
Mod. 13 EM208R4413F
Robots de 6 ejes
Serie C8
MANUAL DEL MANIPULADOR
CPD-60396

Manual del manipulador Serie C8 Mod. 13

C8 Mod.13 i
Robots de 6 ejes
Manual del manipulador de la serie C8
Mod.13
Copyright 2015-2020 SEIKO EPSON CORPORATION. Todos los derechos reservados.

ii C8 Mod.13
PRÓLOGO
Gracias por comprar nuestros productos de robot.
Este manual contiene la información necesaria para el uso correcto del manipulador.
Lea atentamente este manual y otros manuales relacionados antes de instalar el sistema de
robot.
Mantenga este manual a la mano para un acceso fácil en todo momento.
GARANTÍA
El robot y sus piezas opcionales se envían a nuestros clientes solo después de someterlos a
los controles de calidad, pruebas e inspecciones más estrictos para certificar su
cumplimiento con nuestros exigentes estándares de rendimiento.
Los productos que tengan un mal funcionamiento como resultado de la manipulación u
operación normales se repararán en forma gratuita durante el período normal de la garantía.
(Comuníquese con el proveedor de su región para obtener información sobre el período de
garantía).
Sin embargo, se cobrarán al cliente las reparaciones en los siguientes casos (aunque sucedan
dentro del período de garantía):
1.
Daño o mal funcionamiento provocados por un uso inadecuado que no se describe en
este manual o por uso descuidado.
2.
Mal funcionamiento provocado por el desmontaje no autorizado del producto por parte
de los clientes.
3.
Daños debido a ajustes inadecuados o a intentos de reparación no autorizados.
4.
Daño provocado por desastres naturales, como terremotos, inundaciones, etc.
Advertencias, precauciones, uso:
1.
Si el robot o equipos relacionados se usan fuera de las condiciones de uso y las
especificaciones del producto descritas en los manuales, esta garantía queda nula.
2.
Si no sigue las ADVERTENCIAS y PRECAUCIONES de este manual, no podemos
hacernos responsables de ningún mal funcionamiento o accidente, incluso si tienen como
resultado lesiones o la muerte.
3.
No podemos prever todos los posibles peligros y consecuencias. Por lo tanto, este manual
no puede advertir al usuario de todos los posibles peligros.

C8 Mod.13 iii
MARCAS COMERCIALES
Microsoft, Windows y el logotipo de Windows son marcas registradas o marcas comerciales
de Microsoft Corporation en los Estados Unidos y otros países. Otras marcas y nombres de
productos son marcas comerciales o marcas registradas de sus respectivos titulares.
AVISO
Ninguna parte de este manual se puede copiar o reproducir sin autorización.
El contenido de este manual está sujeto a cambios sin previo aviso.
Notifíquenos si encuentra errores en este manual o si tiene comentarios con respecto a su
contenido.
FABRICANTE
INFORMACIÓN DE CONTACTO
La información de contacto se describe en “PROVEEDORES” en las primeras páginas del
siguiente manual:
Seguridad e instalación del sistema de robot Lea primero este manual

iv C8 Mod.13
En relación con la eliminación de la batería
La etiqueta con el basurero con ruedas tachado que se puede encontrar en el producto indica
que este producto y las baterías incorporadas no se deben eliminar en el flujo normal de
desechos domésticos. Para evitar los posibles daños ambientales o a la salud humana, separe
este producto y las baterías de otros flujos de desechos para garantizar que se puedan reciclar
de una manera ambientalmente correcta. Para conocer más detalles acerca de las
instalaciones de recolección, comuníquese con la oficina gubernamental local o con el
vendedor minorista donde compró este producto. El uso de los símbolos químicos Pb, Cd o
Hg indica si estos metales se usan en la batería.
Esta información solo se aplica a los clientes de la Unión Europea, de acuerdo con la
DIRECTIVA 2006/66/EC DEL PARLAMENTO EUROPEO Y DEL CONSEJO DEL 6 de
septiembre de 2006 acerca de las baterías y acumuladores y de las baterías y acumuladores
de desecho y por la que se deroga la Directiva 91/157/EEC y la legislación, transponiéndose
e implementándose en diversos sistemas legales nacionales.
Para otros países, comuníquese con su gobierno local para investigar la posibilidad de
reciclar su producto.
El procedimiento de retiro y reemplazo de la batería se describe en los siguientes manuales:
Manual del controlador de robot/ Manual del manipulador (sección Mantenimiento)

C8 Mod.13 v
Antes de leer este manual
Esta sección describe lo que debería saber antes de leer este manual.
Estructura del sistema de control
Los manipuladores C8 se pueden usar con las siguientes combinaciones de controladores y
software.
Controlador : RC700-A
Software : EPSON RC+ 7.0 versión 7.1.3 o posterior (C8XL)
EPSON RC+ 7.0 versión 7.1.4 o posterior (C8, C8L)
EPSON RC+ 7.0 versión 7.2.0 o posterior (montaje en pared)
Configuración según el software
EPSON
RC+
Este manual contiene los procedimientos de configuración mediante el uso de
software.
Dichas secciones están indicadas por símbolo de la izquierda.
Encender/apagar el controlador
Cuando vea la instrucción “Encienda/apague el controlador” en este manual, asegúrese de
encender o apagar todos los componentes del hardware.
Fotos e ilustraciones utilizadas en este manual
La apariencia de algunas de las piezas puede variar de aquellas en el producto real,
dependiendo de cuándo fue enviado o de las especificaciones. No obstante, los
procedimientos mismos son precisos.

vi C8 Mod.13

Índice
C8 Mod.13 vii
Configuración y operación
1. Seguridad 3
1.1 Convenciones ....................................................................................... 3
1.2 Seguridad en el diseño y la instalación ................................................ 4
1.3 Seguridad en la operación .................................................................... 5
1.4 Parada de emergencia ......................................................................... 7
1.5 Cómo mover los brazos con el freno electromagnético ........................ 9
1.5.1 Mover el brazo con la unidad de desbloqueo del freno .......... 10
1.5.2 Mover el brazo con el software ............................................... 10
1.6 Precaución para la operación en el estado de baja potencia ............. 10
1.7 Etiquetas de advertencia .................................................................... 11
2. Especificaciones 13
2.1 Características de los manipuladores................................................. 13
2.2 Número de modelo ............................................................................. 14
2.3 Nombres de las piezas y rango de movimiento de cada brazo .......... 15
2.4 Dimensiones exteriores ...................................................................... 17
2.4.1 C8-A701*** (C8) ..................................................................... 17
2.4.2 C8-A901*** (C8L) ................................................................... 18
2.4.3 C8-A1401*** (C8XL) ............................................................... 19
2.5 Rango de movimiento estándar .......................................................... 20
2.5.1 C8-A701*** (C8) ..................................................................... 20
2.5.2 C8-A901*** (C8L) ................................................................... 21
2.5.3 C8-A1401*** (C8XL) ............................................................... 22
2.6 Especificaciones ................................................................................. 24
2.6.1 Tabla de especificaciones ....................................................... 24
2.6.2 Opcional .................................................................................. 28
2.7 Cómo configurar el modelo ................................................................ 29
3. Entorno e instalación 30
3.1 Condiciones ambientales ................................................................... 30
3.2 Desembalaje, transporte y reubicación .............................................. 32
3.3 Dimensiones de montaje .................................................................... 35
3.3.1 Modelo de cables hacia atrás ................................................. 35
3.3.2 Modelo de cables hacia abajo ................................................ 37
3.4 Instalación .......................................................................................... 38
3.5 Conexión de los cables ...................................................................... 41
3.6 Cables y tubos neumáticos del usuario .............................................. 43
Cables eléctricos ................................................................................ 44
Tubos neumáticos .............................................................................. 45
3.7 Revisión de la orientación básica ....................................................... 46

Índice
viii C8 Mod.13
4. Efectores finales 47
4.1 Instalación de un efector final ............................................................ 47
4.2 Instalación de cámara y válvulas de aire ........................................... 47
4.3 Configuración de WEIGHT e INERTIA ............................................... 50
4.3.1 Configuración de WEIGHT ..................................................... 52
4.3.2 Configuración de INERTIA ..................................................... 56
4.4 Precauciones para la aceleración/desaceleración automática .......... 61
5. Rango de movimiento 62
5.1 Configuración del rango de movimiento por rango de pulsos
(para cada articulación) ..................................................................... 62
5.1.1 Rango de pulsos máximo de la articulación n.º 1 ................... 63
5.1.2 Rango de pulsos máximo de la articulación n.º 2 ................... 63
5.1.3 Rango de pulsos máximo de la articulación n.º 3 ................... 64
5.1.4 Rango de pulsos máximo de la articulación n.º 4 ................... 64
5.1.5 Rango de pulsos máximo de la articulación n.º 5 ................... 65
5.1.6 Rango de pulsos máximo de la articulación n.º 6 ................... 65
5.2 Configuración del rango de movimiento con topes mecánicos .......... 66
5.2.1 Configuración de rango de movimiento de la articulación n.º 1 .. 66
5.2.2 Configuración de rango de movimiento de la articulación n.º 2 .. 67
5.2.3 Configuración de rango de movimiento de la articulación n.º 3 .. 68
5.3 Restricción de la operación del manipulador mediante una combinación
del ángulo de las articulaciones ......................................................... 69
5.4 Sistema de coordenadas ................................................................... 73
5.5 Cambio del robot ................................................................................ 74
5.6 Configuración del rango cartesiano (rectangular)
en el sistema de coordenadas XY del manipulador ........................... 75
6. Opciones 76
6.1 Unidad de desbloqueo del freno ........................................................... 76
Instale la unidad de desbloqueo del freno ......................................... 78
Retire la unidad de desbloqueo del freno .......................................... 78
Cómo usar la unidad de desbloqueo del freno .................................. 79
6.2 Unidad de la placa de la cámara ........................................................ 80
6.3 Adaptador de herramienta (brida ISO) ............................................... 83
6.4 Topes mecánicos ajustables .............................................................. 84
6.5 Cables y tubos neumáticos del usuario ............................................. 85

Índice
C8 Mod.13 ix
Mantenimiento
1. Mantenimiento de seguridad 88
2. Mantenimiento general 89
2.1 Inspección de mantenimiento ............................................................. 89
2.1.1 Programa de inspección de mantenimiento ............................ 89
2.1.2 Punto de inspección ............................................................... 90
2.2 Revisión (Reemplazo de piezas) ........................................................ 92
2.3 Engrase .............................................................................................. 94
2.3.1 Unidad de engranaje reductor de la articulación n.º 1
(montaje en superficie de mesa) ............................................. 96
2.3.2 Unidad de engranaje reductor de la articulación n.º 1
(Montaje en techo, montaje en pared) ..................................... 97
2.3.3 Unidad de engranaje reductor de la articulación n.º 2 ............ 98
2.3.4 Unidad de engranaje reductor de la articulación n.º 3 ............ 99
2.3.5 Unidad de engranaje reductor de la articulación n.º 4 .......... 100
2.3.6 Unidad de engranaje reductor de la articulación n.º 5 .......... 101
2.3.7 Unidad de engranaje reductor de la articulación n.º 6 .......... 102
2.3.8 Engranaje cónico de la articulación n.º 6 .............................. 103
2.4 Apretar pernos de cabeza hueca hexagonal .................................... 104
2.5 Distribución de las piezas de mantenimiento ................................... 105
3. Cubiertas 106
3.1 Cubierta central del brazo n.º 1 ........................................................ 110
3.2 Cubierta lateral del brazo n.º 1 ......................................................... 111
3.3 Cubierta lateral del brazo n.º 2 ......................................................... 113
3.4 Cubierta del brazo n.º 3 .................................................................... 114
3.5 Cubierta de mantenimiento del brazo n.º 3 ...................................... 115
3.6 Cubierta lateral del brazo n.º 4 ......................................................... 116
3.7 Cubierta de mantenimiento del brazo n.º 4 (solo C8XL) ................... 119
3.8 Accesorio D-sub del brazo n.º 4 ....................................................... 121
3.9 Cubierta de la base ............................................................................. 122
3.9.1 Cable M/C hacia atrás .......................................................... 122
3.9.2 Cable M/C hacia abajo.......................................................... 123
3.10 Cubierta de mantenimiento de la base ........................................... 126
3.11 Placa del conector .......................................................................... 129
3.11.1 Cable M/C hacia atrás ......................................................... 129
3.11.2 Cable M/C hacia abajo ........................................................ 133
3.12 Subplaca del conector .................................................................... 134

Índice
x C8 Mod.13
4. Unidad de cable 136
4.1 Reemplazo de la unidad de cable .................................................... 136
4.1.1 Reemplazo de la unidad de cable (cable M/C hacia atrás) .. 138
4.1.2 Reemplazo de la unidad de cable (cable M/C hacia abajo) . 168
4.2 Asignación de pines del conector .................................................... 173
4.2.1 Cable de señal ..................................................................... 173
4.2.2 Cable de alimentación .......................................................... 176
4.2.3 Cable de usuario .................................................................. 179
4.2.4 Color de los cables ............................................................... 179
5. Articulación n.º 1 176
5.1 Cable M/C hacia atrás (articulación n.º 1) ........................................ 177
5.1.1 Articulación n.º 1 - Reemplazo del motor (Cable M/C hacia atrás) ....
............................................................................................. 177
5.1.2 Articulación n.º 1 - Reemplazo de la unidad de engranaje reductor
(cable M/C hacia atrás) ......................................................... 185
5.1.3 Articulación n.º 1 - Reemplazo de la correa de regulación (cable M/C
hacia atrás) ...................................................................................... 193
5.1.4 Articulación n.º 1 - Reemplazo del freno electromagnético
(Cable M/C hacia atrás) ........................................................ 199
5.2 Cable M/C hacia abajo (articulación n.º 1) ....................................... 201
5.2.1 Articulación n.º 1 - Reemplazo del motor (Cable M/C hacia abajo) ....
............................................................................................. 201
5.2.2 Articulación n.º 1 - Reemplazo de la unidad de engranaje reductor
(Cable M/C hacia abajo) ....................................................... 205
5.2.3 Articulación n.º 1 - Reemplazo de la correa de regulación (cable
M/C hacia abajo) .............................................................................. 208
5.2.4 Articulación n.º 1 - Reemplazo del freno electromagnético
(Cable M/C hacia abajo) ....................................................... 213
6. Articulación n.º 2 216
6.1 Articulación n.º 2 - Reemplazo del motor ......................................... 217
6.2 Articulación n.º 2 - Reemplazo de la unidad de engranaje reductor 226
6.3 Articulación n.º 2 - Reemplazo de la correa de regulación ............... 233
6.4 Articulación n.º 2 - Reemplazo del freno electromagnético .............. 234
7. Articulación n.º 3 235
7.1 Articulación n.º 3 - Reemplazo del motor ......................................... 236
7.2 Articulación n.º 3 - Reemplazo de la unidad de engranaje reductor 244
7.3 Articulación n.º 3 - Reemplazo de la correa de regulación ............... 250
7.4 Articulación n.º 3 - Reemplazo del freno electromagnético .............. 251
8. Articulación n.º 4 252
8.1 Articulación n.º 4 - Reemplazo del motor ......................................... 253
8.2 Articulación n.º 4 - Reemplazo de la unidad de engranaje reductor 259
8.3 Articulación n.º 4 - Reemplazo de la correa de regulación ............... 266
8.4 Articulación n.º 4 - Reemplazo del freno electromagnético .............. 272

Índice
C8 Mod.13 xi
9. Articulación n.º 5 273
9.1 Articulación n.º 5 - Reemplazo del motor ......................................... 274
9.2 Articulación n.º 5 - Reemplazo de la unidad de engranaje reductor
(Reemplazo del juego de unidades de engranaje reductor de las
articulaciones n.º 5, n.º 6) ................................................................ 281
9.3 Articulación n.º 5 - Reemplazo de la correa de regulación ............... 287
9.4 Articulación n.º 5 - Reemplazo del freno electromagnético .............. 288
10. Articulación n.º 6 290
10.1 Articulación n.º 6 - Reemplazo del motor ....................................... 291
10.2 Articulación n.º 6 - Reemplazo de la unidad de engranaje reductor
(Reemplazo del juego de unidades de engranaje reductor de las
articulaciones n.º 5, n.º 6) ................................................................ 297
10.3 Articulación n.º 6 - Reemplazo de la correa de regulación ............. 298
10.4 Articulación n.º 6 - Reemplazo del freno electromagnético ............ 299
11. Reemplazo de la unidad de batería 301
11.1 Reemplazo de la unidad de batería (Batería de litio) ...................... 303
11.2 Reemplazo de la placa de la batería .............................................. 305
12. Reemplazo de la placa de control 308
12.1 Reemplazo de la placa de control 1 ............................................... 309
12.2 Reemplazo de la placa de control 2 ............................................... 311
13. Reemplazo de la luz LED 313
14. Reemplazo del cable M/C 315
15. Reemplazo del ventilador 319
16. Calibración 321
16.1 Descripción general ........................................................................ 321
16.2 Procedimiento de calibración ......................................................... 324
17. Lista de piezas de mantenimiento 328
18. Lista de piezas opcionales 332

Índice
xii C8 Mod.13

Configuración y operación
Este volumen contiene información para la configuración y la operación de los manipuladores.
Lea meticulosamente este volumen antes de configurar y operar los manipuladores.


Configuración y operación
C8 Mod.13 3
1. Seguridad
Personal calificado deberá realizar la instalación y el transporte de los manipuladores y los
equipos de robot, los que deberán cumplir con todos los códigos nacionales y locales.
Lea este manual y otros manuales relacionados antes de instalar el sistema de robot o antes
de conectar los cables.
Mantenga este manual a la mano para un acceso fácil en todo momento.
1.1 Convenciones
En todo este manual se indican consideraciones importantes de seguridad con los siguientes
símbolos. Asegúrese de leer las descripciones que se muestran con cada símbolo.
ADVERTENCIA
Este símbolo indica que existe un peligro de posibles lesiones
graves o la muerte si no se siguen adecuadamente las
instrucciones asociadas.
ADVERTENCIA
Este símbolo indica que existe un peligro de posibles daños a las
personas debido a descarga eléctrica si no se siguen
adecuadamente las instrucciones asociadas.
PRECAUCIÓN
Este símbolo indica que existe un peligro de posibles daños a las
personas o daños físicos a los equipos e instalaciones si no se
siguen adecuadamente las instrucciones asociadas.

Configuración y operación
4 C8 Mod.13
1.2 Seguridad en el diseño y la instalación
Solo personal capacitado debe diseñar e instalar el sistema de robot. El personal
capacitado se define como aquellos quienes hayan tomado clases de capacitación
en sistemas de robot y capacitación en mantenimiento proporcionadas por el
fabricante, los distribuidores o las empresas representantes locales, o aquellos que
comprendan cabalmente los manuales y tengan el mismo nivel de conocimiento y
habilidades que aquellos que hayan completado los cursos de capacitación.
Para garantizar la seguridad, se debe instalar una protección para el sistema de
robot. Para conocer detalles acerca de la protección, consulte las Precauciones de
instalación y diseño en el capítulo Seguridad del Manual del usuario de EPSON
RC+.
Los siguientes elementos son precauciones de seguridad para el personal de
diseño:
ADVERTENCIA
■
El personal que diseñe o construya el sistema de robot con este producto debe
leer el capítulo Seguridad en el Manual del usuario de EPSON RC+. Diseñar o
construir el sistema de robot sin comprender los requisitos de seguridad es
extremadamente peligroso y puede provocar lesiones corporales graves o daños
graves en el sistema de robot.
■
El manipulador y el controlador se deben usar en las condiciones ambientales
que se describen en sus respectivos manuales. Este producto se ha diseñado y
fabricado estrictamente para su uso en un entorno normal en interiores. El uso
del producto en un entorno que supere las condiciones ambientales
especificadas no solo acortará la vida útil del producto, sino que además puede
causar graves problemas de seguridad.
■
El sistema de robot se debe usar de acuerdo con los requisitos de instalación
descritos en los manuales. Si no se usa el sistema de robot de acuerdo con los
requisitos de instalación no solo se podría acortar la vida útil del producto, sino
que además podría causar graves problemas de seguridad.
Las precauciones adicionales para la instalación se mencionan en el capítulo
Configuración y operación 3. Entorno e instalación. Lea atentamente este capítulo
para comprender los procedimientos de instalación segura antes de instalar los
robots y los equipos robóticos.

Configuración y operación
C8 Mod.13 5
1.3 Seguridad en la operación
Los siguientes elementos son precauciones de seguridad para el personal
operador calificado:
ADVERTENCIA
■
Lea atentamente la sección Requisitos relacionados con la seguridad en el
capítulo Seguridad del manual Seguridad e instalación. Operar el sistema de
robot sin comprender los requisitos de seguridad es extremadamente peligroso
y puede provocar lesiones corporales graves o daños graves en el sistema de
robot.
■
No ingrese al área de funcionamiento del manipulador mientras la energía hacia
el sistema de robot esté ENCENDIDA. Ingresar al área de funcionamiento con
la energía ENCENDIDA es extremadamente peligroso y puede provocar graves
problemas de seguridad, ya que es posible que el manipulador se mueva, incluso
si parece estar detenido.
■
Antes de operar el sistema de robot, asegúrese de que no haya nadie al interior
del área protegida. El sistema de robot se puede operar en el modo de
enseñanza, incluso cuando alguien está al interior del área protegida.
El movimiento del manipulador siempre está en estado restringido (baja
velocidad y baja potencia) para garantizar la seguridad de un operador. Sin
embargo, operar el sistema de robot mientras alguien está al interior del área
protegida es extremadamente peligroso y puede provocar problemas graves de
seguridad en caso de que el manipulador se mueva de manera inesperada.
■
Presione inmediatamente el interruptor de parada de emergencia siempre que
el manipulador se mueva de manera anormal durante la operación. Continuar
con la operación mientras el manipulador se mueve de manera anormal es
extremadamente peligroso y puede provocar lesiones corporales graves o
cambios en el equipo graves para el sistema de robot.
ADVERTENCIA
■
Asegúrese de conectar el cable de alimentación de CA a un tomacorriente. NO
lo conecte directamente a la fuente de alimentación de la fábrica. Para cortar la
energía hacia el sistema de robot, desconecte el enchufe de la fuente de
alimentación. Realizar cualquier trabajo mientras conecta el cable de
alimentación de CA a una fuente de alimentación de la fábrica es
extremadamente peligroso y puede provocar una descarga eléctrica o el mal
funcionamiento del sistema de robot.
■
Antes de realizar cualquier procedimiento de reemplazo, apague el controlador
y los equipos relacionados, luego desconecte el enchufe de la fuente de
alimentación.
Realizar cualquier procedimiento de reemplazo con la energía encendida es
extremadamente peligroso y puede provocar una descarga eléctrica o el mal
funcionamiento del sistema de robot.
■
No conecte ni desconecte los conectores del motor mientras el sistema de robot
esté encendido. Conectar o desconectar los conectores del motor con la energía
encendida es extremadamente peligroso y puede provocar lesiones corporales
graves, ya que el manipulador puede moverse de manera anormal; además,
puede provocar descargas eléctricas y el mal funcionamiento del sistema de
robot.

Configuración y operación
6 C8 Mod.13
PRECAUCIÓN
■
Cuando sea posible, solo una persona debería operar el sistema de robot. Si es
necesario operar el sistema de robot con más de una persona, asegúrese de que
todas las personas que participen se comuniquen entre sí con respecto a lo que
están haciendo y tomen todas las precauciones de seguridad necesarias.
■
Si las articulaciones se operan repetidamente con un ángulo de funcionamiento
inferior a 5 grados, es posible que se dañen prematuramente, ya que es probable
que los cojinetes provoquen una escasez de capa de aceite en dicha situación.
Para evitar las averías tempranas, mueva las articulaciones en más de 30 grados
aproximadamente cinco a diez veces por día.
■
La oscilación (resonancia) puede ocurrir continuamente en el movimiento a baja
velocidad del manipulador (Velocidad: aprox. 5 a 20 %), dependiendo de la
combinación de orientación del brazo y carga del efector final. La oscilación surge
de la frecuencia de oscilación natural del brazo y se puede controlar con las
siguientes medidas.
Cambiar la velocidad del manipulador
Cambiar los puntos enseñados
Cambiar la carga del efector final

Configuración y operación
C8 Mod.13 7
1.4 Parada de emergencia
Si el manipulador se mueve de manera anormal durante su operación, presione
inmediatamente el interruptor de parada de emergencia. Presionar el interruptor de parada
de emergencia inmediatamente cambia el manipulador al movimiento de desaceleración y
lo detiene a la velocidad máxima de desaceleración.
Sin embargo, evite presionar el interruptor de parada de emergencia innecesariamente
cuando el manipulador funciona normalmente. De lo contrario, el manipulador puede
golpear los equipos periféricos, ya que la trayectoria de operación hasta que se detiene el
sistema de robot es diferente a la de la operación normal.
No presione el interruptor de parada de emergencia si no es necesario mientras el
manipulador está en operación. Presionarlo durante la operación hace que se accionen los
frenos. Esto acortará la vida útil de los frenos debido al desgaste de las placas de fricción.
Ciclo de vida útil normal del freno: Aproximadamente 2 años (cuando los frenos se usan
100 veces/día)
Además, la parada de emergencia durante la operación aplica un impacto en la unidad de
engranaje reductor, lo que puede provocar una menor duración de la unidad.
Para colocar el sistema de robot en modo de emergencia durante una operación normal,
presione el interruptor de parada de emergencia cuando el manipulador no esté en
movimiento.
Consulte el manual del controlador de robot para conocer las instrucciones acerca de cómo
conectar el circuito del interruptor de parada de emergencia.
No APAGUE el controlador mientras el manipulador esté operando.
Si intenta detener el manipulador en situaciones de emergencia como una “Protección
abierta”, asegúrese de detenerlo usando el interruptor de parada de emergencia del
controlador.
Si se detiene el manipulador cuando apaga el controlador, que está operando, se pueden
producir los siguientes problemas.
Reducción de la vida útil y daños a la unidad de engranaje reductor
Espacio de posición en las articulaciones
Además, si se forzó el apagado del controlador por un corte de energía o sucesos similares
mientras el manipulador estaba en funcionamiento, asegúrese de revisar los siguientes
puntos después de restaurar la energía.
Si el engranaje reductor está dañado o no
Si las articulaciones están en las posiciones correctas o no
Si hay un espacio de posición, realice una calibración con el procedimiento descrito en
Mantenimiento 16. Calibración en este manual.
Antes de usar el interruptor de parada de emergencia, tenga en cuenta lo siguiente.
- El interruptor de parada de emergencia (E-STOP) se debe usar para detener el
manipulador solo en caso de emergencia.
- Para que el manipulador detenga la operación del programa cuando no está en una
emergencia, use los comandos Pause (Pausas) (detención) o STOP (Detener)
(Detención del programa).
Los comandos Pause y STOP no apagan los motores. Por lo tanto, el freno no funciona.
- Para el Sistema de protección, no utilice el circuito para E-STOP.

Configuración y operación
8 C8 Mod.13
Para conocer detalles acerca del sistema de protección, consulte los siguientes manuales.
Manual del usuario de EPSON RC+ 2. Seguridad - Precauciones de instalación y diseño
- Sistema de protección
Seguridad e instalación 2.6 Conexión a un conector de EMERGENCIA
Para revisar problemas con el freno, consulte los siguientes manuales.
Manual del manipulador Mantenimiento 2.1.2 Punto de inspección
- Inspección mientras la energía está encendida
(El manipulador está en operación)
Seguridad e instalación 5.1.1 Manipulador
- Inspección mientras la energía está encendida
(El manipulador está en operación)
Distancia de operación libre en una emergencia
El manipulador en operación no puede detenerse inmediatamente después de presionar el
interruptor de parada de emergencia. Sin embargo, el tiempo, el ángulo y la distancia del
funcionamiento libre varía según los siguientes factores:
Peso de la mano Configuración de WEIGHT Configuración de ACCEL
Peso de la pieza de trabajo Configuración de SPEED Postura, etc.
El tiempo y la distancia aproximados del funcionamiento libre son los siguientes:
Condiciones de medición
Serie C8
Configuración de ACCEL
(Aceleración)
100
Configuración de SPEED
(Velocidad)
100
Carga [kg]
8
Configuración de WEIGHT
8
Controlador de robot
RC700-A
Manipulador
C8-A701*** (C8)
C8-A901*** (C8L)
C8-A1401*** (C8XL)
Tiempo de
funcionamiento
libre [s]
Brazo
n.º 1
Superficie
de mesa
Techo
0,5
0,5
0,9
Pared
0,9
0,9
1,7
Brazo n.º 2
0,5
0,6
0,7
Brazo n.º 3
0,5
0,5
0,4
Brazo n.º 4
0,5
0,4
0,5
Brazo n.º 5
0,2
0,2
0,3
Brazo n.º 6
0,2
0,2
0,3
Ángulo de
funcionamiento
libre []
Brazo
n.º 1
Superficie
de mesa
Techo
60
50
70
Pared
110
100
130
Brazo n.º 2
60
60
40
Brazo n.º 3
70
50
30
Brazo n.º 4
70
60
90
Brazo n.º 5
30
30
50
Brazo n.º 6
40
30
30

Configuración y operación
C8 Mod.13 9
1.5 Cómo mover los brazos con el freno electromagnético
Existen dos métodos para desbloquear el freno electromagnético. Siga alguno de los
métodos para desbloquear el freno electromagnético y mover los brazos manualmente.
1.5.1 Mover el brazo con la unidad de desbloqueo del freno
Siga este método cuando recién haya desembalado las cajas entregadas o cuando aún
no haya arrancado el controlador.
1.5.2 Mover el brazo con el software
Siga este método cuando pueda usar el software.
Mientras el freno electromagnético está encendido (por ejemplo, en modo de emergencia),
no se puede mover ningún brazo empujándolo manualmente.
Movimiento del brazo
Articulación n.º 1
Base
Brazo n.º 1
(brazo inferior)
Brazo n.º 2
Brazo n.º 4
Articulación n.º 6
Articulación n.º 3
Articulación n.º 4
Articulación n.º 5
Brazo n.º 6
Articulación n.º 2
Brazo n.º 5
Brazo n.º 3
J1+
J1-
J2+
J2-
J3+
J3-
J4-
J4+
J5+
J5-
J6-
J6+
(Figura: C8-A701* (C8))

Configuración y operación
10 C8 Mod.13
1.5.1 Mover el brazo con la unidad de desbloqueo del freno
La serie C8 cuenta con la unidad de desbloqueo del freno como elemento opcional.
Para conocer detalles, consulte Configuración y elementos opcionales: 6 Opciones
1.5.2 Mover el brazo con el software
PRECAUCIÓN
■
Normalmente, suelte los frenos de las articulaciones uno por uno. Tenga cuidado
si necesita soltar los frenos de dos o más articulaciones de forma simultánea.
Soltar los frenos de dos o más articulaciones al mismo tiempo puede causar que
manos o dedos queden atrapados, o bien, daños al equipo o mal funcionamiento
del manipulador, ya que sus brazos se pueden mover en direcciones inesperadas.
■
Tenga cuidado con la caída del brazo cuando suelte el freno.
Mientras que suelta el freno, el brazo del manipulador caerá por su propio peso.
La caída de un brazo puede causar que manos y dedos queden atrapados, o
bien, provocar daños en el equipo o mal funcionamiento del manipulador.
■
Antes de soltar el freno, asegúrese de tener el interruptor de parada de
emergencia a mano para poder presionarlo inmediatamente. De lo contrario, si el
brazo cae por una operación incorrecta, no podrá detenerlo de inmediato. La
caída del brazo puede causar daños a los equipos o el mal funcionamiento del
manipulador.
EPSON
RC+
Después de desactivar el interruptor de parada de emergencia, ejecute los siguientes
comandos en
[Command Window] (Ventana Comando).
>Reset
>Brake Off,[El número (del n.º 1 al n.º 6) correspondiente al brazo cuyo freno se
desactivará]
Ejecute el siguiente comando para activar el freno nuevamente.
>Brake On,[el número (del n.º 1 al n.º 6) correspondiente al brazo cuyo freno se activará]
1.6 Precaución para la operación en el estado de baja potencia
En el estado de baja potencia, el manipulador opera a baja velocidad y con torque bajo. Sin
embargo, se puede generar un torque comparativamente alto, como se muestra en la
siguiente tabla, para brindar soporte al propio peso del manipulador.
Opere con cuidado el manipulador, ya que manos y dedos pueden quedar atrapados durante
la operación. El manipulador puede chocar con los equipos periféricos y provocar daños a
los equipos o el mal funcionamiento del manipulador.
Torque máximo de la articulación en el estado de baja potencia [Unidad: N·m]
Articulación
N.º 1
N.º 2
N.º 3
N.º 4
N.º 5
N.º 6
Torque de la
articulación
C8-A701***
(C8)
144,9
245,1
114,2
35,0
40,0
20,5
C8-A901***
(C8L)
149,5
270,9
129,3
C8-A1401***
(C8XL)
299,9
487,6
248,9
PRECAUCIÓN
■
Opere con cuidado el manipulador en el estado de baja potencia. Se puede
generar un torque de articulación comparativamente alto. Puede causar que
manos y dedos queden atrapados o provocar daños a los equipos o mal
funcionamiento del manipulador, puesto que puede colisionar con los equipos
periféricos.

Configuración y operación
C8 Mod.13 11
1.7 Etiquetas de advertencia
El manipulador tiene las siguientes etiquetas de advertencia.
Las etiquetas de advertencia están adheridas en los lugares donde existen riesgos específicos.
Asegúrese de acatar las descripciones y advertencias de las etiquetas para operar y realizar
mantenimiento al manipulador de manera segura.
No rasgue, dañe ni quite las etiquetas de advertencia. Sea meticuloso cuando manipule las
piezas o unidades a las que están adheridas las siguientes etiquetas de advertencia, además
de sus áreas circundantes.
Ubicación
Etiqueta de advertencia
NOTA
A
Para evitar que manos y dedos
queden atrapados, doble el brazo y
fíjelo con una correa o una
herramienta similar, antes de quitar
los tornillos de montaje de la base.
B
No ingrese al área de trabajo mientras
el manipulador esté en operación.
Es extremadamente peligroso, ya que
el brazo puede chocar y provocar
problemas graves de seguridad.
C
No toque las piezas con corriente
dentro del manipulador mientras la
alimentación esté encendida. Puede
causar una descarga eléctrica.
D
Cuando se desbloqueen los frenos,
tenga cuidado con que el brazo se
caiga debido a su propio peso.
Esta etiqueta de advertencia se
encuentra colocada en el manipulador
y en la caja de desbloqueo del freno
opcional.
Cuando se usa la caja de desbloqueo
de freno:
En los manuales del manipulador
encontrará descritos los detalles de
los procedimientos para desbloquear
los frenos mediante la caja de
desbloqueo del freno.
E
Solo personal autorizado debe realizar
trabajo de honda y operar una grúa o
un montacarga. Es extremadamente
peligroso que personal no autorizado
realice estas operaciones, ya que se
pueden provocar lesiones corporales
graves o daños importantes a los
equipos del sistema de robot.

Configuración y operación
12 C8 Mod.13
Ubicación
Etiqueta de advertencia
NOTA
F
Al acercar la mano a las piezas
móviles, los dedos o la mano pueden
quedar atrapados.
Ubicación
Etiqueta de
advertencia
Nota
Ubicación
Etiqueta
G
CALIENTE
Tenga cuidado
de no
quemarse.
H
I
Ubicación de las etiquetas
Vista superior
Vista
posterior
Vista lateral
Vista frontal
C
C
C
C
C
C
A
B
C
H
Modelo de cables hacia abajo
Vista inferior
C
Vista lateral
D
E
F
C
I
G
G

Configuración y operación
C8 Mod.13 13
(Figura: C8-A1401* (C8XL))
2. Especificaciones
2.1 Características de los manipuladores
Velocidad y precisión
Mayor productividad gracias a una operación equilibrada, precisa y más rápida dentro
de su categoría.
Alta velocidad, oscilación baja y posicionamiento muy preciso gracias a nuestra
tecnología, incluso al transportar pesos pesados.
Tiempo del ciclo promedio (300 mm)
1 kg
5 kg
8 kg
C8-A701*** (C8)
Alrededor de
0,31 s
Alrededor de
0,39 s
Alrededor de
0,48 s
C8-A901*** (C8L)
Alrededor de
0,35 s
Alrededor de
0,43 s
Alrededor de
0,50 s
C8-A1401*** (C8XL)
Alrededor de
0,53 s
Alrededor de
0,62 s
Alrededor de
0,72 s
Cuerpo estilizado
Gran eficiencia de espacio
La menor interferencia con los periféricos, las paredes y el techo permite una
instalación más compacta
Se pueden reducir los costos del sistema y de instalación.
Peso del manipulador
C8-A701*** (C8) : 49 kg (108 lb)
C8-A901*** (C8L) : 52 kg (115 lb)
C8-A1401*** (C8XL) : 62 kg (137 lb)
Muñeca hábil
Una muñeca compacta (articulación n.º 5) con un amplio rango de movimiento permite
movimientos uniformes y la capacidad de trabajar desde muchos ángulos
La mínima interferencia con sus alrededores mejora la flexibilidad en el diseño de la
mano

Configuración y operación
14 C8 Mod.13
2.2 Número de modelo
C8 – A 14 0 1 S □ □ □
Especificación UL
-UL
: Cumple con UL
□
: No cumple con UL
Tipo de montaje
□
: Montaje en superficie de mesa
R
: Montaje en techo
W
: Montaje en pared
Dirección de instalación de los cables M/C
□
: Cables hacia atrás
B
: Cables hacia abajo
Entorno
S
: Modelo estándar
C
: Modelo para salas blancas y descarga electroestática
(electrostatic discharge, ESD)
P
: Modelo de protección (IP67)
Equipo del freno
1
: Frenos en todas las articulaciones
Longitud del brazo
7
: 710 mm (C8-A701***: C8)
9
: 900 mm (C8-A901***: C8L)
14
: 1400 mm (C8-A1401***: C8XL)
Ejemplo

Configuración y operación
C8 Mod.13 15
2.3 Nombres de las piezas y rango de movimiento de cada brazo
Articulación
n.º 1
Base
Brazo n.º 1
(Brazo inferior)
Brazo n.º 2
Brazo n.º 4
Articulación n.º 6
Articulación n.º 3
Articulación n.º 4
Articulación n.º 5
Brazo n.º 6
Articulación n.º 2
Brazo n.º 5
Brazo n.º 3
J1+
J1-
J2+
J2-
J3+
J3-
J4-
J4+
J5+
J5-
J6-
J6+
Brazo superior (brazos n.º 3 a n.º 6)
Luz LED
(Esta luz se enciende mientras
los motores están encendidos).
Movimiento de la articulación
Articulación n.º 1: Todo el manipulador gira.
Articulación n.º 2: El brazo inferior oscila.
Articulación n.º 3: El brazo superior oscila.
Articulación n.º 4: La muñeca gira.
Articulación n.º 5: La muñeca oscila.
Articulación n.º 6: La mano gira.
(Figura: C8-A701* (C8))
Cuando la luz LED o la energía del controlador está encendida, se está aplicando corriente
al manipulador. (Es posible que no se vea la luz LED, dependiendo de la postura del
manipulador. Tenga cuidado).
Realizar trabajos con la energía ENCENDIDA es extremadamente peligroso y puede
provocar una descarga eléctrica o el funcionamiento incorrecto del sistema de robot.
Asegúrese de apagar el controlador antes de realizar trabajos de mantenimiento.
NOTA

Configuración y operación
16 C8 Mod.13
Modelo de cables hacia atrás
Cable de alimentación
Cable de señal
Conector del cable del usuario
(Conector D-sub de 15 pines)
Para tubos neumáticos de ø6 mm
(Air1, Air2)
Conector del cable
del sensor F
Conector del cable
de Ethernet
Modelo estándar : Cubierta
Modelo para salas blancas : Puerto de escape
Para tubos neumáticos de ø12 mm
Modelo de cables hacia abajo
Cable de alimentación
Cable de señal
Modelo estándar : Cubierta
Modelo para salas blancas : Puerto de escape
Para tubos neumáticos de ø12 mm
Conector del cable del usuario
(Conector D-sub de 15 pines)
Para tubos neumáticos de ø6 mm
(Air1, Air2)
Conector del cable
del sensor F
Conector del cable
de Ethernet
Modelo de cables hacia atrás / modelo de cables hacia abajo
Etiqueta de firma
(N.º de serie del manipulador)
Agujero para pernos M5
(para conexión a tierra)
(Figura: Modelo de cables hacia atrás)

Configuración y operación
C8 Mod.13 17
2.4 Dimensiones exteriores
[Unidad: mm]
2.4.1 C8-A701*** (C8)
6xM4 profundidad 8
profundidad 8
2xM4 profundidad 8
Consulte el Detalle A
*1 El mismo que para
el otro lado
Espacio para los cables
(IP-modelo: A 238)
(IP-modelo: 216)
(IP-modelo: 100)
2xM4 profundidad 8
2xM12 profundidad 22
870.9 (se incluye la luz LED)
(IP-modelo: 220.5)
(IP-modelo: 320.5)
4xM4 profundidad 8
4xM5 profundidad 8
(a una inclinación de 90°)
Boca de ø5,5 y
profundidad 5,7
profundidad 5
profundidad 7
profundidad 4
profundidad 3
Detalle de A
Detalle de X
Detalle de Y
Modelo de cables hacia abajo
Espacio para los cables
(IP-modelo: 220.5)
(IP-modelo: 224.5)
(IP-modelo: 324.5)
(IP-modelo: A 238)
2xM4 profundidad 8
3xM4 profundidad 7

Configuración y operación
18 C8 Mod.13
2.4.2 C8-A901*** (C8L)
2xM4 profundidad 8
6xM4 profundidad 8
4xM4 profundidad 8
2xM4 profundidad 8
Consulte el Detalle A
(IP-modelo: 216)
(IP-modelo: 238)
2xM12 profundidad 22
(IP-modelo: 100)
(IP-modelo: 220.5)
(IP-modelo: 320.5)
Espacio para los cables
(se incluye la luz LED)
4xM4 profundidad 8
3xM4 profundidad 7
4xM5 profundidad 8
(a una inclinación de 90°)
Boca de ø5,5 y
profundidad 5,7
profundidad 5
profundidad 4
4xM3 profundidad 7
profundidad 3
Modelo de cables hacia abajo
(IP-modelo: 220.5)
(IP-modelo: 224.5)
(IP-modelo: 324.5)
(IP-modelo: A 238)
Espacio para los cables
2xM4 profundidad 8
Detalle de A
Detalle de X
Detalle de Y
*1 El mismo que para
el otro lado

Configuración y operación
C8 Mod.13 19
2.4.3 C8-A1401*** (C8XL)
6xM4 profundidad 8
4xM4 profundidad 8
2xM4 profundidad 8
4xM4 profundidad 8
Consulte el Detalle A
(IP-modelo: 216)
(IP-modelo: 238)
(IP-modelo: 100)
*1 El mismo que para
el otro lado
2xM4 profundidad 8
2xM12 profundidad 22
(IP-modelo: 220.5)
(IP-modelo: 320.5)
Espacio para los cables
(se incluye la luz LED)
Se recomienda 35 o más
(Espacio para el ventilador)
4xM4 profundidad 8
2xM4 profundidad 8
3xM4 profundidad 7
Detalle de A
Detalle de X
Detalle de Y
Modelo de cables hacia abajo
Se recomienda
35 o más
(Espacio para
el ventilador)
90 Espacio para
los cables
4xM5 profundidad 8
(a una inclinación de 90°)
Boca de ø5,5 y
profundidad 5,7
profundidad 5
profundidad 4
profundidad 3
4xM3 profundidad 7
2xM4 profundidad 8

Configuración y operación
20 C8 Mod.13
2.5 Rango de movimiento estándar
2.5.1 C8-A701*** (C8)
[Unidad: mm]
Brazo n.º 1
Posición del pulso 0
Brazo n.º 2
Posición del pulso 0
Punto P*
Brazos n.º 4, n.º 6
Posición del pulso 0
Brazos n.º 3, n.º 5
Posición del pulso 0
Vista superior
Vista lateral
Vista frontal
Punto P*
Rango de movimiento del punto P*
Rango de movimiento del punto P*
a
b
c
d
e
f
a
+135
d
-61
b
-135
e
R181.8
*3
c
+202
f
R317.3
*4
grad.
grad.
grad.
grad.
(Grado =)
* Punto P : Intersección de los centros de giro para las articulaciones n.º 4, n.º 5 y n.º 6
*1 : El punto P desde la parte superior con la articulación n.º 3 descendiendo, 61 (Centro de
la articulación n.º 1 – Centro del punto P)
*2 : El punto P desde la parte superior con la articulación n.º 3 inclinándose 202 (Centro de
la articulación n.º 1 – Centro del punto P)
*3 : El punto P desde el costado con la articulación n.º 3 descendiendo -61 (Centro de la
articulación n.º 2 – Centro del punto P)
*4 : El punto P desde el costado con la articulación n.º 3 inclinándose +202 (Centro de la
articulación n.º 2 – Centro del punto P)
PRECAUCIÓN
■
Preste atención a la pose del brazo de los brazos básicos (Brazos n.º 1, n.º 2 y
n.º 3) cuando opere el manipulador. El brazo n.º 5 se mueve manteniendo un
ángulo constante, sin importar la pose del brazo. Según la pose del brazo de los
brazos básicos, la muñeca puede chocar con el manipulador. La colisión puede
provocar daños a los equipos o el mal funcionamiento del manipulador.

Configuración y operación
C8 Mod.13 21
2.5.2 C8-A901*** (C8L)
[Unidad: mm]
Brazo n.º 1
Posición del pulso 0
Brazo n.º 2
Posición del pulso 0
Punto P*
Brazos n.º 4, n.º 6
Posición del pulso 0
Brazos n.º 3, n.º 5
Posición del pulso 0
Vista superior
Vista lateral
Vista frontal
Punto P*
Rango de movimiento del punto P*
Rango de movimiento del punto P*
grad.
grad.
grad.
grad.
grad.
grad.
grad.
grad.
(Grado =)
* Punto P : Intersección de los centros de giro para las articulaciones n.º 4, n.º 5 y n.º 6
*1 : El punto P desde la parte superior con la articulación n.º 3 descendiendo, 61 (Centro de
la articulación n.º 1 – Centro del punto P)
*2 : El punto P desde la parte superior con la articulación n.º 3 inclinándose 202 (Centro de
la articulación n.º 1 – Centro del punto P)
*3 : El punto P desde el costado con la articulación n.º 3 descendiendo -61 (Centro de la
articulación n.º 2 – Centro del punto P)
*4 : El punto P desde el costado con la articulación n.º 3 inclinándose +202 (Centro de la
articulación n.º 2 – Centro del punto P)

Configuración y operación
22 C8 Mod.13
PRECAUCIÓN
■
Preste atención a la pose del brazo de los brazos básicos (Brazos n.º 1, n.º 2 y
n.º 3) cuando opere el manipulador. El brazo n.º 5 se mueve manteniendo un
ángulo constante, sin importar la pose del brazo. Según la pose del brazo de los
brazos básicos, la muñeca puede chocar con el manipulador. La colisión puede
provocar daños a los equipos o el mal funcionamiento del manipulador.
2.5.3 C8-A1401*** (C8XL)
[Unidad: mm]
Brazo n.º 1
Posición del pulso 0
Brazo n.º 2
Posición del pulso 0
Punto P*
Brazos n.º 4, n.º 6
Posición del pulso 0
Brazos n.º 3, n.º 5
Posición del pulso 0
Vista superior
Vista lateral
Vista frontal
Punto P*
Rango de movimiento del punto P*
Rango de movimiento del punto P*
grad.
grad.
grad.
grad.
grad.
grad.
grad.
(Grado =)
* Punto P : Intersección de los centros de giro para las articulaciones n.º 4, n.º 5 y n.º 6
*1 : El punto P desde la parte superior con la articulación n.º 3 descendiendo, 61 (Centro de
la articulación n.º 1 – Centro del punto P)
*2 : El punto P desde la parte superior con la articulación n.º 3 inclinándose 202 (Centro de
la articulación n.º 1 – Centro del punto P)

Configuración y operación
C8 Mod.13 23
*3 : El punto P desde el costado con la articulación n.º 3 descendiendo -61 (Centro de la
articulación n.º 2 – Centro del punto P)
*4 : El punto P desde el costado con la articulación n.º 3 inclinándose +202 (Centro de la
articulación n.º 2 – Centro del punto P)
PRECAUCIÓN
■
Preste atención a la pose del brazo de los brazos básicos (Brazos n.º 1, n.º 2 y
n.º 3) cuando opere el manipulador. El brazo n.º 5 se mueve manteniendo un
ángulo constante, sin importar la pose del brazo. Según la pose del brazo de los
brazos básicos, la muñeca puede chocar con el manipulador. La colisión puede
provocar daños a los equipos o el mal funcionamiento del manipulador.

Configuración y operación
24 C8 Mod.13
2.6 Especificaciones
2.6.1 Tabla de especificaciones
Elemento
Especificación
Número del modelo
C8-A701***
C8-A901***
C8-A1401***
Nombre del modelo
C8
C8L
C8XL
Tipo de montaje
*1
Montaje en superficie de mesa, montaje en techo, montaje en pared
Peso
(no incluye el peso de los
cables ni las plantillas de
envío)
Estándar
Sala blanca y ESD
49 kg (108 lb)
52 kg (115 lb)
62 kg (137 lb)
Protección
53 kg (117 lb)
56 kg (123 lb)
66 kg (146 lb)
Método de
transmisión
Todas las
articulaciones
Servomotor de CA
Velocidad de
operación máx.
*2
Articulación n.º 1
331/s
294/s
200/s
Articulación n.º 2
332/s
300/s
167/s
Articulación n.º 3
450/s
360/s
200/s
Articulación n.º 4
450/s
Articulación n.º 5
450/s
Articulación n.º 6
720/s
Velocidad sintética máxima
8958 mm/s
9679 mm/s
8858 mm/s
Repetibilidad
Articulaciones n.º
1 a n.º 6
± 0,02 mm
± 0,03 mm
± 0,05 mm
Rango máx. de
movimiento
Articulación n.º 1
± 240
Articulación n.º 2
158 a + 65
158 a + 65
135 a + 55
Articulación n.º 3
61 a + 202
Articulación n.º 4
± 200
Articulación n.º 5
± 135
Articulación n.º 6
± 360
Rango máx. de pulsos
Articulación n.º 1
± 9507090
± 10695600
± 15736800
Articulación n.º 2
6245685 a
+ 2569428
6903178 a
+ 2839915
10616940 a
+4325420
Articulación n.º 3
1776754 a
+ 5883677
2220949 a
+ 7354618
3997696 a
+13238272
Articulación n.º 4
± 5461400
Articulación n.º 5
± 3932280
Articulación n.º 6
± 6553800
Resolución
Articulación n.º 1
0,0000252/pulso
0,0000224/pulso
0,0000153/pulso
Articulación n.º 2
0,0000253/pulso
0,0000229/pulso
0,0000127/pulso
Articulación n.º 3
0,0000343/pulso
0,0000275/pulso
0,0000153/pulso
Articulación n.º 4
0,0000366/pulso
Articulación n.º 5
0,0000343/pulso
Articulación n.º 6
0,0000549/pulso
Capacidad nominal
del motor
Articulación n.º 1
1000 W
Articulación n.º 2
750 W
Articulación n.º 3
400 W
Articulación n.º 4
100 W
Articulación n.º 5
100 W
Articulación n.º 6
100 W
Carga útil
*3
Nominal
3 kg
Máx.
8 kg
Momento permisible
Articulación n.º 4
16,6 N·m (1,69 kgf m)
Articulación n.º 5
16,6 N·m (1,69 kgf m)
Articulación n.º 6
9,4 N·m (0,96 kgf m)

Configuración y operación
C8 Mod.13 25
Elemento
Especificación
Número del modelo
C8-A701***
C8-A901***
C8-A1401***
Nombre del modelo
C8
C8L
C8XL
Momento de inercia
permisible (GD2/4)
*4
Articulación n.º 4
0,47 kg·m
2
Articulación n.º 5
0,47 kg·m
2
Articulación n.º 6
0,15 kg·m
2
Cable instalado para uso del cliente
15 cables (D-sub)
Cat 5e de 8 pines (RJ45) o equivalente
6 pines (para sensor de fuerza)
Tubo neumático instalado para uso del
cliente
*5
Tubos neumáticos de ø6 mm (2 tubos),
Presión permisible: 0,59 MPa (6 kgf/cm
2
) (86 psi)
Requisitos ambientales
*6
Temperatura
ambiente
5 a 40 C
Humedad ambiental
relativa
10 a 80 % (sin condensación)
Vibración
4,9 ms
2
(0,5 G) o inferior
Nivel de ruido
*7
LAeq = 70 dB (A) o inferior
Entorno
Estándar
Modelo para salas blancas y ESD
*8
,
Modelo de protección (IP67)
*9
Controlador al que se aplica
RC700-A, RC700DU-A
Valores
predeterminados
(Valores máximos de
configuración)
SPEED
3 (100)
ACCEL
*10
5, 5 (120, 120)
SPEEDS
50 (2000)
ACCELS
*11
200 (35000)
120 (25000)
FINE
10000, 10000, 10000, 10000, 10000, 10000
(130000, 130000, 130000, 130000, 130000, 130000)
WEIGHT
3 (8)
INERTIA
0.03 (0.15)
Estándar de seguridad
Marca CE:
Directiva EMC, Directiva de maquinaria
Marca KC, Marca KCs
Normas UL (en el caso de la especificación UL):
UL1740
ANSI/RIA R15.06
NFPA 79
*1: Los tipos de montaje distintos al “montaje en sobremesa”, al “montaje en techo” y al “montaje en pared”
están fuera de la especificación.
*2: En caso del control de PTP
*3: No aplique la carga que supere la carga útil máxima.
*4: En el caso donde el centro de gravedad está en el centro de cada brazo. Si el centro de gravedad no está en
el centro de cada brazo, defina el parámetro con el comando INERTIA.
*5: Para conocer detalles acerca del tubo neumático instalado para uso del cliente, consulte Configuración y
operación 3.6 Cables y tubos neumáticos del usuario.
*6: Para conocer detalles de los requisitos ambientales, consulte Configuración y operación 3.1 Condiciones
ambientales.

Configuración y operación
26 C8 Mod.13
*7: Las condiciones del manipulador durante la medición son las siguientes:
Condiciones de operación: Bajo carga nominal, movimiento simultáneo con 6 brazos, velocidad
máxima, aceleración/desaceleración máxima y trabajo al 50 %. para C8 / C8L y
al 30 % para C8XL.
Punto de medición: A 1000 mm de distancia de la parte trasera del manipulador
*8: El sistema de escape en el manipulador del modelo para salas blancas extrae aire del interior de la base y
del interior de la cubierta del brazo.
Una grieta u otra abertura en la unidad base puede provocar la pérdida de presión de aire negativa en la
parte exterior del brazo, lo que puede causar una mayor emisión de polvo.
Nivel de
limpieza
:
C8, C8L
ISO Clase 3 (ISO14644-1)
:
C8XL
ISO Clase 4 (ISO14644-1)
Sistema de
escape
:
Conector rápido para el tubo neumático de ø8 mm
(Referencia: Configuración y operación: 3.6 Cables y tubos neumáticos del
usuario)
60 L/min de vacío
Tubo de escape
:
Tubo de poliuretano Diámetro exterior: ø8 mm (Diámetro interior: ø5 a 6 mm)
La especificación ESD utiliza materiales de resina con tratamiento antiestático. Este modelo controla la
adhesión del polvo debido a la electrificación.
*9 El nivel de protección para los manipuladores del modelo de protección es IP67 (estándar IEC). Los
manipuladores se pueden usar en entornos donde existe la posibilidad de que caiga polvo, agua y aceite
de corte soluble en agua desde el manipulador.
Sin embargo, tenga cuidado con lo siguiente:
- El manipulador no es resistente a la corrosión. No use el manipulador en entornos donde existen
líquidos corrosivos.
- No se pueden usar líquidos que deterioran los materiales de sellado, como los solventes orgánicos,
los ácidos, los alcalinos y los líquidos de corte de cloro
- No se puede usar el manipulador para operaciones bajo el agua.
- El controlador no tiene características de protección contra el entorno (Nivel de protección del
controlador: IP20)
Asegúrese de instalar el sistema donde se cumplan los requisitos ambientales para el controlador.
<Referencia>
- IP40 de la norma IEC
[Nivel de protección contra el ingreso de objetos sólidos]
Protección del ingreso de objetos sólidos con un diámetro o un espesor superior a 1,0 mm.
[Nivel de protección contra el ingreso de líquidos]
Sin protección
- IP67 de la norma IEC
[Nivel de protección contra el ingreso de objetos sólidos]
Totalmente protegido contra el polvo.
[Nivel de protección contra los líquidos]
Protección contra el ingreso de agua en cantidades dañinas cuando el manipulador está
sumergido en agua durante 30 minutos en la condición en que el punto más alto del
manipulador se encuentra 0,15 m bajo la superficie del agua y el punto más bajo se encuentra
1 m bajo la superficie del agua. (Probado mientras el manipulador está detenido).

Configuración y operación
C8 Mod.13 27
*10: En el uso general, la configuración de Accel en 100 es la configuración óptima que mantiene el equilibrio
de la aceleración y la vibración cuando se ajusta la posición. Aunque se pueden definir valores mayores
que 100 en Accel, se recomienda minimizar el uso de valores grandes para movimientos necesarios, ya
que la operación del manipulador continuamente con una configuración Accel grande puede reducir
considerablemente la vida útil del producto.
*11: El valor máximo de configuración de AccelS varía según la carga. Consulte la siguiente tabla para conocer
detalles.
Configurar el valor que supere el valor máximo de AccelS provoca error. En dicho caso, revise el valor de
configuración.
Valor máximo de configuración de AccelS
Montaje en sobremesa, montaje en techo
40000
35000
30000
25000
20000
15000
10000
5000
0 2 4 6 8 (kg) Peso del efector final
30000
20000
35000
13000
12000
C8-A701*** : C8
C8-A901*** : C8L
C8-A1401*** : C8XL
17000
11000
25000
11000
11000
35000
32000
21000
15000
13000
Montaje en pared
40000
35000
30000
25000
20000
15000
10000
5000
0 2 4 6 8 (kg) Peso del efector final
25000
20000
C8-A701**W : C8
C8-A901**W : C8L
C8-A1401**W : C8XL
17000
11000
25000
11000
11000
21000
15000
13000

Configuración y operación
28 C8 Mod.13
2.6.2 Opcional
La serie C8 tiene los siguientes elementos opcionales.
Para conocer detalles de los elementos opcionales, consulte Configuración y operación: 6.
Opciones.
Cables y tubos neumáticos del usuario
Juego de conectores de usuario estándar : Estándar D-Sub de 15 pines × 2
Juego de conectores de usuario impermeables :
D-Sub de 15 pines IP67 impermeable × 2
IP67 impermeable para RJ45 × 2
Conectores rápidos para uso del cliente : ø6, recto × 2
ø6, codo × 2
Tope mecánico ajustable
Tope mecánico ajustable : J1
C8/C8L_J2
C8XL_J2
J3
Adaptador de herramientas
C8, brida ISO (J6)
Unidad de placa de la cámara
Herramienta de montaje de la cámara (común para las series C3 y C4)
Caja de desbloqueo del freno *1
Para la UE (voltaje de alimentación 200 V, se incluye conector corto)
Para EE. UU./JP (voltaje de alimentación 100 V, se incluye conector corto)
Conector corto para la caja de desbloqueo del freno
*1: Cuando use la caja de desbloqueo del freno con la serie C8, es necesario conectar
el conector corto al cable de alimentación M/C o conecte el cable de alimentación
M/C con el controlador. (La caja de desbloqueo del freno se puede utilizar
mientras el controlador está en estado desenergizado).
Si está usando un manipulador de la serie C3 o la serie C4 y ya cuenta con la caja
de desbloqueo del freno, puede utilizarla al conectar el cable M/C con el
controlador o comprar por separado el conector corto y conectarlo al cable de
alimentación M/C.

Configuración y operación
C8 Mod.13 29
2.7 Cómo configurar el modelo
El manipulador para su sistema se ha configurado antes del envío.
PRECAUCIÓN
■
Cuando necesite cambiar la configuración del modelo del manipulador,
asegúrese de definir correctamente el manipulador. La configuración incorrecta
del modelo del manipulador puede provocar una operación anormal del
manipulador o que este no opere, y causar problemas de seguridad.
Si se describe el número de especificaciones personalizadas (MT***) en MODEL (Modelo)
en la etiqueta de firma (etiqueta de N/S), el manipulador tiene especificaciones
personalizadas. (Se puede incluir una etiqueta con solo el número de especificaciones
personalizadas al momento del envío).
Es posible que las especificaciones personalizadas requieran un procedimiento de
configuración distinto; revise el número de especificaciones personalizadas (MT***) y
comuníquese con el proveedor de su región de ser necesario.
El modelo del manipulador se puede configurar desde el software.
Consulte el capítulo Configuración del robot en el Manual del usuario de EPSON RC+.
NOTA

Configuración y operación
30 C8 Mod.13
3. Entorno e instalación
Personal calificado deberá realizar la instalación y el transporte de robots y equipos
robóticos, los que deberán cumplir con todos los códigos nacionales y locales.
3.1 Condiciones ambientales
Es esencial un entorno adecuado para que el sistema de robot funcione de forma correcta y
segura. Asegúrese de instalar el sistema de robot en un entorno que cumpla las siguientes
condiciones:
Elemento
Condiciones
Temperatura ambiente
*1
5 a 40 C
Humedad ambiental relativa
10 a 80 % (sin condensación)
Primera ráfaga de ruido
transitoria
1 kV o menos (cable de señal)
Ruido electrostático
4 kV o menos
Entorno
- Instalar en interiores.
- Mantener lejos de la luz solar directa.
- Mantener lejos del polvo, humo grasiento, salinidad,
polvo metálico u otros contaminantes.
- Mantener lejos de solventes y gases inflamables
o corrosivos.
- Mantener lejos del agua.
- Mantener lejos de golpes o vibraciones.
- Mantener lejos de fuentes de ruido eléctrico.
1* Las condiciones de temperatura ambiente son solo para los manipuladores. Para el
controlador al que está conectado el manipulador, consulte el manual del controlador de
robot.
Cuando use manipuladores en entornos inadecuados que no cumplan con las condiciones
anteriores, comuníquese con el distribuidor.
Para el manipulador de modelo de protección, asegúrese de instalar el sistema de robot en
un entorno que cumpla las siguientes condiciones:
Elemento
Condiciones
Entorno
- Instalar en interiores.
- Mantener lejos de la luz solar directa.
- Mantener lejos de la salinidad u otros contaminantes.
- Mantener lejos de solventes (incluida el agua) y gases
inflamables o corrosivos.
- Mantener lejos de solventes orgánicos, ácidos, alcalinos
y líquidos de corte de cloro.
- No usar en el agua.
- Mantener lejos de golpes o vibraciones.
- Mantener lejos de fuentes de ruido eléctrico.
- Disponible en entornos con polvo, humo grasiento y
metal *
2
.
NOTA

Configuración y operación
C8 Mod.13 31
*1 El cuerpo del manipulador está hecho principalmente de hierro y aluminio. No es
resistente a la corrosión. No use el manipulador en condiciones en que pueda estar
expuesto al agua o a algún otro líquido corrosivo (incluida el agua).
*2 Se debe evitar cualquier contaminante que pueda deteriorar el desempeño de sellado
del sellante de aceite de caucho de nitrilo, las juntas tóricas, los cierres de prensaetopas
y las empaquetaduras líquidas.
Condiciones ambientales especiales
Los sellos protectores se colocan en el manipulador del modelo de protección para evitar
que ingrese polvo, agua, etc. desde el exterior. Tome las precauciones en el entorno de uso
que se describen a continuación:
La superficie del manipulador tiene una resistencia general al aceite. Sin embargo, si sus
requisitos especifican que el manipulador debe soportar ciertos tipos de aceite, comuníquese
con el proveedor de su región.
Los cambios rápidos en la temperatura y la humedad pueden causar condensación dentro
del manipulador.
Si los requisitos especifican que el manipulador manipule alimentos, comuníquese con el
proveedor de su región para comprobar si el manipulador dañará los alimentos o no.
El manipulador no se puede usar en entornos corrosivos donde se usen sustancias ácidas o
alcalinas. El manipulador es susceptible a la oxidación en entornos salados donde se puede
acumular óxido.
El controlador utilizado con el manipulador del modelo de protección no cuenta con las
características de protección contra el polvo o en entorno grasiento. El controlador debe ser
colocado en un entorno que cumpla con las condiciones especificadas.
ADVERTENCIA
■
Use un disyuntor de fuga a tierra en el cable de alimentación de CA del controlador
para evitar descargas eléctricas y averías del circuito causadas por las fugas de
agua inesperadas. Prepare el disyuntor de fuga a tierra que corresponda al
controlador que está utilizando. Para conocer detalles, consulte el manual del
controlador de robot.
PRECAUCIÓN
■
Cuando limpie el manipulador, no lo frote con fuerza con alcohol o benceno.
Puede perder el lustre de la superficie recubierta.

Configuración y operación
32 C8 Mod.13
3.2 Desembalaje, transporte y reubicación
Use una carretilla o un equipo similar para transportar el manipulador en las mismas
condiciones en las que lo recibió. Respete las siguientes precauciones cuando desembale el
manipulador.
Personal de instalación calificado deberá realizar la instalación, y esta deberá cumplir con
todos los códigos nacionales y locales.
ADVERTENCIA
■
Solo personal autorizado debe realizar trabajo de eslinga y operar una grúa o un
montacarga. Es extremadamente peligroso que personal no autorizado realice
estas operaciones, ya que se pueden provocar lesiones corporales graves o
daños importantes a los equipos del sistema de robot.
■
Estabilice el manipulador con sus manos cuando lo eleve. Una elevación
inestable es extremadamente peligrosa y puede provocar lesiones corporales
graves o daños importantes a los equipos del sistema de robot, además de la
caída del manipulador.
PRECAUCIÓN
■
Cuando retire los pernos de anclaje, proporcione soporte al manipulador para
evitar que caiga. Retirar los pernos de anclaje sin proporcionar soporte al
manipulador puede causar que el manipulador se caiga y atrape manos, dedos o
pies.
■
Para transportar el manipulador, fíjelo al equipo de entrega o haga que al menos
2 personas lo sostengan manualmente. Además, no sostenga la parte inferior de
la base (las piezas marcadas con cuadros en la figura). Sostener estas piezas
con las manos es extremadamente peligroso y puede causar atrapamiento de
manos y dedos.
Figura: C8-A901* (C8L)
NO afirme la parte inferi or
de la base con la mano.
Peso del manipulador
C8-A701***: C8
C8-A901***: C8L
C8-A1401***: C8XL
Estándar, sala blanca
49 kg: 108 lb
52 kg: 115 lb
62 kg: 137 lb
Protección
53 kg: 117 lb
56 kg: 123 lb
66 kg: 146 lb
■
Evite vibraciones o golpes excesivos durante el transporte del manipulador. Las
vibraciones o golpes excesivos pueden causar daños a los equipos o el mal
funcionamiento del manipulador.
Asegúrese de instalar el sistema de robot en entornos que cumplan las siguientes
condiciones:
Elemento
Condiciones
Temperatura ambiente
0 a 45 C
Humedad ambiental relativa
10 a 80 % (sin condensación)
Al desembalar y reubicar, evite aplicar fuerza externa a los brazos y los motores del
manipulador.
Cuando transporte el manipulador una gran distancia, fíjelo al equipo de entrega, de modo
que no se pueda caer. Si es necesario, embale el manipulador de la misma manera en la que
se entregó.

Configuración y operación
C8 Mod.13 33
Cuando ocurre condensación en el manipulador durante el transporte, ENCIENDA la
energía solo después de que se seque la condensación.
Cuando vuelva a usar el manipulador para el sistema de robot después de un almacenamiento
por largo tiempo, realice una ejecución de prueba para verificar que el manipulador funciona
correctamente. Después, opere el manipulador de principio a fin.
Reubicación
Siga los procedimientos descritos a continuación cuando cambie la ubicación del
manipulador.
(1)
Apague la alimentación de todos los dispositivos y desenchufe el conector del cable de
alimentación y el conector del cable de señal del controlador.
No desenchufe el cable M/C (cable de alimentación y cable de señal) del manipulador.
(Cable M/C de 3 m: 2 kg)
Retire los topes mecánicos, si los usa para limitar el rango de movimiento.
Para conocer detalles del rango de movimiento, consulte Configuración y operación:
5.2 Configuración del rango de movimiento mediante los topes mecánicos.
(2)
Destornille los pernos de anclaje. Luego, quite el manipulador de la mesa base.
(3)
Coloque el manipulador como se muestra en la figura. Luego, fije el manipulador al
equipo de entrega o haga que al menos 2 personas lo transporten.
Se recomienda: Articulación n.º 2 +55
Articulación n.º 3 55
* La postura es común para todos los modelos.
No sostenga la parte inferior de la base (las piezas achuradas en la figura). Sostener
estas piezas con las manos es extremadamente peligroso y puede causar el
atrapamiento de manos y dedos.
Figura: C8-A901* (C8L)
NO afirme la parte inferior
de la base con la mano.
Peso del manipulador
C8-A701***: C8
C8-A901***: C8L
C8-A1401***: C8XL
Estándar, sala blanca
49 kg: 108 lb
52 kg: 115 lb
62 kg: 137 lb
Protección
53 kg: 117 lb
56 kg: 123 lb
66 kg: 146 lb
NOTA

Configuración y operación
34 C8 Mod.13
Uso de pernos de argolla
Revise que los pernos de argolla estén bien ajustados antes de transportar el manipulador.
Después de transportar el manipulador, retire los pernos de argolla y guárdelos para volver
a usarlos más adelante.
Los pernos de argolla (accesorio, 2 piezas) y el cable deben ser suficientemente fuertes para
resistir el peso (consulte las figuras a continuación).
Si utiliza los pernos de argolla para levantar el manipulador, asegúrese de poner las manos
sobre este, para mantenerlo equilibrado. Se puede caer el manipulador si pierde el equilibrio,
lo que es extremadamente peligroso.
Para evitar daños en las cubiertas y los brazos, se recomienda proteger las partes de contacto
del cable y el brazo con un paño. Tenga cuidado de no dañar las cubiertas, puesto que están
hechas de plástico.
Agujeros para pernos de argolla
2-M12 profundidad 25
(Figura: C8-A1401* (C8XL))
* Las posiciones de los agujeros de los tornillos para los pernos de argolla son comunes para todos
los modelos.
Peso del manipulador
C8-A701***: C8
C8-A901***: C8L
C8-A1401***: C8XL
Estándar, sala blanca
49 kg: 108 lb
52 kg: 115 lb
62 kg: 137 lb
Protección
53 kg: 117 lb
56 kg: 123 lb
66 kg: 146 lb
PRECAUCIÓN
■
Retire los pernos de argolla del manipulador después de terminar el
transporte/reubicación.
Si el manipulador se opera con los pernos de argolla puestos, el brazo puede
chocar con los pernos y puede causar daños a los equipos o mal funcionamiento
del manipulador.

Configuración y operación
C8 Mod.13 35
3.3 Dimensiones de montaje
Área de montaje
Asegúrese de contar con los siguientes espacios adicionales, además del espacio necesario
para el montaje del manipulador, el controlador y los equipos periféricos.
Espacio para la enseñanza de puntos
Espacio para el mantenimiento y las inspecciones (para instalar plantillas)
Espacio para los cables
El radio mínimo de curva del cable de alimentación es de 90 mm. Cuando instale el cable,
asegúrese de mantener suficiente distancia con respecto a los obstáculos. Además, deje
suficiente espacio para otros cables, de modo que no se doblen a la fuerza.
En el caso de C8-A1401*** (C8XL):
Asegúrese de dejar 35 mm o más espacio alrededor de la cubierta del ventilador.
[Unidad: mm]
3.3.1 Modelo de cables hacia atrás
C8-A701** (C8)
NOTA
NOTA
(IP-modelo: 100)
(IP-modelo: 220.5)
(IP-modelo: 320.5)
* El mismo que para el otro lado
2xM12 profundidad 22
2xM4 profundidad 8
Espacio para los cables
4xM4 profundidad 8
(se incluye la luz LED)

Configuración y operación
36 C8 Mod.13
C8-A901** (C8L)
(IP-modelo: 100)
2xM4 profundidad 8
(IP-modelo: 220.5)
(IP-modelo: 320.5)
* El mismo que para el otro lado
2xM12 profundidad 22
Espacio para los cables
4xM4 profundidad 8
(se incluye la luz LED)

Configuración y operación
C8 Mod.13 37
C8-A1401** (C8XL)
3.3.2 Modelo de cables hacia abajo
La siguiente pieza cambia en el modelo de cables hacia atrás.
C8-A701*B* (C8), C8-A901*B* (C8L)
C8-A1401*B* (C8XL)
(IP-modelo: 100)
2xM4 profundidad 8
* El mismo que para el otro lado
(se incluye la luz LED)
2xM12 profundidad 22
Espacio para los cables
Se recomienda 35 o más
(Espacio para el ventilador)
2xM4 profundidad 8
4xM4 profundidad 8
2xM4 profundidad 8
Espacio para
los cables
(IP-modelo: 220.5)
(IP-modelo: 224.5)
(IP-modelo: 324.5)
90 Espacio para
los cables
Se recomienda
35 o más
(Espacio para el
ventilador)

Configuración y operación
38 C8 Mod.13
3.4 Instalación
Personal de instalación calificado deberá realizar la instalación, y esta deberá cumplir con
todos los códigos nacionales y locales.
ADVERTENCIA
■
Para garantizar la seguridad, se debe instalar una protección para el sistema de
robot. Para conocer detalles acerca de la protección, consulte las Precauciones
de instalación y diseño en el capítulo Seguridad del Manual del usuario de
EPSON RC+.
■
Instale el manipulador en un lugar con suficiente espacio para que una
herramienta o una pieza de trabajo en el efector final no entre en contacto con
una pared o una protección cuando el manipulador extienda el brazo
completamente mientras sostiene una pieza de trabajo. Instalar el manipulador
en un lugar con espacio insuficiente es extremadamente peligroso y puede
causar lesiones corporales graves o daños importantes a los equipos del sistema
de robot, ya que una herramienta o una pieza de trabajo puede chocar contra
una pared o una protección.
■
Fije el manipulador antes de encender la energía u operarlo. Encender la energía
u operar un manipulador que no esté fijo es extremadamente peligroso y puede
causar lesiones corporales graves o daños importantes a los equipos del sistema
de robot, ya que el manipulador puede caer.
■
Antes de instalar y operar el manipulador, asegúrese de que todas las piezas del
manipulador estén en su lugar y no presenten defectos externos. Si faltan piezas
o si estas presentan defectos, esto puede causar una operación incorrecta del
manipulador. Es extremadamente peligroso que el manipulador opere de manera
incorrecta, y puede causar lesiones corporales graves o daños importantes a los
equipos del sistema de robot.
PRECAUCIÓN
■
Se debe instalar el manipulador para evitar interferencia con edificios, estructuras,
servicios públicos, otras máquinas y equipos que puedan crear un peligro de
atrapamiento o puntos de apriete.
■
Se puede producir oscilación (resonancia) durante la operación, según la rigidez
de la mesa de instalación. Si se produce oscilación, mejore la rigidez de la mesa
o cambie la configuración de velocidad o de aceleración y desaceleración.
Pernos de montaje
Para conocer las dimensiones, consulte Configuración y operación 3.3 Dimensiones de
montaje.
Hay cuatro agujeros roscados para la base del
manipulador.
Use los pernos de montaje M12, de conformidad
con la resistencia de las clases de calidad de
ISO898-1 10.9 o 12.9.
Torque de ajuste:
100,0 5,0 N·m (1,020 51 kgf·cm)
16 mm
4-M1240
Agujero de tornillo (profundidad
25 mm o más)
Arandela
de presión
Arandela
de ajuste

Configuración y operación
C8 Mod.13 39
Mesa base
No se incluye una mesa base para fijar el manipulador. Fabrique u obtenga la mesa base
para su manipulador. La forma y el tamaño de la mesa base difiere según el uso diseñado
para el sistema de robot. A continuación, se encuentran los requisitos básicos de la mesa del
manipulador para su referencia.
La mesa base no solo debe ser capaz de soportar el peso del manipulador, sino que también
resistir el movimiento dinámico del manipulador mientras funciona a una aceleración o
desaceleración máxima. Para asegurarse de que haya fuerza suficiente en la mesa base,
coloque materiales que la refuercen, como travesaños.
El torque y la fuerza de reacción producidos por el movimiento del manipulador son los
siguientes:
Número del modelo
C8-A701***
C8-
A901***
C8-
A1401***
Nombre del modelo
C8
C8L
C8XL
Torque de rotación horizontal máx.
(N·m)
1,600
1,800
2,600
Fuerza de reacción horizontal máx.
(N)
1,200
1,300
1,300
Torque de rotación vertical máx.
(N·m)
1,900
2,200
3,400
Torque de rotación vertical máx.
(N)
6,600
6,000
7,800
La placa para la superficie de montaje del manipulador debe tener 30 mm de grosor o más
y estar hecha de acero para reducir la vibración. La dureza de la superficie de la placa de
acero debe ser de 25 μm o menos.
La mesa base se debe fijar al suelo para impedir que se mueva.
El manipulador se debe instalar horizontalmente.
Cuando use un nivel para ajustar la altura de la mesa base, use un tornillo con diámetro M16
o superior.
Conector
Si pasará cables a través de los orificios en la mesa base, consulte las figuras a continuación.
[Unidad: mm]
66
Conector de cable de
alimentación (recto)
Conector de
cable de señal
Cables M/C
86
Conector de cable de
alimentación
(en forma de L)
85
35
80
No quite los cables M/C del manipulador.

Configuración y operación
40 C8 Mod.13
Para conocer las condiciones ambientales en relación con el espacio cuando se coloca el
controlador en la mesa base, consulte el manual del controlador de robot.
Cuando use el manipulador en la sala blanca, siga los pasos a continuación, antes de su
instalación.
(1) Desembale el manipulador afuera de la sala blanca.
(2) Fije el manipulador al equipo de entrega, por ejemplo, a un pallet con pernos, de
manera que el manipulador no se caiga.
(3) Limpie el polvo en el manipulador con un poco de alcohol o agua destilada en un paño
sin pelusas.
(4) Transporte el manipulador a la sala blanca.
(5) Fije el manipulador a la mesa base.
NOTA

Configuración y operación
C8 Mod.13 41
3.5 Conexión de los cables
ADVERTENCIA
■
Antes de realizar cualquier procedimiento de reemplazo, apague el controlador y
los equipos relacionados, luego desconecte el enchufe de la fuente de
alimentación.
Realizar cualquier procedimiento de reemplazo con la energía encendida es
extremadamente peligroso y puede provocar una descarga eléctrica o el mal
funcionamiento del sistema de robot.
■
Asegúrese de conectar el cable de alimentación de CA a un tomacorriente. NO lo
conecte directamente a la fuente de alimentación de la fábrica. Para cortar la
energía hacia el sistema de robot, desconecte el enchufe de la fuente de
alimentación. Realizar cualquier trabajo mientras conecta el cable de
alimentación de CA a una fuente de alimentación de la fábrica es extremadamente
peligroso y puede provocar una descarga eléctrica o el mal funcionamiento del
sistema de robot.
■
Asegúrese de conectar los cables correctamente. No permita una tensión
innecesaria en los cables. (No coloque objetos pesados en los cables. No doble
ni tire de los cables por la fuerza). La tensión innecesaria en los cables puede
provocar daños en los cables, desconexión o error de contacto. Los cables
dañados, la desconexión o el error de contacto son extremadamente peligrosos
y pueden provocar descargas eléctricas o el funcionamiento incorrecto del
sistema de robot.
■
Antes de realizar el cableado, apague el controlador y los equipos relacionados,
y luego saque la señal de advertencia (ej. NO ENCENDER LA ENERGÍA).
Realizar el cableado con la energía encendida es extremadamente peligroso y
puede provocar una descarga eléctrica o el mal funcionamiento del sistema de
robot.
■
La conexión a tierra del manipulador se realiza mediante la conexión con el
controlador. Sin embargo, se recomienda usar el agujero de conexión a tierra de
la base, para conectar directamente a tierra y con mayor seguridad.
Si el cable de conexión a tierra se conecta incorrectamente a tierra, puede
provocar incendio o descarga eléctrica.
■
Al conectar o reemplazar la unidad de desbloqueo del freno o el conector corto
externo, apague la alimentación al controlador y a la unidad de desbloqueo del
freno. Insertar y retirar el conector cuando la alimentación está encendida puede
provocar una descarga eléctrica.
PRECAUCIÓN
■
Al conectar el manipulador y el controlador, asegúrese de que coincidan los
números de serie en cada equipo. La conexión incorrecta entre el manipulador y
el controlador no solo pueden causar el funcionamiento incorrecto del sistema de
robot, sino que además pueden causar problemas de seguridad. El método de
conexión varía con el controlador utilizado. Para conocer detalles acerca de la
conexión, consulte el manual del controlador de robot.
■
Solo se debe permitir que el personal autorizado o certificado realice el cableado.
Si el cableado no lo realiza personal autorizado ni certificado puede provocar
lesiones corporales o el mal funcionamiento del sistema de robot.

Configuración y operación
42 C8 Mod.13
■
Si se opera el manipulador sin conectar la unidad de desbloqueo del freno o el
conector corto externo, los frenos no se pueden desbloquear y se pueden dañar.
Después de usar la unidad de desbloqueo del freno, asegúrese de conectar el
conector corto externo al manipulador o verificar la conexión del conector de la
unidad de desbloqueo del freno.
Manipulador de modelo para salas blancas
Para el modelo para salas blancas, se necesita un sistema de escape. Para conocer detalles,
consulte Configuración y operación: 2.6 Especificaciones.
Manipulador de modelo de protección
Para el modelo de protección, también asegúrese de seguir las precauciones siguientes.
PRECAUCIÓN
■
Cuando se opera el manipulador en condiciones ambientales especiales
(condiciones adversas con polvo y humo grasiento), no ponga el controlador en
la misma condición, puesto que este no cumple con IP67. Hacerlo puede causar
daños a los equipos o el mal funcionamiento del controlador.
■
Después de usar la unidad de desbloqueo del freno, asegúrese de volver a
conectar el conector corto externo al manipulador. La unidad de desbloqueo del
freno no está certificada con los valores nominales de protección (IP67).
Método de conexión de los cables M/C
Conecte el conector de alimentación y el conector de señal de los cables M/C al controlador.
Conexión a tierra
ADVERTENCIA
■
La resistencia de tierra debe ser de 100 Ω o menos. La resistencia de tierra
incorrecta puede provocar un incendio o descarga eléctrica.
■
No use la línea de conexión a tierra del manipulador en conjunto con otras líneas
o electrodos de conexión a tierra para otros dispositivos de energía eléctrica,
energía mecánica, soldadura, etc. Usar la línea de conexión a tierra del
manipulador en conjunto con otras líneas o electrodos de conexión a tierra puede
provocar descargas eléctricas o el mal funcionamiento del sistema de robot.
■
Cuando use conductos metálicos o racks de distribución para los cables,
conéctelos a tierra de acuerdo con las normas técnicas para equipos eléctricos
nacionales y locales. La conexión a tierra que no cumpla con las normas puede
provocar descargas eléctricas o el mal funcionamiento del sistema de robot.
Siga los reglamentos locales para la conexión a tierra. Se recomienda que el tamaño del
centro del cable de conexión a tierra sea de 5,5 mm
2
o más.
Conecte de forma directa la línea de conexión a tierra al manipulador como se muestra en
la figura a continuación.
Detalle de A
5,5 mm
2
o más
Agujero para pernos M5 (para conexión a tierra)

Configuración y operación
C8 Mod.13 43
3.6 Cables y tubos neumáticos del usuario
PRECAUCIÓN
■
Solo se debe permitir que el personal autorizado o certificado realice el cableado.
Si el cableado no lo realiza personal autorizado ni certificado puede provocar
lesiones corporales o el mal funcionamiento del sistema de robot.
Los cables eléctricos y los tubos neumáticos del usuario se encuentran en la unidad de cable.
Conector rápido de un
toque para tubos
neumáticos de ø6 mm
(Air1, Air2)
Conector del cable del usuario
(Conector D-sub de 15 pines)
Detalle de B
A
Detalle de A: Modelo de cables hacia atrás
Modelo estándar: Cubierta
Modelo para salas blancas: Puerto de
escape (conector rápido de un toque para
tubos neumáticos de ø12 mm)
ワンタッチ継手)
B
Conector del cable del sensor de fuerza
Conector del cable de Ethernet
Conector del cable del sensor de fuerza
Conector del cable de Ethernet
Conector del cable del usuario
(Conector D-sub de 15 pines)
Conector rápido de un
toque para tubos
neumáticos de ø6 mm
(Air1, Air2)
(Figura: C8-A701* (C8))
Cable de
alimentación
Cable de señal
Modelo estándar
: Cubierta
Modelo para salas blancas
: Puerto de escape
Para tubos neumáticos de ø12 mm
Conector del cable del usuario
(Conector D-sub de 15 pines)
)
Para tubos neumáticos de ø6 mm
(Air1, Air2)
Conector del cable
del sensor F
Conector del
cable de Ethernet
C
Detalle de C: Modelo de cables hacia abajo
(Figura: C8-A701*B (C8))

Configuración y operación
44 C8 Mod.13
Cables eléctricos
Especificaciones de los cables de usuario D-sub de 15 pines
Voltaje nominal
Corriente
permitida
Cables
Área seccional
nominal
Nota
CA/CC 30 V
1 A
15
0,106 mm
2
Blindado
Los pines con el mismo número, indicados en los conectores en ambos extremos de los
cables, están conectados.
El conector instalado para los cables de usuario (modelo estándar, modelo para
salas blancas)
Fabricante
Estándar
15
pines
Conector
JAE
DA-15PF-N
(Tipo de soldadura)
Campana de
sujeción
HRS
HDA-CTH(4-
40)(10)
(Tornillo de fijación del conector:
#4-40 UNC)
Se incluyen dos piezas para cada uno.
El conector instalado para los cables de usuario (modelo de protección)
Fabricante
Estándar
15
pines
Conector
HARTING
09 67 015 5615
(Tipo de soldadura)
Campana de
sujeción
HARTING
09 67 015 0538
(Tornillo de fijación del conector:
#4-40 UNC)
Se incluyen dos piezas para cada uno.
Cat.5e de 8 pines (RJ45) o equivalente
Para los manipuladores del modelo estándar y para salas blancas, se pueden utilizar los
cables Ethernet disponibles comercialmente.
Para el modelo de protección, use la siguiente pieza opcional.
Juego de conectores de usuario (IP67 impermeable, para RJ45, 2 piezas)
Para conocer detalles, consulte Configuración y operación 6. Opción.
Otro
Se incluye el cable de 6 pines para la opción del sensor F.

Configuración y operación
C8 Mod.13 45
Tubos neumáticos
Presión neumática máx. utilizable
Tubos neumáticos
Diámetro exterior × Diámetro
interior
0,59 MPa (6 kgf/cm
2
: 86 psi)
2
ø6 mm ø4 mm
Modelo estándar, modelo para salas blancas
El conector rápido del codo viene instalado en el brazo n.º 4 al momento del envío. La
pieza se puede cambiar por el conector rápido recto (accesorio) dependiendo de la
aplicación.
Modelo de protección
Los tapones están instalados en el brazo n.º 4 y la base. Para usar los tubos de aire, retire
los tapones e instale los conectores rápidos (accesorio) en el brazo n.º 4.
Tamaño del agujero de los tornillos para instalar los conectores rápidos al brazo n.º 4:
M6
Para el modelo de protección, consulte, además, las siguientes precauciones.
PRECAUCIÓN
■
Asegúrese de usar cables y tubos que cumplan con IP67 cuando utilice el
manipulador en condiciones ambientales especiales (condición adversa con
polvo y humo grasiento). El uso de cables y tubos sin protección puede causar
daños en el equipo o el mal funcionamiento del manipulador, puesto que la
operación correcta del manipulador en dichas condiciones ya no está garantizada.
■
Asegúrese de colocar la tapa o el tapón (incluido al momento del envío) en el
conector del cable del usuario, cuando no se utilice el conector. El uso del
manipulador sin la tapa o el tapón puede causar daños al equipo o el mal
funcionamiento del manipulador, ya que ingresa al conector polvo y humo
grasiento.

Configuración y operación
46 C8 Mod.13
3.7 Revisión de la orientación básica
Después de reemplazar las piezas (motores, unidades de engranaje reductor, correas, etc.),
el manipulador no puede operar correctamente, porque existe un espacio entre las posiciones
de origen almacenadas en cada motor y estas almacenadas en el controlador. El proceso para
compensar el espacio de posición se llama “Calibración”.
Al momento del envío, la orientación básica del manipulador que se muestra a continuación
está definida como la posición de origen.
Después de instalar el manipulador y definir el entorno de operación, mueva el manipulador
a la posición de origen y revise si se mueve correctamente a la posición básica.
Para hacer que el manipulador se mueva a la posición de origen, seleccione [Tools] -
[Robot Manager] - [Control Panel] (Herramientas - Administrador de robots - Panel de
control) y haga clic en <Home> (Reposo).
Si aún existe el espacio y el manipulador no puede estar en la orientación básica después de
la calibración, comuníquese con el proveedor de su región.
Orientación básica
(Figura: C8-A701** (C8))

Configuración y operación
C8 Mod.13 47
4. Efectores finales
4.1 Instalación de un efector final
Cree un efector final para su manipulador. Las dimensiones de la brida de la muñeca
colocada en el extremo del brazo n.º 6 se encuentran a continuación.
PRECAUCIÓN
■
Si usa un efector final equipado con gripper o un manguito portaherramientas,
conecte los cables o tubos neumáticos correctamente para que el gripper no
suelte la pieza de trabajo cuando se apague la alimentación del sistema de robot.
Una conexión incorrecta de los cables o tubos neumáticos podría dañar al
sistema de robot o la pieza de trabajo, en caso de que esta última se suelte
cuando presiona el interruptor de parada de emergencia.
Las salidas de E/S se configuran de fábrica para que se apaguen
automáticamente (0) mediante la desconexión de la alimentación, el interruptor
de parada de emergencia o las características de seguridad del sistema de robot.
Brida de la muñeca
Brazo n.º 6
Coloque un efector final en el extremo del brazo n.º 6 con pernos M5.
Diseños
Cuando opera el manipulador con un efector final, este puede interferir con ella carrocería
del manipulador debido al diámetro exterior del efector final, el tamaño de la pieza de trabajo
o la posición de los brazos. Cuando determine el diseño del sistema, preste mucha atención
al área de interferencia del efector final.
Compatibilidad con la brida ISO:
Para instalar el efector final cuyas dimensiones de montaje están diseñadas para la brida ISO,
proporcionamos la C8 brida ISO (J6) opcional. Para conocer detalles, consulte
Configuración y operación: 6. Opciones.
4.2 Instalación de cámara y válvulas de aire
Los brazos n.º 3 y n.º 5 cuentan con plataformas para facilitar la instalación de la válvula de
aire.
Para instalar la cámara, se necesita la unidad de placa para la cámara.
Ofrecemos la unidad de placa para la cámara opcional. Para conocer detalles, consulte
Configuración y operación: 6. Opciones.
4xM5 profundidad 8
(a una inclinación de 90°)
Boca de 5,5 y profundidad 5,7
profundidad 5
profundidad 4
profundidad 3
4xM3 profundidad 7

Configuración y operación
48 C8 Mod.13
C8-A701*** (C8) C8-A901*** (C8L) [Unidad: mm]
Centro de giro
del brazo superior
of the Upper Arm
Plataforma del
brazo n.º 3
Plataforma del
brazo n.º 5
Espacio para
los cables
Deck
6xM4 profundidad 8
4xM4 profundidad 8
2xM4 profundidad 8
Centro de giro
del brazo superior
Plataforma del
brazo n.º 3
Plataforma
del brazo n.º 5
Espacio para
los cables
6xM4 profundidad 8
2xM4 profundidad 8
(se incluye la luz LED)
(se incluye la luz LED)

Configuración y operación
C8 Mod.13 49
C8-A1401*** (C8XL)
Centro de giro
del brazo superior
Plataforma del
brazo n.º 3
Plataforma del
brazo n.º 5
6xM4 profundidad 8
4xM4 profundidad 8
2xM4 profundidad 8
Espacio para los cables
Se recomienda 35 o más
(Espacio para el ventilador)
4xM4 profundidad 8
(se incluye la luz LED)
(se incluye la luz LED)

Configuración y operación
50 C8 Mod.13
4.3 Configuración de WEIGHT e INERTIA
Los comandos WEIGHT (Peso) e INERTIA (Inercia) (momento de inercia y excentricidad)
están definidos para los parámetros de carga del manipulador. Estas configuraciones
optimizan el movimiento del manipulador.
Configuración de WEIGHT
El comando WEIGHT es para definir el peso de la carga. Mientras más aumente el peso de
la carga, más se reduce la velocidad y de la aceleración o desaceleración.
Configuración de INERTIA
El comando INERTIA sirve para definir el momento de inercia y la excentricidad de la carga.
Mientras más aumenta el momento de inercia, más se reduce la aceleración y la
desaceleración del brazo n.º 6. Mientras más aumenta la excentricidad, más se reduce la
aceleración y la desaceleración del movimiento del manipulador.
Para asegurarse de obtener un rendimiento óptimo del manipulador, asegúrese de que la
carga (el peso del efector final y la pieza de trabajo) y el momento de inercia de la carga
estén dentro del valor límite del manipulador, y que el brazo n.º 6 no se vuelva excéntrico.
Si la carga o el momento de inercia supera los valores nominales o si la carga se vuelve
excéntrica, siga los pasos que aparecen en Configuración y operación 4.3.1 Configuración
de WEIGHT (Peso) y 4.3.2 Configuración de INERTIA (Inercia), para definir los parámetros.
Configurar los parámetros permite que la operación de manipulador sea óptima, reduce las
vibraciones para acortar el tiempo de operación y mejora la capacidad para cargas más
grandes. Asimismo, reduce la vibración persistente que se produce cuando el momento de
inercia del efector final y la pieza de trabajo es mayor.
La carga permisible para los manipuladores de la serie C8 es de 8 kg como máximo.
Debido a las limitaciones del momento y del momento de inercia que se muestran en la tabla
siguiente, la carga (peso de efector final + peso de la pieza de trabajo) también debe cumplir
con estas condiciones.
Carga permisible
Articulación
Momento permisible
Momento de inercia permisible
GD
2
/4
N.º 4
16,6 N·m (1,69 kgf m)
0,47 kg·m
2
N.º 5
16,6 N·m (1,69 kgf m)
0,47 kg·m
2
N.º 6
9,4 N·m (0,96 kgf m)
0,15 kg·m
2
Momento
El momento indica la cantidad de torque que se aplica a la articulación a fin de que aguante
la gravedad de la carga (efector final + pieza de trabajo).
El momento aumenta en la medida que la carga y la cantidad de excentricidad aumentan.
Como esto también aumenta la carga que se aplica a la articulación, asegúrese de mantener
el momento dentro del valor permisible.
Momento de inercia
El momento de inercia indica la dificultad de girar la carga (efector final + pieza de trabajo)
cuando la articulación del manipulador comienza a girar (cantidad de inercia). El momento
de inercia aumenta en la medida que la carga y la cantidad de excentricidad aumentan. Como
esto también aumenta la carga que se aplica a la articulación, asegúrese de mantener el
momento de inercia dentro del valor permisible.

Configuración y operación
C8 Mod.13 51
El momento M (Nm) y el momento de inercia I (kgm
2
), cuando el volumen de la carga
(efector final + pieza de trabajo) es pequeño, se puede obtener mediante la siguiente fórmula.
M (N m) = m(kg) × L (m) × g (m/s
2
)
I (kgm
2
) = m(kg) × L
2
(m)
m : Peso de la carga (kg)
L : Cantidad excéntrica de la cantidad (m)
g : Aceleración gravitacional (m/s
2
)
T
L
Centro de giro de la
articulación
La siguiente figura muestra la distribución del centro de gravedad cuando el volumen de la
carga (efector final + pieza de trabajo) es pequeño.
Diseñe el efector final de manera tal que el centro de gravedad esté dentro del momento
permisible.
Si el volumen de la carga es grande, calcule el momento y el momento de inercia según
Configuración y operación 4.3.2 Configuración de INERTIA - Cálculo del momento de
inercia.
Centro de gravedad de la carga desde el centro de giro del brazo n.º 5 [mm]
Centro de gravedad de la carga desde
el centro de giro del brazo n.º 6 [mm]
300
250
200
150
100
50
0
0 50 100 150 200 250 300
1 kg
2 kg
3 kg
4 kg
5 kg
6 kg
7 kg
8 kg
Cantidad excéntrica de la carga máxima
(Distancia entre el centro de giro de la articulación y el centro de gravedad de la
carga)
Articulación
1 kg
2 kg
3 kg
4 kg
5 kg
6 kg
7 kg
8 kg
N.º 4
300 mm
300 mm
300 mm
300 mm
300 mm
280 mm
242 mm
212 mm
N.º 5
300 mm
300 mm
300 mm
300 mm
300 mm
280 mm
242 mm
212 mm
N.º 6
300 mm
274 mm
224 mm
194 mm
173 mm
158 mm
137 mm
120 mm
Cuando calcule la dimensión crítica de la carga, usando el momento permisible y el
momento de inercia, el valor calculado representa una distancia desde el centro de giro del
brazo n.º 5 y no la distancia desde la brida. Para calcular la distancia desde la brida hasta el
centro de gravedad de la brida, reste la distancia desde el centro del centro de giro del brazo
n.º 5 a la brida (=80 mm), como se muestra a continuación en el ejemplo.

Configuración y operación
52 C8 Mod.13
Ejemplo: El cálculo de la dimensión crítica de la carga (a) cuando la carga es 8 kg.
Centro de gravedad por el control del momento permisible:
16,6 N·m/(8 kg×9,8 m
2
) = 0,212 m = 212 mm
Centro de gravedad por el control del momento de inercia permisible:
(0,47 kgm
2
/8 kg)
1/2
= 0,242 m = 242 mm
Debido al control de momento permisible, el centro de gravedad para el límite de
carga es de 212 mm desde el centro de giro del brazo n.º 5.
Distancia desde la brida al centro de gravedad para el límite de carga
= 212 mm-80 mm = 132 mm
Dimensión crítica de la carga
Centro de giro
del brazo n.º 6
Centro de gravedad
de la carga
Brida
Centro de giro
del brazo n.º 5
[Unidad: mm]
4.3.1 Configuración de WEIGHT
PRECAUCIÓN
■
Defina el peso total del efector final y de la pieza de trabajo para que sean
inferiores a la carga útil máxima.
Los manipuladores de la serie C8 pueden operar sin limitaciones en la condición,
a menos que y hasta que la carga supere esta carga útil máxima. Siempre
configure los parámetros de peso del comando WEIGHT en función de la carga.
Configurar un valor que sea inferior a la carga real puede generar errores,
impactos excesivos, función insuficiente del manipulador o acortar el ciclo de vida
útil de las piezas o los mecanismos.
La capacidad de peso aceptable (efector final y pieza de trabajo) en los manipuladores de la
serie C8 es la siguiente:
Nominal
Máximo
3 kg
8 kg
Cambie la configuración del parámetro Weight en función de la carga.
Después de cambiar la configuración del parámetro Weight, se define automáticamente la
velocidad y la aceleración/desaceleración máximas del sistema de robot que corresponde a
la carga.
Método de configuración de los parámetros Weight
EPSON
RC+
Seleccione el panel [Tools]-[Robot Manager]-[Weight] (Herramientas - Administrador de
robot - Peso) y defina el valor en [Weight:].
Además, puede ejecutar el comando Weight en [Command Window] (Ventana Comando).

Configuración y operación
C8 Mod.13 53
Cargue el manipulador
Lugar de montaje de la carga
C8-A701*** (C8)
Plataforma del
brazo n.º 3
Plataforma del
brazo n.º 5
Carga en el extremo delantero del brazo n.º 6
C8-A901*** (C8L)
Plataforma del
brazo n.º 3
Plataforma del
brazo n.º 5
Carga en el extremo delantero del brazo n.º 6
C8-A1401*** (C8XL)
Plataforma del
brazo n.º 3
Plataforma del
brazo n.º 5
Carga en el extremo delantero del brazo n.º 6
Detalles de la plataforma
2×M4 profundidad 8
4×M4 profundidad 8
Plataforma del brazo n.º 5
Plataforma del brazo n.º 3
[Unidad: mm]
Cuando coloque el equipo para las plataformas del brazo superior, convierta su peso en peso
equivalente, suponiendo que el equipo está colocado en el extremo del brazo n.º 6. Entonces,
este peso equivalente agregado a la carga será el parámetro Weight.

Configuración y operación
54 C8 Mod.13
Calcule el parámetro Weight con la fórmula siguiente y escriba el valor.
Fórmula de parámetro Weight
Parámetro Weight =M
w
+ W
a
+ W
b
M
w
W
a
W
b
: Carga en el extremo delantero del brazo n.º 6 (kg)
: Peso equivalente de la plataforma del brazo n.º 3 (kg)
: Peso equivalente de la plataforma del brazo n.º 5 (kg)
W
a
= M
a
(L
a
)²/ (L)²
W
b
= M
b
(L
b
)²/ (L)²
M
a
M
b
L
L
a
L
b
: Peso de la válvula de aire de la plataforma del brazo n.º 3
: Peso de la cámara de la plataforma del brazo n.º 5
: Longitud del brazo superior (315 mm)
: Distancia entre la articulación n.º 3 y el centro de gravedad de
la válvula de aire de la plataforma del brazo n.º 3 (mm)
: Distancia entre la articulación n.º 3 y el centro de gravedad de
la cámara de la plataforma del brazo n.º 5 (mm)
<Ejemplo>
El extremo delantero del brazo n.º 6 está a 730 mm (L) de distancia de la
articulación n.º 3
del C8-A1401*** (C8XL).
La carga en el extremo delantero del brazo n.º 6 es de 5 kg (M
w
).
La carga en la plataforma del brazo n.º 3 es de 1,5 kg (M
a
).
La plataforma está a 0 mm (L
a
) de distancia de la articulación n.º 3.
La carga en la plataforma del brazo n.º 5 es de 1,0 kg (M
b
).
La plataforma está a 690 mm (L
b
) de distancia de la articulación n.º 3.
W
a
=1,5 × 0
2
/730
2
=0
W
b
=1,0×690
2
/730
2
=0,89 → 0,9 (redondeo ascendente)
M
w
+ W
a
+ W
b
=5 + 0 + 0,9=5,9
Ingrese “5,9” como el parámetro Weight.

Configuración y operación
C8 Mod.13 55
Configuración de velocidad automática por parámetro de peso
Los porcentajes de los gráficos se basan en la velocidad a un peso nominal (3 kg) como el
100 %.
C8-A701***(C8)
140
120
100
80
60
40
20
0 2 4 6 8 (kg) Parámetro Weight
(%)
110
100
100
Velocidad
100
100
100
Aceleración / Desaceleración
130
65
45
35
100
C8-A901***(C8L)
140
120
100
80
60
40
20
0 2 4 6 8 (kg) Parámetro Weight
(%)
110
100
100
Velocidad
100
100
100
Aceleración / Desaceleración
130
60
45
35
100
C8-A1401***(C8XL)
140
120
100
80
60
40
20
(%)
105
100
100
100
100
100
120
72
51
45
100
0 2 4 6 8 (kg) Parámetro Weight
Velocidad
Aceleración / Desaceleración
El valor máximo de configuración de AccelS varía según el valor de configuración de
Weight. Para conocer detalles, consulte “Configuración y operación 2.6.1 Tabla de
especificaciones”.
NOTA

Configuración y operación
56 C8 Mod.13
4.3.2 Configuración de INERTIA
Momento de inercia y la configuración de INERTIA
El momento de inercia se define como “la relación del torque aplicado a un cuerpo rígido y
su resistencia al movimiento”. Este valor se conoce comúnmente como “el momento de
inercia”, “inercia”, o “GD
2
”. Cuando el manipulador opera con objetos adicionales como un
efector final instalados en el brazo n.º 6, se debe considerar el momento de inercia de la
carga.
PRECAUCIÓN
■
El momento de inercia de la carga (peso del efector final y de la pieza de trabajo)
debe ser de 0,15 kg m
2
o menos. Los manipuladores de la serie C8 no están
diseñados para trabajar con un momento de inercia que supere 0,15 kg m
2
.
Siempre defina el parámetro del momento de inercia (INERTIA) según el
momento de inercia. Configurar un valor que sea inferior al momento de inercia
real puede generar errores, impactos excesivos, función insuficiente del
manipulador o acortar el de vida útil de las piezas o los mecanismos.
El momento de inercia aceptable de la carga para un manipulador de la serie C8 es de
0,03 kgm
2
como intensidad nominal y 0,15 kgm
2
como máximo. Cambie la configuración
del momento de inercia según el de la carga con el comando INERTIA. Después de cambiar
la configuración, se define automáticamente la velocidad máxima de aceleración o
desaceleración del brazo n.º 6, lo que corresponde al "momento de inercia".
Momento de inercia de la carga del brazo n.º 6
El momento de inercia de la carga (peso del efector final y la pieza de trabajo) en el brazo
n.º 6 se puede definir mediante el parámetro de “momento de inercia (INERTIA)” del
comando INERTIA.
EPSON
RC+
Seleccione en el panel [Tools]-[Robot Manager]-[Inertia] (Herramientas - Administrador de
robot - Inercia) y escriba el valor en [Load inertia:] (Inercia de carga).
Además, puede ejecutar el comando Inertia (Inercia) en [Command Window] (Ventana
Comando).

Configuración y operación
C8 Mod.13 57
Cantidad excéntrica y configuración de INERTIA
PRECAUCIÓN
■
La cantidad excéntrica de la carga (peso del efector final y de la pieza de trabajo)
debe ser de 300 mm o menos. Los manipuladores serie C8 no están diseñados
para trabajar con una cantidad excéntrica que supere los 300 mm.
Siempre configure el parámetro de cantidad excéntrica en función de la cantidad
excéntrica. Configurar un valor que sea inferior a la cantidad excéntrica real puede
generar errores, impactos excesivos, función insuficiente del manipulador o
acortar el ciclo de vida útil de las piezas o los mecanismos.
La cantidad excéntrica aceptable de la carga en los manipuladores de la serie C8 es de 50 mm
como intensidad nominal y 300 mm como máximo. Cuando la cantidad excéntrica de la
carga supera el valor nominal, cambie la configuración del parámetro de cantidad excéntrica
usando el comando INERTIA. Después de cambiar la configuración, se define
automáticamente la velocidad de la aceleración o desaceleración máxima del manipulador
que corresponde a la “cantidad excéntrica”.
Posición del centro de gravedad de la carga
Centro de giro
a, b = Cantidad excéntrica
(300 mm o menos)
Brida
a
b
Para definir el parámetro,
ingrese el valor más grande de
“a” o “b”.
Cantidad excéntrica
Cantidad excéntrica de la carga en el brazo n.º 6
La cantidad excéntrica de la carga (peso del efector final y de la pieza de trabajo) en el brazo
n.º 6 se puede definir mediante el parámetro de “Cantidad excéntrica” del comando
INERTIA.
Escriba el valor más alto de ya sea “a” o “b” de la figura anterior [Excentricidad].
EPSON
RC+
Seleccione en el panel [Tools]-[Robot Manager]-[Inertia] y escriba el valor en
[Eccentricity:] (Excentricidad).
Además, puede ejecutar el comando Inertia (Inercia) en [Command Window] (Ventana
Comando).

Configuración y operación
58 C8 Mod.13
Configuración de aceleración/desaceleración automática por INERTIA (cantidad
excéntrica)
La configuración automática con la configuración del momento de inercia (común
para la serie C8)
0 0.05 0.10 0.15 (kg·m
2
) Momento de inercia
150
140
120
100
80
60
40
20
(%)
140
100
50
15
* El porcentaje en el gráfico se basa en la aceleración/desaceleración a una excentricidad
nominal (0,03 kg m²) como el 100 %.
La configuración automática con la configuración de excentricidad (común para
la serie C8)
120
100
80
60
40
20
0 100 200 300 (mm) Excentricidad
50
25
15
(%)
100
100
* El porcentaje en el gráfico se basa en la aceleración/desaceleración a una excentricidad
nominal (50 mm) como el 100 %.

Configuración y operación
C8 Mod.13 59
Cálculo del momento de inercia
Consulte las siguientes fórmulas de ejemplo para calcular el momento de inercia de la carga
(efector final con pieza de trabajo).
El momento de inercia de toda la carga se calcula al sumar cada parte (a), (b) y (c).
Pieza de trabajo (b)
Piece Pieza de
trabajo (b)
b)
Pieza de trabajo (c)
Efector final (a)
Centro de giro
Momento de inercia
del efector final (a)
=
Momento de
inercia de la pieza
de trabajo (b)
+
Momento de
inercia de la pieza
de trabajo (c)
+
Momento
completo de
inercia
Los métodos para calcular el momento de inercia para (a), (b) y (c) se presentan en esta
página y la siguiente. Descubra todo el momento de inercia, usando las fórmulas básicas a
continuación.
(a) Momento de inercia de un paralelepípedo rectangular
h
b
L
m
Centro de gravedad del paralelepípedo rectangular
Centro de giro
m
+ m L
2
b
2
+ h
2
12
(b) Momento de inercia de un cilindro
m
+ m L
2
r
2
2
m
L
r
Centro de gravedad del cilindro
Centro de giro

Configuración y operación
60 C8 Mod.13
(c) Momento de inercia de una espera
m
r
2
+ m L
2
2
5
Centro de gravedad de la esfera
r
m
L
Centro de giro

Configuración y operación
C8 Mod.13 61
4.4 Precauciones para la aceleración/desaceleración automática
La velocidad y la aceleración / desaceleración del movimiento del manipulador se optimizan
automáticamente de acuerdo con los valores de WEIGHT e INERTIA y las posturas del
manipulador.
Configuración de WEIGHT
La velocidad y la aceleración / desaceleración del manipulador son controladas de acuerdo
con el peso de la carga definido por el comando WEIGHT.
Mientras más aumente el peso de la carga, más se reduce la velocidad y la aceleración /
desaceleración para evitar la vibración residual.
Configuración de INERTIA
La aceleración / desaceleración del brazo n.º 6 son controladas de acuerdo con el momento
de inercia definido por el comando INERTIA. La aceleración / desaceleración de todo el
manipulador son controladas de acuerdo con la excentricidad definida por el comando
INERTIA. Mientas más aumenta el momento de inercia y la excentricidad de la carga, más
se reduce la aceleración / desaceleración.
Aceleración / desaceleración automática de acuerdo con la postura del
manipulador
La aceleración y la desaceleración son controladas de acuerdo con la postura del
manipulador. Cuando el manipulador extiende los brazos o cuando el movimiento del
manipulador produce vibraciones frecuentemente, se reduce la aceleración y la
desaceleración.
Defina los valores correctos para WEIGHT e INERTIA, de manera que el manipulador
optimice la operación.

Configuración y operación
62 C8 Mod.13
5. Rango de movimiento
ADVERTENCIA
■
Cuando limite el rango de movimiento por motivos de seguridad, asegúrese de
definir tanto el rango de pulsos como los topes mecánicos. No hacerlo, puede
causar problemas graves de seguridad.
El rango de movimiento está predeterminado de fábrica como se describe en Configuración
y operación 2.5 Rango de movimiento estándar. Este es el rango de movimiento máximo
del manipulador.
El rango de movimiento se define según los siguientes tres métodos:
1. Configuración mediante el rango de pulsos (para todos los brazos)
2. Configuración de los topes mecánicos
3. Configuración del rango cartesiano (rectangular) en el sistema de coordenadas X,
Y del manipulador
Tope
mecánico
Configuración de rango rectangular
Rango de pulsos
Rango de movimiento
Tope
mecánico
Cuando se cambia el rango de movimiento por temas de eficiencia o seguridad del diseño,
siga las descripciones en 5.1 a 5.4 para definir el rango.
5.1 Configuración del rango de movimiento por rango de pulsos (para
cada articulación)
Los pulsos corresponden a la unidad básica del movimiento de un manipulador. El rango de
movimiento del manipulador se controla mediante el rango de pulsos (el límite inferior y el
límite superior) de cada eje.
Los valores de pulsos se leen desde la salida del codificador del servomotor.
El rango de pulsos se debe definir dentro del rango del tope mecánico.
Los brazos n.º 1 y n.º 4 no tienen un tope mecánico.
Una vez que el manipulador recibe el comando de operación, comprueba si la posición
objetivo que especifica el comando está dentro del rango de pulsos antes de comenzar a
operar. Si la posición objetivo está fuera del rango de pulsos definido, ocurre un error y el
manipulador no se mueve.
EPSON
RC+
El rango de pulsos se puede definir en el panel [Tools]-[Robot manager]-[Range]
(Herramientas - Administrador de robot - Rango).
También puede ejecutar el comando Range en la ventana [Command Window].
NOTA
NOTA

Configuración y operación
C8 Mod.13 63
5.1.1 Rango de pulsos máximo de la articulación n.º 1
Los valores de pulso hacia la izquierda son positivos (+) y los valores hacia la derecha son
negativos (-).
Brazo n.º 1
Posición del pulso 0
- dirección
+ dirección
C8-A701*** (C8)
C8-A901*** (C8L)
C8-A1401*** (C8XL)
Ángulo ()
± 240
Pulso (pulso)
± 9507090
± 10695600
± 15736800
5.1.2 Rango de pulsos máximo de la articulación n.º 2
Los valores de pulso hacia la derecha son positivos (+) y los valores hacia la izquierda son
negativos (-).
Brazo n.º 2
Posición del pulso 0
- dirección
+ dirección
C8-A701*** (C8)
C8-A901*** (C8L)
C8-A1401*** (C8XL)
Ángulo ()
158 al + 65
135 al + 55
Pulso (pulso)
6245685 a
+ 2569428
6903178 a
+ 2839915
10616940 a
+ 4325420

Configuración y operación
64 C8 Mod.13
5.1.3 Rango de pulsos máximo de la articulación n.º 3
Los valores de pulso hacia la derecha son positivos (+) y los valores hacia la izquierda son
negativos (-).
Brazo n.º 3
Posición del pulso 0
- dirección
+ dirección
C8-A701*** (C8)
C8-A901*** (C8L)
C8-A1401***
(C8XL)
Ángulo ()
61 al + 202
Pulso (pulso)
1776754 a
+ 5883677
2220949 a
+ 7354618
3997696 a
+ 13238272
5.1.4 Rango de pulsos máximo de la articulación n.º 4
Desde el ángulo del extremo del brazo, los valores de pulso hacia la derecha son positivos
(+) y los valores de pulso hacia la izquierda son negativos (-). El rango de pulsos máximo
del brazo n.º 4 es común en los manipuladores de la serie C8.
Brazo n.º 4
Posición del pulso 0
-5461400 de pulso
+5461400 de pulso
grad.
grad.
(Grado = )

Configuración y operación
C8 Mod.13 65
5.1.5 Rango de pulsos máximo de la articulación n.º 5
Los valores de pulso hacia la derecha son positivos (+) y los valores hacia la izquierda son
negativos (-). El rango de pulsos máximo del brazo n.º 5 es común en los manipuladores de
la serie C8.
Brazo n.º 5
Posición del pulso 0
-3932280 pulso
+3932280 pulso
grad.
grad.
(Grado = )
5.1.6 Rango de pulsos máximo de la articulación n.º 6
Desde el ángulo del extremo del brazo, los valores de pulso hacia la derecha son positivos
(+) y los valores de pulso hacia la izquierda son negativos (-). El rango de pulsos máximo
del brazo n.º 6 es común en los manipuladores de la serie C8.
Brazo n.º 6
Posición del pulso 0
+ 6553800 pulso
- 6553800 pulso
grad.
grad.
(Grado = )

Configuración y operación
66 C8 Mod.13
5.2 Configuración del rango de movimiento con topes mecánicos
Los topes mecánicos ajustables limitan físicamente el área absoluta en la que se puede
mover el manipulador.
Asegúrese de apagar el manipulador con antelación.
Use pernos que cumplan con la longitud especificada y el procesamiento de superficie (p.
ej.: niquelados) con alta resistencia de corrosión.
Especifique el rango de pulsos nuevamente después de cambiar la posición del tope
mecánico.
Para conocer detalles acerca de la configuración del rango de pulsos, consulte Configuración
y operación 5.1 Configuración del rango de movimiento por rango de pulsos (para todos
los brazos).
Asegúrese de que el rango de pulsos no supere los ángulos de configuración del tope
mecánico.
5.2.1 Configuración de rango de movimiento de la articulación n.º 1
Instale el tope mecánico ajustable (J1) al agujero roscado correspondiente al ángulo que
desea definir.
Normalmente no está instalado el tope mecánico.
Perno de cabeza hueca hexagonal Pernos M12×30×2
Torque de ajuste 42,0 ± 2,1 N m (428 ± 21 kgf cm)
a
b
c
a
b
c
Ángulo ()
145, +110
110, +145
240
Pulso (pulso)
C8-A701***
(C8)
5743867
+4357416
4357416
+5743867
9507090
C8-A901***
(C8L)
6461925
+4902150
4902150
+6461925
10695600
C8-A1401***
(C8XL)
9507650
+7212700
7212700
+9507650
15736800
Tope mecánico ajustable (J1)
Aplicado
Aplicado
No aplicado
(estándar)

Configuración y operación
C8 Mod.13 67
5.2.2 Configuración de rango de movimiento de la articulación n.º 2
C8-A701*** (C8), C8-A901*** (C8L)
Retire el tope mecánico instalado como opción estándar e instale el tope mecánico ajustable
(C8/C8L_J2). (Rango de movimiento estándar de la articulación n.º 2 158 a +65)
Perno de cabeza hueca hexagonal Perno M10×35×1
Torque de ajuste 32,0 ± 1,6 N·m (326 ± 16 kgf·cm)
d
e
d
e
Ángulo ()
158, +30
158, +65
Pulso (pulso)
C8-A701*** (C8)
-6245685
+1185890
-6245685
+ 2569428
C8-A901*** (C8L)
-6903178
+1310730
-6903178
+2839915
Tope mecánico ajustable (C8/C8L_J2)
Aplicado
Aplicado
(estándar)

Configuración y operación
68 C8 Mod.13
C8-A1401***(C8XL)
Retire el tope mecánico instalado como opción estándar e instale el tope mecánico ajustable
(C8XL_J2). (Rango de movimiento estándar de la articulación n.º 2 135 a +55)
Perno de cabeza hueca hexagonal Pernos M10×35×2
Torque de ajuste 32,0 ± 1,6 N·m (326 ± 16 kgf·cm)
d
e
d
e
Ángulo ()
125, +45
135, +55
Pulso (pulso)
C8-A1401*** (C8XL)
9830500
+3538980
10616940
+4325420
Tope mecánico
ajustable (C8XL_J2)
Aplicado
Aplicado
(estándar)
5.2.3 Configuración de rango de movimiento de la articulación n.º 3
Retire el tope mecánico instalado como opción estándar e instale el tope mecánico ajustable
(J3). (Rango de movimiento estándar de la articulación n.º 3 61 a +202)
Perno de cabeza hueca hexagonal Pernos M6×15×2
Torque de ajuste 13,0 ± 0,6 N·m (133 ± 6 kgf·cm)
f
g
f
g
Ángulo ()
51, +192
61, +202
Pulso (pulso)
C8-A701***
(C8)
1485483
+5592406
1776754
+5883677
C8-A901***
(C8L)
1856859
+6990528
2220949
+7354618
C8-A1401***
(C8XL)
3342336
+12582912
3997696
+13238272
Tope mecánico ajustable (J3)
Aplicado
Aplicado (estándar)

Configuración y operación
C8 Mod.13 69
5.3 Restricción de la operación del manipulador mediante una
combinación del ángulo de las articulaciones
Para evitar que los brazos del manipulador interfieran entre sí, se restringe la operación del
manipulador dentro del rango de movimiento especificado de acuerdo con la combinación
del ángulo de las articulaciones de los brazos n.º 1, n.º 2 y n.º 3.
La operación del manipulador está restringida y el manipulador se detiene cuando los
ángulos de las articulaciones del brazo están en las áreas grises de la siguiente figura.
La restricción de operación del manipulador está activada:
- Durante la ejecución del comando CP motion (Movimiento de CP)
- Cuando intenta ejecutar el comando Motion (Movimiento) para mover el manipulador al
punto objetivo (o pose) dentro del rango de movimiento especificado.
La restricción de operación del manipulador está desactivada:
- Los brazos del manipulador pasan momentáneamente por el rango de movimiento
especificado durante la ejecución del comando PTP motion (Movimiento de PTP),
aunque los ángulos de las articulaciones de los brazos estén en el área coloreada de las
figuras anteriores.

Configuración y operación
70 C8 Mod.13
C8-A701***(C8)
Combinación de las articulaciones n.º 2 y n.º 3
50 grados <= J1 <= 50 grados
Ángulo de la articulación n.º 2
Ángulo de la
articulación n.º 3
(grad.)
(grad.)
120 grados <= J1< 50 grados o 50 grados < J1<= 120 grados
Ángulo de la articulación n.º 2
Ángulo de la
articulación n.º 3
(grad.)
(grad.)
240 grados <= J1 < 120 grados o 120 grados < J1<= 240 grados
Joint #2 Angle
Joint #3 Angle
Combinación de las articulaciones n.º 1 y n.º 2
240 grados <= J1 <= 100 grados o 100 grados <= J1 <= 240 grados
Ángulo de la articulación n.º 1
Ángulo de la
articulación n.º 2
(grad.)
(grad.)
(Grados = )

Configuración y operación
C8 Mod.13 71
C8-A901***(C8L)
Combinación de las articulaciones n.º 2 y n.º 3
50 grados <= J1 <= 50 grados
Ángulo de la articulación n.º 2
Ángulo de la
articulación n.º 3
(grad.)
(grad.)
120 grados <= J1< 50 grados o 50 grados < J1<= 120 grados
Ángulo de la articulación n.º 2
Ángulo de la
articulación n.º 3
(grad.)
(grad.)
240 grados <= J1 < 120 grados o 120 grados < J1<= 240 grados
Ángulo de la articulación n.º 2
Ángulo de la
articulación n.º 3
(grad.)
Combinación de las articulaciones n.º 1 y n.º 2
240 grados <= J1 <= 100 grados o 100 grados <= J1 <= 240 grados
Ángulo de la articulación n.º 1
Ángulo de la
articulación n.º 2
(grad.)
(grad.)
(Grados = )

Configuración y operación
72 C8 Mod.13
C8-A1401***(C8XL)
Combinación de las articulaciones n.º 2 y n.º 3
110 grados <= J1 <= 110 grados
Ángulo de la articulación n.º 2
Ángulo de la
articulación n.º 3
(grad.)
(grad.)
140 grados < J1< 110 grados o 110 grados < J1< 140 grados
240 grados < J1< 220 grados o 220 grados < J1< 240 grados.
Ángulo de la articulación n.º 2
Ángulo de la
articulación n.º 3
(grad.)
(grad.)
220 grados <= J1<= 140 grados o 140 grados < J1< 220 grados
Ángulo de la articulación n.º 2
Ángulo de la
articulación n.º 3
(grad.)
(grad.)
(Grados = )

Configuración y operación
C8 Mod.13 73
5.4 Sistema de coordenadas
El punto de origen está en la cara de instalación del manipulador que intersecta con el eje
de giro de la articulación n.º 1.
Para conocer detalles acerca del sistema de coordenadas, consulte el Manual del usuario de
EPSON RC+.
Montaje en superficie
de mesa
Montaje en techo
Montaje en pared
+Z
+X
+Y
+Z
+X
+Y
+X
+Y
+Z
+X
+X
+Y
+Y
La configuración de BASE es adecuada para instalar el robot de manera oblicua.
La configuración de BASE puede cambiar un sistema de coordenadas específico del robot
y coincidir con el sistema de coordenadas mundial de Jog & Teach (Desplazar y Enseñar) y
del sistema de coordenadas del equipo.
Para conocer el procedimiento para la configuración de BASE, consulte el Manual de
referencia del lenguaje SPEL+. Comandos BASE
Con configuración de BASE
Sin configuración de BASE
+Z
+X
+Y
+Z
+Y
+Z
+X
+Y
+Z
+Y

Configuración y operación
74 C8 Mod.13
5.5 Cambio del robot
Esta sección describe la forma de cambiar el modelo del manipulador en EPSON RC+.
PRECAUCIÓN
■
Debe tener mucha precaución al cambiar el manipulador. Inicializa los parámetros de
calibración del robot (Hofs, CalPls), la información del eje adicional y los datos de
parámetros de PG.
Antes de cambiar el robot, asegúrese de guardar los datos de calibración mediante el
siguiente procedimiento.
1. En EPSON RC+ 7.0, seleccione el menú [Setup]-[System Configuration].
2. Seleccione [Controller] (Controlador)-[Robots]-[Robot**]-[Calibration] de la
lista de árbol. Luego, haga clic en <Save> (Guardar).
(1) En EPSON RC+ 7.0, seleccione el menú [Setup]-[System Configuration].
(2) Seleccione [Controller]-[Robots]-[Robot**] de la lista de árbol.
(3) Haga clic en el botón <Change…> (Cambiar). Aparecerá el siguiente cuadro de diálogo.
(4) Introduzca el nombre del robot y el número de serie impreso en la placa de información
del manipulador. Se puede ingresar cualquier número de serie. Sin embargo, introduzca
el número impreso en el manipulador.

Configuración y operación
C8 Mod.13 75
(5) Seleccione el tipo de robot en el cuadro [Robot type].
(6) Seleccione el nombre de la serie del manipulador en el cuadro [Series].
(7) Seleccione el modelo de robot en el cuadro [Model]. Los robots disponibles aparecerán en
función del formato del driver del motor instalado actualmente. Cuando se usa [Dry run]
(Simulacro), aparecerán todos los manipuladores de la serie seleccionada en el paso 6.
(8) Haga clic en el botón <OK> (Aceptar). Se reiniciará el controlador.
5.6 Configuración del rango cartesiano (rectangular) en el sistema
de coordenadas XY del manipulador
El rango cartesiano (rectangular) del sistema de coordenadas XY del manipulador se
especifica según el área de operación limitada del manipulador y la configuración de
XYLIM.
El área de operación limitada del manipulador está definida, de manera tal que el efector
final no interfiera con la parte posterior del manipulador. La configuración de XYLIM le
permite determinar los límites superior e inferior de las coordenadas X e Y.
El área de operación limitada del manipulador y la configuración de XYLIM solo
corresponde al software. Por lo tanto, esta configuración no cambia el rango físico. El rango
físico máximo se basa en la posición de los topes mecánicos.
Esta configuración está desactivada durante la operación de desplazamiento de una
articulación. Por lo tanto, tenga cuidado de no permitir que el efector final choque con el
manipulador o los equipos periféricos.
El método para cambiar la configuración de XYLIM varía según el software que se utilice.
EPSON
RC+
Defina la configuración de XYLIM en el panel [Tools]-[Robot manager]-[XYZ Limits]
(Límites XYZ).
También puede ejecutar el comando XYLim en la ventana [Command Window].

Configuración y operación
76 C8 Mod.13
6. Opciones
El manipulador de la serie C8 tiene las siguientes opciones.
6.1 Unidad de desbloqueo del freno
6.2 Unidad de la placa de la cámara
6.3 Adaptador de herramienta (brida ISO)
6.4 Topes mecánicos ajustables
6.5 Cables y tubos neumáticos del usuario
6.1 Unidad de desbloqueo del freno
Cuando el freno electromagnético está activado (como en estado de parada de emergencia),
no se mueve ningún brazo.
Puede mover los brazos manualmente, gracias a la unidad de desbloqueo del freno, mientras
el controlador está apagado o justo después de desembalar.
ADVERTENCIA
■
Al conectar o reemplazar la unidad de desbloqueo del freno o el conector corto
externo, apague la alimentación al controlador y a la unidad de desbloqueo del
freno. Insertar y retirar el conector cuando la alimentación está encendida puede
provocar una descarga eléctrica.
PRECAUCIÓN
■
Normalmente, suelte los frenos de las articulaciones uno por uno. Tenga cuidado
si necesita soltar los frenos de dos o más articulaciones de forma simultánea.
Soltar los frenos de dos o más articulaciones al mismo tiempo puede causar que
manos o dedos queden atrapados, o bien, daños al equipo o mal funcionamiento
del manipulador, ya que sus brazos se pueden mover en direcciones inesperadas.
■
Tenga cuidado con la caída del brazo cuando suelte el freno.
Mientras que suelta el freno, el brazo del manipulador caerá por su propio peso.
La caída de un brazo puede causar que manos y dedos queden atrapados, o
bien, provocar daños en el equipo o mal funcionamiento del manipulador.

Configuración y operación
C8 Mod.13 77
Ancho
180 mm
Profundidad
150 mm
Altura
87 mm
Peso (no se incluyen los cables).
1,7 kg
Cable al manipulador
2 m
Longitud del cable de alimentación
2 m
Cable de alimentación (EE. UU.)
100 V de especificación
Cable de alimentación (UE)
200 V de especificación
Conector corto M/C
Para cortocircuito del cable de
alimentación M/C
Cable de
alimentación
Interruptor Power
Desbloqueos del freno
Luz de
alimentación
A
Vista desde A
Precauciones para su uso
PRECAUCIÓN
■
Si se opera el manipulador sin conectar la unidad de desbloqueo del freno ni el
conector corto externo, los frenos no se pueden desbloquear y se pueden dañar.
Después de usar la unidad de desbloqueo del freno, asegúrese de conectar el
conector corto externo al manipulador o verificar la conexión del conector de la
unidad de desbloqueo del freno.
■
Conserve el conector corto externo.
De lo contrario, no podrá desbloquear los frenos.
■
Si activa la unidad de desbloqueo del freno, mientras el desbloqueo del freno está
presionado, se puede mover hacia abajo involuntariamente un brazo.
Antes de activar la unidad de desbloqueo del freno, asegúrese de que no esté
presionado el desbloqueo del freno.
■
Si activa la unidad de desbloqueo del freno sin el conector, puede provocar un
corto en el pin macho utilizado en el conector.
Antes de activar la unidad de desbloqueo del freno, asegúrese de que esté
conectado el conector.

Configuración y operación
78 C8 Mod.13
Instale la unidad de desbloqueo del freno
(1)
Apague el controlador.
(2)
Si el cable de alimentación M/C no está conectado al
controlador:
Conecte el conector corto M/C,
o conecte el controlador.
(Mantenga apagado el controlador)
El conector corto M/C se puede comprar por
separado.
Si el cable de alimentación M/C ya está conectado al
controlador:
Vaya al paso (3).
(3)
Retire el conector corto externo.
Conector corto externo
(4)
Conecte la unidad de desbloqueo del freno al conector
del cable de conexión.
Conector del
cable de conexión
Retire la unidad de desbloqueo del freno
(1)
Desactive la unidad de desbloqueo del freno.
(2)
Retire el cable de alimentación de la unidad de desbloqueo del freno.
(3)
Desconecte la unidad de desbloqueo del freno del conector del cable de conexión.
(4)
Si el conector corto M/C está conectado al cable de alimentación M/C, retire el
conector corto.
(5)
Conecte el conector corto externo al conector del cable de conexión.

Configuración y operación
C8 Mod.13 79
Cómo usar la unidad de desbloqueo del freno
PRECAUCIÓN
■
Tenga cuidado con la caída del brazo cuando suelte el freno.
Mientras que suelta el freno, el brazo del manipulador caerá por su propio peso.
La caída de un brazo puede causar que manos y dedos queden atrapados, o
bien, provocar daños en el equipo o mal funcionamiento del manipulador.
■
Si el brazo cuyo freno desbloqueó se mueve de forma extraña o más rápido de lo
habitual, detenga la operación inmediatamente y comuníquese con el proveedor
de su región. Se puede haber dañado la unidad de desbloqueo del freno.
Si sigue operando el manipulador, puede provocar averías en el manipulador, o
bien, manos o dedos pueden quedar atrapados.
Cable de
alimentación
Interruptor Power
Desbloqueos del freno
Luz de
alimentación
(1)
Enchufe el cable de alimentación de la unidad de desbloqueo del freno.
(2)
Enchufe el cable de alimentación al enchufe de la fuente de alimentación.
(3)
Active la unidad de desbloqueo del freno.
Cuando está activada la unidad de desbloqueo del freno, se enciende la luz de
alimentación.
(4)
Presione el interruptor del brazo (J1 a J6) que desea mover y luego, muévalo.
Presione nuevamente el interruptor. Se desbloqueará el freno.
Se activará el freno cuando presione una vez más el interruptor.
Para mover el brazo cuyo freno se desbloqueó, se requieren dos personas o más (una
presiona el interruptor y la otra mueve el brazo). El brazo puede ser muy pesado y se
necesita bastante fuerza para moverse.
NOTA

Configuración y operación
80 C8 Mod.13
6.2 Unidad de la placa de la cámara
Para instalar la cámara al manipulador de la serie C8, se necesita la unidad de placa de la
cámara.
Apariencia del extremo del brazo con la cámara
Unidad de placa
de la cámara
Cámara
B: Placa media de la cámara
D
C: Placa base de la cámara
A: Placa adaptadora
para la cámara
E
F
D
D
Piezas incluidas
Cantidad
A
Placa adaptadora para la
cámara
1
B
Placa media de la cámara
1
C
Placa base de la cámara
1
D
Tornillos de cabeza hueca
hexagonal
M412
6
E
Tornillos de cabeza hueca
hexagonal
M420
2
F
Arandela de ajuste para M4
(arandela pequeña)
2
Instalación
Los agujeros de montaje para la placa base de la cámara del manipulador de la serie C8
Agujero de montaje de la
placa base de la cámara
Para conocer los pasos de instalación, consulte el siguiente manual:
Hardware y configuración, Opción de Vision Guide 7.0 de EPSON RC+
Dimensión de la unidad de placa de la cámara

Configuración y operación
C8 Mod.13 81
(para fijar los cables)
Cámara
6×M4 profundidad 8,5

Configuración y operación
82 C8 Mod.13
Las dimensiones de X e Y cambiarán, dependiendo de la posición de la placa media de la
cámara y del tamaño de la cámara. Consulte la siguiente tabla para conocer los valores.
Placa media de la cámara
La placa media de la cámara usa los agujeros
de montaje A a D.
Como usa distintos agujeros de montaje, se
puede instalar a la placa base de la cámara en
cuatro posiciones distintas.
Cámara y rango de movimiento de la articulación n.º 5 del manipulador de la serie
C8 (valores de referencia)
El rango de movimiento de la articulación n.º 5 varía según la posición de montaje de placa
media de la cámara y de la cámara que utilice.
La siguiente tabla muestra el rango de movimiento (valores de referencia) basado en las
cámaras disponibles para esta opción y las posiciones de montaje de la placa media de la
cámara. Los valores de la tabla pueden variar dependiendo de cómo se fijan los cables.
Si cambia la posición Y, puede extender la distancia desde la superficie de montaje del
efector final para la cámara. Además, puede instalar el efector final más grande. Sin embargo,
tenga cuidado con el rango de movimiento de la articulación n.º 5, que será limitado en este
caso.
A
B
C
D
X
Cámara USB,
cámara GigE
135 a +70
135 al +60
135 al +45
135 al +35
95,5 mm
A
B
C
D
Y
50 mm
30 mm
10 mm
10 mm
Dirección del movimiento de la articulación n.º 5

Configuración y operación
C8 Mod.13 83
6.3 Adaptador de herramienta (brida ISO)
Para usar el adaptador de herramienta, puede instalar el efector final, cuyas dimensiones
están diseñadas para la brida ISO de los manipuladores de la serie C8.
Piezas incluidas
Cantidad
Brida ISO
1
Brida
1
Pin
2
Tornillo de cabeza hueca hexagonal con cabezal bajo
M510
6
Tornillo de cabeza hueca hexagonal M515
4
Dimensiones de la brida ISO
4-M5 profundidad 12
(a una inclinación de 90)
profundidad 5
profundidad 4
(grad.)
Para instalar la brida ISO
(1)
Presione y ajuste el pin a la brida del extremo del brazo
n.º 6.
Proyección del pin: 4 mm desde la brida
Pin
(2)
Alinee el pin y el agujero del pin en la brida, y luego
instale la brida.
Tornillo de cabeza hueca hexagonal: 4-M515
Tornillo de cabeza hueca
hexagonal 4-M5×15
Brida
(3)
Presione y ajuste el pin a la brida instalada.
Saliente del pin: 4 mm desde la brida
Pin
(4)
Alinee el pin y el agujero del pin en la brida ISO, y
luego instale la brida.
Tornillo de cabeza hueca hexagonal
con cabezal bajo: 6-M510
Brida ISO
Tornillo de cabeza hueca
hexagonal con cabezal bajo
6-M5×10

Configuración y operación
84 C8 Mod.13
6.4 Topes mecánicos ajustables
Esta opción se utiliza para limitar mecánicamente el rango de movimiento del manipulador.
Para conocer más sobre la instalación y las medidas de restricción de ángulos, consulte
Configuración y operación: 5.2 Configuración del rango de movimiento mediante los topes
mecánicos.
Tope mecánico ajustable (J1)
Elemento
Cantidad
Tope mecánico ajustable (J1)
1
Tornillo de cabeza hueca hexagonal M12×30
2
Tope mecánico ajustable (C8/C8L_J2)
Elemento
Cantidad
Tope mecánico ajustable (C8/C8L_J2)
1
Tornillo de cabeza hueca hexagonal M10×35
1
Tope mecánico ajustable (C8XL_J2)
Elemento
Cantidad
Tope mecánico ajustable (C8XL_J2)
1
Tornillo de cabeza hueca hexagonal M10×35
2
Tope mecánico ajustable (J3)
Elemento
Cantidad
Tope mecánico ajustable (J3)
1
Tornillo de cabeza hueca hexagonal M6×15
2

Configuración y operación
C8 Mod.13 85
6.5 Cables y tubos neumáticos del usuario
Use las siguientes opciones cuando utilice el cableado y la tubería internos para el drive del
efector final.
Conector rápido para el uso del cliente (ø6 recto)
Elemento
Cantidad
Fabricante
Estándar
Conector rápido de ø6
recto
2
SMC
KQ2S06-M6N
* Se incluye como estándar. Las piezas se pueden comprar como adicionales en caso de
pérdida o escasez.
Conector rápido para el uso del cliente (ø6 de codo)
Elemento
Cantidad
Fabricante
Estándar
Conector rápido de ø6 de
codo
2
SMC
KQ2L06-M6N
* Se incluye como estándar. Las piezas se pueden comprar como adicionales en caso de
pérdida o escasez.
Juego de conectores de usuario estándar (D-sub)
Elemento
Cantidad
Fabricante
Estándar
Conector
2
JAE
DA-15PF-N
(Tipo de soldadura)
Campana de
sujeción
2
HRS
HDA-CTH(4-40)(10)
(Tornillo de fijación
del conector:
#4-40 UNC)
* Incluido como estándar para los manipuladores de modelo estándar y para salas blancas.
Las piezas se pueden comprar como adicionales en caso de pérdida o de escasez.
Juego de conectores de usuario impermeables (D-sub)
Elemento
Cantidad
Fabricante
Estándar
Conector
2
HARTING
09 67 015 5615
(Tipo de soldadura)
Campana de
sujeción
2
HARTING
09 67 015 0538
(Tornillo de fijación
del conector:
#4-40 UNC)
* Incluido como estándar para los manipuladores de modelo de protección.
Las piezas se pueden comprar como adicionales en caso de pérdida o de escasez.
Juego de conectores de usuario impermeables (Ethernet)
Elemento
Cantidad
Fabricante
Estándar
Conector
2
HARTING
09 45 145 1560
* No se incluyen como estándar. Compre el elemento de ser necesario.
Observe que los valores nominales de protección de IP67 no se pueden cumplir si se
utilizan otros conectores.

Mantenimiento
Este volumen contiene los procedimientos de mantenimiento con las precauciones de seguridad para los
manipuladores de la serie C8.



Mantenimiento
88 C8 Mod.13
1. Mantenimiento de seguridad
Lea atentamente este capítulo, este manual y los demás manuales relacionados para
comprender los procedimientos de mantenimiento seguro antes de realizar cualquier tipo de
mantenimiento.
Solo se debe permitir que personal autorizado que ha realizado una capacitación
en seguridad realice mantenimiento al robot.
La capacitación en seguridad es el programa para los operadores de robots
industriales que cumple con las leyes y los reglamentos de cada país.
El personal que ha realizado la capacitación en seguridad adquiere conocimiento
acerca de robots industriales (operaciones, enseñanza, etc.), acerca de las
inspecciones y conocimiento de normas y reglamentos relacionados.
Se permite que el personal que haya completado la capacitación en sistemas de
robot y en mantenimiento que haya realizado el fabricante, el distribuidor o la
empresa incorporada localmente, realice el mantenimiento.
ADVERTENCIA
■
No retire ninguna pieza, a menos que así se indique en este manual. Siga
estrictamente el procedimiento de mantenimiento, como se describe. El retiro
incorrecto de piezas o el mantenimiento inadecuado no solo pueden causar el
mal funcionamiento del sistema de robot, sino que además pueden generar
graves problemas de seguridad.
■
Si no ha recibido la capacitación, manténgase alejado del manipulador mientras
esté encendido. No ingrese al área de operación mientras la energía esté
encendida. Ingresar al área de funcionamiento con la energía ENCENDIDA es
extremadamente peligroso y puede provocar graves problemas de seguridad, ya
que es posible que el manipulador se mueva, incluso si parece estar detenido.
■
Cuando revise la operación del manipulador después de reemplazar piezas,
asegúrese de revisarlo desde fuera del área protegida. Revisar la operación del
manipulador mientras está en el interior del área protegida puede causar
problemas graves de seguridad, ya que el manipulador se puede mover de
improviso.
■
Antes de operar el sistema de robot, asegúrese de que tanto los interruptores de
parada de emergencia como el interruptor de protección funcionen
correctamente. Operar el sistema de robot cuando los interruptores no funcionan
correctamente es extremadamente peligroso y puede provocar lesiones
corporales graves o daños graves al sistema de robot, ya que los interruptores
no pueden cumplir las funciones para las que están diseñados en una
emergencia.
ADVERTENCIA
■
Para cortar la energía hacia el sistema de robot, desconecte el enchufe de la
fuente de alimentación. Asegúrese de conectar el cable de alimentación de CA
a un tomacorriente.
NO lo conecte directamente a la fuente de alimentación de la fábrica.
■
Antes de realizar cualquier procedimiento de reemplazo, apague el controlador
y los equipos relacionados, luego desconecte el enchufe de la fuente de
alimentación.
Realizar cualquier procedimiento de reemplazo con la energía encendida es
extremadamente peligroso y puede provocar una descarga eléctrica o el mal
funcionamiento del sistema de robot.
■
Al conectar o reemplazar la unidad de desbloqueo del freno o el conector corto
externo, apague la alimentación al controlador y a la unidad de desbloqueo del
freno. Conectar y desconectar el conector cuando la alimentación está
encendida puede provocar una descarga eléctrica.

Mantenimiento
C8 Mod.13 89
PRECAUCIÓN
■
Asegúrese de conectar los cables correctamente. No permita una tensión
innecesaria en los cables. (No coloque objetos pesados en los cables. No doble
ni tire de los cables por la fuerza). Puede generar daños en los cables, la
desconexión o error de contacto. Esto es extremadamente peligroso y puede
provocar descargas eléctricas o el funcionamiento incorrecto del sistema de
robot.
■
Si se opera el manipulador sin conectar la unidad de desbloqueo del freno o el
conector corto externo, los frenos no se pueden desbloquear y se pueden dañar.
Después de usar la unidad de desbloqueo del freno, asegúrese de conectar el
conector corto externo al manipulador o verificar la conexión del conector de la
unidad de desbloqueo del freno.
■
Los brazos del manipulador se pueden calentar después dela operación del
manipulador, debido a la generación de calor de los motores. Tenga cuidado
cuando realice el mantenimiento.
2. Mantenimiento general
Este capítulo describe los procedimientos de inspección de mantenimiento. Realizar
inspecciones de mantenimiento adecuadamente es esencial para evitar problemas y
garantizar la seguridad.
Asegúrese de realizar las inspecciones de mantenimiento en conformidad con el programa.
2.1 Inspección de mantenimiento
2.1.1 Programa de inspección de mantenimiento
Los puntos de inspección se dividen en cinco etapas: diaria, mensual, trimestral, semestral
y anual. Los puntos de inspección se agregan en cada etapa.
Si el manipulador se opera durante 250 horas o más al mes, se deben agregar puntos de
inspección cada 250 horas, 750 horas, 1500 horas y 3000 horas de operación.
Punto de inspección
Inspección
diaria
Inspección
mensual
Inspección
trimestral
Inspección
semestral
Inspección
anual
Revisión
(reemplazo)
1 mes (250 h)
Inspeccionar todos los días
√
2 meses (500 h)
√
3 meses (750 h)
√
√
4 meses (1000 h)
√
5 meses (1250 h)
√
6 meses (1500 h)
√
√
√
7 meses (1750 h)
√
8 meses (2000 h)
√
9 meses (2250 h)
√
√
10 meses (2500 h)
√
11 meses (2750 h)
√
12 meses (3000 h)
√
√
√
√
13 meses (3250 h)
√
20.000 h
√
h = hora

Mantenimiento
90 C8 Mod.13
2.1.2 Punto de inspección
Inspección mientras está APAGADO (el manipulador no está en funcionamiento)
Punto de inspección
Lugar de inspección
Diario
Mensual
Trimestral
Semestral
Anual
Verifique la soltura o juego de los
pernos/tornillos.
Apriételos, de ser necesario.
(Para el torque de ajuste, consulte
Mantenimiento: 2.4 Apretar pernos
de cabeza hueca hexagonal).
Pernos de montaje del
efector final
√
√
√
√
√
Pernos de montaje del
manipulador
√
√
√
√
√
Pernos de bloqueo de cada
brazo
√
√
√
√
√
Pernos/tornillos alrededor del
eje
√
Pernos/tornillos que fijan
motores, unidades de
engranaje reductor, etc.
√
Verifique si los conectores están
sueltos.
Si los conectores están sueltos,
presiónelos o apriételos de forma
segura.
Conectores externos del
manipulador (en las placas
del conector, etc.).
√
√
√
√
√
Unidad de cable del
manipulador
√
√
√
√
Verifique visualmente si hay
defectos externos.
Limpie, de ser necesario.
Apariencia externa del
manipulador
√
√
√
√
√
Cables externos
√
√
√
√
Verifique si están doblados o en
posición incorrecta. Repárelos o
colóquelos correctamente, de ser
necesario.
Protecciones, etc.
√
√
√
√
√
Verifique la tensión de las correas
de regulación.
Ténselas, de ser necesario.
Base
Al interior de los brazos n.º 1,
n.º 2, n.º 3, n.º 4
√
√
Condiciones de engrase
Consulte Mantenimiento: 2.3 Engrase.
Batería
Consulte Mantenimiento: 11 Reemplazo de la batería.
Revise que esté conectado el
conector corto externo o el
conector de la unidad de
desbloqueo del freno.
El conector corto externo en
la parte posterior del
manipulador o el conector de
la unidad de desbloqueo del
freno.
√
√
√
√
√

Mantenimiento
C8 Mod.13 91
Inspeccionar mientras está ENCENDIDO (el manipulador está en operación)
Punto de inspección
Lugar de inspección
Diario
Mensual
Trimestral
Semestral
Anual
Revise el rango de movimiento
Cada articulación
√
Mueva los cables hacia adelante y
atrás suavemente para verificar si hay
cables desconectados.
Cables externos
√
√
Empuje cada brazo en el estado
MOTOR ON (Motor encendido) para
verificar si hay juego.
Cada brazo
√
Verifique si ocurren sonidos o
vibraciones inusuales.
Completo
√
√
√
√
√
Mida la precisión varias veces con un
comparador de cuadrante.
Completo
√
Cuando esté instalada la unidad de
desbloqueo del freno:
Conecte la unidad de desbloqueo del
freno y revise el sonido del freno
electromagnético con el freno
desbloqueado.
Si no produce un sonido, reemplace
el freno.
Cuando no esté instalada la unidad de
desbloqueo del freno:
Ejecute el comando Brake off
(Desactivar el freno) (desactivación
del freno, articulación n.º) desde la
ventana de comando de EPSON RC+
mientras los motores están
apagados, y luego revise el sonido del
freno electromagnético. Si no produce
un sonido, reemplace el freno.
Freno
√
√
√
√
√
Revise si está operando el ventilador
(C8-A1401*** (C8XL) solamente)
Ventilador
√
√
√
√
√

Mantenimiento
92 C8 Mod.13
2.2 Revisión (Reemplazo de piezas)
PRECAUCIÓN
■
El tiempo de revisión se basa en la suposición de que todas las articulaciones se
operan para una distancia equivalente. Si una articulación en particular tiene
mucho trabajo o una carga alta, recomendamos revisar todas las articulaciones
(tantas como sea posible) antes de superar las 20.000 horas de operación con la
articulación como base.
Las piezas de las articulaciones del manipulador pueden causar una disminución en la
precisión o un mal funcionamiento debido al deterioro del manipulador causado por el uso
a largo plazo. A fin de usar el manipulador a largo plazo, recomendamos revisar las piezas
(reemplazo de piezas).
Una indicación general para el período entre revisiones es de 20.000 horas de operación del
manipulador.
Sin embargo, el lapso puede variar según las condiciones de uso y el grado de carga (como
cuando se opera con la velocidad de movimiento y la aceleración/desaceleración máximas
en operación continua) aplicado en el manipulador.
Para EPSON RC+ 7.0. Ver. 7.2 x o posterior (firmware Ver. 7.2 x.x. o posterior), el plazo
de reemplazo recomendado para las piezas sujetas a mantenimiento (motores, unidades de
engranaje reductor y correas de regulación) se puede comprobar en el cuadro de diálogo
[Maintenance] (Mantenimiento) de EPSON RC+ 7.0.
Para conocer detalles, consulte el siguiente manual.
Controlador de robot RC700 / RC700-A Mantenimiento 6. Alarma
Nota:
El plazo de reemplazo recomendado para las piezas de mantenimiento es cuando alcanzan
una vida útil de L10 (tiempo para un 10 % de probabilidad de error). En el cuadro de diálogo
[Maintenance], la vida útil de L10 se muestra como 100%.
NOTA

Mantenimiento
C8 Mod.13 93
Las horas de operación del manipulador se pueden revisar en el diálogo [Controller Status
Viewer] (Visor de estado del controlador) -[Motor On Hours] (Horas de funcionamiento del
motor).
(1) En EPSON RC+, seleccione menú-[Tools]-[Controller] (Herramientas - Controlador)
para abrir el diálogo [Controller Tools] (Herramientas del controlador).
(2) Haga clic en el botón <View Controller Status> (Ver estado del controlador) para abrir
el diálogo [Browse For Folder] (Navegar hasta carpeta).
(3) Seleccione la carpeta en la que se almacena la información.
(4) Haga clic en <OK> (Aceptar) para ver el diálogo [Controller Status Viewer] (Visor
de estado del controlador).
(5) Seleccione [Robot] desde el menú de árbol a la izquierda.
Para las piezas sujetas a revisión, consulte Mantenimiento 17. Lista de piezas de
mantenimiento.
Para conocer detalles sobre el reemplazo de cada pieza, consulte la sección Mantenimiento.
Comuníquese con el proveedor de su región para obtener más información.

Mantenimiento
94 C8 Mod.13
2.3 Engrase
Las unidades de engranaje reductor y el engranaje cónico necesitan engrase con regularidad.
Use solo la grasa que se especifica en la siguiente tabla.
ADVERTENCIA
■
Antes de engrasar, apague el controlador y los equipos relacionados, luego
desconecte el enchufe de la fuente de alimentación. Realizar cualquier
procedimiento de reemplazo con la energía encendida es extremadamente
peligroso y puede provocar una descarga eléctrica o el mal funcionamiento del
sistema de robot.
PRECAUCIÓN
■
Mantenga el manipulador con suficiente grasa. Operar el manipulador sin
suficiente grasa generará ruido o dañará las piezas deslizantes o causará un
rendimiento insuficiente del mismo. Si se dañan las piezas, se necesitará mucho
tiempo y dinero para repararlas.
■
Si le entra grasa en los ojos, la boca o cae en su piel, siga las instrucciones a
continuación.
Si le entra grasa en los ojos:
Enjuáguelos a fondo con agua limpia y, luego, consulte a un médico de
inmediato.
Si le entra grasa en la boca:
Si se ingiere, no induzca el vómito. Consulte a un médico de inmediato.
Si la grasa solo entra en su boca, enjuáguese la boca a fondo con agua.
Si le cae grasa en la piel:
Enjuague el área a fondo con agua y jabón.
Pieza de engrase
Intervalo de engrase
Grasa
Articulaciones n.º 1,
n.º 2, n.º 3, n.º 4,
n.º 5
Unidades de engranaje
reductor
Tiempo de revisión
SK-1A
Articulación n.º 6
SK-2
Articulación n.º 6
Engranaje cónico
Una vez al año (cada 8000 horas)
SK-2
Como indicación general, realice el engrase en los mismos lapsos que las revisiones.
Sin embargo, el lapso puede variar según las condiciones de uso y el grado de carga (como
cuando se opera con la velocidad de movimiento y la aceleración/desaceleración máximas
en operación continua) aplicado en el manipulador.

Mantenimiento
C8 Mod.13 95
Nombre
Cantidad
Nota
Piezas de
mantenimiento
Juego de engrase
1
1674592
(Un juego de pistola de engrase, engrasador y
plantilla de extensión)
Tapón de grasa
1
1656158
Junta tórica para entrada de
grasa
1
1657289
Herramientas
Llave hexagonal
(ancho a lo largo de
superficies planas: 2 mm
1
Para los pernos de cabeza hueca hexagonal
embutidos M3
Llave hexagonal
(ancho a lo largo de
superficies planas: 2,5 mm
1
Para los pernos de cabeza hueca hexagonal M3
Destornillador de cruz (n.º 2)
1
Para tornillos con ranura en cruz
Destornillador de cabeza
plana
1
Para el tapón de grasa
Antes de engrasar, mueva el manipulador para que la entrada de grasa no esté mirando hacia
abajo.
No retire el tapón de grasa mientras la entrada de grasa está mirando hacia abajo. De lo
contrario, el contenido de aceite que está separado de la grasa puede filtrarse.
No utilice ninguna herramienta para instalar y retirar el engrasador y la plantilla de
extensión de la tubería de engrase. Siempre manipúlelos directamente con la mano.
Si se instala o retira el engrasador o la plantilla de extensión de la tubería de engrase con
una herramienta como una llave de tuercas, se pueden dañar.
NOTA
NOTA

Mantenimiento
96 C8 Mod.13
2.3.1 Unidad de engranaje reductor de la articulación n.º 1 (montaje
en superficie de mesa)
Engrase
1. Retire la cubierta lateral del brazo n.º 1.
Para conocer detalles, consulte Mantenimiento: 3. Cubiertas.
2. Retire el tapón de grasa desde la entrada de
grasa de la articulación n.º 1 ubicada al interior
del brazo n.º 1.
3. Conecte el engrasador con la entrada de grasa de
la articulación n.º 1.
4. Inyecte grasa desde el engrasador con una
pistola.
Grasa: SK-1A
Cantidad de grasa: 11 kg
5. Retire el engrasador de la entrada de grasa de la
articulación n.º 1.
6. Conecte el tapón de grasa con la entrada de
grasa de la articulación n.º 1.
Si el tapón de grasa está dañado o deteriorado,
cámbielo por uno nuevo.
7. Instale la cubierta lateral del brazo n.º 1.
Para conocer detalles, consulte Mantenimiento: 3. Cubiertas.

Mantenimiento
C8 Mod.13 97
2.3.2 Unidad de engranaje reductor de la articulación n.º 1
(Montaje en techo, montaje en pared)
Engrase
1. Retire la cubierta de la entrada de grasa de la
base.
Pernos de cabeza plana hueca hexagonal: 4-
M36
2. Retire la junta tórica que se ubica en la ranura
de la base.
3. Retire el tapón de grasa desde la entrada de
grasa de la articulación n.º 1 ubicada al interior
de la base.
4. Conecte la plantilla de extensión de la plantilla
de la tubería de engrase y el engrasador con la
entrada de grasa de la articulación n.º 1.
5. Inyecte grasa desde el engrasador con una
pistola.
Grasa: SK-1A
Cantidad de grasa: 11 kg
6. Retire el engrasador y la plantilla de extensión
de la tubería de engrase de la entrada de grasa
de la articulación n.º 1.
7. Conecte el tapón de grasa con la entrada de
grasa de la articulación n.º 1.
Si el tapón de grasa está dañado o deteriorado,
cámbielo por uno nuevo.
8. Aplique una capa delgada de grasa (SK-1A) en la junta tórica.
Encaje la junta tórica en la ranura de la base.
No permita que la junta tórica se salga de la ranura.
Si la junta tórica está hinchada, dañada o deteriorada, cámbiela por una nueva.

Mantenimiento
98 C8 Mod.13
9. Instale la cubierta de la entrada de grasa de la
base.
Pernos de cabeza plana hueca hexagonal: 4-
M36
Torque de ajuste: 2,0 0,1 N·m
2.3.3 Unidad de engranaje reductor de la articulación n.º 2
Engrase
1. Retire el tapón de grasa desde la entrada de
grasa de la articulación n.º 2 en el brazo n.º 1.
2. Conecte el engrasador con la entrada de grasa
de la articulación n.º 2.
3. Inyecte grasa desde el engrasador con una
pistola.
Grasa: SK-1A
Cantidad de grasa: 6 g (C8, C8L)
12 g (C8XL)
4. Retire el engrasador de la entrada de grasa de la
articulación n.º 2.
5. Conecte el tapón de grasa con la entrada de
grasa de la articulación n.º 2.
Si el tapón de grasa está dañado o deteriorado,
cámbielo por uno nuevo.

Mantenimiento
C8 Mod.13 99
2.3.4 Unidad de engranaje reductor de la articulación n.º 3
Engrase
1. Retire el tapón de grasa desde la entrada de
grasa de la articulación n.º 3 en el brazo n.º 2.
2. Conecte el engrasador con la entrada de grasa de
la articulación n.º 3.
3. Inyecte grasa desde el engrasador con una
pistola.
Grasa: SK-1A
Cantidad de grasa: 3 g
4. Retire el engrasador de la entrada de grasa de la
articulación n.º 3.
5. Conecte el tapón de grasa con la entrada de
grasa de la articulación n.º 3.
Si el tapón de grasa está dañado o deteriorado,
cámbielo por uno nuevo.

Mantenimiento
100 C8 Mod.13
2.3.5 Unidad de engranaje reductor de la articulación n.º 4
Engrase
1. Retire el tapón de grasa desde la entrada de
grasa de la articulación n.º 4 en el brazo n.º 4.
2. Conecte el engrasador con la entrada de grasa de
la articulación n.º 4.
La entrada de grasa de la articulación n.º 4 es el
agujero de conexión del tapón de grasa que se
ubica cerca de la etiqueta con un “4” impreso.
La posición de la entrada de grasa cambia
según el modelo. Identifique con cuidad la
posición correcta.
3. Inyecte grasa desde el engrasador
con una pistola.
Grasa: SK-1A
Cantidad de grasa: 2 g
4. Retire el engrasador de la entrada de grasa de la
articulación n.º 4.
5. Conecte el tapón de grasa con la entrada de
grasa de la articulación n.º 4.
Si el tapón de grasa está dañado o deteriorado,
cámbielo por uno nuevo.
NOTA

Mantenimiento
C8 Mod.13 101
2.3.6 Unidad de engranaje reductor de la articulación n.º 5
Engrase
1. Retire el tapón de grasa desde la entrada de grasa
de la articulación n.º 5 en el brazo n.º 5.
2. Conecte el engrasador con la entrada de grasa de
la articulación n.º 5.
La entrada de grasa de la articulación n.º 5 es el
agujero de conexión del tapón de grasa que se
ubica cerca de la etiqueta con un “5” impreso.
Tenga cuidado de no confundirlo con la entrada
de grasa de la articulación n.º 6.
3. Inyecte grasa desde el engrasador con una
pistola.
Grasa: SK-1A
Cantidad de grasa: 1 g
Tenga cuidado de no mezclar la grasa con la que
se usó en la articulación n.º 6 (SK-2).
4. Retire el engrasador de la entrada de grasa de la
articulación n.º 5.
5. Conecte el tapón de grasa con la entrada de grasa
de la articulación n.º 5.
Si el tapón de grasa está dañado o deteriorado,
cámbielo por uno nuevo.
NOTA
NOTA

Mantenimiento
102 C8 Mod.13
2.3.7 Unidad de engranaje reductor de la articulación n.º 6
Engrase
1. Retire el tapón de grasa desde la entrada de
grasa de la articulación n.º 6 en el brazo n.º 5.
2. Conecte el engrasador con la entrada de grasa
de la articulación n.º 6.
La entrada de grasa de la articulación n.º 6 es el
agujero de conexión del tapón de grasa que se
ubica cerca de la etiqueta con un “6” impreso.
Tenga cuidado de no confundirlo con la entrada
de grasa de la articulación n.º 5.
3. Inyecte grasa desde el engrasador con una
pistola.
Grasa: SK-2
Cantidad de grasa: 0,5 g
Tenga cuidado de no mezclar la grasa con la que
se usó en la articulación n.º 5 (SK-1A).
4. Retire el engrasador de la entrada de grasa de la
articulación n.º 6.
5. Conecte el tapón de grasa con la entrada de
grasa de la articulación n.º 6.
Si el tapón de grasa está dañado o deteriorado,
cámbielo por uno nuevo.
NOTA
NOTA

Mantenimiento
C8 Mod.13 103
2.3.8 Engranaje cónico de la articulación n.º 6
Engrase
1. Retire la cubierta de la entrada de grasa del
brazo n.º 5.
Pernos de cabeza hueca hexagonal: 4-M36
2. Retire la junta tórica que se ubica en la ranura
de la base.
3. Aplique grasa a la superficie de contacto del
engranaje cónico al interior del brazo n.º 5.
Grasa: SK-2
Cantidad de grasa: 2 g
4. Aplique una capa delgada de grasa (SK-2) en la
junta tórica.
Encaje la junta tórica en la ranura de la base.
No permita que la junta tórica se salga de la
ranura.
Si la junta tórica está hinchada, dañada o
deteriorada, cámbiela por una nueva.
5. Instale la cubierta de la entrada de grasa del
brazo n.º 5.
Pernos de cabeza hueca hexagonal: 4-M36
Torque de ajuste: 2,0 0,1 N·m

Mantenimiento
104 C8 Mod.13
2.4 Apretar pernos de cabeza hueca hexagonal
Los pernos de cabeza hueca hexagonal (en adelante llamados “pernos”) se usan en lugares
en los que se necesita fuerza mecánica. Estos pernos se aprietan con los torques de ajuste
que aparecen en las siguientes tablas.
Cuando sea necesario volver a apretar estos pernos en algunos procedimientos en este
manual (excepto en casos especiales, según se indique), use un torquímetro para que los
pernos queden apretados con los torques de ajuste correctos que se muestran a continuación.
Tornillo
Torque de ajuste
Consulte a continuación acerca del tornillo de
fijación.
M3
2,0 ± 0,1 Nm
(21 ± 1 kgfcm)
Tornillo de
fijación
Torque de ajuste
M4
4,0 ± 0,2 Nm
(41 ± 2 kgfcm)
M4
2,4 ± 0,1 Nm
(26 ± 1 kgfcm)
M5
8,0 ± 0,4 Nm
(82 ± 4 kgfcm)
M5
3,9 ± 0,2 Nm
(40 ± 2 kgfcm)
M6
13,0 ± 0,6 Nm
(133 ± 6 kgfcm)
M6
8,0 ± 0,4 Nm
(82 ± 4 kgfcm)
M8
32,0 ± 1,6 Nm
(326 ± 16 kgfcm)
M10
58,0 ± 2,9 Nm
(590 ± 30 kgfcm)
M12
100,0 ± 5,0 Nm
(1,020 ± 51 kgfcm)
Se recomienda apretar los pernos alineados en una circunferencia con un patrón cruzado,
como se muestra en la figura a continuación.
1
5
3
7
2
6
4
8
Agujero
para
pernos
No apriete todos los pernos firmemente a la vez.
Divida la cantidad de veces que se aprietan los
pernos en dos o tres y apriete los pernos firmemente
con una llave hexagonal. Luego, use un torquímetro
para apretar los pernos con los torques de ajuste que
se muestran en la tabla anterior.

Mantenimiento
C8 Mod.13 105
2.5 Distribución de las piezas de mantenimiento
Unidad de engranaje reductor
de la articulación n.º 2
Motor + freno electromagnético
de la articulación n.º 2
Correa de regulación de la
articulación n.º 2
Freno electromagnético de la
articulación n.º 1
Motor de la articulación n.º 1
Correa de regulación de la articulación n.º 1
Unidad de engranaje reductor de
la articulación n.º 1
Unidad de engranaje reductor
de la articulación n.º 3
Motor + freno electromagnético
de la articulación n.º 3
Correa de regulación
de la articulación n.º 3
Luz LED
(Figura: C8-A1401* (C8XL))
Motor + freno electromagnético
de la articulación n.º 5
Correa de
regulación de la
articulación n.º 5
Motor + freno electromagnético
de la articulación n.º 6
Correa de regulación de
la articulación n.º 6
Juego de la unidad de
engranaje reductor de las
articulaciones n.º 5, n.º 6
Freno electromagnético
de la articulación n.º 4
Motor de la
articulación n.º 4
Unidad de engranaje
reductor de la
articulación n.º 4
Correa de regulación de la
articulación n.º 4
Placa de baterías
Batería
Placa de control 2
Placa de control 1
Ventilador
Ventilador

Mantenimiento
106 C8 Mod.13
3. Cubiertas
Este capítulo describe los métodos para retirar e instalar las cubiertas y las empaquetaduras
que son comunes para todos los procedimientos de mantenimiento según el modelo de
manipulador.
S: Modelo estándar
C: Modelo para salas blancas y ESD
P: Modelo de protección
ADVERTENCIA
■
No conecte ni desconecte los conectores del motor mientras el sistema de robot
esté encendido. Conectar o desconectar los conectores del motor con la energía
encendida es extremadamente peligroso y puede provocar lesiones corporales
graves, ya que el manipulador puede moverse de manera anormal; además,
puede provocar descargas eléctricas y el mal funcionamiento del sistema de
robot.
■
Para cortar la energía hacia el sistema de robot, desconecte el enchufe de la
fuente de alimentación. Asegúrese de conectar el cable de alimentación de CA a
un tomacorriente.
NO lo conecte directamente a la fuente de alimentación de la fábrica.
■
Antes de realizar cualquier procedimiento de reemplazo, apague el controlador y
los equipos relacionados, luego desconecte el enchufe de la fuente de
alimentación.
Realizar cualquier procedimiento de reemplazo con la energía encendida es
extremadamente peligroso y puede provocar una descarga eléctrica o el mal
funcionamiento del sistema de robot.
■
Tenga cuidado de no introducir sustancias externas en el manipulador, los
conectores y los pines durante el mantenimiento. Encender la energía del sistema
de robot cuando hay sustancias externas en su interior es extremadamente
peligroso y puede causar descargas eléctricas o el mal funcionamiento del
sistema de robot.

Mantenimiento
C8 Mod.13 107
Modelo de cables hacia atrás
Placa de
conectores
Subplaca de conectores
Cubierta lateral del
brazo n.º 4
Cubierta del brazo n.º 3
Cubierta central
del brazo n.º 1
Cubierta de la base
Cubierta de
mantenimiento
del brazo n.º 3
Brazo n.º 4
Accesorio D-sub
Cubierta lateral del
brazo n.º 4
Cubierta lateral
del brazo n.º 2
Cubierta lateral
del brazo n.º 1
Cubierta lateral del
brazo n.º 2
Cubierta lateral del
brazo n.º 1
Cubierta de
mantenimiento
del brazo n.º 4
Cubierta de
mantenimiento
del brazo n.º 1
(Figura: C8-A1401* (C8XL))
Ventilador
C8-A1401* (C8XL) solamente
Modelo de cables hacia abajo
Placa de
conectores
Subplaca de
conectores
Ventilador
C8-A1401*B*
(C8XL) solamente
(Figura: C8-A1401*B* (C8XL))
Cubierta de la base

Mantenimiento
108 C8 Mod.13
Nombre
Cantidad
Nota
Piezas de
mantenimiento
Cubierta
Brazo
n.º 1
Cubierta central
1
1675435
Cubierta de metal
Común en los modelos
estándar o de sala
blanca
Cubierta lateral
2
1674537
Modelo estándar
Cubierta de plástico
Brazo
n.º 2
Cubierta lateral
(izquierda)
1
1655114
Cubierta lateral
(derecha)
1
1674542
Brazo
n.º 3
Cubierta
1
1674543
Brazo
n.º 4
Cubierta lateral
2
1674547
Brazo
n.º 1
Cubierta lateral
2
1674548
Modelos para salas
blancas
Cubierta revestida
Brazo
n.º 2
Cubierta lateral
(izquierda)
1
1655127
Cubierta lateral
(derecha)
1
1674550
Brazo
n.º 3
Cubierta
1
1674551
Brazo
n.º 4
Cubierta lateral
2
1674553
Empaquetadura
Brazo
n.º 1
Empaquetadura
central
1
1665238
Modelo de protección
Empaquetadura
lateral
2
1665240
Brazo
n.º 2
Empaquetadura
lateral
2
1665241
Brazo
n.º 3
Empaquetadura de la
cubierta
1
1665242
Empaquetadura de
mantenimiento
1
1665254
Brazo
n.º 4
Empaquetadura
lateral
2
1665243
Empaquetadura de
mantenimiento
1
1665257
Empaquetadura del
accesorio D-sub
1
1665255
Base
Empaquetadura
posterior
1
1665244
Empaquetadura
inferior
1
1665247
Empaquetadura de
mantenimiento
1
1665248

Mantenimiento
C8 Mod.13 109
Empaquetadura de la
subplaca
1
1665246
Empaquetadura de
instalación
1
1668377
Empaquetadura para
el receptor de calor
1
1694610
Modelo para salas
blancas
Modelo de protección
Arandela de sellado
4
1665882
Para M4
Tapón de aire
2
1657011
Para M6
Herramientas
Llave
hexagonal
ancho a lo largo de
superficies planas:
2,5 mm
1
Para los pernos de cabeza hueca
hexagonal M3
ancho a lo largo de
superficies planas: 3 mm
1
Para los pernos de cabeza hueca
hexagonal M4
Destornillador de cruz (n.º 2)
1
Para tornillos con ranura en cruz

Mantenimiento
110 C8 Mod.13
3.1 Cubierta central del brazo n.º 1
PRECAUCIÓN
■
Cuando instale la cubierta, tenga cuidado de que los cables no queden atrapados
ni los doble a la fuerza para empujarlos hacia la cubierta.
Una tensión innecesaria en los cables puede provocar daños en los cables,
desconexión o error de contacto. Esto es extremadamente peligroso y puede
provocar descargas eléctricas o el funcionamiento incorrecto del sistema de
robot.
Cuando enrute los cables, revise la ubicación de los cables al momento de retirar
la cubierta. Asegúrese de colocar los cables de vuelta en sus ubicaciones
originales.
Retiro
Retire los tornillos y, después, retire la cubierta
central del brazo n.º 1.
Modelos S, C:
Tornillos pequeños con ranura en cruz: 5-M4×10
Modelo P:
Pernos de cabeza hueca hexagonal con arandela
cautiva: 5-M4×12
Retire junta la empaquetadura central del brazo n.º
1.
Instalación
Modelos S, C:
Instale la cubierta central del brazo n.º 1 en el
manipulador.
Tornillos pequeños con ranura en cruz: 5-M4×10
Torque de ajuste: 0,9 0,1 N·m
Modelo P:
Instale la empaquetadura en la ranura de la
cubierta central del brazo n.º 1.
Instale la cubierta central del brazo n.º 1 en el
manipulador.
Pernos de cabeza hueca hexagonal con arandela:
5-M4×12
Torque de ajuste: 4,0 0,2 N·m
Tenga cuidado de que la empaquetadura y los cables no queden atrapados entre la
cubierta y el manipulador.
Reemplace la empaquetadura si existen defectos o deterioros.
NOTA

Mantenimiento
C8 Mod.13 111
3.2 Cubierta lateral del brazo n.º 1
PRECAUCIÓN
■
Cuando instale la cubierta, tenga cuidado de que los cables no queden atrapados
ni los doble a la fuerza para empujarlos hacia la cubierta.
Una tensión innecesaria en los cables puede provocar daños en los cables,
desconexión o error de contacto. Esto es extremadamente peligroso y puede
provocar descargas eléctricas o el funcionamiento incorrecto del sistema de
robot.
Cuando enrute los cables, revise la ubicación de los cables al momento de retirar
la cubierta. Asegúrese de colocar los cables de vuelta en sus ubicaciones
originales.
Retiro
Retire los tornillos y, luego, retire la cubierta lateral del
brazo n.º 1.
Modelos S, C:
Tornillos pequeños con ranura en cruz:
4-M4×10 (un lado)
Modelo P:
Pernos de cabeza hueca hexagonal con arandela
cautiva: 8-M4×12 (un lado)
Retire junta la empaquetadura lateral del brazo n.º
1.
Las cubiertas laterales del brazo n.º 1 y las
empaquetaduras laterales del brazo n.º 1 son idénticas
entre la de la derecha y la de la izquierda.
NOTA

Mantenimiento
112 C8 Mod.13
Instalación
Modelos S, C:
Instale la cubierta lateral del brazo n.º 1 en el
manipulador.
Tornillos pequeños con ranura en cruz:
4-M4×10 (un lado)
Torque de ajuste: 0,9 0,1 N·m
Modelo P:
Instale la empaquetadura en la ranura de la
cubierta lateral del brazo n.º 1.
Instale la cubierta lateral del brazo n.º 1 en el
manipulador.
Pernos de cabeza hueca hexagonal con arandela
cautiva: 8-M4×12 (uno de los lados)
Torque de ajuste: 4,0 0,2 N·m
Tenga cuidado de que la empaquetadura y los
cables no queden atrapados entre la cubierta y el
manipulador.
Reemplace la empaquetadura si existen defectos o
deterioros.
Cuando reemplace la cubierta lateral del lado
derecho del brazo n.º 1, coloque una etiqueta de
advertencia de descarga eléctrica en el lugar que
se indica en la imagen.
NOTA

Mantenimiento
C8 Mod.13 113
3.3 Cubierta lateral del brazo n.º 2
PRECAUCIÓN
■
Cuando instale la cubierta, tenga cuidado de que los cables no queden atrapados
ni los doble a la fuerza para empujarlos hacia la cubierta.
Una tensión innecesaria en los cables puede provocar daños en los cables,
desconexión o error de contacto. Esto es extremadamente peligroso y puede
provocar descargas eléctricas o el funcionamiento incorrecto del sistema de
robot.
Cuando enrute los cables, revise la ubicación de los cables al momento de retirar
la cubierta. Asegúrese de colocar los cables de vuelta en sus ubicaciones
originales.
Retiro
Retire los tornillos y, luego, retire la cubierta lateral
del brazo n.º 2.
Modelos S, C:
Tornillos pequeños con ranura en cruz:
4-M4×10 (un lado)
Modelo P:
Pernos de cabeza hueca hexagonal con arandela
cautiva: 8-M4×12 (un lado)
Retire junta la empaquetadura lateral del brazo n.º
2.
Observe que las cubiertas laterales del brazo n.º 2
y las empaquetaduras laterales del brazo n.º 2 son
distintas entre las de la derecha y las de la
izquierda.
Instalación
Modelos S, C:
Instale la cubierta lateral del brazo n.º 2 en el manipulador.
Tornillos pequeños con ranura en cruz: 4-M4×10 (un lado)
Torque de ajuste: 0,9 0,1 N·m
Modelo P:
Instale la empaquetadura en la ranura de la
cubierta lateral del brazo n.º 2. Instale la
cubierta lateral del brazo n.º 2 en el manipulador.
Pernos de cabeza hueca hexagonal con arandela
cautiva: 8-M4×12 (un lado)
Torque de ajuste: 4,0±0,2 N m
Tenga cuidado de que la empaquetadura y los
cables no queden atrapados entre la cubierta y el
manipulador.
Reemplace la empaquetadura si existen defectos
o deterioros.
NOTA
NOTA

Mantenimiento
114 C8 Mod.13
3.4 Cubierta del brazo n.º 3
PRECAUCIÓN
■
Cuando instale la cubierta, tenga cuidado de que los cables no queden atrapados
ni los doble a la fuerza para empujarlos hacia la cubierta.
Una tensión innecesaria en los cables puede provocar daños en los cables,
desconexión o error de contacto. Esto es extremadamente peligroso y puede
provocar descargas eléctricas o el funcionamiento incorrecto del sistema de
robot.
Cuando enrute los cables, revise la ubicación de los cables al momento de retirar
la cubierta.
Asegúrese de colocar los cables de vuelta en sus ubicaciones originales.
Retiro
Retire los tornillos y, luego, retire la cubierta del
cabezal del brazo n.º 3.
Modelos S, C:
Tornillos pequeños con ranura en cruz: 4-M4×10
Modelo P:
Pernos de cabeza hueca hexagonal con arandela
cautiva: 4-M4×12
Retire junta la empaquetadura del brazo n.º 3.
Instalación
Modelos S, C:
Instale la cubierta del brazo n.º 3 en el
manipulador.
Tornillos pequeños con ranura en cruz: 4-M4×10
Torque de ajuste: 0,9 0,1 N·m
Modelo P:
Instale la empaquetadura en la ranura de la
cubierta del cabezal del brazo n.º 3 y, luego, instale
la cubierta del brazo n.º 3 en el manipulador.
Tornillos truss pequeños con ranura en cruz con
arandela cautiva: 4-M4×12
Torque de ajuste: 4,0 0,2 N·m
Tenga cuidado de que la empaquetadura y los cables no queden atrapados entre la
cubierta y el manipulador.
Reemplace la empaquetadura si existen defectos o deterioros.
NOTA

Mantenimiento
C8 Mod.13 115
3.5 Cubierta de mantenimiento del brazo n.º 3
PRECAUCIÓN
■
Cuando instale la cubierta, tenga cuidado de que los cables no queden atrapados
ni los doble a la fuerza para empujarlos hacia la cubierta.
Una tensión innecesaria en los cables puede provocar daños en los cables,
desconexión o error de contacto. Esto es extremadamente peligroso y puede
provocar descargas eléctricas o el funcionamiento incorrecto del sistema de
robot.
Cuando enrute los cables, revise la ubicación de los cables al momento de retirar
la cubierta.
Asegúrese de colocar los cables de vuelta en sus ubicaciones originales.
Retiro
1. Antes de retirar la cubierta de mantenimiento del
brazo n.º 3, mueva el brazo a una posición en la
cual pueda quitar la cubierta en forma fácil.
2. Retire los tornillos y, luego, retire la cubierta de
mantenimiento del brazo n.º 3.
Modelos S, C:
Tornillos pequeños con ranura en cruz: 4-M4×8
Modelo P:
Pernos de cabeza hueca hexagonal: 4-M4×10
Retire junta la empaquetadura de mantenimiento del brazo n.º 3. La empaquetadura
posee separadores.
Tenga cuidado de no perderlos.
NOTA

Mantenimiento
116 C8 Mod.13
Instalación
(Modelos S, C)
Instale la cubierta de mantenimiento del brazo n.º 3 en el manipulador.
Tornillos pequeños con ranura en cruz: 4-M4×8
Torque de ajuste: 0,9 0,1 N·m
Tenga cuidado de que los cables no queden atrapados entre la cubierta y el manipulador.
Instalación
(Modelo P)
1. Instale los separadores en los agujeros de la
empaquetadura.
(4 lugares)
2. Aplique empaquetadura líquida en la empaquetadura de mantenimiento del brazo n.º
3.
Instale la empaquetadura de mantenimiento del brazo n.º 3 en la cubierta de
mantenimiento del brazo n.º 3.
(Consulte la figura para conocer los puntos de aplicación de empaquetadura).
Empaquetadura de
mantenimiento del brazo n.º 3
Punto de aplicación de
empaquetadura (×4)
Separador (×4)
Cubierta de mantenimiento
del brazo n.º 3
Tras aplicar la empaquetadura líquida, deje que se solidifique y la empaquetadura se
fije.
3. Instale la cubierta de mantenimiento del brazo n.º 3 en el manipulador.
Pernos de cabeza hueca hexagonal: 4-M4×10
Torque de ajuste: 4,0 0,2 N·m
Tenga cuidado de que la empaquetadura y los cables no queden atrapados entre la
cubierta y el manipulador.
Reemplace la empaquetadura si existen defectos o deterioros.
NOTA
NOTA

Mantenimiento
C8 Mod.13 117
3.6 Cubierta lateral del brazo n.º 4
PRECAUCIÓN
■
Cuando instale la cubierta, tenga cuidado de que los cables no queden atrapados
ni los doble a la fuerza para empujarlos hacia la cubierta.
Una tensión innecesaria en los cables puede provocar daños en los cables,
desconexión o error de contacto. Esto es extremadamente peligroso y puede
provocar descargas eléctricas o el funcionamiento incorrecto del sistema de
robot.
Cuando enrute los cables, revise la ubicación de los cables al momento de retirar
la cubierta.
Asegúrese de colocar los cables de vuelta en sus ubicaciones originales.
Retiro
1. Retire los tornillos y, luego, retire la cubierta
lateral del brazo n.º 4.
Modelos S, C:
Tornillos pequeños con ranura en cruz:
7-M4×10 (un lado)
Modelo P:
Pernos de cabeza hueca hexagonal con arandela cautiva: 7-M4×12 (un lado)
Retire junta la empaquetadura lateral del brazo n.º 4.
La cubierta lateral del brazo n.º 4 y la empaquetadura lateral del brazo n.º 4 son
idénticas entre la de la derecha y la de la izquierda.
2. Retire los conectores.
Conector de RJ45 (izquierda):
Retire el conector de RJ45 del conector de la
cubierta.
Conector del sensor F (derecha):
Abra los dos ganchos plásticos del conector
de la cubierta y extraiga el conector metálico.
NOTA

Mantenimiento
118 C8 Mod.13
Instalación
Inserte los conectores.
Conector de RJ45:
Inserte el conector de RJ45 en el conector de la cubierta.
Conector del sensor F:
Inserte el conector metálico al conector de la cubierta.
Modelos S, C:
Instale la cubierta lateral del brazo n.º 4 en el manipulador.
Tornillos pequeños con ranura en cruz: 7-M4×10 (un lado)
Torque de ajuste: 0,9 0,1 N·m
Modelo P:
Instale la empaquetadura lateral del brazo n.º 4 en
la ranura de la cubierta lateral del brazo n.º 4.
Instale la cubierta del brazo n.º 4 en el
manipulador.
Tornillos pequeños con ranura en cruz:
7-M4×12 (un lado)
Torque de ajuste: 4,0 0,2 N·m
Tenga cuidado de que la empaquetadura y los
cables no queden atrapados entre la cubierta y el
manipulador.
Reemplace la empaquetadura si existen defectos o
deterioros.
Cuando reemplace la cubierta, coloque la etiqueta
de advertencia de descarga eléctrica y las demás
etiquetas en los lugares que se indican en las
imágenes.
NOTA

Mantenimiento
C8 Mod.13 119
3.7 Cubierta de mantenimiento del brazo n.º 4 (solo C8XL)
PRECAUCIÓN
■
Cuando instale la cubierta, tenga cuidado de que los cables no queden atrapados
ni los doble a la fuerza para empujarlos hacia la cubierta.
Una tensión innecesaria en los cables puede provocar daños en los cables,
desconexión o error de contacto. Esto es extremadamente peligroso y puede
provocar descargas eléctricas o el funcionamiento incorrecto del sistema de
robot.
Cuando enrute los cables, revise la ubicación de los cables al momento de retirar
la cubierta.
Asegúrese de colocar los cables de vuelta en sus ubicaciones originales.
Retiro
1. Antes de retirar la cubierta de mantenimiento del
brazo n.º 4, mueva el brazo a una posición en la
cual pueda quitar la cubierta en forma fácil.
2. Retire los tornillos y, luego, retire la cubierta de
mantenimiento del brazo n.º 4.
Modelos S, C:
Tornillos pequeños con ranura en cruz:
4-M4×10
Modelo P:
Pernos de cabeza hueca hexagonal: 4-
M4×10
Retire junta la empaquetadura de mantenimiento del brazo n.º 3. La empaquetadura
posee separadores. Tenga cuidado de no perderlos.
NOTA

Mantenimiento
120 C8 Mod.13
Instalación
(Modelos S, C)
Instale la cubierta de mantenimiento del brazo n.º 4 en el manipulador.
Tornillos pequeños con ranura en cruz: 4-M4×10
Torque de ajuste: 0,9 0,1 N·m
Tenga cuidado de que los cables no queden atrapados entre la cubierta y el manipulador.
Instalación
(Modelo P)
1. Instale los separadores en los agujeros de la
empaquetadura.
(4 lugares)
2. Aplique empaquetadura líquida en la empaquetadura de mantenimiento del brazo n.º
4.
Instale la empaquetadura de mantenimiento del brazo n.º 4 en la cubierta de
mantenimiento del brazo n.º 4.
(Consulte la figura para conocer los puntos de aplicación de empaquetadura).
Empaquetadura de
mantenimiento del brazo n.º 4
Punto de aplicación de
empaquetadura (×4)
Separador (×4)
Cubierta de mantenimiento
del brazo n.º 4
Tras aplicar la empaquetadura líquida, deje que se solidifique y la empaquetadura se
fije.
3. Instale la cubierta de mantenimiento del brazo n.º 4 en el manipulador.
Pernos de cabeza hueca hexagonal: 4-M4×10
Torque de ajuste: 4,0 0,2 N·m
Tenga cuidado de que la empaquetadura y los cables no queden atrapados entre la
cubierta y el manipulador.
Reemplace la empaquetadura si existen defectos o deterioros.
NOTA
NOTA

Mantenimiento
C8 Mod.13 121
3.8 Accesorio D-sub del brazo n.º 4
PRECAUCIÓN
■
No retire el accesorio D-sub a la fuerza. Retirarlo a la fuerza puede provocar
daños en los cables, desconexión o error de contacto. Los cables dañados, la
desconexión o el error de contacto son extremadamente peligrosos y pueden
provocar descargas eléctricas o el funcionamiento incorrecto del sistema de robot.
■
Cuando instale el accesorio D-sub, tenga cuidado de que los cables no queden
atrapados ni los doble a la fuerza para empujarlos hacia la cubierta.
Una tensión innecesaria en los cables puede provocar daños en los cables,
desconexión o error de contacto. Esto es extremadamente peligroso y puede
provocar descargas eléctricas o el funcionamiento incorrecto del sistema de robot.
Cuando enrute los cables, revise la ubicación de los cables después de retirar el
accesorio D-sub. Asegúrese de colocar los cables de vuelta en sus ubicaciones
originales.
Retiro
Retire los tornillos y, luego, retire el accesorio D-sub.
Pernos de cabeza hueca hexagonal: 2-M4×10
Modelo P:
Retire junta la empaquetadura del accesorio D-sub.
Instalación
Modelos S, C:
Instale el accesorio D-sub.
Pernos de cabeza hueca hexagonal: 2-M4×10
Torque de ajuste: 4,0 0,2 N·m
Modelo P:
Instale la empaquetadura del accesorio D-sub al
manipulador y, luego, instale el accesorio D-sub.
Pernos de cabeza hueca hexagonal: 2-M4×10
Torque de ajuste: 4,0 0,2 N·m
Tenga cuidado de que la empaquetadura y los cables no queden atrapados entre la cubierta y
el manipulador.
Reemplace la empaquetadura si existen defectos o deterioros.
NOTA

Mantenimiento
122 C8 Mod.13
3.9 Cubierta de la base
3.9.1 Cable M/C hacia atrás
PRECAUCIÓN
■
Cuando instale la cubierta, tenga cuidado de que los cables no queden atrapados
ni los doble a la fuerza para empujarlos hacia la cubierta.
Una tensión innecesaria en los cables puede provocar daños en los cables,
desconexión o error de contacto. Esto es extremadamente peligroso y puede
provocar descargas eléctricas o el funcionamiento incorrecto del sistema de robot.
Cuando enrute los cables, revise la ubicación de los cables al momento de retirar
la cubierta.
Asegúrese de colocar los cables de vuelta en sus ubicaciones originales.
La cubierta de la base del modelo de cable M/C hacia atrás se encuentra en el lado inferior
de la base.
Retiro
Retire los pernos y, luego, retire la cubierta de la base.
Pernos de cabeza hueca hexagonal: 8-M4×10
Modelo P:
Retire junta la empaquetadura inferior de la base.
Instalación
Modelos S, C:
Instale la cubierta de la base en el manipulador.
Pernos de cabeza hueca hexagonal: 8-M4×10
Torque de ajuste: 4,0 0,2 N·m
Modelo P:
Instale la empaquetadura en la ranura del lado
inferior de la base y, luego, instale la cubierta de la
base en el manipulador.
Pernos de cabeza hueca hexagonal: 8-M4×10
Torque de ajuste: 4,0 0,2 N·m
Si se utilizan pernos distintos a los pernos de
cabeza hueca hexagonal, los cabezales de los
pernos pueden sobresalir del lado del extremo de la
base y es posible que la cubierta no quede fija de
manera estable.
Tenga cuidado de que la empaquetadura y los
cables no queden atrapados entre la cubierta y el
manipulador.
Reemplace la empaquetadura si existen defectos o
deterioros.
NOTA
NOTA

Mantenimiento
C8 Mod.13 123
3.9.2 Cable M/C hacia abajo
PRECAUCIÓN
■
Cuando instale la cubierta, tenga cuidado de que los cables no queden atrapados
ni los doble a la fuerza para empujarlos hacia la cubierta.
Una tensión innecesaria en los cables puede provocar daños en los cables,
desconexión o error de contacto. Esto es extremadamente peligroso y puede
provocar descargas eléctricas o el funcionamiento incorrecto del sistema de robot.
Cuando enrute los cables, revise la ubicación de los cables al momento de retirar
la cubierta.
Asegúrese de colocar los cables de vuelta en sus ubicaciones originales.
La cubierta de la base del modelo de cable M/C hacia abajo se encuentra en el lado posterior
de la base.
C8-A701*B* (C8), C8-A901*B* (C8L)
Retiro
Retire los pernos y, luego, retire la cubierta de la base.
Pernos de cabeza hueca hexagonal: 11-M4×10
Modelo P:
Retire junta la empaquetadura posterior de la base.
La empaquetadura posee separadores. Tenga cuidado
de no perderlos.
NOTA

Mantenimiento
124 C8 Mod.13
C8-A701*B* (C8), C8-A901*B* (C8L)
Instalación
(Modelos S, C)
Instale la cubierta de la base en el manipulador.
Pernos de cabeza hueca hexagonal: 11-M4×10
Torque de ajuste: 4,0 0,2 N·m
Tenga cuidado de que los cables no queden atrapados entre la cubierta y el manipulador.
C8-A701*B* (C8), C8-A901*B* (C8L)
Instalación
(Modelo P)
1. Instale los separadores en los agujeros de la
empaquetadura.
(11 lugares)
2. Aplique empaquetadura líquida en la empaquetadura posterior de la base.
Instale la empaquetadura posterior de la base en la cubierta de la base.
(Consulte la figura para conocer los puntos de aplicación de empaquetadura).
Empaquetadura
posterior de base
Punto de aplicación
de empaquetadura
(×11)
Separador (×11)
Cubierta de la base
Tras aplicar la empaquetadura líquida, deje que se solidifique y la empaquetadura se
fije.
3. Instale la cubierta de la base en el manipulador.
Pernos de cabeza hueca hexagonal: 11-M4×10
Torque de ajuste: 4,0 0,2 N·m
Tenga cuidado de que la empaquetadura y los cables no queden atrapados entre la
cubierta y el manipulador.
Reemplace la empaquetadura si existen defectos o deterioros.
NOTA
NOTA
NOTA

Mantenimiento
C8 Mod.13 125
C8-A1401*B* (C8XL)
Retiro
1. Retire el ventilador.
Para conocer detalles, consulte Mantenimiento 15. Reemplazo del ventilador.
2. Retire los pernos del receptor de calor.
Pernos de cabeza hueca hexagonal: 4-M4×15
3. Retire el receptor de calor.
Para los modelos para salas blancas y de protección, retire
la empaquetadura entre el receptor de calor y la cubierta de
la base.
4. Retire los pernos y, luego, retire la cubierta de la base y la
empaquetadura posterior de la base.
Pernos de cabeza hueca hexagonal: 11-M4×10
La empaquetadura posee separadores. Tenga cuidado de no
perderlos.
C8-A1401*B* (C8XL)
Instalación
1. Instale los separadores en los agujeros de la
empaquetadura.
(11 lugares)
2. Aplique empaquetadura líquida en la empaquetadura posterior de la base.
Instale la empaquetadura posterior de la base en la cubierta de la base.
(Consulte la figura para conocer los puntos de aplicación de empaquetadura).
Empaquetadura
posterior de base
Punto de
aplicación de
empaquetadura
(×11)
Separador (×11)
Cubierta de la base
Tras aplicar la empaquetadura líquida, deje que se solidifique y la empaquetadura se
fije.
NOTA
NOTA
NOTA

Mantenimiento
126 C8 Mod.13
3. Instale la cubierta de la base en el manipulador.
Pernos de cabeza hueca hexagonal: 11-M4×10
Torque de ajuste: 4,0 0,2 N·m
Tenga cuidado de que la empaquetadura y los cables no
queden atrapados entre la cubierta y el manipulador.
Reemplace la empaquetadura si existen defectos o
deterioros.
Para los modelos para salas blancas y de protección, instale
la empaquetadura entre el receptor de calor y la cubierta de
la base.
4. Instale el receptor de calor.
Pernos de cabeza hueca hexagonal: 4-M4×15
Torque de ajuste: 4,0 0,2 N·m
5. Instale el ventilador.
Para conocer detalles, consulte Mantenimiento 15. Reemplazo del ventilador.
NOTA
NOTA

Mantenimiento
C8 Mod.13 127
3.10 Cubierta de mantenimiento de la base
PRECAUCIÓN
■
Cuando instale la cubierta, tenga cuidado de que los cables no queden atrapados
ni los doble a la fuerza para empujarlos hacia la cubierta.
Una tensión innecesaria en los cables puede provocar daños en los cables,
desconexión o error de contacto. Esto es extremadamente peligroso y puede
provocar descargas eléctricas o el funcionamiento incorrecto del sistema de robot.
Cuando enrute los cables, revise la ubicación de los cables al momento de retirar
la cubierta.
Asegúrese de colocar los cables de vuelta en sus ubicaciones originales.
Retiro
Retire los tornillos y, luego, retire la cubierta de
mantenimiento.
Modelos S, C:
Tornillos pequeños con ranura en cruz: 6-M410
Modelo P:
Pernos de cabeza hueca hexagonal: 6-M410
Retire junta la empaquetadura de mantenimiento de la base.
La empaquetadura posee separadores. Tenga cuidado de no perderlos.
Instalación
(Modelos S, C)
Instale la cubierta de mantenimiento de la base en el manipulador.
Pernos de cabeza hueca hexagonal: 6-M4×10
Torque de ajuste: 0,9 0,1 N·m
Tenga cuidado de que los cables no queden atrapados entre la cubierta y el
manipulador.
NOTA

Mantenimiento
128 C8 Mod.13
Instalación
(Modelo P)
1. Instale los separadores en los agujeros de la
empaquetadura.
(6 lugares)
2. Aplique empaquetadura líquida en la empaquetadura de mantenimiento de la base.
Instale la empaquetadura de mantenimiento de la base en la cubierta de la base.
(Consulte la figura para conocer los puntos de aplicación de empaquetadura).
Empaquetadura de
mantenimiento de la base
Punto de aplicación de
empaquetadura (×6)
Separador (×6)
Placa de mantenimiento
de la base
Tras aplicar la empaquetadura líquida, deje que se solidifique y la empaquetadura se
fije.
3. Instale la cubierta de mantenimiento de la base en el manipulador.
Pernos de cabeza hueca hexagonal: 6-M4×10
Torque de ajuste: 4,0 0,2 N·m
Tenga cuidado de que la empaquetadura y los cables no queden atrapados entre la
cubierta y el manipulador.
Reemplace la empaquetadura si existen defectos o deterioros.
NOTA
NOTA

Mantenimiento
C8 Mod.13 129
3.11 Placa del conector
3.11.1 Cable M/C hacia atrás
PRECAUCIÓN
■
No retire la placa de conectores a la fuerza. Puede generar daños en los cables,
la desconexión o error de contacto. Esto es extremadamente peligroso y puede
provocar descargas eléctricas o el funcionamiento incorrecto del sistema de robot.
■
Cuando instale la placa de conectores, tenga cuidado de que los cables no queden
atrapados y de no doblarlos a la fuerza para empujarlos hacia la cubierta.
Una tensión innecesaria en los cables puede provocar daños en los cables,
desconexión o error de contacto. Esto es extremadamente peligroso y puede
provocar descargas eléctricas o el funcionamiento incorrecto del sistema de robot.
Cuando enrute los cables, verifique la ubicación de los cables al retirar la placa de
conectores. Asegúrese de colocar los cables de vuelta en sus ubicaciones
originales.
C8-A701** (C8), C8-A901** (C8L)
Retiro
Retire los pernos y, luego, retire la placa de conectores.
Pernos de cabeza hueca hexagonal: 11-M4×10
Modelo P:
Retire junta la empaquetadura posterior de la base.
La empaquetadura posee separadores. Tenga cuidado de
no perderlos.
NOTA

Mantenimiento
130 C8 Mod.13
C8-A701** (C8), C8-A901** (C8L)
Instalación
(Modelos S, C)
Instale la placa de conectores en el manipulador.
Pernos de cabeza hueca hexagonal: 11-M4×10
Torque de ajuste: 4,0 0,2 N·m
Tenga cuidado de que los cables no queden atrapados entre la cubierta y el manipulador.
C8-A701** (C8), C8-A901** (C8L)
Instalación
(Modelo P)
1. Instale los separadores en los agujeros de la
empaquetadura.
(11 lugares)
2. Aplique empaquetadura líquida en la empaquetadura posterior de la base.
Instale la empaquetadura posterior de la base en la placa de conectores.
(Consulte la figura para conocer los puntos de aplicación de empaquetadura).
Empaquetadura
posterior de base
Punto de
aplicación de
empaquetadura
(×11)
Separador (×11)
Placa de
conectores
Tras aplicar la empaquetadura líquida, deje que se solidifique y la empaquetadura se
fije.
3. Instale la placa de conectores en el manipulador.
Pernos de cabeza hueca hexagonal: 11-M4×10
Torque de ajuste: 4,0 0,2 N·m
Tenga cuidado de que la empaquetadura y los cables no queden atrapados entre la
cubierta y el manipulador.
Reemplace la empaquetadura si existen defectos o deterioros.
NOTA
NOTA

Mantenimiento
C8 Mod.13 131
C8-A1401** (C8XL)
Retiro
1. Retire el ventilador.
Para conocer detalles, consulte Mantenimiento 15. Reemplazo del ventilador.
2. Retire los pernos del receptor de calor
Pernos de cabeza hueca hexagonal: 4-M4×15
3. Retire el receptor de calor.
Para los modelos para salas blancas y de protección, retire
la empaquetadura entre el receptor de calor y la placa del
hilo de unión.
4. Retire los pernos y, luego, retire la placa del hilo de unión
y la empaquetadura posterior de la base.
Pernos de cabeza hueca hexagonal: 11-M4×10
La empaquetadura posee separadores. Tenga cuidado de
no perderlos.
C8-A1401** (C8XL)
Instalación
1. Instale los separadores en los agujeros de la
empaquetadura.
(11 lugares)
2. Aplique empaquetadura líquida en la empaquetadura posterior de la base.
Instale la empaquetadura posterior de la base en la cubierta de la base.
(Consulte la figura para conocer los puntos de aplicación de empaquetadura).
Empaquetadura
posterior de base
Punto de
aplicación de
empaquetadura
(×11)
Separador (×11)
Cubierta de la base
Tras aplicar la empaquetadura líquida, deje que se solidifique y la empaquetadura se
fije.
NOTA
NOTA
NOTA

Mantenimiento
132 C8 Mod.13
3. Instale la placa del hilo de unión en el manipulador.
Pernos de cabeza hueca hexagonal: 11-M4×10
Torque de ajuste: 4,0 0,2 N·m
Tenga cuidado de que la empaquetadura y los cables no
queden atrapados entre la cubierta y el manipulador.
Reemplace la empaquetadura si existen defectos o
deterioros.
Para los modelos para salas blancas y de protección,
instale la empaquetadura entre el receptor de calor y la
placa de conectores.
4. Instale el receptor de calor.
Pernos de cabeza hueca hexagonal: 4-M4×15
Torque de ajuste: 4,0 0,2 N·m
5. Instale el ventilador.
Para conocer detalles, consulte Mantenimiento 15. Reemplazo del ventilador.
NOTA
NOTA

Mantenimiento
C8 Mod.13 133
3.11.2 Cable M/C hacia abajo
PRECAUCIÓN
■
No retire la placa de conectores a la fuerza. Puede generar daños en los cables,
la desconexión o error de contacto. Esto es extremadamente peligroso y puede
provocar descargas eléctricas o el funcionamiento incorrecto del sistema de robot.
■
Cuando instale la placa de conectores, tenga cuidado de que los cables no queden
atrapados y de no doblarlos a la fuerza para empujarlos hacia la cubierta.
Una tensión innecesaria en los cables puede provocar daños en los cables,
desconexión o error de contacto. Esto es extremadamente peligroso y puede
provocar descargas eléctricas o el funcionamiento incorrecto del sistema de robot.
Cuando enrute los cables, verifique la ubicación de los cables al retirar la placa de
conectores. Asegúrese de colocar los cables de vuelta en sus ubicaciones
originales.
Retiro
Retire los pernos y, luego, retire la placa de conectores.
Pernos de cabeza hueca hexagonal: 8-M4×10
Modelo P:
Retire junta la empaquetadura inferior de la base.
Instalación
Modelos S, C:
Instale la placa de conectores en el manipulador.
Pernos de cabeza hueca hexagonal: 8-M4×10
Torque de ajuste: 4,0 0,2 N·m
Modelo P:
Instale la empaquetadura inferior de la base en la
ranura de la parte inferior de la base. Instale la placa
de conectores en el manipulador.
Pernos de cabeza hueca hexagonal: 8-M4×10
Torque de ajuste: 4,0 0,2 N·m
Tenga cuidado de que la empaquetadura y los
cables no queden atrapados entre la cubierta y el
manipulador.
Reemplace la empaquetadura si existen defectos o
deterioros.
NOTA

Mantenimiento
134 C8 Mod.13
3.12 Subplaca de conectores
PRECAUCIÓN
■
No retire la subplaca de conectores a la fuerza. Puede generar daños en los
cables, la desconexión o error de contacto. Esto es extremadamente peligroso y
puede provocar descargas eléctricas o el funcionamiento incorrecto del sistema
de robot.
■
Cuando retire la subplaca de conectores, asegúrese de retirar todos los
conectores de la placa de conectores y el cable M/C. Retirar la placa de
conectores a la fuerza puede provocar daños en los cables, desconexión o error
de contacto. Esto es extremadamente peligroso y puede provocar descargas
eléctricas o el funcionamiento incorrecto del sistema de robot.
■
Cuando instale la subplaca de conectores, tenga cuidado de que los cables no
queden atrapados ni los doble a la fuerza para empujarlos hacia la cubierta.
Una tensión innecesaria en los cables puede provocar daños en los cables,
desconexión o error de contacto. Esto es extremadamente peligroso y puede
provocar descargas eléctricas o el funcionamiento incorrecto del sistema de robot.
Cuando enrute los cables, revise la ubicación de los cables después de retirar la
subplaca de conectores. Asegúrese de colocar los cables de vuelta en sus
ubicaciones originales.
Retiro
Retire los pernos y, luego, retire la subplaca de
conectores.
Modelos S, C:
Pernos de cabeza hueca hexagonal: 4-M4×10
Modelo P:
Pernos de cabeza hueca hexagonal:
4-M4×10 (con una arandela de sellado)
Retire junta la empaquetadura de la subplaca de la
base.
La empaquetadura posee separadores.
Tenga cuidado de no perder las arandelas de sellado
y los separadores.
NOTA

Mantenimiento
C8 Mod.13 135
Instalación
(Modelos S, C)
Instale la subplaca de conectores en el manipulador.
Pernos de cabeza hueca hexagonal: 4-M4×10
Torque de ajuste: 4,0 0,2 N·m
Tenga cuidado de que los cables no queden atrapados entre la cubierta y el
manipulador.
Instalación
(Modelo P)
1. Instale los separadores en los agujeros de la
empaquetadura.
(4 lugares)
2. Aplique empaquetadura líquida en la empaquetadura de la subplaca de la base.
Instale la subplaca de la base en la subplaca de conectores. (Consulte la figura para
conocer los puntos de aplicación de empaquetadura).
Empaquetadura
de la subplaca
Punto de aplicación de
empaquetadura (×4)
Separador (×4)
Subplaca de
conectores
Tras aplicar la empaquetadura líquida, deje que se solidifique y la empaquetadura se
fije.
3. Instale la subplaca de conectores en el manipulador.
Pernos de cabeza hueca hexagonal: 4-M4×10 (con una arandela de sellado)
Torque de ajuste: 4,0 0,2 N·m
Tenga cuidado de que la empaquetadura y los cables no queden atrapados entre la
cubierta y el manipulador.
Reemplace las arandelas de sellado y la empaquetadura si existen defectos o deterioros.
NOTA
NOTA
NOTA

Mantenimiento
136 C8 Mod.13
4. Unidad de cable
4.1 Reemplazo de la unidad de cable
ADVERTENCIA
■
Antes de realizar cualquier procedimiento de reemplazo, apague el controlador y
los equipos relacionados, luego desconecte el enchufe de la fuente de
alimentación.
Realizar cualquier procedimiento de reemplazo con la energía encendida es
extremadamente peligroso y puede provocar una descarga eléctrica o el mal
funcionamiento del sistema de robot.
■
No conecte ni desconecte los conectores del motor mientras el sistema de robot
esté encendido. Conectar o desconectar los conectores del motor con la energía
encendida es extremadamente peligroso y puede provocar lesiones corporales
graves, ya que el manipulador puede moverse de manera anormal; además,
puede provocar descargas eléctricas y el mal funcionamiento del sistema de
robot.
■
Asegúrese de conectar el cable de alimentación de CA a un tomacorriente. NO lo
conecte directamente a la fuente de alimentación de la fábrica. Para cortar la
energía hacia el sistema de robot, desconecte el enchufe de la fuente de
alimentación. Realizar cualquier trabajo mientras conecta el cable de
alimentación de CA a una fuente de alimentación de la fábrica es extremadamente
peligroso y puede provocar una descarga eléctrica o el mal funcionamiento del
sistema de robot.
■
Tenga cuidado de no introducir sustancias externas en el manipulador, los
conectores y los pines durante el mantenimiento. Encender la alimentación del
sistema de robot cuando hay sustancias externas en su interior es
extremadamente peligroso y puede causar descargas eléctricas o el mal
funcionamiento del sistema de robot.
■
Asegúrese de conectar los cables correctamente. No permita una tensión
innecesaria en los cables. (No coloque objetos pesados en los cables. No doble
ni tire de los cables por la fuerza). La tensión innecesaria en los cables puede
provocar daños en los cables, desconexión o error de contacto. Esto es
extremadamente peligroso y puede provocar descargas eléctricas o el
funcionamiento incorrecto del sistema de robot.
■
Cuando monte la cubierta, tenga cuidado de no permitir que los cables interfieran
con el montaje de la cubierta y no doble los cables a la fuerza para empujarlos al
interior de la cubierta. Una tensión innecesaria en los cables puede provocar
daños en los cables, desconexión o error de contacto. Los cables dañados, la
desconexión o el error de contacto son extremadamente peligrosos y pueden
provocar descargas eléctricas o el funcionamiento incorrecto del sistema de
robot.
Cuando enrute los cables, observe la ubicación de los cables después de retirar
la cubierta. Asegúrese de colocar los cables de vuelta en sus ubicaciones
originales.

Mantenimiento
C8 Mod.13 137
PRECAUCIÓN
■
Al desconectar los conectores durante el reemplazo de la unidad de cable,
asegúrese de volver a conectar los conectores en sus posiciones correctas.
La conexión incorrecta de los conectores puede provocar un funcionamiento
incorrecto del sistema de robot.
Para conocer detalles sobre las conexiones, consulte Mantenimiento 4.2
Asignaciones de pines del conector.
■
Use alcohol y adhesivo con cuidado, y respete las instrucciones respectivas,
además de las instrucciones a continuación. De lo contrario, puede causar un
incendio o problemas de seguridad.
- Nunca ponga alcohol o adhesivo cerca del fuego.
- Use el alcohol o el adhesivo mientras ventila la habitación.
- Use equipos de protección, como una máscara, gafas de protección y guantes
resistentes al aceite.
- Si la piel entra en contacto con alcohol o adhesivo, lave el área
minuciosamente con agua y jabón.
- Si le entra alcohol o adhesivo a los ojos o la boca, enjuague a fondo con agua
limpia y, luego, consulte a un médico de inmediato.
■
Use equipos de protección, como una máscara, gafas de protección y guantes
resistentes al aceite durante el engrase. Si le entra grasa en los ojos, la boca o
cae en su piel, siga las instrucciones a continuación.
Si le entra grasa en los ojos : Enjuáguelos a fondo con agua limpia y, luego,
consulte a un médico de inmediato.
Si le entra grasa en la boca : Si se ingiere, no induzca el vómito.
Consulte a un médico de inmediato.
Si la grasa solo entra en su boca, enjuáguese
la boca a fondo con agua.
Si le cae grasa en la piel : Enjuague el área a fondo con agua y jabón.

Mantenimiento
138 C8 Mod.13
4.1.1 Reemplazo de la unidad de cable (cable M/C hacia atrás)
Nombre
Cantidad
Nota
Piezas de
mantenimiento
Unidad de
cable
C8-A701** (C8)
1
Para modelos estándar, para
salas blancas
2172929
1
Para el modelo de
protección
2172932
C8-A901** (C8L)
1
Para modelos estándar, para
salas blancas
2172930
1
Para el modelo de
protección
2172933
C8-A1401** (C8XL)
1
Para modelos estándar, para
salas blancas
2172931
1
Para el modelo de
protección
2172934
Plantilla de tensión de la correa*
1
1674582
Plantilla de posicionamiento del freno de
la articulación n.º 1*
1
1675081
Amarracables
AB100
1
1675753
AB150
1
1675754
Herramientas
Llave
hexagonal
ancho a lo largo de
superficies planas:
2,5 mm
1
Para los pernos de cabeza hueca
hexagonal M3
ancho a lo largo de
superficies planas: 3 mm
1
Para los pernos de cabeza hueca
hexagonal M4
ancho a lo largo de
superficies planas: 4 mm
1
Para los pernos de cabeza hueca
hexagonal M5
ancho a lo largo de
superficies planas: 5 mm
1
Para los pernos de cabeza hueca
hexagonal M6
Llave tubular
ancho a lo largo de
superficies planas: 5 mm
1
Para conector D-Sub
Alicate de punta larga
1
Para retirar un tubo de aire
Alicates de corte
1
Para cortar un amarracables
Destornillador de cruz (n.º 2)
1
Para tornillos con ranura en cruz
Torquímetro
1
Para el control del torque de ajuste
Tensiómetro de la correa
1
Consulte: Unitta U-505
* La plantilla de tensión de la correa es una plantilla de montaje. Use esta plantilla para ajustar la tensión de la
correa.
El freno está montado en cada articulación para evitar que el brazo descienda, debido a su propio peso,
mientras el controlador está apagado o el motor está en estado apagado. El freno no funciona durante el
reemplazo. Tenga cuidado cuando realice el trabajo de mantenimiento.
Al retirar el motor de la articulación n.º 2, incline el brazo n.º 2 y presiónelo hacia el brazo n.º 1.
Referencia: Mantenimiento: 6.1 Articulación n.º 2 - Reemplazo del motor, paso para el retiro (2)
Al retirar el motor de la articulación n.º 3, incline el brazo n.º 2 y presiónelo hacia el brazo n.º 2.
Referencia: Mantenimiento: 7.1 Articulación n.º 3 - Reemplazo del motor, paso para el retiro (2)
Cuando presione el brazo, coloque un trozo de tela o un material similar entre los brazos para evitar contacto
entre ellos. Esto protege las superficies del brazo de raspaduras y del desprendimiento de la pintura.

Mantenimiento
C8 Mod.13 139
Retiro: Unidad de cable (Cable M/C hacia atrás)
1. Mueva el manipulador a la postura de origen (posición del pulso 0).
2. Apague el controlador.
3. Retire las siguientes cubiertas y la placa.
Para conocer detalles, consulte Mantenimiento: 3. Cubiertas.
Cubiertas laterales del brazo n.º 4 (ambos lados) Cubierta de mantenimiento del brazo n.º 4 (solo C8XL)
Cubierta del brazo n.º 3 Cubierta de mantenimiento del brazo n.º 3
Cubiertas laterales del brazo n.º 2 (ambos lados) Cubiertas laterales del brazo n.º 1 (ambos lados)
Cubierta central del brazo n.º 1 Cubierta de mantenimiento de la base
Placa de conectores (Cable M/C hacia atrás)
4. Quite los dos tubos de aire que están dentro de la base.
5. Retire los dos conectores D-sub.
6. Desconecte los cables de la base y desconecte los siguientes
conectores.
Conectores: X11, X12, X14, BR010, BR011, X010, X020,
X040, LED, GS01, BT1
(Sostenga el gancho para retirar).
7. Desconecte los siguientes conectores.
Conector de RJ45:
Sostenga el gancho para retirar.
Conector del sensor F:
Abra los ganchos en ambos extremos del conector y sáquelo.

Mantenimiento
140 C8 Mod.13
8. Retire la placa del terminal del cable a tierra (Cable M/C hacia atrás).
Pernos de cabeza hueca hexagonal: 2-M410
9. Quite los terminales del cable a tierra.
Tornillos con ranura en cruz con arandela
Modelos S, C : 9-M48, 2-M36
Modelo P : 10-M48, 2-M36
10. Retire la fuente de alimentación del freno.
Tornillos con ranura en cruz con arandela: 2-M36
11. Desconecte los siguientes cables a través de la abertura de la base.
Cable D-sub
Cable a tierra
Conector de RJ45
Conector del sensor F
12. Retire la unidad del motor de la articulación n.º 1.
Para conocer detalles, consulte Mantenimiento: 5.1.1 Articulación n.º 1 - Reemplazo del motor (Cable M/C
hacia atrás),
pasos para el retiro (6) y (7).

Mantenimiento
C8 Mod.13 141
13. Retire la placa para evitar la interferencia de los cables.
Pernos de cabeza hueca hexagonal: 2-M36
14. Retire el soporte de los cables de la base (C1) y la hoja de protección
de cables.
Pernos de cabeza hueca hexagonal: 2-M36
15. Retire la correa de regulación de la articulación n.º 1.
16. Retire la batería de la caja de la batería.
17. Desconecte el conector de la batería.
Sostenga la placa con la mano y extraiga el cable de la batería para
desconectar el conector.
NOTA

Mantenimiento
142 C8 Mod.13
18. Retire la placa en la que está fijada la placa de baterías.
Pernos de cabeza hueca hexagonal: 2-M410
19. Desconecte los conectores de la batería.
Conectores: CN3, CN6
20. Quite los dos terminales del cable a tierra del brazo n.º 1.
Tornillos con ranura en cruz con arandela: 2-M48
21. Retire la unidad del motor de la articulación n.º 2.
Para conocer detalles, consulte Mantenimiento: 6.1 Articulación n.º 2 – Reemplazo del motor, pasos para el
retiro (1) a (3) y (5) a (9).
22. Corte los amarracables que atan los cables en el interior del brazo n.º
1 y retire el conector conectado a la placa de control 1.
Conector: GS01
23. Retire la placa de fijación de cables de la articulación n.º 1 (costado
del brazo n.º 1).
Pernos de cabeza hueca hexagonal: 2-M410

Mantenimiento
C8 Mod.13 143
24. Desconecte los cables internos del costado de la base del brazo n.º 1.
Proteja los conectores con cinta adhesiva.
- Para proteger los ganchos del conector
- Para evitar la adherencia de grasa de los cables
Desconecte los conectores, uno por uno, del más pequeño al más
grande.
25. Retire los soportes de cables del brazo n.º 1 (C1: 2 piezas) y el tubo
de protección del cable.
Pernos de cabeza hueca hexagonal: 4-M36
26. Retire los soportes de cables del brazo n.º 1 (C2 y S2: uno cada uno)
y el tubo de protección del cable.
Pernos de cabeza hueca hexagonal: 2-M36 (C2)
2-M410 (S2)
27. Retire el soporte de cables del brazo n.º 2 (C2) y el tubo de protección
del cable.
Pernos de cabeza hueca hexagonal: 2-M36
28. Retire la placa de fijación de cables del brazo n.º 2.
Pernos de cabeza hueca hexagonal: 2-M410
NOTA

Mantenimiento
144 C8 Mod.13
29. Corte el amarracables que ata las bobinas de protección de cables que
están dentro del brazo n.º 2.
30. Quite los dos terminales del cable a tierra del brazo n.º 2.
Tornillos con ranura en cruz con arandela: 2-M48
0
31. Retire la unidad del motor de la articulación n.º 3.
Para conocer detalles, consulte Mantenimiento: 7.1 Articulación n.º 3 – Reemplazo del motor, pasos para
el retiro (1) a (3)
y (5) a (8).
32. Retire los dos soportes de cables del brazo n.º 2 (C3A y S3).
Pernos de cabeza hueca hexagonal: 2-M48 (C3A)
2-M48 (S3)
33. Quite los dos tubos de aire que están dentro del brazo n.º 3.
Quite los conectores rápidos de los tubos de aire de los tubos.
Volverá a necesitar los conectores rápidos de los tubos de aire. Tenga
cuidado de no perderlos.
34. Quite los dos terminales del cable a tierra del brazo n.º 3.
Tornillos con ranura en cruz con arandela: 2-M48

Mantenimiento
C8 Mod.13 145
35. Desconecte los conectores al interior del brazo n.º 3.
Conectores: X141, X151, X161, BR041, BR051, X041, X71, X72, PS, LED, BT51, BT4
(Sostenga el gancho para retirar).
36. Retire el conector conectado a la placa de control 2.
Conector: GS02
37. Retire la placa de fijación de la placa de control 2 del brazo n.º 3.
Pernos de cabeza hueca hexagonal: 2-M410
38. Retire el soporte de cables del brazo n.º 3 (C3B).
Pernos de cabeza hueca hexagonal: 2-M36
39. Retire la placa de fijación de cables 1 del brazo n.º 3.
Pernos de cabeza hueca hexagonal: 2-M410
40. Corte el amarracables que ata las bobinas de protección de cables que
están dentro del brazo n.º 3.

Mantenimiento
146 C8 Mod.13
41. Desconecte los cables del costado del brazo n.º 3 hacia el costado del
brazo n.º 2.
42. Extraiga la unidad de cable separada (costado de la base) del costado
del brazo n.º 1 hacia el costado del brazo n.º 2.
Para proteger los conectores y facilitar el trabajo, primero cubra los
conectores con una bolsa plástica. Luego, pase la unidad de cable por
el brazo.
43. Retire la placa de fijación de cables 2 del brazo n.º 3.
Pernos de cabeza hueca hexagonal: 2-M410
44. Retire el soporte de cables del brazo n.º 3 (C4) y la hoja de protección
de cables.
Pernos de cabeza hueca hexagonal: 2-M36
C8XL:
Retire el soporte de cables (C4) y la hoja de protección de cables de
la cubierta de mantenimiento del brazo n.º 4.
Pernos de cabeza hueca hexagonal: 2-M36

Mantenimiento
C8 Mod.13 147
45. Quite los dos tubos de aire que están dentro del brazo n.º 4.
46. Corte los amarracables que atan los cables del brazo n.º 4.
47. Suelte los pernos y fije la placa de protección del cable instalada en
el brazo n.º 4 y desconecte los cables.
Pernos de cabeza hueca hexagonal: 2-M4×10
48. Quite los terminales del cable a tierra de la placa de protección del
cable.
Tornillos con ranura en cruz con arandela: 4-M4×8

Mantenimiento
148 C8 Mod.13
49. Retire las unidades de los motores de las articulaciones n.º 5 y n.º 6.
Para conocer detalles, consulte Mantenimiento: 9.1 Articulación n.º 5 – Reemplazo del motor, pasos para
el retiro (4) a (8)
y Mantenimiento. 10.1 Articulación n.º 6 – Reemplazo del motor, pasos para el retiro (4) a (7).
Se volverán a utilizar los conectores rápidos de los tubos de aire que se retiraron junto con la unidad de
motor de la articulación n.º 5.
Tenga cuidado de no perderlos.
50. Quite el accesorio D-sub del brazo n.º 4.
Pernos de cabeza hueca hexagonal: 2-M410
Para conocer detalles, consulte Mantenimiento: 3. Cubiertas.
51. Retire las siguientes piezas desde el accesorio D-sub del brazo n.º 4.
Modelos S, C:
Conector D-sub
Placa de fijación del conector D-sub
Modelo P:
Conector D-sub
52. Retire la placa de fijación de cables del brazo n.º 4.
Pernos de cabeza hueca hexagonal: 2-M410
53. Retire el soporte de cables (C4).
Pernos de cabeza hueca hexagonal: 2-M36

Mantenimiento
C8 Mod.13 149
54. Desconecte los cables siguientes que no tienen ningún relé en el
costado del brazo n.º 4 hacia el costado del brazo n.º 3.
Cable Ethernet
Cable X052/X062
Cable a tierra (verde/ amarillo)

Mantenimiento
150 C8 Mod.13
Instalación: Unidad de cable (Cable M/C hacia atrás)
1. Revise si la unidad de cable contiene las siguientes piezas.
Hoja de silicona: 3 hojas (25 mm 120 mm)
Carcasa del conector del sensor F, 2 piezas
Hoja de silicona
3 hojas
(25 mm 120 mm)
2. Retire el cable Ethernet del conector.
Proteja los extremos de los cables con cinta adhesiva para evitar que
se dañe el gancho.
3. Retire los tornillos de sujeción y las tuercas del conector D-sub.
Se volverán a utilizar los tornillos y las tuercas para fijar el conector.
Tenga cuidado de no perderlos.
4. Desconecte los siguientes conectores para separar los cables.
Conectores:
X051, X061, X151, X161, XGND, BR051, BR061,
BT51, BT61, X71, X72, SW1

Mantenimiento
C8 Mod.13 151
5. Ponga una marca en la posición de fijación de cada cable, a medida que
los pasa a través del brazo n.º 4.
D-sub : 130 mm desde el extremo del conector
Otros cables : 190 mm desde el extremo del conector
Tubo de aire : 210 mm con respecto al extremo
130 mm
6. Pase la unidad de cable separada (costado de la base) desde el costado
del brazo n.º 2 hacia el brazo n.º 1.
Para proteger los conectores y facilitar el trabajo, primero cubra los
conectores con una bolsa plástica. Luego, pase la unidad de cable por
el brazo.
Pase los siguientes cables que no tienen ningún relé por el brazo hacia
el costado del brazo n.º 3.
Cable Ethernet
Cable X052/X062
Cable a tierra (verde/ amarillo)

Mantenimiento
152 C8 Mod.13
Excluya los demás cables del conector para una cierta longitud, como
se muestra en la imagen, a fin de guardarlos en el brazo n.º 3.
7. Pase el cable Ethernet, el cable X052/X062 y el cable a tierra (verde/
amarillo) desde el costado del brazo n.º 3 hacia el costado del brazo n.º
4.
C8/C8L:
Pase los cables, uno por uno, por el brazo hacia el costado del brazo n.º
3.
C8XL:
Primero pase la trenza tubular desde el costado del brazo n.º 4 hasta el
lado del brazo n.º 3. Inserte los conectores por la trenza tubular, como
se muestra en la foto, y fije el tubo con el amarracables para que no se
salgan los conectores.
Luego, tire de la trenza tubular desde el costado del brazo n.º 4 mientras
empuja los cables por el lado del brazo n.º 3, para que pasen los cables.
(Consulte la imagen).
8. Pase la unidad de cable separada (costado del brazo n.º 4) desde el
costado del brazo n.º 4 hacia el brazo n.º 3.
C8/C8L:
No se incluyen tubos de silicona.
C8XL:
Se incluyen tubos de silicona. Excluya el tubo de silicona del costado
del brazo n.º 4.
Pase los siguientes cables por el tubo de silicona: El cable Ethernet, el
cable X052/X062 y el cable a tierra (verde/ amarillo) que se pasaron
desde el costado del brazo n.º 3.

Mantenimiento
C8 Mod.13 153
Como se muestra en la imagen, desconecte el cable Ethernet y el
tubo de aire (azul) en uno de los costados del brazo n.º 4.
Desconecte el resto de los cables en el otro lado.
Alinee las posiciones marcadas y la posición del brazo n.º 4
indicada con la flecha en la imagen.
9. Instale la placa de fijación de cables en el brazo n.º 4.
Pernos de cabeza hueca hexagonal: 2-M410
Torque de ajuste: 4,0 0,2 N·m
10. Utilice un soporte de cables (C4) para fijar los cables.
Pernos de cabeza hueca hexagonal: 2-M36
Torque de ajuste: 2,4 0,1 N·m
C8/C8L:
Envuelva los cables con la hoja de silicona incluida.
Utilice un soporte de cables para fijar la hoja de silicona envuelta.
C8XL:
Coloque el tubo de silicona en la posición en que quede fijo con un soporte de cables.
Utilice un soporte de cables para fijar el tubo de silicona.
NOTA

Mantenimiento
154 C8 Mod.13
11. Instale el conector D-sub en el accesorio D-sub del brazo n.º 4.
Modelos S, C:
Se incluye una placa de fijación del conector D-sub.
Sostenga el conector D-sub entre el accesorio D-sub del brazo n.º 4 y
la placa de fijación del conector D-sub, y fíjelos con los tornillos de
sujeción que retiró en el paso 3 anterior. (No se usan las tuercas y las
arandelas).
Modelo P:
No se incluye ninguna placa de fijación del conector D-sub.
El conector D-sub tiene agujeros de tornillos.
Fije el conector D-sub con los tornillos de sujeción que retiró en el
paso 3 anterior.
12. Instale el accesorio D-sub en el brazo n.º 4.
Pernos de cabeza hueca hexagonal: 2-M410
Torque de ajuste: 4,0 0,2 N·m
No permita que los cables queden atrapados en el accesorio.
Para conocer detalles, consulte Mantenimiento: 3. Cubiertas.
NOTA

Mantenimiento
C8 Mod.13 155
13. Instale los motores para las articulaciones n.º 5 y 6.
Conecte los cables y el tubo de aire y guárdelos al interior.
Imagen superior: Lado del motor de la articulación n.º 5
Coloque el cable Ethernet y el tubo de aire (azul) en el costado
cercano.
Imagen inferior: Lado del motor de la articulación n.º 6
Coloque los demás cables y el tubo de aire (transparente) en el
costado delantero.
Fije los cables atándolos con un amarracables (INSULOC AB150 o
equivalente) insertado a través del agujero de la placa de fijación de
cables, de manera que no interfiera con la polea del motor de la
articulación n.º 6.
Preste atención, de manera que no haya ningún conector instalado
incorrectamente y ningún cable quede atrapado entre los componentes.
Para conocer detalles, consulte Mantenimiento: 9.1 Articulación n.º 5 – Reemplazo del motor, pasos para
la instalación (4) a (8)
y Mantenimiento: 10.1 Articulación n.º 6 – Reemplazo del motor, pasos para la instalación (4) y (7).
Vuelva a usar los conectores rápidos de los tubos de aire que retiró en los pasos para el retiro del cable.
14. Instale la fuente de alimentación del freno en la placa.
Instale la alimentación de manera que los cables miren hacia abajo.
Tornillos con ranura en cruz con arandela: 4-M3×6
Torque de ajuste: 0,45 0,1 N·m
Lugares de instalación:
Fuente de alimentación del freno para la articulación n.º 5,
lado derecho
Fuente de alimentación del freno para la articulación n.º 6,
lado izquierdo
15. Fije la placa de protección de cables al brazo n.º 4.
Pernos de cabeza hueca hexagonal: 2-M4×10
Torque de ajuste: 4,0 0,2 N·m
Tenga cuidado de que los cables no queden atrapados.
Puede causar un desperfecto en los cables.
NOTA
NOTA

Mantenimiento
156 C8 Mod.13
16. C8XL:
Fije los cables a la cubierta de mantenimiento del brazo n.º 4 con un
soporte de cables (C4).
Envuelva los cables con la hoja de silicona incluida.
Utilice un soporte de cables para fijar la hoja de silicona envuelta.
Pernos de cabeza hueca hexagonal: 2-M36
Torque de ajuste: 2,4 0,1 N·m
17. Aplique grasa a los cables dentro del manguito.
Grasa: Krytox
Cantidad: C8/C8XL aproximadamente 3 g
C8L: aproximadamente 6 g
Divida la grase anterior en mitades y aplique cada mitad en el costado
del brazo n.º 4 y el costado del brazo n.º 3 respectivamente.
Preste atención de manera que la grasa no ingrese en el área de fijación
de los cables del brazo n. 3 y en los conectores.
18. Use el soporte de cables (C4) para fijar los cables a la placa de fijación
de cables 2 del brazo n.º 3.
Envuelva los cables con la hoja de silicona incluida.
Utilice un soporte de cables para fijar la hoja de silicona envuelta.
Pernos de cabeza hueca hexagonal: 2-M36
Torque de ajuste: 2,4 0,1 N·m
19. Instale la placa de fijación de cables 2 del brazo n.º 3 en el brazo n.º
3.
Pernos de cabeza hueca hexagonal: 2-M410
Torque de ajuste: 4,0 0,2 N·m

Mantenimiento
C8 Mod.13 157
20. Use el resorte de protección del cable ara atar los cables en la placa de
fijación de cables 1 del brazo n.º 3.
Tipo de amarracables: AB100
Número de amarracables: 4
21. Instale la placa de fijación de cables 1 del brazo n.º 3 en el brazo n.º
3.
Pernos de cabeza hueca hexagonal: 2-M410
Torque de ajuste: 4,0 0,2 N·m
22. Utilice un soporte de cables (C3B) para fijar los cables.
Coloque los dos tubos de aire en la parte inferior de los cables.
Coloque el tubo de silicona en la posición en que quede fijo con un
soporte de cables.
Utilice un soporte de cables para fijar el tubo de silicona.
Pernos de cabeza hueca hexagonal: 2-M36
Torque de ajuste: 2,4 0,1 N·m
23. Instale la placa de fijación de la placa de control 2 en el brazo n.º 3.
Pernos de cabeza hueca hexagonal: 2-M4×10
Torque de ajuste: 4,0 0,2 N·m

Mantenimiento
158 C8 Mod.13
24. Conecte el conector a la placa de control 2.
Conector: GS02
25. Conecte los conectores de cables al interior del brazo n.º 3.
Conectores: X141, X151, X161, BR041, BR051, X041, X71, X72, PS, LED, BT51, BT4
(Sostenga el gancho para retirar).
26. Instale los dos terminales del cable a tierra en el brazo n.º 3.
Verde/amarillo Lado izquierdo Verde: Lado derecho
Tornillos con ranura en cruz con arandela: 2-M48
Torque de ajuste: 0,9 0,1 N·m
27. Use los conectores rápidos de los tubos de aire (codos) para conectar
los tubos de aire del mismo color.
Retire los conectores rápidos de los tubos de aire de los cables
antiguos para volverlos a utilizar.
Modifique la saliente del conector de manera tal que se pueda instalar
la cubierta.

Mantenimiento
C8 Mod.13 159
28. Use los soportes (S3) para fijar el resorte de protección de cables al
brazo n.º 2.
Pernos de cabeza hueca hexagonal: 2-M48
Torque de ajuste: 4,0 0,2 N·m
29. Use los soportes de cables (C3A) para fijar los cables al brazo n.º 2
en forma temporal.
Coloque el tubo de silicona en la posición en que quede fijo con un
soporte de cables.
Utilice un soporte de cables para fijar el tubo de silicona en forma
temporal.
Pernos de cabeza hueca hexagonal: 2-M48
Guía general para la fijación temporal:
Los cables se pueden empujar, incluso después de fijar los
cables.
30. Empújelos 10 mm hacia arriba en la dirección que indica la flecha de
la foto para crear algo de espacio.
31. Fije los cables en el brazo n.º 2 con los soportes de cables (C3A).
Revise que el tubo de silicona no se aleje de la posición fija.
Pernos de cabeza hueca hexagonal: 2-M48
Torque de ajuste: 4,0 0,2 N·m
32. Instale la unidad del motor de la articulación n.º 3.
Para conocer detalles, consulte Mantenimiento: 7.1 Articulación n.º 3 – Reemplazo del motor, pasos para
la instalación (4) y (8).
33. Fije los dos terminales del cable a tierra en el brazo n.º 2.
Verde: Costado derecho Verde/ amarillo: Costado izquierdo
Tornillos con ranura en cruz con arandela: 2-M48
Torque de ajuste: 0,9 0,1 N·m

Mantenimiento
160 C8 Mod.13
34. Use el resorte de protección del cable para atar la placa de fijación de
cables del brazo n.º 2.
Tipo de amarracables: AB100
Número de amarracables: 4
Tenga cuidado con la orientación de la placa de fijación de cables del
brazo n.º 2.
El costado con dos ranuras en forma de U debería mirar hacia abajo.
35. Use los soportes de cables (C2) para fijar la placa de fijación de cables
del brazo n.º 2 en forma temporal.
Coloque el tubo de silicona en la posición en que quede fijo con un
soporte de cables.
Utilice un soporte de cables para fijar el tubo de silicona en forma
temporal.
Pernos de cabeza hueca hexagonal: 2-M36
Guía general para la fijación temporal:
Los cables se pueden empujar, incluso después de fijar los
cables.
36. Instale la placa de fijación de cables del brazo n.º 2 en el brazo n.º 2.
Después de colocar las dos ranuras en forma de U en los pernos de
fijación, apriete los pernos.
Pernos de cabeza hueca hexagonal: 2-M410
Torque de ajuste: 4,0 0,2 N·m
37. Fije los cables a la placa de fijación de cables del brazo n.º 2.
Revise que el tubo de silicona no se aleje de la posición fija.
Pernos de cabeza hueca hexagonal: 2-M36
Torque de ajuste: 2,4 0,1 N·m

Mantenimiento
C8 Mod.13 161
38. Use los soportes (S2) para fijar el resorte de protección de cables al
brazo n.º 1.
Pernos de cabeza hueca hexagonal: 2-M48
Torque de ajuste: 4,0 0,2 N·m
39. Use los soportes de cables (C2) para fijar los cables al brazo n.º 2 en
forma temporal.
Coloque el tubo de silicona en la posición en que quede fijo con un
soporte de cables.
Utilice un soporte de cables para fijar el tubo de silicona en forma
temporal.
Pernos de cabeza hueca hexagonal: 2-M36
Guía general para la fijación temporal:
Los cables se pueden empujar, incluso después de fijar los cables.
40. Empújelos 10 mm hacia arriba en la dirección que indica la flecha de
la foto para crear algo de espacio.
41. Fije los cables en el brazo n.º 1.
Revise que el tubo de silicona no se aleje de la posición fija.
Pernos de cabeza hueca hexagonal: 2-M36
Torque de ajuste: 2,4 0,1 N·m

Mantenimiento
162 C8 Mod.13
42. Coloque una marca en la posición de 250 mm desde el soporte de
cables (C2).
250 mm
43. Para instalar el cable GS01 en la placa de control 1, coloque una
marca en una posición de 130 mm desde el conector.
44. Para los cables X021, X121, BR021 y CN3, coloque una marca
en una posición de 160 mm desde el conector respectivamente.
45. Use los soportes de cables (C1) para fijar la placa de fijación de
cables del brazo n.º 1 en forma temporal (2 posiciones).
Fije temporalmente el tubo de silicona al alinear su extremo con
la marca.
Pernos de cabeza hueca hexagonal: 4-M36
Guía general para la fijación temporal:
Los cables se pueden empujar, incluso después de fijar los
cables.

Mantenimiento
C8 Mod.13 163
46. Fije temporalmente la placa de fijación de cables del brazo n.º 1
en el brazo n.º 1 y realice el ajuste fino de la longitud del cable.
Pernos de cabeza hueca hexagonal: 2-M410
Guía general para la fijación temporal: No se debe mover la placa.
Notas para los ajustes finos:
- Sin exceso de aflojamiento ni de tensión en los cables.
Los cables no se deben presionar con fuerza contra el borde del
brazo.
- Los conectores X021, X121, BR021 y CN3 deberían alcanzar
el lado del extremo del brazo n.º 1 al extraerlos.
Los cables no deberían ser demasiado largos.
47. Coloque una marca en los cables en la salida del manguito en el
costado de la base.
48. Fije el soporte de cables (C1)-A en el lado cercano, de manera
que no cambien las posiciones de los cables.
Pernos de cabeza hueca hexagonal: 2-M36
Torque de ajuste: 2,4 0,1 N·m
49. Retire la placa de fijación de cables del brazo n.º 1. fijada
temporalmente, y fije otro soporte de cables (C1)-B.
Retiro de la placa de fijación de cables del brazo n.º 1:
Pernos de cabeza hueca hexagonal: 2-M410
Fijación del soporte de cables (C1)-B:
Pernos de cabeza hueca hexagonal: 2-M36
Torque de ajuste: 2,4 0,1 N·m
A
B

Mantenimiento
164 C8 Mod.13
50. Aplique grasa a los cables dentro del manguito de la articulación
n.º 1.
Grasa: Krytox
Cantidad: Aproximadamente 7,5 g:
Posición de aplicación:
Entre la sección de fijación del soporte (C1) y la marca en
el lado de la base
51. Fije la placa de fijación de cables del brazo n.º 1 al brazo n.º 1.
Pernos de cabeza hueca hexagonal: 2-M410
Torque de ajuste: 4,0 0,2 N·m
52. Instale el conector GS01 en la placa de control 1.
53. Instale el motor de la articulación n.º 2 y conecte el conector.
Para conocer detalles, consulte Mantenimiento: 6.1 Articulación n.º 2 – Reemplazo del motor, pasos para
la instalación (4) y (9).
54. Fije los dos terminales del cable a tierra en el brazo n.º 2.
Verde: Costado derecho Verde/ amarillo: Costado izquierdo
55. Conecte los conectores de la batería.
Conectores: CN3, CN6

Mantenimiento
C8 Mod.13 165
56. Instale la placa de fijación de la placa de baterías.
Pernos de cabeza hueca hexagonal: 2-M410
Torque de ajuste: 4,0 0,2 N·m
57. Conecte los conectores de la batería.
58. Instale la batería en la caja de la batería.
59. Pase la correa de regulación de la articulación n.º 1 por el cable.
60. Use los soportes de cables (C1) para fijar los cables en la placa de
fijación de cables.
Envuelva los cables con la hoja de silicona incluida.
Utilice un soporte de cables para fijar la hoja de silicona envuelta.
Pernos de cabeza hueca hexagonal: 2-M36
Torque de ajuste: 2,0 0,1 N·m
61. Instale la placa para evitar la interferencia de los cables.
Pernos de cabeza hueca hexagonal: 2-M36
Torque de ajuste: 2,0 0,1 N·m
62. Instale la unidad del motor de la articulación n.º 1.
Para conocer detalles, consulte Mantenimiento: 5.1.1 Articulación n.º 1 - Reemplazo del motor (Cable M/C
hacia atrás), pasos para la instalación (1) a (4).

Mantenimiento
166 C8 Mod.13
63. Saque los siguientes cables hacia arriba a través de la abertura de la
base.
Cable D-sub
Cable a tierra
Conector de RJ45
Conector del sensor F
64. Instale la fuente de alimentación del freno en la placa.
Los cables deberían quedar en la dirección que aparece en la foto.
(Consulte la imagen).
Tornillos con ranura en cruz con arandela: 2-M36
Torque de ajuste: 0,45 0,1 N·m
65. Instale los terminales del cable a tierra en la placa.
Tornillos con ranura en cruz con arandela
Modelos S, C :9-M48, 2-M36
Modelo P :10-M48, 2-M36
Torque de ajuste : 0,9 0,1 N m (M48)
0,45 0,1 N m (M36)
Las posiciones de instalación de los terminales de conexión a tierra del cable D-sub están predeterminadas.
Asegúrese de instalarlos en los dos agujeros de tornillo en la parte posterior del manipulador (indicado con
flechas en la imagen).
66. Instale la placa de cables a tierra (Cable M/C hacia atrás).
Pernos de cabeza hueca hexagonal: 2-M410
Torque de ajuste: 4,0 0,2 N·m
67. Instale los siguientes conectores de acuerdo con las marcas que aparecen en la placa de conectores.
Conector de RJ45: Ether
Conector del sensor F: Sensor F
NOTA

Mantenimiento
C8 Mod.13 167
68. Conecte los conectores del cable M/C.
Conectores: X11, X12, X14, BR010, BR011, X010, X020,
X040, LED, GS01, BT1
69. Instale los conectores D-sub de acuerdo con las marcas que aparecen en la placa de conectores.
Izquierda: Conector D-sub para el desbloqueo del freno (con un marcador de cable: SW1): Desbloqueo
del freno
Derecha: Conector D-sub para el cableado del usuario (con un marcador de cable: Con terminal
redondo): D-sub
70. Instale los dos tubos de aire de acuerdo con las marcas que aparecen en la placa de conectores.
Air1: Clear
Air2: Azul
Instale el tubo de aire con el color correcto.
71. Instale las cubiertas y la placa como se indica a continuación.
Cubiertas laterales del brazo n.º 4 (ambos lados) Cubierta de mantenimiento del brazo n.º 4 (solo C8XL)
Cubierta del brazo n.º 3 Cubierta de mantenimiento del brazo n.º 3
Cubiertas laterales del brazo n.º 2 (ambos lados) Cubiertas laterales del brazo n.º 1 (ambos lados)
Cubierta central del brazo n.º 1 Cubierta de mantenimiento de la base
Placa de conectores (Cable M/C hacia atrás)
Para conocer detalles, consulte Mantenimiento: 3. Cubiertas.
72. Realice la calibración.
Para conocer detalles, consulte Mantenimiento: 16. Calibración.
NOTA

Mantenimiento
168 C8 Mod.13
4.1.2 Reemplazo de la unidad de cable (cable M/C hacia abajo)
Nombre
Cantidad
Nota
Piezas de
mantenimiento
Unidad de
cable
C8-A701*B* (C8)
1
Para modelos estándar,
para salas blancas
2172929
1
Para el modelo de
protección
2172932
C8-A901*B* (C8L)
1
Para modelos estándar,
para salas blancas
2172930
1
Para el modelo de
protección
2172933
C8-A1401*B* (C8XL)
1
Para modelos estándar,
para salas blancas
2172931
1
Para el modelo de
protección
2172934
Plantilla de tensión de la correa*
1
1674582
Plantilla de posicionamiento del freno
de la articulación n.º 1*
1
1675081
Amarracables
AB100
1
1675753
AB150
1
1675754
Herramientas
Llave
hexagonal
ancho a lo largo de
superficies planas:
2,5 mm
1
Para los pernos de cabeza hueca
hexagonal M3
ancho a lo largo de
superficies planas:
3 mm
1
Para los pernos de cabeza hueca
hexagonal M4
ancho a lo largo de
superficies planas:
4 mm
1
Para los pernos de cabeza hueca
hexagonal M5
ancho a lo largo de
superficies planas:
5 mm
1
Para los pernos de cabeza hueca
hexagonal M6
Llave tubular
ancho a lo largo de
superficies planas:
5 mm
1
Para conector D-Sub
Alicate de punta larga
1
Para retirar un tubo de aire
Alicates de corte
1
Para cortar un amarracables
Destornillador de cruz (n.º 2)
1
Para tornillos con ranura en cruz
Torquímetro
1
Para el control del torque de ajuste
Tensiómetro de la correa
1
Consulte: Unitta U-505
* La plantilla de tensión de la correa es una plantilla de montaje. Use esta plantilla para ajustar la tensión de la
correa.
El freno está montado en cada articulación para evitar que el brazo descienda, debido a su propio peso,
mientras el controlador está apagado o el motor está en estado apagado. El freno no funciona durante el
reemplazo.
Tenga cuidado cuando realice el trabajo de mantenimiento.

Mantenimiento
C8 Mod.13 169
Al retirar el motor de la articulación n.º 2, incline el brazo n.º 2 y presiónelo hacia el brazo n.º 1.
Referencia: Mantenimiento: 6.1 Articulación n.º 2 - Reemplazo del motor, paso para el retiro (2)
Al retirar el motor de la articulación n.º 3, incline el brazo n.º 3 y presiónelo hacia el brazo n.º 2.
Referencia: Mantenimiento: 7.1 Articulación n.º 3 - Reemplazo del motor, paso para el retiro (2)
Cuando presione el brazo, coloque un trozo de tela o un material similar entre los brazos para evitar contacto
entre ellos. Esto protege las superficies del brazo de raspaduras y del desprendimiento de la pintura.
Retiro: Unidad de cable (Cable M/C hacia abajo)
1. Mueva el manipulador a la postura de origen (posición del pulso 0).
2. Apague el controlador.
3. Gire el manipulador en sentido lateral.
PRECAUCIÓN
■
Al girar el manipulador en forma lateral, debe haber dos o más personas para
trabajar en él, de modo que al menos una pueda sostener el brazo mientras los
demás retiran los pernos.
Retirar los pernos sin poner soporte al brazo puede provocar que se caiga el
brazo, se produzcan lesiones corporales o el mal funcionamiento del sistema de
robot.
4. Retire las cubiertas y la placa como se indica a continuación.
Cubiertas laterales del brazo n.º 4 (ambos lados) Cubierta de mantenimiento del brazo n.º 4 (solo C8XL)
Cubierta del brazo n.º 3 Cubierta de mantenimiento del brazo n.º 3
Cubiertas laterales del brazo n.º 2 (ambos lados) Cubiertas laterales del brazo n.º 1 (ambos lados)
Cubierta central del brazo n.º 1 Cubierta de la base (Cable M/C hacia abajo)
Cubierta de mantenimiento de la base Placa de conectores (Cable M/C hacia abajo)
Para conocer detalles, consulte Mantenimiento: 3. Cubiertas.
5. Quite los tubos de aire de la base.
6. Retire los dos conectores D-sub.
7. Desconecte el cable de la base y desconecte los siguientes
conectores.
Conectores: X11, X12, X14, BR010, BR011, X010, X020,
X040, LED, GS01, BT1
(Sostenga el gancho para retirar).
8. Desconecte los siguientes conectores.
Conector de RJ45:
Sostenga el gancho para retirar.

Mantenimiento
170 C8 Mod.13
Conector del sensor F:
Abra los ganchos en ambos extremos del conector
y sáquelo.
9. Quite los terminales del cable a tierra.
Tornillos con ranura en cruz con arandela
Modelos S, C: : 9-M48, 2-M36
Modelo P : 10-M48, 2-M36
10. Retire la fuente de alimentación del freno.
Tornillos con ranura en cruz con arandela: 2-M36
11. Los pasos siguientes son idénticos a los del cable M/C (hacia atrás).
Para conocer detalles, consulte Mantenimiento: 4.1.1 Reemplazo del motor (Cable M/C hacia atrás),
pasos para el retiro (13) a (54).

Mantenimiento
C8 Mod.13 171
Instalación: Unidad de cable (Cable M/C hacia abajo)
1. Realice los pasos para la instalación (1) a (62) de
Mantenimiento: 4.1.1 Reemplazo de la unidad de cable (cable M/C hacia atrás).
2. Gire el manipulador en sentido lateral.
PRECAUCIÓN
■
Al girar el manipulador en forma lateral, debe haber dos o más personas para
trabajar en él, de modo que al menos una pueda sostener el brazo mientras los
demás retiran los pernos.
Retirar los pernos sin poner soporte al brazo puede provocar que se caiga el
brazo, se produzcan lesiones corporales o el mal funcionamiento del sistema de
robot.
3. Instale la fuente de alimentación del freno en la placa.
Los cables deberían quedar en la dirección que aparece en la foto.
(Consulte la imagen).
Tornillos con ranura en cruz con arandela: 2-M36
Torque de ajuste: 0,45 0,1 N·m
4. Instale los terminales del cable a tierra en la placa.
Tornillos con ranura en cruz con arandela
Modelos S, C: : 9-M48, 2-M36
Modelo P : 10-M48, 2-M36
Torque de ajuste : 0,9 0,1 N m (M48)
0,45 0,1 N m (M36)
5. Instale los siguientes conectores de acuerdo con las marcas que aparecen en la placa de conectores.
Conector de RJ45: Ether
Conector del sensor F: Sensor F
6. Conecte los conectores del cable M/C.
Conectores: X11, X12, X14, BR010, BR011, X010, X020, X040, LED, GS01, BT1
7. Instale los conectores D-sub de acuerdo con las marcas que aparecen en la placa de conectores.
Izquierda: Conector D-sub para el desbloqueo del freno (con un marcador de cable: SW1): Desbloqueo
del freno
Derecha: Conector D-sub para el cableado del usuario (con un marcador de cable: Con terminal
redondo): D-sub

Mantenimiento
172 C8 Mod.13
8. Instale los dos tubos de aire de acuerdo con las marcas que aparecen en la placa de conectores.
Air1: Clear
Air2: Azul
Instale el tubo de aire con el color correcto.
9. Instale las siguientes cubiertas y la placa.
Cubiertas laterales del brazo n.º 4 (ambos lados) Cubierta de mantenimiento del brazo n.º 4 (solo C8XL)
Cubierta del brazo n.º 3 Cubierta de mantenimiento del brazo n.º 3
Cubiertas laterales del brazo n.º 2 (ambos lados) Cubiertas laterales del brazo n.º 1 (ambos lados)
Cubierta central del brazo n.º 1 Cubierta de la base (Cable M/C hacia abajo)
Cubierta de mantenimiento de la base Placa de conectores (Cable M/C hacia abajo)
Para conocer detalles, consulte Mantenimiento: 3. Cubiertas.
10. Realice la calibración.
Para conocer detalles, consulte Mantenimiento: 16. Calibración.
NOTA

Mantenimiento
C8 Mod.13 173
4.2 Asignación de pines del conector
4.2.1 Cable de señal

Mantenimiento
174 C8 Mod.13

Mantenimiento
C8 Mod.13 175

Mantenimiento
176 C8 Mod.13
4.2.2 Cable de alimentación
C8-A701*** (C8), C8-A901*** (C8L)

Mantenimiento
C8 Mod.13 177
C8-A1401*** (C8XL)

Mantenimiento
178 C8 Mod.13
C8-A701*** (C8), C8-A901*** (C8L), C8-A1401*** (C8XL)

Mantenimiento
C8 Mod.13 179
4.2.3 Cable de usuario
4.2.4 Color de los cables
La siguiente tabla muestra los códigos y los colores de los cables indicados en las
asignaciones de pines.
4.2.1 Cable de señal
4.2.2 Cable de alimentación
4.2.3 Cable de usuario
Código
Color del cable
B
Negro
W
Blanco
R
Rojo
G
Verde
Y
Amarillo
BR
Café
L
Azul
V
Violeta
A
Azul celeste
O
Anaranjado
GL
Gris
P
Rosado

Mantenimiento
176 C8 Mod.13
5. Articulación n.º 1
ADVERTENCIA
■
Antes de realizar cualquier procedimiento de reemplazo, apague el controlador y
los equipos relacionados, luego desconecte el enchufe de la fuente de
alimentación.
Realizar cualquier procedimiento de reemplazo con la energía encendida es
extremadamente peligroso y puede provocar una descarga eléctrica o el mal
funcionamiento del sistema de robot.
■
No conecte ni desconecte los conectores del motor mientras el sistema de robot
esté encendido. Conectar o desconectar los conectores del motor con la energía
encendida es extremadamente peligroso y puede provocar lesiones corporales
graves, ya que el manipulador puede moverse de manera anormal; además,
puede provocar descargas eléctricas y el mal funcionamiento del sistema de
robot.
■
Asegúrese de conectar el cable de alimentación de CA a un tomacorriente. NO lo
conecte directamente a la fuente de alimentación de la fábrica. Para cortar la
energía hacia el sistema de robot, desconecte el enchufe de la fuente de
alimentación. Realizar cualquier trabajo mientras conecta el cable de
alimentación de CA a una fuente de alimentación de la fábrica es extremadamente
peligroso y puede provocar una descarga eléctrica o el mal funcionamiento del
sistema de robot.
PRECAUCIÓN
■
Tenga cuidado de no aplicar descargas eléctricas excesivas al eje del motor
durante los procedimientos de reemplazo. Las descargas eléctricas pueden
reducir la vida útil de los motores y el codificador, o bien, dañarlos.
■
Nunca desarme el motor y el codificador. Un motor y codificador desarmado
causará un espacio de posición y no se puede volver usar.
Después de reemplazar las piezas (motores, unidades de engranaje reductor, correas de
regulación, etc.), el manipulador no puede operar correctamente, ya que hay un espacio entre
el origen almacenado en cada codificador de motor y el origen correspondiente almacenado
en el controlador.
Después de reemplazar las piezas, es necesario hacer coincidir estos orígenes.
El proceso de alinear los dos orígenes se denomina “Calibración”.
Consulte Mantenimiento 16. Calibración y siga los pasos para realizar la calibración.
Freno electromagnético
de la articulación n.º 1
Motor de la articulación n.º 1
Correa de regulación de
la articulación n.º 1
Unidad de engranaje reductor
de la articulación n.º 1
(Figura: C8-A1401* (C8XL))
Los procedimientos de mantenimiento varían según el tipo de aislamiento del cable M/C.
5.1 Cable M/C hacia atrás (articulación n.º 1)
5.2 Cable M/C hacia abajo (articulación n.º 1)

Mantenimiento
C8 Mod.13 177
5.1 Cable M/C hacia atrás (articulación n.º 1)
5.1.1 Articulación n.º 1 - Reemplazo del motor (Cable M/C hacia atrás)
Nombre
Cantidad
Nota
Piezas de
mantenimiento
Unidad de
motor
(articulación
n.º 1)
C8-A701** (C8)
C8-A901** (C8L)
1
2172921
C8-A1401** (C8XL)
1
2172922
Plantilla de tensión de la correa*
1
1674582
Plantilla de posicionamiento del freno
de la articulación n.º 1*
1
1675081
Amarracables
AB100
-
1675753
AB350
-
1697428
Herramientas
Llave
hexagonal
ancho a lo largo de
superficies planas:
3 mm
1
Para los pernos de cabeza hueca hexagonal
M4
ancho a lo largo de
superficies planas:
4 mm
1
Para los pernos de cabeza hueca hexagonal
M5
ancho a lo largo de
superficies planas:
5 mm
1
Para los pernos de cabeza hueca hexagonal
M6
Destornillador de cruz (n.º 2)
1
Para tornillos con ranura en cruz
Torquímetro
1
Para el control del torque de ajuste
Alicates de corte
1
Para cortar el amarracables
Alicate
1
Para ajustar el amarracables
Tensiómetro de la correa
1
Consulte: Unitta U-505
* La plantilla de tensión de la correa y la plantilla de posicionamiento del freno de la articulación n.º 1 son
plantillas de montaje. Úselas en los pasos pertinentes del mantenimiento.
El freno está montado en cada articulación para evitar que el brazo descienda, debido a su propio peso, mientras
el controlador está apagado o el motor está en estado apagado. El freno no funciona durante el reemplazo.
Tenga cuidado cuando realice el trabajo de mantenimiento.

Mantenimiento
178 C8 Mod.13
Retiro: Motor de la articulación n.º 1 (Cable M/C hacia atrás)
1. Apague el controlador.
2. Retire la cubierta de mantenimiento de la base.
Para conocer detalles, consulte Mantenimiento: 3. Cubiertas.
3. Retire la placa de conectores (Cable M/C hacia atrás).
Para conocer detalles, consulte Mantenimiento: 3. Cubiertas.
4. Desconecte los cables de la base y desconecte los conectores.
Conector: X11, X010, BT1, BR011
(Sostenga el gancho para retirar).
Cuando reemplace solo el freno, no desconecte el conector BT1.
Si el conector está desconectado, efectúe la calibración.
C8-A701** (C8) C8-A901** (C8L)
C8-A1401** (C8XL):
Retire el bloque de radiación de calor
1. Quite el amarracables y los pernos para retirar el bloque
de radiación de calor
Pernos de cabeza hueca hexagonal: M5×15
Amarracables: AB350
2. Retire la hoja de radiación de calor que está entre el
bloque de radiación de calor y el motor.
C8-A1401** (C8XL)
El bloque de radiación de calor, la hoja de radiación de calor y los pernos se volverán a utilizar. Tenga
cuidado de no perderlos.
Tenga cuidado de no romper la hoja de radiación de calor.
5. Retire la fuente de alimentación del freno.
Tornillos con ranura en cruz con arandela: 2-M3×6
NOTA
NOTA

Mantenimiento
C8 Mod.13 179
6. Retire la placa de freno de la articulación n.º 1 desde la unidad de
motor de la articulación n.º 1.
Pernos de cabeza hueca hexagonal: 3-M420
7. Retire la unidad del motor de la articulación n.º 1 desde la base.
Pernos de cabeza hueca hexagonal: 3-M630 (con una arandela de ajuste)
Tenga cuidado de no romper y perder la hoja de radiación de calor que está conectada al motor.

Mantenimiento
180 C8 Mod.13
Instalación: Motor de la articulación n.º 1 (Cable M/C hacia atrás)
1. Coloque la correa de regulación de la articulación n.º 1 en la polea 2
de la articulación n.º 1
Sostenga la correa de manera de no dejarla caer.
2. Revise que la hoja de radiación de calor esté instalada en el lado
derecho del motor (cuando se mira desde la parte posterior del
manipulador).
Si se opera el manipulador sin la hoja de radiación de calor, el
motor genera calor y puede ocurrir un error.
Si la hoja de radiación de calor tiene una película de protección,
retírela.
Pase la polea 1 de la unidad de motor de la articulación n.º 1 por la
correa de regulación de la articulación n.º 1 y fíjela parcialmente a la
base.
Pernos de cabeza hueca hexagonal: 3-M630
(con una arandela de ajuste)
Asegúrese de que las ranuras del engranaje de la correa de regulación
encajen completamente en las de la polea.
Cuando fije parcialmente la unidad de motor, asegúrese de que se
pueda quitar manualmente y que no se incline cuando se tire de ella.
Si la unidad se fijó demasiado suelta o demasiado apretada, la correa
no tendrá la tensión correcta.
NOTA

Mantenimiento
C8 Mod.13 181
3. Aplique la tensión correcta a la unidad del motor de la articulación
n.º 1 y fíjela.
Cuando fije la unidad de motor, instale la hoja de disipación de calor
en el costado derecho de la basa (cuando se mira desde la parte
posterior del manipulador).
Tensión de la correa de regulación de la articulación n.º 1: 89 a 149 N
Valores de configuración del tensiómetro de la correa
Peso: 4,0 g/mm de ancho × m de longitud de separación, Ancho:
20 mm, Longitud de separación:
160 mm
Pernos de cabeza hueca hexagonal: 3-M630
(con una arandela de ajuste)
Torque de ajuste: 13,0 0,6 N·m
En relación con la tensión de la correa:
- Se puede producir un salto (espacio de posición), si el valor está debajo del límite.
- Se puede producir vibración (ruido anormal) o reducción de la vida útil de las piezas cuando el valor
excede el límite superior.
- Cuando la reemplace con una nueva correa, esta se extiende y puede disminuir la tensión en la etapa
inicial. Asegúrese de operar el robot dos o tres días y volver a revisar la tensión de la correa.
Cuando use la plantilla de tensión de la correa (pieza de
mantenimiento):
Fije la plantilla de tensión de la correa (para J1, J2, J3) en la placa del
motor de la articulación n.º 1.
Pernos de cabeza hueca hexagonal: M5×45
Use la plantilla de tensión de la correa (para J1, J2, J3) como se
muestra en la imagen, a fin de aplicar la tensión especificada.
A medida que se aprieta el tornillo, se tirará de la unidad de motor de
la articulación n.º 1 y se aplicará tensión.
C8-A1401** (C8XL):
Instale el bloque de radiación de calor
Para conocer detalles, consulte Instalación del bloque de radiación
de calor
NOTA

Mantenimiento
182 C8 Mod.13
4. Instale el freno electromagnético o la placa del freno de la
articulación n.º 1 en la unidad de motor de la articulación n.º 1.
Pernos de cabeza hueca hexagonal: 3-M420
Torque de ajuste: 4,0 0,2 N·m
Revise que el motor y el centro del freno estén alineados.
Respecto de la alineación incorrecta del freno:
- La alineación incorrecta del núcleo del freno puede generar un
sonido anormal o aplicar un torque anormal en el freno. Puede
provocar una avería del freno.
Cuando use la plantilla de tensión de la correa de J1 (pieza de
mantenimiento):
Al usar la plantilla de posicionamiento del freno de la articulación n.º
1, revise que el motor y el centro del freno estén alineados mientras
fija el freno.
Si no se puede insertar completamente la plantilla de posicionamiento
del freno de la articulación n.º 1, debe haber una alineación incorrecta
entre el motor y el núcleo del freno. El dicho caso, use la unidad de
desbloqueo del freno (pieza opcional) para desbloquear el freno y,
luego, alinearlo.
Correcto
Incorrecto
5. Instale la fuente de alimentación del freno en la placa. Asegúrese de
instalar la fuente de alimentación del freno de modo tal que los cables
queden en la dirección que aparece en la foto.
Tornillos con ranura en cruz con arandela: 2-M3×6
Torque de ajuste: 0,45 0,1 N·m
6. Conecte los siguientes conectores.
Conectores: X11, X010, BT1, BR011
7. Instale la placa de conectores (Cable M/C hacia atrás).
Para conocer detalles, consulte Mantenimiento: 3. Cubiertas.
8. Instale la cubierta de mantenimiento de la base.
Para conocer detalles, consulte Mantenimiento: 3. Cubiertas.
9. Calibre la articulación n.º 1.
Para conocer detalles, consulte Mantenimiento: 16. Calibración.

Mantenimiento
C8 Mod.13 183
Instalación del bloque de radiación de calor
1. Revise que la hoja de radiación de calor esté instalada en el bloque de
radiación de calor.
Si se opera el manipulador sin la hoja de radiación de calor, el motor
genera calor y puede ocurrir un error.
Si la hoja de radiación de calor tiene una película de protección, retírela.
(Imagen de la película de
protección)
2. Fije la parte superior del bloque de radiación de calor en la placa del
motor de la articulación n.º 1 con los pernos.
Pernos de cabeza hueca hexagonal: M5×15
Torque de ajuste: 4,0 0,2 N·m
3. Fije la parte inferior del bloque de radiación de calor en el motor con el
amarracables.
Amarracables: AB350
3-1 Inserte el amarracables por debajo del motor.
3-2 Sostenga el extremo del amarracables.
3-3 Mientras sostiene el extremo del amarracables, empújelo en la
dirección que indica la flecha en la imagen.
NOTA

Mantenimiento
184 C8 Mod.13
3-4 Envuelva el amarracables alrededor del motor.
3-5 Apriete el amarracables para que sostenga firmemente la hoja de
radiación de calor.
Asegúrese de que la hoja de radiación de calor sobresalga del bloque
de radiación de calor.
No apriete demasiado el amarracables. Puede generar un
desperfecto en los cables.
NOTA

Mantenimiento
C8 Mod.13 185
5.1.2 Articulación n.º 1 - Reemplazo de la unidad de engranaje reductor
(Cable M/C hacia atrás)
Nombre
Cantidad
Nota
Piezas de
mantenimiento
Unidad de
engranaje
reductor
(Articulación
n.º 1)
C8-A701** (C8)
1
1674602
C8-A901** (C8L)
1
1674603
C8-A1401** (C8XL)
1
1674604
Plantilla de tensión de la correa*
1
1674582
Plantilla de posicionamiento del freno de
la articulación n.º 1*
1
1675081
Amarracables (AB100)
1
1675753
Herramientas
Llave
hexagonal
ancho a lo largo de
superficies planas:
2,5 mm
1
Para los pernos de cabeza hueca
hexagonal M3
ancho a lo largo de
superficies planas: 3 mm
1
Para los pernos de cabeza hueca
hexagonal M4
ancho a lo largo de
superficies planas: 4 mm
1
Para los pernos de cabeza hueca
hexagonal M5
ancho a lo largo de
superficies planas: 5 mm
1
Para los pernos de cabeza hueca
hexagonal M6
Destornillador de cruz (n.º 2)
1
Para tornillos con ranura en cruz
Torquímetro
1
Para el control del torque de ajuste
Tensiómetro de la correa
1
Consulte: Unitta U-505
Tela (amortiguación)
1
Para brazos de prensado
* La plantilla de tensión de la correa y la plantilla de posicionamiento del freno de la articulación n.º 1 son
plantillas de montaje. Use las plantillas al ajustar la tensión de la correa.
El freno está montado en cada articulación para evitar que el brazo descienda, debido a su propio peso, mientras
el controlador está apagado o el motor está en estado apagado. El freno no funciona durante el reemplazo.
Tenga cuidado cuando realice el trabajo de mantenimiento.
Al retirar la unidad de motor de la articulación n.º 2, incline el brazo n.º 2 y presiónelo hacia el brazo n.º 1.
Referencia: Mantenimiento 6.1 Articulación n.º 2 - Reemplazo del motor, paso para el retiro (2)
Cuando presione el brazo, coloque un trozo de tela o un material similar entre los brazos para evitar contacto
entre ellos. Esto protege las superficies del brazo de raspaduras y del desprendimiento de la pintura.

Mantenimiento
186 C8 Mod.13
Retiro: Unidad de engranaje reductor de la articulación n.º 1 (Cable M/C hacia atrás)
PRECAUCIÓN
■
En este procedimiento existe la posibilidad de que las manos y los dedos
queden atrapados o se produzcan daños o el mal funcionamiento del
manipulador. Tenga mucho cuidado cuando realice el mantenimiento.
■
No suelte los pernos mientras el brazo n.º 2 no esté inclinado.
Puede provocar que se salga la correa y que se caiga el brazo n.º 2; es
extremadamente peligroso. Asegúrese de realizar los pasos de retiro (1) y (2) de
Mantenimiento 6.1 Articulación n.º 2 - Reemplazo del motor antes de quitar el
motor.
■
Al retirar el brazo n.º 1, debe haber dos o más personas para trabajar en él, de
modo que al menos una pueda sostener el brazo, mientras las demás retiran los
pernos. Retirar los pernos sin poner soporte al brazo puede provocar que se
caiga el brazo, se produzcan lesiones corporales o el mal funcionamiento del
sistema de robot.
1. Retire las siguientes piezas.
Placa de conectores
Conector
Placa de conexión a tierra de cables
Fuente de alimentación del freno
Para conocer detalles, consulte Mantenimiento 5.1.3 Articulación n.º 1 - Reemplazo de la correa de
regulación (cable M/C hacia atrás),
Pasos para el retiro (1) a (9).
2. Retire los terminales de conexión a tierra.
Tornillos con ranura en cruz con arandela
Modelos S, C : 9-M4×8, 2-M3×6
Modelo P : 10-M4×8, 2-M3×6
3. Desconecte las siguientes piezas a través del agujero al interior
de la base.
Cable D-sub
Cable a tierra
Conector de RJ45
Conector del sensor F
4. Retire la unidad del motor de la articulación n.º 1.
Para conocer detalles, consulte Mantenimiento 5.1.1 Articulación n.º 1 – Reemplazo de la unidad de
motor, pasos para el retiro (6) a (7).

Mantenimiento
C8 Mod.13 187
5. Retire el cable para evitar la interferencia de la placa.
Pernos de cabeza hueca hexagonal: 2-M36
6. Retire el soporte de cables de la base (C1).
Pernos de cabeza hueca hexagonal: 2-M36
7. Retire la correa de regulación de la articulación n.º 1.
8. Retire la unidad del motor de la articulación n.º 2.
Para conocer detalles, consulte Mantenimiento 6.1 Articulación n.º 2 - Reemplazo del motor, pasos para
el retiro (1) a (9).
9. Retire la placa de fijación de cables de la articulación n.º 1
(costado del brazo n.º 1).
Pernos de cabeza hueca hexagonal: 2-M410

Mantenimiento
188 C8 Mod.13
10. Retire el conector conectado a la placa de control 1.
Conector: GS01
11. Desconecte los cables internos de la base del costado del brazo
n.º 1.
Proteja los conectores con cinta adhesiva.
- Para proteger los ganchos del conector
- Para evitar la adherencia de grasa de los cables
Desconecte los cables, uno por uno, del conector más pequeño al
más grande.
No intente tirar de todos los conectores al mismo tiempo.
Esto podría dañar los cables.
12. Extraiga el tubo de engrase (entre la base y el brazo n.º 1) del
costado del brazo n.º 1 desde el conector rápido.
13. Retire el brazo n.º 1 de la base.
Pernos de cabeza hueca hexagonal: 15-M630 (con una
arandela de ajuste)
PRECAUCIÓN
■
Si se retiran los pernos, se pueden separar los brazos n.º 1, n.º 2, n.º 3, n.º 4, n.º
5 y n.º 6 (efector final). Existe la posibilidad de que las manos y los dedos queden
atrapados o se produzcan daños o el mal funcionamiento del manipulador.
Tenga mucho cuidado al retirar el brazo. Coordine al menos dos trabajadores, de
modo que uno pueda sostener el manipulador, mientras el otro retira los pernos.
NOTA

Mantenimiento
C8 Mod.13 189
14. Retire la unidad de engranaje reductor de la articulación n.º 1.
Pernos de cabeza hueca hexagonal: 12-M650
Instalación: Unidad de engranaje reductor de la articulación n.º 1 (Cable M/C hacia atrás)
1. Instale la unidad de engranaje reductor de la articulación n.º 1.
Pernos de cabeza hueca hexagonal: 12-M650
Torque de ajuste: 18,0 0,9 N·m
El lado de instalación de la unidad de engranaje reductor tiene
agujeros de espacio libre.
Instale la unidad de engranaje reductor para que coincida con
los tornillos y los agujeros de espacio libre.
2. Instale el brazo n.º 1 en la base.
Pernos de cabeza hueca hexagonal: 15-M630 (con una
arandela de ajuste)
Torque de ajuste: 18,0 0,9 N·m
PRECAUCIÓN
■
Existe la posibilidad de que las manos y los dedos queden atrapados o se
produzcan daños o el mal funcionamiento del manipulador. Tenga mucho cuidado
al instalar el brazo. Coordine al menos dos trabajadores, de modo que uno pueda
sostener el manipulador, mientras el otro retira los pernos.
3. Conecte el tubo de engrase para el costado del brazo n.º 1 en el
conector rápido.

Mantenimiento
190 C8 Mod.13
4. Pase los cables internos desde el costado del brazo n.º 1 hacia la
base.
Proteja los conectores con cinta adhesiva.
- Para proteger los ganchos del conector
- Para evitar la adherencia de grasa de los cables
Desconecte los cables, uno por uno, del conector más grande al
más pequeño.
No intente tirar de todos los conectores al mismo tiempo.
Esto podría dañar los cables.
5. Conecte el conector a la placa de control 1.
Conector: GS01
6. Instale el soporte de cables de la articulación n.º 1 (costado del
brazo n.º 1).
Pernos de cabeza hueca hexagonal: 2-M410
Torque de ajuste: 4,0 0,2 N·m
7. Instale la unidad del motor de la articulación n.º 2.
Para conocer detalles, consulte Mantenimiento 6.1 Articulación n.º 2 - Reemplazo del motor, pasos para
la instalación (4) a (9).
8. Pase los cables y el tubo de aire al interior de la correa de
regulación de la articulación n.º 1.
NOTA

Mantenimiento
C8 Mod.13 191
9. Instale el soporte de cables de la base (C1).
Envuelva los cables con la hoja de silicona incluida.
Utilice un soporte de cables para fijar la hoja de silicona
envuelta.
Pernos de cabeza hueca hexagonal: 2-M36
Torque de ajuste: 2,0 0,1 N·m
10. Instale el cable para evitar la interferencia de la placa.
Pernos de cabeza hueca hexagonal: 2-M36
Torque de ajuste: 2,0 0,1 N·m
11. Instale la unidad del motor de la articulación n.º 1.
Para conocer detalles, consulte Mantenimiento 5.1.1 Articulación n.º 1 – Reemplazo del motor (Cable
M/C hacia atrás),
Pasos para el retiro (1) a (4).
12. Pase las siguientes piezas a través del agujero al interior de la
base hacia la parte superior de la base.
Cable D-sub
Cable a tierra
Conector de RJ45
Conector del sensor F
13. Conecte los cables a tierra.
Tornillos con ranura en cruz con arandela
Modelos S, C : 9-M4×8, 2-M3×6
Modelo P : 10-M4×8, 2-M3×6
Torque de ajuste : 0,9 0,1 N m (M4× 8)
0,45 0,1 N m (M3× 6)
Los terminales de conexión a tierra de los cables D-sub tienen posiciones de instalación fijas.
Instálelos en los dos agujeros de tornillo. (Imagen: indicados por las flechas).
NOTA

Mantenimiento
192 C8 Mod.13
14. Instale las siguientes piezas.
Placa de conectores
Conector
Placa de conexión a tierra de cables
Fuente de alimentación del freno
Para conocer detalles, consulte Mantenimiento 5.1.3 Articulación n.º 1– Reemplazo de la correa de
regulación (cable M/C hacia atrás), pasos para la instalación (6) a (14).

Mantenimiento
C8 Mod.13 193
5.1.3 Articulación n.º 1 - Reemplazo de la correa de regulación (cable
M/C hacia atrás)
Nombre
Canti
dad
Nota
Pieza de
mantenimien
to
Correa de
regulación
(Articulaci
ón n.º 1)
C8-A701** (C8)
1
560 mm
1655928
C8-A901** (C8L)
1
580 mm
1655929
C8-A1401** (C8XL)
1
595 mm
1655930
Plantilla de tensión de la correa *
1
1674582
Plantilla de posicionamiento del freno de
la articulación n.º 1*
1
1675081
Amarracables AB100
1
1675753
Herramienta
s
Llave
hexagonal
ancho a lo largo de
superficies planas: 2,5 mm
1
Para el perno de cabeza hueca
hexagonal M3
ancho a lo largo de
superficies planas: 3 mm
1
Para el perno de cabeza hueca
hexagonal M4
ancho a lo largo de
superficies planas: 4 mm
1
Para el perno de cabeza hueca
hexagonal M5
ancho a lo largo de
superficies planas: 5 mm
1
Para el perno de cabeza hueca
hexagonal M6
Llave
tubular
ancho a lo largo de
superficies planas: 5 mm
1
Para conector D-Sub
Alicate de punta larga
1
Para retirar el tubo de aire
Destornillador de cruz
1
Para tornillos con ranura en cruz
Torquímetro
1
Para el control del torque de ajuste
Tensiómetro de la correa
1
Consulte: Unitta U-505
* La plantilla de tensión de la correa y la plantilla de posicionamiento del freno de la articulación n.º 1 son
plantillas de montaje. Úselas en los pasos pertinentes del mantenimiento.
El freno está montado en cada articulación para evitar que el brazo descienda, debido a su propio peso, mientras
el controlador está apagado o el motor está en estado apagado. El freno no funciona durante el reemplazo.
Tenga cuidado cuando realice el trabajo de mantenimiento.

Mantenimiento
194 C8 Mod.13
Retiro: Correa de regulación de la articulación n.º 1 (Cable M/C hacia atrás)
1. Apague el controlador.
2. Retire la cubierta de mantenimiento de la base.
Para conocer detalles, consulte Mantenimiento 3. Cubiertas.
3. Retire la placa de conectores (Cable M/C hacia atrás).
Para conocer detalles, consulte Mantenimiento 3. Cubiertas.
4. Quite los dos tubos de aire que están dentro de la base.
5. Quite los dos conectores D-sub.
6. Desconecte los cables de la base y desconecte los conectores.
Conector: X11, X12, X14, BR010, BR011, X010, X020,
X040, LED, GS01, BT1
(Sostenga el gancho para retirar).
7. Desconecte los siguientes conectores.
Conector de RJ45:
Sostenga el gancho para retirar.
Conector del sensor F:
Abra los ganchos en ambos extremos del conector y sáquelo.

Mantenimiento
C8 Mod.13 195
Retire el cable a tierra de cada conector.
Para quitar el cable a tierra, sostenga el conector con la mano y
tire del cable.
8. Retire la fuente de alimentación del freno.
Tornillos con ranura en cruz con arandela: 2-M3×6
9. Retire la placa del terminal del cable a tierra (Cable M/C hacia
atrás).
Pernos de cabeza hueca hexagonal: 2-M410
10. Quite los siguientes terminales de cables a tierra.
Terminales de cables a tierra del cable D-sub (2)
Terminal del cable a tierra (verde/ amarillo) (1) indicado por
una flecha
Tornillos con ranura en cruz con arandela: 3-M4×8
Las posiciones de los terminales de los cables a tierra (verde/
amarillo) pueden ser distintas a la de la imagen. Revise las
posiciones de los terminales antes de retirarlos.
NOTA

Mantenimiento
196 C8 Mod.13
11. Desconecte las siguientes piezas hacia abajo desde el agujero al
interior de la base.
Cable D-sub
Cable a tierra
Conector de RJ45
Conector del sensor F
12. Retire la unidad del motor de la articulación n.º 1.
Para conocer detalles, consulte Mantenimiento: 5.1.1 Articulación n.º 1-Reemplazo del motor (Cable M/C
hacia atrás), pasos para el retiro (6) a (7).
13. Retire la placa de fijación de cables de la articulación n.º 1.
Pernos de cabeza hueca hexagonal: 2-M36
No retire el soporte de cables de la base (C1)
14. Retire la correa de regulación de la articulación n.º 1.

Mantenimiento
C8 Mod.13 197
Instalación: Correa de regulación de la articulación n.º 1 (Cable M/C hacia abajo)
1. Pase los cables y los tubos de aire por la correa de regulación de la
articulación n.º 1.
2. Instale la placa de fijación de cables de la articulación n.º 1.
Pernos de cabeza hueca hexagonal: 2-M36
Torque de ajuste: 2,0 0,1 N·m
3. Instale la unidad de motor de la articulación n.º 1.
Para conocer detalles, consulte Mantenimiento: 5.1.1 Articulación n.º 1-Reemplazo del motor (Cable
M/C hacia atrás), pasos para la instalación (1) a (4).
4. Desconecte las siguientes piezas desde el agujero al interior de la
base hacia la parte superior de la base.
Cable D-sub
Cable a tierra
Conector de RJ45
Conector del sensor F
5. Instale los terminales del cable a tierra del cable D-sub y el cable a
tierra (verde/ amarillo).
Los terminales de cables a tierra del cable D-sub (2) se indican
con flechas
El terminal del cable a tierra (verde/ amarillo) (1)
Tornillos con ranura en cruz con arandela: 3-M4×8
Torque de ajuste: 0,9 0,1 N·m
Las posiciones de instalación de los terminales de conexión a
tierra del cable D-sub son fijas. Asegúrese de instalarlos en los
dos agujeros de tornillo en la parte posterior del manipulador
(como se indica con flechas en la imagen).
NOTA

Mantenimiento
198 C8 Mod.13
6. Instale la placa del terminal del cable a tierra (Cable M/C hacia
atrás).
Pernos de cabeza hueca hexagonal: 2-M410
Torque de ajuste: 4,0 0,2 N·m
7. Instale la fuente de alimentación del freno en la placa. Asegúrese
de instalar la fuente de alimentación del freno de modo tal que los
cables queden en la dirección que aparece en la foto.
Tornillos con ranura en cruz con arandela: 2-M3×6
Torque de ajuste: 0,45 0,1 N·m
8. Instale los siguientes conectores de acuerdo con las indicaciones que aparecen en las placas del conector.
Conector de RJ45: Ether
Conector del sensor F: Sensor F
Instale el terminal del cable a tierra en cada conector. Para conectar el cable a tierra, insértelo mientras
sostiene con la mano el conector.
9. Conecte los conectores del cable M/C.
Conector: X11, X12, X14, BR010, BR011, X010, X020, X040, LED, GS01, BT1
10. Instale los conectores D-sub, de acuerdo con las indicaciones que aparecen en las placas del conector.
Izquierda: D-sub para el desbloqueo del freno (con un marcador de cable: SW1) : Desbloqueo del freno
Derecha: D-sub para el cableado del usuario (sin marcador de cable: con un terminal redondo): D-sub
11. Instale dos tubos de aire de acuerdo con las indicaciones que aparecen en las placas del conector.
Air1: Semitransparente
Air2: Azul
Tenga cuidado de no instalar un tubo de aire del color incorrecto.
12. Instale la placa de conectores (Cable M/C hacia atrás).
Para conocer detalles, consulte Mantenimiento: 3 Cubiertas.
13. Instale la cubierta de mantenimiento de la base.
Para conocer detalles, consulte Mantenimiento: 3 Cubiertas.
14. Calibre la articulación n.º 1.
Para conocer detalles, consulte Mantenimiento: 16. Calibración.
NOTA

Mantenimiento
C8 Mod.13 199
5.1.4 Articulación n.º 1 - Reemplazo del freno electromagnético
(Cable M/C hacia atrás)
Nombre
Cantidad
Nota
Piezas de
mantenimiento
Freno electromagnético
(articulación n.º 1, n.º 2)
1
2172926
Plantilla de posicionamiento del
freno de la articulación n.º 1 *
1
1675081
Amarracables (AB100)
1
1675753
Herramientas
Llave hexagonal
(ancho a lo largo de superficies
planas: 3 mm
1
Para el perno de cabeza hueca
hexagonal M4
Destornillador de cruz (n.º 2)
1
Para tornillos con ranura en cruz
Torquímetro
1
Para el control del torque de ajuste
* La plantilla de tensión de la correa y la plantilla de posicionamiento del freno de la articulación n.º 1 son
plantillas de montaje. Úselas en los pasos pertinentes del mantenimiento.
El freno está montado en cada articulación para evitar que el brazo descienda, debido a su propio peso, mientras
el controlador está apagado o el motor está en estado apagado. El freno no funciona durante el reemplazo.
Tenga cuidado cuando realice el trabajo de mantenimiento.

Mantenimiento
200 C8 Mod.13
Retiro: Freno electromagnético de la articulación n.º 1 (Cable M/C hacia atrás)
1. Retire el freno electromagnético de la articulación n.º 1 de la unidad de motor de la articulación n.º 1.
Para conocer detalles, consulte Mantenimiento: 5.1.1 Articulación n.º 1-Reemplazo del motor (Cable
M/C hacia atrás),
Pasos para el retiro (1) a (6).
No desconecte el conector BT1. Si el conector está desconectado, efectúe la calibración.
2. Retire el freno de la articulación n.º 1 de la placa del freno.
Pernos de cabeza hueca hexagonal: 3-M425
Instalación: Freno electromagnético de la articulación n.º 1 (Cable M/C hacia atrás)
1. Instale el freno de la articulación n.º 1 en la placa del freno.
Pernos de cabeza hueca hexagonal: 3-M425
Torque de ajuste: 4,0 0,2 N·m
Tenga cuidado con la dirección de montaje del
freno electromagnético de la articulación n.º 1. (Consulte la
imagen)
2. Instale la placa del freno de la articulación n.º 1 en la unidad de motor de la articulación n.º 1.
Para conocer detalles, consulte Mantenimiento: 5.1.1 Articulación n.º 1-Reemplazo del motor (Cable
M/C hacia atrás), pasos para la instalación (4) a (8).
Si desconectó el conector BT1 en los pasos para el retiro, realice la calibración.
NOTA
NOTA

Mantenimiento
C8 Mod.13 201
5.2 Cable M/C hacia abajo (articulación n.º 1)
5.2.1 Articulación n.º 1 - Reemplazo del motor (Cable M/C hacia abajo)
Nombre
Cantidad
Nota
Piezas de
mantenimiento
Unidad de
motor
(articulación
n.º 1)
C8-A701*B* (C8)
C8-A901*B* (C8L)
1
2172921
C8-A1401*B* (C8XL)
1
2172922
Plantilla de tensión de la correa*
1
1674582
Plantilla de posicionamiento del freno
de la articulación n.º 1*
1
1675081
Amarracables
AB100
1
1675753
AB350
1
1697428
Herramientas
Llave
hexagonal
ancho a lo largo de
superficies planas:
3 mm
1
Para los pernos de cabeza hueca
hexagonal M4
ancho a lo largo de
superficies planas:
4 mm
1
Para los pernos de cabeza hueca
hexagonal M5
ancho a lo largo de
superficies planas:
5 mm
1
Para los pernos de cabeza hueca
hexagonal M6
Destornillador de cruz (n.º 2)
1
Para tornillos con ranura en cruz
Torquímetro
1
Para el control del torque de ajuste
Alicates de corte
1
Para cortar el amarracables
Alicate
1
Para ajustar el amarracables
Tensiómetro de la correa
1
Consulte: Unitta U-505
* La plantilla de tensión de la correa y la plantilla de posicionamiento del freno de la articulación n.º 1 son
plantillas de montaje. Úselas en los pasos pertinentes del mantenimiento.
El freno está montado en cada articulación para evitar que el brazo descienda, debido a su propio peso, mientras
el controlador está apagado o el motor está en estado apagado. El freno no funciona durante el reemplazo.
Tenga cuidado cuando realice el trabajo de mantenimiento.

Mantenimiento
202 C8 Mod.13
Retiro: Motor de la articulación n.º 1 (Cable M/C hacia abajo)
1. Apague el controlador.
2. Gire el manipulador en sentido lateral.
PRECAUCIÓN
■
Al girar el manipulador en forma lateral, debe haber dos o más personas para
trabajar en él, de modo que al menos una pueda sostener el brazo, mientras los
demás retiran los pernos. Retirar los pernos sin poner soporte al brazo puede
provocar que se caiga el brazo, se produzcan lesiones corporales o el mal
funcionamiento del sistema de robot.
3. Retire las siguientes cubiertas.
Cubierta de mantenimiento de la base
Cubierta de la base (Cable M/C hacia abajo)
Placa de conectores (Cable M/C hacia abajo)
Para conocer detalles, consulte Mantenimiento: 3 Cubiertas.
4. Desconecte los cables de la base y desconecte los siguientes
conectores.
Conector: X11, X010, BT1, BR011
(Sostenga el gancho para retirar).
Cuando reemplace solo el freno, no desconecte el conector BT1.
Si el conector está desconectado, efectúe la calibración.
C8-A701** (C8) C8-A901** (C8L)
C8-A1401** (C8XL):
Retire el bloque de radiación de calor.
1. Quite el amarracables y los pernos para retirar el bloque
de radiación de calor.
Pernos de cabeza hueca hexagonal: M5×15
Amarracables: AB350
2. Retire la hoja de radiación de calor que está entre el
bloque de radiación de calor y el motor.
C8-A1401*B* (C8XL)
El bloque de radiación de calor, la hoja de radiación de calor y los pernos se volverán a utilizar. Tenga
cuidado de no perderlos.
Tenga cuidado de no romper la hoja de radiación de calor.
NOTA
NOTA

Mantenimiento
C8 Mod.13 203
5. Retire la fuente de alimentación del freno.
Tornillos con ranura en cruz con arandela: 2-M3×6
6. Retire la placa de freno de la articulación n.º 1 desde la unidad de
motor de la articulación n.º 1.
Pernos de cabeza hueca hexagonal: 3-M420
7. Retire la unidad del motor de la articulación n.º 1 desde la base.
Pernos de cabeza hueca hexagonal: 3-M630 (con una arandela de ajuste)
Tenga cuidado de no romper y perder la hoja de radiación de calor que está conectada al motor.

Mantenimiento
204 C8 Mod.13
Instalación: Motor de la articulación n.º 1 (Cable M/C hacia abajo)
1. Instale la unidad del motor de la articulación n.º 1 en la base.
Para conocer detalles, consulte Mantenimiento: 5.1.1 Articulación n.º 1-Reemplazo del motor (Cable
M/C hacia atrás), pasos para el retiro (1) a (4).
2. Instale la fuente de alimentación del freno en la placa.
Asegúrese de instalar la fuente de alimentación del freno de
modo tal que los cables queden en la dirección que aparece en
la foto.
Tornillos con ranura en cruz con arandela: 2-M3×6
Torque de ajuste: 0,45 0,1 N·m
3. Conecte los siguientes conectores.
Conector: X11, X010, BT1, BR011
4. Instale las siguientes cubiertas.
Placa del conector (Cable M/C hacia abajo).
Cubierta de la base (Cable M/C hacia abajo)
Cubierta de mantenimiento de la base
Para conocer detalles, consulte Mantenimiento: 3 Cubiertas.
5. Calibre la articulación n.º 1.
Para conocer detalles, consulte Mantenimiento: 16. Calibración.

Mantenimiento
C8 Mod.13 205
5.2.2 Articulación n.º 1 - Reemplazo de la unidad de engranaje
reductor
(Cable M/C hacia abajo)
Nombre
Cantidad
Nota
Piezas de
mantenimiento
Unidad de
engranaje
reductor
(Articulación
n.º 1)
C8-A701*B* (C8)
1
1674602
C8-A901*B* (C8L)
1
1674603
C8-A1401*B* (C8XL)
1
1674604
Plantilla de tensión de la correa*
1
1674582
Plantilla de posicionamiento del freno de
la articulación n.º 1*
1
1675081
Amarracables AB100
1
1675753
Herramientas
Llave
hexagonal
ancho a lo largo de
superficies planas: 2,5 mm
1
Para los pernos de cabeza hueca
hexagonal M3
ancho a lo largo de
superficies planas: 3 mm
1
Para los pernos de cabeza hueca
hexagonal M4
ancho a lo largo de
superficies planas: 4 mm
1
Para los pernos de cabeza hueca
hexagonal M5
ancho a lo largo de
superficies planas: 5 mm
1
Para los pernos de cabeza hueca
hexagonal M6
Destornillador de cruz (n.º 2)
1
Para tornillos con ranura en cruz
Torquímetro
1
Para el control del torque de ajuste
Tensiómetro de la correa
1
Consulte: Unitta U-505
Tela (amortiguación)
1
Para brazos de prensado
* La plantilla de tensión de la correa y la plantilla de posicionamiento del freno de la articulación n.º 1 son
plantillas de montaje. Use las plantillas al ajustar la tensión de la correa.
El freno está montado en cada articulación para evitar que el brazo descienda, debido a su propio peso, mientras
el controlador está apagado o el motor está en estado apagado. El freno no funciona durante el reemplazo.
Tenga cuidado cuando realice el trabajo de mantenimiento.
Al retirar la unidad de motor de la articulación n.º 2, incline el brazo n.º 2 y presiónelo hacia el brazo n.º 1.
Referencia: Mantenimiento 6.1 Articulación n.º 2 - Reemplazo del motor, paso para el retiro (2)
Cuando presione el brazo, coloque un trozo de tela o un material similar entre los brazos para evitar contacto
entre ellos. Esto protege las superficies del brazo de raspaduras y del desprendimiento de la pintura.

Mantenimiento
206 C8 Mod.13
Retiro: Unidad de engranaje reductor de la articulación n.º 1 (Cable M/C hacia abajo)
PRECAUCIÓN
■
En este procedimiento existe la posibilidad de que las manos y los dedos queden
atrapados o se produzcan daños o el mal funcionamiento del manipulador.
Tenga mucho cuidado cuando realice el mantenimiento.
■
No suelte los pernos mientras el brazo n.º 2 no esté inclinado.
Puede provocar que se salga la correa y que se caiga el brazo n.º 2; es
extremadamente peligroso. Asegúrese de realizar los pasos de retiro (1) y (2) de
Mantenimiento 6.1 Articulación n.º 2 - Reemplazo del motor antes de quitar el
motor.
■
Al retirar el brazo n.º 1, debe haber dos o más personas para trabajar en él, de
modo que al menos una pueda sostener el brazo, mientras las demás retiran los
pernos. Retirar los pernos sin poner soporte al brazo puede provocar que se caiga
el brazo, se produzcan lesiones corporales o el mal funcionamiento del sistema
de robot.
1. Retire las siguientes piezas.
Placa de conectores
Conector
Fuente de alimentación del freno
Para conocer detalles, consulte Mantenimiento 5.2.3 Articulación n.º 1 - Reemplazo de la correa de
regulación (cable M/C hacia abajo),
Pasos para el retiro (1) a (8).
2. Retire los terminales de conexión a tierra.
Tornillos con ranura en cruz con arandela
Modelos S, C : 9-M4×8, 2-M3×6
Modelo P : 10-M4×8, 2-M3×6
3. Retire la unidad de engranaje reductor de la articulación n.º 1.
Para conocer detalles, consulte Mantenimiento 5.1.2 Articulación n.º 1- Reemplazo de la unidad
engranaje reductor (Cable M/C hacia atrás), pasos para el retiro (4) a (14).

Mantenimiento
C8 Mod.13 207
Instalación: Unidad de engranaje reductor de la articulación n.º 1 (Cable M/C hacia abajo)
1. Instale la unidad de engranaje reductor de la articulación n.º 1.
Para conocer detalles, consulte Mantenimiento 5.1.2 Articulación n.º 1- Reemplazo de la unidad de
engranaje reductor (cable M/C hacia atrás), pasos para la instalación (1) a (11).
2. Instale los terminales conexión a tierra en la placa.
Tornillos con ranura en cruz con arandela
Modelos S, C : 9-M4×8, 2-M3×6
Modelo P : 10-M4×8, 2-M3×6
3. Instale las siguientes piezas.
Placa de conectores
Conector
Fuente de alimentación del freno
Para conocer detalles, consulte Mantenimiento 5.2.3 Articulación n.º 1- Reemplazo de la correa de
regulación (cable M/C hacia abajo),
Pasos para la instalación (4) a (10).

Mantenimiento
208 C8 Mod.13
5.2.3 Articulación n.º 1 - Reemplazo de la correa de regulación (cable
M/C hacia abajo)
Nombre
Cantid
ad
Nota
Pieza de
mantenimiento
Correa de
regulación
(Articulació
n n.º 1)
C8-A701*B* (C8)
1
560 mm
1655928
C8-A901*B* (C8L)
1
580 mm
1655929
C8-A1401*B* (C8XL)
1
595 mm
1655930
Plantilla de tensión de la correa*
1
1674582
Plantilla de posicionamiento del freno de
la articulación n.º 1*
1
1675081
Amarracables AB100
1
1675753
Herramientas
Llave
hexagonal
ancho a lo largo de
superficies planas: 3 mm
1
Para el perno de cabeza hueca
hexagonal M4
ancho a lo largo de
superficies planas: 4 mm
1
Para el perno de cabeza hueca
hexagonal M5
ancho a lo largo de
superficies planas: 5 mm
1
Para el perno de cabeza hueca
hexagonal M6
Llave
tubular
ancho a lo largo de
superficies planas: 5 mm
1
Para conector D-Sub
Alicate de punta larga
1
Para retirar el tubo de aire
Destornillador de cruz
1
Para tornillos con ranura en cruz
Torquímetro
1
Para el control del torque de ajuste
Tensiómetro de la correa
1
Consulte: Unitta U-505
* La plantilla de tensión de la correa y la plantilla de posicionamiento del freno de la articulación n.º 1 son
plantillas de montaje. Úselas en los pasos pertinentes del mantenimiento.
El freno está montado en cada articulación para evitar que el brazo descienda, debido a su propio peso, mientras
el controlador está apagado o el motor está en estado apagado. El freno no funciona durante el reemplazo.
Tenga cuidado cuando realice el trabajo de mantenimiento.

Mantenimiento
C8 Mod.13 209
Retiro: Correa de regulación de la articulación n.º 1 (Cable M/C hacia abajo)
1. Apague el controlador.
2. Gire el manipulador en sentido lateral.
PRECAUCIÓN
■
Al girar el manipulador en forma lateral, debe haber dos o más personas para
trabajar en él, de modo que al menos una pueda sostener el brazo, mientras
los demás retiran los pernos. Retirar los pernos sin poner soporte al brazo
puede provocar que se caiga el brazo, se produzcan lesiones corporales o el
mal funcionamiento del sistema de robot.
3. Retire las siguientes cubiertas.
Cubierta de mantenimiento de la base
Cubierta de la base (Cable M/C hacia abajo)
Placa de conectores (Cable M/C hacia abajo)
Para conocer detalles, consulte Mantenimiento: 3 Cubiertas.
4. Desconecte los cables de la base y desconecte los siguientes
conectores.
Conector: X11, X12, X14, BR010, BR011, X010, X020, X040,
LED, GS01, BT1
(Sostenga el gancho para retirar).
5. Desconecte las siguientes piezas.
Tubos de aire
Conector de RJ45
Conector del sensor F
Conector D-sub
Para conocer detalles, consulte Mantenimiento: 5.1.3 Articulación n.º 1-Reemplazo de la correa de
regulación (Cable M/C hacia atrás), pasos para el retiro (4) a (5) y (7).
6. Retire la fuente de alimentación del freno.
Tornillos con ranura en cruz con arandela: 2-M3×6

Mantenimiento
210 C8 Mod.13
7. Retire la placa de cables a tierra (Cable M/C hacia abajo).
Pernos de cabeza hueca hexagonal: 2-M4×12
8. Retire la unidad del motor de la articulación n.º 1.
Para conocer detalles, consulte Mantenimiento: 5.1.1 Articulación n.º 1-Reemplazo del motor (Cable
M/C hacia atrás), pasos para el retiro (6) a (7).
9. Retire la unidad del motor de la articulación n.º 1.

Mantenimiento
C8 Mod.13 211
Instalación: Correa de regulación de la articulación n.º 1 (Cable M/C hacia abajo)
1. Pase los cables y los tubos de aire por la correa de regulación de la
articulación n.º 1.
2. Instale la unidad de motor de la articulación n.º 1.
Para conocer detalles, consulte Mantenimiento: 5.1.1 Articulación n.º 1-Reemplazo del motor (Cable
M/C hacia atrás), pasos para la instalación (1) a (4).
3. Instale la placa de cables a tierra (Cable M/C hacia abajo).
Pernos de cabeza hueca hexagonal: 2-M412
Torque de ajuste: 4,0 0,2 N·m
4. Instale la fuente de alimentación del freno en la placa. Asegúrese
de instalar la fuente de alimentación del freno de modo tal que los
cables queden en la dirección que aparece en la foto.
Tornillos con ranura en cruz con arandela: 2-M3×6
Torque de ajuste: 0,45 0,1 N·m
5. Conecte los siguientes conectores, de acuerdo con las indicaciones que aparecen en las placas del conector.
Conector de RJ45: Ether
Conector del sensor F: Sensor F
Instale el terminal del cable a tierra en cada conector. Para conectar el cable a tierra, insértelo mientras
sostiene con la mano el conector.
6. Conecte los conectores del cable M/C.
Conector: X11, X12, X14, BR010, BR011, X010, X020, X040, LED, GS01, BT1

Mantenimiento
212 C8 Mod.13
7. Instale el conector D-sub, de acuerdo con las indicaciones que aparecen en las placas del conector.
Izquierda: D-sub para el desbloqueo del freno (con un marcador de cable: SW1): Desbloqueo del freno
Derecha: D-sub para el cableado del usuario (sin marcador de cable: con un terminal redondo): D-sub
8. Instale dos tubos de aire de acuerdo con las indicaciones que aparecen en las placas del conector.
Air1: Semitransparente
Air2: Azul
Tenga cuidado de no instalar un tubo de aire del color incorrecto.
9. Instale las siguientes cubiertas.
Placa de conectores (Cable M/C hacia abajo)
Cubierta de la base (Cable M/C hacia abajo)
Cubierta de mantenimiento de la base
Para conocer detalles, consulte Mantenimiento: 3 Cubiertas.
10. Calibre la articulación n.º 1.
Para conocer detalles, consulte Mantenimiento: 16. Calibración.
NOTA

Mantenimiento
C8 Mod.13 213
5.2.4 Articulación n.º 1 - Reemplazo del freno electromagnético
(Cable M/C hacia abajo)
Nombre
Cantidad
Nota
Piezas de
mantenimiento
Freno electromagnético (articulación
n.º 1, n.º 2)
1
2172926
Plantilla de posicionamiento del freno
de la articulación n.º 1 *
1
1675081
Amarracables AB100
1
1675753
Herramientas
Llave hexagonal
(ancho a lo largo de superficies planas:
3 mm
1
Para el perno de cabeza hueca
hexagonal M4
Destornillador de cruz (n.º 2)
1
Para tornillos con ranura en cruz
Torquímetro
1
Para el control del torque de ajuste
* La plantilla de posicionamiento del freno de la articulación n.º 1 es una plantilla de montaje. Úsela en los pasos
pertinentes del mantenimiento.
El freno está montado en cada articulación para evitar que el brazo descienda, debido a su propio peso, mientras
el controlador está apagado o el motor está en estado apagado. El freno no funciona durante el reemplazo.
Tenga cuidado cuando realice el trabajo de mantenimiento.

Mantenimiento
214 C8 Mod.13
Retiro: Freno electromagnético de la articulación n.º 1 (Cable M/C hacia abajo)
1. Retire la placa de freno de la articulación n.º 1 desde la unidad de motor de la articulación n.º 1.
Para conocer detalles, consulte Mantenimiento: 5.2.1 Articulación n.º 1- Reemplazo del motor (Cable
M/C hacia abajo), pasos para el retiro (1) a (6).
No desconecte el conector BT1. Si el conector está desconectado, efectúe la calibración.
2. Retire el freno de la articulación n.º 1 de la placa del freno.
Pernos de cabeza hueca hexagonal: 3-M425
NOTA

Mantenimiento
C8 Mod.13 215
Instalación: Freno electromagnético de la articulación n.º 1 (Cable M/C hacia abajo)
1. Instale el freno de la articulación n.º 1 en la placa del freno.
Pernos de cabeza hueca hexagonal: 3-M425
Torque de ajuste: 4,0 0,2 N·m
Tenga cuidado con la dirección de montaje del
freno electromagnético de la articulación n.º 1. (Consulte la
imagen)
2. Instale la placa del freno de la articulación n.º 1 en la unidad de motor de la articulación n.º 1.
Para conocer detalles, consulte Mantenimiento: 5.1.1 Articulación n.º 1 - Reemplazo del motor (Cable
M/C hacia atrás), paso para la instalación (4).
3. Instale la fuente de alimentación del freno en la placa.
Asegúrese de instalar la fuente de alimentación del freno de
modo tal que los cables queden en la dirección que aparece en la
foto.
Tornillos con ranura en cruz con arandela: 2-M3×6
Torque de ajuste: 0,45 0,1 N·m
4. Conecte los conectores del cable M/C.
Conector: X11, X010, BT1, BR011
5. Instale las siguientes cubiertas.
Placa de conectores (Cable M/C hacia abajo)
Cubierta de la base (Cable M/C hacia abajo)
Cubierta de mantenimiento de la base
Para conocer detalles, consulte Mantenimiento: 3 Cubiertas.
Si desconectó el conector BT1 en los pasos para el retiro, realice la calibración.
NOTA

Mantenimiento
216 C8 Mod.13
6. Articulación n.º 2
ADVERTENCIA
■
No conecte ni desconecte los conectores del motor mientras el sistema de robot
esté encendido. Conectar o desconectar los conectores del motor con la energía
encendida es extremadamente peligroso y puede provocar lesiones corporales
graves, ya que el manipulador puede moverse de manera anormal; además,
puede provocar descargas eléctricas y el mal funcionamiento del sistema de
robot.
■
Para cortar la energía hacia el sistema de robot, desconecte el enchufe de la
fuente de alimentación. Asegúrese de conectar el cable de alimentación de CA
a un tomacorriente.
NO lo conecte directamente a la fuente de alimentación de la fábrica.
■
Antes de realizar cualquier procedimiento de reemplazo, apague el controlador
y los equipos relacionados, luego desconecte el enchufe de la fuente de
alimentación.
Realizar cualquier procedimiento de reemplazo con la energía encendida es
extremadamente peligroso y puede provocar una descarga eléctrica o el mal
funcionamiento del sistema de robot.
PRECAUCIÓN
■
Tenga cuidado de no aplicar descargas eléctricas excesivas al eje del motor
durante el reemplazo. Puede reducir la vida útil de los motores y del codificador,
o bien, dañarlos.
■
Nunca desarme el motor y el codificador. Un motor y codificador desarmado
causará un espacio de posición y no se puede volver usar.
Después de reemplazar las piezas (motores, unidades de engranaje reductor, correas de
regulación, etc.), el manipulador no puede operar correctamente, ya que hay un espacio entre
el origen almacenado en cada codificador de motor y el origen correspondiente almacenado
en el controlador.
Por lo tanto, es necesario hacer coincidir estos orígenes después de reemplazar las piezas.
El proceso de alinear los dos orígenes se denomina “Calibración”.
Consulte Mantenimiento 16. Calibración y realice la calibración después de reemplazar las
piezas.
Unidad de engranaje reductor
de la articulación n.º 2
Motor de la articulación n.º 2
Freno electromagnético
Correa de regulación de
la articulación n.º 2
(Figura: C8-A1401* (C8XL))

Mantenimiento
C8 Mod.13 217
6.1 Articulación n.º 2 - Reemplazo del motor
Nombre
Cantidad
Nota
Piezas de
mantenimiento
Servomotor de CA de 750 W
1
2168683
Plantilla de tensión de la correa*
1
1674582
Herramientas
Llave
hexagonal
ancho a lo largo de
superficies planas:
2,5 mm
1
Para los tornillos de fijación de cabeza
hueca hexagonal M5
ancho a lo largo de
superficies planas: 3 mm
1
Para el perno de cabeza hueca hexagonal
M6
ancho a lo largo de
superficies planas: 4 mm
1
Para el perno de cabeza hueca hexagonal
M5
ancho a lo largo de
superficies planas: 5 mm
1
Para el perno de cabeza hueca hexagonal
M6
Destornillador de cruz (n.º 2)
1
Para tornillos con ranura en cruz
Torquímetro
1
Para el control del torque de ajuste
Galga de espesor (0,5 mm)
2
Para ajuste de posición de la polea
Tensiómetro de la correa
1
Consulte: Unitta U-505
Tela (amortiguación)
1
Para brazos de prensado
* La plantilla de tensión de la correa es una plantilla de montaje. Use la plantilla al ajustar la tensión de la correa.
El freno está montado en cada articulación para evitar que el brazo descienda, debido a su propio peso,
mientras el controlador está apagado o el motor está en estado apagado. El freno no funciona durante el
reemplazo. Tenga cuidado cuando realice el trabajo de mantenimiento.
Al retirar el motor de la articulación n.º 2, incline el brazo n.º 2 y presiónelo hacia el brazo n.º 1.
Referencia: Mantenimiento: 6.1 Articulación n.º 2 - Reemplazo del motor, paso para el retiro (2)
Cuando presione el brazo, coloque un trozo de tela o un material similar entre los brazos para evitar contacto
entre ellos. Esto protege las superficies del brazo de raspaduras y del desprendimiento de la pintura.

Mantenimiento
218 C8 Mod.13
Retiro: Motor de la articulación n.º 2
PRECAUCIÓN
■
En este procedimiento existe la posibilidad de que las manos y los dedos queden
atrapados o se produzcan daños o el mal funcionamiento del manipulador.
Tenga mucho cuidado cuando realice el mantenimiento.
■
No suelte los pernos mientras el brazo n.º 2 no esté inclinado.
Puede provocar que se salga la correa y que se caiga el brazo n.º 2; es
extremadamente peligroso. Asegúrese de realizar los pasos de retiro 1 y 2 antes
de quitar el motor.
1. Encienda la alimentación del controlador.
2. Desbloquee el freno de la articulación n.º 2. Incline el brazo n.º
2 y empújelo hacia el brazo n.º 1.
El brazo n.º 2 cae por su peso cuando se retira la unidad de motor
de la articulación n.º 2. Por lo tanto, desbloquee el freno e incline
el brazo n.º 2 con antelación.
Ponga un paño entre el brazo n.º 1 y el brazo n.º 2, de modo que
los brazos no se toquen.
EPSON
RC+
Comando:
>brake off, 2
PRECAUCIÓN
■
Existe la posibilidad de que las manos y los dedos queden atrapados o se
produzcan daños o el mal funcionamiento del manipulador. Tenga mucho cuidado
al mover el manipulador.
3. Apague la alimentación del controlador.
4. Retire la cubierta central del brazo n.º 1 y la cubierta lateral del brazo n.º 1.
Para conocer detalles, consulte Mantenimiento: 3. Cubiertas.
5. Retire el bloque de disipación de calor y la hoja de disipación
de calor del brazo n.º 1.
Pernos de cabeza hueca hexagonal: 2-M410
Se volverá a utilizar la hoja de disipación de calor instalada
en la unidad de motor. Tenga cuidado de no romperla ni
perderla.

Mantenimiento
C8 Mod.13 219
6. Desconecte los siguientes conectores del motor.
Conector: X121, X021, BT2, BR021
(Sostenga el gancho para retirar).
7. Retire la fuente de alimentación del freno.
Tornillos con ranura en cruz con arandela cautiva: 2-M3×6
8. Suelte los pernos que fijan la unidad de motor de la
articulación n.º 2 y retire la correa.
Pernos de cabeza hueca hexagonal: 3-M5×25
(con una arandela de ajuste)
ADVERTENCIA
■
Si se sueltan los pernos mientras el brazo n.º 2 no está doblado, se podría salir
la correa y podría caer el brazo n.º 2, lo cual es extremadamente peligroso.
Asegúrese de realizar los pasos de retiro 1 y 2 antes de soltar los pernos.

Mantenimiento
220 C8 Mod.13
9. Retire la unidad del motor de la articulación n.º 2.
10. Retire la polea 1 de la articulación n.º 2 y el cubo de mando
del eje del motor de la unidad del motor de articulación n.º
2.
Retire dos tornillos desde la parte plana (corte en D) del eje
del motor visto desde arriba. (A en la figura)
Polea y el eje del motor (A)
Tornillos de fijación de cabeza hueca hexagonal: 2-
M5×12
No retire los tornillos de la polea y del cubo de mando (B
en la figura). Hay un casquillo de bronce en uno de los
tornillos de fijación.
Si retiró los tornillos (B), tenga cuidado de no perder el
casquillo de bronce.
A: Tornillos de la polea y del eje del motor
(Pieza cortada en D del eje del motor 2)
B: Tornillos de la polea y del cubo de mando
No los retire.
C: Casquillo
Polea
Cubo de mando
A
A
C
B
B
NOTA

Mantenimiento
C8 Mod.13 221
11. Retire el freno electromagnético de la articulación n.º 2.
Tornillos de fijación de cabeza hueca hexagonal: 2-M6×6
(con casquillo de bronce)
12. Retire la placa del motor desde el motor de la articulación n.º 2.
Pernos de cabeza hueca hexagonal: 4-M6×20

Mantenimiento
222 C8 Mod.13
Instalación: Motor de la articulación n.º 2
1. Fije la placa del motor en el motor de la articulación n.º 2.
Pernos de cabeza hueca hexagonal: 4-M6×20
Torque de ajuste: 13,0 0,6 N m
Tenga cuidado con la dirección de montaje de la placa del
motor.
(Consulte la imagen).
2. Instale el freno electromagnético de la articulación n.º 2 en la
unidad de motor de la articulación n.º 2.
Tornillos de fijación de cabeza hueca hexagonal: 2-M6×6 (con
casquillo de bronce)
Torque de ajuste: 8,0 0,4 N·m
Tenga cuidado con la dirección de montaje del
freno electromagnético de la articulación n.º 2. (Consulte la
imagen).
Fije los tornillos de fijación, mientras presiona el freno
electromagnético hacia la placa del motor.
No es necesario el casquillo de bronce para el tornillo en la
superficie plana (corte en D). Fije el casquillo al otro tornillo
y, luego, fije el tornillo.
Si la posición de los tornillos es incorrecta o si no se ha fijado
el casquillo, se podría dañar el costado del freno y esto podría
imposibilitar la extracción de la pieza.
NOTA
NOTA

Mantenimiento
C8 Mod.13 223
3. Instale el cubo de mando y la polea 1 a la unidad de motor de la
articulación n.º 2.
Inserte la polea 1 de modo tal que el tornillo de fijación quede
alineado con la superficie plana del eje del motor.
Fije la polea 1 y el eje del motor.
Deje 0,5 mm entre la polea 1 y el freno electromagnético.
Sobresale el tornillo embutido del freno electromagnético. Con la
galga de espesor (0,5 mm), deje un espacio para la prominencia.
Sin este espacio, las piezas se podrían frotar mientras el motor está en marcha y esto puede generar
un desperfecto.
Tornillos de fijación de cabeza hueca hexagonal: 2-M5×12
Torque de ajuste: 3,9 0,2 N·m
Si se retiran el cubo de mando y la polea 1:
Alinee las caras de los extremos del cubo de mando y la polea 1 y, luego, fíjelas.
Tornillos de fijación de cabeza hueca hexagonal: 2-M5×8 (con casquillo de bronce)
Torque de ajuste: 3,9 0,2 N·m
Si la posición de los tornillos es incorrecta o si no se ha fijado el casquillo, se podría dañar el costado
de la pieza y esto podría imposibilitar la extracción de la pieza.
Ajuste los tornillos de fijación en las posiciones que indica la
figura de la derecha.
A: Tornillos de la polea y del eje del motor
(Pieza cortada en D del eje del motor 2)
B: Tornillos de la polea y del cubo de mando
No los retire.
C: Casquillo
Polea
Cubo de mando
A
A
C
B
B
4. Coloque la unidad de motor de la articulación n.º 2 en el brazo n.º
1.
5. Coloque la correa de regulación alrededor de la polea 1 y de la
polea 2 y fíjela en forma temporal.
Revise que los dientes de la correa de regulación se engranen con
los de la polea.
Como guía general sobre fijación temporal, revise que la unidad
de motor se pueda quitar manualmente y que no se incline cuando
se tire de ella. Si la correa está demasiado suelta o demasiado
apretada, no tendrá la tensión correcta.
Tornillos de fijación de cabeza hueca hexagonal: 3-M5×25 (con
una arandela de ajuste)
NOTA
NOTA

Mantenimiento
224 C8 Mod.13
6. Aplique tensión a la correa de regulación de la articulación n.º 2
y fije la unidad del motor de la articulación n.º 2.
Tensión de la correa de regulación de la articulación n.º 2: 58
a 95 N
Valores de configuración del tensiómetro de la correa
Peso: 4,0 g/mm de ancho × m de longitud de separación,
Ancho: 14 mm,
Longitud de separación: 146 mm
Tornillos de fijación de cabeza hueca hexagonal: 3-M5×25
(con una arandela de ajuste)
Torque de ajuste: 8,0 0,4 N·m
En relación con la tensión de la correa:
- Se puede producir un salto (espacio de posición), si el valor está debajo del límite.
- Se puede producir vibración (ruido anormal) o reducción de la vida útil de las piezas cuando el valor
excede el límite superior.
- Cuando la reemplace con una nueva correa, esta se extiende y puede disminuir la tensión en la etapa
inicial. Asegúrese de operar el robot dos o tres días y volver a revisar la tensión de la correa.
Cuando use la plantilla de tensión de la correa (pieza de
mantenimiento):
Fije la plantilla de tensión de la correa (para la articulación n.º 1, la
articulación n.º 2 y la articulación n.º 3) con los tornillos (2-M4×35)
y empuje la goma en contra de la polea.
La tensión se aplica al empujar el tornillo de fijación (M625) con
la goma.
7. Instale la fuente de alimentación del freno.
Tornillos con ranura en cruz con arandela cautiva: 2-M3×6
Torque de ajuste: 0,45 0,1 N m
8. Conecte los siguientes conectores.
Conectores: X121, X021, BT2, BR021
NOTA

Mantenimiento
C8 Mod.13 225
9. Retire el bloque de disipación de calor y la hoja de disipación de
calor del brazo n.º 2.
Pernos de cabeza hueca hexagonal: 2-M410
Torque de ajuste: 4,0 0,2 N·m
10. Instale la cubierta del brazo n.º 1 y la cubierta lateral del brazo n.º 1.
Para conocer detalles, consulte Mantenimiento: 3. Cubiertas.
11. Realice la calibración.
Para conocer detalles, consulte Mantenimiento: 16. Calibración.

Mantenimiento
226 C8 Mod.13
6.2 Articulación n.º 2 - Reemplazo de la unidad de engranaje reductor
Nombre
Cantidad
Nota
Piezas de
mantenimiento
Unidad de
engranaje
reductor
(Articulación
n.º 2)
C8-A701*** (C8)
C8-A901** *(C8L)
1
1674605
C8-A1401*** (C8XL)
1
1674606
Junta tórica
(Articulación
n.º 2)
C8-A701*** (C8)
C8-A901**
*(C8L)
Brazo
n.º 1
1
1263978
Brazo
n.º 2
1
1656161
C8-A1401***
(C8XL)
Brazo
n.º 1
1
1670635
Brazo
n.º 2
1
1656140
Plantilla de tensión de la correa*
1
1674582
Herramientas
Llave
hexagonal
ancho a lo largo de
superficies planas: 2,5 mm
1
Para los pernos de cabeza hueca
hexagonal M3
Para los tornillos de fijación de cabeza
hueca hexagonal M5
ancho a lo largo de
superficies planas: 3 mm
1
Para los pernos de cabeza hueca
hexagonal M4
ancho a lo largo de
superficies planas: 4 mm
1
Para los pernos de cabeza hueca
hexagonal M5
ancho a lo largo de
superficies planas: 5 mm
1
Para los pernos de cabeza hueca
hexagonal M6
Destornillador de cruz (n.º 2)
1
Para tornillos con ranura en cruz
Torquímetro
1
Para el control del torque de ajuste
Tensiómetro de la correa (0,5 mm)
2
Para ajustar la posición de la polea
Tensiómetro de la correa
1
Consulte: Unitta U-505
Tela (amortiguación)
1
Para brazos de prensado
* La plantilla de tensión de la correa es una plantilla de montaje. Use la plantilla al ajustar la tensión de la correa.
El freno está montado en cada articulación para evitar que el brazo descienda, debido a su propio peso,
mientras el controlador está apagado o el motor está en estado apagado. El freno no funciona durante el
reemplazo. Tenga cuidado cuando realice el trabajo de mantenimiento.
Al retirar la correa de regulación de la articulación n.º 2, incline el brazo n.º 2 y presiónelo contra el brazo n.º 1.
Referencia: Mantenimiento: 6.1 Articulación n.º 2 - Reemplazo del motor, paso para el retiro (2)
Cuando presione el brazo, coloque un trozo de tela o un material similar entre los brazos para evitar contacto
entre ellos. Esto protege las superficies del brazo de raspaduras y del desprendimiento de la pintura.

Mantenimiento
C8 Mod.13 227
Retiro: Unidad de engranaje reductor de la articulación n.º 2
1. Retire la correa de regulación de la articulación n.º 2.
Para conocer detalles, consulte Mantenimiento 6.3 Articulación n.º 2 - Reemplazo de la correa de
regulación, pasos para el retiro (1) a (3).
2. Retire las siguientes piezas.
Batería
Placa de baterías
Conector de la batería
Para conocer detalles, consulte Mantenimiento 11.2 Reemplazo de la placa de baterías, pasos para el
retiro (3) a (6).
3. Retire la caja de la batería.
Tornillos embutidos: 2-M38
4. Pernos de fijación del brazo lateral del brazo n.º 1.
Pernos de cabeza hueca hexagonal: 8-M625 (con una arandela
de ajuste)
5. Retire la polea 2 de la articulación n.º 2 desde el eje de la
articulación n.º 2.
Tornillos de fijación de cabeza hueca hexagonal: 2-M5×10
Hay un casquillo de bronce en uno de los tornillos de fijación.
Tenga cuidado de no perderlo.
C8XL:
Retire la chaveta del eje. Volverá a necesitar la chaveta.
Tenga cuidado de no perderla.

Mantenimiento
228 C8 Mod.13
6. Extraiga el tubo de engrase del costado en el brazo n.º 1 desde
el conector rápido.
El tubo de engrase se conecta entre la base y el brazo n.º 1.
7. Retire el brazo n.º 2.
Pernos de cabeza hueca hexagonal (con una arandela de
ajuste)
C8,C8L: 16-M530
C8XL: 16-M635
Retire una arandela de onda del costado del brazo n.º 1.
Volverá a necesitar la arandela de onda. Tenga cuidado de no
perderla.
Limpie la grasa de la pieza mientras la retira.
PRECAUCIÓN
■
Si se retiran los pernos, se pueden separar los brazos n.º 1, n.º 2, n.º 3, n.º 4, n.º
5 y n.º 6 (efector final). Existe la posibilidad de que las manos y los dedos queden
atrapados o se produzcan daños o el mal funcionamiento del manipulador.
Tenga mucho cuidado al retirar el brazo. Coordine al menos dos trabajadores, de
modo que uno pueda sostener el manipulador, mientras el otro retira los pernos.
■
Los brazos se conectan mediante cables internos. Cuando cambie las piezas,
coloque el brazo que retiró mientras no se aplica carga en los cables. Esto puede
provocar la desconexión de los cables.
8. Retire el generador de onda de la unidad de engranaje reductor.
Si la unidad del generador de ondas no se suelta con facilidad,
coloque la polea 2 en el eje del modo que aparece en la imagen
y quite las piezas.
Limpie la grasa de la pieza mientras la retira.

Mantenimiento
C8 Mod.13 229
9. Retire la unidad del engranaje reductor del brazo n.º 2
Pernos de cabeza hueca hexagonal (con arandela de ajuste)
C8,C8L: 12-M540
C8XL: 12-M645
Limpie la grasa de la pieza mientras la retira.
10. Retire la junta tórica desde la ranura del brazo n.º 2.
Limpie la grasa de la pieza mientras la retira.

Mantenimiento
230 C8 Mod.13
Instalación: Unidad de engranaje reductor de la articulación n.º 2
1. Aplique una capa delgada de grasa (SK-1A) en la junta tórica.
Coloque la junta tórica en la ranura del brazo n.º 2.
No permita que la junta tórica se salga de la ranura.
Si la junta tórica está hinchada, dañada o deteriorada, cámbiela
por una nueva.
2. Instale la unidad del engranaje reductor en el brazo n.º 2.
C8, C8L:
Pernos de cabeza hueca hexagonal: 12-M540
Torque de ajuste: 10,0 0,5 N·m
C8XL:
Pernos de cabeza hueca hexagonal: 12-M645
Torque de ajuste: 18,0 0,9 N·m
El lado de instalación de la unidad de engranaje reductor del brazo n.º 2 tiene agujeros de espacio libre.
Instale la unidad de engranaje reductor para que coincida con los tornillos y los agujeros de espacio
libre.
3. Engrase el lado interior de la lámina flexible.
Grasa : SK-1A
Cantidad de grasa : C8, C8L: 55 g
C8XL: 102 g
4. Inserte el generador de onda de la unidad de engranaje reductor
y fíjelo.

Mantenimiento
C8 Mod.13 231
5. Aplique una capa delgada de grasa (SK-1A) en la junta tórica.
Coloque la junta tórica en la ranura de la unidad de engranaje
reductor.
No permita que la junta tórica se salga de la ranura.
Si la junta tórica está hinchada, dañada o deteriorada, cámbiela
por una nueva.
6. Fije temporalmente el brazo lateral del brazo n.º 1 al brazo n.º
1.
En este momento, ponga la arandela de onda en el brazo n.º 1.
Pernos de cabeza hueca hexagonal: 8-M62 5 (con una
arandela de ajuste)
PRECAUCIÓN
■
Existe la posibilidad de que las manos y los dedos queden atrapados o se
produzcan daños o el mal funcionamiento del manipulador. Tenga mucho cuidado
al instalar el brazo. Coordine al menos dos trabajadores, de modo que uno pueda
sostener el manipulador, mientras el otro retira los pernos.
7. Fije el brazo n.º 2.
C8, C8L:
Pernos de cabeza hueca hexagonal: 16-M530
(con una arandela de ajuste)
Torque de ajuste: 10,0 0,5 N·m
C8XL:
Pernos de cabeza hueca hexagonal: 16-M635
(con una arandela de ajuste)
Torque de ajuste: 18,0 0,9 N·m
Tras fijar el brazo, compruebe que no exista juego o una
alineación incorrecta en la unidad de engranaje reductor
mediante un movimiento manual del brazo.

Mantenimiento
232 C8 Mod.13
8. Tras fijar el brazo n.º 2, fije el brazo lateral del brazo n.º 1.
Pernos de cabeza hueca hexagonal: 8-M625 (con una arandela
de ajuste)
Torque de ajuste: 18,0 0,9 N·m
9. Instale la polea 2 de la articulación n.º 2 en el eje de la
articulación n.º 2.
Pernos de cabeza hueca hexagonal: 2-M5×10
(con arandela de bronce)
Torque de ajuste: 3,9 0,2 N·m
C8, C8L:
Inserte la polea 2 de modo tal que los tornillos de fijación
queden en la superficie plana del eje. No es necesario el
casquillo de bronce para el tornillo en la superficie plana.
Fije el casquillo al otro tornillo y, luego, fije el tornillo.
C8XL:
Fije la chaveta en el eje e inserte la polea 2 mientras la alinea hacia la ranura de la chaveta. No es
necesario el casquillo de bronce para el tornillo en la superficie plana. Fije el casquillo al otro tornillo
y, luego, fije el tornillo.
Si la posición de los tornillos es incorrecta o si no se ha fijado el casquillo, se podría dañar el costado
del freno y esto podría imposibilitar la extracción de la pieza.
10. Instale la caja de la batería.
Tornillos embutidos: 2-M38
Torque de ajuste: 0,45 0,1 N m
11. Instale las siguientes piezas.
Batería
Placa de baterías
Conector de la batería
Para conocer detalles, consulte Mantenimiento 11.2 Reemplazo de la placa de baterías, pasos para la
instalación (2) a (5).
12. Instale la correa de regulación de la articulación n.º 2.
Para conocer detalles, consulte Mantenimiento 6.3 Articulación n.º 2 – Reemplazo de la correa de
regulación, pasos para la instalación (1) a (2).
NOTA

Mantenimiento
C8 Mod.13 233
6.3 Articulación n.º 2 - Reemplazo de la correa de regulación
Nombre
Cantidad
Nota
Piezas de
mantenimiento
Correa de
regulación
(Articulación
n.º 2)
C8-A701*** (C8)
1
475 mm
1655920
C8-A901*** (C8L)
1
485 mm
1655924
C8-A1401***
(C8XL)
1
540 mm
1655927
Plantilla de tensión de la correa *
1
1674582
Herramientas
Llave hexagonal
(ancho a lo largo de superficies planas:
4 mm
1
Para el perno de cabeza hueca hexagonal
M5
Destornillador de cruz
1
Para tornillos con ranura en cruz
Torquímetro
1
Para el control del torque de ajuste
Tela (amortiguación)
1
Para brazos de prensado
Tensiómetro de la correa
1
Consulte: Unitta U-505
* La plantilla de tensión de la correa es una plantilla de montaje. Use la plantilla al ajustar la tensión de la
correa.
El freno está montado en cada articulación para evitar que el brazo descienda, debido a su propio peso,
mientras el controlador está apagado o el motor está en estado apagado. El freno no funciona durante el
reemplazo.
Tenga cuidado cuando realice el trabajo de mantenimiento.
Al retirar el motor de la articulación n.º 2, incline el brazo n.º 2 y presiónelo hacia el brazo n.º 1.
Referencia: Mantenimiento: 6.1 Articulación n.º 2 - Reemplazo del motor, paso para el retiro (2)
Cuando presione el brazo, coloque un trozo de tela o un material similar entre los brazos para evitar contacto
entre ellos. Esto protege las superficies del brazo de raspaduras y del desprendimiento de la pintura.
Retiro: Correa de regulación de la articulación n.º 2
1. Siga los pasos para el retiro (1) a (4) de Mantenimiento: 6.1 Articulación n.º 2– Reemplazo del motor.
2. Suelte los tornillos de fijación de la unidad de motor de la
articulación n.º 2.
Pernos de cabeza hueca hexagonal: 3-M5×25
(con una arandela de ajuste)
3. Retire la correa de regulación de la articulación n.º 2.
Instalación: Correa de regulación de la articulación n.º 2
1. Pase la correa de regulación de la articulación n.º 2 alrededor de la polea 1 y de la polea 2 de la articulación
n.º 2.
Pase la correa de regulación por la polea 2, primero, y, luego, póngala en la polea 1.
2. Fije la unidad de motor de la articulación n.º 2.
Para conocer detalles, consulte Mantenimiento: 6.1 Articulación n.º 2 – Reemplazo del motor, pasos para la
instalación (5) al (6) y (10) al (11).

Mantenimiento
234 C8 Mod.13
6.4 Articulación n.º 2 - Reemplazo del freno electromagnético
Nombre
Cantidad
Nota
Piezas de
mantenimiento
Freno electromagnético (articulación n.º
1, n.º 2)
1
2172926
Plantilla de tensión de la correa*
1
1674582
Herramientas
Llave
hexagonal
ancho a lo largo de
superficies planas: 2,5 mm
1
Para los tornillos de fijación de cabeza
hueca hexagonal M5
ancho a lo largo de
superficies planas: 3 mm
1
Para los tornillos de fijación de cabeza
hueca hexagonal M6
ancho a lo largo de
superficies planas: 4 mm
1
Para el perno de cabeza hueca
hexagonal M5
ancho a lo largo de
superficies planas: 5 mm
1
Para el perno de cabeza hueca
hexagonal M6
Destornillador de cruz
1
Para tornillos con ranura en cruz
Torquímetro
1
Para el control del torque de ajuste
Galga de espesor (0,5 mm)
2
Para ajustar la posición de la polea
Tensiómetro de la correa
1
Consulte: Unitta U-505
Tela (amortiguación)
1
Para brazos de prensado
* La plantilla de tensión de la correa es una plantilla de montaje. Use la plantilla al ajustar la tensión de la
correa.
El freno está montado en cada articulación para evitar que el brazo descienda, debido a su propio peso,
mientras el controlador está apagado o el motor está en estado apagado. El freno no funciona durante el
reemplazo.
Tenga cuidado cuando realice el trabajo de mantenimiento.
Al retirar el motor de la articulación n.º 2, incline el brazo n.º 2 y presiónelo hacia el brazo n.º 1.
Referencia: Mantenimiento: 6.1 Articulación n.º 2 - Reemplazo del motor, paso para el retiro (2)
Cuando presione el brazo, coloque un trozo de tela o un material similar entre los brazos para evitar contacto
entre ellos. Esto protege las superficies del brazo de raspaduras y del desprendimiento de la pintura.
Retiro: Freno electromagnético de la articulación n.º 2
1. Retire el freno electromagnético de la articulación n.º 2.
Para conocer detalles, consulte Mantenimiento: 6.1 Articulación n.º 2 – Reemplazo del motor, pasos para
el retiro (1) a (11).
Instalación: Freno electromagnético de la articulación n.º 2
1. Instale el freno electromagnético de la articulación n.º 2 en la unidad de motor de la articulación n.º 2.
Para conocer detalles, consulte Mantenimiento: 6.1 Articulación n.º 2 – Reemplazo del motor, pasos para
la instalación (2) a (11).

Mantenimiento
C8 Mod.13 235
7. Articulación n.º 3
ADVERTENCIA
■
No conecte ni desconecte los conectores del motor mientras el sistema de robot
esté encendido. Conectar o desconectar los conectores del motor con la energía
encendida es extremadamente peligroso y puede provocar lesiones corporales
graves, ya que el manipulador puede moverse de manera anormal; además,
puede provocar descargas eléctricas y el mal funcionamiento del sistema de
robot.
■
Para cortar la energía hacia el sistema de robot, desconecte el enchufe de la
fuente de alimentación. Asegúrese de conectar el cable de alimentación de CA
a un tomacorriente.
NO lo conecte directamente a la fuente de alimentación de la fábrica.
■
Antes de realizar cualquier procedimiento de reemplazo, apague el controlador
y los equipos relacionados, luego desconecte el enchufe de la fuente de
alimentación.
Realizar cualquier procedimiento de reemplazo con la energía encendida es
extremadamente peligroso y puede provocar una descarga eléctrica o el mal
funcionamiento del sistema de robot.
PRECAUCIÓN
■
Tenga cuidado de no aplicar descargas eléctricas excesivas al eje del motor
durante el reemplazo. Las descargas eléctricas pueden reducir la vida útil de los
motores y el codificador, o bien, dañarlos.
■
Nunca desarme el motor y el codificador. Un motor y codificador desarmado
causará un espacio de posición y no se puede volver usar.
Después de reemplazar las piezas (motores, unidades de engranaje reductor, frenos
electromagnéticos, correas de regulación, etc.), el manipulador no puede operar
correctamente, ya que hay un espacio entre el origen almacenado en cada codificador de
motor y el origen correspondiente almacenado en el controlador.
Por lo tanto, es necesario hacer coincidir estos orígenes después de reemplazar las piezas.
El proceso de alinear los dos orígenes se denomina “Calibración”.
Consulte Mantenimiento 16. Calibración y realice la calibración después de reemplazar las
piezas.
Unidad de engranaje reductor
de la articulación n.º 3
Motor + freno electromagnético
de la articulación n.º 3
Correa de regulación
de la articulación n.º 3
(Figura: C8-A1401* (C8XL))

Mantenimiento
236 C8 Mod.13
7.1 Articulación n.º 3 - Reemplazo del motor
Nombre
Cantidad
Nota
Piezas de
mantenimiento
Servomotor de CA de 400 W
1
2168684
Plantilla de tensión de la correa*
1
1674582
Herramientas
Llave
hexagonal
ancho a lo largo de
superficies planas: 2,5 mm
1
Para los tornillos de fijación de cabeza
hueca hexagonal M5
ancho a lo largo de
superficies planas: 3 mm
1
Para los pernos de cabeza hueca
hexagonal M4
ancho a lo largo de
superficies planas: 4 mm
1
Para los pernos de cabeza hueca
hexagonal M5
Destornillador de cruz (n.º 2)
1
Para tornillos con ranura en cruz
Torquímetro
1
Para el control del torque de ajuste
Galga de espesor (0,5 mm)
2
Para ajuste de posición de la polea
Tensiómetro de la correa
1
Consulte: Unitta U-505
Tela (amortiguación)
1
Para brazos de prensado
* La plantilla de tensión de la correa es una plantilla de montaje. Use la plantilla al ajustar la tensión de la correa.
El freno está montado en cada articulación para evitar que el brazo descienda, debido a su propio peso,
mientras el controlador está apagado o el motor está en estado apagado. El freno no funciona durante el
reemplazo.
Tenga cuidado cuando realice el trabajo de mantenimiento.
Al retirar el motor de la articulación n.º 3, incline el brazo n.º 2 y presiónelo hacia el brazo n.º 2.
Referencia: Mantenimiento: 7.1 Articulación n.º 3 - Reemplazo del motor, paso para el retiro (2)
Cuando presione el brazo, coloque un trozo de tela o un material similar entre los brazos para evitar contacto
entre ellos. Esto protege las superficies del brazo de raspaduras y del desprendimiento de la pintura.

Mantenimiento
C8 Mod.13 237
Retiro: Motor de la articulación n.º 3
PRECAUCIÓN
■
En este procedimiento existe la posibilidad de que las manos y los dedos queden
atrapados o se produzcan daños o el mal funcionamiento del manipulador. Tenga
mucho cuidado cuando realice el mantenimiento.
■
No suelte los pernos mientras el brazo n.º 3 no esté inclinado.
Puede provocar que se salga la correa y que se caiga el brazo n.º 3; es
extremadamente peligroso. Asegúrese de realizar los pasos de retiro 1 y 2 antes
de quitar el motor.
1. Encienda la alimentación del controlador.
2. Desbloquee el freno de la articulación n.º 3. Incline el brazo n.º 3 y
empújelo hacia el brazo n.º 2.
El brazo n.º 3 cae por su peso cuando se retira la unidad de motor de
la articulación n.º 3. Por lo tanto, desbloquee el freno e incline el
brazo n.º 3 con antelación.
EPSON
RC+
Comando:
>brake off, 3
PRECAUCIÓN
■
Existe la posibilidad de que las manos y los dedos queden atrapados o se
produzcan daños o el mal funcionamiento del manipulador. Tenga mucho cuidado
al mover el manipulador.
Ponga un paño entre el brazo n.º 2 y el brazo n.º 3, de modo que los brazos no
se toquen.
3. Apague la alimentación del controlador.
4. Retire la cubierta lateral del brazo n.º 2.
Para conocer detalles, consulte Mantenimiento: 3. Cubiertas.
5. Desconecte los siguientes conectores.
Conectores: X131, X031, BT3, BR031
(Sostenga el gancho para retirar).
Tenga cuidado de no soltar al interior del brazo los conectores
retirados.
NOTA

Mantenimiento
238 C8 Mod.13
6. Retire la fuente de alimentación del freno.
Tornillos con ranura en cruz con arandela cautiva: 2-M3×6
7. Suelte los pernos que fijan la unidad de motor de la articulación
n.º 3 y retire la correa.
Pernos de cabeza hueca hexagonal: 3-M4×20
(con una arandela de ajuste)
ADVERTENCIA
■
Si se sueltan los pernos mientras el brazo n.º 3 no está doblado, se podría salir
la correa y podría caer el brazo n.º 3, lo cual es extremadamente peligroso.
Asegúrese de realizar los pasos de retiro 1 y 2 antes de soltar los pernos.

Mantenimiento
C8 Mod.13 239
8. Retire la unidad del motor de la articulación n.º 3.
Tenga cuidado de no soltar al interior del brazo los conectores
retirados.
9. Retire la polea 1 de la articulación n.º 3 y el cubo de mando
del eje del motor de la unidad del motor de articulación n.º 3.
Retire dos tornillos desde la parte plana (corte en D) del eje del
motor visto desde arriba. (A en la figura)
Tornillos de la polea y del eje del motor (A)
Tornillos de fijación de cabeza hueca hexagonal: 2-M5×12
No retire los tornillos de la polea y del cubo de mando
(B en la figura).
Hay un casquillo de bronce en uno de los tornillos de fijación.
Si retiró los tornillos (B), tenga cuidado de no perder el
casquillo de bronce.
Tornillos de la polea y del cubo de mando (B)
Tornillos de fijación de cabeza hueca hexagonal: 2-M5×6
(con casquillo de bronce)
A: Tornillos de la polea y del eje del motor
(Pieza cortada en D del eje del motor 2)
B: Tornillos de la polea y del cubo de mando
No los retire.
C: Casquillo
Pulley
Drive boss
A
A
C
B
B
NOTA
NOTA

Mantenimiento
240 C8 Mod.13
10. Retire el freno electromagnético de la articulación n.º 3.
Tornillos de fijación de cabeza hueca hexagonal: 2-M5×10
(con casquillo de bronce)
Los tornillos tienen un casquillo de bronce.
Tenga cuidado de no perderlos.
11. Retire la placa del motor desde el motor de la articulación n.º 3.
Pernos de cabeza hueca hexagonal: 4-M5×15

Mantenimiento
C8 Mod.13 241
Instalación: Motor de la articulación n.º 3
1. Fije la placa del motor en el motor de la articulación n.º 3.
Pernos de cabeza hueca hexagonal: 4-M5×15
Torque de ajuste: 8,0 0,4 N m
Tenga cuidado con la dirección de montaje de la placa del
motor. (Consulte la figura).
2. Instale el freno electromagnético de la articulación n.º 3 en la
unidad de motor de la articulación n.º 3.
Tornillos de fijación de cabeza hueca hexagonal: 2-M5×10
(con casquillo de bronce)
Torque de ajuste: 3,9 0,2 N m
Tenga cuidado con la dirección de montaje del freno
electromagnético de la articulación n.º 3. (Consulte la
imagen).
Fije los tornillos de fijación, mientras presiona el freno
electromagnético hacia la placa del motor.
No es necesario el casquillo de bronce para el tornillo en la
superficie plana (corte en D). Fije el casquillo al otro tornillo
y, luego, fije el tornillo.
Si la posición de los tornillos es incorrecta o si no se ha fijado
el casquillo, se podría dañar el costado del freno y esto podría
imposibilitar la extracción de la pieza.
NOTA
NOTA
NOTA

Mantenimiento
242 C8 Mod.13
3. Instale el cubo de mando y la polea 1 a la unidad de motor de
la articulación n.º 3.
Inserte la polea 1 de modo tal que el tornillo de fijación
quede alineado con la superficie plana del eje del motor.
Fije la polea 1 y el eje del motor.
Deje 0,5 mm entre la polea 1 y el freno electromagnético.
Sobresale el tornillo embutido del freno electromagnético.
Con la galga de espesor (0,5 mm), deje un espacio para la
prominencia.
Sin este espacio, las piezas se podrían frotar mientras el motor está en marcha y esto puede generar un
desperfecto.
Tornillos de fijación de cabeza hueca hexagonal: 2-M5×12
Torque de ajuste: 3,9 0,2 N·m
Si se retiran el cubo de mando y la polea 1:
Alinee las caras de los extremos del cubo de mando y la polea 1 y, luego, fíjelas.
Tornillo de fijación de cabeza hueca hexagonal: 2-M5×6 (con casquillo de bronce)
Torque de ajuste: 3,9 0,2 N·m
Ajuste los tornillos de fijación en las posiciones que indica la
figura de la derecha.
A: Tornillos de la polea y del eje del motor
(Pieza cortada en D del eje del motor 2)
B: Tornillos de la polea y del cubo de mando
No los retire.
C: Casquillo
Pulley
Drive boss
A
A
C
B
B
Si la posición de los tornillos es incorrecta o si no se ha fijado el casquillo, se podría dañar el costado de
la pieza y esto podría imposibilitar la extracción de la pieza.
4. Coloque la unidad de motor de la articulación n.º 3 en el brazo
n.º 2.
5. Coloque la correa de regulación alrededor de la polea 1 y de
la polea 2 y fíjela en forma temporal.
Revise que los dientes de la correa de regulación se engranen
con los de la polea.
Como guía general sobre fijación temporal, revise que la
unidad de motor se pueda quitar manualmente y que no se
incline cuando se tire de ella. Si la correa está demasiado suelta
o demasiado apretada, no tendrá la tensión correcta.
Tornillos de fijación de cabeza hueca hexagonal: 3-M4×20
(con una arandela de ajuste)
NOTA
NOTA

Mantenimiento
C8 Mod.13 243
6. Aplique tensión en la correa de regulación de la articulación n.º
3 y fije la unidad de motor de la articulación n.º 3.
Tensión de la correa de regulación de la articulación n.º 3: 25
a 85 N
Valor de configuración del tensiómetro de la correa
Peso: 2,5 g/mm de ancho × m de longitud de separación,
Ancho: 10 mm,
Longitud de separación: 168 mm
Torque de ajuste: 4,0 0,2 N m
En relación con la tensión de la correa:
- Se puede producir un salto (espacio de posición), si el valor está debajo del límite
- Se puede producir vibración (ruido anormal) o reducción de la vida útil de las piezas cuando el valor
excede el límite superior.
- Cuando la reemplace con una nueva correa, esta se extiende y puede disminuir la tensión en la etapa
inicial. Asegúrese de operar el robot dos o tres días y volver a revisar la tensión de la correa.
Cuando use la plantilla de tensión de la correa (pieza de mantenimiento):
Fije la plantilla de tensión de la correa (para la articulación n.º 1, la articulación n.º 2 y la articulación n.º
3) con los tornillos (2-M4×35) y empuje la goma en contra de la polea.
La tensión se aplica al empujar el tornillo de fijación (M625) con la goma.
7. Instale la fuente de alimentación del freno.
Tornillo con ranura en cruz con arandela cautiva: 2-M3×6
Torque de ajuste: 0,45 0,1 N·m
8. Conecte los siguientes conectores.
Conectores: X131, X031, BT3, BR031
9. Instale la cubierta lateral del brazo n.º 2.
Para conocer detalles, consulte Mantenimiento: 3. Cubiertas.
10. Realice la calibración.
Para conocer detalles, consulte Mantenimiento: 16. Calibración.
NOTA
Tornillo de fijación de cabeza hueca hexagonal: 3-M4×20 (con una arandela de ajuste)

Mantenimiento
244 C8 Mod.13
7.2 Articulación n.º 3 - Reemplazo de la unidad de engranaje reductor
Nombre
Cantidad
Nota
Piezas de
mantenimiento
Unidad de
engranaje
reductor
(Articulación
n.º 3)
C8-A701*** (C8)
C8-A901*** (C8L)
1
1674607
C8-A1401*** (C8XL)
1
1674608
Junta tórica
(Articulación
n.º 3)
Lado del brazo n.º 2
1
1263977
Lado del brazo n.º 3
1
1510528
Plantilla de tensión de la correa*
1
1674582
Herramientas
Llave
hexagonal
ancho a lo largo de
superficies planas:
2,5 mm
1
Para los pernos de cabeza hueca
hexagonal M3
Para los tornillos de fijación de cabeza
hueca hexagonal M5
ancho a lo largo de
superficies planas: 3 mm
1
Para los pernos de cabeza hueca
hexagonal M4
ancho a lo largo de
superficies planas: 4 mm
1
Para los pernos de cabeza hueca
hexagonal M5
ancho a lo largo de
superficies planas: 5 mm
1
Para los pernos de cabeza hueca
hexagonal M6
Destornillador de cruz (n.º 2)
1
Para tornillos con ranura en cruz
Torquímetro
1
Para el control del torque de ajuste
Galga de espesor (0,5 mm)
2
Para ajustar la posición de la polea
Tensiómetro de la correa
1
Consulte: Unitta U-505
Tela (amortiguación)
1
Para brazos de prensado
* La plantilla de tensión de la correa es una plantilla de montaje. Use la plantilla al ajustar la tensión de la correa.
El freno está montado en cada articulación para evitar que el brazo descienda, debido a su propio peso,
mientras el controlador está apagado o el motor está en estado apagado. El freno no funciona durante el
reemplazo. Tenga cuidado cuando realice el trabajo de mantenimiento.
Al retirar la correa de regulación de la articulación n.º 3, incline el brazo n.º 2 y presiónelo contra el brazo n.º 2.
Referencia: Mantenimiento: 7.1 Articulación n.º 3 - Reemplazo del motor, paso para el retiro (2)
Cuando presione el brazo, coloque un trozo de tela o un material similar entre los brazos para evitar contacto
entre ellos. Esto protege las superficies del brazo de raspaduras y del desprendimiento de la pintura.

Mantenimiento
C8 Mod.13 245
Retiro: Unidad de engranaje reductor de la articulación n.º 3
1. Retire la correa de regulación de la articulación n.º 3.
Para conocer detalles, consulte Mantenimiento 7.3 Articulación
n.º 3 - Reemplazo de la correa de regulación, pasos para el retiro
(1) a (3).
2. Retire los pernos de fijación del brazo lateral del brazo n.º 2.
Pernos de cabeza hueca hexagonal: 6-M520 (con una arandela
de ajuste)
3. Retire la polea 3 de la articulación n.º 2 desde el eje de la
articulación n.º 3.
Tornillos de fijación de cabeza hueca hexagonal
C8, C8L: 2-M510
C8XL: 2-M512
Hay un casquillo de bronce en uno de los tornillos de fijación.
Tenga cuidado de no perderlo.
4. Retire el brazo n.º 3.
Pernos de cabeza hueca hexagonal: 16-M425 (con una arandela
de ajuste)
Retire una arandela de onda del costado del brazo n.º 1.
Volverá a necesitar la arandela de onda. Tenga cuidado de no
perderla.
Limpie la grasa de las piezas mientras las retira.
PRECAUCIÓN
■
Si se retiran los pernos, se puede separar el brazo lateral del brazo n.º 2, y los brazos
n.º 3, n.º 4, n.º 5 y n.º 6 (efector final). Existe la posibilidad de que las manos y los
dedos queden atrapados o se produzcan daños o el mal funcionamiento del
manipulador. Tenga mucho cuidado al retirar el brazo. Coordine al menos dos
trabajadores, de modo que uno pueda sostener el manipulador, mientras el otro
retira los pernos.
■
Los brazos se conectan mediante cables internos. Cuando cambie las piezas,
coloque el brazo que retiró mientras no se aplica carga en los cables. Esto puede
provocar la desconexión de los cables.

Mantenimiento
246 C8 Mod.13
5. Retire el generador de onda de la unidad de engranaje reductor.
Si la unidad del generador de ondas no se suelta con facilidad,
coloque la polea 2 en el eje del modo que aparece en la imagen
y quite las piezas.
Limpie la grasa en el generador de onda mientras lo retira.
6. Retire la unidad del engranaje reductor del brazo n.º 3
Pernos de cabeza hueca hexagonal: 12-M430
Limpie la grasa de la unidad de engranaje reductor mientras la
retira.
7. Retire la junta tórica desde la ranura del brazo n.º 3.
Limpie la grasa de la junta tórica mientras la retira.

Mantenimiento
C8 Mod.13 247
Instalación: Unidad de engranaje reductor de la articulación n.º 3
1. Aplique una capa delgada de grasa (SK-1A) en la junta tórica.
Coloque la junta tórica en la ranura del brazo n.º 3.
No permita que la junta tórica se salga de la ranura.
Si la junta tórica está hinchada, dañada o deteriorada, cámbiela
por una nueva.
2. Instale la unidad del engranaje reductor en el brazo n.º 3.
Pernos de cabeza hueca hexagonal: 12-M430
Torque de ajuste: 5,5 0,2 N·m
El lado de instalación de la unidad de engranaje reductor del
brazo n.º 3 tiene agujeros de espacio libre.
Instale la unidad de engranaje reductor para que coincida con
los tornillos y los agujeros de espacio libre.
3. Engrase el lado interior de la lámina flexible.
Grasa: SK-1A
Cantidad de grasa: 26 g
4. Inserte el generador de onda de la unidad de engranaje reductor
y fíjelo.
5. Aplique una capa delgada de grasa (SK-1A) en la junta tórica.
Coloque la junta tórica en la ranura de la unidad de engranaje
reductor.
No permita que la junta tórica se salga de la ranura.
Si la junta tórica está hinchada, dañada o deteriorada, cámbiela
por una nueva.

Mantenimiento
248 C8 Mod.13
6. Fije temporalmente el brazo lateral del brazo n.º 1 al brazo n.º
2.
En este momento, ponga la arandela de onda en el brazo n.º 2.
Pernos de cabeza hueca hexagonal: 6-M520 (con una arandela
de ajuste)
PRECAUCIÓN
■
Existe la posibilidad de que las manos y los dedos queden atrapados o se produzcan
daños o el mal funcionamiento del manipulador. Tenga mucho cuidado al instalar el
brazo. Coordine al menos dos trabajadores, de modo que uno pueda sostener el
manipulador, mientras el otro retira los pernos.
7. Fije el brazo n.º 3.
Pernos de cabeza hueca hexagonal: 16-M425 (con una
arandela de ajuste)
Torque de ajuste: 5,5 0,2 N·m
Tras fijar el brazo, compruebe que no exista juego o una
alineación incorrecta en la unidad de engranaje reductor
mediante un movimiento manual del brazo.
8. Tras fijar el brazo n.º 3, fije el brazo lateral del brazo n.º 2.
Pernos de cabeza hueca hexagonal: 6-M520 (con una arandela
de ajuste)
Torque de ajuste: 10,0 0,5 N·m

Mantenimiento
C8 Mod.13 249
9. Instale la polea 3 de la articulación n.º 2 en el eje de la
articulación n.º 3.
Pernos de cabeza hueca hexagonal (con 1 casquillo de bronce)
C8, C8L: 2-M510
C8XL: 2-M512
Torque de ajuste: 3,9 0,2 N·m
Inserte la polea 2 de modo tal que los tornillos de fijación
queden en la superficie plana del eje. No es necesario el
casquillo de bronce para el tornillo en la superficie plana.
Fije el casquillo al otro tornillo y, luego, fije el tornillo.
Si la posición de los tornillos es incorrecta o si no se ha fijado el casquillo, se podría dañar el costado
del freno y esto podría imposibilitar la extracción de la pieza.
10. Instale la correa de regulación de la articulación n.º 3.
Para conocer detalles, consulte Mantenimiento 7.3 Articulación n.º 2 – Reemplazo de la correa de
regulación, pasos para la instalación (1) a (2).
NOTA

Mantenimiento
250 C8 Mod.13
7.3 Articulación n.º 3 - Reemplazo de la correa de regulación
Nombre
Cantidad
Nota
Piezas de
mantenimiento
Correa de
regulación
(Articulación
n.º 3)
C8-A701*** (C8)
1
471 mm
1655915
C8-A901*** (C8L)
1
480 mm
1655918
C8-A1401***
(C8XL)
1
501 mm
1655919
Plantilla de tensión de la correa*
1
1674582
Herramientas
Llave hexagonal
(ancho a lo largo de superficies planas:
3 mm
1
Para el perno de cabeza hueca
hexagonal M4
Destornillador de cruz (n.º 2)
1
Para tornillos con ranura en cruz
Torquímetro
1
Para el control del torque de ajuste
Tela (amortiguación)
1
Para brazos de prensado
Tensiómetro de la correa
1
Consulte: Unitta U-505
* La plantilla de tensión de la correa es una plantilla de montaje. Use la plantilla al ajustar la tensión de la
correa.
El freno está montado en cada articulación para evitar que el brazo descienda, debido a su propio peso,
mientras el controlador está apagado o el motor está en estado apagado. El freno no funciona durante el
reemplazo. Tenga cuidado cuando realice el trabajo de mantenimiento.
Al retirar el motor de la articulación n.º 3, incline el brazo n.º 2 y presiónelo hacia el brazo n.º 2.
Referencia: Mantenimiento: 7.1 Articulación n.º 3 - Reemplazo del motor, paso para el retiro (2)
Cuando presione el brazo, coloque un trozo de tela o un material similar entre los brazos para evitar contacto
entre ellos. Esto protege las superficies del brazo de raspaduras y del desprendimiento de la pintura.
Retiro: Correa de regulación de la articulación n.º 3
1. Siga los pasos para el retiro (1) a (4) de Mantenimiento: 7.1 Articulación n.º 3– Reemplazo del motor.
2. Suelte el tornillo de fijación de la unidad del motor de la
articulación n.º 3.
Pernos de cabeza hueca hexagonal: 3-M4×20
(con una arandela de ajuste)
3. Retire la correa de regulación de la articulación n.º 3.
Instalación: Correa de regulación de la articulación n.º 3
1. Pase la correa de regulación de la articulación n.º 3 alrededor de la polea 1 y de la polea 2 de la
articulación n.º 3.
Pase la correa de regulación por la polea 2, primero, y, luego, póngala en la polea 1.
2. Fije la unidad de motor de la articulación n.º 2.
Para conocer detalles, consulte Mantenimiento: 7.1 Articulación n.º 3 – Reemplazo del motor, pasos
para la instalación (5) al (6) y (9) al (10).

Mantenimiento
C8 Mod.13 251
7.4 Articulación n.º 3 - Reemplazo del freno electromagnético
Nombre
Cantidad
Nota
Piezas de
mantenimiento
Freno electromagnético (articulación n.º
3)
1
2172927
Plantilla de tensión de la correa*
1
1674582
Herramientas
Llave
hexagonal
ancho a lo largo de
superficies planas: 2,5 mm
1
Para los tornillos de fijación de cabeza
hueca hexagonal M5
ancho a lo largo de
superficies planas: 3 mm
1
Para el perno de cabeza hueca
hexagonal M4
ancho a lo largo de
superficies planas: 4 mm
1
Para el perno de cabeza hueca
hexagonal M5
Destornillador de cruz (n.º 2)
1
Para tornillos con ranura en cruz
Torquímetro
1
Para el control del torque de ajuste
Galga de espesor (0,5 mm)
2
Para ajustar la posición de la polea
Tensiómetro de la correa
1
Consulte: Unitta U-505
Tela (amortiguación)
1
Para brazos de prensado
* La plantilla de tensión de la correa es una plantilla de montaje. Use la plantilla al ajustar la tensión de la correa.
El freno está montado en cada articulación para evitar que el brazo descienda, debido a su propio peso,
mientras el controlador está apagado o el motor está en estado apagado. El freno no funciona durante el
reemplazo. Tenga cuidado cuando realice el trabajo de mantenimiento.
Al retirar el motor de la articulación n.º 3, incline el brazo n.º 2 y presiónelo hacia el brazo n.º 2.
Referencia: Mantenimiento: 7.1 Articulación n.º 3 - Reemplazo del motor, paso para el retiro (2)
Cuando presione el brazo, coloque un trozo de tela o un material similar entre los brazos para evitar contacto
entre ellos. Esto protege las superficies del brazo de raspaduras y del desprendimiento de la pintura.
Retiro: Freno electromagnético de la articulación n.º 3
1. Retire el freno electromagnético de la articulación n.º 3.
Para conocer detalles, consulte Mantenimiento: 7.1 Articulación n.º 3 – Reemplazo del motor, pasos para
el retiro (1) a (10).
Instalación: Freno electromagnético de la articulación n.º 3
1. Instale el freno electromagnético de la articulación n.º 3 en la unidad de motor de la articulación n.º 3.
Para conocer detalles, consulte Mantenimiento: 7.1 Articulación n.º 3 – Reemplazo del motor, pasos para
la instalación (2) a (10).

Mantenimiento
252 C8 Mod.13
8. Articulación n.º 4
ADVERTENCIA
■
No conecte ni desconecte los conectores del motor mientras el sistema de robot
esté encendido. Conectar o desconectar los conectores del motor con la energía
encendida es extremadamente peligroso y puede provocar lesiones corporales
graves, ya que el manipulador puede moverse de manera anormal; además,
puede provocar descargas eléctricas y el mal funcionamiento del sistema de
robot.
■
Para cortar la energía hacia el sistema de robot, desconecte el enchufe de la
fuente de alimentación. Asegúrese de conectar el cable de alimentación de CA
a un tomacorriente.
NO lo conecte directamente a la fuente de alimentación de la fábrica.
■
Antes de realizar cualquier procedimiento de reemplazo, apague el controlador
y los equipos relacionados, luego desconecte el enchufe de la fuente de
alimentación.
Realizar cualquier procedimiento de reemplazo con la energía encendida es
extremadamente peligroso y puede provocar una descarga eléctrica o el mal
funcionamiento del sistema de robot.
PRECAUCIÓN
■
Tenga cuidado de no aplicar descargas eléctricas excesivas al eje del motor
durante el reemplazo. Las descargas eléctricas pueden reducir la vida útil de los
motores y el codificador, o bien, dañarlos.
■
Nunca desarme el motor y el codificador. Un motor y codificador desarmado
causará un espacio de posición y no se puede volver usar.
Después de reemplazar las piezas (motores, unidades de engranaje reductor, correas de
regulación, etc.), el manipulador no puede operar correctamente, ya que hay un espacio entre
el origen almacenado en cada codificador de motor y el origen correspondiente almacenado
en el controlador.
Por lo tanto, es necesario hacer coincidir estos orígenes después de reemplazar las piezas.
El proceso de alinear los dos orígenes se denomina “Calibración”.
Consulte Mantenimiento 16. Calibración y realice la calibración después de reemplazar las
piezas.
Freno electromagnético de la
articulación n.º 4
Motor de la
articulación n.º 4
Unidad de engranaje reductor
de la articulación n.º 4
Correa de regulación
de la articulación n.º 4
(Figura: C8-A1401* (C8XL))

Mantenimiento
C8 Mod.13 253
8.1 Articulación n.º 4 - Reemplazo del motor
Nombre
Cantidad
Nota
Piezas de
mantenimiento
Servomotor de CA de 100 W
1
2172051
(común para las articulaciones n.º 4, n.º
5, n.º 6)
Plantilla de tensión de la correa*
1
1674582
Herramientas
Llave
hexagonal
ancho a lo largo de
superficies planas: 2 mm
1
Para los tornillos de fijación de cabeza
hueca hexagonal M4
ancho a lo largo de
superficies planas: 2,5 mm
1
Para los pernos de cabeza hueca
hexagonal M3
ancho a lo largo de
superficies planas: 3 mm
1
Para los pernos de cabeza hueca
hexagonal M4
Destornillador de cruz (n.º 2)
1
Para tornillos con ranura en cruz
Galga de espesor (0,5 mm)
2
Para ajuste de posición de la polea
Tensiómetro de la correa
1
Consulte: Unitta U-505
* La plantilla de tensión de la correa es una plantilla de montaje. Use la plantilla al ajustar la tensión de la correa.
El freno está montado en cada articulación para evitar que el brazo descienda, debido a su propio peso,
mientras el controlador está apagado o el motor está en estado apagado. El freno no funciona durante el
reemplazo. Tenga cuidado cuando realice el trabajo de mantenimiento.
Los motores son comunes para las articulaciones n.º 4, n.º 5 y n.º 6.
Los motores de las articulaciones n.º 5 y n.º 6 tienen una etiqueta de identificación para evitar la
conexión incorrecta de los conectores. La etiqueta no es necesaria para el motor de la articulación n.º 4.
(No hay etiqueta de identificación de conector para la articulación n.º 4).
NOTA

Mantenimiento
254 C8 Mod.13
Retiro: Motor de la articulación n.º 4
1. Apague la alimentación del controlador.
2. Retire las siguientes cubiertas.
Cubierta del brazo n.º 3
Cubierta de mantenimiento del brazo n.º 3
Cubierta lateral del brazo n.º 2
Para conocer detalles, consulte Mantenimiento: 3. Cubiertas.
3. Extraiga los cables del brazo n.º 3 y desconecte los siguientes
conectores.
Conector: X141, X041, BT4, BR041
(Sostenga el gancho para retirar).
4. Retire la fuente de alimentación del freno.
Tornillos con ranura en cruz con arandela cautiva: 2-M3×6
5. Retire el soporte de cables.
Pernos de cabeza hueca hexagonal: 2-M4×10
6. Retire la unidad del motor de la articulación n.º 4 desde el brazo
n.º 3.
Pernos de cabeza hueca hexagonal: 2-M4×15
(con arandela de ajuste pequeña)

Mantenimiento
C8 Mod.13 255
7. Retire la polea 1 de la articulación n.º 4 y el cubo de mando del
eje del motor de la unidad del motor de articulación n.º 4.
Tornillos de la polea 1 y del cubo de mando
Tornillos de fijación de cabeza hueca hexagonal: 2-M4×4
(con casquillo de bronce)
Tornillos del cubo de mando y del eje del motor
Tornillos de fijación de cabeza hueca hexagonal: 2-M4×4
Hay un casquillo de bronce en uno de los tornillos de fijación
que fijan el cubo de mando y la polea. Tenga cuidado de no
perderlo.
A: Tornillos de la polea y del eje del motor
B: Tornillos de la polea y del cubo de mando
C: Casquillo
Polea
Cubo de mando
A
A
C
B
8. Retire el freno electromagnético de la articulación n.º 4.
Tornillos de fijación de cabeza hueca hexagonal: 3-M3×15 (con
un separador)
Tenga cuidado de no perder los
separadores.
9. Retire la placa del motor desde el motor de la articulación n.º 4.
Pernos de cabeza hueca hexagonal: 2-M4×10

Mantenimiento
256 C8 Mod.13
Instalación: Motor de la articulación n.º 4
1. Fije la placa del motor en el motor de la articulación n.º 4.
Pernos de cabeza hueca hexagonal: 2-M4×10
Torque de ajuste: 4,0 0,2 N m
Tenga cuidado con la dirección de montaje de la placa del motor.
(Consulte la imagen).
2. Instale el freno electromagnético de la articulación n.º 4 en la
unidad de motor de la articulación n.º 4. Inserte los separadores
entre los tornillos de fijación de cabeza hueca hexagonal y el freno
electromagnético de la articulación n.º 4.
Tornillos de fijación de cabeza hueca hexagonal: 3-M3×15 (con
un separador)
Torque de ajuste: 2,0 0,1 N m
Tenga cuidado con la dirección del cableado del freno
electromagnético de la articulación n.º 4. (Consulte la imagen).
Cable del freno
electromagnético
3. Instale el cubo de mando y la polea 1 a la unidad de motor de la
articulación n.º 4.
Fije el cubo de mando y el eje del motor.
Existe una parte irregular para la galga de espesor (0,5 mm) en el
cubo. Úsela para dejar un espacio de 0,5 mm.
Sin este espacio, las piezas se podrían frotar mientras el motor
está en marcha y esto puede generar un desperfecto mientras el
motor se mueve.
Ajuste los tornillos de fijación en las posiciones que indica la
figura.
A: Tornillos de la polea y del eje del motor
B: Tornillos de la polea y del cubo de mando
C: Casquillo
Polea
Cubo de mando
A
A
C
B
Si la posición de los tornillos es incorrecta o si no se ha fijado el
casquillo, se podría dañar el costado de la pieza y esto podría
imposibilitar la extracción de la pieza.
Parte irregular para la galga de
espesor (0,5 mm)
2 lugares, a una inclinación de 90°
t = 0,5 mm
NOTA
NOTA
NOTA
NOTA

Mantenimiento
C8 Mod.13 257
Cubo de mando y eje del motor:
Tornillos de fijación de cabeza hueca hexagonal: 2-M4×4
Torque de ajuste: 2,5 0,2 N·m
Alinee los tornillos con las dos caras planas del eje del motor y fíjelos.
Cubo de mando y polea 1:
Tornillos de fijación de cabeza hueca hexagonal: 2-M4×4 (con casquillo de bronce)
Torque de ajuste: 2,5 0,2 N·m
Fije los tornillos de fijación, mientras presiona la polea 1 hacia el cubo de mando.
No es necesario el casquillo de bronce para el tornillo en la superficie plana (corte en D). Fije el casquillo
al otro tornillo y, luego, fije el tornillo.
4. Coloque la unidad de motor de la articulación n.º 4 dentro del brazo
n.º 4.
5. Pase la correa de regulación alrededor de la polea 1 y de la polea 2,
y fíjela en forma temporal.
Pernos de cabeza hueca hexagonal: 2-M4×15 (con arandela)
Revise que los dientes de la correa de regulación se engranen con
los de la polea.
Como guía general sobre fijación temporal, revise que la unidad de
motor se pueda quitar manualmente y que no se incline cuando se
tire de ella.
Si la correa está demasiado suelta o demasiado apretada, no tendrá
la tensión correcta.
6. Aplique tensión en la correa de regulación de la articulación n.º 4 y
fije la unidad de motor de la articulación n.º 4.
Tensión de la correa de regulación de la articulación n.º 4: 15 a
30 N
Valor de configuración del tensiómetro de la correa
Peso: 2,5 g/mm de ancho × m de longitud de separación, Ancho:
6 mm, Longitud de separación: 61 mm
Perno de cabeza hueca hexagonal: 2-M4×15 (con una arandela de
ajuste)
Torque de ajuste: 4,0 0,2 N·m

Mantenimiento
258 C8 Mod.13
En relación con la tensión de la correa:
- Se puede producir un salto (espacio de posición), si el valor está debajo del límite.
- Se puede producir vibración (ruido anormal) o reducción de la vida útil de las piezas cuando el valor
excede el límite superior.
- Cuando la reemplace por una nueva correa, se puede extender y disminuiría la tensión en la etapa
inicial de la operación. Asegúrese de operar el robot dos o tres días y volver a revisar la tensión de la
correa.
Cuando use la plantilla de tensión de la correa (pieza de
mantenimiento):
Fije la plantilla de tensión de la correa (para J4) en la placa del
motor de la articulación n.º 4.
Perno de cabeza hueca hexagonal: 2-M4×15
Fije la plantilla de tensión de la correa (para J4, J5 y J6) en el
brazo n.º 3 como se muestra en la imagen. Inserte el tornillo en
el agujero pasado en el centro y fíjelo suavemente en el agujero
para la plantilla de tensión de la correa.
Perno de cabeza hueca hexagonal: M4×15
Se aplica tensión en la medida que la unidad de motor de la
articulación n.º 4 se extiende al apretar el tornillo.
7. Instale la placa para fijar los cables.
Pernos de cabeza hueca hexagonal: 2-M4×10
8. Instale la fuente de alimentación del freno en la placa.
Instale la fuente de alimentación del freno, de modo tal que el
cable quede hacia la izquierda.
Tornillo con ranura en cruz con arandela cautiva: 2-M3×6
Torque de ajuste: 0,45 0,1 N·m
9. Conecte los siguientes conectores.
Conectores: X141, X041, BT4, BR041
10. Instale la siguiente cubierta.
Cubierta del brazo n.º 3
Cubierta de mantenimiento del brazo n.º 3
Cubierta lateral del brazo n.º 2
Para conocer detalles, consulte Mantenimiento: 3. Cubiertas.
11. Calibre la articulación n.º 4.
Para conocer detalles, consulte Mantenimiento: 16. Calibración.
NOTA

Mantenimiento
C8 Mod.13 259
8.2 Articulación n.º 4 - Reemplazo de la unidad de engranaje reductor
Nombre
Cantidad
Nota
Piezas de
mantenimiento
Unidad de
engranaje
reductor
(Articulación
n.º 4)
C8-A701*** (C8)
C8-A1401*** (C8XL)
1
1674609
C8-A901*** (C8L)
1
1675434
Plantilla de tensión de la correa*
1
1674582
Herramientas
Llave
hexagonal
ancho a lo largo de
superficies planas:
2,5 mm
1
Para los pernos de cabeza hueca
hexagonal M3
ancho a lo largo de
superficies planas: 3 mm
1
Para los pernos de cabeza hueca
hexagonal M4
ancho a lo largo de
superficies planas: 4 mm
1
Para los pernos de cabeza hueca
hexagonal M5
ancho a lo largo de
superficies planas: 5 mm
1
Para los pernos de cabeza hueca
hexagonal M6
Destornillador de cruz (n.º 2)
1
Para tornillos con ranura en cruz
Torquímetro
1
Para el control del torque de ajuste
Tensiómetro de la correa
1
Consulte: Unitta U-505
* La plantilla de tensión de la correa es una plantilla de montaje. Use la plantilla al ajustar la tensión de la correa.
El freno está montado en cada articulación para evitar que el brazo descienda, debido a su propio peso, mientras
el controlador está apagado o el motor está en estado apagado. El freno no funciona durante el reemplazo.
Tenga cuidado cuando realice el trabajo de mantenimiento.

Mantenimiento
260 C8 Mod.13
Retiro: Unidad de engranaje reductor de la articulación n.º 4
1. Apague la alimentación del controlador.
2. Retire la cubierta lateral del brazo n.º 4 y la cubierta del brazo n.º 3.
Para conocer detalles, consulte Mantenimiento 3. Cubiertas.
3. Retire los motores de las articulaciones n.º 5 y n.º 6.
Para conocer detalles, consulte los Pasos para el retiro en Mantenimiento 9.1 Articulación n.º 5 -
Reemplazo del motor y en Mantenimiento 10.1 Articulación n.º 6 - Reemplazo del motor.
4. Retire los cables que pasan por el brazo n.º 4, como se muestra en la
foto.
Para conocer detalles, consulte los Pasos para el retiro en
Mantenimiento 4.1 Unidad de cable.
5. Suelte los pernos de fijación de la placa del motor de la articulación
n.º 4 y retire la correa. (No retire el motor de la articulación n.º 4).
Pernos de cabeza hueca hexagonal: 2-M4×15
(con una arandela de ajuste pequeña)
6. Retire los pernos que fijan la brida de J4 y quite el brazo n.º 4 del
brazo n.º 3.
Para retirar todos los pernos, cambie la posición de la articulación
n.º 4, girándola.
Pernos de cabeza hueca hexagonal: 8-M5×30
C8L:
Se pueden retirar los pernos de los cuatro agujeros pasados en la
brida de extensión del brazo n.º 4.

Mantenimiento
C8 Mod.13 261
7. Retire los pernos que fijan la brida de J4 y la unidad de engranaje
reductor de la articulación n.º 4.
Pernos de cabeza hueca hexagonal: 16-M3×20
8. Retire el generador de onda de la unidad de engranaje reductor de la
articulación n.º 4 junto con la brida de J4.
Si no sale con facilidad el generador de onda, inserte una
herramienta en el espacio entre la brida de J4 y el brazo, y retire,
poco a poco, el generador de onda.
Tenga cuidado de no dañar las piezas.
9. Retire la unidad de engranaje reductor de la articulación n.º 4.
Pernos de cabeza hueca hexagonal: 12-M3×28
10. Retire el sujetador del manguito de J4.
Entonces, retire el manguito de la articulación n.º 4.
Pernos de cabeza hueca hexagonal: 4-M3×6
El manguito de J4 está instalado mediante una empaquetadura y no
se puede quitar con facilidad. Si no se puede retirar la pieza, tire del
manguito mientras la gira.
Manipule el manguito con cuidado, pues es delgado y se deforma
con facilidad.

Mantenimiento
262 C8 Mod.13
11. Retire los pernos del soporte del cojinete en la polea.
Pernos de cabeza hueca hexagonal: 3-M3×8 (con una arandela de
ajuste)
12. Retire la polea del separador de polea.
Tornillos de fijación de cabeza hueca hexagonal: 2-M4×4
13. Retire el separador de polea del generador de onda.
Pernos de cabeza hueca hexagonal: 4-M3×8

Mantenimiento
C8 Mod.13 263
Instalación: Unidad de engranaje reductor de la articulación n.º 4
1. Aplique grasa a la superficie de contacto del manguito y los pernos
de fijación.
(para evitar fugas de grasa en la unidad de engranaje reductor)
Encaje el manguito de la articulación n.º 4 e instale el sujetador del
manguito de la articulación n.º 4.
Pernos de cabeza hueca hexagonal: 4-M3×6
Torque de ajuste: 2,0 0,1 N·m
2. Instale la junta tórica en la ranura de la junta tórica.
Instale la unidad de engranaje reductor de la articulación n.º 4.
Pernos de cabeza hueca hexagonal: 12-M3×28
Torque de ajuste: 2,4 0,1 N·m
3. Aplique grasa en la unidad de engranaje reductor de la articulación
n.º 4.
Grasa: SK-1A
Cantidad de grasa: 20 g
Aplique 10 g de grasa al generador de onda.
Aplique los 10 g restantes en el lado interno de la lámina flexible,
como se muestra en la imagen.

Mantenimiento
264 C8 Mod.13
4. Instale el generador de onda de la unidad de engranaje reductor de
la articulación n.º 4.
5. Fije la junta tórica instalada en la unidad de engranaje reductor en la
ranura de la junta tórica de la unidad de engranaje reductor de la
articulación n.º 4.
Después, instale la brida de J4.
Pernos de cabeza hueca hexagonal: 16-M3×20
Torque de ajuste: 2,4 0,1 N·m
6. Fije el separador de polea en el generador de onda de la unidad de
engranaje reductor de la articulación n.º 4.
Pernos de cabeza hueca hexagonal: 4-M3×8
Torque de ajuste: 2,0 0,1 N·m
7. Fije la polea de J4 en el separador de polea de J4.
Tornillos de fijación de cabeza hueca hexagonal: 2-M4×4

Mantenimiento
C8 Mod.13 265
8. Aplique el adhesivo a las siguientes piezas de la polea de J4.
Pieza de contacto del cojinete
Anillo interior (manguito de J4)
Anillo exterior (polea de J4)
Adhesivo: Loctite 641
Instale el cojinete de la polea de J4 y apriete el perno del cojinete.
Pernos de cabeza hueca hexagonal: 3-M3×8 (con una arandela de
ajuste)
Torque de ajuste: 2,0 0,1 N·m
9. Instale el brazo n.º 4 en el brazo n.º 3.
Para fijar todos los pernos, cambie la posición de la articulación n.º
4, girándola.
Pernos de cabeza hueca hexagonal: 8-M5×30
Torque de ajuste: 10,0 0,5 N·m
10. Instale la correa de regulación de la articulación n.º 4 con la tensión
adecuada.
Para conocer detalles, consulte Mantenimiento 8.1 Articulación n.º
4– Reemplazo del motor, pasos para la instalación (5) y (6).
11. Pase los cables hacia el brazo n.º 4.
Para conocer detalles, consulte los Pasos para la instalación en Mantenimiento 4.1 Unidad de cable.
12. Instale los motores de las articulaciones n.º 5 y n.º 6.
Para conocer detalles, consulte los pasos para la instalación en Mantenimiento 9.1 Articulación n.º 5 -
Reemplazo del motor y en Mantenimiento 10.1 Articulación n.º 6 - Reemplazo del motor.
13. Instale las cubiertas retiradas.
Para conocer detalles, consulte Mantenimiento 3. Cubiertas.
14. Realice la calibración.
Para conocer detalles, consulte Mantenimiento 16. Calibración.

Mantenimiento
266 C8 Mod.13
8.3 Articulación n.º 4 - Reemplazo de la correa de regulación
Nombre
Cantida
d
Nota
Piezas de
mantenimiento
Correa de regulación
(Articulación n.º 4)
1
1655931
Plantilla de tensión de la correa
1
1674582
Herramientas
Llave
hexagonal
ancho a lo largo de
superficies planas:
2,5 mm
1
Para el perno de cabeza hueca
hexagonal M3
ancho a lo largo de
superficies planas: 3 mm
1
Para el perno de cabeza hueca
hexagonal M4
Destornillador de cruz (n.º 2)
1
Para tornillos con ranura en cruz
Tensiómetro de la correa
1
Consulte: Unitta U-505
Alicates de corte
1
Para cortar el amarracables
Cinta adhesiva
1
Para proteger los ganchos del conector
Amarracables (AB100 o
equivalente)
Según
sea
necesario
Para pasar los cables
Trenza tubular (600 mm o más)
1
Para pasar los cables
* La plantilla de tensión de la correa es una plantilla de montaje. Use la plantilla al ajustar la tensión de la correa.
El freno está montado en cada articulación para evitar que el brazo descienda, debido a su propio peso,
mientras el controlador está apagado o el motor está en estado apagado. El freno no funciona durante el
reemplazo. Tenga cuidado cuando realice el trabajo de mantenimiento.
Retiro: Correa de regulación de la articulación n.º 4
1. Retire la unidad del motor de la articulación n.º 4.
Para conocer detalles, consulte Mantenimiento: 8.1 Articulación n.º 4 – Reemplazo del motor, pasos
para la instalación (1) a (6).
2. Retire los conectores desde el interior del brazo n.º 3 y el tubo de
aire (transparente).
Conectores:
X71, X72, X041,
BR041, BR051, PS,
BT4, BT51, X141, X151, X161
3. Retire el soporte de cables desde el interior del brazo n.º 3.
Pernos de cabeza hueca hexagonal: 4-M410

Mantenimiento
C8 Mod.13 267
4. Retire el soporte de cables del brazo n.º 3 y la hoja de protección
de cables.
Pernos de cabeza hueca hexagonal: 2-M36
El soporte de cables del brazo n.º 3 y la placa de protección de
cables se volverán a utilizar. Tenga cuidado de no perderlos.
5. Retire la cubierta lateral del brazo n.º 4.
Para conocer detalles, consulte Mantenimiento: 3 Cubiertas.
6. Retire la placa de protección de cables instalada en el brazo n.º 4.
Pernos de cabeza hueca hexagonal: 2-M4×10
7. Retire el cable a tierra verde/amarillo y el cable a tierra verde
conectado a X052 y X062 desde la placa de protección de cables.
Tornillos con ranura en cruz con arandela cautiva: 2-M4×8
Las posiciones de los terminales de los cables a tierra pueden ser
distintas a la de la imagen. Revise a qué conector está conectado
el terminal.
8. Retire los siguientes conectores.
Conector: X052, X062
9. Retire el soporte de cables del brazo n.º 4 y la hoja de protección
de cables.
Pernos de cabeza hueca hexagonal: 2-M36
El soporte de cables del brazo n.º 4 y la placa de protección de
cables se volverán a utilizar. Tenga cuidado de no perderlos.
C8XL:
El tubo de protección del cable se usa en lugar de la hoja de
protección de cables.

Mantenimiento
268 C8 Mod.13
10. Retire el tubo de aire (azul) del conector rápido.
C8XL:
11. Retire la cubierta de mantenimiento del brazo n.º 4.
Para conocer detalles, consulte Mantenimiento: 3 Cubiertas.
C8XL:
12. Retire el soporte de cables del brazo n.º 4 y la hoja de protección
de cables.
Pernos de cabeza hueca hexagonal: 2-M36
El soporte de cables del brazo n.º 4 y la placa de protección de
cables se volverán a utilizar. Tenga cuidado de no perderlos.
13. Extraiga las siguientes piezas desde el brazo n.º 4 hacia el brazo n.º
3.
Cable LAN
Cables X052 y X062
Cable a tierra
Tubo de aire (azul)
Proteja los conectores con cinta adhesiva.
- Para proteger los ganchos del conector
- Para evitar la adherencia de grasa de los cables
14. Retire la correa de regulación de la articulación n.º 4.

Mantenimiento
C8 Mod.13 269
Instalación: Correa de regulación de la articulación n.º 4
1. Pase la correa de regulación de la articulación n.º 4 alrededor de la polea
2 de la articulación n.º 4.
2. Instale la unidad del motor de la articulación n.º 4.
Para conocer detalles, consulte Mantenimiento: 8.1 Articulación n.º 4 – Reemplazo del motor, pasos para
la instalación (4) a (6).
3. Pase las siguientes piezas desde el brazo n.º 3 hacia el brazo n.º 4.
Cables X052 y X062
Cable LAN
Cable a tierra
Tubo de aire (azul)
Cómo pasar los cables:
Primero pase la trenza tubular desde el costado del brazo n.º 4 hasta el lado del brazo n.º 3. Inserte los
conectores por la trenza tubular, como se muestra en la foto, y fije el tubo con el amarracables para que no
se salgan los conectores.
Luego, tire de la trenza tubular desde el costado del brazo n.º 4 mientras empuja los cables por el lado del
brazo n.º 3, para que pasen los cables. (Consulte la imagen).
Extraer los cables a la fuerza puede generar que se caigan los conectores o una avería a estos, además de
la desconexión de los cables.
Si es difícil pasar los cables, páselos de a uno en el siguiente orden.
Cables X052 y X062 Cable LAN Cable a tierra Tubo de aire (azul)
C8XL:
4. Envuelva los cables del interior de la pieza de extensión del brazo n.º
4 con una hoja de protección de cables e instale el soporte de cables
del brazo n.º 4.
Pernos de cabeza hueca hexagonal: 2-M36
Torque de ajuste: 2,0 0,1 N·m
5. Envuelva los cables del interior del brazo n.º 4 con una hoja de
protección de cables e instale el soporte de cables del brazo n.º 4.
C8XL:
Instale el soporte de cables del brazo n.º 4 y la hoja de protección de
cables.
Pernos de cabeza hueca hexagonal: 2-M36
Torque de ajuste: 2,0 0,1 N·m
NOTA

Mantenimiento
270 C8 Mod.13
6. Envuelva los cables del interior del brazo n.º 3 con una hoja de
protección de cables e instale el soporte de cables del brazo n.º 3.
Pernos de cabeza hueca hexagonal: 2-M36
Torque de ajuste: 2,0 0,1 N·m
7. Instale el soporte de cables desde el interior del brazo n.º 3.
Pernos de cabeza hueca hexagonal: 4-M410
Torque de ajuste: 4,0 0,2 N·m
8. Instale la fuente de alimentación del freno en la placa.
Instale la fuente de alimentación del freno, de modo tal que el cable
quede hacia la izquierda.
Tornillos con ranura en cruz con arandela cautiva: 2-M3×6
Torque de ajuste: 0,45 0,1 N·m
9. Conecte los conectores del interior del brazo n.º 3 y el tubo de aire
(transparente).
Conector:
X71, X72, X041,
BR041, BR051, PS,
BT4, BT51, X141, X151, X161
10. Conecte los terminales de los cables a tierra del interior del brazo n.º 4
en el soporte de protección de cables del brazo n.º 4.
Tornillos con ranura en cruz con arandela cautiva: 2-M4×8
Torque de ajuste: 0,45 0,1 N·m

Mantenimiento
C8 Mod.13 271
11. Conecte los conectores al interior del brazo n.º 4.
Conector:
X052, X062
12. Fije el soporte de protección de cables al brazo n.º 4.
Pernos de cabeza hueca hexagonal: 2-M410
Torque de ajuste: 4,0 0,2 N·m
Tenga cuidado de que los cables no queden atrapados.
Puede causar un desperfecto en los cables.
13. Instale el tubo de aire (azul) del conector rápido.
14. Instale las siguientes cubiertas.
Cubierta del brazo n.º 3
Cubierta de mantenimiento del brazo n.º 3
Cubierta lateral del brazo n.º 4
Cubierta de mantenimiento del brazo n.º 4 Solo C8XL
Para conocer detalles, consulte Mantenimiento 3. Cubiertas.
NOTA

Mantenimiento
272 C8 Mod.13
8.4 Articulación n.º 4 - Reemplazo del freno electromagnético
Nombre
Cantidad
Nota
Piezas de
mantenimiento
Freno electromagnético
1
2172928
(común para las articulaciones n.º 4, n.º
5, n.º 6)
Plantilla de tensión de la correa
1
1674582
Herramientas
Llave
hexagonal
ancho a lo largo de
superficies planas: 2 mm
1
Para los tornillos de fijación de cabeza
hueca hexagonal M4
ancho a lo largo de
superficies planas: 2,5 mm
1
Para los pernos de cabeza hueca
hexagonal M3
ancho a lo largo de
superficies planas: 3 mm
1
Para los pernos de cabeza hueca
hexagonal M4
Destornillador de cruz (n.º 2)
1
Para tornillos con ranura en cruz
Galga de espesor (0,5 mm)
1
Para ajustar la posición del cubo de
mando
Tensiómetro de la correa
1
Consulte: Unitta U-505
* La plantilla de tensión de la correa es una plantilla de montaje. Use la plantilla al ajustar la tensión de la correa.
El freno está montado en cada articulación para evitar que el brazo descienda, debido a su propio peso,
mientras el controlador está apagado o el motor está en estado apagado. El freno no funciona durante el
reemplazo. Tenga cuidado cuando realice el trabajo de mantenimiento.
Los frenos electromagnéticos son comunes para las articulaciones n.º 4, n.º 5 y n.º 6.
Los frenos electromagnéticos de las articulaciones n.º 5 y n.º 6 tienen una etiqueta de identificación para
evitar la conexión incorrecta de los conectores. La etiqueta no es necesaria para el freno
electromagnético de la articulación n.º 4. (No hay etiqueta de identificación de conector para la
articulación n.º 4).
Retiro: Freno electromagnético de la articulación n.º 4
1. Retire el freno electromagnético de la articulación n.º 4.
Para conocer detalles, consulte Mantenimiento: 8.1 Articulación n.º 4 – Reemplazo del motor, pasos para
el retiro (1) a (8).
Instalación: Freno electromagnético de la articulación n.º 4
1. Instale el freno electromagnético de la articulación n.º 4 en la unidad de motor de la articulación n.º 4.
Para conocer detalles, consulte Mantenimiento: 8.1 Articulación n.º 4 – Reemplazo del motor, pasos para
la instalación (2) a (11).
NOTA

Mantenimiento
C8 Mod.13 273
9. Articulación n.º 5
ADVERTENCIA
■
No conecte ni desconecte los conectores del motor mientras el sistema de robot
esté encendido. Conectar o desconectar los conectores del motor con la energía
encendida es extremadamente peligroso y puede provocar lesiones corporales
graves, ya que el manipulador puede moverse de manera anormal; además,
puede provocar descargas eléctricas y el mal funcionamiento del sistema de
robot.
■
Para cortar la energía hacia el sistema de robot, desconecte el enchufe de la
fuente de alimentación. Asegúrese de conectar el cable de alimentación de CA a
un tomacorriente.
NO lo conecte directamente a la fuente de alimentación de la fábrica.
■
Antes de realizar cualquier procedimiento de reemplazo, apague el controlador y
los equipos relacionados, luego desconecte el enchufe de la fuente de
alimentación.
Realizar cualquier procedimiento de reemplazo con la energía encendida es
extremadamente peligroso y puede provocar una descarga eléctrica o el mal
funcionamiento del sistema de robot.
PRECAUCIÓN
■
Tenga cuidado de no aplicar descargas eléctricas excesivas al eje del motor
durante el reemplazo. Las descargas eléctricas pueden reducir la vida útil de los
motores y el codificador, o bien, dañarlos.
■
Nunca desarme el motor y el codificador. Un motor y codificador desarmado
causará un espacio de posición y no se puede volver usar.
Después de reemplazar las piezas (motores, unidades de engranaje reductor, frenos
electromagnéticos, correas de regulación, etc.), el manipulador no puede operar
correctamente, ya que hay un espacio entre el origen almacenado en cada codificador de
motor y el origen correspondiente almacenado en el controlador.
Por lo tanto, es necesario hacer coincidir estos orígenes después de reemplazar las piezas.
El proceso de alinear los dos orígenes se denomina “Calibración”.
Consulte Mantenimiento 16. Calibración y realice la calibración después de reemplazar las
piezas.
Motor de la articulación n.º 5 + freno
electromagnético
Correa de regulación de la
articulación n.º 5
Juego de la unidad de
engranaje reductor de las
articulaciones n.º 5, n.º 6
(Figura: C8-A1401* (C8XL))

Mantenimiento
274 C8 Mod.13
9.1 Articulación n.º 5 - Reemplazo del motor
Nombre
Cantidad
Nota
Piezas de
mantenimiento
Servomotor de CA de 100 W
1
2172051
(común para las articulaciones n.º 4,
n.º 5, n.º 6)
Plantilla de tensión de la correa *
1
1674582
Herramientas
Llave
hexagonal
ancho a lo largo de
superficies planas: 2 mm
1
Para los tornillos de fijación de cabeza
hueca hexagonal M4
ancho a lo largo de
superficies planas: 2,5 mm
1
Para los pernos de cabeza hueca
hexagonal M3
ancho a lo largo de
superficies planas: 3 mm
1
Para los pernos de cabeza hueca
hexagonal M4
Destornillador de cruz (n.º 2)
1
Para tornillos con ranura en cruz
Torquímetro
1
Para el control del torque de ajuste
Llave inglesa
(ancho a lo largo de superficies planas:
8 mm
1
Para encajar el tubo de aire
Galga de espesor (0,5 mm)
2
Para ajustar la posición del cubo de
mando
Tensiómetro de la correa
1
Consulte: Unitta U-505
* La plantilla de tensión de la correa es una plantilla de montaje. Use la plantilla al ajustar la tensión de la correa.
El freno está montado en cada articulación para evitar que el brazo descienda, debido a su propio peso, mientras
el controlador está apagado o el motor está en estado apagado. El freno no funciona durante el reemplazo.
Tenga cuidado cuando realice el trabajo de mantenimiento.
Cómo pegar las etiquetas
Los motores son comunes para las articulaciones n.º 4, n.º 5 y n.º 6.
Para evitar una mala conexión de los conectores, pegue la etiqueta del motor como se muestra
en las fotos.
Motor de la articulación n.º 5 Ubicación de las etiquetas de conector
X152
X052
BT52
_BT52

Mantenimiento
C8 Mod.13 275
Retiro: Motor de la articulación n.º 5
1. Apague la alimentación del controlador.
2. Retire la cubierta lateral del brazo n.º 4.
Para conocer detalles, consulte Mantenimiento: 3. Cubiertas.
3. Suelte los tornillos que fijan el soporte de protección de cables del
brazo n.º 4 y extraiga los cables.
Pernos de cabeza hueca hexagonal: 2-M4×10
4. Retire la fuente de alimentación del freno conectada al conector
(BR052) desde la placa.
Tornillo con ranura en cruz con arandela cautiva: 2-M3×6
5. Desconecte los siguientes conectores.
Conector: X052, X152, BT52, BR052
6. Retire el conector rápido del tubo de aire ubicado en la parte
delantera de la unidad de motor de la articulación n.º 5.

Mantenimiento
276 C8 Mod.13
7. Suelte los tornillos que fijan la unidad del motor de la
articulación n.º 5 y retire la correa.
Pernos de cabeza hueca hexagonal:
2-M4×15 (con una arandela de ajuste)
8. Retire la unidad del motor de la articulación n.º 5.
Pernos de cabeza hueca hexagonal:
2-M4×15 (con una arandela de ajuste)
9. Retire la polea 1 de la articulación n.º 5 y el cubo de mando
del eje del motor de la unidad del motor de articulación n.º 5.
Tornillos de la polea 1 y del cubo de mando
Tornillos de fijación de cabeza hueca hexagonal: 2-M4×4
(con casquillo de bronce)
Tornillos del cubo de mando y del eje del motor
Tornillos de fijación de cabeza hueca hexagonal: 2-M4×4
Hay un casquillo de bronce en uno de los tornillos de fijación
que fijan el cubo de mando y la polea. Tenga cuidado de no
perderlo.
A: Tornillos de la polea y del eje del motor
B: Tornillos de la polea y del cubo de mando
C: Casquillo
Polea
Cubo de mando
A
A
C
B

Mantenimiento
C8 Mod.13 277
10. Retire el freno electromagnético de la articulación n.º 5.
Pernos de cabeza hueca hexagonal: 3-M3×15 (con un
separador)
Tenga cuidado de no perder los
separadores.
11. Retire la placa del motor desde el motor de la articulación n.º 5.
Pernos de cabeza hueca hexagonal: 2-M4×10

Mantenimiento
278 C8 Mod.13
Instalación: Motor de la articulación n.º 5
1. Fije la placa del motor en el motor de la articulación n.º 5.
Pernos de cabeza hueca hexagonal: 2-M4×10
Torque de ajuste: 4,0 0,2 N m
Tenga cuidado con la dirección de montaje de la placa del motor.
(Consulte la imagen).
Posición del
cable del motor
2. Instale el freno electromagnético de la articulación n.º 5 en la unidad
de motor de la articulación n.º 5. Inserte los separadores entre los
tornillos de fijación de cabeza hueca hexagonal y el freno
electromagnético de la articulación n.º 5.
Tornillos de fijación de cabeza hueca hexagonal: 3-M2.5×10 (con
un separador)
Torque de ajuste: 2,0 0,1 N·m
Tenga cuidado con la dirección de montaje del
cableado del freno electromagnético de la articulación n.º 5.
(Consulte la imagen).
Cableado del freno
electromagnético
3. Instale el cubo de mando y la polea 1 a la unidad de motor de la
articulación n.º 5.
Fije el cubo de mando y el eje del motor.
Existe una parte irregular para la galga de espesor (0,5 mm) en el
cubo. Úsela para dejar un espacio de 0,5 mm.
Sin este espacio, las piezas se podrían frotar mientras el motor está
en marcha y esto puede generar un desperfecto mientras el motor se
mueve.
Ajuste los tornillos de fijación en las posiciones que indica la figura.
A: Tornillos de la polea y del eje del motor
B: Tornillos de la polea y del cubo de mando
C: Casquillo
Polea
Cubo de mando
A
A
C
B
Si la posición de los tornillos es incorrecta o si no se ha fijado el
casquillo, se podría dañar el costado de la pieza y esto podría
imposibilitar la extracción de la pieza.
Parte irregular para la galga de
espesor (0,5 mm)
2 lugares, a una inclinación de 90°
t = 0,5 mm
NOTA
NOTA
NOTA
NOTA

Mantenimiento
C8 Mod.13 279
Cubo de mando y eje del motor:
Tornillos de fijación de cabeza hueca hexagonal: 2-M4×4
Torque de ajuste: 2,5 0,2 N·m
Alinee los tornillos con las dos caras planas del eje del motor y fíjelos.
Cubo de mando y polea 1:
Tornillos de fijación de cabeza hueca hexagonal: 2-M4×4 (con casquillo de bronce)
Torque de ajuste: 2,5 0,2 N·m
Fije los tornillos de fijación, mientras presiona la polea 1 hacia el cubo de mando.
No es necesario el casquillo de bronce para el tornillo en la superficie plana (corte en D). Fije el casquillo
al otro tornillo y, luego, fije el tornillo.
4. Coloque la unidad de motor de la articulación n.º 5 dentro del brazo
n.º 4.
Pase los cables de la unidad de motor de la articulación n.º 5 hacia
el costado de la unidad de motor de la articulación n.º 6, de manera
que se puedan guardar los cables en el espacio de almacenamiento.
(Consulte la imagen)
5. Pase la correa de regulación alrededor de la polea 1 y de la polea 2
y fíjela en forma temporal.
Asegúrese de que los dientes de la correa de regulación se engranen
con los de la polea.
Como guía general sobre fijación temporal, revise que la unidad de
motor se pueda quitar manualmente y que no se incline cuando se
tire de ella.
Si la correa se fijó demasiado suelta o demasiado apretada, no
tendrá la tensión correcta
6. Aplique tensión en la correa de regulación de la articulación n.º 5 y
fije la unidad de motor de la articulación n.º 5.
Tensión de la correa de regulación de la articulación n.º 5: 15 a
30 N
Valor de configuración del tensiómetro de la correa
Peso: 2,5 g/mm de ancho × m de longitud de separación, Ancho:
6 mm, Longitud de separación: 117 mm
Pernos de cabeza hueca hexagonal: 2-M4×15 (con una arandela
de ajuste)
Torque de ajuste: 4,0 0,2 N·m
En relación con la tensión de la correa:
- Se puede producir un salto (espacio de posición), si el valor está
debajo del límite.
- Se puede producir vibración (ruido anormal) o reducción de la vida
útil de las piezas cuando el valor excede el límite superior.
NOTA

Mantenimiento
280 C8 Mod.13
- Cuando la reemplace con una nueva correa, esta se extiende y
puede disminuir la tensión en la etapa inicial. Asegúrese de operar
el robot dos o tres días y volver a revisar la tensión de la correa.
Cuando use la plantilla de tensión de la correa (pieza de
mantenimiento):
Fije la plantilla de tensión de la correa (para la articulación n.º 4,
la articulación n.º 5 y la articulación n.º 6) con los tornillos (2-
M4×15) y empuje la goma en contra de la polea.
La tensión se aplica mientras se empuja el tornillo de fijación
(M6×15) mediante la goma.
7. Instale el conector rápido del tubo de aire de la parte delantera de la
unidad de motor de la articulación n.º 5.
Después de apretar con la mano, apriete un sexto de cuarto de giro.
Apriete del conector rápido:
Los conectores rápidos están demasiado apretados:
Puede generar fugas de aire debido al quiebre o la
deformación de la empaquetadura.
Los conectores rápidos están demasiado sueltos:
Puede generar que haya tornillos sueltos y fugas de aire.
8. Conecte los siguientes conectores.
Conectores: X052, X152, BT52, BR052
9. Instale la fuente de alimentación del freno en la placa.
Tornillo con ranura en cruz con arandela cautiva: 2-M3×6
Torque de ajuste: 0,45 0,1 N·m
10. Fije el soporte de protección de cables al brazo n.º 4.
Pernos de cabeza hueca hexagonal: 2-M4×10
Torque de ajuste: 4,0 0,2 N·m
Tenga cuidado de que los cables no queden atrapados. Puede
generar un desperfecto en los cables.
11. Instale la cubierta lateral del brazo n.º 4.
Para conocer detalles, consulte Mantenimiento: 3. Cubiertas.
12. Realice la calibración.
Para conocer detalles, consulte Mantenimiento: 16. Calibración.
NOTA
NOTA

Mantenimiento
C8 Mod.13 281
9.2 Articulación n.º 5 - Reemplazo de la unidad de engranaje reductor
(Reemplazo del juego de unidades de engranaje reductor de las
articulaciones n.º 5, n.º 6)
Para reemplazar la unidad de engranaje reductor de la articulación n.º 5 y de la articulación n.º 6, cambie el juego
de la unidad de engranaje reductor de las articulaciones n.º 5 y n.º 6.
El juego de la unidad de engranaje reductor de las articulaciones n.º 5 y n.º 6 está ajustado de antemano.
Nombre
Cantidad
Nota
Piezas de
mantenimiento
Juego de la unidad de engranaje reductor
de las articulaciones n.º 5, n.º 6
1
1674610 (común en la serie C8)
Plantilla de tensión de la correa*
1
1674582
Herramientas
Llave
hexagonal
ancho a lo largo de
superficies planas: 2 mm
1
Para los tornillos de fijación de cabeza
hueca hexagonal M4
ancho a lo largo de
superficies planas: 2,5 mm
1
Para los pernos de cabeza hueca
hexagonal M3
ancho a lo largo de
superficies planas: 3 mm
1
Para los pernos de cabeza hueca
hexagonal M4
ancho a lo largo de
superficies planas: 4 mm
1
Para los pernos de cabeza hueca
hexagonal M5
ancho a lo largo de
superficies planas: 5 mm
1
Para los pernos de cabeza hueca
hexagonal M6
Destornillador de cruz (n.º 2)
1
Para tornillos con ranura en cruz
Torquímetro
1
Para el control del torque de ajuste
Llave inglesa (ancho a lo largo de
superficies planas: 8 mm
1
Para los conectores rápidos de aire
Galga de espesor (0,5 mm)
2
Para ajustar la posición del cubo de
mando
Tensiómetro de la correa
1
Consulte: Unitta U-505
El freno está montado en cada articulación para evitar que el brazo descienda, debido a su propio peso, mientras
el controlador está apagado o el motor está en estado apagado. El freno no funciona durante el reemplazo.
Tenga cuidado cuando realice el trabajo de mantenimiento.

Mantenimiento
282 C8 Mod.13
Retiro: Juego de la unidad de engranaje reductor de las articulaciones n.º 5, n.º 6
1. Apague la alimentación del controlador.
2. Retire la cubierta lateral del brazo n.º 4 y la cubierta del brazo n.º 3.
Para conocer detalles, consulte Mantenimiento 3. Cubiertas.
3. Retire los motores de las articulaciones n.º 5 y n.º 6.
Para conocer detalles, consulte los Pasos para el retiro en Mantenimiento 9.1 Articulación n.º 5 -
Reemplazo del motor y en Mantenimiento 10.1 Articulación n.º 6 - Reemplazo del motor.
4. Retire los cables que pasan por el brazo n.º 4, como se muestra en la
foto.
Para conocer detalles, consulte los Pasos para el retiro en
Mantenimiento 4.1 Unidad de cable.
5. Retire la unidad de engranaje reductor de las articulaciones n.º 5 y
n.º 6.
C8:
Suelte los pernos de fijación de la placa del motor de la articulación
n.º 4 y retire la correa. (No retire el motor de la articulación n.º 4).
Pernos de cabeza hueca hexagonal: 2-M4×15
(con una arandela de ajuste pequeña)
Retire los pernos que fijan la brida de J4 y retire la unidad de
engranaje reductor de las articulaciones n.º 5 y n.º 6 (con la unidad
de engranaje reductor de la articulación n.º 4) desde el brazo n.º 3.
Pernos de cabeza hueca hexagonal: 8-M5×30
C8L, C8XL:
Retire los pernos que fijan la brida de extensión del brazo n.º 4 y
retire la unidad de engranaje reductor de las articulaciones n.º 5 y n.º
6 de la pieza de extensión del brazo n.º 4.
Pernos de cabeza hueca hexagonal: 4-M6×20

Mantenimiento
C8 Mod.13 283
6. Siga los pasos, a continuación, según el modelo.
C8: Retire la unidad de engranaje reductor de la articulación n.º 4.
Para conocer detalles, consulte los pasos para el retiro en
Mantenimiento 8.2. Articulación n.º 4- Reemplazo de la unidad
engranaje reductor.
C8L, C8XL:
Retire la brida de extensión del brazo n.º 4.
C8XL no tiene el manguito de J4 en el brazo n.º 4.
Pernos de cabeza hueca hexagonal: 12-M3×18
7. C8, C8L:
Primero, retire el sujetador del manguito de J4.
Entonces, retire el manguito de la articulación n.º 4.
Pernos de cabeza hueca hexagonal: 4-M3×6
El manguito de J4 está adherido con una empaquetadura y no se
puede quitar con facilidad. Si no se puede retirar la pieza, tire del
manguito mientras la gira.
Manipule el manguito con cuidado, pues es delgado y se deforma
con facilidad.

Mantenimiento
284 C8 Mod.13
Instalación: Juego de la unidad de engranaje reductor de las articulaciones n.º 5, n.º 6
1. C8, C8L:
Aplique grasa a la pieza de contacto del manguito y a los pernos de
fijación.
(para evitar fugas de grasa en la unidad de engranaje reductor)
Encaje el manguito de la articulación n.º 4 e instale el sujetador del
manguito de la articulación n.º 4.
Pernos de cabeza hueca hexagonal: 4-M3×6
Torque de ajuste: 2,0 0,1 N·m
2. C8:
Instale la unidad de engranaje reductor de la articulación n.º 4.
Para conocer detalles, consulte los pasos para la instalación en
Mantenimiento 8.2 Articulación n.º 4- Reemplazo de la unidad
engranaje reductor.
C8L, C8XL:
Instale la brida de extensión del brazo n.º 4.
(C8XL no tiene el manguito).
Pernos de cabeza hueca hexagonal: 12-M3×18
Torque de ajuste: 2,4 0,1 N·m
3. Instale la unidad de engranaje reductor de las articulaciones n.º 5 y
n.º 6.
C8:
Instale la brida de J4 en el brazo n.º 3.
Pernos de cabeza hueca hexagonal: 8-M5×30
Torque de ajuste: 10,0 0,5 N·m
Aplique la tensión correcta a la correa de regulación de la
articulación n.º 4 y fije la unidad del motor de la articulación n.º 4.
Para conocer detalles, consulte Mantenimiento 8.1 Articulación n.º
4– Reemplazo del motor, pasos para la instalación (6).

Mantenimiento
C8 Mod.13 285
C8L,C8XL:
Instale la brida de extensión del brazo n.º 4 en la pieza de extensión
del brazo n.º 4.
C8L:
Ponga adhesivo al manguito de J4 y a la pieza de contacto del
cojinete de la polea de J4 (indicado por una marca amarilla en la
imagen de la derecha)
Adhesivo: Loctite641
Pernos de cabeza hueca hexagonal: 4-M6×20
Torque de ajuste: 13,0 0,6 N·m
4. Pase los cables hacia el brazo n.º 4.
Conecte los conectores al interior del brazo n.º 3 y átelos.
Fije los cables al interior del brazo n.º 4 y conecte el D-sub en el
brazo n.º 4.
Para conocer detalles, consulte los Pasos para la instalación en
Mantenimiento 4.1 Unidad de cable.

Mantenimiento
286 C8 Mod.13
5. Instale los motores de las articulaciones n.º 5 y n.º 6.
Para conocer detalles, consulte los pasos para la instalación en
Mantenimiento 9.1 Articulación n.º 5 - Reemplazo del motor y en
Mantenimiento 10.1 Articulación n.º 6 - Reemplazo del motor.
6. Instale las cubiertas retiradas.
Para conocer detalles, consulte Mantenimiento 3. Cubiertas.
7. Realice la calibración.
Para conocer detalles, consulte Mantenimiento 16. Calibración.

Mantenimiento
C8 Mod.13 287
9.3 Articulación n.º 5 - Reemplazo de la correa de regulación
Nombre
Cantidad
Nota
Piezas de
mantenimiento
Correa de regulación
de la articulación n.º 5
330 mm
1
1655932
Plantilla de tensión de la correa
1
1674582
Herramientas
Llave hexagonal
(ancho a lo largo de superficies planas:
3 mm
1
Para los pernos de cabeza hueca
hexagonal M4
Destornillador de cruz (n.º 2)
1
Para tornillos con ranura en cruz
Torquímetro
1
Para el control del torque de ajuste
Tensiómetro de la correa
1
Consulte: Unitta U-505
* La plantilla de tensión de la correa es una plantilla de montaje. Use la plantilla al ajustar la tensión de la
correa.
El freno está montado en cada articulación para evitar que el brazo descienda, debido a su propio peso,
mientras el controlador está apagado o el motor está en estado apagado. El freno no funciona durante el
reemplazo.
Tenga cuidado cuando realice el trabajo de mantenimiento.
Retiro: Correa de regulación de la articulación n.º 5
1. Apague la alimentación del controlador.
2. Retire la cubierta lateral del brazo n.º 4.
Para conocer detalles, consulte Mantenimiento: 3. Cubiertas.
3. Suelte los tornillos de fijación de la unidad de motor de la
articulación n.º 5.
Pernos de cabeza hueca hexagonal: 2-M4×15
(con una arandela de ajuste)
4. Retire la correa de regulación de la articulación n.º 5.
Instalación: Correa de regulación de la articulación n.º 5.
1. Pase la correa de regulación de la articulación n.º 5 alrededor de la polea 1 y de la polea 2 de la articulación
n.º 5.
2. Fije la unidad de motor de la articulación n.º 5.
Para conocer detalles, consulte Mantenimiento: 9.1 Articulación n.º 5 – Reemplazo del motor, pasos para
la instalación (5) al (6) y (11) al (12).

Mantenimiento
288 C8 Mod.13
9.4 Articulación n.º 5 - Reemplazo del freno electromagnético
Nombre
Cantidad
Nota
Piezas de
mantenimiento
Freno electromagnético
1
2172928 (común para las articulaciones
n.º 4, n.º 5, n.º 6)
Plantilla de tensión de la correa
1
1674582
Herramientas
Llave
hexagonal
ancho a lo largo de
superficies planas: 2 mm
1
Para los tornillos de fijación de cabeza
hueca hexagonal M4
ancho a lo largo de
superficies planas: 2,5 mm
1
Para los pernos de cabeza hueca
hexagonal M3
ancho a lo largo de
superficies planas: 3 mm
1
Para los pernos de cabeza hueca
hexagonal M4
Destornillador de cruz (n.º 2)
1
Para tornillos con ranura en cruz
Torquímetro
1
Para el control del torque de ajuste
Llave inglesa (ancho a lo largo de
superficies planas: 8 mm
1
Para encajar el tubo de aire
Galga de espesor (0,5 mm)
1
Para ajustar la posición de la polea
Tensiómetro de la correa
1
Consulte: Unitta U-505
* La plantilla de tensión de la correa es una plantilla de montaje. Use la plantilla al ajustar la tensión de la
correa.
El freno está montado en cada articulación para evitar que el brazo descienda, debido a su propio peso,
mientras el controlador está apagado o el motor está en estado apagado. El freno no funciona durante el
reemplazo.
Tenga cuidado cuando realice el trabajo de mantenimiento.
Cómo pegar las etiquetas
Los frenos electromagnéticos son comunes para las articulaciones n.º 4, n.º 5 y n.º 6.
Para evitar una mala conexión de los conectores, pegue la etiqueta de los frenos electromagnéticos en la forma
que aparece en las fotos.
Frenos electromagnéticos de la articulación n.º 5 Ubicación de las etiquetas de conector
BR052
Cable (rojo/ negro)
BR053
Cable (azul/ azul)
BR053
Cable (azul/ naranja)
El conector BR053 se conecta al momento del envío. Desconéctelo antes de pegar la
etiqueta.
NOTA

Mantenimiento
C8 Mod.13 289
El conector BR052 y el conector BR053 comparten la misma forma en un lado. Identifique
los conectores por color.
Retiro: Freno electromagnético de la articulación n.º 5
1. Retire el freno electromagnético de la articulación n.º 5.
Para conocer detalles, consulte Mantenimiento: 9.1 Articulación n.º 5 – Reemplazo del motor, pasos para
el retiro (1) a (10).
Instalación: Freno electromagnético de la articulación n.º 5
1. Instale el freno electromagnético de la articulación n.º 5 en la unidad de motor de la articulación n.º 5.
Para conocer detalles, consulte Mantenimiento: 9.1 Articulación n.º 5 – Reemplazo del motor, pasos para
la instalación (2) a (12).

Mantenimiento
290 C8 Mod.13
10. Articulación n.º 6
ADVERTENCIA
■
No conecte ni desconecte los conectores del motor mientras el sistema de robot
esté encendido. Conectar o desconectar los conectores del motor con la energía
encendida es extremadamente peligroso y puede provocar lesiones corporales
graves, ya que el manipulador puede moverse de manera anormal; además,
puede provocar descargas eléctricas y el mal funcionamiento del sistema de
robot.
■
Para cortar la energía hacia el sistema de robot, desconecte el enchufe de la
fuente de alimentación. Asegúrese de conectar el cable de alimentación de CA
a un tomacorriente.
NO lo conecte directamente a la fuente de alimentación de la fábrica.
■
Antes de realizar cualquier procedimiento de reemplazo, apague el controlador
y los equipos relacionados, luego desconecte el enchufe de la fuente de
alimentación.
Realizar cualquier procedimiento de reemplazo con la energía encendida es
extremadamente peligroso y puede provocar una descarga eléctrica o el mal
funcionamiento del sistema de robot.
PRECAUCIÓN
■
Tenga cuidado de no aplicar descargas eléctricas excesivas al eje del motor
durante el reemplazo. Las descargas eléctricas pueden reducir la vida útil de los
motores y el codificador, o bien, dañarlos.
■
Nunca desarme el motor y el codificador. Un motor y codificador desarmado
causará un espacio de posición y no se puede volver usar.
Después de reemplazar las piezas (motores, unidades de engranaje reductor, frenos
electromagnéticos, correas de regulación, etc.), el manipulador no puede operar
correctamente, ya que hay un espacio entre el origen almacenado en cada codificador de
motor y el origen correspondiente almacenado en el controlador.
Por lo tanto, es necesario hacer coincidir estos orígenes después de reemplazar las piezas.
El proceso de alinear los dos orígenes se denomina “Calibración”.
Consulte Mantenimiento 16. Calibración y realice la calibración después de reemplazar las
piezas.
Motor de la articulación n.º 6 +
Freno electromagnético
Correa de regulación de
la articulación n.º 6
Juego de la unidad de engranaje
reductor de las articulaciones n.º 5, n.º 6
(Figura: C8-A1401* (C8XL))

Mantenimiento
C8 Mod.13 291
10.1 Articulación n.º 6 - Reemplazo del motor
Nombre
Cantidad
Nota
Piezas de
mantenimiento
Servomotor de CA de 100 W
1
2172051 (común para las articulaciones
n.º 4, n.º 5, n.º 6)
Plantilla de tensión de la correa *
1
1674582
Herramientas
Llave
hexagonal
ancho a lo largo de
superficies planas: 2 mm
1
Para los tornillos de fijación de cabeza
hueca hexagonal M4
ancho a lo largo de
superficies planas:
2,5 mm
1
Para los pernos de cabeza hueca
hexagonal M3
ancho a lo largo de
superficies planas: 3 mm
1
Para los pernos de cabeza hueca
hexagonal M4
Destornillador de cruz (n.º 2)
1
Para tornillos con ranura en cruz
Galga de espesor (0,5 mm)
2
Para ajustar la posición del cubo de
mando
Tensiómetro de la correa
1
Consulte: Unitta U-505
* La plantilla de tensión de la correa es una plantilla de montaje. Use la plantilla al ajustar la tensión de la correa.
El freno está montado en cada articulación para evitar que el brazo descienda, debido a su propio peso, mientras
el controlador está apagado o el motor está en estado apagado. El freno no funciona durante el reemplazo.
Tenga cuidado cuando realice el trabajo de mantenimiento.
Cómo pegar las etiquetas
Los motores son comunes para las articulaciones n.º 4, n.º 5 y n.º 6.
Para evitar una mala conexión de los conectores, pegue la etiqueta del motor como se muestra en las fotos.
Motor de la articulación n.º 6 Ubicación de las etiquetas de conector
X162
X062
BT62
_BT62

Mantenimiento
292 C8 Mod.13
Retiro: Motor de la articulación n.º 6
1. Apague la alimentación del controlador.
2. Retire la cubierta lateral del brazo n.º 4.
Para conocer detalles, consulte Mantenimiento: 3. Cubiertas.
3. Suelte los tornillos que fijan la placa de protección de cables en
el brazo n.º 4 y extraiga los cables.
Pernos de cabeza hueca hexagonal: 2-M4×10
4. Retire la fuente de alimentación del freno conectada al conector
(BR062) desde la placa de protección.
Tornillo con ranura en cruz con arandela cautiva: 2-M3×6
5. Extraiga los cables del brazo n.º 4 y desconecte los siguientes
conectores.
Conectores: X062, X162, BT62, BR062
6. Suelte los pernos que fijan la unidad de motor de la articulación
n.º 6 y retire las correas.
Pernos de cabeza hueca hexagonal: 2-M4×15 (con una arandela
de ajuste)
7. Retire la unidad de motor de la articulación n.º 6.
Pernos de cabeza hueca hexagonal: 2-M4×15 (con una arandela
de ajuste)

Mantenimiento
C8 Mod.13 293
8. Retire la polea 1 del motor de la articulación n.º 6 y el cubo de
mando de la unidad de motor de articulación n.º 6.
Tornillos de la polea 1 y del cubo de mando
Pernos de fijación de cabeza hueca hexagonal: 2-M4×4 (con
casquillo de bronce)
Tornillos del cubo de mando y del eje del motor
Pernos de fijación de cabeza hueca hexagonal: 2-M4×4
Hay un casquillo de bronce en uno de los tornillos de fijación que
fijan el cubo de mando y la polea. Tenga cuidado de no perderlo.
A: Tornillos de la polea y del eje del motor
B: Tornillos de la polea y del cubo de mando
C: Casquillo
Polea
Cubo de mando
A
A
C
B
9. Retire el freno electromagnético de la articulación n.º 6.
Pernos de fijación de cabeza hueca hexagonal: 3-M3×15 (con un
separador)
Tenga cuidado de no perder los
separadores.
10. Retire la placa del motor desde el motor de la articulación n.º 6.
Pernos de cabeza hueca hexagonal: 2-M4×10

Mantenimiento
294 C8 Mod.13
Instalación: Motor de la articulación n.º 6
1. Fije la placa del motor en el motor de la articulación n.º 6.
Pernos de cabeza hueca hexagonal: 2-M4×10
Torque de ajuste: 4,0 0,2 N·m
Tenga cuidado con la dirección de montaje de la placa del
motor.
(Consulte la imagen).
Posición del
cable del motor
2. Instale el freno electromagnético de la articulación n.º 6 en la
unidad de motor de la articulación n.º 6. Inserte los separadores
entre los tornillos de fijación de cabeza hueca hexagonal y el
freno electromagnético de la articulación n.º 6.
Tornillos de fijación de cabeza hueca hexagonal: 3-M3×15
(con un separador)
Torque de ajuste: 2,0 0,1 N·m
Tenga cuidado con la dirección de montaje del
cableado del freno electromagnético de la articulación n.º 5.
(Consulte la imagen).
Cableado del freno
electromagnético
3. Instale el cubo de mando y la polea 1 a la unidad de motor de la
articulación n.º 6.
Fije el cubo de mando y el eje del motor.
Existe una parte irregular para la galga de espesor (0,5 mm) en
el cubo. Úsela para dejar un espacio de 0,5 mm.
Sin este espacio, las piezas se podrían frotar mientras el motor
está en marcha y esto puede generar un desperfecto mientras
el motor se mueve.
Ajuste los tornillos de fijación en las posiciones que indica la
figura.
A: Tornillos de la polea y del eje del motor
B: Tornillos de la polea y del cubo de mando
C: Casquillo
Polea
Cubo de mando
A
A
C
B
Parte irregular para la galga de
espesor (0,5 mm)
2 lugares, a una inclinación de 90°
t = 0,5 mm
NOTA
NOTA
NOTA
NOTA
Si la posición de los tornillos es incorrecta o si no se ha fijado el casquillo, se podría
dañar el costado de la pieza y esto podría imposibilitar la extracción de la pieza.

Mantenimiento
C8 Mod.13 295
Cubo de mando y eje del motor:
Tornillos de fijación de cabeza hueca hexagonal: 2-M4×4
Torque de ajuste: 2,5 0,2 N·m
Alinee los tornillos con las dos caras planas del eje del motor y fíjelos.
Cubo de mando y polea 1:
Tornillos de fijación de cabeza hueca hexagonal: 2-M4×4 (con casquillo de bronce)
Torque de ajuste: 2,5 0,2 N·m
Fije los tornillos de fijación, mientras presiona la polea 1 hacia el cubo de mando.
No es necesario el casquillo de bronce para el tornillo en la superficie plana (corte en D). Fije el casquillo
al otro tornillo y, luego, fije el tornillo.
4. Coloque la unidad de motor de la articulación n.º 6 dentro del
brazo n.º 4.
5. Pase la correa de regulación alrededor de la polea 1 y de la polea
2 y fíjela en forma temporal.
Asegúrese de que los dientes de la correa de regulación se
engranen con los de la polea.
Como guía general sobre fijación temporal, revise que la unidad de motor se pueda quitar manualmente
y que no se incline cuando se tire de ella. Si la correa está demasiado suelta o demasiado apretada, no
tendrá la tensión correcta.
6. Aplique tensión en la correa de regulación de la articulación n.º
6 y fije la unidad de motor de la articulación n.º 6.
Tensión de la correa de regulación de la articulación n.º 6: 15 a
30 N
Valor de configuración del tensiómetro de la correa
Peso: 2,5 g/mm de ancho × m de longitud de separación,
Ancho: 6 mm, Longitud de separación: 122 mm
Perno de cabeza hueca hexagonal: 2-M4×15 (con una arandela
de ajuste)
Torque de ajuste: 4,0 0,2 N·m
En relación con la tensión de la correa:
- Se puede producir un salto (espacio de posición), si el valor
está debajo del límite.
- Se puede producir vibración (ruido anormal) o reducción
de la vida útil de las piezas cuando el valor excede el límite
superior
- Cuando la reemplace por una nueva correa, se puede
extender y disminuiría la tensión en la etapa inicial de la
operación. Asegúrese de operar el robot dos o tres días y
volver a revisar la tensión de la correa.
NOTA

Mantenimiento
296 C8 Mod.13
Cuando use la plantilla de tensión de la correa (pieza de
mantenimiento):
Fije la plantilla de tensión de la correa (para las articulaciones
n.º 4, n.º 5 y n.º 6) con los tornillos (2-M4×15) y empuje la
goma en contra de la polea.
La tensión se aplica mientras se empuja el tornillo de fijación
(M6×15) mediante la goma.
7. Conecte los siguientes conectores.
Conectores: X062, X162, BT62, BR062
8. Instale la fuente de alimentación del freno en la placa.
Tornillo con ranura en cruz con arandela cautiva: 2-M3×6
Torque de ajuste: 0,45 0,1 N·m
9. Fije la placa de protección de cables al brazo n.º 4.
Perno de cabeza hueca hexagonal: 2-M4×10
Torque de ajuste: 4,0 0,2 N·m
Tenga cuidado de que los cables no queden atrapados. Puede
generar un desperfecto en los cables.
10. Instale la cubierta lateral del brazo n.º 4.
Para conocer detalles, consulte Mantenimiento: 3. Cubiertas.
11. Realice la calibración.
Para conocer detalles, consulte Mantenimiento: 16. Calibración.
NOTA

Mantenimiento
C8 Mod.13 297
10.2 Articulación n.º 6 - Reemplazo de la unidad de engranaje reductor
(Reemplazo del juego de unidades de engranaje reductor de las
articulaciones n.º 5, n.º 6)
Para reemplazar la unidad de engranaje reductor de la articulación n.º 5 y de la articulación n.º 6, cambie el juego
de la unidad de engranaje reductor de las articulaciones n.º 5 y n.º 6.
El juego de la unidad de engranaje reductor de las articulaciones n.º 5 y n.º 6 está ajustado de antemano.
Nombre
Cantidad
Nota
Piezas de
mantenimiento
Juego de la unidad de engranaje reductor
de las articulaciones n.º 5, n.º 6
1
1674610 (común en la serie C8)
Plantilla de tensión de la correa*
1
1674582
Herramientas
Llave
hexagonal
ancho a lo largo de
superficies planas: 2 mm
1
Para los tornillos de fijación de cabeza
hueca hexagonal M4
ancho a lo largo de
superficies planas: 2,5 mm
1
Para los pernos de cabeza hueca
hexagonal M3
ancho a lo largo de
superficies planas: 3 mm
1
Para los pernos de cabeza hueca
hexagonal M4
ancho a lo largo de
superficies planas: 4 mm
1
Para los pernos de cabeza hueca
hexagonal M5
ancho a lo largo de
superficies planas: 5 mm
1
Para los pernos de cabeza hueca
hexagonal M6
Destornillador de cruz (n.º 2)
1
Para tornillos con ranura en cruz
Torquímetro
1
Para el control del torque de ajuste
Llave inglesa (ancho a lo largo de
superficies planas: 8 mm
1
Para los conectores rápidos de aire
Galga de espesor (0,5 mm)
2
Para ajustar la posición del cubo de
mando
Tensiómetro de la correa
1
Consulte: Unitta U-505
Para conocer detalles acerca del procedimiento de reemplazo, consulte Mantenimiento 9.2 Articulación n.º 5 -
Reemplazo de la unidad de engranaje reductor (Reemplazo de la unidad de engranaje de las articulaciones n.º
5 y n.º 6).
El freno está montado en cada articulación para evitar que el brazo descienda, debido a su propio peso, mientras
el controlador está apagado o el motor está en estado apagado. El freno no funciona durante el reemplazo.
Tenga cuidado cuando realice el trabajo de mantenimiento.

Mantenimiento
298 C8 Mod.13
10.3 Articulación n.º 6 - Reemplazo de la correa de regulación
Nombre
Cantidad
Nota
Piezas de
mantenimiento
Correa de regulación de
la articulación n.º 6
339 mm
1
1655933
Plantilla de tensión de la correa
1
1674582
Herramientas
Llave hexagonal
(ancho a lo largo de superficies planas:
3 mm
1
Para los pernos de cabeza hueca
hexagonal M4
Destornillador de cruz (n.º 2)
1
Para tornillos con ranura en cruz
Tensiómetro de la correa
1
Consulte: Unitta U-505
* La plantilla de tensión de la correa es una plantilla de montaje. Use la plantilla al ajustar la tensión de la
correa.
El freno está montado en cada articulación para evitar que el brazo descienda, debido a su propio peso, mientras
el controlador está apagado o el motor está en estado apagado. El freno no funciona durante el reemplazo.
Tenga cuidado cuando realice el trabajo de mantenimiento.
Retiro: Correa de regulación de la articulación n.º 6
1. Apague la alimentación del controlador.
2. Retire la cubierta lateral del brazo n.º 4.
Para conocer detalles, consulte Mantenimiento: 3. Cubiertas.
3. Suelte el tornillo de fijación de la unidad de motor de la
articulación n.º 6.
Perno de cabeza hueca hexagonal: 2-M4×15 (con una arandela
de ajuste)
4. Retire la correa de regulación de la articulación n.º 6.
Instalación: Correa de regulación de la articulación n.º 6
1. Coloque la correa de regulación de la articulación n.º 6 en la polea 1 y la polea 2 de la articulación n.º 6.
2. Fije la unidad de motor de la articulación n.º 6.
Para conocer detalles, consulte Mantenimiento: 10.1 Articulación n.º 6 – Reemplazo del motor, pasos para
la instalación (5) al (6) y (10) al (11).

Mantenimiento
C8 Mod.13 299
10.4 Articulación n.º 6 - Reemplazo del freno electromagnético
Nombre
Cantidad
Nota
Piezas de
mantenimiento
Freno electromagnético
1
2172928 (común para las articulaciones
n.º 4, n.º 5, n.º 6)
Plantilla de tensión de la correa
1
1674582
Herramientas
Llave
hexagonal
ancho a lo largo de
superficies planas: 2 mm
1
Para los tornillos de fijación de cabeza
hueca hexagonal M4
ancho a lo largo de
superficies planas:
2,5 mm
1
Para los pernos de cabeza hueca
hexagonal M3
ancho a lo largo de
superficies planas: 3 mm
1
Para los pernos de cabeza hueca
hexagonal M4
Destornillador de cruz (n.º 2)
1
Para tornillos con ranura en cruz
Galga de espesor (0,5 mm)
1
Para ajustar la posición de la polea
Tensiómetro de la correa
1
Consulte: Unitta U-505
* La plantilla de tensión de la correa es una plantilla de montaje. Use la plantilla al ajustar la tensión de la
correa.
El freno está montado en cada articulación para evitar que el brazo descienda, debido a su propio peso, mientras
el controlador está apagado o el motor está en estado apagado. El freno no funciona durante el reemplazo.
Tenga cuidado cuando realice el trabajo de mantenimiento.
Cómo pegar las etiquetas
Los frenos electromagnéticos son comunes para las articulaciones n.º 4, n.º 5 y n.º 6.
Para evitar una mala conexión de los conectores, pegue la etiqueta de los frenos
electromagnéticos en la forma que aparece en las fotos.
Frenos electromagnéticos de la articulación n.º 6 Ubicación de las etiquetas de conector
BR062
Cable (rojo/ negro)
BR063
Cable (azul/ azul)
BR063
Cable (azul/ naranja)
El conector BR063 se conecta al momento del envío. Desconéctelo antes de pegar la
etiqueta.
El conector BR062 y el conector BR063 comparten la misma forma en un lado. Identifique
los conectores por color.
NOTA

Mantenimiento
300 C8 Mod.13
Retiro: Freno electromagnético de la articulación n.º 6
1. Retire el freno electromagnético de la articulación n.º 6.
Para conocer detalles, consulte Mantenimiento: 10.1 Articulación n.º 6 – Reemplazo del motor, pasos para
el retiro (1) a (9).
Instalación: Freno electromagnético de la articulación n.º 6
1. Instale el freno electromagnético de la articulación n.º 6 en la unidad de motor de la articulación n.º 6.
Para conocer detalles, consulte Mantenimiento: 10.1 Articulación n.º 6 – Reemplazo del motor, pasos para
la instalación (2) a (11).

Mantenimiento
C8 Mod.13 301
11. Reemplazo de la unidad de batería
ADVERTENCIA
■
No conecte ni desconecte los conectores del motor mientras el sistema de robot
esté encendido. Conectar o desconectar los conectores del motor con la energía
encendida es extremadamente peligroso y puede provocar lesiones corporales
graves, ya que el manipulador puede moverse de manera anormal; además,
puede provocar descargas eléctricas y el mal funcionamiento del sistema de
robot.
■
Para cortar la energía hacia el sistema de robot, desconecte el enchufe de la
fuente de alimentación. Asegúrese de conectar el cable de alimentación de CA
a un tomacorriente.
NO lo conecte directamente a la fuente de alimentación de la fábrica.
■
Antes de realizar cualquier procedimiento de reemplazo, apague el controlador
y los equipos relacionados, luego desconecte el enchufe de la fuente de
alimentación.
Realizar cualquier procedimiento de reemplazo con la energía encendida es
extremadamente peligroso y puede provocar una descarga eléctrica o el mal
funcionamiento del sistema de robot.
ADVERTENCIA
■
Sea meticuloso y cuidadoso cuando manipula la batería de litio. Como se
menciona a continuación, la manipulación incorrecta de las baterías de litio es
extremadamente peligrosa y puede causar generación de calor, filtraciones,
explosiones o inflamación.
También puede causar problemas graves de seguridad.
<Manipulación incorrecta>
Intento de carga
Desarmado
Conexión incorrecta de las
baterías
Exposición al fuego
Descarga forzosa
Deformación por presión
Cortocircuito (polaridad; positiva/negativa)
Calefacción (85 °C o más)
Soldar el terminal de la batería de litio
directamente
■
Cuando elimine la batería, consulte con servicios de eliminación profesionales o
cumpla los reglamentos locales. Asegúrese de que el terminal de la batería esté
aislado, incluso cuando se trate de una batería usada. Si los terminales hacen
contacto con otros metales, pueden hacer cortocircuito y generar calor,
filtraciones, explosiones o inflamación.
En caso de que la energía de la batería de litio esté baja, se producirá el error para advertir
de la reducción de voltaje en el inicio del controlador (el inicio del software). Se perderán
todos los datos de posición y deberá calibrar todas las articulaciones.
La duración de una batería de litio varía según las horas de energización y el entorno de
instalación del controlador. Como guía general, es de alrededor de 3 años (cuando el
controlador está conectado a la energía por 8 horas al día). Cuando el controlador no está
conectado a la energía, el consumo de batería será significativamente mayor que cuando el
controlador está energizado. Si ocurren advertencias de reducción de voltaje, reemplace la
batería de metal de litio, incluso si no ha alcanzado la vida útil de producto indicada
anteriormente.
Para EPSON RC+ 7.0. Ver. 7.2.x o posterior (firmware Ver.7.2.x.x o posterior), el plazo de
reemplazo recomendado para la batería se puede revisar en el cuadro de diálogo
NOTA

Mantenimiento
302 C8 Mod.13
[Maintenance] de EPSON RC+ 7.0.
Para conocer detalles, consulte el siguiente manual.
Controlador de robot RC700 / RC700-A Mantenimiento 6. Alarma
La batería puede agotarse si pasa el plazo de reemplazo recomendado.
Si no se producen advertencias de reducción de voltaje, no es necesario calibrar todas las
articulaciones. Deberá realizar una calibración si la posición se mueve desde la original
después de reemplazar la batería.
Las piezas designadas se deben usar para la batería de litio y la placa de baterías.
Tenga cuidado con la polaridad de la batería para conectarla correctamente.
Placa de baterías
Batería
(Figura: C8-A1401** (C8XL))
Nombre
Cantidad
Nota
Piezas de
mantenimiento
Unidad de batería (batería de
litio)
1
2172925
(Dos baterías de litio para reemplazo)
Placa de baterías
1
2173216
Herramientas
Destornillador de cruz (n.º 2)
1
Para tornillos con ranura en cruz
Llave hexagonal
(ancho a lo largo de
superficies planas: 3 mm
1
Para los pernos de cabeza hueca
hexagonal M4

Mantenimiento
C8 Mod.13 303
11.1 Reemplazo de la unidad de batería (batería de litio)
1. Apague la alimentación del controlador.
2. Retire la cubierta lateral del brazo n.º 1.
Para conocer detalles, consulte Mantenimiento: 3. Cubiertas.
3. Retire la batería de la caja de la batería.
Si retiró todas las baterías antes de conectar las nuevas, se borrarán los datos de calibración y deberá realizar
la calibración. Siga los pasos a continuación para retirar las baterías de litio.
4. Conecte las dos baterías nuevas a los conectores de la placa de
baterías que no están conectados a nada.
5. Retire las baterías antiguas.
Sostenga la placa con la mano y extraiga el cable de la batería hacia
arriba para retirar el conector.
6. Instale la batería en la caja de la batería.
NOTA

Mantenimiento
304 C8 Mod.13
7. Instale la cubierta lateral del brazo n.º 1.
Para conocer detalles, consulte Mantenimiento: 3. Cubiertas.
8. Encienda la alimentación del controlador.
9. Revise la operación para ver si la posición y la postura del manipulador están fuera de su posición.
Mueva el manipulador a dos o tres puntos (poses) de los puntos registrados.
10. Si el manipulador está fuera de posición, calibre todas las articulaciones y los ejes.
Para conocer detalles, consulte Mantenimiento: 16. Calibración.

Mantenimiento
C8 Mod.13 305
11.2 Reemplazo de la placa de baterías
Después de reemplazar las piezas (motores, unidades de engranaje reductor, frenos, correas
de regulación, etc.), el manipulador no puede operar correctamente, ya que hay un espacio
entre el origen almacenado en cada codificador de motor y el origen correspondiente
almacenado en el controlador.
Por lo tanto, es necesario hacer coincidir estos orígenes después de reemplazar las piezas.
El proceso de alinear los dos orígenes se denomina “Calibración”.
Consulte Mantenimiento 16. Calibración y realice la calibración después de reemplazar las
piezas.
Retiro: Placa de baterías
1. Apague la alimentación del controlador.
2. Retire la cubierta lateral del brazo n.º 1.
Para conocer detalles, consulte Mantenimiento: 3. Cubiertas.
3. Retire la batería de la caja de la batería.
4. Retire los conectores de la batería.
Sostenga la placa con la mano y extraiga el cable de la batería
hacia arriba para retirar el conector.
5. Retire la placa en la que está fijada la caja de la batería.
Pernos de cabeza hueca hexagonal: 2-M4×10
NOTA

Mantenimiento
306 C8 Mod.13
6. Retire los conectores.
Conectores: CN3, CN6
7. Retire la placa de baterías fijada a la placa.
Tornillos con ranura en cruz: 3-M3×6

Mantenimiento
C8 Mod.13 307
Instalación: Placa de baterías
1. Instale la placa de la batería en la placa.
Tornillos con ranura en cruz: 3-M3×6
Torque de ajuste: 0,45 0,1 N·m
2. Conecte los conectores a la placa de baterías.
Conector: CN3, CN6
3. Instale la placa en la que está instalada la placa de la batería.
Pernos de cabeza hueca hexagonal: 2-M4×10
Torque de ajuste: 4,0 0,2 N·m
4. Conecte los conectores de la batería.
5. Instale la batería en la caja de la batería.
6. Instale la cubierta lateral del brazo n.º 1.
Para conocer detalles, consulte Mantenimiento: 3. Cubiertas.
7. Realice la calibración.
Para conocer detalles, consulte Mantenimiento: 16. Calibración.

Mantenimiento
308 C8 Mod.13
12. Reemplazo de la placa de control
ADVERTENCIA
■
No conecte ni desconecte los conectores del motor mientras el sistema de robot
esté encendido. Conectar o desconectar los conectores del motor con la energía
encendida es extremadamente peligroso y puede provocar lesiones corporales
graves, ya que el manipulador puede moverse de manera anormal; además,
puede provocar descargas eléctricas y el mal funcionamiento del sistema de
robot.
■
Para cortar la energía hacia el sistema de robot, desconecte el enchufe de la
fuente de alimentación. Asegúrese de conectar el cable de alimentación de CA a
un tomacorriente.
NO lo conecte directamente a la fuente de alimentación de la fábrica.
■
Antes de realizar cualquier procedimiento de reemplazo, apague el controlador y
los equipos relacionados, luego desconecte el enchufe de la fuente de
alimentación.
Realizar cualquier procedimiento de reemplazo con la energía encendida es
extremadamente peligroso y puede provocar una descarga eléctrica o el mal
funcionamiento del sistema de robot.
Las piezas designadas se deben usar para la placa de control.
Placa de control 2
Placa de control 1
(Figura: C8-A1401**
(C8XL))
Nombre
Cantidad
Nota
Piezas de
mantenimiento
Placa de control (1, 2)
1
2138032
Herramientas
Llave hexagonal
(ancho a lo largo de superficies
planas: 3 mm
1
Para los pernos de cabeza hueca
hexagonal M4
Llave de tuercas
(ancho a lo largo de superficies
planas: 5,5 mm
1
Para los separadores
Destornillador de cruz
1
Para tornillos con ranura en cruz

Mantenimiento
C8 Mod.13 309
12.1 Reemplazo de la placa de control 1
Retiro: Placa de control 1
1. Apague el controlador.
2. Retire la cubierta central del brazo n.º 1.
Para conocer detalles, consulte Mantenimiento 3. Cubiertas.
3. Retire el conector conectado a la placa de control 1.
Conector: GS01
4. Retire la placa de control 1 fijada en el brazo n.º 1.
Tornillos con ranura en cruz: 3-M38
Tenga cuidado de no soltar los tornillos al interior del
manipulador mientras los están retirando.
5. Retire la placa de protección de la placa de control 1.
Tornillos con ranura en cruz con arandela cautiva: M36
No es necesario quitar completamente el separador de la placa.
NOTA

Mantenimiento
310 C8 Mod.13
Instalación: Placa de control 1
1. Instale la placa de protección de la placa de control 1.
Tornillos con ranura en cruz con arandela cautiva: M36
Torque de ajuste: 0,45 0,1 N·m
Tenga cuidado con la dirección de montaje de la placa de
protección.
(Consulte la imagen)
2. Instale la placa de control 1 en el brazo n.º 1.
Tornillos con ranura en cruz: 3-M38
Torque de ajuste: 0,45 0,1 N·m
Tenga cuidado de no soltar los tornillos al interior del
manipulador mientras los están retirando.
3. Conecte el conector a la placa de control 1.
Conector: GS01
4. Instale la cubierta central del brazo n.º 1.
Para conocer detalles, consulte Mantenimiento: 3. Cubiertas.
5. Revise la operación para ver si la posición y la postura del manipulador están fuera de posición.
Mueva el manipulador a dos o tres puntos (poses) de los puntos registrados.
6. Si el manipulador está fuera de posición, calibre todas las articulaciones y los ejes.
Para conocer detalles, consulte Mantenimiento: 16. Calibración.
NOTA
NOTA

Mantenimiento
C8 Mod.13 311
12.2 Reemplazo de la placa de control 2
Retiro: Placa de control 2
1. Apague la alimentación del controlador.
2. Retire la cubierta del brazo n.º 3.
Para conocer detalles, consulte Mantenimiento: 3. Cubiertas.
3. Retire el conector conectado a la placa de control 2.
Conector: GS02
4. Retire la placa de baterías fijada en el brazo n.º 3.
Pernos de cabeza hueca hexagonal: 2-M410
5. Retire la placa de control 2 fijada a la placa.
Tornillos con ranura en cruz: 4-M3×8

Mantenimiento
312 C8 Mod.13
Instalación: Placa de control 2
1. Instale la placa de control 2 en la placa.
Tornillos con ranura en cruz: 4-M3×8
Torque de ajuste: 0,45 0,1 N·m
Tenga cuidado con la dirección de montaje de la placa de control 2.
(Consulte la imagen).
2. Instale la placa con la placa de control 2 en el brazo n.º 3.
Pernos de cabeza hueca hexagonal: 2-M410
Torque de ajuste: 4,0 0,2 N·m
3. Conecte el conector a la placa de control 2.
Conector: GS02
4. Instale la cubierta del brazo n.º 3.
Para conocer detalles, consulte Mantenimiento: 3. Cubiertas.
5. Encienda la alimentación del controlador.
6. Revise la operación para ver si la posición y la postura del manipulador están fuera de su posición.
Mueva el manipulador a dos o tres puntos (poses) de los puntos registrados.
7. Si el manipulador está fuera de posición, calibre todas las articulaciones y los ejes.
Para conocer detalles, consulte Mantenimiento: 16. Calibración.
NOTA

Mantenimiento
C8 Mod.13 313
13. Reemplazo de la luz LED
ADVERTENCIA
■
No conecte ni desconecte los conectores del motor mientras el sistema de robot
esté encendido. Conectar o desconectar los conectores del motor con la energía
encendida es extremadamente peligroso y puede provocar lesiones corporales
graves, ya que el manipulador puede moverse de manera anormal; además,
puede provocar descargas eléctricas y el mal funcionamiento del sistema de
robot.
■
Para cortar la energía hacia el sistema de robot, desconecte el enchufe de la
fuente de alimentación. Asegúrese de conectar el cable de alimentación de CA
a un tomacorriente.
NO lo conecte directamente a la fuente de alimentación de la fábrica.
■
Antes de realizar cualquier procedimiento de reemplazo, apague el controlador
y los equipos relacionados, luego desconecte el enchufe de la fuente de
alimentación.
Realizar cualquier procedimiento de reemplazo con la energía encendida es
extremadamente peligroso y puede provocar una descarga eléctrica o el mal
funcionamiento del sistema de robot.
Luz LED
(Figura: C8-A1401** (C8XL))
Para conocer el modelo de protección, comuníquese con el proveedor de su región.
Nombre
Cantida
d
Nota
Piezas de
mantenimiento
Luz LED
1
1668127
(Modelo estándar o sala blanca)
Herramientas
Destornillador de cruz (n.º 2)
1
Para tornillos con ranura en cruz

Mantenimiento
314 C8 Mod.13
Retiro: Luz LED
1. Apague la alimentación del controlador.
2. Retire la cubierta del brazo n.º 3.
Para conocer detalles, consulte Mantenimiento: 3. Cubiertas.
3. Retire el conector conectado a la luz LED.
El conector de la luz LED (LED) está debajo de la cubierta del brazo n.º 3.
Conector: LED
4. Retire la luz LED desde el brazo n.º 3.
Gire hacia la izquierda la tuerca de plástico que fija la luz LED en el
brazo n.º 3.
Tuerca
plástica
Instalación: Luz LED
1. Instale la luz LED en el brazo n.º 3.
Retire la tuerca de plástico de la luz LED.
Pase la luz desde el interior del brazo n.º 3.
Gire hacia la derecha y fije la luz al brazo n.º 3.
2. Conecte el siguiente conector.
Conector: LED
3. Instale la cubierta del brazo n.º 3.
Para conocer detalles, consulte Mantenimiento: 3. Cubiertas.

Mantenimiento
C8 Mod.13 315
14. Reemplazo del cable M/C
Cada motor recibe energía de la batería como respaldo. Por lo tanto, se conservan los datos
de posición después de apagar el controlador. Se perderán los datos de posición cuando se
desconecte el conector del cable conectado a la batería. Y en EPSON RC+ se mostrará el
mensaje de error de activación de alarma del codificador cuando se encienda el controlador.
ADVERTENCIA
■
No conecte ni desconecte los conectores del motor mientras el sistema de robot
esté encendido. Conectar o desconectar los conectores del motor con la energía
encendida es extremadamente peligroso y puede provocar lesiones corporales
graves, ya que el manipulador puede moverse de manera anormal; además,
puede provocar descargas eléctricas y el mal funcionamiento del sistema de
robot.
■
Para cortar la energía hacia el sistema de robot, desconecte el enchufe de la
fuente de alimentación. Asegúrese de conectar el cable de alimentación de CA
a un tomacorriente.
NO lo conecte directamente a la fuente de alimentación de la fábrica.
■
Antes de realizar cualquier procedimiento de reemplazo, apague el controlador
y los equipos relacionados, luego desconecte el enchufe de la fuente de
alimentación.
Realizar cualquier procedimiento de reemplazo con la energía encendida es
extremadamente peligroso y puede provocar una descarga eléctrica o el mal
funcionamiento del sistema de robot.
PRECAUCIÓN
■
Al desconectar los conectores durante el reemplazo de la unidad de cable,
asegúrese de volver a conectar los conectores en sus posiciones correctas. La
conexión incorrecta de los conectores puede provocar un funcionamiento
incorrecto del sistema de robot.
Para conocer detalles acerca de las conexiones, comuníquese con el proveedor
de su región.
■
Cuando instale la cubierta, tenga cuidado de no permitir que los cables interfieran
con el montaje de la cubierta y no doble los cables a la fuerza para empujarlos al
interior de la cubierta. Una tensión innecesaria en los cables puede provocar
daños en los cables, desconexión o error de contacto. Esto es extremadamente
peligroso y puede provocar descargas eléctricas o el funcionamiento incorrecto
del sistema de robot. Cuando enrute los cables, revise la ubicación de los cables
después de retirar la cubierta. Asegúrese de colocar los cables de vuelta en sus
ubicaciones originales.
■
Asegúrese de conectar los cables correctamente. No permita una tensión
innecesaria en los cables. (No coloque objetos pesados en los cables. No doble
ni tire de los cables por la fuerza). Una tensión innecesaria en los cables puede
provocar daños en los cables, desconexión o error de contacto. Esto es
extremadamente peligroso y puede provocar descargas eléctricas o el
funcionamiento incorrecto del sistema de robot.
Cable M/C
(Figura: C8-A1401** (C8XL))

Mantenimiento
316 C8 Mod.13
Nombre
Cantidad
Nota
Piezas de
mantenimiento
Cable M/C
3 m
Recto
1
R12NZ900S1
En forma
de L
1
R12NZ900S5
5 m
Recto
1
R12NZ900S2
En forma
de L
1
R12NZ900S6
10 m
Recto
1
R12NZ900S3
En forma
de L
1
R12NZ900S7
15 m
Recto
1
R12NZ900YC
En forma
de L
1
R12NZ900YB
20 m
Recto
1
R12NZ900S4
En forma
de L
1
R12NZ900S8
Cable M/C
(flexible)
3 m
Recto
1
R12NZ900S9
En forma
de L
1
R12NZ900SD
5 m
Recto
1
R12NZ900SA
En forma
de L
1
R12NZ900SE
10 m
Recto
1
R12NZ900SB
En forma
de L
1
R12NZ900SF
15 m
Recto
1
R12NZ900YE
En forma
de L
1
R12NZ900YD
20 m
Recto
1
R12NZ900SC
En forma
de L
1
R12NZ900SG
Herramientas
Llave hexagonal
(ancho a lo largo de superficies
planas: 3 mm
1
Para los pernos de cabeza hueca
hexagonal M4

Mantenimiento
C8 Mod.13 317
Retiro: Cable M/C
1. Apague la alimentación del controlador.
2. Desconecte los siguientes conectores del controlador.
Conector del cable de alimentación
Conector del cable de señal
3. Retire la placa del conector.
Para conocer detalles, consulte Mantenimiento: 3. Cubiertas.
No extraiga la placa del conector con fuerza.
No desconecte el cable M/C de la subplaca de conectores.
4. Retire los conectores.
Conectores: X11, X12, X14, BR010, X010, X020, X040, LED, GS01
Cada conector tiene un número y una forma diferente.
No desconecte el conector de la batería (BT1*) De lo contrario, será necesaria la calibración.
Para conocer detalles, consulte Mantenimiento: 16. Calibración.
5. Retire la subplaca de conectores.
Para conocer detalles, consulte Mantenimiento: 3. Cubiertas.
NOTA
NOTA

Mantenimiento
318 C8 Mod.13
Instalación: Cable M/C
1. Instale la subplaca de conectores.
Para conocer detalles, consulte Mantenimiento: 3. Cubiertas.
2. Conecte los conectores del nuevo cable M/C a estos de la unidad de cable.
Conector: X11, X12, X14, BR010, X010, X020, X040, LED, GS01
3. Instale la placa de conectores.
Para conocer detalles, consulte Mantenimiento: 3. Cubiertas.
4. Conecte los siguientes conectores en el controlador.
Conector del cable de alimentación
Conector del cable de señal
5. Encienda la alimentación del controlador.
6. Revise la operación para ver si la posición y la postura del manipulador están fuera de posición.
Mueva el manipulador a dos o tres puntos (poses) de los puntos registrados.
7. Si se desconectó el conector de la batería (BT1*), realice la calibración de la articulación n.º 1.
Para conocer detalles, consulte Mantenimiento: 16. Calibración.
8. Si el manipulador está fuera de posición, calibre todas las articulaciones y los ejes.
Para conocer detalles, consulte Mantenimiento: 16. Calibración.

Mantenimiento
C8 Mod.13 319
15. Reemplazo del ventilador
ADVERTENCIA
■
No conecte ni desconecte los conectores del motor mientras el sistema de robot
esté encendido. Conectar o desconectar los conectores del motor con la energía
encendida es extremadamente peligroso y puede provocar lesiones corporales
graves, ya que el manipulador puede moverse de manera anormal; además,
puede provocar descargas eléctricas y el mal funcionamiento del sistema de
robot.
■
Para cortar la energía hacia el sistema de robot, desconecte el enchufe de la
fuente de alimentación. Asegúrese de conectar el cable de alimentación de CA a
un tomacorriente.
NO lo conecte directamente a la fuente de alimentación de la fábrica.
■
Antes de realizar cualquier procedimiento de reemplazo, apague el controlador y
los equipos relacionados, luego desconecte el enchufe de la fuente de
alimentación.
Realizar cualquier procedimiento de reemplazo con la energía encendida es
extremadamente peligroso y puede provocar una descarga eléctrica o el mal
funcionamiento del sistema de robot.
Ventilador
Ventilador
(Figura: C8-A1401** (C8XL))
Nombre
Cantidad
Nota
Pieza de
mantenimiento
Ventilador
1
2177465 (Modelos estándar y para salas
blancas)
2178399 (Modelo de protección)
Herramienta
Destornillador de cruz
1
Para tornillos con ranura en cruz

Mantenimiento
320 C8 Mod.13
(Figura: Modelo de cables hacia atrás)
Retiro: Ventilador
1. Retire los tornillos de la cubierta del ventilador, mientras sostiene la cubierta.
Tornillos con ranura en cruz con arandela: 4-M4×35
La cubierta se cae cuando se retiran los tornillos.
Al retirar los tornillos, asegúrese de proporcionar soporte a la cubierta.
2. Retire la cubierta del ventilador.
3. Retire los conectores del ventilador.
4. Retire el ventilador.
Instalación: Ventilador
1. Instale el ventilador.
Tenga cuidado con la dirección de instalación del motor.
La flecha en el ventilador (indicada con la flecha en la imagen) debe apuntar
hacia el receptor de calor, y los cables deben pasar por la parte superior del
ventilador.
Costado del receptor de calor
2. Conecte los conectores del filtro.
3. Instale la cubierta del ventilador.
Tornillos con ranura en cruz con arandela: 4-M4×35
Torque de ajuste: 0,9 0,1 N·m
NOTA
NOTA

Mantenimiento
C8 Mod.13 321
16. Calibración
16.1 Descripción general
Después de reemplazar las piezas (motores, unidades de engranaje reductor, correas de
regulación, etc.), el manipulador no puede operar correctamente, ya que hay un espacio entre
el origen almacenado en cada codificador de motor y el origen correspondiente almacenado
en el controlador.
Por lo tanto, es necesario hacer coincidir estos orígenes después de reemplazar las piezas.
El proceso de alinear los dos orígenes se denomina “Calibración”. Tenga en cuenta que la
calibración no es lo mismo que la enseñanza*.
*“Enseñanza” significa enseñar al controlador los puntos de coordenada (incluidas las
poses) en cualquier lugar del área de funcionamiento del manipulador.
ADVERTENCIA
■
Para garantizar la seguridad, se debe instalar una protección para el sistema de
robot. Para conocer detalles acerca de la protección, consulte las Precauciones
de instalación y diseño en el capítulo Seguridad del Manual del usuario de
EPSON RC+.
■
Antes de operar el sistema de robot, asegúrese de que no haya nadie al interior
del área protegida. El sistema de robot se puede operar en el modo de
enseñanza, incluso cuando alguien está al interior del área protegida. El
movimiento del manipulador siempre está en estado restringido (bajas
velocidades y baja potencia) para garantizar la seguridad de un operador. Sin
embargo, operar el sistema de robot mientras alguien está al interior del área
protegida es extremadamente peligroso y puede provocar problemas graves de
seguridad en caso de que el manipulador se mueva de manera inesperada.
En EPSON RC+, un punto de coordenada que incluye la pose del brazo se define como
“punto” y los datos se denominan “datos del punto”.
Hay dos métodos para mover el manipulador durante la calibración.
- Liberar el freno electromagnético y mover los brazos manualmente.
Para conocer detalles, consulte Configuración y operación 1.5 Cómo mover los brazos con
el freno electromagnético.
- Mover el manipulador con Jog & Teach (Desplazar y Enseñar).
Mover el manipulador mientras libera el freno electromagnético implica riesgo como se
describe a continuación.
Se recomienda mover el manipulador con Jog & Teach.
PRECAUCIÓN
■
Normalmente, suelte los frenos de las articulaciones uno por uno. Tenga cuidado
si necesita soltar los frenos de dos o más articulaciones de forma simultánea.
Soltar los frenos de dos o más articulaciones al mismo tiempo puede causar que
manos o dedos queden atrapados, o bien, daños al equipo o mal funcionamiento
del manipulador, ya que sus brazos se pueden mover en direcciones inesperadas.
■
Tenga cuidado con la caída del brazo cuando suelte el freno.
Mientras que suelta el freno, el brazo del manipulador caerá por su propio peso.
La caída de un brazo puede causar que manos y dedos queden atrapados, o
bien, provocar daños en el equipo o mal funcionamiento del manipulador.

Mantenimiento
322 C8 Mod.13
Además, preste atención a los siguientes puntos en la inicialización del codificador.
PRECAUCIÓN
■
La articulación n.º 1 y la articulación n.º 4 no tienen topes mecánicos y pueden
girarse en más de 360 grados. Si se realiza la inicialización del codificador con
una postura incorrecta, el manipulador se mueve fuera del rango de operación.
Si se mueve el manipulador fuera del rango de operación, el cableado interno
puede dañarse debido a que se torció o quedó atrapado y esto puede causar el
mal funcionamiento del manipulador.
Cuando no están claras las posiciones de reposo de las articulaciones n.º 1 y n.º 4,
compruebe que los cables internos no estén torcidos. La posición de reposo es donde los
cables internos del manipulador no están torcidos en la orientación básica descrita en
Configuración y operación 3.7 Comprobación de la orientación básica.
La torsión de los cables internos se puede comprobar retirando las siguientes cubiertas.
Articulación n.º 1 : Cubierta de la base (Modelo de cables hacia atrás)
: Placa del hilo de unión (Modelo de cables hacia abajo)
Articulación n.º 4 : Cubierta del brazo n.º 3
(común entre los modelos de cables hacia atrás y de cables hacia abajo)
Placa de conectores
(Modelo de cables hacia abajo)
Cubierta del brazo n.º 3
(común entre los modelos de
cables hacia abajo y de
cables hacia atrás)
Cubierta de la base
(Modelo de cables hacia atrás)
NOTA

Mantenimiento
C8 Mod.13 323
Para conocer detalles sobre Jog & Teach, consulte el siguiente manual.
Guía del usuario de EPSON RC+
5.11.1 Herramientas del comando Robot Manager (Administrador de robot): Robot
Manager: Página de Jog & Teach.
- Para conocer detalles acerca de la orientación básica, consulte
Configuración
y operación 3.7. Comprobación de la orientación básica
.
- Cuando sea posible, calibre una articulación a la vez. (Además, reemplace las piezas de
una articulación a la vez cuando sea posible). Si calibra los orígenes de varias
articulaciones simultáneamente, será más difícil verificar sus orígenes y obtener las
posiciones correctas de origen.
Sin embargo, no se puede calibrar la articulación n.º 5 por sí sola, debido a la estructura
del manipulador. Asegúrese de calibrar la articulación n.º 5 y 6 al mismo tiempo.
Diagrama de flujo de calibración
Sí
Inicio
1. Confirmación
de pose básica
2. Reemplazo de
pieza
3. Inicialización del
codificador
6. Prueba de precisión
¿Recalibrar?
Fin
No
····························
Posicionamiento más preciso
Realice estos
procedimientos
si es necesario
NOTA

Mantenimiento
324 C8 Mod.13
16.2 Procedimiento de calibración
Ingreso de comando
Se requiere la ejecución de un comando en algunos procedimientos de calibración.
En EPSON RC+, seleccione el menú - [Tools] (Herramientas) - [Command Window]
(ventana Comando).
Este paso se omite en los procedimientos de calibración.
Movimiento de desplazamiento
Se requiere la configuración del movimiento de desplazamiento en algunos procedimientos
de calibración.
En EPSON RC+, seleccione el menú - [Tools] (Herramientas) - [Robot Manager]
(Administrador de robot) y seleccione la página de [Jog & Teach].
El panel, la ventana y la página anterior se indican como [Jog & Teach] en los
procedimientos de calibración.
Siga los pasos 1 al 6 para calibrar el manipulador.
1.
Confirmación de pose básica
Se necesitan los datos de pose (datos de punto) antes del reemplazo de la pieza
(motores, unidad de engranaje reductor o correa) para la calibración.
Verifique los valores de pulso registrados de la pose básica obtenidos en
Configuración y operación 3.7 Revisión de la orientación básica.
2.
Reemplazo de pieza
Reemplace las piezas según las instrucciones de este manual.
Tenga cuidado de no lesionarse o dañar las piezas cuando las reemplace.
3.
Inicialización del codificador
Encienda el controlador cuando todas las articulaciones estén en el rango de
movimiento.
Aparecerá el mensaje de error “Encoder alarm has occurred. Check robot battery.
EPSON RC+ must be restarted.” (Se activó la alarma de codificador. Revise la
batería del robot. Se debe reiniciar EPSON RC+).
Inicialice el codificador en la posición actual y restablezca el error.
Inicialice el codificador mediante uno de los siguientes procedimientos.
EPSON
RC+
Ejecute el siguiente comando en la [Monitor Window] (Ventana Monitor).
>Encreset [El número de articulación (1 a 6) del codificador que se
restablecerá]
En EPSON RC+, seleccione menú - [Tools] (Herramientas) - [Controller]
(Controlador) y haga clic en <Reset Controller> (Restablecer controlador).

Mantenimiento
C8 Mod.13 325
Después de restablecer el error, se inicializará el codificador del motor de la
articulación cuyas piezas se reemplazaron.
Defina el modo Desplazamiento en “Joint” (Articulación) en [Jog & Teach] y
opere el manipulador en movimiento de desplazamiento para que coincida con
precisión con las marcas de la posición de reposo (posición del pulso 0) de la
articulación.
Cuando no se pueda mover la articulación a la posición de reposo, opere el
manipulador para que coincida con la marca de ajuste colocada en Configuración
y operación 3.7 Revisión de la orientación básica de la forma más precisa posible.
Inicialice el codificador cuando la articulación coincida con la posición de reposo
o la marca de ajuste.
Para la inicialización del codificador, consulte el procedimiento indicado arriba.
Cuando se calibra el origen de la articulación n.º 5, la articulación n.º 6 estará
fuera de posición. (Debido a la estructura del manipulador, cualquier
compensación en la posición de la articulación n.º 5 afecta a la articulación n.º 6).
Calibre el origen de la articulación n.º 6 junto con calibrar la articulación n.º 5.
4.
Calibración
Marcas de calibración de cada articulación
(Figura: C8-A1401** (C8XL))
NOTA

Mantenimiento
326 C8 Mod.13
EPSON
RC+
4-1 Mueva el brazo que desea calibrar a la posición de la marca de
calibración.
Seleccione el menú - [Tool] (Herramienta) - [Robot Manager] (Administrador
de robot) - panel [Jog & Teach] para mover el manipulador.
Si se produce un error después de reemplazar el motor y no puede usar el panel
[Jog & Teach] o “Brake OFF, *” (Desactivar el freno) no funciona (* es un
número de eje para calibrar), siga los pasos (4) y (5) ahora.
Luego, estarán disponibles el panel [Jog & Teach] y “Brake OFF, *”. Mueva el
brazo que desea calibrar a la posición de la marca de calibración.
EPSON
RC+
4-2 Restablecer el codificador.
Ejecute uno de los siguientes comandos para restablecer el codificador de la
articulación que desea calibrar desde el menú-[Tool]-[Command Window].
Articulación n.º 1 >Encreset 1
Articulación n.º 2 >Encreset 2
Articulación n.º 3 >Encreset 3
Articulación n.º 4 >Encreset 4
Articulación n.º 5 >Encreset 5, 6
Articulación n.º 6 >Encreset 6
EPSON
RC+
4-3 Reinicie el controlador.
En EPSON RC+, haga clic en menú - [Tools] (Herramientas) - [Controller]
(Controlador) - <Reset Controller> (Restablecer controlador).
EPSON
RC+
4-4 Ingrese el comando que se indica a continuación en Command
Window.
Ejecute uno de los siguientes comandos para restablecer el codificador de la
articulación que desea calibrar desde el menú-[Tool]-[Command Window].
>calpls 0,0,0,0,0,0
* El manipulador no se mueve.
EPSON
RC+
4-5 Realice la calibración.
Ejecute uno de los siguientes comandos para restablecer el codificador de la
articulación que desea calibrar desde el menú-[Tool]-[Command Window].
Articulación n.º 1 >calib 1
Articulación n.º 2 >calib 2
Articulación n.º 3 >calib 3
Articulación n.º 4 >calib 4
Articulación n.º 5 >calib 5,6
Articulación n.º 6 >calib 6
Mueva el brazo a varios puntos para comprobar si el brazo se mueve a sus
posiciones originales correctamente.
Enseñe puntos si es necesario hacer un ajuste fino.

Mantenimiento
C8 Mod.13 327
5.
Calibración (posicionamiento más preciso)
EPSON
RC+
Mueva el manipulador a los datos del punto seleccionado por desplazamiento en [Jog &
Teach].
Mueva la articulación* que no esté calibrada al punto especificado mediante un
comando de movimiento.
*Cuando se calibre la articulación n.º 5, ajuste las articulaciones n.º 1 a n.º 4 en sus
posiciones de reposo.
Por ejemplo, cuando los datos del punto seleccionados son “P1”, ejecute “Motor On”
(Motor encendido) en [Control Panel] (Panel de control) y ejecute “Go P1” en [Jog &
Teach].
Posicione la articulación de calibración* en la posición seleccionada de los datos de
punto con precisión mediante el comando de desplazamiento.
*Cuando se calibre la articulación n.º 5, mueva las articulaciones n.º 5 y n.º 6 a sus
posiciones de reposo.
Seleccione el modo de desplazamiento “Joint” (Articulación) en [Jog & Teach] para
operar en el movimiento de desplazamiento.
Ingrese el comando que se indica a continuación en Command Window y ejecútelo.
Ejecute el siguiente comando en el menú-[Tools]-[Command Window].
>calpls ppls(P1,1), ppls(P1,2), ppls(P1,3), ppls(P1,4),
ppls(P1,5), ppls(P1,6)
*El manipulador no se moverá.
Realice la calibración. Ingrese uno de los siguientes comandos según la articulación
que está calibrando.
Articulación n.º 1: >calib 1
Articulación n.º 2: >calib 2
Articulación n.º 3: >calib 3
Articulación n.º 4: >calib 4
Articulación n.º 5: >calib 5.6
Articulación n.º 6: >calib 6
6.
Prueba de precisión
Mueva el manipulador a una pose (punto) diferente para verificar si regresa a su posición
original o no. Si la precisión es insuficiente, es necesario recalibrar el origen con una
pose (punto) diferente. Debe definir nuevamente la pose (punto) si el manipulador no
regresa a la posición original después de la recalibración.

Mantenimiento
328 C8 Mod.13
17. Lista de piezas de mantenimiento
Nombre
Código
Nota
Referencia en
Mantenimiento
Revisión**
Servomotor
de CA
Unidad
de la
articulación
n.º 1
C8, C8L
2172921
1000 W, unidad
5.1.1, 5.2.1
C8XL
2172922
Articulación n.º 2
2168683
750 W, elemento individual
6.1
Articulación n.º 3
2168684
400 W, elemento individual
7.1
Articulaciones n.º 4, n.º 5,
n.º 6
2172051
100 W, elemento individual
8.1, 9.1, 10.1
Unidad de
engranaje
reductor*
Articulación
n.º 1
C8
1674602
Unidad
Para modelo estándar
o sala blanca
5.1.2, 5.2.2
C8L
1674603
C8XL
1674604
Articulación
n.º 2
C8, C8L
1674605
6.2
C8XL
1674606
Articulación
n.º 3
C8, C8L
1674607
7.2
C8XL
1674608
Articulación
n.º 4
C8, C8XL
1674609
8.2
C8L
1675434
Articulaciones n.º 5, n.º 6
1674610
9.2, 10.2
Freno
electromagnético
Articulaciones n.º 1, n.º 2
2172926
Un juego de freno y
fuente de alimentación
5.1.4, 5.2.4, 6.4
Articulación n.º 3
2172927
7,4
Articulaciones n.º 4, n.º 5,
n.º 6
2172928
8.4, 9.4, 10.4
Plantilla de posicionamiento del freno de la
articulación n.º 1
1675081
Herramienta de montaje
5.1.4, 5.2.4
Correa de
regulación
Articulación
n.º 1
C8
1655928
Ancho de 20 mm
560 mm
5.1.3, 5.2.3
C8L
1655929
580 mm
C8XL
1655930
595 mm
Articulación
n.º 2
C8
1655920
Ancho de 14 mm
475 mm
6.3
C8L
1655924
485 mm
C8XL
1655927
540 mm
Articulación
n.º 3
C8
1655915
Ancho de 10 mm
471 mm
7.3
C8L
1655918
480 mm
C8XL
1655919
501 mm
Articulación n.º 4
1655931
Ancho de 6 mm
243 mm
8.3
Articulación n.º 5
1655932
330 mm
9.3
Articulación n.º 6
1655933
339 mm
10.3
Plantilla de tensión de la correa
1674582
Herramienta de montaje
5, 6, 7, 8, 9, 10
Unidad de la batería
2172925
(2 baterías de litio
para reemplazo)
11.1
Placa de baterías
2173216
11.2
** Revisión
Como instrucción aproximada, realice la revisión (reemplazo de piezas) antes de alcanzar las 20.000 horas de
operación del manipulador. Las horas de operación se pueden revisar en el diálogo [Controller Status Viewer]
(Visor de estado del controlador) -[Motor On Hours] (Horas de funcionamiento del motor).
Para conocer detalles, consulte Mantenimiento 2.2 Revisión.

Mantenimiento
C8 Mod.13 329
* Unidad de engranaje reductor: Una unidad de engranaje reductor consta de las siguientes tres piezas. Cuando
reemplace la unidad de engranaje reductor, asegúrese de reemplazar todas estas piezas
juntas, como un conjunto.
Generador de forma de onda
Este generador de forma de onda consta de una leva
elipsoidal y cojinetes de bolas en su circunferencia
externa.
El círculo interno de los cojinetes está fijo en la
leva, mientras que el círculo externo es capaz de
deformarse flexiblemente mediante los cojinetes de
bolas.
Brida circular
Lámina flexible
Generador de forma de onda
Lámina flexible
Un cuerpo metálico delgado, elástico y con forma
de sombrero con dientes de engranaje en la
circunferencia externa de la abertura.
Brida circular
Un cuerpo rígido y circular con dientes de engranaje
en la circunferencia interior.
La brida circular tiene dos dientes más que la lámina
flexible.
Las bridas están engrasadas. Asegúrese de evitar mancharse la ropa con grasa.
Nombre
Código
Nota
Referencia en
Mantenimiento
Grasa **
Articulaciones n.º 1, n.º 2, n.º
3, n.º 4 y n.º 5
: SK-1A
-
Para comprar grasa,
empaquetadura líquida y
adhesivo, comuníquese con
el proveedor de su región.
2.3,
5.1.2, 5.2.2,
7.2, 8.2, 9.2
Articulación n.º 6, engranaje
cónico
: SK-2
-
2.3, 10.2
Cable
: GPL-224
-
4
Empaquetadura
líquida**
Para el modelo de protección
: 1207B
-
3
Adhesivo
LOCTITE641
-
8.2, 9.2
Juego de engrase
1674592
Un juego de pistola de engrase,
engrasador y herramienta de
extensión
2.3
Tapón de grasa
1656158
2.3
** Con respecto a la compra de grasa, empaquetadura líquida y adhesivo:
Debido a los reglamentos sobre productos químicos de cada país (GHS de la ONU), pedimos que nuestros
clientes compren la grasa y otros materiales necesarios para el mantenimiento a los fabricantes que se indican
en la siguiente tabla, con fecha de abril de 2015.
Con respecto a la compra de la grasa y otros materiales, comuníquese con los siguientes fabricantes. Si tiene
alguna duda, comuníquese con el proveedor de su región.
Nombre del producto
Fabricante
URL
Grasa Harmonic SK-1A
Grasa Harmonic SK-2
Harmonic Drive Systems
Inc.
http://www.harmonicdrive.net/
Krytox®GPL-224
DuPont
http://www2.dupont.com/Our_Company/en_US/wor
ldwide/us_country.html
1207B
ThreeBond Co.,Ltd
http://www.threebond.com
LOCTITE641
LOCTITE
http://loctite.com/

Mantenimiento
330 C8 Mod.13
Nombre
Código
Nota
Referencia en
Mantenimiento
Placa de control 1, 2
Brazos n.º 1, n.º 3
2138032
12
Junta tórica
Articulación
n.º 2
C8, C8L
1263978
Lado del brazo n.º 1
6.2
1656161
Lado del brazo n.º 2
C8XL
1670635
Lado del brazo n.º 1
1656140
Lado del brazo n.º 2
Articulación n.º 3
1263977
Lado del brazo n.º 2
7.2
1510528
Lado del brazo n.º 3
Articulación n.º 4
1263976
Lado del brazo n.º 3
8.2
1520370
Lado del brazo n.º 4
Entrada de grasa
1657289
Base, brazo n.º 5.
2.3, 11
Luz LED
1668127
Modelo estándar o sala blanca
13
Cable M/C
3 m
Recto
R12NZ900S1
14
En forma de L
R12NZ900S5
5 m
Recto
R12NZ900S2
En forma de L
R12NZ900S6
10 m
Recto
R12NZ900S3
En forma de L
R12NZ900S7
15 m
Recto
R12NZ900YC
En forma de L
R12NZ900YB
20 m
Recto
R12NZ900S4
En forma de L
R12NZ900S8
Cable M/C
(flexible)
3 m
Recto
R12NZ900S9
En forma de L
R12NZ900SD
5 m
Recto
R12NZ900SA
En forma de L
R12NZ900SE
10 m
Recto
R12NZ900SB
En forma de L
R12NZ900SF
15 m
Recto
R12NZ900YE
En forma de L
R12NZ900YD
20 m
Recto
R12NZ900SC
En forma de L
R12NZ900SG
Unidad de cable
C8
2172929
Modelo estándar o sala blanca
4
2172932
Modelo de protección
C8L
2172930
Modelo estándar o sala blanca
2172933
Modelo de protección
C8XL
2172931
Modelo estándar o sala blanca
2172934
Modelo de protección
Amarracables
AB100
1675753
1 bolsa (100 piezas: blancas)
4
AB150
1675754
1 bolsa (100 piezas: blancas)
AB350
1697428
1 bolsa (50 piezas: blancas)
5.1, 5.2
Hoja de fieltro
Para el brazo n.º 3
1673981
Cuadrada
8
Para la cubierta de
mantenimiento del brazo
n.º 3
1673980
Cuadrada
8
Para la articulación n.º 4
1673979
Redonda
8
Para la articulación n.º 5
1673978
Redonda
9
Ventilador (solo C8XL)
2177465
Modelo estándar o sala blanca
15
2178399
Modelo de protección
Hoja de radiación
de calor
Para el bloque de radiación
de calor
1694609
5.1, 5.2
Para el motor
1655043
Común para las articulaciones
n.º 1, n.º 2
5.1, 5.2, 6.2

Mantenimiento
C8 Mod.13 331
Nombre
Código
Nota
Referencia en
Mantenimiento
Cubierta
Brazo n.º 1
Cubierta central
1675435
Cubierta de metal
Común en los modelos
estándar o de sala blanca
3
Cubierta lateral
1674537
Modelo estándar
Cubierta de plástico
3
Brazo n.º 2
Cubierta lateral (izquierda)
1655114
Cubierta lateral (derecha)
1674542
Brazo n.º 3
Cubierta
1674543
Brazo n.º 4
Cubierta lateral
1674547
Brazo n.º 1
Cubierta lateral
1674548
Modelo para salas blancas
Cubierta revestida
3
Brazo n.º 2
Cubierta lateral (izquierda)
1655127
Cubierta lateral (derecha)
1674550
Brazo n.º 3
Cubierta
1674551
Brazo n.º 4
Cubierta lateral
1674553
Empaquetad
ura
Brazo n.º 1
Empaquetadura central
1665238
Modelo de protección
3
Empaquetadura lateral
1665240
Brazo n.º 2
Empaquetadura lateral
1665241
Brazo n.º 3
Empaquetadura de la cubierta
1665242
Empaquetadura de
mantenimiento
1665254
Brazo n.º 4
Empaquetadura lateral
1665243
Empaquetadura de
mantenimiento
1665257
Empaquetadura del accesorio
D-sub
1665255
Base
Empaquetadura posterior
1665244
Empaquetadura inferior
1665247
Empaquetadura de
mantenimiento
1665248
Empaquetadura de la subplaca
1665246
Empaquetadura de instalación
1668377
Empaquetadura para el
receptor de calor
1694610
Modelo para salas blancas
Modelo de protección
3
Arandela de sellado
M4 (para la subplaca)
1665882
Modelo de protección
3
Tapón de aire
Para M6
1657011
4

Mantenimiento
332 C8 Mod.13
18. Lista de piezas opcionales
Nombre
Código
Nota
Referencia
Configuración
y operación
Unidad de desbloqueo del freno
(con cable y conector M/C corto)
R12NZ900N4
Para Europa (200 V)
6.1
R12NZ900N5
Para EE. UU. y Japón
(100 V)
Conector M/C corto
R12NZ900N7
Para la unidad de
desbloqueo del freno
Unidad de placa de la cámara
R12B031922
Común para C3 y C4
(R12NZ9003F)
6.2
Adaptador de herramientas (brida ISO)
R12NZ900LQ
6.3
Tope mecánico ajustable
J1
R12NZ900LR
6.4
C8/C8L_J2
R12NZ900N6
C8XL_J2
R12NZ900LT
J3
R12NZ900LU
Conectores rápidos para uso del
cliente
ø6 recto
R12NZ900LV
6.5
ø6 de codo
R12NZ900LW
Juego de conectores de usuario
estándar
D-sub
R12NZ900LX
Juego de conectores de usuario
impermeables
D-sub
R12NZ900LY
Ethernet
R12NZ900LZ
-
 1
1
-
 2
2
-
 3
3
-
 4
4
-
 5
5
-
 6
6
-
 7
7
-
 8
8
-
 9
9
-
 10
10
-
 11
11
-
 12
12
-
 13
13
-
 14
14
-
 15
15
-
 16
16
-
 17
17
-
 18
18
-
 19
19
-
 20
20
-
 21
21
-
 22
22
-
 23
23
-
 24
24
-
 25
25
-
 26
26
-
 27
27
-
 28
28
-
 29
29
-
 30
30
-
 31
31
-
 32
32
-
 33
33
-
 34
34
-
 35
35
-
 36
36
-
 37
37
-
 38
38
-
 39
39
-
 40
40
-
 41
41
-
 42
42
-
 43
43
-
 44
44
-
 45
45
-
 46
46
-
 47
47
-
 48
48
-
 49
49
-
 50
50
-
 51
51
-
 52
52
-
 53
53
-
 54
54
-
 55
55
-
 56
56
-
 57
57
-
 58
58
-
 59
59
-
 60
60
-
 61
61
-
 62
62
-
 63
63
-
 64
64
-
 65
65
-
 66
66
-
 67
67
-
 68
68
-
 69
69
-
 70
70
-
 71
71
-
 72
72
-
 73
73
-
 74
74
-
 75
75
-
 76
76
-
 77
77
-
 78
78
-
 79
79
-
 80
80
-
 81
81
-
 82
82
-
 83
83
-
 84
84
-
 85
85
-
 86
86
-
 87
87
-
 88
88
-
 89
89
-
 90
90
-
 91
91
-
 92
92
-
 93
93
-
 94
94
-
 95
95
-
 96
96
-
 97
97
-
 98
98
-
 99
99
-
 100
100
-
 101
101
-
 102
102
-
 103
103
-
 104
104
-
 105
105
-
 106
106
-
 107
107
-
 108
108
-
 109
109
-
 110
110
-
 111
111
-
 112
112
-
 113
113
-
 114
114
-
 115
115
-
 116
116
-
 117
117
-
 118
118
-
 119
119
-
 120
120
-
 121
121
-
 122
122
-
 123
123
-
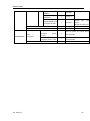 124
124
-
 125
125
-
 126
126
-
 127
127
-
 128
128
-
 129
129
-
 130
130
-
 131
131
-
 132
132
-
 133
133
-
 134
134
-
 135
135
-
 136
136
-
 137
137
-
 138
138
-
 139
139
-
 140
140
-
 141
141
-
 142
142
-
 143
143
-
 144
144
-
 145
145
-
 146
146
-
 147
147
-
 148
148
-
 149
149
-
 150
150
-
 151
151
-
 152
152
-
 153
153
-
 154
154
-
 155
155
-
 156
156
-
 157
157
-
 158
158
-
 159
159
-
 160
160
-
 161
161
-
 162
162
-
 163
163
-
 164
164
-
 165
165
-
 166
166
-
 167
167
-
 168
168
-
 169
169
-
 170
170
-
 171
171
-
 172
172
-
 173
173
-
 174
174
-
 175
175
-
 176
176
-
 177
177
-
 178
178
-
 179
179
-
 180
180
-
 181
181
-
 182
182
-
 183
183
-
 184
184
-
 185
185
-
 186
186
-
 187
187
-
 188
188
-
 189
189
-
 190
190
-
 191
191
-
 192
192
-
 193
193
-
 194
194
-
 195
195
-
 196
196
-
 197
197
-
 198
198
-
 199
199
-
 200
200
-
 201
201
-
 202
202
-
 203
203
-
 204
204
-
 205
205
-
 206
206
-
 207
207
-
 208
208
-
 209
209
-
 210
210
-
 211
211
-
 212
212
-
 213
213
-
 214
214
-
 215
215
-
 216
216
-
 217
217
-
 218
218
-
 219
219
-
 220
220
-
 221
221
-
 222
222
-
 223
223
-
 224
224
-
 225
225
-
 226
226
-
 227
227
-
 228
228
-
 229
229
-
 230
230
-
 231
231
-
 232
232
-
 233
233
-
 234
234
-
 235
235
-
 236
236
-
 237
237
-
 238
238
-
 239
239
-
 240
240
-
 241
241
-
 242
242
-
 243
243
-
 244
244
-
 245
245
-
 246
246
-
 247
247
-
 248
248
-
 249
249
-
 250
250
-
 251
251
-
 252
252
-
 253
253
-
 254
254
-
 255
255
-
 256
256
-
 257
257
-
 258
258
-
 259
259
-
 260
260
-
 261
261
-
 262
262
-
 263
263
-
 264
264
-
 265
265
-
 266
266
-
 267
267
-
 268
268
-
 269
269
-
 270
270
-
 271
271
-
 272
272
-
 273
273
-
 274
274
-
 275
275
-
 276
276
-
 277
277
-
 278
278
-
 279
279
-
 280
280
-
 281
281
-
 282
282
-
 283
283
-
 284
284
-
 285
285
-
 286
286
-
 287
287
-
 288
288
-
 289
289
-
 290
290
-
 291
291
-
 292
292
-
 293
293
-
 294
294
-
 295
295
-
 296
296
-
 297
297
-
 298
298
-
 299
299
-
 300
300
-
 301
301
-
 302
302
-
 303
303
-
 304
304
-
 305
305
-
 306
306
-
 307
307
-
 308
308
-
 309
309
-
 310
310
-
 311
311
-
 312
312
-
 313
313
-
 314
314
-
 315
315
-
 316
316
-
 317
317
-
 318
318
-
 319
319
-
 320
320
-
 321
321
-
 322
322
-
 323
323
-
 324
324
-
 325
325
-
 326
326
-
 327
327
-
 328
328
-
 329
329
-
 330
330
-
 331
331
-
 332
332
-
 333
333
-
 334
334
-
 335
335
-
 336
336
-
 337
337
-
 338
338
-
 339
339
-
 340
340
-
 341
341
-
 342
342
-
 343
343
-
 344
344
-
 345
345
-
 346
346
-
 347
347
-
 348
348
-
 349
349
-
 350
350
-
 351
351































































































































































































































































































































































Epson C8XL Mid Sized 6-Axis Robots Manual de usuario
- Tipo
- Manual de usuario
- Este manual también es adecuado para
Artículos relacionados
-
Epson C12XL 6-Axis Robots Manual de usuario
-
Epson C4 Compact 6-Axis Robots Manual de usuario
-
Epson T6 SCARA Robots Guía de instalación
-
Epson LS10-B SCARA Robot Manual de usuario
-
Epson LS20-B SCARA Robot Manual de usuario
-
Epson LS6-B SCARA Robot Manual de usuario
-
Epson VT6L All-in-One 6-Axis Robot Manual de usuario
-
-
-
Epson RS4 SCARA Robots Manual de usuario