
AUTOPILOT
NAVpilot-700/711/720
Manual de instalación
CONFIGURACIÓN DEL SISTEMA......... ii
LISTAS DE EQUIPOS ........................... iii
1. INSTALACIÓN DE LAS UNIDADES1-1
1.1 Unidad de control FAP-7001/FAP-7011
........................................................... 1-1
1.1.1 Montaje en superficie............... 1-2
1.1.2 Montaje encima de una mesa.. 1-4
1.2 Unidad procesadora FAP-7002.......... 1-5
1.3 Unidad de referencia del timón FAP-6112
........................................................... 1-7
1.4 Controladores remotos (opcionales) .. 1-8
1.5 Unidad de distribución FAP-6800
(opcional)......................................... 1-11
1.6 Unidad de control FAP-7021............ 1-12
1.7 Kit alargador de cable FAP-7822
(opcional)......................................... 1-12
2. CABLEADO ..................................... 2-1
2.1 Cableado general............................... 2-1
2.2 Unidad procesadora........................... 2-2
2.2.1 Conexiones dentro de la unidad
procesadora ............................ 2-2
2.2.2 Cómo fijar los cables a las
abrazadera............................... 2-3
2.2.3 Cómo instalar los cables en los
bloques de conectores ............. 2-4
2.2.4 Cables de alimentación y motor2-5
2.2.5 Sensor lineal Teleflex............... 2-7
2.2.6 Alimentación del bus CAN ....... 2-7
2.2.7 Conexión a TB4 ....................... 2-7
2.3 Unidad de control............................... 2-8
2.4 Controladores remotos (opcionales) .. 2-9
2.4.1 Conexiones de ejemplo de
controladores remotos ............. 2-9
2.4.2 Conexiones prohibidas de
controladores remotos ........... 2-10
2.5 Sentencias de entrada/salida........... 2-12
3. CONFIGURACIÓN INICIAL..............3-1
3.1 Acerca de la configuración inicial,
funcionamiento de los menús............ 3-1
3.2 Cómo abrir el asistente de configuración
........................................................... 3-1
3.3 Config unidad ..................................... 3-3
3.4 Características del barco.................... 3-4
3.5 Alineación del sensor (URT) .............. 3-5
3.6 Configuración de los límites del timón 3-6
3.7 Purgado.............................................. 3-7
3.8 Configuración en puerto (prueba y banda
muerta del timón)............................... 3-8
3.9 Configuración del puerto de bus CAN
......................................................... 3-10
3.10 Configuración del puerto NMEA01833-11
3.11 Configuración del puerto universal... 3-13
3.12 Configuración del sensor.................. 3-15
3.13 Prueba de mar.................................. 3-16
3.14 Calibración de datos......................... 3-18
3.15 Menú CONFIG PARÁMETROS ....... 3-19
3.16 Menú OPCIÓN AUTO ...................... 3-24
3.17 Menú OPCIÓN NAV......................... 3-25
3.18 Menú OPCIÓN DE PESCA u OPCIÓN
VIEN ................................................ 3-27
3.18.1Menú OPCIÓN DE PESCA.... 3-27
3.18.2Menú OPCIÓN VIENTO......... 3-28
3.19 Menú CONFIGUR SISTEMA ........... 3-29
3.20 Menú CONFIGURACIÓN CR
(controlador remoto) ......................... 3-30
PACKING LISTS..................................A-1
OUTLINE DRAWINGS.........................D-1
INTERCONNECTION DIAGRAM ........ S-1
MOUNTING TEMPLATES
www.furuno.co.jp
Todas las marcas y nombres de productos son marcas comerciales, marcas registradas o marcas de servicios que
pertenecen a sus respectivos propietarios.

Pub. No. IES-72720-B1
DATE OF ISSUE: DEC. 2010

i
INSTRUCCIONES DE SEGURIDAD
Indica una situación que, si no se evita, puede causar
lesiones graves o incluso la muerte.
Indica una situación que, si no se evita, puede causar lesiones
leves o moderadas.
Lea estas instrucciones de seguridad antes de instalar el equipo.
ADVERTENCIA
PRECAUCIÓN
Advertencia, precauciónAcción prohibida
Acción obligatoria
ADVERTENCIA
ADVERTENCIA
PRECAUCIÓN
PRECAUCIÓN
Desconecte la alimentación del cuadro
eléctrico principal antes de comenzar
con la instalación.
Si la alimentación permanece conectada,
pueden producirse descargas eléctricas
o incendios.
Utilice el cable de alimentación
adecuado.
Utilice un cable JIS de tipo DPY-2.5 o
equivalente. Los demás tipos pueden
provocar incendios.
Asegúrese de ninguna persona esté
cerca del timón al purgar el aire del
cilindro de aceite.
El timón puede moverse
inesperadamente, lo que podría causar
daños corporales.
Al conectar un sensor de rumbo de
detección geomagnetica, corrija la
desviación del campo magnético.
Si se utiliza un sistema de piloto
automático sin compensación, se puede
producir un cambio de rumbo inesperado.
Ajuste adecuadamente CONTROL
REMOTO 1/2 en el menú CONFIGUR
SISTEMA en función del controlador
remoto conectado.
Si no se realiza correctamente, podrían
producirse averías. Tenga cuidado,
sobre todo, al configurar un controlador
remoto de tipo SSG.
Asegúrese de que la tensión de la
fuente de alimentación sea compatible
con la tensión nominal del equipo.
Si se conectase una fuente de alimentación
incorrecta, se podrían provocar incendios o
daños materiales en el equipo.
Deje las siguientes distancias de
seguridad para evitar interferencias con
el compás magnético:
Separe la bomba reversible, al menos, a un
metro de distancia del equipo, la antena y el
cable de comunicaciones para evitar
interferencias.
Compás
magistral
Compás de
gobierno
Unidad
de
control
FAP-7001
FAP-7011
FAP-7021
0,35 m 0,30 m
0,35 m
0,30 m
0,35 m 0,30 m
Unidad procesadora
FAP-7002
Controladores
remotos
0,45 m 0,30 m
0,30 m 0,30 m

ii
CONFIGURACIÓN DEL SISTEMA
CONTROLADOR REMOTO
CONTROLADOR REMOTO
CONTROLADOR REMOTO
UNIDAD DE
CONTROL
FAP-7001
UNIDAD DE
CONTROL
FAP-7011
UNIDAD DE CONTROL
FAP-7021
CAJA DE
CONEXIONES
FAP-7822
CTDAD. DE UNIDADES DE CONTROL
FAP-7001/7011: MÁX. 6*
FAP-7021: MÁX. 2
Seleccione una.
SISTEMA DE
GOBIERNO
DEL BUQUE
ENTRADA DE SEÑAL
DE CONTACTO
SALIDA DE SEÑAL DE
CONTACTO
PC (para técnico de
mantenimiento)
SENSOR DE RUMBO
PG-700
ZUMBADOR
EXTERNO
INTERRUPTOR DE
EVENTOS
EQUIPO DE
NAVEGACIÓN
(NMEA 0183)
EQUIPO DE
NAVEGACIÓN
(NMEA 0183)
EQUIPO DE BUS CAN
(NMEA 2000)
UNIDAD
PROCESADORA
FAP-7002
VÁLVULA DE
SOLENOIDE
SERVO LINEAL HIDRÁULICO
UNIDAD DE REFERENCIA
DEL TIMÓN FAP-6112
CONTROLADOR REMOTO
UNIDAD DE
DISTRIBUCIÓN
FAP-6800
CONTROLADOR REMOTO:
TIPO DIAL: FAP-5551, FAP-5552
TIPO BOTÓN: FAP-6211, FAP-6212
TIPO PALANCA: FAP-6221, FAP-6222
TIPO PARA EVITAR OBSTÁCULOS:
FAP-6231, FAP-6232
: ESTÁNDAR
: OPCIONAL
: PROVISTO POR EL
USUARIO
12-24 V CC
*: SE DISPONE DE CUALQUIER
COMBINACIÓN DE FAP-7001 Y
7011. TAMBIÉN SE PUEDE
CONECTAR UN FAP-7021 AL
FINAL DE LA SERIE.

iii
LISTAS DE EQUIPOS
Suministro estándar para NAVpilot-700
Suministro estándar para NAVpilot-711
Nombre Tipo Código Cantidad Observaciones
Unidad de control FAP-7001 - 1
Unidad procesadora FAP-7002 - 1
Unidad de referencia
del timón
FAP-6112-200 - 1 Cable de 20 m incluido
Materiales de insta-
lación
CP64-02900 000-016-414 1 juego Para la unidad de control, con
conjunto de cables BD-
07AFFM-LR-150 y CP64-
02901
CP64-03101 001-082-720 1 juego Para la unidad procesadora
CP64-02601 009-001-170 1 juego Para la unidad de referencia
del timón
Piezas de repuesto SP64-01501 001-082-710 1 juego Para la unidad procesadora,
fusibles
Accesorios FP64-01401 001-082-700 1 juego Para la unidad de control
Nombre Tipo Código Cantidad Observaciones
Unidad de control FAP-7011 - 1
Unidad procesadora FAP-7002 - 1
Unidad de referencia
del timón
FAP-6112-200 - 1 Cable de 20 m incluido
Materiales de insta-
lación
CP64-03000 000-016-415 1 juego Para la unidad de control, con
conjunto de cables BD-
07AFFM-LR-150 y CP64-
03001
CP64-03101 001-082-720 1 juego Para la unidad procesadora
CP64-02601 009-001-170 1 juego Para la unidad de referencia
del timón
Piezas de repuesto SP64-01501 001-082-710 1 juego Para la unidad procesadora,
fusibles
Accesorios FP64-01401 001-082-700 1 juego Para la unidad de control

LISTAS DE EQUIPOS
iv
Suministro estándar para NAVpilot-720
Suministro opcional
Nombre Tipo Código Cantidad Observaciones
Unidad de control FAP-7021 - 1
Unidad procesadora FAP-7002 - 1
Unidad de referencia
del timón
FAP-6112-200 - 1 Cable de 20 m incluido
Materiales de insta-
lación
CP64-03101 001-082-720 1 juego Para la unidad procesadora
CP64-02601 009-001-170 1 juego Para la unidad de referencia
del timón
Piezas de repuesto SP64-01501 001-082-710 1 juego Para la unidad procesadora,
fusibles
Accesorios FP64-01401 001-082-770 1 juego Para la unidad de control
Nombre Tipo Código Observaciones
Unidad de control FAP-7001 - Máx. 5 unidades opcionales
FAR-7011 - Máx. 5 unidades opcionales
FAP-7021 - Máx. 2 unidades opcionales
Controlador remoto FAP-5551-E 000-090-224 Tipo dial, con conector
FAP-5552-E 000-090-269 Tipo dial, sin conector
FAP-6211-E 000-090-235 Tipo botón, con conector
FAP-6212-E 000-090-271 Tipo botón, sin conector
FAP-6221-E 000-090-239 Tipo palanca, con conector y
CP64-01100
FAP-6222-E 000-090-273 Tipo palanca, sin conector y
con CP64-01100
FAP-6231-E 000-090-251 Tipo para evitar obstáculos,
con conector
FAP-6232-E 000-090-279 Tipo para evitar obstáculos, sin
conector
Unidad de dis-
tribución
FAP-6800 000-090-242 Para la conexión de tres con-
troladores remotos
Terminal BD-07AFFM-LR7001 001-081-140-10

LISTAS DE EQUIPOS
v
Conjunto de cable MJ-A10SPF0001-
060+
001-081-150-10 Para la unidad de distribución,
6 m
MJ-A10SPF0001-
120+
001-081-160-10 Para la unidad de distribución,
12 m
BD-07AFFM-LR-100 001-081-170-10 Para la unidad de control, 10
m, conector en un extremo
BD-07AFFM-LR-150 001-081-180-10 Para la unidad de control, 15
m, conector en un extremo
BD-07AFFM-LR-200 001-081-190-10 Para la unidad de control, 20
m, conector en un extremo
BD-07AF-07AF-LR-
100
001-081-200-10 Para la unidad de control, 10
m, conector en los dos extrem-
os
BD-07AF-07AF-LR-
200
001-081-210-10 Para la unidad de control, 20
m, conector en los dos extre-
mos
M12-05BFFM-010 000-167-965-10 Cable de caída de bus CAN, 1
m, estilo micro
M12-05BFFM-020 000-167-966-10 Cable de caída de bus CAN, 2
m, estilo micro
M12-05BFFM-060 000-167-967-10 Cable de caída de bus CAN, 6
m, estilo micro
CB-05BFFM-010 000-167-971-10 Cable de caída de bus CAN, 1
m, estilo mini
CB-05BFFM-020 000-167-972-10 Cable de caída de bus CAN, 2
m, estilo mini
CB-05BFFM-060 000-167-973-10 Cable de caída de bus CAN, 6
m, estilo mini
Conector tipo T SS-050505-FMF-
TS001
000-168-603-10 Para bus CAN, estilo mi-
cro+micro
NC-050505-FMF-
TS001
000-160-507-10 Para bus CAN, estilo mini+mi-
cro
Resistencia de termi-
nación
LTWMC-05BMMT-
SL8001
000-168-604-10 Para bus CAN, estilo micro,
macho
LTWMN-05AMMT-
SL8001
000-160-508-10 Para bus CAN, estilo mini, ma-
cho
LTWMC-05BFFT-
SL8001
000-168-605-10 Para bus CAN, estilo micro,
hembra
LTWMN-05AFFT-
SL8001
000-160-509-10 Para bus CAN, estilo mini,
hembra
Kit alargador de ca-
ble
FAP-7822 000-016-670
Base FP64-01411 001-082-770
Nombre Tipo Código Observaciones

LISTAS DE EQUIPOS
vi
Kit de montaje empo-
trado
FAP-7001-FLUSH-KIT 001-082-730 Para FAP-7001
FAP-7011-FLUSH-KIT 001-082-740 Para FAP-7011
Base FAP-7001-HANGER 001-082-750 Para FAP-7001, con base y
dos pernos con pomo
FAP-7011-HANGER 001-082-760 Para FAP-7011, con base y
dos pernos con pomo
Unidad de referencia
del timón
FAP-6112-200 - Cable de 20 m incluido
Caja de cone-xiones FI-5002 000-010-765 con tornillos autorroscantes
Base OP64-2 009-004-030 Para FAP-5551/5552
Kit de montaje empo-
trado
OP64-4 009-005-790 Para FAP-6221/6222, tipo
panel
OP64-5 009-005-800 Para FAP-6221/6222, tipo su-
perficie
Nombre Tipo Código Observaciones

1-1
1. INSTALACIÓN DE LAS UNIDADES
1.1 Unidad de control FAP-7001/FAP-7011
La unidad de control se puede instalar de tres maneras:
• Montaje en superficie (fijación desde el panel frontal o posterior, sólo FAP-7011),
• Montaje encima de una mesa
• Montaje empotrado (kit opcional necesario, instrucciones proporcionadas por sepa-
rado).
Al elegir una ubicación de montaje para la unidad de control, tenga en cuenta lo si-
guiente:
• Seleccione una ubicación con una buena ventilación.
• Las sacudidas y vibraciones deben ser mínimas.
• Utilice la cubierta dura de la pantalla cuando no se esté utilizando el sistema.
• No instale la unidad de presentación debajo de plexiglás u otro tipo de material de
aislamiento. El plexiglás puede capturar el calor y la humedad o aumentar el im-
pacto de la luz del sol en la superficie de la pantalla.
• Deje una reserva de longitud en los cables, así como espacio para mantenimiento
y comprobación, tanto en los lados como en la parte posterior de la unidad. Con-
sulte el esquema correspondiente para ver el espacio recomendado para tareas de
mantenimiento.
• Respete las distancias de seguridad respecto a compases indicadas en la página i
de las instrucciones de seguridad para evitar interferencias con un compás magné-
tico.
Unidad de control FAP-7001 Unidad de control FAP-7011

1. INSTALACIÓN DE LAS UNIDADES
1-2
1.1.1 Montaje en superficie
Hay dos tipos de montaje en superficie: fijación desde el panel frontal y desde el panel
posterior (sólo en FAP-7011).
Cómo fijar la unidad de control desde el panel frontal (FAP-7001/FAP-7011)
1. Utilizando la plantilla de montaje en superficie que aparece al final de este ma-
nual, abra un orificio de montaje en el lugar de la instalación.
2. Retire el panel frontal junto con el conjunto del teclado. Conecte la esponja (su-
ministrada) a la parte trasera de la unidad de presentación.
3. Ajuste la unidad de control en el orificio de montaje y fíjela con cuatro tornillos au-
torroscantes (3×20, suministrados).
4. Fije el panel frontal y el conjunto del teclado a la unidad de control.
Panel frontal
Conjunto del teclado
Orificio de
montaje
Orificio de
montaje
Esponja
Unidad de
control FAP-7001
Tornillo autorroscante
(3x20, 4 uds.)
Cómo retirar el panel frontal
El procedimiento es similar para
FAP-7001.
Tornillo autorroscante
(3x20, 4 uds.)
Orificio de
montaje
Orificio de
montaje
Panel frontal
Esponja
Conjunto del teclado
Unidad de
control
FAP-7011
1. Coloque el extractor en una
muesca en la parte superior
de la unidad.
2. Tire del extractor para
elevar el panel ligeramente.
3. Del mismo modo, utilice el
extractor para elevar el
panel en la parte inferior.
4. Retire manualmente el
panel.
Extractor

1. INSTALACIÓN DE LAS UNIDADES
1-3
Cómo fijar la unidad de control desde el panel posterior (FAP-7001/FAP-7011)
1. Utilizando la plantilla de montaje en superficie que aparece al final de este ma-
nual, abra un orificio de montaje en el lugar de la instalación.
2. Ajuste las varillas roscadas (M3x40, 2 unidades, suministradas) en los orificios
marcados en la ilustración mostrada a continuación. (Utilice únicamente las vari-
llas roscadas suministradas).
3. Ajuste la unidad en el orificio de montaje. Fije la unidad con arandelas planas,
arandelas de resorte y tuercas de mariposa (suministradas).
Insertar la varilla
roscada aquí.
Varilla roscada (M3x40)
Orificio de
montaje
Orificio de
montaje
Tuerca de mariposa (M3)
Arandela elástica
Arandela plana

1. INSTALACIÓN DE LAS UNIDADES
1-4
1.1.2 Montaje encima de una mesa
Utilice el kit de instalación de la base opcional para instalar la unidad de control en
una mesa o en el techo.
Kit de instalación de la base para FAP-7001
Tipo: FAP-7001-HANGER, código: 001-082-750
Kit de instalación de la base para FAP-7011
Tipo: FAP-7011-HANGER, código: 001-082-760
Procedimiento
En el procedimiento mostrado a continuación se indica cómo instalar la unidad FAP-
7001. El procedimiento del modelo FAP-7011 es similar.
1. Fije la base en la ubicación de montaje con cuatro tornillos autorroscantes (sumi-
nistrados de forma opcional).
2. Retire el panel frontal y el conjunto del teclado mediante las instrucciones propor-
cionadas.
3. Fije la placa de conexión a la parte posterior de la unidad de control con cuatro
tornillos de cabeza plana (suministrados).
4. Enrosque los pernos con pomo en la placa de conexión, coloque la unidad en la
base y apriete los pernos.
5. Fije el panel frontal y el conjunto del teclado.
6. Acople la cubierta dura para proteger el LCD.
Nombre Tipo Código Cantidad
Base 64-028-1201-1 100-352-221-10 1
Placa de conexión 64-028-1201-1 100-356-381-10 1
Perno 64-028-1203-0 100-352-240-10 2
Tornillo autorroscante 4x16 000-162-605-10 4
Tornillo de cabeza plana M3x12 000-163-809-10 4
Cuña 64-026-1033 100-321-340-10 2
Nombre Tipo Código Cantidad
Base 64-028-3201-1 100-352-281-10 1
Placa de conexión 64-028-3202-1 100-356-451-10 1
Perno 64-028-1203-0 100-352-240-10 2
Tornillo autorroscante 4x16 000-162-605-10 4
Tornillo de cabeza plana M3x12 000-163-809-10 4
Cuña 64-026-1033 100-321-340-10 2

1. INSTALACIÓN DE LAS UNIDADES
1-5
1.2 Unidad procesadora FAP-7002
La unidad se puede instalar en un mamparo o sobre una mesa. Al elegir una ubica-
ción de montaje, tenga en cuenta lo siguiente:
• Instale la unidad en una ubicación alejada de la luz directa del sol y de las salpica-
duras de agua.
• Seleccione una ubicación en la que la temperatura y la humedad sean moderadas
y estables.
• Tenga en cuenta la longitud del cable conectado entre la unidad procesadora y las
demás unidades.
• Instale la unidad en una ubicación que permite retirar fácilmente la cubierta y acce-
der a los controles y los conectores.
• Si realiza la instalación sobre mamparo, asegúrese de que la ubicación de montaje
sea lo bastante sólida como para soportar la unidad, con el cabeceo y el balance
que normalmente se producen a bordo de la embarcación.
• Para evitar interferencias, separe la unidad procesadora y sus cables, al menos, a
un metro de distancia del equipo, las antenas y los cables de comunicaciones.
Placa de conexión
Tornillo de cabeza plana
(M3x12, suministrado)
Tornillos autorroscantes
(4x16, suministrados)
Base
Cuña
Perno

1. INSTALACIÓN DE LAS UNIDADES
1-6
• Asegúrese de que ningún objeto bloquee la ventilación.
• Deje espacio suficiente alrededor de la unidad para las reparaciones y el manteni-
miento. El espacio de mantenimiento recomendado aparece en el esquema al final
de este manual.
• Respete las distancias de seguridad respecto a compases indicadas en la página i
de las instrucciones de seguridad para evitar interferencias con un compás magné-
tico.
Instale la unidad como se indica a continuación:
Montaje en mesa: Fije con cuatro tornillos autorroscantes.
En un mamparo: Coloque los dos tornillos autorroscantes de la parte superior. Deje
a la vista aproximadamente 5 mm de los tornillos. Cuelgue la unidad en los tornillos y
apriételos. Coloque los dos tornillos autorroscantes de la parte inferior y apriételos.
259(10,2")
90(3,54")
#85(3,34")
144±1(56,7"±0,03")
219(8,62")
#70(2,75")
255(10,0")
230±1(9,06"±0,03")
2-
φ
5
(0,2")
44
(1,73")
12(0,47")
R6(0,24")
#70(2,75")
(ORIFICIO DE
SUJECIÓN)
TERMINAL A
TIERRA
VENTILACIÓN
ENTRADA DEL
CABLE
A
DETALLE DE A

1. INSTALACIÓN DE LAS UNIDADES
1-7
1.3 Unidad de referencia del timón FAP-6112
• Deje suficiente espacio alrededor de las piezas móviles.
• La unidad debe fijarse al timón, como se muestra a continuación, cuando se den
las siguientes condiciones:
350 mm (13,8") <Y2 < 540 mm (21,3")
X1 = X2
Y1 = Y2
Utilice los cuatro tornillos autorroscantes (suministrados) para fijar la unidad de refe-
rencia del timón.
Nota: El soporte de la unidad de referencia del timón debe alinearse con la marca de
flecha. Alinee la ranura del eje con la marca de flecha si se retira el soporte.
90 grados
La unidad de referencia del
timón puede instalarse en
cualquiera de los lados del
timón.
X1
X2
Y1
Y2
90
Marca de
flecha
Unidad de referen-
cia del timón
Timón
Vista superior

1. INSTALACIÓN DE LAS UNIDADES
1-8
Relación entre el caudal de la bomba reversible y la capacidad del cilindro
de dirección
En la siguiente tabla se muestran directrices aproximadas para determinar el caudal
correcto de la bomba reversible a fin de adaptarlo a la capacidad del cilindro de direc-
ción hidráulico. Es posible que su experiencia con diseños de embarcaciones espe-
cíficos le incline a seleccionar una relación de bomba/cilindro fuera del rango de estas
directrices.
Si la capacidad del cilindro hidráulico es bastante inferior a los valores recomendados
de la tabla, es posible que la velocidad de giro del timón sea demasiado rápida para
que el piloto pueda proporcionar el rendimiento adecuado. La banda muerta del timón
aumentará y es posible que NAVpilot no pueda aplicar suficiente tensión para arran-
car el motor de la bomba debido a que el "ciclo de trabajo" aplicado será demasiado
bajo.
Si la capacidad del cilindro hidráulico es bastante superior a los valores recomenda-
dos de la tabla, es posible que la velocidad de giro del timón sea demasiado lenta para
que NAVpilot pueda controlar de forma eficaz la embarcación.
1.4 Controladores remotos (opcionales)
Pueden conectarse dos controladores remotos a la unidad procesadora. Conecte los
tres controladores remotos (de botón y palanca) de tipo SSG (sin seguimiento) a la
unidad procesadora mediante la unidad de distribución FAP-6800 opcional.
Controlador remoto de tipo dial FAP-5551/FAP-5552
Fije estos controladores remotos a un mamparo. También pueden montarse en el
mamparo mediante la base opcional OP64-2 (código: 009-004-030).
FAP-5551, mamparo, montaje de la base
Especificaciones de la
bomba
70° de banda a banda 90° de banda a banda
Bomba de 1.0 pulg. cúb./s de 5,85 a 17,5 pulg. cúb. de 7,5 a 22,5 pulg. cúb.
Bomba de 1,6 pulg. cúb./s de 9,36 a 28,0 pulg. cúb. de 12,0 a 36,0 pulg. cúb.
70(2,76”)
60(2,36”)
119(4,7”)
39
(1,54”)
17.5
(0,69”)
125
(4,92”)
62
(2,44”)
33
(1,3”)
Suministrado de
forma local
Montaje sobre mamparo
Montaje en base (con base opcional OP64-2)

1. INSTALACIÓN DE LAS UNIDADES
1-9
En caso de manejo manual en la dirección contraria, invierta los bloques de interrup-
tor y dial para que pueda leerse éste último. Para ello, afloje los cuatro tornillos mos-
trados a continuación. Tenga en cuenta que los bloques de interruptor y dial se
introducen en el cuerpo del controlador mediante juntas tóricas. Tenga cuidado de no
dañarlas.
Cómo invertir los bloques de interruptor y dial
Controlador remoto de tipo botón FAP-6211/6222
Controlador remoto de tipo palanca FAP-6221/6222
Deje suficiente espacio alrededor de la unidad para el mantenimiento.
48
(1.9”)
135
(5.3”)
62
(2.44”)
Suministrado de forma local
140
(5.51”)
140
(5.51”)
115
(4.52”)
82.5-87.5
(3.24”-3.44”)
16
(0.63”)
100
(3.94”)
132
(5.2”)
100
(3.94”)
132
(5.2”)
16
(0.63”)

1. INSTALACIÓN DE LAS UNIDADES
1-10
Para montar la unidad FAP-6221/6212 en un panel, se necesita el kit de montaje em-
potrado opcional OP64-4 u OP64-5.
Kit de montaje empotrado OP64-4 (código 009-005-790)
Kit de montaje empotrado OP64-5 (código 009-005-800)
Cómo realizar el montaje empotrado de la unidad FAP-6221 con el kit OP64-4
Nombre Tipo Código Cantidad
Marco del panel OP64-4 009-006-170 1
Junta de goma 64-015-4524 100-145-111-10 1
Tuerca hexagonal M4 000-167-488-10 4
Arandela plana M4 000-167-455-10 4
Arandela elástica M4 000-167-405-10 4
Nombre Tipo Código Cantidad
Placa de fijación OP64-5 009-006-200 1
Junta de goma 64-015-4524 100-145-111-10 1
Tuerca hexagonal M4 000-167-488-10 4
Arandela elástica M4 000-167-405-10 4
Tornillo hexagonal M4x35 000-162-861-10 4
140
(5,51”)
6,5
0,26”
150
(5,9”)
137
(5,4”)
147
(5,8”)
150
(5,9”)
1,5
(0,06”)
MAX.25(0,98”)
Tuerca hexagonal
Arandela elástica
Arandela plana
Marco del panel
Junta de goma

1. INSTALACIÓN DE LAS UNIDADES
1-11
Cómo realizar el montaje empotrado de la unidad FAP-6221 con el kit OP64-5
1.5 Unidad de distribución FAP-6800 (opcional)
Utilice la unidad de distribución para conectar los tres controladores remotos sin se-
guimiento en la unidad procesadora. Fije la unidad a la ubicación de montaje con los
tornillos para madera. Para obtener soporte adicional, utilice tuercas, pernos y aran-
delas (suministrados de forma local) en lugar de tornillos para madera.
135
(5,3”)
135
(5,3”)
Tuerca hexagonal
Arandela elástica
Tornillo hexagonal
Tonillo de cabeza plana
M3x20 (suministrado
localmente)
Placa de fijación
Junta de goma
MAX.25(0,98”)
60(2.36”)
37(1.46”)
172(6.77”)
60(2.36”)
8(0.3”)
156(6.14”)
172(6.77”)

1. INSTALACIÓN DE LAS UNIDADES
1-12
1.6 Unidad de control FAP-7021
La unidad de control manual FAP-7021 puede montarse en el mamparo o sobre una
mesa mediante la base.
Al elegir una ubicación para la unidad de control, tenga en cuenta lo siguiente:
• Monte la unidad en un lugar en el que las sacudidas o vibraciones sean mínimas.
• No instale la unidad de presentación debajo de plexiglás u otro tipo de material de
aislamiento. El plexiglás puede capturar el calor y la humedad o aumentar el impac-
to de la luz del sol en la superficie de la pantalla.
• Respete las distancias de seguridad respecto a compases indicadas en la página i
de las instrucciones de seguridad para evitar interferencias con un compás magné-
tico.
Para montar la base, fije ésta a la ubicación de montaje con los cuatro tornillos auto-
rroscantes (4x20, suministrados) tomando como referencia el esquema para conocer
las dimensiones de montaje. Coloque la unidad de control en la base.
1.7 Kit alargador de cable FAP-7822 (opcional)
La unidad de control FAP-7021 incluye un cable de 10 m. Si el cable no es lo suficien-
temente largo, utilice el kit alargador de cable FAP-7822, que proporciona una exten-
sión adicional de 10 m.
Tipo: Kit alargador de cable FAP-7822 Código: 001-082-780
Ajuste la caja de fijación del conector con los cuatro tornillos autorroscantes (4x20,
suministrados). Consulte el esquema para conocer las dimensiones de montaje.
Nota 1: Con la unidad de control desconectada, fije el terminal (suministrado) a la caja
de fijación del conector.
Nota 2: Para conectar el alargador de cable a la unidad procesadora, retire el conec-
tor.
Nombre Tipo Código Cantidad
Caja de fijación del
conector
64-027-1011-2 100-327-882-10 1
Etiqueta 64-027-1012-1 100-327-891-10 1
Tornillo autorroscante 4x20 000-158-850-10 4
Cable BD-07PM-07AF-LR-100 000-172-016-10 1

2-1
2. CABLEADO
2.1 Cableado general
Todas las unidades están conectadas a la unidad procesadora. Separe los cables lo
máximo posible de los cables que transmiten radiofrecuencia o señales de impulsos.
Se recomienda dejar al menos un metro de separación.
BD-07AF-07AF-LR-100
BD-07AF-07AF-LR-100
BD-07AFFM-LR-150
Terminal BD-07AFFM-LR7001*
(suministrado)
UNIDAD PROCESADORA
FAP-7002
Alimentación
12-24 V CC
o
o
UNIDAD DE
CONTROL
FAP-7021
UNIDAD DE CONTROL
FAP-7001/7011
Válvula de solenoide
Bomba reversible
Servo lineal
hidráulico
PC
PUERTO1 NMEA (equipo de navegación)
PUERTO2 NMEA (equipo de navegación)
CANbus (FI-50, PG-700, etc.)
Controlado
r remoto o
unidad de
distribución
UNIDAD DE
REFERENCI
A DEL TIMÓN
FAP-6112
Controlado
r remoto o
unidad de
distribución
*Fije el terminal al conector vacío de la última
unidad de control de la serie.
Terminal
BD-07AFFM-LR7001*
(suministrado)
Salida de señal de contacto
Entrada de señal de contacto

2. CABLEADO
2-2
2.2 Unidad procesadora
Todos los cables están conectados a la unidad procesadora. Para conectar directa-
mente las unidades FAP-7021 y FAP-6112 a la unidad procesadora, retire el conector
en el extremo de los cables.
2.2.1 Conexiones dentro de la unidad procesadora
Las patillas están numeradas de izquierda a derecha en orden ascendente. Consulte
el recuadro de la figura siguiente para obtener información.
1 2
3 4
J104
TB13 TB8
+ -
TB13
(Controlador remoto 1 y 2)
TB8
(Unidad de control A y B)
TB11
(Equipo de bus CAN)
TB1
(Alimentación)
TB2
(Motor/solenoide)
TB10
(URT*)
TB12
(Alimentación del bus CAN)
* Unidad de
referencia del
timón
Ubicación del bloque de
puentes J104
TB7
(Equipo de navegación NMEA 0183)
TB6
(Equipo de navegación NMEA 0183)
TB5
(GENERAL IN, interruptor de eventos, etc.)
TB4
(GENERAL OUT, zumbador externo, etc.)
TB3
(Derivación/embrague)
Disposición de las
patillas
Patillas
núm. 1 - 6
Patillas
núm. 7 - 12
(Ejemplo: TB13)

2. CABLEADO
2-3
2.2.2 Cómo fijar los cables a las abrazaderas
Fije los cables a la unidad procesadora como se muestra a continuación. No es ne-
cesario seguir un orden específico al fijar los cables.
1. Retire la cubierta exterior:
1) Sujete los lados derecho e izquierdo de la cubierta.
2) Tire de la cubierta hacia afuera y levántela para retirarla.
2. Extraiga los cuatro tornillos marcados con círculos, como se muestra en la figura
siguiente.
3. Separe el cable/conjunto del ventilador de la cubierta de apantallamiento, como
se muestra en la figura siguiente. Abra con cuidado el conjunto para evitar que se
produzcan daños en el cable conectado al ventilador.
4. Desconecte el conector del ventilador.
5. Trence los núcleos del cable y, a continuación, colóquelos en los bloques de co-
nectores correctos. (Consulte la página siguiente para obtener información sobre
cómo colocar los cables en un bloque de conectores).
6. En el cable NMEA, envuelva en cinta de vinilo los núcleos de los cables.
Cubierta de apantallamiento
Abrazadera de cables/conjunto
de ventilador
Desconecte
este conector.

2. CABLEADO
2-4
7. Fije una brida (suministrada) a un cable y el "soporte de la abrazadera".
8. Conecte el conector del ventilador.
9. Una vez conectado todo el equipo, fije la abrazadera del cable/conjunto de venti-
lador.
2.2.3 Cómo instalar los cables en los bloques de conectores
Los cables se conectan a los bloques de conectores en la unidad procesadora. Abra
la unidad y coloque los cables en los bloques de conectores como se muestra en la
figura siguiente.
Nota: Para conectar dos unidades de control (a TB8 y TB9), cambie la posición del
bloque de puentes J104 de #1-2 a #3-4. (Consulte la ilustración de la página 2-2 para
conocer la ubicación). En una única unidad de control, use TB8 y ajuste J104 en la
posición #1-2.
Bloque de conectores
Conductor de retorno
Cinta de vinilo
A
pantallamiento trenzado
(si el cable no presenta un
apantallamiento trenzado,
envuelva en cinta de cobre
la película de aluminio).
Brida para cable
Soporte de la abrazadera
Cable
BLOQUE DE
CONECTORES
Empujar
6 mm
Cable
Trence los
núcleos.
Cómo instalar los cables en el bloque de conectores
1. Retire aprox. 6 mm el apantallamiento del cable.
2. Trence el núcleo.
3. Empuje el enganche con el resorte mediante un
destornillador de punta plana.
4. Inserte el núcleo conductor en el orificio.
5. Retire el destornillador.
6. Tire del cable para asegurarse de que está insertado
con seguridad.

2. CABLEADO
2-5
2.2.4 Cables de alimentación y motor
Para seleccionar los cables de alimentación y de línea del motor, consulte la tabla si-
guiente. Conecte el cable de alimentación a un disyuntor con una tensión nominal
aceptable para el motor.
• El grosor de los cables varía en función de la corriente nominal del motor. En la ta-
bla se muestran las especificaciones del motor de 25 A.
• Use un cable de un solo núcleo o trenzado. (El número máximo de cables para un
cable trenzado es de siete).
• No trence los núcleos para impedir que se desconecten.
Cómo conectar una bomba reversible
Longitud del
cable
Tensión del motor
12 V CC 24 V CC
Sección del
núcleo
(mm
2
)
AWG Sección del
núcleo
(mm
2
)
AWG
3 m o inferior 2,5 12 2,5 12
6 m o inferior 4 10 2,5 12
10 m o inferior 6 8 4 10
16 m o inferior 10 6 6 8
TB1
TB2
Bomba reversible
MOTOR A+ MOTOR B-
TIERRA
SOL A
SOL B
ALIMEN-
TACIÓN +
ALIMEN-
TACIÓN -

2. CABLEADO
2-6
Cómo conectar un servo de solenoide
Cómo conectar un servo lineal hidráulico
TB1
TB2
MOTOR A+
SOL A
MOTOR B-
SOL B
TIERRA
ALIMEN-
TACIÓN +
ALIMEN-
TACIÓN -
Válvula de solenoide
TIERRA
(solenoide)
Motor
(solenoide)
TB3
TB1
TB2
1 2 3
MOTOR A+
MOTOR B-
SOL A
SOL B
TIERRA ALIMEN-
TACIÓN +
ALIMEN-
TACIÓN -
ALI-
MEN-
TACIÓN
+
B/C
APANTALLAMIENTO
Servo lineal hidráulico

2. CABLEADO
2-7
2.2.5 Sensor lineal Teleflex
Para conectar un sensor lineal Teleflex AR4502 (en lugar de FAP-6112), realice la si-
guiente modificación.
1. Conecte el cable como se muestra a continuación. Consulte el manual de insta-
lación del sensor lineal para obtener información sobre el cable recomendado.
2. Establezca el tipo URT en [SENSOR LINEAL] en el menú [CONFIG EN PUERT]
al realizar la configuración en el capítulo siguiente.
2.2.6 Alimentación del bus CAN
La corriente máxima que puede suministrarse a la red del bus CAN es de 1 A. Utilice
la "fuente de alimentación flotante" y asegúrese de que cumpla con la normativa
(NMEA 2000) del bus CAN.
Para obtener información completa acerca del cableado del bus CAN, consulte "Furu-
no CAN bus Network Design Guide (TIE-00170-)".
2.2.7 Conexión a TB4
TB4 se utiliza para la salida de relé de contacto. La línea núm. 1 es del tipo Normal-
mente abierto y la línea nº 3 es del tipo Normalmente cerrado. Para el cierre activo,
use Normalmente abierto; para la apertura activa, utilice Normalmente cerrado. La co-
rriente nominal del contacto es de 3 A. La apertura-cierre máximo aceptable es de 50
VA.
1
2
3
4
5
TB10
Envuelva en cinta los puntos en los que se retiró el apantallamiento.
UNIDAD
PROCESADORA
Placa SPU
(64P1158)
SENSOR LINEAL
AR4502
ROJO
BLA
NEG

2. CABLEADO
2-8
2.3 Unidad de control
FAP-7001/FAP-7011
Se puede conectar un máximo de seis unidades de control. La unidad procesadora
presenta dos puertos para conectar dos unidades de control; se pueden conectar dos
unidades de control en serie a cada unidad de control principal.
Utilice el cable BD-07AFFM-LR-150 (suministrado) para conectar la unidad de control
y la unidad procesadora y el cable BD-07AF-07AF-LR-100 (opcional) para conectar
dos unidades de control.
FAP-7021
Se puede conectar un máximo de dos unidades de control. Utilice el cable conectado
a la unidad de control (10 m) para conectar ésta a la unidad procesadora. Para au-
mentar la longitud, utilice el kit alargador de cable opcional.
Notas acerca de la conexión de las unidades de control
• Conecte el terminal BD-07AFFM-LR7001 al puerto no utilizado en la ultima unidad
de control de la serie.
• Para conectar una única unidad de control, utilice TB8.
• La longitud total de los cables de una serie no debe superar los 35 m.
• FAP-7021 puede conectarse al extremo de la unidad de control FAP-7001/FAP-
7011.
BD-07AFFM-LR-150
BD-07AF-07AF-LR-100
BD-07AF-07AF-LR-100
BD-07AF-07AF-LR-100
BD-07AF-07AF-LR-100
TB8
BD-07AFFM-LR-150
FAP-7001/7011
FAP-7021
UNIDAD PROCESADORA
UNIDAD PROCESADORA
Termi-
nal
Longitud máx. del cable 35 m

2. CABLEADO
2-9
2.4 Controladores remotos (opcionales)
La unidad procesadora presenta dos puertos para conectar dos controladores remo-
tos.
La unidad de distribución FAP-6800 permite conectar tres controladores remotos de
tipo SSG (sin seguimiento) a la unidad procesadora.
Nota 1: Conecte los controladores remotos que dispongan de conectores a la unidad
de distribución FAP-6800.
Nota 2: Ajuste el tipo de controlador remoto en el menú [CONFIGUR SISTEMA],
como se indica en el capítulo 3.
2.4.1 Conexiones de ejemplo de controladores remotos
Sin unidad de distribución
Conecte cualquiera de los dos controladores remotos.
Controlador remoto de tipo dial
No se puede utilizar la unidad de distribución con el controlador remoto de tipo dial.
Controladores remotos con conector Controladores remotos sin conector
FAP-5551 (dial), FAP-6211 (botón),
FAP-6221 (palanca), FAP-6231 (para
evitar obstáculos)
FAP-5552 (dial), FAP-6212 (botón),
FAP-6222 (palanca), FAP-6232 (para
evitar obstáculos)
UNIDAD
PROCESADORA
FAP-5552, FAP-6212 o
FAP-6222
FAP-5552, FAP-6212 o
FAP-6222
UNIDAD
PROCESADORA
FAP-5552 (dial)
FAP-5552 (dial)

2. CABLEADO
2-10
Controlador remoto de tipo botón o palanca con unidad de distribución
Conecte un máximo de seis controladores remotos de tipo botón o palanca.
Controlador remoto para evitar obstáculos con unidad de distribución
Conecte un máximo de seis controladores remotos para evitar obstáculos.
2.4.2 Conexiones prohibidas de controladores remotos
No se pueden realizar las combinaciones de controladores remotos mostradas en
esta sección.
Conexión incorrecta núm. 1
No puede conectar diferentes tipos de controladores remotos.
UNIDAD
PROCESADORA
FAP-6211 (botón)/6221 (palanca)
FAP-6211 (botón)/6221 (palanca)
FAP-6211 (botón)/6221 (palanca)
FAP-6211 (botón)/6221 (palanca)
FAP-6211 (botón)/6221 (palanca)
FAP-6211 (botón)/6221 (palanca)
UNIDAD
PROCESADORA
FAP-6231 (para evitar obstáculos)
FAP-6231 (para evitar obstáculos)
FAP-6231 (para evitar obstáculos)
FAP-6231 (para evitar obstáculos)
FAP-6231 (para evitar obstáculos)
FAP-6231 (para evitar obstáculos)
UNIDAD
PROCESADORA
FAP-6211 (botón)
FAP-6221 (palanca)
FAP-6231 (para evitar obstáculos)
FAP-6211 (botón)
FAP-6221 (palanca)
FAP-6231 (para evitar obstáculos)

2. CABLEADO
2-11
Conexión incorrecta núm. 2
Conecte únicamente un controlador remoto de tipo dial.
Conexión incorrecta núm. 3
No puede conectar varias unidades de distribución.
UNIDAD
PROCESADORA
FAP-5551 (dial)
FAP-5551 (dial)
FAP-5551 (dial)
FAP-5551 (dial)
UNIDAD
PROCESADORA

2. CABLEADO
2-12
2.5 Sentencias de entrada/salida
Puerto 1 NMEA0183, puerto 2 NMEA0183, entrada
Puerto 1 NMEA0183, puerto 2 NMEA0183, salida
Datos Sentencias (prioridad) Observaciones
Heading (True) THS>HDT>(Heading (Mag)+;Mag Var.) NMEA0183
Ver.1.5/2.0/3.0
200ms interval
Heading (Mag) HDG>HDM>(Heading (True)-Mag Var.) 200ms interval
Mag variation HDG>RMC
Position GNS>GGA>GLL>RMC
Speed (STW)(VHW)>(SOG)(VTG>RMC)
Waypoint Information
(Waypoint location)
(XTE)
(Waypoint arrival alarm)
(Bearing and distance to waypoint)
APB>RMB>(BWR+XTE+AAM)>(BWC+
XTE+AAM)>(BOD+XTE+AAM)
Note: The following conditions apply:
APB or RMB selected:
AAM's "Arrival circle radius".
APB or (BOD+XTE+AAM) selected:
RMB's "Waypoint location".
APB or (BOD+XTE+AAM) selected:
RMB>BWR>BWC)'s "Distance".
Course RMC>VTG
Depth DPT>DBT
Water temperature MTW
Time and Date ZDA>RMC
Wind speed, direction (True) MWV>VWT
Wind speed, direction (Apparent) MWV>VWR
Rate of Turn ROT
Target L/L TLL
Datos Sentencias (prioridad) Observaciones
Heading (True) HDT
Heading (Mag) HDG, HDM
Mag variation HDG, RMC
Position GNS, GGA, GLL, RMC
Speed VHW, VTG, RMC
Course RMC, VTG
Depth RMC, VTG
Water temperature DPT, DBT
Time and Date MTW
Wind speed, direction (True) ZDA, RMC
Wind speed, direction (Apparent) MWV, VWR
Rate of Turn ROT
Rudder angle RSA

2. CABLEADO
2-13
Puerto de bus CAN, entrada
Título PGN PGN
Actual Pressure 130314
Additional Weather Data 130880
COG & SOG, Rapid Update 129026
Cross Track Error 129283
Direction Data 130577
Engine Parameters, Dynamic 127489
Engine Parameters, Rapid Update 127488
Environmental Parameters (Temperature (Sea, Ambient), Atmospheric Pressure) 130310
Environmental Parameters (Temperature (Sea, Ambient)) 130312
Environmental Parameters (Temperature (Sea, Ambient), Humidity, Atmospheric
Pressure)
130311
GNSS Position Data 129029
Humidity 130313
ISO Acknowledgement 059392
ISO Address Claim 060928
ISO Request 059904
Magnetic Variation 127258
Memory Clear Group Function 126720
Navigation - Route/WP Information 129285
Navigation Data 129284
NMEA - Request Group Function 126208
PGN List - Transmit PGN's Group Function 126464
Position, Rapid Update 129025
Product Information 126996
Rate of Turn 127251
Self Test Group Function 061184
Speed, Water Referenced 128259
System Time 126992
Time and Date 129033
Vessel Heading 127250
Water Depth 128267
Wind Data 130306

2. CABLEADO
2-14
Puerto de bus CAN, salida
Título PGN PGN
Browser Control Status 130823
COG & SOG, Rapid Update 129026
Cross Track Error 129283
Environmental Parameters (Temperature (Sea, Ambient), Atmospheric Pressure) 130310
Environmental Parameters (Temperature (Sea, Ambient)) 130312
Environmental Parameters (Temperature (Sea, Ambient), Humidity, Atmospheric
Pressure)
130311
GNSS Position Data 129029
ISO Acknowledgement 059392
ISO Address Claim 060928
ISO Request 059904
Magnetic Variation 127258
Memory Clear Group Function 126720
Navigation - Route/WP Information 129285
Navigation Data 129284
NMEA - Request Group Function 126208
PGN List - Transmit PGN's Group Function 126464
Position, Rapid Update 129025
Product Information 126996
Rate of Turn 127251
Rudder 127245
Self Test Group Function 061184
Speed, Water Referenced 128259
System Time 126992
Time & Date 129033
Unit Division Code 130822
Vessel Heading 127250
Water Depth 128267
Wind Data 130306

3-1
3. CONFIGURACIÓN INICIAL
3.1 Acerca de la configuración inicial, funciona-
miento de los menús
En esta sección se describe cómo introducir la configuración inicial con el asistente
de configuración. Algunos menús del asistente contienen elementos que no son apli-
cables a su sistema. En ese caso, vaya al menú siguiente. Para ello, pulse la tecla X.
Como mínimo, se deben realizar los siguientes ajustes de configuración:
• Ajustar las características del barco
• Configurar la unidad de referencia del timón (URT)
• Ajustar el límite del timón
• Purgado de aire
• Realizar la configuración en puerto (prueba y banda muerta del timón)
• Prueba de mar
Todas las operaciones del menú se realizan con el botón de control de rumbo . Gire
el botón para seleccionar un elemento del menú o ajustar un valor alfanumérico y, a
continuación, púlselo para confirmar la configuración. En este manual se hace refe-
rencia al botón de control de rumbo simplemente como "botón".
Botón de control de rumbo (imagen correspondiente a NAVpilot-700)
3.2 Cómo abrir el asistente de configuración
1. Pulse la tecla POWER/BRILL (NAVpilot-
700) o POWER/STBY (NAVpilot-711/
720) para encender la unidad. Aparece la
pantalla de presentación y, a continua-
ción, la prueba de inicio y el menú de se-
lección de idioma, como se muestra a la
derecha. Si no necesita cambiar el idio-
ma, vaya al paso 2. Para cambiar el idio-
ma, gire el botón para seleccionar el que
desee y, a continuación, púlselo.
Botón de control de rumbo
LANGUAGE 1
ENGLISH(USA)
ENGLISH
FRANCAIS
ESPANOL
PORTUGUES
DEUTSCHE
ITALIANO
NORSK
DANSKE
SVENSKA
SUOMI
NEXT
STOP MENU

3. CONFIGURACIÓN INICIAL
3-2
2. Pulse la tecla X; aparecerá el menú [CONFIG UNIDAD].
3. Las opciones del menú [CONFIG UNIDAD] varían en función del idioma seleccio-
nado. Si necesita utilizar unidades diferentes, cámbielas como se indica a conti-
nuación.
1) Gire el botón para seleccionar el valor que desea cambiar y, a continuación,
púlselo.
2) Gire el botón para seleccionar una unidad y, a continuación, púlselo.
4. Pulse la tecla X; aparecerá el menú [SI-
MULACIÓN].
5. La opción [INSTALACIÓN] aparece se-
leccionada. Pulse el botón para mostrar el
menú [MODO ASISTENTE].
Nota: El menú [MODO ASISTENTE] tam-
bién se puede mostrar una vez encendida
la unidad. Mantenga pulsada la tecla
MENU y pulse el botón tres veces.
6. Gire el botón para seleccionar [ASISTENT PERSONALIZ] y, a continuación, púl-
selo. Aparecerá el menú [CONFIG PANTALLA]. Las diferencias entre los modos
del asistente se muestran en la tabla siguiente. [MODO INSTALACIÓN] y [ASIS-
TENT PERSONALIZ] comparten los mismos elementos, excepto en el formato de
menú y paso a paso respectivamente.
Elemento Asistente estándar
Asistente personalizado,
Modo de instalación
Unidades SÍ SÍ
Config unidad SÍ SÍ
Características barco SÍ SÍ
Alineación sensor SÍ SÍ
Límite timón SÍ SÍ
Purgado SÍ SÍ
Config en puert SÍ SÍ
CANbus NO SÍ
NMEA 0183 NO SÍ
Puerto universal NO SÍ
Sensor SÍ SÍ
Prueba mar SÍ SÍ
Calibración datos NO SÍ
Parámetros NO SÍ
Opción Auto NO SÍ
Opción NAV NO SÍ
Guía de funcionamiento (omitida
en las ilustraciones de aquí en
adelante).
CONFIG UNIDAD 2
UNIDAD VEL: kn
UNIDAD ESC: nm
UNID VEL VIENTO: kn
UNID PROF: ft
UNID TEMP AGUA: °F
ANT. SIG. STOP MENU
SIMULACIÓN 3
INSTALACIÓN
DEMO
SIMULACIÓN
MODO ASISTENTE 4/15
ASISTENT ESTÁNDAR
ASISTENT PERSONALIZ
MODO INSTALACIÓN

3. CONFIGURACIÓN INICIAL
3-3
3.3 Config unidad
El menú [CONFIG PANTALLA] le permite mostrar indicaciones en función de sus ne-
cesidades como, por ejemplo, el formato de fecha y hora.
Para cambiar un valor, realice lo siguiente:
1. Gire el botón para seleccionar el valor actual del elemento que desea a cambiar
y, a continuación, púlselo.
2. Gire el botón para seleccionar una opción y, a continuación, púlselo.
Opción de pesca (u Opción viento
para veleros)
NO SÍ
Configur sistema SÍ SÍ
Configuración control remoto SÍ SÍ
Alarma NO SÍ
Elemento de menú,
descripción
Configuración
Elemento de menú,
descripción
Configuración
[FORMAT RUMBO]
Permite seleccionar la
forma en que se muestra
la indicación de enca-
bezado, con tres o cua-
tro cifras.
[FORMAT HORA]
Permite seleccionar el
formato con el que se
muestra la hora.
[FORMAT XTE]
Permite seleccionar la
forma en que se muestra
la indicación de XTE,
con tres o cuatro cifras.
[FORM CUAD DATOS]
Permite seleccionar el
número de cuadros de
datos que se mostrará
en la pantalla de datos
de navegación.
Elemento Asistente estándar
Asistente personalizado,
Modo de instalación
CONFIG PANTALLA 5/23
FORMAT RUMBO: HHH°
FORMAT XTE: *.**
FORMATO POSICIÓN: DD°MM.MM’
PANTALLA RUMBO: VERDR
FORMAT FECHA: MMM DD, AAAA
FORMAT HORA: 24 H
FORM CUAD DATOS: 2CUAD
GRÁF TEMP: 5min
MOD PRESENTAC: ON
HHH°
HHH.H°
24 H
12 H
*.**
*.***
2CUAD
3CUAD
NAVpilot-700
1CUAD
2CUAD
NAVpilot-711
NAVpilot-720

3. CONFIGURACIÓN INICIAL
3-4
3. Pulse la tecla X para mostrar el menú [CARACTERÍSTICAS BARCO], que per-
mite ajustar las características de la embarcación: tipo, eslora, etc.
3.4 Características del barco
1. El cursor selecciona el valor de [TIP BARCO]; pulse el botón.
2. Gire el botón para seleccionar el tipo de barco y, a continuación, púlselo.
[PLANEO]: barcos con hidrochorro, lanchas patrulleras rápidas y embarcaciones
de pesca deportiva
[SEMI-DESPLAZADO]: lanchas de prácticos, lanchas a motor y catamaranes rá-
pidos
[DESPLAZAMIENTO]: barca a pedales, embarcaciones de pesca, barcos de tra-
bajo y embarcaciones utilizadas como viviendas
[VELERO]: veleros
3. Ajuste [LONG. BARCO], [VEL CRUCERO] y [VEL DE GIRO] de la siguiente for-
ma:
1) Gire el botón para seleccionar el valor actual de un elemento y, a continua-
ción, pulse el botón.
2) Gire el botón para ajustar un valor y, a continuación, púlselo.
[FORMATO POSICIÓN]
Permite seleccionar la
forma en que se muestra
la indicación de posición,
en grados, minutos o se-
gundos.
[GRÁF TEMP]
Permite seleccionar la
escala de tiempo para el
gráfico de temperatura
del agua. (Requiere un
sensor de temperatura
del agua).
[PANTALLA RUMBO]
Permite seleccionar la
forma en que se muestra
el rumbo, verdadero o
magnético.
[MOD PRESENTAC]
Permite activar o desac-
tivar la selección de pre-
sentaciones en el modo
ESPERA.
[FORMAT FECHA]
Permite seleccionar el
formato con el que se
muestra la fecha.
Elemento de menú,
descripción
Configuración
Elemento de menú,
descripción
Configuración
DD MM.MM'
DD MM.MMM'
DD MM.MMMM'
DD MM'SS.S"
5min
10min
20min
MAGNÉTIC
VERDR
OFF
ON
DD MMM AAAA
MMM DD, AAAA
AAAA MM DD
CARACTERÍSTICAS BARCO 6/23
TIP BARCO: SEMI-DESPLAZADO
LONG. BARCO: 40ft(12.2m)
VEL CRUCERO: 30kn
VEL DE GIRO: 5°/s
PLANEO
SEMI-DESPLAZADO
DESPLAZAMIENTO
VELERO

3. CONFIGURACIÓN INICIAL
3-5
Nota: Ajuste la velocidad de giro en función de las especificaciones del barco. Si
la velocidad se configura en un valor superior a las especificaciones del barco, es
posible que el timón gire de forma brusca en un waypoint, lo que provocaría una
situación peligrosa. Además, es posible que no pueda cambiar correctamente el
rumbo si la velocidad es superior a la velocidad real de giro del barco.
4. Pulse la tecla X para mostrar el menú [ALINEACIÓN SENSOR], que permite ali-
near la unidad de referencia del timón (URT).
3.5 Alineación del sensor (URT)
1. El cursor selecciona el valor de [SELECCIONAR SEN-
SOR]; pulse el botón.
2. Gire el botón para seleccionar la opción correcta y, a
continuación, púlselo.
[SENS GIRATRIO]: para la unidad de referencia del timón FAP-6112 de FURU-
NO.
[SENSOR LINEAL]: para el sensor lineal Teleflex AR4502.
3. Gire el botón para seleccionar [ALINEACIÓN SENSOR URT] y, a continuación,
púlselo.
4. Con el timón centrado físicamente, confirme que la indicación de ángulo del timón
mostrada es inferior o igual a ±5°. De lo contrario, debe ajustar el cuerpo del sen-
sor del timón o la posición del imán (si utiliza el sensor lineal Teleflex AR4502)
para que el indicador se encuentre en el intervalo de ±5° antes de continuar.
Tono alineación: existe un tono de alineación que puede utilizar para ayudarle a
realizar este ajuste de forma remota. Sonará de forma continua un pitido cuando
el indicador se encuentre en el intervalo de ±5°. Si no necesita utilizar el tono de
alineación, debe desactivarlo. Para ello, pulse el botón y seleccione [OFF] en
[TONO ALINEACIÓN].
INSTALACIÓN 7/23
SELECCIONAR SENSOR:
SENS GIRATRIO
ALINEACIÓN SENSOR URT
SENS GIRATRIO
SENSOR LINEAL
0
0
20 10 5 5 10 20
20 10 5 5 10 20
ALINEACIÓN SENSOR URT
TONO ALINEACIÓN: ON
ALINEACIÓN SENSOR URT
MEDIR POS CENTRAL TIMÓN
Y CONFIRMAR SI EL VALOR
MOSTRADO ES < 5.
SI NO, AJUSTAR URT O
NAVPILOT CORREGIRÁ
LA INDICACIÓN P & S
MÁS TARDE.
NAVpilot-700
NAVpilot-711/720
Pulse cualquier tecla.
ALINEACIÓN SENSOR URT
MEDIR POS CENTRAL TIMÓN
Y CONFIRMAR SI EL VALOR
MOSTRADO ES < 5.
SI NO, AJUSTAR URT O
NAVPILOT CORREGIRÁ
LA INDICACIÓN P & S
MÁS TARDE.
TONO ALINEACIÓN: ON

3. CONFIGURACIÓN INICIAL
3-6
5. Pulse la tecla MENU y, a continuación, la tecla X para mostrar el menú [CONF
LÍMITE TIMÓN], que permite definir los límites del timón del barco.
3.6 Configuración de los límites del timón
Ajuste la posición central del timón y, a continuación, los límites máximos o puntos de
giro máximo del timón. Si utiliza un sensor lineal, introduzca manualmente los valores
del timón.
Nota 1: NAVpilot ajustará AUTOMÁTICAMENTE la dirección de babor/estribor del
ángulo del timón en este paso. No es relevante el sentido en el que esté instalado el
soporte de la unidad de referencia del timón o la barra del sensor lineal, ya que está
corrección se realizará automáticamente.
Nota 2: NAVpilot "linealizará" AUTOMÁTICAMENTE los valores de indicación del ti-
món si éste se gira más en una dirección que en la otra. Por lo tanto, es recomendable
que utilice los mismos valores de babor y estribor del timón. De esta forma se evitará
la confusión del cliente durante el funcionamiento. Además, el valor numérico selec-
cionado no es vital, por lo que no es necesario medirlo siempre que crea que la esti-
mación se aproxima al valor correcto.
1. El cursor selecciona [AJUSTE 0]; pulse el botón.
2. Gire la rueda para centrar el timón y, a continuación, pulse el botón. Aparecerá el
menú [CONF LÍMIT TIMÓN].
3. Gire el botón para seleccionar [BAB LÍMT TIMÓN].
4. Gire al máximo la rueda del timón a babor y, a continuación, pulse el botón.
5. Gire el botón para seleccionar [EST LÍMT TIMÓN].
6. Gire al máximo la rueda del timón a estribor y, a continuación, pulse el botón.
Nota: Si en los pasos 1, 4 o 6, el ángulo es incorrecto, aparecerá un mensaje de
error. En ese caso, vuelva al menú [ALINEACIÓN SENSOR URT] y compruebe
si el ajuste de URT es correcto.
7. Pulse la tecla X para mostrar el menú [PURGADO], que permite realizar el pur-
gado de aire.
CONF LÍMITE TIMÓN 8/23
AJUSTE 0
BAB LÍMT TIMÓN
EST LÍMT TIMÓN
GIRAR A POS TIMÓN CENTRAL
Y PULSAR ENTER.
CENT TIMÓN APROX Y PULS
ENTER PARA EST VALOR.
ESTÁ SEGURO?
SÍ ENTER NO MENU

3. CONFIGURACIÓN INICIAL
3-7
3.7 Purgado
1. El cursor selecciona [NO]; pulse el botón. Gire el botón para seleccionar [SÍ] y, a
continuación, púlselo para mostrar la siguiente pantalla.
2. En la pantalla se muestra el mensaje "UNIDAD SERVO DETECTANDO" mientras
se busca la unidad del servo.
Si la unidad del servo es "REVERSIBLE", en la pantalla se muestra [REVERSI-
BLE 12V] o [REVERSIBLE 24V]. Si la unidad del servo es "SOLENOIDE", no apa-
recerá nada en la pantalla.
Nota: Si no se pudo detectar el tipo de servo, aparece la pantalla de la izquierda
que se muestra a continuación. [DESCONOCIDO] aparece seleccionado; pulse
el botón para mostrar la ventana emergente. Seleccione su tipo de servo.
3. Aparecerá la siguiente ventana emergente.
4. Pulse la tecla W (o X) hasta que el indicador esté completamente lleno (en ne-
gro).
5. Retire el tapón de goma adecuado del cilindro para realizar el purgado de aire.
6. Pulse la tecla W (o X) hasta que el indicador esté completamente lleno (en ne-
gro).
7. Retire el tapón de goma adecuado del cilindro para realizar el purgado de aire.
8. Repita los pasos 4 a 7 para purgar por competo el aire.
9. Pulse la tecla MENÚ para volver al menú [PURGADO]. A continuación, pulse la
tecla X para mostrar el menú [CONFIG EN PUERT], que permite realizar la prue-
ba del timón.
PURGADO 9/23
PURGADO: NO
0
20 10 5 5 10 20
PURGADO
Pulse
el
botón.
MENÚ SELEC UNIDAD SERVO
DISCRIMINACIÓN UNID SERVO
DESCONOCIDO
REVERSIBLE 24V
REVERSIBLE 12V
SOLENOIDE
PULSAR TECLAS DE FLECHA
PARA ACTIVAR CONJ BOMBA
PULSAR MENU AL TERMINAR

3. CONFIGURACIÓN INICIAL
3-8
3.8 Configuración en puerto (prueba y banda muerta
del timón)
El menú [CONFIG EN PUERT] proporciona la prueba del timón y permite ajustar la
banda muerta del timón de forma automática o manual.
Nota: En las embarcaciones con dirección hidráulica y una bomba de dirección hi-
dráulica asistida por motor, los motores deben estar en marcha con una velocidad li-
geramente superior a la de ralentí antes de realizar esta prueba.
1. El cursor selecciona [NO]; pulse el botón. Seleccione la opción [SÍ] y pulse el bo-
tón para iniciar la prueba.
Una vez finalizada la prueba del timón, aparece el mensaje "PRUEBA TIMÓN FI-
NALIZADA.".
Los resultados se muestran en el menú de la siguiente forma:
[TIPO SERVO]: [REVERSIBLE 12V] (o 24 V) o [SOLENOIDE]
[DERIV/EMBRAGUE]: [NACT] o [ACTIV]
[BM]: muestra la banda muerta del timón.
[VEL]: la velocidad del timón.
(Si los valores de la banda muerta, BM, y la velocidad del timón no son iguales,
aparecerá un mensaje de advertencia).
[CNTRL TIMÓN]: el ciclo de trabajo de PWM (modulación de ancho de impulsos)
para controlar la salida de la bomba.
• En los sistemas de solenoide, la indicación de trabajo del timón es siempre del
100%
• En un sistema de motor reversible, este valor debe encontrarse en el intervalo
del 50% al 90% para obtener un rendimiento óptimo. Si el valor es inferior al
50%, la capacidad de la bomba es demasiado elevada para el volumen del ci-
lindro de dirección. Aunque es posible que el sistema funcione correctamente,
existe la posibilidad de que la bomba no pueda arrancar (bomba detenida)
cuando la carga sea excesiva en el timón al navegar por mares agitados o rea-
lizar grandes giros debido a que la tensión aplicada a la bomba es demasiado
baja. Si la velocidad del timón es inferior a 3 grados/s y el valor es superior al
90%, la capacidad de la bomba es demasiado reducida para el volumen del ci-
lindro de dirección. Aunque es posible que el sistema funcione correctamente,
la unidad de control NAVpilot puede que no consiga aumentar adecuadamente
la tensión media en la bomba para mejorar su rendimiento en mares agitados
o de popa.
CONFIG EN PUERT 10/23
PRUEBA TIMÓN: NO
DB TIMÓN: AUTO
20 10 5 5 10 20
CONFIG TIMON Y PRUEB AUTO
TIPO SERVO: -
DERIV/EMBRAGE: -
BM: - -.-° VEL: - -. -°/s
CNTRL TIMÓN: - -%

3. CONFIGURACIÓN INICIAL
3-9
2. Pulse la tecla MENU para volver al menú [CONFIG EN PUERT].
3. Ajuste de forma automática o manual la banda muerta del timón. Esta configura-
ción suele realizarse automáticamente durante la PRUEBA TIMÓN. No es reco-
mendable ajustar manualmente el parámetro; de hecho, sólo podría resultar útil
en embarcaciones antiguas con sistemas de timón antiguos y en mal estado o im-
pulsados por cadenas. Si es necesario realizar este ajuste manualmente, realice
lo siguiente:
1) Seleccione [DB TIMÓN] en el menú [CONFIG EN PUERT] y, a continuación,
pulse el botón.
2) Seccione [MANUAL] y, a continuación, pulse el botón.
3) Gire el botón para seleccionar el valor mostrado y, a continuación, púlselo.
4) Gire el botón para ajustar el valor mostrado y, a continuación, púlselo.
4. Pulse la tecla X para mostrar el menú [PUERTO CAN BUS], que permite confi-
gurar el equipo conectado al puerto de bus CAN.
Nota 1: Si la banda muerta del timón es superior a 1°, el barco no se podrá controlar
correctamente. Compruebe si hay aire en el sistema de dirección y si la velocidad del
timón es superior a 10°/s,.
Nota 2: Si ajusta manualmente la banda muerta, no configure un valor demasiado
bajo, ya que podría curvarse.
Nota 3: Si la prueba del timón no se pudo completar satisfactoriamente, aparecerá
uno de los mensajes siguientes. Realice la prueba de nuevo una vez resuelto el pro-
blema.
• "ERROR EN PRUEBA DE TIMÓN."
• "URT NO CALIBRADO PARA CONTROLAR EL BUQUE. EL BUQUE NO SE PO-
DRÁ CONTROLAR CORRECTAMENTE."
• "TIMÓN SIN DEFINIR PARA CONTROLAR EL BUQUE. EL BUQUE NO SE PO-
DRÁ CONTROLAR CORRECTAMENTE."
• "DEMASIADA VELOC DEL TIMÓN PARA CONTROLAR EL BUQUE. EL BUQUE
NO SE PODRÁ CONTROLAR CORRECTAMENTE."
• "POCA VELOCIDAD DEL TIMÓN PARA CONTROLAR EL BUQUE. EL BUQUE
NO SE PODRÁ CONTROLAR CORRECTAMENTE."
• "BANDA MUERTA MUY GRANDE PARA CONTROLAR EL BUQUE. EL BUQUE
NO SE PODRÁ CONTROLAR CORRECTAMENTE."
• "BANDA MUERTA MUY GRANDE DEMASIADA VELOC DEL TIMÓN PARA CON-
TROLAR EL BUQUE. EL BUQUE NO SE PODRÁ CONTROLAR CORRECTA-
MENTE."
• "BANDA MUERTA MUY GRANDE POCA VELOCIDAD DEL TIMÓN PARA CON-
TROLAR EL BUQUE. EL BUQUE NO SE PODRÁ CONTROLAR CORRECTA-
MENTE."
• "ERROR EN ANGULO DE TIMÓN CIRCUITO SERVO"
• "ERROR EN SERVO DE TIMÓN"

3. CONFIGURACIÓN INICIAL
3-10
3.9 Configuración del puerto de bus CAN
El menú [PUERTO CAN BUS] permite configurar el equipo conectado al puerto de
bus CAN.
1. El cursor selecciona [LISTA DISPOSITI-
VOS]; pulse el botón.
Se muestra el nombre del equipo co-
nectado al puerto de bus CAN. (En la
ilustración de ejemplo, se encuentra conectado el sensor de rumbo PG-700 de
FURUNO. La serie de valores alfanuméricos que aparecen detrás del nombre de
modelo hacen referencia al número exclusivo de bus CAN). El nombre del dispo-
sitivo se puede cambiar. Si no necesita cambiar el nombre, vaya al paso 3.
2. Para cambiar el nombre del dispositivo, realice lo siguiente:
1) Pulse el botón.
2) Gire el botón para seleccionar un carácter y, a continuación, púlselo.
3) El cursor se desplazará al carácter siguiente. Repita el paso 2 para cambiar
el carácter. Puede seleccionar la ubicación de entrada con las teclas W y X.
El nombre puede tener, como máximo, 14 caracteres.
3. Pulse la tecla MENU para volver al menú [PUERTO CAN BUS].
4. Gire el botón para seleccionar [LISTA DATOS ENTRADA] y mostrar la siguiente
pantalla.
En esta pantalla se muestran todas las sentencias de NMEA 2000 que NAVpilot
puede recibir. El número de grupo del parámetro (PGN) que NAVpilot está reci-
biendo actualmente aparece resaltado.
5. Pulse la tecla MENU para volver al menú [PUERTO CAN BUS].
PUERTO CAN BUS 11/23
LISTA DISPOSITIVOS
LISTA DATOS ENTRADA
SELECCIONAR LISTA PGN
ACTUAL: NO
LISTA DISPOSITIVOS
PG-700: 0019E4
126992
127488
129026
129285
130313
126464
127258
129025
129284
130312
126208
127251
128267
129283
130311
059904
126996
127489
129029
130306
130314
060928
127250
128259
129033
130310
130577
DATOS CAN BUS ENTRADA

3. CONFIGURACIÓN INICIAL
3-11
6. Gire el botón para seleccionar [SELECCIONAR LISTA PGN]; se mostrará una
pantalla similar a la que aparece a continuación.
En esta pantalla se muestran todas las sentencias de NMEA 2000 que pueden
trasmitirse a NAVpilot. Las sentencias que se están transmitiendo actualmente
aparecen resaltadas. Para activar o desactivar una sentencia, vaya al paso 7.
(Debe conectarse el equipo correspondiente para activar una sentencia). Si no
necesita cambiar la configuración, vaya al paso 8.
7. Para activar o desactivar una sentencia de NMEA 2000, realice lo siguiente:
1) Gire el botón para seleccionar una sentencia y, a continuación, púlselo.
2) Gire el botón para seleccionar [ON] (activado) u [OFF] (desactivado) y, a con-
tinuación, púlselo.
8. Pulse la tecla MENU para volver al menú [PUERTO CAN BUS].
9. Gire el botón para seleccionar [ACTUAL] y, a continuación, púlselo.
10. Espere cinco segundos para permitir que el sistema actualice la lista de disposi-
tivos.
11. Pulse la tecla X para mostrar el menú [PUERTO NMEA0183], que permite confi-
gurar el equipo conectado a los puertos NMEA0183
3.10 Configuración del puerto NMEA0183
1. El cursor selecciona [PUERTO1]; pulse el botón.
2. El cursor selecciona [NOMBRE: PUERTO1]. Este elemento del menú permite
cambiar el nombre del puerto. Por ejemplo, el tipo de equipo, el número de mo-
CAN BUS
126992: OFF
127250: OFF
127258: OFF
128267: OFF
129026: OFF
129033: OFF
129284: OFF
130306: OFF
130311: OFF
127245: ON
127251: OFF
128259: OFF
129025: OFF
129029: OFF
129283: OFF
129285: OFF
130310: OFF
130312: OFF
OFF
ON
PUERTO NMEA0183 12/23
PUERTO1
PUERTO2
PUERTO1 NMEA0183
NOMBRE: PUERTO1
OUTPUT FMT: NMEA0183 V3.0
BAUDRATE: 4800BPS
SELEC SENTENCIA SALIDA
LISTA DATOS ENTRADA

3. CONFIGURACIÓN INICIAL
3-12
delo, etc. El nombre puede tener, como máximo, 14 caracteres alfanuméricos. Si
no necesita cambiar el nombre, vaya al paso 3.
1) Pulse el botón.
2) Gire el botón para seleccionar un carácter y, a continuación, púlselo.
3) El cursor se desplazará al carácter siguiente. Repita el paso 2 para cambiar
el carácter. Puede seleccionar la ubicación de entrada con las teclas W y X.
3. Gire el botón para seleccionar [FTO SALIDA] y, a continua-
ción, púlselo.
4. Gire el botón para seleccionar el formato de salida del
equipo y, a continuación, púlselo.
5. Gire el botón para seleccionar [VEL TRANS] y, a continuación,
púlselo.
6. Gire el botón para seleccionar la velocidad de transmisión del
equipo y, a continuación, púlselo.
7. Gire el botón para seleccionar [SELEC SENTENCIA SALIDA] y, a continuación,
púlselo. Aparecerá una de las siguientes pantallas en función del formato de sa-
lida de NMEA seleccionado.
8. Para activar o desactivar una sentencia, gire el botón para seleccionar la senten-
cia, púlselo, y gírelo para seleccionar [ON] (activado) u [OFF] (desactivado) y, a
continuación, púlselo.
9. Pulse la tecla MENU para volver al menú [PUERTO1 NMEA0183].
10. Gire el botón para seleccionar [LISTA DATOS ENTRADA] y, a continuación, púl-
selo.
En esta pantalla se muestran las sentencias de NMEA0183 que se están reci-
biendo actualmente.
NMEA0183 V1.5
NMEA0183 V2.0
NMEA0183 V3.0
4800BPS
38400BPS
VER 1.5 VER 2.0
VER 3.0
DBT: OFF
HDM: OFF
RMB: OFF
VHW: OFF
VWT: OFF
GGA: OFF
HDT: OFF
RMC: OFF
VTG: OFF
ZDA: OFF
GLL: OFF
MTW: OFF
ROT: OFF
VWR: OFF
DBT: OFF
GLL: OFF
MTW: OFF
RMC: OFF
VHW: OFF
DPT: OFF
RUM: OFF
MWV: OFF
ROT: OFF
VTG: OFF
GGA: OFF
RUM: OFF
RMB: OFF
RSA: OFF
VDA: OFF
DBT: OFF
GLL: OFF
HDT: OFF
RMB: OFF
RSA: OFF
ZDA: OFF
DPT: OFF
GNS: OFF
MTW: OFF
RMC: OFF
VHW: OFF
GGA: OFF
RUM: OFF
MWV: OFF
ROT: OFF
VTG: OFF
DATOS DE ENTRADA NMEA0183
AAM
APB
BOD
BWC
BWR
DBT
DPT
GGA
GLL
GNS
RUM
HDM
HDT
MTW
MWV
RMB
RMC
ROT
THS
TLL
VHW
VTG
VWR
VWT
XTE
ZDA

3. CONFIGURACIÓN INICIAL
3-13
11. Pulse dos veces la tecla MENU para volver al menú [PUERTO NMEA0183].
Si tiene un equipo conectado a PUERTO2 NMEA0183, configure el equipo del
mismo modo que lo configuraría en PUERTO1 NMEA0183.
12. Pulse la tecla X para mostrar el menú [PUERTO UNIVERSAL], que permite con-
figurar el equipo conectado a los puertos GENERAL IN y GENERAL OUT.
3.11 Configuración del puerto universal
El menú [PUERTO UNIVERSAL] permite configurar los puertos GENERAL IN y GE-
NERAL OUT.
GENERAL IN: se conecta una caja de conmutadores a este puerto para controlar NA-
Vpilot desde una ubicación remota.
GENERAL OUT: suena un zumbador o se ilumina un indicador en una ubicación re-
mota cuando la función especificada se realiza en NAVpilot.
Si sólo tiene equipos conectados al puerto GENERAL OUT, vaya al paso 5.
1. El cursor selecciona el valor de [PTO1 EN]; pulse el botón.
2. Gire el botón para seleccionar el comando o la función de [PTO1 EN]. Se trata de
la función o el comando asignado a la caja de conmutadores conectada a este
puerto.
[DESACT]: el puerto está desactivado.
[ACTIV PA]: seleccione ON (activado) para asumir el control total del barco con
NAVpilot. Si se utiliza la opción OFF (desactivado), sólo está disponible el modo
ESPERA
[PASAR A ESPER]: el conmutador, si se utiliza, establece NAVpilot en el modo
ESPERA.
[PASAR A AUTO]: el conmutador, si se utiliza, establece NAVpilot en el modo
AUTOMÁTIC.
[TCL FLCH BAB]: el conmutador, si se utiliza, controla la tecla W en NAVpilot.
[TCL FLCH EST]: el conmutador, si se utiliza, controla la tecla X en NAVpilot.
[TCLA FUNCIÓN]: asigne la función del equipo conectado a NAVpilot.
PUERTO UNIVERSAL 13/23
PTO1 EN: DESACT
TCLA FUN:
BAB/ESTR:
PTO2 EN: DESACT
TCLA FUN:
BAB/ESTR:
PTO1 SAL: DESACT
PTO2 SAL: DESACT
* Esta función no está disponible si
se selecciona velero como tipo de
barco.
DESACT
ACTIV PA
PASAR A ESPER
PASAR A AUTO
TCL FLCH BAB
TCL FLCH EST
TCLA FUNCIÓN*

3. CONFIGURACIÓN INICIAL
3-14
3. Si se selecciona [TCLA FUNCIÓN], realice lo siguiente para elegir una función.
De lo contrario, vaya al paso 4.
1) Gire el botón para seleccionar [TCLA FUN] y, a continuación, púlselo.
2) Gire el botón para seleccionar una opción y, a continuación, púlselo.
3) Gire el botón para seleccionar [BAB/ESTR] y, a continuación, púlselo.
4) Gire el botón para seleccionar la dirección del giro y, a continuación, púlselo.
4. Si tiene otro dispositivo conectado al puerto UNIVERSAL IN, configúrelo en
[PTO2 EN].
5. Gire el botón para seleccionar [PTO1 SAL] y, a continuación, púlselo.
GIRO DE 180º
CÍRCULO
ÓRBITA
ESPIRAL
CUADRADO
FIG8
ZIGZAG
GIRO 180
CÍRCULO
ÓRBITA
ESPIRAL
CUADRADO
FIG. EN OCHO
ZIGZAG
BAB
ESTR
ALARMA EXTER*
MODO ESPERA
MODO AUTOMÁTIC
MODO NAV
MODO AUTO/NAV
CONTROL PA
TCL FLCH BAB
TCL FLCH EST
DESACT
Se enciende un indicador luminoso o suena un
zumbador externo en los siguientes casos:
NAVpilot pasa al modo de ESPERA.
NAVpilot pasa al modo AUTO.
NAVpilot pasa al modo NAV.
NAVpilot cambia del modo AUTO a NAV y viceversa.
Se mueve el timón.
Se utiliza la tecla de flecha BAB (
) de NAVpilot.
Se utiliza la tecla de flecha EST (
) de NAVpilot.
Función desactivada.
* La opción [ZUMBAD] del menú [ALARMA] se
establece automáticamente en
[INTERNO+EXTERNO]. Aplicable tanto a PTO1
SAL como a PTO2 SAL.

3. CONFIGURACIÓN INICIAL
3-15
6. Gire el botón para seleccionar la acción que activará un zumbador externo o un
indicador luminoso y, a continuación, pulse el botón.
7. Si tiene otro dispositivo conectado al puerto UNIVERSAL OUT, configúrelo en
[PTO2 SAL].
8. Pulse la tecla X para mostrar el menú [SELECCIÓN SENSOR], que permite con-
figurar los sensores como, por ejemplo, el compás, la velocidad, la profundidad,
etc.
3.12 Configuración del sensor
Antes de realizar este procedimiento, active el equipo de bus CAN conectado a la red
de bus CAN de NAVpilot.
1. Active todos los sensores y, a continuación, pulse el botón.
2. El cursor selecciona [SENSOR DE RUMBO]; pulse el botón.
Si [AUTO] se establece en [SÍ], se muestran todos los sensores de rumbo conec-
tados a NAVpilot. Si se utilizan varios sensores de rumbo, éstos se ordenan de la
siguiente forma: el sensor de rumbo de bus CAN de FURUNO, los demás senso-
res de rumbo de bus CAN y el sensor de rumbo NMEA 0183 Si desea cambiar el
orden, seleccione el número, pulse el botón, gírelo para seleccionar un sensor y,
a continuación, púlselo de nuevo. La opción [AUTO] permite volver a organizar
los sensores en el orden indicado anteriormente. Seleccione [SÍ] en AUTO para
volver a ordenarlos.
3. Configure del mismo modo los sensores de velocidad, posición, viento, profundi-
dad y temperatura.
4. Pulse la tecla X para mostrar el menú [PRUEBA MAR], que permite realizar la
prueba de mar para NAVpilot.
SELECCIÓN SENSOR 14/23
SENSOR DE RUMBO
VELOCIDAD (VB)
VELOCIDAD (VF)
SENSOR DE POSICIÓN
SENSOR DE VIENTO
SENSOR PROFUNDIDAD
SENSOR TEMP
SENSOR DE RUMBO
1º: PG-700 0019E4
2º: - - - - - - - - - - - - - -
3º: - - - - - - - - - - - - - -
AUTO: NO

3. CONFIGURACIÓN INICIAL
3-16
3.13 Prueba de mar
Con un sensor de rumbo magnético (PG-500/700 etc.), se necesita la información de
variación magnética para mostrar los datos de rumbo verdaderos. En casi todos los
casos, se conecta un dispositivo GPS a NAVpilot, que envía automáticamente esta
información de variación a la unidad. Por lo tanto, seleccione "AUTO". En los casos
especiales en los que se requiere una variación manual, se pueden introducir manual-
mente estos valores. Tenga en cuenta que esta selección sólo es aplicable cuando la
indicación de rumbo de NAVpilot se ajusta en "VERDADERO".
Si se ha seleccionado la presentación del rumbo verdadero en el menú [CONFIG
PANTALLA ], NAVpilot mostrará la información de rumbo auténtica, incluso aunque
NAVpilot esté conectado a un sensor de rumbo magnético. Esto resulta muy valioso
al conectar el radar de la serie FAR-21X7 de FURUNO a NAVpilot, ya que estos ra-
dares no pueden configurarse para una entrada de rumbo magnético y la marca en
forma de piruleta del waypoint sólo se alineará correctamente cuando se utilice el
rumbo verdadero.
Si ha seleccionado FURUNO PG-500/700 como sensor de rumbo, realice el pro-
cedimiento indicado a continuación para calibrar el compás y obtener la compensa-
ción automática de la distorsión. De lo contrario, vaya al paso 9.
• Este procedimiento no es aplicable a los demás sensores de rumbo.
• Si no es necesario realizar de forma local ningún ajuste en PG-500/600/700, NAV-
pilot asumirá el control completo de estos sensores de rumbo.
1. Gire el botón para seleccionar [CONFIG DE COMPÁS] y, a continuación, púlselo.
2. [SELEC COMPÁS] se establece en [1º]. Calibre el primer compás y, a continua-
ción, el resto.
3. Gire el botón para seleccionar [CALIBRAC USUARIO] y, a continuación, púlselo.
PRUEBA MAR 15/23
VAR MAGNT: AUTO
CONFIG DE COMPÁS
EST POS TIMÓN CTRAL
SINTONIZACIÓN AUTO: NO
CST - - -° RUM: T178°
CONFIG DE COMPÁS
SELEC COMPÁS: 1º
CALIBRAC USUARIO: NO
CALIBRACÓN AUTO: ON
COMP COMPÁS: # 0.0°
CST - - -° RUM: T178°
NO
AUTO
MANUAL

3. CONFIGURACIÓN INICIAL
3-17
4. Gire el botón para seleccionar [AUTO] o [MANUAL] y, a continuación, púlselo.
AUTO: el barco gira a estribor aproximadamente tres o cuatro círculos completos
para realizar la calibración. Tenga en cuenta que el barco girará a estribor los gra-
dos establecidos en la opción [LÍMITE TIMÓN MANUAL] del menú [CONF LÍMIT
TIMÓN].
MANUAL: utilice la rueda del timón para girar el barco a babor o a estribor tres o
cuatro círculos completos a una velocidad de aproximadamente un minuto/círculo
para realizar la calibración.
5. Pulse el botón para iniciar la calibración.
En [AUTO], el barco empieza a girar a estribor y, a continuación, la calibración se
inicia automáticamente. En [MANUAL], gire el barco a estribor o babor con un
rumbo circular. Se tardará aproximadamente dos minutos en completar el círculo.
• Si falla la calibración, aparecerá el mensaje "CALIBRACIÓN NO FINALIZADA,
¿VOLVER A CALIBRAR?". Para volver a realizar la calibración, pulse el botón
de control de rumbo .
• Si desea detener la calibración mientras gira el barco, pulse cualquier tecla
para mostrar el mensaje "CALIBRACIÓN DETENIDA". Pulse de nuevo cual-
quier tecla para volver al menú [PRUEBA MAR].
• Una vez completada con éxito la calibración, aparecerá el mensaje "CALIBRA-
CIÓN FINALIZADA". Pulse cualquier tecla para volver al menú [PRUEBA
MAR].
• Si falla la calibración, aparecerá el mensaje "CALIBRACIÓN NO FINALIZADA,
¿VOLVER A CALIBRAR?". Pulse el botón para volver a realizar la calibración
o cualquier tecla para salir.
6. Gire el botón para seleccionar [CALIBRACÓN AUTO] y, a continuación, púlselo.
7. Gire el botón para seleccionar [ON] y, a continuación, púlselo. Los indicadores
LED AUTO de PG-500.
8. Si dispone de otro dispositivo PG-500/600/700, selecciónalo en [SELEC COM-
PÁS] y calíbrelo mediante el procedimiento indicado anteriormente.
9. Si los datos de rumbo mostrados en la unidad de control son diferentes a los in-
dicados en el compás del barco, aplique una compensación en [COMP COM-
PÁS]. Esta compensación se aplica a los datos del sensor de rumbo. Por ejemplo,
si la unidad de control muestra 125°, aunque la lectura del compás del barco es
120°, introduzca, por ejemplo, el valor "5".
1) Gire el botón para seleccionar [COMP COMPÁS] y, a continuación, púlselo.
2) Gire el botón para configurar un valor (margen de ajuste: E0.0°-E180.0°,
W0.1°-W179.9°) y, a continuación, púlselo.
10. Pulse la tecla MENU para volver al menú [CONFIG DE COMPÁS].
11. Gire el botón para seleccionar [EST POS TIMÓN CTRAL] y, a continuación, púl-
selo.
Debe ajustar la posición del timón en cero grados en el menú [PRUEBA MAR]. Si
este ajuste no se realizar por completo, es posible que se produzca un abatimien-

3. CONFIGURACIÓN INICIAL
3-18
to del barco. En los barcos con dos motores, asegúrese de que se sincronicen los
motores y de que mantengan una velocidad de crucero normal.
12. Acelere el barco entre 10 y 15 nudos (la velocidad de crucero).
13. Si el barco sigue un rumbo fijo, pulse el botón para configurar el valor. A continua-
ción, detenga el barco. Vaya al paso 14 si el barco se desplaza en zigzag. De lo
contrario, vaya al paso 15.
14. El ajuste automático permite que NAVpilot configure automáticamente los dos pa-
rámetros de dirección principales (la ganancia de timón y el contratimón) del bar-
co. Este procedimiento acorta el periodo de aprendizaje de la función de
aprendizaje automático. Sin embargo, este procedimiento resulta difícil de reali-
zar debido a las limitaciones de espacio o las restricciones de tiempo. Por lo tanto,
no es necesario realizarlo; NAVpilot podrá seguir aprendiendo todos los paráme-
tros del barco durante el primer uso. Realice este procedimiento si el barco se
desplaza en zigzag. Al igual que en otros sistemas de piloto automático, no es
obligatorio realizarlo.
Realice lo siguiente en aguas tranquilas:
1) Asegúrese de que haya suficiente espacio abierto alrededor y desplace el bar-
co en línea recta a una velocidad de 10 a 12 nudos a barlovento.
2) Gire el botón para seleccionar [SINTONIZACIÓN AUTO] y, a continuación,
púlselo.
3) Seleccione [SÍ] y pulse el botón para iniciar la sincronización automática.
El barco funciona en modo AUTOMÁTIC. Al girar, aparecerá el mensaje "SIN-
TO AUT EN CURSO (**%)". El porcentaje del grado de finalización del proce-
so se indica con "%". Una vez completada la sincronización automática,
aparecerá el mensaje "SINTO AUTO FINALIZADA". (El proceso de sincroni-
zación tarda aprox. 5 minutos en completarse).
4) Pulse cualquier tecla para finalizar.
15. Pulse la tecla X para mostrar el menú [CALIBRACIÓN DATOS], que aplica valo-
res de compensación a los sensores para obtener indicaciones precisas en NA-
Vpilot.
3.14 Calibración de datos
El menú [CALIBRACIÓN DATOS] permite aplicar un valor de compensación a los da-
tos de velocidad, viento, temperatura y profundidad. Si la indicación de la unidad de
control es distinta al valor real, aplique un valor de compensación para corregir la in-
dicación. Las indicaciones actuales de la unidad de control aparecen entre parénte-
sis.
SEGUIR RUMBO FIJO Y PULS
ENTER PARA EST VALOR.
¿ESTÁ SEGURO?
SÌ ENTER NO MENU

3. CONFIGURACIÓN INICIAL
3-19
1. Gire el botón para seleccionar el valor al que desea aplicar la compensación y, a
continuación, púlselo.
2. Gire el botón para ajustar un valor y, a continuación, púlselo. Introduzca un valor
negativo si la indicación es superior al valor real y un valor positivo si es inferior
al valor real. Por ejemplo, si la indicación de profundidad es de 100 pies y la pro-
fundidad real es de 98 pies, introduzca -2.
*;VSA=velocidad sobre el agua
3. Pulse la tecla X para mostrar el menú [CONFIG PARÁMETROS], que permite
ajustar NAVpilot en función de las condiciones de la mar, el reglaje, etc.
3.15 Menú CONFIG PARÁMETROS
Condiciones de la mar
NAVpilot cuenta con una función de ajuste automático que permite configurar el equi-
po en función de las características del barco y la condición de la mar para obtener
un rendimiento óptimo en los modos AUTO, NAV y VIEN. Además, incorpora un al-
goritmo de aprendizaje automático, que optimiza constantemente los parámetros de
las ganancias de reglaje automático, contratimón y relación del timón, en función de
los datos históricos de gobierno del barco y los almacena para la futura navegación.
Así es como podrá indicar cómo gobernará NAVpilot el barco:
Elemento Rango de compensación Elemento Rango de compensación
VSA* -50 - +50(%) TEMP 10 - +10(°C), -18 - +18(°F)
ÁNG VIEN-
TO
-180,0 - +180,0(°) PROF -15 - +100(ft/m/fa/PB)
VEL VIENT -5,0 - +5,0(km/h, m/s, mph)
CALIBRACIÓN DATOS 16/23
VSA: 0° % ( 5.1 kn )
ÁNG VIENTO: 0.0° (---.- kn ) A
VEL VIENT: 0.0kn
0% (---.- kn ) A
TEMP: 0°F (---.- °F )
PROF: 0ft (---.- ft )
CONFIG PARÁMETROS 17/23
COND. MAR: COMPLETO-AUTO
NIVEL DESVIACIÓN: AUTO
PARÁMETRO MANUAL
GAN REGLA: AUTO
CÁLCULO VELOCIDAD: AUTO*
NAVpilot-700
* Aparece en la página 2 del
menú de NAVpilot-711/720.

3. CONFIGURACIÓN INICIAL
3-20
1. Gire el botón para seleccionar [COND. MAR] y, a continuación, púlselo.
2. Gire el botón para seleccionar la opción que mejor se ajuste las condiciones ac-
tuales de la mar y, a continuación, púlselo. Para todos los demás elementos apar-
te de [COMPLETO-AUTO], diríjase al paso 4.
[COMPLETO-AUTO]: aprendizaje y ajuste automático activados.
[SEMI-AUTO]: aprendizaje desactivado y ajuste automático activado.
[MANUAL-CALMA]: aprendizaje desactivado; utilizar los parámetros selecciona-
dos para mar en calma.
[MANUAL-MODERADO]: aprendizaje desactivado; utilizar los parámetros para
una condición típica de mar normal.
[MANUAL-FUERTE]: está desactivado el aprendizaje automático, utilizándose
los parámetros preajustados para condiciones típicas de mar fuerte.
Para el funcionamiento cotidiano normal, se recomienda el modo [COMPLETO-
AUTO]. No obstante, si desea que el NAVpilot gobierne el barco en función de los
parámetros obtenidos de la experiencia, pero no desea que el piloto esté en modo
de aprendizaje automático, seleccione la opción [SEMI-AUTO].
Tenga en cuenta que el rumbo no se puede mantener tan bien si la condición de
la mar es diferente de aquella en la que se obtuvieron los parámetros obtenidos
de la experiencia. Esta opción se proporciona por si, utilizando el piloto, se en-
cuentra en una situación que no espera volverse a encontrar.
3. Para [COMPLETO-AUTO], establezca el nivel de desviación como sigue:
1) Gire el botón para seleccionar [NIVEL DESVIACIÓN] y, a continuación, púlse-
lo.
2) Gire el botón para seleccionar [AUTO] o [NIVEL]. Para [NIVEL], puede ajustar
un valor entre 1 y 9. Un número bajo mantiene el rumbo con mayor precisión,
pero el timón actúa más frecuentemente. Con un número alto, el timón gira
lentamente, pero el rumbo no se mantiene con tanta precisión.
3) Pulse el botón para confirmar el parámetro establecido.
Cómo ajustar manualmente los parámetros de gobierno de NAVpilot
Cuando está seleccionada una de estas opciones: [MANUAL-CALMA], [MANUAL-
MODERADO] o [MANUAL-FUERTE] para las condiciones de la mar, el apartado [PA-
RÁMETRO MANUAL] se establece como se indica a continuación.
Se pueden ajustar tres parámetros para la función MANUAL: meteorología, ganancia
del timón y contratimón.
1. Gire el botón para seleccionar la opción [PARÁMETRO MANUAL] del menú
[CONFIG PARÁMETROS] y, a continuación, púlselo. La pantalla ahora adoptará
un aspecto como el que se muestra a continuación.
COMPLETO-AUTO
SEMI-AUTO
MANUAL-CALMA
MANUAL-MODERADO
MANUAL-FUERTE
AUTO
NIVEL

3. CONFIGURACIÓN INICIAL
3-21
2. Gire el botón para seleccionar el valor de [METEOROLOGÍA-CALM] y, a conti-
nuación, púlselo.
3. Gire el botón para establecer el valor (de 0° a 10° para la meteorología).
4. Pulse el botón.
5. Ajuste de la misma forma [METEOROLOGÍA-MODERADA], [METEOROLOGÍA-
FUERT], [GANANC TIMÓN] y [CONTRA TIMÓN] (margen de ajuste: 1-20 para la
ganancia de timón y el contratimón).
6. Pulse la tecla MENU para terminar.
Directrices sobre cómo establecer COND. MAR
[METEOROLOGÍA]: con mala mar, la proa del barco cae a babor y a estribor. Si se
acciona el timón con mucha frecuencia para mantener el rumbo deseado, el mecanis-
mo del timón se desgasta rápidamente. Para evitarlo, el ajuste por condiciones me-
teorológicas insensibiliza el NAVpilot frente a pequeñas desviaciones de rumbo.
Puede elegir una cantidad entre 0° y 10°. Mientras la desviación del rumbo no supere
el valor seleccionado, no se gobernará para corregir el rumbo.
En la ilustración de la parte superior de la
página siguiente se muestran las líneas
de derrota del barco con los valores para
la meteorología ajustados en 3° y 7°. Por
ejemplo, cuando se ajusta en 7°, el timón
no se acciona hasta que la desviación del
rumbo es superior a 7°. Si se aumenta el
ajuste se reduce la utilización del meca-
nismo del timón, pero el barco tiende a na-
vegar en zigzag. Con la mar en calma,
establezca a un valor inferior.
[GANANC TIMÓN]: cuando el rumbo del barco se desvía del curso fijado, NAVpilot
ajusta el timón para corregirlo. Al ángulo del timón (en grados) con el que se gobierna
por cada grado de desviación de rumbo se le denomina ganancia del timón.
En las ilustraciones siguientes se muestran con cuántos grados de timón gobierna el
NAVpilot para anular una desviación de 4 grados respecto al rumbo con varios ajustes
de la ganancia del timón.
COND. MAR
[CALMA] [MODERADO] [FUERTE]
[METEOROLOGÍA] 1° 2° 3°
[GANANC TIMÓN] 3 5 10
[CONTRA TIMÓN] 1 2 4
7°
3°
Meteorología
= 3°
Meteorología
= 7°

3. CONFIGURACIÓN INICIAL
3-22
Ajuste la ganancia del timón para que el barco no realice demasiadas guiñadas. En
esta figura se facilitan las directrices generales para ajustar la ganancia del timón.
[CONTRA TIMON]: si el barco lleva mucha carga, el rumbo de proa puede cambiar
excesivamente debido a la inercia. Este fenómeno provoca que la embarcación "so-
brevire" respecto al rumbo previsto. Si esto ocurre, NAVpilot gobernará el timón al
costado opuesto y la proa caerá, de nuevo demasiado, hacia la banda contraria. En
un caso límite, la proa oscilará varias veces hasta estabilizarse en el nuevo rumbo.
Un ajuste, llamado "contratimón" evita este tipo de oscilaciones.
Los barcos pequeños no suelen necesitar contratimón. Si el barco realiza muchos zig-
zags antes de estabilizarse en un nuevo rumbo, aumente el ajuste de contratimón.
4°
4°
4°
Ganancia de timón = 1° Ganancia de timón = 2° Ganancia de timón = 3°
Ángulo del timón =
4° x 1=4°
Ángulo del timón =
4° x 2=8°
Ángulo del timón =
4° x 3=12°
Rápida
Calm
Ligera
Bajo
Velocidad
Cond. Mar
Carga
GANANC
Lenta
Fuert
Pesada
Alto
Contratimón:
con poco ajuste
Error grave de rumbo
Rumbo
previsto
Contratimón:
ajuste correcto
La función de contratimón retorna suavemente el
rumbo de proa del barco al rumbo previsto.
Lenta
Ligera
Bajo
Velocidad
Carga
CONTRA TIMÓN
Rápida
Pesada
Alto

3. CONFIGURACIÓN INICIAL
3-23
Ganancia de reglaje
NAVpilot supervisa continuamente el asiento del barco para mantener una sensibili-
dad al asiento óptima. Normalmente se utiliza un ajuste bajo, porque el asiento del
barco no suele cambiar rápidamente. Con un número alto se cambia el valor de com-
pensación del asiento con más frecuencia. Un ajuste demasiado alto puede producir
los problemas citados a continuación.
• La sensibilidad del asiento resulta afectada en exceso, con lo que aparecen asien-
tos a la banda de estribor y de babor alternativamente.
• El mecanismo de compensación del asiento responde a la guiñada, lo que provoca
una oscilación más marcada de la proa del barco.
Para ajustar el asiento, siga estas instrucciones:
1. Gire el botón para seleccionar [GAN REGLA] en el menú [CONFIG PARÁME-
TROS].
2. Gire el botón para mostrar las opciones de [GAN REGLA].
3. Gire el botón para seleccionar [AUTO] o [MANUAL] y, a continuación, púlselo.
Para [AUTO], diríjase al paso 4. Para [MANUAL], siga estos pasos:
1) Gire el botón para seleccionar el valor actual y, a continuación, púlselo.
2) Gire el botón para establecer un valor, de 1 a 20; el valor predeterminado se
calcula automáticamente según la eslora del barco, indicada en el menú [CA-
RACTERÍSTICAS BARCO].
4. Pulse el botón para finalizar.
Cálculo de la velocidad
Normalmente, el navegador indica la velocidad de forma automática. Si el navegador
falla, indique la velocidad manualmente.
1. Gire el botón para seleccionar la opción [CÁLCULO VELOCIDAD] en el menú
[CONFIG PARÁMETROS].
2. Pulse el botón para mostrar las opciones de [CÁLCULO VELOCIDAD].
3. Gire el botón para seleccionar [AUTO] o [MANUAL] y, a continuación, púlselo.
Para [AUTO], diríjase al paso 5. Para [MANUAL], siga estos pasos:
1) Gire el botón para seleccionar el valor actual y, a continuación, púlselo.
2) Gire el botón para establecer un valor (de 0,1 a 99,0).
4. Pulse el botón para finalizar.
5. Pulse la tecla X para mostrar el menú [OPCIÓN AUTO], que permite activar o
desactivar diversas operaciones automáticas.
AUTO
MANUAL
AUTO
MANUAL

3. CONFIGURACIÓN INICIAL
3-24
3.16 Menú OPCIÓN AUTO
Una vez completado este menú, pulse la tecla X para mostrar el menú [OPCIÓN
NAV]. El menú [OPCIÓN NAV] permite configurar las condiciones del modo NAV.
Elemento Descripción Configuración
[AUTO AVANZADO] El modo AUTOMÁTIC permite mantener un rum-
bo establecido, pero la marea o el viento pueden
desplazar el rumbo de la embarcación. Para com-
pensar los efectos de los vientos y las mareas,
ajuste [AUTO AVANZADO] en [ON]. Su unidad
NAVpilot debe estar conectada a un navegador
GPS que facilite datos de posición (latitud y longi-
tud) en un formato NMEA 0183 o de bus CAN.
[OFF], [ON]
[ARRAST RED AU-
TO]
Cuando un barco arrastra un arte de pesca, la red
"frena" la popa. Por este motivo, el barco se des-
vía del rumbo previsto. Para mantener el rumbo
del barco se necesita ajustar manualmente el
asiento, lo que puede ser molesto. Si no quiere
molestarse en realizar ajustes de asiento, puede
activar la función de arrastre automático para que
ajuste automáticamente el asiento. Esta función
es útil para pesqueros de arrastre o de cerco.
[OFF], [ON]
[RUMO TRAS FTO
CTROL RTO]
Seleccione qué rumbo se debe seguir tras haber
activado un controlador remoto. Consulte la figura
siguiente.
[RUMBO ANTERIOR],
[RUMBO ACTUAL]
OPCIÓN AUTO 18/23
AUTO AVANZADO: ON
ARRAST RED AUTO: OFF
RUMO TRAS FTO CTROL RTO:
RUMBO ACTUAL
Modo RUMBO ACTUAL Modo RUMBO ANTERIOR
Nuevo rumbo
Controlador
remoto: OFF
Rumbo anterior
Rumbo anterior
Remote
controller: OFF
Controlador
remoto: ON
Controlador
remoto: ON

3. CONFIGURACIÓN INICIAL
3-25
3.17 Menú OPCIÓN NAV
Tras configurar los elementos de este menú, pulse la tecla X para ir al menú [OP-
CIÓN DE PESCA] (todos, excepto veleros) o al menú [OPCIÓN VIEN] (velero).
Elemento Descripción Configuración
[MODO NAV] La embarcación puede desviarse del rumbo en-
tre dos waypoints en el modo NAV. Puede ocu-
rrir si, por ejemplo, se recibe un comando de un
controlador remoto. Para volver al rumbo fijado,
hay tres métodos disponibles: [RUMBO],
[XTE(PRECISIÓN)] y [XTE(ECONOMICO)].
Para [RUMBO], NAVpilot calcula un nuevo rum-
bo de acuerdo con la nueva posición, tras evitar
un obstáculo, etc., que le lleva directamente al
waypoint de destino. Tanto [XTE(PRECISIÓN)]
como [XTE(ECONOMICO)] son opciones que
usan el valor del error de desviación (XTE) para
gobernar el barco hacia el rumbo ORIGINAL an-
tes de esquivar el obstáculo correspondiente. La
opción PRECISIÓN permite gobernar el barco
de forma más precisa que ECONOMICO.
[RUMBO], [XTE(PRE-
CISIÓN)] y [XTE(ECO-
NOMICO)].
[ORIGEN DATOS
NAV]
Seleccione el origen de los datos de navegación
que se utilizará en el modo NAV. Consulte el
procedimiento descrito en la página siguiente.
[CAMBIO DE WAY-
POINT]
Cuando llegue a un waypoint de una ruta en el
modo NAV, podrá cambiar al siguiente waypoint
de forma automática o manual.
Con el ajuste [AUTO] se cambiará automática-
mente al siguiente waypoint de destino cuando
el barco esté dentro del área de alarma de arri-
bada (ajustada en el plóter de cartas).
Con el ajuste [MANUAL] es necesaria la confir-
mación del operador (pulsando el botón) antes
de cambiar al waypoint siguiente.
[AUTO], [MANUAL],
[DESPUÉS ARRIB-
ADA]
Ajuste cómo se gobernará el barco tras arribar al
último waypoint de la ruta en el modo NAV. Esta
función no está disponible si se selecciona vele-
ro como tipo de barco.
[IR RECTO],
[ÓRBIT A BABOR],
[ÓRBIT A ESTRB],
[BAB FIG EN OCHO],
[ESTRB FIG EN OCHO],
[BABOR CUADRADO],
[ESTRIBOR CUADRA-
DO ]
[NAVNET2] NAVpilot pasa automáticamente al modo NAV
cuando recibe una sentencia P (propiedad de
FURUNO) procedente de un equipo NAVNet2.
Esta función se puede activar o desactivar.
Además, no es válida si se utiliza el modo de
pesca.
[OFF], [ON]
OPCIÓN NAV 19/23
MODO NAV: XTE(ECONOMICO)
ORIGEN DATOS NAV
CAMBIO DE WAYPOINT:
AUTO
DESPUÉS ARRIBADA:
IR RECTO
NAVNET2: OFF

3. CONFIGURACIÓN INICIAL
3-26
Cómo seleccionar el origen de datos de navegación
1. En el menú [OPCIÓN NAV], gire el botón para seleccionar [ORIGEN DATOS
NAV] y, a continuación, púlselo.
2. Gire el botón para seleccionar [ORIG DATOS] y, a continuación, púlselo.
3. Gire el botón para seleccionar el origen y, a continuación, púlselo. Si tiene más
de un origen de datos de navegación, puede seleccionar la opción [AMBOS]. En
este caso, los datos de navegación que proporciona [ORIGEN2] se utilizan cuan-
do no está disponible [ORIGEN1].
4. Gire el botón para seleccionar [ORIGEN1] y, a continuación, púlselo.
Si tiene algún equipo que proporcione datos de navegación, el nombre aparecerá
en la ventana. En el ejemplo de más arriba, está conectado un equipo NAVNet3,
con un número único de 000C2F.
5. Gire el botón para seleccionar el origen y, a continuación, púlselo. Si tiene más
de un dispositivo que proporcione datos de navegación, puede seleccionarlo en
[ORIGEN2].
Nota: Si tiene un equipo NAVnet 2 conectado y está sincronizado con NAVpilot
([NAVNET2] activado en el menú [OPCIÓN AUTO], se selecciona automáticamente
[ORIGEN2]).
ORIGEN DATOS NAV
ORIG DATOS: ORIGEN1
ORIGEN1: - - - - - - - - - - - - - -
ORIGEN2: - - - - - - - - - - - - - -
ORIGEN1
ORIGEN2
AMBOS
- - - - - - - - - - - - - -
NAVNET3: 000C2F
PORT2

3. CONFIGURACIÓN INICIAL
3-27
3.18 Menú OPCIÓN DE PESCA u OPCIÓN VIENTO
En función de la configuración de [CARACTERÍSTICAS BARCO], aparecerá el menú
[OPCIÓN DE PESCA] u [OPCIÓN VIEN] después del menú [OPCIÓN NAV]. El menú
[OPCIÓN VIEN] aparecerá si se ha seleccionado velero como tipo de barco.
3.18.1 Menú OPCIÓN DE PESCA
El menú [OPCIÓN DE PESCA] permite preestablecer los parámetros de diversos gi-
ros, a los que se accede con la tecla TURN (NAVpilot-700) o TURN/MENU (NAVpilot-
711/720).
OPCIÓN DE PESCA 20/23
CÍRCULO
ÓRBITA
ESPIRAL
FIG8
CUADRAD
ZIGZAG
CÍRCULO
VEL DE GIRO: 3 °/s
ÓRBITA
RADIO: 0,05 nm
ESPIRAL
VELOC: 0,5 kn
RADIO: 0,05 nm
FIG. EN OCHO
RADIO: 0,05 nm
GIRO CUADRAD
LONG LATERL: 1,0 nm
AZIMUT: AUTO
AUTO
MANUAL
ZIGZAG
ÁNG GIRO: 90 °
TERMINACIÓN:
CONTINUO
DISTANC:
NÚMERO DE GIROS:
ANCHO: 0,5 nm
Elemento
Margen de ajuste *
CÍRCULO
ÓRBITA
ESPIRAL
FIG8
CUADRAD
ZIGZAG
1° - 5°/s
0,05 - 9,99 nm
Velocidad: 0,1 - 2,0 kn
Radio: 0,05 - 9,99 nm
0,05 - 9,99 nm
Longitud lateral: 1,0 - 9,9 nm
Azimut: 0 - 359° (manual)
Ángulo de giro: 30° - 150°
Número de giros: 1 - 20
Distancia: 1 - 99 nm
Ancho: 0,1 - 9,9 nm
* El margen de ajuste depende de las unidades seleccionadas en
el menú [CONFIG UNIDAD].
Establecido en la opción de menú NÚMERO DE GIROS.
Establecido en la opción de menú DISTANC.
NÚMERO DE GIROS
DISTANC
CONTINUO

3. CONFIGURACIÓN INICIAL
3-28
3.18.2 Menú OPCIÓN VIENTO
Una vez configuradas todas las opciones del menú [OPCIÓN DE PESCA] (u [OP-
CIÓN VIEN]), pulse la tecla X para ir al menú [CONFIGUR SISTEMA]. El menú
Elemento Descripción Configuración
[TIPO MODO] Hay tres modos para el ángulo del viento: AAV
(ángulo aparente del viento), AVV (ángulo verda-
dero del viento) y AUTO.
AAV: la dirección (relativa a la proa del barco) del
viento como aparece desde el barco, detectada
por el sensor de viento. El modo AAV necesita da-
tos de velocidad y ángulo del viento. Utilice este
modo cuando el viento esté estable.
AVV: la dirección real del viento, que es una com-
binación del ángulo aparente del viento y el mov-
imiento del barco. Este modo necesita el ángulo
del viento aparente, la velocidad del viento
aparente, la velocidad y el rumbo de proa del bar-
co propio. Utilice este modo cuando haya un vien-
to de popa inestable.
AUTO: NAVpilot utiliza el modo AVV cuando el
ángulo del viento es superior al valor de AUTO
(50° - 150°).
[AAV], [AVV], [AUTO]
[ANG TIMON VIRD
VNTO]
La virada en el modo VIEN necesita que se ajuste
el ángulo de timón máximo. Ese ángulo se calcula
automáticamente durante la instalación de
NAVpilot. Si necesita cambiar el valor, hágalo
aquí.
10° - 45°
[SUAVIZR VNTO] Puede establecer el intervalo de suavizado para
los datos del viento de manera que compense la
fluctuación aleatoria de dichos datos. Cuanto más
alto sea el ajuste, más precisos serán los datos.
Sin embargo, un intervalo elevado provoca retra-
sos en la recepción de los datos del viento; un re-
traso equivalente al intervalo de suavizado.
Desactive la función de suavizado si los datos del
viento se reciben de forma estable.
[OFF], [ON] (0,7 - 99,9)
[ANG VIRADA FI-
JAD]
El modo de virada fijada necesita que se ajuste el
ángulo de virada.
15° - 179°
[REL VIRADA LEN-
TA]
Ajuste la relación de virada lenta. 1° - 10°s
[REL VIRADA RÁPI-
DA]
Ajuste la relación de virada rápida. 10° - 30°s
[TIEMPO VIR] Ajuste cuánto tiempo se esperará antes de iniciar
un giro tras pulsar el botón.
[OFF], [ON] (1 - 99 s)
OPCIÓN VIEN 20/23
TIPO MODO: AAV
ANG TIMON VIRD VNTO: 35
°
SUAVIZR VNTO: OFF
ANG VIRADA FIJAD: 20
°
REL VIRADA LENTA: 3
°
/s
REL VIRADA : 20
°
/s
TIEMPO VIR: OFF

3. CONFIGURACIÓN INICIAL
3-29
[CONFIGUR SISTEMA] permite establecer la configuración del sistema como, por
ejemplo, el sonido del teclado, la iluminación del panel, etc.
3.19 Menú CONFIGUR SISTEMA
Una vez configuradas todas las opciones del menú [CONFIGUR SISTEMA], pulse la
tecla X para ir al menú [CONFIGURACIÓN CR], que permite configurar los controla-
dores remotos.
Elemento Descripción Configuración
[PITO TCL] Permite activar o desactivar el pitido del
teclado.
[ON], [OFF]
[VOL ALARM] Permite ajustar el volumen del zumbador en
NAVpilot-700.
[PEQUE], [GRAND]
[TCL FLECH] Permite establecer la función de una tecla de
flecha cuando se pulsa para evitar un ob-
stáculo en los modos AUTO y NAV.
[EVI OBS], [5°], [10°],
[MANUAL]. Para [MAN-
UAL], seleccione el gra-
do de viraje de 1°; a 90°.
[ÁNG GIRO] Permite ajustar el ángulo de giro en el modo
de giro.
15° - 360°, en intervalos
de 15°
[ILUMIN PANEL] Permite ajustar el nivel de retroiluminación
para el panel.
1 - 8
[CONTRAS] Permite asignar una contraseña de cuatro
dígitos con la que desbloquear las teclas y
los menús de la unidad de control.
0000 - 9999
[FUNC CONTRASEÑA] Activa o desactiva el requisito de con-
traseña.
[ON], [OFF]
CONFIGUR SISTEMA 21/23
PITO TCL: ON
VOL ALARM: GRAND
TCL FLECH: EVI OBS
ÁNG GIRO: 45
°
ILUMIN PANEL: 8
CONTRAS: 0000
FUNC CONTRASEÑA: OFF

3. CONFIGURACIÓN INICIAL
3-30
3.20 Menú CONFIGURACIÓN CR (controlador remo-
to)
Configure el tipo de controlador remoto de la siguiente forma:
1. Se selecciona el valor de [CONTROL REMOTO1]; pulse el botón.
2. Gire el botón para seleccionar el tipo de controlador remoto conec-
tado.
[SSG]: seleccione el controlador remoto de tipo botón o palanca.
[CS]: seleccione el controlador remoto de tipo dial.
[EVI OBS]: seleccione el controlador remoto para evitar obstáculos.
[DESACT]: desactive el funcionamiento del controlador remoto.
3. Ajuste el tipo del controlador remoto 2, si está conectado.
Una vez completados todos los ajustes de configuración, pulse dos veces la tecla X
para que aparezca el siguiente mensaje.
Pulse la tecla X para guardar todos los ajustes de configuración. Para comprobar de
nuevo la configuración, pulse la tecla W.
CONFIGURACIÓN CR 22/23
CONTROL REMOTO1: DESACT
CONTROL REMOTO2: DESACT
SSG
CS
EVI OBS
DESACT
CONFIG REGISTRADA COMO
CONFIG. TÉCNICA,
¿ESTÁ SEGURO?
ANT.
SÍ NO MENU

PACKING LIST
64BB-X-9854 -0
FAP-7001
N A M E
O U T L I N E
DESCRIPTION/CODE №
Q'TY
1/1
ユニット UNIT
操作部2D
CONTROL UNIT 2D
FAP-7001
000-016-411-00
1
付属品 ACCESSORIES FP64-01401
ターミナルコネクタ
TERMINATOR
BD-07AFFM-LR7001
001-081-140-10
1
工事材料 INSTALLATION MATERIALS CP64-02900
+ナベタッピンネジ 1シュ
SELF-TAPPING SCREW
3X20 SUS304
000-163-884-10
4
Sマウントスポンジ-2D
FLUSH MOUNTING SPONGE 2D
64-028-1013-0
100-352-540-10
1
パネルリムーバー
PANEL REMOVER
19-028-3124-1
100-340-471-10
1
ケーブル組品
CABLE ASSEMBLY
BD-07AFFM-LR-150
001-081-180-10
1
図書 DOCUMENT
取扱説明書(英)
OPERATOR'S MANUAL (EN)
OME-72720-*
000-171-812-1*
1
操作要領書(多言)
OPERATOR'S GUIDE (MLG)
MLG-72720-*
000-172-121-1*
1
(略図の寸法は、参考値です。 DIMENSIONS IN DRAWING FOR REFERENCE ONLY.)
64BB-X-9854
型式/コード番号が2段の場合、下段より上段に代わる過渡期品であり、どちらかが入っています。 なお、品質は変わりません。
TWO TYPES AND CODES MAY BE LISTED FOR AN ITEM. THE LOWER PRODUCT MAY BE SHIPPED IN PLACE OF THE UPPER
PRODUCT. QUALITY IS THE SAME.
A-1

NAME OUTLINE Q'TYDESCRIPTION/CODE №
PACKING LIST
64BB-X-9855 -0
FAP-7011
1/1
NAME OUTLINE Q'TYDESCRIPTION/CODE №
ユニット UNIT
操作部1D
CONTROL UNIT 1D
1
FAP-7011
000-016-412-00
付属品 ACCESSORIES
FP64-01401
ターミナルコネクタ
TERMINATOR
1
BD-07AFFM-LR7001
001-081-140-10
工事材料 INSTALLATION MATERIALS
CP64-03000
+ナベタッピンネジ 1シュ
SELF-TAPPING SCREW
4
3X20 SUS304
000-163-884-10
Sマウントスポンジ
SPONGE
1
26-001-1012-0
100-352-270-10
パネルリムーバー
PANEL REMOVER
1
19-028-3124-1
100-340-471-10
バネ座金
SPRING WASHER
2
M3 SUS304
000-167-404-10
ミガキ丸平座金
FLAT WASHER
2
M3 SUS304
000-167-453-10
寸切ボルト
BOLT
2
M3X40 SUS304
000-167-804-10
蝶ナット
WING NUT
2
M3 SUS304
000-167-826-10
ケーブル組品
CABLE ASSEMBLY
1
BD-07AFFM-LR-150
001-081-180-10
図書 DOCUMENT
取扱説明書(英)
OPERATOR'S MANUAL (EN)
1
OME-72720-*
000-171-812-1*
操作要領書(多言)
OPERATOR'S GUIDE (MLG)
1
MLG-72720-*
000-172-121-1*
(略図の寸法は、参考値です。 DIMENSIONS IN DRAWING FOR REFERENCE ONLY.)
64BB-X-9855
型式/コード番号が2段の場合、下段より上段に代わる過渡期品であり、どちらかが入っています。 なお、品質は変わりません。
TWO TYPES AND CODES MAY BE LISTED FOR AN ITEM. THE LOWER PRODUCT MAY BE SHIPPED IN PLACE OF
THE UPPER PRODUCT. QUALITY IS THE SAME.
A-2

PACKING LIST
64BB-X-9856 -1
FAP-7021
N A M E
O U T L I N E
DESCRIPTION/CODE №
Q'TY
1/1
ユニット UNIT
操作部HANDY
CONTROL UNIT HANDY
FAP-7021
000-016-413-00
1
付属品 ACCESSORIES FP64-01411
+トラスタッピンネジ 1シュ
SELF-TAPPING SCREW
4X20 SUS304
000-158-850-10
4
クレードル(N2.5)
CRADLE(N2.5)
64-028-4004-1
100-356-481-10
1
図書 DOCUMENT
取扱説明書(英)
OPERATOR'S MANUAL (EN)
OME-72720-*
000-171-812-1*
1
操作要領書(多言)
OPERATOR'S GUIDE (MLG)
MLG-72720-*
000-172-121-1*
1
(略図の寸法は、参考値です。 DIMENSIONS IN DRAWING FOR REFERENCE ONLY.)
64BB-X-9856
型式/コード番号が2段の場合、下段より上段に代わる過渡期品であり、どちらかが入っています。 なお、品質は変わりません。
TWO TYPES AND CODES MAY BE LISTED FOR AN ITEM. THE LOWER PRODUCT MAY BE SHIPPED IN PLACE OF THE UPPER
PRODUCT. QUALITY IS THE SAME.
A-3

PACKING LIST
64BB-X-9857 -1
FAP-7002/-11/-20
N A M E
O U T L I N E
DESCRIPTION/CODE №
Q'TY
1/1
ユニット UNIT
制御部
PROCESSOR UNIT
FAP-7002/-11/-20
000-016-419-00
1
**
予備品 SPARE PARTS SP64-01501
ヒューズ
GLASS TUBE FUSE
FGMB 125V 4A PBF
000-157-482-10
4
工事材料 INSTALLATION MATERIALS CP64-03101
+トラスタッピンネジ 1シュ
SELF-TAPPING SCREW
4X20 SUS304
000-158-850-10
4
コンベックス
CABLE TIE
CV-80N
000-162-192-10
20
図書 DOCUMENT
装備要領書(英)
INSTALLATION MANUAL
IME-72720-*
000-171-813-1*
1
コ-ド番号末尾の[**]は、選択品の代表コードを表します。
CODE NUMBER ENDING WITH "**" INDICATES THE CODE NUMBER OF REPRESENTATIVE MATERIAL.
(略図の寸法は、参考値です。 DIMENSIONS IN DRAWING FOR REFERENCE ONLY.)
64BB-X-9857
型式/コード番号が2段の場合、下段より上段に代わる過渡期品であり、どちらかが入っています。 なお、品質は変わりません。
TWO TYPES AND CODES MAY BE LISTED FOR AN ITEM. THE LOWER PRODUCT MAY BE SHIPPED IN PLACE OF THE UPPER
PRODUCT. QUALITY IS THE SAME.
A-4

D-1

D-2

D-3

D-4

D-5

D-6

D-7

D-8

D-9

Y
. Hata
i
D-10

D-11

D-12

D-13

D-14

D-15

D-16

$
#
&
%
0#/'
ฬ⒓
6+6.'
MI
/#55
&9) 0Q
5%#.'
#22418'&
%*'%-'&
&4#90
4'(0Q
+06'4%100'%6+10 &+#)4#/
⋧⚿✢࿑
ࠝ࠻ࡄࠗࡠ࠶࠻
#7612+.16
0#8RKNQV
5*+'.&
)0&
9*6
$.7
;'.
)40
4'&
$.-
ࠪࡠ
ࠕࠝ
ࠠ
㩚㩎㩨㩢
ࠕࠞ
ࠢࡠ
)0&
%10641. #
5*+'.&
)0&
9*6
$.7
;'.
)40
4'&
$.-
ࠪࡠ
ࠕࠝ
ࠠ
㩚㩎㩨㩢
ࠕࠞ
ࠢࡠ
%10641. $
,
5*+'.&
)0&
$.7
;'.
)40
ࠕࠝ
ࠠ
㩚㩎㩨㩢
4'&ࠕࠞ
࠴ࡖ $40
4'/2
4'/5+)
4'/0
4'/59
4475+)
447A5+)
5*+'.&
)40㩚㩎㩨㩢
;'.ࠠ
ࠢࡠ
ࠪࡠ 9*6
$.-
447
,
,
%10641. 70+6
ᠲㇱ
,
,
)0&
O (#2
4'/16' %10641..'4
㆙㓒▤ེ
47&&'4 4'('4'0%'
ㅊᓥ⊒ାེ
70+6 (#2
ห
&+661
6'4/+0#614
⚳┵ེ
,
%10641. 70+6
ᠲㇱ
OǾ
5*+'.&
)0&
4'/16' %10641..'4
(#2
㆙㓒▤ེ
4'/16' %10641..'4
㆙㓒▤ེ
4'/16' %10641..'4
㆙㓒▤ེ
(#2 (#2
ᠲㇱᠲㇱ %10641. 70+6%10641. 70+6
+8US
+8US
+8US
4'/2
4'/5+)
4'/0
4'/59
(#2 (#2
,
(#2
(#2
6$
)0&
51.$/1614
51.#/1614
6$
8&%
8&%
51.#
51.$
51.%1/
51.'01+& 8#.8'
㔚⏛ᑯ
&2;
4'8'45+$.' 27/2
ࡃࠪࡉ࡞ࡐࡦࡊ
/1614#
/1614$
241%'5514 70+6
ᓮㇱ
(#2
6$
$%A219'4
$%
5*+'.&
/1614
/1614
$;2#55%.76%*
$;2#55%.76%*
&2;
$%
*;&4#7.+% .+0'4
&4+8'
ࠢ࠶࠴
5*+'.&
6$
)'0'4#. 176
176A01
%1/
176A0%
176A01
%1/
176A0%
219'4
/161451.
)'0'4#. +0
6$
59A8
59A+0
59A)0&
59A8
59A+0
59A)0&
5*+'.&
5*+'.&
6&#
6&$
4&*
4&%
6$
6&#
6&$
4&*
4&%
/,#52(OǾ
;'.
)40
ࠠ
㩚㩎㩨㩢
9*6ࠪࡠ
ࠢࡠ $.-
0%
5*+'.&
6:&*
6:&%
4:&*
4:&%
2
2
2
%#0 DWU
6$
5*+'.&
$&#((/
219'4A59
%#0A*
%#0A.
8A2
$&#((/
.4
OǾ
$&#((/
$&#((/.4OǾ
$&#((/.4OǾ
6$
6$
0'6A5
0'6A%
0'6A*
0'6A.
0'6 219'4
6$
0'6A5
0'6A%
5*+'.&
+8US
8$75
&A2
&A0
)0&
75$
8$75
&A2
&A0
)0&
75$
75$ %#$.'
⥶ᴺⵝ⟎
0#8 '37+2/'06
0/'# 2146
0/'# 2146
6$
6$
4'/
447A294
)0&
)0&
8A2
219'4A59
%#0A*
%#0A.
4'/16' %10641..'4
㆙㓒▤ེ
(#2
4'/16' %10641..'4
(#2
㆙㓒▤ེ
/,#52(OǾ
/,#52(
,
/,#52(
4'/2
4'/5+)
4'/0
4'/59
4'/%1/
0%
0%
0%
0%
()
4'/2
4'/5+)
4'/0
4'/59
4'/%1/
0%
0%
0%
0%
()
ࠕࠝ
ࠠ
㩚㩎㩨㩢
࠴ࡖ
ࠕࠞ
$.7
;'.
)40
4'&
$40
294A59A*
294A59A%
%#0A*
%#0A.
8
5*+'.&
)0&
294A59A*
294A59A%
%#0A*
%#0A.
8
5*+'.&
)0&
294A59A*
294A59A%
%#0A*
%#0A.
8
5*+'.&
)0&
294A59A*
294A59A%
%#0A*
%#0A.
8
5*+'.&
)0&
294A59A*
294A59A%
%#0A*
%#0A.
8
5*+'.&
)0&
294A59A*
294A59A%
%#0A*
%#0A.
8
5*+'.&
߹ߚߪ 14
㩗㩍㩨㨲㩧㩂㩨㩈㩧㩅㨺
*'#&+0) 5'05140/'#
(#2
&+564+$7614
ಽ㈩ེ
,
,
/,#52(
/,#52(
,
ห
&+661
219'4 5722.;
8&%
2
ࠗࡌࡦ࠻ࠬࠗ࠶࠴
'8'06 59+6%*
4'.#; %106#%6 /#:#
ᄖㇱࠕࡓ
':6'40#. #.#4/
ᄖㇱࠕࡓ
':6'40#. #.#4/
ାภߩ⒳㘃ߦࠃࠅធ⛯ࠍㆬᛯߔࠆ
%100'%6+10 5'.'%6'& $; 5+)0#. /1&'
&2;/#:#
&2;
62;
ห
&+661
O
/2;%
ห
&+661
126+10
5*+2;#4& 5722.;
016'
㧖㧞㧕ࠝࡊ࡚ࠪࡦޕ
㧖㧝㧕ㅧ⦁ᚲᚻ㈩ޕ
ᵈ⸥
㧖㧟㧕ࠤࡉ࡞㐳ߐߦࠃࠅ⧌✢ߩᄥߐࠍᄌᦝߔࠆޕ
%*#0)' 6*' %14' 5+<' #%%14&+0) 61 %#$.' .'0)6*
2%
ࡄ࠰ࠦࡦ
ࡔࡦ࠹࠽ࡦࠬ↪
(14 /#+06'0#0%' 10.;
%10641. 70+6
ᠲㇱ
(#2
(#2
,70%6+10 $1:
ࠤࡉ࡞ᑧ㐳
࡙࠾࠶࠻
$&#((/
,
$&#(#(.4
OǾ
$&#(#(.4
OǾ
ࠕࠞ 4'&
ࠢࡠ $.-
ࠪࡠ 9*6
ࠕࠝ $.7
㩒㨹㩎㩦㨺㩂㩍㩨㩔㩨㨼㩇
0'6914- &'8+%'
/$((/O
%$$((/O
6;#/#5#-+
66#-#*#5*+
6$
/C[
/C[
%% '
20/May/2010 TAKAHASHI
S-1

φ
90(3.54”) +2
-0 mm
Cut out shaded area only
Pilot hole for 3×20mm self-tapping screw.
Control Unit FAP-7001
Surface Mount Template
206 ±0.5 mm(8.11” ±0.02”)
48 ±0.5 mm(1.89” ±0.02”)
85 ±0.5 mm(3.35” ±0.02”)

Cut out shaded area only
Drill hole of 10mm(0.39”) in dia.
228 ±0.5 mm(8.98” ±0.02”)
218 ±1 mm(8.58” ±0.04”)
Pilot hole for 3×20mm self-tapping screw.
113 ±1 mm(4.45” ±0.04”)
60 ±0.5 mm(2.36” ±0.02”)
103 mm(4.06”)
208 mm(8.19”)
Control Unit FAP-7001
Flush Mount Template

80 ±0.5 mm(3.15” ±0.02”)
51.5 mm(2.03”)
94 ±0.5 mm(3.70” ±0.02”)
45 ±0.5 mm(1.77” ±0.02”)
44.6
±0.5 mm
(1.76” ±0.02”)
60 ±0.5 mm(2.36”±0.02”)
Cut out shaded area only
Drill hole of 3.5 mm(0.14”)
in dia.
Pilot hole for 3×20 mm
self-tapping screw.
Control Unit FAP-7011
Surface Mount Template
96 ±0.5 mm(3.78” ±0.02”)
φ
90 (3.54”) +2
-0 mm

Cut out shaded area only
96 mm(3.78”)
113 ±1 mm(4.45” ±0.04”)
101 mm(3.97”)
Drill hole of 10 mm
(0.39”) in dia.
Pilot hole for 3×20 mm
self-tapping screw.
Control Unit FAP-7011
Flush Mount Template
118 ±0.5 mm(4.65” ±0.02”)
108 ±1 mm(4.25” ±0.04”)
60 ±0.5 mm(2.36” ±0.02”)
-
 1
1
-
 2
2
-
 3
3
-
 4
4
-
 5
5
-
 6
6
-
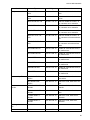 7
7
-
 8
8
-
 9
9
-
 10
10
-
 11
11
-
 12
12
-
 13
13
-
 14
14
-
 15
15
-
 16
16
-
 17
17
-
 18
18
-
 19
19
-
 20
20
-
 21
21
-
 22
22
-
 23
23
-
 24
24
-
 25
25
-
 26
26
-
 27
27
-
 28
28
-
 29
29
-
 30
30
-
 31
31
-
 32
32
-
 33
33
-
 34
34
-
 35
35
-
 36
36
-
 37
37
-
 38
38
-
 39
39
-
 40
40
-
 41
41
-
 42
42
-
 43
43
-
 44
44
-
 45
45
-
 46
46
-
 47
47
-
 48
48
-
 49
49
-
 50
50
-
 51
51
-
 52
52
-
 53
53
-
 54
54
-
 55
55
-
 56
56
-
 57
57
-
 58
58
-
 59
59
-
 60
60
-
 61
61
-
 62
62
-
 63
63
-
 64
64
-
 65
65
-
 66
66
-
 67
67
-
 68
68
-
 69
69
-
 70
70
-
 71
71
-
 72
72
-
 73
73
-
 74
74
-
 75
75
-
 76
76
-
 77
77
-
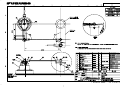 78
78
-
 79
79
-
 80
80
-
 81
81
-
 82
82
-
 83
83
-
 84
84
-
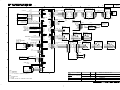 85
85
-
 86
86
-
 87
87
-
 88
88
-
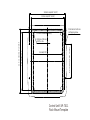 89
89

























































































