
Mod. 6 EM204R4257F
ROBOT SCARA
Serie LS10-B
MANUAL DEL MANIPULADOR
CPD-60410

MANUAL DEL MANIPULADOR
Serie LS10
-
B Mod.
6

LS10-B Mod.6 i
ROBOT SCARA
Manual del manipulador de la serie
LS10-B
Mod. 6
Copyright 2018-2020 SEIKO EPSON CORPORATION. Todos los derechos reservados.

ii
PRÓLOGO
Gracias por comprar nuestros productos de robot.
Este manual contiene la información necesaria para el uso correcto del manipulador.
Lea atentamente este manual y otros manuales relacionados antes de instalar el sistema de
robot.
Mantenga este manual a la mano para un acceso fácil en todo momento.
GARANTÍA
El manipulador y sus piezas opcionales se envían a nuestros clientes solo después de ser
sometidas a los controles de calidad, pruebas e inspecciones más estrictos para certificar su
cumplimiento con nuestras exigentes normas de rendimiento.
Los productos que tengan un mal funcionamiento como resultado de la manipulación u
operación normales se repararán en forma gratuita durante el período normal de la garantía.
(Comuníquese con el proveedor de su región para obtener información sobre el período de
garantía).
Sin embargo, se cobrarán al cliente las reparaciones en los siguientes casos (aunque sucedan
dentro del período de garantía):
1.
Daño o mal funcionamiento provocados por un uso inadecuado que no se describe en
este manual o por uso descuidado.
2.
Mal funcionamiento provocado por el desmontaje no autorizado del producto por parte
de los clientes.
3.
Daños debido a ajustes inadecuados o a intentos de reparación no autorizados.
4.
Daño provocado por desastres naturales, como terremotos, inundaciones, etc.
Advertencias, precauciones, uso:
1.
Si el manipulador o los equipos relacionados no se usan de acuerdo con las condiciones
de uso y las especificaciones del producto descritas en los manuales, esta garantía queda
nula.
2.
Si no sigue las ADVERTENCIAS y PRECAUCIONES de este manual, no podemos
hacernos responsables de ningún mal funcionamiento o accidente, incluso si tienen como
resultado lesiones o la muerte.
3.
No podemos prever todos los posibles peligros y consecuencias. Por lo tanto, este manual
no puede advertir al usuario de todos los posibles peligros.

LS10-B Mod.6 iii
MARCAS COMERCIALES
Microsoft, Windows y el logotipo de Windows son marcas registradas o marcas comerciales
de Microsoft Corporation en los Estados Unidos y otros países. Otras marcas y nombres de
productos son marcas comerciales o marcas registradas de sus respectivos titulares.
AVISO
Ninguna parte de este manual se puede copiar o reproducir sin autorización.
El contenido de este manual está sujeto a cambios sin previo aviso.
Notifíquenos si encuentra errores en este manual o si tiene comentarios con respecto a su
contenido.
FABRICANTE
INFORMACIÓN DE CONTACTO
La información de contacto se describe en “PROVEEDORES” en las primeras páginas del
siguiente manual:
Seguridad e instalación del sistema de robot Lea primero este manual

iv
En relación con la eliminación de la batería
La etiqueta con el basurero con ruedas tachado que se puede encontrar en el producto indica
que este producto y las baterías incorporadas no se deben eliminar en el flujo normal de
desechos domésticos. Para evitar los posibles daños ambientales o a la salud humana, separe
este producto y las baterías de otros flujos de desechos para garantizar que se puedan reciclar
de una manera ambientalmente correcta. Para conocer más detalles acerca de las
instalaciones de recolección, comuníquese con la oficina gubernamental local o con el
vendedor minorista donde compró este producto. El uso de los símbolos químicos Pb, Cd o
Hg indica si estos metales se usan en la batería.
Esta información solo se aplica a los clientes de la Unión Europea, de acuerdo con la
DIRECTIVA 2006/66/EC DEL PARLAMENTO EUROPEO Y DEL CONSEJO DEL 6 de
septiembre de 2006 acerca de las baterías y acumuladores y de las baterías y acumuladores
de desecho y por la que se deroga la Directiva 91/157/EEC y la legislación, transponiéndose
e implementándose en diversos sistemas legales nacionales.
Para otros países, comuníquese con su gobierno local para investigar la posibilidad de
reciclar su producto.
El procedimiento de retiro y reemplazo de la batería se describe en los siguientes manuales:
Sección de mantenimiento del manual del controlador

LS10-B Mod.6 v
Antes de leer este manual
Esta sección describe lo que debería saber antes de leer este manual.
Estructura del sistema de control
Los manipuladores de la serie LS10-B se puede usar con las siguientes combinaciones de
controladores y software.
Controlador : RC90-B
Software : EPSON RC+ 7.0 Ver. 7.4.2 o posterior
Encienda/apague el controlador
Cuando vea la instrucción “Encienda/apague el controlador” en este manual, asegúrese de
encender o apagar todos los componentes del hardware. Para la composición del controlador,
consulte la tabla anterior.
Forma de los motores
Es posible que la forma de los motores que se usan para el manipulador que está usando sea
distinta a la forma de los motores que se describen en este manual debido a las
especificaciones.
Configuración con el software
Este manual contiene procedimientos de configuración mediante el uso de software. Están
marcados con el siguiente ícono.
Figuras en este manual
Las figuras del manipulador indicadas en este manual son básicamente del manipulador de
modelo estándar. A menos que se entreguen instrucciones especiales, las especificaciones
del modelo estándar y del modelo para salas blancas son las mismas.
Imágenes en este manual
Las imágenes e ilustraciones del manipulador en este manual pueden variar, según la fecha
de envío y las especificaciones.
EPSON
RC+

vi

ÍNDICE
LS10-B Mod.6 vii
Configuración y operación
1. Seguridad 3
1.1 Convenciones .......................................................................................... 3
1.2 Seguridad en el diseño y la instalación ................................................... 4
1.2.1 Resistencia de la ranura de tornillo esférico ................................ 5
1.3 Seguridad en la operación ....................................................................... 6
1.4 Parada de emergencia ............................................................................ 8
1.5 Movimiento de emergencia sin fuerza motriz ........................................ 10
1.6 Configuración ACCELS para movimientos de CP ................................. 11
1.7 Etiquetas de advertencia ....................................................................... 12
2. Especificaciones 14
2.1 Características de los manipuladores de la serie LS10-B ..................... 14
2.2 Número de modelo ................................................................................ 15
2.3 Nombres de piezas y dimensiones exteriores ....................................... 16
2.3.1 Modelo estándar (LS10-B***S) .................................................. 16
2.3.2 Modelo para salas blancas (LS10-B***C) .................................. 18
2.4 Especificaciones .................................................................................... 20
2.5 Cómo configurar el modelo ................................................................... 22
3. Entornos e instalación 23
3.1 Condiciones ambientales ...................................................................... 23
3.2 Mesa base ............................................................................................. 24
3.3 Dimensiones de montaje ....................................................................... 25
3.4 Desembalaje y transporte ...................................................................... 26
3.5 Procedimiento de instalación ................................................................. 27
3.5.1 Modelo estándar ........................................................................ 27
3.5.2 Modelo para salas blancas ........................................................ 28
3.6 Conexión de los cables ......................................................................... 28
3.7 Cables y tubos neumáticos del usuario ................................................. 30
3.8 Reubicación y almacenamiento ............................................................. 31
3.8.1 Precauciones para la reubicación y el almacenamiento ............ 31
3.8.2 Reubicación ............................................................................... 32
4. Configuración de los efectores finales 33
4.1 Instalación de un efector final ................................................................ 33
4.2 Instalación de cámaras y válvulas ......................................................... 34
4.3 Configuración de peso e inercia ............................................................ 35
4.3.1 Configuración de peso ............................................................... 35
4.3.2 Configuración de inercia ............................................................ 37
4.4 Precauciones para la aceleración/desaceleración automática de la
articulación n.º 3 .................................................................................... 42
5. Rango de movimiento 43
5.1 Configuración del rango de movimiento con rango de pulsos ............... 43

ÍNDICE
viii
5.1.1 Rango de pulsos máximo de la articulación n.º 1 ...................... 44
5.1.2 Rango de pulsos máximo de la articulación n.º 2 ...................... 44
5.1.3 Rango de pulsos máximo de la articulación n.º 3 ...................... 45
5.1.4 Rango de pulsos máximo de la articulación n.º 4 ...................... 45
5.2 Configuración del rango de movimiento con topes mecánicos ............. 46
5.2.1 Configuración de los topes mecánicos de las articulaciones
n.º 1 y n.º 2 ........................................................................................... 47
5.2.2 Configuración del tope mecánico de la articulación n.º 3 .......... 50
5.3 Configuración del rango cartesiano (rectangular) en el sistema de
coordenadas XY del manipulador ......................................................... 52
5.4 Rango de movimiento estándar ............................................................ 53
Mantenimiento
1. Mantenimiento de seguridad 58
2. Mantenimiento general 59
2.1 Inspección de mantenimiento ............................................................... 59
2.1.1 Programa de inspección de mantenimiento .............................. 59
2.1.2 Punto de inspección .................................................................. 60
2.2 Revisión (Reemplazo de piezas) .......................................................... 61
2.3 Engrase ................................................................................................ 63
2.4 Apretar pernos de cabeza hueca hexagonal ........................................ 64
2.5 Orígenes coincidentes .......................................................................... 64
2.6 Distribución de las piezas de mantenimiento ........................................ 65
3. Cubiertas 66
3.1 Cubierta superior del brazo ................................................................... 67
3.2 Cubierta inferior del brazo ..................................................................... 68
3.3 Placa del conector ................................................................................ 68
3.4 Subplaca del conector .......................................................................... 70
3.5 Placa del usuario .................................................................................. 71
4. Cable 72
4.1 Reemplazo de la unidad de cable ......................................................... 72
4.2 Diagramas de cableado ........................................................................ 77
4.2.1 Cable de señal .......................................................................... 77
4.2.2 Cable de alimentación ............................................................... 78
4.2.3 Cable de usuario ....................................................................... 79
4.2.4 Color de los cables .................................................................... 79
4.3 Reemplazo del cable M/C ..................................................................... 80
5. Articulación n.º 1 86
5.1 Reemplazo del motor de la articulación n.º 1 ........................................ 87
5.2 Reemplazo de la unidad de engranaje reductor de la articulación n.º 1 91

ÍNDICE
LS10-B Mod.6 ix
6. Articulación n.º 2 94
6.1 Reemplazo del motor de la articulación n.º 2 ........................................ 95
6.2 Reemplazo de la unidad de engranaje reductor de la articulación n.º 2 99
7. Articulación n.º 3 103
7.1 Reemplazo del motor de la articulación n.º 3 ...................................... 104
7.2 Reemplazo de la correa de regulación ................................................ 109
7.3 Reemplazo del freno ........................................................................... 114
7.4 Comprobación de la tensión de la correa de regulación (Correa Z) .... 118
8. Articulación n.º 4 119
8.1 Reemplazo del motor de la articulación n.º 4 ...................................... 120
8.2 Reemplazo de la correa de regulación ................................................ 124
8.2.1 Correa U2 ................................................................................ 125
8.2.2 Correa U1 ................................................................................ 132
8.3 Reemplazo del freno ........................................................................... 136
8.4 Comprobación de la tensión de la correa de regulación (Correas U1, U2)
............................................................................................................ 139
9. Fuelle 140
10. Unidad de ranura de tornillo esférico 142
10.1 Engrase de la unidad de ranura de tornillo esférico .......................... 142
10.1.1 Modelo estándar .................................................................... 143
10.1.2 Modelo para salas blancas .................................................... 144
10.2 Reemplazo de la unidad de ranura de tornillo esférico ...................... 145
11. Placas 148
11.1 Reemplazo de la placa del convertidor .............................................. 149
11.2 Reemplazo de la placa de control ...................................................... 151
12. Luz LED 152
13. Calibración 153
13.1 Acerca de la calibración .................................................................... 153
13.2 Procedimiento de calibración ............................................................ 154
13.3 Calibración precisa de la articulación n.º 2 ........................................ 164
13.4 Procedimiento de calibración sin usar el asistente de calibración ..... 166
14. Lista de piezas de mantenimiento 170

ÍNDICE
x

Configuración y operación
Este volumen contiene información para la configuración y la operación de los manipuladores
de la serie LS10-B.
Lea meticulosamente este volumen antes de configurar y operar los manipuladores.


Configuración y operación
LS10-B Mod.6 3
1. Seguridad
Personal calificado deberá realizar la instalación y el transporte de los manipuladores y
equipos de robot, los que deberán cumplir todos los códigos nacionales y locales. Lea este
manual y otros manuales relacionados antes de instalar el sistema de robot o antes de
conectar los cables.
Mantenga este manual a la mano para un acceso fácil en todo momento.
1.1 Convenciones
En todo este manual se indican consideraciones importantes de seguridad con los siguientes
símbolos. Asegúrese de leer las descripciones que se muestran con cada símbolo.
ADVERTENCIA
Este símbolo indica que existe un peligro de posibles lesiones
graves o la muerte si no se siguen adecuadamente las
instrucciones asociadas.
ADVERTENCIA
Este símbolo indica que existe un peligro de posibles lesiones
graves o la muerte debido a descarga eléctrica si no se siguen
adecuadamente las instrucciones asociadas.
PRECAUCIÓN
Este símbolo indica que existe un peligro de posibles daños a
las personas o daños físicos a los equipos e instalaciones si no
se siguen adecuadamente las instrucciones asociadas.

Configuración y operación
4 LS10-B Mod.6
1.2 Seguridad en el diseño y la instalación
Solo personal capacitado debe diseñar e instalar el sistema de robot. El personal
capacitado se define como aquellos quienes hayan tomado clases de capacitación
en sistemas de robot y capacitación en mantenimiento proporcionadas por un
fabricante, distribuidor o empresa representante local, o aquellos quienes
comprendan cabalmente los manuales y tengan el mismo nivel de conocimiento y
habilidades que aquellos que hayan completado los cursos de capacitación.
Para garantizar la seguridad, se debe instalar una protección para el sistema de
robot. Para conocer detalles acerca de la protección, consulte las Precauciones de
instalación y diseño en el capítulo Seguridad del Manual del usuario de EPSON
RC+.
Los siguientes elementos son precauciones de seguridad para el personal de
diseño:
ADVERTENCIA
■
El personal que diseñe o construya el sistema de robot con este producto debe
leer el capítulo Seguridad en el Manual del usuario de EPSON RC+ para
comprender los requisitos de seguridad antes de diseñar o construir el sistema
de robot. Diseñar o construir el sistema de robot sin comprender los requisitos de
seguridad es extremadamente peligroso y puede provocar lesiones corporales
graves o daños graves en el sistema de robot, además de causar problemas
graves de seguridad.
■
El manipulador y el controlador se deben usar en las condiciones ambientales
que se describen en sus respectivos manuales. Este producto se ha diseñado y
fabricado estrictamente para su uso en un entorno normal en interiores. El uso
del producto en un entorno que supere las condiciones ambientales especificadas
no solo acortará la vida útil del producto, sino que además puede causar graves
problemas de seguridad.
■
El sistema de robot se debe usar de acuerdo con los requisitos de instalación
descritos en los manuales. Si no se usa el sistema de robot de acuerdo con los
requisitos de instalación no solo acortará la vida útil del producto, sino que
además puede causar graves problemas de seguridad.
Las precauciones adicionales para la instalación se mencionan en el capítulo
Configuración y operación: 3. Entornos e instalación. Lea atentamente este
capítulo para comprender los procedimientos de instalación segura antes de
instalar los robots y los equipos robóticos.

Configuración y operación
LS10-B Mod.6 5
1.2.1 Resistencia de la ranura de tornillo esférico
Si se aplica a la ranura de tornillo esférico una carga que supere el valor permisible, es
posible que no funcione correctamente debido a la deformación o el quiebre del eje. Si se
aplica a la ranura de tornillo esférico la carga que supera el valor permisible, es necesario
reemplazar la unidad de ranura de tornillo esférico.
Las cargas permisibles varían según la distancia donde se aplica la carga. Para calcular la
carga permisible, consulte la fórmula de cálculo a continuación.
[Momento de flexión permisible]
M=50.000 N∙mm
[Momento]
M=F∙L
=
100∙200
=
20.000 N mm
Ejemplo:
Si se aplica una carga de 100 N
(10,2 kgf) a 200 mm desde
el extremo de la tuerca de la ranura
Extremo
de la
tuerca de
la ranura
F
L

Configuración y operación
6 LS10-B Mod.6
1.3 Seguridad en la operación
Los siguientes elementos son precauciones de seguridad para el personal
operador calificado:
ADVERTENCIA
■
Lea atentamente la sección Requisitos relacionados con la seguridad en el
capítulo Seguridad del manual Seguridad e instalación antes de operar el sistema
de robot. Operar el sistema de robot sin comprender los requisitos de seguridad
es extremadamente peligroso y puede provocar lesiones corporales graves o
daños graves en el sistema de robot.
■
No ingrese al área de funcionamiento del manipulador mientras la energía hacia
el sistema de robot esté encendida. Ingresar al área de funcionamiento con la
energía encendida es extremadamente peligroso y puede provocar graves
problemas de seguridad, ya que es posible que el manipulador se mueva, incluso
si parece estar detenido.
■
Antes de operar el sistema de robot, asegúrese de que no haya nadie al interior
del área protegida. El sistema de robot se puede operar en el modo de
enseñanza, incluso cuando alguien está al interior del área protegida.
El movimiento del manipulador siempre está en estado restringido (baja velocidad
y baja potencia) para garantizar la seguridad de un operador. Sin embargo, operar
el sistema de robot mientras alguien está al interior del área protegida es
extremadamente peligroso y puede provocar problemas graves de seguridad en
caso de que el manipulador se mueva de manera inesperada.
■
Presione inmediatamente el interruptor de parada de emergencia siempre que el
manipulador se mueva de manera anormal mientras se opera el sistema de robot.
Continuar con la operación mientras el manipulador se mueve de manera anormal
es extremadamente peligroso y puede provocar lesiones corporales graves o
daños graves en el sistema de robot.
ADVERTENCIA
■
Para cortar la energía hacia el sistema de robot, desconecte el enchufe de la
fuente de energía. Asegúrese de conectar el cable de alimentación de CA a un
tomacorriente.
NO lo conecte directamente a la fuente de energía de la fábrica.
■
Antes de realizar cualquier procedimiento de reemplazo, apague el controlador y
los equipos relacionados, luego desconecte el enchufe de la fuente de
alimentación.
Realizar cualquier procedimiento de reemplazo con la energía encendida es
extremadamente peligroso y puede provocar una descarga eléctrica o el mal
funcionamiento del sistema de robot.
■
No conecte ni desconecte los conectores del motor mientras el sistema de robot
esté encendido. Conectar o desconectar los conectores del motor con la energía
encendida es extremadamente peligroso y puede provocar lesiones corporales
graves, ya que el manipulador puede moverse de manera anormal; además,
puede provocar descargas eléctricas y el mal funcionamiento del sistema de
robot.

Configuración y operación
LS10-B Mod.6 7
PRECAUCIÓN
■
Cuando sea posible, solo una persona debería operar el sistema de robot. Si es
necesario operar el sistema de robot con más de una persona, asegúrese de que
todas las personas que participen se comuniquen entre sí con respecto a lo que
están haciendo y tomen todas las precauciones de seguridad necesarias.
■
Articulaciones n.º 1, n.º 2 y n.º 4:
Si las articulaciones se operan repetidamente con un ángulo de funcionamiento
inferior a 5 grados, es posible que se dañen prematuramente, ya que es probable
que los cojinetes provoquen una escasez de capa de aceite en dicha situación.
Para evitar las averías tempranas, mueva las articulaciones en más de 50 grados
aproximadamente cinco a diez veces por día.
Articulación n.º 3:
Si el movimiento hacia arriba y hacia abajo de la mano es menos que LS10-B:
50 mm, mueva la articulación la mitad de la carrera máxima cinco a diez veces
por día.
■
La oscilación (resonancia) puede ocurrir continuamente en el movimiento a baja
velocidad del manipulador (Velocidad: aprox. 5 a 20 %), dependiendo de la
combinación de orientación del brazo y carga del efector final. La oscilación surge
de la frecuencia de oscilación natural del brazo y se puede controlar con las
siguientes medidas.
Cambiar la velocidad del manipulador
Cambiar los puntos de enseñanza
Cambiar la carga del efector final

Configuración y operación
8 LS10-B Mod.6
1.4 Parada de emergencia
Si el manipulador se mueve de manera anormal durante su operación, presione
inmediatamente el interruptor de parada de emergencia. Se detiene la alimentación al motor,
y el brazo se detiene en la distancia más corta con el freno dinámico y el freno mecánico.
No presione el interruptor de parada de emergencia si no es necesario mientras el
manipulador está en operación. Presionarlo durante la operación hace que se accionen los
frenos. Esto acortará la vida útil de los frenos debido al desgaste de las placas de fricción.
Vida útil normal del freno: Aproximadamente 2 años (cuando los frenos se usan 100
veces/día)
Para colocar el sistema en modo de emergencia durante una operación normal, presione el
interruptor de parada de emergencia cuando el manipulador no esté en movimiento.
Consulte el manual del controlador para conocer las instrucciones acerca de cómo conectar
el circuito del interruptor de parada de emergencia.
No APAGUE el controlador mientras esté funcionando el manipulador.
Si intenta detener el manipulador en situaciones de emergencia como una “Protección
abierta”, asegúrese de detenerlo usando el interruptor de parada de emergencia del
controlador.
Si el manipulador se detiene cuando apaga el controlador mientras está operando, se pueden
producir los siguientes problemas.
Reducción de la vida útil y daños a la unidad de engranaje reductor
Espacio de posición en las articulaciones
Además, si se forzó el apagado del controlador por un corte de energía o sucesos similares
mientras el manipulador estaba en operación, asegúrese de revisar los siguientes puntos
después de restaurar la energía.
Si el engranaje reductor está dañado o no
Si las articulaciones están en las posiciones correctas o no
Si hay un espacio de posición, realice una calibración con el procedimiento descrito en
Mantenimiento 13. Calibración en este manual.
Antes de usar el interruptor de parada de emergencia, tenga en cuenta lo siguiente.
- El interruptor de parada de emergencia (E-STOP) se debe usar para detener el
manipulador solo en caso de emergencia.
- Para que el manipulador detenga la operación del programa cuando no está en una
emergencia, use los comandos Pause (Pausas) (detención) o STOP (Detener)
(Detención del programa).
Los comandos Pause y STOP no apagan los motores. Por lo tanto, el freno no funciona.
- Para el Sistema de protección, no utilice el circuito para E-STOP.
Para conocer detalles acerca del sistema de protección, consulte los siguientes manuales.
Manual del usuario de EPSON RC+
2. Seguridad - Precauciones de diseño e instalación - Sistema de protección
Seguridad e instalación
2.6 Conexión al conector de EMERGENCIA
Para revisar problemas con el freno, consulte los siguientes manuales.
Manual del manipulador Mantenimiento
2.1.2 Punto de inspección - Inspección mientras la energía está encendida
(El manipulador está en operación)
Seguridad e instalación
5.1.1 Manipulador - Inspección mientras la energía está encendida
(El manipulador está en funcionamiento)

Configuración y operación
LS10-B Mod.6 9
Distancia de operación libre en una emergencia
El manipulador en funcionamiento no puede detenerse inmediatamente después de presionar
el interruptor de parada de emergencia.
A continuación, se muestra el tiempo, el ángulo y la distancia de funcionamiento libre del
manipulador. Sin embargo, recuerde que los valores dependen de las siguientes condiciones.
Peso del efector final Configuración del peso
Peso de la pieza de trabajo Configuración de Speed (Velocidad)
Pose de operación Configuración de la aceleración
Condiciones para la medición
LS10-B****
Configuración Accel
100
Configuración Speed
100
Carga [kg]
10
Configuración Weight
10
Articulación n.º 1
Punto de
detención
Punto donde se
ingresa la señal
de parada de
emergencia
Punto objetivo
Punto de
inicio de la
operación
Articulación n.º 2
Controlador
RC90-B
Manipulador
LS10-B60**
LS10-B70**
LS10-B80**
Tiempo de funcionamiento
libre
Articulación n.º 1 +
Articulación n.º 2 [s]
0,7
0,9
0,7
Articulación n.º 3 [s]
0,2
Ángulo de funcionamiento
libre
Articulación n.º 1 [°]
35
75
65
Articulación n.º 2 [°]
115
105
55
Articulación n.º 1+
Articulación n.º 2 [°]
120
135
90
Distancia de
funcionamiento libre
Articulación n.º 3 [mm]
50

Configuración y operación
10 LS10-B Mod.6
1.5 Movimiento de emergencia sin fuerza motriz
Cuando se coloca el sistema en modo de emergencia, empuje el brazo o la articulación del
manipulador con la mano, como se muestra a continuación:
Brazo n.º 1 Empuje el brazo con la mano.
Brazo n.º 2 Empuje el brazo con la mano.
Articulación n.º 3 La articulación no se puede mover con la mano hacia arriba ni
hacia abajo hasta que se haya liberado el freno electromagnético que
se aplicó a la articulación. Mueva la articulación hacia arriba y hacia
abajo mientras presiona el desbloqueo del freno.
Articulación n.º 4 El eje no se puede girar con la mano hasta que se haya
aplicado el freno electromagnético al eje que se había liberado.
Mueva el eje mientras presiona el desbloqueo del freno.
Desbloqueo del freno de
Articulación n.º 3, n.º 4
Articulación n.º 1
(giratoria)
Articulación n.º 2
(giratoria)
Articulación n.º 3
(arriba y abajo)
Articulación n.º 4
(giratoria)
Brazo n.º 1
Brazo n.º 2
+
+
+
+
Eje
(Figura: LS10-B702S)
El desbloqueo del freno solo afecta a las articulaciones n.º 3 y n.º 4. Cuando se presiona el
desbloqueo del freno en modo de emergencia, se libera simultáneamente el freno de las
articulaciones n.º 3 y n.º 4.
Tenga cuidado de que el eje no se caiga ni gire mientras se presiona el desbloqueo del freno, ya
que es posible que el eje baje debido al peso del efector final.
NOTA

Configuración y operación
LS10-B Mod.6 11
1.6 Configuración ACCELS para movimientos de CP
Cuando opere el manipulador en movimiento de CP:
Se puede modificar automáticamente la aceleración y la desaceleración, dependiendo de
la carga de la punta y de la altura del eje Z, a fin de evitar los daños a la ranura de tornillo
esférico.
La corrección de ACCELS se realiza con la configuración de WEIGHT. Si la configuración
de Weight no es la adecuada para la carga de la punta, se produce el siguiente problema.
- Disminución de la vida útil y daños de la ranura de tornillo esférico
Ejemplo:
El valor máximo de ACCELS se corrige automáticamente, dependiendo de la altura del
eje Z.
El siguiente es un ejemplo de los valores que son correctos para 100 mm (altura del eje
Z).
Valores máximos de corrección de ACCELS por altura del eje Z y carga de la
punta
Altura del eje Z
(mm)
Carga de la punta
3 kg
6 kg
10 kg
Z = 0
25000 o menos
25000 o menos
25000 o menos
Z = 100
18000 o menos
Z = 200
18000 o menos
11000 o menos
Z = 300
13000 o menos
7500 o menos
Z
Eje Z altura 0
(Posición de origen)
Si el manipulador se opera en movimiento CP con los valores incorrectos, asegúrese de
revisar lo siguiente:
- Si el eje de ranura de tornillo esférico está deformado o doblado
NOTA

Configuración y operación
12 LS10-B Mod.6
1.7 Etiquetas de advertencia
El manipulador tiene las siguientes etiquetas de advertencia.
Las etiquetas de advertencia están adheridas en los lugares donde existen riesgos específicos.
Asegúrese de acatar las descripciones y advertencias de las etiquetas para operar y realizar
mantenimiento al manipulador de manera segura.
No rasgue, dañe ni quite las etiquetas de advertencia. Sea meticuloso cuando manipule las
piezas o unidades a las que están adheridas las siguientes etiquetas de advertencia, además
de sus áreas circundantes.
Ubicación
Etiqueta de advertencia
NOTA
A
Antes de soltar los tornillos de la base de
montaje, afirme el brazo y fíjelo firmemente con
una correa para evitar que las manos o dedos
queden atrapados en el manipulador.
B
No ingrese al área de funcionamiento mientras el
manipulador esté en movimiento. El brazo del
robot puede chocar contra el operador. Esto es
extremadamente peligroso y puede provocar
problemas graves de seguridad.
C
Hay voltaje peligroso mientras el manipulador
está encendido. Para evitar las descargas
eléctricas, no toque las piezas eléctricas
internas.
D
Su mano o sus dedos pueden quedar atrapados
entre el eje y la cubierta si coloca la mano cerca
de piezas móviles.
* Los manipuladores con fuelle no tienen esta
etiqueta, ya que no existe peligro de que manos
o dedos queden atrapados.
Ubicación
Etiqueta de firma
NOTA
E
N.º de serie del manipulador

Configuración y operación
LS10-B Mod.6 13
LS10-B
(Figura: LS10-B702S)

Configuración y operación
14 LS10-B Mod.6
2. Especificaciones
2.1 Características de los manipuladores de la serie LS10-B
Los manipuladores de la serie LS10-B son manipuladores avanzados en busca de alta
velocidad y rendimiento rentable. Las características de los manipuladores de la serie LS10-
B son las siguientes:
Gran capacidad
Soporta el momento permisible del eje U de hasta 0,30 kg m
2
.
Manejan grandes cargas de manera estable gracias al control optimizado según cada
carga.
Mejora en el tiempo de ciclo gracias al movimiento de alta velocidad
Mejora el tiempo de ciclo de movimientos de largo rango mediante el reajuste de la
velocidad más alta.
Mejora el tiempo de ciclo de los movimientos delicados gracias a la velocidad de
aceleración / desaceleración optimizada para cada carga útil y tecnología de
paralización.
El conector Ethernet para el cable de la cámara se incluye de forma predeterminada
El conector Ethernet se incluye en el brazo n.º 2 y en la base del manipulador de forma
predeterminada.
Más fácil para montar una cámara (opción: Vision Guide) que en los modelos
convencionales.
Simplifica la conexión y la desconexión del cable M/C
Conecte el cable M/C y el cable al interior del manipulador con el conector.
Fácil de conectar y desconectar el cable M/C y mayor facilidad para transportar el
manipulador que en los modelos convencionales.

Configuración y operación
LS10-B Mod.6 15
2.2 Número de modelo
LS10-B60 2 S
Entorno
S
: Estándar
C
: Sala blanca
Carrera de la articulación n.º 3
2
: 200 mm: Modelo estándar
: 170 mm: Modelo para salas blancas (con fuelle)
3
: 300 mm: Modelo estándar
: 270 mm: Modelo para salas blancas (con fuelle)
Longitud del brazo
60
: 600 mm
70
: 700 mm
80
: 800 mm
Carga útil
10
: 10 kg
Entorno
Modelo para salas blancas
Este modelo tiene características adicionales que reducen el polvo emitido por el
manipulador, lo que permite el uso en entornos de salas blancas.
Para conocer detalles acerca de las especificaciones, consulte Configuración y operación:
2.4 Especificaciones.
Modelos
Carga útil
Longitud del
brazo
Entorno
Carrera de la
articulación n.º 3
Número del
modelo
10 kg
600 mm
Estándar
200 mm
LS10-B602S
300 mm
LS10-B603S
Sala blanca
170 mm
LS10-B602C
270 mm
LS10-B603C
700 mm
Estándar
200 mm
LS10-B702S
300 mm
LS10-B703S
Sala blanca
170 mm
LS10-B702C
270 mm
LS10-B703C
800 mm
Estándar
200 mm
LS10-B802S
300 mm
LS10-B803S
Sala blanca
170 mm
LS10-B802C
270 mm
LS10-B803C

Configuración y operación
16 LS10-B Mod.6
2.3 Nombres de piezas y dimensiones exteriores
2.3.1 Modelo estándar (LS10-B***S)
Desbloqueo del freno de
Articulación n.º 3, n.º 4
Brazo n.º 1
Brazo n.º 2
Base
Eje
Luz LED
Etiqueta de firma
(N.º de serie del
manipulador)
Cable de
alimentación
Cable de señal
Conectores rápidos
(azul) para tubos
neumáticos de ø4 mm
Conectores rápidos
(azul) para tubos
neumáticos de ø6 mm
Conectores rápidos
(blanco) para tubos
neumáticos de ø6 mm
Conector del
usuario (Conector
D-sub de 15 pines)
Conector Ethernet
- El desbloqueo del freno solo afecta a las articulaciones n.º 3 y n.º 4. Cuando se presiona
el desbloqueo del freno en modo de emergencia, se liberan simultáneamente los frenos
de las articulaciones n.º 3 y n.º 4.
- Mientras la luz LED esté encendida, se está aplicando corriente al manipulador.
Realizar trabajos con la energía encendida es extremadamente peligroso y puede
provocar una descarga eléctrica o el mal funcionamiento del sistema de robot.
Asegúrese de apagar el controlador antes de realizar trabajos de mantenimiento.
NOTA

Configuración y operación
LS10-B Mod.6 17
LS10-B***S (Modelo estándar)
LS10-B602S
LS10-B702S
LS10-B802S
LS10-B603S
LS10-B703S
LS10-B803S
a
225
325
425
225
325
425
b
577
577
577
677
677
677
c
200
200
200
300
300
300
d
53
53
53
153
153
153
e
565
580
580
565
580
580
agujero pasado
agujero pasado
profundidad 6
Indica la posición del tope mecánico
90 o más
Espacio para los cables
profundidad 10
profundidad 10
profundidad 10
agujero pasado
agujero pasado
Corte plano de 1 mm
Agujero cónico Ø3,90°
Agujero pasado máx. Ø18
Diámetro del eje Ø25 h7
Diámetro del tope mecánico Ø 39,5
Vista detallada desde A

Configuración y operación
18 LS10-B Mod.6
2.3.2 Modelo para salas blancas (LS10-B***C)
Las siguientes figuras muestran las piezas adicionales y las especificaciones para el modelo
para salas blancas, si se compara con la apariencia del modelo estándar.
Fuelle superior
Fuelle inferior
Puerto de escape

Configuración y operación
LS10-B Mod.6 19
LS10-B***C (Modelo para salas blancas)
LS10-B602C
LS10-B702C
LS10-B802C
LS10-B603C
LS10-B703C
LS10-B803C
a
225
325
425
225
325
425
b
627
627
627
727
727
727
c
170
170
170
270
270
270
d
53
53
53
153
153
153
e
565
580
580
565
580
580
agujero pasado
profundidad 6
profundidad11
agujero pasado
Indica la posición del tope mecánico
90 o más
Espacio para los cables
profundidad 10
profundidad 10
agujero pasado
profundidad 10
Corte plano de 1 mm
Agujero cónico Ø4,90°
Agujero pasado máx. Ø18
Diámetro del eje Ø25 h7
Diámetro del tope mecánico Ø 39,5
D.E. de fuelle Ø90
Vista detallada desde A

Configuración y operación
20 LS10-B Mod.6
2.4 Especificaciones
Elemento
LS10-B60**
LS10-B70**
LS10-B80**
Longitud del brazo
Brazo n.º 1, n.º 2
600 mm
700 mm
800 mm
Brazo n.º 1
225 mm
325 mm
425 mm
Brazo n.º 2
375 mm
Velocidad de operación
máx. *1
Articulaciones n.º 1+ n.º 2
9100 mm/s
9800 mm/s
10500 mm/s
Articulación n.º 3
1100 mm/s
Articulación n.º 4
2700 °/s
Repetibilidad
Articulaciones n.º
1+ n.º 2
0,02 mm
0,025 mm
Articulación n.º 3
0,01 mm
Articulación n.º 4
0,01 °
Carga útil (Carga)
Nominal
5 kg
Máx.
10 kg
Momento de inercia
permisible de la
articulación n.º 4 *2
Nominal
0,02 kg·m
2
Máx.
0,3 kg·m
2
Resolución
Articulación n.º 1
0.000275 °/pulso
Articulación n.º 2
0.000439 °/pulso
Articulación n.º 3
0,000740 mm/pulso
Articulación n.º 4
0.001674 °/pulso
Mano
Diámetro del eje
ø 25 mm
Agujero pasado
ø 18 mm
Agujero de montaje
150 150 mm
4-M8
Peso (no se incluyen los cables)
22 kg (48,5 lb)
22 kg (48,5 lb)
23 kg (50,7 lb)
Método de transmisión
Todas las
articulaciones
Servomotor de CA
Capacidad
nominal del motor
Articulación n.º 1
520 W
Articulación n.º 2
520 W
Articulación n.º 3
200 W
Articulación n.º 4
150 W
Opción
Entorno de instalación
Sala blanca *3
Fuerza hacia abajo de la articulación n.º 3
200 N
Cable instalado para uso del cliente
15 (15 pines: D-sub)
Cat.5e equivalente a 8 pines (RJ45)
Tubo neumático instalado
para uso del cliente
2 tubos neumáticos (ø6 mm): 0,59 MPa (6 kgf/cm
2
: 86 psi)
1 tubo neumático (ø4 mm): 0,59 MPa (6 kgf/cm
2
: 86 psi)
Requisitos
ambientales
Temp. ambiente
5 a 40 °C (con variación mínima de temperatura)
Humedad ambiental relativa
10 a 80 % (sin condensación)
Nivel de ruido *4
L
Aeq
= 70 dB (A) o inferior
Controlador al que se aplica
RC90-B
Valor asignable
( ) Valores
predeterminados
Speed
1 ~ (4) ~ 100
Accel *5
1 ~ (10) ~ 120
SpeedS
1 ~ (50) ~ 2000
AccelS
1 ~ (200) ~ 25000
Fine
0 ~ (1250) ~ 65535
Weight
0,375 ~ (5,375) ~ 10,375
Estándar de seguridad
Marca CE
Directiva EMC, Directiva de maquinaria, Directiva RoHS
Marca KC, Marca KCs
ANSI/RIA R15.06
NFPA 79

Configuración y operación
LS10-B Mod.6 21
Elemento
LS10-B**2S
LS10-B**2C
LS10-B**3S
LS10-B**3C
Rango
máximo de
movimiento
Articulación n.º 1
132 °
Articulación n.º 2
150 °
Articulación n.º 3
200 mm
170 mm
300 mm
270 mm
Articulación n.º 4
360 °
Rango
máximo de
pulsos
Articulación n.º 1
152918 ~ 808278
Articulación n.º 2
341334
Articulación n.º 3
270336 ~ 0
229786 ~ 0
405504 ~ 0
364954 ~ 0
Articulación n.º 4
215040
*1: En caso de un comando PTP.
La velocidad máxima de funcionamiento para el comando CP es de 2000 mm/s en el plano horizontal.
*2: En el caso donde el centro de gravedad esté en el centro de la articulación n.º 4.
Si el centro de gravedad no está en el centro de la articulación n.º 4, defina el parámetro con la configuración
de INERTIA (Inercia).
*3: El sistema de escape en el manipulador del modelo para salas blancas extrae aire del interior de la base y
del interior de la cubierta del brazo al mismo tiempo.
Una grieta u otra abertura en la unidad base puede provocar la pérdida de presión de aire negativa en la parte
exterior del brazo, lo que puede causar una mayor emisión de polvo.
Nivel de limpieza : ISO Clase 4 (ISO14644-1)
Sistema de escape : Diámetro del puerto de escape: Diámetro interior: ø12 mm
Tubo de escape : Tubo de poliuretano
Diámetro exterior: ø12 mm (Diámetro interior: ø8 mm)
Caudal de escape recomendado: aprox. 1000 cm
3
/s (Normal)
*4: Las condiciones del manipulador durante la medición son las siguientes:
Condiciones de funcionamiento : Con carga nominal, movimiento simultáneo con 4 articulaciones,
velocidad máxima, aceleración/desaceleración máxima y trabajo al 50 %.
Punto de medición : Parte posterior del manipulador, a 1000 mm de distancia del rango de movimiento,
50 mm sobre la superficie instalada en la base.
*5: En el uso general, la configuración de Accel en 100 es la configuración óptima que mantiene el equilibrio
de la aceleración y la vibración cuando se ajusta la posición. Aunque se pueden establecer valores mayores
que 100 en Accel, se recomienda minimizar el uso de valores grandes a movimientos necesarios, ya que el
operar el manipulador continuamente con una configuración de Accel grande puede reducir
considerablemente la vida útil del producto.

Configuración y operación
22 LS10-B Mod.6
2.5 Cómo configurar el modelo
El modelo del manipulador para su sistema se ha configurado antes del envío desde la
fábrica.
Normalmente no es necesario cambiar el modelo cuando recibe el sistema.
PRECAUCIÓN
■
Cuando necesite cambiar la configuración del modelo del manipulador,
asegúrese de definir correctamente el manipulador. La configuración incorrecta
del modelo del manipulador puede provocar una operación anormal del
manipulador o que este no opere, y causar problemas de seguridad.
Si se describe el número de especificaciones personalizadas (MT***) en MODEL (Modelo)
en la etiqueta de firma (etiqueta de N/S), el manipulador tiene especificaciones
personalizadas. (Se puede incluir una etiqueta con solo el número de especificaciones
personalizadas al momento del envío).
Es posible que las especificaciones personalizadas requieran un procedimiento de
configuración distinto; revise el número de especificaciones personalizadas (MT***) y
comuníquese con el proveedor de su región cuando sea necesario.
El modelo del manipulador se puede configurar desde el software.
Consulte el capítulo Configuración del robot en el Manual del usuario de EPSON RC+.
NOTA

Configuración y operación
LS10-B Mod.6 23
3. Entornos e instalación
3.1 Condiciones ambientales
Es necesario un entorno adecuado para que el sistema de robot funcione de forma correcta
y segura. Asegúrese de instalar el sistema de robot en un entorno que cumpla las siguientes
condiciones:
Elemento
Condiciones
Temperatura ambiente
*
5 a 40 °C (con variación mínima de temperatura)
Humedad ambiental relativa
10 a 80 % (sin condensación)
Primera ráfaga de ruido
transitoria
1 kV o menos (cable de señal)
Ruido electrostático
4 kV o menos
Entorno
· Instalar en interiores.
· Mantener lejos de la luz solar directa.
· Mantener lejos del polvo, humo grasiento, salinidad,
polvo metálico u otros contaminantes.
· Mantener lejos de solventes y gases inflamables o
corrosivos.
· Mantener lejos del agua.
· Mantener lejos de golpes o vibraciones.
· Mantener lejos de fuentes de ruido eléctrico.
Los manipuladores no son adecuados para su operación en entornos adversos, como áreas
de pintura, etc. Cuando use manipuladores en entornos inadecuados que no cumplan las
condiciones anteriores, comuníquese con el proveedor de su región.
* Las condiciones de temperatura ambiente son solo para los manipuladores. Para el
controlador al que está conectado el manipulador, consulte el manual del controlador.
Condiciones ambientales especiales
La superficie del manipulador tiene una resistencia general al aceite. Sin embargo, si sus
requisitos especifican que el manipulador debe resistir ciertos tipos de aceite,
comuníquese con el proveedor de su región.
Los cambios rápidos en la temperatura y la humedad pueden causar condensación dentro
del manipulador.
Si los requisitos especifican que el manipulador manipule alimentos, comuníquese con el
proveedor de su región para comprobar si el manipulador dañará los alimentos o no.
El manipulador no se puede usar en entornos corrosivos donde se usen sustancias ácidas
o alcalinas. El manipulador es susceptible a la oxidación en entornos salados donde se
puede acumular óxido.
ADVERTENCIA
■
Use un disyuntor de fuga a tierra en el cable de alimentación de CA del controlador
para evitar descargas eléctricas y averías del circuito causadas por cortocircuitos.
Prepare el disyuntor de fuga a tierra que corresponda al controlador que está
utilizando.
Para conocer detalles, consulte el manual del controlador.
PRECAUCIÓN
■
Cuando limpie el manipulador, no lo frote con fuerza con alcohol o benceno.
Puede perder el lustre de la superficie recubierta.
NOTA

Configuración y operación
24 LS10-B Mod.6
3.2 Mesa base
No se incluye una mesa base para fijar el manipulador. Fabrique u obtenga la mesa base para
su manipulador. La forma y el tamaño de la mesa base difiere según el uso del sistema de
robot. Para su referencia, incluimos algunos requisitos para la mesa del manipulador aquí.
La mesa base no solo debe ser capaz de soportar el peso del manipulador, sino que también
resistir el movimiento dinámico del manipulador mientras funciona a una aceleración o
desaceleración máxima. Para asegurarse de que haya fuerza suficiente en la mesa base,
coloque materiales que la refuercen, como travesaños.
El torque y la fuerza de reacción producidos por el movimiento del manipulador son los
siguientes:
LS10-B
Torque de reacción máx. en la placa horizontal
550
N·m
Fuerza de reacción máx. horizontal
3200
N
Fuerza de reacción máx. vertical.
1500
N
Los agujeros roscados necesarios para el montaje de la base del manipulador son M8. Use
pernos de montaje con especificaciones que cumplan con la clase de calidad ISO898-1: 10.9
o 12.9.
Para conocer las dimensiones, consulte Configuración y operación: 3.3 Dimensiones de
montaje.
La placa para la superficie de montaje del manipulador debe tener 20 mm de grosor o más
y estar hecha de acero para reducir la vibración. La dureza de la superficie de la placa de
acero debe ser de 25 μm o menos.
La mesa se debe fijar al suelo o a la pared para impedir que se mueva.
El manipulador se debe instalar horizontalmente.
Cuando use un nivel para ajustar la altura de la mesa base, use un tornillo con diámetro M16
o superior.
Si pasará cables a través de los agujeros en la mesa base, consulte las figuras a continuación.
Conector del cable
de alimentación
Conector del
cable de señal
44
18
63
15
Cables M/C
(Unidad : mm)
40
80
No quite los cables M/C del manipulador.
Para conocer las condiciones ambientales en relación con el espacio cuando se coloca el
controlador en la mesa base, consulte el manual del controlador.
ADVERTENCIA
■
Para garantizar la seguridad, se debe instalar una protección para el sistema de
robot.
Para conocer detalles acerca de la protección, consulte el Manual del usuario de
EPSON RC+.
NOTA

Configuración y operación
LS10-B Mod.6 25
3.3 Dimensiones de montaje
El espacio máximo (R) incluye el radio del efector final. Si este supera los 60 mm, defina el
radio como la distancia hasta el borde exterior del espacio máximo.
Si una cámara o válvula de solenoide se extiende fuera del brazo, configure el rango máximo,
lo que incluye el espacio que puedan alcanzar.
Asegúrese de permitir los siguientes espacios adicionales, además del espacio necesario para
el montaje del manipulador, del controlador y de los equipos periféricos.
Espacio para la enseñanza
Espacio para mantenimiento e inspección
(Asegúrese de tener un espacio para abrir las cubiertas y placas para
realizar mantenimiento).
Espacio para los cables
El radio mínimo de curva del cable de alimentación es de 90 mm. Cuando instale el cable,
asegúrese de mantener suficiente distancia con respecto a los obstáculos. Además, deje
suficiente espacio para otros cables, de modo que no se doblen a la fuerza.
Asegúrese de que la distancia de la protección hasta el rango máximo de movimiento sea
mayor que 100 mm.

Configuración y operación
26 LS10-B Mod.6
3.4 Desembalaje y transporte
PERSONAL DE INSTALACIÓN CALIFICADO DEBERÁ REALIZAR LA
INSTALACIÓN
Y ESTA DEBERÁ CUMPLIR CON TODOS LOS CÓDIGOS NACIONALES Y
LOCALES.
ADVERTENCIA
■
Solo personal autorizado debe realizar trabajo de eslinga y operar una grúa y un
montacargas. Es extremadamente peligroso que personal no autorizado realice
estas operaciones, ya que se pueden provocar lesiones corporales graves o
daños importantes a los equipos del sistema de robot.
PRECAUCIÓN
■
Use una carretilla o un equipo similar para transportar el manipulador de la misma
manera en que lo recibió.
■
Después de retirar los pernos que fijan el manipulador al equipo de entrega, el
manipulador se puede caer. Tenga cuidado de que sus manos o dedos no queden
atrapados.
■
El brazo está fijado con un amarracables. Deje el amarracables fijo hasta que
termine la instalación para impedir que sus manos o dedos queden atrapados.
■
Para transportar el manipulador, solicite que dos o más personas trabajen en él y
lo fijen al equipo de entrega, o sostengan con la mano las áreas indicadas en gris
en la figura (la parte inferior del brazo n.º 1 y la parte inferior de la base).
Cuando sostenga la parte inferior de la base de forma manual, tenga cuidado de
que sus manos o dedos no queden atrapados.
LS10-B60**: aprox. 22 kg: 48,5 lb
LS10-B70**: aprox. 22 kg: 48,5 lb
LS10-B80**: aprox. 23 kg: 50,7 lb
■
Estabilice el manipulador con sus manos cuando lo eleve.
■
Cuando transporte el manipulador una gran distancia, fíjelo directamente al
equipo de entrega, de modo que nunca se caiga.
Si es necesario, embale el manipulador de la misma manera en la que se entregó.

Configuración y operación
LS10-B Mod.6 27
3.5 Procedimiento de instalación
PRECAUCIÓN
■
Se debe instalar el sistema de robot para evitar interferencia con edificios,
estructuras, servicios públicos, otras máquinas y equipos que puedan crear un
peligro de atrapamiento o puntos de apriete.
■
Se puede producir oscilación (resonancia) durante la operación, según la rigidez
de la mesa de instalación.
Si se produce oscilación, mejore la rigidez de la mesa o cambie la configuración
de velocidad o de aceleración y desaceleración.
3.5.1 Modelo estándar
PRECAUCIÓN
■
Instale el manipulador de montaje en sobremesa con dos o más personas.
Los pesos del manipulador son los siguientes. Tenga cuidado de que sus manos,
dedos o pies no queden atrapados, o de que los equipos sufran daños por la
caída del manipulador.
LS10-B60**: Aprox. 22 kg: 48,5 lb
LS10-B70**: Aprox. 22 kg: 48,5 lb
LS10-B80**: Aprox. 23 kg: 50,7 lb
(1)
Fije la base a la mesa base con
cuatro pernos.
Use pernos con especificaciones
que cumplan con la clase de
calidad ISO898-1: 10.9 o 12.9.
Torque de ajuste:
32,0 N m (326 kgf cm)
10 mm
Agujero de tornillo
(profundidad 20 mm o más)
4-M825
Arandela
de presión
Arandela
de ajuste
(2)
Con alicates de corte, corte el
amarracable que une el eje con
el soporte de retención del brazo
de la base.
Amarracables
Perno: M4
Perno
: M4
(3)
Retire los pernos que fijan el
amarracable que quitó en el
paso (2).
Retire la hoja de fijación para el
transporte que está instalada en el
brazo.
Asegúrese de retirar el
amarracables de protección del
tope mecánico.
NOTA
NOTA

Configuración y operación
28 LS10-B Mod.6
3.5.2 Modelo para salas blancas
(1) Desembale el manipulador fuera de la sala blanca.
(2) Fije el manipulador al equipo de entrega, por ejemplo, a un pallet con pernos, de
manera que el manipulador no se caiga.
(3) Limpie el polvo en el manipulador con un poco de alcohol o agua destilada en un paño
sin pelusas.
(4) Transporte el manipulador a la sala blanca.
(5) Consulte el procedimiento de instalación de cada modelo de manipulador e instale el
manipulador.
(6) Conecte un tubo de escape al puerto de escape.
3.6 Conexión de los cables
ADVERTENCIA
■
Para cortar la energía hacia el sistema de robot, desconecte el enchufe de la
fuente de energía. Asegúrese de conectar el cable de alimentación de CA a un
tomacorriente.
NO lo conecte directamente a la fuente de energía de la fábrica.
■
Antes de realizar cualquier procedimiento de reemplazo, apague el controlador y
los equipos relacionados, luego desconecte el enchufe de la fuente de
alimentación.
Realizar cualquier procedimiento de reemplazo con la energía encendida es
extremadamente peligroso y puede provocar una descarga eléctrica o el mal
funcionamiento del sistema de robot.
■
Asegúrese de conectar los cables correctamente. No permita una tensión
innecesaria en los cables. (No coloque objetos pesados en los cables. No doble
ni tire de los cables por la fuerza). La tensión innecesaria en los cables puede
provocar daños en los cables, desconexión o error de contacto.
Los cables dañados, la desconexión o el error de contacto son extremadamente
peligrosos y pueden provocar descargas eléctricas o el funcionamiento incorrecto
del sistema de robot.
■
La conexión a tierra del manipulador se realiza mediante la conexión con el
controlador. Asegúrese de que el controlador esté conectado a tierra y que los
cables estén conectados correctamente. Si el cable de conexión a tierra se
conecta incorrectamente a tierra, puede provocar incendio o descarga eléctrica.

Configuración y operación
LS10-B Mod.6 29
PRECAUCIÓN
■
Al conectar el manipulador al controlador, asegúrese de que coincidan los números
de serie en cada equipo. La conexión incorrecta entre el manipulador y el
controlador no solo pueden causar el funcionamiento incorrecto del sistema de
robot, sino que además pueden causar graves problemas de seguridad. El método
de conexión varía con el controlador utilizado. Para conocer detalles acerca de la
conexión, consulte el Manual del controlador.
Cuando el manipulador sea del modelo para salas blancas, tenga en cuenta lo siguiente.
Para el manipulador del modelo para salas blancas, úselo con un sistema de escape.
Para conocer detalles, consulte Configuración y operación: 2.4 Especificaciones.
Conexiones de los cables
Conecte el cable de alimentación y el conector de señal del cable M/C al controlador, como
se muestra a continuación.
Conector de señal
Conector de alimentación
Conecte y desconecte el cable M/C
En la serie LS10-B, puede conectar y desconectar con facilidad el cable M/C hacia/desde el
manipulador.
Para conocer detalles, consulte Mantenimiento: 4.3 Reemplazo del cable M/C.
NOTA

Configuración y operación
30 LS10-B Mod.6
3.7 Cables y tubos neumáticos del usuario
PRECAUCIÓN
■
Solo se debe permitir que el personal autorizado o certificado realice el cableado.
Si el cableado no lo realiza personal autorizado ni certificado puede provocar
lesiones corporales o el mal funcionamiento del sistema de robot.
Los cables eléctricos y los tubos neumáticos del usuario se encuentran en la unidad de cable.
Cables eléctricos
Voltaje nominal
Corriente permitida
Cables
Área seccional nominal
Nota
CA/CC 30 V
1 A
15
0,211 mm
2
Par trenzado
ADVERTENCIA
■
No aplique corriente superior a 1 A al manipulador.
Fabr.
Estándar
15
pines
Conector adecuado
JAE
DA-15PF-N
(Tipo de soldadura)
Campana de
sujeción
JAE
DA-C8-J10-F2-1R
(Tornillo de fijación del conector:
# 4- 40 NC)
Los pines con el mismo número, indicados en los conectores en ambos extremos de los
cables, están conectador.
Tubos neumáticos
Presión neumática máx. utilizable
Tubos neumáticos
Diámetro exterior × Diámetro interior
0,59 MPa (6 kgf/cm2
:
86 psi)
2
ø 6 mm ø 4 mm
1
ø 4 mm ø 2,5 mm
Se proporcionan conectores rápidos para los tubos neumáticos de ø6 mm y ø4 mm (diámetro
exterior) en ambos extremos de los mismos.
Conector rápido (azul) para
tubos neumáticos de ø4 mm
Conector rápido (azul) para
tubos neumáticos de ø6 mm
Conector del usuario
(Conector D-sub de 15 pines)
Conector del usuario
(Conector D-sub de 15 pines)
Conector rápido (blanco) para
tubos neumáticos de ø6 mm
Vista detallada desde A
Vista detallada desde B
Desbloqueo del freno
de Articulación n.º 3
Conector rápido (blanco) para
tubos neumáticos de ø6 mm
Conector rápido (azul) para
tubos neumáticos de ø6 mm
Conector rápido (azul) para
tubos neumáticos de ø4 mm
a
Puerto de escape
(solo modelo para sala blanca)
Conector RJ45
(EtherNet)
Conector RJ45
(EtherNet)

Configuración y operación
LS10-B Mod.6 31
3.8 Reubicación y almacenamiento
3.8.1 Precauciones para la reubicación y el almacenamiento
Observe lo siguiente cuando reubique, almacene y transporte los manipuladores.
PERSONAL DE INSTALACIÓN CALIFICADO DEBERÁ REALIZAR LA
INSTALACIÓN, Y ESTA DEBERÁ CUMPLIR CON TODOS LOS CÓDIGOS
NACIONALES Y LOCALES.
ADVERTENCIA
■
Solo personal autorizado debe realizar trabajo de eslinga y operar una grúa y un
montacargas. Es extremadamente peligroso que personal no autorizado realice
estas operaciones, ya que se pueden provocar lesiones corporales graves o
daños importantes a los equipos del sistema de robot.
PRECAUCIÓN
■
Antes de reubicar el manipulador, pliegue el brazo y fíjelo firmemente con un
amarracables para evitar que las manos o los dedos queden atrapados en el
manipulador.
■
Cuando retire los pernos de anclaje, proporcione soporte al manipulador para
evitar que caiga. Retirar los pernos de anclaje sin un soporte puede provocar la
caída del manipulador y que queden atrapados manos, dedos o pies.
■
Para transportar el manipulador, solicite que dos o más personas trabajen en él y
lo fijen al equipo de entrega, o sostengan con la mano el área sombreada (la parte
inferior del brazo n.º 1 y la parte inferior de la base). Cuando sostenga la parte
inferior de la base de forma manual, tenga cuidado de que sus manos o dedos
no queden atrapados.
LS10-B60**: aprox. 22 kg: 48,5 lb
LS10-B70**: aprox. 22 kg: 48,5 lb
LS10-B80**: aprox. 23 kg: 50,7 lb
■
Estabilice el manipulador con sus manos cuando lo eleve. Una elevación
inestable es extremadamente peligrosa y puede provocar la caída del
manipulador.
Cuando transporte el manipulador una gran distancia, fíjelo al equipo de entrega,
de modo que no se pueda caer.
Si es necesario, embale el manipulador de la misma manera en la que se entregó.
Cuando se usa el manipulador para un sistema de robot después de un
almacenamiento prolongado, realice un funcionamiento de prueba para verificar
que funcione correctamente y luego hágalo funcionar de principio a fin.
Transporte y almacene el manipulador dentro del rango de 25 C a +55 C.
Se recomienda una humedad entre el 10 % y el 90 %.
Cuando se produzca condensación en el manipulador durante el transporte,
encienda la energía solo después de que se seque la condensación.
No golpee ni agite el manipulador durante el transporte.

Configuración y operación
32 LS10-B Mod.6
3.8.2 Reubicación
PRECAUCIÓN
■
Instale o reubique el manipulador con dos o más personas. Los pesos del
manipulador son los siguientes. Tenga cuidado de que sus manos, dedos o pies
no queden atrapados, o de que los equipos sufran daños por la caída del
manipulador.
LS10-B60** : aprox. 22 kg :48,5 lb
LS10-B70** : aprox. 22 kg :48,5 lb
LS10-B80** : aprox. 23 kg :50,7 lb
(1) CORTE la energía en todos los dispositivos y desenchufe los cables.
Retire todos los topes mecánicos, si los usa para limitar el rango de movimiento de
las articulaciones n.º 1 y n.º 2. Para conocer detalles acerca del rango de movimiento,
consulte Configuración y operación: 5.2 Configuración del rango de movimiento con
topes mecánicos.
(2) Cubra el brazo con una hoja de modo que no se dañe el brazo.
Consulte la siguiente figura y fije el brazo.
Amarracables
Perno: M4
Perno
: M4
Ejemplo de postura fija del brazo
(3) Afirme la parte inferior del brazo n.º 1 con la mano para destornillar los pernos de
anclaje.
Luego, quite el manipulador de la mesa base.
NOTA

Configuración y operación
LS10-B Mod.6 33
4. Configuración de los efectores finales
4.1 Instalación de un efector final
Los usuarios son responsables de hacer sus propios efectores finales. Antes de instalar un
efector final, respete las siguientes pautas.
PRECAUCIÓN
■
Si usa un efector final equipado con un gripper o un manguito portaherramientas,
conecte los cables o tubos neumáticos correctamente para que el gripper no
suelte la pieza de trabajo cuando se apague la alimentación del sistema de robot.
Una conexión incorrecta de los cables o tubos neumáticos podría dañar al
sistema de robot o la pieza de trabajo, en caso de que esta última se suelte
cuando presiona el interruptor de parada de emergencia.
Las salidas de E/S se configuran de fábrica para que se apaguen
automáticamente (0) mediante la desconexión de la alimentación, el interruptor
de parada de emergencia o las características de seguridad del sistema de robot.
Eje
-
Conecte un efector final en la parte inferior del eje.
Para conocer las dimensiones del eje, y las dimensiones generales del manipulador,
consulte Configuración y operación: 2. Especificaciones.
-
No mueva el tope mecánico del límite superior en el lado inferior del eje. De lo
contrario, cuando se realice el “movimiento de salto”, el tope mecánico del límite
superior podría golpear al manipulador y el sistema de robot podría no funcionar
correctamente.
-
Use un acoplamiento de manguito con un perno M4 o más grande para fijar el efector
final en el eje.
Desbloqueo del freno
-
Las articulaciones n.º 3 y n.º 4 no pueden moverse hacia arriba/abajo con la mano,
porque se aplicó el freno electromagnético en la articulación mientras la alimentación
del sistema de robot estaba apagada.
Esto evita que el eje golpee equipos periféricos en caso de que el eje baje debido al
peso del efector final cuando se desconecta la alimentación durante la operación, o
cuando se apaga el motor incluso estando encendida la alimentación.
Para mover la articulación n.º 3 hacia arriba o abajo o girar la articulación n.º 4
mientras instala un efector final, encienda el controlador y mueva la articulación hacia
arriba y hacia abajo o gire la articulación mientras presiona el desbloqueo del freno.
Este interruptor de pulsador es de tipo momentáneo; el freno se desbloquea solamente
mientras presiona este pulsador.
-
Tenga cuidado con el eje mientras se presiona el desbloqueo del freno, ya que es
posible que el eje baje debido al peso del efector final.

Configuración y operación
34 LS10-B Mod.6
Desbloqueo del freno
El eje puede bajar por el
peso del efector final.
Diseños
-
Cuando hace funcionar el manipulador con un efector final, este puede interferir con el
manipulador debido al diámetro exterior del efector final, el tamaño de la pieza de
trabajo o la posición de los brazos. Cuando determine el diseño del sistema, preste
atención al área de la interfaz del efector final.
4.2 Instalación de cámaras y válvulas
La parte inferior del brazo n.º 2 tiene agujeros roscados, como se muestra en la siguiente
figura. Úselos para instalar cámaras, válvulas y otro tipo de equipo.
[Unidad: mm]
*: Desde la superficie de instalación de la base

Configuración y operación
LS10-B Mod.6 35
4.3 Configuración de Weight e Inertia
Para asegurarse de obtener un rendimiento óptimo del manipulador, es importante
asegurarse de que la carga (el peso del efector final y la pieza de trabajo) y el momento de
inercia de la carga estén dentro del valor límite del manipulador, y que la articulación n.º 4
no se vuelva excéntrica.
Si la carga o el momento de inercia supera los valores nominales o si la carga se vuelve
excéntrica, siga los pasos que aparecen en Configuración y operación 4.3.1 Configuración
de WEIGHT y 4.3.2 Configuración de INERTIA, para definir los parámetros.
Configurar los parámetros permite que el movimiento PTP del manipulador sea óptimo,
reduce las vibraciones para acortar el tiempo de funcionamiento y mejora la capacidad para
cargas más grandes. Asimismo, reduce la vibración persistente que se produce cuando el
momento de inercia del efector final y la pieza de trabajo es más grande que la configuración
predeterminada.
4.3.1 Configuración de peso
PRECAUCIÓN
■
El peso total del efector final y la pieza de trabajo no debe superar los 10 kg. Los
manipuladores serie LS10-B no están diseñados para trabajar con cargas
superiores a los 10 kg. Siempre configure los parámetros Weight en función de la
carga. Configurar un valor que sea inferior a la carga real puede generar errores,
impactos excesivos y una función insuficiente del manipulador. Además, el ciclo
de vida de las piezas se reducirá y se producirá el salto de los dientes de la correa,
lo que producirá un cambio de posición.
La capacidad de peso aceptable (efector final y pieza de trabajo) en la serie LS10-B es
Valor nominal predeterminado: 5 kg
Máximo: 10 kg
Cuando la carga (peso del efector final y la pieza de trabajo) supera el valor nominal, cambie
la configuración del parámetro Weight.
Después de haber cambiado la configuración, se establece automáticamente la velocidad de
aceleración/desaceleración máxima del sistema de robot en el movimiento PTP que
corresponde al “Parámetro Weight”.
Carga en el eje
La carga (peso del efector final y la pieza de trabajo) en el eje puede configurarse mediante
el parámetro Weight.
EPSON
RC+
Ingrese un valor en el cuadro de texto [Load inertia:] en el panel [Inertia], [Tools]-[Robot
Manager]. (También puede ejecutar el comando Inertia en la ventana [Command Window]).

Configuración y operación
36 LS10-B Mod.6
Carga en el brazo
Cuando instale una cámara u otro dispositivo en el brazo, calcule el peso como un valor
equivalente del eje. Luego, agregue este cálculo a la carga e ingrese el peso total en el
parámetro Weight.
Fórmula de peso equivalente
Cuando instala el equipo cerca del brazo n.º 2:
Cuando instala el equipo cerca al final del brazo n.º 2:
WM = M (L1)
2
/(L1+L2)
2
WM = M (LM)
2
/(L2)
2
WM
M
L1
L2
LM
: peso equivalente
: peso de la cámara, etc.
: largo del brazo n.º 1
: largo del brazo n.º 2
: distancia desde el centro de giro de la articulación n.º 2 hasta el centro de
gravedad de la cámara, etc.
<Ejemplo>
Una cámara de “1 kg” se instala al final del brazo de la serie LS10-B (475 mm lejos del centro
de giro de la articulación n.º 2) con un peso de carga de “1 kg”.
M=1
L2=375
LM=475
WM=1475
2
/375
2
=1,604
1,7 (redondeo ascendente)
W+WM = 1 + 1,7 = 2,7
Ingrese “2.7” como el parámetro Weight.
Eje
Peso de la
cámara
M=1kg
W=1kg
L
2
=375 mm
L
M
=475 mm
Articulación n.º 2
Configuración de velocidad automática por peso
140
120
100
80
60
40
20
0 2 4 6 8 10 12 (kg) Configuración Weight
(%)
* El porcentaje del gráfico se
basa en la velocidad a un peso
nominal (5 kg) como el 100 %.
120
116
100
LS10-B60**
LS10-B70**
LS10-B80**
112
111
110
85
80
65
80
70
54
Peso del efector
final (kg)
Configuración automática de velocidad
mediante Weight (%)
LS10-B60**
LS10-B70**
LS10-B80**
0
120
120
120
1
111
116
116
2
110
112
112
5
100
100
100
8
85
80
65
10
80
70
54

Configuración y operación
LS10-B Mod.6 37
Configuración de aceleración/desaceleración automática por peso
180
160
140
120
100
80
60
0 2 4 6 8 10 12 (kg) Configuración Weight
(%)
* El porcentaje en el gráfico se basa en
la aceleración/desaceleración a un
peso nominal (5 kg) como el 100 %
170
164
100
LS10-B60**
LS10-B70**
LS10-B80**
160
125
75
64
60
51
≈
150
Peso del efector
final (kg)
Configuración automática de aceleración/desaceleración
mediante Weight (%)
LS10-B60**
LS10-B70**
LS10-B80**
0
170
160
160
1
164
150
150
2
125
125
125
5
100
100
100
8
75
64
75
10
60
51
60
4.3.2 Configuración de inercia
Momento de inercia y la configuración de inercia
El momento de inercia se define como “la relación de torque aplicado a un cuerpo rígido y
su resistencia al movimiento”. Este valor se conoce comúnmente como “el momento de
inercia”, “inercia”, o “GD
2
”. Cuando el manipulador funciona con objetos adicionales
(como un efector final) instalados en el eje, se debe considerar el momento de inercia de la
carga.
PRECAUCIÓN
■
El momento de inercia de la carga (peso del efector final y de la pieza de trabajo)
debe ser de 0,30 kg m
2
o menos. Los manipuladores de la serie LS10-B no están
diseñados para trabajar con un momento de inercia superior a 0,30 kg m
2
.
Siempre configure los parámetros Weight en función de la carga. Configurar un
valor que sea inferior a la carga real puede generar errores, impactos excesivos
y una función insuficiente del manipulador. Además, se acorta el ciclo de vida útil
de las piezas y el espacio de posición debido a que ocurren golpes de los dientes
de la correa.
El momento de inercia aceptable de carga para un manipulador de la serie LS10-B es
Valor nominal predeterminado: 0,02 kg·m
2
Máximo: 0,30 kg·m
2
Cuando el momento de inercia de la carga supera el valor nominal, cambie la configuración
del parámetro de momento de inercia del comando Inertia. Después de haber cambiado la
configuración, se establece automáticamente la velocidad de aceleración/desaceleración
máxima de la articulación n.º 4 en el movimiento PTP que corresponde al valor de “momento
de inercia”.

Configuración y operación
38 LS10-B Mod.6
Momento de inercia de la carga en el eje
El momento de inercia de la carga (peso del efector final y la pieza de trabajo) en el eje se
puede configurar mediante el parámetro de “momento de inercia” del comando Inertia.
EPSON
RC+
Ingrese un valor en el cuadro de texto [Load inertia:] en el panel [Inertia], [Tools]-[Robot
Manager]. (También puede ejecutar el comando Inertia en la ventana [Command Window]).
Configuración de aceleración/desaceleración automática de la articulación n.º 4
por inercia (momento de inercia)
0 0.05 0.1 0.15 0.2 0.25 0.3 (kg·m
2
) Configuración de momento de inercia
120
100
80
60
40
20
(%)
113
60
30
10
100
Configuración de
momento de inercia
(kg m
2
)
Configuración automática de
aceleración/desaceleración de la articulación
n.º 4 mediante Inertia (momento de inercia)
0,01
113
0,02
100
0,05
60
0,1
30
0,3
10

Configuración y operación
LS10-B Mod.6 39
Cantidad excéntrica y configuración de inercia
PRECAUCIÓN
■
La cantidad excéntrica de la carga (peso del efector final y de la pieza de trabajo)
debe ser de 200 mm o menos. Los manipuladores serie LS10-B no están
diseñados para trabajar con una cantidad excéntrica que supere los 200 mm.
Siempre defina los parámetros de Weight en función de la carga. Configurar un
valor que sea inferior a la carga real puede generar errores, impactos excesivos
y una función insuficiente del manipulador. Además, se acorta el ciclo de vida útil
de las piezas y el espacio de posición debido a que ocurren golpes de los dientes
de la correa.
La cantidad excéntrica aceptable de la carga en la serie LS10-B es 0 mm como valor nominal
predeterminado y 200 mm como máximo. Cuando la cantidad excéntrica de la carga supera
el valor nominal, cambie la configuración del parámetro de cantidad excéntrica del comando
Inertia. Después de haber cambiado la configuración, se establece automáticamente la
velocidad de aceleración/desaceleración máxima del manipulador en el movimiento PTP
que corresponde a la “cantidad excéntrica”.
Posición del centro de gravedad de la carga
Centro de giro
Cantidad excéntrica (200 mm o menos)
Cantidad excéntrica
Cantidad excéntrica de la carga en el eje
La cantidad excéntrica de la carga (peso del efector final y la pieza de trabajo) en el eje se
puede configurar mediante el parámetro de “cantidad excéntrica” del comando Inertia.
EPSON
RC+
Ingrese un valor en el cuadro de texto [Eccentricity:] (Excentricidad) en el panel [Inertia],
[Tools]-[Robot Manager]. (También puede ejecutar el comando Inertia en la ventana
[Command Window]).

Configuración y operación
40 LS10-B Mod.6
Configuración de aceleración/desaceleración automática por inercia (cantidad
excéntrica)
*El porcentaje del gráfico se basa
en la aceleración/desaceleración
a una excentricidad nominal (0
mm) como el 100 %.
120
100
80
60
40
20
0 50 100 150 200 250 (mm) Configuración de excentricidad
60
26
(%)
100
15
Parámetro de cantidad
excéntrica (mm)
Configuración automática de
aceleración/desaceleración mediante
Inertia (cantidad excéntrica) (%)
0
100
50
60
100
26
200
15
Cálculo del momento de inercia
Consulte los siguientes ejemplos de las fórmulas para calcular el momento de inercia de la
carga (efector final con pieza de trabajo). El momento de inercia de toda la carga se calcula
mediante la suma de cada parte (a), (b) y (c).
Pieza de
trabajo (b)
Pieza de trabajo (c)
Efector final (a)
Eje de la articulación n.º 3
Cetro de giro
Momento
completo de
inercia
Momento de
inercia del efector
final (a)
=
+
Momento de inercia
de la pieza de
trabajo (c)
+
Momento de
inercia de la pieza
de trabajo (b)

Configuración y operación
LS10-B Mod.6 41
Los métodos para calcular el momento de inercia de (a), (b) y (c) aparecen a continuación.
Calcule el momento de inercia total mediante las fórmulas básicas.
(a) Momento de inercia de un paralelepípedo rectangular
h
b
L
m
Centro de gravedad del paralelepípedo rectangular
Centro de giro
m
+ m L
2
b
2
+ h
2
12
(a) Momento de inercia de un cilindro
m
+ m L
2
r
2
2
m
L
r
Centro de gravedad del cilindro
Centro de giro
(a) Momento de inercia de una esfera
m
r
2
+ m L
2
2
5
Centro de gravedad de la esfera
r
m
L
Centro de giro

Configuración y operación
42 LS10-B Mod.6
4.4 Precauciones para la aceleración/desaceleración automática de la
articulación n.º 3
Cuando mueve el manipulador en el movimiento PTP horizontal con la articulación n.º 3
(Z) en la posición alta, el tiempo de movimiento será más rápido.
Cuando la articulación n.º 3 queda por debajo de un punto determinado, se usa la
aceleración/desaceleración automática para reducir la aceleración y desaceleración.
(Consulte las siguientes figuras.) Mientras más alta sea la posición del eje, más rápida será
la aceleración/desaceleración del movimiento. Sin embargo, el movimiento ascendente o
descendente de la articulación n.º 3 demora más tiempo. Ajuste la posición de la articulación
n.º 3 para el movimiento del manipulador después de considerar la relación entre la posición
actual y la posición de destino. Con el comando LimZ se puede configurar el límite superior
de la articulación n.º 3 durante el movimiento horizontal que usa el comando Jump (Saltar).
Aceleración/desaceleración automática vs. posición de la articulación n.º 3
* Las cifras en el gráfico (%) corresponden
a la proporción según la velocidad de
aceleración/desaceleración en la posición
de límite superior del eje.
100
60
100
LS10-B60**
LS10-B70**
LS10-B80**
120
100
80
60
40
20
0 -100 -200 -300 (mm) Altura del eje
(%)
20
70
40
Cuando mueve horizontalmente el manipulador mientras se baja el eje, puede sobrepasarse
al momento del posicionamiento final.
Altura del eje
(mm)
Aceleración / Desaceleración
LS10-B60**
LS10-B70**
LS10-B80**
0
100
100
100
100
100
200
60
70
300
20
40
NOTA

Configuración y operación
LS10-B Mod.6 43
5. Rango de movimiento
PRECAUCIÓN
■
Cuando configura el rango de movimiento para la seguridad, tanto el rango de
pulsos como los topes mecánicos se deben configurar al mismo tiempo.
El rango de movimiento está predeterminado de fábrica como se explica en Configuración
y operación: 5.4 Rango de movimiento estándar. Este es el rango máximo de movimiento
del manipulador.
Existen tres métodos para configurar el rango de movimiento, como se describen a
continuación:
1. Configuración mediante el rango de pulsos (para todas las articulaciones)
2. Configuración mediante los topes mecánicos (para las articulaciones n.º 1 a n.º 3)
3. Configuración del rango cartesiano (rectangular) en el sistema de coordenadas X,
Y del manipulador (para las articulaciones n.º 1 y n.º 2)
Tope mecánico
Configuración de rango
rectangular
Rango de pulsos
Rango de
movimiento
Tope mecánico
Cuando se cambia el rango de movimiento por temas de eficiencia o seguridad del diseño,
siga las descripciones en 5.1 a 5.3 para definir el rango.
5.1 Configuración del rango de movimiento con rango de pulsos
Los pulsos corresponden a la unidad básica del movimiento de un manipulador. El rango de
movimiento del manipulador se controla mediante el rango de pulsos entre el límite inferior
y el límite superior del pulso de cada articulación.
Los valores de pulsos se leen desde la salida del codificador del servomotor.
Para conocer el rango máximo de pulsos, consulte las siguientes secciones.
El rango de pulsos se debe configurar dentro del rango del tope mecánico.
5.1.1 Rango máximo de pulsos de la articulación n.º 1
5.1.2 Rango máximo de pulsos de la articulación n.º 2
5.1.3 Rango máximo de pulsos de la articulación n.º 3
5.1.4 Rango máximo de pulsos de la articulación n.º 4.
Una vez que el manipulador recibe el comando de operación, comprueba si la posición
objetivo que especifica el comando está dentro del rango de pulsos antes de comenzar a
operar. Si la posición objetivo está fuera del rango de pulsos definido, ocurre un error y el
manipulador no se mueve.
El rango de pulsos se puede configurar en el panel [Range] (Rango) que aparece cuando
selecciona [Tools]-[Robot Manager]. (También puede ejecutar el comando Range en la
ventana [Command Window]).
EPSON
RC+
NOTA

Configuración y operación
44 LS10-B Mod.6
5.1.1 Rango máximo de pulsos de la articulación n.º 1
La posición del pulso 0 (cero) de la articulación n.º 1 es la posición donde el brazo n.º 1 se
orienta hacia la dirección positiva (+) en el eje de la coordenada X.
Cuando el pulso 0 se encuentra en el punto de inicio, el valor del pulso hacia la izquierda se
define como positivo (+) y el valor de pulso hacia la derecha se define como negativo (-).
+Y
+X 0 pulso
+ B
B
+ A
A
A: Rango máximo de
movimiento
B: Rango máximo de pulsos
LS10-B
132 °
152918~808278 pulsos
5.1.2 Rango máximo de pulsos de la articulación n.º 2
La posición del pulso 0 (cero) de la articulación n.º 2 es la posición donde el brazo n.º 2 se
encuentra en línea con el brazo n.º 1. Con el pulso 0 en el punto de inicio, el valor del pulso
hacia la izquierda se define como positivo (+) y el valor de pulso hacia la derecha se define
como negativo (-).
B
+ B
0 pulso
A
+ A
A: Rango máximo de
movimiento
B: Rango máximo de pulsos
LS10-B
150 °
341334 pulsos

Configuración y operación
LS10-B Mod.6 45
5.1.3 Rango máximo de pulsos de la articulación n.º 3
La posición del pulso 0 (cero) de la articulación n.º 3 es la posición donde el eje se encuentra
en su límite superior.
El valor de pulso siempre será negativo, porque la articulación n.º 3 siempre se mueve más
abajo que la posición del pulso 0.
Límite superior:
0 pulso
Carrera de la
articulación n.º 3
Pulso del límite
inferior
LS10-B***S (Modelo estándar)
200 mm
270336 pulsos
300 mm
405504 pulsos
LS10-B***C (Modelo para salas
blancas)
170 mm
229786 pulsos
270 mm
364954 pulsos
Para el modelo para salas blancas, no se puede cambiar el rango de movimiento definido
con el tope mecánico de la articulación n.º 3.
5.1.4 Rango máximo de pulsos de la articulación n.º 4
La posición del pulso 0 (cero) de la articulación n.º 4 es la posición donde la parte plana
cerca del eje se orienta hacia el extremo del brazo n.º 2. Con el pulso 0 en el punto de inicio,
el valor del pulso hacia la izquierda se define como positivo (+) y el valor de pulso hacia la
derecha se define como negativo (-).
+X 0 215040 pulsos
+Y
Hacia la derecha (-valor)
Hacia la izquierda (+valor)
NOTA

Configuración y operación
46 LS10-B Mod.6
5.2 Configuración del rango de movimiento con topes mecánicos
Los topes mecánicos limitan físicamente el área absoluta en la que se puede mover el
manipulador.
Las articulaciones n.º 1 y n.º 2 tienen agujeros roscados en las posiciones que corresponden
a los ángulos de la configuración de los topes mecánicos. Instale los pernos en los agujeros
correspondientes al ángulo que desea definir.
Las articulaciones n.º 3 se pueden establecer en cualquier longitud inferior a la carrera
máxima.
Tope mecánico de
Articulación n.º 2
(Fijo)
Tope mecánico de
Articulación n.º 1
(Ajustable)
Tope mecánico de Articulación n.º 3
(Tope mecánico del límite inferior)
(No mueva la posición del
tope mecánico superior)
Tope mecánico de
Articulación n.º 1
(Fijo)
Tope mecánico de
Articulación n.º 2
(Ajustable)

Configuración y operación
LS10-B Mod.6 47
5.2.1 Configuración de los topes mecánicos de las articulaciones n.º
1 y n.º 2
Las articulaciones n.º 1 y n.º 2 tienen agujeros roscados en las posiciones que corresponden
a los ángulos de la configuración de los topes mecánicos. Instale los pernos en los agujeros
correspondientes al ángulo que desea definir.
Instale los pernos para el tope mecánico en la siguiente posición.
Vistas desde la parte inferior del brazo n.º 1
a
b
Topes mecánicos de Articulación n.º 1
a
b
LS10-B
Ángulo de
configuración (°)
115
115
Valor de pulso
(pulso)
746382
91022
Vistas desde la parte superior del brazo n.º 1
b
a
Topes mecánicos de Articulación n.º 2
a
b
LS10-B
Ángulo de
configuración (°)
125
125
Valor de pulso
(pulso)
284444
284444

Configuración y operación
48 LS10-B Mod.6
(1)
Apague el controlador.
(2)
Instale un perno de cabeza hueca hexagonal en el agujero correspondiente al ángulo de
configuración y apriételo.
Joint
Perno de cabeza hueca
hexagonal (completamente
roscado)
El número
de pernos
Torque de ajuste
recomendado
1
M8 × 10
1 perno/lado
12,3 Nm (125 kgfcm)
(3)
Encienda el controlador.
(4)
Configure el rango de pulsos que corresponda a las nuevas posiciones de los topes
mecánicos.
Asegúrese de configurar el rango de pulsos dentro de las posiciones del rango del tope
mecánico.
Ejemplo: Uso de LS10-B602S
El ángulo de la articulación n.º 1 está definido desde 110º hasta +110º.
El ángulo de la articulación n.º 2 está definido desde 110° hasta +110°.
Ejecute los siguientes comandos en [Command Window].
>JRANGE 1, -72817, 728177 ' Define el rango de pulsos de la
articulación n.º 1
>JRANGE 2,- 250331, 250331 ' Define el rango de pulsos de la
articulación n.º 2
>RANGE ' Revisa la configuración usando el rango
-72817, 728177, -250311, 250311, -270336, 0
-215040, 215040
(5)
Mueva el brazo con la mano hasta que toque los topes mecánicos y asegúrese de que el
brazo no golpee ningún equipo periférico durante la operación.
(6)
Haga funcionar la articulación cambiada a baja velocidad hasta que llegue a las
posiciones del rango mínimo y máximo de pulsos. Asegúrese de que el brazo no golpee
los topes mecánicos. (Revise la posición del tope mecánico y el rango de movimiento
que configuró).
Ejemplo: Uso de LS10-B602S
El ángulo de la articulación n.º 1 está definido desde 110º hasta +110º.
El ángulo de la articulación n.º 2 está definido desde 110° hasta +110°.
Ejecute los siguientes comandos en [Command Window].
>MOTOR ON ' Enciende el motor
>POWER LOW ' Ingresa al modo de baja potencia
>SPEED 5 ' Se configura a baja velocidad
>PULSE -72817,0,0,0 ' Se mueve a la posición del pulso mínimo
de la articulación n.º 1
>PULSE 728177,0,0,0 ' Se mueve a la posición del pulso
máximo de la articulación n.º 1
>PULSE 327680,-250311,0,0 ' Se mueve a la posición del pulso mínimo
de la articulación n.º 2
>PULSE 327680,250311,0,0 ' Se mueve a la posición del pulso
máximo de la articulación n.º 2
EPSON
RC+
EPSON
RC+
NOTA

Configuración y operación
LS10-B Mod.6 49
El comando Pulse (comando Go Pulse) mueve todas las articulaciones hasta las
posiciones especificadas al mismo tiempo. Especifique las posiciones seguras después
de considerar el movimiento no solo de las articulaciones cuyos rangos de pulsos hayan
cambiado, sino también de las otras articulaciones.
En este ejemplo, la articulación n.º 1 se movió hasta la posición 0°, que está cerca del
centro de su rango de movimiento (valor de pulso: 327680) cuando se comprobaba la
articulación n.º 2.
Si el brazo golpea los topes mecánicos o si ocurre un error después de que el brazo
golpea los topes mecánicos, restablezca el rango de pulsos a una configuración más
acotada o extienda las posiciones de los topes mecánicos dentro del límite.

Configuración y operación
50 LS10-B Mod.6
5.2.2 Configuración del tope mecánico de la articulación n.º 3
Este método se aplica solo al manipulador del modelo estándar.
Para el modelo para salas blancas, no se puede cambiar el rango de movimiento definido
con el tope mecánico de la articulación n.º 3.
(1)
Encienda el controlador y apague los motores usando el comando Motor OFF (Apagar
motor).
(2)
Mueva el eje mientras presiona el
desbloqueo del freno.
No empuje el eje hacia arriba hasta su
límite superior o será difícil sacar la
cubierta superior del brazo. Empuje el eje
hacia arriba hasta una posición donde se
pueda cambiar el tope mecánico de la
articulación n.º 3.
Tornillo del tope
mecánico del
límite inferior
Tornillo de fijación:
2-M56
Desbloqueo del freno
Eje
Cuando presiona el desbloqueo del freno, el eje puede bajar debido al peso del efector
final. Asegúrese de retener el eje con la mano mientras presiona el botón.
(3)
Apague el controlador.
(4)
Suelte el tornillo del tope mecánico del límite inferior (tornillos de fijación: 2-M56).
Hay un tope mecánico montado en la parte superior e inferior de la articulación n.º 3.
No obstante, solo se puede cambiar la posición del tope mecánico del límite inferior
que está en la parte superior.
No saque el tope mecánico del límite superior que está en la parte inferior, porque el
punto de calibración de la articulación n.º 3 se especifica con ese tope.
(5)
El extremo superior del eje define la carrera máxima. Mueva el tope mecánico del
límite inferior hacia abajo hasta la posición donde desea limitar la carrera.
Por ejemplo, cuando configura el tope mecánico del límite inferior en una carrera de
“200 mm”, el valor de la coordenada Z del límite inferior es “200”. Para cambiar el
valor a “180”, mueva el tope mecánico del límite inferior hacia abajo “20 mm”.
Use calibradores para medir la distancia cuando ajuste el tope mecánico.
Mida esta
distancia
NOTA
NOTA
NOTA

Configuración y operación
LS10-B Mod.6 51
(6)
Apriete firmemente el tornillo del tope mecánico del límite inferior (tornillos de
fijación: 2-M56).
Torque de ajuste recomendado: 3,9 N m (39.8 kgf cm)
(7)
Encienda el controlador.
(8)
Mueva la articulación n.º 3 a su límite inferior mientras presiona el desbloqueo del
freno y luego revise la posición del límite inferior. No baje demasiado el tope mecánico.
De lo contrario, la articulación podría no alcanzar la posición de destino.
(9)
Calcule el valor de los pulsos del rango de pulsos para el límite inferior mediante la
fórmula que se muestra a continuación y configure el valor.
El resultado del cálculo siempre es negativo porque el valor de la coordenada Z de
límite inferior es negativo.
Límite inferior del pulso
= valor de coordenada Z de límite inferior (mm) / resolución (mm/pulso)
** Para conocer la resolución de la articulación n.º 3,
consulte la sección Configuración y operación 2.4 Especificaciones.
Ejecute el siguiente comando en [Command Window]. Ingrese el valor calculado en
X.
>JRANGE 3,X,0 ' Configura el rango de pulsos de la articulación n.º 3
(10)
Use el comando Pulse (comando Go Pulse), mueva la articulación n.º 3 a la posición
del límite inferior del rango de pulsos a baja velocidad. Si el rango del tope mecánico
es inferior al rango de pulsos, la articulación n.º 3 golpea el tope mecánico y ocurre un
error. Cuando se genera el error, cambie el rango de pulsos a una configuración inferior
o extienda la posición del tope mecánico dentro del límite.
Es difícil comprobar si la articulación n.º 3 ha golpeado el tope mecánico. Apague el
controlador y levante la cubierta superior del brazo para comprobar la condición que
produjo el problema desde el costado.
Ejecute los siguientes comandos en [Command Window]. Ingrese el valor calculado en
el paso (9) en X.
>MOTOR ON ' Enciende el motor
>SPEED 5 ' Configura una baja velocidad
>PULSE 0,0,X,0 ' Se mueve a la posición del pulso de límite inferior de la
articulación n.º 3.
(En este ejemplo, todos los pulsos, excepto aquellos para la
articulación n.º 3, son “0”. Reemplace estos “0” con los otros
valores de pulsos que especifican una posición donde no existe
interferencia, incluso cuando se baja la articulación n.º 3).
EPSON
RC+
EPSON
RC+
NOTA

Configuración y operación
52 LS10-B Mod.6
5.3 Configuración del rango cartesiano (rectangular) en el sistema
de coordenadas XY del manipulador
(para las articulaciones n.º 1 y n.º 2)
Use este método para configurar los límites superior e inferior de las coordenadas X e Y.
Esta configuración solo la aplica el software. Por lo tanto, no cambia el rango físico. El
rango físico máximo se basa en la posición de los topes mecánicos.
Ajuste la configuración XYLim en el panel [XYZ Limits] (Límites XYZ) que se muestran
cuando selecciona [Tools]-[Robot Manager].
(También puede ejecutar el comando XYLim en la ventana [Command Window]).
EPSON
RC+

Configuración y operación
LS10-B Mod.6 53
5.4 Rango de movimiento estándar
Los siguientes diagramas de “rango de movimiento” muestran las especificaciones estándar
(máximas). Cuando el motor de cada articulación se encuentra bajo servocontrol, el centro
del punto más bajo de la articulación n.º 3 (del eje) se mueve a las áreas que aparecen en la
figura.
El “área limitada por el tope mecánico” es el área donde el centro del punto más bajo de la
articulación n.º 3 puede moverse cuando el motor de cada articulación no se encuentra bajo
servocontrol.
El “tope mecánico” configura el rango de movimiento limitado para que el centro de la
articulación n.º 3 no pueda moverse más allá del área mecánicamente.
El “espacio máximo” es el área que incluye el punto de alcance más lejano de los brazos.
Si el radio máximo del efector final es superior a 60 mm, agregue el “área limitada por el
tope mecánico” y el “radio del efector final”. El valor total queda especificado como el área
máxima.
A
Centro de la articulación n.º 3
B
Rango de movimiento
C
Rango máximo
D
Superficie de montaje de la base
E
Área limitada por un tope mecánico
LS10-B60**
LS10-B70**
LS10-B80**
a
Longitud del brazo n.º 1 + el brazo n.º 2 [mm]
600
700
800
b
Longitud del brazo n.º 1 [mm]
225
325
425
c
Longitud del brazo n.º 2 [mm]
375
d
Ángulo e movimiento de la articulación n.º 1 [°]
132
e
Ángulo e movimiento de la articulación n.º 2 [°]
150
f
(Rango de movimiento)
212
188
213
g
(Rango de movimiento en la parte posterior)
526
592
659
h
Ángulo del tope mecánico de la articulación n.º 1 [°]
2.0
i
Ángulo del tope mecánico de la articulación n.º 2 [°]
2.0
j
(Área del tope mecánico)
206
176
200
k
(Área del tope mecánico en la parte posterior)
531
601
670
m
(Rango de movimiento de la
articulación n.º 3)
LS10-B**2S
200
LS10-B**3S
300
LS10-B**2C
170
LS10-B**3C
270
n
(Desde la cara de montaje de la base)
LS10-B**2*
53
LS10-B**3*
153
p
(Extremo superior del área del tope
mecánico de la articulación n.º 3)
LS10-B***S
4
LS10-B***C
1
q
(Extremo inferior del área del tope mecánico de la
articulación n.º 3)
3

Configuración y operación
54 LS10-B Mod.6
Modelo estándar LS10-B***S

Configuración y operación
LS10-B Mod.6 55
Modelo para salas blancas LS10-B***C

Mantenimiento
Este volumen contiene los procedimientos de mantenimiento con las precauciones
de seguridad para los manipuladores de la serie LS10-B.



Mantenimiento
58 LS10-B Mod.6
1. Mantenimiento de seguridad
Lea atentamente este capítulo, este manual y otros manuales relacionados para comprender
los procedimientos de mantenimiento seguro antes de realizar cualquier tipo de
mantenimiento de rutina.
Solo se debe permitir que personal autorizado que ha realizado una capacitación
en seguridad realice mantenimiento al sistema de robot.
La capacitación en seguridad es el programa para los operadores de robots
industriales que cumple con las leyes y reglamentos de cada país.
El personal que ha realizado la capacitación en seguridad adquiere conocimiento
acerca de robots industriales (operaciones, enseñanza, etc.), conocimiento
acerca de las inspecciones y conocimiento de normas y reglamentos
relacionados.
Se permite que el personal que haya completado las clases de capacitación en
sistemas de robot y en mantenimiento que ha realizado el fabricante, el
distribuidor o la empresa incorporada localmente, realice mantenimiento al
sistema de robot.
ADVERTENCIA
■
No retire las piezas que no están cubiertas en este manual. Siga estrictamente
el procedimiento de mantenimiento, como se describe en este manual. El retiro
incorrecto de piezas o el mantenimiento inadecuado no solo pueden causar el
mal funcionamiento del sistema de robot, sino que además pueden causar
graves problemas de seguridad.
■
Manténgase alejado del manipulador mientras la energía esté ENCENDIDA si
no ha tomado cursos de capacitación. No ingrese al área de funcionamiento
mientras la energía esté ENCENDIDA. Ingresar al área de funcionamiento con
la energía encendida es extremadamente peligroso y puede provocar graves
problemas de seguridad, ya que es posible que el manipulador se mueva, incluso
si parece estar detenido.
■
Cuando revise la operación del manipulador después de reemplazar piezas,
asegúrese de revisarlo desde fuera del área protegida. Revisar la operación del
manipulador mientras está en el interior del área protegida puede causar
problemas graves de seguridad, ya que el manipulador se puede mover de
improviso.
■
Antes de operar el sistema de robot, asegúrese de que tanto los interruptores de
parada de emergencia como el interruptor de protección funcionen
correctamente. Operar el sistema de robot cuando los interruptores no funcionan
correctamente es extremadamente peligroso y puede provocar lesiones
corporales graves o daños graves al sistema de robot, ya que los interruptores
no pueden cumplir las funciones para las que están diseñados en una
emergencia.
ADVERTENCIA
■
■
Para cortar la energía hacia el sistema de robot, desconecte el enchufe de la
fuente de energía. Asegúrese de conectar el cable de alimentación de CA a un
tomacorriente.
NO lo conecte directamente a la fuente de energía de la fábrica.
Antes de realizar cualquier procedimiento de reemplazo, apague el controlador
y los equipos relacionados, luego desconecte el enchufe de la fuente de
alimentación.

Mantenimiento
LS10-B Mod.6 59
Realizar cualquier procedimiento de reemplazo con la energía encendida es
extremadamente peligroso y puede provocar una descarga eléctrica o el mal
funcionamiento del sistema de robot.
PRECAUCIÓN
■
Asegúrese de conectar los cables correctamente. No permita una tensión
innecesaria en los cables. (No coloque objetos pesados en los cables. No doble
ni tire de los cables por la fuerza). La tensión innecesaria en los cables puede
provocar daños en los cables, desconexión o error de contacto. Los cables
dañados, la desconexión o el error de contacto son extremadamente peligrosos
y pueden provocar descargas eléctricas o el funcionamiento incorrecto del
sistema de robot.
2. Mantenimiento general
Este capítulo describe las inspecciones y procedimientos de mantenimiento. Realizar
inspecciones y procedimientos de mantenimiento es esencial para evitar problemas y
garantizar la seguridad.
Asegúrese de realizar las inspecciones de mantenimiento en conformidad con el programa.
2.1 Inspección de mantenimiento
2.1.1 Programa de inspección de mantenimiento
Los puntos de inspección se dividen en cinco etapas: diaria, mensual, trimestral, semestral
y anual. Los puntos de inspección se agregan en cada etapa.
Si el manipulador se opera durante 250 horas o más al mes, se deben agregar puntos de
inspección cada 250 horas, 750 horas, 1500 horas y 3000 horas de operación.
Punto de inspección
Inspección
diaria
Inspección
mensual
Inspección
trimestral
Inspección
semestral
Inspección
anual
Revisión
(reemplazo)
1 mes (250 h)
Inspeccionar todos los días
√
2 meses (500 h)
√
3 meses (750 h)
√
√
4 meses (1000 h)
√
5 meses (1250 h)
√
6 meses (1500 h)
√
√
√
7 meses (1750 h)
√
8 meses (2000 h)
√
9 meses (2250 h)
√
√
10 meses (2500 h)
√
11 meses (2750 h)
√
12 meses (3000 h)
√
√
√
√
13 meses (3250 h)
√
20.000 h
√
h = hora

Mantenimiento
60 LS10-B Mod.6
2.1.2 Punto de inspección
Inspección mientras está apagado (el manipulador no está en funcionamiento)
Punto de inspección
Lugar de inspección
Diario
Mensual
Trimestral
Semestral
Anual
Verifique la soltura o juego de los
pernos y tornillos.
Apriételos, de ser necesario.
(Para el torque de ajuste, consulte
Mantenimiento: 2.4 Apretar pernos
de cabeza hueca hexagonal).
Pernos de montaje del
efector final
√
√
√
√
√
Pernos de montaje del
manipulador
√
√
√
√
√
Pernos de bloqueo de cada
brazo
√
√
√
√
√
Pernos, tornillos alrededor
del eje
√
Pernos, tornillos que fijan
motores, unidades de
engranaje reductor, etc.
√
Verifique si los conectores están
sueltos.
Si los conectores están sueltos,
presiónelos o apriételos de forma
segura.
Conectores externos del
manipulador (en las placas
del conector, etc.).
√
√
√
√
√
Unidad de cable del
manipulador
√
√
√
√
Verifique visualmente si hay
defectos externos.
Limpie, de ser necesario.
Apariencia externa del
manipulador
√
√
√
√
√
Cables externos
√
√
√
√
Verifique si están doblados o en
posición incorrecta. Repárelos o
colóquelos correctamente, de ser
necesario.
Protecciones, etc.
√
√
√
√
√
Verifique la tensión de las correas
de regulación.
Ténselas, de ser necesario.
Interior del brazo n.º 2
√
√
Condiciones de engrase
Consulte Mantenimiento: 2.3 Engrase.
Inspeccionar mientras está encendido (el manipulador está en operación)
Punto de inspección
Lugar de inspección
Diario
Mensual
Trimestral
Semestral
Anual
Revise el rango de movimiento
Cada articulación
√
Verifique si ocurren sonidos o
vibraciones inusuales.
Completo
√
√
√
√
√
Mida la precisión varias veces con
un medidor.
Completo
√
Active y desactive el desbloqueo
del freno y verifique el sonido del
freno electromagnético. Si no
produce un sonido, reemplace el
freno.
Freno
√
√
√
√
√

Mantenimiento
LS10-B Mod.6 61
2.2 Revisión (Reemplazo de piezas)
PRECAUCIÓN
■
El tiempo de revisión se basa en la suposición de que todas las articulaciones se
operan para una distancia equivalente. Si una articulación en particular tiene
mucho trabajo o una carga alta, recomendamos revisar todas las articulaciones
(tantas como sea posible) antes de superar las 20.000 horas de operación con la
articulación como base.
Las piezas de las articulaciones del manipulador pueden causar una disminución en la
precisión o un mal funcionamiento debido al deterioro del manipulador causado por el uso
a largo plazo. A fin de usar el manipulador a largo plazo, recomendamos revisar las piezas
(reemplazo de piezas).
Una indicación general para el período entre revisiones es de 20.000 horas de operación del
manipulador.
Sin embargo, el lapso puede variar según las condiciones de uso y el grado de carga (como
cuando se opera con la velocidad de movimiento y la aceleración/desaceleración máximas
en operación continua) aplicado en el manipulador.
El plazo de reemplazo recomendado para las piezas sujetas a mantenimiento (motores,
unidades de engranaje reductor y correas de regulación) se puede comprobar en el cuadro
de diálogo [Maintenance] (Mantenimiento) de EPSON RC+ 7.0.
Para conocer detalles, consulte el siguiente manual.
Controlador de robot RC90 / RC90-B Mantenimiento 6. Alarma
Nota:
El plazo de reemplazo recomendado para las piezas de mantenimiento es cuando alcanzan
una vida útil de L10 (tiempo para un 10 % de probabilidad de error). En el cuadro de
diálogo [Maintenance], la vida útil de L10 se muestra como 100%.
NOTA

Mantenimiento
62 LS10-B Mod.6
Las horas de operación del manipulador se pueden revisar en el diálogo [Controller Status
Viewer] (Visor de estado del controlador) -[Motor On Hours] (Horas de funcionamiento del
motor).
(1) En EPSON RC+, seleccione menú-[Tools]-[Controller] (Herramientas - Controlador)
para abrir el diálogo [Controller Tools] (Herramientas del controlador).
(2) Haga clic en el botón <View Controller Status> (Ver estado del controlador) para abrir
el diálogo [Browse For Folder] (Examinar carpeta).
(3) Seleccione la carpeta en la que se almacena la información.
(4) Haga clic en <OK> (Aceptar) para ver el diálogo [Controller Status Viewer] (Visor
de estado del controlador).
(5) Seleccione [Robot] desde el menú de árbol a la izquierda.
Para las piezas sujetas a revisión, consulte Mantenimiento 14. Lista de piezas de
mantenimiento.
Para conocer detalles sobre el reemplazo de cada pieza, consulte la sección Mantenimiento.
Comuníquese con el proveedor de su región para obtener más información.

Mantenimiento
LS10-B Mod.6 63
2.3 Engrase
La ranura del tornillo esférico y las unidades de engranaje reductor se deben engrasar
regularmente. Use solo la grasa que se especifica en la siguiente tabla.
PRECAUCIÓN
■
Mantenga el manipulador con suficiente grasa. Operar el manipulador sin
suficiente grasa dañará las piezas deslizantes o causará un rendimiento
insuficiente del mismo. Si se dañan las piezas, se necesitará mucho tiempo y
dinero para repararlas.
PRECAUCIÓN
■
Si le entra grasa en los ojos, la boca o cae en su piel, siga las instrucciones a
continuación.
Si le entra grasa en los ojos
: Enjuáguelos a fondo con agua limpia y, luego, consulte a un médico
de inmediato.
Si le entra grasa en la boca
: Si se ingiere, no induzca el vómito. Consulte a un médico de
inmediato.
: Si la grasa solo entra en su boca, enjuáguese la boca a fondo con
agua.
Si le cae grasa en la piel
: Enjuague el área a fondo con agua y jabón.
Pieza de engrase
Intervalo de engrase
Grasa
Consulte Mantenimiento:
Articulación n.º 1
Unidades de
engranaje reductor
Tiempo de revisión
SK-1A
5 Articulación n.º 1
Articulación n.º 2
SK-1A
6 Articulación n.º 2
Articulación n.º 3
Unidad de ranura
de tornillo esférico
A los 100 km de
operación
(50 km para el primer
engrase)
AFB
10. Engrase de la unidad
de ranura de tornillo
esférico
Unidades de engranaje reductor de la articulación n.º 1, 2
Como indicación general, realice el engrase en los mismos lapsos que las revisiones.
Sin embargo, el lapso puede variar según las condiciones de uso y el grado de carga (como
cuando se opera con la velocidad de movimiento y la aceleración/desaceleración máximas
en operación continua) aplicado en el manipulador.
Unidad de ranura de tornillo esférico de la articulación n.º 3
El intervalo de engrase recomendado es a los 100 km de operación. Sin embargo, los
lapsos de engrase también se pueden verificar a partir de la condición de engrase.
Realice el engrase si la grasa está descolorida o seca.
Grasa normal Grasa descolorida
Realice el engrase a los 50 km de operación para el primer engrase.
El plazo de reemplazo recomendado para la grasa en la ranura de tornillo esférico se puede
revisar en el cuadro de diálogo [Maintenance] de EPSON RC+ 7.0.
Para conocer detalles, consulte el siguiente manual.
Controlador de robot RC90 / RC90-B Mantenimiento 6. Alarma
NOTA

Mantenimiento
64 LS10-B Mod.6
2.4 Apretar pernos de cabeza hueca hexagonal
Los pernos de cabeza hueca hexagonal se usan en lugares en los que se necesita fuerza
mecánica. (En este manual, nos referiremos a los pernos de cabeza hueca hexagonal como
“pernos”). Estos pernos se aprietan con los torques de ajuste que se muestran en la siguiente
tabla.
Cuando es necesario volver a apretar los pernos en algunos procedimientos en este manual
(excepto en casos especiales, según se indica), use un torquímetro para que los pernos
queden apretados con los torques de ajuste correctos que se muestran a continuación.
Tornillo
Torque de ajuste
Consulte a continuación para obtener
información acerca del tornillo de fijación.
M2.5
1,4 ± 0,1 Nm
(14 ± 1 kgfcm)
Tornillo
Torque de ajuste
M3
2,0 ± 0,1 Nm
(21 ± 1 kgfcm)
M3
0,7 ± 0,1 Nm
(7,1 ± 1
kgfcm)
M4
4,0 ± 0,2 Nm
(41 ± 2 kgfcm)
M4
2,4 ± 0,1 Nm
(26 ± 1 kgfcm)
M5
8,0 ± 0,4 Nm
(82 ± 4 kgfcm)
M5
3,9 ± 0,2 Nm
(40 ± 2 kgfcm)
M6
13,0 ± 0,6 Nm
(133 ± 6 kgfcm)
M8
32,0 ± 1,6 Nm
(326 ± 16 kgfcm)
M10
58,0 ± 2,9 Nm
(590 ± 30 kgfcm)
M12
100,0 ± 5,0 Nm
(1,020 ± 51 kgfcm)
Los pernos alineados en una circunferencia se deben apretar en un patrón entrecruzado,
como se muestra en la figura a continuación.
1
5
3
7
2
6
4
8
Agujero
para
pernos
No apriete todos los pernos firmemente a la vez.
Divida la cantidad de veces que se aprietan los
pernos en dos o tres y apriete los pernos firmemente
con una llave hexagonal. Luego, use un torquímetro
para apretar los pernos con los torques de ajuste que
se muestran en la tabla anterior.
2.5 Orígenes coincidentes
Después de reemplazar las piezas (motores, unidades de engranaje reductor, un freno,
correas de regulación, una unidad de ranura de tornillo esférico, etc.), el manipulador no
puede operar correctamente, ya que no coincide el origen almacenado en cada motor y el
origen correspondiente almacenado en el controlador. Después de reemplazar las piezas, es
necesario hacer coincidir estos orígenes.
Para realizar la calibración, es necesario registrar los valores del pulso para una posición
específica.
Antes de reemplazar piezas, seleccione datos de pose del dato del punto registrado para
verificar la precisión. Luego siga los pasos a continuación para mostrar los valores del pulso
y regístrelos.
Ejecute el siguiente comando en [Command Window].
>PULSE
PULSE: [Valor de pulso de articulación n.º 1] pls [Valor de pulso de articulación n.º
2] pls [Valor de pulso de articulación n.º 3] pls [Valor de pulso de articulación n.º 4]
pls
EPSON
RC+

Mantenimiento
LS10-B Mod.6 65
2.6 Distribución de las piezas de mantenimiento
Modelo estándar
Cable de alimentación
Unidad de cable
Freno de
articulación n.º 3
Cable de señal
Desbloqueo
del freno
Luz LED
Unidad de
ranura de
tornillo
esférico
Cubierta superior
del brazo
er
Motor de la
articulación n.º 4
Correa Z
Correa U2
Correa U1
Motor de la
articulación n.º 2
Articulación n.º 2
unidades de
engranaje reductor
Unidad de engranaje
reductor de la
articulación n.º 1
Motor de la
articulación n.º 1
Motor de la
articulación n.º 3
(Figura: LS10-B602S)
Placa de
control
Cubierta inferior del brazo
Freno de la
articulación
n.º 4
Polea
intermedia
Placa del
convertidor
Modelo para salas blancas (con fuelle opcional)
Para el modelo para salas blancas, se agregan las siguientes piezas al modelo estándar.
Fuelle
Fuelle
Banda de
apriete
(Figura: LS10-B602C)
Banda de
apriete
Banda de
apriete

Mantenimiento
66 LS10-B Mod.6
3. Cubiertas
En este capítulo se describen todos los procedimientos para retirar e instalar cubiertas
durante el mantenimiento.
ADVERTENCIA
■
No conecte ni desconecte los conectores del motor mientras el sistema de robot
esté encendido. Conectar o desconectar los conectores del motor con la energía
encendida es extremadamente peligroso y puede provocar lesiones corporales
graves, ya que el manipulador puede moverse de manera anormal; además,
puede provocar descargas eléctricas y el mal funcionamiento del sistema de
robot.
■
Para cortar la energía hacia el sistema de robot, desconecte el enchufe de la
fuente de energía. Asegúrese de conectar el cable de alimentación de CA a un
tomacorriente.
NO lo conecte directamente a la fuente de energía de la fábrica.
■
Antes de realizar cualquier procedimiento de reemplazo, apague el controlador y
los equipos relacionados, luego desconecte el enchufe de la fuente de
alimentación.
Realizar cualquier procedimiento de reemplazo con la energía encendida es
extremadamente peligroso y puede provocar una descarga eléctrica o el mal
funcionamiento del sistema de robot.
■
Tenga cuidado de no introducir sustancias externas en el manipulador, los
conectores y los pines durante el mantenimiento. Encender la alimentación del
sistema de robot cuando hay sustancias externas en su interior es
extremadamente peligroso y puede causar descargas eléctricas o el mal
funcionamiento del sistema de robot.
Cubierta inferior
del brazo
Placa de conectores
Subplaca de conectores
Placa del
usuario
(Figura: LS10-B702S)
Cubierta superior
del brazo

Mantenimiento
LS10-B Mod.6 67
3.1 Cubierta superior del brazo
PRECAUCIÓN
■
No retire la cubierta superior del brazo a la fuerza. Retirar la cubierta a la fuerza
puede provocar daños en los cables, desconexión o error de contacto. Los cables
dañados, la desconexión o el error de contacto son extremadamente peligrosos
y pueden provocar descargas eléctricas o el funcionamiento incorrecto del
sistema de robot.
■
Cuando monte la cubierta, tenga cuidado de no permitir que los cables interfieran
con el montaje de la cubierta y no doble los cables a la fuerza para empujarlos al
interior de la cubierta. Una tensión innecesaria en los cables puede provocar
daños en los cables, desconexión o error de contacto. Los cables dañados, la
desconexión o el error de contacto son extremadamente peligrosos y pueden
provocar descargas eléctricas o el funcionamiento incorrecto del sistema de
robot.
Cuando enrute los cables, observe la ubicación de los cables después de retirar
la cubierta. Asegúrese de colocar los cables de vuelta en sus ubicaciones
originales.
Retiro
de la cubierta
superior
del brazo
Destornille los pernos de montaje de la cubierta
superior del brazo, y luego levante la cubierta.
Cuando haya fuelles instalados en el manipulador,
retire el fuelle superior y, luego, retire la cubierta
superior del brazo. Para conocer más acerca del
retiro del fuelle, consulte Mantenimiento 9.
Fuelle.
Tenga cuidado con los cables y tubos del usuario
cuando retire la cubierta.
4-M416
doble sems
6-M48
Truss
Cubierta superior
del brazo
Instalación
de la cubierta
superior
del brazo
Coloque la cubierta superior del brazo y fíjela con los pernos de montaje de la cubierta
superior del brazo.
Después de fijar la cubierta superior del brazo, asegúrese de que el tope mecánico del límite
inferior no toque la parte cilíndrica de la cubierta superior del brazo.
Cuando haya fuelles instalados en el manipulador, instale la cubierta superior del brazo y,
luego, ajuste el fuelle superior. Para conocer más acerca de la instalación del fuelle,
consulte Mantenimiento 9. Fuelle.
NOTA
NOTA

Mantenimiento
68 LS10-B Mod.6
3.2 Cubierta inferior del brazo
Destornille los pernos de montaje de la cubierta inferior del
brazo, y luego retire la cubierta.
Tenga cuidado con el efector final. Cuando el efector final
está instalado, no se podrá retirar la cubierta inferior del
brazo del eje.
Cuando reemplace la unidad de ranura de tornillo esférico,
deberá retirar el efector final para retirar completamente la
cubierta inferior del brazo.
Cuando pueda trabajar (mantenimiento, inspección) sin
retirar la cubierta completamente, mueva el eje al límite
inferior y baje la cubierta inferior del brazo.
Cuando haya fuelles instalados en el manipulador, retire o
saque por abajo el fuelle inferior y, luego, retire la cubierta
inferior del brazo. Para conocer más acerca del retiro del
fuelle, consulte Mantenimiento 9. Fuelle.
4-M410
Cubierta inferior
del brazo
3.3 Placa del conector
PRECAUCIÓN
■
No retire la placa del conector a la fuerza. Retirar la placa del conector a la fuerza
puede provocar daños en los cables, desconexión o error de contacto. Los
cables dañados, la desconexión o el error de contacto son extremadamente
peligrosos y pueden provocar descargas eléctricas o el funcionamiento incorrecto
del sistema de robot.
■
Cuando monte la placa del conector, tenga cuidado de no permitir que los cables
interfieran con el montaje de la placa y no doble los cables a la fuerza para
empujarlos al interior de la cubierta.
Una tensión innecesaria en los cables puede provocar daños en los cables,
desconexión o error de contacto. Los cables dañados, la desconexión o el error
de contacto son extremadamente peligrosos y pueden provocar descargas
eléctricas o el funcionamiento incorrecto del sistema de robot.
Cuando enrute los cables, observe la ubicación de los cables después de retirar
la placa del conector. Asegúrese de colocar los cables de vuelta en sus
ubicaciones originales.
NOTA

Mantenimiento
LS10-B Mod.6 69
Destornille los pernos de montaje de la placa
del conector y retire la placa.
4-M410
Placa de
conectores
Cuando monte la placa del conector, tenga cuidado con lo siguiente.
No permita que el tubo de aire se doble considerablemente
dentro del manipulador. Tampoco bloquee el flujo de aire.
Si hay una torcedura en el tubo de aire, el flujo de aire se
bloqueará cuando el manipulador esté funcionando, y esto
puede causar problemas.
Ponga el tubo de aire a lo largo de la pared del lado
izquierdo como se muestra en la imagen.
CORRECTO: Curvo
INCORRECTO: Doblado
NOTA

Mantenimiento
70 LS10-B Mod.6
3.4 Subplaca del conector
PRECAUCIÓN
■
No retire la subplaca del conector a la fuerza. Retirar la subplaca del conector a la
fuerza puede provocar daños en los cables, desconexión o error de contacto.
Los cables dañados, la desconexión o el error de contacto son extremadamente
peligrosos y pueden provocar descargas eléctricas o el funcionamiento incorrecto
del sistema de robot.
■
Cuando monte la subplaca del conector, tenga cuidado de no permitir que los
cables interfieran con el montaje de la placa y no doble los cables a la fuerza para
empujarlos al interior de la cubierta.
Una tensión innecesaria en los cables puede provocar daños en los cables,
desconexión o error de contacto. Los cables dañados, la desconexión o el error
de contacto son extremadamente peligrosos y pueden provocar descargas
eléctricas o el funcionamiento incorrecto del sistema de robot.
Cuando enrute los cables, observe la ubicación de los cables después de retirar
la subplaca del conector. Asegúrese de colocar los cables de vuelta en sus
ubicaciones originales.
Destornille los pernos de
montaje de la subplaca del
conector y retire la placa.
Consulte
Configuración y operación
3.6 Conexión de los cables.
Subplaca de
conectores
4-M3
Tornillos de orejetas
(No es necesario destornillar)

Mantenimiento
LS10-B Mod.6 71
3.5 Placa del usuario
Retiro de la
placa de
usuario
(1)
Retire la cubierta superior del brazo.
Consulte Mantenimiento: 3.1 Cubierta superior del brazo.
(2)
Destornille los pernos de montaje de la
placa del usuario y retire la placa.
2-M410
Placa de usuario
Instalación de
la placa
de usuario
(1)
Coloque la placa del usuario en el brazo y fíjela con los pernos de montaje.
(2)
Monte la cubierta superior del brazo.
Consulte Mantenimiento: 3.1 Cubierta superior del brazo.

Mantenimiento
72 LS10-B Mod.6
4. Cable
ADVERTENCIA
■
No conecte ni desconecte los conectores del motor mientras el sistema de robot
esté encendido. Conectar o desconectar los conectores del motor con la energía
encendida es extremadamente peligroso y puede provocar lesiones corporales
graves, ya que el manipulador puede moverse de manera anormal; además,
puede provocar descargas eléctricas y el mal funcionamiento del sistema de
robot.
■
Para cortar la energía hacia el sistema de robot, desconecte el enchufe de la
fuente de energía. Asegúrese de conectar el cable de alimentación de CA a un
tomacorriente.
NO lo conecte directamente a la fuente de energía de la fábrica.
■
Antes de realizar cualquier procedimiento de reemplazo, apague el controlador y
los equipos relacionados, luego desconecte el enchufe de la fuente de
alimentación.
Realizar cualquier procedimiento de reemplazo con la energía encendida es
extremadamente peligroso y puede provocar una descarga eléctrica o el mal
funcionamiento del sistema de robot.
■
Tenga cuidado de no introducir sustancias externas en el manipulador, los
conectores y los pines durante el mantenimiento. Encender la alimentación del
sistema de robot cuando hay sustancias externas en su interior es
extremadamente peligroso y puede causar descargas eléctricas o el mal
funcionamiento del sistema de robot.
PRECAUCIÓN
■
Asegúrese de conectar los cables correctamente. No permita una tensión
innecesaria en los cables. (No coloque objetos pesados en los cables. No doble
ni tire de los cables por la fuerza). La tensión innecesaria en los cables puede
provocar daños en los cables, desconexión o error de contacto. Los cables
dañados, la desconexión o el error de contacto son extremadamente peligrosos
y pueden provocar descargas eléctricas o el funcionamiento incorrecto del
sistema de robot.

Mantenimiento
LS10-B Mod.6 73
4.1 Reemplazo de la unidad de cable
El manipulador de la serie LS10-B no tiene baterías. Los datos de posición son memorizados
por el motor. Cuando se reemplazan los cables, no es necesaria la calibración.
Nombre
Cantidad
Nota
Piezas de
mantenimiento
Unidad de cable
1
LS10-B60**: 2196931
LS10-B70**: 2196932
LS10-B80**: 2196933
Herramientas
Llave
hexagonal
ancho a lo largo de
superficies planas: 3 mm
1
Para tornillo M4
Llave de
tuercas
ancho a lo largo de
superficies planas: 5 mm
1
Para el retiro del conector D-
sub
Destornillador
de tuercas
ancho a lo largo de
superficies planas: 5 mm
1
Para el retiro del conector D-
sub
Torquímetro
1
Alicates de corte
1
Para cortar amarracables
Material
Amarracables
-
Unidad de cable
(Figura: LS10-B602S)
NOTA

Mantenimiento
74 LS10-B Mod.6
PRECAUCIÓN
■
Si los conectores se desconectaron durante el reemplazo de la unidad de cable,
asegúrese de volver a conectar los conectores en sus posiciones correctas.
Consulte los diagramas de los bloques.
La conexión incorrecta de los conectores puede provocar un funcionamiento
incorrecto del sistema de robot.
Para conocer detalles acerca de las conexiones, consulte Mantenimiento: 4.2
Diagramas de cableado.
■
Cuando instale la cubierta, tenga cuidado de no permitir que los cables interfieran
con el montaje de la cubierta y no doble los cables a la fuerza para empujarlos al
interior de la cubierta. Una tensión innecesaria en los cables puede provocar
daños en los cables, desconexión o error de contacto. Los cables dañados, la
desconexión o el error de contacto son extremadamente peligrosos y pueden
provocar descargas eléctricas o el funcionamiento incorrecto del sistema de
robot.
Cuando enrute los cables, observe la ubicación de los cables después de retirar
la cubierta. Asegúrese de colocar los cables de vuelta en sus ubicaciones
originales.
■
Asegúrese de conectar los cables correctamente. No permita una tensión
innecesaria en los cables. (No coloque objetos pesados en los cables. No doble
ni tire de los cables por la fuerza). La tensión innecesaria en los cables puede
provocar daños en los cables, desconexión o error de contacto. Los cables
dañados, la desconexión o el error de contacto son extremadamente peligrosos
y pueden provocar descargas eléctricas o el funcionamiento incorrecto del
sistema de robot.
Hay un freno montado en el motor de las articulaciones n.º 3 y n.º 4 para evitar que el eje
baje y gire debido al peso del efector final mientras la alimentación del controlador está
apagada o mientras el motor está en el estado apagado (MOTOR OFF).
Baje el eje hasta su límite inferior antes del procedimiento de reemplazo después de los
pasos de retiro.
NOTA

Mantenimiento
LS10-B Mod.6 75
Retiro de la
unidad de cable
(1)
Apague el controlador y cambie el motor al estado apagado (MOTOR OFF).
(2)
Mantenga presionado el desbloqueo del freno para bajar el eje. Asegúrese de mantener
suficiente espacio y evitar que el efector final golpee algún equipo periférico.
El desbloqueo del freno solo se aplica a las articulaciones n.º 3 y n.º 4.
Cuando se presiona el desbloqueo del freno, se liberan simultáneamente los frenos
respectivos de las articulaciones n.º 3 y n.º 4.
Tenga cuidado de que el eje no se caiga ni gire mientras se presiona el desbloqueo del
freno, ya que es posible que el eje baje debido al peso del efector final.
(3)
Apague el controlador.
(4)
Retire la subplaca del conector de la placa del conector.
Para conocer detalles, consulte Mantenimiento 3.4. Subplaca del conector
(5)
Desconecte el cable M/C
Para conocer detalles, consulte Configuración y operación 3.6 Conexión de los
cables - Conectar y desconectar el cable M/C.
(6)
Retire la placa del conector.
Para conocer detalles, consulte Mantenimiento: 3.3 Placa del conector.
(7)
Retire los siguientes elementos que están conectados al
(interior) de la placa del conector y de la subplaca del
conector.
Tubo de aire
Cable D-sub
Cable Ethernet (RJ45)
Conectores
: X11, X111, X121, CV11, CV12, CV13
Para los conectores fijados en la base de montaje, sostenga
el gancho para desconectar.
(8)
Corte los dos amarracables que atan los cables en la placa
de fijación de cables del lado de la base.
NOTA
NOTA

Mantenimiento
76 LS10-B Mod.6
(9)
Retire los siete cables de conexión a tierra que están fijos
en la base de montaje.
Tenga cuidado de no perder el separador que sostiene los
cables a tierra.
(10)
Corte los amarracables que atan los cables en el lado de la base.
(11)
Retire la cubierta superior del brazo.
Para conocer detalles, consulte Mantenimiento: 3.1 Cubierta superior del brazo.
(12)
Retire la placa del usuario.
Para conocer detalles, consulte Mantenimiento: 3.5 Placa del usuario.
(13)
Desconecte los 10 conectores en el costado del brazo.
Conectores: X22, X33, X42, X43, X44, X51, BR, X221, X231, X241
(14)
Desconecte los dos conectores al interior de la base.
Conectores: X41, X211
(15)
Desconecte el cable D-sub, el tubo de aire y el cable Ethernet (RJ45) de la placa del
usuario.
Los tornillos de montaje del cable D-sub son muy pequeños. Asegúrese de conservar
los tornillos.
Presione el anillo sobre los conectores rápidos para sacar el tubo de aire. (ø62, ø41)
Recuerde la distribución de los cables para volver a conectar las piezas desconectadas
después de realizar el reemplazo.
(16)
Quite los dos cables a tierra de la placa del usuario.
Destornille el sujetador de cable que ata los cables en el lado del brazo y retire el
sujetador y la hoja de protección.
(17)
Tenga cuidado de no perder el sujetador de cable, la hoja de protección ni los tornillos
de fijación.
(18)
La tuerca que fija los conectores rápidos del conducto
del cable a la placa del usuario. Gire la tuerca para
quitarla y extraiga los cables de la placa del usuario.
(16)
(17)
(19)
Gire los conectores rápidos del conducto del cable
para quitar la tuerca que fija la base y extraiga los
cables de la base.
NOTA
NOTA

Mantenimiento
LS10-B Mod.6 77
Instalación de la
unidad de cable
(1)
Pase los cables nuevos por la base, la placa de fijación
de cables y la tuerca. Después, gire los conectores
rápidos para fijar los cables.
(2)
(1)
Placa de
fijación de
cables
(2)
Pase los cables en la placa del usuario a través de la
placa del usuario y la tuerca, y gire la tuerca para fijar
los cables.
(3)
Al igual que con el corte del amarracables en el paso para el retiro (8), una los cables con
un nuevo amarracables.
(4)
Conecte los dos conectores en el interior de la base.
Conectores: X41, X211
(5)
Conecte los siguientes elementos en la base de montaje y la placa del conector.
Tubo de aire, cable D-sub, cable Ethernet (RJ45)
Conectores: X11, X111, X121, CV11, CV12, CV13
(6)
Conecte el cable de conexión a tierra al lado de la base en la base de montaje.
(7)
Conecte el tubo de aire, el cable D-sub y el cable Ethernet (RJ45) a la placa del usuario.
(8)
Fije el cable a tierra en la placa del usuario.
(9)
Monte la placa del usuario.
Para conocer los detalles, consulte Mantenimiento: 3.5 Placa del usuario.
(10)
Conecte los conectores.
Conectores: X22, X33, X42, X43, X44, X51, BR, X221, X231, X241
(11)
Al igual que con el corte del amarracables en el paso para el retiro (15), una los cables
con un nuevo amarracables.
(12)
Monte la placa del conector.
Para conocer los detalles, consulte Mantenimiento: 3.3 Placa del conector.
(13)
Coloque y fije la cubierta superior del brazo sin que se atasquen los cables.
Para conocer detalles, consulte Mantenimiento: 3.1 Cubierta superior del brazo.

Mantenimiento
78 LS10-B Mod.6
4.2 Diagramas de cableado
4.2.1 Cable de señal

Mantenimiento
LS10-B Mod.6 79
4.2.2 Cable de alimentación

Mantenimiento
80 LS10-B Mod.6
4.2.3 Cable de usuario
4.2.4 Color de los cables
La siguiente tabla muestra los códigos y los colores de los cables indicados en las
asignaciones de pines.
4.2.1 Cable de señal
4.2.2 Cable de alimentación
4.2.3 Cable de usuario
Código
Color del cable
B
Negro
W
Blanco
R
Rojo
G
Verde
Y
Amarillo
BR
Café
L
Azul
V
Violeta
O
Naranja
P
Rosado
SB
Azul cielo
GY
Gris

Mantenimiento
LS10-B Mod.6 81
4.3 Reemplazo del cable M/C
El manipulador de la serie LS10-B no tiene baterías. Los datos de posición son memorizados
por el motor. Cuando se reemplazan los cables, no es necesaria la calibración.
Nombre
Cantidad
Nota
Piezas de
mantenimiento
Cable M/C
1
3 m: 2196934
5 m: 2196935
10 m: 2196936
Herramientas
Destornillador de cabeza plana
1
Torquímetro
1
(Figura: LS10-B602S)
Cable M/C
PRECAUCIÓN
■
Si los conectores se desconectaron durante el reemplazo de la unidad de cable,
asegúrese de volver a conectar los conectores en sus posiciones correctas.
Consulte los diagramas de los bloques.
La conexión incorrecta de los conectores puede provocar un funcionamiento
incorrecto del sistema de robot.
Para conocer detalles acerca de las conexiones, consulte Mantenimiento: 4.2
Diagramas de cableado.
■
Cuando instale la cubierta, tenga cuidado de no permitir que los cables interfieran
con el montaje de la cubierta y no doble los cables a la fuerza para empujarlos al
interior de la cubierta. Una tensión innecesaria en los cables puede provocar
daños en los cables, desconexión o error de contacto. Los cables dañados, la
desconexión o el error de contacto son extremadamente peligrosos y pueden
provocar descargas eléctricas o el funcionamiento incorrecto del sistema de
robot.
Cuando enrute los cables, observe la ubicación de los cables después de retirar
la cubierta. Asegúrese de colocar los cables de vuelta en sus ubicaciones
originales.
NOTA

Mantenimiento
82 LS10-B Mod.6
■
Asegúrese de conectar los cables correctamente. No permita una tensión
innecesaria en los cables. (No coloque objetos pesados en los cables. No doble
ni tire de los cables por la fuerza). La tensión innecesaria en los cables puede
provocar daños en los cables, desconexión o error de contacto. Los cables
dañados, la desconexión o el error de contacto son extremadamente peligrosos
y pueden provocar descargas eléctricas o el funcionamiento incorrecto del
sistema de robot.
Retiro del
cable M/C
(1)
Apague el controlador.
(2)
Desconecte los siguientes conectores del controlador.
Conector del cable de alimentación Conector del cable de señal
(3)
Suelte los tornillos que fijan la placa.
No es necesario retirarlos por completo.
Para conocer detalles, consulte
Mantenimiento:
3.3 Placa del conector.
Tornillos de
orejetas
4-M310
(4)
Deslice la placa para quitarla de la base.
No extraiga el cable M/C después de retirar
la placa. Los cables M/C están conectados
por conectores. Hacerlo puede provocar la
desconexión de los cables.
(5)
Como se muestra a la derecha, extraiga los
cables del manipulador.
NOTA

Mantenimiento
LS10-B Mod.6 83
(6)
Desconecte los conectores en el orden que
se muestra a la derecha.
Los ganchos de los conectores se indican en
las posiciones △ en la figura.
Presione el gancho para desconectar el
conector.
2
1
3
Es difícil de desconectar el conector (blanco) para el cable de alimentación, por
motivos de seguridad.
Para desconectar el conector, presione firmemente el gancho.
Si no puede desconectarlo, presione el conector una vez y, luego, desconéctelo al
presionar el gancho.
No tire de los cables. Hacerlo, puede causar la desconexión.
No quite el cable M/C de la placa.
NOTA

Mantenimiento
84 LS10-B Mod.6
Cable M/C
Instalación
(1)
Fije el cable M/C como se muestra a la
derecha.
Tenga cuidado de no ajustar la placa en
dirección incorrecta.
(2)
Conecte los conectores en el orden que se
muestra a la derecha.
2
3
1
(3)
Deslice la placa para instalarla.
Tornillos de orejetas: 4-M310
Torque de ajuste: 0,60,1 N·m
Tornillos
de orejetas
4-M310
Deslice la placa hasta que esté paralela a la mesa base.
Tenga cuidado de no apretar los tornillos mientras los cables están atrapados en la
placa.
(4)
Conecte los siguientes conectores en el controlador.
Conector del cable de alimentación Conector del cable de señal
(5)
Encienda el controlador.
NOTA
NOTA

Mantenimiento
LS10-B Mod.6 85
Dirección de la subplaca del conector
Cuando instale la placa, tenga cuidado con la dirección.
La dirección correcta es donde las letras: ADVERTENCIA de la etiqueta de advertencia de
descarga eléctrica estén paralelas con la mesa base.
Si la placa está instalada en la dirección incorrecta, los cables al interior del manipulador se
torcerán y puede causar la desconexión.
Correcto: Los cables no están torcidos
Incorrecto: Los cables están torcidos

Mantenimiento
86 LS10-B Mod.6
5. Articulación n.º 1
ADVERTENCIA
■
No conecte ni desconecte los conectores del motor mientras el sistema de robot
esté encendido. Conectar o desconectar los conectores del motor con la energía
encendida es extremadamente peligroso y puede provocar lesiones corporales
graves, ya que el manipulador puede moverse de manera anormal; además,
puede provocar descargas eléctricas y el mal funcionamiento del sistema de
robot.
■
Para cortar la energía hacia el sistema de robot, desconecte el enchufe de la
fuente de energía. Asegúrese de conectar el cable de alimentación de CA a un
tomacorriente.
NO lo conecte directamente a la fuente de energía de la fábrica.
■
Antes de realizar cualquier procedimiento de reemplazo, apague el controlador
y los equipos relacionados, luego desconecte el enchufe de la fuente de
alimentación.
Realizar cualquier procedimiento de reemplazo con la energía encendida es
extremadamente peligroso y puede provocar una descarga eléctrica o el mal
funcionamiento del sistema de robot.
PRECAUCIÓN
■
Tenga cuidado de no aplicar descargas eléctricas excesivas al eje del motor
cuando reemplace los motores. Las descargas eléctricas pueden reducir el ciclo
de vida de los motores y el codificador o dañarlos.
■
Nunca desarme el motor y el codificador. Un motor y codificador desarmado
causará un espacio de posición y no se puede volver a usar.
Después de reemplazar las piezas (motores, unidades de engranaje reductor, frenos, correas
de regulación, unidad de ranura de tornillo esférico, etc.), el manipulador no puede operar
correctamente, ya que no coincide el origen almacenado en cada motor y el origen
correspondiente almacenado en el controlador.
Después de reemplazar las piezas, es necesario hacer coincidir estos orígenes.
El proceso de alinear los dos orígenes se denomina “Calibración”.
Consulte Mantenimiento: 13. Calibración para ejecutar la calibración.
Unidad de engranaje reductor
de la articulación n.º 1
Motor de la articulación n.º 1

Mantenimiento
LS10-B Mod.6 87
5.1 Reemplazo del motor de la articulación n.º 1
Nombre
Cantidad
Nota
Piezas de
mantenimiento
Servomotor de CA de 520 W
1
2197984 (con sello de aceite)
Junta tórica
1
1213266 (CO0543A)
1
1520371 (CO0538A)
1
1510528 (CO0551A)
Herramientas
Llave
hexagonal
ancho a lo largo de
superficies planas: 2 mm
1
Para tornillo de fijación M4
ancho a lo largo de
superficies planas: 3 mm
1
Para tornillo M4
Torquímetro
1
Paño de limpieza
1
Para limpiar grasa
Grasa
Grasa (SK-1A)
-
-
Retiro del motor
de la articulación
n.º 1
(1)
Retire la placa del conector.
Para conocer detalles, consulte Mantenimiento: 3.3 Placa del conector.
(2)
Desconecte el conector.
Conectores: X41, X211 (Sostenga el gancho para retirar).
(3)
Retire el perno de montaje del brazo n.º 1 en el lado de la articulación n.º 1 y retire el
brazo.
Hay una junta tórica (CO0551A) entre la unidad de la articulación n.º 1 y el brazo.
Asegúrese de conservar la junta tórica.
(4)
Retire los tornillos de montaje de la brida de la
articulación n.º 1 en la base.
6-M515
(5)
Sostenga la unidad de la articulación n.º 1 y
retírela de la base.
Tenga cuidado de no dañar el cable del motor en
caso de que quede atrapado en la base.
(6)
Suelte los tornillos de montaje del motor en la
brida del motor de la articulación n.º 1 y retire la
unidad del motor
Hay una junta tórica en la posición de montaje de
la brida del motor y la brida de la articulación n.º
1.
Tenga cuidado de no perder la junta tórica.
4-M415
Unidad de
motor de la
articulación
n.º 1

Mantenimiento
88 LS10-B Mod.6
(7)
Retire el generador de forma de onda desde
el motor de la articulación n.º 1.
Hay un casquillo de bronce en uno de los
agujeros de tornillo de fijación. Tenga
cuidado de no perder el casquillo.
A: Casquillo de bronce : M5
B: Tornillo de fijación : 2-M56
B: Tornillo de fijación
A: Casquillo de bronce
Generador de forma de onda
Motor de la
articulación n.º 1
(8)
Retire los tornillos de montaje del motor
para quitar la brida y la junta tórica
(CO0538A).
4-M412
Motor de la
articulación n.º 1
Brida del motor
Junta tórica
4-Arandela M4

Mantenimiento
LS10-B Mod.6 89
Instalación
del motor de la
articulación n.º 1
(1)
Coloque la junta tórica (CO0538A) en la
superficie de montaje del motor e instale la
brida del motor.
4-M412
Motor de la
articulación n.º 1
Brida del motor
Junta tórica
4-Arandela M4
(2)
Aplique grasa (SK-1A) entre el generador de
forma de onda y el motor.
Volumen de grasa : 13 g
Monte el generador de forma de onda en el
motor de la articulación n.º 1.
Asegúrese de alinear el lado del extremo del
generador de forma de onda con el lado del
extremo del eje del motor.
Apriete uno de los tornillos de fijación
verticalmente en el lado plano del eje del
motor. Inserte un casquillo en el otro
agujero de tornillo de fijación para evitar
daños al eje del motor.
B: Tornillo de
fijación
A: Casquillo de bronce
Generador de forma de onda
Motor de la
articulación n.º 1
A: Casquillo de bronce : M5
B: Tornillo de fijación : 2-M56
PRECAUCIÓN
■
Consulte la figura anterior para conocer la orientación del generador de forma de
onda. Asegúrese de instalar el generador de forma de onda correctamente. Una
instalación incorrecta del generador de forma de onda tendrá como resultado un
funcionamiento incorrecto del manipulador.
(3)
Coloque una junta tórica (CO0538A) en la brida del motor y arme el motor con la
brida de la articulación n.º 1.
Para insertar el motor, gírelo lentamente de lado a lado manualmente y presione.
(4)
Monte la unidad de la articulación n.º 1 en la base.
Fije los cables del motor en la articulación n.º 1 en la dirección de la parte posterior
de la base.
(5)
Coloque la junta tórica (CO0538A) retirada en el paso de retiro (3) en la ranura de la
junta tórica del brazo. Después, instale el brazo de la unidad de la articulación n.º 1.
(6)
Conecte los conectores.
Conectores: X41, X211
(7)
Monte la placa del conector.
Para conocer detalles, consulte Mantenimiento: 3.3 Placa del conector.

Mantenimiento
90 LS10-B Mod.6
(8)
Revise si la articulación n.º 1 se mueve en un movimiento de desplazamiento cuando
se opera desde el menú de EPSON RC+ [Tools]-[Robot Manager]-[Jog & Teach]
(Herramientas - Administrador de robot - Desplazar y Enseñar).
Si el manipulador oscila con MotorON (Motor encendido) y se detectan los siguientes
errores,
Error 5041: Error de salida de torque del motor en estado de baja potencia.
Error 4241: Se detectó exceso de velocidad durante el modo de baja potencia.
o cuando una articulación distinta a la articulación n.º 1 se mueve, es posible que el
conector para esa otra articulación esté conectado al motor de la articulación n.º 1.
Revise la conexión del conector.
(9)
Ejecute la calibración para la articulación n.º 1.
Para conocer detalles, consulte Mantenimiento: 13. Calibración.

Mantenimiento
LS10-B Mod.6 91
5.2 Reemplazo de la unidad de engranaje reductor de la
articulación n.º 1.
Una unidad de engranaje reductor consta de las siguientes tres piezas. Cuando reemplace la
unidad de engranaje reductor, asegúrese siempre de reemplazar el generador, la lámina
flexible y la brida circular juntas como un conjunto.
Generador de forma de onda, lámina flexible, brida circular
Para conocer detalles acerca de la unidad de engranaje reductor, consulte Mantenimiento:
14. Lista de piezas de mantenimiento.
Nombre
Cantida
d
Nota
Piezas de
mantenimiento
Unidad de engranaje reductor
1
1765530
Herramientas
Llave
hexagonal
ancho a lo largo de
superficies planas: 2 mm
1
Para tornillo de fijación
M4
ancho a lo largo de
superficies planas:
2,5 mm
1
Para tornillo M3
ancho a lo largo de
superficies planas: 3 mm
1
Para tornillo M4
Torquímetro
1
Alicates de corte
1
Espátula
1
Para aplicar grasa
Paño de limpieza
1
Para limpiar grasa (Brida)
1
Para limpiar grasa
(Perno)
Tornillo (M4)
2
Alrededor de 20 mm de
longitud
Para retirar lámina
flexible
Grasa
Grasa (SK-1A)
-
-
Retiro de la
unidad de
engranaje
reductor de la
articulación n.º 1
(1)
Retire la unidad del motor de la articulación n.º 1.
Siga los pasos para el retiro en Mantenimiento: 5.1 Reemplazo del motor de la
articulación n.º 1.
(2)
Retire el engranaje reductor de la brida de
la articulación n.º 1
16-M425
Brida
Unidad de
engranaje
reductor

Mantenimiento
92 LS10-B Mod.6
Instalación de la
unidad de
engranaje
reductor de la
articulación n.º 1
(1)
Una nueva unidad de engranaje reductor
contiene las piezas que se muestran en la
figura a la derecha cuando se desembala.
Las ranuras del engranaje de la lámina
flexible, la brida circular y los cojinetes
del generador de forma de onda están
engrasadas. Limpie el exceso de grasa de
la superficie de montaje.
Lámina flexible y Unidad de
cojinete de rodillo cruzado
Brida circular
Generador de forma de onda
Junta tórica
PRECAUCIÓN
■
Nunca ajuste (suelte ni apriete) los pernos de montaje entre la lámina flexible y la
unidad de cojinete de rodillo cruzado. Si se ajustan los pernos de montaje, la
lámina flexible y la unidad de cojinete de rodillo cruzado deben ser alineados por
el fabricante de la unidad de engranaje reductor.
(2)
Coloque las juntas tóricas en las ranuras de
ambos lados de la nueva brida circular.
Asegúrese de que las juntas no se salgan de
las ranuras.
Lado convexo
Ranuras
El otro lado
(3)
Coloque el lado convexo de la brida
circular hacia abajo y encájela en la lámina
flexible.
(4)
Haga coincidir los agujeros del círculo
interno de la unidad de cojinete de rodillo
cruzado y los agujeros pasados de la brida
circular.

Mantenimiento
LS10-B Mod.6 93
(5)
Fije la brida del engranaje reductor a la brida
circular.
Apriete parcialmente todos los pernos en un
patrón entrecruzado, para poder apretar de forma
pareja todos los pernos. Luego, con un
torquímetro, apriete cada perno de forma segura
en un patrón entrecruzado al torque especificado
en la siguiente tabla.
Brida
Unidad de
engranaje
reductor
16-M425
Elemento
Tipo de
perno
Pernos
Torque de ajuste
Unidad de
engranaje
reductor de la
articulación
n.º 1
M425
16
5,4 Nm (55 kgfcm)
Tenga cuidado de no aplicar demasiada fuerza ya que puede dañar las piezas.
(6)
Aplique grasa (SK-1A) dentro de la lámina flexible.
Volumen de grasa : 37 g
(7)
Monte el motor de la articulación n.º 1.
Siga los pasos para la instalación en Mantenimiento: 5.1 Reemplazo del motor de la
articulación n.º 1.
NOTA

Mantenimiento
94 LS10-B Mod.6
6. Articulación n.º 2
ADVERTENCIA
■
No conecte ni desconecte los conectores del motor mientras el sistema de robot
esté encendido. Conectar o desconectar los conectores del motor con la energía
encendida es extremadamente peligroso y puede provocar lesiones corporales
graves, ya que el manipulador puede moverse de manera anormal; además,
puede provocar descargas eléctricas y el mal funcionamiento del sistema de
robot.
■
Para cortar la energía hacia el sistema de robot, desconecte el enchufe de la
fuente de energía. Asegúrese de conectar el cable de alimentación de CA a un
tomacorriente.
NO lo conecte directamente a la fuente de energía de la fábrica.
■
Antes de realizar cualquier procedimiento de reemplazo, apague el controlador
y los equipos relacionados, luego desconecte el enchufe de la fuente de
alimentación.
Realizar cualquier procedimiento de reemplazo con la energía encendida es
extremadamente peligroso y puede provocar una descarga eléctrica o el mal
funcionamiento del sistema de robot.
PRECAUCIÓN
■
Tenga cuidado de no aplicar descargas eléctricas excesivas al eje del motor
cuando reemplace los motores. Las descargas eléctricas pueden reducir el ciclo
de vida de los motores y el codificador o dañarlos.
■
Nunca desarme el motor y el codificador. Un motor y codificador desarmado
causará un espacio de posición y no se puede volver a usar.
Después de reemplazar las piezas (motores, unidades de engranaje reductor, frenos, correas
de regulación, unidad de ranura de tornillo esférico, etc.), el manipulador no puede operar
correctamente, ya que no coincide el origen almacenado en cada motor y el origen
correspondiente almacenado en el controlador.
Después de reemplazar las piezas, es necesario hacer coincidir estos orígenes.
El proceso de alinear los dos orígenes se denomina “Calibración”.
Consulte Mantenimiento: 13. Calibración para ejecutar la calibración.
Motor de la
articulación n.º 2
Unidad de engranaje
reductor de la
articulación n.º 2

Mantenimiento
LS10-B Mod.6 95
6.1 Reemplazo del motor de la articulación n.º 2
Nombre
Cantidad
Nota
Piezas de
mantenimiento
Servomotor
de CA
520 W
1
2197985 (sin sello de aceite)
Herramientas
Llave
hexagonal
ancho a lo largo de
superficies planas: 2 mm
1
Para tornillo de fijación M4
ancho a lo largo de
superficies planas: 3 mm
1
Para tornillo M4
Torquímetro
1
Alicates de corte
1
Para cortar amarracables
Paño de limpieza
1
Para limpiar grasa
Material
Amarracables
-
Grasa
Grasa
SK-1A
-
Hay un freno montado en el motor de las articulaciones n.º 3 y n.º 4 para evitar que el eje
baje y gire debido al peso del efector final mientras la alimentación del controlador está
apagada o mientras el motor está en el estado apagado (MOTOR OFF).
Baje el eje hasta su límite inferior antes del procedimiento de reemplazo después de los
pasos de retiro.
Retiro del motor
de la articulación
n.º 2
(1)
Encienda el controlador.
(2)
Empuje el eje hasta su límite inferior mientras presiona el desbloqueo del freno.
Asegúrese de mantener suficiente espacio y evitar que el efector final golpee algún equipo
periférico.
El desbloqueo del freno solo se aplica a las articulaciones n.º 3 y n.º 4.
Cuando se presiona el desbloqueo del freno, se liberan simultáneamente los frenos
respectivos de las articulaciones n.º 3 y n.º 4.
Tenga cuidado de que el eje no se caiga ni gire mientras se presiona el desbloqueo del
freno, ya que es posible que el eje baje debido al peso del efector final.
(3)
Apague el controlador.
(4)
Retire la cubierta superior del brazo.
Para conocer detalles, consulte Mantenimiento: 3.1 Cubierta superior del brazo.
(5)
Retire la placa del usuario.
Para conocer detalles, consulte Mantenimiento: 3.5 Placa del usuario.
(6)
Corte los amarracables que atan los cables.
No corte los demás amarracables.
(7)
Desconecte los conectores.
Conectores: X221, X42 (Sostenga el gancho para retirar).
NOTA

Mantenimiento
96 LS10-B Mod.6
(8)
Retire los tornillos que sujetan la unidad del
motor y, luego, retire la unidad de motor de
la articulación n.º 2 desde el brazo n.º 2.
Tornillo de montaje del motor 4-M415
Para sacar el motor sin problemas, mueva
manualmente el brazo n.º 2 lentamente
mientras tira del motor.
Unidad de motor de
la articulación n.º 2
Brazo n.º 2
4-M415
(9)
Retire el generador de forma de onda desde
el motor de la articulación n.º 2.
Hay un casquillo de bronce en uno de los
agujeros de tornillo de fijación. Asegúrese
de conservar el casquillo.
2-M46
Tornillos
de fijación
Casquillo de
bronce M4
Motor de la
articulación n.º 2
Generador de forma de onda

Mantenimiento
LS10-B Mod.6 97
Instalación del
motor de la
articulación n.º 2
(1)
Monte el generador de forma de onda en el motor
de la articulación n.º 2.
Asegúrese de alinear el lado del extremo del
generador de forma de onda con el lado del
extremo del eje del motor.
Apriete uno de los tornillos de fijación
verticalmente en el lado plano del eje del motor.
Inserte un casquillo en el otro agujero de tornillo
de fijación para evitar daños al eje del motor.
2-M46
tornillos de
fijación
Casquillo de
bronce M4
Motor de la
articulación n.º 2
Generador de forma de onda
PRECAUCIÓN
■
Consulte las figuras anteriores para conocer la orientación del generador de forma
de onda. Asegúrese de instalar el generador de forma de onda correctamente.
Una instalación incorrecta del generador de forma de onda tendrá como resultado
un funcionamiento incorrecto del manipulador.
(2)
Aplique grasa entre el generador de forma de onda y la brida del motor.
Volumen de grasa 6 g (SK-1A)
(3)
Monte la unidad del motor de la articulación
n.º 2 en el brazo n.º 2.
Para insertar el motor, mueva manualmente el
brazo n.º 2 de forma manual y presiónelo
hacia adentro.
Tornillo de montaje del motor 4-M415
Unidad de motor de
la articulación n.º 2
Brazo n.º 2
4-M415
(4)
Monte la placa del usuario.
Para conocer detalles, consulte Mantenimiento: 3.5 Placa del usuario.
(5)
Conecte los conectores.
Conectores: X221, X42.
(6)
Amarre los cables del con un amarracables en las posiciones originales en las que
estaban antes de retirarlos en el paso para el retiro (6).
No permita una tensión innecesaria en los cables.
(7)
Monte la cubierta superior del brazo.
Para conocer detalles, consulte Mantenimiento: 3.1 Cubierta superior del brazo.

Mantenimiento
98 LS10-B Mod.6
(8)
Revise si la articulación n.º 2 se mueve en un movimiento de desplazamiento cuando se
opera desde el menú de EPSON RC+ [Tools]-[Robot Manager]-[Jog & Teach]
(Herramientas - Administrador de robot - Desplazar y Enseñar).
Si el manipulador oscila con MotorON (Motor encendido) y se detectan los siguientes
errores,
Error 5041: Error de salida de torque del motor en estado de baja potencia.
Error 4241: Se detectó exceso de velocidad durante el modo de baja potencia.
o cuando una articulación distinta a la articulación n.º 2 se mueve, es posible que el
conector para esa otra articulación esté conectado al motor de la articulación n.º 2.
Revise la conexión del conector.
(9)
Ejecute la calibración para la articulación n.º 2.
Para conocer detalles, consulte Mantenimiento: 13. Calibración.

Mantenimiento
LS10-B Mod.6 99
6.2 Reemplazo de la unidad de engranaje reductor de la articulación n.º 2.
Una unidad de engranaje reductor consta de las siguientes tres piezas. Cuando reemplace la
unidad de engranaje reductor, asegúrese de reemplazar siempre todas estas piezas juntas,
como un conjunto.
Generador de forma de onda, lámina flexible, brida circular
Para conocer detalles acerca de las tres piezas, consulte Mantenimiento: 14. Lista de piezas
de mantenimiento.
Nombre
Cantidad
Nota
Piezas de
mantenimiento
Unidad de engranaje reductor
1
1765520
Junta tórica
1
1213267 (CO0547A)
Herramientas
Llave
hexagonal
ancho a lo largo de
superficies planas: 2 mm
1
Para tornillo de fijación M4
ancho a lo largo de
superficies planas: 2,5 mm
1
Para tornillo M3
ancho a lo largo de
superficies planas: 3 mm
1
Para tornillo M4
Torquímetro
1
Espátula
1
Para aplicar grasa
Paño de limpieza
1
Para limpiar grasa (Brida)
1
Para limpiar grasa (Perno)
Tornillo (M3) Longitud de alrededor de
20 mm
2
Para retirar la lámina flexible
Material
Amarracables
-
Grasa
Grasa
SK-1A
-
Hay un freno montado en el motor de las articulaciones n.º 3 y n.º 4 para evitar que el eje
baje y gire debido al peso del efector final mientras la alimentación del controlador está
apagada o mientras el motor está en el estado apagado (MOTOR OFF).
Baje el eje hasta su límite inferior antes del procedimiento de reemplazo después de los
pasos de retiro.
NOTA

Mantenimiento
100 LS10-B Mod.6
Retiro de la
unidad de
engranaje
reductor de la
articulación n.º 2
(1)
Encienda el controlador.
(2)
Empuje el eje hasta su límite inferior mientras presiona el desbloqueo del freno.
Asegúrese de mantener suficiente espacio y evitar que el efector final golpee algún
equipo periférico.
El desbloqueo del freno solo se aplica a las articulaciones n.º 3 y n.º 4.
Cuando se presiona el desbloqueo del freno, se liberan simultáneamente los frenos
respectivos de las articulaciones n.º 3 y n.º 4.
Tenga cuidado de que el eje no se caiga ni gire mientras se presiona el desbloqueo del
freno, ya que es posible que el eje baje debido al peso del efector final.
(3)
Apague el controlador.
(4)
Retire el generador de forma de onda desde el motor de la articulación n.º 2.
Siga los pasos para el retiro en Mantenimiento: 6.1 Reemplazo del motor de la
articulación n.º 2.
(5)
Retire los tornillos que montan el brazo n.º 2
en la unidad del engranaje reductor para retirar
el brazo n.º 2.
A: 16-M328
B: Arandela pequeña 8-M332+8-M3
C: Arandela pequeña 4-M312+4-M3
Brazo n.º 2
アーム 2
Unidad de
engranaje
reductor
Brazo n.º 1
B
C
Junta tórica
A
(6)
Retire los tornillos que montan la unidad de
engranaje reductor del brazo n.º 1 para retirar
el engranaje reductor del brazo n.º 1.
Hay una junta tórica entre el brazo n.º 1 y la
unidad de engranaje reductor.
Tenga cuidado de no perder la junta tórica
retirada.

Mantenimiento
LS10-B Mod.6 101
Instalación de la
unidad de
engranaje
reductor de la
articulación n.º 2
(1)
Una nueva unidad de engranaje reductor
contiene las piezas que se muestran en la
figura a la derecha cuando se desembala.
Las ranuras del engranaje de la lámina
flexible, la brida circular y los cojinetes del
generador de forma de onda están
engrasadas. Limpie el exceso de grasa de
la superficie de montaje.
Junta tórica
Lámina flexible y Unidad de
cojinete de rodillo cruzado
Brida circular
Generador de forma de onda
PRECAUCIÓN
■
Nunca ajuste (suelte ni apriete) los pernos de montaje entre la lámina flexible y la
unidad de cojinete de rodillo cruzado. Si se ajustan los pernos de montaje, la
lámina flexible y la unidad de cojinete de rodillo cruzado deben ser alineados por
el fabricante de la unidad de engranaje reductor.
(2)
Coloque las juntas tóricas en las ranuras de
ambos lados de la nueva brida circular.
Asegúrese de que las juntas no se salgan de
las ranuras.
Lado convexo
Ranuras
El otro lado
(3)
Coloque el lado convexo de la brida
circular hacia abajo y encájela en la lámina
flexible.
(4)
Haga coincidir los agujeros del círculo
interno de la unidad de cojinete de rodillo
cruzado y los agujeros pasados de la brida
circular.

Mantenimiento
102 LS10-B Mod.6
(5)
Coloque la junta tórica retirada en el paso para el
retiro (6) en la ranura de la junta tórica del brazo
n.º 1.
Si la junta tórica no calza en la ranura, use otra
junta tórica que esté preparada como pieza de
mantenimiento.
Instale la lámina flexible del brazo n.º 1.
A: 16-M328
B: Arandela pequeña 8-M332+8-M3
C: Arandela pequeña 4-M312+4-M3
Brazo n.º 2
Unidad de
engranaje
reductor
Brazo n.º 1
B
C
Junta tórica
A
Fije parcialmente todos los pernos en un patrón entrecruzado, para poder apretar de
forma pareja todos los pernos. Luego, con un torquímetro, apriete cada perno de
forma segura en un patrón entrecruzado al torque especificado en la siguiente tabla.
Elemento
Tipo de perno
Torque de ajuste
Unidad de engranaje reductor
de la articulación n.º 2
M3
2,35 Nm (24 kgfcm)
Tenga cuidado de no aplicar demasiada fuerza ya que puede dañar las piezas
(6)
Aplique grasa entre la brida del motor y el generador de forma de onda y en el interior
de la lámina flexible.
Entre la brida del motor y el generador de forma de onda:
Volumen de grasa 6 g (SK-1A)
Dentro de la lámina flexible:
Volumen de grasa 16 g (SK-1A)
(7)
Coloque la junta tórica incluida en la ranura de junta tórica de la brida circular.
Fije el brazo n.º 2 en la brida circular.
(8)
Monte el motor de la articulación n.º 2.
Siga los pasos para la instalación en Mantenimiento: 6.1 Reemplazo del motor de la
articulación n.º 2.
NOTA
NOTA

Mantenimiento
LS10-B Mod.6 103
7. Articulación n.º 3
ADVERTENCIA
■
No conecte ni desconecte los conectores del motor mientras el sistema de robot
esté encendido. Conectar o desconectar los conectores del motor con la energía
encendida es extremadamente peligroso y puede provocar lesiones corporales
graves, ya que el manipulador puede moverse de manera anormal; además,
puede provocar descargas eléctricas y el mal funcionamiento del sistema de
robot.
■
Para cortar la energía hacia el sistema de robot, desconecte el enchufe de la
fuente de energía. Asegúrese de conectar el cable de alimentación de CA a un
tomacorriente.
NO lo conecte directamente a la fuente de energía de la fábrica.
■
Antes de realizar cualquier procedimiento de reemplazo, apague el controlador
y los equipos relacionados, luego desconecte el enchufe de la fuente de
alimentación.
Realizar cualquier procedimiento de reemplazo con la energía encendida es
extremadamente peligroso y puede provocar una descarga eléctrica o el mal
funcionamiento del sistema de robot.
PRECAUCIÓN
■
Tenga cuidado de no aplicar descargas eléctricas excesivas al eje del motor
cuando reemplace los motores. Las descargas eléctricas pueden reducir el ciclo
de vida de los motores y el codificador o dañarlos.
■
Nunca desarme el motor y el codificador. Un motor y codificador desarmado
causará un espacio de posición y no se puede volver a usar.
Después de reemplazar las piezas (motores, unidades de engranaje reductor, frenos, correas
de regulación, unidad de ranura de tornillo esférico, etc.), el manipulador no puede operar
correctamente, ya que no coincide el origen almacenado en cada motor y el origen
correspondiente almacenado en el controlador.
Después de reemplazar las piezas, es necesario hacer coincidir estos orígenes.
El proceso de alinear los dos orígenes se denomina “Calibración”.
Consulte Mantenimiento: 13. Calibración para ejecutar la calibración.
Freno de la
articulación n.º 3
Correa Z
Motor de la
articulación n.º 3

Mantenimiento
104 LS10-B Mod.6
7.1 Reemplazo del motor de la articulación n.º 3
Nombre
Cantidad
Nota
Piezas de
mantenimiento
Servomotor de CA de 200 W
1
2197986
Herramientas
Llave hexagonal
ancho a lo largo de
superficies planas: 2 mm
1
Para tornillo de fijación
M4
ancho a lo largo de
superficies planas: 4 mm
1
Para tornillo M5
Llave de tuercas
ancho a lo largo de
superficies planas: 7 mm
Para el perno M4, tuerca
M4
Torquímetro
Alicates de corte
1
Para cortar
amarracables
Tensiómetro sónico
1
Z: Tensión de correa
69 N (7,0 0,5 kgf)
Cable adecuado (longitud de alrededor de
800 mm)
1
Para tensión de correa
Material
Amarracables
-
Hay un freno montado en el motor de las articulaciones n.º 3 y n.º 4 para evitar que el eje
baje y gire debido al peso del efector final mientras la alimentación del controlador está
apagada o mientras el motor está en el estado apagado (MOTOR OFF).
Baje el eje hasta su límite inferior antes del procedimiento de reemplazo después de los
pasos de retiro.
Retiro del
motor de la
articulación n.º
3
(1)
Encienda el controlador.
(2)
Empuje el eje hasta su límite inferior mientras presiona el desbloqueo del freno.
Asegúrese de mantener suficiente espacio y evitar que el efector final golpee algún equipo
periférico.
El desbloqueo del freno solo se aplica a las articulaciones n.º 3 y n.º 4.
Cuando se presiona el desbloqueo del freno, se liberan simultáneamente los frenos
respectivos de las articulaciones n.º 3 y n.º 4.
Tenga cuidado de que el eje no se caiga ni gire mientras se presiona el desbloqueo del
freno, ya que es posible que el eje baje debido al peso del efector final.
(3)
Apague el controlador.
(4)
Retire la cubierta superior del brazo.
Para conocer detalles, consulte Mantenimiento: 3.1 Cubierta superior del brazo.
(5)
Corte el amarracables que ata los cables del motor de la articulación n.º 3.
No corte los demás amarracables que no se relacionas con el retiro de la placa del usuario.
(6)
Retire la placa del usuario.
Para conocer detalles, consulte Mantenimiento: 3.5 Placa del usuario.
NOTA

Mantenimiento
LS10-B Mod.6 105
(7)
Desconecte los siguientes conectores.
Conectores: X231, X32, X43 (Sostenga el gancho para retirar).
(8)
Suelte los pernos de la unidad del motor
de la articulación n.º 3.
Unidad de motor de
la articulación n.º 3
3-M418 Arandela
(9)
Retire el motor de la articulación n.º 3
de la unidad del motor de la articulación
n.º 3.
Motor de la
articulación n.º 3
4-M415
+Arandela
(10)
Suelte los tornillos de la polea y retírela
del motor de la articulación n.º 3.
Hay un casquillo de bronce en uno de
los agujeros de tornillo de fijación.
Asegúrese de conservar el casquillo.
Motor de la
articulación n.º 3
Tornillo de
fijación M5×8
+ Casquillo M5
Polea
Tornillo de
fijación
M5×8

Mantenimiento
106 LS10-B Mod.6
Instalación del
motor de
articulación n.º 3
(1)
Instale la polea en el motor de la articulación
n.º 3.
Inserte la polea donde su lado del extremo
toca el lado del extremo eje del motor y
fíjela con tornillos de fijación.
Motor de la
articulación n.º 3
Freno
electromagnético
Polea
Placa del motor
Apriete uno de los tornillos de fijación verticalmente en el lado plano del eje del motor.
Inserte un casquillo en el otro agujero de tornillo de fijación para evitar daños al eje
del motor.
(2)
Instale el motor de la articulación n.º 3 en la
placa del motor, mientras alinea el cubo con
el disco de freno.
Antes de alinear el cubo, fije el motor de
manera que la polea esté dentro de la correa
Z.
Fije los cables del motor hacia la parte
trasera del brazo.
Motor de la
articulación n.º 3
4-M415
+Arandela
Correa
Z
Placa
del motor
(3)
Fije parcialmente la unidad del motor de la articulación n.º 3 al brazo n.º 2.
Asegúrese de que los dientes de la correa de regulación se engranen con los de la
polea.
En este momento, asegúrese de que la unidad del motor de la articulación n.º 3 se
pueda mover manualmente, y que no se incline cuando se empuja con el tensador.
Si la unidad está fijada demasiado suelta o demasiado apretada, la correa no tendrá la
tensión correcta.
(4)
Aplique la tensión correcta a la correa Z y
fije la unidad del motor de la articulación
n.º 3.
Tuerca
Placa
Perno
Tensador
Instale el tensador en la parte delantera de
la unidad de motor de la articulación n.º 3.
Gire el perno hexagonal del tensador y
empuje la placa para aplicar la tensión
especificada.
Tensión de correa Z
69 N (7,0 0,5 kgf)
NOTA
NOTA

Mantenimiento
LS10-B Mod.6 107
(4)-1 Suelte la tuerca y gire el perno. Empuje la unidad del motor de la articulación
n.º 3.
(4)-2 Después de fijar la unidad de motor de la articulación n.º 3, gire el perno para
dejar la placa.
(4)-3 Revise la tensión con el tensiómetro sónico.
Para conocer detalles, consulte Mantenimiento 7.4 Reemplazo de la tensión
de la correa de regulación.
(4)-4 Repita los pasos (4)-1 a (4)-3 hasta que obtenga la tensión correcta.
(4)-5 Después del ajuste, vuelva a ponerla en su posición original y fíjela con la
tuerca.
Para comprobar la tensión de la correa con el tensiómetro, consulte Mantenimiento: 7.4
Comprobar la tensión de la correa de regulación (Correa Z).
NOTA

Mantenimiento
108 LS10-B Mod.6
(5)
Conecte los conectores.
Conectores: X231, X241, X32, X43, X44, X51
(6)
Monte la placa del usuario.
Para conocer detalles, consulte Mantenimiento: 3.5 Placa del usuario.
(7)
Amarre los cables del con un amarracables en las posiciones originales en las que
estaban antes de retirarlos en el paso para el retiro (6).
No permita una tensión innecesaria en los cables.
(8)
Instale la cubierta superior del brazo.
Para conocer detalles, consulte Mantenimiento: 3.1 Cubierta superior del brazo.
(9)
Revise si la articulación n.º 3 se mueve en un movimiento de desplazamiento cuando se
opera desde el menú de EPSON RC+ [Tools]-[Robot Manager]-[Jog & Teach].
Si el manipulador oscila con Motor ON y se detectan los siguientes errores,
Error 5041: Error de salida de torque del motor en estado de baja potencia.
Error 4241: Se detectó exceso de velocidad durante el modo de baja potencia.
o cuando una articulación distinta a la articulación n.º 3 se mueve, es posible que el
conector para esa otra articulación esté conectado al motor de la articulación n.º 3.
Revise la conexión del conector.
(10)
Ejecute la calibración de las articulaciones n.º 3 y 4.
Para conocer detalles, consulte Mantenimiento: 13. Calibración.

Mantenimiento
LS10-B Mod.6 109
7.2 Reemplazo de la correa de regulación
Nombre
Cantidad
Nota
Piezas de
mantenimiento
Correa Z
1
1758946
Herramientas
Llave
hexagonal
ancho a lo largo de superficies
planas: 2,5 mm
1
Para tornillo M3
ancho a lo largo de superficies
planas: 3 mm
1
Para tornillo M4
Torquímetro
1
Alicates de corte
1
Para cortar
amarracables
Tensiómetro sónico
1
Z: Tensión de correa
69 N (7,0 0,5 kgf)
Material
Amarracables
-
Hay un freno montado en el motor de las articulaciones n.º 3 y n.º 4 para evitar que el eje
baje y gire debido al peso del efector final mientras la alimentación del controlador está
apagada o mientras el motor está en el estado apagado (MOTOR OFF).
Baje el eje hasta su límite inferior antes del procedimiento de reemplazo después de los
pasos de retiro.
Retiro
de correa Z
(1)
Encienda el controlador.
(2)
Empuje el eje hasta su límite inferior mientras presiona el desbloqueo del freno.
Asegúrese de mantener suficiente espacio y evitar que el efector final golpee algún
equipo periférico.
El desbloqueo del freno solo se aplica a las articulaciones n.º 3 y n.º 4.
Cuando se presiona el desbloqueo del freno, se liberan simultáneamente los frenos
respectivos de las articulaciones n.º 3 y n.º 4.
Tenga cuidado de que el eje no se caiga ni gire mientras se presiona el desbloqueo del
freno, ya que es posible que el eje baje debido al peso del efector final.
(3)
Apague el controlador.
(4)
Retire la cubierta superior del brazo.
Para conocer detalles, consulte Mantenimiento: 3.1 Cubierta superior del brazo.
(5)
Corte los amarracables que atan los cables.
Corte el amarracables que ata el cable del freno de la articulación n.º 3.
No corte el amarracables que amarra los cables a la placa del usuario.
(6)
Desconecte los siguientes conectores.
Conectores: BR4, X231, X43, X51 (Sostenga el gancho para retirar).
(7)
Retire la placa del usuario.
Para conocer detalles, consulte Mantenimiento: 3.5 Placa del usuario.
NOTA

Mantenimiento
110 LS10-B Mod.6
(8)
Retire los tornillos de la unidad del motor de la
articulación n.º 3 y extraiga la unidad de motor
de la articulación n.º 3.
3-M4×18+Arandela
Unidad de motor de
la articulación n.º 3
(9)
Retire el motor de la articulación n.º 3 de la
placa del motor y extraiga la correa Z.
La correa está alrededor de la polea. Para
retirar el motor de la articulación n.º 3, incline
ligeramente el motor y extráigalo hacia arriba,
evitando la correa.
(10)
Retire los tornillos de la placa de la ranura.
Tire de la correa Z para sacarla mientras
sostiene la placa de la brida hacia arriba.
Correa Z
Placa de la ranura
3-M4×15

Mantenimiento
LS10-B Mod.6 111
Instalación
de correa Z
(1)
Pase una nueva correa Z a través del eje.
Correa Z
Placa de la ranura
3-M4×15
(2)
Baje la placa de la brida con la correa Z
ubicada alrededor de la polea de la placa
de la brida.
Fije la placa de la brida con 3 tornillos.
Fije parcialmente la placa de la brida en el
brazo n.º 2 y mueva el eje hacia arriba y
hacia abajo varias veces antes de fijar
firmemente la placa de la brida.
(3)
Vuelva a instalar la unidad del motor de la articulación n.º 3 en el brazo.
(4)
Pase el cable del freno y la fuente de
alimentación sobreexcitación por la correa Z.
Ponga la correa Z alrededor de la polea Z1 y
de la polea Z2, haciendo calzar
completamente las ranuras del engranaje de
la correa con las de la polea.
3-M4×18+Arandela
Unidad de motor de
la articulación n.º 3
(5)
Fije parcialmente la unidad del motor de la
articulación n.º 3 al brazo n.º 2.
En este momento, asegúrese de que la unidad del motor de la articulación n.º 3 se
pueda mover manualmente, y que no se incline cuando se empuja con el tensador.
Si la unidad está asegurada demasiado suelta o demasiado apretada, la correa no
tendrá la tensión correcta.
(6)
Aplique la tensión correcta a la correa Z y,
luego, fije la unidad del motor de la
articulación n.º 3.
Instale el tensador en la parte delantera de la
unidad de motor de la articulación n.º 3.
Gire el perno hexagonal del tensador y
empuje la placa para aplicar la tensión
especificada.
Tensión de correa Z
69 N (7,0 0,5 kgf)
Tuerca
Placa
Perno
Tensador
NOTA

Mantenimiento
112 LS10-B Mod.6
(6)-1 Suelte la tuerca y gire el perno. Empuje la unidad del motor de la
articulación n.º 3.
(6)-2 Después de fijar la unidad de motor de la articulación n.º 3, gire el perno
para dejar la placa.
(6)-3 Revise la tensión con el tensiómetro sónico.
Para conocer detalles, consulte Mantenimiento 7.4 Reemplazo de la tensión
de la correa de regulación.
(6)-4 Repita los pasos (6)-1 a (6)-3 hasta que obtenga la tensión correcta.
(6)-5 Después del ajuste, vuelva a ponerla en su posición original y fíjela con la
tuerca.
Para comprobar la tensión de la correa con el tensiómetro, consulte Mantenimiento: 7.4
Comprobar la tensión de la correa de regulación (Correa Z).
NOTA

Mantenimiento
LS10-B Mod.6 113
(7)
Conecte los conectores.
Conectores: BR4, X231, X241, X32, X43, X44, X51
(8)
Monte la placa del usuario.
Para conocer detalles, consulte Mantenimiento: 3.5 Placa del usuario.
(9)
Amarre los cables del con un amarracables en las posiciones originales en las que
estaban antes de retirarlos en el paso para el retiro (7). No permita una tensión
innecesaria en los cables.
(10)
Instale la cubierta superior del brazo.
Para conocer detalles, consulte Mantenimiento: 3.1 Cubierta superior del brazo.
(11)
Revise si la articulación n.º 3 se mueve en un movimiento de desplazamiento cuando
se opera desde el menú de EPSON RC+ [Tools]-[Robot Manager]-[Jog & Teach]
(Herramientas - Administrador de robot - Desplazar y Enseñar).
Si el manipulador oscila con MotorON (Motor encendido) y se detectan los siguientes
errores,
Error 5041: Error de salida de torque del motor en estado de baja potencia.
Error 4241: Se detectó exceso de velocidad durante el modo de baja potencia.
o cuando una articulación distinta a la articulación n.º 3 se mueve, es posible que el
conector para esa otra articulación esté conectado al motor de la articulación n.º 3.
Revise la conexión del conector.
(12)
Ejecute la calibración de la articulación n.º 3.
Para conocer detalles, consulte Mantenimiento: 13. Calibración.

Mantenimiento
114 LS10-B Mod.6
7.3 Reemplazo del freno
Nombre
Cantidad
Nota
Piezas de
mantenimiento
Freno electromagnético
1
1499588
Herramientas
Llave hexagonal
ancho a lo largo de
superficies planas: 1,5 mm
1
Para tornillo de fijación
M3
ancho a lo largo de
superficies planas: 2,5 mm
1
Para tornillo M3
ancho a lo largo de
superficies planas: 3 mm
1
Para tornillo M4
ancho a lo largo de
superficies planas: 4 mm
1
Para tornillo M5
Torquímetro
1
Alicates de corte
1
Para cortar
amarracables
Tensiómetro sónico
1
Z: Tensión de correa
69 N (7,0 0,5 kgf)
Material
Amarracables
-
Hay un freno montado en el motor de las articulaciones n.º 3 y n.º 4 para evitar que el eje
baje y gire debido al peso del efector final mientras la alimentación del controlador está
apagada o mientras el motor está en el estado apagado (MOTOR OFF).
Baje el eje hasta su límite inferior antes del procedimiento de reemplazo después de los
pasos de retiro.
Retiro del
freno de la
articulación n.º 3
(1)
Encienda el controlador.
(2)
Empuje el eje hasta su límite inferior mientras presiona el desbloqueo del freno.
Asegúrese de mantener suficiente espacio y evitar que el efector final golpee algún equipo
periférico.
El desbloqueo del freno solo se aplica a las articulaciones n.º 3 y n.º 4.
Cuando se presiona el desbloqueo del freno, se liberan simultáneamente los frenos
respectivos de las articulaciones n.º 3 y n.º 4.
Tenga cuidado de que el eje no se caiga ni gire mientras se presiona el desbloqueo del
freno, ya que es posible que el eje baje debido al peso del efector final.
(3)
Apague el controlador.
(4)
Retire la cubierta superior del brazo.
Para conocer detalles, consulte Mantenimiento: 3.1 Cubierta superior del brazo.
(5)
Retire la unidad del motor de la articulación
n.º 3.
Para conocer detalles, consulte
Mantenimiento: 7.2 Reemplazo de la correa
de regulación.
3-M4×18+Arandela
Unidad de motor de
la articulación n.º 3
NOTA

Mantenimiento
LS10-B Mod.6 115
(6)
Retire el motor de la articulación n.º 3 de la unidad del
motor de la articulación n.º 3.
La correa está alrededor de la polea. Para retirar el motor
de la articulación n.º 3, incline ligeramente el motor y
extráigalo hacia arriba, evitando la correa.
Motor de la
articulación
n.º 3
4-M415
+arandela
(7)
Retire el freno de la placa del freno.
Freno
3-M38
(8)
Suelte los tornillos del cubo de freno y
retírelo de la polea del motor de la
articulación n.º 3.
Hay un casquillo de bronce en uno de los
agujeros de tornillo de fijación. Asegúrese
de conservar el casquillo.
Motor de la
articulación n.º 3
Tornillos de
fijación M5×8
+ Casquillo M3
Cubo de freno
M3×4
Tornillos de
fijación

Mantenimiento
116 LS10-B Mod.6
Instalación del
freno de la
articulación n.º
3
(1)
Instale el freno en la placa del freno.
Freno
3-M38
(2)
Instale el cubo de freno en la polea del
motor de la articulación n.º 3.
Inserte el cubo de freno y fíjelo cuando
toque la polea.
Apriete uno de los tornillos de fijación
verticalmente en el lado plano del eje del
motor.
Inserte un casquillo en el otro agujero de
tornillo de fijación para evitar daños al
eje del motor.
Motor de la
articulación n.º 3
Tornillos de fijación
M5×8 + casquillo M3
Cubo de freno
Tornillos de
fijación M3×4
(3)
Instale el motor de la articulación n.º 3
en la placa del motor, mientras alinea el
cubo con el disco de freno.
Antes de alinear el cubo, fije el motor de
manera que la polea esté dentro de la
correa Z.
Asegúrese de fijar el cable del motor, de
modo tal que mire al lado opuesto del
soporte del freno.
Motor de la
articulación n.º 3
Freno
electromagnético
Polea
Placa de motor
Cuando el disco de freno no esté alineado, modifique manualmente la posición, siguiendo
los pasos a continuación.
1. Conecte el conector X32.
2. Presione el desbloqueo del freno para desbloquear el freno.
3. Ajuste el disco de freno manualmente, de modo que el agujero esté en el centro.

Mantenimiento
LS10-B Mod.6 117
(4)
Vuelva a instalar la unidad del motor de
la articulación n.º 3 en el brazo n.º 2.
Para conocer detalles, consulte la
sección 7.2 Reemplazo de la correa de
regulación.
Tensión de correa Z
69 N (7,0 0,5 kgf)
3-M4×18
+ Arandela
Unidad de motor de
la articulación n.º 3
Tuerca
Placa
Perno
Tensador
(4)-1 Suelte la tuerca y gire el perno. Empuje la unidad del motor de la
articulación n.º 3.
(4)-2 Después de fijar la unidad de motor de la articulación n.º 3, gire el perno para
dejar la placa.
(4)-3 Revise la tensión con el tensiómetro sónico.
Para conocer detalles, consulte Mantenimiento 7.4 Reemplazo de la tensión
de la correa de regulación.
(4)-4 Repita los pasos (4)-1 a (4)-3 hasta que obtenga la tensión correcta.
(4)-5 Después del ajuste, vuelva a ponerla en su posición original y fíjela con la
tuerca.
Para comprobar la tensión de la correa con el tensiómetro, consulte Mantenimiento: 7.4
Comprobar la tensión de la correa de regulación (Correa Z).
(5)
Monte la cubierta superior del brazo.
Para conocer detalles, consulte Mantenimiento: 3.1 Cubierta superior del brazo.
(6)
Revise si la articulación n.º 3 se mueve en un movimiento de desplazamiento cuando se
opera desde el menú de EPSON RC+ [Tools]-[Robot Manager]-[Jog & Teach].
Si el manipulador oscila con Motor ON y se detectan los siguientes errores,
Error 5041: Error de salida de torque del motor en estado de baja potencia.
Error 4241: Se detectó exceso de velocidad durante el modo de baja potencia.
o cuando una articulación distinta a la articulación n.º 3 se mueve, es posible que el
conector para esa otra articulación esté conectado al motor de la articulación n.º 3.
Revise la conexión del conector.
(7)
Ejecute la calibración de la articulación n.º 3.
Para conocer detalles, consulte Mantenimiento: 13. Calibración.
NOTA

Mantenimiento
118 LS10-B Mod.6
7.4 Comprobación de la tensión de la correa de regulación
(Correa Z)
Nombre
Cantidad
Nota
Herramienta
Tensiómetro sónico
1
Para conocer detalles de uso y los métodos de medición del
tensiómetro, consulte el manual de instrucciones del
tensiómetro.
Comprobación
de la tensión de
la correa de la
Articulación n.º 3
(1)
Ingrese los valores de configuración adecuados para el tensiómetro.
Modelo
Correa
Masa de unidad M
[g/ (1 mm de ancho ×1 m de
longitud)]
Ancho
W
[mm]
Longitud
de
separación
S
[mm]
LS10-B
Correa
Z
2,5
17
303
(2)
Toque la correa y mida la tensión.
Puede ocurrir un error en la medición si el micrófono
toca la correa durante la medición.
NOTA

Mantenimiento
LS10-B Mod.6 119
8. Articulación n.º 4
ADVERTENCIA
■
No inserte ni desconecte los conectores del motor mientras el sistema de robot
esté encendido. Insertar o desconectar los conectores del motor con la energía
encendida es extremadamente peligroso y puede provocar lesiones corporales
graves, ya que el manipulador puede moverse de manera anormal; además,
puede provocar descargas eléctricas y el mal funcionamiento del sistema de
robot.
■
Para cortar la energía hacia el sistema de robot, desconecte el enchufe de la
fuente de alimentación. Asegúrese de conectar el cable de alimentación de CA
a un tomacorriente. NO lo conecte directamente a la fuente de energía de la
fábrica.
■
Antes de realizar cualquier reemplazo, apague el controlador y los equipos
relacionados, luego desconecte el enchufe de la fuente de alimentación.
Realizar cualquier reemplazo con la energía encendida es extremadamente
peligroso y puede provocar una descarga eléctrica o el mal funcionamiento del
sistema de robot.
PRECAUCIÓN
■
Tenga cuidado de no aplicar descargas eléctricas excesivas al eje del motor
cuando reemplace los motores. Las descargas eléctricas pueden reducir el ciclo
de vida de los motores y el codificador o dañarlos.
■
Nunca desarme el motor y el codificador. Un motor y codificador desarmado
causará un espacio de posición y no se puede volver a usar.
Después de reemplazar las piezas (motores, unidades de engranaje reductor, frenos, correas
de regulación, unidad de ranura de tornillo esférico, etc.), el manipulador no puede operar
correctamente, ya que no coincide el origen almacenado en cada motor y el origen
correspondiente almacenado en el controlador.
Después de reemplazar las piezas, es necesario hacer coincidir estos orígenes.
El proceso de alinear los dos orígenes se denomina “Calibración”.
Consulte Mantenimiento: 13. Calibración para ejecutar la calibración.
Motor de la
articulación n.º 4
Correa U
2
Correa U1

Mantenimiento
120 LS10-B Mod.6
8.1 Reemplazo del motor de la articulación n.º 4
Nombre
Cantidad
Nota
Piezas de
mantenimiento
Servomotor de CA de 150 W
1
2197987
Herramientas
Llave
hexagonal
ancho a lo largo de superficies
planas: 2 mm
1
Para tornillo de fijación
M4
ancho a lo largo de superficies
planas: 3 mm
1
Para tornillo M4
Torquímetro
1
Alicates de corte
1
Para cortar amarracables
Dinamómetro
1
U1:
Tensión axial (fuerza de
tracción)
114 N (11,6 0,5 kgf)
Cable adecuado (longitud de alrededor de
800 mm)
1
Para tensión de correa
PRECAUCIÓN
■
La correa se debe instalar con la tensión correcta; de lo contrario, pueden ocurrir
los siguientes problemas.
Si es menor al límite inferior : Salto de los engranajes de la correa (espacio
de posición)
Si es mayor que el límite superior : Ruidos o vibraciones anormales
(oscilación), disminución de la vida útil de las
piezas accionadoras
Hay un freno montado en el motor de las articulaciones n.º 3 y n.º 4 para evitar que el eje
baje y gire debido al peso del efector final mientras la alimentación del controlador está
apagada o mientras el motor está en el estado apagado (MOTOR OFF).
Baje el eje hasta su límite inferior antes del procedimiento de reemplazo después de los
pasos de retiro.
Retiro del
motor de
articulación n.º 4
(1)
Encienda el controlador.
(2)
Empuje el eje hasta su límite inferior mientras presiona el desbloqueo del freno.
Asegúrese de mantener suficiente espacio y evitar que el efector final golpee algún equipo
periférico.
El desbloqueo del freno solo se aplica a las articulaciones n.º 3 y n.º 4.
Cuando se presiona el desbloqueo del freno, se liberan simultáneamente los frenos
respectivos de las articulaciones n.º 3 y n.º 4.
Tenga cuidado de que el eje no se caiga ni gire mientras se presiona el desbloqueo del
freno, ya que es posible que el eje baje debido al peso del efector final.
(3)
Apague el controlador.
(4)
Retire la cubierta superior del brazo.
Para conocer detalles, consulte Mantenimiento: 3.1 Cubierta superior del brazo.
(5)
Corte los amarracables que atan los cables.
En este punto, no corte el amarracables (en la salida de los conectores rápidos del
conducto) que amarra los cables a la placa del usuario.
NOTA

Mantenimiento
LS10-B Mod.6 121
(6)
Desconecte los conectores.
Conectores: BR4, X241, X44 (Sostenga el gancho para retirar).
(7)
Retire la placa del usuario.
Para conocer detalles, consulte Mantenimiento: 3.5 Placa del usuario.
(8)
Retire la unidad del motor de la
articulación n.º 4 desde el brazo n.º 2.
Retire los pernos que fijan el motor de
la articulación n.º 4 de la placa del
motor y saque el motor.
La correa está alrededor de la polea.
Incline la unidad de motor ligeramente
y extráigala.
Unidad de motor de
la articulación n.º 4
3-M415
Arandela
Placa del motor
(9)
Retire la polea desde el motor de la
articulación n.º 4.
Hay un casquillo de bronce en uno de
los agujeros de tornillo de fijación.
Asegúrese de conservar el casquillo.
Tornillo de fijación
2-M48 + Casquillo
Polea
2-M470
+ Separador
Placa del motor
(10)
Retire la placa del motor desde el
motor de la articulación n.º 4.

Mantenimiento
122 LS10-B Mod.6
Instalación
del motor de la
articulación n.º 4
(1)
Instale la placa del motor en el motor de la
articulación n.º 4.
En este punto, los cables del motor deben estar en
forma convexa de la placa.
Tornillo de
fijación 2-M48
+ Casquillo
Polea
2-M470
+ Separador
Placa del motor
(2)
Instale la polea en el motor de la articulación n.º
4.
Asegúrese de hacer calzar el lado del extremo de la polea con el lado del extremo del
eje del motor.
Asegúrese de fijar el juego de tornillos de fijación + el casquillo verticalmente en el
lado plano del eje del motor. Tenga cuidado de no dañar el eje del motor cuando apriete
el casquillo en el agujero del tornillo de fijación.
(3)
Coloque la polea alrededor de la correa U1 y
coloque la unidad de motor de la articulación
n.º 4 en la parte superior del brazo n.º 2.
Unidad de
motor de la
articulación
n.º 4
3-M415
Arandela
Placa del motor
(4)
Fije parcialmente la unidad del motor de la
articulación n.º 4 al brazo n.º 2.
Asegúrese de que la unidad del motor se pueda mover manualmente, y que no se
incline cuando se tire de ella.
Si la unidad está asegurada demasiado suelta o demasiado apretada, la correa no tendrá
la tensión correcta.
Asegúrese de que las ranuras del engranaje de la correa encajen en las de la polea
completamente.
NOTA

Mantenimiento
LS10-B Mod.6 123
(5)
Aplique la tensión correcta a la correa U1 y fije la unidad del motor de la articulación
n.º 4.
Pase un cable o una cuerda adecuada alrededor de la unidad del motor de la
articulación n.º 4 cerca de su placa de montaje.
Luego, tire del cable usando un dinamómetro o una herramienta similar para aplicar la
tensión especificada que se muestra en la figura.
Tensión axial de U1 (fuerza de tracción): 114 N (11,6 0,5 kgf)
Tensión de la correa U1: 58 N (5,9 0,5 kgf)
3-M415
Arandela
Dinamómetro
Unidad de motor de
la articulación n.º 4
Para comprobar la tensión de la correa con el tensiómetro, consulte Mantenimiento: 8.4
Comprobación de la tensión de la correa de regulación (Correas U1, U2).
(6)
Conecte los conectores.
Conectores: BR4, X241, X44
(7)
Monte la placa del usuario.
Para conocer detalles, consulte Mantenimiento: 3.5 Placa del usuario.
(8)
Amarre los cables con un amarracables en las posiciones originales en las que estaban
antes de retirarlos en el paso para el retiro (5). No permita una tensión innecesaria en los
cables.
(9)
Monte la cubierta superior del brazo.
Para conocer detalles, consulte Mantenimiento: 3.1 Cubierta superior del brazo.
(10)
Revise si la articulación n.º 4 se mueve en un movimiento de desplazamiento cuando se
opera desde el menú de EPSON RC+ [Tools]-[Robot Manager]-[Jog & Teach].
Si el manipulador oscila con Motor ON y se detectan los siguientes errores,
Error 5041: Error de salida de torque del motor en estado de baja potencia.
Error 4241: Se detectó exceso de velocidad durante el modo de baja potencia.
o cuando una articulación distinta a la articulación n.º 4 se mueve, es posible que el
conector para esa otra articulación esté conectado al motor de la articulación n.º 4.
Revise la conexión del conector.
(11)
Ejecute la calibración de la articulación n.º 4.
Para conocer detalles acerca de los métodos de calibración, consulte Mantenimiento: 13.
Calibración.
NOTA

Mantenimiento
124 LS10-B Mod.6
8.2 Reemplazo de la correa de regulación
Nombre
Cantidad
Nota
Piezas de
mantenimiento
Correa U1
ancho de 10 mm
1
1757386
Correa U2
ancho de 21 mm
1
1757387
Herramientas
Llave
hexagonal
ancho a lo largo de
superficies planas: 2,5 mm
1
Para tornillo M3
ancho a lo largo de
superficies planas: 3 mm
1
Para tornillo M4
Llave de
tuercas
ancho a lo largo de
superficies planas: 7 mm
1
Destornillador de cruz
1
Para tornillos con ranura
en cruz
Torquímetro
1
Alicates de corte
1
Para cortar amarracables
Dinamómetro
1
U1:
Tensión axial (fuerza de
tracción)
114 N (11,6 0,5 kgf)
Tensiómetro sónico
1
U2:
Tensión (tensión de
correa)
102 N (10,4 0,5 kgf)
Cable adecuado (longitud de alrededor de
800 mm)
1
Para tensión de correa
PRECAUCIÓN
■
La correa se debe instalar con la tensión correcta; de lo contrario, pueden ocurrir
los siguientes problemas.
Si es menor al límite inferior : Salto de los engranajes de la correa (espacio
de posición)
Si es mayor que el límite superior : Ruidos o vibraciones anormales
(oscilación), disminución de la vida útil de las
piezas accionadoras
Hay un freno montado en el motor de las articulaciones n.º 3 y n.º 4 para evitar que el eje
baje y gire debido al peso del efector final mientras la alimentación del controlador está
apagada o mientras el motor está en el estado apagado (MOTOR OFF).
Baje el eje hasta su límite inferior antes del procedimiento de reemplazo después de los
pasos de retiro.
NOTA

Mantenimiento
LS10-B Mod.6 125
8.2.1 Correa U2
Retiro de la
correa U2
(1)
Encienda el controlador.
(2)
Empuje el eje hasta su límite inferior mientras presiona el desbloqueo del freno.
Asegúrese de mantener suficiente espacio y evitar que el efector final golpee algún
equipo periférico.
El desbloqueo del freno solo se aplica a las articulaciones n.º 3 y n.º 4.
Cuando se presiona el desbloqueo del freno, se liberan simultáneamente los frenos
respectivos de las articulaciones n.º 3 y n.º 4.
Tenga cuidado de que el eje no se caiga ni gire mientras se presiona el desbloqueo del
freno, ya que es posible que el eje baje debido al peso del efector final.
(3)
Apague el controlador.
(4)
Retire la cubierta superior del brazo.
Para conocer detalles, consulte Mantenimiento: 3.1 Cubierta superior del brazo.
(5)
Retire la placa de control de la placa.
Tornillos de cabeza
plana 2-M2×16
Placa de control
Placa
4-M3×10
(6)
Corte los amarracables que atan los cables.
No corte el amarracables que ata los cables de la placa del usuario.
(7)
Desconecte los siguientes conectores.
Conectores: BR4, X32, X43, X44, X51, X231, X241 (Sostenga el gancho para retirar).
(8)
Retire la placa del usuario.
Para conocer detalles, consulte Mantenimiento: 3.5 Placa del usuario.
(9)
Retire los tornillos que fijan la unidad del
motor de la articulación n.º 3 y extraiga
la unidad de motor.
3-M4×18
+Arandela
Unidad de motor de
la articulación n.º 3

Mantenimiento
126 LS10-B Mod.6
(10)
Retire los tornillos que fijan la unidad
del motor de la articulación n.º 4 y
extraiga la unidad de motor.
La correa está alrededor de la polea.
Incline la unidad de motor ligeramente
y extráigala.
3-M4×15
+Arandela
Unidad de motor de
la articulación n.º 4
(11)
Retire los tornillos que fijan la unidad
intermedia del eje de la articulación n.º
4.
Extraiga de la unidad intermedia del
eje de la articulación n.º 4 y la correa
U1.
3-M4×12
+Arandela
Unidad intermedia del eje
de la articulación n.º 4
Correa U1
(12)
Retire los tornillos que montan la
placa de la ranura.
Tire de la correa Z y la correa U2
mientras sostiene la placa de la ranura.
3-M4×15
Placa de
la ranura
Correa Z
Correa U2

Mantenimiento
LS10-B Mod.6 127
Instalación
de la correa U2
(1)
Sostenga la placa de la ranura y coloque la
correa U2 alrededor de la polea U3.
Asegúrese de que las ranuras del engranaje
de la correa encajen en las de la polea
completamente.
3-M4×15
Placa de
la ranura
Correa Z
Correa U2
(2)
Sostenga la placa de la brida y coloque la correa Z alrededor de la polea Z2.
Asegúrese de que las ranuras del engranaje de la correa encajen en las de la polea
completamente.
(3)
Fije parcialmente la placa de la brida en el brazo n.º 2 y mueva el eje hacia arriba y
hacia abajo varias veces antes de fijar firmemente la placa de la brida.
(4)
Con la correa U1 en la polea grande
de la unidad intermedia del eje de la
articulación n.º 4, ponga la correa U2
en el brazo n.º 2, en la polea pequeña,
y póngalas en la superficie superior
del brazo n.º 2.
Asegúrese de que las ranuras del
engranaje de las correas encajen
completamente en las de la polea.
3-M4×12
+Arandela
Unidad intermedia del eje
de la articulación n.º 4
Correa U1
Correa U2
Polea (grande)
Polea (pequeña)
(5)
Fije parcialmente la unidad intermedia del eje de la articulación n.º 4.
Asegúrese de que la unidad se pueda mover manualmente, y que no se incline cuando
se tire de ella. Si la unidad está asegurada demasiado suelta o demasiado apretada,
la correa no tendrá la tensión correcta.
(6)
Aplique la tensión correcta a la correa U2 y,
luego, fije la unidad intermedia del eje de la
articulación n.º 4.
Instale el tensador en la parte delantera de la
unidad de motor de la articulación n.º 4. Gire
el perno hexagonal del tensador y empuje la
placa para aplicar la tensión especificada.
Tensión de la correa U2: 102 N (10,4 0,75 kgf)
Tuerca
Placa
ボルト
Tensador
Perno

Mantenimiento
128 LS10-B Mod.6
(6)-1 Suelte la tuerca y gire el perno. Empuje la unidad del motor de la
articulación n.º 3.
(6)-2 Después de fijar la unidad de motor de la articulación n.º 3, gire el perno para
dejar la placa.
(6)-3 Revise la tensión con el tensiómetro sónico.
Para conocer detalles, consulte Mantenimiento 7.4 Reemplazo de la tensión
de la correa de regulación.
(6)-4 Repita los pasos (6)-1 a (6)-3 hasta que obtenga la tensión correcta.
(6)-5 Después del ajuste, vuelva a ponerla en su posición original y fíjela con la
tuerca.
Para comprobar la tensión de la correa con el tensiómetro, consulte Mantenimiento: 8.4
Comprobación de la tensión de la correa de regulación (Correas U1, U2).
(7)
Instale la unidad de motor de la
articulación n.º 4 en el brazo n.º 2 con la
correa U1 alrededor de la polea.
3-M4×15
+Arandela
Unidad de motor de
la articulación n.º 4
Correa U1
Polea
(8)
Fije parcialmente la unidad del motor
de la articulación n.º 4 al brazo n.º 2.
Asegúrese de que la unidad del motor se pueda mover manualmente, y que no se incline
cuando se tire de ella.
Si la unidad está asegurada demasiado suelta o demasiado apretada, la correa no tendrá
la tensión correcta.
NOTA

Mantenimiento
LS10-B Mod.6 129
(9)
Aplique la tensión correcta a la correa U1 y fije la unidad del motor de la articulación
n.º 4.
Pase un cable o una cuerda adecuada alrededor de la unidad del motor de la
articulación n.º 4 cerca de su placa de montaje.
Luego, tire del cable usando un dinamómetro o una herramienta similar para aplicar
la tensión especificada que se muestra en la figura a la derecha.
Tensión axial de U1 (fuerza de tracción): 114 N (11,6 0,5 kgf)
Tensión de la correa U1: 58 N (5,9 0,5 kgf)
3-M415
Arandela
Dinamómetro
Unidad de motor de
la articulación n.º 4
Para comprobar la tensión de la correa con el tensiómetro, consulte Mantenimiento: 8.4
Comprobación de la tensión de la correa de regulación (Correas U1, U2).
NOTA

Mantenimiento
130 LS10-B Mod.6
(10)
Vuelva a colocar la unidad del motor de
la articulación n.º 3 en el brazo.
3-M4×18
+Arandela
Unidad de motor de la
articulación n.º 3
(11)
Pase el cable del freno y la fuente de
alimentación especial por la correa Z.
Fije la correa Z alrededor de la polea Z1
y de la polea Z2, haciendo calzar
completamente las ranuras del engranaje
de la correa con las de la polea.
(12)
Fije parcialmente la unidad del motor de la articulación n.º 3 al brazo n.º 2.
Asegúrese de que la unidad del motor se pueda mover manualmente, y que no se
incline cuando se tire de ella. Si la unidad está asegurada demasiado suelta o
demasiado apretada, la correa no tendrá la tensión correcta.
(13)
Aplique la tensión correcta a la correa Z y fije la
unidad del motor de la articulación n.º 3.
Instale el tensador en la parte delantera de la
unidad de motor de la articulación n.º 3. Gire el
perno hexagonal del tensador y empuje la placa
para aplicar la tensión especificada.
Para conocer detalles, consulte Mantenimiento 7.2
Reemplazo de la correa de regulación.
Tensión de correa Z:
69 N (7,0 0,5 kgf)
Tuerca
Placa
Perno
Tensador
(13)-1 Suelte la tuerca y gire el perno. Empuje la unidad del motor de la
articulación n.º 3.
(13)-2 Después de fijar la unidad de motor de la articulación n.º 3, gire el perno para
dejar la placa.
(13)-3 Revise la tensión con el tensiómetro sónico.
Para conocer detalles, consulte Mantenimiento 7.4 Reemplazo de la tensión
de la correa de regulación.
(13)-4 Repita los pasos (13)-1 a (13)-3 hasta que obtenga la tensión correcta.
(13)-5 Después del ajuste, vuelva a ponerla en su posición original y fíjela con la
tuerca.
Para comprobar la tensión de la correa con el tensiómetro, consulte Mantenimiento: 7.4
Comprobar la tensión de la correa de regulación (Correa Z).
(14)
Retire la placa de control de la placa.
Para conocer detalles, consulte Mantenimiento: 11.3 Reemplazo de la placa de control.
(15)
Conecte los siguientes conectores.
Conectores: BR4, X32, X43, X44, X51, X231, X241
NOTA
NOTA

Mantenimiento
LS10-B Mod.6 131
(16)
Monte la placa del usuario.
Para conocer detalles, consulte Mantenimiento: 3.5 Placa del usuario.
(17)
Amarre los cables del con un amarracables en las posiciones originales en las que
estaban antes de retirarlos en el paso para el retiro (7).
No permita una tensión innecesaria en los cables.
(18)
Retire la cubierta superior del brazo.
Para conocer detalles, consulte Mantenimiento: 3.1 Cubierta superior del brazo.
(19)
Revise si la articulación n.º 4 se mueve en un movimiento de desplazamiento cuando
se opera desde el menú de EPSON RC+ [Tools]-[Robot Manager]-[Jog & Teach].
Si el manipulador oscila con Motor ON y se detectan los siguientes errores,
Error 5041: Error de salida de torque del motor en estado de baja potencia.
Error 4241: Se detectó exceso de velocidad durante el modo de baja potencia.
o cuando una articulación distinta a la articulación n.º 4 se mueve, es posible que el
conector para esa otra articulación esté conectado al motor de la articulación n.º 4.
Revise la conexión del conector.
(20)
Ejecute la calibración para la articulación n.º 3.
Para conocer detalles acerca de los métodos de calibración, consulte Mantenimiento:
13. Calibración.

Mantenimiento
132 LS10-B Mod.6
8.2.2 Correa U1
Retiro de la
correa U1
(1)
Retire la unidad del motor de la articulación
n.º 4.
Siga los pasos para el retiro en
Mantenimiento: 8.2.1 Correa U2.
Unidad de motor de
la articulación n.º 4
3-M415
Arandela
(2)
Retire la unidad intermedia del eje de la articulación n.º 4.
Consulte los pasos para el retiro en Mantenimiento: 8.2.1 Correa U2.
Unidad intermedia del eje
de la articulación n.º 4.
3-M4×12
+Arandela
Correa U1
(3)
Retire la correa U1.

Mantenimiento
LS10-B Mod.6 133
Instalación
de la correa U1
(1)
Con la correa U1 en la polea grande de la unidad intermedia del eje de la articulación
n.º 4, ponga la correa U2 en el brazo n.º 2, en la polea pequeña, y póngalas en la
superficie superior del brazo n.º 2.
Asegúrese de que las ranuras del engranaje de las correas encajen completamente en
las de la polea.
Unidad de motor de la
articulación n.º 4
3-M4×12
+Arandela
Correa U1
Correa
U2
Polea (grande)
Polea (pequeña)
(2)
Fije parcialmente la unidad intermedia del eje de la articulación n.º 4.
Asegúrese de que la unidad del motor se pueda mover manualmente, y que no se incline
cuando se tire de ella.
Si la unidad está asegurada demasiado suelta o demasiado apretada, la correa no tendrá
la tensión correcta.
(3)
Aplique la tensión correcta a la correa U2 y,
luego, fije la unidad intermedia del eje de la
articulación n.º 4.
Instale el tensador en la parte delantera de la
unidad de motor de la articulación n.º 4. Gire el
perno hexagonal del tensador y empuje la placa
para aplicar la tensión especificada.
Tensión de la correa U2: 102 N (10,4 0,5 kgf)
(3)-1 Suelte la tuerca y gire el perno. Empuje la unidad del motor de la
articulación n.º 3.
(3)-2 Después de fijar la unidad de motor de la articulación n.º 3, gire el perno para
dejar la placa.
(3)-3 Revise la tensión con el tensiómetro sónico.
Para conocer detalles, consulte Mantenimiento 7.4 Reemplazo de la tensión
de la correa de regulación.
(3)-4 Repita los pasos (3)-1 a (3)-3 hasta que obtenga la tensión correcta.
(3)-5 Después del ajuste, vuelva a ponerla en su posición original y fíjela con la
tuerca.
Para comprobar la tensión de la correa con el tensiómetro, consulte Mantenimiento:
8.4 Comprobación de la tensión de la correa de regulación (Correas U1, U2).
Nut
Plate
ボルト
Tensioner
Bolt
NOTA
NOTA
Placa
Tuerca
Perno
Tensador

Mantenimiento
134 LS10-B Mod.6
(4)
Fije parcialmente la unidad del motor de la
articulación n.º 4 al brazo n.º 2.
Asegúrese de que la unidad del motor se
pueda mover manualmente, y que no se
incline cuando se tire de ella.
Si la unidad está asegurada demasiado
suelta o demasiado apretada, la correa no
tendrá la tensión correcta.
Unidad de motor de
la articulación n.º 4
3-M412
Arandela
(5)
Aplique la tensión correcta a la correa U1
y, luego, fije la unidad intermedia del eje
de la articulación n.º 4.
Pase un cable o una cuerda adecuada
alrededor de la unidad del motor de la
articulación n.º 4 cerca de su placa de
montaje. Luego, tire del cable usando un
dinamómetro o una herramienta similar
para aplicar la tensión especificada que se
muestra en la figura a la derecha.
Tensión axial de U1 (fuerza de tracción):
114 N (11,6 0,5 kgf)
Tensión de la correa U1
58 N (5,9 0,5 kgf)
3-M415
Arandela
Dinamómetro
Unidad de motor de
la articulación n.º 4
Para comprobar la tensión de la correa con el tensiómetro, consulte Mantenimiento:
8.4 Comprobación de la tensión de la correa de regulación (Correas U1, U2).
(6)
Conecte los conectores.
Conectores: BR4, X241, X44
(7)
Amarre los del con un amarracables en las posiciones originales en las que estaban
antes de retirarlos en el paso para el retiro (5).
(8)
Retire la placa del usuario.
Para conocer detalles, consulte Mantenimiento: 3.5 Placa del usuario.
(9)
Instale la cubierta superior del brazo.
Para conocer detalles, consulte Mantenimiento: 3.1 Cubierta superior del brazo.
NOTA

Mantenimiento
LS10-B Mod.6 135
(10)
Revise si la articulación n.º 4 se mueve en un movimiento de desplazamiento cuando se
opera desde el menú de EPSON RC+ [Tools]-[Robot Manager]-[Jog & Teach].
Si el manipulador oscila con Motor ON y se detectan los siguientes errores,
Error 5041: Error de salida de torque del motor en estado de baja potencia.
Error 4241: Se detectó exceso de velocidad durante el modo de baja potencia.
o cuando una articulación distinta a la articulación n.º 4 se mueve, es posible que el
conector para esa otra articulación esté conectado al motor de la articulación n.º 4.
Revise la conexión del conector.
(11)
Ejecute la calibración de la articulación n.º 4.
Para conocer detalles, consulte Mantenimiento: 13. Calibración.

Mantenimiento
136 LS10-B Mod.6
8.3 Reemplazo del freno
Nombre
Cantidad
Nota
Piezas de
mantenimiento
Freno electromagnético
1
1750573
Herramientas
Llave
hexagonal
ancho a lo largo de
superficies planas: 1,5 mm
1
Para tornillo de fijación M3
ancho a lo largo de
superficies planas: 2 mm
1
Para tornillo M2.5
Alicates de corte
1
Para cortar amarracables
Material
Amarracables
1
Hay un freno montado en el motor de las articulaciones n.º 3 y n.º 4 para evitar que el eje
baje y gire debido al peso del efector final mientras la alimentación del controlador está
apagada o mientras el motor está en el estado apagado (MOTOR OFF).
Baje el eje hasta su límite inferior antes del procedimiento de reemplazo después de los
pasos de retiro.

Mantenimiento
LS10-B Mod.6 137
Retiro del
freno de la
articulación n.º 4
(1)
Encienda el controlador.
(2)
Empuje el eje hasta su límite inferior mientras presiona el desbloqueo del freno.
Asegúrese de mantener suficiente espacio y evitar que el efector final golpee algún
equipo periférico.
El desbloqueo del freno se aplica a las articulaciones n.º 3 y n.º 4. Cuando se presiona el
desbloqueo del freno, se liberan simultáneamente los frenos respectivos de las
articulaciones n.º 3 y n.º 4.
Tenga cuidado de que el eje no se caiga ni gire mientras se presiona el desbloqueo del
freno, ya que es posible que el eje baje debido al peso del efector final.
(3)
Apague el controlador.
(4)
Retire la cubierta superior del brazo.
Para conocer detalles, consulte Mantenimiento: 3.1 Cubierta superior del brazo.
(5)
Desconecte el conector.
Conector BR4
(6)
Corte el amarracables que atan los cables del freno.
(7)
Retire el tapón de goma.
Tapón de goma
(8)
Retire el cubo de freno.
2-M2,525
Cubo de freno
Freno
Tornillos de fijación :
M34+ Casquillo
(9)
Retire el freno.

Mantenimiento
138 LS10-B Mod.6
Instalación del
freno de la
articulación n.º 4
(1)
Instale el freno en la unidad intermedia del
eje de la articulación n.º 4.
2-M2.525
Cubo de freno
Freno
Tornillos de
fijación : M34+
Casquillo
(2)
Instale el cubo de freno en la unidad
intermedia del eje de la articulación n.º 4.
(3)
Instale el tapón de goma.
Inserte el tapón de goma hasta que el cable
se separe del freno. Si los cables entran al
interior del tapón de goma, se pueden
desconectar.
Tapón de goma
Tapón de
goma
Pieza giratoria
(Cubo de freno)
(4)
Conecte el conector.
Conector: BR4
(5)
Vuelva a agrupar los cables en sus posiciones originales con el amarracables que se
retiró en el paso (6).
No permita una tensión innecesaria en los cables.
(6)
Instale la cubierta superior del brazo.
Para conocer detalles, consulte Mantenimiento: 3.1 Cubierta superior del brazo.

Mantenimiento
LS10-B Mod.6 139
8.4 Comprobación de la tensión de la correa de regulación
(Correas U1, U2).
Nombre
Cantidad
Nota
Herramienta
Tensiómetro sónico
1
Para conocer detalles de uso y los métodos de medición
del tensiómetro, consulte el manual de instrucciones del
tensiómetro.
Comprobación
de la tensión de
la correa de
articulación n.º 4
(1)
Ingrese los valores de configuración adecuados para el tensiómetro.
Correa
Masa de unidad M
[g/ (1 mm de ancho ×1 m
de longitud)]
Ancho W
[mm]
Longitud
de
separación
S
[mm]
Correa U1
2,5
10
70
Correa U2
2,5
21
250
(2)
Toque la correa y mida la tensión.
Puede ocurrir un error en la medición si el
micrófono toca la correa durante la medición.
NOTA

Mantenimiento
140 LS10-B Mod.6
9. Fuelle
El fuelle para LS10-B***C se incluye en una unidad de dos piezas. La forma varía entre el
fuelle superior y el inferior.
Se emite una gran cantidad de polvo cuando se reemplaza el fuelle.
Lleve el manipulador a una sala exterior, como la sala frente a la entrada de la sala blanca,
o bien, tome las medidas necesarias para evitar la emisión de polvo antes de reemplazar el
fuelle.
Nombre
Cantidad
Nota
Piezas de
mantenimiento
Fuelle
1
170 mm: 1765523
270 mm: 1765524
Herramientas
Destornillador de cruz
1
Para el retiro de la banda de apriete
Fuelle
Fuelle
Banda de
apriete
Banda de
apriete
d
Banda de
apriete
Retiro del
fuelle
(1)
Retire los cables y los tubos del efector final.
(2)
Retire el efector final.
(3)
Encienda el controlador. Detenga la excitación del motor. (MOTOR OFF)
(4)
Suelte las dos bandas de apriete en el fuelle.
(5)
Extraiga el fuelle y las bandas de apriete del eje.
NOTA

Mantenimiento
LS10-B Mod.6 141
Instalación
del fuelle
(1)
Para colocar el fuelle superior, mueva el eje a su límite inferior.
Para colocar el fuelle inferior, mueva el eje a su límite superior.
Para mover hacia arriba y hacia abajo el eje, presione y mantenga presionado el
desbloqueo del freno.
Asegúrese de mantener suficiente espacio y evitar que el efector final golpee algún equipo
periférico.
El desbloqueo del freno solo se aplica a las articulaciones n.º 3 y n.º 4.
Cuando se presiona el desbloqueo del freno, se liberan simultáneamente los frenos
respectivos de las articulaciones n.º 3 y n.º 4.
Tenga cuidado de que el eje no se caiga ni gire mientras se presiona el desbloqueo del
freno, ya que es posible que el eje baje debido al peso del efector final.
(2)
Pase el eje a través del fuelle desde la articulación más grande.
(3)
Fije el lado de la cubierta del fuelle.
El fuelle tiene dos articulaciones:
La articulación más grande debe estar
unida al lado de la cubierta.
La articulación más pequeña debe
estar unida al lado de la cara del
extremo del eje.
Una la pieza de montaje del fuelle
hasta que el extremo toque la parte
cilíndrica de la cubierta.
Luego, fíjelos con bandas de apriete
Lado de la cubierta del fuelle superior
Lado de la cubierta del fuelle inferior
(4)
Fije el lado del borde del eje del fuelle.
Cubra el soporte de cojinetes (negro)
en el borde del eje con la pieza de
montaje del fuelle.
Luego, fíjelos con bandas de apriete
Borde del eje del fuelle superior
Borde del eje del fuelle inferior
(5)
Cuando termine la instalación del fuelle, revise que el fuelle se estire sin problemas ni
fuerza excesiva, al mover el eje hacia arriba y hacia abajo con la mano, y girar la
articulación n.º 4.
(6)
Apague el controlador y los equipos periféricos.
(7)
Coloque el efector final.
(8)
Conecte los cables y los tubos del efector final.

Mantenimiento
142 LS10-B Mod.6
10. Unidad de ranura de tornillo esférico
ADVERTENCIA
■
No conecte ni desconecte los conectores del motor mientras el sistema de robot
esté encendido. Conectar o desconectar los conectores del motor con la energía
encendida es extremadamente peligroso y puede provocar lesiones corporales
graves, ya que el manipulador puede moverse de manera anormal; además,
puede provocar descargas eléctricas y el mal funcionamiento del sistema de
robot.
■
Para cortar la energía hacia el sistema de robot, desconecte el enchufe de la
fuente de energía. Asegúrese de conectar el cable de alimentación de CA a un
tomacorriente.
NO lo conecte directamente a la fuente de energía de la fábrica.
■
Antes de realizar cualquier procedimiento de reemplazo, apague el controlador
y los equipos relacionados, luego desconecte el enchufe de la fuente de
alimentación.
Realizar cualquier procedimiento de reemplazo con la energía encendida es
extremadamente peligroso y puede provocar una descarga eléctrica o el mal
funcionamiento del sistema de robot.
Después de reemplazar las piezas (motores, unidades de engranaje reductor, frenos, correas
de regulación, unidad de ranura de tornillo esférico, etc.), el manipulador no puede operar
correctamente, ya que no coincide el origen almacenado en cada motor y el origen
correspondiente almacenado en el controlador.
Después de reemplazar las piezas, es necesario hacer coincidir estos orígenes.
El proceso de alinear los dos orígenes se denomina “Calibración”.
Consulte Mantenimiento: 13. Calibración para realizar la calibración.
10.1 Engrase de la unidad de ranura de tornillo esférico
Nombre
Cantidad
Nota
Grasa
Para unidad de ranura de tornillo
esférico
(grasa AFB)
Cantidad
correcta
Herramientas
Paño de limpieza
1
Para limpiar grasa
(Eje de ranura)
Destornillador de cruz
1
Para el retiro de la banda de
apriete
Solo para el modelo para salas
blancas
El desbloqueo del freno solo afecta a las articulaciones n.º 3 y n.º 4. Cuando se presiona el
desbloqueo del freno en modo de emergencia, se libera simultáneamente el freno de las
articulaciones n.º 3 y n.º 4.
Tenga cuidado de que el eje no se caiga ni gire mientras se presiona el desbloqueo del freno, ya
que es posible que el eje baje debido al peso del efector final.
NOTA
NOTA

Mantenimiento
LS10-B Mod.6 143
10.1.1 Modelo estándar
Cubra el área circundante como el efector final y los equipos periféricos, por si gotea la
grasa.
(1)
Encienda el controlador. Detenga la excitación del motor. (MOTOR OFF)
(2)
Mueva el brazo a la posición en la que la articulación n.º 3 se pueda mover realizando
la carrera completa.
(3)
Mueva el eje hasta su límite superior manualmente
mientras presiona el desbloqueo del freno.
Desbloqueo del freno
(4)
Apague el controlador.
(5)
Limpie la grasa antigua de la parte superior del eje
y aplíquele grasa nueva.
Cuando aplique la nueva grasa a la parte superior
del eje, llene directamente las ranuras de forma
manual. Limpie el exceso de grasa del eje.
(6)
Encienda el controlador.
(7)
Empuje el eje hasta su límite superior manualmente mientras presiona el desbloqueo
del freno.
(8)
Limpie la grasa antigua de la parte inferior del eje y aplíquele grasa nueva.
Cuando aplique la nueva grasa a la parte inferior del eje, llene directamente las ranuras
de forma manual. Limpie el exceso de grasa del eje.
(9)
Mueva el eje hacia arriba y abajo varias veces mientras presiona el desbloqueo del
freno para suavizar la grasa del eje. Limpie el exceso de grasa del eje.
Cuando limpie el exceso de grasa de la parte superior del eje, apague el controlador y
retire la cubierta superior del brazo.
Para conocer detalles, consulte Mantenimiento: 3.1 Cubierta superior del brazo.

Mantenimiento
144 LS10-B Mod.6
10.1.2 Modelo para salas blancas
Cubra el área circundante como el efector final y los equipos periféricos, por si gotea la
grasa.
Parte superior
del eje
(1)
Encienda el controlador. Detenga la excitación del motor. (MOTOR OFF)
(2)
Mueva el brazo a la posición en la que la articulación n.º 3 se pueda mover realizando
la carrera completa.
(3)
Mueva el eje hasta su límite inferior manualmente
mientras presiona el desbloqueo del freno.
Desbloqueo del freno
(4) Banda de apriete
(4)
Suelte la banda de apriete debajo del fuelle y,
luego, levante el fuelle.
(5)
Mueva el eje hasta el límite superior manualmente
mientras presiona el desbloqueo del freno.
(6)
Limpie la grasa antigua de la parte superior del eje
y, luego, aplique grasa nueva.
Llene con grasa directamente las ranuras del eje,
al interior del fuelle, de forma manual.
Limpie el exceso de grasa del eje.
(6) Eje
(7) Banda de apriete
Parte inferior
del eje
(7)
Suelte la banda de apriete en el fuelle y, luego,
mueva el fuelle hacia abajo.
(8)
Mueva el eje hasta su límite inferior manualmente
mientras presiona el desbloqueo del freno.
(9)
Limpie la grasa antigua de la parte inferior del eje
y, luego, aplique grasa nueva.
Llene con grasa directamente las ranuras del eje,
al interior del fuelle, de forma manual.
Limpie el exceso de grasa del eje.
(9) Eje
(10)
Mueva el eje hacia arriba y abajo varias veces
mientras presiona el desbloqueo del freno para
suavizar la grasa del eje. Limpie el exceso de
grasa del eje.

Mantenimiento
LS10-B Mod.6 145
(11)
Fije el fuelle.
Para colocar el fuelle superior, mueva el eje a su límite inferior.
Para colocar el fuelle inferior, mueva el eje a su límite superior.
Para mover hacia arriba y hacia abajo el eje, presione y mantenga presionado el
desbloqueo del freno.
Una la pieza de montaje del fuelle hasta que toque la parte cilíndrica de la cubierta.
Luego, fíjelos con bandas de apriete
10.2 Reemplazo de la unidad de ranura de tornillo esférico
Hay un freno montado en el motor de las articulaciones n.º 3 y n.º 4 para evitar que el eje
baje y gire debido al peso del efector final mientras la alimentación del controlador está
apagada o mientras el motor está en el estado apagado (MOTOR OFF).
Baje el eje hasta su límite inferior antes del procedimiento de reemplazo después de los
pasos de retiro.
Nombre
Cantidad
Nota
Piezas de
mantenimiento
Unidad de ranura de tornillo esférico
1
Cada modelo de manipulador
(Consulte Mantenimiento:
14. Piezas de
mantenimiento)
Grasa
Para unidad de ranura de tornillo esférico
(grasa AFB)
Cantidad
correcta
Herramientas
Llave
hexagonal
(ancho a lo largo de
superficies planas: 3 mm
1
Para tornillo M4
(ancho a lo largo de
superficies planas: 4 mm
1
Para tornillo M5
Torquímetro
1
Alicates de corte
1
Para cortar amarracables
Destornillador de cruz
1
Solo para el modelo para
salas blancas
Dinamómetro
1
Tensión axial (fuerza de
tracción):
114 N (11,6 0,5 kgf)
Cable adecuado (longitud de alrededor
de 1000 mm)
1
Para tensión de correa
Paño de limpieza
1
Para limpiar grasa
(Eje de ranura)
Material
Amarracables
-
Retiro de la
(1)
Encienda el controlador.
NOTA

Mantenimiento
146 LS10-B Mod.6
unidad de ranura
de tornillo esférico
(2)
Empuje el eje hasta su límite inferior mientras presiona el desbloqueo del freno.
Asegúrese de mantener suficiente espacio y evitar que el efector final golpee algún
equipo periférico.
El desbloqueo del freno solo se aplica a las articulaciones n.º 3 y n.º 4.
Cuando se presiona el desbloqueo del freno, se liberan simultáneamente los frenos
respectivos de las articulaciones n.º 3 y n.º 4.
Tenga cuidado de que el eje no se caiga ni gire mientras se presiona el desbloqueo del
freno, ya que es posible que el eje baje debido al peso del efector final.
(3)
Apague el controlador.
(4)
Desconecte los cables/tubos desde el efector final y retire el efector final.
(5)
Este paso es solamente para el modelo para el modelo para salas blancas.
Retire el fuelle. Para conocer detalles, consulte Mantenimiento: 9. Fuelle.
(6)
Retire la cubierta superior del brazo y la cubierta inferior del brazo.
Para conocer detalles, consulte Mantenimiento: 3. Cubiertas.
(7)
Retire los siguientes elementos.
Unidad de motor de la articulación n.º 4 Polea intermedia de la articulación n.º 4
Correa U1 Correa U2 Correa Z
Siga los pasos para el retiro de la correa U2 en Mantenimiento: 8.2 Reemplazo de la
correa de regulación.
(8)
Retire los tres tornillos que montan la placa
de la ranura.
3-M4×15
4-M5×15
(9)
Retire los cuatro tornillos que montan la placa
de la ranura.
(10)
Tire de lo siguiente hacia el lado superior del brazo n.º 2.
Unidad de ranura de tornillo esférico Correa Z Correa U2

Mantenimiento
LS10-B Mod.6 147
Instalación de la
unidad de ranura
de tornillo
esférico
(1)
Inserte una nueva unidad de ranura de tornillo esférico en el brazo n.º 2.
(2)
Fije la tuerca de la ranura desde el lado
inferior del brazo n.º 2.
4-M5×15
(3)
Monte lo siguiente.
Unidad de motor de la articulación n.º 3/ Unidad de motor de la articulación n.º 4/
Polea intermedia de la articulación n.º 4/
Correa U1 / Correa U2 / Correa Z
Siga los pasos para la instalación de la correa U2 en Mantenimiento: 8.2 Reemplazo de
la correa de regulación.
(4)
Monte la cubierta superior del brazo y la cubierta inferior del brazo.
Para conocer detalles, consulte Mantenimiento: 3. Cubiertas.
(5)
Engrase el eje.
Para conocer detalles, consulte Mantenimiento: 10.1 Engrase de la unidad de ranura
de tornillo esférico
(6)
Para el modelo para salas blancas, instale el fuelle.
Para conocer detalles, consulte Mantenimiento: 9. Fuelle.
(7)
Monte el efector final, los cables y tubos.
(8)
Realice la calibración de las articulaciones n.º 3 y 4.
Para conocer detalles, consulte Mantenimiento: 13. Calibración.

Mantenimiento
148 LS10-B Mod.6
11. Placas
ADVERTENCIA
■
No conecte ni desconecte los conectores del motor mientras el sistema de robot
esté encendido. Conectar o desconectar los conectores del motor con la energía
encendida es extremadamente peligroso y puede provocar lesiones corporales
graves, ya que el manipulador puede moverse de manera anormal; además,
puede provocar descargas eléctricas y el mal funcionamiento del sistema de
robot.
■
Para cortar la energía hacia el sistema de robot, desconecte el enchufe de la
fuente de energía. Asegúrese de conectar el cable de alimentación de CA a un
tomacorriente.
NO lo conecte directamente a la fuente de energía de la fábrica.
■
Antes de realizar cualquier procedimiento de reemplazo, apague el controlador
y los equipos relacionados, luego desconecte el enchufe de la fuente de
alimentación.
Realizar cualquier procedimiento de reemplazo con la energía encendida es
extremadamente peligroso y puede provocar una descarga eléctrica o el mal
funcionamiento del sistema de robot.
Nombre
Cantidad
Nota
Piezas de
mantenimiento
Placa del convertidor
1
2196970
Placa de control
1
2196966
Herramientas
Alicates de corte
1
Para cortar amarracables
Destornillador de cruz (n.º 1)
1
Material
Amarracables
1
Para fijar los cables

Mantenimiento
LS10-B Mod.6 149
11.1 Reemplazo de la placa del convertidor
La placa que suministra la alimentación al codificador del motor está instalada al interior de
la base del manipulador. Si se daña la placa, el manipulador no operará.
Retiro de
la placa del
convertidor
(1)
Apague el controlador.
(2)
Retire la placa del conector.
Para conocer detalles, consulte Mantenimiento: 3.3 Placa del conector.
(3)
Desconecte los conectores, que están conectados en la
placa del convertidor.
Conectores: CV11, CV12, CV13
Placa del convertidor
(4)
Retire la placa del convertidor de la base de montaje.
Tornillos de cabeza fijadora pequeños:
2-M3 (Destornillador de cruz)
Placa del convertidor
2-M3
Tornillos de
cabeza fijadora
pequeños

Mantenimiento
150 LS10-B Mod.6
Instalación de
la placa del
convertidor
(1)
Instale la placa del convertidor en la base de montaje.
Tornillos de cabeza fijadora pequeños: (2-M3)
Placa del convertidor
2-M3
Tornillos de
cabeza fijadora
pequeños
(2)
Conecte los conectores a la placa del convertidor.
Conectores: CV11, CV12, CV13
(3)
Monte la placa del conector.
Para conocer detalles, consulte Mantenimiento: 3.3 Placa del conector.
(4)
Encienda el controlador.
(5)
Asegúrese de que se produzca ningún error en ninguna de las articulaciones.

Mantenimiento
LS10-B Mod.6 151
11.2 Reemplazo de la placa de control
Retiro de
la placa de
control
(1)
Apague el controlador.
(2)
Retire la cubierta superior del brazo.
Para conocer detalles, consulte Mantenimiento: 3.1 Cubierta superior del brazo.
(3)
Desconecte el conector.
Conector: X51
(4)
Retire la placa de control.
2-M2×16
Tornillo de cabeza plana
Placa de control
Conector
Instalación de
la placa de
control
(1)
Instale la nueva placa de control.
Tenga cuidado con la dirección de la
placa.
(Revise la dirección de la placa según la
posición del conector).
(2)
Conecte el conector.
Conector: X51
(3)
Monte la cubierta superior del brazo.
Para conocer detalles, consulte Mantenimiento: 3.1 Cubierta superior del brazo.
(4)
Encienda el controlador.

Mantenimiento
152 LS10-B Mod.6
12. Luz LED
ADVERTENCIA
■
No conecte ni desconecte los conectores del motor mientras el sistema de robot
esté encendido. Conectar o desconectar los conectores del motor con la energía
encendida es extremadamente peligroso y puede provocar lesiones corporales
graves, ya que el manipulador puede moverse de manera anormal; además,
puede provocar descargas eléctricas y el mal funcionamiento del sistema de
robot.
■
Para cortar la energía hacia el sistema de robot, desconecte el enchufe de la
fuente de energía. Asegúrese de conectar el cable de alimentación de CA a un
tomacorriente.
NO lo conecte directamente a la fuente de energía de la fábrica.
■
Antes de realizar cualquier procedimiento de reemplazo, apague el controlador
y los equipos relacionados, luego desconecte el enchufe de la fuente de
alimentación.
Realizar cualquier procedimiento de reemplazo con la energía encendida es
extremadamente peligroso y puede provocar una descarga eléctrica o el mal
funcionamiento del sistema de robot.
Nombre
Cantidad
Nota
Piezas de
mantenimiento
Luz LED
1
2077258
Herramientas
Destornillador de cruz
1
Para el retiro de cables
Alicates de corte
1
Material
Amarracables
1
Retiro de la
luz LED
(1)
Retire la cubierta superior del brazo.
Para conocer detalles, consulte Mantenimiento: 3.1 Cubierta superior del brazo.
(2)
Retire la placa del usuario.
Para conocer detalles, consulte Mantenimiento: 3.5 Placa del usuario.
(3)
Desconecte los terminales X1 y X2 del
indicador LED.
Terminal
X2
Terminal
X1
Lente
Soporte de lente
Anillo
LED
(4)
Gire el lente hacia la izquierda para extraerlo.
Luego gire el soporte del lente hacia la
izquierda para extraerlo.
(5)
Retire el LED y el anillo de la placa del
usuario.
Instalación de la
luz LED
(1)
Conecte los terminales X1 y X2 al LED.
Cada terminal debe estar conectado al mismo
número de terminal del indicador LED.
(2)
Coloque la placa del usuario entre el anillo y
el soporte de lente y fije el indicador LED a la
cubierta.
(3)
Monte el lente.
(4)
Monte la placa del usuario.
Para conocer detalles, consulte Mantenimiento: 3.5 Placa del usuario.
(5)
Instale la cubierta superior del brazo.
Para conocer detalles, consulte Mantenimiento: 3.1 Cubierta superior del brazo.

Mantenimiento
LS10-B Mod.6 153
13. Calibración
13.1 Acerca de la calibración
Después de reemplazar las piezas (motores, unidades de engranaje reductor, correas de
regulación, etc.), el manipulador no puede ejecutar el posicionamiento correctamente, ya
que no coincide el origen almacenado en cada de motor y el origen correspondiente
almacenado en el controlador.
Después de reemplazar las piezas, es necesario hacer coincidir estos orígenes.
El proceso de alinear los dos orígenes se denomina “Calibración”. Tenga en cuenta que la
calibración no es lo mismo que la enseñanza*.
*: “Enseñanza” significa enseñar al controlador los puntos de coordenada (incluidas las
poses) en cualquier lugar del área de funcionamiento del manipulador.
ADVERTENCIA
■
Para garantizar la seguridad, se debe instalar una protección para el sistema de
robot.
Para conocer detalles sobre la protección, consulte el Manual del usuario de
EPSON RC+: 2.4 Precauciones de diseño e instalación.
■
Antes de operar el sistema de robot, asegúrese de que no haya nadie al interior
del área protegida. El sistema de robot se puede operar en el modo de
enseñanza, incluso cuando alguien está al interior del área protegida.
El movimiento del manipulador siempre está en estado restringido (bajas
velocidades y baja potencia) para garantizar la seguridad de un operador. Sin
embargo, operar el sistema de robot mientras alguien está al interior del área
protegida es extremadamente peligroso y puede provocar problemas graves de
seguridad en caso de que el manipulador se mueva de manera inesperada.
Ingreso de comando
Los procedimientos de calibración incluyen el proceso para ingresar comandos. En EPSON
RC+, seleccione el menú-[Tools]-[Command Window] para usar la ventana Command.
La información anterior se omite en el procedimiento de calibración.
Movimiento de desplazamiento
El proceso para definir el movimiento de desplazamiento se incluye en la página [Jog &
Teach] de Robot Manager. En EPSON RC+, seleccione menú-[Tools]-[Robot Manager] y
seleccione la pestaña [Jog & Teach] para usar la página [Jog & Teach].
La página anterior se indica como [Jog & Teach] en el procedimiento de calibración.

Mantenimiento
154 LS10-B Mod.6
13.2 Procedimiento de calibración
EPSON RC+ tiene un asistente para la calibración.
Esta sección indica la calibración usando el asistente de calibración de EPSON RC+.
Se usa el mismo procedimiento de calibración para cada articulación.
Los pasos a continuación son una calibración que usa la articulación n.º 1. Para calibrar las
otras articulaciones, siga el procedimiento detallado a continuación.
Cuando las coordenadas para el punto de trabajo del manipulador requieren cálculos, es
importante que la articulación n.º 2 esté calibrada de forma precisa. Ejecute el procedimiento
en “Calibration Using Right / Left Arm Orientations” para calibrar la articulación n.º 2 de
forma precisa. Para conocer detalles, consulte Mantenimiento: 13.3 Calibración precisa de
la articulación n.º 2.
Cuando calibre la articulación n.º 4, debe calibrar la articulación n.º 3 y 4 al mismo tiempo.
No puede calibrar la articulación n.º 4 por sí sola, debido a la estructura del manipulador.
Si ocurre Err9716 o 5016 (Error de suministro de alimentación del codificador absoluto.
Reemplace la batería. Revise el cableado interno del robot), aplique el procedimiento de
13.4 Procedimiento de calibración sin usar el asistente de calibración - 3. Inicialización de
codificador, y luego inicie el asistente de calibración.
Se debe especificar el punto de referencia (un punto para comprobar la precisión) para la
calibración.
(1) Inicie el asistente de calibración.
i. En EPSON RC+ 7.0, seleccione menú-[Setup] (Configuración) para mostrar el
diálogo [System Configuration] (Configuración de sistema).
ii. Seleccione [Robot]-[Robot**]-[Calibration] (Calibración) para mostrar
[Calibration].
iii. Seleccione la articulación y haga clic en el botón <Calibrate...>.
NOTA

Mantenimiento
LS10-B Mod.6 155
(2) Confirme el mensaje de advertencia y haga clic en el botón <Yes> (Sí).
(3) Mueva manualmente la articulación que desea calibrar hasta aproximadamente la
posición cero, como se muestra en el diálogo. Después de mover la articulación, haga
clic en el botón <Next> (Siguiente).
Posición del pulso 0 de la articulación
n.º 1:
posición alineada con el eje X
en el sistema de coordenadas
del robot
Pulso 0
+
Posición del pulso 0 de la articulación
n.º 2:
posición en la que los brazos n.º
1 y 2 están en línea recta
(Sin importar la dirección de la
articulación n.º 1).
Pulso 0
+

Mantenimiento
156 LS10-B Mod.6
Posición del pulso 0 de la articulación
n.º 3:
posición de límite superior en el
rango de movimiento
La altura de la articulación n.º 3
depende del modelo de manipulador.
Modelo estándar
Modelo para salas
blancas
Posición del pulso 0 de la articulación
n.º 4:
posición en la que la superficie
plana en el eje mira hacia la
punta del brazo n.º 2
Superficie
plana
Pulso 0
+
(4) Haga clic en el botón <Yes> para restablecer el codificador.
(5) Reinicie el controlador.
* Esta ventana desaparecerá cuando el controlador se inicie.

Mantenimiento
LS10-B Mod.6 157
(6) Seleccione el punto de referencia a usar para la calibración y haga clic en el botón
<Next>.
Seleccione un punto
en los puntos
actuales para usar
para revisar la
precisión.
.
(7) Luego haga clic en el botón <Jog...> para mostrar el cuadro de diálogo [Jog & Teach]
(Desplazar y enseñar).

Mantenimiento
158 LS10-B Mod.6
(8) Desplace el efector final hasta aproximadamente el punto de referencia en el diálogo
[Jog & Teach] para una calibración aproximada. Haga clic en el botón <OK>.
Antes de operar el robot, abra [Control Panel] (Panel de control) y haga clic en el botón
<Motor ON> (Motor encendido).
Mueva el efector final desde la posición del pulso cero hasta el punto de referencia
aproximado en el que se ejecutará una calibración general al realizar el movimiento de
desplazamiento. Puede producirse un espacio de posición si el movimiento de
desplazamiento no mueve el efector final.
(9) Haga clic en el botón <Next>.
NOTA

Mantenimiento
LS10-B Mod.6 159
(10) El manipulador se mueve al punto de referencia. Haga clic en el botón <Execute>
(Ejecutar).
Escriba JUMP P0:z(0).
Punto seleccionado en el
paso (6)
(11) Configure el mensaje y haga clic en el botón <Yes>.
(12) Después de que el manipulador se mueva al punto de referencia, haga clic en el botón
<Next>.

Mantenimiento
160 LS10-B Mod.6
(13) Desplace a la posición de referencia precisa.
(14) Desplace el efector final hasta aproximadamente el punto de referencia en el diálogo
[Jog & Teach] para una calibración aproximada. Haga clic en el botón <OK>.
* Posicione solo la articulación n.º 2 y mueva la articulación n.º 3 a cerca del pulso 0.

Mantenimiento
LS10-B Mod.6 161
(15) Haga clic en el botón <Next>.
(16) Ejecute el procedimiento en “Calibration Using Right / Left Arm Orientations” para
calibrar la articulación n.º 2 de forma precisa.
Vaya al paso (17) para la calibración de las otras articulaciones.
i. Mueva a otro punto que tenga una pose diferente (de righty a lefty) con el comando
Jump. Haga clic en el botón <Yes> (Sí).
ii. Desplace a la posición de referencia precisa.

Mantenimiento
162 LS10-B Mod.6
iii. Desplace a la posición de referencia precisa y ajuste la posición. Haga clic en el
botón <Aceptar>.
iv. Haga clic en el botón <Next>.

Mantenimiento
LS10-B Mod.6 163
(17) La calibración está completa. Haga clic en el botón <Finish> (Finalizar).
(18) Mueva el manipulador a otros puntos y compruebe si puede moverlo sin problemas.
Enseñe puntos cuando corresponda.

Mantenimiento
164 LS10-B Mod.6
13.3 Calibración precisa de la articulación n.º 2
Cuando las coordenadas para el punto de trabajo del manipulador requieren cálculos, es
importante que la articulación n.º 2 esté calibrada de forma precisa.
Si no se logra la precisión de la articulación n.º 2 al usar los pasos en la sección
Mantenimiento: 13.2 Procedimiento de calibración, siga el procedimiento en “Calibration
Using Right / Left Arm Orientations” para calibrar la articulación n.º 2 de forma precisa.
El punto de referencia es el centro del eje de
ranura de tornillo esférico.
Cuando se produce una alineación incorrecta
entre el centro del efector final y el centro del eje
de ranura de tornillo esférico, retire el efector
final y ejecute la calibración del eje.
El centro del eje
Esta es una alineación
incorrecta entre el
centro del efector final y
el centro del eje.
.
Cree una plantilla de calibración como se muestra
en la figura de la derecha y ubíquela en el
extremo del eje para dejar en claro el centro del
eje.
Decida un punto objetivo y márquelo con una
cruz () para poder verificar el centro del eje
fácilmente después de cambiar la pose del brazo
entre derecha e izquierda.
Plantilla de
calibración en el
extremo del eje
(Ejemplo)
Punto objetivo
El centro del eje
Después de retirar el efector final y ejecutar la calibración, instale el efector final y mueva
el manipulador al punto de enseñanza para verificar si hay un espacio de posición. Si la hay,
ajuste la posición de instalación del efector final del efector y vuelva a enseñar el punto.
En los siguientes casos es necesario realizar cálculos para obtener las
coordenadas del punto de trabajo:
· Enseñar el punto de trabajo ingresando los valores de coordenada (enseñanza MDI)
· Cambiar la orientación del brazo entre derecha e izquierda en un punto determinado
· Usar el comando Pallet
· Ejecutar el control CP (como una interpolación lineal o circular)
· Usar el comando Local
· Datos de pose especificados con coordenadas relativas <Ejemplo: P1+X(100) >
· Calibraciones de cámara de Vision Guide
NOTA

Mantenimiento
LS10-B Mod.6 165
Calibración con orientación de brazo derecho/izquierdo
(1)
Compruebe los datos de punto para la calibración
Use un punto cuya precisión puede verificar fácilmente dentro del envolvente de trabajo
del brazo derecho e izquierdo. Luego verifique la cantidad de puntos que desea usar.
(2)
En EPSON RC+, abra el menú [Tools]-[Robot Manager]-[Control Panel]
(Herramientas - Administrador de robot - Panel de control) y haga clic en MOTOR ON.
(3)
Haga clic en el botón <Free All> (Liberar todos) para liberar todas las articulaciones
del servocontrol. Ahora puede mover los brazos manualmente.
(4)
Mueva los brazos a la posición de los datos de punto para la calibración en la
orientación del brazo derecho.
(5)
Desde la posición actual, enseñe cualquier número sin utilizar de datos de punto.
Este punto ahora se llama P1.
Especifique el número de punto “1” y haga clic en el botón <Teach> en [Jog & Teach].
(6)
Haga clic en Lock All (Bloquear todos) en [Control Panel] para bloquear todas las
articulaciones en el servocontrol.
(7)
Cambie a la orientación del brazo lefty. Luego mueva el brazo al mismo punto.
>Jump P1/L:Z(0) ' Cambie la orientación del brazo de righty a lefty
Z es la posición máxima
* Si hay interferencia en el camino de righty a lefty, haga clic en Free All (Liberar
todos) en [Control Panel] y cambie la orientación del brazo a lefty manualmente.
Luego, vaya al paso (6) y (7).
(8)
Las articulaciones están levemente fuera de posición.
Ajuste la separación con Z en el grupo de Jogging (Desplazamiento) en [Jog & Teach].
Luego enseñe otro número sin utilizar de datos de punto. Este punto ahora se llama P2.
Especifique el número de punto “P2” y haga clic en el botón <Teach> en [Jog & Teach].
(9)
Ingrese el nuevo valor Hofs.
> Hofs Hofs (1), Hofs (2) + (Ppls(P1,2) + Ppls(P2,2)) /
2, Hofs(3), Hofs(4)
(10)
Desde la orientación lefty actual del brazo (la posición en el paso (8)), enseñe el número
de datos de punto utilizado en el paso (8). Este punto se llama P2.
Especifique el número de punto “P2” y haga clic en el botón <Teach> en [Jog & Teach].
(11)
Cambie a la orientación del brazo righty. Luego, asegúrese de que el manipulador se
mueva en la posición correcta.
>Jump P2/R ' Cambie la orientación del brazo de lefty a righty
* Si hay alguna interferencia en el camino de lefty a righty, haga clic en Free All en
[Control Panel] y cambie la orientación del brazo a righty manualmente. Luego, vaya
al paso (6) y (11).

Mantenimiento
166 LS10-B Mod.6
(12)
Mueva el manipulador al otro dato de punto y asegúrese de que se mueva a la posición
correcta. Enseñe dos puntos más, de ser necesario.
* Elimine los dos puntos enseñados para la calibración de la articulación n.º 2.
13.4 Procedimiento de calibración sin usar el asistente de calibración
Esta sección indica la calibración sin usar el asistente de calibración de EPSON RC+. Para
conocer detalles de la calibración usando el asistente de calibración, consulte
Mantenimiento: 13.2 Procedimiento de calibración.
Cuando las coordenadas para el punto de trabajo del manipulador requieren cálculos, es
importante que la articulación n.º 2 esté calibrada de forma precisa. Ejecute el procedimiento
en “Calibration Using Right / Left Arm Orientations” para calibrar la articulación n.º 2 de
forma precisa. Para conocer detalles, consulte Mantenimiento: 13.3 Calibración precisa
de la articulación n.º 2.
No puede calibrar la articulación n.º 4 por sí sola, debido a la estructura del manipulador.
Cuando calibre la articulación n.º 4, debe calibrar la articulación n.º 3 y 4 al mismo tiempo.
Se debe especificar el punto de referencia (un punto para identificar la posición del
manipulador) para la calibración.
Siga los pasos 1 al 6 que se describen a continuación para calibrar el origen.
1.
Confirmación de pose básica
(1)-1 Después del reemplazo de la pieza, ejecute la calibración con los datos de punto
que están registrados actualmente.
Confirme el número de datos de punto (P*) para volver a construir la posición
correcta del manipulador.
* Se necesitan los puntos de dato antes del reemplazo de la pieza (motor,
engranaje reductor, correa, etc.) para la calibración.
2.
Reemplazo de pieza
(2)-1 Reemplace las piezas según se indica en este manual.
* Tenga cuidado de no lesionarse o dañar las piezas cuando las reemplace.
3.
Inicialización del codificador
(3)-1 Encienda el controlador cuando todas las articulaciones estén en el rango de
movimiento.
(3)-2 Mueva manualmente la articulación que necesite alinear el origen a su
posición del pulso 0 aproximada.
NOTA
NOTA

Mantenimiento
LS10-B Mod.6 167
Posición del pulso 0 de la articulación
n.º 1:
posición alineada con el eje X en
el sistema de coordenadas del
robot
Pulso 0
+
Posición del pulso 0 de la
articulación n.º 2:
posición en la que los brazos
n.º 1 y 2 están en línea recta
(Sin importar la dirección de
la articulación n.º 1).
Pulso 0
+
Posición del pulso 0 de la
articulación n.º 3:
posición de límite superior
en el rango de movimiento
La altura de la articulación n.º 3
depende del modelo de manipulador.
Modelo estándar
Modelo para salas
blancas
Posición del pulso 0 de la articulación
n.º 4:
posición en la que la superficie
plana en el eje mira hacia la
punta del brazo n.º 2
Superficie
plana
Pulso 0
+

Mantenimiento
168 LS10-B Mod.6
(3)-3 Conecte EPSON RC+ al controlador.
Seleccione un robot para calibrar. Ingrese el comando que se indica a
continuación en [Command Window].
(Este ejemplo usa “robot 1”).
> robot 1
(3)-4 Ejecute el comando de inicialización del codificador absoluto.
Ingrese uno de los siguientes comandos en [Command Window] según la
articulación que está calibrando.
Articulación n.º 1: >EncReset 1
Articulación n.º 2: >EncReset 2
Articulación n.º 3: >EncReset 3
Articulación n.º 4: >EncReset 3, 4
(3)-5 Reinicie el controlador.
En EPSON RC+, seleccione menú-[Tools]-[Controller] y haga clic en el botón
<Reset Controller> (Restablecer controlador).
* Esta ventana desaparecerá cuando se inicie el controlador.
4.
Calibración aproximada
(4)-1 Ejecute el siguiente comando en el menú-[Tools]-[Command Window].
>calpls 0,0,0,0
* El manipulador no se mueve.
(4)-2 Ejecute los siguientes comandos según la articulación que desea calibrar desde
el menú-[Tool]-[Command Window].
Articulación n.º 1 >calib 1
Articulación n.º 2 >calib 2
Articulación n.º 3 >calib 3
Articulación n.º 4 >calib 3, 4
5.
Calibración (Posicionamiento preciso)
(5)-1 Encienda los motores desde EPSON RC+, en el menú -[Tools]-[Robot
Manager]-[Control Panel].
(5)-2 Haga clic en el botón <Free All> para liberar todas las articulaciones del
servocontrol. Ahora puede mover los brazos manualmente.

Mantenimiento
LS10-B Mod.6 169
(5)-3 Mueva el manipulador manualmente a una posición/postura aproximada de los
datos de punto de calibración.
(5)-4 Cree los datos a partir de los datos de punto de calibración.
Ingrese y ejecute el siguiente comando en [Command Window].
(En este ejemplo, se usa P1 como dato de punto de calibración.)
> Calpls Ppls(P1,1), Ppls(P1,2), Ppls(P1,3),
Ppls(P1,4)
(5)-5 Mueve la articulación al punto especificado con un comando de movimiento.
Por ejemplo, cuando los datos de punto especificados son “P1”,
ejecute “Jump P1:Z(0)” desde [Jog & Teach].
* La articulación que NO se está calibrando se mueve a la posición original.
(5)-6 Alinee de forma precisa la articulación* que se está calibrando al punto
especificado con un comando de desplazamiento.
* Debe mover la articulación n.º 3 y 4 a la posición cuando calibre la
articulación n.º 4.
Seleccione el modo de desplazamiento [Joint] desde [Jog & Teach] para
ejecutar el movimiento de desplazamiento.
(5)-7 Ejecute la calibración.
Ingrese y ejecute uno de los siguientes comandos en [Command Window]
según la articulación que está calibrando.
Articulación n.º 1: >Calib 1
Articulación n.º 2: >Calib 2
Articulación n.º 3: >Calib 3
Articulación n.º 4: >Calib 3, 4
6.
Prueba de precisión
(6)-1 Mueva el manipulador a otro punto para confirmar que se mueva a la misma
posición.
Si no se mueve a la misma posición, vuelva a calibrarlo usando otro punto.
Debe volver a definir el punto si no se puede asegurar la reproducibilidad a
través de la calibración.

Mantenimiento
170 LS10-B Mod.6
14. Lista de piezas de mantenimiento
Nombre de pieza
Código
Nota
Referencia:
Mantenimiento
Revisión
*3
Unidad de cable
600 mm
2196931
4.1
-
700 mm
2196932
800 mm
2196933
Servomotor de CA
Articulación
n.º 1
2197984
520 W (con sello de aceite)
5.1
Articulación
n.º 2
2197985
520 W (sin sello de aceite)
6.1
Articulación
n.º 3
2197986
200 W
7.1
Articulación
n.º 4
2197987
150 W
8.1
Unidad de engranaje
reductor *1|
Articulación
n.º 1
1765530
5.2
Articulación
n.º 2
1765520
6.2
Junta tórica
Articulación
n.º 1
1650901
Incluido con la unidad de
engranaje reductor de la
articulación n.º 1
5.1
-
1213266
CO0543A
1520371
CO0538A
1510528
CO0551A
Articulación
n.º 2
1653181
Incluido con la unidad de
engranaje reductor de la
articulación n.º 2
6.2
-
1213267
CO0547A
Correa de
regulación
Articulación
n.º 3
1758946
Z
7.2
Articulación
n.º 4
1757386
U1
8.2
1757387
U2
Freno electromagnético
1499588
Eje Z (solo freno)
7.3
1750573
Eje U (Freno +
Alimentación)
7.4
Desbloqueo del freno
2117817
-
-
Fuelle
LS10-B**2C
1765523
*4
9
-
LS10-B**3C
1765524
*4
9
-
Ranura de tornillo
esférico
LS10-B**2S
1765521
200 mm
10.2
LS10-B**3S
1765522
300 mm
LS10-B**2C
1765528
170 mm

Mantenimiento
LS10-B Mod.6 171
Nombre de pieza
Código
Nota
Referencia:
Mantenimiento
Revisión
*3
LS10-B**3C
1765529
270 mm
Placa del convertidor
2196970
11.1
-
Placa de control
2196966
11.2
-
Luz LED
2077258
12
-
Grasa *2
Ranura de tornillo
esférico: AFB
-
Para comprar grasa y
adhesivo, comuníquese con
el proveedor de su región.
10.1
-
Unidad de engranaje
reductor: SK-1A
5.2, 6.2
-
Cubierta superior del brazo
1802514
Blanco
3.1
-
Cubierta inferior del brazo
1759511
Azul
3.2
-
Cubierta antipolvo
2014430
Para el conector de RJ45
-
Tope mecánico
1759366
1
-
Cable M/C
2196934
3 m
4.3
-
2196935
5 m
2196936
10 m
*1 Unidad de engranaje reductor
Una unidad de engranaje reductor consta de las siguientes tres piezas. Cuando reemplace la unidad de engranaje
reductor, asegúrese siempre de reemplazar el generador, la lámina flexible y la brida circular juntas como un
conjunto.
Generador de forma de onda
Este generador de forma de onda consta de una leva elipsoidal con
cojinetes de bolas en su circunferencia externa.
El círculo interno de cojinetes está fijo en la leva, mientras que el
círculo externo es capaz de deformarse flexiblemente mediante los
cojinetes de bolas.
Brida circular
Lámina flexible
Generador de forma de onda
Lámina flexible
Un cuerpo metálico delgado, elástico y con forma de copa con
dientes de engranaje en la circunferencia externa de la abertura.
Brida circular
Un cuerpo rígido y circular con dientes de engranaje en la
circunferencia interior.
La brida circular tiene dos dientes más que la lámina flexible.
Las bridas están engrasadas. Tenga cuidado de no permitir que la grasa se adhiera a su ropa.
*2 Con respecto a la compra de grasa
Debido a los reglamentos sobre productos químicos de los países individuales (GHS de la ONU), pedimos que
nuestros clientes compren la grasa requerida para el mantenimiento desde los fabricantes que se indican en la
siguiente tabla, con fecha de abril de 2015. Con respecto a la compra de la grasa, comuníquese con los
siguientes fabricantes. Si tiene alguna duda, comuníquese con los proveedores de su región.

Mantenimiento
172 LS10-B Mod.6
Nombre del producto
Fabricante
URL
Grasa THK AFB-LF
THK CO., LTD.
http://www.thk.com/
Grasa Harmonic SK-1A
Harmonic Drive Systems Inc.
http://www.harmonicdrive.net/
*3 Revisión
Como instrucción aproximada, realice la revisión (reemplazo de piezas) antes de alcanzar las 20.000 horas de
operación del manipulador. Las horas de operación se pueden revisar en el diálogo [Controller Status Viewer]
(Visor de estado del controlador) -[Motor On Hours] (Horas de funcionamiento del motor).
Para conocer detalles, consulte Mantenimiento 2.2. Revisión (Reemplazo de piezas).
*4 Fuelle
El fuelle para LS10-B***C se incluye en una unidad de dos piezas. La forma varía entre el fuelle superior y el
inferior.
-
 1
1
-
 2
2
-
 3
3
-
 4
4
-
 5
5
-
 6
6
-
 7
7
-
 8
8
-
 9
9
-
 10
10
-
 11
11
-
 12
12
-
 13
13
-
 14
14
-
 15
15
-
 16
16
-
 17
17
-
 18
18
-
 19
19
-
 20
20
-
 21
21
-
 22
22
-
 23
23
-
 24
24
-
 25
25
-
 26
26
-
 27
27
-
 28
28
-
 29
29
-
 30
30
-
 31
31
-
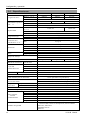 32
32
-
 33
33
-
 34
34
-
 35
35
-
 36
36
-
 37
37
-
 38
38
-
 39
39
-
 40
40
-
 41
41
-
 42
42
-
 43
43
-
 44
44
-
 45
45
-
 46
46
-
 47
47
-
 48
48
-
 49
49
-
 50
50
-
 51
51
-
 52
52
-
 53
53
-
 54
54
-
 55
55
-
 56
56
-
 57
57
-
 58
58
-
 59
59
-
 60
60
-
 61
61
-
 62
62
-
 63
63
-
 64
64
-
 65
65
-
 66
66
-
 67
67
-
 68
68
-
 69
69
-
 70
70
-
 71
71
-
 72
72
-
 73
73
-
 74
74
-
 75
75
-
 76
76
-
 77
77
-
 78
78
-
 79
79
-
 80
80
-
 81
81
-
 82
82
-
 83
83
-
 84
84
-
 85
85
-
 86
86
-
 87
87
-
 88
88
-
 89
89
-
 90
90
-
 91
91
-
 92
92
-
 93
93
-
 94
94
-
 95
95
-
 96
96
-
 97
97
-
 98
98
-
 99
99
-
 100
100
-
 101
101
-
 102
102
-
 103
103
-
 104
104
-
 105
105
-
 106
106
-
 107
107
-
 108
108
-
 109
109
-
 110
110
-
 111
111
-
 112
112
-
 113
113
-
 114
114
-
 115
115
-
 116
116
-
 117
117
-
 118
118
-
 119
119
-
 120
120
-
 121
121
-
 122
122
-
 123
123
-
 124
124
-
 125
125
-
 126
126
-
 127
127
-
 128
128
-
 129
129
-
 130
130
-
 131
131
-
 132
132
-
 133
133
-
 134
134
-
 135
135
-
 136
136
-
 137
137
-
 138
138
-
 139
139
-
 140
140
-
 141
141
-
 142
142
-
 143
143
-
 144
144
-
 145
145
-
 146
146
-
 147
147
-
 148
148
-
 149
149
-
 150
150
-
 151
151
-
 152
152
-
 153
153
-
 154
154
-
 155
155
-
 156
156
-
 157
157
-
 158
158
-
 159
159
-
 160
160
-
 161
161
-
 162
162
-
 163
163
-
 164
164
-
 165
165
-
 166
166
-
 167
167
-
 168
168
-
 169
169
-
 170
170
-
 171
171
-
 172
172
-
 173
173
-
 174
174
-
 175
175
-
 176
176
-
 177
177
-
 178
178
-
 179
179
-
 180
180
-
 181
181
-
 182
182
-
 183
183
-
 184
184
-
 185
185

























































































































































































Epson LS10-B SCARA Robot Manual de usuario
- Tipo
- Manual de usuario
- Este manual también es adecuado para
Documentos relacionados
-
Epson LS6-B SCARA Robot Guía de instalación
-
Epson C4 Compact 6-Axis Robots Manual de usuario
-
Epson LS3 SCARA Robots Manual de usuario
-
Epson C8XL Mid Sized 6-Axis Robots Manual de usuario
-
Epson LS6-B SCARA Robot Manual de usuario
-
Epson T6 SCARA Robots Manual de usuario
-
Epson C12XL 6-Axis Robots Manual de usuario
-
Epson T3-401S Manual de usuario
-
-