Mod.26 EM208C4443F
CONTROLADOR DE ROBOT
RC90 / RC90-B
(EPSON RC+ 7.0)
CPD-60422

CONTROLADOR DE ROBOT RC90 / RC90-B (EPSON RC+ 7.0) Rev.26

RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 i
CONTROLADOR DE ROBOT
RC90 / RC90-B
(EPSON RC+ 7.0)
Mod.26
Copyright © 2013-2020 SEIKO EPSON CORPORATION. Todos los derechos reservados.

ii RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
PRÓLOGO
Gracias por comprar nuestros productos de robot.
Este manual contiene la información necesaria para el uso correcto del controlador de robot.
Lea atentamente este manual y otros manuales relacionados antes de instalar el sistema de
robot.
Mantenga este manual a la mano para un acceso fácil en todo momento.
GARANTÍA
El sistema de robot y las piezas opcionales se envían a nuestros clientes solo después de
haberlos sometido a los más estrictos controles, pruebas e inspecciones de calidad para
certificar que cumplen con nuestras altas normas de rendimiento.
Los productos que tengan un mal funcionamiento como resultado de la manipulación u
operación normales se repararán en forma gratuita durante el período normal de la garantía.
(Comuníquese con el proveedor de su región para obtener información sobre el período de
garantía).
Sin embargo, se cobrarán al cliente las reparaciones en los siguientes casos (aunque sucedan
dentro del período de garantía):
1.
Daño o mal funcionamiento provocados por un uso inadecuado que no se describe en
este manual o por uso descuidado.
2.
Mal funcionamiento provocado por el desmontaje no autorizado del producto por parte
de los clientes.
3.
Daños debido a ajustes inadecuados o a intentos de reparación no autorizados.
4.
Daño provocado por desastres naturales, como terremotos, inundaciones, etc.
Advertencias, precauciones, uso:
1.
Si el equipo asociado al sistema de robot no se usa de acuerdo con las condiciones de
uso y las especificaciones del producto descritas en los manuales, esta garantía queda
nula.
2.
Si no sigue las ADVERTENCIAS y PRECAUCIONES de este manual, no podemos
hacernos responsables de ningún mal funcionamiento o accidente, incluso si tienen como
resultado lesiones o la muerte.
3.
No podemos prever todos los posibles peligros y consecuencias. Por lo tanto, este manual
no puede advertir al usuario de todos los posibles peligros.

RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 iii
MARCAS COMERCIALES
Microsoft, Windows y el logotipo de Windows son marcas registradas o marcas comerciales
de Microsoft Corporation en los Estados Unidos y otros países. Otras marcas y nombres de
productos son marcas comerciales o marcas registradas de sus respectivos titulares.
NOTACIÓN DE MARCAS COMERCIALES EN ESTE MANUAL
Sistema operativo Microsoft® Windows® 8
Sistema operativo Microsoft® Windows® 10
En todo este manual, Windows 8 y Windows 10 se refieren a los respectivos sistemas
operativos ya citados. En algunos casos, Windows se refiere en forma genérica a
Windows 8 y Windows 10.
AVISO
Ninguna parte de este manual se puede copiar o reproducir sin autorización.
El contenido de este manual está sujeto a cambios sin previo aviso.
Notifíquenos si encuentra errores en este manual o si tiene comentarios con respecto a su
contenido.
FABRICANTE
INFORMACIÓN DE CONTACTO
La información de contacto se describe en “PROVEEDORES” en las primeras páginas del
siguiente manual:
Seguridad e instalación del sistema de robot Lea primero este manual

iv RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
Antes de leer este manual
No conecte los siguientes elementos al puerto TP/OP de RC90 / RC90-B. Conectar los
siguientes elementos puede provocar el mal funcionamiento del dispositivo, ya que las
asignaciones de los pines son distintas.
Clavija aislante de DISPOSITIVO OPCIONAL
Caja de comandos de operación OP500
Caja de comandos del operador OP500RC
Teclado de desplazamiento JP500
Teach Pendant TP-3**
Panel del operador OP1
Para RC90 / RC90-B, asegúrese de primero instalar el software EPSON RC+ 7.0 en la
computadora de desarrollo y, luego, de conectar la computadora de desarrollo y RC90 /
RC90-B con el cable USB.
Si RC90 / RC90-B y la computadora de desarrollo se conectan sin instalar EPSON RC+
7.0 en la computadora de desarrollo, aparecerá [Add New Hardware Wizard] (Asistente
para agregar nuevo hardware). Si aparece este asistente, haga clic en el botón <Cancel>
(Cancelar).
Con respecto a la compatibilidad de seguridad para la conexión de red:
La función de conexión de red (Ethernet) de nuestros productos supone el uso en la red
local, como la red LAN de la fábrica. No la conecte a la red externa, como Internet.
Además, tome medidas de seguridad, por ejemplo, contra virus de la conexión de red,
mediante la instalación de un software antivirus.
Compatibilidad de seguridad para la memoria USB:
Asegúrese de que la memoria USB no esté infectada con virus cuando se conecte al
controlador.
NOTA
NOTA
NOTA
NOTA

RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 v
Configuración del sistema de control
Este manual explica las siguientes combinaciones de controladores y software.
Controlador de robot RC90 con la siguiente etiqueta pegada:
Etiqueta
Controlador
Software
RC90
EPSON RC+ 7.0
Firmware del controlador
RC90
Ver.7.0.2.0 o posterior
EPSON RC+ 7.0
Anterior a la
versión 7.0.1
!!!
Ver.7.0.2 o
posterior
OK
OK: Compatible Todas las funciones de EPSON RC+ 7.0 y el controlador están disponibles.
!!!: Compatible La conexión está bien. Recomendamos que use EPSON RC+7.0 Ver. 7.0.2 o posterior.
Controlador de robot RC90-B:
Firmware del controlador RC90-B
Ver.7.4.2.0 o posterior
EPSON RC+ 7.0
Antes de Ver.7.4.1
!!!
Ver.7.4.2 o
posterior
OK
OK: Compatible Todas las funciones de EPSON RC+ 7.0 y el controlador están disponibles.
!!!: Compatible La conexión está bien. Recomendamos que use EPSON RC+7.0 Ver. 7.4.2 o posterior.
No existe etiqueta en el RC90-B.
El manual en PDF de este sistema de robot está disponible desde EPSON RC+ 7.0 Ver. 7.0.2
Esta opción no está disponible para el controlador de robot RC90 (EPSON RC+ 5.0) sin la etiqueta.
NOTA
NOTA
NOTA

vi RC90 / RC90-B (EPSON RC+ 7.0) Mod.26

Índice
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 vii
Seguridad
1. Seguridad 3
2. Convenciones 3
3. Precauciones de seguridad 4
Configuración y operación
1. Especificaciones 9
1.1 Ejemplo de sistema ................................................................................ 9
1.2 Especificaciones estándar ................................................................... 10
1.3 Dimensiones exteriores ....................................................................... 12
2. Nombres y funciones de las piezas 13
2.1 Nombres de piezas .............................................................................. 13
2.2 Funciones ............................................................................................ 13
2.3 LED ...................................................................................................... 15
2.4 Características de seguridad ............................................................... 16
3. Instalación 18
3.1 Desembalaje ........................................................................................ 18
3.2 Requisitos ambientales ........................................................................ 18
3.2.1 Entorno ..................................................................................... 18
3.2.2 Instalación ................................................................................ 19
3.3 Fuente de alimentación ........................................................................ 20
3.3.1 Especificaciones ....................................................................... 20
3.3.2 Cable de alimentación de CA ................................................... 21
3.3.3 Cable de alimentación M/C ...................................................... 22
3.4 Conexión de cables ............................................................................. 23
3.4.1 Conexión de cables típica ........................................................ 24
3.4.2 Conexión del manipulador al controlador ................................. 26
3.5 Medidas contra el ruido ........................................................................ 28
4. Modo de operación (TEACH/AUTO/TEST) 29
4.1 Descripción general ............................................................................. 29
4.2 Modo de operación del interruptor ....................................................... 29
4.3 Modo Program (AUTO) ........................................................................ 30
4.3.1 ¿Qué es el modo Program (AUTO)? ........................................ 30

Índice
viii RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
4.3.2 Configuración desde EPSON RC+ 7.0 .................................... 30
4.4 Modo automático (AUTO).................................................................... 31
4.4.1 ¿Qué es el modo automático (AUTO)? .................................... 31
4.4.2 Configuración desde EPSON RC+ 7.0 .................................... 31
4.4.3 Configuración desde el dispositivo de control .......................... 32
5. Puerto de conexión de la computadora de desarrollo 33
5.1 Acerca del puerto de conexión de la computadora de desarrollo ........ 33
5.2 Precaución .......................................................................................... 34
5.3 Verificación de conexión y configuración de software ......................... 34
5.4 Desconexión de la computadora de desarrollo y el controlador .......... 35
6. Puerto de memoria 36
6.1 ¿Qué es la función de almacenamiento de estado del controlador? ... 36
6.2 Antes de usar la función de almacenamiento del estado del controlador36
6.2.1 Precauciones ........................................................................... 36
6.2.2 Memoria USB adoptable .......................................................... 36
6.3 Función de almacenamiento del estado del controlador ..................... 37
6.3.1 Almacenamiento del estado del controlador con el botón
Trigger (Disparador) ................................................................ 37
6.3.2 Carga de datos con EPSON RC+ 7.0 ...................................... 37
6.3.3 Transferencia con correo electrónico ....................................... 39
6.4 Detalles de los datos ........................................................................... 39
7. Puerto LAN (comunicación Ethernet) 41
7.1 Acerca del puerto LAN (comunicación Ethernet) ................................. 41
7.2 Dirección IP ......................................................................................... 41
7.3 Cambio de la dirección IP del controlador ........................................... 42
7.4 Conexión de la computadora de desarrollo y el controlador
mediante Ethernet ............................................................................... 43
7.5 Desconexión de la computadora de desarrollo y del controlador
mediante Ethernet ............................................................................... 44
8. Puerto TP 45
8.1 ¿Qué es el puerto TP? ........................................................................ 45
8.2 Conexión del Teach Pendant .............................................................. 45
9. EMERGENCIA 46
9.1 Interruptor de puerta de seguridad e interruptor de liberación de
enganche............................................................................................. 46

Índice
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 ix
9.1.1 Interruptor de puerta de seguridad ........................................... 47
9.1.2 Interruptor de liberación de enganche ...................................... 47
9.1.3 Comprobación de la operación del interruptor de
liberación de enganche ............................................................ 48
9.2 Conexión del interruptor de parada de emergencia ............................. 49
9.2.1 Interruptor de parada de emergencia ....................................... 49
9.2.2 Comprobación de la operación del interruptor de
parada de emergencia ............................................................. 49
9.2.3 Recuperación desde la parada de emergencia ........................ 49
9.3 Asignaciones de pines ......................................................................... 50
9.4 Diagramas de circuitos ........................................................................ 52
9.4.1 Ejemplo 1: Aplicación típica del interruptor de parada de
emergencia externo ................................................................. 52
9.4.2 Ejemplo 2: Aplicación típica de relé de seguridad externo ....... 53
10. Puerto estándar RS-232C 54
10.1 Acerca del puerto RS-232C ............................................................... 54
10.2 Confirmación con EPSON RC+ 7.0 (RS-232C) ................................. 54
10.3 Configuración de comunicación con el software de RS-232C
(RS-232C)........................................................................................... 55
10.4 Cable de comunicación (RS-232C) .................................................... 55
11. Conector de E/S 56
11.1 RC90 (Conector I/O) .......................................................................... 57
11.1.1 Circuito de entrada (RC90) ..................................................... 57
11.1.2 Circuito de salida (RC90) ....................................................... 59
11.2 RC90-B (Conector I/O) ...................................................................... 62
11.2.1 Circuito de entrada (RC90-B) ................................................. 62
11.2.2 Circuito de salida (RC90-B) .................................................... 64
11.3 Asignaciones de pines ....................................................................... 66
12. Configuración remota de E/S 67
12.1 Descripción de la señal de E/S .......................................................... 68
12.1.1 Señales de entrada remota .................................................... 68
12.1.2 Señales de salida remota ....................................................... 73
12.2 Especificaciones de temporización .................................................... 76
12.2.1 Notas de diseño para las señales de entrada remota ............ 76
12.2.2 Diagrama de temporización para la secuencia de ejecución
de la operación......................................................................... 76

Índice
x RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
12.2.3 Diagrama de temporización para la secuencia de ejecución
de la operación ......................................................................... 76
12.2.4 Diagrama de temporización para la secuencia de entrada
de la puerta de seguridad ......................................................... 78
12.2.5 Diagrama de temporización para la secuencia de la
parada de emergencia .............................................................. 78
13. Ranuras opcionales 79
13.1 Acerca de las ranuras opcionales ..................................................... 79
13.2 Placa de E/S de expansión ............................................................... 79
13.2.1 Acerca de la placa de E/S de expansión ............................... 79
13.2.2 Configuración de la placa (E/S de expansión) ....................... 79
13.2.3 Confirmación con EPSON RC+ 7.0 ....................................... 80
13.2.4 Circuito de entrada ................................................................. 80
13.2.5 Circuito de salida ................................................................... 82
13.2.6 Asignaciones de pines ........................................................... 85
13.3 Placa de E/S de bus de campo ......................................................... 86
13.4 Placa RS-232C .................................................................................. 86
13.4.1 Placa RS-232C ...................................................................... 86
13.4.2 Configuración de la placa (RS-232C) .................................... 86
13.4.3 Confirmación con EPSON RC+ 7.0 (RS-232C) ..................... 87
13.4.4 Configuración de comunicación con el software de RS-232C
(RS-232C) ......................................................................................... 87
13.4.5 Cable de comunicación (RS-232C) ........................................ 88
13.5 Placa de E/S analógica ..................................................................... 89
13.5.1 Acerca de la placa de E/S analógica ..................................... 89
13.5.2 Configuración de la placa (placa de E/S analógica) ............... 90
13.5.3 Confirmación con EPSON RC+ (Placa de E/S analógica) ..... 93
13.5.4 Circuito de entrada (placa de E/S analógica) ......................... 94
13.5.5 Circuito de salida (placa de E/S analógica) ........................... 94
13.5.6 Asignaciones de pines (placa de E/S analógica) ................... 95
13.6 Placa EUROMAP67 .......................................................................... 96
13.6.1 Notas sobre la placa EUROMAP67 ....................................... 97
13.6.2 Configuración de la placa (placa EUROMAP67).................... 99
13.6.3 Instalación (placa EUROMAP67) ........................................... 99
13.6.4 Confirmación con EPSON RC+ 7.0 (placa EUROMAP67) .. 101
13.6.5 Proyecto de muestra (placa EUROMAP67) ......................... 101
13.6.6 Descripción general del circuito (placa EUROMAP67) ........ 102
13.6.7 Circuito de entrada (placa EUROMAP67) ............................ 103

Índice
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 xi
13.6.8 Circuito de salida (placa EUROMAP67) ............................... 103
13.6.9 Parada de emergencia, Protección (placa EUROMAP67) ... 104
13.6.10 Asignaciones de pines de E/S (placa EUROMAP67) ......... 105
13.6.11 Asignaciones de pines de los hilos de unión de
parada de emergencia (Placa EUROMAP67) ........................ 106
Mantenimiento
1. Precauciones de seguridad para el mantenimiento 111
1.1 Precauciones de seguridad ............................................................... 111
1.2 Bloqueo y etiquetado ......................................................................... 112
2. Inspección de mantenimiento regular 114
3. Estructura del controlador 115
3.1 Ubicación de piezas ........................................................................... 115
3.1.1 RC90 (para LS3, LS6) ............................................................ 115
3.1.2 RC90 (para LS20) .................................................................. 115
3.1.3 RC90-B (para LS3-B, LS6-B) ................................................. 116
3.1.4 RC90-B (para LS10-B, LS20-B) ............................................. 116
3.2 Diagrama de las conexiones de cables ............................................. 117
3.2.1 RC90 (para LS3, LS6), RC90-B (para LS3-B, LS6-B) ............ 117
3.2.2 RC90 (para LS20), RC90-B (para LS10-B, LS20-B) .............. 118
4. Copia de seguridad y restauración 119
4.1 ¿Qué es la función Backup Controller? ............................................. 119
4.2 Tipos de datos de copia de seguridad ............................................... 119
4.3 Copia de seguridad ............................................................................ 120
4.4 Restauración ...................................................................................... 121
5. Actualización del firmware 124
5.1 Actualización del firmware ................................................................. 124
5.2 Procedimiento de actualización de firmware ...................................... 124
5.3 Recuperación del controlador ............................................................ 127
5.4 Procedimiento de inicialización de firmware ...................................... 128
5.5 Adición de pasos de confirmación al fortalecer la seguridad de la
conexión de EtherNet ........................................................................ 130

Índice
xii RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
6. Alarma 134
6.1 Antes del firmware Ver.7.1.8.x del controlador .................................. 135
6.1.1 Configuración de alarmas ...................................................... 135
6.1.2 Cómo ver la información de las alarmas ................................ 136
6.1.3 Cómo editar la información de las alarmas ............................ 137
6.1.4 Método de notificación de alarma .......................................... 137
6.1.5 Cómo cancelar la alarma ....................................................... 138
6.2 Firmware del controlador Ver.7.2.0.x o posterior ............................... 139
6.2.1 Información de mantenimiento ............................................... 139
6.2.2 Cómo ver la información de mantenimiento ........................... 140
6.2.3 Cómo editar la información de mantenimiento ....................... 142
6.2.4 Método de notificación de alarma .......................................... 143
6.2.5 Cómo cancelar la alarma ....................................................... 143
7. Procedimiento de reemplazo de piezas de
mantenimiento 144
7.1 Filtro del ventilador ............................................................................ 144
7.2 Ventilador .......................................................................................... 146
7.3 Batería ............................................................................................... 147
7.4 CF (Compact Flash) .......................................................................... 149
7.5 MDB .................................................................................................. 150
7.6 DMB .................................................................................................. 152
7.7 Placa de DMB Sub ............................................................................ 156
7.8 DPB ................................................................................................... 157
7.9 Placa opcional ................................................................................... 159
8. Verificación de la operación del sistema de robot 161
9. Solución de problemas 162
9.1 Tabla de códigos de error.................................................................. 162
9.2 No se puede conectar la computadora de desarrollo y el controlador
mediante el cable USB ...................................................................... 314
9.2.1 Confirmación mediante el administrador de dispositivos
de Windows............................................................................ 315
9.2.2 Cuando se reconoce como "Otros dispositivos" en el
administrador de dispositivos de Windows ............................ 317
10. Lista de piezas de mantenimiento 318

Seguridad
Esta sección contiene información de seguridad para el sistema de robot.


Seguridad
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 3
1. Seguridad
Personal calificado deberá realizar la instalación y el transporte de robots y equipos
robóticos, los que deberán cumplir con todos los códigos nacionales y locales.
Lea este manual y otros manuales relacionados antes de instalar el sistema de robot o antes
de conectar los cables. Mantenga este manual a la mano para un acceso fácil en todo
momento.
2. Convenciones
En todo este manual se indican consideraciones importantes de seguridad con los siguientes
símbolos. Asegúrese de leer las descripciones que se muestran con cada símbolo.
ADVERTENCIA
Este símbolo indica que existe un peligro de posibles lesiones graves
o la muerte si no se siguen adecuadamente las instrucciones asociadas.
ADVERTENCIA
Este símbolo indica que existe un peligro de posibles daños a las
personas debido a descarga eléctrica si no se siguen adecuadamente
las instrucciones asociadas.
PRECAUCIÓN
Este símbolo indica que existe un peligro de posibles daños a las
personas o daños físicos a los equipos e instalaciones si no se siguen
adecuadamente las instrucciones asociadas.

Seguridad
4 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
3. Precauciones de seguridad
Solo personal capacitado debe diseñar e instalar el sistema de robot.
El personal capacitado se define como aquellos quienes hayan tomado una clase de
capacitación en sistemas de robot proporcionada por un fabricante, distribuidor o empresa
representante local, o aquellos quienes comprendan cabalmente los manuales y tengan el
mismo nivel de conocimiento y habilidades que aquellos que hayan completado los cursos
de capacitación.
Los siguientes elementos son precauciones de seguridad para el personal
calificado de diseño o instalación:
ADVERTENCIA
El personal que diseñe o construya el sistema de robot con este producto debe
leer el capítulo Seguridad en el Manual del usuario para comprender los
requisitos de seguridad antes de diseñar o construir el sistema de robot. Diseñar
o construir el sistema de robot sin comprender los requisitos de seguridad es
extremadamente peligroso y puede provocar lesiones corporales graves o daños
graves en el sistema de robot, además de causar problemas graves de seguridad.
El manipulador y el controlador se deben usar en las condiciones ambientales
que se describen en sus respectivos manuales. Este producto se ha diseñado y
fabricado estrictamente para su uso en un entorno normal en interiores. El uso
del producto en un entorno que supere las condiciones ambientales especificadas
no solo acortará la vida útil del producto, sino que además puede causar graves
problemas de seguridad.
El sistema de robot se debe usar de acuerdo con los requisitos de instalación
descritos en los manuales. Si no se usa el sistema de robot de acuerdo con los
requisitos de instalación no solo acortará la vida útil del producto, sino que
además puede causar graves problemas de seguridad.
El enclavamiento de la puerta de seguridad debe estar en funcionamiento cuando
se opere el sistema de robot. No opere el sistema si no se puede activar o
desactivar el interruptor. (Por ejemplo, si el interruptor está desactivado)
(Ejemplo: el interruptor está envuelto con cinta para mantenerlo en la posición
cerrada). Operar el sistema de robot cuando el interruptor no funciona
correctamente es extremadamente peligroso y puede causar problemas de
seguridad graves, ya que la entrada de la puerta de seguridad no puede cumplir
su función designada.
Conecte los cables de señal de entrada para la parada de emergencia y para la
puerta de seguridad con el conector EMERGENCY, de manera que el interruptor
Emergency Stop (Parada de emergencia) de Teach Pendant esté siempre
conectado a las funciones del puerto TP. (Consulte el diagrama de la aplicación
típico en Configuración y operación 9.4 Diagramas de circuitos).

Seguridad
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 5
Los siguientes elementos son precauciones de seguridad para el personal
calificado de diseño o instalación: (continúa)
ADVERTENCIA
No abra las cubiertas del controlador excepto cuando le realiza mantenimiento.
Abrir las cubiertas del controlador es extremadamente peligroso y puede causar
una descarga eléctrica incluso cuando esté apagada la alimentación principal
debido a la carga de alto voltaje que hay dentro del controlador.
Asegúrese de que la alimentación que va al controlador esté apagada antes de
conectar o desconectar cables. Conectar o desconectar cualquier cable con la
alimentación encendida es extremadamente peligroso y puede provocar una
descarga eléctrica o el mal funcionamiento del controlador.
Asegúrese de conectar los cables correctamente. No permita una tensión
innecesaria en los cables. (No coloque objetos pesados en los cables. No doble
ni tire de los cables por la fuerza). La tensión innecesaria en los cables puede
provocar daños en los cables, desconexión o error de contacto. Los cables
dañados, la desconexión o la falla de contacto son extremadamente peligrosos y
pueden provocar descargas eléctricas o el funcionamiento incorrecto del sistema.
Cuando conecte el enchufe para que se ajuste al tomacorriente en la fábrica,
asegúrese de que sea hecho por personal calificado. Cuando conecte el enchufe,
asegúrese de conectar el cable a tierra con el cable de alimentación de CA de
color verde/amarillo en el controlador y al terminal de tierra de la fuente de
alimentación de fábrica. El equipo debe estar conectado a tierra de forma correcta
en todo momento para evitar el riesgo de descargas eléctricas. Siempre utilice un
enchufe de alimentación y un tomacorriente. Nunca conecte el controlador de
forma directa a la fuente de alimentación de la fábrica. (Cableado en terreno)
PRECAUCIÓN
El número de serie del manipulador que debe estar conectado se indica en la
etiqueta de verificación de conexión en el controlador. Conecte el controlador y el
manipulador correctamente. La conexión incorrecta entre el controlador y el
manipulador pueden causar el mal funcionamiento del sistema de robot y ,a
además, pueden causar problemas de seguridad.
Cuando use la E/S remota, siempre asegúrese de lo siguiente. Use el sistema de
robot en condiciones poco satisfactorias puede provocar un mal funcionamiento
del sistema o problemas de seguridad.
- Asigne funciones remotas correctamente a las entradas/salidas y realice un
cableado adecuado cuando defina las señales de E/S remota.
- Asegúrese de que las funciones corresponden a las señales de entrada/salida
correspondientes antes de encender el sistema.
- Cuando verifique la operación del sistema de robot, prepárese para enfrentar
errores con la configuración inicial o el cableado. Si el manipulador funciona de
forma inusual a causa de los errores con la configuración inicial o el cableado,
presione el interruptor de parada de emergencia de inmediato para detener el
manipulador.

Seguridad
6 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
Los siguientes elementos son precauciones de seguridad para el personal
operador calificado:
ADVERTENCIA
El enclavamiento de la puerta de seguridad debe estar en funcionamiento cuando
se opere el sistema de robot. No opere el sistema si no se puede activar o
desactivar el interruptor. (Por ejemplo, si el interruptor está desactivado)
(Ejemplo: el interruptor está envuelto con cinta para mantenerlo en la posición
cerrada). Operar el sistema de robot cuando el interruptor no funciona
correctamente es extremadamente peligroso y puede causar problemas de
seguridad graves, ya que la entrada de la puerta de seguridad no puede cumplir
su función designada.
ADVERTENCIA
No abra las cubiertas del controlador excepto cuando le realiza mantenimiento.
Abrir las cubiertas del controlador es extremadamente peligroso y puede causar
una descarga eléctrica incluso cuando esté apagada la alimentación principal
debido a la carga de alto voltaje que hay dentro del controlador.

Configuración y operación
Esta sección contiene información para la configuración y la operación del controlador
de robot.


Configuración y operación
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 9
1. Especificaciones
1.1 Ejemplo de sistema
*1 EPSON RC+ 7.0 es compatible con los siguientes sistemas operativos
Windows 8.1 Pro (EPSON RC+7.0 versión 7.1.0 o posterior)
Windows 10 Pro (EPSON RC+7.0 versión 7.2.0 o posterior)
Panel de operación
Controlador de movimiento
RC90 / RC90-B
Placa de E/S de expansión
Bus de campo
PROFIBUS-DP
DeviceNet
CC-Link
EtherNet/IP
PROFINET
EtherCAT
Placa RS-232C
Windows *1
PC
Software EPSON
RC+ 7.0
Opción
USB 2.0
o
Ethernet
TP2
(opción)
E/S estándar
E/S remota
Ethernet
RS-232C
Requiere preparación por
parte de los usuarios.
Serie LS / LS-B
PLC (Secuenciador)
Option
Estándar
Placa PG
TP1
(opción)
Placa de E/S analógica
Placa EUROMAP67

Configuración y operación
10 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
1.2 Especificaciones estándar
Elemento
Especificación
Modelo
Controlador de robot RC90, RC90-B
CPU
Microprocesador de 32 bits
Ejes controlables
4 servomotores de CA
Control del
manipulador del
robot
Lenguaje de
programación y
software de
control del robot
EPSON RC+ 7.0 (lenguaje para robot multitarea)
Se recomienda la versión 7.0.2 o superior.
Control de
articulaciones
Control simultáneo de hasta 4 articulaciones
Servocontrol de CA del software
Control de
velocidad
Movimiento de PTP : Programable en el
intervalo de
1 a 100 %
Movimiento de CP : Programable (el valor real
se debe ingresar manualmente).
Control de
aceleración/
desaceleración
Movimiento de PTP : Programable en el
intervalo de
1 a 100 %; Automático
Movimiento de CP : Programable (el valor real
se debe ingresar manualmente).
Control de
posicionamiento
PTP (Control punto a punto)
CP (control de ruta continua)
Capacidad de
memoria
Tamaño máximo del objeto : 4 MB
Área de datos de punto : 1000 puntos (por archivo)
Área variable de copia de seguridad : Máx. 100 KB (Incluye
el área de memoria para la mesa de
administración).
Aprox. 1000 variables (Depende del tamaño
de las variables de matriz).
Método de
enseñanza
Remoto
Directo
MDI (Entrada de datos manual)
Señales externas de
entrada/salida
(estándar)
E/S estándar
Entrada : 24
Salida : 16
Incluidas 8 entradas,
8 salidas con función
remota asignada
Cambio de asignación
permitido
Interfaz de
comunicación
(estándar)
Ethernet
1 canal
Puerto RS-232C
1 puerto

Configuración y operación
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 11
Elemento
Especificación
Opciones
(Máx. 2 ranuras)
E/S de
expansión
Entrada : 24 por placa
Salida : 16 canales por placa
Se permite
agregar 2 placas
Interfaz de
comunicación
RS-232C : 2 canales por
placa
Se permite
agregar 2 placas
E/S de bus de campo:
1 canal por placa
PROFIBUS-DP,
DeviceNet, CC-Link,
EtherNet/IP, PROFINET,
EtherCAT
Se permite
agregar 1 placa desde
la izquierda
PG
Articulaciones controlables
4 articulaciones/placa
Se permite
agregar 2 placas
E/S analógica
SKU1
Salida: 1 canal
Se permite
agregar 2 placa desde
la izquierda
SKU2
Salida: 2 canales
Entrada: 2 canales
EUROMAP67
Entrada : 15
Salida : 16
Se permite
agregar 1 placa
Características de
seguridad
- Interruptor de parada de emergencia
- Entrada de puerta de seguridad
- Modo Low power (Baja potencia)
- Freno dinámico
- Detección de sobrecarga del motor
- Detección de torque irregular del motor (manipulador fuera de
control)
- Detección de error de velocidad del motor
- Detección de error del servo: Desbordamiento de posicionamiento
- Detección de error del servo: Desbordamiento de velocidad
- Detección de irregularidad de CPU
- Detección de error de suma de comprobación de memoria
- Detección de sobrecalentamiento en el módulo de driver del motor
- Detección de soldado de relé
- Detección de sobrevoltaje
- Detección de reducción de voltaje de la fuente de alimentación de CA
- Detección de error de temperatura
- Detección de error de ventilador
Fuente de alimentación
200 V CA a 240 V CA
Monofásico 50/60 Hz
Capacidad nominal máxima
2,5 kVA (según el modelo del manipulador)
Resistencia del aislamiento
100 M o más
Temperatura ambiente
nominal
5 a 40 C
Humedad relativa nominal
20 % a 80 % (sin condensación)
Peso *1
7,5 kg o 10 kg (según el modelo del manipulador)
Grado de protección
IP20
*1 El peso de la unidad está indicado en el controlador mismo.
Asegúrese de revisar el peso antes de transferir o reubicar las unidades y así evitar dañarse la espalda
al sostener la unidad.
Además, asegúrese de proteger sus manos, dedos y pies para que no queden atrapados ni reciban
lesiones graves.

Configuración y operación
12 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
1.3 Dimensiones exteriores
[Unidad: mm]

Configuración y operación
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 13
2. Nombres y funciones de las piezas
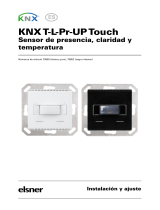
2.1 Nombres de piezas
(3)
(18)
(11) (1 2) (1 3) (14) (15) (1 6) ( 6)
(4)
(1)
(10)
(9)
(8)
(19)
(19)
(17)
(5)
(Costado
izquierdo)
(2)
(7)
La ilustración corresponde a RC90. Los nombres de las piezas y las funciones de RC90 y
de RC90-B son iguales.
2.2 Funciones
(1) Interruptor POWER (Alimentación)
Enciende o apaga el controlador.
(2) AC IN (Entrada de CA)
El bloque de terminales para la entrada de alimentación de 200 V CA.
Para conocer detalles, consulte Configuración y operación: 3.3.2 Cable de
alimentación CA.
(3) LED
El LED indica el modo de operación actual (modo ERROR, E-STOP, TEACH, AUTO,
PROGRAM [Error, Parada de emergencia, Enseñar, Automático, Programar]). Para
conocer detalles, consulte Configuración y operación 2.3. LED
(4) Filtro del ventilador
Hay un filtro de protección instalado delante del ventilador, a fin de filtrar el polvo.
Revise con regularidad la condición del filtro y límpielo cuando sea necesario. Un filtro
sucio puede provocar un mal funcionamiento del sistema de robot, debido al aumento
de temperatura del controlador.
(5) Etiqueta de firma
Aparece el número de serie del controlador y otras informaciones del controlador.
(6) Etiqueta de número del controlador
Se indica el número de serie del controlador.
(7) Etiqueta de revisión de conexión
Los detalles del manipulador que se conectará están registrados
en la etiqueta, como se muestra a la derecha. La etiqueta indica
el modelo y el número de serie del manipulador.
MANIPULADOR
00002
LS3-401S
NOTA

Configuración y operación
14 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
(8) Conector M/C POWER (Alimentación de M/C)
Un conector para la fuente de alimentación del manipulador.
Conecte el cable de alimentación dedicado con el manipulador.
(9) Conector M/C SIGNAL (Señal de M/C)
Este conector se usa para señales, como las del detector de posición del motor del
manipulador, etc. Conecte el cable de señal dedicado del manipulador.
(10) Conector EMERGENCY (Emergencia)
Este conector se usa para entrada / salida de los interruptores de parada de emergencia
y puerta de seguridad. Para conocer detalles, consulte Configuración y operación 9.
EMERGENCIA.
(11) Puerto TP
Conecta Teach Pendant TP1 (opcional) y TP2 (opcional) con el enchufe de derivación
de TP. Para conocer detalles, consulte Configuración y operación 8. Puerto TP.
No conecte los siguientes elementos al puerto TP de RC90/RC90-B. Puede provocar el
mal funcionamiento del dispositivo, ya que las asignaciones de pines son distintas.
Clavija aislante de DISPOSITIVO OPCIONAL
Caja de comandos de operación OP500
Caja de comandos del operador OP500RC
Teclado de desplazamiento JP500
Teach Pendant TP-3**
Panel del operador OP1
(12) Puerto de conexión de la computadora de desarrollo
Este puerto conecta el controlador con la computadora de desarrollo, mediante un cable
USB.
No conecte otros dispositivos salvo la computadora de desarrollo.
Para conocer detalles, consulte Configuración y operación 5. Puerto de conexión de la
computadora de desarrollo.
(13) Puerto de memoria
Este puerto conecta la memoria USB común para la función de almacenamiento de
estado del controlador. No conecte otros dispositivos USB salvo la memoria USB.
Para conocer detalles, consulte Configuración y operación 6. Puerto de memoria.
(14) Interruptor Trigger (Disparador)
Este interruptor es para la función de almacenamiento de estado del controlador
mediante la memoria USB.
Para conocer detalles, consulte Configuración y operación 6. Puerto de memoria.
(15) Puerto LAN (comunicación Ethernet)
Este puerto conecta el controlador con la computadora de desarrollo, mediante un cable
Ethernet.
Están disponibles las comunicaciones de 100BASE-TX / 10BASE-T.
Para conocer detalles, consulte Configuración y operación 7. Puerto LAN
(comunicación Ethernet).
(16) Conector de E/S
Este conector se usa para el dispositivo de entrada/salida. Hay 24 entradas y 16 salidas.
Para conocer detalles, consulte Configuración y operación 11. Conector de E/S.
NOTA

Configuración y operación
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 15
(17) Puerto RS-232C estándar
Este puerto se usa para las comunicaciones de RS-232C con dispositivos externos.
Para conocer detalles, consulte Configuración y operación 10. Puerto estándar RS-232C.
(18) Ranura opcional
Se pueden instalar las placas opcionales, como la placa de E/S de expansión, la placa
de E/S de bus de campo, la placa RS-232C, la placa PG y la placa de E/S analógica.
Hay dos ranuras disponibles.
Para conocer detalles, consulte Configuración y operación 13. Ranuras opcionales.
(19) Sujetador de cable
Se puede usar para fijar el cable de alimentación M/C y el cable de alimentación de CA.
(20) Batería (montada dentro del controlador)
Se trata de una batería de litio para copia de seguridad.
2.3 LED
Existen cinco LED instalados en el panel delantero del controlador.
Los LED (ERROR, E-STOP, TEACH, AUTO, PROGRAM [Error, Parada de emergencia,
Enseñar, Automático, Programar]) se encienden de acuerdo con el estado del controlador
(error, parada de emergencia, modo TEACH, modo Auto, modo Program).
Desde el encendido del controlador hasta el inicio completo
Parpadean tres LED (TEACH, AUTO, PROGRAM).
Después del inicio del controlador
Estado del controlador
Pantalla LED
Ejecute la función de
almacenamiento del estado del
controlador en la memoria USB
TEACH AUTO, PROGRAM parpadean.
Complete el almacenamiento
del estado del controlador en la
memoria USB
TEACH, AUTO, PROGRAM se encienden
(durante dos segundos).
ERROR se apaga incluso si ocurre un error.
Error en el almacenamiento
del estado del controlador en la
memoria USB
ERROR, TEACH, AUTO, PROGRAM se
encienden (durante dos segundos).
Error
ERROR se activa.
Advertencia
ERROR parpadea.
Parada de emergencia
E-STOP se enciende.
Modo TEACH
TEACH parpadea.
Modo automático (modo AUTO)
AUTO parpadea.
Modo Program (modo AUTO)
PROGRAM parpadea.
Modo de recuperación
ERROR, TEACH y PROGRAM se activan.
Caída de la fuente de
alimentación de CA
TEACH, AUTO se encienden.
Modo Test
ERROR se activa.

Configuración y operación
16 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
2.4 Características de seguridad
El sistema de control de robot cuenta con las características de seguridad que se describen a
continuación. Sin embargo, se recomienda leer completamente los manuales incluidos antes
de usar el sistema para cumplir estrictamente con el uso adecuado del sistema de robot. No
leer ni comprender las instrucciones acerca del uso correcto de las funciones de seguridad
es sumamente peligroso.
Entre las siguientes características de seguridad, el interruptor de parada de emergencia y la
entrada de puerta de seguridad son particularmente importantes. Asegúrese de que estas y
otras características de seguridad funcionen adecuadamente antes de operar el sistema de
robot.
Para conocer detalles, consulte Configuración y operación 9. EMERGENCIA.
Interruptor de parada de emergencia
El conector EMERGENCY en el controlador tiene terminales de expansión de entrada de
parada de emergencia, que se usan para conectar los interruptores de parada de emergencia..
Presionar cualquier interruptor de parada de emergencia puede cortar la energía del motor
inmediatamente y el sistema de robot ingresará a la condición de parada de emergencia.
Entrada de puerta de seguridad
Con el fin de activar esta característica, asegúrese de que el interruptor de entrada de la
puerta de seguridad esté conectado al conector EMERGENCY en el controlador.
Cuando se abre la puerta de seguridad, normalmente el manipulador detiene inmediatamente
el funcionamiento actual y el estado de la energía del manipulador será operación prohibida
hasta que se cierre la puerta de seguridad y se libere la condición de enganche. Con el fin de
ejecutar la operación del manipulador mientras la puerta de seguridad está abierta, debe
cambiar la llave de contacto del selector de modo del Teach Pendant al modo “Teach”. La
operación del manipulador solo estará disponible cuando el interruptor de activación esté en
encendido. En este caso, se puede hacer funcionar el manipulador en estado de potencia baja.
Modo de baja potencia
La potencia del motor se reduce en este modo.
Ejecutar una instrucción de cambio de estado de potencia cambiará al estado restringido
(baja potencia), sin importar las condiciones de la puerta de seguridad o el modo de
operación. El estado restringido (baja potencia) garantiza la seguridad del operador y reduce
la posibilidad de la destrucción de equipos periféricos o daños provocados por la operación
descuidada.
Freno dinámico
El circuito de freno dinámico incluye relés que cortocircuitan las armaduras del motor. El
circuito de freno dinámico se activa cuando hay una entrada de parada de emergencia o
cuando se detecta alguno de los siguientes errores: desconexión del cable del codificador,
sobrecarga del motor, torque irregular del motor, error de velocidad del motor, error del
servo (desbordamiento de posicionamiento o velocidad), CPU irregular, error de suma de
comprobación de memoria y condición de sobrecalentamiento dentro del módulo del driver
del motor.
Detección de sobrecarga del motor
El circuito de freno dinámico se activa cuando el sistema detecta que la carga del motor ha
superado su capacidad.

Configuración y operación
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 17
Detección de torque irregular del motor (manipulador fuera de control)
El circuito de freno dinámico se activa cuando se detecta una irregularidad con el torque del
motor (salida del motor) (en cuyo caso el manipulador está fuera de control).
Detección de error de velocidad del motor
El circuito de freno dinámico se activa cuando el sistema detecta que el motor funciona a
una velocidad incorrecta.
Detección de error del servo: Desbordamiento de posicionamiento
El circuito de freno dinámico se activa cuando el sistema detecta que la diferencia entre la
posición real del manipulador y la posición solicitada superan el margen de error permitido.
Detección de error del servo: Desbordamiento de velocidad
El circuito de freno dinámico se activa cuando se detecta que la velocidad real del
manipulador marca un error de desbordamiento (la velocidad real está fuera del margen
nominal).
Detección de irregularidad de CPU
El temporizador guardián detecta la irregularidad de la CPU que controla el motor. La
CPU del sistema y la CPU que controla el motor al interior del controlador también están
diseñadas para revisarse constantemente entre sí para ver si tienen discrepancias. Si se
detecta una discrepancia, se activa el circuito de freno dinámico.
Detección de error de suma de comprobación de memoria
El circuito de freno dinámico se activa cuando se detecta un error de suma de comprobación
de memoria.
Detección de sobrecalentamiento en el módulo de driver del motor
El circuito de freno dinámico se activa cuando la temperatura del dispositivo de potencia al
interior del módulo de driver del motor está sobre el límite nominal.
Detección de deposición de relé
El circuito de freno dinámico se activa cuando se detecta una deposición de relé, un error de
unión o una falla abierta..
Detección de sobrevoltaje
El circuito de freno dinámico se activa cuando el voltaje del controlador está sobre el límite
normal.
Detección de caída de voltaje de la fuente de alimentación de CA
El circuito de freno dinámico se activa cuando se detecta la caída de voltaje de la fuente de
alimentación.
Detección de anomalía de temperatura
Se detecta una anomalía de temperatura.
Detección de mal funcionamiento del ventilador
Se detecta mal funcionamiento de la velocidad de giro del ventilador.

Configuración y operación
18 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
3. Instalación
3.1 Desembalaje
Enchufe de derivación de TP/OP 1 unidad
Conector del puerto EMERGENCY 1 juego
Conector de E/S 1 juego
Bastidor y placa de montaje 1 juego
3.2 Requisitos ambientales
ADVERTENCIA
■
El manipulador y el controlador se deben usar en las condiciones ambientales que
se describen en sus manuales. Este producto se ha diseñado y fabricado
estrictamente para su uso en un entorno normal en interiores. El uso del producto
en un entorno que supere las condiciones no solo acortará la vida útil del producto,
sino que además causará graves problemas de seguridad.
3.2.1 Entorno
A fin de optimizar el rendimiento de seguridad del sistema de robot, se debe colocar el
controlador en un entorno que cumpla con las siguientes condiciones:
- El controlador no está diseñado para la especificación de la sala blanca. Si se debe instalar
en una sala blanca, asegúrese de instalarlo en un recinto adecuado, con la ventilación y la
refrigeración correctas.
- Instale el controlador en una ubicación que permita una fácil conexión y desconexión de
los cables.
Elemento
Condición
Temperatura ambiente
5 a 40 C (con variación mínima)
Humedad ambiental
relativa
20 % a 80 % (sin condensación)
Ráfaga de ruido rápida y
transitoria
2 kV o menos (Cable de alimentación)
1 kV o menos (cable de señal)
Ruido electrostático
4 kV o menos
Mesa base
Utilice la mesa base que esté, al menos, a 100 mm de
distancia del suelo. Colocar el controlador directamente el
suelo puede permitir la penetración de polvo y provocar
mal funcionamiento.
Si se debe usar el controlador en un entorno que cumple con las condiciones mencionadas
anteriormente, tome las medidas adecuadas. Por ejemplo, el controlador puede estar dentro
de un armario con la ventilación y la refrigeración adecuadas.
- Instalar solo en interiores.
- Colocar en un área bien ventilada.
- Mantener lejos de la luz solar directa y de la irradiación de calor.
· Mantener lejos del polvo, humo grasiento, salinidad, polvo metálico u otros contaminantes.
- Mantener lejos del agua.
· Mantener lejos de golpes o vibraciones.
- Mantener lejos de fuentes de ruido eléctrico.
- Mantener lejos de los campos eléctricos o magnéticos fuertes.

Configuración y operación
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 19
3.2.2 Instalación
Instale el controlador en una superficie plana, como una pared, el suelo y la caja de
controlador en la dirección que se muestra de (A) a (C).
(A) Montaje horizontal
(B) Montaje vertical (C) Montaje en bastidor
* Se debe reemplazar la pata de caucho.
* Se requiere una placa de
montaje en bastidor.
Para la instalación del controlador en la caja del controlador o en la mesa base, procese los
agujeros para los tornillos de la siguiente manera.
133,35 mm
463 mm
Asegúrese de que haya corriente de aire en la entrada/salida para evitar otros equipos, las
paredes e instale el controlador, manteniendo la distancia para el mantenimiento del
siguiente modo.
50 mm
50 mm
100 mm
Excluye el lado de instalación,
como la mesa base
Flujo de aire del ventilador
del controlador
100 mm
200 mm
- Aire caliente con temperatura superior a la temperatura ambiente (unos 10 C) sale del
controlador. Asegúrese de que no haya dispositivos sensibles al calor cerca de la salida de
aire.
- Ordene los cables en la parte delantera del controlador, de manera que pueda tirar hacia
adelante el controlador.
NOTA

Configuración y operación
20 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
3.3 Fuente de alimentación
3.3.1 Especificaciones
Asegúrese de que la energía disponible cumpla con las siguientes especificaciones.
Instale un disyuntor de fuga a tierra o un disyuntor en la línea de cable de alimentación de
CA a una corriente eléctrica nominal de 15 A o menor. Ambos deben ser de tipo de
desconexión bipolar. Si instala un disyuntor de fuga a tierra, asegúrese de usar un tipo de
inversor que no funcione con inducción de una corriente de fuga de 10 kHz o superior. Si
instala un disyuntor, seleccione uno que soporte la “corriente máxima” indicada
anteriormente.
El tomacorriente debe estar instalado cerca del equipo y debe tener un acceso fácil.
Elemento
Especificación
Voltaje
200 a 240 V CA
El voltaje de entrada debe estar dentro de 10 del voltaje
nominal.
Fase
Monofásico
Frecuencia
50/60 Hz
Interrupción de
energía
momentánea
10 ms o menos
Capacidad nominal
Máx. 2,5 kVA
El consumo de energía real depende del modelo, el movimiento
y la carga del manipulador.
Para conocer el consumo de energía aproximado de cada
modelo, consulte los siguientes valores
LS3 : 1,0 kVA
LS6 : 1,1 kVA
LS20 : 2,4 kVA
LS3-B: 1,0 kVA
LS6-B : 1,1 kVA
LS20-B : 2,4 kVA
LS10-B : 1,8 kVA
Consulte el manual del manipulador para conocer la
capacidad nominal del motor del manipulador.
Corriente máxima
Cuando la energía está encendida : aproximadamente 70
A (2 ms)
Cuando el motor está encendido : aproximadamente 50
A (2 ms)
Corriente de fuga
Máx. 10 mA
Resistencia de tierra
100 o menos

Configuración y operación
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 21
3.3.2 Cable de alimentación de CA
ADVERTENCIA
■
Asegúrese de que personal calificado realice las operaciones.
■
Asegúrese de conectar el cable a tierra (verde/amarillo) del cable de alimentación
de CA al terminal de conexión a tierra de la fuente de alimentación de la fábrica.
El equipo debe estar conectado a tierra de forma correcta en todo momento para
evitar el riesgo de descargas eléctricas.
■
Siempre use un enchufe o un dispositivo de desconexión para el cable de
alimentación. Nunca conecte el controlador de forma directa a la fuente de
alimentación de la fábrica.
■
Seleccione el enchufe o un dispositivo de desconexión que cumpla con las normas
de seguridad de los países.
Elemento
Especificación
Cable de alimentación de
CA (2 cables)
Negro, Negro
o Negro, Blanco
Cable a tierra
Verde / Amarillo
Longitud de cable
3 m
Terminal
Terminal redondo sin soldadura M4

Configuración y operación
22 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
3.3.3 Cable de alimentación M/C
(1)
Instale el cable de alimentación M/C como se muestra en la
imagen y forme los cables.
(2)
Ajuste el cable de alimentación M/C en el sujetador para el
cable de alimentación M/C.
(3)
Instale la cubierta del conector de alimentación M/C.
(4)
Fije la cubierta con el tornillo.

Configuración y operación
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 23
3.4 Conexión de cables
ADVERTENCIA
■
Asegúrese de que la energía que va al controlador esté apagada y que el enchufe
de alimentación esté desconectado antes de conectar o desconectar cables.
Conectar o desconectar cualquier cable con la energía encendida es
extremadamente peligroso y puede provocar una descarga eléctrica o el mal
funcionamiento del controlador.
■
Asegúrese de conectar los cables correctamente. No permita una tensión
innecesaria en los cables. (No coloque objetos pesados en los cables. No doble
ni tire de los cables por la fuerza). La tensión innecesaria en los cables puede
provocar daños en los cables, desconexión o error de contacto. Los cables
dañados, la desconexión o el error de contacto son extremadamente peligrosos y
pueden provocar descargas eléctricas o el mal funcionamiento del sistema.
PRECAUCIÓN
■
El número de serie del manipulador que debe estar conectado se indica en la
etiqueta de verificación de conexión en el controlador. Conecte el controlador y el
manipulador correctamente. La conexión incorrecta entre el controlador y el
manipulador no solo pueden causar el mal funcionamiento del sistema de robot,
sino que además pueden causar problemas de seguridad.
■
Antes de conectar el conector, asegúrese de que los pines no estén doblados. Si
lo conecta con los pines doblados, se puede dañar el conector y causar un mal
funcionamiento del sistema de robot.

Configuración y operación
24 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
3.4.1 Conexión de cables típica
Manipulador
(6) Memoria USB
Computadora de
desarrollo
Dispositivo de
entrada/ salida
Se conecta mediante
(5) o (7)
*1
*1
Controlador
(1) Bloque de terminales de alimentación de CA
(2) Conector de encendido de M/C
(3) Conector de señal de M/C
(4) Conector de EMERGENCIA
200 V CA-240 V CA
(7) LAN (Comunicación
Ethernet)
(8) Conector de E/S
(9) Conector TP
(10) Conector estándar RS-232C
Parada de emergencia
puerta de seguridad, etc.
Teach
Pendant
Opción
E/S de bus de campo
E/S de expansión
RS-232C
Placa PG
E/S analógica
EUROMAP67
Conector desmontable
Cable instalado en el envío
Cable preparado por los usuarios
(5) Puerto de conexión de la computadora
de desarrollo
*1: Solo la serie LS-B es desmontable.
(1)
Bloque de terminales de alimentación de CA
Bloque de terminales para la entrada de alimentación de 200 V CA hacia el
controlador.
(2)
Cable de alimentación M/C
El cable con el conector de 20 pines en el lado del controlador.
Conecte el manipulador y el conector de ENCENDIDO de M/C en el controlador.
Inserte los conectores hasta que oiga un “clic”.
(3)
Cable de señal M/C
El cable con el conector de 36 pines en el lado del controlador.
Conecte el manipulador y el conector de SEÑAL M/C en el controlador.
(4)
EMERGENCIA
El conector EMERGENCY (Emergencia) tiene entradas para conectar el
interruptor de parada de emergencia y el interruptor de la puerta de seguridad. Por
motivos de seguridad, conecte los interruptores adecuados para estos dispositivos
de entrada.
Para conocer detalles, consulte Configuración y operación 9. EMERGENCIA.

Configuración y operación
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 25
(5)
Computadora de desarrollo
Conecte la computadora de desarrollo
Para conocer detalles, consulte Configuración y operación 5. Puerto de la
computadora de desarrollo.
(6)
Memoria USB
Conecte la memoria USB.
Para conocer detalles, consulte Configuración y operación 6. Puerto de memoria.
(7)
LAN (comunicación Ethernet)
Conecte el cable EtherNet.
Para conocer detalles, consulte Configuración y operación 7. Puerto LAN
(comunicación Ethernet).
(8)
Conector de E/S
Este conector se usa para los dispositivos de entrada / salida del usuario.
Cuando haya dispositivos de entrada y salida, use este conector.
Hay un conector de E/S (opcional) y un bloque de terminales (opcional) para el
conector de E/S.
Para conocer detalles, consulte Configuración y operación 11. Conector de E/S.
(9)
Cable de TP
Sirve para conectar la opción de Teach Pendant.
Para conocer detalles, consulte Configuración y operación 8. Puerto TP.
(10)
Puerto estándar RS-232C
Este puerto se usa para las comunicaciones de RS-232C con dispositivos externos.
Para conocer detalles, consulte Configuración y operación 10. Puerto estándar RS-
232C.

Configuración y operación
26 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
3.4.2 Conexión del manipulador al controlador
Conecte el manipulador al controlador con el cable de alimentación y el cable de señal.
ADVERTENCIA
■
Asegúrese de que la alimentación que va al controlador esté apagada antes de
conectar o desconectar cables. Conectar o desconectar cualquier cable con la
energía encendida es extremadamente peligroso y puede provocar una descarga
eléctrica o el mal funcionamiento del controlador.
■
Asegúrese de conectar los cables correctamente. No permita una tensión
innecesaria en los cables. (No coloque objetos pesados en los cables. No doble
ni tire de los cables por la fuerza). La tensión innecesaria en los cables puede
provocar daños en los cables, desconexión o error de contacto. Los cables
dañados, la desconexión o el error de contacto son extremadamente peligrosos y
pueden provocar descargas eléctricas o el mal funcionamiento del sistema.
PRECAUCIÓN
■
El número de serie del manipulador que debe estar conectado se indica en la
etiqueta de verificación de conexión en el controlador. Conecte el controlador y el
manipulador correctamente. La conexión incorrecta entre el controlador y el
manipulador no solo pueden causar el mal funcionamiento del sistema de robot,
sino que además pueden causar problemas de seguridad.
■
Al conectar el manipulador al controlador, asegúrese de que coincidan los
números de serie en cada equipo. La conexión incorrecta entre el manipulador y
el controlador no solo pueden causar el funcionamiento incorrecto del sistema de
robot, sino que además pueden causar graves problemas de seguridad. El
método de conexión varía con el controlador utilizado. Para conocer detalles
sobre la conexión, consulte el manual del controlador.

Configuración y operación
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 27
Los datos de configuración para el manipulador y el modelo del manipulador se guardan en
el controlador. Por lo tanto, se debe conectar el controlador al manipulador, cuyo número de
serie esté especificado en la etiqueta de verificación de conexión pegada en la parte delantera
del controlador.
El número de serie del manipulador está indicado en la etiqueta de firma del manipulador.
Manipulador de la serie LS3
(Figura: LS3-401S)
Controlador RC90
Cable de alimentación
de M/C
Cable de señal de M/C
NOTA

Configuración y operación
28 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
3.5 Medidas contra el ruido
Para minimizar las condiciones de ruido eléctrico, se deben observar los siguientes
elementos en el cableado del sistema:
Para minimizar la condición de ruido eléctrico, asegúrese de que se cumpla lo siguiente para
el cableado.
- El cable a tierra de la fuente de alimentación debe estar conectado a tierra. (Resistencia
de tierra: 100 o menos). Es importante conectar a tierra la estructura del controlador,
no solo con fines de prevención de descargas eléctricas, sino que además para reducir la
influencia del ruido eléctrico alrededor del controlador. Por lo tanto, asegúrese de
conectar el cable a tierra (amarillo/verde) del cable de alimentación del controlador al
terminal de conexión a tierra de la fuente de alimentación de la fábrica. Para conocer
detalles acerca del enchufe y el cable de alimentación de CA, consulte Configuración y
operación 3.3 Fuente de alimentación.
- No extraiga energía de una línea de alimentación que se conecte a cualquier equipo que
pueda causar ruido.
- Cuando deriva la energía para el controlador y el motor monofásico de CA desde la
misma línea de alimentación, cambie la fase de uno o del otro. Asegúrese de que no estén
en la misma fase.
- Use una línea de alimentación de motor de par
trenzado.
- No pase las líneas de alimentación de CA y las
líneas de alimentación de CC por los mismos
conductos de cableado y sepárelas lo más
posible. Por ejemplo, separe la línea de
alimentación del motor de CA y la línea de
alimentación del controlador lo más posible de
las líneas de E/S del sensor o de la válvula; no
agrupe ambos conjuntos de cableado con el
mismo amarracables. Si uno o más conductos o
cables se deben cruzar, deben hacerlo de
manera perpendicular. El ejemplo preferido se
muestra en la figura a la derecha.
- Conecte con los cables lo más cortos posibles al conector de E/S y al conector
EMERGENCY. Use un cable blindado y afirme el blindaje al interior del conector
adjunto. Asegúrese de mantenerse lo más alejado posible de fuentes de ruido periféricas.
- Asegúrese de que los elementos de inducción que se usan para conectar a la E/S del
controlador (como relés y válvulas de solenoide) sean piezas de supresión de ruido. Si
se usa un elemento de inducción sin protección contra ruido, asegúrese de conectar una
pieza de supresión de ruido, como un diodo, ubicada en paralelo al elemento de inducción.
Cuando seleccione piezas de supresión de ruido, asegúrese de que puedan soportar el
voltaje y la corriente en la que incurre la carga de inducción.
- Para comenzar y cambiar las revoluciones del motor de CA del transportador (o similar)
(ej.: un motor de inducción o un motor de inducción trifásico) de manera regular o
abrupta, asegúrese de instalar un supresor de chispa entre los cables. El supresor de
chispa es más efectivo cuando se pone más cerca del motor.
- Mantenga los cables como USB, Ethernet, RS-232C o de bus de campo alejados de
fuentes de ruido periféricas, ya que se influencian fácilmente con estas.

Configuración y operación
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 29
4. Modo de operación (TEACH/AUTO/TEST)
4.1 Descripción general
El sistema de robot tiene tres modos de operación.
Modo TEACH
(Enseñar)
Este modo permite enseñar y revisar datos de puntos cercanos al robot
con el Teach Pendant.
En este modo, el robot funciona en estado de potencia baja.
Modo AUTO
(Automático)
Este modo permite la operación automática (ejecución del programa)
del sistema de robot para las actividades de fabricación y, además, para
la programación, depuración, ajuste y mantenimiento del sistema de
robot.
Este modo no puede accionar los robots ni ejecutar programas con la
puerta de seguridad abierta.
Modo TEST
(Prueba)
Este modo permite la verificación del programa mientras se mantiene
presionado el interruptor de activación y la protección está abierta.
Esta es una función de verificación del programa de baja seguridad (T1:
modo de desaceleración manual), la que se define en las normas de
seguridad.
Este modo puede accionar la función especificada con varias tareas /
una sola tarea, varios manipuladores / un solo manipulador a baja
velocidad.
4.2 Modos de operación del interruptor
Cambie el modo de operación con el interruptor de llave selector de modo en el Teach
Pendant.
Modo TEACH
(Enseñar)
Gire el interruptor de llave selector de modo a “Teach” para el modo
TEACH. Si cambia al modo TEACH, se pausa el programa si estaba
ejecutándose.
El robot operativo se detiene con Quick Pause (Pausa rápida).
Modo AUTO
(Automático)
Gire el interruptor de llave selector de modo a “Auto” y active la señal
de entrada de liberación del enganche para el modo AUTO.
Modo TEST
(Prueba)
Gire el interruptor de llave selector de modo a “Teach” para el modo
TEACH. Presione la tecla <F1> [Test Mode] (Modo de prueba) en el
cuadro de diálogo [Jog & Teach] (Desplazar y enseñar) del modo
TEACH. El modo se cambia a TEST

Configuración y operación
30 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
4.3 Modo Program (AUTO)
4.3.1 ¿Qué es el modo Program (AUTO)?
El modo Program (Programar) sirve para la programación, depuración, ajuste y
mantenimiento del sistema de robot.
Siga los siguientes procedimientos para cambiar al modo Program.
4.3.2 Configuración desde EPSON RC+ 7.0
Cambie al modo Program desde EPSON RC+ 7.0.
(1) En EPSON RC+ 7.0, seleccione menú-[Setup]-[System Configuration] (Configuración
- Configuración del sistema) para mostrar el diálogo [System Configuration].
(2)
(5)
(3)
(4)
(2) Seleccione [Startup] (Inicio).
(3) Seleccione [Start mode]-botón <Program> (Modo Inicio - botón Programar).
(4) Haga clic en el botón <Apply> (Aplicar).
(5) Haga clic en el botón <Close>.

Configuración y operación
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 31
4.4 Modo automático (AUTO)
4.4.1 ¿Qué es el modo automático (AUTO)?
El modo automático (AUTO) sirve para la operación automática del sistema de robot.
Los siguientes corresponden a los procedimientos para cambiar al modo automático
(AUTO).
A : Defina el modo de inicio de EPSON RC+ 7.0 en “Auto” e inicie EPSON RC+
7.0.
(Consulte Configuración y operación 4.4.2 Configuración desde EPSON RC+ 7.0.)
B : Desconecte de Internet EPSON RC+ 7.0.
Ejecute y detenga el programa desde el dispositivo de control que especifica EPSON RC+
7.0. (Consulte Configuración y operación 4.4.3 Configuración del dispositivo de control.)
4.4.2 Configuración desde EPSON RC+ 7.0
Cambie al modo automático (AUTO) desde EPSON RC+ 7.0.
(1) En EPSON RC+ 7.0, seleccione menú-[Setup]-[System Configuration] para mostrar el
diálogo [System Configuration].
(2)
(5)
(3)
(4)
(2) Seleccione [Startup].
(3) Seleccione [Start mode]-botón <Auto> (Modo Inicio - botón Automático).
(4) Haga clic en el botón <Apply>.
(5) Haga clic en el botón <Close>.
NOTA

Configuración y operación
32 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
4.4.3 Configuración desde el dispositivo de control
Configure el dispositivo de control desde EPSON RC+ 7.0.
(1) En EPSON RC+ 7.0, seleccione menú-[Setup]-[System Configuration] para mostrar el
diálogo [System Configuration].
(2)
(5)
(3)
(4)
(2) Seleccione [Controller]-[Configuration] (Controlador - Configuración).
(3) Seleccione [Control Device] (Dispositivo de control) para seleccionar el dispositivo de
control desde los siguientes dos tipos.
- PC
- Remoto (E/S)
(4) Haga clic en el botón <Apply>.
(5) Haga clic en el botón <Close>.

Configuración y operación
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 33
5. Puerto de conexión de la computadora de desarrollo
Puerto USB de conexión de la computadora de desarrollo (conector de la serie USB B)
Puerto de conexión de la computadora de desarrollo
Para otros detalles acerca de la conexión de la computadora de desarrollo y el controlador,
consulte Manual del usuario de EPSON RC+ 7.0, 5.12.1 Comando PC to Controller
Communications.
Para RC90 / RC90-B, asegúrese de primero instalar el software EPSON RC+ 7.0 en la
computadora de desarrollo y, luego, de conectar la computadora de desarrollo y RC90 /
RC90-B con el cable USB.
Si RC90 / RC90-B y la computadora de desarrollo se conectan sin instalar EPSON RC+ 7.0
en la computadora de desarrollo, aparecerá [Add New Hardware Wizard] (Asistente para
agregar nuevo hardware). Si aparece este asistente, haga clic en el botón <Cancel>
(Cancelar).
5.1 Acerca del puerto de conexión de la computadora de desarrollo
El puerto de conexión de la computadora de desarrollo es compatible con los siguientes
tipos de USB.
- USB2.0 de alta velocidad/velocidad completa (selección de velocidad automática o modo
de velocidad completa)
- USB1.1 de velocidad completa
Estándar de interfaz: Especificación de USB compatible con versión 2.0
(compatible con USB versión 1.1 y superior)
Conecte el controlador y la computadora de desarrollo mediante un cable USB para
desarrollar el sistema de robot o ajustar la configuración del controlador con el software
EPSON RC+ 7.0 instalado en la computadora de desarrollo.
El puerto de conexión de la computadora de desarrollo es compatible con la conexión
directa. La inserción y el retiro de los cables desde la computadora de desarrollo y el
controlador están disponibles cuando la energía está encendida. Sin embargo, se produce
una detención cuando el cable USB se quita del controlador o de la computadora de
desarrollo durante una conexión.
NOTA

Configuración y operación
34 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
5.2 Precaución
Cuando conecte la computadora de desarrollo y el controlador, asegúrese de lo siguiente:
- Conecte la computadora de desarrollo y el controlador con un cable USB de 5 m o menos.
No use un concentrador USB o cable de extensión.
- Asegúrese de que el puerto de conexión de la computadora de desarrollo no se use con
ningún dispositivo que no sea la computadora de desarrollo.
- Use un cable de computadora y USB que sea compatible con el modo de alta velocidad
de USB 2.0 para operar en modo de alta velocidad de USB 2.0.
- No tire del cable con fuerza ni lo doble.
- No aplique presiones innecesarias al cable.
- Cuando la computadora de desarrollo y el controlador están conectados, no inserte ni
retire otros dispositivos USB de la computadora de desarrollo. Se puede perder la
conexión con el controlador.
5.3 Verificación de conexión y configuración de software
Se indica la conexión de la computadora de desarrollo con el controlador.
(1) Asegúrese de que el software EPSON RC+ 7.0 (se recomienda la versión 7.0.2 o
superior) esté instalado en el controlador conectado con la computadora de desarrollo.
(Si el software no está instalado, instálelo). Consulte Seguridad e instalación del sistema
de robot o el Manual del usuario de EPSON RC+ 7.0.
(2) Conecte la computadora de desarrollo con el controlador con el cable USB.
(3) Encienda el controlador.
(4) Inicie EPSON RC+ 7.0.
(5) En EPSON RC+ 7.0, seleccione menú-[Setup]-[PC to Controller Communications]
(Configuración - Comunicaciones de computadora a controlador) para mostrar el
diálogo [PC to Controller Communications] (Comunicaciones de computadora a
controlador).
(6) Seleccione “No.1 USB” (USB n.º 1) y haga clic en el botón <Connect> (Conectar).

Configuración y operación
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 35
(7) Después de que la conexión de la computadora de desarrollo con el controlador esté
completa, aparecerá “Connected” (Conectado) en [Connection status] (Estado de
conexión). Asegúrese de que aparezca “Connected” y haga clic en el botón <Close>
(Cerrar) para cerrar el diálogo de [PC to Controller Communications].
Se completó la conexión entre la computadora de desarrollo y el controlador. Ahora se puede
usar el sistema de robot desde EPSON RC+ 7.0.
5.4 Desconexión de la computadora de desarrollo y el controlador
Se indica la desconexión de la computadora de desarrollo y el controlador.
(1) En EPSON RC+ 7.0, seleccione menú-[Setup]-[PC to Controller Communications]
para mostrar el diálogo [PC to Controller Communications].
(2) Haga clic en el botón <Disconnect> (Desconectar).
La comunicación entre el controlador y la computadora de desarrollo está desconectada
y se puede retirar el cable USB.
Si se retira el cable USB mientras el controlador y la computadora de desarrollo se encuentran
conectados, se detendrá el robot. Asegúrese de hacer clic en el botón <Disconnect> en el
diálogo [PC to Controller Communications] antes de retirar el cable USB.
NOTA

Configuración y operación
36 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
6. Puerto de memoria
Conecte una memoria USB comercial al puerto de memoria del controlador para usar la
función de almacenamiento del estado del controlador en la memoria USB.
6.1 ¿Qué es la función de almacenamiento de estado del controlador?
Esta función guarda diversos tipos de datos del controlador en la memoria USB. Los datos
guardados en la memoria USB se cargan a EPSON RC+ 7.0 para obtener el estado del
controlador y del programa de forma simple y precisa.
Los datos guardados también se pueden usar para restaurar el controlador.
6.2 Antes de usar la función de almacenamiento del estado del
controlador
6.2.1 Precauciones
PRECAUCIÓN
■
La función de almacenamiento del estado del controlador está disponible en
cualquier momento y en cualquier estado del controlador después de iniciarlo.
Sin embargo, las operaciones desde la consola, como la detención y pausa, no
están disponibles mientras ejecuta esta función.
Asimismo, esta función influye en el tiempo del ciclo del robot y la comunicación
con EPSON RC+ 7.0. Aparte de cuando es estrictamente necesario, no ejecute
esta función mientras esté funcionando el robot.
- Asegúrese de que el puerto USB se usa solamente para la memoria USB, incluso si el
puerto del controlador sea uno universal.
- Inserte la memoria USB directamente en el puerto de memoria del controlador. No se
garantiza que se establezca la conexión con cables o concentradores entre el controlador
y la memoria USB.
- Asegúrese de insertar y sacar lentamente la memoria USB.
- No edite los archivos guardados con un editor. No se garantiza la operación del sistema
de robot después de restaurar los datos en el controlador.
6.2.2 Memoria USB adoptable
Use la memoria USB que cumpla las siguientes condiciones.
- Compatibilidad con USB2.0
- Sin función de seguridad
No se puede usar una memoria USB con función de entrada de contraseña.
- No se necesita instalar un driver o un software para Windows 8 o Windows 10.
(Para conocer los sistemas operativos compatibles con EPSON RC+ 7.0, consulte
Configuración y operación 1.1 Ejemplo de sistema).

Configuración y operación
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 37
6.3 Función de almacenamiento del estado del controlador
6.3.1 Almacenamiento del estado del controlador con el botón
Trigger (Disparador)
PRECAUCIÓN
■
La función de almacenamiento del estado del controlador está disponible en
cualquier momento y en cualquier estado del controlador después de iniciarlo.
Sin embargo, las operaciones desde la consola, como la detención y pausa, no
están disponibles mientras ejecuta esta función.
Asimismo, esta función influye en el tiempo del ciclo del robot y en la comunicación
con EPSON RC+ 7.0. Aparte de cuando es estrictamente necesario, no ejecute
esta función mientras esté funcionando el robot.
Use este procedimiento para guardar el estado del controlador en la memoria USB.
(1) Inserte la memoria USB en el puerto de memoria.
(2) Espere aproximadamente 10 segundos para que se reconozca la memoria USB.
(3) Presione el botón Trigger del controlador.
Cuando se inicie la transferencia de datos, los LED de TEACH, AUTO y PROGRAM
comienzan a parpadear. Espere hasta que el estado de los LED cambie.
(El tiempo de transferencia de datos varía según el tamaño de los datos, así como el de
los proyectos).
(4) Cuando el almacenamiento de estado del controlador termina satisfactoriamente, los LED de
TEACH, AUTO y PROGRAM se encienden durante dos segundos. Observe que el LED
ERROR se apaga, incluso en el estado de error.
Si termina con errores, el LED ERROR, TEACH, AUTO y PROGRAM se encienden
durante dos segundos.
(5) Retire la memoria USB del controlador.
- Se recomienda usar una memoria USB con LED para revisar los cambios de estado en el
procedimiento (2).
- Cuando se ejecuta el almacenamiento durante un estado de motor encendido, podría no
almacenarse el estado.
Use otra memoria USB o ejecute el almacenamiento durante el estado de motor apagado.
6.3.2 Carga de datos con EPSON RC+ 7.0
Lo siguiente corresponde al procedimiento para leer datos almacenados en una memoria
USB mediante EPSON RC+ 7.0 y la visualización del estado del controlador.
(1) Inserte la memoria USB en la computadora con EPSON RC+ 7.0.
(2) Asegúrese de que la siguiente carpeta aparezca en la memoria USB.
Se guardó el estado de B_controller model_serial number_data
Ejemplo RC90 : B_RC90_12345_2013-10-29_092951
Ejemplo RC90-B : B_RC90-B_12345_2013-10-29_092951
(3) Copie la carpeta confirmada en el procedimiento (2) en la carpeta
“\EpsonRC70\Backup”.
NOTA

Configuración y operación
38 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
(4) En EPSON RC+ 7.0, seleccione menú-[Tools]-[Controller] para mostrar el diálogo
[Controller Tools] (Herramientas de controlador).
(5) Haga clic en el botón <View Controller Status…> (Ver estado del controlador…).
(6) Aparece el cuadro de diálogo [Browse For Folder] (Examinar carpeta). Seleccione la
carpeta copiada en el procedimiento (3) y haga clic en el botón <OK> (Aceptar).
(7) Aparece el cuadro de diálogo [Controller Status Viewer] (Visor de estado del
controlador) para confirmar el estado del controlador.
Para conocer detalles, consulte Ver estado del controlador en Manual del usuario de
EPSON RC+ 7.0, 5.11.8 Comando Controller (menú Tools).

Configuración y operación
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 39
6.3.3 Transferencia con correo electrónico
Siga este procedimiento para transferir los datos que se guardaron en la memoria USB por
correo electrónico.
(1) Inserte la memoria USB en una computadora compatible con el envío de correo
electrónico.
(2) Asegúrese de que la memoria USB tenga las siguientes carpetas.
Se guardó el estado de B_controller model_serial number_data
Ejemplo RC90 : B_RC90_12345_2013-10-29_092951
Ejemplo RC90-B : B_RC90-B_12345_2013-10-29_092951
(3) Envíe todas las carpetas por correo electrónico.
- Elimine los archivos que no se relacionen con el proyecto antes de la transferencia.
- Esta función se usa para enviar los datos al director del sistema y EPSON desde los
usuarios finales para el análisis de problemas.
6.4 Detalles de los datos
Los siguientes archivos de datos se crearon mediante la función de almacenamiento del
estado del controlador.
Nombre de archivo
Descripción
Backup.txt
Archivo de
información
para
restauración
Archivo con información para restaurar el controlador.
CurrentMnp01.PRM
Parámetro del
robot
Guarda información como ToolSet.
CurrentStatus.txt
Estado
guardado
Guarda el estado del programa y E/S.
ErrorHistory.csv
Historial de
errores
InitFileSrc.txt
Configuración
inicial
Guarda diversas configuraciones del controlador.
MCSys01.MCD
Configuración
del robot
Guarda información del robot conectado.
SrcmcStat.txt
Información de
hardware
Guarda información de instalación del hardware.
ProjectName.obj
Archivo OBJ
Resultado de la compilación del proyecto.
El archivo Prg no se incluye.
GlobalPreserves.dat *1
Variables
globales
conservadas
Guarda los valores de las variables globales conservadas.
WorkQueues.dat
Información de
WorkQue
Guarda información de las colas de WorkQue.
NOTA

Configuración y operación
40 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
MCSRAM.bin
MCSYSTEMIO.bin
MCTABLE.bin
MDATA.bin
SERVOSRAM.bin
VXDWORK.bin
Información
interna
de la operación
del robot
Todos los archivos
relacionados con
el proyecto, excepto
NombreDeProyecto.obj
*2
Proyecto
Cuando está marcada la casilla de verificación [Include
project files when status exported] (Incluir archivos del
proyecto cuando se exporta el estado) en el menú [Setup]-
[System Configuration]-[Controller]-
[Preference] (Configuración - Configuración del sistema -
Controlador - Preferencia) de EPSON RC+ 7.0, el archivo del
proyecto se almacena. Incluye los archivos de programa.
*1 Cuando la versión de firmware del controlador es Ver.1.0.*.*, no se almacena GlobalPreserves.dat.
*2 El almacenamiento de “Todos los archivos relacionados con el proyecto, excepto NombreDeProyecto.obj”
se puede especificar con una configuración.

Configuración y operación
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 41
7. Puerto LAN (comunicación Ethernet)
- Consulte el Manual del usuario 5.12.1 de EPSON RC+ 7.0[PC to Controller
Communications] Command (Setup Menu) EPSON RC+ 7.0, 5.12.1 Comando PC to
Controller Communications (menú Setup) para otros detalles sobre la conexión entre la
computadora de desarrollo y el controlador.
- Para conocer la comunicación Ethernet (TCP/IP) con el software de la aplicación del robot,
consulte la Ayuda en línea de EPSON RC+ 7.0 o el Manual del usuario 14.
Comunicaciones TCP/IP.
7.1 Acerca del puerto LAN (comunicación Ethernet)
El puerto de comunicación Ethernet admite 100BASE-TX / 10 BASE-T.
Este puerto se usa para dos fines distintos.
Conexión con la computadora de desarrollo
El puerto LAN (comunicación Ethernet) se usa para conectar el controlador y la
computadora de desarrollo.
Existe una operación equivalente para realizar la conexión entre el controlador y la
computadora de desarrollo con el puerto de conexión de la computadora de desarrollo.
(Consulte Configuración y operación 5. Puerto de conexión de la computadora de
desarrollo)
Conexión con otro controlador o computadora
El puerto LAN (comunicación Ethernet) se puede usar como un puerto de
comunicaciones Ethernet (TCP/IP) para comunicarse entre varios controladores desde el
software de la aplicación del robot.
7.2 Dirección IP
Desde la siguiente versión de firmware se requiere contraseña de autenticación cuando
conecte controladores y computadoras a una red global accesible.
F/W : Ver.7.4.8.x
Nuestro sistema de robot se entrega bajo el supuesto de que los clientes lo utilizarán en redes
de área local cerradas. Tuvimos en cuenta que la configuración de la dirección IP global es
el acceso a Internet y cambiamos la especificación para realizar la autenticación con
contraseña a fin de asegurar las conexiones.
La autenticación con contraseña no se realiza en caso de las conexiones USB.
Asegúrese de usar las siguientes direcciones IP privadas.
Lista de dirección privada
10.0.0.1
a
10.255.255.254
172.16.0.1
a
172.31.255.254
192.168.0.1
a
192.168.255.254
A continuación se encuentra la configuración del controlador al momento de la entrega.
Dirección IP : 192.168.0.1
Máscara IP : 255.255.255.0
Puerta de enlace de IP: 0.0.0.0
NOTA

Configuración y operación
42 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
7.3 Cambio de la dirección IP del controlador
En esta sección se indica el procedimiento para cambiar la dirección IP del controlador
cuando realiza la conexión entre el puerto de conexión de la computadora de desarrollo del
controlador y la computadora de desarrollo mediante el cable USB.
(1) Para conocer la conexión entre la computadora de desarrollo y el controlador, consulte
Configuración y operación5. Puerto de conexión de la computadora de desarrollo.
(2) En EPSON RC+ 7.0, seleccione menú-[Setup]-[Controller] para abrir el siguiente
cuadro de diálogo.
(3) Seleccione [Controller]-[Configuration].
(4) Ingrese la dirección IP correspondiente y la máscara de subred, y luego haga clic en el
botón <Apply>.
(5) Haga clic en el botón <Close>. El controlador se reinicia automáticamente.
La configuración de la dirección IP se completa y vuelve a aparecer el diálogo
Controller reboot (Reinicio del controlador).
Cuando el controlador y la computadora de desarrollo se conectan mediante Ethernet,
también se puede cambiar la dirección IP del controlador. Sin embargo, el controlador y la
computadora de desarrollo no se conectan automáticamente después de reiniciar el
controlador en la conexión Ethernet.
NOTA

Configuración y operación
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 43
7.4 Conexión de la computadora de desarrollo y el controlador
mediante Ethernet
A continuación, se muestra la conexión entre la computadora de desarrollo y el controlador.
(1) Conecte la computadora de desarrollo y el controlador con el cable Ethernet.
(2) Encienda el controlador.
(3) Inicie EPSON RC+ 7.0.
(4) Muestre el diálogo [PC to Controller Communication] en [Setup] en el menú de EPSON
RC+ 7.0.
(5) Haga clic en el botón <Add> (Agregar).
(6) Se agrega la conexión “No.2”. Configure lo siguiente y haga clic en el botón <Apply>.
Nombre: Valor válido para identificar el controlador que desea conectar Dirección IP:
Dirección IP del controlador que desea conectar
(7) Aparece el [Name] (Nombre) y [IP Address] (Dirección IP) especificados en el
procedimiento (6).

Configuración y operación
44 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
(8) Asegúrese de que esté seleccionado “No.2” y haga clic en el botón <Connect>
(Conectar).
(9) Después de que se completa la conexión de la computadora de desarrollo con el
controlador, aparecerá “Connected” (Conectado) en [Connection status:] (Estado de
conexión:). Asegúrese de que aparezca “Connected” y haga clic en el botón <Close>
(Cerrar) para cerrar el diálogo de [PC to Controller Communications].
Se completó la conexión entre la computadora de desarrollo y el controlador. Ahora se
puede usar el sistema de robot desde EPSON RC+ 7.0 mediante la conexión Ethernet.
7.5 Desconexión de la computadora de desarrollo y el controlador
mediante Ethernet
A continuación, se muestra la desconexión entre la computadora de desarrollo y el
controlador.
(1) Muestre el diálogo [PC-Controller Connection] en [Setup] en el menú de EPSON RC+
7.0.
(2) Haga clic en el botón <Disconnect> (Desconectar).
La comunicación entre el controlador y la computadora de desarrollo está desconectada
y se puede retirar el cable Ethernet.
Si se retira el cable Ethernet mientras el controlador y la computadora de desarrollo se encuentran
conectados, se produce una parada de emergencia y el robot se detiene. Asegúrese de hacer clic
en el botón <Disconnect> en el diálogo [PC to Controller Communications] antes de retirar
el cable Ethernet.
NOTA

Configuración y operación
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 45
8. Puerto TP
8.1 ¿Qué es el puerto TP?
El puerto TP conecta el Teach Pendant con el controlador. Puede conectar el Teach Pendant.
Cuando no hay nada conectado al puerto TP, se produce un estado de parada de emergencia en
el controlador. Cuando no está conectado el Teach Pendant, conecte el enchufe de derivación
TP.
No conecte los siguientes elementos al puerto TP de RC90 / RC90-B. Conectar estos
dispositivos puede provocar el mal funcionamiento del dispositivo, ya que las asignaciones
de los pines son distintas.
Clavija aislante de DISPOSITIVO OPCIONAL
Caja de comandos de operación OP500
Caja de comandos del operador OP500RC
Teclado de desplazamiento JP500
Teach Pendant TP-3**
Panel del operador OP1
8.2 Conexión del Teach Pendant
Un cable para la conexión al controlador RC90/RC90-B se incluye en Teach Pendant.
Conecte este conector de cable al puerto TP.
La comunicación se configura de manera automática. Active el Teach Pendant mediante
uno de los siguientes procedimientos.
- Inserte el conector del Teach Pendant en el controlador y encienda este último.
- Inserte el conector del Teach Pendant mientras el controlador está encendido.
- Se permite la conexión y desconexión del Teach Pendant desde el controlador cuando el
controlador está encendido.
- Cuando se retira el conector del Teach Pendant desde el controlador, con el interruptor
de llave selector de modo del Teach Pendant en la posición “Teach”, el modo de
operación seguirá en TEACH. El modo de operación no se puede cambiar a AUTO.
Asegúrese de retirar el Teach Pendant después de cambiar el modo de operación a
“Auto”.
Para conocer detalles, consulte el manual
Teach Pendant TP1 opcional del controlador de robot RC700/RC90.
Teach Pendant TP2 opcional del controlador de robot RC700/RC90.
NOTA
NOTA

Configuración y operación
46 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
9. EMERGENCIA
Los detalles sobre los requisitos de seguridad de esta sección se describen en EPSON RC+
7.0 2. Seguridad. Consulte este manual para mantener seguro el sistema de robot.
Conecte un interruptor de protección o un interruptor de parada de emergencia al conector
EMERGENCY por motivos de seguridad.
Cuando no hay nada conectado al conector EMERGENCY, el sistema de robot no funciona
de forma normal.
ADVERTENCIA
■
Antes de conectar el conector, asegúrese de que los pines no estén doblados. Si
lo conecta con los pines doblados, se puede dañar el conector y causar un mal
funcionamiento del sistema de robot.
Conector de EMERGENCIA
9.1 Interruptor de puerta de seguridad e interruptor de liberación de
enganche
El conector EMERGENCY tiene terminales de entrada para el interruptor de puerta de
seguridad y el interruptor de parada de emergencia. Asegúrese de usar estos terminales de
entrada para mantener el sistema seguro.
Conector
Estándar
Conector EMERGENCY
(lado del manipulador)
D-Sub de 25 pines macho
Inserto metálico n.º 4 - 40
* El cable del conector E-STOP BOX (Caja de parada de emergencia), EMERGENCY, el
bloque de terminales y el kit del conector EMERGENCY se ofrecen como opciones.
NOTA

Configuración y operación
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 47
9.1.1 Interruptor de puerta de seguridad
ADVERTENCIA
■
El enclavamiento de la puerta de seguridad debe estar en funcionamiento cuando
se opere el sistema de robot. No opere el sistema si no se puede encender o
apagar el interruptor (por ejemplo, si el interruptor está envuelto con cinta).
Operar el sistema de robot cuando el interruptor no funciona correctamente es
extremadamente peligroso y puede causar problemas de seguridad graves, ya que
la entrada de la puerta de seguridad no puede cumplir su función designada.
Con el fin de mantener una zona de trabajo segura, se debe construir una protección
alrededor del manipulador. La protección debe tener un interruptor de enclavamiento en la
entrada de la zona de trabajo. La puerta de seguridad que se describe en este manual es una
de las protecciones, y un enclavamiento para la puerta de seguridad se llama un interruptor
de puerta de seguridad. Conecte el interruptor de puerta de seguridad al terminal de entrada
de la puerta de seguridad en el conector EMERGENCY.
El interruptor de puerta de seguridad cuenta con características de seguridad, como una
retención temporal del programa o el estado de operación prohibida, que se activan siempre
que se abre la puerta de seguridad.
Respete las siguientes instrucciones en el diseño del interruptor de puerta de seguridad y de
la puerta de seguridad.
- Para el interruptor de puerta de seguridad, seleccione un interruptor que se abra cuando
se abre la puerta de seguridad, y no con el resorte del propio interruptor.
- La señal de la puerta de seguridad (entrada de puerta de seguridad) está diseñada para
producir dos señales redundantes. Si las señales de las dos entradas difieren en dos
segundos o más, el sistema lo reconoce como un error crítico. Por lo tanto, asegúrese de
que el interruptor de puerta de seguridad tenga dos circuitos redundantes separados y
que cada uno se conecte a los pines especificados en el conector EMERGENCY en el
controlador.
- La puerta de seguridad se debe diseñar e instalar de modo que no se cierre de forma
accidental.
9.1.2 Interruptor de liberación de enganche
El software del controlador engancha estas condiciones:
- La puerta de seguridad está abierta.
- El modo de operación está ajustado en “TEACH” (Enseñar).
El conector EMERGENCY cuenta con un terminal de entrada para un interruptor de
liberación de enganche que cancela las condiciones de enganche.
Abierto : El interruptor de liberación de enganche se engancha en las condiciones en que la
puerta de seguridad esté abierta o cuando
el modo de operación esté en “TEACH”.
Cerrado : El interruptor de liberación de enganche libera las condiciones de enganche.
Cuando el modo TEACH enganchado se libera mientras que la puerta de seguridad está
abierta, el estado de la energía del manipulador es operación prohibida, ya que en ese
momento la puerta de seguridad está abierta.
Para ejecutar una operación del manipulador, vuelva a cerrar la puerta de seguridad y cierre
la entrada de liberación de enganche.
NOTA

Configuración y operación
48 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
9.1.3 Comprobación del funcionamiento del interruptor de liberación
de enganche
Después de conectar el interruptor de puerta de seguridad y el interruptor de liberación de
enganche al conector EMERGENCY, asegúrese de revisar la operación segura del
interruptor con los procedimientos descritos a continuación, antes de operar el manipulador.
(1) Encienda el controlador mientras la puerta de seguridad está abierta para iniciar el
software del controlador.
(2) Asegúrese de que se muestre “Safety” (Seguridad) en la barra de estado de la ventana
principal.
(3) Cierre la puerta de seguridad y encienda el interruptor que se conecta a la entrada de
liberación de enganche.
Asegúrese de que “Safety” esté atenuado en la barra de estado.
La información de que la puerta de seguridad está abierta se puede enganchar con el software,
según la condición de entrada de la liberación de enganche. Para cancelar la condición,
cierre la puerta de seguridad y luego cierre la entrada de liberación de enganche de la puerta
de seguridad.
Abierto : El interruptor de liberación de enganche engancha la condición de que la puerta
de seguridad está abierta.
Cerrado : El interruptor de liberación de enganche no engancha la condición de que la puerta
de seguridad está abierta.
La entrada de liberación de enganche también sirve para reconocer el cambio al modo TEACH.
Con el fin de cambiar la condición enganchada del modo TEACH, coloque el interruptor de
llave selector de modo de Teach Pendant en “Auto” (Automático). Luego, cierre la entrada
de liberación de enganche.
NOTA

Configuración y operación
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 49
9.2 Conexión del interruptor de parada de emergencia
9.2.1 Interruptor de parada de emergencia
Si se desea agregar interruptores de parada de emergencia externos, además de la parada
de emergencia en el Teach Pendant y el panel del operador, asegúrese de conectar estos
interruptores de parada de emergencia al terminal de entrada de parada de emergencia en
el conector EMERGENCY.
El interruptor de parada de emergencia conectado debe cumplir los siguientes requisitos:
- Debe ser un interruptor de botón que esté “normalmente cerrado”.
- Un pulsador que no regrese ni reanude el funcionamiento automáticamente.
- El pulsador debe tener forma de hongo y debe ser rojo.
- El pulsador debe tener un contacto doble que esté “normalmente cerrado”.
La señal del interruptor de parada de emergencia está diseñada para usar dos circuitos
redundantes.
Si las señales de los dos circuitos difieren en dos segundos o más, el sistema lo reconoce
como un error crítico. Por lo tanto, asegúrese de que el interruptor de parada de
emergencia tenga dos contactos y que cada circuito se conecte a los pines especificados en
el conector EMERGENCY en el controlador. Consulte Configuración y operación 9.4
Diagramas de circuitos.
9.2.2 Comprobación de la operación del interruptor de parada de
emergencia
Una vez que el interruptor de parada de emergencia esté conectado al conector de
EMERGENCIA, continúe con el siguiente procedimiento para asegurarse de que el
interruptor funcione correctamente. Para la seguridad del operador, no se debe encender el
manipulador hasta que se complete la siguiente prueba.
(1) Encienda el controlador para iniciar el software del controlador mientras presiona el
interruptor de parada de emergencia.
(2) Asegúrese de que el indicador LED E-STOP del controlador esté encendido.
(3) Asegúrese de que “EStop” aparezca en la barra de estado de la ventana principal.
(4) Suelte el interruptor de parada de emergencia.
(5) Ejecute el comando RESET (Restablecer).
(6) Asegúrese de que el indicador LED E-STOP esté desactivado y que “EStop” esté
atenuado en la barra de estado de la ventana principal.
9.2.3 Recuperación desde la parada de emergencia
Para recuperarse desde la condición de parada de emergencia, siga el procedimiento de
comprobación de seguridad como lo requiere el sistema.
Después de la comprobación de seguridad, se necesitan las siguientes operaciones para
recuperarse de una condición de parada de emergencia.
- Suelte el interruptor de parada de emergencia
- Ejecute el comando RESET
NOTA

Configuración y operación
50 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
9.3 Asignaciones de pines
Las asignaciones de pines del conector EMERGENCY son las siguientes:
N.º de
pin
Señal
Función
N.º de
pin
Señal
Función
1
ESW11
Contacto del interruptor de parada de
emergencia (1)
*3
14
ESW21
Contacto del interruptor de parada de
emergencia (2)
*3
2
ESW12
Contacto del interruptor de parada de
emergencia (1)
*3
15
ESW22
Contacto del interruptor de parada de
emergencia (2)
*3
3
ESTOP1+
Circuito de parada de emergencia 1
(+) *4
16
ESTOP2+
Circuito de parada de emergencia 2
(+) *4
4
ESTOP1
Circuito de parada de emergencia 1
(-) *4
17
ESTOP2
Circuito de parada de emergencia 2
(-) *4
5
Sin uso
*1
18
SDLATCH1
Liberación de enganche de puerta de
seguridad
6
Sin uso
*1
19
SDLATCH2
Liberación de enganche de puerta de
seguridad
7
SD11
Entrada de puerta de seguridad (1)
*2
20
SD21
Entrada de puerta de seguridad (2)
*2
8
SD12
Entrada de puerta de seguridad (1)
*2
21
SD22
Entrada de puerta de seguridad (2)
*2
9
24 V
Salida de +24 V
22
24 V
Salida de +24 V
10
24 V
Salida de +24 V
23
24 V
Salida de +24 V
11
24VGND
Salida de +24 V a tierra
24
24VGND
Salida de +24 V a tierra
12
24VGND
Salida de +24 V a tierra
25
24VGND
Salida de +24 V a tierra
13
Sin uso
*1 No conecte nada a estos pines.
*2 Se produce un error crítico si los valores de entrada desde la puerta de seguridad 1 y de
la puerta de seguridad 2 son distintos en dos o más segundos. Deben estar conectadas
al mismo interruptor con dos grupos de contactos.
*3 Ocurre un error crítico si los valores de entrada desde el contacto del interruptor de
parada de emergencia 1 y el contacto del interruptor de parada de emergencia 2 son
distintos en dos o más segundos. Deben estar conectados al mismo interruptor con dos
grupos de contactos.
*4 No aplique voltaje inverso al circuito de parada de emergencia.
Carga nominal de salida del interruptor de parada de
emergencia
+30 V 0,3 A o inferior
Pines 1-2, 14-15
Margen de voltaje de entrada nominal de parada de
emergencia
Corriente de entrada nominal de parada de
emergencia
+24 V 10 %
37,5 mA 10 % / Entrada de +24 V
Pines 3-4, 16-17
Margen de voltaje de entrada nominal de puerta de
seguridad
Corriente de entrada nominal de puerta de seguridad
+24 V 10 %
10 mA / Entrada de +24 V
Pines 7-8, 20-21
Margen de voltaje de entrada nominal de liberación
de enganche
Corriente de entrada nominal de liberación de
enganche
+24 V 10 %
10 mA / Entrada de +24 V
Pines 18-19

Configuración y operación
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 51
La resistencia eléctrica total de los interruptores de parada de emergencia y sus circuitos
debe ser de 1 o menos.
PRECAUCIÓN
■
La salida de 24 V es para la parada de emergencia. No la utilice para otros
propósitos. De hacerlo, puede causar un mal funcionamiento del sistema.
■
No aplique voltaje inverso al circuito de parada de emergencia. De hacerlo, puede
causar un mal funcionamiento del sistema.
NOTA

Configuración y operación
52 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
9.4 Diagramas de circuitos
9.4.1 Ejemplo 1: Aplicación típica del interruptor de parada de
emergencia externo
+24 V
+5 V
Entrada de puerta
de seguridad 1
Externo
+24 V
Entrada de puerta de
seguridad 2
Entrada de liberación de
enganche
Entrada de liberación de enganche Cerrado: Enganche desactivado
Abierto: Enganche activado
Control de
circuito principal
Entrada de CA
Interruptor de
parada de
emergencia de
una unidad de
operación (TP)
Externo +24 V
a tierra
Interruptores externos
de parada de
emergencia
Driver del
motor
+
Controlador
9
10
22
23
1
2
14
15
3
16
4
17
11
12
24
25
7
8
20
21
18
19
+
Detección de
parada de
emergencia
NOTA:+24 V a tierra
+ 5 V a tierra
ESTOP1+
ESTOP2+
ESTOP1
ESTOP2
Tenga cuidado
con la dirección
de la aplicación
de voltaje

Configuración y operación
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 53
9.4.2 Ejemplo 2: Aplicación típica de relé de seguridad externo
+24 V
+5 V
Entrada de puerta de
seguridad 1
Externo
+24 V
Entrada de puerta de
seguridad 2
Entrada de liberación
de enganche
Entrada de liberación de enganche Cerrado: Enganche desactivado
Abierto: Enganche activado
Entrada de CA
Interruptor de
parada de
emergencia
de una unidad de
operación (TP)
Externo
+24 V
a tierra
9
10
22
23
1
2
14
15
3
16
4
17
11
12
24
25
7
8
20
21
18
19
Externo +24 V
Driver del motor
+
Controlador
+
NOTA:+24 V a tierra
+ 5 V a tierra
Externo
+24 V a tierra
Externo
+24 V
Fusible
Externo
+24 V a tierra
* Para la protección del
circuito de parada de
emergencia, la capacidad
del fusible debería ser la
siguiente:
- Cumple la capacidad
del relé de seguridad
externo
- 0,4 A o menos
Relé de seguridad externo
(El diagrama anterior
está simplificado para
representación).
Detección de
parada de
emergencia
Control de circuito
principal

Configuración y operación
54 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
10. Puerto estándar RS-232C
10.1 Acerca del puerto RS-232C
Un puerto estándar RS-232C está disponible con el controlador.
Instale la placa RS-232C en la ranura opcional para comunicarse con el equipo externo con
dos o más puertos RS-232C.
Para conocer detalles del puerto de expansión, consulte Configuración y operación 13.4
Placa RS-232C.
Los número de puerto se asignan de la siguiente manera:
N.º de
puerto
Hardware compatible
#1
Conector estándar RS-232C
#2
Primera placa de expansión de RS-232C CH1
#3
Primera placa de expansión de RS-232C CH2
#4
Segunda placa de expansión de RS-232C CH1
#5
Segunda placa de expansión de RS-232C CH2
10.2 Confirmación con EPSON RC+ 7.0 (RS-232C)
Cuando se instala una placa RS-232C como unidad opcional, el software del controlador
identifica automáticamente la placa RS-232C. Por lo tanto, no se necesita configurar el
software. La identificación correcta se puede confirmar desde EPSON RC+ 7.0.
(1) En EPSON RC+ 7.0, seleccione menú-[Setup]-[System Configuration]
(Configuración - Configuración de sistema) para mostrar el diálogo [System
Configuration].
(2) Seleccione [RS232]-[CU].

Configuración y operación
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 55
10.3 Configuración de comunicación con el software de RS-232C (RS-
232C)
La configuración de comunicación disponible es la siguiente.
Elemento
Especificación
Velocidades en baudios
110, 300, 600, 1200, 2400, 4800, 9600,
14400, 19200, 38400, 57600, 115200
Longitud de bit de datos
7, 8
Longitud de bit de detención
1, 2
Paridad
Par, impar, NA
Terminador
CR, LF, CRLF
Consulte la Ayuda en línea de EPSON RC+ 7.0 o el Manual del usuario 13. Comunicaciones
de RS-232C para la comunicaciones de RS-232C desde la aplicación del robot.
10.4 Cable de comunicación (RS-232C)
Prepare un cable de comunicación como se describe en esta sección.
Conector
Estándar
Conector RS-232C
(lado del controlador)
D-Sub de 9 pines macho
Inserto metálico n.º 4 - 40
Use cable par trenzado para cables blindados.
Fije el blindaje a la campana para prevenir el ruido.
La asignación de pines del conector RS-232C es la siguiente.
N.º de pin
Señal
Función
Dirección de la
señal
1
DCD
Detección del portador de datos
Entrada
2
RXD
Recibir datos
Entrada
3
TXD
Enviar datos
Salida
4
DTR
Terminal preparado
Salida
5
GND
Señal de tierra
-
6
DSR
Conjunto de datos preparado
Entrada
7
RTS
Solicitud para enviar
Salida
8
CTS
Autorizado para enviar
Entrada
9
RI
Indicador de anillo
Entrada
NOTA

Configuración y operación
56 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
11. Conector de E/S
El conector de E/S sirve para conectar el equipo de entrada o salida al sistema.
La especificación del conector de E/S es distinta para RC90 y para RC90-B.
RC90 : Existen dos tipos de circuito de salida: Tipo Receptor y tipo Fuente. Alguno
de los tipos se configuró en el controlador antes del envío.
RC90-B : Se usa un relé PhotoMOS no polar. Hay dos tipos de conexión disponibles.
Pines
Número de bit
Entrada
24
0 a 23
Salida
16
0 a 15
Consulte Configuración y operación 13.2. Placas de E/S de expansión
Para conocer detalles sobre el cableado, consulte Configuración y operación 3.5 Medidas
contra el ruido para evitar el ruido.
La función remota se asigna inicialmente tanto para la entrada como para la salida, de 0 a 7.
Para mayor información, consulte Configuración y Operación 11. Configuración remota de
E/S.

Configuración y operación
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 57
11.1 RC90 (Conector I/O)
11.1.1 Circuito de entrada (RC90)
Margen de voltaje de entrada : +12 V a 24 V 10 %
Voltaje de encendido : +10,8 V (mín.)
Voltaje de apagado : +5 V (máx.)
Corriente de entrada : 10 mA (TYP) en la entrada de +24 V
Hay disponibles dos tipos de cableados para usar con el optoacoplador bidireccional en el
circuito de entrada.
Aplicación típica del circuito de entrada 1 (RC90)
E/S-1
(Idéntico)
Omitir
A tierra +CC
34 Entrada n.º 16~23 común
Omitir
26 Entrada n.º 15
42 Entrada n.º 23
35 Entrada n.º 16
36 Entrada n.º 17
1 Entrada n.º 0 a 7 común
2 Entrada n.º 0
3 Entrada n.º 1
4 Entrada n.º 2
5 Entrada n.º 3
6 Entrada n.º 4
7 Entrada n.º 5
8 Entrada n.º 6
9 Entrada n.º 7
18 Entrada n.º 8 a 15 común
19 Entrada n.º 8
20 Entrada n.º 9
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)

Configuración y operación
58 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
Aplicación típica del circuito de entrada 2 (RC90)
E/S-1
(Idéntico)
Omitir
A tierra +CC
34 Entrada n.º 16~23 común
Omitir
26 Entrada n.º 15
42 Entrada n.º 23
35 Entrada n.º 16
36 Entrada n.º 17
1 Entrada n.º 0 a 7 común
2 Entrada n.º 0
3 Entrada n.º 1
4 Entrada n.º 2
5 Entrada n.º 3
6 Entrada n.º 4
7 Entrada n.º 5
8 Entrada n.º 6
9 Entrada n.º 7
18 Entrada n.º 8 a 15 común
19 Entrada n.º 8
20 Entrada n.º 9
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)

Configuración y operación
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 59
11.1.2 Circuito de salida (RC90)
Voltaje nominal de salida : +12 V a +24 V 10 %
Corriente máxima de salida : Salida TYP de 100 mA/1
Driver de salida : Optoacoplador
PRECAUCIÓN
■
Existen dos tipos de circuito de salida: Tipo Receptor y tipo Fuente. Alguno de los
tipos se configura en el controlador antes del envío. Antes de instalar los cables,
asegúrese de que el tipo de salida de E/S de su controlador cumpla con los
dispositivos de conexión externa.
Si instala los cables con el tipo de salida incorrecto, se pueden romper las piezas
de la placa y el sistema de robot no funcionará normalmente.
■
Use el diagrama de cableado de 2: Tipo Fuente para cumplir con las normas de
CE. Asegúrese de instalar los cables correctamente. El cableado incorrecto
puede provocar problemas de seguridad, ya que el manipulador se mueve de
forma inusual.
■
Asegúrese de cablear el circuito de salida correctamente, porque no cuenta con
circuitos de protección contra cortocircuitos y conexión inversa. Un cableado
inadecuado puede provocar un mal funcionamiento de las piezas del tablero y un
funcionamiento incorrecto del sistema de robot posteriormente.

Configuración y operación
60 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
Aplicación típica del circuito de salida 1: Tipo de receptor (NPN) (RC90)
10 Salida n.º 0
12 Salida n.º 2
11 Salida n.º 1
13 Salida n.º 3
29 Salida n.º 8
17 Salida n.º 0 a 7 común (Tierra)
30 Salida n.º 9
L
L
Tierra +CC
L
Omitir
~
~
~
~
14 Salida n.º 4
15 Salida n.º 5
27 Salida n.º 6
28 Salida n.º 7
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)

Configuración y operación
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 61
Aplicación típica del circuito de salida 2: Tipo de fuente (PNP) (RC90)
PRECAUCIÓN
■
Asegúrese de cablear el circuito de salida correctamente, porque no cuenta con
circuitos de protección contra cortocircuitos y conexión inversa. Un cableado
inadecuado puede provocar un mal funcionamiento de las piezas del tablero y un
funcionamiento incorrecto del sistema de robot posteriormente.
17 Salida n.º 0 a 7 común
11 Salida n.º 1
10 Salida n.º 0
12 Salida n.º 2
13 Salida n.º 3
L
L
Tierra +CC
33 Salida n.º 8 a 15 común
L
Omitir
~
~
~
~
29 Salida n.º 8
14 Salida n.º 4
15 Salida n.º 5
27 Salida n.º 6
30 Salida n.º 9
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)
28 Salida n.º 7

Configuración y operación
62 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
11.2 RC90-B (Conector I/O)
11.2.1 Circuito de entrada (RC90-B)
Margen de voltaje de entrada : + 12∼24 V10 %
Voltaje de encendido : + 10,8 V (MÍN.)
Voltaje de apagado : + 5 V (MÁX.)
Corriente de entrada : 3 mA (TÍP.)/ entrada de +24 V
Hay disponibles dos tipos de cableados para usar con el optoacoplador bidireccional en el
circuito de entrada.
Aplicación típica del circuito de entrada 1 (RC90-B)
E/S-1
(Idéntico)
Omitir
Tierra +CC
34 Entrada n.º 16~23 común
Omitir
26 Entrada n.º 15
42 Entrada n.º 23
35 Entrada n.º 16
36 Entrada n.º 17
1 Entrada n.º 0 a 7 común
2 Entrada n.º 0
3 Entrada n.º 1
4 Entrada n.º 2
5 Entrada n.º 3
6 Entrada n.º 4
7 Entrada n.º 5
8 Entrada n.º 6
9 Entrada n.º 7
18 Entrada n.º 8 a 15 común
19 Entrada n.º 8
20 Entrada n.º 9
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)

Configuración y operación
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 63
Aplicación típica del circuito de entrada 2 (RC90-B)
E/S-1
(Idéntico)
Omitir
Tierra +CC
34 Entrada n.º 16~23 común
Omitir
26 Entrada n.º 15
42 Entrada n.º 23
35 Entrada n.º 16
36 Entrada n.º 17
1 Entrada n.º 0 a 7 común
2 Entrada n.º 0
3 Entrada n.º 1
4 Entrada n.º 2
5 Entrada n.º 3
6 Entrada n.º 4
7 Entrada n.º 5
8 Entrada n.º 6
9 Entrada n.º 7
18 Entrada n.º 8 a 15 común
19 Entrada n.º 8
20 Entrada n.º 9
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)

Configuración y operación
64 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
11.2.2 Circuito de salida (RC90-B)
Voltaje nominal de salida : +12 V∼24 V10%
Corriente máxima de salida : Salida TYP de 100mA/1
Driver de salida : Relé PhotoMOS
Resistencia encendida (promedio) : 0,13 o menos
Hay disponibles dos tipos de cableados para usar con el relé PhotoMOS no polar en el
circuito de salida.
Aplicación típica del circuito de salida 1: Tipo de receptor (NPN) (RC90-B)
10 Salida n.º 0
E/S-1
Omitir
+CC
29 Salida n.º 8
30 Salida n.º 9
11 Salida n.º 1
12 Salida n.º 2
13 Salida n.º 3
14 Salida n.º 4
15 Salida n.º 5
27 Salida n.º 6
28 Salida n.º 7
17 Salida n.º 0 a 7 común (Tierra)
Carga
L
Tierra
L
33 Salida n.º 8 a 15 común (Tierra)
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)

Configuración y operación
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 65
Aplicación típica del circuito de salida 2: Tipo de fuente (PNP) (RC90-B)
C
10 Salida n.º 0
E/S-1
Omitir
+CC
29 Salida n.º 8
30 Salida n.º 9
11 Salida n.º 1
12 Salida n.º 2
13 Salida n.º 3
14 Salida n.º 4
15 Salida n.º 5
27 Salida n.º 6
28 Salida n.º 7
17 Salida n.º 0 a 7 común (+CC)
Carga
L
Tierra
L
33 Salida n.º 8 a 15 común (+CC)
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)

Configuración y operación
66 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
11.3 Asignaciones de pines
N.º
de
pin
Nombre de señal
N.º
de
pin
Nombre de señal
N.º
de
pin
Nombre de señal
1
Entrada común n.º 0 a 7
18
Entrada común n.º 8 a 15
34
Entrada común n.º 16 a 23
2
Entrada n.º 0 (Iniciar)
19
Entrada n.º 8
35
Entrada n.º 16
3
Entrada n.º 1 (SelProg1)
20
Entrada n.º 9
36
Entrada n.º 17
4
Entrada n.º 2 (SelProg2)
21
Entrada n.º 10
37
Entrada n.º 18
5
Entrada n.º 3 (SelProg4)
22
Entrada n.º 11
38
Entrada n.º 19
6
Entrada n.º 4 (Parar)
23
Entrada n.º 12
39
Entrada n.º 20
7
Entrada n.º 5 (Pausar)
24
Entrada n.º 13
40
Entrada n.º 21
8
Entrada n.º 6 (Continuar)
25
Entrada n.º 14
41
Entrada n.º 22
9
Entrada n.º 7 (Restablecer)
26
Entrada n.º 15
42
Entrada n.º 23
10
Salida n.º 0 (Ready)
27
Salida n.º 6 (SError)
43
Salida n.º 11
11
Salida n.º 1 (Running)
(Ejecución)
28
Salida n.º 7 (Warning)
(Advertencia)
44
Salida n.º 12
12
Salida n.º 2 (Paused)
(Pausada)
29
Salida n.º 8
45
Salida n.º 13
13
Salida n.º 3 (Error)
30
Salida n.º 9
46
Salida n.º 14
14
Salida n.º 4 (EstopOn) (Parada
de emergencia activada)
31
Salida n.º 10
47
Salida n.º 15
15
Salida n.º 5 (SafeguardOn)
(Protección activada)
32
Sin uso
48
Sin uso
16
Sin uso
33
Salida común n.º 8 a 15
49
Sin uso
17
Salida común n.º 0 a 7
50
Sin uso
La función remota dentro de los paréntesis ( ) en la tabla anterior se asigna inicialmente tanto a la entrada como
a la salida de 0 a 7. Para conocer más detalles, consulte 12. Configuración remota de E/S.
Conector
Estándar
Conector de E/S (lado del controlador)
D-Sub de 50 pines macho
Inserto metálico n.º 4 - 40
* El conector de E/S, el cable de E/S y el bloque de terminales se ofrecen como opciones.
* El conector de E/S se incluye con el envío.

Configuración y operación
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 67
12. Configuración remota de E/S
En esta sección se describen las funciones y temporizaciones de las señales de entrada y
salida.
Las funciones remotas se pueden asignar a sus placas de E/S estándar, las placas de E/S de
expansión o las placas de E/S de bus de campo, para mejorar el control del sistema de robot;
ya sea desde una unidad operativa de su elección o un secuenciador.
La función remota se asigna inicialmente tanto para la entrada como para la salida, de 0 a 7.
Para aceptar las entradas remotas externas, asigne las funciones remotas y el dispositivo de
control debe ser remoto. Para mayor información, consulte la sección Configuración de
software del control remoto en el Manual del usuario de EPSON RC+ 7.0 - Control remoto.
El usuario define el número de E/S que se asigna a la función remota mediante la
configuración de software. Para mayor información, consulte la sección Configuración de
software del control remoto en el Manual del usuario de EPSON RC+ 7.0 - Control remoto.
Para conocer detalles sobre la conexión del cable de E/S, consulte las secciones de
Configuración y operación 11. Conector de E/S y 13.2. Placa de E/S de expansión y 13.3
placa de E/S de bus de campo.
Para conocer detalles sobre la comunicación con el equipo externo, consulte el Manual del
usuario de EPSON RC+ 7.0 - 12. Control remoto.
PRECAUCIÓN
■
Cuando use la E/S remota, siempre asegúrese de lo siguiente. Usar el sistema
de robot en condiciones poco satisfactorias puede provocar un mal
funcionamiento del sistema o problemas de seguridad.
- Asigne funciones remotas correctamente a las entradas/salidas y realice un
cableado adecuado cuando configure las señales de E/S remota.
- Asegúrese de que las funciones corresponden a las señales de
entrada/salida correspondientes antes de encender el sistema.
- Cuando verifique la operación del sistema de robot, prepárese para enfrentar
errores con la configuración inicial o el cableado. Si el manipulador funciona
de forma inusual a causa de los errores con la configuración inicial o el
cableado, presione el interruptor de parada de emergencia de inmediato para
detener el manipulador.
La función remota está disponible cuando está activada la E/S virtual.
Cuando defina una señal de E/S remota, mantenga un registro escrito de la configuración o
guarde los datos en un archivo como referencia futura.
Cuando configura la señal de E/S de un bus de campo a la función remota, la respuesta
dependerá de la velocidad de baudios del bus de campo. Para conocer detalles sobre la
respuesta del bus de campo, consulte E/S de bus de campo opcional del controlador de robot
RC700 / RC90.
NOTA

Configuración y operación
68 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
12.1 Descripción de la señal de E/S
La función remota se asigna inicialmente tanto para la entrada como para la salida, de 0 a 7.
Para cambiar la asignación de la función a partir de la configuración inicial, use EPSON
RC+ 7.0.
Para usar todas las señales, necesitará agregar una placa de E/S de expansión o de E/S de
bus de campo.
12.1.1 Señales de entrada remota
Las entradas remotas se usan para controlar los manipuladores e iniciar programas. Ciertas
condiciones se deben cumplir antes de poder activar las entradas, como se muestra en la
siguiente tabla.
Para aceptar entradas remotas externas, asigne la función remota y ajuste el dispositivo de
control en Remoto. Cuando está disponible la entrada remota externa, se enciende la “salida
AutoMode”.
Excepto para “SelProg”, las señales ejecutan cada función cuando la señal se inicia en la
condición de aceptación de la entrada. La función se ejecuta automáticamente. Por lo tanto,
no se necesita programación especial.
Cuando ocurre un error, debe ejecutar un “Restablecimiento” para borrar la condición de
error antes de poder ejecutar cualquier otro comando de entrada remota. Use la “salida Error”
y la “entrada Reset” (Restablecer) para monitorear el estado de error y borrar las condiciones
de error del dispositivo remoto.
Nombre
Inicial
Descripción
Condición de aceptación de
entrada (*1)
Partida
0
Ejecuta la función seleccionada en
SelProg.
(*2)
Salida Ready ACTIVADA
Salida Error DESACTIVADA
Salida EStopOn DESACTIVADA
Salida SafeguardOn
DESACTIVADA
Entrada Pause DESACTIVADA
Entrada Stop DESACTIVADA
SelProg1
SelProg2
SelProg4
SelProg8
SelProg16
SelProg32
1
2
3
No
config.
No
config.
No
config.
Especifica la ejecución de número
Main function (Función principal).
(*2)
Stop
4
Se detienen todas las tareas y
comandos.
Pause
5
Todas las tareas se pausan. (*3)
Salida Running ACTIVADA
Continue
6
Continuar la tarea pausada.
Salida Paused ACTIVADA
Entrada Pause DESACTIVADA
Entrada Stop DESACTIVADA
Restablecer
7
Restablece la parada de emergencia y
el error. (*4)
Salida Ready ACTIVADA
Shutdown
No
Finaliza el sistema
NOTA

Configuración y operación
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 69
Nombre
Inicial
Descripción
Condición de aceptación de
entrada (*1)
config.
ForcePowerLow
(*6)
No
config.
Funciona como la función de baja
potencia forzada.
El robot se hace funcionar en el modo
de baja potencia.
No se acepta el control de alta potencia
desde el comando.
Ejecuta lo siguiente de acuerdo con las
preferencias del controlador.
Se detiene o detiene temporalmente
todas las tareas y comandos. (*12)
En cualquier momento
Esta entrada es aceptable incluso
cuando la salida AutoMode está
apagada.
SelRobot
No
config.
Cambios a la condición de salida de
MotorsOn, AtHome, PowerHigh y
MCalReqd. (*9)
SelRobot1
SelRobot2
SelRobot4
SelRobot8
SelRobot16
No
config.
Especifica el número del robot que
ejecuta un comando. (*5)
SetMotorsOn
No
config.
Enciende los motores del robot. (*5)
Salida Ready ACTIVADA
Salida EStopOn DESACTIVADA
Salida SafeguardOn
DESACTIVADA
Entrada SetMotorOff
DESACTIVADA
SetMotorsOff
No
config.
Apaga los motores del robot.
Salida Ready ACTIVADA
SetPowerHigh
No
config.
Ajusta el modo de potencia del robot
en Alta (*5)
Salida Ready ACTIVADA
Salida EStopOn DESACTIVADA
Salida SafeguardOn
DESACTIVADA
Entrada SetPowerLow
DESACTIVADA
SetPowerLow
No
config.
Ajusta el modo de potencia del robot
en Bajo. (*5)
Salida Ready ACTIVADA
Home
No
config.
Mueve el brazo del robot a la posición
de reposo definida por el usuario.
Salida Ready ACTIVADA
Salida Error DESACTIVADA
Salida EStopOn DESACTIVADA
Salida SafeguardOn
DESACTIVADA
Salida MotorsOn ACTIVADA
Entrada Pause DESACTIVADA
Entrada Stop DESACTIVADA
MCal
No
config.
Ejecuta MCal (*5) (*7)
Salida Ready ACTIVADA
Salida Error DESACTIVADA
Salida EStopOn DESACTIVADA
Salida SafeguardOn
DESACTIVADA
Salida MotorsOn ACTIVADA
Entrada Pause DESACTIVADA
Entrada Stop DESACTIVADA
Recover
No
config.
Después de que se cierra la protección,
recupera la posición donde la
Salida Paused ACTIVADA
Salida Error DESACTIVADA

Configuración y operación
70 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
Nombre
Inicial
Descripción
Condición de aceptación de
entrada (*1)
protección estaba abierta.
Salida EStopOn DESACTIVADA
Salida SafeguardOn
DESACTIVADA
Salida RecoverReqd ACTIVADA
Entrada Pause DESACTIVADA
Entrada Stop DESACTIVADA
ResetAlarm
No
config.
Cancela la alarma (*11)
SelAlarm1
SelAlarm2
SelAlarm4
SelAlarm8
No
config.
Especifica el número de alarma que se
debe cancelar (*10)
ALIVE
No
config.
Señal de entrada para el monitoreo en
vivo del controlador. Para la salida
ALIVE, se generan las mismas señales
que las de entrada. Los equipos
maestros pueden realizar monitoreo en
vivo del controlador, mediante el
cambio periódico de la entrada y la
revisión de la señal de salida.

Configuración y operación
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 71
(*1) La “salida AutoMode output” activada se omite de la tabla. Esta es una condición de aceptación de la
entrada para todas las funciones.
(*2) La “entrada Start” (Iniciar) ejecuta la función especificada mediante los siguientes seis bits: SelProg 1, 2, 4, 8,
16 y 32.
Nombre de la
función
SelProg1
SelProg2
SelProg4
SelProg8
SelProg16
SelProg32
Main
0
0
0
0
0
0
Main1
1
0
0
0
0
0
Main2
0
1
0
0
0
0
Main3
1
1
0
0
0
0
Main60
0
0
1
1
1
1
Main61
1
0
1
1
1
1
Main62
0
1
1
1
1
1
Main63
1
1
1
1
1
1
0=DESACTIVADO, 1=ACTIVADO
(*3) La “tarea NoPause” y la “tarea NoEmgAbort” no se pausan.
Para conocer detalles, consulte la Ayuda en línea de EPSON RC+ 7.0 o Pausa en la Referencia del lenguaje
SPEL
+
.
(*4) Desactiva la salida de E/S e inicia el parámetro del robot.
Para conocer detalles, consulte Ayuda en línea de EPSON RC+ 7.0 o Restablecimiento en la Referencia del
lenguaje SPEL+.
(*5) Los valores especificados mediante “SelRobot1, 2, 4, 8 y 16” corresponden a los números del robot.
Número del
robot
SelRobot1
SelRobot2
SelRobot4
SelRobot8
SelRobot16
0 (Todo)
0
0
0
0
0
1
1
0
0
0
0
2
0
1
0
0
0
3
1
1
0
0
0
13
1
0
1
1
0
14
0
1
1
1
0
15
1
1
1
1
0
16
0
0
0
0
1
0=DESACTIVADO, 1=ACTIVADO
(*6) Inicia el parámetro del robot.
Para conocer detalles, consulte la Ayuda en línea de EPSON RC+ 7.0 o Motor en la Referencia del lenguaje
SPEL
+
.
(*7) Para conocer detalles, consulte la Ayuda en línea de EPSON RC+ 7.0 o MCal en la Referencia del
lenguaje SPEL
+
.
(*8) Esto solo es para usuarios experimentados. Asegúrese de que comprende completamente la especificación
de entrada antes de usarla.
La salida CmdRunning y la salida CmdError no cambian para esta entrada.
La “tarea NoEmgAbort” no se detendrá con esta entrada.
Cuando cambia la entrada de ON (Activado) a OFF (Desactivado), se detienen todas las tareas y los
comandos.
(*9) Esta función cambia la condición de salida de MotorsOn, AtHome, PowerHigh y MCalReqd.
Cuando configura esta señal con la condición seleccionada mediante SelRobot1 - SelRobot16, puede cambiar
la condición de salida.
Luego de seleccionar la condición, se mantendrá hasta que la cambie o desactive/reinicie el controlador.
Todos los manipuladores se han seleccionado de manera predeterminada.

Configuración y operación
72 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
(*10) Los valores especificados mediante “SelAlarm1, 2, 4 y 8” corresponden a los números de la alarma.
N.º de
alarma
Destino
SelAlarm1
SelAlarm2
SelAlarm4
SelAlarm8
1
Batería del controlador
1
0
0
0
2
Batería del robot conectado a CU
0
1
0
0
3
Grasa del robot conectado a CU
1
1
0
0
4
Batería del robot conectado a DU1
0
0
1
0
5
Grasa del robot conectado a DU1
1
0
1
0
6
Batería del robot conectado a DU2
0
1
1
0
7
Grasa del robot conectado a DU2
1
1
1
0
8
Batería del robot conectado a DU3
0
0
0
1
9
Grasa del robot conectado a DU3
1
0
0
1
0=DESACTIVADO, 1=ACTIVADO
Las siguientes piezas están sujetas al engrase.
Unidad de ranura de tornillo esférico en la articulación n.º 3
(*11) Podrá cancelar la alarma especificada si selecciona las condiciones mediante SelAlarm1-SelAlarm8 y
configura esta señal.
(*12) La operación de todas las tareas y los comandos, el modo de potencia del robot y el comando PowerHigh
se ejecutan mediante el valor de configuración de las preferencias del controlador.
Preferencias (1): "Motor power low when ForcePowerLow signal OFF" (Potencia baja del motor cuando
la señal ForcePowerLow está DESACTIVADA)
Preferencias (2): "ForcePowerLow signal change pauses all tasks" (El cambio en la señal ForcePowerLow
pausa todas las tareas)
Para conocer detalles de las preferencias del controlador, consulte el Manual del usuario de EPSON
RC+ 7.0
[Setup]-[System Configuration]-[Controller]-[Preferences] (Configuración - Configuración de sistema
- Controlador - Preferencias) en 5.12.2 Comando [System Configuration] (menú Setup).
Preferencias (1)
Preferencias (2)
ForcePowerLow
Todas las
tareas y
comandos
Modo de
potencia
PowerHigh
0
0
1→0
Detener
Solo bajo
Aceptar
0
0
0→1
Detener
Solo bajo
No aceptar
0
1
1→0
Continuar
Alto/Bajo
Aceptar
0
1
0→1
Detener temp.
Solo bajo
No aceptar
1
0
1→0
Detener
Solo bajo
No aceptar
1
0
0→1
Detener
Solo bajo
Aceptar
1
1
1→0
Detener temp.
Solo bajo
No aceptar
1
1
0→1
Continuar
Alto/Bajo
Aceptar

Configuración y operación
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 73
12.1.2 Señales de salida remota
Las salidas remotas entregan el estado del manipulador y del controlador.
Las salidas remotas suministran las funciones asignadas que se usan con cualquier
dispositivo de control. Las salidas se ejecutan automáticamente. Por lo tanto, no se necesita
programación especial.
Nombre
Inicial
Descripción
Ready
0
Se activa cuando el inicio del controlador se completa y no se
ejecuta ninguna tarea.
Running
1
Se activa cuando hay una tarea en ejecución.
Sin embargo, se desactiva cuando “Paused output” está
activada.
Paused
2
Se activa cuando existe una tarea de pausa.
Error
3
Se activa cuando ocurre un error.
Use la “entrada Reset” (Restablecer) para recuperarse del
error.
EStopOn
4
Se activa en la parada de emergencia.
SafeguardOn
5
Se activa cuando la protección está abierta.
SError
6
Se activa cuando ocurre un error crítico.
Cuando ocurre un error crítico, la “entrada Reset” no funciona.
Reinicie el controlador para recuperarse.
Warning
7
Se activa cuando ocurre una advertencia.
La tarea funciona de forma normal con la advertencia. No
obstante, asegúrese de eliminar la causa de la advertencia lo
antes posible.
MotorsOn
No
config.
Se activa cuando el motor está activado. (*5)
AtHome
No
config.
Se activa cuando el robot está en la posición de reposo. (*5)
PowerHigh
No
config.
Se activa cuando el modo de potencia del robot es Alto. (*5)
MCalReqd
No
config.
Se activa cuando el robot no ha ejecutado MCal. (*5)
RecoverReqd
No
config.
Se activa cuando hay al menos un robot esperando la
recuperación después de que se cierra la protección.
RecoverInCycle
No
config.
Se activa cuando hay al menos un robot ejecutando la
recuperación.
CmdRunning
No
config.
Se activa cuando se ejecuta un comando de entrada.
CmdError
No
config.
Se activa cuando no se puede aceptar un comando de entrada.
CurrProg1
CurrProg2
CurrProg4
CurrProg8
CurrProg16
CurrProg32
No
config.
Indica la ejecución del último número de main function
(función principal)
(*1)
AutoMode
No
config.
Se activa en el estado aceptable de la entrada remota. (*2)
TeachMode
No
config.
Se activa en modo TEACH.
ErrorCode1
ErrorCode8192
No
config.
Indica el número de error.
InsideBox1
InsideBox15
No
config.
Se activa cuando el robot está en el área de control de
acercamiento.
(*3)

Configuración y operación
74 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
InsidePlane1
InsidePlane15
No
config.
Se activa cuando el robot está en el plano de control de
acercamiento.
(*4)
Alarm
No
config.
Se activa cuando se produce alguna de las alarmas. (*9)
Alarm1
No
config.
Se activa cuando se produce la alarma de la batería del
controlador.
Alarm2
No
config.
Se activa cuando se produce la alarma de la batería del robot
conectado a CU.
Alarm3
No
config.
Se activa cuando se produce una alarma de grasa del robot
conectado a CU. (*10)
Alarm4
No
config.
Se activa cuando se produce una alarma de la batería del robot
conectado DU1.
Alarm5
No
config.
Se activa cuando se produce una alarma de grasa del robot
conectado a DU1. (*10)
Alarm6
No
config.
Se activa cuando se produce una alarma de la batería del robot
conectado DU2.
Alarm7
No
config.
Se activa cuando se produce una alarma de grasa del robot
conectado a DU2. (*10)
Alarm8
No
config.
Se activa cuando se produce una alarma de la batería del robot
conectado DU3.
Alarm9
No
config.
Se activa cuando se produce una alarma de grasa del robot
conectado a DU3. (*10)
PositionX
No
config.
Genera la coordenada X actual en el sistema de coordenadas
World (Mundo) (*6) (*7)
PositionY
No
config.
Genera la coordenada Y actual en el sistema de coordenadas
World (*6) (*7)
PositionZ
No
config.
Genera la coordenada Z actual en el sistema de coordenadas
World
(*6) (*7)
PositionU
No
config.
Genera la coordenada U actual en el sistema de coordenadas
World (*6) (*7)
PositionV
No
config.
Genera la coordenada V actual en el sistema de coordenadas
World (*6) (*7)
PositionW
No
config.
Genera la coordenada W actual en el sistema de coordenadas
World (*6) (*7)
Torque1
No
config.
Produce el valor de torque actual de la articulación n.º 1(*6)
(*7)
Torque2
No
config.
Produce el valor de torque actual de la articulación n.º 2(*6)
(*7)
Torque3
No
config.
Produce el valor de torque actual de la articulación n.º 3(*6)
(*7)
Torque4
No
config.
Produce el valor de torque actual de la articulación n.º 4(*6)
(*7)
Torque5
No
config.
Produce el valor de torque actual de la articulación n.º 5(*6)
(*7)
Torque6
No
config.
Produce el valor de torque actual de la articulación n.º 6(*6)
(*7)
Procesador
No
config.
Genera el factor de carga de la CPU del programa del usuario
(*8)
ESTOP
No
config.
Genera la cantidad de veces que se han ejecutado las paradas
de emergencia.
ALIVE
No
config.
Genera la señal de salida para el monitoreo en vivo del
controlador. Se genera la entrada de señal mediante la entrada
ALIVE. Los equipos maestros pueden realizar monitoreo en
vivo del controlador, mediante el cambio periódico de la
entrada y la revisión de la señal de salida.

Configuración y operación
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 75
(*1) Genera el último número de función o el actual de CurrProg1, 2, 4, 8, 16 o 32.
Nombre de la
función
CurrProg1
CurrProg2
CurrProg4
CurrProg8
CurrProg16
CurrProg32
Main
0
0
0
0
0
0
Main1
1
0
0
0
0
0
Main2
0
1
0
0
0
0
Main3
1
1
0
0
0
0
Main60
0
0
1
1
1
1
Main61
1
0
1
1
1
1
Main62
0
1
1
1
1
1
Main63
1
1
1
1
1
1
0=DESACTIVADO, 1=ACTIVADO
(*2) La función remota está disponible en las siguientes condiciones.
- La configuración es el modo Auto y el dispositivo de control es remoto.
- La configuración está en modo Program (Programar) y la E/S remota está activada.
(*3) Para conocer detalles, consulte la Ayuda en línea de EPSON RC+ 7.0 o Caja en la Referencia del lenguaje
SPEL
+
.
(*4) Para conocer detalles, consulte la Ayuda en línea de EPSON RC+ 7.0 o Plano en la Referencia del lenguaje
SPEL
+
.
(*5) Se genera el estado del manipulador de la siguiente manera, de acuerdo con la condición seleccionada en
SelRobot.
Espere al menos 40 ms antes de ingresar la señal después de cambiar la condición en SelRobot.
Nombre
La condición (SelRobot1- SelRobot16) cuando se ingresa SelRobot
0: Todos los robots están
seleccionados
1 - 16: Se seleccione el número de robot
en particular
MotorsOn
Se activa cuando hay al menos un motor
encendido.
Se activa cuando el motor del robot seleccionado
está encendido.
AtHome
Se activa cuando todos los robots están
en la posición de reposo.
Se activa cuando el robot seleccionado está en la
posición de reposo.
PowerHigh
Se activa cuando al menos un modo de
potencia del robot es Alto.
Se activa cuando el modo de potencia del robot
seleccionado es Alto.
MCalReqd
Se activa cuando existe al menos un
robot que no ha ejecutado MCal.
Se activa cuando el robot seleccionado no ha
ejecutado MCal.
(*6) Genera la información del robot seleccionado cuando se establece SelRobot1, SelRobot2, SelRobot4,
SelRobot8 y SelRobot16. De lo contrario, se genera la información de Robot 1.
(*7) Genera la información en el formato real.
(*8) Genera el factor de carga de las tareas creadas por el usuario. Para conocer detalles sobre el factor de carga
de la CPU, consulte el administrador de tareas.
(*9) La señal se activa cuando sucede la alarma ya sea en la información de alarma de control o en la
información de alarma del robot.
(*10) Las siguientes piezas están sujetas a engrase.
Unidad de ranura de tornillo esférico en la articulación n.º 3

Configuración y operación
76 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
12.2 Especificaciones de temporización
12.2.1 Notas de diseño para las señales de entrada remota
Las siguientes tablas indican las secuencias de temporización para las operaciones
principales del controlador.
Los lapsos de tiempo señalados (duraciones) se deben consultar solo como valores de
referencia, dado que los valores de temporización actuales varían en función de número de
tareas en ejecución, así como la velocidad de CPU del controlador. Revise cuidadosamente
y consulte las siguientes tablas para conocer la interrelación de temporización cuando
ingrese una señal de entrada.
Durante el diseño del sistema, asegúrese de que acciona solamente una operación de entrada
remota a la vez, de lo contrario, se generará un error.
El ancho del pulso de una señal de entrada debe ser de 25 o más milisegundos para que se
pueda detectar.
[Unit: msec] (Unidad: ms)
12.2.2 Diagrama de temporización para la secuencia de ejecución de
la operación
940
924
Según el
movimiento HOME
MotorsOn
Salida
AtHome
Salida
SetMotorsOn
Entrada
SetMotorsOff
Entrada
Home
Entrada
12.2.3 Diagrama de temporización para la secuencia de ejecución
del programa
17
17
13
107
107
16
15
162
Ready
Salida
CurrProg1
Salida
Running
Salida
* Paused
Salida
SelProg1
Entrada
Start
Entrada
Pause
Entrada
Continue
Entrada
Stop
Entrada
162

Configuración y operación
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 77
* La duración varía en función de la configuración de Quick Pause (QP, Pausa rápida) y
el estado de funcionamiento del programa en el momento de la entrada Pause (Pausar)

Configuración y operación
78 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
12.2.4 Diagrama de temporización para la secuencia de entrada de
la puerta de seguridad
8
1052
1052
500
9
11
11
928
Running
Salida
Paused
Salida
SafeguardOn
Salida
MotorsOn
Salida
Entrada de
seguridad
Entrada de
enganche
Continue
Entrada
12.2.5 Diagrama de temporización para la secuencia de la parada de
emergencia
920
7
5
Running
Salida
MotorsOn
Salida
EStopOn
Salida
Entrada de
emergencia
Reset
Entrada
7

Configuración y operación
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 79
13. Ranuras opcionales
13.1 Acerca de las ranuras opcionales
Use la ranura opcional para instalar las placas opcionales del controlador RC90 / RC90-B.
Se pueden instalar hasta dos placas opcionales en el controlador. Los tipos de placas
opcionales son los siguientes:
13.2 Placa de E/S de expansión
13.3 Placa de E/S de bus de campo
13.4 Placa RS-232C
13.5 Placa de E/S analógica
13.6 Placa EUROMAP67
13.2 Placa de E/S de expansión
13.2.1 Acerca de la placa de E/S de expansión
Cada placa de E/S de expansión cuenta con 24 entradas y 16 salidas.
Puede instalar hasta dos placas de E/S de expansión en el controlador.
Los números de bits de entrada y salida se asignan de la siguiente manera: (El número de
bit se asigna desde CN1).
N.º de bit de entrada
N.º de bit de salida
Hardware aplicable
0 a 23
0 a 15
E/S ESTÁNDAR
64 al 87
64 al 79
La primera placa de E/S de
expansión
96 al 119
96 al 111
La segunda placa de E/S de
expansión
13.2.2 Configuración de la placa (E/S de expansión)
Apariencia de la placa
Configuración del interruptor y del puente
DSW2
DSW1
CN3
Configuración de DSW1 y DSW2. En CN3 están
todos abiertos.
Primera placa
Segunda placa
SW1
SW2
SW3
SW4
DSW1
SW1
SW2
SW3
SW4
SW5
SW6
SW7
SW8
DSW2
CN3
1
2
9
10
SW1
SW2
SW3
SW4
DSW2
SW1
SW2
SW3
SW4
SW5
SW6
SW7
SW8
DSW1
CN3
1
2
9
10

Configuración y operación
80 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
13.2.3 Confirmación con EPSON RC+ 7.0
Cuando se instala una placa de E/S de expansión como unidad opcional, el software del
controlador identifica automáticamente la placa de E/S de expansión. Por lo tanto, no se
necesita configurar el software.
La identificación correcta se puede confirmar desde EPSON RC+ 7.0.
(1) En EPSON RC+ 7.0, seleccione menú-[Setup]-[System Configuration] (Configuración
- Configuración de sistema) para mostrar el diálogo [System Configuration].
(2) Seleccione [Controller]-[Inputs / Outputs] (Controlador - Entradas / salidas).
(3) Asegúrese de que “Yes” (Sí) aparezca en la columna instalada.
La placa de E/S de expansión es identificada por el software del controlador. Están
disponibles la entrada y la salida correspondientes.
13.2.4 Circuito de entrada
Margen de voltaje de
entrada : 12 V a 24 V 10 %
Voltaje de encendido : +10,8 V (mín.)
Voltaje de apagado : +5 V (máx.)
Corriente de entrada : 10 mA (TÍP.) en la entrada de 24 V
Hay disponibles dos tipos de cableados para usar con el optoacoplador bidireccional en el
circuito de entrada.

Configuración y operación
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 81
Aplicación típica del circuito de entrada 1
1 Entrada n.º 64 a 71 común
2 Entrada n.º 64
3 Entrada n.º 65
4 Entrada n.º 66
5 Entrada n.º 67
6 Entrada n.º 68
7 Entrada n.º 69
8 Entrada n.º 70
9 Entrada n.º 71
Placa de E/S de expansión-1
(Idéntico)
Omitir
Tierra +CC
18 Entrada n.º 72 a 79 común
19 Entrada n.º 72
20 Entrada n.º 73
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)
Aplicación típica del circuito de entrada 2
1 Entrada n.º 64 a 71 común
2 Entrada n.º 64
3 Entrada n.º 65
4 Entrada n.º 66
5 Entrada n.º 67
6 Entrada n.º 68
7 Entrada n.º 69
8 Entrada n.º 70
9 Entrada n.º 71
Placa de E/S de expansión-1
(Idéntico)
Omitir
Tierra +CC
18 Entrada n.º 72 a 79 común
19 Entrada n.º 72
20 Entrada n.º 73
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)

Configuración y operación
82 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
13.2.5 Circuito de salida
Voltaje nominal de salida : +12 V a 24 V 10 %
Corriente máxima de salida : Salida TYP de 100 mA/1
Driver de salida : Optoacoplador
PRECAUCIÓN
■
Existen dos tipos de circuito de salida: Tipo Receptor y tipo Fuente. Alguno de los
tipos se configura en el controlador antes del envío. Antes de instalar los cables,
asegúrese de que el tipo de salida de E/S de su controlador cumpla con los
dispositivos de conexión externa.
Si instala los cables con el tipo de salida incorrecto, se pueden romper las piezas
de la placa y el sistema de robot no funcionará normalmente.
■
Use el diagrama de cableado de 2: Tipo Fuente para cumplir con las normas de
CE. Asegúrese de instalar los cables correctamente. El cableado incorrecto
puede provocar problemas de seguridad, ya que el manipulador se mueve de
forma inusual.
■
Asegúrese de cablear el circuito de salida correctamente, porque no cuenta con
circuitos de protección contra cortocircuitos y conexión inversa. Un cableado
inadecuado puede provocar un mal funcionamiento de las piezas del tablero y un
funcionamiento incorrecto del sistema de robot posteriormente.

Configuración y operación
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 83
Aplicación típica del circuito de salida 1: Tipo de receptor (NPN)
10 Salida n.º 64
12 Salida n.º 66
11 Salida n.º 65
13 Salida n.º 67
29 Salida n.º 72
17 Salida n.º 64 a 71 común (Tierra)
30 Salida n.º 73
L
L
Tierra +CC
L
Omitir
~
~
~
~
14 Salida n.º 68
15 Salida n.º 69
27 Salida n.º 70
28 Salida n.º 71
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)

Configuración y operación
84 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
Aplicación típica del circuito de salida 2: Tipo de fuente (PNP)
17 Salida n.º 64 a 71 común
11 Salida n.º 65
10 Salida n.º 64
12 Salida n.º 66
13 Salida n.º 67
L
L
Tierra +CC
33 Salida n.º 72 a 79 común
L
Omitir
~
~
~
~
29 Salida n.º 72
14 Salida n.º 68
15 Salida n.º 69
27 Salida n.º 70
30 Salida n.º 73
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)
(Idéntico)
28 Salida n.º 71

Configuración y operación
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 85
13.2.6 Asignaciones de pines
Tabla de asignación de pines de la 1
era
placa de E/S de expansión.
Asignaciones de pines del conector 1
N.º
de
pin
Nombre de señal
N.º
de
pin
Nombre de señal
N.º
de
pin
Nombre de señal
1
Entrada común n.º 64 a 71
18
Entrada común n.º 72 a 79
34
Entrada común n.º 80 a 87
2
Entrada n.º 64
19
Entrada n.º 72
35
Entrada n.º 80
3
Entrada n.º 65
20
Entrada n.º 73
36
Entrada n.º 81
4
Entrada n.º 66
21
Entrada n.º 74
37
Entrada n.º 82
5
Entrada n.º 67
22
Entrada n.º 75
38
Entrada n.º 83
6
Entrada n.º 68
23
Entrada n.º 76
39
Entrada n.º 84
7
Entrada n.º 69
24
Entrada n.º 77
40
Entrada n.º 85
8
Entrada n.º 70
25
Entrada n.º 78
41
Entrada n.º 86
9
Entrada n.º 71
26
Entrada n.º 79
42
Entrada n.º 87
10
Salida n.º 64
27
Salida n.º 70
43
Salida n.º 75
11
Salida n.º 65
28
Salida n.º 71
44
Salida n.º 76
12
Salida n.º 66
29
Salida n.º 72
45
Salida n.º 77
13
Salida n.º 67
30
Salida n.º 73
46
Salida n.º 78
14
Salida n.º 68
31
Salida n.º 74
47
Salida n.º 79
15
Salida n.º 69
32
Sin uso
48
Sin uso
16
Sin uso
33
Salida común
n.º 72 a 79
49
Sin uso
17
Salida común
n.º 64 a 71
50
Sin uso
Conector
Estándar
Conector de E/S (lado del controlador)
D-Sub de 50 pines macho
Inserto metálico n.º 4 - 40
* El conector de E/S, el cable del conector de E/S, el bloque de terminales y el kit del conector de E/S se ofrecen
como opciones.

Configuración y operación
86 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
13.3 Placa de E/S de bus de campo
La E/S de bus de campo es compatible con los modelos siguientes.
- DeviceNet™
- PROFIBUS-DP
- PROFINET
- CC-LINK
- EtherNet/IP™
- EtherCAT®
- Modbus (Este no es opcional, pero es una característica estándar).
Consulte los siguientes manuales.
E/S de bus de campo opcional del controlador de robot RC700 / RC90
Manual del usuario de EPSON RC+ 7.0 11.7 E/S del esclavo del bus de campo
13.4 Placa RS-232C
13.4.1 Placa RS-232C
Uno de los puertos estándar RS-232C no está disponible con el controlador.
Debe instalar la placa RS-232C en la ranura opcional para comunicarse con el equipo
externo con dos o más puertos RS-232C.
La placa RS-232C admite dos puertos de expansión por placa. Hay máximo dos placas,
cuatro puertos de expansión disponibles para la placa RS-232C.
Los número de puerto se asignan de la siguiente manera:
N.º de
puerto
Hardware compatible
N.º 2, n.º 3
Primera placa RS-232C
N.º 4, n.º 5
Segunda placa RS-232C
13.4.2 Configuración de la placa (RS-232C)
Apariencia de la placa
Configuración del interruptor y del puente
CN1
CN5
(#2 or #4)
CN4
(#3 or #5)
JMP1
DSW2
DSW1
CN3
Defina DSW1, DSW2 y JMP1.
En CN3 están todos abiertos.
Primera placa
Segunda placa
SW1
SW2
SW3
SW4
DSW1
SW1
SW2
SW3
SW4
SW5
SW6
SW7
SW8
DSW2
IRQ5
IRQ7
IRQ10
IRQ11
IRQ15
JMP1
JP1
JP2
JP3
JP4
JP5
CN3
1
2
9
10
CN3
1
2
9
10
SW1
SW2
SW3
SW4
DSW2
SW1
SW2
SW3
SW4
SW5
SW6
SW7
SW8
DSW1
IRQ5
IRQ7
IRQ10
IRQ11
IRQ15
JMP1
JP1
JP2
JP3
JP4
JP5

Configuración y operación
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 87
13.4.3 Confirmación con EPSON RC+ 7.0 (RS-232C)
Cuando se instala una placa RS-232C como unidad opcional, el software del controlador
identifica automáticamente la placa RS-232C. Por lo tanto, no se necesita configurar el
software. La identificación correcta se puede confirmar desde EPSON RC+ 7.0.
(1) En EPSON RC+ 7.0, seleccione menú-[Setup]-[System Configuration]
(Configuración - Configuración de sistema) para mostrar el diálogo [System
Configuration].
(2) Seleccione [RS232]-[CU].
13.4.4 Configuración de comunicación con el software de RS-232C
(RS-232C)
La configuración de comunicación disponible es la siguiente.
Elemento
Especificación
Velocidades en baudios
110, 300, 600, 1200, 2400, 4800, 9600,
14400, 19200, 38400, 57600, 115200
Longitud de bit de datos
7, 8
Longitud de bit de
detención
1, 2
Paridad
Par, impar, NA
Terminador
CR, LF, CRLF
Consulte la Ayuda en línea de EPSON RC+ 7.0 o el Manual del usuario 13. Comunicaciones
de RS-232C para la comunicaciones de RS-232C desde la aplicación del robot.

Configuración y operación
88 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
13.4.5 Cable de comunicación (RS-232C)
Prepare un cable de comunicación como se describe en esta sección.
Conector
Estándar
Conector RS-232C
(lado del controlador)
D-Sub de 9 pines macho
Inserto metálico n.º 4 - 40
Use cable par trenzado para cables blindados.
Fije el blindaje a la campana para prevenir el ruido.
La asignación de pines del conector RS-232C es la siguiente.
N.º de pin
Señal
Función
Dirección de la
señal
1
DCD
Detección del portador de
datos
Entrada
2
RXD
Recibir datos
Entrada
3
TXD
Enviar datos
Salida
4
DTR
Terminal preparado
Salida
5
GND
Señal de tierra
-
6
DSR
Conjunto de datos preparado
Entrada
7
RTS
Solicitud para enviar
Salida
8
CTS
Autorizado para enviar
Entrada
9
RI
Indicador de anillo
Entrada
NOTA

Configuración y operación
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 89
13.5 Placa de E/S analógica
13.5.1 Acerca de la placa de E/S analógica
La función de entradas / salida analógica está disponible cuando se instala la placa de E/S
analógica en la ranura opcional. Puede instalar un máximo de cuatro placas de E/S
analógicas en la ranura opcional.
Placa de E/S analógica (1CH): “DAC: 1ch” está disponible para una placa.
Placa de E/S analógica (4CH): “DAC: 2ch, ADC: 2ch” está disponible para una placa.
DAC: Salida de señal analógica (voltaje/corriente)
ADC: Entrada de señal analógica (voltaje/corriente)
Ejemplo de conexión de placa de E/S analógica (4CH)
Equipo externo
1 *
Equipo externo
2 *
Equipo externo
3 *
Equipo externo
4 *
Controlador de robot
Placa de E/S analógica 4CH
(placa opcional)
Computadora
de desarrollo
Señal de MC
Encendido de MC
Manipulador
ADC CH2
DAC CH2
ADC CH1
DAC CH1
*: Entrada de
voltaje/corriente

Configuración y operación
90 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
Descripción general del circuito de la placa de E/S analógica
Rv: Resistencia terminal de entrada de voltaje (100 kΩ),
Rc: Resistencia terminal de entrada de corriente
13.5.2 Configuración de la placa (placa de E/S analógica)
Blindaje (DAC)
Blindaje (ADC)
Aislamiento de bus

Configuración y operación
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 91
Configuración del interruptor y del puente
(1) Configuración de dirección (SW1): Dirección de la placa opcional
SW1
S1
S2
S3
S4
S5
S6
S7
S8
12345678
ON
S5 a S8: Sin uso. Apáguelos.
Configuración
S1
S2
S3
S4
S5
S6
S7
S8
La primera placa
Off
Off
On
Off
Off
Off
Off
Off
La segunda placa
Off
On
Off
Off
Off
Off
Off
Off
La tercera placa
On
Off
Off
Off
Off
Off
Off
Off
La cuarta placa
Off
Off
Off
Off
Off
Off
Off
Off
(2) Salida analógica Configuración
Interruptor de conmutación de corriente y voltaje (SWD1): Salida de voltaje/corriente
Interruptor de conmutación de rango (SWD2): Rango de salida
Canal
Modo de
salida
Configuración
de intervalo
SWD1 (conmutación de voltaje y
corriente)
SWD2 (conmutación de intervalo)
S1
S2
S3
S4
S1
S2
S3
S4
DAC 1ch
Modo de
salida
de voltaje
5V
On
Sin uso
Sin uso
Sin uso
On
On
Sin uso
Sin uso
10V
On
On
Off
0~5 V
On
Off
On
0~10 V *
On
Off
Off
Modo de
salida
de corriente
0~20 mA
Off
On
On
4~20 mA
Off
Off
Off
DAC 2ch
Modo de
salida
de voltaje
5V
Sin uso
On
Sin uso
Sin uso
Sin uso
Sin uso
On
On
10V
On
On
Off
0~5 V
On
Off
On
0~10 V *
On
Off
Off
Modo de
salida
de corriente
0~20 mA
Off
On
On
4~20 mA
Off
Off
Off
*: Predetermin.: Configuración predeterminada de DAC (salida de voltaje: 0 a 10 V)
S1
S2
S3
S4
SWD1
ON
1234
S1
S2
S3
S4
SWD2
ON
1234

Configuración y operación
92 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
(3) Entrada analógica: Configuración
Puente de conmutación de corriente y voltaje (CN8/CN9): Entrada de
corriente/entrada de voltaje
1 a 2 pines cortos: Configuración de entrada de voltaje
Pines 2 a 3 cortos: Configuración de entrada de corriente
Interruptor de conmutación de corriente y voltaje (SWD1): Entrada de
voltaje/corriente
Interruptor de conmutación de rango (SWD3): Rango de entrada
Canal
Modo de
entrada
Configuración
de intervalo
SWD1 (conmutación de voltaje y corriente)
CN8
(conmutación de
voltaje y
corriente)
CN9
(conmutación
de voltaje y
corriente)
S1
S2
S3
S4
ADC 1ch
Modo de
entrada
de voltaje
5,12 V
Sin uso
Sin uso
On
Sin uso
1 a 2 cortos
Sin uso
10,24 V
On
1 a 2 cortos
0 a 5,12 V
On
1 a 2 cortos
0 a 10,24 V*
On
1 a 2 cortos
Modo de
entrada
de corriente
0 a 24 mA
Off
2 a 3 cortos
ADC 2ch
Modo de
entrada
de voltaje
5,12 V
Sin uso
Sin uso
Sin uso
On
Sin uso
1 a 2 cortos
10,24 V
On
1 a 2 cortos
0 a 5,12 V
On
1 a 2 cortos
0 a 10,24 V*
On
1 a 2 cortos
Corriente
Modo de
entrada
0 a 24 mA
Apagado
2 a 3 cortos
Canal
Modo de
entrada
Configuración
de intervalo
SWD3 (conmutación de intervalo)
SWD4
S1
S2
S3
S4
ADC 1ch
Modo de
entrada
de voltaje
5,12 V
On
On
Sin uso
Sin uso
Off
10,24 V
On
Off
0 a 5,12 V
Off
On
0 a 10,24 V*
Off
Off
Modo de
entrada
de corriente
0 a 24 mA
Off
On
ADC 2ch
Modo de
entrada
de voltaje
5,12 V
Sin uso
Sin uso
On
On
Off
10,24 V
On
Off
0 a 5,12 V
Off
On
0 a 10,24 V*
Off
Off
Modo de
entrada
de corriente
0 a 24 mA
Off
On
SWD4: Sin uso. Apáguelos.
*: Predetermin.: Configuración predeterminada de ADC (Entrada de voltaje: 0 a 10,24 V)
S1
S2
S3
S4
SWD1
ON
1234
S1
S2
S3
S4
SWD3
ON
123
4
S1
S2
S3
S4
SWD4
ON
123
4

Configuración y operación
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 93
(4) Configuración de blindaje
“Frame Ground” (Tierra al bastidor) y “User Ground” (Tierra al usuario) del blindaje:
CN4, CN5, CN6 y CN7
1 a 2 pines cortos : Configuración de blindaje Frame ground (FG).
Cuando desea ampliar el ruido del blindaje al lado del
controlador de robot.
Pines 2 a 3 cortos : Configuración de blindaje User ground (UG).
Cuando desea aislar el blindaje con un dispositivo de
conexión externa y el controlador de robot.
O cuando desea ampliar el ruido del blindaje al lado del
dispositivo de conexión externa.
User Ground (UG): La conexión a tierra analógica (AGND) en el lado del dispositivo
de conexión externa.
Frame Ground (FG): Conexión a tierra digital (DGND) dentro del controlador de
robot.
Canal
Configuración
CN4
CN5
CN6
CN7
DAC1ch
Blindaje FG*
1 a 2 cortos
Sin uso
Sin uso
Sin uso
Blindaje UG
2 a 3 cortos
DAC2ch
Blindaje FG
Sin uso
1 a 2 cortos
Sin uso
Sin uso
Blindaje UG
2 a 3 cortos
ADC1ch
Blindaje FG
Sin uso
Sin uso
1 a 2 cortos
Sin uso
Blindaje UG
2 a 3 cortos
ADC2ch
Blindaje FG
Sin uso
Sin uso
Sin uso
1 a 2 cortos
Blindaje UG
2 a 3 cortos
*: Predeterminado
13.5.3 Confirmación con EPSON RC+ (Placa de E/S analógica)
El software del controlador identifica automáticamente la placa de E/S analógica cuando se
instala en la unidad opcional del controlador. Por lo tanto, no se necesita configurar el software.
La identificación correcta se puede confirmar desde EPSON RC+.
(1) En EPSON RC+ 7.0, seleccione menú-[Setup]-[System Configuration] (Configuración
- Configuración de sistema) para mostrar el diálogo [System Configuration].
(2) Seleccione [Controller]-[Inputs / Outputs].

Configuración y operación
94 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
13.5.4 Circuito de entrada (placa de E/S analógica)
Resolución de entrada : 16 bits
Rango de entrada : Entrada de voltaje: 0 a 5,12 V, 0 a 10,24 V, 5,12 V, 10,24 V
Entrada de corriente: 0 a 24 mA
Impedancia de entrada : 100.000 (5 %)
Voltaje nominal absoluto de los pines de entrada
: 11 V
Especificación de aislamiento : aislamiento entre canales, aislamiento del bus
13.5.5 Circuito de salida (placa de E/S analógica)
Resolución de salida : 16 bits
Rango de salida : Salida de voltaje: 0 a 5 V, 0 a 10 V, 5 V, 10 V
Salida de corriente: 0 a 20 mA, 4 a 20 mA
Impedancia de salida : 2 (TÍP.)
Voltaje nominal absoluto de los pines de salida
: 11 V
Especificación de aislamiento : aislamiento entre canales, aislamiento del bus
PRECAUCIÓN
■
Es posible que la entrada / salida analógica no funcione de manera adecuada,
si se realiza incorrectamente el cableado o la configuración.
■
La operación con ruido externo puede afectar la entrada / salida analógica.
Revise el entorno de ruido, por ejemplo, revise si los cables están blindados.
■
Use el cable blindado/trenzado.
■
Nunca aplique voltaje o corriente que esté fuera del rango de entrada / salida
al pin de entrada/ salida analógica. Aplicar un voltaje superior a 11 V puede
provocar mal funcionamiento de la placa.
■
Un cableado inadecuado o un cortocircuito pueden provocar un mal
funcionamiento de las piezas de la placa y un funcionamiento incorrecto del
sistema de robot posteriormente.

Configuración y operación
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 95
13.5.6 Asignaciones de pines (placa de E/S analógica)
Especificaciones de 1CH
N.º de pin
Señal
N.º de pin
Señal
1
VOUT (DAC 1ch)
20
Blindaje (DAC
1ch)
2
COM (DAC 1ch)
21
IOUT (DAC 1ch)
3
Blindaje (DAC
1ch)
22
COM (DAC 1ch)
4
Sin uso
23
Sin uso
5
Sin uso
24
Sin uso
6
Sin uso
25
Sin uso
7
Sin uso
26
Sin uso
8
Sin uso
27
Sin uso
9
Sin uso
28
Sin uso
10
Sin uso
29
Sin uso
11
Sin uso
30
Sin uso
12
Sin uso
31
Sin uso
13
Sin uso
32
Sin uso
14
Sin uso
33
Sin uso
15
Sin uso
34
Sin uso
16
Sin uso
35
Sin uso
17
Sin uso
36
Sin uso
18
Sin uso
37
Sin uso
19
Sin uso
Especificaciones de 4CH
N.º de pin
Señal
N.º de pin
Señal
1
VOUT (DAC 1ch)
20
Blindaje (DAC
1ch)
2
COM (DAC 1ch)
21
IOUT (DAC 1ch)
3
Blindaje (DAC
1ch)
22
COM (DAC 1ch)
4
Sin uso
23
Sin uso
5
Sin uso
24
Sin uso
6
Sin uso
25
Sin uso
7
VIN (ADC 1ch)
26
Blindaje (ADC
1ch)
8
COM (ADC 1ch)
27
Sin uso
9
Sin uso
28
Sin uso
10
Sin uso
29
Sin uso
11
VOUT (DAC 2ch)
30
Blindaje (DAC
2ch)
12
COM (DAC 2ch)
31
IOUT (DAC 2ch)
13
Blindaje (DAC
2ch)
32
COM (DAC 2ch)
14
Sin uso
33
Sin uso
15
Sin uso
34
Sin uso
16
Sin uso
35
Sin uso
17
Sin uso
36
Sin uso
18
VIN (ADC 2ch)
37
Blindaje (ADC
2ch)
19
COM (ADC 2ch)

Configuración y operación
96 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
13.6 Placa EUROMAP67
EUROMAP67 es una interfaz estandarizada para las comunicaciones entre las
moldeadoras por inyección (IMM) y robots fabricados en el mundo occidental.
Lista de accesorios
Código de
las piezas
Piezas
Nota
2194667
EUROMAP67 Cable1
CN2
Cable de parada de
emergencia
(CN2)
2194667
EUROMAP67 Cable2
CN4
CN1
Cable de conexión
Controlador de robot (CN1)
- IMM(CN4)
2165789
EUROMAP67 Enchufe del conector de
emergencia
Para el cableado del
interruptor de parada de
emergencia
Enchufe de soldadura (CN3)
2194882
EUROMAP67 Revestimiento del conector
de emergencia
Para el cableado del
interruptor de parada de
emergencia
Kit del revestimiento (CN3)
Instale los cables del conector de cableado del interruptor de parada de emergencia (CN3).
Referencia: Configuración y operación 9. EMERGENCIA
La ubicación de señal del conector se describe a continuación.
Configuración y operación 13.6.11 Asignaciones de pines de los hilos de unión de parada
de emergencia
Lista de los conectores utilizados
N.º de hilo de
unión
Fabricante
Modelo
CN1
JAE
DD-50PF-N
CN2
3M
10126-3000PE, 10326-52K0-008
CN3 (accesorio)
3M
10136-3000PE, 10336-52K0-008
CN4
Tyco
T1319320125-000 / T2020252201-000 /
T2020252101-000

Configuración y operación
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 97
Esquema de conexión
(IMM: moldeadora por inyección)
13.6.1 Notas sobre la placa EUROMAP67
La placa EUROMAP67 cuenta con 15 entradas y 16 salidas en un solo sustrato.
Puede instalar hasta una placa EUROMAP67 en el controlador.
Los números de bits de entrada y salida se asignan de la siguiente manera:
N.º de bit de entrada
N.º de bit de salida
Hardware compatible
192 al 206
192 al 208
La primera placa EUROMAP67
No se usan las salidas n.º 205 y n.º 237. Sin embargo, la norma EUROMAP describe que
potencialmente se pueden usar en el futuro.
Definiciones de pines de EUROMAP67
Conector
EUROMAP67
(CN4) n.º de pin
Nombre de señal
Nota
ZA1
ZC1
Parada de emergencia de canal 1 de la máquina
ZA2
ZC2
Parada de emergencia de canal 2 de la máquina
ZA3
ZC3
Dispositivos de seguridad del canal 1 de la
máquina
ZA4
ZC4
Dispositivos de seguridad del canal 2 de la
máquina
ZA5
Rechazo
Entrada de E/S
(*1)
ZA6
Molde cerrado
Entrada de E/S
(*1)
ZA7
Posición del molde abierto
Entrada de E/S
(*1)
ZA8
Posición intermedia de la abertura del molde
Entrada de E/S
(*1)
ZA9
Suministro desde el dispositivo/robot de
manipulación
24 V CC
(Robot → IMM)
ZB2
Activar la operación con la manipulación del
dispositivo / robot
Entrada de E/S
(*1)
Computadora
de desarrollo
Conector de
emergencia
Señal de M/C
Alimentación de M/C
Controlador de robot
Interruptor de
parada de
emergencia
(Para EUROMAP67)
Placa opcional
EUROMAP67

Configuración y operación
98 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
Conector
EUROMAP67
(CN4) n.º de pin
Nombre de señal
Nota
ZB3
Posición hacia atrás del eyector
Entrada de E/S
(*1)
ZB4
Posición hacia adelante del eyector
Entrada de E/S
(*1)
ZB5
Extractores centrales 1 en posición 1
Entrada de E/S
(*1)
ZB6
Extractores centrales 1 en posición 2
Entrada de E/S
(*1)
ZB7
Extractores centrales 2 en posición 1
Entrada de E/S
(*1)
ZB8
Extractores centrales 2 en posición 2
Entrada de E/S
(*1)
ZC5
Reservado para uso futuro por EUROMAP
Entrada de E/S
(*1)
ZC6
Reservado para uso futuro por EUROMAP
Entrada de E/S
(*1)
ZC7
Reservado para uso futuro por EUROMAP
Entrada de E/S
(*1)
ZC8
No fijado por EUROMAP, dependiente del
fabricante
Entrada de E/S
(*1)
ZC9
Suministro desde el dispositivo/robot de
manipulación
0 V (Robot → IMM)
A1
C1
Parada de emergencia de canal 1 del robot
A2
C2
Parada de emergencia de canal 2 del robot
A3
C3
Área de moldura libre
A4
C4
Reservado para uso futuro por EUROMAP
A5
No fijado por EUROMAP, dependiente del
fabricante
Entrada de E/S
(*1)
A6
Activar cierre de molde
Entrada de E/S
(*1)
A7
Activar abertura completa del molde
Entrada de E/S
(*1)
A8
Reservado para uso futuro por EUROMAP
Entrada de E/S
(*1)
A9
Suministro desde IMM
24 V CC
(IMM → Robot)
(*1)
B2
Modo de operación del robot
Entrada de E/S
(*1)
B3
Activar eyector hacia atrás
Entrada de E/S
(*1)
B4
Activar eyector hacia adelante
Entrada de E/S
(*1)
B5
Activar movimiento de los extractores centrales
1 a la posición 1
Entrada de E/S
(*1)
B6
Activar movimiento de los extractores centrales
1 a la posición 2
Entrada de E/S
(*1)
B7
Activar movimiento de los extractores centrales
2 a la posición 1
Entrada de E/S
(*1)
B8
Activar movimiento de los extractores centrales
2 a la posición 2
Entrada de E/S
(*1)
C5
No fijado por EUROMAP, dependiente del
fabricante
Entrada de E/S
(*1)
C6
Reservado para uso futuro por EUROMAP
Entrada de E/S
(*1)
C7
Reservado para uso futuro por EUROMAP
Entrada de E/S
(*1)
C8
No fijado por EUROMAP, dependiente del
fabricante
Entrada de E/S
(*1)
C9
Suministro desde IMM
0 V (IMM → Robot)
*1: NO ingrese un voltaje superior a 24 V. La placa puede dañarse y quemarse.

Configuración y operación
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 99
13.6.2 Configuración de la placa (placa EUROMAP67)
Configure el interruptor DIP (SW1) para permitir que el controlador de robot reconozca la
placa EUROMAP67.
Apariencia de la placa
Configuración del interruptor:
Configuración de SW1
SW1
13.6.3 Instalación (placa EUROMAP67)
(1) Apague el controlador.
(2) Desconecte el enchufe de alimentación.
(3) Retire el panel superior. (Tornillo de montaje 10)
(4) Inserte la placa EUROMAP67 en la ranura.
(5) Use cuatro tornillos para fijar la placa EUROMAP67 en su posición.
Primero, ajuste temporalmente los cuatro tornillos en su posición. Luego, apriete
completamente los tornillos ubicados diagonalmente opuestos entre sí.
Tenga cuidado de no dañar los agujeros roscados mientras lo hace.

Configuración y operación
100 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
(6) Conecte el “Cable1 CN2”.
Use un destornillador de cruz para fijar el conector (CN2).
Conecte Cable1 con los hilos de unión de emergencia.
(7) Consulte lo siguiente para conectar CN3 al interruptor de parada de emergencia (parada
de emergencia, puerta de seguridad, enganche).
Configuración y operación 9. EMERGENCIA
(8) Conecte “CN3”.
Use un destornillador de cruz para fijar el conector (CN3).
(9) Conecte el “Cable2 CN1”.
Use un destornillador de cruz para fijar el conector (CN1).
(10) Instale el panel superior. (Tornillo de montaje 10)
(11) Conecte el “Cable2 CN4” a la IMM.
(12) Conecte el enchufe de alimentación. Encienda el controlador y asegúrese de que se
inicie correctamente sin ninguna vibración o ruido anormal.

Configuración y operación
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 101
13.6.4 Confirmación con EPSON RC+ 7.0 (placa EUROMAP67)
El software del controlador reconocerá automáticamente la placa EUROMAP67 cuando se
conecte a la unidad opcional. Esto elimina la necesidad de cambiar la configuración de
software.
Puede revisar si software ha reconocido correctamente la interfaz EUROMAP67 en la
pantalla de EPSON RC+ 7.0.
(1) En EPSON RC+ 7.0, seleccione menú-[Setup]-[System Configuration] para mostrar el
cuadro de diálogo [System Configuration].
(2) Seleccione [Controller]-[Inputs/ Outputs].
(3) Revise que [Installed] (Instalado) esté en “Yes” (Sí).
El software del controlador reconoció la placa EUROMAP67.
Ahora puede seleccionar las entradas y las salidas compatibles para su uso.
13.6.5 Proyecto de muestra (placa EUROMAP67)
Puede usar el proyecto de muestra de la placa EUROMAP67.
A continuación, se describen los procedimientos que se usarán el proyecto de muestra.
(1) En el menú de EPSON RC+ 7.0 seleccione [Project]-[Open..] (Proyecto - Abrir).
(2) Seleccione [Projects] - [Samples] - [Euromap67Demo1] (Proyectos - Muestras -
Demostración 1 de Euromap).
(3) Haga clic en el botón <Open>.
(4) Modifique el proyecto en función de la IMM.

Configuración y operación
102 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
13.6.6 Descripción general del circuito (placa EUROMAP67)
Placa EUROMAP67: Diagrama del sistema
Controlador de robot
Opción EUROMAP
Detección de
emergencia/puerta
de seguridad
Controlador
Salida de señal de
emergencia/puerta
de seguridad
E/S
Potencia de 24 V
Potencia de salida
de E/S
Conector de
emergencia (25 pines)
Emergencia
(50 pines)
(50 pines)
Salida de
emergencia/puerta
de seguridad
Detección de
emergencia/puerta
de seguridad
E/S de IMM
Potencia de
salida de E/S
Potencia de 24 V

Configuración y operación
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 103
13.6.7 Circuito de entrada (placa EUROMAP67)
Margen de voltaje de entrada : + 12 a 24 V 10
Voltaje de encendido : + 10,8 V (MÍN.)
Voltaje de apagado : + 5 V (MÁX.)
Corriente de entrada : 10 mA (TÍP.)/ entrada de +24 V
13.6.8 Circuito de salida (placa EUROMAP67)
Voltaje nominal de salida : + 12 V a 24 V 10
Corriente máxima de salida : Salida TÍP. de 100 mA/1
Driver de salida : Relé PhotoMOS
Resistencia encendida (promedio) : 23,5 o menos
Descripción general del circuito de entrada / salida de la placa EUROMAP67
PRECAUCIÓN
Los circuitos de entrada/salida no cuentan con un circuito de protección integrado
para evitar los cortocircuitos o las conexiones inversas.
Tenga el cuidado de no cometer errores de cableado.
Los errores de cableado pueden dañar las piezas de la placa y evitar que el
sistema de robot funcione correctamente.
No use un voltaje o corriente superior al nominal.
Esto puede dañar las piezas de la placa y evitar que el sistema de robot funcione
correctamente.
Observe que la lógica de E/S para controlar la IMM variará en función de la
moldeadora. Confirme la lógica correcta que se usará antes de crear programas.
Controlador de
robot
Control de E/S
del robot
Tierra del robot
IMM 24 V
Tierra del robot
Salida IMM de
E/S
Entrada IMM de
E/S

Configuración y operación
104 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
13.6.9 Parada de emergencia, Protección (placa EUROMAP67)
Cuando se mantiene presionado el interruptor de parada de emergencia en el controlador de
robot:
Se utiliza una función para comunicar la instrucción de parada de emergencia a la IMM.
La instrucción de parada de emergencia se comunica mediante el relé de seguridad.
Además, se brinda una función de detección de deposición.
Cuando se detecta una deposición, el controlador de robot definirá la instrucción de
parada de emergencia comunicada a la IMM como OPEN (Abierta).
Cuando se produce una parada de emergencia en el lado de la IMM:
Se utiliza una función para comunicar la instrucción de parada de emergencia al
controlador de robot.
Cuando se abre la puerta de seguridad en el lado de IMM:
Se utiliza una función para comunicar la instrucción de protección abierta al controlador
de robot.
Placa EUROMAP67: Descripción general del circuito de parada de emergencia
Placa EUROMAP67: Descripción general del circuito de puerta de seguridad
Controlador
de robot
Control de
emergencia
Detección de parada de
emergencia
Robot 24 V
Detección de
soldadura
Tierra del
controlador
de robot
Robot 24 V
Línea de emergencia
Robot 200 V
Detección de IMM
de emergencia
Salida de IMM
de emergencia
Botón de
parada de
emergencia
Controlador de robot
Detección de puerta
de seguridad
Salida de puerta de
seguridad
(IMM Robot)

Configuración y operación
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 105
13.6.10 Asignaciones de pines de E/S (placa EUROMAP67)
Nombre de señal
Hilo de unión D-Sub (CN1)
N.º de pin
Hilo de unión EUROMAP67
(CN4)
N.º de pin
Entrada n.º 192
33
ZA5
(*1)
Entrada n.º 193
32
ZA6
(*1)
Entrada n.º 194
50
ZA7
(*1)
Entrada n.º 195
49
ZA8
(*1)
Entrada n.º 196
48
ZB2
(*1)
Entrada n.º 197
47
ZB3
(*1)
Entrada n.º 198
31
ZB4
(*1)
Entrada n.º 199
30
ZB5
(*1)
Entrada n.º 200
15
ZB6
(*1)
Entrada n.º 201
14
ZB7
(*1)
Entrada n.º 202
46
ZB8
(*1)
Entrada n.º 203
45
ZC5
(*1)
Entrada n.º 204
29
ZC6
(*1)
Entrada n.º 205
28
ZC7
(*1)
Entrada n.º 206
13
ZC8
(*1)
Salida n.º 192
41
A6
(*1)
Salida n.º 193
7
A7
(*1)
Salida n.º 194
8
A8
(*1)
Salida n.º 195
24
B2
(*1)
Salida n.º 196
25
B3
(*1)
Salida n.º 197
42
B4
(*1)
Salida n.º 198
43
B5
(*1)
Salida n.º 199
9
B6
(*1)
Salida n.º 200
10
B7
(*1)
Salida n.º 201
26
B8
(*1)
Salida n.º 202
27
C6
(*1)
Salida n.º 203
11
C7
(*1)
Salida n.º 204
4/3
A3/C3
(área de módulo+/área de
módulo-)
Salida n.º 205
(Sin uso)
37/36
A4/C4 (Sin uso)
Salida n.º 206
12
C8
(*1)
Salida n.º 207
40
A5
(*1)
Salida n.º 208
44
C5
(*1)
24 V (IMM)
1
A9
(*1)
A tierra (IMM)
2
C9
(*1)
Emergency1 (IMM)
39/38
ZA1/ZC1
Emergency2 (IMM)
21/20
ZA2/ZC2
Safety1 (IMM)
6/5
ZA3/ZC3
Safety2 (IMM)
23/22
ZA4/ZC4
24 V (robot)
17
ZA9
A tierra (robot)
16
ZC9
Emergency1 (robot)
35/34
A1/C1
Emergency2 (robot)
19/18
A2/C2
*1: NO ingrese un voltaje superior a 24 V. La placa puede dañarse y quemarse.

Configuración y operación
106 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
13.6.11 Asignaciones de pines de los hilos de unión de parada de
emergencia (placa EUROMAP67)
Tabla de asignación de pines de conector de parada de emergencia (CN2) de la placa
EUROMAP67.
N.º de pin de hilos de
unión de parada de
emergencia (CN2)
Nombre de señal
Función
1
ESW11
Contacto del interruptor de
parada de emergencia
2
ESW12
Contacto del interruptor de
parada de emergencia
3
ESTOP1+
Circuito de parada de
emergencia 1+
4
ESTOP1-
Circuito de parada de
emergencia 1-
5
Sin uso
-
6
Sin uso
-
7
SD11
Entrada de puerta de
seguridad 1
8
SD12
Entrada de puerta de
seguridad 1
9
24 V
Salida de 24 V
10
24 V
Salida de 24 V
11
24VGND
Salida de
24 V a tierra
12
24VGND
Salida de
24 V a tierra
13
Sin uso
-
14
ESW21
Contacto del interruptor de
parada de emergencia
15
ESW22
Contacto del interruptor de
parada de emergencia
16
ESTOP2+
Circuito de parada de
emergencia 2+
17
ESTOP2-
Circuito de parada de
emergencia 2-
18
SDLATCH1
Liberación de enganche de
puerta de seguridad
19
SDLATCH2
Liberación de enganche de
puerta de seguridad
20
SD21
Entrada de puerta de
seguridad 2
21
SD22
Entrada de puerta de
seguridad 2
22
24 V
Salida de 24 V
23
24 V
Salida de 24 V
24
24VGND
Salida de
24 V a tierra
25
24VGND
Salida de
24 V a tierra
26
Sin uso
-

Configuración y operación
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 107
Tabla de asignación de pines de conector de parada de emergencia (CN3) de la placa
EUROMAP67.
N.º de pin de hilos de
unión de parada de
emergencia (CN3)
Nombre de señal
Función
1
ESW11
Contacto del interruptor de
parada de emergencia
2
ESW12
Contacto del interruptor de
parada de emergencia
3
ESTOP1+
Circuito de parada de
emergencia 1+
4
ESTOP1-
Circuito de parada de
emergencia 1-
5
Sin uso
-
6
Sin uso
-
7
SD11
Entrada de puerta de
seguridad 1
8
SD12
Entrada de puerta de
seguridad 1
9
24 V
Salida de 24 V
10
24 V
Salida de 24 V
11
24VGND
Salida de
24 V a tierra
12
24VGND
Salida de
24 V a tierra
13
Sin uso
-
14
ESW21
Contacto del interruptor de
parada de emergencia
15
ESW22
Contacto del interruptor de
parada de emergencia
16
ESTOP2+
Circuito de parada de
emergencia 2+
17
ESTOP2-
Circuito de parada de
emergencia 2-
18
SDLATCH1
Liberación de enganche de
puerta de seguridad
19
SDLATCH2
Liberación de enganche de
puerta de seguridad
20
SD21
Entrada de puerta de
seguridad 2
21
SD22
Entrada de puerta de
seguridad 2
22
24 V
Salida de 24 V
23
24 V
Salida de 24 V
24
24VGND
Salida de
24 V a tierra
25
24VGND
Salida de
24 V a tierra
26
Sin uso
-
27
Sin uso
-
28
Sin uso
-
29
Sin uso
-
30
Sin uso
-
31
Sin uso
-
32
Sin uso
-
33
Sin uso
-
34
Sin uso
-
35
Sin uso
-
36
Sin uso
-

Configuración y operación
108 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26

105
Mantenimiento
Esta sección contiene los procedimientos de mantenimiento para el controlador de robot.


Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 111
1. Precauciones de seguridad para el mantenimiento
1.1 Precauciones de seguridad
ADVERTENCIA
■
Solo se debe permitir que el personal autorizado que haya realizado una
capacitación en seguridad esté autorizado para realizar la enseñanza o la
calibración del sistema de robot.
La capacitación en seguridad es el programa para el operador de robots
industriales que cumple con las leyes y reglamentos de cada país. El personal
que ha realizado la capacitación en seguridad adquiere conocimiento acerca de
robots industriales (operaciones, enseñanza, etc.).
Se permite que el personal que haya completado las clases de capacitación en
sistemas de robot que ha realizado el fabricante, el distribuidor o la empresa
incorporada localmente, realice mantenimiento al sistema de robot.
■
Solo se debe permitir que el personal autorizado que ha realizado una
capacitación en seguridad realice mantenimiento al sistema de robot.
La capacitación en seguridad es el programa para el operador de robots
industriales que cumple con las leyes y reglamentos de cada país.
El personal que ha realizado la capacitación en seguridad adquiere conocimiento
acerca de robots industriales (operaciones, enseñanza, etc.), conocimiento
acerca de las inspecciones y conocimiento de normas y reglamentos
relacionados.
Se permite que el personal que haya completado las clases de capacitación en
sistemas de robot y en mantenimiento que han realizado el fabricante, el
distribuidor o la empresa incorporada localmente realice el mantenimiento al
sistema de robot.
Asegúrese de utilizar solo las piezas de mantenimiento dedicadas/especificadas
especialmente para las placas opcionales o alguna de las demás piezas del
controlador que se deban reemplazar. Usar piezas que no están especificadas
puede provocar daños graves al sistema de robot o problemas graves de
seguridad.
■
No retire las piezas que no están cubiertas en este manual. Siga estrictamente el
procedimiento de mantenimiento, como se describe en este manual. No siga
usando ningún método que no sea alguno de los descritos en este manual,
cuando reemplace una pieza o realice el mantenimiento del equipo. El retiro
incorrecto de piezas o el mantenimiento inadecuado no solo pueden causar el
funcionamiento incorrecto del sistema de robot, sino que además pueden causar
graves problemas de seguridad.
ADVERTENCIA
■
Antes de realizar algún procedimiento de mantenimiento, siempre asegúrese de
que la alimentación principal del controlador esté apagada, desconecte la
energía eléctrica y asegúrese de que el área cargada con alto voltaje esté
completamente descargada. Realizar cualquier procedimiento de mantenimiento
mientras está encendida la alimentación o el área cargada con alto voltaje no
está completamente descargada es extremadamente peligroso y puede causar
descargas eléctricas o provocar problemas graves de seguridad.
PRECAUCIÓN
■
No toque los módulos de driver del motor ni cambie la fuente de alimentación
directamente en el controlador. La resistencia del metal de estos puede calentarse
mucho y provocar una quemadura. Si los mantiene, examine las temperaturas
superficiales y use guantes de protección, si es necesario.
■
No golpee, sacuda ni deje caer ninguna pieza durante el mantenimiento. Cuando
se golpean físicamente las piezas relacionadas con los datos, se pueden dañar y
provocar la pérdida de información durante la carga/guardado de datos.

Mantenimiento
112 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
PRECAUCIÓN
■
No pierda los tornillos retirados durante el mantenimiento. Si un tornillo cae en el
controlador, asegúrese de sacarlo. Dejar el tornillo en el controlador puede causar
un cortocircuito y provocar daños en el equipo, a las piezas o al sistema de robot.
■
Asegúrese de que la potencia nominal (vatiaje) de un nuevo módulo del driver del
motor sea la correcta. Usar un módulo de driver del motor con potencia nominal
(vatiaje) incorrecta en el controlador puede provocar el funcionamiento incorrecto
del sistema de robot y errores.
■
El número de serie del manipulador que debe estar conectado se indica en la
etiqueta de verificación de conexión en el controlador. Conecte el controlador y el
manipulador correctamente. La conexión incorrecta entre el controlador y el
manipulador no solo puede causar el mal funcionamiento del sistema de robot,
sino que además puede causar graves problemas de seguridad.
Antes de realizar el mantenimiento en el controlador, se deben copiar todos los datos como copia
de seguridad. Los detalles de la copia de seguridad/restauración de datos se describen en
Mantenimiento 4. Copia de seguridad y restauración.
1.2 Bloqueo y etiquetado
El bloqueo y etiquetado es un método para evitar que alguien encienda el sistema de robot
por error, mientras alguien más está dentro del área protegida para realizar el mantenimiento
o reparaciones.
Cuando se realiza el mantenimiento o reparaciones, bloquee y etiquete mediante el siguiente
procedimiento. Use el accesorio de bloqueo para RC90/RC90-B.
Instalación de accesorio de bloqueo
(1) Apague el interruptor POWER (Alimentación) y coloque el accesorio de bloqueo en el
interruptor.
Inserte el pasador en los agujeros debajo del actuador retráctil.
Empuje el pin en la dirección
de las flechas e insértelo en
los agujeros.
Interruptor
POWER
Agujero
Accesorio
de bloqueo
t
Pin
(2) Gire el accesorio
de bloqueo.
(3) Instale el accesorio
de bloqueo en el
interruptor.
(4) Deslice el pin
la posición de
bloqueo.
Posición de bloqueo
NOTA

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 113
Tamaño y peso del candado
El candado no se incluye el accesorio de bloqueo y debe ser provisto por el usuario.
El peso total del candado puede ser de máximo 45 g.
Asegúrese de que el peso del candado no supere los 45 g, de lo contrario, se puede dañar el
interruptor POWER.
Candado correspondiente
Precauciones de seguridad
・ Cuando use el candado, no use el controlador que está sometido a vibraciones o golpes,
de lo contrario se pueden producir fallas o daños.
・ No aplique una fuerza superior a 50 N en el accesorio de bloqueo, de lo contrario, se
puede dañar.
(A)
(B)
C
D
E
(F)
G
19 a 25
35 a 42
9 a 11,5
4 a 4,5
11 a 15
8 a 10
7,5 a 9,0
(A), (B), (F) : Dimensión de referencia
Candado recomendado
Fabricante
N. º de tipo
Alpha
100-25
Master Lock
4120

Mantenimiento
114 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
2. Inspección de mantenimiento regular
Realizar inspecciones de mantenimiento regulares es esencial para evitar problemas y
mantener la seguridad. Este capítulo describe la programación para las inspecciones y los
procedimientos de mantenimiento.
Asegúrese de realizar las inspecciones de mantenimiento en conformidad con la
programación.
Pieza
Filtro del ventilador
Ventilador
Batería
Contenido
Limpieza
Reemplazo
Reemplazo
Reemplazo
Código
-
2195107
2157260
2113554
Cantidad
-
1
1
1
Intervalo de
mantenimiento
Se recomienda
más de una vez
al mes
Cuando se
deteriora el
filtro
Cuando se
produzca el
error 515, o
cuando se
genera ruido
anormal.
Cada 5 años,
o cuando se
produzca el
error 511
Posible mal
funcionamiento
si no se realiza
el
mantenimiento
La temperatura
del controlador
puede ser muy
alta y es posible
que el sistema de
robot no opere
correctamente.
Se puede
producir el error
debido a la
reducción del
giro del
ventilador.
Es posible que
el sistema de
robot no
funcione
correctamente
debido al polvo
o algo similar.
Se produce el
error 9015 y
puede
detenerse el
sistema de
robot.
Se produce el
error 9011 y
puede
detenerse el
sistema de
robot.
Duración
(referencia)
5 minutos
5 minutos
20 minutos
15 minutos
Referencia:
Mantenimiento
7.1
Filtro del
ventilador
7.1
Filtro del
ventilador
7.2
Ventilador
7.3
Batería
Vida útil
esperada
-
-
30.000 horas
-

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 115
3. Estructura del controlador
3.1 Ubicación de piezas
3.1.1 RC90 (para LS3, LS6)
MDB2
DPB
Módulo de suministro de
energía de conmutación de 24 V
MDB1
Ventilador
Placa de
DMB-Sub
DMB
Módulo de suministro de energía
de conmutación de 5 V
Módulo de suministro de
energía de conmutación de
15 V
Ranuras opcionales
CF
Batería
3.1.2 RC90 (para LS20)
MDB2
DPB
MDB1
Ventilador
Placa de
DMB-Sub
Ranuras opcionales
CF
Batería
Resistor
regenerativo

Mantenimiento
116 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
3.1.3 RC90-B (para LS3-B, LS6-B)
MDB2
DPB
MDB1
DMB
CF
Módulo de suministro de energía
de conmutación de 24 V
Módulo de suministro de energía
de conmutación de 5 V
Módulo de suministro de energía
de conmutación de 15 V
Ventilador
Placa de
DMB-Sub
Ranuras opcionales
Batería
3.1.4 RC90-B (para LS10-B, LS20-B)
MDB2
DPB
Módulo de suministro de
energía de conmutación de 24 V
MDB1
Ventilador
Placa de
DMB-Sub
DMB
Módulo de suministro de energía
de conmutación de 5 V
Módulo de suministro de energía
de conmutación de 15 V
Ranuras opcionales
CF
Batería
Resistor
regenerativo

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 117
3.2 Diagrama de las conexiones de cables
3.2.1 RC90 (para LS3, LS6), RC90-B (para LS3-B, LS6-B)
(Los hilos de unión de la línea punteada roja (RC90)/ línea punteada azul (RC90-B) funcionan correctamente en
cualquier orden).
NOTA: La configuración del sistema es la misma para RC90 (para LS3,LS6) y para RC90-
B (para LS3-B, LS6-B). Sin embargo, hay leves diferencias en la placa o en la pieza.
Alimentación de
mando de 15 V
Driver del motor (eje 3, 4)
Driver del motor (eje 1, 2)
Señal de
control del
driver
Señal de
M/C
Alimentación
de M/C
EMERGENCIA
(Memoria)
E/S
Batería
Placa opcional
de 5 V
Suministro de energía
de conmutación
Filtro de
ruido
Protector contra
sobrevoltaje
Protector de
circuito
Bloque de terminales
Entrada 200-240 V CA

Mantenimiento
118 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
3.2.2 RC90 (para LS20), RC90-B (para LS10-B, LS20-B)
(Los hilos de unión de la línea punteada roja (RC90)/ línea punteada azul (RC90-B) funcionan correctamente en
cualquier orden).
NOTA: La configuración del sistema es la misma para RC90 (para LS20) y para RC90-B (para
LS10-B, LS20-B) . Sin embargo, hay leves diferencias en la placa o en la pieza.
Entrada 200-240 V CA
Bloque de terminales
Protector de
circuito
Protector contra
sobrevoltaje
Filtro de
ruido
Suministro de energía de
conmutación
Batería
(Memoria)
EMERGENCIA
Alimentación
de M/C
Señal de
M/C
Señal de
control del
driver
Driver del motor (eje 1, 2)
Driver del motor (eje 3, 4)
Alimentación de
mando de 15 V
Resistor regenerativo
Termosensor
Placa opcional
de 5 V
E/S

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 119
4. Copia de seguridad y restauración
4.1 ¿Qué es la función Backup Controller?
La configuración del controlador definida por EPSON RC+ 7.0 se puede almacenar con la
función “Backup Controller” (Realizar copia de seguridad del controlador).
La configuración del controlador se puede restaurar fácilmente usando los datos
anteriormente almacenados con “Backup Controller” después de un error de configuración
o un problema del controlador.
Asegúrese de ejecutar “Backup Controller” antes de cambiar la configuración del
controlador, antes del mantenimiento o después de enseñar.
Para algunos problemas, es posible que la copia de seguridad no esté disponible antes de realizar
el mantenimiento. Asegúrese de realizar una copia de seguridad de los datos después de realizar
cambios, antes de que ocurran problemas.
“Controller Status Storage” (Almacenamiento de estado del controlador) es una de las
funciones de RC90/ RC90-B. Guarda la configuración del controlador del mismo modo que
“Backup Controller”.
Los datos se pueden usar como datos de copia de seguridad en la restauración.
Los métodos para “Controller Status Storage” son los siguientes:
A : “Controller status storage to USB memory” (Almacenamiento de estado del
controlador a memoria USB)
Para conocer detalles, consulte Configuración y operación 6. Puerto de memoria.
B : “Export Controller Status function” (Función Exportar estado del controlador) en
EPSON RC+ 7.0.
Para conocer detalles, consulte Manual del usuario EPSON RC+ 7.0 5.9.9 Comando
Import (Importar) (Menú Project).
4.2 Tipos de datos de copia de seguridad
La tabla a continuación muestra los archivos creados con “Backup Controller”.
Nombre de archivo
Descripción general
Backup.txt
Archivo de
información para
restauración
Archivo que incluye información para
restaurar el controlador.
CurrentMnp01.PRM
Parámetros del robot
Almacena la información como TlSet.
InitFileSrc.txt
Configuración
inicial
Almacena varios parámetros del
controlador.
MCSys01.MCD
Configuración del
robot
Almacena información del robot
conectado.
Todos los archivos
relacionados con el
proyecto *
Relacionados con el
proyecto
Todos los archivos del proyecto
transferidos al controlador. Incluye
archivos de programa cuando se configura
que EPSON RC+ 7.0 transfiera el código
fuente al controlador.
GlobalPreserves.dat
*
Variables globales
conservadas
Guarda los valores de las variables
globales conservadas.
WorkQueues.dat
Información de
WorkQue
Guarda información de las colas de
WorkQue.
* Si la versión de firmware del controlador es Ver.1.0.*.*, no se almacenan los datos
relacionados con el proyecto ni GlobalPreserves.dat.
NOTA

Mantenimiento
120 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
4.3 Copia de seguridad
Realiza una copia de seguridad del estado del controlador desde EPSON RC+ 7.0.
(1) En EPSON RC+ 7.0, seleccione menú-[Tools]-[Controller] para mostrar el diálogo
[Controller Tools] (Herramientas del controlador).
(2) Haga clic en el botón <Backup Controller…> (Realizar copia de seguridad del
controlador...) para mostrar el diálogo [Browse For Folder] (Examinar carpeta).
(3) Especifique la carpeta en la que desea guardar los datos de copia de seguridad. Cree una
nueva carpeta si lo desea.
(4) Haga clic en el botón <OK> (Aceptar). Se crea una carpeta en la carpeta especificada
que contiene los datos de copia de seguridad en el siguiente formato.
Se guardó el estado de B_controller model_serial number_data
Ejemplo RC90 : B_RC90_12345_2013-10-29_092951
Ejemplo RC90-B : B_RC90-B_12345_2013-10-29_092951
PRECAUCIÓN
■
No edite los archivos de copia de seguridad. De lo contrario, no se garantiza la
operación del sistema de robot después de la restauración del controlador.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 121
4.4 Restauración
Restaura el estado del controlador desde EPSON RC+ 7.0.
PRECAUCIÓN
■
Asegúrese de que los datos utilizados para la restauración se hayan guardado
anteriormente para el mismo controlador.
■
No edite los archivos de copia de seguridad. De lo contrario, no se garantiza la
operación del sistema de robot después de la restauración del controlador.
(1) En EPSON RC+ 7.0, seleccione menú-[Tools]-[Controller] para mostrar el diálogo
[Controller Tools].
(2) Haga clic en el botón <Restore Controller…> para mostrar el diálogo [Browse For
Folder].
(3) Especifique la carpeta que contiene los datos de la copia de seguridad. Las carpetas de
datos de copia de seguridad se nombran con el siguiente formato:
Se guardó el estado de B_controller model_serial number_data
Ejemplo RC90 : B_RC90_12345_2013-10-29_092951
Ejemplo RC90-B : B_RC90-B_12345_2013-10-29_092951
Los datos guardados con la función de almacenamiento del estado del controlador
también se pueden especificar para restaurar.
Especifique la siguiente carpeta.
NOTA

Mantenimiento
122 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
(4) Haga clic en el botón <OK> para mostrar el diálogo para seleccionar los datos de
restauración.
Robot name, serial #, calibration (Nombre de robot, n.º de serie, calibración)
Esta casilla de verificación le permite restaurar el nombre del robot, el número de serie del
robot, los datos de Hofs y los datos de CalPls. Asegúrese de que se restauren los datos de
Hofs correctos. Si se restauran los datos de Hofs incorrectos, el robot se puede mover a las
posiciones incorrectas.
La configuración predeterminada no selecciona esto.
Robot maintenance configuration (Configuración de mantenimiento del robot)
Esta casilla de verificación le permite restaurar los archivos relacionados con la alarma del
robot.
Para conocer detalles, consulte Mantenimiento 6 Alarma.
La configuración predeterminada no selecciona esto.
Proyecto
Esta casilla de verificación le permite restaurar los archivos relacionados con los proyectos.
La configuración predeterminada no selecciona esto.
Cuando se restaura un proyecto, se restauran los valores de las variables globales
conservadas.
Para conocer detalles acerca de la copia de seguridad de las variables globales conservadas,
consulte Manual del usuario de EPSON RC+ 7.0 5.10.10 Comando [Display Variables]
(Menú Run).
Vision hardware configuration (Configuración del hardware de visión)
Esta casilla de verificación le permite restaurar la configuración de hardware de Vision.
Para conocer detalles, consulte Opción Vision Guide 7.0 de EPSON RC+ 7.0.
La configuración predeterminada no selecciona esto.
Casilla de verificación Security configuration (Configuración de seguridad)
Esta casilla de verificación le permite restaurar la configuración de seguridad.
Para conocer detalles, consulte Manual del usuario de EPSON RC+ 7.0. 15. Seguridad.
La configuración predeterminada no selecciona esto.
Force Sensing I/F configuration (Configuración de I/F de detección de fuerza)
Esta casilla de verificación le permite restaurar la configuración I/F de detección de fuerza.
La configuración predeterminada no selecciona esto.
Esta función no es compatible con el controlador de robot RC90/RC90-B.
Password authentication settings (Configuración de la autenticación con
contraseña)
Esta casilla de verificación le permite restaurar la configuración de la autenticación de la
conexión de la computadora.
Se restaura la contraseña de autenticación de la conexión de la computadora y la
configuración para desactivar la autenticación.
La configuración predeterminada no selecciona esto.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 123
(5) Haga clic en el botón <OK> para restaurar la información del sistema.
Restaure la configuración del sistema que se guardó con Backup Controller solo para el
mismo sistema.
Cuando se restaura una información del sistema diferente, aparece el siguiente mensaje de
advertencia.
Haga clic en el botón <No> (no restaurar datos), excepto para situaciones especiales, como
el reemplazo del controlador.
Al restaurar la copia de seguridad, que incluye la información no compatible del robot con
el controlador de destino, se produce un error.
NOTA
NOTA

Mantenimiento
124 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
5. Actualización del firmware
Este capítulo describe el procedimiento de actualización de firmware y la inicialización de
archivo de datos cuando los errores de firmware o de configuración del robot causan una
falla en el inicio o en la operación del controlador.
5.1 Actualización del firmware
El firmware (software almacenado en memoria no volátil) y los archivos de datos necesarios
para controlar el controlador y el robot vienen preinstalados en el controlador. La
configuración del controlador definida desde EPSON RC+ 7.0 siempre se guarda en el
controlador.
El firmware del controlador se entrega en un CD-ROM, según sea necesario.
Comuníquese con el proveedor de su región para obtener información.
Debe usar una computadora que ejecute EPSON RC+7.0 conectada al controlador con USB para
actualizar el firmware del controlador. No se puede actualizar el firmware con una conexión
Ethernet.
Al instalar el firmware Ver.7.5.0.x o superior, asegúrese de que la computadora tenga instalado
EPSON RC+ 7.0 versión 7.5.0 o posterior.
5.2 Procedimiento de actualización de firmware
El procedimiento de actualización de firmware se describe del siguiente modo:
(1) Conecte la computadora de desarrollo y el controlador con un cable USB (el firmware
no se puede cambiar con una conexión Ethernet).
(2) Encienda el controlador. (No inicie el software de desarrollo EPSON RC+ 7.0 hasta
que se haya completado la actualización del firmware).
(3) Inserte el “CD-ROM de firmware” en la unidad de CD-ROM de la computadora de
desarrollo.
(4) Ejecute “Ctrlsetup70.exe”. Aparece el siguiente diálogo.
(5) Seleccione el botón de la opción <Upgrade> (Actualizar) y haga clic en el botón <Next>
(Siguiente).
NOTA

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 125
(6) Asegúrese de que la computadora de desarrollo esté conectada con el controlador con
un cable USB y haga clic en el botón <Next>.
(7) Compruebe la versión de firmware actual y la versión de firmware nueva y haga clic en
el botón <Install> (Instalar).
(8) Comienza la actualización de firmware. Se demora varios minutos.
No desconecte el cable USB durante la transferencia ni apague el controlador o la
computadora de desarrollo.
NOTA

Mantenimiento
126 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
(9) Comienza la transferencia continua del archivo de datos.
(10) Aparece el siguiente diálogo cuando se completa la transferencia. Haga clic en el botón
<Next> para reiniciar el controlador.
(11) El siguiente diálogo aparece después del reinicio del controlador. Haga clic en el botón
<Finish>.
Se completó la actualización de firmware.
Cuando instale el firmware (Ver.7.4.0.2 o posterior) en el controlador, que tenga instalado
el firmware (anterior a la versión 7.4.0.2), aparecerá el siguiente mensaje.
Cuando se muestre el mensaje, vuelva a instalar el firmware.
NOTA

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 127
5.3 Recuperación del controlador
Si el controlador se vuelve inoperable, use los procedimientos descritos en esta sección para
recuperarlo.
Se recomienda Controller Backup para recuperar fácilmente la operación del controlador. Para
conocer detalles acerca de Controller Backup, consulte Mantenimiento 4. Copia de
seguridad y restauración.
Las dos siguientes condiciones describen el estado de error del controlador
después de encenderlo.
Condición
A
El controlador cambia automáticamente al modo Recovery (Recuperación)
y se encienden las LED de ERROR, TEACH y PROGRAM (Error -
Enseñar - Programar). Puede comunicarse con la computadora de
desarrollo, aunque el controlador no opere correctamente.
Condición
B
Los LED de TEACH, AUTO y PROGRAM no parpadean.
No se puede comunicar con el controlador desde la computadora de
desarrollo.
La medida contra el estado de error es la siguiente.
Condición
A
Siga el procedimiento de inicialización de firmware que aparece en
Mantenimiento 5.4 Procedimiento de inicialización de firmware
Condición
B
Ejecute los siguientes pasos:
(1) Apague el controlador.
(2) Presione el botón Trigger (Disparador) ubicado en el lado delantero del
controlador, mientras lo mantiene presionado, encienda el controlador.
Siga presionando el botón Trigger durante 30 segundos. Esto
provocará que el controlador arranque en modo de recuperación.
(3) Asegúrese de que los LED de ERROR, TEACH y PROGRAM estén
encendidos.
(4) Siga el procedimiento en Mantenimiento 5.4 Procedimiento de
inicialización de firmware desde el paso (3) para iniciar el firmware.
NOTA

Mantenimiento
128 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
5.4 Procedimiento de inicialización de firmware
En esta sección se describe el procedimiento de inicialización de firmware.
(1) Conecte la computadora de desarrollo y el controlador con un cable USB (el firmware
no se puede cambiar con una conexión Ethernet).
(2) Encienda el controlador. No inicie el software de desarrollo EPSON RC+ 7.0 hasta que
se haya completado la inicialización de firmware.
(3) Inserte el “CD-ROM de firmware” en la unidad de CD-ROM de la computadora de
desarrollo.
(4) Ejecute “Ctrlsetup.exe”.
(5) Seleccione la opción <Initialize> (Inicializar) y haga clic en el botón <Next>.
(6) Asegúrese de que la computadora de desarrollo esté conectada con el controlador con
un cable USB y haga clic en el botón <Next>.
(7) Compruebe la información de versión y haga clic en el botón <Install>.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 129
(8) Comienza la transferencia del firmware y del archivo de datos. Se demora varios
minutos.
No desconecte el cable USB durante la transferencia ni apague el controlador o la
computadora de desarrollo.
(9) El siguiente diálogo aparece cuando se completa la transferencia. Haga clic en el botón
<Next> para reiniciar el controlador.
(10) El siguiente diálogo aparece después del reinicio del controlador. Haga clic en el botón
<Finish>.
Se completó la actualización de firmware.
Inicie EPSON RC+ 7.0 y restaure la configuración del controlador.
Para conocer detalles acerca de la restauración del sistema operativo, consulte
Mantenimiento 4. Copia de seguridad y restauración.
Cuando instale el firmware (Ver.7.4.0.2 o posterior) en el controlador, que tenga instalado
el firmware (anterior a la versión 7.4.0.2), aparecerá el siguiente mensaje.
Cuando se muestre el mensaje, vuelva a instalar el firmware.
NOTA
NOTA

Mantenimiento
130 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
5.5 Adición de pasos de confirmación al fortalecer la seguridad de la
conexión de EtherNet
Desde la siguiente versión de firmware se requiere contraseña de autenticación cuando
conecte controladores y computadoras a una red global accesible.
F/W: Ver.7.4.8.x
En los siguientes casos, las conexiones del conector Ethernet (computadora) y Ethernet
remoto no están disponibles.
La dirección IP del controlador está configurada como la dirección IP global
La versión de firmware es 7.4.8.x o posterior
EPSON RC+7.0 es versión 7.4.7 o anterior
Cuando se actualiza el firmware del controlador en las siguientes condiciones, se pueden
ejecutar pasos adicionales para confirmar si desea continuar con la actualización del
firmware, dependiendo de los ajustes de configuración del controlador. (el paso 3 o posterior
aparece a continuación)
La dirección IP del controlador está configurada como la dirección IP global
La versión de firmware que se debe instalar es la 7.4.8.x o posterior
A continuación, se describen los pasos para confirmar si se desea continuar con la
actualización del firmware.
(1) Inserte el “CD-ROM del firmware” que se instalará en la unidad de CD-ROM de la
computadora de desarrollo.
(2) Ejecute “CtrlSetup70.exe”.
(3) Aparece la ventana Controller Setup.
Seleccione el botón <Upgrade> y haga clic en el botón <Next>.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 131
(4) Se muestra la ventana Step 2 (Paso 2).
Haga clic en el botón <Next>.
(5) Se muestra la ventana Step 3 (Paso 3).
(5)-1 Cuando no se ejecutan los pasos para confirmar si se desea continuar con la
actualización:
Se muestra la ventana Step 3.
Siga las instrucciones de la ventana e instale el firmware.
(5)-2 Cuando se ejecutan los pasos para confirmar si se desea continuar con la
actualización:
Aparece la siguiente ventana.
Cuando se selecciona el botón <I understand the contents> (Entiendo los
contenidos), se activa el botón <OK>.
Cuando se hace clic en el botón <OK>, aparece la ventana Step3. Vaya al paso (6).
Cuando se hace clic en el botón <Cancel> (Cancelar), aparece la ventana Step3.
La casilla de verificación [Disable connection password] (Desactivar la contraseña
de conexión) y el botón <Install> (Instalar) están desactivados y no se pueden
seleccionar.

Mantenimiento
132 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
(6) Se muestra la ventana Step 3.
(6)-1 Si se selecciona la casilla de verificación [Disable connection password]
(Desactivar contraseña de conexión), se desactiva la autenticación de la conexión
después de actualizar el firmware.
(6)-2 Si se hace clic en el botón <Install>, aparece la ventana de confirmación.
Cuando se selecciona la casilla de verificación [Disable connection password]:
Cuando no se selecciona la casilla de verificación [Disable connection password]:
Cuando se hace clic en el botón <OK>, aparece la ventana Step 4. Vaya al paso (7).
Cuando se hace clic en el botón <Cancel>, se cierra la ventana.
(7) Comienza la instalación del firmware.
Cuando el firmware esté instalado, haga clic en el botón <Next>. Reinicie el controlador.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 133
(8) Cuando se reinicia el controlador, aparece la siguiente ventana.
Confirme que el firmware esté instalado.
Haga clic en el botón <Finish>.

Mantenimiento
134 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
6. Alarma
Cuando se agotan las baterías (baterías de litio) para el controlador y el manipulador, se
produce una alarma de advertencia de reducción del voltaje. Sin embargo, la alarma no
garantiza que la batería dure hasta su reemplazo, y es necesario reemplazarlas de inmediato.
Si las baterías se agotan, se perderán los parámetros del robot, y se deberá volver a calibrar.
Además, las piezas de las articulaciones del manipulador pueden causar una disminución en
la precisión o un mal funcionamiento debido al deterioro de las piezas causado por el uso a
largo plazo. Si el robot se avería a causa del deterioro de las piezas, se necesitará mucho
tiempo y dinero para repararlo.
Las siguientes secciones describen el funcionamiento de la alarma, lo que anuncia los
siguientes lapsos de mantenimiento para realizar el mantenimiento antes de tiempo antes de
la advertencia de error.
Los plazos de mantenimiento que se anunciarán variarán en función de la versión del
firmware del controlador.
Consulte la sección correspondiente a la versión de firmware de su controlador.
Versión del firmware del
controlador
Elementos de mantenimiento
Antes de Ver.7.1.8.x
- Reemplazo de la batería del controlador
- Reemplazo de la batería del robot
- Engrase
Ver.7.2.0.x o posterior
- Reemplazo de la batería del controlador
- Reemplazo de la batería del robot
- Engrase
- Reemplazo de la correa de regulación
- Reemplazo del motor
- Reemplazo de la unidad de engranaje reductor
- Reemplazo de la unidad de ranura de tornillo
esférico

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 135
6.1 Antes del firmware Ver.7.1.8.x del controlador
6.1.1 Configuración de alarmas
La alarma se puede configurar para anunciar los plazos de mantenimiento de batería/engrase
del robot y batería del controlador. La fecha de expiración de la alarma se define un mes
antes del plazo de mantenimiento, si se configura la fecha de reemplazo de piezas o el
período de engrase.
PRECAUCIÓN
Asegúrese de que la fecha y hora del controlador estén configuradas
correctamente. La alarma no puede funcionar correctamente si la fecha y la hora
no están configuradas correctamente.
Si se reemplaza la placa de la CPU o CF, es posible que se pierda la información
de la alarma. Cuando reemplace estas piezas, confirme la fecha y la hora del
controlador y la información de la alarma.
6.1.1.1 Batería del robot y engrase
Cuando se configura o cambia el robot, se configurará automáticamente una alarma para el
cambio de batería y engrase.
Las siguientes piezas están sujetas al engrase:
Unidad de ranura de tornillo esférico en la articulación n.º 3
Cuando se elimina el robot de la configuración, la información de la alarma también se
eliminará automáticamente.
Para conocer detalles de la configuración del robot, consulte Manual del usuario de EPSON
RC+ 7.0 10.1 Configuración del modelo del robot.
PRECAUCIÓN
El cambio del robot se debe realizar con cuidado. La configuración de la alarma
se restablecerá cuando se cambie el robot.
La primera alarma para el cambio de batería del robot y el engrase después de la compra puede
producirse antes de lo programado.
Si está utilizando el controlador con versión de firmware anterior a 7.1.0.x, no está
configurada la información de alarma. En tal caso, edite la información de alarma.
Para conocer detalles sobre cómo editar la información de alarma, consulte Mantenimiento
6.1.3 Cómo editar la información de alarma.
La información de alarma del reemplazo de la batería del robot y el engrase depende del
controlador en el que está configurado el robot. Si se reemplaza el robot por otro robot con
un número de serie distinto, la alarma no funcionará correctamente. Cuando cambie el robot,
edite la información de la alarma.
Para conocer detalles sobre cómo editar la información de alarma, consulte Mantenimiento
6.1.3 Cómo editar la información de alarma.
NOTA
NOTA
NOTA

Mantenimiento
136 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
6.1.1.2 Batería del controlador
La batería del controlador se configura automáticamente durante la primera conexión con
EPSON RC+7.0, después de actualizar al firmware versión 7.1.0.x y posterior.
Si está utilizando el controlador antes de actualizar la versión, puede haber una diferencia
en la información de la alarma. En tal caso, edite la información de alarma. Para conocer
detalles sobre cómo editar la información de alarma, consulte Mantenimiento 6.1.3 Cómo
editar la información de alarma.
6.1.2 Cómo ver la información de alarmas
La información de alarmas configurada se puede revisar en EPSON RC+.
(1) En EPSON RC+ 7.0, seleccione menú-[Tools]-[Maintenance] para mostrar el cuadro
diálogo [Controller Tools].
(2) Haga clic en el botón <Controller Alarms> (Alarmas del controlador) y aparecerá el
cuadro de diálogo [Controller Alarms].
Existen tres estados de alarma.
Pantalla
Estado
OK
Está configurada una alarma. No se está produciendo una alarma.
Expiró
Se está produciendo una alarma. Es necesario reemplazar.
No config.
No está configurada una alarma.
NOTA
NOTA

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 137
6.1.3 Cómo editar la información de las alarmas
La información de alarmas configurada se puede editar en EPSON RC+.
(1) En EPSON RC+ 7.0, seleccione menú-[Tools]-[Maintenance] para mostrar el cuadro
de diálogo [Controller Tools].
(2) Seleccione la alarma que cambiará y haga clic en el botón <Change> (Cambiar).
(3) Muestre el cuadro de diálogo [Change Alarm] (Cambiar alarma) e ingrese cualquiera
de las siguientes opciones.
Fecha de compra o reemplazo de la batería
Fecha de engrase
(4) Haga clic en el botón <OK> para restaurar la información del sistema.
6.1.4 Método de notificación de alarma
El método de notificación de alarma se debe configurar según el bit de salida de la E/S
remota.
La E/S remota se puede configurar en EPSON RC+ 7.0- [Setup] - [System Configuration]
- [Controller] - [Remote Control] (Configuración - Configuración de sistema - Controlador
- Control remoto).
Para conocer detalles, consulte el Manual del usuario EPSON RC+ 7.0 12.1 E/S remota.
El controlador no entra en el estado de error o advertencia, incluso si se produce una alarma.
NOTA

Mantenimiento
138 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
6.1.5 Cómo cancelar la alarma
Se produce una alarma cuando llega a la fecha de expiración.
Existen los dos métodos siguientes para cancelar la alarma.
- Desde el cuadro de diálogo [Change Alarm] (Cambiar alarma)
- Mediante el bit de entrada de la E/S remota
No se puede cancelar la alarma con la ejecución del comando Reset (Restablecer) ni con el
reinicio del controlador.
6.1.5.1 Diálogo de cancelación de la alarma
Se puede cancelar la alarma en EPSON RC+.7.0
Consulte Mantenimiento 6.1.3 Cómo editar la información la alarma para cambiar la
información de alarma en los mismos pasos.
6.1.5.2 Entrada remota
Se puede cancelar la alarma mediante el bit de entrada de la E/S remota.
Para conocer detalles, consulte el Manual del usuario EPSON RC+ 7.0 12.1 E/S remota.
NOTA

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 139
6.2 Firmware del controlador Ver.7.2.0.x o posterior
6.2.1 Información de mantenimiento
Se pueden configurar plazos de reemplazo recomendados para las baterías del controlador,
las batería/engrase del robot, las correas de regulación, los motores, las unidades de
engranaje reductor y las unidades de ranura de tornillo esférico.
PRECAUCIÓN
Asegúrese de que la fecha y hora del controlador estén configuradas
correctamente. La administración de consumo de piezas no puede funcionar
correctamente si la fecha y hora no están configuradas correctamente.
Si se reemplaza la placa de la CPU o CF, es posible que se pierda la información
de mantenimiento. Cuando reemplace estas piezas, confirme la fecha y la hora
del controlador y la información de mantenimiento.
La configuración de mantenimiento variará en función de los métodos de instalación para
actualizar desde el firmware versión 7.1.0.x o anterior a 7.2.0.x o posterior.
Instalación inicial : Está activado Maintenance (Mantenimiento).
Actualizaciones : Maintenance hereda los datos anteriores.
(Está desactivado de forma predeterminada)
Para conocer detalles sobre cómo activar o desactivar Maintenance, consulte el Manual
del usuario de EPSON RC+ 7.0 , página [Setup]-[System Configuration]-[Controller]-
[Preferences] (Configuración - Configuración de sistema, Controlador, Preferencias) en
5.12.2 Comando [System Configuration] (Setup Menu) (menú Configuración).
Maintenance se activa al momento del envío.
6.2.1.1 Información de mantenimiento del robot
Si esto se encuentra activado, la información de mantenimiento de la batería, las correas de
regulación, los motores, las unidades de engranaje reductor, las unidades de ranura de
tornillo esférico y el engrase se configurarán automáticamente cuando se configure o
modifique el robot.
Las siguientes piezas están sujetas al engrase:
Unidad de ranura de tornillo esférico en la articulación n.º 3
Cuando se elimina de la configuración el robot, la información de mantenimiento también
se eliminará automáticamente.
Para conocer detalles de la configuración del robot, consulte Manual del usuario de EPSON
RC+ 7.0 10.1 Configuración del modelo del robot.
PRECAUCIÓN
El cambio del robot se debe realizar con cuidado. La configuración de la alarma
se restablecerá cuando se cambie el robot.
Si está utilizando el controlador con una versión de firmware anterior a 7.1.0.x, no está
configurada la información de Maintenance. En tal caso, edite la información.
Para conocer detalles sobre cómo editar la información de mantenimiento, consulte
Mantenimiento 6.2.3 Cómo editar la información de mantenimiento.
NOTA
NOTA
NOTA

Mantenimiento
140 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
La información de mantenimiento del robot depende del controlador en el que está
configurado el robot. Si se reemplaza el robot por otro robot con un número de serie distinto,
la información de mantenimiento no funcionará correctamente. Cuando cambie el robot,
edite la información de mantenimiento.
Para conocer detalles sobre cómo editar la información de mantenimiento, consulte
Mantenimiento 6.2.3 Cómo editar la información de mantenimiento.
6.2.1.2 Información de mantenimiento del controlador
Si está activado Maintenance, la batería del controlador se configura automáticamente
durante la primera conexión con EPSON RC+7.0, después de actualizar el firmware a la
versión 7.2.0.x o posterior.
Si está utilizando el controlador antes de actualizar la versión, puede haber una diferencia
en la información de mantenimiento. En tal caso, edite la información. Para conocer
detalles sobre cómo editar la información de mantenimiento, consulte Mantenimiento 6.2.3
Cómo editar la información de mantenimiento.
6.2.2 Cómo ver la información de mantenimiento
La información de mantenimiento configurada se puede revisar en EPSON RC+ 7.0 Ver.
7.2.x o posterior.
(1) En EPSON RC+ 7.0, seleccione menú-[Tools]-[Maintenance] para mostrar el cuadro
diálogo [Controller Tools].
(2) Para verificar la información de mantenimiento del controlador, haga clic en el botón
<Maintenance> y muestre el cuadro de diálogo [Maintenance].
NOTA
NOTA

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 141
(3) Seleccione “General” o especifique el eje en el árbol para mostrar información sobre
las piezas de objetivo.
El plazo de reemplazo recomendado para la batería se calcula según la capacidad
de la batería y el tiempo de encendido del controlador. La batería puede agotarse si
pasa el plazo de reemplazo recomendado.
El plazo de reemplazo recomendado para el engrase se calcula según los días que
han transcurrido desde la fecha del engrase. El plazo de reemplazo puede ser más
corto o largo según la condición de uso, como la carga aplicada por el robot.
El plazo de reemplazo recomendado para las piezas (correas de regulación,
motores, unidades de engranaje reductor y unidades de ranura de tornillo esférico)
es cuando alcanza una vida útil de L10 (tiempo para alcanzar un 10 % de
probabilidad de error). En la ventana de diálogo, la vida útil de L10 se muestra
como 100 %.
Los meses restantes se calcular en función de las condiciones de operación
anteriores.
Active para definir el período para el cálculo del comando “HealthCalcPeriod”.
(Valor predeterminado: siete días del tiempo de encendido del controlador)
Los meses restantes no se pueden calcular correctamente hasta que haya
transcurrido el período para el cálculo.
NOTA

Mantenimiento
142 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
6.2.3 Cómo editar la información de mantenimiento
La información de mantenimiento configurada se puede editar en EPSON RC+ 7.0 Ver.
7.2.x o posterior.
(1) En EPSON RC+ 7.0, seleccione menú-[Tools]-[Maintenance] para mostrar el cuadro
diálogo [Controller Tools].
(2) Para editar la información de mantenimiento, muestre el cuadro de diálogo
[Maintenance].
(3) Seleccione “General” o especifique el eje en el árbol para mostrar información sobre
las piezas de objetivo.
(4) Seleccione la alarma que cambiará y haga clic en el botón <Change> (Cambiar).
(5) Muestre el cuadro de diálogo [Change Alarm] (Cambiar alarma) e ingrese cualquiera
de las siguientes opciones.
Fecha de compra o reemplazo de la batería
Fecha de engrase
Fecha de compra o reemplazo de la correa de regulación
Fecha de compra o reemplazo del motor
Fecha de compra o reemplazo de la unidad de engranaje reductor
Fecha de compra o reemplazo de la unidad de ranura de tornillo esférico
(6) Haga clic en el botón <OK> para restaurar la información del sistema.
La compensación se puede configurar para la velocidad de consumo de las piezas ya instaladas.
Siga los pasos a continuación para calcular un valor aproximado de configuración de
compensación.
1. Mida los meses utilizables para la operación anterior según HealthRBAnalysis.
2. Confirme el tiempo anterior de encendido del motor en el visor de estado del
controlador.
3. Calcule un valor de compensación aproximado con la siguiente fórmula.
Compensación=100
Tiempo encendido del motor
2430.4375 Meses en los
que se utiliza
Para conocer detalles, consulte el siguiente manual.
Referencia del lenguaje SPEL+ de EPSON RC+ 7.0
NOTA

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 143
6.2.4 Método de notificación de alarma
El estado del controlador se convierte en una advertencia y aparece un mensaje de
advertencia si alguna pieza requiere que se realice un reemplazo o engrase.
Para conocer detalles, consulte el siguiente manual.
Mantenimiento 9.1 Tabla de códigos de error
El método de notificación de alarma se puede configurar según el bit de salida de la E/S
remota.
La E/S remota se puede configurar en EPSON RC+ 7.0- [Setup] - [System Configuration]
- [Controller] - [Remote Control] (Configuración - Configuración de sistema - Controlador
- Control remoto).
Para conocer detalles, consulte Manual del usuario EPSON RC+ 7.0 12.1 E/S remota.
El controlador entra en el estado de advertencia si se produce una alarma.
6.2.5 Cómo cancelar la alarma
Se produce una alarma cuando la tasa de consumo de las piezas alcanza un 100 %.
No se puede cancelar la alarma con la ejecución del comando Reset (Restablecer) ni con el
reinicio del controlador.
La alarma se puede cancelar con los siguientes métodos.
Cuadro de diálogo [Maintenance] en EPSON RC+ 7.0.
Comando HealthCtrlReset
Comando HealthRBReset
Consulte Mantenimiento 6.2.3 Cómo editar la información de mantenimiento para cambiar
la información de alarma en los mismos pasos.
NOTA
NOTA

Mantenimiento
144 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
7. Procedimientos de reemplazo de piezas de
mantenimiento
ADVERTENCIA
■
Antes de realizar algún procedimiento de mantenimiento, siempre asegúrese de
que la alimentación principal del controlador esté apagada y de que el área
cargada con alto voltaje esté completamente descargada. Realizar cualquier
procedimiento de mantenimiento mientras está encendida la alimentación o el
área cargada con alto voltaje no está completamente descargada es
extremadamente peligroso y puede causar descargas eléctricas o provocar
problemas graves de seguridad.
■
Cuando abra o cierre la parte delantera, asegúrese de que la fuente de
alimentación de 200 V del controlador esté apagada. Realizar el procedimiento
en el bloque de terminales de la fuente de alimentación dentro del controlador
mientras está encendida es extremadamente peligroso y puede causar
descargas eléctricas o provocar problemas graves de seguridad.
- Tenga cuidado de no dañar los cables.
- Asegúrese de no dejar caer ningún tornillo dentro del controlador.
- La posición y los números de los tornillos que fijan el panel superior varían con el
manipulador que esté conectado al controlador. Consulte las siguientes imágenes si
necesita retirar el panel superior para realizar mantenimiento.
RC90 (para LS3, LS6), RC90-B (para LS3-B, LS6-B): Tornillos de montaje
Parte superior
Atrás: consulte la imagen de la derecha.
1
2
3
4
5
Atrás
6
7
8
9
10
RC90 (para LS20), RC90-B (para LS10-B, LS20-B): Tornillos de montaje6
Solo parte superior
1
2
5
6
3
4
NOTA

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 145
7.1 Filtro del ventilador
Inspeccione el filtro del ventilador periódicamente y límpielo cuando sea necesario. La
temperatura al interior del controlador puede llegar a elevarse mucho y es posible que el
controlador no funcione correctamente si el filtro no se mantiene limpio.
Retiro del
filtro del
ventilador
(1)
Apague el controlador.
(2)
Retire dos tornillos del filtro del
ventilador.
(3)
Retire la cubierta del filtro del ventilador.
(4)
Extraiga el filtro del ventilador.
Aspire todo el polvo cuando limpie el filtro.
Instalación del
filtro del
ventilador
(1)
Coloque el filtro del ventilador en la cubierta del filtro del ventilador.
(2)
Coloque la cubierta del filtro del ventilador con dos tornillos.
(3)
Conecte el enchufe de alimentación. Encienda el controlador y asegúrese de que se
inicie correctamente sin ninguna vibración o ruido anormal.

Mantenimiento
146 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
7.2 Ventilador
Retiro del
ventilador
(1)
Apague el controlador.
(2)
Desconecte el enchufe de alimentación.
(3)
Retire la cubierta superior.
RC90 (para LS3, LS6), RC90-B (para LS3-B, LS6-B): Tornillos de montaje 10
RC90 (para LS20), RC90-B (para LS10-B, LS20-B): Tornillos de montaje 6
(4)
Retire el cable del ventilador desde la DMB.
(5)
Retire los tornillos del ventilador (2).
(6)
Retire el ventilador.
Instalación del
ventilador
(1)
Instale el nuevo ventilador con dos tornillos.
En este punto, apriete los tornillos de forma diagonal. Tenga cuidado con la dirección
de montaje.
(2)
Conecte los cables del ventilador a DMB.
(3)
Instale el panel superior.
RC90 (para LS3, LS6), RC90-B (para LS3-B, LS6-B): Tornillos de montaje 10
RC90 (para LS20), RC90-B (para LS10-B, LS20-B): Tornillos de montaje 6
(4)
Conecte el enchufe de alimentación. Encienda el controlador y asegúrese de que se
inicie correctamente sin ninguna vibración o ruido anormal.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 147
7.3 Batería
PRECAUCIÓN
■
Sea meticuloso y cuidadoso cuando manipule la batería de litio. Como se
menciona a continuación, la manipulación incorrecta de las baterías de litio es
extremadamente peligrosa y puede causar generación de calor, filtraciones,
explosiones o inflamación, y puede causar problemas graves de seguridad.
・Carga de batería
・Desmontaje
・Instalación incorrecta
・Exposición al fuego
・Descarga forzosa
・Deformación por presión
・Cortocircuito (polaridad; positiva/negativa)
・Calefacción (85C o más)
・Soldar el terminal de la batería de litio directamente
■
Asegúrese de usar la batería provista como pieza de mantenimiento por
EPSON.
(Consulte Mantenimiento 10. Lista de piezas de mantenimiento.)
■
Cuando elimine la batería, consulte con servicios de eliminación profesionales o
cumpla los reglamentos locales.
Sin importar si las baterías están gastadas o no, asegúrese de que su terminal
esté aislado. Si los terminales hacen contacto con otros metales, pueden hacer
cortocircuito y generar calor, filtraciones, explosiones o inflamación.
Encienda el controlador durante aproximadamente un minuto antes de reemplazar la
batería.
Finalice el reemplazo en 10 minutos para prevenir la pérdida de datos.
Retiro de
la batería
(1)
Realice una copia de seguridad de los datos del controlador.
Consulte Mantenimiento 4. Copia de seguridad y restauración.
(2)
Apague el controlador.
(3)
Desconecte el enchufe de alimentación.
(4)
Retire el panel superior.
RC90 (para LS3, LS6), RC90-B (para LS3-B, LS6-B): Tornillos de montaje 10
RC90 (para LS20), RC90-B (para LS10-B, LS20-B): Tornillos de montaje 6
(5)
Desconecte el cable de la batería.
(6)
Retire la batería hacia arriba de forma vertical.
NOTA

Mantenimiento
148 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
Instalación
de la batería
(1)
Coloque una batería nueva.
Fije la batería con la pestaña de montaje.
(2)
Conecte los cables de la batería.
(3)
Instale el panel superior.
RC90 (para LS3, LS6), RC90-B (para LS3-B, LS6-B): Tornillos de montaje 10
RC90 (para LS20), RC90-B (para LS10-B, LS20-B): Tornillos de montaje 6
(4)
Conecte el enchufe de alimentación. Encienda el controlador y asegúrese de que se
inicie correctamente sin ninguna vibración o ruido anormal.
NOTA

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 149
7.4 CF (Compact Flash)
Retiro
de la CF
(1)
Apague el controlador y desconecte el conector de alimentación.
(2)
Retire el panel superior.
RC90 (para LS3, LS6), RC90-B (para LS3-B, LS6-B): Tornillos de montaje 10
RC90 (para LS20), RC90-B (para LS10-B, LS20-B): Tornillos de montaje 6
(3)
Retire el tornillo de montaje de la CF (1).
(4)
Tire de la CF hacia la dirección de la flecha en la
imagen.
Instalación
de la CF
(1)
Inserte un nueva CF en la dirección opuesta de la flecha en la imagen anterior.
(2)
Apriete el tornillo de montaje de la CF (1).
(3)
Instale el panel superior.
RC90 (para LS3, LS6), RC90-B (para LS3-B, LS6-B): Tornillos de montaje 10
RC90 (para LS20), RC90-B (para LS10-B, LS20-B): Tornillos de montaje 6
(4)
Conecte el enchufe de alimentación. Encienda el controlador y asegúrese de que se
inicie correctamente sin ninguna vibración o ruido anormal.

Mantenimiento
150 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
7.5 MDB
Retiro
de MDB
(1)
Apague el controlador.
(2)
Desconecte el enchufe de alimentación.
(3)
Retire el panel superior.
RC90 (para LS3, LS6), RC90-B (para LS3-B, LS6-B): Tornillos de montaje 10
RC90 (para LS20), RC90-B (para LS10-B, LS20-B): Tornillos de montaje 6
(4)
Retire el cable de salida de cada eje de la MDB.
(5)
Retire los tornillos de la superficie lateral del
chasis (4).
(5)
(7)
(6)
Extraiga el sujetador de la MDB para realizar el
montaje vertical.
(7)
Retire los tornillos de la superficie lateral del
chasis. (2)
(8)
Retire el sujetador de la MDB.
(Tornillo de montaje 2)
(9)
Extraiga la MDB en la dirección que se muestra
en la imagen.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 151
Instalación
de la MDB
(1)
Inserte la MDB en la dirección que se muestra en
la imagen.
(2)
Coloque el sujetador de la MDB.
(Tornillo de montaje 2)
(3)
Apriete los tornillos de la superficie lateral del
chasis.
(2).
(5)
(3)
(4)
Coloque el sujetador de la MDB para realizar el
montaje vertical.
(5)
Apriete los tornillos de la superficie lateral del
chasis (4).
(6)
Coloque el cable de salida de cada eje de la
MDB.
Cuando instale los cables de salida, asegúrese de
que el número en el sujetador de la MDB y en el
conector sean los mismos.
(7)
Instale el panel superior.
RC90 (para LS3, LS6), RC90-B (para LS6-B): Tornillos de montaje 10
RC90 (para LS20), RC90-B (para LS10-B, LS20-B): Tornillos de montaje 6
(8)
Conecte el enchufe de alimentación. Encienda el controlador y asegúrese de que se
inicie correctamente sin ninguna vibración o ruido anormal.
NOTA

Mantenimiento
152 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
7.6 DMB
Retiro
de la DMB
(1)
Apague el controlador.
(2)
Desconecte el enchufe de alimentación.
(3)
Retire el panel superior.
RC90 (para LS3, LS6), RC90-B (para LS3-B, LS6-B): Tornillos de montaje 10
RC90 (para LS20), RC90-B (para LS10-B, LS20-B): Tornillos de montaje 6
(4)
Retire los siguientes elementos del
controlador.
Conector de señal M/C
Conector EMERGENCY
Conector TP
Conector USB
Memoria USB
Conector Ethernet
Conector de E/S
Conector de RS-232C
(5)
Retire la MDB.
Consulte Mantenimiento: 7.5 MDB.
(6)
Retire los conectores (4).
(7)
Retire los tornillos de montaje de la DMB ( 14).
(8)
Retire el ventilador.
Consulte Mantenimiento: 7.2 Ventilador.
(9)
Retire la cubierta del conector de alimentación
M/C.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 153
(10)
Retire el tornillo del sujetador del cable de
alimentación M/C (1) y los tornillos del conector
de alimentación M/C (2).
(11)
Retire la línea FG del cable de alimentación M/C.
(12)
Desconecte el cable de alimentación M/C de la parte delantera del chasis.
(13)
Retire la DMB del chasis.
En este punto, tenga cuidado de no tocar el chasis y otras piezas.

Mantenimiento
154 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
Instalación
de la DMB
(1)
Inserte la DMB en el chasis.
En este punto, tenga cuidado de no tocar el chasis y otras piezas.
(2)
Inserte el cable de alimentación M/C desde la parte delantera del chasis.
(3)
Coloque la línea FG del cable de alimentación M/C.
(4)
Apriete el tornillo del sujetador del cable de
alimentación M/C (1) y los tornillos del conector
de alimentación M/C (2).
(5)
Retire la cubierta del conector de alimentación
M/C.
(6)
Instale el ventilador.
Consulte Mantenimiento: 7.2 Ventilador.
(7)
Apriete los tornillos de montaje de la DMB ( 14).
(8)
Conecte los conectores (4).
(9)
Instale la MDB.
Consulte Mantenimiento: 7.5 MDB.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 155
(10)
Instale los siguientes elementos en
el controlador.
Conector de señal M/C
Conector EMERGENCY
Conector TP
Conector USB
Memoria USB
Conector Ethernet
Conector de E/S
Conector de RS-232C
(11)
Instale el panel superior.
RC90 (para LS3, LS6), RC90-B (para LS3-B, LS6-B): Tornillos de montaje 10
RC90 (para LS20), RC90-B (para LS10-B, LS20-B): Tornillos de montaje 6
(12)
Conecte el enchufe de alimentación. Encienda el controlador y asegúrese de que se inicie
correctamente sin ninguna vibración o ruido anormal.

Mantenimiento
156 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
7.7 Placa de DMB Sub
Retiro de la
placa de DMB
Sub
(1)
Apague el controlador.
(2)
Desconecte el enchufe de alimentación.
(3)
Retire el panel superior.
RC90 (para LS3, LS6), RC90-B (para LS3-B, LS6-B): Tornillos de montaje 10
RC90 (para LS20), RC90-B (para LS10-B, LS20-B): Tornillos de montaje 6
(4)
Retire la DMB.
Consulte Mantenimiento: 7.6 DMB.
(5)
Retire los cables de la placa de DMB Sub.
(6)
Retire los dos insertos metálicos que fijan el conector RS-232C a la parte delantera.
(7)
Retire la placa de DMB Sub. (Tornillos de montaje 3)
Instalación de la
placa de DMB
Sub
(1)
Instale la placa de DMB Sub. (Tornillos de montaje 3)
(2)
Coloque los dos insertos metálicos que fijan el conector RS-232C a la parte
delantera.
(3)
Conecte los cables a la placa de DMB Sub.
(4)
Instale la DMB.
Consulte Mantenimiento: 7.6 DMB.
(5)
Instale el panel superior.
RC90 (para LS3, LS6), RC90-B (para LS3-B, LS6-B): Tornillos de montaje 10
RC90 (para LS20), RC90-B (para LS10-B, LS20-B): Tornillos de montaje 6
(6)
Conecte el enchufe de alimentación. Encienda el controlador y asegúrese de que se
inicie correctamente sin ninguna vibración o ruido anormal.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 157
7.8 DPB
Retiro
de la DPB
(1)
Apague el controlador.
(2)
Desconecte el enchufe de alimentación.
(3)
Retire el panel superior.
RC90 (para LS3, LS6), RC90-B (para LS3-B, LS6-B): Tornillos de montaje 10
RC90 (para LS20), RC90-B (para LS10-B, LS20-B): Tornillos de montaje 6
(4)
Retire la MDB.
Consulte Mantenimiento: 7.5 MDB
(5)
Desconecte los conectores de la DPB.
RC90 (para LS3, LS6)
: Conectores 6
RC90-B (para LS3-B, LS6-B)
: Conectores 6
RC90 (para LS20),
RC90-B (para LS10-B, LS20-B)
: Conectores 8
(6)
Solo para RC90 (para LS20),
RC90-B (para LS10-B, LS20-B)
Retire la placa posterior del controlador.
Tornillos de montaje 7
(7)
Destornille los tornillos de montaje de la DPB.
RC90 (para LS3, LS6):
: Tornillos de montaje 10
RC90-B (para LS3-B, LS6-B):
: Tornillos de montaje 9
RC90 (para LS20),
RC90-B (para LS10-B, LS20-B):
: Tornillos de montaje 12
(8)
Retire la DPB del controlador.

Mantenimiento
158 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
Instalación
de la DPB
(1)
Inserte la DPB en el controlador.
(2)
Instale la DPB.
RC90 (para LS3, LS6):
: Tornillos de montaje 10
RC90-B (para LS3-B, LS6-B):
: Tornillos de montaje 9
RC90 (para LS20),
RC90-B (para LS10-B, LS20-B):
: Tornillos de montaje 12
(3)
Solo para RC90 (para LS20),
RC90-B (para LS10-B, LS20-B)
Instale la placa posterior en el controlador.
Tornillos de montaje 7
(4)
Conecte los conectores a la DPB.
RC90 (para LS3, LS6)
: Conectores 6
RC90-B (para LS3-B, LS6-B)
: Conectores 6
RC90 (para LS20),
RC90-B (para LS10-B, LS20-B):
Conectores 8
(5)
Instale la MDB.
Consulte Mantenimiento: 7.5 MDB
(6)
Instale el panel superior.
RC90 (para LS3, LS6), RC90-B (para LS3-B, LS6-B): Tornillos de montaje 10
RC90 (para LS20), RC90-B (para LS10-B, LS20-B): Tornillos de montaje 6
(7)
Conecte el enchufe de alimentación. Encienda el controlador y asegúrese de que se
inicie correctamente sin ninguna vibración o ruido anormal.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 159
7.9 Placa opcional
Adición de la
placa opcional
(1)
Apague el controlador.
(2)
Desconecte el enchufe de alimentación.
(3)
Retire el panel superior.
RC90 (para LS3, LS6), RC90-B (para LS3-B, LS6-B): Tornillos de montaje 10
RC90 (para LS20), RC90-B (para LS10-B, LS20-B): Tornillos de montaje 6
(4)
Retire el sujetador del cable de la fuente de
alimentación.
(5)
Retire los tornillos del panel de ranuras
opcionales (4).
Cuando instale una placa opcional:
Deslice el panel en la forma que se muestra en la
imagen e instale la placa con los tornillos (2).
Cuando instale dos placas opcionales:
No es necesario el panel de ranuras opcionales.
(6)
Instale la placa opcional como se muestra en la
imagen.
(7)
Instale la placa en forma de L de sujeción con un
tornillo desde la parte delantera.
En este punto, se deja sin usar un tornillo para el
panel de ranuras opcionales.

Mantenimiento
160 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
(8)
Fije la placa en forma de L y la placa opcional
con el tornillo de fijación.
(9)
Instale el sujetador del cable de alimentación.
(10)
Instale el panel superior.
RC90 (para LS3, LS6), RC90-B (para LS3-B, LS6-B): Tornillos de montaje 10
RC90 (para LS20), RC90-B (para LS10-B, LS20-B): Tornillos de montaje 6
(11)
Conecte el enchufe de alimentación. Encienda el controlador y asegúrese de que se
inicie correctamente sin ninguna vibración o ruido anormal.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 161
8. Verificación de la operación del sistema de robot
Cuando se haya realizado mantenimiento del manipulador o el controlador, incluido el
reemplazo de piezas en esas unidades, se deben revisar los elementos de acuerdo con los
procedimientos en esta sección para asegurar una operación correcta.
(1) Conecte todos los cables necesarios para el sistema.
ADVERTENCIA
■
Cuando verifique la operación del sistema de robot, prepárese para enfrentar
errores con la configuración inicial o el cableado. Si el manipulador opera de forma
anormal a causa de una configuración inicial o un cableado incorrectos, presione
el interruptor de parada de emergencia de inmediato para detener el manipulador.
Verifique la operación del sistema de robot en el estado de modo restringido
(bajas velocidades y baja potencia). Verificar la operación del sistema de robot a
altas velocidades puede dañarlo y provocar graves problemas de seguridad, ya
que no se puede detener inmediatamente la operación del manipulador en caso
de que opere de forma anormal.
PRECAUCIÓN
■
El número de serie del manipulador que debe estar conectado se indica en la
etiqueta de verificación de conexión en el controlador. Conecte el controlador y
el manipulador correctamente. La conexión incorrecta entre el controlador y el
manipulador no solo puede causar el mal funcionamiento del sistema de robot,
sino que además puede causar graves problemas de seguridad.
(2) Encienda el controlador. Se iniciará el controlador. Durante este proceso, observe y
vigile el estado de LED.
Para conocer detalles acerca de la pantalla, consulte Mantenimiento 2.3. LED.
Para el número de error, consulte Mantenimiento 9.1 Tabla de códigos de error.
(3) Ejecute MOTOR ON (Motor encendido) y compruebe lo siguiente:
- No aparece ningún error.
- Hay excitación del servo y el manipulador funciona normalmente.
(4) Ejecute diversos comandos de movimiento (como JUMP, etc.). El manipulador debe
operar como corresponde y normalmente sin vibración o sonidos inusuales.

Mantenimiento
162 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
9. Solución de problemas
9.1 Tabla de códigos de error
N.º
Mensaje
Solución
Nota 1
Nota 2
1
Se inició el programa de control del
controlador.
-
2
Término debido a bajo voltaje de la
fuente de alimentación.
-
3
Se completó el programa de control del
controlador.
Se guarda este registro cuando se
reinicia el controlador desde EPSON
RC+ o TP1.
4
Se limpió el área de guardado de las
variables conservadas.
-
5
Se inició Function Main.
-
6
Se inició Function Main.
Posteriormente, los mismos registros
se omiten.
Omita el registro "Se inició Function
Main" para evitar que se acabe el
espacio del historial del sistema.
7
Se guardó el número de serie.
-
8
Se ejecutó la copia de seguridad del
sistema.
-
9
Se ejecutó la restauración del sistema.
-
10
Se inicializaron los parámetros del
robot.
-
11
Cambió el valor del pulso de
compensación entre el origen del
codificador y el sensor de reposo
(HOFS).
-
Valor
después del
cambio
Valor
antes del
cambio
17
Se activó el modo de guardado de
mensajes. Evento poco común.
-
18
Se ejecutó la conversión del archivo de
parámetros del robot.
-
19
Se instaló el firmware de la DU.
-
20
Se guardó la configuración de
habilitación en el modo Teach
(Enseñar).
-
21
Se cambió la configuración de
habilitación en el modo Teach.
-
23
Se ejecutó la parada de emergencia
(EStop).
-
Número de
robot que
ejecuta el
comando de
movimiento
Estado del
controlador
24
Se abrió la protección.
-
Número de
robot que
ejecuta el
comando de
movimiento
Estado del
controlador
25
Cambió la configuración del robot.
-
Número del
robot
26
Cambió la configuración de alarma.
-
Número de
alarma
50
Se restableció la alarma de la batería
que corresponde al controlador.
-
51
Se restableció la alarma de la batería
que corresponde al robot.
-
Número del
robot
52
Se restableció la alarma de engrase
que corresponde al robot.
-
Número del
robot
100
Dispositivo conectado al controlador.
-

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 163
N.º
Mensaje
Solución
Nota 1
Nota 2
101
Cambió el dispositivo de la consola.
-
20: TP3
21: RC+
22: E/S
remota
26: Ethernet
remoto
29: RS232
remoto
102
Cambió el dispositivo de presentación.
-
103
Cambió el modo de trabajo.
-
104
Cambió el modo cooperativo.
-
0:
Independient
e
1:
Cooperativo
110
Se instaló el firmware del controlador.
-
1:
Configurar
2: Inicializar
3: Actualizar
4:
Recuperar
111
Se restauró la dirección IP.
Puede guardar este registro cuando se
instala el firmware del controlador.
112
Controlador reiniciado
-
120
RC+ conectado al controlador.
-
1: Ethernet
2: USB
121
TP conectado al controlador.
-
123
RC+ desconectado del controlador.
-
124
TP desconectado del controlador.
-
126
El modo de trabajo cambió a AUTO
(Automático).
-
127
El modo de trabajo cambió a Program
(Programar).
-
128
El modo de trabajo cambió a Teach
(Enseñar).
-
129
Ethernet remoto conectado al
controlador
-
130
Ethernet remoto desconectado del
controlador
-
131
Comunicación remota conectada al
controlador
-
132
Comunicación remota desconectada
del controlador
-
Estado de
cierre de
sesión
0: Normal
1: Anormal
(tiempo de
espera)
133
El modo de trabajo cambió a Test
(Probar).
-
400
Se activó la alarma de la batería que
corresponde al controlador.
Reemplace la batería y reinicie la
alarma.
Reemplace la batería y reinicie la
alarma.
401
Se activó la alarma de la batería que
corresponde al robot. Reemplace la
batería y reinicie la alarma.
Reemplace la batería y reinicie la
alarma.
Número del
robot
402
Se activó la alarma de engrase.
Lubrique el robot y reinicie la alarma.
Lubrique el robot y reinicie la alarma.
Número del
robot

Mantenimiento
164 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
410
Se activó la alarma de la batería que
corresponde al controlador.
Reemplace la batería y reinicie la
alarma.
Reemplace la batería.
Después de reemplazar la batería,
reinicie la alarma en EPSON RC+ 7.0-
[Tools]-[Controller]-[Maintenance]
(Herramientas - Controlador -
Mantenimiento).
1000
veces la
tasa de
consumo
1000
veces el
valor de
límite
411
Se activó la alarma de la batería que
corresponde al robot. Reemplace la
batería y reinicie la alarma.
Reemplace la batería.
Después de reemplazar la batería,
reinicie la alarma en EPSON RC+ 7.0-
[Tools]-[Controller]-[ Maintenance].
1000
veces la
tasa de
consumo
1000
veces el
valor de
límite
412
Se activó la alarma de correa.
Reemplace la correa y reinicie la
alarma.
Reemplace la correa de regulación.
Después de reemplazar las correas de
regulación, reinicie la alarma en
EPSON RC+ 7.0-[Tools]-[Controller]-
[Maintenance].
1000
veces la
tasa de
consumo
1000
veces el
valor de
límite
413
Se activó la alarma de engrase que
corresponde a la ranura de tornillo
esférico. Lubrique las unidades de
ranura del tornillo esférico y reinicie la
alarma.
Lubrique la ranura del tornillo esférico.
Después de realizar el lubricado,
reinicie la alarma en EPSON RC+ 7.0-
[Tools]-[Controller]-[Maintenance].
1000
veces la
tasa de
consumo
1000
veces el
valor de
límite
414
Se activó la alarma de motor.
Reemplace el motor y reinicie la alarma.
Reemplace el motor.
Después de reemplazar el motor,
reinicie la alarma en EPSON RC+ 7.0-
[Tools]-[Controller]-[Maintenance].
1000
veces la
tasa de
consumo
1000
veces el
valor de
límite
415
Se activó la alarma de engranaje.
Reemplace las unidades de engranaje
y reinicie la alarma.
Reemplace las unidades de engranaje.
Después de reemplazar las unidades
de engranaje, reinicie la alarma en
EPSON RC+ 7.0-[Tools]-[Controller]-
[Maintenance].
1000
veces la
tasa de
consumo
1000
veces el
valor de
límite
416
Se activó la alarma de ranura del tornillo
esférico. Reemplace la ranura del
tornillo esférico y reinicie la alarma.
Reemplace la ranura del tornillo
esférico.
Después de reemplazar la ranura del
tornillo esférico, reinicie la alarma en
EPSON RC+ 7.0-[Tools]-[Controller]-
[Maintenance].
1000
veces la
tasa de
consumo
1000
veces el
valor de
límite
420
Se activó la alarma de la batería que
corresponde al controlador.
Reemplace la batería y reinicie la
alarma.
Reemplace la batería.
Después de reemplazar la batería,
reinicie la alarma en EPSON RC+ 7.0-
[Tools]-[Controller]-[Maintenance].
1000
veces la
tasa de
consumo
1000
veces el
valor de
límite
421
Se activó la alarma de la batería que
corresponde al robot. Reemplace la
batería y reinicie la alarma.
Reemplace la batería.
Después de reemplazar la ranura del
tornillo esférico, reinicie la alarma en
EPSON RC+ 7.0-[Tools]-[Controller]-
[Maintenance].
1000
veces la
tasa de
consumo
1000
veces el
valor de
límite
422
Se activó la alarma de correa.
Reemplace la correa y reinicie la
alarma.
Reemplace la correa de regulación.
Después de reemplazar las correas de
regulación, reinicie la alarma en
EPSON RC+ 7.0-[Tools]-[Controller]-
[Maintenance].
1000
veces la
tasa de
consumo
1000
veces el
valor de
límite
423
Se activó la alarma de engrase que
corresponde a la ranura de tornillo
esférico. Lubrique la ranura del tornillo
esférico y reinicie la alarma.
Lubrique la ranura del tornillo esférico.
Después de realizar el lubricado,
reinicie la alarma en EPSON RC+ 7.0-
[Tools]-[Controller]-[Maintenance].
1000
veces la
tasa de
consumo
1000
veces el
valor de
límite
424
Se activó la alarma de motor.
Reemplace el motor y reinicie la alarma.
Reemplace el motor.
Después de reemplazar el motor,
reinicie la alarma en EPSON RC+ 7.0-
[Tools]-[Controller]-[Maintenance].
1000
veces la
tasa de
consumo
1000
veces el
valor de
límite

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 165
N.º
Mensaje
Solución
Nota 1
Nota 2
425
Se activó la alarma de engranaje.
Reemplace las unidades de engranaje
y reinicie la alarma.
Reemplace las unidades de engranaje.
Después de reemplazar las unidades
de engranaje, reinicie la alarma en
EPSON RC+ 7.0-[Tools]-[Controller]-
[Maintenance].
1000
veces la
tasa de
consumo
1000
veces el
valor de
límite
426
Se activó la alarma de ranura del tornillo
esférico. Reemplace la ranura del
tornillo esférico y reinicie la alarma.
Reemplace la ranura del tornillo
esférico.
Después de reemplazar la ranura del
tornillo esférico, reinicie la alarma en
EPSON RC+ 7.0-[Tools]-[Controller]-
[Maintenance].
1000
veces la
tasa de
consumo
1000
veces el
valor de
límite
501
El historial de seguimientos está
activado.
Efectúa el rendimiento del sistema si
está activo el historial de seguimientos.
502
Se inicializó la memoria.
Cuando se genera este error, se
inicializa el valor de la variable global
conservada.
Reemplace la batería de la placa de la
CPU.
Reemplace la placa de la CPU.
503
Se encontró un error de disco duro.
Debe reemplazar el disco duro lo antes
posible.
Esta es una advertencia de error del
disco duro. Reemplace el disco duro lo
antes posible.
504
Se generó un error en una tarea en
segundo plano.
Asegúrese de que no haya problemas
en el sistema y siga con la operación.
505
Se reinició el controlador.
-
507
Se inicia el controlador utilizando el
archivo de configuración inicial anterior,
ya que el archivo de configuración
inicial está dañado. Revise la
configuración.
Es posible que no se hayan guardado
los cambios de configuración del inicio
anterior. Revise la configuración.
511
El voltaje de la batería de la copia de
seguridad de la placa de la CPU es
inferior al voltaje permitido.
Reemplace la batería de la placa de la
CPU.
Reemplace de inmediato la batería de
la placa de la CPU. Mantenga
activada la alimentación del
controlador todo el tiempo que sea
posible hasta que reemplace la
batería.
100 veces el
valor actual
100 veces el
valor de límite
512
El voltaje de entrada de 5 V de la placa
de CPU es inferior al voltaje permitido.
Si el voltaje normal no se genera a
partir de una sola fuente de
alimentación de 5 V, reemplace la
fuente de alimentación.
100 veces el
valor actual
100 veces el
valor de límite
513
El voltaje de entrada de 24 V para el
freno del motor, el codificador y el
ventilador es inferior al voltaje
especificado.
Si el voltaje normal no se genera a
partir de una sola fuente de
alimentación de 24 V, reemplace la
fuente de alimentación.
100 veces el
valor actual
100 veces el
valor de límite
514
La temperatura interna del controlador
es superior a la temperatura permitida.
Detenga el controlador lo antes posible
y compruebe que la temperatura
ambiente del controlador no sea alta.
Revise que el filtro no esté obstruido.
100 veces el
valor actual
100 veces el
valor de límite
515
La velocidad de rotación del ventilador
del controlador es inferior a la velocidad
permitida. (FAN1)
Revise que el filtro no esté obstruido.
Si la advertencia no desaparece
después de reiniciar el controlador,
reemplace el ventilador.
Valor actual
Valor de límite
516
La velocidad de rotación del ventilador
del controlador es inferior a la velocidad
permitida. (FAN2)
Revise que el filtro no esté obstruido.
Si la advertencia no desaparece
después de reiniciar el controlador,
reemplace el ventilador.
Valor actual
Valor de límite

Mantenimiento
166 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
517
La temperatura interna del controlador
es superior a la temperatura permitida.
Detenga el controlador lo antes posible
y compruebe que la temperatura
ambiente del controlador no sea alta.
Revise que el filtro no esté obstruido.
100 veces el
valor actual
100 veces el
valor de límite
518
El voltaje de entrada de 54 V de la placa
de CPU es inferior al voltaje permitido.
Si el voltaje normal no se genera a
partir de una sola fuente de
alimentación de 54 V, reemplace la
fuente de alimentación.
100 veces el
valor actual
100 veces el
valor de límite
519
El voltaje de entrada de 3,3 V de la
placa de CPU es inferior al voltaje
permitido.
Si el voltaje normal no se genera a
partir de una sola fuente de
alimentación de 3,3 V, reemplace la
fuente de alimentación.
100 veces el
valor actual
100 veces el
valor de límite
520
El voltaje de entrada de CC de la placa
de la CPU es inferior o superior al
voltaje permitido.
Si el voltaje normal no se genera a
partir de una sola fuente de
alimentación de CC, reemplace la
fuente de alimentación.
100 veces el
valor actual
100 veces el
valor de límite
521
El voltaje de entrada de 3,3 V de DU1
para la placa es inferior al voltaje
permitido.
Si el voltaje normal no se genera a
partir de una sola fuente de
alimentación de 3,3 V de la unidad de
mando 1, reemplace la fuente de
alimentación.
100 veces el
valor actual
100 veces el
valor de límite
522
El voltaje de entrada de 5 V de DU1
para la placa es inferior al voltaje
permitido.
Si el voltaje normal no se genera a
partir de una sola fuente de
alimentación de 5 V de la unidad de
mando 1, reemplace la fuente de
alimentación.
100 veces el
valor actual
100 veces el
valor de límite
523
El voltaje de entrada de 24 V de DU1
para el freno del motor, el codificador y
el ventilador es inferior al voltaje
especificado.
Si el voltaje normal no se genera a
partir de una sola fuente de
alimentación de 24 V de la unidad de
mando 1, reemplace la fuente de
alimentación.
100 veces el
valor actual
100 veces el
valor de límite
524
La temperatura interna de DU1 del
controlador es superior a la temperatura
permitida.
Detenga la unidad de mando 1 lo antes
posible y compruebe que la
temperatura ambiente de la unidad de
mando 1 no sea alta.
Revise que el filtro no esté obstruido.
100 veces el
valor actual
100 veces el
valor de límite
525
La velocidad de giro de DU1 del
ventilador del controlador es inferior a la
velocidad permitida. (FAN1)
Revise que el filtro de la unidad de
mando 1 no esté obstruido. Si la
advertencia no desaparece después
de reiniciar el controlador, reemplace
el ventilador.
Valor actual
Valor de límite
526
La velocidad de giro de DU1 del
ventilador del controlador es inferior a la
velocidad permitida. (FAN2)
Revise que el filtro de la unidad de
mando 1 no esté obstruido. Si la
advertencia no desaparece después
de reiniciar el controlador, reemplace
el ventilador.
Valor actual
Valor de límite
531
El voltaje de entrada de 3,3 V de DU2
para la placa es inferior al voltaje
permitido.
Si el voltaje normal no se genera a
partir de una sola fuente de
alimentación de 3,3 V de la unidad de
mando 2, reemplace la fuente de
alimentación.
100 veces el
valor actual
100 veces el
valor de límite
532
El voltaje de entrada de 5V de DU2 para
la placa es inferior al voltaje permitido.
Si el voltaje normal no se genera a
partir de una sola fuente de
alimentación de 5 V de la unidad de
mando 2, reemplace la fuente de
alimentación.
100 veces el
valor actual
100 veces el
valor de límite

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 167
N.º
Mensaje
Solución
Nota 1
Nota 2
533
El voltaje de entrada de 24 V de DU2
para el freno del motor, el codificador y
el ventilador es inferior al voltaje
especificado.
Si el voltaje normal no se genera a
partir de una sola fuente de
alimentación de 24 V de la unidad de
mando 2, reemplace la fuente de
alimentación.
100 veces el
valor actual
100 veces el
valor de límite
534
La temperatura interna de DU2 del
controlador es superior a la temperatura
permitida.
Detenga la unidad de mando 2 lo antes
posible y compruebe que la
temperatura ambiente de la unidad de
mando 2 no sea alta.
Revise que el filtro no esté obstruido.
100 veces el
valor actual
100 veces el
valor de límite
535
La velocidad de rotación de DU2 del
ventilador del controlador es inferior a la
velocidad permitida. (FAN1)
Revise que el filtro de la unidad de
mando 2 no esté obstruido. Si la
advertencia no desaparece después
de reiniciar el controlador, reemplace
el ventilador.
Valor actual
Valor de límite
536
La velocidad de rotación de DU2 del
ventilador del controlador es inferior a la
velocidad permitida. (FAN2)
Revise que el filtro de la unidad de
mando 2 no esté obstruido. Si la
advertencia no desaparece después
de reiniciar el controlador, reemplace
el ventilador.
Valor actual
Valor de límite
541
El voltaje de entrada de 3,3 V de DU3
para la placa es inferior al voltaje
permitido.
Si el voltaje normal no se genera a
partir de una sola fuente de
alimentación de 3,3 V de la unidad de
mando 3, reemplace la fuente de
alimentación.
100 veces el
valor actual
100 veces el
valor de límite
542
El voltaje de entrada de 5 V de DU3
para la placa es inferior al voltaje
permitido.
Si el voltaje normal no se genera a
partir de una sola fuente de
alimentación de 5 V de la unidad de
mando 3, reemplace la fuente de
alimentación.
100 veces el
valor actual
100 veces el
valor de límite
543
El voltaje de entrada de 24 V de DU3
para el freno del motor, el codificador y
el ventilador es inferior al voltaje
especificado.
Si el voltaje normal no se genera a
partir de una sola fuente de
alimentación de 24 V de la unidad de
mando 3, reemplace la fuente de
alimentación.
100 veces el
valor actual
100 veces el
valor de límite
544
La temperatura interna de DU3 del
controlador es superior a la temperatura
permitida.
Detenga la unidad de mando 3 lo antes
posible y compruebe que la
temperatura ambiente de la unidad de
mando 3 no sea alta.
Revise que el filtro no esté obstruido.
100 veces el
valor actual
100 veces el
valor de límite
545
La velocidad de giro de DU3 del
ventilador del controlador es inferior a la
velocidad permitida. (FAN1)
Revise que el filtro de la unidad de
mando 3 no esté obstruido. Si la
advertencia no desaparece después
de reiniciar el controlador, reemplace
el ventilador.
Valor actual
Valor de límite
546
La velocidad de giro de DU3 del
ventilador del controlador es inferior a la
velocidad permitida. (FAN2)
Revise que el filtro de la unidad de
mando 3 no esté obstruido. Si la
advertencia no desaparece después
de reiniciar el controlador, reemplace
el ventilador.
Valor actual
Valor de límite
550
Se desconectó la comunicación con
Compact Vision. Revise el cableado de
red.
Revise la conexión entre el controlador
y Compact Vision.
N.º de cámara

Mantenimiento
168 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
551
Las RPM del ventilador de la CPU de
Compact Vision han disminuido.
Limpie el filtro del ventilador o
reemplace el ventilador.
Revise que el filtro del ventilador de
Compact Vision no esté obstruido.
Si no se borró la advertencia después
de reiniciar el controlador y Compact
Vision, reemplace el ventilador de la
CPU.
N.º de cámara
Valor actual
552
Las RPM del ventilador de la CPU de
Compact Vision han disminuido.
Limpie el filtro del ventilador o
reemplace el ventilador.
Reemplace el ventilador de la CPU de
Compact Vision.
N.º de cámara
Valor actual
553
Las RPM del ventilador del chasis de
Compact Vision han disminuido.
Reemplace el ventilador.
Revise que el filtro del ventilador de
Compact Vision no esté obstruido.
Si no se borró la advertencia después
de reiniciar el controlador y Compact
Vision, reemplace el ventilador del
sistema.
N.º de cámara
Valor actual
554
Las RPM del ventilador del chasis de
Compact Vision han disminuido.
Reemplace el ventilador.
Reemplace el ventilador del sistema de
Compact Vision.
N.º de cámara
Valor actual
555
La temperatura de la CPU de Compact
Vision es demasiado alta. Revise el
entorno de instalación (ventilación,
temperatura ambiente, etc.)
Revise que el filtro del ventilador de
Compact Vision no esté obstruido.
Si la advertencia no desaparece
después de reiniciar el controlador y
Compact Vision, revise el entorno de
instalación (espacio circundante,
temperatura ambiente) de Compact
Vision.
N.º de cámara
1000 veces el
valor actual
556
La temperatura de la CPU de Compact
Vision es demasiado alta. Revise el
entorno de instalación (ventilación,
temperatura ambiente, etc.)
Revise que el filtro del ventilador de
Compact Vision no esté obstruido.
Si la advertencia no desaparece
después de reiniciar el controlador y
Compact Vision, revise el entorno de
instalación (espacio circundante,
temperatura ambiente) de Compact
Vision.
N.º de cámara
1000 veces el
valor actual
557
El voltaje de la batería de reserva de
Compact Vision es bajo. Reemplace la
batería.
Reemplace la batería de reserva de
Compact Vision.
N.º de cámara
1000 veces el
valor actual
558
El voltaje de la batería de reserva de
Compact Vision es bajo. Reemplace la
batería.
Reemplace la batería de reserva de
Compact Vision.
N.º de cámara
1000 veces el
valor actual
559
El proceso de Compact Vision terminó
de manera anormal. Reinicie la unidad
de Compact Vision.
Si la advertencia no desaparece
después de reiniciar el controlador y
Compact Vision, inicialice Compact
Vision.
N.º de cámara
560
La memoria disponible de Compact
Vision es baja. Reinicie la unidad de
Compact Vision.
Si la advertencia no desaparece
después de reiniciar el controlador y
Compact Vision, inicialice Compact
Vision.
N.º de cámara
Valor actual
561
El espacio de disco disponible de
Compact Vision es bajo. Reduzca el
número de objetos que usan modelos
(geométrico, correlación, DefectFinder,
etc.)
Revise la secuencia de visión si tiene
modelos innecesarios que se pueden
reducir. Considere usar la memoria
USB.
N.º de cámara
Valor actual

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 169
N.º
Mensaje
Solución
Nota 1
Nota 2
562
Se generó un error crítico de hardware
en la unidad de Compact Vision.
Revise la condición del hardware, como
el cableado interno.
Si la advertencia no desaparece
después de reiniciar el controlador y
Compact Vision, inicialice Compact
Vision.
N.º de cámara
563
Se generó un error crítico de hardware
en la unidad de Compact Vision.
Revise la condición del hardware, como
el cableado interno.
Si no se borró la advertencia después
de reiniciar el controlador y Compact
Vision, reemplace la placa LED/SW.
N.º de cámara
569
Se recuperó la comunicación con
Compact Vision.
-
N.º de cámara
570
Compact Vision. Error de la
autenticación con contraseña.
Ingrese la contraseña correcta de
conexión de Compact Vision en la
página de la cámara RC+.
Si desconoce la contraseña, cuenta
con las siguientes opciones:
a. Ingrese una nueva contraseña de
conexión en el monitor de CV y,
después, ingrese esa misma
contraseña en la página de la
cámara RC+.
o
b. Efectúe un restablecimiento de
fábrica en la unidad Compact
Vision, para borrar la contraseña.
Recompile el actual proyecto de
RC+ y compruebe la operación
597
Se completó el movimiento PTP para
evitar el punto de singularidad.
Se completó el movimiento PTP para
la evasión de la singularidad.
Si hace clic en el mismo botón de
desplazamiento, se hará funcionar el
robot en el movimiento de
desplazamiento normal.
598
Se detuvo el robot debido a la detección
de colisión
Mueva el manipulador en la dirección
que evita la colisión
599
Desplazamiento intentado cerca del
punto de singularidad.
El robot no pudo desplazarse en el
movimiento CP (predeterminado).
Si hace clic en el mismo botón de
desplazamiento, se hará funcionar el
robot en el movimiento PTO.
700
El tipo de driver del motor no coincide
con el modelo actual del robot. Revise
el modelo del robot. Reemplace el
driver del motor.
Revise el modelo del robot.
736
Se restableció el codificador. Reinicie
el controlador.
Reinicie el controlador.
737
Bajo voltaje desde la batería del
codificador. Reemplace la batería.
Apague el controlador y reemplace la
batería.
Para conocer el procedimiento de
reemplazo de la batería, consulte
Mantenimiento en el manual del
manipulador.
752
Servoalarma D.
-

Mantenimiento
170 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
1001
Error de operación.
El parámetro Command no es
válido.
-
1002
No se puede acceder a los datos
solicitados. Los datos no están
configurados o el rango no es
válido.
Revise que la E/S de destino, las
variables y las tareas existan.
1003
La contraseña no es válida
Ingrese la contraseña correcta.
1004
No se puede ejecutar con una
versión no compatible.
Use el archivo de la versión correcta.
1005
No se puede ejecutar con un
número de serie no válido.
Use los datos de copia de seguridad
del mismo controlador para restaurar
la configuración del controlador.
1006
No se puede ejecutar con un
modelo de robot no válido.
Use los datos de copia de seguridad
del mismo controlador para restaurar
la configuración del controlador.
1007
No se puede ejecutar con un
controlador no válido.
Use el instalador compatible.
1010
Error de configuración remota.
No se puede asignar el número de
entrada R-IO a la entrada remota.
Especifique el número de entrada y
excluya del número de entrada R-IO.
1011
Error de configuración remota.
No se puede asignar un número de
bit que no existe a una señal de E/S
remota.
Revise el tamaño del esclavo del
bus de campo.
Revise el tamaño del esclavo del bus
de campo.
1012
Error de configuración remota.
No se puede asignar un número de
bit que no existe a una señal de E/S
remota.
Revise el tamaño del maestro del
bus de campo.
Revise el tamaño del maestro del bus
de campo.
1013
Error del esclavo del bus de campo.
No se puede cambiar el tamaño
porque incluye actualmente una
señal de E/S remota.
-
1014
Error del maestro del bus de
campo. No se puede cambiar el
tamaño porque incluye actualmente
una señal de E/S remota.
-
1015
Error de configuración remota. No
se puede asignar el número de
entrada/salida Hand-IO a la entrada
remota.
-
1016
Error de configuración remota. No
se puede cambiar la asignación
porque está definido el tipo de
proveedor de PLC.
Defina el proveedor de PLC en
“None” (Ninguno) para cambiar la
asignación de E/S.
1020
No se puede ejecutar en el modo de
recuperación.
Inicie el controlador de manera
normal.
1021
No se puede ejecutar debido a un
error de inicialización del
controlador.
Restaure la configuración del
controlador.
1022
No se puede ejecutar sin que se
abra el proyecto.
Abra un proyecto.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 171
N.º
Mensaje
Solución
Nota 1
Nota 2
1023
No se puede ejecutar mientras el
proyecto esté abierto.
Recompile el proyecto.
1024
No se puede activar desde la
entrada remota.
Habilite la entrada remota.
1025
Se prohíbe la ejecución en el modo
Teach.
Cambie al modo AUTO (Automático).
1026
No se puede ejecutar en el modo
Teach, excepto desde TP.
Cambie al modo AUTO (Automático).
1027
No se puede ejecutar en el modo
Auto.
Cambie al modo Program
(Programar).
1028
No se puede ejecutar en el modo
Auto, excepto desde la consola
principal.
Cambie al modo Program
(Programar).
1029
No se puede ejecutar desde OP.
Habilite la entrada OP.
1030
No se permite el cambio del modo
de operación.
Cambie al modo Auto con una
consola en el modo Program.
1031
No se puede ejecutar mientras se
ejecutan las tareas.
Detenga la tarea y luego ejecútela.
1032
No se puede ejecutar mientras se
ejecuta el número máximo de
tareas.
Detenga la tarea y luego ejecútela.
1033
No se puede ejecutar durante el
comando de movimiento
asincrónico.
Ejecute después de que termine el
movimiento.
1034
Comando asincrónico detenido
durante la operación.
El comando asincrónico ya se detuvo
cuando el controlador recibió un
comando de parada.
1035
No se puede ejecutar cuando la E/S
remota está activada, excepto
desde el dispositivo remoto.
El comando no se puede ejecutar
mediante la consola, excepto la E/S
remota cuando la salida AutoMode de
la E/S remota está en ON (Activado).
1037
No se puede ejecutar cuando
Ethernet remoto está activado,
excepto desde el dispositivo de
Ethernet remoto.
El comando no se puede ejecutar
mediante la consola, excepto
Ethernet remoto cuando el indicador
Auto del Ethernet remoto está en ON
(Activado).
1039
Se prohíbe la ejecución.
Se ejecutó un comando prohibido
mientras se ejecutaba el programa.
Detenga el programa y luego ejecute
el comando.
1041
No se puede ejecutar durante el
estado de parada de emergencia.
Cancele el estado de parada de
emergencia.
1042
No se puede ejecutar mientras esté
abierta la protección.
Cierre la protección.
1043
No se puede ejecutar durante la
condición de error.
Cancele la condición de error.
1044
No se puede ejecutar cuando la
entrada de pausa remota está ON.
Cambie la entrada de pausa remota a
OFF.
1045
La condición de espera de entrada
es la única condición disponible
para la entrada.
El controlador recibió una entrada
mientras no se encontraba en la
condición de espera de entrada.
1046
No se puede ejecutar durante la
transferencia de archivos.
Ejecute después de la transmisión del
archivo.
1047
No se puede cancelar el comando
ejecutado desde otros dispositivos.
Cancele el comando de movimiento
desde el dispositivo que emitió el
comando.

Mantenimiento
172 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
1048
No se puede ejecutar después de
haber detectado bajo voltaje.
Reinicie el controlador.
1049
Otros dispositivos están en el modo
Program.
Revise la conexión de otros
dispositivos.
1050
La contraseña es demasiado larga.
Ingrese la contraseña que tenga
menos de 16 caracteres.
1051
Falla al exportar el estado del
controlador.
1. Vuelva a intentarlo con la misma
memoria USB.
2. Vuelva a intentarlo con otra
memoria USB.
3. Vuelva a intentarlo después de
reiniciar el controlador.
1052
Exportar estado del controlador
ocupada.
Ejecute el comando después de
completar la copia de seguridad del
estado del controlador.
1053
Se prohíbe la ejecución en el modo
Test
Ejecute en otros modos.
1054
No se puede ejecutar en el modo
TEST, excepto desde TP.
-
1055
No se puede ejecutar la tarea en
segundo plano.
Confirme que no haya ninguna tarea
en segundo plano ejecutándose.
Recompile el proyecto.
1056
No se puede ejecutar desde OP.
Habilite la entrada TP3.
1057
No se puede ejecutar cuando TP3
está activado, excepto desde TP3.
El comando no se puede ejecutar
desde otras consolas cuando TP3
está activado.
1058
No se puede ejecutar, excepto el
modo T2.
Cambie a la tecla <Teach/T2>.
1059
No se puede cambiar al modo T2.
El modo T2 no se puede usar en los
controladores RC700-A que cumplen
con las normas UL.
1100
Error del archivo. No se puede
tener acceso al archivo.
1. Reinicie el controlador.
2. Reinstale el firmware.
3. Reemplace la CF.
1102
Error del archivo. Error de lectura y
escritura del registro
1. Reinicie el controlador.
2. Reemplace la CF.
1103
No se encontró el archivo.
Revise si existe el archivo.
1104
No se encontró el archivo del
proyecto.
Recompile el proyecto.
1105
No se encontró el archivo objeto.
Recompile el proyecto.
1106
No se encontraron los archivos de
puntos.
Recompile el proyecto.
1107
El programa usa una característica
no compatible con la versión actual
del firmware del controlador.
Revise la versión del compilador en
EPSON RC+ 7.0-[Project]-
[Properties]-[Compiler] (Proyecto -
Propiedades - Compilador).
1108
Se actualizaron uno o más archivos
de origen. Compile el proyecto.
Recompile el proyecto.
1109
No hay capacidad de
almacenamiento suficiente.
Aumente el espacio libre de la
memoria USB.
1110
No se encontró el archivo.
-
1111
No se encontró el archivo del
transportador.
-
1112
No se encontraron los archivos de
fuerza.
Recompile el proyecto.
Recompile el proyecto.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 173
N.º
Mensaje
Solución
Nota 1
Nota 2
1114
No se puede crear el proyecto en el
controlador.
Existe una posibilidad de que la
carpeta esté llena o que el nombre de
proyecto esté duplicado.
Seleccione la aplicación para
marcarlo.
1120
Error del archivo.
El archivo de configuración está
dañado.
Restaure la configuración del
controlador.
1121
Error del archivo.
El archivo de proyecto está dañado.
Recompile el proyecto.
1122
Error del archivo.
El archivo de puntos está dañado.
Recompile el proyecto.
1123
Error del archivo.
El archivo de la etiqueta de E/S está
dañado.
Recompile el proyecto.
1124
Error del archivo.
El archivo de error de usuario está
dañado.
Recompile el proyecto.
1126
Error del archivo.
La información de opción del
software está dañada.
1. Reinicie el controlador.
2. Reinstale el firmware.
3. Reconfigure la opción.
1127
Error del archivo.
El archivo de visión está dañado.
Recompile el proyecto.
1128
Error del archivo.
El archivo de información de la
copia de seguridad está dañado.
No se puede restaurar la información
de copia de seguridad especificada.
Adquiera nuevamente la información
de copia de seguridad y luego
restaure el archivo.
1130
Error del mensaje de error.
No se encontró ningún elemento en
el historial de errores.
No existe ningún historial de errores.
Reinicie el controlador.
1131
No se puede tener acceso a la
memoria USB.
Inserte correctamente la memoria
USB. Cuando sigue sucediendo este
error después de insertar
correctamente la memoria USB, la
memoria podría ser irreconocible
para el controlador. Inserte otra
memoria para revisar la operación.
1132
Error del archivo.
No se pudo copiar el archivo.
-
1133
Error del archivo.
No se pudo eliminar el archivo.
-
1134
Error del archivo.
El archivo de GUI Builder está
dañado.
Recompile el proyecto.
1138
Error del archivo. El archivo de
Force Guide está dañado.
Recompile el proyecto.
1140
Error del archivo.
No se pudo abrir el archivo objeto.
Recompile el proyecto.
1141
Error del archivo.
No se pudo abrir el archivo de
proyecto.
Recompile el proyecto.
1142
Error del archivo.
No se pudo leer el archivo de
proyecto.
Recompile el proyecto.

Mantenimiento
174 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
1143
Error del archivo.
No se pudo abrir el archivo de
guardado de la condición.
1. Vuelva a intentarlo con la misma
memoria USB.
2. Vuelva a intentarlo con otra
memoria USB.
3. Vuelva a intentarlo después de
reiniciar el controlador.
1144
Error del archivo.
No se pudo escribir el archivo de
guardado de la condición.
1. Vuelva a intentarlo con la misma
memoria USB.
2. Vuelva a intentarlo con otra
memoria USB.
3. Vuelva a intentarlo después de
reiniciar el controlador.
1145
Error del archivo.
No se pudo abrir el archivo del
transportador.
Recompile el proyecto.
1146
Error del archivo.
No se pudo leer el archivo del
transportador.
Recompile el proyecto.
1150
Error del archivo.
El historial de errores no es válido.
1. Reinicie el controlador.
2. Reemplace la CF.
1151
Error del archivo.
No se pudo asignar el historial de
errores.
1. Reinicie el controlador.
2. Reemplace la CF.
1152
Error del archivo.
No se pudo abrir el archivo del
historial de errores.
1. Reinicie el controlador.
2. Reemplace la CF.
1153
Error del archivo.
No se pudo escribir el archivo del
historial de errores.
1. Reinicie el controlador.
2. Reemplace la CF.
1155
Error del archivo.
No se pudo abrir el archivo de
configuración.
Restaure la configuración del
controlador.
1156
Error del archivo.
No se pudo guardar el archivo de
configuración.
Restaure la configuración del
controlador.
1157
Error del archivo.
No se pudo leer el archivo de
configuración.
Restaure la configuración del
controlador.
1158
Error del archivo.
No se pudo escribir el archivo de
configuración.
Restaure la configuración del
controlador.
1160
Error de MCD.
No se pudo abrir el archivo MCD.
Restaure la configuración del
controlador.
1161
Error de MCD.
No se pudo leer el archivo MCD.
Restaure la configuración del
controlador.
1163
Error de MCD.
No se pudo guardar el archivo
MCD.
Restaure la configuración del
controlador.
1165
Error de MPD.
No se pudo abrir el archivo MPD.
-
1166
Error de MPD.
No se pudo leer el archivo MPD.
-
1168
Error de MPD.
No se pudo guardar el archivo
MPD.
-
1170
Error de MPL.
No se pudo abrir el archivo MPL.
1. Reinicie el controlador.
2. Reinstale el firmware.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 175
N.º
Mensaje
Solución
Nota 1
Nota 2
1181
Error de PRM.
No se pudo reemplazar el archivo
PRM.
1. Reinicie el controlador.
2. Reconfigure el robot.
1185
Error del archivo.
No se pudo abrir el archivo de
información de copia de seguridad.
-
1186
Error del archivo.
No se pudo leer el archivo de
información de copia de seguridad.
-
1187
Error del archivo.
No se pudo escribir el archivo de
información de copia de seguridad.
-
1188
Error del archivo.
No se pudo guardar el archivo de
información de copia de seguridad.
-
1189
Los datos de copia de seguridad se
crearon con una versión anterior.
No se puede restaurar la
configuración del controlador en el
procedimiento especificado para usar
datos de una copia de seguridad
anterior.
Revise los datos de copia de
seguridad.
1190
Los datos de copia de seguridad se
crearon con una versión más
nueva.
-
1191
No hay ningún proyecto en los
datos de copia de seguridad.
-
1192
No se puede ejecutar con un
número de robot no válido.
Revise que los datos de copia de
seguridad sean iguales al número de
robot actual.
1193
No se puede ejecutar con
información del robot no válida.
Revise que los datos de copia de
seguridad sean iguales al número de
robot actual.
1194
No se puede ejecutar con un
número de unidad de mando no
válido.
-
1195
Error del archivo. No se pudo
asignar el historial de salud.
Reinicie el controlador.
-
-
1196
Error del archivo. No se pudo abrir
el archivo del historial de salud.
Reinicie el controlador.
-
-
1197
Error del archivo. No se pudo
escribir el archivo del historial de
salud.
Reinicie el controlador.
-
-
1198
Error de restauración.
El proyecto no es válido. Si se va
a restaurar la configuración del
hardware de visión, restaure el
proyecto en forma conjunta.
Si se va a restaurar la configuración
del hardware de visión, restaure el
proyecto en forma conjunta.
1200
Error de compilación.
Revise el mensaje de compilación.
Este error se genera durante la
compilación desde TP. Corrija el lugar
donde se generó el error.
1201
Error de enlace.
Revise el mensaje de enlace.
Este error se genera durante la
compilación desde TP. Corrija el lugar
donde se generó el error.
1250
Error de salida del usuario.
El nombre está vacío.
-

Mantenimiento
176 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
1251
Error de salida del usuario.
La condición está vacía.
-
1252
Error de salida del usuario.
El número de robot está fuera del
rango disponible.
-
1260
Error de configuración de la alarma.
El robot no existe.
-
1261
Error de configuración de la alarma.
No se pudo obtener la fecha de
expiración.
-
1262
Error de configuración de la alarma.
No se pudo configurar la alarma.
-
1263
Error de configuración de la alarma.
El número de alarma especificado
está fuera del rango permitido.
-
1264
Error de configuración de la alarma.
El número de alarma especificado
no está activado.
-
1290
El número del monitor de fuerza
está fuera del rango permitido.
Reinicie el controlador.
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.
1291
El monitor de fuerza ya se está
usando en otro dispositivo.
Cierre el monitor de fuerza del otro
dispositivo y luego ejecute el
monitor de fuerza.
Revise si otra PC está usando el
monitor de fuerza.
1292
No se pudo definir/cargar la
información de la secuencia FG y
del objeto.
1400
Error en el archivo de Force Guide.
1401
La ruta del archivo de Force Guide
no es válida.
1402
No se pudo abrir el archivo de
Force Guide.
1403
El archivo de Force Guide no se
abre.
1404
El número de secuencia de Force
Guide no es válido.
1405
El número de objeto de Force
Guide no es válido.
1406
La propiedad de la secuencia de
Force Guide no es válida.
1407
La propiedad del objeto de Force
Guide no es válida.
1408
El tipo de objeto de Force Guide no
es válido.
1409
El parámetro no es válido.
1410
La versión del archivo de Force
Guide no es válida.
1411
Existe la propiedad incorrecta de
Force Guide.
Confirme la propiedad.
Confirme la propiedad de Force
Guide.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 177
N.º
Mensaje
Solución
Nota 1
Nota 2
1412
No se puede definir el objeto
Decision para iniciar la secuencia
de Force Guide.
Confirme la secuencia de Force
Guide.
No se puede definir el objeto Decision
para iniciar una secuencia.
Confirme la secuencia de Force
Guide.
1413
El objeto de Force Guide
especificado como ConditionObject
está desactivado. Confirme la
configuración.
Confirme la configuración del objeto
de Force Guide.
1420
No se pudo convertir el programa.
Ejecute recompilar.
1421
Error de inicialización.
No se puede asignar la memoria.
1422
Error de finalización.
No se puede finalizar el controlador.
1423
La ruta del archivo de conversión
no es válida.
1424
La ruta del archivo Prg no es válida.
1425
La ruta del archivo Command no es
válida.
1426
El archivo de conversión no es
válido.
1427
El archivo Command no es válido.
Actualización de la versión 7.4.0.2 o
anterior a la versión 7.4.0.2 o superior
puede fallar. Reinstale el firmware.
1428
No se pudo ejecutar la conversión
del programa.
Ejecute recompilar.
Recompile el proyecto.
1429
No se pudo escribir el archivo Prg.
1500
Error de comunicación.
-
1501
El comando no se completó a
tiempo.
Ejecute el comando nuevamente
después de un rato. Revise la
conexión entre EPSON RC+7.0 y el
controlador.
1502
Desconexión de la comunicación
entre RC+ y el controlador.
Vuelva a restablecer la
comunicación.
Revise la conexión entre EPSON
RC+7.0 y el controlador.
1: Tiempo de
espera de la
comunicació
n
2:
Desconexión
del cable
USB
3: Error de
recepción de
USB
4: Apagado
de la
comunicació
n USB
1503
Desconexión mientras se ejecutaba
una tarea.
Revise la conexión entre el
dispositivo de la consola y el
controlador.
1504
Desconexión de la comunicación
entre el Ethernet remoto y el
controlador. Vuelva a restablecer la
comunicación.
Revise la conexión entre el
dispositivo Ethernet remoto y el
controlador.

Mantenimiento
178 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
1505
Desconexión de la comunicación
entre RS232 remoto y el
controlador. Vuelva a restablecer la
comunicación.
Revise la conexión entre el
dispositivo RS232 remoto y el
controlador.
1506
Desconexión de la comunicación
entre TP3 y el controlador.
Vuelva a restablecer la
comunicación.
Revise la conexión entre TP3 y el
controlador.
1510
Fuera del rango de la dirección IP.
Revise la configuración de la
dirección IP del controlador.
1511
Dirección IP reservada.
La dirección IP está reservada.
Configure la otra dirección IP.
1512
Puerta de enlace de IP reservada.
La dirección de la puerta de enlace
está reservada. Configure la
dirección de la otra puerta de enlace.
1513
Las condiciones de configuración
de la dirección global no coinciden.
Defina la contraseña.
1514
Los parámetros de conexión o la
contraseña no son válidos.
Revise los parámetros y la
contraseña.
Revise los parámetros y la
contraseña.
1521
Comunicación de Vision.
No se pudo inicializar Ethernet.
Reinicie el controlador.
1522
Comunicación de Vision.
No se pudo terminar Ethernet.
-
1523
Comunicación de Vision.
No se pudo crear el identificador de
socket.
Reinicie el controlador.
1524
Comunicación de Vision.
No se pudo conectar.
Revise la conexión entre la cámara y
el controlador.
1526
Comunicación de Vision.
No se pudo enviar al servidor.
Revise la conexión entre la cámara y
el controlador.
1527
Comunicación de Vision.
No se pudo leer desde el servidor.
Revise la conexión entre la cámara y
el controlador.
1528
Comunicación de Vision.
No se pudo configurar la opción.
-
1529
Comunicación de Vision.
Ethernet aún no se ha inicializado.
Reinicie el controlador.
1530
Comunicación de Vision.
No se completó la conexión.
Revise la conexión entre la cámara y
el controlador.
1531
Comunicación de Vision.
Todos los sockets están en uso.
-
1532
Comunicación de Vision.
Tiempo de espera del envío.
Revise la conexión entre la cámara y
el controlador.
1533
Comunicación de Vision.
Tiempo de espera de recepción.
Revise la conexión entre la cámara y
el controlador.
1534
Comunicación de Vision.
Error de comunicación.
Revise la conexión entre la cámara y
el controlador.
1550
Error de comunicación.
Error de inicialización de Ethernet.
Reinicie el controlador. Revise la
conexión del cable Ethernet.
1551
Error de comunicación.
Error de inicialización de USB.
Reinicie el controlador. Revise la
conexión del cable USB.
1552
Error de comunicación.
Error de comunicación interna del
controlador.
Reinicie el controlador.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 179
N.º
Mensaje
Solución
Nota 1
Nota 2
1553
Error de comunicación.
Se detectaron datos no válidos.
-
1555
Error de transmisión de Ethernet.
Revise la conexión entre EPSON
RC+7.0 y el controlador.
1556
Error de recepción de Ethernet.
Revise la conexión entre EPSON
RC+7.0 y el controlador.
Si se usó el router entre el PC y el
controlador, confirme que la función
DHCP esté desactivada.
1557
Error de transmisión de USB.
Revise la conexión entre EPSON
RC+7.0 y el controlador.
1558
Error de recepción de USB.
Revise la conexión entre EPSON
RC+7.0 y el controlador.
1559
Error de comunicación.
No se pudo asignar la memoria
-
1580
Error de comunicación del
analizador.
Error de comunicación.
1. Reinicie el controlador.
2. Actualice el firmware.
1581
Error de comunicación del
analizador.
Se generó el tiempo de espera
durante la comunicación.
1. Reinicie el controlador.
2. Reinstale el firmware.
1582
Error de comunicación del
analizador.
Error de transmisión.
Reinicie el controlador.
Recompile el proyecto.
1583
Error de comunicación del
analizador.
Error de inicialización.
Reinicie el controlador.
1584
Error de comunicación del
analizador.
Error de conexión.
Reinicie el controlador.
1585
Error de comunicación del
analizador.
El parámetro no es válido.
Reinicie el controlador.
Recompile el proyecto.
1586
Error de comunicación del
analizador.
Ocupado
-
1587
Error de comunicación del
analizador.
Se detectaron datos no válidos.
Actualice el firmware.
1700
Error de inicialización.
No se pudo inicializar TP.
-
1701
Error de inicialización.
No se pudo inicializar TP.
-
1702
Error de inicialización.
No se pudo inicializar TP.
-
1703
Error del archivo.
No se pudo leer el archivo de datos
de la pantalla.
-
1704
No se pudo leer el archivo de
configuración.
-
1706
No se pudo abrir el puerto TP.
-
1708
No se pudo leer la tabla de claves
de TP.
-
1709
No se pudo cambiar el idioma.
-
1710
No se pudo mostrar la pantalla.
-

Mantenimiento
180 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
1800
El controlador ya está conectado
RC+.
Solo un RC+ 7.0 puede conectarse al
controlador.
1802
Se intentó el comando sin estar
conectado al controlador.
Conéctese al controlador.
1803
No se pudo leer ni escribir el
archivo en el PC.
-
1804
Error de inicialización.
No se pudo asignar la memoria en
el PC.
-
1805
Error de conexión.
Revise el inicio del controlador y la
conexión del cable de
comunicación.
-
1806
Tiempo de espera durante la
conexión vía Ethernet.
-
1807
Tiempo de espera durante la
conexión vía USB.
-
1808
El driver USB no está instalado.
No se pudo instalar EPSON RC+ 7.0.
Instale EPSON RC+ 7.0 nuevamente.
1809
Error de inicialización.
No se pudo inicializar el Daemon de
PC.
Reinicie el sistema.
1810
Error de Daemon de PC.
Error poco común.
1. Reinicie EPSON RC+ +7.0.
2. Reinicie el PC.
1812
Error de conexión.
El controlador conectado no es
compatible con EPSON RC+ 7.0.
Use EPSON RC+ 5.0.
El controlador conectado es RC180 o
RC90 compatible con EPSON RC+
5.0.
Revise la conexión entre el PC y el
controlador.
1852
Error del sistema.
Error poco común.
1. Reinicie EPSON RC+ +7.0.
2. Reinicie el PC.
3. Reinstale EPSON RC+ 7.0.
1861
Error de inicialización.
No se pudo inicializar
SimulatorMNG.
1. Reinicie EPSON RC+ 7.0.
2. Reinicie el PC.
3. Reinstale EPSON RC+ 7.0.
1862
Error de inicialización.
Falló la inicialización de WBProxy.
1. Reinicie EPSON RC+ 7.0.
2. Reinicie el PC.
3. Reinstale EPSON RC+ 7.0.
1863
El parámetro no es válido.
-
1864
Error de inicialización.
El controlador virtual no existe.
Error de instalación de EPSON RC+
7.0. Reinstale el software.
1865
Error de inicialización.
No se pudo iniciar el controlador
virtual.
1. Vuelva a intentarlo después de
un rato.
2. Reinicie el PC.
1867
No se puede ejecutar porque no se
encuentra en el modo de simulacro.
El modo de simulacro no es válido.
Habilite el simulacro.
1868
Error de inicialización.
No se encontró el directorio.
Error de instalación de EPSON RC+
7.0. Reinstale el software.
1872
Error de conexión.
No se encontraron los archivos
para el simulador que usaba el
controlador real.
-
1873
Error de conexión.
No se encontraron los archivos
para el simulador que usaba el
controlador virtual.
-

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 181
N.º
Mensaje
Solución
Nota 1
Nota 2
1874
No se pudo agregar el controlador
virtual.
Error de instalación de EPSON RC+
7.0. Reinstale el software.
1875
Error del objeto del simulador.
No se pueden cargar datos para el
objeto del simulador.
-
1876
Error del objeto del simulador.
No se pueden leer datos del objeto
del simulador.
-
1877
Error del objeto del simulador.
No se pueden eliminar datos del
objeto del simulador.
-
1878
Error del objeto del simulador.
No se pueden actualizar datos del
objeto del simulador.
-
1879
Otros controladores virtuales se
están iniciando.
Se pueden usar otros controladores
virtuales en EPSON RC+ 5.0.
O bien, el controlador virtual puede ya
estar en uso en otro EPSON RC+7.0.
1880
No se puede ejecutar durante el
restablecimiento del controlador.
-
1901
No compatible.
Se intentó un comando no admitido.
Actualice el firmware.
1902
No compatible.
Se especificó un parámetro no
admitido.
-
1903
Error del sistema.
-
1910
Error del sistema.
No se pudo escribir el archivo de
reinicio.
-

Mantenimiento
182 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
2000
No compatible.
Se intentó un comando no admitido.
Recompile el proyecto.
2001
No compatible.
Se intentó un comando de
movimiento no compatible.
Recompile el proyecto.
2003
No compatible.
Se especificó un argumento de
función no admitido.
Recompile el proyecto.
2004
No compatible.
Se especificó un valor devuelto de
función no compatible.
Recompile el proyecto.
2005
No compatible.
Se especificó una condición no
admitida.
Recompile el proyecto.
2006
No compatible.
Se especificó un comando E/S no
admitido.
Recompile el proyecto.
2007
Se especificó una condición no
admitida.
No se puede realizar el
desplazamiento en el movimiento CP
(predeterminado).
2008
No compatible.
Número de error desconocido.
Si hace clic en el mismo botón de
desplazamiento, se hará funcionar el
robot en el movimiento PTP.
2009
No compatible.
Número de tarea no válido.
No se puede realizar el
desplazamiento en el movimiento CP
(predeterminado).
2010
Error de archivo objeto.
Compile el proyecto. Fuera del
rango del código interno.
Recompile el proyecto.
2011
Error de archivo objeto.
Compile el proyecto. Error del
argumento de la función.
Recompile el proyecto.
Valor de parámetro de función no
válido
Alimentación de piezas:
Configuraciones de formato o valor de
comando incorrectas
Lea la descripción del comando
correspondiente que se entrega en
Alimentación de piezas 7.0
Introducción y hardware (común) y
software
Software 3 Referencia sobre
comandos SPEL+ para la
alimentación de piezas y corrija el
código.
2012
Error de archivo objeto.
Compile el proyecto. Error del
argumento del comando.
Recompile el proyecto.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 183
N.º
Mensaje
Solución
Nota 1
Nota 2
Valor de parámetro de comando no
válido
Alimentación de piezas:
Configuraciones de formato o valor de
comando incorrectas
Lea la descripción del comando
correspondiente que se entrega en
Alimentación de piezas 7.0
Introducción y hardware (común) y
software
Software 3 Referencia sobre
comandos SPEL+ para la
alimentación de piezas y corrija el
código.
2013
Error de archivo objeto.
Compile el proyecto. No se puede
procesar el código.
Recompile el proyecto.
2014
Error de archivo objeto.
Compile el proyecto. No se puede
procesar el código de tipo de
variable.
Recompile el proyecto.
2015
Error de archivo objeto.
Compile el proyecto. No se puede
procesar el código de tipo de
cadena.
Recompile el proyecto.
2016
Error de archivo objeto.
Compile el proyecto. No se puede
procesar el código de categoría de
la variable.
Recompile el proyecto.
2017
Error de archivo objeto.
Compile el proyecto. No se puede
procesar debido a un código
inadecuado.
Recompile el proyecto.
2018
Error de archivo objeto.
Compile el proyecto. No se pudo
calcular el tamaño de la variable.
Recompile el proyecto.
2019
Error de archivo objeto.
No se puede procesar la espera de
la variable.
Compile el proyecto.
Recompile el proyecto.
2020
Se superó el número de tabla de la
pila.
La llamada Function o la variable
local están fuera de rango.
Revise que no se llame una función
de forma infinita. Reduzca la
profundidad de la función de llamada.
2021
Se superó el tamaño del área de la
pila.
Error de pila. La llamada Function o
la variable local están fuera de
rango.
Si se usan muchas variables locales,
particularmente del tipo cadena,
reemplácelas con variables globales.
2022
Error de la pila. No se encontraron
los datos requeridos en la pila.
Recompile el proyecto.
2023
Error de la pila. Se encontró una
etiqueta inesperada en la pila.
Recompile el proyecto.
2024
Se superó el tamaño del área de la
pila. La variable local está fuera de
rango.
Cambie el tamaño de la variable local.
2031
Error del sistema.
El número del robot supera el
número máximo.
Restaure la configuración del
controlador.

Mantenimiento
184 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
2032
Error del sistema.
Error de cumplimiento del número
de tarea.
Recompile el proyecto.
2033
Error del sistema.
Demasiados errores.
Solucione los errores que suceden
con frecuencia.
2040
Error del subproceso.
No se pudo crear el subproceso.
Reinicie el controlador.
2041
Error del subproceso.
Se agotó el tiempo de espera de
creación del subproceso.
Reinicie el controlador.
2042
Error del subproceso.
Se agotó el tiempo de espera de
término del subproceso.
Reinicie el controlador.
2043
Error del subproceso.
Se agotó el tiempo de espera de
término del subproceso.
Reinicie el controlador.
2044
Error del subproceso.
Se agotó el tiempo de espera del
proceso de Daemon.
Reinicie el controlador.
2045
Error del subproceso.
Se agotó el tiempo de espera de
continuación de la tarea.
Reinicie el controlador.
2046
Error del subproceso.
Se agotó el tiempo de espera de
parada de la tarea.
Reinicie el controlador.
2047
Error del subproceso.
Se agotó el tiempo de espera de
inicio de la tarea.
Reinicie el controlador.
2050
Error de operación del archivo
objeto.
El tamaño del archivo objeto supera
el tamaño permitido.
Recompile el proyecto.
2051
Error de operación del archivo
objeto.
No se puede eliminar el archivo
objeto durante la ejecución.
Reinicie el controlador.
2052
Error de operación del archivo
objeto.
No puede asignar la memoria para
el archivo objeto.
Reinicie el controlador.
2053
Error de operación del archivo
objeto.
No se puede acceder al archivo
objeto mientras se actualiza.
Realice el mismo procesamiento
después de un tiempo. Recompile el
proyecto.
2054
Error de operación del archivo
objeto.
Error de ID de la función.
Recompile el proyecto.
Sincronice los archivos del proyecto.
Recompile el proyecto.
2055
Error de operación del archivo
objeto.
Error de ID de la variable local.
Recompile el proyecto.
Sincronice los archivos del proyecto.
Recompile el proyecto.
2056
Error de operación del archivo
objeto.
Error de ID de la variable global.
Recompile el proyecto.
Sincronice los archivos del proyecto.
Recompile el proyecto.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 185
N.º
Mensaje
Solución
Nota 1
Nota 2
2057
Error de operación del archivo
objeto.
Error de ID de la variable global
conservada. Recompile el proyecto.
Sincronice los archivos del proyecto.
Recompile el proyecto.
2058
Error de operación del archivo
objeto.
No se pudo calcular el tamaño de la
variable.
Sincronice los archivos del proyecto.
Recompile el proyecto.
2059
Se superó el área de la variable
global.
No se puede asignar el área de la
variable global porque no se pudo
asignar la memoria.
Reduzca el número de variables
globales que se usarán.
2070
Error de SRAM.
SRAM no está asignado.
Reemplace la placa de la CPU.
2071
Error de SRAM.
No se puede eliminar cuando la
variable global conservada está en
uso.
Realice el mismo procesamiento
después de un tiempo. Recompile el
proyecto.
2072
Se superó el área de la variable de
copia de seguridad.
No se puede asignar el área de la
variable global conservada porque
no se pudo asignar la memoria.
Reduzca el número de variables
globales conservadas que se usarán.
Tamaño
máximo
El tamaño
que intentó
usar
2073
Error de SRAM.
No se pudo borrar el área de la
variable global conservada.
Recompile el proyecto.
2074
Error de SRAM.
No se pudo limpiar el área de
guardado de la variable global
conservada.
Reinicie el controlador.
2100
Error de inicialización.
No se pudo abrir el archivo de
inicialización.
Restaure la configuración del
controlador.
2101
Error de inicialización.
Inicialización duplicada.
Reinicie el controlador.
2102
Error de inicialización.
No se pudo inicializar MNG.
Reinicie el controlador.
2103
Error de inicialización.
No se pudo crear un evento.
Reinicie el controlador.
2104
Error de inicialización.
No se pudo configurar una
prioridad.
Reinicie el controlador.
2105
Error de inicialización.
No se pudo configurar el tamaño de
la pila.
Reinicie el controlador.
2106
Error de inicialización.
No se pudo configurar un proceso
de interrupción.
Reinicie el controlador.
2107
Error de inicialización.
No pudo iniciar un proceso de
interrupción.
Reinicie el controlador.
2108
Error de inicialización.
No se pudo detener un proceso de
interrupción.
Reinicie el controlador.

Mantenimiento
186 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
2109
Error de inicialización.
No se pudo terminar MNG.
Reinicie el controlador.
2110
Error de inicialización.
No se pudo asignar la memoria.
Reinicie el controlador.
2111
Error de inicialización.
No se pudo inicializar el
movimiento.
Restaure la configuración del
controlador.
2112
Error de inicialización.
No se pudo terminar el movimiento.
Reinicie el controlador.
2113
Error de inicialización.
No se pudo asignar la SRAM.
Reemplace la placa de la CPU.
2114
Error de inicialización.
No se pudo registrar la SRAM.
Reemplace la placa de la CPU.
2115
Error de inicialización.
Las placas de bus de campo
superan el número máximo.
Revise el número de placas del bus
de campo.
2116
Error de inicialización.
No se pudo inicializar el bus de
campo.
Reinicie el controlador.
Revise la placa del bus de campo.
Reemplace la placa del bus de
campo.
2117
Error de inicialización.
No se pudo terminar el bus de
campo.
Reinicie el controlador.
2118
Error de inicialización.
No se pudo abrir el movimiento.
Restaure la configuración del
controlador.
2119
Error de inicialización.
No se pudo inicializar el
seguimiento del transportador.
Asegúrese de que la configuración
del transportador y el codificador sea
correcta.
2120
Error de inicialización.
No se pudo asignar el área del
sistema.
Reinicie el controlador.
2121
Error de inicialización.
No se pudo asignar el área del
archivo objeto.
Reinicie el controlador.
2122
Error de inicialización.
No se pudo asignar el área del
robot.
Reinicie el controlador.
2123
Error de inicialización.
No se pudo crear el evento.
Reinicie el controlador.
2124
Error de inicialización.
Está instalado un módulo de bus de
campo no compatible.
Instale el módulo de bus de campo
comprado desde SEC.
2126
Se inicializó la configuración, ya que
el archivo de configuración inicial
está dañado. Restaure el sistema.
Como el archivo de configuración
inicial está dañado de manera
significativa, se usa el archivo de
configuración inicial predeterminado
de fábrica.
2130
Error de MCD.
No se pudo abrir el archivo MCD.
Restaure la configuración del
controlador.
2131
Error de MCD.
No se pudo asignar el archivo MCD.
Restaure la configuración del
controlador.
2132
Error de PRM.
No se pudo encontrar el archivo
PRM.
Restaure la configuración del
controlador.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 187
N.º
Mensaje
Solución
Nota 1
Nota 2
2133
Error de PRM.
No se pudo asignar el archivo PRM.
Restaure la configuración del
controlador.
2134
Error de PRM.
Error de contenido del archivo PRM.
Restaure la configuración del
controlador.
2135
Error de PRM.
No se pudo convertir el archivo
PRM.
Reinicie el controlador.
2136
Error de PRM.
No se pudo convertir el archivo
PRM.
Reinicie el controlador.
2137
Error de PRM.
No se pudo convertir el archivo
PRM.
Reinicie el controlador.
2140
Error de inicialización de DU.
No se pueden usar las unidades de
mando.
La comunicación con las unidades de
mando no está disponible para los
controladores virtuales. Regrese el
archivo de configuración a los valores
originales si es que se cambió.
2141
Error de inicialización de DU. No
se pudieron inicializar las unidades
de mando.
Revise la conexión con las unidades
de mando.
2142
Error de inicialización de DU.
No se pudieron inicializar las
unidades de mando.
Revise la conexión con las unidades
de mando.
2143
Error de inicialización de DU.
Tiempo de espera durante la
inicialización de las unidades de
mando.
Revise la conexión con las unidades
de mando.
2144
Error de inicialización de DU.
No hay datos para descargar en las
unidades de mando.
Reinicie la unidad de control y las
unidades de mando.
2145
Error de inicialización de DU.
No se pudo iniciar la comunicación
con las unidades de mando.
Reinicie la unidad de control y las
unidades de mando.
2146
Error de inicialización de DU.
Tiempo de espera cuando se inicia
la comunicación con las unidades
de mando.
Reinicie la unidad de control y las
unidades de mando.
2147
Error de inicialización de DU. No se
pudo actualizar el software de las
unidades de mando.
Revise la configuración de
actualización de software.
Revise la conexión con la unidad de
mando.
2148
Error de inicialización de DU. No se
pudo actualizar el software de las
unidades de mando.
Revise el nombre del archivo.
Revise el archivo de actualización.
2149
Error de inicialización de DU. No se
pudo actualizar el software de las
unidades de mando.
Revise la potencia y conexión de la
unidad de mando.
Reinicie el controlador.
2150
Error de operación.
No se pudo encontrar el número de
la tarea.
Reinicie el controlador.
2151
Error de operación.
Ejecución de la tarea.
Reinicie el controlador.
2152
Error de operación.
Error del tamaño del código de
objeto.
Reinicie el controlador.

Mantenimiento
188 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
2153
Error de operación.
Error del parámetro de
desplazamiento.
Reinicie el controlador.
2154
Error de operación.
Ejecución del desplazamiento.
Reinicie el controlador.
2155
Error de operación.
No se puede ejecutar la función de
desplazamiento.
Reinicie el controlador.
2156
Error de operación.
No se configuraron los datos de
desplazamiento.
Reinicie el controlador.
2157
Error de operación.
No se pudo cambiar el parámetro de
desplazamiento.
Reinicie el controlador.
2158
Error de operación.
No se pudo asignar el área para el
punto de interrupción.
Reinicie el controlador.
2159
Error de operación.
El número de puntos de interrupción
supera el número de configuración
permitido.
Reduzca los puntos de interrupción.
2160
Error de operación.
No se pudo asignar la ID de función.
Reinicie el controlador.
2161
Error de operación.
No se pudo asignar la dirección de
la variable local.
Reinicie el controlador.
2162
Error de operación.
No hay búfer suficiente para
almacenar la variable local.
Revise el tamaño de la variable local.
2163
Error de operación.
El cambio de valor está disponible
solamente cuando se suspende la
tarea.
Suspenda la tarea mediante el punto
de interrupción.
2164
Error de operación.
No se pudo asignar la dirección de
la variable global.
Revise el tamaño de la variable
global.
2165
Error de operación.
No hay búfer suficiente para
almacenar la variable global.
Revise el tamaño de la variable
global.
2166
Error de operación.
No se pudo obtener la dirección de
la variable global conservada.
Revise el tamaño de la variable global
conservada.
2167
Error de operación.
No hay búfer suficiente para
almacenar la variable global
conservada.
Revise el tamaño de la variable global
conservada.
2168
Error de operación.
SRAM no está asignado.
Reinicie el controlador.
2169
Error de operación.
No se puede borrar la variable
global conservada cuando se carga
el archivo objeto.
Reinicie el controlador.
2170
Error de operación.
No hay búfer suficiente para
almacenar la cadena.
Revise el tamaño de la variable de
cadena.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 189
N.º
Mensaje
Solución
Nota 1
Nota 2
2171
Error de operación.
No se puede iniciar la tarea después
de detectar un bajo voltaje.
Revise la potencia del controlador.
Reinicie el controlador.
2172
Error de operación.
Configuración de E/S remota
duplicada.
Reinicie el controlador.
2173
Error de configuración remota.
No se puede asignar un número de
entrada inexistente a la función
remota.
Revise el número de entrada de E/S.
2174
Error de configuración remota.
No se puede asignar un número de
salida inexistente a la función
remota.
Revise el número de salida de E/S.
2175
Error de operación.
No se configuró la función remota.
Reinicie el controlador.
2176
Error de operación.
Error de espera del evento.
Reinicie el controlador.
2177
Error de operación.
Error de la copia de seguridad del
sistema.
Reinicie el controlador.
Instale el firmware del controlador.
2178
Error de operación.
Error de restauración del sistema.
Reinicie el controlador.
Instale el firmware del controlador.
2179
Error de configuración remota.
No se puede asignar el mismo
número de entrada a algunas
funciones remotas.
Revise la configuración remota.
2180
Error de configuración remota.
No se puede asignar el mismo
número de salida a algunas
funciones remotas.
Revise la configuración remota.
2181
Error de operación.
El número de tarea no se ha
reservado para la API de RC+.
Configure el número de tareas de la
API de RC+.
2190
No se puede calcular porque son
datos de la cola.
Revise el programa.
2191
No se puede ejecutar AbortMotion
porque el robot no se ejecuta desde
una tarea.
Si no opera el robot desde un
programa, no puede usar
AbortMotion.
2192
No puede ejecutar AbortMotion
porque la tarea del robot ya finalizó.
La tarea está completa.
Revise el programa.
2193
No puede ejecutar Recover sin el
movimiento, porque AbortMotion no
se ejecutó.
Ejecute AbortMotion antes de
ejecutar Recover WithoutMove.
2194
Error de configuración del
transportador.
Asegúrese de que la configuración
del transportador y el codificador sea
correcta.
2195
Error de configuración del
transportador.
Asegúrese de que la configuración
del transportador y el codificador sea
correcta.
2196
El número del transportador está
fuera de rango.
Asegúrese de que la configuración
del transportador y el codificador sea
correcta.
2197
Se usó un parámetro de comando
prohibido para el movimiento de
seguimiento del transportador.
Elimine LJM.

Mantenimiento
190 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
2200
Robot en uso.
No se puede ejecutar el comando
de movimiento cuando otras tareas
están usando el robot.
El comando de movimiento del robot
no se puede ejecutar
simultáneamente desde más de una
tarea. Revise el programa.
2201
El robot no existe.
Revise si la configuración del robot se
realizó correctamente. Restaure la
configuración del controlador.
2202
Error de estado del módulo de
control de movimiento. Se arrojó
un error desconocido.
Recompile el proyecto.
2203
No se puede borrar el número local
' 0 '.
No se puede borrar el número local 0.
Revise el programa.
2204
No se puede borrar un brazo
mientras está en uso.
No se puede borrar el brazo mientras
está en uso. Revise si el brazo no
está en uso.
El número de
brazo que
intentó borrar
2205
No se puede borrar el número de
brazo ' 0 '.
No se puede borrar el número de
brazo 0. Revise el programa.
2206
No se puede borrar una herramienta
mientras está en uso.
No se puede borrar la herramienta
mientras está en uso. Revise si la
herramienta no está en uso.
El número de
herramienta
que intentó
borrar
2207
No se puede borrar el número de
herramienta ' 0 '.
No se puede borrar el número de
herramienta 0. Revise el programa.
2208
No se puede borrar ECP ' 0 '.
No se puede borrar el número ECP 0.
Revise el programa.
2209
No se puede borrar un ECP
mientras está en uso.
No se puede borrar el ECP mientras
está en uso. Revise si el ECP no está
en uso.
El número de
ECP que
intentó borrar
2210
No se puede especificar ' 0 ' como
el número local.
El comando que procesa el valor local
no puede especificar el número local
0. Revise el programa.
2216
El número de caja está fuera de
rango.
Los números de caja disponibles
varían de 1 a 15. Revise el programa.
2217
El número de caja no está definido.
La caja especificada no está definida.
Revise el número de caja.
2218
El número de plano está fuera de
rango.
Los números de caja disponibles
varían de 1 a 15. Revise el programa.
2219
El número de plano no está
definido.
El plano especificado no está
definido. Revise el número de plano.
2220
Error de PRM. No se encontraron
datos del archivo PRM.
Reinicie el controlador. Restaure la
configuración del controlador.
2221
Error de PRM. No se pudo
actualizar el archivo PRM.
Reinicie el controlador. Restaure la
configuración del controlador.
2222
El número local no está definido.
Revise la configuración local.
Revise el programa.
El número
local
especificado
2223
El número local está fuera de rango.
El número local disponible es de 1 a
15. Revise el programa.
El número
local
especificado
2224
No compatible. MCOFS no está
definido
-
2225
CalPls no está definido.
Revise la configuración de CalPls.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 191
N.º
Mensaje
Solución
Nota 1
Nota 2
2226
El número de brazo está fuera de
rango.
El número de brazo disponible es de
0 a 3. Dependiendo de los comandos,
el número de brazo 0 no está
disponible. Revise el programa.
El número de
brazo
especificado
2227
El número de brazo no está
definido.
Revise la configuración del brazo.
Revise el programa.
El número de
brazo
especificado
2228
El pulso para la posición de reposo
no está definido.
Revise la configuración de HomeSet.
2229
El número de herramienta está
fuera de rango.
El número de herramienta disponible
varía de 0 a 3. Según los comandos,
el número de herramienta 0 no está
disponible. Revise el programa.
El número de
herramienta
especificado
2230
El número de la herramienta no está
definido.
Revise la configuración de la
herramienta. Revise el programa.
El número de
herramienta
especificado
2231
El número ECP está fuera de rango.
El número de herramienta disponible
varía de 0 a 15. Según los comandos,
el número de herramienta 0 no está
disponible. Revise el programa.
El número
ECP
especificado
2232
El número ECP no está definido.
Revise la configuración de ECP.
Revise el programa.
El número
ECP
especificado
2233
El eje para restablecer el codificador
no está especificado.
Asegúrese de especificar el eje para
restablecer el codificador.
2234
No se puede restablecer el
codificador con el motor en el
estado ON.
Apague el motor antes de
restablecerlo.
2235
XYLIM no está definido.
Revise la configuración de XYLim.
Revise el programa.
2236
Error de PRM. No se pudo
configurar el contenido del archivo
PRM para el módulo de estado del
control de movimiento.
Reinicie el controlador. Restaure la
configuración del controlador.
2237
El número de pallet está fuera de
rango.
Los números de pallets disponibles
son de 0 a 15. Revise el programa.
2238
El pallet no está definido.
Revise la configuración de pallet.
2240
El subíndice de la matriz está fuera
del rango definido por el usuario.
No se puede tener acceso ni
actualizar fuera de los límites de la
matriz.
Revise el subíndice de la matriz.
Revise el programa.
Las
dimensiones
superan la
definición
El subíndice
especificado
2241
Las dimensiones de la matriz no
coinciden con la declaración.
Revise las dimensiones de la matriz.
Revise el programa.
2242
Se usó cero '0' como divisor.
Revise el programa.
2243
Desbordamiento de la variable. La
variable especificada superaba el
valor máximo permitido.
Revise el tipo de variable y el
resultado del cálculo. Revise el
programa.
2244
Subdesbordamiento de la variable.
La variable especificada era inferior
al valor mínimo permitido.
Revise el tipo de variable y el
resultado del cálculo. Revise el
programa.
2245
No se puede ejecutar este comando
con un número de punto flotante.
No se puede ejecutar este comando
para el tipo Real o Double. Revise el
programa.
2246
No se puede calcular el valor
especificado con la función Tan.
Revise el valor especificado. Revise
el programa.
El valor
especificado

Mantenimiento
192 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
2247
El subíndice de la matriz
especificada es inferior a ' 0 '.
Revise el valor especificado. Revise
el programa.
El valor
especificado
2248
Error de matriz. Redim solo se
puede ejecutar para una variable de
matriz.
Intentó Redim en una variable que no
es de una matriz. Recompile el
proyecto.
2249
Error de matriz. Solo puede
especificar Preserve para la matriz
de una sola dimensión.
Se especificó otra matriz que no es de
una sola dimensión como Preserve
para Redim. Recompile el proyecto.
2250
Error de matriz. No se pudo calcular
el tamaño del área de la variable.
Recompile el proyecto.
2251
No se pudo asignar suficiente
memoria para la instrucción Redim.
Reduzca el número de subíndices
que se especificarán para Redim.
Realice Redim con moderación.
2252
No se puede asignar memoria
suficiente para ByRef.
Reduzca el número de subíndices de
la matriz que se verán mediante
ByRef.
2253
No se pueden comparar caracteres
con valores.
Revise que el tipo de cadena y el tipo
de datos numéricos no se comparen.
Revise el programa.
2254
Los datos especificados superan
los límites de la matriz. No se puede
consultar o actualizar fuera de los
límites de la matriz.
Revise el número de subíndices y
datos de la matriz. Revise el
programa.
El número de
subíndices de
la matriz
El número
de datos que
se
consultarán
o
actualizarán
2255
Desbordamiento o
subdesbordamiento de la variable.
La variable especificada está fuera
de rango.
Se especificó el valor que supera el
rango del tipo Double. Revise el
programa.
2256
El subíndice de la matriz
especificada está fuera del rango
permitido máximo.
Reduzca el número de subíndices
que se especificarán. Para conocer
los subíndices disponibles, consulte
la ayuda en línea.
2257
No se puede especificar la variable
Int64 ni la variable UInt64.
Ni la variable Int64 ni la variable
UInt64 se pueden especificar.
Corrija el programa.
2260
El número de tarea está fuera del
rango disponible.
Para conocer el número de tarea
disponible, consulte la ayuda en línea.
Revise el programa.
El número de
tarea
especificado
2261
El número de tarea especificado no
existe.
Revise el programa.
El número de
tarea
especificado
2262
El número de robot está fuera del
rango disponible.
El número de robot disponible es 1.
Revise el programa.
El número de
robot
especificado
2263
El número de salida está fuera del
rango disponible. El n.º de puerto o
el n.º de dispositivo están fuera del
rango disponible.
Para conocer el número de salida
disponible, consulte la ayuda en línea.
Revise el programa.
El número de
salida
especificado
2264
El argumento del comando está
fuera del rango disponible. Revise
los argumentos. Datos agregados
1: Valor aprobado. Datos
agregados 2: orden del argumento.
Para conocer el rango del argumento
disponible, consulte la ayuda en línea.
Revise el programa.
El valor
agregado
¿Qué
argumento
de número?

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 193
N.º
Mensaje
Solución
Nota 1
Nota 2
Parámetro de comando fuera de
rango
Alimentación de piezas:
Configuraciones de formato o valor de
comando incorrectas
Lea la descripción del comando
correspondiente que se entrega en
Alimentación de piezas 7.0
Introducción y hardware (común) y
software
Software 3 Referencia sobre
comandos SPEL+ para la
alimentación de piezas y corrija el
código.
2265
El número de articulación está fuera
del rango disponible.
El número de articulación disponible
es de 1 a 6. Revise el programa.
El número de
articulación
especificado
2266
El tiempo de espera está fuera del
rango disponible.
El tiempo de espera disponible es de
0 a 2147483. Revise el programa.
El tiempo de
espera
especificado
2267
El número de temporizador está
fuera del rango disponible.
El número de temporizador disponible
es de 0 a 15. Revise el programa.
El número de
temporizador
especificado
2268
El número de captura está fuera del
rango disponible.
El número de captura disponible es
de 1 a 4. Revise el programa.
El número de
captura
especificado
2269
La ID de idioma está fuera del rango
disponible.
Para conocer la ID de idioma
disponible, consulte la ayuda en línea.
Revise el programa.
La ID de
idioma
especificada
2270
El valor del parámetro D
especificado para el proceso
paralelo está fuera del rango
disponible.
El valor de parámetro D disponible es
de 0 a 100. Revise el programa.
El valor de
parámetro D
especificado
2271
El número de arco está fuera del
rango disponible.
El número de arco disponible es de 0
a 7. Revise el programa.
El número de
arco
especificado
2272
El n.º de dispositivo está fuera del
rango disponible.
El número especificado que
representa un dispositivo de control o
un dispositivo de presentación está
fuera del rango disponible. Para
conocer el número de dispositivo
disponible, consulte la ayuda en línea.
Revise el programa.
El número de
dispositivo
especificado
2273
Los datos de salida están fuera del
rango disponible.
El valor de los datos de salida
disponibles es de 0 a 255. Revise el
programa.
Datos de
salida
¿Qué datos
de byte del
número
están fuera
de rango?
2274
El argumento Asin está fuera del
rango disponible. El rango es de -1
a 1.
Revise el programa.
2275
El argumento Acos está fuera del
rango disponible. El rango es de -1
a 1.
Revise el programa.
2276
El argumento Sqr está fuera del
rango disponible.
Revise el programa.
2277
El argumento Randomize está fuera
del rango disponible.
Revise el programa.

Mantenimiento
194 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
2278
El argumento Sin, Cos, Tan está
fuera del rango disponible.
Revise el programa.
2280
El período de tiempo de espera
configurado con la instrucción
TMOut expiró antes de que la
condición de espera terminara en la
instrucción WAIT.
Investigue la causa del tiempo de
espera. Revise si es correcto el
período de tiempo de espera
configurado.
Período de
tiempo de
espera
2281
Expiró el período de tiempo de
espera configurado con la
instrucción TMOut en las
instrucciones WaitSig o SyncLock.
Investigue la causa del tiempo de
espera. Revise si es correcto el
período de tiempo de espera
configurado.
Número de
señal
Período de
tiempo de
espera
2282
Expiró el período de tiempo de
espera configurado con la
instrucción TMOut en la instrucción
WaitNet.
Investigue la causa del tiempo de
espera. Revise si es correcto el
período de tiempo de espera
configurado.
Número de
puerto
Período de
tiempo de
espera
2283
Tiempo de espera.
Se agotó el tiempo de espera en la
configuración del dispositivo de
presentación.
Reinicie el controlador.
2290
No se puede ejecutar un comando
de movimiento.
No se puede ejecutar un comando de
movimiento después de usar la
función de usuario en el comando de
movimiento. Revise el programa.
2291
No se puede ejecutar el comando
OnErr.
No se puede ejecutar OnErr en el
comando de movimiento cuando se
usa la función de usuario en el
comando de movimiento. Revise el
programa.
2292
No se puede ejecutar el comando
de E/S mientras está abierta la
protección. Necesidad forzada.
No se puede ejecutar el comando de
E/S mientras está abierta la
protección. Revise el programa
2293
No se puede ejecutar un comando
de E/S durante la condición de
parada de emergencia.
Necesidad forzada.
No se puede ejecutar el comando de
E/S durante la condición de parada de
emergencia. Revise el programa.
2294
No se puede ejecutar el comando
de E/S cuando se ha detectado un
error. Necesidad forzada.
No se puede ejecutar el comando de
E/S mientras ocurre un error.
Revise el programa.
2295
No se puede ejecutar este comando
desde una tarea NoEmgAbort y una
tarea en segundo plano.
Para conocer detalles sobre los
comandos ejecutables, consulte la
ayuda en línea.
Revise el programa.
2296
Se actualizaron uno o más archivos
de origen. Compile el proyecto.
Recompile el proyecto.
2297
No se puede ejecutar el comando
de E/S en el modo TEACH sin el
parámetro Forced.
No se puede ejecutar el comando de
E/S en el modo TEACH. Revise el
programa.
2298
No se puede continuar la ejecución
en el proceso Trap SGClose.
No puede ejecutar las instrucciones
Cont y Recover con la tarea de
procesamiento Trap SGClose.
2299
No se puede ejecutar este
comando. Necesita la configuración
[enable the advance task control
commands] (habilite los comandos
de control de la tarea avanzada)
desde la configuración de
preferencias del controlador RC+.
Habilite [enable the advance task
control commands] desde RC+ para
ejecutar el comando.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 195
N.º
Mensaje
Solución
Nota 1
Nota 2
2300
Robot en uso. No se puede ejecutar
el comando de movimiento cuando
otra tarea está usando al robot.
El comando de movimiento del robot
no se puede ejecutar
simultáneamente desde más de una
tarea. Revise el programa.
El número de
tarea que está
usando al
robot
2301
No se puede ejecutar el comando
de movimiento cuando Enable
Switch (Interruptor de activación)
está en OFF.
Ejecute el comando de movimiento
con el interruptor de activación
agarrado.
2302
No se puede ejecutar la instrucción
Call en un proceso Trap Call.
No se puede llamar a otra función
desde la función que llama Trap Call.
Revise el programa.
2303
No se puede ejecutar la instrucción
Call en un proceso paralelo.
Revise el programa.
2304
No se puede ejecutar la instrucción
Xqt en un proceso paralelo.
Revise el programa.
2305
No se puede ejecutar la instrucción
Call desde la ventana Command.
Ejecute Call desde el programa.
2306
No se puede ejecutar la instrucción
Xqt desde la tarea iniciada por Trap
Xqt.
Revise el programa.
2307
No se puede ejecutar este comando
mientras las tareas están en
ejecución.
Revise si todas las tareas se han
completado.
2308
No se puede encender el motor
debido a un error crítico.
Encuentre el error que ocurrió
anteriormente en el historial de
errores y resuelva su causa. Luego,
reinicie el controlador.
2309
No se puede ejecutar el comando
de movimiento mientras está
abierta la protección.
Revise el estado de protección.
2310
No se puede ejecutar el comando
de movimiento mientras se espera a
que continúe.
Ejecute Continue o Stop y luego
ejecute el comando de movimiento.
2311
No se puede ejecutar un comando
de movimiento durante el proceso
de continuación.
Espere a que termine Continue y
luego ejecute el comando de
movimiento.
2312
No se puede ejecutar la tarea
durante la condición de parada de
emergencia.
Revise el estado de parada de
emergencia.
2313
No se puede continuar la ejecución
inmediatamente después de abrir la
protección.
Espere 1,5 segundos después de
abrir la protección y luego ejecute
Continue.
2314
No se puede continuar la ejecución
mientras está abierta la protección.
Revise el estado de protección.
2315
No se puede ejecutar el comando
Cont y Restart en la operación de
reanudación.
Espere hasta que finalice Continue.
2316
No se puede continuar la ejecución
después de haber detectado un
error.
Revise el estado del error.
2317
No se puede ejecutar la tarea
cuando se ha detectado un error.
Restablezca el error con Reset y
luego ejecute la tarea.
2318
No se puede ejecutar un comando
de movimiento cuando se ha
detectado un error.
Ejecute el comando de movimiento
después de restablecer el error con
Reset.

Mantenimiento
196 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
2319
No se puede ejecutar un comando
de E/S durante la condición de
parada de emergencia.
Revise el estado de parada de
emergencia.
2320
Error de función. El tipo de
argumento no coincide.
Recompile el proyecto.
2321
Error de función. El valor devuelto
no coincide con la función.
Recompile el proyecto.
2322
Error de función.
El tipo ByRef no coincide.
Recompile el proyecto.
2323
Error de función. No se pudo
procesar el parámetro ByRef.
Recompile el proyecto.
2324
Error de función. La dimensión del
parámetro ByRef no coincide.
Recompile el proyecto.
2325
Error de función. No se puede usar
ByRef en una instrucción Xqt.
Recompile el proyecto.
2326
No se puede ejecutar una
instrucción Dll Call desde la ventana
Command.
Ejecute DII Call desde el programa.
2327
No se pudo ejecutar una Dll Call.
Revise la DLL.
Revise el programa.
2328
No se puede ejecutar la tarea antes
de la conexión con RC+.
Necesita conectarse con RC+ antes
de ejecutar la tarea.
2329
No se puede ejecutar una
instrucción Eval en un proceso Trap
Call.
Revise el programa.
2330
Error de captura.
No se puede usar el argumento en
la instrucción Trap Call o Xqt.
Revise el programa.
2331
Error de captura.
No se pudo procesar la instrucción
Trap Goto.
Recompile el proyecto.
2332
Error de captura.
No se pudo procesar la instrucción
Trap Goto.
Recompile el proyecto.
2333
Error de captura.
La captura ya está en proceso.
Recompile el proyecto.
2334
No se puede ejecutar una
instrucción Eval en un proceso Trap
Finish o Trap Abort.
Revise el programa.
2335
No se puede continuar la ejecución
y Reset Error en el modo TEACH.
Revise el programa.
2336
No se puede la instrucción Here con
un proceso paralelo.
Go Here :Z(0) ! D10; MemOn(1) !
no es ejecutable.
Cambie el programa:
P999 = Here
Go P999 Here :Z(0) ! D10;
MemOn(1) !
2337
No se puede ejecutar, excepto
desde las funciones del
identificador de eventos de GUI
Builder.
Revise el programa.
2338
No se puede ejecutar Xqt, la
entrada de datos y la salida para TP
en el modo TEST.
No se puede ejecutar en el modo
TEST.
Revise el programa.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 197
N.º
Mensaje
Solución
Nota 1
Nota 2
2339
No se puede ejecutar en el modo
independiente.
Cambie la configuración a
“cooperative mode” (modo
cooperativo) y ejecute.
2340
El valor especificado en la función
InBCD no es un valor BCD válido.
Revise el programa.
Dígito de
decenas
Dígito de
unidades
2341
El valor especificado en la
instrucción OpBCD no es un valor
BCD válido.
Revise el programa.
El valor
especificado
2342
No se puede cambiar el estado del
bit de salida configurado como
salida remota.
Revise la configuración de E/S
remota.
Número de
E/S
1: bit, 2: byte,
3: palabra
2343
El tiempo de salida para la salida
asincrónica ordenada por la
instrucción On u Off está fuera del
rango disponible.
Revise el programa.
El tiempo
especificado
2344
El número de bit de entrada/salida
de E/S está fuera del rango
disponible o la placa no está
instalada.
Revise el programa.
Revise si se detectó correctamente la
placa E/S de expansión y la placa E/S
del bus de campo.
Número de bit
2345
El número de byte de entrada/salida
de E/S está fuera del rango
disponible o la placa no está
instalada.
Revise el programa.
Revise si se detectó correctamente la
placa E/S de expansión y la placa E/S
del bus de campo.
Número de
byte
2346
El número de palabra de
entrada/salida de E/S está fuera del
rango disponible o la placa no está
instalada.
Revise el programa.
Revise si se detectó correctamente la
placa E/S de expansión y la placa E/S
del bus de campo.
Número de
palabra
2347
El número de bit de E/S de memoria
está fuera del rango disponible.
Revise el programa.
Número de bit
2348
El número de byte de E/S de
memoria está fuera del rango
disponible.
Revise el programa.
Número de
byte
2349
El número de palabra de E/S de
memoria está fuera del rango
disponible.
Revise el programa.
Número de
palabra
2350
El comando se permite solo cuando
está activo el modo de E/S virtual.
El comando puede ejecutarse solo
para el modo de E/S virtual.
2353
El comando especificado no se
puede ejecutar desde la ventana
Command.
Ejecute el comando especificado
desde el programa.
Alimentación de piezas:
No se puede ejecutar el comando en
la ventana Command.
2354
No se puede ejecutar el comando
de salida de E/S cuando Enable
Switch está en OFF.
Ejecute el comando de salida de E/S
con el interruptor de activación
agarrado.
2360
Error del archivo.
No se pudo abrir el archivo de
configuración.
Restaure la configuración del
controlador.
2361
Error del archivo.
No se pudo cerrar el archivo de
configuración.
Restaure la configuración del
controlador.
2362
Error del archivo.
No se pudo abrir la clave del archivo
de configuración.
Restaure la configuración del
controlador.
2363
Error del archivo.
No se pudo obtener una cadena
desde el archivo de configuración.
Restaure la configuración del
controlador.

Mantenimiento
198 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
2364
Error del archivo.
No se pudo escribir en el archivo de
configuración.
Restaure la configuración del
controlador.
2365
Error del archivo.
No se pudo actualizar el archivo de
configuración.
Restaure la configuración del
controlador.
2370
La combinación de la cadena
supera la longitud de cadena
máxima.
La longitud máxima de la cadena es
255. Revise el programa.
Longitud de
cadena
combinada
2371
La longitud de la cadena está fuera
de rango.
La longitud máxima de la cadena es
255. Revise el programa.
La longitud
especificada
2372
Se especificó un carácter no válido
después del ampersand en la
función Val.
Revise el programa.
2373
Se especificó una cadena no válida
para la función Val.
Revise el programa.
2374
Error de cadena. Código de carácter
no válido en la cadena.
Revise el programa.
2380
No se puede usar ' 0 ' para el valor
Step en For...Next.
Revise el valor Step.
2381
La relación entre For...Next y
GoSub no es válida. Entrada o
salida de For...Next mediante una
instrucción Goto.
Revise el programa.
2382
No se puede ejecutar Return
mientras se ejecuta OnErr.
Revise el programa.
2383
Se usó Return sin GoSub. Revise el
programa.
Revise el programa.
2384
Se usó Case o Send sin Select.
Revise el programa.
Revise el programa.
2385
No se puede ejecutar EResume
mientras se ejecuta GoSub.
Revise el programa.
2386
Se usó EResume sin OnErr. Revise
el programa.
Revise el programa.
2400
Error de curva.
No se pudo abrir el archivo de
curva.
Reinicie el controlador.
Cree un archivo de curva
nuevamente.
2401
Error de curva.
No se pudieron asignar los datos de
encabezado del archivo de curva.
Reinicie el controlador.
Cree un archivo de curva
nuevamente.
2402
Error de curva.
No se pudo escribir el archivo de
curva.
Reinicie el controlador.
Cree un archivo de curva
nuevamente.
2403
Error de curva.
No se pudo abrir el archivo de
curva.
Reinicie el controlador.
Cree un archivo de curva
nuevamente.
2404
Error de curva.
No se pudo actualizar el archivo de
curva.
Reinicie el controlador.
Cree un archivo de curva
nuevamente.
2405
Error de curva.
No se pudo leer el archivo de curva.
Reinicie el controlador.
Cree un archivo de curva
nuevamente.
2406
Error de curva.
El archivo de curva está dañado.
Reinicie el controlador.
Cree un archivo de curva
nuevamente.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 199
N.º
Mensaje
Solución
Nota 1
Nota 2
2407
Error de curva.
Especifique un archivo distinto del
archivo de curva.
Reinicie el controlador.
Cree un archivo de curva
nuevamente.
2408
Error de curva.
La versión del archivo de curva no
es válida.
Reinicie el controlador.
Cree un archivo de curva
nuevamente.
2409
Error de curva.
El número de robot en el archivo de
curva no es válido.
Reinicie el controlador.
Cree un archivo de curva
nuevamente.
2410
Error de curva.
No se puede asignar suficiente
memoria para la instrucción
CVMove.
Reinicie el controlador.
2411
Los datos de punto especificados
en la instrucción Curve superan el
número máximo.
El número máximo de puntos
especificado en la instrucción Curve
es 200. Revise el programa.
2412
El número de comandos de salida
especificado en la instrucción Curve
supera el número máximo.
El número máximo de comandos de
salida especificado en la instrucción
Curve es 16. Revise el programa.
2413
Error de curva. El código interno
especificado supera el tamaño
permitido en la instrucción Curve.
Reinicie el controlador.
2414
Los datos de punto de continuación
P(:) especificados superan el
número máximo.
El número máximo de puntos
especificado continuamente es 200.
Revise el programa.
Punto de
inicio
Punto final
2415
Error de curva.
No se puede crear un archivo de
curva.
Reinicie el controlador.
Cree un archivo de curva
nuevamente.
2416
El archivo de curva no existe.
Revise si el nombre del archivo de
curva especificado es correcto.
2417
Error de curva.
El comando de salida se especifica
antes de los datos de punto.
Revise que no se especifique un
comando de salida antes de los datos
de punto.
2430
Error del mensaje de error.
El archivo de mensajes de error no
existe.
Reinicie el controlador.
2431
Error del mensaje de error.
No se pudo abrir el archivo de
mensajes de error.
Reinicie el controlador.
2432
Error del mensaje de error.
No se pudieron obtener los datos de
encabezado del archivo de
mensajes de error.
Reinicie el controlador.
2433
Error del mensaje de error.
El archivo de mensajes de error
está dañado.
Reinicie el controlador.
2434
Error del mensaje de error.
Se especificó un archivo distinto del
archivo de mensajes de error.
Reinicie el controlador.
2435
Error del mensaje de error.
La versión del archivo de mensajes
de error no es válida.
Reinicie el controlador.
2440
Error de archivo.
El número de archivo ya se está
usando.
Revise el número de archivo.
2441
Error de archivo.
No se pudo abrir el archivo.
Asegúrese de que el archivo existe y
que lo especificó correctamente.

Mantenimiento
200 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
2442
Error de archivo.
El archivo no está abierto.
Abra el archivo por adelantado.
2443
Error de archivo. Otra tarea está
utilizando el número de archivo.
Revise el programa.
2444
Error de archivo. No se pudo cerrar
el archivo.
Revise el archivo.
2445
Error de archivo. Falla al buscar
archivo.
Revise el programa.
Revise la configuración del puntero.
2446
Error de archivo.
Se están usando todos los números
de archivo.
Cierre los archivos innecesarios.
2447
Error de archivo.
No tiene permiso de lectura.
Use ROpen o UOpen que tenga
acceso de lectura para el archivo.
2448
Error de archivo.
No tiene permiso de escritura.
Use WOpen o UOpen que tenga
acceso de escritura para el archivo.
2449
Error de archivo.
No tiene permiso binario.
Use BOpen que tenga acceso binario
al archivo.
2450
Error de archivo.
No se pudo obtener acceso al
archivo.
Revise el archivo.
2451
Error de archivo. No se pudo
escribir el archivo.
Revise el archivo.
2452
Error de archivo. No se pudo leer
el archivo.
Revise el archivo.
2453
Error de archivo.
No se puede ejecutar el comando
para el disco actual.
El comando especificado no está
disponible en el disco actual (ChDisk).
2454
Error de archivo. Disco no válido.
Revise el programa.
2455
Error de archivo. Unidad no válida.
Revise el programa.
2456
Error de archivo. Carpeta no válida.
Revise el programa.
2460
Error de la base de datos.
El número de la base de datos ya se
está usando.
Revise el programa.
Especifique el número de otra base
de datos.
Cierre la base de datos.
2461
Error de la base de datos.
La base de datos no está abierta.
Revise el programa.
Abra la base de datos.
2462
Error de la base de datos.
Otra tarea está utilizando el número
de base de datos.
Revise el programa.
2470
Error de comunicación de Windows.
Estado no válido.
Reinicie el controlador.
Recompile el proyecto.
2471
Error de comunicación de Windows.
Respuesta no válida.
Reinicie el controlador.
Recompile el proyecto.
2472
Error de comunicación de Windows.
Ya se inició.
Reinicie el controlador.
2473
Error de comunicación de Windows.
Ocupado.
Reinicie el controlador.
Recompile el proyecto.
2474
Error de comunicación de Windows.
Sin solicitud.
Reinicie el controlador.
Recompile el proyecto.
2475
Error de comunicación de Windows.
Desbordamiento de búfer de datos.
Reduzca el volumen de datos.
Revise el programa.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 201
N.º
Mensaje
Solución
Nota 1
Nota 2
2476
Error de comunicación de Windows.
No se pudo esperar el evento.
Reinicie el controlador.
2477
Error de comunicación de Windows.
Carpeta no válida.
Asegúrese de que la carpeta
especificada sea correcta.
2478
Error de comunicación de Windows.
Código de error no válido.
Recompile el proyecto.
2500
La condición del evento
especificado para Wait supera el
número máximo.
El número máximo de condiciones de
eventos es 8. Revise el programa.
2501
El número de bit especificado en la
función Ctr no se inicializó con una
instrucción CTReset.
Revise el programa.
El número de
bit
especificado
2502
El número de tarea supera el
número máximo que se puede
ejecutar.
El número de tareas disponible que
puede ejecutarse simultáneamente
es 32 para las tareas normales y 16
para las tareas en segundo plano.
Revise el programa.
2503
No se puede ejecutar Xqt cuando ya
se está ejecutando el número de
tarea especificado.
Revise el programa.
El número de
tarea
especificado
2504
Error de la tarea. El manipulador
especificado ya está ejecutando un
proceso paralelo.
Recompile el proyecto.
2505
No hay datos suficientes para la
asignación de variable de la
instrucción Input.
Revise el contenido de los datos de
comunicación. Revise el programa.
2506
La variable especificada para la
instrucción Input supera el número
máximo.
Para OP, solo se puede especificar
una variable. Para otros dispositivos,
se pueden especificar hasta 32
variables.
2507
Todos los contadores están en uso
y no se puede inicializar un nuevo
contador con CTReset.
El número de contadores disponible
que se puede configurar
simultáneamente es 16. Revise el
programa.
2508
Error de OnErr. No se pudo
procesar la instrucción OnErr.
Recompile el proyecto.
2509
Error de OnErr. No se pudo
procesar la instrucción OnErr.
Recompile el proyecto.
2510
La etiqueta de E/S especificada no
está definida.
La etiqueta de E/S especificada no
está registrada. Revise el archivo de
etiqueta de E/S.
2511
Se usó la instrucción SyncUnlock
sin ejecutar una instrucción
SyncLock anterior. Revise el
programa.
Revise el programa.
Número de
señal
2512
La instrucción SyncLock ya se
ejecutó.
La instrucción SyncLock no se puede
ejecutar por segunda vez
consecutiva. Revise el programa.
Número de
señal
2513
La etiqueta de punto especificada
no está definida.
La etiqueta de punto especificado no
está registrada. Revise el archivo de
puntos.
2514
No se pudo obtener el tiempo de
funcionamiento del motor del robot.
Reinicie el controlador.
2515
No se pudo configurar la fecha o la
hora.
Revise si la fecha y hora están
configuradas correctamente.

Mantenimiento
202 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
2516
No se pudieron obtener los datos de
depuración o para la inicialización.
Reinicie el controlador.
2517
No se pudo convertir en fecha u
hora.
Revise la hora configurada en el
controlador.
Reinicie el controlador.
2518
Se especificó un número mayor
para los datos de punto de inicio
que para los datos del punto final.
Especifique un número mayor para
los datos de punto final que para los
datos del punto de inicio.
Punto de
inicio
Punto final
2519
Sintaxis de formato no válido para
FmtStr$.
Revise el formato.
2520
El nombre del archivo es demasiado
largo.
Revise si el nombre del archivo de
puntos especificado es correcto. La
longitud máxima de la cadena para el
nombre del archivo es de 32.
2521
La ruta del archivo es demasiado
larga.
Revise si el nombre del archivo de
puntos especificado es correcto.
2522
El nombre de archivo no es válido.
Asegúrese de no usar caracteres
incorrectos para el nombre del
archivo.
2523
El proceso de continuación ya se
ejecutó.
Revise el programa.
2524
No se puede ejecutar Xqt cuando el
número de captura especificado ya
se está ejecutando.
Revise el programa.
2525
Contraseña no válida.
Revise si la contraseña se configuró
correctamente.
2526
No hay términos de espera.
Recompile el proyecto.
2527
Se usaron demasiadas variables
para la espera de la variable global.
Revise el programa.
2528
Se especificó la variable global que
no se pudo usar para el comando
Wait.
Revise el programa.
2529
No se puede usar ByRef si la
variable se usó para la espera de la
variable global.
Revise el programa.
2530
Demasiados archivos de puntos.
Revise el archivo de puntos.
2531
Otro robot está usando el archivo de
puntos.
Revise el programa.
2532
No se puede calcular la posición del
punto porque existen datos no
definidos.
Revise los datos de punto.
2533
Error en INP o OUTP.
Revise el programa.
2534
No se iniciará ninguna función
principal para la instrucción Restart.
Sin ejecutar la función principal, se
llama la instrucción Restart.
2535
No permite cambiar la configuración
Enable en el modo Teach.
Configure la autoridad.
2536
No se pudo cambiar la
configuración Enable en el modo
Teach.
Reinicie el controlador.
2537
El recuento de los datos de punto
P(:) es incorrecto o el formato del
parámetro es incorrecto.
Revise el programa.
2538
Error de Force_GetForces.
No se pudo procesar la instrucción
Force_GetForces.
Revise el programa.
2539
Contraseña no válida.
Revise la contraseña.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 203
N.º
Mensaje
Solución
Nota 1
Nota 2
2540
Sin conexión a RC+.
Conéctese a RC+.
2541
Parámetro duplicado.
Se especificó el mismo número de
robot.
Revise el parámetro.
2542
El número de cola de trabajo
especificada no es válido.
Los números de la cola de trabajo
disponibles son de 1 a 16. Revise el
programa.
2543
Se especificó una secuencia no
válida.
No se pudo encontrar la secuencia
especificada. Revise el nombre de la
secuencia.
2544
Se especificó un objeto no válido.
No se pudo encontrar el nombre del
objeto especificado. Revise el nombre
del objeto.
2545
Se especificó una calibración no
válida.
No se pudo encontrar el nombre de la
calibración especificada. Revise el
nombre de la calibración.
2546
No se puede encender el motor
inmediatamente después de abrir la
protección.
Espere 1,5 segundos después de
abrir la protección y luego encienda el
motor.
2547
No se puede usar la opción
especificada
Alimentación de piezas:
Configuraciones de formato o valor de
comando incorrectas
Lea la descripción del comando
correspondiente que se entrega en
Alimentación de piezas 7.0
Introducción y hardware (común) y
software
Software 3 Referencia sobre
comandos SPEL+ para la
alimentación de piezas y corrija el
código.
2548
Hay demasiados archivos de
fuerza.
Elimine los archivos de fuerza o use
los archivos de fuerza existentes.
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.
2549
No se puede especificar el archivo
de fuerza que no está asociado con
el robot.
Especifique el archivo de fuerza
correcto.
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.
2550
El comando especificado no es
compatible con el robot articulado y
el robot de tipo cartesiano.
El robot especificado no es
compatible.
Revise la configuración del robot.
2551
No se pudo obtener la información
de salud.
Reinicie el controlador.
2552
No se permite cambiar la
configuración en el modo UL.
Configure la autoridad.
2553
No se pudo cambiar la
configuración en el modo UL.
Reinicie el controlador.

Mantenimiento
204 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
2556
Se detectó un bucle excesivo.
Reduzca el número de tareas en
bucle o defina Wait (Esperar)
Este mensaje de error solo aparece
en los manipuladores de la serie
T/VT.
En lo posible, no realice ningún
procesamiento, como bucles infinitos
ni otro tipo de procesamientos
similares.
Para conocer detalles, consulte
Restricciones de las funciones en
Mantenimiento, manual de la serie
T/VT.
2557
Hubo un error en Trap.
Nota 1: Información detallada del
error
Una vez tenga la información de
error detallada, tome las medidas
correspondientes.
Hubo un error en Trap.
Revise el código de error
correspondiente en el historial del
sistema y tome las medidas
correspondientes.
Información
detallada
del error
2558
El parámetro de argumento es
demasiado largo.
Confirme un parámetro del
argumento.
2559
No se puede ejecutar cuando el
motor está en el estado
desactivado.
Cambie el estado a motor activado y
ejecute.
2560
El número del robot actual y la
propiedad de secuencia de Force
Guide no coinciden. Revise el
número del robot.
Confirme el número del robot actual y
la propiedad de secuencia de Force
Guide.
Número del
robot
2561
El tipo de robot actual y el tipo de
robot de la propiedad de secuencia
de Force Guide no coinciden.
Reconfigure la propiedad
RobotNumber.
Confirme el número del robot actual y
el número del robot de la propiedad
de secuencia de Force Guide.
Reconfigure la propiedad
RobotNumber.
2562
El número de la herramienta actual
y la herramienta del robot de la
propiedad de secuencia de Force
Guide no coinciden. Revise el
número de la herramienta.
Confirme el número de la herramienta
actual y la herramienta del robot de la
propiedad de secuencia de Force
Guide.
Número de
herramienta
2563
El archivo de punto que está
cargando no coincide con el archivo
de punto de la propiedad de
secuencia de Force Guide.
Revise el archivo de punto.
Confirme el archivo de punto cargado
y el archivo de punto de la secuencia
de Force Guide.
2564
No se puede ejecutar una
instrucción mientras se ejecuta el
control de torque.
Desactive el control de torque y
ejecute.
2565
Se ejecutó un comando prohibido
durante el seguimiento.
Elimine los comandos prohibidos del
programa.
2566
No se puede ejecutar el comando
FGRun para el mismo robot.
No se puede ejecutar el comando
FGRun para el mismo robot.
Finalice el comando FGRun o
ejecútelo en otro robot
2567
No se puede ejecutar el comando
FGRun para la secuencia de Force
Guide que está en ejecución.
No se puede ejecutar el comando
FGRun para la secuencia de Force
Guide que está en ejecución.
Ejecútelo después de que finalice la
secuencia de Force Guide.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 205
N.º
Mensaje
Solución
Nota 1
Nota 2
2568
Se ejecutó una instrucción que no
se puede ejecutar mediante el
procesamiento paralelo.
Revise el programa.
Revise el programa.
2569
No se puede obtener la propiedad
de la secuencia de Force Guide.
Reinicie el controlador.
2570
El número de secuencia está fuera
del rango. Revise el número de
secuencia especificado.
El número de secuencia va de 1 a 64.
Confirme el número de secuencia
especificado.
Número de
secuencia
2571
El número de objeto está fuera del
rango. Revise el número de objeto
especificado.
El número de objeto va de 1 a 16.
Confirme el número de objeto
especificado.
Número de
objeto
2572
No se puede borrar el resultado de
Force Guide.
Reinicie el controlador.
2573
No se puede definir el resultado de
Force Guide.
Reinicie el controlador.
2574
No se puede obtener el resultado de
Force Guide.
Reinicie el controlador.
2575
No se pudo guardar el resultado de
la secuencia de Force Guide en una
variable.
Reinicie el controlador.
2576
Se especificó un nombre de
secuencia de fuerza que no existe.
Confirme el nombre de la secuencia
de fuerza especificado.
2577
Se especificó un nombre de objeto
de fuerza que no existe.
Confirme el nombre del objeto de
fuerza especificado.
2578
No se puede ejecutar el comando
FGGet para la secuencia de Force
Guide que no está en ejecución.
Confirme la secuencia de Force
Guide especificada.
2580
No existe el nombre de alimentador
especificado.
El nombre de alimentador
especificado es incorrecto.
Verifique el nombre del alimentador
en Menú - [Setup] - [System
Configuration] (Configuración -
Configuración del sistema) en
EPSON RC+ 7.0.
2581
No se pudo restablecer el
alimentador. Verifique la conexión.
No se puede conectar con el
alimentador.
Verifique que sean correctas las
configuraciones de red del
alimentador (dirección IP, máscara
IP, puerto).
Verifique que sea normal el
funcionamiento de la conexión
Ethernet entre el alimentador y el
controlador (cables desconectados,
error en el concentrador o falta de una
fuente de alimentación para el
concentrador, etc.). Compruebe la
fuente de alimentación del
alimentador.
2582
Alimentador no conectado.
Verifique la conexión.
(Como en el caso anterior)
2583
Luz de fondo del alimentador no
activada
El alimentador especificado es
incorrecto.
Verifique que la luz de fondo esté
activada en Menú - [Setup] - [System
Configuration] en EPSON RC+ 7.0.

Mantenimiento
206 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
2584
Terminal de salida del alimentador
no activado
El alimentador especificado es
incorrecto.
Verifique que la tolva esté activada en
Menú - [Setup] - [System
Configuration] en EPSON RC+ 7.0.
2585
Tipo de alimentador incorrecto
Sucede cuando se restaura una copia
de seguridad del controlador, si se ha
cambiado la configuración del
alimentador.
Una vez que se quita y registra la
configuración del alimentador en
“EPSON RC+ 7.0 - Menu - Setup -
System Settings”.
2587
No se puede ejecutar el controlador
virtual
La opción PartFeeding exige que se
ejecute un controlador real.
2588
No se consiguió la información de
alimentación de piezas
No se puede ejecutar este comando
desde una ventana Command ni
desde un controlador virtual. Revise
la descripción del comando
correspondiente en "Referencia sobre
comandos SPEL+ para la
alimentación de piezas".
2589
El comando no es compatible con la
cámara móvil.
Este comando solo funciona con la
cámara descendente fija, así que
utilice una de ese tipo.
Revise la configuración de la
secuencias de visión especificada en
la secuencias de visión de blob de
pieza para la pieza objetivo.
Alimentación de piezas:
No se puede usar el comando cuando
la secuencia de visión de la pieza está
usando la cámara móvil del robot.
2591
Se usó la instrucción
PF_ReleaseFeeder sin ejecutar una
instrucción PF_AccessFeeder
anterior. Revise el programa.
Revise el programa.
2592
La instrucción PF_AccessFeeder ya
se ejecutó.
La instrucción PF_AccessFeeder no
se puede ejecutar por segunda vez
consecutiva. Revise el programa.
2600
El número de objeto de propiedad
de masa está fuera del rango
permitido.
Revise el rango de los números.
Los valores de MassProperties que
se pueden especificar son de 1 a 15.
Revise el programa.
2601
El objeto de propiedad de masa no
está definido.
Revise la configuración.
Confirme la configuración de
MassProperties.
Revise el programa.
2602
No se puede borrar el objeto de
propiedad de masa mientras está
en uso.
Especifique otro objeto de
propiedad de masa antes de borrar
el objeto anterior.
No se puede borrar MP mientras está
en uso.
Confirme si MP está en uso.
2603
No se puede borrar el número '0' del
objeto de propiedad de masa
No se puede borrar el número MP 0.
Revise el programa.
2840
Falla en la confirmación del
recuento de conexión de DU.
Revise si la unidad de mando está
conectada correctamente.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 207
N.º
Mensaje
Solución
Nota 1
Nota 2
2841
Falla en la adquisición del recuento
de conexión de DU.
Revise si la unidad de mando está
conectada correctamente.
2842
Falla en la confirmación de la
información de conexión de DU.
Revise si la unidad de mando está
conectada correctamente.
2843
Falla en la adquisición de la
información de conexión de DU.
Revise si la unidad de mando está
conectada correctamente.
2844
Hay un número faltante o una
repetición en la configuración del
interruptor DIP de DU.
Revise los interruptores DIP de la
unidad de mando
2845
La unidad de mando (DU) que usa
el robot no está conectada.
Revise si la unidad de mando está
conectada correctamente.
Elimine el
registro del
robot o
conecte la DU
al
manipulador
registrado.
2846
Debido a que se reconoció el
aumento y la disminución de la
unidad de mando, la unidad del
controlador se reinició.
El controlador se reinició debido a un
cambio de conexión con la unidad de
mando.
2847
La configuración del interruptor DIP
de la unidad I/F del sensor de fuerza
es inadecuada.
No es necesario cambiar la
configuración del interruptor DIP.
Comuníquese con nosotros.
2848
No está conectada la unidad I/F del
sensor de fuerza para la cual está
registrado el sensor de fuerza.
Verifique la conexión.
Confirme si es posible conectarlo
correctamente a la unidad I/F del
sensor de fuerza.
2849
No se pudo inicializar la unidad I/F
del sensor de fuerza.
Verifique la conexión.
Confirme si es posible conectarlo
correctamente a la unidad I/F del
sensor de fuerza.
2850
No se pudo inicializar la unidad I/F
del sensor de fuerza.
Verifique la conexión.
Confirme si es posible conectarlo
correctamente a la unidad I/F del
sensor de fuerza.
2851
El sensor de fuerza, que es
diferente del sensor registrado, está
conectado.
Revise la conexión o la
configuración.
No corresponde el número de serie
del sensor conectado con el sensor
registrado.
Cámbielo por un sensor nuevo
después de confirmar la conexión,
regresar al sensor conectado o
invalidar el sensor. En caso de que se
reemplace, establezca nuevamente
la configuración de la conexión en la
configuración del sensor.
2852
El sensor de fuerza registrado no
está conectado.
Verifique la conexión.
Confirme que sea posible hacer una
correcta conexión con el sensor
registrado.
Invalide el sensor cuando no conecte
el sensor.
2853
No se pudo actualizar el software de
la unidad I/F del sensor de fuerza.
Revise el procedimiento de
actualización.
Revise la configuración de
actualización del software.
Confirme la conexión con la unidad
I/F del sensor de fuerza.
2854
No se pudo actualizar el software de
la unidad I/F del sensor de fuerza.
Revise el procedimiento de
actualización.
Confirme el nombre del archivo.
Confirme el archivo de actualización.

Mantenimiento
208 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
2855
No se pudo actualizar el software de
la unidad I/F del sensor de fuerza.
Revise el procedimiento de
actualización.
Confirme la fuente de alimentación y
la conexión de la unidad I/F del
sensor de fuerza.
Reinicie el controlador.
2856
Está conectada la unidad I/F del
sensor de fuerza con una versión
anterior.
Actualice el software de la unidad
I/F del sensor de fuerza.
Se necesita actualizar la versión de la
unidad I/F del sensor de fuerza
conectado. Actualice la unidad I/F del
sensor de fuerza. Para actualizar los
procedimientos, consúltenos.
2857
El robot registrado en la unidad I/F
del sensor de fuerza no está
conectado.
Revise el registro del robot o la
configuración del sensor de fuerza.
El robot que se relaciona con el
sensor no está registrado.
Revise el registro del robot o invalide
la conexión del robot.
2858
No se pudo asignar la memoria para
el monitor de fuerza.
Reinicie el controlador.
Consulte con nosotros si ocurre un
error similar después de reiniciarlo.
2859
No se pudo asignar la memoria para
el registro de fuerza.
Reinicie el controlador.
Consulte con nosotros si ocurre un
error similar después de reiniciarlo.
2860
El objeto del monitor de fuerza
especificado en el registro de fuerza
está en uso.
Especifique otro objeto del monitor
de fuerza.
No se puede especificar el mismo
número FM.
Especifique un número FM diferente.
2861
Se ejecuta el número máximo de los
registros de fuerza.
Revise la sincronización del
registro.
Se usa el número de registro más
grande.
Confirme el número de registros.
2862
No se pudo asignar la memoria de
función de fuerza.
Reinicie el controlador.
Consulte con nosotros si ocurre un
error similar después de reiniciarlo.
2863
No se pueden ejecutar al mismo
tiempo la secuencia de Force
Guide, RecordStart, FCMStart y
LogStart.
Revise el programa.
Ejecute después de que termine la
propiedad LogStart mediante la
propiedad LogEnd.
2864
No se pueden ejecutar al mismo
tiempo la secuencia de Force
Guide, RecordStart, FCMStart y el
monitor de fuerza.
Salga de alguna.
Ejecute después de salir del monitor
de fuerza.
2865
No se pueden ejecutar al mismo
tiempo la secuencia de Force
Guide, RecordStart, FCMStart y
LogStart.
Revise el programa.
Ejecute la propiedad LogStart
después de que finalice la propiedad
RecordStart mediante la secuencia
de Force Guide, Force Control
Monitor o la propiedad RecordEnd.
2866
No se pueden ejecutar al mismo
tiempo la secuencia de Force
Guide, RecordStart, FCMStart y el
monitor de fuerza.
Salga de alguna.
Ejecute el monitor de fuerza después
de que finalice la propiedad
RecordStart mediante la secuencia
de Force Guide, Force Control
Monitor o la propiedad RecordEnd.
2867
El canal especificado está en uso.
Especifique otro canal.
No se puede especificar el mismo
canal. Especifique un canal diferente
para ejecutar.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 209
N.º
Mensaje
Solución
Nota 1
Nota 2
2868
Se especifica el objeto del monitor
de fuerza que se está usando.
Especifique otro objeto de monitor
de fuerza.
No se puede especificar el mismo
número FM. Especifique un número
FM diferente para ejecutar.
2869
La duración especificada de la
medición es menor que el intervalo
de medición especificado.
Revise el parámetro.
Especifique el tiempo de medición por
más tiempo que el intervalo de
medición que se ejecutará.
2870
El producto de la duración
especificada de la medición y el
intervalo de medición especificado
está fuera del rango permitido.
Revise el parámetro.
Revise el tiempo e intervalo de
medición.
2871
No se pueden ejecutar al mismo
tiempo más de tres de las siguientes
funciones: secuencia de Force
Guide, RecordStart, FCMStart y
monitor de fuerza.
Para ejecutar nuevamente,
asegúrese de cerrar alguno de los
dos elementos en funcionamiento y
ejecutar.
2872
No se puede iniciar dos veces el
monitor de fuerza.
Para iniciar nuevamente el monitor de
fuerza, cierre el monitor de fuerza en
ejecución e inicie uno nuevo.
2880
No se pudo inicializar la placa I/F del
sensor de fuerza.
Verifique la conexión.
Revise la conexión del controlador y
la placa I/F del sensor de fuerza.
Reinicie el controlador.
Consulte con nosotros si se genera
un error similar, incluso después de
reiniciar el controlador.
2881
No se pudo inicializar la placa I/F del
sensor de fuerza.
Verifique la conexión.
Revise la conexión del controlador y
la placa I/F del sensor de fuerza.
Reinicie el controlador.
Consulte con nosotros si se genera
un error similar, incluso después de
reiniciar el controlador.
2882
Se detectan dos placas: Placa I/F
del sensor de fuerza y placa RS-
232C.
Si está usando la placa I/F del
sensor de fuerza, la placa RS-232C
está disponible hasta para una
placa.
Quite la placa I/F del sensor de fuerza
o la segunda placa de la placa RS-
232C.
2883
Se detectan dos placas: Placa I/F
del sensor de fuerza y placa RS-
232C con la configuración de la
segunda placa.
Si está usando la placa I/F del
sensor de fuerza, arroja la
configuración de la primera placa de
la placa RS-232C.
Arroja la configuración para la primera
placa de la placa RS-232C.
2884
No se pudo inicializar la placa I/F del
sensor de fuerza.
Verifique la conexión.
Revise la conexión del controlador y
la placa I/F del sensor de fuerza.
Reinicie el controlador.
Consulte con nosotros si se genera
un error similar, incluso después de
reiniciar el controlador.

Mantenimiento
210 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
2885
Los sensores 3 y 4 de los sensores
de fuerza están activados.
Si está usando la placa I/F del
sensor de fuerza, desactive los
sensores 3 y 4 de los sensores de
fuerza.
Desactive los sensores 3 y 4 del
sensor de fuerza.
2886
No se pudo comunicar con placa I/F
del sensor de fuerza y el sensor de
fuerza.
Revise la conexión del sensor de
fuerza.
Revise la conexión de la placa I/F del
sensor de fuerza y el sensor de
fuerza. Reinicie el controlador.
Consulte con nosotros si se genera
un error similar, incluso después de
reiniciar el controlador.
2887
Se detectó la placa I/F del sensor de
fuerza y la unidad I/F del sensor de
fuerza.
Quite la placa I/F del sensor de
fuerza o la unidad I/F del sensor de
fuerza.
No se puede usar la placa I/F del
sensor de fuerza y la unidad I/F del
sensor de fuerza al mismo tiempo.
Quite la placa I/F del sensor de fuerza
o la unidad I/F del sensor de fuerza.
2888
Está definido un sensor de fuerza
que no es compatible.
Revise la configuración.
Revise la configuración.
La versión de firmware puede ser
antigua. Revise si la versión de
firmware es compatible y actualícela
si es necesario.
2900
No se pudo abrir como servidor para
el puerto Ethernet.
Revise si el puerto Ethernet está
configurado correctamente. Revise si
el cable Ethernet está conectado
correctamente.
2901
No se pudo abrir como cliente para
el puerto Ethernet.
Revise si el puerto Ethernet está
configurado correctamente. Revise
si el cable Ethernet está conectado
correctamente.
No se pudo abrir el puerto TCP/IP
(cliente).
Alimentación de piezas:
No se puede conectar con el
alimentador.
Verifique que sean correctas las
configuraciones de red del
alimentador (dirección IP, máscara
IP, puerto).
Verifique que sea normal el
funcionamiento de la conexión
Ethernet entre el alimentador y el
controlador (cables desconectados,
error en el concentrador o falta de una
fuente de alimentación para el
concentrador, etc.). Compruebe la
fuente de alimentación del
alimentador.
2902
No se pudo leer desde el puerto
Ethernet.
Revise que el puerto del destinatario
de comunicaciones no esté cerrado.
2904
Se especificó una dirección IP no
válida.
Revise la dirección IP.
2905
Error de Ethernet.
No hay especificación del
servidor/cliente.
Revise el programa.
2906
No se configuró el puerto Ethernet.
Revise si el puerto Ethernet está
configurado correctamente.
Número de
puerto

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 211
N.º
Mensaje
Solución
Nota 1
Nota 2
2907
El puerto Ethernet ya estaba siendo
usado por otra tarea.
Solamente una tarea puede usar un
puerto a la vez.
Número de
puerto
2908
No se pueden cambiar los
parámetros del puerto mientras el
puerto Ethernet está abierto.
Los parámetros del puerto no pueden
cambiarse mientras el puerto esté
abierto.
Número de
puerto
2909
El puerto Ethernet no está abierto.
Para usar el puerto Ethernet, ejecute
la instrucción OpenNet.
Número de
puerto
2910
Tiempo de espera de lectura desde
un puerto Ethernet.
Revise la comunicación.
Valor de
tiempo de
espera
2911
No se pudo leer desde un puerto
Ethernet.
Revise la comunicación.
2912
El puerto Ethernet ya estaba siendo
usado por otra tarea.
Solamente una tarea puede usar un
puerto a la vez.
Número de
puerto
2913
No se pudo escribir en el puerto
Ethernet.
Revise si el puerto Ethernet está
configurado correctamente. Revise si
el cable Ethernet está conectado
correctamente.
Número de
puerto
2914
No se completó la conexión del
puerto Ethernet.
Revise si el puerto del destinatario de
la comunicación está abierto.
Número de
puerto
2915
Los datos recibidos desde el puerto
Ethernet superan el límite de una
línea.
La longitud máxima de una línea es
de 255 bytes.
El número de
bytes es una
línea recibida
2916
No se pudo procesar un archivo
simulado del puerto Ethernet virtual
Revise el contenido del archivo
simulado.
Número de
puerto
2920
Error de RS-232C.
Error de proceso del puerto RS-
232C.
Revise si se detectó correctamente la
placa RS-232C.
2921
No se pudo leer desde el puerto RS-
232C.
Revise el parámetro y la
comunicación.
2922
No se pudo leer desde el puerto RS-
232C. Error de exceso.
Desacelere la transferencia de datos
o reduzca el tamaño de los datos.
2926
El hardware del puerto RS-232C no
está instalado.
Revise si se detectó correctamente la
placa RS-232C.
Número de
puerto
2927
El puerto RS-232C ya lo tiene
abierto otra tarea.
Solamente una tarea puede usar un
puerto a la vez.
Número de
puerto
2928
No se pueden cambiar los
parámetros del puerto mientras está
abierto el puerto RS-232C.
Los parámetros del puerto no pueden
cambiarse mientras el puerto esté
abierto.
Número de
puerto
2929
El puerto RS-232C no está abierto.
Para usar el puerto RS-232C, ejecute
la instrucción OpenCom.
Número de
puerto
2930
Tiempo de espera de lectura desde
el puerto RS-232C.
Revise la comunicación.
Valor de
tiempo de
espera
2931
No se pudo leer desde el puerto RS-
232C.
Revise la comunicación.
2932
El puerto RS-232C ya lo tiene
abierto otra tarea.
Solamente una tarea puede usar un
puerto a la vez.
Número de
puerto
2933
No se pudo escribir en el puerto RS-
232C.
Revise la comunicación.
Número de
puerto
2934
No se completó la conexión del
puerto RS-232C.
Revise el puerto RS-232C.

Mantenimiento
212 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
2935
Los datos recibidos desde el puerto
RS-232C superan el límite de una
línea.
La longitud máxima de una línea es
de 255 bytes.
El número de
bytes es una
línea recibida
2936
No se pudo procesar un archivo
simulado del puerto RS-232C virtual
Revise el contenido del archivo
simulado.
Número de
puerto
2937
No se puede ejecutar mientras se
usa RS-232C remoto.
El puerto especificado está en uso
actualmente.
Especifique otro puerto.
2938
No se puede ejecutar mientras se
usa ModBus.
El puerto especificado está en uso
actualmente.
Especifique otro puerto.
2950
Error de Daemon. No se pudo crear
el subproceso de Daemon.
Reinicie el controlador.
2951
Error de Daemon. Se agotó el
tiempo de espera mientras se
creaba el subproceso de Daemon.
Reinicie el controlador.
2952
Se detectó un error en la señal de
entrada de la llave de interruptor de
TEACH/AUTO.
Configure el interruptor de llave de TP
en TEACH o AUTO, según
corresponda. Revise si el TP está
conectado correctamente.
2953
Se detectó un error en la señal de
entrada de la llave ENABLE.
Revise si el TP está conectado
correctamente.
2954
Se detectó una soldadura de relé.
Probablemente se generó un exceso
de corriente debido a un error de
cortocircuito. Investigue la causa del
problema y tome las medidas
necesarias, y reemplace la DPB.
2955
La temperatura del resistor de
regeneración fue más alta que la
temperatura especificada.
Revise que el filtro no esté obstruido
y que el ventilador no se detenga.
Si no existen problemas en el filtro y
el ventilador, reemplace el módulo
regenerativo.
2970
Error de MNG.
Error de asignación de área.
Reinicie el controlador.
2971
Error de MNG.
Error de comprobación en tiempo
real.
Reinicie el controlador.
2972
Error de MNG.
Error de prioridad estándar.
Reinicie el controlador.
2973
Error de MNG. Error de prioridad del
impulso.
Reinicie el controlador.
2974
Error de MNG. Error de prioridad
descendente.
Reinicie el controlador.
2975
Error de MNG. Error de espera del
evento.
Reinicie el controlador.
2976
Error de MNG. Error de cierre del
mapa.
Reinicie el controlador.
2977
Error de MNG. Error libre del área.
Reinicie el controlador.
2978
Error de MNG. Error de AddIOMem.
Reinicie el controlador.
2979
Error de MNG. Error de AddInPort.
Reinicie el controlador.
2980
Error de MNG. Error de AddOutPort.
Reinicie el controlador.
2981
Error de MNG. Error de
AddInMemPort.
Reinicie el controlador.
2982
Error de MNG.
Error de AddOutMemPort.
Reinicie el controlador.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 213
N.º
Mensaje
Solución
Nota 1
Nota 2
2983
Error de MNG. Error de
IntervalOutBit.
Reinicie el controlador.
2984
Error de MNG. Error de CtrReset.
Reinicie el controlador.
2997
Detección de colisión
Si utiliza el simulador, revise que el
objeto esté ubicado en la dirección de
movimiento del robot.
2998
Se intentó AbortMotion cuando el
robot no se estaba moviendo
Consulte la ayuda para conocer
AbortMotion.
2999
Se intentó AbortMotion cuando el
robot se estaba moviendo
Consulte la ayuda para conocer
AbortMotion.
3000
El tamaño del archivo OBJ es
grande. TP1 podría no compilar
este proyecto.
Cuando es necesario compilar el
proyecto desde TP1, considere
reducir el programa.
3001
El número de variables que usan el
comando Wait está cerca del
máximo permitido.
El número de variables que usan el
comando Wait supera 56 (el máximo
es 64). Revise si existen variables
innecesarias.
3002
No se pudo encontrar el archivo
DLL.
Revise si existe el archivo DLL en
alguna de las siguientes carpetas:
- Carpeta del proyecto
- Carpeta del sistema de Windows
- Carpeta de configuración de la
variable de entorno PATH
3003
No se puede encontrar la función
DLL.
Revise el nombre de la función
especificada. Además, revise el
archivo DLL para ver si existe la
función especificada en la DLL.
3050
La función Main no está definida.
Declare una función Main.
3051
La función no existe.
Declare una función sin resolver.
3052
La variable no existe.
Declare una variable sin resolver.
3100
Error de sintaxis.
Corrija el error de sintaxis.
Alimentación de piezas:
La sintaxis de comandos no es
correcta.
Revise la descripción del comando en
Alimentación de piezas 7.0
Introducción y hardware (común) y
software
Software
“Parte 3: Referencia sobre comandos
SPEL+ para la alimentación” y corrija
el código.
3101
Error de recuento del parámetro.
El número de parámetros es excesivo
o insuficiente. Corrija los parámetros.
Alimentación de piezas:
La sintaxis de comandos no es
correcta.
Revise la descripción del comando en
Alimentación de piezas 7.0
Introducción y hardware (común) y
software
Software “Parte 3: Referencia sobre
comandos SPEL+ para la
alimentación” y corrija el código.
3102
La longitud del nombre del archivo
supera el máximo permitido.
Acorte el nombre del archivo.

Mantenimiento
214 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
3103
Definición de función duplicada.
Cambie el nombre de la función.
3104
Definición de variable duplicada
‘ ** ’.
Cambie el nombre de la variable.
3105
Las variables global y global
conservada no se pueden definir
dentro de un bloque de funciones.
Declare las variables global y global
conservada fuera del bloque de
funciones.
3106
Se especificó una función no
definida.
Especifique un nombre de función
válido.
3107
Se especificó While y Until para
Do...Loop.
La instrucción While/Until se
especificó para ambas instrucciones
Do y Loop. Elimine la cualquiera de
las instrucciones While/Until.
3108
El número o etiqueta de la línea
especificada ‘ ** ’ no existe.
Configure la etiqueta de línea.
3109
Error de desbordamiento.
La especificación numérica directa se
desborda. Reduzca el valor numérico.
3110
Se especificó una variable no
definida ‘ ** ’.
Existe una variable no definida.
Declare la variable.
3111
La variable especificada no es una
variable de matriz.
Especifique la variable de matriz.
3112
No se pueden cambiar las
dimensiones de la variable de
matriz.
La dimensión de la matriz no se
puede cambiar en la instrucción
Redim durante el tiempo de
ejecución. Corrija el programa.
3114
La variable Next especificada no
coincide con la variable For
especificada.
Corrija el nombre de la variable.
3115
No se puede usar una expresión de
punto en el primer argumento.
Especifique un solo punto para la
configuración del indicador de puntos.
No especifique una expresión de
puntos.
3116
El número de dimensiones de la
matriz no coincide con la
declaración.
Revise el número de dimensiones de
la matriz.
3117
No se pudo encontrar el archivo.
No se pudo encontrar el archivo que
configura el proyecto. Revise en la
carpeta del proyecto si existe el
archivo.
3118
No se pudo encontrar la instrucción
EndIf correspondiente.
El número de instrucciones EndIf que
corresponden a las instrucciones If y
ElseIf no es suficiente. Agregue
instrucciones EndIf.
3119
No se puede encontrar la
instrucción Loop correspondiente.
El número de instrucciones Loop que
corresponden a las instrucciones Do
no es suficiente. Agregue las
instrucciones Loop.
3120
No se puede encontrar la
instrucción Next correspondiente.
El número de instrucciones Next que
corresponden a las instrucciones For
no es suficiente. Agregue las
instrucciones Next.
3121
No se pudo encontrar el Send
correspondiente.
El número de instrucciones Send que
corresponde a las instrucciones
Select no es suficiente. Agregue las
instrucciones Send.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 215
N.º
Mensaje
Solución
Nota 1
Nota 2
3123
Las instrucciones On/Off superan el
número máximo.
Se define un límite superior (máx. 16)
en el número de instrucciones On/Off
en la instrucción Curve. Revise el
límite superior y corrija el programa.
3124
El número de puntos supera el
número máximo.
Un límite superior ("200" para curvas
abiertas, "50" para curvas cerradas)
está definido en el número de puntos
disponible en la instrucción Curve.
Revise el límite superior y corrija el
programa.
3125
No se pudo encontrar el If
correspondiente.
El número de instrucciones EndIf que
corresponde a las instrucciones If es
excesivo. Elimine los EndIf
innecesarios.
3126
No se pudo encontrar el Do
correspondiente.
El número de instrucciones Loop que
corresponde a las instrucciones Do es
excesivo. Elimine los Loop
innecesarios.
3127
No se pudo encontrar el Select
correspondiente.
El número de instrucciones Send que
corresponde a las instrucciones
Select es excesivo. Elimine los Send
innecesarios.
3128
No se pudo encontrar el For
correspondiente.
El número de instrucciones Next que
corresponde a las instrucciones For
es excesivo. Elimine los Next
innecesarios.
3129
'_' no se puede usar como el primer
carácter de un identificador.
Cambie el primer carácter del
identificador a un carácter alfabético.
3130
No se puede especificar el
parámetro ROT.
No se puede especificar el parámetro
ROT en las instrucciones BGo, Go,
TGo, Jump y Jump3. Corrija el
programa.
3131
No se puede especificar el
parámetro ECP.
No se puede especificar el parámetro
ECP en las instrucciones BGo, Go,
TGo, Jump, Jump3 y Arc. Corrija el
programa.
3132
No se puede especificar el
parámetro Arch.
No se puede especificar el parámetro
Arch en las instrucciones Go, BGo,
TGo, Arc, Arc3, BMove, Move y
TMove. Corrija el programa
3133
No se puede especificar el
parámetro LimZ.
No se puede especificar el parámetro
LimZ en las instrucciones BGo, TGo,
Jump3, Arc, Arc3, BMove, Move y
TMove. Corrija el programa.
3134
No se puede especificar el
parámetro Sense.
No se puede especificar el parámetro
Sense en las instrucciones BGo, TGo,
Arc, Arc3, BMove, Move y TMove.
Corrija el programa.
3135
Se especificó un parámetro no
válido.
Se especificó un parámetro no válido
en las instrucciones Xqt y Call.
Corrija el programa.
3137
No se puede especificar el
subíndice variable de matriz.
No se puede especificar el subíndice
de variable de matriz. Corrija el
programa.

Mantenimiento
216 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
3138
No se especificó ByRef en la
declaración de función.
Especifique ByRef en la lista de
parámetros de declaraciones de
función que es llamada por la
instrucción Call.
3139
No se puede ejecutar la instrucción
Xqt para una función que necesita
un parámetro ByRef.
No se puede ejecutar la instrucción
Xqt para una función que necesita un
parámetro ByRef. Elimine el
parámetro ByRef.
3140
No se puede ejecutar la instrucción
Redim para la variable ByRef.
No se puede ejecutar la instrucción
Redim para una variable que
especifica un parámetro ByRef.
Elimine el parámetro ByRef.
3141
El archivo OBJ está dañado.
-
3142
El tamaño del archivo OBJ supera
el tamaño disponible después de la
compilación.
El resultado de la compilación supera
el valor de límite (máx. 1 MB por
archivo). Divida el programa.
3143
La longitud de sangría supera el
tamaño disponible.
La longitud disponible del
identificador es de un máximo de 32
caracteres para nombres de etiquetas
y variables y 64 caracteres para
nombres de funciones. Reduzca el
número de caracteres para que no
superen la longitud disponible. Para
conocer detalles de la longitud
disponible, consulte el Manual del
usuario de EPSON RC+ "6.4
Nombres de funciones y variables
(Restricciones de nombres)".
3144
' ** ' ya está siendo usado para un
nombre de función.
Corrija el identificador ' ** ' o el
nombre de la función.
3145
' ** ' ya está siendo usado para una
variable global conservada.
Corrija el identificador ' ** ' o el
nombre de la variable global
conservada.
3146
' ** ' ya está siendo usado para una
variable global.
Corrija el identificador ' ** ' o el
nombre de la variable global.
3147
' ** ' ya está siendo usado para una
variable de módulo.
Corrija el identificador ' ** ' o el
nombre de la variable de módulo.
3148
' ** ' ya está siendo usado para una
variable local.
Corrija el identificador ' ** ' o el
nombre de la variable local.
3149
' ** ' ya está siendo usado para una
etiqueta de E/S.
Corrija el identificador ' ** ' o el
nombre de la etiqueta de E/S.
3150
' ** ' ya está siendo usado para una
etiqueta de error de usuario.
Corrija el identificador ' ** ' o el
nombre de la etiqueta de error de
usuario.
3151
No se puede usar un parámetro de
función.
No se puede especificar un
argumento para la función que se
ejecuta la instrucción Trap. Corrija el
programa.
3152
Los elementos especificados de la
variable de matriz superan el
tamaño disponible.
El valor de límite de los elementos de
la matriz depende del tipo de
variables.
Consulte el Manual del usuario de
EPSON RC+7.0 "6.7.6 Matriz" y
corrija el número de elementos de
matriz para que no supere el valor de
límite.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 217
N.º
Mensaje
Solución
Nota 1
Nota 2
3153
Diferencia de tipo de parámetro.
El tipo de parámetro no coincide en
las instrucciones Call,
Force_GetForces y Xqt. Corrija el tipo
de parámetro.
3154
' ** ' no es una etiqueta de bit de
entrada.
Especifique una etiqueta de bit de
entrada válida.
3155
' ** ' no es una etiqueta de byte de
entrada.
Especifique una etiqueta de byte de
entrada válida.
3156
' ** ' no es una etiqueta de palabra
de entrada.
Especifique una etiqueta de palabra
de entrada válida.
3157
' ** ' no es una etiqueta de bit de
salida.
Especifique una etiqueta de bit de
salida válida.
3158
' ** ' no es una etiqueta de byte de
salida.
Especifique una etiqueta de byte de
salida válida.
3159
' ** ' no es una etiqueta de palabra
de salida.
Especifique una etiqueta de palabra
de salida válida.
3160
' ** ' no es una etiqueta de bit de
memoria.
Especifique una etiqueta de bit de E/S
de memoria válida.
3161
' ** ' no es una etiqueta de byte de
memoria.
Especifique una etiqueta de byte de
E/S de memoria válida.
3162
' ** ' no es una etiqueta de palabra
de memoria.
Especifique una etiqueta de palabra
de E/S de memoria válida.
3163
Demasiados argumentos de
función.
El número máximo del parámetro de
función es de 100. Reduzca el
número de parámetros.
3164
No se puede comparar con un valor
booleano.
El tamaño de los valores booleanos
no se puede comparar. Corrija el
programa.
3165
No se puede usar un valor
booleano en la expresión.
El valor booleano no se puede usar en
la expresión. Corrija el programa.
3166
No se puede comparar entre el
valor booleano y la expresión.
El tamaño del valor booleano y la
expresión no se pueden comparar.
Corrija el programa.
3167
No se puede almacenar un valor
booleano en una variable numérica.
El valor booleano no se puede usar en
el valor numérico. Corrija el programa.
3168
No se puede almacenar un valor
numérico en una variable booleana.
El valor numérico no se puede usar en
la variable booleana. Corrija el
programa.
3169
Se especificó una etiqueta de E/S
sin definir.
Defina una nueva etiqueta de E/S o
especifique la etiqueta de E/S
definida.
3170
Se especificó una expresión de
condición no válida.
Se especificó una expresión de
cadena para el lado derecho de la
expresión de condición en la
instrucción Do o Loop. Corrija la
expresión de la condición para que el
lado derecho de la expresión sea un
valor booleano.
3171
No se puede comparar entre el
valor numérico y la cadena.
El valor numérico y la cadena no
pueden ser comparados. Corrija el
programa.
3172
No se puede usar una palabra clave
como nombre de variable.
Algunas palabras clave de SPEL+ no
se pueden usar como nombres de
variables. Corrija el nombre de
variable para que no se sobreponga
con las palabras clave.

Mantenimiento
218 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
3173
' ** ' ya está siendo usado para una
etiqueta de línea.
Corrija el identificador ' ** ' o el
nombre de la etiqueta de línea.
3174
Número o etiqueta de línea
duplicado (**).
No se puede especificar etiquetas de
línea con el mismo nombre en la
misma función. Elimine la etiqueta de
línea ' ** ' o defina una nueva etiqueta
de línea y corrija el programa.
3175
Se especificó una etiqueta de punto
sin definir.
Defina una nueva etiqueta de punto o
especifique la etiqueta de punto
definida.
3176
Se especificó una variable no
definida.
Defina una nueva variable o
especifique la variable definida.
3177
' ** ' ya está siendo usado para una
etiqueta de punto.
Corrija el identificador ' ** ' o el
nombre de la etiqueta de punto.
3178
No se puede usar el número de
resultado.
No se puede especificar el número de
resultado cuando se usa un objeto de
visión que no arroja resultados
múltiples en las instrucciones VSet y
VGet. Corrija el programa.
3179
El literal de cadena está fuera de la
longitud disponible.
El valor de límite de la longitud de
cadena es de un máximo de 255
caracteres. Reduzca la longitud de la
cadena para que no supere el valor de
límite.
3180
No se puede cambiar el valor de
propiedad de calibración con el
comando VSet.
La propiedad de calibración no se
puede cambiar en la instrucción VSet.
Corrija el programa.
3181
Se debe usar la variable de matriz
con ByRef.
No se puede especificar ByVal para la
variable de matriz. Especifique el
parámetro ByRef.
3182
No se especificó una suscripción.
Especifique una suscripción.
3183
No se puede omitir el parámetro.
Agregue un parámetro.
3184
No se puede usar el parámetro
SYNC con el comando de
seguimiento.
No se puede especificar el parámetro
SYNC en comandos de seguimiento.
Elimine el parámetro SYNC.
3185
No se puede usar datos de cola de
trabajo.
No se puede especificar los datos de
cola de trabajo en las instrucciones
BGo, BMove, TGo y TMove. Elimine
los datos de cola de trabajo.
3186
La combinación entre los datos de
cola de trabajo y los datos de punto
no coincide.
No se puede especificar la
combinación de los datos de cola de
trabajo y los datos de punto para la
especificación de coordenada de las
instrucciones Arc, Arc3, Jump3 y
Jump3CP.
Use los datos de cola de trabajo o los
datos de punto.
3187
Se especificó un valor de indicador
de punto no válido.
Corrija el programa para que el valor
de indicador de punto esté dentro del
rango de 0 a 127.
3188
No se puede usar el comando Call
en el procesamiento paralelo.
No se puede usar el comando Call en
el procesamiento paralelo. Corrija el
programa.
3189
No se puede usar variables locales
con el comando Wait.
La instrucción Wait no puede esperar
el cambio de variables locales.
Corrija el programa.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 219
N.º
Mensaje
Solución
Nota 1
Nota 2
3190
No se puede usar variables de
matriz con el comando Wait.
La instrucción Wait no puede esperar
el cambio de variables de matriz.
Corrija el programa.
3191
No se puede usar variables reales
con el comando Wait.
La instrucción Wait no puede esperar
el cambio de variables reales.
Corrija el programa.
3192
No se puede usar variables de
cadena con el comando Wait.
La instrucción Wait no puede esperar
el cambio de variables de cadena.
Corrija el programa.
3193
Falta el nombre del objeto de visión.
No se puede omitir el nombre del
objeto de visión en la instrucción
VTeach. Especifique el nombre del
objeto.
3194
No se puede usar un valor
booleano para el valor de tiempo de
espera.
No se puede usar el valor booleano
para el valor de tiempo de espera de
la instrucción Wait. Corrija el
programa.
3196
No se encontró la instrucción Fend.
El número de instrucciones Fend que
corresponde a las instrucciones
Function no es suficiente. Agregue las
instrucciones Fend.
3197
El nombre de la variable numérica
no puede usar '$'.
El nombre de la variable numérica no
puede usar '$'. Corrija el nombre de la
variable.
3198
Las variables de cadena deben
tener el sufijo '$'.
Las variables de cadena deben tener
un sufijo '$'. Agregue un sufijo '$' al
nombre de variable.
3199
Se especificó un objeto no válido.
Se especificó un objeto de visión no
válido en los comandos de Vision
Guide como VSet y VGet.
Especifique un objeto de visión válido.
3200
Falta el valor.
Agregue un valor.
3201
Se esperaba ' , '.
Agregue ' , '.
3202
Se esperaba ' ( '.
Agregue ' ( '.
3203
Se esperaba ' ) '.
Agregue ' ) '.
3204
Falta el identificador.
Especifique un identificador.
3205
No se especificó el punto.
Especifique un punto.
3206
Falta la expresión de condición de
evento.
Agregue una expresión de condición
de evento.
3207
Falta la fórmula.
Agregue una fórmula.
3208
Falta la fórmula de cadena.
Agregue una fórmula de cadena.
3209
Falta la fórmula de punto.
Agregue una fórmula de punto.
3210
No se especificó la etiqueta de
línea.
Revise si la etiqueta de línea
especificada existe en el programa.
Agregue una etiqueta de línea válida.
3211
No se especificó la variable.
Especifique una variable.
3212
No se pudo encontrar el Fend
correspondiente.
El número de instrucciones Fend que
corresponde a las instrucciones
Function no es suficiente. Agregue las
instrucciones Fend.
3213
Se esperaba ' : '.
Agregue ' : '.

Mantenimiento
220 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
3214
No se especificó True/False.
No se especificó True/False en la
propiedad de Vision Guide/GUI
Builder o la sustitución de la expresión
lógica que requiere la configuración
de un valor booleano.
Especifique True o False.
3215
No se especificó On/Off.
Se debe especificar On u Off para la
configuración de lógica de salida
remota de las instrucciones Motor,
Brake, AutoLJM, SetSw y Box.
Especifique On u Off.
Formato de comando
PF_OutputOnOff no válido.
Lea la descripción del comando
correspondiente que se entrega en
Alimentación de piezas 7.0
Introducción y hardware (común) y
software
Software 3 Referencia sobre
comandos SPEL+ para la
alimentación de piezas y corrija el
código.
3216
No se especificó High/Low.
Se debe especificar High o Low para
la configuración de modo de
alimentación de la instrucción Power.
Especifique High o Low.
3217
No se especificó la etiqueta de bit
de entrada.
No se especificó la etiqueta de bit de
entrada en las instrucciones SetSW y
CTReset y las funciones Sw y Ctr.
Especifique una etiqueta de bit de
entrada válida.
3218
No se especificó la etiqueta de byte
de entrada.
No se especificó la etiqueta de byte
de entrada en la instrucción SetIn y en
las funciones In e InBCD.
Especifique una etiqueta de byte de
entrada válida.
3219
No se especificó la etiqueta de
palabra de entrada.
No se especificó la etiqueta de
palabra de entrada en la instrucción
SetInW y en las funciones InReal e
InW. Especifique una etiqueta de
palabra de entrada válida.
3220
No se especificó la etiqueta de bit
de salida.
No se especificó la etiqueta de bit de
salida en las instrucciones On, Off y
en la función Oport. Especifique una
etiqueta de bit de salida válida.
3221
No se especificó la etiqueta de byte
de salida.
No se especificó la etiqueta de byte
de salida en las instrucciones Out y
OpBCD y en la función Out.
Especifique una etiqueta de byte de
salida válida.
3222
No se especificó la etiqueta de
palabra de salida.
No se especificó la etiqueta de
palabra de salida en las instrucciones
OutReal y OpW y en la función
OutReal. Especifique una etiqueta de
palabra de salida válida.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 221
N.º
Mensaje
Solución
Nota 1
Nota 2
3223
No se especificó la etiqueta de bit
de memoria.
No se especificó la etiqueta de bit de
memoria en las instrucciones
MemOn, MemOff y en la función
MemSw. Especifique una etiqueta de
bit de memoria válida.
3224
No se especificó la etiqueta de byte
de memoria.
No se especificó la etiqueta de byte
de memoria en la instrucción MemOut
y en la función MemIn. Especifique
una etiqueta de byte de memoria
válida.
3225
No se especificó la etiqueta de
palabra de memoria.
No se especificó la etiqueta de
palabra de memoria en la instrucción
MemOutW y en la función MemInW.
Especifique una etiqueta de palabra
de memoria válida.
3226
No se especificó la etiqueta de error
de usuario.
No se especificó la etiqueta de error
de usuario en la instrucción Error.
Especifique una etiqueta de error de
usuario válida.
3227
No se especificó el nombre de
función.
No se especificó el nombre de función
en una instrucción que requiere la
designación del nombre de función,
como Call y Xqt. Especifique un
nombre de función válido.
3228
No se especificó el tipo de variable.
No se especificó el tipo de variable
para la definición de parámetro de la
instrucción Function y la
especificación del parámetro
Preserve de la instrucción Global.
Especifique un tipo de variable
correcto.
3229
Parámetro de instrucción Trap no
válido. Use Goto, Call o Xqt.
Especifique GoTo, Call o Xqt como
parámetro de la instrucción Trap.
3230
Se esperaba For/Do/Function.
Especifique For, Do o Function como
parámetro de la instrucción Exit.
3231
No se especificó Above/Below.
El valor de configuración para la
orientación del codo no se especificó
en la instrucción Elbow. Especifique
Above o Below.
3232
No se especificó Righty/Lefty.
El valor de configuración para la
orientación de la mano no se
especificó en la instrucción Hand.
Especifique Righty o Lefty.
3233
No se especificó NoFlip/Flip.
El valor de configuración para la
orientación de la muñeca no se
especificó en la instrucción Wrist.
Especifique NoFlip o Flip.
3234
No se especificó el número de
puerto.
El número de puerto que indica el
archivo o puerto de comunicación no
se especificó en las instrucciones
Read, ReadBin, Write y WriteBin.
Consulte “Instrucción SetCom” en la
Referencia del lenguaje SPEL+ y
especifique un número de archivo o
número de puerto adecuado.

Mantenimiento
222 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
3235
No se especificó la variable de tipo
de cadena.
No se especificó la variable de tipo de
cadena en un comando que requiere
la especificación de la variable de tipo
de cadena como parámetro.
Especifique una variable de tipo de
cadena válida.
3236
No se especificó el número de
puerto RS-232C.
El número de puerto RS-232C no se
especifica en las instrucciones
OpenCom, CloseCom y SetCom.
Consulte “Instrucción OpenCom” en
la Referencia del lenguaje SPEL+ y
especifique un número de puerto
adecuado.
3237
No se especificó el número de
puerto de comunicación de red.
No se especificó el número de puerto
de comunicación de red en las
instrucciones OpenNet, CloseNet,
SetNet y WaitNet. Especifique un
número entero de 201 a 216.
3238
No se especificó la velocidad de
comunicación.
No se especificó la velocidad de
comunicación (velocidad en baudios)
en la instrucción SetCom. Consulte
"Instrucción SetCom" en la
Referencia del lenguaje SPEL+ y
especifique una velocidad en baudios
adecuada.
3239
No se especificó el número de bit
de datos.
No se especificó la longitud de bit de
datos en la instrucción SetCom.
Consulte “Instrucción SetCom” en la
Referencia del lenguaje SPEL+ y
especifique una longitud de bit de
datos adecuada.
3240
No se especificó el número de bit
de detención.
No se especificó la longitud de bit de
detención en la instrucción SetCom.
Consulte “Instrucción SetCom”en la
Referencia del lenguaje SPEL+ y
especifique una longitud de bit de
detención adecuada.
3241
No se especificó la paridad.
No se especificó la paridad en la
instrucción SetCom. Consulte
“Instrucción SetCom” en la
Referencia del lenguaje SPEL+ y
especifique una paridad adecuada.
3242
No se especificó el terminador.
No se especificó el terminador (fin de
la línea de enviar/recibir) en las
instrucciones SetCom y SetNet.
Consulte “Instrucción SetCom” en la
Referencia del lenguaje SPEL+ y
especifique un terminador adecuado.
3243
No se especificó el flujo de
hardware.
No se especificó el flujo de hardware
en la instrucción SetCom. Consulte
“Instrucción SetCom” en la
Referencia del lenguaje SPEL+ y
especifique un control de flujo
adecuado.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 223
N.º
Mensaje
Solución
Nota 1
Nota 2
3244
No se especificó el flujo de
software.
No se especificó el flujo de software
en la instrucción SetCom. Consulte
“Instrucción SetCom” en la
Referencia del lenguaje SPEL+ y
especifique un control de flujo
adecuado.
3245
No se especificó el valor None.
No se especificó "NONE" para la
configuración de control de flujo de
software en la instrucción SetNet.
Especifique "NONE".
3246
No se especificó el parámetro ' O '
o ' C '.
No se especificó el parámetro Open o
Close para el final de una curva en la
instrucción Curva.
Consulte “Instrucción Curve” en la
Referencia del lenguaje SPEL+ y
especifique un parámetro Open/Close
adecuado.
3247
No se especificó el parámetro
NumAxes.
El número de ejes de coordenadas
controlado durante un movimiento de
curva no se especifica en la
instrucción Curve. Consulte
“Instrucción Curve” en la Referencia
del lenguaje SPEL+ y especifique un
número de ejes de coordenadas
adecuado.
3248
El valor J4Flag (0-1) no se
especificó.
Especifique 0 o 1, o una expresión
para el valor J4Flag.
3249
El valor J6Flag (0-127) no se
especificó.
Especifique un número entero entre 0
y 127, o una expresión para el valor
J6Flag.
3250
No se especificó la variable de
matriz.
No se especificó la variable de matriz
en la instrucción que requiere la
especificación de la variable de
matriz. Especifique una variable de
matriz válida.
3251
No se especificó la variable de
matriz de cadena.
La matriz que almacena un token
debe ser una variable de matriz de
cadena en la instrucción ParseStr y la
función ParseStr. Especifique una
variable de matriz de cadena.
3252
No se especificó la ID del
dispositivo.
No se especificó la ID del dispositivo
en la instrucción DispDev o el
comando Cls. Consulte "Instrucción
DispDev" en la Referencia del
lenguaje SPEL+ y especifique una ID
de dispositivo adecuada.
3253
No se especificó el tipo de E/S.
No se especificó el tipo de E/S en la
función IOLabel$. Consulte "Función
IOLabel$" en la Referencia del
lenguaje SPEL+ y especifique un tipo
de E/S adecuado.
3254
No se especificó el ancho de bits de
E/S.
No se especificó el ancho de bits de
E/S (ancho del puerto de E/S) en las
funciones IODef e IOLabe. Consulte
"Función IODef" en la Referencia del
lenguaje SPEL+ y especifique un
ancho de bits de E/S adecuado.

Mantenimiento
224 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
3255
No se especificó ByRef.
Aunque se especificó ByRef en la
declaración de función, no se
especificó ByRef para llamadas.
Especifique el parámetro ByRef.
3256
No se especificó el tipo de variable.
No se especificó el tipo de variable en
la instrucción Global. Especifique un
tipo de variable adecuado.
3257
La expresión de condición no se
evalúa un valor booleano.
La expresión de condición en las
instrucciones If, ElseIf, Do y Loop
debe arrojar un valor booleano.
Corrija la expresión de condición para
arrojar un valor booleano.
3258
No se especificó el número de
puerto RS232C.
No se especificó el número de puerto
RS-232C en la función ChkCom.
Consulte "Función ChkCom" en la
Referencia del lenguaje SPEL+ y
especifique un número de puerto
adecuado.
3259
No se especificó el número de
puerto de comunicación de red.
No se especificó el número de puerto
de comunicación de red en la función
ChkCom. Consulte "Función ChkNet"
en la Referencia del lenguaje SPEL+
y especifique un número de puerto
adecuado.
3260
No se especificó la ID de idioma.
No se especificó la ID de idioma en la
función ErrMsg$. Consulte "Función
ErrMsg$" en la Referencia del
lenguaje SPEL+ y especifique una ID
de idioma adecuada.
3261
Se esperaba '.'.
Agregue '.'.
3262
No se especificó el nombre de
secuencia de visión.
No se especificó el nombre de
secuencia de visión en comandos de
Vision Guide como VSet, VGet y
VRun. Agregue un nombre de
secuencia.
3263
No se especificó el nombre de
secuencia o nombre de calibración
de visión.
No se especificó el nombre de
secuencia o nombre de calibración de
visión en las instrucciones VSet y
VGet. Agregue un nombre de
secuencia o un nombre de
calibración.
3264
No se especificó el nombre de
propiedad o nombre de resultado
de visión.
No se especificó el nombre de
propiedad o nombre de resultado de
visión en las instrucciones VSet y
VGet. Agregue un nombre de
propiedad o un nombre de resultado.
3265
No se especificó el nombre de
propiedad, nombre de resultado o
nombre de objeto de visión.
No se especificó el nombre de
propiedad, el nombre de resultado o
el nombre de objeto de visión en las
instrucciones VSet y VGet. Agregue
un nombre de propiedad, el nombre
de resultado o el nombre de objeto.
3266
No se especificó el nombre de
propiedad de calibración de visión.
No se especificó el nombre de
propiedad de calibración de visión en
las instrucciones VSet y VGet.
Agregue un nombre de propiedad.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 225
N.º
Mensaje
Solución
Nota 1
Nota 2
3267
No se especificó el tipo de tarea.
No se especificó el tipo de tarea en la
instrucción Xqt. Consulte "Instrucción
Xqt" en la Referencia del lenguaje
SPEL+ y especifique un tipo de tarea
adecuado.
3268
No se especificó el nombre de
formulario.
No se especificó el nombre de
formulario en las instrucciones GSet,
GGet, GShow, GShowDialog y
GClose. Especifique un nombre de
fórmula.
3269
No se especificó el nombre de
propiedad o nombre de control.
No se especificó el nombre de
propiedad o nombre de control en las
instrucciones GSet y GGet.
Especifique un nombre de propiedad
o un nombre de control.
3270
No se especificó el nombre de
propiedad.
No se especificó el nombre de
propiedad en las instrucciones GSet y
GGet. Especifique un nombre de
propiedad.
3271
No se especificó BackColorMode.
No se especificó el valor de
configuración de la propiedad
BackColorMode en la instrucción
GSet. Consulte "Propiedad
BackColorMode" en el manual de GUI
Builder 7.0, y especifique un valor de
configuración adecuado.
3272
No se especificó BorderStyle.
No se especificó el valor de
configuración de la propiedad
BorderStyle en la instrucción GSet.
Consulte "Propiedad BorderStyle" en
el manual de GUI Builder 7.0, y
especifique un valor de configuración
adecuado.
3273
No se especificó DropDownStyle.
No se especificó el valor de
configuración de la propiedad
DropDownStyle en la instrucción
GSet. Consulte "Propiedad
DropDownStyle" en el manual de GUI
Builder 7.0, y especifique un valor de
configuración adecuado.
3274
No se especificó EventTaskType.
No se especificó el valor de
configuración de la propiedad
EventTaskType en la instrucción
GSet. Consulte "Propiedad
EventTaskType" en el manual de GUI
Builder 7.0, y especifique un valor de
configuración adecuado.
3275
No se especificó ImageAlign.
No se especificó el valor de
configuración de propiedad
ImageAlign en la instrucción GSet.
Consulte "Propiedad ImageAlign" en
el manual de GUI Builder 7.0, y
especifique un valor de configuración
adecuado.

Mantenimiento
226 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
3276
No se especificó IOType.
No se especificó el valor de
configuración de la propiedad IOType
en la instrucción GSet. Consulte
"Propiedad IOType" en el manual de
GUI Builder 7.0, y especifique un valor
de configuración adecuado.
3277
No se especificó FormBorderStyle.
No se especificó el valor de
configuración de la propiedad
FormBorderStyle en la instrucción
GSet. Consulte "Propiedad
FormBorderStyle" en el manual de
GUI Builder 7.0, y especifique un valor
de configuración adecuado.
3278
No se especificó ScrollBars.
No se especificó el valor de
configuración de la propiedad
ScrollBars en la instrucción GSet.
Consulte "Propiedad ScrollBars" en el
manual de GUI Builder 7.0, y
especifique un valor de configuración
adecuado.
3279
No se especificó SizeMode.
No se especificó el valor de
configuración de la propiedad
SizeMode en la instrucción GSet.
Consulte "Propiedad SizeMode" en el
manual de GUI Builder 7.0, y
especifique un valor de configuración
adecuado.
3280
No se especificó StartPosition.
No se especificó el valor de
configuración de la propiedad
StartPosition en la instrucción GSet.
Consulte "Propiedad StartPosition" en
el manual de GUI Builder 7.0, y
especifique un valor de configuración
adecuado.
3281
TextAlign no se especificó.
El valor de configuración de la
propiedad TextAlign no se especificó
en la instrucción GSet.
Este error ocurre cuando el tipo de
control no se puede identificar porque
el control fue especificado por la
variable de cadena. Consulte
“Propiedad TextAlign” en el manual
de GUI Builder 7.0, y especifique un
valor de configuración adecuado.
3282
TextAlign no se especificó.
El valor de configuración de la
propiedad TextAlign no se especificó
en la instrucción GSet.
Este error ocurre cuando el control es
un cuadro de texto. Consulte
“Propiedad TextAlign” en el manual
de GUI Builder 7.0, y especifique un
valor de configuración adecuado.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 227
N.º
Mensaje
Solución
Nota 1
Nota 2
3283
TextAlign no se especificó.
El valor de configuración de la
propiedad TextAlign no se especificó
en la instrucción GSet.
Este error ocurre cuando el control no
es un cuadro de texto. Consulte
“Propiedad TextAlign” en el manual
de GUI Builder 7.0, y especifique un
valor de configuración adecuado.
3284
No se especificó WindowState.
No se especificó el valor de
configuración de la propiedad
WindowState en la instrucción GSet.
Consulte "Propiedad WindowState"
en el manual de GUI Builder 7.0, y
especifique un valor de configuración
adecuado.
3285
J1FLAG no se especificó.
Especifique 0 o 1, o una expresión
para el valor J1Flag.
3286
J2FLAG no se especificó.
Especifique 0 o 1, o una expresión
para el valor J2Flag.
3287
No se especificó la ID del robot.
Especifique un número de robot.
3288
No se especificó la ID del
robot/Valor All.
No se especificó el número del robot
o el valor All en las funciones
InsideBox e InsidePlane.
Especifique un número de robot que
realice la detección de intrusión, o el
valor All.
3289
No se especificó la ID del área.
No se especificó el número del área
en las funciones InsideBox e
InsidePlane. Especifique un número
de área de comprobación de
acercamiento que arroje un estado
mediante un número entero de 1 a 15.
3290
No se especificó el número de
archivo.
No se especificó el número de archivo
en el comando relacionado con la
administración de archivos.
Especifique un número de archivo
mediante un número entero entre 30
y 63 o una expresión.
3292
No se especificó el tipo de base de
datos.
No se especificó el tipo de base de
datos en la instrucción OpenDB.
Consulte "Instrucción OpenDB" en la
Referencia del lenguaje SPEL+ y
especifique un tipo de base de datos
adecuado.
3293
No se especificó el tipo de disco.
No se especificó el tipo de disco que
está sometido a manipulación de
archivos en la instrucción ChDisk.
Consulte "Instrucción ChDisk" en la
Referencia del lenguaje SPEL+ y
especifique un tipo de disco
adecuado.

Mantenimiento
228 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
3295
No se especificó la ID del área de
transportador.
No se especificó la ID de área que
está sometida al conteo de datos de
cola de trabajo en la función
Cnv_QueLen. Consulte “Función
Cnv_QueLen” en la Referencia del
lenguaje SPEL+ y especifique una ID
de área adecuada.
3296
No se especificó el número de
archivo de la base de datos.
No se especificó el número de la base
de datos que está sometida a
operación en las funciones OpenDB,
CloseDB, DeleteDB, UpdateDB y
SelectDB. Consulte "Instrucción
OpenDB" en la Referencia del
lenguaje SPEL+ y especifique un
número de base de datos adecuado.
3297
No se especificó el nombre de
calibración de visión.
No se especificó el nombre de
calibración en la instrucción VCal.
Especifique un nombre de calibración
que esté sometido a calibración.
3298
No se especificó la ID de tipo de
objeto de visión.
No se especificó el tipo de objeto de
visión en la instrucción
VCreateObject. Consulte "Instrucción
VCreateObject" en la Referencia de
propiedades y resultados de Vision
Guide 7.0 y especifique un tipo de
objeto adecuado.
3299
No se especificó la ID del modo de
apagado.
No se especificó el valor del modo de
apagado en la instrucción ShutDown
y la función ShutDown. Consulte
"Instrucción ShutDown" en la
Referencia del lenguaje SPEL+ y
especifique un valor de modo
adecuado.
3301
La versión del archivo OBJ
enlazado no coincide.
No todos los archivos del proyecto se
compilan en la misma versión.
Recompile el proyecto.
3302
El archivo OBJ no coincide con la
etiqueta de E/S compilada.
Cambió la configuración del proyecto.
Recompile el proyecto.
3303
El archivo OBJ enlazado no
coincide con la etiqueta de error de
usuario compilada.
Cambió la configuración del proyecto.
Recompile el proyecto.
3304
El archivo OBJ enlazado no
coincide con la opción de
compilación compilada.
Cambió la configuración del proyecto.
Recompile el proyecto.
3305
El archivo OBJ enlazado no
coincide con la opción de enlace
compilada.
Cambió la configuración del proyecto.
Recompile el proyecto.
3306
El archivo OBJ enlazado no
coincide con la opción SPEL
compilada.
Cambió la configuración del proyecto.
Recompile el proyecto.
3307
Función duplicada.
Se está usando el mismo nombre de
función en más de un archivo.
Corrija el programa (nombre de
función).

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 229
N.º
Mensaje
Solución
Nota 1
Nota 2
3308
Variable global conservada
duplicada.
Se está usando el mismo nombre de
variable global conservada en más de
un archivo.
Corrija el programa (nombre de
variable).
3309
Variable global duplicada.
Se está usando el mismo nombre de
variable global en más de un archivo.
Corrija el programa (nombre de
variable).
3310
Variable de módulo duplicada.
Se está usando el mismo nombre de
variable de módulo en más de un
archivo.
Corrija el programa (nombre de
variable).
3311
No se pudo encontrar el archivo.
-
3312
El archivo OBJ está dañado.
-
3313
El nombre de archivo especificado
incluye caracteres que no se
pueden usar.
-
3314
No se puede abrir el archivo.
El archivo está siendo usado para otra
aplicación. Salga de la otra aplicación.
3315
' ** ' ya está siendo usado para un
nombre de función.
Corrija el identificador ' ** ' o el
nombre de la función. Recompile el
proyecto.
3316
' ** ' ya está siendo usado para un
nombre de variable global
conservada.
Corrija el identificador ' ** ' o el
nombre de la variable global
conservada. Recompile el proyecto.
3317
' ** ' ya está siendo usado para un
nombre de variable global.
Corrija el identificador ' ** ' o el
nombre de la variable global.
Recompile el proyecto.
3318
' ** ' ya está siendo usado para un
nombre de variable de módulo.
Corrija el identificador ' ** ' o el
nombre de la variable de módulo.
Recompile el proyecto.
3319
La dimensión de la variable de
matriz no coincide con la
declaración.
Corrija la dimensión de la matriz y
recompile el proyecto.
3320
El tipo de valor devuelto de la
función no coincide con la
declaración.
Corrija el tipo de valor devuelto de la
función y recompile el proyecto.
3321
' ** ' ya está siendo usado con un
nombre de función.
Corrija el identificador ' ** ' o el
nombre de la función. Recompile el
proyecto.
3322
' ** ' ya está siendo usado con un
nombre de variable global
conservada.
Corrija el identificador ' ** ' o el
nombre de la variable global
conservada. Recompile el proyecto.
3323
' ** ' ya está siendo usado con un
nombre de variable global.
Corrija el identificador ' ** ' o el
nombre de la variable global.
Recompile el proyecto.
3324
' ** ' ya está siendo usado con un
nombre de variable de módulo.
Corrija el identificador ' ** ' o el
nombre de la variable de módulo.
Recompile el proyecto.
3325
' ** ' ya está siendo usado con un
nombre de variable local.
Corrija el identificador ' ** ' o el
nombre de la variable local.
Recompile el proyecto.

Mantenimiento
230 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
3326
El número de parámetros no
coincide con la declaración.
Revise el número de parámetros en la
función, corrija el programa y
recompile el proyecto.
3327
No se especificó ByRef en la
declaración de función para el
parámetro **.
-
3328
No se especificó ByRef para el
parámetro **.
-
3329
Diferencia de tipo de parámetro **.
-
3330
El archivo OBJ enlazado no
coincide con el proyecto de Vision
compilado.
Recompile el proyecto.
3331
El tamaño del archivo OBJ supera
el tamaño disponible después del
enlazado.
El tamaño del archivo OBJ supera el
valor de límite (8 MB). Reduzca el
programa.
3332
Se redefinió la variable '**'.
Se sobrecargó la variable ' ** ’.
Elimine las definiciones de variables
innecesarias y recompile el proyecto.
3333
El archivo OBJ enlazado no
coincide con el proyecto de GUI
Builder compilado.
Recompile el proyecto.
3334
El número de variables que está
usando el comando Wait supera el
máximo permitido.
El número de variables que está
usando el comando Wait supera el
máximo permitido (64). Elimine las
variables y recompile el proyecto.
3335
No se puede usar la llamada en el
procesamiento paralelo.
No se puede usar la llamada en el
procesamiento paralelo. Corrija el
programa y recompile el proyecto.
3336
Se redefinió la variable.
Corrija el tipo de datos de la variable
y recompile el proyecto.
3351
Se especificó un índice de objeto no
válido.
3352
No se especificó el nombre de
secuencia de Force Guide.
3353
No se especificó el nombre de
propiedad o el nombre de resultado
de Force Guide.
3354
No se especificó el nombre de
propiedad, el nombre de resultado
o el nombre de objeto de Force
Guide.
3355
El archivo de proyecto de Force
Guide tiene un formato de archivo
no admitido.
3356
El archivo OBJ enlazado no
coincide con el proyecto de Force
Guide compilado.
3400
No se especificó la ID de diálogo.
No se especificó la ID de diálogo en la
instrucción RunDialog. Consulte
"Instrucción RunDialog" en la
Referencia del lenguaje SPEL+ y
especifique una ID de diálogo.
3401
No se especificó el nombre de la
función principal.
No se especificó el nombre de la
función principal a ejecutar en la
instrucción StartMain. Especifique un
nombre de función principal (main a
main63).

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 231
N.º
Mensaje
Solución
Nota 1
Nota 2
3402
No se especificó el nombre de
objeto de visión.
No se especificó el nombre de objeto
de visión en las instrucciones
VLoadModel, VSaveModel,
VShowModel, VTeach y VTrain.
Especifique un nombre de objeto.
3403
No se especificó la ID del modo de
recuperación.
No se especificó el valor del modo de
recuperación en la instrucción
Recover o la función Recover.
Consulte "Instrucción Recover" en la
Referencia del lenguaje SPEL+ y
especifique un modo adecuado.
3404
No se especificó la condición de
captura.
No se especificó el número de captura
o el evento de captura en la
instrucción Trap. Consulte
“Instrucción Trap” en la Referencia del
lenguaje SPEL+ y especifique un
número o evento de captura
adecuado.
3405
No se especificó DialogResult.
No se especificó el valor de
configuración de la propiedad
DialogResult en la instrucción GSet.
Consulte "Propiedad DialogResult" en
el manual de GUI Builder 7.0, y
especifique un valor de configuración
adecuado.
3406
No se especificó MsgBox_Type.
No se especificó el tipo de
visualización en la instrucción
MsgBox_Type. Consulte "Instrucción
MsgBox" en la Referencia del
lenguaje SPEL+ y especifique un
valor de configuración adecuado.
3407
No se especificó la variable de
matriz de tipo de byte.
No se especificó la variable de matriz
de tipo de byte para enviar o recibir
datos en la instrucción
FbusIO_SendMsg. Los datos de
envío/recepción se deben especificar
por matriz de tipo de byte.
3408
No se especificó la variable de
matriz única.
El número de dimensiones no es el
adecuado en el comando donde solo
está disponible la variable de matriz
única. Corrija el número de
dimensiones.
3409
No se especificó la lista de puntos.
No se especificó la coordenada de
píxel o la coordenada del robot como
un dato de punto continuo en la
instrucción VxCalib. Especifique un
dato de punto continuo en el siguiente
formato: P (inicio : fin)
3410
No se especificó el tipo de código.
No se especificó el valor de
configuración de la propiedad
CodeType en la instrucción VSet.
Consulte "Propiedad CodeType" en la
Referencia de propiedades y
resultados de Vision Guide 7.0 y
especifique un valor de configuración
adecuado.

Mantenimiento
232 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
3411
No se especificó el tipo Edge.
No se especificó el valor de
configuración de la propiedad
EdgeType en la instrucción VSet.
Consulte "Propiedad EdgeType" en la
Referencia de propiedades y
resultados de Vision Guide 7.0 y
especifique un valor de configuración
adecuado.
3412
No se especificó el tipo de ECC.
No se especificó el valor de
configuración de la propiedad
ErrorCorrection en la instrucción
VSet. Este error es para la versión
antigua de RC+6.x. Es posible
configurar la versión antigua
mediante la configuración de la
versión del compilador. Consulte
"Propiedad ErrorCorrection" en la
Referencia de propiedades y
resultados de Vision Guide 6.0 y
especifique un valor de configuración
adecuado.
3413
No se especificó el tipo ImageColor.
No se especificó el valor de
configuración de la propiedad
ImageColor en la instrucción VSet.
Consulte "Propiedad ImageColor" en
la Referencia de propiedades y
resultados de Vision Guide 7.0 y
especifique un valor de configuración
adecuado.
3414
No se especificó el tipo de punto.
No se especificó el valor de
configuración de la propiedad
PointType en la instrucción VSet.
Consulte "Propiedad PointType" en la
Referencia de propiedades y
resultados de Vision Guide 7.0 y
especifique un valor de configuración
adecuado.
3415
No se especificó el tipo de
referencia.
No se especificó el valor de
configuración de la propiedad
ReferenceType en la instrucción
VSet. Consulte "Propiedad
ReferenceType" en la Referencia de
propiedades y resultados de Vision
Guide 7.0 y especifique un valor de
configuración adecuado.
3416
No se especificó el tipo Edge.
La lógica (tipo Edge) de la entrada del
disparador no se especifica en la
instrucción SetLatch. Especifique 0
(lógica negativa) o 1 (lógica positiva).
3417
No se especificó el número de
puerto.
No se especificó el número del puerto
de entrada de R-E/S al que está
conectada la entrada del disparador
en la instrucción SetLatch. Consulte
“Instrucción SetLatch” en la
Referencia del lenguaje SPEL+ y
especifique un número de puerto
adecuado.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 233
N.º
Mensaje
Solución
Nota 1
Nota 2
3418
No se especificó el eje.
No se especificó el parámetro del eje
en la función Force_GetForce o la
instrucción Force_SetTrigger.
Consulte "Función Force_GetForce"
en la Referencia del lenguaje SPEL+
y especifique un valor de
configuración adecuado.
3419
No se especificó CompareType.
No se especificó el parámetro
CompareType para definir la
condición de juicio en la instrucción
Force_SetTrigger.
Consulte "Instrucción
Force_SetTrigger" en la Referencia
del lenguaje SPEL+ y especifique un
parámetro adecuado.
3420
Solo está disponible una matriz de
número entero o de tipo corto.
-
3421
No se especificó el nombre de
formulario o de ID de ventana.
No se especificó el nombre de
formulario o de ID de ventana del
sistema sometido a operación en las
instrucciones GShow y GClose.
Especifique un nombre de formulario
o ID de ventana válido. Para conocer
detalles de la ID de ventana, consulte
"Instrucción GShow" en el Manual de
GUI Builder7.0.
3422
No se especificó la ID de ventana.
No se especificó la ID de ventana del
sistema sometida a operación en las
instrucciones GShow y GClose.
Consulte "Instrucción GShow" en el
Manual de GUI Builder7.0 y
especifique una ID de ventana
adecuada.
3423
No se especificó la ID del modo de
rendimiento.
No se especificó el modo de
rendimiento en el parámetro
PerformMode de las instrucciones
PerformMode, Go, BGo, TGo y Jump.
Consulte "Instrucción PerformMode"
en la Referencia del lenguaje SPEL+
y especifique un modo de rendimiento
adecuado.
3424
No se especificó el tipo de
protocolo.
No se especificó la configuración del
protocolo de comunicación en la
instrucción SetNet. Especifique UDP
o TCP.
3425
No se especificó el tipo de E/S o la
etiqueta de E/S.
No se especificó el tipo de E/S o la
etiqueta de E/S en la función IODef.
Especifique la etiqueta de E/S o el tipo
de E/S para comprobar la existencia
de la definición. Para conocer detalles
de los tipos E/S, consulte "Función
IODef" en la Referencia del lenguaje
SPEL+.

Mantenimiento
234 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
3426
No se especificó el modo de
evasión de singularidad.
No se especificó el modo de evasión
de singularidad en la instrucción
AvoidSingularity. Consulte
"Instrucción AvoidSingularity" en la
Referencia del lenguaje SPEL+ y
especifique un modo adecuado.
3427
No se especificó el valor de
aceleración.
No se especificó el número de
configuración de la aceleración en la
función AccelR. Consulte "Función
AccelR" en la Referencia del lenguaje
SPEL+ y especifique un valor de
configuración adecuado.
3428
No se especificó el valor de
aceleración.
No se especificó el número de
configuración de la aceleración en la
función Accel, la función AccelMax, la
función AccelS y la función RealAccel.
Consulte "Función Accel" en la
Referencia del lenguaje SPEL+ y
especifique un número de
configuración adecuado.
3429
No se especificó el criterio de
ordenación de los datos de la cola
de trabajo.
No se especificó el criterio de
ordenación de los datos de la cola de
trabajo en la instrucción
WorkQue_Sort. Consulte "Instrucción
WorkQue_Sort" en la Referencia del
lenguaje SPEL+ y especifique un
criterio de ordenación adecuado.
3430
No se especificó el número de ejes
de las coordenadas.
-
3431
No se especificó el número de ejes
de las coordenadas.
-
3432
No se especificó un punto o
expresión de punto.
Revise el programa.
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.
3433
No se especificó la variable de
matriz de tipo booleano.
Especifique la variable de matriz de
tipo booleano.
La matriz que almacena un valor
Enabled (Activado) o una propiedad
LPF_Enabled debe ser una matriz de
tipo booleano en la instrucción FGet.
Especifique una variable de matriz
booleana.
3434
No se especificó la variable de
matriz de tipo real o doble.
Especifique una variable de matriz
de tipo real o doble.
No se especificó la variable de matriz
de tipo real o doble en las
instrucciones FGet o MPGet.
Especifique una variable de matriz
de tipo real o doble.
3435
No se especificó la variable de
matriz de tipo de número entero.
Especifique una variable de matriz
de tipo de número entero.
La matriz que almacena un valor de
la propiedad Polarities debe ser una
matriz de tipo de número entero en la
instrucción FGet.
Especifique una variable de matriz
de tipo de número entero.
3436
No se especificó la duración de la
instrucción FCKeep.
Especifique la duración.
No se especificó la duración del
control de fuerza (valor de tiempo de
espera) en la instrucción FCKeep.
Especifique un valor de configuración
adecuado.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 235
N.º
Mensaje
Solución
Nota 1
Nota 2
3437
No se especificó el tipo de pieza del
controlador.
Especifique el tipo de pieza del
controlador.
3438
No se especificó el tipo de pieza del
robot.
Especifique el tipo de pieza del robot.
3439
No se especificó el tipo de pieza del
robot.
Especifique el tipo de pieza del robot.
3440
Se especifica un valor distinto al
valor numérico para el parámetro
del comando. Especifique un valor
numérico.
Especifique un valor numérico para el
séptimo parámetro del comando
AIO_TrackingSet.
3441
Se especifica un valor distinto al
valor numérico para el parámetro
del comando. Especifique un valor
numérico.
Especifique un valor numérico para el
sexto parámetro del comando
AIO_TrackingSet.
3450
No se especificó el nombre de
propiedad de fuerza o el nombre de
estado.
Agregue un nombre de propiedad o
un nombre de estado.
No se especificó el nombre de
propiedad de fuerza o el nombre de
estado en las instrucciones FSet,
FGet, MPSet y MPGet.
Agregue un nombre de propiedad o
un nombre de estado.
3451
No se especificó el nombre de
propiedad de fuerza, el nombre de
estado o el nombre de objeto.
Agregue un nombre de propiedad,
el nombre de estado o el nombre de
objeto.
No se especificó el nombre de
propiedad de fuerza, el nombre de
estado o el nombre de objeto en las
instrucciones FSet, FGet, MPSet y
MPGet.
Agregue un nombre de propiedad, el
nombre de estado o el nombre de
objeto.
3452
No se especificó el nombre de
objeto de fuerza.
Agregue un nombre de objeto de
fuerza.
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.
3453
No se especificó el objeto de la
propiedad de masa.
Especifique el objeto de la
propiedad de masa.
Especifique un objeto de la
propiedad de masa válido.
3454
No se especificó el objeto del
sistema de coordenadas de fuerza.
Especifique un objeto del sistema
de coordenadas de fuerza.
Especifique un objeto del sistema de
coordenadas de fuerza válido.
3455
No se especificó el objeto de control
de fuerza.
Especifique un objeto de control de
fuerza.
Especifique un objeto de Force
Control válido.
3456
No se especificó el objeto de
monitor de fuerza.
Especifique un objeto de monitor de
fuerza.
Especifique un objeto de monitor de
fuerza válido.
3457
No se especificó el objeto
disparador de fuerza.
Especifique un objeto disparador de
fuerza.
Especifique un objeto disparador de
fuerza válido.

Mantenimiento
236 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
3458
No se especificó el objeto de control
de fuerza o el objeto del sistema de
coordenadas de fuerza.
Especifique un objeto de control de
fuerza o un objeto del sistema de
coordenadas de fuerza.
No se especificaron los datos de
control de fuerza o los datos del
sistema de coordenadas de fuerza
en la instrucción FCSMove.
Especifique un objeto de control de
fuerza o un objeto del sistema de
coordenadas de fuerza válido.
3459
No se especificó el objeto de
fuerza.
Especifique un objeto de fuerza.
3460
No se especificó la etiqueta del
objeto de fuerza.
Especifique una etiqueta del objeto
de fuerza.
3461
No se especificó el objeto o la
etiqueta de fuerza.
Especifique un objeto o una etiqueta
de fuerza.
3462
No se especificó el objeto o la
etiqueta del sistema de
coordenadas de fuerza.
Especifique un objeto o una
etiqueta del sistema de
coordenadas de fuerza.
Especifique un objeto o una etiqueta
del sistema de coordenadas de
fuerza válidos.
3463
No se especificó el objeto o la
etiqueta de control de fuerza.
Especifique un objeto o una
etiqueta de control de fuerza.
Especifique un objeto o una etiqueta
de control de fuerza válidos.
3464
No se especificó el objeto o la
etiqueta de monitor de fuerza.
Especifique un objeto o una
etiqueta de monitor de fuerza.
Especifique un objeto o una etiqueta
de monitor de fuerza válidos.
3465
No se especificó el objeto o la
etiqueta de disparador de fuerza.
Especifique un objeto o una
etiqueta de disparador de fuerza.
Especifique un objeto o una etiqueta
de disparador de fuerza válidos.
3466
No se especificó el objeto o la
etiqueta de la propiedad de masa.
Especifique el objeto o la etiqueta
de la propiedad de masa.
Especifique un objeto o una etiqueta
de la propiedad de masa válidos.
3467
No se especificó el objeto o la
etiqueta del sistema de
coordenadas de fuerza.
Especifique un objeto o una
etiqueta del sistema de
coordenadas de fuerza.
Especifique un objeto o una etiqueta
del sistema de coordenadas de
fuerza válidos.
3468
No se especificó la etiqueta del
objeto de control de fuerza.
Especifique una etiqueta del objeto
de control de fuerza.
Especifique una etiqueta del objeto
de control de fuerza válida.
3469
No se especificó la etiqueta del
objeto de monitor de fuerza.
Especifique una etiqueta del objeto
de monitor de fuerza.
Especifique una etiqueta del objeto
de monitor de fuerza válida.
3470
No se especificó la etiqueta del
objeto disparador de fuerza.
Especifique una etiqueta del objeto
disparador de fuerza.
Especifique una etiqueta del objeto
disparador de fuerza válida.
3471
No se especificó la etiqueta del
objeto sensor de fuerza.
Especifique una etiqueta del objeto
sensor de fuerza.
Especifique una etiqueta del objeto
sensor de fuerza válida.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 237
N.º
Mensaje
Solución
Nota 1
Nota 2
3472
No se especificó la etiqueta del
objeto de la propiedad de masa.
Especifique la etiqueta del objeto
de la propiedad de masa.
Especifique una etiqueta del objeto
de la propiedad de masa válida.
3473
No se especificó la etiqueta del
objeto de la propiedad de masa.
Especifique la etiqueta del objeto
de la propiedad de masa.
Especifique una etiqueta del objeto
de la propiedad de masa válida.
3474
No se especificaron los valores de
configuración de las propiedades
Fmag_Axes o Tmag_Axes.
Especifique un valor de
configuración adecuado.
No se especificaron los valores de
configuración de las propiedades
Fmag_Axes o Tmag_Axes en la
instrucción FSet.
Consulte "Propiedad Fmag_Axes" o
"Propiedad Tmag_Axes" y
especifique un valor de configuración
adecuado.
3475
No se especificó el valor de
configuración de la propiedad
TriggerMode.
Especifique un valor de
configuración adecuado.
No se especificó el valor de
configuración de la propiedad
TriggerMode en la instrucción FSet.
Consulte "Propiedad TriggerMode" y
especifique un valor de configuración
adecuado.
3476
No se especificó el valor de
configuración de la propiedad
Operator.
Especifique un valor de
configuración adecuado.
No se especificó el valor de
configuración de la propiedad
Operator en la instrucción FSet.
Consulte "Propiedad Operator" y
especifique un valor de configuración
adecuado.
3477
No se especificó el valor de
configuración de la propiedad
Orientation.
Especifique un valor de
configuración adecuado.
No se especificó el valor de
configuración de la propiedad
Orientation en la instrucción FSet.
Consulte "Propiedad Orientation" y
especifique un valor de configuración
adecuado.
3478
No se especificó el valor de
configuración de la propiedad
Polarity.
Especifique un valor de
configuración adecuado.
No se especificaron los valores de
configuración de las propiedades
Fmag_Polarity, Fx_Polarity,
Fy_Polarity, Fz_Polarity,
Tmag_Polarity, Tx_Polarity,
Ty_Polarity y Tz_Polarity en la
instrucción FSet.
Especifique un valor de configuración
adecuado.
3500
Macro duplicada en la instrucción
#define.
Se definió otra macro con el mismo
nombre. Cambie el nombre de la
macro.
3501
No se especificó el nombre de la
macro.
No se especificó el nombre de la
macro en las instrucciones #define,
#ifdef, #ifndef y #undef. Agregue un
nombre de macro.
3502
No se pudo encontrar el nombre de
archivo de inclusión.
No se especificó el nombre del
archivo de inclusión en la instrucción
#include. Agregue un nombre de
archivo de inclusión válido.

Mantenimiento
238 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
3503
El archivo de inclusión especificado
no se encuentra en el proyecto.
Se especificó un archivo de inclusión
que no se encuentra registrado en la
configuración del proyecto. Agregue
un archivo de inclusión a la
configuración del proyecto.
3504
El parámetro de la función de
macro no coincide con la
declaración.
Revise el número de parámetros y
corrija la función de macro.
3505
La macro tiene una referencia
circular.
La macro tiene una referencia
circular. Corrija la referencia
circular.
3506
Las instrucciones #define, #ifdef,
#ifndef, #else, #endif, #undef y de
declaración de variable son solo
válidas en un archivo de inclusión.
Revise y corrija los contenidos del
archivo de inclusión.
3507
Sobre el nivel de anidado de #ifdef
o #ifndef.
El límite de los niveles de anidado es
de un máximo de 7. Corrija el
programa para que no supere el valor
de límite.
3508
No se pudo encontrar #ifdef o
#ifndef.
El número de instrucciones #endif que
corresponden a las instrucciones
#ifdef e #ifndef es excesivo. Elimine
instrucciones #endif o agregue
instrucciones #ifdef e #ifndef.
3509
No se encontró #endif para #ifdef o
#ifndef.
El número de instrucciones #endif que
corresponden a las instrucciones
#ifdef e #ifndef es insuficiente.
Agregue instrucciones #endif.
3510
No se pudo obtener el búfer de la
macro.
-
3550
No se especificó el parámetro para
la función de macro.
La macro declarada como función de
macro se llama sin un argumento.
Corrija el programa.
3600
El comando de movimiento de
seguimiento no puede usar el
parámetro Sense.
Cuando se especifican los datos de
cola en las instrucciones Jump,
Jump3 y Jump3CP, no se puede
especificar el parámetro Sense.
Elimine la instrucción Sense.
3601
El tipo de parámetro no coincide
con la función externa ' ** '.
Revise todas las instrucciones que
llaman a esta función en este
archivo.
No se puede especificar el parámetro
LJM en las instrucciones BGo, TGo,
Arc, Arc3, BMove, Move y TMove.
Elimine el parámetro LJM.
3602
El comando de movimiento de
seguimiento especificado no puede
usar el parámetro LJM.
La función InReal no se puede usar
con la instrucción Wait. Corrija el
programa.
3603
La función InReal no se puede usar
con la instrucción Wait.
No se puede especificar el parámetro
PerformMode en las instrucciones
Jump3, Jump3CP, Arc, Arc3, BMove,
Move y TMove. Elimine el parámetro
PerformMode.
3605
El comando de movimiento de
seguimiento especificado no puede
usar el parámetro PerformMode.
No se puede especificar el parámetro
LJM en las instrucciones BGo, TGo,
Arc, Arc3, BMove, Move y TMove.
Elimine el parámetro LJM.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 239
N.º
Mensaje
Solución
Nota 1
Nota 2
3606
No se puede usar el índice.
No se puede especificar el número de
índice excepto en la propiedad List en
las instrucciones GSet y GGet.
Corrija el programa.
3607
Se especificó un índice de objeto no
válido.
Se especificó un índice no válido en la
propiedad Objects de las
instrucciones VSet y VGet. El índice
debe ser superior a 1 e inferior al
número de objetos en la secuencia
especificada. Especifique un índice
adecuado.
3608
Se especificó un índice de control
no válido.
Se especificó un índice no válido en la
propiedad Controls de las
instrucciones GSet y GGet. El índice
debe ser superior a 1 e inferior al
número de controles en el formulario
especificado. Especifique un índice
adecuado.
3609
Los parámetros del modificador
están duplicados.
Revise el programa.
Los datos de Force Guide o el
parámetro CF están duplicados en las
instrucciones CVMover, FCKeep y en
otras instrucciones para el
movimiento del robot. Corrija el
programa.
3610
No se puede usar una palabra clave
como nombre de etiqueta.
Las palabras claves como un
comando o una función se usan como
nombre de etiqueta. Cambie el
nombre de la etiqueta que no use
estas palabras claves.
3733
No se especificó el nombre de
secuencia o nombre de calibración
de visión.
No se especificó el nombre de
secuencia o nombre de calibración de
visión en las instrucciones VSet y
VGet. Agregue un nombre de
secuencia o un nombre de
calibración.
3800
Proceso de compilación cancelado.
-
3801
Proceso de enlace cancelado.
-
3802
Proceso de compilación cancelado.
Los errores de compilación
alcanzaron el número máximo.
Corrija el error en el programa y
recompile el proyecto.
3803
Proceso de enlace cancelado.
Los errores de enlace alcanzaron el
número máximo.
Corrija el error en el programa y
recompile el proyecto.
3804
El comando especificado no se
puede ejecutar desde la ventana
Command.
La declaración de variables y
funciones, la instrucción de control del
programa, los comandos de
preprocesador y algunos comandos
no pueden ser ejecutados desde la
ventana Command. Para conocer
detalles, consulte "Apéndice A: Lista
de condiciones de uso de comandos
de SPEL+" en la Referencia del
lenguaje SPEL+.

Mantenimiento
240 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
3805
El comando especificado solo se
puede ejecutar desde la ventana
Command.
Las instrucciones Brake, SysConfig,
Where, Cnv_QueList y WorlQue_List
solo se pueden ejecutar desde la
ventana Command. Elimine estas
instrucciones desde el programa.
3806
La función especificada no se
puede ejecutar desde la ventana
Command.
La función LogIn no se puede ejecutar
desde la ventana Command incluso
cuando se usa con la instrucción
Print. Use la función en el programa.
3808
No se puede usar la sintaxis
especificada en la versión actual.
Los parámetros de movimiento LJM y
PerformMode no se pueden
especificar según la versión del
compilador.
Parámetro LJM: 6.0.x.x o posterior
Parámetro PerformMode: 7.0.4.x o
posterior
Revise la versión del compilador
desde las propiedades del proyecto.
3809
Las variables de módulo no se
pueden usar en la ventana
Command.
No se puede acceder a la variable de
módulo desde la ventana Command.
Revise el comando de entrada.
3812
No se puede usar la función
especificada con una salida remota
del usuario.
Las funciones para la expresión de
condición de salida remota definida
por el usuario son limitadas.
Consulte el Manual del usuario de
EPSON RC+7.0 “11.8 E/S de salida
remota definida por el usuario” y
especifique una función válida.
3813
No se puede usar la etiqueta,
función y variable definidas por el
usuario con una salida remota del
usuario.
No se puede usar la etiqueta, función
y variable definidas por el usuario con
la expresión de condición de salida
remota definida por el usuario.
Corrija la expresión de condición.
3814
El tamaño del código de objeto
supera el tamaño disponible.
Una combinación de instrucciones
múltiples supera el tamaño disponible
de código intermedio que se puede
ejecutar de una vez (1024 bytes).
Divida las instrucciones.
3815
No se puede especificar el
parámetro para la propiedad o el
estado en la ventana Command.
Elimine el parámetro y ejecute
nuevamente.
Cuando ejecute la instrucción FGet o
MPGet desde una ventana
Command, no es posible especificar
un parámetro en una propiedad o
estado.
Elimine el parámetro y ejecute
nuevamente.
3850
No se encontró el archivo.
-
3851
No se encontró el archivo de
puntos.
No se pudo leer el archivo de puntos
que configura el proyecto. Revise en
la carpeta del proyecto si existe el
archivo.
3852
No se encontró el archivo de
etiqueta de E/S.
No se pudo leer el archivo de etiqueta
de E/S que configura el proyecto.
Revise en la carpeta del proyecto si
existe el archivo.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 241
N.º
Mensaje
Solución
Nota 1
Nota 2
3853
No se encontró el archivo de
etiqueta de error de usuario.
No se pudo leer el archivo de etiqueta
de error de usuario que configura el
proyecto. Revise en la carpeta del
proyecto si existe el archivo.
3854
El archivo de fuerza no existe.
Revise en la carpeta del proyecto si
existe el archivo.
No se pudo leer el archivo de fuerza
que configura el proyecto. Revise en
la carpeta del proyecto si existe el
archivo.
3860
El archivo de etiqueta de E/S no es
un formato admitido.
Vuelva a generar el archivo de
etiqueta de E/S.
3861
El archivo de etiqueta de error de
usuario tiene un formato de archivo
no admitido.
Vuelva a generar el archivo de error
de usuario.
3862
El archivo de puntos tiene un
formato de archivo no admitido.
Vuelva a generar el archivo de
puntos.
3863
El archivo de proyecto de Vision
tiene un formato de archivo no
admitido.
Vuelva a generar la secuencia de
Vision.
3864
El archivo de proyecto de GUI
Builder tiene un formato de archivo
no admitido.
Vuelva a generar el formulario de GUI
Builder.
3865
El archivo OBJ no es un formato
admitido.
Recompile el proyecto.
3866
El archivo de fuerza tiene un
formato de archivo no admitido.
Vuelva a crear el archivo de fuerza.
Vuelva a generar el archivo de fuerza.
3870
No se puede especificar el objeto
de la propiedad de masa.
Revise el programa.
No se puede especificar el objeto de
la propiedad de masa en las
instrucciones FSet, FGet, FDel y FList
y las funciones FDef y FLabel$.
Corrija el programa.
3871
No se puede especificar un objeto
del sistema de coordenadas de
fuerza.
Revise el programa.
No se puede especificar un objeto de
sistema de coordenadas de fuerza en
las instrucciones Go, BGo, TGo,
Jump, Jump3, Mode, BMove, TMove,
Arc y Arc3, en las instrucciones
MPSet, MPGet, MPDel y MPList y en
las funciones MPDef y MPLabel$.
Corrija el programa.
3872
No se puede especificar un objeto
de control de fuerza.
Revise el programa.
No se puede especificar un objeto de
control en las instrucciones Go, BGo,
TGo, Jump y Jump3, las instrucciones
MPSet, MPGet MPDel y MPList y las
funciones MPDef y MPLabel$.
Corrija el programa.
3873
No se puede especificar un objeto
de monitor de fuerza.
Revise el programa.
No se puede especificar un objeto de
monitor de fuerza en las instrucciones
MPSet, MPGet, MPDel y MPList y las
funciones MPDef y MPLabel$. Corrija
el programa.
3874
No se puede especificar un objeto
disparador de fuerza.
Revise el programa.
No se puede especificar un objeto
disparador de fuerza en las
instrucciones MPSet, MPGet, MPDel
y MPList y las funciones MPDef y
MPLabel$. Corrija el programa.

Mantenimiento
242 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
3875
No se puede especificar un objeto
sensor de fuerza.
Revise el programa.
No se puede especificar un objeto
sensor de fuerza en las instrucciones
FDel y FList, las funciones FDef y
FLabel$, las instrucciones MPSet,
MPGet, MPDel y MPList y las
funciones MPDef y MPLabel$.
Corrija el programa.
3876
No se puede especificar un objeto
de robot.
Revise el programa.
No se puede especificar un objeto de
robot en las instrucciones FDel y
FList, las funciones FDef y FLabel$,
las instrucciones MPSet, MPGet,
MPDel y MPList y las funciones
MPDef y MPLabel$.
Corrija el programa.
3877
No se puede especificar un objeto
de Force Control y un objeto del
sistema de coordenadas de fuerza
al mismo tiempo.
Revise el programa.
No se puede especificar un objeto de
Force Control y un objeto del sistema
de coordenadas de fuerza al mismo
tiempo en la instrucción FCSMove.
Corrija el programa.
3878
No se puede especificar el
parámetro CF.
Elimine el parámetro CF.
No se puede especificar el parámetro
CF en las instrucciones Go, BGo,
TGo, Jump y Jump3.
Elimine el parámetro CF.
3879
No se puede especificar la etiqueta
del objeto de la propiedad de masa.
Revise el programa.
No se puede especificar la etiqueta
del objeto de la propiedad de masa en
las instrucciones MPDel y MPList.
Corrija el programa.
3880
No se puede especificar la etiqueta
del objeto del sistema de
coordenadas de fuerza.
Revise el programa.
No se puede especificar la etiqueta
del objeto del sistema de
coordenadas de fuerza en las
instrucciones FDel y FList.
Corrija el programa.
3881
No se puede especificar la etiqueta
del objeto de control de fuerza.
Revise el programa.
No se puede especificar la etiqueta
del objeto de control de fuerza en las
instrucciones FDel y FList.
Corrija el programa.
3882
No se puede especificar la etiqueta
del objeto de monitor de fuerza.
Revise el programa.
No se puede especificar la etiqueta
del objeto de monitor de fuerza en las
instrucciones FDel y FList.
Corrija el programa.
3883
No se puede especificar la etiqueta
del objeto disparador de fuerza.
Revise el programa.
No se puede especificar la etiqueta
del objeto disparador de fuerza en las
instrucciones FDel y FList.
Corrija el programa.
3884
No se puede especificar la etiqueta
del objeto sensor de fuerza.
Revise el programa.
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.
3885
No se puede especificar el número
del objeto de la propiedad de masa.
Revise el programa.
No se puede especificar el número
del objeto de la propiedad de masa en
la función MPNumber.
Corrija el programa.
3886
No se puede especificar el número
del objeto del sistema de
coordenadas de fuerza.
Revise el programa.
No se puede especificar el número
del objeto del sistema de
coordenadas de fuerza en la función
FNumber.
Corrija el programa.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 243
N.º
Mensaje
Solución
Nota 1
Nota 2
3887
No se puede especificar el número
del objeto de control de fuerza.
Revise el programa.
No se puede especificar el número
del objeto de control de fuerza en la
función FNumber.
Corrija el programa.
3888
No se puede especificar el número
del objeto de monitor de fuerza.
Revise el programa.
No se puede especificar el número
del objeto de monitor de fuerza en la
función FNumber.
Corrija el programa.
3889
No se puede especificar el número
del objeto disparador de fuerza.
Revise el programa.
No se puede especificar el número
del objeto del disparador de fuerza en
la función FNumber.
Corrija el programa.
3890
No se puede especificar el número
del objeto sensor de fuerza.
Revise el programa.
-
3891
El tipo de los dos objetos
especificados no coincide.
Especifique el mismo tipo de
objetos.
Los tipos de datos del primer y
segundo parámetro no coinciden en
las instrucciones FDel, FList, MPDel y
MPList.
Corrija el programa.
3900
No se puede obtener el búfer de
comunicación interno.
-
3901
El tamaño de búfer no es suficiente.
-
3910
Se especificó un comando sin
definir.
-
3911
No se puede ingresar el nombre del
archivo en el búfer de nombre de
archivo.
-
3912
No se puede obtener el búfer
interno.
-
3913
No se puede definir la prioridad.
Reinicie el controlador.
3914
ICode no válido.
Recompile el proyecto.
3915
ICode no válido.
Recompile el proyecto.
3916
ICode no válido.
Recompile el proyecto.
3917
ICode no válido.
Recompile el proyecto.
3918
ICode no válido.
Recompile el proyecto.
3919
ICode no válido.
Recompile el proyecto.
3920
ICode no válido.
Recompile el proyecto.
3921
ICode no válido.
Recompile el proyecto.
3930
No se especifica ID de tipo de
VDefTool.
Especifique un valor numérico para el
segundo parámetro del comando
VDefTool.
3931
No se especifica ID de tipo de
VDefArm.
Especifique un valor numérico para el
segundo parámetro del comando
VDefArm.
3932
No se especifica VDefArm
ArmSetMode.
Especifique un valor numérico para el
tercer parámetro del comando
VDefArm.
3933
No se especifica ID de tipo de
VDefLocal.
Especifique un valor numérico para el
segundo parámetro del comando
VDefLocal.
3934
No se especifica ID de tipo de
VDefLocal CalibPlate.
Especifique un valor numérico para el
tercer parámetro del comando
VDefLocal.

Mantenimiento
244 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
3940
No se especifica ID de tipo de
LatchPos.
Especifique un valor numérico para el
primer parámetro del comando
LatchPos.
3960
No se especificaron ni Robot, ni
Object ni ResetCollision.
3961
No se especificaron ni Hand ni
Property.
3962
Se especificó una propiedad no
válida.
3963
No se especificaron ni Robot ni
Object.
3964
Se especificó un objeto no válido.
3965
Se especificó un índice de objeto no
válido.
3990
No se especificó tipo TCPSpeed de
E/S analógica.
Especifique un valor numérico para el
tercer parámetro del comando
AIO_Set.
4001
El brazo alcanzó el límite de rango
de movimiento.
Revise el punto que se moverá, el
punto actual y la configuración de
rango.
4002
El valor especificado está fuera del
rango permitido.
Revise los parámetros de
configuración.
El parámetro
que causa el
error.
4003
Error del driver del dispositivo de
movimiento.
Error de comunicación dentro del
módulo de control de movimiento.
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.
4004
Error del driver del dispositivo de
movimiento.
Error de espera de evento dentro
del módulo de control de
movimiento.
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.
4005
La posición del punto actual supera
el valor LimZ especificado.
Reduzca el eje Z. Aumente el valor
LimZ especificado.
4006
La posición del punto objetivo
supera el valor LimZ especificado.
Reduzca la posición de la coordenada
Z del punto objetivo. Aumente el valor
LimZ especificado.
4007
Error de conversión de
coordenadas. El punto final/medio
está fuera del área de movimiento.
Se desplaza al exterior del área de
movimiento.
Revise si no se especificó la
coordenada fuera del rango de
movimiento.
4008
La posición del punto actual o el
valor LimZ especificado está fuera
del rango de movimiento.
Cambie el valor LimZ especificado.
4009
Error del driver del dispositivo de
movimiento.
Error de tiempo de espera dentro
del módulo de control de
movimiento.
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.
4010
No se definieron las coordenadas
locales especificadas.
Defina el sistema de coordenadas
local.
Número local
4011
El brazo alcanzó el límite de rango
de movimiento XY especificado por
la instrucción XYLim.
Revise el área limitada por la
instrucción XYLim.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 245
N.º
Mensaje
Solución
Nota 1
Nota 2
4012
El valor del límite superior de Box
es menor que el valor del límite
inferior. Cambie los valores del
límite superior e inferior.
Defina el valor de límite superior para
que sea mayor que el valor de límite
inferior.
4013
Error de cálculo interno del módulo
de control de movimiento.
Falló el cálculo de la temporización
del movimiento de arco. Realice una
de las siguientes opciones:
- Revise y modifique el parámetro
Arch
- Desactive Arch
4014
No se completó MCAL.
Ejecute MCal. Asegúrese de que
MCOdr esté definido para la
articulación conectada a la placa PG.
4016
Se intentó ejecutar la instrucción
SFree para articulaciones
prohibidas.
A causa de las limitaciones
mecánicas del robot, está prohibido
definir algunas articulaciones en el
estado sin servo. Revise las
especificaciones del robot.
4018
Error de comunicación dentro del
módulo de control de movimiento.
Error de la suma de comprobación.
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.
4021
Las posiciones de punto usadas
para definir Local están demasiado
cerca.
Configure la distancia entre puntos
que estén a más de 1 μm.
4022
Los datos de coordenadas de
punto utilizados para definir Local
no son válidos.
Haga coincidir los datos de
coordenadas para los puntos que se
especificarán.
4023
No se puede ejecutar cuando el
motor está en el estado
desactivado.
Active la alimentación del motor y
ejecútelo.
4024
No se pudo completar el
posicionamiento del brazo con la
especificación Fine actual.
Revise que el robot no genere
vibraciones o que todas las piezas y
tornillos estén aseguradas
firmemente. Aumente el valor de la
configuración Fine.
4025
No se puede ejecutar un comando
de movimiento durante la
condición de parada de
emergencia.
Elimine la condición de parada de
emergencia y ejecute el comando de
movimiento.
4026
Error de comunicación dentro del
módulo de control de movimiento.
Error del servo I/F.
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.
4028
Error de comunicación dentro del
módulo de control de movimiento.
Error de estado del driver del
dispositivo.
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.
4030
El búfer del cálculo de torque
promedio se desbordó.
Reduzca el intervalo de tiempo de
Atclr a Atrq.
Reduzca el intervalo de tiempo de
Atclr a Atrq a menos de dos minutos.
4031
No se puede ejecutar un comando
de movimiento cuando el motor
está en el estado desactivado.
Active la alimentación del motor y
ejecute el comando de movimiento.
4032
No se puede ejecutar un comando
de movimiento cuando hay una o
más articulaciones en el estado
SFree.
Defina todas las articulaciones en el
estado SLock y ejecute el comando
de movimiento.

Mantenimiento
246 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
4033
Las articulaciones de la placa del
generador de pulsos no admiten el
comando especificado.
Las articulaciones con placa PG no
permiten el comando especificado.
4034
Este modelo del robot no admite el
comando especificado.
Elimine el comando no admitido del
programa.
4035
La instrucción CP intentó cambiar
solo la orientación de la
herramienta.
Defina una distancia de movimiento
entre los puntos. Use el modificador
ROT, la instrucción SpeedR y la
instrucción AccelR.
4036
La velocidad de rotación de la
orientación de la herramienta
según la instrucción CP es
demasiado alta.
Reduzca los valores de configuración
para las instrucciones SpeedS y
AccelS. Use el modificador ROT, la
instrucción SpeedR y la instrucción
AccelR.
4037
El atributo de punto de las
posiciones de punto actuales y de
objetivo difieren para ejecutar un
comando de control de CP.
Haga coincidir el atributo de punto.
4038
Dos posiciones de punto están
demasiado cerca para ejecutar una
instrucción Arc.
Configure la distancia entre puntos
que estén a más de 1 μm.
4039
Tres posiciones de punto
especificadas por la instrucción Arc
se encuentran en una línea recta.
Use la instrucción Move.
4041
Se intentó el comando de
movimiento hacia el área prohibida
en la parte posterior del robot.
Revise el rango de movimiento del
robot.
4042
Error del driver del dispositivo de
movimiento.
No se pudo detectar la interrupción
del formato circular.
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.
4043
Este modelo del robot o este tipo
de articulación no admiten el
comando especificado.
Elimine el comando no admitido del
programa.
4044
Error de curva. No se admite la
forma de curva especificada.
Cree un archivo de curva nuevamente
con la instrucción Curve.
4045
Error de curva. No se admite el
modo especificado.
Especifique el modo Curve
adecuadamente. Cree un archivo de
curva nuevamente con la instrucción
Curve.
4046
Error de curva. El número de
coordenadas especificado está
fuera del rango permitido.
El número de ejes de coordenadas
disponible es de 2, 3, 4 y 6. Cree un
archivo de curva nuevamente con la
instrucción Curve.
4047
Error de curva. No se especificaron
datos de punto.
Cree un archivo de curva nuevamente
con la instrucción Curve.
4048
Error de curva. Se especificó el
proceso paralelo antes de la
designación del punto.
Cree un archivo de curva nuevamente
con la instrucción Curve.
4049
Error de curva. El número de
procesos paralelos está fuera del
rango permitido.
Cree un archivo de curva nuevamente
con la instrucción Curve.
4050
Error de curva. El número de
puntos está fuera del rango
permitido.
El número de puntos disponibles
difiere según la forma de curva.
Vuelva a revisar el número de puntos.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 247
N.º
Mensaje
Solución
Nota 1
Nota 2
4051
Error de curva. El atributo Local y
el atributo de punto de todos los
puntos especificados no coinciden.
Haga coincidir los indicadores locales
y de punto para todos los puntos
especificados.
4052
Error de curva. No hay suficiente
memoria para dar formato al
archivo de curva.
Reinicie el controlador.
4053
Error de curva. No se pudo dar
formato al archivo de curva.
Revise los datos de punto. Revise si
dos puntos adyacentes no se
sobreponen a la línea del punto
especificado.
4054
Error de curva. Error del archivo de
curva
El archivo de curva está dañado.
Cree un archivo de curva nuevamente
con la instrucción Curve.
4055
Error de curva. No hay distancia
para el movimiento del archivo de
curva.
Revise los datos de punto.
4056
Error de curva. Las posiciones de
punto para la instrucción Curve
están demasiado cerca.
Defina la distancia entre dos puntos
adyacentes al punto especificado en
más de 0,001 mm.
4058
Se ejecutó un comando prohibido
durante el seguimiento.
Elimine el comando prohibido del
programa.
4059
Se ejecutó un comando de
restablecimiento del codificador
mientras el motor estaba en el
estado activado.
Apague el motor.
4060
Se ejecutó un comando no válido
mientras el motor estaba en el
estado activado.
Apague el motor.
4061
El parámetro especificado está en
uso.
Intentó borrar el brazo y la
herramienta actualmente
especificado.
Seleccione otro brazo y herramienta y
ejecútelos.
4062
La variación de orientación es
superior a 360 grados.
Intentó girar la articulación n.º J6 más
de 360 grados con un comando de
movimiento CP.
4063
La variación de orientación del
punto adyacente es superior a 90
grados.
En la línea de punto especificada por
la instrucción Curve, defina la
variación de orientación de los valores
de coordenadas de U, V y W entre dos
puntos adyacentes en menos de 90
grados.
4064
No se puede ejecutar la corrección
de orientación automáticamente.
En la línea de punto especificada, no
se puede crear una curva con la
corrección de orientación automática.
Cambie la línea de punto especificada
para que disminuya la variación de
orientación de la articulación n.º J6.
4065
Intente realizar una rotación de J6
con la misma orientación en la
instrucción CP.
Intentó girar la articulación n.º J6 más
de 360 grados con un comando de
movimiento CP. Intentó realizar una
rotación de la articulación 6 con la
misma orientación de inicio de
movimiento.
Cambie el punto objetivo para que la
articulación n.º J6 realice menos de
una rotación.

Mantenimiento
248 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
4066
Se intentó el comando Motion en el
área prohibida según la
combinación de articulaciones.
Intentó mover las articulaciones al
área limitada de interferencia del
robot.
4068
Se especificó el parámetro del
modificador ROT para el comando
de movimiento CP sin la rotación
de orientación.
Elimine el ROT desde el comando de
movimiento CP.
4069
Se especificó ECP sin seleccionar
ECP en la instrucción CP.
Especifique un ECP válido.
4070
El número ECP especificado no
coincide con el número ECP
utilizado en la creación del archivo
de curva.
Especifique un ECP válido.
4071
Se intentó el comando de
movimiento durante la condición
de bloqueo de freno
electromagnético.
Libere el freno electromagnético.
4072
Error de inicialización. No se
inicializó el monitor de hardware.
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.
4073
La variación de orientación del
punto adyacente es superior a 90
grados.
Cualquiera de los U, V o W cambia en
90 grados o más. Cambie el punto de
la orientación.
4074
El tipo de motor no coincide con la
configuración del robot actual.
Revise si el modelo del robot
especificado está conectado.
4075
La opción no está activa.
Habilite la opción.
4076
Las posiciones de punto usadas
para definir Plane están
demasiado cerca.
Defina la distancia entre puntos a más
de 1 μm.
4077
Los datos de coordenadas de
punto utilizados para definir Plane
no son válidos.
Haga coincidir los datos de
coordenadas para los puntos que se
especificarán.
4078
La instrucción CP intentó cambiar
solo el eje ST adicional.
Use los comandos de movimiento
PTP para mover solo el eje adicional.
4079
La velocidad del eje ST adicional
con la instrucción CP es
demasiado alta.
Reduzca los valores definidos de
SpeedS y AccelS.
4080
No se puede ejecutar cuando
Enable Switch está desactivado.
Active Enable Switch y ejecútelo.
4081
Se detectó un error durante la
operación.
Revise la placa PG.
Revise la conexión con el driver del
motor.
Reemplace la placa PG.
Reemplace el controlador.
4082
Se detectó un error de la placa del
generador de pulsos durante la
operación.
Revise la placa PG.
Revise la conexión con el driver del
motor.
Reemplace la placa PG.
4083
MCAL no se completó a tiempo.
Defina el parámetro PG para que
MCAL pueda completarse dentro de
120 segundos.
4084
Se detectó un error del sensor de
límite durante la operación.
Revise el sensor de límite.
4085
No se pudo cambiar a la ubicación
específica.
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 249
N.º
Mensaje
Solución
Nota 1
Nota 2
4086
No se puede ejecutar porque no se
encuentra en el modo de
simulacro.
Cambie al modo de simulacro y
ejecútelo.
4087
No se pudo dar formato al archivo
de reproducción.
Revise la cantidad de espacio libre de
la computadora.
Reinicie la computadora.
Reinstale RC+.
Reemplace la computadora.
4089
El intervalo de tiempo de
HealthRBStart a HealthRBStop es
demasiado largo o demasiado
corto.
Defina el intervalo de tiempo de
HealthRBStart a HealthRBStop para
que esté entre 1 y 3600 segundos.
-
-
4090
HealthRBStop se ejecuta sin
HealthRBStart.
Ejecute HealthRBStop después de
ejecutar HealthRBStart.
Este error se produce cuando se
ejecuta nuevamente HealthRBStop
sin ejecutar HealthRBStart después
de HealthRBStop.
-
-
4091
No existe el canal de E/S analógica
especificado.
Revise el número de canal. Monte la
placa opcional de E/S analógica.
4092
El canal de salida analógico
especificado se usa para una
salida de datos de velocidad.
Ejecute después de detener la salida
de velocidad del canal especificado.
4093
Si el movimiento se pausa durante
la evasión de singularidad, no se
puede reanudar el movimiento.
Cancele el comando de
movimiento.
Cancele el comando de movimiento.
4094
La posición actual está fuera de
rango de movimiento.
Alguno de los ejes J1 o J2 está fuera
de rango de movimiento. Siga los
procedimientos siguientes y mueva el
robot dentro del rango de movimiento.
・ Use el comando Pulse (Pulso) y
JTran para mover el robot dentro del
rango de movimiento.
・Mueva manualmente el robot dentro
del rango de movimiento.
(Este error solo se produce en las
series RS y N).
4096
Robot en uso.
No se puede ejecutar el comando
de movimiento cuando otras tareas
están usando el robot.
El comando de movimiento del robot
no se puede ejecutar
simultáneamente desde más de una
tarea. Revise el programa.
Este error no se puede recuperar
automáticamente mediante OnErr.
4099
Se detectó un error del servo
durante la operación.
Revise si se está produciendo un error
número 5000 en el historial del
sistema. Si se está produciendo el
error, tome las medidas para un error
número 5000.
4100
Error de comunicación dentro del
módulo de control de movimiento.
No se puede calcular el punto o
pulso actual.
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.

Mantenimiento
250 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
4101
Error de comunicación dentro del
módulo de control de movimiento.
No se puede calcular el punto o
pulso actual.
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.
4103
Error de inicialización. Error de
inicialización del módulo de control
de movimiento.
Manipuladores de la serie T/VT:
Para el manipulador de la serie T,
reinicie el controlador y tome medidas
contra el ruido.
Si el número de articulación aparece
en el historial del sistema, cambie la
unidad del motor. De lo contrario,
cambie la placa de la CPU.
Otros manipuladores:
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.
4104
Se agotó el tiempo de espera de
posicionamiento de la articulación
conectada a la placa del generador
de pulsos.
No se puede recibir la señal de
finalización de posicionamiento
(DEND) desde el servomotor
conectado a la placa de PG
(generador de pulsos).
4108
Error de inicialización.
Error de conexión de la unidad del
motor.
Revise el cableado de la unidad del
motor.
4150
Error de señal de entrada
redundante de la parada de
emergencia.
El estado de la entrada de parada de
emergencia redundante sigue siendo
diferente por más de dos segundos.
Revise que no exista una
desconexión, error de conexión a
tierra o cortocircuito en la señal de
entrada de la parada de emergencia.
Luego reinicie el controlador.
4151
Error de la señal de entrada
redundante de la protección.
El estado de la entrada de parada de
emergencia redundante sigue siendo
diferente por más de dos segundos.
Revise que no exista una
desconexión, error de conexión a
tierra o cortocircuito en la señal de
entrada de la parada de emergencia.
Luego reinicie el controlador.
4152
Error de soldadura del relé del
circuito principal.
Se detectó un error de soldadura del
relé debido a sobrecorriente del
sistema de alimentación.
Reemplace el controlador.
Reemplace el robot.
4153
Error de señal de entrada
redundante del interruptor de
activación.
El estado de la entrada de la señal de
activación redundante difiere
continuamente por más de dos
segundos.
Revise la conexión del conector de
TP.
Reemplace el TP.
Reemplace el controlador.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 251
N.º
Mensaje
Solución
Nota 1
Nota 2
4154
La temperatura del resistor de
regeneración fue más alta que la
temperatura especificada.
El trabajo del robot es demasiado alto.
Alargue el tiempo de espera o
reduzca el valor de aceleración. Si se
produce un error aunque se haya
reducido el trabajo, reemplace el
DPB.
4180
Error de inicialización del robot. No
se encontró el robot especificado
Configure el manipulador.
4181
Error de inicialización del robot. El
robot especificado está siendo
utilizado por otra tarea.
No se puede configurar el
manipulador especificado, puesto que
ya está configurado.
4182
Error de inicialización del robot. El
nombre del robot es demasiado
largo.
Acorte el nombre del manipulador.
4183
Error de inicialización del robot.
Error de versión de los datos del
robot.
Vuelva a configurar el manipulador.
4187
Error de inicialización del robot.
Error de comunicación con el
módulo: VSRCMNPK.
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.
4188
Error de inicialización del robot. La
matriz de interferencia del ángulo
de la articulación no es válida.
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.
4189
Error de inicialización del robot.
Error de comunicación con el
módulo: VSRCMC.
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.
4191
Error de inicialización del robot. La
matriz de transformación de pulsos
físico-lógicos no es válida.
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.
4192
Error de inicialización del robot.
Error de comunicación con el
módulo del servo.
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.
4210
El circuito RAS detectó un mal
funcionamiento del sistema servo.
Reinicie el controlador.
Compruebe si hay ruidos.
Reemplace el controlador.
Reinicie el controlador, tome medidas
contra el ruido o reemplace la DMB.
4211
Error interno de RAM de la CPU
servo.
Reinicie el controlador.
Compruebe si hay ruidos.
Reemplace la DMB.
Reinicie el controlador, tome medidas
contra el ruido o reemplace la DMB.
4212
Error de RAM para la
comunicación de la CPU principal y
la CPU servo. Reinicie el
controlador. Compruebe si hay
ruidos.
Reemplace la DMB.
Reinicie el controlador, tome medidas
contra el ruido o reemplace la DMB.
4213
Error interno de RAM de la CPU
servo.
Reinicie el controlador.
Compruebe si hay ruidos.
Reemplace la DMB.
Reinicie el controlador, tome medidas
contra el ruido o reemplace la DMB.
Para la serie T, no es la DMB, sino la
placa de la CPU.

Mantenimiento
252 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
4214
Error de inicialización de la
comunicación de la CPU principal y
la CPU servo.
Reinicie el controlador.
Compruebe si hay ruidos.
Reemplace la DMB.
Reinicie el controlador, tome medidas
contra el ruido o reemplace la DMB.
Para la serie T, no es la DMB, sino la
placa de la CPU.
4215
Error de inicialización de la
comunicación de la CPU principal y
la CPU servo.
Reinicie el controlador.
Compruebe si hay ruidos.
Reemplace la DMB.
Reinicie el controlador, tome medidas
contra el ruido o reemplace la DMB.
4216
Error de comunicación de la CPU
principal y la CPU servo. Reinicie el
controlador. Compruebe si hay
ruidos. Reemplace la DMB.
Reinicie el controlador, tome medidas
contra el ruido o reemplace la DMB.
Para la serie T, no es la DMB, sino la
placa de la CPU.
4217
Error de comunicación de la CPU
principal y la CPU servo. Reinicie el
controlador. Compruebe si hay
ruidos. Reemplace la DMB.
Reinicie el controlador, tome medidas
contra el ruido o reemplace la DMB.
Para la serie T, no es la DMB, sino la
placa de la CPU.
4218
Exceso del comando de tiempo
prolongado del servo.
Reinicie el controlador, tome medidas
contra el ruido o reemplace la DMB.
4219
Error de la suma de comprobación
del comando de tiempo prolongado
del servo.
Reinicie el controlador, tome medidas
contra el ruido o reemplace la DMB.
4220
El temporizador guardián del
sistema detectó una falla.
Reinicie el controlador.
Compruebe si hay ruidos.
Reemplace la DMB.
Reinicie el controlador, tome medidas
contra el ruido o reemplace la DMB.
Para la serie T, no es la DMB, sino la
placa de la CPU.
4221
Error de comprobación de la
unidad de mando.
Reinicie el controlador, tome medidas
contra el ruido o reemplace la DMB.
4222
Error de RAM de la CPU servo.
Reinicie el controlador.
Compruebe si hay ruidos.
Reemplace la DMB.
Reinicie el controlador, tome medidas
contra el ruido o reemplace la DMB.
4223
Error del circuito duplicado de la
parada de emergencia o la
protección.
Revise el cableado.
Revise el cableado de la parada de
emergencia o la protección.
4224
Se detectó voltaje bajo en la
alimentación del circuito principal.
Revise el voltaje de la fuente de
alimentación. Reinicie el
controlador.
Revise el voltaje de alimentación o
reinicie el controlador.
4225
El contacto del relé de control de la
alimentación del circuito principal
está soldado.
Reemplace el DPB.
Reemplace el DPB.
4226
Detecte la diferencia de
reconocimiento de la CPU
secundaria y la CPU principal.
Reinicie el controlador, tome medidas
contra el ruido o reemplace la placa de
la CPU.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 253
N.º
Mensaje
Solución
Nota 1
Nota 2
4227
La temperatura del resistor de
regeneración fue más alta que la
temperatura especificada.
Especifique la configuración de
peso/inercia. Revise la carga.
Revise el robot. (Uniformidad, juego,
movimiento no uniforme, tensión
suelta de la correa, freno)
Revise la interferencia con los
equipos periféricos. (Colisión,
contacto)
Revise la configuración del modelo.
Revise la conexión del cable de
alimentación.
4228
Sobrevoltaje de la CPU
secundaria.
Reemplace la placa DPB.
4230
Error de estado en tiempo real del
servo.
Error de la suma de comprobación.
Se detectó un error en la suma de
comprobación de los datos en el
controlador.
Compruebe si hay un cortocircuito y
una conexión incorrecta del cableado
de los equipos periféricos.
(Emergencia, D-E/S y conectores E/S
de expansión)
Reemplace el controlador.
4232
Error de estado en tiempo real del
servo. Error de contador de
funcionamiento libre con el servo.
Se detectó un error del contador de
funcionamiento libre en el controlador.
Compruebe si hay un cortocircuito y
una conexión incorrecta del cableado
de los equipos periféricos.
(Emergencia, D-E/S y conectores E/S
de expansión)
Reemplace el controlador.
4233
Error de estado en tiempo real del
servo. Error de comunicación con
la CPU servo.
Se detectó un error de comunicación
en el controlador.
Compruebe si hay un cortocircuito y
una conexión incorrecta del cableado
de los equipos periféricos.
(Emergencia, D-E/S y conectores E/S
de expansión)
Reemplace el controlador.
4240
Se detectó una interrupción del
control de movimiento irregular.
Duplicado de interrupción.
Se detectó un error de interrupción en
el controlador.
Compruebe si hay un cortocircuito y
una conexión incorrecta del cableado
de los equipos periféricos.
(Emergencia, D-E/S y conectores E/S
de expansión)
Reemplace el controlador.

Mantenimiento
254 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
4241
Se detectó exceso de velocidad
durante el modo de baja potencia.
Se detectó exceso de velocidad del
robot durante el modo de baja
potencia.
Revise el mecanismo del robot.
(Uniformidad, juego, movimiento no
uniforme, tensión suelta de la correa,
freno)
Revise si el robot no interfiere con los
equipos periféricos. (Colisión,
contacto)
Reemplace el driver del motor.
Reemplace el motor. (Error del motor
y codificador)
Compruebe si hay un cortocircuito y
una conexión incorrecta del cableado
de los equipos periféricos.
(Emergencia, D-E/S y conectores E/S
de expansión)
4242
Se generó una referencia de
aceleración incorrecta.
Intentó operar el robot mientras la
referencia de aceleración superaba el
valor especificado.
Para un movimiento CP, disminuya el
valor AccelS.
4243
Se generó una referencia de
velocidad incorrecta en el modo de
potencia alta.
Se detectó exceso de velocidad del
robot durante el modo de alta
potencia.
Revise el mecanismo del robot.
(Uniformidad, juego, movimiento no
uniforme, tensión suelta de la correa,
freno)
Revise si el robot no interfiere con los
equipos periféricos. (Colisión,
contacto)
Reemplace el driver del motor.
Reemplace el motor. (Error del motor
y codificador)
Compruebe si hay un cortocircuito y
una conexión incorrecta del cableado
de los equipos periféricos.
(Emergencia, D-E/S y conectores E/S
de expansión)
4248
El robot choca consigo mismo.
Cambie la posición objetivo.
Defina un punto de relevo. O bien,
cambie el punto objetivo.
4250
El brazo alcanzó el límite del rango
de movimiento durante la
operación.
Revise si una trayectoria de
movimiento CP está dentro del rango
de movimiento.
4251
El brazo alcanzó el límite del rango
de movimiento XY especificado por
XYLim durante la operación.
Revise la configuración de XYLim.
4252
Se produjo un error de conversión
de coordenadas durante la
operación.
Revise si una trayectoria de
movimiento CP está dentro del rango
de movimiento.
4255
Debido a que SpeedS es
demasiado alta, el robot no puede
pasar a la postura especificada del
codo
Reduzca el valor de SpeedS.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 255
N.º
Mensaje
Solución
Nota 1
Nota 2
4256
Cuando un robot pasó a la postura
específica del codo, se realizaron
Stop (Detención) o Pause (Pausa)
No ejecutar Stop o Pause.
4257
El robot no puede sobrepasar el
área de singularidad del codo
El robot no puede sobrepasar el área
de singularidad del codo.
Para sobrepasar el área de
singularidad de codo, use
SING_AVOID de “AvoidSingularity”.
4261
El brazo alcanzó el límite del rango
de movimiento en el seguimiento
del transportador.
Ponga el transportador dentro del
rango de movimiento. Mientras
tanto, permita que el rango de
seguimiento para la desaceleración
durante el cambio del movimiento
desde seguimiento a sin seguimiento.
Si se produce un error durante el
cambio del movimiento de
seguimiento, se puede evitar si se
aumenta la velocidad de aceleración
para finalizar el movimiento de
seguimiento.
4262
El brazo alcanzó el límite del rango
de movimiento XY en el
seguimiento del transportador.
4263
El brazo alcanzó el límite del rango
de movimiento de pulso en el
seguimiento del transportador.
4267
Trate de superar el atributo J4Flag
sin indicaciones.
Intentó superar el atributo J4Flag
durante el movimiento sin la
indicación J4Flag.
Cambie J4Flag del punto objetivo.
4268
Trate de superar el atributo J6Flag
sin indicaciones.
Intentó superar el atributo J6Flag
durante el movimiento sin la
indicación J6Flag.
Cambie J6Flag del punto objetivo.
4269
Intente superar el atributo de
orientación de muñeca particular
sin indicaciones.
Intentó superar el atributo de
orientación de muñeca particular
durante el movimiento sin la
indicación Wrist (muñeca).
Cambie el atributo Wrist para el punto
objetivo.
Cambie el punto objetivo para evitar
una orientación de muñeca particular.
4270
Intente superar el atributo de
orientación de brazo particular sin
indicaciones.
Intente superar el atributo de
orientación de mano particular
durante el movimiento sin la
indicación Hand (Mano).
Cambie el atributo Hand para el punto
objetivo.
Cambie el punto objetivo para evitar
una orientación de mano particular.
4271
Intente superar el atributo de
orientación de codo particular sin
indicaciones.
Intentó superar el atributo de
orientación de codo particular durante
el movimiento sin la indicación Elbow
(Codo).
Cambie el atributo Elbow para el
punto objetivo.
Cambie el punto objetivo para evitar
una orientación de codo particular.

Mantenimiento
256 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
4272
El indicador de punto especificado
no es válido.
Para el comando de movimiento CP,
la forma del brazo en el punto objetivo
es distinta a la del indicador de punto
especificado para el punto objetivo.
Cambie el indicador de punto para el
punto objetivo.
4273
J6Flag cambió durante el
movimiento de levantamiento en el
seguimiento del transportador.
Ajuste la orientación de la
herramienta, de manera que J6Flag
no cambie.
4274
No se alcanzó J6Flag
especificado. Cambie J6Flag del
punto objetivo.
Para un comando de movimiento CP,
el manipulador alcanzó el punto
objetivo con J6Flag, que es distinto
del especificado para el punto
objetivo.
Cambie J6Flag del punto objetivo.
4275
No se alcanzó J4Flag
especificado. Cambie J4Flag del
punto objetivo.
Para un comando de movimiento CP,
el manipulador alcanzó el punto
objetivo con J4Flag, que es distinto
del especificado para el punto
objetivo.
Cambie J4Flag del punto objetivo.
4276
No se alcanzó el ArmFlag
especificado. Cambie el ArmFlag
para el punto objetivo.
Para un comando de movimiento CP,
el manipulador alcanzó el punto
objetivo con ArmFlag, que es distinto
del especificado para el punto
objetivo.
Cambie ArmFlag para el punto
objetivo.
4277
No se alcanzó el indicador de codo
especificado. Cambie el indicador
de codo para el punto objetivo.
Para un comando de movimiento CP,
el manipulador alcanzó el punto
objetivo con ElbowFlag, que es
distinto del especificado para el punto
objetivo.
Cambie ElbowFlag para el punto
objetivo.
4278
No se alcanzó el WristFlag
especificado. Cambie el WristFlag
para el punto objetivo.
Para un comando de movimiento CP,
el manipulador alcanzó el punto
objetivo con WristFlag, que es distinto
del especificado para el punto
objetivo.
Cambie el WristFlag para el punto
objetivo.
4279
No se alcanzó J1Flag
especificado. Cambie J1Flag del
punto objetivo.
Para un comando de movimiento CP,
el manipulador alcanzó el punto
objetivo con J1Flag, que es distinto
del especificado para el punto
objetivo.
Cambie J1Flag del punto objetivo.
4291
Error de envío de datos en la red
de movimiento.
Revise la conexión del cable de la
unidad de mando.
4292
Error de recepción de datos en la
red de movimiento.
Revise la conexión del cable de la
unidad de mando.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 257
N.º
Mensaje
Solución
Nota 1
Nota 2
4297
Error de envío de datos de la placa
I/F del sensor de fuerza.
Revise la conexión de la placa I/F
del sensor de fuerza y el sensor de
fuerza.
Revise la conexión de la placa I/F del
sensor de fuerza y el sensor de
fuerza.
Reinicie el controlador.
Consulte con nosotros si se genera un
error similar, incluso después de
reiniciar el controlador.
4298
Error de recepción de datos en la
placa I/F del sensor de fuerza.
Revise la conexión de la placa I/F
del sensor de fuerza y el sensor de
fuerza.
Revise la conexión de la placa I/F del
sensor de fuerza y el sensor de
fuerza.
Reinicie el controlador.
Consulte con nosotros si se genera un
error similar, incluso después de
reiniciar el controlador.
4301
La placa de generación de pulsos
detectó una señal limitada.
Reinicie y luego ejecute el siguiente
movimiento.
4302
La placa de generación de pulsos
detectó una señal de alarma.
Desconecte la alarma del driver del
motor de pulsos.
4401
El número de transportador
especificado no es válido.
Revise el número del transportador.
4402
El número de cola del
transportador especificado está
lleno.
El número de registro alcanzó el límite
superior (1000 piezas). Elimine la
cola.
4403
La operación continua no se puede
realizar durante el movimiento de
seguimiento.
¿El movimiento de seguimiento no se
puede continuar después de que se
canceló/puso en pausa?
4404
Los datos de la cola del
transportador especificados no
existen.
Revise el número de cola. O bien,
revise si está registrada la cola.
4405
El transportador no se inicializó
correctamente.
Recompile el proyecto.
Elimine el transportador y luego
restablezca la configuración.
4406
Los datos de cola especificados
están fuera del área definida.
No se puede hacer seguimiento a la
cola fuera del rango. Si la cola
especificada está sobre el límite de
subida, cambie el programa, de
manera que el seguimiento no
empiece hasta que la cola ingrese al
área debajo del límite superior. Si la
cola especificada está debajo del
límite de bajada, cambie el programa
para borrar los datos de la cola.
4407
El codificador no se asignó
correctamente.
Configure el codificador.
4409
El parámetro de la instrucción del
transportador no es válido.
Revise el parámetro.
4410
Se produjo un error de conversión
de coordenadas del transportador.
Recompile el proyecto.
Elimine el transportador y luego
restablezca la configuración.
4411
Error de comunicación dentro de
los módulos del transportador.
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.
4413
Error de inicio de seguimiento del
transportador.
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.

Mantenimiento
258 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
4414
No se puede iniciar el seguimiento
del transportador después del
movimiento con CP activado.
Inicie el seguimiento del transportador
con
CP desactivado.
4415
La configuración del límite de
subida diagonal o del límite de
bajada diagonal no es correcta.
El límite de bajada diagonal está
sobre el límite de subida, o bien, el
límite de subida/de bajada diagonal es
horizontal a la dirección del
transportador. Revise la configuración
del límite de subida/de bajada
diagonal.
4500
No se pueden ejecutar al mismo
tiempo las funciones
especificadas.
Nota 1, 2: Tipo de las funciones.
Revise el programa.
Revise el programa.
Tipo de las
funciones
1:
Movimiento
de punto de
control
externo
(ECP)
2: Control de
torque
3:
Seguimiento
del
transportado
r
4: Función
Force
Control
5: FCSMove
6: Función
de
seguimiento
de distancia
Tipo de las
funciones
* Igual que
la Nota 1
4501
Dispositivo en uso.
Nota 1: Tipo de dispositivo.
Revise si los demás comandos
están utilizando el dispositivo.
Revise si el dispositivo se usa en otra
tarea o comando.
Tipo de
dispositivo
1: Canal de
entrada de
E/S
analógica
4502
No se puede ejecutar este
comando durante la función
Control.
Nota 1: Tipo de función Control.
Salga de la función Control.
Revise si la función Control se ejecuta
en otra tarea o
Salga de la función Control para
ejecutar el comando.
Tipo de
función
Control
1: Función
de
seguimiento
de distancia
4503
Se especificó un parámetro no
definido
Nota 1: Tipo de parámetro. Revise
el parámetro.
Revise si el parámetro está definido.
Defina el parámetro.
Tipo de
parámetro
1: Parámetro
de la función
de
seguimiento
de distancia
4504
Opción no activada.
Revise la configuración de Option.
Habilite la opción.
4601
No se pudo inicializar el
movimiento. Reinicie el
controlador.
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 259
N.º
Mensaje
Solución
Nota 1
Nota 2
4602
Error de cálculo de movimiento.
Reinicie el controlador.
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.
4603
El valor de sensor está fuera del
rango. Revise el sensor.
Revise el valor medido por el sensor.
Revise el estado del sensor.
Revise la configuración del rango del
sensor.
Cuando la Nota 1 es 1 (la función de
seguimiento de distancia usa el
sensor), revise y ajuste el parámetro
especificado por AIO_TrackingStart o
AIO_TrackingSet.
Tipo de
sensor
1: El sensor
es usado por
la función de
seguimiento
de distancia
4604
Se alcanza el punto de
singularidad.
Se evita el punto de singularidad.
Revise si se especificaron las
coordenadas cercanas a la
singularidad.
Revise si el robot se mueve hacia la
singularidad durante la operación.
Revise la posición de la instalación del
robot.

Mantenimiento
260 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
5000
Error de matriz de la compuerta de
servocontrol.
Revise la DMB.
Compruebe si hay un cortocircuito
y una conexión incorrecta del
cableado de los equipos
periféricos. (Emergencia y
conectores E/S de expansión)
Reemplace la DMB.
Reemplace la unidad del eje
adicional.
Para la serie T, reinicie el
controlador, tome medidas contra
el ruido y reemplace la placa de la
CPU y la unidad del motor.
5001
Desconexión de la señal del
codificador paralelo. Revise la
conexión del cable de señal o el
cableado interno del robot.
Revise la señal del cable M/C.
Revise el cableado de la señal del
robot. (Pin faltante, desconexión,
cortocircuito)
Reemplace el motor.
Reemplace la DMB.
Revise la conexión del conector
en el controlador. (Soltar,
conexión al terminal del
codificador de serie en DMB)
Revise la configuración del
modelo.
Revise el cableado de los equipos
periféricos. (Emergencia y E/S)
Para la serie T, reinicie el
controlador, tome medidas contra
el ruido y reemplace la unidad del
motor.
5002
El driver del motor no está
instalado. Instale el driver del
motor. Revise la DMB o el driver
del motor.
Revise si el driver del motor está
montado.
Revise la configuración del
modelo y la configuración de
hardware.
Reemplace el driver del motor.
Reemplace la DMB.
Para la serie T, revise el cableado
de la unidad del motor.
5003
Error de inicialización de la
comunicación del codificador
incremental. Revise la conexión del
cable de señal y la configuración
del robot.
Revise la configuración del
modelo.
Reemplace el motor. (Error del
codificador)
Reemplace la DMB.
Para la serie T, reinicie el
controlador, tome medidas contra
el ruido y reemplace la placa de la
CPU y la unidad del motor.
5004
Error de inicialización del
codificador absoluto. Revise la
conexión del cable de señal o la
configuración del robot.
Revise la configuración del
modelo.
Reemplace el motor. (Error del
codificador)
Reemplace la DMB.
Para la serie T, reinicie el
controlador, tome medidas contra
el ruido y reemplace la unidad del
motor.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 261
N.º
Mensaje
Solución
Nota 1
Nota 2
5005
Error de configuración de la división
del codificador.
Revise la configuración del robot.
Revise la configuración del
modelo.
5006
Error de los datos durante la
inicialización del codificador
absoluto. Revise la conexión del
cable de señal, el controlador o el
motor.
Reemplace el motor.
Reemplace la DMB. (Error del
codificador)
Revise las contramedidas para el
ruido.
Para la serie T, reinicie el
controlador, tome medidas contra
el ruido y reemplace la unidad del
motor.
5007
Los turnos múltiples del codificador
absoluto superan el rango máximo.
Reinicie el codificador.
Reinicie el codificador.
Reemplace el motor.
5008
La posición está fuera de rango.
Reinicie el codificador.
Reinicie el codificador.
Reemplace la DMB.
Reemplace el motor.
5009
No hay respuesta del codificador de
serie. Revise la conexión del cable
de señal, el motor, DMB o la placa
IF del codificador.
Revise la configuración del
modelo. (Configuración incorrecta
del modelo de codificador
paralelo)
Revise la conexión del cable de
señal.
Reemplace la DMB y la tarjeta I/F
del codificador.
5010
Error de inicialización del
codificador de serie.
Reinicie el controlador.
Revise el motor, la DMB o la placa
IF del codificador.
Revise la configuración del robot.
Revise la conexión del cable de
señal.
Reemplace la DMB y la tarjeta I/F
del codificador.
Para la serie T, reinicie el
controlador, tome medidas contra
el ruido y reemplace la unidad del
motor.
5011
Error de comunicación del
codificador de serie. Reinicie el
controlador. Revise el motor, la
DMB o la placa IF del codificador.
Revise la configuración del robot.
Revise la conexión del cable de
señal.
Reemplace la DMB y la tarjeta I/F
del codificador.
Para la serie T, reinicie el
controlador, tome medidas contra
el ruido y reemplace la unidad del
motor.
5012
Error del temporizador guardián de
la CPU servo.
Reinicie el controlador. Revise el
motor o la DMB.
Reemplace la DMB.
Revise las contramedidas para el
ruido.
Para la serie T, revise la conexión
del cable de señal. Reinicie el
controlador, tome medidas contra
el ruido y reemplace la unidad del
motor.

Mantenimiento
262 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
5013
Error de WDT del circuito de control
actual.
Reinicie el controlador. Revise el
controlador.
Revise la conexión del cable de
alimentación.
Revise la fuente de alimentación
de 15 V y la conexión del cable.
Reemplace la DMB.
Revise las contramedidas para el
ruido.
Para la serie T, reinicie el
controlador, tome medidas contra
el ruido y reemplace la unidad del
motor.
5014
La DMB no es para este robot.
Revise la configuración del robot.
Reemplace por la DMB
compatible.
5015
El codificador se reinició. Reinicie
el controlador.
Reinicie el controlador.
5016
Error de suministro de alimentación
del codificador absoluto.
Reemplace la batería. Revise el
cableado interno del robot.
Reinicie el codificador.
Revise la conexión del cable de
señal.
5017
Error de datos de copia de
seguridad del codificador absoluto.
Reinicie el codificador.
Reinicie el codificador.
Revise la conexión del cable de
señal.
5018
Alarma de la batería del codificador
absoluto.
Reemplace la batería.
Revise la conexión del cable de
señal.
5019
Error de posición del codificador
absoluto. Reinicie el codificador.
Reemplace el motor.
Reinicie el codificador.
Reemplace el motor. (Error del
codificador)
Para la serie T, reinicie el
controlador, tome medidas contra
el ruido y reemplace la unidad del
motor.
5020
La velocidad es demasiado alta
durante el encendido del
controlador. Detenga el robot y
reinicie el controlador.
Reinicie el controlador.
Reinicie el codificador.
Para la serie T, reinicie el
controlador, tome medidas contra
el ruido y reemplace la unidad del
motor.
Revise la interferencia con otros
dispositivos.
5021
Sobrecalentamiento del codificador
absoluto.
Reduzca el trabajo de
movimiento.
Espere hasta que disminuya la
temperatura del codificador.
5022
Error del transductor R/D. Reinicie
el codificador. Revise la placa del
solucionador o el cableado interno
del robot.
Reinicie el codificador.
Revise el cableado de señal del
manipulador (pin suelto,
desconexión, cortocircuito).
Reemplace la placa del
solucionador.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 263
N.º
Mensaje
Solución
Nota 1
Nota 2
5023
Error de comunicación del sensor
G.
Revise la conexión del cable de
señal o el cableado interno del
manipulador.
Revise la conexión del cableado
de señal.
Revise el cableado de señal del
manipulador (pin suelto,
desconexión, cortocircuito).
Revise la contramedida para el
ruido.
Reemplace la placa de control.
Reemplace la DMB.
5024
Error de datos del sensor G.
Revise la placa de control.
Reemplace la placa de control.
5025
Se produjo una brecha entre los
datos de los turnos múltiples y los
datos de conversión R/D
(Radianes/grados).
Reinicio del codificador.
Reinicie el solucionador.
Revise la contramedida para el
ruido.
Reemplace la placa del
solucionador.
5026
Desconexión de la señal de
excitación del solucionador.
Reinicie el codificador. Revise la
placa del solucionador o el
cableado interno del robot.
Revise el cableado de señal del
manipulador (pin suelto,
desconexión, cortocircuito).
Reemplace la placa del
solucionador.
5027
S-DSP detectó el error de
comunicación en DSP.
Revise la DMB.
Reinicie el controlador.
Revise la contramedida para el
ruido.
Reemplace la DMB.
5028
Se detectó error de datos de
realimentación actual.
Revise la DMB.
Reinicie el controlador.
Revise la contramedida para el
ruido.
Reemplace la DMB.
Para la serie T, revise si existen
fallas de cortocircuito y conexión
a tierra en el cable de
alimentación. Reinicie el
controlador o reemplace la unidad
del motor.
5029
Error de comunicación de D-DSP.
Revise la DMB.
Reinicie el controlador.
Revise la contramedida para el
ruido.
Reemplace la DMB.
5030
La velocidad es demasiado alta
durante el apagado del controlador.
Reinicie el codificador.
Reinicie el codificador.
Reemplace el motor.
5031
La velocidad es demasiado alta.
Reinicie el codificador.
Exceso de cantidad de cálculo
Reinicie el codificador.
Reemplace el motor.
Para la serie T, reinicie el
controlador y reemplace la unidad
del motor.
5032
Servoalarma A.
Reinicie el controlador.

Mantenimiento
264 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
5040
Error de salida del torque del motor
en estado de alta potencia.
Revise la conexión del cable de
alimentación, el robot, el driver o el
motor.
Especifique la configuración de
peso/inercia. Revise la carga.
Revise el robot. (Uniformidad,
juego, movimiento no uniforme,
tensión suelta de la correa, freno)
Revise la interferencia con los
equipos periféricos. (Colisión,
contacto)
Revise la configuración del
modelo.
Revise la conexión del cable de
alimentación.
Revise el cableado de
alimentación del robot. (Pin
faltante, desconexión,
cortocircuito)
Revise el voltaje de la fuente de
alimentación. (Bajo voltaje de la
fuente de alimentación)
Reemplace el driver del motor.
Reemplace la DMB.
Reemplace el motor.
Para la serie T, reemplace la
placa de la CPU y la unidad del
motor, además de las piezas
anteriores.
5041
Error de salida de torque del motor
en estado de baja potencia.
Revise la conexión del cable de
alimentación, el robot, el freno, el
driver o el motor.
Revise el robot. (Uniformidad,
juego, movimiento no uniforme,
tensión suelta de la correa, freno)
Revise la interferencia con los
equipos periféricos. (Colisión,
contacto)
Revise la configuración del
modelo.
Revise la conexión del cable de
alimentación.
Revise el cableado de
alimentación del robot. (Pin
faltante, desconexión,
cortocircuito)
Revise el voltaje de la fuente de
alimentación. (Bajo voltaje de la
fuente de alimentación)
Reemplace el driver del motor.
Reemplace la DMB.
Reemplace el motor.
Para la serie T, reemplace la
placa de la CPU y la unidad del
motor, además de las piezas
anteriores.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 265
N.º
Mensaje
Solución
Nota 1
Nota 2
5042
Desbordamiento de error de
posición en estado de potencia alta.
Revise la conexión del cable de
alimentación, el robot, el driver y el
motor.
Especifique la configuración de
peso/inercia. Revise la carga.
Revise el robot. (Uniformidad,
juego, movimiento no uniforme,
tensión suelta de la correa, freno)
Revise la interferencia con los
equipos periféricos. (Colisión,
contacto)
Revise la configuración del
modelo.
Revise la conexión del cable de
alimentación.
Revise el cableado de
alimentación del robot. (Pin
faltante, desconexión,
cortocircuito)
Revise el voltaje de la fuente de
alimentación. (Bajo voltaje de la
fuente de alimentación)
Reemplace el driver del motor.
Reemplace la DMB.
Reemplace el motor.
Para la serie T, reemplace la
placa de la CPU y la unidad del
motor, además de las piezas
anteriores.
5043
Desbordamiento de error de
posición en estado de potencia
baja. Revise la conexión del cable
de alimentación, el robot, el freno,
el driver o el motor.
Revise el robot. (Uniformidad,
juego, movimiento no uniforme,
tensión suelta de la correa, freno)
Revise la interferencia con los
equipos periféricos. (Colisión,
contacto)
Revise la configuración del
modelo.
Revise la conexión del cable de
alimentación.
Revise el cableado de
alimentación del robot.
(Pin faltante, desconexión,
cortocircuito)
Revise el voltaje de la fuente de
alimentación.
(Bajo voltaje de la fuente de
alimentación)
Reemplace el driver del motor.
Reemplace la DMB.
Reemplace el motor.
Para la serie T, reemplace la
placa de la CPU y la unidad del
motor, además de las piezas
anteriores.

Mantenimiento
266 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
5044
Desbordamiento de error de
velocidad en estado de potencia
alta. Revise la conexión del cable
de alimentación, el robot, el freno,
el driver o el motor.
Especifique la configuración de
peso/inercia. Revise la carga.
Revise el robot. (Uniformidad,
juego, movimiento no uniforme,
tensión suelta de la correa, freno)
Revise la interferencia con los
equipos periféricos. (Colisión,
contacto)
Revise la configuración del
modelo.
Revise la conexión del cable de
alimentación.
Revise el cableado de
alimentación del robot. (Pin
faltante, desconexión,
cortocircuito)
Revise el voltaje de la fuente de
alimentación. (Bajo voltaje de la
fuente de alimentación)
Reemplace el driver del motor.
Reemplace la DMB.
Reemplace el motor.
Para la serie T, reemplace la
placa de la CPU y la unidad del
motor, además de las piezas
anteriores.
5045
Desbordamiento de error de
velocidad en estado de potencia
baja. Revise la conexión del cable
de alimentación, el robot, el freno,
la unidad o el motor.
Revise el robot. (Uniformidad,
juego, movimiento no uniforme,
tensión suelta de la correa, freno)
Revise la interferencia con los
equipos periféricos. (Colisión,
contacto)
Revise la configuración del
modelo.
Revise la conexión del cable de
alimentación.
Revise el cableado de
alimentación del robot. (Pin
faltante, desconexión,
cortocircuito)
Revise el voltaje de la fuente de
alimentación. (Bajo voltaje de la
fuente de alimentación)
Reemplace el driver del motor.
Reemplace la DMB.
Reemplace el motor.
Para la serie T, reemplace la
placa de la CPU y la unidad del
motor, además de las piezas
anteriores.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 267
N.º
Mensaje
Solución
Nota 1
Nota 2
5046
Exceso de velocidad en estado de
potencia alta.
Revise la conexión del cable de
señal, el robot, el freno, el driver o
el motor.
Reduzca SpeedS del movimiento
CP. Cambie la orientación del
movimiento CP.
Especifique la configuración de
peso/inercia. Revise la carga.
Revise el robot. (Uniformidad,
juego, movimiento no uniforme,
tensión suelta de la correa, freno)
Revise la interferencia con los
equipos periféricos. (Colisión,
contacto)
Revise la configuración del
modelo.
Revise la conexión del cable de
alimentación.
Revise el cableado de
alimentación del robot. (Pin
faltante, desconexión,
cortocircuito)
Revise el voltaje de la fuente de
alimentación. (Bajo voltaje de la
fuente de alimentación)
Reemplace el driver del motor.
Reemplace la DMB.
Reemplace el motor.
Para la serie T, reemplace la
placa de la CPU y la unidad del
motor, además de las piezas
anteriores.
5047
Exceso de velocidad en estado de
potencia baja.
Revise la conexión del cable de
señal, el robot, el freno, el driver o
el motor.
Revise el movimiento en estado
de potencia alta.
Revise el robot. (Uniformidad,
juego, movimiento no uniforme,
tensión suelta de la correa, freno)
Revise la interferencia con los
equipos periféricos. (Colisión,
contacto)
Revise la configuración del
modelo.
Revise la conexión del cable de
alimentación.
Revise el cableado de
alimentación del robot. (Pin
faltante, desconexión,
cortocircuito)
Revise el voltaje de la fuente de
alimentación. (Bajo voltaje de la
fuente de alimentación)
Reemplace el driver del motor.
Reemplace la DMB.
Reemplace el motor.
Para la serie T, reemplace la
placa de la CPU y la unidad del
motor, además de las piezas
anteriores.

Mantenimiento
268 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
5048
Sobrevoltaje del circuito de
alimentación principal. Revise el
voltaje de alimentación principal o
el módulo de regeneración.
Especifique la configuración de
peso/inercia. Revise la carga.
Revise el robot. (Uniformidad,
juego, movimiento no uniforme,
tensión suelta de la correa, freno)
Revise la interferencia con los
equipos periféricos. (Colisión,
contacto)
Revise la configuración del
modelo.
Revise la conexión del cable de
alimentación.
Revise el cableado de
alimentación del robot. (Pin
faltante, desconexión,
cortocircuito)
Revise el voltaje de la fuente de
alimentación. (Bajo voltaje de la
fuente de alimentación)
Reemplace el driver del motor.
Reemplace la DMB.
Reemplace el motor.
5049
Sobrecorriente del driver del motor.
Revise la conexión del cable de
alimentación o el cableado interno
del robot.
Revise si existen fallas de
cortocircuito y conexión a tierra en
el cable de alimentación.
Reemplace el driver del motor.
Reemplace la DMB.
Para la serie T, revise si existen
fallas de cortocircuito y conexión
a tierra en el cable de
alimentación.
Reinicie el controlador o
reemplace la unidad del motor.
5050
Exceso de velocidad durante el
control de torque. Revise el rango
de velocidad del movimiento de
trabajo.
Revise la velocidad de
movimiento durante el control de
torque.
5051
Error de alimentación de la unidad
de modulación de ancho de pulso
(PWM) de 15 V. Reinicie el
controlador. Reemplace la
alimentación de 15 V.
Revise la fuente de alimentación
de 15 V y la conexión del cable.
Reemplace el driver del motor.
Reemplace la DMB.
5054
Sobrecarga del motor. Disminuya el
trabajo de movimiento y la
aceleración.
Reduzca el trabajo de
movimiento.
Revise la configuración de
peso/inercia.
Revise el robot. (Juego, gran
carga, tensión suelta de la correa,
freno)
5055
Sobrecarga del motor. Disminuya el
trabajo de operación y la
aceleración.
Reduzca el trabajo de
movimiento.
Revise la configuración de
peso/inercia.
Revise el robot. (Juego, gran
carga, tensión suelta de la correa,
freno)

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 269
N.º
Mensaje
Solución
Nota 1
Nota 2
5056
Los datos del sensor G han
cambiado rápidamente. Revise la
placa de control.
Revise la contramedida para el
ruido.
Reemplace la placa de control.
5057
Se detectó una colisión en el modo
de potencia alta
(Detección del error de movimiento
del robot)
La detección de colisión
(detección del error de movimiento
del robot) estaba funcionando.
Se detectaron los siguientes
errores:
- Hubo colisión o contacto con el
brazo del robot.
- Saturación de torque debido a
una configuración deficiente de
Weight (Peso) o Inertia (Inercia).
- Saturación de torque debido a un
movimiento combinado de varias
articulaciones y rodeo de un objeto
largo.
- Saturación de torque debido a la
reducción del voltaje de
suministro.
- Movimiento erróneo debido a
error de hardware o mal
funcionamiento de software.
Contramedidas:
Compruebe que no exista colisión
o contacto del brazo del robot y
cambie la distribución para evitar
interferencias.
Confirme que se produjo la
saturación de torque.
Durante la saturación de torque:
revise que la configuración de
Weight e Inertia sea correcta y
corríjala si es necesario.
Durante el movimiento
combinado: ajuste la aceleración y
desaceleración para evitar la
saturación de torque.
Revise el voltaje de la fuente de
alimentación y corríjalo si es
necesario.
Si ocurre otro error al mismo
tiempo, tome una contramedida
para eso primero.
Referencia: Manual del usuario de
EPSON RC+ 7.0 “6.18.10 Función
de detección de colisión (Función
de detección de error de
movimiento del robot)”

Mantenimiento
270 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
5058
Se detectó una colisión en el modo
de baja potencia
(Detección del error de movimiento
del robot)
La detección de colisión
(detección del error de movimiento
del robot) estaba funcionando.
Se detectaron los siguientes
errores:
- Hubo colisión o contacto con el
brazo del robot.
- Saturación de torque debido a
que sostiene una mano o un objeto
largo que sobrepasa el peso
descrito en las especificaciones.
- Movimiento erróneo debido a
error de hardware o mal
funcionamiento de software.
Contramedidas:
Compruebe que no exista colisión
o contacto del brazo del robot y
cambie la distribución para evitar
interferencias.
Revise el peso de la mano y
corríjalo si es necesario.
Articulación n.º 4 y 5 del robot de 6
ejes: se confirma que se produjo la
saturación de torque.
Si se produce saturación de
torque: cambie para sostener en
modo de alta potencia.
Si ocurre otro error al mismo
tiempo, tome una contramedida
para eso primero.
Referencia: Manual del usuario de
EPSON RC+ 7.0 “6.18.10 Función
de detección de colisión (Función
de detección de error de
movimiento del robot)”
5072
Servoalarma B.
Reinicie el controlador.
5080
El motor está sobrecargado.
Disminuya el trabajo y la
aceleración.
Reduzca el trabajo de
movimiento.
Revise la configuración de
peso/inercia.
Revise el robot. (Juego, gran
carga, tensión suelta de la correa,
freno)
5098
Temperatura alta del codificador.
Reduzca el trabajo. Revise la
unidad de engranaje reductor del
robot.
Espere hasta que disminuya la
temperatura del codificador.
Reduzca el trabajo de
movimiento.
Revise la configuración de
peso/inercia.
Revise el robot. (Juego, gran
carga, tensión suelta de la correa,
freno)

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 271
N.º
Mensaje
Solución
Nota 1
Nota 2
5099
Temperatura alta del driver del
motor. Limpie el filtro del ventilador
del controlador. Revise la
temperatura ambiente. Reduzca
el trabajo.
Limpie el filtro del ventilador de
enfriamiento.
Reduzca el trabajo de
movimiento.
Revise la configuración de
peso/inercia.
Baje la temperatura ambiente.
5112
Servoalarma C.
Reinicie el controlador.
5501
Error de inicialización del control de
fuerza.
Reinicie el controlador.
Reinicie el controlador.
Inicialice el firmware del
controlador.
Reemplace el controlador.
5510
Error de cálculo del control de
fuerza.
Reinicie el controlador.
Reinicie el controlador.
Inicialice el firmware del
controlador.
Reemplace el controlador.
5511
Error de transformación de
coordenadas en el control de
fuerza.
Revise si el robot se mueve fuera
del rango de movimiento.
Revise si se especificó la
coordenada fuera del rango de
movimiento.
Revise si el robot se mueve fuera
del rango de movimiento durante
la ejecución del control de fuerza.
5520
Error de parámetro de impedancia.
Revise la combinación de Mass
(Masa), Damper (Amortiguador) y
Spring (Resorte).
Revise la combinación de Spring,
Damper y Mass. Revise si la
propiedad Mass es demasiado
pequeña para la propiedad
Damper.
5521
Se especificó el modo de sistema
de coordenadas en vez del modo
personalizado para el sensor de
fuerza, el que no está asociado con
el robot.
Revise la configuración del sensor
de fuerza o el modo del sistema de
coordenadas.
Revise la asociación con el robot.
Revise si se especificó la
dirección en lugar de la
coordenada personalizada para
la propiedad Orientation
(Orientación) del objeto del
sistema de coordenadas de
fuerza para el sensor que no está
asociado con el robot.
5522
Está seleccionado Undefined data
(Datos sin definir).
Revise si están definidos los datos
seleccionados.
Revise si está definido el
parámetro especificado.
5523
El parámetro que no se puede
continuar cuando se especifica el
control de fuerza continua CF.
Revise el objeto de control de
fuerza y el objeto del sistema de
coordenadas de fuerza.
Revise el objeto de control de
fuerza y el objeto de
coordenadas de fuerza que están
siendo utilizados por los
comandos de movimiento antes y
después de continuar el control
de fuerza mediante el parámetro
CF.
5530
El tiempo especificado ha
transcurrido después de reiniciar el
sensor de fuerza.
Ejecute la propiedad Reset del
objeto del sensor de fuerza.
Ejecute la propiedad Reset del
objeto del sensor de fuerza.

Mantenimiento
272 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
5531
Aproxímese al punto de
singularidad mientras ejecuta el
control de fuerza.
Evite el punto de singularidad
mientras utiliza el control de fuerza.
Revise si se especificaron las
coordenadas cercanas a la
singularidad.
Revise si el robot se mueve
hacia el entorno de la
singularidad durante la ejecución
del control de fuerza. O bien,
revise la posición de instalación
del robot.
5532
El búfer para el sensor de fuerza
está saturado.
Acorte el intervalo de tiempo de
AvgForceClear a AvgForce.
Acorte el intervalo de tiempo
entre AvgForceClear y AvgForce
para que sea menor a un minuto.
5533
Ha transcurrido el tiempo de
continuación para que CF ejecute
el control de fuerza.
Para continuar el control de fuerza,
utilice FCKeep.
Revise si el intervalo de los
comandos de movimiento es
igual o inferior a un minuto.
5535
El robot SCARA no puede ejecutar
el control de fuerza si la propiedad
Orientation de los objetos Base
(Base), Tool (Herramienta), Local
(Local) y FCS, o de V y W de la
posición del comando actual es
distinta de 0.
Revise los parámetros.
Configure “0” en la propiedad
Orientation o V y W de la posición
del comando actual para los
objetos Base, Tool, Local y FCS.
5536
El control de fuerza no es
compatible con este modelo de
robot.
Revise el modelo del robot y la
versión de firmware del controlador.
Revise si el robot especificado es
el correcto.
Revise si el firmware del
controlador es compatible con el
modelo del robot.
5540
Error de transmisión del sensor de
fuerza.
Revise la conexión de la unidad I/F
del sensor de fuerza (placa) y el
sensor de fuerza.
Ejecute la propiedad Reboot del
objeto del sensor de fuerza.
Revise la conexión del sensor de
fuerza y la unidad I/F del sensor
de fuerza (placa).
Reinicie el sensor de fuerza y la
unidad I/F del sensor de fuerza
(placa).
Consulte con nosotros si ocurre
un error similar incluso después
de tomar las anteriores
contramedidas.
5541
Error de recepción del sensor de
fuerza.
Revise la conexión de la unidad I/F
del sensor de fuerza (placa) y el
sensor de fuerza.
Ejecute la propiedad Reboot del
objeto del sensor de fuerza.
Revise la conexión del sensor de
fuerza y la unidad I/F del sensor
de fuerza (placa).
Reinicie el sensor de fuerza y la
unidad I/F del sensor de fuerza
(placa).
Consulte con nosotros si ocurre
un error similar incluso después
de tomar las anteriores
contramedidas.
5542
Sensor de fuerza en uso.
Revise si los demás comandos
están usando el sensor de fuerza.
Revise si las propiedades Reset
o Reboot del objeto de sensor de
fuerza se ejecutan en otra tarea.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 273
N.º
Mensaje
Solución
Nota 1
Nota 2
5543
Error de comunicación del sensor
de fuerza.
Ejecute la propiedad Reboot del
objeto del sensor de fuerza.
Ejecute la propiedad Reboot del
objeto del sensor de fuerza.
Revise la conexión del sensor de
fuerza y la unidad I/F del sensor
de fuerza (placa).
Reinicie el sensor de fuerza y la
unidad I/F del sensor de fuerza
(placa).
Consulte con nosotros si ocurre
un error similar incluso después
de tomar las anteriores
contramedidas.
5544
Error del elemento del sensor de
fuerza.
Revise si la fuerza que supera el
valor nominal se aplica al sensor de
fuerza.
Ejecute la propiedad Reset del
objeto del sensor de fuerza.
Este error se puede producir si
ha transcurrido mucho tiempo
desde que no se reinicia el
sensor de fuerza.
Ejecute la propiedad Reset del
objeto del sensor de fuerza.
Revise si la fuerza que supera el
valor nominal se aplica al sensor
de fuerza.
Reinicie el sensor de fuerza y la
unidad I/F del sensor de fuerza
(placa).
Consulte con nosotros si ocurre
un error similar incluso después
de tomar las anteriores
contramedidas.
5545
Error del circuito 1 del sensor de
fuerza.
Ejecute la propiedad Reset del
objeto del sensor de fuerza.
Ejecute la propiedad Reset del
objeto del sensor de fuerza.
Reinicie el sensor de fuerza y la
unidad I/F del sensor de fuerza
(placa).
Consulte con nosotros si ocurre
un error similar incluso después
de tomar las anteriores
contramedidas.
5546
Error del circuito 2 del sensor de
fuerza.
Ejecute la propiedad Reset del
objeto del sensor de fuerza.
Ejecute la propiedad Reset del
objeto del sensor de fuerza.
Reinicie el sensor de fuerza y la
unidad I/F del sensor de fuerza
(placa).
Si se produce un error similar
incluso después de tomar las
medidas anteriores, revise si hay
vibración en la punta del brazo
del robot.
5547
Error de temperatura alta del
sensor de fuerza.
Revise si la temperatura ambiente
se encuentra dentro del valor
nominal y que no haya un cambio
rápido de temperatura.
Ejecute la propiedad Reset del
objeto del sensor de fuerza.
Ejecute la propiedad Reset del
objeto del sensor de fuerza.
Revise la temperatura ambiente.
Reinicie el sensor de fuerza y la
unidad I/F del sensor de fuerza
(placa).
Consulte con nosotros si ocurre
un error similar incluso después
de tomar las anteriores
contramedidas.

Mantenimiento
274 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
5548
El sensor de fuerza detectó una
fuerza que supera el valor nominal.
Revise si se aplica una fuerza que
supera el valor nominal.
Ejecute la propiedad Reset del
objeto del sensor de fuerza.
Ejecute la propiedad Reset del
objeto del sensor de fuerza.
Revise si la fuerza que supera el
valor nominal se aplica al sensor
de fuerza.
Reinicie el sensor de fuerza y la
unidad I/F del sensor de fuerza
(placa).
Consulte con nosotros si ocurre
un error similar incluso después
de tomar las anteriores
contramedidas.
5549
No está conectada la unidad I/F del
sensor de fuerza.
Revise la conexión de la unidad I/F
del sensor de fuerza (placa) y el
sensor de fuerza.
Revise la conexión del sensor de
fuerza y la unidad I/F del sensor
de fuerza (placa).
Reinicie el sensor de fuerza y la
unidad I/F del sensor de fuerza
(placa).
Consulte con nosotros si ocurre
un error similar incluso después
de tomar las anteriores
contramedidas.
5550
La detección de fuerza del sensor
de fuerza está desactivada.
Revise la configuración del sensor
de fuerza.
Revise la configuración del
sensor de fuerza.
Reinicie el sensor de fuerza y la
unidad I/F del sensor de fuerza
(placa).
5551
Está conectado un sensor de
fuerza que no es compatible.
Revise la versión de firmware del
controlador y la conexión del
sensor de fuerza.
Revise si el firmware del
controlador es compatible con el
sensor de fuerza.
Revise la conexión del sensor de
fuerza y la unidad I/F del sensor
de fuerza (placa).
Reinicie el sensor de fuerza y la
unidad I/F del sensor de fuerza
(placa).
5552
Error en la configuración del sensor
de fuerza.
Revise la configuración del sensor
de fuerza.
Revise la configuración del
sensor de fuerza.
5553
Se ejecuta una función no admitida
en el sensor de fuerza conectado.
Revise el programa.
Revise la configuración del
sensor de fuerza.
Revise el programa.
5560
Error de corrección de desfase del
sensor de fuerza.
Revise la conexión del sensor de
fuerza y la unidad I/F del sensor
de fuerza (placa).
Reinicie el sensor de fuerza y la
unidad I/F del sensor de fuerza
(placa).
5570
Desbordamiento de búfer del
monitor de fuerza.
Reinicie el monitor de fuerza.
Cierre y vuelva a abrir el monitor
de fuerza.
5571
Desbordamiento de búfer del
registro de fuerza.
Configure un intervalo de medición
de datos más largo.
Configure un intervalo más largo
para medir los datos.
La computadora que recibe los
datos puede estar en estado de
carga pesada.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 275
N.º
Mensaje
Solución
Nota 1
Nota 2
5572
Desbordamiento de búfer del
monitor de control de fuerza.
Reinicie el monitor de control de
fuerza.
Cierre y vuelva a abrir el monitor
de control de fuerza.
5573
Los datos de registro de la
secuencia de Force Guide están
desbordados.
Reinicie el controlador.
La computadora que recibe los
datos puede estar en estado de
carga pesada.
5574
Está desbordado el búfer de
RecordStart. Configure un intervalo
de medición de datos más largo.
Configure un intervalo más largo
para medir los datos.
La computadora que recibe los
datos puede estar en estado de
carga pesada.
5800
Error de inicialización del control de
fuerza.
Reinicie el controlador.
Reinicie el controlador.
Inicialice el firmware del
controlador.
Reemplace el controlador.
5801
Error al asignar memoria con el
control de fuerza.
Reinicie el controlador.
Reinicie el controlador.
Inicialice el firmware del
controlador.
Reemplace el controlador.
5802
Error de cálculo del control de
fuerza.
Reinicie el controlador.
Reinicie el controlador.
Inicialice el firmware del
controlador.
Reemplace el controlador.
5803
El sensor de fuerza no pudo
conectarse con el robot.
Revise la configuración de la
conexión del sensor de fuerza.
Revise la configuración de la
conexión del sensor de fuerza.
5810
Error de parámetro del control de
fuerza.
Revise el rango del parámetro.
Revise el rango del parámetro
especificado.
5811
El parámetro del objeto de Force
Control está fuera de rango.
Nota 1: Propiedad
Nota 2: Eje
Revise el parámetro.
Revise la propiedad del objeto de
control de fuerza.
1: Número
2: Sistema de
coordenadas
3: Activado
4: Masa
5: Amortiguador
6: Resorte
7:
TargetForcePrio
rityMode
8: TargetForce
9: LimitSpeed
10: LimitAccel
1: Fx
2: Fy
3: Fz
4: Tx
5: Ty
6: Tz
o
1:J
2:S
3:R
5812
LimitSpeed o LimitAccel del objeto
de Force Control es inferior a la
configuración de velocidad o
aceleración del robot.
Revise el parámetro.
Revise los valores de Speed,
SpeedS, SpeedR, Accel, AccelS,
AccelR, LimitSpeed y LimitAccel.
5813
Todas las propiedades activadas
del objeto de control de fuerza son
falsas.
Configure True (Verdadero) en 1 o
más ejes.
Active la propiedad “Enabled”
(Activada) para al menos un eje.

Mantenimiento
276 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
5814
El robot SCARA no puede ejecutar
el control de fuerza si la propiedad
Orientation de los objetos Base,
Tool, Local y FCS, o de V y W de la
posición del comando actual es
distinta de 0,
o si Tx_Enabled y Ty_Enabled no
está en False (Falso).
Revise los parámetros.
Desactive el estado activado de
Tx y Ty.
Configure “0” en la propiedad
Orientation o V y W de la
posición del comando actual para
los objetos Base, Tool, Local y
FCS.
5815
El parámetro del objeto del
disparador de fuerza está fuera de
rango.
Nota 1: Propiedad
Nota 2: Eje
Revise el parámetro.
Revise la propiedad del objeto
del disparador de fuerza.
1: Número
2: Sensor de
fuerza
3: Sistema de
coordenadas
4: TriggerMode
5: Operador
6: Activado
7: FMag_Axes
8: TMag_Axes
9: Polaridad
10: UpperLevel
11: LowerLevel
12: UpperLevel
inferior al
LowerLevel
13:
LPF_Enabled
14:
LPF_TimeConst
ant
1: Fx
2: Fy
3: Fz
4: Tx
5: Ty
6: Tz
7: Fmag
8: Tmag
5816
El parámetro del objeto del sistema
de coordenadas de fuerza está
fuera de rango.
Nota 1: Propiedad
Nota 2: Eje
Revise el parámetro.
Revise la propiedad del objeto
del sistema de coordenadas de
fuerza.
1: Número
2: Posición
3:
Orientation_Mo
de
4:
Orientation_UV
W
5:
Orientation_Rob
otLocal
1: X
2: Y
3: Z
o
1: U
2: V
3: W
5817
El parámetro del objeto de monitor
de fuerza está fuera de rango.
Nota 1: Propiedad
Nota 2: Eje
Revise el parámetro.
Revise la propiedad del objeto de
monitor de fuerza.
1: Número
2: Sensor de
fuerza
3: Sistema de
coordenadas
4: FMag_Axes
5: TMag_Axes
6: LPF_Enabled
7:
LPF_TimeConst
ant
5818
El parámetro del objeto de
restricción de movimiento de fuerza
está fuera de rango.
Reinicie el controlador.
Inicialice el firmware del
controlador.
Reemplace el controlador.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 277
N.º
Mensaje
Solución
Nota 1
Nota 2
5819
La duración especificada de
FCKeep está fuera del rango
permitido.
Revise la duración.
Revise si la duración
especificada es igual o inferior a
600 segundos.
5830
No se puede reanudar el control de
fuerza desde la pausa. Cancele el
comando de movimiento.
Cancele el movimiento.
5831
No se puede ejecutar este
comando durante el control de
fuerza.
Salga del control de fuerza
mediante FCEnd.
Cancele el control de fuerza.
Ejecute el comando FCEnd.
5832
No se puede ejecutar un comando
de movimiento que no tenga ningún
objeto de Force Control durante el
control de fuerza.
Salga del control de fuerza
mediante FCEnd.
Revise si el comando de
movimiento inmediatamente
después de continuar el control
de fuerza con CT no contiene el
control de fuerza.
5833
No se puede usar la compensación
de gravedad. Solo se puede usar el
número de objeto de propiedad de
masa '0'.
Esta es la combinación del
sensor de fuerza y el robot que
no pueden usar la compensación
de gravedad.
Defina el número de objeto de
propiedad de masa en '0'.
5834
Se ejecuta una función no admitida
en el sensor de fuerza conectado.
Revise el programa.
Revise la configuración del
sensor de fuerza.
Revise el programa.
5840
Sensor de fuerza en uso.
Revise si los demás comandos
están utilizando el sensor de
fuerza.
Revise si las propiedades Reset
o Reboot del objeto de sensor de
fuerza se ejecutan en otra tarea.
5841
No se pudo restablecer el sensor de
fuerza.
Restablecer el sensor de fuerza
nuevamente.
Note1: Información detallada del
error
Cuando se omite el parámetro o
se especifica FG_RESET_FINE,
especifique
FG_RESET_WAIT_VIBRATION
para el parámetro.
Cuando se especifica
FG_RESET_WAIT_VIBRATION,
ajuste la temporización de
restablecimiento mediante la
instrucción Wait (Esperar) o retire
la fuente de vibración externa.
1: Se agotó el
tiempo de
espera desde
que no se
cumple la
condición Fine
(Fino).
2: Se agotó el
tiempo de
espera desde
que no se
detuvo la
vibración.
5901
Error al asignar memoria con el
control de fuerza.
Reinicie el controlador.
Reinicie el controlador.
Inicialice el firmware del
controlador.
Reemplace el controlador.
5902
El control de fuerza no pudo liberar
la memoria.
Reinicie el controlador.
Reinicie el controlador.
Inicialice el firmware del
controlador.
Reemplace el controlador.
5903
No se puede encontrar el robot
especificado.
Reinicie el controlador.
Inicialice el firmware del
controlador.
Reemplace el controlador.

Mantenimiento
278 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
5904
Error al asignar memoria con el
control de fuerza.
Reinicie el controlador.
Reinicie el controlador.
Inicialice el firmware del
controlador.
Reemplace el controlador.
5906
No se puede encontrar el número
de datos de fuerza especificado.
Especifique un número de datos de
fuerza válido.
Reinicie el controlador.
Inicialice el firmware del
controlador.
Reemplace el controlador.
5907
No se definió el número de datos de
fuerza especificado.
Especifique un número de datos de
fuerza de enseñanza.
Especifique un número de datos
de fuerza definido.
5908
No se definió el número de datos
del sistema de coordenadas de
fuerza especificado. Especifique un
número de datos del sistema de
coordenadas de fuerza de
enseñanza.
Especifique un número de datos
del sistema de coordenadas de
fuerza definido.
5909
No se pueden actualizar los datos
de fuerza especificados.
No se pueden actualizar ni
eliminar los datos de fuerza
especificados con las
instrucciones FSet, FDel, MPSet
o MPDel.
5910
El valor de los datos de fuerza
especificados está fuera del rango
permitido.
Especifique el valor dentro del
rango.
5911
El valor del nivel superior es menor
que el valor del nivel inferior.
Cambie los valores del nivel
superior e inferior.
Cambie los valores del nivel
superior e inferior.
5912
El número de los parámetros de
comando especificado no es
correcto.
Especifique un número válido de
parámetros.
Especifique un número válido de
parámetros.
Número de
parámetros
5913
El número de los parámetros de
función especificado no es
correcto.
Especifique un número válido de
parámetros.
Especifique un número válido de
parámetros.
Número de
parámetros
5914
El tipo de parámetro de comando
especificado no es correcto.
Especifique los parámetros válidos.
Especifique los parámetros
válidos.
5915
El tipo de parámetro de función
especificado no es correcto.
Especifique los parámetros válidos.
Reinicie el controlador.
Inicialice el firmware del
controlador.
Reemplace el controlador.
5918
No se puede encontrar la etiqueta
de datos de fuerza especificada.
Especifique una etiqueta de datos
de fuerza válida.
Especifique una etiqueta de
datos de fuerza válida definida.
5921
Duplique la etiqueta de datos de
fuerza. El nombre de etiqueta
especificado ya está en uso.
Cambie el nombre de la etiqueta.
Cambie el nombre de la etiqueta.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 279
N.º
Mensaje
Solución
Nota 1
Nota 2
5924
El control de fuerza del robot
especificado no pudo asignar
memoria.
Reinicie el controlador.
Reinicie el controlador.
Inicialice el firmware del
controlador.
Reemplace el controlador.
5927
No se pueden leer los datos de
fuerza del archivo de fuerza.
Vuelva a crear el archivo de fuerza.
Los datos de fuerza no son
válidos y no se pueden leer.
Vuelva a crear el archivo de
fuerza.
0: FC
1: FCS
2: FT
3: FM
4: MASS
Número de
datos de
fuerza
5928
Error al asignar memoria con el
control de fuerza.
Reinicie el controlador.
Reinicie el controlador.
Inicialice el firmware del
controlador.
Reemplace el controlador.
5929
El nombre del archivo de fuerza
especificado no es correcto.
Especifique un nombre de archivo
de fuerza válido.
Reinicie el controlador.
Inicialice el firmware del
controlador.
Reemplace el controlador.
5930
La etiqueta de datos de fuerza
especificada supera la longitud
máxima. Especifique una etiqueta
de datos de fuerza válida.
Especifique una etiqueta de
datos de fuerza válida. Consulte
"Propiedad Label" para conocer
detalles.
5931
La descripción de los datos de
fuerza especificada supera la
longitud máxima.
Especifique una descripción válida.
Especifique una descripción
válida.
Consulte "Propiedad Description"
(Descripción) para conocer
detalles.
5932
El archivo de fuerza está dañado.
Vuelva a crear el archivo de fuerza.
No se puede cargar el archivo de
fuerza porque está dañado o fue
editado por herramientas
distintas a Force Guide 7.0.
Vuelva a crear el archivo de
fuerza.
5933
No se puede encontrar el archivo
de datos de fuerza especificado.
Especifique un nombre de archivo
de fuerza válido.
Especifique un nombre de
archivo de fuerza válido.
5934
No se puede guardar el archivo de
fuerza.
Libere el espacio suficiente para
escribir el archivo de fuerza.
Número del
robot
5940
La etiqueta de datos de fuerza es
incorrecta.
Especifique una etiqueta de datos
de fuerza válida.
Especifique una etiqueta de
datos de fuerza válida. Consulte
"Propiedad Label" para conocer
detalles.
5941
La etiqueta de datos de fuerza es
incorrecta.
Especifique una etiqueta de datos
de fuerza válida.
Especifique una etiqueta de
datos de fuerza válida. Consulte
"Propiedad Label" para conocer
detalles.
5943
La versión del archivo de fuerza no
es válida.
Actualice el firmware del
controlador.
No se puede cargar el archivo de
fuerza, porque es una versión
más reciente.
5944
No se pudo leer el archivo de
fuerza.
Vuelva a crear el archivo de fuerza.
No se puede cargar el archivo de
fuerza, porque el formato no es
compatible.

Mantenimiento
280 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
6001
El número de calibración está fuera del
rango.
Corrija el número de calibración.
6002
No está definida la calibración.
Realice la calibración.
6003
La orientación de la cámara está fuera del
rango.
Corrija el valor
CameraOrientation.
6004
El indicador TwoRefPoints está fuera del
rango.
Corrija el valor TwoRefPoints.
6005
No se puede calcular la posición del punto
porque existen datos no válidos.
Vuelva a enseñar los puntos.
6006
No se pudo calibrar. No se puede calcular
porque existen datos no válidos.
Realice nuevamente la
enseñanza de puntos y la
calibración.
6007
Falla en la transformación de coordenadas.
No se puede calcular porque existen datos no
válidos.
Vuelva a enseñar los puntos.
6009
El nombre del archivo de calibración no es
válido.
Corrija el nombre del archivo de
calibración.
6010
No se encontró el archivo de calibración.
Corrija el nombre del archivo de
calibración.
6012
No se pudo leer el archivo de calibración.
Corrija el nombre del archivo de
calibración.
6013
No se pudo escribir el archivo de calibración.
Revise el permiso de acceso a la
carpeta del proyecto.
6014
Se deben especificar 9 puntos de
coordenadas de píxeles.
Asegúrese de obtener al menos
9 resultados en la secuencia de
visión.
6015
Se deben especificar 18 puntos de
coordenadas de píxeles.
Asegúrese de obtener al menos
18 resultados en la secuencia de
visión.
6016
Se deben especificar 9 puntos de
coordenadas del robot.
Vuelva a enseñar los puntos.
6017
Se deben especificar 18 puntos de
coordenadas del robot.
Vuelva a enseñar los puntos.
6018
Se deben especificar 9 puntos de
coordenadas del robot y 1 punto de
referencia.
Realice nuevamente la
enseñanza de puntos y la
calibración.
6019
Se deben especificar 9 puntos de
coordenadas del robot y 2 puntos de
referencia.
Realice nuevamente la
enseñanza de puntos y la
calibración.
6502
Proceso de Vision Error de comunicación (-
3)
Revise la conexión con la cámara
(cable, configuración).
6503
Proceso de Vision Error de memoria (-11)
Reinicie RC+.
6506
Proceso de Vision Error de modelado (-14)
Cambie el objetivo y vuelva a
enseñar.
6507
Proceso de Vision Error de recuperación (-
15)
Especifique el archivo del
formato adecuado.
6508
Proceso de Vision Número de iteraciones
no válido (-16)
Configure un valor en el rango
válido.
6509
Proceso de Vision Modo no válido (-17)
Configure un valor válido.
6510
Proceso de Vision Valor de umbral no
válido (-18)
Configure un valor en el rango
válido.
6511
Proceso de Vision Polaridad no válida (-19)
Configure un valor en el rango
válido.
6512
Proceso de Vision No se pudo abrir el
archivo (-20)
Especifique un archivo correcto.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 281
N.º
Mensaje
Solución
Nota 1
Nota 2
6513
Proceso de Vision Error de inicialización (-
21)
Reinstale RC+.
6514
Proceso de Vision Error de estado (-22)
Revise la conexión con la
cámara.
6517
Proceso de Vision Formato de imagen no
válido (-25)
Especifique el archivo de imagen
del formato de lectura.
6520
Proceso de Vision Valor de propiedad no
válido (-100)
Configure un valor en el rango
válido.
6521
Proceso de Vision No se pudo realizar el
proceso de término de exposición (-201)
Desactive el Firewall de
Windows.
6533
Proceso de Vision Valor ThresholdLow de
propiedad Blob no válido (-11004)
Configure un valor en el rango
válido.
6534
Proceso de Vision Valor ThresholdHigh de
propiedad Blob no válido (-11005)
Configure un valor en el rango
válido.
6535
Proceso de Vision Valor Polarity de
propiedad Blob no válido (-11006)
Configure un valor en el rango
válido.
6536
Proceso de Vision Valor NumberToFind de
propiedad Blob no válido (-11007)
Configure un valor en el rango
válido.
6537
Proceso de Vision Valor MinArea de
propiedad Blob no válido (-11008)
Configure un valor en el rango
válido.
6538
Proceso de Vision Valor MaxArea de
propiedad Blob no válido (-11009)
Configure un valor en el rango
válido.
6539
Proceso de Vision Valor RejectOnEdge de
propiedad Blob no válido (-11010)
Configure un valor en el rango
válido.
6540
Proceso de Vision Valor SizeToFind de
propiedad Blob no válido (-11011)
Configure un valor en el rango
válido.
6553
Proceso de Vision Valor Accept de
propiedad Geom no válido (-11504)
Configure un valor en el rango
válido.
6554
Proceso de Vision Valor NumberToFind de
propiedad Geom no válido (-11505)
Configure un valor en el rango
válido.
6555
Proceso de Vision Valor AngleEnable de
propiedad Geom no válido (-11506)
Configure un valor en el rango
válido.
6556
Proceso de Vision Valor AngleRange de
propiedad Geom no válido (-11507)
Configure un valor en el rango
válido.
6557
Proceso de Vision Valor AngleStart de
propiedad Geom no válido (-11508)
Configure un valor en el rango
válido.
6558
Proceso de Vision Valor ScaleEnable de
propiedad Geom no válido (-11509)
Configure un valor en el rango
válido.
6559
Proceso de Vision Valor ScaleFactorMax
de propiedad Geom no válido (-11510)
Configure un valor en el rango
válido.
6560
Proceso de Vision Valor ScaleFactorMin de
propiedad Geom no válido (-11511)
Configure un valor en el rango
válido.
6561
Proceso de Vision Valor ScaleTarget de
propiedad Geom no válido (-11512)
Configure un valor en el rango
válido.
6562
Proceso de Vision Valor SeparationMinX de
propiedad Geom no válido (-11513)
Configure un valor en el rango
válido.
6563
Proceso de Vision Valor SeparationMinY de
propiedad Geom no válido (-11514)
Configure un valor en el rango
válido.
6564
Proceso de Vision Valor SeparationAngle
de propiedad Geom no válido (-11515)
Configure un valor en el rango
válido.
6565
Proceso de Vision Valor SeparationScale
de propiedad Geom no válido (-11516)
Configure un valor en el rango
válido.
6566
Proceso de Vision Valor Confusion de
propiedad Geom no válido (-11517)
Configure un valor en el rango
válido.

Mantenimiento
282 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
6567
Proceso de Vision Valor
ModelOrgAutoCenter de propiedad Geom no
válido (-11518)
Configure un valor en el rango
válido.
6570
Proceso de Vision Valor DetailLevel de
propiedad Geom no válido (-11521)
Configure un valor en el rango
válido.
6571
Proceso de Vision Valor Smoothness de
propiedad Geom no válido (-11522)
Configure un valor en el rango
válido.
6572
Proceso de Vision Valor RejectOnEdge de
propiedad Geom no válido (-11523)
Configure un valor en el rango
válido.
6573
Proceso de Vision Valor SharedEdges de
propiedad Geom no válido (-11524)
Configure un valor en el rango
válido.
6574
Proceso de Vision Valor Timeout de
propiedad Geom no válido (-11525)
Configure un valor en el rango
válido.
6575
Proceso de Vision Valor RejectByArea de
propiedad Geom no válido (-11526)
Configure un valor en el rango
válido.
6576
Proceso de Vision Valor SearchReversed
de propiedad Geom no válido (-11527)
Configure un valor en el rango
válido.
6577
Proceso de Vision Valor
ScaleTargetPriority de propiedad Geom no
válido (-11528)
Configure un valor en el rango
válido.
6578
Proceso de Vision Valor
SearchReducedImage de propiedad Geom
no válido (-11529)
Configure un valor en el rango
válido.
6586
Proceso de Vision Valor DetailLevel de
propiedad Geom Model no válido (-11602)
Configure un valor en el rango
válido.
6587
Proceso de Vision Valor Smoothness de
propiedad Geom Model no válido (-11603)
Configure un valor en el rango
válido.
6603
Proceso de Vision Propiedad Corr no válida
Valor Accept (-12004)
Configure un valor en el rango
válido.
6604
Proceso de Vision Propiedad Corr no válida
Valor NumberToFind (-12005)
Configure un valor en el rango
válido.
6605
Proceso de Vision Propiedad Corr no válida
Valor AngleEnable (-12006)
Configure un valor en el rango
válido.
6606
Proceso de Vision Propiedad Corr no válida
Valor AngleRange (-12007)
Configure un valor en el rango
válido.
6607
Proceso de Vision Propiedad Corr no válida
Valor AngleStart (-12008)
Configure un valor en el rango
válido.
6608
Proceso de Vision Propiedad Corr no válida
Valor AngleAccuracy (-12009)
Configure un valor en el rango
válido.
6609
Proceso de Vision Propiedad Corr no válida
Valor Confusion (-12010)
Configure un valor en el rango
válido.
6610
Proceso de Vision Propiedad Corr no válida
Valor ModelOrgAutoCenter (-12011)
Configure un valor en el rango
válido.
6613
Proceso de Vision Propiedad Corr no válida
Valor RejectOnEdge (-12014)
Configure un valor en el rango
válido.
6614
Proceso de Vision Propiedad Corr no válida
Valor Timeout (-12015)
Configure un valor en el rango
válido.
6615
Proceso de Vision Propiedad Corr no válida
Valor RejectByArea (-12016)
Configure un valor en el rango
válido.
6630
Proceso de Vision Tamaño de estructura de
la propiedad Edge no válido (-12501)
Configure un valor en el rango
válido.
6631
Proceso de Vision Tamaño de estructura
del encabezado de resultado de Edge no
válido (-12502)
Configure un valor en el rango
válido.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 283
N.º
Mensaje
Solución
Nota 1
Nota 2
6632
Proceso de Vision Tamaño de estructura
del elemento de resultado de Edge no válido
(-12503)
Configure un valor en el rango
válido.
6633
Proceso de Vision Propiedad Edge no
válida
Valor EdgeType (-12504)
Configure un valor en el rango
válido.
6634
Proceso de Vision Propiedad Edge no
válida
Valor NumberToFind (-12505)
Configure un valor en el rango
válido.
6635
Proceso de Vision Propiedad Edge no
válida
Valor Polarity (-12506)
Configure un valor en el rango
válido.
6636
Proceso de Vision Propiedad Edge no
válida
Valor SearchWidth (-12507)
Configure un valor en el rango
válido.
6637
Proceso de Vision Propiedad Edge no
válida
Valor Accept (-12508)
Configure un valor en el rango
válido.
6638
Proceso de Vision Propiedad Edge no
válida
Valor ScoreWeightContrast (-12509)
Configure un valor en el rango
válido.
6639
Proceso de Vision Propiedad Edge no
válida
Valor ContrastTarget (-12510)
Configure un valor en el rango
válido.
6640
Proceso de Vision Propiedad Edge no
válida
Valor ContrastVariation (-12511)
Configure un valor en el rango
válido.
6641
Proceso de Vision Propiedad Edge no
válida
Valor StrengthTarget (-12512)
Configure un valor en el rango
válido.
6642
Proceso de Vision Propiedad Edge no
válida
Valor StrengthVariation (12513)
Configure un valor en el rango
válido.
6653
Proceso de Vision Lector de código
Error de suma de comprobación (-1010)
Cambie el código a uno con una
suma de comprobación correcta.
O bien, cambie la configuración
para que no utilice la suma de
comprobación.
6654
Proceso de Vision Lector de código
Zona silenciosa no válida (-1011)
Asegúrese de que haya una zona
silenciosa (margen en blanco)
alrededor del código. Configure
una zona silenciosa más
estrecha.
6655
Proceso de Vision Lector de código
El mensaje es demasiado largo (-1012)
Cambie el código.
6686
Proceso de Vision OCR
El diccionario de reconocimiento está lleno (-
2132)
Borre los caracteres registrados.

Mantenimiento
284 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
7003
No se puede encontrar el robot
especificado.
Reinicie el controlador.
Inicialice el firmware del control.
7004
Duplique la asignación del área de
datos de punto.
Reinicie el controlador.
Inicialice el firmware del control.
7006
No se puede encontrar el número
de punto especificado.
Especifique un número de punto
válido.
Revise el número de punto
especificado.
7007
No se definió el número de punto
especificado. Especifique un
número de punto de enseñanza.
Revise si los datos de punto están
registrados en el punto especificado.
Realice la enseñanza.
7010
No se puede asignar el área de
memoria para la definición de
pallet.
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.
7011
No se puede liberar el área de
memoria para la definición de
pallet.
Reinicie el controlador.
Inicialice el firmware del controlador.
7012
No se puede encontrar el número
de pallet especificado.
Especifique un número de pallet
válido.
Revise el número de pallet.
7013
No está definido el pallet
especificado. Especifique el pallet
definido o defina el pallet.
Revise si el pallet especificado está
definido por la instrucción Pallet.
Declare el pallet.
7014
El número de división especificado
es superior a la definición del
número de división de pallet.
Especifique una división válida.
Revise el número de división
especificado.
7015
El número de eje de coordenadas
especificado no existe.
Revise el número de eje de
coordenadas especificado.
7016
El número de orientación del brazo
especificado no existe.
Revise el número de orientación del
brazo especificado.
7017
No se puede asignar la memoria
necesaria.
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.
7018
No se puede encontrar la etiqueta
de punto especificada. Especifique
una etiqueta de punto válida.
Revise la etiqueta de punto
especificada.
7019
La configuración del parámetro en
el archivo de inicialización no es
válida.
Reinicie el controlador.
Inicialice el firmware del controlador.
7021
Duplique la etiqueta de punto. El
nombre de etiqueta especificado ya
está en uso. Cambie el nombre de
la etiqueta.
Cambie la etiqueta de punto.
7022
No está definido el sistema de
coordenadas local especificado.
Especifique un número del sistema
de coordenadas local válido.
Revise el número local especificado.
Defina el sistema de coordenadas
local.
7024
No está asignada el área de
memoria para los datos de punto
para el robot especificado.
Recompile el proyecto.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 285
N.º
Mensaje
Solución
Nota 1
Nota 2
7026
No se puede abrir el archivo de
puntos. Especifique un nombre de
archivo de puntos válido.
Revise el nombre del archivo de
puntos.
Revise si existe el archivo de puntos
especificado para el proyecto.
7027
No se pueden leer los datos de
punto del archivo de puntos.
Cree nuevamente un archivo de
puntos.
7028
El área de puntos está asignada
más allá del número de punto
disponible.
Hay demasiados puntos.
Revise el número de puntos.
7029
El nombre del archivo de puntos
especificado no es correcto.
Especifique un nombre de archivo
de puntos válido.
Revise la extensión del archivo.
7030
La etiqueta de punto especificada
supera la longitud máxima.
Especifique una etiqueta de punto
válida.
Cambie la etiqueta de punto.
7031
La descripción del punto
especificado supera la longitud
máxima. Especifique una
descripción válida.
Cambie el comentario.
7032
El archivo de puntos está dañado.
Error de la suma de comprobación.
Cree nuevamente un archivo de
puntos.
7033
No se puede encontrar el archivo
de puntos especificado.
Especifique un nombre de archivo
de puntos válido.
Revise el nombre del archivo de
puntos especificado.
7034
No se puede guardar el archivo de
puntos.
No se pudo guardar el archivo de
puntos (cree un archivo temporal).
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.
7035
No se puede guardar el archivo de
puntos.
No se pudo guardar el archivo de
puntos (archivo abierto).
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.
7036
No se puede guardar el archivo de
puntos.
No se pudo guardar el archivo de
puntos (renueve el encabezado del
archivo).
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.
7037
No se puede guardar el archivo de
puntos.
No se pudo guardar el archivo de
puntos (cree el nombre del archivo).
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.
7038
No se puede guardar el archivo de
puntos.
No se pudo guardar el archivo de
puntos (copie el archivo).
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.

Mantenimiento
286 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
7039
No se puede guardar el archivo de
puntos.
No se pudo guardar el archivo de
puntos (cambie el nombre del
archivo).
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.
7040
La etiqueta de punto es incorrecta.
Especifique una etiqueta de punto
válida.
El carácter inicial del nombre de la
etiqueta de punto no es correcto.
Corrija el nombre de la etiqueta.
7041
La etiqueta de punto es incorrecta.
Especifique una etiqueta de punto
válida.
Se usó un carácter incorrecto.
Corrija el nombre de la etiqueta.
7042
No se puede definir el pallet.
El indicador no definido para los datos
del pallet está mezclado.
Revise los datos de punto.
Corrija los datos de punto.
7043
La versión del archivo de puntos no
es válida.
La versión del archivo de puntos es
distinta.
Vuelva a crear el archivo de puntos.
7044
La versión del formato del archivo
de puntos no es compatible.
El archivo de puntos no es
compatible.
Vuelva a crear el archivo de puntos.
7045
El número de cola de trabajo
especificada no es válido.
Revise el número de cola de trabajo
especificado.
7046
La cola de trabajo especificada está
llena.
La cola de trabajo está llena. Borre
los datos de punto de la cola de
trabajo y registre.
7047
No existen los datos de la cola de
trabajo especificados.
Revise el índice especificado.
7048
La cola de trabajo no se inicializó
correctamente.
No se pudo inicializar la cola de
trabajo (asigne memoria).
Reinicie el controlador.
Inicialice el firmware del controlador.
Reemplace el controlador.
7049
El parámetro de la instrucción de
cola de trabajo no es válido.
Revise los parámetros de los
comandos relacionados con la cola
de trabajo.
7050
No se puede ejecutar mientras se
registran los datos de la cola de
trabajo.
No se puede definir la cola de trabajo,
ya que los datos de punto están
registrados en la cola de trabajo.
Vacíe la cola de trabajo antes de la
configuración.
7101
Esclavo del bus de campo. Se
produjo un error durante la
transformación de los datos de E/S.
La placa del esclavo del bus de
campo está rota o el software del
controlador está dañado. Restaure el
firmware del controlador.
1
2
3
4
10
Se detectó un error de datos de
comunicación durante la
comunicación. El cable de
comunicación tiene un problema.
Revise el cable de comunicación y
sus unidades relacionadas.
11
12
El bus de campo está roto o el
software del controlador está dañado.
Restaure el firmware del controlador.
13
14
15

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 287
N.º
Mensaje
Solución
Nota 1
Nota 2
El PLC no está en ejecución o no está
conectado.
Revise el PLC, el cable de
comunicación y los dispositivos
periféricos.
(Si el código 1 es 22 cuando se usa la
placa CC-Link).
22
7103
Esclavo del bus de campo. Se
produjo un error de tiempo de
espera durante la transformación
de datos de E/S.
La placa del esclavo del bus de
campo está rota o el software del
controlador está dañado. Restaure el
firmware del controlador.
1
2
3
Se detectó un error de datos de
comunicación durante la
comunicación. El cable de
comunicación tiene un problema.
Revise el cable de comunicación y
sus unidades relacionadas.
4
7104
EPSON RC+ no es compatible con
la configuración de CC-Link versión
2.00. Use EPSON RC+ 7.5.0. o
superior.
El RC+ conectado no es compatible
con la configuración de CC-Link
versión 2.00.
Actualice a RC+ 7.5.0 o superior, o
bien, utilice un RC+ compatible.
7150
Maestro del bus de campo.
El bus está desconectado.
Revise la conexión del cable de
comunicación del bus de campo.
7151
Maestro del bus de campo. El bus
está apagado.
Revise si el cable de comunicación
del bus de campo tiene alimentación.
7152
Maestro del bus de campo.
Error de estado de bus.
Reinicie el controlador.
Revise la placa del maestro del bus
de campo.
Reemplace la placa del maestro del
bus de campo.
7200
Argumento no válido.
Revise el parámetro.
7201
Se produjo un error del sistema.
-
7202
No hay suficiente memoria.
-
7203
Acceso denegado.
-
7210
La unidad no está lista.
Configure el dispositivo.
7211
La ruta especificada no es válida.
Asegúrese de que exista la ruta
especificada.
7212
La ruta especificada ya existe.
Si la carpeta o archivo especificado
ya existe, no puede realizar la
ejecución.
7213
No existe el archivo especificado
por la ruta.
Asegúrese de que exista el archivo
especificado.
7214
El tamaño del archivo es
demasiado grande.
Especifique un archivo que sea de
menos de 2 G bytes.
7215
El archivo especificado está
abierto.
El número de archivo especificado ya
existe. Use otro número de archivo.
7216
El modo de apertura no es válido.
Asegúrese de que lo abrió en modo
de lectura o escritura.
7217
No hay datos de lectura.
Asegúrese de que haya datos que
leer.
7230
La conexión especificada está
abierta.
El número de archivo especificado ya
existe. Use otro número de archivo.
7231
Ocurrió un error de nivel de
conexión al abrir la conexión.
Revise el derecho de acceso a la
base de datos.
7232
La conexión está cerrada.
Use OpenDB y abra la base de datos.

Mantenimiento
288 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
7233
Se usó un tipo de datos no
admitido.
Convierta los datos en un valor de
cadena o numérico.
7234
El tamaño de los datos es
demasiado grande.
Datos demasiado grandes en una
línea. Especifique la consulta para
que solo se recuperen los campos
necesarios.
7235
El tipo de archivo especificado no
es admitido.
Revise el tipo de archivo Excel.
7236
No hay datos seleccionados.
Asegúrese de que los datos que
recuperó existan.
7250
No hay bytes disponibles para
lectura.
No hay datos recuperados. Revise el
programa de envío.
7251
El puerto es un estado no válido.
Revise la configuración del
dispositivo para el puerto
especificado.
7252
El puerto especificado está abierto.
Revise el número de puerto que
desea abrir.
7253
El puerto está cerrado.
Revise el número de puerto que
desea cerrar.
7254
El puerto especificado no está
abierto.
Revise el número de puerto que
desea abrir.
7255
Se agotó el tiempo de espera
durante la lectura desde el puerto.
Revise el período de tiempo de
espera del puerto y actualice según la
configuración correspondiente.
7256
Se agotó el tiempo de espera
durante la escritura al puerto.
Revise el período de tiempo de
espera del puerto y actualice según la
configuración correspondiente.
7260
La suma de comprobación del
proyecto no es válida.
Recompile el proyecto.
7261
Función no válida.
Revise la definición de función que
desea llamar.
7262
Parámetros no válidos.
Revise la definición de función que
desea llamar.
7263
No se puede ejecutar mientras se
crea el DLL.
-
7264
No se pudo crear el DLL.
-
7265
No se pudo encontrar el archivo
DLL.
-

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 289
N.º
Mensaje
Solución
Nota 1
Nota 2
7300
Comunicación de Vision.
No se admite el modo servidor.
-
7302
Comunicación de Vision.
No se pudo leer desde la cámara.
Revise la conexión con la cámara.
7303
Comunicación de Vision.
Desbordamiento de lectura de
datos.
Los datos recibidos superan el búfer
de recepción.
7304
Comunicación de Vision.
No se pudo abrir el puerto Ethernet.
Revise la conexión con la cámara.
7305
Comunicación de Vision.
Dirección IP de cámara no válida.
Recompile el proyecto. Revise la
configuración de la cámara.
7306
Comunicación de Vision.
No se especificó el servidor o cliente.
-
7307
Comunicación de Vision.
No se pudo enviar a la cámara.
Revise la conexión con la cámara.
7308
Comunicación de Vision.
Versión de cámara antigua.
La versión de la cámara conectada
es antigua. Actualice la cámara.
7321
Comunicación de Vision.
No se ha ajustado la configuración
de la cámara.
Recompile el proyecto. Revise la
configuración de la cámara.
7322
Comunicación de Vision.
Se agotó el tiempo de espera de
lectura.
Revise la conexión con la cámara.
7323
Comunicación de Vision.
Datos no válidos de lectura.
Revise la conexión con la cámara.
7324
Comunicación de Vision.
No se pudo enviar a la cámara.
Revise la conexión con la cámara.
7325
Comunicación de Vision.
No se completó la conexión.
Revise la conexión con la cámara.
7326
Comunicación de Vision.
Los datos de lectura son demasiado
largos.
-
7327
Comunicación de Vision.
Secuencia de visión no definida.
Revise el nombre de secuencia.
7328
Comunicación de Vision.
No se ha ajustado la configuración
de la cámara.
Recompile el proyecto. Revise la
configuración de la cámara.
7329
Comunicación de Vision.
No se encontró el archivo Vis.
Recompile el proyecto. Revise la
configuración de la cámara.
7330
Comunicación de Vision.
No se pudo asignar la memoria.
Reduzca el número de secuencias,
objetos y calibración.
7341
Comunicación de Vision.
Número de cámara máximo
superado.
Revise el registro de la cámara.
7342
Comunicación de Vision.
Número de cámara no válido.
Revise el registro de la cámara.
7343
Comunicación de Vision.
El parámetro VSet es demasiado
largo.
Revise los nombres y las variables
de cadena de secuencias, objetos y
calibración.
7344
Comunicación de Vision:
Demasiados parámetros para VGet.
El número de variables especificado
supera las 32. Reduzca el número
de parámetros.
7345
Comunicación de Vision.
No hay suficientes datos para la
asignación de la variable de la
instrucción VGet.
Reinicie la cámara.
Revise la versión de la cámara.

Mantenimiento
290 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
7346
Comunicación de Vision.
No se puede ejecutar una
instrucción Vision desde la ventana
Command.
Elimine el comando desde el
programa.
7400
Matriz determinada demasiado
pequeña.
Si especifica la cámara virtual,
especifique la cámara real.
7402
Valor no válido para distancia de
movimiento máxima.
Especifique el valor válido.
7403
Valor no válido para ángulo de
diferencia de pose máximo.
Especifique el valor válido.
7404
Valor no válido para LJMMode.
Especifique el valor válido.
7405
Comando anulado por el usuario.
-
7406
El cambio de ángulo de la
articulación 1 superó el máximo
permitido durante la calibración.
Ajuste el ángulo de inicio de la
articulación 1.
7407
El cambio de ángulo de la
articulación 2 superó el máximo
permitido durante la calibración.
Ajuste el ángulo de inicio de la
articulación 2.
7408
El cambio de ángulo de la
articulación 4 superó el máximo
permitido durante la calibración.
Ajuste el ángulo de inicio de la
articulación 4.
7409
El cambio de ángulo de la
articulación 6 superó el máximo
permitido durante la calibración.
Ajuste el ángulo de inicio de la
articulación 6.
7410
Cámara de red. Se agotó el tiempo
de espera durante la transferencia
de imagen desde la computadora.
Revise la conexión de la
computadora con la cámara.
7411
No se especificó ninguna secuencia
de cámara ascendente para la
calibración móvil con la referencia
ascendente.
Especifique la secuencia existente.
7412
La secuencia de cámara ascendente
especificada no está calibrada.
Defina la calibración para la
secuencia de cámara ascendente.
7413
La calibración de la secuencia de
cámara ascendente especificada
está incompleta.
Complete la calibración de la
secuencia de cámara ascendente.
7414
No se puede usar la secuencia
objetivo cuando RuntimeAcquire
está definido en Estroboscópico.
Defina RuntimeAcquire de la
secuencia objetivo en Fijo.
7415
El tipo de referencia de calibración
no es válido.
El tipo de referencia seleccionable
es diferente dependiendo de
CameraOrientation. Vuelva a
seleccionar.
7416
Los datos de calibración no son
válidos. Vuelva a enseñar los
puntos de calibración.
Debe volver a enseñar los puntos de
calibración.
7417
Configuración de calibración no
válida.
Vuelva a intentar la enseñanza de
puntos de calibración. O bien, revise
la secuencia objetivo.
7418
La secuencia objetivo no es válida.
Es posible que no esté seleccionada
la secuencia objetivo o que el
número de la cámara de la
secuencia objetivo sea distinta a la
de la calibración.
7419
La cámara de la secuencia objetivo
no es la misma que la cámara de
calibración.
Defina la secuencia de la misma
cámara.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 291
N.º
Mensaje
Solución
Nota 1
Nota 2
7420
La secuencia objetivo no tiene
objetos.
Agregue el objeto de detección a la
secuencia objetivo.
7421
El último paso no es válido para la
secuencia objetivo.
Revise los pasos.
7422
Se produjo una excepción durante la
búsqueda de objetivo de calibración.
Revise la secuencia objetivo.
7423
El número de resultados no es válido
para la secuencia objetivo de
calibración.
Cree una secuencia para detectar
resultados de la cantidad de
objetivos necesarios.
7424
No se pueden cargar los puntos de
calibración.
Vuelva a realizar la enseñanza de
puntos de calibración.
7425
La orientación de la cámara no es
válida.
Revise CameraOrientation de
calibración.
7426
La calibración de corrección de la
distorsión está incompleta.
Realice la corrección de la distorsión
si está definida.
7427
Se especificó un objeto de visión no
válido.
Se especificó un objeto de visión no
válido en los comandos de Vision
Guide como VSet y VGet.
Especifique un objeto de visión
válido.
7428
Las coordenadas V y W deben estar
en cero para el tipo de robot
utilizado.
Defina V y W de la base en 0.
7429
Se especificó una velocidad del
robot no válida para la operación
actual.
Especifique el valor válido.
7430
Se especificó una aceleración del
robot no válida para la operación
actual.
Especifique el valor válido.
7431
El valor de parámetro ShowWarning
no es válido.
Especifique el valor válido.
7432
No se puede crear el objeto con la
cámara especificada en la
secuencia.
Revise el tipo de objeto de visión.
Actualice el firmware de la cámara.
7433
Los datos de modelo no son válidos.
Vuelva a enseñar el modelo o use un
modelo distinto si se produce un
error.
El modelo
que se está
cargando
puede no ser
compatible
con la
versión
actual de CV
o RC+.
7434
Cámara de red.
La contraseña de conexión no es
válida.
Ingrese la contraseña correcta de
conexión de Compact Vision en la
página de la cámara RC+.
Si desconoce la contraseña, cuenta
con las siguientes opciones:

Mantenimiento
292 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
7435
Cámara de red.
No se puede ejecutar el comando
debido a un inicio de sesión
incorrecto.
a. Ingrese una nueva contraseña
de conexión en el monitor de
CV y, después, ingrese esa
misma contraseña en la página
de la cámara RC+.
o
b. Efectúe un restablecimiento de
fábrica en la unidad Compact
Vision, para borrar la
contraseña.
Recompile el actual proyecto
de RC+ y compruebe la
operación
7500
Cámara de red.
Se agotó la memoria.
Inicialice la cámara.
Reduzca el tamaño del proyecto.
7501
Cámara de red.
El proyecto no existe.
Recompile el proyecto.
7502
Cámara de red.
El proyecto no se definió.
Recompile el proyecto.
7503
Cámara de red.
No se admite la propiedad o
resultado de Vision.
Actualice el firmware de la cámara.
7504
Cámara de red.
No se puede abrir el archivo de
proyecto.
Recompile el proyecto.
7505
Secuencia de visión no definida.
Revise el nombre de secuencia.
Recompile el proyecto.
7506
Objeto de visión no definido.
Revise el nombre del objeto.
Recompile el proyecto.
7507
Cámara de red.
Error crítico.
Inicialice la cámara.
Recompile el proyecto.
7508
Cámara de red.
Comando no válido.
Actualice el firmware de la cámara.
7509
Valor de propiedad de visión no
válido.
Revise el valor de propiedad.
Actualice el firmware de la cámara.
7510
Propiedad de visión no válida.
Revise el nombre de la propiedad.
Actualice el firmware de la cámara.
7511
Modelo de Vision no enseñado.
Enseñe el modelo.
7512
Calibración de Vision no definida.
Revise el nombre de calibración.
Recompile el proyecto.
7513
Modelo de Vision no es Self.
Revise el valor de propiedad.
7514
Resultado de visión no válido.
Revise el nombre del resultado.
Actualice el firmware de la cámara.
7515
No se encontró el objeto de visión.
Revise el resultado Found antes de
obtener el resultado.
7516
Sin calibración de visión.
Revise el nombre de calibración.
7517
Calibración de visión incompleta.
Realice la calibración.
7518
Cámara de red.
No se pudo conectar con la cámara.
Revise la conexión de la cámara.
7819
Cámara de red.
Error de comunicación.
Revise la conexión de la cámara.
7520
Ventana fuera de límites.
Coloque la ventana dentro de los
límites.
7521
Fuente OCR no válida.
Registre la fuente OCR.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 293
N.º
Mensaje
Solución
Nota 1
Nota 2
7522
La calibración de visión especificada
ya existe.
Cambie el nombre de calibración.
Elimine la calibración existente por
adelantado.
7523
La secuencia de visión especificada
ya existe.
Cambie el nombre de secuencia.
Elimine la secuencia existente por
adelantado.
7524
El objeto de visión especificado ya
existe.
Cambie el nombre del objeto.
Elimine la secuencia existente por
adelantado.
7525
No se pudo cargar el proyecto de
Vision.
La carpeta del proyecto puede estar
dañada.
Restaure los datos de copia de
seguridad.
7526
No se pudo guardar el proyecto de
Vision.
La carpeta del proyecto puede estar
protegida contra escritura.
Revise los permisos de acceso para
la carpeta de proyecto.
7527
Procesador de Vision. Error crítico.
Inicialice la cámara.
Recompile el proyecto.
7528
No se encontró el archivo de
imagen.
Revise el archivo de imagen.
7529
La cámara no existe.
Revise la conexión de la cámara.
7530
Falló la adquisición.
Revise la conexión de la cámara.
7531
No hay objetos a enseñar.
Enseñe el modelo.
7532
No se puede cargar el archivo de
imagen.
Revise el archivo de imagen.
7533
RC+7.0 no admite la cámara.
RC+7.0 no admite SC300/SC1200.
Use CV1/CV2.
7534
El firmware de la cámara no admite
las nuevas funciones de RC+7.0.
Actualice el firmware de la cámara.
7535
Datos no válidos de la cámara de
red.
Inicialice la cámara.
7536
Falló el estado de exportación de la
cámara de red.
Inicialice la cámara.
7537
Valor ImageSize no válido. El valor
especificado no es admitido por la
cámara.
No se puede especificar un valor
ImageSize que supere la resolución
de la cámara. Corrija el valor de
propiedad.
7538
Valor ZoomFactor no válido. El valor
especificado requiere datos fuera
del área de la imagen.
Los valores admitidos son de 0,1 a
10,0.
Corrija el valor de propiedad.
7539
La cámara no admite Code Reader.
Actualice el firmware de la cámara.
7540
La cámara no admite OCR.
Actualice el firmware de la cámara.
7541
Datos insuficientes para enseñar
modelo.
No se puede registrar una imagen en
blanco o negro como un modelo.
7542
La ventana de modelo no puede
estar fuera de la imagen.
Corrija la posición de la ventana de
modelo.
7543
No se han enseñado los puntos de
calibración.
Enseñe el punto de calibración.
7544
La calibración debe ser fija
ascendente.
Solo se puede configurar la
secuencia con datos de calibración
de la cámara fija ascendente.
7545
No se definió el punto.
Enseñe el punto de calibración.
7546
No se calibró RobotPlacePos.
Haga clic en CalRobotPlacePos y
calibre RobotPlacePos.

Mantenimiento
294 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
7547
La dirección IP de la cámara está
fuera de la subred actual.
Corrija la dirección IP de la cámara.
7548
No se detectó la cámara.
Revise el cableado de la cámara.
7549
Radio no válido. El radio debe ser >=
RadiusInner y <= RadiusOuter.
Corrija el valor de propiedad.
7550
No existe el carácter OCR.
Registre el carácter OCR.
7551
La opción OCR no está activa.
Habilite la opción.
7572
Nombre de secuencia no válido.
Especifique un nombre que
comience con una letra. Para el
nombre también puede usar
caracteres alfanuméricos y guion
bajo (_).
7573
Nombre de calibración no válido.
Especifique un nombre que
comience con una letra. Para el
nombre también puede usar
caracteres alfanuméricos y guion
bajo (_).
7574
El nombre de secuencia o de
calibración ya existe.
Especifique otro nombre de
calibración.
7575
Cámara no válida.
Especifique una cámara válida.
7576
No se pudo encontrar el objetivo de
visión.
Revise la secuencia de visión para
detectar el objetivo
7577
No se pudo posicionar el objetivo de
visión dentro de la tolerancia
especificada.
Revise la secuencia de visión para
detectar el objetivo
7578
No se encontró ningún objeto con
una ventana Search en la
secuencia.
Agregue un objeto para detectar el
objetivo en la secuencia de visión.
7579
Ángulo de rotación inicial no válido.
Especifique el valor válido.
7580
Ángulo de giro final no válido.
Especifique el valor válido.
7581
Tolerancia de objetivo no válida.
Especifique el valor válido.
7582
Tipo de definición de herramienta no
válida.
Especifique el valor válido.
7583
Ángulo de giro no válido.
Especifique el valor válido.
7584
Tipo de definición local no válida.
Especifique el valor válido.
7585
Falló la detección de placa de
calibración.
Ajuste el foco y el tiempo de
exposición del lente para mostrar el
objeto con claridad.
7586
Falló la detección de longitud focal.
Reduzca el diafragma de una lente.
7587
Falló la detección de escala de
definición local.
Ajuste el foco y el tiempo de
exposición del lente para mostrar el
objeto con claridad.
7588
Falló la detección de pose de placa
de calibración.
Ajuste el foco y el tiempo de
exposición del lente para mostrar el
objeto con claridad.
7589
Nombre de objeto no válido.
Especifique un nombre que
comience con una letra. Para el
nombre también puede usar
caracteres alfanuméricos y guion
bajo (_).
7590
La distancia de movimiento máxima
superó el límite definido por
VDefSetMotionRange.
Ajuste la posición de inicio. O
configure el valor de límite
ampliamente.
7591
El ángulo de diferencia de pose
máximo superó el límite definido por
VDefSetMotionRange.
Ajuste la posición de inicio. O
configure el valor de límite
ampliamente.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 295
N.º
Mensaje
Solución
Nota 1
Nota 2
7592
La diferencia de ángulo de
articulación máxima superó el límite
definido por VDefSetMotionRange.
Ajuste la posición de inicio. O
configure el valor de límite
ampliamente.
7596
Falló la alineación aproximada de la
cámara de definición local.
Ajuste la posición de inicio.
7597
No se pudo calcular el plano de
definición local.
Ajuste la secuencia de visión para
mostrar la placa de calibración con
claridad.
7598
La calibración genera una distancia
de movimiento del punto demasiado
pequeña.
Aumente el área de búsqueda o
reduzca el objetivo.
7599
La calibración genera un error de
relación de la cámara del punto con
el robot
Si especifica la cámara virtual,
especifique la cámara real.
7600
GUI Builder.
No se puede ejecutar una
instrucción GUI Builder desde la
ventana Command.
-
7602
GUI Builder.
El parámetro GSet es demasiado
largo.
Corrija el parámetro a la longitud
adecuada.
7603
GUI Builder.
Demasiados parámetros para GGet.
Revise el número de parámetros.
7604
GUI Builder.
No hay suficientes datos para la
asignación de la variable de la
instrucción GGet.
Especifique la variable.
7610
GUI Builder.
No se puede ejecutar la tarea Event.
El sistema está en estado de pausa
y EventTaskType está normal.
No se puede operar el sistema si se
cambia EventTaskType a
“NoPause”
7611
GUI Builder.
No se puede ejecutar la tarea Event.
La protección está abierta y
EventTaskType está normal.
No se puede operar el sistema si se
cambia EventTaskType a
“NoEmgAbort”
7612
GUI Builder.
No se puede ejecutar la tarea Event.
Estop está activo y EventTaskType
no está en NoEmgAbort.
No se puede operar el sistema si se
cambia EventTaskType a
“NoEmgAbort”
7613
GUI Builder.
No se puede ejecutar la tarea Event.
El sistema está en estado de error y
EventTaskType no está en
NoEmgAbort.
No se puede operar el sistema si se
cambia EventTaskType a
“NoEmgAbort”
7650
GUI Builder.
Propiedad no válida.
Especifique la propiedad válida.
7651
GUI Builder.
Formulario no válido.
Especifique el formulario válido.
7652
GUI Builder.
Control no válido.
Especifique el control válido.
7653
GUI Builder.
El formulario especificado ya está
abierto.
Modifique el programa para prevenir
un lanzamiento doble.
7654
GUI Builder.
No existe la función del evento
Revise el nombre de la función
definida para el evento.

Mantenimiento
296 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
7655
GUI Builder.
El archivo no existe.
Especifique el artículo válido.
7656
GUI Builder.
Valor de propiedad no válido.
Revise el valor de la propiedad y
especifique el archivo válido.
7700
Seguridad.
Usuario no válido.
Comuníquese con el administrador
para registrar el usuario.
7701
Seguridad.
Contraseña no válida.
Revise la contraseña.
7702
Seguridad.
Permiso denegado.
Comuníquese con el administrador
para definir la autoridad.
7703
Seguridad.
Opción inactiva.
Registre las opciones.
7710
El origen y el destino no pueden ser
idénticos.
Especifique otro destino.
7711
El nombre de archivo de punto está
siendo usado por otro robot.
Revise el nombre del archivo de
puntos.
7712
Se especificó un eje no válido.
Revise si el eje especificado es
válido. Revise si el eje está
especificado correctamente.
7713
Opción no activada.
Habilite la opción.
7714
No se encontró el archivo.
Especifique el nombre de archivo
correcto.
7715
El número de robot está fuera del
rango disponible.
Revise el número del robot.
7716
El robot no existe.
Revise si el robot está registrado.
7717
Error de archivo. Carpeta no
válida.
Revise el nombre de la carpeta.
7718
No se puede escribir el archivo.
Revise el almacenamiento o los
permisos de escritura.
7719
La licencia de la llave de opción USB
no es válida.
Active la opción mediante la llave
USB para la licencia de opción.
7720
Alimentación de piezas. No existen
alimentadores en el sistema.
Revise la página Setup | System
Configuration | Controller | Part
Feeding (Alimentación de piezas)
del EPSON RC+.
7730
Se excedió el número máximo de
robots por alimentador.
Cuando use la opción PartFeeding,
el número máximo de robots por
alimentador es 2.
Revise la configuración del robot de
cada pieza que se especifica en el
argumento del comando PF_Start.
7731
Se excedió el número máximo de
alimentadores simultáneos para el
tipo de controlador.
El controlador T/VT permite que se
usen hasta dos alimentadores al
mismo tiempo. Revise el código para
asegurarse de que no haya más de
tres alimentadores en uso (PF_Start
se ha ejecutado más de tres veces).
7750
Simulador. Error de inicialización.
Reinicie RC+.
7751
Simulador. No se pudo guardar los
objetos.
Reinicie RC+.
7752
Simulador. No se pudo cargar los
objetos.
Reinicie RC+.
7753
Simulador. No se pudo asignar la
memoria.
Reinicie RC+.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 297
N.º
Mensaje
Solución
Nota 1
Nota 2
7754
Simulador. El controlador virtual ya
existe.
Se puede duplicar el nombre del
controlador virtual. Revise el nombre
del controlador.
7755
Simulador. No se pudo crear la
información de conexión del
controlador virtual.
Reinicie RC+.
7756
Simulador. El origen de la copia del
controlador virtual no existe.
Revise el nombre del controlador
virtual.
7757
Simulador. El destino de la copia del
controlador ya existe.
Se puede duplicar el nombre del
controlador virtual. Revise el nombre
del controlador.
7758
Simulador. No se pudo copiar la
información de conexión del
controlador virtual.
Reinicie RC+.
7759
Simulador. No se pudo eliminar la
información de conexión del
controlador virtual.
Reinicie RC+.
7760
Simulador. No se pudo eliminar la
información de conexión del
controlador.
Reinicie RC+.
7761
Simulador. No se pudo cambiar el
nombre de la información de
conexión del controlador.
Revise el nombre del controlador
virtual.
7762
Simulador. El origen del cambio de
nombre del controlador virtual no
existe.
Revise el nombre del controlador
virtual.
7763
Simulador. El destino del cambio de
nombre del controlador virtual ya
existe.
Revise el nombre del controlador
virtual.
7764
Simulador. Número de robot no
válido.
Reinicie RC+.
7765
Simulador. No se pudo leer el
archivo de definición del robot.
Revise si existe el archivo de
definición.
7766
Simulador. No se pudo copiar los
objetos de diseño.
Reinicie RC+.
7767
Simulador. No se pudo cortar los
objetos de diseño.
Reinicie RC+.
7768
Simulador. No se pudo pegar los
objetos de diseño.
Reinicie RC+.
7769
Simulador. No se pudo eliminar el
robot.
Reinicie RC+.
7773
Simulador. No se especificó el robot
o el objeto.
Especifique el robot o el objeto.
7774
Simulador. Nombre duplicado del
robot o del objeto.
Cambie el nombre del robot o de
objeto, para que no esté duplicado.
7775
Simulador. No se pudo encontrar el
robot.
Revise si está definido el robot, o
bien, revise el nombre del robot.
7776
Simulador. No se pudo encontrar el
objeto.
Revise si está definido el objeto, o
bien, revise el nombre del objeto.
7777
Simulador. No se pudo encontrar la
mano.
Revise si está definida la mano, o
bien, revise el nombre de la mano.
7778
Simulador. El objeto especificado ya
está registrado como Part object
(Objeto de la pieza).
Elimine el registro de la pieza.

Mantenimiento
298 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
7779
Simulador. El objeto especificado no
está registrado como Part object
Especifique el objeto definido para la
pieza.
7780
Simulador. No se pudo encontrar la
herramienta especificada.
Especifique la herramienta definida.
7781
Simulador. No se pudo recoger el
objeto secundario.
Cambie a objeto principal.
7782
Simulador. No se pueden especificar
los objetos principales para Part
(Pieza), Mounted Device
(Dispositivo montado) o Mobile
Camera (Cámara móvil)
Elimine el registro como Part,
Mounted Device o Mobile Camera.
7783
Simulador. No se puede especificar
el robot.
Especifique un objeto distinto al
robot.
7784
Simulador. No se puede especificar
el mismo objeto como objeto
principal.
Especifique otro objeto.
7785
Simulador. No se puede especificar
el objeto secundario como objeto
principal.
Cambie a objeto principal.
7786
Simulador. El objeto especificado ya
está registrado como objeto principal
Especifique otro objeto.
7787
Simulador. El valor especificado no
es válido.
Revise el valor definido.
7788
Simulador. El tipo de variable
especificada no es válida.
Revise el tipo de variable.
7789
Simulador. No se puede especificar
el objeto.
Especifique el robot.
7790
Simulador. No se puede especificar
la mano.
Especifique un objeto distinto a la
mano.
7791
Simulador. No se puede especificar
la cámara.
Especifique un objeto distinto a la
cámara.
7800
No es posible cambiar los datos, ya
que no son datos del eje PG.
-
7801
Se especificó un número de
articulación no válido.
-
7802
El tipo de robot no es válido.
-
7803
El parámetro no es válido.
-
7804
El número de robot no es válido.
-
7805
Error de MCD.
No se pudo abrir el archivo MCD.
Restaure la configuración del
controlador.
7806
Error de MCD.
No se pudo leer el archivo MCD.
Restaure la configuración del
controlador.
7807
Error de MCD.
No se pudo guardar el archivo MCD.
Restaure la configuración del
controlador.
7808
Error de MCD.
No se pudo crear el archivo MCD.
Restaure la configuración del
controlador.
7809
Error de MCD.
No se pudo escribir el archivo MCD.
Restaure la configuración del
controlador.
7810
Error de MPL.
No se pudo abrir el archivo MPL.
Reinstale el firmware.
7811
Error de MPL.
No se pudo leer el archivo MPL.
Actualice el firmware.
7812
Error de MPL.
No se pudo escribir el archivo MPL.
1. Reinicie el controlador.
2. Reinstale el firmware.
7815
Error de IFS.
No se pudo abrir el archivo IFS.
Restaure la configuración del
controlador.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 299
N.º
Mensaje
Solución
Nota 1
Nota 2
7816
Error de IFS.
No se pudo leer el archivo IFS.
Restaure la configuración del
controlador.
7817
Error de IFS.
No se pudo escribir el archivo IFS.
Restaure la configuración del
controlador.
7822
Error de MTR.
No se pudo leer el archivo MTR.
1. Reinicie el controlador.
2. Reinstale el MT.
7824
Error de MTR.
No se pudo guardar el archivo MTR.
Reinicie el controlador.
7825
Error de PRM.
No se pudo crear el archivo PRM.
Restaure la configuración del
controlador.
7827
Error de PRM.
No se pudo leer el archivo PRM.
Restaure la configuración del
controlador.
7829
Error de PRM.
No se pudo guardar el archivo PRM.
Restaure la configuración del
controlador.
7830
Error del archivo.
No se puede tener acceso al archivo.
1. Reinicie el controlador.
2. Reinstale el firmware.
7831
El tipo de motor no es válido.
Revise el amplificador del motor.
7840
Error de MCD.
Error de asignación de área.
Reinicie el controlador.
7845
Error de FGI. No se pudo abrir el
archivo FGI.
Reinicie el controlador.
Reinstale el firmware.
-
-
7847
Error de MDL. No se pudo abrir el
archivo MDL.
Reinicie el controlador.
Reinstale el firmware.
-
-
7848
Error de MDL. No se pudo leer el
archivo MDL.
Reinicie el controlador.
Reinstale la última versión de
firmware.
-
-
7900
El bus de campo no está instalado.
-
7901
Parámetro de bus de campo no
válido.
-
7902
Defecto de línea del bus de campo.
Revise la conexión del cable de
comunicación del bus de campo.
Revise si el cable de comunicación
del bus de campo tiene
alimentación. (si el bus de campo
requiere una fuente de alimentación)
Revise la conexión con el esclavo
del bus de campo.
7903
El dispositivo de bus de campo no
está configurado.
Revise que esté instalada la placa
del maestro del bus de campo.
Reinicie la computadora donde está
instalada la placa del maestro del
bus de campo.
Reemplace la placa del maestro del
bus de campo.
7904
Placa de bus de campo no válida.
Revise que esté instalada la placa
del maestro del bus de campo.
Reinicie la computadora donde está
instalada la placa del maestro del
bus de campo.
Reemplace la placa del maestro del
bus de campo.
7905
Conexión de bus de campo
denegada.
-

Mantenimiento
300 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
7906
Configuración de dispositivo no
válida de bus de campo.
Revise que esté instalada la placa
del maestro del bus de campo.
Reinicie la computadora donde está
instalada la placa del maestro del
bus de campo.
Reemplace la placa del maestro del
bus de campo.
7907
Error general de bus de campo.
Revise que esté instalada la placa
del maestro del bus de campo.
Reinicie la computadora donde está
instalada la placa del maestro del
bus de campo.
Reemplace la placa del maestro del
bus de campo.
7908
Error de configuración del bus de
campo.
Revise la configuración del maestro
del bus de campo.
7909
No se detectaron esclavos del bus
de campo.
Registre el esclavo del bus de
campo con el maestro según la
aplicación de consola applicomIO.
7910
No se encontró el archivo de
configuración del bus de campo.
Importe el archivo de configuración
del bus de campo, según lo descrito
en el manual de E/S de bus de
campo.
7911
El archivo de configuración del bus
de campo no es válido.
Importe el archivo de configuración
del bus de campo, según lo descrito
en el manual de E/S de bus de
campo.
Si el problema continua,
comuníquese con Epson.
7912
La ID de dispositivo del bus de
campo no es válida.
Se usó un parámetro de ID de
dispositivo no válido. Revise su
programa.
7913
Se especificó un servicio de bus de
campo no válido.
Se utilizó un número de servicio de
mensajería explícita no válido.
Revise su programa.
7914
El bus de campo no puede abrir el
driver de la placa maestra.
Revise que esté instalada
correctamente la placa del maestro
del bus de campo.
Compruebe que los drivers de la
placa maestra del bus de campo
estén instalados correctamente.
7915
El bus de campo no puede abrir el
canal de la placa maestra.
Revise que no haya otra aplicación
usando la placa maestra del bus de
campo.
Revise que esté instalado
(descargado) el firmware correcto en
la placa.
7916
Se agotó el tiempo de espera para
host del bus de campo listo.
Compruebe que los drivers de la
placa maestra del bus de campo
estén instalados correctamente.
Reinicie e intente nuevamente.
Cambie la placa.
7917
Se agotó el tiempo de espera de la
comunicación de bus del bus de
campo.
Revise la alimentación del bus y las
conexiones esclavas.
7950
Detección de fuerza. Sensor de
fuerza no válido.
-

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 301
N.º
Mensaje
Solución
Nota 1
Nota 2
7951
Detección de fuerza. Eje de sensor
de fuerza no válido.
-
7952
Detección de fuerza. Falló la lectura
del sensor.
-
7953
Detección de fuerza. Falló la
inicialización del sensor.
-
7954
Detección de fuerza. Sensor no
inicializado.
-
7955
Detección de fuerza. La fuerza o el
torque superaron el nivel de
saturación.
-
7975
Force Guide. Valor fuera de rango.
-
7976
Force Guide. Valor de propiedad no
válido.
-
7977
Force Guide. Ningún robot está
usando un sensor de fuerza Epson.
Revise la página Setup | System
Configuration | Controller | Force
Sensing | Force Sensor I/F de
EPSON RC+.

Mantenimiento
302 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
9001
Se detectó un error del circuito
de parada de emergencia.
Se encontró una desconexión
u otro error en una de las
entradas redundantes.
Revise que no exista una
desconexión, error de conexión a
tierra o cortocircuito en la señal de
entrada de la parada de
emergencia. Luego reinicie el
controlador.
9002
Se detectó un error del circuito
de protección.
Se encontró una desconexión
u otro error en una de las
entradas redundantes.
Revise que no exista una
desconexión, error de conexión a
tierra o cortocircuito en la señal de
entrada de la protección. Luego
reinicie el controlador.
9003
Error de inicialización.
No se pudo inicializar el
firmware.
Esto probablemente es a causa de
un error de hardware del
controlador. Revise que el
cableado sea correcto. Si el error
no desaparece después de
reiniciar el controlador,
comuníquese con nosotros.
9004
Error de inicialización.
No se pudo inicializar la DU.
Revise la alimentación de DU
y la conexión.
El número de unidades de mando
no coincide con el número de
unidades de mando reconocido.
Revise que el cableado de la
fuente de alimentación y entre la
unidad de control y la unidad de
mando esté correcto. Si el error
no desaparece después de
reiniciar el controlador,
comuníquese con nosotros.
9005
Error de inicialización.
No se pudo inicializar la DU.
Revise la conexión.
Esto probablemente es a causa de
un error de hardware de la unidad
de mando. Revise que el cableado
sea correcto. Si el error no
desaparece después de reiniciar el
controlador, comuníquese con
nosotros.
9006
Error de inicialización.
No se puedo inicializar la E/S
remota.
Revise la configuración de E/S
remota.
Revise el valor de la configuración
de E/S remota.
9007
Se produjo un error del sensor
de fuerza.
Nota 1: Cada código de error
Consulte cada código de error
para tomar las medidas
correspondientes.
Se produjo un error del sensor de
fuerza.
Confirme la Nota 1 del historial del
sistema y tome las medidas
correspondientes.
Cada código de
error
9011
El voltaje de batería de la
copia de seguridad de la placa
de la CPU es menor que el
voltaje especificado.
Reemplace la batería de la
placa de la CPU.
Reemplace la batería de la placa
de la CPU de inmediato.
Mantenga el controlador
encendido por tanto tiempo como
sea posible hasta que haya
reemplazado la batería.
100 veces el valor
actual
100 veces el valor
de límite
9012
El voltaje de entrada de 5 V
para la placa de la CPU es
inferior al voltaje especificado.
Si el voltaje normal no se genera a
partir de una sola fuente de
alimentación de 5 V, reemplace la
fuente de alimentación.
100 veces el valor
actual
100 veces el valor
de límite

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 303
N.º
Mensaje
Solución
Nota 1
Nota 2
9013
El voltaje de entrada de 24 V
para el freno del motor, el
codificador y el ventilador es
inferior al voltaje especificado.
Si el voltaje normal no se genera a
partir de una sola fuente de
alimentación de 24 V, reemplace la
fuente de alimentación.
100 veces el valor
actual
100 veces el valor
de límite
9014
La temperatura interna del
controlador es superior a la
temperatura especificada.
Detenga el controlador lo antes
posible y compruebe que la
temperatura ambiente del
controlador no sea alta.
Revise que el filtro no esté
obstruido.
100 veces el valor
actual
100 veces el valor
de límite
9015
La velocidad del ventilador del
controlador es inferior a la
velocidad especificada.
(FAN1)
Revise que el filtro del controlador
no esté obstruido. Reemplace el
ventilador.
Valor actual
Valor de límite
9016
La velocidad del ventilador del
controlador es inferior a la
velocidad especificada.
(FAN2)
Revise que el filtro del controlador
no esté obstruido. Reemplace el
ventilador.
Valor actual
Valor de límite
9017
La temperatura interna del
controlador es superior a la
temperatura especificada.
Detenga el controlador lo antes
posible y compruebe que la
temperatura ambiente del
controlador no sea alta.
Revise que el filtro no esté
obstruido.
100 veces el valor
actual
100 veces el valor
de límite
9018
El voltaje de entrada de 54 V
para la placa de la CPU es
inferior al voltaje especificado.
Si el voltaje normal no se genera a
partir de una sola fuente de
alimentación de 54 V, reemplace la
fuente de alimentación.
100 veces el valor
actual
100 veces el valor
de límite
9019
El voltaje de entrada de 3,3 V
para la placa de la CPU es
inferior al voltaje especificado.
Si el voltaje normal no se genera a
partir de una sola fuente de
alimentación de 3,3 V, reemplace
la fuente de alimentación.
100 veces el valor
actual
100 veces el valor
de límite
9020
El voltaje de entrada de CC de
la placa de la CPU es inferior
o superior al voltaje
especificado.
Si el voltaje normal no se genera
partir de una sola fuente de
alimentación de CC, reemplace la
fuente de alimentación.
100 veces el valor
actual
100 veces el valor
de límite
9021
El voltaje de entrada de 3,3 V
de DU1 para la placa es
inferior al voltaje mínimo
permitido.
Si el voltaje normal no se genera a
partir de una sola fuente de
alimentación de 3,3 V de la unidad
de mando 1, reemplace la fuente
de alimentación.
9022
El voltaje de entrada de 5 V de
DU1 para la placa es inferior al
voltaje mínimo permitido.
Si el voltaje normal no se genera a
partir de una sola fuente de
alimentación de 5 V de la unidad
de mando 1, reemplace la fuente
de alimentación.
9023
El voltaje de entrada de 24 V
de DU1 para el freno del
motor, el codificador y el
ventilador es inferior al voltaje
especificado.
Si el voltaje normal no se genera a
partir de una sola fuente de
alimentación de 24 V de la unidad
de mando 1, reemplace la fuente
de alimentación.
9024
La temperatura interna de
DU1 del controlador es
superior a la temperatura
permitida.
Detenga la unidad de mando 1 lo
antes posible y compruebe que la
temperatura ambiente del
controlador no sea alta.
Revise que el filtro no esté
obstruido.

Mantenimiento
304 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
9025
La velocidad de giro de DU1
del ventilador del controlador
es inferior a la velocidad
permitida. (FAN1)
Revise que el filtro de la unidad de
mando 1 no esté obstruido.
Reemplace el ventilador.
9026
La velocidad de giro de DU1
del ventilador del controlador
es inferior a la velocidad
permitida. (FAN2)
Revise que el filtro de la unidad de
mando 1 no esté obstruido.
Reemplace el ventilador.
9031
El voltaje de entrada de 3,3 V
de DU2 para la placa es
inferior al voltaje mínimo
permitido.
Si el voltaje normal no se genera a
partir de una sola fuente de
alimentación de 3,3 V de la unidad
de mando 2, reemplace la fuente
de alimentación.
9032
El voltaje de entrada de 5 V de
DU2 para la placa es inferior al
voltaje mínimo permitido.
Si el voltaje normal no se genera a
partir de una sola fuente de
alimentación de 5 V de la unidad
de mando 2, reemplace la fuente
de alimentación.
9033
El voltaje de entrada de 24 V
de DU2 para el freno del
motor, el codificador y el
ventilador es inferior al voltaje
especificado.
Si el voltaje normal no se genera a
partir de una sola fuente de
alimentación de 24 V de la unidad
de mando 2, reemplace la fuente
de alimentación.
9034
La temperatura interna de
DU2 del controlador es
superior a la temperatura
permitida.
Detenga la unidad de mando 2 lo
antes posible y compruebe que la
temperatura ambiente del
controlador no sea alta.
Revise que el filtro no esté
obstruido.
9035
La velocidad de rotación de
DU2 del ventilador del
controlador es inferior a la
velocidad permitida. (FAN1)
Revise que el filtro de la unidad de
mando 2 no esté obstruido.
Reemplace el ventilador.
9036
La velocidad de rotación de
DU2 del ventilador del
controlador es inferior a la
velocidad permitida. (FAN2)
Revise que el filtro de la unidad de
mando 2 no esté obstruido.
Reemplace el ventilador.
9041
El voltaje de entrada de 3,3 V
de DU3 para la placa es
inferior al voltaje mínimo
permitido.
Si el voltaje normal no se genera a
partir de una sola fuente de
alimentación de 3,3 V de la unidad
de mando 3, reemplace la fuente
de alimentación.
9042
El voltaje de entrada de 5 V de
DU3 para la placa es inferior al
voltaje mínimo permitido.
Si el voltaje normal no se genera a
partir de una sola fuente de
alimentación de 5 V de la unidad
de mando 3, reemplace la fuente
de alimentación.
9043
El voltaje de entrada de 24 V
de DU3 para el freno del
motor, el codificador y el
ventilador es inferior al voltaje
especificado.
Si el voltaje normal no se genera a
partir de una sola fuente de
alimentación de 24 V de la unidad
de mando 3, reemplace la fuente
de alimentación.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 305
N.º
Mensaje
Solución
Nota 1
Nota 2
9044
La temperatura interna de
DU3 del controlador es
superior a la temperatura
permitida.
Detenga la unidad de mando 3 lo
antes posible y compruebe que la
temperatura ambiente del
controlador no sea alta.
Revise que el filtro no esté
obstruido.
9045
La velocidad de giro de DU3
del ventilador del controlador
es inferior a la velocidad
permitida. (FAN1)
Revise que el filtro de la unidad de
mando 3 no esté obstruido.
Reemplace el ventilador.
9046
La velocidad de giro de DU3
del ventilador del controlador
es inferior a la velocidad
permitida. (FAN2)
Revise que el filtro de la unidad de
mando 3 no esté obstruido.
Reemplace el ventilador.
9100
Error de inicialización.
No se pudo asignar la
memoria.
Reinicie el controlador.
9101
La cola de mensajes se llenó.
-
9102
Error de inicialización.
No se pudo inicializar
Modbus.
(Cuando se selecciona RTU)
Revise si el puerto seleccionado
está instalado.
(Cuando se selecciona TCP)
Revise si el número del puerto
seleccionado está siendo usado
por otro
9103
Error de inicialización.
No se pudo inicializar la
salida del usuario.
Si se especificó el manipulador,
revise si el manipulador
especificado está registrado.
9104
Error de salida remota del
usuario. No se puede
ejecutar el comando
especificado.
Revise la condición de la
expresión.
9233
El driver de E/S de bus de
campo es un estado anormal.
El módulo está roto o el software
del controlador está dañado.
Restaure el firmware del
controlador.
9234
Error de inicialización del
driver de E/S de bus de
campo.
El módulo está roto o el software
del controlador está dañado.
Restaure el firmware del
controlador.
9610
El circuito RAS detectó un mal
funcionamiento del sistema
servo. Reinicie el
controlador.
Compruebe si hay ruidos.
Reemplace el controlador.
Revise las contramedidas para el
ruido.
Reemplace la DMB.
9611
Error interno de RAM de la
CPU servo. Reinicie el
controlador. Compruebe si
hay ruidos. Reemplace la
DMB.
Revise las contramedidas para el
ruido.
Reemplace la DMB.
9612
Error de RAM para la
comunicación de la CPU
principal y la CPU servo.
Reinicie el controlador.
Compruebe si hay ruidos.
Reemplace la DMB.
Revise las contramedidas para el
ruido.
Reemplace la DMB.

Mantenimiento
306 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
9613
Error interno de RAM de la
CPU servo. Reinicie el
controlador. Compruebe si
hay ruidos. Reemplace la
DMB.
Reinicie el controlador.
Revise las contramedidas para el
ruido.
Reemplace la DMB.
Para la serie T, no es la DMB, sino
la placa de la CPU.
9614
Error de inicialización de la
comunicación de la CPU
principal y la CPU servo.
Reinicie el controlador.
Compruebe si hay ruidos.
Reemplace la DMB.
Reinicie el controlador.
Revise las contramedidas para el
ruido.
Reemplace la DMB.
Para la serie T, no es la DMB, sino
la placa de la CPU.
9615
Error de inicialización de la
comunicación de la CPU
principal y la CPU servo.
Reinicie el controlador.
Compruebe si hay ruidos.
Reemplace la DMB.
Revise las contramedidas para el
ruido.
Reemplace la DMB.
9616
Error de comunicación de la
CPU principal y la CPU servo.
Reinicie el controlador.
Compruebe si hay ruidos.
Reemplace la DMB.
Reinicie el controlador.
Revise las contramedidas para el
ruido.
Reemplace la DMB.
Para la serie T, no es la DMB, sino
la placa de la CPU.
9617
Error de comunicación de la
CPU principal y la CPU servo.
Reinicie el controlador.
Compruebe si hay ruidos.
Reemplace la DMB.
Reinicie el controlador.
Revise las contramedidas para el
ruido.
Reemplace la DMB.
Para la serie T, no es la DMB, sino
la placa de la CPU.
9618
Exceso del comando de
tiempo prolongado del servo.
Revise las contramedidas para el
ruido.
Reemplace la DMB.
9619
Error de la suma de
comprobación del comando
de tiempo prolongado del
servo.
Revise las contramedidas para el
ruido.
Reemplace la DMB.
9620
El temporizador guardián del
sistema detectó una falla.
Reinicie el controlador.
Compruebe si hay ruidos.
Reemplace la DMB.
Reinicie el controlador.
Revise las contramedidas para el
ruido.
Reemplace la DMB.
Para la serie T, no es la DMB, sino
la placa de la CPU.
9621
Error de comprobación de la
unidad de mando.
Revise las contramedidas para el
ruido.
Reemplace la DMB.
9622
Error de RAM de la CPU
servo. Reinicie el controlador.
Compruebe si hay ruidos.
Reemplace la DMB.
Revise las contramedidas para el
ruido.
Reemplace la DMB.
9623
Error de los circuitos
redundantes para la parada de
emergencia o la protección.
Revise el cableado.
Revise las contramedidas para el
ruido.
Reemplace la DMB.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 307
N.º
Mensaje
Solución
Nota 1
Nota 2
9624
Se detectó bajo voltaje del
suministro de alimentación del
circuito principal. Revise el
voltaje de la fuente de
alimentación. Reinicie el
controlador.
Revise las contramedidas para el
ruido.
Reemplace la DMB.
9625
El contacto del relé de control
de la fuente de alimentación
del circuito principal está
soldado firmemente.
Reemplace el DPB.
Reemplace la DMB.
9626
Detecte la diferencia de
reconocimiento de la CPU
secundaria y la CPU principal.
Reinicie el controlador, tome
medidas contra el ruido o
reemplace la placa de la CPU.
9627
La temperatura del resistor de
regeneración fue más alta que
la temperatura especificada.
Especifique la configuración de
peso/inercia. Revise la carga.
Revise el robot. (Uniformidad,
juego, movimiento no uniforme,
tensión suelta de la correa, freno)
Revise la interferencia con los
equipos periféricos. (Colisión,
contacto)
Revise la configuración del
modelo.
Revise la conexión del cable de
alimentación.
9628
Sobrevoltaje de la CPU
secundaria.
Reemplace la placa DPB.
9630
Error de estado en tiempo real
del servo.
Error de la suma de
comprobación.
Reinicie el controlador.
Reemplace la DMB.
Revise las contramedidas para el
ruido.
9632
Error de estado en tiempo real
del servo.
Error de contador de ejecución
sin servo.
Reinicie el controlador.
Reemplace la DMB.
Revise las contramedidas para el
ruido.
9633
Error de estado en tiempo real
del servo.
Error de comunicación de la
CPU servo.
Reinicie el controlador.
Reemplace la DMB.
Revise las contramedidas para el
ruido.
9640
Se detectó una interrupción
del control de movimiento
irregular.
Duplicado de interrupción.
Reinicie el controlador.
Reemplace la DMB.
Revise las contramedidas para el
ruido.
9691
Error de envío de datos en la
red de movimiento.
Revise la conexión del cable de la
unidad de mando.
9692
Error de recepción de datos en
la red de movimiento.
Revise la conexión del cable de la
unidad de mando.
9697
Error de envío de datos de la
placa I/F del sensor de fuerza.
Revise la conexión de la placa
I/F del sensor de fuerza y el
sensor de fuerza.
Revise la conexión de la placa I/F
del sensor de fuerza y el sensor de
fuerza.
Reinicie el controlador.
Consulte con nosotros si ocurre un
error similar incluso después de
tomar las anteriores
contramedidas.

Mantenimiento
308 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
9698
Error de recepción de datos en
la placa I/F del sensor de
fuerza.
Revise la conexión de la placa
I/F del sensor de fuerza y el
sensor de fuerza.
Revise la conexión de la placa I/F
del sensor de fuerza y el sensor de
fuerza.
Reinicie el controlador.
Consulte con nosotros si ocurre un
error similar incluso después de
tomar las anteriores
contramedidas.
9700
Error de matriz de la
compuerta de servocontrol.
Revise la DMB.
Compruebe si hay un cortocircuito
y una conexión incorrecta del
cableado de los equipos
periféricos. (Emergencia y
conectores E/S de expansión)
Reemplace la DMB.
Reemplace la unidad del eje
adicional.
Para la serie T, reinicie el
controlador, tome medidas contra
el ruido y reemplace la placa de la
CPU y la unidad del motor.
9701
Desconexión de la señal del
codificador paralelo. Revise la
conexión del cable de señal o
el cableado interno del robot.
Revise la señal del cable M/C.
Revise el cableado de la señal del
robot. (Pin faltante, desconexión,
cortocircuito)
Reemplace el motor. (Error del
codificador)
Reemplace la DMB. (Error del
circuito de detección)
Revise la conexión del conector en
el controlador. (Soltar, conexión al
terminal del codificador de serie en
DMB)
Revise la configuración del
modelo. (Configuración incorrecta
del codificador paralelo)
Revise el cableado de los equipos
periféricos. (Emergencia y E/S)
Para la serie T, reinicie el
controlador, tome medidas contra
el ruido y reemplace la unidad del
motor.
9702
El driver del motor no está
instalado. Instale el driver del
motor. Revise la DMB o el
driver del motor.
Revise si el driver del motor está
montado.
Revise la configuración del modelo
y la configuración de hardware.
Reemplace el driver del motor.
Reemplace la DMB.
Para la serie T, revise el cableado
de la unidad del motor.
9703
Error de inicialización de la
comunicación del codificador
incremental. Revise la
conexión del cable de señal y
la configuración del robot.
Revise la configuración del
modelo.
Reemplace el motor. (Error del
codificador)
Reemplace la DMB.
Para la serie T, reinicie el
controlador, tome medidas contra
el ruido y reemplace la placa de la
CPU y la unidad del motor.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 309
N.º
Mensaje
Solución
Nota 1
Nota 2
9704
Error de inicialización del
codificador absoluto.
Revise la conexión del cable
de señal o la configuración del
robot.
Revise la configuración del
modelo.
Reemplace el motor. (Error del
codificador)
Reemplace la DMB.
Para la serie T, reinicie el
controlador, tome medidas contra
el ruido y reemplace la unidad del
motor.
9705
Error de configuración de la
división del codificador.
Revise la configuración del
robot.
Revise la configuración del
modelo.
9706
Error de datos durante la
inicialización del codificador
absoluto. Revise la conexión
del cable de señal, el
controlador o el motor.
Reemplace el motor. (Error del
codificador)
Reemplace la DMB.
Revise las contramedidas para el
ruido.
Para la serie T, reinicie el
controlador, tome medidas contra
el ruido y reemplace la unidad del
motor.
9707
Los turnos múltiples del
codificador absoluto superan
el rango máximo. Reinicie el
codificador.
Reinicie el codificador.
Reemplace el motor. (Error del
codificador)
9708
La posición está fuera de
rango. Reinicie el codificador.
Reinicie el codificador.
Reemplace la DMB.
Reemplace el motor. (Error del
codificador)
9709
No hay respuesta del
codificador de serie.
Revise la conexión del cable
de señal, el motor, DMB o la
placa IF del codificador.
Revise la configuración del
modelo. (Configuración incorrecta
del modelo de codificador paralelo)
Revise la conexión del cable de
señal.
Reemplace la DMB y la tarjeta I/F
del codificador.
9710
Error de inicialización del
codificador de serie.
Reinicie el controlador. Revise
el motor, la DMB o la placa IF
del codificador.
Revise la configuración del robot.
Revise el cable de señal.
Reemplace la DMB y la tarjeta I/F
del codificador.
Para la serie T, reinicie el
controlador, tome medidas contra
el ruido y reemplace la unidad del
motor.
9711
Error de comunicación del
codificador de serie.
Reinicie el controlador.
Revise el motor, la DMB o la
placa IF del codificador.
Revise la configuración del robot.
Revise el cable de señal.
Reemplace la DMB y la placa I/F
del codificador.
Para la serie T, reinicie el
controlador, tome medidas contra
el ruido y reemplace la unidad del
motor.

Mantenimiento
310 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
9712
Error del temporizador
guardián de la CPU servo.
Reinicie el controlador.
Revise el motor o la DMB.
Reemplace la DMB.
Revise las contramedidas para el
ruido.
Para la serie T, revise la conexión
del cable de señal. Reinicie el
controlador, tome medidas contra
el ruido y reemplace la unidad del
motor.
9713
Error de WDT del circuito de
control actual.
Reinicie el controlador.
Revise el controlador.
Revise la conexión del cable de
alimentación.
Revise la fuente de alimentación
de 15 V y la conexión del cable.
Reemplace la DMB.
Revise las contramedidas para el
ruido.
Para la serie T, reinicie el
controlador, tome medidas contra
el ruido y reemplace la unidad del
motor.
9714
La DMB no es para este robot.
Revise la configuración del robot.
Reemplace por la DMB
compatible.
9715
El codificador se reinició.
Reinicie el controlador.
Reinicie el controlador.
9716
Error de suministro de
alimentación del codificador
absoluto. Reemplace la
batería con una nueva.
Revise el cableado interno del
robot.
Reinicie el codificador.
Revise la conexión del cable de
señal.
9717
Error de datos de copia de
seguridad del codificador
absoluto. Reinicie el
codificador.
Reinicie el codificador.
Revise la conexión del cable de
señal.
9718
Alarma de la batería del
codificador absoluto.
Reemplace la batería.
Revise la conexión del cable de
señal.
9719
Error de posición del
codificador absoluto.
Reinicie el codificador.
Reemplace el motor.
Reinicie el codificador.
Reemplace el motor. (Error del
codificador)
Para la serie T, reinicie el
controlador, tome medidas contra
el ruido y reemplace la unidad del
motor.
9720
La velocidad es demasiado
alta durante el encendido del
controlador. Detenga el robot
y reinicie el controlador.
Reinicie el controlador.
Reinicie el codificador.
Para la serie T, reinicie el
controlador, tome medidas contra
el ruido y reemplace la unidad del
motor.
Revise la interferencia con otros
dispositivos.
9721
Sobrecalentamiento del
codificador absoluto.
Reduzca el trabajo de movimiento.
Espere hasta que disminuya la
temperatura del codificador.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 311
N.º
Mensaje
Solución
Nota 1
Nota 2
9722
Error del transductor R/D.
Reinicie el codificador. Revise
la placa del solucionador o el
cableado interno del robot.
Reinicia el codificador.
Revise el cableado de señal del
manipulador (pin suelto,
desconexión, cortocircuito).
Reemplace la placa del
solucionador.
9723
Error de comunicación del
sensor G. Revise la conexión
del cable de señal o el
cableado interno del robot.
Revise la conexión del cable de
señal.
Revise el cableado de señal del
manipulador (pin suelto,
desconexión, cortocircuito).
Revise la contramedida para el
ruido.
Reemplace la placa de control.
Reemplace la DMB.
9724
Error de datos del sensor G.
Revise la placa de control.
Reemplace la placa de control.
9725
Los datos de giro múltiple y los
datos de conversión R/D son
diferentes. Reinicie el
codificador.
Reinicie el solucionador.
Revise la contramedida para el
ruido.
Reemplace la placa del
solucionador.
9726
Desconexión de la señal de
excitación del solucionador.
Reinicie el codificador. Revise
la placa del solucionador o el
cableado interno del robot.
Revise el cableado de señal del
manipulador (pin suelto,
desconexión, cortocircuito).
Reemplace la placa del
solucionador.
9727
Error de comunicación de S-
DSP. Revise la DMB.
Reinicie el controlador.
Revise la contramedida para el
ruido.
Reemplace la DMB.
9728
Error de datos de
realimentación actual. Revise
la DMB.
Reinicie el controlador.
Revise la contramedida para el
ruido.
Reemplace la DMB.
Para la serie T, revise si existen
fallas de cortocircuito y conexión a
tierra en el cable de alimentación.
Reinicie el controlador o
reemplace la unidad del motor.
9729
Error de comunicación de D-
DSP. Revise la DMB.
Reinicie el controlador.
Revise la contramedida para el
ruido.
Reemplace la DMB.
9730
La velocidad es demasiado
alta durante el apagado del
controlador. Reinicie el
codificador.
Reinicie el codificador.
Reemplace el motor.
9731
La velocidad es demasiado
alta. Reinicie el codificador.
Reinicie el codificador. Reemplace
el motor.
Para la serie T, reinicie el
controlador y reemplace la unidad
del motor.
9732
Servoalarma A.
-

Mantenimiento
312 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
N.º
Mensaje
Solución
Nota 1
Nota 2
10000
Comando anulado por el usuario
-
10001
Se agotó el tiempo de espera del
comando.
-
10002
Sintaxis de línea de archivo de punto
incorrecta.
-
10003
El proyecto no se pudo compilar.
-
10004
No se puede inicializar la instancia de
la clase Spel.
-
10005
No se pudo inicializar el analizador.
-
10006
No se pudo inicializar wbproxy.
-
10007
El proyecto no existe.
Revise que el nombre y la ruta
del proyecto sean correctos.
10008
No se especificó un proyecto.
Especifique el proyecto.
10009
No se puede abrir el archivo.
Revise que el nombre y la ruta
del proyecto sean correctos.
10010
No se puede crear el archivo.
-
10011
No se encontró el archivo
Revise que el nombre y la ruta
del proyecto sean correctos.
10013
No se puede ejecutar LoadPoints con
Robot Manager abierto.
Cierre Robot Manager y
ejecútelo.
10014
No se puede bloquear el proyecto.
Está siendo usado por otra sesión.
Cierre otras aplicaciones.
10015
No se pudo sincronizar el proyecto.
-
10016
La unidad no está preparada
Revise si la designación de la
unidad es correcta.
10017
Dirección IP no válida
Revise la dirección IP.
10018
Máscara IP no válida
Revise la máscara IP.
10019
Puerta de enlace de IP no válida
Revise la puerta de enlace de
IP.
10020
La dirección IP o puerta de enlace de
IP no pueden ser la dirección de
subred.
Revise la dirección IP.
10021
La dirección IP o puerta de enlace de
IP no pueden ser la dirección de
transmisión.
Revise la dirección IP.
10022
Dirección DNS no válida
Revise la DNS.
10023
No se pueden ejecutar los comandos
porque la compilación del proyecto no
está completa.
Ejecútelos una vez que la
compilación del proyecto esté
completa.
10024
Nombre de tarea no válido.
Revise el nombre de la tarea.
10100
El comando ya se está ejecutando.
-
10101
Comando anulado por el usuario.
Ejecute ResetAbort.
10102
Instancia de servidor no válida.
Especifique la instancia
correcta.
10103
Valor CommandTask no válido.
Especifique el número de tarea
correcto.
10104
No se puede cambiar ServeInstance
después de la inicialización.
Defina ServerInstance después
de la inicialización.
10105
Los datos son válidos.
Revise los datos en el método
TaskInfo de RC+ API.
10106
No se puede continuar mientras haya
un diálogo abierto.
Revise si se está ejecutando el
método Rundialog o el método
TeachPoint mientras se ejecuta
el método Rundialog o el
método TeachPoint en RC+
API.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 313
N.º
Mensaje
Solución
Nota 1
Nota 2
10250
AOI. Se agotó el tiempo de espera de
ejecución del comando.
Revise la conexión con PLC.
10251
AOI. No se puede ejecutar el comando.
ExtError es alto o ExtCmdReset es
bajo.
Revise el bit ExtError y el bit
ExtCmdReset.
10252
Se detectó una configuración de AOI
no válida.
Revise la configuración.
10501
Conexión cancelada.
-
10502
No se puede conectar con el
controlador.
-
10503
El firmware del controlador no es
compatible con esta versión de RC+.
Actualice la versión RC+.
10504
La conexión USB de este sistema está
reservada para el controlador RC620 y
no se puede usar para RC+7.0.
Instale RC+7.0 en otra
computadora.
10505
La conexión especificada no existe.
Revise el número de la
conexión.
10600
El driver del digitalizador de video no
está instalado.
Instale el driver.

Mantenimiento
314 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
9.2 No se puede conectar la computadora de desarrollo con el
controlador
mediante el cable USB
PRECAUCIÓN
■
No conecte el cable USB a una computadora o un controlador sin instalar el
software de desarrollo de programas EPSON RC+ 7.0 en la computadora.
Debe instalar EPSON RC+ 7.0 para controlar el controlador.
Si el cable USB se conecta a una computadora o un controlador sin instalar el
software de desarrollo de programas EPSON RC+ 7.0, aparecerá el asistente
[Add New Hardware] (Asistente para agregar nuevo hardware). Haga clic en el
botón <Cancel> (Cancelar) para cerrar el asistente [Add New Hardware]..
- Si aparece el siguiente mensaje de error cuando conecta la computadora de desarrollo y el
controlador con el cable USB y conecta el controlador a EPSON RC+ 7.0, es posible que
Windows no reconozca al controlador correctamente. Consulte Mantenimiento 9.2.1
Confirmación mediante el Administrador de dispositivos de Windows para comprobar la
conexión del controlador.
“No se puede conectar al controlador
!! Error: 1805, error de conexión. Revise el inicio del controlador y la conexión del cable
de comunicación”.
- Recuerde que el nombre del driver se registrará como “Controlador de robot EPSON
RC170” cuando se conecte con el Controlador RC90/RC90-B.

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 315
9.2.1 Confirmación mediante el Administrador de dispositivos de Windows
(1) Asegúrese de que la computadora de desarrollo y el controlador estén conectados
mediante el cable USB.
Cuando compruebe la conexión del controlador mediante el Administrador de
dispositivos de Windows, la computadora de desarrollo y el controlador deben estar
conectados con el cable USB.
(2) Haga clic en Windows-[Control Panel]-<Performance and Maintenance> (Windows-
Panel de control-Rendimiento y mantenimiento).
(3) Aparecerá el diálogo [Performance and Maintenance] (Rendimiento y mantenimiento).
Haga clic en el icono <System>.
(4) Aparecerá el diálogo [System Properties] (Propiedades del sistema).
Seleccione la pestaña [Hardware] y haga clic en el botón <Administrador de
dispositivos>.
NOTA

Mantenimiento
316 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
(5) Aparecerá el diálogo [Device Manager].
Haga clic en <Universal Serial Bus controllers> (Controladores de bus serie universal)
y asegúrese de que “EPSON Robot Controller RC170” (Controlador de robot EPSON
RC170) esté registrado.
Cuando “EPSON Robot Controller RC170” está registrado y ubicado en “Universal Serial
Bus controllers” como se muestra en el paso (5), la computadora de desarrollo y el
controlador se conectarán correctamente.
Si aparece el siguiente mensaje de error, comuníquese con el proveedor de su región.
“No se puede conectar al controlador.
!! Error: 1805, error de conexión, revise el inicio del controlador y la conexión del cable de
comunicación”.
Si “EPSON Robot Controller RC170” no está ubicado en “Universal Serial Bus controllers”,
sino en “Other devices” (Otros dispositivos) en el paso (5), consulte Mantenimiento 9.2.2
Cuando se reconoce en “Other devices” en el Administrador de dispositivos de Windows.
NOTA

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 317
9.2.2 Cuando se reconoce en “Other devices” en el Administrador de dispositivos de
Windows
Si “EPSON Robot Controller RC170” se reconoce en “Other devices” en el Administrador
de dispositivos de Windows como se muestra en el siguiente diálogo, borre “EPSON Robot
Controller RC170” del administrador de dispositivos y conecte nuevamente el cable USB
para corregir el problema.
(1) Seleccione y haga clic con el botón derecho del mouse en “EPSON Robot Controller
RC170” en el diálogo [Device Manager].
(2) Seleccione [Uninstall] (Desinstalar).
(3) Aparecerá el diálogo [Confirm Device Removal] (Confirmar retiro de dispositivos).
Haga clic en el botón <OK>.
(4) Retire el cable USB y vuelva a conectar el cable USB. Aparecerá el siguiente mensaje
en la parte inferior derecha de la pantalla de Windows.
(5) Cuando el controlador se instala en forma automática y aparece el siguiente mensaje, la
comunicación queda disponible.
Si el problema no se corrige, comuníquese con el proveedor de su región.
NOTA

Mantenimiento
318 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
10. Lista de piezas de mantenimiento
Para RC90
Nombre de pieza
Código
Código antiguo
Nota
DPB
2173220
Para LS3, LS6
2171263
Para LS20
Las piezas cambian en función de los números de serie del controlador.
Si necesita las piezas, confirme el número de serie del controlador antes de comunicarse con nosotros.
Número de
serie del
controlador
Nombre de pieza
Código
Código antiguo
Nota
R9V303****
R9V603****
R9V201****
o superior
DMB
FUENTE
2189442
R9V303****
R9V603****
RECEPTOR
2189441
FUENTE
2195265
R9V201****
RECEPTOR
2195266
Placa de DMB Sub
2176569
CF (Compact Flash)
2191240
R9V300****
R9V301****
R9V302****
R9V600****
R9V601****
R9V602****
R9V200****
DMB
FUENTE
2180966
R9V300****
R9V301****
R9V302****
R9V600****
R9V601****
R9V602****
RECEPTOR
2180967
FUENTE
2195263
R9V200****
RECEPTOR
2195264
Placa de DMB Sub
2176569
CF (Compact Flash)
2166273
R13N8B6021
R9S2******
R9S3******
R9S6******
A9S2******
DMB
FUENTE
2180936
Común con
EPSON RC+5.0
RECEPTOR
2180937
Placa de DMB Sub
2173117
R13B040209
CF (Compact Flash)
2166273
R13N8B6021
Referencia: A continuación, las piezas de mantenimiento para usuarios de EPSON RC+5.0.
Número de
serie del
controlador
Nombre de pieza
Código
Código antiguo
Nota
RC9E******
R9E6******
DMB
FUENTE
2180936
Común con
EPSON RC+7.0
RECEPTOR
2180937
Placa de DMB Sub
2173117
R13B040209
CF (Compact Flash)
2166272
R13B110607

Mantenimiento
RC90 / RC90-B (EPSON RC+ 7.0) Mod.26 319
Para RC90-B
Nombre de pieza
Código
Nota
DMB
2190402
Para LS10-B, LS20-B
2197075
Para LS3-B, LS6-B
Placa de DMB-Sub
2190403
DPB
2202276
Para LS20-B
2197025
Para LS10-B
2197024
Para LS3-B, LS6-B
CF (Compact Flash)
2197078
Para RC90 / RC90-B
Nombre de pieza
Código
Código
antiguo
Nota
Ventilador
2157260
R13B060510
Filtro del ventilador
1520975
R13B060511
Negro (Hasta agotar
existencias)
2195107
Blanco
Batería
2113554
R13B060003
Enchufe de derivación
de TP/OP
2111451
R13B060705
Driver
del
motor
30A/30A
2191086
Para LS20 (articulación n.º 1,
n.º 2)
Para LS20-B (articulación n.º 1,
n.º 2)
30A/15 A
2191087
Para LS10-B (articulación n.º 1,
n.º 2)
Para LS20-B (articulación n.º 3,
n.º 4)
15 A/15 A-2
2194709
Para LS20 (articulación n.º 3,
n.º 4)
Para LS10-B (articulación n.º 3,
n.º 4)
10A/10A
2195536
Para LS3, LS6, LS3-B, LS6-B

Mantenimiento
320 RC90 / RC90-B (EPSON RC+ 7.0) Mod.26
Opción
Nombre de pieza
Código
Código antiguo
Nota
Placa de E/S
de expansión
Tipo de fuente
R12NZ9003P
R12B040302
Tipo de
receptor
R12NZ9003Q
R12B040303
Placa RS-232C
R12NZ9004E
R12B040726
Placa DeviceNet
R12NZ9004F
R12B040727
El módulo DeviceNet se
instala en la placa de bus de
campo.
Placa PROFIBUS
R12NZ9004H
R12B040729
El módulo PROFIBUS-DP se
instala en la placa de bus de
campo.
Placa CC-Link
R12NZ9004J
R12B040730
El módulo CC-Link se instala
en la placa de bus de campo.
Placa PROFINET
R12NZ900A6
R12N747051
El módulo PROFINET se
instala en la placa de bus de
campo.
Placa Ethernet/IP
R12NZ900A7
R12N747061
El módulo Ethernet/IP se
instala en la placa de bus de
campo.
Placa PG
R12NZ900A8
R12N748011
Placa EtherCAT
R12NZ900CL
El módulo EtherCAT se
instala en la placa de bus de
campo.
Placa de E/S
analógica
1CH
R12NZ900WZ
4CH
R12NZ900X1
Placa EUROMAP67
R12NZ90104
Placa EUROMAP67
(sin cable de conexión IMM)
R12NZ9010A
EUROMAP67 Sin cable 2
EUROMAP67 Cable1
2194667
Para la placa EUROMAP67
Cable de parada de
emergencia
EUROMAP67 Cable2
2194668
Para la placa EUROMAP67
Cable de conexión IMM
Conector
de emergencia de EUROMAP67:
Enchufe
2165789
Para la placa EUROMAP67
Enchufe de soldadura
Conector
de emergencia de EUROMAP67:
Revestimiento
2194882
Para la placa EUROMAP67
Kit del revestimiento
-
 1
1
-
 2
2
-
 3
3
-
 4
4
-
 5
5
-
 6
6
-
 7
7
-
 8
8
-
 9
9
-
 10
10
-
 11
11
-
 12
12
-
 13
13
-
 14
14
-
 15
15
-
 16
16
-
 17
17
-
 18
18
-
 19
19
-
 20
20
-
 21
21
-
 22
22
-
 23
23
-
 24
24
-
 25
25
-
 26
26
-
 27
27
-
 28
28
-
 29
29
-
 30
30
-
 31
31
-
 32
32
-
 33
33
-
 34
34
-
 35
35
-
 36
36
-
 37
37
-
 38
38
-
 39
39
-
 40
40
-
 41
41
-
 42
42
-
 43
43
-
 44
44
-
 45
45
-
 46
46
-
 47
47
-
 48
48
-
 49
49
-
 50
50
-
 51
51
-
 52
52
-
 53
53
-
 54
54
-
 55
55
-
 56
56
-
 57
57
-
 58
58
-
 59
59
-
 60
60
-
 61
61
-
 62
62
-
 63
63
-
 64
64
-
 65
65
-
 66
66
-
 67
67
-
 68
68
-
 69
69
-
 70
70
-
 71
71
-
 72
72
-
 73
73
-
 74
74
-
 75
75
-
 76
76
-
 77
77
-
 78
78
-
 79
79
-
 80
80
-
 81
81
-
 82
82
-
 83
83
-
 84
84
-
 85
85
-
 86
86
-
 87
87
-
 88
88
-
 89
89
-
 90
90
-
 91
91
-
 92
92
-
 93
93
-
 94
94
-
 95
95
-
 96
96
-
 97
97
-
 98
98
-
 99
99
-
 100
100
-
 101
101
-
 102
102
-
 103
103
-
 104
104
-
 105
105
-
 106
106
-
 107
107
-
 108
108
-
 109
109
-
 110
110
-
 111
111
-
 112
112
-
 113
113
-
 114
114
-
 115
115
-
 116
116
-
 117
117
-
 118
118
-
 119
119
-
 120
120
-
 121
121
-
 122
122
-
 123
123
-
 124
124
-
 125
125
-
 126
126
-
 127
127
-
 128
128
-
 129
129
-
 130
130
-
 131
131
-
 132
132
-
 133
133
-
 134
134
-
 135
135
-
 136
136
-
 137
137
-
 138
138
-
 139
139
-
 140
140
-
 141
141
-
 142
142
-
 143
143
-
 144
144
-
 145
145
-
 146
146
-
 147
147
-
 148
148
-
 149
149
-
 150
150
-
 151
151
-
 152
152
-
 153
153
-
 154
154
-
 155
155
-
 156
156
-
 157
157
-
 158
158
-
 159
159
-
 160
160
-
 161
161
-
 162
162
-
 163
163
-
 164
164
-
 165
165
-
 166
166
-
 167
167
-
 168
168
-
 169
169
-
 170
170
-
 171
171
-
 172
172
-
 173
173
-
 174
174
-
 175
175
-
 176
176
-
 177
177
-
 178
178
-
 179
179
-
 180
180
-
 181
181
-
 182
182
-
 183
183
-
 184
184
-
 185
185
-
 186
186
-
 187
187
-
 188
188
-
 189
189
-
 190
190
-
 191
191
-
 192
192
-
 193
193
-
 194
194
-
 195
195
-
 196
196
-
 197
197
-
 198
198
-
 199
199
-
 200
200
-
 201
201
-
 202
202
-
 203
203
-
 204
204
-
 205
205
-
 206
206
-
 207
207
-
 208
208
-
 209
209
-
 210
210
-
 211
211
-
 212
212
-
 213
213
-
 214
214
-
 215
215
-
 216
216
-
 217
217
-
 218
218
-
 219
219
-
 220
220
-
 221
221
-
 222
222
-
 223
223
-
 224
224
-
 225
225
-
 226
226
-
 227
227
-
 228
228
-
 229
229
-
 230
230
-
 231
231
-
 232
232
-
 233
233
-
 234
234
-
 235
235
-
 236
236
-
 237
237
-
 238
238
-
 239
239
-
 240
240
-
 241
241
-
 242
242
-
 243
243
-
 244
244
-
 245
245
-
 246
246
-
 247
247
-
 248
248
-
 249
249
-
 250
250
-
 251
251
-
 252
252
-
 253
253
-
 254
254
-
 255
255
-
 256
256
-
 257
257
-
 258
258
-
 259
259
-
 260
260
-
 261
261
-
 262
262
-
 263
263
-
 264
264
-
 265
265
-
 266
266
-
 267
267
-
 268
268
-
 269
269
-
 270
270
-
 271
271
-
 272
272
-
 273
273
-
 274
274
-
 275
275
-
 276
276
-
 277
277
-
 278
278
-
 279
279
-
 280
280
-
 281
281
-
 282
282
-
 283
283
-
 284
284
-
 285
285
-
 286
286
-
 287
287
-
 288
288
-
 289
289
-
 290
290
-
 291
291
-
 292
292
-
 293
293
-
 294
294
-
 295
295
-
 296
296
-
 297
297
-
 298
298
-
 299
299
-
 300
300
-
 301
301
-
 302
302
-
 303
303
-
 304
304
-
 305
305
-
 306
306
-
 307
307
-
 308
308
-
 309
309
-
 310
310
-
 311
311
-
 312
312
-
 313
313
-
 314
314
-
 315
315
-
 316
316
-
 317
317
-
 318
318
-
 319
319
-
 320
320
-
 321
321
-
 322
322
-
 323
323
-
 324
324
-
 325
325
-
 326
326
-
 327
327
-
 328
328
-
 329
329
-
 330
330
-
 331
331
-
 332
332
-
 333
333
-
 334
334














































































































































































































































































































































Epson RC90B Controller Manual de usuario
- Tipo
- Manual de usuario
- Este manual también es adecuado para
Artículos relacionados
-
Epson LS6-B SCARA Robot Manual de usuario
-
Epson LS20-B SCARA Robot Manual de usuario
-
-
Epson LS10-B SCARA Robot Manual de usuario
-
Epson IntelliFlex Feeding System Manual de usuario
-
-
Epson RS4 SCARA Robots Guía del usuario
-
Epson C12XL 6-Axis Robots Manual de usuario
-
-
Epson T3 SCARA Robots Guía del usuario