- El tipo de datos de entrada debe coincidir con el tipo de variable.
Los siguientes programas son ejemplos para intercambiar la variable de cadena y la variable numérica
entre los controladores con un puerto de comunicación.
Punto de envío (cualquier patrón es correcto).
Print #PortNum, "$Status,", InData, OutData
Print #PortNum, "$Status", ",",InData, OutData
Punto de destino
Input #PortNum, Response$, InData, OutData

360 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Posible error
Diferencia entre el número de variables y los datos de entrada
Cuando la cantidad de variables especificada en la instrucción es distinta a la cantidad de datos numéricos
recibidos desde el dispositivo, ocurrirá un Error 2505.
Consulte también
Input, Line Input, Line Input #, Print #
Ejemplo de instrucción Input #
Esta función muestra algunos ejemplos simples de instrucción Input #.
Function GetData
Integer A
String B$
OpenCom #1
Print #1, "Send"
Input #1, A 'Obtiene un valor numérico desde el Puerto n.° 1
Input #1, B$ 'Obtiene una cadena desde el Puerto n.° 1
CloseCom #1
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 361
Instrucción InputBox
Muestra una indicación en un cuadro de diálogo, espera que el operador ingrese el texto o elija un botón y
arroja el contenido del cuadro.
Sintaxis
InputBox prompt, title, default, data$
Parámetros
prompt Expresión de cadena que se muestra como un mensaje en el cuadro de diálogo.
title Expresión de cadena que se muestra en la barra de título del cuadro de diálogo.
default Expresión de cadena que se muestra en el cuadro de texto como una respuesta
predeterminada. Si no se desea un valor predeterminado, use una cadena vacía (“”).
data$ Una variable de cadena contendrá lo que ingresó el operador. Si el operador hace clic
en Cancel (Cancelar), esta cadena será “@”.
Descripción
InputBox muestra el diálogo y espera que el operador haga clic en OK (Aceptar) o Cancel. data es una
cadena que contiene lo que escribió el operador.
Consulte también
MsgBox
Ejemplo de instrucción InputBox
Esta función muestra un ejemplo de InputBox.
Function GetPartName$ As String
String prompt$, title$, data$
prompt$ = "Enter " + Chr$(34) + "part name" + Chr$(34) + ":"
title$ = "Sample Application"
InputBox prompt$, title$, "", data$
If data$ <> "@" Then
GetPartName$ = data$
EndIf
Fend
La siguiente imagen muestra la salida de ejemplo desde el código de ejemplo de InputBox que se mostró
anteriormente.

362 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función InReal
Arroja los datos de entrada de 2 palabras (32 bits) como los datos de punto flotantes (en cumplimiento con
IEEE754) de 32 bits.
Sintaxis
InReal(WordPortNumber)
Parámetros
WordPortNumber Expresión entera que representa la palabra de entrada de E/S.
Valores devueltos
Arroja el estado del puerto de entrada en el número de tipo real.
Descripción
Desde el puerto de palabra de entrada especificado por el número de puerto de palabra, recupere los 2 valores
de palabra de entrada como el valor de tipo real IEEE754. La etiqueta de palabra de entrada se puede usar
para el parámetro de número de puerto de palabra.
La función InReal no se puede usar para el comando Wait o la condición de Till, Find, Sense.
Consulte también
In, InW, InBCD, Out, OutW, OpBCD, OutReal
Ejemplo de función InW
Real realVal
realVal = InReal(32)

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 363
Función InsideBox
Arroja el estado de comprobación del área de control de acercamiento.
Sintaxis
InsideBox(AreaNum [, robotNumber | All])
Parámetros
AreaNum Expresión entera de 1 a 15 que representa el área de control de acercamiento de la
cual se arrojará el estado.
robotNumber Valor entero que incluye el número de robot que desea buscar.
Si se omite, se especificará el número del robot actual.
Si especifica All (Todo), arroja True si hay un robot en el área de control.
Valores devueltos
True si el efector final del robot se acerca al área de control de acercamiento especificada; de lo contrario,
False.
Consulte también
Box, BoxClr, BoxDef, GetRobotInsideBox, InsidePlane
Nota
Puede usar la instrucción Wait con InsideBox para esperar el resultado de la función InsideBox en EPSON
RC+ 5.0. No obstante, no se puede usar en EPSON RC+ 6.0 y 7.0.
En este caso, use la función GetRobotInsideBox en lugar de la función InsideBox.
Tabla de correspondencia
RC+
versión
Controlado
r de robot
Wait
Till, Find,
Sense, Trap
Otros comandos
(como Print)/
procesamiento de
decisiones de
bifurcación
Uso de la función
GetRobotInsideBox
RC+ 7.0
RC700
No disponible
No disponible
Disponible
Todo disponible
RC+ 7.0
RC90
No disponible
No disponible
Disponible
Todo disponible
RC+ 6.0
RC620
No disponible
No disponible
Disponible
Todo disponible
RC+ 5.0
RC90
Disponible
No disponible
Disponible
No disponible
No disponible: Combinación no disponible
Disponible: Combinación disponible
Todo disponible: Disponible para Wait, Till, Find, Sense, Trap, Print y el procesamiento de decisiones de
bifurcación.
Ejemplo de función InsideBox
El siguiente programa comprueba si el Robot 1 está en el área de control (Box 3) o no.
Function PrintInsideBox
If InsideBox(3,1) = True Then
Print “Inside Box3”
Else
Print “Outside Box3”
EndIf
Fend

364 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función InsidePlane
Arroja el estado de comprobación del plano de control de acercamiento.
Sintaxis
InsidePlane(PlaneNum [, robotNumber | All])
Parámetros
PlaneNum Expresión entera de 1 a 15 que representa el plano de control de acercamiento del cual
se arrojará el estado.
robotNumber Valor entero que incluye el número de robot que desea buscar.
Si se omite, se especificará el número del robot actual.
Si especifica All (Todo), arroja True si hay un robot en el área de control.
Valores devueltos
True si el efector final del robot se acerca al plano de control de acercamiento especificada; de lo contrario,
False.
Consulte también
InsideBox, GetRobotInsidePlane, Plane, PlaneClr, PlaneDef
Nota
Puede usar la instrucción Wait con InsidePlane para esperar el resultado de la función InsidePlane en EPSON
RC+ 5.0. No obstante, no se puede usar en EPSON RC+ 6.0 y 7.0.
En este caso, use la función GetRobotInsidePlane en lugar de la función InsidePlane.
Tabla de correspondencia
RC+
versión
Controlador
de robot
Wait
Till, Find,
Sense, Trap
Otros comandos
(como Print)/
procesamiento de
decisiones de
bifurcación
Uso de la función
GetRobotInsidePlane
RC+ 7.0
RC700
No disponible
No disponible
Disponible
Todo disponible
RC+ 7.0
RC90
No disponible
No disponible
Disponible
Todo disponible
RC+ 6.0
RC620
No disponible
No disponible
Disponible
Todo disponible
RC+ 5.0
RC90
Disponible
No disponible
Disponible
No disponible
No disponible: Combinación no disponible
Disponible: Combinación disponible
Todo disponible: Disponible para Wait, Till, Find, Sense, Trap, Print y el procesamiento de decisiones de
bifurcación.
Ejemplo de función InsidePlane
Esto es un ejemplo para comprobar si el Robot 1 está en el plano de comprobación (Plano 3).
Function PrintInsidePlane
If InsidePlane(3,1) = True Then
Print “Inside Plane3”
Else
Print “Outside Plane3”
EndIf
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 365
Función InStr
Arroja la posición de una cadena dentro de otra.
Sintaxis
InStr(string, searchString)
Parámetros
string Expresión de cadena que se debe buscar.
searchString Expresión de cadena que se debe buscar dentro de string.
Valores devueltos
Arroja la posición de la cadena de búsqueda si se encuentra la ubicación; de lo contario, es -1.
Consulte también
Mid$
Ejemplo de función InStr
Integer pos
pos = InStr("abc", "b")

366 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función Int
Convierte un número real en un número entero. Arroja el número entero más grande que sea menor o igual
que el valor especificado.
Sintaxis
Int(number)
Parámetros
number Una expresión de número real.
Valores devueltos
Arroja un valor entero del número real que se usa en number.
Descripción
Int(number) toma el valor de number y arroja el número entero más grande que sea menor o igual que number.
Nota
Para valores menores que 1 (números negativos)
Si el parámetro number tiene un valor menor que 1, entonces el valor devuelto tiene un valor absoluto mayor
que number. (Por ejemplo, si el número = -1,35, entonces se arrojará -2).
Consulte también
Abs, Atan, Atan2, Cos, Mod, Not, Sgn, Sin, Sqr, Str$, Tan, Val
Ejemplo de función Int
Algunos ejemplos simples de la ventana Command incluyen los siguientes:
> Print Int(5.1)
5
> Print Int(0.2)
0
> Print Int(-5.1)
-6
>

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 367
Instrucción Int32
Declara variables del tipo Int32. (Variable de número entero de 4 bytes).
Sintaxis
Int32 varName [(subscripts)] [, varName [(subscripts)]...]
Parámetros
varName Nombre de variable que el usuario desea declarar.
subscripts Opcional. Las dimensiones de una matriz son variables; es posible declarar hasta 3
dimensiones. La sintaxis del subíndice es la siguiente
(ubound1, [ubound2], [ubound3])
ubound1, ubound2, ubound3 especifican, cada una, el límite superior máximo para la
dimensión asociada.
Los elementos en cada dimensión de una matriz se numeran desde 0 y el número
disponible de elementos de matriz es el valor de límite superior + 1.
Cuando especifique el valor del límite superior, asegúrese de que el número total de
elementos esté dentro del rango que se muestra a continuación:
Variable local 2.000
Variables globales conservadas 4.000
Variable global y variable de módulo 100.000
Descripción
Int32 se usa para declarar variables como un tipo entero. Las variables de número entero pueden incluir
valores de -2147483648 a 2147483647. Las variables locales se deben declarar al inicio de una función. Las
variables globales y de módulo se deben declarar fuera de las funciones.
Consulte también
Boolean, Byte, Double, Global, Int64, Integer, Long, Real, Short, String, UByte, UInt32, UInt64,
UShort
Ejemplo de instrucción Int32
El siguiente ejemplo muestra un programa simple que declara algunas variables con Int32.
Function int32test
Int32 A(10) 'Matriz de una dimensión de Int32
Int32 B(10, 10) 'Matriz de dos dimensiones de Int32
Int32 C(5, 5, 5) 'Matriz de tres dimensiones de Int32
Int32 var1, arrayvar(10)
Integer i
Print "Please enter an Integer Number"
Input var1
Print "The Integer variable var1 = ", var1
For i = 1 To 5
Print "Please enter an Integer Number"
Input arrayvar(i)
Print "Value Entered was ", arrayvar(i)
Next i
Fend

368 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción Int64
Declara variables del tipo Int64. (Variable de número entero de 8 bytes).
Sintaxis
Int64 varName [(subscripts)] [, varName [(subscripts)]...]
Parámetros
varName Nombre de variable que el usuario desea declarar.
subscripts Opcional. Las dimensiones de una matriz son variables; es posible declarar hasta 3
dimensiones. La sintaxis del subíndice es la siguiente
(ubound1, [ubound2], [ubound3])
ubound1, ubound2, ubound3 especifican, cada una, el límite superior máximo para la
dimensión asociada.
Los elementos en cada dimensión de una matriz se numeran desde 0 y el número
disponible de elementos de matriz es el valor de límite superior + 1.
Cuando especifique el valor del límite superior, asegúrese de que el número total de
elementos esté dentro del rango que se muestra a continuación:
Variable local 2.000
Variables globales conservadas 4.000
Variable global y variable de módulo 100.000
Descripción
Int64 se usa para declarar variables como un tipo entero. Las variables de número entero pueden incluir
valores de -9223372036854775808 a 9223372036854775807. Las variables locales se deben declarar al
inicio de una función. Las variables globales y de módulo se deben declarar fuera de las funciones.
Consulte también
Boolean, Byte, Double, Global, Int32, Integer, Long, Real, Short, String, UByte, UInt32, UShort
UInt64
Ejemplo de instrucción Int64
El siguiente ejemplo muestra un programa simple que declara algunas variables con Int64.
Function int64test
Int64 A(10) 'Matriz de una dimensión de Int64
Int64 B(10, 10) 'Matriz de dos dimensiones de Int64
Int64 C(5, 5, 5) 'Matriz de tres dimensiones de Int64
Int64 var1, arrayvar(10)
Integer i
Print "Please enter an Integer Number"
Input var1
Print "The Integer variable var1 = ", var1
For i = 1 To 5
Print "Please enter an Integer Number"
Input arrayvar(i)
Print "Value Entered was ", arrayvar(i)
Next i
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 369
Instrucción Integer
Declara variables del tipo Integer. (Variable de número entero de 2 bytes).
Sintaxis
Integer varName [(subscripts)] [, varName [(subscripts)]...]
Parámetros
varName Nombre de variable que el usuario desea declarar como un tipo entero.
subscripts Opcional. Las dimensiones de una matriz son variables; es posible declarar hasta 3
dimensiones. La sintaxis del subíndice es la siguiente
(ubound1, [ubound2], [ubound3])
ubound1, ubound2, ubound3 especifican, cada una, el límite superior máximo para la
dimensión asociada.
Los elementos en cada dimensión de una matriz se numeran desde 0 y el número
disponible de elementos de matriz es el valor de límite superior + 1.
Cuando especifique el valor del límite superior, asegúrese de que el número total de
elementos esté dentro del rango que se muestra a continuación:
Variable local 2.000
Variables globales conservadas 4.000
Variable global y variable de módulo 100.000
Descripción
Integer se usa para declarar variables como un tipo entero. Las variables de tipo entero pueden incluir
números enteros con valores de -32768 a 32767. Las variables locales se deben declarar al inicio de una
función. Las variables globales y de módulo se deben declarar fuera de las funciones.
Consulte también
Boolean, Byte, Double, Global, Int32, Int64, Long, Real, Short, String, UByte, UInt32, UInt64,
UShort
Ejemplo de instrucción Integer
El siguiente ejemplo muestra un programa simple que declara algunas variables con Integer.
Function inttest
Integer A(10) 'Matriz de una dimensión de Integer
Integer B(10, 10) 'Matriz de dos dimensiones de Integer
Integer C(5, 5, 5) 'Matriz de tres dimensiones de Integer
Integer var1, arrayvar(10)
Integer i
Print "Please enter an Integer Number"
Input var1
Print "The Integer variable var1 = ", var1
For i = 1 To 5
Print "Please enter an Integer Number"
Input arrayvar(i)
Print "Value Entered was ", arrayvar(i)
Next i
Fend

370 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función InW
Arroja el estado del puerto de palabra de entrada especificado. Cada puerto de palabra contiene 16 bits de
entrada.
Sintaxis
InW(WordPortNum)
Parámetros
WordPortNum Expresión entera que representa la palabra de entrada de E/S.
Valores devueltos
Arroja el estado actual de las entradas (números enteros largos de 0 a 65535).
Nota
Regla del puerto de palabra que incluye el bit de entrada de la E/S de tiempo real
Los puertos de palabra =1, 3, 17, 19 arrojan el estado del puerto de salida con un número entero de 0 a 255.
El bit de entrada de la E/S en tiempo real no se ve reflejado.
Consulte también
In, Out, OutW
Ejemplo de función InW
Long word0
word0 = InW(0)

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 371
Función IODef
Arroja si se definió el bit, byte o palabra especificados de entrada o salida o la etiqueta de E/S.
Sintaxis
IODef (IOType, IOWidth, portNumber)
IODef (IOlabel)
Parámetros
IOType Expresión entera que representa el tipo de E/S.
0 - Entrada
1 - Salida
2 - Memoria
IOWidth Expresión entera que representa el ancho del puerto: 1 (bit), 8 (byte) o 16 (palabra).
portNumber Expresión entera que representa el número de puerto de bit, byte o palabra para el cual se
devuelve la etiqueta.
IOlabel Expresión de cadena que especifica la E/S estándar o la etiqueta de E/S de memoria.
Valores devueltos
True si se definió el bit, byte o palabra especificados de entrada o salida o la etiqueta de E/S; de lo
contrario, False.
Consulte también
IOLabel$, IONumber
Ejemplo de función IODef
Integer i
For i = 0 To 15
If IODef( 0, 1, i) = TRUE Then
Print “Port “ , i, “ is defined”
Else
Print “Port “ , i, “ is undefined”
EndIf
Next i

372 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función IOLabel$
Arroja la etiqueta de E/S para un bit, byte o palabra especificados de entrada o salida.
Sintaxis
IOLabel$(IOType, IOWidth, portNumber)
Parámetros
IOType Expresión entera que representa el tipo de E/S.
0 - Entrada
1 - Salida
2 - Memoria
IOWidth Expresión entera que representa el ancho del puerto: 1 (bit), 8 (byte) o 16 (palabra).
portNumber Expresión entera que representa el número de puerto de bit, byte o palabra para el cual se
devuelve la etiqueta.
Valores devueltos
Cadena que contiene la etiqueta.
Consulte también
PLabel$, IONumber, IODef
Ejemplo de función IOLabel$
Integer i
For i = 0 To 15
Print "Input ", i, ": ", IOLabel$(0, 1, i)
Next i

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 373
Función IONumber
Arroja el número de E/S de la etiqueta de E/S especificada.
Sintaxis
IONumber(IOlabel)
Parámetros
IOlabel Expresión de cadena que especifica la E/S estándar o la etiqueta de E/S de memoria.
Valores devueltos
Arroja el número de puerto de E/S (bit, byte, palabra) de la etiqueta de E/S especificada. Si no hay una
etiqueta de E/S, se generará un error.
Consulte también
IOLabel$, IODef
Ejemplo de función IONumber
Integer IObit
IObit = IONumber("myIO")
IObit = IONumber("Station" + Str$(station) + "InCycle")

374 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción J1Angle
Establece el atributo J1Angle de un punto.
Sintaxis
(1) J1Angle point [, Step ]
(2) J1Angle
Parámetros
point Pnumber o P(expr) o etiqueta de punto.
Step Opcional. Valor real que especifica el valor definido.
Resultado
El atributo J1Angle se puede usar para los robots serie RS y N.
Si se omite Step, se mostrará el valor de J1Angle para el punto especificado.
Si se omiten ambos parámetros, se mostrará el valor de J1Angle de la posición actual del robot.
Serie RS: Especifica el ángulo de la articulación n.° 1 cuando los valores de las coordenadas X e Y de
un punto son “0” (singularidad). J1Angle no tiene significado para otros puntos de serie del
robot.
Serie N: Especifica el ángulo de la Articulación n.° 1 cuando los centros de eje de “Articulación n.°
1, n.° 4 y n.° 6”, “Articulación n.° 1 y n.° 6” o “Articulación n.° 1 y n.° 4” están en línea
recta. J1Angle no tiene significado para otros puntos de serie del robot (sin singularidad).
Consulte también
Hand, Función J1Angle, J1Flag, J2Flag, J4Angle, Función J4Angle
Ejemplo de instrucción J1Angle
J1Angle P0, 10.0
J1Angle P(mypoint), 0.0

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 375
Función J1Angle
Arroja el atributo J1Angle de un punto.
Sintaxis
J1Angle [( point )]
Parámetros
point Expresión de punto
Opcional. Si se omite, arroja la configuración de J1Angle de la posición actual del robot.
Valores devueltos
El atributo J1Angle se puede usar para los robots serie RS y N.
Arroja el ángulo de la Articulación 1 cuando los valores de las coordenadas X e Y de un punto son “0”
(singularidad) en un valor real. El atributo J1Angle se puede usar para la serie RS.
Serie RS: Arroja un valor entero que representa el ángulo de la Articulación n.° 1 cuando los valores
de las coordenadas X e Y de un punto son “0” (singularidad).
Serie N: Arroja un valor entero que representa el ángulo de la Articulación n.° 1 cuando los centros
de eje de “Articulación n.° 1, n.° 4 y n.° 6”, “Articulación n.° 1 y n.° 6” o “Articulación n.°
1 y n.° 4” están en línea recta.
Consulte también
Hand, J1Angle, J1Flag, J2Flag, J4Angle, Función J4Angle
Ejemplo de función J1Angle
Print J1Angle(pick)
Print J1Angle(P1)
Print J1Angle

376 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción J1Flag
Especifica el atributo J1Flag de un punto.
Sintaxis
(1) J1Flag point [, value]
(2) J1Flag
Parámetros
point Pnumber o P(expr) o etiqueta de punto.
value Opcional. Expresión entera.
Para el manipulador de la serie RS:
El rango de J1 0 (/J1F0) va de -90 a +270 grados
El rango de J1 1 (/J1F1) va de -270 a -90 o +270 a +450 grados
Para el manipulador de la serie C8 y C12:
El rango de J1 0 (/J1F0) va de 0 a -180 o 0 a +180 grados
El rango de J1 1 (/J1F1) va de -180 a -240 o +180 a -240 grados
Valores devueltos
El atributo J1Flag especifica el rango de valores para la articulación 1 para un punto. Si se omite value, se
muestra el valor de J1Flag para el punto especificado. Cuando se omiten ambos parámetros, se muestra el
valor de J1Flag para la posición actual del robot.
Consulte también
Hand, Función J1Flag, J2Flag
Ejemplo de instrucción J1Flag
J1Flag P0, 1
J1Flag P(mypoint), 0

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 377
Función J1Flag
Arroja el atributo J1Flag de un punto.
Sintaxis
J1Flag [(point)]
Parámetros
point Opcional. Expresión de punto. Si se omite point, entonces se arroja la configuración de J1Flag
de la posición actual del robot.
Valores devueltos
0 /J1F0
1 /J1F1
Consulte también
Hand, Instrucción J1Flag, J2Flag
Ejemplo de función J1Flag
Print J1Flag(pick)
Print J1Flag(P1)
Print J1Flag
Print J1Flag(Pallet(1, 1))

378 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción J2Flag
Establece el atributo J2Flag de un punto.
Sintaxis
(1) J2Flag point [, value ]
(2) J2Flag
Parámetros
point Pnumber o P(expr) o etiqueta de punto.
value Opcional. Expresión entera.
El rango de J2 0 (/J2F0) va de -180 a +180 grados
El rango de J2 1 (/J2F1) va de -360 a -180 o +180 a +360 grados
Valores devueltos
El atributo J2Flag especifica el rango de valores para la articulación 2 para un punto. Si se omite value, se
muestra el valor de J2Flag para el punto especificado. Cuando se omiten ambos parámetros, se muestra el
valor de J2Flag para la posición actual del robot.
Consulte también
Hand, J1Flag, Función J2Flag
Ejemplo de instrucción J2Flag
J2Flag P0, 1
J2Flag P(mypoint), 0

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 379
Función J2Flag
Arroja el atributo J2Flag de un punto.
Sintaxis
J2Flag [(point)]
Parámetros
point Opcional. Expresión de punto. Si se omite point, entonces se arroja la configuración de J2Flag
de la posición actual del robot.
Valores devueltos
0 /J2F0
1 /J2F1
Consulte también
Hand, J1Flag, Instrucción J2Flag
Ejemplo de función J2Flag
Print J2Flag(pick)
Print J2Flag(P1)
Print J2Flag
Print J2Flag(P1 + P2)

380 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción J4Angle
Establece el atributo J4Angle de un punto.
Sintaxis
(1) J4Angle point [, value ]
(2) J4Angle
Parámetros
point Pnumber o P(expr) o etiqueta de punto.
value Opcional. Expresión entera.
Resultado
El atributo J4Angle se usa solo para la serie N del robot.
Especifica el ángulo de la Articulación n.° 4 cuando los centros del eje de la Articulación n.° 4 y n.° 6 están
en línea recta.
J4Angle no tiene significado si el punto no es una singularidad.
Si se omite value, se muestra el valor de J4Angle para el punto especificado. Cuando se omiten ambos
parámetros, se muestra el valor de J4Angle para la posición actual del robot.
Consulte también
Hand, J1Angle, Función J1Angle, Función J4Angle
Nota
Cuando se utilizan ambos J4Flag y J4Angle, se le da prioridad a J4Angle de la siguiente
manera:
J4Angle P0,0
J4Flag P0,1
Ejemplo de J4Angle
J4Angle P0, 10.0
J4Angle P(mypoint), 0.0

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 381
Función J4Angle
Arroja el atributo J4Angle de un punto.
Sintaxis
J4Angle [(point)]
Parámetros
point Opcional. Expresión de punto. Si se omite point, entonces se arroja la configuración de
J4Angle de la posición actual del robot.
Valores devueltos
Arroja un valor entero que representa el ángulo de la Articulación n.° 4 cuando los centros del eje de la
Articulación n.° 4 y n.° 6 están en línea recta.
El atributo J4Angle se usa solo para la serie N del robot.
Consulte también
Hand, J1Angle, Función J1Angle, J4Angle
Ejemplo de función J4Angle
Print J4Angle(pick)
Print J4Angle(P1)
Print J4Angle

382 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción J4Flag
Establece el atributo J4Flag de un punto.
Sintaxis
(1) J4Flag point [, value ]
(2) J4Flag
Parámetros
point Pnumber o P(expr) o etiqueta de punto.
value Opcional. Expresión entera.
El rango de J4 0 (/J4F0) va de -180 a +180 grados
El rango de J4 1 (/J4F1) va de -360 a -180 o +180 a +360 grados
Valores devueltos
El atributo J4Flag especifica el rango de valores para la articulación 4 para un punto. Si se omite value, se
muestra el valor de J4Flag para el punto especificado. Cuando se omiten ambos parámetros, se muestra el
valor de J4Flag para la posición actual del robot.
Consulte también
Elbow, Hand, Función J4Flag, J6Flag, Wrist
Ejemplo de instrucción J4Flag
J4Flag P0, 1
J4Flag P(mypoint), 0

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 383
Función J4Flag
Arroja el atributo J4Flag de un punto.
Sintaxis
J4Flag [(point)]
Parámetros
point Opcional. Expresión de punto. Si se omite point, entonces se arroja la configuración de J4Flag
de la posición actual del robot.
Valores devueltos
0 /J4F0
1 /J4F1
Consulte también
Elbow, Hand, Wrist, Instrucción J4Flag, J6Flag
Ejemplo de función J4Flag
Print J4Flag(pick)
Print J4Flag(P1)
Print J4Flag
Print J4Flag(Pallet(1, 1))

384 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción J6Flag
Establece el atributo J6Flag de un punto.
Sintaxis
(1) J6Flag point [, value]
(2) J6Flag
Parámetros
point Pnumber o P(expr) o etiqueta de punto.
value Expresión entera. El rango va de 0 a 127 (/J6F0 a /J6F127). El rango de J6 para el punto
especificado es el siguiente:
( -180 * (value+1) < J6 <= 180 * value ) y ( 180 * value < J6 <= 180 * (value+1) )
Valores devueltos
El atributo J6Flag especifica el rango de valores para la articulación 6 para un punto. Si se omite value, se
muestra el valor de J6Flag para el punto especificado. Cuando se omiten ambos parámetros, se muestra el
valor de J6Flag para la posición actual del robot.
Consulte también
Elbow, Hand, J4Flag, Función J6Flag, Wrist
Nota
El rango de J6Flag varía dependiendo de los modelos de manipulador
C4 : 0 - 127 (/J6F0 a /J6F127)
C8, C12 : 0 - 81 (/J6F0 a /J6F81)
N2 : 0 - 40 (/J6F0 a /J6F40)
N6 : 0 - 61 (/J6F0 a /J6F61)
Ejemplo de instrucción J6Flag
J6Flag P0, 1
J6Flag P(mypoint), 0

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 385
Función J6Flag
Arroja el atributo J6Flag de un punto.
Sintaxis
J6Flag [(point)]
Parámetros
point Opcional. Expresión de punto. Si se omite point, entonces se arroja la configuración de J6Flag
de la posición actual del robot.
Valores devueltos
0 a 127 /J6F0 a /J6F127
Consulte también
Elbow, Hand, Wrist, J4Flag, J6Flag
Ejemplo de función J6Flag
Print J6Flag(pick)
Print J6Flag(P1)
Print J6Flag
Print J6Flag(P1 + P2)

386 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función JA
Arroja un punto de robot especificado en los ángulos de la articulación.
Sintaxis
JA ( j1, j2, j3, j4 [, j5, j6 ] [, j7 ] [, j8, j9 ] )
Parámetros
j1 – j9 Expresiones reales que representan los ángulos de la articulación.
Para las articulaciones lineales, se especifica en unidades de mm.
j5 y j6 son para el robot de 6 ejes (incluida la serie N) y el robot de 6 ejes de tipo
articulación.
j7 es para el robot de 7 ejes de tipo articulado.
j8 y j9 son para el eje ST adicional.
Nota
Si se especifica el ángulo que excede el rango de movimiento, ocurre un error de fuera de rango.
Valores devueltos
Un punto de robot cuya ubicación se determina mediante los ángulos de articulación especificados.
Descripción
Use JA para especificar un punto de robot con los ángulos de articulación.
Cuando los puntos devueltos con la función JA especifican una singularidad del robot, los ángulos de
articulación del robot no siempre concuerdan con los ángulos de articulación que se suministran a la función
JA como argumentos durante la ejecución de un comando de movimiento para los puntos. Para operar el
robot con los ángulos de articulación especificados para la función JA, evite una singularidad del robot.
Por ejemplo:
> go ja(0,0,0,90,0,-90)
> where
WORLD: X: 0.000 mm Y: 655.000 mm Z: 675.000 mm U: 0.000 deg
V: -90.000 deg W: -90.000 deg
JOINT: 1: 0.000 deg 2: 0.000 deg 3: 0.000 deg 4: 0.000 deg
5: 0.000 deg 6: 0.000 deg
PULSE: 1: 0 pls 2: 0 pls 3: 0 pls 4: 0 pls
5: 0 pls 6: 0 pls
> go ja(0,0,0,90,0.001,-90)
> where
WORLD: X: -0.004 mm Y: 655.000 mm Z: 675.000 mm U: 0.000 deg
V: -90.000 deg W: -89.999 deg
JOINT: 1: 0.000 deg 2: 0.000 deg 3: 0.000 deg 4: 90.000 deg
5: 0.001 deg 6: -90.000 deg
PULSE: 1: 0 pls 2: 0 pls 3: 0 pls 4: 2621440 pls
5: 29 pls 6: -1638400 pls
Consulte también
AglToPls, XY
Ejemplo de función JA
P10 = JA(60, 30, -50, 45)
Go JA(135, 90, -50, 90)
P3 = JA(0, 0, 0, 0, 0, 0)

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 387
Instrucción Joint
Muestra la posición actual del robot en coordenadas de articulación.
Sintaxis
Joint
Consulte también
Pulse, Where
Ejemplo de instrucción Joint
>joint
JOINT: 1: -6.905 deg 2: 23.437 deg 3: -1.999 mm 4: -16.529 deg
>

388 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción JRange
Define el rango de trabajo permisible de la articulación especificada en pulsos.
Sintaxis
JRange jointNumber, lowerLimit, upperLmit
Parámetros
jointNumber Expresión entera de 1 a 9 que representa la articulación para la cual se especificará JRange.
El eje S adicional es 8 y el eje T es 9.
lowerLmit Expresión entera larga que representa la posición de conteo de pulsos del codificador para el
rango de límite inferior de la articulación especificada.
upperLmit Expresión entera larga que representa la posición de conteo de pulsos del codificador para el
rango de límite superior de la articulación especificada.
Descripción
Define el rango de trabajo permisible para la articulación especificada con los límites inferior y superior en
los conteos de pulso del codificador. JRange es similar al comando Range. Sin embargo, el comando Range
exige que se establezcan todos los límites de rango de la articulación mientras el comando JRange se puede
usar para establecer cada uno de los límites de trabajo de la articulación de manera individual, con lo que se
reduce la cantidad de parámetros necesarios. Para confirmar el rango de trabajo definido, use el comando
Range.
Los datos de los parámetros del robot se almacenan en la memoria Compact Flash en el controlador. Por
tanto, la memoria flash de comandos se escribe cuando se ejecuta este comando. La escritura frecuente en
la memoria Compact Flash afecta su vida útil. Recomendamos que el uso de este comando sea mínimo.
Notas
Los límites inferiores no deben exceder los límites superiores:
El límite inferior definido en el comando JRange no debe exceder el límite superior. Un límite inferior que
exceda el límite superior causará un error, lo que hará imposible la ejecución de un comando de movimiento.
Factores que pueden cambiar JRange:
Una vez establecidos los valores de JRange, permanecen en su lugar hasta que el usuario modifica los valores
mediante los comandos Range o JRange. Apagar el controlador no cambiará los valores de límite de
articulación de JRange.
Rangos de trabajo máximo y mínimo:
Consulte las especificaciones en el manual del robot para conocer los rangos máximos de trabajo para cada
modelo del robot, ya que estos varían de un modelo a otro.
Consulte también
Range, Función JRange
Ejemplo de instrucción JRange
Los siguientes ejemplos se llevan a cabo desde la ventana Command:
> JRange 2, -6000, 7000 'Define el rango de la segunda articulación
> JRange 1, 0, 7000 'Define el rango de la primera articulación

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 389
Función JRange
Arroja el rango de trabajo permisible de la articulación especificada en pulsos.
Sintaxis
JRange(jointNumber, paramNumber)
Parámetros
jointNumber Especifica el número de referencia de articulación (enteros de 1 a 9) mediante una
expresión o valor numérico.
El eje S adicional es 8 y el eje T es 9.
paramNumber Expresión entera que contiene uno o dos valores:
1: Especifica el valor de límite inferior.
2: Especifica el valor de límite superior.
Valores devueltos
Configuración de rango (valor entero, pulsos) de la articulación especificada.
Consulte también
Range, Instrucción JRange
Ejemplo de función JRange
Long i, oldRanges(3, 1)
For i = 0 To 3
oldRanges(i, 0) = JRange(i + 1, 1)
oldRanges(i, 1) = JRange(i + 1, 2)
Next i

390 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función JS
Jump Sense detecta si el brazo se detuvo antes de completar una instrucción Jump, Jump3, JumpTLZ o
Jump3CP, la cual usó una entrada Sense o si el brazo completó el movimiento.
Sintaxis
JS
Valores devueltos
Arroja un valor True o False.
True : Cuando el brazo se detuvo antes de alcanzar el destino objetivo debido a que se cumplió
una condición de entrada de Sense, JS arroja True.
False : Cuando el brazo completa el movimiento normal y alcanza el destino objetivo, como se
define en la instrucción Jump, JS arroja False.
Descripción
JS se usa en conjunto con las instrucciones Jump y Sense. El fin de la instrucción JS es proporciona un
resultado de estado con respecto a si se cumple o no una condición de entrada (como se define en la
instrucción Sense) durante el movimiento causado por la instrucción Jump. Cuando se cumple la condición
de entrada, JS arroja True. Cuando no se cumple la condición de entrada y el brazo alcanza la posición
objetivo, JS arroja False.
JS es simplemente una instrucción de comprobación de estado y no causa movimiento ni especifica la entrada
que se debe revisar durante el movimiento. La instrucción Jump se usa para iniciar el movimiento, mientras
que la instrucción Sense se usa para especificar cuál entrada (de haber alguna) se debe revisar durante el
movimiento iniciado.
Nota
JS funciona solo con la instrucción Jump, Jump3, JumpTLZ, Jump3CP más reciente:
JS solo se puede usar para revisar la comprobación de entrada de la instrucción Jump más reciente (la que se
inició con la instrucción Sense). Una vez que se inicia una segunda instrucción Jump, la instrucción JS solo
puede arrojar el estado de la segunda instrucción Jump. El estado JS del primer Jump desaparece para
siempre. Entonces, asegúrese de realizar siempre una comprobación del estado de JS para las instrucciones
Jump inmediatamente posteriores a la instrucción Jump que se va a comprobar.
Consulte también
JT, Jump, Jump3, Jump3CP, JumpTLZ, Sense
Ejemplo de función JS
Function SearchSensor As Boolean
Sense Sw(5) = On
Jump P0
Jump P1 Sense
If JS = TRUE Then
Print "Sensor was found"
SearchSensor = TRUE
EndIf
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 391
Función JT
Arroja el estado de la instrucción Jump, Jump3, JumpTLZ o Jump3CP más reciente para el robot actual.
Sintaxis
JT
Valores devueltos
JT arroja una cadena larga con los siguientes bits definidos o borrados:
Bit 0 Establecido en 1 cuando ha comenzado el movimiento de elevación o si la distancia de elevación es 0.
Bit 1 Establecido en 1 cuando ha comenzado el movimiento horizontal o si la distancia horizontal es 0.
Bit 2 Establecido en 1 cuando ha comenzado el movimiento de descenso o si la distancia de descenso es 0.
Bit 16 Establecido en 1 cuando ha finalizado el movimiento de elevación o si la distancia de elevación es 0.
Bit 17 Establecido en 1 cuando ha finalizado el movimiento horizontal o si la distancia horizontal es 0.
Bit 18 Establecido en 1 cuando ha finalizado el movimiento de descenso o si la distancia de descenso es 0.
Descripción
Use JT para determinar el estado del comando Jump más reciente que se detuvo antes de la finalización
mediante Sense, Till, Abort, etc.
Consulte también
JS, Jump, Jump3, Jump3CP, JumpTLZ, Sense, Till
Ejemplo de función JT
Function SearchTill As Boolean
Till Sw(5) = On
Jump P0
Jump P1 Till
If JT And 4 Then
Print "Motion stopped during descent"
SearchTill = TRUE
EndIf
Fend

392 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción JTran
Realiza un movimiento relativo de una articulación.
Sintaxis
JTran jointNumber, distance
Parámetros
jointNumber Expresión entera que representa la articulación que se moverá.
El eje S adicional es 8 y el eje T es 9.
distance Expresión real que representa la distancia de movimiento en grados para las
articulaciones giratorias o en milímetros para las articulaciones lineales.
Descripción
Use JTran para mover una articulación una distancia específica desde la posición actual.
Consulte también
Go, Jump, Move, Ptran
Ejemplo de instrucción JTran
JTran 1, 20

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 393
Instrucción Jump
Mueve el brazo desde la posición actual al punto de destino especificado con el movimiento de punto a
punto; para esto, se mueve primero en dirección vertical hacia arriba, luego horizontalmente y, finalmente,
verticalmente hacia abajo para llegar al punto de destino final.
Sintaxis
Jump destination [, CarchNumber] [, LimZ [zLimit] ] [, CP] [, PerformMode modeNumber]
[, searchExpr] [, !...!] [, SYNC]
Parámetros
destination El destino objetivo del movimiento que usa una expresión de punto.
archNumber Opcional. El número de arco (archNumber) especifica qué entrada de la tabla Arch se debe
usar para el movimiento de tipo arco que provoca la instrucción Jump. La letra C siempre
debe preceder a archNumber. (Las entradas válidas varían entre C0 y C7).
zLimit Opcional. Este es el valor de límite Z que representa la posición máxima que se desplazará
la articulación Z durante el movimiento Jump. Esto se puede considerar como el techo de
altura Z para la instrucción Jump. Cualquier valor de coordenada de articulación Z válido
es aceptable.
PerformMode Opcional. Especifique el modo de rendimiento del robot.
modeNumber Especifica el modo de operación asignado a PerformMode con un valor de número entero
(1 a 3) o con la siguiente constante. Si se especifica PerformMode, no se puede omitir este
parámetro.
Constante Valor Descripción
Mode_Standard 1 Define el modo estándar
Mode_High_Speed 2 Define el modo de alta velocidad
Mode_Low_Oscillation 3 Define el modo de baja oscilación
CP Opcional. Especifica un movimiento de ruta continua.
searchExpr Opcional. Una expresión Sense, Till o Find.
Sense | Till | Find
Sense Sw(expr) = {On | Off}
Till Sw(expr) = {On | Off}
Find Sw(expr) = {On | Off}
!...! Opcional. Las instrucciones Parallel Processing se pueden agregar a la instrucción Jump
para permitir que la E/S y otros comandos se ejecuten durante el movimiento.
SYNC Reserva un comando de movimiento. El robot no se moverá hasta que se ejecute
SyncRobots.
Descripción
Jump mueve el brazo desde la posición actual a destination con lo que se llama Movimiento de arco. Jump
se puede considerar como 3 movimientos en 1. Por ejemplo, cuando la entrada de tabla Arch definida por
archNumber es 7, ocurrirán los siguientes 3 movimientos.
1) El movimiento comienza solo con el movimiento de la articulación Z hasta que alcanza la altura de
la articulación Z calculada por el número de arco que se usó para el comando Jump.
2) Luego, el brazo se mueve horizontalmente (mientras aún se mueve hacia arriba en Z) hacia la posición
de punto objetivo hasta que se alcance el límite superior de Z (definido por LimZ). Entonces, el brazo
comienza a moverse hacia abajo en dirección Z (mientras continúa el movimiento de articulación X,
Y y U) hasta alcanzar las posiciones de articulación X, Y y U.
3) Para completar la instrucción Jump mueva el brazo hacia abajo solo con el movimiento de la
articulación Z hasta alcanzar la posición objetivo de la articulación Z.

394 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Se deben enseñar las coordenadas de destination (la posición objetivo del movimiento) anteriormente antes
de ejecutar la instrucción Jump. Las coordenadas no se pueden especificar en la instrucción Jump en sí. La
aceleración y desaceleración de Jump se controla mediante la instrucción Accel. La velocidad del
movimiento se controla mediante la instrucción Speed.
No se puede ejecutar la instrucción Jump para los robots de 6 ejes verticales (incluida la serie N). Use la
instrucción Jump3.
Detalles de CP
El parámetro CP causa que comience la aceleración del siguiente comando de movimiento cuando
comienza la desaceleración para el comando de movimiento actual. En este caso, el robot no se detendrá en
la coordenada de destino y continuará moviéndose al siguiente punto.
Detalles de archNumber
Se puede modificar el valor de Arch de la instrucción Jump según el valor de archNumber especificado
opcionalmente con la instrucción Jump. Esto permite que el usuario defina cuánto se debe mover Z antes de
comenzar con el movimiento de articulación X, Y y U. (Esto permite que el usuario mueva el brazo hacia
arriba y lo aleje del trayecto de las piezas, alimentadores y otros objetos antes de comenzar con el movimiento
horizontal). Las entradas válidas de archNumber para la instrucción Jump son entre C0 y C7. El usuario
puede definir las entradas de tabla de arco para C0 a C6 con la instrucción Arch. Sin embargo, C7 es una
entrada de Arch especial que siempre define lo que se llama Movimiento de compuerta. Movimiento de
compuerta significa que el robot primero mueve Z completamente hasta la coordenada definida por LimZ
antes de comenzar cualquier movimiento de articulación X, Y o U. Una vez se alcance el límite Z de LimZ,
comienza el movimiento de articulación X, Y y U. Después de que las articulaciones X, Y y U alcanzan su
posición de destino final, entonces la articulación Z puede comenzar a moverse hacia abajo, hacia la posición
de coordenada de articulación Z final, según se define en destination (el punto objetivo). El Movimiento de
compuerta se ve de la siguiente manera:
Origin Pt.
Destination Pt.
Pend
LIMZ
Detalles de LimZ
zLimit de LimZ especifica el valor de coordenada Z superior para el plano de movimiento horizontal en el
sistema de coordenadas local actual. La configuración especificada del arco puede causar que las
articulaciones X, Y y U comiencen a moverse antes de alcanzar LimZ, pero LimZ siempre es la altura Z
máxima para el movimiento. Cuando se omite el parámetro opcional LimZ, el valor anterior especificado
mediante la instrucción LimZ se usa para la definición del plano de movimiento horizontal.
Es importante destacar que la especificación de límite de altura zLimit de LimZ es el valor Z para el sistema
de coordenadas locales para robots. No es el valor Z para Arm o Tool. Por lo tanto, tome las precauciones
necesarias cuando use herramientas o las manos con distintas alturas de funcionamiento.
Detalles de Sense
El parámetro opcional Sense permite que el usuario revise una condición de entrada o condición de E/S de
memoria antes de comenzar el movimiento Z final hacia abajo. Si se cumple, este comando finaliza con el
robot detenido sobre la posición objetivo, donde solo se necesita el movimiento Z para alcanzar la posición
objetivo. Es importante observar que el brazo del robot no se detenga inmediatamente cuando detecte el
modificador de entrada Sense.
Pto. de origen
Pto. de
destino Pend.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 395
Entonces, se pueden usar los comandos JS o Stat para verificar si se cumplió la condición Sense y el robot
se detuvo antes de su posición objetivo o si no se cumplió la condición Sense y el robot siguió hasta detenerse
en su posición objetivo.
Detalles de Till
El calificador opcional Till permite que el usuario especifique una condición que cause que el robot
desacelere hasta detenerse antes de completar la instrucción Jump. La condición especificada es simplemente
una comprobación contra una de las entradas de E/S o de una de las E/S de memoria. Esto se logra mediante
la función Sw o MemSw. El usuario puede comprobar si la entrada está activada o desactivada y causar que
el brazo desacelere y se detenga según la condición especificada.
La función Stat se puede usar para verificar si se cumplió la condición Till y se ha completado este comando
o si no se cumplió la condición Till y el robot se detuvo en la posición objetivo.
Los modos de movimiento de desaceleración y movimiento de aceleración se pueden combinar cuando se
define PerformMode mientras el movimiento de ruta está activado. Algunas combinaciones no están
disponibles según los modos de operación. Para conocer detalles, consulte Instrucción PerformMode.
Notas
No se puede ejecutar Jump para los robots de 6 ejes (incluida la serie N)
Use Jump3 o Jump3CP para los robots de 6 ejes.
Omisión de los parámetros archNumber
Si se omite el parámetro opcional archNumber, la entrada de Arch predeterminada para usar con la
instrucción Jump es C7. Esto causará el Movimiento de compuerta, como se describió anteriormente.
Diferencia entre Jump y Jump3, Jump3CP
Las instrucciones Jump3 y Jump3CP se pueden usar para los robots de 6 ejes (incluida la serie N). Por el otro
lado, la instrucción Jump no se puede usar para los robots de 6 ejes. Para los robots SCARA (incluida la serie
RS), usar la instrucción Jump acorta el tiempo de movimiento de articulación para el movimiento de
alejamiento y acercamiento. Los movimientos de alejamiento y acercamiento en Jump3 se pueden ejecutar
a lo largo del eje Z y en otras direcciones.
Diferencia entre Jump y Go
La instrucción Go es similar a Jump en que ambas generan un movimiento de tipo Punto a punto; sin
embargo, tienen muchas diferencias. La diferencia más importante es que la instrucción Go simplemente
causa un movimiento de Punto a punto (PTP) donde todas las articulaciones comienzan y se detienen al
mismo tiempo (están sincronizadas). Jump es diferente, ya que genera el movimiento Z vertical al comienzo
y al final del movimiento. Jump es ideal para aplicaciones de tipo recoger y colocar.
Desaceleración hasta la detención con la instrucción Jump
La instrucción Jump siempre causa que el brazo desacelere hasta la detención antes de alcanzar un punto de
destino.
Instrucciones de velocidad y aceleración adecuadas con Jump:
Las instrucciones Speed y Accel se usan para especificar la velocidad y la aceleración del robot durante el
movimiento Jump. Preste atención al hecho de que Speed y Accel se aplican al movimiento de tipo punto a
punto (Go, Jump, Etc.), mientras que las instrucciones de movimiento interpolado lineal y circular, como
Move o Arc, utilizan las instrucciones SpeedS y AccelS. Para la instrucción Jump, es posible especificar por
separado las velocidades y las aceleraciones del movimiento hacia arriba de la articulación Z, el
desplazamiento horizontal que incluye la rotación de la articulación U y el movimiento hacia abajo de la
articulación Z.
Revise si hay una condición
Comando completo
Posición de objetivo

396 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función Pass de Jump
Cuando se especifica el parámetro CP para Jump con movimiento hacia abajo 0, el desplazamiento horizontal
Jump no desacelera hasta una detención, sino que continúa suavemente hasta el siguiente movimiento PTP.
Cuando se especifica el parámetro CP para un comando de movimiento PTP justo antes de Jump con
movimiento hacia arriba 0, el movimiento PTP no desacelera hasta una detención, sino que se conecta
suavemente con el desplazamiento horizontal Jump.
Esto es útil cuando desee reemplazar el desplazamiento horizontal de Jump (un movimiento PTP) por varios
movimientos PTP.
(Ejemplo)
Go P1
Jump P2 :Z(-50) C0 LimZ -50 CP
Go P3 :Z(0) CP
Jump P4 C0 LimZ 0
Precaución para el movimiento de arco
La trayectoria del movimiento Jump consiste en el movimiento vertical y el movimiento horizontal. No es
una trayectoria de ruta continua. La trayectoria real de Jump de movimiento de arco no se determina solo por
los parámetros de Arch. También depende del movimiento y la velocidad.
Siempre tenga cuidado al optimizar la trayectoria de Jump en sus aplicaciones. Ejecute Jump con el
movimiento y la velocidad deseados para verificar la trayectoria real.
Cuando la velocidad es menor, la trayectoria será menor. Si se ejecuta Jump con una alta velocidad para
verificar una trayectoria de movimiento de arco, el efector final puede chocar con un objeto con menor
velocidad.
En una trayectoria de Jump, la distancia de alejamiento aumenta y la distancia de acercamiento disminuye
cuando la velocidad de movimiento está configurada a un valor alto. Cuando la distancia de caída de la
trayectoria es más corta que la esperada, reduzca la velocidad o la desaceleración, o aumente la distancia de
caída.
Incluso si se ejecutan los comandos Jump con la misma distancia y velocidad, la trayectoria se ve afectada
por el movimiento de los brazos del robot. Como ejemplo general, para el robot SCARA, la distancia vertical
ascendente aumenta y la distancia vertical descendente disminuye cuando el movimiento del primer brazo es
grande. Cuando la distancia de caída vertical disminuye y la trayectoria es menor que la esperada, reduzca la
velocidad o la desaceleración, o cambie la distancia de caída para que sea mayor.
Posibles errores
El valor de LimZ no es lo suficientemente alto
Cuando la posición actual del brazo de la articulación Z es mayor que el valor establecido para LimZ y se
intenta una instrucción Jump, ocurrirá un Error 4005.
Consulte también
Accel, Arc, Arch, Go, JS, JT, LimZ, P#= (Asignación de punto), PerformMode, Pulse, Sense,
Speed, Stat, Till

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 397
Ejemplo de instrucción Jump
El siguiente ejemplo muestra un movimiento simple de punto a punto entre los puntos P0 y P1 y, luego, se
mueve de vuelta a P0 con la instrucción Jump. Más adelante en el programa, el brazo se mueve con la
instrucción Jump. Si la entrada n.° 4 nunca sube, entonces el brazo comienza el movimiento de acercamiento
y se mueve hacia P1. Si la entrada n.° 4 sube, entonces el brazo no ejecuta el movimiento de acercamiento.
Function jumptest
Home
Go P0
Go P1
Sense Sw(4) = On
Jump P0 LimZ -10
Jump P1 LimZ -10 Sense 'Revisa entrada n.° 4
If Js(0) = 1 Then
Print "Input #4 came on during the move and"
Print "the robot stopped prior to arriving on"
Print "point P1."
Else
Print "The move to P1 completed successfully."
Print "Input #4 never came on during the move."
EndIf
Fend
> Jump P10+X50 C0 LimZ-20 Sense !D50;On 0;D80;On 1!

398 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucciones Jump3, Jump3CP
Movimiento de compuerta 3D.
Jump3 es una combinación de dos movimientos de CP y un movimiento PTP.
Jump3CP es una combinación de tres movimientos de CP.
Sintaxis
(1) Jump3 depart, approach, destination [, CarchNumber] [, CP] [, LJM [, orientationFlag]] [,
searchExpr] [, !...!] [, SYNC]
(2) Jump3CP depart, approach, destination [, ROT] [, CarchNumber] [, CP] [, LJM [,
orientationFlag]] [, searchExpr] [, !...!] [, SYNC]
Parámetros
depart El punto de alejamiento sobre la posición actual usando una expresión de punto.
approach El punto de acercamiento sobre la posición de destino con una expresión de punto.
destination El destino objetivo del movimiento que usa una expresión de punto.
ROT Opcional. :Decide la velocidad/aceleración/desaceleración en favor de la rotación de la
herramienta.
archNumber Opcional. El número de arco (archNumber) especifica qué entrada de la tabla Arch se debe
usar para el movimiento de tipo arco que provoca la instrucción Jump. La letra C siempre
debe preceder a la instrucción archNumber. (Las entradas válidas son C0 a C7).
CP Opcional. Especifica un movimiento de ruta continua.
LJM Opcional. Convierte el destino objetivo con la función LJM.
orientationFlag Opcional. Especifica un parámetro que selecciona un indicador de orientación para la
función LJM.
searchExpr Opcional. Una expresión Sense, Till o Find.
Sense | Till | Find
Sense Sw(expr) = {On | Off}
Till Sw(expr) = {On | Off}
Find Sw(expr) = {On | Off}
!...! Opcional. Las instrucciones Parallel Processing se pueden agregar a la instrucción Jump
para permitir que la E/S y otros comandos se ejecuten durante el movimiento.
SYNC Reserva un comando de movimiento. El robot no se moverá hasta que se ejecute
SyncRobots.
Descripción
Mueve el brazo desde la posición actual hasta el punto de destino con el movimiento de la compuerta 3D. El
movimiento de la compuerta 3D se conforma con los movimientos de alejamiento, alcance y acercamiento.
El movimiento de alejamiento desde la posición actual hasta el punto de alejamiento es siempre un
movimiento CP. El movimiento de alcance desde el punto de alejamiento al punto de inicio de acercamiento
es el movimiento PTP en Jump3 y el movimiento de CP en Jump3CP.
El movimiento de acercamiento desde el punto de inicio de acercamiento hasta el punto objetivo es siempre
un movimiento de CP.
Movimiento de alcance
PTP/CP
CP de
movimiento de
alejamiento
Posición actual
Punto de destino
Punto de
alejamiento
Punto de acercamiento
CP de movimiento
de acercamiento

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 399
Se logra el movimiento de arco si se especifica un número de arco. En la siguiente figura se muestra el
movimiento de arco para Jump3 y Jump3CP. Para que ocurra el movimiento de arco, la distancia de
alejamiento debe ser superior a la distancia ascendente del arco y la distancia de acercamiento debe ser
superior a la distancia descendente del arco.
Punto de alejamiento
Iniciar punto de acercamiento
Jump3CP usa el valor de velocidad SpeedS y los valores de aceleración y desaceleración AccelS. Consulte
Uso de Jump3CP con CP a continuación para conocer la relación entre velocidad y aceleración y entre
aceleración y desaceleración. Sin embargo, si se usa el parámetro modificador ROT, Jump3CP utiliza el valor
de velocidad SpeedR y los valores de aceleración y desaceleración AccelR. En este caso, el valor de velocidad
SpeedS y el valor de aceleración y desaceleración AccelS no tienen efecto.
Normalmente, cuando la distancia de movimiento es 0 y solo cambia la orientación de la herramienta, ocurrirá
un error. Sin embargo, mediante el uso del parámetro ROT y la priorización de la aceleración y la
desaceleración del giro de la herramienta, es posible realizar el movimiento sin un error. Cuando no existe
ningún cambio de orientación con el parámetro modificador ROT y la distancia del movimiento no es 0, se
genera un error.
También, cuando el giro de la herramienta es grande en comparación con la distancia de movimiento, y
cuando la velocidad de giro supera la velocidad especificada del manipulador, ocurrirá un error. En este caso,
reduzca la velocidad o agregue el parámetro modificador ROT para dar prioridad a la velocidad
rotacional/aceleración/desaceleración.
Notas
LimZ no afecta a Jump3 ni Jump3CP
LimZ no tiene efecto alguno en Jump3 ni Jump3CP, dado que el movimiento de alcance no es necesariamente
perpendicular al eje Z del sistema de coordenadas.
El movimiento de alcance de Jump3 es PTP (punto a punto)
Es difícil predecir la trayectoria del movimiento de alcance de Jump3. Por lo tanto, tenga cuidado de que el
robot no choque con los equipos periféricos y que los brazos del robot no choquen con el propio robot.
Uso de Jump3, Jump3CP con CP
El parámetro CP causa que el brazo se mueva al destino sin desacelerar o detenerse en el punto definido
según el destino. Esto se hace para permitir al usuario enlazar una serie de instrucciones de movimiento que
causan que el brazo se mueva a lo largo de una ruta continua mientras mantiene una velocidad especificada
durante todo el movimiento. Las instrucciones Jump3 y Jump3CP sin CP siempre causan que el brazo
desacelere hasta la detención antes de alcanzar el punto destination.
Función Pass de Jump3
Cuando se especifica el parámetro CP para Jump3 con movimiento de acercamiento 0, el movimiento de
alcance Jump3 no desacelera hasta una detención, sino que continúa suavemente hasta el siguiente
movimiento PTP.

400 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Cuando se especifica el parámetro CP para un comando de movimiento PTP justo antes de Jump3 con
movimiento de alejamiento 0, el movimiento PTP no desacelera hasta una detención, sino que se conecta
suavemente con el movimiento de alcance de Jump3.
Esto es útil cuando desee reemplazar el movimiento de alcance de Jump3 (un movimiento PTP) por varios
movimientos PTP.
Función Pass de Jump3CP
Cuando se especifica el parámetro CP para Jump3CP con movimiento de acercamiento 0, el movimiento de
alcance Jump3CP no desacelera hasta una detención, sino que continúa suavemente hasta el siguiente
movimiento de CP.
Cuando se especifica el parámetro CP para un comando de movimiento de CP justo antes de Jump3CP con
movimiento de alejamiento 0, el movimiento de CP no desacelera hasta una detención, sino que se conecta
suavemente con el movimiento de alcance de Jump3CP.
Esto es útil cuando desee reemplazar el movimiento de alcance de Jump3CP (un movimiento de CP) por
varios movimientos de CP.
(Ejemplo 1)
Jump3 P1,P2,P2 CP
Go P3,P4 CP
Jump3 P4,P5,P5+tlz(50)
(Ejemplo 2)
Jump3CP P1,P2,P2 CP
Move P3,P4 CP
Jump3CP P4,P5,P5+tlz(50)
Uso de Jump3, Jump3CP con LJM
Con el parámetro LJM, el programa que usa la función LJM puede ser más simple.
Por ejemplo, el siguiente programa de cuatro líneas
P11 = LJM(P1, Here, 2)
P12 = LJM(P2, P11, 2)
P13 = LJM(P3, P12, 2)
Jump3 P11, P12, P13
puede ser… el programa de una línea.
Jump3 P1, P2, P3 LJM 2
El parámetro LJM está disponible para los robots de 6 ejes (incluida la serie N) y de la serie RS.
El movimiento de alcance de Jump3CP es un movimiento de línea recta (CP) y no puede cambiar la
orientación de la muñeca durante el trayecto. Por lo tanto, no use orientationFlag (LJM 1) de la función LJM
que es capaz de cambiar la orientación de la muñeca.
Precaución para el movimiento de arco
La trayectoria del movimiento de Jump3 cambia según el movimiento y la velocidad
La trayectoria del movimiento de Jump3 comprende los movimientos de alejamiento, alcance y
acercamiento. No es una trayectoria de ruta continua. La trayectoria real de Jump3 en el movimiento de arco
no se determina solo por los parámetros Arch. También depende del movimiento y la velocidad.
Siempre tenga cuidado al optimizar la trayectoria de Jump3 en sus aplicaciones. Ejecute Jump3 con el
movimiento y la velocidad deseados para verificar la trayectoria real.
Cuando la velocidad es menor, la trayectoria será menor. Si se ejecuta Jump3 con una alta velocidad para
verificar una trayectoria de movimiento de arco, el efector final puede chocar con un objeto de menor
velocidad.
En una trayectoria de Jump3, la distancia de alejamiento aumenta y la distancia de acercamiento disminuye
cuando la velocidad de movimiento está configurada con un valor alto. Cuando la distancia de acercamiento
de la trayectoria es más corta de lo esperado, reduzca la velocidad, desacelere o cambie la distancia de
acercamiento para que sea más larga.
Incluso si se ejecutan los comandos Jump con la misma distancia y velocidad, la trayectoria se ve afectada
por el movimiento de los brazos del robot.
P2
P1
P3
P4
P5
Fin
Inicio

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 401
Posibles errores de aceleración
Cuando la mayor parte del movimiento de alejamiento (acercamiento) usa la misma
articulación que el movimiento de alcance
Puede ocurrir un error de aceleración durante la ejecución de un movimiento de arco mediante los comandos
Jump3 y Jump3CP. Este error se genera frecuentemente cuando la mayor parte del movimiento durante el
alejamiento o acercamiento utiliza la misma articulación que el movimiento de alcance. Para evitar este error,
reduzca la velocidad de aceleración y desaceleración del movimiento de alcance con el comando Accel para
Jump3 o con el comando AccelS para Jump3CP. Según el movimiento y la orientación del robot, también
podría ser útil la reducción de la aceleración o la desaceleración del movimiento de alejamiento (movimiento
de acercamiento) mediante el comando AccelS.
Consulte también
Accel, Arc, Arch, Go, JS, JT, Expresión de punto, Pulse, Sense, Speed, Stat, Till
Ejemplo de instrucción Jump3
' Movimiento del robot de 6 ejes (incluida la serie N) que funciona como Jump del robot SCARA
Jump3 Here :Z(100), P3 :Z(100), P3
' Alejamiento y acercamiento utilizan las coordenadas de herramienta Z
Jump3 Here -TLZ(100), P3 -TLZ(100), P3
' Alejamiento usa base Z y acercamiento usa Z de la herramienta
Jump3 Here +Z(100), P3 -TLZ(100), P3
Ejemplo de movimiento de alejamiento de P1 en Tool 1 (Herramienta 1) y de movimiento de acercamiento
a P3 en Tool 2 (Herramienta 2)
Arch 0,20,20
Tool 1
Go P1
P2 = P1 -TLZ(100)
Tool 2
Jump3 P2, P3-TLZ(100), P3 C0

402 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción JumpTLZ
Movimiento de compuerta 3D.
JumpTLZ es una combinación de dos movimientos de CP y un movimiento PTP.
Sintaxis
JumpTLZ destination, TLZ movement [, CarchNumber] [, CP] [, LJM [, orientationFlag]] [,
searchExpr] [, !...!] [, SYNC]
Parámetros
destination El destino objetivo del movimiento que usa una expresión de punto.
TLZ movement La cantidad de movimiento en dirección Z en el sistema de coordenadas de la
herramienta. La unidad es [mm].
Se usa el sistema de coordenadas de la herramienta para el número de herramienta que se
usa actualmente.
archNumber Opcional. El número de arco (archNumber) especifica qué entrada de la tabla Arch se debe
usar para el movimiento de tipo arco que provoca la instrucción JumpTLZ. La letra C
siempre debe preceder a la instrucción archNumber. (Las entradas válidas son C0 a C7).
CP Opcional. Especifica un movimiento de ruta continua.
LJM Opcional. Convierte el destino objetivo con la función LJM.
orientationFlag Opcional. Especifica un parámetro que selecciona un indicador de orientación para la
función LJM.
searchExpr Opcional. Una expresión Sense, Till o Find.
Sense | Till | Find
Sense Sw(expr) = {On | Off}
Till Sw(expr) = {On | Off}
Find Sw(expr) = {On | Off}
!...! Opcional. Las instrucciones Parallel Processing se pueden agregar a la instrucción Jump3
y Jump3CP para permitir que la E/S y otros comandos se ejecuten durante el movimiento.
SYNC Reserva un comando de movimiento. El robot no se moverá hasta que se ejecute
SyncRobots.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 403
Descripción
Mueve el brazo desde la posición actual hasta el punto de destino con el movimiento de la compuerta 3D. El
movimiento de la compuerta 3D se conforma con los movimientos de alejamiento, alcance y acercamiento.
El movimiento de alejamiento desde la posición actual hasta el punto de alejamiento es siempre un
movimiento CP. El movimiento de alcance desde el punto de alejamiento al punto de inicio de acercamiento
es movimiento PTP.
El punto de alejamiento es un punto que se mueve desde la posición actual con TLZ amount en la dirección
Z.
La postura del robot en el punto de alejamiento es el mismo que la posición actual. (La postura puede cambiar
si el robot pasa la singularidad o el entorno de singularidad).
El punto de acercamiento es un punto que se mueve desde el punto de alejamiento en las direcciones X e Y
del sistema de coordenadas de la herramienta con una cantidad de movimiento para acercarse al punto de
destino. Las coordenadas U, V y W y la postura del robot en el punto de alejamiento son las mismas que la
posición actual. (La postura puede cambiar si el robot pasa la singularidad o el entorno de singularidad).
PTP de movimiento
de alcance
CP de
movimiento de
alejamiento
Posición actual
Punto de destino
Punto de alejamiento
Punto de acercamiento
CP de movimiento
de acercamiento
Se logra el movimiento de arco si se especifica un número de arco. Para que ocurra el movimiento de arco,
la distancia de alejamiento debe ser superior a la distancia ascendente del arco y la distancia de acercamiento
debe ser superior a la distancia descendente del arco.
Punto de alejamiento
Iniciar punto de acercamiento
Notas
LimZ no afecta a JumpTLZ
LimZ no tiene efecto en JumpTLZ ya que el movimiento de alcance no es necesariamente perpendicular al
eje Z del sistema de coordenadas.
El movimiento de alcance de JumpTLZ es PTP (punto a punto)
Es difícil predecir la trayectoria del movimiento de alcance de JumpTLZ. Por lo tanto, tenga cuidado de que
el robot no choque con los equipos periféricos y que los brazos del robot no choquen con el propio robot.
Diferencia entre JumpTLZ y Jump3
JumpTLZ y Jump3 son diferentes en los siguientes puntos.
JumpTLZ:
El punto de alejamiento debe estar en la dirección Z desde la posición actual.
El punto de acercamiento debe estar en la dirección Z desde el punto de destino. Además, no se puede
especificar la distancia de acercamiento.

404 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
No se pueden seleccionar distintos sistemas de coordenadas de herramientas para los puntos de
alejamiento, acercamiento y destino.
(No es posible ejecutar el movimiento de alejamiento en Tool1 y ejecutar el movimiento de
acercamiento en Tool2).
Jump3:
El punto de alejamiento puede estar en cualquier lugar.
El punto de acercamiento puede estar en cualquier lugar.
Se pueden seleccionar distintos sistemas de coordenadas de herramientas para los puntos de
alejamiento, acercamiento y destino.
(Es posible ejecutar el movimiento de alejamiento en Tool1 y ejecutar el movimiento de acercamiento
en Tool2).
Manipuladores aplicables
JumpTLZ solo está disponible para la serie N.
Precaución para el movimiento de arco
La trayectoria del movimiento de JumpTLZ comprende los movimientos de alejamiento, alcance y
acercamiento. No es una trayectoria de ruta continua. La trayectoria real de JumpTLZ en el movimiento de
arco no se determina solo por los parámetros Arch. También depende del movimiento y la velocidad.
Siempre tenga cuidado al optimizar la trayectoria de JumpTLZ en sus aplicaciones. Ejecute JumpTLZ con el
movimiento y la velocidad deseados para verificar la trayectoria real.
Cuando la velocidad es menor, la trayectoria será menor. Si se ejecuta JumpTLZ con una alta velocidad para
verificar una trayectoria de movimiento de arco, el efector final puede chocar con un obstáculo de menor
velocidad.
En una trayectoria de JumpTLZ, la distancia de alejamiento aumenta y la distancia de acercamiento
disminuye cuando la velocidad de movimiento está configurada con un valor alto. Cuando la distancia de
acercamiento de la trayectoria es más corta de lo esperado, reduzca la velocidad, desacelere o cambie la
distancia de acercamiento para que sea más larga.
Incluso si se ejecutan los comandos JumpTLZ con la misma distancia y velocidad, la trayectoria se ve
afectada por el movimiento de los brazos del robot.
Posibles errores de aceleración
Cuando la mayor parte del movimiento de alejamiento (acercamiento) usa la misma
articulación que el movimiento de alcance
Puede ocurrir un error de aceleración durante la ejecución de un movimiento de arco mediante el comando
JumpTLZ. Este error se genera frecuentemente cuando la mayor parte del movimiento durante el alejamiento
o acercamiento utiliza la misma articulación que el movimiento de alcance. Para evitar este error, reduzca la
velocidad de aceleración y desaceleración del movimiento de alcance con el comando Accel para JumpTLZ.
Según el movimiento y la orientación del robot, también podría ser útil la reducción de la aceleración o la
desaceleración del movimiento de alejamiento (movimiento de acercamiento) mediante el comando AccelS.
Consulte también
Accel, Arc, Arch, Go, JS, JT, Expresión de punto, Pulse, Sense, Speed, Stat, Till
Ejemplo de JumpTLZ
Mueva 100 mm hacia arriba desde el punto actual en la dirección Z del sistema de coordenadas de la
herramienta. Luego, mueva hasta el punto objetivo (P0):
JumpTLZ P0, -100

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 405
Instrucción LatchEnable
Activa/desactiva la función de unión de la posición del robot con la entrada R-E/S.
Sintaxis
LatchEnable { On | Off }
Parámetros
On | Off On : Activa la función de unión de la posición del robot.
Desactivado: Desactiva la función de unión de la posición del robot.
Resultado
Cuando se omite el parámetro, muestra que la función de unión actual está ON (Activada) u OFF
(Desactivada).
Descripción
Activa/desactiva la función de unión de la posición del robot con las señales de entrada del disparador
conectadas a R-E/S. Engancha la posición del robot con la primera entrada del disparador después de activar
la función de unión.
Para unir la posición del robot repetidamente, ejecute LatchEnable Off y luego vuelva a ejecutar LatchEnable
On. Para usar el comando repetidamente, se necesita un intervalo de al menos 60 ms para cada tiempo de
procesamiento de comando, pero no es necesario considerar el tiempo de ejecución del comando.
Nota
Antes de habilitar la función de unión, ajuste el puerto de entrada del disparador y la lógica de señal del
disparador con SetLatch.
Consulte también
Función LatchPos, Función LatchState, SetLatch
Ejemplo de instrucción LatchEnable
Function main
SetLatch 24, SETLATCH_TRIGGERMODE_LEADINGEDGE
LatchEnable On 'Activa la función de enganche
Go P1
Wait LatchState = True 'Espera un disparador
Print LatchPos 'Muestra la posición enganchada
LatchEnable Off 'Desactiva la función de enganche
Fend

406 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función LatchState
Arroja el estado de unión de la posición del robot con R-E/S.
Sintaxis
LatchState
Valores devueltos
Arroja True cuando se ha enganchado la posición del robot, False cuando no se ha terminado el unión.
Cuando se confirma la finalización del unión, adquiere la información de la posición unida mediante la
función LatchPos.
Consulte también
LatchEnable, Función LatchPos, SetLatch, Wait
Ejemplo de función LatchState
Function main
SetLatch 24, SETLATCH_TRIGGERMODE_LEADINGEDGE
LatchEnable On 'Activa la función de enganche
Go P1
Wait LatchState = True 'Espera un disparador
Print LatchPos 'Muestra la posición enganchada
LatchEnable Off 'Desactiva la función de enganche
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 407
Función LatchPos
Arroja la posición del robot enganchada con la señal de entrada de R-E/S.
Sintaxis
LatchPos ([WithToolArm | WithoutToolArm])
Parámetros
Opcional. Si se omite, se usa WithToolArm.
Constante
Valor
WithToolArm
0
WithoutToolArm
1
WithToolArm Valor constante de 0.
Arroja la posición de acuerdo a la configuración de Tool y Arm en una llamada
de función.
WithoutToolArm Valor constante de 0,1
Arroja la posición de Tool 0 y Arm 0, sin importar la configuración de Tool y
Arm.
Valores devueltos
Arroja la posición del robot enganchada con la señal de entrada de R-E/S en datos de punto.
Ejecutar esta función requiere aproximadamente 15 ms para su procesamiento.
Cuando se especifica WithToolArm, arroja la posición de acuerdo a la configuración de Tool y Arm en una
llamada de función.
Cuando se especifica WithoutToolArm, arroja la posición de Tool 0 y Arm 0, sin importar la configuración
de Tool y Arm.
Consulte también
LatchEnable, Función LatchState, SetLatch
Ejemplo de función LatchPos
Function main
SetLatch 24, SETLATCH_TRIGGERMODE_LEADINGEDGE
LatchEnable On 'Activa la función de enganche
Go P1
Wait LatchState = True 'Espera un disparador
Print LatchPos 'Muestra la posición enganchada
LatchEnable Off 'Desactiva la función de enganche
Fend
Para asignar el valor devuelto de LatchPos a los datos de punto:
P2 = LatchPos

408 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función LCase$
Arroja una cadena que se ha convertido a minúsculas.
Sintaxis
LCase$(string)
Parámetros
string Una expresión de cadena válida.
Valores devueltos
La cadena convertida a minúsculas.
Consulte también
LTrim$, Trim$, RTrim$, UCase$
Ejemplo de función LCase$
str$ = "Data"
str$ = LCase$(str$) ' str$ = "datos"

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 409
Función Left$
Arroja una subcadena desde el lado izquierdo de una expresión de cadena.
Sintaxis
Left$(string, count)
Parámetros
string Expresión de cadena desde la cual se copian los caracteres del extremo izquierdo.
count La cantidad de caracteres que se copiarán de string, comenzando por el carácter del
extremo izquierdo.
Valores devueltos
Arroja una cadena de los caracteres number del extremo izquierdo de la cadena de caracteres especificada
por el usuario.
Descripción
Left$ arroja los caracteres number del extremo izquierdo de una cadena especificada por el usuario. Left$
puede arrojar hasta la cantidad total de caracteres que haya en la cadena de caracteres.
Consulte también
Asc, Chr$, InStr, Len, Mid$, Right$, Space$, Str$, Val
Ejemplo de función Left$
El ejemplo que aparece a continuación muestra un programa que toma la cadena de datos de una pieza como
su entrada y descompone el número, el nombre y el recuento de la pieza.
Function ParsePartData(DataIn$ As String, ByRef PartNum$ As String,
ByRef PartName$ As String, ByRef PartCount As Integer)
Integer pos
String temp$
pos = Instr(DataIn$, ",")
PartNum$ = Left$(DataIn$, pos - 1)
DataIn$ = Right$(datain$, Len(DataIn$) - pos)
pos = Instr(DataIn$, ",")
PartName$ = Left$(DataIn$, pos - 1)
PartCount = Val(Right$(datain$, Len(DataIn$) - pos))
Fend
Otro ejemplo surge de la instrucción Left$ desde la ventana Command.
> Print Left$("ABCDEFG", 2)
AB
> Print Left$("ABC", 3)
ABC

410 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función Len
Arroja la cantidad de caracteres de una cadena de caracteres.
Sintaxis
Len(string)
Parámetros
string Expresión de cadena.
Valores devueltos
Arroja un número entero que representa la cantidad de caracteres en string que se dio como un argumento a
la instrucción Len.
Descripción
Len arroja un número entero que representa la cantidad de caracteres en una cadena especificada por el
usuario. Len arrojará valores entre 0 y 255 (ya que una cadena puede contener entre 0 y 255 caracteres).
Consulte también
Asc, Chr$, InStr, Left$, Mid$, Right$, Space$, Str$, Val
Ejemplo de función Len
El ejemplo que aparece a continuación muestra un programa que toma la cadena de datos de una pieza como
su entrada y descompone el número, el nombre y el recuento de la pieza.
Function ParsePartData(DataIn$ As String, ByRef PartNum$ As String,
ByRef PartName$ As String, ByRef PartCount As Integer)
Integer pos
String temp$
pos = Instr(DataIn$, ",")
PartNum$ = Left$(DataIn$, pos - 1)
DataIn$ = Right$(datain$, Len(DataIn$) - pos)
pos = Instr(DataIn$, ",")
PartName$ = Left$(DataIn$, pos - 1)
PartCount = Val(Right$(datain$, Len(DataIn$) - pos))
Fend
Otro ejemplo surge de la instrucción Len desde la ventana Command.
> ? len("ABCDEFG")
7
> ? len("ABC")
3
> ? len("")
0
>

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 411
Instrucción LimitTorque
Establece y arroja el valor del torque de límite superior en el modo de potencia alta.
Sintaxis
(1) LimitTorque AllMax
(2) LimitTorque j1Max, j2Max, j3Max, j4Max
(3) LimitTorque j1Max, j2Max, j3Max, j4Max, j5Max, j6Max
(4) LimitTorque
Parámetros
AllMax Especifica el valor del torque de límite superior para todos los ejes en el modo de potencia alta
mediante un número entero que representa el porcentaje de torque momentáneo máximo de
cada eje
j #n Max Especifica el valor del torque de límite superior para el n.° de eje en el modo de potencia alta
mediante un número entero que representa el porcentaje de torque momentáneo máximo del n.°
de eje
Resultado
Arroja el valor actual de LimitTorque cuando se omiten los parámetros.
Descripción
Establece el valor límite superior de torque en modo de potencia alta. Normalmente, el torque máximo viene
establecido y no hay necesidad de cambiar este valor. Esta instrucción es útil para restringir el torque para
que no exceda lo necesario para el movimiento específico, con el fin de reducir los daños al manipulador y
los equipos causados por la colisión con equipos periféricos.
El valor de límite superior es el torque máximo en el movimiento específico, medido por PTRQ con
tolerancias que consideran la variación agregada (aproximadamente 10 %).
No se puede establecer el torque inferior al valor de límite superior en modo de potencia baja para este
comando. Los valores mínimos varían para los modelos y las articulaciones. Obtenga el valor de
configuración y confirme el valor de límite superior real después de configurar el valor.
En cualquiera de los siguientes casos, LimitTorque se convierte en el valor predeterminado.
Inicio del controlador
Motor On
Se ejecuta SFree, SLock o Brake
Se ejecuta Reset o Reset Error
Fin de tarea por interruptor de parada o Quit All
Nota
Configuración de LimitTorque demasiado baja
LimitTorque restringe el torque para el movimiento específico con el valor de restricción de torque
establecido como el valor de límite superior, sin importar el tamaño del torque necesario para la ejecución
del movimiento con la aceleración y desaceleración definidas. Por lo tanto, si el movimiento requiere un
torque más grande que el valor de límite superior establecido, es posible que el robot no se mueva
adecuadamente y provoque movimientos vibratorios, ruido o exceso y error de desviación de posición.
Asegúrese de medir PTRQ antes de usar la función de restricción de torque. Si ocurren los problemas
anteriores, establezca un mayor valor de límite superior y ajuste el valor para que el manipulador funcione
correctamente.

412 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Consulte también
Función LimitTorque, Power, PTrq, RealTorque
Ejemplo de instrucción LimitTorque
A continuación, se muestra un ejemplo en donde se opera el manipulador con el máximo torque de la
articulación n.º 1 al 80 %.
Function main
Motor On
Power high
Speed 100; Accel 100,100
LimitTorque 80,100,100,100 'Restringe el torque máximo de la articulación
n.° 1 a 80 %
Jump P1 'Ejecuta el movimiento Jump
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 413
Función LimitTorque
Arroja el valor de configuración del comando LimitTorque.
Sintaxis
LimitTorque(jointNumber)
Parámetros
jointNumber Expresión entera que varía de 1 a 9.
El eje adicional S es 8 y el eje T es 9.
Valores devueltos
Arroja un número entero que representa el valor de configuración del comando LimitTorque.
Consulte también
LimitTorque
Ejemplo de función LimitTorque
Print LimitTorque(1) 'Muestra el valor de LimitTorque de la articulación n.° 1.

414 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción LimitTorqueLP
Establece y arroja el valor del torque de límite superior en el modo de potencia baja.
Sintaxis
(1) LimitTorqueLP AllMax
(2) LimitTorqueLP j1Max, j2Max, j3Max, j4Max
(3) LimitTorqueLP j1Max, j2Max, j3Max, j4Max, j5Max, j6Max
(4) LimitTorqueLP
Parámetros
AllMax Especifica el valor del torque de límite superior para todos los ejes en el modo de potencia baja
mediante un número entero que representa el porcentaje de torque momentáneo máximo de
cada eje
j #n Max Especifica el valor del torque de límite superior para el n.° de eje en modo de potencia baja
mediante un número entero que representa el porcentaje de torque momentáneo máximo del n.°
de eje
Resultado
Arroja el valor actual de LimitTorqueLP cuando se omiten los parámetros.
Muestra el valor predeterminado cuando este comando no cambia los valores.
Descripción
Establece el valor límite superior de torque en modo de potencia baja. Normalmente, el torque máximo viene
establecido y no hay necesidad de cambiar este valor (los valores varían según los modelos y ejes del robot.
Aprox. 15 a 60 %). Este comando es útil para restringir el torque para que no exceda lo necesario para el
movimiento normal, con el fin de reducir los daños al manipulador y los equipos causados por la colisión
con equipos periféricos.
El valor de límite superior es el torque máximo en el movimiento, medido por PTRQ con tolerancias que
consideran la variación agregada (se recomienda 40 %). Para aplicar el mismo valor a un robot distinto,
agregue una tolerancia de 10 a 20 %.
El valor de PTRQ considera el torque máximo predeterminado en modo de potencia baja como 1,0. Por
ejemplo, cuando el valor predeterminado antes del cambio es 27 % y el valor medido por PTRQ es 0,43, el
valor de límite superior es el siguiente: 27 % × 0,43 × 1,4 = 16,25. Entonces, redondee el valor y establézcalo
en 17.
No se puede establecer el valor inferior al 5 % o mayor que el valor predeterminado para este comando. Si
se establecen estos valores, los valores de configuración inferiores a 5 se redondearán hacia arriba hasta 5 y
los valores que superen el valor predeterminado se redondearán hacia abajo hasta el valor predeterminado.
Por ejemplo, cuando “LimitTorqueLP 100”, los valores se devuelven al valor predeterminado para todas las
articulaciones, ya que el valor predeterminado es siempre menor que 100.
Obtenga el valor de configuración y confirme el valor de límite superior real después de configurar el valor.
El valor de configuración de LimitTorqueLP está vigente hasta que se reinicia el controlador.
Nota
Configuración de LimitTorqueLP demasiado baja
LimitTorqueLP restringe el torque para el movimiento específico con el valor de restricción de torque
establecido como el valor de límite superior, sin importar el tamaño del torque necesario para la ejecución
del movimiento con la aceleración y desaceleración definidas. Por lo tanto, si el movimiento requiere un
torque más grande que el valor de límite superior establecido, es posible que el robot no se mueva
adecuadamente y provoque error de desviación de posición. Asegúrese de medir PTRQ antes de usar la
función de restricción de torque. Si ocurre el problema anterior, establezca un mayor valor de límite superior
y ajuste el valor para que el manipulador funcione correctamente.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 415
Consulte también
Función LimitTorqueLP, PTRQ
Ejemplo de LimitTorqueLP
A continuación, se muestra un ejemplo en donde se opera el manipulador con el máximo torque de la
articulación n.º 1 al 10 %.
Function main
Motor On
Power low
LimitTorqueLP 10,27,31,42 ' Restringe el torque máximo de la articulación n.° 1 a 10 %
' Define el valor predeterminado de otros ejes
Go P1 ' Ejecuta el movimiento Go
Fend

416 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función LimitTorqueLP
Arroja el valor de configuración del comando LimitTorqueLP.
Sintaxis
LimitTorqueLP(jointNumber)
Parámetros
jointNumber Expresión entera que varía de 1 a 9.
El eje adicional S es 8 y el eje T es 9.
Valores devueltos
Arroja un número entero que representa el valor de configuración del comando LimitTorqueLP.
Consulte también
LimitTorqueLP
Ejemplo de función Len
Print LimitTorqueLP(1) 'Muestra el valor de LimitTorqueLP de la articulación n.° 1.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 417
Instrucción LimitTorqueStop
Activa o desactiva la función para detener el robot cuando se alcanza el torque de límite superior en el modo
de potencia alta.
Sintaxis
(1) LimitTorqueStop status
(2) LimitTorqueStop status, jointNumber
(3) LimitTorqueStop
Parámetros
status On: Activa la función para detener el robot en el torque de límite superior
Off: Desactiva la función para detener el robot en el torque de límite superior
jointNumber El número de la articulación de 1 a 6.
(Para los robots SCARA, los números de articulación varían de 1 a 4)
Resultado
Arroja el estado de LimitTorqueStop status si se omite el parámetro.
Descripción
LimitTorqueStop activa la función para detener el robot en el valor de torque de límite superior en modo de
potencia alta. El robot se detiene inmediatamente cuando alcanza el torque de límite superior (el valor
predeterminado es 100 %). Usar este comando con la función de restricción de torque de LimitTorque
proporciona el efecto para reducir los daños en el robot y los equipos periféricos durante una colisión en
modo de potencia alta.
Esta función se puede activar o desactivar para cada articulación o para todas. El valor predeterminado es
“all joints off” (Todas las articulaciones desactivadas).
La configuración vuelve al valor predeterminado durante el inicio del controlador. En otros casos, la
configuración no cambia a menos que se configure explícitamente lo contrario con este comando.
Cuando se alcanza el torque de límite superior, aparecerá el Error 5040 “Falla de salida de torque del motor
en estado de potencia alta” y se detendrá el robot.
Consulte también
LimitTorque, Función LimitTorque
Ejemplo de LimitTorqueStop
A continuación, se ve el ejemplo que restringe el torque máximo de la articulación n.º 1 al 30 % y detiene
al robot de inmediato.
Function main
Motor On
Power high
Speed 20
Accel 20,20
LimitTorque 30,100,100,100 ' Restringe el torque máximo de la articulación n.° 1 a
30 %
LimitTorqueStop On, 1 ' La articulación n.° 1 se detiene inmediatamente en el
torque máximo
Go P1 ' Ejecuta el movimiento Go
Fend

418 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función LimitTorqueStop
Arroja el valor de configuración del comando LimitTorqueStop.
Sintaxis
LimitTorqueStop(jointNumber)
Parámetros
jointNumber Expresión entera que varía de 1 a 6.
Valores devueltos
Arroja un número entero que representa el valor de configuración del comando LimitTorqueStop.
0 = Desactivado
1 = Activado
Consulte también
LimitTorqueStop
Ejemplo de función LimitTorqueStop
Print LimitTorqueStop(1) 'Muestra el valor de LimitTorqueStop de la articulación n.° 1.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 419
Instrucción LimitTorqueStopLP
Activa o desactiva la función para detener el robot cuando se alcanza el torque de límite superior en el
modo de potencia baja.
Sintaxis
(1) LimitTorqueStopLP status
(2) LimitTorqueStopLP status, jointNumber
(3) LimitTorqueStopLP
Parámetros
status On: Activa la función para detener el robot en el torque de límite superior
Off: Desactiva la función para detener el robot en el torque de límite superior
jointNumber El número de la articulación de 1 a 6.
(Para los robots SCARA, los números de articulación varían de 1 a 4)
Resultado
Arroja el estado de LimitTorqueStopLP status si se omite el parámetro.
Descripción
LimitTorqueStopLP activa la función para detener el robot en el valor de torque de límite superior en modo
de potencia baja. El robot se detiene inmediatamente cuando alcanza el torque de límite superior. Usar este
comando con la función de restricción de torque de LimitTorqueLP proporciona el efecto para reducir los
daños en el robot y los equipos periféricos durante una colisión en modo de potencia baja.
Esta función se puede activar o desactivar para cada articulación o para todas. El valor predeterminado es
“all joints off” (Todas las articulaciones desactivadas).
La configuración vuelve al valor predeterminado durante el inicio del controlador. En otros casos, la
configuración no cambia a menos que se configure explícitamente lo contrario con este comando.
Cuando se alcanza el torque de límite superior, aparecerá el Error 5041 “Falla de salida de torque del motor
en estado de potencia baja” y se detendrá el robot.
Consulte también
LimitTorqueLP, Función LimitTorqueLP
Ejemplo de LimitTorqueStopLP
A continuación, se ve el ejemplo que restringe el torque máximo de la articulación n.º 3 al 15 % y detiene
al robot de inmediato.
Function main
Motor On
Power low
LimitTorqueLP 20,27,15,42 ' Restringe el torque máximo de la articulación n.° 3 a
15 %
' Establezca el valor predeterminado para otros ejes
LimitTorqueStop LP On, 3 ' La articulación n.° 3 se detiene inmediatamente en el
torque máximo
Go P1 ' Ejecuta el movimiento Go
Fend

420 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función LimitTorqueStopLP
Arroja el valor de configuración del comando LimitTorqueStopLP.
Sintaxis
LimitTorqueStopLP(jointNumber)
Parámetros
jointNumber Expresión entera que varía de 1 a 6.
Valores devueltos
Arroja un número entero que representa el valor de configuración del comando LimitTorqueStopLP.
0 = Desactivado
1 = Activado
Consulte también
LimitTorqueStopLP
Ejemplo de función LimitTorqueStopLP
Print LimitTorqueStopLP(3) 'Muestra el valor de LimitTorqueStopLP de la articulación n.°
3.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 421
Instrucción LimZ
Determina el valor predeterminado de la altura de la articulación Z para los comandos Jump.
Sintaxis
(1) LimZ zLimit
(2) LimZ
Parámetros
zLimit Un valor de coordenada dentro del rango móvil de la articulación Z.
Valores devueltos
Muestra el valor actual de LimZ cuando se omite el parámetro.
Descripción
LimZ determina la altura de articulación Z máxima en la que se mueve el brazo cuando usa la instrucción
Jump, donde el brazo del robot sube en la articulación Z, se mueve en el plano X-Y, y luego baja en la
articulación Z. LimZ es simplemente el valor de articulación Z predeterminado que se usa para definir la
posición de techo de la articulación Z para usar durante el movimiento causado por la instrucción Jump.
Cuando no se especifica un valor de LimZ específico en la instrucción Jump, se usa la última configuración
de LimZ para la instrucción Jump.
Notas
Restablecimiento de LimZ a 0
Reiniciar el controlador o ejecutar los comandos SFree, Slock o Motor On inicializará LimZ a 0.
El valor de LimZ no es válido para las coordenadas de Arm, Tool o Local:
La especificación de límite de altura de la articulación Z LimZ es el valor de la articulación Z para el sistema
de coordenadas del robot. No es el valor de articulación Z para las coordenadas de Arm, Tool o Local. Por
lo tanto, tome las precauciones necesarias cuando use herramientas o efectores finales con distintas alturas
de funcionamiento.
LimZ no afecta a Jump3 ni Jump3CP
LimZ no tiene efecto alguno en Jump3 ni Jump3CP, dado que el movimiento de alcance no es necesariamente
perpendicular al eje Z del sistema de coordenadas.
Consulte también
Jump
Ejemplo de instrucción LimZ
El ejemplo a continuación muestra el uso de LimZ en las operaciones de Jump.
Function main
LimZ -10 'Ajuste el valor predeterminado de LimZ
Jump P1 'Mueva hacia arriba hasta la posición Z=-10 para Jump
Jump P2 LimZ -20 'Mueva hacia arriba hasta la posición Z=-20 para Jump
Jump P3 'Mueva hacia arriba hasta la posición Z=-10 para Jump
Fend

422 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función LimZ
Arroja la configuración actual de LimZ.
Sintaxis
LimZ
Valores devueltos
Número real que contiene la configuración de LimZ actual.
Consulte también
Instrucción LimZ
Ejemplo de función LimZ
Real savLimz
savLimz = LimZ
LimZ -25
Go pick
LimZ savLimZ

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 423
Instrucción LimZMargin
Establece y arroja el valor de configuración para la detección de errores cuando la operación comienza en
un valor más alto que el valor LimZ.
Sintaxis
(1) LimZMargin LimZmargin
(2) LimZMargin
Parámetros
LimZmargin Un valor de margen para la detección de errores de LimZ
Valores devueltos
Si se omite el parámetro, se arrojará el valor de LimZMargin actual.
Descripción
Cuando se ejecuta el comando Jump, la articulación n.° 3 se eleva a la posición establecida por LimZ. Sin
embargo, si la posición de inicio de la articulación está sobre la posición de LimZ, ocurrirá un error.
LimZMargin establece un valor de margen para la detección de errores. El valor predeterminado es 0,02
mm.
Nota
Restablecimiento de LimZ al valor predeterminado
Reiniciar el controlador o ejecutar los comandos SFree, Slock o Motor On inicializará LimZ al valor
predeterminado.
Consulte también
Función LimZMargin, LimZ
Ejemplo de instrucción LimZ
A continuación se muestra un ejemplo de LimZMargin en la operación Jump.
Function main
LimZ -10 'Ajusta el valor predeterminado de LimZ
LimZMargin 0.03 'establece 0,03 mm para un margen de detección de errores de
LimZ
Jump P1 'movimiento horizontal con -10 en la ejecución de Jump
Jump P2 LimZ -20 'movimiento horizontal con -20 en la ejecución de Jump
Jump P3 'movimiento horizontal con -10 en la ejecución de Jump
Fend

424 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función LimZMargin
Arroja la configuración actual de LimZMargin.
Sintaxis
LimZMargin
Valores devueltos
Número real que contiene la configuración de LimZMargin actual.
Consulte también
Instrucción LimZMargin, Instrucción LimZ
Ejemplo de función LimZ
Real savLimzMargin
savLimzZMargin = LimZMargin
LimZMargin 0.03
Jump pick
LimZ savLimZMargin

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 425
Instrucción Line Input
Lee los datos de entrada de una línea y asigna los datos a una variable de cadena.
Sintaxis
Line Input stringVar$
Parámetros
stringVar$ Un nombre de variable de cadena. (La variable de cadena debe terminar con el carácter
$).
Descripción
Line Input lee datos de entrada de una línea desde el dispositivo de presentación y asigna los datos a las
variables de cadena que se usan con la instrucción Line Input. Cuando la instrucción Line Input está lista
para recibir datos del usuario, causa que se muestre una indicación “?” en el dispositivo de visualización.
Entonces, se recibe la línea de datos de entrada después de la indicación como el valor de la variable de
cadena. Después de ingresar la línea de datos, presione la tecla [ENTER].
Consulte también
Input, Input #, Line Input#, ParseStr
Ejemplo de instrucción Line Input
El ejemplo a continuación muestra el uso de Line Input.
Function Main
String A$
Line Input A$ 'Lee datos de entrada de una línea en A$
Print A$
Fend
Ejecute el programa anterior con la tecla F5 o el menú Run en la pantalla principal de EPSON RC+.
Una sesión de funcionamiento resultante puede ser la siguiente:
?A, B, C
A, B, C

426 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción Line Input #
Lee datos de una línea desde un archivo, puerto de comunicación o el dispositivo.
Sintaxis
Line Input #portNumber, stringVar$
Parámetros
portNumber Número de ID que representa un archivo, un puerto de comunicación, una base de
datos o un dispositivo.
El número de archivo se puede especificar en las instrucciones ROpen, WOpen y
AOpen.
El número del puerto de comunicación se puede especificar en las instrucciones
OpenCom (RS232) y OpenNet (TCP/IP).
El número de la base de datos se puede especificar en la instrucción OpenDB.
Los números enteros de ID del dispositivo son los siguientes.
21 RC+
23 OP
24 TP (solo TP1)
20 TP3
stringVar$ Una variable de cadena. (Las variables de cadena deben terminar con el carácter $).
Descripción
Line Input # lee los datos de cadena de una línea desde el dispositivo especificado con el parámetro
portNumber y asigna los datos a la variable de cadena stringVar$.
Consulte también
Input, Input #, Line Input
Ejemplo de instrucción Line Input #
Este ejemplo recibe los datos de cadena desde el puerto de comunicación número 1 y asigna los datos a la
variable de cadena A$.
Function lintest
String a$
Print #1, "Please input string to be sent to robot"
Line Input #1, a$
Print "Value entered = ", a$
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 427
Función LJM
Arroja los datos de punto con los indicadores de orientación convertidos para activar el último
movimiento de articulación cuando se mueva a un punto especificado según el punto de referencia.
Sintaxis
LJM (Point [, refPoint [, orientationFlag] ])
Parámetros
Point Especifica los datos de punto.
refPoint Especifica los datos de punto de referencia. Cuando esto se omite, el punto de
referencia es la posición actual (Aquí).
orientationFlag
Robot de 6 ejes 1: Convierte la orientación de la muñeca (indicador Wrist [muñeca]), J4Flag,
J6Flag o J1Flag, para que la articulación n.º 4 tenga el movimiento más corto.
Esta es la configuración predeterminada cuando se omite “orientationFlag”.
2: Convierte el indicador J4Flag o J6Flag.
3: Convierte la orientación de la muñeca (indicador Wrist [muñeca]), J4Flag, J6Flag
o J1Flag, para que la articulación n.º 5 tenga el movimiento más corto.
4: Convierte la orientación de la muñeca (indicador Wrist [muñeca]), J4Flag, J6Flag
o J1Flag, para que la articulación n.º 6 tenga el movimiento más corto.
“orientation
Flag”
Orientación
de la mano
Orientación
del codo
Orientación
de la
muñeca
J1Flag J4Flag J6Flag
Orden de prioridad
del eje con el
movimiento más
corto
1
-
-
J4
2
-
-
-
-
3
-
-
J5
4
-
-
J6
Nota: La orientación de “-” es la misma que la orientación especificada por
“refPoint”.
Serie RS 1: Convierte la orientación de la mano (indicador Hand [Mano]), J1Flag o J2Flag.
Esta es la configuración predeterminada cuando se omite “orientationFlag”.
2: Convierte la orientación de la mano (indicador Hand), J1Flag o J2Flag. Evita
que el eje U se mueva fuera del rango de movimiento en la conversión del
indicador “orientationFlag”.
Serie N2 1: Convierte a la postura con el mínimo movimiento de articulación en el orden de
prioridad de la articulación n.º 1 y de la articulación n.º 5. Las posturas objetivo
son la orientación de la mano (indicador Hand), la orientación del codo
(indicador Elbow), la orientación de la muñeca (indicador Wrist), J4Flag y
J6Flag. La orientación del codo (indicador Elbow [Codo]) es siempre la
orientación arriba del codo. Esta es la configuración predeterminada cuando se
omite “orientationFlag” .
2: Convierte a la postura con el mínimo movimiento de articulación en el orden de
prioridad de la articulación n.º 1 y de la articulación n.º 4. Las posturas objetivo
son la orientación de la mano (indicador Hand), la orientación del codo
(indicador Elbow), la orientación de la muñeca (indicador Wrist), J4Flag y
J6Flag. La orientación del codo (indicador Elbow) es siempre la orientación
arriba del codo.
3: Convierte la orientación de la muñeca (indicador Wrist), J4Flag y J6Flag, para
que la articulación n.º 4 tenga el movimiento más corto.
4: Convierte los indicadores J4Flag y J6Flag.

428 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
5: Cambie la orientación de la mano especificada en “refPoint” por otra orientación
de mano (indicador Hand). Convierte la orientación de la muñeca (indicador
Wrist [muñeca]), J4Flag, J6Flag o J1Flag, para que la articulación n.º 5 tenga el
movimiento más corto. Las posturas objetivo son la orientación de la mano
(indicador Hand), la orientación del codo (indicador Elbow), la orientación de
la muñeca (indicador Wrist), J4Flag y J6Flag. La orientación del codo (indicador
Elbow) es siempre la orientación arriba del codo.
6: Cambie la orientación de la mano especificada en “refPoint” por otra orientación
de mano (indicador Hand). Convierte la orientación de la muñeca (indicador
Wrist [muñeca]), J4Flag, J6Flag o J1Flag, para que la articulación n.º 4 tenga el
movimiento más corto. Las posturas objetivo son la orientación de la mano
(indicador Hand), la orientación del codo (indicador Elbow), la orientación de
la muñeca (indicador Wrist), J4Flag y J6Flag. La orientación del codo (indicador
Elbow) es siempre la orientación arriba del codo.
7: Cambie la orientación del codo por la orientación debajo del codo (indicador
Elbow). Para tener el movimiento más corto, convierte la orientación de la
muñeca (indicador Wrist), J4Flag y J6Flag en el orden de prioridad de la
articulación n.º 1 y de la articulación n.º 5. Las posturas objetivo son la
orientación de la mano (indicador Hand), la orientación del codo (indicador
Elbow), la orientación de la muñeca (indicador Wrist), J4Flag y J6Flag.
8: Cambie la orientación del codo por la orientación debajo del codo (indicador
Elbow). Para tener el movimiento más corto, convierte la orientación de la
muñeca (indicador Wrist), J4Flag y J6Flag en el orden de prioridad de la
articulación n.º 1 y de la articulación n.º 4. Las posturas objetivo son la
orientación de la mano (indicador Hand), la orientación del codo (indicador
Elbow), la orientación de la muñeca (indicador Wrist), J4Flag y J6Flag.
“orientation
Flag”
Orientación
de la mano
Orientación
del codo
Orientación
de la muñeca
J4Flag J6Flag
Orden de prioridad del eje
con el movimiento más corto
1
*1
J1>J5
2
*1
J1>J4
3
-
-
J4
4
-
-
-
-
5
*2
*1
J4
6
*2
*1
J5
7
*3
J1>J5
8
*3
J1>J4
Nota: La orientación de “-” es la misma que la orientación especificada por “refPoint”.
*1: Orientación sobre el codo
*2: La orientación de la mano es diferente a la orientación especificada por
“refPoint”.
*3: Orientación bajo el codo
Serie N6 1: Convierte la orientación de la muñeca (indicador Wrist), J4Flag y J6Flag, para
que la articulación n.º 4 tenga el movimiento más corto. Esta es la configuración
predeterminada cuando se omite “orientationFlag” .
2: Convierte los indicadores J4Flag y J6Flag.
3: Convierte la orientación de la muñeca (indicador Wrist [muñeca]), J4Flag,
J6Flag o J1Flag, para que la articulación n.º 5 tenga el movimiento más corto.
4: Convierte la orientación de la muñeca (indicador Wrist [muñeca]), J4Flag,
J6Flag o J1Flag, para que la articulación n.º 6 tenga el movimiento más corto.
“orientation
Flag”
Orientación
de la mano
Orientación
del codo
Orientación
de la muñeca
J1Flag J4Flag J6Flag
Orden de prioridad del eje con
el movimiento más corto
1
-
-
J4
2
-
-
-
-
3
-
-
J5
4
-
-
J6

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 429
Nota: La orientación de “-” es la misma que la orientación especificada por “refPoint”.

430 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Descripción
Cuando el robot de 6 ejes o de la serie N se mueve hasta un punto calculado mediante las compensaciones
de pallet o relativas, la pieza de la muñeca podría girar hacia una dirección involuntaria. El cálculo del punto
anterior no depende de los modelos de robot y genera un movimiento sin convertir el indicador de punto
necesario. La función LJM se puede usar para convertir el indicador de punto y evitar la rotación involuntaria
de la muñeca.
Para los robots de la serie N, también es posible reducir el tiempo del ciclo y omitir la enseñanza del punto
de evasión, el cual es necesario para los robots de 6 ejes, mediante el cambio del indicador Hand y del
indicador Elbow.
Cuando el robot de la serie RS se mueve hasta un punto calculado mediante las compensaciones de pallet o
relativas, el brazo n.º 1 podría girar hacia una dirección involuntaria. La función LJM se puede usar para
convertir el indicador de punto y evitar la rotación involuntaria del brazo n.º 1.
Además, el eje U de un robot de la serie RS puede salir del rango de movimiento cuando se convierte el
indicador de orientación, lo que causará un error.
Para evitar este error, la función LJM ajusta el ángulo objetivo del eje U de modo que esté dentro del rango
de movimiento. Esto está disponible cuando se selecciona “2” para orientationFlag.
Arroja el punto especificado para todos los robots, excepto el robot de 6 ejes, de la serie N y de la serie RS.
Nota
La omisión del punto de referencia y el procesamiento paralelo
No puede usar la omisión de punto paralelo y el procesamiento paralelo juntos en un comando de movimiento
como este:
Go LJM(P10) ! D10; MemOn 1 !
Asegúrese de cambiar el programa de la siguiente forma:
P999 = Here
Go LJM(P10,P999) ! D10; MemOn 1 !
orientationFlag para la serie N2
- orientationFlag 1, 2:
Para acortar el tiempo del ciclo, seleccione orientationFlag 1 o 2.
Ya que la postura tiene un movimiento mínimo de articulación n.º 1, el tiempo del ciclo puede ser el más
corto en la mayoría del movimiento.
Para reducir el movimiento de la articulación n.º 5, seleccione orientationFlag 1.
Para reducir el movimiento de la articulación n.º 4, seleccione orientationFlag 2.
- orientationFlag 3, 4:
Use estos indicadores si no desea cambiar la orientación de referencia, la orientación de la mano y la
orientación del codo.
Use estos indicadores si desea usarlos de la misma manera como indicadores para los robots de 6 ejes
verticales.
orientationFlag 3 es igual que orientationFlag 1 de los robots de 6 ejes verticales.
orientationFlag 4 es igual que orientationFlag 2 de los robots de 6 ejes verticales.
- orientationFlag 5, 6:
Si la mano colisiona con paredes periféricas durante la operación, seleccione orientationFlag 5 o 6.
Ya que la mano pasa el entorno del punto de origen del robot, este se puede mover con menos posibilidad
de colisionar con los obstáculos.
Para reducir el movimiento de la articulación n.º 5, seleccione orientationFlag 5.
Para reducir el movimiento de la articulación n.º 4, seleccione orientationFlag 6.
- orientationFlag 7, 8:
Para tener una orientación de codo hacia abajo, seleccione orientationFlag 7 o 8.
Según el movimiento, el robot pasa el entorno del origen, como orientationFlag 5 y orientationFlag 6.
Por lo tanto, el robot se puede mover con menos posibilidad de colisionar con los obstáculos si estos están
ubicados alrededor del robot.
Para reducir el movimiento de la articulación n.º 5, seleccione orientationFlag 7.
Para reducir el movimiento de la articulación n.º 4, seleccione orientationFlag 8.
localNumber
Los números locales de los puntos que arroja la función LJM son los mismos que los de "Expresión de
puntos".

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 431
Consulte también
Pallet
Ejemplo de función LJM
Function main
Integer i, j
P0 = XY(300, 300, 300, 90, 0, 180)
P1 = XY(200, 280, 150, 90, 0, 180)
P2 = XY(200, 330, 150, 90, 0, 180)
P3 = XY(-200, 280, 150, 90, 0, 180)
Pallet 1, P1, P2, P3, 10, 10
Motor On
Power High
Speed 50; Accel 50, 50
SpeedS 1000; AccelS 5000
Go P0
P11 = P0 -TLZ(50)
For i = 1 To 10
For j = 1 To 10
'Especifica los puntos
P10 = P11 'Punto de alejamiento
P12 = Pallet(1, i, j) 'Punto objetivo
P11 = P12 -TLZ(50) 'Inicia el punto de acercamiento
'Convierte cada punto a LJM
P10 = LJM(P10)
P11 = LJM(P11, P10)
P12 = LJM(P12, P11)
'Ejecuta el movimiento
Jump3 P10, P11, P12 C0
Next
Next
Fend
Function main2
P0 = XY(300, 300, 300, 90, 0, 180)
P1 = XY(400, 0, 150, 90, 0, 180)
P2 = XY(400, 500, 150, 90, 0, 180)
P3 = XY(-400, 0, 150, 90, 0, 180)
Pallet 1, P1, P2, P3, 10, 10
Motor On
Power High
Speed 50; Accel 50, 50
SpeedS 1000; AccelS 5000
Go P0
Do
' Especifica los puntos
P10 = Here -TLZ(50) 'Punto de alejamiento
P12 = Pallet(1, Int(Rnd(9)) + 1, Int(Rnd(9)) + 1) 'Punto objetivo
P11 = P12 -TLZ(50) 'Inicia el punto de
acercamiento
If TargetOK(P11) And TargetOK(P12) Then 'Control de punto
' Conversión de cada punto a LJM
P10 = LJM(P10)
P11 = LJM(P11, P10)
P12 = LJM(P12, P11)
'Ejecuta el movimiento
Jump3 P10, P11, P12 C0
EndIf
Loop
Fend

432 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción LoadPoints
Carga un archivo de punto en un área de memoria de puntos del robot actual.
Sintaxis
LoadPoints fileName [, Merge]
Parámetros
fileName Expresión de cadena que contiene el archivo específico para cargar en el área de
memoria de puntos del robot actual. La extensión debe ser .PTS. El archivo debe
existir en el proyecto actual para el robot actual.
No puede especificar una ruta de archivo y fileName no tiene efecto de ChDisk.
Consulte ChDisk para conocer detalles.
Merge Opcional. Si se suministra, entonces no se borran los puntos actuales antes de cargar
los puntos nuevos. Los puntos del archivo se agregan a los puntos actuales. Si existe
un punto en el archivo, sobrescribirá el punto en la memoria.
Descripción
LoadPoints carga archivos de puntos desde el disco en el área de memoria principal del controlador del
robot actual.
Use Merge para combinar archivos de puntos. Por ejemplo, puede tener un archivo de puntos principal que
incluye puntos comunes para ubicaciones, estacionamiento, etc., que varía entre 0 y 100. Luego, use Merge
para cargar otros archivos de puntos para cada pieza que se hace funcionar sin borrar los puntos comunes.
El rango puede ir de 101 a 999.
Posibles errores
No se puede especificar una ruta
Si fileName contiene una ruta, ocurrirá un error. Solo se puede especificar un nombre de archivo en el
proyecto actual.
El archivo no existe
Si fileName no existe, ocurrirá un error.
El archivo de punto no es para el robot actual
Si fileName no es un archivo de puntos del robot actual, se emitirá el siguiente error: No se encontró el
archivo de punto para el robot actual. Para corregir esto, agregue el archivo de punto del robot en el editor
Project (Proyecto) o ejecute SavePoints o ImportPoints.
Consulte también
ImportPoints, Robot, SavePoints
Ejemplo de instrucción LoadPoints
Function main
' Cargar puntos en común para el robot actual
LoadPoints "R1Common.pts"
' Fusionar los puntos para el modelo de pieza 1
LoadPoints "R1Model1.pts", Merge
Robot 2
' Carga archivo de punto para el robot 2
LoadPoints "R2Model1.pts"
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 433
Instrucción Local
Define y muestra los sistemas de coordenadas locales.
Sintaxis
(1) Local localNumber, ( pLocal1 : pBase1 ), ( pLocal2 : pBase2 ) [, { L | R } ] [, BaseU ]
(2) Local localNumber, pCoordinateData
(3) Local localNumber, pOrigin, [pXaxis], [pYaxis], [ { X | Y } ]
(4) Local localNumber
Parámetros
localNumber El número del sistema de coordenadas local. Se puede definir un total de 15 sistemas
de coordenadas locales (del valor entero de 1 a 15).
pLocal1, pLocal2 Variables de puntos con datos de puntos en el sistema de coordenadas local.
pBase1, pBase2 Variables de puntos con datos de puntos en el sistema de coordenadas base.
L | R Opcional. Alinea el origen local a los puntos base izquierdos (primero) o derechos
(segundo).
BaseU Opcional. Cuando se suministran, las coordenadas del eje U están en el sistema de
coordenadas base. Cuando se omiten, las coordenadas del eje U están en el sistema de
coordenadas local.
pCoordinateData Los datos de punto que representan los datos de coordenada del origen y la dirección.
pOrigin Expresión entera que representa el punto de origen con el sistema de coordenadas del
robot.
pXaxis Opcional. Expresión entera que representa un punto a lo largo del eje X con el sistema
de coordenadas del robot, si se especifica la alineación de X.
pYaxis Opcional. Expresión entera que representa un punto a lo largo del eje Y con el sistema
de coordenadas del robot, si se especifica la alineación de Y.
X | Y Si se especifica la alineación de X, entonces pXaxis yace en el eje X del local. Se
calcula que los ejes Y y Z son ortogonales con X en el plano que se crea con los 3
puntos locales. Si se especifica la alineación de Y, entonces pYaxis yace en el eje Y
del local. Se calcula que los ejes X y Z son ortogonales con Y en el plano que se crea
con los 3 puntos locales.
Descripción
(1) Local define un sistema de coordenadas local mediante la especificación de 2 puntos, pLocal1 y pLocal2,
contenidos dentro de este que coincide con dos puntos, pBase1 y pBase2, contenidos en el sistema de
coordenadas base.
Ejemplo:
Local 1, (P1:P11), (P2:P12)
P1 y P2 son puntos de sistema de coordenadas local. P11 y P12 son puntos de sistema de coordenadas
base.
Si la distancia entre los dos puntos especificados en el sistema de coordenadas local no es igual a la que
existe entre dos puntos especificados en el sistema de coordenadas base, el plano XY del sistema de
coordenadas local se define en la posición donde el punto medio entre los dos puntos especificados en el
sistema de coordenadas local coincide con el que se encuentra entre los dos puntos especificados en el
sistema de coordenadas base.
Asimismo, el eje Z del sistema de coordenadas local se define en la posición donde los puntos medios
coinciden entre sí.

434 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
(2) Define un sistema de coordenadas local mediante la especificación del origen y los ángulos de rotación
del eje con respecto al sistema de coordenadas base.
Ejemplo:
Local 1, XY(x, y, z, u)
Local 1, XY(x, y, z, u, v, w)
Local 1, P1
(3) Define un sistema de coordenadas local 3D mediante la especificación del punto de origen, el punto de
eje x y el punto de eje y. Solo se usan las coordenadas X, Y y Z de cada punto. Se ignoran las coordenadas
U, V y W. Cuando se usan los parámetros de alineación X, entonces pXaxis está en el eje X del local y
solo se usa la coordenada Z de pYaxis. Cuando se usan los parámetros de alineación Y, entonces pYaxis
está en el eje Y del local y solo se usa la coordenada Z de pXaxis.
Ejemplo:
Local 1, P1, P2, P3
Local 1, P1, P2, P3, X
Local 1, P1, P2, P3, Y
(4) Muestra la configuración local especificada.
Uso de los parámetros L y R
Mientras que Local básicamente usa puntos medios para posicionar los ejes de su sistema de coordenadas
local como se describió anteriormente, puede especificar opcionalmente local izquierdo o derecho con los
parámetros L y R.
Left Local
Left local define el sistema de coordenadas local mediante la especificación del punto pLocal1 que
corresponde al punto pBase1 en el sistema de coordenadas base (se incluye la dirección del eje Z).
Right Local
Right local define el sistema de coordenadas local mediante la especificación del punto pLocal2 que
corresponde al punto pBase2 en el sistema de coordenadas base. (Se incluye la dirección del eje Z).
Uso del parámetro BaseU
Si se omite el parámetro BaseU, entonces el eje U del sistema de coordenadas local se corrige
automáticamente de acuerdo con los valores de coordenadas X e Y de los 4 puntos especificados. Por lo tanto,
los 2 puntos en el sistema de coordenadas base pueden inicialmente tener cualquier valor de coordenada U.
Es posible que se desee corregir el eje U del sistema de coordenadas local basado en los valores de coordenada
U de los dos puntos en el sistema de coordenadas base, en lugar de corregirlo automáticamente (por ejemplo,
corregir el eje de rotación mediante la enseñanza). Para hacer esto, proporcione el parámetro BaseU.
Los datos de los parámetros del robot se almacenan en la memoria Compact Flash en el controlador. Por
tanto, la memoria flash de comandos se escribe cuando se ejecuta este comando. La escritura frecuente en
la memoria Compact Flash afecta su vida útil. Recomendamos que el uso de este comando sea mínimo.
Consulte también
ArmSet, Base, ECPSet, LocalClr, TLSet, Where

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 435
Ejemplos de instrucción Local
Aquí hay algunos ejemplos de la ventana Command:
Local alineado a la izquierda:
> p1 = 0, 0, 0, 0/1
> p2 = 100, 0, 0, 0/1
> p11 = 150, 150, 0, 0
> p12 = 300, 150, 0, 0
> local 1, (P1:P11), (P2:P12), L
> p21 = 50, 0, 0, 0/1
> go p21
Local definido solo con el punto de origen:
> local 1, 100, 200, -20, 0
Local definido solo con el punto de origen, girado en 45 grados con respecto al eje X:
> local 2, 50, 200, 0, 0, 45, 0
3D Local con p2 alineado con el eje X del local:
> local 3, p1, p2, p3, x
3D Local con p3 alineado con el eje Y del local:
> local 4, p1, p2, p3, y

436 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función Local
Arroja los datos del sistema de coordenadas especificado como un punto.
Sintaxis
Local(localNumber)
Parámetros
localNumber Número del sistema de coordenadas local (entero de 1 a 15) con el uso de una expresión
o un valor numérico.
Valores devueltos
Datos del sistema de coordenadas local especificado como datos de puntos.
Consulte también
Instrucción Local
Ejemplo de función Local
P1 = Local(1)

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 437
Instrucción LocalClr
Borra (anula la definición) un sistema de coordenadas local.
Sintaxis
LocalClr localNumber
Parámetros
localNumber Expresión entera que representa cuáles de los 15 locales (entero de 1 a 15) se borrarán
(se anulará la definición).
Descripción
Los datos de los parámetros del robot se almacenan en la memoria Compact Flash en el controlador. Por
tanto, la memoria flash de comandos se escribe cuando se ejecuta este comando. La escritura frecuente en
la memoria Compact Flash afecta su vida útil. Recomendamos que el uso de este comando sea mínimo.
Consulte también
Arm, ArmSet, ECPSet, Local, Tool, TLClr, TLSet
Ejemplo de instrucción LocalClr
LocalClr 1

438 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función LocalDef
Arroja el estado de la definición local.
Sintaxis
LocalDef (localCoordinateNumber)
Parámetros
localCoordinateNumber Expresión entera que representa para cuál coordenada local se debe arrojar el
estado.
Valores devueltos
True si se ha definido el Local especificado, o de lo contrario, False.
Consulte también
Arm, ArmClr, ArmSet, ECPSet, Local, LocalClr, Tool, TLClr, TLSet
Ejemplo de función LocalDef
Function DisplayLocalDef(localNum As Integer)
If LocalDef(localNum) = False Then
Print "Local ", localNum, "is not defined"
Else
Print "Local 1: ",
Print Local(localNum)
EndIf
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 439
Función Lof
Comprueba si el puerto RS-232 o TCP/IP especificado tiene líneas de datos en su búfer.
Sintaxis
Lof ( fileNumber como un número entero)
Parámetros
fileNumber Un número especificado en las instrucciones OpenCom (RS-232C) u OpenNet
(TCP/IP).
Valores devueltos
La cantidad de líneas de datos en el búfer. Si no hay datos en el búfer, Lof arroja “0”.
Descripción
Lof comprueba si el puerto especificado ha recibido o no las líneas de datos. Los datos recibidos se almacenan
en el búfer, sin importar la instrucción Input#.
Puede esperar el valor devuelto de la función Lof mediante la ejecución de Wait.
Nota
Cuando use el puerto PC COM (1001 a 1008), no puede usar la función Lof con el comando Wait.
Consulte también
ChkCom, ChkNet, Input#, Wait
Ejemplo de función Lof
Este ejemplo de ventana Command imprime la cantidad de líneas de datos recibidas a través del puerto de
comunicación número 1.
>print lof(1)
5
>

440 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción LogIn
Inicia sesión en EPSON RC+ 6.0 como un usuario distinto.
Sintaxis
LogIn logID, password
Parámetros
logID Expresión de cadena que contiene el Id de sesión del usuario.
password Expresión de cadena que contiene la contraseña del usuario.
Descripción
Puede utilizar la seguridad de EPSON RC+ en su aplicación. Por ejemplo, puede mostrar un menú que
permita que distintos usuarios inicien sesión en el sistema. Cada tipo de usuario puede tener sus propios
derechos de seguridad. Para conocer más detalles acerca de la seguridad, consulte el Manual del usuario de
EPSON RC+.
Cuando ejecuta programas en el entorno de desarrollo, se restaurará el usuario antes de que se inicien los
programas cuando los programas dejen de ejecutarse.
Cuando ejecute la ventana Operator en modo Auto, se inicia sesión en la aplicación como un usuario
invitado, a menos que Auto LogIn esté activado, en cuyo caso se inicia sesión en la aplicación como el
usuario de Windows actual, si dicho usuario está configurado en el sistema EPSON RC+.
Nota
Este comando solo funcionará si la opción Security está activada.
Consulte también
Función GetCurrentUser$
Ejemplo de instrucción LogIn
Integer errCode
errCode = LogIn("operator", "oprpass")

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 441
Instrucción Long
Declara las variables de tipo número entero largo. (Número entero de 4 bytes).
Sintaxis
Long varName [(subscripts)] [, varName [(subscripts)]...]
Parámetros
varName Nombre de la variable que el usuario desea declarar como de tipo Long.
subscripts Opcional. Las dimensiones de una matriz son variables; es posible declarar hasta 3
dimensiones. La sintaxis del subíndice es la siguiente
(ubound1, [ubound2], [ubound3])
ubound1, ubound2, ubound3 especifican, cada una, el límite superior máximo para la
dimensión asociada.
Los elementos en cada dimensión de una matriz se numeran desde 0 y el número
disponible de elementos de matriz es el valor de límite superior + 1.
Cuando especifique el valor del límite superior, asegúrese de que el número total de
elementos esté dentro del rango que se muestra a continuación:
Variable local 2.000
Variables globales conservadas 4.000
Variable global y variable de módulo 100.000
Descripción
Long se usa para declarar variables como un tipo largo. Las variables de tipo Long pueden incluir números
enteros con valores de -2,147,483,648 a 2,147,483,647. Las variables locales se deben declarar al inicio de
una función. Las variables globales y de módulo se deben declarar fuera de las funciones.
Consulte también
Boolean, Byte, Double, Global, Int32, Int64, Integer, Real, Short, String, UByte, UInt32, UInt64,
UShort
Ejemplo de instrucción Long
El siguiente ejemplo muestra un programa simple que declara algunas variables como largas con el uso de
Long.
Function longtest
Long A(10) 'Matriz de una dimensión de largo
Long B(10, 10) 'Matriz de dos dimensiones de largo
Long C(5, 5, 5) 'Matriz de tres dimensiones de largo
Long var1, arrayVar(10)
Long i
Print "Please enter a Long Number"
Input var1
Print "The Integer variable var1 = ", var1
For i = 1 To 5
Print "Please enter a Long Number"
Input arrayVar(i)
Print "Value Entered was ", arrayVar(i)
Next I
Fend

442 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función LSet$
Arroja la cadena especificada con espacios finales anexados hasta una longitud especificada.
Sintaxis
LSet$ (string, length)
Parámetros
string Expresión de cadena.
length Expresión entera para la longitud total de la cadena devuelta.
Valores devueltos
Cadena especificada con espacios finales anexados.
Consulte también
RSet$, Space$
Ejemplo de función LSet$
temp$ = "123"
temp$ = LSet$(temp$, 10) ' temp$ = "123 "

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 443
Función LShift
Desplaza los datos numéricos a la izquierda según el número de bits especificados por un usuario.
Sintaxis
LShift(number, shiftBits)
Parámetros
number Expresión entera que se desplazará.
shiftBits El número de bits (entero de 0 a 31) que se desplazará number a la izquierda.
Valores devueltos
Arroja un resultado numérico igual al valor de number después de desplazar el número de bits shiftBits a la
izquierda.
Descripción
LShift cambia los datos numéricos especificados (number) a la izquierda (hacia un dígito de orden más alto)
según la cantidad de bits especificada (shiftBits). Los bits de orden inferior desplazados se reemplazan por
un 0.
La explicación más sencilla de LShift es que simplemente arroja el resultado de number * 2 shiftBits.
Nota
Tipo de datos numéricos:
El valor number de datos numéricos puede ser cualquier tipo de dato numérico válido. LShift admite los tipos
de datos: Byte, Double, Int32, Integer, Long, Real, Short, UByte, UInt32 y UShort.
Consulte también
And, LShift64, Not, Or, RShift, RShift64, Xor
Ejemplo de función LShift
Function lshiftst
Integer i
Integer num, snum
num = 1
For i = 1 to 10
Print "i =", i
snum = LShift(num, i)
Print "The shifted num is ", snum
Next i
Fend
Otro ejemplo surge de la instrucción LShift desde la ventana Command.
> Print LShift(2,2)
8
> Print LShift(5,1)
10
> Print LShift(3,2)
12
>

444 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función LShift64
Desplaza los datos numéricos a la izquierda según el número de bits especificados por un usuario.
Sintaxis
LShift64(number, shiftBits)
Parámetros
number Expresión entera que se desplazará.
shiftBits El número de bits (entero de 0 a 63) que se desplazará number a la izquierda.
Valores devueltos
Arroja un resultado numérico igual al valor de number después de desplazar el número de bits shiftBits a la
izquierda.
Descripción
LShift64 cambia los datos numéricos especificados (number) a la izquierda (hacia un dígito de orden más
alto) según la cantidad de bits especificada (shiftBits). Los bits de orden inferior desplazados se reemplazan
por un 0.
La explicación más sencilla de LShift64 es que simplemente arroja el resultado de number * 2 shiftBits.
Nota
Tipo de datos numéricos:
El valor number de datos numéricos puede ser cualquier tipo de dato numérico válido. LShift64 admite los
tipos de datos: Int64 y UInt64.
Consulte también
And, LShift, Not, Or, RShift, RShift64, Xor
Ejemplo de función LShift64
Function lshiftst
Int64 i
Int64 num, snum
num = 1
For i = 1 to 10
Print "i =", i
snum = LShift64(num, i)
Print "The shifted num is ", snum
Next i
Fend
Otro ejemplo surge de la instrucción LShift64 desde la ventana Command.
> Print LShift64(2,2)
8
> Print LShift64(5,1)
10
> Print LShift64(3,2)
12
>

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 445
Función LTrim$
Arroja una cadena igual a la cadena especificada sin espacios delanteros.
Sintaxis
LTrim$ (string)
Parámetros
string Expresión de cadena.
Valores devueltos
Cadena especificada sin espacios delanteros.
Consulte también
RTrim$, Trim$
Ejemplo de función LTrim$
str$ = " data "
str$ = LTrim$(str$) ' str$ = "data "

446 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Operador Mask
Máscara de bitwise para la expresión de condición de la instrucción Wait.
Sintaxis
Wait expr1 Mask exrp2
Parámetros
expr1 Cualquier condición de entrada de expresión válida para Wait.
expr2 Cualquier expresión válida que arroje un resultado numérico.
Descripción
El operador Mask es un And bitwise para las expresiones de condición de la entrada de instrucción Wait.
Consulte también
Wait
Ejemplo del operador Mask
' Espere que los 3 bits inferiores del puerto de entrada 0 sean iguales a 1
Wait In(0) Mask 7 = 1

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 447
Instrucción MCal
Ejecuta la calibración de máquina para robots con codificadores incrementales.
Sintaxis
MCal
Descripción
Es necesario calibrar los robots que tienen codificadores incrementales. Esta calibración se debe ejecutar
después de encender la energía principal. Si intenta la ejecución del comando de movimiento, o cualquier
comando que requiera los datos de posición actual sin primero ejecutar la calibración de la máquina,
ocurrirá un error.
La calibración de la máquina se ejecuta de acuerdo al orden de articulación que se mueve, el que se
especifica con el comando MCordr. El valor predeterminado de MCordr al momento del envío varía de un
modelo a otro, por lo que debe consultar el manual del manipulador correspondiente para conocer detalles.
Posibles errores
Intento de ejecución de un comando de movimiento sin ejecutar Mcal primero
Si intenta la ejecución del comando de movimiento, o cualquier comando que requiera los datos de
posición actual (por ejemplo, la instrucción Plist*) sin primero ejecutar la calibración de la máquina,
ocurrirá un error.
Robots de codificador absoluto
Los robots de codificador absoluto no necesitan MCAL.
Nota de instalación del robot
Espacio de articulación Z necesario para regreso a la posición de reposo
Cuando la articulación Z vuelve a la posición de inicio se mueve primero hacia arriba y, luego, se mueve
hacia abajo y se queda en la posición de reposo. Esto significa que es muy importante instalar
adecuadamente el robot para que quede suficiente espacio para que el brazo lleve la articulación Z a la
posición de reposo. Se recomienda que se deje un espacio de 6 mm sobre el límite superior. (No instale
herramientas o accesorios dentro de 6 mm sobre el robot, de modo que haya suficiente espacio para que la
articulación Z vuelva correctamente a la posición de reposo).
Consulte también
Hofs, Home, Hordr, Mcorg, MCordr
Ejemplo de instrucción Mcal
El siguiente ejemplo se realizó en la ventana Monitor:
> Motor On
> Mcal
>

448 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función MCalComplete
Arroja el estado de MCal.
Sintaxis
MCalComplete
Valores devueltos
True si MCal se ha completado; de lo contrario, False.
Consulte también
MCal
Ejemplo de función MCalComplete
If Not MCalComplete Then
MCal
EndIf

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 449
Instrucción MCordr
Especifica y muestra el orden de movimiento de las articulaciones para el valor Mcal de calibración de
máquina.
Solo se requiere para robots con codificadores incrementales.
Sintaxis
(1) MCordr Step1, Step2, Step3, Step4 [, Step5] [, Step6] [, Step7] [, Step8] [, Step9]
(2) MCordr
Parámetros
Step1 Patrón de bits que indica los ejes que se deberían calibrar durante el primer paso del proceso de
Mcal. Cualquier número de ejes, entre 0 a los 4, se pueden calibrar durante el primer paso.
(Consulte a continuación para ver las definiciones del patrón de bits)
Step2 Patrón de bits que indica los ejes que se deberían calibrar durante el segundo paso del proceso de
Mcal. Cualquier número de ejes, entre 0 a los 4, se pueden calibrar durante el segundo paso.
(Consulte a continuación para ver las definiciones del patrón de bits)
Step3 Patrón de bits que indica los ejes que se deberían calibrar durante el tercer paso del proceso de
Mcal. Cualquier número de ejes, entre 0 a los 4, se pueden calibrar durante el tercer paso.
(Consulte a continuación para ver las definiciones del patrón de bits)
Step4 Patrón de bits que indica los ejes que se deberían calibrar durante el cuarto paso del proceso de
Mcal. Cualquier número de ejes, entre 0 a los 4, se pueden calibrar durante el cuarto paso.
(Consulte a continuación para ver las definiciones del patrón de bits)
Step5 Patrón de bits que indica los ejes que se deberían calibrar durante el quinto paso del proceso de
Mcal. Cualquier número de ejes, entre 0 a los 4, se pueden calibrar durante el quinto paso.
(Consulte a continuación para ver las definiciones del patrón de bits)
Step6 Patrón de bits que indica los ejes que se deberían calibrar durante el sexto paso del proceso de
Mcal. Cualquier número de ejes, entre 0 a los 4, se pueden calibrar durante el sexto paso.
(Consulte a continuación para ver las definiciones del patrón de bits)
Step7 Patrón de bits que indica los ejes que se deberían calibrar durante el séptimo paso del proceso de
Mcal. Cualquier número de ejes, entre 0 a los 4, se pueden calibrar durante el séptimo paso.
(Consulte a continuación para ver las definiciones del patrón de bits)
Step8 Patrón de bits que indica los ejes que se deberían calibrar durante el octavo paso del proceso de
Mcal. Cualquier número de ejes, entre 0 a los 4, se pueden calibrar durante el octavo paso.
(Consulte a continuación para ver las definiciones del patrón de bits)
Step9 Patrón de bits que indica los ejes que se deberían calibrar durante el noveno paso del proceso de
Mcal. Cualquier número de ejes, entre 0 a los 4, se pueden calibrar durante el noveno paso.
(Consulte a continuación para ver las definiciones del patrón de bits)
Valores devueltos
Muestra el orden de calibración de la máquina actual cuando se omiten los parámetros.
Descripción
Después de encender el sistema, se debe emitir la instrucción Mcal antes de realizar cualquier operación con
el brazo del robot. Cuando se emite la instrucción Mcal, cada uno de los 4 ejes del robot se moverá a sus
posiciones de calibración respectivas.
Especifica el orden de movimiento de las articulaciones para el comando Mcal. (Es decir, define qué
articulación volverá a la posición de reposo primero, cuál realizará Mcal en segundo lugar, en tercer lugar,
etc.)
El fin de la instrucción MCordr es permitir que el usuario cambie el orden de regreso a la posición de reposo.
El orden de regreso a la posición de reposo se divide en 9 pasos separados. Entonces, el usuario utiliza
MCordr para definir los ejes específicos que se moverán a la posición de calibración (hecho con el comando
Mcal) durante cada paso. Es importante darse cuenta de que se puede definir más de 1 articulación para
moverse a la posición de calibración durante un solo paso. Esto significa que los cuatro ejes posiblemente se

450 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
pueden calibrar al mismo tiempo. Sin embargo, se recomienda que se defina la articulación Z normalmente
para que se mueva a la posición de calibración primero (en el Paso 1), y luego permita que los demás ejes
sigan en pasos posteriores. (Consulte las notas a continuación)
La instrucción MCordr espera que se defina un patrón de bits para cada uno de los 9 pasos. Ya que hay 4
ejes, cada articulación tiene asignada un bit específico. Cuando el bit es alto (1) (para un paso específico),
entonces se calibrará la articulación correspondiente. Cuando el bit es bajo (0), entonces no se calibrará la
articulación correspondiente durante ese paso. Los patrones del bit de la articulación están asignados de la
siguiente manera:
Articulación:
1
2
3
4
Número de bit:
bit 0
bit 1
bit 2
bit 3
Código binario:
&B000001
&B000010
&B000100
&B001000
Articulación:
5
6
7
8
9
Número de bit:
bit 4
bit 5
bit 6
bit 7
bit 8
Código binario:
&B010000
&B100000
&B1000000
&B10000000
&B100000000
Notas
Diferencia entre MCordr y Hordr
Aunque, a primera vista, los comandos Hordr y MCordr pueden parecer muy similares, hay una diferencia
principal que es muy importante que comprendan. MCordr se usa para definir el orden de articulación de
calibración del robot (se usa con Mcal), mientras que Hordr se usa para definir el orden de regreso a la
posición de reposo de la articulación (se usa con el comando Home).
Orden de MCal predeterminado (configuración de fábrica)
El orden de calibración de articulación predeterminado de fábrica es que la articulación 3 volverá a la posición
de reposo en el Paso 1. Luego, las articulaciones 1, 2 y 4 volverán a la posición de reposo al mismo tiempo
en el paso 2. (Los Pasos 3 y 4 no se usan en la configuración predeterminada). Los valores predeterminados
de MCordr son los siguientes:
MCordr &B0100, &B1011, 0, 0
La articulación Z normalmente se debería calibrar primero
La razón para mover primero la articulación Z (y por sí sola) es permitir que se muevan las herramientas
sobre la superficie de trabajo antes de comenzar con el movimiento horizontal. Esto permitirá evitar que las
herramientas golpeen algo en el envolvente de trabajo durante el proceso de regreso a la posición de reposo.
Los valores MCordr se mantienen
Los valores de la tabla MCordr se guardan permanentemente y no cambian hasta que el usuario los modifica
o se redefine el robot.
Consulte también
Mcal
Ejemplo de instrucción MCordr
A continuación se ven algunos ejemplos de la ventana Monitor:
Este ejemplo define el orden de calibración como J3 en el primer paso, J1 en el segundo paso, J2 en el
tercer paso y J4 en el cuarto paso. El orden se especifica con valores binarios.
>mcordr &B0100, &B0001, &B0010, &B1000
Este ejemplo define el orden de calibración como J3 en el primer paso, luego las articulaciones J1, J2 y J4
simultáneamente en el segundo paso. El orden se especifica con valores decimales.
>mcordr 4, 11, 0, 0
Este ejemplo muestra el orden de calibración actual en números decimales.
>mcordr
4, 11, 0, 0
>

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 451
Función MCordr
Arroja una configuración de parámetro MCordr.
Sintaxis
MCordr (paramNumber)
Parámetros
paramNumber Especifica los números de configuración de referencia (enteros de 1 a 9) por medio
de una expresión o un valor numérico.
Valores devueltos
Arroja valores binarios (enteros) que representan al articulación del número de configuración especificado
para ejecutar la calibración de la máquina.
Descripción
Arroja el orden de movimiento de articulación para que Mcal ejecute la calibración de la máquina.
Consulte también
Mcal
Ejemplo de función MCordr
En este ejemplo se usa la función MCordr en un programa:
Integer a
a = MCordr(1)

452 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función MemIn
Arroja el estado del puerto de E/S de memoria especificado. Cada puerto contiene 8 bits de memoria.
Sintaxis
MemIn(portNumber)
Parámetros
portNumber Expresión entera que representa los bytes de E/S de memoria.
Valores devueltos
Arroja un valor entero entre 0 y 255. El valor devuelto es 8 bits, donde cada bit corresponde a 1 bit de E/S
de memoria.
Descripción
MemIn la capacidad para ver el valor de 8 bits de E/S de memoria al mismo tiempo. La instrucción MemIn
se puede usar para guardar el estado de los 8 bits de E/S de memoria en una variable o, bien, se puede usar
con la instrucción Wait para esperar hasta que se cumpla una condición específica que involucre más de 1
bit de E/S de memoria.
Ya que se recuperan 8 bits al mismo tiempo, los valores devueltos van de 0 a 255. Revise la siguiente tabla
para ver cómo corresponden los valores enteros devueltos a los bits de E/S de memoria individuales.
Resultado del bit de E/S de memoria (mediante el puerto n.º 0)
Valores devueltos
7
6
5
4
3
2
1
0
1
Off
Off
Off
Off
Off
Off
Off
On
5
Off
Off
Off
Off
Off
On
Off
On
15
Off
Off
Off
Off
On
On
On
On
255
On
On
On
On
On
On
On
On
Resultado del bit de E/S de memoria (mediante el puerto n.º 31)
Valores devueltos
255
254
253
252
251
250
249
248
3
Off
Off
Off
Off
Off
Off
On
On
7
Off
Off
Off
Off
Off
On
On
On
32
Off
Off
On
Off
Off
Off
Off
Off
255
On
On
On
On
On
On
On
On
Nota
Diferencia entre MemIn y MemSw
La instrucción MemSw permite que el usuario lea el valor de 1 bit de E/S de memoria. El valor devuelto de
MemSw es 1 o 0, lo que indica que el bit de E/S de memoria está On u Off. MemSw puede comprobar cada
uno de los bits de E/S de memoria de manera individual. La instrucción MemIn es muy similar a la instrucción
MemSw en que también se usa para revisar el estado de los bits de E/S de memoria. Sin embargo, hay 1
diferencia distintiva. La instrucción MemIn revisa 8 bits de E/S de memoria a la vez, en comparación con la
funcionalidad de comprobación de un solo bit de la instrucción MemSw. MemIn arroja un valor entre 0 y
255, el que indica al usuario cuáles de los 8 bits de E/S están On y cuáles están Off.
Consulte también
In, InBCD, Off, MemOff, On, MemOn, OpBCD, Oport, Out, MemOut, Sw, MemSw, Wait

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 453
Ejemplo de función MemIn
El ejemplo de programa a continuación obtiene el valor actual de los primeros 8 bits de E/S de memoria, y
luego se asegura de que las 8 E/S estén actualmente establecidas en “0” antes de continuar. Si no están en
“0”, aparece un mensaje de error para el operador y se detiene la tarea.
Function main
Integer var1
var1 = MemIn(0) 'Obtiene el valor de los primeros 8 bit de E/S de memoria
If var1 = 0 Then
Go P1
Go P2
Else
Print "Error in initialization!"
Print "First 8 memory I/O bits were not all set to 0"
EndIf
Fend
Otros ejemplos simples de la ventana Command incluyen los siguientes:
> memout 0, 1
> print MemIn(0)
1
> memon 1
> print MemIn(0)
3
> memout 31,3
> print MemIn(31)
3
> memoff 249
> print MemIn(31)
1
>

454 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función MemInW
Arroja el estado del puerto de palabra de E/S de memoria especificado. Cada puerto de palabra contiene 16
bits de E/S de memoria.
Sintaxis
MemInW(WordPortNum)
Parámetros
WordPortNum Expresión entera que representa el puerto de palabra de E/S.
Valores devueltos
Arroja el estado actual de la E/S de memoria (números enteros largos de 0 a 65535).
Consulte también
MemIn, MemOut, MemOutW
Ejemplo de función MemInW
Long word0
word0 = MemInW(0)

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 455
Instrucción MemOff
Desactiva el bit especificado de E/S de memoria.
Sintaxis
MemOff { bitNumber | memIOLabel }
Parámetros
bitNumber Expresión entera que representa los bits de E/S de memoria.
memIOLabel Etiqueta de E/S de memoria.
Descripción
MemOff desactiva el bit especificado de E/S de memoria. Los 256 bits de E/S de memoria son generalmente
excelentes opciones para usar como bits de estado para usos, como On/Off, True/False, Done/Not Done, etc.
La instrucción MemOn activa el bit de memoria, la instrucción MemOff lo desactiva y la instrucción MemSw
se usa para comprobar el estado actual del bit de memoria especificado. También se puede usar la instrucción
Wait con el bit de E/S de memoria para provocar que el sistema espere hasta que se establezca un estado de
E/S de memoria especificado.
Nota
Salidas de memoria desactivadas
Todos los bits de E/S de memoria están desactivados cuando se reinicia el controlador. No se desactivan con
la parada de emergencia, la protección abierta, el fin del programa, el comando Reset (Restablecer) o el
reinicio de EPSON RC+.
Consulte también
In, MemIn, InBCD, Off, On, MemOn, OpBCD, Oport, Out, MemOut, Sw, MemSw, Wait
Ejemplo de instrucción MemOff
El ejemplo que se indica a continuación muestra 2 tareas, cada una con la capacidad de iniciar las
instrucciones de movimiento. No obstante, se usa un mecanismo de bloqueo entre las 2 tareas para garantizar
que cada una de ellas obtenga el control de las instrucciones de movimiento del robot solamente después de
que la otra tarea haya terminado de usarlas. Esto permite que las 2 tareas ejecuten las instrucciones de
movimiento según sea necesario y de manera ordenada y predecible. MemSw se usa junto con la instrucción
Wait para esperar hasta que la E/S de memoria n.º 1 tenga el valor adecuado antes de que sea seguro moverse
nuevamente. MemOn y MemOff se usan para activar y desactivar la E/S de memoria para conseguir una
sincronización adecuada.
Function main
Integer I
MemOff 1
Xqt 2, task2
For i = 1 to 100
Wait MemSw(1) = Off
Go P(i)
MemOn 1
Next I
Fend
Function task2
Integer I
For i = 101 to 200
Wait MemSw(1) = On
Go P(i)
MemOff 1
Next I
Fend

456 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Otros ejemplos simples de la ventana Command incluyen los siguientes:
> MemOn 1 'Activa el bit de E/S de memoria n.° 1
> Print MemSw(1)
1
> MemOff 1 'Desactiva el bit de E/S de memoria n.° 1
> Print MemSw(1)
0

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 457
Instrucción MemOn
Activa el bit especificado de E/S de memoria.
Sintaxis
MemOn { bitNumber | memIOLabel }
Parámetros
bitNumber Expresión entera que representa los bits de E/S de memoria.
memIOLabel Etiqueta de E/S de memoria.
Descripción
MemOn activa el bit especificado de E/S de memoria del robot. Los 256 bits de E/S de memoria se usan
generalmente como bits de estado de comunicación de tareas. La instrucción MemOn activa el bit de
memoria, la instrucción MemOff lo desactiva y la instrucción MemSw se usa para comprobar el estado actual
del bit de memoria especificado. También se puede usar la instrucción Wait con el bit de memoria para
provocar que el sistema espere hasta que se establezca un estado especificado.
Nota
Salidas de memoria desactivadas
Todos los bits de E/S de memoria están desactivados cuando se reinicia el controlador. No se desactivan con
la parada de emergencia, la protección abierta, el fin del programa, el comando Reset o el reinicio de EPSON
RC+.
Consulte también
In, MemIn, InBCD, Off, MemOff, On, OpBCD, Oport, Out, MemOut, Sw, MemSw, Wait
Ejemplo de instrucción MemOn
El ejemplo que se indica a continuación muestra 2 tareas, cada una con la capacidad de iniciar las
instrucciones de movimiento. No obstante, se usa un mecanismo de bloqueo entre las 2 tareas para garantizar
que cada una de ellas obtenga el control de las instrucciones de movimiento del robot solamente después de
que la otra tarea haya terminado de usarlas. Esto permite que las 2 tareas ejecuten las instrucciones de
movimiento según sea necesario y de manera ordenada y predecible. MemSw se usa junto con la instrucción
Wait para esperar hasta que la E/S de memoria n.º 1 tenga el valor adecuado antes de que sea seguro moverse
nuevamente. MemOn y MemOff se usan para activar y desactivar la E/S de memoria para conseguir una
sincronización adecuada.
Function main
Integer I
MemOff 1
Xqt 2, task2
For i = 1 to 100
Wait MemSw(1) = Off
Go P(i)
MemOn 1
Next I
Fend
Function task2
Integer I
For i = 101 to 200
Wait MemSw(1) = On
Go P(i)
MemOff 1
Next I
Fend

458 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Otros ejemplos simples de la ventana Command incluyen los siguientes:
> memon 1
> print memsw(1)
1
> memoff 1
> print memsw(1)
0

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 459
Instrucción MemOut
Configura simultáneamente 8 bits de E/S de memoria.
Sintaxis
MemOut portNumber, outData
Parámetros
portNumber Expresión entera que representa el número de puerto del bit de E/S de memoria. La selección
portNumber corresponde a lo siguiente:
Número de
puerto
Salidas
0
0-7
1
8-15
.
.
outData Expresión entera entre 0 y 255 que representa el patrón de salida para el grupo de salida
seleccionado con portNumber. Si se representa en forma hexadecimal, el rango varía de &H0
a &HFF. El dígito inferior representa los dígitos menos significativos (o las primeras 4 salidas)
y el dígito superior representa los dígitos más relevantes (o las segundas 4 salidas).
Descripción
MemOut establece simultáneamente 8 bits de E/S de memoria con la combinación de los valores portNumber
y outdata especificados por el usuario para determinar qué salidas se determinarán. El parámetro portNumber
especifica el grupo de 8 entradas que se leerá, donde portNumber = 0 significa las entradas 0 a 7, portNumber
= 1 significa las entradas 8 a 15, etc.
Una vez seleccionado un portNumber, se debe definir un patrón de salida específico. Esto se lleva a cabo
mediante el parámetro outData. El parámetro outData puede tener un valor entre 0 y 255 y se puede
representar en formato hexadecimal o de número entero. (es decir, &H0 a &HFF o 0 a 255)
La siguiente tabla muestra algunas de las combinaciones posibles de E/S y sus valores outData asociados,
asumiendo que portNumber son “0” y “1” según corresponde.
Configuración de salida cuando portNumber=0 (número de salida)
Valor OutData
7
6
5
4
3
2
1
0
01
Off
Off
Off
Off
Off
Off
Off
On
02
Off
Off
Off
Off
Off
Off
On
Off
03
Off
Off
Off
Off
Off
Off
On
On
08
Off
Off
Off
Off
On
Off
Off
Off
09
Off
Off
Off
Off
On
Off
Off
On
10
Off
Off
Off
On
Off
Off
Off
Off
11
Off
Off
Off
On
Off
Off
Off
On
99
Off
On
On
Off
Off
Off
On
On
255
On
On
On
On
On
On
On
On

460 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Configuración de salida cuando portNumber=1 (número de salida)
Valor OutData
15
14
13
12
11
10
9
8
01
Off
Off
Off
Off
Off
Off
Off
On
02
Off
Off
Off
Off
Off
Off
On
Off
03
Off
Off
Off
Off
Off
Off
On
On
08
Off
Off
Off
Off
On
Off
Off
Off
09
Off
Off
Off
Off
On
Off
Off
On
10
Off
Off
Off
On
Off
Off
Off
Off
11
Off
Off
Off
On
Off
Off
Off
On
99
Off
On
On
Off
Off
Off
On
On
255
On
On
On
On
On
On
On
On
Consulte también
In, MemIn, InBCD, MemOff, MemOn, MemSw, Off, On, OpBCD, Oport, Out, Sw, Wait
Ejemplo de instrucción MemOut
El ejemplo a continuación muestra la tarea principal que inicia una tarea en segundo plano llamada “iotask”.
La tarea “iotask” es una tarea simple para alternar entre activar y desactivar los bits de E/S de memoria de 0
a 3. La instrucción MemOut hace que esto sea posible usando solo 1 comando en lugar de activar y desactivar
individualmente cada bit de E/S de memoria.
Function main
Xqt 2, iotask
Go P1
.
.
Fend
Function iotask
Do
MemOut 0, &H
Wait 1
MemOut 0, &H0
Wait 1
Loop
Fend
Entre otros de los ejemplos simples de la ventana Command se incluyen los siguientes:
> MemOut 1,6 'Activa los bits de E/S de memoria 9 y 10
> MemOut 2,1 'Activa el bit de E/S de memoria 8
> MemOut 3,91 'Activa los bits de E/S de memoria 24, 25, 27, 28 y 30

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 461
Instrucción MemOutW
Configura simultáneamente 16 bits de E/S de memoria.
Sintaxis
MemOutW wordPortNum, outputData
Parámetros
wordPortNum Expresión entera que representa las palabras de E/S de memoria.
outputData Especifica los datos de salida (enteros de 0 a 65535) mediante una expresión o un valor
numérico.
Descripción
Cambia el estado actual del grupo de puertos de E/S de memoria especificado según el número de puerto de
palabra para los datos de salida especificados.
Consulte también
MemIn, MemInW, MemOut
Ejemplo de instrucción MemOutW
MemOutW 0, 25

462 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función MemSw
Arroja el estado del bit de E/S de memoria especificado.
Sintaxis
MemSw(bitNumber)
Parámetros
bitNumber Expresión entera que representa el número de bits de E/S de memoria.
Valores devueltos
Arroja "1" cuando el bit especificado está activado y "0" cuando el bit especificado está desactivado.
Descripción
MemSw arroja el estado de un bit de E/S de memoria. Entradas válidas para MemSw varían entre el bit 0 y
el bit 511. MemOn activa el bit especificado y MemOff desactiva el bit especificado.
Consulte también
In, MemIn, InBCD, MemOff, MemOn, MemOut, Off, On, OpBCD, Oport, Out, Sw, Wait
Ejemplo de función MemSw
El ejemplo que se indica a continuación muestra 2 tareas, cada una con la capacidad de iniciar las
instrucciones de movimiento. No obstante, se usa un mecanismo de bloqueo entre las 2 tareas para garantizar
que cada una de ellas obtenga el control de las instrucciones de movimiento del robot solamente después de
que la otra tarea haya terminado de usarlas. Esto permite que las 2 tareas ejecuten las instrucciones de
movimiento según sea necesario y de manera ordenada y predecible. MemSw se usa junto con la instrucción
Wait para esperar hasta que el bit de E/S de memoria 1 tenga el valor adecuado antes de que sea seguro
moverse nuevamente.
Function main
Integer I
MemOff 1
Xqt 2, task2
For i = 1 to 100
Wait MemSw(1) = Off
Go P(i)
MemOn 1
Next I
Fend
Function task2
Integer I
For i = 101 to 200
Wait MemSw(1) = On
Go P(i)
MemOff 1
Next I
Fend
Otros ejemplos simples de la ventana Command incluyen los siguientes:
> memon 1
> print memsw(1)
1
> memoff 1
> print memsw(1)
0

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 463
Función MHour
Arroja el tiempo de funcionamiento del motor acumulado de los motores del robot.
Sintaxis
MHour ([robotNumber])
Parámetros
robotNumber Especifica el número de robot al cual se comprobará el tiempo de funcionamiento del
motor mediante un valor entero.
Si se omite, se usa el robot seleccionado actualmente.
Valores devueltos
Arroja el tiempo de funcionamiento del motor acumulado de los motores mediante un valor entero.
Consulte también
Time, Hour
Ejemplo de función MHour
Robot 2
Print MHour
Print MHour(1)

464 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función Mid$
Arroja una subcadena de una cadena que comienza desde una posición especificada.
Sintaxis
Mid$(string, position [, count])
Parámetros
string Expresión de cadena fuente.
position La posición de inicio en la cadena del carácter para copiar los caracteres de count.
count Opcional. La cantidad de caracteres que se copiarán de string, comenzando por el
carácter definido por position. Si se omite, se arrojan todos los caracteres desde
position hasta el final de la cadena.
Valores devueltos
Arroja una subcadena de caracteres a partir de string.
Descripción
Mid$ arroja una subcadena de count caracteres que comiencen con el carácter position en string.
Consulte también
Asc, Chr$, InStr, Left$, Len, Right$, Space$, Str$, Val
Ejemplo de función Mid$
El siguiente ejemplo muestra un programa que extrae los 2 caracteres del medio desde la cadena
“ABCDEFGHIJ” y el resto de la cadena, comenzando en la posición 5.
Function midtest
String basestr$, m1$, m2$
basestr$ = "ABCDEFGHIJ"
m1$ = Mid$(basestr$, (Len(basestr$) / 2), 2)
Print "The middle 2 characters are: ", m1$
m2$ = Mid$(basestr$, 5)
Print "The string starting at 5 is: ", m2$
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 465
Instrucción MkDir
Crea un subdirectorio en una unidad de disco de controlador.
Sintaxis
MkDir dirName
Parámetros
dirName Expresión de cadena que define la ruta y el nombre del directorio que se creará.
Consulte ChDisk para conocer detalles.
Descripción
Crea un subdirectorio en la ruta especificada. Si se omite, se crea un subdirectorio en la carpeta actual.
Nota
- Esta instrucción es ejecutable solo con el disco de la PC.
Consulte también
ChDir, ChDrive, RenDir, RmDir
Ejemplo de instrucción MkDir
Los siguientes ejemplos se llevan a cabo desde la ventana Command:
> MkDir \Data
> MkDir \Data\PTS
> MkDir \TEST1 \TEST2

466 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Operador Mod
Arroja el restante obtenido al dividir una expresión numérica por otra expresión numérica.
Sintaxis
number Mod divisor
Parámetros
number El número que se divide (el dividendo).
divisor El número por el que se divide number.
Valores devueltos
Arroja el restante después de dividir number por divisor.
Descripción
Mod se usa para obtener el restante después de dividir 2 números. El restante es un número entero. Un uso
ingenioso de la instrucción Mod es el de determinar si un número es par o impar. El método en el que funciona
la instrucción Mod es el siguiente: number se divide por divisor. El restante después de esta división es el
valor devuelto para la instrucción Mod.
Consulte también
Abs, Atan, Atan2, Cos, Int, Not, Sgn, Sin, Sqr, Str$, Tan, Val
Ejemplo de operador Mod
El ejemplo que se muestra a continuación determina si un número (var1) es par o impar. Cuando el número
es par, el resultado de la instrucción Mod arrojará "0". Cuando el número es impar, el resultado de la
instrucción Mod arrojará "1".
Function modtest
....Integer var1, result
....Print "Enter an integer number:"
....Input var1
....result = var1 Mod 2
....Print "Result = ", result
....If result = 0 Then
........Print "The number is EVEN"
....Else
........Print "The number is ODD"
....EndIf
Fend
Otro ejemplo surge de la instrucción Mod desde la ventana Command.
> Print 36 Mod 6
> 0
> Print 25 Mod 10
> 5
>

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 467
Instrucción Motor
Arroja la alimentación del motor para todos los ejes activados o desactivados del robot actual.
Sintaxis
Motor ON | OFF
Parámetros
ON | OFF La palabra clave ON se usa para activar la alimentación del robot. La palabra clave OFF se usa
para desactivar la alimentación del robot.
Descripción
El comando Motor On se usa para encender el motor y liberar los frenos para todos los ejes. Motor Off se
usa para desactivar la alimentación del motor y activar los frenos.
Para mover el robot, la alimentación del robot debe estar activada.
Después de una parada de emergencia, o después de que haya ocurrido un error que requiera restablecer con
el comando Reset, ejecute Reset y luego ejecute Motor On.
Motor On define el parámetro de control del robot, como se indica a continuación:
Speed, SpeedR, SpeedS Valores predeterminados
Accel, AccelR, AccelS Valores predeterminados
QPDecelR, QPDecelS Valores predeterminados
LimZ 0
CP Off
SoftCP Off
Fine Valores predeterminados
Power Low Low
PTPBoost Valores predeterminados
TCLim, TCSpeed Valores predeterminados
PgLSpeed Valores predeterminados
Consulte también
Brake, Power, Reset, SFree, SLock
Ejemplo de instrucción Motor
Los siguientes ejemplos se llevan a cabo desde la ventana Command:
> Motor On
> Motor Off

468 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función Motor
Arroja el estado de la alimentación del motor para el robot especificado.
Sintaxis
Motor [(robotNumber)]
Parámetros
robotNumber Especifica el número de robot al cual se va a comprobar el estado mediante un valor
entero.
Si se omite, se usa el robot seleccionado actualmente.
Valores devueltos
0 = Motores desactivados, 1 = Motores activados.
Consulte también
Motor
Ejemplo de función Motor
If Motor = Off Then
Motor On
EndIf

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 469
Instrucción Move
Mueve el brazo desde la posición actual al punto especificado mediante el uso de la interpolación lineal (es
decir, lo mueve en una línea recta) a una velocidad de punto central de la herramienta constante.
Sintaxis
Move destination [ROT] [ECP] [CP] [searchExpr] [!...!] [SYNC]
Parámetros
destination El destino objetivo del movimiento que usa una expresión de punto.
ROT Opcional. Decide la velocidad/aceleración/desaceleración en favor del giro de
la herramienta.
ECP Opcional. Movimiento de punto de control externo. Este parámetro es válido
cuando se activa la opción ECP.
CP Opcional. Especifica un movimiento de ruta continua.
searchExpr Opcional. Una expresión Till o Find.
Till | Find
Till Sw(expr) = {On | Off}
Find Sw(expr) = {On | Off}
!...! Opcional. Es posible agregar las instrucciones de procesamiento paralelo para
ejecutar E/S y otros comandos durante el movimiento.
SYNC Reserva un comando de movimiento. El robot no se moverá hasta que se ejecute
SyncRobots.
Descripción
Move mueve el brazo desde la posición actual a destination en una línea recta. Mueve las coordenadas de
todos los ejes para que comiencen y se detengan al mismo tiempo. Las coordenadas de destination se deben
enseñar antes de ejecutar la instrucción Move. La aceleración y desaceleración de Move se controla mediante
la instrucción AccelS. La velocidad del movimiento se controla mediante la instrucción SpeedS. Si el valor
SpeedS supera la velocidad permitida para cualquier articulación, la alimentación de los motores de las cuatro
articulaciones se desactivará y el robot se detendrá.
Move usa el valor de velocidad SpeedS y los valores de aceleración y desaceleración AccelS. Consulte Uso
de Move con CP a continuación para conocer la relación entre velocidad y aceleración, y entre aceleración y
desaceleración. Sin embargo, si se usa el parámetro modificador ROT, Move utiliza el valor de velocidad
SpeedR y los valores de aceleración y desaceleración AccelR. En este caso, el valor de velocidad SpeedS y
el valor de aceleración y desaceleración AccelS no tienen efecto.
Normalmente, cuando la distancia de movimiento es "0" y solo cambia la orientación de la herramienta,
ocurrirá un error. Sin embargo, mediante el uso del parámetro ROT y la priorización de la aceleración y la
desaceleración del giro de la herramienta, es posible realizar el movimiento sin un error. Cuando no hay un
cambio de orientación con el parámetro modificador ROT y la distancia de movimiento no es "0", ocurrirá
un error.
También, cuando el giro de la herramienta es grande en comparación con la distancia de movimiento, y
cuando la velocidad de giro supera la velocidad especificada del manipulador, ocurrirá un error. En este caso,
reduzca la velocidad o agregue el parámetro modificador ROT para darle prioridad a la velocidad de
rotación/aceleración/desaceleración.
Cuando se usa ECP, la trayectoria del punto de control externo correspondiente al número ECP especificado
con la instrucción ECP se mueve en línea recta con respecto al sistema de coordenadas de la herramienta.
En este caso, la trayectoria del punto central de la herramienta no sigue una línea recta.

470 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
ECP
Trabajo
TCP
El calificador opcional Till permite que el usuario especifique una condición que cause que el robot
desacelere hasta detenerse antes de completar la instrucción Move. La condición especificada es simplemente
una comprobación contra una de las entradas. Esto se logra mediante la instrucción Sw. El usuario puede
comprobar si la entrada está activada o desactivada y causar que el brazo se detenga según la condición
especificada. Esta característica funciona casi como una interrupción en la que Move se interrumpe (detiene)
una vez que se cumple la condición Input. Si la condición de entrada nunca se cumple durante Move, el brazo
llega exitosamente al punto especificado por destination. Para conocer más información acerca del calificador
Till, consulte el comando Till.
Notas
Move no puede
Move no puede ejecutar una verificación de rango de la trayectoria antes de comenzar el movimiento en sí.
Por lo tanto, incluso para las posiciones objetivo que se encuentran dentro de un rango permitido, es posible
que el sistema encuentre una posición prohibida en el camino hacia un punto objetivo. En este caso, el brazo
puede detenerse de forma abrupta, lo que puede producir un impacto y una condición sin servo del brazo.
Para evitar esto, asegúrese de realizar verificaciones de rango a baja velocidad antes de usar Move a alta
velocidad. En resumen, aunque la posición objetivo está dentro del alcance del brazo, hay algunos
movimientos que no funcionarán ya que el brazo no puede llegar físicamente a algunas de las posiciones
intermedias requeridas durante Move.
Usar Move con CP
El parámetro CP causa que el brazo se mueva al destino sin desacelerar o detenerse en el punto definido
según el destino. Esto se hace para permitir al usuario enlazar una serie de instrucciones de movimiento que
causan que el brazo se mueva a lo largo de una ruta continua mientras mantiene una velocidad específica
durante todo el movimiento. La instrucción Move sin CP siempre causa que el brazo desacelere hasta
detenerse antes de alcanzar el punto destination.
Instrucciones de velocidad y aceleración adecuadas con Move
Las instrucciones SpeedS y AccelS se usan para especificar la velocidad y la aceleración del manipulador
durante el movimiento Move. Preste atención al hecho de que SpeedS y AccelS se aplica a movimientos
interpolados lineales y circulares mientras que el movimiento punto a punto usa las instrucciones Speed y
Accel.
Posibles errores
Intento de cambiar solo la orientación de la herramienta
Cambiar solo la orientación de la herramienta durante el movimiento es imposible. Si lo intenta, ocurrirá un
error. En este caso, use el parámetro ROT.
Errores de sobrevelocidad de articulación

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 471
Cuando el movimiento solicitado tiene como resultado que la velocidad de uno de los ejes supere su velocidad
máxima permitida, ocurrirá un error de sobrevelocidad. En el caso de un error de sobrevelocidad, el brazo
del robot se detiene y se desactiva la alimentación del servo.
Intento de pasar el punto original (Serie RS)
Es imposible operar el brazo de la serie RS para que pase cerca de un punto original. Si lo intenta, ocurrirá
un error de sobrevelocidad. Para operar cerca de un punto original, lleve a cabo las siguientes acciones.
- Reduzca la velocidad de SpeedS.
- Encuentre una ruta diferente para evitar un punto original.
- Use un movimiento PTP, como un comando Go en lugar de un comando Move.
Consulte también
AccelS, Arc, CP, Go, Jump, Jump3, Jump3CP, SpeedS, Sw, Till
Ejemplo de instrucción Move
El siguiente ejemplo muestra un movimiento simple de punto a punto entre los puntos P0 y P1, y luego se
mueve de vuelta a P0 en una línea recta. Luego, en el programa, el brazo se mueve en línea recta hacia el
punto P2 hasta que se activa la entrada n.° 2. Si la salida n.° 2 se activa durante Move, el brazo desacelera
hasta detenerse antes de llegar al punto P2 y se ejecuta la siguiente instrucción de programa.
Function movetest
Home
Go P0
Go P1
Move P0
Move P2 Till Sw(2) = On
If Sw(2) = On Then
Print "Input #2 came on during the move and"
Print "the robot stopped prior to arriving on"
Print "point P2."
Else
Print "The move to P2 completed successfully."
Print "Input #2 never came on during the move."
EndIf
Fend
Este ejemplo usa Move con CP. El diagrama a continuación muestra el movimiento de arco que se origina
en el punto P100 y luego se mueve en una línea recta a través de P101, punto en que el brazo comienza a
formar un arco. Luego, el arco continúa a través de P102 y P103. Luego, el brazo se mueve en una línea recta
a P104, donde finalmente desacelera hasta detenerse. Tenga en cuenta que el brazo no desacelera entre cada
punto hasta su destino final de P104. La siguiente función generaría tal movimiento.
P102
P100
P103
P104
P101
Function CornerArc
Go P100
Move P101 CP 'No se detiene en P101
Arc P102, P103 CP 'No se detiene en P103
Move P104 'Desacelera hasta detenerse en P104
Fend

472 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción MsgBox
Muestra un mensaje en un cuadro de diálogo y espera que el operador elija un botón.
Sintaxis
MsgBox message$ [, type] [, title$] [, answer]
Parámetros
message$ Aparecerá el siguiente mensaje.
type Opcional. Una expresión numérica que es la suma de los valores que especifica la cantidad y
el tipo de botones que se mostrarán, el estilo de icono que se usará y la identidad del botón
predeterminado. EPSON RC+ 7.0 incluye constantes predefinidas que se pueden usar para
este parámetro. La siguiente tabla muestra los valores que se pueden usar.
Constante simbólica Valor Significado
MB_OK 0 Solo muestra el botón OK.
MB_OKCANCEL 1 Muestra los botones OK y Cancel.
MB_ABORTRETRYIGNORE 2 Muestra los botones Abort, Retry e
Ignore.
MB_YESNOCANCEL 3 Muestra los botones Yes, No y Cancel.
MB_YESNO 4 Muestra los botones Yes y No.
MB_RETRYCANCEL 5 Muestra los botones Retry y Cancel.
MB_ICONSTOP 16 Signo de parada.
MB_ICONQUESTION 32 Signo de pregunta.
MB_ICONEXCLAMATION 64 Signo de exclamación.
MB_DEFBUTTON1 0 El primer botón es predeterminado.
MB_DEFBUTTON2 256 El segundo botón es predeterminado.
title$ Opcional. Expresión de cadena que se muestra en la barra de título del cuadro de mensaje.
answer Opcional. Una variable entera que recibe un valor que indica la acción realizada por el
operador. EPSON RC+ 6.0 incluye constantes predefinidas que se pueden usar para este
parámetro. La siguiente tabla muestra los valores devueltos en answer.
Constante simbólica Valor Significado
IDOK 1 Se seleccionó el botón OK.
IDCANCEL 2 Se seleccionó el botón Cancel.
IDABORT 3 Se seleccionó el botón Abort.
IDRETRY 4 Se seleccionó el botón Retry.
IDYES 6 Se seleccionó el botón Yes.
IDNO 7 Se seleccionó el botón No.
Descripción
MsgBox da formato al mensaje automáticamente. Si quiere líneas en blanco, use CRLF en el mensaje.
Consulte el ejemplo.
Consulte también
InputBox

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 473
Ejemplo de instrucción MsgBox
Este ejemplo muestra un cuadro de mensaje que pregunta al operador si desea continuar o no. El cuadro de
mensaje mostrará dos botones: Yes y No. También se mostrará un signo de pregunta. Después de que vuelve
MsgBox (después de que el operador hace clic en el botón), se examina la respuesta. Si la respuesta es no,
todas las tareas se detienen con el comando Quit.
Function msgtest
String msg$, title$
Integer mFlags, answer
msg$ = Chr$(34) + "Operation complete" + Chr$(34) + CRLF
msg$ = msg$ + "Ready to continue?"
title$ = "Sample Application"
mFlags = MB_YESNO + MB_ICONQUESTION
MsgBox msg$, mFlags, title$, answer
If answer = IDNO then
Quit All
EndIf
Fend
A continuación se muestra una imagen del cuadro de mensaje que se creará con este código.

474 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función MyTask
Arroja el número de tarea del programa actual.
Sintaxis
MyTask
Valores devueltos
Arroja el número de tarea de la tarea actual. Las entradas válidas son las siguientes:
Tareas normales 1 a 32
Tareas en segundo plano 65 a 80
Tareas de captura 257 a 267
Descripción
MyTask arroja el número de tarea del programa actual con un número. La instrucción MyTask se inserta
dentro de un programa específico y cuando el programa se ejecuta, la función MyTask arrojará el número de
la tarea en la que está ejecutando el programa.
Consulte también
Xqt
Ejemplo de función MyTask
El siguiente programa activa y desactiva los puertos E/S desde 1 a 8.
Function main
Xqt 2, task 'Ejecuta la tarea 2.
Xqt 3, task 'Ejecuta la tarea 3.
Xqt 4, task 'Ejecuta la tarea 4.
Xqt 5, task 'Ejecuta la tarea 5.
Xqt 6, task 'Ejecuta la tarea 6.
Xqt 7, task 'Ejecuta la tarea 7.
Xqt 8, task 'Ejecuta la tarea 8.
Call task
Fend
Function task
Do
On MyTask 'Activa el puerto E/S que tiene los mismos números que
'Número de tarea actual
Off MyTask 'Desactiva el puerto E/S que tiene los mismos números que
'Número de tarea actual
Loop
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 475
Instrucción Next
Las instrucciones For/Next se usan juntas para crear un bucle en que las instrucciones ubicadas entre las
instrucciones For y Next se ejecutan múltiples veces según lo que especifique el usuario.
Sintaxis
For var1 = initval To finalval [Step Increment ]
statements
Next var1
Parámetros
var1 La variable de recuento usada con el bucle For/Next. Esta variable normalmente se
define como un número entero, pero también se puede definir como una variable Real.
initval El valor inicial para var1 del contador.
finalval El valor final para la var1 del contador. Cuando se cumple este valor, se completa el
bucle For/Next y la ejecución continúa a partir de la instrucción a continuación de la
instrucción Next.
Increment Un parámetro opcional que define el incremento de recuento para cada vez que la
instrucción Next se ejecute dentro del bucle For/Next. Esta variable puede ser positiva
o negativa. Sin embargo, si el valor es negativo, el valor inicial de la variable debe ser
mayor que el valor final de la variable. Si se excluye el valor de incremento, el sistema
automáticamente incrementa en 1.
statements Se puede insertar cualquier instrucción SPEL
+
válida dentro del bucle For/Next.
Valores devueltos
Ninguno
Descripción
For/Next ejecuta un conjunto de instrucciones dentro de un bucle una cantidad especificada de veces. El
inicio del bucle es la instrucción For. El final del bucle es la instrucción Next. Se usa una variable para contar
el número de veces que se ejecutan las instrucciones dentro del bucle.
La primera expresión numérica (initval) es el valor inicial del contador. Este valor puede ser positivo o
negativo siempre que la variable finalval y el incremento Step correspondan correctamente.
La segunda expresión numérica (finalval) es el valor final del contador. Este es el valor que una vez alcanzado
provoca que termine el bucle For/Next y el control del programa pasa a la siguiente instrucción a continuación
de la instrucción Next.
Las instrucciones del programa después de la instrucción For se ejecutan hasta que se alcanza la instrucción
Next. Luego la variable (var1) del contador se incrementa en el valor Step definido por el parámetro
increment. Si no se usa la opción Step, el contador se incrementa en uno.
A continuación la variable (var1) del contador se compara con el valor final (finalval). Si el contador es
menor o igual que el valor final (finalval), se ejecutan nuevamente las instrucciones posteriores a la
instrucción For. Si la variable del contador es mayor que el valor final (finalval), la ejecución se bifurca fuera
del bucle For/Next y continúa con la instrucción inmediatamente posterior a la instrucción Next.
El anidado de las instrucciones For/Next se admite para hasta 10 niveles de profundidad. Esto significa que
se puede colocar un bucle For/Next dentro de otro bucle For/Next y así en adelante hasta que hayan 10
"nidos" para bucles For/Next.

476 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Nota
Valores Step negativos
Si el valor del incremento Step (increment) es negativo, la variable (var1) del contador disminuye (reduce)
cada vez que pasa por el bucle y el valor inicial (initval) debe ser mayor que el valor final (finalval) para que
el bucle funcione.
Consulte también
For
Ejemplo de instrucción Next
Function fornext
Integer ctr
For ctr = 1 to 10
Go Pctr
Next ctr
'
For ctr = 10 to 1 Step -1
Go Pctr
Next ctr
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 477
Operador Not
Realiza la operación bitwise sobre los valores del operando.
Sintaxis
Not operand
Parámetros
operand Expresión entera.
Valores devueltos
El complemento de 1 del valor del operando.
Descripción
La función Not realiza la operación bitwise sobre los valores del operando. Cada bit del resultado es el
complemento del bit correspondiente en el operando, lo que cambia efectivamente los bits 0 a 1, y los bits 1
a 0.
Consulte también
Abs, And, Atan, Atan2, Cos, Int, LShift, Mod, Or, RShift, Sgn, Sin, Sqr, Str$, Tan, Val, Xor
Ejemplo de operador Not
Este es un ejemplo de ventana Command simple acerca del uso de la instrucción Not.
>print not(1)
-2
>

478 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción Off
Desactiva la salida especificada y, después de un tiempo especificado, puede volver a activarla.
Sintaxis
Off { bitNumber | outputLabel }, [ time ], [ parallel ] [,Forced]
Parámetros
bitNumber Expresión entera que representa a cuál salida desactivar.
outputLabel Etiqueta de salida.
time Opcional. Especifica un intervalo de tiempo en segundos para la que la salida permanezca
desactivada. Una vez expira el intervalo de tiempo, la salida se vuelve a activar. El intervalo de
tiempo mínimo es de 0,01 segundos y el intervalo de tiempo máximo es de 10 segundos.
parallel Opcional. Cuando se configura un temporizador, se puede usar el parámetro paralelo para
especificar cuando se ejecuta el siguiente comando:
0 - inmediatamente después de desactivar la salida
1 - después de que transcurre el intervalo especificado. (Valor predeterminado)
Forced Opcional. Normalmente se omite.
Descripción
Off desactiva (define en 0) la salida especificada.
Si se especifica el parámetro de intervalo time, el bit de salida especificado por bitNumber se desactiva y
luego se vuelve a activar una vez que termina el intervalo time. Si antes de ejecutar Off, el bit de salida ya
estaba desactivado, se vuelve a activar después de que termina el intervalo de tiempo.
La configuración del parámetro parallel se aplica cuando el intervalo se especifica de la siguiente manera:
1: Desactiva la salida, la vuelve a activar después del intervalo especificado termina y luego ejecuta
el siguiente comando. (Este también es el valor predeterminado del parámetro Parallel. Si este
parámetro se omite, es igual que configurar el parámetro en “1”).
0: Desactiva la salida y ejecuta simultáneamente el siguiente comando.
Notas
Bits de salida configurados como salidas de control remoto
Si se especificó un bit de salida que se configuró como una salida de sistema, ocurrirá un error. Los bits de
salida de control remoto se desactivan y activan automáticamente de acuerdo con el estado del sistema.
Salidas y momentos en que ocurre una parada de emergencia:
EPSON RC+ tiene una característica que genera que todas las salidas se desactiven cuando ocurre una parada
de emergencia. Si desea conservar la configuración, incluso en caso de una parada de emergencia, esta
característica se puede reconfigurar desde la casilla de verificación [Outputs Off during emergency stop]
(Salidas desactivadas durante parada de emergencia) en [Setup]-[System Configuration]-[Controller]-
[Preferences] (Configuración - Configuración de sistema - Controlador - Preferencias).
Indicador Forced
Este indicador se usa para desactivar la salida de E/S durante una parada de emergencia o la apertura de la
puerta de seguridad desde la tarea NoPause o NoEmgAbort (tarea especial mediante NoPause o NoEmgAbort
en Xqt).
Asegúrese de que las salidas de E/S cambien mediante la parada de emergencia y la apertura de la puerta de
seguridad cuando diseñe el sistema.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 479
Consulte también
In, InBCD, MemOn, MemOff, MemOut, MemSw, OpBCD, Oport, Out, Wait
Ejemplo de instrucción Off
El ejemplo que se indica a continuación muestra cómo la tarea principal inicia una tarea en segundo plano
llamada “iotask”. “iotask” es una tarea simple para activar y desactivar los bits de salida 1 y 2, esperar 10
segundos y luego hacerlo nuevamente.
Function main
Xqt 2, iotask
Go P1
.
.
.
Fend
Function iotask
Do
On 1
On 2
Off 1
Off 2
Wait 10
Loop
Fend
Otros ejemplos simples de la ventana Command incluyen los siguientes:
> on 1
> off 1, 10 'Desactiva la salida 1, espera 10 segundos y la activa nuevamente
> on 2
> off 2

480 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción OLAccel
Configura el ajuste automático de la aceleración/desaceleración que se está ajustando según la calificación
de sobrecarga.
Sintaxis
OLAccel {On | Off}
Parámetros
On | Off On: Activa el ajuste automático de la aceleración/desaceleración que se está ajustando según
la calificación de sobrecarga.
Off: Desactiva el ajuste automático de la aceleración/desaceleración que se está ajustando
según la calificación de sobrecarga.
Descripción
OLAccel puede ser utilizado para activar la función de ajuste automático de aceleración y desaceleración que
se ajusta según la tasa de carga del robot (OLRate). Cuando OLAccel está activado, la aceleración y
desaceleración se ajustan automáticamente, en conformidad con la tasa de carga del robot en los comandos
de movimiento PTP. Esto se hace para evitar el error de sobrecarga, mediante la reducción de la
aceleración/desaceleración automáticamente cuando la tasa de carga supera un valor determinado en el
movimiento PTP. Por lo tanto, cuando los usuarios ejecutaban movimientos con cargas pesadas que podían
provocar un error de sobrecarga, los usuarios tenían que detener el robot con el programa o ajustar la
velocidad y aceleración para evitar el error. La instrucción OLAccel reduce estas medidas. Sin embargo,
esta instrucción no impide el error de sobrecarga en todos los tipos de ciclos. Cuando el ciclo tiene una carga
muy pesada, puede ocurrir el error de sobrecarga. En este caso, los usuarios deben detener el robot o ajustar
la velocidad y aceleración. En algunos entornos de operación, la temperatura del motor puede aumentar al
operar el robot sin errores de sobrecarga y provocar un error de sobrecalentamiento.
Esta instrucción no es necesaria en una operación de carga correcta.
Use OLRate en el ciclo de prueba para comprobar si puede o no ocurrir el error de sobrecarga.
El valor OLAccel se inicializa a los valores predeterminados (baja aceleración) cuando ocurre una de las
siguientes condiciones:
Inicio del controlador
Motor On
SFree, SLock, Brake
Reset, Reset Error
El botón Stop o QuitAll detiene las
tareas
Nota
Si se ejecuta OLAccel On en un robot que no admite la función de ajuste automático de la aceleración y
desaceleración, ocurrirá un error.
Consulte también
Función OLAccel, OLRate

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 481
Ejemplo de instrucción OLAccel
>olaccel on
>olaccel
OLACCEL is ON
Function main
Motor On
Power High
Speed 100
Accel 100, 100
OLAccel On
Xqt 2, MonitorOLRate
Do
Jump P0
Jump P1
Loop
Fend
Function MonitorOLRate
Do
'Muestra OLRate
OLRate
Wait 1
Loop
Fend

482 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función OLAccel
Arroja la configuración de ajuste automático.
Sintaxis
OLAccel
Valores devueltos
Off = Está desactivado el ajuste automático de la aceleración/desaceleración que se está ajustando según la
calificación de sobrecarga.
On = Está activado el ajuste automático de la aceleración/desaceleración que se está ajustando según la
calificación de sobrecarga.
Consulte también
OLAccel, OLRate
Ejemplo de función OLAccel
If OLAccel = Off Then
Print “OLAccel is off”
EndIf

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 483
Instrucción OLRate
Muestra la calificación de sobrecarga para una o todas las articulaciones para el robot actual.
Sintaxis
OLRate [jointNumber]
Parámetros
jointNumber Expresión entera de 1 a 9.
El eje S adicional es 8 y el eje T es 9.
Descripción
OLRate se puede usar para comprobar si un ciclo provoca un esfuerzo en el sistema servo. Los factores de
temperatura y corriente pueden causar errores del servo durante aplicaciones con ciclos de mucho trabajo.
OLRate puede ayudar a comprobar si el sistema de robot está a punto de tener un error de servo.
Durante un ciclo, ejecute otra tarea para el comando OLRate. Si OLRate supera 1,0 en cualquier articulación,
entonces se generará un error de servo.
Es más probable que se generen los errores de servo con cargas útiles pesadas. Mediante el uso de OLRate
durante un ciclo de prueba, puede ayudar a garantizar que la configuración de velocidad y aceleración no
generará un error de servo durante el ciclo de producción.
Para obtener lecturas válidas, debe ejecutar OLRate mientras el robot está en movimiento.
Consulte también
Función OLRate
Ejemplo de instrucción OLRate
>olrate
0.10000 0.20000
0.30000 0.40000
0.50000 0.60000
Function main
Power High
Speed 50
Accel 50, 50
Xqt 2, MonitorOLRate
Do
Jump P0
Jump P1
Loop
Fend
Function MonitorOLRate
Do
OLRate ' Muestra OLRate
Wait 1
Loop
Fend

484 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función OLRate
Arroja la calificación de sobrecarga para una articulación para el robot actual.
Sintaxis
OLRate(jointNumber)
Parámetros
jointNumber Expresión entera de 1 a 9.
El eje S adicional es 8 y el eje T es 9.
Valores devueltos
Arroja el OLRate para la articulación especificada. Los valores van del 0,0 al 2,0.
Descripción
OLRate se puede usar para comprobar si un ciclo provoca un esfuerzo en el sistema servo. Los factores de
temperatura y corriente pueden causar errores del servo durante aplicaciones con ciclos de mucho trabajo.
OLRate puede ayudar a comprobar si el sistema de robot está a punto de tener un error de servo.
Durante un ciclo, ejecute otra tarea para el comando OLRate. Si OLRate supera 1,0 en cualquier articulación,
entonces se generará un error de servo.
Es más probable que se generen los errores de servo con cargas útiles pesadas. Mediante el uso de OLRate
durante un ciclo de prueba, puede ayudar a garantizar que la configuración de velocidad y aceleración no
generará un error de servo durante el ciclo de producción.
Para obtener lecturas válidas, debe ejecutar OLRate mientras el robot está en movimiento.
Consulte también
OLRate
Ejemplo de función OLRate
Function main
Power High
Speed 50
Accel 50, 50
Xqt 2, MonitorOLRate
Do
Jump P0
Jump P1
Loop
Fend
Function MonitorOLRate
Integer i
Real olRates(4)
Do
For i = 1 to 4
olRates(i) = OLRate(i)
If olRate(i) > .5 Then
Print "Warning: OLRate(", i, ") is over .5"
EndIf
Next i
Loop
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 485
Instrucción On
Activa la salida especificada y, después de un tiempo especificado, puede volver a desactivarla.
Sintaxis
On { bitNumber | outputLabel }, [ time ], [ parallel ] [,Forced]
Parámetros
bitNumber Expresión entera que representa cuál salida activar On.
outputLabel Etiqueta de salida.
time Opcional. Especifica un intervalo de tiempo en segundos para la que la salida permanezca
activada. Una vez expira el intervalo de tiempo, la salida se vuelve a desactivar. (El intervalo
de tiempo mínimo es de 0,01 segundos)
parallel Opcional. Cuando se configura un temporizador, se puede usar el parámetro paralelo para
especificar cuando se ejecuta el siguiente comando:
0 - inmediatamente después de activar la salida
1 - después de que transcurre el intervalo especificado. (Valor predeterminado)
Forced Opcional. Normalmente se omite.
Descripción
On activa (define en 1) la salida especificada.
Si se especifica el parámetro de intervalo time, el bit de salida especificado por outnum se activa y luego se
vuelve a desactivar una vez que termina el intervalo time.
La configuración del parámetro parallel se aplica cuando el intervalo se especifica de la siguiente manera:
1: Activa la salida, la vuelve a desactivar después del intervalo especificado termina y luego ejecuta
el siguiente comando. (Este también es el valor predeterminado del parámetro Parallel. Si este
parámetro se omite, es igual que configurar el parámetro en “1”).
0: Activa la salida y ejecuta simultáneamente el siguiente comando.
Notas
Bits de salida configurados como control remoto
Si se especificó un bit de salida que se configuró como un control remoto, ocurrirá un error. Los bits de salida
remota se activan y desactivan automáticamente de acuerdo con el estado del sistema. Para conocer detalles
acerca de la función remota, consulte el Manual del usuario de EPSON RC+. Los bits individuales para el
conector remoto se pueden configurar como remoto o como E/S desde el panel [Setup]-[System
Configuration]-[Controller]-[Remote Control] (Configuración - Configuración de sistema - Controlador -
Control Remoto).
Salidas y momentos en que ocurre una parada de emergencia
El controlador tiene una característica que genera que todas las salidas se desactiven cuando ocurre una
parada de emergencia. Si desea conservar la configuración, incluso en caso de una parada de emergencia,
esta característica se puede reconfigurar desde la casilla de verificación [Outputs Off during emergency stop]
(Salidas desactivadas durante parada de emergencia) en [Setup]-[System Configuration]-[Controller]-
[Preferences] (Configuración - Configuración de sistema - Controlador - Preferencias).
Indicador Forced
Este indicador se usa para activar la salida de E/S durante una parada de emergencia o la apertura de la puerta
de seguridad desde la tarea NoPause, la tarea NoEmgAbort (tarea especial que usa NoPause o NoEmgAbort
en Xqt) o las tareas en segundo plano.
Asegúrese de que las salidas de E/S cambien mediante la parada de emergencia y la apertura de la puerta de
seguridad cuando diseñe el sistema.

486 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Consulte también
In, InBCD, MemOff, MemOn, Off, OpBCD, Oport, Out, Wait
Ejemplo de instrucción On
El ejemplo que se indica a continuación muestra cómo la tarea principal inicia una tarea en segundo plano
llamada “iotask”. “iotask” es una tarea simple para activar y desactivar los bits de salida 1 y 2, esperar 10
segundos y luego hacerlo nuevamente.
Function main
Xqt iotask
Go P1
.
.
.
Fend
Function iotask
Do
On 1
On 2
Off 1
Off 2
Wait 10
Loop
Fend
Otros ejemplos simples de la ventana Command incluyen los siguientes:
> on 1
> off 1, 10 'Desactiva la salida 1, espera 10 segundos y la activa nuevamente
> on 2
> off 2

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 487
Instrucción OnErr
Define bifurcaciones de interrupción para que causen que el control se transfiera a una subrutina de
manipulación de errores cuando ocurre un error. Permite a los usuarios llevar a cabo el control de errores.
Sintaxis
OnErr GoTo {label | 0}
Parámetros
label Etiqueta de instrucción a la que saltar cuando ocurre un error.
0 Parámetros utilizados para borrar la configuración OnErr.
Descripción
OnErr permite el control de errores de usuario. Cuando ocurre un error sin que se use OnErr, la tarea se
termina y se muestra el error. Sin embargo, cuando se usa OnErr, este permite al usuario "atrapar" el error e
ir a un controlador de errores para recuperarse automáticamente del error. Una vez que recibe un error, OnErr
bifurca el control a la etiqueta designada especificada en la instrucción EResume. De este modo, la tarea no
se termina y el usuario recibe la capacidad de manipular el error automáticamente. Esto hace que las celdas
de trabajo funcionen con mucha más fluidez, ya que los posibles errores siempre son manipulados y
recuperados del mismo modo.
Cuando se especifica el comando OnErr con el parámetro "0", se borra la configuración actual de OnErr. (Es
decir, después de ejecutar OnErr 0, si ocurre un error, se detendrá la ejecución del programa)
Consulte también
Err, EResume
Ejemplo de instrucción OnErr
El siguiente ejemplo muestra un programa de utilidad simple que comprueba si existen los puntos P0 a P399.
Si el punto no existe, se mostrará un mensaje en la pantalla para informar al usuario de que el punto no existe.
El programa usa la instrucción CX para comprobar si se definió o no cada punto. Cuando un punto no está
definido, el control se traslada al controlador de errores y se muestra un mensaje en la pantalla para indicar
al usuario el punto que no estaba definido.
Function errDemo
Integer i, errNum
OnErr GoTo errHandler
For i = 0 To 399
temp = CX(P(i))
Next i
Exit Function
'
'
'*********************************************
'* Error Handler *
'*********************************************
errHandler:
errNum = Err
' Comprueba si se está usando un punto no definido
If errNum = 7007 Then
Print "Point number P", i, " is undefined!"
Else
Print "ERROR: Error number ", errNum, " occurred while"
Print " trying to process point P", i, " !"
EndIf
EResume Next
Fend

488 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción OpBCD
Define simultáneamente 8 líneas de salida con el formato BCD. (Decimal codificado binariamente)
Sintaxis
OpBCD portNumber, outData [, Forced]
Parámetros
portNumber Expresión entera que representa los bytes de salida de E/S. Cuando la selección de
portNumber corresponde a las siguientes salidas:
Portnum
Salidas
0
0-7
1
8-15
2
16-23
3
24-31
...
...
outData Expresión entera entre 0 y 99 que representa el patrón de salida para el grupo de salida
seleccionado con portNumber. El segundo dígito (llamado el dígito de las unidades)
representa las 4 salidas inferiores del grupo seleccionado y el primer dígito (llamado el dígito
de las decenas) representa las 4 salidas superiores del grupo seleccionado.
Forced Opcional. Normalmente se omite.
Descripción
OpBCD define simultáneamente 8 líneas de salida con el formato BCD. Las salidas del usuario estándar y
de expansión se dividen en grupos de 8. El parámetro portNumber de la instrucción OpBCD define el grupo
de 8 salidas que se usará, donde portNumber = 0 significa las salidas 0 a 7, portNumber = 1 significa las
salidas 8 a 15, etc.
Una vez que se selecciona un número de puerto (es decir, se seleccionó un grupo de 8 salidas), se debe definir
un patrón de salida específico. Esto se hace en el formato decimal codificado binariamente con el parámetro
outdata. El parámetro de datos de salida puede tener 1 o 2 dígitos. (Las entradas válidas varían entre 0 y 99).
El primer dígito (o dígito de las decenas) corresponde a las 4 salidas superiores del grupo de 8 salidas que
selecciona portNumber. El segundo dígito (o dígito de las unidades) corresponde a las 4 salidas inferiores del
grupo de 8 salidas que selecciona portNumber.
Dado que las entradas válidas en el formato BCD varían entre 0 y 9 para cada dígito, no se puede obtener
cada combinación de E/S. La siguiente tabla muestra algunas de las combinaciones posibles de E/S y sus
valores outnum asociados, asumiendo que portNumber es 0.
Configuraciones de salida (Número de salida)
Valor Outnum
7
6
5
4
3
2
1
0
01
Off
Off
Off
Off
Off
Off
Off
On
02
Off
Off
Off
Off
Off
Off
On
Off
03
Off
Off
Off
Off
Off
Off
On
On
08
Off
Off
Off
Off
On
Off
Off
Off
09
Off
Off
Off
Off
On
Off
Off
On
10
Off
Off
Off
On
Off
Off
Off
Off
11
Off
Off
Off
On
Off
Off
Off
On
99
On
Off
Off
On
On
Off
Off
On
Tenga en cuenta que el formato de decimal codificado binariamente solo permite especificar valores
decimales. Esto significa que, con el formato decimal codificado binariamente, es imposible activar todas las
salidas con la instrucción OpBCD. Tenga en cuenta que el valor máximo para cualquiera de los dígitos para
outnum es “9”. Esto significa que el máximo valor posible para usar con OpBCD es “99”. En la tabla anterior,
es fácil ver que “99” no activa todas las salidas. En su lugar, activa las entradas 0, 3, 4 y 7 y desactiva todas
las demás.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 489
Notas
Diferencia entre OpBCD y Out
Las instrucciones OpBCD y Out son muy similares en el lenguaje SPEL
+
. Sin embargo, existe una gran
diferencia entre ambos, la cual se muestra a continuación:
- La instrucción OpBCD utiliza un formato de decimal codificado binariamente para especificar para
especificar un valor de 8 bits para usar para activar o desactivar las salidas. Dado que el formato de decimal
codificado binariamente excluye el uso de los valores &HA, &HB, &HC, &HD, &HE o &HF, no se pueden
ver todas las combinaciones para configurar el grupo de 8 salidas.
- La instrucción Out funciona de manera muy similar a la instrucción OpBCD, excepto que Out permite usar
el rango del valor de 8 bits para activar o desactivar las salidas de manera que sean entre 0 y 255 (0 a 99
para OpBCD). Esto permite todas las combinaciones posibles para los grupos de salida de 8 bits que se
iniciarán, de acuerdo con las especificaciones del usuario.
Bits de salida configurados como control remoto:
Si se especificó un bit de salida que se configuró como un control remoto para que se active con OpBCD,
ocurrirá un error. Los bits de salida remota se activan y desactivan automáticamente de acuerdo con el estado
del sistema. Para conocer detalles acerca de la función remota, consulte el Manual del usuario de EPSON
RC+. Los bits individuales para el conector remoto se pueden configurar como remoto o como E/S desde el
panel [Setup]-[System Configuration]-[Controller]-[Remote Control] (Configuración - Configuración de
sistema - Controlador - Control Remoto).
Salidas y momentos en que ocurre una parada de emergencia:
El controlador tiene una característica que genera que todas las salidas se desactiven cuando ocurre una
parada de emergencia. Esta característica se configura o se desactiva desde la casilla de verificación [Outputs
Off during emergency stop] (Salidas desactivadas durante parada de emergencia) en [Setup]-[System
Configuration]-[Controller]-[Preferences] (Preferencias).
Indicador Forced
Este indicador se usa para activar la salida de E/S durante una parada de emergencia o la apertura de la puerta
de seguridad desde la tarea NoPause, la tarea NoEmgAbort (tarea especial que usa NoPause o NoEmgAbort
en Xqt) o las tareas en segundo plano.
Asegúrese de que las salidas de E/S cambien mediante la parada de emergencia y la apertura de la puerta de
seguridad cuando diseñe el sistema.
Consulte también
In, InBCD, MemOff, MemOn, MemSw, Off, On, Oport, Out, Sw, Wait
Ejemplo de función OpBCD
El ejemplo que se indica a continuación muestra cómo la tarea principal inicia una tarea en segundo plano
llamada “iotask”. La tarea "iotask" es una tarea simple para alternar entre las activar las salidas 1 y 2 y luego
las salidas 0 y 3. Cuando 1 y 2 están activadas, 0 y 3 también se desactivan, y viceversa.
Function main
Xqt 2, iotask
Go P1
.
.
Fend
Function iotask
Do
OpBCD 0, 6
OpBCD 0, 9
Wait 10
Loop
Fend
Otros ejemplos simples de la ventana Command incluyen los siguientes:
> OpBCD 1,6 'Activa las salidas 1 y 2
> OpBCD 2,1 'Activa la salida 8
> OpBCD 3, 91 'Activa las salidas 24, 28 y 31

490 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción OpenDB
Abre una base de datos o libro de Excel.
Sintaxis
OpenDB #fileNumber, { SQL | Accel | Eccel } [, DBserverName As String ],
{DBname As String | filename As String }
Parámetros
fileNumber Número entero de 501 a 508
SQL | Accel | Eccel Selecciona un tipo de base de datos que desee abrir desde [SQL], [Access] y
[Excel].
DBserverName Si selecciona [SQL], se especifica el nombre del servidor SQL.
Si se omite, se especifica el servidor LOCAL. El servidor SQL de la red no se
puede especificar.
Si selecciona [Access] o [Excel], no se especifica el nombre del servidor SQL.
DBname | filename Si selecciona [SQL] como base de datos, se especifica un nombre de base de
datos en el servidor SQL.
Si selecciona [Access], se especifica el nombre del archivo Access.
Si se omite la ruta del nombre del archivo Access, se busca en la carpeta actual.
Consulte ChDisk para conocer detalles.
Si selecciona [Excel], se especifica el nombre del archivo Excel.
Puede especificar un archivo de libro de Excel 2007 o de Excel 97-2003 como el
archivo de Excel.
Si se omite el nombre del archivo Excel, se busca en la carpeta actual.
Consulte ChDisk para conocer detalles.
Descripción
Abre la base de datos especificada con el nombre de archivo especificado.
La base de datos especificada debe existir en el disco de la PC en la que está instalado RC+. De lo contrario,
causa un error. El número de archivo especificado se puede usar para identificar la base de datos mientras
está abierta, pero no se puede usar para hacer referencia a una base de datos distinta hasta que cierre la base
de datos con el CloseDB command. El número de archivo se usa con los comandos de operación de la base
de datos (SelectDB, Print#, Input#, CloseDB).
No es posible usar los archivos Access y Excel de Microsoft Office 2010 64-bit.
Nota
- Se requiere la conexión de una PC con RC+ instalado.
Consulte también
SelectDB, CloseDB, UpdateDB, DeleteDB, Input #, Print #
Ejemplo de instrucción OpenDB
Usar la base de datos SQL
El siguiente ejemplo usa la base de datos de muestra de SQL server 2000, Northwind y carga los datos
desde una tabla.
Integer count, i, eid
String Lastname$, Firstname$, Title$
OpenDB #501, SQL, "(LOCAL)", "Northwind"
count = SelectDB(#501, "Employees")
For i = 0 To count - 1
Input #501, eid, Lastname$, Firstname$, Title$
Print eid, ",", Lastname$, ",", Firstname$, ",", Title$
Next
CloseDB #501

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 491
Uso de la base de datos de Access
El siguiente ejemplo usa la base de datos de muestra de Microsoft Access 2007, "Students" y carga los
datos desde una tabla.
Integer count, i, eid
String Lastname$, Firstname$, dummy$
OpenDB #502, Access, "c:\MyDataBase\Students.accdb"
count = SelectDB(#502, "Students")
For i = 0 To count - 1
Input #502, eid, dummy$, Lastname$, Firstname$
Print eid, ",", Lastname$, ",", Firstname$
Next
CloseDB #502
Uso del libro de Excel
El siguiente ejemplo usa un libro de Microsoft Excel "StudentsList" y carga los datos desde una hoja.
Integer count, i, eid
String Lastname$, Firstname$
OpenDB #503, Excel, "c:\MyDataBase\Students.xls"
count = SelectDB(#503, "[Students$]")
For i = 0 To count - 1
Input #503, eid, Lastname$, Firstname$
Print eid, ",", Lastname$, ",", Firstname$
Next
CloseDB #503

492 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción OpenCom
Abre un puerto de comunicación RS-232.
Sintaxis
OpenCom #portNumber
Parámetros
portNumber Expresión entera para el número del puerto RS-232C que se abrirá.
El rango del número de puerto es:
Parte real 1 a 8
Parte de Windows 1001 a 1008
Descripción
Debe conectar el puerto RS-232C al controlador.
Para usar los puertos de piezas reales de SPEL
+
, se debe instalar la placa opcional de E/S en el controlador.
Para usar los puertos de piezas de Windows, se debe configurar RC+. Para conocer detalles, consulte la
descripción de RC-232C en el Manual del usuario de EPSON RC+ 5.12 Menú [Setup].
Consulte también
ChkCom, CloseCom, SetCom
Ejemplo de instrucción OpenCom
Integer PortNo
PortNo = 1001
OpenCom #PortNo
Print #PortNo, "Data from COM1"
CloseCom #PortNo

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 493
Función OpenCom
Adquiere el número de tarea que ejecuta OpenCom.
Sintaxis
OpenCom (portNumber)
Parámetros
portNumber Expresión entera para el número del puerto RS-232C.
El rango del número de puerto es:
Parte real 1 a 8
Parte de Windows 1001 a 1008
Descripción
Adquiere el número de tarea que ejecuta OpenCom.
Consulte también
ChkCom, CloseCom, OpenCom, SetCom
Ejemplo de función OpenCom
Print OpenCom(PortNo)

494 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción OpenNet
Abre un puerto de red TCP/IP.
Sintaxis
OpenNet #portNumber As { Client | Server }
Parámetros
portNumber Expresión entera para el número del puerto TCP/IP que se abrirá. El rango es de 201 a 216.
Descripción
OpenNet abre un puerto TCP/IP para comunicación con otra computadora en la red.
Un sistema debe abrirse como Servidor y otro como Cliente. No importa cuál se ejecuta primero.
Consulte también
ChkNet, CloseNet, SetNet
Ejemplo de instrucción OpenNet
Para este ejemplo, se configuró la característica TCP/IP de dos controladores de la siguiente manera:
Controlador n.º 1:
Puerto: #201
Nombre del host: 192.168.0.2
Puerto TCP/IP: 1000
Function tcpip
OpenNet #201 As Server
WaitNet #201
Print #201, "Data from host 1"
Fend
Controlador n.º 2:
Puerto: #201
Nombre del host: 192.168.0.1
Puerto TCP/IP: 1000
Function tcpip
String data$
OpenNet #201 As Client
WaitNet #201
Input #201, data$
Print "received '", data$, "' from host 1"
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 495
Función OpenNet
Adquiere el número de tarea que ejecuta OpenNet.
Sintaxis
OpenNet (portNumber)
Parámetros
portNumber Expresión entera para el número del puerto TCP/IP. El rango es de 201 a 216.
Descripción
Adquiere el número de tarea que ejecuta OpenNet.
Consulte también
ChkNet, CloseNet, OpenNet, SetNet
Ejemplo de función OpenNet
Print OpenNet(PortNo)

496 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función Oport
Arroja el estado de la salida especificada.
Sintaxis
Oport(outnum)
Parámetros
outnum Expresión entera que representa los bits de salida de E/S.
Valores devueltos
Arroja el estado del bit de salida especificado como 0 o 1.
0: Estado desactivado
1: Estado activado
Descripción
Oport proporciona una comprobación de estado para las salidas. Funciona de forma muy similar a la
instrucción Sw con las entradas. Oport frecuentemente se usa para comprobar el estado de una de las entradas
que se puede conectar aun alimentador, transportador, solenoide de pinza o una serie de otros dispositivos
que funcionan mediante E/S discretas. Obviamente, la salida comprobada con la instrucción Oport tiene 2
estados (1 o 0). Estos indican si la salida especificada está activada o desactivada.
Nota
Diferencia entre Oport y Sw
Es muy importante que el usuario comprenda la diferencia entre las instrucciones Oport y Sw. Ambas
instrucciones se usan para obtener el estado de E/S. Sin embargo, el tipo de E/S es distinto para cada una. La
instrucción Sw funciona con entradas. La instrucción Oport funciona con las salidas de hardware estándar y
de expansión. Estos puertos de hardware son salidas discretas que interactúan con dispositivos externos al
controlador.
Consulte también
In, InBCD, MemIn, MemOn, MemOff, MemOut, MemSw, Off, On, OpBCD, Out, Sw, Wait

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 497
Ejemplo de función OPort
El ejemplo que se muestra a continuación activa la salida 5 y luego la revisa para asegurarse de que esté
activada antes de continuar.
Function main
TMOut 10
OnErr errchk
Integer errnum
On 5 'Activa la salida 5
Wait Oport(5)
Call mkpart1
Exit Function
errchk:
errnum = Err(0)
If errnum = 94 Then
Print "TIME Out Error Occurred during period"
Print "waiting for Oport to come on. Check"
Print "Output #5 for proper operation. Then"
Print "restart this program."
Else
Print "ERROR number ", errnum, "Occurred"
Print "Program stopped due to errors!"
EndIf
Exit Function
Fend
Otros ejemplos simples de la ventana Command incluyen los siguientes:
> On 1
> Print Oport(1)
1
> Off 1
> Print Oport(1)
0
>

498 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Operador Or
Realiza una operación OR bitwise o lógica en dos operandos.
Sintaxis
expr1 Or expr2
Parámetros
expr1, exrp2 Expresiones enteras o booleanas.
Valores devueltos
El valor OR bitwise de los operandos si las expresiones son números enteros. OR lógica si las expresiones
son booleanas.
Descripción
Para las expresiones enteras, el operador Or realiza la operación OR bitwise sobre los valores de los
operandos. Cada bit de los resultados es 1 si uno o dos de los bits correspondientes de los dos operandos es
1. Para las expresiones booleanas, el resultado es True si una de las expresiones resulta True.
Consulte también
And, LShift, Mod, Not, RShift, Xor
Ejemplo de operador Or
Este es un ejemplo de un OR bitwise.
>print 1 or 2
3
Este es un ejemplo de un OR lógico.
If a = 1 Or b = 2 Then
c = 3
EndIf

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 499
Instrucción Out
Configura simultáneamente 8 bits de salida.
Sintaxis
Out portNumber, outData [, Forced]
Parámetros
portNumber Expresión entera que representa los bytes de salida de E/S. La selección portnum corresponde
a las siguientes salidas:
Portnum
Salidas
0
0-7
1
8-15
...
...
outData Número entero entre 0 y 255 que representa el patrón de salida para el grupo de salida
seleccionado con portNumber. Si se representa en forma hexadecimal, el rango varía de &H0
a &HFF. El dígito inferior representa los dígitos menos significativos (o las primeras 4 salidas)
y el dígito superior representa los dígitos más relevantes (o las segundas 4 salidas).
Forced Opcional. Normalmente se omite.
Descripción
Out define simultáneamente 8 líneas de salida con la combinación de los valores portNumber y outdata
especificados por el usuario para determinar qué salidas se determinarán. El parámetro portNumber define el
grupo de 8 entradas que se leerá, donde portNumber = 0 significa las entradas 0 a 7, portNumber = 1 significa
las entradas 8 a 15, etc.
Una vez que se selecciona portnum (es decir, se seleccionó un grupo de 8 salidas), se debe definir un patrón
de salida específico. Esto se lleva a cabo mediante el parámetro outData. El parámetro outData puede tener
un valor entre 0 a 255 y se puede representar en formato hexadecimal o de número entero. (es decir, &H0 a
&HFF o 0 a 255)
La siguiente tabla muestra algunas de las combinaciones posibles de E/S y sus valores outData asociados,
asumiendo que portNumber son “0” y “1” según corresponde.
Configuración de salida cuando portNumber=0 (número de salida)
Valor OutData
7
6
5
4
3
2
1
0
01
Off
Off
Off
Off
Off
Off
Off
On
02
Off
Off
Off
Off
Off
Off
On
Off
03
Off
Off
Off
Off
Off
Off
On
On
08
Off
Off
Off
Off
On
Off
Off
Off
09
Off
Off
Off
Off
On
Off
Off
On
10
Off
Off
Off
On
Off
Off
Off
Off
11
Off
Off
Off
On
Off
Off
Off
On
99
Off
On
On
Off
Off
Off
On
On
255
On
On
On
On
On
On
On
On

500 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Configuración de salida cuando portNumber=1 (número de salida)
Valor OutData
15
14
13
12
11
10
9
8
01
Off
Off
Off
Off
Off
Off
Off
On
02
Off
Off
Off
Off
Off
Off
On
Off
03
Off
Off
Off
Off
Off
Off
On
On
08
Off
Off
Off
Off
On
Off
Off
Off
09
Off
Off
Off
Off
On
Off
Off
On
10
Off
Off
Off
On
Off
Off
Off
Off
11
Off
Off
Off
On
Off
Off
Off
On
99
Off
On
On
Off
Off
Off
On
On
255
On
On
On
On
On
On
On
On
Notas
Diferencia entre OpBCD y Out
Las instrucciones Out y OpBCD son muy similares en el lenguaje SPEL
+
. Sin embargo, existe una gran
diferencia entre ambos, la cual se muestra a continuación:
- La instrucción OpBCD utiliza un formato de decimal codificado binariamente para especificar para
especificar un valor de 8 bits para usar para activar o desactivar las salidas. Dado que el formato de decimal
codificado binariamente excluye el uso de los valores &HA, &HB, &HC, &HD, &HE o &HF, no se pueden
ver todas las combinaciones para configurar el grupo de 8 salidas.
- La instrucción Out funciona de manera muy similar a la instrucción OpBCD, excepto que Out permite usar
el rango del valor de 8 bits para activar o desactivar las salidas de manera que sean entre 0 y 255 (0 a 99
para OpBCD). Esto permite todas las combinaciones posibles para los grupos de salida de 8 bits que se
iniciarán, de acuerdo con las especificaciones del usuario.
Indicador Forced
Este indicador se usa para activar la salida de E/S durante una parada de emergencia o la apertura de la puerta
de seguridad desde la tarea NoPause, la tarea NoEmgAbort (tarea especial que usa NoPause o NoEmgAbort
en Xqt) o las tareas en segundo plano.
Asegúrese de que las salidas de E/S cambien mediante la parada de emergencia y la apertura de la puerta de
seguridad cuando diseñe el sistema.
Consulte también
In, InBCD, MemOff, MemOn, MemOut, MemSw, Off, On, Oport, Sw, Wait
Ejemplo de instrucción Out
El ejemplo que se indica a continuación muestra cómo la tarea principal inicia una tarea en segundo plano
llamada “iotask”. La tarea “iotask” es una tarea simple para alternar entre activar y desactivar los bits de
salida 0 a 3. La instrucción Out hace que esto sea posible usar solo 1 comando en lugar de activar y desactivar
cada salida individualmente.
Function main
Xqt iotask
Do
Go P1
Go P2
Loop
Fend
Function iotask
Do
Out 0, &H0F
Out 0, &H00
Wait 10
Loop
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 501
Otros ejemplos simples de la ventana Command incluyen los siguientes:
> Out 1,6 'Activa las salidas 9 y 10
> Out 2,1 'Activa la salida 8
> Out 3,91 'Activa las salidas 24, 25, 27, 28 y 30

502 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función Out
Arroja el estado de un byte de salidas.
Sintaxis
Out(portNumber)
Parámetros
portNumber Expresión entera que representa los bytes de salida de E/S. Cuando la selección de
portNumber corresponde a las siguientes salidas:
Portnum
Salidas
0
0-7
1
8-15
...
...
Valores devueltos
El valor de 8 bits del estado de salida para el puerto especificado.
Consulte también
Instrucción Out
Ejemplo de función Out
Print Out(0)

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 503
Instrucción OutReal
Los datos de salida del valor real son los datos de punto flotante (en cumplimiento con IEEE754) de 32 bits.
Define el estado de la palabra de salida de puerto 2 (32 bits).
Sintaxis
OutReal WordPortNumber, OutputData [,Forced]
Parámetros
WordPortNumber Expresión entera que representa las palabras de salida de E/S.
OutputData Especifica la expresión entera que representa los datos de salida (Valor de tipo real).
Forced Opcional. Normalmente se omite.
Descripción
Genera el valor real IEEE754 especificado al puerto de palabra de salida especificado según el número de
puerto de palabra y el siguiente puerto de palabra de salida.
Se puede usar la etiqueta de palabra de salida para el parámetro de número de puerto de palabra.
Nota
Indicador Forced
Este indicador se usa para activar la salida de E/S durante una parada de emergencia o la apertura de la puerta
de seguridad desde la tarea NoPause o NoEmgAbort (tarea especial iniciada mediante la especificación de
NoPause o NoEmgAbort en Xqt).
Diseñe cuidadosamente el sistema, ya que la salida de E/S cambia por la parada de emergencia y la apertura
de la puerta de seguridad.
Consulte también
In, InW, InBCD, InReal, Out, OutW, OpBCD, Función OutReal
Ejemplo de instrucción OutReal
OutReal 32, 2.543

504 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función OutReal
Recupera el estado del puerto de salida como los datos de punto flotante de 32 bits (en cumplimiento con
IEEE754).
Sintaxis
OutReal (WordPortNumber)
Parámetros
WordPortNumber Expresión entera que representa las palabras de salida de E/S.
Valores devueltos
Arroja el estado del puerto de salida especificado como datos de punto flotante de 32 bits (en cumplimiento
con IEEE754).
Consulte también
In, InW, InBCD, InReal, Out, OutW, OpBCD, OutReal
Ejemplo de función OutReal
Real rdata01
rdata01 = OutReal(0)

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 505
Instrucción OutW
Configura simultáneamente 16 bits de salida.
Sintaxis
OutW wordPortNum, outputData [, Forced]
Parámetros
wordPortNum Expresión entera que representa las palabras de salida de E/S.
outputData Especifica los datos de salida (enteros de 0 a 65535) mediante una expresión o un valor
numérico.
Forced Opcional. Normalmente se omite.
Descripción
Cambia el estado actual del grupo de puertos de salida de E/S especificado del usuario según el número de
puerto de palabra a los datos de salida especificados.
Nota
Indicador Forced
Este indicador se usa para activar la salida de E/S durante una parada de emergencia o la apertura de la puerta
de seguridad desde la tarea NoPause, la tarea NoEmgAbort (tarea especial que usa NoPause o NoEmgAbort
en Xqt) o las tareas en segundo plano.
Asegúrese de que las salidas de E/S cambien mediante la parada de emergencia y la apertura de la puerta de
seguridad cuando diseñe el sistema.
Consulte también
In, InW, Out
Ejemplo de instrucción OutW
OutW 0, 25

506 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función OutW
Arroja el estado de una palabra (2 bytes) de salidas.
Sintaxis
OutW(wordPortNum)
Parámetros
wordPortNum Expresión entera que representa las palabras de salida de E/S.
Valores devueltos
El valor de 16 bits del estado de salida para el puerto especificado.
Consulte también
Instrucción OutW
Ejemplo de función OutW
OutW 0, &H1010

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 507
P# (1. Point Definition)
Define un punto de robot mediante su asignación a una expresión de punto.
Sintaxis
point = pointExpr
pointLabel = pointExpr
Parámetros
point Expresión que incluye un valor numérico o ( ) (paréntesis)
Pnumber
P(expr)
pointLabel Etiqueta de punto
pointExpr Uno de los siguientes datos de punto
Número de punto P, Etiqueta de punto, Here, Pallet, Función de datos de punto
(función Here, función XY, función JA, función Pulse, etc.)
Para conocer detalles acerca de pointExpr, consulte P# (2. Expresión de punto)
Descripción
Define un punto de robot mediante su configuración idéntica a otro punto o expresión de punto.
Consulte también
Local, Pallet, PDef, PDel, Plist
Ejemplo de definición de punto
Los siguientes ejemplos se llevan a cabo desde la ventana Command:
Asigna coordenadas a P1:
> P1 = 300,200,-50,100
Especifica la postura del brazo izquierdo:
> P2 = -400,200,-80,100/L
Agrega 20 a la coordenada X de P2 y define el punto resultante como P3:
> P3 = P2 +X(20)
> plist 3
P3=-380,200,-80,100/L
Resta 50 de la coordenada Y de P2, sustituye -30 para la coordenada Z y define el punto P4 resultante como
la postura del brazo derecho:
>P4=P2 -Y(50) :Z(-30) /R
> plist 4
P4 = XY(-450,200,-30,100)/R
Agrega 90 a la coordenadas U de Pallet(3, 5) y define el punto resultante como P6:
> P5 = Here
> P6 = pallet(3,5) +U(90)

508 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
P# (2. Expresión de punto)
Especifica un punto de robot para sus comandos de asignación y movimiento.
Sintaxis
point [ { + | - } point ] [local] [hand] [elbow] [wrist] [j4flag] [j6flag] [j1flag] [j2flag] [relativeOffsets]
[absoluteCoords]
Parámetros
point La especificación del punto base. Esto puede ser una de las siguientes opciones:
Pnumber
P(expr)
pointLabel
Pallet(palletNumber, palletIndex)
Here
XY(X, Y, Z, U, [V], [W])
JA(J1, J2, J3, J4, [J5], [J6])
Pulse(J1, J2, J3, J4, [J5], [J6])
local Opcional. Los números locales desde 1 a 15 son precedidos por una barra diagonal (/0
a /15) o arroba (@0 a @15). La barra diagonal significa que las coordenadas serán
locales. El símbolo de arroba significa que las coordenadas se traducirán en coordenadas
locales.
hand Opcional para robots SCARA (incluida la serie RS) y robots de 6 ejes (incluida la serie
N). Especifica /L o /R para las orientaciones lefty y righty.
elbow Opcional para los robots de 6 ejes (incluida la serie N).
Especifica /A o /B para las orientaciones hacia arriba o hacia abajo.
wrist Opcional para los robots de 6 ejes (incluida la serie N).
Especifica /F o /NF para la orientación con giro o sin giro.
j4flag Opcional para los robots de 6 ejes (incluida la serie N).
Especifica /J4F0 o /J4F1.
j6flag Opcional para los robots de 6 ejes (incluida la serie N).
Especifica /J6F0 - /J6F127.
j1flag Opcional para la serie RS y robots de 6 ejes (excluida la serie N). Especifica /J1F0 o
/J1F1.
j2flag Opcional para la serie RS. Especifica /J2F0 - /J2F127.
j1angle Opcional para las series RS y N. Especifica /J1A (valor real).
j4angle Opcional para la serie N. Especifica /J4A (valor real).
relativeOffsets Opcional. Uno o más ajustes de coordenadas relativas.
{+ | -} {X | Y | Z | U | V | W | RZ | RY | RX | R | S | T | ST } (expr)
Las compensaciones de TL son compensaciones relativas en el sistema de coordenadas
de la herramienta actual.
{+ | -} {TLX | TLY | TLZ | TLU | TLV | TLW} (expr)
absoluteCoords Opcional. Una o más coordenadas absolutas.
: {X | Y | Z | U | V | W | R | S | T | ST } (expr)
Descripción
Las expresiones de punto se usan en instrucciones de asignación de punto y comandos de movimiento.
Go P1 + P2
P1 = P2 + XY(100, 100, 0, 0)

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 509
Usar compensaciones relativas
Puede compensar una o más coordenadas relativas para el punto base. Por ejemplo, la siguiente instrucción
mueve el robot 20 mm en el eje X positivo desde la posición actual:
Go Here +X(20)
Si vuelve a ejecutar la misma instrucción, el robot se moverá 20 mm adicionales a lo largo del eje X, ya que
este es un movimiento relativo.
Para realizar una rotación relativa alrededor del eje de coordenadas de los robots de 6 ejes (incluida la serie
N), ejecute la instrucción según se indica a continuación. La siguiente instrucción gira la herramienta 20
grados en la dirección positiva del eje X según la orientación actual de la herramienta.
Go Here +RX(20)
También puede usar compensaciones relativas de herramientas:
Go Here +TLX(20) -TLY(5.5)
Cuando el robot de 6 ejes (incluida la serie N) se mueve hasta un punto calculado mediante las
compensaciones de pallet o relativas, la pieza de la muñeca podría girar hacia una dirección involuntaria. El
cálculo del punto anterior no depende de los modelos de robot y genera un movimiento sin convertir el
indicador de punto necesario.
La función LJM evita la rotación involuntaria de la muñeca.
Go LJM(Here +X(20))
Usar coordenadas absolutas
Puede cambiar una o más coordenadas del punto base por coordenadas absolutas. Por ejemplo, la siguiente
instrucción mueve el robot a la posición de 20 mm en el eje X:
Go Here :X(20)
Si vuelve a ejecutar la misma instrucción, el robot no se moverá, ya que ya se encuentra en la posición
absoluta para X por el movimiento anterior.
Las compensaciones relativas y las coordenadas absolutas hacen que sea fácil modificar un punto
temporalmente. Por ejemplo, este código realiza un movimiento rápidamente sobre el punto de recogida en
10 mm con una compensación relativa para Z o 10 mm, y luego se mueve lentamente al punto de recogida.
Speed fast
Jump pick +Z(10)
Speed slow
Go pick
Este código realiza un movimiento en línea recta hacia arriba desde la posición actual mediante la
especificación de un valor absoluto de 0 para la articulación Z:
LimZ 0
Jump Here :Z(0)
Uso de Locals
Puede especificar un número local con una barra diagonal o una arroba. Cada una tiene una función distinta.
Use la barra diagonal para marcar las coordenadas en un local. Por ejemplo, si agrega /1 en la siguiente
instrucción, esto indicará que P1 estará en la ubicación 0,0,0,0 en local 1.
P1 = XY(0, 0, 0, 0) /1
Use arroba para traducir las coordenadas a coordenadas locales.
Por ejemplo, aquí se muestra cómo definir la posición actual en P1:
P1 = Here @1

510 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Consulte también
Go, LJM, Local, Pallet, Pdel, Plist, Hand, Elbow, Wrist, J4Flag, J6Flag, J1Flag, J2Flag
Ejemplo de expresión de punto
Estos son algunos ejemplos del uso de expresiones de punto en instrucciones de asignación y comandos de
movimiento:
P1 = XY(300,200,-50,100)
P2 = P1 /R
P3 = pick /1
P4 = P5 + P6
P(i) = XY(100, 200, CZ(P100), 0)
Go P1 -X(20) :Z(-20) /R
Go Pallet(1, 1) -Y(25.5)
Move pick /R
Jump Here :Z(0)
Go Here :Z(-25.5)
Go JA(25, 0, -20, 180)
pick = XY(100, 100, -50, 0)
P1 = XY(300,200,-50,100, -90, 0)
P2 = P1 /F /B
P2 = P1 +TLV(25)

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 511
Función PAgl
Arroja un valor de articulación desde un punto especificado.
Sintaxis
PAgl (point, jointNumber)
Parámetros
point Expresión de punto.
jointNumber Especifica el número de articulación (enteros de 1 a 9) mediante una expresión o un
valor numérico.
El eje S adicional es 8 y el eje T es 9.
Valores devueltos
Arroja la posición de la articulación calculada (valor real, grado para la articulación giratoria, mm para la
articulación prismática).
Consulte también
Agl, CX, CY, CZ, CU, CV, CW, CR, CS, CT, PPls
Ejemplo de función PAgl
Real joint1
joint1 = PAgl(P10, 1)

512 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción Pallet
Define y muestra los pallets.
Sintaxis
(1) Pallet [Outside,] [ palletNumber, P1, P2, P3 [, P4 ], columns, rows ]
(2) Pallet [Outside,] palletNumber, coordinateData 1, coordinateData 2, coordinateData 3
[, coordinateData 4 ], columns1, rows2
(3) Pallet
Parámetros
Outside Opcional. Permite índices de fila y columna fuera del rango de las filas y columnas
especificado.
palletNumber Número de pallet representado por un número entero entre 0 y 15.
P1, P2, P3 Variables de punto que definen la posición estándar del pallet de 3 puntos.
P4 Opcional. Variable de puntos que se usa con P1, P2 y P3 para definir pallets de 4
puntos.
columns |Expresión entera que representa el número de puntos en el lado de
P1(coordinateData 1) a P2(coordinateData 2) del pallet. El rango es de 1 a 32767.
rows Expresión entera que representa el número de puntos en el lado de P1
(coordinateData 1) a P3(coordinateData 3) del pallet. El rango es de 1 a 32767.
coordinateData1, 2, 3 Datos de punto que se usan para definir pallets (definición estándar de 3 puntos)
coordinateData 4 Opcional. Datos de punto que se usan con coordinateData 1 a 3 para definir pallets
de 4 puntos.
Valores devueltos
(3) Muestra todos los pallets definidos cuando se omiten los parámetros.
Descripción
Define un pallet mediante la enseñanza del robot de, como mínimo, los puntos P1 (coordinateData 1), P2
(coordinateData 2) y P3 (coordinateData 3) y mediante la especificación del número de puntos desde P1
(coordinateData 1) a P2 (coordinateData 2) y desde P1 (coordinateData 1) a P3 (coordinateData 3).
Si el pallet tiene una buena forma rectangular ordenada, solo se deben especificar los puntos para 3 de las 4
esquinas. Sin embargo, en la mayoría de las situaciones, es mejor usar los puntos de las 4 esquinas para definir
un pallet.
Para definir un pallet, primero enseñe al robot 3 o 4 puntos de esquina, y luego defina el pallet de la siguiente
forma:
Un pallet definido con 4 puntos: A continuación se muestran P1, P2, P3 y P4. Hay 3 posiciones desde P1-P2
y 4 posiciones desde P1-P3. Esto produce un pallet que tiene 12 posiciones
en total. Para definir este pallet, la sintaxis es la siguiente:

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 513
Pallet 1, P1, P2, P3, P4, 3, 4
P1
P3
P2
1 2 3
7 8 9
4 5 6
10 11 12
P4
2
-2,10
1,5
2,5
3,5
4,5
1,4
2,4
3,4
4,4
1,3
2,3
3,3
4,3
1,2
2,2
3,2
4,2
1,1
2,1
3,1
4,1
Muestra
1,6
4,6
-1,4
1,4
2,4
3,4
4,4
6,4
1,3
2,3
3,3
4,3
1,2
2,2
3,2
4,2
-1,1
1,1
2,1
3,1
4,1
6,1
1,-1
4,-1
Los puntos que representan divisiones de un pallet reciben números de división automáticamente, los que,
en este ejemplo, comienzan en P1. Estos números de división también son necesarios para la función Pallet.
Cuando se especifica Outside, es posible especificar los índices de filas y columnas fuera del rango de filas
y columnas.
Por ejemplo:
Pallet Outside 1, P1, P2, P3, 4, 5
Jump Pallet(1, -2, 10)
Notas
El tamaño máximo de pallet
El número de puntos total definido por un pallet específico debe ser menor que 32,767.
Definiciones de forma de pallet incorrectas
Tenga en cuenta que un orden incorrecto de los puntos o un número de divisiones incorrecto tendrá como
resultado una definición de forma de pallets incorrecta.
Definición de plano de pallet
El plano de pallet se define con los valores de coordenada del eje Z de los 3 puntos de esquina del pallet. Por
lo tanto, también se puede definir un pallet vertical.
Definición de pallet para un pallet de fila única
Es posible definir un pallet de fila única con una instrucción o comando de pallet de 3 puntos. Simplemente
enseñe un punto en cada extremo y defínalos del siguiente modo: Especifique 1 como el número de divisiones
entre el mismo punto.
> Pallet 2, P20, P21, P20, 5, 1 'Define un pallet 5×1
Valores de coordenadas UVW
Cuando los valores de coordenadas UVW de los 3 (o 4) puntos especificados con la instrucción Pallet
varían, se usan los valores de coordenadas UVW del punto 1 y los datos 1 del sistema de coordenadas.
Se ignoran los valores de coordenadas UVW de los números de puntos de 2 a 4 y los números del sistema
de coordenadas de 2 a 4.

514 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Valores de coordenadas de los ejes adicionales
Cuando los valores de coordenadas de los 3 (o 4) puntos especificados con la instrucción Pallet incluyen los
valores de coordenadas del eje adicional ST, Pallet incluye estas coordenadas adicionales en los cálculos de
posición. En el caso donde el eje adicional se usa como el eje de funcionamiento, el movimiento de este eje
se considera y calcula con la definición de Pallet. Es necesario definir un pallet más grande que el rango de
movimiento del robot, considerando la posición del eje de funcionamiento. Incluso si define los ejes
adicionales que no se ven afectados por la definición del pallet, tenga cuidado con las posiciones de los ejes
adicionales cuando define el pallet.
Consulte también
Función Pallet
Ejemplo de instrucción Pallet
La siguiente instrucción de la ventana Command configura el pallet definido por los puntos P1, P2 y P3, y
divide el plano del pallet en 15 posiciones de punto de pallet distribuidos equitativamente, con el número de
punto de pallet 1, el número de punto de pallet 2 y el número de punto de pallet 3 colocados a lo largo del
lado de P1 a P2.
> pallet 1, P1, P2, P3, 3, 5
> jump pallet(1, 2) 'Salta a la posición del pallet
El pallet resultante se muestra a continuación:
P3
13 14 15
10 11 12
7 8 9
4 5 6
1 2 3
P1 P2

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 515
Función Pallet
Especifica una posición en un pallet definido anteriormente.
Sintaxis
(1) Pallet ( palletNumber, palletPosition )
(2) Pallet ( palletNumber, column, row )
Parámetros
palletNumber Número de pallet representado por una expresión entera entre 0 y 15.
PalletPosition La posición del pallet representada por una expresión entera entre 1 y 32767.
column La columna de pallets representada por una expresión entera entre −32768 y 32767.
row La fila de pallets representada por una expresión entera entre −32768 y 32767.
Descripción
El pallet arroja una posición en un pallet que se definió anteriormente con la instrucción Pallet. Use esta
función con comandos de movimiento como Go y Jump para provocar que el brazo se mueva a la posición
de pallet especificada.
El número de posición del pallet se puede definir de forma aritmética o simplemente mediante un número
entero.
Notas
Movimiento de pallet para robots de 6 ejes (incluida la serie N).
Cuando el robot de 6 ejes (incluida la serie N) se mueve hasta un punto calculado mediante las
compensaciones de pallet o relativas, la pieza de la muñeca podría girar hacia una dirección involuntaria. El
cálculo del punto anterior no depende de los modelos de robot y genera un movimiento sin convertir el
indicador de punto necesario.
La función LJM evita la rotación involuntaria de la muñeca.
Movimiento de pallet de la serie RS
Al igual que los robots de 6 ejes, cuando el robot de la serie RS se mueve hasta un punto calculado mediante
las compensaciones de pallet o relativas, el brazo n.º 1 podría girar hasta una dirección involuntaria. La
función LJM se puede usar para convertir el indicador de punto y evitar la rotación involuntaria del brazo n.º
1.
Además, el eje U de un robot de la serie RS puede salir del rango de movimiento cuando se convierte el
indicador de orientación y provocar un error.
Para evitar este error, la función LJM ajusta el ángulo objetivo del eje U para que esté dentro del rango de
movimiento. Está disponible cuando se selecciona el indicador de orientación "2".
Valores de coordenadas UVW
Cuando los valores de coordenadas UVW de los 3 (o 4) puntos especificados con la instrucción Pallet
varían, se usan los valores de coordenadas UVW del punto 1 y los datos 1 del sistema de coordenadas.
Se ignoran los valores de coordenadas UVW de los números de puntos de 2 a 4 y los números del sistema
de coordenadas de 2 a 4.
Valores de coordenadas de los ejes adicionales
Cuando los valores de coordenadas de los 3 (o 4) puntos especificados con la instrucción Pallet incluyen los
valores de coordenadas del eje adicional ST, Pallet incluye estas coordenadas adicionales en los cálculos de
posición. En el caso donde el eje adicional se usa como el eje de funcionamiento, el movimiento de este eje
se considera y calcula con la definición de Pallet. Es necesario definir un pallet más grande que el rango de
movimiento del robot, considerando la posición del eje de funcionamiento. Incluso si define los ejes
adicionales que no se ven afectados por la definición del pallet, tenga cuidado con las posiciones de los ejes
adicionales cuando define el pallet.
Consulte también
LJM, Pallet

516 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Ejemplo de función Pallet
El siguiente programa traslada piezas desde el pallet 1 al pallet 2.
Function main
Integer index
Pallet 1, P1, P2, P3, 3, 5 'Define el pallet 1
Pallet 2, P12, P13, P11, 5, 3 'Define el pallet 2
For index = 1 To 15
Jump Pallet(1, index) 'Se mueve al índice de punto en pallet 1
On 1 'Sostiene la pieza de trabajo
Wait 0.5
Jump Pallet(2, index) 'Se mueve al índice de punto en pallet 2
Off 1 'Libera la pieza de trabajo
Wait 0.5
Next I
Fend
Function main
Integer i, j
P0 = XY(300, 300, 300, 90, 0, 180)
P1 = XY(200, 280, 150, 90, 0, 180)
P2 = XY(200, 330, 150, 90, 0, 180)
P3 = XY(-200, 280, 150, 90, 0, 180)
Pallet 1, P1, P2, P3, 10, 10
Motor On
Power High
Speed 50; Accel 50, 50
SpeedS 1000; AccelS 5000
Go P0
P11 = P0 -TLZ(50)
For i = 1 To 10
For j = 1 To 10
'Especifica los puntos
P10 = P11 'Punto de alejamiento
P12 = Pallet(1, i, j) 'Punto objetivo
P11 = P12 -TLZ(50) 'Inicia el punto de acercamiento
'Convierte cada punto a LJM
P10 = LJM(P10)
P11 = LJM(P11, P10)
P12 = LJM(P12, P11)
'Ejecuta el movimiento
Jump3 P10, P11, P12 C0
Next
Next
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 517
Function main2
P0 = XY(300, 300, 300, 90, 0, 180)
P1 = XY(400, 0, 150, 90, 0, 180)
P2 = XY(400, 500, 150, 90, 0, 180)
P3 = XY(-400, 0, 150, 90, 0, 180)
Pallet 1, P1, P2, P3, 10, 10
Motor On
Power High
Speed 50; Accel 50, 50
SpeedS 1000; AccelS 5000
Go P0
Do
' Especifica los puntos
P10 = Here -TLZ(50) 'Punto de
alejamiento
P12 = Pallet(1, Int(Rnd(9)) + 1, Int(Rnd(9)) + 1)'Punto objetivo
P11 = P12 -TLZ(50) 'Inicia el punto de
acercamiento
If TargetOK(P11) And TargetOK(P12) Then 'Control de punto
' Conversión de cada punto a LJM
P10 = LJM(P10)
P11 = LJM(P11, P10)
P12 = LJM(P12, P11)
'Ejecuta el movimiento
Jump3 P10, P11, P12 C0
EndIf
Loop
Fend

518 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción PalletClr
Borra un pallet definido.
Sintaxis
PalletClr palletNumber
Parámetros
palletNumber Número de pallet representado por una expresión entera entre 0 y 15.
Consulte también
Pallet
Ejemplo de PalletClr
PalletClr 1

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 519
Instrucción/Función ParseStr
Descompone una cadena y arroja una matriz de tokens.
Sintaxis
ParseStr inputString$, tokens$(), delimiters$
numTokens = ParseStr(inputString$, tokens$(), delimiters$)
Parámetros
inputString$ Expresión de cadena que se debe descomponer.
tokens$() Matriz de salida de cadenas que contienen los tokens.
La matriz declarada por ByRef no puede ser especificada.
delimiters$ Expresión de cadena que contiene uno o más delimitadores de token.
Valores devueltos
Cuando se usa como una función, se arroja la cantidad de tokens descompuestos.
Consulte también
Redim, String
Ejemplo de instrucción ParseStr
String toks$(0)
Integer i
ParseStr "1 2 3 4", toks$(), " "
For i = 0 To UBound(toks)
Print "token ", i, " = ", toks$(i)
Next i

520 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción Pass
Ejecuta un movimiento de punto a punto simultáneamente en cuatro articulaciones, que pasa cerca pero no
a través de los puntos especificados.
Sintaxis
Pass point [, {On | Off | MemOn | MemOff} bitNumber [, point ... ]] [LJM [orientationFlag]]
Parámetros
point Pnumber o P(expr) o etiqueta de punto.
Cuando los datos de punto continúan y en el orden ascendente o descendente,
especifique dos enlaces de números de punto que se unen con dos puntos como
P(1:5).
bitNumber El bit de salida de E/S o el bit de E/S de memoria que se activará o desactivará. Número
entero entre 0 y 511 o etiqueta de salida.
LJM Opcional. Convierte el punto de alejamiento, el punto de acercamiento y el destino
objetivo con la función LJM.
orientationFlag Opcional. Especifica un parámetro que selecciona un indicador de orientación para la
función LJM.
Descripción
Pass mueve el brazo del robot cerca pero no a través de la serie de puntos especificada.
Para especificar una serie de puntos, use los puntos (P0,P1,...) con comas entre los puntos.
Para activar o desactivar bits de salida mientras ejecuta un movimiento, inserte un comando On u Off
delimitado por comas entre puntos. On u Off se ejecutan antes de que el robot alcance el punto
inmediatamente anterior a On u Off.
Si Pass es seguido inmediatamente por otro Pass, controla las pasadas al siguiente Pass sin que el robot se
detenga en el punto especificado final Pass anterior.
Si Pass es seguido inmediatamente por un comando de movimiento que no sea otro Pass, el robot se detiene
en el punto especificado final de Pass, pero no se ejecutará el posicionamiento Fine.
Si Pass es seguido inmediatamente por un comando, instrucción o función que no sea otro comando de
movimiento, el comando, instrucción o función inmediatamente posterior se ejecutará antes de que el robot
llegue al punto final del Pass anterior.
Si se desea posicionamiento Fine en la posición objetivo, siga Pass con un Go, especificando la posición
objetivo como se muestra en el siguiente ejemplo:
Pass P5; Go P5; On 1; Move P10
Entre más grandes sean los valores de aceleración/desaceleración, el brazo se moverá más cerca del punto
especificado. La instrucción Pass se puede usar de modo que el brazo del robot evite los obstáculos.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 521
Con el parámetro LJM, el programa que usa la función LJM puede ser más simple.
Por ejemplo, el siguiente programa de cuatro líneas
P11 = LJM(P1, Here, 1)
P12 = LJM(P2, P11, 1)
P13 = LJM(P3, P12, 1)
Pass P11, P12, P13
puede ser… un programa de una línea.
Pass P1, P2, P3 LJM 1
El parámetro LJM está disponible para los robots de 6 ejes (incluida la serie N) y de la serie RS.
Cuando use orientationFlag con el valor predeterminado, se puede omitir.
Pass P1, P2, P3 LJM
Consulte también
Accel, Go, Jump, Speed
Ejemplo de instrucción Pass
El ejemplo muestra la manipulación del brazo del robot con la instrucción Pass:
Function main
Jump P1
Pass P2 'Mueve el brazo hacia P2 y lleva a cabo la siguiente instrucción antes de llegar a P2.
On 2
Pass P3
Pass P4
Off 0
Pass P5
Fend

522 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción Pause
Detiene temporalmente la ejecución del programa de todas las tareas para las que se activa la pausa.
Sintaxis
Pause
Descripción
Cuando se ejecuta Pause, se suspende la ejecución del programa para todas las tareas con la pausa activada
(tareas que no usan NoPause o NoEmgAbort en el comando Xqt). Además, si cualquier tarea está ejecutando
una instrucción de movimiento, se pausará incluso si la pausa no está activada para esa tarea.
Sin embargo, Pause no puede detener las tareas en segundo plano.
Nota
QP y su efecto en Pause
La instrucción QP se usa para provocar que el brazo se detenga de inmediato al ejecutar Pause o completar
el movimiento actual y luego pausar el programa. Consulte la ayuda de la instrucción QP para obtener más
información.
Ejemplo de instrucción Pause
El ejemplo a continuación muestra el uso de la instrucción Pause para detener la ejecución temporalmente.
La tarea ejecuta instrucciones de programa hasta llegar a la línea que contiene el comando Pause. En este
punto, la tarea se pausa. El usuario puede hacer clic en el botón Continue de la ventana Run para reanudar la
ejecución.
Function main
Xqt monitor
Go P1
On 1
Jump P2
Off 1
Pause 'Suspende la ejecución del programa
Go P40
Jump P50
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 523
Función PauseOn
Arroja el estado de pausa.
Sintaxis
PauseOn
Valores devueltos
True si el estado es Pause, False de lo contrario.
Descripción
La función PauseOn se usa solo para la tarea NoPause, la tarea NoEmgAbort (tarea especial que usa
NoPause o NoEmgAbort en Xqt) y las tareas en segundo plano.
Consulte también
ErrorOn, EstopOn, SafetyOn, Wait, Xqt
Ejemplo de función PauseOn
El siguiente ejemplo muestra un programa que monitorea la pausa del controlador y activa o desactiva la E/S
cuando ocurre la pausa. Sin embargo, cuando el estado cambia de pausa por apertura de puerta de seguridad,
la E/S no se activa o desactiva.
Function main
Xqt PauseMonitor, NoPause
:
:
Fend
Function PauseMonitor
Boolean IsPause
IsPause = False
Do
Wait 0.1
If SafetyOn = On Then
If IsPause = False Then
Print "Saftey On"
IsPause = True
EndIf
ElseIf PauseOn = On Then
If IsPause = False Then
Print "InPause"
If SafetyOn = Off Then
Off 10
On 12
EndIf
IsPause = True
EndIf
Else
If IsPause = True Then
Print "OutPause"
On 10
Off 12
IsPause = False
EndIf
EndIf
Loop
Fend

524 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función PDef
Arroja el estado de definición de un punto especificado.
Sintaxis
PDef (point)
Parámetros
point Un valor entero o Pnumber o P(expr) o etiqueta de punto.
Precauciones de compatibilidad
No se puede especificar ninguna variable para el parámetro point
Para usar las variables, escriba PDef(P(varName)).
Valores devueltos
True si el estado el punto está definido, False de lo contrario.
Consulte también
Instrucción Here, Pdel
Ejemplo de función PDef
If Not PDef(1) Then
Here P1
EndIf
Integer i
For i = 0 to 10
If PDef (P(i)) Then
Print “P(“;i;”) is defined”
EndIf
Next

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 525
Instrucción PDel
Elimina los datos de posición especificados.
Sintaxis
PDel firstPointNum [, lastPointNum ]
Parámetros
firstPointNum El primer número de punto en una secuencia de puntos a eliminar. firstPointNum debe
ser un número entero.
lastPointNum El último número de punto en una secuencia de puntos a eliminar. lastPointNum debe
ser un número entero.
Descripción
Elimina datos de posición especificados desde la memoria de punto del controlador para el robot actual.
Elimina todos los datos de posición desde firstPointNum hasta e incluido lastPointNum. Para evitar que
ocurra el Error 2, firstPointNum debe ser menor que lastPointNum.
Ejemplo de instrucción PDel
> p1=10,300,-10,0/L
> p2=0,300,-40,0
> p10=-50,350,0,0
> pdel 1,2 'Elimina los puntos 1 y 2
> plist
P10 = -50.000, 350.000, 0.000, 0.000 /R /0
> pdel 50 'Elimina el punto 50
> pdel 100,200 'Elimina los puntos desde 100 a 200
>

526 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción PDescription
Defina un comentario para los datos de puntos especificados.
Sintaxis
Datos de punto PDescription, Newcomment
Parámetros
Point data Un valor entero o Pnumber o P(expr) o etiqueta de punto.
No se pueden especificar variables para el parámetro datos de punto.
Para usar las variables, escriba PDescription Statement (P(varName)),
“new comment”.
New comment Expresión de cadena que representa el comentario para el punto especificado.
Descripción
PDescription guarda una descripción en un dato de puntos especificado de la memoria del controlador.
Al crear o al ejecutar un programa, se borra de la memoria la descripción guardada en la memoria del
controlador. Si es necesario, ejecute “SavePoints” para guardar un archivo de puntos.
Consulte también
Función PDef, función PDescription$, PLabel, función PLabel$
Ejemplo de instrucción PDescription
PDescription 1, "Comment"

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 527
Función PDescription$
Arroja la descripción del punto definido para el número de punto especificado.
Sintaxis
PDescription$( pointData)
Parámetros
pointData Un valor entero o Pnumber o P(expr) o etiqueta de punto.
No se pueden especificar variables para el parámetro datos de punto.
Para usar las variables, escriba PDescription$(P(varName)).
Valores devueltos
Arroja las descripciones del número especificado como una cadena.
Consulte también
Función PDef, PDescription, PLabel, Función PLabel$
Ejemplo de función PDescription$
Print PDescription$(1)
Print PDescription$(P(i))

528 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción PeakSpeedClear
Borra e inicializa la velocidad máxima para una o más articulaciones.
Sintaxis
PeakSpeedClear [j1 [, j2 [, j3 [, j4 [, j5 [, j6 [, j7 [, j8 [, j9]]]]]]]]]
Parámetros
j1 – j9 Expresión entera que representa el número de articulación. Si no se suministran
parámetros, se borran los valores de velocidad máxima de todas las articulaciones.
El eje S adicional es 8 y el eje T es 9. Si se proporciona un número de articulación no
existente, ocurre un error.
Descripción
PeakSpeedClear muestra los valores de velocidad máxima para las articulaciones especificadas.
Debe ejecutar PeakSpeedClear antes de ejecutar PeakSpeed.
Este comando no admite los ejes adicionales PG.
Consulte también
AvgSpeed, PeakSpeed
Ejemplo de instrucción PeakSpeedClear
<Ejemplo 1>
A continuación se encuentra el ejemplo para mostrar los valores de velocidad para articulaciones
especificadas después de borrar los valores de velocidad máxima de todas las articulaciones.
> PeakSpeedClear
> Go P1
> PeakSpeed 1
-0.273
> PeakSpeed
-0.273 -0.164
-0.080 0.258
-0.005 0.401
0.000 0.000
0.000
>
<Ejemplo 2>
A continuación se encuentra el ejemplo para mostrar los valores de velocidad máxima para articulaciones
especificadas después de borrar los valores de velocidad máxima de J1, J4 y J5 para los robots de ejes
múltiples verticales.
> PeakSpeedClear 4, 1, 5
> Go P1
> PeakSpeed 1
-0.273
> PeakSpeed 4
0.258

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 529
Instrucción PeakSpeed
Muestra los valores de velocidad máxima para la articulación especificada.
Sintaxis
PeakSpeed [jointNumber]
Parámetros
jointNumber Opcional. Expresión entera que representa el número de articulación.
El eje S adicional es 8 y el eje T es 9.
Valores devueltos
Muestra los valores de velocidad máxima actuales para todas las articulaciones.
Descripción
La instrucción PeakSpeed muestra el valor de la velocidad absoluta máxima para la articulación con señal.
La velocidad máxima es un número real de -1 a 1, siendo 1 la máxima velocidad.
Primero ejecute PeakSpeedClear y, luego, ejecute PeakSpeed para mostrar el valor de velocidad máximo
para la articulación.
Cuando use este controlador virtual o realice un simulacro, el promedio de los valores de velocidad absoluta
se calcula a partir de la velocidad ordenada en lugar de la velocidad real.
Este comando no admite los ejes adicionales PG.
Consulte también
Función AvgSpeed, PeakSpeedClear, PeakSpeed
Ejemplo de instrucción PeakSpeed
> PeakSpeedClear
> Go P1
> PeakSpeed 1
-0.273
> PeakSpeed
-0.273 0.163
-0.080 0.258
-0.005 -0.401
0.000 0.000
0.000
>

530 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función PeakSpeed
Arroja la velocidad máxima para la articulación especificada.
Sintaxis
PeakSpeed (jointNumber)
Parámetros
jointNumber Expresión entera que representa el número de articulación.
El eje S adicional es 8 y el eje T es 9.
Valores devueltos
Valor real de -1 a 1.
Descripción
La función PeakSpeed arroja el valor de la velocidad absoluta máxima para la articulación con señal. La
velocidad máxima es un número real de -1 a 1, siendo 1 la máxima velocidad.
Primero ejecute la instrucción PeakSpeedClear y, luego, ejecute la instrucción PeakSpeed para mostrar el
valor de velocidad máximo para la articulación.
Cuando use este controlador virtual o realice un simulacro, el promedio de los valores de velocidad absoluta
se calcula a partir de la velocidad ordenada en lugar de la velocidad real.
Este comando no admite los ejes adicionales PG.
Consulte también
AvgSpeed, PeakSpeedClear, PeakSpeed
Ejemplo de función PeakSpeed
Este ejemplo usa la función PeakSpeed en un programa:
Function DisplayPeakSpeed
Integer i
PeakSpeedClear
Go P1
Print "Peak Speeds:"
For i = 1 To 6
Print "Joint ", i, " = ", PeakSpeed (i)
Next i
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 531
Instrucción PerformMode
Define el modo del robot.
Sintaxis
(1) PerformMode [modeNumber] [, robotNumber]
(2) PerformMode
Parámetros
modeNumber Especifica el modo de operación con un valor de número entero (1 a 3) o con la siguiente
constante. Este parámetro es opcional solo cuando la instrucción se ejecuta desde la
ventana Command.
Constante Valor Descripción
MODE_STANDARD 1 Define el modo estándar
MODE_HIGH_SPEED 2 Define el modo de alta velocidad
MODE_LOW_OSCILLATION 3 Define el modo de baja oscilación
robotNumber Especifica el número de robot con un valor entero.
Si se omite, se usa el robot seleccionado actualmente.
Resultado
Cuando lo especifica la sintaxis (1), el número de modo que se especificó definirá el modo.
Cuando lo especifica la sintaxis (2), se mostrará el número de modo del robot actualmente seleccionado.
Descripción
PerformMode es una función para cambiar la preferencia de rendimiento del manipulador (modo) según el
uso deseado. Esta función admite los siguientes tres modos.
Estándar
El tiempo del ciclo, el trabajo y la oscilación en la parada de movimiento están balanceados.
Este modo está disponible para cualquier tipo de aplicación.
Alta velocidad
Este es un modo especializado para reducir el tiempo de operación de una tarea.
Aunque este modo empeora el trabajo y la oscilación en la parada de movimiento en comparación con el
modo estándar, puede reducir el tiempo de operación.
Aplicación recomendada: Transporte
Baja oscilación
Este es un modo especializado para reducir la oscilación en la parada de movimiento.
Aunque este modo aumenta el tiempo de funcionamiento si se compara con el modo estándar, puede reducir
la oscilación en la detención del movimiento.
Aplicación recomendada: Transporte y montaje de los componentes de precisión

532 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Comparación de rendimiento
Modo
Elemento de comparación
Tiempo de
funcionamiento (*1)
Oscilación Trabajo
Estándar
Normal
Normal
Normal
Alta velocidad
Mejorado
Reducido
Reducido
Baja oscilación
Reducido
Mejorado
Mejorado
(*1) El tiempo de desplazamiento del manipulador que se mueve desde la posición actual al punto objetivo.
Nota
- Comandos de movimiento objetivo: Comandos de movimientos PTP (Go, BGo, TGo, Jump, JTran)
* Los siguientes rendimientos del movimiento CP no se ven afectados por la instrucción Precede.
Precisión de la trayectoria
Los valores de los límites superiores de AccelS, AccelR, SpeedS, SpeedR
Frecuencia del error de configuración de aceleración y error de configuración de velocidad
Condiciones que inicializan automáticamente el modo (al modo Standard)
En la siguiente tabla aparecen las condiciones que inicializan automáticamente el modo.
Cambio del modo
Encendido del controlador
Cambia al modo estándar
Reinicio del controlador
Cambia al modo estándar
Motor encendido
Cambia al modo estándar
Cambiar la potencia (Baja ↔ Alta)
El modo no cambia
Compilación / Recompilación
El modo no cambia
Restablecer
Cambia al modo estándar
Consulte también
Bo, Go, Jump, JTran, función PerformMode, TGo
Ejemplo de instrucción PerformMode
PerformMode MODE_STANDARD
Go P1
PerformMode 2
Go P2

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 533
Función PerformMode
Arroja el estado del modo de operación del robot.
Sintaxis
PerformMode ([robotNumber])
Parámetros
robotNumber Especifica el número de robot al cual se va a comprobar el estado mediante un valor entero.
Si se omite, se usa el robot seleccionado actualmente.
Valores devueltos
Arroja el valor entero que representa el modo de operación configurado actualmente.
1 = Modo estándar
2 = Modo de velocidad alta
3 = Modo de oscilación baja
Consulte también
PerformMode
Ejemplo de función PerformMode
Print PerformMode(1)

534 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción PG_FastStop
Detiene los ejes PG de inmediato.
Sintaxis
PG_FastStop
Descripción
PG_FastStop detiene de inmediato el robot PG actual sin desaceleración.
Para detenerlo con normalidad, utilice la instrucción PG_SlowStop.
Consulte también
PG_Scan, PG_SlowStop
Ejemplo de instrucción PG_FastStop
El siguiente programa mueve el eje PG durante 10 segundos y lo detiene.
Function main
Motor On
PG_Scan 0
Wait 10
PG_FastStop ' Detiene de inmediato el movimiento continuo
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 535
Instrucción PG_LSpeed
Define la velocidad de pulso del tiempo cuando el eje PG comienza a acelerar y termina de desacelerar.
Sintaxis
PG_LSpeed accelSpeed As Integer [, decelSpeed As Integer ],
Parámetros
speed Expresión entera que contiene la velocidad de pulso (1 a 32767 pulsos/segundo)
decalSpeed Expresión entera que contiene la velocidad de pulso (1 a 32767 pulsos/segundo)
Descripción
PG_LSpeed especifica la velocidad de pulso cuando el eje PG comienza a acelerar y termina de desacelerar.
Es útil al configurar la velocidad inicial/final de un motor paso a paso a la más alta dentro del rango de la
frecuencia máxima de arranque para ofrecer el mejor rendimiento del motor, o configurar la velocidad en la
más baja para evitar que el motor paso a paso se acelere. El valor predeterminado es 300 pulsos/segundos y
no se debe cambiar para usarlo.
Tiempo
Velocidad
Inicio de aceleración
Fin de desaceleración
Si se omite la velocidad final de desaceleración, se utiliza el valor definido de velocidad.
El valor PG_LSpeed se inicializa en los valores predeterminados cuando ocurre una de las siguientes
condiciones:
Inicio del controlador
Motor On
SFree, SLock, Brake
Reset, Reset Error
El botón Stop o QuitAll detiene las
tareas
Consulte también
Función PG_LSpeed
Ejemplo de instrucción PG_LSpeed
Se puede utilizar PG_LSpeed en la ventana Command o en el programa. En los siguientes ejemplos se
presentan ambos casos.
Function pglspeedtst
Motor On
Power High
Speed 30; Accel 30,30
PG_LSpeed 1000
Go P0
Fend
Para definir el valor PG_LSpeed en la ventana Command.
> PG_LSpeed 1000,1100
>

536 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función PG_LSpeed
Arroja la velocidad de pulso en el momento cuando el eje PG comienza a acelerar y termina de desacelerar.
Sintaxis
PG_LSpeed [ (paramNumber) ]
Parámetros
paramNumber Uno de los números siguientes que especifica el número del valor definido.
Si se omite, se usa 1.
1: Velocidad de pulso cuando empieza la aceleración
2: Velocidad de pulso cuando termina la desaceleración
Valores devueltos
Valor entero entre 1 y 32767 en unidades de pulsos/segundo.
Consulte también
PG_LSpeed
Ejemplo de función PG_LSpeed
Integer savPGLSpeed
savPGLSpeed = PG_LSpeed(1)

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 537
Instrucción PG_Scan
Inicia el movimiento giratorio continuo de los ejes del robot PG.
Sintaxis
PG_Scan direction As Integer
Parámetros
direction Dirección de giro
0: Dirección + (CW)
1: Dirección − (CCW)
Descripción
PG_Scan inicia el movimiento giratorio continuo del robot PG actual.
Para ejecutar el movimiento giratorio continuo, se debe activar el giro continuo del parámetro PG mediante
la configuración del robot.
Cuando se completa la tarea de ejecución del programa, se detiene el giro continuo.
Consulte también
PG_FastStop
Ejemplo de instrucción PG_Scan
En el siguiente ejemplo se hace girar el eje PG durante 10 segundos y se detiene repentinamente.
Function main
Motor On
Power High
Speed 10; Accel 10,10
PG_Scan 0
Wait 10
PG_SlowStop
Fend

538 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción PG_SlowStop
Detiene lentamente el giro continuo del eje PG.
Sintaxis
PG_SlowStop
Descripción
PG_SlowStop desacelera el movimiento giratorio continuo del robot PG actual y lo detiene.
Consulte también
PG_Scan, PG_FastStop
Ejemplo de instrucción PG_SlowStop
En el siguiente ejemplo se hace girar el eje PG durante 10 segundos y se detiene repentinamente.
Function main
Motor On
PG_Scan 0
Wait 10
PG_SlowStop ' Detiene repentinamente el movimiento giratorio continuo
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 539
Instrucción PLabel
Define una etiqueta para un punto especificado.
Sintaxis
PLabel pointNumber, newLabel
Parámetros
pointNumber Expresión entera que representa un número de punto.
newLabel Expresión de cadena que representa la etiqueta que se debe usar para el punto especificado.
Consulte también
Función PDef, PDescription, función PDescription$, función PLabel$, función PNumber
Ejemplo de instrucción PLabel
PLabel 1, "pick"

540 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función PLabel$
Arroja la etiqueta de punto asociada con un número de punto.
Sintaxis
PLabel$(point)
Parámetros
point Un valor entero o Pnumber, o P(expr), o etiqueta de punto.
Precauciones de compatibilidad
No se puede especificar ninguna variable para el parámetro point
Para usar las variables, escriba PLabel$(P(varName)).
Consulte también
Función PDef, PDescription, función PDescription$,PLabel, función PNumber
Ejemplo de función PLabel$
Print PLabel$(1)
Print PLabel$(P(i))

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 541
Instrucción Plane
Especifica y muestra el plano de control de acercamiento.
Sintaxis
(1) Plane PlaneNum [, robotNumber], pCoordinateData
(2) Plane PlaneNum [, robotNumber], pOrigin, pXaxis, pYaxis
(3) Plane PlaneNum [, robotNumber]
(4) Plane
Parámetros
PlaneNum Valor entero que representa el número de plano de 1 a 15.
robotNumber Valores enteros que representan el número de robot
Si se omiten, se usa el robot actual.
pCoordinateData Los datos de punto que representan los datos de coordenadas del plano de control de
acercamiento.
pOrigin Expresión entera que representa el punto de origen con el sistema de coordenadas
del robot.
pXaxis Expresión entera que representa un punto a lo largo del eje X mediante el sistema de
coordenadas del robot, en caso de especificarse la alineación X.
pYaxis Expresión entera que representa un punto a lo largo del eje Y mediante el sistema de
coordenadas del robot, en caso de especificarse la alineación Y.
Valores devueltos
Cuando se usa la sintaxis (3), aparece la configuración del plano especificada.
Cuando se usa la sintaxis (4), aparece la configuración de todos los números del plano del robot actual.
Descripción
Se usa Plane para configurar el plano de control de acercamiento. El plano de control de acercamiento se usa
para revisar si el efector final del robot está en una de las dos áreas divididas por el plano de control de
acercamiento especificado. La posición del efector final se calcula según la herramienta actual. El plano de
control de acercamiento se define con el plano XY del sistema de coordenadas base. El plano de control de
acercamiento detecta el efector final cuando se acerca al área en el lado + Z del plano del control de
acercamiento.
Cuando se usa el plano de control de acercamiento, el sistema detecta acercamientos en cualquier estado de
potencia del motor mientras esté activado el controlador.
Los detalles de cada sintaxis son los siguientes:
(1) Especifica un sistema de coordenadas para crear el plano de control de acercamiento con los datos de
punto que representan la traslación y la rotación basados en el sistema de coordenadas base y define el
plano de control de acercamiento.
Ejemplo:
Plane 1, XY(x, y, z, u, v, w)
Plane 1, P1
(2) Define el plano de control de acercamiento (coordenada XP) con la especificación del punto de origen,
el punto a lo largo del eje X y el punto a lo largo del eje Y. Utiliza las coordenadas X, Y, Z e ignora las
coordenadas U, V, W. Calcula el eje Z a la derecha y define la dirección del control de acercamiento.
Ejemplo:
Plane 1, P1, P2, P3
(3) Muestra la configuración del plano de control de acercamiento.
(4) Muestra todo el plano de control de acercamiento.

542 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Se puede usar la función GetRobotInsidePlane o la función InsidePlane para obtener el resultado del plano
de control de acercamiento. La función GetRobotInsidePlane se puede usar como la condición para un
comando Wait. Se puede ofrecer el resultado de detección para la E/S mediante la configuración de la salida
remota.
Para usar un plano con más de un robot, se deben definir los planos del sistema de coordenadas de cada robot.
Robot 1
Robot 2
Sistema de coordenadas del
plano de control de
acercamiento
Plano de control de
acercamiento
Los datos de los parámetros del robot se almacenan en la memoria Compact Flash en el controlador. Por
tanto, la memoria flash de comandos se escribe cuando se ejecuta este comando. La escritura frecuente en
la memoria Compact Flash afecta su vida útil. Recomendamos que el uso de este comando sea mínimo.
Notas
Selección de herramienta
Se ejecuta la comprobación de acercamiento para la herramienta actual. Cuando cambia la herramienta, el
control de acercamiento podría mostrar el acercamiento de la herramienta desde adentro hacia afuera del
plano, o al revés, aunque el robot no esté funcionando.
Eje adicional
Para el robot que tiene los ejes ST adicionales (incluido el eje de funcionamiento), el plano de control de
acercamiento que se configurará no depende de la posición de un eje adicional, sino que se basa en el sistema
de coordenadas base del robot.
Consulte también
Box, GetRobotInsidePlane, InsidePlane, PlaneClr, PlaneDef
Consejo
Configuración de la instrucción Plane desde Robot Manager
EPSON RC+ cuenta con un cuadro de diálogo para señalar y activar que permite definir el plano de control
de acercamiento. El método más simple de configurar los valores Plane es a través de la página Plane de
Robot Manager.
Ejemplo de instrucción Plane
Estos son ejemplos que sirven para configurar el plano de control de acercamiento mediante la instrucción
Plane.
Revise que la dirección sea el lado inferior del plano horizontal que está −20 mm en dirección del eje Z en el
sistema de coordenadas del robot:
> plane 1, xy(100, 200, -20, 90, 0, 180)
El plano de control de acercamiento es la coordenada XY creada al mover 50 mm en el eje X y 200 mm en
el eje Y, y girar 45 º alrededor del eje Y:
> plane 2, xy(50, 200, 0, 0, 45, 0)
Defina el plano de control de acercamiento con el sistema de coordenadas para herramientas del robot. (robot
de 6 ejes)
> plane 3, here

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 543
Función Plane
Arroja el plano de control de acercamiento especificado.
Sintaxis
Plane(PlaneNum [, robotNumber])
Parámetros
PlaneNum Expresión entera que representa el número de plano de 1 a 15.
robotNumber Valores enteros que representan el número de robot
Si se omiten, se usa el robot actual.
Valores devueltos
Arroja los datos de coordenadas para el plano de control de acercamiento especificado.
Consulte también
GetRobotInsidePlane, InsidePlane, Plane, PlaneClr, PlaneDef
Ejemplo de función Plane
P1 = Plane(1)

544 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción PlaneClr
Borra (anula la definición) de una definición de Plane.
Sintaxis
PlaneClr PlaneNum [, robotNumber ]
Parámetros
PlaneNum Expresión entera que representa el número de plano de 1 a 15.
robotNumber Valores enteros que representan el número de robot
Si se omiten, se usa el robot actual.
Descripción
Los datos de los parámetros del robot se almacenan en la memoria Compact Flash en el controlador. Por
tanto, la memoria flash de comandos se escribe cuando se ejecuta este comando. La escritura frecuente en
la memoria Compact Flash afecta su vida útil. Recomendamos que el uso de este comando sea mínimo.
Consulte también
GetRobotInsidePlane, InsidePlane, Plane, PlaneDef
Ejemplo de instrucción PlaneClr
PlaneClr 1

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 545
Función PlaneDef
Arroja la configuración del plano de control de acercamiento.
Sintaxis
PlaneDef (PlaneNum [, robotNumber])
Parámetros
PlaneNum Expresión entera que representa el número de plano de 1 a 15.
robotNumber Valores enteros que representan el número de robot
Si se omiten, se usa el robot actual.
Valores devueltos
Es True si el plano de detección de acercamiento se define para el número de plano especificado, de lo
contrario es False.
Consulte también
GetRobotInsidePlane, Box, InsidePlane, Plane, PlaneClr
Ejemplo de función PlaneDef
Function DisplayPlaneDef(planeNum As Integer)
If PlaneDef(planeNum) = False Then
Print "Plane ", planeNum, "is not defined"
Else
Print "Plane 1: ",
Print Plane(PlaneNum)
EndIf
Fend

546 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción PList
Muestra los datos de punto en la memoria para el robot actual.
Sintaxis
(1) PList
(2) PList pointNumber
(3) PList startPoint,
(4) PList startPoint, endpoint
Parámetros
pointNumber El rango del número está entre 0 y 999.
startPoint El número del punto de inicio. El rango del número es de 0 a 999.
endPoint El índice del punto final. El rango del número es de 0 a 999.
Valores devueltos
Datos del punto.
Descripción
PList muestra los datos del punto en la memoria para el robot actual.
Cuando no existen datos del punto dentro del rango especificado de puntos, no aparecerá ningún dato.
Cuando se especifica un número del punto de inicio mayor al número del punto final, entonces se produce
un error.
(1) PList
Muestra los datos de coordenadas para todos los puntos.
(2) PList pointNumber
Muestra los datos de coordenadas para el punto especificado.
(3) PList startPoint,
Muestra los datos de coordenadas para todos los puntos a partir de startPoint.
(4) PList startPoint, endPoint
Muestra los datos de coordenadas para todos los puntos a partir de startPoint y finaliza con endPoint.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 547
Ejemplo de instrucción PList
El tipo de visualización depende del tipo de robot y de la existencia de ejes adicionales.
Los siguientes ejemplos son para un robot Scara sin ejes adicionales.
Muestra los datos del punto especificado:
> plist 1
P1 = XY( 200.000, 0.000, -20.000, 0.000 ) /R /0
>
Muestra los datos del punto dentro del rango 10 y 20. En este ejemplo, solo se encuentran tres puntos dentro
de este rango.
> plist 10, 20
P10 = XY( 290.000, 0.000, -20.000, 0.000 ) /R /0
P12 = XY( 300.000, 0.000, 0.000, 0.000 ) /R /0
P20 = XY( 285.000, 10.000, -30.000, 45.000 ) /R /0
>
Muestra los datos del punto que inician con el número de punto 10.
> plist 10,
P10 = XY( 290.000, 0.000, -20.000, 0.000 ) /R /0
P12 = XY( 300.000, 0.000, 0.000, 0.000 ) /R /0
P20 = XY( 285.000, 10.000, -30.000, 45.000 ) /R /0
P30 = XY( 310.000, 20.000, -50.000, 90.000 ) /R /0

548 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción PLocal
Define el atributo local para un punto.
Sintaxis
PLocal(point) = localNumber
Parámetros
point Un valor entero o Pnumber, o P(expr), o etiqueta de punto.
Precauciones de compatibilidad
No se puede especificar ninguna variable para el parámetro point
Para usar las variables, escriba PLocal(P(varName)).
localNumber Una expresión entera que representa el nuevo número local. El rango es de 0 a 15.
Consulte también
Función PLocal
Ejemplo de instrucción PLocal
PLocal(pick) = 1

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 549
Función PLocal
Arroja el número local para un punto especificado.
Sintaxis
PLocal(point)
Parámetros
point Un valor entero o Pnumber, o P(expr), o etiqueta de punto.
Precauciones de compatibilidad
No se puede especificar ninguna variable para el parámetro point
Para usar las variables, escriba PLocal(P(varName)).
Valores devueltos
Número local para el punto especificado.
Consulte también
PLocal
Ejemplo de función PLocal
Integer localNum
localNum = PLocal(pick)

550 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función Pls
Arroja el número de pulsos del codificador actual para cada articulación en la posición actual.
Sintaxis
Pls(jointNumber)
Parámetros
jointNumber La articulación específica para la cual se debe obtener el número de pulsos del codificador
actual.
El eje S adicional es 8 y el eje T es 9.
Valores devueltos
Arroja un valor del número que representa el número de pulsos del codificador actual para la articulación
especificada por jointNumber.
Descripción
Se utiliza Pls para leer la posición del codificador actual (o el número de pulsos) de cada articulación. Estos
valores se pueden guardar y usar posteriormente con el comando Pulse.
Consulte también
CX, CY, CZ, CU, CV, CW, Pulse
Ejemplo de función Pls
A continuación se muestra un ejemplo simple para obtener los valores de pulso para articulación e
imprimirlos.
Function plstest
Real t1, t2, z, u
t1 = pls(1)
t2 = pls(2)
z = pls(3)
u = pls(4)
Print "T1 joint current Pulse Value: ", t1
Print "T2 joint current Pulse Value: ", t2
Print "Z joint current Pulse Value: ", z
Print "U joint current Pulse Value: ", u
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 551
Función PNumber
Arroja el número de punto asociado con una etiqueta de punto.
Sintaxis
PNumber(pointLabel)
Parámetros
pointLabel Una etiqueta de punto en el archivo de punto o en la expresión de cadena que contiene un punto
de etiqueta.
Consulte también
Función PDef, Función PLabel$
Ejemplo de función PNumber
Integer pNum
String pointName$
pNum = PNumber(pick)
pNum = PNumber("pick")
pointName$ = "place"
pNum = PNumber(pointName$)

552 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función PosFound
Arroja el estado de la operación Find.
Sintaxis
PosFound
Valores devueltos
True si se encontró la posición durante el movimiento, False si no se encontró.
Consulte también
Find
Ejemplo de función PosFound
Find Sw(5) = ON
Go P10 Find
If PosFound Then
Go FindPos
Else
Print "Error: Cannot find the sensor signal."
EndIf

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 553
Instrucción Power
Conmuta el modo Power (Potencia) a alta o baja y muestra el estado actual.
Sintaxis
(1) Power { High | Low } [, Forced]
(2) Power
Parámetros
High | Low La configuración puede ser High (Alta) o Low (Baja). El valor predeterminado es Low.
Forced Opcional. Normalmente se omite este parámetro.
Valores devueltos
Muestra el estado actual de Power cuando se omite el parámetro.
Descripción
Conmuta el modo Power a High o Low. También muestra el estado actual del modo.
Low - Cuando se configura la potencia en Low, se activa el modo Low Power. Esto significa que el robot
funcionará lento (debajo de 250 mm/s) y la rigidez del servo está configurada en leve, de manera que
se pueda eliminar la potencia del servo en caso de que el robot choque con algún objeto.
High - Cuando se configura la potencia en High, se desactiva el modo Low Power. Esto significa que el robot
puede funcionar a velocidad máxima con toda la rigidez del servo.
Las siguientes operaciones conmutarán al modo Low Power. En este caso, las configuraciones de velocidad
y aceleración estarán limitadas al valor predeterminado. El valor predeterminado está descrito en la tabla de
especificaciones de cada manipulador. Consulte el Manual del usuario EPSON RC+: 2. Seguridad.
Condiciones que provocan el modo Power Low:
Inicio del controlador
Motor On
SFree, SLock, Brake
Reset, Reset Error
El botón Stop o QuitAll detiene las
tareas
Configuración limitada al valor predeterminado
Speed
Accel
SpeedS
AccelS

554 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Notas
Modo Low Power (baja potencia) y su efecto en la velocidad máxima:
En el modo Low Power, está limitada la potencia del motor y la configuración de la velocidad del movimiento
efectiva es menor que el valor predeterminado. Si, mientras se está en el modo Low Power, se especifica una
velocidad mayor desde la ventana Command (directamente) o en un programa, la velocidad cambia al valor
predeterminado. Si se necesita un movimiento a una velocidad mayor, configure Power High.
Modo High Power (alta potencia) y su efecto en la velocidad máxima:
En el modo High Power, se puede configurar una velocidad mayor que el valor predeterminado.
Indicador Forced
El modo Power se puede cambiar durante la operación del robot (incluido el estado en pausa).
Si se cambia el modo al modo High Power mientras el robot se mueve en el modo Low Power, el
movimiento siguiente no se cambiará a la velocidad alta con la velocidad especificada.
Si se cambia el modo a Low Power mientras se está moviendo el robot en el modo High Power, se puede
producir un error de exceso de velocidad o un error de torque de potencia baja.
Detenga el robot y especifique el indicador Forced para cambiar al modo Low Power.
Consulte también
Accel, AccelS, Speed, SpeedS
Ejemplo de instrucción Power
Los siguientes ejemplos se realizaron en la ventana Command:
> Speed 50 'Especifica la velocidad alta en el modo Low Power
> Accel 100, 100 'Especifica la aceleración alta
> Jump P1 'Se mueve a velocidad baja y con aceleración baja
> Speed 'Muestra los valores de la velocidad actual
Modo Low Power
50
50 50
> Accel 'Muestra los valores de la aceleración actual
Modo Low Power
100 100
100 100
100 100
> Power High 'Configura el modo High Power
> Jump P2 'Mueve el robot a velocidad alta

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 555
Función Power
Arroja el estado de la potencia.
Sintaxis
Power [(robotNumber)]
Parámetros
robotNumber Especifica el número de robot al cual se va a comprobar el estado mediante un valor
entero.
Si se omite, se usa el robot seleccionado actualmente.
Valores devueltos
0 = Potencia baja, 1 = Alta potencia.
Consulte también
Instrucción Power
Ejemplo de función Power
If Power = 0 Then
Print "Low Power Mode"
EndIf

556 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función PPls
Arroja la posición del pulso de un valor de articulación especificado desde un punto especificado.
Sintaxis
PPls (point, jointNumber)
Parámetros
point Expresión de punto.
jointNumber Expresión o valor numérico que especifica el número de la articulación (entero entre
1 y 9)
El eje S adicional está en 8 y el eje T está en 9.
Valores devueltos
Arroja la posición de la articulación calculada (valor largo, en pulsos).
Consulte también
Agl, CX, CY, CZ, CU, CV, CW, Pagl
Ejemplo de función PPls
Long pulses1
pulses1 = PPls(P10, 1)

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 557
Instrucción Print
Genera los datos para la ventana de visualización actual, incluida la ventana Run, la ventana Operator, la
ventana Command y la ventana Macro.
Sintaxis
Print expression [ ,expression... ] [ , ]
Print
Parámetros
expression Opcional. Un número o una expresión de cadena.
, (coma) Opcional. Si se proporciona una coma al final de la instrucción, entonces no se
agrega un CRLF.
Valores devueltos
Datos de la variable o la cadena de caracteres especificada.
Descripción
Print muestra los datos de la variable o la cadena de caracteres en el dispositivo de presentación.
Un CRLF (retorno de carro y avance de línea) de final de línea se añade automáticamente a cada salida a
menos que se utilice una coma al final de la instrucción.
Nota
Asegúrese de que se utilice Print con Wait o un movimiento dentro de un bucle
El controlador puede quedar inmovilizado si solo se usa Print en bucle (bucles que no están en Wait ni en
movimiento).
Asegúrese de que se utilice Print con el comando Wait o con un comando de movimiento dentro de un bucle.
Mal ejemplo
Do
Print "1234"
Loop
Buen ejemplo
Do
Print "1234"
Wait 0.1
Loop
Consulte también
Print #
Ejemplo de instrucción Print
En el siguiente ejemplo se extrae el valor de la coordenada del eje U del punto P100 y se pone el valor de
coordenada en la variable uvar. Luego se imprime el valor en la ventana de visualización actual.
Function test
Real uvar
uvar = CU(P100)
Print "The U Axis Coordinate of " + Chr$(34) + "P100" + Chr$(34) +
" is ", uvar
Fend

558 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción Print#
Genera datos en el archivo, en el puerto de comunicación, en la base de datos o en el dispositivo especificado.
Sintaxis
Print #portNumber, expression [ ,expression... ] [ , ]
Parámetros
portNumber Número de ID que representa un archivo, un puerto de comunicación, una base de
datos o un dispositivo.
El número de archivo se puede especificar en las instrucciones ROpen, WOpen y
AOpen.
El número del puerto de comunicación se puede especificar en las instrucciones
OpenCom (RS232) y OpenNet (TCP/IP).
El número de la base de datos se puede especificar en la instrucción OpenDB.
Los números enteros de ID del dispositivo son los siguientes.
21 RC+
24 TP (solo TP1)
20 TP3
expression Una expresión numérica o de cadena.
, (coma) Opcional. Si se proporciona una coma al final de la instrucción, entonces no se agrega
un CRLF.
Descripción
Print # genera datos de la variable, valores numéricos o cadenas de caracteres en el puerto de comunicación
o en el dispositivo especificado por portNumber.
Notas
Longitud máxima de datos
Este comando puede manejar hasta 256 bytes.
Sin embargo, si el objetivo es una base de datos, puede manejar hasta 4096 bytes.
Si el objetivo es el puerto de comunicación (TCP/IP), puede manejar hasta 1024 bytes.
Intercambio de datos de las variables con otro controlador
- Cuando hay más de una variable de cadena o si se especifica tanto la variable numérica como la variable
de cadena, se debe agregar expresamente un carácter de coma (“,”) a los datos de la cadena.
Los siguientes programas son ejemplos para intercambiar la variable de cadena y la variable numérica
entre los controladores con un puerto de comunicación.
Punto de envío (cualquier patrón es correcto).
Print #PortNum, "$Status,", InData, OutData
Print #PortNum, "$Status", ",",InData, OutData
Punto de destino
Input #PortNum, Response$, InData, OutData
Búfer de escritura en archivo
La escritura en archivo se almacena en el búfer. Los datos almacenados en el búfer se pueden escribir con la
instrucción Flush. También, al cerrar un archivo con la instrucción Close, los datos almacenados en el búfer
se pueden escribir.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 559
Asegúrese de que se utilice Print # con el comando Wait o con un comando de movimiento
dentro de un bucle
No use solo Print # en un bucle
El controlador puede quedar inmovilizado si solo se usa Print # en bucle (bucles que no están en Wait ni en
movimiento).
Según el estado del controlador, es posible que la información no aparezca de manera correcta, incluso si se
usa el comando Wait o un comando de movimiento. Si la salida es TP1, ajuste el tiempo de espera en 1
(segundo) o más. En los demás, ajuste el tiempo de espera en 0,1 (segundo) o más.
Mal ejemplo
Do
Print #24,"1234"
Loop
Buen ejemplo
Do
Print #24,"1234"
Wait 1
Loop
Consulte también
Input#, Print
Ejemplo de instrucción Print#
A continuación se muestran algunos ejemplos simples de Print#:
Function printex
String temp$
Print #1, "5" 'Envía el carácter "5" al puerto en serie 1 temp$ = "hello"
Print #1, temp$
Print #2, temp$
Print #1 " Next message for " + Chr$(34) + "port 1" + Chr$(34)
Print #2 " Next message for " + Chr$(34) + "port 2" + Chr$(34)
Fend

560 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción PTCLR
Borra e inicializa el torque máximo para una o más articulaciones.
Sintaxis
PTCLR [j1 [, j2 [, j3 [, j4 [, j5 [, j6 [, j7 [, j8 [, j9]]]]]]]]]
Parámetros
j1 – j9 Expresión entera que representa el número de articulación. Si no se suministra ningún
parámetro, entonces se borran los valores del torque máximo de todas las articulaciones.
El eje S adicional es 8 y el eje T es 9. Si se proporciona un número de articulación no
existente, ocurre un error.
Descripción
PTCLR borra los valores del torque máximo de todas las articulaciones especificadas.
Debe ejecutar PTCLR antes de ejecutar PTRQ.
Consulte también
ATRQ, PTRQ
Ejemplo de instrucción PTCLR
<Ejemplo 1>
El siguiente es un ejemplo que sirve para mostrar los valores de torque de las articulaciones especificadas
después de borrar los valores de torque máximo de todas las articulaciones.
> ptclr
> go p1
> ptrq 1
0.227
> ptrq
0.227 0.118
0.249 0.083
0.000 0.000
>
<Ejemplo 2>
El siguiente es un ejemplo que sirve para mostrar los valores de torque de las articulaciones especificadas
después de borrar los valores de torque máximo de J1, J4 y J5 para los robots de varios ejes verticales.
> ptclr 4, 1, 5
> go p1
> ptrq 1
0.227
> ptrq 4
0.083

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 561
Instrucción PTPBoost
Especifica o muestra el parámetro de impulso algorítmico de aceleración, desaceleración y velocidad para
el movimiento PTP (punto a punto) de poca distancia.
Sintaxis
(1) PTPBoost boost [, departBoost] [, approBoost]
(2) PTPBoost
Parámetros
boost La expresión entera está entre 0 y 100.
departBoost Opcional. Valor de impulso de alejamiento de salto. La expresión entera es de 0 a 100.
approBoost Opcional. Valor de impulso de acercamiento de salto. La expresión entera es de 0 a 100.
Valores devueltos
Cuando se omiten los parámetros, se muestra la configuración PTPBoost actual.
Descripción
PTPBoost define la aceleración, la desaceleración y la velocidad para un movimiento PTP de poca distancia.
Solo es efectivo cuando la distancia de movimiento es pequeña. La función PTPBoostOK se puede utilizar
para confirmar si la distancia de movimiento específica al destino es lo suficientemente corta para verse
afectada por PTPBoost o no.
PTPBoost no necesita ninguna modificación en circunstancias normales. Utilice PTPBoost solo cuando desee
reducir el tiempo del ciclo, incluso si la vibración aumenta, o por el contrario, cuando sea necesario reducir
la vibración incluso si el tiempo del ciclo se extiende.
Cuando el valor PTPBoost es alto, el tiempo del ciclo se reduce, pero aumenta la vibración de posición.
Cuando PTPBoost es bajo, se reduce la vibración de posición, pero se extiende el tiempo del ciclo. Si se
especifica un PTPBoost incorrecto provoca errores o puede dañar el manipulador. Esto puede degradar el
robot, o bien, en algunos casos reducir la vida útil del manipulador.
El valor PTPBoost se inicializa en el valor predeterminado cuando ocurre alguna de las siguientes
situaciones:
Inicio del controlador
Motor On
SFree, SLock, Brake
Reset, Reset Error
El botón Stop o QuitAll detiene las
tareas
Consulte también
Función PTPBoost, PTPBoostOK
Ejemplo de instrucción PTPBoost
PTPBoost 50, 30, 30

562 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función PTPBoost
Arroja el valor de PTPBoost especificado.
Sintaxis
PTPBoost(paramNumber)
Parámetros
paramNumber Expresión entera que puede tener los siguientes valores:
1: Valor de impulso
2: Valor de impulso de alejamiento de salto
3: Valor de impulso de acercamiento de salto
Valores devueltos
El valor entero es de 0 a 100.
Consulte también
Instrucción PTPBoost, PTPBoostOK
Ejemplo de función PTPBoost
Print PTPBoost(1)

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 563
Función PTPBoostOK
Arroja si el movimiento PTP (Punto a punto) desde una posición actual a la posición objetivo es o no una
distancia de desplazamiento corta.
Sintaxis
PTPBoostOK(targetPos)
Parámetros
targetPos Expresión de punto para la posición objetivo.
Valores devueltos
True si es posible mover a la posición objetivo desde la posición actual con el movimiento PTP, de lo
contrario, es False.
Descripción
Utilice PTPBoostOK cuando la distancia desde la posición actual a la posición objetivo sea lo
suficientemente corta para que PTPBoost sea efectivo.
Consulte también
PTPBoost
Ejemplo de función PTPBoostOK
If PTPBoostOK(P1) Then
PTPBoost 50
EndIf
Go P1

564 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función PTPTime
Arroja el tiempo estimado para un comando de movimiento de punto a punto sin ejecutarlo.
Sintaxis
(1) PTPTime(destination, destArm, destTool)
(2) PTPTime(start, startArm, startTool, destination, destArm, destTool)
Parámetros
start Expresión de punto para la posición inicial.
destination Expresión de punto para la posición de destino.
destArm Expresión entera para el número de brazo de destino.
destTool Expresión entera para el número de herramienta de destino.
startArm Expresión entera para el número de brazo del punto de inicio.
startTool Expresión entera para el número de herramienta del punto de inicio.
Valores devueltos
Valor real en segundos.
Descripción
Utilice PTPTime para calcular el tiempo que tardaría un comando (Go) de punto a punto. Utilice la sintaxis
1 para calcular el tiempo desde la posición actual al destino. Utilice la sintaxis 2 para calcular el tiempo desde
un punto de inicio a un punto de destino.
No se realiza la operación de movimiento actual cuando se ejecuta esta función. No cambia la configuración
de la posición actual, el brazo y la herramienta.
Si la posición es una a la que no se puede llegar o si la configuración del brazo o de la herramienta no es
correcta, se arroja 0.
Si un robot incluye un eje adicional y este corresponde al eje servo, la función considerará el tiempo de
movimiento del eje adicional.
Si el eje adicional es un eje PG, se arrojará el tiempo de movimiento del robot.
Consulte también
ATRQ, Go, PTRQ
Ejemplo de función PTPTime
Real secs
secs = PTPTime(P1, 0, 0, P2, 0, 1)
Print "Time to go from P1 to P2 is:", secs
Go P1
secs = PTPTime(P2, 0, 1)
Print "Time to go from P1 to P2 is:", secs

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 565
Instrucción PTran
Realiza el movimiento relativo de una articulación en pulsos.
Sintaxis
PTran joint, pulses
Parámetros
joint Expresión entera que representa la articulación que se moverá.
El eje S adicional es 8 y el eje T es 9.
pulses Expresión entera que representa el número de pulsos que se moverá.
Descripción
Utilice PTran para mover una articulación un número específico de pulsos desde la posición actual.
Consulte también
Go, JTran, Jump, Move
Ejemplo de instrucción PTran
PTran 1, 2000

566 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción PTRQ
Muestra el torque máximo de la articulación especificada.
Sintaxis
PTRQ [jointNumber]
Parámetros
jointNumber Opcional. Expresión entera que representa el número de articulación.
El eje S adicional es 8 y el eje T es 9.
Valores devueltos
Muestra los valores de torque máximo actual de todas las articulaciones.
Descripción
Utilice PTRQ para mostrar el valor de torque máximo para una o todas las articulación desde que se ejecutó
la instrucción PTCLR.
El torque máximo es un número real entre 0 y 1.
Consulte también
ATRQ, PTCLR, Función PTRQ
Ejemplo de instrucción PTRQ
> ptclr
> go p1
> ptrq 1
0.227
> ptrq
0.227 0.118
0.249 0.083
0.000 0.000
>

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 567
Función PTRQ
Arroja el torque máximo de la articulación especificada.
Sintaxis
PTRQ(jointNumber)
Parámetros
jointNumber Expresión entera que representa el número de articulación
El eje S adicional es 8 y el eje T es 9.
Valores devueltos
Valor real de 0 a 1.
Consulte también
ATRQ, PTCLR, instrucción PTRQ
Ejemplo de función PTRQ
Este ejemplo utiliza la función PTRQ en un programa:
Function DisplayPeakTorque
Integer i
Print "Peak torques:"
For i = 1 To 4
Print "Joint ", i, " = ", PTRQ(i)
Next i
Fend

568 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción Pulse
Mueve el brazo del robot con el movimiento de punto a punto especificado por los valores de pulsos para
cada articulación.
Sintaxis
(1) Pulse J1, J2, J3, J4 , [J5, J6] , [J7] , [J8, J9]
(2) Pulse
Parámetros
J1 ~ J4 El valor de pulso para cada una de las primeras cuatro articulaciones. El valor de pulso
debe ser definido por la instrucción Range y debe ser una expresión entera o larga.
J5, J6 Opcional. Para los robots de 6 ejes (incluida la serie N) y los robots de 6 ejes de tipo
articulado.
J7 Opcional. Para los robots de 7 ejes de tipo articulado.
J8, J9 Opcional. Para los ejes adicionales.
Valores devueltos
Cuando se omiten los parámetros, aparecerá el valor de pulso de la posición actual del robot.
Descripción
Pulse utiliza el valor de pulso de la articulación de la posición del pulso cero para representar la posición del
brazo del robot, en lugar del sistema de coordenadas ortogonal. La instrucción Pulse mueve el brazo del robot
mediante el movimiento punto a punto.
La instrucción Range define los límites superior e inferior utilizados en la instrucción Pulse.
Nota
Asegúrese de que no haya obstáculos en la ruta antes de usar Pulse
A diferencia de Jump, Pulse mueve todos los ejes simultáneamente, lo que incluye levantar y bajar la
articulación Z en el desplazamiento a la posición objetivo. Por lo tanto, cuando utilice Pulse, tenga mucho
cuidado, de manera que la mano se pueda mover a través de una ruta sin obstáculos.
Posible error
El valor de pulso excede el límite:
Si el valor de pulso especificado en la instrucción Pulse excede el límite definido por la instrucción Range,
se producirá un error.
Consulte también
Go, Accel, Range, Speed, Pls, función Pulse
Ejemplo de instrucción Pulse
A continuación se muestran algunos ejemplos de la ventana Command:
En este ejemplo se mueve el brazo del robot a la posición que fue definida por el pulso de cada articulación.
> pulse 16000, 10000, -100, 10
En este ejemplo se muestran los números de pulso de los ejes 1 a 4 de la posición actual del brazo del robot.
> pulse
PULSE: 1: 27306 pls 2: 11378 pls 3: -3072 pls 4: 1297 pls
>

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 569
Función Pulse
Arroja el punto de robot cuyas coordenadas están especificadas en los pulsos para cada articulación.
Sintaxis
Pulse ( J1, J2, J3, J4 [, J5 , J6] [, J7] [, J8 , J9] )
Parámetros
J1 ~ J4 El valor de pulso para las articulaciones 1 a 4. El valor de pulso debe estar dentro de
rango definido por la instrucción Range y debe ser una expresión entera o larga.
J5, J6 Opcional. Para los robots de 6 ejes (incluida la serie N) y los robots de 6 ejes de tipo
articulado.
J7 Opcional. Para los robots de 7 ejes de tipo articulado.
J8, J9 Opcional. Para los ejes adicionales.
Valores devueltos
Un punto de robot que utiliza los valores de pulso especificados.
Consulte también
Go, JA, Jump, Move, instrucción Pulse, XY
Ejemplo de función Pulse
Jump Pulse(1000, 2000, 0, 0)

570 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción QP
Activa o desactiva el modo Quick Pause (Pausa rápida) y muestra el estado del modo actual.
Sintaxis
(1) QP { On | Off }
(2) QP
Parámetros
On | Off Se puede activar o desactivar el modo Quick Pause.
Valores devueltos
Muestra el estado actual del modo QP cuando se omite el parámetro.
Descripción
Si durante la ejecución del comando de movimiento, se presiona el interruptor Pause o se ingresa la señal de
pausa al controlador, el modo Quick Pause determina si el robot se detendrá inmediatamente o hará una pausa
después de ejecutar el comando de movimiento.
Desacelerar y detenerse inmediatamente se denomina “Quick Pause” (Pausa rápida).
Con el parámetro especificado activado, QP activa el modo Quick Pause.
Con el parámetro especificado desactivado, QP desactiva el modo Quick Pause.
QP muestra la configuración actual ya sea que el brazo del robot deba responder a la entrada de la pausa para
detenerse inmediatamente o después de que haya finalizado la operación actual del brazo. QP simplemente
es una instrucción de estado que se usa para mostrar si el modo Quick Pause está activado o desactivado.
Notas
El modo Quick Pause está predeterminado para activarse cuando se enciende el equipo:
El modo Quick Pause definido por la instrucción QP permanece activo después de la instrucción Reset. Sin
embargo, cuando se apaga la PC o la unidad de disco y luego se vuelve a encender, de manera predeterminada
se activa el modo Quick Pause.
QP y la entrada de protección:
Incluso si el modo QP se encuentra desactivado, si se abre la entrada de protección, el robot se pausará
inmediatamente.
Consulte también
Pausa
Ejemplo de instrucción QP
En el ejemplo de esta ventana de Command se muestra la configuración actual de si el brazo del robot se
detendrá inmediatamente con la entrada de Pause (Pausa). (es decir, el modo QP está activado o desactivado)
> qp
QP ON
> qp on 'Define QP en el modo Quick Pause
>

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 571
Instrucción QPDecelR
Define la velocidad de desaceleración de la pausa rápida para el cambio de la orientación de la herramienta
durante el movimiento CP.
Sintaxis
(1) QPDecelR QPDecelR
(2) QPDecelR
Parámetros
QPDecelR El valor real que representa la velocidad de desaceleración de la pausa rápida
durante el movimiento de CP (grado/s
2).
Resultado
Si se omite el parámetro, aparece el valor actual definido de QPDecelR.
Descripción
La instrucción QPDecelR está activada cuando se utiliza el parámetro ROT en las instrucciones Move, Arc,
Arc3, BMove, TMove y Jump3CP.
Mientras se ejecuta la pausa rápida en estas instrucciones, puede producirse un error de aceleración de la
articulación. Esto se debe a que la velocidad de desaceleración de la pausa rápida, que se configuró
automáticamente en una pausa rápida normal, está sobre la velocidad de desaceleración permitida de la
articulación. Específicamente, es probable que se produzca el error cuando el valor AccelR en el movimiento
CP es demasiado alto o el desplazamiento del robot se acerca a una singularidad. En estos casos, se utiliza
QPDecelR y se define una menor velocidad de desaceleración de pausa rápida. Pero si la configuración es
demasiado baja, aumenta la distancia para la pausa rápida. Por lo tanto, configure el valor posible.
Normalmente no es necesario configurar QPDecelR.
No se pueden utilizar valores inferiores a los de la velocidad de desaceleración del cambio de orientación en
el movimiento CP definido con QPDecelR y AccelR. Si lo hace, se genera un error de parámetro fuera de
rango.
Además, después de definir QPDecelR, si se define un valor superior a la velocidad de desaceleración de QP
definida con AccelR, QPDecelR definirá automáticamente la velocidad de desaceleración QP a la misma
velocidad de desaceleración definida con AccelR.
El valor de la instrucción QPDecelR se inicializa con la velocidad de desaceleración máxima predeterminada
cuando ocurre alguna de las siguientes condiciones:
Inicio del controlador
Motor On
SFree, SLock, Brake
Reset, Reset Error
El botón Stop o QuitAll detiene las
tareas
Consulte también
Función QPDecelR, QPDecelS, AccelR
Ejemplo de instrucción QPDecelR
El siguiente programa define QPDecelR de la instrucción Move.
Function QPDecelTest
AccelR 3000
QPDecelR 4000
SpeedR 100
Move P1 ROT
.
.
.
Fend

572 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función QPDecelR
Arroja la velocidad de desaceleración definida de la pausa rápida para el cambio de la orientación de la
herramienta durante el movimiento CP.
Sintaxis
QPDecelR
Valores devueltos
El valor real que contiene la velocidad de desaceleración de pausa rápida para el cambio de orientación de la
herramienta en el movimiento CP (grado/s
2
).
Consulte también
QPDecelR, función QPDecelS
Ejemplo de función QPDecelR
Real savQPDecelR
savQPDecelR = QPDecelR

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 573
Instrucción QPDecelS
Define la velocidad de desaceleración de la pausa rápida en el movimiento CP.
Sintaxis
(1) QPDecelS QPDecelS [, departDecel, approDecel ]
(2) QPDecelS
Parámetros
QPDecelS Valor real que especifica la velocidad de desaceleración de la pausa rápida en el
movimiento CP. (mm/s
2)
departDecel Valor real que especifica la velocidad de desaceleración de la pausa rápida en el
movimiento de alejamiento Jump3 (mm/s
2)
approDecel Valor real que especifica la velocidad de desaceleración de la pausa rápida en el
movimiento de acercamiento Jump3 (mm/s
2)
Valores devueltos
Si se omite el parámetro, aparece el valor actual definido de QPDecelS.
Descripción
Mientras se ejecuta la pausa rápida en el movimiento CP, puede producirse un error de aceleración de la
articulación. Esto se debe a que la velocidad de desaceleración de la pausa rápida, que se configuró
automáticamente en una pausa rápida normal, está sobre la velocidad de desaceleración permitida de la
articulación. Específicamente, es probable que se produzca el error cuando el valor AccelS en el movimiento
CP es demasiado alto o el desplazamiento del robot se acerca a una singularidad. En estos casos, se utiliza
QPDecelS y se define una menor velocidad de desaceleración de pausa rápida. Pero si la configuración es
demasiado baja, aumenta la distancia para la pausa rápida. Por lo tanto, configure el valor posible.
Normalmente no es necesario configurar QPDecelS.
No se pueden utilizar valores inferiores a los de la velocidad de desaceleración del movimiento CP definido
con AccelR. Si lo hace, se genera un error de parámetro fuera de rango.
Además, después de definir QPDecelS, si se define un valor superior a la velocidad de desaceleración de QP
definida con AccelS, QPDecelS definirá automáticamente la velocidad de desaceleración QP a la misma
velocidad de desaceleración definida con AccelS.
El valor de la instrucción QPDecelS se inicializa con la velocidad de desaceleración máxima predeterminada
cuando ocurre alguna de las siguientes condiciones:
Inicio del controlador
Motor On
SFree, SLock, Brake
Reset, Reset Error
El botón Stop o QuitAll detiene las
tareas
Consulte también
Función QPDecelS, QPDecelR, AccelS
Ejemplo de instrucción QPDecelS
El siguiente programa define QPDecelS de la instrucción Move.
Function QPDecelTest
AccelS 3000
QPDecelS 4000
SpeedS 100
Move P1
.
.
.
Fend

574 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función QPDecelS
Arroja la velocidad de desaceleración de la pausa rápida definida en el movimiento CP.
Sintaxis
QPDecelS ( paramNumber )
Parámetros
paramNumber Expresión entera que especifica uno de los siguientes valores.
1: Velocidad de desaceleración de pausa rápida durante el movimiento CP
2: Velocidad de desaceleración de pausa rápida en el movimiento de alejamiento durante
Jump3 y Jump3CP
3: Velocidad de desaceleración de pausa rápida en el movimiento de acercamiento
durante Jump3 y Jump3CP
Valores devueltos
Valor real que representa la velocidad de desaceleración de pausa rápida (mm/s
2
).
Consulte también
QPDecelS, función QPDecelR
Ejemplo de función QPDecelS
Real savQPDecelS
savQPDecelS = QPDecelS(1)

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 575
Instrucción Quit
Finaliza la ejecución de una tarea específica o todas las tareas.
Sintaxis
Quit { taskIdentifier | All }
Parámetros
taskIdentifier El nombre de la tarea o la expresión entera que representa el número de tarea.
Un nombre de la tarea corresponde a un nombre de la función usada en una
instrucción Xqt o una función iniciada desde la ventana Run o la ventana Operator.
El rango del número de la tarea es:
Tareas normales: 1 a 32
Tarea en segundo plano: 65 a 80
Tareas de captura: 257 a 267
All Especifica este parámetro si se deben terminar todas las tareas excepto la tarea en
segundo plano.
Descripción
Quit detiene las tareas que se están ejecutando actualmente, o que se han suspendido temporalmente con
Halt.
Quit también detiene la tarea cuando la tarea específica está en la tarea NoPause, la tarea NoEmgAbort (tarea
especial que usa NoPause o NoEmgAbort en Xqt) o las tareas en segundo plano.
Quit All detiene todas las tareas, incluidas las tareas sobre otras que están en segundo plano.
Quit All define el parámetro de control del robot de la manera siguiente:
Parámetro de control del robot
Speed, SpeedR, SpeedS actuales del robot (inicializados en valores predeterminados)
QPDecelR , QPDecelS actuales del robot (inicializados en valores predeterminados)
Parámetro LimZ actual del robot (inicializado en 0)
Parámetro CP actual del robot (inicializado en Off)
Parámetro SoftCP actual del robot (inicializado en Off)
Fine actual del robot (inicializado en valores predeterminados)
Power Low actual del robot (modo de baja potencia configurado en On)
PTPBoost actual del robot (inicializado en valores predeterminados)
TCLim, TCSpeed actuales del robot (inicializados en valores predeterminados)
PgLSpeed actual del robot (inicializado en valores predeterminados)
Consulte también
Exit, Halt, Resume, Xqt

576 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Ejemplo de instrucción Quit
En este ejemplo se muestran dos tareas que son finalizadas después de 10 segundos.
Function main
Xqt winc1 'Inicia la función winc1
Xqt winc2 'Inicia la función winc2
Wait 10
Quit winc1 'Finaliza la tarea winc1
Quit winc2 'Finaliza la tarea winc2
Fend
Function winc1
Do
On 1; Wait 0.2
Off 1; Wait 0.2
Loop
Fend
Function winc2
Do
On 2; Wait 0.5
Off 2; Wait 0.5
Loop
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 577
Función RadToDeg
Convierte los radianes a grados.
Sintaxis
RadToDeg(radians)
Parámetros
radians Expresión real que representa los radianes que se convertirán a grados.
Valores devueltos
Un valor doble que contiene la cantidad de grados.
Consulte también
ATan, ATan2, función DegToRad
Ejemplo de función RadToDeg
s = Cos(RadToDeg(x))

578 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción Randomize
Inicializa el generador de números aleatorios.
Sintaxis
(1) Randomize seedValue
(2) Randomize
Parámetros
seedValue Especifica un valor real (0 o más) para que sea la base para recuperar un número aleatorio.
Consulte también
Función Rnd
Ejemplo de instrucción Randomize
Function main
Real r
Randomize
Integer randNum
randNum = Int(Rnd(10)) + 1
Print "Random number is:", randNum
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 579
Instrucción Range
Especifica y muestra los límites de movimiento para cada una de las articulaciones del servo.
Sintaxis
(1) Range j1Min, j1Max, j2Min, j2Max, j3Min, j3Max, j4Min, j4Max
[, j5Min, j5Max, j6Min, j6Max]
[, j7Min, j7Max]
[, j8Min, j8Max, j9Min, j9Max]
(2) Range
Parámetros
j1Min El límite inferior para la articulación 1 especificada en pulsos.
j1Max El límite superior para la articulación 1 especificada en pulsos.
j2Min El límite inferior para la articulación 2 especificada en pulsos.
j2Max El límite superior para la articulación 2 especificada en pulsos.
j3Min El límite inferior para la articulación 3 especificada en pulsos.
j3Max El límite superior para la articulación 3 especificada en pulsos.
j4Min El límite inferior para la articulación 4 especificada en pulsos.
j4Max El límite superior para la articulación 4 especificada en pulsos.
j5Min Opcional para los robots de 6 ejes (incluida la serie N) y los robots de 6 ejes de tipo
articulado.
El límite inferior para la articulación 5 especificado en pulsos.
j5Max Opcional para los robots de 6 ejes (incluida la serie N) y los robots de 6 ejes de tipo
articulado.
El límite superior para la articulación 5 especificado en pulsos.
j6Min Opcional para los robots de 6 ejes (incluida la serie N) y los robots de 6 ejes de tipo
articulado.
El límite inferior para la articulación 6 especificado en pulsos.
j6Max Opcional para los robots de 6 ejes (incluida la serie N) y los robots de 6 ejes de tipo
articulado.
El límite superior para la articulación 6 especificado en pulsos.
j7Min Opcional para los robots de 7 ejes de tipo articulado. El límite inferior para la articulación
7 especificado en pulsos.
j7Max Opcional para los robots de 7 ejes de tipo articulado. El límite superior para la
articulación 7 especificado en pulsos.
j8Min Opcional para el eje S adicional. El límite inferior para la articulación 8 especificado en
pulsos.
j8Max Opcional para el eje S adicional. El límite superior para la articulación 8 especificado en
pulsos.
j9Min Opcional para el eje T adicional. El límite inferior para la articulación 9 especificado en
pulsos.
j9Max Opcional para el eje T adicional. El límite superior para la articulación 9 especificado en
pulsos.
Valores devueltos
Muestra los valores de Range actuales cuando se escribe el rango sin parámetros
Descripción
Range especifica los límites inferior y superior de cada articulación del motor en cantidad de pulsos. Estos
límites de articulación están especificados en unidades de pulso. Esto permite que el usuario defina un rango
de movimiento máximo y mínimo de la articulación para cada una de las articulaciones individuales. Los
límites de las coordenadas XY también se pueden definir con la instrucción XYLim.

580 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Los valores iniciales de Range son distintos para cada robot. Los valores especificados por la instrucción
siguen vigentes incluso después de que se apaga el equipo.
Cuando se omiten los parámetros, aparecen los parámetros actuales de Range.
Los datos de los parámetros del robot se almacenan en la memoria Compact Flash en el controlador. Por
tanto, la memoria flash de comandos se escribe cuando se ejecuta este comando. La escritura frecuente en
la memoria Compact Flash afecta su vida útil. Recomendamos que el uso de este comando sea mínimo.
Posibles errores
Intento de salir de un rango aceptable
Si el brazo del robot intenta moverse a través de uno de los límites de la articulación, se producirá un error.
El eje no se mueve
Si el pulso del límite inferior es igual o mayor que el pulso del límite superior, la articulación no se mueve.
Nota
El rango de límites inferior/superior de la articulación n.º 6 de pulso varía según el modelo de
manipulador
C4 : −419430399 al 419430399
C8, C12, N2, N6 : −26847955 al 26847955
Consulte también
JRange, SysConfig, XYLim
Ejemplo de instrucción Range
En este ejemplo simple de la ventana Command se muestran las configuraciones de rango actuales y luego
se cambian.
> range
-18205, 182045, -82489, 82489, -36864, 0, -46695, 46695
>
> range 0, 32000, 0, 32224, -10000, 0, -40000, 40000
>

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 581
Instrucción Read
Lee los caracteres desde un archivo o un puerto de comunicación.
Sintaxis
Read #portNumber, stringVar$, count
Parámetros
portNumber Número de ID que representa un archivo o puerto de comunicación desde donde
realizar la lectura.
El número de archivo se puede especificar en las instrucciones ROpen, WOpen y
AOpen.
El número de puerto de comunicación se puede especificar en las instrucciones
OpenCom (RS-232C) u OpenNet (TCP/IP).
stringVar$ Nombre de una variable de cadena que recibirá la cadena de caracteres.
count Número máximo de bytes para lectura.
Consulte también
ChkCom, ChkNet, OpenCom, OpenNet, Write
Ejemplo de instrucción Read
Integer numOfChars
String data$
numOfChars = ChkCom(1)
If numOfChars > 0 Then
Read #1, data$, numOfChars
EndIf

582 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción ReadBin
Lee datos binarios desde un archivo o un puerto de comunicación.
Sintaxis
ReadBin #portNumber, var
ReadBin #portNumber, array(), count
Parámetros
portNumber Número de ID que representa un archivo o puerto de comunicación desde donde
realizar la lectura.
El número del archivo se puede especificar en la instrucción BOpen.
El número de puerto de comunicación se puede especificar en las instrucciones
OpenCom (RS-232C) u OpenNet (TCP/IP).
var Nombre de un byte, entero o variable larga que recibirá los datos.
array() Nombre de un byte, entero o variable de matriz larga que recibirá los datos.
Especifica la variable de matriz de una dimensión.
count Especifica el número de bytes para lectura.
El recuento especificado tiene que ser menor o igual que el número de elementos de
la matriz y, también, menor que 256 bytes.
Si el puerto de comunicación (TCP/IP) es el asunto, el recuento tiene que ser menor
o igual que el número de matriz, y también menor que 1024 bytes.
Consulte también
Write, WriteBin
Ejemplo de instrucción ReadBin
Integer data
Integer dataArray(10)
numOfChars = ChkCom(1)
If numOfChars > 0 Then
ReadBin #1, data
EndIf
NumOfChars = ChkCom(1)
If numOfChars > 10 Then
ReadBin #1, dataArray(), 10
EndIf

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 583
Instrucción Real
Declara variables del tipo Real (número real de 4 bytes).
Sintaxis
Real varName [(subscripts)] [, varName [(subscripts)]...]
Parámetros
varName Nombre de variable que el usuario desea declarar como tipo real.
subscripts Opcional. Las dimensiones de una matriz son variables; es posible declarar hasta 3
dimensiones. La sintaxis del subíndice es la siguiente
(ubound1, [ubound2], [ubound3])
ubound1, ubound2, ubound3 especifican, cada una, el límite superior máximo para la
dimensión asociada.
Los elementos en cada dimensión de una matriz se numeran desde 0 y el número
disponible de elementos de matriz es el valor de límite superior + 1.
Cuando especifique el valor del límite superior, asegúrese de que el número total de
elementos esté dentro del rango que se muestra a continuación:
Variable local 2.000
Variables globales conservadas 4.000
Variable global y variable de módulo 100.000
Descripción
Real se usa para declarar variables como de tipo real. Las variables locales se deben declarar al inicio de una
función. Las variables globales y de módulo se deben declarar fuera de las funciones.
El número de dígitos válidos es seis para el tipo real.
Consulte también
Boolean, Byte, Double, Global, Int32, Int64, Integer, Long, Short, String, UByte, UInt32, UInt64,
UShort
Ejemplo de instrucción Real
En el siguiente ejemplo se muestra un programa simple que declara algunas variables que utilizan Real.
Function realtest
Real var1
Real A(10) 'Matriz de una dimensión de real
Real B(10, 10) 'Matriz de dos dimensiones de real
Real C(5, 5, 5) 'Matriz de tres dimensiones de real
Real arrayVar(10)
Integer i
Print "Please enter a Real Number:"
Input var1
Print "The Real variable var1 = ", var1
For i = 1 To 5
Print "Please enter a Real Number:"
Input arrayVar(i)
Print "Value Entered was ", arrayVar(i)
Next i
Fend

584 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función RealAccel
Arroja el valor Accel (Aceleración) ajustado por OLAccel.
Sintaxis
RealAccel(paramNumber)
Parámetros
paramNumber Expresión entera que puede tener los siguientes valores:
1: valor de especificación de aceleración
2: valor de especificación de desaceleración
3: valor de especificación de aceleración de alejamiento para Jump
4: valor de especificación de desaceleración de alejamiento para Jump
5: valor de especificación de aceleración de acercamiento para Jump
6: valor de especificación de desaceleración de acercamiento para Jump
Valores devueltos
Número entero 1 % o mayor
Uso
Con RealAccel, se puede alcanzar la velocidad máxima de aceleración con la que el robot puede operar de
manera continua.
Los pasos son los siguientes:
(1) Operar el robot con el comando OLAccel activado.
(2) Ejecutar el comando OLRate y revisar si aumenta la relación de sobrecarga.
(3) Si aumenta la relación de sobrecarga, empieza el ajuste automático cuando la relación de sobrecarga
excede 0,5.
(4) Después de que haya transcurrido cierto período de tiempo, ejecute el comando OLRate y revise que no
aumente la relación de sobrecarga.
(5) Después de revisar que no haya aumentado la relación de sobrecarga, ejecute la función RealAccel.
(6) El valor devuelto por la función RealAccel es la velocidad de aceleración máxima a la que el robot puede
operar de manera continua en el paso (1).
* Si se ejecuta la función RealAccel mientras la relación de sobrecarga está aumentado, no se puede
alcanzar la velocidad de aceleración máxima del movimiento continuo.
* Si se produce un error de sobrecalentamiento, no se puede alcanzar la velocidad de aceleración máxima
del movimiento continuo mediante el procedimiento anterior.
Consulte también
Accel, OLAccel, OLRate
Ejemplo de función RealAccel
A continuación se encuentra el ejemplo de la función RealAccel utilizada en el programa.
Integer RealAccel1, RealDecel1
Accel 100, 100
OLAccel on
'Alcanza la velocidad de aceleración actual.
RealAccel1 = RealAccel (1)
RealDecel1 = RealAccel (2)
Muestra la velocidad de aceleración actual.
Print RealAccel1
Muestra la velocidad de desaceleración actual.
Print RealDecel1

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 585
Función RealPls
Arroja el valor de pulso de la articulación especificada.
Sintaxis
RealPls(jointNumber)
Parámetros
jointNumber La articulación específica para la cual se debe obtener el número de pulsos actual.
El eje S adicional es 8 y el eje T es 9.
Valores devueltos
Arroja un valor entero que representa el número de pulsos del codificador actual para la articulación
especificada por jointNumber.
Descripción
Se utiliza RealPls para leer la posición del codificador actual (o el número de pulsos) de cada articulación.
Estos valores se pueden guardar y usar posteriormente con el comando Pulse.
Consulte también
CX, CY, CZ, CU, CV, CW, Pulse
Ejemplo de función RealPls
Function DisplayPulses
Long joint1Pulses
joint1Pulses = RealPls(1)
Print "Joint 1 Current Pulse Value: ", joint1Pulses
Fend

586 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función RealPos
Arroja la posición actual del robot especificado.
Sintaxis
RealPos
Valores devueltos
Un punto de robot que representa la posición actual del robot especificado.
Descripción
Se utiliza RealPos para leer la posición actual del robot.
Consulte también
CurPos, CX, CY, CZ, CU, CV, CW, RealPls
Ejemplo de función RealPos
Function ShowRealPos
Print RealPos
Fend
P1 = RealPos

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 587
Función RealTorque
Arroja el valor de la instrucción de torque actual de la articulación especificada.
Sintaxis
RealTorque(jointNumber)
Parámetros
jointNumber Especifica el número de articulación que debe alcanzar el valor de la instrucción de torque
mediante una expresión o valor numérico.
El eje S adicional es 8 y el eje T es 9.
Valores devueltos
Arroja el valor real (-1 a 1) que representa la proporción en el torque máximo en el modo Power actual.
El valor positivo implica la dirección positiva del ángulo de la articulación y el valor negativo implica la
dirección negativa.
Consulte también
TC, TCSpeed, TCLim
Ejemplo de función RealTorque
Print "Current Z axis torque instruction value (SCARA):",
RealTorque(3)

588 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción Recover
Ejecuta la recuperación de la posición de protección y regresa el estado.
Esto es para el usuario experimentado y es necesario comprender la especificación del comando antes de
usarlo.
Sintaxis
(1) Recover robotNumber | All
(2) Recover robotNumber | All , WithMove | WithoutMove
Parámetros
robotNumber Número de robot para el cual desea ejecutar la recuperación.
Si se omite, se ejecuta la recuperación de todos los robots.
All Todos los robots ejecutan la recuperación
Si se omite, es igual que All.
WithMove Constante cuyo valor es 0.
Activa el motor y ejecuta la recuperación de posición de la protección.
Si se omite, es igual que WithMove.
WithoutMove Constante cuyo valor es 1.
Activa el motor del robot. No se usa normalmente.
Lleva a cabo la recuperación especial con AbortMotion.
Valores devueltos
Valor booleano. Es True si se completa la recuperación, False si no se completa.
Descripción
Para ejecutar la instrucción Recover desde un programa, se debe configurar la casilla de verificación
[Enable advanced task commands] (Activar comandos de tareas avanzadas) en la página [Setup] menu-
[System Configuration]-[Controller]-[Preferences] de EPSON RC+.
Se puede usar la recuperación después de cerrar la protección para activar los motores del robot y mover el
robot de vuelta a la posición en la que estaba cuando se abrió la protección con el movimiento PTP de baja
potencia. Después de completar correctamente la recuperación, puede ejecutar el método Cont para seguir
el ciclo.
Cuando se usa más de un robot en el controlador y se especifica All, se recuperan todos los robots.
Consulte también
AbortMotion, Cont, Función Recover, RecoverPos

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 589
Ejemplo de instrucción Recover
PRECAUCIÓN
■
Cuando se ejecuta el comando
Recover desde un programa, debe comprender la
especificación del comando y confirmar que el sistema tiene las condicion
es
adecuadas para este comando.
El uso incorrecto, como la ejecución continua de
un comando dentro de un bucle, puede deteriorar la seguridad del sistema.
Function main
Xqt 2, monitor, NoPause
Do
Jump P1
Jump P2
Loop
Fend
Function monitor
Do
If Sw(SGOpenSwitch) = On then
Wait Sw(SGOpenSwitch) = Off and Sw(RecoverSwitch) = On
Recover All
EndIf
Loop
Fend

590 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función Recover
Ejecuta la recuperación de la posición de protección y regresa el estado.
Esto es para el usuario experimentado y es necesario comprender la especificación del comando antes de
usarlo.
Sintaxis
(1) Recover
(2) Recover ( robotNumber | All )
(3) Recover ( robotNumber | All , WithMove | WithoutMove )
Parámetros
robotNumber Número de robot para el cual desea ejecutar la recuperación.
Si se omite, se ejecuta la recuperación de todos los robots.
All Todos los robots ejecutan la recuperación
Si se omite, es igual que All.
WithMove Constante cuyo valor es 0.
Activa el motor y ejecuta la recuperación de posición de la protección.
Si se omite, es igual que WithMove.
WithoutMove Constante cuyo valor es 1.
Activa el motor del robot. No se usa normalmente.
Lleva a cabo la recuperación especial con AbortMotion.
Valores devueltos
Valor booleano. Es True si se completa la recuperación, False si no se completa.
Descripción
Para ejecutar la instrucción Recover desde un programa, se debe seleccionar la casilla de verificación [Enable
advanced task commands] (Activar comandos de tareas avanzadas) en [Setup]- [System Configuration]-
[Controller]-[Preferences] de EPSON RC+.
Se puede usar la recuperación después de cerrar la protección para activar los motores del robot y mover el
robot de vuelta a la posición en la que estaba cuando se abrió la protección con el movimiento PTP de baja
potencia. Después de completar correctamente la recuperación, puede ejecutar el método Cont para seguir el
ciclo.
Cuando se usa más de un robot en el controlador y se especifica All, se recuperan todos los robots.
PRECAUCIÓN
■
Cuando se ejecuta el comando Recover desde un programa, debe comprender la
especificación del comando y confirmar que el sistema tiene las condiciones
adecuadas para este comando. El uso incorrecto, como la ejecución continua de
un comando dentro de un bucle, puede deteriorar la seguridad del sistema.
Consulte también
AbortMotion, Cont, Instrucción Recover, RecoverPos

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 591
Ejemplo de función Recover
Boolean sts
Integer answer
sts = Recover
If sts = True Then
MsgBox "Ready to continue", MB_ICONQUESTION + MB_YESNO,
"MyProject", answer
If answer = IDYES Then
Cont
EndIf
EndIf

592 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función RecoverPos
Arroja la posición en la que estaba el robot cuando se abrió la protección.
Esto es para el usuario experimentado y se debe entender la especificación del comando antes de usarlo.
Sintaxis
RecoverPos ( [ robotNumber ] )
Parámetros
robotNumber Valor entero que especifica el número de un robot
Si se omite, se utiliza el robot actual.
Valores devueltos
Arroja la posición en la que estaba el robot especificado cuando se abrió la protección.
En el caso en que no se haya abierto la protección o que el robot haya finalizado la recuperación, las
coordenadas de los datos de punto devueltos son 0.
Descripción
Esta función arroja la posición de recuperación del robot cuando se utilizan los comandos Cont o Recover.
Consulte también
AbortMotion, Cont, Recover, Función Recover, RealPos
Ejemplo de función RecoverPos
Si la distancia en línea recta de recuperación es menor que 10 mm, ejecuta la recuperación. Si es más de
10 mm, finaliza el programa.
If Dist(RecoverPos, RealPos) < 10 Then
Recover All
Else
Quit All
EndIf

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 593
Instrucción Redim
Cambia las dimensiones de una matriz en el tiempo de ejecución.
Sintaxis
Redim [Preserve] arrayName (subscripts)
Parámetros
Preserve Opcional. Especifica que se debe conservar los contenidos anteriores de la matriz. Si
se omite, se borrará la matriz.
arrayName Nombre de la variable de matriz; sigue las convenciones de nomenclatura de variables
estándar. Ya se debe haber declarado la matriz.
subscripts Opcional. Se pueden declarar dimensiones nuevas de una variable de matriz. Se debe
entregar el mismo número de dimensiones que cuando se declaró la variable. La
sintaxis del subíndice es la siguiente
(ubound1, [ubound2], [ubound3])
ubound1, ubound2, ubound3 especifican, cada una, el límite superior máximo para la
dimensión asociada.
Los elementos en cada dimensión de una matriz se numeran desde 0 y el número
disponible de elementos de matriz es el valor de límite superior + 1.
Cuando especifique el valor del límite superior, asegúrese de que el número total de
elementos esté dentro del rango que se muestra a continuación:
Otras que no
son de cadena
Cadena
Variable local
2.000
200
Variable global conservada
4.000
400
Variable global y variable de
módulo
100.000 10.000
Descripción
Utilice Redim para cambiar las dimensiones de una matriz al momento de la ejecución. Utilice Preserve para
conservar los valores anteriores.
La variable de matriz declarada por Byref no puede utilizar Redim.
Frequent Redim disminuirá la velocidad de ejecución del programa. En especial, recomendamos usar el
mínimo de Redim para las variables globales conservadas.
Consulte también
UBound

594 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Ejemplo de instrucción Redim
Integer i, numParts, a(0)
Print "Enter number of parts "
Input numParts
Redim a(numParts)
For i=0 to UBound(a)
a(i) = i
Next
‘ Cambia la dimensión de la matriz con 20 elementos más
Redim Preserve a(numParts + 20)
' Se conservan los valores del primer elemento
For i = 0 to UBound(a)
Print a(i)
Next

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 595
Instrucción Rename
Cambia el nombre de un archivo.
Sintaxis
Rename oldFileName, newFileName
Parámetros
oldFileName Expresión de cadena que contiene la ruta y el nombre del archivo al que se le
cambiará el nombre.
Consulte ChDisk para conocer detalles.
newFileName El nuevo nombre que se le pondrá al archivo especificado con oldFileName.
Consulte ChDisk para conocer detalles.
Descripción
Cambia el nombre del archivo especificado oldFileName a newFileName.
Si se omite la ruta, Rename busca el oldFileName en el directorio actual.
Rename solo se activa cuando oldFileName y newFileName se especifican en la misma unidad de disco.
No se puede cambiar el nombre de un archivo a un nombre de archivo que ya existe en la misma ruta.
No están permitidos los caracteres comodines en el oldFileName ni en el newFileName.
Consulte también
Copiar
Ejemplo de instrucción Rename
Ejemplo desde la ventana Command:
> Rename A.PRG B.PRG

596 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción RenDir
Cambia el nombre de un directorio.
Sintaxis
Rendir oldDirName As String, newDirName As String
Parámetros
oldDirName Expresión de cadena que especifica la ruta y el nombre del directorio al que se le
cambiará el nombre.
newDirName Expresión de cadena que especifica la ruta y el nombre nuevo que se le pondrá al
directorio especificado por oldDir.
Consulte ChDisk para conocer los detalles de la ruta.
Descripción
La misma ruta utilizada para oldDirName se debe incluir para el newDirName.
Si se omiten ambas rutas de los parámetros anteriores y solo se especifica el nombre del directorio, se
especifica el directorio actual.
No están permitidos los caracteres comodines en oldDirName o newDirName.
Nota
- Esta instrucción solo se puede ejecutar con el disco de la PC.
Consulte también
MkDir
Ejemplo de instrucción RenDir
RenDir "c:\mydata", "c:\mydata1"

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 597
Instrucción Reset
Restablece el controlador a un estado inicializado.
Sintaxis
(1) Reset
(2) Reset Error
Descripción
Reset restablece los elementos que se muestran a continuación.
Reset Error termina todas las tareas que no están en segundo plano y restablece el estado del error y los
parámetros de control del robot. Para ejecutar la instrucción Reset Error desde los programas, se debe
configurar la preferencia [Enable advanced task commands] (Habilitar comandos de tareas avanzadas) en la
página [Setup] -[System Configuration]-[Controller]-[Preferences] de EPSON RC+.
Estado de parada de emergencia (restablecer solo con Reset)
Estado de error
Bits de salida (restablecer solo con Reset)
Todos los bits de salida generan que se configure en desactivado excepto la E/S para remota.
El usuario puede configurar Option Switch para desactivar la característica.
Parámetro de control del robot
Speed, SpeedR, SpeedS (inicializados en valores predeterminados)
Accel, AccelR, AccelS (inicializados en valores predeterminados)
QPDecelR , QPDecelS (inicializados en valores predeterminados)
Parámetro LimZ (inicializado en 0)
Parámetro CP (inicializado en Off)
Parámetro SoftCP (inicializado en Off)
Fine (inicializado en valores predeterminados)
Power Low (modo de baja potencia configurado en On)
PTPBoost (inicializado en valores predeterminados)
TCLim, TCSpeed (inicializados en valores predeterminados)
PpLSpeed (inicializado en valores predeterminados)
Para los errores relacionados con el servo, el estado Emergency Stop (Parada de emergencia), y cualquier
otra condición que requiera ser restablecida, no se aceptará ningún otro comando que no sea Reset. En este
caso, primero ejecute Reset, luego ejecute los demás procesamientos según sea necesario.
Por ejemplo, después de una parada de emergencia, primero verifique las condiciones de operación segura,
ejecute Reset y luego ejecute Motor On.
El estado Critical error (Error crítico) no será cancelado por Reset.
Cuando se produzca un error crítico, apague el controlador y solucione la causa del error.
La instrucción Reset no se puede ejecutar desde una tarea en segundo plano o desde las tareas que se hayan
iniciado con Trap Emergency o Trap Error. El estado de la parada de emergencia no se puede restablecer
desde los programas.
Nota
Preferencia de salidas de Reset
([Setup]-[System Configuration]-[Controller]-[Preferences]). Si se selecciona la casilla de verificación
[Reset command turns off outputs] (El comando Restablecer desactiva las salidas), se desactivarán todas las
salidas cuando se emita el comando Reset.
Es importante recordar esto cuando se conecta el sistema, de manera que la desactivación de las salidas no
provoque que las herramientas se caigan o situaciones similares.
Consulte también
Accel, AccelS, Fine, LimZ, Motor, Off, On, PTPBoost, SFree, SLock, Speed, SpeedS
Ejemplo de instrucción Reset
Ejemplo desde la ventana Command.
>reset
>

598 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción ResetElapsedTime
Restablece el temporizador de medición de tiempo takt utilizado en la función ElapsedTime.
Sintaxis
ResetElapsedTime
Descripción
Restablece e inicia un temporizador de medición de tiempo takt.
Consulte también
Función ElapsedTime
Ejemplo de instrucción ResetElapsedTime
ResetElapsedTime 'Restablece el temporizador de medición de tiempo takt
For i = 1 To 10 'Se ejecuta 10 veces
GoSub Cycle
Next
Print ElapsedTime / 10 'Mide un tiempo takt y lo muestra

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 599
Instrucción Restart
Reinicia el grupo de programa principal actual.
Este comando es para usuarios experimentados y se debe comprender la especificación del comando antes
de usarla.
Sintaxis
Restart
Descripción
Restart detiene todas las tareas y vuelve a ejecutar el último grupo de programas principales que se estaba
ejecutando. Las tareas en segundo plano seguirán funcionando.
Toda la configuración de Trap (Captura) se restablece y aunque Restart detenga las tareas, no ejecuta Trap
Abort (Cancelar captura).
Restart restablece el estado Pause.
Si se ejecuta Restart durante un estado de error, se debe restablecer el error antes con un método como la
instrucción Reset Error (Restablecer el error).
No se puede usar Restart durante el estado Emergency Stop, puesto que provoca un error. El estado de la
parada de emergencia no se puede restablecer desde los programas.
PRECAUCIÓN
■
Cuando se ejecuta el comando
Restart desde un programa, debe comprender la
especificación del comando y confirmar que el
sistema tiene las condiciones
adecuadas para este comando.
El uso incorrecto, como la ejecución continua de
un comando dentro de un bucle, puede deteriorar la seguridad del sistema.
Consulte también
Quit, Reset, Trap, Xqt
Ejemplo de instrucción Restart
Function main
Trap Error Xqt eTrap
Motor On
Call PickPlac
Fend
Function eTrap
Wait Sw(ERresetSwitch)
Reset Error
Wait Sw(RestartSwitch)
Restart
Fend

600 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción Resume
Continúa una tarea que fue suspendida por la instrucción Halt.
Sintaxis
Resume { taskIdentifier | All }
Parámetros
taskIdentifier El nombre de la tarea o la expresión entera que representa el número de tarea.
Un nombre de la tarea corresponde a un nombre de la función usada en una
instrucción Xqt o una función iniciada desde la ventana Run o la ventana Operator.
El rango del número de la tarea es:
Tareas normales: 1 a 32
Tarea en segundo plano: 65 a 80
Tareas de captura: 257 a 267
All Especifica todas las tareas que se reanudarán.
Descripción
Resume continúa la ejecución de las tareas suspendidas por la instrucción Halt.
Consulte también
Halt, Quit, Xqt
Ejemplo de instrucción Resume
Aquí se muestra el uso de la instrucción Resume después de la instrucción Halt.
Function main
Xqt 2, flicker 'Ejecuta Flicker como tarea 2
Do
Wait 3 'Permite que Flicker se ejecute durante 3 segundos
Halt flicker 'Detiene la tarea Flicker
Wait 3
Resume flicker 'Reanuda la tarea flicker
Loop
Fend
Function flicker
Do
On 1
Wait 0.2
Off 1
Wait 0.2
Loop
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 601
Instrucción Return
La instrucción Return se usa con la instrucción GoSub. GoSub transfiere el control del programa a una
subrutina. Una vez que se completa la subrutina, Return provoca que continúe la ejecución del programa en
línea con la siguiente instrucción GoSub, que inició la subrutina.
Sintaxis
Return
Descripción
La instrucción Return se usa con la instrucción GoSub. El propósito primario de la instrucción Return es
devolver el control del programa a la instrucción posterior a la instrucción GoSub que inició la subrutina en
primer lugar.
La instrucción GoSub provoca que el control del programa se bifurque al número de línea de instrucción o
etiqueta especificados por el usuario. El programa luego ejecuta la instrucción en esa línea y continúa la
ejecución por los números subsiguientes de la línea hasta que se encuentre la instrucción Return. Luego, la
instrucción Return causa que el control del programa se transfiera de vuelta a la línea inmediatamente
posterior a la línea con la que se inició GoSub en primer lugar. (es decir, la instrucción GoSub provoca la
ejecución de una subrutina y luego la ejecución se devuelve a la instrucción que sigue a la instrucción GoSub).
Posible error
Se encontró Return sin GoSub
Se usa una instrucción Return para "volver" desde una subrutina al programa original que emitió la
instrucción GoSub. Si se encuentra la instrucción Return sin que se haya emitido una GoSub antes, entonces
se producirá un error. Una instrucción Return autónoma significa nada, ya que el sistema no sabe a dónde
volver.
Consulte también
OnErr, GoSub, GoTo
Ejemplo de instrucción Return
En el siguiente ejemplo se muestra una función simple que utiliza una instrucción GoSub para bifurcar a una
etiqueta llamada checkio y revisar las primeras 16 entradas del usuario. Entonces la subrutina se devuelve al
programa principal.
Function main
Integer var1, var2
GoSub checkio
On 1
On 2
Exit Function
checkio: 'La subrutina comienza aquí
var1 = In(0)
var2 = In(1)
If var1 <> 0 Or var2 <> 0 Then
Print "Message to Operator here"
EndIf
finished:
Return 'La subrutina termina aquí y vuelve a la línea 40
Fend

602 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función Right$
Arroja una subcadena de los caracteres de la derecha de una cadena.
Sintaxis
Right$(string, count)
Parámetros
string Variable de cadena o cadena de caracteres de hasta 255 caracteres desde donde se
copian los caracteres de la derecha.
count La cantidad de caracteres que se copiarán de string, comenzando por el carácter del
extremo derecho.
Valores devueltos
Arroja una cadena de los caracteres count del extremo derecho de la cadena de caracteres especificada por el
usuario.
Descripción
Right$ arroja los caracteres count del extremo derecho de una cadena especificada por el usuario. Right$
puede arrojar hasta la cantidad total de caracteres que haya en la cadena de caracteres.
Consulte también
Asc, Chr$, InStr, Left$, Len, Mid$, Space$, Str$, Val
Ejemplo de función Right$
El ejemplo que aparece a continuación muestra un programa que toma la cadena de datos de una pieza como
su entrada y divide el número, el nombre y el recuento de la pieza.
Function SplitPartData(DataIn$ As String, ByRef PartNum$ As String,
ByRef PartName$ As String, ByRef PartCount As Integer)
PartNum$ = Left$(DataIn$, 10)
DataIn$ = Right$(datain$, Len(DataIn$) - pos)
pos = Instr(DataIn$, ",")
PartName$ = Mid$(DataIn$, 11, 10)
PartCount = Val(Right$(dataIn$, 5))
Fend
Otro ejemplo surge de la instrucción Right$ desde la ventana Command.
> Print Right$("ABCDEFG", 2)
FG
> Print Right$("ABC", 3)
ABC

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 603
Instrucción RmDir
Elimina un subdirectorio vacío de la unidad de disco de un controlador.
Sintaxis
Rmdir dirName
Parámetros
dirName Expresión de cadena para la ruta y el nombre del directorio que se eliminará.
Si el nombre de directorio se especifica sin una ruta, entonces se especifica el subdirectorio
en el directorio actual.
Consulte ChDisk para conocer los detalles de la ruta.
Descripción
Elimina el subdirectorio especificado. Antes de ejecutar Rmdir, se deben borrar todos los archivos del
subdirectorio.
El directorio actual o el directorio principal no se pueden eliminar.
Cuando se utiliza en la ventana Command, se pueden omitir las comillas.
Nota
- Esta instrucción solo se puede ejecutar con el disco de la PC.
Ejemplo de instrucción Rmdir
Ejemplo desde la ventana Command:
> RmDir \mydata

604 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función Rnd
Arroja un número aleatorio.
Sintaxis
Rnd(maxValue)
Parámetros
maxValue Expresión real que representa el valor máximo devuelto.
Valores devueltos
Número real aleatorio de 0 a range.
Descripción
Utilice Rnd para generar valores de números aleatorios.
Consulte también
Int, Randomize
Ejemplo de función Rnd
En este ejemplo de Rnd se genera un número aleatorio entre 1 y 10.
Function main
Real r
Integer randNum
Randomize
randNum = Int(Rnd(9)) + 1
Print "Random number is:", randNum
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 605
Instrucción Robot
Selecciona el robot actual.
Sintaxis
Robot number
Parámetros
number Número del robot deseado. Los rangos de valor desde 1 al número de robots instalados.
Descripción
Robot permite que el usuario seleccione el robot predeterminado para las instrucciones de movimiento.
En un sistema con un robot, no es necesario utilizar la instrucción Robot.
Consulte también
Accel, AccelS, Arm, ArmSet, Go, Hofs, Home, HOrdr, Local, Move, Pulse, Función Robot,
Speed, SpeedS
Ejemplo de instrucción Robot
Function main
Integer I
For I = 1 to 100
Robot 1
Go P(i)
Robot 2
Go P(i)
Next I
Fend

606 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función Robot
Arroja el número de robot actual.
Sintaxis
Robot
Valores devueltos
Número entero que contiene el número de robot actual.
Consulte también
Instrucción Robot
Ejemplo de función Robot
Print "The current robot is: ", Robot

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 607
Función RobotInfo
Arroja la información de estado para el robot.
Sintaxis
RobotInfo(index)
Parámetros
index Expresión entera que representa el índice de la información que desea recuperar.
Valores devueltos
La información especificada es arrojada como un entero.
Descripción
La información para cada bit del valor devuelto aparece en la siguiente tabla:
Índice
Bit
Valor
Descripción
0
0
&H1
No definido
1
&H2
Se ha producido un error restaurable
2
&H4
Se ha producido un error no restaurable
3
&H8
Los motores están encendidos
4
&H10
La potencia actual es alta
5
&H20
No definido
6
&H40
No definido
7
&H80
No definido
8
&H100
El robot está detenido
9
&H200
El robot no está detenido (está ejecutando un movimiento o en pausa
rápida)
10
&H400
El robot está parado por una pausa o protección
11
No definido
12
No definido
13
No definido
14
&H4000
Se cumplió la condición TILL con el comando de movimiento que le
precede
15
&H8000
Se cumplió la condición SENSE con el comando de movimiento
anterior
16-31
No definido
1
0
&H1
El robot está siguiendo (seguimiento de transportador)
1
&H2
El robot está esperando el movimiento de recuperación (estado
WaitRecover)
2
&H4
El robot está siendo recuperado
3-31
No definido
2
0
&H1
El robot está en la posición de reposo
1-31
No definido
3
0
&H1
El servo de la articulación 1 está activado
1
&H2
El servo de la articulación 2 está activado
2
&H4
El servo de la articulación 3 está activado
3
&H8
El servo de la articulación 4 está activado
4
&H10
El servo de la articulación 5 está activado
5
&H20
El servo de la articulación 6 está activado
6
&H40
El servo de la articulación 7 está activado
7
&H80
El servoeje S está activado
8
&H100
El servoeje T está activado
9-31
No definido

608 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Índice
Bit
Valor
Descripción
4
No
dispon
ible
0 - 32
−1
Número de tareas ejecutando los comandos del robot
0 = comando que se ejecuta desde la ventana Command o macro
−1 = ninguna tarea está usando el manipulador
5
0
&H1
El freno de la articulación 1 está activado
1
&H2
El freno de la articulación 2 está activado
2
&H4
El freno de la articulación 3 está activado
3
&H8
El freno de la articulación 4 está activado
4
&H10
El freno de la articulación 5 está activado
5
&H20
El freno de la articulación 6 está activado
6
&H40
El freno de la articulación 7 está activado
7
&H80
El freno del eje S está activado
8
&H100
El freno del eje T está activado
9-31
No definido
Consulte también
CtrlInfo, RobotInfo$, TaskInfo
Ejemplo de función RobotInfo
If (RobotInfo(3) And &H1) = &H1 Then
Print "Joint 1 is locked"
Else
Print "Joint 1 is free"
EndIf

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 609
Función RobotInfo$
Arroja la información de texto para el robot.
Sintaxis
RobotInfo$(index)
Parámetros
index Expresión entera que representa el índice de la información que desea recuperar.
Valores devueltos
Cadena que incluye la información especificada.
Descripción
Índice
Descripción
0
Nombre del robot
1
Nombre del modelo
2
Nombre del archivo de
punto predeterminado
3
No definido
4
Número de serie del
robot
Consulte también
CtrlInfo, RobotInfo, TaskInfo
Ejemplo de función RobotInfo$
Print "Robot Name: ", RobotInfo$(0)

610 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función RobotModel$
Arroja el nombre del modelo del robot.
Sintaxis
RobotModel$
Valores devueltos
Una cadena que contiene el nombre del modelo. Este es el nombre que aparece en el panel trasero del robot.
Consulte también
RobotType
Ejemplo de función RobotModel$
Print "The robot model is ", RobotModel$

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 611
Función RobotName$
Arroja el nombre del robot.
Sintaxis
RobotName$
Valores devueltos
Una cadena que contiene el nombre del robot.
Consulte también
RobotInfo, RobotModel$
Ejemplo de función RobotName$
Print "The robot name is ", RobotName$

612 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función RobotSerial$
Arroja el número de serie del robot.
Sintaxis
RobotSerial$
Valores devueltos
Una cadena que contiene el número de serie del robot.
Consulte también
RobotInfo, RobotName$, RobotModel$
Ejemplo de función RobotSerial$
Print "The robot serial number is ", RobotSerial$

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 613
Función RobotType
Arroja el tipo de robot.
Sintaxis
RobotType
Valores devueltos
1: Articulado
2: Cartesiano
3: SCARA
5: 6 EJES
6: Serie RS
7: Serie N
Consulte también
RobotModel$
Ejemplo de función RobotType
If RobotType = 3 Then
Print "Robot type is SCARA"
EndIf

614 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción ROpen
Abre un archivo para lectura.
Sintaxis
ROpen fileName As #fileNumber
.
.
Close #fileNumber
Parámetros
fileName Una expresión de cadena que contiene el nombre del archivo que se leerá desde la
ruta incluida.
Si solo se especifica el nombre del archivo, se especifica el archivo en el directorio
actual.
Consulte ChDisk para conocer detalles.
fileNumber Expresión entera de 30 a 63
Descripción
Abre el fileName especificado para lectura y lo identifica por el fileNumber especificado. Esta instrucción
se utiliza para abrir y leer los datos del archivo especificado.
Notas
Solo el disco de la PC
Hay una ruta de red disponible.
El fileNumber identifica el archivo siempre y cuando esté abierto y no se puede usar para los otros archivos
hasta que se cierre el mismo número de archivo.
El fileNumber se utiliza para los comandos de operación del archivo (Input#, Read, Seek, Eof, Close)
La instrucción Close cierra el archivo y libera el número de archivo.
Recomendamos que use la función FreeFile para obtener el número de archivo para que el mismo número
no sea utilizado por más de una tarea.
Consulte también
Close, Input #, AOpen, BOpen, UOpen, WOpen, FreeFile
Ejemplo de instrucción ROpen
Integer fileNum, i, j
fileNum = FreeFile
WOpen "TEST.DAT" As #fileNum
For i = 0 To 100
Print #fileNum, i
Next i
Close #fileNum
fileNum = FreeFile
ROpen "TEST.DAT" As #fileNum
For i = 0 to 100
Input #fileNum, j
Print "data = ", j
Next i
Close #fileNum

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 615
Función RSet$
Arroja la cadena especificada con los espacios al principio agregados hasta la longitud especificada.
Sintaxis
RSet$ (string, length)
Parámetros
string Expresión de cadena.
length Expresión entera para la longitud total de la cadena devuelta.
Valores devueltos
Cadena especificada con espacios agregados al principio.
Consulte también
LSet$, Space$
Ejemplo de función RSet$
temp$ = "123"
temp$ = RSet$(temp$, 10) ' temp$ = " 123"

616 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función RShift
Desplaza los datos numéricos a la derecha mediante un número de bits especificados por el usuario.
Sintaxis
RShift(number, shiftBits)
Parámetros
number Expresión numérica que se desplazará.
shiftBits El número de bits (entero de 0 a 31) que se desplazará number a la derecha.
Valores devueltos
Arroja un resultado numérico igual al valor de number después de desplazar el número de bits shiftbits a la
derecha.
Descripción
RShift desplaza los datos numéricos especificados (number) a la derecha (hacia un dígito de orden inferior)
según el número especificado de bits (shiftBits). Los bits de orden superior desplazados se reemplazan por
un 0.
La explicación más sencilla para RShift es que simplemente arroja el resultado de number / 2shiftBits.
(Number se divide por 2 veces shiftBit).
Nota
Tipo de datos numéricos:
Los datos numéricos (number) pueden ser cualquier tipo de dato numérico válido. RShift admite los tipos de
datos: Byte, Double, Int32, Integer, Long, Real, Short, UByte, UInt32 y UShort.
Consulte también
And, LShift, LShift64, Not, Or, RShift64, Xor
Ejemplo de función RShift
En el ejemplo siguiente se muestra un programa que presenta todos los valores posibles de RShift para un
tipo de datos enteros que empiezan con el entero definido en “0”.
Function rshiftst
Integer num, snum, i
num = 32767
For i = 1 to 16
Print "i =", i
snum = RShift(num, 1)
Print "RShift(32767, ", i, ") = ", snum
Next i
Fend
Otro ejemplo surge de la instrucción RShift desde la ventana Command.
> Print RShift(10,1)
5
> Print RShift(8,3)
1
> Print RShift(16,2)
4

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 617
Función RShift64
Desplaza los datos numéricos a la derecha mediante un número de bits especificados por el usuario.
Sintaxis
RShift64(number, shiftBits)
Parámetros
number Expresión numérica que se desplazará.
shiftBits El número de bits (entero de 0 a 63) que se desplazará number a la derecha.
Valores devueltos
Arroja un resultado numérico igual al valor de number después de desplazar el número de bits shiftbits a la
derecha.
Descripción
RShift64 cambia los datos numéricos especificados (number) a la derecha (hacia un dígito de orden inferior)
según el número especificado de bits (shiftBits). Los bits de orden superior desplazados se reemplazan por
un 0.
La explicación más sencilla para RShift64 es que simplemente arroja el resultado de number / 2shiftBits.
(Number se divide por 2 veces shiftBit).
Nota
Tipo de datos numéricos:
Los datos numéricos (number) pueden ser cualquier tipo de dato numérico válido. RShift64 admite los tipos
de datos Int64 y UInt64.
Consulte también
And, LShift, LShift64, Not, Or, RShift, Xor
Ejemplo de función RShift64
En el ejemplo siguiente se muestra un programa que presenta todos los valores posibles de RShift64 para un
tipo de datos enteros que empiezan con el entero definido en “0”.
Function rshif64tst
UInt64 num, snum, i
num = 18446744073709551615
For i = 1 to 63
Print "i =", i
snum = RShift64(num, i)
Print "RShift64(18446744073709551615, ", i, ") = ", snum
Next i
Fend
Otro ejemplo surge de la instrucción RShift64 desde la ventana Command.
> Print RShift64(10,1)
5
> Print RShift64(8,3)
1
> Print RShift64(16,2)
4

618 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función RTrim$
Arroja una cadena igual a la cadena especificada sin espacios finales.
Sintaxis
RTrim$(string)
Parámetros
string Expresión de cadena.
Valores devueltos
Cadena especificada sin espacios finales.
Consulte también
LTrim$, Trim$
Ejemplo de función RTrim$
str$ = " data "
str$ = RTrim$(str$) ' str$ = "..data"

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 619
Instrucción RunDialog
Ejecuta un diálogo EPSON RC+ desde un programa SPEL
+
.
Sintaxis
(1) RunDialog dialogID
(2) RunDialog DLG_ROBOTMNG [, robotAllowed]
Parámetros
dialogID Expresión entera que contiene una ID de diálogo válido. Estos valores son constantes
predefinidas como se muestra a continuación.
DLG_ROBOTMNG 100 Ejecuta el diálogo de Robot Manager
DLG_IOMON 102 Ejecuta el monitor de E/S
DLG_VGUIDE 110 Ejecuta el diálogo de Vision Guide
robotAllowed Este parámetro solo está disponible cuando se especifica DLG_ROBOTMNG como
dialog ID.
Especifica un robot que está disponible en el Robot Manager en valor de bit.
Ejemplo
Valor
definido
bit15 bit14 ... bit2 bit1 bit0
Robot 1 &H0001 Off Off Off Off On
Robot 2 &H0002 Off Off Off On Off
Robot 1 y 2
&H0003
Off
Off
Off
On
On
:
Robot 16
&H1000
On
Off
Off
Off
Off
Descripción
Utiliza RunDialog para ejecutar diálogos EPSON RC+ desde una tarea SPEL
+
. Se suspenderá la tarea hasta
que el operador cierre el diálogo.
Mientras se ejecutan los diálogos para los comandos del robot, se debe asegurar de que no haya otras tareas
controlando el robot al mismo tiempo que aparece el diálogo, de lo contrario, se producirá un error.
Consulte también
InputBox, MsgBox
Ejemplo de instrucción RunDialog
If Motor = Off Then
RunDialog DLG_ROBOTMNG
If Motor = Off Then
Print "Motors are off, aborting program"
Quit All
EndIf
EndIf

620 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función SafetyOn
Arroja el estado de apertura de la puerta de seguridad.
Sintaxis
SafetyOn
Valores devueltos
True si la puerta de seguridad está abierta, de lo contrario, False.
Descripción
La función SafetyOn solo se utiliza para la tarea NoPause, la tarea NoEmgAbort (tarea especial que utiliza
NoPause o NoEmgAbort en Xqt) y las tareas en segundo plano.
Consulte también
ErrorOn, EstopOn, PauseOn, Wait, Xqt
Ejemplo de función SafetyOn
En el siguiente ejemplo se muestra un programa que monitorea la apertura de la puerta de seguridad y activa
o desactiva la E/S cuando se produce la apertura de la puerta de seguridad.
Nota
Indicador Forced
Este ejemplo de programa usa el indicador Forced para el comando On/Off.
Al diseñar el sistema, asegúrese de que las salidas E/S cambien durante el error o una parada de emergencia
o apertura de la puerta de seguridad.
Function main
Xqt SafetyOnOffMonitor, NoPause
:
:
Fend
Function SafetyOnOffMonitor
Do
Wait SafetyOn = On
Print "Saftey Open"
Off 10, Forced
On 12, Forced
Wait SafetyOn = Off
Print "Saftey Close"
On 10, Forced
Off 12, Forced
Loop
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 621
Instrucción SavePoints
Guarda los datos de punto de la memoria principal en un archivo de disco para el robot actual.
Sintaxis
SavePoints filename
Parámetros
fileName Expresión de cadena que contiene el archivo en el que se guardan los puntos. La
extensión debe ser “.pts”.
No puede especificar una ruta de archivo y fileName no tiene efecto de ChDisk.
Consulte ChDisk para conocer detalles.
Descripción
SavePoints guarda los puntos para el robot actual en el archivo especificado del directorio del proyecto
actual. Siempre se debe especificar la extensión “.pts”.
El comando SavePoints siempre agregará el archivo de punto al proyecto para el robot actual, si aún no
existe.
Los datos de punto se guardan en la memoria Compact Flash dentro del controlador. Por lo tanto, SavePoints
empieza a escribir en Compact Flash. La escritura frecuente en la memoria Compact Flash reducirá su vida
útil. Recomendamos usar SavePoints solo para guardar los datos de punto.
Posibles errores
Sin espacio de disco
Si no hay espacio restante, se producirá un error.
Archivo de punto para otro robot.
Si fileName es un archivo de punto de otro robot, se genera un error.
No se puede especificar una ruta
Si fileName contiene una ruta, ocurrirá un error. Solo se puede especificar un nombre de archivo en el
proyecto actual.
Nombre de archivo incorrecto
Si se escribe un nombre de archivo que tiene espacios en el nombre u otras características de nombre de
archivo incorrectas, se producirá un error.
Consulte también
ImportPoints, LoadPoints
Ejemplo de instrucción SavePoints
ClearPoints
For i = 1 To 10
P(i) = XY(i, 100, 0, 0)
Next i
SavePoints "TEST.PTS"

622 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción Seek
Cambia la posición del puntero del archivo para un archivo especificado.
Sintaxis
Seek #fileNumber, pointer
Parámetros
fileNumber Expresión entera de 30 a 63
pointer Expresión entera para la posición que se desea buscar, empezando desde 0 hasta la
longitud del archivo.
Consulte también
BOpen, Read, ROpen, UOpen, Write, WOpen
Ejemplo de instrucción Seek
Integer fileNum
String data$
fileNumber = FreeFile
UOpen "TEST.DAT" As #fileNum
Seek #fileNum, 20
Read #fileNum, data$, 2
Close #fileNum

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 623
Instrucción Select...Send
Ejecuta uno de varios grupos de instrucciones, según el valor de una expresión.
Sintaxis
Select selectExpr
Case caseExpr
statements
[Case caseExpr
statements ]
[Default
statements ]
Send
Parámetros
selectExpr Cualquier expresión numérica o de cadena.
caseExpr Cualquier expresión numérica o de cadena que da el mismo tipo de resultado que
selectExpr.
statements Una o más instrucciones o varias instrucciones válidas de SPEL
+
.
Descripción
Si alguna de las caseExpr es equivalente a selectExpr, entonces se ejecutan las instrucciones posteriores a la
instrucción Case. Después de la ejecución, el control del programa se traspasa a la instrucción que sigue a la
instrucción Send.
Si ninguna caseExpr es equivalente a selectExpr, se ejecutan las instrucciones predeterminadas y el control
del programa se traspasa a la instrucción que sigue a la instrucción Send.
Si caseExpr es equivalente a selectExpr y se omite Default, nada se ejecuta y el control del programa se
transfiere a la instrucción inmediatamente posterior a la instrucción Send.
selectExpr puede incluir constantes, variables y operadores lógicos que usan And, Or y Xor. caseExpr
también pueden incluir constantes, variables y operadores lógicos que usan And, Or y Xor. En este caso, se
compara el resultado del cálculo de caseExpr con selectExpr y no se especifica la variable en caseExpr
debido a que el movimiento se vuelve complicado.
Consulte también
If...Then...Else
Ejemplo de instrucción Select…Send
A continuación se muestra un ejemplo simple para Select...Send:
Function Main
Integer I
For i = 0 To 10
Select I
Caso 0
Off 1;On 2;Jump P1
Caso 3
On 1;Off 2
Jump P2;Move P3;On 3
Caso 7
On 4
Predeterminado
On 7
Send
Next
Fend

624 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción SelectDB
Busca los datos en la tabla en una base de datos abierta.
Sintaxis
SelectDB (#fileNumber, TableName, SelectCondition, SortMethod)
Parámetros
#fileNumber Valor entero de 501 a 508 que representa el número de la base de datos especificado
con la instrucción OpenDB
TableName El nombre de la tabla en la que desea buscar
Si el tipo de base de datos especificado con #fileNumber es un libro de Excel,
especifique una hoja de cálculo de Excel o el nombre de la tabla
Cuando especifique una hoja de Excel, agregue $ al final del nombre de la hoja de
cálculo y encierre el nombre con [ ].
Cuando especifique un área con un nombre en una hoja de cálculo de Excel, encierre
el nombre con [ ].
SelectCondition Condiciones de la búsqueda.
AND, OR están disponibles para especificar las múltiples condiciones.
Si se omiten, se realiza la búsqueda en todos los datos de la tabla.
SortMethod Orden para mostrar los datos buscados
Especifique el criterio y orden de ordenación (orden ascendente [ASC] / orden
descendente [DESC]).
Si se omite el criterio de ordenación, se especifica el orden ascendente.
Si se omite SortMethod, el orden se decide según la base de datos abierta.
Valores devueltos
Arroja los números totales de líneas.
Descripción
Ordena los datos que cumplen con SelectCondition en la tabla especificada de la base de datos abierta
según las condiciones de ordenación.
Debe ejecutar SelectDB antes de leer/escribir datos con las instrucciones Input# y Print#.
Si la base de datos abierta es un libro de Excel, escriba un nombre de fila para realizar la búsqueda en la
primera línea de la hoja de cálculo y el área definida con el nombre.
Para un libro de Excel 2007, se debe especificar el nombre de la hoja de cálculo. No puede acceder al área
definida con el nombre.
Nota
- Se requiere la conexión de una PC con RC+ instalado.
Consulte también
OpenDB,CloseDB, UpdateDB,DeleteDB, Input #, Print #

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 625
Ejemplo de SelectDB
El siguiente ejemplo usa la base de datos de muestra de SQL server 2000, Northwind.
Se hace una búsqueda en la tabla Employees (Empleados) con la condición TitleOfCourtesy = Ms. Y con
EmployeeID en orden descendente.
Integer count, i, eid
String Lastname$, Firstname$, Title$
OpenDB #501, SQL, "(LOCAL)", "Northwind"
count = SelectDB(#501, "Employees", "TitleOfCourtesy = 'Ms.'",
"EmployeeID DESC")
For i = 0 To count - 1
Input #501, eid, Lastname$, Firstname$, Title$
Print eid, ",", Lastname$, ",", Firstname$, ",", Title$
Next
CloseDB #501
Uso de la base de datos de Access
El siguiente ejemplo usa la base de datos de muestra de Microsoft Access 2007, “Students” (Estudiantes) y
carga los datos cuya ID es más que 10 de la tabla “Students” en el orden descendente de ID.
Integer count, i, eid
String Lastname$, Firstname$, dummy$
OpenDB #502, Access, "c:\MyDataBase\Students.accdb"
count = SelectDB(#502, "Students", "ID > 10'", "ID")
For i = 0 To count - 1
Input #502, eid, dummy$, Lastname$, Firstname$
Print eid, ",", Lastname$, ",", Firstname$
Next
CloseDB #502
Uso del libro de Excel
El siguiente ejemplo usa el libro de Microsoft Excel “Students“ y carga los datos en la hoja de cálculo
“Student” de aquellos estudiantes cuya edad es menor que 25 con la ID en orden ascendente.
Integer count, i, eid
String Lastname$, Firstname$
OpenDB #503, Excel, "c:\MyDataBase\Students.xls"
count = SelectDB(#503, "[Students$]", "Age < 25", "ID ASC")
For i = 0 To count - 1
Input #503, eid, Lastname$, Firstname$
Print eid, ",", Lastname$, ",", Firstname$
Next
CloseDB #503

626 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción Sense
Especifica y muestra la condición de entrada que, si se cumple, completa la instrucción Jump en curso
deteniendo el robot sobre la posición objetivo.
Sintaxis
Sense [ condition ]
Parámetros
condition Estado de entrada especificado como disparador
[Event] operador comparativo ( =, <>, >=, >, <, <=) [Expresión entera]
Se pueden usar las siguientes funciones y variables en Event:
Funciones : Sw, In, InW, Oport, Out, OutW, MemSw, MemIn, MemInW, Ctr
GetRobotInsideBox, GetRobotInsidePlane, AIO_In, AIO_InW,
AIO_Out, AIO_OutW
Variables : Byte, Int32, Integer, Long, Short, UByte, UInt32, UShort global
preserve variable, Global variable, module variable
También, puede especificar múltiples condiciones de evento si usa los siguientes
operadores.
Operador : And, Or, Xor
Ejemplo : Sense Sw(5) = On
Sense Sw(5) = On And Sw(6) = Off
Descripción
Sense se usa para detener el movimiento de acercamiento durante las instrucciones Jump, Jump3 y Jump3CP.
La condición Sense debe incluir como mínimo una de las funciones anteriores.
Cuando las variables están incluidas en la condición Sense, sus valores se calculan cuando se configura la
condición Sense. Se recomienda no usar variables. De lo contrario, la condición puede ser una condición no
intencional. Se permiten múltiples instrucciones Sense. La condición Sense más reciente se mantiene vigente
hasta que es substituida con otra instrucción Sense.
Jump, Jump3, Jump3CP con modificador Sense
Comprueba si se cumple la condición Sense actual. Si se cumple, se completa la orden Jump con el robot
detenido sobre la posición objetivo. (Es decir, cuando la condición Sense es True, el brazo del robot se
mantiene justo sobre la posición objetivo sin ejecutar el movimiento de acercamiento). Cuando la condición
Sense es False, el brazo del robot completa todo el movimiento de la instrucción Jump hasta la posición
objetivo.
Cuando los parámetros se omiten, se muestra la definición actual de Sense.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 627
Notas
Configuración de Sense al encenderse la alimentación principal
En el momento del encendido, la condición inicial de Sense es:
Sense Sw(0) = On 'El robot no ejecuta el movimiento descendente cuando el bit 0 de entrada está activado.
Uso de JS y Stat para verificar Sense
Use JS o Stat para verificar si se cumplió la condición Sense después de ejecutar un comando de movimiento
mediante un modificador Sense.
Para usar las variables en la expresión de condición de evento
- Las variables disponibles son del tipo de número entero (Byte, Int32, Integer, Long, Short, UByte, UInt32,
UShort)
- Las variables de matriz no están disponibles
- Las variables locales no están disponibles
- Si el valor de una variable no puede cumplir la condición del evento por más de 0,01 segundos, el sistema
no puede recuperar el cambio en las variables.
- Hasta 64 pueden esperar a las variables en un sistema (incluidas las que se usan en las expresiones de la
condición del evento, como Wait). Si es superior a 64, ocurre un error durante la compilación del proyecto.
- Si trata de trasladar una variable que espera variables como referencia con Byref, ocurrirá un error.
- Cuando se incluye una variable en el miembro del lado derecho de la expresión de la condición del evento,
el valor se calcula cuando se inicia el comando de movimiento. Recomendamos no usar variables en una
expresión entera para evitar crear condiciones no intencionales.
Consulte también
In, JS, Jump, Jump3, Jump3CP, MemIn, MemSw, Stat, Sw
Ejemplo de Sense
Este es un ejemplo simple sobre el uso de la instrucción Sense.
Function test
.
.
TrySense:
Sense Sw(1) = Off 'Especifica que el brazo se detiene sobre el objetivo cuando
'el bit 1 de entrada está desactivado.
Jump P1 C2 Sense
If JS = True Then
GoSub ERRPRC 'Si el brazo se mantiene estático
GoTo TrySense 'sobre el punto especificado,
'luego ejecute ERRPRC y vaya a TrySense.
EndIf
On 1; Wait 0.2; Off 1
.
.
Fend
<Otros ejemplos de sintaxis>
> Sense Sw(1)=1 And MemSw(1)=1
> Sense Sw(0) Or (Sw(1) And MemSw(1))

628 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción SetCom
Define o muestra los parámetros para el puerto RS-232C.
Sintaxis
SetCom #portNumber [, baud ] [, dataBits ] [, stopBits ] [, parity ] [, terminator] [, HWFlow ]
[, SWFlow ] [, timeOut ]
Parámetros
portNumber Valor entero que representa un número de puerto RS-232C
Parte real 1 a 8
Parte de Windows 1001 a 1008
baud Opcional. Especifica la velocidad en baudios. Los valores válidos son:
110 2400 19200
300 4800 38400
600 9600 56000
1200 14400 115200
(Valor predeterminado: 9600)
Cuando use el puerto de la parte de Windows, algunos datos se pueden perder a
velocidades en baudios de 19200 o más.
dataBits Opcional. Especifica el número de bits de datos por carácter. Los valores válidos son 7 y
8.
stopBits Opcional. Especifica el número de bits de detención por carácter. Los valores válidos son
1 y 2.
parity Opcional. Especifica la paridad. Los valores válidos son O (impar), E (par) y N (ninguno).
terminator Opcional. Especifica los caracteres de terminación de línea. Los valores válidos son CR,
LF, CRLF.
HWFlow Opcional. Especifica el control de hardware. Los valores válidos son RTS y NONE.
SWFlow Opcional. Especifica el control de software. Los valores válidos son XON y NONE.
timeOut Opcional. Especifica el tiempo máximo en segundos para transmitir o recibir. Si el valor
es 0, no hay tiempo de espera.
Descripción
Cuando se omiten todos los parámetros, muestra la configuración del puerto de comunicación.
Si se usan varios puertos en la comunicación en un determinado momento a una velocidad en baudios superior
a 19200, se puede generar el error 2929 o 2922. En este caso, seleccione la velocidad en baudios inferior o
evite usar varios puertos en un determinado momento.
Cuando use el puerto de la parte de Windows, algunos datos se pueden perder a la velocidad en baudios de
19200 o más.
Si se pierden datos, seleccione la velocidad en baudios más baja o use el puerto de la parte real.
Los parámetros se guardan en la tarjeta Compact Flash dentro del controlador. Cuando ejecuta SetCom, los
datos se escriben en la memoria Compact Flash. Si los datos se escriben en la tarjeta Compact Flash
frecuentemente, puede acortar la vida útil de dicha tarjeta. Se recomienda usar SetCom solamente cuando se
cambien los parámetros.
Consulte también
OpenCom, CloseCom, SetNet
Ejemplo de instrucción SetCom
SetCom #1, 9600, 8, 1, N, CRLF, NONE, NONE, 0
SetCom #2, 4800

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 629
Instrucción SetLatch
Define la función de unión de la posición de robot con la entrada R-E/S.
Sintaxis
SetLatch { #portNumber, triggerMode}
Parámetros
#portNumber Número de puerto del puerto de entrada R-E/S para conectar la señal de entrada del
disparador.
La tabla a continuación muestra los números de puerto que puede especificar.
Especifique el número de puerto de la unidad a la que está conectado el robot objeto.
Punto
Número de puerto
Unidad de
control
ENTRADA
2 puntos
24, 25
SALIDA
-
-
Unidad de
mando 1
ENTRADA
2 puntos
56, 57
SALIDA
-
-
Unidad de
mando 2
ENTRADA
2 puntos
280, 281
SALIDA
-
-
Las siguientes constantes se definen como el puerto de entrada.
Constante Número de puerto
SETLATCH_PORT_CU_0 24
SETLATCH_PORT_CU_1 25
SETLATCH_PORT_DU1_0 56
SETLATCH_PORT_DU1_1 57
SETLATCH_PORT_DU2_0 280
SETLATCH_PORT_DU2_1 281
triggerMode La lógica de señal de entrada del disparador para conectar con R-E/S. La lógica se
puede especificar con las siguientes constantes.
Constante Valor Explicación
SETLATCH_TRIGGERMODE_TRAILINGEDGE 0 Lógica negativa
SETLATCH_TRIGGERMODE_LEADINGEDGE 1 Lógica positiva
Con la lógica negativa, engancha la posición del robot en el borde del interruptor desde
la señal de entrada de alta a baja.
Con la lógica positiva, engancha la posición del robot en el borde del interruptor
desde la señal de entrada de alta a baja.
Descripción
Define la condición de la posición de robot enganchada con las señales de entrada R-E/S. Un robot no puede
esperar señales del disparador de varios puertos simultáneamente.
Ejecutar SetLatch requiere aproximadamente 40 ms para su procesamiento.

630 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Nota
Si especifica un número de puerto de la unidad no relacionado con el robot seleccionado, ocurrirá el error “I/O
input/output bit number is out of available range” (El número de bit de entrada/salida E/S está fuera del rango
disponible).
Consulte también
LatchEnable, Función LatchState, Función LatchPos
Ejemplo de instrucción SetLatch
Function main
SetLatch 24, SETLATCH_TRIGGERMODE_LEADINGEDGE 'Lógica positiva
LatchEnable On 'Activa la función de enganche
Go P1
Wait LatchState = True 'Espera un disparador
Print LatchPos 'Muestra la posición enganchada
LatchEnable Off 'Desactiva la función de enganche
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 631
Instrucción SetIn
Para la E/S virtual, define un puerto de entrada especificado (8 bits) en el valor especificado.
Sintaxis
SetIn portNumber, value
Parámetros
portNumber Expresión entera que representa el número del puerto de entrada.
value Expresión entera entre 0 y 255 en la que se configura el puerto especificado.
Descripción
SetIn proporciona la capacidad de configurar hasta 8 bits de entradas virtuales de una sola vez.
Consulte también
SetSW, SetInW
Ejemplo de instrucción SetIn
> setin 0, 1 ' Define el primer bit del puerto 0 en On.

632 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción SetInW
Para la E/S virtual, define una palabra de entrada especificada (16 bits) en el valor especificado.
Sintaxis
SetInW portNumber, value
Parámetros
portNumber Expresión entera que representa el número del puerto de entrada.
value Número entre 0 y 65535 en el que se define la palabra especificada.
Nota
Regla del puerto de palabra que incluye el bit de entrada de la E/S de tiempo real
No se puede reflejar el bit de entrada de la E/S de tiempo real.
Especifique el valor de configuración de los puertos de palabras que contienen el bit de entrada de la E/S de
tiempo real =1, 3, 17, 19 con un número entero entre 0 y 255.
El valor mayor que 255 generará un error.
Descripción
SetInW proporciona la capacidad de configurar hasta 16 bits de entradas virtuales de una sola vez.
Consulte también
SetSw, SetIn
Ejemplo de instrucción SetInW
> setinw 0, 1 ' Configura el primer bit de la palabra 0 en On.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 633
Instrucción SetNet
Define los parámetros para un puerto TCP/IP.
Sintaxis
SetNet #portNumber, hostAddress, TCP_IP_PortNum, terminator, SWFlow, timeout, protocol
Parámetros
portNumber Especifica para cuál puerto TCP/IP se van a definir parámetros. Los valores válidos
son de 201 a 216.
hostAddress Especifica la dirección IP del host.
TCP_IP_PortNum Especifica el número de puerto TCP/IP para este nodo.
terminator Especifica los caracteres de terminación de línea. Los valores válidos son CR, LF,
CRLF.
SWFlow Especifica el control de software. El valor válido es NONE.
timeOut Especifica en segundos el tiempo máximo para transmitir o recibir. Si el valor es “0”,
no hay tiempo de espera.
protocol Especifica el protocolo (TCP/UDP) de comunicación.
Descripción
Los parámetros se guardan en la tarjeta Compact Flash dentro del controlador. Cuando ejecuta SetNet, los
datos se escriben en la memoria Compact Flash. Si los datos se escriben en la tarjeta Compact Flash
frecuentemente, puede acortar la vida útil de dicha tarjeta. Se recomienda usar SetNet solamente cuando se
cambien los parámetros.
Consulte también
OpenNet, CloseNet, SetCom
Ejemplo de instrucción SetNet
SetNet #201, "192.168.0.1", 2001, CRLF, NONE, 0

634 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción SetSw
Para la E/S virtual, define un bit de entrada especificado en el valor especificado.
Sintaxis
SetSw bitNumber, value
Parámetros
bitNumber Expresión entera que representa el número de bit de entrada.
value Expresión entera con un valor de 0 (Off) o 1 (On).
Descripción
SetSw proporciona la capacidad de activar o desactivar un bit de entrada.
Consulte también
SetIn, SetInW
Ejemplo de instrucción SetSw
> setsw 2, on ' Configura el segundo bit de entrada en On.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 635
Instrucción SFree
Retira la alimentación del servo del eje servo especificado.
Sintaxis
SFree jointNumber [ , jointNumber,... ]
Parámetros
jointNumber Expresión entera que representa un número de articulación del servo (1 a 9).
El eje S adicional es 8 y el eje T es 9.
Descripción
Retira la alimentación del servo de las articulaciones del servo especificadas. Esta instrucción se usa para la
enseñanza directa o la instalación de piezas mediante la desactivación parcial de una articulación específica.
Para volver a activar una articulación, ejecute la instrucción SLock o Motor On.
SFree inicializa el parámetro de control del robot.
Consulte Motor On para conocer detalles.
Nota
SFree devuelve algunos elementos del sistema a su estado inicial:
SFree, para fines de seguridad, inicializa los parámetros relacionados con la velocidad del brazo del robot
(Speed y SpeedS ), aceleración (Accel y AccelS ) y el parámetro LimZ.
Importante
SFree y su uso con la articulación Z y la articulación U para robots SCARA (incluida la serie
RS)
La articulación Z tiene frenos electromagnéticos por lo que configurar SFree para la articulación Z no permite
que la articulación Z se mueva de inmediato. Para mover la articulación Z a mano se requiere que se libere
el freno presionando continuamente el desbloqueo del freno en la parte superior del brazo del robot.
Algunos modelos tienen un freno electrónico en la articulación U. Cuando el robot tiene un freno electrónico
en la articulación U, configurar SFree para la articulación U no permite que la articulación U se mueva de
inmediato. Para mover la articulación U a mano se requiere que se libere el freno presionando continuamente
el desbloqueo del freno en la parte superior del brazo del robot.
SFree no es válido con los robots de 6 ejes (incluida la serie N)
Ocurre un error cuando se ejecuta SFree en robots de 6 ejes (incluida la serie N).
Para mover el brazo a mano, libere el freno electromagnético con Brake Off (freno desactivado) después de
apagar el motor mediante Motor Off.
Ejecución de comandos de movimiento mientras las articulaciones están en estado SFree
Intentar ejecutar un comando de movimiento mientras está en la condición SFree provocará un error en el
estado predeterminado del controlador. Sin embargo, para permitir el movimiento mientras 1 o más de las
articulaciones están en el estado SFree, seleccione la casilla de verificación [Allow motion with one or more
joints free] (Permitir movimiento con uno o más ejes libres) en [Setup] -[System Configuration]-[Controller]-
[Preferences].
No use SFree durante el seguimiento del transportador
Si se usa SFree durante el seguimiento del transportador, podrían ocurrir los errores 5057 o 5058. Use
SFree tras poner fin al seguimiento del transportador, por ejemplo, con Cnv_AbortTrack.
Consulte también
Brake, LimZ, Motor, Función SFree, SLock

636 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Ejemplo de instrucción SFree
Este es un ejemplo simple del uso del comando SFree. Para operar el robot en este ejemplo, se debe
seleccionar la casilla de verificación [Allow motion with one or more joints free] (Permitir movimiento con
una o más articulaciones libres) en [Setup]-[System Configuration]-[Controller]-[Preferences].
Function GoPick
Speed pickSpeed
SFree 1, 2 'Libera la excitación de J1 y J2,
'y controla las articulaciones Z y U para la instalación de piezas.
Go pick
SLock 1, 2 'Restablece la excitación de J1 y J2.
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 637
Función SFree
Arroja el estado de SFree de una articulación especificada.
Sintaxis
SFree(jointNumber)
Parámetros
jointNumber Expresión entera que representa el número de articulación que se debe revisar.
El eje S adicional es 8 y el eje T es 9.
Valores devueltos
True si la articulación está libre, False si no es así.
Consulte también
Instrucción SFree
Ejemplo de instrucción SetFree
If SFree(1) Then
Print "Joint 1 is free"
EndIf

638 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función Sgn
Determina el signo del operando.
Sintaxis
Sgn(Operand)
Parámetros
Operand Una expresión numérica.
Valores devueltos
1: Si el operando es un valor positivo.
0: Si el operando es un 0
-1: Si el operando es un valor negativo.
Descripción
La función Sgn determina el signo del valor numérico del operando.
Consulte también
Abs, And, Atan, Atan2, Cos, Int, Mod, Or, Not, Sin, Sqr, Str$, Tan, Val, Xor
Ejemplo de función Sgn
Este es un ejemplo simple de ventana de comando del uso de la función Sgn.
>print sgn(123)
1
>print sgn(-123)
-1
>

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 639
Instrucción Short
Declara variables del tipo Short. (Variable de número entero de 2 bytes).
Sintaxis
Short varName [(subscripts)] [, varName [(subscripts)]...]
Parámetros
varName Nombre de variable que el usuario desea declarar.
subscripts Opcional. Las dimensiones de una matriz son variables; es posible declarar hasta 3
dimensiones. La sintaxis del subíndice es la siguiente
(ubound1, [ubound2], [ubound3])
ubound1, ubound2, ubound3 especifican, cada una, el límite superior máximo para la
dimensión asociada.
Los elementos en cada dimensión de una matriz se numeran desde 0 y el número
disponible de elementos de matriz es el valor de límite superior + 1.
Cuando especifique el valor del límite superior, asegúrese de que el número total de
elementos esté dentro del rango que se muestra a continuación:
Variable local 2.000
Variables globales conservadas 4.000
Variable global y variable de módulo 100.000
Descripción
Short se usa para declarar variables como un tipo entero. Las variables de número entero pueden incluir
valores de -32768 a 32767. Las variables locales se deben declarar al inicio de una función. Las variables
globales y de módulo se deben declarar fuera de las funciones.
Consulte también
Boolean, Byte, Double, Global, Int32, Int64, Integer, Long, Real, String, UByte, UInt32, UInt64,
UShort
Ejemplo de instrucción Short
El siguiente ejemplo muestra un programa simple que declara algunas variables mediante Short.
Function shorttest
Short A(10) 'Matriz de una dimensión de Short
Short B(10, 10) 'Matriz de dos dimensiones de Short
Short C(5, 5, 5) 'Matriz de tres dimensiones de Short
Short var1, arrayvar(10)
Integer i
Print "Please enter an Integer Number"
Input var1
Print "The Integer variable var1 = ", var1
For i = 1 To 5
Print "Please enter an Integer Number"
Input arrayvar(i)
Print "Value Entered was ", arrayvar(i)
Next i
Fend

640 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción ShutDown
Apaga EPSON RC+ y apaga o reinicia opcionalmente Windows.
Sintaxis
ShutDown [mode] [, Forced]
Parámetros
mode Opcional. Expresión entera que representa la configuración de modo descrita a
continuación.
Constante simbólica Valor Significado
Modo omitido −1 Aparece un cuadro de diálogo que le permite al usuario elegir la
opción de apagado.
SHUTDOWN_ALL 0 Apaga EPSON RC+ y Windows.
SHUTDOWN_RESTART 1 Apaga EPSON RC+ y reinicia Windows.
SHUTDOWN_EPSONRC 2 Apaga EPSON RC+.
Forced Opcional. Use para forzar un apagado.
Descripción
Use ShutDown para apagar RC+ y, de manera opcional, apagar o reiniciar Windows desde el programa.
Puede forzar un apagado mediante el parámetro Forced.
Nota
Si apaga con el parámetro Forced mientras están ejecutándose las tareas, puede perder datos.
Asegúrese de guardar los datos antes de apagar el equipo.
Cuando la configuración del controlador está definida en “Cooperative mode” en el
controlador virtual
Cuando la configuración del controlador está definida en “Cooperative mode” (Modo cooperativo) en el
controlador virtual, no se guardan las variables globales conservadas si se ejecuta la instrucción ShutDown.
No use la instrucción ShutDown si necesita guardar las variables globales conservadas.
Consulte también
Restart
Ejemplo de instrucción ShutDown
ShutDown 0 ' Apagar EPSON RC+ y Windows

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 641
Función ShutDown
Apaga EPSON RC+ y apaga o reinicia opcionalmente Windows.
Sintaxis
ShutDown ( [mode] [, Forced] )
Parámetros
mode Opcional. Expresión entera que representa la configuración de modo descrita a
continuación.
Constante simbólica Valor Significado
Modo omitido −1 Aparece un cuadro de diálogo que le permite al usuario elegir la
opción de apagado.
SHUTDOWN_ALL 0 Apaga EPSON RC+ y Windows.
SHUTDOWN_RESTART 1 Apaga EPSON RC+ y reinicia Windows.
SHUTDOWN_EPSONRC 2 Apaga EPSON RC+.
Forced Opcional. Use para forzar un apagado.
Descripción
Use ShutDown para apagar RC+ y, de manera opcional, apagar o reiniciar Windows desde el programa.
Puede forzar un apagado mediante el parámetro Forced.
Nota
Si apaga con el parámetro Forced mientras están ejecutándose las tareas, puede perder datos.
Asegúrese de guardar los datos antes de apagar el equipo.
Cuando la configuración del controlador está definida en “Cooperative mode” en el
controlador virtual
Cuando la configuración del controlador está definida en “Cooperative mode” en el controlador virtual, no
se guardan las variables globales conservadas si se ejecuta la función ShutDown. No use la función
ShutDown si necesita guardar las variables globales conservadas.
Valores devueltos
Arroja los siguientes valores enteros.
-1 Cuando aparece un cuadro de diálogo y el usuario selecciona Cancel.
0 Si falla el apagado
1 Si es exitoso el apagado
Ejemplo de función ShutDown
If Shutdown(SHUTDOWN_EPSONRC) = 1 Then
Print "Shutdown: OK"
Else
Print "Shutdown: NG"
EndIf

642 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción de Signal
Envía una señal a las tareas que ejecutan WaitSig.
Sintaxis
Signal signalNumber
Parámetros
signalNumber Número de la señal que se transmitirá. El rango es de 0 a 63.
Descripción
La señal se puede usar para sincronizar la ejecución de tareas múltiples.
Se omiten las señales previas emitidas antes de la ejecución de WaitSig.
Consulte también
WaitSig
Ejemplo de instrucción de Signal
Function Main
Xqt 2, SubTask
Call InitSys
Signal 1
Fend
Function SubTask
WaitSig 1
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 643
Instrucción SimGet
Adquiera los valores de configuración de las propiedades de cada objeto del simulador.
Sintaxis
SimGet Object.Property, Var
SimGet Robot.Hand.Propoerty, Var
Parámetros
Object Variable de cadena que indica los nombres de los objetos que adquieren los valores de la
propiedad.
Robot Variable de cadena que indica el nombre del robot en que está instalada la mano
especificada en “Hand” (mano).
Hand Variable de cadena que indica el nombre de la mano que adquiere los valores de la
propiedad.
Property Nombre de la propiedad que adquiere los valores. Más adelante se describen las
propiedades.
Var Variable que indica el valor devuelto.
Descripción
Use este comando para adquirir el valor de configuración de la propiedad de cada objeto del simulador.
Defina las siguientes propiedades para adquirir los valores de configuración del objeto.
Propiedad
Descripciones
Unidad
Tipo de
datos
Valor
devuelto
PositionX
Adquiera una posición en el sistema de
coordenadas de X.
(mm)
Double
PositionY
Adquiera una posición en el sistema de
coordenadas de Y.
(mm)
Double
PositionZ
Adquiera una posición en el sistema de
coordenadas de Z.
(mm)
Double
RotationX
Adquiera un ángulo de rotación en el eje
X.
(grado)
Double
RotationY
Adquiera un ángulo de rotación en el eje
Y.
(grado)
Double
RotationZ
Adquiera un ángulo de rotación en el eje
Z.
(grado)
Double
CollisionCheck
Adquiera la activación/ desactivación de
detección de colisiones.
-
Boolean
Verdadero o
falso
CollisionCheckSelf
Adquiera la activación/ desactivación de
detección de autocolisiones del robot.
-
Boolean
Verdadero o
falso
Visible
Adquiera el estado de visualización/ no
visualización.
-
Boolean
Verdadero o
falso
Type
Adquiera los tipos de objetos.
-
Integer
Layout: 0
Part: 1
Mounted
Device: 3
HalfSizeX
Adquiera una longitud de objeto de caja
en la dirección X.
(mm)
Double
HalfSizeY
Adquiera una longitud de objeto de caja
en la dirección Y.
(mm)
Double
HalfSizeZ
Adquiera una longitud de objeto de caja
en la dirección Z.
(mm)
Double
HalfSizeHeight
Adquiera una longitud de objeto de plano.
(mm)
Double
HalfSizeWidth
Adquiera un ancho de objeto de plano.
(mm)
Double
PlaneType
Adquiera un tipo de objeto de plano.
-
Integer
Horizontal: 0
Vertical: 1
Radius
Adquiera un radio de objeto de esfera o
(mm)
Double

644 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
de objeto de cilindro.
Height
Adquiera una altura de objeto de cilindro.
(mm)
Double
Name
Adquiera un nombre de objeto.
String
Color
Adquiera un color de visualización de un
objeto.
String
Nombre del
color o código
hexadecimal
del color
(ARGB)
Puede adquirir las propiedades mediante las combinaciones que aparecen en la siguiente lista.
Propiedad
Objeto
Robot
Hand
Box
Sphere
Cylinder
Plane
CAD
Camera
PositionX
PositionY
PositionZ
RotationX
RotationY
RotationZ
CollisionCheck
CollisionCheckSelf
-
-
-
-
-
-
-
Visible
-
Type
-
-
-
HalfSizeX
-
-
-
-
-
-
-
HalfSizeY
-
-
-
-
-
-
-
HalfSizeZ
-
-
-
-
-
-
-
HalfSizeHeight
-
-
-
-
-
-
-
HalfSizeWidth
-
-
-
-
-
-
-
PlaneType
-
-
-
-
-
-
-
Radius
-
-
-
-
-
-
Height
-
-
-
-
-
-
-
Name
Color
-
-
-
-
Consulte también
SimSet
Ejemplo de instrucción SimGet
‘Adquiera el valor de la coordenada X para el objeto SBox_1
Double boxPosX
SimGet SBox_1.PositionX, boxPosX
‘Adquiera el estado de visualización/ no visualización para el objeto SBox_1
Boolean boxVisible
SimGet SBox_1.Visible, boxVisible
‘Adquiera el tipo de objeto SBox_1
Integer boxType
SimGet SBox_1.Type, boxType

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 645
Instrucción SimSet
Defina las propiedades de cada objeto del simulador. Ejecute las configuraciones de movimiento del robot,
de los objetos y del simulador.
Sintaxis
(1) Configuración de propiedades para el objeto
SimSet Object.Property, valor
SimSet Robot.Hand.Property, valor
(2) Configuración de movimiento para el robot (recogida y colocación)
SimSet Robot.Pick, Object [,Tool]
SimSet Robot.Place, Object
(3) Configuración de funcionamiento para objetos (especifique el objeto principal)
SimSet Object.SetParent [, ParentObject]
(4) Configuración del simulador (restablezca la detección de colisiones)
SimSet ResetCollision
Parámetros
(1) Configuración de propiedades para el objeto
Object Variable de cadena que indica los nombres de los objetos que definen los valores de la
propiedad.
Robot Variable de cadena del robot que indica el nombre del robot en que está instalada la
mano especificada en “Hand”.
Hand Variable de cadena que indica el nombre de la mano que define los valores de la
propiedad.
Property Nombre de la propiedad que define los valores. Más adelante se describen las
propiedades.
Value Fórmula con valores nuevos. El tipo de datos depende de las propiedades.
(2) Configuración de movimiento para el robot (recogida y colocación)
Object Variable de cadena que indica el nombre del robot que será recogido o colocado.
Object Variable de cadena que indica el nombre del objeto que será recogido o colocado.
Tool Fórmula que indica el número de herramienta que se usa al momento de la recogida.
(3) Configuración de funcionamiento para el objeto (especifique el objeto principal)
Object Variable de cadena que indica el nombre del objeto que define el objeto principal.
ParentObject Variable de cadena que indica el nombre del objeto principal.

646 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Descripción
Use este comando para definir las propiedades de cada objeto del simulador. Además, úselo para cambiar
la configuración de movimiento del robot, de los objetos y del simulador.
(1) Configuración de propiedades del objeto
Puede definir los objetos mediante la especificación de las propiedades que aparecen a continuación.
Propiedad
Descripciones
Unidad
Tipo de
datos
Valor devuelto
PositionX
Defina una posición de la coordenada
X.
(mm)
Double
Máx: 100000
Mín: -100000
PositionY
Defina una posición de la coordenada
Y.
(mm)
Double
Máx: 100000
Mín: -100000
PositionZ
Defina una posición de la coordenada
Z.
(mm)
Double
Máx: 100000
Mín: -100000
RotationX
Defina un ángulo de rotación del eje
X.
(grado)
Double
Máx: 360
Mín: -360
RotationY
Defina un ángulo de rotación del eje
Y.
(grado)
Double
Máx: 360
Mín: -360
RotationZ
Defina un ángulo de rotación del eje
Z.
(grado)
Double
Máx: 360
Mín: -360
CollisionCheck
Defina la activación/ desactivación
de detección de colisiones.
-
Boolean
Verdadero o
falso
CollisionCheckSelf
Defina la activación/ desactivación
de detección de autocolisiones del
robot.
-
Boolean
Verdadero o
falso
Visible
Defina el estado de visualización/ no
visualización.
-
Boolean
Verdadero o
falso
HalfSizeX
Adquiera una longitud de objeto de
caja en la dirección X.
(mm)
Double
Máx: 100000
Mín: 0,001
HalfSizeY
Adquiera una longitud de objeto de
caja en la dirección Y.
(mm)
Double
Máx: 100000
Mín: 0,001
HalfSizeZ
Adquiera una longitud de objeto de
caja en la dirección Z.
(mm)
Double
Máx: 100000
Mín: 0,001
HalfSizeHeight
Adquiera una longitud de objeto de
plano.
(mm)
Double
Máx: 100000
Mín: 0,001
HalfSizeWidth
Adquiera un ancho de objeto de
plano.
(mm)
Double
Máx: 100000
Mín: 0,001
PlaneType
Adquiera un tipo de objeto de plano.
-
Integer
Horizontal: 0
Vertical: 1
Radius
Adquiera un radio de objeto de esfera
o de objeto de cilindro.
(mm)
Double
Máx: 100000
Mín: 0,001
Height
Adquiera una altura de objeto de
cilindro.
(mm)
Double
Máx: 100000
Mín: 0,001
Name
Adquiera un nombre de objeto.
String
Color
Adquiera un color de visualización
de un objeto.
String
Nombre del
color o código
hexadecimal
del color
(ARGB)

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 647
Puede definir la propiedad mediante las combinaciones que aparecen en la siguiente lista.
Propiedad
Objetos
Robot
Hand
Box
Sphere
Cylinder
Plane
CAD
Camera
PositionX
PositionY
PositionZ
RotationX
RotationY
RotationZ
CollisionCheck
CollisionCheckSelf
-
-
-
-
-
-
-
Visible
-
HalfSizeX
-
-
-
-
-
-
-
HalfSizeY
-
-
-
-
-
-
-
HalfSizeZ
-
-
-
-
-
-
-
HalfSizeHeight
-
-
-
-
-
-
-
HalfSizeWidth
-
-
-
-
-
-
-
PlaneType
-
-
-
-
-
-
-
Radius
-
-
-
-
-
-
Height
-
-
-
-
-
-
-
Name
Color
-
-
-
-
(2) Configuración de movimiento para el robot (recogida y colocación)
Puede definir los siguientes movimientos del robot.
Recogida
El robot especificado por “Robot” toma el objeto especificado en “Object”.
Este objeto se registra como pieza del robot. Además, si se especifica algún número de herramienta en
“Tool”, se puede ejecutar el movimiento de sujeción con el número de herramienta especificado. Si se
omite la configuración de “Tool”, use Tool0 para ejecutar el movimiento de sujeción.
No puede tomar un objeto ya registrado como pieza o definido como herramienta de instalación del brazo.
Además, no puede sujetar la cámara.
Colocación
El robot especificado por “Robot” coloca el objeto especificado en “Object”. Este objeto es eliminado del
registro como pieza del robot.
No puede colocar objetos cuyos registros ya estén eliminados.
Puede tomar o colocar el objeto mediante las combinaciones que aparecen en la siguiente lista.
Movimiento
Objetos
Robot
Hand
Box
Sphere
Cylinder
Plane
CAD
Camera
Recogida
-
-
-
Colocación
-
-
-
(3) Configuración de funcionamiento para el objeto (especifique el objeto principal)
Puede definir operaciones para los siguientes objetos

648 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
SetParent
Defina el objeto especificado por “ParentObject”como el objeto principal del objeto especificado en
“Object”. Se puede omitir “ParentObject”. En ese caso, el objeto especificado en “Object” será el objeto
principal. Si el objeto especificado en “Object” es un objeto secundario de algún objeto, se elimina el
registro de la configuración como un objeto secundario.
Si el objeto especificado en “Object” está registrado como herramienta de instalación de piezas o del brazo,
no podrá especificar el objeto principal.
A continuación, los objetos que pueden especificar SetParent. Con el objeto de la cámara, solo el objeto
definido como cámara fija puede usar SetParent.
Operación
Objetos
Robot
Hand
Box
Sphere
Cylinder
Plane
CAD
Camera
SetParent
-
-
Puede usar SetParent mediante las combinaciones que aparecen en la siguiente lista.
ParentObject
Robot
Hand
Box
Sphere
Cylinder
Plane
CAD
Camera
Objeto secundario
Robot
-
-
-
-
-
-
-
-
Hand
-
-
-
-
-
-
-
-
Box
-
-
Sphere
-
-
Cylinder
-
-
Plane
-
-
CAD
-
-
Camera
-
-
(4) Configuración del simulador (restablezca la detección de colisiones)
Puede cambiar las siguientes configuraciones del simulador.
ResetCollision
Restablezca la detección de colisiones. Si no hay colisión entre el robot y el objeto después de ejecutar
ResetCollision, restablezca el estado de colisión y actualice la visualización 3D del simulador. Si ocurre
una colisión entre el robot y el objeto, no se restablece el estado de colisión y no se actualiza la
visualización 3D del simulador.
Consulte también
SimGet

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 649
Ejemplo de instrucción SimSet
‘Defina en 100,0 mm el valor de la coordenada X para el objeto SBox_1
SimSet SBox_1.PositionX, 100.0
‘Grasp SBox_1 by Tool1 in Robot1
SimSet Robot1.Pick, SBox_1, 1
‘Place SBox_1 grasped by Robot1
SimSet Robot1.Place, SBox_1
‘Set CAD_1 to the parent object of SBox_1
SimSet SBox_1.SetParent, CAD_1
‘Set SBox_1 as the parent object
SimSet SBox_1.SetParent
‘Reset the collision detect
SimSet ResetCollision

650 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función Sin
Arroja el seno de una expresión numérica.
Sintaxis
Sin(radians)
Parámetros
radians Expresión real en radianes.
Valores devueltos
Valor numérico que representa el seno de los radianes de la expresión numérica.
Descripción
Sin arroja el seno de una expresión numérica. La expresión numérica (radianes) debe estar en unidades de
radianes. El valor arrojado por la función Sin varía entre -1 y 1.
Para convertir de radianes a grados, use la función RadToDeg.
Consulte también
Abs, Atan, Atan2, Cos, Int, Mod, Not, Sgn, Sqr, Str$, Tan, Val
Ejemplo de función Sin
El siguiente ejemplo muestra un programa simple que utiliza Sin.
Function sintest
Real x
Print "Please enter a value in radians:"
Input x
Print "Sin of ", x, " is ", Sin(x)
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 651
Instrucción SingularityAngle
Define el ángulo del entorno de singularidad para la función de evasión de singularidad.
Sintaxis
SingularityAngle {angle}
Parámetros
angle Especifica el ángulo de la articulación n.º 5 (números iguales o mayores que 0,1.
Unidad: deg) mediante una fórmula o un valor para determinar el entorno de
singularidad de muñeca del robot de 6 ejes verticales (incluida la serie N).
Resultado
Se muestra el valor de SingularityAngle actual si se omite el parámetro.
Descripción
Este comando se activa solamente cuando se usa la función de evasión de singularidad.
El valor predeterminado es 10 deg. Este comando se puede usar para ajustar la posición de inicio de la evasión
de singularidad. Si se especifica el valor menor que el valor predeterminado, el movimiento de evasión se
inicia en el punto más cercano a la singularidad. Normalmente, no es necesario cambiar el parámetro. Puede
que resulte útil para reducir errores que suceden cuando se pasa por la singularidad.
Si se cambia el parámetro de SingularityAngle, esta configuración permanece vigente hasta el siguiente inicio
del controlador.
Consulte también
AvoidSingularity, Función SingularityAngle, SingularitySpeed
Ejemplo de instrucción SingularityAngle
SingularityAngle 7.0 'Configura el ángulo del entorno de singularidad en 7 grados

652 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función SingularityAngle
Arroja el valor de configuración de SingularityAngle.
Sintaxis
SingularityAngle
Valores devueltos
Arroja el ángulo del entorno de singularidad (Unidad: deg).
Consulte también
AvoidSingularity, SingularityAngle, SingularitySpeed, Función SingularitySpeed
Ejemplo de función SingularityAngle
Real currSingularityAngle
currSingularityAngle = SingularityAngle

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 653
Instrucción SingularityDist
Define la distancia del entorno de singularidad necesaria para la función de evasión de singularidad.
Sintaxis
SingularityDist {distance}
Parámetros
distance Especifica la distancia entre el punto P y el eje de rotación de la articulación n.º 1 (el
número real es igual o mayor que 0. Unidad: mm) mediante una fórmula o valor para
determinar el entorno de singularidad de hombro del robot de 6 ejes verticales (incluida
la serie N) y la serie RS.
Resultado
Se muestra el valor actual de SingularityAngle si se omite el parámetro.
Descripción
Este comando se activa solamente cuando se usa la función de evasión de singularidad.
El valor predeterminado es 30 mm. Este comando se puede usar para ajustar la posición de inicio de la
evasión de singularidad. Si se especifica el valor menor que el valor predeterminado, el movimiento de
evasión se inicia en el punto más cercano a la singularidad. Normalmente, no es necesario cambiar el
parámetro. Puede que resulte útil para reducir errores que suceden cuando se pasa por la singularidad.
Si se cambia el parámetro SingularityDist, la configuración actual permanece vigente hasta el siguiente inicio
del controlador.
Consulte también
AvoidSingularity, SingularityAngle, Función SingularityAngle, Función SingularityDist,
SingularitySpeed, Función SingularitySpeed
Ejemplo de instrucción SingularityDist
SingularityDist 10.0 'Configura la distancia del entorno de singularidad a 10 mm

654 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función SingularityDist
Arroja el valor de configuración de SingularityDist.
Sintaxis
SingularityDist
Valores devueltos
Arroja la distancia del entorno de singularidad (Unidad: mm).
Consulte también
SingularityDist, AvoidSingularity, SingularityAngle, Función SingularityAngle, SingularitySpeed,
Función SingularitySpeed
Ejemplo de función SingularityDist
Real currSingularityDist
currSingularityDist = SingularityDist

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 655
Instrucción SingularitySpeed
Define la velocidad angular del entorno de singularidad para la función de evasión de singularidad.
Sintaxis
SingularitySpeed {Angular velocity}
Parámetros
Angular velocity Especifique el porcentaje de la velocidad angular de la articulación n.º 4 con respecto
a la velocidad angular máxima (el número real es igual o mayor que 0,1. Unidad: %)
mediante una fórmula o un valor para determinar el entorno de singularidad de la
muñeca del robot de 6 ejes verticales (incluida la serie N).
Resultado
Se muestra el valor de SingularitySpeed actual si se omite el parámetro.
Descripción
Este comando se activa solamente cuando se usa la función de evasión de singularidad.
El valor predeterminado es 10 %. Este comando se puede usar para ajustar la posición de inicio de la evasión
de singularidad. Si se especifica el valor menor que el valor predeterminado, el movimiento de evasión se
inicia en el punto más cercano a la singularidad. Normalmente, no es necesario cambiar el parámetro. Puede
que resulte útil para reducir errores que suceden cuando se pasa por la singularidad.
Si se cambia el parámetro de SingularitySpeed, la configuración actual permanece vigente hasta el siguiente
inicio del controlador.
Consulte también
Función AvoidSingularity, SingularityAngle, SingularitySpeed
Ejemplo de SingularitySpeed
SingularitySpeed 30.0 'Configura la velocidad angular del entorno de singularidad en 30 %

656 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función SingularitySpeed
Arroja el valor de configuración de SingularitySpeed.
Sintaxis
SingularitySpeed
Valores devueltos
Arroja la velocidad angular del entorno de singularidad (Unidad: %).
Consulte también
SingularitySpeed, SingularityAngle, AvoidSingularity
Ejemplo de función SingularitySpeed
Real currSingularitySpeed
currSingularitySpeed = SingularitySpeed

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 657
Instrucción SLock
Restaura la alimentación servo de la condición sin servo para el eje servo especificado.
Sintaxis
SLock jointNumber [, jointNumber,... ]
Parámetros
jointNumber El número de la articulación del servo (1 a 9).
El eje S adicional es 8 y el eje T es 9.
Descripción
SLock restaura la alimentación del servo a la articulación del servo especificada, que fue desactivada por la
instrucción SFree para la enseñanza directa o la instalación de piezas.
Si se omite el número de la articulación, se activan todas las articulaciones.
Activar la articulación n.º 3 (Z) causa la liberación del freno.
Para activar todos los ejes, se puede usar Motor On en lugar de SLock.
Ejecutar SLock mientras se está en el estado Motor Off causará un error.
SLock inicializa el parámetro de control del robot.
Consulte Motor On para conocer detalles.
La instrucción SFree no puede desenergizar robots de 6 ejes (incluida la serie N). Cuando se ejecuta SLock,
sucede un error.
Consulte también
Brake, LimZ, Reset, SFree
Ejemplo SLock
Este es un ejemplo simple del uso del comando SLock. Para operar el robot en este ejemplo, se debe
seleccionar la casilla de verificación [Allow motion with one or more joints free] (Permitir movimiento con
una o más articulaciones libres) en [Setup]-[System Configuration]-[Controller]-[Preferences].
Function test
.
.
.
SFree 1, 2 'Libera la excitación de J1 y J2,
'y controla las articulaciones Z y U para la instalación de piezas.
Go P1
SLock 1, 2 'Restablece la excitación de J1 y J2.
.
.
.
Fend

658 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción SoftCP
Especifica el modo de movimiento SoftCP.
Sintaxis
SoftCP { On | Off }
Parámetros
On | Off On se usa para activar el modo de movimiento SoftCP.
Off se usa para desactivar el modo de movimiento SoftCP.
Descripción
El modo de movimiento SoftCP controla la vibración provocada por el movimiento CP con alta
aceleración/desaceleración.
El movimiento CP normal se centra en el seguimiento de ruta y el movimiento uniforme que aumenta la
vibración cuando la aceleración/desaceleración es alta. Para reducir la vibración, se debe reducir la
aceleración/desaceleración con los comandos SpeedS y AccelS.
Sin embargo, algunas aplicaciones no necesariamente requieren el alto rendimiento de seguimiento de ruta y
movimiento uniforme pero sí requieren el movimiento CP con menos vibración cuando la
aceleración/desaceleración es alta.
El modo de movimiento SoftCP disminuye el rendimiento de seguimiento de ruta y movimiento uniforme
más que en el modo de movimiento CP normal y reduce la vibración en el movimiento CP con
aceleración/desaceleración alta.
El modo de movimiento SoftCP se aplica a los siguientes comandos de movimiento CP:
Move, BMove, TMove, Arc, Arc3, CVMove, Jump3CP
Si la vibración no importa en el movimiento CP normal o se requieren los rendimientos de seguimiento de
ruta y movimiento uniforme, no aplique el modo de movimiento SoftCP.
Precaución
Cuando están activados el movimiento CP y el movimiento PTP de la conexión
Asegúrese de activar SoftCP para conectar el movimiento CP y el movimiento PTP en la forma que se
aprecia a continuación.
Si no se activa, se podría generar ruido en el robot, dependiendo del movimiento. Tras conectar el
movimiento CP y el movimiento PTP, desactive SoftCP.
SoftCP On
Go P1 CP
Move P2
SoftCP Off
Consulte también
Función SoftCP
Ejemplo de instrucción SoftCP
SoftCP On
Move P1
Move P2
SoftCP Off

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 659
Función SoftCP
Arroja el estado del modo de movimiento SoftCP.
Sintaxis
SoftCP
Valores devueltos
0 = modo de movimiento SoftCP desactivado, 1 = modo de movimiento SoftCP activado.
Consulte también
Instrucción SoftCP
Ejemplo de función SoftCP
If SoftCP = Off Then
Print "SoftCP is off"
EndIf

660 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función Space$
Arroja una cadena de caracteres de espacio.
Sintaxis
Space$(count)
Parámetros
count El número de espacios que se debe incluir en la cadena devuelta.
Valores devueltos
Arroja una cadena de caracteres de espacio count.
Descripción
Space$ arroja una cadena de caracteres de espacio count según lo especifique el usuario. Space$ puede arrojar
hasta 255 caracteres (el número máximo de caracteres permitidos en una variable de cadena).
La instrucción Space$ normalmente se usa para insertar espacios antes, después o entre otras cadenas de
caracteres.
Consulte también
Asc, Chr$, InStr, Left$, Len, LSet$, Mid$, Right$, RSet$, Str$, Val
Ejemplo de función Space$
> Print "XYZ" + Space$(1) + "ABC"
XYZ ABC
> Print Space$(3) + "ABC"
ABC
>

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 661
Instrucción Speed
Especifica o muestra la velocidad del brazo para las instrucciones de movimiento de punto a punto Go,
Jump y Pulse.
Sintaxis
(1) Speed percent [, departSpeed, approSpeed]
(2) Speed
Parámetros
percent Expresión entera entre 1 y 100 que representa la velocidad del brazo como porcentaje
de la velocidad máxima.
departSpeed Expresión entera entre 1 y 100 que representa la velocidad del movimiento de
alejamiento de la instrucción Jump. Solo está disponible con el comando Jump.
approSpeed Expresión entera entre 1 y 100 que representa la velocidad del movimiento de
acercamiento de la instrucción Jump. Solo está disponible con el comando Jump.
Valores devueltos
Muestra el valor actual de Speed cuando se usa sin parámetros.
Descripción
Speed especifica la velocidad del brazo para todas las instrucciones de movimiento de punto a punto. Esto
incluye el movimiento causado por las instrucciones de movimiento del robot Go, Jump y Pulse. La velocidad
se especifica como un porcentaje de velocidad máxima con un rango de valores aceptables entre 1 y 100. (1
representa el 1 % de la velocidad máxima y 100 representa el 100 % de la velocidad máxima). Speed 100
representa la velocidad máxima posible.
Los valores de alejamiento y acercamiento se aplican solamente a la instrucción Jump. Si se omiten, su valor
predeterminado será el valor porcentual.
El valor de velocidad se inicializa en los valores predeterminados cuando se realiza una de las siguientes
acciones:
Inicio del controlador
Motor On
SFree, SLock, Brake
Reset, Reset Error
El botón Stop o QuitAll detiene las
tareas
En el modo de potencia baja, la configuración de la velocidad efectiva es menor que el valor predeterminado.
Si se especifica una velocidad mayor directamente (desde la ventana Command) o en un programa, la
velocidad cambia al valor predeterminado. En el modo de alta potencia, la configuración de la velocidad de
movimiento es el valor especificado con Speed.
Si se necesita un movimiento a mayor velocidad, configure el modo de alta potencia mediante Power High y
cierre la puerta de seguridad. Si la puerta de seguridad está abierta, las configuraciones de Speed cambiarán
a su valor predeterminado.
Si Speed se ejecuta cuando el robot está en el modo de potencia baja, aparece el siguiente mensaje. El
siguiente ejemplo muestra que el robot se moverá a la velocidad predeterminada (5) porque está en el modo
de potencia baja, aunque el valor de configuración de velocidad de Speed es 80.
> speed 80
> speed
Low Power Mode
80
80 80
>

662 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Consulte también
Accel, Go, Jump, Power, Pass, Pulse, SpeedS
Ejemplo de instrucción Speed
Speed se puede usar desde la ventana Command o en un programa. A continuación, se muestran ejemplos
simples de ambos métodos.
Function speedtst
Integer slow, fast, i
slow = 10
fast = 100
For i = 1 To 10
Speed slow
Go P0
Go P1
Speed fast
Go P0
Go P1
Next i
Fend
Desde la ventana Command, el usuario también puede configurar los valores de Speed.
> Speed 100,100,50 'Velocidad descendente de la articulación Z establecida en 50 %
> Speed 50
> Speed
Low Power State: Speed is limited to 5
50
50 50
>

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 663
Función Speed
Arroja una de las tres configuraciones de velocidad.
Sintaxis
Speed[(paramNumber)]
Parámetros
paramNumber Expresión entera que da como resultado uno de los valores que se muestran a
continuación.
Cuando se omite, se tomará 1 como el número especificado.
1: Velocidad de movimiento de PTP
2: Velocidad de alejamiento de Jump
3: Velocidad de acercamiento de Jump
Valores devueltos
El valor entero es de 1 a 100.
Consulte también
Velocidad
Ejemplo de función Speed
Integer savSpeed
savSpeed = Speed(1)
Speed 50
Go pick
Speed savSpeed
Fend

664 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción SpeedFactor
Define y arroja el valor de configuración del factor de velocidad para movimientos del manipulador.
Sintaxis
(1) SpeedFactor speedRatio
(2) SpeedFactor
Parámetros
speedRatio Expresión entera o valor entero entre 1 y 100 que representa la relación de velocidad
del movimiento del manipulador. (Unidad: %)
Valores devueltos
Muestra el valor actual de SpeedFactor cuando se usa sin parámetros.
Descripción
SpeedFactor especifica el factor de velocidad para todos los manipuladores y los movimientos definidos para
el controlador. Normalmente, SpeedFactor se configura en 100 % y la velocidad para cada
manipulador/comando de movimiento está definida por Speed o SpeedR. SpeedFactor es útil para definir
una velocidad específica para todos los movimientos de todos los manipuladores a la vez. Por ejemplo, el
movimiento con Speed = 80 % opera al 40 % de la velocidad, cuando la relación de velocidad es de 50 %.
SpeedFactor también cambia la aceleración en la misma proporción teniendo en cuenta un equilibrio de
aceleración y desaceleración del movimiento del manipulador.
SpeedFactor es equivalente a la configuración de relación de velocidad en la ventana Operator y cambia junto
con el valor.
SpeedFactor se inicializará en 100 % en el inicio del controlador.
Consulte también
Función SpeedFactor
Ejemplo de instrucción SpeedFactor
Function main
Motor On
Power High
SpeedFactor 80
Speed 100; Accel 100,100
Go P1 'Opera con Speed 80; Accel 80,80
Speed 50; Accel 50,50
Go P2 'Opera con Speed 40; Accel 40,40
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 665
Función SpeedFactor
Arroja el valor de configuración de SpeedFactor.
Sintaxis
SpeedFactor
Valores devueltos
Valor entero que representa la configuración de SpeedFactor.
Consulte también
Instrucción SpeedFactor
Ejemplo de función Speed
Real savSpeedFactor
savSpeedFactor = SpeedFactor
SpeedFactor 80
Go P1
Go P2
SpeedFactor savSpeedFactor

666 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción SpeedR
Define o muestra la velocidad de rotación de herramientas para el movimiento CP cuando se usa ROT.
Sintaxis
(1) SpeedR rotSpeed
(2) SpeedR
Parámetros
rotSpeed Expresión real en grados/segundos.
Rango válido de entradas de los parámetros: 0,1 a 1000
Valores devueltos
Cuando los parámetros se omiten, se muestra la configuración actual de SpeedR.
Descripción
SpeedR es efectivo cuando se usa el modificador ROT en los comandos de movimiento Move, Arc, Arc3,
BMove, TMove y Jump3CP.
El valor SpeedR se inicializa en el valor predeterminado (baja velocidad) cuando ocurre una de las siguientes
condiciones:
Inicio del controlador
Motor On
SFree, SLock, Brake
Reset, Reset Error
El botón Stop o QuitAll detiene las
tareas
Consulte también
AccelR, Arc, Arc3, BMove, Jump3CP, Power, Función SpeedR, TMove
Ejemplo de instrucción SpeedR
SpeedR 200

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 667
Función SpeedR
Arroja un valor de velocidad de rotación de herramienta.
Sintaxis
SpeedR
Valores devueltos
Valor real en grados/segundos.
Consulte también
AccelR, SpeedR
Ejemplo de función SpeedR
Real currSpeedR
currSpeedR = SpeedR

668 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción SpeedS
Especifica o muestra la velocidad del brazo para su uso con las instrucciones de movimiento de ruta
continua, como Move, Arc, Arc3, Jump3 y Jump3CP.
Sintaxis
(1) SpeedS speed [, departSpeed, approSpeed]
(2) SpeedS
Parámetros
speed Expresión real que representa la velocidad de movimiento CP en unidades de mm/s.
departSpeed Opcional. Expresión real que representa la velocidad de alejamiento de Jump3 en
unidades de mm/s.
approSpeed Opcional. Expresión real que representa la velocidad de acercamiento de Jump3 en
unidades de mm/s.
Rango válido de entradas de los parámetros:
Series distintas de la serie N: 0,1 a 2000
Serie N, serie X5: 0,1 a 1120
Valores devueltos
Muestra el valor actual de SpeedS cuando se usa sin parámetros.
Descripción
SpeedS especifica la velocidad del punto central de la herramienta para su uso con todas las instrucciones de
movimiento de ruta continua. Esto incluye el movimiento causado por las instrucciones Move y Arc.
SpeedS se especifica en mm/s que representa una velocidad de punto central de herramienta para el brazo del
robot. El valor predeterminado varía de robot a robot. Consulte el manual del robot para conocer los valores
predeterminados de SpeedS para su modelo de robot. Este es el valor inicial de SpeedS configurado
automáticamente por el controlador cada vez que se enciende la alimentación principal.
El valor de SpeedS se inicializa en su valor predeterminado cuando se realiza una de las siguientes acciones:
Inicio del controlador
Motor On
SFree, SLock, Brake
Reset, Reset Error
El botón Stop o QuitAll detiene las
tareas
En el modo de potencia baja, la configuración de SpeedS efectiva es menor que el valor predeterminado. Si
se especifica una velocidad mayor directamente (desde la ventana Command) o en un programa, la velocidad
cambia al valor predeterminado. En el modo de alta potencia, la configuración de movimiento de SpeedS es
el valor de SpeedS.
Si se necesita un movimiento a mayor velocidad, configure el modo de alta potencia mediante Power High y
cierre la puerta de seguridad. Si la puerta de seguridad está abierta, las configuraciones de SpeedS cambiarán
a su valor predeterminado.
Consulte también
AccelS, Arc, Jump3, Move, Speed

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 669
Ejemplo de instrucción SpeedS
SpeedS se puede usar desde la ventana Command o en un programa. A continuación, se muestran ejemplos
simples de ambos métodos.
Function speedtst
Integer slow, fast, i
slow = 50
fast = 500
For i = 1 To 10
SpeedS slow
Move P0
Move P1
SpeedS fast
Move P0
Move P1
Next i
Fend
Desde la ventana Command, el usuario también puede configurar los valores de SpeedS.
> speeds 1000
> speeds 500
> speed 30 'define la velocidad de punto a punto
> go p0 'movimiento de punto a punto
> speeds 100 'define la velocidad en línea recta en mm/s
> move P1 'se mueve en línea recta

670 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función SpeedS
Arroja la configuración actual de SpeedS.
Sintaxis
SpeedS [(paramNumber)]
Parámetros
paramNumber Opcional. Expresión entera que especifica cuál valor de SpeedS se arrojará.
1: Velocidad CP
2: Velocidad de alejamiento de Jump3
3: Velocidad de acercamiento de Jump3
Valores devueltos
Número real, en mm/s
Consulte también
Instrucción SpeedS
Ejemplo de función SpeedS
Real savSpeeds
savSpeeds = SpeedS
Print "Jump3 depart speed = ", SpeedS(2)

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 671
Función Sqr
Calcula el valor de raíz cuadrada no negativo del operando.
Sintaxis
Sqr(Operand)
Parámetros
Operand Una expresión real.
Valores devueltos
Valor de la raíz cuadrada.
Descripción
La función Sqr arroja el valor de raíz cuadrada no negativo del operando.
Posible error
Operando negativo
Si el operando es o tiene un valor numérico negativo, ocurrirá un error.
Consulte también
Abs, And, Atan, Atan2, Cos, Int, Mod, Not, Or, Sgn, Sin, Str$, Tan, Val, Xor
Ejemplo de función Sqr
Este es un ejemplo simple de ventana de comando sobre el uso de la función Sqr.
>print sqr(2)
1.414214
>
El siguiente ejemplo muestra un programa simple que utiliza Sqr.
Function sqrtest
Real x
Print "Please enter a numeric value:"
Input x
Print "The Square Root of ", x, " is ", Sqr(x)
Fend

672 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función ST
Arroja el valor de coordenada del eje adicional especificado en los datos de punto.
Sintaxis
ST ( sValue As Real, tValue As Real )
Parámetros
sValue Valor real que especifica el valor de coordenada del eje S
tValue Valor real que especifica el valor de coordenada del eje T
Valores devueltos
Valores de coordenada del eje adicional especificado en los datos de punto.
Descripción
Esta función se usa cuando se usan los ejes ST adicionales.
Cuando use esta función como Go ST(10,20), el eje adicional se moverá a la coordenada especificada pero
el manipulador no se moverá. Si también desea mover el manipulador, use Go XY(60,30,-50,45) :
ST( 10,20).
Para conocer detalles acerca del eje adicional, consulte el Manual del usuario de EPSON RC+: 20. Eje
adicional.
Consulte también
Función XY
Ejemplo de función ST
P10 = ST(10, 20)

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 673
Instrucción StartMain
Ejecuta la función principal desde una tarea en segundo plano.
Este comando es para usuarios experimentados y se debe comprender la especificación del comando antes
de usarla.
Sintaxis
StartMain mainFuncname
Parámetros
mainFuncname Nombre de la función principal que desea ejecutar (main ~ main63)
Descripción
Para ejecutar StartMain, debe definir la preferencia [Enable advanced task commands] (Habilitar comandos
de tareas avanzadas) en la página [Setup]-[System Configuration]-[Controller]-[Preferences].
Si la tarea se ejecuta usando una instrucción Xqt desde una tarea en segundo plano, la tarea ejecutada pasa
a ser una tarea en segundo plano. Con StartMain, puede ejecutar la función principal como una tarea que no
está en segundo plano desde una tarea en segundo plano.
Si ya ha ejecutado la función principal o si ejecuta StartMain desde una tarea que no está en segundo plano,
ocurre un error.
PRECAUCIÓN
■
Cuando ejecuta el comando
StartMain desde un programa, debe comprender la
especificación del
comando y confirmar que el sistema tiene las condiciones
adecuadas para este comando.
El uso incorrecto, como la ejecución continua de
un comando dentro de un bucle, puede deteriorar la seguridad del sistema.
Consulte también
Xqt
Ejemplo de instrucción StartMain
Function bgmain
:
If Sw(StartMainSwitch) = On And Sw(ErrSwitch) = Off Then
StartMain main
EndIf
:
Fend

674 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función Stat
Arroja la información del estado de ejecución del controlador.
Sintaxis
Stat(address)
Parámetros
address Define cuáles bits de estado se deben revisar. (0 a 2)
Valores devueltos
Arroja un valor de 4 bytes que presenta el estado del controlador. Consulte la siguiente tabla.
Descripción
La instrucción Stat arroja información tal como se muestra en la siguiente tabla:
Dirección
Bit
Estado del controlador indicado cuando bit está activado
0 0-15 &H1 to&H8000
La tarea (1~16) se está ejecutando (Xqt) o se encuentra en el
estado de suspensión
16
&H10000
Las tareas se están ejecutando
17
&H20000
Condición de pausa
18
&H40000
Condición de error
19
&H80000
Modo Teach
20
&H100000
Condición de parada de emergencia
21
&H200000
Modo de potencia baja (Power Low)
22
&H400000
La entrada de la protección está cerrada
23
&H800000
El interruptor de activación está abierto
24
&H1000000
No definido
25
&H2000000
No definido
26
&H4000000
Modo de prueba
27
&H8000000
Modo T2
28-31
No definido
1 0 &H1
Registro de detención sobre la posición objetivo cuando se
cumple la condición en la instrucción Jump...Sense. (Este
registro se borra cuando se ejecuta otra instrucción Jump).
1 &H2
Registro de detención en una posición de desplazamiento
intermedia cuando se cumple la condición en la instrucción
Go/Jump/Move/...Till. (Este registro se borra cuando se ejecuta
otra instrucción Go/Jump/Move/...Till).
2
&H4
No definido
3 &H8
Registro de detención en una posición de desplazamiento
intermedia cuando se cumple la condición en la instrucción
Trap.
4
&H10
Modo Motor On
5
&H20
La posición actual es la posición de reposo
6
&H40
Estado de potencia baja
7
&H80
No definido
8
&H100
El motor de la articulación n.º 4 está encendido
9
&H200
El motor de la articulación n.º 3 está encendido
10
&H400
El motor de la articulación n.º 2 está encendido
11
&H800
El motor de la articulación n.º 1 está encendido
12
&H1000
El motor de la articulación n.º 6 está encendido
13
&H2000
El motor de la articulación n.º 5 está encendido
14
&H4000
El motor del eje T está encendido
15
&H8000
El motor del eje S está encendido
16
&H10000
El motor de la articulación n.º 7 está encendido

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 675
Dirección
Bit
Estado del controlador indicado cuando bit está activado
17-31
No definido
2 0-15 &H1 a &H8000
La tarea (17~32) se está ejecutando (Xqt) o se encuentra en el
estado de suspensión
Consulte también
Función EStopOn, Función TillOn, Función PauseOn, Función SafetyOn
Ejemplo de función Stat
Function StatDemo
rbt1_sts = RShift((Stat(0) And &H070000), 16)
Select TRUE
Case (rbt1_sts And &H01) = 1
Print "Tasks are running"
Case (rbt1_sts And &H02) = 2
Print "Pause Output is ON"
Case (rbt1_sts And &H04) = 4
Print "Error Output is ON"
Send
Fend

676 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función Str$
Convierte un valor numérico en una cadena y la devuelve.
Sintaxis
Str$(number)
Parámetros
number Expresión entera o real.
Valores devueltos
Arroja una representación de cadena del valor numérico.
Descripción
Str$ convierte un número en una cadena. Cualquier número positivo o negativo es válido.
Consulte también
Abs, Asc, Chr$, InStr, Int, Left$, Len, Mid$, Mod, Right$, Sgn, Space$, Val
Ejemplo de función Str$
El ejemplo que aparece a continuación muestra un programa que convierte varios números diferentes en
cadenas y luego las imprime en la pantalla.
Function strtest
Integer intvar
Real realvar
'
intvar = -32767
Print "intvar = ", Str$(intvar)
'
realvar = 567.9987
Print "realvar = ", Str$(realvar)
'
Fend
Otro ejemplo surge de la instrucción Str$ desde la ventana Command.
> Print Str$(99999999999999)
1.000000E+014
> Print Str$(25.999)
25.999

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 677
Instrucción String
Declara las variables de tipo cadena. (Variables de cadena de caracteres)
Sintaxis
String varName$ [(subscripts)] [, varName$ [(subscripts)]...]
Parámetros
varName$ Nombre de la variable que el usuario desea declarar como de tipo cadena.
subscripts Opcional. Las dimensiones de una matriz son variables; es posible declarar hasta 3
dimensiones. La sintaxis del subíndice es la siguiente
(ubound1, [ubound2], [ubound3])
ubound1, ubound2, ubound3 especifican, cada una, el límite superior máximo para la
dimensión asociada.
Los elementos en cada dimensión de una matriz se numeran desde 0 y el número
disponible de elementos de matriz es el valor de límite superior + 1.
Cuando especifique el valor del límite superior, asegúrese de que el número total de
elementos esté dentro del rango que se muestra a continuación:
Variable local 200
Variables globales conservadas 400
Variable global y variable de módulo 10.000
Descripción
La instrucción String se usa para declarar las variables de tipo cadena. Las variables de cadena pueden
contener hasta 255 caracteres. Las variables locales se deben declarar al inicio de una función. Las variables
globales y de módulo se deben declarar fuera de las funciones.
Operadores de cadena
Los siguientes operadores se pueden usar para manipular variables de cadena:
+ Fusiona cadenas de caracteres. Se puede usar en las instrucciones de asignación para variables
de cadena o en la instrucción Print.
Ejemplo: name$ = fname$ + " " + lname$
= Compara cadenas de caracteres. Arroja True solo cuando las dos cadenas son exactamente
iguales, incluida las mayúsculas/minúsculas.
Ejemplo: If temp1$ = "A" Then GoSub test
< > Compara cadenas de caracteres. Arroja True cuando uno o más caracteres en las dos cadenas
son diferentes.
Ejemplo: If temp1$ <> "A" Then GoSub test
Nota
Los nombres de variables deben incluir el carácter "$":
Las variables del tipo cadena deben tener el carácter "$" como el último carácter en el nombre de variable.
Consulte también
Boolean, Byte, Double, Global, Int32, Int64, Integer, Long, Real, Short, UByte, UInt32, UInt64,
UShort

678 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Ejemplo de instrucción String
String password$
String A$(10) 'Matriz de cadena de una dimensión
String B$(10, 10) 'Matriz de cadena de dos dimensiones
String C$(5, 5, 5) 'Matriz de cadena de tres dimensiones
Print "Enter password:"
Input password$
If UCase$(password$) = "EPSON" Then
Call RunMaintenance
Else
Print "Password invalid!"
EndIf

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 679
Función Sw
Arroja o muestra el estado del puerto de entrada seleccionado. (Es decir, E/S de usuario discreto)
Sintaxis
Sw(bitNumber)
Parámetros
bitNumber Expresión entera que representa los bits de entrada E/S.
Valores devueltos
Arroja un 1 cuando la entrada especificada está activada y un 0 cuando la entrada especificada está
desactivada.
Descripción
Sw proporciona una comprobación de estado de las entradas de hardware. Sw se usa más comúnmente para
comprobar el estado de una de las entradas que podría estar conectada a un alimentador, transportador,
solenoide de pinzas o una gran cantidad de otros dispositivos que funcionan mediante E/S discretas.
Naturalmente, la entrada comprobada con la instrucción Sw tiene 2 estados (1 o 0). Estos indican si el
dispositivo está activado o no.
Consulte también
In, InBCD, MemOn, MemOff, MemSw, Off, On, OpBCD, Oport, Out, Wait
Ejemplo de función Sw
El ejemplo a continuación comprueba de forma simple la entrada n.º 5 y se bifurca de acuerdo con ello. Se
usa On en lugar de 1 para mayor claridad.
Function main
Integer i, feed5Ready
feed5Ready = Sw(5)
'Comprueba si el alimentador está listo
If feed5Ready = On Then
Call mkpart1
Else
Print "Feeder #5 is not ready. Please reset and"
Print "then restart program"
EndIf
Fend
Otros ejemplos simples de la ventana Command incluyen los siguientes:
> print sw(5)
1
>

680 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción SyncLock
Sincroniza tareas usando un bloqueo de exclusión mutuo.
Sintaxis
SyncLock syncID [, timeOut]
Parámetros
syncID Expresión entera que representa el número de señal que se recibe. El rango es de 0 a
63.
timeOut Opcional. Expresión real que representa el tiempo máximo de espera para bloqueo.
Descripción
Use SyncLock para bloquear el uso de un recurso común para que solo pueda usarlo una tarea a la vez.
Cuando la tarea se termina con el recurso, debe llamar a SyncUnlock para liberar el bloqueo de modo que
otras tareas puedan usarlo.
Una tarea solamente puede desbloquear un syncID que bloqueó previamente.
Una tarea debe ejecutar SyncUnlock para liberar el bloqueo.
Si la tarea está terminada, se libera el bloqueo que mantenía anteriormente.
Cuando SynLock es el segundo consecutivo en usarse después de un número de señal, ocurre un error.
Si se usa el parámetro timeOut, entonces debe usarse la función Twcmd_tw para comprobar si el bloqueo fue
exitoso.
Nota
En EPSON RC+ 6.0 y 7.0, el bloqueo se libera automáticamente cuando la tarea termina, lo que no sucede
en EPSON RC+5.0.
Consulte también
Signal, SyncLock, Tw, Wait, WaitPos

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 681
Ejemplo de instrucción SyncLock
El siguiente ejemplo usa SyncLock y SyncUnlock para permitir que solo una tarea a la vez escriba un mensaje
a un puerto de comunicación.
Function Main
Xqt Func1
Xqt Func2
Fend
Function Func1
Long count
Do
Wait .5
count = count + 1
LogMsg "Msg from Func1, " + Str$(count)
Loop
Fend
Function Func2
Long count
Do
Wait .5
count = count + 1
LogMsg "Msg from Func2, " + Str$(count)
Loop
Fend
Function LogMsg(msg$ As String)
SyncLock 1
OpenCom #1
Print #1, msg$
CloseCom #1
SyncUnlock 1
Fend
El siguiente ejemplo usa SyncLock con tiempo de espera opcional. Tw se usa para comprobar si el bloqueo
fue exitoso. Mediante el uso de un tiempo de espera, puede ejecutar otro código periódicamente mientras
espera para bloquear un recurso.
Function MySyncLock(syncID As Integer)
Do
SyncLock syncID, .5
If Tw = 0 Then
Exit Function
EndIf
If Sw(1) = On Then
Off 1
EndIf
Loop
Fend

682 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción SyncUnlock
Desbloquea una ID de sincronización que se bloqueó anteriormente con SyncLock.
Sintaxis
SyncUnlock syncID
Parámetros
syncID Expresión entera que representa el número de señal que se recibe. El rango es de 0 a
63.
Descripción
Use SyncUnlock para desbloquear una ID de sincronización que se bloqueó anteriormente con SyncLock.
Una tarea solamente puede desbloquear un syncID que bloqueó previamente.
Consulte también
Signal, SyncLock, Wait, WaitPos
Ejemplo de instrucción SyncUnlock
Function Main
Xqt task
Xqt task
Xqt task
Xqt task
Fend
Function task
Do
SyncLock 1
Print "resource 1 is locked by task", MyTask
Wait .5
SyncUnlock 1
Loop
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 683
Instrucción SyncRobots
Inicia el movimiento del robot reservado.
Sintaxis
SyncRobots robotNumber [, robotNumber] [, ...]
SyncRobots All
Parámetros
robotNumber Expresión entera que especifica el número de robot cuyo movimiento desea iniciar.
All Todos los robots cuyo movimiento está reservado.
Descripción
SyncRobots se usa para iniciar el movimiento del robot reservado con el parámetro SYNC de cada comando
de movimiento. Los robots especificados por SyncRobots inician el movimiento al mismo tiempo. Esto es
más útil que sincronizar los programas normales de tareas múltiples esperando al evento de señal de E/S,
porque no hay un efecto de alternar tareas. Puede sincronizar el inicio del movimiento del robot de forma
más precisa.
Si se especifica un número de robot cuyo movimiento no está reservado, ocurre un error.
Consulte también
Función SyncRobots
Ejemplo de instrucción SyncRobots
El siguiente ejemplo utiliza el parámetro SYNC de un comando de movimiento y SyncRobots para iniciar los
movimientos de dos robots simultáneamente.
Function Main
Xqt Func1
Xqt Func2
Do
Wait 0.1
If (SyncRobots And &H03) = &H03 Then
Exit Do
EndIf
Loop
SyncRobots 1,2
Fend
Function Func1
Robot 1
Motor On
Go P1 SYNC
Fend
Function Func2
Robot 2
Motor On
Go P1 SYNC
Fend

684 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función SyncRobots
Arroja el estado de un robot cuyo movimiento está reservado.
Sintaxis
SyncRobots
Valores devueltos
Arroja el movimiento del robot en un bit, y si no está reservado, arroja “0”.
bit 0: robotNumber 1
bit 1: robotNumber 2
:
bit 15: robotNumber 16
Descripción
La función SyncRobots comprueba el estado de reserva de movimiento del parámetro SYNC de los comandos
de movimiento del robot. El estado que comprueba SyncRobots se muestra en el estado de bit
correspondiente al número del robot. Cada bit muestra si el movimiento del robot está reservado (1) o no (2).
Puede comenzar el movimiento del robot reservado mediante la instrucción SyncRobots.
Consulte también
SyncRobots
Ejemplo de función SyncRobots
El siguiente ejemplo utiliza el parámetro SYNC de un comando de movimiento y SyncRobots para iniciar los
movimientos de dos robots simultáneamente.
Function Main
Xqt Func1
Xqt Func2
Do
Wait 0.1
If (SyncRobots And &H03) = &H03 Then
Exit Do
EndIf
Loop
SyncRobots 1,2
Fend
Function Func1
Robot 1
Motor On
Go P1 SYNC
Fend
Function Func2
Robot 2
Motor On
Go P1 SYNC
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 685
Instrucción SysConfig
Muestra el parámetro de configuración de sistema.
Sintaxis
SysConfig
Valores devueltos
Arroja el parámetro de configuración de sistema.
Descripción
Muestra el valor configurado actual para los datos de control del sistema. Cuando e robot y el controlador se
reciben de la fábrica o después de cambiar la configuración, es recomendable guardar estos datos. Esto se
puede realizar con Backup Controller desde [Tools]-[Controller dialog] (Herramientas - Controlador).
Aparecen los siguientes datos. (Los siguientes datos son solo para referencia debido a que los datos variarán
de un controlador a otro).
' Version:
' Firmware 1, 0, 0, 0
' Options:
' External Control Point
' RC+ API
' HOUR: 414.634
' Controller:
' Serial #: 0001
' ROBOT 1:
' Name: Mnp01
' Model: PS3-AS10
' Serial #: 0001
' Motor On Time: 32.738
' Motor 1: Enabled, Power = 400
' Motor 2: Enabled, Power = 400
' Motor 3: Enabled, Power = 200
' Motor 4: Enabled, Power = 50
' Motor 5: Enabled, Power = 50
' Motor 6: Enabled, Power = 50
ARCH 0, 30, 30
ARCH 1, 40, 40
ARCH 2, 50, 50
ARCH 3, 60, 60
ARCH 4, 70, 70
ARCH 5, 80, 80
ARCH 6, 90, 90
ARMSET 0, 0, 0, 0, 0, 0
HOFS 0, 0, 0, 0, 0, 0
HORDR 63, 0, 0, 0, 0, 0
RANGE -7427414, 7427414, -8738134, 2621440, -3145728, 8301227, -
5534152, 5534152, -3640889, 3640889, -6553600, 6553600
BASE 0, 0, 0, 0, 0, 0
WEIGHT 2, 0
INERTIA 0.1, 0
XYLIM 0, 0, 0, 0, 0, 0

686 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
' Extended I/O Boards:
' 1: Installed
' 2: Installed
' 3: None installed
' 4: None installed
' Fieldbus I/O Slave Board:
' Installed
' Type: PROFIBUS
‘ Fieldbus I/O Master Board:
' None installed
' RS232C Boards:
' 1: Installed
' 2: None installed
' PG Boards:
' 1: None installed
' 2: None installed
' 3: None installed
' 4: None installed
Ejemplo de instrucción SysConfig
> SysConfig

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 687
Función de SysErr
Arroja el último estado de error o estado de advertencia.
Sintaxis
SysErr [(infoNo)]
Parámetros
infoNo Opcional. Número entero que representa el código de error o el código de advertencia que se
obtendrá.
0 : Código de error (cuando el parámetro se omite, se selecciona 0 automáticamente)
1 : Código de advertencia
Valores devueltos
Número entero que representa el código de error o el código de advertencia del controlador.
Descripción
SysErr solo se utiliza para la tarea NoEmgAbort (tarea especial que utiliza NoEmgAbort en Xqt) y tareas en
segundo plano.
Los códigos de error o los códigos de advertencia del controlador son los códigos de error o los códigos de
advertencia que aparecen en la pantalla LCD.
Cuando no hay errores o advertencias, el valor devuelto será 0.
Consulte también
ErrMsg$, ErrorOn, Trap, Xqt
Ejemplo de función SysErr
El siguiente ejemplo muestra un programa que monitorea el error del controlador y activa o desactiva la E/S
según el número del error cuando este ocurre.
Notas
Indicador Forced
Este ejemplo de programa usa el indicador Forced para el comando On/Off.
Al diseñar el sistema, asegúrese de que las salidas E/S cambien durante el error o una parada de emergencia
o apertura de la puerta de seguridad.
Después del error
Como este programa, termine la tarea rápidamente después de completar el control de errores.
Function main
Xqt ErrorMonitor, NoEmgAbort
:
:
Fend
Function ErrorMonitor
Wait ErrorOn
If 4000 < SysErr Then
Print "Motion Error = ", SysErr
Off 10, Forced
On 12, Forced
Else
Print "Other Error = ", SysErr
Off 11, Forced
On 13, Forced
EndIf
Fend

688 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función Tab$
Arroja una cadena que contiene un número especificado de caracteres de pestaña.
Sintaxis
Tab$(number)
Parámetros
number Expresión entera que representa el número de pestañas.
Valores devueltos
Cadena que contiene caracteres de pestaña.
Descripción
Arroja una cadena que contiene el número especificado de pestañas.
Consulte también
Left$, Mid$, Right$, Space$
Ejemplo de función Tab$
Print "X", Tab$(1), "Y"
Print
For i = 1 To 10
Print x(i), Tab$(1), y(i)
Next i

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 689
Función Tan
Arroja la tangente de una expresión numérica.
Sintaxis
Tan(radians)
Parámetros
radians Expresión real proporcionada en radianes
Valores devueltos
Número real que contiene la tangente del parámetro radianes.
Descripción
Tan arroja la tangente de una expresión numérica. La expresión numérica (radianes) puede ser cualquier
valor numérico siempre que se exprese en unidades de radianes.
Para convertir de radianes a grados, use la función RadToDeg.
Consulte también
Abs, Atan, Atan2, Cos, Int, Mod, Not, Sgn, Sin, Sqr, Str$, Val
Ejemplo de función Tan
Function tantest
Real num
Print "Enter number in radians to calculate tangent for:"
Input num
Print "The tangent of ", num, "is ", Tan(num)
Fend
Los siguientes ejemplos muestran algunos resultados típicos obtenidos con el uso de la instrucción Tan desde
la ventana Command.
> print tan(0)
0.00
> print tan(45)
1.6197751905439
>

690 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función TargetOK
Arroja un estado que indica si es posible o no el movimiento PTP (Punto a punto) desde la posición actual a
la posición objetivo.
Sintaxis
TargetOK(targetPos)
Parámetros
targetPos Expresión de punto para la posición objetivo.
Valores devueltos
True si es posible mover hacia la posición objetivo desde la posición actual, de lo contrario False.
Descripción
Use TargetOK para verificar que se pueda llegar a una posición objetivo y orientación antes de realizar el
movimiento. La trayectoria de movimiento hacia el punto objetivo no se considera.
Consulte también
CurPos, FindPos, InPos, WaitPos
Ejemplo de función TargetOK
If TargetOK(P1) Then
Go P1
EndIf
If TargetOK(P10 /L /F) Then
Go P10 /L /F
EndIf

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 691
Función TaskDone
Arroja el estado de finalización de la tarea.
Sintaxis
TaskDone (taskIdentifier)
Parámetros
taskIdentifier El nombre de la tarea o la expresión entera que representa el número de tarea.
Un nombre de la tarea corresponde a un nombre de la función usada en una
instrucción Xqt o una función iniciada desde la ventana Run o la ventana Operator.
El rango del número de la tarea es:
Tareas normales: 1 a 32
Tarea en segundo plano: 65 a 80
Tareas de captura: 257 a 267
Valores devueltos
True si se finalizó la tarea, False si no es así.
Descripción
Use TaskDone para determinar si se finalizó la tarea.
Consulte también
TaskState, TaskWait
Ejemplo de función TaskDone
Xqt 2, conveyor
Do
.
.
Loop Until TaskDone(conveyor)

692 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función TaskInfo
Arroja la información de estado para una tarea.
Sintaxis
TaskInfo( taskIdentifier, index)
Parámetros
taskIdentifier El nombre de la tarea o la expresión entera que representa el número de tarea.
El nombre de la tarea corresponde al nombre de la función usada en una instrucción Xqt o
una función iniciada desde la ventana Run o la ventana Operator.
Especificación de un número de tarea:
Tareas normales: 1 a 32
Tareas en segundo plano: 65 a 80
Tareas de captura: 257 a 267
index Expresión entera que representa el índice de la información que desea recuperar.
Valores devueltos
Un número entero que incluye la información especificada.
Descripción
Índice
Descripción
0
Número de tarea
1
0: tarea normal, tarea NoPause o tarea NoEmgAbort
1: tarea en segundo plano
2
Tipo de tarea
0: tarea normal
Nada especificado en Xqt o se inicia la tarea en Normal
1: tarea NoPause
Se especifica NoPause en Xqt y se inicia la tarea
2: tarea NoEmgAbort
Se especifica NoEmgAbort en Xqt y se inicia la tarea
3: tarea de captura
4: tarea en segundo plano
3
−1: la tarea especificada no se ejecuta.
1: la tarea especificada se ejecuta.
2: la tarea especificada está esperando un evento.
3: la tarea especificada está en pausa o suspendida.
4: la tarea especificada está en estado de pausa rápida.
5: la tarea especificada está en estado de error.
4
Se produjo un tiempo de espera durante la espera de un evento (igual
que en TW)
5
Tiempo de espera de evento (milisegundos).
6
El número del robot actual seleccionado por la tarea
7
El número del robot actual en uso por la tarea
Consulte también
CtrlInfo, RobotInfo, TaskInfo$

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 693
Ejemplo de función TaskInfo
If (TaskInfo(1, 3) <> 0 Then
Print "Task 1 is running"
Else
Print "Task 1 is not running"
EndIf

694 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función TaskInfo$
Arroja información de texto para una tarea.
Sintaxis
TaskInfo$( taskIdentifier, index)
Parámetros
taskIdentifier El nombre de la tarea o la expresión entera que representa el número de tarea.
El nombre de la tarea corresponde al nombre de la función usada en una instrucción Xqt o
una función iniciada desde la ventana Run o la ventana Operator.
Especificación de un número de tarea:
Tareas normales: 1 a 32
Tareas en segundo plano: 65 a 80
Tareas de captura: 257 a 267
index Expresión entera que representa el índice de la información que desea recuperar.
Valores devueltos
Cadena que incluye la información especificada.
Descripción
En la tabla siguiente se muestra la información que se puede obtener mediante TaskInfo$:
Índice
Descripción
0
Nombre de la tarea
1
Fecha/hora de inicio
2
Nombre de la función que se ejecuta actualmente
3
Número de línea en el archivo de programa que contiene la función
Consulte también
CtrlInfo, RobotInfo, TaskInfo
Ejemplo de función TaskInfo$
Print "Task 1 started: "TaskInfo$(1, 1)

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 695
Función TaskState
Arroja el estado actual de una tarea.
Sintaxis
TaskState( taskIdentifier )
Parámetros
taskIdentifier El nombre de la tarea o la expresión entera que representa el número de tarea.
El nombre de la tarea corresponde al nombre de la función usada en una instrucción Xqt o
una función iniciada desde la ventana Run o la ventana Operator.
Especificación de un número de tarea:
Tareas normales: 1 a 32
Tareas en segundo plano: 65 a 80
Tareas de captura: 257 a 267
Valores devueltos
0: La tarea no se está ejecutando
1: La tarea se está ejecutando
2: La tarea está esperando un evento
3: La tarea está suspendida
4: La tarea está en pausa en QuickPause
5: La tarea está en condición de error
Descripción
Use TaskState para obtener el estado de una tarea determinada. Puede especificar el número de tarea o el
nombre de la tarea.
Consulte también
TaskDone, TaskWait
Ejemplo de función TaskState
If TaskState(conveyor) = 0 Then
Xqt 2, conveyor
EndIf

696 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción TaskWait
Espera que una tarea termine.
Sintaxis
TaskWait (taskIdentifier)
Parámetros
taskIdentifier El nombre de la tarea o la expresión entera que representa el número de tarea.
Un nombre de la tarea corresponde a un nombre de la función usada en una
instrucción Xqt o una función iniciada desde la ventana Run o la ventana Operator.
El rango del número de la tarea es:
Tareas normales: 1 a 32
Tarea en segundo plano: 65 a 80
Tareas de captura: 257 a 267
Consulte también
TaskDone, TaskState
Ejemplo de instrucción TaskWait
Xqt 2, conveyor
TaskWait conveyor

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 697
Instrucción TC
Arroja la configuración del modo de control de torque y el modo actual.
Sintaxis
(1) TC { On | Off }
(2) TC
Parámetros
On | Off On : Modo de control de torque ACTIVADO
Desactivado: Modo de control de torque DESACTIVADO
Valores devueltos
Cuando se omite el parámetro, arroja el modo de control de torque actual.
Descripción
TC On/Off configura el modo de control de torque en disponible/no disponible.
El modo de control de torque configura el límite de salida del motor para generar la fuerza constante. Esto
se usa presionando una mano contra un objeto a una fuerza constante o haciendo contacto cercano y
coordinando el movimiento de la mano con un objeto.
Antes de configurar el control de torque disponible, configure los límites del control de torque y de control
de velocidad en TCLim y TCSpeed.
Bajo el control de torque, el robot se mueve como para posicionarse en el objetivo mientras se ejecuta el
comando de operación. Cuando el robot hace contacto con un objeto y la salida del motor está en el límite
del control de torque, el robot detiene su operación y mantiene el torque constante.
En cualquiera de los siguientes casos, el modo de torque deja de estar disponible.
Inicio del controlador
Motor On
SFree, SLock, Brake
Reset, Reset Error
El botón Stop o QuitAll detiene las
tareas
Consulte también
TCLim, TCSpeed
Ejemplo de instrucción TC
Speed 5
Go ApproachPoint
'Configura el límite de torque del eje Z en 20 %
TCLim -1, -1, 20, -1
'Configura la velocidad del control de torque en 5 %
TcSpeed 5
TC On
Go ContactPoint
Wait 3
Go ApproachPoint
TC Off

698 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción TCLim
Especifica el límite de torque de cada articulación para el modo de control de torque.
Sintaxis
TCLim [j1Torque limit, j2Torque limit, j3Torque limit, j4Torque limit [, j5Torque limit]
[, j6Torque limit] [, j7Torque limit] [, j8Torque limit] [, j9Torque limit] ]
Parámetros
j1Torque limit Especifica la proporción al torque momentáneo máximo
(1 a 100 / unidad: %) mediante una expresión o valor numérico.
-1: Desactiva el límite de torque y cambia el modo al control de posición normal.
j2Torque limit Especifica la proporción al torque momentáneo máximo
(1 a 100 / unidad: %) mediante una expresión o valor numérico.
-1: Desactiva el límite de torque y cambia el modo al control de posición normal.
j3Torque limit Especifica la proporción al torque momentáneo máximo
(1 a 100 / unidad: %) mediante una expresión o valor numérico.
-1: Desactiva el límite de torque y cambia el modo al control de posición normal.
j4Torque limit Especifica la proporción al torque momentáneo máximo (1 a 100 / unidad: %)
mediante una expresión o valor numérico.
-1: Desactiva el límite de torque y cambia el modo al control de posición normal.
j5Torque limit Opción. Especifica la proporción al torque momentáneo máximo
(1 a 100 / unidad: %) mediante una expresión o valor numérico.
-1: Desactiva el límite de torque y cambia el modo al control de posición normal.
j6Torque limit Opción. Especifica la proporción al torque momentáneo máximo
(1 a 100 / unidad: %) mediante una expresión o valor numérico.
-1: Desactiva el límite de torque y cambia el modo al control de posición normal.
j7Torque limit Opción. Especifica la proporción al torque momentáneo máximo
(1 a 100 / unidad: %) mediante una expresión o valor numérico.
-1: Desactiva el límite de torque y cambia el modo al control de posición normal.
j8Torque limit Opción. Especifica la proporción al eje S momentáneo máximo
(1 a 100 / unidad: %) mediante una expresión o valor numérico.
-1: Desactiva el límite de torque y cambia el modo al control de posición normal.
j9Torque limit Opción. Especifica la proporción al eje T momentáneo máximo
(1 a 100 / unidad: %) mediante una expresión o valor numérico.
-1: Desactiva el límite de torque y cambia el modo al control de posición normal.
Valores devueltos
Cuando se omite el parámetro, arroja el límite de torque actual.
Descripción
La configuración en el límite del torque está disponible con TC On.
Cuando el valor del límite es demasiado bajo, el robot no funciona y el comando de operación se detiene
antes de que el robot llegue a la posición objetivo.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 699
En cualquiera de los siguientes casos, se inicializa el valor definido de TCLim.
Inicio del controlador
Motor On
SFree, SLock, Brake
Reset, Reset Error
El botón Stop o QuitAll detiene las
tareas
Consulte también
TC, Función TCLim, TCSpeed
Ejemplo de instrucción TCLim
Speed 5
Go ApproachPoint
'Configura el límite de torque del eje Z en 20 %
TCLim -1, -1, 20, -1
'Configura la velocidad del control de torque en 5 %
TcSpeed 5
TC On
Go ContactPoint
Wait 3
Go ApproachPoint
TC Off

700 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función TCLim
Arroja el límite del torque de la articulación especificada.
Sintaxis
TCLim (jointNumber)
Parámetros
jointNumber Especifica el número de la articulación desde el cual obtener el límite del torque
mediante una expresión o valor numérico.
El eje S adicional es 8 y el eje T es 9.
Valores devueltos
Arroja el número entero que representa el límite del torque actual (1 a 100). -1 significa que el límite del
torque no es válido.
Consulte también
TC, TCLim, TCSpeed
Ejemplo de función TCLim
Print "Current Z axis torque limit:", TCLim(3)

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 701
Función TCPSpeed
Arroja la velocidad actual calculada del punto central de la herramienta (TCP).
Sintaxis
TCPSpeed
Valores devueltos
El valor real contiene la velocidad actual calculada del punto central de la herramienta en mm/s.
Descripción
Use TCPSpeed para obtener la velocidad actual calculada del punto central de la herramienta (TCP) en mm/s
cuando ejecute un comando de movimiento CP (ruta continua). Los comandos de movimiento CP incluyen
Move, TMove, Arc, Arc3, CVMove y Jump3CP. Esta no es la velocidad actual del punto central de la
herramienta. Es la velocidad que el sistema ha calculado para el punto central de la herramienta en el
momento que se llamó a la función.
El retraso de seguimiento real del motor se excluyó de este valor.
Si el robot está ejecutando un comando de movimiento PTP (Punto a punto), esta función arroja “0”.
Incluso si está usando el eje adicional, solo se arroja la distancia de desplazamiento del robot.
Por ejemplo, no incluye la velocidad de desplazamiento del eje adicional mientras se usa el eje adicional
como eje de ejecución.
Consulte también
AccelS, CurPos, InPos, SpeedS
Ejemplo de función TCPSpeed
Function MoveTest
AccelS 4000, 4000
SpeedS 200
Xqt ShowTCPSpeed
Do
Move P1
Move P2
Loop
Fend
Function ShowTCPSpeed
Do
Print "Current TCP speed is: ", TCPSpeed
Wait .1
Loop
Fend

702 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción TCSpeed
Especifica el límite de velocidad en el control de torque.
Sintaxis
TCSpeed [speed]
Parámetros
speed Especifica la proporción a la velocidad máxima (1 a 100 / unidad: %) mediante una expresión o
valor numérico.
Descripción
Bajo el control de torque, la velocidad se limita a la configuración de TCSpeed a pesar de las
configuraciones de velocidad de comandos como Speed.
Ocurre un error si la velocidad supera el límite en el control de torque.
En cualquiera de los siguientes casos, el valor definido de TCSpeed se inicializa en 100 %.
Inicio del controlador
Motor On
SFree, SLock, Brake
Reset, Reset Error
El botón Stop o QuitAll detiene las
tareas
Consulte también
TC, TCLim, Función TCSpeed
Ejemplo de instrucción TCSpeed
Speed 5
Go ApproachPoint
'Configura el límite de torque del eje Z en 20 %
TCLim -1, -1, 20, -1
‘Configura la velocidad bajo el control de torque en 5 %
TcSpeed 5
TC On
Go ContactPoint
Wait 3
Go ApproachPoint
TC Off

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 703
Función TCSpeed
Arroja el límite de velocidad en el control de torque.
Sintaxis
TCSpeed
Valores devueltos
Arroja el número entero (1 a 100) que representa el límite de velocidad actual.
Consulte también
TC, TCSpeed, TCLim
Ejemplo de función TCSpeed
Integer var
var = TCSpeed

704 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función TeachOn
Arroja el estado del modo Teach (Enseñar).
Sintaxis
TeachOn
Valores devueltos
True si está en el modo Teach, False si no es así.
Descripción
La función TeachOn solo se usa en la tarea en segundo plano.
Consulte también
ErrorOn, EstopOn, SafetyOn, Xqt
Ejemplo de función TeachOn
El siguiente ejemplo supervisa al controlador cuando se inicia en el modo Teach, y activa o desactiva la E/S.
Function BGMain
Do
Wait 0.1
If TeachOn = True Then
On teachBit
Else
Off teachBit
EndIf
If SafetyOn = True Then
On safetyBit
Else
Off safetyBit
EndIf
If PauseOn = True Then
On PauseBit
Else
Off PauseBit
EndIf
Loop
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 705
Instrucción TGo
Ejecuta un movimiento relativo de punto a punto, en el sistema de coordenadas de la herramienta actual.
Sintaxis
TGo destination [CP] [PerformMode modeNumber] [searchExpr] [!...!] [SYNC]
Parámetros
destination El destino objetivo del movimiento que usa una expresión de punto.
CP Opcional. Especifica un movimiento de ruta continua.
PerformMode Opcional. Especifique el modo de rendimiento del robot.
modeNumber Especifica el modo de operación asignado a PerformMode con un valor de
número entero (1 a 3) o con la siguiente constante. Si se especifica
PerformMode, no se puede omitir este parámetro.
Constante Valor Descripción
Mode_Standard 1 Define el modo estándar
Mode_High_Speed 2 Define el modo de alta velocidad
Mode_Low_Oscillation 3 Define el modo de baja oscilación
searchExpr Opcional. Una expresión Till o Find.
Till | Find
Till Sw(expr) = {On | Off}
Find Sw(expr) = {On | Off}
!...! Opcional. Es posible agregar las instrucciones de procesamiento paralelo para
ejecutar E/S y otros comandos durante el movimiento.
SYNC Reserva un comando de movimiento. El robot no se moverá hasta que se ejecute
SyncRobots.
Descripción
Ejecuta un movimiento relativo de punto a punto en el sistema de coordenadas de la herramienta actual.
Los atributos de la orientación del brazo especificados en la expresión de punto de destino se ignoran. El
manipulador mantiene los atributos de orientación actual del brazo. Sin embargo, para manipuladores de 6
ejes (incluida la serie N), los atributos de orientación del brazo se cambian automáticamente de modo que la
distancia de desplazamiento de la articulación sea la menor posible.
El modificador Till también se usa para completar TGo mediante la desaceleración y detención del robot en
una posición de desplazamiento intermedia, si se cumple la condición actual Till.
El modificador Find se usa para almacenar un punto en FindPos cuando la condición Find se vuelve verdadera
durante el movimiento.
Cuando se usa el procesamiento paralelo, es posible ejecutar otros procesamientos en paralelo con el
comando de movimiento.
El parámetro CP causa que comience la aceleración del siguiente comando de movimiento cuando comienza
la desaceleración para el comando de movimiento actual. En este caso, el robot no se detendrá en la
coordenada de destino y continuará moviéndose al siguiente punto.
Los modos de movimiento de desaceleración y movimiento de aceleración se pueden combinar cuando se
define PerformMode mientras el movimiento de ruta está activado. Algunas combinaciones no están
disponibles según los modos de operación. Para conocer detalles, consulte Instrucción PerformMode.
Consulte también
Accel, CP, Find, !....! Parallel Processing, P#= (Point Assignment), PerformMode, Speed, Till,
TMove, Tool

706 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Ejemplo de instrucción TGo
> TGo XY(100, 0, 0, 0) 'Mueve 100 mm en la dirección X (en el sistema de coordenadas de
la herramienta)
Function TGoTest
Speed 50
Accel 50, 50
Power High
Tool 0
P1 = XY(300, 300, -20, 0)
P2 = XY(300, 300, -20, 0) /L
Go P1
Print Here
TGo XY(0, 0, -30, 0)
Print Here
Go P2
Print Here
TGo XY(0, 0, -30, 0)
Print Here
Fend
[Output]
X: 300.000 Y: 300.000 Z: -20.000 U: 0.000 V: 0,000 W: 0.000 /R /0
X: 300.000 Y: 300.000 Z: -50.000 U: 0.000 V: 0,000 W: 0.000 /R /0
X: 300.000 Y: 300.000 Z: -20.000 U: 0.000 V: 0,000 W: 0.000 /L /0
X: 300.000 Y: 300.000 Z: -50.000 U: 0.000 V: 0,000 W: 0.000 /L /0

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 707
Instrucción Till
Especifica y muestra la condición de evento que, si se cumple, completa el comando de movimiento (Jump,
Go, Move, etc.) en progreso desacelerando y deteniendo el robot en una posición intermedia.
Sintaxis
Till [ eventcondition ]
Parámetros
eventcondition Estado de entrada especificado como disparador
[Event] operador comparativo ( =, <>, >=, >, <, <=) [Expresión entera]
Se pueden usar las siguientes funciones y variables en Event:
Funciones : Sw, In, InW, Oport, Out, OutW, MemSw, MemIn, MemInW, Ctr
GetRobotInsideBox, GetRobotInsidePlane, Force, AIO_In, AIO_InW,
AIO_Out, AIO_OutW
Variables : Byte, Int32, Integer, Long , Short, UByte, UInt32, UShort global
preserve variable, Global variable, module variable
También, puede especificar múltiples condiciones de evento si usa los siguientes
operadores.
Operador : And, Or, Xor
Ejemplo : Till Sw(5) = On
Till Sw(5) = On And Till(6) = Off
Descripción
La instrucción Till puede usarse por sí sola o como expresión de búsqueda en una instrucción de comando de
movimiento.
La condición Till debe incluir como mínimo una de las funciones anteriores.
Cuando las variables están incluidas, sus valores se calculan cuando se configura la condición Till. Se
recomienda no usar variables. De lo contrario, la condición puede ser una condición no intencional. Se
permiten múltiples instrucciones Till. La condición Till más reciente será la actual hasta que sea sustituida.
Cuando los parámetros se omiten, se muestra la definición actual de Till.
Notas
Configuración de Till al encenderse la alimentación principal
En el momento del encendido, la condición Till se inicializa en Till Sw(0) = On.
Uso de Stat o TillOn para verificar Till
Después de ejecutar un comando de movimiento que usa el calificador Till pueden haber casos en los que
desee verificar si se cumplió o no la condición Till. Esto se puede hacer mediante la función Stat o la función
TillOn.
Para usar las variables en la expresión de condición de evento
- Las variables disponibles son del tipo de número entero (Byte, Int32, Integer, Long, Short, UByte, UInt32,
UShort)
- Las variables de matriz no están disponibles
- Las variables locales no están disponibles
- Si el valor de una variable no puede cumplir la condición del evento por más de 0,01 segundos, el sistema
no puede recuperar el cambio en las variables.
- Hasta 64 pueden esperar a las variables en un sistema (incluidas las que se usan en las expresiones de la
condición del evento, como Wait). Si es superior a 64, ocurre un error durante la compilación del proyecto.
- Si especifica Byref en una variable en espera de cualquier llamada de función, se genera un error.

708 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
- Cuando se incluye una variable en el miembro del lado derecho de la expresión de la condición del evento,
el valor se calcula al iniciar el comando de movimiento. Recomendamos no usar variables en una expresión
entera para evitar crear condiciones no intencionales.
Consulte también
Find, Go, In, InW, Jump, MemIn, MemSw, Move, Stat, Sw, TillOn
Ejemplo de instrucción Till
A continuación se muestran algunas líneas de ejemplo de programas que usan la instrucción Till.
Till Sw(1) = Off 'Especifica la condición Till (bit 1 de entrada
desactivado)
Go P1 Till 'Detener si se cumple la condición de la línea anterior
Till Sw(1) = On And Sw($1) = On 'Especifica la nueva condición de Till
Move P2 Till 'Detener si se cumple la condición de la línea anterior
Move P5 Till Sw(10) = On 'Detener si se cumple la condición de esta línea

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 709
Función TillOn
Arroja el estado Till actual.
Sintaxis
TillOn
Valores devueltos
True si la condición Till ocurrió en el comando de movimiento anterior mediante el uso de Till.
Descripción
TillOn arroja True si ocurrió la condición Till.
TillOn es equivalente a ((Stat(1) And 2) <> 0).
Consulte también
EStopOn, SafetyOn, Sense, Stat, Till
Ejemplo de función TillOn
Go P0 Till Sw(1) = On
If TillOn Then
Print "Till condition occurred during move to P0"
EndIf

710 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción Time
Muestra la hora actual.
Sintaxis
Tiempo
Descripción
Muestra la hora actual en un formato de 24 horas.
Consulte también
Date, Time$
Ejemplo de instrucción Time
Ejemplo desde la ventana Command:
> Time
10:15:32 a.m.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 711
Función Time
Arroja el tiempo de operación acumulado del controlador.
Sintaxis
Time(unitSelect)
Parámetros
unitSelect Número entero que varía de 0 a 2. Este número entero especifica cuál unidad de tiempo
arroja el controlador:
0: horas
1: minutos
2: segundos
Descripción
Arroja el tiempo de operación acumulado del controlador como un número entero.
Consulte también
Hour
Ejemplo de función Time
A continuación se muestran algunos ejemplos de la ventana Command:
Function main
Integer h, m, s
h = Time(0) 'Almacena el tiempo en horas
m = Time(1) ‘Almacena el tiempo en minutos
s = Time(2) 'Almacena el tiempo en segundos
Print "This controller has been used:"
Print h, "hours, ",
Print m, "minutes, ",
Print s, "seconds"
Fend

712 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función Time$
Arroja la hora actual del sistema.
Sintaxis
Time$
Valores devueltos
Muestra la hora actual en un formato de 24 horas hh:mm:ss.
Consulte también
Date, Date$, Time
Ejemplo de función Time$
Print "The current time is: ", Time$

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 713
Instrucción TLClr
Borra (elimina la definición) un sistema de coordenadas de la herramienta.
Sintaxis
TLClr toolNumber
Parámetros
toolNumber Expresión entera que representa cuál de las 3 herramientas se debe borrar (anular la
definición).
(Herramienta 0 es la herramienta predeterminada y no se puede borrar).
Descripción
Los datos de los parámetros del robot se almacenan en la memoria Compact Flash en el controlador. Por
tanto, la memoria flash de comandos se escribe cuando se ejecuta este comando. La escritura frecuente en
la memoria Compact Flash afecta su vida útil. Recomendamos que el uso de este comando sea mínimo.
Consulte también
Arm, ArmClr, ArmSet, ECPSet, Local, LocalClr, Tool, TLSet
Ejemplo de instrucción TLClr
TLClr 1

714 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función TLDef
Arroja el estado de la definición de la herramienta.
Sintaxis
TLDef (toolNumber)
Parámetros
toolNumber Expresión entera que representa para cuál herramienta se debe arrojar el estado.
Valores devueltos
True si se ha definido la herramienta especificada, o de lo contrario, False.
Consulte también
Arm, ArmClr, ArmSet, ECPSet, Local, LocalClr, Tool, TLClr, TLSet
Ejemplo de función TLDef
Function DisplayToolDef(toolNum As Integer)
If TlDef(toolNum) = False Then
Print "Tool ", toolNum, "is not defined"
Else
Print "Tool ", toolNum, ": ",
Print TlSet(toolNum)
EndIf
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 715
Instrucción TLSet
Define o muestra un sistema de coordenadas de herramienta.
Sintaxis
(1) TLSet toolNum, toolDefPoint
(2) TLSet toolNum
(3) TLSet
Parámetros
toolNum Número entero del 1 al 15 que representa cuál de las 15 herramientas se define.
(Herramienta 0 es la herramienta predeterminada y no se puede modificar).
toolDefPoint Pnumber o P(expr) o etiqueta de punto o expresión de punto.
Valores devueltos
Cuando se omiten los parámetros, se muestra toda la definición de TLSet.
Cuando solo se especifica el número de herramienta, se muestra la definición de TLSet especificada.
Descripción
Define los sistemas de coordenadas de herramientas de la Herramienta 1, Herramienta 2 o Herramienta 3
mediante la especificación del origen del sistema de coordenadas de la herramienta y el ángulo de rotación
en relación con el sistema de coordenadas de la Herramienta 0 (sistema de coordenadas de la mano).
TLSet 1, XY(50,100,-20,30)
TLSet 2, P10 +X(20)
En este caso, se hace referencia a los valores de coordenada de P10 y se suma 20 al valor X. Se ignoran los
números de atributo de brazo y del sistema de coordenadas local.
TLSET 1, XY(100, 60, -20, 30)
Ángulo de giro (se muestra c en la siguiente figura)
Posición del eje Z
Posición del eje Y (se muestra b en la siguiente figura)
Posición del eje X (se muestra a en la siguiente figura)
Número del sistema de coordenadas de la herramienta

716 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
TLSet para robots de 6 ejes
El origen de la Herramienta 0 es el lado de la brida de la sexta articulación. Cuando todas las articulaciones
están en la posición de grado 0, el eje X del sistema de coordenadas de la Herramienta 0 está alineado con el
eje Z del sistema de coordenadas para robots, el eje Y está alineado con el eje X del sistema de coordenadas
para robots, y el eje Z está perpendicular a la cara de la brida, y está alineado con el eje Y del sistema de
coordenadas para robots, tal como se muestra en la figura a continuación:
Sistema de coordenadas de Tool 1
Sistema de coordenadas de Tool 0
Sistema de coordenadas del robot
Sistema de
coordenadas
de Tool 0
Sistema de coordenadas del robot

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 717
Los sistemas de coordenadas de la herramienta 0 se definen para los robots montados en techo y pared, como
se muestra en las siguientes figuras.
TLSet para robots de la serie N
Cuando todas las articulaciones están en la posición de grado 0, el eje X del sistema de coordenadas de la
Herramienta 0 está alineado con el eje -X del sistema de coordenadas para robots, el eje Y está alineado con
el eje Y del sistema de coordenadas para robots, y el eje Z está alineado con el eje -Z del sistema de
coordenadas para robots, tal como se muestra en la figura a continuación:
Sistema de coordenadas del robot
Sistema de coordenadas del robot
Sistema de coordenadas de Tool 0
Sistema de coordenadas de Tool 0
Montaje en techo
Montaje lateral (en pared)

718 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Los sistemas de coordenadas de la herramienta 0 se definen para los robots montados en techo y pared,
como se muestra en las siguientes figuras.
Descripción
Los datos de los parámetros del robot se almacenan en la memoria Compact Flash en el controlador. Por
tanto, la memoria flash de comandos se escribe cuando se ejecuta este comando. La escritura frecuente en
la memoria Compact Flash afecta su vida útil. Recomendamos que el uso de este comando sea mínimo.
Nota
Los valores TLSet se mantienen
Los valores TLSet se conservan. Use TLClr para borrar una definición de herramienta.
Consulte también
Tool, Arm, ArmSet, TLClr
Ejemplo de instrucción TLSet
El ejemplo que se indica a continuación muestra una prueba adecuada que se puede realizar desde la ventana
Command para ayudar a comprender la diferencia entre el movimiento cuando hay definida una herramienta
y cuando no la hay.
> TLSet 1, XY(100, 0, 0, 0) 'Define el sistema de coordenadas de herramienta para la
Herramienta 1 (más 100 mm
' en dirección x desde el sistema de coordenadas de la
mano)
> Tool 1 'Selecciona la Herramienta 1 según la definición de TLSet
> TGo P1 'Posiciona la punta de la Herramienta 1 en P1
> Tool 0 'Le dice al robot que no use ninguna herramienta para el
movimiento futuro
> Go P1 'Posiciona l centro de la articulación U en P1
Montaje en techo
Montaje lateral (en pared)
Sistema de coordenadas del robot
Sistema de coordenadas del robot
Sistema de coordenadas de Tool 0
Sistema de coordenadas de Tool 0

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 719
Función TLSet
Arroja un punto que contiene la definición de herramienta para la herramienta especificada.
Sintaxis
TLSet(toolNumber)
Parámetros
toolNumber Expresión entera que representa el número de la herramienta que desea obtener.
Valores devueltos
Un punto que contiene la definición de herramienta.
Consulte también
Instrucción TLSet
Ejemplo de función TLSet
P1 = TLSet(1)

720 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción TMOut
Especifica el número de segundos para esperar que se realice la condición especificada con la instrucción
Wait antes de emitir un error de tiempo de espera (error 2280).
Sintaxis
TMOut seconds
Parámetros
seconds Expresión real que representa el número de segundos hasta que ocurre el tiempo de espera.
El rango válido es de 0 a 2147483 segundos en intervalos de 1 segundo.
Descripción
TMOut establece la cantidad de tiempo de espera (cuando se usa la instrucción Wait) hasta que se emite un
error de tiempo de espera. Si se especifica un tiempo de espera de 0 segundos, el tiempo de espera está de
hecho desactivado. En este caso, la instrucción Wait espera indefinidamente a que se cumpla la condición
especificada.
El valor inicial predeterminado de TMOut es 0.
Consulte también
In, MemSw, OnErr, Sw, TW, Wait
Ejemplo de instrucción TMOut
TMOut 5
Wait MemSw(0) = On

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 721
Instrucción TMove
Ejecuta un movimiento relativo de interpolación lineal en el sistema de coordenadas de la herramienta
actual
Sintaxis
TMove destination [ROT] [CP] [ searchExpr ] [ !...! ] [SYNC]
Parámetros
destination El destino objetivo del movimiento que usa una expresión de punto.
ROT Opcional. :Decide la velocidad/aceleración/desaceleración en favor de la
rotación de la herramienta.
CP Opcional. Especifica un movimiento de ruta continua.
searchExpr Opcional. Una expresión Till o Find.
Till | Find
Till Sw(expr) = {On | Off}
Find Sw(expr) = {On | Off}
!...! Opcional. Es posible agregar las instrucciones de procesamiento paralelo para
ejecutar E/S y otros comandos durante el movimiento.
SYNC Reserva un comando de movimiento. El robot no se moverá hasta que se ejecute
SyncRobots.
Descripción
Ejecuta un movimiento relativo interpolado lineal en el sistema de coordenadas de la herramienta actual.
Los atributos de la orientación del brazo especificados en la expresión de punto de destino se ignoran. El
manipulador mantiene los atributos de orientación actual del brazo. Sin embargo, para manipuladores de 6
ejes (incluida la serie N), los atributos de orientación del brazo se cambian automáticamente de modo que la
distancia de desplazamiento de la articulación sea la menor posible. Esto es equivalente a especificar el
parámetro modificador LJM para la instrucción Move. Por lo tanto, si desea cambiar la orientación del
brazo más de 180 grados, se debe ejecutar varias veces.
TMove usa el valor de velocidad SpeedS y los valores de aceleración y desaceleración AccelS. Consulte Uso
de TMove con CP a continuación para conocer la relación entre velocidad y aceleración, y entre aceleración
y desaceleración. Sin embargo, si se usa el parámetro modificador ROT, TMove utiliza el valor de velocidad
SpeedR y los valores de aceleración y desaceleración AccelR. En este caso, el valor de velocidad SpeedS y
el valor de aceleración y desaceleración AccelS no tienen efecto.
Normalmente, cuando la distancia de movimiento es 0 y solo cambia la orientación de la herramienta, ocurrirá
un error. Sin embargo, mediante el uso del parámetro ROT y la priorización de la aceleración y la
desaceleración del giro de la herramienta, es posible realizar el movimiento sin un error. Cuando no existe
ningún cambio de orientación con el parámetro modificador ROT y la distancia del movimiento no es 0, se
genera un error.
También, cuando el giro de la herramienta es grande en comparación con la distancia de movimiento, y
cuando la velocidad de giro supera la velocidad especificada del manipulador, ocurrirá un error. En este caso,
reduzca la velocidad o agregue el parámetro modificador ROT para darle prioridad a la velocidad de
rotación/aceleración/desaceleración.
El modificador Till se usa para completar TMove mediante la desaceleración y detención del robot en una
posición de desplazamiento intermedio, si se cumple la condición actual Till.
El modificador Find se usa para almacenar un punto en FindPos cuando la condición Find se vuelve verdadera
durante el movimiento.
Cuando se usa el procesamiento paralelo, es posible ejecutar otros procesamientos en paralelo con el
comando de movimiento.

722 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Nota
Uso de TMove con CP
El parámetro CP causa que el brazo se mueva al destino sin desacelerar o detenerse en el punto definido
según el destino. Esto se hace para permitir al usuario enlazar una serie de instrucciones de movimiento que
causan que el brazo se mueva a lo largo de una ruta continua mientras mantiene una velocidad especificada
durante todo el movimiento. La instrucción TMove sin CP siempre provoca que el brazo desacelere hasta
detenerse antes de llegar al punto destination.
Consulte también
AccelS, CP, Find, !....! Parallel Processing, Point Assignment, SpeedS, TGo, Till, Tool
Ejemplo de instrucción TMove
> TMove XY(100, 0, 0, 0) 'Se mueve 100 mm en la dirección X (en el sistema de coordenadas
de herramienta)
Function TMoveTest
Speed 50
Accel 50, 50
SpeedS 100
AccelS 1000, 1000
Power High
Tool 0
P1 = XY(300, 300, -20, 0)
P2 = XY(300, 300, -20, 0) /L
Go P1
Print Here
TMove XY(0, 0, -30, 0)
Print Here
Go P2
Print Here
TMove XY(0, 0, -30, 0)
Print Here
Fend
[Output]
X: 300.000 Y: 300.000 Z: -20.000 U: 0.000 V: 0,000 W: 0.000 /R /0
X: 300.000 Y: 300.000 Z: -50.000 U: 0.000 V: 0,000 W: 0.000 /R /0
X: 300.000 Y: 300.000 Z: -20.000 U: 0.000 V: 0,000 W: 0.000 /L /0
X: 300.000 Y: 300.000 Z: -50.000 U: 0.000 V: 0,000 W: 0.000 /L /0

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 723
Función Tmr
La función Tmr arroja la cantidad de tiempo en segundos que ha pasado desde que se inició el
temporizador.
Sintaxis
Tmr(timerNumber)
Parámetros
timerNumber Expresión entera que representa a cuál de los 64 temporizadores revisar. (0 a 63)
Valores devueltos
Tiempo transcurrido para el temporizador especificado como un número real en segundos. El rango válido
es desde 0 a aproximadamente 1.7E+31. La resolución del temporizador es de 0,001 segundos.
Descripción
Arroja el tiempo transcurrido en segundos desde que se inició el temporizador especificado. A diferencia de
la función ElapsedTime, la función Tmr cuenta el tiempo mientras el programa está detenido.
Los temporizadores se restablecen con TmReset.
Real overhead
TmReset 0
overHead = Tmr(0)
Consulte también
Función ElapsedTime, TmReset
Ejemplo de función Tmr
TmReset 0 'Restablece el temporizador 0
For i
= 1 To 10 'Realiza una operación 10 veces
GoSub Cycle
Next
Print Tmr(0) / 10 'Calcula y muestra el tiempo del ciclo

724 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción TmReset
Restablece los temporizadores utilizados por la función Tmr.
Sintaxis
TmReset timerNumber
Parámetros
timerNumber Expresión entera que representa a cuál de los 64 temporizadores restablecer. (0 a 63)
Descripción
Restablece e inicia el temporizador especificado por timerNumber.
Use la función Tmr para recuperar el tiempo transcurrido para un temporizador específico.
Consulte también
Tmr
Ejemplo de instrucción TmReset
TmReset 0 'Restablece el temporizador 0
For i = 1 To 10 'Realiza una operación 10 veces
GoSub CYL
Next
Print Tmr(0)/10 'Calcula y muestra el tiempo del ciclo

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 725
Instrucción Toff
Desactiva la pantalla de la línea de ejecución en la pantalla LCD.
Sintaxis
Toff
Descripción
No se mostrará la línea de ejecución en la pantalla LCD.
Consulte también
Ton
Ejemplo de instrucción Toff
Function main
Ton MyTask
...
Toff
Fend

726 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción Ton
Especifica una tarea que muestra una línea de ejecución en la pantalla LCD.
Sintaxis
Ton taskIdentifier
Ton
Parámetros
taskIdentifier El nombre de la tarea o la expresión entera que representa el número de tarea.
Un nombre de la tarea corresponde a un nombre de la función usada en una
instrucción Xqt o una función iniciada desde la ventana Run o la ventana Operator.
El rango del número de la tarea es:
Tareas normales: 1 a 32
Descripción
La línea de ejecución de la tarea 1 se muestra en el estado inicial.
La instrucción Ton muestra la línea de ejecución de la tarea especificada en la pantalla LCD.
Cuando se omite taskIdentifier, la línea de ejecución de tarea con la ejecución de la instrucción Ton se muestra
en la pantalla LCD.
Consulte también
Toff
Ejemplo de instrucción Ton
Function main
Ton MyTask
...
Toff
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 727
Instrucción Tool
Selecciona o muestra la tarea actual.
Sintaxis
(1) Tool toolNumber
(2) Tool
Parámetros
toolNumber Opcional. Expresión entera de 0 a 15 que representa a cuál de las 16 definiciones de
herramientas utilizar con las siguientes instrucciones movimiento.
Valores devueltos
Muestra la Tool actual cuando se utiliza sin parámetros.
Descripción
Tool selecciona la herramienta especificada por el número de herramienta (toolNum). Cuando el número de
herramienta es "0", no se selecciona ninguna herramienta y todos los movimientos se realizan con respecto
al centro de la articulación del efector final. Sin embargo, cuando se selecciona la entrada Tool 1, 2 o 3, el
movimiento se realiza con respeto al extremo de la herramienta según se define con la definición de
herramienta.
Nota
Desconexión y su efecto en la selección de herramienta
Desactivar la alimentación principal no cambia la selección del sistema de coordenadas de la herramienta.
Vida útil de la tarjeta compact flash
Los datos de los parámetros del robot se almacenan en la memoria Compact Flash en el controlador. Por
tanto, la memoria flash de comandos se escribe cuando se ejecuta este comando. La escritura frecuente en
la memoria Compact Flash afecta su vida útil. Recomendamos que el uso de este comando sea mínimo.
Consulte también
TGo, TLSet, Tmove
Ejemplo de instrucción Tool
El ejemplo que se indica a continuación muestra una prueba adecuada que se puede realizar desde la ventana
Command para ayudar a comprender la diferencia entre el movimiento cuando hay definida una herramienta
y cuando no la hay.
>tlset 1, 100, 0, 0, 0 'Define el sistema de coordenadas de herramienta para Tool 1
(más 100 mm en
'la dirección x desde el sistema de coordenadas de la mano)
>tool 1 'Selecciona Tool 1 según lo definido por TLSet
>tgo p1 'Coloca la posición de la punta de Tool 1 en P1
>tool 0 'Indica al robot que no use la herramienta para movimientos
futuros
>go p1 'Coloca el centro de la articulación U en P1

728 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función Tool
Arroja el número de herramienta actual.
Sintaxis
Tool
Valores devueltos
Número entero que contiene el número de herramienta actual.
Consulte también
Instrucción Tool
Ejemplo de función Tool
Integer savTool
savTool = Tool
Tool 2
Go P1
Tool savTool

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 729
Instrucción Trap (Disparador definido por el usuario)
Define las interrupciones y lo que debería suceder cuando ocurren.
Con la instrucción Trap , puede saltar a etiquetas o llamar funciones cuando ocurre el evento.
La instrucción Trap tiene 2 tipos, igual que a continuación:
- 4 capturas que se interrumpen con el estado de entrada definido por el usuario
- 7 capturas que se interrumpen con el estado del sistema
Aquí se explica Trap con un disparador definido por el usuario.
Sintaxis
Trap trapNumber, eventCondition GoTo label
Trap trapNumber, eventCondition Call funcname
Trap trapNumber, eventCondition Xqt funcname
Trap trapNumber
Parámetros
trapNumber Número entero del 1 al 4 que representa a cuál de los 4 números de Trap usar.
(SPEL
+
admite hasta 4 interrupciones Trap activas al mismo tiempo).
eventCondition Estado de entrada especificado como disparador
[Event] operador comparativo ( =, <>, >=, >, <, <=) [Expresión entera]
Se pueden usar las siguientes funciones y variables en Event:
Funciones : Sw, In, InW, Oport, Out, OutW, MemSw, MemIn, MemInW, Ctr,
GetRobotInsideBox, GetRobotInsidePlane, AIO_In, AIO_InW,
AIO_Out, AIO_OutW
Variables : Byte, Int32, Integer, Long, Short, UByte, UInt32, variable global
conservada UShort, variable Global, variable de módulo
Adicionalmente, puede usar las siguientes operaciones para especificar
condiciones múltiples de eventos.
Operador : And, Or, Xor
Ejemplo: Trap 1, Sw(5) = On Call, TrapFunc
Trap 1, Sw(5) = On And Till(6) = Off, Call TrapFunc
label La etiqueta a la que se trasladará la ejecución del programa una vez se cumpla la
condición Trap.
funcName La función que se ejecuta cuando Call o Xqt una vez se cumpla la condición Trap.
La función con argumento no se puede especificar.
Descripción
Trap ejecuta el procesamiento de interrupción que se especifica con GoTo, Call o Xqt una vez se cumpla la
condición especificada.
La condición Trap debe incluir como mínimo una de las funciones anteriores.
Cuando las variables están incluidas en la condición Trap, sus valores se calculan cuando se configura la
condición Trap. Se recomienda no usar variables. De lo contrario, la condición puede ser una condición no
intencional.
Una vez se ejecuta el proceso de interrupción, se borra su configuración Trap. Si se necesita el mismo proceso
de interrupción, se debe volver a ejecutar la instrucción Trap.
Para cancelar una configuración Trap, simplemente ejecute la instrucción Trap solo con el parámetro
trapNumber. Es decir, "Trap 3" cancela Trap n.° 3.
Cuando la función que ejecutó Trap GoTo termina (o se cierra), Trap GoTo se cancelará de forma automática.
Cuando la tarea declarada termine, se cancelará Trap Call.
Trap Xqt se cancelará cuando todas las tareas se hayan detenido.

730 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Si se especificó GoTo
En la tarea definida para Trap, el comando en ejecución se procesará del modo descrito a continuación.
Luego, el control se bifurca a la etiqueta especificada.
- Cualquier movimiento del brazo se pausará de forma inmediata
- El estado de espera por los comandos Wait o Input se descontinuará
- Todos los otros comandos completarán la ejecución antes de que el control se bifurque
Si se especificó Call
Después de ejecutar el mismo proceso según lo descrito por GoTo anteriormente, el control se bifurca al
número de línea o a la etiqueta especificada.
Una vez que la función termina, la ejecución del programa vuelve a la siguiente instrucción después de la
instrucción en la que ocurrió la interrupción del programa. Las instrucciones Call no se pueden usar en la
función de procesamiento de Trap.
Cuando ocurre un error en la función de procesamiento, el control de errores con OnErr no será válido y
ocurrirá un error.
Si se especificó Xqt
El control del programa ejecuta la función especificada como una tarea de procesamiento de interrupción. En
este caso, la tarea que ejecuta el comando Trap no esperará que la función Trap termine y continuará
ejecutándose.
No puede ejecutar una tarea con una instrucción Xqt desde una tarea de procesamiento de interrupción.
Notas
Para usuarios de EPSON RC+4.x
La función Trap Call de EPSON RC+ 4.x o anterior es reemplazada con Trap Xqt en EPSON RC+ 7.0.
La función Trap GoSub de EPSON RC+ 4.x o anterior se eliminó en EPSON RC+ 7.0. En su lugar, use Trap
Call.
Para usar las variables en la expresión de condición de evento
- Las variables disponibles son del tipo de número entero (Byte, Int32, Integer, Long, Short, UByte, UInt32,
UShort)
- Las variables de matriz no están disponibles
- Las variables locales no están disponibles
- Si el valor de una variable no puede cumplir la condición del evento por más de 0,01 segundos, el sistema
no puede recuperar el cambio en las variables.
- Hasta 64 pueden esperar a las variables en un sistema (incluidas las que se usan en las expresiones de la
condición del evento, como Wait). Si es superior a 64, ocurre un error durante la compilación del proyecto.
- Si especifica Byref en una variable en espera de cualquier llamada de función, se genera un error.
- Cuando se incluye una variable en el miembro derecho de la expresión de condición del evento, el valor se
calcula cuando se configura la condición Trap. Recomendamos no usar variables en una expresión entera
para evitar crear condiciones no intencionales.
Consulte también
Call, GoTo, Xqt

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 731
Ejemplo de instrucción Trap
<Ejemplo 1> Proceso de error definido por el usuario
La entrada Sw(0) se considera una entrada de error definida por el usuario.
Function Main
Trap 1, Sw(0)= On GoTo EHandle ' Define Trap
.
.
.
EHandle:
On 31 'Señaliza las luces de torre
OpenCom #1
Print #1, "Error is issued"
CloseCom #1
Fend
<Ejemplo 2> Uso como multitarea
Function Main
Trap 2, MemSw(0) = On Or MemSw(1) = On Call Feeder
.
.
.
Fend
.
Function Feeder
Select TRUE
Case MemSw(0) = On
MemOff 0
On 2
Case MemSw(1) = On
MemOff 1
On 3
Send
' Vuelve a armar la captura para el próximo ciclo
Trap 2, MemSw(0) = On Or MemSw(1) = On Call Feeder
Fend
<Ejemplo 3> Usar la variable global como una condición de evento
Global Integer gi
Function main
Trap 1, gi = 5 GoTo THandle
Xqt sub
Wait 100
Exit Function
THandle:
Print "IN Trap ", gi
Fend
Function sub
For gi = 0 To 10
Print gi
Wait 0.5
Next
Fend

732 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción Trap (Disparador de estado del sistema)
Define las interrupciones y lo que debería suceder cuando ocurren.
Con la instrucción Trap , puede saltar a etiquetas o llamar funciones cuando ocurre el evento.
La instrucción Trap tiene 2 tipos, igual que a continuación:
- 4 capturas que se interrumpen con el estado de entrada definido por el usuario
- 7 capturas que se interrumpen con el estado del sistema
Aquí se explica Trap con disparadores de estado del sistema.
Sintaxis
Trap {Emergency | Error | Pause | SGOpen | SGClose | Abort | Finish } Xqt funcname
Trap {Emergency | Error | Pause | SGOpen | SGClose | Abort | Finish }
Parámetros
Emergency En el estado de parada de emergencia, ejecuta la función especificada.
Error En el estado de error, ejecute la función especificada.
Pause En el estado de pausa, ejecute la función especificada.
SGOpen Cuando la protección está abierta, ejecuta la función especificada.
SGClose Cuando la protección está cerrada, ejecuta la función especificada.
Abort Cuando todas las tareas, excepto las tareas en segundo plano (como cuando se ejecuta
una instrucción correspondiente a Abort All o se presione el botón Pause), son
detenidas por el usuario o el sistema, ejecuta la función especificada.
Finish Cuando se completan todas las tareas, excepto las tareas en segundo plano, ejecuta la
función especificada. No se puede ejecutar en la condición que ejecuta Trap Abort.
funcname Función de tarea de procesamiento de interrupción para la cual se ejecuta Xqt cuando
se completa el estado del sistema.
Las funciones con argumento no se pueden especificar.
Sin embargo, es posible especificar tres parámetros si “Error” está especificado para
el parámetro.
Nota
La función Trap *** Call de EPSON RC+ 4.x o anterior es reemplazada con Trap *** Xqt en EPSON RC+ 7.0.
Descripción
Cuando el estado del sistema se completa, se ejecuta la tarea de procesamiento de interrupción especificada.
Incluso si ejecuta una tarea de procesamiento de interrupción, no se puede borrar la configuración de Trap.
Para borrar la configuración Trap, omita funcname y ejecute la instrucción Trap .
Ejemplo : Trap Emergency borra Trap Emergency
Una vez se completen todas las tareas normales y el controlador esté en el estado Ready, se borran todas las
configuraciones de Trap.
No puede ejecutar más tareas con la instrucción Xqt desde un procesamiento de interrupción.
PRECAUCIÓN
■
Indicador Forced
Puede activar o desactivar las salidas E/S incluso en el estado Emergency Stop, el
estado Safeguard Open (Protección abierta), el modo Teach o el estado de error
mediante la especificación del indicador Forced para las instrucciones de salida de
E/S como las instrucciones On y Off.
NO conecte equipos externos que pueda mover máquinas como actuadores con las
salidas de E/S que especifiquen el indicador Forced. Es extremadamente peligroso y
puede causar que los dispositivos externos se muevan en el estado Emergency Stop,
el estado Safeguard Open, el modo Teach o el estado de error.
Las salidas de E/S que especifican el indicador Forced se deben conectar con el
dispositivo externo, como un LED como el indicador de estado que no puede mover
máquinas.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 733
Si se especificó Emergency
Cuando se activa la parada de emergencia, se ejecuta la función especificada en el atributo de la tarea
NoEmgAbort.
Los comandos ejecutables desde las tareas de procesamiento de la interrupción pueden ejecutar la tarea
NoEmgAbort.
Cuando se completa el procesamiento de la interrupción de la parada de emergencia, termine la tarea
oportunamente. De lo contrario, el controlador no podrá estar en el estado Ready. No puede restablecer
la parada de emergencia automáticamente mediante la ejecución del comando Reset desde la tarea de
procesamiento de interrupción.
Cuando la tarea ejecuta la activación/desactivación de E/S desde la tarea de procesamiento de
interrupción, desmarque de la casilla de verificación [Outputs off during emergency stop] (Salidas
desactivadas durante parada de emergencia) en la página [Controller]-[Preferences]. Si esta casilla
permanece marcada, no se garantiza el orden de ejecución de la desactivación con el controlador o de la
activación con la tarea.
Si se especificó Error
Cuando se activa Error, se ejecuta la función especificada en el atributo de la tarea NoEmgAbort.
Los comandos ejecutables desde las tareas de procesamiento de la interrupción pueden ejecutar la tarea
NoEmgAbort.
Cuando se completa el procesamiento de la interrupción de la parada de emergencia, termine la tarea
oportunamente. De lo contrario, el controlador no podrá estar en el estado Ready.
Los tres parámetros omisibles (errNumber, robotNumber, jointNumber) se pueden especificar en la
función del usuario. Si quiere usar estos parámetros, agregue tres parámetros de números enteros byval
a la función Trap.
Si ocurre un error de movimiento, se definen errNumber, robotNumber, y jointNumber.
Si ocurre un error que no sea el error de movimiento, se definirán robotNumber y jointNumber en ’0’.
Si se especificó Pause
Cuando se activa Pause, se ejecuta la función especificada en el atributo de la tarea NoEmgAbort.
Si se especificó SGOpen
Cuando la protección está abierta, se ejecuta la función especificada en el atributo de la tarea
NoEmgAbort.
Si se especificó SGClose
Cuando la protección está cerrada y enganchada, se ejecuta la función especificada en el atributo de la
tarea NoEmgAbort.
Si ejecuta la instrucción Cont desde las tareas de procesamiento de interrupción, ocurre un error.
Si se especificó Abort
Cuando todas las tareas, excepto las tareas en segundo plano (como cuando se ejecuta una instrucción
correspondiente a Abort All o se presiona el botón Pause) son detenidas por el usuario o el sistema,
ejecuta la función especificada y, luego, el atributo NoPause.
Cuando se completa el procesamiento de la interrupción de Pause, termine la tarea oportunamente. De lo
contrario, el controlador no podrá estar en el estado Ready. Aunque una tarea que se ejecute con Trap
Abort presente un error, no se ejecutará la tarea de procesamiento de Trap Error.
Si se cancelan las instrucciones Shutdown o Restart, no se ejecutan las tareas de procesamiento de Trap
Abort ni de Trap Finish.
Si se especificó Finish
Cuando todas las tareas, excepto las tareas en segundo plano (como cuando se ejecuta una instrucción
correspondiente a Abort All o se presione el botón Pause), son detenidas por el usuario o el sistema,
ejecuta la función especificada y luego el atributo NoPause. No se puede ejecutar en la condición que
ejecuta la tarea de procesamiento Trap Abort.
Cuando se completan el apagado y el procesamiento de interrupción, termina las tareas oportunamente.
De lo contrario, el controlador no podrá estar en el estado Ready.
Consulte también
Era, Erl, Err, Ert, ErrMsg$, OnErr, Reset, Restart, SysErr, Xqt

734 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Ejemplo de instrucción Trap
Function main
:
Trap Error Xqt suberr
:
Fend
Function suberr
Print "Error =", Err
On ErrorSwitch
Fend
Function main
Trap Error Xqt trapError
FEnd
Function trapError(errNum As Integer, robotNum As Integer, jointNum
As Integer)
Print ‘‘error number = ‘‘, errNum
Print ‘‘robot number = ‘‘, robotNum
Print ‘‘joint number = ‘‘, jointNum
If Ert = 0 Then
Print ‘‘system error’’
Else
Print ‘‘task error’’
Print ‘‘function = ‘‘, Erf$(Ert)
Print ‘‘line number = ‘‘, Erl(Ert)
EndIf
FEnd

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 735
Función Trim$
Arroja una cadena igual a la cadena especificada sin espacios delanteros o finales.
Sintaxis
Trim$(string)
Parámetros
string Expresión de cadena.
Valores devueltos
Cadena especificada sin espacios delanteros o finales.
Consulte también
LTrim$, RTrim$
Ejemplo de función Trim$
str$ = " data "
str$ = Trim$(str$) ' str$ = "data"

736 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función TW
Arroja el estado de los comandos Wait, WaitNet y WaitSig.
Sintaxis
TW
Valores devueltos
Arroja False si la condición Wait se cumple dentro del intervalo de tiempo.
Arroja True si el intervalo de tiempo ya transcurrió.
Descripción
La función Timer Wait TW arroja el estado de la condición Wait anterior con un intervalo de tiempo con
False (se cumplió la condición Wait) o True (el intervalo ya transcurrió).
Consulte también
TMOut, Wait
Ejemplo de función TW
Wait Sw(0) = On, 5 'Espera hasta 5 segundos por la activación del bit de entrada 0
If TW = True Then
Print “Time Up” 'Muestra "Time UP" después de 5 segundos
EndIf

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 737
Función UBound
Arroja el subíndice más grande disponible para la dimensión indicada de una matriz.
Sintaxis
UBound (arrayName [, dimension])
Parámetros
arrayName Nombre de la variable de matriz; sigue las convenciones de nomenclatura de variables
estándar.
dimension Opcional. Expresión entera que indica la dimensión cuyo límite superior se arroja.
Usa 1 para la primera dimensión, 2 para la segunda y 3 para la tercera. Si se omite
dimension, se asume el valor 1.
Consulte también
Redim
Ejemplo de función UBound
Integer i, a(10)
For i=0 to UBound(a)
a(i) = i
Next

738 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción UByte
Declara variables de tipo UByte. (tipo de variable sin signo, tamaño: 2 bytes).
Sintaxis
UByte varName [(subscripts)] [, varName [(subscripts)]...]
Parámetros
varName Nombre de la variable que el usuario desea declarar como de tipo UByte.
subscripts Opcional. Las dimensiones de una matriz son variables; es posible declarar hasta 3
dimensiones. La sintaxis del subíndice es la siguiente
(ubound1, [ubound2], [ubound3])
ubound1, ubound2, ubound3 especifican, cada una, el límite superior máximo para la
dimensión asociada.
Los elementos en cada dimensión de una matriz se numeran desde 0 y el número
disponible de elementos de matriz es el valor de límite superior + 1.
Cuando especifique el valor del límite superior, asegúrese de que el número total de
elementos esté dentro del rango que se muestra a continuación:
Variable local 2.000
Variables globales conservadas 4.000
Variable global y variable de módulo 100.000
Descripción
UByte se usa para declarar variables como de tipo UByte. Las variables del tipo UByte pueden incluir valores
de 0 a 255. Las variables locales se deben declarar al inicio de una función. Las variables globales y de
módulo se deben declarar fuera de las funciones.
Consulte también
Boolean, Byte, Double, Global, Int32, Int64, Integer, Long, Real, Short, String, UInt32, UInt64,
UShort
Ejemplo de instrucción UByte
El siguiente ejemplo muestra un programa simple que declara algunas variables como de tipo UByte y asigna
valores a las variables.
El programa monitorea si el bit superior de "test_ok" es 1 o 0. El resultado aparecerá en la pantalla. (Ya que
el valor 15 está asignado a la variable, el bit con el valor "test_ok" más alto siempre está definido en este
ejemplo).
Function Test
UByte A(10) 'Matriz de una dimensión de tipo UByte
UByte B(10, 10) 'Matriz de dos dimensiones de tipo UByte
UByte C(5, 5, 5) 'Matriz de tres dimensiones de tipo UByte
UByte test_ok
test_ok = 15
Print "Initial Value of test_ok = ", test_ok
test_ok = (test_ok And 8)
If test_ok <> 8 Then
Print "test_ok high bit is ON"
Else
Print "test_ok high bit is OFF"
EndIf
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 739
Función UCase$
Arroja una cadena que se ha convertido a mayúsculas.
Sintaxis
UCase$ (string)
Parámetros
string Expresión de cadena.
Valores devueltos
La cadena mayúscula convertida.
Consulte también
LCase$, LTrim$, Trim$, RTrim$
Ejemplo de función UCase$
str$ = "Data"
str$ = UCase$(str$) ' str$ = "DATA"

740 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción UInt32
Declara variables del tipo UInt32. (Variable de número entero de 4 bytes sin signo).
Sintaxis
UInt32 varName [(subscripts)] [, varName [(subscripts)]...]
Parámetros
varName Nombre de variable que el usuario desea declarar.
subscripts Opcional. Las dimensiones de una matriz son variables; es posible declarar hasta 3
dimensiones. La sintaxis del subíndice es la siguiente
(ubound1, [ubound2], [ubound3])
ubound1, ubound2, ubound3 especifican, cada una, el límite superior máximo para la
dimensión asociada.
Los elementos en cada dimensión de una matriz se numeran desde 0 y el número
disponible de elementos de matriz es el valor de límite superior + 1.
Cuando especifique el valor del límite superior, asegúrese de que el número total de
elementos esté dentro del rango que se muestra a continuación:
Variable local 2.000
Variables globales conservadas 4.000
Variable global y variable de módulo 100.000
Descripción
UInt32 se usa para declarar variables como de tipo de número entero. Las variables del tipo entero pueden
incluir valores de 0 a 4294967295. Las variables locales se deben declarar al inicio de una función. Las
variables globales y de módulo se deben declarar fuera de las funciones.
Consulte también
Boolean, Byte, Double, Global, Int32, Int64, Integer, Long, Real, Short, String, UByte, UInt64,
UShort
Ejemplo de instrucción UInt32
El siguiente ejemplo muestra un programa simple que declara algunas variables como de tipo de número
entero con UInt32.
Function uint32test
UInt32 A(10) 'Matriz de una dimensión de tipo UInt32
UInt32 B(10, 10) 'Matriz de dos dimensiones de tipo UInt32
UInt32 C(5, 5, 5) 'Matriz de tres dimensiones de tipo UInt32
UInt32 var1, arrayvar(10)
Integer i
Print "Please enter an Integer Number"
Input var1
Print "The Integer variable var1 = ", var1
For i = 1 To 5
Print "Please enter an Integer Number"
Input arrayvar(i)
Print "Value Entered was ", arrayvar(i)
Next i
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 741
Instrucción UInt64
Declara variables del tipo Uint64. (Variable de número entero de 8 bytes sin signo).
Sintaxis
Uint64 varName [(subscripts)] [, varName [(subscripts)]...]
Parámetros
varName Nombre de variable que el usuario desea declarar.
subscripts Opcional. Las dimensiones de una matriz son variables; es posible declarar hasta 3
dimensiones. La sintaxis del subíndice es la siguiente.
(ubound1, [ubound2], [ubound3])
ubound1, ubound2, ubound3 especifican, cada una, el límite superior máximo para la
dimensión asociada.
Los elementos en cada dimensión de una matriz se numeran desde 0 y el número
disponible de elementos de matriz es el valor de límite superior + 1.
Cuando especifique el valor del límite superior, asegúrese de que el número total de
elementos esté dentro del rango que se muestra a continuación:
Variable local 2.000
Variables globales conservadas 4.000
Variable global y variable de módulo 100.000
Descripción
UInt64 se usa para declarar variables como de tipo de número entero. Las variables del tipo entero pueden
incluir valores de 0 a 18446744073709551615. Las variables locales se deben declarar al inicio de una
función. Las variables globales y de módulo se deben declarar fuera de las funciones.
Consulte también
Boolean, Byte, Double, Global, Int32, Int64, Integer, Long, Real, Short, String, UByte, UInt32,
UShort
Ejemplo de instrucción UInt64
El siguiente ejemplo muestra un programa simple que declara algunas variables como de tipo de número
entero con UInt64.
Function uint64test
UInt64 A(10) 'Matriz de una dimensión de tipo UInt64
UInt64 B(10, 10) 'Matriz de dos dimensiones de tipo UInt64
UInt64 C(5, 5, 5) 'Matriz de tres dimensiones de tipo UInt64
UInt64 var1, arrayvar(10)
Integer i
Print "Please enter an Integer Number"
Input var1
Print "The Integer variable var1 = ", var1
For i = 1 To 5
Print "Please enter an Integer Number"
Input arrayvar(i)
Print "Value Entered was ", arrayvar(i)
Next i
Fend

742 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción UOpen
Abre un archivo para acceso de lectura/escritura.
Sintaxis
UOpen fileName As #fileNumber
.
.
Close #fileNumber
Parámetros
fileName Expresión de cadena que especifica una ruta y un nombre de archivo.
Si se omite la ruta, se especifica el archivo en el directorio actual
Consulte ChDisk para conocer detalles.
fileNumber Expresión entera que representa valores desde 30 a 63.
Descripción
Abre el archivo especificado con el nombre de archivo especificado. Esta instrucción se usa para escribir y
cargar datos en el archivo especificado.
Nota
Hay una ruta de red disponible.
Si el archivo especificado no existe en el disco, se creará el archivo y se escribirán los datos en él.
Si el archivo especificado ya existe en el disco, los datos se escribirán y leerán desde el comienzo de los
datos existentes.
La posición de lectura/escritura (puntero) del archivo se puede cambiar con el comando Seek. Cuando se
cambia entre el acceso de lectura y escritura, debe usar Seek para volver a ubicar el puntero del archivo.
fileNumber identifica el archivo mientras está abierto y no se puede usar para hacer referencia a un archivo
diferente hasta que se cierre el archivo actual. fileNumber es utilizado por otras operaciones como Print#,
Read, Write, Seek y Close.
Close cierra el archivo y libera el número de archivo.
Recomendamos que use la función FreeFile para obtener el número de archivo para que el mismo número
no sea utilizado por más de una tarea.
Consulte también
Close, Print #, Input#, AOpen, BOpen, ROpen, WOpen, FreeFile, Seek
Ejemplo de instrucción UOpen
Integer fileNum, i, j
fileNum = FreeFile
UOpen "TEST.DAT" As #fileNum
For i = 0 To 100
Print #fileNum, i
Next i
Close #fileNum
fileNum = FreeFile
UOpen "TEST.DAT" As #fileNum
Seek #fileNum, 10
Input #fileNum, j
Print "data = ", j
Close #fileNum

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 743
Instrucción UpdateDB
Actualiza los datos en la tabla que se recupera en la base de datos abierta.
Sintaxis
UpdateDB #DBNumber, item, value
Parámetros
DBNumber Expresión entera (501 a 508) que representa el número de base de datos especificado
por OpenDB.
item Nombre del elemento de la tabla que se actualizará.
value Valor que se actualizará.
Descripción
Actualiza los datos en la tabla que se recupera en la base de datos abierta con el valor especificado.
Antes de actualizar los datos, es necesario emitir SelectDB y seleccionar el registro que se va a actualizar.
Nota
- Se requiere la conexión de una PC con RC+ instalado.
Consulte también
OpenDB,CloseDB, SelectDB, DeleteDB
Ejemplo de instrucción UpdateDB
Ejemplo con base de datos SQL
A continuación se incluye un ejemplo de cómo registrar los datos en la tabla "Employees" de la base de
datos de muestra "Northwind" de SQL server 2000 y actualizar los elementos en los datos registrados.
Integer count, i, eid
String Lastname$, Firstname$, Title$
OpenDB #501, SQL, "(LOCAL)", "Northwind"
count = SelectDB(#501, "Employees", "TitleOfCourtesy = 'Mr.'")
Print #501, "Epson", "Taro", "Engineer", "Mr."
count = SelectDB(#501, "Employees", "LastName = 'Epson' and
FirstName = 'Taro'")
Input #501, eid, Lastname$, Firstname$, Title$
Print eid, ",", Lastname$, ",", Firstname$, ",", Title$
UpdateDB #501, "Title", "Chief Engineer"
count = SelectDB(#501, "Employees", "LastName = 'Epson' and
FirstName = 'Taro'")
Input #501, eid, Lastname$, Firstname$, Title$
Print eid, ",", Lastname$, ",", Firstname$, ",", Title$
CloseDB #501

744 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción UShort
Declara variables del tipo Ushort. (Variable de número entero de 2 bytes sin signo).
Sintaxis
UShort varName [(subscripts)] [, varName [(subscripts)]...]
Parámetros
varName Nombre de variable que el usuario desea declarar.
subscripts Opcional. Las dimensiones de una matriz son variables; es posible declarar hasta 3
dimensiones. La sintaxis del subíndice es la siguiente
(ubound1, [ubound2], [ubound3])
ubound1, ubound2, ubound3 especifican, cada una, el límite superior máximo para la
dimensión asociada.
Los elementos en cada dimensión de una matriz se numeran desde 0 y el número
disponible de elementos de matriz es el valor de límite superior + 1.
Cuando especifique el valor del límite superior, asegúrese de que el número total de
elementos esté dentro del rango que se muestra a continuación:
Variable local 2.000
Variables globales conservadas 4.000
Variable global y variable de módulo 100.000
Descripción
UShort se usa para declarar variables como un tipo entero. Las variables de número entero pueden incluir
valores desde 0 a 65535. Las variables locales se deben declarar al inicio de una función. Las variables
globales y de módulo se deben declarar fuera de las funciones.
Consulte también
Boolean, Byte, Double, Global, Int32, Int64, Integer, Long, Real, Short, String, UByte, UInt32,
UInt64
Ejemplo de instrucción UShort
El siguiente ejemplo muestra un programa simple que declara algunas variables como de tipo de número
entero con UShort.
Function ushorttest
UShort A(10) 'Matriz de dimensión única de tipo UShort
UShort B(10, 10) 'Matriz de dos dimensiones de tipo UShort
UShort C(5, 5, 5) 'Matriz de tres dimensiones de tipo UShort
UShort var1, arrayvar(10)
Integer i
Print "Please enter an Integer Number"
Input var1
Print "The Integer variable var1 = ", var1
For i = 1 To 5
Print "Please enter an Integer Number"
Input arrayvar(i)
Print "Value Entered was ", arrayvar(i)
Next i
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 745
Función Val
Convierte una cadena de carácter que consta de números en su valor numérico y arroja ese valor.
Sintaxis
Val(string)
Parámetros
string Expresión de cadena que contiene solo caracteres numéricos. La cadena también puede
contener un prefijo: &H (hexadecimal), &O (octal) o &B (binario).
Valores devueltos
Arroja un número entero o un resultado de punto flotante según la cadena de entrada. Si la cadena de entrada
tiene un carácter de punto decimal, el número se convierte en un número de punto flotante. De lo contrario
el valor devuelto es un número entero.
Descripción
Val convierte una cadena de caracteres de números en un valor numérico. El resultado puede ser un número
entero o un número de punto flotante. Si la cadena que se entrega a la instrucción Val contiene un punto
decimal, el valor devuelto será un número de punto flotante. De lo contrario, será un número entero.
Consulte también
Abs, Asc, Chr$, Int, Left$, Len, Mid$, Mod, Right$, Sgn, Space$, Str$
Ejemplo de función Val
El ejemplo a continuación muestra un programa que convierte varias cadenas diferentes en números y las
imprime en la pantalla.
Function ValDemo
String realstr$, intstr$
Real realsqr, realvar
Integer intsqr, intvar
realstr$ = "2.5"
realvar = Val(realstr$)
realsqr = realvar * realvar
Print "The value of ", realstr$, " squared is: ", realsqr
intstr$ = "25"
intvar = Val(intstr$)
intsqr = intvar * intvar
Print "The value of ", intstr$, " squared is: ", intsqr
Fend
Este es otro ejemplo de la ventana Command.
> Print Val("25.999")
25.999
>

746 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción VSD
Define la función de movimiento CP de velocidad variable para robots SCARA.
Sintaxis
VSD { ON | Off }
Parámetros
On | Off On: Activa la función de movimiento CP de velocidad variable para el robot SCARA.
Off: Desactiva la función de movimiento CP de velocidad variable para el robot SCARA.
Descripción
VSD está disponible para los siguientes comandos.
Move, Arc, Arc3
El comando está disponible solo para robots SCARA.
Para robots que no sean SCARA, use AvoidSingularity SING_VSD.
La función de movimiento CP de velocidad variable evita que ocurran el error de aceleración y el error de
sobrevelocidad cuando el robot SCARA ejecuta el movimiento CP. Esta función controla automáticamente
la velocidad de la articulación mientras mantiene la trayectoria. Si se controla la velocidad de la
articulación, no se mantendrá la velocidad del punto central de la herramienta especificada por SpeedS. Sin
embargo, se arrojará la configuración de velocidad original cuando la velocidad de articulación disminuya
a menos del límite. Si se prioriza la velocidad constante, defina AccelS, DecelS y SpeedS en valores más
pequeños para eliminar la ocurrencia de errores.
Si ocurren los errores de aceleración y sobrevelocidad incluso cuando se usa la instrucción VSD, defina
AccelS, DecelS y SpeedS en valores más pequeños.
Si se cambia el parámetro VSD, la configuración actual permanecerá vigente hasta el siguiente inicio del
controlador.
VSD se activa al inicio del controlador.
Consulte también
Función VSD
Ejemplo de instrucción VSD
VSD On 'Activa el movimiento CP de velocidad variable y ejecuta el movimiento
Move P1
Move P2
VSD Off

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 747
Función VSD
Arroja la configuración de la función de movimiento CP de velocidad variable para robots SCARA.
Sintaxis
VSD
Valores devueltos
On = Activa la función de movimiento CP de velocidad variable
Off = Desactiva la función de movimiento CP de velocidad variable
Consulte también
VSD
Ejemplo de función VSD
If VSD = Off Then
Print "Variable Speed Drive is off"
EndIf

748 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción VxCalib
Este comando solo se usa con los sistemas de visión externos y no se puede usar con Vision Guide.
Crea datos de calibración para un sistema de visión externo.
Sintaxis
(1) VxCalib CalNo
(2) VxCalib CalNo, CamOrient, P(pixel_st : pixel_ed), P(robot_st : robot_ed) [, TwoRefPoints]
(3) VxCalib CalNo, CamOrient, P(pixel_st : pixel_ed), P(robot_st : robot_ed), P(ref0) [, P(ref180)]
Parámetros
CalNo Expresión entera que especifica el número de datos de calibración. El rango es de 0 a 15; se
pueden definir hasta 16 calibraciones.
CamOrient Expresión entera que especifica la dirección de montaje de la cámara con los siguientes
valores:
1 a 3: Disponible solo para sintaxis (2).
4 a 7: Disponible solo para sintaxis (3).
1: Autónomo
2: Descendente fija
3: Ascendente fija
4: Móvil en la articulación n.° 2
5: Móvil en la articulación n.° 4
6: Móvil en la articulación n.° 5
7: Móvil en la articulación n.° 6
P(pixel_st : pixel_ed)
Especifica las coordenadas de Pixel (solo X, Y) con datos de punto continuos.
P(robot_st : robot_ed)
Especifica las coordenadas de robot con datos de punto continuos.
Los datos de punto varían con las instrucciones de montaje de la cámara especificadas por
CamOrient.
Si CamOrient = 1 a 3:
Las coordenadas del robot deben definirse en los valores TOOL y ARM actuales.
Si CamOrient = 4 a 7:
Las coordenadas del robot se deben definir en TOOL: 0, ARM: 0.
TwoRefPoints Disponible para la sintaxis (1).
Verdadero, cuando se usan dos puntos de medición. Falso, cuando se usa un punto de
medición.
Especificar dos puntos de medición hace que la calibración sea más precisa.
Opcional.
Predetermin.: Falso
P(ref0) Disponible para la sintaxis (3).
Especifica las coordenadas de robot del punto de referencia mediante datos de punto.
P(ref180) Disponible para la sintaxis (3).
Especifica las coordenadas de robot del segundo punto de referencia mediante datos de
punto. Especificar dos puntos de referencia hace que la calibración sea más precisa.
Opcional.
Descripción
El comando VxCalib calcula los datos de calibración de visión para el número de calibración con la
orientación de cámara especificada, las coordenadas de píxel, las coordenadas del robot y los puntos de
referencia (solo cámara móvil) proporcionados por el parámetro.
Cuando solo especifica CalNo, se muestran los datos de punto y otras configuraciones que definió (solo desde
la ventana Command).

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 749
La siguiente imagen muestra el sistema de coordenadas de las coordenadas de píxel. (Unidades: píxel)
0, 0
+Θ
+Y
+X
0°
Para las coordenadas de píxel y las coordenadas del robot, defina la posición superior izquierda de la ventana
como Point 1 y la posición inferior derecha como Point 9 según el orden que se indica en la siguiente tabla.
Se clasifica en las cuatro categorías según el parámetro CamOrient y TwoRefPoints.
1) CamOrient = 1 a 3 (Autónomo, Descendente fija, Ascendente fija), TwoRefPoints = False
Orden de
datos
Posición Coordenadas de píxel Coordenadas del robot
1
Parte superior
izquierda
Coordenadas de detección 1
Medición de coordenadas de punto 1
2
Parte superior
central
Coordenadas de detección 2
Medición de coordenadas de punto 2
3
Parte superior
derecha
Coordenadas de detección 3
Medición de coordenadas de punto 3
4 Parte central
derecha
Coordenadas de detección 4 Medición de coordenadas de punto 4
5
Centro
Coordenadas de detección 5
Medición de coordenadas de punto 5
6
Parce central
izquierda
Coordenadas de detección 6
Medición de coordenadas de punto 6
7
Parte inferior
izquierda
Coordenadas de detección 7
Medición de coordenadas de punto 7
8 Parte inferior
central
Coordenadas de detección 8 Medición de coordenadas de punto 8
9
Parte inferior
derecha
Coordenadas de detección 9
Medición de coordenadas de punto 9
2) CamOrient = 2 (Descendente fija), TwoRefPoints = True
Nota: Cuando se define exactamente la herramienta, no es necesario usar TwoRefPoints y se debe
configurar en False.
Si configura TwoRefPoints en True, se usan dos puntos de medición para cada posición de calibración, lo
que hace que la calibración sea más precisa. 18 puntos de robot con eje U: se requieren 0 grados / 180 grados.
Después de configurar las coordenadas de los puntos de medición 1 al 9, gire el eje U en 180 grados y defina
las coordenadas de los puntos de medición 10 al 18 donde la mano (como la vara) se encuentra posicionada
en la posición objetivo de calibración.
Orden de
datos
Posición Coordenadas de píxel Coordenadas del robot Eje U
1
Parte superior
izquierda
Coordenadas de detección 1
Medición de coordenadas de punto 1
0 grados
2
Parte superior
central
Coordenadas de detección 2
Medición de coordenadas de punto 2
3
Parte superior
derecha
Coordenadas de detección 3
Medición de coordenadas de punto 3
4 Parte central
derecha
Coordenadas de detección 4 Medición de coordenadas de punto 4

750 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
5
Centro
Coordenadas de detección 5
Medición de coordenadas de punto 5
6 Parce central
izquierda
Coordenadas de detección 6 Medición de coordenadas de punto 6
7
Parte inferior
izquierda
Coordenadas de detección 7
Medición de coordenadas de punto 7
8
Parte inferior
central
Coordenadas de detección 8
Medición de coordenadas de punto 8
9
Parte inferior
derecha
Coordenadas de detección 9
Medición de coordenadas de punto 9
10
Parte superior
izquierda
- - -
Medición de coordenadas de punto
10
180
grados
11
Parte superior
central
- - -
Medición de coordenadas de punto
11
12 Parte superior
derecha
- - - Medición de coordenadas de punto
12
13
Parte central
derecha
- - -
Medición de coordenadas de punto
13
14
Centro
- - -
Medición de coordenadas de punto
14
15
Parce central
izquierda
- - -
Medición de coordenadas de punto
15
16 Parte inferior
izquierda
- - - Medición de coordenadas de punto
16
17
Parte inferior
central
- - -
Medición de coordenadas de punto
17
18
Parte inferior
derecha
- - -
Medición de coordenadas de punto
18

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 751
3) CamOrient = 3 (Ascendente fija), TwoRefPoints = True
Nota: Cuando se define exactamente la herramienta, no es necesario usar TwoRefPoints y se debe configurar
en False.
Si configura TwoRefPoints en True, se usan dos puntos de detección, lo que hace que la calibración sea más
precisa. Solo para las coordenadas de píxel, 18 puntos de eje U: se requieren 0 grados / 180 grados.
Después de configurar las coordenadas de detección 1 a 9 en cada coordenada de punto de medición a 0
grados, defina las coordenadas de detección para los puntos 10 a 18 en 180 grados.
Orden de
datos
Posición Coordenadas de píxel Coordenadas del robot Eje U
1
Parte superior
izquierda
Coordenadas de detección 1
Medición de coordenadas de
punto 1
0 grados
2 Parte superior
central
Coordenadas de detección 2 Medición de coordenadas de
punto 2
3
Parte superior
derecha
Coordenadas de detección 3
Medición de coordenadas de
punto 3
4
Parte central
derecha
Coordenadas de detección 4
Medición de coordenadas de
punto 4
5
Centro
Coordenadas de detección 5
Medición de coordenadas de
punto 5
6 Parce central
izquierda
Coordenadas de detección 6 Medición de coordenadas de
punto 6
7
Parte inferior
izquierda
Coordenadas de detección 7
Medición de coordenadas de
punto 7
8
Parte inferior
central
Coordenadas de detección 8
Medición de coordenadas de
punto 8
9
Parte inferior
derecha
Coordenadas de detección 9
Medición de coordenadas de
punto 9
10
Parte superior
izquierda
Coordenadas de detección
10
- - -
180 grados
11
Parte superior
central
Coordenadas de detección
11
- - -
12 Parte superior
derecha
Coordenadas de detección
12
- - -
13
Parte central
derecha
Coordenadas de detección
13
- - -
14
Centro
Coordenadas de detección
14
- - -
15
Parce central
izquierda
Coordenadas de detección
15
- - -
16 Parte inferior
izquierda
Coordenadas de detección
16
- - -
17
Parte inferior
central
Coordenadas de detección
17
- - -
18
Parte inferior
derecha
Coordenadas de detección
18
- - -
4) CamOrient = 4 a 7
Orden de
datos
Posición Coordenadas de píxel Coordenadas del robot
1
Parte superior
izquierda
Coordenadas de detección 1
Medición de coordenadas de punto 1
2 Parte superior
central
Coordenadas de detección 2 Medición de coordenadas de punto 2
3
Parte superior
derecha
Coordenadas de detección 3
Medición de coordenadas de punto 3
4
Parte central
derecha
Coordenadas de detección 4
Medición de coordenadas de punto 4
5
Centro
Coordenadas de detección 5
Medición de coordenadas de punto 5

752 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
6
Parce central
izquierda
Coordenadas de detección 6
Medición de coordenadas de punto 6
7 Parte inferior
izquierda
Coordenadas de detección 7 Medición de coordenadas de punto 7
8
Parte inferior
central
Coordenadas de detección 8
Medición de coordenadas de punto 8
9
Parte inferior
derecha
Coordenadas de detección 9
Medición de coordenadas de punto 9
Nota
Además de las tablas anteriores, especifique las coordenadas de robot de los puntos de referencia.
Con los dos puntos de referencia hace que la calibración sea más precisa. En este caso, necesita dos puntos
del eje U: 0 grados / 180 grados.
Después de configurar las coordenadas del primer punto de referencia, gire el eje U en 180 grados y defina
las coordenadas del segundo punto de referencia donde la mano (como la vara) se encuentra posicionada en
la posición objetivo de calibración. Cuando la herramienta se define de forma precisa, los dos puntos de
referencia no son necesarios.
Consulte también
Función VxTrans, Función VxCalInfo, VxCalDelete, VxCalSave, VxCalLoad

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 753
Ejemplo de instrucción VxCalib
Function MobileJ2
Integer i
Double d(8)
Robot 1
LoadPoints "MobileJ2.pts"
VxCalib 0, 4, P(21:29), P(1:9), P(0)
If (VxCalInfo(0, 1) = True) Then
For i = 0 To 7
d(i) = VxCalInfo(0, i + 2)
Next i
Print "Calibration result:"
Print d(0), d(1), d(2), d(3), d(4), d(5), d(6), d(7)
P52 = VxTrans(0, P51, P50)
Print "Coordinates conversion result:"
Print P52
SavePoints "MobileJ2.pts"
VxCalSave "MobileJ2.caa"
Else
Print "Calibration failed"
EndIf
Fend

754 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción VxCalDelete
Este comando solo se usa con los sistemas de visión externos y no se puede usar con Vision Guide.
Elimina los datos de calibración para la calibración de un sistema de visión externo.
Sintaxis
VxCalDelete CalNo
Parámetros
CalNo Expresión entera que especifica el número de datos de calibración.
El rango es de 0 a 15; se pueden definir hasta 16 calibraciones.
Descripción
Elimina los datos de calibración definidos por el número de calibración.
Consulte también
VxCalib, Función VxTrans, Función VxCalInfo, VxCalSave, VxCalLoad
Ejemplo de instrucción VxCalDelete
VxCalDelete "MobileJ2.caa"

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 755
Instrucción VxCalLoad
Este comando solo se usa con los sistemas de visión externos y no se puede usar con Vision Guide.
Carga los datos de calibración para la calibración de un sistema de visión externo desde un archivo.
Sintaxis
VxCalLoad FileName
Parámetros
FileName Especifica el nombre del archivo desde el cual se cargan los datos de calibración mediante
la expresión de cadena.
La extensión del archivo es “.caa”. Si se omite, “.caa” se agrega automáticamente.
Para extensiones distintas de “.caa”, se cambian automáticamente a “.caa”.
Descripción
Carga los datos de calibración desde el archivo especificado en el proyecto actual.
Consulte también
VxCalib, Función VxTrans, Función VxCalInfo, VxCalDelete, VxCalSave
Ejemplo de instrucción VxCalLoad
VxCalLoad "MobileJ2.caa"

756 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función VxCalInfo
Este comando solo se usa con los sistemas de visión externos y no se puede usar con Vision Guide.
Arroja el estado de finalización de la calibración y los datos de calibración.
Sintaxis
VxCalInfo (CalNo,CalData)
Parámetros
CalNo Expresión entera que especifica el número de datos de calibración. El rango es de 0 a 15; se
pueden definir hasta 16 calibraciones.
CalData Especifica el tipo de datos de calibración que se debe adquirir con los valores enteros en la
siguiente tabla.
CalData
Tipo de datos de calibración
1
CalComplete
2
X Avg Error [mm]
3
X Max error [mm]
4
X mm per pixel [mm]
5
X tilt
6
Y Avg error [mm]
7
Y Max error [mm]
8
Y mm per pixel [mm]
9
Y tilt
Valores devueltos
Arroja los datos de calibración especificados. Para CalData = 1, el tipo de dato es Booleano. Para todos los
otros datos, el tipo de datos es Doble.
Descripción
Puede revisar qué calibración tiene datos de calibración definidos.
También puede recuperar los valores de los datos de calibración.
Consulte también
VxCalib, Función VxTrans, VxCalDelete, VxCalSave, VxCalLoad
Ejemplo de función VxCalInfo
Print VxCalInfo(0, 1)

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 757
Instrucción VxCalSave
Este comando solo se usa con los sistemas de visión externos y no se puede usar con Vision Guide.
Guarda los datos de calibración para la calibración de un sistema de visión externo a un archivo.
Sintaxis
VxCalSave FileName
Parámetros
FileName Especifica el nombre del archivo desde el cual se cargan los datos de calibración mediante
la expresión de cadena.
La extensión es “.caa”. Si se omite, “.caa” se agrega automáticamente.
Para extensiones distintas de “.caa”, se cambian automáticamente a “.caa”.
Descripción
Guarda los datos de calibración con el nombre de archivo especificado. El archivo se guarda en el proyecto
actual. Si el nombre de archivo ya existe, los datos de calibración se sobrescriben.
Consulte también
VxCalib, Función VxTrans, Función VxCalInfo, VxCalDelete, VxCalLoad
Ejemplo de instrucción VxCalSave
VxCalSave "MobileJ2.caa"

758 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función VxTrans
Este comando solo se usa con los sistemas de visión externos y no se puede usar con Vision Guide.
Convierte las coordenadas de píxel a coordenadas de robot y arroja los datos de punto convertidos.
Sintaxis
VxTrans (CalNo, P(pixel) [, P(camRobot)] ) As Point
Parámetros
CalNo Expresión entera que especifica el número de datos de calibración.
El rango es de 0 a 15; se pueden definir hasta 16 calibraciones.
P(pixel) Especifica las coordenadas de píxel de visión (solo X, Y, U) con datos de punto.
P(camRobot) Opcional. Para una cámara móvil, esta es la posición en la que el robot se encontraba
cuando se adquirió la imagen. Si no se especifica, se usa la posición del robot actual.
El punto debe estar en TOOL: 0 y ARM: 0.
Valores devueltos
Arroja las coordenadas calculadas del robot con los datos de punto.
Descripción
Este comando convierte las coordenadas de píxel a coordenadas de robot con los datos de calibración del
número de calibración especificado.
Cuando use una cámara móvil, especifique P(camRobot) si el robot se movió desde la posición en la que se
adquirió la imagen. Asegure que P(camRobot) esté en TOOL: 0 y ARM: 0. Se usan los ángulos de las
articulaciones n.° 4 y n.° 6 de las coordenadas definidas del robot para el cálculo.
Consulte también
VxCalib, Función VxCalInfo, VxCalDelete, VxCalSave, VxCalLoad
Ejemplo de función VxTrans
P52 = VxTrans(0, P51, P50)

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 759
Instrucción Wait
Causa que el programa esté en Wait por un lapso de tiempo especificado o hasta que la condición de entrada
especificada (con MemSw o Sw) se cumpla. (También se puede usar Oport en lugar de Sw para verificar las
salidas de hardware). También espera que los valores de las variables globales cambien.
Sintaxis
(1) Wait time
(2) Wait inputcondition
(3) Wait inputcondition, time
Parámetros
time Expresión real entre 0 y 2,147,483, que representa el lapso de tiempo que se esperará
cuando se use la instrucción Wait para esperar según el tiempo. El tiempo se especifica
en segundos. El incremento más pequeño es de 0,01 segundos.
inputcondition Se puede usar la siguiente sintaxis para especificar la condición de entrada:
[Event] Operador comparativo ( =, <>, >=, >, <, <=) [Expresión entera]
Se pueden usar las siguientes funciones y variables en Event.
Funciones : Sw, In, InW, Oport, Out, OutW, MemSw, MemIn, MemInW,
Ctr, GetRobotInsideBox, GetRobotInsidePlane,
MCalComplete,
Motor, LOF, ErrorOn, SaftyOn, EstopOn, TeachOn ,
Cnv_QueLen, WindowsStatus, AtHome, LatchState,
WorkQue_Len, PauseOn, AIO_In, AIO_InW, AIO_Out,
AIO_OutW
Operadores : Byte, Int32, Integer, Long, Short, UByte, UInt32, variable
global conservada UShort, variable Global, variable de módulo
También, puede especificar múltiples condiciones de entrada si usa los siguientes
operadores.
Operador : And, Or, Xor, Mask
Descripción
(1) Esperar con intervalo de tiempo
Cuando se usa como un temporizador, la instrucción Wait causa que el programa se pause por la cantidad
de tiempo especificada y luego continúe la ejecución del programa.
(2) Esperar condiciones de evento sin intervalo de tiempo
Cuando se usa como un enclavamiento de espera condicional, la instrucción Wait causa que el programa
espere hasta que se cumplan las condiciones especificadas. Si una vez que transcurre el intervalo de
tiempo TMOut las condiciones aún no se han cumplido, ocurre un error. Para comprobar múltiples
condiciones con una sola instrucción Wait, el usuario puede usar las instrucciones And, Mask, Or o Xor.
(Consulte la sección de ejemplo para Wait).
(3) Esperar con condición de evento e intervalo de tiempo
Especifica la condición de Wait y el intervalo de tiempo. Después de que la condición de Wait se cumple,
o transcurre el intervalo de tiempo, el control del programa se traslada al siguiente comando. Use Tw
para verificar si la condición Wait se cumplió o si transcurrió el intervalo de tiempo.

760 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Notas
Especificación de un período de tiempo de espera para usar con Wait
Cuando se usa la instrucción Wait sin un intervalo de tiempo, se puede especificar un período de tiempo de
espera que define un límite de tiempo para la espera de la condición especificada. Este período de tiempo de
espera se define con la instrucción TMOut. Consulte esta instrucción para obtener más información. (La
configuración predeterminada para TMOut es "0", que significa que no hay período de tiempo de espera).
Esperar una variable con Wait
- Las variables disponibles son del tipo de número entero (Byte, Int32, Integer, Long, Short, UByte, UInt32,
UShort)
- Las variables de matriz no están disponibles
- Las variables locales no están disponibles
- Si el valor de las variables no puede cumplir la condición del evento por más de 0,01 segundos, no se podrá
obtener el cambio en las variables.
- Pueden esperar hasta 64 a las variables de un sistema (incluidas las que se usan en las expresiones de
condición de evento, como Till). Si es superior a 64, ocurre un error durante la compilación del proyecto.
- Si especifica Byref en una variable en espera de cualquier llamada de función, se genera un error.
- Cuando se incluye una variable en el miembro derecho de la expresión de condición del evento, el valor se
calcula cuando se configura la condición Trap. Recomendamos no usar variables en una expresión entera
para evitar crear condiciones no intencionales.
Cuando use el puerto PC COM (1001 a 1008)
- No puede usar la función Lof para la instrucción Wait.
Cuando el programa se pausa mientras Wait está en ejecución
La instrucción Wait no se detiene ni siquiera cuando se pausa el programa mientras se ejecuta la instrucción
Wait. La instrucción Wait finaliza cuando se cumple una condición del evento o cuando transcurre el
tiempo especificado.
Si el tiempo está definido por el parámetro Wait, se restablece el tiempo transcurrido y el programa
esperará durante el tiempo especificado al reiniciar el programa mediante la selección de Continue en la
ventana Run.
Consulte también
AtHome, Cnv_QueLen, Ctr, ErrorOn, EstopOn, GetRobotInsideBox, GetRobotInsidePlane, In,
InW, LatchState, LOF, Mask, MCalComplete, MemIn, MemInW, MemSw, Motor, Oport, Out, OutW,
PauseOn, SaftyOn, Sw, TeachOn, TMOut, WindowsStatus, Tw, WorkQue_Len
Ejemplo de instrucción Wait
El ejemplo que se indica a continuación muestra 2 tareas, cada una con la capacidad de iniciar las
instrucciones de movimiento. No obstante, se usa un mecanismo de bloqueo entre las 2 tareas para garantizar
que cada una de ellas obtenga el control de las instrucciones de movimiento del robot solamente después de
que la otra tarea haya terminado de usarlas. Esto permite que las 2 tareas ejecuten las instrucciones de
movimiento según sea necesario y de manera ordenada y predecible. MemSw se usa junto con la instrucción
Wait para esperar hasta que la E/S de memoria n.º 1 tenga el valor adecuado antes de que sea seguro moverse
nuevamente.
Function main
Integer I
MemOff 1
Xqt !2, task2
For i = 1 to 100
Wait MemSw(1) = Off
Go P(i)
MemOn 1
Next I
Fend
Function task2
Integer i

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 761
For i = 101 to 200
Wait MemSw(1) = On
Go P(i)
MemOff 1
Next i
Fend
' Espera hasta que la entrada 0 esté activada
Wait Sw(0) = On
' Espera 60,5 segundos y continúa la ejecución
Wait 60,5
' Espera hasta que la entrada 0 esté desactivada y la entrada 1 esté activada.
Wait Sw(0) = Off And Sw(1) = On
' Espera hasta que el bit de memoria 0 esté activado o el bit de memoria 1 esté activado
Wait MemSw(0) = On Or MemSw(1) = On
' Espera un segundo y activa la salida 1
Wait 1; On 1
' Espera que los 3 bits inferiores del puerto de entrada 0 sean iguales a 1
Wait In(0) Mask 7 = 1
' Espera hasta que la variable global de tipo Integer giCounter sea mayor que 10
Wait giCounter > 10
' Espera diez segundos hasta que la variable global de tipo Long glCheck sea 30000
Wait glCheck = 30000, 10

762 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción WaitNet
Espera que se establezca una conexión de puerto TCP/IP.
Sintaxis
WaitNet #portNumber [, timeOut]
Parámetros
portNumber Expresión entera para el número del puerto TCP/IP que se conectará. El rango es de
201 a 216.
timeOut Opcional. Tiempo máximo de espera para conexión.
Consulte también
OpenNet, CloseNet
Ejemplo de instrucción WaitNet
Para este ejemplo, se configuró la característica TCP/IP de dos controladores de la siguiente manera:
Controlador n.º 1:
Puerto: #201
Nombre del host: 192.168.0.2
Puerto TCP/IP: 1000
Function tcpip
OpenNet #201 As Server
WaitNet #201
Print #201, "Data from host 1"
Fend
Controlador n.º 2:
Puerto: #201
Nombre del host: 192.168.0.1
Puerto TCP/IP: 1000
Function tcpip
String data$
OpenNet #201 As Client
WaitNet #201
Input #201, data$
Print "received '", data$, "' from host 1"
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 763
Instrucción WaitPos
Espera que el robot reduzca su aceleración y se detenga en la posición antes de ejecutar la nueva
instrucción mientras el movimiento de ruta está activo.
Sintaxis
WaitPos
Descripción
Normalmente, cuando el movimiento de ruta está activo (CP está activado o se especificó el parámetro de
CP), el comando de movimiento inicia la siguiente instrucción a medida que comienza la desaceleración.
Use el comando WaitPos inmediatamente antes del movimiento para completar el movimiento de
desaceleración y pase al siguiente movimiento.
Consulte también
Wait, WaitSig, CP
Ejemplo de instrucción WaitPos
Off 1
CP On
Move P1
Move P2
WaitPos ' espera que el robot desacelere
On 1
CP Off

764 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción WaitSig
Espera una señal de otra tarea.
Sintaxis
WaitSig signalNumber [, timeOut]
Parámetros
signalNumber Expresión entera que representa el número de señal que se recibirá. El rango es de 0 a
63.
timeOut Opcional. Expresión real que representa el tiempo máximo que se espera.
Descripción
Use WaitSig para esperar una señal de otra tarea. La señal solo será recibida después de que se inicie WaitSig.
Las señales anteriores se ignoran.
Consulte también
Wait, WaitPos, Signal
Ejemplo de instrucción WaitSig
Function Main
Xqt SubTask
Wait 1
Signal 1
.
.
Fend
Function SubTask
WaitSig 1
Print "signal received"
.
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 765
Instrucción Weight
Especifica o muestra la configuración de peso del brazo del robot.
Sintaxis
Weight payloadWeight [, distance | S | T ]
Peso
Parámetros
payloadWeight El peso del efector final que se transportará en unidades de kg.
distance La distancia desde el centro de rotación del segundo brazo al centro de gravedad del
efector final en unidades de mm. Solo válido para robots SCARA (incluida la serie
RS).
S Peso de carga contra el eje S en kg a 2 posiciones decimales)
T Peso de carga contra el eje T en kg a 2 posiciones decimales)
Valores devueltos
Muestra la configuración actual de Weight cuando se omiten los parámetros.
Descripción
Especifica los parámetros para calcular la aceleración máxima del movimiento de punto a punto. La
instrucción Weight especifica el peso del efector final y las piezas que se transportarán.
Solo es necesario especificar la longitud del brazo (distance) para robots SCARA (incluida la serie RS). Es
la distancia desde la línea central de la articulación de rotación del segundo brazo hasta el centro de gravedad
combinado de la mano/pieza de trabajo.
Si el robot tiene un eje adicional, las cargas en el eje adicional deben definirse con los parámetros S y T.
Si el peso de la pieza de trabajo de valor equivalente calculado a partir de los parámetros especificados supera
la carga útil permisible, ocurre un error.
Los datos de los parámetros del robot se almacenan en la memoria Compact Flash en el controlador. Por
tanto, la memoria flash de comandos se escribe cuando se ejecuta este comando. La escritura frecuente en
la memoria Compact Flash afecta su vida útil. Recomendamos que el uso de este comando sea mínimo.
Posibles errores
El peso supera el máximo
Cuando el peso de carga equivalente calculado a partir del valor ingresado supera el peso de carga máximo,
ocurrirá un error.
Daño potencial al brazo del manipulador
Tenga en cuenta que especificar un peso de mano Weight significativamente menor que el peso de la pieza
de trabajo real puede causar una aceleración y desaceleración excesivas. Estas, a su vez, pueden causar daños
graves al manipulador.
Nota
Los valores de peso no cambian mediante la desactivación de la alimentación principal
Los valores de peso no cambian mediante la desactivación de la alimentación principal.
Consulte también
Accel, Inertia

766 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Ejemplo de instrucción Weight
Esta instrucción Weight en la ventana Command muestra la siguiente configuración.
> weight
2.000, 200.000
>
Define el peso de la mano (3 kg) con la instrucción Weight
Weight 3.0
Define el peso de la carga en el eje S adicional (30 kg) con la instrucción Weight
Weight 30.0, S

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 767
Función Weight
Arroja un parámetro Weight.
Sintaxis
Weight(paramNumber)
Parámetros
paramNumber Expresión entera que contiene uno de los siguientes valores:
1: Peso de carga útil
2: Longitud del brazo
3: Carga en el eje S adicional.
4: Carga en el eje T adicional.
Valores devueltos
Número real que contiene el valor del parámetro.
Consulte también
Inertia, Weight
Ejemplo de función Weight
Print "The current Weight parameters are: ", Weight(1)

768 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción Where
Muestra los datos de posición actuales del robot.
Sintaxis
Where [localNumber]
Parámetros
localNumber Opcional. El número del sistema de coordenadas local. El valor predeterminado es Local
0.
Consulte también
Joint, PList, Pulse
Ejemplo de instrucción Where
El tipo de visualización puede ser distinto según el tipo de robot y la existencia de ejes adicionales.
El siguiente ejemplo es para un robot SCARA sin el eje adicional.
>where
WORLD: X: 350.000 mm Y: 0.000 mm Z: 0.000 mm U: 0.000 deg V: 0.000 deg
W: 0.000 deg
JOINT: 1: 0.000 deg 2: 0.000 deg 3: 0.000 mm 4: 0.000 deg
PULSE: 1: 0 pls 2: 0 pls 3: 0 pls 4: 0 pls
> local 1, 100,100,0,0
> where 1
WORLD: X: 250.000 mm Y:-100.000 mm Z: 0.000 mm U: 0.000 deg V: 0.000 deg
W: 0.000 deg
JOINT: 1: 0.000 deg 2: 0.000 deg 3: 0.000 mm 4: 0.000 deg
PULSE: 1: 0 pls 2: 0 pls 3: 0 pls 4: 0 pls

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 769
Función WindowsStatus
Arroja el estado de inicio de Windows.
Sintaxis
WindowsStatus
Valores devueltos
El valor entero representa el estado de inicio actual de Windows. El estado de inicio actual de Windows es
devuelto en una imagen de bit y muestra el siguiente estado.
Nombre de la
función
Reserva del sistema Con capacidad de RC+ Con capacidad de PC
Número de bit 15 a 2: 1 0
Detalles de
funciones
disponibles
Vision Guide
(Tipo de digitalizador de
video)
API de RC+
Maestro del bus de campo
Archivo de PC
PC RS-232C
Acceso a base de datos
Llamada de DLL
Descripción
Esta función se usa para comprobar el estado de inicio del controlador cuando su configuración está definida en
"Independent mode" (Modo independiente). Cuando la configuración del controlador está definida en
"Cooperative mode" (Modo cooperativo), los programas no se podrán iniciar hasta que tanto la función RC+ y
la función de PC estén disponibles.
Ejemplo de función WindowsStatus
Print "The current PC Booting up Status is: ", WindowsStatus

770 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción WOpen
Abre un archivo para escritura.
Sintaxis
WOpen fileName As #fileNumber
.
.
Close #fileNumber
Parámetros
fileName Una expresión de cadena que contiene la ruta y el nombre de archivo.
Si se omite la ruta, se muestra el archivo en el directorio actual.
Consulte ChDisk para conocer detalles.
fileNumber Expresión entera de 30 a 63
Descripción
Abre el archivo especificado con el fileNumber especificado. Esta instrucción se usa para abrir y escribir
datos en el archivo especificado. (Para agregar datos, consulte la explicación de AOpen).
Si el nombre de archivo especificado no existe en el directorio actual del disco, WOpen crea el archivo y
escribe en él. Si el nombre de archivo especificado existe, WOpen borra todos los datos en el archivo y
escribe en él.
fileNumber identifica el archivo mientras está abierto y no se puede usar para hacer referencia a un archivo
diferente hasta que se cierre el archivo actual. fileNumber es utilizado por otras operaciones como Print#,
Write, Seek y Close.
Close cierra el archivo y libera el número de archivo.
Recomendamos que use la función FreeFile para obtener el número de archivo para que el mismo número
no sea utilizado por más de una tarea.
Notas
Hay una ruta de red disponible.
Búfer de escritura en archivo
La escritura en archivo se almacena en el búfer. Los datos almacenados en el búfer se pueden escribir con la
instrucción Flush. También, al cerrar un archivo con la instrucción Close, los datos almacenados en el búfer
se pueden escribir.
Consulte también
AOpen, BOpen, Close, Print#, ROpen, UOpen, FreeFile
Ejemplo de instrucción WOpen
Integer fileNum, i, j
fileNum = FreeFile
WOpen "TEST.DAT" As #fileNum
For i = 0 To 100
Print #fileNum, i
Next i
Close #fileNum
fileNum = FreeFile
ROpen "TEST.DAT" As #fileNum
For i = 0 to 100
Input #fileNum, j
Print "data = ", j
Next i
Close #fileNum

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 771
Instrucción WorkQue_Add
Agrega los datos de cola de trabajo (datos de punto y datos de usuario) a la cola de trabajo especificada.
Sintaxis
WorkQue_Add WorkQueNum, pointData [, userData ]
Parámetros
WorkQueNum Expresión entera (1 a 16) que especifica el número de cola de trabajo.
pointData Los datos de punto que se van a agregar a la cola de trabajo.
userData Opcional. Expresión real que se usa para registrar los datos del usuario junto con los
datos de puntos.
Si se omite, 0 (número real) se registra como los datos del usuario.
Descripción
pointData y useData se agregan al final de la cola de trabajo. Sin embargo, cuando el tipo de orden es
especificado por WorkQue_Sort, se registran según el tipo de orden especificado.
Cuando la distancia de prevención de doble registro es definida por WorkQue_Reject, se calcula la distancia
desde el dato de punto registrado anteriormente. Si los datos de punto son menores que esa distancia, los
datos de punto y los datos del usuario no se agregan a la cola de trabajo. En este caso, no ocurre un error.
El límite superior de los datos de la cola de trabajo es 1000. Los datos de la cola de trabajo se eliminan con
WorkQue_Remove cuando dejan de ser utilizados.
Consulte también
WorkQue_AutoRemove, WorkQue_Len, WorkQue_Reject, WorkQue_Remove, WorkQue_Sort
Ejemplo de instrucción WorkQueAdd
Integer x, y
Real u
P0 = XY(300, 300, 300, 90, 0, 180)
P1 = XY(200, 280, 150, 90, 0, 180)
P2 = XY(200, 330, 150, 90, 0, 180)
P3 = XY(-200, 280, 150, 90, 0, 180)
Pallet 1, P1, P2, P3, 10, 10
x = 1
y = 1
u = 5.3
WorkQue_Add 1, Pallet(1, x, y), u

772 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción WorkQue_AutoRemove
Define la función de eliminación automática en la cola de trabajo especificada.
Sintaxis
WorkQue_AutoRemove WorkQueNum ,{True | False}
Parámetros
WorkQueNum Expresión entera (1 a 16) que especifica el número de cola de trabajo.
True | False True: activa la función de eliminación automática.
False: desactiva la función de eliminación automática.
Descripción
Define la función de eliminación automática en la cola de trabajo. Cuando la eliminación automática está
activada, los datos de punto y los datos de usuario se eliminan automáticamente de la cola de trabajo cuando
los datos de punto se obtienen de la cola de trabajo por WorkQue_Get.
Cuando está desactivada la eliminación automática, los datos de punto y los datos de usuario no se eliminan.
Para eliminarlos, use WorkQue_Remove.
Los datos de usuario obtenidos por WorkQue_UserData no se eliminan automáticamente.
La función de eliminación automática se puede definir para cada cola de trabajo.
Consulte también
Función WorkQue_AutoRemove, WorkQue_Get
Ejemplo de instrucción WorkQue_AutoRemove
WorkQue_AutoRemove 1, True

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 773
Función WorkQue_AutoRemove
Arroja el estado de la función de eliminación automática definida en la cola de trabajo.
Sintaxis
WorkQue_AutoRemove (WorkQueNum)
Parámetros
WorkQueNum
Expresión entera (1 a 16) que especifica el número de cola de trabajo.
Valores devueltos
True si la función de eliminación automática de la cola de trabajo especificada está activada, de lo contrario
False.
Consulte también
WorkQue_AutoRemove, WorkQue_Get
Ejemplo de función WorkQue_AutoRemove
Boolean autoremove
autoremove = WorkQue_AutoRemove(1)

774 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función WorkQue_Get
Arroja los datos de punto desde la cola de trabajo especificada.
Sintaxis
WorkQue_Get(WorkQueNum [, index ] )
Parámetros
WorkQueNum Expresión entera (1 a 16) que especifica el número de cola de trabajo.
index Opcional. Expresión entera que representa el índice de los datos de la cola que desea
adquirir. (el comienzo del número de índice es 0)
Valores devueltos
Los datos de punto son arrojados desde la cola de trabajo especificada.
Descripción
Use WorkQue_Get para adquirir los datos de punto desde la cola de trabajo especificada. Si se omite el
índice, se arrojan los primeros datos de los datos de la cola. Si se especifica el índice, se arrojan los datos
de punto del índice especificado.
Cuando la función de eliminación automática está desactivada por WorkQue_AutoRemove, los datos de
punto y los datos de usuario son eliminados por WorkQue_Get.
Cuando está desactivada la eliminación automática, los datos de punto y los datos de usuario no se
eliminan. Para eliminarlos, use WorkQue_Remove.
Consulte también
WorkQue_AutoRemove, WorkQue_Len, WorkQue_Reject, WorkQue_Remove, WorkQue_Sort
Ejemplo de función WorkQue_Get
' Salta a la primera pieza en la cola y la sigue
Jump WorkQue_Get(1)
On gripper
Wait .1
Jump place
Off gripper
Wait .1
WorkQueRemove 1

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 775
Función WorkQue_Len
Arroja el número de los datos de cola de trabajo válidos registrados en la cola de trabajo especificada.
Sintaxis
WorkQue_Len(WorkQueNum)
Parámetros
WorkQueNum
Expresión entera (1 a 16) que especifica el número de cola de trabajo.
Valores devueltos
La expresión entera que representa el número de datos de cola de trabajo válidos registrados.
Descripción
Arroja el número de datos de cola de trabajo válidos registrados.
También se puede utilizar WorkQue_Len como argumento para la instrucción Wait.
Consulte también
WorkQue_Add, WorkQue_Get, WorkQue_Remove
Ejemplo de función WorkQue_Len
Do
Do While WorkQue_Len(1) > 0
WorkQue_Remove 1, 0
Loop
If WorkQue_Len(1) > 0 Then
Jump WorkQue_Get(1, 0) C0
On gripper
Wait .1
WorkQue_Remove 1, 0
Jump place
Off gripper
Jump idlePos
EndIf
Loop

776 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción WorkQue_List
Muestra la lista de datos (datos de punto y datos de usuario) de la cola de trabajo especificada.
Sintaxis
WorkQue_List WorkQueNum [, numOfItems ]
Parámetros
WorkQueNum
Expresión entera (1 a 16) que especifica el número de cola de trabajo.
numOfItems Opcional. Expresión entera para especificar la cantidad de elementos que desea
mostrar. Si se omite, se muestran todos los elementos.
Nota
Este comando solo funcionará en la ventana Command.
Consulte también
WorkQue_Add, WorkQue_Get, WorkQue_Remove
Ejemplo de instrucción WorkQue_List
Desde la ventana Command:
> WorkQue_List 1
Queue 0 = XY( 1.000, 1.000, 0.000, 0.000 ) /R /0 ( 0.000)
Queue 1 = XY( 3.000, 1.000, 0.000, 0.000 ) /R /0 ( 2.000)
Queue 2 = XY( 4.000, 1.000, 0.000, 0.000 ) /R /0 ( 3.000)
Queue 3 = XY( 5.000, 1.000, 0.000, 0.000 ) /R /0 ( 4.000)
Queue 4 = XY( 6.000, 1.000, 0.000, 0.000 ) /R /0 ( 5.000)

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 777
Instrucción WorkQue_Reject
Define y muestra la distancia mínima para prevenir el doble registro en la cola de trabajo especificada.
Sintaxis
WorkQue_Reject WorkQueNum [, rejectDistance ]
Parámetros
WorkQueNum Expresión entera (1 a 16) que especifica el número de cola de trabajo.
rejectDistance Opcional cuando se ejecuta desde la ventana Command. Expresión real que especifica
la distancia mínima permitida entre piezas en la cola en milímetros. Si se omite,
aparece la rejectDistance actual.
Descripción
Utilice WorkQue_Reject para especificar la distancia mínima entre las piezas a fin de evitar el registro doble
de los datos de punto. La cola de trabajo no se puede registrar cuando WorkQue_Add registra datos de punto
menores a la distancia mínima. WorkQue_Reject ayuda a que el sistema filtre el registro doble. El valor
predeterminado es 0 mm.
WorkQue_Reject se debe ejecutar antes de agregar los datos de la cola de trabajo (datos de punto y de usuario)
con WorkQue_Add.
La prevención de doble registro se puede definir para cada cola de trabajo.
Consulte también
WorkQue_Add, Función WorkQue_Reject
Ejemplo de instrucción WorkQue_Reject
WorkQue_Reject 1, 2.5

778 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función WorkQue_Reject
Arroja la distancia de la función de prevención de doble registro definida en la cola de trabajo especificada.
Sintaxis
WorkQue_Reject (WorkQueNum)
Parámetros
WorkQueNum Expresión entera (1 a 16) que especifica el número de cola de trabajo.
Valores devueltos
Valor real en milímetros
Consulte también
WorkQue_Add, WorkQue_Reject
Ejemplo de función WorkQue_Reject
Real rejectDist
RejectDist = WorkQue_Reject(1)

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 779
Instrucción WorkQue_Remove
Elimina los datos de cola de trabajo (datos de punto y datos de usuario) de la cola de trabajo especificada.
Sintaxis
WorkQue_Remove WorkQueNum [, index | All]
Parámetros
WorkQueNum Expresión entera (1 a 16) que especifica el número de cola de trabajo.
index Opcional. La expresión entera que representa el índice de los datos de la cola que desea
eliminar. (el comienzo del número de índice es 0).
Especifique All cuando elimine todos los datos de cola desde la cola de trabajo.
Descripción
Use WorkQue_Remove para eliminar uno o más elementos de los datos de una cola de trabajo.
Normalmente, se eliminan elementos de la cola después de terminar con los datos.
Consulte también
WorkQue_Add
Ejemplo de instrucción WorkQue_Remove
Jump WorkQue_Get(1)
On gripper
Wait .1
Jump place
Off gripper
Wait .1
' Elimina los datos de WorkQueue
WorkQue_Remove 1

780 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción WorkQue_Sort
Define y muestra el tipo de orden para la cola de trabajo especificada.
Sintaxis
WorkQue_Sort WorkQueNum [, SortMethod ]
Parámetros
WorkQueNum Expresión entera (1 a 16) que especifica el número de cola de trabajo.
SortMethod Especifica el método Sort de orden con una expresión entera o con la siguiente
constante. Esto se puede omitir si se ejecuta desde la ventana Command. Si se omite,
aparece el método de orden actual.
Constante Valor Descripción
QUE_SORT_NONE 0 Sin orden (orden de registro para la cola de trabajo)
QUE_SORT_POS_X 1 Orden ascendente de coordenada X
QUE_SORT_INV_X 2 Orden descendente de coordenada X
QUE_SORT_POS_Y 3 Orden ascendente de coordenada Y
QUE_SORT_INV_Y 4 Orden descendente de coordenada Y
QUE_SORT_POS_USER 5 Datos de usuario (valor real) en orden ascendente
QUE_SORT_INV_USER 6 Datos de usuario (valor real) en orden descendente
Descripción
Define el método de orden de la cola de trabajo. Cuando los datos de punto y los datos de usuario son
agregados por WorkQue_Add, se registran en la cola de trabajo según el método de orden especificado.
Cuando los datos de usuario son definidos nuevamente por WorkQue_UserData, el orden de las colas de
trabajo cambia según el método de orden especificado.
WorkQue_Sort se debe ejecutar antes de agregar los datos de la cola de trabajo (datos de punto y de usuario)
a los datos de la cola de trabajo con WorkQue_Add.
WorkQue_Sort se debe ejecutar antes de volver a configurar los datos de usuario con WorkQue_UserData.
El método de orden se puede definir para cada cola de trabajo.
Consulte también
WorkQue_Add, WorkQue_UserData
Ejemplo de instrucción WorkQue_Sort
WorkQue_Sort 1, QUE_SORT_POS_X

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 781
Función WorkQue_Sort
Arroja el método de orden de la cola de trabajo especificada.
Sintaxis
WorkQue_Sort (WorkQueNum)
Parámetros
WorkQueNum Expresión entera (1 a 16) que especifica el número de cola de trabajo.
Valores devueltos
Una expresión entera que representa el método de orden definido en la cola de trabajo.
4 = Sin orden (orden de registro para la cola de trabajo)
5 = Orden ascendente de coordenada X
6 = Orden descendente de coordenada X
7 = Orden ascendente de coordenada Y
8 = Orden descendente de coordenada Y
9 = Datos de usuario (valor real) en orden ascendente
10 = Datos de usuario (valor real) en orden descendente
Consulte también
WorkQue_Add, WorkQue_Sort, WorkQue_UserData
Ejemplo de función WorkQue_Sort
Integer quesort
quesort = WorkQue_Sort(1)

782 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción WorkQue_UserData
Restablece y muestra los datos de usuario (número real) registrados en la cola de trabajo especificada.
Sintaxis
WorkQue_UserData WorkQueNum [, index] [, userData]
Parámetros
WorkQueNum Expresión entera (1 a 16) que especifica el número de cola de trabajo.
index Expresión entera que representa el índice de los datos de la cola de trabajo. (el
comienzo del número de índice es 0). Opcional cuando se ejecuta desde la ventana de
comandos.
userData Expresión entera que representa los datos de usuario que se volverán a definir. Se
puede omitir cuando se ejecuta desde la ventana de comandos. Si se omite, se muestran
los actuales datos del usuario (expresión real).
Descripción
Restablece y muestra los datos de usuario registrados actualmente en la cola de trabajo especificada.
Si el método de orden es especificado por WorkQue_Sort, el orden de los datos de la cola de trabajo
cambia según el método de orden especificado.
QUE_SORT_POS_USER : Orden ascendente de datos del usuario (expresión real)
QUE_SORT_INV_USER : Orden descendente de datos del usuario (expresión real)
Consulte también
Función WorkQue_UserData
Ejemplo de WorkQue_UserData
WorkQue_UserData 1, 1, angle

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 783
Función WorkQue_UserData
Arroja los datos de usuario (valor real) registrados en la cola de trabajo especificada.
Sintaxis
WorkQue_UserData (WorkQueNum [, index])
Parámetros
WorkQueNum Expresión entera (1 a 16) que especifica el número de cola de trabajo.
index Opcional. Expresión entera que representa el índice de los datos de la cola de trabajo.
(El primer valor de índice es 0).
Valores devueltos
Valor real.
Consulte también
WorkQue_UserData
Ejemplo de función WorkQue_UserData
' Elimina de la cola
angle = WorkQue_UserData(1) ' pasa de forma predeterminada al índice de cola de 0
Jump WorkQue_Get(1) :U(angle)
WorkQue_Remove 1

784 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción Wrist
Define la orientación de la muñeca de un punto.
Sintaxis
(1) Wrist point [, Flip | NoFlip]
(2) Wrist
Parámetros
point Pnumber o P(expr) o etiqueta de punto.
Flip | NoFlip Representa la orientación de la muñeca.
Valores devueltos
Cuando se omiten ambos parámetros, aparece la orientación de la muñeca para la posición del robot actual.
Si se omite Flip | NoFlip, se muestra la orientación de la muñeca para el punto especificado.
Consulte también
Función Elbow, Hand, J4Flag, J6Flag, Wrist
Ejemplo de instrucción Wrist
Wrist P0, Flip
Wrist P(mypoint), NoFlip
P1 = 320.000, 400.000, 350.000, 140.000, 0.000, 150.000
Wrist P1, NoFlip
Go P1
Wrist P1, Flip
Go P1

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 785
Función Wrist
Arroja la orientación de la muñeca de un punto.
Sintaxis
Wrist [(point)]
Parámetros
point Opcional. Pnumber o P(expr) o etiqueta de punto o expresión de punto. Si se omite point, se
arroja la orientación de la muñeca de la posición actual del robot.
Valores devueltos
1 NoFlip (/NF)
2 Flip (/F)
Consulte también
Instrucción Elbow, Hand, J4Flag, J6Flag, Wrist
Ejemplo de función Wrist
Print Wrist(pick)
Print Wrist(P1)
Print Wrist
Print Wrist(P1 + P2)

786 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción Write
Escribe caracteres en un archivo o puerto de comunicación sin un terminador de final de línea.
Sintaxis
Write #portNumber, string
Parámetros
portNumber Número de ID que especifica el archivo o el puerto de comunicación.
El número de archivo se puede especificar en las instrucciones ROpen, WOpen y
AOpen.
El número de puerto de comunicación se puede especificar en las instrucciones
OpenCom (RS-232C) u OpenNet (TCP/IP).
string Expresión de cadena que se escribirá en el archivo.
Descripción
Write es distinto a Print en que no agrega un terminador de fin de línea.
Nota
Búfer de escritura en archivo
La escritura en archivo se almacena en el búfer. Los datos almacenados en el búfer se pueden escribir con la
instrucción Flush. También, al cerrar un archivo con la instrucción Close, los datos almacenados en el búfer
se pueden escribir.
Consulte también
Print, Read
Ejemplo de instrucción Write
OpenCom #1
For i = 1 to 10
Write #1, data$(i)
Next i
CloseCom #1

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 787
Instrucción WriteBin
Escribe datos binarios en un archivo o puerto de comunicación.
Sintaxis
WriteBin #portNumber, data
WriteBin #portNumber, array(), count
Parámetros
portNumber Número de ID que especifica el archivo o el puerto de comunicación
El número de archivo puede ser especificado en instrucciones BOpen.
El número de puerto de comunicación se puede especificar en las instrucciones OpenCom
(RS-232C) u OpenNet (TCP/IP).
data Expresión entera que contiene los datos que se escribirán.
array() Nombre de un byte, entero o variable de matriz larga que contiene los bytes de datos que se
escribirán. Especifica la variable de matriz de una dimensión.
count Especifica el número de bytes a escribir.
El recuento especificado tiene que ser menor o igual que el número de elementos de la
matriz y, también, menor que 256 bytes.
Si el puerto de comunicación (TCP/IP) es el asunto, el recuento tiene que ser menor o igual
que el número de matriz, y también menor que 1024 bytes.
Consulte también
ReadBin, Write
Ejemplo de instrucción WriteBin
Integer i, data(100)
OpenCom #1
For i = 0 To 100
WriteBin #1, i
Next I
WriteBin #1, data(), 100
CloseCom #1

788 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Operador Xor
Realiza la operación Xor bitwise (incluido OR) en las dos expresiones.
Sintaxis
result = expr1 Xor expr2
Parámetros
expr1, expr2 Un valor numérico o un nombre de variable.
result Un número entero.
Resultado
Arroja un resultado de una operación bitwise Xor.
Descripción
El operador Xor realiza la operación Xor bitwise sobre los valores de los operandos. Cada bit de los resultados
es el valor con Xor de los bits correspondientes de los dos operandos.
Si el bit en expr1
es
Y el bit en expr2 es
El resultado
es:
0
0
0
0
1
1
1
0
1
1
1
0
Consulte también
And, LShift, Not, Or, Rshift
Ejemplo del operador Xor
>print 2 Xor 6
4
>

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 789
Instrucción Xqt
Inicia la ejecución de una tarea desde el interior de otra tarea.
Sintaxis
Xqt [taskNumber,] funcName [(argList)] [, Normal | NoPause | NoEmgAbort ]
Parámetros
taskNumber Optional. El número de tarea de la tarea que se ejecutará. El rango del número de
tarea es de 1 a 32.
Para las tareas en segundo plano, especifica un valor entero desde 65 a 80.
funcName El nombre de la función a ejecutar.
argList Opcional. Lista de argumentos que se transfieren al procedimiento de la función
cuando se lo llama. Múltiples argumentos se separan con comas.
taskType Opcional. Normalmente se omite.
Para las tareas en segundo plano, especificar un tipo de tarea no significa nada.
Normal Ejecuta una tarea normal.
NoPause Ejecuta una tarea que no hace una pausa con la instrucción Pause, la ocurrencia de la
señal de entrada Pause o la apertura de la puerta de seguridad.
NoEmgAbort Ejecuta una tarea que continúa procesando con la parada de emergencia o la ocurrencia
de un error.
Descripción
Xqt inicia la función especificada y arroja inmediatamente.
Normalmente, no se requiere el parámetro taskNumber. Cuando se omite taskNumber, SPEL
+
asigna
automáticamente un número de tarea a la función, para que no tenga que hacer un seguimiento de los números
de tarea que están en uso.
Notas
Tipo de tarea
Especifica NoPause o NoEmgAbort como un tipo de tarea para ejecutar una tarea que monitorea el
controlador completo.
Sin embargo, asegúrese de usar estas tareas especiales según la comprensión del movimiento de la tarea con
SPEL
+
o una restricción de tareas especiales.
Para conocer detalles de las tareas especiales, consulte la sección Tareas especiales del Manual del usuario
de EPSON RC+.
Tarea en segundo plano
Cuando ejecute Xqt en una tarea en segundo plano, la tarea generada también es la tarea en segundo plano.
Para ejecutar la función principal desde una tarea en segundo plano, use la instrucción StartMain.
Los detalles de la tarea en segundo plano se explican en el Manual del usuario de EPSON RC+: 6.20 Tarea
especial.

790 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Comandos no disponibles en la tarea NoEmgAbort y la tarea en segundo plano
Los siguientes comandos no se pueden ejecutar en una tarea NoEmgAbort y tarea en segundo plano.
A
Accel
G
Go
S
Sense
V
VLoad
AccelR
H
Home
SFree
VLoadModel
AccelS
HomeClr
SingularityAngle
VRun
AIO_TrackingStart
HomeSet
SingularitySpeed
VSave
AIO_TrackingEnd
Hordr
SLock
VSaveImage
Arc
I
Inertia
SoftCP
VSaveModel
Arc3
J
JTran
Speed
VSet
Arch
Jump
SpeedFactor
VShowModel
Arm
Jump3
SpeedR
VStasShow
ArmSet
Jump3CP
SpeedS
VStatsReset
ArmClr
JRange
SyncRobots
VStatsResetAll
AutoLJM
L
LimitTorque
T
TC
VStatsSave
AvoidSingularity
LimZ
TGo
VTeach
B
Base
LimZMargin
Till
VTrain
BGo
Local
TLSet
W
WaitPos
BMove
LocalClr
TLClr
Peso
Box
M
MCal
TMove
X
Xqt *3
BoxClr
MCordr
Tool
XYLim
Brake
Motor
Trap
C
Cnv_AbortTrack
Move
V
VCal
Cnv_Accel
O
OLAccel
VcalPoints
Cnv_DownStream
P
Pass
VCls
Cnv_Fine
Pg_LSpeed
VCreateCalibration
Cnv_Mode
Pg_Scan
VCreateObject
Cnv_QueAdd
Plane
VCreateSequence
Cnv_QueMove
PlaneClr
VDefArm
Cnv_QueReject
Power
VDefGetMotionRange
Cnv_QueUserData
PTPBoost
VDefLocal
Cnv_Trigger
Pulse
VDefSetMotionRange
Cnv_UpStream
Q
QP
VDefTool
CP
QPDecelR
VDeleteCalibration
Curve
QPDecelS
VDeleteObject
CVMove
R
Range
VDeleteSeuence
E
ECP
Reset *1
VGet
ECPClr
Restart *2
VGoCenter
ECPSet
F
Find
Fine
*1 Se puede ejecutar Reset Error
*2 Ejecutable desde la tarea de procesamiento Trap Error
*3 Ejecutable desde las tareas en segundo plano
NO use el comando XQT en forma reiterada en las instrucciones Loop.
No use el comando XQT en forma reiterada en las instrucciones Loop como Do…Loop.
El controlador podría quedar inmovilizado. Si usa instrucciones de bucle en forma reiterada, asegúrese de
agregar el comando de espera (Wait 0,1).
Consulte también
Function/Fend, Halt, Resume, Quit, Startmain, Trap

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 791
Ejemplo de instrucción Xqt
Function main
Xqt flash 'Inicia la función Flash como la tarea 2
Xqt Cycle(5) 'Inicia la función Cycle como la tarea 3
Do
Wait 3 'Ejecuta la tarea 2 por 3 segundos
Halt flash 'Suspende la tarea
Wait 3
Resume flash 'Reanuda la tarea
Loop
Fend
Function Cycle(count As Integer)
Integer i
For i = 1 To count
Jump pick
On vac
Wait .2
Jump place
Off vac
Wait .2
Next i
Fend
Function flash
Do
On 1
Wait 0.2
Off 1
Wait 0.2
Loop
Fend

792 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Función XY
Arroja un punto desde coordenadas individuales que se pueden usar en una expresión de punto.
Sintaxis
XY(x, y, z, u [, v, w])
Parámetros
x Expresión real que representa la coordenada X.
y Expresión real que representa la coordenada Y.
z Expresión real que representa la coordenada Z.
u Expresión real que representa la coordenada U.
v Opcional para los robots de 6 ejes (incluye la serie N). Expresión real que representa la coordenada V.
w Opcional para los robots de 6 ejes (incluye la serie N). Expresión real que representa la coordenada W.
Valores devueltos
Un punto construido de las coordenadas especificadas.
Descripción
Cuando no usa el eje ST adicional, no necesita ser cuidadoso con respecto a nada en particular.
Puede mover el manipulador a la coordenada especificada con la función XY como se indica a
continuación:
Go XY(60,30,-50,45)
Cuando usa el eje ST adicional, debe tener cuidado.
La función XY arroja solo los datos de punto de robot, sin incluir el eje adicional.
Si usa la función XY del siguiente modo: Go XY(60,30,-50,45), el manipulador se moverá a la coordenada
especificada pero el eje adicional no se moverá. Si también desea mover el eje adicional, especifique lo
siguiente: Go XY(60,30,-50,45) : ST( 10,20).
Para conocer detalles acerca del eje adicional, consulte el Manual del usuario de EPSON RC+. 20. Eje
adicional.
Consulte también
JA, Expresión Point, Función ST
Ejemplo de función XY
P10 = XY(60, 30, -50, 45) + P20

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 793
Instrucción XYLim
Define o muestra los límites del rango de movimiento permisibles de XY para el robot.
Sintaxis
XYLim minX, maxX, minY, maxY [, minZ] [, maxZ]
XYLim
Parámetros
minX La posición mínima de la coordenada X a la que puede viajar el manipulador.
(El manipulador no se puede mover a una posición con una coordenada X menor que minX).
maxX La posición máxima de la coordenada X a la que puede viajar el manipulador.
(El manipulador no se puede mover a una posición con una coordenada X mayor que maxX).
minY La posición mínima de la coordenada Y a la que puede viajar el manipulador.
(El manipulador no se puede mover a una posición con una coordenada Y menor que minY).
maxY La posición máxima de la coordenada Y a la que puede viajar el manipulador.
(El manipulador no se puede mover a una posición con una coordenada Y mayor que maxY).
minZ Opcional. La posición mínima de la coordenada Z a la que puede viajar el manipulador.
(El manipulador no se puede mover a una posición con una coordenada Z menor que minZ).
maxZ Opcional. La posición máxima de la coordenada Z a la que puede viajar el manipulador.
(El manipulador no se puede mover a una posición con una coordenada Z mayor que maxZ).
Valores devueltos
Muestra los valores de XYLim actuales cuando se usan sin parámetros.
Descripción
XYLim se usa para definir los límites de rango de movimiento XY. Muchos sistemas de robot permiten a los
usuarios definir límites de articulación, pero el lenguaje SPEL
+
permite definir límites de articulación y de
movimiento. En efecto, esto permite que los usuarios creen un envolvente de trabajo para la aplicación.
(Tenga en mente que los límites de rango de articulación también se pueden definir con SPEL).
El rango de movimiento estableció con valores XYLim se aplica solo a las posiciones de objetivo del
comando de movimiento, y no a las rutas de movimiento desde la posición inicial a la posición objetivo. Por
lo tanto, el brazo no puede moverse fuera del rango XYLim durante el movimiento. (Es decir, el rango
XYLim no afecta a Pulse).
Los datos de los parámetros del robot se almacenan en la memoria Compact Flash en el controlador. Por
tanto, la memoria flash de comandos se escribe cuando se ejecuta este comando. La escritura frecuente en
la memoria Compact Flash afecta su vida útil. Recomendamos que el uso de este comando sea mínimo.
Notas
Desactivar la comprobación del rango de movimiento
Hay muchas aplicaciones que no requieren comprobar el límite del rango de movimiento y, por este motivo,
hay un método simple para desactivar esta comprobación de límite. Para desactivar la comprobación de límite
de rango de movimiento, defina los valores de Motion Range Limit para minX, maxX, minY y maxY en "0".
Por ejemplo XYLim 0, 0, 0, 0.
Valores de límite de rango de movimiento predeterminados
Los valores predeterminados de la instrucción XYLim son "0, 0, 0, 0". (Motion Range Limit Checking está
desactivado).

794 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Consejo
Configuración de señalar y activar para XYLim
EPSON RC+ cuenta con un cuadro de diálogo para señalar y activar que permite definir los límites de rango
de movimiento. El método más simple de configurar los valores XYLim es mediante el uso de la página XYZ
Limits (Límites XYZ) de Robot Manager.
Consulte también
Range
Ejemplo de instrucción XYLim
Este simple ejemplo con la ventana Command define y luego muestra la configuración de XYLim:
> xylim -200, 300, 0, 500
> XYLim
-200.000, 300.000, 0.000, 500.000

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 795
Función XYLim
Arroja los datos de punto para el límite superior o inferior de la región XYLim.
Sintaxis
XYLim(limit)
Parámetros
limit Expresión entera que especificará el límite que se arrojará.
1: Límite inferior.
2: Límite superior.
Valores devueltos
Cuando se especifica "1" para los datos de referencia, arroja la posición de límite inferior del eje X
especificada en XYLim como X de datos de punto, la posición de límite inferior del eje Y como Y y la
posición del límite inferior del eje Z como Z.
Cuando se especifica "2" para los datos de referencia, arroja la posición de límite superior del eje X
especificada en XYLim como X de datos de punto, la posición de límite superior del eje Y como Y y la
posición del límite superior del eje Z como Z.
Consulte también
Instrucción XYLim
Ejemplo de función XYLim
P1 = XYLim(1)
P2 = XYLim(2)

796 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción XYLimClr
Borra la definición XYLim.
Sintaxis
XYLimClr
Consulte también
XYLim, XYLimDef
Ejemplo de función XYLimClr
En este ejemplo se usa la función XYLimClr en un programa:
Function ClearXYLim
If XYLimDef = True Then
XYLimClr
EndIf
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 797
Función XYLimDef
Indica si se definió o no XYLimClr.
Sintaxis
XYLimDef
Valores devueltos
Es True si se definió XYLimClr, de lo contrario es False.
Consulte también
XYLim, XYLimClr
Ejemplo de función XYLimDef
En este ejemplo se usa la función XYLimDef en un programa:
Function ClearXYLim
If XYLimDef = True Then
XYLimClr
EndIf
Fend

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 793
Mensajes de error de SPEL
+
N.º Mensaje Solución Nota 1 Nota 2
1
Se inició el programa de control del
controlador.
-
2
Término debido a bajo voltaje de la fuente
de alimentación.
-
3
Se completó el programa de control del
controlador.
Se guarda este registro cuando se reinicia
el controlador desde EPSON RC+ o TP1.
4
Se limpió el área de guardado de las
variables conservadas.
-
5 Se inició Function Main. -
6
Se inició Function Main. Posteriormente,
los mismos registros se omiten.
Omita el registro “Se inició Function Main”
para evitar que se acabe el espacio del
historial del sistema.
7 Se guardó el número de serie. -
8
Se ejecutó la copia de seguridad del
sistema.
-
9 Se ejecutó la restauración del sistema. -
10 Se inicializaron los parámetros del robot. -
11
Cambió el valor del pulso de compensación
entre el origen del codificador y el sensor de
reposo (HOFS).
-
Valor
después del
cambio
Valor
antes del
cambio
17
Se activó el modo de guardado de
mensajes. Evento poco común.
-
18
Se ejecutó la conversión del archivo de
parámetros del robot.
-
19 Se instaló el firmware de la DU. -
20
Se guardó la configuración de activación en
el modo Teach (Enseñar).
-
21
Se cambió la configuración de activación en
el modo Teach.
-
23
Se ejecutó la parada de emergencia
(EStop).
-
Número de
robot que
ejecuta el
comando de
movimiento
Estado del
controlador
24 Se abrió la protección. -
Número de
robot que
ejecuta el
comando de
movimiento
Estado del
controlador
25 Cambió la configuración del robot. -
Número del
robot
26 Cambió la configuración de alarma. -
Número de
alarma
50
Se restableció la alarma de la batería que
corresponde al controlador.
-
51
Se restableció la alarma de la batería que
corresponde al robot.
-
Número del
robot
52
Se restableció la alarma de engrase que
corresponde al robot.
-
Número del
robot
100 Dispositivo conectado al controlador. -
101 Cambió el dispositivo de la consola. -
20: TP3
21: RC+
22: E/S
remota
26: Ethernet
remoto
29: RS232
remoto
102
Cambió el dispositivo de presentación.
-
103 Cambió el modo de trabajo.
-
104 Cambió el modo cooperativo.
-
0:
Independiente
1:
Cooperativo

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
794 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
110 Se instaló el firmware del controlador. -
1: Configurar
2: Inicializar
3: Actualizar
4: Recuperar
111 Se restauró la dirección IP.
Puede guardar este registro cuando se
instala el firmware del controlador.
112 Controlador reiniciado -
120 RC+ conectado al controlador. -
1: Ethernet
2: USB
121 TP conectado al controlador. -
123
RC+ desconectado del controlador.
-
124
TP desconectado del controlador.
-
126
El modo de trabajo cambió a AUTO.
-
127 El modo de trabajo cambió a Program. -
128
El modo de trabajo cambió a Teach.
-
129 Ethernet remoto conectado al controlador -
130 Ethernet remoto desconectado del controlador -
131 Comunicación remota conectada al controlador -
132
Comunicación remota desconectada del
controlador
-
Estado de
cierre de
sesión
0: Normal
1: Anormal
(tiempo de
espera)
133 El modo de trabajo cambió a Test (Prueba). -
400
Se activó la alarma de la batería que
corresponde al controlador. Reemplace la
batería y reinicie la alarma.
Reemplace la batería y reinicie la alarma.
401
Se activó la alarma de la batería que
corresponde al robot. Reemplace la batería
y reinicie la alarma.
Reemplace la batería y reinicie la alarma.
Número del
robot
402
Se activó la alarma de lubricación. Lubrique
el robot y reinicie la alarma.
Lubrique el robot y reinicie la alarma.
Número del
robot
410
Se activó la alarma de la batería que
corresponde al controlador. Reemplace la
batería y reinicie la alarma.
Reemplace la batería.
Después de reemplazar la batería, reinicie
la alarma en EPSON RC+ 7.0-[Tools]-
[Controller]-[Maintenance].
1000 veces
la tasa de
consumo
1000 veces
el valor de
límite
411
Se activó la alarma de la batería que
corresponde al robot. Reemplace la batería
y reinicie la alarma.
Reemplace la batería.
Después de reemplazar la batería, reinicie
la alarma en EPSON RC+ 7.0-[Tools]-
[Controller]-[ Maintenance].
1000 veces
la tasa de
consumo
1000 veces
el valor de
límite
412
Se activó la alarma de correa. Reemplace
la correa y reinicie la alarma.
Reemplace la correa de regulación.
Después de reemplazar las correas de
regulación, reinicie la alarma en EPSON
RC+ 7.0-[Tools]-[Controller]-[Maintenance].
1000 veces
la tasa de
consumo
1000 veces
el valor de
límite
413
Se activó la alarma de engrase que
corresponde a la ranura de tornillo esférico.
Lubrique las unidades de ranura del tornillo
esférico y reinicie la alarma.
Lubrique la ranura del tornillo esférico.
Después de realizar la lubricación, reinicie
la alarma en EPSON RC+ 7.0-[Tools]-
[Controller]-[Maintenance].
1000 veces
la tasa de
consumo
1000 veces
el valor de
límite
414
Se activó la alarma de motor. Reemplace
el motor y reinicie la alarma.
Reemplace el motor.
Después de reemplazar el motor, reinicie
la alarma en EPSON RC+ 7.0-[Tools]-
[Controller]-[Maintenance].
1000 veces
la tasa de
consumo
1000 veces
el valor de
límite
415
Se activó la alarma de engranaje.
Reemplace las unidades de engranaje y
reinicie la alarma.
Reemplace las unidades de engranaje.
Después de reemplazar las unidades de
engranaje, reinicie la alarma en EPSON
RC+ 7.0-[Tools]-[Controller]-[Maintenance].
1000 veces
la tasa de
consumo
1000 veces
el valor de
límite

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 795
N.º Mensaje Solución Nota 1 Nota 2
416
Se activó la alarma de ranura del tornillo
esférico. Reemplace la ranura del tornillo
esférico y reinicie la alarma.
Reemplace la ranura del tornillo esférico.
Después de reemplazar la ranura del
tornillo esférico, reinicie la alarma en
EPSON RC+ 7.0-[Tools]-[Controller]-
[Maintenance].
1000 veces
la tasa de
consumo
1000 veces
el valor de
límite
420
Se activó la alarma de la batería que
corresponde al controlador. Reemplace la
batería y reinicie la alarma.
Reemplace la batería.
Después de reemplazar la batería, reinicie
la alarma en EPSON RC+ 7.0-[Tools]-
[Controller]-[Maintenance].
1000 veces
la tasa de
consumo
1000 veces
el valor de
límite
421
Se activó la alarma de la batería que
corresponde al robot. Reemplace la batería
y reinicie la alarma.
Reemplace la batería.
Después de reemplazar la ranura del
tornillo esférico, reinicie la alarma en
EPSON RC+ 7.0-[Tools]-[Controller]-
[Maintenance].
1000 veces
la tasa de
consumo
1000 veces
el valor de
límite
422
Se activó la alarma de correa. Reemplace
la correa y reinicie la alarma.
Reemplace la correa de regulación.
Después de reemplazar las correas de
regulación, reinicie la alarma en EPSON
RC+ 7.0-[Tools]-[Controller]-[Maintenance].
1000 veces
la tasa de
consumo
1000 veces
el valor de
límite
423
Se activó la alarma de engrase que
corresponde a la ranura de tornillo esférico.
Lubrique la ranura del tornillo esférico y
reinicie la alarma.
Lubrique la ranura del tornillo esférico.
Después de realizar la lubricación, reinicie
la alarma en EPSON RC+ 7.0-[Tools]-
[Controller]-[Maintenance].
1000 veces
la tasa de
consumo
1000 veces
el valor de
límite
424
Se activó la alarma de motor. Reemplace
el motor y reinicie la alarma.
Reemplace el motor.
Después de reemplazar el motor, reinicie
la alarma en EPSON RC+ 7.0-[Tools]-
[Controller]-[Maintenance].
1000 veces
la tasa de
consumo
1000 veces
el valor de
límite
425
Se activó la alarma de engranaje.
Reemplace las unidades de engranaje y
reinicie la alarma.
Reemplace las unidades de engranaje.
Después de reemplazar las unidades de
engranaje, reinicie la alarma en EPSON
RC+ 7.0-[Tools]-[Controller]-[Maintenance].
1000 veces
la tasa de
consumo
1000 veces
el valor de
límite
426
Se activó la alarma de ranura del tornillo
esférico. Reemplace la ranura del tornillo
esférico y reinicie la alarma.
Reemplace la ranura del tornillo esférico.
Después de reemplazar la ranura del
tornillo esférico, reinicie la alarma en
EPSON RC+ 7.0-[Tools]-[Controller]-
[Maintenance].
1000 veces
la tasa de
consumo
1000 veces
el valor de
límite
501 El historial de seguimientos está activado.
Efectúa el rendimiento del sistema si está
activo el historial de seguimientos.
502 Se inicializó la memoria.
Cuando se genera este error, se inicializa
el valor de la variable global conservada.
Reemplace la batería de la placa de la CPU.
Reemplace la placa de la CPU.
503
Se encontró un error de disco duro.
Debe reemplazar el disco duro lo antes
posible.
Esta es una advertencia de error del disco
duro. Reemplace el disco duro lo antes
posible.
504
Se generó un error en una tarea en
segundo plano.
Asegúrese de que no haya problemas en
el sistema y siga con la operación.
505 Se reinició el controlador. -
507
Se inicia el controlador utilizando el archivo
de configuración inicial anterior, ya que el
archivo de configuración inicial está
dañado. Revise la configuración.
Es posible que no se hayan guardado los
cambios de configuración del inicio
anterior. Revise la configuración.
511
El voltaje de la batería de la copia de
seguridad de la placa de la CPU es inferior
al voltaje permitido. Reemplace la batería
de la placa de la CPU.
Reemplace de inmediato la batería de la
placa de la CPU. Mantenga activada la
alimentación del controlador todo el tiempo
que sea posible hasta que reemplace la
batería.
100 veces el
valor actual
100 veces el
valor de límite

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
796 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
512
El voltaje de entrada de 5 V de la placa de
la CPU es inferior al voltaje permitido.
Si el voltaje normal no se genera a partir
de una sola fuente de alimentación de 5 V,
reemplace la fuente de alimentación.
100 veces el
valor actual
100 veces el
valor de límite
513
El voltaje de entrada de 24 V para el freno
del motor, el codificador y el ventilador es
inferior al voltaje especificado.
Si el voltaje normal no se genera a partir
de una sola fuente de alimentación de
24 V, reemplace la fuente de alimentación.
100 veces el
valor actual
100 veces el
valor de límite
514
La temperatura interna del controlador es
superior a la temperatura permitida.
Detenga el controlador lo antes posible y
compruebe que la temperatura ambiente
del controlador no sea alta.
Revise que el filtro no esté obstruido.
100 veces el
valor actual
100 veces el
valor de límite
515
La velocidad de giro del ventilador del
controlador es inferior a la velocidad
permitida. (FAN1)
Revise que el filtro no esté obstruido. Si la
advertencia no desaparece después de
reiniciar el controlador, reemplace el
ventilador.
Valor actual Valor de límite
516
La velocidad de giro del ventilador del
controlador es inferior a la velocidad
permitida. (FAN2)
Revise que el filtro no esté obstruido. Si la
advertencia no desaparece después de
reiniciar el controlador, reemplace el
ventilador.
Valor actual Valor de límite
517
La temperatura interna del controlador es
superior a la temperatura permitida.
Detenga el controlador lo antes posible y
compruebe que la temperatura ambiente
del controlador no sea alta.
Revise que el filtro no esté obstruido.
100 veces el
valor actual
100 veces el
valor de límite
518
El voltaje de entrada de 54 V de la placa de
la CPU es inferior al voltaje permitido.
Si el voltaje normal no se genera a partir
de una sola fuente de alimentación de
54 V, reemplace la fuente de alimentación.
100 veces el
valor actual
100 veces el
valor de límite
519
El voltaje de entrada de 3,3 V de la placa de
la CPU es inferior al voltaje permitido.
Si el voltaje normal no se genera a partir
de una sola fuente de alimentación de
3,3 V, reemplace la fuente de alimentación.
100 veces el
valor actual
100 veces el
valor de límite
520
El voltaje de entrada de CC de la placa de
la CPU es inferior o superior al voltaje
permitido.
Si el voltaje normal no se genera a partir
de una sola fuente de alimentación de CC,
reemplace la fuente de alimentación.
100 veces el
valor actual
100 veces el
valor de límite
521
El voltaje de entrada de 3,3 V de DU1 para
la placa es inferior al voltaje permitido.
Si el voltaje normal no se genera a partir
de una sola fuente de alimentación de
3,3 V de la unidad de mando 1, reemplace
la fuente de alimentación.
100 veces el
valor actual
100 veces el
valor de límite
522
El voltaje de entrada de 5V de DU1 para la
placa es inferior al voltaje permitido.
Si el voltaje normal no se genera a partir
de una sola fuente de alimentación de 5 V
de la unidad de mando 1, reemplace la
fuente de alimentación.
100 veces el
valor actual
100 veces el
valor de límite
523
El voltaje de entrada de 24 V de DU1 para
el freno del motor, el codificador y el
ventilador es inferior al voltaje especificado.
Si el voltaje normal no se genera a partir
de una sola fuente de alimentación de 24 V
de la unidad de mando 1, reemplace la
fuente de alimentación.
100 veces el
valor actual
100 veces el
valor de límite
524
La temperatura interna de DU1 del
controlador es superior a la temperatura
permitida.
Detenga la unidad de mando 1 lo antes
posible y compruebe que la temperatura
ambiente de dicha unidad no sea alta.
Revise que el filtro no esté obstruido.
100 veces el
valor actual
100 veces el
valor de límite
525
La velocidad de giro de DU1 del ventilador
del controlador es inferior a la velocidad
permitida. (FAN1)
Revise que el filtro de la unidad de mando
1 no esté obstruido. Si la advertencia no
desaparece después de reiniciar el
controlador, reemplace el ventilador.
Valor actual Valor de límite
526
La velocidad de giro de DU1 del ventilador
del controlador es inferior a la velocidad
permitida. (FAN2)
Revise que el filtro de la unidad de mando
1 no esté obstruido. Si la advertencia no
desaparece después de reiniciar el
controlador, reemplace el ventilador.
Valor actual Valor de límite

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 797
N.º Mensaje Solución Nota 1 Nota 2
531
El voltaje de entrada de 3,3 V de DU2 para
la placa es inferior al voltaje permitido.
Si el voltaje normal no se genera a partir
de una sola fuente de alimentación de
3,3 V de la unidad de mando 2, reemplace
la fuente de alimentación.
100 veces el
valor actual
100 veces el
valor de límite
532
El voltaje de entrada de 5V de DU2 para la
placa es inferior al voltaje permitido.
Si el voltaje normal no se genera a partir
de una sola fuente de alimentación de 5 V
de la unidad de mando 2, reemplace la
fuente de alimentación.
100 veces el
valor actual
100 veces el
valor de límite
533
El voltaje de entrada de 24 V de DU2 para
el freno del motor, el codificador y el
ventilador es inferior al voltaje especificado.
Si el voltaje normal no se genera a partir
de una sola fuente de alimentación de 24 V
de la unidad de mando 2, reemplace la
fuente de alimentación.
100 veces el
valor actual
100 veces el
valor de límite
534
La temperatura interna de DU2 del
controlador es superior a la temperatura
permitida.
Detenga la unidad de mando 2 lo antes
posible y compruebe que la temperatura
ambiente de la unidad de mando 2 no sea
alta.
Revise que el filtro no esté obstruido.
100 veces el
valor actual
100 veces el
valor de límite
535
La velocidad de giro de DU2 del ventilador
del controlador es inferior a la velocidad
permitida. (FAN1)
Revise que el filtro de la unidad de mando
2 no esté obstruido. Si la advertencia no
desaparece después de reiniciar el
controlador, reemplace el ventilador.
Valor actual Valor de límite
536
La velocidad de giro de DU2 del ventilador
del controlador es inferior a la velocidad
permitida. (FAN2)
Revise que el filtro de la unidad de mando
2 no esté obstruido. Si la advertencia no
desaparece después de reiniciar el
controlador, reemplace el ventilador.
Valor actual Valor de límite
541
El voltaje de entrada de 3,3 V de DU3 para
la placa es inferior al voltaje permitido.
Si el voltaje normal no se genera a partir
de una sola fuente de alimentación de
3,3 V de la unidad de mando 3, reemplace
la fuente de alimentación.
100 veces
el valor
actual
100 veces el
valor de límite
542
El voltaje de entrada de 5V de DU3 para la
placa es inferior al voltaje permitido.
Si el voltaje normal no se genera a partir
de una sola fuente de alimentación de 5 V
de la unidad de mando 3, reemplace la
fuente de alimentación.
100 veces
el valor
actual
100 veces el
valor de límite
543
El voltaje de entrada de 24 V de DU3 para
el freno del motor, el codificador y el
ventilador es inferior al voltaje especificado.
Si el voltaje normal no se genera a partir
de una sola fuente de alimentación de 24 V
de la unidad de mando 3, reemplace la
fuente de alimentación.
100 veces
el valor
actual
100 veces el
valor de límite
544
La temperatura interna de DU3 del
controlador es superior a la temperatura
permitida.
Detenga la unidad de mando 3 lo antes
posible y compruebe que la temperatura
ambiente de la unidad de mando 3 no sea
alta.
Revise que el filtro no esté obstruido.
100 veces
el valor
actual
100 veces el
valor de límite
545
La velocidad de giro de DU3 del ventilador
del controlador es inferior a la velocidad
permitida. (FAN1)
Revise que el filtro de la unidad de mando
3 no esté obstruido. Si la advertencia no
desaparece después de reiniciar el
controlador, reemplace el ventilador.
Valor actual Valor de límite
546
La velocidad de giro de DU3 del ventilador
del controlador es inferior a la velocidad
permitida. (FAN2)
Revise que el filtro de la unidad de mando
3 no esté obstruido. Si la advertencia no
desaparece después de reiniciar el
controlador, reemplace el ventilador.
Valor actual Valor de límite
550
Se desconectó la comunicación con
Compact Vision. Revise el cableado de red.
Revise la conexión entre el controlador y
Compact Vision.
N.º de
cámara
551
Las RPM del ventilador de la CPU de
Compact Vision han disminuido. Limpie el
filtro del ventilador o reemplace el
ventilador.
Revise que el filtro del ventilador de
Compact Vision no esté obstruido.
Si no se borró la advertencia después de
reiniciar el controlador y Compact Vision,
reemplace el ventilador de la CPU.
N.º de
cámara
Valor actual

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
798 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
552
Las RPM del ventilador de la CPU de
Compact Vision han disminuido. Limpie el
filtro del ventilador o reemplace el
ventilador.
Reemplace el ventilador de la CPU de
Compact Vision.
N.º de
cámara
Valor actual
553
Las RPM del ventilador del chasis de
Compact Vision han disminuido.
Reemplace el ventilador.
Revise que el filtro del ventilador de
Compact Vision no esté obstruido.
Si no se borró la advertencia después de
reiniciar el controlador y Compact Vision,
reemplace el ventilador del sistema.
N.º de
cámara
Valor actual
554
Las RPM del ventilador del chasis de
Compact Vision han disminuido.
Reemplace el ventilador.
Reemplace el ventilador del sistema de
Compact Vision.
N.º de
cámara
Valor actual
555
La temperatura de la CPU de Compact
Vision es demasiado alta. Revise el
entorno de instalación (ventilación,
temperatura ambiente, etc.)
Revise que el filtro del ventilador de
Compact Vision no esté obstruido.
Si la advertencia no desaparece después
de reiniciar el controlador y Compact
Vision, revise el entorno de instalación
(espacio circundante, temperatura
ambiente) de Compact Vision.
N.º de
cámara
1000 veces el
valor actual
556
La temperatura de la CPU de Compact
Vision es demasiado alta. Revise el
entorno de instalación (ventilación,
temperatura ambiente, etc.)
Revise que el filtro del ventilador de
Compact Vision no esté obstruido.
Si la advertencia no desaparece después
de reiniciar el controlador y Compact
Vision, revise el entorno de instalación
(espacio circundante, temperatura
ambiente) de Compact Vision.
N.º de
cámara
1000 veces el
valor actual
557
El voltaje de la batería de reserva de
Compact Vision es bajo. Reemplace la
batería.
Reemplace la batería de reserva de
Compact Vision.
N.º de
cámara
1000 veces el
valor actual
558
El voltaje de la batería de reserva de
Compact Vision es bajo. Reemplace la
batería.
Reemplace la batería de reserva de
Compact Vision.
N.º de
cámara
1000 veces el
valor actual
559
El proceso de Compact Vision terminó de
manera anormal. Reinicie la unidad de
Compact Vision.
Si la advertencia no desaparece después
de reiniciar el controlador y Compact
Vision, inicialice Compact Vision.
N.º de
cámara
560
La memoria disponible de Compact Vision
es baja. Reinicie la unidad de Compact
Vision.
Si la advertencia no desaparece después
de reiniciar el controlador y Compact
Vision, inicialice Compact Vision.
N.º de
cámara
Valor actual
561
El espacio de disco disponible de Compact
Vision es bajo. Reduzca el número de
objetos que usan modelos (geométrico,
correlación, DefectFinder, etc.)
Revise la secuencia de visión si tiene
modelos innecesarios que se pueden
reducir. Considere usar la memoria USB.
N.º de
cámara
Valor actual
562
Se generó un error crítico de hardware en la
unidad de Compact Vision. Revise la
condición del hardware, como el cableado
interno.
Si la advertencia no desaparece después
de reiniciar el controlador y Compact
Vision, inicialice Compact Vision.
N.º de
cámara
563
Se generó un error crítico de hardware en la
unidad de Compact Vision. Revise la
condición del hardware, como el cableado
interno.
Si no se borró la advertencia después de
reiniciar el controlador y Compact Vision,
reemplace la placa LED/SW.
N.º de
cámara
569
Se recuperó la comunicación con Compact
Vision.
-
N.º de
cámara

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 799
N.º Mensaje Solución Nota 1 Nota 2
570
Compact Vision. Error de la autenticación
con contraseña.
Ingrese la contraseña correcta de conexión
de Compact Vision en la página de la
cámara RC+.
Si desconoce la contraseña, cuenta con
las siguientes opciones:
a. Ingrese una nueva contraseña de
conexión en el monitor de CV y,
después, ingrese esa misma
contraseña en la página de la cámara
RC+.
o
b. Efectúe un restablecimiento de fábrica
en la unidad Compact Vision, para
borrar la contraseña.
Recompile el actual proyecto de RC+
y compruebe la operación
597
Se completó el movimiento PTP para evitar
el punto de singularidad.
Se completó el movimiento PTP para la
evasión de la singularidad.
Si hace clic en el mismo botón de
desplazamiento, se hará funcionar el robot
en el movimiento de desplazamiento
normal.
598
Se detuvo el robot debido a la detección de
colisión
Mueva el manipulador en la dirección que
evita la colisión
599
Desplazamiento intentado cerca del punto
de singularidad.
El robot no pudo desplazarse en el
movimiento CP (predeterminado).
Si hace clic en el mismo botón de
desplazamiento, se hará funcionar el robot
en el movimiento PTO.
700
El tipo de driver del motor no coincide con
el modelo actual del robot. Revise el
modelo del robot. Reemplace el driver del
motor.
Revise el modelo del robot.
736
Se restableció el codificador. Reinicie el
controlador.
Reinicie el controlador.
737
Bajo voltaje desde la batería del codificador.
Reemplace la batería.
Apague el controlador y reemplace la
batería.
Para conocer el procedimiento de
reemplazo de la batería, consulte
Mantenimiento en el manual del
manipulador.
752 Servoalarma D. -

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
800 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
1001
Error de operación.
El parámetro Command no es
válido.
-
1002
No se puede acceder a los datos
solicitados. Los datos no están
configurados o el rango no es
válido.
Revise que la E/S de destino, las
variables y las tareas existan.
1003
La contraseña no es válida
Ingrese la contraseña correcta.
1004
No se puede ejecutar con una
versión no compatible.
Use el archivo de la versión correcta.
1005
No se puede ejecutar con un
número de serie no válido.
Use los datos de copia de seguridad
del mismo controlador para restaurar
la configuración del controlador.
1006
No se puede ejecutar con un
modelo de robot no válido.
Use los datos de copia de seguridad
del mismo controlador para restaurar
la configuración del controlador.
1007
No se puede ejecutar con un
controlador no válido.
Use el instalador compatible.
1010
Error de configuración remota.
No se puede asignar el número de
entrada R-IO a la entrada remota.
Especifique el número de entrada y
excluya del número de entrada R-IO.
1011
Error de configuración remota.
No se puede asignar un número
de bit que no existe a una señal de
E/S remota.
Revise el tamaño del esclavo del
bus de campo.
Revise el tamaño del esclavo del bus
de campo.
1012
Error de configuración remota.
No se puede asignar un número
de bit que no existe a una señal de
E/S remota.
Revise el tamaño del maestro del
bus de campo.
Revise el tamaño del maestro del
bus de campo.
1013
Error del esclavo del bus de
campo.
No se puede cambiar el tamaño
porque incluye actualmente una
señal de E/S remota.
-
1014
Error del maestro del bus de
campo. No se puede cambiar el
tamaño porque incluye
actualmente una señal de E/S
remota.
-
1015
Error de configuración remota. No
se puede asignar el número de
entrada/salida Hand-IO a la
entrada remota.
-
1016
Error de configuración remota. No
se puede cambiar la asignación
porque está definido el tipo de
proveedor de PLC.
Defina el proveedor de PLC en
“None” (Ninguno) para cambiar la
asignación de E/S.
1020
No se puede ejecutar en el modo
de recuperación.
Inicie el controlador de manera
normal.
1021
No se puede ejecutar debido a un
error de inicialización del
controlador.
Restaure la configuración del
controlador.
1022
No se puede ejecutar sin que se
abra el proyecto.
Abra un proyecto.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 801
N.º Mensaje Solución Nota 1 Nota 2
1023
No se puede ejecutar mientras el
proyecto esté abierto.
Recompile el proyecto.
1024
No se puede activar desde la
entrada remota.
Active la entrada remota.
1025
Se prohíbe la ejecución en el
modo Teach.
Cambie al modo AUTO.
1026
No se puede ejecutar en el modo
Teach, excepto desde TP.
Cambie al modo AUTO.
1027
No se puede ejecutar en el modo
Auto.
Cambie al modo Program.
1028
No se puede ejecutar en el modo
Auto, excepto desde la consola
principal.
Cambie al modo Program.
1029
No se puede ejecutar desde OP.
Active la entrada OP.
1030
No se permite el cambio del modo
de operación.
Cambie al modo Auto con una
consola en el modo Program.
1031
No se puede ejecutar mientras se
ejecutan las tareas.
Detenga la tarea y luego ejecútela.
1032
No se puede ejecutar mientras se
ejecuta el número máximo de
tareas.
Detenga la tarea y luego ejecútela.
1033
No se puede ejecutar durante el
comando de movimiento
asincrónico.
Ejecute después de que termine el
movimiento.
1034
Comando asincrónico detenido
durante la operación.
El comando asincrónico ya se
detuvo cuando el controlador recibió
un comando de parada.
1035
No se puede ejecutar cuando la
E/S remota está activada, excepto
desde el dispositivo remoto.
El comando no se puede ejecutar
mediante la consola, excepto la E/S
remota cuando la salida AutoMode
de la E/S remota está en ON
(Activado).
1037
No se puede ejecutar cuando
Ethernet remoto está activado,
excepto desde el dispositivo de
Ethernet remoto.
El comando no se puede ejecutar
mediante la consola, excepto
Ethernet remoto cuando el indicador
Auto del Ethernet remoto está en
ON.
1039 Se prohíbe la ejecución.
Se ejecutó un comando prohibido
mientras se ejecutaba el programa.
Detenga el programa y luego ejecute
el comando.
1041
No se puede ejecutar durante el
estado de parada de emergencia.
Cancele el estado de parada de
emergencia.
1042
No se puede ejecutar mientras
esté abierta la protección.
Cierre la protección.
1043
No se puede ejecutar durante la
condición de error.
Cancele la condición de error.
1044
No se puede ejecutar cuando la
entrada de pausa remota está ON.
Cambie la entrada de pausa remota
a OFF.
1045
La condición de espera de entrada
es la única condición disponible
para la entrada.
El controlador recibió una entrada
mientras no se encontraba en la
condición de espera de entrada.
1046
No se puede ejecutar durante la
transferencia de archivos.
Ejecute después de la transmisión
del archivo.
1047
No se puede cancelar el comando
ejecutado desde otros dispositivos.
Cancele el comando de movimiento
desde el dispositivo que emitió el
comando.

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
802 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
1048
No se puede ejecutar después de
haber detectado bajo voltaje.
Reinicie el controlador.
1049
Otros dispositivos están en el
modo Program.
Revise la conexión de otros
dispositivos.
1050 La contraseña es demasiado larga.
Ingrese la contraseña que tenga
menos de 16 caracteres.
1051
Error al exportar el estado del
controlador.
1. Vuelva a intentarlo con la misma
memoria USB.
2. Vuelva a intentarlo con otra
memoria USB.
3. Vuelva a intentarlo después de
reiniciar el controlador.
1052
Exportar estado del controlador
ocupada.
Ejecute el comando después de
completar la copia de seguridad del
estado del controlador.
1053
Se prohíbe la ejecución en el
modo Test
Ejecute en otros modos.
1054
No se puede ejecutar en el modo
TEST, excepto desde TP.
-
1055
No se puede ejecutar la tarea en
segundo plano.
Confirme que no haya ninguna tarea
en segundo plano ejecutándose.
Recompile el proyecto.
1056 No se puede ejecutar desde OP. Active la entrada TP3.
1057
No se puede ejecutar cuando TP3
está activado, excepto desde TP3.
El comando no se puede ejecutar
desde otras consolas cuando TP3
está activado.
1058
No se puede ejecutar, excepto el
modo T2.
Cambie a la tecla <Teach/T2>.
1059 No se puede cambiar al modo T2.
El modo T2 no se puede usar en los
controladores RC700-A que cumplen
con las normas UL.
1100
Error del archivo. No se puede
tener acceso al archivo.
1. Reinicie el controlador.
2. Reinstale el firmware.
3. Reemplace la CF.
1102
Error del archivo. Error de lectura y
escritura del registro
1. Reinicie el controlador.
2. Reemplace la CF.
1103
No se encontró el archivo.
Revise si existe el archivo.
1104
No se encontró el archivo del
proyecto.
Recompile el proyecto.
1105
No se encontró el archivo objeto.
Recompile el proyecto.
1106
No se encontraron los archivos de
puntos.
Recompile el proyecto.
1107
El programa usa una característica
no compatible con la actual versión
de firmware del controlador.
Revise la versión del compilador en
EPSON RC+ 7.0-[Project]-
[Properties]-[Compiler] (Proyecto -
Propiedades - Compilador).
1108
Se actualizaron uno o más
archivos de origen. Compile el
proyecto.
Recompile el proyecto.
1109
No hay capacidad de
almacenamiento suficiente.
Aumente el espacio libre de la
memoria USB.
1110
No se encontró el archivo.
-
1111
No se encontró el archivo del
transportador.
-
1112
No se encontraron los archivos de
fuerza.
Recompile el proyecto.
Recompile el proyecto.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 803
N.º Mensaje Solución Nota 1 Nota 2
1114
No se puede crear el proyecto en
el controlador.
Existe una posibilidad de que la
carpeta esté llena o que el nombre
de proyecto esté duplicado.
Seleccione la aplicación para
marcarlo.
1120
Error del archivo.
El archivo de configuración está
dañado.
Restaure la configuración del
controlador.
1121
Error del archivo.
El archivo de proyecto está
dañado.
Recompile el proyecto.
1122
Error del archivo.
El archivo de puntos está dañado.
Recompile el proyecto.
1123
Error del archivo.
El archivo de la etiqueta de E/S
está dañado.
Recompile el proyecto.
1124
Error del archivo.
El archivo de error de usuario está
dañado.
Recompile el proyecto.
1126
Error del archivo.
La información de opción del
software está dañada.
1. Reinicie el controlador.
2. Reinstale el firmware.
3. Reconfigure la opción.
1127
Error del archivo.
El archivo de visión está dañado.
Recompile el proyecto.
1128
Error del archivo.
El archivo de información de la
copia de seguridad está dañado.
No se puede restaurar la información
de la copia de seguridad
especificada.
Adquiera nuevamente la información
de la copia de seguridad y luego
restaure el archivo.
1130
Error del mensaje de error.
No se encontró ningún elemento
en el historial de errores.
No existe ningún historial de errores.
Reinicie el controlador.
1131
No se puede tener acceso a la
memoria USB.
Inserte correctamente la memoria
USB. Cuando sigue sucediendo este
error después de insertar
correctamente la memoria USB, la
memoria podría ser irreconocible
para el controlador. Inserte otra
memoria para revisar la operación.
1132
Error del archivo.
No se pudo copiar el archivo.
-
1133
Error del archivo.
No se pudo eliminar el archivo.
-
1134
Error del archivo.
El archivo de GUI Builder está
dañado.
Recompile el proyecto.
1138
Error del archivo. El archivo de
Force Guide está dañado.
Recompile el proyecto.
1140
Error del archivo.
No se pudo abrir el archivo objeto.
Recompile el proyecto.
1141
Error del archivo.
No se pudo abrir el archivo de
proyecto.
Recompile el proyecto.
1142
Error del archivo.
No se pudo leer el archivo de
proyecto.
Recompile el proyecto.

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
804 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
1143
Error del archivo.
No se pudo abrir el archivo de
guardado de la condición.
1. Vuelva a intentarlo con la misma
memoria USB.
2. Vuelva a intentarlo con otra
memoria USB.
3. Vuelva a intentarlo después de
reiniciar el controlador.
1144
Error del archivo.
No se pudo escribir el archivo de
guardado de la condición.
1. Vuelva a intentarlo con la misma
memoria USB.
2. Vuelva a intentarlo con otra
memoria USB.
3. Vuelva a intentarlo después de
reiniciar el controlador.
1145
Error del archivo.
No se pudo abrir el archivo del
transportador.
Recompile el proyecto.
1146
Error del archivo.
No se pudo leer el archivo del
transportador.
Recompile el proyecto.
1150
Error del archivo.
El historial de errores no es válido.
1. Reinicie el controlador.
2. Reemplace la CF.
1151
Error del archivo.
No se pudo asignar el historial de
errores.
1. Reinicie el controlador.
2. Reemplace la CF.
1152
Error del archivo.
No se pudo abrir el archivo del
historial de errores.
1. Reinicie el controlador.
2. Reemplace la CF.
1153
Error del archivo.
No se pudo escribir el archivo del
historial de errores.
1. Reinicie el controlador.
2. Reemplace la CF.
1155
Error del archivo.
No se pudo abrir el archivo de
configuración.
Restaure la configuración del
controlador.
1156
Error del archivo.
No se pudo guardar el archivo de
configuración.
Restaure la configuración del
controlador.
1157
Error del archivo.
No se pudo leer el archivo de
configuración.
Restaure la configuración del
controlador.
1158
Error del archivo.
No se pudo escribir el archivo de
configuración.
Restaure la configuración del
controlador.
1160
Error de MCD.
No se pudo abrir el archivo MCD.
Restaure la configuración del
controlador.
1161
Error de MCD.
No se pudo leer el archivo MCD.
Restaure la configuración del
controlador.
1163
Error de MCD.
No se pudo guardar el archivo
MCD.
Restaure la configuración del
controlador.
1165
Error de MPD.
No se pudo abrir el archivo MPD.
-
1166
Error de MPD.
No se pudo leer el archivo MPD.
-
1168
Error de MPD.
No se pudo guardar el archivo
MPD.
-
1170
Error de MPL.
No se pudo abrir el archivo MPL.
1. Reinicie el controlador.
2. Reinstale el firmware.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 805
N.º Mensaje Solución Nota 1 Nota 2
1181
Error de PRM.
No se pudo reemplazar el archivo
PRM.
1. Reinicie el controlador.
2. Reconfigure el robot.
1185
Error del archivo.
No se pudo abrir el archivo de
información de la copia de
seguridad.
-
1186
Error del archivo.
No se pudo leer el archivo de
información de la copia de
seguridad.
-
1187
Error del archivo.
No se pudo escribir el archivo de
información de la copia de
seguridad.
-
1188
Error del archivo.
No se pudo guardar el archivo de
información de la copia de
seguridad.
-
1189
Los datos de copia de seguridad
se crearon con una versión
anterior.
No se puede restaurar la
configuración del controlador en el
procedimiento especificado para
usar datos de una copia de
seguridad anterior.
Revise los datos de copia de
seguridad.
1190
Los datos de copia de seguridad
se crearon con una versión más
nueva.
-
1191
No hay ningún proyecto en los
datos de copia de seguridad.
-
1192
No se puede ejecutar con un
número de robot no válido.
Revise que los datos de copia de
seguridad sean iguales al número de
robot actual.
1193
No se puede ejecutar con
información del robot no válida.
Revise que los datos de copia de
seguridad sean iguales al número de
robot actual.
1194
No se puede ejecutar con un
número de unidad de mando no
válido.
-
1195
Error del archivo. No se pudo
asignar el historial de salud.
Reinicie el controlador. - -
1196
Error del archivo. No se pudo abrir
el archivo del historial de salud.
Reinicie el controlador. - -
1197
Error del archivo. No se pudo
escribir el archivo del historial de
salud.
Reinicie el controlador. - -
1198
Error de restauración.
El proyecto no es válido. Si se va a
restaurar la configuración del
hardware de visión, restaure el
proyecto en forma conjunta.
Si se va a restaurar la configuración
del hardware de visión, restaure el
proyecto en forma conjunta.
1200
Error de compilación.
Revise el mensaje de compilación.
Este error se genera durante la
compilación desde TP. Corrija el
lugar donde se generó el error.
1201
Error de enlace.
Revise el mensaje de enlace.
Este error se genera durante la
compilación desde TP. Corrija el
lugar donde se generó el error.

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
806 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
1250
Error de salidas del usuario.
El nombre está vacío.
-
1251
Error de salidas del usuario.
La condición está vacía.
-
1252
Error de salidas del usuario.
El número de robot está fuera del
rango disponible.
-
1260
Error de configuración de la
alarma.
El robot no existe.
-
1261
Error de configuración de la
alarma.
No se pudo obtener la fecha de
expiración.
-
1262
Error de configuración de la
alarma.
No se pudo configurar la alarma.
-
1263
Error de configuración de la
alarma.
El número de alarma especificado
está fuera del rango permitido.
-
1264
Error de configuración de la
alarma.
El número de alarma especificado
no está activado.
-
1290
El número del monitor de fuerza
está fuera del rango permitido.
Reinicie el controlador.
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.
1291
El monitor de fuerza ya se está
usando en otro dispositivo.
Cierre el monitor de fuerza del otro
dispositivo y luego ejecute el
monitor de fuerza.
Revise si otra PC está usando el
monitor de fuerza.
1292
No se pudo definir/cargar la
información de la secuencia FG y
del objeto.
1400
Error en el archivo de Force Guide.
1401
La ruta del archivo de Force Guide
no es válida.
1402
No se pudo abrir el archivo de
Force Guide.
1403
El archivo de Force Guide no se
abre.
1404
El número de secuencia de Force
Guide no es válido.
1405
El número de objeto de Force
Guide no es válido.
1406
La propiedad de la secuencia de
Force Guide no es válida.
1407
La propiedad del objeto de Force
Guide no es válida.
1408
El tipo de objeto de Force Guide
no es válido.
1409
El parámetro no es válido.
1410
La versión del archivo de Force
Guide no es válida.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 807
N.º Mensaje Solución Nota 1 Nota 2
1411
Existe la propiedad incorrecta de
Force Guide.
Confirme la propiedad.
Confirme la propiedad de Force
Guide.
1412
No se puede definir el objeto
Decision para iniciar la secuencia
de Force Guide.
Confirme la secuencia de Force
Guide.
No se puede definir el objeto
Decision para iniciar una secuencia.
Confirme la secuencia de Force
Guide.
1413
El objeto de Force Guide
especificado como
ConditionObject está desactivado.
Confirme la configuración.
Confirme la configuración del objeto
de Force Guide.
1420
No se pudo convertir el programa.
Ejecute recompilar.
1421
Error de inicialización.
No se puede asignar la memoria.
1422
Error de finalización.
No se puede finalizar el
controlador.
1423
La ruta del archivo de conversión
no es válida.
1424
La ruta del archivo Prg no es
válida.
1425
La ruta del archivo Command no
es válida.
1426
El archivo de conversión no es
válido.
1427 El archivo Command no es válido.
Actualización de la versión 7.4.0.2 o
anterior a la versión 7.4.0.2 o
superior puede fallar. Reinstale el
firmware.
1428
No se pudo ejecutar la conversión
del programa.
Ejecute recompilar.
Recompile el proyecto.
1429
No se pudo escribir el archivo Prg.
1500
Error de comunicación.
-
1501
El comando no se completó a
tiempo.
Ejecute el comando nuevamente
después de un rato. Revise la
conexión entre EPSON RC+7.0 y el
controlador.
1502
Desconexión de la comunicación
entre RC+ y el controlador. Vuelva
a restablecer la comunicación.
Revise la conexión entre EPSON
RC+7.0 y el controlador.
1: Se agotó
el tiempo de
espera de la
comunicación
2:
Desconexión
del cable
USB
3: Error de
recepción de
USB
4: Apagado
de la
comunicación
USB
1503
Desconexión mientras se
ejecutaba una tarea.
Revise la conexión entre el
dispositivo de la consola y el
controlador.

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
808 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
1504
Desconexión de la comunicación
entre el Ethernet remoto y el
controlador. Vuelva a restablecer
la comunicación.
Revise la conexión entre el
dispositivo Ethernet remoto y el
controlador.
1505
Desconexión de la comunicación
entre RS232 remoto y el
controlador. Vuelva a restablecer
la comunicación.
Revise la conexión entre el
dispositivo RS232 remoto y el
controlador.
1506
Desconexión de la comunicación
entre TP3 y el controlador.
Vuelva a restablecer la
comunicación.
Revise la conexión entre TP3 y el
controlador.
1510 Fuera del rango de la dirección IP.
Revise la configuración de la
dirección IP del controlador.
1511 Dirección IP reservada.
La dirección IP está reservada.
Configure la otra dirección IP.
1512 Puerta de enlace de IP reservada.
La dirección de la puerta de enlace
está reservada. Configure la
dirección de la otra puerta de enlace.
1513
Las condiciones de configuración
de la dirección global no coinciden.
Defina la contraseña.
1514
Los parámetros de conexión o la
contraseña no son válidos.
Revise los parámetros y la
contraseña.
Revise los parámetros y la
contraseña.
1521
Comunicación de Vision.
No se pudo inicializar Ethernet.
Reinicie el controlador.
1522
Comunicación de Vision.
No se pudo terminar Ethernet.
-
1523
Comunicación de Vision.
No se pudo crear el identificador
de socket.
Reinicie el controlador.
1524
Comunicación de Vision.
No se pudo conectar.
Revise la conexión entre la cámara y
el controlador.
1526
Comunicación de Vision.
No se pudo enviar al servidor.
Revise la conexión entre la cámara y
el controlador.
1527
Comunicación de Vision.
No se pudo leer desde el servidor.
Revise la conexión entre la cámara y
el controlador.
1528
Comunicación de Vision.
No se pudo configurar la opción.
-
1529
Comunicación de Vision.
Ethernet aún no se ha inicializado.
Reinicie el controlador.
1530
Comunicación de Vision.
No se completó la conexión.
Revise la conexión entre la cámara y
el controlador.
1531
Comunicación de Vision.
Todos los sockets están en uso.
-
1532
Comunicación de Vision.
Tiempo de espera del envío.
Revise la conexión entre la cámara y
el controlador.
1533
Comunicación de Vision.
Tiempo de espera de recepción.
Revise la conexión entre la cámara y
el controlador.
1534
Comunicación de Vision.
Error de comunicación.
Revise la conexión entre la cámara y
el controlador.
1550
Error de comunicación.
Error de inicialización de Ethernet.
Reinicie el controlador. Revise la
conexión del cable Ethernet.
1551
Error de comunicación.
Error de inicialización de USB.
Reinicie el controlador. Revise la
conexión del cable USB.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 809
N.º Mensaje Solución Nota 1 Nota 2
1552
Error de comunicación.
Error de comunicación interna del
controlador.
Reinicie el controlador.
1553
Error de comunicación.
Se detectaron datos no válidos.
-
1555 Error de transmisión de Ethernet.
Revise la conexión entre EPSON
RC+7.0 y el controlador.
1556 Error de recepción de Ethernet.
Revise la conexión entre EPSON
RC+7.0 y el controlador.
Si se usó el router entre el PC y el
controlador, confirme que la función
DHCP esté desactivada.
1557 Error de transmisión de USB.
Revise la conexión entre EPSON
RC+7.0 y el controlador.
1558 Error de recepción de USB.
Revise la conexión entre EPSON
RC+7.0 y el controlador.
1559
Error de comunicación.
No se pudo asignar la memoria
-
1580
Error de comunicación del
analizador.
Error de comunicación.
1. Reinicie el controlador.
2. Actualice el firmware.
1581
Error de comunicación del
analizador.
Se generó el tiempo de espera
durante la comunicación.
1. Reinicie el controlador.
2. Reinstale el firmware.
1582
Error de comunicación del
analizador.
Error de transmisión.
Reinicie el controlador.
Recompile el proyecto.
1583
Error de comunicación del
analizador.
Error de inicialización.
Reinicie el controlador.
1584
Error de comunicación del
analizador.
Error de conexión.
Reinicie el controlador.
1585
Error de comunicación del
analizador.
El parámetro no es válido.
Reinicie el controlador.
Recompile el proyecto.
1586
Error de comunicación del
analizador.
Ocupado
-
1587
Error de comunicación del
analizador.
Se detectaron datos no válidos.
Actualice el firmware.
1700
Error de inicialización.
No se pudo inicializar TP.
-
1701
Error de inicialización.
No se pudo inicializar TP.
-
1702
Error de inicialización.
No se pudo inicializar TP.
-
1703
Error del archivo.
No se pudo leer el archivo de
datos de la pantalla.
-
1704
No se pudo leer el archivo de
configuración.
-
1706 No se pudo abrir el puerto TP. -
1708
No se pudo leer la tabla de claves
de TP.
-

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
810 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
1709 No se pudo cambiar el idioma. -
1710 No se pudo mostrar la pantalla. -
1800
El controlador ya está conectado
RC+.
Solo un RC+ 7.0 puede conectarse
al controlador.
1802
Se intentó el comando sin estar
conectado al controlador.
Conéctese al controlador.
1803
No se pudo leer ni escribir el
archivo en el PC.
-
1804
Error de inicialización.
No se pudo asignar la memoria en
el PC.
-
1805
Error de conexión.
Revise el inicio del controlador y la
conexión del cable de
comunicación.
-
1806
Se agotó el tiempo de espera
durante la conexión vía Ethernet.
-
1807
Se agotó el tiempo de espera
durante la conexión vía USB.
-
1808
El driver del USB no está
instalado.
No se pudo instalar EPSON RC+
7.0. Instale EPSON RC+ 7.0
nuevamente.
1809
Error de inicialización.
No se pudo inicializar el Daemon
de PC.
Reinicie el sistema.
1810
Error de Daemon de PC.
Error poco común.
1. Reinicie EPSON RC+ +7.0.
2. Reinicie el PC.
1812
Error de conexión.
El controlador conectado no es
compatible con EPSON RC+ 7.0.
Use EPSON RC+ 5.0.
El controlador conectado es RC180
o RC90 compatible con EPSON RC+
5.0.
Revise la conexión entre el PC y el
controlador.
1852
Error del sistema.
Error poco común.
1. Reinicie EPSON RC+ +7.0.
2. Reinicie el PC.
3. Reinstale EPSON RC+ 7.0.
1861
Error de inicialización.
No se pudo inicializar
SimulatorMNG.
1. Reinicie EPSON RC+ 7.0.
2. Reinicie el PC.
3. Reinstale EPSON RC+ 7.0.
1862
Error de inicialización.
Falló la inicialización de WBProxy.
1. Reinicie EPSON RC+ 7.0.
2. Reinicie el PC.
3. Reinstale EPSON RC+ 7.0.
1863
El parámetro no es válido.
-
1864
Error de inicialización.
El controlador virtual no existe.
Falla de instalación de EPSON RC+
7.0. Reinstale el software.
1865
Error de inicialización.
No se pudo iniciar el controlador
virtual.
1. Vuelva a intentarlo después de
un rato.
2. Reinicie el PC.
1867
No se puede ejecutar porque no se
encuentra en el modo de
simulacro.
El modo de simulacro no es válido.
Active el simulacro.
1868
Error de inicialización.
No se encontró el directorio.
Falla de instalación de EPSON RC+
7.0. Reinstale el software.
1872
Error de conexión.
No se encontraron los archivos
para el simulador que usaba el
controlador real.
-

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 811
N.º Mensaje Solución Nota 1 Nota 2
1873
Error de conexión.
No se encontraron los archivos
para el simulador que usaba el
controlador virtual.
-
1874
No se pudo agregar el controlador
virtual.
Falla de instalación de EPSON RC+
7.0. Reinstale el software.
1875
Error del objeto del simulador.
No se pueden cargar datos para el
objeto del simulador.
-
1876
Error del objeto del simulador.
No se pueden leer datos del objeto
del simulador.
-
1877
Error del objeto del simulador.
No se pueden eliminar datos del
objeto del simulador.
-
1878
Error del objeto del simulador.
No se pueden actualizar datos del
objeto del simulador.
-
1879
Otros controladores virtuales se
están iniciando.
Se pueden usar otros controladores
virtuales en EPSON RC+ 5.0.
O bien, el controlador virtual puede
ya estar en uso en otro EPSON
RC+7.0.
1880
No se puede ejecutar durante el
restablecimiento del controlador.
-
1901
No compatible.
Se intentó un comando no
admitido.
Actualice el firmware.
1902
No compatible.
Se especificó un parámetro no
admitido.
-
1903 Error del sistema. -
1910
Error del sistema.
No se pudo escribir el archivo de
reinicio.
-

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
812 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
2000
No compatible.
Se intentó un comando no
admitido.
Recompile el proyecto.
2001
No compatible.
Se intentó un comando de
movimiento no compatible.
Recompile el proyecto.
2003
No compatible.
Se especificó un argumento de
función no admitido.
Recompile el proyecto.
2004
No compatible.
Se especificó un valor devuelto de
función no compatible.
Recompile el proyecto.
2005
No compatible.
Se especificó una condición no
admitida.
Recompile el proyecto.
2006
No compatible.
Se especificó un comando E/S no
admitido.
Recompile el proyecto.
2007
Se especificó una condición no
admitida.
No se puede realizar el
desplazamiento en el movimiento CP
(predeterminado).
2008
No compatible.
Número de error desconocido.
Si hace clic en el mismo botón de
desplazamiento, se hará funcionar el
robot en el movimiento PTP.
2009
No compatible.
Número de tarea no válido.
No se puede realizar el
desplazamiento en el movimiento CP
(predeterminado).
2010
Error de archivo objeto.
Compile el proyecto. Fuera del
rango del código interno.
Recompile el proyecto.
2011
Error de archivo objeto.
Compile el proyecto. Error del
argumento de la función.
Recompile el proyecto.
Valor de parámetro de función no
válido
Alimentación de piezas:
Configuraciones de formato o valor
de comando incorrectas
Lea la descripción del comando
correspondiente que se entrega en
Alimentación de piezas 7.0
Introducción y hardware (común) y
software
Software 3 Referencia sobre
comandos SPEL+ para la
alimentación de piezas y corrija el
código.
2012
Error de archivo objeto.
Compile el proyecto. Error del
argumento del comando.
Recompile el proyecto.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 813
N.º Mensaje Solución Nota 1 Nota 2
Valor de parámetro de comando no
válido
Alimentación de piezas:
Configuraciones de formato o valor
de comando incorrectas
Lea la descripción del comando
correspondiente que se entrega en
Alimentación de piezas 7.0
Introducción y hardware (común) y
software
Software 3 Referencia sobre
comandos SPEL+ para la
alimentación de piezas y corrija el
código.
2013
Error de archivo objeto.
Compile el proyecto. No se puede
procesar el código.
Recompile el proyecto.
2014
Error de archivo objeto.
Compile el proyecto. No se puede
procesar el código de tipo de
variable.
Recompile el proyecto.
2015
Error de archivo objeto.
Compile el proyecto. No se puede
procesar el código de tipo de
cadena.
Recompile el proyecto.
2016
Error de archivo objeto.
Compile el proyecto. No se puede
procesar el código de categoría de
la variable.
Recompile el proyecto.
2017
Error de archivo objeto.
Compile el proyecto. No se puede
procesar debido a un código
inadecuado.
Recompile el proyecto.
2018
Error de archivo objeto.
Compile el proyecto. No se pudo
calcular el tamaño de la variable.
Recompile el proyecto.
2019
Error de archivo objeto.
No se puede procesar la espera de
la variable.
Compile el proyecto.
Recompile el proyecto.
2020
Se superó el número de tabla de la
pila.
La llamada Function o la variable
local están fuera de rango.
Revise que no se llame una función
de forma infinita. Reduzca la
profundidad de la función de
llamada.
2021
Se superó el tamaño del área de la
pila.
Error de pila. La llamada Function
o la variable local están fuera de
rango.
Si se usan muchas variables locales,
particularmente del tipo cadena,
reemplácelas con variables globales.
2022
Error de la pila. No se encontraron
los datos requeridos en la pila.
Recompile el proyecto.
2023
Error de la pila. Se encontró una
etiqueta inesperada en la pila.
Recompile el proyecto.
2024
Se superó el tamaño del área de la
pila. La variable local está fuera de
rango.
Cambie el tamaño de la variable
local.
2031
Error del sistema.
El número del robot supera el
número máximo.
Restaure la configuración del
controlador.

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
814 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
2032
Error del sistema.
Error de cumplimiento del número
de tarea.
Recompile el proyecto.
2033
Error del sistema.
Demasiados errores.
Solucione los errores que suceden
con frecuencia.
2040
Error del subproceso.
No se pudo crear el subproceso.
Reinicie el controlador.
2041
Error del subproceso.
Se agotó el tiempo de espera de
creación del subproceso.
Reinicie el controlador.
2042
Error del subproceso.
Se agotó el tiempo de espera de
término del subproceso.
Reinicie el controlador.
2043
Error del subproceso.
Se agotó el tiempo de espera de
término del subproceso.
Reinicie el controlador.
2044
Error del subproceso.
Se agotó el tiempo de espera del
proceso de Daemon.
Reinicie el controlador.
2045
Error del subproceso.
Se agotó el tiempo de espera de
continuación de la tarea.
Reinicie el controlador.
2046
Error del subproceso.
Se agotó el tiempo de espera de
parada de la tarea.
Reinicie el controlador.
2047
Error del subproceso.
Se agotó el tiempo de espera de
inicio de la tarea.
Reinicie el controlador.
2050
Error de operación del archivo
objeto.
El tamaño del archivo objeto
supera el tamaño permitido.
Recompile el proyecto.
2051
Error de operación del archivo
objeto.
No se puede eliminar el archivo
objeto durante la ejecución.
Reinicie el controlador.
2052
Error de operación del archivo
objeto.
No puede asignar la memoria para
el archivo objeto.
Reinicie el controlador.
2053
Error de operación del archivo
objeto.
No se puede acceder al archivo
objeto mientras se actualiza.
Realice el mismo procesamiento
después de un tiempo. Recompile el
proyecto.
2054
Error de operación del archivo
objeto.
Error de ID de la función.
Recompile el proyecto.
Sincronice los archivos del proyecto.
Recompile el proyecto.
2055
Error de operación del archivo
objeto.
Error de ID de la variable local.
Recompile el proyecto.
Sincronice los archivos del proyecto.
Recompile el proyecto.
2056
Error de operación del archivo
objeto.
Error de ID de la variable global.
Recompile el proyecto.
Sincronice los archivos del proyecto.
Recompile el proyecto.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 815
N.º Mensaje Solución Nota 1 Nota 2
2057
Error de operación del archivo
objeto.
Error de ID de la variable global
conservada. Recompile el
proyecto.
Sincronice los archivos del proyecto.
Recompile el proyecto.
2058
Error de operación del archivo
objeto.
No se pudo calcular el tamaño de
la variable.
Sincronice los archivos del proyecto.
Recompile el proyecto.
2059
Se superó el área de la variable
global.
No se puede asignar el área de la
variable global porque no se pudo
asignar la memoria.
Reduzca el número de variables
globales que se usarán.
2070
Error de SRAM.
SRAM no está asignado.
Reemplace la placa de la CPU.
2071
Error de SRAM.
No se puede eliminar cuando la
variable global conservada está en
uso.
Realice el mismo procesamiento
después de un tiempo. Recompile el
proyecto.
2072
Se superó el área de la variable de
copia de seguridad.
No se puede asignar el área de la
variable global conservada porque
no se pudo asignar la memoria.
Reduzca el número de variables
globales conservadas que se usarán.
Tamaño
máximo
El tamaño
que intentó
usar
2073
Error de SRAM.
No se pudo borrar el área de la
variable global conservada.
Recompile el proyecto.
2074
Error de SRAM.
No se pudo limpiar el área de
guardado de la variable global
conservada.
Reinicie el controlador.
2100
Error de inicialización.
No se pudo abrir el archivo de
inicialización.
Restaure la configuración del
controlador.
2101
Error de inicialización.
Inicialización duplicada.
Reinicie el controlador.
2102
Error de inicialización.
No se pudo inicializar MNG.
Reinicie el controlador.
2103
Error de inicialización.
No se pudo crear un evento.
Reinicie el controlador.
2104
Error de inicialización.
No se pudo configurar una
prioridad.
Reinicie el controlador.
2105
Error de inicialización.
No se pudo configurar el tamaño
de la pila.
Reinicie el controlador.
2106
Error de inicialización.
No se pudo configurar un proceso
de interrupción.
Reinicie el controlador.
2107
Error de inicialización.
No pudo iniciar un proceso de
interrupción.
Reinicie el controlador.
2108
Error de inicialización.
No se pudo detener un proceso de
interrupción.
Reinicie el controlador.

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
816 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
2109
Error de inicialización.
No se pudo terminar MNG.
Reinicie el controlador.
2110
Error de inicialización.
No se pudo asignar la memoria.
Reinicie el controlador.
2111
Error de inicialización.
No se pudo inicializar el
movimiento.
Restaure la configuración del
controlador.
2112
Error de inicialización.
No se pudo terminar el movimiento.
Reinicie el controlador.
2113
Error de inicialización.
No se pudo asignar la SRAM.
Reemplace la placa de la CPU.
2114
Error de inicialización.
No se pudo registrar la SRAM.
Reemplace la placa de la CPU.
2115
Error de inicialización.
Las placas de bus de campo
superan el número máximo.
Revise el número de placas del bus
de campo.
2116
Error de inicialización.
No se pudo inicializar el bus de
campo.
Reinicie el controlador.
Revise la placa del bus de campo.
Reemplace la placa del bus de
campo.
2117
Error de inicialización.
No se pudo terminar el bus de
campo.
Reinicie el controlador.
2118
Error de inicialización.
No se pudo abrir el movimiento.
Restaure la configuración del
controlador.
2119
Error de inicialización.
No se pudo inicializar el
seguimiento del transportador.
Asegúrese de que la configuración
del transportador y el codificador sea
correcta.
2120
Error de inicialización.
No se pudo asignar el área del
sistema.
Reinicie el controlador.
2121
Error de inicialización.
No se pudo asignar el área del
archivo objeto.
Reinicie el controlador.
2122
Error de inicialización.
No se pudo asignar el área del
robot.
Reinicie el controlador.
2123
Error de inicialización.
No se pudo crear el evento.
Reinicie el controlador.
2124
Error de inicialización.
Está instalado un módulo de bus
de campo no compatible.
Instale el módulo de bus de campo
comprado desde SEC.
2126
Se inicializó la configuración, ya
que el archivo de configuración
inicial está dañado. Restaure el
sistema.
Como el archivo de configuración
inicial está dañado de manera
significativa, se usa el archivo de
configuración inicial predeterminado
de fábrica.
2130
Error de MCD.
No se pudo abrir el archivo MCD.
Restaure la configuración del
controlador.
2131
Error de MCD.
No se pudo asignar el archivo
MCD.
Restaure la configuración del
controlador.
2132
Error de PRM.
No se pudo encontrar el archivo
PRM.
Restaure la configuración del
controlador.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 817
N.º Mensaje Solución Nota 1 Nota 2
2133
Error de PRM.
No se pudo asignar el archivo
PRM.
Restaure la configuración del
controlador.
2134
Error de PRM.
Error de contenido del archivo
PRM.
Restaure la configuración del
controlador.
2135
Error de PRM.
No se pudo convertir el archivo
PRM.
Reinicie el controlador.
2136
Error de PRM.
No se pudo convertir el archivo
PRM.
Reinicie el controlador.
2137
Error de PRM.
No se pudo convertir el archivo
PRM.
Reinicie el controlador.
2140
Error de inicialización de DU.
No se pueden usar las unidades de
mando.
La comunicación con las unidades
de mando no está disponible para los
controladores virtuales. Regrese el
archivo de configuración a los
valores originales si es que se
cambió.
2141
Error de inicialización de DU. No se
pudieron inicializar las unidades de
mando.
Revise la conexión con las unidades
de mando.
2142
Error de inicialización de DU.
No se pudieron inicializar las
unidades de mando.
Revise la conexión con las unidades
de mando.
2143
Error de inicialización de DU.
Se agotó el tiempo de espera
durante la inicialización de las
unidades de mando.
Revise la conexión con las unidades
de mando.
2144
Error de inicialización de DU.
No hay datos para descargar en
las unidades de mando.
Reinicie la unidad de control y las
unidades de mando.
2145
Error de inicialización de DU.
No se pudo iniciar la comunicación
con las unidades de mando.
Reinicie la unidad de control y las
unidades de mando.
2146
Error de inicialización de DU.
Se agotó el tiempo de espera
cuando se iniciaba la comunicación
con las unidades de mando.
Reinicie la unidad de control y las
unidades de mando.
2147
Error de inicialización de DU. No se
pudo actualizar el software de las
unidades de mando.
Revise la configuración de
actualización de software.
Revise la conexión con la unidad de
mando.
2148
Error de inicialización de DU. No se
pudo actualizar el software de las
unidades de mando.
Revise el nombre del archivo.
Revise el archivo de actualización.
2149
Error de inicialización de DU. No se
pudo actualizar el software de las
unidades de mando.
Revise la potencia y conexión de la
unidad de mando.
Reinicie el controlador.
2150
Error de operación.
No se pudo encontrar el número de
la tarea.
Reinicie el controlador.
2151
Error de operación.
Ejecución de la tarea.
Reinicie el controlador.

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
818 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
2152
Error de operación.
Error del tamaño del código de
objeto.
Reinicie el controlador.
2153
Error de operación.
Error del parámetro de
desplazamiento.
Reinicie el controlador.
2154
Error de operación.
Ejecución del desplazamiento.
Reinicie el controlador.
2155
Error de operación.
No se puede ejecutar la función de
desplazamiento.
Reinicie el controlador.
2156
Error de operación.
No se configuraron los datos de
desplazamiento.
Reinicie el controlador.
2157
Error de operación.
No se pudo cambiar el parámetro
de desplazamiento.
Reinicie el controlador.
2158
Error de operación.
No se pudo asignar el área para el
punto de interrupción.
Reinicie el controlador.
2159
Error de operación.
El número de puntos de
interrupción supera el número de
configuración permitido.
Reduzca los puntos de interrupción.
2160
Error de operación.
No se pudo asignar la ID de
función.
Reinicie el controlador.
2161
Error de operación.
No se pudo asignar la dirección de
la variable local.
Reinicie el controlador.
2162
Error de operación.
No hay búfer suficiente para
almacenar la variable local.
Revise el tamaño de la variable local.
2163
Error de operación.
El cambio de valor está disponible
solamente cuando se suspende la
tarea.
Suspenda la tarea mediante el punto
de interrupción.
2164
Error de operación.
No se pudo asignar la dirección de
la variable global.
Revise el tamaño de la variable
global.
2165
Error de operación.
No hay búfer suficiente para
almacenar la variable global.
Revise el tamaño de la variable
global.
2166
Error de operación.
No se pudo obtener la dirección de
la variable global conservada.
Revise el tamaño de la variable
global conservada.
2167
Error de operación.
No hay búfer suficiente para
almacenar la variable global
conservada.
Revise el tamaño de la variable
global conservada.
2168
Error de operación.
SRAM no está asignado.
Reinicie el controlador.
2169
Error de operación.
No se puede borrar la variable
global conservada cuando se carga
el archivo objeto.
Reinicie el controlador.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 819
N.º Mensaje Solución Nota 1 Nota 2
2170
Error de operación.
No hay búfer suficiente para
almacenar la cadena.
Revise el tamaño de la variable de
cadena.
2171
Error de operación.
No se puede iniciar la tarea
después de detectar un bajo
voltaje.
Revise la potencia del controlador.
Reinicie el controlador.
2172
Error de operación.
Configuración de E/S remota
duplicada.
Reinicie el controlador.
2173
Error de configuración remota.
No se puede asignar un número de
entrada inexistente a la función
remota.
Revise el número de entrada de E/S.
2174
Error de configuración remota.
No se puede asignar un número de
salida inexistente a la función
remota.
Revise el número de salida de E/S.
2175
Error de operación.
No se configuró la función remota.
Reinicie el controlador.
2176
Error de operación.
Error de espera del evento.
Reinicie el controlador.
2177
Error de operación.
Falla de la copia de seguridad del
sistema.
Reinicie el controlador.
Instale el firmware del controlador.
2178
Error de operación.
Falla de restauración del sistema.
Reinicie el controlador.
Instale el firmware del controlador.
2179
Error de configuración remota.
No se puede asignar el mismo
número de entrada a algunas
funciones remotas.
Revise la configuración remota.
2180
Error de configuración remota.
No se puede asignar el mismo
número de salida a algunas
funciones remotas.
Revise la configuración remota.
2181
Error de operación.
El número de tarea no se ha
reservado para la API de RC+.
Configure el número de tareas de la
API de RC+.
2190
No se puede calcular porque son
datos de la cola.
Revise el programa.
2191
No se puede ejecutar AbortMotion
porque el robot no se ejecuta
desde una tarea.
Si no opera el robot desde un
programa, no puede usar
AbortMotion.
2192
No puede ejecutar AbortMotion
porque la tarea del robot ya
finalizó.
La tarea está completa.
Revise el programa.
2193
No puede ejecutar Recover sin el
movimiento, porque AbortMotion
no se ejecutó.
Ejecute AbortMotion antes de
ejecutar Recover WithoutMove.
2194
Error de configuración del
transportador.
Asegúrese de que la configuración
del transportador y el codificador sea
correcta.
2195
Error de configuración del
transportador.
Asegúrese de que la configuración
del transportador y el codificador sea
correcta.
2196
El número del transportador está
fuera de rango.
Asegúrese de que la configuración
del transportador y el codificador sea
correcta.

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
820 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
2197
Se usó un parámetro de comando
prohibido para el movimiento de
seguimiento del transportador.
Elimine LJM.
2200
Robot en uso.
No se puede ejecutar el comando
de movimiento cuando otras tareas
están usando el robot.
El comando de movimiento del robot
no se puede ejecutar
simultáneamente desde más de una
tarea. Revise el programa.
2201 El robot no existe.
Revise si la configuración del robot
se realizó correctamente. Restaure la
configuración del controlador.
2202
Error de estado del módulo de
control de movimiento. Se arrojó
un error desconocido.
Recompile el proyecto.
2203
No se puede borrar el número local
' 0 '.
No se puede borrar el número local
0. Revise el programa.
2204
No se puede borrar un brazo
mientras está en uso.
No se puede borrar el brazo mientras
está en uso. Revise si el brazo no
está en uso.
El número de
brazo que
intentó borrar
2205
No se puede borrar el número de
brazo ' 0 '.
No se puede borrar el número de
brazo 0. Revise el programa.
2206
No se puede borrar una
herramienta mientras está en uso.
No se puede borrar la herramienta
mientras está en uso. Revise si la
herramienta no está en uso.
El número de
herramienta
que intentó
borrar
2207
No se puede borrar el número de
herramienta ' 0 '.
No se puede borrar el número de
herramienta 0. Revise el programa.
2208 No se puede borrar ECP ' 0 '.
No se puede borrar el número ECP
0. Revise el programa.
2209
No se puede borrar un ECP
mientras está en uso.
No se puede borrar el ECP mientras
está en uso. Revise si el ECP no
está en uso.
El número de
ECP que
intentó borrar
2210
No se puede especificar ' 0 ' como
el número local.
El comando que procesa el valor
local no puede especificar el número
local 0. Revise el programa.
2216
El número de caja está fuera de
rango.
Los números de caja disponibles
varían de 1 a 15. Revise el
programa.
2217 El número de caja no está definido.
La caja especificada no está
definida.
Revise el número de caja.
2218
El número de plano está fuera de
rango.
Los números de caja disponibles
varían de 1 a 15. Revise el
programa.
2219
El número de plano no está
definido.
El plano especificado no está
definido. Revise el número de plano.
2220
Error de PRM. No se encontraron
datos del archivo PRM.
Reinicie el controlador. Restaure la
configuración del controlador.
2221
Error de PRM. No se pudo
actualizar el archivo PRM.
Reinicie el controlador. Restaure la
configuración del controlador.
2222 El número local no está definido.
Revise la configuración local. Revise
el programa.
El número
local
especificado

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 821
N.º Mensaje Solución Nota 1 Nota 2
2223
El número local está fuera de
rango.
El número local disponible es de 1 a
15. Revise el programa.
El número
local
especificado
2224
No compatible. MCOFS no está
definido
-
2225 CalPls no está definido. Revise la configuración de CalPls.
2226
El número de brazo está fuera de
rango.
El número de brazo disponible es de
0 a 3. Dependiendo de los
comandos, el número de brazo 0 no
está disponible. Revise el programa.
El número de
brazo
especificado
2227
El número de brazo no está
definido.
Revise la configuración del brazo.
Revise el programa.
El número de
brazo
especificado
2228
El pulso para la posición de reposo
no está definido.
Revise la configuración de HomeSet.
2229
El número de herramienta está
fuera de rango.
El número de herramienta disponible
varía de 0 a 3. Según los comandos,
el número de herramienta 0 no está
disponible. Revise el programa.
El número de
herramienta
especificado
2230
El número de la herramienta no
está definido.
Revise la configuración de la
herramienta. Revise el programa.
El número de
herramienta
especificado
2231
El número ECP está fuera de
rango.
El número de herramienta disponible
varía de 0 a 15. Según los
comandos, el número de herramienta
0 no está disponible. Revise el
programa.
El número
ECP
especificado
2232 El número ECP no está definido.
Revise la configuración de ECP.
Revise el programa.
El número
ECP
especificado
2233
El eje para restablecer el
codificador no está especificado.
Asegúrese de especificar el eje para
restablecer el codificador.
2234
No se puede restablecer el
codificador con el motor en el
estado ON.
Apague el motor antes de
restablecerlo.
2235 XYLIM no está definido.
Revise la configuración de XYLim.
Revise el programa.
2236
Error de PRM. No se pudo
configurar el contenido del archivo
PRM para el módulo de estado del
control de movimiento.
Reinicie el controlador. Restaure la
configuración del controlador.
2237
El número de pallet está fuera de
rango.
Los números de pallets disponibles
son de 0 a 15. Revise el programa.
2238 El pallet no está definido. Revise la configuración de pallet.
2240
El subíndice de la matriz está fuera
del rango definido por el usuario.
No se puede tener acceso ni
actualizar fuera de los límites de la
matriz.
Revise el subíndice de la matriz.
Revise el programa.
Las
dimensiones
superan la
definición
El subíndice
especificado
2241
Las dimensiones de la matriz no
coinciden con la declaración.
Revise las dimensiones de la matriz.
Revise el programa.
2242
Se usó cero '0' como divisor.
Revise el programa.
2243
Desbordamiento de la variable. La
variable especificada superaba el
valor máximo permitido.
Revise el tipo de variable y el
resultado del cálculo. Revise el
programa.

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
822 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
2244
Subdesbordamiento de la variable.
La variable especificada era inferior
al valor mínimo permitido.
Revise el tipo de variable y el
resultado del cálculo. Revise el
programa.
2245
No se puede ejecutar este
comando con un número de punto
flotante.
No se puede ejecutar este comando
para el tipo Real o Double. Revise el
programa.
2246
No se puede calcular el valor
especificado con la función Tan.
Revise el valor especificado. Revise
el programa.
El valor
especificado
2247
El subíndice de la matriz
especificada es inferior a ' 0 '.
Revise el valor especificado. Revise
el programa.
El valor
especificado
2248
Error de matriz. Redim solo se
puede ejecutar para una variable
de matriz.
Intentó Redim en una variable que
no es de una matriz. Recompile el
proyecto.
2249
Error de matriz. Solo puede
especificar Preserve para la matriz
de una sola dimensión.
Se especificó otra matriz que no es
de una sola dimensión como
Preserve para Redim. Recompile el
proyecto.
2250
Error de matriz. No se pudo
calcular el tamaño del área de la
variable.
Recompile el proyecto.
2251
No se pudo asignar suficiente
memoria para la instrucción Redim.
Reduzca el número de subíndices
que se especificarán para Redim.
Realice Redim con moderación.
2252
No se puede asignar memoria
suficiente para ByRef.
Reduzca el número de subíndices de
la matriz que se verán mediante
ByRef.
2253
No se pueden comparar caracteres
con valores.
Revise que el tipo de cadena y el tipo
de datos numéricos no se comparen.
Revise el programa.
2254
Los datos especificados superan
los límites de la matriz. No se
puede consultar o actualizar fuera
de los límites de la matriz.
Revise el número de subíndices y
datos de la matriz. Revise el
programa.
El número de
subíndices de
la matriz
El número
de datos que
se
consultarán
o
actualizarán
2255
Desbordamiento o
subdesbordamiento de la variable.
La variable especificada está fuera
de rango de valor.
Se especificó el valor que supera el
rango del tipo Double. Revise el
programa.
2256
El subíndice de la matriz
especificada está fuera del rango
permitido máximo.
Reduzca el número de subíndices
que se especificarán. Para conocer
los subíndices disponibles, consulte
la ayuda en línea.
2257
No se puede especificar la variable
Int64 ni la variable UInt64.
Ni la variable Int64 ni la variable
UInt64 se pueden especificar.
Corrija el programa.
2260
El número de tarea está fuera del
rango disponible.
Para conocer el número de tarea
disponible, consulte la ayuda en
línea. Revise el programa.
El número de
tarea
especificado
2261
El número de tarea especificado no
existe.
Revise el programa.
El número de
tarea
especificado
2262
El número de robot está fuera del
rango disponible.
El número de robot disponible es 1.
Revise el programa.
El número de
robot
especificado

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 823
N.º Mensaje Solución Nota 1 Nota 2
2263
El número de salida está fuera del
rango disponible. El n.º de puerto o
el n.º de dispositivo están fuera del
rango disponible.
Para conocer el número de salida
disponible, consulte la ayuda en
línea. Revise el programa.
El número de
salida
especificado
2264
El argumento del comando está
fuera del rango disponible. Revise
los argumentos. Datos agregados
1: Valor aprobado. Datos
agregados 2: orden del argumento.
Para conocer el rango del argumento
disponible, consulte la ayuda en
línea. Revise el programa.
El valor
agregado
¿Qué
argumento
de número?
Parámetro de comando fuera de
rango
Alimentación de piezas:
Configuraciones de formato o valor
de comando incorrectas
Lea la descripción del comando
correspondiente que se entrega en
Alimentación de piezas 7.0
Introducción y hardware (común) y
software
Software 3 Referencia sobre
comandos SPEL+ para la
alimentación de piezas y corrija el
código.
2265
El número de articulación está
fuera del rango disponible.
El número de articulación disponible
es de 1 a 6. Revise el programa.
El número de
articulación
especificado
2266
El tiempo de espera está fuera del
rango disponible.
El tiempo de espera disponible es de
0 a 2147483. Revise el programa.
El tiempo de
espera
especificado
2267
El número de temporizador está
fuera del rango disponible.
El número de temporizador
disponible es de 0 a 15. Revise el
programa.
El número de
temporizador
especificado
2268
El número de captura está fuera
del rango disponible.
El número de captura disponible es
de 1 a 4. Revise el programa.
El número de
captura
especificado
2269
La ID de idioma está fuera del
rango disponible.
Para conocer la ID de idioma
disponible, consulte la ayuda en
línea. Revise el programa.
La ID de
idioma
especificada
2270
El valor del parámetro D
especificado para el proceso
paralelo está fuera del rango
disponible.
El valor de parámetro D disponible
es de 0 a 100. Revise el programa.
El valor de
parámetro D
especificado
2271
El número de arco está fuera del
rango disponible.
El número de arco disponible es de 0
a 7. Revise el programa.
El número de
arco
especificado
2272
El n.º de dispositivo está fuera del
rango disponible.
El número especificado que
representa un dispositivo de control o
un dispositivo de presentación está
fuera del rango disponible. Para
conocer el número de dispositivo
disponible, consulte la ayuda en
línea. Revise el programa.
El número de
dispositivo
especificado
2273
Los datos de salida están fuera del
rango disponible.
El valor de los datos de salida
disponibles es de 0 a 255. Revise el
programa.
Datos de
salida
¿Qué datos
de byte del
número
están fuera
de rango?
2274
El argumento Asin está fuera del
rango disponible. El rango es de -1
a 1.
Revise el programa.

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
824 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
2275
El argumento Acos está fuera del
rango disponible. El rango es de -1
a 1.
Revise el programa.
2276
El argumento Sqr está fuera del
rango disponible.
Revise el programa.
2277
El argumento Randomize está
fuera del rango disponible.
Revise el programa.
2278
El argumento Sin, Cos, Tan está
fuera del rango disponible.
Revise el programa.
2280
El período de tiempo de espera
configurado con la instrucción
TMOut expiró antes de que la
condición de espera terminara en
la instrucción WAIT.
Investigue la causa del tiempo de
espera. Revise si es correcto el
período de tiempo de espera
configurado.
Período de
tiempo de
espera
2281
Expiró el período de tiempo de
espera configurado con la
instrucción TMOut en las
instrucciones WaitSig o SyncLock.
Investigue la causa del tiempo de
espera. Revise si es correcto el
período de tiempo de espera
configurado.
Número de
señal
Período de
tiempo de
espera
2282
Expiró el período de tiempo de
espera configurado con la
instrucción TMOut en la instrucción
WaitNet.
Investigue la causa del tiempo de
espera. Revise si es correcto el
período de tiempo de espera
configurado.
Número de
puerto
Período de
tiempo de
espera
2283
Tiempo de espera.
Se agotó el tiempo de espera en la
configuración del dispositivo de
presentación.
Reinicie el controlador.
2290
No se puede ejecutar un comando
de movimiento.
No se puede ejecutar un comando
de movimiento después de usar la
función de usuario en el comando de
movimiento. Revise el programa.
2291
No se puede ejecutar el comando
OnErr.
No se puede ejecutar OnErr en el
comando de movimiento cuando se
usa la función de usuario en el
comando de movimiento. Revise el
programa.
2292
No se puede ejecutar el comando
de E/S mientras está abierta la
protección. Necesidad forzada.
No se puede ejecutar el comando de
E/S mientras está abierta la
protección. Revise el programa
2293
No se puede ejecutar un comando
de E/S durante la condición de
parada de emergencia. Necesidad
forzada.
No se puede ejecutar el comando de
E/S durante la condición de parada
de emergencia. Revise el programa.
2294
No se puede ejecutar el comando
de E/S cuando se ha detectado un
error. Necesidad forzada.
No se puede ejecutar el comando de
E/S mientras ocurre un error. Revise
el programa.
2295
No se puede ejecutar este
comando desde una tarea
NoEmgAbort y una tarea en
segundo plano.
Para conocer detalles sobre los
comandos ejecutables, consulte la
ayuda en línea.
Revise el programa.
2296
Se actualizaron uno o más
archivos de origen. Compile el
proyecto.
Recompile el proyecto.
2297
No se puede ejecutar el comando
de E/S en el modo TEACH sin el
parámetro Forced.
No se puede ejecutar el comando de
E/S en el modo TEACH. Revise el
programa.
2298
No se puede continuar la ejecución
en el proceso Trap SGClose.
No puede ejecutar las instrucciones
Cont y Recover con la tarea de
procesamiento Trap SGClose.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 825
N.º Mensaje Solución Nota 1 Nota 2
2299
No se puede ejecutar este
comando. Necesita la
configuración [enable the advance
task control commands] (active los
comandos de control de la tarea
avanzada) desde la configuración
de preferencias del controlador
RC+.
Active [enable the advance task
control commands] desde RC+ para
ejecutar el comando.
2300
Robot en uso. No se puede
ejecutar el comando de movimiento
cuando otra tarea está usando al
robot.
El comando de movimiento del robot
no se puede ejecutar
simultáneamente desde más de una
tarea. Revise el programa.
El número de
tarea que
está usando
al robot
2301
No se puede ejecutar el comando
de movimiento cuando Enable
Switch (Interruptor de activación)
está en OFF.
Ejecute el comando de movimiento
con el interruptor de activación
agarrado.
2302
No se puede ejecutar la instrucción
Call en un proceso Trap Call.
No se puede llamar a otra función
desde la función que llama Trap Call.
Revise el programa.
2303
No se puede ejecutar la instrucción
Call en un proceso paralelo.
Revise el programa.
2304
No se puede ejecutar la instrucción
Xqt en un proceso paralelo.
Revise el programa.
2305
No se puede ejecutar la instrucción
Call desde la ventana Command.
Ejecute Call desde el programa.
2306
No se puede ejecutar la instrucción
Xqt desde la tarea iniciada por
Trap Xqt.
Revise el programa.
2307
No se puede ejecutar este
comando mientras las tareas están
en ejecución.
Revise si todas las tareas se han
completado.
2308
No se puede encender el motor
debido a un error crítico.
Encuentre el error que ocurrió
anteriormente en el historial de
errores y resuelva su causa. Luego,
reinicie el controlador.
2309
No se puede ejecutar el comando
de movimiento mientras está
abierta la protección.
Revise el estado de protección.
2310
No se puede ejecutar el comando
de movimiento mientras se espera
a que continúe.
Ejecute Continue o Stop y luego
ejecute el comando de movimiento.
2311
No se puede ejecutar un comando
de movimiento durante el proceso
de continuación.
Espere a que termine Continue y
luego ejecute el comando de
movimiento.
2312
No se puede ejecutar la tarea
durante la condición de parada de
emergencia.
Revise el estado de parada de
emergencia.
2313
No se puede continuar la ejecución
inmediatamente después de abrir
la protección.
Espere 1,5 segundos después de
abrir la protección y luego ejecute
Continue.
2314
No se puede continuar la ejecución
mientras está abierta la protección.
Revise el estado de protección.
2315
No se puede ejecutar el comando
Cont and Restart en la operación
de reanudación.
Espere hasta que finalice Continue.
2316
No se puede continuar la ejecución
después de haber detectado un
error.
Revise el estado del error.

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
826 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
2317
No se puede ejecutar la tarea
cuando se ha detectado un error.
Restablezca el error con Reset y
luego ejecute la tarea.
2318
No se puede ejecutar un comando
de movimiento cuando se ha
detectado un error.
Ejecute el comando de movimiento
después de restablecer el error con
Reset.
2319
No se puede ejecutar un comando
de E/S durante la condición de
parada de emergencia.
Revise el estado de parada de
emergencia.
2320
Error de función. El tipo de
argumento no coincide.
Recompile el proyecto.
2321
Error de función. El valor devuelto
no coincide con la función.
Recompile el proyecto.
2322
Error de función.
El tipo ByRef no coincide.
Recompile el proyecto.
2323
Error de función. No se pudo
procesar el parámetro ByRef.
Recompile el proyecto.
2324
Error de función. La dimensión del
parámetro ByRef no coincide.
Recompile el proyecto.
2325
Error de función. No se puede
usar ByRef en una instrucción Xqt.
Recompile el proyecto.
2326
No se puede ejecutar una
instrucción Dll Call desde la
ventana Command.
Ejecute DII Call desde el programa.
2327 No se pudo ejecutar una Dll Call.
Revise la DLL.
Revise el programa.
2328
No se puede ejecutar la tarea
antes de la conexión con RC+.
Necesita conectarse con RC+ antes
de ejecutar la tarea.
2329
No se puede ejecutar una
instrucción Eval en un proceso
Trap Call.
Revise el programa.
2330
Error de captura.
No se puede usar el argumento en
la instrucción Trap Call o Xqt.
Revise el programa.
2331
Error de captura.
No se pudo procesar la instrucción
Trap Goto.
Recompile el proyecto.
2332
Error de captura.
No se pudo procesar la instrucción
Trap Goto.
Recompile el proyecto.
2333
Error de captura.
La captura ya está en proceso.
Recompile el proyecto.
2334
No se puede ejecutar una
instrucción Eval en un proceso
Trap Finish o Trap Abort.
Revise el programa.
2335
No se puede continuar la ejecución
y Reset Error en el modo TEACH.
Revise el programa.
2336
No se puede la instrucción Here
con un proceso paralelo.
Go Here :Z(0) ! D10; MemOn(1) !
no es ejecutable.
Cambie el programa:
P999 = Here
Go P999 Here :Z(0) ! D10;
MemOn(1) !
2337
No se puede ejecutar, excepto
desde las funciones del
identificador de eventos de GUI
Builder.
Revise el programa.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 827
N.º Mensaje Solución Nota 1 Nota 2
2338
No se puede ejecutar Xqt, la
entrada de datos y la salida para
TP en el modo TEST.
No se puede ejecutar en el modo
TEST.
Revise el programa.
2339
No se puede ejecutar en el modo
independiente.
Cambie la configuración a
“cooperative mode” (modo
cooperativo) y ejecute.
2340
El valor especificado en la función
InBCD no es un valor BCD válido.
Revise el programa.
Dígito de
decenas
Dígito de
unidades
2341
El valor especificado en la
instrucción OpBCD no es un valor
BCD válido.
Revise el programa.
El valor
especificado
2342
No se puede cambiar el estado del
bit de salida configurado como
salida remota.
Revise la configuración de E/S
remota.
Número de
E/S
1: bit, 2:
byte, 3:
palabra
2343
El tiempo de salida para la salida
asincrónica ordenada por la
instrucción On u Off está fuera del
rango disponible.
Revise el programa.
El tiempo
especificado
2344
El número de bit de entrada/salida
de E/S está fuera del rango
disponible o la placa no está
instalada.
Revise el programa.
Revise si se detectó correctamente
la placa E/S de expansión y la placa
E/S de bus de campo.
Número de bit
2345
El número de byte de
entrada/salida de E/S está fuera
del rango disponible o la placa no
está instalada.
Revise el programa.
Revise si se detectó correctamente
la placa E/S de expansión y la placa
E/S de bus de campo.
Número de
byte
2346
El número de palabra de
entrada/salida de E/S está fuera
del rango disponible o la placa no
está instalada.
Revise el programa.
Revise si se detectó correctamente
la placa E/S de expansión y la placa
E/S de bus de campo.
Número de
palabra
2347
El número de bit de E/S de
memoria está fuera del rango
disponible.
Revise el programa. Número de bit
2348
El número de byte de E/S de
memoria está fuera del rango
disponible.
Revise el programa.
Número de
byte
2349
El número de palabra de E/S de
memoria está fuera del rango
disponible.
Revise el programa.
Número de
palabra
2350
El comando se permite solo
cuando está activo el modo E/S
virtual.
El comando puede ejecutarse solo
para el modo E/S virtual.
2353
El comando especificado no se
puede ejecutar desde la ventana
Command.
Ejecute el comando especificado
desde el programa.
Alimentación de piezas:
No se puede ejecutar el comando en
la ventana Command.
2354
No se puede ejecutar el comando
de salida de E/S cuando Enable
Switch está en OFF.
Ejecute el comando de salida de E/S
con el interruptor de activación
agarrado.
2360
Error del archivo.
No se pudo abrir el archivo de
configuración.
Restaure la configuración del
controlador.
2361
Error del archivo.
No se pudo cerrar el archivo de
configuración.
Restaure la configuración del
controlador.

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
828 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
2362
Error del archivo.
No se pudo abrir la clave del
archivo de configuración.
Restaure la configuración del
controlador.
2363
Error del archivo.
No se pudo obtener una cadena
desde el archivo de configuración.
Restaure la configuración del
controlador.
2364
Error del archivo.
No se pudo escribir en el archivo
de configuración.
Restaure la configuración del
controlador.
2365
Error del archivo.
No se pudo actualizar el archivo de
configuración.
Restaure la configuración del
controlador.
2370
La combinación de la cadena
supera la longitud de cadena
máxima.
La longitud máxima de la cadena es
255. Revise el programa.
Longitud de
cadena
combinada
2371
La longitud de la cadena está fuera
de rango.
La longitud máxima de la cadena es
255. Revise el programa.
La longitud
especificada
2372
Se especificó un carácter no válido
después del ampersand en la
función Val.
Revise el programa.
2373
Se especificó una cadena no válida
para la función Val.
Revise el programa.
2374
Error de cadena. Código de
carácter no válido en la cadena.
Revise el programa.
2380
No se puede usar ' 0 ' para el valor
Step en For...Next.
Revise el valor Step.
2381
La relación entre For...Next y
GoSub no es válida. Entrada o
salida de For...Next mediante una
instrucción Goto.
Revise el programa.
2382
No se puede ejecutar Return
mientras se ejecuta OnErr.
Revise el programa.
2383
Se usó Return sin GoSub. Revise
el programa.
Revise el programa.
2384
Se usó Case o Send sin Select.
Revise el programa.
Revise el programa.
2385
No se puede ejecutar EResume
mientras se ejecuta GoSub.
Revise el programa.
2386
Se usó EResume sin OnErr.
Revise el programa.
Revise el programa.
2400
Error de curva.
No se pudo abrir el archivo de
curva.
Reinicie el controlador.
Cree un archivo de curva
nuevamente.
2401
Error de curva.
No se pudieron asignar los datos
de encabezado del archivo de
curva.
Reinicie el controlador.
Cree un archivo de curva
nuevamente.
2402
Error de curva.
No se pudo escribir el archivo de
curva.
Reinicie el controlador.
Cree un archivo de curva
nuevamente.
2403
Error de curva.
No se pudo abrir el archivo de
curva.
Reinicie el controlador.
Cree un archivo de curva
nuevamente.
2404
Error de curva.
No se pudo actualizar el archivo de
curva.
Reinicie el controlador.
Cree un archivo de curva
nuevamente.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 829
N.º Mensaje Solución Nota 1 Nota 2
2405
Error de curva.
No se pudo leer el archivo de
curva.
Reinicie el controlador.
Cree un archivo de curva
nuevamente.
2406
Error de curva.
El archivo de curva está dañado.
Reinicie el controlador.
Cree un archivo de curva
nuevamente.
2407
Error de curva.
Especifique un archivo distinto del
archivo de curva.
Reinicie el controlador.
Cree un archivo de curva
nuevamente.
2408
Error de curva.
La versión del archivo de curva no
es válida.
Reinicie el controlador.
Cree un archivo de curva
nuevamente.
2409
Error de curva.
El número de robot en el archivo
de curva no es válido.
Reinicie el controlador.
Cree un archivo de curva
nuevamente.
2410
Error de curva.
No se puede asignar suficiente
memoria para la instrucción
CVMove.
Reinicie el controlador.
2411
Los datos de punto especificados
en la instrucción Curve superan el
número máximo.
El número máximo de puntos
especificado en la instrucción Curve
es 200. Revise el programa.
2412
El número de comandos de salida
especificado en la instrucción
Curve supera el número máximo.
El número máximo de comandos de
salida especificado en la instrucción
Curve es 16. Revise el programa.
2413
Error de curva. El código interno
especificado supera el tamaño
permitido en la instrucción Curve.
Reinicie el controlador.
2414
Los datos de punto de continuación
P(:) especificados superan el
número máximo.
El número máximo de puntos
especificado continuamente es 200.
Revise el programa.
Punto de
inicio
Punto final
2415
Error de curva.
No se puede crear un archivo de
curva.
Reinicie el controlador.
Cree un archivo de curva
nuevamente.
2416 El archivo de curva no existe.
Revise si el nombre del archivo de
curva especificado es correcto.
2417
Error de curva.
El comando de salida se especifica
antes de los datos de punto.
Revise que no se especifique un
comando de salida antes de los
datos de punto.
2430
Error del mensaje de error.
El archivo de mensajes de error no
existe.
Reinicie el controlador.
2431
Error del mensaje de error.
No se pudo abrir el archivo de
mensajes de error.
Reinicie el controlador.
2432
Error del mensaje de error.
No se pudieron obtener los datos
de encabezado del archivo de
mensajes de error.
Reinicie el controlador.
2433
Error del mensaje de error.
El archivo de mensajes de error
está dañado.
Reinicie el controlador.
2434
Error del mensaje de error.
Se especificó un archivo distinto
del archivo de mensajes de error.
Reinicie el controlador.
2435
Error del mensaje de error.
La versión del archivo de mensajes
de error no es válida.
Reinicie el controlador.

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
830 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
2440
Error de archivo.
El número de archivo ya se está
usando.
Revise el número de archivo.
2441
Error de archivo.
No se pudo abrir el archivo.
Asegúrese de que el archivo existe y
que lo especificó correctamente.
2442
Error de archivo.
El archivo no está abierto.
Abra el archivo por adelantado.
2443
Error de archivo. Otra tarea está
utilizando el número de archivo.
Revise el programa.
2444
Error de archivo. No se pudo
cerrar el archivo.
Revise el archivo.
2445
Error de archivo. Error al buscar
archivo.
Revise el programa.
Revise la configuración del puntero.
2446
Error de archivo.
Se están usando todos los
números de archivo.
Cierre los archivos innecesarios.
2447
Error de archivo.
No tiene permiso de lectura.
Use ROpen o UOpen que tenga
acceso de lectura para el archivo.
2448
Error de archivo.
No tiene permiso de escritura.
Use WOpen o UOpen que tenga
acceso de escritura para el archivo.
2449
Error de archivo.
No tiene permiso binario.
Use BOpen que tenga acceso binario
al archivo.
2450
Error de archivo.
No se pudo obtener acceso al
archivo.
Revise el archivo.
2451
Error de archivo. No se pudo
escribir el archivo.
Revise el archivo.
2452
Error de archivo. No se pudo leer
el archivo.
Revise el archivo.
2453
Error de archivo.
No se puede ejecutar el comando
para el disco actual.
El comando especificado no está
disponible en el disco actual
(ChDisk).
2454 Error de archivo. Disco no válido. Revise el programa.
2455 Error de archivo. Unidad no válida. Revise el programa.
2456
Error de archivo. Carpeta no
válida.
Revise el programa.
2460
Error de la base de datos.
El número de la base de datos ya
se está usando.
Revise el programa.
Especifique el número de otra base
de datos.
Cierre la base de datos.
2461
Error de la base de datos.
La base de datos no está abierta.
Revise el programa.
Abra la base de datos.
2462
Error de la base de datos.
Otra tarea está utilizando el
número de base de datos.
Revise el programa.
2470
Error de comunicación de
Windows. Estado no válido.
Reinicie el controlador.
Recompile el proyecto.
2471
Error de comunicación de
Windows. Respuesta no válida.
Reinicie el controlador.
Recompile el proyecto.
2472
Error de comunicación de
Windows. Ya se inició.
Reinicie el controlador.
2473
Error de comunicación de
Windows. Ocupado.
Reinicie el controlador.
Recompile el proyecto.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 831
N.º Mensaje Solución Nota 1 Nota 2
2474
Error de comunicación de
Windows. Sin solicitud.
Reinicie el controlador.
Recompile el proyecto.
2475
Error de comunicación de
Windows. Desbordamiento del
búfer de datos.
Reduzca el volumen de datos.
Revise el programa.
2476
Error de comunicación de
Windows. No se pudo esperar el
evento.
Reinicie el controlador.
2477
Error de comunicación de
Windows. Carpeta no válida.
Asegúrese de que la carpeta
especificada sea correcta.
2478
Error de comunicación de
Windows. Código de error no
válido.
Recompile el proyecto.
2500
La condición del evento
especificado para Wait supera el
número máximo.
El número máximo de condiciones
de eventos es 8. Revise el
programa.
2501
El número de bit especificado en la
función Ctr no se inicializó con una
instrucción CTReset.
Revise el programa.
El número de
bit
especificado
2502
El número de tarea supera el
número máximo que se puede
ejecutar.
El número de tareas disponible que
puede ejecutarse simultáneamente
es 32 para las tareas normales y 16
para las tareas en segundo plano.
Revise el programa.
2503
No se puede ejecutar Xqt cuando
ya se está ejecutando el número
de tarea especificado.
Revise el programa.
El número de
tarea
especificado
2504
Error de la tarea. El manipulador
especificado ya está ejecutando un
proceso paralelo.
Recompile el proyecto.
2505
No hay datos suficientes para la
asignación de variable de la
instrucción Input.
Revise el contenido de los datos de
comunicación. Revise el programa.
2506
La variable especificada para la
instrucción Input supera el número
máximo.
Para OP, solo se puede especificar
una variable. Para otros dispositivos,
se pueden especificar hasta 32
variables.
2507
Todos los contadores están en uso
y no se puede inicializar un nuevo
contador con CTReset.
El número de contadores disponible
que se puede configurar
simultáneamente es 16. Revise el
programa.
2508
Error de OnErr. No se pudo
procesar la instrucción OnErr.
Recompile el proyecto.
2509
Error de OnErr. No se pudo
procesar la instrucción OnErr.
Recompile el proyecto.
2510
La etiqueta de E/S especificada no
está definida.
La etiqueta de E/S especificada no
está registrada. Revise el archivo de
etiqueta de E/S.
2511
Se usó la instrucción SyncUnlock
sin ejecutar una instrucción
SyncLock anterior. Revise el
programa.
Revise el programa.
Número de
señal
2512
La instrucción SyncLock ya se
ejecutó.
La instrucción SyncLock no se puede
ejecutar por segunda vez
consecutiva. Revise el programa.
Número de
señal

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
832 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
2513
La etiqueta de punto especificada
no está definida.
La etiqueta de punto especificado no
está registrada. Revise el archivo de
puntos.
2514
No se pudo obtener el tiempo de
funcionamiento del motor del robot.
Reinicie el controlador.
2515
No se pudo configurar la fecha o la
hora.
Revise si la fecha y hora están
configuradas correctamente.
2516
No se pudieron obtener los datos
de depuración o para la
inicialización.
Reinicie el controlador.
2517
No se pudo convertir en fecha u
hora.
Revise la hora configurada en el
controlador.
Reinicie el controlador.
2518
Se especificó un número mayor
para los datos de punto de inicio
que para los datos del punto final.
Especifique un número mayor para
los datos de punto final que para los
datos del punto de inicio.
Punto de
inicio
Punto final
2519
Sintaxis de formato no válido para
FmtStr$.
Revise el formato.
2520
El nombre del archivo es
demasiado largo.
Revise si el nombre del archivo de
puntos especificado es correcto. La
longitud máxima de la cadena para el
nombre del archivo es de 32.
2521
La ruta del archivo es demasiado
larga.
Revise si el nombre del archivo de
puntos especificado es correcto.
2522 El nombre de archivo no es válido.
Asegúrese de no usar caracteres
incorrectos para el nombre del
archivo.
2523
El proceso de continuación ya se
ejecutó.
Revise el programa.
2524
No se puede ejecutar Xqt cuando
el número de captura especificado
ya se está ejecutando.
Revise el programa.
2525 Contraseña no válida.
Revise si la contraseña se configuró
correctamente.
2526
No hay términos de espera.
Recompile el proyecto.
2527
Se usaron demasiadas variables
para la espera de la variable
global.
Revise el programa.
2528
Se especificó la variable global que
no se pudo usar para el comando
Wait.
Revise el programa.
2529
No se puede usar ByRef si la
variable se usó para la espera de
la variable global.
Revise el programa.
2530
Demasiados archivos de puntos.
Revise el archivo de puntos.
2531
Otro robot está usando el archivo
de puntos.
Revise el programa.
2532
No se puede calcular la posición
del punto porque existen datos no
definidos.
Revise los datos de punto.
2533
Error en INP o OUTP.
Revise el programa.
2534
No se iniciará ninguna función
principal para la instrucción
Restart.
Sin ejecutar la función principal, se
llama la instrucción Restart.
2535
No permite cambiar la
configuración Enable en el modo
Teach.
Configure la autoridad.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 833
N.º Mensaje Solución Nota 1 Nota 2
2536
No se pudo cambiar la
configuración Enable en el modo
Teach.
Reinicie el controlador.
2537
El recuento de los datos de punto
P(:) es incorrecto o el formato del
parámetro es incorrecto.
Revise el programa.
2538
Error de Force_GetForces.
No se pudo procesar la instrucción
Force_GetForces.
Revise el programa.
2539
Contraseña no válida.
Revise la contraseña.
2540
Sin conexión a RC+.
Conéctese a RC+.
2541 Parámetro duplicado.
Se especificó el mismo número de
robot.
Revise el parámetro.
2542
El número de cola de trabajo
especificada no es válido.
Los números de la cola de trabajo
disponibles son de 1 a 16. Revise el
programa.
2543
Se especificó una secuencia no
válida.
No se pudo encontrar la secuencia
especificada. Revise el nombre de la
secuencia.
2544 Se especificó un objeto no válido.
No se pudo encontrar el nombre del
objeto especificado. Revise el
nombre del objeto.
2545
Se especificó una calibración no
válida.
No se pudo encontrar el nombre de
la calibración especificada. Revise el
nombre de la calibración.
2546
No se puede encender el motor
inmediatamente después de abrir
la protección.
Espere 1,5 segundos después de
abrir la protección y luego encienda
el motor.
2547
No se puede usar la opción
especificada
Alimentación de piezas:
Configuraciones de formato o valor
de comando incorrectas
Lea la descripción del comando
correspondiente que se entrega en
Alimentación de piezas 7.0
Introducción y hardware (común) y
software
Software 3 Referencia sobre
comandos SPEL+ para la
alimentación de piezas y corrija el
código.
2548
Hay demasiados archivos de
fuerza.
Elimine los archivos de fuerza o
use los archivos de fuerza
existentes.
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.
2549
No se puede especificar el archivo
de fuerza que no está asociado
con el robot.
Especifique el archivo de fuerza
correcto.
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.
2550
El comando especificado no es
compatible con el robot articulado y
el robot de tipo cartesiano.
El robot especificado no es
compatible.
Revise la configuración del robot.
2551
No se pudo obtener la información
de salud.
Reinicie el controlador.
2552
No se permite cambiar la
configuración en el modo UL.
Configure la autoridad.

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
834 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
2553
No se pudo cambiar la
configuración en el modo UL.
Reinicie el controlador.
2556
Se detectó un bucle excesivo.
Reduzca el número de tareas en
bucle o defina Wait (Esperar)
Este mensaje de error solo aparece
en los manipuladores de la serie
T/VT.
En lo posible, no realice ningún
procesamiento, como bucles infinitos
ni otro tipo de procesamientos
similares.
Para conocer detalles, consulte
Restricciones de las funciones en
Mantenimiento, manual de la serie
T/VT.
2557
Hubo un error en Trap.
Nota 1: Información detallada del
error
Una vez tenga la información de
error detallada, tome las medidas
correspondientes.
Hubo un error en Trap.
Revise el código de error
correspondiente en el historial del
sistema y tome las medidas
correspondientes.
Información
detallada
del error
2558
El parámetro de argumento es
demasiado largo.
Confirme un parámetro del
argumento.
2559
No se puede ejecutar cuando el
motor está en el estado
desactivado.
Cambie el estado a motor activado y
ejecute.
2560
El número del robot actual y la
propiedad de secuencia de Force
Guide no coinciden. Revise el
número del robot.
Confirme el número del robot actual
y la propiedad de secuencia de
Force Guide.
Número del
robot
2561
El tipo de robot actual y el tipo de
robot de la propiedad de secuencia
de Force Guide no coinciden.
Reconfigure la propiedad
RobotNumber.
Confirme el número del robot actual
y el número del robot de la propiedad
de secuencia de Force Guide.
Reconfigure la propiedad
RobotNumber.
2562
El número de la herramienta actual
y la herramienta del robot de la
propiedad de secuencia de Force
Guide no coinciden. Revise el
número de la herramienta.
Confirme el número de la
herramienta actual y la herramienta
del robot de la propiedad de
secuencia de Force Guide.
Número de
herramienta
2563
El archivo de punto que está
cargando no coincide con el
archivo de punto de la propiedad
de secuencia de Force Guide.
Revise el archivo de punto.
Confirme el archivo de punto
cargado y el archivo de punto de la
secuencia de Force Guide.
2564
No se puede ejecutar una
instrucción mientras se ejecuta el
control de torque.
Desactive el control de torque y
ejecute.
2565
Se ejecutó un comando prohibido
durante el seguimiento.
Elimine los comandos prohibidos del
programa.
2566
No se puede ejecutar el comando
FGRun para el mismo robot.
No se puede ejecutar el comando
FGRun para el mismo robot. Finalice
el comando FGRun o ejecútelo en
otro robot
2567
No se puede ejecutar el comando
FGRun para la secuencia de Force
Guide que está en ejecución.
No se puede ejecutar el comando
FGRun para la secuencia de Force
Guide que está en ejecución.
Ejecútelo después de que finalice la
secuencia de Force Guide.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 835
N.º Mensaje Solución Nota 1 Nota 2
2568
Se ejecutó una instrucción que no
se puede ejecutar mediante el
procesamiento paralelo.
Revise el programa.
Revise el programa.
2569
No se puede obtener la propiedad
de la secuencia de Force Guide.
Reinicie el controlador.
2570
El número de secuencia está fuera
del rango. Revise el número de
secuencia especificado.
El número de secuencia va de 1 a
64. Confirme el número de
secuencia especificado.
Número de
secuencia
2571
El número de objeto está fuera del
rango. Revise el número de objeto
especificado.
El número de objeto va de 1 a 16.
Confirme el número de objeto
especificado.
Número de
objeto
2572
No se puede borrar el resultado de
Force Guide.
Reinicie el controlador.
2573
No se puede definir el resultado de
Force Guide.
Reinicie el controlador.
2574
No se puede obtener el resultado
de Force Guide.
Reinicie el controlador.
2575
No se pudo guardar el resultado de
la secuencia de Force Guide en
una variable.
Reinicie el controlador.
2576
Se especificó un nombre de
secuencia de fuerza que no existe.
Confirme el nombre de la secuencia
de fuerza especificado.
2577
Se especificó un nombre de objeto
de fuerza que no existe.
Confirme el nombre del objeto de
fuerza especificado.
2578
No se puede ejecutar el comando
FGGet para la secuencia de Force
Guide que no está en ejecución.
Confirme la secuencia de Force
Guide especificada.
2580
No existe el nombre de alimentador
especificado.
El nombre de alimentador
especificado es incorrecto.
Verifique el nombre del alimentador
en Menú - [Setup] - [System
Configuration] (Configuración -
Configuración de sistema) en
EPSON RC+ 7.0.
2581
No se pudo restablecer el
alimentador. Verifique la conexión.
No se puede conectar con el
alimentador.
Verifique que sean correctas las
configuraciones de red del
alimentador (dirección IP, máscara
IP, puerto).
Verifique que sea normal el
funcionamiento de la conexión
Ethernet entre el alimentador y el
controlador (cables desconectados,
error en el concentrador o falta de
una fuente de alimentación para el
concentrador, etc.). Compruebe la
fuente de alimentación del
alimentador.
2582
Alimentador no conectado.
Verifique la conexión.
(Como en el caso anterior)

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
836 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
2583
Luz de fondo del alimentador no
activada
El alimentador especificado es
incorrecto.
Verifique que la luz de fondo esté
activada en Menú - [Setup] - [System
Configuration] (Configuración -
Configuración de sistema) en
EPSON RC+ 7.0.
2584
Terminal de salida del alimentador
no activado
El alimentador especificado es
incorrecto.
Verifique que la tolva esté activada
en Menú - [Setup] - [System
Configuration] (Configuración -
Configuración de sistema) en
EPSON RC+ 7.0.
2585 Tipo de alimentador incorrecto
Sucede cuando se restaura una
copia de seguridad del controlador, si
se ha cambiado la configuración del
alimentador.
Una vez que se quita y registra la
configuración del alimentador en
“EPSON RC+ 7.0 - Menu (Menú)-
Setup (Configuración) - System
Settings (Configuración de sistema)”.
2587
No se puede ejecutar el
controlador virtual
La opción PartFeeding exige que se
ejecute un controlador real.
2588
No se consiguió la información de
alimentación de piezas
No se puede ejecutar este comando
desde una ventana Command ni
desde un controlador virtual. Revise
la descripción del comando
correspondiente en “Referencia
sobre comandos SPEL+ para la
alimentación de piezas”.
2589
El comando no es compatible con
la cámara móvil.
Este comando solo funciona con la
cámara descendente fija, así que
utilice una de ese tipo.
Revise la configuración de la
secuencias de visión especificada en
la secuencias de visión de blob de
pieza para la pieza objetivo.
Alimentación de piezas:
No se puede usar el comando
cuando la secuencias de visión de la
pieza está usando la cámara móvil
del robot.
2591
Se usó la instrucción
PF_ReleaseFeeder sin ejecutar
una instrucción PF_AccessFeeder
anterior. Revise el programa.
Revise el programa.
2592
La instrucción PF_AccessFeeder
ya se ejecutó.
La instrucción PF_AccessFeeder no
se puede ejecutar por segunda vez
consecutiva. Revise el programa.
2600
El número de objeto de propiedad
de masa está fuera del rango
permitido.
Revise el rango de los números.
Los valores de MassProperties que
se pueden especificar son de 1 a 15.
Revise el programa.
2601
El objeto de propiedad de masa no
está definido.
Revise la configuración.
Confirme la configuración de
MassProperties.
Revise el programa.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 837
N.º Mensaje Solución Nota 1 Nota 2
2602
No se puede borrar el objeto de
propiedad de masa mientras está
en uso.
Especifique otro objeto de
propiedad de masa antes de borrar
el objeto anterior.
No se puede borrar MP mientras
está en uso.
Confirme si MP está en uso.
2603
No se puede borrar el número '0'
del objeto de propiedad de masa
No se puede borrar el número MP 0.
Revise el programa.
2840
Falla en la confirmación del
recuento de conexión de DU.
Revise si la unidad de mando está
conectada correctamente.
2841
Falla en la adquisición del recuento
de conexión de DU.
Revise si la unidad de mando está
conectada correctamente.
2842
Falla en la confirmación de la
información de conexión de DU.
Revise si la unidad de mando está
conectada correctamente.
2843
Falla en la adquisición de la
información de conexión de DU.
Revise si la unidad de mando está
conectada correctamente.
2844
Hay un número faltante o una
repetición en la configuración del
interruptor DIP de DU.
Revise los interruptores DIP de la
unidad de mando
2845
La unidad de mando (DU) que usa
el robot no está conectada.
Revise si la unidad de mando está
conectada correctamente.
Elimine el
registro del
robot o
conecte la DU
al
manipulador
registrado.
2846
Debido a que se reconoció el
aumento y la disminución de la
unidad de mando, la unidad del
controlador se reinició.
El controlador se reinició debido a un
cambio de conexión con la unidad de
mando.
2847
La configuración del interruptor DIP
de la unidad I/F del sensor de
fuerza es inadecuada.
No es necesario cambiar la
configuración del interruptor DIP.
Comuníquese con nosotros.
2848
No está conectada la unidad I/F del
sensor de fuerza para la cual está
registrado el sensor de fuerza.
Verifique la conexión.
Confirme si es posible conectarlo
correctamente a la unidad I/F del
sensor de fuerza.
2849
No se pudo inicializar la unidad I/F
del sensor de fuerza.
Verifique la conexión.
Confirme si es posible conectarlo
correctamente a la unidad I/F del
sensor de fuerza.
2850
No se pudo inicializar la unidad I/F
del sensor de fuerza.
Verifique la conexión.
Confirme si es posible conectarlo
correctamente a la unidad I/F del
sensor de fuerza.
2851
El sensor de fuerza, que es
diferente del sensor registrado,
está conectado.
Revise la conexión o la
configuración.
No corresponde el número de serie
del sensor conectado con el sensor
registrado.
Cámbielo por un sensor nuevo
después de confirmar la conexión,
regresar al sensor conectado o
invalidar el sensor. En caso de que
se reemplace, establezca
nuevamente la configuración de la
conexión en la configuración del
sensor.

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
838 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
2852
El sensor de fuerza registrado no
está conectado.
Verifique la conexión.
Confirme que sea posible hacer una
correcta conexión con el sensor
registrado.
Invalide el sensor cuando no conecte
el sensor.
2853
No se pudo actualizar el software
de la unidad I/F del sensor de
fuerza.
Revise el procedimiento de
actualización.
Revise la configuración de
actualización del software.
Confirme la conexión con la unidad
I/F del sensor de fuerza.
2854
No se pudo actualizar el software
de la unidad I/F del sensor de
fuerza.
Revise el procedimiento de
actualización.
Confirme el nombre del archivo.
Confirme el archivo de actualización.
2855
No se pudo actualizar el software
de la unidad I/F del sensor de
fuerza.
Revise el procedimiento de
actualización.
Confirme la fuente de alimentación y
la conexión de la unidad I/F del
sensor de fuerza.
Reinicie el controlador.
2856
Está conectada la unidad I/F del
sensor de fuerza con una versión
anterior.
Actualice el software de la unidad
I/F del sensor de fuerza.
Se necesita actualizar la versión de
la unidad I/F del sensor de fuerza
conectado. Actualice la unidad I/F
del sensor de fuerza. Para actualizar
los procedimientos, consúltenos.
2857
El robot registrado en la unidad I/F
del sensor de fuerza no está
conectado.
Revise el registro del robot o la
configuración del sensor de fuerza.
El robot que se relaciona con el
sensor no está registrado.
Revise el registro del robot o invalide
la conexión del robot.
2858
No se pudo asignar la memoria
para el monitor de fuerza.
Reinicie el controlador.
Consulte con nosotros si ocurre un
error similar después de reiniciarlo.
2859
No se pudo asignar la memoria
para el registro de fuerza.
Reinicie el controlador.
Consulte con nosotros si ocurre un
error similar después de reiniciarlo.
2860
El objeto del monitor de fuerza
especificado en el registro de
fuerza está en uso.
Especifique otro objeto del monitor
de fuerza.
No se puede especificar el mismo
número FM.
Especifique un número FM diferente.
2861
Se ejecuta el número máximo de
los registros de fuerza.
Revise la sincronización del
registro.
Se usa el número de registro más
grande.
Confirme el número de registros.
2862
No se pudo asignar la memoria de
función de fuerza.
Reinicie el controlador.
Consulte con nosotros si ocurre un
error similar después de reiniciarlo.
2863
No se pueden ejecutar al mismo
tiempo la secuencia de Force
Guide, RecordStart, FCMStart y
LogStart.
Revise el programa.
Ejecute después de que termine la
propiedad LogStart mediante la
propiedad LogEnd.
2864
No se pueden ejecutar al mismo
tiempo la secuencia de Force
Guide, RecordStart, FCMStart y el
monitor de fuerza.
Salga de alguna.
Ejecute después de salir del monitor
de fuerza.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 839
N.º Mensaje Solución Nota 1 Nota 2
2865
No se pueden ejecutar al mismo
tiempo la secuencia de Force
Guide, RecordStart, FCMStart y
LogStart.
Revise el programa.
Ejecute la propiedad LogStart
después de que finalice la propiedad
RecordStart mediante la secuencia
de Force Guide, Force Control
Monitor o la propiedad RecordEnd.
2866
No se pueden ejecutar al mismo
tiempo la secuencia de Force
Guide, RecordStart, FCMStart y el
monitor de fuerza.
Salga de alguna.
Ejecute el monitor de fuerza después
de que finalice la propiedad
RecordStart mediante la secuencia
de Force Guide, Force Control
Monitor o la propiedad RecordEnd.
2867
El canal especificado está en uso.
Especifique otro canal.
No se puede especificar el mismo
canal. Especifique un canal diferente
para ejecutar.
2868
Se especifica el objeto del monitor
de fuerza que se está usando.
Especifique otro objeto de monitor
de fuerza.
No se puede especificar el mismo
número FM. Especifique un número
FM diferente para ejecutar.
2869
La duración especificada de la
medición es menor que el intervalo
de medición especificado.
Revise el parámetro.
Especifique el tiempo de medición
por más tiempo que el intervalo de
medición que se ejecutará.
2870
El producto de la duración
especificada de la medición y el
intervalo de medición especificado
está fuera del rango permitido.
Revise el parámetro.
Revise el tiempo e intervalo de
medición.
2871
No se pueden ejecutar al mismo
tiempo más de tres de las
siguientes funciones: secuencia de
Force Guide, RecordStart,
FCMStart y monitor de fuerza.
Para ejecutar nuevamente,
asegúrese de cerrar alguno de los
dos elementos en funcionamiento y
ejecutar.
2872
No se puede iniciar dos veces el
monitor de fuerza.
Para iniciar nuevamente el monitor
de fuerza, cierre el monitor de fuerza
en ejecución e inicie uno nuevo.
2880
No se pudo inicializar la placa I/F
del sensor de fuerza.
Verifique la conexión.
Revise la conexión del controlador y
la placa I/F del sensor de fuerza.
Reinicie el controlador.
Consulte con nosotros si se genera
un error similar, incluso después de
reiniciar el controlador.
2881
No se pudo inicializar la placa I/F
del sensor de fuerza.
Verifique la conexión.
Revise la conexión del controlador y
la placa I/F del sensor de fuerza.
Reinicie el controlador.
Consulte con nosotros si se genera
un error similar, incluso después de
reiniciar el controlador.
2882
Se detectan dos placas: Placa I/F
del sensor de fuerza y placa RS-
232C.
Si está usando la placa I/F del
sensor de fuerza, la placa RS-
232C está disponible hasta para
una placa.
Quite la placa I/F del sensor de
fuerza o la segunda placa de la placa
RS-232C.

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
840 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
2883
Se detectan dos placas: Placa I/F
del sensor de fuerza y placa RS-
232C con la configuración de la
segunda placa.
Si está usando la placa I/F del
sensor de fuerza, arroja la
configuración de la primera placa
de la placa RS-232C.
Arroja la configuración para la
primera placa de la placa RS-232C.
2884
No se pudo inicializar la placa I/F
del sensor de fuerza.
Verifique la conexión.
Revise la conexión del controlador y
la placa I/F del sensor de fuerza.
Reinicie el controlador.
Consulte con nosotros si se genera
un error similar, incluso después de
reiniciar el controlador.
2885
Los sensores 3 y 4 de los sensores
de fuerza están activados.
Si está usando la placa I/F del
sensor de fuerza, desactive los
sensores 3 y 4 de los sensores de
fuerza.
Desactive los sensores 3 y 4 del
sensor de fuerza.
2886
No se pudo comunicar con placa
I/F del sensor de fuerza y el sensor
de fuerza.
Revise la conexión del sensor de
fuerza.
Revise la conexión de la placa I/F del
sensor de fuerza y el sensor de
fuerza. Reinicie el controlador.
Consulte con nosotros si se genera
un error similar, incluso después de
reiniciar el controlador.
2887
Se detectó la placa I/F del sensor
de fuerza y la unidad I/F del sensor
de fuerza.
Quite la placa I/F del sensor de
fuerza o la unidad I/F del sensor de
fuerza.
No se puede usar la placa I/F del
sensor de fuerza y la unidad I/F del
sensor de fuerza al mismo tiempo.
Quite la placa I/F del sensor de
fuerza o la unidad I/F del sensor de
fuerza.
2888
Está definido un sensor de fuerza
que no es compatible.
Revise la configuración.
Revise la configuración.
La versión de firmware puede ser
antigua. Revise si la versión de
firmware es compatible y actualícela
si es necesario.
2900
No se pudo abrir como servidor
para el puerto Ethernet.
Revise si el puerto Ethernet está
configurado correctamente. Revise
si el cable Ethernet está conectado
correctamente.
2901
No se pudo abrir como cliente para
el puerto Ethernet.
Revise si el puerto Ethernet está
configurado correctamente. Revise
si el cable Ethernet está conectado
correctamente.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 841
N.º Mensaje Solución Nota 1 Nota 2
No se pudo abrir el puerto TCP/IP
(cliente).
Alimentación de piezas:
No se puede conectar con el
alimentador.
Verifique que sean correctas las
configuraciones de red del
alimentador (dirección IP, máscara
IP, puerto).
Verifique que sea normal el
funcionamiento de la conexión
Ethernet entre el alimentador y el
controlador (cables desconectados,
error en el concentrador o falta de
una fuente de alimentación para el
concentrador, etc.). Compruebe la
fuente de alimentación del
alimentador.
2902
No se pudo leer desde el puerto
Ethernet.
Revise que el puerto del destinatario
de comunicaciones no esté cerrado.
2904
Se especificó una dirección IP no
válida.
Revise la dirección IP.
2905
Error de Ethernet.
No hay especificación del
servidor/cliente.
Revise el programa.
2906 No se configuró el puerto Ethernet.
Revise si el puerto Ethernet está
configurado correctamente.
Número de
puerto
2907
El puerto Ethernet ya estaba
siendo usado por otra tarea.
Solamente una tarea puede usar un
puerto a la vez.
Número de
puerto
2908
No se pueden cambiar los
parámetros del puerto mientras el
puerto Ethernet está abierto.
Los parámetros del puerto no
pueden cambiarse mientras el puerto
esté abierto.
Número de
puerto
2909 El puerto Ethernet no está abierto.
Para usar el puerto Ethernet, ejecute
la instrucción OpenNet.
Número de
puerto
2910
Se agotó el tiempo de espera de
lectura desde un puerto Ethernet.
Revise la comunicación.
Valor de
tiempo de
espera
2911
No se pudo leer desde un puerto
Ethernet.
Revise la comunicación.
2912
El puerto Ethernet ya estaba
siendo usado por otra tarea.
Solamente una tarea puede usar un
puerto a la vez.
Número de
puerto
2913
No se pudo escribir en el puerto
Ethernet.
Revise si el puerto Ethernet está
configurado correctamente. Revise
si el cable Ethernet está conectado
correctamente.
Número de
puerto
2914
No se completó la conexión del
puerto Ethernet.
Revise si el puerto del destinatario
de la comunicación está abierto.
Número de
puerto
2915
Los datos recibidos desde el puerto
Ethernet superan el límite de una
línea.
La longitud máxima de una línea es
de 255 bytes.
El número de
bytes es una
línea recibida
2916
No se pudo procesar un archivo
simulado del puerto Ethernet virtual
Revise el contenido del archivo
simulado.
Número de
puerto
2920
Error de RS-232C.
Error de proceso del puerto RS-
232C.
Revise si se detectó correctamente
la placa RS-232C.
2921
No se pudo leer desde el puerto
RS-232C.
Revise el parámetro y la
comunicación.

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
842 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
2922
No se pudo leer desde el puerto
RS-232C. Error de exceso.
Desacelere la transferencia de datos
o reduzca el tamaño de los datos.
2926
El hardware del puerto RS-232C
no está instalado.
Revise si se detectó correctamente
la placa RS-232C.
Número de
puerto
2927
El puerto RS-232C ya lo tiene
abierto otra tarea.
Solamente una tarea puede usar un
puerto a la vez.
Número de
puerto
2928
No se pueden cambiar los
parámetros del puerto mientras
está abierto el puerto RS-232C.
Los parámetros del puerto no
pueden cambiarse mientras el puerto
esté abierto.
Número de
puerto
2929 El puerto RS-232C no está abierto.
Para usar el puerto RS-232C,
ejecute la instrucción OpenCom.
Número de
puerto
2930
Se agotó el tiempo de espera de
lectura desde el puerto RS-232C.
Revise la comunicación.
Valor de
tiempo de
espera
2931
No se pudo leer desde el puerto
RS-232C.
Revise la comunicación.
2932
El puerto RS-232C ya lo tiene
abierto otra tarea.
Solamente una tarea puede usar un
puerto a la vez.
Número de
puerto
2933
No se pudo escribir en el puerto
RS-232C.
Revise la comunicación.
Número de
puerto
2934
No se completó la conexión del
puerto RS-232C.
Revise el puerto RS-232C.
2935
Los datos recibidos desde el puerto
RS-232C superan el límite de una
línea.
La longitud máxima de una línea es
de 255 bytes.
El número de
bytes es una
línea recibida
2936
No se pudo procesar un archivo
simulado del puerto RS-232C
virtual
Revise el contenido del archivo
simulado.
Número de
puerto
2937
No se puede ejecutar mientras se
usa RS-232C remoto.
El puerto especificado está en uso
actualmente.
Especifique otro puerto.
2938
No se puede ejecutar mientras se
usa ModBus.
El puerto especificado está en uso
actualmente.
Especifique otro puerto.
2950
Error de Daemon. No se pudo
crear el subproceso de Daemon.
Reinicie el controlador.
2951
Error de Daemon. Se agotó el
tiempo de espera mientras se
creaba el subproceso de Daemon.
Reinicie el controlador.
2952
Se detectó un error en la señal de
entrada de la llave de interruptor de
TEACH/AUTO.
Configure el interruptor de llave de
TP en TEACH o AUTO, según
corresponda. Revise si el TP está
conectado correctamente.
2953
Se detectó un error en la señal de
entrada de la llave ENABLE.
Revise si el TP está conectado
correctamente.
2954 Se detectó una soldadura de relé.
Probablemente se generó un exceso
de corriente debido a un error de
cortocircuito. Investigue la causa del
problema y tome las medidas
necesarias, y reemplace la DPB.
2955
La temperatura del resistor de
regeneración fue más alta que la
temperatura especificada.
Revise que el filtro no esté obstruido
y que el ventilador no se detenga.
Si no existen problemas en el filtro y
el ventilador, reemplace el módulo
regenerativo.
2970
Error de MNG.
Error de asignación de área.
Reinicie el controlador.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 843
N.º Mensaje Solución Nota 1 Nota 2
2971
Error de MNG.
Error de comprobación en tiempo
real.
Reinicie el controlador.
2972
Error de MNG.
Error de prioridad estándar.
Reinicie el controlador.
2973
Error de MNG. Error de prioridad
del impulso.
Reinicie el controlador.
2974
Error de MNG. Error de prioridad
descendente.
Reinicie el controlador.
2975
Error de MNG. Error de espera del
evento.
Reinicie el controlador.
2976
Error de MNG. Error de cierre del
mapa.
Reinicie el controlador.
2977 Error de MNG. Error libre del área. Reinicie el controlador.
2978
Error de MNG. Error de
AddIOMem.
Reinicie el controlador.
2979 Error de MNG. Error de AddInPort. Reinicie el controlador.
2980
Error de MNG. Error de
AddOutPort.
Reinicie el controlador.
2981
Error de MNG. Error de
AddInMemPort.
Reinicie el controlador.
2982
Error de MNG.
Error de AddOutMemPort.
Reinicie el controlador.
2983
Error de MNG. Error de
IntervalOutBit.
Reinicie el controlador.
2984 Error de MNG. Error de CtrReset. Reinicie el controlador.
2997 Detección de colisión
Si utiliza el simulador, revise que el
objeto esté ubicado en la dirección
de movimiento del robot.
2998
Se intentó AbortMotion cuando el
robot no se estaba moviendo
Consulte la ayuda para conocer
AbortMotion.
2999
Se intentó AbortMotion cuando el
robot se estaba moviendo
Consulte la ayuda para conocer
AbortMotion.

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
844 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
3000
El tamaño del archivo OBJ es
grande. TP1 podría no compilar
este proyecto.
Cuando es necesario compilar el
proyecto desde TP1, considere
reducir el programa.
3001
El número de variables que usan el
comando Wait está cerca del
máximo permitido.
El número de variables que usan el
comando Wait supera 56 (el máximo
es 64). Revise si existen variables
innecesarias.
3002
No se pudo encontrar el archivo
DLL.
Revise si existe el archivo DLL en
alguna de las siguientes carpetas:
- Carpeta del proyecto
- Carpeta del sistema de Windows
- Carpeta de configuración de la
variable de entorno PATH
3003
No se puede encontrar la función
DLL.
Revise el nombre de la función
especificada. Además, revise el
archivo DLL para ver si existe la
función especificada en la DLL.
3050
La función Main no está definida.
Declare una función Main.
3051
La función no existe.
Declare una función sin resolver.
3052
La variable no existe.
Declare una variable sin resolver.
3100 Error de sintaxis.
Corrija el error de sintaxis.
Alimentación de piezas:
La sintaxis de comandos no es
correcta.
Revise la descripción del comando
en Alimentación de piezas 7.0
Introducción y hardware (común) y
software
Software
“Parte 3: Referencia sobre comandos
SPEL+ para la alimentación” y corrija
el código.
3101 Error de recuento del parámetro.
El número de parámetros es
excesivo o insuficiente. Corrija los
parámetros.
Alimentación de piezas:
La sintaxis de comandos no es
correcta.
Revise la descripción del comando
en Alimentación de piezas 7.0
Introducción y hardware (común) y
software
Software “Parte 3: Referencia sobre
comandos SPEL+ para la
alimentación” y corrija el código.
3102
La longitud del nombre del archivo
supera el máximo permitido.
Acorte el nombre del archivo.
3103
Definición de función duplicada.
Cambie el nombre de la función.
3104
Definición de variable duplicada ‘ **
’.
Cambie el nombre de la variable.
3105
Las variables global y global
conservada no se pueden definir
dentro de un bloque de funciones.
Declare las variables global y global
conservada fuera del bloque de
funciones.
3106
Se especificó una función no
definida.
Especifique un nombre de función
válido.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 845
N.º Mensaje Solución Nota 1 Nota 2
3107
Se especificó While y Until para
Do...Loop.
La instrucción While/Until se
especificó para ambas instrucciones
Do y Loop. Elimine la cualquiera de
las instrucciones While/Until.
3108
El número o etiqueta de la línea
especificada ‘ ** ’ no existe.
Configure la etiqueta de línea.
3109 Error de desbordamiento.
La especificación numérica directa
se desborda. Reduzca el valor
numérico.
3110
Se especificó una variable no
definida ‘ ** ’.
Existe una variable no definida.
Declare la variable.
3111
La variable especificada no es una
variable de matriz.
Especifique la variable de matriz.
3112
No se pueden cambiar las
dimensiones de la variable de
matriz.
La dimensión de la matriz no se
puede cambiar en la instrucción
Redim durante el tiempo de
ejecución. Corrija el programa.
3114
La variable Next especificada no
coincide con la variable For
especificada.
Corrija el nombre de la variable.
3115
No se puede usar una expresión
de punto en el primer argumento.
Especifique un solo punto para la
configuración del indicador de
puntos. No especifique una
expresión de puntos.
3116
El número de dimensiones de la
matriz no coincide con la
declaración.
Revise el número de dimensiones de
la matriz.
3117 No se pudo encontrar el archivo.
No se pudo encontrar el archivo que
configura el proyecto. Revise en la
carpeta del proyecto si existe el
archivo.
3118
No se pudo encontrar la
instrucción EndIf correspondiente.
El número de instrucciones EndIf que
corresponden a las instrucciones If y
ElseIf no es suficiente. Agregue
instrucciones EndIf.
3119
No se puede encontrar la
instrucción Loop correspondiente.
El número de instrucciones Loop que
corresponden a las instrucciones Do
no es suficiente. Agregue las
instrucciones Loop.
3120
No se puede encontrar la
instrucción Next correspondiente.
El número de instrucciones Next que
corresponden a las instrucciones For
no es suficiente. Agregue las
instrucciones Next.
3121
No se pudo encontrar el Send
correspondiente.
El número de instrucciones Send que
corresponde a las instrucciones
Select no es suficiente. Agregue las
instrucciones Send.
3123
Las instrucciones On/Off superan
el número máximo.
Se define un límite superior (máx.
16) en el número de instrucciones
On/Off en la instrucción Curve.
Revise el límite superior y corrija el
programa.
3124
El número de puntos supera el
número máximo.
Un límite superior ("200" para curvas
abiertas, "50" para curvas cerradas)
está definido en el número de puntos
disponible en la instrucción Curve.
Revise el límite superior y corrija el
programa.

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
846 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
3125
No se pudo encontrar el If
correspondiente.
El número de instrucciones EndIf que
corresponde a las instrucciones If es
excesivo. Elimine los EndIf
innecesarios.
3126
No se pudo encontrar el Do
correspondiente.
El número de instrucciones Loop que
corresponde a las instrucciones Do
es excesivo. Elimine los Loop
innecesarios.
3127
No se pudo encontrar el Select
correspondiente.
El número de instrucciones Send que
corresponde a las instrucciones
Select es excesivo. Elimine los Send
innecesarios.
3128
No se pudo encontrar el For
correspondiente.
El número de instrucciones Next que
corresponde a las instrucciones For
es excesivo. Elimine los Next
innecesarios.
3129
'_' no se puede usar como el
primer carácter de un identificador.
Cambie el primer carácter del
identificador a un carácter alfabético.
3130
No se puede especificar el
parámetro ROT.
No se puede especificar el parámetro
ROT en las instrucciones BGo, Go,
TGo, Jump y Jump3. Corrija el
programa.
3131
No se puede especificar el
parámetro ECP.
No se puede especificar el parámetro
ECP en las instrucciones BGo, Go,
TGo, Jump, Jump3 y Arc. Corrija el
programa.
3132
No se puede especificar el
parámetro Arch.
No se puede especificar el parámetro
Arch en las instrucciones Go, BGo,
TGo, Arc, Arc3, BMove, Move y
TMove. Corrija el programa
3133
No se puede especificar el
parámetro LimZ.
No se puede especificar el parámetro
LimZ en las instrucciones BGo, TGo,
Jump3, Arc, Arc3, BMove, Move y
TMove. Corrija el programa.
3134
No se puede especificar el
parámetro Sense.
No se puede especificar el parámetro
Sense en las instrucciones BGo,
TGo, Arc, Arc3, BMove, Move y
TMove. Corrija el programa.
3135
Se especificó un parámetro no
válido.
Se especificó un parámetro no válido
en las instrucciones Xqt y Call.
Corrija el programa.
3137
No se puede especificar el
subíndice variable de matriz.
No se puede especificar el subíndice
de variable de matriz. Corrija el
programa.
3138
No se especificó ByRef en la
declaración de función.
Especifique ByRef en la lista de
parámetros de declaraciones de
función que es llamada por la
instrucción Call.
3139
No se puede ejecutar la instrucción
Xqt para una función que necesita
un parámetro ByRef.
No se puede ejecutar la instrucción
Xqt para una función que necesita un
parámetro ByRef. Elimine el
parámetro ByRef.
3140
No se puede ejecutar la instrucción
Redim para la variable ByRef.
No se puede ejecutar la instrucción
Redim para una variable que
especifica un parámetro ByRef.
Elimine el parámetro ByRef.
3141
El archivo OBJ está dañado.
-

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 847
N.º Mensaje Solución Nota 1 Nota 2
3142
El tamaño del archivo OBJ supera
el tamaño disponible después de la
compilación.
El resultado de la compilación supera
el valor de límite (máx. 1 MB por
archivo). Divida el programa.
3143
La longitud de sangría supera el
tamaño disponible.
La longitud disponible del
identificador es de un máximo de 32
caracteres para nombres de
etiquetas y variables y 64 caracteres
para nombres de funciones.
Reduzca el número de caracteres
para que no superen la longitud
disponible. Para conocer detalles de
la longitud disponible, consulte el
Manual del usuario de EPSON RC+
"6.4 Nombres de funciones y
variables (Restricciones de
nombres)".
3144
' ** ' ya está siendo usado para un
nombre de función.
Corrija el identificador ' ** ' o el
nombre de la función.
3145
' ** ' ya está siendo usado para una
variable global conservada.
Corrija el identificador ' ** ' o el
nombre de la variable global
conservada.
3146
' ** ' ya está siendo usado para una
variable global.
Corrija el identificador ' ** ' o el
nombre de la variable global.
3147
' ** ' ya está siendo usado para una
variable de módulo.
Corrija el identificador ' ** ' o el
nombre de la variable de módulo.
3148
' ** ' ya está siendo usado para una
variable local.
Corrija el identificador ' ** ' o el
nombre de la variable local.
3149
' ** ' ya está siendo usado para una
etiqueta de E/S.
Corrija el identificador ' ** ' o el
nombre de la etiqueta de E/S.
3150
' ** ' ya está siendo usado para una
etiqueta de error de usuario.
Corrija el identificador ' ** ' o el
nombre de la etiqueta de error de
usuario.
3151
No se puede usar un parámetro de
función.
No se puede especificar un
argumento para la función que se
ejecuta la instrucción Trap. Corrija el
programa.
3152
Los elementos especificados de la
variable de matriz superan el
tamaño disponible.
El valor de límite de los elementos de
la matriz depende del tipo de
variables.
Consulte el Manual del usuario de
EPSON RC+7.0 "6.7.6 Matriz" y
corrija el número de elementos de
matriz para que no supere el valor de
límite.
3153 Diferencia de tipo de parámetro.
El tipo de parámetro no coincide en
las instrucciones Call,
Force_GetForces y Xqt. Corrija el
tipo de parámetro.
3154
' ** ' no es una etiqueta de bit de
entrada.
Especifique una etiqueta de bit de
entrada válida.
3155
' ** ' no es una etiqueta de byte de
entrada.
Especifique una etiqueta de byte de
entrada válida.
3156
' ** ' no es una etiqueta de palabra
de entrada.
Especifique una etiqueta de palabra
de entrada válida.
3157
' ** ' no es una etiqueta de bit de
salida.
Especifique una etiqueta de bit de
salida válida.
3158
' ** ' no es una etiqueta de byte de
salida.
Especifique una etiqueta de byte de
salida válida.

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
848 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
3159
' ** ' no es una etiqueta de palabra
de salida.
Especifique una etiqueta de palabra
de salida válida.
3160
' ** ' no es una etiqueta de bit de
memoria.
Especifique una etiqueta de bit de
E/S de memoria válida.
3161
' ** ' no es una etiqueta de byte de
memoria.
Especifique una etiqueta de byte de
E/S de memoria válida.
3162
' ** ' no es una etiqueta de palabra
de memoria.
Especifique una etiqueta de palabra
de E/S de memoria válida.
3163
Demasiados argumentos de
función.
El número máximo del parámetro de
función es de 100. Reduzca el
número de parámetros.
3164
No se puede comparar con un
valor booleano.
El tamaño de los valores booleanos
no se puede comparar. Corrija el
programa.
3165
No se puede usar un valor
booleano en la expresión.
El valor booleano no se puede usar
en la expresión. Corrija el programa.
3166
No se puede comparar entre el
valor booleano y la expresión.
El tamaño del valor booleano y la
expresión no se pueden comparar.
Corrija el programa.
3167
No se puede almacenar un valor
booleano en una variable
numérica.
El valor booleano no se puede usar
en el valor numérico. Corrija el
programa.
3168
No se puede almacenar un valor
numérico en una variable
booleana.
El valor numérico no se puede usar
en la variable booleana. Corrija el
programa.
3169
Se especificó una etiqueta de E/S
no definida.
Defina una nueva etiqueta de E/S o
especifique la etiqueta de E/S
definida.
3170
Se especificó una expresión de
condición no válida.
Se especificó una expresión de
cadena para el lado derecho de la
expresión de condición en la
instrucción Do o Loop. Corrija la
expresión de la condición para que el
lado derecho de la expresión sea un
valor booleano.
3171
No se puede comparar entre el
valor numérico y la cadena.
El valor numérico y la cadena no
pueden ser comparados. Corrija el
programa.
3172
No se puede usar una palabra
clave como nombre de variable.
Algunas palabras clave de SPEL+ no
se pueden usar como nombres de
variables. Corrija el nombre de
variable para que no se sobreponga
con las palabras clave.
3173
' ** ' ya está siendo usado para una
etiqueta de línea.
Corrija el identificador ' ** ' o el
nombre de la etiqueta de línea.
3174
Número o etiqueta de línea
duplicado (**).
No se puede especificar etiquetas de
línea con el mismo nombre en la
misma función. Elimine la etiqueta
de línea ' ** ' o defina una nueva
etiqueta de línea y corrija el
programa.
3175
Se especificó una etiqueta de
punto no definida.
Defina una nueva etiqueta de punto
o especifique la etiqueta de punto
definida.
3176
Se especificó una variable no
definida.
Defina una nueva variable o
especifique la variable definida.
3177
' ** ' ya está siendo usado para una
etiqueta de punto.
Corrija el identificador ' ** ' o el
nombre de la etiqueta de punto.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 849
N.º Mensaje Solución Nota 1 Nota 2
3178
No se puede usar el número de
resultado.
No se puede especificar el número
de resultado cuando se usa un
objeto de visión que no arroja
resultados múltiples en las
instrucciones VSet y VGet. Corrija el
programa.
3179
El literal de cadena está fuera de la
longitud disponible.
El valor de límite de la longitud de
cadena es de un máximo de 255
caracteres. Reduzca la longitud de
la cadena para que no supere el
valor de límite.
3180
No se puede cambiar el valor de
propiedad de calibración con el
comando VSet.
La propiedad de calibración no se
puede cambiar en la instrucción
VSet. Corrija el programa.
3181
Se debe usar la variable de matriz
con ByRef.
No se puede especificar ByVal para
la variable de matriz. Especifique el
parámetro ByRef.
3182
No se especificó una suscripción.
Especifique una suscripción.
3183
No se puede omitir el parámetro.
Agregue un parámetro.
3184
No se puede usar el parámetro
SYNC con el comando de
seguimiento.
No se puede especificar el parámetro
SYNC en comandos de seguimiento.
Elimine el parámetro SYNC.
3185
No se puede usar datos de cola de
trabajo.
No se puede especificar los datos de
cola de trabajo en las instrucciones
BGo, BMove, TGo y TMove. Elimine
los datos de cola de trabajo.
3186
La combinación entre los datos de
cola de trabajo y los datos de
punto no coincide.
No se puede especificar la
combinación de los datos de cola de
trabajo y los datos de punto para la
especificación de coordenada de las
instrucciones Arc, Arc3, Jump3 y
Jump3CP.
Use los datos de cola de trabajo o
los datos de punto.
3187
Se especificó un valor de indicador
de punto no válido.
Corrija el programa para que el valor
de indicador de punto esté dentro del
rango de 0 a 127.
3188
No se puede usar el comando Call
en el procesamiento paralelo.
No se puede usar el comando Call
en el procesamiento paralelo. Corrija
el programa.
3189
No se puede usar variables locales
con el comando Wait.
La instrucción Wait no puede esperar
el cambio de variables locales.
Corrija el programa.
3190
No se puede usar variables de
matriz con el comando Wait.
La instrucción Wait no puede esperar
el cambio de variables de matriz.
Corrija el programa.
3191
No se puede usar variables reales
con el comando Wait.
La instrucción Wait no puede esperar
el cambio de variables reales.
Corrija el programa.
3192
No se puede usar variables de
cadena con el comando Wait.
La instrucción Wait no puede esperar
el cambio de variables de cadena.
Corrija el programa.
3193
Falta el nombre del objeto de
visión.
No se puede omitir el nombre del
objeto de visión en la instrucción
VTeach. Especifique el nombre del
objeto.

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
850 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
3194
No se puede usar un valor
booleano para el valor de tiempo
de espera.
No se puede usar el valor booleano
para el valor de tiempo de espera de
la instrucción Wait. Corrija el
programa.
3196
No se encontró la instrucción
Fend.
El número de instrucciones Fend que
corresponde a las instrucciones
Function no es suficiente. Agregue
las instrucciones Fend.
3197
El nombre de la variable numérica
no puede usar '$'.
El nombre de la variable numérica no
puede usar '$'. Corrija el nombre de
la variable.
3198
Las variables de cadena deben
tener el sufijo '$'.
Las variables de cadena deben tener
un sufijo '$'. Agregue un sufijo '$' al
nombre de variable.
3199 Se especificó un objeto no válido.
Se especificó un objeto de visión no
válido en los comandos de Vision
Guide como VSet y VGet.
Especifique un objeto de visión
válido.
3200
Falta el valor.
Agregue un valor.
3201
Se esperaba ' , '.
Agregue ' , '.
3202
Se esperaba ' ( '.
Agregue ' ( '.
3203
Se esperaba ' ) '.
Agregue ' ) '.
3204
Falta el identificador.
Especifique un identificador.
3205
No se especificó el punto.
Especifique un punto.
3206
Falta la expresión de condición de
evento.
Agregue una expresión de condición
de evento.
3207 Falta la fórmula. Agregue una fórmula.
3208 Falta la fórmula de cadena. Agregue una fórmula de cadena.
3209 Falta la fórmula de punto. Agregue una fórmula de punto.
3210
No se especificó la etiqueta de
línea.
Revise si la etiqueta de línea
especificada existe en el programa.
Agregue una etiqueta de línea válida.
3211 No se especificó la variable. Especifique una variable.
3212
No se pudo encontrar el Fend
correspondiente.
El número de instrucciones Fend que
corresponde a las instrucciones
Function no es suficiente. Agregue
las instrucciones Fend.
3213 Se esperaba ' : '. Agregue ' : '.
3214 No se especificó True/False.
No se especificó True/False en la
propiedad de Vision Guide/GUI
Builder o la sustitución de la
expresión lógica que requiere la
configuración de un valor booleano.
Especifique True o False.
3215 No se especificó On/Off.
Se debe especificar On u Off para la
configuración de lógica de salida
remota de las instrucciones Motor,
Brake, AutoLJM, SetSw y Box.
Especifique On u Off.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 851
N.º Mensaje Solución Nota 1 Nota 2
Formato de comando
PF_OutputOnOff no válido.
Lea la descripción del comando
correspondiente que se entrega en
Alimentación de piezas 7.0
Introducción y hardware (común) y
software
Software 3 Referencia sobre
comandos SPEL+ para la
alimentación de piezas y corrija el
código.
3216 No se especificó High/Low.
Se debe especificar High o Low para
la configuración de modo de
alimentación de la instrucción Power.
Especifique High o Low.
3217
No se especificó la etiqueta de bit
de entrada.
No se especificó la etiqueta de bit de
entrada en las instrucciones SetSW y
CTReset y las funciones Sw y Ctr.
Especifique una etiqueta de bit de
entrada válida.
3218
No se especificó la etiqueta de
byte de entrada.
No se especificó la etiqueta de byte
de entrada en la instrucción SetIn y
en las funciones In e InBCD.
Especifique una etiqueta de byte de
entrada válida.
3219
No se especificó la etiqueta de
palabra de entrada.
No se especificó la etiqueta de
palabra de entrada en la instrucción
SetInW y en las funciones InReal e
InW. Especifique una etiqueta de
palabra de entrada válida.
3220
No se especificó la etiqueta de bit
de salida.
No se especificó la etiqueta de bit de
salida en las instrucciones On, Off y
en la función Oport. Especifique una
etiqueta de bit de salida válida.
3221
No se especificó la etiqueta de
byte de salida.
No se especificó la etiqueta de byte
de salida en las instrucciones Out y
OpBCD y en la función Out.
Especifique una etiqueta de byte de
salida válida.
3222
No se especificó la etiqueta de
palabra de salida.
No se especificó la etiqueta de
palabra de salida en las
instrucciones OutReal y OpW y en la
función OutReal. Especifique una
etiqueta de palabra de salida válida.
3223
No se especificó la etiqueta de bit
de memoria.
No se especificó la etiqueta de bit de
memoria en las instrucciones
MemOn, MemOff y en la función
MemSw. Especifique una etiqueta
de bit de memoria válida.
3224
No se especificó la etiqueta de
byte de memoria.
No se especificó la etiqueta de byte
de memoria en la instrucción
MemOut y en la función MemIn.
Especifique una etiqueta de byte de
memoria válida.

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
852 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
3225
No se especificó la etiqueta de
palabra de memoria.
No se especificó la etiqueta de
palabra de memoria en la instrucción
MemOutW y en la función MemInW.
Especifique una etiqueta de palabra
de memoria válida.
3226
No se especificó la etiqueta de
error de usuario.
No se especificó la etiqueta de error
de usuario en la instrucción Error.
Especifique una etiqueta de error de
usuario válida.
3227
No se especificó el nombre de
función.
No se especificó el nombre de
función en una instrucción que
requiere la designación del nombre
de función, como Call y Xqt.
Especifique un nombre de función
válido.
3228
No se especificó el tipo de
variable.
No se especificó el tipo de variable
para la definición de parámetro de la
instrucción Function y la
especificación del parámetro
Preserve de la instrucción Global.
Especifique un tipo de variable
correcto.
3229
Parámetro de instrucción Trap no
válido. Use Goto, Call o Xqt.
Especifique GoTo, Call o Xqt como
parámetro de la instrucción Trap.
3230 Se esperaba For/Do/Function.
Especifique For, Do o Function como
parámetro de la instrucción Exit.
3231 No se especificó Above/Below.
El valor de configuración para la
orientación del codo no se especificó
en la instrucción Elbow. Especifique
Above o Below.
3232 No se especificó Righty/Lefty.
El valor de configuración para la
orientación de la mano no se
especificó en la instrucción Hand.
Especifique Righty o Lefty.
3233 No se especificó NoFlip/Flip.
El valor de configuración para la
orientación de la muñeca no se
especificó en la instrucción Wrist.
Especifique NoFlip o Flip.
3234
No se especificó el número de
puerto.
El número de puerto que indica el
archivo o puerto de comunicación no
se especificó en las instrucciones
Read, ReadBin, Write y WriteBin.
Consulte “Instrucción SetCom” en la
Referencia del lenguaje SPEL+ y
especifique un número de archivo o
número de puerto adecuado.
3235
No se especificó la variable de tipo
de cadena.
No se especificó la variable de tipo
de cadena en un comando que
requiere la especificación de la
variable de tipo de cadena como
parámetro. Especifique una variable
de tipo de cadena válida.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 853
N.º Mensaje Solución Nota 1 Nota 2
3236
No se especificó el número de
puerto RS-232C.
El número de puerto RS-232C no se
especifica en las instrucciones
OpenCom, CloseCom y SetCom.
Consulte “Instrucción OpenCom” en
la Referencia del lenguaje SPEL+ y
especifique un número de puerto
adecuado.
3237
No se especificó el número de
puerto de comunicación de red.
No se especificó el número de puerto
de comunicación de red en las
instrucciones OpenNet, CloseNet,
SetNet y WaitNet. Especifique un
número entero de 201 a 216.
3238
No se especificó la velocidad de
comunicación.
No se especificó la velocidad de
comunicación (velocidad en baudios)
en la instrucción SetCom. Consulte
“Instrucción SetCom” en la
Referencia del lenguaje SPEL+ y
especifique una velocidad en
baudios adecuada.
3239
No se especificó el número de bit
de datos.
No se especificó la longitud de bit de
datos en la instrucción SetCom.
Consulte “Instrucción SetCom” en la
Referencia del lenguaje SPEL+ y
especifique una longitud de bit de
datos adecuada.
3240
No se especificó el número de bit
de detención.
No se especificó la longitud de bit de
detención en la instrucción SetCom.
Consulte “Instrucción SetCom” en la
Referencia del lenguaje SPEL+ y
especifique una longitud de bit de
detención adecuada.
3241 No se especificó la paridad.
No se especificó la paridad en la
instrucción SetCom. Consulte
“Instrucción SetCom” en la
Referencia del lenguaje SPEL+ y
especifique una paridad adecuada.
3242 No se especificó el terminador.
No se especificó el terminador (fin de
la línea de enviar/recibir) en las
instrucciones SetCom y SetNet.
Consulte “Instrucción SetCom” en la
Referencia del lenguaje SPEL+ y
especifique un terminador adecuado.
3243
No se especificó el flujo de
hardware.
No se especificó el flujo de hardware
en la instrucción SetCom. Consulte
“Instrucción SetCom” en la
Referencia del lenguaje SPEL+ y
especifique un control de flujo
adecuado.
3244
No se especificó el flujo de
software.
No se especificó el flujo de software
en la instrucción SetCom. Consulte
“Instrucción SetCom” en la
Referencia del lenguaje SPEL+ y
especifique un control de flujo
adecuado.
3245 No se especificó el valor None.
No se especificó "NONE" para la
configuración de control de flujo de
software en la instrucción SetNet.
Especifique "NONE".

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
854 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
3246
No se especificó el parámetro ' O '
o ' C '.
No se especificó el parámetro Open
o Close para el final de una curva en
la instrucción Curva.
Consulte “Instrucción Curve” en la
Referencia del lenguaje SPEL+ y
especifique un parámetro
Open/Close adecuado.
3247
No se especificó el parámetro
NumAxes.
El número de ejes de coordenadas
controlado durante un movimiento de
curva no se especifica en la
instrucción Curve. Consulte
“Instrucción Curve” en la Referencia
del lenguaje SPEL+ y especifique un
número de ejes de coordenadas
adecuado.
3248
El valor J4Flag (0-1) no se
especificó.
Especifique 0 o 1, o una expresión
para el valor J4Flag.
3249
El valor J6Flag (0-127) no se
especificó.
Especifique un número entero entre
0 y 127, o una expresión para el
valor J6Flag.
3250
No se especificó la variable de
matriz.
No se especificó la variable de matriz
en la instrucción que requiere la
especificación de la variable de
matriz. Especifique una variable de
matriz válida.
3251
No se especificó la variable de
matriz de cadena.
La matriz que almacena un token
debe ser una variable de matriz de
cadena en la instrucción ParseStr y
la función ParseStr. Especifique una
variable de matriz de cadena.
3252
No se especificó la ID del
dispositivo.
No se especificó la ID del dispositivo
en la instrucción DispDev o el
comando Cls. Consulte "Instrucción
DispDev" en la Referencia del
lenguaje SPEL+ y especifique una ID
de dispositivo adecuada.
3253 No se especificó el tipo de E/S.
No se especificó el tipo de E/S en la
función IOLabel$. Consulte "Función
IOLabel$" en la Referencia del
lenguaje SPEL+ y especifique un tipo
de E/S adecuado.
3254
No se especificó el ancho de bits
de E/S.
No se especificó el ancho de bits de
E/S (ancho del puerto de E/S) en las
funciones IODef e IOLabe. Consulte
"Función IODef" en la Referencia del
lenguaje SPEL+ y especifique un
ancho de bits de E/S adecuado.
3255 No se especificó ByRef.
Aunque se especificó ByRef en la
declaración de función, no se
especificó ByRef para llamadas.
Especifique el parámetro ByRef.
3256
No se especificó el tipo de
variable.
No se especificó el tipo de variable
en la instrucción Global. Especifique
un tipo de variable adecuado.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 855
N.º Mensaje Solución Nota 1 Nota 2
3257
La expresión de condición no se
evalúa un valor booleano.
La expresión de condición en las
instrucciones If, ElseIf, Do y Loop
debe arrojar un valor booleano.
Corrija la expresión de condición
para arrojar un valor booleano.
3258
No se especificó el número de
puerto RS232C.
No se especificó el número de puerto
RS-232C en la función ChkCom.
Consulte "Función ChkCom" en la
Referencia del lenguaje SPEL+ y
especifique un número de puerto
adecuado.
3259
No se especificó el número de
puerto de comunicación de red.
No se especificó el número de puerto
de comunicación de red en la función
ChkCom. Consulte "Función
ChkNet" en la Referencia del
lenguaje SPEL+ y especifique un
número de puerto adecuado.
3260 No se especificó la ID de idioma.
No se especificó la ID de idioma en
la función ErrMsg$. Consulte
"Función ErrMsg$" en la Referencia
del lenguaje SPEL+ y especifique
una ID de idioma adecuada.
3261 Se esperaba '.'. Agregue '.'.
3262
No se especificó el nombre de
secuencia de visión.
No se especificó el nombre de
secuencia de visión en comandos de
Vision Guide como VSet, VGet y
VRun. Agregue un nombre de
secuencia.
3263
No se especificó el nombre de
secuencia o nombre de calibración
de visión.
No se especificó el nombre de
secuencia o nombre de calibración
de visión en las instrucciones VSet y
VGet. Agregue un nombre de
secuencia o un nombre de
calibración.
3264
No se especificó el nombre de
propiedad o nombre de resultado
de visión.
No se especificó el nombre de
propiedad o nombre de resultado de
visión en las instrucciones VSet y
VGet. Agregue un nombre de
propiedad o un nombre de resultado.
3265
No se especificó el nombre de
propiedad, nombre de resultado o
nombre de objeto de visión.
No se especificó el nombre de
propiedad, el nombre de resultado o
el nombre de objeto de visión en las
instrucciones VSet y VGet. Agregue
un nombre de propiedad, el nombre
de resultado o el nombre de objeto.
3266
No se especificó el nombre de
propiedad de calibración de visión.
No se especificó el nombre de
propiedad de calibración de visión en
las instrucciones VSet y VGet.
Agregue un nombre de propiedad.
3267 No se especificó el tipo de tarea.
No se especificó el tipo de tarea en
la instrucción Xqt. Consulte
"Instrucción Xqt" en la Referencia del
lenguaje SPEL+ y especifique un tipo
de tarea adecuado.

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
856 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
3268
No se especificó el nombre de
formulario.
No se especificó el nombre de
formulario en las instrucciones GSet,
GGet, GShow, GShowDialog y
GClose. Especifique un nombre de
formulario.
3269
No se especificó el nombre de
propiedad o nombre de control.
No se especificó el nombre de
propiedad o nombre de control en las
instrucciones GSet y GGet.
Especifique un nombre de propiedad
o un nombre de control.
3270
No se especificó el nombre de
propiedad.
No se especificó el nombre de
propiedad en las instrucciones GSet
y GGet. Especifique un nombre de
propiedad.
3271 No se especificó BackColorMode.
No se especificó el valor de
configuración de la propiedad
BackColorMode en la instrucción
GSet. Consulte "Propiedad
BackColorMode" en el manual de
GUI Builder 7.0, y especifique un
valor de configuración adecuado.
3272 No se especificó BorderStyle.
No se especificó el valor de
configuración de la propiedad
BorderStyle en la instrucción GSet.
Consulte "Propiedad BorderStyle" en
el manual de GUI Builder 7.0, y
especifique un valor de configuración
adecuado.
3273 No se especificó DropDownStyle.
No se especificó el valor de
configuración de la propiedad
DropDownStyle en la instrucción
GSet. Consulte "Propiedad
DropDownStyle" en el manual de
GUI Builder 7.0, y especifique un
valor de configuración adecuado.
3274 No se especificó EventTaskType.
No se especificó el valor de
configuración de la propiedad
EventTaskType en la instrucción
GSet. Consulte "Propiedad
EventTaskType" en el manual de
GUI Builder 7.0, y especifique un
valor de configuración adecuado.
3275 No se especificó ImageAlign.
No se especificó el valor de
configuración de propiedad
ImageAlign en la instrucción GSet.
Consulte "Propiedad ImageAlign" en
el manual de GUI Builder 7.0, y
especifique un valor de configuración
adecuado.
3276 No se especificó IOType.
No se especificó el valor de
configuración de la propiedad
IOType en la instrucción GSet.
Consulte "Propiedad IOType" en el
manual de GUI Builder 7.0, y
especifique un valor de configuración
adecuado.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 857
N.º Mensaje Solución Nota 1 Nota 2
3277 No se especificó FormBorderStyle.
No se especificó el valor de
configuración de la propiedad
FormBorderStyle en la instrucción
GSet. Consulte "Propiedad
FormBorderStyle" en el manual de
GUI Builder 7.0, y especifique un
valor de configuración adecuado.
3278 No se especificó ScrollBars.
No se especificó el valor de
configuración de la propiedad
ScrollBars en la instrucción GSet.
Consulte "Propiedad ScrollBars" en
el manual de GUI Builder 7.0, y
especifique un valor de configuración
adecuado.
3279 No se especificó SizeMode.
No se especificó el valor de
configuración de la propiedad
SizeMode en la instrucción GSet.
Consulte "Propiedad SizeMode" en
el manual de GUI Builder 7.0, y
especifique un valor de configuración
adecuado.
3280 No se especificó StartPosition.
No se especificó el valor de
configuración de la propiedad
StartPosition en la instrucción GSet.
Consulte "Propiedad StartPosition"
en el manual de GUI Builder 7.0, y
especifique un valor de configuración
adecuado.
3281 TextAlign no se especificó.
El valor de configuración de la
propiedad TextAlign no se especificó
en la instrucción GSet.
Este error ocurre cuando el tipo de
control no se puede identificar
porque el control fue especificado
por la variable de cadena. Consulte
“Propiedad TextAlign” en el manual
de GUI Builder 7.0, y especifique un
valor de configuración adecuado.
3282 TextAlign no se especificó.
El valor de configuración de la
propiedad TextAlign no se especificó
en la instrucción GSet.
Este error ocurre cuando el control
es un cuadro de texto. Consulte
“Propiedad TextAlign” en el manual
de GUI Builder 7.0, y especifique un
valor de configuración adecuado.
3283 TextAlign no se especificó.
El valor de configuración de la
propiedad TextAlign no se especificó
en la instrucción GSet.
Este error ocurre cuando el control
no es un cuadro de texto. Consulte
“Propiedad TextAlign” en el manual
de GUI Builder 7.0, y especifique un
valor de configuración adecuado.

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
858 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
3284 No se especificó WindowState.
No se especificó el valor de
configuración de la propiedad
WindowState en la instrucción GSet.
Consulte "Propiedad WindowState"
en el manual de GUI Builder 7.0, y
especifique un valor de configuración
adecuado.
3285 J1FLAG no se especificó.
Especifique 0 o 1, o una expresión
para el valor J1Flag.
3286 J2FLAG no se especificó.
Especifique 0 o 1, o una expresión
para el valor J2Flag.
3287 No se especificó la ID del robot. Especifique un número de robot.
3288
No se especificó la ID del
robot/Valor All.
No se especificó el número del robot
o el valor All en las funciones
InsideBox e InsidePlane.
Especifique un número de robot que
realice la detección de intrusión, o el
valor All.
3289 No se especificó la ID del área.
No se especificó el número del área
en las funciones InsideBox e
InsidePlane. Especifique un número
de área de comprobación de
acercamiento que arroje un estado
mediante un número entero de 1 a
15.
3290
No se especificó el número de
archivo.
No se especificó el número de
archivo en el comando relacionado
con la administración de archivos.
Especifique un número de archivo
mediante un número entero entre 30
y 63 o una expresión.
3292
No se especificó el tipo de base de
datos.
No se especificó el tipo de base de
datos en la instrucción OpenDB.
Consulte "Instrucción OpenDB" en la
Referencia del lenguaje SPEL+ y
especifique un tipo de base de datos
adecuado.
3293 No se especificó el tipo de disco.
No se especificó el tipo de disco que
está sometido a manipulación de
archivos en la instrucción ChDisk.
Consulte "Instrucción ChDisk" en la
Referencia del lenguaje SPEL+ y
especifique un tipo de disco
adecuado.
3295
No se especificó la ID del área de
transportador.
No se especificó la ID de área que
está sometida al conteo de datos de
cola de trabajo en la función
Cnv_QueLen. Consulte “Función
Cnv_QueLen” en la Referencia del
lenguaje SPEL+ y especifique una ID
de área adecuada.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 859
N.º Mensaje Solución Nota 1 Nota 2
3296
No se especificó el número de
archivo de la base de datos.
No se especificó el número de la
base de datos que está sometida a
operación en las funciones OpenDB,
CloseDB, DeleteDB, UpdateDB y
SelectDB. Consulte "Instrucción
OpenDB" en la Referencia del
lenguaje SPEL+ y especifique un
número de base de datos adecuado.
3297
No se especificó el nombre de
calibración de visión.
No se especificó el nombre de
calibración en la instrucción VCal.
Especifique un nombre de
calibración que esté sometido a
calibración.
3298
No se especificó la ID de tipo de
objeto de visión.
No se especificó el tipo de objeto de
visión en la instrucción
VCreateObject. Consulte
"Instrucción VCreateObject" en la
Referencia de propiedades y
resultados de Vision Guide 7.0 y
especifique un tipo de objeto
adecuado.
3299
No se especificó la ID del modo de
apagado.
No se especificó el valor del modo de
apagado en la instrucción ShutDown
y la función ShutDown. Consulte
"Instrucción ShutDown" en la
Referencia del lenguaje SPEL+ y
especifique un valor de modo
adecuado.
3301
La versión del archivo OBJ
enlazado no coincide.
No todos los archivos del proyecto se
compilan en la misma versión.
Recompile el proyecto.
3302
El archivo OBJ no coincide con la
etiqueta de E/S compilada.
Cambió la configuración del
proyecto. Recompile el proyecto.
3303
El archivo OBJ enlazado no
coincide con la etiqueta de error de
usuario compilada.
Cambió la configuración del
proyecto. Recompile el proyecto.
3304
El archivo OBJ enlazado no
coincide con la opción de
compilación compilada.
Cambió la configuración del
proyecto. Recompile el proyecto.
3305
El archivo OBJ enlazado no
coincide con la opción de enlace
compilada.
Cambió la configuración del
proyecto. Recompile el proyecto.
3306
El archivo OBJ enlazado no
coincide con la opción SPEL
compilada.
Cambió la configuración del
proyecto. Recompile el proyecto.
3307 Función duplicada.
Se está usando el mismo nombre de
función en más de un archivo.
Corrija el programa (nombre de
función).
3308
Variable global conservada
duplicada.
Se está usando el mismo nombre de
variable global conservada en más
de un archivo.
Corrija el programa (nombre de
variable).
3309 Variable global duplicada.
Se está usando el mismo nombre de
variable global en más de un archivo.
Corrija el programa (nombre de
variable).

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
860 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
3310 Variable de módulo duplicada.
Se está usando el mismo nombre de
variable de módulo en más de un
archivo.
Corrija el programa (nombre de
variable).
3311
No se pudo encontrar el archivo.
-
3312
El archivo OBJ está dañado.
-
3313
El nombre de archivo especificado
incluye caracteres que no se
pueden usar.
-
3314 No se puede abrir el archivo.
El archivo está siendo usado para
otra aplicación. Salga de la otra
aplicación.
3315
' ** ' ya está siendo usado para un
nombre de función.
Corrija el identificador ' ** ' o el
nombre de la función. Recompile el
proyecto.
3316
' ** ' ya está siendo usado para un
nombre de variable global
conservada.
Corrija el identificador ' ** ' o el
nombre de la variable global
conservada. Recompile el proyecto.
3317
' ** ' ya está siendo usado para un
nombre de variable global.
Corrija el identificador ' ** ' o el
nombre de la variable global.
Recompile el proyecto.
3318
' ** ' ya está siendo usado para un
nombre de variable de módulo.
Corrija el identificador ' ** ' o el
nombre de la variable de módulo.
Recompile el proyecto.
3319
La dimensión de la variable de
matriz no coincide con la
declaración.
Corrija la dimensión de la matriz y
recompile el proyecto.
3320
El tipo de valor devuelto de la
función no coincide con la
declaración.
Corrija el tipo de valor devuelto de la
función y recompile el proyecto.
3321
' ** ' ya está siendo usado con un
nombre de función.
Corrija el identificador ' ** ' o el
nombre de la función. Recompile el
proyecto.
3322
' ** ' ya está siendo usado con un
nombre de variable global
conservada.
Corrija el identificador ' ** ' o el
nombre de la variable global
conservada. Recompile el proyecto.
3323
' ** ' ya está siendo usado con un
nombre de variable global.
Corrija el identificador ' ** ' o el
nombre de la variable global.
Recompile el proyecto.
3324
' ** ' ya está siendo usado con un
nombre de variable de módulo.
Corrija el identificador ' ** ' o el
nombre de la variable de módulo.
Recompile el proyecto.
3325
' ** ' ya está siendo usado con un
nombre de variable local.
Corrija el identificador ' ** ' o el
nombre de la variable local.
Recompile el proyecto.
3326
El número de parámetros no
coincide con la declaración.
Revise el número de parámetros en
la función, corrija el programa y
recompile el proyecto.
3327
No se especificó ByRef en la
declaración de función para el
parámetro **.
-
3328
No se especificó ByRef para el
parámetro **.
-
3329
Diferencia de tipo de parámetro **.
-

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 861
N.º Mensaje Solución Nota 1 Nota 2
3330
El archivo OBJ enlazado no
coincide con el proyecto de Vision
compilado.
Recompile el proyecto.
3331
El tamaño del archivo OBJ supera
el tamaño disponible después del
enlazado.
El tamaño del archivo OBJ supera el
valor de límite (8 MB). Reduzca el
programa.
3332 Se redefinió la variable '**'.
Se sobrecargó la variable ' ** ’.
Elimine las definiciones de variables
innecesarias y recompile el proyecto.
3333
El archivo OBJ enlazado no
coincide con el proyecto de GUI
Builder compilado.
Recompile el proyecto.
3334
El número de variables que está
usando el comando Wait supera el
máximo permitido.
El número de variables que está
usando el comando Wait supera el
máximo permitido (64). Elimine las
variables y recompile el proyecto.
3335
No se puede usar la llamada en el
procesamiento paralelo.
No se puede usar la llamada en el
procesamiento paralelo. Corrija el
programa y recompile el proyecto.
3336 Se redefinió la variable.
Corrija el tipo de datos de la variable
y recompile el proyecto.
3351
Se especificó un índice de objeto
no válido.
3352
No se especificó el nombre de
secuencia de Force Guide.
3353
No se especificó el nombre de
propiedad o el nombre de
resultado de Force Guide.
3354
No se especificó el nombre de
propiedad, el nombre de resultado
o el nombre de objeto de Force
Guide.
3355
El archivo de proyecto de Force
Guide tiene un formato de archivo
no admitido.
3356
El archivo OBJ enlazado no
coincide con el proyecto de Force
Guide compilado.
3400 No se especificó la ID de diálogo.
No se especificó la ID de diálogo en
la instrucción RunDialog. Consulte
"Instrucción RunDialog" en la
Referencia del lenguaje SPEL+ y
especifique una ID de diálogo.
3401
No se especificó el nombre de la
función principal.
No se especificó el nombre de la
función principal a ejecutar en la
instrucción StartMain. Especifique
un nombre de función principal (main
a main63).
3402
No se especificó el nombre de
objeto de visión.
No se especificó el nombre de objeto
de visión en las instrucciones
VLoadModel, VSaveModel,
VShowModel, VTeach y VTrain.
Especifique un nombre de objeto.

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
862 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
3403
No se especificó la ID del modo de
recuperación.
No se especificó el valor del modo de
recuperación en la instrucción
Recover o la función Recover.
Consulte "Instrucción Recover" en la
Referencia del lenguaje SPEL+ y
especifique un modo adecuado.
3404
No se especificó la condición de
captura.
No se especificó el número de
captura o el evento de captura en la
instrucción Trap. Consulte
"Instrucción Trap" en la Referencia
del lenguaje SPEL+ y especifique un
número o evento de captura
adecuado.
3405 No se especificó DialogResult.
No se especificó el valor de
configuración de la propiedad
DialogResult en la instrucción GSet.
Consulte "Propiedad DialogResult"
en el manual de GUI Builder 7.0, y
especifique un valor de configuración
adecuado.
3406 No se especificó MsgBox_Type.
No se especificó el tipo de
visualización en la instrucción
MsgBox_Type. Consulte "Instrucción
MsgBox" en la Referencia del
lenguaje SPEL+ y especifique un
valor de configuración adecuado.
3407
No se especificó la variable de
matriz de tipo de byte.
No se especificó la variable de matriz
de tipo de byte para enviar o recibir
datos en la instrucción
FbusIO_SendMsg. Los datos de
envío/recepción se deben especificar
por matriz de tipo de byte.
3408
No se especificó la variable de
matriz única.
El número de dimensiones no es el
adecuado en el comando donde solo
está disponible la variable de matriz
única. Corrija el número de
dimensiones.
3409 No se especificó la lista de puntos.
No se especificó la coordenada de
píxel o la coordenada del robot como
un dato de punto continuo en la
instrucción VxCalib. Especifique un
dato de punto continuo en el
siguiente formato: P (inicio : fin)
3410 No se especificó el tipo de código.
No se especificó el valor de
configuración de la propiedad
CodeType en la instrucción VSet.
Consulte "Propiedad CodeType" en
la Referencia de propiedades y
resultados de Vision Guide 7.0 y
especifique un valor de configuración
adecuado.
3411 No se especificó el tipo Edge.
No se especificó el valor de
configuración de la propiedad
EdgeType en la instrucción VSet.
Consulte "Propiedad EdgeType" en
la Referencia de propiedades y
resultados de Vision Guide 7.0 y
especifique un valor de configuración
adecuado.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 863
N.º Mensaje Solución Nota 1 Nota 2
3412 No se especificó el tipo de ECC.
No se especificó el valor de
configuración de la propiedad
ErrorCorrection en la instrucción
VSet. Este error es para la versión
antigua de RC+6.x. Es posible
configurar la versión antigua
mediante la configuración de la
versión del compilador. Consulte
"Propiedad ErrorCorrection" en la
Referencia de propiedades y
resultados de Vision Guide 6.0 y
especifique un valor de configuración
adecuado.
3413
No se especificó el tipo
ImageColor.
No se especificó el valor de
configuración de la propiedad
ImageColor en la instrucción VSet.
Consulte "Propiedad ImageColor" en
la Referencia de propiedades y
resultados de Vision Guide 7.0 y
especifique un valor de configuración
adecuado.
3414 No se especificó el tipo de punto.
No se especificó el valor de
configuración de la propiedad
PointType en la instrucción VSet.
Consulte "Propiedad PointType" en
la Referencia de propiedades y
resultados de Vision Guide 7.0 y
especifique un valor de configuración
adecuado.
3415
No se especificó el tipo de
referencia.
No se especificó el valor de
configuración de la propiedad
ReferenceType en la instrucción
VSet. Consulte "Propiedad
ReferenceType" en la Referencia de
propiedades y resultados de Vision
Guide 7.0 y especifique un valor de
configuración adecuado.
3416 No se especificó el tipo Edge.
La lógica (tipo Edge) de la entrada
del disparador no se especifica en la
instrucción SetLatch. Especifique 0
(lógica negativa) o 1 (lógica positiva).
3417
No se especificó el número de
puerto.
No se especificó el número del
puerto de entrada de R-E/S al que
está conectada la entrada del
disparador en la instrucción
SetLatch. Consulte “Instrucción
SetLatch” en la Referencia del
lenguaje SPEL+ y especifique un
número de puerto adecuado.
3418 No se especificó el eje.
No se especificó el parámetro del eje
en la función Force_GetForce o la
instrucción Force_SetTrigger.
Consulte "Función Force_GetForce"
en la Referencia del lenguaje SPEL+
y especifique un valor de
configuración adecuado.

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
864 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
3419 No se especificó CompareType.
No se especificó el parámetro
CompareType para definir la
condición de juicio en la instrucción
Force_SetTrigger.
Consulte "Instrucción
Force_SetTrigger" en la Referencia
del lenguaje SPEL+ y especifique un
parámetro adecuado.
3420
Solo está disponible una matriz de
número entero o de tipo corto.
-
3421
No se especificó el nombre de
formulario o de ID de ventana.
No se especificó el nombre de
formulario o de ID de ventana del
sistema sometido a operación en las
instrucciones GShow y GClose.
Especifique un nombre de formulario
o ID de ventana válido. Para
conocer detalles de la ID de ventana,
consulte "Instrucción GShow" en el
Manual de GUI Builder7.0.
3422 No se especificó la ID de ventana.
No se especificó la ID de ventana del
sistema sometida a operación en las
instrucciones GShow y GClose.
Consulte "Instrucción GShow" en el
Manual de GUI Builder7.0 y
especifique una ID de ventana
adecuada.
3423
No se especificó la ID del modo de
rendimiento.
No se especificó el modo de
rendimiento en el parámetro
PerformMode de las instrucciones
PerformMode, Go, BGo, TGo y
Jump. Consulte "Instrucción
PerformMode" en la Referencia del
lenguaje SPEL+ y especifique un
modo de rendimiento adecuado.
3424
No se especificó el tipo de
protocolo.
No se especificó la configuración del
protocolo de comunicación en la
instrucción SetNet. Especifique UDP
o TCP.
3425
No se especificó el tipo de E/S o la
etiqueta de E/S.
No se especificó el tipo de E/S o la
etiqueta de E/S en la función IODef.
Especifique la etiqueta de E/S o el
tipo de E/S para comprobar la
existencia de la definición. Para
conocer detalles de los tipos E/S,
consulte "Función IODef" en la
Referencia del lenguaje SPEL+.
3426
No se especificó el modo de
evasión de singularidad.
No se especificó el modo de evasión
de singularidad en la instrucción
AvoidSingularity. Consulte
"Instrucción AvoidSingularity" en la
Referencia del lenguaje SPEL+ y
especifique un modo adecuado.
3427
No se especificó el valor de
aceleración.
No se especificó el número de
configuración de la aceleración en la
función AccelR. Consulte "Función
AccelR" en la Referencia del
lenguaje SPEL+ y especifique un
valor de configuración adecuado.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 865
N.º Mensaje Solución Nota 1 Nota 2
3428
No se especificó el valor de
aceleración.
No se especificó el número de
configuración de la aceleración en la
función Accel, la función AccelMax,
la función AccelS y la función
RealAccel. Consulte "Función Accel"
en la Referencia del lenguaje SPEL+
y especifique un número de
configuración adecuado.
3429
No se especificó el criterio de
ordenación de los datos de la cola
de trabajo.
No se especificó el criterio de
ordenación de los datos de la cola de
trabajo en la instrucción
WorkQue_Sort. Consulte
"Instrucción WorkQue_Sort" en la
Referencia del lenguaje SPEL+ y
especifique un criterio de ordenación
adecuado.
3430
No se especificó el número de ejes
de las coordenadas.
-
3431
No se especificó el número de ejes
de las coordenadas.
-
3432
No se especificó un punto o
expresión de punto.
Revise el programa.
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.
3433
No se especificó la variable de
matriz de tipo booleano.
Especifique la variable de matriz
de tipo booleano.
La matriz que almacena un valor
Enabled (Activado) o una propiedad
LPF_Enabled debe ser una matriz de
tipo booleano en la instrucción FGet.
Especifique una variable de matriz
booleana.
3434
No se especificó la variable de
matriz de tipo real o doble.
Especifique una variable de matriz
de tipo real o doble.
No se especificó la variable de matriz
de tipo real o doble en las
instrucciones FGet o MPGet.
Especifique una variable de matriz
de tipo real o doble.
3435
No se especificó la variable de
matriz de tipo de número entero.
Especifique una variable de matriz
de tipo de número entero.
La matriz que almacena un valor de
la propiedad Polarities debe ser una
matriz de tipo de número entero en la
instrucción FGet.
Especifique una variable de matriz
de tipo de número entero.
3436
No se especificó la duración de la
instrucción FCKeep.
Especifique la duración.
No se especificó la duración del
control de fuerza (valor de tiempo de
espera) en la instrucción FCKeep.
Especifique un valor de configuración
adecuado.
3437
No se especificó el tipo de pieza
del controlador.
Especifique el tipo de pieza del
controlador.
3438
No se especificó el tipo de pieza
del robot.
Especifique el tipo de pieza del robot.
3439
No se especificó el tipo de pieza
del robot.
Especifique el tipo de pieza del robot.
3440
Se especifica un valor distinto al
valor numérico para el parámetro
del comando. Especifique un valor
numérico.
Especifique un valor numérico para
el séptimo parámetro del comando
AIO_TrackingSet.

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
866 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
3441
Se especifica un valor distinto al
valor numérico para el parámetro
del comando. Especifique un valor
numérico.
Especifique un valor numérico para
el sexto parámetro del comando
AIO_TrackingSet.
3450
No se especificó el nombre de
propiedad de fuerza o el nombre
de estado.
Agregue un nombre de propiedad
o un nombre de estado.
No se especificó el nombre de
propiedad de fuerza o el nombre de
estado en las instrucciones FSet,
FGet, MPSet y MPGet.
Agregue un nombre de propiedad o
un nombre de estado.
3451
No se especificó el nombre de
propiedad de fuerza, el nombre de
estado o el nombre de objeto.
Agregue un nombre de propiedad,
el nombre de estado o el nombre
de objeto.
No se especificó el nombre de
propiedad de fuerza, el nombre de
estado o el nombre de objeto en las
instrucciones FSet, FGet, MPSet y
MPGet.
Agregue un nombre de propiedad, el
nombre de estado o el nombre de
objeto.
3452
No se especificó el nombre de
objeto de fuerza.
Agregue un nombre de objeto de
fuerza.
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.
3453
No se especificó el objeto de la
propiedad de masa.
Especifique el objeto de la
propiedad de masa.
Especifique un objeto de la
propiedad de masa válido.
3454
No se especificó el objeto del
sistema de coordenadas de fuerza.
Especifique un objeto del sistema
de coordenadas de fuerza.
Especifique un objeto del sistema de
coordenadas de fuerza válido.
3455
No se especificó el objeto de Force
Control.
Especifique un objeto de Force
Control.
Especifique un objeto de Force
Control válido.
3456
No se especificó el objeto de
monitor de fuerza.
Especifique un objeto de monitor
de fuerza.
Especifique un objeto de monitor de
fuerza válido.
3457
No se especificó el objeto
disparador de fuerza.
Especifique un objeto disparador
de fuerza.
Especifique un objeto disparador de
fuerza válido.
3458
No se especificó el objeto de Force
Control o el objeto del sistema de
coordenadas de fuerza.
Especifique un objeto de Force
Control o un objeto del sistema de
coordenadas de fuerza.
No se especificaron los datos de
Force Control o los datos del sistema
de coordenadas de fuerza en la
instrucción FCSMove. Especifique
un objeto de Force Control o un
objeto del sistema de coordenadas
de fuerza válido.
3459
No se especificó el objeto de
fuerza.
Especifique un objeto de fuerza.
3460
No se especificó la etiqueta del
objeto de fuerza.
Especifique una etiqueta del objeto
de fuerza.
3461
No se especificó el objeto o la
etiqueta de fuerza.
Especifique un objeto o una etiqueta
de fuerza.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 867
N.º Mensaje Solución Nota 1 Nota 2
3462
No se especificó el objeto o la
etiqueta del sistema de
coordenadas de fuerza.
Especifique un objeto o una
etiqueta del sistema de
coordenadas de fuerza.
Especifique un objeto o una etiqueta
del sistema de coordenadas de
fuerza válidos.
3463
No se especificó el objeto o la
etiqueta de Force Control.
Especifique un objeto o una
etiqueta de Force Control.
Especifique un objeto o una etiqueta
de Force Control válidos.
3464
No se especificó el objeto o la
etiqueta de monitor de fuerza.
Especifique un objeto o una
etiqueta de monitor de fuerza.
Especifique un objeto o una etiqueta
de monitor de fuerza válidos.
3465
No se especificó el objeto o la
etiqueta de disparador de fuerza.
Especifique un objeto o una
etiqueta de disparador de fuerza.
Especifique un objeto o una etiqueta
de disparador de fuerza válidos.
3466
No se especificó el objeto o la
etiqueta de la propiedad de masa.
Especifique el objeto o la etiqueta
de la propiedad de masa.
Especifique un objeto o una etiqueta
de la propiedad de masa válidos.
3467
No se especificó el objeto o la
etiqueta del sistema de
coordenadas de fuerza.
Especifique un objeto o una
etiqueta del sistema de
coordenadas de fuerza.
Especifique un objeto o una etiqueta
del sistema de coordenadas de
fuerza válidos.
3468
No se especificó la etiqueta del
objeto de Force Control.
Especifique una etiqueta del objeto
de Force Control.
Especifique una etiqueta del objeto
de Force Control válida.
3469
No se especificó la etiqueta del
objeto de monitor de fuerza.
Especifique una etiqueta del objeto
de monitor de fuerza.
Especifique una etiqueta del objeto
de monitor de fuerza válida.
3470
No se especificó la etiqueta del
objeto disparador de fuerza.
Especifique una etiqueta del objeto
disparador de fuerza.
Especifique una etiqueta del objeto
disparador de fuerza válida.
3471
No se especificó la etiqueta del
objeto sensor de fuerza.
Especifique una etiqueta del objeto
sensor de fuerza.
Especifique una etiqueta del objeto
sensor de fuerza válida.
3472
No se especificó la etiqueta del
objeto de la propiedad de masa.
Especifique la etiqueta del objeto
de la propiedad de masa.
Especifique una etiqueta del objeto
de la propiedad de masa válida.
3473
No se especificó la etiqueta del
objeto de la propiedad de masa.
Especifique la etiqueta del objeto
de la propiedad de masa.
Especifique una etiqueta del objeto
de la propiedad de masa válida.

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
868 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
3474
No se especificaron los valores de
configuración de las propiedades
Fmag_Axes o Tmag_Axes.
Especifique un valor de
configuración adecuado.
No se especificaron los valores de
configuración de las propiedades
Fmag_Axes o Tmag_Axes en la
instrucción FSet.
Consulte "Propiedad Fmag_Axes" o
"Propiedad Tmag_Axes" y
especifique un valor de configuración
adecuado.
3475
No se especificó el valor de
configuración de la propiedad
TriggerMode.
Especifique un valor de
configuración adecuado.
No se especificó el valor de
configuración de la propiedad
TriggerMode en la instrucción FSet.
Consulte "Propiedad TriggerMode" y
especifique un valor de configuración
adecuado.
3476
No se especificó el valor de
configuración de la propiedad
Operator.
Especifique un valor de
configuración adecuado.
No se especificó el valor de
configuración de la propiedad
Operator en la instrucción FSet.
Consulte "Propiedad Operator" y
especifique un valor de configuración
adecuado.
3477
No se especificó el valor de
configuración de la propiedad
Orientation.
Especifique un valor de
configuración adecuado.
No se especificó el valor de
configuración de la propiedad
Orientation en la instrucción FSet.
Consulte "Propiedad Orientation" y
especifique un valor de configuración
adecuado.
3478
No se especificó el valor de
configuración de la propiedad
Polarity.
Especifique un valor de
configuración adecuado.
No se especificaron los valores de
configuración de las propiedades
Fmag_Polarity, Fx_Polarity,
Fy_Polarity, Fz_Polarity,
Tmag_Polarity, Tx_Polarity,
Ty_Polarity y Tz_Polarity en la
instrucción FSet.
Especifique un valor de configuración
adecuado.
3500
Macro duplicada en la instrucción
#define.
Se definió otra macro con el mismo
nombre. Cambie el nombre de la
macro.
3501
No se especificó el nombre de la
macro.
No se especificó el nombre de la
macro en las instrucciones #define,
#ifdef, #ifndef y #undef. Agregue un
nombre de macro.
3502
No se pudo encontrar el nombre
de archivo de inclusión.
No se especificó el nombre del
archivo de inclusión en la instrucción
#include. Agregue un nombre de
archivo de inclusión válido.
3503
El archivo de inclusión
especificado no se encuentra en el
proyecto.
Se especificó un archivo de inclusión
que no se encuentra registrado en la
configuración del proyecto. Agregue
un archivo de inclusión a la
configuración del proyecto.
3504
El parámetro de la función de
macro no coincide con la
declaración.
Revise el número de parámetros y
corrija la función de macro.
3505
La macro tiene una referencia
circular.
La macro tiene una referencia
circular. Corrija la referencia circular.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 869
N.º Mensaje Solución Nota 1 Nota 2
3506
Las instrucciones #define, #ifdef,
#ifndef, #else, #endif, #undef y de
declaración de variable son solo
válidas en un archivo de inclusión.
Revise y corrija los contenidos del
archivo de inclusión.
3507
Sobre el nivel de anidado de #ifdef
o #ifndef.
El límite de los niveles de anidado es
de un máximo de 7. Corrija el
programa para que no supere el
valor de límite.
3508
No se pudo encontrar #ifdef o
#ifndef.
El número de instrucciones #endif
que corresponden a las instrucciones
#ifdef e #ifndef es excesivo. Elimine
instrucciones #endif o agregue
instrucciones #ifdef e #ifndef.
3509
No se encontró #endif para #ifdef o
#ifndef.
El número de instrucciones #endif
que corresponden a las instrucciones
#ifdef e #ifndef es insuficiente.
Agregue instrucciones #endif.
3510
No se pudo obtener el búfer de la
macro.
-
3550
No se especificó el parámetro para
la función de macro.
La macro declarada como función de
macro se llama sin un argumento.
Corrija el programa.
3600
El comando de movimiento de
seguimiento no puede usar el
parámetro Sense.
Cuando se especifican los datos de
cola en las instrucciones Jump,
Jump3 y Jump3CP, no se puede
especificar el parámetro Sense.
Elimine la instrucción Sense.
3601
El tipo de parámetro no coincide
con la función externa ' ** '.
Revise todas las instrucciones que
llaman a esta función en este
archivo.
No se puede especificar el parámetro
LJM en las instrucciones BGo, TGo,
Arc, Arc3, BMove, Move y TMove.
Elimine el parámetro LJM.
3602
El comando de movimiento de
seguimiento especificado no puede
usar el parámetro LJM.
La función InReal no se puede usar
con la instrucción Wait. Corrija el
programa.
3603
La función InReal no se puede
usar con la instrucción Wait.
No se puede especificar el parámetro
PerformMode en las instrucciones
Jump3, Jump3CP, Arc, Arc3, BMove,
Move y TMove. Elimine el parámetro
PerformMode.
3605
El comando de movimiento de
seguimiento especificado no puede
usar el parámetro PerformMode.
No se puede especificar el parámetro
LJM en las instrucciones BGo, TGo,
Arc, Arc3, BMove, Move y TMove.
Elimine el parámetro LJM.
3606 No se puede usar el índice.
No se puede especificar el número
de índice excepto en la propiedad
List en las instrucciones GSet y
GGet. Corrija el programa.
3607
Se especificó un índice de objeto
no válido.
Se especificó un índice no válido en
la propiedad Objects de las
instrucciones VSet y VGet. El índice
debe ser superior a 1 e inferior al
número de objetos en la secuencia
especificada. Especifique un índice
adecuado.

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
870 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
3608
Se especificó un índice de control
no válido.
Se especificó un índice no válido en
la propiedad Controls de las
instrucciones GSet y GGet. El índice
debe ser superior a 1 e inferior al
número de controles en el formulario
especificado. Especifique un índice
adecuado.
3609
Los parámetros del modificador
están duplicados.
Revise el programa.
Los datos de Force Guide o el
parámetro CF están duplicados en
las instrucciones CVMover, FCKeep
y en otras instrucciones para el
movimiento del robot. Corrija el
programa.
3610
No se puede usar una palabra
clave como nombre de etiqueta.
Las palabras claves como un
comando o una función se usan
como nombre de etiqueta. Cambie
el nombre de la etiqueta que no use
estas palabras claves.
3733
No se especificó el nombre de
secuencia o nombre de calibración
de visión.
No se especificó el nombre de
secuencia o nombre de calibración
de visión en las instrucciones VSet y
VGet. Agregue un nombre de
secuencia o un nombre de
calibración.
3800 Proceso de compilación anulado. -
3801 Proceso de enlace anulado. -
3802
Proceso de compilación anulado.
Los errores de compilación
alcanzaron el número máximo.
Corrija el error en el programa y
recompile el proyecto.
3803
Proceso de enlace anulado. Los
errores de enlace alcanzaron el
número máximo.
Corrija el error en el programa y
recompile el proyecto.
3804
El comando especificado no se
puede ejecutar desde la ventana
Command.
La declaración de variables y
funciones, la instrucción de control
del programa, los comandos de
preprocesador y algunos comandos
no pueden ser ejecutados desde la
ventana Command. Para conocer
detalles, consulte "Apéndice A: Lista
de condiciones de uso de comandos
de SPEL+" en la Referencia del
lenguaje SPEL+.
3805
El comando especificado solo se
puede ejecutar desde la ventana
Command.
Las instrucciones Brake, SysConfig,
Where, Cnv_QueList y WorlQue_List
solo se pueden ejecutar desde la
ventana Command. Elimine estas
instrucciones desde el programa.
3806
La función especificada no se
puede ejecutar desde la ventana
Command.
La función LogIn no se puede
ejecutar desde la ventana Command
incluso cuando se usa con la
instrucción Print. Use la función en
el programa.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 871
N.º Mensaje Solución Nota 1 Nota 2
3808
No se puede usar la sintaxis
especificada en la versión actual.
Los parámetros de movimiento LJM
y PerformMode no se pueden
especificar según la versión del
compilador.
Parámetro LJM: 6.0.x.x o posterior
Parámetro PerformMode: 7.0.4.x o
posterior
Revise la versión del compilador
desde las propiedades del proyecto.
3809
Las variables de módulo no se
pueden usar en la ventana
Command.
No se puede acceder a la variable de
módulo desde la ventana Command.
Revise el comando de entrada.
3812
No se puede usar la función
especificada con una salida remota
del usuario.
Las funciones para la expresión de
condición de salida remota definida
por el usuario son limitadas.
Consulte el Manual del usuario de
EPSON RC+7.0 “11.8 E/S de salida
remota definida por el usuario” y
especifique una función válida.
3813
No se puede usar la etiqueta,
función y variable definidas por el
usuario con una salida remota del
usuario.
No se puede usar la etiqueta, función
y variable definidas por el usuario
con la expresión de condición de
salida remota definida por el usuario.
Corrija la expresión de condición.
3814
El tamaño del código de objeto
supera el tamaño disponible.
Una combinación de instrucciones
múltiples supera el tamaño
disponible de código intermedio que
se puede ejecutar de una vez (1024
bytes). Divida las instrucciones.
3815
No se puede especificar el
parámetro para la propiedad o el
estado en la ventana Command.
Elimine el parámetro y ejecute
nuevamente.
Cuando ejecute la instrucción FGet o
MPGet desde una ventana
Command, no es posible especificar
un parámetro en una propiedad o
estado.
Elimine el parámetro y ejecute
nuevamente.
3850
No se encontró el archivo.
-
3851
No se encontró el archivo de
puntos.
No se pudo leer el archivo de puntos
que configura el proyecto. Revise en
la carpeta del proyecto si existe el
archivo.
3852
No se encontró el archivo de
etiqueta de E/S.
No se pudo leer el archivo de
etiqueta de E/S que configura el
proyecto. Revise en la carpeta del
proyecto si existe el archivo.
3853
No se encontró el archivo de
etiqueta de error de usuario.
No se pudo leer el archivo de
etiqueta de error de usuario que
configura el proyecto. Revise en la
carpeta del proyecto si existe el
archivo.
3854
El archivo de fuerza no existe.
Revise en la carpeta del proyecto
si existe el archivo.
No se pudo leer el archivo de fuerza
que configura el proyecto. Revise en
la carpeta del proyecto si existe el
archivo.
3860
El archivo de etiqueta de E/S no es
un formato admitido.
Vuelva a generar el archivo de
etiqueta de E/S.

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
872 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
3861
El archivo de etiqueta de error de
usuario tiene un formato de archivo
no admitido.
Vuelva a generar el archivo de error
de usuario.
3862
El archivo de puntos tiene un
formato de archivo no admitido.
Vuelva a generar el archivo de
puntos.
3863
El archivo de proyecto de Vision
tiene un formato de archivo no
admitido.
Vuelva a generar la secuencia de
Vision.
3864
El archivo de proyecto de GUI
Builder tiene un formato de archivo
no admitido.
Vuelva a generar el formulario de
GUI Builder.
3865
El archivo OBJ no es un formato
admitido.
Recompile el proyecto.
3866
El archivo de fuerza tiene un
formato de archivo no admitido.
Vuelva a crear el archivo de
fuerza.
Vuelva a generar el archivo de
fuerza.
3870
No se puede especificar el objeto
de la propiedad de masa.
Revise el programa.
No se puede especificar el objeto de
la propiedad de masa en las
instrucciones FSet, FGet, FDel y
FList y las funciones FDef y FLabel$.
Corrija el programa.
3871
No se puede especificar un objeto
del sistema de coordenadas de
fuerza.
Revise el programa.
No se puede especificar un objeto de
sistema de coordenadas de fuerza
en las instrucciones Go, BGo, TGo,
Jump, Jump3, Mode, BMove, TMove,
Arc y Arc3, en las instrucciones
MPSet, MPGet, MPDel y MPList y en
las funciones MPDef y MPLabel$.
Corrija el programa.
3872
No se puede especificar un objeto
de Force Control.
Revise el programa.
No se puede especificar un objeto de
control en las instrucciones Go, BGo,
TGo, Jump y Jump3, las
instrucciones MPSet, MPGet MPDel
y MPList y las funciones MPDef y
MPLabel$.
Corrija el programa.
3873
No se puede especificar un objeto
de monitor de fuerza.
Revise el programa.
No se puede especificar un objeto de
monitor de fuerza en las
instrucciones MPSet, MPGet, MPDel
y MPList y las funciones MPDef y
MPLabel$. Corrija el programa.
3874
No se puede especificar un objeto
disparador de fuerza.
Revise el programa.
No se puede especificar un objeto
disparador de fuerza en las
instrucciones MPSet, MPGet, MPDel
y MPList y las funciones MPDef y
MPLabel$. Corrija el programa.
3875
No se puede especificar un objeto
sensor de fuerza.
Revise el programa.
No se puede especificar un objeto
sensor de fuerza en las instrucciones
FDel y FList, las funciones FDef y
FLabel$, las instrucciones MPSet,
MPGet, MPDel y MPList y las
funciones MPDef y MPLabel$.
Corrija el programa.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 873
N.º Mensaje Solución Nota 1 Nota 2
3876
No se puede especificar un objeto
de robot.
Revise el programa.
No se puede especificar un objeto de
robot en las instrucciones FDel y
FList, las funciones FDef y FLabel$,
las instrucciones MPSet, MPGet,
MPDel y MPList y las funciones
MPDef y MPLabel$.
Corrija el programa.
3877
No se puede especificar un objeto
de Force Control y un objeto del
sistema de coordenadas de fuerza
al mismo tiempo.
Revise el programa.
No se puede especificar un objeto de
control de fuerza y un objeto del
sistema de coordenadas de fuerza al
mismo tiempo en la instrucción
FCSMove.
Corrija el programa.
3878
No se puede especificar el
parámetro CF.
Elimine el parámetro CF.
No se puede especificar el parámetro
CF en las instrucciones Go, BGo,
TGo, Jump y Jump3.
Elimine el parámetro CF.
3879
No se puede especificar la etiqueta
del objeto de la propiedad de
masa.
Revise el programa.
No se puede especificar la etiqueta
del objeto de la propiedad de masa
en las instrucciones MPDel y MPList.
Corrija el programa.
3880
No se puede especificar la etiqueta
del objeto del sistema de
coordenadas de fuerza.
Revise el programa.
No se puede especificar la etiqueta
del objeto del sistema de
coordenadas de fuerza en las
instrucciones FDel y FList.
Corrija el programa.
3881
No se puede especificar la etiqueta
del objeto de Force Control.
Revise el programa.
No se puede especificar la etiqueta
del objeto de control de fuerza en las
instrucciones FDel y FList.
Corrija el programa.
3882
No se puede especificar la etiqueta
del objeto de monitor de fuerza.
Revise el programa.
No se puede especificar la etiqueta
del objeto de monitor de fuerza en
las instrucciones FDel y FList.
Corrija el programa.
3883
No se puede especificar la etiqueta
del objeto disparador de fuerza.
Revise el programa.
No se puede especificar la etiqueta
del objeto disparador de fuerza en
las instrucciones FDel y FList.
Corrija el programa.
3884
No se puede especificar la etiqueta
del objeto sensor de fuerza.
Revise el programa.
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.
3885
No se puede especificar el número
del objeto de la propiedad de
masa.
Revise el programa.
No se puede especificar el número
del objeto de la propiedad de masa
en la función MPNumber.
Corrija el programa.
3886
No se puede especificar el número
del objeto del sistema de
coordenadas de fuerza.
Revise el programa.
No se puede especificar el número
del objeto del sistema de
coordenadas de fuerza en la función
FNumber.
Corrija el programa.
3887
No se puede especificar el número
del objeto de Force Control.
Revise el programa.
No se puede especificar el número
del objeto de control de fuerza en la
función FNumber.
Corrija el programa.
3888
No se puede especificar el número
del objeto de monitor de fuerza.
Revise el programa.
No se puede especificar el número
del objeto de monitor de fuerza en la
función FNumber.
Corrija el programa.

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
874 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
3889
No se puede especificar el número
del objeto disparador de fuerza.
Revise el programa.
No se puede especificar el número
del objeto del disparador de fuerza
en la función FNumber.
Corrija el programa.
3890
No se puede especificar el número
del objeto sensor de fuerza.
Revise el programa.
-
3891
El tipo de los dos objetos
especificados no coincide.
Especifique el mismo tipo de
objetos.
Los tipos de datos del primer y
segundo parámetro no coinciden en
las instrucciones FDel, FList, MPDel
y MPList.
Corrija el programa.
3900
No se puede obtener el búfer de
comunicación interno.
-
3901
El tamaño de búfer no es
suficiente.
-
3910
Se especificó un comando no
definido.
-
3911
No se puede ingresar el nombre
del archivo en el búfer de nombre
de archivo.
-
3912
No se puede obtener el búfer
interno.
-
3913
No se puede definir la prioridad.
Reinicie el controlador.
3914 ICode no válido.
Recompile el proyecto.
3915 ICode no válido.
Recompile el proyecto.
3916 ICode no válido.
Recompile el proyecto.
3917 ICode no válido.
Recompile el proyecto.
3918 ICode no válido.
Recompile el proyecto.
3919 ICode no válido.
Recompile el proyecto.
3920 ICode no válido.
Recompile el proyecto.
3921 ICode no válido. Recompile el proyecto.
3930
No se especifica ID de tipo de
VDefTool.
Especifique un valor numérico para
el segundo parámetro del comando
VDefTool.
3931
No se especifica ID de tipo de
VDefArm.
Especifique un valor numérico para
el segundo parámetro del comando
VDefArm.
3932
No se especifica VDefArm
ArmSetMode.
Especifique un valor numérico para
el tercer parámetro del comando
VDefArm.
3933
No se especifica ID de tipo de
VDefLocal.
Especifique un valor numérico para
el segundo parámetro del comando
VDefLocal.
3934
No se especifica ID de tipo de
VDefLocal CalibPlate.
Especifique un valor numérico para
el tercer parámetro del comando
VDefLocal.
3940
No se especifica ID de tipo de
LatchPos.
Especifique un valor numérico para
el primer parámetro del comando
LatchPos.
3960
No se especificaron ni Robot, ni
Object ni ResetCollision.
3961
No se especificaron ni Hand ni
Property.
3962
Se especificó una propiedad no
válida.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 875
N.º Mensaje Solución Nota 1 Nota 2
3963
No se especificaron ni Robot ni
Object.
3964
Se especificó un objeto no válido.
3965
Se especificó un índice de objeto
no válido.
3990
No se especificó tipo TCPSpeed
de E/S analógica.
Especifique un valor numérico para
el tercer parámetro del comando
AIO_Set.

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
876 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
4001
El brazo alcanzó el límite de rango
de movimiento.
Revise el punto que se moverá, el
punto actual y la configuración de
rango.
4002
El valor especificado está fuera
del rango permitido.
Revise los parámetros de
configuración.
El parámetro
que causa el
error.
4003
Error del driver del dispositivo de
movimiento.
Error de comunicación dentro del
módulo de control de movimiento.
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.
4004
Error del driver del dispositivo de
movimiento.
Error de espera de evento dentro
del módulo de control de
movimiento.
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.
4005
La posición del punto actual
supera el valor LimZ especificado.
Reduzca el eje Z. Aumente el valor
LimZ especificado.
4006
La posición del punto objetivo
supera el valor LimZ especificado.
Reduzca la posición de la
coordenada Z del punto objetivo.
Aumente el valor LimZ especificado.
4007
Error de conversión de
coordenadas. El punto final/medio
está fuera del área de movimiento.
Se desplaza al exterior del área
de movimiento.
Revise si no se especificó la
coordenada fuera del rango de
movimiento.
4008
La posición del punto actual o el
valor LimZ especificado está fuera
del rango de movimiento.
Cambie el valor LimZ especificado.
4009
Error del driver del dispositivo de
movimiento.
Error de tiempo de espera dentro
del módulo de control de
movimiento.
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.
4010
No se definieron las coordenadas
locales especificadas.
Defina el sistema de coordenadas
local.
Número local
4011
El brazo alcanzó el límite de rango
de movimiento XY especificado
por la instrucción XYLim.
Revise el área limitada por la
instrucción XYLim.
4012
El valor del límite superior de Box
es menor que el valor del límite
inferior. Cambie los valores del
límite superior e inferior.
Defina el valor de límite superior para
que sea mayor que el valor de límite
inferior.
4013
Error de cálculo interno del
módulo de control de movimiento.
Falló el cálculo de la temporización
del movimiento de arco. Realice una
de las siguientes opciones:
- Revise y modifique el parámetro
Arch
- Desactive Arch
4014 No se completó MCAL.
Ejecute MCal. Asegúrese de que
MCOdr esté definido para la
articulación conectada a la placa PG.
4016
Se intentó ejecutar la instrucción
SFree para articulaciones
prohibidas.
A causa de las limitaciones
mecánicas del robot, está prohibido
definir algunas articulaciones en el
estado sin servo. Revise las
especificaciones del robot.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 877
N.º Mensaje Solución Nota 1 Nota 2
4018
Error de comunicación dentro del
módulo de control de movimiento.
Error de la suma de
comprobación.
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.
4021
Las posiciones de punto usadas
para definir Local están
demasiado cerca.
Configure la distancia entre puntos
que estén a más de 1 μm.
4022
Los datos de coordenadas de
punto utilizados para definir Local
no son válidos.
Haga coincidir los datos de
coordenadas para los puntos que se
especificarán.
4023
No se puede ejecutar cuando el
motor está en el estado
desactivado.
Active el encendido del motor y
ejecútelo.
4024
No se pudo completar el
posicionamiento del brazo con la
especificación Fine actual.
Revise que el robot no genere
vibraciones o que todas las piezas y
tornillos estén aseguradas
firmemente. Aumente el valor de la
configuración Fine.
4025
No se puede ejecutar un comando
de movimiento durante la
condición de parada de
emergencia.
Elimine la condición de parada de
emergencia y ejecute el comando de
movimiento.
4026
Error de comunicación dentro del
módulo de control de movimiento.
Error del servo I/F.
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.
4028
Error de comunicación dentro del
módulo de control de movimiento.
Error de estado del driver del
dispositivo.
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.
4030
El búfer del cálculo de torque
promedio se desbordó.
Reduzca el intervalo de tiempo de
Atclr a Atrq.
Reduzca el intervalo de tiempo de
Atclr a Atrq a menos de dos minutos.
4031
No se puede ejecutar un comando
de movimiento cuando el motor
está en el estado desactivado.
Active el encendido del motor y
ejecute el comando de movimiento.
4032
No se puede ejecutar un comando
de movimiento cuando hay una o
más articulaciones en el estado
SFree.
Defina todas las articulaciones en el
estado SLock y ejecute el comando
de movimiento.
4033
Las articulaciones de la placa del
generador de pulsos no admiten el
comando especificado.
Las articulaciones con placa PG no
permiten el comando especificado.
4034
Este modelo del robot no admite
el comando especificado.
Elimine el comando no admitido del
programa.
4035
La instrucción CP intentó cambiar
solo la orientación de la
herramienta.
Defina una distancia de movimiento
entre los puntos. Use el modificador
ROT, la instrucción SpeedR y la
instrucción AccelR.
4036
La velocidad de giro de la
orientación de la herramienta
según la instrucción CP es
demasiado alta.
Reduzca los valores de configuración
para las instrucciones SpeedS y
AccelS. Use el modificador ROT, la
instrucción SpeedR y la instrucción
AccelR.
4037
El atributo de punto de las
posiciones del punto actual y del
punto objetivo difiere para ejecutar
un comando de control de CP.
Haga coincidir el atributo de punto.

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
878 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
4038
Dos posiciones de punto están
demasiado cerca para ejecutar
una instrucción Arc.
Configure la distancia entre puntos
que estén a más de 1 μm.
4039
Tres posiciones de punto
especificadas por la instrucción
Arc se encuentran en una línea
recta.
Use la instrucción Move.
4041
Se intentó el comando de
movimiento hacia el área
prohibida en la parte posterior del
robot.
Revise el rango de movimiento del
robot.
4042
Error del driver del dispositivo de
movimiento.
No se pudo detectar la
interrupción del formato circular.
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.
4043
Este modelo del robot o este tipo
de articulación no admiten el
comando especificado.
Elimine el comando no admitido del
programa.
4044
Error de curva. No se admite la
forma de curva especificada.
Cree un archivo de curva
nuevamente con la instrucción Curve.
4045
Error de curva. No se admite el
modo especificado.
Especifique el modo Curve
adecuadamente. Cree un archivo de
curva nuevamente con la instrucción
Curve.
4046
Error de curva. El número de
coordenadas especificado está
fuera del rango permitido.
El número de ejes de coordenadas
disponible es de 2, 3, 4 y 6. Cree un
archivo de curva nuevamente con la
instrucción Curve.
4047
Error de curva. No se
especificaron datos de punto.
Cree un archivo de curva
nuevamente con la instrucción Curve.
4048
Error de curva. Se especificó el
proceso paralelo antes de la
designación del punto.
Cree un archivo de curva
nuevamente con la instrucción Curve.
4049
Error de curva. El número de
procesos paralelos está fuera del
rango permitido.
Cree un archivo de curva
nuevamente con la instrucción Curve.
4050
Error de curva. El número de
puntos está fuera del rango
permitido.
El número de puntos disponibles
difiere según la forma de curva.
Vuelva a revisar el número de
puntos.
4051
Error de curva. El atributo Local y
el atributo de punto de todos los
puntos especificados no
coinciden.
Haga coincidir los indicadores locales
y de punto para todos los puntos
especificados.
4052
Error de curva. No hay suficiente
memoria para dar formato al
archivo de curva.
Reinicie el controlador.
4053
Error de curva. No se pudo dar
formato al archivo de curva.
Revise los datos de punto. Revise si
dos puntos adyacentes no se
sobreponen a la línea del punto
especificado.
4054
Error de curva. Error de archivo de
curva
El archivo de curva está dañado.
Cree un archivo de curva
nuevamente con la instrucción Curve.
4055
Error de curva. No hay distancia
para el movimiento del archivo de
curva.
Revise los datos de punto.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 879
N.º Mensaje Solución Nota 1 Nota 2
4056
Error de curva. Las posiciones de
punto para la instrucción Curve
están demasiado cerca.
Defina la distancia entre dos puntos
adyacentes al punto especificado en
más de 0,001 mm.
4058
Se ejecutó un comando prohibido
durante el seguimiento.
Elimine el comando prohibido del
programa.
4059
Se ejecutó un comando de
restablecimiento del codificador
mientras el motor estaba en el
estado activado.
Apague el motor.
4060
Se ejecutó un comando no válido
mientras el motor estaba en el
estado activado.
Apague el motor.
4061
El parámetro especificado está en
uso.
Intentó borrar el brazo y la
herramienta actualmente
especificado.
Seleccione otro brazo y herramienta
y ejecútelos.
4062
La variación de orientación es
superior a 360 grados.
Intentó girar la articulación #J6 más
de 360 grados con un comando de
movimiento CP.
4063
La variación de orientación del
punto adyacente es superior a 90
grados.
En la línea de punto especificada por
la instrucción Curve, defina la
variación de orientación de los
valores de coordenadas de U, V y W
entre dos puntos adyacentes en
menos de 90 grados.
4064
No se puede ejecutar la
corrección de orientación
automáticamente.
En la línea de punto especificada, no
se puede crear una curva con la
corrección de orientación automática.
Cambie la línea de punto
especificada para que disminuya la
variación de orientación de la
articulación n.° J6.
4065
Intente realizar un giro de J6 con
la misma orientación en la
instrucción CP.
Intentó girar la articulación #J6 más
de 360 grados con un comando de
movimiento CP. Intentó realizar un
giro de la articulación 6 con la misma
orientación de inicio de movimiento.
Cambie el punto objetivo para que la
articulación n.° J6 realice menos de
un giro.
4066
Se intentó el comando Motion en
el área prohibida según la
combinación de articulaciones.
Intentó mover las articulaciones al
área limitada de interferencia del
robot.
4068
Se especificó el parámetro del
modificador ROT para el comando
de movimiento CP sin el giro de
orientación.
Elimine el ROT desde el comando de
movimiento CP.
4069
Se especificó ECP sin seleccionar
ECP en la instrucción CP.
Especifique un ECP válido.
4070
El número ECP especificado no
coincide con el número ECP
utilizado en la creación del archivo
de curva.
Especifique un ECP válido.
4071
Se intentó el comando de
movimiento durante la condición
de bloqueo de freno
electromagnético.
Libere el freno electromagnético.

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
880 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
4072
Error de inicialización. No se
inicializó el monitor de hardware.
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.
4073
La variación de orientación del
punto adyacente es superior a 90
grados.
Cualquiera de los U, V o W cambia
en 90 grados o más. Cambie el
punto de la orientación.
4074
El tipo de motor no coincide con la
configuración del robot actual.
Revise si el modelo del robot
especificado está conectado.
4075 La opción no está activa. Active la opción.
4076
Las posiciones de punto usadas
para definir Plane están
demasiado cerca.
Defina la distancia entre puntos a
más de 1 μm.
4077
Los datos de coordenadas de
punto utilizados para definir Plane
no son válidos.
Haga coincidir los datos de
coordenadas para los puntos que se
especificarán.
4078
La instrucción CP intentó cambiar
solo el eje ST adicional.
Use los comandos de movimiento
PTP para mover solo el eje adicional.
4079
La velocidad del eje ST adicional
con la instrucción CP es
demasiado alta.
Reduzca los valores definidos de
SpeedS y AccelS.
4080
No se puede ejecutar cuando
Enable Switch está desactivado.
Active Enable Switch y ejecútelo.
4081
Se detectó un error durante la
operación.
Revise la placa PG.
Revise la conexión con el driver del
motor.
Reemplace la placa PG.
Reemplace el controlador.
4082
Se detectó un error de la placa del
generador de pulsos durante la
operación.
Revise la placa PG.
Revise la conexión con el driver del
motor.
Reemplace la placa PG.
4083 MCAL no se completó a tiempo.
Defina el parámetro PG para que
MCAL pueda completarse dentro de
120 segundos.
4084
Se detectó un error del sensor de
límite durante la operación.
Revise el sensor de límite.
4085
No se pudo cambiar a la ubicación
específica.
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.
4086
No se puede ejecutar porque no
se encuentra en el modo de
simulacro.
Cambie al modo de simulacro y
ejecútelo.
4087
No se pudo dar formato al archivo
de reproducción.
Revise la cantidad de espacio libre
de la computadora.
Reinicie la computadora.
Reinstale RC+.
Reemplace la computadora.
4089
El intervalo de tiempo de
HealthRBStart a HealthRBStop es
demasiado largo o demasiado
corto.
Defina el intervalo de tiempo de
HealthRBStart a HealthRBStop para
que esté entre 1 y 3600 segundos.
- -
4090
HealthRBStop se ejecuta sin
HealthRBStart.
Ejecute HealthRBStop después de
ejecutar HealthRBStart.
Este error se produce cuando se
ejecuta nuevamente HealthRBStop
sin ejecutar HealthRBStart después
de HealthRBStop.
- -

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 881
N.º Mensaje Solución Nota 1 Nota 2
4091
No existe el canal de E/S
analógico especificado.
Revise el número de canal. Monte la
placa opcional de E/S analógica.
4092
El canal de salida analógico
especificado se usa para una
salida de datos de velocidad.
Ejecute después de detener la salida
de velocidad del canal especificado.
4093
Si el movimiento se pausa durante
la evasión de singularidad, no se
puede reanudar el movimiento.
Anule el comando de movimiento.
Anule el comando de movimiento.
4094
La posición actual está fuera de
rango de movimiento.
Alguno de los ejes J1 o J2 está fuera
de rango de movimiento. Siga los
procedimientos siguientes y mueva el
robot dentro del rango de
movimiento.
・Use el comando Pulse (Pulso) y
JTran para mover el robot dentro del
rango de movimiento.
・Mueva manualmente el robot dentro
del rango de movimiento.
(Este error solo se produce en las
series RS y N).
4096
Robot en uso.
No se puede ejecutar el comando
de movimiento cuando otras
tareas están usando el robot.
El comando de movimiento del robot
no se puede ejecutar
simultáneamente desde más de una
tarea. Revise el programa.
Este error no se puede recuperar
automáticamente mediante OnErr.
4099
Se detectó un error del servo
durante la operación.
Revise si se está produciendo un
error número 5000 en el historial del
sistema. Si se está produciendo el
error, tome las medidas para un error
número 5000.
4100
Error de comunicación dentro del
módulo de control de movimiento.
No se puede calcular el punto o
pulso actual.
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.
4101
Error de comunicación dentro del
módulo de control de movimiento.
No se puede calcular el punto o
pulso actual.
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.
4103
Error de inicialización. Error de
inicialización del módulo de
control de movimiento.
Manipuladores de la serie T/VT:
Para el manipulador de la serie T,
reinicie el controlador y tome
medidas contra el ruido.
Si el número de articulación aparece
en el historial del sistema, cambie la
unidad del motor. De lo contrario,
cambie la placa de la CPU.
Otros manipuladores:
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.
4104
Se agotó el tiempo de espera de
posicionamiento de la articulación
conectada a la placa del
generador de pulsos.
No se puede recibir la señal de
finalización de posicionamiento
(DEND) desde el servomotor
conectado a la placa de PG
(generador de pulsos).

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
882 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
4108
Error de inicialización.
Error de conexión de la unidad del
motor.
Revise el cableado de la unidad del
motor.
4150
Error de señal de entrada
redundante de la parada de
emergencia.
El estado de la entrada de parada de
emergencia redundante sigue siendo
diferente por más de dos segundos.
Revise que no exista una
desconexión, error de conexión a
tierra o cortocircuito en la señal de
entrada de la parada de emergencia.
Luego reinicie el controlador.
4151
Error de la señal de entrada
redundante de la protección.
El estado de la entrada de parada de
emergencia redundante sigue siendo
diferente por más de dos segundos.
Revise que no exista una
desconexión, error de conexión a
tierra o cortocircuito en la señal de
entrada de la parada de emergencia.
Luego reinicie el controlador.
4152
Error de soldadura del relé del
circuito principal.
Se detectó un error de soldadura del
relé debido a sobrecorriente del
sistema de alimentación.
Reemplace el controlador.
Reemplace el robot.
4153
Error de señal de entrada
redundante del interruptor de
activación.
El estado de la entrada de la señal
de activación redundante difiere
continuamente por más de dos
segundos.
Revise la conexión del conector de
TP.
Reemplace el TP.
Reemplace el controlador.
4154
La temperatura del resistor de
regeneración fue más alta que la
temperatura especificada.
El trabajo del robot es demasiado
alto. Alargue el tiempo de espera o
reduzca el valor de aceleración. Si
se produce un error aunque se haya
reducido el trabajo, reemplace el
DPB.
4180
Error de inicialización del robot.
No se encontró el robot
especificado
Configure el manipulador.
4181
Error de inicialización del robot. El
robot especificado está siendo
utilizado por otra tarea.
No se puede configurar el
manipulador especificado, puesto
que ya está configurado.
4182
Error de inicialización del robot. El
nombre del robot es demasiado
largo.
Acorte el nombre del manipulador.
4183
Error de inicialización del robot.
Error de versión de los datos del
robot.
Vuelva a configurar el manipulador.
4187
Error de inicialización del robot.
Error de comunicación con el
módulo: VSRCMNPK.
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.
4188
Error de inicialización del robot. La
matriz de interferencia del ángulo
de la articulación no es válida.
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 883
N.º Mensaje Solución Nota 1 Nota 2
4189
Error de inicialización del robot.
Error de comunicación con el
módulo: VSRCMC.
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.
4191
Error de inicialización del robot. La
matriz de transformación de
pulsos físico-lógicos no es válida.
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.
4192
Error de inicialización del robot.
Error de comunicación con el
módulo del servo.
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.
4210
El circuito RAS detectó un mal
funcionamiento del sistema servo.
Reinicie el controlador.
Compruebe si hay ruidos.
Reemplace el controlador.
Reinicie el controlador, tome medidas
contra el ruido o reemplace la DMB.
4211
Error interna de RAM de la CPU
servo.
Reinicie el controlador.
Compruebe si hay ruidos.
Reemplace la DMB.
Reinicie el controlador, tome medidas
contra el ruido o reemplace la DMB.
4212
Error de RAM para la
comunicación de la CPU principal
y la CPU servo. Reinicie el
controlador. Compruebe si hay
ruidos.
Reemplace la DMB.
Reinicie el controlador, tome medidas
contra el ruido o reemplace la DMB.
4213
Error interna de RAM de la CPU
servo.
Reinicie el controlador.
Compruebe si hay ruidos.
Reemplace la DMB.
Reinicie el controlador, tome medidas
contra el ruido o reemplace la DMB.
Para la serie T, no es la DMB, sino la
placa de la CPU.
4214
Error de inicialización de la
comunicación de la CPU principal
y la CPU servo.
Reinicie el controlador.
Compruebe si hay ruidos.
Reemplace la DMB.
Reinicie el controlador, tome medidas
contra el ruido o reemplace la DMB.
Para la serie T, no es la DMB, sino la
placa de la CPU.
4215
Error de inicialización de la
comunicación de la CPU principal
y la CPU servo.
Reinicie el controlador.
Compruebe si hay ruidos.
Reemplace la DMB.
Reinicie el controlador, tome medidas
contra el ruido o reemplace la DMB.
4216
Error de comunicación de la CPU
principal y la CPU servo. Reinicie
el controlador. Compruebe si hay
ruidos. Reemplace la DMB.
Reinicie el controlador, tome medidas
contra el ruido o reemplace la DMB.
Para la serie T, no es la DMB, sino la
placa de la CPU.
4217
Error de comunicación de la CPU
principal y la CPU servo. Reinicie
el controlador. Compruebe si hay
ruidos. Reemplace la DMB.
Reinicie el controlador, tome medidas
contra el ruido o reemplace la DMB.
Para la serie T, no es la DMB, sino la
placa de la CPU.
4218
Exceso del comando de tiempo
prolongado del servo.
Reinicie el controlador, tome medidas
contra el ruido o reemplace la DMB.
4219
Error de la suma de comprobación
del comando de tiempo
prolongado del servo.
Reinicie el controlador, tome medidas
contra el ruido o reemplace la DMB.

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
884 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
4220
El temporizador guardián del
sistema detectó un error. Reinicie
el controlador. Compruebe si hay
ruidos. Reemplace la DMB.
Reinicie el controlador, tome medidas
contra el ruido o reemplace la DMB.
Para la serie T, no es la DMB, sino la
placa de la CPU.
4221
Error de comprobación de la
unidad de mando.
Reinicie el controlador, tome medidas
contra el ruido o reemplace la DMB.
4222
Error de RAM de la CPU servo.
Reinicie el controlador.
Compruebe si hay ruidos.
Reemplace la DMB.
Reinicie el controlador, tome medidas
contra el ruido o reemplace la DMB.
4223
Error del circuito duplicado de la
parada de emergencia o la
protección.
Revise el cableado.
Revise el cableado de la parada de
emergencia o la protección.
4224
Se detectó voltaje bajo en la
alimentación del circuito principal.
Revise el voltaje de la fuente de
alimentación. Reinicie el
controlador.
Revise el voltaje de alimentación o
reinicie el controlador.
4225
El contacto del relé de control de
la alimentación del circuito
principal está soldado.
Reemplace el DPB.
Reemplace el DPB.
4226
Detecte la diferencia de
reconocimiento de la CPU
secundaria y la CPU principal.
Reinicie el controlador, tome medidas
contra el ruido o reemplace la placa
de la CPU.
4227
La temperatura del resistor de
regeneración fue más alta que la
temperatura especificada.
Especifique la configuración de
peso/inercia. Revise la carga.
Revise el robot. (Uniformidad, juego,
movimiento no uniforme, tensión
suelta de la correa, freno)
Revise la interferencia con los
equipos periféricos. (Colisión,
contacto)
Revise la configuración del modelo.
Revise la conexión del cable de
alimentación.
4228
Sobrevoltaje de la CPU
secundaria.
Reemplace la placa DPB.
4230
Error de estado en tiempo real del
servo.
Error de la suma de
comprobación.
Se detectó un error en la suma de
comprobación de los datos en el
controlador.
Compruebe si hay un cortocircuito y
una conexión incorrecta del cableado
de los equipos periféricos.
(Emergencia, D-E/S y conectores E/S
de expansión)
Reemplace el controlador.
4232
Error de estado en tiempo real del
servo. Error de contador de
funcionamiento libre con el servo.
Se detectó un error del contador de
funcionamiento libre en el
controlador.
Compruebe si hay un cortocircuito y
una conexión incorrecta del cableado
de los equipos periféricos.
(Emergencia, D-E/S y conectores E/S
de expansión)
Reemplace el controlador.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 885
N.º Mensaje Solución Nota 1 Nota 2
4233
Error de estado en tiempo real del
servo. Error de comunicación con
la CPU servo.
Se detectó un error de comunicación
en el controlador.
Compruebe si hay un cortocircuito y
una conexión incorrecta del cableado
de los equipos periféricos.
(Emergencia, D-E/S y conectores E/S
de expansión)
Reemplace el controlador.
4240
Se detectó una interrupción del
control de movimiento irregular.
Duplicado de interrupción.
Se detectó un error de interrupción
en el controlador.
Compruebe si hay un cortocircuito y
una conexión incorrecta del cableado
de los equipos periféricos.
(Emergencia, D-E/S y conectores E/S
de expansión)
Reemplace el controlador.
4241
Se detectó exceso de velocidad
durante el modo de baja potencia.
Se detectó exceso de velocidad del
robot durante el modo de baja
potencia.
Revise el mecanismo del robot.
(Uniformidad, juego, movimiento no
uniforme, tensión suelta de la correa,
freno)
Revise si el robot no interfiere con los
equipos periféricos. (Colisión,
contacto)
Reemplace el driver del motor.
Reemplace el motor. (Error del motor
y codificador)
Compruebe si hay un cortocircuito y
una conexión incorrecta del cableado
de los equipos periféricos.
(Emergencia, D-E/S y conectores E/S
de expansión)
4242
Se generó una referencia de
aceleración incorrecta.
Intentó operar el robot mientras la
referencia de aceleración superaba el
valor especificado.
Para un movimiento CP, disminuya el
valor AccelS.
4243
Se generó una referencia de
velocidad incorrecta en el modo
de alta potencia.
Se detectó exceso de velocidad del
robot durante el modo de alta
potencia.
Revise el mecanismo del robot.
(Uniformidad, juego, movimiento no
uniforme, tensión suelta de la correa,
freno)
Revise si el robot no interfiere con los
equipos periféricos. (Colisión,
contacto)
Reemplace el driver del motor.
Reemplace el motor. (Error del motor
y codificador)
Compruebe si hay un cortocircuito y
una conexión incorrecta del cableado
de los equipos periféricos.
(Emergencia, D-E/S y conectores E/S
de expansión)
4248
El robot choca consigo mismo.
Cambie la posición objetivo.
Defina un punto de relevo. O bien,
cambie el punto objetivo.

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
886 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
4250
El brazo alcanzó el límite del
rango de movimiento durante la
operación.
Revise si una trayectoria de
movimiento CP está dentro del rango
de movimiento.
4251
El brazo alcanzó el límite del
rango de movimiento XY
especificado por XYLim durante la
operación.
Revise la configuración de XYLim.
4252
Se produjo un error de conversión
de coordenadas durante la
operación.
Revise si una trayectoria de
movimiento CP está dentro del rango
de movimiento.
4255
Debido a que SpeedS es
demasiado alta, el robot no puede
pasar a la postura especificada
del codo
Reduzca el valor de SpeedS.
4256
Cuando un robot pasó a la postura
específica del codo, se realizaron
Stop (Detención) o Pause (Pausa)
No ejecutar Stop o Pause.
4257
El robot no puede sobrepasar el
área de singularidad del codo
El robot no puede sobrepasar el área
de singularidad del codo.
Para sobrepasar el área de
singularidad de codo, use
SING_AVOID de “AvoidSingularity”.
4261
El brazo alcanzó el límite del
rango de movimiento en el
seguimiento del transportador.
Ponga el transportador dentro del
rango de movimiento. Mientras
tanto, permita que el rango de
seguimiento para la desaceleración
durante el cambio del movimiento
desde seguimiento a sin seguimiento.
Si se produce un error durante el
cambio del movimiento de
seguimiento, se puede evitar si se
aumenta la velocidad de aceleración
para finalizar el movimiento de
seguimiento.
4262
El brazo alcanzó el límite del
rango de movimiento XY en el
seguimiento del transportador.
4263
El brazo alcanzó el límite del
rango de movimiento de pulso en
el seguimiento del transportador.
4267
Trate de superar el atributo J4Flag
sin indicaciones.
Intentó superar el atributo J4Flag
durante el movimiento sin la
indicación J4Flag.
Cambie J4Flag del punto objetivo.
4268
Trate de superar el atributo J6Flag
sin indicaciones.
Intentó superar el atributo J6Flag
durante el movimiento sin la
indicación J6Flag.
Cambie J6Flag del punto objetivo.
4269
Intente superar el atributo de
orientación de muñeca particular
sin indicaciones.
Intentó superar el atributo de
orientación de muñeca particular
durante el movimiento sin la
indicación Wrist (muñeca).
Cambie el atributo Wrist para el
punto objetivo.
Cambie el punto objetivo para evitar
una orientación de muñeca particular.
4270
Intente superar el atributo de
orientación de brazo particular sin
indicaciones.
Intente superar el atributo de
orientación de mano particular
durante el movimiento sin la
indicación Hand (Mano).
Cambie el atributo Hand para el
punto objetivo.
Cambie el punto objetivo para evitar
una orientación de mano particular.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 887
N.º Mensaje Solución Nota 1 Nota 2
4271
Intente superar el atributo de
orientación de codo particular sin
indicaciones.
Intentó superar el atributo de
orientación de codo particular
durante el movimiento sin la
indicación Elbow (Codo).
Cambie el atributo Elbow para el
punto objetivo.
Cambie el punto objetivo para evitar
una orientación de codo particular.
4272
El indicador de punto especificado
no es válido.
Para el comando de movimiento CP,
la forma del brazo en el punto
objetivo es distinta a la del indicador
de punto especificado para el punto
objetivo.
Cambie el indicador de punto para el
punto objetivo.
4273
J6Flag cambió durante el
movimiento de levantamiento en
el seguimiento del transportador.
Ajuste la orientación de la
herramienta, de manera que J6Flag
no cambie.
4274
No se alcanzó J6Flag
especificado. Cambie J6Flag del
punto objetivo.
Para un comando de movimiento CP,
el manipulador alcanzó el punto
objetivo con J6Flag, que es distinto
del especificado para el punto
objetivo.
Cambie J6Flag del punto objetivo.
4275
No se alcanzó J4Flag
especificado. Cambie J4Flag del
punto objetivo.
Para un comando de movimiento CP,
el manipulador alcanzó el punto
objetivo con J4Flag, que es distinto
del especificado para el punto
objetivo.
Cambie J4Flag del punto objetivo.
4276
No se alcanzó el ArmFlag
especificado. Cambie el ArmFlag
para el punto objetivo.
Para un comando de movimiento CP,
el manipulador alcanzó el punto
objetivo con ArmFlag, que es distinto
del especificado para el punto
objetivo.
Cambie ArmFlag para el punto
objetivo.
4277
No se alcanzó el indicador de
codo especificado. Cambie el
indicador de codo para el punto
objetivo.
Para un comando de movimiento CP,
el manipulador alcanzó el punto
objetivo con ElbowFlag, que es
distinto del especificado para el punto
objetivo.
Cambie ElbowFlag para el punto
objetivo.
4278
No se alcanzó el WristFlag
especificado. Cambie el WristFlag
para el punto objetivo.
Para un comando de movimiento CP,
el manipulador alcanzó el punto
objetivo con WristFlag, que es
distinto del especificado para el punto
objetivo.
Cambie el WristFlag para el punto
objetivo.
4279
No se alcanzó J1Flag
especificado. Cambie J1Flag del
punto objetivo.
Para un comando de movimiento CP,
el manipulador alcanzó el punto
objetivo con J1Flag, que es distinto
del especificado para el punto
objetivo.
Cambie J1Flag del punto objetivo.
4291
Error de envío de datos en la red
de movimiento.
Revise la conexión del cable de la
unidad de mando.

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
888 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
4292
Error de recepción de datos en la
red de movimiento.
Revise la conexión del cable de la
unidad de mando.
4297
Error de envío de datos de la
placa I/F del sensor de fuerza.
Revise la conexión de la placa I/F
del sensor de fuerza y el sensor
de fuerza.
Revise la conexión de la placa I/F del
sensor de fuerza y el sensor de
fuerza.
Reinicie el controlador.
Consulte con nosotros si se genera
un error similar, incluso después de
reiniciar el controlador.
4298
Error de recepción de datos en la
placa I/F del sensor de fuerza.
Revise la conexión de la placa I/F
del sensor de fuerza y el sensor
de fuerza.
Revise la conexión de la placa I/F del
sensor de fuerza y el sensor de
fuerza.
Reinicie el controlador.
Consulte con nosotros si se genera
un error similar, incluso después de
reiniciar el controlador.
4301
La placa de generación de pulsos
detectó una señal limitada.
Reinicie y luego ejecute el siguiente
movimiento.
4302
La placa de generación de pulsos
detectó una señal de alarma.
Desconecte la alarma del driver del
motor de pulsos.
4401
El número de transportador
especificado no es válido.
Revise el número del transportador.
4402
El número de cola del
transportador especificado está
lleno.
El número de registro alcanzó el
límite superior (1000 piezas). Elimine
la cola.
4403
La operación continua no se
puede realizar durante el
movimiento de seguimiento.
¿El movimiento de seguimiento no se
puede continuar después de que se
anuló o se puso en pausa?
4404
Los datos de la cola del
transportador especificados no
existen.
Revise el número de cola. O bien,
revise si está registrada la cola.
4405
El transportador no se inicializó
correctamente.
Recompile el proyecto.
Elimine el transportador y luego
restablezca la configuración.
4406
Los datos de cola especificados
están fuera del área definida.
No se puede hacer seguimiento a la
cola fuera del rango. Si la cola
especificada está sobre el límite de
subida, cambie el programa, de
manera que el seguimiento no
empiece hasta que la cola ingrese al
área debajo del límite superior. Si la
cola especificada está debajo del
límite de bajada, cambie el programa
para borrar los datos de la cola.
4407
El codificador no se asignó
correctamente.
Configure el codificador.
4409
El parámetro de la instrucción del
transportador no es válido.
Revise el parámetro.
4410
Se produjo un error de conversión
de coordenadas del transportador.
Recompile el proyecto.
Elimine el transportador y luego
restablezca la configuración.
4411
Error de comunicación dentro de
los módulos del transportador.
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.
4413
Error de inicio de seguimiento del
transportador.
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 889
N.º Mensaje Solución Nota 1 Nota 2
4414
No se puede iniciar el seguimiento
del transportador después del
movimiento con CP activado.
Inicie el seguimiento del
transportador con
CP desactivado.
4415
La configuración del límite de
subida diagonal o del límite de
bajada diagonal no es correcta.
El límite de bajada diagonal está
sobre el límite de subida, o bien, el
límite de subida/de bajada diagonal
es horizontal a la dirección del
transportador. Revise la
configuración del límite de subida/de
bajada diagonal.
4500
No se pueden ejecutar al mismo
tiempo las funciones
especificadas.
Nota 1, 2: Tipo de las funciones.
Revise el programa.
Revise el programa.
Tipo de las
funciones
1:
Movimiento
de punto de
control
externo
(ECP)
2: Control de
torque
3:
Seguimiento
del
transportado
r
4: Función
Force
Control
5: FCSMove
6: Función
de
seguimiento
de distancia
Tipo de las
funciones
* Igual que
la Nota 1
4501
Dispositivo en uso.
Nota 1: Tipo de dispositivo.
Revise si los demás comandos
están utilizando el dispositivo.
Revise si el dispositivo se usa en otra
tarea o comando.
Tipo de
dispositivo
1: Canal de
entrada de
E/S
analógica
4502
No se puede ejecutar este
comando durante la función
Control.
Nota 1: Tipo de función Control.
Salga de la función Control.
Revise si la función Control se
ejecuta en otra tarea o
Salga de la función Control para
ejecutar el comando.
Tipo de
función
Control
1: Función
de
seguimiento
de distancia
4503
Se especificó un parámetro no
definido
Nota 1: Tipo de parámetro. Revise
el parámetro.
Revise si el parámetro está definido.
Defina el parámetro.
Tipo de
parámetro
1:
Parámetro
de la función
de
seguimiento
de distancia
4504
Opción no activada.
Revise la configuración de Option.
Active la opción.
4601
No se pudo inicializar el
movimiento. Reinicie el
controlador.
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
890 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
4602
Error de cálculo de movimiento.
Reinicie el controlador.
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.
4603
El valor de sensor está fuera del
rango. Revise el sensor.
Revise el valor medido por el sensor.
Revise el estado del sensor.
Revise la configuración del rango del
sensor.
Cuando la Nota 1 es 1 (la función de
seguimiento de distancia usa el
sensor), revise y ajuste el parámetro
especificado por AIO_TrackingStart o
AIO_TrackingSet.
Tipo de
sensor
1: El sensor
es usado
por la
función de
seguimiento
de distancia
4604
Se alcanza el punto de
singularidad.
Se evita el punto de singularidad.
Revise si se especificaron las
coordenadas cercanas a la
singularidad.
Revise si el robot se mueve hacia la
singularidad durante la operación.
Revise la posición de la instalación
del robot.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 891
N.º Mensaje Solución Nota 1 Nota 2
5000
Error de matriz de la compuerta de
servocontrol.
Revise la DMB.
Compruebe si hay un
cortocircuito y una conexión
incorrecta del cableado de los
equipos periféricos. (Emergencia
y conectores E/S de expansión)
Reemplace la DMB.
Reemplace la unidad del eje
adicional.
Para la serie T, reinicie el
controlador, tome medidas contra
el ruido y reemplace la placa de
la CPU y la unidad del motor.
5001
Desconexión de la señal del
codificador paralelo. Revise la
conexión del cable de señal o el
cableado interno del robot.
Revise la señal del cable M/C.
Revise el cableado de la señal
del robot. (Pin faltante,
desconexión, cortocircuito)
Reemplace el motor.
Reemplace la DMB.
Revise la conexión del conector
en el controlador. (Soltar,
conexión al terminal del
codificador de serie en DMB)
Revise la configuración del
modelo.
Revise el cableado de los
equipos periféricos. (Emergencia
y E/S)
Para la serie T, reinicie el
controlador, tome medidas contra
el ruido y reemplace la unidad
del motor.
5002
El driver del motor no está
instalado. Instale el driver del
motor. Revise la DMB o el driver
del motor.
Revise si el driver del motor está
montado.
Revise la configuración del
modelo y la configuración de
hardware.
Reemplace el driver del motor.
Reemplace la DMB.
Para la serie T, revise el
cableado de la unidad del motor.
5003
Error de inicialización de la
comunicación del codificador
incremental. Revise la conexión
del cable de señal y la
configuración del robot.
Revise la configuración del
modelo.
Reemplace el motor. (Error del
codificador)
Reemplace la DMB.
Para la serie T, reinicie el
controlador, tome medidas contra
el ruido y reemplace la placa de
la CPU y la unidad del motor.
5004
Error de inicialización del
codificador absoluto. Revise la
conexión del cable de señal o la
configuración del robot.
Revise la configuración del
modelo.
Reemplace el motor. (Error del
codificador)
Reemplace la DMB.
Para la serie T, reinicie el
controlador, tome medidas contra
el ruido y reemplace la unidad
del motor.

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
892 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
5005
Error de configuración de la
división del codificador.
Revise la configuración del robot.
Revise la configuración del
modelo.
5006
Error de los datos durante la
inicialización del codificador
absoluto. Revise la conexión del
cable de señal, el controlador o el
motor.
Reemplace el motor.
Reemplace la DMB. (Error del
codificador)
Revise las contramedidas para el
ruido.
Para la serie T, reinicie el
controlador, tome medidas contra
el ruido y reemplace la unidad
del motor.
5007
Los turnos múltiples del codificador
absoluto superan el rango máximo.
Reinicie el codificador.
Reinicie el codificador.
Reemplace el motor.
5008
La posición está fuera de rango.
Reinicie el codificador.
Reinicie el codificador.
Reemplace la DMB.
Reemplace el motor.
5009
No hay respuesta del codificador
de serie. Revise la conexión del
cable de señal, el motor, DMB o la
placa IF del codificador.
Revise la configuración del
modelo. (Configuración
incorrecta del modelo de
codificador paralelo)
Revise la conexión del cable de
señal.
Reemplace la DMB y la placa I/F
del codificador.
5010
Error de inicialización del
codificador de serie.
Reinicie el controlador.
Revise el motor, la DMB o la placa
IF del codificador.
Revise la configuración del robot.
Revise la conexión del cable de
señal.
Reemplace la DMB y la placa I/F
del codificador.
Para la serie T, reinicie el
controlador, tome medidas contra
el ruido y reemplace la unidad
del motor.
5011
Error de comunicación del
codificador de serie. Reinicie el
controlador. Revise el motor, la
DMB o la placa IF del codificador.
Revise la configuración del robot.
Revise la conexión del cable de
señal.
Reemplace la DMB y la placa I/F
del codificador.
Para la serie T, reinicie el
controlador, tome medidas contra
el ruido y reemplace la unidad
del motor.
5012
Error del temporizador guardián de
la CPU servo.
Reinicie el controlador. Revise el
motor o la DMB.
Reemplace la DMB.
Revise las contramedidas para el
ruido.
Para la serie T, revise la
conexión del cable de señal.
Reinicie el controlador, tome
medidas contra el ruido y
reemplace la unidad del motor.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 893
N.º Mensaje Solución Nota 1 Nota 2
5013
Error de WDT del circuito de
control actual.
Reinicie el controlador. Revise el
controlador.
Revise la conexión del cable de
alimentación.
Revise la fuente de alimentación
de 15 V y la conexión del cable.
Reemplace la DMB.
Revise las contramedidas para el
ruido.
Para la serie T, reinicie el
controlador, tome medidas contra
el ruido y reemplace la unidad
del motor.
5014 La DMB no es para este robot.
Revise la configuración del robot.
Reemplace por la DMB
compatible.
5015
El codificador se reinició. Reinicie
el controlador.
Reinicie el controlador.
5016
Error de suministro de
alimentación del codificador
absoluto. Reemplace la batería.
Revise el cableado interno del
robot.
Reinicie el codificador.
Revise la conexión del cable de
señal.
5017
Error de datos de copia de
seguridad del codificador absoluto.
Reinicie el codificador.
Reinicie el codificador.
Revise la conexión del cable de
señal.
5018
Alarma de la batería del
codificador absoluto.
Reemplace la batería.
Revise la conexión del cable de
señal.
5019
Error de posición del codificador
absoluto. Reinicie el codificador.
Reemplace el motor.
Reinicie el codificador.
Reemplace el motor. (Error del
codificador)
Para la serie T, reinicie el
controlador, tome medidas contra
el ruido y reemplace la unidad
del motor.
5020
La velocidad es demasiado alta
durante el encendido del
controlador. Detenga el robot y
reinicie el controlador.
Reinicie el controlador.
Reinicie el codificador.
Para la serie T, reinicie el
controlador, tome medidas contra
el ruido y reemplace la unidad
del motor.
Revise la interferencia con otros
dispositivos.
5021
Sobrecalentamiento del codificador
absoluto.
Reduzca el trabajo de
movimiento.
Espere hasta que disminuya la
temperatura del codificador.
5022
Error del transductor R/D. Reinicie
el codificador. Revise la placa del
solucionador o el cableado interno
del robot.
Reinicie el codificador.
Revise el cableado de señal del
manipulador (pin suelto,
desconexión, cortocircuito).
Reemplace la placa del
solucionador.

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
894 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
5023
Error de comunicación del sensor
G.
Revise la conexión del cable de
señal o el cableado interno del
manipulador.
Revise la conexión del cableado
de señal.
Revise el cableado de señal del
manipulador (pin suelto,
desconexión, cortocircuito).
Revise la contramedida para el
ruido.
Reemplace la placa de control.
Reemplace la DMB.
5024
Error de datos del sensor G.
Revise la placa de control.
Reemplace la placa de control.
5025
Se produjo una brecha entre los
datos de los turnos múltiples y los
datos de conversión R/D
(Radianes/grados).
Reinicio del codificador.
Reinicie el solucionador.
Revise la contramedida para el
ruido.
Reemplace la placa del
solucionador.
5026
Desconexión de la señal de
excitación del solucionador.
Reinicie el codificador. Revise la
placa del solucionador o el
cableado interno del robot.
Revise el cableado de señal del
manipulador (pin suelto,
desconexión, cortocircuito).
Reemplace la placa del
solucionador.
5027
S-DSP detectó el error de
comunicación en DSP.
Revise la DMB.
Reinicie el controlador.
Revise la contramedida para el
ruido.
Reemplace la DMB.
5028
Se detectó error de datos de
realimentación actual.
Revise la DMB.
Reinicie el controlador.
Revise la contramedida para el
ruido.
Reemplace la DMB.
Para la serie T, revise si existen
fallas de cortocircuito y conexión
a tierra en el cable de
alimentación. Reinicie el
controlador o reemplace la
unidad del motor.
5029
Error de comunicación de D-DSP.
Revise la DMB.
Reinicie el controlador.
Revise la contramedida para el
ruido.
Reemplace la DMB.
5030
La velocidad es demasiado alta
durante el apagado del
controlador. Reinicie el codificador.
Reinicie el codificador.
Reemplace el motor.
5031
La velocidad es demasiado alta.
Reinicie el codificador.
Exceso de cantidad de cálculo
Reinicie el codificador.
Reemplace el motor.
Para la serie T, reinicie el
controlador y reemplace la
unidad del motor.
5032 Servoalarma A. Reinicie el controlador.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 895
N.º Mensaje Solución Nota 1 Nota 2
5040
Error de salida del torque del
motor en estado de alta potencia.
Revise la conexión del cable de
alimentación, el robot, el driver o el
motor.
Especifique la configuración de
peso/inercia. Revise la carga.
Revise el robot. (Uniformidad,
juego, movimiento no uniforme,
tensión suelta de la correa, freno)
Revise la interferencia con los
equipos periféricos. (Colisión,
contacto)
Revise la configuración del
modelo.
Revise la conexión del cable de
alimentación.
Revise el cableado de
alimentación del robot. (Pin
faltante, desconexión,
cortocircuito)
Revise el voltaje de la fuente de
alimentación. (Bajo voltaje de la
fuente de alimentación)
Reemplace el driver del motor.
Reemplace la DMB.
Reemplace el motor.
Para la serie T, reemplace la
placa de la CPU y la unidad del
motor, además de las piezas
anteriores.
5041
Error de salida de torque del motor
en estado de baja potencia.
Revise la conexión del cable de
alimentación, el robot, el freno, el
driver o el motor.
Revise el robot. (Uniformidad,
juego, movimiento no uniforme,
tensión suelta de la correa, freno)
Revise la interferencia con los
equipos periféricos. (Colisión,
contacto)
Revise la configuración del
modelo.
Revise la conexión del cable de
alimentación.
Revise el cableado de
alimentación del robot. (Pin
faltante, desconexión,
cortocircuito)
Revise el voltaje de la fuente de
alimentación. (Bajo voltaje de la
fuente de alimentación)
Reemplace el driver del motor.
Reemplace la DMB.
Reemplace el motor.
Para la serie T, reemplace la
placa de la CPU y la unidad del
motor, además de las piezas
anteriores.

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
896 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
5042
Desbordamiento de error de
posición en estado de alta
potencia. Revise la conexión del
cable de alimentación, el robot, el
driver y el motor.
Especifique la configuración de
peso/inercia. Revise la carga.
Revise el robot. (Uniformidad,
juego, movimiento no uniforme,
tensión suelta de la correa, freno)
Revise la interferencia con los
equipos periféricos. (Colisión,
contacto)
Revise la configuración del
modelo.
Revise la conexión del cable de
alimentación.
Revise el cableado de
alimentación del robot. (Pin
faltante, desconexión,
cortocircuito)
Revise el voltaje de la fuente de
alimentación. (Bajo voltaje de la
fuente de alimentación)
Reemplace el driver del motor.
Reemplace la DMB.
Reemplace el motor.
Para la serie T, reemplace la
placa de la CPU y la unidad del
motor, además de las piezas
anteriores.
5043
Desbordamiento de error de
posición en estado de baja
potencia. Revise la conexión del
cable de alimentación, el robot, el
freno, el driver o el motor.
Revise el robot. (Uniformidad,
juego, movimiento no uniforme,
tensión suelta de la correa, freno)
Revise la interferencia con los
equipos periféricos. (Colisión,
contacto)
Revise la configuración del
modelo.
Revise la conexión del cable de
alimentación.
Revise el cableado de
alimentación del robot.
(Pin faltante, desconexión,
cortocircuito)
Revise el voltaje de la fuente de
alimentación.
(Bajo voltaje de la fuente de
alimentación)
Reemplace el driver del motor.
Reemplace la DMB.
Reemplace el motor.
Para la serie T, reemplace la
placa de la CPU y la unidad del
motor, además de las piezas
anteriores.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 897
N.º Mensaje Solución Nota 1 Nota 2
5044
Desbordamiento de error de
velocidad en estado de alta
potencia. Revise la conexión del
cable de alimentación, el robot, el
freno, el driver o el motor.
Especifique la configuración de
peso/inercia. Revise la carga.
Revise el robot. (Uniformidad,
juego, movimiento no uniforme,
tensión suelta de la correa, freno)
Revise la interferencia con los
equipos periféricos. (Colisión,
contacto)
Revise la configuración del
modelo.
Revise la conexión del cable de
alimentación.
Revise el cableado de
alimentación del robot. (Pin
faltante, desconexión,
cortocircuito)
Revise el voltaje de la fuente de
alimentación. (Bajo voltaje de la
fuente de alimentación)
Reemplace el driver del motor.
Reemplace la DMB.
Reemplace el motor.
Para la serie T, reemplace la
placa de la CPU y la unidad del
motor, además de las piezas
anteriores.
5045
Desbordamiento de error de
velocidad en estado de baja
potencia. Revise la conexión del
cable de alimentación, el robot, el
freno, la unidad o el motor.
Revise el robot. (Uniformidad,
juego, movimiento no uniforme,
tensión suelta de la correa, freno)
Revise la interferencia con los
equipos periféricos. (Colisión,
contacto)
Revise la configuración del
modelo.
Revise la conexión del cable de
alimentación.
Revise el cableado de
alimentación del robot. (Pin
faltante, desconexión,
cortocircuito)
Revise el voltaje de la fuente de
alimentación. (Bajo voltaje de la
fuente de alimentación)
Reemplace el driver del motor.
Reemplace la DMB.
Reemplace el motor.
Para la serie T, reemplace la
placa de la CPU y la unidad del
motor, además de las piezas
anteriores.

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
898 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
5046
Exceso de velocidad en estado de
alta potencia.
Revise la conexión del cable de
señal, el robot, el freno, el driver o
el motor.
Reduzca SpeedS del movimiento
CP. Cambie la orientación del
movimiento CP.
Especifique la configuración de
peso/inercia. Revise la carga.
Revise el robot. (Uniformidad,
juego, movimiento no uniforme,
tensión suelta de la correa, freno)
Revise la interferencia con los
equipos periféricos. (Colisión,
contacto)
Revise la configuración del
modelo.
Revise la conexión del cable de
alimentación.
Revise el cableado de
alimentación del robot. (Pin
faltante, desconexión,
cortocircuito)
Revise el voltaje de la fuente de
alimentación. (Bajo voltaje de la
fuente de alimentación)
Reemplace el driver del motor.
Reemplace la DMB.
Reemplace el motor.
Para la serie T, reemplace la
placa de la CPU y la unidad del
motor, además de las piezas
anteriores.
5047
Exceso de velocidad en estado de
baja potencia.
Revise la conexión del cable de
señal, el robot, el freno, el driver o
el motor.
Revise el movimiento en estado
de alta potencia.
Revise el robot. (Uniformidad,
juego, movimiento no uniforme,
tensión suelta de la correa, freno)
Revise la interferencia con los
equipos periféricos. (Colisión,
contacto)
Revise la configuración del
modelo.
Revise la conexión del cable de
alimentación.
Revise el cableado de
alimentación del robot. (Pin
faltante, desconexión,
cortocircuito)
Revise el voltaje de la fuente de
alimentación. (Bajo voltaje de la
fuente de alimentación)
Reemplace el driver del motor.
Reemplace la DMB.
Reemplace el motor.
Para la serie T, reemplace la
placa de la CPU y la unidad del
motor, además de las piezas
anteriores.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 899
N.º Mensaje Solución Nota 1 Nota 2
5048
Sobrevoltaje del circuito de
alimentación principal. Revise el
voltaje de alimentación principal o
el módulo de regeneración.
Especifique la configuración de
peso/inercia. Revise la carga.
Revise el robot. (Uniformidad,
juego, movimiento no uniforme,
tensión suelta de la correa, freno)
Revise la interferencia con los
equipos periféricos. (Colisión,
contacto)
Revise la configuración del
modelo.
Revise la conexión del cable de
alimentación.
Revise el cableado de
alimentación del robot. (Pin
faltante, desconexión,
cortocircuito)
Revise el voltaje de la fuente de
alimentación. (Bajo voltaje de la
fuente de alimentación)
Reemplace el driver del motor.
Reemplace la DMB.
Reemplace el motor.
5049
Sobrecorriente del driver del
motor. Revise la conexión del
cable de alimentación o el
cableado interno del robot.
Revise si existen fallas de
cortocircuito y conexión a tierra
en el cable de alimentación.
Reemplace el driver del motor.
Reemplace la DMB.
Para la serie T, revise si existen
fallas de cortocircuito y conexión
a tierra en el cable de
alimentación.
Reinicie el controlador o
reemplace la unidad del motor.
5050
Exceso de velocidad durante el
control de torque. Revise el rango
de velocidad del movimiento de
trabajo.
Revise la velocidad de
movimiento durante el control de
torque.
5051
Error de alimentación de la unidad
de modulación de ancho de pulso
(PWM) de 15 V. Reinicie el
controlador. Reemplace la
alimentación de 15 V.
Revise la fuente de alimentación
de 15 V y la conexión del cable.
Reemplace el driver del motor.
Reemplace la DMB.
5054
Sobrecarga del motor. Disminuya
el trabajo de movimiento y la
aceleración.
Reduzca el trabajo de
movimiento.
Revise la configuración de
peso/inercia.
Revise el robot. (Juego, gran
carga, tensión suelta de la
correa, freno)
5055
Sobrecarga del motor. Disminuya
el trabajo de operación y la
aceleración.
Reduzca el trabajo de
movimiento.
Revise la configuración de
peso/inercia.
Revise el robot. (Juego, gran
carga, tensión suelta de la
correa, freno)
5056
Los datos del sensor G han
cambiado rápidamente. Revise la
placa de control.
Revise la contramedida para el
ruido.
Reemplace la placa de control.

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
900 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
5057
Se detectó una colisión en el modo
de alta potencia
(Detección del error de movimiento
del robot)
La detección de colisión
(detección del error de
movimiento del robot) estaba
funcionando.
Se detectaron los siguientes
errores:
- Hubo colisión o contacto con el
brazo del robot.
- Saturación de torque debido a
una configuración deficiente de
Weight (Peso) o Inertia (Inercia).
- Saturación de torque debido a
un movimiento combinado de
varias articulaciones y rodeo de
un objeto largo.
- Saturación de torque debido a la
reducción del voltaje de
suministro.
- Movimiento erróneo debido a
error de hardware o mal
funcionamiento de software.
Contramedidas:
Compruebe que no exista colisión
o contacto del brazo del robot y
cambie la distribución para evitar
interferencias.
Confirme que se produjo la
saturación de torque.
Durante la saturación de torque:
revise que la configuración de
Weight e Inertia sea correcta y
corríjala si es necesario.
Durante el movimiento
combinado: ajuste la aceleración
y desaceleración para evitar la
saturación de torque.
Revise el voltaje de la fuente de
alimentación y corríjalo si es
necesario.
Si ocurre otro error al mismo
tiempo, tome una contramedida
para eso primero.
Referencia: Manual del usuario
de EPSON RC+ 7.0 “6.18.10
Función de detección de colisión
(Función de detección de error de
movimiento del robot)”

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 901
N.º Mensaje Solución Nota 1 Nota 2
5058
Se detectó una colisión en el modo
de baja potencia
(Detección del error de movimiento
del robot)
La detección de colisión
(detección del error de
movimiento del robot) estaba
funcionando.
Se detectaron los siguientes
errores:
- Hubo colisión o contacto con el
brazo del robot.
- Saturación de torque debido a
que sostiene una mano o un
objeto largo que sobrepasa el
peso descrito en las
especificaciones.
- Movimiento erróneo debido a
error de hardware o mal
funcionamiento de software.
Contramedidas:
Compruebe que no exista colisión
o contacto del brazo del robot y
cambie la distribución para evitar
interferencias.
Revise el peso de la mano y
corríjalo si es necesario.
Articulación n.º 4 y 5 del robot de
6 ejes: se confirma que se
produjo la saturación de torque.
Si se produce saturación de
torque: cambie para sostener en
modo de alta potencia.
Si ocurre otro error al mismo
tiempo, tome una contramedida
para eso primero.
Referencia: Manual del usuario
de EPSON RC+ 7.0 “6.18.10
Función de detección de colisión
(Función de detección de error de
movimiento del robot)”
5072
Servoalarma B.
Reinicie el controlador.
5080
El motor está sobrecargado.
Disminuya el trabajo y la
aceleración.
Reduzca el trabajo de
movimiento.
Revise la configuración de
peso/inercia.
Revise el robot. (Juego, gran
carga, tensión suelta de la
correa, freno)
5098
Temperatura alta del codificador.
Reduzca el trabajo. Revise la
unidad de engranaje reductor del
robot.
Espere hasta que disminuya la
temperatura del codificador.
Reduzca el trabajo de
movimiento.
Revise la configuración de
peso/inercia.
Revise el robot. (Juego, gran
carga, tensión suelta de la
correa, freno)

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
902 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
5099
Temperatura alta del driver del
motor. Limpie el filtro del
ventilador del controlador. Revise
la temperatura ambiente. Reduzca
el trabajo.
Limpie el filtro del ventilador de
enfriamiento.
Reduzca el trabajo de
movimiento.
Revise la configuración de
peso/inercia.
Baje la temperatura ambiente.
5112 Servoalarma C. Reinicie el controlador.
5501
Falla de inicialización del control
de fuerza.
Reinicie el controlador.
Reinicie el controlador.
Inicialice el firmware del
controlador.
Reemplace el controlador.
5510
Error de cálculo del control de
fuerza.
Reinicie el controlador.
Reinicie el controlador.
Inicialice el firmware del
controlador.
Reemplace el controlador.
5511
Error de transformación de
coordenadas en el control de
fuerza.
Revise si el robot se mueve fuera
del rango de movimiento.
Revise si se especificó la
coordenada fuera del rango de
movimiento.
Revise si el robot se mueve fuera
del rango de movimiento durante
la ejecución del control de fuerza.
5520
Error de parámetro de impedancia.
Revise la combinación de Mass
(Masa), Damper (Amortiguador) y
Spring (Resorte).
Revise la combinación de Spring,
Damper y Mass. Revise si la
propiedad Mass es demasiado
pequeña para la propiedad
Damper.
5521
Se especificó el modo de sistema
de coordenadas en vez del modo
personalizado para el sensor de
fuerza, el que no está asociado
con el robot.
Revise la configuración del sensor
de fuerza o el modo del sistema de
coordenadas.
Revise la asociación con el robot.
Revise si se especificó la
dirección en lugar de la
coordenada personalizada para
la propiedad Orientation
(Orientación) del objeto del
sistema de coordenadas de
fuerza para el sensor que no está
asociado con el robot.
5522
Está seleccionado Undefined data
(Datos no definidos).
Revise si están definidos los datos
seleccionados.
Revise si está definido el
parámetro especificado.
5523
El parámetro que no se puede
continuar cuando se especifica el
control de fuerza continua CF.
Revise el objeto de Force Control y
el objeto del sistema de
coordenadas de fuerza.
Revise el objeto de control de
fuerza y el objeto de
coordenadas de fuerza que están
siendo utilizados por los
comandos de movimiento antes y
después de continuar el control
de fuerza mediante el parámetro
CF.
5530
El tiempo especificado ha
transcurrido después de reiniciar el
sensor de fuerza.
Ejecute la propiedad Reset del
objeto del sensor de fuerza.
Ejecute la propiedad Reset del
objeto del sensor de fuerza.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 903
N.º Mensaje Solución Nota 1 Nota 2
5531
Aproxímese al punto de
singularidad mientras ejecuta el
control de fuerza.
Evite el punto de singularidad
mientras utiliza el control de
fuerza.
Revise si se especificaron las
coordenadas cercanas a la
singularidad.
Revise si el robot se mueve
hacia el entorno de la
singularidad durante la ejecución
del control de fuerza. O bien,
revise la posición de instalación
del robot.
5532
El búfer para el sensor de fuerza
está saturado.
Acorte el intervalo de tiempo de
AvgForceClear a AvgForce.
Acorte el intervalo de tiempo
entre AvgForceClear y AvgForce
para que sea menor a un minuto.
5533
Ha transcurrido el tiempo de
continuación para que CF ejecute
el control de fuerza.
Para continuar el control de fuerza,
utilice FCKeep.
Revise si el intervalo de los
comandos de movimiento es
igual o inferior a un minuto.
5535
El robot SCARA no puede ejecutar
el control de fuerza si la propiedad
Orientation de los objetos Base
(Base), Tool (Herramienta), Local
(Local) y FCS, o de V y W de la
posición del comando actual es
distinta de 0.
Revise los parámetros.
Configure “0” en la propiedad
Orientation o V y W de la
posición del comando actual para
los objetos Base, Tool, Local y
FCS.
5536
El control de fuerza no es
compatible con este modelo de
robot.
Revise el modelo del robot y la
versión de firmware del
controlador.
Revise si el robot especificado es
el correcto.
Revise si el firmware del
controlador es compatible con el
modelo del robot.
5540
Error de transmisión del sensor de
fuerza.
Revise la conexión de la unidad I/F
del sensor de fuerza (placa) y el
sensor de fuerza.
Ejecute la propiedad Reboot del
objeto del sensor de fuerza.
Revise la conexión del sensor de
fuerza y la unidad I/F del sensor
de fuerza (placa).
Reinicie el sensor de fuerza y la
unidad I/F del sensor de fuerza
(placa).
Consulte con nosotros si ocurre
un error similar incluso después
de tomar las anteriores
contramedidas.
5541
Error de recepción del sensor de
fuerza.
Revise la conexión de la unidad I/F
del sensor de fuerza (placa) y el
sensor de fuerza.
Ejecute la propiedad Reboot del
objeto del sensor de fuerza.
Revise la conexión del sensor de
fuerza y la unidad I/F del sensor
de fuerza (placa).
Reinicie el sensor de fuerza y la
unidad I/F del sensor de fuerza
(placa).
Consulte con nosotros si ocurre
un error similar incluso después
de tomar las anteriores
contramedidas.
5542
Sensor de fuerza en uso.
Revise si los demás comandos
están usando el sensor de fuerza.
Revise si las propiedades Reset
o Reboot del objeto de sensor de
fuerza se ejecutan en otra tarea.

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
904 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
5543
Error de comunicación del sensor
de fuerza.
Ejecute la propiedad Reboot del
objeto del sensor de fuerza.
Ejecute la propiedad Reboot del
objeto del sensor de fuerza.
Revise la conexión del sensor de
fuerza y la unidad I/F del sensor
de fuerza (placa).
Reinicie el sensor de fuerza y la
unidad I/F del sensor de fuerza
(placa).
Consulte con nosotros si ocurre
un error similar incluso después
de tomar las anteriores
contramedidas.
5544
Error del elemento del sensor de
fuerza.
Revise si la fuerza que supera el
valor nominal se aplica al sensor
de fuerza.
Ejecute la propiedad Reset del
objeto del sensor de fuerza.
Este error se puede producir si
ha transcurrido mucho tiempo
desde que no se reinicia el
sensor de fuerza.
Ejecute la propiedad Reset del
objeto del sensor de fuerza.
Revise si la fuerza que supera el
valor nominal se aplica al sensor
de fuerza.
Reinicie el sensor de fuerza y la
unidad I/F del sensor de fuerza
(placa).
Consulte con nosotros si ocurre
un error similar incluso después
de tomar las anteriores
contramedidas.
5545
Error del circuito 1 del sensor de
fuerza.
Ejecute la propiedad Reset del
objeto del sensor de fuerza.
Ejecute la propiedad Reset del
objeto del sensor de fuerza.
Reinicie el sensor de fuerza y la
unidad I/F del sensor de fuerza
(placa).
Consulte con nosotros si ocurre
un error similar incluso después
de tomar las anteriores
contramedidas.
5546
Error del circuito 2 del sensor de
fuerza.
Ejecute la propiedad Reset del
objeto del sensor de fuerza.
Ejecute la propiedad Reset del
objeto del sensor de fuerza.
Reinicie el sensor de fuerza y la
unidad I/F del sensor de fuerza
(placa).
Si se produce un error similar
incluso después de tomar las
medidas anteriores, revise si hay
vibración en la punta del brazo
del robot.
5547
Error de temperatura alta del
sensor de fuerza.
Revise si la temperatura ambiente
se encuentra dentro del valor
nominal y que no haya un cambio
rápido de temperatura.
Ejecute la propiedad Reset del
objeto del sensor de fuerza.
Ejecute la propiedad Reset del
objeto del sensor de fuerza.
Revise la temperatura ambiente.
Reinicie el sensor de fuerza y la
unidad I/F del sensor de fuerza
(placa).
Consulte con nosotros si ocurre
un error similar incluso después
de tomar las anteriores
contramedidas.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 905
N.º Mensaje Solución Nota 1 Nota 2
5548
El sensor de fuerza detectó una
fuerza que supera el valor nominal.
Revise si se aplica una fuerza que
supera el valor nominal.
Ejecute la propiedad Reset del
objeto del sensor de fuerza.
Ejecute la propiedad Reset del
objeto del sensor de fuerza.
Revise si la fuerza que supera el
valor nominal se aplica al sensor
de fuerza.
Reinicie el sensor de fuerza y la
unidad I/F del sensor de fuerza
(placa).
Consulte con nosotros si ocurre
un error similar incluso después
de tomar las anteriores
contramedidas.
5549
No está conectada la unidad I/F
del sensor de fuerza.
Revise la conexión de la unidad I/F
del sensor de fuerza (placa) y el
sensor de fuerza.
Revise la conexión del sensor de
fuerza y la unidad I/F del sensor
de fuerza (placa).
Reinicie el sensor de fuerza y la
unidad I/F del sensor de fuerza
(placa).
Consulte con nosotros si ocurre
un error similar incluso después
de tomar las anteriores
contramedidas.
5550
La detección de fuerza del sensor
de fuerza está desactivada.
Revise la configuración del sensor
de fuerza.
Revise la configuración del
sensor de fuerza.
Reinicie el sensor de fuerza y la
unidad I/F del sensor de fuerza
(placa).
5551
Está conectado un sensor de
fuerza que no es compatible.
Revise la versión de firmware del
controlador y la conexión del
sensor de fuerza.
Revise si el firmware del
controlador es compatible con el
sensor de fuerza.
Revise la conexión del sensor de
fuerza y la unidad I/F del sensor
de fuerza (placa).
Reinicie el sensor de fuerza y la
unidad I/F del sensor de fuerza
(placa).
5552
Error en la configuración del
sensor de fuerza.
Revise la configuración del sensor
de fuerza.
Revise la configuración del
sensor de fuerza.
5553
Se ejecuta una función no admitida
en el sensor de fuerza conectado.
Revise el programa.
Revise la configuración del
sensor de fuerza.
Revise el programa.
5560
Error de corrección de desfase del
sensor de fuerza.
Revise la conexión del sensor de
fuerza y la unidad I/F del sensor
de fuerza (placa).
Reinicie el sensor de fuerza y la
unidad I/F del sensor de fuerza
(placa).
5570
Desbordamiento de búfer del
monitor de fuerza.
Reinicie el monitor de fuerza.
Cierre y vuelva a abrir el monitor
de fuerza.
5571
Desbordamiento de búfer del
registro de fuerza.
Configure un intervalo de medición
de datos más largo.
Configure un intervalo más largo
para medir los datos.
La computadora que recibe los
datos puede estar en estado de
carga pesada.

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
906 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
5572
Desbordamiento de búfer del
monitor de control de fuerza.
Reinicie el monitor de control de
fuerza.
Cierre y vuelva a abrir el monitor
de Force Control.
5573
Los datos de registro de la
secuencia de Force Guide están
desbordados.
Reinicie el controlador.
La computadora que recibe los
datos puede estar en estado de
carga pesada.
5574
Está desbordado el búfer de
RecordStart. Configure un
intervalo de medición de datos
más largo.
Configure un intervalo más largo
para medir los datos.
La computadora que recibe los
datos puede estar en estado de
carga pesada.
5800
Falla de inicialización del control
de fuerza.
Reinicie el controlador.
Reinicie el controlador.
Inicialice el firmware del
controlador.
Reemplace el controlador.
5801
Error al asignar memoria con el
control de fuerza.
Reinicie el controlador.
Reinicie el controlador.
Inicialice el firmware del
controlador.
Reemplace el controlador.
5802
Error de cálculo del control de
fuerza.
Reinicie el controlador.
Reinicie el controlador.
Inicialice el firmware del
controlador.
Reemplace el controlador.
5803
El sensor de fuerza no pudo
conectarse con el robot.
Revise la configuración de la
conexión del sensor de fuerza.
Revise la configuración de la
conexión del sensor de fuerza.
5810
Error de parámetro del control de
fuerza.
Revise el rango del parámetro.
Revise el rango del parámetro
especificado.
5811
El parámetro del objeto de Force
Control está fuera de rango.
Nota 1: Propiedad
Nota 2: Eje
Revise el parámetro.
Revise la propiedad del objeto de
control de fuerza.
1: Número
2: Sistema de
coordenadas
3: Activado
4: Masa
5: Amortiguador
6: Resorte
7:
TargetForcePrio
rityMode
8: TargetForce
9: LimitSpeed
10: LimitAccel
1: Fx
2: Fy
3: Fz
4: Tx
5: Ty
6: Tz
o
1:J
2:S
3:R
5812
LimitSpeed o LimitAccel del objeto
de Force Control es inferior a la
configuración de velocidad o
aceleración del robot.
Revise el parámetro.
Revise los valores de Speed,
SpeedS, SpeedR, Accel, AccelS,
AccelR, LimitSpeed y LimitAccel.
5813
Todas las propiedades activadas
del objeto de Force Control son
falsas.
Configure True (Verdadero) en 1 o
más ejes.
Active la propiedad “Enabled”
(Activada) para al menos un eje.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 907
N.º Mensaje Solución Nota 1 Nota 2
5814
El robot SCARA no puede ejecutar
el control de fuerza si la propiedad
Orientation de los objetos Base,
Tool, Local y FCS, o de V y W de
la posición del comando actual es
distinta de 0,
o si Tx_Enabled y Ty_Enabled no
está en False (Falso).
Revise los parámetros.
Desactive el estado activado de
Tx y Ty.
Configure “0” en la propiedad
Orientation o V y W de la
posición del comando actual para
los objetos Base, Tool, Local y
FCS.
5815
El parámetro del objeto del
disparador de fuerza está fuera de
rango.
Nota 1: Propiedad
Nota 2: Eje
Revise el parámetro.
Revise la propiedad del objeto
del disparador de fuerza.
1: Número
2: Sensor de
fuerza
3: Sistema de
coordenadas
4: TriggerMode
5: Operador
6: Activado
7: FMag_Axes
8: TMag_Axes
9: Polaridad
10: UpperLevel
11: LowerLevel
12: UpperLevel
inferior al
LowerLevel
13:
LPF_Enabled
14:
LPF_TimeConst
ant
1: Fx
2: Fy
3: Fz
4: Tx
5: Ty
6: Tz
7: Fmag
8: Tmag
5816
El parámetro del objeto del
sistema de coordenadas de fuerza
está fuera de rango.
Nota 1: Propiedad
Nota 2: Eje
Revise el parámetro.
Revise la propiedad del objeto
del sistema de coordenadas de
fuerza.
1: Número
2: Posición
3:
Orientation_Mo
de
4:
Orientation_UV
W
5:
Orientation_Rob
otLocal
1: X
2: Y
3: Z
o
1: U
2: V
3: W
5817
El parámetro del objeto de monitor
de fuerza está fuera de rango.
Nota 1: Propiedad
Nota 2: Eje
Revise el parámetro.
Revise la propiedad del objeto de
monitor de fuerza.
1: Número
2: Sensor de
fuerza
3: Sistema de
coordenadas
4: FMag_Axes
5: TMag_Axes
6: LPF_Enabled
7:
LPF_TimeConst
ant
5818
El parámetro del objeto de
restricción de movimiento de
fuerza está fuera de rango.
Reinicie el controlador.
Inicialice el firmware del
controlador.
Reemplace el controlador.

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
908 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
5819
La duración especificada de
FCKeep está fuera del rango
permitido.
Revise la duración.
Revise si la duración
especificada es igual o inferior a
600 segundos.
5830
No se puede reanudar el control
de fuerza desde la pausa. Anule
el comando de movimiento.
Anule el movimiento.
5831
No se puede ejecutar este
comando durante el control de
fuerza.
Salga del control de fuerza
mediante FCEnd.
Anule el control de fuerza.
Ejecute el comando FCEnd.
5832
No se puede ejecutar un comando
de movimiento que no tenga
ningún objeto de Force Control
durante el control de fuerza.
Salga del control de fuerza
mediante FCEnd.
Revise si el comando de
movimiento inmediatamente
después de continuar el control
de fuerza con CT no contiene el
control de fuerza.
5833
No se puede usar la
compensación de gravedad. Solo
se puede usar el número de objeto
de propiedad de masa '0'.
Esta es la combinación del
sensor de fuerza y el robot que
no pueden usar la compensación
de gravedad.
Defina el número de objeto de
propiedad de masa en '0'.
5834
Se ejecuta una función no admitida
en el sensor de fuerza conectado.
Revise el programa.
Revise la configuración del
sensor de fuerza.
Revise el programa.
5840
Sensor de fuerza en uso.
Revise si los demás comandos
están utilizando el sensor de
fuerza.
Revise si las propiedades Reset
o Reboot del objeto de sensor de
fuerza se ejecutan en otra tarea.
5841
No se pudo restablecer el sensor
de fuerza.
Restablecer el sensor de fuerza
nuevamente.
Note1: Información detallada del
error
Cuando se omite el parámetro o
se especifica FG_RESET_FINE,
especifique
FG_RESET_WAIT_VIBRATION
para el parámetro.
Cuando se especifica
FG_RESET_WAIT_VIBRATION,
ajuste la temporización de
restablecimiento mediante la
instrucción Wait (Esperar) o retire
la fuente de vibración externa.
1: Se agotó el
tiempo de
espera desde
que no se
cumple la
condición Fine
(Fino).
2: Se agotó el
tiempo de
espera desde
que no se
detuvo la
vibración.
5901
Error al asignar memoria con el
control de fuerza.
Reinicie el controlador.
Reinicie el controlador.
Inicialice el firmware del
controlador.
Reemplace el controlador.
5902
El control de fuerza no pudo liberar
la memoria.
Reinicie el controlador.
Reinicie el controlador.
Inicialice el firmware del
controlador.
Reemplace el controlador.
5903
No se puede encontrar el robot
especificado.
Reinicie el controlador.
Inicialice el firmware del
controlador.
Reemplace el controlador.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 909
N.º Mensaje Solución Nota 1 Nota 2
5904
Error al asignar memoria con el
control de fuerza.
Reinicie el controlador.
Reinicie el controlador.
Inicialice el firmware del
controlador.
Reemplace el controlador.
5906
No se puede encontrar el número
de datos de fuerza especificado.
Especifique un número de datos
de fuerza válido.
Reinicie el controlador.
Inicialice el firmware del
controlador.
Reemplace el controlador.
5907
No se definió el número de datos
de fuerza especificado.
Especifique un número de datos
de fuerza de enseñanza.
Especifique un número de datos
de fuerza definido.
5908
No se definió el número de datos
del sistema de coordenadas de
fuerza especificado. Especifique
un número de datos del sistema de
coordenadas de fuerza de
enseñanza.
Especifique un número de datos
del sistema de coordenadas de
fuerza definido.
5909
No se pueden actualizar los datos
de fuerza especificados.
No se pueden actualizar ni
eliminar los datos de fuerza
especificados con las
instrucciones FSet, FDel, MPSet
o MPDel.
5910
El valor de los datos de fuerza
especificados está fuera del rango
permitido.
Especifique el valor dentro del
rango.
5911
El valor del nivel superior es menor
que el valor del nivel inferior.
Cambie los valores del nivel
superior e inferior.
Cambie los valores del nivel
superior e inferior.
5912
El número de los parámetros de
comando especificado no es
correcto.
Especifique un número válido de
parámetros.
Especifique un número válido de
parámetros.
Número de
parámetros
5913
El número de los parámetros de
función especificado no es
correcto.
Especifique un número válido de
parámetros.
Especifique un número válido de
parámetros.
Número de
parámetros
5914
El tipo de parámetro de comando
especificado no es correcto.
Especifique los parámetros
válidos.
Especifique los parámetros
válidos.
5915
El tipo de parámetro de función
especificado no es correcto.
Especifique los parámetros
válidos.
Reinicie el controlador.
Inicialice el firmware del
controlador.
Reemplace el controlador.
5918
No se puede encontrar la etiqueta
de datos de fuerza especificada.
Especifique una etiqueta de datos
de fuerza válida.
Especifique una etiqueta de
datos de fuerza válida definida.
5921
Duplique la etiqueta de datos de
fuerza. El nombre de etiqueta
especificado ya está en uso.
Cambie el nombre de la etiqueta.
Cambie el nombre de la etiqueta.

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
910 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
5924
El control de fuerza del robot
especificado no pudo asignar
memoria.
Reinicie el controlador.
Reinicie el controlador.
Inicialice el firmware del
controlador.
Reemplace el controlador.
5927
No se pueden leer los datos de
fuerza del archivo de fuerza.
Vuelva a crear el archivo de
fuerza.
Los datos de fuerza no son
válidos y no se pueden leer.
Vuelva a crear el archivo de
fuerza.
0: FC
1: FCS
2: FT
3: FM
4: MASS
Número de
datos de
fuerza
5928
Error al asignar memoria con el
control de fuerza.
Reinicie el controlador.
Reinicie el controlador.
Inicialice el firmware del
controlador.
Reemplace el controlador.
5929
El nombre del archivo de fuerza
especificado no es correcto.
Especifique un nombre de archivo
de fuerza válido.
Reinicie el controlador.
Inicialice el firmware del
controlador.
Reemplace el controlador.
5930
La etiqueta de datos de fuerza
especificada supera la longitud
máxima. Especifique una etiqueta
de datos de fuerza válida.
Especifique una etiqueta de
datos de fuerza válida. Consulte
"Propiedad Label" para conocer
detalles.
5931
La descripción de los datos de
fuerza especificada supera la
longitud máxima.
Especifique una descripción válida.
Especifique una descripción
válida.
Consulte “Propiedad Description”
(Descripción) para conocer
detalles.
5932
El archivo de fuerza está dañado.
Vuelva a crear el archivo de
fuerza.
No se puede cargar el archivo de
fuerza porque está dañado o fue
editado por herramientas
distintas a Force Guide 7.0.
Vuelva a crear el archivo de
fuerza.
5933
No se puede encontrar el archivo
de datos de fuerza especificado.
Especifique un nombre de archivo
de fuerza válido.
Especifique un nombre de
archivo de fuerza válido.
5934
No se puede guardar el archivo de
fuerza.
Libere el espacio suficiente para
escribir el archivo de fuerza.
Número del
robot
5940
La etiqueta de datos de fuerza es
incorrecta.
Especifique una etiqueta de datos
de fuerza válida.
Especifique una etiqueta de
datos de fuerza válida. Consulte
"Propiedad Label" para conocer
detalles.
5941
La etiqueta de datos de fuerza es
incorrecta.
Especifique una etiqueta de datos
de fuerza válida.
Especifique una etiqueta de
datos de fuerza válida. Consulte
"Propiedad Label" para conocer
detalles.
5943
La versión del archivo de fuerza no
es válida.
Actualice el firmware del
controlador.
No se puede cargar el archivo de
fuerza, porque es una versión
más reciente.
5944
No se pudo leer el archivo de
fuerza.
Vuelva a crear el archivo de
fuerza.
No se puede cargar el archivo de
fuerza, porque el formato no es
compatible.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 911
N.º Mensaje Solución Nota 1 Nota 2
6001
El número de calibración está fuera del
rango.
Corrija el número de calibración.
6002
No está definida la calibración.
Realice la calibración.
6003
La orientación de la cámara está fuera del
rango.
Corrija el valor
CameraOrientation.
6004
El indicador TwoRefPoints está fuera del
rango.
Corrija el valor TwoRefPoints.
6005
No se puede calcular la posición del punto
porque existen datos no válidos.
Vuelva a enseñar los puntos.
6006
No se pudo calibrar. No se puede calcular
porque existen datos no válidos.
Realice nuevamente la
enseñanza de puntos y la
calibración.
6007
Falla en la transformación de coordenadas.
No se puede calcular porque existen datos
no válidos.
Vuelva a enseñar los puntos.
6009
El nombre del archivo de calibración no es
válido.
Corrija el nombre del archivo de
calibración.
6010 No se encontró el archivo de calibración.
Corrija el nombre del archivo de
calibración.
6012 No se pudo leer el archivo de calibración.
Corrija el nombre del archivo de
calibración.
6013 No se pudo escribir el archivo de calibración.
Revise el permiso de acceso a
la carpeta del proyecto.
6014
Se deben especificar 9 puntos de
coordenadas de píxeles.
Asegúrese de obtener al menos
9 resultados en la secuencia de
visión.
6015
Se deben especificar 18 puntos de
coordenadas de píxeles.
Asegúrese de obtener al menos
18 resultados en la secuencia de
visión.
6016
Se deben especificar 9 puntos de
coordenadas del robot.
Vuelva a enseñar los puntos.
6017
Se deben especificar 18 puntos de
coordenadas del robot.
Vuelva a enseñar los puntos.
6018
Se deben especificar 9 puntos de
coordenadas del robot y 1 punto de
referencia.
Realice nuevamente la
enseñanza de puntos y la
calibración.
6019
Se deben especificar 9 puntos de
coordenadas del robot y 2 puntos de
referencia.
Realice nuevamente la
enseñanza de puntos y la
calibración.
6502
Proceso de Vision Error de comunicación (-
3)
Revise la conexión con la
cámara (cable, configuración).
6503
Proceso de Vision Error de memoria (-11)
Reinicie RC+.
6506 Proceso de Vision Error de modelado (-14)
Cambie el objetivo y vuelva a
enseñar.
6507
Proceso de Vision Error de recuperación (-
15)
Especifique el archivo del
formato adecuado.
6508
Proceso de Vision Número de iteraciones
no válido (-16)
Configure un valor en el rango
válido.
6509
Proceso de Vision Modo no válido (-17)
Configure un valor válido.
6510
Proceso de Vision Valor de umbral no
válido (-18)
Configure un valor en el rango
válido.
6511 Proceso de Vision Polaridad no válida (-19)
Configure un valor en el rango
válido.
6512
Proceso de Vision No se pudo abrir el
archivo (-20)
Especifique un archivo correcto.
6513
Proceso de Vision Error de inicialización (-
21)
Reinstale RC+.

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
912 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
6514 Proceso de Vision Error de estado (-22)
Revise la conexión con la
cámara.
6517
Proceso de Vision Formato de imagen no
válido (-25)
Especifique el archivo de
imagen del formato de lectura.
6520
Proceso de Vision Valor de propiedad no
válido (-100)
Configure un valor en el rango
válido.
6521
Proceso de Vision No se pudo realizar el
proceso de término de exposición (-201)
Desactive el Firewall de
Windows.
6533
Proceso de Vision Valor ThresholdLow de
propiedad Blob no válido (-11004)
Configure un valor en el rango
válido.
6534
Proceso de Vision Valor ThresholdHigh de
propiedad Blob no válido (-11005)
Configure un valor en el rango
válido.
6535
Proceso de Vision Valor Polarity de
propiedad Blob no válido (-11006)
Configure un valor en el rango
válido.
6536
Proceso de Vision Valor NumberToFind de
propiedad Blob no válido (-11007)
Configure un valor en el rango
válido.
6537
Proceso de Vision Valor MinArea de
propiedad Blob no válido (-11008)
Configure un valor en el rango
válido.
6538
Proceso de Vision Valor MaxArea de
propiedad Blob no válido (-11009)
Configure un valor en el rango
válido.
6539
Proceso de Vision Valor RejectOnEdge de
propiedad Blob no válido (-11010)
Configure un valor en el rango
válido.
6540
Proceso de Vision Valor SizeToFind de
propiedad Blob no válido (-11011)
Configure un valor en el rango
válido.
6553
Proceso de Vision Valor Accept de
propiedad Geom no válido (-11504)
Configure un valor en el rango
válido.
6554
Proceso de Vision Valor NumberToFind de
propiedad Geom no válido (-11505)
Configure un valor en el rango
válido.
6555
Proceso de Vision Valor AngleEnable de
propiedad Geom no válido (-11506)
Configure un valor en el rango
válido.
6556
Proceso de Vision Valor AngleRange de
propiedad Geom no válido (-11507)
Configure un valor en el rango
válido.
6557
Proceso de Vision Valor AngleStart de
propiedad Geom no válido (-11508)
Configure un valor en el rango
válido.
6558
Proceso de Vision Valor ScaleEnable de
propiedad Geom no válido (-11509)
Configure un valor en el rango
válido.
6559
Proceso de Vision Valor ScaleFactorMax de
propiedad Geom no válido (-11510)
Configure un valor en el rango
válido.
6560
Proceso de Vision Valor ScaleFactorMin de
propiedad Geom no válido (-11511)
Configure un valor en el rango
válido.
6561
Proceso de Vision Valor ScaleTarget de
propiedad Geom no válido (-11512)
Configure un valor en el rango
válido.
6562
Proceso de Vision Valor SeparationMinX de
propiedad Geom no válido (-11513)
Configure un valor en el rango
válido.
6563
Proceso de Vision Valor SeparationMinY de
propiedad Geom no válido (-11514)
Configure un valor en el rango
válido.
6564
Proceso de Vision Valor SeparationAngle
de propiedad Geom no válido (-11515)
Configure un valor en el rango
válido.
6565
Proceso de Vision Valor SeparationScale
de propiedad Geom no válido (-11516)
Configure un valor en el rango
válido.
6566
Proceso de Vision Valor Confusion de
propiedad Geom no válido (-11517)
Configure un valor en el rango
válido.
6567
Proceso de Vision Valor
ModelOrgAutoCenter de propiedad Geom
no válido (-11518)
Configure un valor en el rango
válido.
6570
Proceso de Vision Valor DetailLevel de
propiedad Geom no válido (-11521)
Configure un valor en el rango
válido.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 913
N.º Mensaje Solución Nota 1 Nota 2
6571
Proceso de Vision Valor Smoothness de
propiedad Geom no válido (-11522)
Configure un valor en el rango
válido.
6572
Proceso de Vision Valor RejectOnEdge de
propiedad Geom no válido (-11523)
Configure un valor en el rango
válido.
6573
Proceso de Vision Valor SharedEdges de
propiedad Geom no válido (-11524)
Configure un valor en el rango
válido.
6574
Proceso de Vision Valor Timeout de
propiedad Geom no válido (-11525)
Configure un valor en el rango
válido.
6575
Proceso de Vision Valor RejectByArea de
propiedad Geom no válido (-11526)
Configure un valor en el rango
válido.
6576
Proceso de Vision Valor SearchReversed
de propiedad Geom no válido (-11527)
Configure un valor en el rango
válido.
6577
Proceso de Vision Valor ScaleTargetPriority
de propiedad Geom no válido (-11528)
Configure un valor en el rango
válido.
6578
Proceso de Vision Valor
SearchReducedImage de propiedad Geom
no válido (-11529)
Configure un valor en el rango
válido.
6586
Proceso de Vision Valor DetailLevel de
propiedad Geom Model no válido (-11602)
Configure un valor en el rango
válido.
6587
Proceso de Vision Valor Smoothness de
propiedad Geom Model no válido (-11603)
Configure un valor en el rango
válido.
6603
Proceso de Vision Propiedad Corr no válida
Valor Accept (-12004)
Configure un valor en el rango
válido.
6604
Proceso de Vision Propiedad Corr no válida
Valor NumberToFind (-12005)
Configure un valor en el rango
válido.
6605
Proceso de Vision Propiedad Corr no válida
Valor AngleEnable (-12006)
Configure un valor en el rango
válido.
6606
Proceso de Vision Propiedad Corr no válida
Valor AngleRange (-12007)
Configure un valor en el rango
válido.
6607
Proceso de Vision Propiedad Corr no válida
Valor AngleStart (-12008)
Configure un valor en el rango
válido.
6608
Proceso de Vision Propiedad Corr no válida
Valor AngleAccuracy (-12009)
Configure un valor en el rango
válido.
6609
Proceso de Vision Propiedad Corr no válida
Valor Confusion (-12010)
Configure un valor en el rango
válido.
6610
Proceso de Vision Propiedad Corr no válida
Valor ModelOrgAutoCenter (-12011)
Configure un valor en el rango
válido.
6613
Proceso de Vision Propiedad Corr no válida
Valor RejectOnEdge (-12014)
Configure un valor en el rango
válido.
6614
Proceso de Vision Propiedad Corr no válida
Valor Timeout (-12015)
Configure un valor en el rango
válido.
6615
Proceso de Vision Propiedad Corr no válida
Valor RejectByArea (-12016)
Configure un valor en el rango
válido.
6630
Proceso de Vision Tamaño de estructura de
la propiedad Edge no válido (-12501)
Configure un valor en el rango
válido.
6631
Proceso de Vision Tamaño de estructura
del encabezado de resultado de Edge no
válido (-12502)
Configure un valor en el rango
válido.
6632
Proceso de Vision Tamaño de estructura
del elemento de resultado de Edge no válido
(-12503)
Configure un valor en el rango
válido.
6633
Proceso de Vision Propiedad Edge no
válida
Valor EdgeType (-12504)
Configure un valor en el rango
válido.
6634
Proceso de Vision Propiedad Edge no
válida
Valor NumberToFind (-12505)
Configure un valor en el rango
válido.

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
914 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
6635
Proceso de Vision Propiedad Edge no
válida
Valor Polarity (-12506)
Configure un valor en el rango
válido.
6636
Proceso de Vision Propiedad Edge no
válida
Valor SearchWidth (-12507)
Configure un valor en el rango
válido.
6637
Proceso de Vision Propiedad Edge no
válida
Valor Accept (-12508)
Configure un valor en el rango
válido.
6638
Proceso de Vision Propiedad Edge no
válida
Valor ScoreWeightContrast (-12509)
Configure un valor en el rango
válido.
6639
Proceso de Vision Propiedad Edge no
válida
Valor ContrastTarget (-12510)
Configure un valor en el rango
válido.
6640
Proceso de Vision Propiedad Edge no
válida
Valor ContrastVariation (-12511)
Configure un valor en el rango
válido.
6641
Proceso de Vision Propiedad Edge no
válida
Valor StrengthTarget (-12512)
Configure un valor en el rango
válido.
6642
Proceso de Vision Propiedad Edge no
válida
Valor StrengthVariation (12513)
Configure un valor en el rango
válido.
6653
Proceso de Vision Lector de código
Error de suma de comprobación (-1010)
Cambie el código a uno con una
suma de comprobación correcta.
O bien, cambie la configuración
para que no utilice la suma de
comprobación.
6654
Proceso de Vision Lector de código
Zona silenciosa no válida (-1011)
Asegúrese de que haya una
zona silenciosa (margen en
blanco) alrededor del código.
Configure una zona silenciosa
más estrecha.
6655
Proceso de Vision Lector de código
El mensaje es demasiado largo (-1012)
Cambie el código.
6686
Proceso de Vision OCR
El diccionario de reconocimiento está lleno (-
2132)
Borre los caracteres registrados.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 915
N.º Mensaje Solución Nota 1 Nota 2
7003
No se puede encontrar el robot
especificado.
Reinicie el controlador.
Inicialice el firmware del control.
7004
Duplique la asignación del área de
datos de punto.
Reinicie el controlador.
Inicialice el firmware del control.
7006
No se puede encontrar el número
de punto especificado.
Especifique un número de punto
válido.
Revise el número de punto
especificado.
7007
No se definió el número de punto
especificado. Especifique un
número de punto enseñado.
Revise si los datos de punto están
registrados en el punto especificado.
Realice la enseñanza.
7010
No se puede asignar el área de
memoria para la definición de
pallet.
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.
7011
No se puede liberar el área de
memoria para la definición de
pallet.
Reinicie el controlador.
Inicialice el firmware del controlador.
7012
No se puede encontrar el número
de pallet especificado. Especifique
un número de pallet válido.
Revise el número de pallet.
7013
No está definido el pallet
especificado. Especifique el pallet
definido o defina el pallet.
Revise si el pallet especificado está
definido por la instrucción Pallet.
Declare el pallet.
7014
El número de división especificado
es superior a la definición del
número de división de pallet.
Especifique una división válida.
Revise el número de división
especificado.
7015
El número de eje de coordenadas
especificado no existe.
Revise el número de eje de
coordenadas especificado.
7016
El número de orientación del brazo
especificado no existe.
Revise el número de orientación del
brazo especificado.
7017
No se puede asignar la memoria
necesaria.
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.
7018
No se puede encontrar la etiqueta
de punto especificada. Especifique
una etiqueta de punto válida.
Revise la etiqueta de punto
especificada.
7019
La configuración del parámetro en
el archivo de inicialización no es
válida.
Reinicie el controlador.
Inicialice el firmware del controlador.
7021
Duplique la etiqueta de punto. El
nombre de etiqueta especificado
ya está en uso. Cambie el nombre
de la etiqueta.
Cambie la etiqueta de punto.
7022
No está definido el sistema de
coordenadas local especificado.
Especifique un número del sistema
de coordenadas local válido.
Revise el número local especificado.
Defina el sistema de coordenadas
local.
7024
No está asignada el área de
memoria para los datos de punto
para el robot especificado.
Recompile el proyecto.
7026
No se puede abrir el archivo de
puntos. Especifique un nombre de
archivo de puntos válido.
Revise el nombre del archivo de
puntos.
Revise si existe el archivo de puntos
especificado para el proyecto.

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
916 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
7027
No se pueden leer los datos de
punto del archivo de puntos.
Cree nuevamente un archivo de
puntos.
7028
El área de puntos está asignada
más allá del número de punto
disponible.
Hay demasiados puntos.
Revise el número de puntos.
7029
El nombre del archivo de puntos
especificado no es correcto.
Especifique un nombre de archivo
de puntos válido.
Revise la extensión del archivo.
7030
La etiqueta de punto especificada
supera la longitud máxima.
Especifique una etiqueta de punto
válida.
Cambie la etiqueta de punto.
7031
La descripción del punto
especificado supera la longitud
máxima. Especifique una
descripción válida.
Cambie el comentario.
7032
El archivo de puntos está dañado.
Error de la suma de comprobación.
Cree nuevamente un archivo de
puntos.
7033
No se puede encontrar el archivo
de puntos especificado.
Especifique un nombre de archivo
de puntos válido.
Revise el nombre del archivo de
puntos especificado.
7034
No se puede guardar el archivo de
puntos.
No se pudo guardar el archivo de
puntos (cree un archivo temporal).
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.
7035
No se puede guardar el archivo de
puntos.
No se pudo guardar el archivo de
puntos (archivo abierto).
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.
7036
No se puede guardar el archivo de
puntos.
No se pudo guardar el archivo de
puntos (renueve el encabezado del
archivo).
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.
7037
No se puede guardar el archivo de
puntos.
No se pudo guardar el archivo de
puntos (cree el nombre del archivo).
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.
7038
No se puede guardar el archivo de
puntos.
No se pudo guardar el archivo de
puntos (copie el archivo).
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.
7039
No se puede guardar el archivo de
puntos.
No se pudo guardar el archivo de
puntos (cambie el nombre del
archivo).
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.
7040
La etiqueta de punto es incorrecta.
Especifique una etiqueta de punto
válida.
El carácter inicial del nombre de la
etiqueta de punto no es correcto.
Corrija el nombre de la etiqueta.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 917
N.º Mensaje Solución Nota 1 Nota 2
7041
La etiqueta de punto es incorrecta.
Especifique una etiqueta de punto
válida.
Se usó un carácter incorrecto.
Corrija el nombre de la etiqueta.
7042 No se puede definir el pallet.
El indicador no definido para los
datos del pallet está mezclado.
Revise los datos de punto.
Corrija los datos de punto.
7043
La versión del archivo de puntos
no es válida.
La versión del archivo de puntos es
distinta.
Vuelva a crear el archivo de puntos.
7044
La versión del formato del archivo
de puntos no es compatible.
El archivo de puntos no es
compatible.
Vuelva a crear el archivo de puntos.
7045
El número de cola de trabajo
especificada no es válido.
Revise el número de cola de trabajo
especificado.
7046
La cola de trabajo especificada
está llena.
La cola de trabajo está llena. Borre
los datos de punto de la cola de
trabajo y registre.
7047
No existen los datos de la cola de
trabajo especificados.
Revise el índice especificado.
7048
La cola de trabajo no se inicializó
correctamente.
No se pudo inicializar la cola de
trabajo (asigne memoria).
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.
7049
El parámetro de la instrucción de
cola de trabajo no es válido.
Revise los parámetros de los
comandos relacionados con la cola
de trabajo.
7050
No se puede ejecutar mientras se
registran los datos de la cola de
trabajo.
No se puede definir la cola de
trabajo, ya que los datos de punto
están registrados en la cola de
trabajo.
Vacíe la cola de trabajo antes de la
configuración.
7101
Esclavo del bus de campo. Se
produjo un error durante la
transformación de los datos de
E/S.
La placa del esclavo del bus de
campo está rota o el software del
controlador está dañado. Restaure
el firmware del controlador.
1
2
3
4
10
Se detectó un error de datos de
comunicación durante la
comunicación. El cable de
comunicación tiene un problema.
Revise el cable de comunicación y
sus unidades relacionadas.
11
12
El bus de campo está roto o el
software del controlador está
dañado. Restaure el firmware del
controlador.
13
14
15
El PLC no está en ejecución o no
está conectado.
Revise el PLC, el cable de
comunicación y los dispositivos
periféricos.
(Si el código 1 es 22 cuando se usa
la placa CC-Link.)
22

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
918 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
7103
Esclavo del bus de campo. Se
produjo un error de tiempo de
espera durante la transformación
de datos de E/S.
La placa del esclavo del bus de
campo está rota o el software del
controlador está dañado. Restaure el
firmware del controlador.
1
2
3
Se detectó un error de datos de
comunicación durante la
comunicación. El cable de
comunicación tiene un problema.
Revise el cable de comunicación y
sus unidades relacionadas.
4
7104
EPSON RC+ no es compatible con
la configuración de CC-Link
versión 2.00. Use EPSON RC+
7.5.0. o superior.
El RC+ conectado no es compatible
con la configuración de CC-Link
versión 2.00.
Actualice a RC+ 7.5.0 o superior, o
bien, utilice un RC+ compatible.
7150
Maestro del bus de campo.
El bus está desconectado.
Revise la conexión del cable de
comunicación del bus de campo.
7151
Maestro del bus de campo. El bus
está apagado.
Revise si el cable de comunicación
del bus de campo tiene alimentación.
7152
Maestro del bus de campo.
Error de estado de bus.
Reinicie el controlador.
Revise la placa del maestro del bus
de campo.
Reemplace la placa del maestro del
bus de campo.
7200
Argumento no válido.
Revise el parámetro.
7201
Se produjo un error del sistema.
-
7202
No hay suficiente memoria.
-
7203
Acceso denegado.
-
7210
La unidad no está lista.
Configure el dispositivo.
7211
La ruta especificada no es válida.
Asegúrese de que exista la ruta
especificada.
7212
La ruta especificada ya existe.
Si la carpeta o archivo especificado
ya existe, no puede realizar la
ejecución.
7213
No existe el archivo especificado
por la ruta.
Asegúrese de que exista el archivo
especificado.
7214
El tamaño del archivo es
demasiado grande.
Especifique un archivo que sea de
menos de 2 G bytes.
7215
El archivo especificado está
abierto.
El número de archivo especificado
ya existe. Use otro número de
archivo.
7216
El modo de apertura no es válido.
Asegúrese de que lo abrió en modo
de lectura o escritura.
7217
No hay datos de lectura.
Asegúrese de que haya datos que
leer.
7230
La conexión especificada está
abierta.
El número de archivo especificado
ya existe. Use otro número de
archivo.
7231
Ocurrió un error de nivel de
conexión al abrir la conexión.
Revise el derecho de acceso a la
base de datos.
7232
La conexión está cerrada.
Use OpenDB y abra la base de
datos.
7233
Se usó un tipo de datos no
admitido.
Convierta los datos en un valor de
cadena o numérico.
7234
El tamaño de los datos es
demasiado grande.
Datos demasiado grandes en una
línea. Especifique la consulta para
que solo se recuperen los campos
necesarios.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 919
N.º Mensaje Solución Nota 1 Nota 2
7235
El tipo de archivo especificado no
es admitido.
Revise el tipo de archivo Excel.
7236
No hay datos seleccionados.
Asegúrese de que los datos que
recuperó existan.
7250
No hay bytes disponibles para
lectura.
No hay datos recuperados. Revise
el programa de envío.
7251
El puerto es un estado no válido.
Revise la configuración del
dispositivo para el puerto
especificado.
7252
El puerto especificado está abierto.
Revise el número de puerto que
desea abrir.
7253
El puerto está cerrado.
Revise el número de puerto que
desea cerrar.
7254
El puerto especificado no está
abierto.
Revise el número de puerto que
desea abrir.
7255
Se agotó el tiempo de espera
durante la lectura desde el puerto.
Revise el período de tiempo de
espera del puerto y actualice según
la configuración correspondiente.
7256
Se agotó el tiempo de espera
durante la escritura al puerto.
Revise el período de tiempo de
espera del puerto y actualice según
la configuración correspondiente.
7260
La suma de comprobación del
archivo del proyecto no es válida.
Recompile el proyecto.
7261
Función no válida.
Revise la definición de función que
desea llamar.
7262
Parámetros no válidos.
Revise la definición de función que
desea llamar.
7263
No se puede ejecutar mientras se
crea el DLL.
-
7264
No se pudo crear el DLL.
-
7265
No se pudo encontrar el archivo
DLL.
-

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
920 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
7300
Comunicación de Vision.
No se admite el modo servidor.
-
7302
Comunicación de Vision.
No se pudo leer desde la cámara.
Revise la conexión con la cámara.
7303
Comunicación de Vision.
Desbordamiento de lectura de
datos.
Los datos recibidos superan el
búfer de recepción.
7304
Comunicación de Vision.
No se pudo abrir el puerto Ethernet.
Revise la conexión con la cámara.
7305
Comunicación de Vision.
Dirección IP de cámara no válida.
Recompile el proyecto. Revise la
configuración de la cámara.
7306
Comunicación de Vision.
No se especificó el servidor o
cliente.
-
7307
Comunicación de Vision.
No se pudo enviar a la cámara.
Revise la conexión con la cámara.
7308
Comunicación de Vision.
Versión de cámara antigua.
La versión de la cámara conectada
es antigua. Actualice la cámara.
7321
Comunicación de Vision.
No se ha ajustado la configuración
de la cámara.
Recompile el proyecto. Revise la
configuración de la cámara.
7322
Comunicación de Vision.
Se agotó el tiempo de espera de
lectura.
Revise la conexión con la cámara.
7323
Comunicación de Vision.
Datos no válidos de lectura.
Revise la conexión con la cámara.
7324
Comunicación de Vision.
No se pudo enviar a la cámara.
Revise la conexión con la cámara.
7325
Comunicación de Vision.
No se completó la conexión.
Revise la conexión con la cámara.
7326
Comunicación de Vision.
Los datos de lectura son demasiado
largos.
-
7327
Comunicación de Vision.
Secuencia de visión no definida.
Revise el nombre de secuencia.
7328
Comunicación de Vision.
No se ha ajustado la configuración
de la cámara.
Recompile el proyecto. Revise la
configuración de la cámara.
7329
Comunicación de Vision.
No se encontró el archivo Vis.
Recompile el proyecto. Revise la
configuración de la cámara.
7330
Comunicación de Vision.
No se pudo asignar la memoria.
Reduzca el número de secuencias,
objetos y calibración.
7341
Comunicación de Vision.
Número de cámara máximo
superado.
Revise el registro de la cámara.
7342
Comunicación de Vision.
Número de cámara no válido.
Revise el registro de la cámara.
7343
Comunicación de Vision.
El parámetro VSet es demasiado
largo.
Revise los nombres y las variables
de cadena de secuencias, objetos y
calibración.
7344
Comunicación de Vision:
Demasiados parámetros para VGet.
El número de variables especificado
supera las 32. Reduzca el número
de parámetros.
7345
Comunicación de Vision.
No hay suficientes datos para la
asignación de la variable de la
instrucción VGet.
Reinicie la cámara.
Revise la versión de la cámara.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 921
N.º Mensaje Solución Nota 1 Nota 2
7346
Comunicación de Vision.
No se puede ejecutar una
instrucción Vision desde la ventana
Command.
Elimine el comando desde el
programa.
7400
Matriz determinada demasiado
pequeña.
Si especifica la cámara virtual,
especifique la cámara real.
7402
Valor no válido para distancia de
movimiento máxima.
Especifique el valor válido.
7403
Valor no válido para ángulo de
diferencia de pose máximo.
Especifique el valor válido.
7404
Valor no válido para LJMMode.
Especifique el valor válido.
7405
Comando anulado por el usuario.
-
7406
El cambio de ángulo de la
articulación 1 superó el máximo
permitido durante la calibración.
Ajuste el ángulo de inicio de la
articulación 1.
7407
El cambio de ángulo de la
articulación 2 superó el máximo
permitido durante la calibración.
Ajuste el ángulo de inicio de la
articulación 2.
7408
El cambio de ángulo de la
articulación 4 superó el máximo
permitido durante la calibración.
Ajuste el ángulo de inicio de la
articulación 4.
7409
El cambio de ángulo de la
articulación 6 superó el máximo
permitido durante la calibración.
Ajuste el ángulo de inicio de la
articulación 6.
7410
Cámara de red. Se agotó el tiempo
de espera durante la transferencia
del archivo de imagen desde la PC.
Revise la conexión de la
computadora con la cámara.
7411
No se especificó ninguna secuencia
de cámara ascendente para la
calibración móvil con la referencia
ascendente.
Especifique la secuencia existente.
7412
La secuencia de cámara
ascendente especificada no está
calibrada.
Defina la calibración para la
secuencia de cámara ascendente.
7413
La calibración de la secuencia de
cámara ascendente especificada
está incompleta.
Complete la calibración de la
secuencia de cámara ascendente.
7414
No se puede usar la secuencia
objetivo cuando RuntimeAcquire
está definido en Estroboscópico.
Defina RuntimeAcquire de la
secuencia objetivo en Fijo.
7415
El tipo de referencia de calibración
no es válido.
El tipo de referencia seleccionable
es diferente dependiendo de
CameraOrientation. Vuelva a
seleccionar.
7416
Los datos de calibración no son
válidos. Vuelva a enseñar los
puntos de calibración.
Debe volver a enseñar los puntos
de calibración.
7417
Configuración de calibración no
válida.
Vuelva a intentar la enseñanza de
puntos de calibración. O bien,
revise la secuencia objetivo.
7418
La secuencia objetivo no es válida.
Es posible que no esté
seleccionada la secuencia objetivo
o que el número de la cámara de la
secuencia objetivo sea distinta a la
de la calibración.
7419
La cámara de la secuencia objetivo
no es la misma que la cámara de
calibración.
Defina la secuencia de la misma
cámara.

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
922 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
7420
La secuencia objetivo no tiene
objetos.
Agregue el objeto de detección a la
secuencia objetivo.
7421
El último paso no es válido para la
secuencia objetivo.
Revise los pasos.
7422
Se produjo una excepción durante
la búsqueda de objetivo de
calibración.
Revise la secuencia objetivo.
7423
El número de resultados no es
válido para la secuencia objetivo de
calibración.
Cree una secuencia para detectar
resultados de la cantidad de
objetivos necesarios.
7424
No se pueden cargar los puntos de
calibración.
Vuelva a realizar la enseñanza de
puntos de calibración.
7425
La orientación de la cámara no es
válida.
Revise CameraOrientation de
calibración.
7426
La calibración de corrección de la
distorsión está incompleta.
Realice la corrección de la
distorsión si está definida.
7427
Se especificó un objeto de visión no
válido.
Se especificó un objeto de visión no
válido en los comandos de Vision
Guide como VSet y VGet.
Especifique un objeto de visión
válido.
7428
Las coordenadas V y W deben
estar en cero para el tipo de robot
utilizado.
Defina V y W de la base en 0.
7429
Se especificó una velocidad del
robot no válida para la operación
actual.
Especifique el valor válido.
7430
Se especificó una aceleración del
robot no válida para la operación
actual.
Especifique el valor válido.
7431
El valor de parámetro ShowWarning
no es válido.
Especifique el valor válido.
7432
No se puede crear el objeto con la
cámara especificada en la
secuencia.
Revise el tipo de objeto de visión.
Actualice el firmware de la cámara.
7433
Los datos de modelo no son
válidos.
Vuelva a enseñar el modelo o use
un modelo distinto si se produce un
error.
El modelo
que se está
cargando
puede no
ser
compatible
con la
versión
actual de CV
o RC+.
7434
Cámara de red.
La contraseña de conexión no es
válida.
Ingrese la contraseña correcta de
conexión de Compact Vision en la
página de la cámara RC+.
Si desconoce la contraseña, cuenta
con las siguientes opciones:

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 923
N.º Mensaje Solución Nota 1 Nota 2
7435
Cámara de red.
No se puede ejecutar el comando
debido a un inicio de sesión
incorrecto.
a. Ingrese una nueva contraseña
de conexión en el monitor de
CV y, después, ingrese esa
misma contraseña en la página
de la cámara RC+.
o
b. Efectúe un restablecimiento de
fábrica en la unidad Compact
Vision, para borrar la
contraseña.
Recompile el actual proyecto
de RC+ y compruebe la
operación
7500
Cámara de red.
Se agotó la memoria.
Inicialice la cámara.
Reduzca el tamaño del proyecto.
7501
Cámara de red.
El proyecto no existe.
Recompile el proyecto.
7502
Cámara de red.
El proyecto no se definió.
Recompile el proyecto.
7503
Cámara de red.
No se admite la propiedad o
resultado de Vision.
Actualice el firmware de la cámara.
7504
Cámara de red.
No se puede abrir el archivo de
proyecto.
Recompile el proyecto.
7505 Secuencia de visión no definida.
Revise el nombre de secuencia.
Recompile el proyecto.
7506 Objeto de visión no definido.
Revise el nombre del objeto.
Recompile el proyecto.
7507
Cámara de red.
Error crítico.
Inicialice la cámara.
Recompile el proyecto.
7508
Cámara de red.
Comando no válido.
Actualice el firmware de la cámara.
7509
Valor de propiedad de visión no
válido.
Revise el valor de propiedad.
Actualice el firmware de la cámara.
7510 Propiedad de visión no válida.
Revise el nombre de la propiedad.
Actualice el firmware de la cámara.
7511
Modelo de Vision no enseñado.
Enseñe el modelo.
7512 Calibración de Vision no definida.
Revise el nombre de calibración.
Recompile el proyecto.
7513
Objeto de modelo de Vision no es
Self.
Revise el valor de propiedad.
7514 Resultado de visión no válido.
Revise el nombre del resultado.
Actualice el firmware de la cámara.
7515 No se encontró el objeto de visión.
Revise el resultado Found antes de
obtener el resultado.
7516
Sin calibración de visión.
Revise el nombre de calibración.
7517
Calibración de visión incompleta.
Realice la calibración.
7518
Cámara de red.
No se pudo conectar con la cámara.
Revise la conexión de la cámara.
7819
Cámara de red.
Error de comunicación.
Revise la conexión de la cámara.
7520 Ventana fuera de límites.
Coloque la ventana dentro de los
límites.
7521
Fuente OCR no válida.
Registre la fuente OCR.

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
924 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
7522
La calibración de visión
especificada ya existe.
Cambie el nombre de calibración.
Elimine la calibración existente por
adelantado.
7523
La secuencia de visión especificada
ya existe.
Cambie el nombre de secuencia.
Elimine la secuencia existente por
adelantado.
7524
El objeto de visión especificado ya
existe.
Cambie el nombre del objeto.
Elimine la secuencia existente por
adelantado.
7525
No se pudo cargar el proyecto de
Vision.
La carpeta del proyecto puede estar
dañada.
Restaure los datos de copia de
seguridad.
7526
No se pudo guardar el proyecto de
Vision.
La carpeta del proyecto puede estar
protegida contra escritura.
Revise los permisos de acceso para
la carpeta de proyecto.
7527 Procesador de Vision. Error crítico.
Inicialice la cámara.
Recompile el proyecto.
7528
No se encontró el archivo de
imagen.
Revise el archivo de imagen.
7529
La cámara no existe.
Revise la conexión de la cámara.
7530
Falló la adquisición.
Revise la conexión de la cámara.
7531
No hay objetos a enseñar.
Enseñe el modelo.
7532
No se puede cargar el archivo de
imagen.
Revise el archivo de imagen.
7533 RC+7.0 no admite la cámara.
RC+7.0 no admite SC300/SC1200.
Use CV1/CV2.
7534
El firmware de la cámara no admite
las nuevas funciones de RC+7.0.
Actualice el firmware de la cámara.
7535
Datos no válidos de la cámara de
red.
Inicialice la cámara.
7536
Falló el estado de exportación de la
cámara de red.
Inicialice la cámara.
7537
Valor ImageSize no válido. El valor
especificado no es admitido por la
cámara.
No se puede especificar un valor
ImageSize que supere la resolución
de la cámara. Corrija el valor de
propiedad.
7538
Valor ZoomFactor no válido. El
valor especificado requiere datos
fuera del área de la imagen.
Los valores admitidos son de 0,1 a
10,0.
Corrija el valor de propiedad.
7539
La cámara no admite Code Reader.
Actualice el firmware de la cámara.
7540
La cámara no admite OCR.
Actualice el firmware de la cámara.
7541
Datos insuficientes para enseñar
modelo.
No se puede registrar una imagen
en blanco o negro como un modelo.
7542
La ventana de modelo no puede
estar fuera de la imagen.
Corrija la posición de la ventana de
modelo.
7543
No se han enseñado los puntos de
calibración.
Enseñe el punto de calibración.
7544
La calibración debe ser fija
ascendente.
Solo se puede configurar la
secuencia con datos de calibración
de la cámara fija ascendente.
7545
No se definió el punto.
Enseñe el punto de calibración.
7546 No se calibró RobotPlacePos.
Haga clic en CalRobotPlacePos y
calibre RobotPlacePos.
7547
La dirección IP de la cámara está
fuera de la subred actual.
Corrija la dirección IP de la cámara.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 925
N.º Mensaje Solución Nota 1 Nota 2
7548
No se detectó la cámara.
Revise el cableado de la cámara.
7549
Radio no válido. El radio debe ser
>= RadiusInner y <= RadiusOuter.
Corrija el valor de propiedad.
7550
No existe el carácter OCR.
Registre el carácter OCR.
7551
La opción OCR no está activa.
Active la opción.
7572 Nombre de secuencia no válido.
Especifique un nombre que
comience con una letra. Para el
nombre también puede usar
caracteres alfanuméricos y guion
bajo (_).
7573 Nombre de calibración no válido.
Especifique un nombre que
comience con una letra. Para el
nombre también puede usar
caracteres alfanuméricos y guion
bajo (_).
7574
El nombre de secuencia o de
calibración ya existe.
Especifique otro nombre de
calibración.
7575
Cámara no válida.
Especifique una cámara válida.
7576
No se pudo encontrar el objetivo de
visión.
Revise la secuencia de visión para
detectar el objetivo
7577
No se pudo posicionar el objetivo
de visión dentro de la tolerancia
especificada.
Revise la secuencia de visión para
detectar el objetivo
7578
No se encontró ningún objeto con
una ventana Search en la
secuencia.
Agregue un objeto para detectar el
objetivo en la secuencia de visión.
7579
Ángulo de giro inicial no válido.
Especifique el valor válido.
7580
Ángulo de giro final no válido.
Especifique el valor válido.
7581
Tolerancia de objetivo no válida.
Especifique el valor válido.
7582
Tipo de definición de herramienta
no válida.
Especifique el valor válido.
7583
Ángulo de giro no válido.
Especifique el valor válido.
7584
Tipo de definición local no válida.
Especifique el valor válido.
7585
Falló la detección de placa de
calibración.
Ajuste el foco y el tiempo de
exposición del lente para mostrar el
objeto con claridad.
7586
Falló la detección de distancia focal.
Reduzca el diafragma de una lente.
7587
Falló la detección de escala de
definición local.
Ajuste el foco y el tiempo de
exposición del lente para mostrar el
objeto con claridad.
7588
Falló la detección de pose de placa
de calibración.
Ajuste el foco y el tiempo de
exposición del lente para mostrar el
objeto con claridad.
7589 Nombre de objeto no válido.
Especifique un nombre que
comience con una letra. Para el
nombre también puede usar
caracteres alfanuméricos y guion
bajo (_).
7590
La distancia de movimiento máxima
superó el límite definido por
VDefSetMotionRange.
Ajuste la posición de inicio. O
configure el valor de límite
ampliamente.
7591
El ángulo de diferencia de pose
máximo superó el límite definido por
VDefSetMotionRange.
Ajuste la posición de inicio. O
configure el valor de límite
ampliamente.
7592
La diferencia de ángulo de
articulación máxima superó el límite
definido por VDefSetMotionRange.
Ajuste la posición de inicio. O
configure el valor de límite
ampliamente.

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
926 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
7596
Falló la alineación aproximada de la
cámara de definición local.
Ajuste la posición de inicio.
7597
No se pudo calcular el plano de
definición local.
Ajuste la secuencia de visión para
mostrar la placa de calibración con
claridad.
7598
La calibración genera una distancia
de movimiento del punto demasiado
pequeña.
Aumente el área de búsqueda o
reduzca el objetivo.
7599
La calibración genera un error de
relación de la cámara del punto con
el robot
Si especifica la cámara virtual,
especifique la cámara real.
7600
GUI Builder.
No se puede ejecutar una
instrucción GUI Builder desde la
ventana Command.
-
7602
GUI Builder.
El parámetro GSet es demasiado
largo.
Corrija el parámetro a la longitud
adecuada.
7603
GUI Builder.
Demasiados parámetros para
GGet.
Revise el número de parámetros.
7604
GUI Builder.
No hay suficientes datos para la
asignación de la variable de la
instrucción GGet.
Especifique la variable.
7610
GUI Builder.
No se puede ejecutar la tarea de
evento.
El sistema está en estado de pausa
y EventTaskType está normal.
No se puede operar el sistema si se
cambia EventTaskType a
“NoPause”
7611
GUI Builder.
No se puede ejecutar la tarea de
evento.
La protección está abierta y
EventTaskType está normal.
No se puede operar el sistema si se
cambia EventTaskType a
“NoEmgAbort”
7612
GUI Builder.
No se puede ejecutar la tarea de
evento.
Estop está activo y EventTaskType
no está en NoEmgAbort.
No se puede operar el sistema si se
cambia EventTaskType a
“NoEmgAbort”
7613
GUI Builder.
No se puede ejecutar la tarea de
evento.
El sistema está en estado de error y
EventTaskType no está en
NoEmgAbort.
No se puede operar el sistema si se
cambia EventTaskType a
“NoEmgAbort”
7650
GUI Builder.
Propiedad no válida.
Especifique la propiedad válida.
7651
GUI Builder.
Formulario no válido.
Especifique el formulario válido.
7652
GUI Builder.
Control no válido.
Especifique el control válido.
7653
GUI Builder.
El formulario especificado ya está
abierto.
Modifique el programa para
prevenir un lanzamiento doble.
7654
GUI Builder.
No existe la función de evento
Revise el nombre de la función
definida para el evento.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 927
N.º Mensaje Solución Nota 1 Nota 2
7655
GUI Builder.
El elemento no existe.
Especifique el elemento válido.
7656
GUI Builder.
Valor de propiedad no válido.
Revise el valor de la propiedad y
especifique el archivo válido.
7700
Seguridad.
Usuario no válido.
Póngase en contacto con el
administrador para registrar el
usuario.
7701
Seguridad.
Contraseña no válida.
Revise la contraseña.
7702
Seguridad.
Permiso denegado.
Comuníquese con el administrador
para definir la autoridad.
7703
Seguridad.
Opción inactiva.
Registre las opciones.
7710
El origen y el destino no pueden ser
idénticos.
Especifique otro destino.
7711
El nombre de archivo de punto está
siendo usado por otro robot.
Revise el nombre del archivo de
puntos.
7712 Se especificó un eje no válido.
Revise si el eje especificado es
válido. Revise si el eje está
especificado correctamente.
7713
Opción no activada.
Active la opción.
7714 No se encontró el archivo.
Especifique el nombre de archivo
correcto.
7715
El número de robot está fuera del
rango disponible.
Revise el número del robot.
7716
El robot no existe.
Revise si el robot está registrado.
7717
Error de archivo. Carpeta no válida.
Revise el nombre de la carpeta.
7718 No se puede escribir el archivo.
Revise el almacenamiento o los
permisos de escritura.
7719
La licencia de la llave de opción
USB no es válida.
Active la opción mediante la llave
USB para la licencia de opción.
7720
Alimentación de piezas. No existen
alimentadores en el sistema.
Revise la página Setup | System
Configuration | Controller | Part
Feeding (Configuración /
Configuración de sistema /
Controlador / Alimentación de
piezas) del EPSON RC+.
7730
Se excedió el número máximo de
robots por alimentador.
Cuando use la opción PartFeeding,
el número máximo de robots por
alimentador es 2.
Revise la configuración del robot de
cada pieza que se especifica en el
argumento del comando PF_Start.
7731
Se excedió el número máximo de
alimentadores simultáneos para el
tipo de controlador.
El controlador T/VT permite que se
usen hasta dos alimentadores al
mismo tiempo. Revise el código
para asegurarse de que no haya
más de tres alimentadores en uso
(PF_Start se ha ejecutado más de
tres veces).
7750 Simulador. Error de inicialización. Reinicie RC+.
7751
Simulador. No se pudo guardar los
objetos.
Reinicie RC+.
7752
Simulador. No se pudo cargar los
objetos.
Reinicie RC+.

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
928 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
7753
Simulador. No se pudo asignar la
memoria.
Reinicie RC+.
7754
Simulador. El controlador virtual ya
existe.
Se puede duplicar el nombre del
controlador virtual. Revise el
nombre del controlador.
7755
Simulador. No se pudo crear la
información de conexión del
controlador virtual.
Reinicie RC+.
7756
Simulador. El origen de la copia del
controlador virtual no existe.
Revise el nombre del controlador
virtual.
7757
Simulador. El destino de la copia
del controlador virtual ya existe.
Se puede duplicar el nombre del
controlador virtual. Revise el
nombre del controlador.
7758
Simulador. No se pudo copiar la
información de conexión del
controlador virtual.
Reinicie RC+.
7759
Simulador. No se pudo eliminar la
información de conexión del
controlador virtual.
Reinicie RC+.
7760
Simulador. No se pudo eliminar la
información de conexión del
controlador.
Reinicie RC+.
7761
Simulador. No se pudo cambiar el
nombre de la información de
conexión del controlador.
Revise el nombre del controlador
virtual.
7762
Simulador. El origen del cambio de
nombre del controlador virtual no
existe.
Revise el nombre del controlador
virtual.
7763
Simulador. El destino del cambio de
nombre del controlador virtual ya
existe.
Revise el nombre del controlador
virtual.
7764
Simulador. Número de robot no
válido.
Reinicie RC+.
7765
Simulador. No se pudo leer el
archivo de definición del robot.
Revise si existe el archivo de
definición.
7766
Simulador. No se pudo copiar los
objetos de diseño.
Reinicie RC+.
7767
Simulador. No se pudo cortar los
objetos de diseño.
Reinicie RC+.
7768
Simulador. No se pudo pegar los
objetos de diseño.
Reinicie RC+.
7769
Simulador. No se pudo eliminar el
robot.
Reinicie RC+.
7773
Simulador. No se especificó el robot
o el objeto.
Especifique el robot o el objeto.
7774
Simulador. Nombre duplicado del
robot o del objeto.
Cambie el nombre del robot o de
objeto, para que no esté duplicado.
7775
Simulador. No se pudo encontrar el
robot.
Revise si está definido el robot, o
bien, revise el nombre del robot.
7776
Simulador. No se pudo encontrar el
objeto.
Revise si está definido el objeto, o
bien, revise el nombre del objeto.
7777
Simulador. No se pudo encontrar la
mano.
Revise si está definida la mano, o
bien, revise el nombre de la mano.
7778
Simulador. El objeto especificado
ya está registrado como Part object
(Objeto de la pieza).
Elimine el registro de la pieza.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 929
N.º Mensaje Solución Nota 1 Nota 2
7779
Simulador. El objeto especificado
no está registrado como Part object
Especifique el objeto definido para
la pieza.
7780
Simulador. No se pudo encontrar la
herramienta especificada.
Especifique la herramienta definida.
7781
Simulador. No se pudo recoger el
objeto secundario.
Cambie a objeto principal.
7782
Simulador. No se pueden
especificar los objetos principales
para Part (Pieza), Mounted Device
(Dispositivo montado) o Mobile
Camera (Cámara móvil)
Elimine el registro como Part,
Mounted Device o Mobile Camera.
7783
Simulador. No se puede especificar
el robot.
Especifique un objeto distinto al
robot.
7784
Simulador. No se puede especificar
el mismo objeto como objeto
principal.
Especifique otro objeto.
7785
Simulador. No se puede especificar
el objeto secundario como objeto
principal.
Cambie a objeto principal.
7786
Simulador. El objeto especificado
ya está registrado como objeto
principal
Especifique otro objeto.
7787
Simulador. El valor especificado no
es válido.
Revise el valor definido.
7788
Simulador. El tipo de variable
especificada no es válida.
Revise el tipo de variable.
7789
Simulador. No se puede especificar
el objeto.
Especifique el robot.
7790
Simulador. No se puede especificar
la mano.
Especifique un objeto distinto a la
mano.
7791
Simulador. No se puede especificar
la cámara.
Especifique un objeto distinto a la
cámara.
7800
No es posible cambiar los datos, ya
que no son datos del eje PG.
-
7801
Se especificó un número de
articulación no válido.
-
7802
El tipo de robot no es válido.
-
7803
El parámetro no es válido.
-
7804
El número de robot no es válido.
-
7805
Error de MCD.
No se pudo abrir el archivo MCD.
Restaure la configuración del
controlador.
7806
Error de MCD.
No se pudo leer el archivo MCD.
Restaure la configuración del
controlador.
7807
Error de MCD.
No se pudo guardar el archivo
MCD.
Restaure la configuración del
controlador.
7808
Error de MCD.
No se pudo crear el archivo MCD.
Restaure la configuración del
controlador.
7809
Error de MCD.
No se pudo escribir el archivo MCD.
Restaure la configuración del
controlador.
7810
Error de MPL.
No se pudo abrir el archivo MPL.
Reinstale el firmware.
7811
Error de MPL.
No se pudo leer el archivo MPL.
Actualice el firmware.
7812
Error de MPL.
No se pudo escribir el archivo MPL.
1. Reinicie el controlador.
2. Reinstale el firmware.

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
930 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
7815
Error de IFS.
No se pudo abrir el archivo IFS.
Restaure la configuración del
controlador.
7816
Error de IFS.
No se pudo leer el archivo IFS.
Restaure la configuración del
controlador.
7817
Error de IFS.
No se pudo escribir el archivo IFS.
Restaure la configuración del
controlador.
7822
Error de MTR.
No se pudo leer el archivo MTR.
1. Reinicie el controlador.
2. Reinstale el MT.
7824
Error de MTR.
No se pudo guardar el archivo
MTR.
Reinicie el controlador.
7825
Error de PRM.
No se pudo crear el archivo PRM.
Restaure la configuración del
controlador.
7827
Error de PRM.
No se pudo leer el archivo PRM.
Restaure la configuración del
controlador.
7829
Error de PRM.
No se pudo guardar el archivo
PRM.
Restaure la configuración del
controlador.
7830
Error del archivo.
No se puede tener acceso al
archivo.
1. Reinicie el controlador.
2. Reinstale el firmware.
7831
El tipo de motor no es válido.
Revise el amplificador del motor.
7840
Error de MCD.
Error de asignación de área.
Reinicie el controlador.
7845
Error de FGI. No se pudo abrir el
archivo FGI.
Reinicie el controlador.
Reinstale el firmware.
- -
7847
Error de MDL. No se pudo abrir el
archivo MDL.
Reinicie el controlador.
Reinstale el firmware.
- -
7848
Error de MDL. No se pudo leer el
archivo MDL.
Reinicie el controlador.
Reinstale la última versión de
firmware.
- -
7900
El bus de campo no está instalado.
-
7901
Parámetro de bus de campo no
válido.
-
7902 Defecto de línea del bus de campo.
Revise la conexión del cable de
comunicación del bus de campo.
Revise si el cable de comunicación
del bus de campo tiene
alimentación. (si el bus de campo
requiere una fuente de
alimentación)
Revise la conexión con el esclavo
del bus de campo.
7903
El dispositivo de bus de campo no
está configurado.
Revise que esté instalada la placa
del maestro del bus de campo.
Reinicie la computadora donde está
instalada la placa del maestro del
bus de campo.
Reemplace la placa del maestro del
bus de campo.
7904 Placa de bus de campo no válida.
Revise que esté instalada la placa
del maestro del bus de campo.
Reinicie la computadora donde está
instalada la placa del maestro del
bus de campo.
Reemplace la placa del maestro del
bus de campo.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 931
N.º Mensaje Solución Nota 1 Nota 2
7905
Conexión de bus de campo
denegada.
-
7906
Configuración de dispositivo no
válida de bus de campo.
Revise que esté instalada la placa
del maestro del bus de campo.
Reinicie la computadora donde está
instalada la placa del maestro del
bus de campo.
Reemplace la placa del maestro del
bus de campo.
7907 Error general de bus de campo.
Revise que esté instalada la placa
del maestro del bus de campo.
Reinicie la computadora donde está
instalada la placa del maestro del
bus de campo.
Reemplace la placa del maestro del
bus de campo.
7908
Error de configuración del bus de
campo.
Revise la configuración del maestro
del bus de campo.
7909
No se detectaron esclavos del bus
de campo.
Registre el esclavo con el maestro
del bus de campo según la
aplicación de consola applicomIO.
7910
No se encontró el archivo de
configuración del bus de campo.
Importe el archivo de configuración
del bus de campo, según lo descrito
en el manual de E/S de bus de
campo.
7911
El archivo de configuración del bus
de campo no es válido.
Importe el archivo de configuración
del bus de campo, según lo descrito
en el manual de E/S de bus de
campo.
Si el problema continua,
comuníquese con Epson.
7912
La ID de dispositivo del bus de
campo no es válida.
Se usó un parámetro de ID de
dispositivo no válido. Revise su
programa.
7913
Se especificó un servicio de bus de
campo no válido.
Se utilizó un número de servicio de
mensajería explícita no válido.
Revise su programa.
7914
El bus de campo no puede abrir el
driver de la placa maestra.
Revise que esté instalada la placa
del maestro del bus de campo.
Compruebe que los drivers de la
placa del maestro del bus de campo
estén instalados correctamente.
7915
El bus de campo no puede abrir el
canal de la placa maestra.
Revise que no haya otra aplicación
usando la placa del maestro del bus
de campo.
Revise que esté instalado
(descargado) el firmware correcto
en la placa.
7916
Se agotó el tiempo de espera para
host del bus de campo listo.
Compruebe que los drivers de la
placa del maestro del bus de campo
estén instalados correctamente.
Reinicie e intente nuevamente.
Cambie la placa.
7917
Se agotó el tiempo de espera de la
comunicación de bus del bus de
campo.
Revise la alimentación del bus y las
conexiones esclavas.
7950
Detección de fuerza. Sensor de
fuerza no válido.
-

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
932 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
7951
Detección de fuerza. Eje de sensor
de fuerza no válido.
-
7952
Detección de fuerza. Falló la lectura
del sensor.
-
7953
Detección de fuerza. Falló la
inicialización del sensor.
-
7954
Detección de fuerza. Sensor no
inicializado.
-
7955
Detección de fuerza. La fuerza o el
torque superaron el nivel de
saturación.
-
7975
Force Guide. Valor fuera de rango.
-
7976
Force Guide. Valor de propiedad no
válido.
-
7977
Force Guide. Ningún robot está
usando un sensor de fuerza Epson.
Revise la página Setup | System
Configuration | Controller | Force
Sensing | Force Sensor I/F de
EPSON RC+.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 933
N.º Mensaje Solución Nota 1 Nota 2
9001
Se detectó un error del
circuito de parada de
emergencia. Se encontró una
desconexión u otro error en
una de las entradas
redundantes.
Revise que no exista una
desconexión, error de conexión a
tierra o cortocircuito en la señal de
entrada de la parada de
emergencia. Luego reinicie el
controlador.
9002
Se detectó un error del
circuito de protección.
Se encontró una desconexión
u otro error en una de las
entradas redundantes.
Revise que no exista una
desconexión, error de conexión a
tierra o cortocircuito en la señal de
entrada de la protección. Luego
reinicie el controlador.
9003
Error de inicialización.
No se pudo inicializar el
firmware.
Esto probablemente es a causa
de un error de hardware del
controlador. Revise que el
cableado sea correcto. Si el error
no desaparece después de
reiniciar el controlador,
comuníquese con nosotros.
9004
Error de inicialización.
No se pudo inicializar la DU.
Revise la alimentación de DU
y la conexión.
El número de unidades de mando
no coincide con el número de
unidades de mando reconocido.
Revise que el cableado de la
fuente de alimentación y entre la
unidad de control y la unidad de
mando esté correcto. Si el error
no desaparece después de
reiniciar el controlador,
comuníquese con nosotros.
9005
Error de inicialización.
No se pudo inicializar la DU.
Revise la conexión.
Esto probablemente es a causa
de un error de hardware de la
unidad de mando. Revise que el
cableado sea correcto. Si el error
no desaparece después de
reiniciar el controlador,
comuníquese con nosotros.
9006
Error de inicialización.
No se puedo inicializar la E/S
remota.
Revise la configuración de
E/S remota.
Revise el valor de la configuración
de E/S remota.
9007
Se produjo un error del
sensor de fuerza.
Nota 1: Cada código de error
Consulte cada código de error
para tomar las medidas
correspondientes.
Se produjo un error del sensor de
fuerza.
Confirme la Nota 1 del historial del
sistema y tome las medidas
correspondientes.
Cada código de
error
9011
El voltaje de batería de la
copia de seguridad de la
placa de la CPU es menor
que el voltaje especificado.
Reemplace la batería de la
placa de la CPU.
Reemplace la batería de la placa
de la CPU de inmediato.
Mantenga el controlador
encendido por tanto tiempo como
sea posible hasta que haya
reemplazado la batería.
100 veces el valor
actual
100 veces el valor
de límite
9012
El voltaje de entrada de 5 V
para la placa de la CPU es
inferior al voltaje especificado.
Si el voltaje normal no se genera
a partir de una sola fuente de
alimentación de 5 V, reemplace la
fuente de alimentación.
100 veces el valor
actual
100 veces el valor
de límite

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
934 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
9013
El voltaje de entrada de 24 V
para el freno del motor, el
codificador y el ventilador es
inferior al voltaje especificado.
Si el voltaje normal no se genera
a partir de una sola fuente de
alimentación de 24 V, reemplace
la fuente de alimentación.
100 veces el valor
actual
100 veces el valor
de límite
9014
La temperatura interna del
controlador es superior a la
temperatura especificada.
Detenga el controlador lo antes
posible y compruebe que la
temperatura ambiente del
controlador no sea alta.
Revise que el filtro no esté
obstruido.
100 veces el valor
actual
100 veces el valor
de límite
9015
La velocidad del ventilador
del controlador es inferior a la
velocidad especificada.
(FAN1)
Revise que el filtro del controlador
no esté obstruido. Reemplace el
ventilador.
Valor actual Valor de límite
9016
La velocidad del ventilador
del controlador es inferior a la
velocidad especificada.
(FAN2)
Revise que el filtro del controlador
no esté obstruido. Reemplace el
ventilador.
Valor actual Valor de límite
9017
La temperatura interna del
controlador es superior a la
temperatura especificada.
Detenga el controlador lo antes
posible y compruebe que la
temperatura ambiente del
controlador no sea alta.
Revise que el filtro no esté
obstruido.
100 veces el valor
actual
100 veces el valor
de límite
9018
El voltaje de entrada de 54 V
para la placa de la CPU es
inferior al voltaje especificado.
Si el voltaje normal no se genera
a partir de una sola fuente de
alimentación de 54 V, reemplace
la fuente de alimentación.
100 veces el valor
actual
100 veces el valor
de límite
9019
El voltaje de entrada de 3,3 V
para la placa de la CPU es
inferior al voltaje especificado.
Si el voltaje normal no se genera
a partir de una sola fuente de
alimentación de 3,3 V, reemplace
la fuente de alimentación.
100 veces el valor
actual
100 veces el valor
de límite
9020
El voltaje de entrada de CC
de la placa de la CPU es
inferior o superior al voltaje
especificado.
Si el voltaje normal no se genera
partir de una sola fuente de
alimentación de CC, reemplace la
fuente de alimentación.
100 veces el valor
actual
100 veces el valor
de límite
9021
El voltaje de entrada de 3,3 V
de DU1 para la placa es
inferior al voltaje mínimo
permitido.
Si el voltaje normal no se genera
a partir de una sola fuente de
alimentación de 3,3 V de la
unidad de mando 1, reemplace la
fuente de alimentación.
9022
El voltaje de entrada de 5V de
DU1 para la placa es inferior
al voltaje mínimo permitido.
Si el voltaje normal no se genera
a partir de una sola fuente de
alimentación de 5 V de la unidad
de mando 1, reemplace la fuente
de alimentación.
9023
El voltaje de entrada de 24 V
de DU1 para el freno del
motor, el codificador y el
ventilador es inferior al voltaje
especificado.
Si el voltaje normal no se genera
a partir de una sola fuente de
alimentación de 24 V de la unidad
de mando 1, reemplace la fuente
de alimentación.
9024
La temperatura interna de
DU1 del controlador es
superior a la temperatura
permitida.
Detenga la unidad de mando 1 lo
antes posible y compruebe que la
temperatura ambiente del
controlador no sea alta.
Revise que el filtro no esté
obstruido.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 935
N.º Mensaje Solución Nota 1 Nota 2
9025
La velocidad de giro de DU1
del ventilador del controlador
es inferior a la velocidad
permitida. (FAN1)
Revise que el filtro de la unidad
de mando 1 no esté obstruido.
Reemplace el ventilador.
9026
La velocidad de giro de DU1
del ventilador del controlador
es inferior a la velocidad
permitida. (FAN2)
Revise que el filtro de la unidad
de mando 1 no esté obstruido.
Reemplace el ventilador.
9031
El voltaje de entrada de 3,3 V
de DU2 para la placa es
inferior al voltaje mínimo
permitido.
Si el voltaje normal no se genera
a partir de una sola fuente de
alimentación de 3,3 V de la
unidad de mando 2, reemplace la
fuente de alimentación.
9032
El voltaje de entrada de 5V de
DU2 para la placa es inferior
al voltaje mínimo permitido.
Si el voltaje normal no se genera
a partir de una sola fuente de
alimentación de 5 V de la unidad
de mando 2, reemplace la fuente
de alimentación.
9033
El voltaje de entrada de 24 V
de DU2 para el freno del
motor, el codificador y el
ventilador es inferior al voltaje
especificado.
Si el voltaje normal no se genera
a partir de una sola fuente de
alimentación de 24 V de la unidad
de mando 2, reemplace la fuente
de alimentación.
9034
La temperatura interna de
DU2 del controlador es
superior a la temperatura
permitida.
Detenga la unidad de mando 2 lo
antes posible y compruebe que la
temperatura ambiente del
controlador no sea alta.
Revise que el filtro no esté
obstruido.
9035
La velocidad de giro de DU2
del ventilador del controlador
es inferior a la velocidad
permitida. (FAN1)
Revise que el filtro de la unidad
de mando 2 no esté obstruido.
Reemplace el ventilador.
9036
La velocidad de giro de DU2
del ventilador del controlador
es inferior a la velocidad
permitida. (FAN2)
Revise que el filtro de la unidad
de mando 2 no esté obstruido.
Reemplace el ventilador.
9041
El voltaje de entrada de 3,3 V
de DU3 para la placa es
inferior al voltaje mínimo
permitido.
Si el voltaje normal no se genera
a partir de una sola fuente de
alimentación de 3,3 V de la
unidad de mando 3, reemplace la
fuente de alimentación.
9042
El voltaje de entrada de 5V de
DU3 para la placa es inferior
al voltaje mínimo permitido.
Si el voltaje normal no se genera
a partir de una sola fuente de
alimentación de 5 V de la unidad
de mando 3, reemplace la fuente
de alimentación.
9043
El voltaje de entrada de 24 V
de DU3 para el freno del
motor, el codificador y el
ventilador es inferior al voltaje
especificado.
Si el voltaje normal no se genera
a partir de una sola fuente de
alimentación de 24 V de la unidad
de mando 3, reemplace la fuente
de alimentación.
9044
La temperatura interna de
DU3 del controlador es
superior a la temperatura
permitida.
Detenga la unidad de mando 3 lo
antes posible y compruebe que la
temperatura ambiente del
controlador no sea alta.
Revise que el filtro no esté
obstruido.

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
936 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
9045
La velocidad de giro de DU3
del ventilador del controlador
es inferior a la velocidad
permitida. (FAN1)
Revise que el filtro de la unidad
de mando 3 no esté obstruido.
Reemplace el ventilador.
9046
La velocidad de giro de DU3
del ventilador del controlador
es inferior a la velocidad
permitida. (FAN2)
Revise que el filtro de la unidad
de mando 3 no esté obstruido.
Reemplace el ventilador.
9100
Error de inicialización.
No se pudo asignar la
memoria.
Reinicie el controlador.
9101 La cola de mensajes se llenó. -
9102
Error de inicialización.
No se pudo inicializar
Modbus.
(Cuando se selecciona RTU)
Revise si el puerto seleccionado
está instalado.
(Cuando se selecciona TCP)
Revise si el número del puerto
seleccionado está siendo usado
por otro
9103
Error de inicialización.
No se pudo inicializar la
salida del usuario.
Si se especificó el manipulador,
revise si el manipulador
especificado está registrado.
9104
Error de salida remota del
usuario. No se puede
ejecutar el comando
especificado.
Revise la condición de la
expresión.
9233
El driver de E/S de bus de
campo es un estado anormal.
El módulo está roto o el software
del controlador está dañado.
Restaure el firmware del
controlador.
9234
Error de inicialización del
driver de E/S de bus de
campo.
El módulo está roto o el software
del controlador está dañado.
Restaure el firmware del
controlador.
9610
El circuito RAS detectó un
mal funcionamiento del
sistema servo. Reinicie el
controlador.
Compruebe si hay ruidos.
Reemplace el controlador.
Revise las contramedidas para el
ruido.
Reemplace la DMB.
9611
Error interna de RAM de la
CPU servo. Reinicie el
controlador. Compruebe si
hay ruidos. Reemplace la
DMB.
Revise las contramedidas para el
ruido.
Reemplace la DMB.
9612
Error de RAM para la
comunicación de la CPU
principal y la CPU servo.
Reinicie el controlador.
Compruebe si hay ruidos.
Reemplace la DMB.
Revise las contramedidas para el
ruido.
Reemplace la DMB.
9613
Error interna de RAM de la
CPU servo. Reinicie el
controlador. Compruebe si
hay ruidos. Reemplace la
DMB.
Reinicie el controlador.
Revise las contramedidas para el
ruido.
Reemplace la DMB.
Para la serie T, no es la DMB,
sino la placa de la CPU.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 937
N.º Mensaje Solución Nota 1 Nota 2
9614
Error de inicialización de la
comunicación de la CPU
principal y la CPU servo.
Reinicie el controlador.
Compruebe si hay ruidos.
Reemplace la DMB.
Reinicie el controlador.
Revise las contramedidas para el
ruido.
Reemplace la DMB.
Para la serie T, no es la DMB,
sino la placa de la CPU.
9615
Error de inicialización de la
comunicación de la CPU
principal y la CPU servo.
Reinicie el controlador.
Compruebe si hay ruidos.
Reemplace la DMB.
Revise las contramedidas para el
ruido.
Reemplace la DMB.
9616
Error de comunicación de la
CPU principal y la CPU servo.
Reinicie el controlador.
Compruebe si hay ruidos.
Reemplace la DMB.
Reinicie el controlador.
Revise las contramedidas para el
ruido.
Reemplace la DMB.
Para la serie T, no es la DMB,
sino la placa de la CPU.
9617
Error de comunicación de la
CPU principal y la CPU servo.
Reinicie el controlador.
Compruebe si hay ruidos.
Reemplace la DMB.
Reinicie el controlador.
Revise las contramedidas para el
ruido.
Reemplace la DMB.
Para la serie T, no es la DMB,
sino la placa de la CPU.
9618
Exceso del comando de
tiempo prolongado del servo.
Revise las contramedidas para el
ruido.
Reemplace la DMB.
9619
Error de la suma de
comprobación del comando
de tiempo prolongado del
servo.
Revise las contramedidas para el
ruido.
Reemplace la DMB.
9620
El temporizador guardián del
sistema detectó un error.
Reinicie el controlador.
Compruebe si hay ruidos.
Reemplace la DMB.
Reinicie el controlador.
Revise las contramedidas para el
ruido.
Reemplace la DMB.
Para la serie T, no es la DMB,
sino la placa de la CPU.
9621
Error de comprobación de la
unidad de mando.
Revise las contramedidas para el
ruido.
Reemplace la DMB.
9622
Error de RAM de la CPU
servo. Reinicie el
controlador. Compruebe si
hay ruidos. Reemplace la
DMB.
Revise las contramedidas para el
ruido.
Reemplace la DMB.
9623
Error de los circuitos
redundantes para la parada
de emergencia o la
protección. Revise el
cableado.
Revise las contramedidas para el
ruido.
Reemplace la DMB.
9624
Se detectó bajo voltaje del
suministro de alimentación
del circuito principal. Revise
el voltaje de la fuente de
alimentación. Reinicie el
controlador.
Revise las contramedidas para el
ruido.
Reemplace la DMB.

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
938 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
9625
El contacto del relé de control
de la fuente de alimentación
del circuito principal está
soldado firmemente.
Reemplace el DPB.
Reemplace la DMB.
9626
Detecte la diferencia de
reconocimiento de la CPU
secundaria y la CPU principal.
Reinicie el controlador, tome
medidas contra el ruido o
reemplace la placa de la CPU.
9627
La temperatura del resistor de
regeneración fue más alta
que la temperatura
especificada.
Especifique la configuración de
peso/inercia. Revise la carga.
Revise el robot. (Uniformidad,
juego, movimiento no uniforme,
tensión suelta de la correa, freno)
Revise la interferencia con los
equipos periféricos. (Colisión,
contacto)
Revise la configuración del
modelo.
Revise la conexión del cable de
alimentación.
9628
Sobrevoltaje de la CPU
secundaria.
Reemplace la placa DPB.
9630
Error de estado en tiempo
real del servo.
Error de la suma de
comprobación.
Reinicie el controlador.
Reemplace la DMB.
Revise las contramedidas para el
ruido.
9632
Error de estado en tiempo
real del servo.
Error de contador de
ejecución sin servo.
Reinicie el controlador.
Reemplace la DMB.
Revise las contramedidas para el
ruido.
9633
Error de estado en tiempo
real del servo.
Error de comunicación de la
CPU servo.
Reinicie el controlador.
Reemplace la DMB.
Revise las contramedidas para el
ruido.
9640
Se detectó una interrupción
del control de movimiento
irregular.
Duplicado de interrupción.
Reinicie el controlador.
Reemplace la DMB.
Revise las contramedidas para el
ruido.
9691
Error de envío de datos en la
red de movimiento.
Revise la conexión del cable de la
unidad de mando.
9692
Error de recepción de datos
en la red de movimiento.
Revise la conexión del cable de la
unidad de mando.
9697
Error de envío de datos de la
placa I/F del sensor de
fuerza.
Revise la conexión de la
placa I/F del sensor de fuerza
y el sensor de fuerza.
Revise la conexión de la placa I/F
del sensor de fuerza y el sensor
de fuerza.
Reinicie el controlador.
Consulte con nosotros si ocurre
un error similar incluso después
de tomar las anteriores
contramedidas.
9698
Error de recepción de datos
en la placa I/F del sensor de
fuerza.
Revise la conexión de la
placa I/F del sensor de fuerza
y el sensor de fuerza.
Revise la conexión de la placa I/F
del sensor de fuerza y el sensor
de fuerza.
Reinicie el controlador.
Consulte con nosotros si ocurre
un error similar incluso después
de tomar las anteriores
contramedidas.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 939
N.º Mensaje Solución Nota 1 Nota 2
9700
Error de matriz de la
compuerta de servocontrol.
Revise la DMB.
Compruebe si hay un cortocircuito
y una conexión incorrecta del
cableado de los equipos
periféricos. (Emergencia y
conectores E/S de expansión)
Reemplace la DMB.
Reemplace la unidad del eje
adicional.
Para la serie T, reinicie el
controlador, tome medidas contra
el ruido y reemplace la placa de la
CPU y la unidad del motor.
9701
Desconexión de la señal del
codificador paralelo. Revise
la conexión del cable de señal
o el cableado interno del
robot.
Revise la señal del cable M/C.
Revise el cableado de la señal del
robot. (Pin faltante, desconexión,
cortocircuito)
Reemplace el motor. (Error del
codificador)
Reemplace la DMB. (Error del
circuito de detección)
Revise la conexión del conector
en el controlador. (Soltar,
conexión al terminal del
codificador de serie en DMB)
Revise la configuración del
modelo. (Configuración incorrecta
del codificador paralelo)
Revise el cableado de los equipos
periféricos. (Emergencia y E/S)
Para la serie T, reinicie el
controlador, tome medidas contra
el ruido y reemplace la unidad del
motor.
9702
El driver del motor no está
instalado. Instale el driver del
motor. Revise la DMB o el
driver del motor.
Revise si el driver del motor está
montado.
Revise la configuración del
modelo y la configuración de
hardware.
Reemplace el driver del motor.
Reemplace la DMB.
Para la serie T, revise el cableado
de la unidad del motor.
9703
Error de inicialización de la
comunicación del codificador
incremental. Revise la
conexión del cable de señal y
la configuración del robot.
Revise la configuración del
modelo.
Reemplace el motor. (Error del
codificador)
Reemplace la DMB.
Para la serie T, reinicie el
controlador, tome medidas contra
el ruido y reemplace la placa de la
CPU y la unidad del motor.

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
940 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
9704
Error de inicialización del
codificador absoluto.
Revise la conexión del cable
de señal o la configuración
del robot.
Revise la configuración del
modelo.
Reemplace el motor. (Error del
codificador)
Reemplace la DMB.
Para la serie T, reinicie el
controlador, tome medidas contra
el ruido y reemplace la unidad del
motor.
9705
Error de configuración de la
división del codificador.
Revise la configuración del
robot.
Revise la configuración del
modelo.
9706
Error de datos durante la
inicialización del codificador
absoluto. Revise la conexión
del cable de señal, el
controlador o el motor.
Reemplace el motor. (Error del
codificador)
Reemplace la DMB.
Revise las contramedidas para el
ruido.
Para la serie T, reinicie el
controlador, tome medidas contra
el ruido y reemplace la unidad del
motor.
9707
Los turnos múltiples del
codificador absoluto superan
el rango máximo. Reinicie el
codificador.
Reinicie el codificador.
Reemplace el motor. (Error del
codificador)
9708
La posición está fuera de
rango. Reinicie el codificador.
Reinicie el codificador.
Reemplace la DMB.
Reemplace el motor. (Error del
codificador)
9709
No hay respuesta del
codificador de serie.
Revise la conexión del cable
de señal, el motor, DMB o la
placa IF del codificador.
Revise la configuración del
modelo. (Configuración incorrecta
del modelo de codificador
paralelo)
Revise la conexión del cable de
señal.
Reemplace la DMB y la placa I/F
del codificador.
9710
Error de inicialización del
codificador de serie.
Reinicie el controlador.
Revise el motor, la DMB o la
placa IF del codificador.
Revise la configuración del robot.
Revise el cable de señal.
Reemplace la DMB y la placa I/F
del codificador.
Para la serie T, reinicie el
controlador, tome medidas contra
el ruido y reemplace la unidad del
motor.
9711
Error de comunicación del
codificador de serie.
Reinicie el controlador.
Revise el motor, la DMB o la
placa IF del codificador.
Revise la configuración del robot.
Revise el cable de señal.
Reemplace la DMB y la placa I/F
del codificador.
Para la serie T, reinicie el
controlador, tome medidas contra
el ruido y reemplace la unidad del
motor.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 941
N.º Mensaje Solución Nota 1 Nota 2
9712
Error del temporizador
guardián de la CPU servo.
Reinicie el controlador.
Revise el motor o la DMB.
Reemplace la DMB.
Revise las contramedidas para el
ruido.
Para la serie T, revise la conexión
del cable de señal. Reinicie el
controlador, tome medidas contra
el ruido y reemplace la unidad del
motor.
9713
Error de WDT del circuito de
control actual.
Reinicie el controlador.
Revise el controlador.
Revise la conexión del cable de
alimentación.
Revise la fuente de alimentación
de 15 V y la conexión del cable.
Reemplace la DMB.
Revise las contramedidas para el
ruido.
Para la serie T, reinicie el
controlador, tome medidas contra
el ruido y reemplace la unidad del
motor.
9714
La DMB no es para este
robot.
Revise la configuración del robot.
Reemplace por la DMB
compatible.
9715
El codificador se reinició.
Reinicie el controlador.
Reinicie el controlador.
9716
Error de suministro de
alimentación del codificador
absoluto. Reemplace la
batería con una nueva.
Revise el cableado interno del
robot.
Reinicie el codificador.
Revise la conexión del cable de
señal.
9717
Error de datos de copia de
seguridad del codificador
absoluto. Reinicie el
codificador.
Reinicie el codificador.
Revise la conexión del cable de
señal.
9718
Alarma de la batería del
codificador absoluto.
Reemplace la batería.
Revise la conexión del cable de
señal.
9719
Error de posición del
codificador absoluto.
Reinicie el codificador.
Reemplace el motor.
Reinicie el codificador.
Reemplace el motor. (Error del
codificador)
Para la serie T, reinicie el
controlador, tome medidas contra
el ruido y reemplace la unidad del
motor.
9720
La velocidad es demasiado
alta durante el encendido del
controlador. Detenga el robot
y reinicie el controlador.
Reinicie el controlador.
Reinicie el codificador.
Para la serie T, reinicie el
controlador, tome medidas contra
el ruido y reemplace la unidad del
motor.
Revise la interferencia con otros
dispositivos.
9721
Sobrecalentamiento del
codificador absoluto.
Reduzca el trabajo de
movimiento.
Espere hasta que disminuya la
temperatura del codificador.

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
942 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
9722
Error del transductor R/D.
Reinicie el codificador. Revise
la placa del solucionador o el
cableado interno del robot.
Reinicia el codificador.
Revise el cableado de señal del
manipulador (pin suelto,
desconexión, cortocircuito).
Reemplace la placa del
solucionador.
9723
Error de comunicación del
sensor G. Revise la conexión
del cable de señal o el
cableado interno del robot.
Revise la conexión del cable de
señal.
Revise el cableado de señal del
manipulador (pin suelto,
desconexión, cortocircuito).
Revise la contramedida para el
ruido.
Reemplace la placa de control.
Reemplace la DMB.
9724
Error de datos del sensor G.
Revise la placa de control.
Reemplace la placa de control.
9725
Los datos de giro múltiple y
los datos de conversión R/D
son diferentes. Reinicie el
codificador.
Reinicie el solucionador.
Revise la contramedida para el
ruido.
Reemplace la placa del
solucionador.
9726
Desconexión de la señal de
excitación del solucionador.
Reinicie el codificador. Revise
la placa del solucionador o el
cableado interno del robot.
Revise el cableado de señal del
manipulador (pin suelto,
desconexión, cortocircuito).
Reemplace la placa del
solucionador.
9727
Error de comunicación de S-
DSP. Revise la DMB.
Reinicie el controlador.
Revise la contramedida para el
ruido.
Reemplace la DMB.
9728
Error de datos de
realimentación actual. Revise
la DMB.
Reinicie el controlador.
Revise la contramedida para el
ruido.
Reemplace la DMB.
Para la serie T, revise si existen
fallas de cortocircuito y conexión a
tierra en el cable de alimentación.
Reinicie el controlador o
reemplace la unidad del motor.
9729
Error de comunicación de D-
DSP. Revise la DMB.
Reinicie el controlador.
Revise la contramedida para el
ruido.
Reemplace la DMB.
9730
La velocidad es demasiado
alta durante el apagado del
controlador. Reinicie el
codificador.
Reinicie el codificador.
Reemplace el motor.
9731
La velocidad es demasiado
alta. Reinicie el codificador.
Reinicie el codificador.
Reemplace el motor.
Para la serie T, reinicie el
controlador y reemplace la unidad
del motor.
9732 Servoalarma A. -

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 943
N.º Mensaje Solución Nota 1 Nota 2
10000 Comando anulado por el usuario
-
10001
Se agotó el tiempo de espera del
comando.
-
10002
Sintaxis de línea de archivo de punto
incorrecta.
-
10003 El proyecto no se pudo compilar.
-
10004
No se puede inicializar la instancia de
la clase Spel.
-
10005 No se pudo inicializar el analizador.
-
10006 No se pudo inicializar wbproxy.
-
10007 El proyecto no existe.
Revise que el nombre y la ruta
del proyecto sean correctos.
10008 No se especificó un proyecto.
Especifique el proyecto.
10009 No se puede abrir el archivo.
Revise que el nombre y la ruta
del proyecto sean correctos.
10010 No se puede crear el archivo.
-
10011 No se encontró el archivo
Revise que el nombre y la ruta
del proyecto sean correctos.
10013
No se puede ejecutar LoadPoints con
Robot Manager abierto.
Cierre Robot Manager y
ejecútelo.
10014
No se puede bloquear el proyecto.
Está siendo usado por otra sesión.
Cierre otras aplicaciones.
10015 No se pudo sincronizar el proyecto.
-
10016 La unidad no está preparada
Revise si la designación de la
unidad es correcta.
10017
Dirección IP no válida
Revise la dirección IP.
10018
Máscara IP no válida
Revise la máscara IP.
10019
Puerta de enlace de IP no válida
Revise la puerta de enlace de
IP.
10020
La dirección IP o puerta de enlace de
IP no pueden ser la dirección de
subred.
Revise la dirección IP.
10021
La dirección IP o puerta de enlace de
IP no pueden ser la dirección de
transmisión.
Revise la dirección IP.
10022
Dirección DNS no válida
Revise la DNS.
10023
No se pueden ejecutar los comandos
porque la compilación del proyecto no
está completa.
Ejecútelos una vez que la
compilación del proyecto esté
completa.
10024 Nombre de tarea no válido. Revise el nombre de la tarea.
10100 El comando ya se está ejecutando. -
10101 Comando anulado por el usuario. Ejecute ResetAbort.
10102 Instancia de servidor no válida.
Especifique la instancia
correcta.
10103 Valor CommandTask no válido.
Especifique el número de tarea
correcto.
10104
No se puede cambiar ServeInstance
después de la inicialización.
Defina ServerInstance después
de la inicialización.
10105 Los datos son válidos.
Revise los datos en el método
TaskInfo de RC+ API.

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
944 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
N.º Mensaje Solución Nota 1 Nota 2
10106
No se puede continuar mientras haya
un diálogo abierto.
Revise si se está ejecutando el
método Rundialog o el método
TeachPoint mientras se ejecuta
el método Rundialog o el
método TeachPoint en RC+
API.
10250
AOI. Se agotó el tiempo de espera de
ejecución del comando.
Revise la conexión con PLC.
10251
AOI. No se puede ejecutar el
comando. ExtError es alto o
ExtCmdReset es bajo.
Revise el bit ExtError y el bit
ExtCmdReset.
10252
Se detectó una configuración de AOI
no válida.
Revise la configuración.
10501 Conexión anulada. -
10502
No se puede conectar con el
controlador.
-
10503
El firmware del controlador no es
compatible con esta versión de RC+.
Actualice la versión RC+.
10504
La conexión USB de este sistema está
reservada para el controlador RC620 y
no se puede usar para RC+7.0.
Instale RC+7.0 en otra
computadora.
10505 La conexión especificada no existe.
Revise el número de la
conexión.
10600
El driver del digitalizador de video no
está instalado.
Instale el driver.

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 945

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
946 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Apéndice A: Lista de condiciones de uso de
comandos SPEL
+
Ventana Command
El comando se puede usar en la ventana Command.
Programa
El comando se puede usar como una instrucción en el
programa SPEL
+
.
Función
El comando se puede usar como una función.
Comando
Ventana Command
Programa Función
RC+
TP3
A
AbortMotion
-
Abs
-
-
Accel
AccelMax
-
-
AccelR
AccelS
Acos
-
-
Agl
-
-
AglToPls
-
-
AIO_In
-
AIO_InW
-
AIO_Out
AIO_OutW
AIO_Set
AIO_TrackingSet
-
AIO_TrackingStart
-
-
-
AIO_TrackingEnd
-
-
-
AIO_TrackingOn
Align
-
-
AlignECP
-
-
And
-
-
-
AOpen
-
Arc
-
Arc3
-
Arch
Arm
ArmClr
-
ArmDef
-
-
ArmSet
Asc
-
-
Asin
-
-
Atan
-
-
Atan2
-
-
ATCLR
-
AtHome
-
-
ATRQ
AutoLJM
AvoidSingularity
B
Base
BClr
-
-
BClr64
-
-
BGo
-
BMove
-
Boolean
-
-
-
BOpen
-
Box
BoxClr
-
BoxDef
-
-

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 947
Comando
Ventana Command
Programa Función
RC+
TP3
Brake
(Solo función)
BSet
-
-
BSet64
-
-
BTst
-
-
BTst64
-
-
Byte
-
-
-
C
Calib
-
Call
-
-
-
CalPls
ChDir
-
ChDisk
-
ChDrive
-
ChkCom
-
-
ChkNet
-
-
Chr$
-
-
ClearPoints
-
Close
-
CloseCom
-
CloseDB
-
CloseNet
-
Cls
-
Cnv_AbortTrack
-
Cnv_Accel
Cnv_Downstream
Cnv_Fine
Cnv_LPulse
-
-
Cnv_Mode
Cnv_Name$
-
-
Cnv_Number
-
-
Cnv_OffsetAngle
Cnv_Point
-
-
Cnv_PosErr
-
-
Cnv_Pulse
-
-
Cnv_QueAdd
-
Cnv_QueGet
-
-
Cnv_QueLen
-
-
Cnv_QueList
-
-
Cnv_QueMove
-
Cnv_QueReject
Cnv_QueRemove
-
Cnv_QueUserData
Cnv_RobotConveyor
-
-
Cnv_Speed
-
-
Cnv_Trigger
-
Cnv_Upstream
CollisionDetect
Cont
-
-
Copy
-
Cos
-
-
CP
Ctr
-
-
CTReset
-
CtrlDev
-
-
CtrlInfo
-
-
CurDir$
-
-
CurDisk$
-
-
CurDrive$
-
-
CurPos
-
-

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
948 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Comando
Ventana Command
Programa Función
RC+
TP3
Curve
-
CVMove
-
CP_Offset
CR
CS
CT
CU
CV
CW
CX
CY
CZ
D
Date
-
Date$
-
-
Declare
-
-
-
DegToRad
-
-
Del
-
DeleteDB
-
DispDev
Dist
-
-
Do...Loop
-
-
-
Double
-
-
-
E
ECP
ECPClr
-
ECPDef
-
-
ECPSet
ElapsedTime
-
-
Elbow
Eof
-
-
Era
-
-
EResume
-
Erf$
-
-
Erl
-
-
Err
-
-
Errb
ErrMsg$
-
-
Error
-
ErrorOn
-
-
Ert
-
-
EStopOn
-
-
Eval
-
-
Exit
-
-
-
ExportPoints
-
F
FbusIO_GetBusStatus
-
-
FbusIO_GetDeviceStatus
-
-
FbusIO_SendMsg
-
FileDataTime$
-
-
FileExists
-
-
FileLen
-
-
Find
-
FindPos
-
-
Fine
FineDist
FineStatus
Fix
-
-
Flush
-
FmtStr
-
FmtStr$
-
-

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 949
Comando
Ventana Command
Programa Función
RC+
TP3
FolderExists
-
-
For...Next
-
-
-
Force_Calibrate
-
Force_ClearTrigger
-
Force_GetForce
-
-
Force_GetForces
-
Force_Sensor
Force_SetTrigger
-
FreeFile
-
-
Function...Fend
-
-
-
G
GClose
-
GetCurrentUser$
-
-
GetRobotInsideBox
-
-
GetRobotInsidePlane
-
-
GGet
-
Global
-
-
-
Go
-
Gosub...Return
-
-
-
Goto
-
-
-
GSet
-
GShow
-
GShowDialog
-
-
H
Halt
-
-
-
Hand
HealthCalcPeriod
HealthCtrlAlarmOn
HealthCtrlInfo
HealthCtrlRateOffset
-
HealthCtrlReset
-
HealthCtrlWarningEnable
HealthRateCtrlInfo
HealthRateRBInfo
HealthRBAlarmOn
HealthRBAnalysis
HealthRBDistance
HealthRBInfo
HealthRBRateOffset
-
HealthRBReset
-
HealthRBSpeed
HealthRBStart
-
HealthRBStop
-
HealthRBTRQ
HealthRBWarningEnable
Here
Hex$
-
-
Hofs
Home
-
HomeClr
-
HomeDef
-
-
HomeSet
Hordr
Hour
I
If...Then..Else…EndIf
-
-
-
ImportPoints
-
In
-
-
InBCD
-
-
Inertia
InPos
-
-

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
950 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Comando
Ventana Command
Programa Función
RC+
TP3
Input
-
Input #
-
InputBox
-
InReal
-
-
InsideBox
-
-
InsidePlane
-
-
InStr
-
-
Int
-
-
Int32
-
-
-
Integer
-
-
-
InW
-
-
IODef
-
-
IOLabel$
-
-
IONumber
-
-
J
J1Angle
J4Angle
J1Flag
J2Flag
J4Flag
J6Flag
JA
-
-
Joint
-
JRange
JS
-
-
JT
-
-
JTran
-
Jump
-
Jump3
-
Jump3CP
-
JumpTLZ
-
L
LatchEnable
-
LatchPos
-
-
LatchState
-
-
LCase$
-
-
Left$
-
-
Len
-
-
LimitTorque
LimitTorqueLP
LimitTorqueStop
LimitTorqueStopLP
LimZ
LimZMargin
Line Input
-
Line Input #
-
LJM
-
-
LoadPoints
-
Local
LocalClr
-
LocalDef
-
-
Lof
-
-
LogIn
-
-
Long
-
-
-
LSet$
-
-
LShift
-
-
LShift64
-
-
LTrim$
-
-
M
Mask
-
-
-
MCal
-

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 951
Comando
Ventana Command
Programa Función
RC+
TP3
MCalComplete
-
-
MCordr
MemIn
-
-
MemInW
-
-
MemOff
-
MemOn
-
MemOut
-
MemOutW
-
MemSw
-
-
Mid$
-
-
MHour
-
-
MkDir
-
Mod
-
-
-
Motor
Move
-
MsgBox
MyTask
-
-
N
Next
-
-
-
Not
-
-
-
O
Off
-
OLAccel
OLRate
On
-
OnErr
-
-
-
OpBCD
-
OpenCom
OpenDB
-
OpenNet
Oport
-
-
O
-
-
-
Out
OutReal
OutW
P
P#
-
PAgl
-
-
Pallet
PalletClr
-
ParseStr
Pass
-
Pause
-
-
-
PauseOn
-
-
PDescription
-
PDescription$
-
PDef
-
-
PDel
-
PerformMode
PG_FastStop
-
PG_LSpeed
PG_Scan
-
PG_SlowStop
-
PLabel
-
PLabel$
-
-
Plane
PlaneClr
-
PlaneDef
-
-
PList
-
PLocal
Pls
-
-

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
952 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Comando
Ventana Command
Programa Función
RC+
TP3
PNumber
-
-
PosFound
-
-
Power
PPls
-
-
Preserve
-
-
-
Print
-
Print #
-
PTCLR
-
PTPBoost
PTPBoostOK
-
-
PTPTime
-
-
PTran
-
PTRQ
Pulse
Q
QP
-
QPDecelR
QPDecelS
Quit
-
-
-
R
RadToDeg
-
-
Randmize
-
Range
-
Leer
-
ReadBin
-
Real
-
-
-
RealAccel
-
-
RealPls
-
-
RealPos
-
-
RealTorque
-
-
Recover
-
RecoverPos
-
-
Redim
-
Rename
-
RenDir
-
Reset
-
ResetElapsedTime
-
Restart
-
-
Resume
-
-
-
Return
-
-
-
Right$
-
-
RmDir
-
Rnd
-
-
Robot
RobotInfo
-
-
RobotInfo$
-
-
RobotModel$
-
-
RobotName$
-
-
RobotSerial$
-
-
RobotType
-
-
ROpen
-
RSet$
-
-
RShift64
-
-
RShift
-
-
RTrim$
-
-
RunDialog
-
-
-
S
SafetyOn
-
-
SavePoints
-
Seek
-
Select...Send
-
-
-

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 953
Comando
Ventana Command
Programa Función
RC+
TP3
SelectDB
Sense
-
SetCom
-
SetIn
-
SetInReal
-
SetInW
-
SetLatch
-
SetNet
-
SetSw
-
SFree
Sgn
-
-
Short
-
-
-
Shutdown
Signal
-
SimGet
-
-
-
SimSet
-
Sin
-
-
SingularityAngle
SingularityDist
SingularitySpeed
SLock
-
SoftCP
Space$
-
-
Speed
SpeedFactor
SpeedR
SpeedS
SPELCom_Event
-
Sqr
-
-
ST
-
-
StartMain
-
-
-
Stat
-
-
Str$
-
-
String
-
-
-
Sw
-
-
SyncLock
-
-
-
SyncUnlock
-
-
-
SyncRobots
SysConfig
-
-
SysErr
-
-
T
Tab$
-
-
Tan
-
-
TargetOK
-
-
TaskDone
-
-
TaskInfo
-
-
TaskInfo$
-
-
TaskState
TaskWait
-
TC
-
TCLim
TCPSpeed
-
-
TCSpeed
TeachOn
-
-
TGo
-
Till
-
TillOn
-
-
Time
Time$
-
-

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
954 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Comando
Ventana Command
Programa Función
RC+
TP3
TLClr
-
TLDef
-
-
TLSet
TMOut
-
TMove
-
Tmr
-
-
TmReset
-
Toff
-
Ton
-
Tool
Trap
-
-
-
Trim$
-
-
TW
-
-
U
UBound
-
-
UByte
-
-
-
UCase$
-
-
UInt32
-
-
-
UOpen
-
UpdateDB
-
UShort
-
-
-
V
Val
-
-
VCal
-
VCalPoints
-
VCls
-
-
-
VCreateCalibration
-
-
-
VCreateObject
-
-
-
VCreateSequence
-
-
-
VDefArm
-
-
-
VDefGetMotionRange
-
-
-
VDefLocal
-
-
-
VDefSetMotionRange
-
-
-
VDefTool
-
-
-
VDeleteCalibration
-
-
-
VDeleteObject
-
-
-
VDeleteSequence
-
-
-
VGet
-
-
-
VGoCenter
-
-
-
VisCalib
-
-
-
-
VisCalInfo
-
-
-
VisCalLoad
-
-
-
-
VisCalSave
-
-
-
-
VisTrans
-
-
-
VLoad
-
-
-
VRun
-
-
-
VSave
-
-
-
VSaveImage
-
-
-
VSD
VSet
-
-
-
VShowModel
-
-
-
-
VStatsReset
-
-
-
VStatsResetAll
-
-
-
VStatsSave
-
-
-
VStatsShow
-
VTeach
-
-
-
VTrain
-
-
-
VxCalib
-
VxCalDelete
-
VxCalLoad
-

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 955
Comando
Ventana Command
Programa Función
RC+
TP3
VxCalInfo
-
-
VxCalSave
-
VxTrans
-
-
W
Wait
-
WaitNet
-
WaitPos
-
WaitSig
-
Weight
Where
-
-
WindowStatus
-
-
WorkQue_Add
-
WorkQue_AutoRemove
WorkQue_Get
WorkQue_Len
WorkQue_List
-
-
WorkQue_Reject
WorkQue_Remove
-
WorkQue_Sort
WorkQue_UserData
WOpen
-
Wrist
Write
-
WriteBin
-
X
Xor
-
-
-
Xqt
-
-
-
XY
-
-
XYLim
XYLimClr
-
XYLimDef
-
-

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
956 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Apéndice B: Precaución de compatibilidad
B-1: Precaución de compatibilidad con EPSON RC+ 6.0
Descripción general
Esta sección contiene información para los clientes que usan EPSON RC+ 7.0 con
controladores RC700 que ya hayan usado EPSON RC+ 6.0 con RC620.
EPSON RC+ 7.0 y EPSON RC+ 6.0 son diferentes en cuanto a hardware, manipuladores
adaptables, número de articulaciones permitido y entorno de ejecución del software. Lea
esta sección y comprenda el contenido para usar el sistema de robot con seguridad.
EPSON RC+ 7.0 es un software mejorado compatible con productos previos a EPSON RC+
7.0 y está diseñado para innovar en cuanto a las tecnologías de software avanzado. Sin
embargo, algunas piezas no son compatibles con EPSON RC+ 6.0 o se eliminaron para
especializarse en el controlador de robot y para facilitar el uso.
Se indica la siguiente compatibilidad según EPSON RC+ 6.0 en comparación con EPSON
RC+ 7.0.
Diferencias generales
Las diferencias generales entre EPSON RC+ 6.0 y EPSON RC+ 7.0 son las siguientes.
Elemento
EPSON RC+ 7.0
EPSON RC+ 6.0
Número de tarea
Hasta 32 tareas
(Tarea en segundo plano: hasta 16 tareas)
Hasta 32 tareas
(Tarea en segundo plano: hasta 16 tareas)
Tipo de tarea
Se puede especificar la tarea NoPouse
Se puede especificar la tarea
NoEmgAbort
Se puede especificar la tarea en
segundo plano
Se puede especificar la tarea
NoPouse
Se puede especificar la tarea
NoEmgAbort
Se puede especificar la tarea en
segundo plano
TRAP especial
como TRAP ERROR
Compatible
Compatible
La tarea se inicia mediante el
número TRAP
Número de tarea dedicado
Número de tarea dedicado
Manipuladores múltiples
Compatible
Compatible
Número del robot
1 a 16
1 a 16
Número de cifras significativas
para el tipo Real
6 dígitos
6 dígitos
Número de cifras significativas
para el tipo Double
14 dígitos
14 dígitos
Número de elementos de la
matriz
Aparte de la variable de cadena
Aparte de la variable de cadena
Variable local
2,000
Variable local
2,000
Variable global
100,0000
Variable global
100,0000
Variable de módulo
100,0000
Variable de módulo
100,0000
Variable global
conservada
4,000
Variable global
conservada
4,000
Variable de cadena
Variable de cadena
Variable local
200
Variable local
200
Variable global
10.000
Variable global
10.000
Variable de módulo
10.000
Variable de módulo
10.000
Variable global
conservada
400
Variable global
conservada
400
Número de dispositivo
21:PC
22:REMOTE
24:TP
20:TP3
21:PC
22:REMOTE
24:TP
28:LCD

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 957
Elemento
EPSON RC+ 7.0
EPSON RC+ 6.0
Dispositivo de control
E/S remota
PC
REMOTE COM
Ethernet REMOTO
TP3
E/S remota
PC
Rango de número del
temporizador
0 a 63
0 a 63
Capacidad del programa
8 MB
8 MB
Señal sin rango
para SyncLock, SyncUnlock
0 a 63
0 a 63
Señal sin rango
para WaitSig, señal
0 a 63
0 a 63
Puerto de E/S de memoria
1024
1024
Número de puerto de E/S
Común con EPSON RC+ 6.0
Número de puerto de Ethernet
201 a 216
201 a 216
Asignación de E/S remota
Asignado como predeterminado
Predetermin.: --
Número de puerto de
comunicación RS-232C
1 a 8, 1001 a 1008
1 a 8, 1001, 1002
Ejecución de OpenCom del
puerto de comunicación RS-
232C
Obligatorio
Obligatorio
Entrada/salida a los archivos
Compatible
Compatible
Número de archivo
30 a 63
30 a 63
Número de acceso para la base de
datos
501 a 508
501 a 508
Vision Guide
Tipo de cámara de red
Tipo de digitalizador de video
Tipo de cámara de red
Tipo de digitalizador de video
Seguimiento del transportador
Compatible
Compatible
Robot PG
Compatible
Compatible
OCR
Compatible
Compatible
Seguridad
Compatible
Compatible
VBGuide 6.0 (API de RC+ 7.0)
Compatible
Compatible
E/S de bus de campo
Usar comandos E/S normales
Usar comandos E/S normales
Maestro del bus de campo
No se garantiza la respuesta
No se garantiza la respuesta
Esclavo del bus de campo
Se garantiza la respuesta
Se garantiza la respuesta
GUI Builder
Compatible
Compatible
Número de error
Común con EPSON RC+ 6.0

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
958 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Lista de compatibilidad de comandos
+
Se aplicó la expansión de función/cambios de función con compatibilidad con versiones
superiores.
−
Sin cambios.
!
Preste atención. Se aplicaron cambios de función o cambios de sintaxis.
!!
Preste atención. Se aplicaron cambios significativos.
×
Eliminado.
Comando
Compatibilidad
Nota
A Función Abs
−
Instrucción Accel
−
Función Accel
−
Instrucción AccelMax
−
Instrucción AccelR
−
Función AccelR
−
Instrucción AccelS
−
Función AccelS
−
Función Acos
−
Función AglToPls
−
Función Agl
−
Función AlignECP
−
Función Align
−
Instrucción And
−
Instrucción Arc
−
Instrucción Arc3
−
Instrucción Arch
−
Función Arch
−
Instrucción Arm
−
Función Arm
−
Instrucción ArmClr
−
Función ArmDef
−
Instrucción ArmSet
−
Función ArmSet
−
Función Asc
−
Función Asin
−
Función Atan
−
Función Atan2
−
Instrucción ATCLR
−
Instrucción ATRQ
−
Función ATRQ
−
B Instrucción Base
−
Función Base
−
Función BClr
−
Instrucción BGo
+
Se agregó parámetro PerformMode.
Instrucción BMove
−
Instrucción Boolean
−
Instrucción Box
+
Se agregó la designación lógica de salida
remota
Función Box
−

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 959
Comando
Compatibilidad
Nota
Función BoxClr
−
Función BoxDef
−
Instrucción Brake
−
Función Brake
−
Función BSet
−
Función BTst
−
Instrucción Byte
−
C
Instrucción Call
−
Función ChkCom
−
Función ChkNet
−
Función Chr$
−
Instrucción ClearPoints
−
Instrucción CloseCom
−
Instrucción CloseNet
−
Instrucción Cls
−
Función Cos
−
Instrucción CP
−
Función CP
−
Instrucción CTReset
−
Función Ctr
−
Función CtrlDev
−
Función CtrlInfo
−
Función CurPos
−
Instrucción Curve
−
Instrucción CVMove
−
Instrucción de CX a CW
−
Función CX a CW
−
D Instrucción Date
−
Función Date$
−
Función DegToRad
−
Instrucción DispDev
−
Función DispDev
−
Función Dist
−
Instrucción Do...Loop
−
Instrucción doble
−
E
Instrucción ECP
−
Función ECP
−
Instrucción ECPClr
−
Función EcpDef
−
Instrucción ECPSet
−
Función ECPSet
−
Instrucción Elbow
−
Función Elbow
−
Función Era
−
Instrucción Erase
−
Instrucción EResume
−
Función Erf$
−

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
960 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Comando
Compatibilidad
Nota
Función Erl
−
Función Err
−
Función ErrMsg$
−
Instrucción Error
−
Función ErrorOn
−
Función Ert
−
Función EStopOn
−
Instrucción Exit
−
F Instrucción Find
−
Función FindPos
−
Instrucción Fine
−
Función Fine
−
Función Fix
−
Instrucción FmtStr$
−
For...Next
−
Function...Fend
−
G
Instrucción Global
+
Se agregó parámetro PerformMode.
Instrucción Go
−
Gosub...Return
−
Instrucción Goto
−
H
Instrucción Halt
−
Instrucción Hand
−
Función Hand
−
Instrucción Here
−
Función Here
−
Función Hex$
−
Instrucción Home
−
Instrucción HomeClr
−
Función HomeDef
−
Instrucción HomeSet
−
Función HomeSet
−
Instrucción Hordr
−
Función Hordr
−
Instrucción Hour
−
Función Hour
−
I
If...EndIf
−
Función In
−
Función InBCD
−
Instrucción Inertia
−
Función Inertia
−
Función InPos
−
Instrucción Input
−
Instrucción Input#
−
Función InsideBox
−
Función InsidePlane
−
Función InStr
−
Función Int
−

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 961
Comando
Compatibilidad
Nota
Instrucción Integer
−
Función InW
−
Función IOLabel$
−
Función IONumber
−
Función IONumber
−
J
Instrucción J1Flag
−
Función J1Flag
−
Instrucción J2Flag
−
Función J2Flag
−
Instrucción J4Flag
−
Función J4Flag
−
Instrucción J6Flag
−
Función J6Flag
−
Función JA
−
Joint
−
Instrucción JRange
−
Función JRange
−
Función JS
−
Función JT
−
Instrucción JTran
−
Instrucción Jump
+
Se agregó parámetro PerformMode.
Instrucción Jump3
−
Instrucción Jump3CP
−
L
Función LCase$
−
Función Left$
−
Función Len
−
Instrucción LimZ
−
Función LimZ
−
Instrucción Line Input
−
Instrucción Line Input#
−
Función LJM
−
LoadPoints
−
Instrucción Local
−
Función Local
−
Instrucción LocalClr
−
Función LocalDef
−
Función Lof
−
Instrucción Long
−
Función LSet$
−
Función LShift
−
Función LTrim$
−
M
Operador Mask
−
Función MemIn
−
Función MemInW
−
Instrucción MemOff
−
Instrucción MemOn
−
Instrucción MemOut
−

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
962 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Comando
Compatibilidad
Nota
Instrucción MemOutW
−
Función MemSw
−
Función Mid$
−
Operador Mod
−
Instrucción Motor
−
Función Motor
−
Instrucción Move
−
Función MyTask
−
N Operador Not
−
O
Instrucción Off
−
Instrucción OLAccel
−
Función OLAccel
−
Instrucción OLRate
−
Función OLRate
−
Instrucción On
−
OnErr
−
Instrucción OpBCD
−
Instrucción OpenCom
−
Instrucción OpenNet
−
Función Oport
−
Operador Or
−
Instrucción Out
−
Función Out
−
Instrucción OutW
−
Función OutW
−
P
Función PAgl
−
Instrucción Pallet
+
Designación de valor de coordenadas agregada
Función Pallet
−
Instrucción ParsStr
−
Función ParsStr
−
Instrucción Pass
−
Instrucción Pause
−
Función PauseOn
−
Función PDef
−
PDel
−
Función PLabel$
−
Instrucción PLabel
−
Instrucción Plane
−
Función Plane
−
Instrucción PlaneClr
−
Función PlaneDef
−
Instrucción PList
−
Instrucción PLocal
−
Función PLocal
−
Función Pls
−
Función PNumber
−
Función PosFound
−

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 963
Comando
Compatibilidad
Nota
Instrucción Power
−
Función Power
−
Función PPls
−
Instrucción Print
−
Instrucción Print#
−
Instrucción PTCLR
−
Instrucción PTPBoost
−
Función PTPBoost
−
Función PTPBoostOK
−
Función PTPTime
−
Instrucción PTran
−
Instrucción PTRQ
−
Función PTRQ
−
Instrucción Pulse
−
Función Pulse
−
Q
Instrucción QP
−
Instrucción Quit
−
R Función RadToDeg
−
Instrucción Randmize
−
Instrucción Range
−
Instrucción Read
−
Instrucción ReadBin
−
Instrucción Real
−
Función RealPls
−
Función RealPos
−
Instrucción RealTorque
−
Instrucción Redim
−
Instrucción Reset
−
Instrucción Resume
−
Instrucción Return
−
Función RobotInfo
−
Función RobotInfo$
−
Función RobotModel$
−
Función RobotName$
−
Función RobotSerial$
−
Función RobotType
−
Función RSet$
−
Función RShift
−
Función RTrim$
−
S
Función SafetyOn
−
Instrucción SavePoints
−
Instrucción Select...Send
−
Instrucción Sense
−
Instrucción SetCom
−
Instrucción SetInW
−
Instrucción SetIn
−
Instrucción SetNet
−

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
964 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Comando
Compatibilidad
Nota
Instrucción SetSw
−
Instrucción SFree
−
Función SFree
−
Función Sgn
−
Instrucción Signal
−
Función Sin
−
Instrucción SLock
−
Instrucción SoftCP
−
Función SoftCP
−
Función Space$
−
Instrucción Speed
−
Función Speed
−
Instrucción SpeedR
−
Función SpeedR
−
Instrucción SpeedS
−
Función SpeedS
−
Instrucción
SPELCom_Event
−
Función Sqr
−
Función Stat
−
Función Str$
−
Instrucción String
−
Función Sw
−
Instrucción SyncLock
−
Instrucción SyncUnlock
−
Instrucción SysConfig
−
Función SysErr
−
T Función Tab$
−
Función Tan
−
Función TargetOK
−
Función TaskDone
−
Función TaskInfo
−
Función TaskInfo$
−
Instrucción TaskState
−
Función TaskState
−
Instrucción TaskWait
−
Instrucción TC
−
Instrucción TCLim
−
Función TCLim
−
Instrucción TCSpeed
−
Función TCSpeed
−
Instrucción TGo
+
Se agregó parámetro PerformMode.
Función TillOn
−
Comando Time
−
Función Time
−
Función Time$
−
Instrucción TLClr
−

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 965
Comando
Compatibilidad
Nota
Función TlDef
−
Instrucción TLSet
−
Función TLSet
−
Instrucción TMOut
−
Instrucción TMove
−
Función Tmr
−
Instrucción TmReset
−
Instrucción Toff
−
Instrucción Ton
−
Instrucción Tool
−
Función Tool
−
Instrucción Trap
−
Función Trim$
−
Función Tw
−
U
Función UBound
−
Función UCase$
−
V
Función Val
−
W Instrucción Wait
−
Instrucción WaitNet
−
Instrucción WaitPos
−
Instrucción WaitSig
−
Instrucción Weight
−
Función Weight
−
Instrucción Where
−
Instrucción Wrist
−
Función Wrist
−
Instrucción Write
−
Instrucción WriteBin
−
X Operador Xor
−
Instrucción Xqt
−
Función XY
−
Instrucción XYLim
−
Función XYLim
−
Instrucción XYLimClr
−
Instrucción XYLimDef
−
Función XYLimDef
−

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
966 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
B-2: Precaución de compatibilidad con EPSON RC+ 5.0
Descripción general
Esta sección contiene información para clientes que usan EPSON RC+ 7.0 con
controladores RC700 y RC90 que ya hayan usado EPSON RC+ 5.0 con RC180.
EPSON RC+ 7.0 y EPSON RC+ 5.0 son diferentes en cuanto a hardware, manipuladores
adaptables, número de articulaciones permitido y entorno de ejecución del software. Lea
esta sección y comprenda el contenido para usar el sistema de robot con seguridad.
EPSON RC+ 7.0 es un software mejorado compatible con productos previos a EPSON RC+
7.0 y está diseñado para innovar en cuanto a las tecnologías de software avanzado. Sin
embargo, algunas piezas no son compatibles con EPSON RC+ 5.0 o se eliminaron para
especializarse en el controlador de robot y para facilitar el uso.
Se indica la siguiente compatibilidad según EPSON RC+ 5.0 en comparación con EPSON
RC+ 7.0.
Diferencias generales
Las diferencias generales entre EPSON RC+ 5.0 y EPSON RC+ 7.0 son las siguientes.
Elemento
EPSON RC+ 7.0
EPSON RC+ 5.0
Número de tarea
Hasta 32 tareas
(Tarea en segundo plano: hasta 16
tareas)
Hasta 16 tareas
Tipo de tarea
Se puede especificar la tarea NoPouse
Se puede especificar la tarea
NoEmgAbort
Se puede especificar la tarea en segundo
plano
Se puede especificar la tarea
NoPouse
Se puede especificar la tarea
NoEmgAbort
TRAP especial
como TRAP ERROR
Compatible
No compatible
La tarea se inicia mediante el
número TRAP
Número de tarea dedicado
Número de tarea dedicado
Manipuladores múltiples
Compatible
No compatible
Número del robot
1 a 16
1
Número de cifras significativas
para el tipo Real
6 dígitos
6 dígitos
Número de cifras significativas
para el tipo Double
14 dígitos
14 dígitos
Número de elementos de la matriz
Aparte de la variable de cadena
Aparte de la variable de cadena
Variable local
2.000
Variable local
1.000
Variable global
100,000
Variable global
10.000
Variable de módulo
100.000
Variable de módulo
10.000
Variable global
conservada
4,000
Variable global
conservada
1.000
Variable de cadena
Variable de cadena
Variable local
200
Variable local
100
Variable global
10.000
Variable global
1.000
Variable de módulo
10.000
Variable de módulo
1.000
Variable global
conservada
400
Variable global
conservada
100
Número de dispositivo
21:PC
22:REMOTE
24:TP
20:TP3
21:PC
22:REMOTE
23:OP
24:TP
Dispositivo de control
E/S remota
PC
E/S remota
PC

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 967
Elemento
EPSON RC+ 7.0
EPSON RC+ 5.0
REMOTE COM
Ethernet REMOTO
TP3
OP1
Ethernet REMOTO
Rango de número del
temporizador
0 a 63
0 a 15
Capacidad del programa
8 MB
4 MB
Señal sin rango
para SyncLock, SyncUnlock
0 a 63
0 a 15
Señal sin rango
para WaitSig, señal
0 a 63
0 a 5
Puerto de E/S de memoria
1024
256
Número de puerto de E/S
Común con EPSON RC+ 5.0
Número de puerto de Ethernet
201 a 216
201 a 208
Asignación de E/S remota
Asignado como predeterminado
Asignado como predeterminado
Número de puerto de
comunicación RS-232C
1 a 8, 1001 a 1008
1 a 8
Ejecución de OpenCom del
puerto de comunicación RS-232C
Obligatorio
Obligatorio
Entrada/salida a los archivos
Compatible
No compatible
Número de archivo
30 a 63
No compatible
Número de acceso para la base de
datos
501 a 508
No compatible
Vision Guide
Tipo de cámara de red
Tipo de digitalizador de video
Tipo de cámara de red
Seguimiento del transportador
Compatible
No compatible
Robot PG
Compatible
No compatible
OCR
Compatible
No compatible
Seguridad
Compatible
No compatible
VBGuide 5.0 (API de RC+ 7.0)
Compatible
VBGuide Lite es compatible
E/S de bus de campo
Usar comandos E/S normales
Usar comandos E/S normales
Maestro del bus de campo
No se garantiza la respuesta
No compatible
Esclavo del bus de campo
Se garantiza la respuesta
Se garantiza la respuesta
GUI Builder
Compatible
No compatible
Número de error
Común con EPSON RC+ 5.0

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
968 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Lista de compatibilidad de comandos
+
Se aplicó la expansión de función/cambios de función con compatibilidad con versiones
superiores.
−
Sin cambios.
!
Preste atención. Se aplicaron cambios de función o cambios de sintaxis.
!!
Preste atención. Se aplicaron cambios significativos.
×
Eliminado.
Com
ando
Compatibilidad
Nota
A
Función Abs
−
Instrucción Accel
−
Función Accel
−
Instrucción AccelMax
−
Instrucción AccelR
−
Función AccelR
−
Instrucción AccelS
−
Función AccelS
−
Función Acos
−
Función AglToPls
−
Función Agl
−
Función AlignECP
−
Función Align
−
Instrucción And
−
Instrucción Arc
−
Instrucción Arc3
−
Instrucción Arch
−
Función Arch
−
Instrucción Arm
−
Función Arm
−
Instrucción ArmClr
−
Función ArmDef
−
Instrucción ArmSet
−
Función ArmSet
−
Función Asc
−
Función Asin
−
Función Atan
−
Función Atan2
−
Instrucción ATCLR
−
Instrucción ATRQ
−
Función ATRQ
−
B
Instrucción Base
−
Función Base
−
Función BClr
−
Instrucción BGo
+
Se agregó parámetro PerformMode.
Instrucción BMove
−
Instrucción Boolean
−
Instrucción Box
+
Se agregó la designación del número de robot
Función Box
+
Se agregó la designación del número de robot
Función BoxClr
+
Se agregó la designación del número de robot

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 969
Comando
Compatibilidad
Nota
Función BoxDef
+
Se agregó la designación del número de robot
Instrucción Brake
−
Función Brake
−
Función BSet
−
Función BTst
−
Instrucción Byte
−
C
Instrucción Call
+
La función Call de DLL está admitida.
Función ChkCom
−
Función ChkNet
−
Función Chr$
−
Instrucción ClearPoints
−
Instrucción CloseCom
−
Instrucción CloseNet
−
Instrucción Cls
−
Función Cos
−
Instrucción CP
−
Función CP
−
Instrucción CTReset
−
Función Ctr
−
Función CtrlDev
!
Se cambió la ID del dispositivo
Función CtrlInfo
−
Se cambiaron los contenidos de obtención
Función CurPos
−
Instrucción Curve
−
Instrucción CVMove
−
Instrucción de CX a CW
+
Se agregó CR, CS, CT
Función CX a CW
+
Se agregó CR, CS, CT
D
Instrucción Date
!
Solo se muestra
Función Date$
−
Función DegToRad
−
Instrucción DispDev
−
Función DispDev
−
Función Dist
−
Instrucción Do...Loop
−
Instrucción doble
−
E
Instrucción ECP
−
Función ECP
−
Instrucción ECPClr
−
Función EcpDef
−
Instrucción ECPSet
−
Función ECPSet
−
Función ElapsedTime
−
Instrucción Elbow
−
Función Elbow
−
Función Era
−
Instrucción Erase
×
Instrucción EResume
−
Función Erf$
−
Función Erl
−

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
970 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Comando
Compatibilidad
Nota
Función Err
−
Función ErrMsg$
−
Instrucción Error
−
Función ErrorOn
−
Función Ert
−
Función EStopOn
−
Instrucción Exit
−
F
Instrucción Find
−
Función FindPos
−
Instrucción Fine
−
Función Fine
−
Función Fix
−
Instrucción FmtStr$
−
For...Next
−
Function...Fend
−
G
Instrucción Global
−
Instrucción Go
+
Se agregó parámetro PerformMode.
Gosub...Return
−
Instrucción Goto
−
H
Instrucción Halt
−
Instrucción Hand
−
Función Hand
−
Instrucción Here
−
Función Here
−
Función Hex$
−
Instrucción Home
−
Instrucción HomeClr
−
Función HomeDef
−
Instrucción HomeSet
−
Función HomeSet
−
Instrucción Hordr
−
Función Hordr
−
Instrucción Hour
−
Función Hour
−
I
If...EndIf
−
Función In
−
Función InBCD
−
Instrucción Inertia
−
Función Inertia
−
Función InPos
−
Instrucción Input
−
Instrucción Input#
+
Se agreg
ó
el n
ú
mero de dispositivo
Fu
nción InsideBox
!
Se agregó la designación del número de robot y
All
no se puede usar con la instrucción Wait
Función InsidePlane
!
Se agregó la designación del número de robot y
All
no se puede usar con la instrucción Wait

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 971
Comando
Compatibilidad
Nota
Función InStr
−
Función Int
−
Instrucción Integer
−
Función InW
−
Función IOLabel$
−
Función IONumber
−
Función IONumber
−
J
Instrucción J1Flag
−
Función J1Flag
Instrucción J2Flag
Función J2Flag
Instrucción J4Flag
Función J4Flag
−
Instrucción J6Flag
−
Función J6Flag
−
Función JA
−
Joint
−
Instrucción JRange
−
Función JRange
−
Función JS
−
Función JT
−
Instrucción JTran
−
Instrucción Jump
+
Se agregó parámetro PerformMode.
Instrucción Jump3
+
Instrucción Jump3CP
+
L
Función LCase$
−
Función Left$
−
Función Len
−
Instrucción LimZ
−
Función LimZ
−
Instrucción Line Input
−
Instrucción Line Input#
+
Se agregó el número de dispositivo
Función LJM
−
LoadPoints
−
Instrucción Local
−
Función Local
−
Instrucción LocalClr
−
Función LocalDef
−
Función Lof
−
Instrucción Long
−
Función LSet$
−
Función LShift
−
Función LTrim$
−
M
Operador Mask
−
Función MemIn
−
Función MemInW
−
Instrucción MemOff
−
Instrucción MemOn
−

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
972 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Comando
Compatibilidad
Nota
Instrucción MemOut
−
Instrucción MemOutW
−
Función MemSw
−
Función Mid$
−
Operador Mod
−
Instrucción Motor
−
Función Motor
−
Instrucción Move
−
Función MyTask
−
N
Operador Not
−
O
Instrucción Off
−
Instrucción OLAccel
−
Función OLAccel
−
Instrucción OLRate
−
Función OLRate
−
Instrucción On
−
OnErr
−
Instrucción OpBCD
−
Instrucción OpenCom
−
Instrucción OpenNet
−
Función Oport
−
Operador Or
−
Instrucción Out
−
Función Out
−
Instrucción OutW
−
Función OutW
−
P
Función PAgl
−
Instrucción Pallet
−
Se agregó la designación de coordenadas
Función Pallet
−
Instrucción ParsStr
−
Función ParsStr
−
Instrucción Pass
+
Instrucción Pause
−
Función PauseOn
−
Función PDef
−
PDel
−
Función PLabel$
−
Instrucción PLabel
−
Instrucción Plane
+
Se agregó la designación del número de robot
Función Plane
+
Se agregó la designación del número de robot
Instrucción PlaneClr
+
Se agregó la designación del número de robot
Función PlaneDef
+
Se agregó la designación del número de robot
Instrucción PList
!
Se cambió el tipo de visualización
Instrucción PLocal
−
Función PLocal
−
Función Pls
−
Función PNumber
−
Función PosFound
−

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 973
Comando
Compatibilidad
Nota
Instrucción Power
−
Función Power
−
Función PPls
−
Instrucción Print
−
Instrucción Print#
+
Se cambió el número de dispositivo
Instrucción PTCLR
−
Instrucción PTPBoost
−
Función PTPBoost
−
Función PTPBoostOK
−
Función PTPTime
−
Instrucción PTran
−
Instrucción PTRQ
−
Función PTRQ
−
Instrucción Pulse
−
Función Pulse
−
Q
Instrucción QP
−
Instrucción Quit
−
R
Función RadToDeg
−
Instrucción Randmize
−
Instrucción Range
−
Instrucción Read
−
Instrucción ReadBin
−
Instrucción Real
−
Función RealPls
−
Función RealPos
−
Instrucción RealTorque
−
Instrucción Redim
−
Instrucción Reset
−
Instrucción
ResetElapsedTime
-
Instrucción Resume
−
Instrucción Return
−
Función RobotInfo
+
Se agregó información
F
unción RobotInfo$
+
Se agregó la visualización del nombre del
archivo de punto predeterminado
Función RobotModel$
−
Función RobotName$
−
Función RobotSerial$
−
Función RobotType
−
Función RSet$
−
Función RShift
−
Función RTrim$
−
S
Función SafetyOn
−
Instrucción SavePoints
−
Instrucción Select...Send
−
Instrucción Sense
−
Instrucción SetCom
−
Instrucción SetInW
−

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
974 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Comando
Compatibilidad
Nota
Instrucción SetIn
−
Instrucción SetNet
−
Instrucción SetSw
−
Instrucción SFree
−
Función SFree
−
Función Sgn
−
Instrucción Signal
−
Función Sin
−
Instrucción SLock
−
Instrucción SoftCP
−
Función SoftCP
−
Función Space$
−
Instrucción Speed
−
Función Speed
−
Instrucción SpeedR
−
Función SpeedR
−
Instrucción SpeedS
−
Función SpeedS
−
Instrucción
SPELCom_Event
−
Función Sqr
−
Función Stat
+
Se agregó información
Función Str$
−
Instrucción String
−
Función Sw
−
Instrucción SyncLock !
Ocurre un error si se ejecuta SyncLock
repetidamente
Instrucción SyncUnlock
−
Instrucción SysConfig
+
Se agregó información
F
unción SysErr
+
Se agregó la función de recuperar las
advertencias
T
Función Tab$
−
Función Tan
−
Función TargetOK
−
Función TaskDone
−
Función TaskInfo
−
Función TaskInfo$
−
I
nstrucción TaskState
+
Se agregó la visualización de la tarea en
segundo plano.
Función TaskState
−
Instrucción TaskWait
−
Instrucción TC
−
Instrucción TCLim
−
Función TCLim
−
Instrucción TCSpeed
−
Función TCSpeed
−
Instrucción TGo
+
Se agregó parámetro PerformMode.
Función TillOn
−

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 975
Comando
Compatibilidad
Nota
Comando Time
!
Solo se muestra
Función Time
−
Función Time$
−
Instrucción TLClr
−
Función TlDef
−
Instrucción TLSet
−
Función TLSet
−
Instrucción TMOut
−
Instrucción TMove
−
Función Tmr
−
Instrucción TmReset
−
Instrucción Toff
−
Instrucción Ton
−
Instrucción Tool
−
Función Tool
−
Instrucción Trap !
Se agregó la Trap que interrumpe el estado del
controlador.
Función Trim$
−
Función Tw
−
U
Función UBound
−
Función UCase$
−
V
Función Val
−
W Instrucción Wait
!
Se agregaron variables globales y otros como la
condición Wait
Instrucción WaitNet
−
Instrucción WaitPos
−
Instrucción WaitSig
−
Instrucción Weight
+
Se agregó la designación S, T
Función Weight
+
Se agregó la designación S, T
Instrucción Where
−
Instrucción Wrist
−
Función Wrist
−
Instrucción Write
−
Instrucción WriteBin
−
X
Operador Xor
−
Instrucción Xqt
−
Función XY
−
Instrucción XYLim
−
Función XYLim
−
Instrucción XYLimClr
−
Instrucción XYLimDef
−
Función XYLimDef
−

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
976 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Comandos de EPSON RC+ Ver.4.* (No admitidos en EPSON RC+ 5.0)
Instrucción AOpen
Instrucción BOpen
Instrucción Calib
Instrucción CalPls
Instrucción ChDir
Instrucción ChDrive
Instrucción Close
Instrucción Cnv_AbortTrack
Instrucción Cnv_Downstream
Instrucción Cnv_Fine
Función Cnv_Fine
Función Cnv_Name$
Función Cnv_Number
Función Cnv_Point
Función Cnv_PosErr
Función Cnv_Pulse
Instrucción Cnv_QueAdd
Función Cnv_QueGet
Función Cnv_QueLen
Instrucción Cnv_QueList
Instrucción Cnv_QueMove
Instrucción Cnv_QueReject
Función Cnv_QueReject
Instrucción Cnv_QueRemove
Instrucción Cnv_QueUserData
Función Cnv_QueUserData
Función Cnv_RobotConveyor
Función Cnv_Speed
Instrucción Cnv_Trigger
Función Cnv_Upstream
Instrucción Cont
Instrucción Copy
Función CurDir$
Función CurDrive$
Instrucción Declare
Instrucción Del
Función Eof
Función Eval
Función FbusIO_GetBusStatus
Función FbusIO_GetDeviceStatus
Instrucción FbusIO_SendMsg
Función FileDateTime$
Función FileExists
Función FileLen
Función FolderExists
Función FreeFile
Instrucción GetCurrentUser$
Instrucción Hofs
Función Hofs
Instrucción ImportPoints
Instrucción InputBox
Función LogIn
Función MCalComplete
Instrucción MCal
Instrucción MCordr
Función MCordr
Instrucción MKDir
Instrucción MsgBox
Función Recover
Instrucción Rename
Instrucción RenDir
Instrucción Restart
Instrucción RmDir
Instrucción Robot
Función Robot
Instrucción ROpen
Instrucción RunDialog
Instrucción Seek
Instrucción Shutdown
Instrucción UOpen
Instrucción WOpen

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 977
B-3: Precaución de EPSON RC+ Ver.4.* Compatibilidad
Descripción general
Esta sección contiene información para clientes que usan EPSON RC+ 7.0 con
controladores RC700 que ya hayan usado EPSON RC+ Ver.4.* con RC520 o RC420.
EPSON RC+ 7.0 y EPSON RC+ Ver.4.* son diferentes en cuanto a hardware, manipuladores
adaptables, número de articulaciones permitido y entorno de ejecución del software. Lea
esta sección y comprenda el contenido para usar el sistema de robot con seguridad.
EPSON RC+ 7.0 es un software mejorado compatible con productos previos a EPSON RC+
7.0 y está diseñado para innovar en cuanto a las tecnologías de software avanzado. Sin
embargo, algunas piezas no son compatibles con EPSON RC+ Ver.4.* o se eliminaron para
especializarse en el controlador de robot y para facilitar el uso.
Se indica la siguiente compatibilidad según EPSON RC+ Ver.4.* en comparación con
EPSON RC+ 7.0.
Diferencias generales
Las diferencias generales entre EPSON RC+ Ver.4.* y EPSON RC+ 7.0 son las siguientes.
Elemento
EPSON RC+ 7.0
EPSON RC+ Ver.4.*
Número de tarea
Hasta 32 tareas
(Tarea en segundo plano: hasta 16
tareas)
Hasta 32 tareas
Tipo de tarea
Se puede especificar la tarea NoPouse
Se puede especificar la tarea
NoEmgAbort
Se puede especificar la tarea en
segundo plano
Se puede especificar la tarea
NoPouse
TRAP especial
como TRAP ERROR
Compatible
Compatible
La tarea se inicia mediante el
número TRAP
Número de tarea dedicado
Números de tarea solo desde 1 a
32
Manipuladores múltiples
Compatible
Compatible
Número del robot
1 a 16
1 a 16
Número de cifras significativas
para el tipo Real
6 dígitos
7 dígitos
Número de cifras significativas
para el tipo Double
14 dígitos
15 dígitos
Número de elementos de la
matriz
Aparte de la variable de cadena
Hasta la capacidad de la
memoria
Variable local
Variable global
Variable de módulo
Variable global
conservada
2000
1,000,000
1,000,000
4,000
Variable de cadena
Variable local
Variable global
Variable de módulo
Variable global
conservada
200
10.000
10.000
400
Número de línea
No compatible
Compatible
Número de dispositivo
21:PC
22:REMOTE
24:TP
20:TP3
1:Controller
2:REMOTE
3:OP
Dispositivo de control
E/S remota
PC
REMOTE COM
E/S remota
PC
OP500RC

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
978 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Elemento
EPSON RC+ 7.0
EPSON RC+ Ver.4.*
Ethernet REMOTO
TP3
Rango de número del
temporizador
0 a 63
0 a 63
Capacidad del programa
8 MB
4 MB
Señal sin rango
para SyncLock, SyncUnlock
0 a 63
1 a 32
Señal sin rango
para WaitSig, señal
0 a 63
0 al 127
Puerto de E/S de memoria
1024
512
Número de puerto de E/S
Diferente con EPSON RC+ 4.0
Número de puerto de Ethernet
201 a 216
128 a 147
Asignación de E/S remota
Asignado como predeterminado
Predetermin.: --
Número de puerto de
comunicación RS-232C
1 a 8, 1001, 1008
1 a 16
Ejecución de OpenCom del
puerto de comunicación RS-
232C
Obligatorio
Opcional
Entrada/salida a los archivos
Compatible
Compatible
Número de archivo para acceso
del archivo
30 a 63
30 a 63
Número de acceso para la base
de datos
501 a 508
No compatible
Vision Guide
Tipo de cámara de red
Tipo de digitalizador de video
Tipo de digitalizador de video
Seguimiento del transportador
Compatible
Compatible
Robot PG
Compatible
Compatible
OCR
Compatible
Compatible
Seguridad
Compatible
Compatible
VBGuide (API de RC+ 7.0)
Compatible
Compatible
E/S de bus de campo
Usar comandos E/S normales
Usar comandos especiales
Maestro del bus de campo
No se garantiza la respuesta
No se garantiza la respuesta
Esclavo del bus de campo
Se garantiza la respuesta
No se garantiza la respuesta
GUI Builder
Compatible
No compatible
Agrupe el proyecto
No compatible
Compatible
Número de error
Diferente con EPSON RC+ Ver.4.*

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 979
Lista de compatibilidad de comandos
+
Se aplicó la expansión de función/cambios de función con compatibilidad con versiones
superiores.
−
Sin cambios.
!
Preste atención. Se aplicaron cambios de función o cambios de sintaxis.
!!
Preste atención. Se aplicaron cambios significativos.
×
Eliminado.
Comando
Compatibilidad
Nota
A Función Abs
−
Instrucción Accel
+
Se pueden especificar más de 100 para
algunos robots
Función Accel
−
Instrucción AccelR
−
Función AccelR
−
Instrucción AccelS
−
Función AccelS
−
Función Acos
+
Se agregó la comprobación del rango del
argumento
Función Agl
−
Función AglToPls
−
Operador And
−
Instrucción AOpen
×
Instrucción Arc
−
Instrucción Arc3
−
Instrucción Arch
−
Función Arch
−
Instrucción Arm
−
Función Arm
−
Instrucción ArmClr
−
Instrucción ArmSet
−
Función ArmSet
−
Función Asc
−
Función Asin
+
Se agregó la comprobación del rango del
argumento
Función Atan
−
Función Atan2
−
Instrucción ATCLR
−
Instrucción ATRQ
−
Función ATRQ
−
B
Instrucción Base
−
Función BClr
+
Se agregó la comprobación del rango del
argumento
Instrucción Beep
×
Instrucción BGo
+
Se agregó parámetro PerformMode.
Instrucción BMove
−
Instrucción Boolean
−
Instrucción BOpen
−
Instrucción Brake
−
Función BSet
+
Se agregó la comprobación del rango del
argumento

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
980 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Comando
Compatibilidad
Nota
Función BTst
+
Se agregó la comprobación del rango del
argumento
Instrucción Byte
−
C
Instrucción Calib
−
Instrucción Call
−
Instrucción CalPls
−
Función CalPls
−
Instrucción Chain
×
Instrucción ChDir
−
Instrucción ChDrive
−
Función ChkCom
−
Función ChkNet
−
Función Chr$
−
Instrucción Clear
!
Se cambió el nombre a ClearPoints
Instrucción Close
−
Instrucción CloseCom
−
Instrucción CloseNet
+
Se puede especificar All
Instrucción ClrScr
!
Se cambió el nombre a Cls
Se puede especificar Device ID para
argumentos
Cnv_**
−
Instrucción Cont
!
Se puede ejecutar según la configuración
Instrucción Copy
−
Función Cos
−
Instrucción CP
−
Función CP
−
Función Ctr
−
Instrucción CTReset
−
Instrucción CtrlDev
×
Función CtrlDev
!
Se cambió la ID del dispositivo
Función CtrlInfo
!!
Se cambiaron los contenidos de obtención
Función CurDir$
−
Función CurDrive$
−
Función CurPos
−
Instrucción Curve
−
Instrucción CVMove
−
Instrucción de CX a CW
+
Se agregó CR, CS, CT
Función CX a CW
+
Se agregó CR, CS, CT
D
Instrucción Date
!
Solo se muestra
Función Date$
−
Instrucción Declare
!
El procesamiento es lento
Función DegToRad
−
Instrucción Del
−
Instrucción Dir
−
Función Dist
−
Instrucción Do...Loop
−
Instrucción doble
!
La cifra significativa es de 14 dígitos
E
Instrucción EClr
×
Instrucción ECP
−

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 981
Comando
Compatibilidad
Nota
Función ECP
−
Instrucción ECPClr
−
Instrucción ECPSet
−
Función ECPSet
−
Instrucción Elbow
−
Función Elbow
−
ENetIO_****
×
Función Eof
−
Instrucción EPrint
×
Función Era
−
Instrucción Erase
×
Instrucción EResume
−
Función Erf$
+
Se puede omitir el número de la tarea
Función Erl
+
Se puede omitir el número de la tarea
Función Err
−
Instrucción ErrHist
×
Función ErrMsg$
!
El argumento tiene una ID de idioma
Instrucción Error
+
Se puede especificar el número de tarea para
los argumentos.
Función Ert
−
Función EStopOn
+
Se puede especificar Wait
Función Eval
!
Diferencias en la salida de error
Instrucción Exit
−
F
FbusIO_****
×
Comando de E/S normal disponible
Función FileDateTime$
−
Función FileExists
−
Función FileLen
−
Instrucción Find
−
Función FindPos
−
Instrucción Fine
−
Función Fine
−
Función Fix
−
Instrucción FmtStr$
!!
La función está limitada de forma importante
Función FoldrExist
−
For...Next
−
Función FreeFile
−
Function...Fend
−
G
Función GetCurrentUser$
−
Instrucción Global
−
Instrucción Go
+
Se agregó parámetro PerformMode.
Gosub...Return
−
Instrucción Goto
−
H
Instrucción Halt
−
Instrucción Hand
−
Función Hand
−
Instrucción Here
−
Función Here
−

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
982 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Comando
Compatibilidad
Nota
Función Hex$
−
Instrucción Hofs
−
Función Hofs
−
Instrucción Home
−
Instrucción HomeSet
−
Función HomeSet
−
Instrucción Hordr
−
Función Hordr
−
Instrucción Hour
−
Función Hour
−
Instrucción HTest
×
Función HTest
×
I If...EndIf
−
Instrucción ImportPoints
!
La extensión “.pnt” cambió a “.pts”
Función In
−
Instrucción In($n)
×
Se reemplazó por MemIn
Función InBCD
−
Instrucción Inertia
−
Función Inertia
−
Función InPos
−
Instrucción Input
−
Instrucción Input#
+
La entrada está disponible desde los
dispositivos
Instrucción InputBox
−
Función InStr
−
Función Int
−
Instrucción Integer
−
Función InW
−
Instrucción InW($n)
×
Se reemplazó por MemInW
Función IONumber
−
J Instrucción J4Flag
−
Función J4Flag
−
Instrucción J6Flag
−
Función J6Flag
−
Función JA
−
Instrucción JRange
−
Función JRange
−
Función JS
!
Arroja True/False
Función JT
−
Instrucción JTran
−
Instrucción Jump
+
Se agregó parámetro PerformMode.
Instrucción Jump3
−
Instrucción Jump3CP
−
K
Instrucción Kill
×
Se reemplazó con Del
L Función LCase$
−
Función Left$
−
Función Len
−
Instrucción LimZ
−

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 983
Comando
Compatibilidad
Nota
Función LimZ
−
Instrucción Line Input
−
Instrucción Line Input#
+
La entrada está disponible desde los
dispositivos
LoadPoints
!
La extensión “.pnt” cambió a “.pts”
Instrucción Local
!
El número local “0” es un error
Función Local
!
El número local “0” es un error
Instrucción LocalClr
−
Función Lof
−
Instrucción LogIn
!
Se cambió de instrucción a función
Instrucción Long
−
Instrucción LPrint
×
Función LSet$
−
Función LShift
+
Se agregó la comprobación del rango del
argumento
Función LTrim$
−
M
Operador Mask
−
Instrucción MCal
−
Función MCalComplete
−
Instrucción MCofs
×
Función MCofs
×
Instrucción MCordr
−
Función MCordr
−
Instrucción Mcorg
×
Función MemIn
−
Función MemInW
−
Instrucción MemOff
−
Instrucción MemOn
−
Instrucción MemOut
−
Instrucción MemOutW
−
Función MemSw
−
Función Mid$
−
Instrucción MKDir
−
Operador Mod
−
Instrucción Motor
−
Función Motor
−
Instrucción Move
−
Instrucción MsgBox
−
Función MyTask
−
N Operador Not
−
O Instrucción Off
−
Instrucción Off$
×
Se reemplazó por MemOff
Instrucción OLRate
−
Función OLRate
−
Instrucción On
−
Instrucción On$
×
Se reemplazó por MemOn
OnErr
−
OP_*
×

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
984 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Comando
Compatibilidad
Nota
Instrucción OpBCD
−
Instrucción OpenCom
!
OpenCom es obligatorio
Instrucción OpenNet
−
Función Oport
−
Operador Or
−
Instrucción Out
−
Función Out
−
Instrucción Out$
×
Se reemplazó por MemOut
Instrucción OutW
−
Función OutW
−
Instrucción OutW$
×
Se reemplazó por MemOutW
P
Función PAgl
−
Instrucción Pallet
−
Función Pallet
−
Instrucción ParsStr
−
Función ParsStr
−
Instrucción Pass
+
Se puede especificar un punto continuo
Instrucción Pause
−
Función PauseOn
−
Función PDef
−
PDel
+
Se agregó la comprobación del argumento
Función PLabel$
−
Instrucción PLabel
−
PList
!!
Se cambió el tipo de visualización
Se agregó la comprobación de argumento
Se eliminó la función de Plist*
Instrucción PLocal
−
Función PLocal
−
Función Pls
−
Función PNumber
−
Asignación de punto
−
Expresión de punto
−
Instrucción POrient
×
Función POrient
×
Función PosFound
!
Arroja True/False
Instrucción Power
−
Función Power
−
Función PPls
−
Instrucción Print
!
Genera todos los indicadores en la salida de
punto
Define el número de dígito de salida del tipo
Double y del tipo Real en una cifra
significativa
Instrucción Print#
!
Igual que la instrucción Print
Activa Print en cada dispositivo
Instrucción PTCLR
−
Instrucción PTPBoost
−
Función PTPBoost
−
Función PTPBoostOK
!
Arroja True/False

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 985
Comando
Compatibilidad
Nota
Función PTPTime
−
Instrucción PTran
−
Instrucción PTRQ
−
Función PTRQ
−
Instrucción Pulse
−
Función Pulse
−
Q
Instrucción QP
−
Instrucción Quit
−
R Función RadToDeg
−
Instrucción Randmize
+
Se puede especificar el valor Seed
Instrucción Range
−
Instrucción Read
−
Instrucción ReadBin
+
Se pueden leer bytes múltiples para la variable
de matriz
Instrucción Real
!
Cifra significativa de 6 dígitos
Instrucción Recover
!
Se puede ejecutar según la configuración
Instrucción Redim
!
El número de elemento está limitado
No se puede ejecutar la matriz llamada por
referencia
Instrucción Rename
−
Instrucción RenDir
−
Instrucción Reset
−
Instrucción Resume
−
Instrucción Restart
−
Instrucción Reset
+
Se agregó Reset Error
Instrucción Return
−
Función Right$
−
Instrucción RmDir
−
Función Rnd
−
Instrucción Robot
+
Se agregó la serie RS
Función Robot
−
Función RobotModel$
−
Función RobotType
−
Instrucción ROpen
×
Función RSet$
−
Función RShift
+
Se agregó la comprobación del argumento
Función RTrim$
−
Instrucción RunDialog
−
S
Función SafetyOn
+
Se puede especificar Wait
Instrucción SavePoints
!
La extensión (.pnt) cambió a (.pts)
Instrucción Seek
−
Select...Send
−
Sense
−
Instrucción SetCom
!
No se puede especificar "56000" para la
velocidad de transferencia
No se puede ejecutar el puerto con OpenCom
Instrucción SetNet
−
Instrucción SFree
−
Función SFree
−

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
986 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Comando
Compatibilidad
Nota
Función Sgn
−
Instrucción Shutdown
−
Instrucción Signal
−
Función Sin
−
Instrucción SLock
−
Función Space$
−
Instrucción Speed
−
Función Speed
+
Argumento opcional
Instrucción SpeedR
−
Función SpeedR
−
Instrucción SpeedS
−
Función SpeedS
−
Instrucción
SPELCom_Event
−
Instrucción
SPELCom_Return
×
Función Sqr
−
Función Stat
!
No se puede recuperar alguna información
Función Str$
−
Instrucción String
−
Función Sw
−
Función Sw($)
×
Se reemplazó por MemSw
Instrucción SyncLock
!
Ocurre un error si se ejecuta SyncLock
repetidamente
Se libera el bloqueo cuando se completa la
tarea
Instrucción SyncUnlock
−
T
Función Tab$
−
Función Tan
−
Función TargetOK
!
Arroja True/False
Función TaskDone
−
Función TaskState
!
No se arrojan 6 tareas especificadas durante la
ejecución de la instrucción Wait
Instrucción TaskWait
−
Instrucción TGo
+
Se agregó parámetro PerformMode.
Función TillOn
−
Comando Time
!
Solo se muestra
Función Time
−
Función Time$
−
Instrucción TLClr
−
Instrucción TLSet
−
Función TLSet
−
Instrucción TMOut
−
Instrucción TMove
−
Función Tmr
−
Instrucción TmReset
−
Instrucción Tool
−
Función Tool
−

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 987
Comando
Compatibilidad
Nota
Instrucción Trap
!!
Compatibilidad con Trap Goto
Se prohibió Trap Gosub y se reemplazó con
Trap Call
Trap Call cambió de nombre a Trap Xqt
Se agregó Trap Finish
Función Trim$
−
Función Tw
!
Arroja True/False
Instrucción Type
−
U Función UBound
−
Función UCase$
−
Instrucción UOpen
−
V
Función Val
−
Instrucción Ver
×
Se reemplazó por SysConfig
Instrucción Verinit
×
W Instrucción Wait
+
Se agregaron variables globales y otros como
la condición Wait
Instrucción WaitNet
−
Instrucción WaitPos
−
Instrucción WaitSig
−
Instrucción Weight
+
Se agregó la designación S, T
Función Weight
+
Se agregó la designación S, T
Instrucción Where
!
El valor de coordenadas siempre muestra 6
ejes
While..Wend
×
Se reemplazó por Do...Loop
Instrucción WOpen
−
Instrucción Wrist
−
Función Wrist
−
Instrucción Write
−
Instrucción WriteBin
+
Se pueden enumerar bytes múltiples desde la
variable de matriz
X Operador Xor
−
Instrucción Xqt
+
Se puede especificar NoEmgAbort
Función XY
−
Instrucción XYLim
−
Función XYLim
−
Z Función ZeroFlg
×

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
988 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Apéndice C: Comandos de EPSON RC+7.0
C-1: Lista de comandos agregados EPSON RC+4.0 o superior
Instrucción AbortMotion
Función AccelMax
Función AglToPls
Instrucción AIO_Out
Función AIO_Out
Instrucción AIO_OutW
Función AIO_OutW
Instrucción AIO_Set
Función AIO_Set
Instrucción AIO_TrackingSet
Instrucción AIO_TrackingStart
Instrucción AIO_TrackingEnd
Función AIO_TrackingOn
Función AIO_In
Función AIO_InW
Función Align
Función AlignECP
Función ArmDef
Instrucción ATCLR
Función AtHome
Instrucción ATRQ
Función ATRQ
Instrucción AutoLJM
Función AutoLJM
Instrucción AvoidSingularity
Función AvoidSingularity
Función BClr
Función BClr64
Instrucción Box
Función Box
Función BoxClr
Función BoxDef
Función Brake
Función BSet
Función BSet64
Función BTst
Función BTst64
Instrucción ChDisk
Función ChkCom
Función ChkNet
Instrucción CloseCom
Instrucción CloseDB
Instrucción CloseNet
Instrucción Cls
Instrucción CP
Función CP
Instrucción CP_Offset
Función CP_Offset
Instrucción CR
Función CR
Instrucción CS
Función CS
Instrucción CT
Función CT
Función CtrlDev
Instrucción Curve
Instrucción CVMove
Instrucción Cnv_Accel
Función Cnv_Accel
Instrucción Cnv_DownStream
Instrucción Cnv_Mode
Función Cnv_Mode
Instrucción Cnv_OffsetAngle
Función Cnv_OffsetAngle
Instrucción Cnv_Upstream
Instrucción CollisionDetect
Función CollisionDetect
Función DegToRad
Instrucción DeleteDB
Instrucción DispDev
Función DispDev
Función Dist
Función EcpDef
Función ElapsedTime
Instrucción EResume
Función Errb
Función ErrorOn
Instrucción Error
Función EStopOn
Instrucción Exit
Instrucción ExportPoints
Función FindPos
Instrucción Find
Instrucción FineDist
Función FineDist
Función FineStatus
Función Fix
Instrucción Flush
Instrucción Fmtstr
Instrucción FunctionHere
Función GetRobotInsideBox
Instrucción GetRobotInsidePlane
Instrucción HealthCalcPeriod
Función HealthCalcPeriod Function
HealthCtrlAlarmOn
Instrucción HealthCtrlInfo
Función HealthCtrlInfo
Instrucción HealthCtrlRateOffset
Instrucción HealthCtrlReset
Instrucción HealthCtrlWarningEnable
Función HealthCtrlWarningEnable
Función HealthRateCtrlInfo
Función HealthRateRBInfo
Función HealthRBAlarmOn
Instrucción HealthRBAnalysis
Función HealthRBAnalysis
Instrucción HealthRBDistance
Función HealthRBDistance
Instrucción HealthRBInfo
Función HealthRBInfo
Instrucción HealthRBRateOffset
Instrucción HealthRBReset
Instrucción HealthRBSpeed
Función HealthRBSpeed
Instrucción HealthRBStart
Instrucción HealthRBStop
Instrucción HealthRBTRQ
Función HealthRBTRQ
Instrucción HealthRBWarningEnable
Función HealthRBWarningEnable
Función Here
Función Hex$
Instrucción HomeClr
Función HomeDef
Función InReal
Función InsideBox
Función InsidePlane
Función InStr
Función IODef
Función IOLabel$
Función IONumber
Instrucción J1Angle
Función J1Angle
Instrucción J4Angle
Función JA
Instrucción Joint
Instrucción JumpTLZ
Instrucción JTran

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 989
Instrucción LatchEnable
Función LatchState
Función LatchPos
Instrucción LimZMargin
Función LimZMargin
Instrucción LimitTorque
Función LimitTorque
Instrucción LimitTorqueLP
Función LimitTorqueLP
Instrucción LimitTorqueStop
Función LimitTorqueStop
Instrucción LimitTorqueStopLP
Función LimitTorqueStopLP
Función LJM
Función LocalDef
Función LShift64
Función MemInW
Instrucción MemOutW
Función MHour
Instrucción OLAccel
Función OLAccel
Instrucción OpenCom
Función OpenCom
Instrucción OpenDB
Instrucción OpenNet
Función OpenNet
OutReal
Función OutReal
Instrucción P#
Instrucción PalletClr
Función PauseOn
Función PDef
Instrucción PDel
Instrucción PDescription
Función PDescription
Instrucción PerformMode
Función PerformMode
Instrucción PG_FastStop
Instrucción PG_LSpeed
Función PG_LSpeed
Instrucción PG_Scan
Instrucción PG_SlowStop
Instrucción PLabel
Función PLabel$
Instrucción PlaneClr
Instrucción PlaneDef
Instrucción Plane
Función Plane
Instrucción PList
Instrucción PLocal
Función PLocal
Función PNumber
Función PosFound
Instrucción PTCLR
Función PTPBoostOK
Función PTPTime
Instrucción PTran
Instrucción PTRQ
Función PTRQ
Instrucción QPDECELR
Función QPDECELR
Instrucción QPDECELS
Función QPDECELS
Función RadToDeg
Instrucción Randomize
Instrucción ReadBin
Instrucción Read
Función RealAccel
Función RealPls
Función RealPos
Función RealTorque
Función RecoverPos
Instrucción Recover
Instrucción Redim
Función Rnd
Instrucción ResetElapsedTime
Función Rnd
Función RobotInfo
Función RobotInfo$
Función RobotModel$
Función RobotName$
Función RobotSerial$
Función RobotType
Función RShift64
Función SafetyOn
Instrucción SelectDB
Instrucción SetCom
Instrucción SetInW
Instrucción SetIn
Instrucción SetNet
Instrucción SetSw
Función Shutdown
Instrucción SimGet
Instrucción SimSet
Instrucción SingularityAngle
Función SingularityAngle
Instrucción SingularityDist
Función SingularityDist
Instrucción SingularitySpeed
Función SingularitySpeed
Instrucción SoftCP
Función SoftCP
Instrucción SpeedFactor
Función SpeedFactor
Instrucción StartMain
Instrucción SyncRobots
Función SyncRobots
Función SysErr
Función Tab$
Función TargetOK
Función TaskDone
Función TaskInfo
Función TaskInfo$
Instrucción TaskState
Función TaskState
Instrucción TaskWait
Instrucción TC
Instrucción TCLim
Función TCLim
Instrucción TCSpeed
Función TCSpeed
Función TeachOn
Función TillOn
Función TlDef
Instrucción Toff
Instrucción Ton
Función UBound
Instrucción UpdateDB
Instrucción VDefArm
Instrucción VDefLocal
Instrucción VDefSetMotionRange
Instrucción VDefGetMotionRange
Instrucción VDefTool
Instrucción VGoCenter
Instrucción VSD
Función VSD
Instrucción VxCalib
Instrucción VxCalDelete
Instrucción VxCalLoad
Función VxCalInfo
Instrucción VxCalSave
Función VxTrans

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
990 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Instrucción WaitNet
Instrucción WaitPos
Instrucción Where
Función WindosStatus
Instrucción WriteBin
Instrucción Write
Instrucción WorkQue_Add
Instrucción WorkQue_AutoRemove
Función WorkQue_AutoRemove
Función WorkQue_Get
Función WorkQue_Len
Instrucción WorkQue_List
Instrucción WorkQue_Reject
Función WorkQue_Reject
Instrucción WorkQue_Remove
Instrucción WorkQue_Sort
Función WorkQue_Sort
Instrucción WorkQue_UserData
Función WorkQue_UserData
Instrucción XYLimClr
Instrucción XYLimDef
Función XY

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 991
C-2: Lista de comandos agregados para cada versión de EPSON RC+ 7.0
Común con EPSON RC+ 6.0, 5.0 y 4.0
Versión de
EPSON RC+7.0
Nuevos comandos
Ver.7.4.3
AIO_TrackingSet
AIO_TrackingStart
AIO_TrackingEnd
Función AIO_TrackingOn
Ver.7.4.1
AutoOrientationFlag
Función AutoOrientationFlag
Ver.7.3.4
SimGet
SimSet
Ver.7.3.3
Instrucción HealthCtrlWarningEnable
Función HealthCtrlWarningEnable
Instrucción HealthRBWarningEnable
Función HealthRBWarningEnable
Ver.7.3.2 Instrucción PDescription Función PDescription
Ver.7.3.1
Instrucción AIO_Out
Función AIO_Out
Instrucción AIO_OutW
Función AIO_OutW
Instrucción AIO_Set
Función AIO_Set
Función AIO_In
Función AIO_InW
Instrucción HealthCalcPeriod
Función HealthCalcPeriod
Ver.7.3.0
Instrucción VDefArm
Instrucción VDefGetMotionRange
Instrucción VDefLocal
Instrucción VDefSetMotionRange
Instrucción VDefTool
Instrucción VGoCenter
Ver.7.2.0
Función CP_Offset
Instrucción CP_Offset
Instrucción HealthCtrlAlarmOn
Función HealthCtrlInfo
Instrucción HealthCtrlInfo
Función HealthCtrlRateOffset
Función HealthCtrlReset
Instrucción HealthRateCtrlInfo
Instrucción HealthRateRBInfo
Instrucción HealthRBAlarmOn
Función HealthRBAnalysis
Instrucción HealthRBAnalysis
Función HealthRBDistance
Instrucción HealthRBDistance
Función HealthRBInfo
Instrucción HealthRBInfo
Función HealthRBRateOffset
Función HealthRBReset HealthRBSpeed
Instrucción HealthRBSpeed
Función HealthRBStart
Función HealthRBStop
Función HealthRBTRQ
Instrucción HealthRBTRQ
Función J4Angle
Función JumpTLZ
Función LimitTorqueLP
Instrucción LimitTorqueLP
Función LimitTorqueStop
Instrucción LimitTorqueStop
Función LimitTorqueStopLP
Instrucción LimitTorqueStopLP
Función VSD
Instrucción VSD
Ver.7.1.4 Función CollisionDetectStatement
Ver.7.1.3
Función CollisionDetect
Función MHourStatement
Ver.7.1.2
Función SingularityDist
Instrucción SingularityDist
Función ExportPoints
Ver.7.1.0
Instrucción BClr64
Instrucción BSet64
Instrucción BTst64
Función FineDist
Instrucción FineDist
Instrucción FineStatus
Función Fmtstr
Instrucción IODef
Instrucción LShift64
Instrucción RealAccel
Instrucción RShift64
Función WorkQue_Add
Función WorkQue_AutoRemove
Instrucción WorkQue_AutoRemove
Instrucción WorkQue_Get
Instrucción WorkQue_Len
Función WorkQue_List
Función WorkQue_Reject
Instrucción WorkQue_Reject
Función WorkQue_Remove
Función WorkQue_Sort
Instrucción WorkQue_Sort
Función WorkQue_UserData
Instrucción WorkQue_UserData
Ver.7.0.3 Función PerformMode
Instrucción PerformMode

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
992 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Para EPSON RC+7.0 versión 7.0.0, los nuevos comandos son distintos de EPSON RC+
6.0 y EPSON RC+ 5.0.
Comandos agregados para EPSON RC+ 6.0, 5.0.
Versión de
EPSON RC+7.0
EPSON RC+ 6.0 EPSON RC+ 5.0
Ver.7.0.0
Función AutoLJM
Instrucción AutoLJM
Función AvoidSingularity
Instrucción AvoidSingularity
Función AbortMotion
Función AutoLJM
Instrucción AutoLJM
Función AvoidSingularity
Instrucción AvoidSingularity
Función Cnv_Accel
Instrucción Cnv_Accel
Función Cnv_Down Stream
Función Cnv_Mode
Instrucción Cnv_Mode
Función Cnv_Upstream
Función ChDisk
Función CloseDB
Función Cnv_Accel
Instrucción Cnv_Accel
Función Cnv_DownStream
Función Cnv_Mode
Instrucción Cnv_Mode
Función Cnv_Upstream
Función CR
Instrucción CR
Función CS
Instrucción CS
Función CT
Instrucción CT
Función DeleteDB
Función DeleteDB
Instrucción ElapsedTime
Instrucción Errb
Instrucción Errb
Función Flush
Instrucción GetRobotInsideBox
Instrucción GetRobotInsidePlane
Función J1Angle
Instrucción J1Angle
Función LimZMargin
Instrucción LimZMargin
Instrucción LimitTorque
Function LimitTorque
Función LimZMargin
Instrucción LimZMargin
Función LimitTorque
Instrucción LimitTorque
Función OpenDB
Función PalletClr
Función PalletClr
Función PG_FastStop
Función PG_LSpeed
Instrucción PG_LSpeed
Función PG_Scan
Función PG_SlowStop
Función QPDECELR
Instrucción QPDECELR
Función QPDECELS
Instrucción QPDECELS
Instrucción RecoverPos
Función Recover
Función ResetElapsedTime
Función SelectDB
Instrucción Shutdown
NOTA

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 993
Versión de
EPSON RC+7.0
EPSON RC+ 6.0 EPSON RC+ 5.0
Ver.7.0.0
Función SingularityAngle
Instrucción SingularityAngle
Función SingularitySpeed
Instrucción SingularitySpeed
Función SpeedFactor
Instrucción SpeedFactor
Función SingularityAngle
Instrucción SingularityAngle
Función SingularitySpeed
Instrucción SingularitySpeed
Función SpeedFactor
Instrucción SpeedFactor
Función StartMain
Función SyncRobots
Instrucción SyncRobots
Función TeachOnStatement
Función UpdateDB
Función UpdateDB Instrucción
WindosStatus
Comandos agregados para EPSON RC+ 4.0.
Versión de
EPSON RC+7.0
EPSON RC+ 4.0
Ver.7.0.0
Función AbortMotion
Instrucción AccelMax
Instrucción AglToPls
Instrucción Align
Instrucción AlignECP
Instrucción ArmDef
Función ATCLR
Instrucción AtHome
Función ATRQ
Instrucción ATRQ
Función AutoLJM
Instrucción AutoLJM
Función AvoidSingularity
Instrucción AvoidSingularity
Instrucción BClr
Función Box
Instrucción Box
Instrucción BoxClr
Instrucción BoxDef
Instrucción Brake
Instrucción BSet
Instrucción BTst
Función ChDisk
Instrucción ChkCom
Instrucción ChkNet
Función CloseCom
Función CloseDB
Función CloseNet
Función Cls
Función CP
Instrucción CP
Función CR
Instrucción CR
Función CS
Instrucción CS
Función CT
Instrucción CT
Instrucción CtrlDev
Función Curve
Función CVMove
Función Cnv_Accel
Instrucción Cnv_Accel Función
Cnv_DownStream
Función Cnv_Mode
Instrucción Cnv_Mode
Función Cnv_OffsetAngle
Instrucción Cnv_OffsetAngle
Función Cnv_Upstream
Instrucción DegToRad
Función DeleteDB
Función DispDev
Instrucción DispDev
Instrucción Dist
Instrucción EcpDef
Función EResume
Instrucción Errb
Instrucción ErrorOn
Función Error
Instrucción EStopOn
Función Exit

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
994 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
Versión de
EPSON RC+7.0
EPSON RC+ 4.0
Ver.7.0.0
Instrucción FindPos
Función Find
Instrucción FineStatus
Instrucción Fix
Función Flush
Instrucción GetRobotInsideBox
Instrucción
GetRobotInsidePlane
Función Here
Instrucción Here
Instrucción Hex$
Función HomeClr
Instrucción HomeDef
Instrucción InReal
Instrucción InsideBox
Instrucción InsidePlane
Instrucción InStr
Instrucción IOLabel$
Instrucción IONumber
Función J1Angle
Instrucción J1Angle
Instrucción JA
Función Joint
Función JTran
Función LatchEnable
Instrucción LatchState
Instrucción LatchPos
Función LimZMargin
Instrucción LimZMargin
Función LimitTorque
Instrucción LimitTorque
Instrucción LJM
Instrucción LocalDef
Instrucción MemInW
Función MemOutW
Función OLAccel
Instrucción OLAccel
Función OpenCom
Instrucción OpenCom
Función OpenDB
Función OpenNet
Instrucción OpenNet
Función OutReal
Instrucción OutReal
Función P#
Función PalletClr
Instrucción PauseOn
Instrucción PDef
Función PDel
Función PG_FastStop
Función PG_LSpeed
Instrucción PG_LSpeed
Función PG_Scan
Función PG_SlowStop
Función PLabel
Instrucción PLabel$
Función PlaneClr
Función PlaneDef
Función Plane
Instrucción Plane
Función PList
Función PLocal
Instrucción PLocal
Instrucción PNumber
Instrucción PosFound
Función PTCLR
Instrucción PTPBoostOK
Instrucción PTPTime
Función PTran
Función PTRQ
Instrucción PTRQ
Función QPDECELR
Instrucción QPDECELR
Función QPDECELS
Instrucción QPDECELS
Instrucción RadToDeg
Función Randomize
Función ReadBin
Función Read
Instrucción RealPls
Instrucción RealPos
Instrucción RealTorque
Instrucción RecoverPos
Función Recover

Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1 995
Versión de
EPSON RC+7.0
EPSON RC+ 4.0
Ver.7.0.0
Función Redim
Instrucción RobotInfo
Instrucción RobotInfo$
Instrucción RobotModel$
Instrucción RobotName$
Instrucción RobotSerial$
Instrucción RobotType
Instrucción SafetyOn
Función SelectDB
Función SetCom
Función SetInW
Función SetIn
Función SetNet
Función SetSw
Instrucción Shutdown
Función SingularityAngle
Instrucción SingularityAngle
Función SingularitySpeed
Instrucción SingularitySpeed
Función SoftCP
Instrucción SoftCP
Función SpeedFactor
Instrucción SpeedFactor
Función StartMain
Función SyncRobots
Instrucción SyncRobots
Instrucción SysErr
Función Tab$
Instrucción TargetOK
Instrucción TaskDone
Instrucción TaskInfo
Instrucción TaskInfo$
Función TaskState
Instrucción TaskState
Función TaskWait
Función TC
Función TCLim
Instrucción TCLim
Función TCSpeed
Instrucción TCSpeed
Instrucción TeachOn
Instrucción TillOn
Instrucción TlDef
Función Toff
Función Ton
Instrucción UBound
Función UpdateDB
Función VxCalib
Función VxCalDelete
Función VxCalLoad
Instrucción VxCalInfo
Función VxCalSave
Instrucción VxTrans
Función WaitNet
Función WaitPos
Función Where
Instrucción WindosStatus
Función WriteBin
Función Write
Función XYLimClr
Función XYLimDef
Instrucción XY

¡Error! Utilice la pestaña Inicio para aplicar 見出し 1 al texto que desea que aparezca aquí.
996 Referencia del lenguaje SPEL+ de EPSON RC+ 7.0 (Ver.7.5) Mod.1
C-3: Comandos de eliminación (Ordenar por versión)
Comandos de eliminación de EPSON RC+ 6.0, 5.0 y 4.0.
Versión de
EPSON RC+7.0
EPSON RC+ 6.0 EPSON RC+ 5.0 EPSON RC+ 4.0
Ver.7.1.2
Función SetLCD Función SetLCD Función SetLCD
Ver.7.0.0
Función Dir
Función Type
-
Función Dir
Función Type
-
 1
1
-
 2
2
-
 3
3
-
 4
4
-
 5
5
-
 6
6
-
 7
7
-
 8
8
-
 9
9
-
 10
10
-
 11
11
-
 12
12
-
 13
13
-
 14
14
-
 15
15
-
 16
16
-
 17
17
-
 18
18
-
 19
19
-
 20
20
-
 21
21
-
 22
22
-
 23
23
-
 24
24
-
 25
25
-
 26
26
-
 27
27
-
 28
28
-
 29
29
-
 30
30
-
 31
31
-
 32
32
-
 33
33
-
 34
34
-
 35
35
-
 36
36
-
 37
37
-
 38
38
-
 39
39
-
 40
40
-
 41
41
-
 42
42
-
 43
43
-
 44
44
-
 45
45
-
 46
46
-
 47
47
-
 48
48
-
 49
49
-
 50
50
-
 51
51
-
 52
52
-
 53
53
-
 54
54
-
 55
55
-
 56
56
-
 57
57
-
 58
58
-
 59
59
-
 60
60
-
 61
61
-
 62
62
-
 63
63
-
 64
64
-
 65
65
-
 66
66
-
 67
67
-
 68
68
-
 69
69
-
 70
70
-
 71
71
-
 72
72
-
 73
73
-
 74
74
-
 75
75
-
 76
76
-
 77
77
-
 78
78
-
 79
79
-
 80
80
-
 81
81
-
 82
82
-
 83
83
-
 84
84
-
 85
85
-
 86
86
-
 87
87
-
 88
88
-
 89
89
-
 90
90
-
 91
91
-
 92
92
-
 93
93
-
 94
94
-
 95
95
-
 96
96
-
 97
97
-
 98
98
-
 99
99
-
 100
100
-
 101
101
-
 102
102
-
 103
103
-
 104
104
-
 105
105
-
 106
106
-
 107
107
-
 108
108
-
 109
109
-
 110
110
-
 111
111
-
 112
112
-
 113
113
-
 114
114
-
 115
115
-
 116
116
-
 117
117
-
 118
118
-
 119
119
-
 120
120
-
 121
121
-
 122
122
-
 123
123
-
 124
124
-
 125
125
-
 126
126
-
 127
127
-
 128
128
-
 129
129
-
 130
130
-
 131
131
-
 132
132
-
 133
133
-
 134
134
-
 135
135
-
 136
136
-
 137
137
-
 138
138
-
 139
139
-
 140
140
-
 141
141
-
 142
142
-
 143
143
-
 144
144
-
 145
145
-
 146
146
-
 147
147
-
 148
148
-
 149
149
-
 150
150
-
 151
151
-
 152
152
-
 153
153
-
 154
154
-
 155
155
-
 156
156
-
 157
157
-
 158
158
-
 159
159
-
 160
160
-
 161
161
-
 162
162
-
 163
163
-
 164
164
-
 165
165
-
 166
166
-
 167
167
-
 168
168
-
 169
169
-
 170
170
-
 171
171
-
 172
172
-
 173
173
-
 174
174
-
 175
175
-
 176
176
-
 177
177
-
 178
178
-
 179
179
-
 180
180
-
 181
181
-
 182
182
-
 183
183
-
 184
184
-
 185
185
-
 186
186
-
 187
187
-
 188
188
-
 189
189
-
 190
190
-
 191
191
-
 192
192
-
 193
193
-
 194
194
-
 195
195
-
 196
196
-
 197
197
-
 198
198
-
 199
199
-
 200
200
-
 201
201
-
 202
202
-
 203
203
-
 204
204
-
 205
205
-
 206
206
-
 207
207
-
 208
208
-
 209
209
-
 210
210
-
 211
211
-
 212
212
-
 213
213
-
 214
214
-
 215
215
-
 216
216
-
 217
217
-
 218
218
-
 219
219
-
 220
220
-
 221
221
-
 222
222
-
 223
223
-
 224
224
-
 225
225
-
 226
226
-
 227
227
-
 228
228
-
 229
229
-
 230
230
-
 231
231
-
 232
232
-
 233
233
-
 234
234
-
 235
235
-
 236
236
-
 237
237
-
 238
238
-
 239
239
-
 240
240
-
 241
241
-
 242
242
-
 243
243
-
 244
244
-
 245
245
-
 246
246
-
 247
247
-
 248
248
-
 249
249
-
 250
250
-
 251
251
-
 252
252
-
 253
253
-
 254
254
-
 255
255
-
 256
256
-
 257
257
-
 258
258
-
 259
259
-
 260
260
-
 261
261
-
 262
262
-
 263
263
-
 264
264
-
 265
265
-
 266
266
-
 267
267
-
 268
268
-
 269
269
-
 270
270
-
 271
271
-
 272
272
-
 273
273
-
 274
274
-
 275
275
-
 276
276
-
 277
277
-
 278
278
-
 279
279
-
 280
280
-
 281
281
-
 282
282
-
 283
283
-
 284
284
-
 285
285
-
 286
286
-
 287
287
-
 288
288
-
 289
289
-
 290
290
-
 291
291
-
 292
292
-
 293
293
-
 294
294
-
 295
295
-
 296
296
-
 297
297
-
 298
298
-
 299
299
-
 300
300
-
 301
301
-
 302
302
-
 303
303
-
 304
304
-
 305
305
-
 306
306
-
 307
307
-
 308
308
-
 309
309
-
 310
310
-
 311
311
-
 312
312
-
 313
313
-
 314
314
-
 315
315
-
 316
316
-
 317
317
-
 318
318
-
 319
319
-
 320
320
-
 321
321
-
 322
322
-
 323
323
-
 324
324
-
 325
325
-
 326
326
-
 327
327
-
 328
328
-
 329
329
-
 330
330
-
 331
331
-
 332
332
-
 333
333
-
 334
334
-
 335
335
-
 336
336
-
 337
337
-
 338
338
-
 339
339
-
 340
340
-
 341
341
-
 342
342
-
 343
343
-
 344
344
-
 345
345
-
 346
346
-
 347
347
-
 348
348
-
 349
349
-
 350
350
-
 351
351
-
 352
352
-
 353
353
-
 354
354
-
 355
355
-
 356
356
-
 357
357
-
 358
358
-
 359
359
-
 360
360
-
 361
361
-
 362
362
-
 363
363
-
 364
364
-
 365
365
-
 366
366
-
 367
367
-
 368
368
-
 369
369
-
 370
370
-
 371
371
-
 372
372
-
 373
373
-
 374
374
-
 375
375
-
 376
376
-
 377
377
-
 378
378
-
 379
379
-
 380
380
-
 381
381
-
 382
382
-
 383
383
-
 384
384
-
 385
385
-
 386
386
-
 387
387
-
 388
388
-
 389
389
-
 390
390
-
 391
391
-
 392
392
-
 393
393
-
 394
394
-
 395
395
-
 396
396
-
 397
397
-
 398
398
-
 399
399
-
 400
400
-
 401
401
-
 402
402
-
 403
403
-
 404
404
-
 405
405
-
 406
406
-
 407
407
-
 408
408
-
 409
409
-
 410
410
-
 411
411
-
 412
412
-
 413
413
-
 414
414
-
 415
415
-
 416
416
-
 417
417
-
 418
418
-
 419
419
-
 420
420
-
 421
421
-
 422
422
-
 423
423
-
 424
424
-
 425
425
-
 426
426
-
 427
427
-
 428
428
-
 429
429
-
 430
430
-
 431
431
-
 432
432
-
 433
433
-
 434
434
-
 435
435
-
 436
436
-
 437
437
-
 438
438
-
 439
439
-
 440
440
-
 441
441
-
 442
442
-
 443
443
-
 444
444
-
 445
445
-
 446
446
-
 447
447
-
 448
448
-
 449
449
-
 450
450
-
 451
451
-
 452
452
-
 453
453
-
 454
454
-
 455
455
-
 456
456
-
 457
457
-
 458
458
-
 459
459
-
 460
460
-
 461
461
-
 462
462
-
 463
463
-
 464
464
-
 465
465
-
 466
466
-
 467
467
-
 468
468
-
 469
469
-
 470
470
-
 471
471
-
 472
472
-
 473
473
-
 474
474
-
 475
475
-
 476
476
-
 477
477
-
 478
478
-
 479
479
-
 480
480
-
 481
481
-
 482
482
-
 483
483
-
 484
484
-
 485
485
-
 486
486
-
 487
487
-
 488
488
-
 489
489
-
 490
490
-
 491
491
-
 492
492
-
 493
493
-
 494
494
-
 495
495
-
 496
496
-
 497
497
-
 498
498
-
 499
499
-
 500
500
-
 501
501
-
 502
502
-
 503
503
-
 504
504
-
 505
505
-
 506
506
-
 507
507
-
 508
508
-
 509
509
-
 510
510
-
 511
511
-
 512
512
-
 513
513
-
 514
514
-
 515
515
-
 516
516
-
 517
517
-
 518
518
-
 519
519
-
 520
520
-
 521
521
-
 522
522
-
 523
523
-
 524
524
-
 525
525
-
 526
526
-
 527
527
-
 528
528
-
 529
529
-
 530
530
-
 531
531
-
 532
532
-
 533
533
-
 534
534
-
 535
535
-
 536
536
-
 537
537
-
 538
538
-
 539
539
-
 540
540
-
 541
541
-
 542
542
-
 543
543
-
 544
544
-
 545
545
-
 546
546
-
 547
547
-
 548
548
-
 549
549
-
 550
550
-
 551
551
-
 552
552
-
 553
553
-
 554
554
-
 555
555
-
 556
556
-
 557
557
-
 558
558
-
 559
559
-
 560
560
-
 561
561
-
 562
562
-
 563
563
-
 564
564
-
 565
565
-
 566
566
-
 567
567
-
 568
568
-
 569
569
-
 570
570
-
 571
571
-
 572
572
-
 573
573
-
 574
574
-
 575
575
-
 576
576
-
 577
577
-
 578
578
-
 579
579
-
 580
580
-
 581
581
-
 582
582
-
 583
583
-
 584
584
-
 585
585
-
 586
586
-
 587
587
-
 588
588
-
 589
589
-
 590
590
-
 591
591
-
 592
592
-
 593
593
-
 594
594
-
 595
595
-
 596
596
-
 597
597
-
 598
598
-
 599
599
-
 600
600
-
 601
601
-
 602
602
-
 603
603
-
 604
604
-
 605
605
-
 606
606
-
 607
607
-
 608
608
-
 609
609
-
 610
610
-
 611
611
-
 612
612
-
 613
613
-
 614
614
-
 615
615
-
 616
616
-
 617
617
-
 618
618
-
 619
619
-
 620
620
-
 621
621
-
 622
622
-
 623
623
-
 624
624
-
 625
625
-
 626
626
-
 627
627
-
 628
628
-
 629
629
-
 630
630
-
 631
631
-
 632
632
-
 633
633
-
 634
634
-
 635
635
-
 636
636
-
 637
637
-
 638
638
-
 639
639
-
 640
640
-
 641
641
-
 642
642
-
 643
643
-
 644
644
-
 645
645
-
 646
646
-
 647
647
-
 648
648
-
 649
649
-
 650
650
-
 651
651
-
 652
652
-
 653
653
-
 654
654
-
 655
655
-
 656
656
-
 657
657
-
 658
658
-
 659
659
-
 660
660
-
 661
661
-
 662
662
-
 663
663
-
 664
664
-
 665
665
-
 666
666
-
 667
667
-
 668
668
-
 669
669
-
 670
670
-
 671
671
-
 672
672
-
 673
673
-
 674
674
-
 675
675
-
 676
676
-
 677
677
-
 678
678
-
 679
679
-
 680
680
-
 681
681
-
 682
682
-
 683
683
-
 684
684
-
 685
685
-
 686
686
-
 687
687
-
 688
688
-
 689
689
-
 690
690
-
 691
691
-
 692
692
-
 693
693
-
 694
694
-
 695
695
-
 696
696
-
 697
697
-
 698
698
-
 699
699
-
 700
700
-
 701
701
-
 702
702
-
 703
703
-
 704
704
-
 705
705
-
 706
706
-
 707
707
-
 708
708
-
 709
709
-
 710
710
-
 711
711
-
 712
712
-
 713
713
-
 714
714
-
 715
715
-
 716
716
-
 717
717
-
 718
718
-
 719
719
-
 720
720
-
 721
721
-
 722
722
-
 723
723
-
 724
724
-
 725
725
-
 726
726
-
 727
727
-
 728
728
-
 729
729
-
 730
730
-
 731
731
-
 732
732
-
 733
733
-
 734
734
-
 735
735
-
 736
736
-
 737
737
-
 738
738
-
 739
739
-
 740
740
-
 741
741
-
 742
742
-
 743
743
-
 744
744
-
 745
745
-
 746
746
-
 747
747
-
 748
748
-
 749
749
-
 750
750
-
 751
751
-
 752
752
-
 753
753
-
 754
754
-
 755
755
-
 756
756
-
 757
757
-
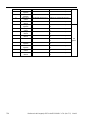 758
758
-
 759
759
-
 760
760
-
 761
761
-
 762
762
-
 763
763
-
 764
764
-
 765
765
-
 766
766
-
 767
767
-
 768
768
-
 769
769
-
 770
770
-
 771
771
-
 772
772
-
 773
773
-
 774
774
-
 775
775
-
 776
776
-
 777
777
-
 778
778
-
 779
779
-
 780
780
-
 781
781
-
 782
782
-
 783
783
-
 784
784
-
 785
785
-
 786
786
-
 787
787
-
 788
788
-
 789
789
-
 790
790
-
 791
791
-
 792
792
-
 793
793
-
 794
794
-
 795
795
-
 796
796
-
 797
797
-
 798
798
-
 799
799
-
 800
800
-
 801
801
-
 802
802
-
 803
803
-
 804
804
-
 805
805
-
 806
806
-
 807
807
-
 808
808
-
 809
809
-
 810
810
-
 811
811
-
 812
812
-
 813
813
-
 814
814
-
 815
815
-
 816
816
-
 817
817
-
 818
818
-
 819
819
-
 820
820
-
 821
821
-
 822
822
-
 823
823
-
 824
824
-
 825
825
-
 826
826
-
 827
827
-
 828
828
-
 829
829
-
 830
830
-
 831
831
-
 832
832
-
 833
833
-
 834
834
-
 835
835
-
 836
836
-
 837
837
-
 838
838
-
 839
839
-
 840
840
-
 841
841
-
 842
842
-
 843
843
-
 844
844
-
 845
845
-
 846
846
-
 847
847
-
 848
848
-
 849
849
-
 850
850
-
 851
851
-
 852
852
-
 853
853
-
 854
854
-
 855
855
-
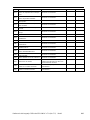 856
856
-
 857
857
-
 858
858
-
 859
859
-
 860
860
-
 861
861
-
 862
862
-
 863
863
-
 864
864
-
 865
865
-
 866
866
-
 867
867
-
 868
868
-
 869
869
-
 870
870
-
 871
871
-
 872
872
-
 873
873
-
 874
874
-
 875
875
-
 876
876
-
 877
877
-
 878
878
-
 879
879
-
 880
880
-
 881
881
-
 882
882
-
 883
883
-
 884
884
-
 885
885
-
 886
886
-
 887
887
-
 888
888
-
 889
889
-
 890
890
-
 891
891
-
 892
892
-
 893
893
-
 894
894
-
 895
895
-
 896
896
-
 897
897
-
 898
898
-
 899
899
-
 900
900
-
 901
901
-
 902
902
-
 903
903
-
 904
904
-
 905
905
-
 906
906
-
 907
907
-
 908
908
-
 909
909
-
 910
910
-
 911
911
-
 912
912
-
 913
913
-
 914
914
-
 915
915
-
 916
916
-
 917
917
-
 918
918
-
 919
919
-
 920
920
-
 921
921
-
 922
922
-
 923
923
-
 924
924
-
 925
925
-
 926
926
-
 927
927
-
 928
928
-
 929
929
-
 930
930
-
 931
931
-
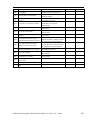 932
932
-
 933
933
-
 934
934
-
 935
935
-
 936
936
-
 937
937
-
 938
938
-
 939
939
-
 940
940
-
 941
941
-
 942
942
-
 943
943
-
 944
944
-
 945
945
-
 946
946
-
 947
947
-
 948
948
-
 949
949
-
 950
950
-
 951
951
-
 952
952
-
 953
953
-
 954
954
-
 955
955
-
 956
956
-
 957
957
-
 958
958
-
 959
959
-
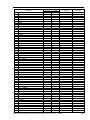 960
960
-
 961
961
-
 962
962
-
 963
963
-
 964
964
-
 965
965
-
 966
966
-
 967
967
-
 968
968
-
 969
969
-
 970
970
-
 971
971
-
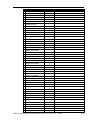 972
972
-
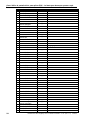 973
973
-
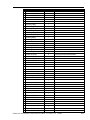 974
974
-
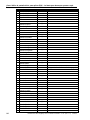 975
975
-
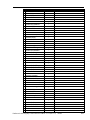 976
976
-
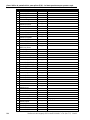 977
977
-
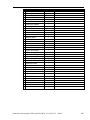 978
978
-
 979
979
-
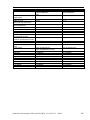 980
980
-
 981
981
-
 982
982
-
 983
983
-
 984
984
-
 985
985
-
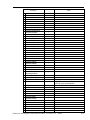 986
986
-
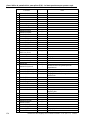 987
987
-
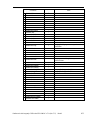 988
988
-
 989
989
-
 990
990
-
 991
991
-
 992
992
-
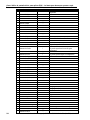 993
993
-
 994
994
-
 995
995
-
 996
996
-
 997
997
-
 998
998
-
 999
999
-
 1000
1000
-
 1001
1001
-
 1002
1002
-
 1003
1003
-
 1004
1004
-
 1005
1005
-
 1006
1006
-
 1007
1007
-
 1008
1008
-
 1009
1009

















































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































































Artículos relacionados
-
Epson T3 SCARA Robots Manual de usuario
-
Epson RS4 SCARA Robots Guía del usuario
-
-
Epson T6 SCARA Robots Manual de usuario
-
Epson IntelliFlex Feeding System Manual de usuario
-
-
-
-
Epson LS3 SCARA Robots Manual de usuario
-
Epson GX4B SCARA Robots Manual de usuario
