
www.furuno.com
Todas las marcas y nombres de productos son marcas comerciales, marcas registradas o
marcas de servicios que pertenecen a sus respectivos propietarios.
Manual de Instalacion
RADAR MARINO
MODELO
FAR-1513/1523/1513-BB/1523-BB
FAR-1518/1528/1518-BB/1528-BB
INSTRUCCIONES DE SEGURIDAD................................................................................ i
CONFIGURACIÓN DEL SISTEMA ................................................................................ iii
LISTA DE EQUIPOS .......................................................................................................v
1. INSTALACIÓN.........................................................................................................1-1
1.1 Antes de comenzar la instalación... ...................................................................................1-1
1.2 Consideraciones de la instalación de la unidad de antena................................................1-2
1.3 Cómo instalar la unidad de antena para FAR-1513, FAR-1523 ........................................1-4
1.4 Cómo instalar la unidad de antena para FAR-1518, FAR-1528 ........................................1-8
1.5 Unidad procesadora.........................................................................................................1-10
1.6 Unidad de presentación...................................................................................................1-11
1.7 Unidad de control.............................................................................................................1-12
1.8 Unidad de control de la bola de control (opcional)...........................................................1-12
2. CABLEADO.............................................................................................................2-1
2.1 Esquema de cableado .......................................................................................................2-1
2.2 Cómo conectar el cable de señal para FAR-1513, FAR-1523...........................................2-2
2.3 Cómo conectar el cable de señal para FAR-1518, FAR-1528...........................................2-6
2.4 Unidad procesadora.........................................................................................................2-10
2.5 Unidad de control de la bola de control ...........................................................................2-17
2.6 Conexión VDR .................................................................................................................2-17
3. AJUSTES.................................................................................................................3-1
3.1 Cómo abrir el menú de instalación del radar .....................................................................3-1
3.2 Cómo utilizar el menú ........................................................................................................3-2
3.3 Cómo inicializar la sintonización........................................................................................3-2
3.4 Cómo alinear el rumbo .......................................................................................................3-3
3.5 Cómo ajustar el timing .......................................................................................................3-4
3.6 Cómo suprimir Main Bang .................................................................................................3-4
3.7 Menú RADAR INSTALLATION..........................................................................................3-5
3.8 Configuración de la unidad de presentación....................................................................3-14
4. DATOS DE ENTRADA/SALIDA..............................................................................4-1
4.1 Unidad procesadora...........................................................................................................4-1
4.2 Sentencias IEC 61162 .......................................................................................................4-2
APÉNDICE 1 GUÍA SOBRE CABLES JIS ...............................................................AP-1
APÉNDICE 2 INTERFAZ DIGITAL ...........................................................................AP-2
LISTAS DE EQUIPAMENTO....................................................................................... A-1
PLANOS DE DIMENSIONES ...................................................................................... D-1
DIAGRAMAS DE INTERCONEXION .......................................................................... S-1

Pub. No. IES-36380-A
DATE OF ISSUE: OCT. 2016

i
INSTRUCCIONES DE SEGURI-
DAD
Acción obligatoria
Acción prohibida
ADVERTENCIA
Indica la existencia de una situación
potencialmente peligrosa que, si no se evita,
puede causar lesiones graves o incluso la muerte.
PRECAUCIÓN
Indica la existencia de una situación potencialmente
peligrosa que, si no se evita, puede ocasionar
lesiones leves o moderadas.
Advertencia, precaución
ADVERTENCIA
Riesgo de radiación de radiofrecuencia
PELIGRO
Indica la existencia de una situación potencialmente peligrosa
que, si no se evita, puede causar lesiones graves o incluso
la muerte.
Lleve un cinturón de seguridad y un casco cuando maneje la unidad de antena.
La caída desde el mástil de la antena del radar puede provocar graves lesiones o
la muerte.
PELIGRO
La antena del radar emite energía electromagnética de radiofrecuencia (RF) que puede resultar
dañina, especialmente para los ojos. No mire nunca directamente desde una distancia corta a la
abertura de la antena cuando el radar esté funcionando ni se acerque a una antena que esté
transmitiendo. Las distancias a las que hay niveles de radiación de RF de 100, 50 y 10 W/m
2
se
proporcionan en la tabla siguiente.
Si la unidad de antena se instala a poca distancia del puente de mando, su dirección puede solicitar
la parada de la transmisión durante un sector específico de la revolución de antena. Consulte el
manual de instalación para saber cómo gestionar los sectores ciegos.
El instalador del equipo debe leer estas instrucciones de seguridad antes de proceder a instalar el equipo.
Modelo de radar Transceptor Magnetrón Antena
100W/m
2
50W/m
2
10W/m
2
XN12A N/D 2,1 m
XN13A N/D 1,9 m
XN12A 0,6 m 4,6 m
XN13A 0,4 m 3,1 m
XN12AF 0,3 m 0,7 m 4,1 m
XN20AF 0,2 m 0,5 m 3,1 m
XN20AF 0,6 m 1,2 m 6,1 m
XN24AF 0,3 m 0,8 m 4,0 m
MAF1565N
M1458F
MAF1615B
MG5436
FAR-1513
FAR-1523
FAR-1518
FAR-1528
RTR-086A
RTR-087A
RTR-100
RTR-101

INSTRUCCIONES DE SEGURIDAD
ii
PRECAUCIÓN
Deje las siguientes distancias de
seguridad para evitar interferencias
con el compás magnético:
No abra el equipo a menos
que esté completamente
familiarizado con los circuitos
eléctricos y el manual de
servicio.
Solo personal cualificado
debe trabajar en el interior del
equipo.
ADVERTENCIA
PELIGRO DE
DESCARGA
ELÉCTRICA
Construya una plataforma de servicio
adecuada desde la que instalar la
unidad de antena.
La caída desde el mástil de la antena de
radar puede provocar serios daños o la
muerte.
Desconecte la alimentación del cuadro
eléctrico principal antes de comenzar
con la instalación.
Pueden producirse incendios, descargas
eléctricas o lesiones graves si se deja
encendida la alimentación o si se activa
mientras se está instalando el equipo.
Asegúrese de que la fuente de
alimentación sea compatible con la
tensión nominal de los equipos.
La conexión de una fuente de
alimentación incorrecta puede provocar
incendios o daños materiales.
Utilice únicamente el cable de
alimentación especificado.
El uso de un cable diferente puede
causar un incendio o provocar daños
en el equipo.
No instale la unidad procesadora, la
unidad de presentación o una unidad
de control en un entorno con polvo
o en una ubicación en la que las
unidades puedan estar expuestas a la
lluvia o a salpicaduras de agua.
Si penetran materiales extraños o agua
en las unidades, pueden producirse
incendios, descargas eléctricas o daños
materiales.
Conecte la tierra de protección entre
la unidad procesadora y la
superestructura del barco.
La alimentación eléctrica CA (toma de
tierra) necesita la tierra de protección
para evitar que se produzcan descargas
eléctricas.
Unidad
Compás
estándar
Compás
de gobierno
Unidad de antena
para FAR-1513
Unidad de antena
para FAR-1523
Unidad de antena
para FAR-1518
RSB-0070 1,00 m 0,60 m
RSB-0073 1,10 m 0,70 m
RSB-0070 1,85 m 1,25 m
RSB-0073 1,80 m 1,15 m
RSB-120
RSB-121
RSB-120
RSB-121
Unidad procesadora (RPU-024) 2,60 m 1,70 m
Unidad de control (RCU-028) 0,90 m 0,60 m
Unidad de presentación (MU-150HD(-CV15))
0,65 m 0,45 m
Unidad de presentación (MU-190) 1,65 m 1,05 m
Unidad de bola de control (RCU-030)
0,50 m 0,30 m
Unidad de antena
para FAR-1528
1,55 m 1,00 m
2,05 m 1,30 m
Nota: Para obtener más información consulte las
"Indicaciones para la instalación del equipo de
radar a bordo" de IMO SN/Circ.271.

iii
CONFIGURACIÓN DEL SISTEMA
FAR-1513(-BB), FAR-1523(-BB)
UNIDAD DE ANTENA
FAR-1513(-BB)
XN12A-RSB-0070-086A
XN12A-RSB-0073-086A
XN13A-RSB-0070-086A
XN13A-RSB-0073-086A
FAR-1523(-BB)
XN12A-RSB-0070-087A
XN12A-RSB-0073-087A
XN13A-RSB-0070-087A
XN13A-RSB-0073-087A
Categoría del equipo
UNIDAD
PROCESADORA
RPU-024
Unidad Categoría
Antena Expuesta a la intemperie
Otras unidades Protegidas de la intemperie
UNIDAD DE
CONTROL
RCU-028
BOLA DE CONTROL
UNIDAD DE CONTROL
RCU-030
12-24 VCC
UNIDAD DE
PRESENTACIÓN
MU-150HD(-CV15)
*2
HUB DE
CONMUTACIÓN
HUB-100
100-230 VCA,
1ø, 50/60 Hz
Interconmutador
Compás giroscópico
*1
, formato AD-10
Compás giroscópico
*1
, formato IEC61162
Transpondedor AIS
EPFS (GPS)
SDME (Velocidad de corredera)
AMS, formato IEC61162
ECDIS
AMS (Contacto)
*3
Pres. secd. 1
Pres. secd. 2
VDR
o
Monitor analógico RGB
*1: El compás giroscópico debe tener también una frecuencia de actualización que sea
adecuada a la velocidad de giro del barco. La frecuencia de actualización debe ser mayor
que 40 Hz (HSC) o 20 Hz (embarcación convencional).
*2: Este monitor debe haber sido aprobado por IMO, MU-150HD(-CV15) para CAT 3,
MU-190 para CAT 2. Si se va a utilizar un monitor diferente en embarcaciones IMO, su
diámetro efectivo debe ser cumplir con los requisitos de Categoría aplicables (CAT 3:
diámetro efectivo de 180 mm o superior; CAT 2: diámetro efectivo de 250 mm
o superior). Para la instalación, el funcionamiento y la visualización de distancia de otros
monitores, consulte sus manuales correspondientes. Para los tipos BB, el usuario debe
preparar un monitor.
*3: Características de contacto de salida para AMS (Sistema de gestión de alertas):
• (Corriente de carga) 250 mA
• (Polaridad) Normalmente abierto: 2 puertos, Normalmente cerrado: 2 puertos
100/110/115
200/220/230 VCA,
1ø, 50/60 Hz
Versión CC
24 V CC
Rectificador
RU-1746B-2
RU-3424

CONFIGURACIÓN DEL SISTEMA
iv
FAR-1518(-BB), FAR-1528(-BB)
Categoría del equipo
UNIDAD DE ANTENA
100/110/115
200/220/230 VCA,
1ø, 50/60 Hz
UNIDAD
PROCESADORA
RPU-024
12-24 VCC
UNIDAD DE
CONTROL
RCU-028
BOLA DE CONTROL
UNIDAD DE CONTROL
RCU-030
UNIDAD DE
PRESENTACIÓN
MU-150HD(-CV15)
*2
HUB DE
CONMUTACIÓN
HUB-100
100-230 VCA,
1ø, 50/60 Hz,
Interconmutador
Versión CC
24 V CC
Rectificador
RU-1746B-2
RU-3424
440 VCA,
1ø, 50/60 Hz
Versión CA
Unidad del
transformador de
nivel inferior
RU-1803
100/110/115
200/220/230 VCA,
1ø, 50/60 Hz
Compás giroscópico
*1
, formato AD-10
Compás giroscópico *1, formato IEC61162
Transpondedor AIS
EPFS (GPS)
SDME (Velocidad de corredera)
AMS, formato IEC61162
ECDIS
AMS (Contacto)
*3
Pres. secd. 1
Pres. secd. 2
FAR-1518(-BB)
XN12AF-RSB-120-100
XN12AF-RSB-121-100
XN20AF-RSB-120-100
XN20AF-RSB-121-100
FAR-1528(-BB)
XN20AF-RSB-120-101
XN20AF-RSB-121-101
XN24AF-RSB-120-101
XN24AF-RSB-121-101
• El radar debe estar interconectado a los siguientes tipos de sensores aprobados:
• Compás giroscópico que cumple con los requisitos de la resolución IMO A.424(XI).
• EPFS que cumple con los requisitos de la resolución IMO MSC.112(73).
• SDME que cumple con los requisitos de la resolución IMO MSC.86(72).
• El radar puede estar interconectado mediante un hub de conmutación HUB-100
a otras unidades de procesamiento de FURUNO que tengan puertos LAN aprobados.
•
La sentencia siguiente no se puede utilizar para instalaciones en embarcaciones SOLAS.
BWC, BWR, DBK, GBS, HDG, HDM y TLL.
AVISO PARA FAR-1518(-BB)/FAR-1528(-BB)
VDR
o
Monitor analógico RBG
*1: El compás giroscópico debe tener también una frecuencia de actualización que sea adecuada
a la velocidad de giro del barco. La frecuencia de actualización debe ser mayor que 40 Hz
(HSC) o 20 Hz (embarcación convencional).
*3: Características de contacto de salida para AMS (Sistema de gestión de alertas):
• (Corriente de carga) 250 mA
• (Polaridad) Normalmente abierto: 2 puertos, Normalmente cerrado: 2 puertos
Unidad Categoría
Antena Expuesta a la intemperie
Otras unidades Protegidas de la intemperie
100-230 VAC
1ø, 50/60 Hz
UNIDAD DE
PRESENTACIÓN
MU-190
*2
*2: Este monitor debe haber sido aprobado por IMO, MU-150HD(-CV15) para CAT 3, MU-190
para CAT 2. Si se va a utilizar un monitor diferente en embarcaciones IMO, su diámetro
efectivo debe ser cumplir con los requisitos de Categoría aplicables (CAT 3: diámetro efectivo
de 180 mm o superior; CAT 2: diámetro efectivo de 250 mm o superior). Para la instalación, el
funcionamiento y la visualización de distancia de otros monitores, consulte sus manuales
correspondientes. Para los tipos BB, el usuario debe preparar un monitor.

v
LISTA DE EQUIPOS
Suministro estándar
Nombre Tipo N.º de código Cantidad Observaciones
Unidad procesado-
ra
RPU-024 - 1
Unidad de control RCU-028 - 1
Unidad de present-
ación
MU-150HD-CV15 - Selecci-
one una
MU-190 -
Unidad de antena
(FAR-1513,
FAR-1513-BB)
XN12A-RSB-0070-
086A
-
Seleccione
una
24 rpm, 1200 mm
XN12A-RSB-0073-
086A
- 48 rpm, 1200 mm
XN13A-RSB-0070-
086A
- 24 rpm, 1800 mm
XN13A-RSB-0073-
086A
- 48 rpm, 1800 mm
Unidad de antena
(FAR-1523,
FAR-1523-BB)
XN12A-RSB-0070-
087A
-
Seleccione
una
24 rpm, 1200 mm
XN12A-RSB-0073-
087A
- 48 rpm, 1200 mm
XN13A-RSB-0070-
087A
- 24 rpm, 1800 mm
XN13A-RSB-0073-
087A
- 48 rpm, 1800 mm
Unidad de antena
FAR-1518,
FAR-1518-BB)
XN12AF-RSB-120-
100
-
Seleccione
una
26 rpm, 1200 mm
XN12AF-RSB-121-
100
- 48 rpm, 1200 mm
XN20AF-RSB-120-
100
- 26 rpm, 2000 mm
XN20AF-RSB-121-
100
- 48 rpm, 2000 mm
Unidad de antena
(FAR-1528,
FAR-1528-BB)
XN20AF-RSB-120-
101
-
Seleccione
una
26 rpm, 2000 mm
XN20AF-RSB-121-
101
- 48 rpm, 2000 mm
XN24AF-RSB-120-
101
- 26 rpm, 2400 mm
XN24AF-RSB-121-
101
- 48 rpm, 2400 mm
Materiales de
instalación
(FAR-1513,
FAR-1513-BB)
CP03-36700 000-028-129
Seleccione
una
Cable de señal de 10 m
CP03-36710 000-028-130 Cable de señal de 15 m
CP03-36720 000-028-131 Cable de señal de 20 m
CP03-36730 000-028-132 Cable de señal de 30 m
Materiales de
instalación
(FAR-1523,
FAR-1523-BB)
CP03-36800 000-028-133
Seleccione
una
Cable de señal de 10 m
CP03-36810 000-028-134 Cable de señal de 15 m
C
P0
3-36820 000-028-135 Cable de señal de 20 m
CP03-36830 000-028-136 Cable de señal de 30 m

LISTA DE EQUIPOS
vi
Suministro opcional
Materiales de
instalación
(FAR-1518,
FAR-1518-BB
FAR-1528,
FAR-1528-BB)
CP03-36900 000-028-137
Seleccione
una
Cable de señal de 15 m
CP03-36910 000-028-138 Cable de señal de 20 m
CP03-36920 000-028-139 Cable de señal de 30 m
Materiales de
instalación
CP03-36500 000-027-862 1 La unidad procesadora
incluye CP03-36501,
DVI-D/D S-LINK (5 m)
Materiales de
instalación
CP03-36510 000-028-881 1 La unidad de control/
procesadora incluye
CP03-36501, CP03-
36601, DVI-D/D S-LINK
(5 m)
Piezas de repuesto SP03-18001 001-419-820 1 Fusibles (2 unidades)
para la unidad procesa-
dora de alimentación CC
Piezas de repuesto SP03-18002 001-419-830 1 Fusibles (2 unidades)
para la unidad procesa-
dora de alimentación CA
Nombre Tipo N.º de código Observaciones
Unidad de control RCU-028 -
Monitor de rendimiento PM-32A 001-419-490 Obligatorio para los radares
IMO.
Kit IPX2 de la unidad
procesadora
OP03-238 001-419-560
Unidad del transforma-
dor de nivel inferior
RU-1803 - 440 V100 V
Rectificador RU-3423 - Para la unidad de presentación,
capacidad de corriente máxima
de 7 A
PR-240 - Para la unidad de presentación,
capacidad de corriente máxima
de 8 A
RU-1746B-2 - Capacidad de corriente máxima
de 13 A
RU-3424 - Capacidad de corriente máxima
de 20 A
PR-850A - 100/110/120/220/240
V CA24 V CC. Capacidad
de corriente máxima de 30 A
Conjunto de cables RW-4864 1M 001-103-620-10 Cable de señal de radar, 1 m
RW-4864 5M 001-103-630-10 Cable de señal de radar, 5 m
RW-4864 10M 001-103-640-10 Cable de señal de radar, 10 m
RW-4864 15M 001-103-650-10 Cable de señal de radar, 15 m
Conjunto de cables DVI-D/D S-LINK 10
M
001-133-980-10 Para la unidad de presentación,
cable DVI, 10 m
Hub de conmutación HUB-100 -
Materiales de insta-
lación
CP03-28900 000-082-658 10 m
Nombre Tipo N.º de código Cantidad Observaciones

LISTA DE EQUIPOS
vii
Materiales de insta-
lación
CP03-28910 000-082-659 20 m
Materiales de insta-
lación
CP03-28920 000-082-660 30 m
Kit de montaje empotra-
do
OP26-4 001-080-850
Conjunto de capota OP26-3 001-080-840
Conjunto de la abraza-
dera
OP26-2 000-016-268
Cable LAN MOD-Z072-020+ 001-167-880-10
MOD-Z072-050+ 001-167-890-10
MOD-Z072-100+ 001-167-900-10
Conjunto de cables 3COX-2P-6C 5M 001-077-230-10
3COX-2P-6C 10M 001-077-220-10
Nombre Tipo N.º de código Observaciones

LISTA DE EQUIPOS
viii
Esta página se ha dejado en blanco a propósito.

1-1
1. INSTALACIÓN
1.1 Antes de comenzar la instalación...
Lea las siguientes instrucciones antes de comenzar la instalación.
• Realice la instalación siguiendo las instrucciones que aparecen en este manual.
• Asegúrese de realizar la configuración de instalación (sintonía, hora, alineación de
rumbo, etc.) del capítulo 3 antes de instalar el equipo.
• Los nombres de los cables que se mencionan en este manual son cables JIS (Ja-
pan Industrial Standard). Si no están disponibles en su localidad, consulte el Apén-
dice 1 para obtener información sobre cables equivalentes.
• La unidad de control no se puede montar en una consola; se ha diseñado para
montarse sobre una mesa.
• Consulte la siguiente tabla para conocer la posibilidad de actualización. Se puede
utilizar el cable de antena existente para el FR-8125 o FR-8255 fijando un conector
(NH y VH). Sin embargo, se recomienda sustituir el cable.
• El cable de antena para el FAR-1513/FAR-1523 tiene conectores en ambos extre-
mos. Si el cable se debe pasar a través de un mamparo, no retire los conectores
(para facilitar su paso). Realice una apertura en el mamparo lo suficientemente
grande para que pasen el cable y los conectores.
• Utilice únicamente el cable de alimentación y el fusible especificados.
• Conecte la unidad procesadora de especificación de alimentación de CC a la red
eléctrica del barco mediante un disyuntor.
• Realice la conexión a tierra de la unidad procesadora de especificación de alimen-
tación de CA.
• Si la unidad procesadora se va a instalar cerca de un lugar en el que pueda haber
salpicaduras de agua o lluvia, instale el kit de impermeabilización opcional que im-
permeabiliza la unidad con el estándar de resistencia al agua IPX2. No instale la
unidad en una zona en la que las salpicaduras de agua o lluvia supere las condi-
ciones de IPX2.
• No conecte el radar a la LAN a bordo del barco.
• Conecte los conductores de retorno del equipo externo a las ubicaciones especifi-
cadas en la unidad procesadora para evitar ruidos.
• No desmonte el equipo para evitar que se produzcan descargas eléctricas.
• No aplique pintura, sellante anticorrosivo o spray de contacto a las superficies o
piezas de plástico exteriores del equipo. Estos elementos contienen disolventes or-
gánicos que pueden dañar el revestimiento y las piezas de plástico, en especial los
conectores de este material.
Posibilidad de actualización
FAR-1513/1523
FAR-1518/1528
(sin Monitor de
rendimiento)
FAR-1518/1528
(con Monitor de
rendimiento)
Serie FR-8002 Sí No No
Serie FR-1500 MK3 Sí Sí No

1. INSTALACIÓN
1-2
• En caso de problemas consulte con un distribuidor de FURUNO.
• El modelo “BB“ (BlackBox, unidad de monitor suministrada localmente) no está in-
cluido en los títulos o descripciones de sección a menos que sea necesario dado
que la configuración es la misma de cualquier modo.
1.2 Consideraciones de la instalación de la unidad
de antena
• La unidad de antena se instala generalmente bien encima del puente, bien en un
mástil o sobre una superficie adecuada. Coloque la unidad de antena en una posi-
ción elevada que no interfiera con ninguna estructura a bordo del barco.
• Una línea de visión desde la unidad de antena hasta la proa del barco debe dirigirse
a la superficie del mar en no más de 500 m o dos veces la eslora del barco, depen-
diendo de qué valor sea menor, para todas las condiciones de carga y reglaje.
• Instale la unidad de antena de modo que cualquier sector ciego causado por obje-
tos (mástil, etc.) se minimice todo lo posible. No debe existir ningún sector ciego en
el arco del horizonte desde la derecha de proa a 22,5º de popa del haz a ambos
lados (consulte la figura 1 a continuación). Asimismo, los sectores ciegos individua-
les de más de 5º o el arco total de ambos sectores ciegos de más de 20º, no se
deben producir en el arco restante (consulte la figura 2 a continuación). Tenga en
cuenta que si hay dos sectores ciegos separados por 3º o menos, se les conside-
rará como un solo sector.
(a) Puente (b) Mástil normal (c) Mástil de radar
inferior a 500 m o dos veces la eslora
Figura 1 Figura 2
menos de 3°
22,5 °
22,5 °
270 °
90 °
a, b, c: menos de 5°
respectivamente
a+b+c+: menos de 20°
a, b, c: menos de 5°
respectivamente
a+b+c+: menos de 20°

1. INSTALACIÓN
1-3
• No instale la antena en un lugar en el que vientos extremos puedan golpear los la-
dos de babor y estribor de la antena.
• Instale la unidad de antena lejos de fuentes de energía de alta potencia y de ante-
nas de radio TX.
• Mantenga la distancia y el ángulo siguientes con otra antena de radar.
• Mantenga el borde inferior de la unidad de antena por encima de la barandilla de
seguridad a al menos 500 mm.
• No deberá haber ninguna chimenea, mástil o grúa dentro del ancho vertical del haz
de la unidad de antena en la dirección de proa, especialmente cero grados ±5º para
evitar que existan puntos ciegos y ecos falsos en la imagen del radar.
• Rara vez es posible situar la unidad de antena en un lugar que disponga de una
visión completa en todas las direcciones. Por lo tanto, en cuanto le sea posible tras
la instalación, determine la influencia de la anchura angular y la demora relativa de
todo sector de sombra sobre el radar.
• Ubique la antena de un EFPS alejada de la antena del radar para evitar interferen-
cias con el EFPS. Se recomienda una separación de más de dos metros.
• Si la unidad de antena se coloca demasiado cerca de un compás magnético, éste
se verá afectado. Respete las distancias de seguridad de los compases (página ii)
para evitar que se produzcan interferencias en éste.
• Para garantizar una emisión correcta de las ondas del radar, no pinte la apertura
del radar.
• Realice la toma de tierra de la unidad de antena con el cable de tierra suministrado.
• Los depósitos y humos procedentes de una chimenea o de otra instalación ventila-
dora de escape pueden afectar al rendimiento de la antena, y la presencia de gases
calientes puede deformar el segmento del radiador. No instale la unidad de antena
en lugares con una temperatura superior a 55 ºC (131 ºF).
• Deje espacio suficiente alrededor de la unidad para reparaciones y mantenimiento.
Consulte el espacio recomendado para mantenimiento en el esquema de la unidad
de antena.
Nota: Para el radar compatible con IMO, consulte las “Indicaciones para la instalación
del equipo de radar a bordo“ de IMO SN/Circ.271 para obtener más información.
Más de 20°
Más de 1 m

1. INSTALACIÓN
1-4
1.3 Cómo instalar la unidad de antena para
FAR-1513, FAR-1523
1.3.1 Cómo fijar el radiador al soporte del radiador
Realice cinco orificios en la plataforma, cuatro orificios para fijar la unidad de antena
y uno para el cable de señal, consultando el esquema de la parte trasera del manual
para obtener información sobre las dimensiones.
Consulte la lista de envío al final de este manual para ver los materiales de instala-
ción.
1. Retire la cubierta del soporte del radiador.
2. Aplique el sellante marino a la superficie del radiador de la antena y del soporte
del radiador. Consulte la siguiente figura para conocer la ubicación.
3. Recubra las roscas de los cuatro orificios del radiador de la antena con el sellante
marino.
4. Recubra la junta tórica con grasa y colóquela en su ranura del soporte del radia-
dor.
5. Coloque el radiador de la antena en su soporte.
6. Fije el radiador de la antena al soporte del radiador mediante los pernos hexago-
nales, arandelas planas y arandelas elásticas. Recubra los pernos hexagonales
con el sellante marino.
SOPORTE DEL RADIADOR
(vista superior)
Aplique sobre la zona rayada
una capa de sellante marino.
10 mm
Arandela plana
Arandela elástica
Perno hexagonal
(M8×30)
Soporte del radiador
Aplique sellante marino
en los pernos.
Radiador
de la antena
Junta tórica
Aplique sellante marino
a los orificios roscados.

1. INSTALACIÓN
1-5
1.3.2 Cómo montar la unidad de antena
La unidad de antena se puede montar antes de izarla en la plataforma de montaje.
Sin embargo, no eleve la unidad de antena por el radiador. Levántela siempre por su
carcasa. Si utiliza una grúa o elevador, utilice los anillos de izado que debe fijar a la
carcasa de la unidad. Consulte la figura siguiente para ver las directrices de izado.
Montaje utilizando los orificios exteriores del chasis
1. Coloque la goma anticorrosión (suministrada) en la ubicación de montaje.
2. Consultando el sección 1.4.2, eleve la unidad de antena hasta la ubicación de
montaje.
3. Oriente la unidad de antena de modo que la marca de proa de su base quede lo
más alineada posible con la proa del barco.
• Para izar la unidad de antena a bordo de la embarcación, conecte anillos de izado
y cuerdas a la unidad de izado con la grúa.
• Para retirar la carga del radiador cuando esté izando, la longitud de la cuerda entre
la base del radiador y el gancho debe ser al menos de 130 cm.
• Para mantener la cuerda alejada del radiador, gire el radiador y el chasis
aproximadamente 30 grados como se muestra a continuación.
• ASEGÚRESE DE QUITAR LOS ANILLOS DE IZADO DESPUÉS DEL IZADO.
130 cm
Gancho
Anillo de izado
Aprox. 30
grados.
Aprox. 30
grados.
Anillo de izado
(Vista superior)
Anillo de
izado
Anillo de
izado
¡NO!
Cómo izar la unidad de antena
Borne de
puesta a tierra
Goma resistente
a la corrosión
Marca de proa

1. INSTALACIÓN
1-6
4. Coloque cuatro pernos hexagonales (M1260, suministrados) y cuatro arandelas
de sellado (suministradas) desde la parte superior de la carcasa de la antena,
como se muestra a continuación.
5. Coloque las arandelas planas (M12, suministradas), las arandelas elásticas (su-
ministradas) y las tuercas (suministradas) en los pernos hexagonales. Apriete gi-
rando las tuercas. No apriete girando los pernos hexagonales para evitar que las
arandelas de sellado resulten dañadas.
6. Recubra con sellante marino las arandelas planas, las arandelas elásticas, las
tuercas y las partes visibles de los pernos.
7. Prepare el punto de tierra en la plataforma de montaje. Use un perno M625,
una tuerca y una arandela plana (suministrados). La distancia del punto de tierra
respecto al borne de puesta a tierra de la unidad de antena no debe superar los
340 mm.
8. Conecte el cable de tierra (RW-4747, suministrado) entre el borne de puesta a tie-
rra y el punto de tierra.
9. Recubra con el sellante marino el borne de puesta a tierra y el punto de tierra, tal
y como se muestra en la página siguiente.
Borne de puesta a tierra
Plantilla de goma
Plataforma Entrada del cable*
Cable de antena
Orificio de ventilación*
Perno hexagonal
Arandela de
sellado
Arandela plana
Arandela elástica
Tuerca
*
: No selle/bloquee estos orificios dado que permiten que la unidad respire.
Si estos orificios están sellados/bloqueados, la presión interna de la antena
pasa a ser negativa, lo cual puede causar filtraciones de agua.
Arandela de sellado
Chasis de antena
Goma
resistente a la corrosión
Arandela de sellado
Sellante marino
Sellante marino
Perno
Tuerca
Perno hexagonal
O
Cable de tierra
Soldadura
Tuerca hexagonal
Perno
hexagonal
Arandela plana
Tuerca hexagonal
Arandela elástica
Arandela plana
Arandela
plana
Arandela elástica
Cable de tierra
Recubrir con sellante marino.
Arandela plana
Recubrir
con
sellante
marino.

1. INSTALACIÓN
1-7
Montaje mediante los orificios de fijación interiores
Para este método se requiere extraer la unidad de RF de la unidad de antena para
poder acceder a los orificios de fijación interiores. Utilice pernos hexagonales, aran-
delas planas, arandelas elásticas y tuercas (no suministrados) para montar la unidad
de antena, y confirme la longitud de los pernos.
1. Afloje los cuatro pernos de la cubierta de la antena para abrir la unidad de antena.
2. Afloje los cuatro tornillos de la placa RTB para extraerla.
3. Desenchufe el conector J827 y J834 de la placa RTB.
4. Separe el chasis superior del inferior retirando dos pernos hexagonales (M825).
5. Extraiga la unidad de RF aflojando los cuatro pernos hexagonales.
6. Coloque la goma resistente a la corrosión (suministrada) sobre la plataforma de
montaje. Eleve la unidad de antena hasta la ubicación de montaje, consultando
sección 1.4.2.
7. Fije el chasis inferior a la plataforma de montaje mediante seis pernos hexagona-
les, arandelas elásticas, arandelas planas y tuercas (no suministrados). Aplique
una capa de sellante marino en las arandelas planas, las tuercas y las partes ex-
puestas de los pernos. Haga un corte en el casquillo de goma e inserte un perno
en el casquillo. No utilice arandelas de sellado.
8. Vuelva a montar la unidad de RF, la cubierta y el chasis.
9. Coloque cuatro tapas (suministradas) en los pernos de fijación exteriores.
Perno hexagonal (M10x20)
Perno hexagonal
(M8x25)
J827, J834
Extraiga la
abrazadera
del cable

1. INSTALACIÓN
1-8
1.4 Cómo instalar la unidad de antena para
FAR-1518, FAR-1528
1.4.1 Cómo fijar el radiador al soporte del radiador
La unidad de antena consta del radiador de antena y el chasis de la unidad de antena
y se embalan por separado. Fije el radiador de la antena al chasis de la unidad de
antena tal y como se indica a continuación.
1. Para los XN20AF, XN24AF, conecte dos patillas guía en la parte inferior del ra-
diador de antena.
2. Retire la cubierta del guíaondas del soporte del radiador. El capuchón se puede
desechar.
3. Cubra la brida del guíaondas con sellante marino como se muestra a continua-
ción.
4. Cubra los orificios de fijación del radiador de la antena con sellante marino.
5. Engrase la junta tórica y ajústela en la ranura correspondiente del radiador.
6. Fije el radiador de la antena en el soporte del radiador.
7. Cubra los pernos hexagonales con sellante marino y utilícelos para ajustar sin
apretar el radiador de la antena al chasis de la unidad de antena.
8. Para los XN20AF, XN24AF, retire las dos patillas guía (introducidas en el paso
1).
Orificio para
patilla guía
5 mm
Sellante anticorrosión
Tapa guíaondas
Junta tórica10 mm
Orificio para
patilla guía

1. INSTALACIÓN
1-9
9. Apriete los tornillos hexagonales.
1.4.2 Cómo montar la unidad de antena
La unidad de antena se puede montar antes de izarla en la plataforma de montaje.
Sin embargo, no eleve la unidad de antena por el radiador. Levántela siempre por su
carcasa. Si utiliza una grúa o elevador, utilice los anillos de izado que debe fijar a la
carcasa de la unidad. Consulte las instrucciones de izado en la página 1-5.
1. Construya una plataforma de montaje adecuada consultando el esquema que
aparece al final de este manual.
2. Taladre cuatro orificios de montaje de 15 mm de diámetro y un orificio de entrada
de cable de unos 50 mm en la plataforma de montaje.
3. Coloque la goma resistente a la corrosión (suministrada) sobre la plataforma de
montaje.
4. Coloque la unidad de antena en la goma anticorrosión y oriente la unidad de
modo que la marca de proa de su base mire hacia la proa del barco.
5. Fije la unidad con pernos hexagonales (M1260), arandelas planas, arandelas
elásticas y arandelas de sellado. Consulte las ilustraciones de las páginas 1-6
para ver los detalles.
6. Como se muestra en la siguiente figura, utilice pernos hexagonales (M625),
tuercas hexagonales (M6), arandelas planas (M6) y arandelas elásticas (M6) para
establecer el sistema de conexión a tierra en la plataforma de montaje. La ubica-
ción del punto de puesta a tierra debe estar dentro de los 340 mm del terminal de
tierra en la unidad de antena dado que es la longitud del cable de tierra. Conecte
el cable de tierra (RW-4747, suministrado) entre el punto de tierra y el terminal de
Radiador de la antena
Guíaondas
Soporte del radiador
Perno hexagonal
XN12AF: M8×35
XN20AF, XN24AF: M8×40
Junta tórica
Patilla guía
(XN20AF,
XN24AF)
Recubra con
capa de sellante marino.
PRECAUCIÓN
Asegúrese de quitar las
patillas guía.
Pueden producirse lesiones
si las patillas guía se aflojan
y caen.
Borne de
puesta a tierra
Goma resistente
a la corrosión
Marca de proa

1. INSTALACIÓN
1-10
tierra en la unidad de antena. Cubra todo el sistema de puesta a tierra con sellan-
te marino (suministrado).
7. Retire los anillos de izado (si aún no se han retirado).
1.5 Unidad procesadora
1.5.1 Consideraciones de montaje
La unidad procesadora se puede montar en un mamparo o sobre una mesa. Para es-
coger una ubicación de montaje, tenga en cuenta los puntos siguientes.
• Coloque la unidad alejada de la luz solar directa y de fuentes de calor debido a la
temperatura que pueda acumularse dentro de la caja del procesador.
• Coloque el equipo lejos de los lugares que puedan recibir salpicaduras de agua y
lluvia.
• Seleccione una ubicación de montaje teniendo en cuenta la longitud de los cables
conectados.
• En caso de montaje en mamparo, asegúrese de que la ubicación sea lo bastante
sólida para soportar el peso de la unidad con las vibraciones que normalmente se
producen en la embarcación. Refuerce la ubicación de montaje si es necesario.
• Deje espacio suficiente a ambos lados y en la parte trasera de la unidad para faci-
litar las tareas de mantenimiento. (Consulte el esquema situado al final de este ma-
nual para ver el espacio de mantenimiento recomendado).
• Si la unidad procesadora se coloca demasiado cerca de un compás magnético,
éste se verá afectado. Respete las distancias de seguridad del compás magnético,
las cuales se muestran en la página ii, para evitar interferencias.
Perno hexagonal
O
Cable de tierra
Soldadura
Tuerca hexagonal
Puesta a tierra
Perno
hexagonal
Arandela plana
Tuerca hexagonal
Arandela elástica
Arandela plana
Arandela
plana
Arandela elástica
Cable de tierra
Recubrir con sellante marino.
Arandela plana
Recubrir
con sellante
marino.
(Par: 49 N•m)
Arandela plana
Arandela elástica
Ajuste el cable de tierra
y recúbralo con sellante
marino.
Cable de tierra
Chasis de antena
Tuerca
Perno de fijación Base de antena
Arandela de sellado
Recubrir con
sellante marino.
Recubrir
con sellante
marino.
Goma resistente
a la corrosión

1. INSTALACIÓN
1-11
1.5.2 Cómo montar la unidad procesadora
Instalación sobre mesa
Fije la unidad con cuatro pernos (M5, suministrados) o tornillos autorroscantes (520,
no suministrados).
Nota: Si la instalación debe cumplir con el estándar de impermeabilización IPX2,
instale el kit IPX2 de la unidad procesadora. Para obtener más información, consulte
sección 2.4.5.
Instalación en mamparo
Marque las ubicaciones para cuatro tornillos autorros-
cantes si se van a utilizar los tornillos. Inserte cuatro
pernos M5 (o los tornillos autorroscantes), dejando
unos 5 mm de los pernos (tornillos) expuestos. Cuelgue
la unidad procesadora en los cuatros pernos (tornillos).
Apriete todos los pernos (tornillos).
Nota: Si la instalación debe cumplir con el estándar de
impermeabilización IPX2, establezca el sello ciego su-
ministrado con los materiales de instalación de la uni-
dad procesadora (CP03-36501) en el orificio de la
unidad como aparece en la figura de la derecha.
1.6 Unidad de presentación
Consulte el manual del operador del MU-150HD (OMC-44560) y MU-190 (OMC-
33670) para el procedimiento de instalación. Tenga en cuenta los puntos siguientes
al seleccionar una ubicación.
• Localice la unidad de presentación en un lugar en el que no haya una trama insta-
lada inmediatamente delante de la unidad de presentación.
• Localice la unidad de presentación en un lugar en el que sea fácil ver la presenta-
ción en todas las condiciones de iluminación ambiental.
Sello ciego
Ventana
de puente
Punt odev i sualización
Punto de visualización
Punt odev i sualización
Punto de visualización
Ventana de puente

1. INSTALACIÓN
1-12
1.7 Unidad de control
La unidad de control (RCU-028) se ha diseñado para fijarse en una mesa. Instale la
unidad de control a cinco metros de la unidad procesadora dado que la longitud del
cable que las conecta es de cinco metros.
Suministre los tornillos autorroscantes de forma local (tornillo autorroscante, 4 uds.,
4). Asegúrese de que son suficientemente largos.
Nota: El cable para RCU-028 está conectado a la unidad de control y viene de fábrica
cubierto con una bolsa de plástico para ser resistente al agua. Si no se va a utilizar el
conector, no retire la bolsa de plástico. Si se va a utilizar el conector, utilice el tubo
termorretráctil y el vinilo para impermeabilizar el conector. Para obtener más informa-
ción, consulte sección 2.5.
1. Taladre cuatro orificios de montaje de 5 mm de diámetro, consultando el esque-
ma que se encuentra en la parte posterior de este manual.
2. Fije la unidad de control con cuatro tornillos autorroscantes desde la parte supe-
rior de la unidad de control.
3. Fije cuatro tapones a los orificios de fijación de la unidad de control.
1.8 Unidad de control de la bola de control (opcio-
nal)
Cómo montar la unidad inclinada
Utilice la placa de fijación para mesa para montar la unidad inclinada en una mesa.
Conecte la placa de fijación para mesa a la parte inferior de la unidad de control. Co-
necte la unidad de control a la mesa con tornillos autorroscantes (no suministrados).
Cómo montar la unidad empotrada en la superficie de montaje
Taladre cuatro orificios de montaje de 5 mm de diámetro en la ubicación de montaje,
consultando el esquema que se encuentra en la parte posterior de este manual. Fije
la unidad de control con cuatro tornillos M4 (no suministrados) en la parte de abajo de
la mesa.
Orificio de fijación
Placa de fijación para mesa

2-1
2. CABLEADO
2.1 Esquema de cableado
UNIDAD DE ANTENA
100/110/115
200/220/230 VCA,
1ø, 50/60 Hz
UNIDAD
PROCESADORA
RPU-024
12-24 VCC
UNIDAD DE
PRESENTACIÓN
MU-150HD(-CV15)
RBG analógico
Monitor
HUB DE
CONMUTACIÓN
HUB-100
100-230 VCA,
1ø, 50/60 Hz
Versión CC
24 V CC
Rectificador
RU-1746B-2
RU-3424
440 VCA,
1ø, 50/60 Hz
Versión CA
Unidad del
transformador de
nivel inferior
RU-1803
100/110/115
200/220/230 VCA,
1ø, 50/60 Hz
FAR-1518
XN12AF
XN20AF
FAR-1528
XN20AF
XN24AF
DVI-D/D
S-LINK
(5/10 m)
3COX-2P-6C
(5/10 m)
FR-FTPC-CY
10/20/30 m)
MOD-Z072
(2/5/10 m)
Radar
ECDIS
FAR-1518/1528
RW-0030
(15/20/30 m)
UNIDAD DE
CONTROL
RCU-028
BOLA DE CONTROL
UNIDAD DE CONTROL
RCU-030
AD-100
Sensor de rumbo
Transpondedor AIS
Navegador GPS
Doppler log
AMS (serie)
ECDIS
AMS (contacto)
Master
Pres. secd. 1
Pres. secd. 2
TTYCSLA-4
TTYCSLA-1Q
TTYCSLA-4
TTYCSLA-1
TTYCSLA-1
TTYCSLA-4
TTYCSLA-4
TTYCSLA-7
RW-4864
(1/5/10 m)
RW-4864
(1/5/10 m)
DPYC-6
DPYC-2.5
FAR-1513/1523
XN12A
XN13A
UNIDAD DE ANTENA
O
FAR-1513
RW-00024
FAR-1523
RW-00025
(15/20/30 m)

2. CABLEADO
2-2
2.2 Cómo conectar el cable de señal para FAR-1513,
FAR-1523
Para minimizar las probabilidades de captar interferencias eléctricas, evite en la me-
dida de lo posible instalar el cable de señal cerca de otro equipo eléctrico situado a
bordo. Asimismo, evite extender el cable en paralelo a cables de alimentación.
Esta señal está lista para conectarse; no es necesario ningún tipo de preparación. Co-
necte los cables como se muestra a continuación.
1. Afloje los cuatro pernos para abrir la cubierta de la antena y, a continuación, fije
el soporte.
2. Afloje el conjunto del prensaestopas del cable (junta y arandela plana).
3. Pase el cable de señal con conector por la parte inferior del chasis de la unidad
de antena. Pase el cable por el conjunto del prensaestopas, como se muestra a
continuación.
4. Coloque la placa de fijación con cuatro pernos.
Entrada del cable
Cubierta de la placa RTB
Soporte
Entrada del
Placa de fijación
Junta
Arandela plana
Perno de fijación
(M4×16, 4 unidades)
Entrada del cable

2. CABLEADO
2-3
5. Consultando la siguiente figura, fije el terminal de orejeta de apantallamiento a
uno de los pernos de fijación del conjunto del prensaestopas del cable.
6. Afloje los cuatro tornillos que fijan la cubierta RTB. Deslice la cubierta para acce-
der a la placa RTB.
7. Conecte los conectores del cable de señal a la placa RTB.
8. Cierre la cubierta de la placa RTB.
9. Fije tres núcleos EMI al cable de señal en las ubicaciones que se muestran a con-
tinuación.
Cable de señal
Junta
Fije el apantallamiento
para atornillar.
Placa RTB
J820
J823
J824
J821
Conductor EMI RFC-13 (2 unidades)
Conductor EMI RFC-H13 (1 unidad)

2. CABLEADO
2-4
10. Fije el cable de señal mediante la abrazadera para cables como se indica a con-
tinuación.
a) Desmonte la placa de la abrazadera del cable y extraiga la abrazadera y la
almohadilla.
b) Pase el cable de señal a través del canal de cable y, a continuación, vuelva a
fijar la placa de la guía del cable
Placa de guía de cables
Extraiga la abrazadera.
Extraiga la almohadilla.

2. CABLEADO
2-5
c) Fije el cable de señal mediante la abrazadera como se indica a continuación.
11. Suelte el soporte y cierre la cubierta. Fije los pernos de fijación, pero sin apretar-
los demasiado, ya que deberá realizar algunos ajustes en el interior una vez fina-
lizado el cableado.
Nota: Al cerrar la cubierta, fije las juntas a las ranuras del chasis inferior y, a continua-
ción, apriete los pernos de fijación.
Vista superior
Cubierta de la placa RTB
Abrazadera del cable
Chasis
inferior
Junta
Ranura
Par: 9,8 ±0,1 Nm
Perno de fijación

2. CABLEADO
2-6
2.3 Cómo conectar el cable de señal para FAR-1518,
FAR-1528
Para minimizar las probabilidades de captar interferencias eléctricas, evite en la me-
dida de lo posible instalar el cable de señal cerca de otro equipo eléctrico situado a
bordo. Asimismo, evite extender el cable en paralelo a cables de alimentación.
1. Abra la cubierta de la antena.
2. Desconecte los conectores P821, P822, P801 y P802.
3. Afloje dos pernos para desmontar el módulo transceptor. Retire el módulo trans-
ceptor.
4. Afloje los cuatro pernos de fijación del prensaestopas del cable en la base de la
unidad de antena. Retire el anillo de apriete, la junta de goma y las arandelas pla-
nas. Guárdelos para más adelante.
5. Pase el cable de señal a través del orificio de la entrada de cable en la plataforma
de montaje de la unidad de antena. Regle el cable a una longitud de 500 mm des-
de el prensaestopas del cable.
Módulo transceptor
(magnetrón en el
interior)
Altura superior
a 5 cm
Bloque no ferroso
El magnetrón del módulo transceptor se
desmagnetizará si entra en contacto con material
ferroso. Al desmontar el módulo del transceptor,
póngalo de lado o encima del material no ferroso
como se muestra a continuación.
AVISO
J801 y J802
(en pcb 03P9506)
J822
(en pcb 03P9487)
Borne de puesta
a tierra
J821

2. CABLEADO
2-7
6. Deslice las arandelas planas, la junta de goma y el anillo de apriete en el cable
en el orden que aparece a continuación.
7. Fabrique el cable de señal como se muestra a continuación.
1) Pele unos 500 mm de cubierta de vinilo.
2) Regle la armadura y la cubierta de vinilo (interior) para que sus longitudes
sean de 10 y 20 mm, respectivamente. Suelte la cubierta para exponer los nú-
cleos de los cables.
3) Acorte la longitud de los núcleos de los cables 430 mm.
4) Acorte la longitud de los apantallamientos interior y exterior 510 mm. Enrolle
los apantallamientos interior y exterior y fije un terminal de orejeta FV5.5-4
(amarillo, 4).
5) Retire el aislamiento de cada núcleo excepto el cable coaxial unos 8 mm.
6) Acorte la longitud del núcleo del cable coaxial unos 10 mm. Pliegue hacia
atrás el cable coaxial.
Arandela plana
Junta Anillo de apriete
Arandela plana
500500
2020
Cubierta de vinilo
Armadura
Apantallamiento
Conecte el terminal de orejeta al apantallamiento.
Apantallamiento interno/externo
Pliegue hacia atrás el apantallamiento.
Conecte el conector
TNC (suministrado
localmente) aquí.
Núcleo
Cable
coaxial
1010
8
Cubierta de vinilo (interna)
Armadura
de reglaje.
Exponga los cables y, a continuación,
trence el apantallamiento.
Exponga los cables y, a continuación,
trence el apantallamiento.
430430

2. CABLEADO
2-8
8. Pase el apantallamiento entre el anillo de apriete y la arandela como se muestra
a continuación. Sujete el anillo de apriete con los tornillos.
9. Conecte el cable de señal TB801, TB802 y TB803 a la placa RF (03P9488), to-
mando como referencia el diagrama de conexiones.
Anillo de apriete
Arandela
Junta de goma
Perno
(M4×16, 4 unidades)
Apantallamiento
Armadura
Accesorio de apertura
Placa RF (03P9488A)
TB803
(Línea de alto voltaje)
TB802
(Conector WAGO)
Abrazadera del cable
Motor
TB801
(Conector WAGO)
Abrazadera
del cable
Entrada
del núcleo
Entrada
del núcleo
Cómo insertar el núcleo
1. Presione la palanca.
2. Introduzca el núcleo.
3. Suelte la palanca.
Cable
Cómo conectar los cables al conector WAGO
Empuje hacia abajo.
Accesorio
de apertura
Conector
WAGO
Trenzar
Procedimiento
1. Trence el núcleo.
2. Coloque el accesorio de apertura
y empújelo hacia abajo.
3. Inserte el núcleo en el orificio.
4. Retire el accesorio de apertura.
5. Tire del cable para confirmar que
está bien sujeto.

2. CABLEADO
2-9
10. Pase el cable coaxial por debajo de la placa de fijación (flecha) y la abrazadera
(círculo de puntos).
11. Retire la caja de conexiones de la unidad transceptora.
12. Afloje dos tornillos de la caja de conexiones y, a continuación, deslice la cubierta
para abrir la caja. Conecte el cable coaxial como se muestra a continuación.
13. Cierre la caja de conexiones y apriete los tornillos. Vuelva a unir la caja a la uni-
dad transceptora.
14. Vuelva a conectar los conectores que desconectó en el paso 2.
15. Coloque el módulo transceptor en la unidad de antena y presione el módulo hasta
que encaje. Apriete los pernos de fijación. Asegúrese de presionar la unidad
transceptora hasta que encaje. Si no lo hace, puede causar fugas de mi-
croondas.
16. Apriete el cable de apantallamiento a la tuerca de mariposa en el módulo trans-
ceptor.
17. Confirme que todos los tornillos están apretados y que todo el cableado se ha rea-
lizado correctamente. Confirme que la junta impermeabilizante, los pernos y los
orificios de rosca de la unidad de antena están cubiertos con grasa de silicona.
18. Cierre la cubierta de la unidad de antena.
Caja de conexiones
Unidad transceptora
Tornillo de
fijación
Tornillo de fijación de núcleo
Abrazadera de fijación
de apantallamiento
Entrada del
cable coaxial
Apantallamiento de posición
por debajo de la abrazadera.
Ajuste el núcleo.

2. CABLEADO
2-10
2.4 Unidad procesadora
La ilustración que se muestra a continuación es la unidad de especificación de CA.
La unidad de especificación de CC no tiene el fusible.
2.4.1 Cómo fabricar el cable de alimentación
1. Retire la cantidad de armadura del cable que se muestra en la siguiente imagen.
2. Retire el aislamiento de los núcleos 10 mm.
3. Fije los terminales de orejeta (FV5.5-4, amarillo, suministrados) a los núcleos. Cu-
bra el extremo de la armadura con cinta de vinilo. Coloque el cable en la abraza-
dera para cables en el lado de entrada de cables de la unidad procesadora. Ajuste
la abrazadera del cable.
4. Apriete los terminales de orejeta al bloque de terminal de dentro de la unidad, de
acuerdo con el diagrama de interconexión que aparece al final de este manual.
Cable DVI-D
(5 m, a la unidad del monitor)
Cable RGB (opcional)
(al monitor externo)
TTYCSLA, antena, unidad de
control y cables RW-4864
(Para posiciones de sujeción,
consulte la pegatina del
lado opuesto de la cubierta).
* Para el cable de antena del
FAR-15x8, retire el espaciador
para introducir el cable.
Cable LAN (UTP, CAT5e, suministro local)
(a otro radar o conmutador hub)
(Fije el cable al poste debajo del conector
con una brida para cable).
Cable de alimentación
Alimentación de CC: DPYC-6
Alimentación de CA: DPYC-2.5
Borne de puesta a tierra
(Use IV-8sq., no suministrado)
Conector USB
(No utilizar).
Ranura para
tarjeta SD
*
FUSIBLE
8A
Armadura
Alimentación de CC: DPYC-6
Alimentación de CA: DPYC-2.5
CA: 50 mm
CC: 60 mm
Cinta
10

2. CABLEADO
2-11
2.4.2 Cómo fabricar el cable de señal, cables del equipo externo
Cable de señal para FAR-1518, FAR-1528
Cable de señal para FAR-1513, FAR-1523
Este cable está listo para conectarse; no es necesario ningún tipo de preparación.
Conecte el terminal de orejeta al apantallamiento.
Pliegue hacia atrás el apantallamiento.
Núcleo
300300
5050
Cubierta de vinilo
Armadura
Cubierta interior
Cable
coaxial
10
Exponga los cables y,
a continuación, trence
el apantallamiento.
8

2. CABLEADO
2-12
Cables TTYCS, TTYCSLA (para el equipo externo)
Consulte la tabla de la siguiente página para ver las longitudes.
Conector, cable y longitudes (L1, L2 y L3)
Nº de conector Tipo de cable L1 L2 L3
J613 (Señal de contacto de alarma ext.) TTYCSLA-7 300 70 150
J614 (HDG) TTYCSLA-1Q 250 70 150
J615 (AIS) TTYCSLA-4 200 70 200
J616 (GPS), J617 (LOG) TTYCSLA-1 200 70 200
J618/J619/J620 (AMS/ECDIS/AD-10) TTYCSLA-4 200 70 200
Cómo conectar los cables al conector WAGO
Empujar hacia abajo.
Accesorio
de apertura
Conector WAGO
Cable
Trenzar
<Procedimiento>
1. Trence los conductores.
2. Empuje hacia abajo el accesorio de apertura.
3. Introduzca el cable por el orificio.
4. Retire el accesorio de apertura.
5. Tire del cable para confirmar que está
bien sujeto.
Fabricación del cable de la serie TTYCS
Fabricación del cable de la serie TTYCSLA
Pase el tubo resistente al calor (suministrado) por el conductor
de retorno. Conecte un terminal de orejeta (previamente
conectado a la unidad procesadora) al conductor de retorno.
Ajuste el terminal de orejeta a su ubicación original.
Cubierta
Armadura
Conductor
de retorno
Terminal
de orejeta
Cinta de seguridad con
brida para cables (incluida).
Apantallamiento
6
5
L1
Armadura
Exponga los núcleos y luego
envuelva en cinta la armadura.
Cinta de vinilo
L2
L1
L2
6
Coloque esta parte en la abrazadera para cables.
Cinta de vinilo
Cinta de seguridad
con brida para cables
(incluida).
Coloque esta parte en la
abrazadera para cables.

2. CABLEADO
2-13
Cable LAN
Si el cable LAN no está equipado con un conector RJ-45, conecte uno como se mues-
tra a continuación. Conecte el cable a J202 (en la parte exterior de la unidad proce-
sadora).
2.4.3 Cable para la unidad de presentación secundaria (RW-4864)
Se pueden conectar dos unidades de presentación secundarias a este radar cuando
funciona como el radar principal. Utilice el cable opcional RW-4864 para conectar la
unidad de presentación secundaria al radar principal. Conecte la unidad de presenta-
ción secundaria nº 1 a J612 y la unidad de presentación secundaria nº a J611.
Con la herramienta crimpadora
especial MPT5-8AS
(PANDUIT CORP.),
doble el conector modular.
Finalmente, compruebe el
conector visualmente.
Exponga la cubierta de vinilo
interior.
Retire la cubierta exterior
unos 25 mm. Tenga cuidado
de no dañar la cubierta
interior y los núcleos.
Pliegue hacia atrás el
apantallamiento,
envuélvalo a la cubierta exterior
y córtelo, dejando 9 mm.
12
3
25 mm
unos 9 mm
4
5
6
unos 9 mm
unos 11 mm
Doble hacia atrás el
conductor de retorno
y córtelo, dejando 9 mm.
Ordene los cables, aplánelos
por el centro y córtelos
dejando 11 mm.
Inserte el cable en el conector
modular de forma que la parte
plegada del apantallamiento
entre en la carcasa del conector.
El conductor de retorno debe
estar en el lado de la lengüeta
del conector.
7
1
8
Conector modular
1 BLA/VER
2 VER
3 BLA/NAR
4 AZU
5 BLA/AZU
6 NAR
7 BLA/MAR
8 MAR
BLA/NAR 1
NAR 2
BLA/VER 3
AZU 4
BLA/AZU 5
VER 6
BLA/MAR 7
MAR 8
1 BLA/NAR
2 NAR
3 BLA/VER
4 AZU
5 BLA/AZU
6 VER
7 BLA/MAR
8 MAR
BLA/NAR 1
NAR 2
BLA/VER 3
AZU 4
BLA/AZU 5
VER 6
BLA/MAR 7
MAR 8
[Cable cruzado] [Cable recto]
Conductor de retorno

2. CABLEADO
2-14
2.4.4 Dónde conectar los cables dentro de la unidad procesadora
Conecte el cable de antena y los cables del equipo externo a la placa FRP_TB
(03P9601) dentro de la unidad procesadora como se muestra a continuación.
*1
Conecte estos terminales de orejeta a un conductor de retorno de los cables TTYCLSA y ajuste aquí los
conductores de retorno.
*2
Conecte la línea TX HV aquí. Para los FAR-1513, FAR-1523, corte las líneas TX-HV en la base del
conector y conéctelas aquí.
*3
Ajuste el conductor pelado. No utilice un terminal de orejeta para realizar la conexión, a fin de evitar una
mayor resistencia de contacto.
Fije el apantallamiento con la abrazadera.
Fije el conductor con un tornillo.
J617
(Sensor LOG)
J614
(Sensor HDG)
J601
*2
(TX-HV)
J604
*3
(Entrada de vídeo)
(Cable coaxial)
J613
(Señal de contacto
de alarma externa)
J608
(Teclado)
J618
(AMS)
J615
(AIS)
AD-10
(Conv. de giro)
Cable de antena
(FAR-1513/1523)
De izquierda
a derecha:
J605, J606, J607
J616
(GPS)
J619
(ECDIS)
*1
De arriba abajo:
J612 (PRES. SECD. 2)
J611 (PRES. SECD. 1)
J610 (no utilizar).
Cable de antena
(FAR-1518/1528)
De izquierda a derecha:
J603, J602

2. CABLEADO
2-15
2.4.5 Cómo instalar el kit IPX2 de la unidad procesadora opcional
El kit IPX2 de la unidad procesadora opcional (OP03-238) tiene dos cubiertas resis-
tentes al agua que protegen los cables y los conectores de la unidad procesadora con
el estándar IPX2 de impermeabilización.
Nota: La instalación también utiliza el sello ciego que se suministra con los materiales
de instalación de la unidad procesadora.
Cómo sujetar la cubierta impermeable 2
1. Suelte los dos tornillos rodeados con un círculo en la ilustración siguiente.
2. Fije la cubierta impermeable 2 (03-186-1104) con los dos tornillos sin apretar en
el paso 1.
Nombre Tipo N.º de código Cantidad
Cubierta impermeable 2 03-186-1104 100-401-840-10 1
Cubierta impermeable 03-186-1105 100-401-850-10 1

2. CABLEADO
2-16
Cómo sujetar la cubierta impermeable
1. Suelte los tres tornillos rodeados con un círculo en la ilustración siguiente.
2. Fije la cubierta impermeable (03-186-1105) con los tres tornillos sin apretar en el
paso 1.

2. CABLEADO
2-17
Cómo sujetar el sello ciego
Fije el sello ciego encima del orificio de la parte posterior de la unidad.
2.5 Unidad de control de la bola de control
Conecte el cable de la unidad de control al cable de la unidad de control de la bola de
control. Cubra la conexión con el tubo termorretráctil y, a continuación, aplique calor.
Cubra el tubo termorretráctil con cinta de vinilo.
2.6 Conexión VDR
La unidad procesadora tiene un puerto RGB para conectar un VDR. Utilice el cable
RGB opcional (3COX-2P-6C 5 m/10 m) para conectar el VDR.
Acerca del puerto RBG
• El puerto RGB y el puerto DVI tienen sus propios circuitos. Esto impide la interrup-
ción de la imagen del radar que aparece en el monitor principal conectado al puerto
DVI, si se produce una condición de fallo en el puerto RGB.
• La unidad procesadora emite de forma continua señales de vídeo desde sus puer-
tos DVI y RGB. El operador no puede detener la salida.
Blind
seal
Conecte los cables, cubra la conexión con el tubo termorretráctil
y, a continuación, aplique calor.
Cubra con cinta de vinilo.

2. CABLEADO
2-18
Esta página se ha dejado en blanco a propósito.

3-1
3. AJUSTES
Nota: Tras completar la configuración y los ajustes, copie los datos de configuración
en la tarjeta SD (la ranura de la tarjeta SD está en la parte posterior de la unidad pro-
cesadora), consultando la sección 1.51 del Manual del operador. Esto permitirá res-
taurar fácilmente los datos de configuración tras reemplazar la placa SPU, etc.
Al encender la unidad por primera vez tras la instalación, abra los menús protegidos
para ajustar el radar. Siga los procedimientos de este capítulo, en el orden mostrado,
para completar el ajuste.
A continuación se encuentran los controles de la unidad de control que se utilizan
para realizar los ajustes.
3.1 Cómo abrir el menú de instalación del radar
El menú [RADAR INSTALLATION] tiene elementos para ajustar el radar. Proceda de
la siguiente manera para acceder a este menú.
1. Abra la tapa del interruptor de encendido y púlselo para encender el radar.
2. Pulse la tecla MENU cinco veces mientras pulsa la tecla HL OFF para abrir el
menú [RADAR INSTALLATION].
Tecla de encendido
Botón izquierdo
Botón derecho
Teclado táctil Botón de ajuste
Luz de encendido
[RADAR INSTALLATION]
(1/2)
1 BACK
2 [ECHO ADJUST]
3 [OWN SHIP INFO]
4 [SCANNER]
5 [INSTALLATION]
6 [TT PRESET]
7 [BAUD RATE]
8 [ALERT I/F]
9 [INPUT PORT]
0 [NEXT]
[RADAR INSTALLATION]
(2/2)
1 BACK
2 [OTHERS]
Página 2
Página 1

3. AJUSTES
3-2
3.2 Cómo utilizar el menú
1. Pulse la tecla MENU para abrir el menú principal.
2. Active el botón de ajuste para seleccionar un menú y púlselo.
3. Active el botón de ajuste para seleccionar un elemento de menú y, a continua-
ción, púlselo.
4. Active el botón de ajuste para seleccionar una opción de menú y, a continuación,
púlselo.
5. Si la opción del menú requiere la entrada de datos numéricos, gire el botón de
ajuste y, a continuación, púlselo. El botón también se puede pulsar durante unos
segundos para definir un numérico. Cada pulsación incrementa el numérico en
uno.
3.3 Cómo inicializar la sintonización
1. Abra el menú principal.
2. Abra el menú [ECHO].
3. Seleccione [TUNE INITIALIZE] y, a continuación, pulse el botón izquierdo.
La indicación "TUNE INITIALIZE" aparece en la pantalla durante la inicialización.
4. Una vez que se haya completado la sintonización, pulse el botón derecho dos ve-
ces para cerrar el menú.
[MAIN MENU]
1 [ECHO]
2 [MARK]
3 [NAVTOOL]
4 [ALERT]
5 [TT•AIS]
6 [FILES]
7 [INFORMATION BOX]
8 [NAV LINE•WPT]
9 [INITIAL SETTING]
0 [RADAR INSTALLATION]
[ECHO]
1 BACK
2 2nd ECHO REJ
OFF/ON
3 TUNE INITIALIZE
4 PERFORMANCE MON
OFF/ON
5 PM ARC
2/3/5/6
6 SART
OFF/ON
7 ECHO AREA
CIRCLE/WIDE/
ALL/SIMPLE
8 WIPER
OFF/1/2
9 [ACE]
0 [CUSTOM SELECT]
Aparece sin
especificación IMO.

3. AJUSTES
3-3
3.4 Cómo alinear el rumbo
Ha montado la unidad de antena apuntando directamente hacia delante en dirección
a la proa. Sin embargo, podría aparecer un objetivo, pequeño pero visible, en la mis-
ma popa en la línea de rumbo (cero grados). En la práctica, probablemente observará
algún pequeño error en demora en la pantalla, debido a la dificultad de obtener un po-
sicionamiento inicial adecuado de la unidad de antena. El siguiente ajuste compensa-
rá este error.
1. Seleccione un eco de blanco estacionario con un rango que oscila entre 0,124 y
0,25 nm, preferiblemente cerca de la línea de proa.
2. Pulse la tecla EBL para encender el EBL. Gire el botón de ajuste para que el EBL
pase por el centro del eco del blanco.
3. Lea la demora del blanco.
4. Mida la demora del blanco estacionario de la carta de navegación y calcule la di-
ferencia entre la demora real y la aparente en la pantalla del radar.
5. Abra el menú [RADAR INSTALLATION] y, a continuación, abra el menú [ECHO
ADJUST].
6. Seleccione [HD ALIGN] y, a continuación, introduzca la diferencia de demora me-
dida en el paso 4. El intervalo de ajuste va de 0 a 359,9 grados.
7. Confirme que el eco del blanco aparece con la demora correcta en la pantalla.
000
010
020
030
040
050
060
070
080
090
100
110
120
130
140
150
160
170
180
190
200
210
220
230
240
250
260
270
280
290
300
310
320
330
340
350
a
Blanco
a
Corrija la demora
(referencia al rumbo)
Error de montaje de antena
en el puerto (HDG SW
avanzado)
Aparece la imagen
desviada hacia la
derecha.
000
010
020
030
040
050
060
070
080
090
100
110
120
130
140
150
160
170
180
190
200
210
220
230
240
250
260
270
280
290
300
310
320
330
340
350
b
Blanco
b
Posición aparente
del blanco
Demora
correcta
relativa
al rumbo
Posición
aparente del
blanco
Error de montaje
de antena
en el puerto (HDG SW
retrasado)
Aparece la imagen
desviada hacia la
izquierda.
[ECHO ADJUST]
1 BACK
2 VIDEO ADJ
MAN/AUTO
3 VIDEO ADJ VALUE
30
4 HD ALIGN
000.0°
5 TIMING ADJ
MAN/AUTO
6 TIMING ADJ VALUE
200
7 MBS LEVEL
0

3. AJUSTES
3-4
3.5 Cómo ajustar el timing
El timing difiere con respecto a la longitud del cable de señal entre la unidad de la an-
tena y la unidad procesadora. Ajuste el timing en el momento de la instalación para
evitar los siguientes síntomas:
• El eco de un blanco “recto“ (por ejemplo, embarcadero) con el rango de 0,25 NM,
aparecerá en la pantalla como si entrara o saliera. Consulte las figuras siguientes.
• El rango de los ecos de blancos es incorrecto.
1. Establezca los controles GAIN, A/C SEA y A/C RAIN como se muestra a conti-
nuación.
GAIN: 80
A/C SEA: Totalmente hacia la derecha (Apagado)
A/C RAIN: Totalmente hacia la derecha (Apagado)
2. Abra el menú [RADAR INSTALLATION] y, a continuación, abra el menú [ECHO
ADJUST].
3. Establezca [TIMING ADJ] en [AUTO] para activar el ajuste automático, que lleva
unos dos minutos.
4. Una vez que se ha completado el ajuste, establezca el radar en el intervalo míni-
mo. Confirme que no falta ningún eco en el centro de la pantalla del radar.
Si faltan ecos, establezca [TIMING ADJ] en [MAN]. Seleccione [TIMING ADJ VA-
LUE] y, a continuación, utilice el botón de ajuste para ajustar el timing de forma
manual.
3.6 Cómo suprimir Main Bang
Si el main bang aparece (un aro rojo en el centro de la pantalla), elimínelo de la si-
guiente forma.
1. Transmita en un rango largo y, a continuación, espere 10 minutos.
2. Ajuste la ganancia para que solo aparezca un bajo nivel de ruido en la pantalla.
3. Seleccione el rango 0,125 NM y, a continuación, ajuste los controles A/C SEA y
A/C RAIN.
4. Vaya al menú [RADAR INSTALLATION] y, a continuación, abra el menú [ECHO
ADJUST].
5. Seleccione [MBS LEVEL] y, a continuación, utilice el botón de ajuste para intro-
ducir un valor que provoca que el main bang desaparezca ligeramente. El rango
de ajuste va de 0 a 255.
(1) Correcto
(2) Blanco empujado
hacia dentro
(3) Blanco empujado
hacia fuera

3. AJUSTES
3-5
3.7 Menú RADAR INSTALLATION
Esta sección proporciona descripciones de los elementos del menú [RADAR INSTA-
LLATION] que no se han mencionado previamente.
3.7.1 Menú OWN SHIP INFO
Introduzca la eslora, la manga del barco, y el escáner, la antena GOS y las posiciones
de gobierno, consultando la descripción y la figura siguiente.
Nota: Este radar utiliza los valores CCRP=CONNING POSITION y ANT=SCANNER
POSITION como los puntos de referencia para realizar medidas y cálculos. El inge-
niero de puesta en marcha debería comprender este aspecto e introducir la informa-
ción del barco propio en consecuencia.
[LENGTH/WIDTH]: introduzca la eslora y la manga del barco.
[SCANNER POSITION]: introduzca la distancia desde el escáner hasta la proa y la
popa.
[GPS 1 ANT POSITION]: introduzca la distancia desde la antena GPS hasta la proa
y la popa. Si se instala una segunda antena GPS, introduzca su posición en [GPS 2
ANT POSITION].
[CONNING POSITION]: introduzca la distancia desde la posición de gobierno hasta
la proa y la popa.
L1
L1: Eslora
W1: Manga del barco
L2: Posición de gobierno (desde la proa)
W2: Posición de gobierno (desde babor)
L3: Posición de escáner (desde la proa)
W3: Posición de escáner (desde babor)
L4: Posición de antena GPS (desde la proa)
W4: Posición de antena GPS (desde babor)
W1
L2
W2
W3
W4
L3
L4
Ejemplo
[OWN SHIP INFO]
1 BACK
2 LENGTH/WIDTH
LENGTH 0m
WIDTH 0m
3 SCANNER POSITION
BOW 0m
PORT 0m
4 GPS1 ANT POSITION
BOW 0m
PORT 0m
5 GPS2 ANT POSITION
BOW 0m
PORT 0m
6 CONNING POSITION
BOW 0m
PORT 0m

3. AJUSTES
3-6
3.7.2 Menú INSTALLATION
[IP ADDRESS]: introduzca la dirección IP. La dirección predeterminada es
172.031.003.017.
[RANGE UNIT]: seleccione la unidad de medida de distancia, entre [NM], [km] o [SM].
[RADAR NO]: seleccione el número de radar: 1, 2, 3 o 4.
[RADAR POSITION]: seleccione la posición del radar. Las opciones son [FORE],
[MAIN-TOP], [MAIN-2ND], [MAIN-3RD], [AFT], [PORT] y [STARBOARD].
[MODEL]: seleccione el nombre del modelo: [FAR-1513], [FAR-1523], [FAR-1518] o
[FAR-1528].
[TYPE]: seleccione el tipo de radar: [IMO] o [Non-IMO].
[ON TIME], [TX TIME]: estos elementos muestran el número de horas que el radar
ha estado activado y transmitiendo, respectivamente. El valor se puede cambiar; por
ejemplo, tras sustituir el magnetrón. [TX TIME] se puede restablecer a 0.
[PM GAIN ADJ]: ajuste la ganancia del monitor de rendimiento, automática o manual-
mente, siempre que se sustituya el magnetrón.
Para ajustar la ganancia del monitor de rendimiento, haga lo siguiente:
1. Seleccione el ajuste automático o manual. Para el ajuste automático, no es nece-
sario realizar más operaciones; cierre el menú al finalizar el ajuste. Vaya al paso
siguiente para el ajuste manual.
2. Establezca los controles como se muestra a continuación.
Escala: 24 NM
Longitud de impulso: Long
A/C SEA: OFF (apagado manualmente)
A/C RAIN: OFF (apagado manualmente)
Promedio de eco (EAV): OFF
Contraste de vídeo: 2-B
[INSTALLATION 1/2]
1 BACK
2 IP ADDRESS
172.031.003.017
3 RANGE UNIT
NM/km/SM
4 RADAR NO
1/2/3/4
5 RADAR POSITION
FORE/MAIN-TOP/
MAIN-2ND/MAIN-3RD/
AFT/PORT/STARBOARD
6 MODEL
FAR-1513/FAR-1523/
FAR-1518/FAR-1528
7 TYPE
IMO/Non-IMO
0 NEXT
[INSTALLATION 2/2]
1 BACK
2 ON TIME
000000.0H
3 TX TIME
000000.0H
4 PM GAIN ADJ
MAN/AUTO
255

3. AJUSTES
3-7
3. Ajuste el control GAIN para que aparezca una ligera cantidad de ruido blanco en
la pantalla. En la pantalla aparecen arcos para el monitor de rendimiento.
4. Seleccione [PM GAIN ADJ]. Active el botón de ajuste para que el arco exterior
aparezca ligeramente y, a continuación, pulse el botón derecho para establecerlo.
3.7.3 Menú ECHO ADJUST
[VIDEO LEVEL ADJ]: ajuste el nivel de vídeo, automática o manualmente. Establez-
ca el radar del siguiente modo:
Supresor de interferencias (IR): 2
Amplificador de ecos (ES): OFF
Promedio de eco (EAV): OFF
Ganancia: 80
Escala: 24 NM
Longitud de impulso: Long
Para ajuste manual, seleccione [VIDEO ADJ VALUE]. Gire el botón de ajuste para
que el ruido simplemente desaparezca de la pantalla. El rango de ajuste va de 0 a 73.
3.7.4 Menú SCANNER
[SECTOR BLANK1], [SECTOR BLANK2]: Establezca las áreas en las que evitar la
transmisión. El rumbo se debe alinear correctamente (consulte sección 3.4) antes de
establecer cualquier punto ciego. Por ejemplo, ajuste el área en el que un objeto que
interfiere en la parte trasera de la antena produciría un punto ciego (área en la que no
Aproximadamente 12,1 MM (10 dB)
Antes de la configuraciónAntes de la configuración
Después de la configuraciónDespués de la configuración
8,1 NM a
10,1 NM
8,1 NM a
10,1 NM
Ejemplo: [PM ARC] está establecido en [5]. (La ubicación
de los arcos cambia con la configuración de [PM ARC] en
[PERFORMANCE MON] en el menú [ECHO]).
Rumbo
Demora
de
inicio
Ajustar
ángulo
Ajuste de sector ciego
[SCANNER]
1 BACK
2 SECTOR BLANK1
START 000°
ANGLE 000°
3 SECTOR BLANK2
START 000°
ANGLE 000°
5 ANT SW
OFF/ON/EXT
6 ANT STOPPED
STBY/TX
7 DEFAULT ANT HEIGHT
5/7.5/10/15/20/
25/30/35/40/45/
more50m

3. AJUSTES
3-8
aparecen ecos) en la pantalla. Para especificar un área, introduzca el inicio de la de-
mora relativo al rumbo y el ángulo de sector muerto. Para borrar un área, especifique
0 para las secciones [START] y [ANGLE]. El rango de ajuste de [START] es de 0º a
359º y de [ANGLE] es de 0º a 180º.
Nota: Apague un sector ciego de la popa al ajustar la ganancia del monitor de rendi-
miento con el fin de mostrar el eco del monitor de rendimiento correctamente.
[ANT STOPPED]: para el personal de mantenimiento
Nota: Seleccione [OFF] en [ANT SW] para impedir la rotación de la antena.[ANT
STOPPED] desactiva la transmisión mientras la antena está detenida en STBY.
[DEFAULT ANT HEIGHT]: seleccione la altura (en metros) de la antena del radar so-
bre la línea de flotación.
3.7.5 Menú TT PRESET
[MAX RANGE]: seleccione el rango de TT (derrota del barco) máximo, 24 o 32 NM.
[TT PRESET]
1 BACK
2 [TT DATA OUTPUT]
3 MAX RANGE
24NM/32NM
4 TT ECHO LEVEL
13
5 QV DISPLAY
OFF/ON
6 TT W/O GYRO
OFF/ON
7 [ACQ PRESET]
8 [TRACK PRESET]
9 [TT SENSOR DATA]*
0 DEFAULT
[TRACK PRESET]
1 BACK
2 GATE SIZE
S/M/L/LL
3 FILTER RESPONSE
1/2/3/4
4 LOST COUNT
9SCAN
5 MAX SPEED
150kn
6 START TIME TGT VECT
TIME/SCAN
0sec
0SCAN
7 NUMBER OF TT
50/100
[TT DATA OUTPUT]
1 BACK
2 SELECT SENTENCE
OFF/TTM/TTD
3 TTM/TTD SENTENCE
REL/TRUE
[ACQ PRESET]
1 BACK
2 LAND SIZE
1600m
3 ANT SELECT
XN12AF/XN20AF/
XN24AF/XN12A/XN13A
4 AUTO ACQ CORRE
5
5 AUTO ACQ WEED
1SCAN
6 [TT DETAIL DATA]*
* Para el personal de mantenimiento.

3. AJUSTES
3-9
[TT ECHO LEVEL]: establezca el nivel del umbral de detección para los ecos TT.
[QV DISPLAY]: [OFF]: imagen normal,[ON]: vídeo cuantificado. La imagen normal
está activa siempre que la alimentación esté encendida independientemente de esta
configuración.
[TT W/O GYRO]: seleccione [ON] para utilizar TT sin un giroscopio.
[DEFAULT]: restaure los valores predeterminados para este menú.
Menú TT DATA OUTPUT
[SELECT SENTENCE]: seleccione la sentencia de datos de blanco (TTM o TTD) de
salida. Seleccione [OFF] para sin salida.
[TTM/TTD REFERENCE]: seleccione el formato de salida (demora) para la sentencia
TTM/TTD.
[REL] (Demora del blanco desde el barco propio, grado relativo, curso del blanco,
grado relativo) o [TRUE] (Demora del blanco, grado verdadero, curso del blanco, gra-
do verdadero).
Menú ACQ PRESET
[LAND SIZE]: establezca el tamaño de tierra en unidades de 100 m. El rango de ajus-
te es de 100 a 3.000 m. Un blanco cuya longitud es igual o mayor que la longitud es-
tablecida se considera un blanco de tierra.
[ANT SELECT]: seleccione el tipo del radiador de la antena de su radar. El tamaño
del eco cambia con el tamaño del radiador. Seleccione el tipo de radiador correcto
para garantizar un rendimiento adecuado.
[AUTO ACQ CORRE]: establezca el recuento de correlación para la adquisición au-
tomática. El rango de ajuste es de 3 a 10.
[AUTO ACQ WEED]: establezca el recuento de cancelación para la adquisición au-
tomática. El rango de ajuste es de 1 a 5.
[TT DETAIL DATA]: para el servicio técnico.
Menú TRACK PRESET
[GATE SIZE]: seleccione el tamaño de la puerta: [S], [M], [L] o [LL].
[FILTER RESPONSE]: ajuste la función de respuesta de filtro. El rango de ajuste es
de 1 a 4.
1: la respuesta del filtro mejora.
4: la estabilidad del filtro mejora.
[LOST COUNT]: establezca el número de exploraciones que se permitirá entre el
tiempo en el que se pierde un blanco y se declara perdido. El rango de ajuste es de
1 a 20.
[MAX SPEED]: no se utiliza.
[START TIME TGT VECT]: establezca el número de segundos o número de explora-
ciones que esperar antes de mostrar el vector para un blanco recién adquirido. Selec-
cione [TIME] o [SCAN] y, a continuación, introduzca el valor.
[NUMBER OF TT]: seleccione el número máximo de TT que seguir, 50 o 100.
Menú TT SENSOR DATA
Para el servicio técnico.

3. AJUSTES
3-10
3.7.6 Menú BAUD RATE
Establezca la velocidad de transmisión en baudios, 4800 o 38400 (bps), para el equi-
po conectado: sensor de rumbo, transpondedor AIS, navegador GPS, registro, AMS
y ECDIS.
3.7.7 Menú ALERT I/F
Hay cuatro salidas de contacto de alertas disponibles, [ALERT OUT1] - [ALERT
OUT4]. Establezca cada alerta externa de acuerdo con la descripción de la página si-
guiente.
[BAUD RATE]
1 BACK
2 HDG
4800/38400
3 AIS
4800/38400
4 GPS
4800/38400
5 LOG
4800/38400
6 AMS
4800/38400
7 ECDIS
4800/38400
[ALERT OUT1 1/3]
1 BACK
2 ALERT OUT TYPE
ALERT OUT/
ALERT ACK/
OPERATOR FITNESS
3 ALERT OUT POLARITY
NORMAL/INVERT
4
TRANSFER
TT NEW TGT (A)
TT NEW TGT (C)
TT LOST TGT (A)
TT LOST TGT (C)
TT COLLISION (A)
TT COLLISION (C)
TT TGT FULL(AUTO) (A)
TT TGT FULL(AUTO) (C)
TT TGT FULL(MAN) (A)
0 NEXT
Página 1/3 Página 2/3
[ALERT OUT1 2/3]
1 BACK
2
TT TGT FULL(MAN) (C)
AIS NEW TGT (A)
AIS NEW TGT (C)
AIS LOST TGT (A)
AIS LOST TGT (C)
AIS COLLISION (A)
AIS COLLISION (C)
AIS TGT ACT FULL (A)
AIS TGT ACT FULL (C)
AIS TGT DISP FULL (A)
AIS TGT DISP FULL (C)
AZIMUTH
HEADLINE
TRIGGER
VIDEO
0 NEXT
[ALERT OUT1 3/3]
1 BACK
2
KEY
PM COM ERROR
TUNE ERROR
GYRO
LOG(BT)
LOG(WT)
EPFS
UTC
XTE
ARRIVAL
DEPTH
ANCHOR WATCH
Página 3/3
*Mismo contenido que
[ALERT OUT1].
[ALERT]
1 BACK
2 [ALERT OUT1]
3 [ALERT OUT2]*
4 [ALERT OUT3]*
5 [ALERT OUT4]*
6 ALERT DATA OUT
ALR/ALF
7 AIS ALERT I/F
OFF/LEGACY/IF1

3. AJUSTES
3-11
Menú ALERT (principal)
[ALERT OUT 1] - [ALERT OUT 4]: seleccione la alerta de salida para cada número
de alerta externa. Para supervisar los fallos de la unidad cuando se produzcan, si lo
hacen, establezca las salidas de contacto de las alertas consultando la tabla siguien-
te.
Para supervisar los fallos de la unidad procesadora, conecte SYS_FAIL y PWR_FAIL
desde el terminal J613 en la unidad procesadora en el AMS.
[ALERT DATA OUT]: seleccione el formato de salida de las alertas, [ALR] (Estable-
cer estado de alarma) o [ALF] (Sentencia de alerta).
[AIS ALERT I/F]: establezca la interfaz de alerta AIS. [OFF] no produce la alerta AIS.
[LEGACY]: para conectar a FA-100 o conectar a FA-150 donde el modo AIS es LE-
GACY.
[IF1]: Para conectar a FA-150 donde el modo AIS es AlertIF1.
Submenús ALERT OUT
[ALERT OUT TYPE]: seleccione el formato de alerta de salida, [ALERT OUT], [OPE-
RATOR FITNESS] o [ALERT ACK].
[ALERT OUT POLARITY]: seleccione la polaridad de alerta de salida, [NORMAL] o
[INVERT].
Nota: Para la alerta de categoría A, hay dos tipos de operaciones de salida, “A“ y “C“.
Para informar a AMS de las alertas de categoría A mediante la señal de contacto, co-
necte las señales “A“ y “C“.
(A): el sonido de alerta se emite cuando el elemento correspondiente es una alerta sin
confirmar. La salida se detiene cuando el elemento se confirma.
(C): el sonido de alerta se emite cuando el elemento correspondiente se convierte en
una condición de alerta. La salida se detiene cuando la condición de alerta se confir-
ma.
La siguiente tabla muestra el estado operativo de las salidas de alerta según el tipo
de salida.
Unidad Alerta
Unidad transceptora • AZIMUTH
• HEADLINE
• TRIGGER
• VIDEO
Monitor de rendimiento PM COM ERROR
Unidad de control KEY
Tipo de
salida
Estado
Normal
Aparece una
nueva alerta
Se confirma una
alerta existente
Una condición de
alerta existente pasa a
estar no activa
A Off On Off Off
C Off On On Off

3. AJUSTES
3-12
3.7.8 Menú INPUT PORT
Menú INPUT PORT
Seleccione el origen para LOG, GPS, HEADING, WIND, CURRENT, WATER TEMP
y DEPTH.
(Menú) [GPS]: seleccione el origen para el navegador GPS GPS1 y GPS2.[PRIORI-
TIZE GLL], cuando se activa, da prioridad a la sentencia GLL.
Nota: no establezca el mismo puerto para GPS1 y GPS2. Por ejemplo, establezca
GPS1 en el puerto GPS y GPS2 en cualquier otro puerto (ej. LOG).
[LOG]: seleccione el origen de los datos de velocidad.
[HEADING]: seleccione el origen de los datos de rumbo.
[WIND]: seleccione el origen de los datos de viento.
[CURRENT]: seleccione el origen de los datos de corriente (dirección).
[WATER TEMP]: seleccione el origen de los datos de la temperatura del agua.
[DEPTH]: seleccione el origen de los datos de profundidad.
[GPS]
1 BACK
2 GPS1
GPS/LOG/ECDIS/HDG/AMS
3 GPS2
GPS/LOG/ECDIS/HDG/AMS
4 PRIORITIZE GLL
OFF/ON
[INPUT PORT]
1 BACK
2 [GPS]
3 LOG
GPS/LOG/ECDIS/HDG/AMS
4 HEADING
GPS/LOG/ECDIS/HDG/AMS
5 WIND
GPS/LOG/ECDIS/HDG/AMS
6 CURRENT
GPS/LOG/ECDIS/HDG/AMS
7 WATER TEMP
GPS/LOG/ECDIS/HDG/AMS
8 DEPTH
GPS/LOG/ECDIS/HDG/AMS

3. AJUSTES
3-13
3.7.9 Menú OTHERS
[DEMO ECHO]: seleccione el origen del eco de demostración, [EG] (Generador de
eco), [TT-TEST] o [PC]. Seleccione [OFF] para desactivar la característica de eco de
demostración.
[EAV W/O GYRO]: la característica de promedio de eco se puede utilizar sin un com-
pás giroscópico. Seleccione [ON] para utilizar la característica sin un compás giros-
cópico.
[INS]: seleccione el método de comunicación INS, [SERIAL] o [LAN]. Seleccione
[OFF] si no hay conexión INS.
[SUB MONITOR]: no se utiliza. Manténgalo en el ajuste [OFF].
[AIS FUNCTION]: active o desactive la función AIS. (Disponible únicamente con el
tipo no IMO).
[SUB MONITOR]: no se utiliza. Manténgalo en el ajuste [OFF].
[MONITOR TYPE]: para uso futuro. Mantenga el ajuste predeterminado ([1]).
[OTHERS]
1 BACK
2 DEMO ECHO
OFF/EG/TT-TEST/PC
3 EAV W/O GYRO
OFF/ON
4 INS
OFF/SERIAL/LAN
5 SUB MONITOR
OFF/ON
6 AIS FUNCTION
OFF/ON
7 MONITOR TYPE
1/2/3/4/5/6/7/8/9/10
Aparece sin
especificación IMO.

3. AJUSTES
3-14
3.8 Configuración de la unidad de presentación
3.8.1 MU-150HD
Cómo encenderla y apagarla
El equipo externo conectado al puerto DVI (DVI-D1 o DVI-D2) puede encender y apa-
gar la unidad de presentación.
Interruptor deslizante
• ON (encendido) (hacia arri-
ba): permite a la señal digital
procedente de equipos exter-
nos controlar el encendido y
apagado de la unidad de pre-
sentación.
• OFF (apagado) (hacia aba-
jo): configure esta posición
para señales RGB analógicas.
Nota: Apague el interruptor deslizante para conectar equipos a los puertos DVI y
RBG.
Cómo ajustar el brillo desde el equipo externo
Puede configurar el control de brillo en el menú [SYSTEM]. Asimismo, puede compro-
bar el estado de la señal y el número de programa en el menú [SYSTEM].
1. Pulse la tecla MENU para mostrar el menú principal.
2. Pulse la tecla ▼ para seleccionar [SYSTEM]. Aparece el mensaje "Input Signal
Searching. Please Wait." y se mostrará el menú [SYSTEM], como aparece en la
figura de la derecha.
3. Pulse la tecla ▼ o ▼ para seleccionar [AUTO DIMMER].
4. Pulse la tecla ▼ o ▼ para seleccionar [OFF].
5. Pulse la tecla ▼ o ▼ para seleccionar [EXT BRIL CTRL].
6. Pulse la tecla ▼ o ▼ para seleccionar [DVI1] o [DVI2].
7. Pulse la tecla MENU para cerrar el menú.
Hacia arriba: ajuste predeterminado
(Interruptor deslizante ENCENDIDO)
Hacia arriba: ajuste predeterminado
(Interruptor deslizante ENCENDIDO)
Hacia abajo
(Interruptor deslizante APAGADO)
Hacia abajo
(Interruptor deslizante APAGADO)
Estado de la
señal y número
de programa

3. AJUSTES
3-15
Cómo bloquear el funcionamiento
Puede bloquear la unidad de presentación para evitar que funcione. Todas las teclas
(excepto la tecla /BRILL) dejarán de funcionar.
1. Mientras mantiene pulsada la tecla PIP encienda la unidad de presentación. Man-
tenga pulsada la tecla PIP durante más de cinco segundos.
Nota: Cuando el interruptor deslizante esté ON (encendido), encienda el equipo
externo conectado mientras pulsa la tecla PIP de la unidad de presentación.
2. Para cancelar el bloqueo, apague la unidad de presentación y, a continuación,
enciéndala mientras pulsa la tecla PIP.
Mantenga pulsada la tecla PIP durante más de cinco segundos.
3.8.2 MU-190
El menú [INSTALLATION SETTING] aparece solo cuando el equipo se enciende por
primera vez tras la instalación.
* "DVI PWR SYNC" es el interruptor deslizante que se encuentra en la parte inferior
trasera de la unidad de monitor. Consulte el apartado “Interruptor deslizante“ que apa-
rece a continuación.
Interruptor deslizante
Establezca el interruptor deslizante en “ON“ (encendido) (ajuste predeterminado).
Esta configuración enciende o apaga automáticamente la unidad de monitor según la
entrada de la señal DVI. El interruptor de encendido de la unidad de monitor no está
operativo.
Nota: La posición OFF (apagado) proporciona control de la alimentación de la unidad
de monitor con el interruptor de esta.
Equipo
conectado
Unidad
conectada
EXT BRILL
CTRL
SERIAL
BAUDRATE
COLOR
CALIBRATION
KEY
LOCK
DVI PWR
SYNC*
FAR-15x3/
15x8
RPU-024 DVI - OFF ON ON
INSTALLATION SETTING
EXT BRILL CTRL
SERIAL BAUDRATE
COLOR CALIBRATION
KEY LOCK
SAVE AND EXIT
RS-485
4800bps
ON
ON
YES
(OFF/DVI1/DVI2/RS-232C/RS-485/USB)
(4800/9600/19200/38400)
(OFF/ON)
(OFF/ON)
(NO/YES)
Menú
Elemento
de menú
Interruptor deslizante ENCENDIDO (ajuste predeterminado)
䠄ᕤሙฟⲴ䛾≧ែ䠅
Interruptor deslizante
ENCENDIDO (ajuste predeterminado)
Puerto DVI
APAGADO
Puerto RGB

3. AJUSTES
3-16
Cómo abrir el menú INSTALLATION SETTING
Apague la unidad de monitor. Mientras mantiene pulsada la tecla DISP, pulse la tecla
/BRILL para encender la unidad de monitor. Mantenga pulsada la tecla DISP du-
rante más de cinco segundos.
Nota: Cuando el interruptor deslizante "DVI PWR SYNC" esté en ON (encendido), en-
cienda el equipo externo conectado mientras pulsa la tecla DISP para encender la
unidad de monitor.
Cómo ajustar la relación de aspecto de la pantalla
1. Pulse la tecla MENU para mostrar el menú. (El menú principal se cierra automá-
ticamente en 10 segundos si no hay operación).
2. Pulse la tecla ▼ o ▼ para seleccionar [DVI1] o [DVI2]. El ajuste actual (el cursor)
se muestra en naranja. Los elementos de menú disponibles dependen del menú
seleccionado. Los elementos del menú [DVI1] y [DVI2] tienen las mismas opcio-
nes.
3. Pulse la tecla ▼ o ▼ para seleccionar [DISP MODE].
4. Pulse la tecla ▼ o ▼ para seleccionar [NORMAL].
5. Pulse la tecla MENU para cerrar el menú.
Elemento
de menú
RGB DVI1 DVI2 VIDEO OSD SYSTEM
BRIGHTNESS
CONTRAST
H_POSITION
V_POSITION
R_LEVEL
G
_LEVEL
B_LEVEL
TEMPERATURE
B STRETCH
W
STRETCH
DISP MODE
SHARPNESS
128
32
25
20
128
128
128
7000K
OFF
OFF
FULL
1
(1~256)
(1~64)
(1~50)
(1~40)
(1~256)
(1~256)
(1~256)
(5000K~9300K)
(OFF, 1~10)
(OFF, 1~10)
(FULL/NORMAL)
(1~10)
Menú de configuración de DVI
Menú

4-1
4. DATOS DE ENTRADA/SALIDA
4.1 Unidad procesadora
Los datos de entrada y salida que se gestionan en la unidad procesadora se muestran
en la tabla siguiente.
Entrada
* El ciclo de entrada de datos debe ser de más de 40 Hz (barcos de alta velocidad) o
20 Hz (barcos convencionales).
Salida
** La sentencia de salida se puede establecer en el menú [TT DATA OUTPUT] (con-
sulte página 3-10).
Datos Especificación Contenido Observaciones
Señal de rumbo IEC 61162-2*
Señal de velocidad IEC 61162-1 Ed.4
Datos de ayuda a la
navegación
IEC 61162-1 Ed.4 Posición, hora y fe-
cha, dato, curso,
velocidad, viento,
corriente, profundi-
dad, temperatura,
Navtex, etc.
Señal AIS IEC 61162-2
Señal de manipu-
lación de alarma
Señal de cierre Entrada del sistema
de alarma
IEC 61162-1 Ed.4 Entrada del sistema
de alarma
Datos Especificación Sentencia Observaciones
Datos del siste-
ma del radar
IEC 61162-1 Ed.4 RSD, OSD
Datos TT* IEC 61162-1 Ed.4 TTD, TTM, TLB
Señal de alarma IEC 61162-1 Ed.4 Se seleccionan cuatro siste-
mas y contenidos de salida
en el menú [ALERT I/F].
Señal de cierre
Aviso para FAR-1518(-BB)/FAR-1528(-BB)
Estos radares deben estar interconectados a los siguientes tipos de sensores aprobados:
EPFS que cumple con los requisitos de la resolución IMO MSC.112(73).
Compás giroscópico que cumple con los requisitos de la resolución IMO A.424(XI).
SDME que cumple con los requisitos de la resolución IMO MSC.96(72).

4. DATOS DE ENTRADA/SALIDA
4-2
4.2 Sentencias IEC 61162
Sentencia de entrada y prioridad de sentencia
* No utilizar con el radar tipo IMO.
Sentencias de salida
Datos Prioridad de sentencia
Rumbo (verdadero) THS>HDT>HDG*>VHW*
Rumbo (magnético)* HDG>HDM>VHW
Desviación magnética* HDG
Mensaje de blanco AIS, alerta VDM, VDO, ABK, ALR
Hora y fecha ZDA
Posición GNS>GGA>RMC>GLL
Dato DTM
Detección de funcionamiento anómalo de
satélite GNSS
GBS
Curso respecto al fondo (COG) VTG>RMC>VBW
Velocidad respecto al fondo (SOG) (GPS) VTG>RMC
Velocidad respecto al fondo (LOG (BT)) VBW
Velocidad con respecto al agua (STW) VBW>VHW
Alerta ACK, ACN, HBT
Waypoint RMB>BWR>BWC>WPL
Datos de ruta RTE+WPL
Velocidad y ángulo del viento (verdadero) MWV>VWT
Velocidad y ángulo del viento (relativo) MWV>VWR
Profundidad DPT>DBT>DBS>DBK
Temperatura del agua MTW
Corriente CUR, VDR
Datos Sentencia
Mensaje AIS, alerta ABM, BBM, ACK, VSD
Sentencia de alerta ALR, ALC, ALF, ARC, HBT
Estado del operador EVE
Datos del barco propio OSD
Datos del sistema del radar RSD
Datos de blanco TTM, TLB, TTD
Posición L/L del blanco TLL

AP-1
APÉNDICE 1 GUÍA SOBRE CABLES
JIS
Núcleo
Tipo Área Diámetro
En la lista de referencia que aparece a continuación se indican las medidas de los cables JIS que se usan habitualmente
con los productos de Furuno:
TTYCSLA-4
MPYC-4
TPYCY
DPYCY
Diámetro
del cable
DPYC-1.5 1,5 mm
2
1,56 mm 11,7 mm
DPYC-2.5 2,5 mm
2
2,01 mm 12,8 mm
DPYC-4 4.0 mm
2
2,55 mm 13,9 mm
DPYC-6 6.0 mm
2
3,12 mm 15,2 mm
DPYC-10 10.0 mm
2
4,05 mm 17,1 mm
DPYCY-1.5 1,5 mm
2
1,56 mm 13,7 mm
DPYCY-2.5 2,5 mm
2
2,01 mm 14,8 mm
DPYCY-4 4.0 mm
2
2,55 mm 15,9 mm
MPYC-2 1,0 mm
2
1,29 mm 10,0 mm
MPYC-4 1,0 mm
2
1,29 mm 11,2 mm
MPYC-7 1,0 mm
2
1,29 mm 13,2 mm
MPYC-12 1,0 mm
2
1,29 mm 16,8 mm
TPYC-1.5 1,5 mm
2
1,56 mm 12,5 mm
TPYC-2.5 2,5 mm
2
2,01 mm 13,5 mm
TPYC-4 4.0 mm
2
2,55 mm 14,7 mm
TPYCY-1.5 1,5 mm
2
1,56 mm 14,5 mm
TPYCY-2.5 2,5 mm
2
2,01 mm 15,5 mm
TPYCY-4 4.0 mm
2
2,55 mm 16,9 mm
TTYCS-1 0,75 mm
2
1,11 mm 10,1 mm
TTYCS-1T 0,75 mm
2
1,11 mm 10,6 mm
TTYCS-1Q 0,75 mm
2
1,11 mm 11,3 mm
TTYCS-4 0,75 mm
2
1,11 mm 16,3 mm
TTYCSLA-1 0,75 mm
2
1,11 mm 9,4 mm
TTYCSLA-1T 0,75 mm
2
1,11 mm 10,1 mm
TTYCSLA-1Q 0,75 mm
2
1,11 mm 10,8 mm
TTYCSLA-4 0,75 mm
2
1,11 mm 15,7 mm
TTYCY-1 0,75 mm
2
1,11 mm 11,0 mm
TTYCY-1T 0,75 mm
2
1,11 mm 11,7 mm
TTYCY-1Q 0,75 mm
2
1,11 mm 12,6 mm
TTYCY-4 0,75 mm
2
1,11 mm 17,7 mm
TTYCY-4S 0,75 mm
2
1,11 mm 21,1 mm
TTYCY-4SLA 0,75 mm
2
1,11 mm 19,5 mm
TTYCYS-1 0,75 mm
2
1,11 mm 12,1 mm
TTYCYS-4 0,75 mm
2
1,11 mm 18,5 mm
TTYCYSLA-1 0,75 mm
2
1,11 mm 11,2 mm
TTYCYSLA-4 0,75 mm
2
1,11 mm 17,9 mm
EX: TTYCYSLA - 4 MPYC - 4
Tipo de designación
N.º de pares
trenzados
Tipo de designación
N.º de núcleos
1 2 3 4 5 6 1 2 3 4
Los cables citados en el manual normalmente aparecen como Japanese Industrial Standard (JIS). Utilice la siguiente
guía para buscar un cable equivalente para su región.
Los nombres de los cables JIS pueden contener hasta 6 caracteres alfanuméricos seguidos por un guión y un valor
numérico (ejemplo: DPYC-2.5).
Para los tipos de núcleo D y T, la designación numérica indica el área transversal (mm
2
) de los hilos del núcleo
contenidos en el cable.
Para los tipos M y TT, la designación numérica indica el número de hilos del núcleo contenidos en el cable.
1. Tipo de núcleo
D: Línea de alimentación
de doble núcleo
T: Línea de alimentación
de tres núcleos
M: Múltiples núcleos
TT: Cable de comunicaciones
de par trenzado
(1Q=cable cuádruple)
2. Tipo de
aislamiento
P: Caucho
etileno-propileno
3. Tipo de cubierta
Y: PVC (Vinilo)
4. Tipo de armadura
C: Acero
5. Tipo de cubierta
Y: Cubierta de vinilo
anticorrosión
6. Tipo de apantallamiento
S: Todos los núcleos en una cubierta
-S: Núcleos cubiertos
individualmente
SLA: Todos los núcleos en un
apantallamiento, cinta de
plástico con cinta de aluminio
-SLA: Núcleos con
apantallamiento individual,
cinta de plástico con cinta
de aluminio
Núcleo
Tipo Área Diámetro
Diámetro
del cable

AP-2
APÉNDICE 2 INTERFAZ DIGITAL
Interfaz digital
Sentencias de entrada
ABK, ACK, ACN, ALR, BWC, BWR, CUR, DBK, DBS, DBT, DPT, DTM, GBS, GGA, GLL, GNS,
HBT, HDG, HDM, HDT, MTW, MWV, RMB, RMC, RTE, THS, VBW, VDM, VDO, VDR, VHW,
VSD, VTG, VWR, VWT, WPL, ZDA
Sentencias de salida
ABM, ACK, ALC, ALF, ALR, ARC, BBM, EVE, HBT, OSD, RSD, TLB, TLL, TTD, TTM, VSD
Recepción de datos
Los datos se reciben de forma asíncrona en serie de acuerdo con la norma a la que se hace re-
ferencia en IEC 61162-2 o IEC 61162-1 Ed.4.
Se utilizan los siguientes parámetros:
Velocidad de transferencia: 38.400 bps HDT, THS, !AIVDM, !AIVDO, !AIABK, $AIALR. La veloci-
dad de transmisión de todas las demás sentencias es 4.800 bps.
Bits de datos: 8 (D7=0), Paridad: ninguna, Bits de parada: 1
Sentencias de datos
Sentencias de entrada
ABK - Direccionamiento y acuse de recibo binario de radiodifusión UAIS
ACK – Acuse de recibo de alarma
D0 D1 D2 D3 D4 D5 D6 D7
Bits de datos
Bit de
inicio
Bit de
parada
$**ABK,xxxxxxxxx,x,x.x,x,x,*hh<CR><LF>
1 2 3 4 5
1. MMSI of the addressed AIS unit (9 digits) (No use)
2. AIS channel of reception (No use)
3. Message ID (6, 8, 12, 14) (No use)
4. Message sequence number (0 - 9) (No use)
5. Type of acknowledgement (See below)
0 = message (6 or 12) successfully received by the addressed AIS unit
1 = message (6 or 12) was broadcast, but not ACK by addressed AIS unit
2 = message could not be broadcast (quantity of encapsulated data exceeds five slots)
3 = requested broadcast of message (8, 14 or 15) has been successfully completed
4 = late reception of message (7 or 13) ACK that was addressed to this AIS unit (own ship)
and referenced a valid transaction
5 = message has been read and acknowledged on a display unit.
$**ACK,xxx,*hh<CR><LF>
1
1. Local alarm number (identifier) (001 - 999)

APÉNDICE 2 INTERFAZ DIGITAL
AP-3
ACN - Comando de alerta
ALR - Estado de alarma establecido
BWC - Demora y distancia al waypoint - ortodrómica
$**ACN,hhmmss.ss,aaa,x.x,x.x,ca,a*hh<CR><LF>
1 2 3 4 5 6
1. Time (hh=00 - 23, mm=00 - 59, ss.ss=00.00 - 60.99) (No use)
2. Manufacturer mnemonic code (3 digit alphanumeric code), null
3. Alert identifier (10001 - 10999)
4. Alert instance (null)
5. Alert command (A/Q/O/S)
A=ACK from ext. equipment,
Q=Request from ext. equipment
O=Responsibility transfer
S=Silence from ext. equipment
6. Sentence status flag (C)
(C should not be null field. Sentence without C is not a command.)
$**ALR,hhmmss.ss,xxx,A,A,c—c,*hh<CR><LF>
1 2 3 4 5
1. Time of alarm condition change, UTC (No use)
2. Unique alarm number (identifier) at alarm source (001 - 999)
3. Alarm condition (A/V)
A=threshold exceeded V=not exceeded
4. Alarm acknowledge state (A/V)
A=acknowledged V=not acknowledged
5. Alarm description text (alphanumeric characters, max. 32)
$ **BWC,hhmmss.ss,llll.ll, a,IIIII.II,a,yyy.y,T, yyy.y,M,yyy.y,N,c--c,A,*hh<CR><LF>
1 2 3 4 5 6 7 8 9 10 11 12 13
1. UTC of observation (No use)
2. Waypoint latitude (0000.00000 - 9000.00000)
3. N/S (N/S)
4. Waypoint longitude (00000.00000 - 18000.00000)
5. E/W (E/W)
6. Bearing, degrees true (No use)
7. Unit, True (No use)
8. Bearing, degrees (No use)
9. Unit, Magnetic (No use)
10. Distance, nautical miles (No use)
11. Unit, N (No use)
12. Waypoint ID (Max. 15 characters)
13. Mode Indicator (A/D)
A=Autonomous
D=Differential
E=Estimated (dead reckoning) mode
S=Simulator
N=Data not valid

APÉNDICE 2 INTERFAZ DIGITAL
AP-4
BWR - Demora y distancia hasta waypoint- loxodrómica
CUR - Corriente
DBK - Profundidad bajo la quilla
DBS - Profundidad bajo la superficie
$ **BWR,hhmmss.ss,llll.ll,a,IIIII.II,a,yyy.y,T,yyy.y,M,yyy.y,N,c--c,A,*hh<CR><LF>
1 2 3 4 5 6 7 8 9 10 11 12 13
1. UTC of observation No use)
2. Waypoint latitude (0000.00000 - 9000.00000)
3. N/S (N/S)
4. Waypoint longitude (00000.00000 - 18000.00000)
5. E/W (E/W)
6. Bearing, degrees true (0.00 - 360.00) (No use)
7. Unit, True (No use)
8. Bearing, degrees magnetic (No use)
9. Unit (No use)
10. Distance, nautical miles (No use)
11. Unit (No use)
12. Waypoint ID (Max. 15 characters)
13. Mode Indicator (A/D)
A=Autonomous
D=Differential
E=Estimated (dead reckoning) mode
S=Simulator
N=Data not valid
$**CUR,A,x,x.x,x.x,x.x,a,x.x,x.x,x.x,a,a,*hh<CR><LF>
1 2 3 4 5 6 7 8 9 1011
1. Validity of data (A)
A=valid, V=not valid
2. Data set number (No use)
3. Layer number (1 - 3)
4. Current depth in meters (No use)
5. Current direction in degrees (0.00 - 360.00)
6. Direction reference in use (No use)
7. Current speed in knots (0.00 - 99.94)
8. Reference layer depth in meters (No use)
9. Heading (No use)
10. Heading reference in use (No use)
11. Speed reference (No use)
$**DBK,x.x,f,x.x,M,x.x,F<CR><LF>
1 2 3 4 5 6
1. Water depth (0.00 - 99999.994)
2. f = feet (fixed)
3. Water depth (0.00 - 99999.994)
4. M = Meters (fixed)
5. Water depth (0.00 - 99999.994)
6. F = Fathom (fixed)
$**DBS,x.x,f,x.x,M,x.x,F<CR><LF>
1 2 3 4 5 6
1. Water depth (0.00 - 99999.994)
2. f = feet (fixed)
3. Water depth (0.00 - 99999.994)
4. M = Meters (fixed)
5. Water depth (0.00 - 99999.994)
6. F = Fathom (fixed)

APÉNDICE 2 INTERFAZ DIGITAL
AP-5
DBT - Profundidad bajo el transductor
DPT - Profundidad
DTM - Dato de referencia
GBS - Detección de fallo de satélite GNSS
$**DBT,xxxx.x,f,xxxx.x,M,xxxx.x,F<CR><LF>
1 2 3 4 5 6
1. Water depth (0.00 - 99999.994)
2. f = feet (fixed)
3. Water depth (0.00 - 99999.994)
4. M = Meters (fixed)
5. Water depth (0.00 - 99999.994)
6. F = Fathom (fixed)
$**DPT,x.x,x.x,x.x,*hh<CR><LF>
1 2 3
1. Water depth relative to the transducer, meters (0.00-99999.994)
2. Offset from transducer, meters
(IMO: -99.994 - 99.994,
Other than IMO: -99.994 - 99.994, null)
3. Minimum range scale in use (No use)
$**DTM,ccc,a,x.x,a,x.x,a,x.x,ccc,*hh<CR><LF>
1 2 3 4 5 6 7 8
1. Local datum (W84/W72/S85/P90)
W84=WGS84 W72=WGS72 S85=SGS85 P90=PE90
2. Local datum subdivision code (No use)
3. Lat offset, min (No use)
4. N/S (No use)
5. Lon offset, min (No use)
6. E/W (No use)
7. Altitude offset, meters (No use)
8. Reference datum (No use)
$**GBS, hhmmss.ss, x.x, x.x, x.x, xx, x.x, x.x, x.x,hh*hh<CR><LF>
1 2 3 4 5 6 7 8 910
1. UTC time of GGA or GNS fix associated with this sentence (No use)
2. Expected error in latitude (0.0 - 999.9)
3. Expected error in longitude (0.0 - 999.9)
4. Expected error in altitude (No use)
5. ID number of most likely failed satellite (No use)
6. Probability of missed detection for most likely failed satellite (No use)
7. Estimate of bias in meters on most likely failed satellite (No use)
8. Standard deviation of bias estimate (No use)
9. GNSS Signal ID (No use)
10. GNSS System ID (No use)

APÉNDICE 2 INTERFAZ DIGITAL
AP-6
GGA - Datos de fijación del sistema de posicionamiento global
GLL - Posición geográfica, latitud/longitud
GNS - Datos fijos del GNSS
$**GGA,hhmmss.ss,llll.lll,a,yyyyy.yyy,a,x,xx,x.x,x.x,M,x.x,M,x.x,xxxx,*hh<CR><LF>
1 2 3 4 5 6 7 8 9 10 11 12 13 14
1. UTC of position (no use)
2. Latitude (0000.00000 - 9000.00000)
3. N/S (N/S)
4. Longitude (0000.00000 - 18000.00000)
5. E/W (E/W)
6. GPS quality indicator (1 - 8)
0 = fix not available or invalid
1 = GPS SPS mode
2 = differential GPS, SPS mode
3 = GPS PPS mode
4 = Real Time Kinematic. Satellite system used in RTK mode with fixed integers
5 = Float RTK. Satellite system used in RTK mode with floating solution
6 = Estimated (dead reckoning) mode
7 = Manual input mode
8 = Simulator mode
7. Number of satellite in use (No use)
8. Horizontal dilution of precision (0.0 - 999.9)
9. Antenna altitude above/below mean sea level (No use)
10. Unit, m (No use)
11. Geoidal separation (No use)
12. Unit, m (No use)
13. Age of differential GPS data (0 - 999, null)
14. Differential reference station ID (No use)
$**GLL,llll.lll,a,yyyyy.yyy,a,hhmmss.ss,A,a,*hh<CR><LF>
1 2 3 4 5 6 7
1. Latitude (0000.00000 - 9000.00000)
2. N/S (N/S)
3. Longitude (0000.00000 - 18000.00000)
4. E/W (E/W)
5. UTC of position (No use)
6. Status (A)
A=data valid V=data invalid
7. Mode indicator (A/D/E/M/S)
A=Autonomous D=Differential E=Estimated M=Manual input S=Simulator N=Data not valid
$**GNS,hhmmss.ss,llll.lll,a,IIIII.III,a,c--c,xx,x.x,x.x,x.x,x.x,x.x,a*hh<CR><LF>
1 2 3 4 5 6 7 8 9 10 11 12 13
1. UTC of position (No use)
2. Latitude (0000.00000 - 9000.00000)
3. N/S (N/S)
4. Longitude (0000.00000 - 18000.00000)
5. E/W (E/W)
6. Mode indicator (A/D/P/R/F/E/M/S)
N=No fix A=Autonomous D=Differential P=Precise R=Real Time Kinematic
F=Float RTK E=Estimated Mode M=Manual Input Mode S=Simulator Mode
7. Total number of satellites in use (No use)
8. HDOP (0.00 - 999.99)
9. Antenna altitude, meters (No use)
10. Geoidal separation, meters (No use)
11. Age of differential data (0 - 999)
12. Differential reference station ID (No use)
13. Navigational status indicator(S/C/U/V, null)
S=Safe, C=Caution, U=Unsafe, V=Not valid

APÉNDICE 2 INTERFAZ DIGITAL
AP-7
HBT - Sentencia de supervisión de latido
HDG - Rumbo, desviación y variación
HDM - Rumbo, magnético
HDT - Rumbo, verdadero
MTW - Temperatura del agua
MWV - Velocidad y ángulo del viento
$**HBT,x.x,A,x*hh<CR><LF>
1 2 3
1. Configured repeat interval (1 - 999, null)
2. Equipment status (No use)
3. Sequential sequence identifier (0 - 9)
$**HDG,x.x,x.x,a,x.x,a*hh<CR><LF>
1 2 3 4 5
1. Magnetic sensor heading, degrees (0.00 - 360.00)
2. Magnetic deviation, degrees (0.00 - 180.00)
3. E/W
4. Magnetic variation, degrees (0.00 - 180.00)
5. E/W
*No use for
Type-IMO
$ ** HDM, x.x, M *hh <CR><LF>
1 2
1. Heading, degrees (0.00 - 360.00)
2. Magnetic (M)
*No use for
Type-IMO
$**HDT, xxx.x,T*hh<CR><LF>
1 2
1. Heading, degrees (0.00 - 360.00)
2. True (T)
$**MTW,x.x,C<CR><LF>
1 2
1. Water temperature (-9.994 - 99.994)
2. C=degrees C (fixed)
$**MWV,x.x,a,x.x,a,A*hh<CR><LF>
1 2 3 4 5
1. Wind angle, degrees (0.00 - 360.00)
2. Reference (R/T)
3. Wind speed (0.00 - 9999.94)
4. Wind speed units (K/M/N/S)
K=km/h M=m/s N=Knots S=Statute mile
5. Status (A)

APÉNDICE 2 INTERFAZ DIGITAL
AP-8
RMB - Información de navegación específica mínima recomendada
RMC - Datos GPS/TRANSIT específicos mínimos recomendados
$**RMB,A,x.x,a,CCCC,CCCC,IIII.II,a,yyyyy.yy,a,x.x,x.x,x.x,A,a*hh <CR><LF>
1 2 3 4 5 6 7 8 9 10 11 12 1314
1. Data status (A)
A=Data valid, V=Navigation receiver warning
2. Cross track error (NM) (No use)
3. Direction to steer (L/R) (No use)
4. Origin waypoint ID (No use)
5. Destination waypoint ID (Max. 15 characters)
6. Destination waypoint latitude (0000.00000 - 9000.00000)
7. N/S
8. Destination waypoint longitude (0000.00000 - 18000.00000)
9. E/W
10. Range to destination, nautical miles (No use)
11. Bearing to destination, degrees true (No use)
12. Destination closing velocity, knots (No use)
13. Arrival status (No use)
14.
Mode indicator (A/D)
A=Autonomous mode; D=Differential mode; E=Estimated (dead reckoning) mode;
M=Manual input mode; S=Simulator mode; N=Data not valid
$**RMC,hhmmss.ss,A,llll.ll,a,yyyyy.yy,a,x.x,x.x,xxxxxx,x.x,a,a,a*hh<CR><LF>
1 2 3 4 5 6 7 8 9 10
111213
1. UTC of position fix (No use)
2. Status (A)
A=data valid, V=navigation receiver warning
3. Latitude (0000.00000 - 9000.00000)
4. N/S (N/S)
5. Longitude (00000.00000 - 18000.00000)
6. E/W (E/W)
7. Speed over ground, knots (0.00 - 9999.94)
8. Course over ground, degrees true (0.00 - 360.0)
9. Date (No use)
10. Magnetic variation, degrees (No use)
11. E/W (No use)
12. Mode indicator (A/D/E/M/S/F/P/R)
A=Autonomous. Satellite system used in non-differential mode in position fix;
D=Differential. Satellite system used in differential mode in position fix;
E=Estimated (dead reckoning) mode;
F=Float RTK. Satellite system used in real time kinematic mode with floating integers;
M=Manual input mode;
N=No fix. Satellite system not used in position fix, or fix not valid;
P=Precise. Satellite system used in precision mode. Precision mode is defined as: no
deliberate degradation (such as selective availability) and higher resolution code (P-code) is
used to compute position fix. P is also used for satellite system used in multi-frequency,
SBAS or Precise Point Positioning (PPP) mode;
R=Real time kinematic. Satellite system used in RTK mode with fixed integers;
S=Simulator mode
13. Navigational status indication (S/C/U/V, null)
S=Safe, C=Caution, U=Unsafe, V=Not valid

APÉNDICE 2 INTERFAZ DIGITAL
AP-9
RTE - Rutas
THS - Rumbo y estado verdaderos
VBW - Velocidad dual respecto al fondo/agua
VDM - Mensaje de enlace de datos UAIS VHF
VDO - Informe del enlace de datos VHFG del barco propio UAIS
$**RTE,x.x,x.x,a,c--c,c--c,...
,
c--c*hh <CR><LF>
1 2 3 4 5 ...
6
1. Total number of sentences being transmitted (1 - 500, null)
2. Sentence number (1 - 500, null)
3. Sentence mode (C/W)
C=Complete route, all waypoints W=Working route, first listed
4. Route identifier (alphabet or null)
5. Waypoint identifier (alphabet or null)
6. Waypoint “n” identifier (alphabet or null)
$**THS,x.x,a*hh<CR><LF>
1 2
1. Heading, degrees True (0.00 to 360.00)
2. Mode indicator(A/E)
A=Autonomous; E=Estimated; M=Manual; S=Simulator; V=Data not valid
$**VBW,x.x,x.x,a,x.x,x.x,a,x.x,a,x.x,a,*hh<CR><LF>
1 2 3 4 5 6 7 8 9 10
1. Longitudinal water speed, knots (-9999.994 - 9999.994)
2. Transverse water speed, knots (-9999.994 - 9999.994, null)
3. Status: water speed, A=data valid V=data invalid (A)
4. Longitudinal ground speed, knots (-9999.994 - 9999.994)
5. Transverse ground speed, knots (-9999.994 - 9999.994, null)
6. Status: ground speed, A=data valid V=data invalid (A)
7. Stern transverse water speed, knots (No use)
8. Status: stern water speed, A=data valid V=data invalid (No use)
9. Stern transverse ground speed, knots (No use)
10. Status: stern ground speed, A=data valid V=data invalid (No use)
!VDM,x,x,x,a,s--s,x,*hh<CR><LF>
1 2 3 4 5 6
1. Total number of sentences needed to transfer the message (1 - 9)
2. Sentence number (1 - 9)
3. Sequential message identifier (0 - 9, null)
4. AIS channel number (A/B, null)
5. Encapsulated ITU-R M.1371 radio message (1 - 63 bytes)
6. Number of fill-bits (0 - 5)
!VDO,x,x,x,a,s--s,x,*hh<CR><LF>
1 2 3 4 5 6
1. Total number of sentences needed to transfer the message (1 - 9)
2. Sentence number (1 - 9)
3. Sequential message identifier (0 - 9, null)
4. AIS channel Number (A/B, null)
5. Encapsulated ITU-R M.1371 radio message (1 - 63 bytes)
6. Number of fill-bits (0 - 5)

APÉNDICE 2 INTERFAZ DIGITAL
AP-10
VDR - Ajuste y deriva
VHW - Velocidad y rumbo respecto al agua
VSD - Datos estáticos de viaje UAIS
VTG - Velocidad y curso respecto al fondo
$**VDR,x.x,T,x.x,M,x.x,N,*hh <CR><LF>
1 2 3 4 5 6
1. Direction, degrees (0.00 - 360.00, null)
2. T=True (fixed)
3. Direction, degrees Magnetic (No use)
4. M=Magnetic (No use)
5. Current speed (0 - 99.94)
6. N=Knots (fixed)
$**VHW,x.x,T,x.x,M,x.x,N,x.x,K,*hh <CR><LF>
1 2 3 4 5 6 7 8
1. Heading, degrees (0.00 - 360.00)
2. T=True (fixed)
3. Heading, degrees (0.00 - 360.00)
4. M=Magnetic (fixed)
5. Speed, knots (0.00 - 999.94)
6. N=Knots (fixed)
7. Speed, knots (0.00 - 999.94)
8. K=km/hr (fixed)
$--VSD,x.x,x.x,x.x,c--c,hhmmss.ss,xx,xx,x.x,x.x*hh<CR><LF>
1 2 3 4 5 6 7 8 9
1. Type of ship and cargo category (No use)
2. Maximum present static draught (No use)
3. Persons on-board (0 - 8191, null)
4. Destination (No use)
5. Estimated UTC of arrival at destination (No use)
6. Estimated day of arrival at destination (No use)
7. Estimated month of arrival at destination (No use)
8. Navigational status (No use)
9. Regional application flags (No use)
$**VTG,x.x,T,x.x,M,x.x,N,x.x,K,a,*hh <CR><LF>
1 2 3 4 5 6 7 8 9
1. Course over ground, degrees (0.00 - 360.00)
2. T=True (fixed)
3. Course over ground, degrees (No use)
4. M=Magnetic (No use)
5. Speed over ground, knots (0.00 - 9999.94)
6. N=Knots (fixed)
7. Speed over ground (0.00 - 9999.94)
8. K=km/h (fixed)
9. Mode indicator (A/D/E/M/P/S)
A=Autonomous mode;
D=Differential mode;
E=Estimated (dead reckoning) mode;
M=Manual input mode;
P=Precise. Satellite system used in precision mode. Precision mode is defined as: no
deliberate degradation (such as selective availability) and higher resolution code (P-code)
is used to compute position fix. P is also used for satellite system used in multi-frequency,
SBAS or Precise Point Positioning (PPP) mode;
S=Simulator mode;
N=Data not valid

APÉNDICE 2 INTERFAZ DIGITAL
AP-11
VWR - Demora y velocidad relativas del viento
VWT - Ángulo y velocidad del viento verdaderos
WPL - Situación del waypoint
ZDA - Hora y fecha
Sentencias de salida
Para ACK, consulte las sentencias de entrada.
$**VWR,x.x,a,x.x,N,x.x,M,x.x,K<CR><LF>
1 2 3 4 5 6 7 8
1. Measured wind angle relative to the vessel, degrees (0.00 to 180.00)
2. Left/Right of vessel heading (L/R)
L=Left semicircle, R=Right semicircle
3. Velocity, knots (0.00 - 999.94)
4. N=Knots (fixed)
5. Velocity (0.00 - 999.94)
6. M=m/s (fixed)
7. Velocity, km/h(0.00 - 999.94)
8. K=km/h (fixed)
$**VWT,xxx,a,xx.x,N,xx.x,M,xxx.x,K<CR><LF>
1 2 3 4 5 6 7 8
1. Measured wind angle relative to the vessel, degrees (0.00 - 180.00)
2. Left/Right of vessel heading (L/R)
L=Left semicircle, R=Right semicircle
3. Calculated wind speed kn (0.00 - 999.94)
4. N=Knots (fixed)
5. Wind speed m/s (0.00 - 999.94)
6. M=m/s (fixed)
7. Velocity, km/h (0.00 - 999.94)
8. K=km/h (fixed)
$**WPL,llll.ll,a,yyyyy.yy,a,c--c*hh<CR><LF>
1 2 3 4 5
1. Waypoint latitude (0000.00000 - 9000.00000)
2. N/S (N/S)
3. Waypoint longitude (00000.00000 - 18000.00000)
4. E/W (E/W)
5. Waypoint identifier (alphanumeric characters)
$**ZDA,hhmmss,xx,xx,xxxx,xx,xx<CR><LF>
1 2 3 4 5 6
1. UTC (000000.00 - 2400001.00)
2. Day (01 - 31)
3. Month (01 -12)
4. Year (0000-9999)
5. Local zone, hours (No use)
6. Loca zone, minutes (No use)

APÉNDICE 2 INTERFAZ DIGITAL
AP-12
ABM - Direccionamiento binario y mensaje relativo a la seguridad AIS
ALC - Lista de alerta cíclica
ALF - Sentencia de alerta
!**ABM,x,x,x,xxxxxxxxx,x,xx,s--s,x,*hh<CR><LF>
1 2 3 4 5 6 7 8
1. Total number of sentences needed to transfer the message (1 - 9)
2. Sentence number (1 - 9)
3. Sequential message identifier (0 - 3)
4. The MMSI of destination AIS unit for the ITU-R M.1371 message (9 digits / null)
5. AIS channel for broadcast of the radio message (0 - 3 / null)
6. VDL message number (6 / 12 / null), see ITU-R M.1371
7. Encapsulated data (1 - 63 bytes)
8. Number of fill-bits (0 - 5)
$**ALC,xx,xx,xx,xx, aaa,x.x,x.x,x.x,’’’’’’’’’,*hh<CR><LF>
1 2 3 4 5 6 7 8 9
1. Total number of sentences this message (01 - 16)
2. Sentence number (01 - 16)
3. Sequential message identifier (00 - 99)
4. Number of alert entries (0 - 3)
5. Manufacturer mnemonic code (FEC, null)
6. Alert identifier (1 - 999 or 10001 - 10999)
7. Alert instance (null)
8. Revision counter (1 - 99)
9. Additional alert entries (see Note)
Note: Alert entry 0 - n: Each alert entry consists of
- Manufacturer Identifier (see ALF Manufactuer
- Alert Identifier (see ALF Alert identifier)
- Alert instance (see ALF instance)
- Revision counter (see ALF revision counter)
Each entry identifies a certain alert with a certain state.
It is not allowed that an alert entry is split between two ALC sentences.
Alert entry 1
See Note
$**ALF,x,x,x,hhmmss.ss,a,a,a,aaa,x.x,x.x,x.x,x,c--c,*hh<CR><LF>
1 2 3 4 5 6 7 8 9 10 11 12 13
1. Total number of ALF sentences this message (1, 2)
2. Sentence number (1, 2)
3. Sequential message identifier (0 - 9)
4. Time of last change (000000.00 - 240001.00 / null)
null when #2 is 2
5. Alert category (A/ B/null)
A=Alert category A, B=Alert category B, null when #2 is 2
6. Alert priority (A/W/C/null)
A=Alarm, W=Warning, C=Caution, null when #2 is 2
7. Alert state (A/S/O/U/V/N/null)
A=Acknowledged
S=Silence
O=Active-responsiblity transferred
U=Rectified-unacknowledged
V=Not acknowledged
N=Normal state
null when #2 is 2
8. Manufacturer mnemonic code (FEC/null)
9. Alert identifier (1 - 999 or 10001 - 10999)
10. Alert instance (null)
11. Revision counter (1 - 99)
12. Escalation counter (0 - 9)
13. Alert text (max. 16 characters)

APÉNDICE 2 INTERFAZ DIGITAL
AP-13
ALR - Estado de alarma establecido
ARC - Comando de alerta rechazado
BBM - Mensaje binario de radiodifusión UAIS
EVE - Mensaje de evento general
Nota: Hay salida de la sentencia EVE después de haber detectado la entrada desde la bola de
control o el teclado.
HBT - Sentencia de supervisión de latido
$**ALR,hhmmss.ss,xxx,A,A,c—c,*hh<CR><LF>
1 2 3 4 5
1. Time of alarm condition change, UTC (000000.00 - 240001.00)
2. Unique alarm number (identifier) at alarm source (001 - 999 / null)
3. Alarm condition (A/V)
A=threshold exceeded V=not exceeded
4. Alarm acknowledge state (A/V)
A=acknowledged V=not acknowledged
5. Alarm description text (alphanumeric characters, max. 32)
$**ARC,hhmmss.ss,aaa,x.x,x.x,c*hh<CR><LF>
1 2 3 4 5
1. Release time of the alert command refused (000000.00 - 240001.00, null)
2. Used for proprietary alerts, defined by the manufacturer (FEC)
3. The alert identifier (10001 - 10999)
4. The alert instance (null)
5. Refused alert command (A/O)
A=acknowledge, O=responsibility transfer
!**BBM,x,x,x,x,xx,s--s,x,*hh<CR><LF>
1 2 3 4 5 6 7
1. Total number of sentences needed to transfer the message (1 - 9)
2. Sentence number (1 - 9)
3. Sequential message identifier (0 - 9)
4. AIS channel for broadcast of the radio message (0 - 3/null)
5. VDL message number (8/14/null)
6. Encapsulated data (1 - 63 bytes)
7. Number of fill-bits (0 - 5)
$ **EVE,hhmmss.ss,c--c,c--c*hh <CR><LF>
1 2 3
1. Event time (000000.00 - 240001.00, null)
2. Tag code used for identification of source of event (six alphanumeric characters, two
English characters, four digits)
3. Event description (OPERATION)
$**HBT,x.x,A,x*hh<CR><LF>
1 2 3
1. Configured repeat interval (60.0)
2. Equipment status (A)
A=Normal
3. Sequential sequence identifier (0 - 9)

APÉNDICE 2 INTERFAZ DIGITAL
AP-14
OSD - Datos del barco propio
RSD - Datos del radar del barco
TLB - Etiqueta de blanco
$**OSD,x.x,A,x.x,a,x.x,a,x.x,x,x.x,a*hh<CR><LF>
1 2 3 4 5 6 7 8 9
1. Heading, degrees true (0.0 - 359.9, null)
2. Heading status (A/V)
A=data valid V=data invalid
3. Vessel course, degrees true (0.0 - 359.9)
4. Course reference (B/M/W/R/P, null)
B=Bottom tracking log
M=Manually entered
W=Water referenced
R=Radar tracking (of fixed target)
P=Positioning system ground reference
5. Vessel speed (0.0 - 99.9)
6. Speed reference (B/M/W/R/P, null)
7. Vessel set, degrees true, manually entered(0.0 - 359.9, null)
8. Vessel drift (speed), manually entered (0.0 – 19.9, null)
9. Speed units (K/N/S, null)
K=km/h N=Knots S=Statute mile
$**RSD,
x.x,x.x,x.x,x.x,x.x,x.x,x.x,x.x,x.x,x.x,x.x,a,aH
*hh <CR><LF>
1 2 3 4 5 6 7 8 9 10 11
12 13
1. Origin 1 range, from own ship (0.000 - 9999, null) (see note 2)
2. Origin 1 bearing, degrees from 0 (0.0 - 359.9) (see note 2)
3. Variable range marker 1(VRM1), range (0.000 – 999.9, null)
4. Bearing line 1(EBL1), degrees from 0 (0.0 - 359.9, null)
5. Origin 2 range (0.000 - 9999, null) (see note 2)
6. Origin 2 bearing (0.0 - 359.9)(see note 2)
7. VRM2,.9 range (0.000 - 999.9, null)
8. EBL2, degrees (0.0 - 359.9, null)
9. Cursor range, from own ship (0.000 - 999.9)
10. Cursor bearing, degrees clockwise from 0 (0.0 - 359.9)
11. Range scale in use (0.0625 - 120)
12. Range units (K/N/S)
K=km/h N=Knots S=Statute mile
13. Display rotation (C/H/N, null)(see note 1)
NOTES
1 Display rotation:
C=Course-up, course-over-ground up, degrees true
H=Head-up, ship's heading(center-line) 0 up
N=North-up, true north is 0 up
null=Stern-up
2 Origin 1 and origin 2 are located at the stated range and bearing from own ship and provide for two
independent sets of variable range markers (VRM) and electronic bearing lines (EBL) originating
away from own ship position.
$**TLB,x.x,c--c,x.x,c--c,…,x.x,c--c*hh<CR><LF>
1 2 3 3
1. Target number “n” reported by the device (1 - 1023)
2. Label assigned to target “n” (TT=000 - 999, AIS=000000000 - 999999999)
3. Additional label pairs

APÉNDICE 2 INTERFAZ DIGITAL
AP-15
TLL - Latitud y longitud del blanco
TTD - Datos del blanco derrotado
TTM - Mensaje de blanco con seguimiento
$**TLL,xx,llll.ll,a,yyyyy.yy,a,c--c,hhmmss.ss,a,a*hh<CR><LF>
1 2 3 4 5 6 7 8 9
1. Target number (Fixed at null)
2. Target Latitude (0000.0000 - 9000.0000)
3. Target N/S (N/S)
4. Target Longitude (00000.0000 - 18000.0000)
5. Target E/W (E/W)
6. Target name (Fixed at null)
7. UTC of data (000000.00 - 235959.99)
8. Target status (Fixed at null)
9. Reference target (Fixed at null)
!**TTD,hh,hh,x,s--s,x*hh<CR><LF>
1 2 3 4 5
1. Total hex number of sentences need to transfer the message (1 - FF)
2. Hex sentence number (1 - FF)
3. Sequential message identifier (0 - 9)
4. Encapsulated trancked target data (6 bit binary-converted data)
5. Number of fill bits (0 - 5)
$**TTM,xx,x.x,x.x,a,x.x,x.x,a,x.x,x.x,a,c--c,a,a,hhmmss.ss,a*hh<CR><LF>
1 2 3 4 5 6 7 8 9 10 11
12 13
14 15
1. Target number (00 - 99)
2. Target distance from own ship (0.000 - 99.999)
3. Bearing from own ship,degrees (0.0 - 359.9)
4. True or Relative (T)
5. Target speed (0.00 - 999.99, null)
6. Target course, degrees (0.0 - 359.9, null)
7. True or Relative output (T/R)
8. Distance of closet point of approach (0.00 - 99.99, null)
9. Time to CPA, min., "-" increasing (-99.99 - 99.99, null)
10. Speed/distance units (N)
N=nm
11. Target name (null)
12. Target status (L/Q/T)
L=Lost Q=Acquiring T=Tracking
13. Reference target (R/null)
14. UTC of data (null)
15. Type of acquisition (A/M)
A=Automatic M=Manual

APÉNDICE 2 INTERFAZ DIGITAL
AP-16
VSD - Datos estáticos de viaje UAIS
$--VSD,x.x,x.x,x.x,c--c,hhmmss.ss,xx,xx,x.x,x.x*hh<CR><LF>
1 2 3 4 5 6 7 8 9
1. Type of ship and cargo category (null)
2. Maximum present static draught (0 - 25.5, null)
3. Persons on-board (0 - 8191, null)
4. Destination (Alphanumeric character, null)
5. Estimated UTC of arrival at destination (000000.00 - 246000.00*, null)
6. Estimated day of arrival at destination (00 - 31) (UTC)
7. Estimated month of arrival at destination (00 - 12) (UTC)
8. Navigational status (0 - 15)
0=Under way using engine
1=At anchor
2=Not under command
3=Restricted maneuverability
4=Constrained by her draught
5=Moored
6=Aground
7=Engaged in Fishing
8=Under way sailing
9=HSC
10=WIG
11=Power-driven vessel towing astern
12=Power-driven vessel pushing ahead or towing alongside
13=Reserved for future use
14=AIS-SART (active), MOB-AIS, EPIRB-AIS
15=Undefined = default (also used by AIS-SART, MOB-AIS and
EPIRB AIS under test)
9. Regional application flags (null)
* 246000.00 when ETA is not set.

APÉNDICE 2 INTERFAZ DIGITAL
AP-17
Interfaz serie
Entrada/salida de IEC 61162-2
Entrada de IEC 61162-1
Salida de IEC 61162-1
TD-A
TD-B
COMÚN (ISOGND)
RD-A
RD-B
ADM2587E
110 ohmios*
* Establecido con puente.
Abrir/cerrar cambiables.
RD-H
RD-C
PC400
390 ohmios 100 ohmios
TD-A
TD-B
SN65HVD30

㧼
㧼㧭㧯㧷㧵㧺㧳ޓ㧸㧵㧿㨀
)6:
45$#45$#45$#45$#45$
#45$#
0#/'
176.+0'
&'5%4+26+10%1&'ͳ
36;
࡙࠾࠶࠻ 70+6
ⓨਛ✢ᧄㇱ
5%#00'470+6
45$##
ⓨਛ✢ㇱᎿ᧚ #06'00#70+6+056#..#6+10/#6'4+#.5
ⓨਛ✢ㇱᎿ᧚
+056#..#6+10/#6'4+#.5
%2
䍘㪄䍢䍼⇟ภᧃየ䈱㪲㪁㪁㪴䈲䇮ㆬᛯຠ䈱ઍ䍘䍎䍢䍼䉕䈚䉁䈜䇯
㪚㪦㪛㪜㩷㪥㪬㪤㪙㪜㪩㩷㪜㪥㪛㪠㪥㪞㩷㪮㪠㪫㪟㩷㩹㪁㪁㩹㩷㪠㪥㪛㪠㪚㪘㪫㪜㪪㩷㪫㪟㪜㩷㪚㪦㪛㪜㩷㪥㪬㪤㪙㪜㪩㩷㪦㪝㩷㪩㪜㪧㪩㪜㪪㪜㪥㪫㪘㪫㪠㪭㪜㩷㪤㪘㪫㪜㪩㪠㪘㪣㪅
䋨⇛࿑䈱ኸᴺ䈲䇮ෳ⠨୯䈪䈜䇯㩷㩷㪛㪠㪤㪜㪥㪪㪠㪦㪥㪪㩷㪠㪥㩷㪛㪩㪘㪮㪠㪥㪞㩷㪝㪦㪩㩷㪩㪜㪝㪜㪩㪜㪥㪚㪜㩷㪦㪥㪣㪰㪅䋩
ဳᑼ㪆䍘䍎䍢䍼⇟ภ䈏䋲Ბ䈱႐ว䇮ਅᲑ䉋䉍Ბ䈮ઍ䉒䉎ㆊᷰᦼຠ䈪䈅䉍䇮䈬䈤䉌䈎䈏䈦䈩䈇䉁䈜䇯䇭䈭䈍䇮ຠ⾰䈲ᄌ䉒䉍䉁䈞䉖䇯
㪫㪮㪦㩷㪫㪰㪧㪜㪪㩷㪘㪥㪛㩷㪚㪦㪛㪜㪪㩷㪤㪘㪰㩷㪙㪜㩷㪣㪠㪪㪫㪜㪛㩷㪝㪦㪩㩷㪘㪥㩷㪠㪫㪜㪤㪅㩷㩷㪫㪟㪜㩷㪣㪦㪮㪜㪩㩷㪧㪩㪦㪛㪬㪚㪫㩷㪤㪘㪰㩷㪙㪜㩷㪪㪟㪠㪧㪧㪜㪛㩷㪠㪥㩷㪧㪣㪘㪚㪜㩷㪦㪝㩷㪫㪟㪜㩷㪬㪧㪧㪜㪩㩷
㪧㪩㪦㪛㪬㪚㪫㪅㩷㪨㪬㪘㪣㪠㪫㪰㩷㪠㪪㩷㪫㪟㪜㩷㪪㪘㪤㪜㪅
%<$
A
-1
㹎㸿㹁㹉㹇㹌㹅ࠉ㹊㹇㹑㹒
+4;
56%,0256%,0256%+.56%+.
1$0(
287/,1(
'(6&5,37,21&2'(θ
47<
ࣘࢽࢵࢺ
81,7
✵୰⥺ᮏయ㒊
6&$11(581,7
56%
ணഛရ
63$5(3$576
✵୰⥺ணഛရ
63$5(3$576
63
ᕤᮦᩱ
,167$//$7,210$7(5,$/6
ᕤᮦᩱ
,167$//$7,210$7(5,$/6
&3
䡶㻙䢀䢚␒ྕᮎᑿ䛾㼇㻖㻖㼉䛿䚸㑅ᢥရ䛾௦⾲䡶䡬䢀䢚䜢⾲䛧䜎䛩䚹
㻯㻻㻰㻱㻌㻺㼁㻹㻮㻱㻾㻌㻱㻺㻰㻵㻺㻳㻌㼃㻵㼀㻴㻌㻎㻖㻖㻎㻌㻵㻺㻰㻵㻯㻭㼀㻱㻿㻌㼀㻴㻱㻌㻯㻻㻰㻱㻌㻺㼁㻹㻮㻱㻾㻌㻻㻲㻌㻾㻱㻼㻾㻱㻿㻱㻺㼀㻭㼀㻵㼂㻱㻌㻹㻭㼀㻱㻾㻵㻭㻸㻚
䠄␎ᅗ䛾ᑍἲ䛿䚸ཧ⪃್䛷䛩䚹㻌㻌㻰㻵㻹㻱㻺㻿㻵㻻㻺㻿㻌㻵㻺㻌㻰㻾㻭㼃㻵㻺㻳㻌㻲㻻㻾㻌㻾㻱㻲㻱㻾㻱㻺㻯㻱㻌㻻㻺㻸㼅㻚䠅
&=$
A
-2

㹎㸿㹁㹉㹇㹌㹅ࠉ㹊㹇㹑㹒
+4;
5&53-+.5&53(+.'&
1$0(
287/,1(
'(6&5,37,21&2'(θ
47<
ࣘࢽࢵࢺ
81,7
ไᚚ㒊
352&(662581,7
538
᧯స㒊
&21752/81,7
5&8
ணഛရ
63$5(3$576
ணഛရ
63$5(3$576
63
ᕤᮦᩱ
,167$//$7,210$7(5,$/6
㺗㺎㺪㺼㺷⤌ရ
&$%/($66(0%/<
'9,''6/,1.0
ᕤᮦᩱ
,167$//$7,210$7(5,$/6
&3
ᕤᮦᩱ
,167$//$7,210$7(5,$/6
&3
ᅗ᭩
'2&80(17
ྲྀᢅㄝ᫂᭩
23(5$72560$18$/
20
᧯సせ㡿᭩ከゝㄒ
23(5$7256*8,'(0/*
0/*
᧯సせ㡿᭩
23(5$7256*8,'(-3
26-
ഛせ㡿᭩
,167$//$7,210$18$/
,0
㻝㻚䡶㻙䢀䢚␒ྕᮎᑿ䛾㼇㻖㻖㼉䛿䚸㑅ᢥရ䛾௦⾲䡶䡬䢀䢚䜢⾲䛧䜎䛩䚹
㻯㻻㻰㻱㻌㻺㼁㻹㻮㻱㻾㻌㻱㻺㻰㻵㻺㻳㻌㼃㻵㼀㻴㻌㻎㻖㻖㻎㻌㻵㻺㻰㻵㻯㻭㼀㻱㻿㻌㼀㻴㻱㻌㻯㻻㻰㻱㻌㻺㼁㻹㻮㻱㻾㻌㻻㻲㻌㻾㻱㻼㻾㻱㻿㻱㻺㼀㻭㼀㻵㼂㻱㻌㻹㻭㼀㻱㻾㻵㻭㻸㻚
㻞㻚㻔㻖㻝㻕༳䛿䚸ᵝ䛻䜘䜚㑅ᢥ䚹
㻔㻖㻝㻕㻦㻌㻯㻴㻻㻻㻿㻱㻌㻻㻺㻱㻌㻰㻱㻼㻱㻺㻰㻵㻺㻳㻌㻻㻺㻌㼀㻴㻱㻌㻿㻼㻱㻯㻵㻲㻵㻯㻭㼀㻵㻻㻺㻚
䠄␎ᅗ䛾ᑍἲ䛿䚸ཧ⪃್䛷䛩䚹㻌㻌㻰㻵㻹㻱㻺㻿㻵㻻㻺㻿㻌㻵㻺㻌㻰㻾㻭㼃㻵㻺㻳㻌㻲㻻㻾㻌㻾㻱㻲㻱㻾㻱㻺㻯㻱㻌㻻㻺㻸㼅㻚䠅
&=$
A
-3
㹎㸿㹁㹉㹇㹌㹅ࠉ㹊㹇㹑㹒
+4;
5&53-+.5&53(+.5&53(+.$&
1$0(
287/,1(
'(6&5,37,21&2'(θ
47<
ࣘࢽࢵࢺ
81,7
ไᚚ㒊
352&(662581,7
538
᧯స㒊
&21752/81,7
5&8
ணഛရ
63$5(3$576
ணഛရ
63$5(3$576
63
ᕤᮦᩱ
,167$//$7,210$7(5,$/6
㺗㺎㺪㺼㺷⤌ရ
&$%/($66(0%/<
'9,''6/,1.0
ᕤᮦᩱ
,167$//$7,210$7(5,$/6
&3
ᕤᮦᩱ
,167$//$7,210$7(5,$/6
&3
ᅗ᭩
'2&80(17
ྲྀᢅㄝ᫂᭩
23(5$72560$18$/
20
᧯సせ㡿᭩ከゝㄒ
23(5$7256*8,'(0/*
0/*
᧯సせ㡿᭩
23(5$7256*8,'(-3
26-
ഛせ㡿᭩
,167$//$7,210$18$/
,0
㻝㻚䡶㻙䢀䢚␒ྕᮎᑿ䛾㼇㻖㻖㼉䛿䚸㑅ᢥရ䛾௦⾲䡶䡬䢀䢚䜢⾲䛧䜎䛩䚹
㻯㻻㻰㻱㻌㻺㼁㻹㻮㻱㻾㻌㻱㻺㻰㻵㻺㻳㻌㼃㻵㼀㻴㻌㻎㻖㻖㻎㻌㻵㻺㻰㻵㻯㻭㼀㻱㻿㻌㼀㻴㻱㻌㻯㻻㻰㻱㻌㻺㼁㻹㻮㻱㻾㻌㻻㻲㻌㻾㻱㻼㻾㻱㻿㻱㻺㼀㻭㼀㻵㼂㻱㻌㻹㻭㼀㻱㻾㻵㻭㻸㻚
㻞㻚㻔㻖㻝㻕༳䛿䚸ᵝ䛻䜘䜚㑅ᢥ䚹
㻔㻖㻝㻕㻦㻌㻯㻴㻻㻻㻿㻱㻌㻻㻺㻱㻌㻰㻱㻼㻱㻺㻰㻵㻺㻳㻌㻻㻺㻌㼀㻴㻱㻌㻿㻼㻱㻯㻵㻲㻵㻯㻭㼀㻵㻻㻺㻚
䠄␎ᅗ䛾ᑍἲ䛿䚸ཧ⪃್䛷䛩䚹㻌㻌㻰㻵㻹㻱㻺㻿㻵㻻㻺㻿㻌㻵㻺㻌㻰㻾㻭㼃㻵㻺㻳㻌㻲㻻㻾㻌㻾㻱㻲㻱㻾㻱㻺㻯㻱㻌㻻㻺㻸㼅㻚䠅
&=$
A
-4

&2'(12
7<3(
&3
␎ࠉࠉᅗ
287/,1(
ྡࠉࠉ⛠
1$0(
ᩘ㔞
47<
⏝㏵㸭ഛ⪃
5(0$5.6
␒ྕ
12
ᆺྡ㸭つ᱁
'(6&5,37,216
,167$//$7,210$7(5,$/6
ᕤᮦᩱ⾲
+4;
㜵⼃ࢦ࣒
&25526,213522)58%%(5
52+6
&2'(
12
㺚㺎㺷㺺㺍㺚㺊㺎
6($/:$6+(5
52+6
&2'(
12
ᅽ╔➃Ꮚ
&5,0321/8*
)9/)<(/
&2'(
12
㺖㺼㺵㺻㺢㺼⏝ᗙ㔠
&$%/(*/$1':$6+(5
-,6)&
&2'(
12
භゅ㺣㺍㺢㺚㺋
+(;$*21$/187
0686
&2'(
12
㺮㺔㺼㺕㺭㺷ᖹᗙ㔠
)/$7:$6+(5
0686
&2'(
12
㺨㺼㺦ᗙ㔠
635,1*:$6+(5
0686
&2'(
12
භゅ㺬㺼㺷㺢㺦㺚㺼
+(;$*21+($'6&5(:
0;686
&2'(
12
භゅ㺣㺍㺢㺚㺋
+(;$*21$/187
0686
&2'(
12
㺨㺼㺦ᗙ㔠
635,1*:$6+(5
0686
&2'(
12
㸦␎ᅗࡢᑍἲࡣࠊཧ⪃್࡛ࡍࠋࠉ',0(16,216,1'5$:,1*)255()(5(1&(21/<㸧
㹄㹓㹐㹓㹌㹍ࠉ㹃㹊㹃㹁㹒㹐㹇㹁ࠉ㹁㹍ࠉ㸬㸪㹊㹒㹂
&0$
A
-5
&2'(12
7<3(
&3
␎ࠉࠉᅗ
287/,1(
ྡࠉࠉ⛠
1$0(
ᩘ㔞
47<
⏝㏵㸭ഛ⪃
5(0$5.6
␒ྕ
12
ᆺྡ㸭つ᱁
'(6&5,37,216
,167$//$7,210$7(5,$/6
ᕤᮦᩱ⾲
+4;
㺮㺔㺼㺕ᖹᗙ㔠
)/$7:$6+(5
0686
&2'(
12
භゅ㺬㺼㺷㺢
+(;$*21$/+($'%2/7
0;686
&2'(
12
㺗㺎㺪㺼㺷⤌ရ
&$%/($66<
5:
&2'(
12
㸦␎ᅗࡢᑍἲࡣࠊཧ⪃್࡛ࡍࠋࠉ',0(16,216,1'5$:,1*)255()(5(1&(21/<㸧
㹄㹓㹐㹓㹌㹍ࠉ㹃㹊㹃㹁㹒㹐㹇㹁ࠉ㹁㹍ࠉ㸬㸪㹊㹒㹂
&0$
A
-6

&2'(12
7<3(
&3
␎ࠉࠉᅗ
287/,1(
ྡࠉࠉ⛠
1$0(
ᩘ㔞
47<
⏝㏵㸭ഛ⪃
5(0$5.6
␒ྕ
12
ᆺྡ㸭つ᱁
'(6&5,37,216
,167$//$7,210$7(5,$/6
ᕤᮦᩱ⾲
+4;
㺪㺼㺵㺐㺻㺢㺼㺚㺎㺷1
%/,1'6($/1
&2'(
12
㺐㺵㺍㺖㺛㺟㺋㺎㺪㺼$
,168/$7,2178%(
;<(/&0
&2'(
12
㺢㺵㺛㺞㺍㺩㺽㺻㺦㺚㺼ࠉ㺚㺋
6(/)7$33,1*6&5(:
;686
&2'(
12
㸦␎ᅗࡢᑍἲࡣࠊཧ⪃್࡛ࡍࠋࠉ',0(16,216,1'5$:,1*)255()(5(1&(21/<㸧
㹄㹓㹐㹓㹌㹍ࠉ㹃㹊㹃㹁㹒㹐㹇㹁ࠉ㹁㹍ࠉ㸬㸪㹊㹒㹂
&0&
A
-7
&2'(12
7<3(
&3
␎ࠉࠉᅗ
287/,1(
ྡࠉࠉ⛠
1$0(
ᩘ㔞
47<
⏝㏵㸭ഛ⪃
5(0$5.6
␒ྕ
12
ᆺྡ㸭つ᱁
'(6&5,37,216
,167$//$7,210$7(5,$/6
ᕤᮦᩱ⾲
+4;
㺢㺵㺛㺞㺍㺩㺽㺻㺦㺚㺼ࠉ㺚㺋
6(/)7$33,1*6&5(:
;686
&2'(
12
㸦␎ᅗࡢᑍἲࡣࠊཧ⪃್࡛ࡍࠋࠉ',0(16,216,1'5$:,1*)255()(5(1&(21/<㸧
㹄㹓㹐㹓㹌㹍ࠉ㹃㹊㹃㹁㹒㹐㹇㹁ࠉ㹁㹍ࠉ㸬㸪㹊㹒㹂
&0$
A
-8

&2'(12
7<3(
63
,7(0
12
1$0(2)
3
3$57
287/,1(
':*12
25
3(5
6
6(7
3(5
9
9(6
63$5(
:25.,1*
48$17,7<
5(0$5.6&2'(12
%2;123
6+,312
63$5(3$576/,67)25
86(
6(763(5
9
9(66(/
7<3(12
+4;
㺩㺋㺎㺛㺼
)*%29
$3%)
*/$6678%(
)86(
0)561$0(
)85812(/(&75,&&2/7'
':*12
㸦␎ᅗࡢᑍἲࡣࠊཧ⪃್࡛ࡍࠋࠉ',0(16,216,1'5$:,1*ࠉ)255()(5(1&(21/<㸧
&3$
A
-9
&2'(12
7<3(
63
,7(0
12
1$0(2)
3
3$57
287/,1(
':*12
25
3(5
6
6(7
3(5
9
9(6
63$5(
:25.,1*
48$17,7<
5(0$5.6&2'(12
%2;123
6+,312
63$5(3$576/,67)25
86(
6(763(5
9
9(66(/
7<3(12
+4;
㺩㺋㺎㺛㺼
)*%29$
3%)
*/$6678%(
)86(
0)561$0(
)85812(/(&75,&&2/7'
':*12
㸦␎ᅗࡢᑍἲࡣࠊཧ⪃್࡛ࡍࠋࠉ',0(16,216,1'5$:,1*ࠉ)255()(5(1&(21/<㸧
&3$
A
-10

D-1

D-2

D-3

D-4

D-5

D-6

NOTE
*1: SHIPYARD SUPPLY.
*2: OPTION.
*2)オプション。
*1)造船所手配。
注記
NAME
TYPE
名称
kg
DRAWN
CHECKED
APPROVED
DWG.No.
SCALE MASS
T.YAMASAKI
相互結線図
INTERCONNECTION DIAGRAM
REF.No.
FURUNO ELECTRIC CO., LTD.
C
12 4
3
B
A
1
2
3
4
5
6
7
8
GND
OP_HD_OUT
GND
OP_BP_OUT
OP_VIDEO_OUT
OP_TRIG_OUT
GND
GND
SUB1/2
1
2
3
4
5
6
7
8
ドウジク COAX.
キ
ダイ
アカ
チャ
シロ
クロ
YEL
ORG
RED
BRN
WHT
BLK
(NH8P)
RADAR
副指示器用 FOR REMOTE DISPLAY
RW-4864
制御部
DVI
1
2
TB1
(+)
(-)
RPU-024
PROCESSOR UNIT
船舶用レーダー
MARINE RADAR
*3)BBタイプの表示器はユーザー手配とする。
24VDC
1φ,50/60 Hz
100-115/
220-230VAC
6521
(+)(-)
*2
整流器
RECTIFIER
RU-1746B-2
DPYC-6
*1
DPYC-1.5
*1
IV-2sq.
*1
RU-3424
03-186-6001-0
LAN
USB1/2
1
2
3
LOGJ617
LOG_RD-C
LOG_RD-H
NC
1
2
3
4
5
AMS_TD-A
AMS_TD-B
AMS_RD-H
AMS_RD-C
NC
J618
1
2
3
4
5
NC
J619 ECDIS
ECDIS_TD-A
ECDIS_TD-B
ECDIS_RD-H
ECDIS_RD-C
1
2
3
4
5
ALARM1_0
ALARM1_1
ALARM2_0
ALARM2_1
ALARM3_0
6
7
8
9
10
11
12
13
14
15
ALARM3_1
ALARM4_0
ALARM4_1
SYS_FAIL-H
SYS_FAIL-C
NC
1
2
3
4
5
AIS
J615
AIS_TD-A
AIS_TD-B
AIS_RD-A
AIS_RD-B
AIS_COMMON
1
2
3
J616 GPS
GPS_RD-H
GPS_RD-C
NC
GPS RECEIVER
AIS
TTYCS(LA)-4
LOG
TTYCS(LA)-4
アラートマネジメントシステム
TTYCS(LA)-4
TTYCS(LA)-7
J613
ECDIS
AMS
*1
*1
*1
P
P
TTYCS(LA)-1
P
P
TTYCS(LA)-1
ALERT MANAGEMENT SYSTEM (AMS)
BNWAS
EXT_ALARM_ACK_N
GND
PWR_FAIL-H
PWR_FAIL-C
P
P
*1
*1
*1
*1
IV-8sq.
J823(VH4P)
1
2
3
4
5
6
7
8
9
1
2
3
4
ANTENNA UNIT空中線部
RSB-0070/0073
RSB-0073: 48rpm
RSB-0070: 24rpm
J821(VH9P)
10
11
12
13
1
2
J824(NH13P)
1
2
3
4
5
6
7
8
9
GND
J605
1
2
3
4
5
6
7
8
9
1
2
3
5
4
J606
GND
GND
1
2
4
MBS_T
5
6
7
8
3
11
12
13
10
9
J607
NC
NC
NC
RW-4864,MAX.15m
8
ミドリ
WHT
BLU[B]
BLK
PPL[B]
シロ
アオ(太)
クロ
ムラサキ(太)
YEL[B]
BLK[B]
RED[B]
WHT[B]
BRN[B]
BRN
BLU
GRN
キ(太)
クロ(太)
アカ(太)
シロ(太)
チャ(太)
チャ
アオ
ドウジク
2C-2V COAX.
YELキ
REDアカ
(17C+2C2V)
REMOTE DISPLAY
副指示器(x2)
*2
P12V
P12V
M12V
M12V
BP
MOTOR-H
HD
MOTOR-C
M12V
TUNING_IND
MOTOR-C
MOTOR-H
NC
MOTOR-H
VIDEO_IN
TUNING_CONT
SUB1/2
J611/612
1
2
3
J614HDG
HDG_RD-A
HDG_RD-B
HDG_COMMON
TTYCS(LA)-1Q *1
1
2
3
4
J620
GYRO_DATA-H
GYRO_DATA-C
GYRO_CLK-H
GYRO_CLK-C
TTYCS(LA)-4 *1
RW-00224,10/15/20/30m,φ11
P12V
J822(VH2P)
キミドリ(太)L-GRN[B]
モモ(太) PNK[B]
ハイ(太) GRY[B]
ダイ ORG
ミドリ(太) GRN[B]
ORG[B]
ダイ(太)
24
5m,φ7 (10m:OPTION)
24
表示器
MARINE DISPLAY
8
HUB-100
*2
3.5m
*2
またはネットワーク機器
OR NETWORK EQUIPMENT
100-230VAC
1φ,50/60 Hz
FAR-1513(-BB)
ムラサキ PPL
ヘディングセンサー
HEADING SENSOR
ADコンバータ
A-D CONVERTER
PG-1000
AD-100
P
P
*3: DISPLAY UNIT FOR BB-TYPE SHOULD BE PREPARED BY USER.
15
RGB
Dsub-15P
3COX-2P-6C,5/10m *2
AMS(SERIAL)
AMS(CONTACT)
03P9405A
H.MAKI
5m
10
2m
操作部
CONTROL UNIT
RCU-028
RCU-028
RCU-030
*2
TRACKBALL
CONTROL UNIT
トラックボール操作部
または OR
VDR
VGA MONITOR
VGAモニター
RW-4747
15
11
13
12
17
8
7
5
19
3
16
2
18
14
21
4
20
6
10
22
9
14
NC
TX_TRIG_15x3
AD-10
PL_A
PL_B
DVI-D/D_S-LINK5M
NOT USED
FR-FTPC-CY,10/20/30m
MOD-Z072-***,2/5/10m
OR
MU-150HD/190
*3
C3638-C01-B001
28/Sep/2015
28/Sep/2015
S-1

NOTE
*1: SHIPYARD SUPPLY.
*2: OPTION.
*2)オプション。
*1)造船所手配。
注記
NAME
TYPE
名称
kg
DRAWN
CHECKED
APPROVED
DWG.No.
SCALE MASS
T.YAMASAKI
相互結線図
INTERCONNECTION DIAGRAM
REF.No.
FURUNO ELECTRIC CO., LTD.
C
12 4
3
B
A
1
2
3
4
5
6
7
8
GND
OP_HD_OUT
GND
OP_BP_OUT
OP_VIDEO_OUT
OP_TRIG_OUT
GND
GND
SUB1/2
1
2
3
4
5
6
7
8
ドウジク COAX.
キ
ダイ
アカ
チャ
シロ
クロ
YEL
ORG
RED
BRN
WHT
BLK
(NH8P)
RADAR
副指示器用 FOR REMOTE DISPLAY
RW-4864
制御部
DVI
1
2
TB1
(+)
(-)
RPU-024
PROCESSOR UNIT
船舶用レーダー
MARINE RADAR
*3)BBタイプの表示器はユーザー手配とする。
03-186-6002-0
24VDC
1φ,50/60 Hz
100-115/
220-230VAC
6521
(+)(-)
*2
整流器
RECTIFIER
RU-1746B-2
DPYC-6
*1
DPYC-1.5
*1
IV-2sq.
*1
RU-3424
1
2
3
LOGJ617
LOG_RD-C
LOG_RD-H
NC
1
2
3
4
5
AMS_TD-A
AMS_TD-B
AMS_RD-H
AMS_RD-C
NC
J618
1
2
3
4
5
NC
J619 ECDIS
ECDIS_TD-A
ECDIS_TD-B
ECDIS_RD-H
ECDIS_RD-C
1
2
3
4
5
ALARM1_0
ALARM1_1
ALARM2_0
ALARM2_1
ALARM3_0
6
7
8
9
10
11
12
13
14
15
ALARM3_1
ALARM4_0
ALARM4_1
SYS_FAIL-H
SYS_FAIL-C
NC
1
2
3
4
5
AIS
J615
AIS_TD-A
AIS_TD-B
AIS_RD-A
AIS_RD-B
AIS_COMMON
1
2
3
J616 GPS
GPS_RD-H
GPS_RD-C
NC
GPS RECEIVER
AIS
TTYCS(LA)-4
LOG
TTYCS(LA)-4
アラートマネジメントシステム
TTYCS(LA)-4
TTYCS(LA)-7
J613
ECDIS
AMS
*1
*1
*1
P
P
TTYCS(LA)-1
P
P
TTYCS(LA)-1
ALERT MANAGEMENT SYSTEM (AMS)
BNWAS
EXT_ALARM_ACK_N
GND
PWR_FAIL-H
PWR_FAIL-C
P
P
LAN
USB1/2
*1
*1
*1
24
5m,φ7 (10m:OPTION)
24
表示器
MARINE DISPLAY
8
HUB-100
*2
3.5m
*2
またはネットワーク機器
OR NETWORK EQUIPMENT
100-230VAC
1φ,50/60 Hz
J823(VH4P)
1
2
3
4
5
6
7
8
9
1
2
3
4
ANTENNA UNIT空中線部
RSB-0070/0073
RSB-0073: 48rpm
RSB-0070: 24rpm
J821(VH9P)
10
11
12
13
J824(NH13P)
1
2
3
4
5
6
7
8
9
GND
J605
1
2
3
4
5
6
7
8
9
1
2
3
5
4
J606
GND
GND
1
2
4
MBS_T
5
6
7
8
3
11
12
13
10
9
J607
NC
NC
NC
ミドリ
WHT
BLU[B]
BLK
PPL[B]
シロ
アオ(太)
クロ
ムラサキ(太)
YEL[B]
BLK[B]
RED[B]
WHT[B]
BRN[B]
BRN
BLU
GRN
キ(太)
クロ(太)
アカ(太)
シロ(太)
チャ(太)
チャ
アオ
ドウジク
2C-2V COAX.
YELキ
WHT/BRN
RED
WHT/ORG
シロ/チャ
アカ
シロ/ダイ
モモ(太) PNK[B]
(17C+2C2V)
RW-00225,10/15/20/30m,φ11
ミドリ(太) GRN[B]
P12V
P12V
M12V
M12V
M12V
BP
MOTOR-H
HD
MOTOR-C
M12V
TUNING_IND
MOTOR-C
MOTOR-H
NC
MOTOR-H
VIDEO_IN
シロ/アカ(太)WHT/RED[B]
FAR-1523(-BB)
TUNING_CONT
*1
IV-8sq.
RW-4864,MAX.15m
8
REMOTE DISPLAY
副指示器(x2)
*2
SUB1/2
J611/612
1
2
3
4
J620
GYRO_DATA-H
GYRO_DATA-C
GYRO_CLK-H
GYRO_CLK-C
TTYCS(LA)-4 *1
1
2
3
J614HDG
HDG_RD-A
HDG_RD-B
HDG_COMMON
TTYCS(LA)-1Q *1
ADコンバータ
A-D CONVERTER
ヘディングセンサー
HEADING SENSOR
PG-1000
AD-100
1
2
J820(VH2P)
NC
TX_HV
J601
1
2
ORG[B]ダイ(太)
NC
14
P
P
*3: DISPLAY UNIT FOR BB-TYPE SHOULD BE PREPARED BY USER.
03P9405B
H.MAKI
15
RGB
Dsub-15P
*2
AMS(CONTACT)
AMS(SERIAL)
3COX-2P-6C,5/10m
5m
10
2m
操作部
CONTROL UNIT
RCU-028
RCU-028
RCU-030
TRACKBALL
CONTROL UNIT
トラックボール操作部
*2
または OR
VDR
VGA MONITOR
VGAモニター
RW-4747
TX_TRIG_15x3
PL_A
PL_B
AD-10
15
18
14
12
13
3
7
6
2
16
8
17
9
21
10
11
5
19
4
20
DVI-D/D_S-LINK5M
MOD-Z072-***,2/5/10m
FR-FTPC-CY,10/20/30m
OR
NOT USED
*3
MU-150HD/190
28/Sep/2015
28/Sep/2015
C3639-C01-B001
S-2

NOTE
*1: SHIPYARD SUPPLY.
*2: OPTION.
*2)オプション。
*1)造船所手配。
注記
NAME
TYPE
名称
kg
DRAWN
CHECKED
APPROVED
DWG.No.
SCALE MASS
T.YAMASAKI
相互結線図
INTERCONNECTION DIAGRAM
REF.No.
FURUNO ELECTRIC CO., LTD.
C
12 4
3
B
A
1
2
3
4
5
6
7
8
GND
OP_HD_OUT
GND
OP_BP_OUT
OP_VIDEO_OUT
OP_TRIG_OUT
GND
GND
SUB1/2
1
2
3
4
5
6
7
8
ドウジク COAX.
キ
ダイ
アカ
チャ
シロ
クロ
YEL
ORG
RED
BRN
WHT
BLK
(NH8P)
RADAR
副指示器用 FOR REMOTE DISPLAY
RW-4864
制御部
DVI
1
2
TB1
RPU-024
PROCESSOR UNIT
*3)BBタイプの表示器はユーザー手配とする。
1
2
3
LOGJ617
LOG_RD-C
LOG_RD-H
NC
1
2
3
4
5
AMS_TD-A
AMS_TD-B
AMS_RD-H
AMS_RD-C
NC
J618
1
2
3
4
5
NC
J619 ECDIS
ECDIS_TD-A
ECDIS_TD-B
ECDIS_RD-H
ECDIS_RD-C
1
2
3
4
5
ALARM1_0
ALARM1_1
ALARM2_0
ALARM2_1
ALARM3_0
6
7
8
9
10
11
12
13
14
15
ALARM3_1
ALARM4_0
ALARM4_1
SYS_FAIL-H
SYS_FAIL-C
NC
1
2
3
4
5
AIS
J615
AIS_TD-A
AIS_TD-B
AIS_RD-A
AIS_RD-B
AIS_COMMON
1
2
3
J616 GPS
GPS_RD-H
GPS_RD-C
NC
GPS RECEIVER
AIS
TTYCS(LA)-4
LOG
TTYCS(LA)-4
アラートマネジメントシステム
TTYCS(LA)-4
TTYCS(LA)-7
J613
ECDIS
AMS
*1
*1
*1
P
P
TTYCS(LA)-1
P
P
TTYCS(LA)-1
ALERT MANAGEMENT SYSTEM (AMS)
BNWAS
EXT_ALARM_ACK_N
GND
PWR_FAIL-H
PWR_FAIL-C
P
P
LAN
USB1/2
*1
*1
*1
24
5m,φ7 (10m:OPTION)
24
表示器
MARINE DISPLAY
8
HUB-100
*2
3.5m
*2
またはネットワーク機器
OR NETWORK EQUIPMENT
100-230VAC
1φ,50/60 Hz
FAR-1518/1528(-BB)
03-186-6004-0
MARINE RADAR (AC)
H
C
*1
DPYC-2.5
*1
IV-8sq.
RW-4864,MAX.15m
8
REMOTE DISPLAY
副指示器(x2)
SUB1/2
J611/612
1
2
3
4
J620
GYRO_DATA-H
GYRO_DATA-C
GYRO_CLK-H
GYRO_CLK-C
TTYCS(LA)-4 *1
1
2
3
J614HDG
HDG_RD-A
HDG_RD-B
HDG_COMMON
TTYCS(LA)-1Q *1
*2
1
2
3
4
5
6
7
8
9
10
11
12
13
14
TB802
1
2
3
4
5
6
7
8
9
10
11
12
13
TB801
1
2
J823
1
2
3
4
5
6
7
8
9
10
11
12
13
14
YEL4
BRN1
キ4
チャ1
アカ22 RED22
RED2アカ2
ミドリ5 GRN5
ムラサキ7
シロ9 WHT9
PPL7
ダイ3
ハイ18 GRY18
ORG3
ドウジク COAX.CABLE
YEL[B]14
RED[B]12
ORG13ダイ13
キ(太)14
アカ(太)12
ムラサキ17 PPL17
アオ6 BLU6
J602
BLK27
BLK28
BLK29
BRN21
GRY8
GRN[B]15
GRN[B]25
チャ21
ハイ8
ミドリ(太)15
ミドリ(太)25
クロ27
クロ28
クロ29
BLK[B]20
WHT[B]19
BLU[B]26
ORG[B]23
BLU[B]16
YEL[B]24
クロ(太)20
シロ(太)19
アオ(太)26
ダイ(太)23
アオ(太)16
キ(太)24
1
2
3
4
5
6
7
8
9
10
11
12
13
J603
GND
GND
HD
BP
MOTOR-H
MOTOR-H
MOTOR-C
MOTOR-C
PM_COMMON
PM_TDRD-A
PM_TDRD-B
P12V
1
2
BRN11チャ11
J601
TX-HV
NC
J604
RW-4747
ADコンバータ
A-D CONVERTER
ヘディングセンサー
HEADING SENSOR
AD-100
PG-1000
P
P
GND
GND
HEATER-H
HEATER-C
GND
GND
HEATER-H
HEATER-C
GND
GND
HD
BP
MOTOR-H
MOTOR-H
MOTOR-C
MOTOR-C
PM_COMMON
PM_TDRD-A
PM_TDRD-B
P12V
M12VM12V
TUNE_GATE
MAG_CUR_LVL
TUNE_GATE
MAG_CUR_LVL
TUNING_IND
TUNING_CONT
TUNING_IND
TUNING_CONT
MBS_L
LNA_MONLNA_MON
MBS_L
PL_A
PL_B
PL_C
PL_A
PL_B
PL_C
TX_TRIG
TB803
TX-HV
NC
空中線部 ANTENNA UNIT
RSB-120/121
1φ,50/60 Hz
100-115/
220-230VAC
RU-1803
TRANS.
トランス
*1
IV-8sq.
*2
100V
1φ,50/60 Hz
440VAC
DPYC-1.5
*1
*3: DISPLAY UNIT FOR BB-TYPE SHOULD BE PREPARED BY USER.
航海用レーダー(AC仕様)
15
RGB
Dsub-15P
3COX-2P-6C,5/10m *2
AMS(SERIAL)
AMS(CONTACT)
H.MAKI
5m
10
2m
操作部
CONTROL UNIT
RCU-028
RCU-028
RCU-030
*2
TRACKBALL
CONTROL UNIT
トラックボール操作部
VGA MONITOR
VGAモニター
または OR
VDR
RW-0030,15/20/30m,φ18.4
RSB-120:26(24)rpm
RSB-121:48(42)rpm
(): JAPAN ONLY
MOD-Z072-***,2/5/10m
FR-FTPC-CY,10/20/30m
OR
NOT USED
AD-10
DVI-D/D_S-LINK5M
TX_TRIG_15x8
*3
MU-150HD/190
28/Sep/2015
28/Sep/2015
C3642-C01-B001
S-3

NOTE
*1: SHIPYARD SUPPLY.
*2: OPTION.
*2)オプション。
*1)造船所手配。
注記
NAME
TYPE
名称
kg
DRAWN
CHECKED
APPROVED
DWG.No.
SCALE MASS
T.YAMASAKI
相互結線図
INTERCONNECTION DIAGRAM
REF.No.
FURUNO ELECTRIC CO., LTD.
C
12 4
3
B
A
1
2
3
4
5
6
7
8
GND
OP_HD_OUT
GND
OP_BP_OUT
OP_VIDEO_OUT
OP_TRIG_OUT
GND
GND
SUB1/2
1
2
3
4
5
6
7
8
ドウジク COAX.
キ
ダイ
アカ
チャ
シロ
クロ
YEL
ORG
RED
BRN
WHT
BLK
(NH8P)
RADAR
副指示器用 FOR REMOTE DISPLAY
RW-4864
制御部
DVI
1
2
TB1
(+)
(-)
RPU-024
PROCESSOR UNIT
*3)BBタイプの表示器はユーザー手配とする。
24VDC
1φ,50/60 Hz
100-115/
220-230VAC
6521
(+)(-)
*2
整流器
RECTIFIER
RU-1746B-2
DPYC-6
*1
DPYC-1.5
*1
IV-2sq.
*1
RU-3424
1
2
3
LOGJ617
LOG_RD-C
LOG_RD-H
NC
1
2
3
4
5
AMS_TD-A
AMS_TD-B
AMS_RD-H
AMS_RD-C
NC
J618
1
2
3
4
5
NC
J619 ECDIS
ECDIS_TD-A
ECDIS_TD-B
ECDIS_RD-H
ECDIS_RD-C
1
2
3
4
5
ALARM1_0
ALARM1_1
ALARM2_0
ALARM2_1
ALARM3_0
6
7
8
9
10
11
12
13
14
15
ALARM3_1
ALARM4_0
ALARM4_1
SYS_FAIL-H
SYS_FAIL-C
NC
1
2
3
4
5
AIS
J615
AIS_TD-A
AIS_TD-B
AIS_RD-A
AIS_RD-B
AIS_COMMON
1
2
3
J616 GPS
GPS_RD-H
GPS_RD-C
NC
GPS RECEIVER
AIS
TTYCS(LA)-4
LOG
TTYCS(LA)-4
アラートマネジメントシステム
TTYCS(LA)-4
TTYCS(LA)-7
J613
ECDIS
AMS
*1
*1
*1
P
P
TTYCS(LA)-1
P
P
TTYCS(LA)-1
ALERT MANAGEMENT SYSTEM (AMS)
BNWAS
EXT_ALARM_ACK_N
GND
PWR_FAIL-H
PWR_FAIL-C
P
P
LAN
USB1/2
*1
*1
*1
24
5m,φ7 (10m:OPTION)
24
表示器
MARINE DISPLAY
8
HUB-100
*2
3.5m
*2
またはネットワーク機器
OR NETWORK EQUIPMENT
100-230VAC
1φ,50/60 Hz
FAR-1518/1528(-BB)
MARINE RADAR (DC)
03-186-6003-0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
TB802
1
2
3
4
5
6
7
8
9
10
11
12
13
TB801
1
2
J823
1
2
3
4
5
6
7
8
9
10
11
12
13
14
YEL4
BRN1
キ4
チャ1
アカ22 RED22
RED2アカ2
ミドリ5 GRN5
ムラサキ7
シロ9 WHT9
PPL7
ダイ3
ハイ18 GRY18
ORG3
ドウジク COAX.CABLE
YEL[B]14
RED[B]12
ORG13ダイ13
キ(太)14
アカ(太)12
ムラサキ17 PPL17
アオ6 BLU6
J602
BLK27
BLK28
BLK29
BRN21
GRY8
GRN[B]15
GRN[B]25
チャ21
ハイ8
ミドリ(太)15
ミドリ(太)25
クロ27
クロ28
クロ29
BLK[B]20
WHT[B]19
BLU[B]26
ORG[B]23
BLU[B]16
YEL[B]24
クロ(太)20
シロ(太)19
アオ(太)26
ダイ(太)23
アオ(太)16
キ(太)24
1
2
3
4
5
6
7
8
9
10
11
12
13
J603
GND
GND
HD
BP
MOTOR-H
MOTOR-H
MOTOR-C
MOTOR-C
PM_COMMON
PM_TDRD-A
PM_TDRD-B
P12V
1
2
BRN11チャ11
J601
TX-HV
NC
J604
RW-4747
GND
GND
HEATER-H
HEATER-C
GND
GND
HEATER-H
HEATER-C
GND
GND
HD
BP
MOTOR-H
MOTOR-H
MOTOR-C
MOTOR-C
PM_COMMON
PM_TDRD-A
PM_TDRD-B
P12V
M12VM12V
TUNE_GATE
MAG_CUR_LVL
TUNE_GATE
MAG_CUR_LVL
TUNING_IND
TUNING_CONT
TUNING_IND
TUNING_CONT
MBS_L
LNA_MONLNA_MON
MBS_L
PL_A
PL_B
PL_C
PL_A
PL_B
PL_C
TX_TRIG
TB803
TX-HV
NC
空中線部 ANTENNA UNIT
RSB-120/121
*1
IV-8sq.
RW-4864,MAX.15m
8
REMOTE DISPLAY
副指示器(x2)
SUB1/2
J611/612
1
2
3
4
J620
GYRO_DATA-H
GYRO_DATA-C
GYRO_CLK-H
GYRO_CLK-C
TTYCS(LA)-4 *1
1
2
3
J614HDG
HDG_RD-A
HDG_RD-B
HDG_COMMON
TTYCS(LA)-1Q *1
*2
ADコンバータ
A-D CONVERTER
ヘディングセンサー
HEADING SENSOR
AD-100
PG-1000
P
P
*3: DISPLAY UNIT FOR BB-TYPE SHOULD BE PREPARED BY USER.
航海用レーダー(DC仕様)
RW-0030,15/20/30m,φ18.4
H.MAKI
15
RGB
Dsub-15P
3COX-2P-6C,5/10m *2
AMS(SERIAL)
AMS(CONTACT)
VGA MONITOR
VGAモニター
または OR
VDR
5m
10
2m
操作部
CONTROL UNIT
RCU-028
RCU-028
RCU-030
*2
TRACKBALL
CONTROL UNIT
トラックボール操作部
MOD-Z072-***,2/5/10m
FR-FTPC-CY,10/20/30m
OR
DVI-D/D_S-LINK5M
RSB-120:26(24)rpm
RSB-121:48(42)rpm
(): JAPAN ONLY
TX_TRIG_15x8
AD-10
NOT USED
*3
MU-150HD/190
28/Sep/2015
28/Sep/2015
C3642-C02-B001
S-4
-
 1
1
-
 2
2
-
 3
3
-
 4
4
-
 5
5
-
 6
6
-
 7
7
-
 8
8
-
 9
9
-
 10
10
-
 11
11
-
 12
12
-
 13
13
-
 14
14
-
 15
15
-
 16
16
-
 17
17
-
 18
18
-
 19
19
-
 20
20
-
 21
21
-
 22
22
-
 23
23
-
 24
24
-
 25
25
-
 26
26
-
 27
27
-
 28
28
-
 29
29
-
 30
30
-
 31
31
-
 32
32
-
 33
33
-
 34
34
-
 35
35
-
 36
36
-
 37
37
-
 38
38
-
 39
39
-
 40
40
-
 41
41
-
 42
42
-
 43
43
-
 44
44
-
 45
45
-
 46
46
-
 47
47
-
 48
48
-
 49
49
-
 50
50
-
 51
51
-
 52
52
-
 53
53
-
 54
54
-
 55
55
-
 56
56
-
 57
57
-
 58
58
-
 59
59
-
 60
60
-
 61
61
-
 62
62
-
 63
63
-
 64
64
-
 65
65
-
 66
66
-
 67
67
-
 68
68
-
 69
69
-
 70
70
-
 71
71
-
 72
72
-
 73
73
-
 74
74
-
 75
75
-
 76
76
-
 77
77
-
 78
78
-
 79
79
-
 80
80
-
 81
81
-
 82
82
-
 83
83
-
 84
84
-
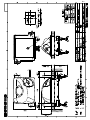 85
85
-
 86
86
-
 87
87
-
 88
88
-
 89
89
-
 90
90


























































































Furuno FAR1523 Guía de instalación
- Tipo
- Guía de instalación
- Este manual también es adecuado para
Artículos relacionados
-
 Furuno Electric FAR-1528-BB Manual de usuario
Furuno Electric FAR-1528-BB Manual de usuario
-
Furuno FI507 Guía del usuario
-
-
Furuno DFF3D Manual de usuario
-
Furuno SC-130 Manual de usuario
-
-
Furuno 1935 Guía de instalación
-
-
-
