
Software de programación EPSON RC+ 7.0
Manipulador T3 y T6
VT6
CPD-56087R1
Guía de seguridad
e instalación
Sistema de robot
Lea este manual primero
Rev.9 EM193B3890F


Guía de seguridad e instalación
– Sistema de robot (T, VT / EPSON RC+ 7.0) Rev.9


Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9 i
Guía de seguridad e instalación – Sistema de robot
(T, VT / EPSON RC+ 7.0)
Rev.9
Copyright 2017-2019 SEIKO EPSON CORPORATION. Quedan reservados todos los derechos.

ii Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
PRÓLOGO
Gracias por comprar nuestros productos de robot. Este manual contiene la
información necesaria para el uso correcto del sistema de robot. Lea atentamente
este manual y otros manuales relacionados antes de instalar el sistema de robot.
Mantenga este manual a la mano para un acceso fácil en todo momento.

Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9 iii
MARCAS COMERCIALES
Microsoft, Windows y el logotipo de Windows son marcas registradas o marcas
comerciales de Microsoft Corporation en los Estados Unidos y/o en otros países.
Otras marcas y productos son marcas comerciales o marcas registradas de sus
respectivos propietarios.
ANOTACIONES DE MARCAS COMERCIALES EN ESTE
MANUAL
Sistema operativo Microsoft® Windows® 7
Sistema operativo Microsoft® Windows® 8
Sistema operativo Microsoft® Windows® 10
En todo este manual Windows 7, Windows 8 y Windows 10 se refieren a los
sistemas operativos respectivos mencionados anteriormente. En algunos casos,
Windows se refiere de manera genérica a Windows 7, Windows 8 y Windows 10.
AVISO
Ninguna parte de este manual se puede copiar o reproducir sin autorización.
El contenido de este manual está sujeto a cambios sin previo aviso.
Notifíquenos si encuentra errores en este manual o si tiene comentarios con
respecto a su contenido.
FABRICANTE
Seiko Epson Corporation
3-3-5 Owa, Suwa-shi, Nagano, 392-8502
URL
: http://global.epson.com/company/
: http://www.epson.jp/prod/robots/
Toyoshina Plant
Robotics Solutions Operations Division
6925 Toyoshina Tazawa,
Azumino
-shi, Nagano, 399-8285
Japón
TEL
: +81-(0)263-72-1530
FAX
: +81-(0)263-72-1685

iv Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
PROVEEDORES (País/Región)
América del
Norte
y del Sur
Epson America, Inc.
Factory Automation/Robotics
1650 Glenn Curtiss Street
Carson, CA 90746
EE.UU.
TEL
: +1-562-290-5900
FAX
: +1-562-290-5999
CORRO
ELECTRÓNICO
Europa
Epson Deutschland GmbH
Robotic Solutions
Otto
-Hahn-Str.4
D
-40670 Meerbusch
Alemania
TEL
: +49-(0)-2159-538-1800
FAX
: +49-(0)-2159-538-3170
CORRO
ELECTRÓNICO
URL:
: www.epson.de/robots
China
Epson (China) Co., Ltd.
Factory Automation Division
4F, Tower 1, China Central Place,
81 Jianguo Road, Chaoyang District,
Beijing, 100025, PRC
TEL
: +86-(0)-10-8522-1199
FAX
: +86-(0)-10-8522-1120
Taiwán
Epson Taiwan Technology & Trading Ltd.
Factory Automation Division
1
5F, No.100, Songren Rd, Sinyi Dist., Taipei City, 11073
Taiwán
TEL
: +886-(0)-2-8786-6688
FAX
: +886-(0)-2-8786-6600

Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9 v
Corea
Epson Korea Co., Ltd.
Marketing Team (Robot Business)
10F Posco P&S Tower, Teheranro 134 (Yeoksam
-dong)
Gangnam
-gu, Seoul, 06235
Corea
TEL
: +82-(0)-2-3420-6692
FAX
: +82-(0)-2-558-4271
Sudeste Asiático
Epson Singapore Pte. Ltd.
Factory Automation System
1 HarbourFront Place, #03
-02,
HarbourFront Tower One,
Singapur 098633
TEL
: +65-(0)-6586-5696
FAX
: +65-(0)-6271-3182
India
Epson India Pvt. Ltd.
Sales & Marketing (Factory Automation)
12th Floor, The Millenia, Tower A, No. 1,
Murphy Road, Ulsoor, Bangalore,
India
560008
TEL
: +91-80-3051-5000
FAX
: +91-80-3051-5005
Japón
Epson Sales Japan Corporation
Factory Automation Systems Department
29
th
floor, JR Shinjuku Miraina Tower, 4-1-6
Shinjuku, Shinjuku
-ku, Tokyo 160-8801
Japón
TEL
:+81-(0)3-5919-5257
FAX
:+81-(0)3-5919-5402

vi Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
En relación con la eliminación de la batería
La etiqueta con el basurero con ruedas tachado que se puede encontrar en el producto
indica que este producto y las baterías incorporadas no se deben eliminar en el flujo
normal de desechos domésticos. Para evitar los posibles daños ambientales o a la
salud humana, separe este producto y las baterías de otros flujos de desechos para
garantizar que se puedan reciclar de una manera ambientalmente correcta. Para
conocer más detalles acerca de las instalaciones de recolección, comuníquese con la
oficina gubernamental local o con el vendedor minorista donde compró este producto.
El uso de los símbolos químicos Pb, Cd o Hg indica si estos metales se usan en la
batería.
Esta información solo se aplica a los clientes de la Unión Europea, de acuerdo con la
DIRECTIVA 2006/66/EC DEL PARLAMENTO EUROPEO Y DEL CONSEJO DEL 6 de
septiembre de 2006 acerca de las baterías y acumuladores y de las baterías y
acumuladores de desecho y por la que se deroga la Directiva 91/157/EEC y la
legislación, transponiéndose e implementándose en diversos sistemas legales
nacionales.
Para otros países, comuníquese con su gobierno local para investigar la posibilidad de
reciclar su producto.
El procedimiento de retiro y reemplazo de la batería se describe en los siguientes
manuales:
Manual del manipulador Mantenimiento: Reemplazo de la batería de litio
Solo para clientes de California
Las baterías de litio de este producto contienen material de perclorato: Se pueden
aplicar procedimientos de manipulación especiales. Consulte la página
www.dtsc.ca.gov/hazardouswaste/perchlorate (solo disponible en inglés).

Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9 vii
Antes de leer este manual
Los manipuladores de la serie T y VT pueden utilizar la caja de comandos
Teach Pendant (TP2, TP3). No conecte los demás dispositivos al puerto TP,
salvo los dispositivos TP2 y TP3. Al conectar otros dispositivos puede
provocar el mal funcionamiento del dispositivo, ya que las asignaciones de
los pines son distintas.
Con respecto a la compatibilidad de seguridad para la conexión de red:
La función de conexión de red (Ethernet) de nuestros productos asume el
uso en la red local, como la red LAN de la fábrica. No la conecte a la red
externa, como Internet.
Además, tome medidas de seguridad, como contra virus de la conexión de
red, mediante la instalación de un software antivirus.
Compatibilidad de seguridad para la memoria USB:
Asegúrese de que la memoria USB no esté infectada con virus cuando se
conecte al controlador.
NOTA
NOTA
NOTA

viii Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
Configuración del sistema de control
El sistema de manipulador de las series T y VT se configura con una
combinación del siguiente software.
T3-401S
Firmware del controlador
Versión 7.3.51.1 o posterior
EPSON RC+ 7.0
Anterior a la
versión 7.3.0
!!!
Versión 7.3.1 o
posterior
OK
T6-602S
Firmware del controlador
Versión 7.3.53.0 o posterior
EPSON RC+ 7.0
Anterior a la
versión 7.3.3
!!!
Versión 7.3.4 o
posterior
OK
VT6-A901S
Firmware del controlador
Versión 7.4.53.0 o posterior
EPSON RC+ 7.0
Anterior a la
versión 7.4.2
!!!
Versión 7.4.3 o
posterior
OK
OK: Compatible Todas las funciones de EPSON RC+ 7.0 y el controlador están
disponibles.
!!!: Compatible La conexión está bien. Se recomienda utilizar las siguientes
versiones o versiones posteriores. Es posible que la pantalla o el
control no funcionen correctamente.
T3-401S: EPSON RC+7.0 Ver.7.3.1
T6-602S: EPSON RC+7.0 Ver.7.3.4
VT6-A901S: EPSON RC+7.0 Ver.7.4.3

Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9 ix
RoHS de China
Esta hoja y etiqueta de período de uso de protección ambiental se basan en el
reglamento de China. No es necesario preocuparse por esto en otros países.
产品中有害物产的名称及含量
机器人型号名称
T VT
部件名称
有害物产
产
汞
产
六价产
多产
产苯
多产
二苯产
(Pb)
(Hg)
(Cd)
(Cr(VI))
(PBB)
(PBDE)
机器人部
× ○ ○ ○ ○ ○
产机 (产行器产元、产机产元)
× ○ ○ ○ ○ ○
减速机产元
× ○ ○ ○ ○ ○
产磁制产器
× ○ ○ ○ ○ ○
同产皮产
○ ○ ○ ○ ○ ○
产池产元
(产池、产池固定架、产池基板)
× ○ ○ ○ ○ ○
密封
(密封填料、油封、密封脂、
产片、O型产)
× ○ ○ ○ ○ ○
产滑脂
○ ○ ○ ○ ○ ○
产产 (M/C产产、产接产产)
× ○ ○ ○ ○ ○
散产片
○ ○ ○ ○ ○ ○
LED指示灯
○ ○ ○ ○ ○ ○
产路板
× ○ ○ ○ ○ ○
产珠产杠花产(T系列)
○ ○ ○ ○ ○ ○
制产解除产产
× ○ ○ ○ ○ ○
外罩
○ ○ ○ ○ ○ ○
扎产
○ ○ ○ ○ ○ ○
原点产产
○ ○ ○ ○ ○ ○
气管接产
× ○ ○ ○ ○ ○
选
件
VT
相机板单元
× ○ ○ ○ ○ ○
外部配线配套元件
○
○
○
○
○
○
工具适配器(ISO法兰)
○
○
○
○
○
○
相机安装板
○ ○ ○ ○ ○ ○
可调机械挡块
○
○
○
○
○
○
T
相机安装板
× ○ ○ ○ ○ ○
兼容板
×
○
○
○
○
○
本表格依据SJ/T 11364的产定产制。
○
:表示
产有害物
产
在产部件所有均
产
材料中的含量在GB/T 26572产定的限量要求以下。
×:表示
产有害物
产
至少在
产
部件的某一均产
材料中
的含量超出GB/T 26572产定的限量要求。
本产品中
含有的有害物产的部件皆因全球技产产展水平限制而无法产产
有
害物产的替代。
产品产保使用期限的使用条件
产于适用于在中产人民共和国境内产售的产器产子产品的产保使用期限,在遵守产产品的安全及使用注意
事产的条件下,从生产日期
产
始产
算
,在产志的年限内,本产品中含有的有害物产
不会
产产
境造成
产
重
产
染或产人身、产产造成产重产害。
附注:
本表格及产保使用期限产志依据中国的有产产定而制定,中国以外的国家/地区产无需产注。
Nota:
Esta hoja y etiqueta de período de uso de protección ambiental se basan en el reglamento
de China. No es necesario preocuparse por esto en otros países.

x Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
产品中有害物产的名称及含量
控制器型号名称
T VT
部件名称
有害物产
产
汞
产
六价产
多产
产苯
多产
二苯产
(Pb)
(Hg)
(Cd)
(Cr(VI))
(PBB)
(PBDE)
控制器部
× ○ ○ ○ ○ ○
产路板
× ○ ○ ○ ○ ○
产产产源
× ○ ○ ○ ○ ○
产束
× ○ ○ ○ ○ ○
存产卡
× ○ ○ ○ ○ ○
产池
○ ○ ○ ○ ○ ○
产接器附件
× ○ ○ ○ ○ ○
选
件
产路板
× ○ ○ ○ ○ ○
接产
× ○ ○ ○ ○ ○
接产端子
× ○ ○ ○ ○ ○
产急停止产产
× ○ ○ ○ ○ ○
TP3
× ○ ○ ○ ○ ○
墙面安装金属件
× ○ ○ ○ ○ ○
Hot Plug Kit
× ○ ○ ○ ○ ○
CV1
× ○ ○ ○ ○ ○
CV2
× ○ ○ ○ ○ ○
相机
× ○ ○ ○ ○ ○
延产管
× ○ ○ ○ ○ ○
GigE相机PoE产产器
× ○ ○ ○ ○ ○
GigE相机PoE交产集产器
× ○ ○ ○ ○ ○
GigE相机三脚架适配器
× ○ ○ ○ ○ ○
以太网交产机
× ○ ○ ○ ○ ○
USB选件密钥
×
○
○
○
○
○
电源插头
○
○
○
○
○
○
本表格依据SJ/T 11364的产定产制。
○
:表示
产有害物
产
在产部件所有均
产
材料中的含量在GB/T 26572产定的限量要求以下。
×:表示
产有害物
产
至少在
产
部件的某一均产
材料中
的含量超出GB/T 26572产定的限量要求。
本产品中
含有的有害物产的部件皆因全球技产产展水平限制而无法产产
有
害物产的替代。
产品产保使用期限的使用条件
产于适用于在中产人民共和国境内产售的产器产子产品的产保使用期限,在遵守产产品的安全及使用注
意事产的条件下,从生产日期产始
产算,在
产
志的年
限内,本产品中含有的有害物
产
不会
产
产境造成
产
重产染或产人身、产产造成产重产害。
附注:
本表格及产保使用期限产志依据中国的有产产定而制定,中国以外的国家/地区产无需产注。
Nota:
Esta hoja y etiqueta de período de uso de protección ambiental se basan en el
reglamento de China. No es necesario preocuparse por esto en otros países.

Contenido
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9 xi
1. Seguridad 1
1.1 Convenciones ........................................................................... 1
1.2 Seguridad en el diseño y la instalación ..................................... 2
1.2.1 Manuales pertinentes .................................................... 2
1.2.2 Diseño de un sistema de robot seguro .......................... 3
1.3 Seguridad en la operación ........................................................ 7
1.3.1 Requisitos relacionados con la seguridad ................... 10
1.3.2 Nombres de piezas / Movimiento del brazo .................. 11
1.3.3 Modos de funcionamiento ............................................ 14
1.4 Seguridad en el mantenimiento ............................................... 14
1.5 Parada de emergencia ............................................................ 18
1.5.1 Distancia de funcionamiento libre en una
emergencia ............................................................................. 18
1.5.2 Cómo restablecer el modo de emergencia .................. 22
1.6 Etiquetas ................................................................................. 23
Manipulador serie T ................................................................. 23
Manipulador serie VT .............................................................. 25
1.7 Funciones de seguridad .......................................................... 27
1.8 Especificaciones del manipulador ........................................... 30
Manipulador serie T ................................................................. 30
Manipulador serie VT .............................................................. 33
1.9 Ajuste del margen de movimiento con paradas mecánicas .... 37
Manipulador serie T ................................................................. 37
Manipulador serie VT .............................................................. 37
1.10 Capacitación del usuario final ............................................... 41
2. Instalación 42
Ejemplo de sistema ......................................................................... 42
2.1 Esquema desde el desembalaje hasta la operación del
sistema de robot .............................................................................. 45
2.2 Desembalaje ........................................................................... 46
2.2.1 Precauciones de desembalaje ..................................... 46
2.3 Transporte ............................................................................... 47
2.3.1 Precauciones de transporte ......................................... 47
2.3.2 Transporte del manipulador ......................................... 48
2.4 Instalación del manipulador ..................................................... 49
2.4.1 Precauciones de instalación ........................................ 49
2.4.2 Entorno ........................................................................ 50
2.4.3 Nivel de ruido ............................................................... 51
2.4.4 Mesa base ................................................................... 51
2.4.5 Procedimiento de instalación ....................................... 52

Contenido
xii Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
2.5 Conexión al conector EMERGENCY ...................................... 55
2.5.1 Interruptor de puerta de seguridad e interruptor de
liberación de enganche ........................................................... 56
2.5.2 Interruptor de puerta de seguridad .............................. 56
2.5.3 Interruptor de liberación de enganche ......................... 57
2.5.4 Comprobación del funcionamiento del interruptor de
liberación de enganche ........................................................... 58
2.5.5 Interruptor de parada de emergencia .......................... 59
2.5.6 Comprobación del funcionamiento del interruptor de
parada de emergencia ............................................................ 59
2.5.7 Asignaciones de pines ................................................. 60
2.5.8 Diagramas de circuitos ................................................ 62
2.6 Fuente de alimentación, cable de alimentación de CA,
disyuntor .......................................................................................... 64
2.6.1 Fuente de alimentación ............................................... 64
2.6.2 Cable de alimentación de CA ...................................... 65
2.7 Encendido ............................................................................... 66
2.7.1 Precauciones de encendido ........................................ 66
2.7.2 Procedimiento de encendido ....................................... 67
2.8 Guardar estado predeterminado ............................................. 68
3. Primer paso 69
3.1 Instalación del software EPSON RC+ 7.0 ............................... 69
3.2 Conexión de la computadora de desarrollo y
el manipulador ................................................................................. 72
3.2.1 Acerca del puerto de conexión de la computadora
de desarrollo ........................................................................... 73
3.2.2 Precauciones ............................................................... 74
3.2.3 Configuración de software y verificación de
conexión ................................................................................. 74
3.2.4 Copia de seguridad de la condición inicial
del manipulador ...................................................................... 75
3.2.5 Desconexión de la computadora de desarrollo y
el manipulador ........................................................................ 76
3.2.6 Colocación del manipulador en la posición inicial ........ 76
3.3 Escritura del primer programa ................................................. 81

Contenido
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9 xiii
4. Segundo paso 88
4.1 Conexión con equipos externos .............................................. 88
4.1.1 Control remoto ............................................................. 88
4.1.2 Ethernet ....................................................................... 88
4.2 Conexión Ethernet de la computadora de desarrollo y
el manipulador ................................................................................. 89
4.3 Conexión de la caja de comandos (Teach Pendant)
opcional ........................................................................................... 89
5. Mantenimiento general 90
5.1 Programa de inspección de mantenimiento ............................ 90
5.2 Revisión (Reemplazo de piezas) ............................................. 93
5.3 Apretar pernos de cabeza hueca hexagonal ........................... 95
5.4 Engrase (Manipulador serie T) ................................................ 86
5.5 Manipulación y eliminación de baterías ................................... 98
6. Manuales 100
Software ......................................................................................... 100
Opciones ........................................................................................ 100
Manipulador ................................................................................... 101
7. Directivas y normas 102

1. Seguridad
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
1
1. Seguridad
Personal calificado deberá realizar la instalación y el transporte de robots y equipos
robóticos, los que deberán cumplir con todos los códigos nacionales y locales.
Lea este manual y otros manuales relacionados antes de instalar el sistema de robot
o antes de conectar los cables.
Mantenga este manual a la mano para un acceso fácil en todo momento.
1.1 Convenciones
En todo este manual se indican consideraciones importantes de seguridad con los
siguientes símbolos. Asegúrese de leer las descripciones que se muestran con cada
símbolo.
ADVERTENCIA
Este símbolo indica que existe un peligro de posibles lesiones
graves o la muerte si no se siguen adecuadamente las
instrucciones asociadas.
ADVERTENCIA
Este símbolo indica que existe un peligro de posibles daños a
las personas debido a descarga eléctrica si no se siguen
adecuadamente las instrucciones asociadas.
P
RECAUCIÓN
Este símbolo indica que existe un peligro de posibles daños a
las personas o daños físicos a los equipos e instalaciones si no
se siguen adecuadamente las instrucciones asociadas.

1. Seguridad
2
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
1.2 Seguridad en el diseño y la instalación
Solo personal capacitado debe diseñar e instalar el sistema de robot. El personal
capacitado se define como aquellos quienes hayan tomado una capacitación en
sistemas de robot proporcionada por un fabricante, distribuidor o empresa
representante local, o aquellos quienes comprendan cabalmente los manuales y
tengan el mismo nivel de conocimiento y habilidades que aquellos que hayan
completado los cursos de capacitación.
Para garantizar la seguridad, se debe instalar una protección para el sistema de
robot. Para conocer detalles acerca de la protección, consulte Precauciones de
diseño e instalación en el capítulo Seguridad del Manual del usuario EPSON RC+.
Los siguientes elementos son precauciones de seguridad para el personal de diseño:
ADVERTENCIA
■
El personal que diseñe o construya el sistema de robot con este producto
debe leer el capítulo
Seguridad en el Manual del usuario EPSON RC+ para
comprender los requisitos de seguridad antes de diseñar o construir el
sistema de robot
. Diseñar o construir el sistema de robot sin comprender los
requisitos de seguridad es extremadamente peligroso y puede provocar
lesiones corporales graves o daños graves en el sistema de robot.
■
El sistema de robot se debe usar en las condiciones ambientales que se
describen
en sus respectivos manuales. Este producto se ha diseñado y
fabricado estrictamente para su uso en un entorno normal en interiores. El
uso del producto en un entorno que exceda las condiciones ambientales
especificadas no solo acortará la vida útil del pr
oducto, sino que además
puede causar graves problemas de seguridad.
■
El sistema de robot se debe usar dentro de los requisitos de instalación
descritos en los manuales. El uso del sistema de robot fuera de los requisitos
de instalación no solo acortará
la vida útil del producto, sino que además
puede causar graves problemas de seguridad.
En los siguientes manuales se mencionan precauciones adicionales para la
instalación. Lea atentamente estos capítulos para comprender los procedimientos
de instalación segura antes de instalar los robots y los equipos robóticos.
1.2.1 Manuales pertinentes
Consulte
Este manual:
2. Instalación
Manual del manipulador: Configuración y operación 3. Entorno e instalación

1. Seguridad
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
3
1.2.2 Diseño de un sistema de robot seguro
Es importante operar el manipulador de manera segura. También es importante que
los usuarios del manipulador consideren cuidadosamente la seguridad de todo el
diseño del sistema de robot.
Esta sección resume las condiciones mínimas que se deben observar cuando use el
manipulador de Epson en sus sistemas de robot.
Diseñe y fabrique los sistemas de robot de acuerdo con los principios descritos en
esta sección y las siguientes secciones.
Condiciones ambientales
Observe detenidamente las condiciones para la instalación del manipulador y los
sistemas de robot que se indican en las tablas de “Condiciones ambientales” que se
incluyen en los manuales de todos los equipos que se usan en el sistema.
Distribución del sistema
Cuando diseñe la distribución de un sistema de robot, considere cuidadosamente la
posibilidad de errores entre el manipulador y los equipos periféricos. Las paradas
de emergencia requieren particular atención, ya que un robot se detendrá después
de seguir una ruta que sea distinta a su ruta de movimiento normal. El diseño de la
distribución debe proporcionar suficientes márgenes para la seguridad. Consulte
los manuales de cada manipulador y asegúrese de que la distribución asegure un
amplio espacio para realizar trabajos de inspección y mantenimiento.
Cuando diseñe un sistema de robot para restringir el área de movimiento del
manipulador, hágalo de acuerdo con los métodos descritos en el manual de cada
manipulador. Utilice las paradas mecánicas y de software como medidas para
restringir el movimiento.
Instale el interruptor de parada de emergencia en un lugar cerca de la unidad de
operación del sistema de robot, en donde el operador pueda mantenerlo presionado
fácilmente durante una emergencia.
Diseño del efector final
Proporcione cableado y tuberías que eviten que el efector final del manipulador
suelte el objeto sostenido (la pieza de trabajo) cuando se corte la energía del
sistema de robot.
Diseñe el efector final del manipulador de manera que su peso y el momento de
inercia no superen los límites permisibles. El uso de valores que superen los límites
permisibles puede someter al manipulador a cargas excesivas. Esto no solo acortará
la vida útil del robot, sino que además puede provocar situaciones peligrosas
debido a fuerzas externas adicionales que se aplican al efector final y a la pieza de
trabajo.

1. Seguridad
4
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
Diseñe el tamaño del efector final con cuidado, ya que el cuerpo del manipulador y
el efector final del manipulador pueden interferir entre ellos.
Diseño de los equipos periféricos
Cuando diseñe equipos que retiren y suministren piezas y materiales al sistema de
robot, asegúrese de que el diseño proporcione suficiente seguridad al operador. Si
hay necesidad de retirar y suministrar materiales sin detener el manipulador, instale
un dispositivo de transporte o tome otras medidas para garantizar que el operador
no deba ingresar a una zona posiblemente peligrosa.
Asegúrese de que una interrupción de la fuente de alimentación (corte de energía)
de los equipos periféricos no provocará una situación peligrosa. Tome medidas que
no solo eviten que una pieza de trabajo sostenida se suelte, como se menciona en
“Diseño del efector final”, sino que además garantice que los equipos periféricos,
aparte de los manipuladores, se puedan detener con seguridad. Verifique la
seguridad de los equipos para garantizar que, cuando se corte la energía, el área sea
segura.
Control remoto
Para evitar que la operación por control remoto sea peligrosa, las señales de
arranque desde el controlador remoto solo se permiten cuando el dispositivo de
control está configurado en REMOTE, el modo TEACH está configurado en OFF
y el sistema está configurado para aceptar señales remotas. Además, cuando
remoto es válido, la ejecución del comando de movimiento y la salida de E/S están
disponibles solo desde el control remoto. Sin embargo, para la seguridad de todo el
sistema, se necesitan medidas de seguridad para eliminar el riesgo asociado con el
arranque y apagado de equipos periféricos por control remoto.
Parada de emergencia
Cada sistema de robot necesita equipos que permitan que el operador detenga
inmediatamente el funcionamiento del sistema. Instale un dispositivo de parada de
emergencia que utilice una entrada de parada de emergencia desde el controlador y
de todos los demás equipos.
Durante la parada de emergencia, se corta la energía que se suministra al motor
para accionar el robot y el robot se detiene debido al frenado dinámico.
Asegure que todos los componentes externos que cortan la energía en caso de
emergencia se APAGUEN por el circuito de la parada de emergencia. No lo diseñe
para que se APAGUE el controlador del robot utilizando las salidas de todas las
placas de E/S. Por ejemplo, si la placa de E/S está defectuosa, el controlador no
puede APAGAR los componentes eternos. La parada de emergencia del
controlador está conectada permanentemente para cortar la energía del motor del
robot, pero no de las fuentes de alimentación externas.

1. Seguridad
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
5
Para conocer detalles acerca del sistema de protección, consulte la siguiente
sección.
1.5 Parada de emergencia
Sistema de protección
Para garantizar la seguridad, se debe instalar un sistema de protección para el
sistema de robot.
Cuando instale el sistema de protección, acate estrictamente los siguientes puntos:
Consulte todos los manuales del manipulador e instale el sistema de protección
fuera del espacio máximo. Considere detenidamente el tamaño del efector final y
las piezas de trabajo que se sostendrán, de modo que no haya errores entre las
piezas móviles y el sistema de protección.
Fabrique el sistema de protección para soportar las fuerzas externas calculadas
(fuerzas que se sumarán durante la operación y fuerzas del entorno circundante).
Cuando diseñe el sistema de protección, asegúrese de que no tenga esquinas
puntiagudas o proyecciones pronunciadas y que el sistema de protección en sí no
sea peligroso.
Asegúrese de que el sistema de protección solo se pueda retirar con una
herramienta.
Hay varios tipos de dispositivos de protección, como puertas de seguridad, barreras
de seguridad, cortinas de luz, compuertas de seguridad y esteras de seguridad.
Instale la función de enclavamiento en el dispositivo de protección. El
enclavamiento de protección se debe instalar de manera que se vea forzado a
funcionar en caso de la falla de un dispositivo u otro accidente inesperado. Por
ejemplo, cuando use una puerta con un interruptor como el enclavamiento, no
dependa de la propia fuerza de resorte del interruptor para abrir el contacto. El
mecanismo de contacto se debe abrir inmediatamente en caso de un accidente.
Conecte el interruptor de enclavamiento a la entrada de protección del conector
EMERGENCY del manipulador. La entrada de protección informa al manipulador
que es posible que un operador esté dentro del área de protección. Cuando se activa
la entrada de protección, el manipulador se detiene inmediatamente e ingresa al
estado de pausa, así como al estado de operación prohibida o al estado restringido
(estado de potencia baja).
Asegúrese de no ingresar al área protegida, excepto a través del punto donde está
instalado el enclavamiento de protección.
Se debe instalar el enclavamiento de protección de manera que pueda mantener una
condición segura hasta que se libere el enclavamiento a propósito una vez iniciado.

1. Seguridad
6
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
La entrada de liberación de enganche se proporciona para que el conector
EMERGENCY en el manipulador libere la condición de enganche del
enclavamiento de protección. El interruptor de liberación de enganche del
enclavamiento de protección debe estar instalado fuera del área protegida y
conectado a la entrada de liberación de enganche.
Es peligroso permitir que alguien más libere el enclavamiento de protección por
error mientras el operador trabaja dentro del área protegida. Para proteger al
operador que trabaja dentro de esta área, tome medidas para bloquear y etiquetar el
interruptor de liberación de enganche.
Dispositivo de detección
El enclavamiento de protección mencionado anteriormente es un tipo de
dispositivo de detección, ya que indica la posibilidad de que alguien esté dentro del
sistema de protección. Sin embargo, cuando instale un dispositivo de detección por
separado, realice una evaluación de riesgos satisfactoria y preste atención a su
confiabilidad.
Aquí hay algunas precauciones que debe observar:
- Diseñe el sistema de modo que, cuando el dispositivo de detección no esté
activado o una situación peligrosa aún exista, el personal no pueda
ingresar al área de protección o colocar las manos dentro de esta.
- Diseñe el dispositivo de detección de modo que el sistema funcione de
manera segura sin importar la situación.
- Si el manipulador deja de funcionar cuando el dispositivo de detección se
activa, es necesario garantizar que no vuelva a arrancar hasta que se haya
retirado el objeto que detectó. Asegúrese de que el manipulador no pueda
volver a arrancar automáticamente.
Restablecimiento de la protección
Asegúrese de que el sistema de robot solo pueda volver a arrancar a través de la
operación cuidadosa desde el exterior del sistema de protección. El manipulador
nunca volverá a arrancar si simplemente se restablece el interruptor de
enclavamiento de protección. Aplique este concepto a las compuertas de
enclavamiento y a los dispositivos de detección de presencia de todo el sistema.
Panel de operación del manipulador
Cuando se use el panel de operación del manipulador, se debe instalar de modo que
opere el sistema de robot desde fuera del área protegida.

1. Seguridad
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
7
1.3 Seguridad en la operación
Los siguientes elementos son precauciones de seguridad para el personal operador
calificado:
A
DVERTENCIA
■
Lea atentamente los
Requisitos relacionados con la seguridad antes
de operar el sistema de robot
. Operar el sistema de robot sin
comprender los requisitos de seguridad es extremadamente
peligroso y puede provocar lesiones corporales graves o daños
graves e
n el sistema de robot.
■
No ingrese al área de funcionamiento del manipulador mientras la
energía hacia el sistema de robot esté ENCENDIDA
. Ingresar al
área de funcionamiento con la energía ENCENDIDA es
extremadamente peligroso y puede provocar graves p
roblemas de
seguridad, ya que es posible que el manipulador se mueva, incluso
si parece estar detenido.
■
Antes de operar el sistema de robot, asegúrese de que no haya
nadie dentro del área protegida
. El sistema de robot se puede operar
en el modo de
enseñanza, incluso cuando alguien está dentro del
área protegida.
El movimiento del manipulador siempre está en estado restringido
(baja velocidad y baja potencia) para garantizar la seguridad de un
operador
. Sin embargo, operar el sistema de robot mientras alguien
está dentro del área protegida es extremadamente peligroso y
puede provocar problemas graves de seguridad en caso de que el
manipulador se mueva de manera inesperada.
■
Presione inmediatamente el interruptor de parada de emergencia
siempre que
el manipulador se mueva de manera anormal mientras
se opera el sistema de robot
. Seguir operando el sistema de robot
mientras el manipulador se mueve de manera anormal es
extremadamente peligroso y puede provocar lesiones corporales
graves o cambios drásti
cos de equipos en el sistema de robot.

1. Seguridad
8
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
A
DVERTENCIA
■
Para cortar la energía hacia el sistema de robot, desconecte el
enchufe de la fuente de alimentación
. Asegúrese de conectar el
cable de alimentación de CA a un receptor de energía
. NO lo
conecte
directamente a la fuente de alimentación de la fábrica.
■
Antes de realizar cualquier procedimiento de reemplazo, APAGUE
el sistema de robot y los equipos relacionados, luego desconecte el
enchufe de la fuente de alimentación
. Realizar cualquier
procedimiento de reemplazo con la energía ENCENDIDA es
extremadamente peligroso y puede provocar una descarga eléctrica
o el mal funcionamiento del sistema de robot.
■
No conecte o desconecte los conectores del motor mientras el
sistema de robot esté
ENCENDIDO. Conectar o desconectar los
conectores del motor con la energía ENCENDIDA es
extremadamente peligroso y puede provocar lesiones corporales
graves, ya que el manipulador puede moverse de manera anormal;
además, puede provocar descargas eléctricas
y el mal
funcionamiento del sistema de robot.
P
RECAUCIÓN
■
Cuando sea posible, solo una persona debería operar el sistema
de robot
. Si es necesario operar el sistema de robot con más de
una persona, asegúrese de que todas las personas que participen
se
comuniquen entre sí con respecto a lo que están haciendo y
tomen todas las precauciones de seguridad necesarias.
■
Robot SCARA
Articulación n.° 1, n.° 2 y n.° 4:
Si las articulaciones se operan repetidamente con un ángulo de
funcionamiento inferior a 5 grados, el
manipulador se puede
dañar prematuramente debido a que los cojinetes no est
án
engrasados durante el movimiento. Para evitar las averías
tempranas, mueva l
as articulaciones en más de 50 grados
aproximadamente cinco a diez veces por día.
Articulación n.° 3:
Si el movimiento hacia arriba y hacia abajo de la mano es de
menos de 10 mm, mueva la articulación la mitad de la carrera
máxima cinco a diez veces por dí
a.

1. Seguridad
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
9
P
RECAUCIÓN
■
■
Robot de 6 ejes
Cada articulación:
Si las articulaciones se operan repetidamente con un ángulo de
funcionamiento inferior a 5 grados, el Manipulador se puede
dañar prematuramente debido a que los cojinetes no estén
engrasados durante el movimiento. Para evitar las averías
tempranas, mueva las articulaciones en más de 30 grados
aproximadamente cinco a diez veces por día.
La vibración (resonancia) puede ocurrir continuamente
dependiendo de la combinación de velocidad d
el movimiento del
robot, orientación del brazo y carga del efector final. La vibración
surge de la frecuencia de vibración natural del brazo y se puede
controlar con las siguientes medidas.
Cambiar la velocidad del manipulador
Cambiar los puntos de enseñanza
Cambiar la carga del efector final
■
Es posible que el manipulador se caliente debido al calor del
motor o a causas similares. No toque el manipulador hasta que
baje la temperatura. Además, asegúrese de que la temperatura
del manipulador baje y no se
sienta caliente cuando lo toque.
Luego, realice la enseñanza o el mantenimiento.

1. Seguridad
10
1.3.1 Requisitos relacionados con la seguridad
Las tolerancias y condiciones de funcionamiento específicas para la seguridad se
encuentran en los manuales del manipulador, controlador y otros dispositivos.
Asegúrese de leer esos manuales también.
Para la instalación y operación del sistema de robot, asegúrese de cumplir con
todos los reglamentos locales y nacionales pertinentes.
En este capítulo se presentan las normas de seguridad del sistema de robot y otros
ejemplos. Para asegurarse de cumplir las medidas de seguridad, consulte también
estas normas.
(Nota: Esta es una lista parcial de las normas de seguridad necesarias).
EN ISO 10218-1
Robots y dispositivos robóticos -- Requisitos de seguridad para
robots industriales -- Parte 1: Robots
EN ISO 10218-2
Robots y dispositivos robóticos -- Requisitos de seguridad para
robots industriales -- Parte 2: Sistemas robóticos e integración
ANSI/RIA R15.06
Norma nacional americana para robots y sistemas robóticos
EN ISO 12100
EN ISO 13849-1
EN ISO 13850
EN ISO 13855
EN ISO 13857
ISO14120
IEC 60204-1
EN 60204-1
CISPR11
EN55011
IEC 61000-6-2
EN 61000-6-2
industriales -- Requisitos de seguridad
Seguridad de la maquinaria -- Principios generales para el diseño --
Evaluación de riesgos y reducción de riesgos
Seguridad de la maquinaria -- Piezas de sistemas de control
relacionadas con la seguridad -- Parte 1: Principios generales para
el diseño
Seguridad de la maquinaria – Función de parada de emergencia --
Principios para el diseño
Seguridad de la maquinaria -- Posicionamiento de las protecciones
con respecto a las velocidades de acercamiento de partes del cuerpo
humano.
Seguridad de la maquinaria -- Distancias de seguridad para evitar
que las extremidades superiores e inferiores alcancen las zonas de
peligro.
Seguridad de la maquinaria -- Protecciones -- Requisitos generales
para el diseño y la construcción de protecciones fijas y móviles
Seguridad de la maquinaria -- Equipos eléctricos de las máquinas --
Parte 1: Requisitos generales
Equipos de radiofrecuencia industriales, científicos y médicos
(ISM) -- Características de la perturbación electromagnética --
Límites y métodos de medición
Compatibilidad electromagnética (CEM) -- Parte 6-2: Normas
genéricas -- Inmunidad para entornos industriales
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9

1. Seguridad
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
11
1.3.2 Nombres de piezas / Movimiento del brazo
Manipulador serie VT
En la siguiente figura se muestra el margen de movimiento de cada brazo.
Tome todas las precauciones de seguridad necesarias.
Articulación n.º 3
Interruptor de desbloqueo del freno
Articulación n.º 1
(Giro)
Articulación n.º 2
(Giro)
Articulación n.º 3
(Arriba/Abajo)
Articulación n.º 4
(Giro)
Brazo n.º 1
Brazo n.º 2
+
−
+
−
+
−
+
−
Mango
Luz LED
Unidad de
energía
Base
Conector E/S manual
(Ilustración: T3-401S)
Etiqueta de firma
(Núm. de serie del manipulador)

1. Seguridad
12
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
Conector rápido (azul) o
tubo neumático de ø4
Conector rápido (azul) o
tubo neumático de ø6 mm
Conector TP
Conector EMERGENCY
Cubierta de fuente de alimentación
(Conector de CA en el interior)
Conector E/S (Entrada)
Conector E/S (Salida)
Conector LAN (Ethernet)
Puerto para computadora
de desarrollo
Interruptor de reinicio (RESET)
Conector rápido (blanco) o
tubo neumático de ø6 mm
Puerto para unidad
de memoria
Cuando se coloca el sistema en modo de emergencia, empuje el brazo o la
articulación del manipulador con la mano, tal como se muestra a continuación:
Brazo n.° 1 Empuje el brazo con la mano.
Brazo n.° 2 Empuje el brazo con la mano.
Articulación n.° 3 La articulación no se puede mover con la mano
hacia arriba o hacia abajo hasta que se haya liberado el
freno de solenoide que se aplicó a la articulación. Mueva
la articulación hacia arriba y hacia abajo mientras
presiona el interruptor de desbloqueo del freno.
Articulación n.° 4 Gire el mango con la mano.
El interruptor de desbloqueo del freno solo afecta a la articulación n.° 3. Cuando se
presiona el interruptor de desbloqueo del freno en modo de emergencia, se libera el
freno de la articulación n.° 3.
Tenga cuidado con el mango mientras se presiona el interruptor de desbloqueo del
freno, ya que es posible que el mango baje debido al peso del efector final.
Cuando ocurren los siguientes errores, no se libera el freno del manipulador aún se
está presionando el interruptor de desbloqueo del freno.
Revise las conexiones de los cables y elimine los errores. Luego, vuelva a conectar
los cables y libere el freno.
Errores: 1552, 2118, 4003, 4004, 4009, 4100, 4101, 4103, 4187, 4188, 4189, 4191,
4192, 4233, 4240, 4285-4292, 9633, 9640, 9691, 9685-9692
NOTA
NOTA

1. Seguridad
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
13
Manipulador serie VT
En la siguiente figura se muestra el margen de movimiento de cada brazo.
Tome todas las precauciones de seguridad necesarias.
Articul. n.° 6
Brazo n.° 6
Brazo n.° 3
Brazo n.° 4
Articul.n.° 3
Brazo n.° 5
Articul.
n.°
4
Articul. n.° 5
Brazo n.° 2
Articul. n.° 2
Movimiento de la articulación
Joint n.° 1: Todo el manipulador gira.
Joint n.° 2: El brazo inferior oscila.
Joint n.° 3: El brazo
superior oscila.
Joint n.° 4: La muñeca gira.
Joint n.° 5: La muñeca oscila.
Joint n.° 6:
La mano gira.
Brazo n.° 1 (brazo inferior)
Articul.n.° 1
Base
Brazo superior (Brazo n.° 3 a 6)
Conector EMERGENCY
Puerto TP
Conector de E/S
(salida) del
puerto TP
Interruptor RESET
Puerto de MEMORIA
Conector de
E/S (entrada)
Puerto de la computadora de desarrollo
Conector LAN
(Ethernet)
Cubierta OPCIONAL
(Conector OPCIONAL dentro)
Cubierta de la unidad de
alimentación
(Conector de alimentación
de CA dentro)

1. Seguridad
14
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
Cuando la luz LED está encendida o está ACTIVADO el controlador, se
aplica corriente al manipulador. (Según la posición del manipulador, es
posible que no se vea la luz LED. Tenga mucho cuidado).
Realizar trabajos con la energía ENCENDIDA es extremadamente peligroso y
puede provocar una descarga eléctrica o el mal funcionamiento del sistema de
robot. Asegúrese de APAGAR el manipulador antes de realizar trabajos de
mantenimiento.
1.3.3 Modos de funcionamiento
El sistema de robot tiene tres modos de funcionamiento.
Modo TEACH
(Enseñar)
Este modo permite enseñar y revisar datos de puntos
cercanos al robot con la caja de comandos (Teach Pendant).
En este modo, el robot funciona en estado de potencia baja.
Modo AUTO
(Automático)
Este modo permite el funcionamiento automático
(ejecución del programa) del sistema de robot para las
actividades de fabricación y, además, para la programación,
depuración, ajuste y mantenimiento del sistema de robot.
Este modo no puede accionar los robots o ejecutar
programas con la puerta de seguridad abierta.
Modo TEST
(Prueba)
Este modo permite la verificación del programa mientras se
mantiene presionado el interruptor de activación y la
protección está abierta.
Esta es una función de verificación del programa de baja
seguridad (T1: modo de desaceleración manual), la que se
define en las normas de seguridad.
Este modo puede accionar la función especificada con
varias tareas / una sola tarea, varios manipuladores / un solo
manipulador a baja velocidad.
1.4 Seguridad en el mantenimiento
Lea atentamente esta sección, la sección Mantenimiento del manual del
manipulador y otros manuales relacionados para comprender los procedimientos de
mantenimiento seguro antes de realizar cualquier tipo de mantenimiento.
Solo se debe permitir que el personal autorizado que ha realizado una capacitación
en seguridad realice mantenimiento al sistema de robot. La capacitación en
seguridad es el programa para el operador de robots industriales que cumple con
las leyes y reglamentos de cada país.
El personal que ha realizado la capacitación en seguridad adquiere conocimiento
acerca de robots industriales (operaciones, enseñanza, etc.), conocimiento acerca
de las inspecciones y conocimiento de normas y reglamentos relacionados. Solo se
debe permitir que el personal que ha completado las clases de capacitación en
sistemas de robot y en mantenimiento que ha realizado el fabricante, el distribuidor
o la empresa incorporada localmente, realice mantenimiento al sistema de robot.
NOTE

1. Seguridad
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
15
A
DVERTENCIA
■
No
retire las piezas que no están cubiertas en este manual. Siga
estrictamente el procedimiento de mantenimiento, tal como se
describe en este manual ella sección
Mantenimiento del manual
del manipulador
. El retiro incorrecto de piezas o el mantenimiento
ina
decuado no solo pueden causar el mal funcionamiento del
sistema de robot, sino que además pueden causar graves
problemas de seguridad.
■
Manténgase alejado del manipulador mientras la energía esté
ENCENDIDA si no ha tomado cursos de capacitación
. No ingrese
al área de funcionamiento mientras la energía esté ENCENDIDA
.
Ingresar al área de funcionamiento con la energía ENCENDIDA
es extremadamente peligroso y puede provocar graves
problemas de seguridad, ya que es posible que el manipulador se
mueva, incluso
si parece estar detenido.
■
Cuando revise el funcionamiento del manipulador después de
reemplazar piezas, asegúrese de revisarlo desde fuera del área
protegida
. Revisar el funcionamiento del manipulador mientras
está dentro del área protegida puede
causar problemas graves
de seguridad, ya que el manipulador se puede mover de
improviso.
■
Antes de operar el sistema de robot, asegúrese de que tanto los
interruptores de parada de emergencia como los interruptores de
protección funcionen correctamente
. Operar el sistema de robot
cuando los interruptores no funcionan correctamente es
extremadamente peligroso y puede provocar lesiones corporales
graves o daños graves al sistema de robot, ya que los
interruptores no pueden cumplir las funciones para las
que están
diseñados en una emergencia.

1. Seguridad
16
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
A
DVERTENCIA
■
Asegúrese de conectar el cable de alimentación de CA a un
receptor de energía
. NO lo conecte directamente a la fuente de
alimentación de la fábrica
. Para cortar la energía hacia el sistema
de robot,
desconecte el enchufe de la fuente de alimentación.
Realizar cualquier trabajo mientras conecta el cable de
alimentación de CA a una fuente de alimentación de la fábrica es
extremadamente peligroso y puede provocar una descarga
eléctrica o el mal funcionam
iento del sistema de robot.
■
Antes de realizar cualquier procedimiento de reemplazo,
APAGUE el manipulador y los equipos relacionados, luego
desconecte el enchufe de la fuente de alimentación
.
Realizar cualquier procedimiento de reemplazo con la
energía
ENCENDIDA es extremadamente peligroso y puede provocar una
descarga eléctrica o el mal funcionamiento del sistema de robot.
■
Asegúrese de conectar los cables correctamente
. No permita una
tensión innecesaria en los cables
. (No coloque objetos pesados
en los cables
. No doble o tire de los cables por la fuerza). La
tensión innecesaria en los cables puede provocar daños en los
cables, desconexión o falla de contacto
. Los cables dañados, la
desconexión o la falla de contacto son extremadamente
peli
grosos y pueden provocar descargas eléctricas o el mal
funcionamiento del sistema de robot.

1. Seguridad
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
17
P
RECAUCIÓN
■
Utilice cuidadosamente alcohol, empaquetadura líquida y
adhesivo, respetando las instrucciones correspondientes, además
de las instrucciones a continuación. El uso descuidado de alcohol,
empaquetadura líquida o adhesivo puede provocar un incendio o
problem
as de seguridad.
- Nunca coloque alcohol, empaquetadura líquida o adhesivo
cerca del fuego.
- Use alcohol, empaquetadura líquida o adhesivo mientras
ventila la habitación.
- Use equipos de protección, como una máscara, gafas de
protección y guantes resistentes al aceite.
- Si le cae alcohol, empaquetadura líquida o adhesivo en la piel,
lávese la zona cuidadosamente con agua y jabón.
- Si le entra alcohol, empaquetadura líquida o adhesivo en los
ojos o la boca, enjuague a fondo con agua limpia y, luego,
consulte a un médico de inmediato.
■
Use equipo de protección, como una máscara, gafas de protección
y guantes resistentes al aceite durante la lubricación. Si le entra
grasa en los ojos, la boca o cae en su piel, siga las instrucciones a
continuación.
Si le entra grasa en los ojos:
Enjuáguelos a fondo con agua limpia y, luego, consulte a un
médico de inmediato.
Si le entra grasa en la boca:
Si se ingiere, no induzca el vómito. Consulte a un médico de
inmediato.
Si la grasa solo entra en su boca, enjuáguese la boca a
fondo con agua.
Si le cae grasa en la piel:
Enjuague el área a fondo con agua y jabón.
■
Es posible que el manipulador se caliente debido al calor del motor
o a causas similares. No toque el manipulador hasta que baje la
temperatura. Además, asegúrese
de que la temperatura del
manipulador baje y no se sienta caliente cuando lo toque. Luego,
realice la enseñanza o el mantenimiento.

1. Seguridad
18
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
1.5 Parada de emergencia
1.5.1 Distancia de funcionamiento libre en una emergencia
Si el manipulador se mueve de manera anormal durante su funcionamiento,
presione inmediatamente el interruptor de parada de emergencia. Presionar el
interruptor de parada de emergencia inmediatamente cambia el manipulador al
movimiento de desaceleración y lo detiene a la velocidad máxima de
desaceleración.
Sin embargo, evite presionar el interruptor de parada de emergencia
innecesariamente cuando el manipulador funciona normalmente. Presionar el
interruptor de parada de emergencia bloquea el freno y puede causar desgaste en la
placa de fricción del freno, lo que acortará la vida útil del freno.
Ciclo de vida útil normal del freno: Aproximadamente 2 años (cuando los frenos
se usan 100 veces/día)
Para colocar el sistema en modo de emergencia durante el funcionamiento normal,
presione el interruptor de parada de emergencia cuando el manipulador no esté en
movimiento.
Consulte el manual del manipulador para conocer instrucciones acerca de cómo
conectar el circuito del interruptor de parada de emergencia.
No APAGUE el manipulador mientras esté funcionando.
Si intenta detener el manipulador en situaciones de emergencia, como “Protección
abierta”, asegúrese de detener el manipulador con el interruptor de parada de
emergencia.
Si detiene el manipulador apagándolo mientras está en funcionamiento, pueden
ocurrir los siguientes problemas.
Reducción de la vida útil y daños a la unidad del engranaje reductor
Espacio de posición en las articulaciones
Además, si se forzó el apagado del manipulador por un corte de energía o sucesos
similares mientras estaba en funcionamiento, asegúrese de revisar los siguientes
puntos después de restaurar la energía.
Si el engranaje reductor está dañado o no
Si las articulaciones están en las posiciones correctas o no
Si hay un espacio, realice una calibración con el procedimiento descrito en el
capítulo Mantenimiento: Calibración en el manual del manipulador. Además, los
mismos problemas pueden ocurrir si ocurre un error y el manipulador se detiene
por una emergencia durante el funcionamiento. Revise la condición del
manipulador y realice la calibración, si es necesario.

1. Seguridad
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
19
Antes de usar el interruptor de parada de emergencia, tenga en cuenta lo siguiente.
- El interruptor de parada de emergencia (E-STOP) se debe usar para detener el
manipulador solo en caso de emergencias.
- Para detener el manipulador que opera el programa, excepto en caso de
emergencia, utilice los comandos Pause (parada) o STOP (detención del
programa). Los comandos Pause y STOP no apagan los motores. Por lo tanto,
el freno no funciona.
- Para el sistema de protección, no utilice el circuito para E-STOP.
Para conocer detalles acerca del sistema de protección, consulte los siguientes
manuales.
Manual del usuario EPSON RC+
2. Seguridad - Precauciones de diseño e instalación - Sistema de protección
Seguridad e instalación
2.5 Conexión al conector EMERGENCY
Para revisar problemas con el freno, consulte los siguientes manuales.
Manual del manipulador - Mantenimiento
2.1.2 Punto de inspección - Inspección mientras la energía está ENCENDIDA
(El manipulador está en funcionamiento)
Seguridad e instalación
5.1.1 Manipulador - Inspección mientras la energía está ENCENDIDA
(El manipulador está en funcionamiento)

1. Seguridad
20
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
Distancia de funcionamiento libre en una emergencia
El manipulador en funcionamiento no puede detenerse inmediatamente después de
presionar el interruptor de parada de emergencia.
A continuación, se muestra el tiempo, el ángulo y la distancia de funcionamiento
libre del manipulador. Sin embargo, recuerde que los valores dependen de las
siguientes condiciones.
Peso del efector final Peso Accel
Peso de la pieza de trabajo Velocidad Pose de funcionamiento
Manipulador serie T
Condiciones de
medida
T3-401S
T6-602S
Configuración de
aceleración
100
100
Configuración de
velocidad
100
100
Carga [kg]
3
6
Configuración de peso
3
6
Articulación n.º 1
Articulación n.º 2
Punto de parada
Punto de
entrada de la
señal de parada
de emergencia
Punto objetivo
Punto de
inicio de
operación
T3-401S
T6-602S
Tiempo de
funcionamiento libre
Articulación n.º 1 + Articulación n.º 2 [s]
0,5
0,4
Articulación n.º 3 [s]
0,2
0,2
Ángulo de
funcionamiento libre
Articulación n.º 1 [grados]
50
60
Articulación n.º 2 [grados]
50
30
Articulación n.º 1 + Articulación n.º 2 [grados]
100
90
Distancia de
funcionamiento libre
Articulación n.º 3 [mm] 20 40

1. Seguridad
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
21
Manipulador serie VT
Condiciones de medida
Serie VT
Configuración de ACCEL
100
Configuración de velocidad
100
Carga [kg]
6
Configuración de peso
6
VT6-A901**
Tiempo de
funcionamiento
libre
[segundos]
Brazo n.º 1
0,2
Brazo n.º 2
0,3
Brazo n.º 3
0,2
Brazo n.º 4
0,2
Brazo n.º 5
0,2
Brazo n.º 6
0,2
Ángulo de
funcionamiento
libre [grados]
B
razo n.º 1
Mesa
Techo
50
Pared
30
Brazo n.º 2
70
Brazo n.º 3
20
Brazo n.º 4
20
Brazo n.º 5
20
Brazo n.º 6
30

1. Seguridad
22
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
1.5.2 Cómo restablecer el modo de emergencia
Seleccione EPSON RC+ [Tools] – [Robot Manager] – [Control Panel] y luego
haga clic en <Reset>.
La pantalla Control Panel contiene los botones para las operaciones básicas del
robot, tal como encender y apagar los motores y regresar el robot a la posición de
inicio. Además, muestra el estado de Emergency Stop (Parada de emergencia),
Safeguard (Protección), Motor (Motores) y Power (Energía).

1. Seguridad
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
23
1.6 Etiquetas
Las etiquetas están adheridas en lugares del manipulador donde existan peligros
específicos.
Asegúrese de acatar las descripciones y advertencias de las etiquetas para operar y
realizar mantenimiento al sistema de robot de manera segura.
No rasgue, dañe o retire las etiquetas. Sea meticuloso cuando manipule las piezas o
unidades a las que están adheridas las siguientes etiquetas, además de sus áreas
circundantes:
Manipulador serie T
Ubicación
Etiqueta
Nota
A
Antes de soltar los tornillos de la base
de montaje, afirme el brazo y fíjelo
firmemente con una correa para evitar
que las manos o dedos queden
atrapados en el manipulador.
Para la instalación y transporte de los
robots, siga las instrucciones de este
manual.
B
No ingrese al área de funcionamiento
mientras el manipulador esté en
movimiento. El brazo del robot puede
chocar contra el operador. Esto es
extremadamente peligroso y puede
provocar problemas graves de
seguridad.
C
Hay voltaje peligroso mientras el
manipulador está ENCENDIDO. Para
evitar las descargas eléctricas, no toque
las piezas eléctricas internas.
D
Puede atrapar su mano o sus dedos
entre el mango y la cubierta si coloca su
mano cerca de piezas móviles.

1. Seguridad
24
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
T3
D
B
C
C
C
C
C
A
T6
D
B
C
C
C
C
A

1. Seguridad
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
25
Manipulador serie VT
Ubicación
Etiqueta
Nota
A
Antes de soltar los tornillos de la base
de montaje,
sostenga el brazo y fíjelo
firmemente con una correa
para evitar
que las manos o dedos queden
atrapados en el
manipulador.
Para los procesos de transporte
e
instalación, siga los
pasos que se
d
escriben en este manual.
B
No ingrese al área de funcionamiento
mientras el
manipulador esté en
movimiento.
El brazo del robot puede
chocar contra el operador. Esto es
extremadamente
peligroso y puede
provocar problemas graves de
seguridad.
C
Hay voltaje peligroso mientras el
manipulador está
ENCENDIDO. Para
evitar las descargas eléctricas, no
toque
las
piezas eléctricas internas.
D
Cuando suelte los frenos, tenga
cuidado
con el brazo que caerá debido
a su
propio peso.
La etiqueta de advertencia está
adherida al
manipulador y a la caja
opcional de desbloqueo de los
frenos.
E
Solo personal autorizado debe realizar
trabajo de eslinga
y operar una grúa o
un montacargas. Es extremadamente
peligroso que personal no autorizado
realice estas
operaciones, ya que se
pueden provocar lesiones
corporales
graves o daños importantes a los
equipo
s del sistema de robot.

1. Seguridad
26
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
Ubicación
Etiqueta
Nota
F
Su mano o sus dedos pueden quedar
atrapados entre el
mango y la cubierta si
coloca la mano cerca de piezas
móviles.

1. Seguridad
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
27
1.7 Funciones de seguridad
El sistema de control del robot cuenta con las funciones de seguridad que se describen a
continuación. Sin embargo, se recomienda que el usuario lea completamente los manuales
incluidos antes de usar el sistema para cumplir estrictamente con el uso adecuado del sistema de
robot. No leer o comprender las instrucciones acerca del uso correcto de las funciones de
seguridad es sumamente peligroso.
Entre las siguientes características de seguridad, el interruptor de parada de emergencia y la
entrada de puerta de seguridad son particularmente importantes. Asegúrese de que estas y otras
funciones de seguridad funcionen adecuadamente antes de operar el sistema de robot.
Para obtener detalles, consulte la sección 2.6.1 Interruptor de puerta de seguridad e interruptor de
liberación de enganche.
Interruptor de parada de emergencia
El conector EMERGENCY (Emergencia) en el manipulador tiene terminales de expansión de
entrada de parada de emergencia, que se usan para conectar los interruptores de parada de
emergencia.
Presionar cualquier interruptor de parada de emergencia puede cortar la energía del motor
inmediatamente y el sistema de robot ingresará a la condición de parada de emergencia.
Categoría de parada de entrada de parada de emergencía: Categoría 0 (consulte la norma de
seguridad IEC60204-1)
Entrada de puerta de seguridad
Con el fin de activar estas funciones, asegúrese de que el interruptor de entrada de puerta de
seguridad esté conectado al conector EMERGENCY en el manipulador.
Cuando se abre la puerta de seguridad, normalmente el manipulador detiene inmediatamente el
funcionamiento actual y el estado de la energía del manipulador será operación prohibida hasta
que se cierre la puerta de seguridad y se libere la condición de enganche. Para ejecutar el
funcionamiento del manipulador mientras la puerta de seguridad está abierta, debe cambiar el
interruptor de selección de modo de la caja de comandos (Teach Pendant) al modo “Teach”.
El funcionamiento del manipulador solo estará disponible cuando el interruptor de activación esté
encendido. En este caso, el manipulador funciona en estado de potencia baja.
Categoría de parada de entrada de puerta de seguridad: Categoría 1 (consulte la norma de
seguridad IEC60204-1)

1. Seguridad
28
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
Modo de potencia baja
La potencia del motor se reduce en este modo.
Ejecutar una instrucción de cambio de estado de potencia cambiará al estado restringido (potencia
baja), sin importar las condiciones de la puerta de seguridad o el modo de funcionamiento. El
estado restringido (potencia baja) garantiza la seguridad del operador y reduce la posibilidad de la
destrucción de equipos periféricos o daños provocados por la operación descuidada.
Freno dinámico
El circuito de freno dinámico incluye relés que cortocircuitan las armaduras del motor. El circuito
de freno dinámico se activa cuando hay una entrada de parada de emergencia o cuando se detecta
alguno de los siguientes errores: desconexión del cable del codificador, sobrecarga del motor,
torque irregular del motor, error de velocidad del motor, error del servo (desbordamiento de
posicionamiento o velocidad), unidad central de procesamiento (CPU, por sus siglas en inglés)
irregular, error de suma de comprobación de memoria y condición de sobrecalentamiento dentro
del módulo del driver del motor.
Detección de sobrecarga del motor
El circuito de freno dinámico se activa cuando el sistema detecta que la carga del motor ha
superado su capacidad.
Detección de torque irregular del motor (manipulador fuera de control)
El circuito de freno dinámico se activa cuando se detecta una irregularidad con el torque del motor
(salida del motor) (en cuyo caso el manipulador está fuera de control).
Detección de error de velocidad del motor
El circuito de freno dinámico se activa cuando el sistema detecta que el motor funciona a una
velocidad incorrecta.
Detección de error del servo: Desbordamiento de posicionamiento
El circuito de freno dinámico se activa cuando el sistema detecta que la diferencia entre la
posición real del manipulador y la posición solicitada superan el margen de error permitido.
Detección de error del servo: Desbordamiento de velocidad
El circuito de freno dinámico se activa cuando se detecta que la velocidad real del manipulador
marca un error de desbordamiento (la velocidad real está fuera del margen nominal).
Detección de irregularidad de la CPU
El temporizador guardián detecta la irregularidad de la CPU que controla el motor. La CPU del
sistema y la CPU que controla el motor dentro del manipulador también están diseñadas para
revisar constantemente entre sí si tienen discrepancias. Si se detecta una discrepancia, se activa el
circuito de freno dinámico.

1. Seguridad
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
29
Detección de error de suma de comprobación de memoria
El circuito de freno dinámico se activa cuando se detecta un error de suma de comprobación de
memoria.
Detección de sobrecalentamiento en el módulo de driver del motor
El circuito de freno dinámico se activa cuando la temperatura del dispositivo de potencia en el
interior del módulo de driver del motor está sobre el límite nominal.
Detección de deposición de relé
El circuito de freno dinámico se activa cuando se detecta una deposición de relé.
Detección de sobre voltaje
El circuito de freno dinámico se activa cuando el voltaje del manipulador está sobre el límite
normal.
Detección de caída de voltaje de la fuente de alimentación de CA
El circuito de freno dinámico se activa cuando se detecta la caída de voltaje de la fuente de
alimentación.
Detección de anomalía de temperatura
Se detecta la anomalía de temperatura del manipulador.

1. Seguridad
30
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
1.8 Especificaciones del manipulador
Manipulador serie T
Elemento T3-401S T6-602S
Longitud del brazo
Brazo n.° 1, n.° 2
400 mm
600 mm
Brazo n.° 1
225 mm
325 mm
Brazo n.° 2
175 mm
275 mm
Peso (sin incluir los cables)
16 kg: 35 lb
22 kg: 49 lb
Método de
transmisión
Todas las
articulaciones
Servomotor de CA
Velocidad máx. de
funcionamiento*1
Articulaciones
n.° 1, n.° 2
3700 mm/s 4180 mm/s
Articulación n.° 3:
1000 mm/s
1000 mm/s
Articulación n.° 4:
2600 grados/s
1800 grados/s
Repetitividad
Articulaciones
n.° 1, n.° 2
± 0,02 mm ± 0,04 mm
Articulación n.° 3:
± 0,02 mm
± 0,02 mm
Articulación n.° 4:
± 0,02 grados
± 0,02 grados
Margen máx.
de movimiento
Articulación n.° 1:
± 132 grados
± 132 grados
Articulación n.° 2:
± 141 grados
± 150 grados
Articulación n.° 3:
150 mm
200 mm
Articulación n.° 4:
± 360 grados
± 360 grados
Margen máx.
de pulso
Articulación n.° 1:
− 95574 ~ 505174
− 152918 ~ 808278
Articulación n.° 2:
± 320854
± 341334
Articulación n.° 3:
− 187734 ~ 0
− 245760 ~ 0
Articulación n.° 4:
± 71760
± 245760
Resolución
Articulación n.° 1:
0,000439 grados/pulso
0,000275 grados/pulso
Articulación n.° 2:
0,000439 grados/pulso
0,000439 grados/pulso
Articulación n.° 3:
0,000799 mm/pulso
0,000814 mm/pulso
Articulación n.° 4:
0,005017 grados/pulso
0,01465 grados/pulso
Capacidad nominal
del motor
Articulación n.° 1:
200 W
300 W
Articulación n.° 2:
100 W
200 W
Articulación n.° 3:
100 W
Articulación n.° 4:
100 W
Carga útil (Carga)
Nominal
1 kg
2 kg
Máx.
3 kg
6 kg
Momento de
inercia permisible
de la articulación
n.° 4
Nominal
0,003 kg·m
2
0,01 kg·m
2
Máx. 0,01 kg·m
2
0,08 kg·m
2
Mano
Diámetro del
mango
ø 16 mm ø 20 mm
Agujero pasado
ø 11 mm
ø 14 mm
Fuerza hacia abajo de la articulación n.° 3
83 N
Conector de E/S de la mano
15 pines: D-sub
Tubo neumático instalado
para uso del cliente
2 tubos neumáticos (ø6 mm):
0,59 MPa (6 kgf/cm
2
: 86 psi)

1. Seguridad
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
31
Elemento T3-401S T6-602S
1 tubo neumático (ø4 mm):
0,59 MPa (6 kgf/cm
2
: 86 psi)
Orificio de montaje
120 × 120 mm
150 × 150 mm
4-M8
Requisitos
ambientales
Temp. ambiente
5 a 40 °C
(con variación mínima de temperatura)
Humedad ambiental
relativa
20 a 80 % (sin condensación)
Nivel de ruido *3
L
Aeq
= 80 dB (A) o inferior
Valor asignable
( ) Valores
predeterminados
Speed (Velocidad)
1 ~ (5) ~ 100
1 ~ (5) ~ 100
Accel (Aceleración)
*4
1 ~ (10) ~ 120
1 ~ (10) ~ 120
SpeedS
0,1 ~ (50) ~ 2000
0,1 ~ (40) ~ 2000
AccelS
0,1 ~ (200) ~ 10000
0,1 ~ (200) ~ 10000
Fine
0 ~ (1250) ~ 65000
0 ~ (1250) ~ 65000
Weight (Peso)
0,175 ~ (1,175) ~ 3,175
0,275 ~ (2,275) ~ 6,275
Control de
movimiento
Entorno de
desarrollo
EPSON RC+ 7.0
Lenguaje de
programación
SPEL+ (lenguaje de robot multitarea)
Control de
articulación
Control estándar simultáneo de 4 articulaciones
Servocontrol digital de CA
Control de
posicionamiento
PTP (control punto a punto)
CP (control de ruta continua)
Control de velocidad
Movimiento de PTP: Programable en el intervalo de
1 a 100 %
Movimiento de CP: Programable (el valor real se
debe ingresar manualmente).
Control de
aceleración/
desaceleración
Movimiento de PTP: Programable en el intervalo de
1 a 100 %; Automático
Movimiento de CP: Programable (el valor real se
debe ingresar manualmente).
Interfaz externa
EMERGENCY
(Emergencia)
EMERGENCY STOP (Parada de emergencia):
Redundante (Categoría 3) Compatible con fuente de
alimentación interna y externa
Sistema de protección:
Redundante (Categoría 3) Compatible con fuente de
alimentación externa
E/
S
E/S estándar
(Lado posterior
del
manipulador)
Entrada: 18 puntos
Salida: 12 puntos
No polar, compatible con receptor y fuente
E
/S remota
(Las
funciones
remotas
Entrada: 8 puntos
Programa: 3 puntos
Start, Stop, Pause, Continue, Reset (Iniciar, Detener,
Pausa, Continuar, Reiniciar)
Salida: 8 puntos

1. Seguridad
32
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
Elemento T3-401S T6-602S
E/
S
se aplican
a E/S
estándar)
Ready, Running, Paused, ErrorEStopOn, SafeguardOn,
SError, Warning (Listo, En funcionamiento, En pausa,
Error Parada de emergencia activada, Protección
activada, SError, Advertencia)
E/S de la
mano
(Lado superior
del brazo n.° 2)
Entrada: 6 puntos
Salida: 4 puntos
No polar, compatible con receptor y fuente
Fuente de alimentación:
hasta 24V 500mA
Fuente de alimentación:
hasta 24V 700mA
Interfaz externa
Subordinado de
fieldbus
(Opción)
Entrada: 256 puntos
Salida: 256 puntos
Permite agregar solo un módulo más
Puerto de conexión
TP
Compatible con caja de comandos (Teach Pendant)
(Opción: TP2, TP3)
Puerto de conexión
PC
Conector USB B
Compatible con USB 2.0 alta velocidad / velocidad plena
Puerto de conexión
de memoria USB
Conector USB A
Compatible con USB 2.0 alta velocidad / velocidad plena
Puerto Ethernet
Compatible con 10/100 Mbps
Hasta 8 puertos disponibles
Interruptor RESET Habilite para el restablecimiento del sistema
Pantalla
Indicador LED de
pantalla de modo
TEACH, AUTO, PROGRAM, TestMode, Error, E-STOP
Guardado de estado del controlador
Guardar a memoria USB
Guardar en RC+ (PC)
Voltaje
100 V ~ 240 V CA
Fase
Monofásico
Frecuencia
50 / 60 Hz
Interrupción de energía momentánea
Menos de 10 ms
Capacidad nominal
660 VA
1,200 VA
Corriente máxima (cuando la energía está
ENCENDIDA)
Máx. 30 A (menos de 2 ms) Máx. 60 A (menos de 2 ms)
Corriente de fuga
Máx. 10 mA
Resistencia de tierra
Menos de 100Ω
Norma de seguridad
Marca CE
Directiva EMC, Directiva de maquinaria
Marca KC / Marcas KC
ANSI/RIA R15.06-2012
NFPA 79 (Edición 2007)
*1: En caso de un comando PTP.
La velocidad máxima de funcionamiento para el comando CP es de 2000 mm/s en un plano horizontal.
*2: En el caso donde el centro de gravedad esté en el centro de la articulación n.° 4.
Si el centro de gravedad no está en el centro de la articulación n.° 4, ajuste el parámetro con el comando Inertia
(Inercia).

1. Seguridad
Guía de seguridad e instalación (T / EPSON RC+ 7.0) Rev.6 33
*3: Las condiciones del manipulador durante la medición son las siguientes:
Condiciones de funcionamiento: Bajo carga nominal, movimiento simultáneo con 4 articulaciones, velocidad
máxima, aceleración máxima y trabajo al 50 %.
Punto de medición: Frente al manipulador, a 1000 mm de distancia del rango de movimiento, 50
mm sobre la superficie instalada en la base.
*4: En el uso general, el ajuste Accel 100 es el ajuste óptimo que mantiene el equilibrio de la aceleración y la
vibración cuando se ajusta la posición. Aunque se pueden establecer valores mayores que 100 en Accel, se
recomienda minimizar el uso de valores grandes a movimientos necesarios, ya que el operar el manipulador
continuamente con un ajuste de Accel grande puede reducir considerablemente la vida útil del producto.
Manipulador serie VT
Elemento Especificaciones
Número de modelo
VT6-A901S
VT6-A901SR
VT6-A901SW
Nombre del modelo
VT6L
Tipo de montaje
*1
Montaje
sobre mesa
Montaje en
techo
Montaje en
pared
Peso (No incluye el peso de los cables o los
dispositivos de sujeción de envío).
40 kg : 89 lb
Método de transmisión
Todas las
articulaciones
Servomotor de CA
Velocidad máx. de
funcionamiento
*2
Articulación n.° 1
166,2°/s
Articulación n.° 2
122,5°/s
Articulación n.° 3
118,8°/s
Articulación n.° 4
271,4°/s
Articulación n.° 5
296,8°/s
Articulación n.° 6
293,2°/s
Velocidad sintética máxima
4522 mm/s
Repetibilidad
Articulación
n.° 1 - n.° 6
± 0,1 mm
Rango máx. de movimiento
Articulación n.° 1
± 170°
± 30°
Articulación n.° 2
− 160° ~ + 65°
Articulación n.° 3
− 51° ~ + 190°
Articulación n.° 4
± 200°
Articulación n.° 5
± 125°
Articulación n.° 6
± 360°
Rango máx. de pulsos
Articulación n.° 1
± 8488472
±1497966
Articulación n.° 2
− 9986438 ~ + 4056990
Articulación n.° 3
− 2343172 ~ + 8729465
Articulación n.° 4
±8048281
Articulación n.° 5
± 4599018
Articulación n.° 6
± 13410735
Resolución
Articulación n.° 1
0,0000200°/pulso
Articulación n.° 2
0,0000160°/pulso
Articulación n.° 3
0,0000217°/pulso
Articulación n.° 4
0,0000248°/pulso

1. Seguridad
34
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
Elemento
Especificaciones
Articulación n.° 5
0,0000271°/pulso
Articulación n.° 6
0,0000268°/pulso
Capacidad nominal del motor
Articulación n.° 1
300 W
Articulación n.° 2
300 W
Articulación n.° 3
200 W
Articulación n.° 4
100 W
Articulación n.° 5
100 W
Articulación n.° 6
100 W
Carga útil *3
Nominal
3 kg
Máx.
6 kg
Momento permisible
Articulación n.° 4
12 N·m (1.22 kgf·m)
Articulación n.° 5
12 N·m (1.22 kgf·m)
Articulación n.° 6
7 N·m (0.71 kgf·m)
Momento permisible de
inercia *4 (GD
2
/4)
Articulación n.° 4
0,3 kg·m2
Articulación n.° 5
0,3 kg·m2
Articulación n.° 6
0,1 kg·m2
Requisitos ambientales *5
Temperatura ambiente
5 ~ 40 °C
Humedad ambiental
relativa
10 ~ 80 % HR (sin condensación)
Vibración
4,9 m·s2 (0.5 G) or less
Nivel de ruido *6
LAeq = 80 dB (A) or less
Entorno
Standard
Valores predet.
(valores máximos
de config.)
Velocidad
(5) 100
Accel *7
(5, 5) 120, 120
SpeedS
(50) 2000
AccelS *8
(200) 10000
Fine
(10000, 10000, 10000, 10000, 10000, 10000)
65535, 65535, 65535, 65535, 65535, 65535
Peso
3 (6)
Inercia
0,03 (0,1)
Control de
movimiento
Entorno
de desarrollo
EPSON RC+ 7.0
Lenguaje
de programación
SPEL+ (lenguaje de robot multitarea)
Control de articulaciones
Control simultáneo estándar de 6 articulaciones
Servocontrol digital de CA
Control de posicionamiento
PTP (control punto a punto)
CP (control de ruta continua)
Control de velocidad
Movimiento de PTP: Programable en el intervalo de 1 a 100 %
Movimiento de CP: Programable
(El valor real se debe ingresar manualmente.)
Control de
aceleración/
desaceleración
Movimiento de PTP: Programable en el intervalo de 1 a 100 %
Aceleración/desaceleración automática
Movimiento de CP: Programable
(El valor real se debe ingresar manualmente.)

1. Seguridad
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
35
Elemento
Especificaciones
Interfaz
externa
EMERGENCIA
PARADA DE EMERGENCIA: Redundante (Categoría 3)
Compatible con fuente de alimentación interna y externa
Sistema de protección: Redundante (Categoría 3)
Compatible con fuente de alimentación externa
E/S
E/S estándar
(Lado posterior del
manipulador)
Entrada: 24 puntos
Salida: 16 puntos
No polarizado, compatible con receptor y fuente
E/S remota
(Las funciones
remotas se
aplican a
E/S
estándar).
Entrada: 8 puntos
Programa, 3 puntos
Start, Stop, Pause, Continue, Reset
Salida: 8 puntos -
Ready, Running, Paused, ErrorEStopOn, SafeguardOn,
SError, Warning
Subordinado de bus
de campo (Opción)
Entrada: 256 puntos
Salida: 256 puntos
Permite agregar solo un módulo más
Puerto de conexión TP
Compatible con Teach Pendant (Opción: TP2, TP3)
Puerto de conexión de la
computadora
Conector USB B: Compatible con USB 2.0 alta velocidad/
velocidad plena
Puerto de conexión
de memoria USB
Conector USB A: Compatible con USB 2.0 alta velocidad/
velocidad plena
Puerto Ethernet
Compatible con 10/100 Mbps
Disponible hasta 8 puertos
Interruptor RESET
Habilite para el restablecimiento del sistema
Pantalla LED de pantalla de modo TEACH, AUTO, PROGRAM, TestMode, Error,
E-STOP
Guardado de estado del controlador
Guardar a memoria USB
Guardar en RC+ (PC)
Voltaje
100 ~ 240 V CA
Fase
Monofásico
Frecuencia
50 / 60 Hz
Interrupción de energía momentánea
Menos de 10 ms
Capacidad nominal
1, 200 VA
Corriente máxima
(Cuando la energía está ENCENDIDA)
Máx. 60A (menos de 2 ms)
Corriente de fuga
Máx. 10 mA
Resistencia de tierra
Menos de 100 Ω
Norma de seguridad
Marca CE
Directiva CEM,
Directiva de maquinaria
ANSI/RIA
R15.06-2012
NFPA 79 (Edición 2007)

1. Seguridad
36
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
*1: Los tipos de montaje diferentes a “montaje sobre mesa”, “montaje en techo” y “montaje en pared” están
fuera de la especificación. Si prefiere otros tipos de montaje, comuníquese con el proveedor de su región.
*2: En caso de control PTP
*3: No aplique la carga que supere la carga útil máxima.
*4: Si el centro de gravedad está en el centro de cada brazo. Si el centro de gravedad no está en el centro
de cada brazo, defina la cantidad excéntrica con el comando INERTIA (Inercia).
*5: Para conocer detalles de los requisitos ambientales, consulte la sección Configuración y operación 3.1
Condiciones ambientales.
*6: Las condiciones del manipulador durante la medición son las siguientes:
Condiciones de funcionamiento: Bajo carga nominal, movimiento simultáneo con todos los
brazos, velocidad máxima, aceleración máxima, VT6L:
trabajo al 50 %.
Punto de medición: 1000 mm de distancia desde la parte trasera del
manipulador
*7: En el uso general, el valor de Accel 100 es la configuración óptima que mantiene el equilibrio de la
aceleración y la vibración cuando se ajusta la posición. Aunque se pueden establecer valores
superiores a 100 en Accel, se recomienda minimizar el uso de valores mayores a movimientos
necesarios, ya que el operar el manipulador continuamente con un ajuste mayor de Accel puede
reducir considerablemente la vida útil del producto.
*8: El valor máximo de configuración de AccelS varía según la carga. Consulte la siguiente tabla para
conocer detalles. Configurar un valor que supere el AccelS máximo causa un error. En ese caso,
revise el valor de configuración.
Valor máximo de configuración de AccelS
10000
8000
6000
0 1 2 3 4 5 6 (kg) Peso del efector final
2000
3000
6000
8000
10000

1. Seguridad
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
37
1.9 Ajuste del margen de movimiento con paradas mecánicas
Manipulador serie T
Las detenciones mecánicas limitan físicamente el área absoluta en la que no se puede
mover el manipulador.
Las articulaciones n.° 1 y n.° 2 tienen orificios roscados en las posiciones que
corresponden a los ángulos de los ajustes de parada mecánica. Instale los pernos
en los orificios correspondientes al ángulo que desea establecer.
Las articulaciones n.° 3 se pueden establecer en cualquier longitud inferior a la carrera
máxima.
Parada mecánica de
articulación n.º2 (Fija)
Parada mecánica
de articulación
n.º1 (Ajustable)
Parada mecánica de
articulación n.º 3
(Límite inferior de
parada mecánica)
(No mueva el límite
superior de la
parada mecánica).
Parada mecánica de
articulación n.º1 (Fija)
Parada mecánica de
Articulación n.º2 (Ajustable)
Manipulador serie VT
El uso de topes mecánicos (opcionales) limita físicamente el área absoluta en la que se puede mover el
manipulador.
Asegúrese de APAGAR el manipulador con anticipación.
Use pernos que cumplan con la especificación sobre longitud y procesamiento de
superficie (ej.: niquelado) con alta resistencia a la corrosión.
Vuelva a especificar el rango de pulsos tras cambiar la posición del tope mecánico.
Para conocer detalles sobre la configuración de rango de pulsos, consulte la sección siguiente.
Configuración y operación 5.1 Configuración del rango de movimiento por rango de
pulsos (para todos los brazos)
Asegúrese de configurar un rango de pulsos que no supere los ángulos de configuración del tope
mecánico.

1. Seguridad
38
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
Configuración del rango de movimiento de la articulación n.° 1
Instale el tope mecánico ajustable (J1) en el agujero roscado correspondiente al ángulo
que desea formar.
Perno de cabeza hueca hexagonal Perno M4 × 28 × 1
Torque de ajuste 4,0 ± 0,2 N·m (41 ± 2 kgf·cm)
a
b
Ángulo (grados)
±170
−170 ~ +84
or
−
84 ~ +170
Pulso (pulso)
±8488472
− 8488472 ~ +4194304,
o − 194304 ~ +8488472
Tope mecánico ajustable (J1)
No se aplica.
(estándar)
Se aplica.

1. Seguridad
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
39
Configuración del rango de movimiento de la articulación n.° 2
Instale el tope mecánico ajustable (J2) en el agujero roscado correspondiente al ángulo
que desea formar).
Perno de cabeza hueca hexagonal Perno M4 × 16 × 1
Torque de ajuste 4,0 ± 0,2 N·m (0,2 N·m (41 ± 2 kgf·cm)
c
d
Ángulo (grados)
−160, +65
−160 ~+43
o −148 ~ +65
Pulso (pulso)
−9986438
+4056990
−9986438 ~ +2683855
o
−
9237455 ~ +4056990
Tope mecánico ajustable
(J2) No se aplica.
(estándar)
Se aplica.

2. Seguridad
40
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
Configuración del rango de movimiento de la articulación n.° 3
Instale el tope mecánico ajustable (J3) en el agujero roscado correspondiente al ángulo
que desea formar
Perno de cabeza hueca hexagonal Perno M4 × 16 × 1
Torque de ajuste 4,0 ± 0,2 N·m (0,2 N·m (41 ± 2 kgf·cm)
e
f
Ángulo (grados)
-51,
+190
-34 a +190, o
51 a +173
Pulso (pulso)
-2343172
+8729465
-1562115 a 8729465,
o -2343172 a 7948407
Tope mecánico ajustable (J3)
No se aplica.
(estándar)
Se aplica.

2. Seguridad
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
41
1.10 Capacitación del usuario final
Las personas a cargo de la gestión de la seguridad deben confirmar que los operadores
que programan, operan y realizan mantenimiento al robot y al sistema de robot realicen
la capacitación adecuada y tengan el conocimiento técnico para realizar el trabajo de
manera segura.
La capacitación debe incluir, al menos, lo siguiente:
- Estudio de los procedimientos de seguridad reglamentarios y las recomendaciones
relacionadas con la seguridad de los fabricantes del robot y los diseñadores del
sistema.
- Explicación clara del trabajo involucrado.
- Descripción de todos los equipos de control necesarios para el trabajo y sus funciones.
- Explicación de los posibles peligros involucrados en el trabajo.
- Procedimientos de seguridad en el trabajo y métodos específicos para evitar posibles
peligros.
- Métodos de prueba y confirmación de que el enclavamiento y el dispositivo de
seguridad funcionan correctamente.

2. Instalación
42 Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
2. Instalación
Este capítulo contiene p recauciones para la instalación segura y precisa del sistema
de robot.
El flujo de trabajo para la instalación del sistema de robot se describe en la sección
2.1 Esquema desde el desembalaje hasta la operación del sistema de robot. Para
obtener información sobre el desembalaje, el transporte y la instalación, consulte
la sección correspondiente y los manuales del manipulador.
Ejemplo de sistema
*1 EPSON RC+ 7.0 es compatible con los siguientes sistemas operativos:
Windows 7 Professional Service Pack 1
Windows 8.1 Pro (EPSON RC+7.0 versión 7.1.0 o posterior)
Windows 10 Pro (EPSON RC+7.0 versión 7.2.0 o posterior)
*2 Cualquiera de las cajas de comandos (Teach Pendant) está disponible.
*3 Si conecta un manipulador de la serie T o VT, necesita un cable de
conversión dedicado.

2.Instalación
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9 43
T3 / T6
Estándar
E/S Estándar
E/S Remoto
Ethernet
E/S Manual
USB (para guardar)
USB (para desarrollo)
ModBus
Bus de campo
Slave (Esclavo)
Opción
TP2
TP3
*2
*3
Opción: Teach Pendant
Windows *1
Software
EPSON RC+ 7.0
USB 2.0
o
Ethernet
Opción
Illustration: T3-401S

2. Instalación
44 Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
USB 2.0
o
*2
Opción: Teach Pendant
*3
TP3
TP2
Windows *1
Opción
Bus de campo
Slav e (Esclav o)
VT
Estándar
E/S estándar
E/S remoto
Ethernet
USB (para guardar)
USB (para desarrollo)
ModBus
Softw are RC+ 7.0
Softw are
Opción

2.Instalación
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9 45
2.1 Esquema desde el desembalaje hasta la operación del sistema
de robot
Transporte
Desembalaje
Error?
Instalación
Encendido
Sí
No
Procedimientos para instalar el software
EPSON RC+7.0 en la computadora de
desarrollo y activar la operación del
sistema de robot
Información del manual para conectar o
configurar el equipo de y los accesorios
opciones
2. Instalación
Procedimientos para instalar el
sistema de robot y encender la
energía correctamente
4. Segundo paso
3. Primer paso

2. Instalación
46 Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
2.2 Desembalaje
Personal calificado deberá realizar la instalación y el transporte de los
manipuladores y equipos de robot, y cumplir todos los códigos nacionales y
locales.
Use una carretilla o un equipo similar para transportar el manipulador en las
mismas condiciones en las que lo recibió. Respete las siguientes precauciones
cuando desembale el manipulador.
2.2.1 Precauciones de desembalaje
Procedimiento de transporte
: Solo personal autorizado debe realizar trabajo de honda y operar una grúa o
un montacargas. Es extremadamente peligroso que personal no autorizado
realice estas operaciones, ya que se pueden provocar lesiones corporales
graves o daños importantes a los equipos del sistema de robot.
Vibración durante el transporte
: Evite vibraciones o golpes excesivos durante el transporte del manipulador.
Las vibraciones o golpes excesivos pueden causar daños a los equipos o el
mal funcionamiento del manipulador.
Perno de anclaje
: Cuando retire los pernos de anclaje, proporcione soporte al manipulador para
evitar que caiga.
Retirar los pernos de anclaje sin proporcionar soporte al manipulador puede
causar que el manipulador caiga y atrape manos, dedos o pies.
Amarracables
: No retire el amarracables que fija el brazo hasta que termine la instalación.
Sus manos pueden quedar atrapadas en el manipulador si retira el
amarracables antes de completar la instalación.

2.Instalación
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9 47
2.3 Transporte
Personal calificado deberá realizar la instalación y el transporte de los
manipuladores y equipos de robot, y cumplir todos los códigos nacionales y
locales.
2.3.1 Precauciones de transporte
Procedimiento de transporte:
Use una carretilla o un equipo similar para transportar el manipulador en
las mismas condiciones en las que lo recibió. Respete las siguientes
precauciones cuando desembale el manipulador.
Solo personal autorizado debe realizar trabajo de honda y operar una grúa
o un montacargas. Es extremadamente peligroso que personal no
autorizado realice estas operaciones, ya que se pueden provocar lesiones
corporales graves o daños importantes a los equipos del sistema de robot.
Vibración durante el transporte:
Evite vibraciones o golpes excesivos durante el transporte del
manipulador. Las vibraciones o golpes excesivos pueden causar daños a
los equipos o el mal funcionamiento del manipulador.
Perno de anclaje:
Cuando retire los pernos de anclaje, proporcione soporte al manipulador
para evitar que caiga.
Retirar los pernos de anclaje sin proporcionar soporte al manipulador
puede causar que el manipulador caiga y atrape manos, dedos o pies.
Hoja:
El brazo está fijado con una hoja. Deje la hoja fija hasta que termine la
instalación para impedir que sus manos o dedos queden atrapados.
Procedimiento de elevación
Estabilice el manipulador con sus manos cuando lo eleve. Una elevación
inestable es extremadamente peligrosa y puede provocar lesiones
corporales graves o daños importantes a los equipos del sistema de robot,
además de la caída del manipulador.

2. Instalación
48 Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
2.3.2 Transporte del manipulador
Manipulador serie T
Para transportar el manipulador, solicite que dos o más
personas trabajen en él y lo fijen al equipo de entrega, o
sostengan la parte inferior del brazo n.° 1 y la parte
inferior de las áreas base (indicada en gris en la imagen)
manualmente.
Cuando sostenga la parte inferior de la base
manualmente, tenga cuidado de que sus manos o dedos
no queden atrapados.
T3-401S: aprox. 16 kg: 35 lb
T6-602S: aprox. 22 kg: 49 lb
No sostenga la unidad de energía cuando transporte el
manipulador.
(Ilustración: T3-401S)
Manipulador serie VT
Al transportar el manipulador, fíjelo al
equipo de entrega o considere al menos dos
personas para sostenerlo manualmente.
Tampoco sostenga la parte inferior de la
base (el área sombreada en la figura).
Sostener el área con las manos es
extremadamente peligroso y puede provocar
el atrapamiento de manos y dedos.
VT6-A901*: aprox.40 kg: 89 lb.
NO sostenga la parte inferior
de la base en forma manual.

2.Instalación
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9 49
2.4 Instalación del manipulador
Personal calificado deberá realizar la instalación y el transporte de los
manipuladores y equipos de robot, y cumplir todos los códigos nacionales y
locales.
2.4.1 Precauciones de instalación
Instalación de protecciones:
Para garantizar la seguridad, se debe instalar una protección para el
sistema de robot. Para conocer detalles acerca de la protección, consulte
la sección Precauciones de diseño e instalación en el capítulo Seguridad
del Manual del usuario EPSON RC+.
Espacio entre la protección y el manipulador:
Instale el manipulador en un lugar con suficiente espacio para que una
herramienta o una pieza de trabajo en el efector final no entre en
contacto con una pared o protección cuando el manipulador extienda su
brazo completamente mientras sostiene una pieza de trabajo. Instalar el
manipulador en un lugar con espacio insuficiente es extremadamente
peligroso y puede causar lesiones corporales graves o daños importantes
a los equipos del sistema de robot, ya que una herramienta o una pieza
de trabajo puede chocar contra una pared y una protección.
Revisión del manipulador antes de la instalación:
Antes de instalar y operar el manipulador, asegúrese de que todas las
piezas del manipulador estén en su lugar y no presenten defectos
externos. Si faltan piezas o si estas presentan defectos, esto puede causar
un mal funcionamiento del manipulador. Es extremadamente peligroso
que el manipulador funcione de manera incorrecta, y puede causar
lesiones corporales graves o daños importantes a los equipos del sistema
de robot.
M ontaje en p ared y montaje en techo:
Al montar el manipulador en una pared o en el techo, fíjelo a una pared o
a un techo que tenga suficiente fortaleza y rigidez. El montaje del
manipulador en una pared o en un techo que no cumpla con esto es
extremadamente peligroso y puede causar lesiones corporales graves o
daños importantes a los equipos del sistema de robot ya que el
manipulador se puede caer o vibrar.
M ontaje en p ared y montaje en techo:
Al montar el manipulador en una pared o el techo, por razones de
seguridad, debe fijar el soporte a la base del manipulador para evitar que
se caiga. Si el manipulador se cae, es extremadamente peligroso y puede
causar lesiones corporales graves o daños importantes a los equipos del
sistema de robot.

2. Instalación
50 Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
2.4.2 Entorno
Es necesario un entorno adecuado para que el sistema de robot funcione de forma
correcta y segura. Asegúrese de instalar el sistema de robot en un entorno que
cumpla las siguientes condiciones:
Elemento
Condiciones
Temperatura ambiente
5 a 40 °C (con variación mínima de temperatura)
Humedad ambiental
relativa
Serie T
20 a 80 % (sin condensación)
Serie VT
10 a 80 % (sin condensación)
Primera ráfaga de ruido
transitoria
Serie T
2 kV o menos
Serie VT
2 kV o menos (cable de fuente de
alimentación)
1 kV o menos (cable de señal)
Ruido electrostático
4 kV o menos
Entorno
- Instalar en interiores.
- M antener lejos de la luz solar directa.
- Mantener lejos del polvo, humo grasiento,
salinidad, polvo metálico u otros contaminantes.
- M antener lejos de solventes y gases inflamables o
corrosivos.
- M antener lejos del agua.
- Mantener lejos de golpes o vibraciones.
- Mantener lejos de fuentes de ruido eléctrico.
- M antener lejos de campos magnéticos o eléctricos
fuertes.
Los manipuladores no son adecuados para su operación en entornos adversos,
como áreas de pintura, etc. Cuando use manipuladores en entornos inadecuados
que no cumplan las condiciones anteriores, comuníquese con el distribuidor en su
región.
Condiciones ambientales especiales
La superficie del manipulador tiene una resistencia general al aceite. Sin embargo,
si sus requisitos especifican que el manipulador debe soportar ciertos tipos de
aceite, consulte con el distribuidor en su región.
Los cambios rápidos en la temperatura y la humedad pueden causar condensación
dentro del manipulador.
Si sus requisitos especifican que el manipulador manipule alimentos, consulte con
el distribuidor en su región para comprobar si el manipulador dañará los alimentos
o no.
El manipulador no se puede usar en entornos corrosivos donde se usen sustancias
ácidas o alcalinas. El manipulador es susceptible a la oxidación en entornos
salados donde se puede acumular óxido.

2.Instalación
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9 51
A DV ERTENCIA
■
Use un disyuntor de fuga a tierra en el cable de alimentación de CA de
los manipuladores para evitar descargas eléctricas y ave
rías del
circuito causadas por cortocircuitos.
PRECAUCIÓ N
■
Cuando limpie el manipulador, no lo frote con fuerza con alcohol o
benceno. Puede perder el lustre de la superficie recubierta.
2.4.3 Nivel de ruido
Manipulador Nivel dB(A) Condiciones de
funcionamiento
Punto de
medición
Serie T 80 o menos
Bajo carga nominal,
movimiento
simultáneo de las 4
articulaciones,
velocidad máxima,
aceleración máxima y
trabajo al 50 %
Parte posterior del
manipulador, a 1000
mm de distancia del
margen de
movimiento, 50 mm
sobre la superficie
instalada en la base
Serie VT 80 o menos
Bajo carga nominal,
movimiento
simultáneo de todas
las articulaciones,
velocidad máxima,
aceleración máxima y
trabajo al 50 %
1000 mm de
distancia de la parte
post erior del
manipulador
2.4.4 Mesa base
No se incluy e una mesa base p ara fijar el manipulador. Fabrique u obtenga la mesa
base para su manipulador. La forma y el tamaño de la mesa base difiere según el
uso del sistema de robot. Para su referencia, incluimos algunos requisitos para la
mesa del manipulador aquí.
El torque y la fuerza de reacción producidos por el movimiento del manipulador
son los siguientes:
T3
T6
VT6
Torque de reacción máx. en la
placa horizontal
150 Nm
150 Nm
500 Nm
Fuerza de reacción horizontal
máx.
500 N
500 N
500 N
Fuerza de reacción vertical máx.
900 N
900 N
3100 N

2. Instalación
52 Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
Los orificios roscados necesarios para el montaje de la base del manipulador son
M8. Use pernos de montaje con especificaciones que cumplan con la clase de
propiedad ISO 898-1: 10.9 o 12.9.
La placa para la superficie de montaje del manipulador debe tener 20 mm de
grosor o más y estar hecha de acero para reducir la vibración. La dureza de la
superficie de la placa de acero debe ser de 25 μm o menos.
La mesa se debe fijar al suelo o a la pared para impedir que se mueva.
El manipulador se debe instalar horizontalmente.
Cuando use un nivel para ajustar la altura de la mesa base, use un tornillo con
diámetro M16.
2.4.5 Procedimiento de instalación
PRECAUCIÓ N
■
Instale el manipulador con dos o
más personas.
Los pesos del manipulador son los siguientes
. Tenga cuidado de
que sus manos, dedos o pies no queden atrapados, o de que los
equipos sufran daños por la caída del manipulador.
T3
-401S: aprox. 16 kg: 35 lb.
T6
-602S: aprox. 22 kg: 49 lb
VT6
-A901: aprox. 40 kg: 89 lb
Serie T
Fije la base a la mesa base
con cuatro pernos.
Use pernos con
especificaciones que
cumplan con la clase de
propiedad ISO 898
-1: 10.9 o
12.9.
Torque de ajuste:
32,0
±1,6 N·m
10 mm
4-M8×25
Agujero para tornillo
(profundidad de
20 mm o más)
Arandela
de resorte
Arandela
plana
(Illustration:T3-401S)
Asegúrese de retirar el amarracables del protector de parada mecánica.

2.Instalación
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9 53
Serie T
Fije la base a la mesa base
con cuatro pernos.
Use pernos con
especificaciones que
cumplan con la clase de
propiedad ISO 898
-1: 10.9 o
12.9.
Torque de ajuste:
32,0
±1,6 N·m
Screw Hole
Conexión a tierra
Siga los reglamentos locales para la conexión a tierra. Se recomienda que el
tamaño del centro del cable de conexión a tierra sea de 5,5 mm
2
o más.
Conecte de forma directa la línea de conexión a tierra al manipulador a través del
orificio para pernos que se muestra en la figura a continuación.
Manipulador serie T
Agujero para perno
(para conexión
a tierra)
(Ilustración: T3-401S)
4-M8×35
Arandela
de presión
Arandela
de ajuste
17 mm
Ag ujero de tornillo
(profundidad de 18 mm o más)

2. Instalación
54 Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
Manipulador serie VT
Agujero para perno M4
(para conexión a tierra)

2.Instalación
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9 55
2.5 Conexión al conector EMERGENCY
Conecte un interruptor de protección o un interruptor de parada de emergencia al
conector EMERGENCY (emergencia) por motivos de seguridad.
Cuando no hay nada conectado al conector EMERGENCY, el controlador no
funciona de forma normal.
A DV ERTENCIA
■
Asegúrese de que la parada de emergencia o la puerta de seguridad
funcionen correctamente antes de su
operación; no solo el
arranque, sino que también los cambios de uso, como opciones
agregadas o piezas reemplazadas por mantenimiento.
■
Antes de conectar el conector, asegúrese de que los pines no estén
doblados
. Si lo conecta con los pines doblados, se puede dañar el
conector y causar un mal funcionamiento en el sistema de robot.
Manipulador serie T
Conector EMERGENCY
(Illustration:T3-401S)

2. Instalación
56 Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
Manipulador serie VT
2.5.1 Interruptor de puerta de seguridad e interruptor de liberación de
enganche
El conector EM ERGENCY tiene terminales de entrada para el interruptor de
puerta de seguridad y el interruptor de parada de emergencia. Asegúrese de usar
estos terminales de entrada para mantener el sistema seguro.
Conector
Estándar
Conector EMERGENCY (lado del
manipulador)
D-Sub de 25 pines hembra
(lado del cable)
D-Sub de 25 pines macho
(lado del tablero)
2.5.2 Interruptor de puerta de seguridad
A DV ERTENCIA
El enclavamiento de la puerta de
seguridad debe estar en
funcionamiento cuando se opere el sistema de robot
. No opere el
sistema si no se puede encender o apagar el interruptor (por ejemplo,
si el interruptor está cubierto con cinta)
. Operar el sistema de robot
cuando el interruptor no fu
nciona correctamente es extremadamente
peligroso y puede causar problemas de seguridad graves, ya que la
entrada de la puerta de seguridad no puede cumplir su función
designada.
Conector EMERGENCY

2.Instalación
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9 57
Con el fin de mantener una zona de trabajo segura, se debe instalar una protección
alrededor del manipulador. La protección debe tener un interruptor de
enclavamiento en la entrada de la zona de trabajo. La puerta de seguridad que se
describe en este manual es una de las protecciones, y un enclavamiento para la
puerta de seguridad se llama un interruptor de puerta de seguridad. Conecte el
interruptor de puerta de seguridad al terminal de entrada de la puerta de seguridad
en el conector EM ERGENCY.
El interruptor de puerta de seguridad cuenta con características de seguridad, como
una retención temporal del programa o el estado de operación prohibida, que se
activan siempre que se abre la puerta de seguridad.
Respete las siguientes instrucciones en el diseño del interruptor de puerta de
seguridad y de la puerta de seguridad.
- Para el interruptor de puerta de seguridad, seleccione un interruptor que se
abra cuando se abre la puerta de seguridad y no con el resorte del propio
interruptor.
- La señal de la puerta de seguridad (entrada de puerta de seguridad) está
diseñada para producir dos señales redundantes. Si las señales de las dos
entradas difieren por dos segundos o más, el sistema lo considera un error
crítico. Por lo tanto, asegúrese de que el interruptor de puerta de seguridad
tenga dos circuitos redundantes separados y que cada uno se conecte a los
pines especificados en el conector EMERGENCY del controlador.
- La puerta de seguridad se debe diseñar e instalar de modo que no se cierre de
forma accidental.
2.5.3 Interruptor de liberación de enganche
El software del controlador bloquea las siguientes condiciones:
- La puerta de seguridad está abierta.
- El modo de operación es “TEACH” (Enseñar).
El conector EMERGENCY cuenta con un terminal de entrada para un interruptor
de liberación de enganche que cancela las condiciones de bloqueo.
Abierto: El interruptor de liberación de enganche bloquea las condiciones de que
la puerta de seguridad esté abierta o el modo de operación esté en
“TEACH”.
Cerrado: El interruptor de liberación de enganche libera las condiciones de
bloqueo.

2. Instalación
58 Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
Cuando el modo TEACH bloqueado se libera mientras que la puerta de seguridad
está abierta, el estado de la energía del manipulador es operación prohibida, ya que
en ese momento la puerta de seguridad está abierta
.
Para ejecutar una operación del manipulador, vuelva a cerrar la puerta de
seguridad y luego cierre la entrada de liberación de enganche.
2.5.4 Comprobación del funcionamiento del interruptor de liberación de
enganche
Después de conectar el interruptor de puerta de seguridad y el interruptor de
liberación de enganche al conector EM ERGENCY, asegúrese de comprobar el
funcionamiento seguro del interruptor con los procedimientos descritos a
continuación, antes de operar el manipulador.
(1) Encienda el controlador mientras la puerta de seguridad está abierta para
iniciar el software del controlador.
(2) Asegúrese de que se muestre “Safety” (Seguridad) en la barra de estado de
EPSON RC+ 7.0.
(3) Cierre la puerta de seguridad y encienda el interruptor que se conecta a la
entrada de liberación de enganche.
Asegúrese de que “Safety” esté atenuado en la barra de estado.
La información de que la puerta de seguridad está abierta se puede enganchar con
el software, según la condición de entrada de liberación de enganche.
Abierto: El interruptor de liberación de enganche engancha la condición de
que la puerta de seguridad está abierta.
Para cancelar la condición, cierre la puerta de seguridad y luego
cierre la entrada de liberación de enganche de la puerta de seguridad.
Cerrado: El interruptor de liberación de enganche no engancha la condición de
que la puerta de seguridad está abierta.
La entrada de liberación de enganche también sirve para reconocer el cambio del
modo TEACH.
Con el fin de cambiar la condición enganchada del modo TEACH, coloque el
interruptor de llave selector de modo de la caja de comandos (Teach Pendant) en
“Auto” (Automático). Luego, cierre la entrada de liberación de enganche.
N O TA
N O TA

2.Instalación
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9 59
2.5.5 Interruptor de parada de emergencia
Si se desea crear un interruptor de parada de emergencia externo, además de la
parada de emergencia en la caja de comandos (Teach Pendant), asegúrese de
conectar dicho interruptor de parada de emergencia al terminal de entrada de
parada de emergencia en el conector EM ERGENCY.
El interruptor de parada de emergencia conectado debe cumplir los siguientes
requisitos:
El interruptor de parada de emergencia conectado debe cumplir con las siguientes
normas de seguridad y otras normas relacionadas (IEC60947-5-5, etc.):
- Debe ser un interruptor de botón que esté “normalmente cerrado”.
- Un botón que no regrese o reanude el funcionamiento automáticamente.
- El botón debe tener forma de hongo y debe ser rojo.
- El botón debe tener un contacto doble que esté “normalmente cerrado”.
La señal del interruptor de parada de emergencia está diseñada para usar dos
circuitos redundantes. Si las señales de los dos circuitos difieren en dos segundos o
más, el sistema lo reconoce como un error crítico. Por lo tanto, asegúrese de que el
interruptor de parada de emergencia tenga contactos dobles e instale el interruptor
según lo indicado en la sección 2.5.8: Diagramas de circuitos.
2.5.6 Comprobación del funcionamiento del interruptor de parada de
emergencia
Una vez que el interruptor de parada de emergencia esté conectado al conector
EMERGENCY, continúe con el siguiente procedimiento para asegurarse de que el
interruptor funcione correctamente. Para la seguridad del operador, NO se debe
encender el manipulador hasta que se complete la siguiente prueba.
(1) Encienda el manipulador para iniciar el software del controlador mientras
presiona el interruptor de parada de emergencia.
(2) Asegúrese de que el indicador E-STOP (Parada de emergencia) del
manipulador esté encendido.
(3) Asegúrese de que “EStop” aparezca en la barra de estado.
(4) Suelte el interruptor de parada de emergencia.
(5) Ejecute el comando RESET (Restablecer).
(6) Asegúrese de que el indicador E-STOP esté APAGADO y que “E-Stop” esté
atenuado en la barra de estado de la ventana principal.
N O TA

2. Instalación
60 Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
2.5.7 Asignaciones de pines
Las asignaciones de pines del conector EM ERGENCY son las siguientes: (D-Sub
de 25 pines macho)
N.°
de
pin
Señal Función
N.°
de
pin
Señal Función
1 ESW11
Contacto del interruptor
parada de emergencia (1)
*3
14 ESW21
Contacto del interruptor de
parada de emergencia (2)
*3
2 ESW12
Contacto del interruptor
parada de emergencia (1)
*3
15 ESW22
Contacto del interruptor de
parada de emergencia (2)
*3
3
ESTOP1+
Circuito de parada de
emergencia 1 (+)
*4
16 ESTOP2+
Circuito de parada de
emergencia 2 (+)
*4
4
ESTOP1
−
Circuito de parada de
emergencia 1 (-)
*4
17
ESTOP2−
Circuito de parada de
emergencia 2 (-)
*4
5 No se usa
*1
18
SDLATCH1
Liberación de enganche de
puerta de seguridad
6 No se usa
*1
19
SDLATCH2
Liberación de enganche de
puerta de seguridad
7 SD11
Entrada de puerta de
seguridad (1)
*2
20 SD21
Entrada de puerta de seguridad
(2)
*2
8 SD12
Entrada de puerta de
seguridad (1)
*2
21 SD22
Entrada de puerta de seguridad
(2)
*2
9
24V
Salida de +24 V
22
24V
Salida de +24 V
10
24V
Salida de +24 V
23
24V
Salida de +24 V
11
24VGND
Salida de +24 V a tierra
24
24VGND
Salida de +24 V a tierra
12
24VGND
Salida de +24 V a tierra
25
24VGND
Salida de +24 V a tierra
13
No se usa
*1
*1 No conecte nada a estos pines.
*2 Ocurre un error crítico si los valores de entrada desde la puerta de seguridad 1 y la puerta de
seguridad 2 son distintos en dos o más segundos. Deben estar conectadas al mismo
interruptor con dos grupos de contactos.
*3 Ocurre un error crítico si los valores de entrada desde el contacto de interruptor de parada de
emergencia 1 y el contacto de interruptor de parada de emergencia 2 son distintos en dos o
más segundos. Deben estar conectados al mismo interruptor con dos grupos de contactos.
*4 No aplique voltaje inverso al circuito de parada de emergencia.

2.Instalación
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9 61
Carga nominal de salida del interruptor de
parada de emergencia
+30 V 0,3 A o inferior Pines 1-2, 14-15
Margen de voltaje de entrada nominal de
parada de emergencia
Corriente de entrada nominal de parada de
emergencia
+24 V ±10%
37,5 mA ±10% /
Entrada de +24V
Pines 3-4, 16-17
Margen de voltaje de entrada nominal de
puerta de seguridad
Corriente de entrada nominal de puerta de
seguridad
+24 V ±10%
10 mA / Entrada de +24 V
Pines 7-8, 20-21
M argen de voltaje de entrada nominal de
liberación de enganche
Corriente de entrada nominal de liberación
de enganche
+24 V ±10%
10 mA / Entrada de +24 V
Pines 18-19
La resistencia eléctrica total de los interruptores de parada de emergencia
y sus circuitos debe ser de 1 Ω o menos.
PRECAUCIÓ N
La salida de 24 V es para la parada de emergencia
. No la utilice para
otros propósitos
. De hacerlo, puede causar un mal funcionamiento del
sistema.
No aplique voltaje inverso al circuito de parada de emergencia
.
De hacerlo, puede causar un mal funcionamiento del sistema.
N O TA

2. Instalación
62 Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
2.5.8 Diagramas de circuitos
Ejemplo 1: Aplicación típica de interruptor de parada de emergencia
externa
+24V
+5V
Entrada de puerta
de seguridad 1
Externo
+24V
Entrada de puerta
de seguridad 2
Entrada de liberación
de enganche
Entrada de liberación de enganche Cerrar :Enganche desactivado
Abrir :Enganche activado
Control de
circuito principal
Entrada de CA
Interruptor de
parada de
emergencia de
unidad de
operación (TP)
Externo +24V
GND
Interruptores de parada
de emergencia externos
Controlador
de motor
+
−
Manipulator
9
10
22
23
1
2
14
15
3
16
4
17
11
12
24
25
7
8
20
21
18
19
+
Detección de
parada de
emergencia
Cuidado con la
dirección de la
aplicación de
voltaje
ESTOP1+
ESTOP2+
ESTOP1−
ESTOP2-

2.Instalación
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9 63
Ejemplo 2: Aplicación típica de relé de seguridad externo
* Para proteger el circuito
de la parada de emergencia,
la capacidad del fusible
debe:
- cumplir con la capacidad
del relé de seguridad
externo
- 0,4A o menos
Relé de seguridad
Externo(El diagrama
arriba está
simplificado).
Externo
+24V
GND
+24V
+5V
Entrada de puerta
de seguridad 1
Entrada de puerta
de seguridad 2
Entrada de liberación
de enganche
Entrada de CA
Controlador
del motor
Externo +24V
Fusible
+
−
Externo
+24V
Manipulator
9
10
22
23
1
2
14
15
3
16
4
17
11
12
24
25
7
8
20
21
18
19
+
Control de
circuito principal
Interruptor de
parada de
emergencia
de unidad de
operación
(TP)
Detección de
parada de
motor
Externo
+24V
Entrada de liberación de enganche
Cerrar
:Enganche desactivado
Abrir :Enganche activado
Externo +24V
GND
Externo
+24V
GND

2. Instalación
64 Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
2.6 Fuente de alimentación, cable de alimentación de CA, disyuntor
ADVERTENCIA
■ El manipulador no cuenta con un interruptor de encendido.
Inmediatamente después de insertar el enchufe en el
suministro, se enciende el sistema de robot.
Tenga cuidado con las descargas eléctricas cuando inserte el
enchufe.
2.6.1 Fuente de alimentación
Asegúrese de que la energía cumpla con las siguientes especificaciones.
Elemento
Especificación
Voltaje
100 a 240 V CA
(El voltaje de entrada debe estar dentro
de
±
10
%
del voltaje nominal).
Fase
Monofásico
Frecuencia
50/60 Hz
Interrupción de energía
momentánea
Menos de 10 ms
Capacidad nominal
T3: 660 VA
T6, VT: 1,200 VA
Corriente máxima
(Cuando la corriente de CA está
ENCENDIDA)
T3: aprox. 30 A (menos de 2 ms)
T6, VT: aprox. 60 A (menos de 2 ms)
Corriente de fuga
Máx. 10 mA
Resistencia de tierra
Menos de 100
Ω
Instale un disyuntor de fuga a tierra o un disyuntor en la línea del cable de
alimentación de CA.
Para la corriente eléctrica nominal del disyuntor, consulte los valores en la
siguiente tabla.
Manipulador
Energía
Corriente eléctrica
nominal
Serie T3
100 V de CA
10 A
200 V de CA
5 A
Serie T6, VT
100 V de CA
20 A
200 V de CA
10 A
Si instala un disyuntor, seleccione uno que soporte la “corriente máxima” indicada
anteriormente.
El tomacorriente debe estar instalado cerca del equipo y debe tener un acceso fácil.

2.Instalación
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9 65
2.6.2 Cable de alimentación de CA
A DV ERTENCIA
■
Asegúrese de que personal calificado realice las operaciones.
■
Asegúrese de conectar el cable a tierra )verde/amarillo) al cable
de alimentación de CA al terminal de tierra de la fuente de
alimentación de la fábrica.
También se recomienda que lo conecte a tierra directamente a
través de un agujero en la base para poner a tierra el manipulador
completamente.
El equipo debe estar conectado a tierra de forma correcta en todo
m
omento para evitar el riesgo de descargas eléctricas.
■
Siempre use un enchufe o un dispositivo de desconexión para el
cable conector de energía. Nunca conecte el controlador de forma
directa a la fuente de alimentación de la fábrica.
■
Seleccione el enchufe o un dispositivo de desconexión que
cumpla con las normas de seguridad de los países.
Cuando conecte el conector del cable de CA al manipulador, asegúrese de
insertarlo completamente.
Elemento
Especificación
Cable de alimentación de CA (2 cables)
Negro, blanco
Cable a tierra
Verde/amarillo
Longitud de cable
5 m
Terminal
Terminal redonda M4 sin soldadura
Utilice el sujetador de cable en el lado posterior del manipulador para fijar el cable
de alimentación de CA.
NOTA

2. Instalación
66 Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
Manipulador serie T Manipulador serie VT
2.7 Encendido
2.7.1 Precauciones de encendido
Revisión del manipulador:
Antes de operar el manipulador, asegúrese de que todas las piezas del
manipulador estén en su lugar y no presenten defectos externos. Si ocurre un
error, detenga la operación y comuníquese con nosotros.
Verificación de pernos de envío y plantillas antes de ENCENDER:
Antes de ENCENDER la alimentación después de la instalación, asegúrese de
retirar los pernos de envío y plantillas del manipulador. Si ENCIENDE la
alimentación con los pernos de envío y plantillas adjuntos, puede causar daños
a los equipos del manipulador.
Activación de la alimentación:
Fije el manipulador antes de ENCENDER la energía u operarlo. ENCENDER
la alimentación u operar un manipulador que no esté fijo es extremadamente
peligroso y puede causar lesiones corporales graves o daños importantes a los
equipos del sistema de robot, ya que el manipulador se puede caer.
Cuando vuelva a suministrar energía:
(Ilustración: T3-401S)

2.Instalación
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9 67
Cuando vuelva a suministrar energía al manipulador, APAGUE el controlador
y espere 5 segundos o más. Luego, ENCIENDA nuevamente el manipulador.
2.7.2 Procedimiento de encendido
(1) Verifique la conexión del conector EMERGENCY.
(2) Conecte el enchufe de derivación TP al puerto TP.
(3) Conecte el cable de alimentación de CA al
manipulador
(4) Conecte el cable de alimentación de CA al tomacorriente de la fuente de
alimentación.
(5) El indicador PROGRAM parpadea aproximadamente 30 segundos después
de que el controlador se inicia de forma normal.
Si el indicador ERROR está encendido o parpadeando, revise la conexión en
los pasos (1) al (4) y encienda nuevamente la energía.
Si el indicador ERROR sigue encendido o parpadeando, comuníquese con el
proveedor de su región.
Manipulador serie T Manipulador serie VT
(Ilustración: T3-401S)
LED
LED

2. Instalación
68 Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
2.8 Guardar estado predeterminado
Al momento del envío, el manipulador ya está configurado con los manipuladores
que compró. Sin embargo, por si acaso, recomendamos guardar el estado
predeterminado del controlador. Se necesita una memoria USB para guardar el
estado del controlador.
Para el procedimiento de almacenamiento del estado del controlador, consulte el
siguiente manual.
Manual del manipulador de la serie T: Configuración y operación
8. Puerto de memoria
Manual del manipulador de la serie VT: Configuración y operación
8. Puerto de memoria

3. Primer paso
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9 69
3. Primer paso
Esta sección indica el procedimiento para instalar el software EPSON RC+ en la
computadora de desarrollo y para ejecutar un programa simple después de
conectar la computadora de desarrollo y un Manipulador con USB.
Siga las instrucciones que se incluyen en las secciones 1 Seguridad y 2.
Instalación para asegurarse de que el sistema de robot esté instalado de forma
segura. Luego, siga los siguientes procedimientos para operar el sistema de robot.
3.1 Instalación del software EPSON RC+ 7.0
El software EPSON RC+ 7.0 se debe instalar en su computadora de desarrollo.
(1) Introduzca el DVD EPSON RC+ 7.0 en la unidad de DVD de la
computadora.
(2) Aparecerá el siguiente cuadro de diálogo. Haga clic en <Next>.

3. Primer paso
70 Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
(3) Ingrese su nombre de usuario y nombre de empresa y haga clic en <Next>.
(4)
Seleccione la unidad en la que desea instalar el software EPSON
RC+ 7.0 y haga clic en <Next>.
La carpeta de instalación se llama EpsonRC70. Esto no se puede modificar.
NOTA

3. Primer paso
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9 71
(5) Se mostrará el cuadro de diálogo para seleccionar las opciones a instalar.
Seleccione las opciones que desea instalar y haga clic en <Next>.
(6) Se mostrará el cuadro de diálogo para revisar la configuración. Si está
satisfecho con la configuración, haga clic en <Next>.
(7) De ser necesario, instale “Windows Installer” y “Microsoft .NET Framework
3.5” en su sistema. Esto puede demorar varios minutos.
Adobe Reader debe estar instalado en su computadora para ver los manuales
de EPSON RC+ 7.0. Si el instalador no puede encontrar Adobe Reader en su
sistema, se instalará ahora. Siga las instrucciones del instalador de Adobe.
No reinicie el sistema después del término de la instalación de Adobe
Reader.
NOTA

3. Primer paso
72 Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
(8) Después de que la instalación haya terminado, reinicie su computadora.
La instalación del software EPSON RC+ 7.0 está completa.
3.2 Conexión de la computadora de desarrollo y el manipulador
Conecte la computadora de desarrollo al puerto de conexión para la computadora
de desarrollo.
Manipulador serie T
Puerto de conexión para la
computadora de desarrollo
(Ilustración: T3-401S)
Manipulador serie VT

3. Primer paso
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9 73
Para obtener más detalles acerca de la conexión de la computadora de desarrollo y
el manipulador, consulte el Manual del usuario EPSON RC+ 7.0: Comando de
comunicaciones de computadora a controlador.
Asegúrese de instalar el software EPSON RC+7.0 en la computadora de desarrollo
primero y luego conecte la computadora de desarrollo y el manipulador con el
cable USB.
Si el manipulador y la computadora de desarrollo se conectan sin instalar el
software EPSON RC+7.0 en la computadora de desarrollo, aparecerá la ventana
[Add New Hardware Wizard]. Si aparece este asistente, haga clic en el botón
<Cancel>.
3.2.1 Acerca del puerto de conexión de la computadora de desarrollo
El puerto de conexión de la computadora de desarrollo es compatible con los
siguientes tipos de USB.
- USB2.0 de alta velocidad/velocidad completa (selección de velocidad
automática o modo de velocidad completa)
- USB1.1 de velocidad completa
Estándar de interfaz: Especificación de USB compatible con versión 2.0
(compatible con USB versión 1.1 y superior)
Conecte el manipulador y la computadora de desarrollo mediante un cable USB
para desarrollar el sistema de robot o ajustar la configuración del manipulador con
el software EPSON RC+ 7.0 instalado en la computadora de desarrollo.
El puerto de conexión de la computadora de desarrollo es compatible con la
conexión directa. Es posible insertar y retirar los cables mientras que la
alimentación de la computadora de desarrollo y el manipulador estén
ENCENDIDOS. Sin embargo, el manipulador se detiene cuando se retira el cable
USB si el manipulador y la computadora de desarrollo se encuentran conectados.
N O TA

3. Primer paso
74 Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
3.2.2 Precauciones
Cuando conecte la computadora de desarrollo y el manipulador, asegúrese de lo
siguiente.
- Conecte la computadora de desarrollo al manipulador con un cable USB de 5
m o más corto. No utilice un concentrador USB o un cable de extensión.
- Asegúrese de que el puerto de conexión de la computadora de desarrollo no
se use con ningún dispositivo que no sea la computadora de desarrollo.
- Use un cable de computadora o USB que sea compatible con el modo de alta
velocidad de USB 2.0 para operar en modo de alta velocidad de USB 2.0.
- No tire del cable con fuerza y no lo doble.
- No aplique fuerza excesiva al conector.
- Cuando la computadora de desarrollo y el manipulador están conectados, no
inserte o retire otros dispositivos USB de la computadora de desarrollo. La
conexión con el manipulador se puede desconectar.
3.2.3 Configuración de software y verificación de conexión
A continuación, encontrará los pasos para conectar la computadora de desarrollo y
el manipulador.
(1) Asegúrese de que el software EPSON RC+ 7.0 esté instalado en el
manipulador conectado a la computadora de desarrollo. (Si el software no está
instalado, instálelo).
(2) Conecte la computadora de desarrollo al manipulador con el cable USB.
(3) ENCIENDA el manipulador.
(4) Inicie el software EPSON RC+ 7.0.
(5) En el software EPSON RC+ 7.0, seleccione el menú [Setup] - [PC to
Controller Communications] para mostrar el cuadro de diálogo [PC to
Controller Communications].
(6) Seleccione “No.1 USB” y haga clic en el botón <Connect>.

3. Primer paso
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9 75
(7) Después de que la conexión de la computadora de desarrollo con el
manipulador está completa, aparecerá “Connected” (Conectado) como el
estado [Connection Status]. Asegúrese de que aparezca “Connected” y haga
clic en el botón <Close> para cerrar la ventana [PC to Controller
Communications].
Se completó la conexión de la computadora de desarrollo con el manipulador.
Ahora se puede usar el sistema de robot a través del software EPSON RC+ 7.0.
3.2.4 Copia de seguridad de la condición inicial del manipulador
Realice una copia de seguridad de los datos configurados del manipulador antes
del envío.
Procedimiento de copia de seguridad de la configuración del proyecto y el
sistema:
(1) Desde el menú [Project], seleccione [Copy].
(2) Seleccione una unidad arbitraria para la opción [Destination Drive].
(3) Haga clic en <OK>. El proyecto se copiará al medio externo.
(4) Desde el menú [Tools], seleccione [Controller].
(5) Haga clic en el botón <Backup Controller>.
(6) Seleccione la unidad arbitraria.
(7) Haga clic en <OK>. Se realizará una copia de seguridad de la configuración
del sistema en el medio externo.

3. Primer paso
76 Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
3.2.5 Desconexión de la computadora de desarrollo y el manipulador
Se indica cuando la computadora de desarrollo y el manipulador están
desconectados.
(1) En el software EPSON RC+ 7.0, seleccione el menú [Setup] - [PC to
Controller Communications] para mostrar el cuadro de diálogo [PC to
Controller Communications].
(2) Haga clic en el botón <Disconnect>.
El manipulador y la computadora de desarrollo se desconectan y puede retirar
el cable USB.
Si retira el cable USB mientras el manipulador y la computadora de desarrollo se
encuentran conectados, el manipulador se detiene. Asegúrese de hacer clic en el
botón <Disconnect> en el cuadro de diálogo [PC to Controller Communications]
antes de retirar el cable USB.
3.2.6 Colocar el manipulador en la posición inicial
Aparte de crear y ejecutar el programa, puede operar el manipulador mediante los
siguientes métodos.
Operación manual
Movimiento de desplazamiento por la caja de comandos (Teach Pendant)
Ejecución de comandos desde el software EPSON RC+
Movimiento de desplazamiento desde el software EPSON RC+
Esta sección explica los siguientes métodos.
A: Operación manual
B: Ejecución de comando desde el software EPSON RC+
C: Movimiento de desplazamiento desde el software EPSON RC+
N O TA

3. Primer paso
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9 77
A: Operación manual
Mueva de forma manual el manipulador que sea libre del servocontrol.
Para robot SCARA:.
Puede mover la articulación n.° 3 de forma manual mientras que el interruptor de
desbloqueo del freno del manipulador se mantiene presionado con el controlador
ENCENDIDO.
Las articulaciones n.° 1, n.° 2 y n.° 4 se puede mover manualmente.
Además, puede mover el manipulador de forma manual liberando el freno de
solenoide de la ventana de comandos del software EPSON RC+.
Para robot de 6 ejes:
Puede mover los manipuladores de forma manual presionando el interruptor de
desbloqueo del freno cuando la unidad de desbloqueo del freno está conectada.
Para obtener detalles, consulte la sección sobre la unidad de desbloqueo del freno
en el manual de cada manipulador.
Además, puede mover los manipuladores de forma manual liberando el freno
electromagnético de la ventana de comandos del software EPSON RC+.
PRECAUCIÓ N
■
Por lo general, suelte los frenos de las articulaciones uno por uno
.
Tenga cuidado si necesita soltar los frenos de dos o más
articulaciones de forma simultánea
. Soltar los frenos de dos o más
articulaciones al mismo tiempo puede causar que manos o dedos
queden atrapados, o daños al manipulador, o su mal
funcionamiento, ya que sus brazos se pueden mover en direcciones
inesperadas
.
■
Tenga cuidado con la caída del brazo cuando suelte el freno
.
Mientras que suelta el freno, el brazo del manipulador caerá por su
propio peso
. La caída del brazo puede causar que manos o dedos
queden atrapados o daños al equipo del manipulador, o su
mal
funcionamiento.
■
Antes de soltar el freno, asegúrese de tener el interruptor de parada
de emergencia a la mano para poder presionarlo inmediatamente
.
De lo contrario, si el brazo cae por una operación incorrecta, no
podrá detenerlo de inmediato
. La caída del brazo puede causar
daños a los equipos o el mal funcionamiento del manipulador.

3. Primer paso
78 Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
(1) Inicie el software EPSON RC+ 7.0.
Haga doble clic en el icono <EPSON RC+ 7.0> en el escritorio.
(2) Abra la ventana de comandos.
En el software EPSON RC+ 7.0, seleccione el menú [Tools] - [Command
Window].
(3) Ejecute el siguiente comando en la ventana de comandos.
>Reset
>Brake Off,[Brazo n.° (1 al 6) cuyo freno se soltará]
Ejecute el siguiente comando para activar el freno nuevamente.
>Brake On,[Brazo n.° (1 al 6) cuyo freno se activará]
B: Ejecución de comandos desde el software EPSON RC+
Active los motores del manipulador y ejecute el comando para mover el
manipulador.
A continuación, se explica el ejemplo de mover todas las articulaciones a las
posiciones de pulso 0, especificando el pulso para cada articulación.
(1) Inicie el software EPSON RC+ 7.0.
Haga doble clic en el icono <EPSON RC+ 7.0> en el escritorio.
(2) Abra la ventana de comandos.
En el software EPSON RC+ 7.0, seleccione el menú [Tools] - [Command
Window].
(3) Ejecute el siguiente comando en la ventana de comandos.
Robot SCARA:
>Motor On
>Go Pulse (0,0,0, 0)
Robot de 6 ejes:
>Motor On
>Go Pulse (0,0,0, 0,0,0)
Para definir la posición y la postura del manipulador en la posición de pulso 0,
consulte la sección Rango de movimiento en los manuales del manipulador.

3. Primer paso
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9 79
C: Movimiento de desplazamiento desde el software EPSON RC+
Active los motores y realice operaciones desde la ventana Jog & Teach del
software EPSON RC+ para mover el manipulador.
(1) Inicie el software EPSON RC+ 7.0.
Haga doble clic en el icono <EPSON RC+ 7.0> en el escritorio.
(2) Cree un proyecto nuevo.
1. Seleccione [New] desde el menú [Project].
Verá el cuadro de
diálogo [New Project].
2. Escriba un nombre de proyecto en el cuadro [New Project Name], por
ejemplo, PrimAplic.
3. Haga clic en el botón <OK> para crear el proyecto nuevo.
(3) Abra el administrador Robot Manager.
En el software EPSON RC+ 7.0, seleccione el menú [Tools] - [Robot
M anager].

3. Primer paso
80 Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
(4) Encienda los motores.
Verifique que la pestaña [Control Panel] esté abierta. Haga clic en el botón
<MOTOR ON>.
(5) Mueva el manipulador con el movimiento de desplazamiento.
1. Seleccione la pestaña [Jog & Teach].
2. Seleccione “Joint” como el ajuste [Jogging]-<Mode>.
3. Haga clic en las teclas de desplazamiento J1 a J4 para mover el
manipulador por articulación.
Para mover el manipulador, puede configurarlo en otros modos o
configurar la distancia de desplazamiento.

3. Primer paso
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9 81
3.3 Escritura del primer programa
Después de instalar el manipulador y el software EPSON RC+ 7.0 en su
computadora, siga las instrucciones a continuación para crear un programa de
aplicación simple para poder familiarizarse con el entorno de desarrollo de
EPSON RC+ 7.0.
1. Inicie el software EPSON RC+ 7.0
Haga doble clic en el icono EPSON RC+ 7.0 en el escritorio.
2. Cree un proyecto nuevo
(1) Seleccione [New] en el menú [Project]. Verá el cuadro de diálogo [New
Project].
(2) Escriba un nombre de proyecto en el cuadro [New Project Name], por
ejemplo, PrimAplic.
(3) Haga clic en el botón <OK> para crear el proyecto nuevo.
Cuando crea el proyecto nuevo, se crea un programa llamado M ain.prg.
La ventana llamada M ain.p rg aparecerá con un cursor parpadeando en la
esquina superior izquierda.
Ahora está listo para comenzar a ingresar su primer programa.

3. Primer paso
82 Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
3. Edite el programa
Ingrese las siguientes líneas de programa en la ventana de edición Main.prg.
Function main
Print "This is my first program."
Fend

3. Primer paso
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9 83
4. Ejecute el programa
(1) Presione F5 para ejecutar el programa. (F5 es la tecla de acceso
rápido para la selección [Run Window] del menú [Run]). Verá la
ventana Status ubicada en la parte inferior de la ventana principal,
que muestra el estado de operación de compilación.
(2) Durante la compilación del proyecto, su programa se compila y
enlaza. Luego, se establecen comunicaciones con el manipulador y
los archivos de proyecto se envían al controlador. Si no se producen
errores durante la compilación, aparecerá la ventana Run.
(3) Haga clic en el botón <Start> en la ventana Run para ejecutar el
programa.
(4) Los textos como los que se encuentran a continuación se mostrarán
en la ventana de estado.
19:32:45 Task mai n started
19:32:45 All task s stopped
En la ventana Run, verá el resultado de la instrucción de impresión.

3. Primer paso
84 Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
A continuación, enseñemos algunos puntos del manipulador y creemos un
programa para mover el manipulador.
5. Enseñe los puntos de robot
(1) Asegúrese de que sea seguro operar el manipulador. Haga clic en el
botón <Robot Manager> en la barra de herramientas para
mostrar la ventana [Robot M anager].
(2) Haga clic en la pestaña [Control Panel].
Luego haga clic en el botón <Motor On> para encender los motores
del manip ulador. Se le pedirá que confirme la operación.
(3) Haga clic en el botón <Yes> para continuar.

3. Primer paso
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9 85
(4) Haga clic en la pestaña [Jog & Teach].
(5) Haga clic en el botón <Teach> en la esquina inferior derecha para
enseñar el punto P0. Se le pedirá una etiqueta de punto y descripción.
(6) Haga clic en el botón de desplazamiento <+Y> para desplazar el
robot en la dirección +Y. Mantenga presionado el botón para
continuar el desplazamiento. Mueva el manipulador hasta que llegue
al centro del espacio de trabajo.
(7) Haga clic en el botón <-Z> para bajar el eje Z del manipulador.
(8) Seleccione “P1” en la lista desplegable [Point (P)] que se encuentra
junto al botón <Teach>. El punto actual está configurado en P1.
(9) Haga clic en el botón <Teach>. Verá un mensaje de confirmación
para cada punto.
(10) Haga clic en el botón <Yes>.
(11) Haga clic en el botón <+X> para desplazar el manipulador hacia la
dirección +X.

3. Primer paso
86 Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
(12) Seleccione “P2” en la lista desplegable [Point (P)] que se encuentra
junto al botón <Teach>. El punto actual está configurado en P2.
(13) Haga clic en el botón <Teach>. Verá un mensaje de confirmación
para cada punto.
(14) Haga clic en el botón <Yes>.
(15) Haga clic en el botón <Save Project> para guardar los
cambios.
6. Modifique el programa para incluir los comandos de movimiento del
manipulador
(1) Inserte tres nuevas instrucciones Go en el programa M ain.prg, tal
como se muestra a continuación:
Function main
Print "This is my first program."
Go P1
Go P2
Go P0
Fend
(2) Presione F5 para mostrar la ventana Run.
(3) Haga clic en el botón <Start> para ejecutar el programa.
El manipulador se moverá a los puntos que le enseñó.
7. Modifique el programa para cambiar la velocidad de los comandos de
movimiento del manipulador
(1) Inserte los comandos Power, Speed y Accel, según se muestra en el
programa a continuación:
Function main
Print "This is my first program."
Power High
Speed 20
Accel 20, 20
Go P1
Go P2
Go P0
Fend
(3) Presione F5 para mostrar la ventana Run.

3. Primer paso
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9 87
(3) Haga clic en el botón <Start> para ejecutar el programa.
El manipulador se moverá a cada uno de los puntos que le enseñó a
un 20 % de velocidad, aceleración y desaceleración. La instrucción
Power High ejecuta el programa para que opere el robot con mayor
velocidad y aceleración.
8. Realizar copia de seguridad del proyecto y la configuración
del sistema.
Aunque este es solo un proyecto de muestra, realizaremos una copia de
seguridad del proyecto y la configuración del manipulador. Se puede
realizar la copia de seguridad fácilmente con el software EPSON RC+ 7.0.
Es importante que mantenga copias de seguridad regulares de sus
aplicaciones en un medio externo como una memoria USB.
Siga los pasos a continuación para realizar una copia de seguridad del
proyecto y la configuración del sistema:
(1) En el software EPSON RC+ 7.0, seleccione el menú [Project] -
[Copy].
(2) Cambie la unidad [Destination Drive] a una unidad arbitraria.
(3) Haga clic en <OK>. El proyecto se copiará al medio externo.
(4) En el software EPSON RC+ 7.0, seleccione el menú [Tools] -
[Controller].
(5) Haga clic en el botón <Backup Controller>.
(6) Seleccione la unidad arbitraria.
(7) Haga clic en <OK>. Se realizará una copia de seguridad de la
configuración del sistema en el medio externo.

3. Primer paso
88 Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
4. Segundo paso
Después de operar el sistema de robot según lo indicado en la sección 3. Primer
paso, configure otras funciones según sea necesario.
Esta sección muestra los manuales que contienen información de configuraciones
y procedimientos de configuración necesarios.
(Para obtener más detalles acerca de los manuales, consulte la sección 6.
Manuales).
4.1 Conexión con equipos externos
4.1.1 Control remoto
Manual del usuario de EPSON RC+ 7.0
Control remoto
Manual del manipulador de la serie T
Configuración y operación: 14. Configuración remota de E/S
Manual del manipulador de la serie VT
Configuración y operación: 14. Configuración remota de E/S
E/S
Manual del usuario de EPSON RC+ 7.0
Configuración de E/S
Manual del manipulador de la serie T
Configuración y operación: 12. Conector E/S estándar
Configuración y operación: 13. Conector de E/S de la mano
Manual del manipulador de la serie VT
Configuración y operación: 12. Conector E/S estándar
E/S de bus de campo (opcional)
CONTROLADOR DE ROBOT RC700 / Tablero E/S de bus de campo opcional
de RC90
4.1.2 Ethernet
Manual del usuario de EPSON RC+ 7.0
Comunicación de Ethernet
Manual del manipulador de la serie T
Configuración y operación: 7. Puerto LAN (Ethernet)
Manual del manipulador de la serie VT
Configuración y operación: 9. Puerto LAN (Ethernet)

3. Primer paso
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9 89
4.2 Conexión Ethernet de la computadora de desarrollo y el manipulador
Manual del usuario de EPSON RC+ 7.0
Comunicación de Ethernet
Manual del manipulador de la serie T
Configuración y operación: 7. Puerto LAN (Ethernet)
Manual del manipulador de la serie VT
Configuración y operación: 9. Puerto LAN (Ethernet)
4.3 Conexión de caja de comandos (Teach Pendant) opcional
Manual del manipulador de la serie T
Configuración y operación: 10. Puerto TP
Manual del manipulador de la sersie VT
Configuración y operación: 10. Puerto TP
CONTROLADOR DE ROBOT RC700 / Caja de comandos (Teach Pendant)
opcional TP2 RC90
Función e instalación: 3. Instalación
CONTROLADOR DE ROBOT RC700 – Una caja de comandos (Teach Pendant)
opcional TP3
Función e instalación: 3. Instalación

3. Primer paso
90 Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
5. Mantenimiento general
Este capítulo describe las inspecciones y procedimientos de mantenimiento.
Realizar inspecciones y p rocedimientos de mantenimiento es esencial para
prevenir problemas y garantizar la seguridad.
Asegúrese de realizar las inspecciones de mantenimiento en conformidad con el
programa.
5.1 Programa de inspección de mantenimiento
Los puntos de inspección se dividen en cinco etapas: diaria, mensual, trimestral,
semestral y anual. Los puntos de inspección se agregan en cada etapa.
Si el manipulador se opera por 250 horas o más por mes, se debe agregar puntos
de inspección cada 250 horas, 750 horas, 1500 horas y 3000 horas de operación.
Punto de inspección
Diario Mensual Trimestral Semestral Anual
Rev isión
(reemplazo)
1 mes
(250 h)
Inspeccionar todos los días
√
2 meses
(500 h)
√
3 meses
(750 h)
√
√
4 meses
(1000 h)
√
5 meses
(1250 h)
√
6 meses
(1500 h)
√
√
√
7 meses
(1750 h)
√
8 meses
(2000 h)
√
9 meses
(2250 h)
√
√
10 meses
(2500 h)
√
11 meses
(2750 h)
√
12 meses
(3000 h)
√
√
√
√
13 meses
(3250 h)
√
…
…
…
…
…
…
20.000 h
√
h = hora

3. Primer paso
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9 91
Inspeccionar mientras está ENCENDIDO (el manipulador está en operación)
Punto de inspección
Lugar de
inspección
Diario Mensual Trimestral Semestral Anual
Verifique el margen de
movimiento.
Cada articulación
√
Mueva los cables hacia
adelante y atrás
suavemente para verificar
si hay cables
desconectados.
Cables externos
(incluida la unidad
de cable del
manipulador)
√ √
Empuje cada brazo en el
estado MOTOR ON
(Encender motor) para
verificar si hay algún
contragolpe.
Cada articulación
√
Verifique si ocurren
sonidos o vibraciones
inusuales.
Completo
√ √ √ √ √
Mida la precisión varias
veces con un reloj
comparador cuando
ocurren espacios.
Completo
√
T: Active y desactive el
int erruptor de desbloqueo
del freno y verifique el
sonido del freno de
solenoide.
Si no produce un sonido,
reemplace el freno.
VT: Ejecute el comando
Brake off (freno
desactivado, articulación
n.°) desde la ventana de
comandos de EPSON
RC+ con los motores
APAGADOS y, luego,
verifique el sonido del
freno electromagnético.
Si no produce un sonido,
reemplace el freno.
Freno
√ √ √ √ √

3. Primer paso
92 Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
Inspeccionar mientras está APAGADO (el manipulador no está en operación)
Punto de inspección
Lugar de inspección
Diario
Mensual
Trimestral
Semestral
Anual
Verifique la soltura o
contragolpe de los
pernos/tornillos.
Apriételos, de ser
necesario.
(Para conocer el torque
de ajuste, consulte la
sección Apretar pernos
de cabeza hueca
hexagonal).
Pernos de montaje
del efector final
√ √ √ √ √
Pernos de montaje
del manipulador
√ √ √ √ √
Cada articulación
√ √ √ √ √
Pernos/tornillos
alrededor del mango
(serie T)
√
Pernos/tornillos que
fijan motores,
unidades de
engranaje reductor,
etc.
√
Verifique si los
conectores están
sueltos.
Si los conectores están
sueltos, presiónelos o
apriételos de forma
segura.
Conectores externos
del manipulador (en
las placas del
conector, etc.).
√ √ √ √ √
Unidad de cable del
manipulador
√ √ √ √
Verifique visualmente
si hay defectos
externos.
Límpielos, de ser
necesario.
Apariencia externa
del manipulador
√ √ √ √ √
Cables externos √ √ √ √
Verifique si están
doblados o en posición
incorrecta. Repárelos o
colóquelos
correctamente, de ser
necesario.
Protecciones, etc.
√ √ √ √ √
Verifique la tensión de
las correas de
regulación.
Ténselas, de ser
necesario.
Interior del brazo
n.° 2
√ √
Condiciones de engrase
(serie T)
Consulte la sección 5.4 Engrase.
Batería de litio Consulte la sección 5.5 Manipulación y eliminación de baterías de litio

3. Primer paso
93
5.2 Revisión (Reemplazo de piezas)
PRECAUCIÓ N
■
El tiempo de revisión se basa en la suposición de que todas las
articulaciones se operan para una distancia equivalente
. Si una
unidad en particular tiene mucho trabajo o una carga
alta,
recomendamos revisar todas las articulaciones (tantas como sea
posible) antes de superar las 20.000 horas de operación con la
articulación como base.
Las piezas de las articulaciones del manipulador pueden causar una disminución
en la precisión o un mal funcionamiento debido al deterioro del manipulador
causado por el uso a largo plazo. A fin de usar el manipulador a largo plazo,
recomendamos revisar las piezas (reemplazo de piezas).
Una indicación general para el lapso entre revisiones es de 20.000 horas de
operación del manipulador. (Cuando se opera con la velocidad de movimiento
máxima y la aceleración/desaceleración máxima en operación continua). Sin
embargo, esto puede variar según las condiciones de uso y la carga aplicada en el
manipulador.
Para el software EPSON RC+ 7.0, el lapso de reemplazo recomendado para las
piezas sujetas a mantenimiento (motores, unidades de engranaje reductor y correas
de regulación) se puede comprobar en el cuadro de diálogo [Maintenance].
Para obtener más detalles, consulte el siguiente manual.
M anual del manipulador de la serie T: Mantenimiento 4. Alarma
M anual del manipulador de la serie VT: Mantenimiento 4. Alarma
Nota:
El lapso de reemplazo recomendado para las piezas de mantenimiento es cuando
alcanzan una vida útil de L10 (tiempo para un 10 % de probabilidad de falla). En
el cuadro de diálogo [Maintenance], la vida útil de L10 se muestra como 100 %.
Las horas de operación del manipulador se pueden verificar en el cuadro de
diálogo [Controller Status Viewer] - [Motor On Hours].
(1) En el software EPSON RC+, seleccione el menú [Tools]-[Controller] para
abrir el cuadro de diálogo [Controller Tools].
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0)
Rev.9
N O TA

3. Primer paso
94 Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
(2) Haga clic en el botón <View Controller Status> para abrir el cuadro de
diálogo [Browse For Folder].
(3) Seleccione la carpeta en la que se almacena la información.
(4) Haga clic en el botón <OK> para ver el cuadro de diálogo [Controller Status
Viewer].
(5) Seleccione [Robot] desde el menú de árbol a la izquierda.
Para las piezas sujetas a revisión, consulte el manual del manipulador: Sección de
mantenimiento: Lista de piezas de mantenimiento.
Para obtener detalles sobre el reemplazo de cada pieza, consulte el manual del
manipulador: Sección de mantenimiento.
Comuníquese con los distribuidores de su región para obtener más información.

3. Primer paso
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9 95
5.3 Apretar pernos de cabeza hueca hexagonal
Los pernos de cabeza hueca hexagonal se usan en lugares en los que se necesita
fuerza mecánica. (En este manual, nos referiremos a los pernos de cabeza hueca
hexagonal como “pernos”). Estos pernos se aprietan con los pares de sujeción que
se muestran en la siguiente tabla.
Cuando es necesario volver a apretar los pernos en algunos procedimientos en este
manual (excepto en casos especiales, según se indica), use un torquímetro para que
los pernos queden apretados con los torques de ajuste correctos que se muestran a
continuación.
Tornillo
Torque de ajuste
M3
2,0 ± 0,1 N⋅m
(21 ± 1 kgf⋅cm)
M4
4,0 ± 0,2 N⋅m
(41 ± 2 kgf⋅cm)
M5
8,0 ± 0,4 N⋅m
(82 ± 4 kgf⋅cm)
M6
13,0 ± 0,6 N⋅m
(133 ± 6 kgf⋅cm)
M8
32,0 ± 1,6 N⋅m
(326 ± 16 kgf⋅cm)
M10
58,0 ± 2,9 N⋅m
(590 ± 30 kgf⋅cm)
M12
100,0 ± 5,0 N⋅m
(1.020 ± 51 kgf⋅cm)
Consulte la tabla a continuación para obtener información
acerca del tornillo de fijación.
Tornillo de
fijación
Torque de ajuste
M4
2,4 ± 0,1 N⋅m
(26 ± 1 kgf⋅cm)
M5
4,0 ± 0,2 N⋅m
(41 ± 2 kgf⋅cm)
Los pernos alineados en una circunferencia se deben apretar en un patrón
entrecruzado, como se muestra en la figura a continuación.
1
5
3
7
2
6
4
8
Agujero
para
perno
No apriete todos los pernos de forma segura a
la vez. Divida la cantidad de veces que se
aprietan los pernos en dos o tres y apriete los
pernos de forma segura con una llave
hexagonal. Luego, use un torquímetro para
apretar los pernos con los torques de ajuste
que se muestran en la tabla anterior.

3. Primer paso
96 Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
5.4 Engrase (Manipulador serie T)
La flecha del tornillo esférico y las unidades de engranaje de reducción se deben
engrasar regularmente. Use solo la grasa especificada.
Esta sección contiene información acerca de las piezas que requieren intervalos de
lubricación y engrase. Para obtener detalles sobre el proceso de lubricación,
consulte el manual del manipulador:
PRECAUCIÓN
■
Mantenga el manipulador con suficiente grasa. Operar el
manipulador sin suficiente grasa daña las pieza
s deslizantes, lo que
causa un rendimiento insuficiente del mismo
. Su reparación también
puede requerir mucho tiempo y dinero.
■
Si le entra grasa en los ojos, la boca o cae en su piel, siga las
instrucciones a continuación.
Si le entra grasa en los
ojos:
Enjuáguelos a fondo con agua limpia y, luego, consulte a un
médico de inmediato.
Si le entra grasa en la boca:
Si se ingiere, no induzca el vómito. Consulte a un médico de
inmediato.
Si la grasa solo entra en su boca, enjuáguese la boca a fondo con
agua.
Si se mancha la piel con grasa
Lave el área minuciosamente con jabón y agua.
Pieza de engrase
Intervalo de engrase
Articulación
n.° 1:
Unidades de engranaje
de reducción
Tiempo de revisión
Articulación
n.° 2:
Unidades de engranaje
de reducción
Articulación
n.° 3:
M ango de flecha de
tornillo esférico
A los 100 km de operación
(50 km para el primer engrase)
Articulación n.° 1, 2 unidades de engranaje de reducción
Como indicación general, realice el engrase en los mismos lapsos que las
revisiones.
Sin embargo, los lapsos pueden variar según las condiciones de uso y la carga
aplicada al manipulador (como cuando se opera con la velocidad de movimiento y
la aceleración/desaceleración máximas en operación continua).

3. Primer paso
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9 97
Articulación n.° 3, unidad de flecha de tornillo esférico
El intervalo de engrase recomendado es a los 100 km de operación.
Sin embargo, los lapsos de engrase también se pueden verificar a partir de la
condición de engrase. Realice el engrase si la grasa está descolorida o seca, como
en las imágenes a continuación.
Grasa normal Grasa descolorida
Realice el engrase a los 50 km de operación para el primer engrase.
En el software EPSON RC+ 7.0, el lapso de reemplazo recomendado para el
engrase se puede comprobar en el cuadro de diálogo [Maintenance].
Para obtener más detalles, consulte el siguiente manual.
M anual del manipulador de la serie T: Mantenimiento 4. Alarma
NOTA

3. Primer paso
98 Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
5.5 Manipulación y eliminación de baterías de litio
PRECAUCIÓ N
■
Sea meticuloso y cuidadoso
cuando manipula la batería de litio.
Como se menciona a continuación, la manipulación incorrecta de
las baterías de litio es extremadamente peligrosa y puede causar
generación de calor, fugas, explosiones o inflamación, y puede
originar problemas de seguri
dad graves.
・Carga de batería
・
Desmontaje
・
Instalación
incorrecta
・
Exposición al fuego
・Descarga forzosa
・Deformación por presión
・
Cortocircuito (polaridad; positiva/negativa)
・
Calefacción (85°C o más)
・
Soldar el terminal de la batería de litio
directamente
■
Cuando elimine la batería, consulte con servicios de eliminación
profesionales o cumpla los reglamentos locales
.
Sin importar si las baterías están gastadas o no, asegúrese de que
sus terminales
estén aislados. Si los terminales hacen contacto con
otros metales, pueden hacer cortocircuito y generar calor, fugas,
explosiones o inflamación.
A DV ERTENCIA
■
No conecte o desconecte los conectores del motor mientras el
sistema de robot esté ENCENDIDO
. Conectar o desconectar los
conectores del motor con la energía ENCENDIDA es
extremadamente peligroso y puede provocar lesiones corporales
graves, ya que el manipulador puede moverse de manera anormal;
además, puede provocar
descargas eléctricas y el mal
funcionamiento del sistema de robot.
■
Para cortar la energía hacia el sistema de robot, desconecte el
enchufe de la fuente de alimentación
. Asegúrese de conectar el
cable de alimentación de CA a un receptor de energía.
NO
lo conecte directamente a la fuente de alimentación de la
fábrica.

3. Primer paso
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9 99
A DV ERTENCIA
■
Antes de realizar cualquier procedimiento de reemplazo, APAGUE
el controlador y los equipos relacionados, luego desconecte el
enchufe de la fuente de alimentación.
Realizar cualquier procedimiento de reemplazo con la energía
ENCENDIDA es extremadamente peligroso y puede provocar una
descarga eléctrica o el mal funcionamiento del sistema de robot.
La duración de una batería de litio varía según las horas de energización y el
entorno de instalación del manipulador. Como guía general, es de alrededor de 7
años (cuando el controlador está conectado a la energía por 8 horas al día). Cuando
el manipulador no está conectado a la energía, el consumo de batería será
significativamente may or que cuando el manipulador está energizado. Si ocurren
advertencias de reducción de voltaje, reemplace la batería de litio, incluso si no ha
alcanzado la vida útil de producto indicada anteriormente.
En el software EPSON RC+ 7.0, el lapso de reemplazo recomendado para la
batería se puede comprobar en el cuadro de diálogo [Maintenance].
Para obtener más detalles, consulte el siguiente manual.
M anual del manipulador de la serie T: Mantenimiento 4. Alarma
Manual del manipulador de la serie VT: Mantenimiento 4. Alarma
La batería puede agotarse si pasa el lapso de reemplazo recomendado.
Si no ocurren advertencias de reducción de voltaje, no es necesario calibrar todas
las articulaciones. Deberá realizar una calibración si la posición se mueve desde la
original después de reemplazar la batería.
Asegúrese de usar la batería de litio designada.
Asegúrese de configurar la polaridad correcta cuando instale la batería.
NOTA

3. Primer paso
100 Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
6. Manuales
Esta sección describe el contenido de cada manual.
Los manuales a continuación se proporcionan en formato PDF para usar el sistema
de robot.
Para leer los manuales en PDF en una computadora, seleccione EPSON RC+ 7.0 -
[Help] - [PDF Manual]. (Haga clic en <Inicio> - [Programas] - [EPSON RC+ 7.0]
desde el escritorio de Windows).
Software
Manual del usuario EPSON RC+ 7.0
Este manual contiene información acerca del sistema de robot y el software de
desarrollo de programas.
- Seguridad
- Operación y configuración del sistema de robot
- Operación del software de desarrollo de programas EPSON RC + GUI
- Lenguaje y aplicación SPEL+
- Configuración del robot, E/S, comunicación
Referencia de lenguaje SPEL+ de EPSON RC+ 7.0
Este manual contiene información acerca del lenguaje de programación SPEL+.
- Detalles de los comandos
- Mensajes de error
- Precauciones de compatibilidad de EPSON RC+ 4.0, 5.0, 6.0
Opciones
Los siguientes manuales contienen información acerca de las opciones de software
y los comandos.
- RC+ API 7.0
- Vision Guide 7.0
- Vision Guide 7.0 Properties & Results Reference (Referencia de propiedades y
resultados de Vision Guide 7.0)
- GUI Builder 7.0
- Remote Control Reference (Referencia de control remoto)
- Fieldbus I/O (E/S de bus de campo)
- Teach Pendant TP2, TP3 (Caja de comandos TP2, TP3)

3. Primer paso
Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9 101
Manipulador
Los manuales del manipulador contienen información acerca de los
manipuladores.
Cada modelo de manipulador tiene una manual diferente.
Robot SCARA: T (T3, T6)
Robot de 6 ejes : VT
- Seguridad
- Especificación, instalación, configuración
- Mantenimiento
- Calibración

3. Primer paso
102 Guía de seguridad e instalación (T, VT / EPSON RC+ 7.0) Rev.9
7. Directivas y normas
Estos productos cumplen las siguientes directivas y normas.
Para obtener más detalles acerca del controlador y el manipulador, consulte cada
manual.
Nombre del producto
Modelo
Controlador
Serie T, Serie VT
Manipulador
Nombre
Definición
Directiva 2006/42/CE Directiva 2006/42/CE del Parlamento Europeo y del Concejo
de 17 de mayo de 2006 relativa a las máquinas y por la que se
modifica la Directiva 95/16/CE
Directiva 2014/30/CE Directiva 2014/30/CE del Parlamento Europeo y del Concejo
de 26 de febrero de 2014 relativa a la coordinación de las
leyes de los Estados Miembros sobre la compatibilidad
electromagnética (refundición)
EN ISO 12100 (2010) Seguridad de la maquinaria -- Principios generales para el
diseño -- Evaluación de riesgos y reducción de riesgos
EN ISO 10218-1 (2011) Robots y dispositivos robóticos -- Requisitos de seguridad
para robots industriales -- Parte 1: Robots
EN 60204-1
(2006/A1:2009)
Seguridad de la maquinaria -- Equipos eléctricos de las
máquinas -- Parte 1: Requisitos generales
EN ISO 13849-1 (2015)* Seguridad de la maquinaria – Seguridad – Partes relativas a
los sistemas de mando -- Parte 1: Principios generales para el
diseño
EN ISO 13850 (2015) Seguridad de la maquinaria – Función de parada de
emergencia -- Principios para el diseño
EN 55011 (2009)
Equipos de radiofrecuencia industriales, científicos y médicos
(ISM) -- Características de la perturbación electromagnética
-- Límites y métodos de medición
EN 61000-6-2 (2005) Compatibilidad electromagnética (CEM) -- Parte 6-2:
Normas genéricas -- Inmunidad para entornos industriales
*Circuito de parada de emergencia categoría 3, PL d
Circuito de puerta de seguridad categoría 3, PL d
-
 1
1
-
 2
2
-
 3
3
-
 4
4
-
 5
5
-
 6
6
-
 7
7
-
 8
8
-
 9
9
-
 10
10
-
 11
11
-
 12
12
-
 13
13
-
 14
14
-
 15
15
-
 16
16
-
 17
17
-
 18
18
-
 19
19
-
 20
20
-
 21
21
-
 22
22
-
 23
23
-
 24
24
-
 25
25
-
 26
26
-
 27
27
-
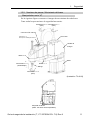 28
28
-
 29
29
-
 30
30
-
 31
31
-
 32
32
-
 33
33
-
 34
34
-
 35
35
-
 36
36
-
 37
37
-
 38
38
-
 39
39
-
 40
40
-
 41
41
-
 42
42
-
 43
43
-
 44
44
-
 45
45
-
 46
46
-
 47
47
-
 48
48
-
 49
49
-
 50
50
-
 51
51
-
 52
52
-
 53
53
-
 54
54
-
 55
55
-
 56
56
-
 57
57
-
 58
58
-
 59
59
-
 60
60
-
 61
61
-
 62
62
-
 63
63
-
 64
64
-
 65
65
-
 66
66
-
 67
67
-
 68
68
-
 69
69
-
 70
70
-
 71
71
-
 72
72
-
 73
73
-
 74
74
-
 75
75
-
 76
76
-
 77
77
-
 78
78
-
 79
79
-
 80
80
-
 81
81
-
 82
82
-
 83
83
-
 84
84
-
 85
85
-
 86
86
-
 87
87
-
 88
88
-
 89
89
-
 90
90
-
 91
91
-
 92
92
-
 93
93
-
 94
94
-
 95
95
-
 96
96
-
 97
97
-
 98
98
-
 99
99
-
 100
100
-
 101
101
-
 102
102
-
 103
103
-
 104
104
-
 105
105
-
 106
106
-
 107
107
-
 108
108
-
 109
109
-
 110
110
-
 111
111
-
 112
112
-
 113
113
-
 114
114
-
 115
115
-
 116
116
-
 117
117
-
 118
118
-
 119
119























































































































Epson VT6L All-in-One 6-Axis Robot Guía de instalación
- Tipo
- Guía de instalación
- Este manual también es adecuado para
Documentos relacionados
-
Epson VT6L All-in-One 6-Axis Robot Manual de usuario
-
Epson T6 SCARA Robots Manual de usuario
-
-
-
Epson T3 SCARA Robots Guía de instalación
-
Epson C4 Compact 6-Axis Robots Manual de usuario
-
Epson GX4 SCARA Robots Manual de usuario
-
-
-