

- 2 -
ERRORES DETECTADOS EN EL MANUAL DE PROGRAMACIÓN (REF. 9701)
Página 64. Función G51
Cuando se trabaja en diámetros, el valor de "I" en la tabla está expresado en diámetros y el valor que se debe asignar
al parámetro "I" de la función G51 se debe expresar siempre en radios.
ERRORES DETECTADOS EN EL MANUAL DE OPERACIÓN (REF. 9701)
Página 47. Ultimos párrafos.
Debe decir:
El CNC demandará que número es el del programa origen y cuál el del nuevo programa, tras teclear cada uno de
ellos se debe pulsar la tecla ENTER.
En el caso de no existir el número tecleado como programa origen, de existir ya en memoria un programa con
el mismo número que el tecleado como nuevo o bien si al copiar el nuevo programa no existe memoria suficiente,
el CNC emitirá un comunicado indicando la causa.
MODIFICACIONES AL MANUAL DE INSTALACIÓN (REF. 9707)
Apartado 3.3.3 (capítulo 3 página 11). P602(4). Otro ejemplo:
Se dispone de un volante electrónico Fagor (25 impulsos/vuelta) personalizado de la siguiente forma:
P602(1)=0 Milímetros P501=1 Resolución 0.001 mm. P602(4)=0 Factor de multiplicación x4
Dependiendo de la posición del conmutador MFO (Manual Feedrate Override) el eje seleccionado avanzará:
Posición 1 1 x 25 x 4 = 0,100 milímetros por vuelta
Posición 10 10 x 25 x 4 = 1,000 milímetros por vuelta
Posición 100 100 x 25 x 4 = 10,.000 milímetros por vuelta
MODIFICACIONES AL MANUAL DE RED LOCAL (REF. 9701)
Apartado 2.2 (página 3). P616(7)
Cambian los 2 primeros párrafos. Debe decir:
Si se personaliza "P616(7)=0" el CNC 8025 T utiliza el terminal 15 del conector I/O1 como entrada de las señales
Feed-Hold, Transfer-Inhibit y M Ejecutada. Tal y como se explica en el manual de Instalación, capítulo 1 apartado
"Entradas del conector I/O 1"
Si se personaliza "P616(7)=1" el CNC actúa del siguiente modo:
* La entrada Feed-Hold .......

- 3 -
Versión 7.1 (Julio de 1996)
1. AMPLIACIÓN DE RECURSOS DEL PLC INTEGRADO
1.1 ENTRADAS
1.1.1 TIPO DE AVANCE (G94/G95)
La entrada I86 del PLCI mostrará siempre el tipo de avance (F) que se encuentra seleccionado en el CNC.
I86 = 0 G94. Avance en milímetros (pulgadas) por minuto
I86 = 1 G95. Avance en milímetros (pulgadas) por revolución.
1.1.2 TIPO DE VELOCIDAD (G96/G97)
La entrada I87 del PLCI mostrará siempre el tipo de velocidad que se encuentra seleccionado en el CNC.
I87 = 0 G97. Velocidad del centro de la herramienta constante.
I87 = 1 G96. Velocidad del punto de corte constante.
1.1.3 EJE REFERENCIÁNDOSE (EN BÚSQUEDA DE CERO)
La entrada I88 indica si se está efectuando la búsqueda de Cero y las entradas I100, I101, I102, I103 e I104 indican
que se ha efectuado la búsqueda de cero del eje correspondiente.
I88 Indica si se está efectuando la búsqueda de cero en algún eje (0=No / 1=Si)
I100 Indica si se ha efectuado la búsqueda de cero en el eje X (0=No / 1=Si)
I101 Indica si se ha efectuado la búsqueda de cero en el 3º eje (0=No / 1=Si)
I102 Indica si se ha efectuado la búsqueda de cero en el eje Z (0=No / 1=Si)
I103 Indica si se ha efectuado la búsqueda de cero en el 4º eje (0=No / 1=Si)
I104 Indica si se ha efectuado la búsqueda de cero en el eje C (0=No / 1=Si)
1.1.4 SENTIDO DE MOVIMIENTO DE LOS EJES
Las entradas I42, I43, I44 e I45 mostrarán siempre el sentido de desplazamiento de cada uno de los ejes.
I42 Indica el sentido de desplazamiento del eje X (0=Positivo / 1=negativo)
I43 Indica el sentido de desplazamiento del 3º eje (0=Positivo / 1=negativo)
I44 Indica el sentido de desplazamiento del eje Z (0=Positivo / 1=negativo)
I45 Indica el sentido de desplazamiento del 4º eje (0=Positivo / 1=negativo)
1.2 SALIDAS
1.2.1 HABILITACIÓN DE LA TECLA START DESDE EL PLCI
Esta prestación permite fijar desde el PLCI el tratamiento de la tecla [START] en el CNC. El parámetro máquina
"P621(7)" indica si se dispone de esta prestación.
P621(7) = 0 No se dispone de esta prestación.
P621(7) = 1 Si se dispone de esta prestación.
Cuando se dispone de esta prestación el tratamiento de la tecla [START] en el CNC depende del estado de la salida
O25 (START ENABLE) del PLCI.
O25 = 0 El CNC no tiene en cuenta la tecla [START] ni la señal START exterior.
O25 = 1 El CNC tiene en cuenta la tecla [START] y la señal START exterior.
1.2.2 LÍMITES DE RECORRIDO FIJADOS POR PLCI
Esta prestación permite controlar desde el PLCI los límites de recorrido de los ejes. El parámetro máquina "P621(7)"
indica si se dispone de esta prestación.
P621(7) = 0 No se dispone de esta prestación.
P621(7) = 1 Si se dispone de esta prestación.
Se deben utilizar las siguientes salidas del PLCI para fijar los límites de recorrido de cada eje.
O52 / O53 Límite positivo / negativo del eje X
O54 / O55 Límite positivo / negativo del 3º eje
O56 / O57 Límite positivo / negativo del eje Z
O58 / O59 Límite positivo / negativo del 4º eje
Si el PLCI activar una de estas salidas y el eje se está desplazando en el mismo sentido, el CNC detiene el avance de
los ejes y el giro del cabezal, visualizando en pantalla el error de límite de recorrido sobrepasado.

- 4 -
1.2.3 BLOQUEAR EL ACCESO AL MODO EDITOR DESDE EL PLCI
El parámetro máquina "P621(7)" indica si se dispone de esta prestación.
P621(7) = 0 No se dispone de esta prestación.
P621(7) = 1 Si se dispone de esta prestación.
Cuando se dispone de esta prestación el acceso al modo editor en el CNC depende, además de las condiciones actuales
(Memoria protegida, Nº de programa a bloquear), del estado de la salida O26 del PLCI.
O26 = 0 Acceso libre al modo editor (queda protegido por las condiciones actuales).
O26 = 1 Acceso bloqueado al modo editor.
1.2.4 CABEZAL CONTROLADO POR EL CNC O POR EL PLCI
A partir de esta versión, la salida de consigna de cabezal puede ser fijada por el CNC o desde el PLCI. El parámetro
máquina "P621(7)" indica si se dispone de esta prestación.
P621(7) = 0 No se dispone de esta prestación.
P621(7) = 1 Si se dispone de esta prestación.
Fijar la consigna analógica de cabezal desde el PLCI
Para fijar, desde el PLCI, la consigna analógica del cabezal se debe utilizar el binomio M1956 - R156.
El registro R156 fija la consigna de cabezal en unidades de 2,442 mV. (10 / 4095)
R156 = 0000 1111 1111 1111 (R1256=4095) = 10V.
R156 = 0001 1111 1111 1111 = -10V.
R156 = 0000 0000 0000 0001 (R1256=1) = 2,5 mV.
R156 = 0001 0000 0000 0001 = -2,5 mV.
Para que el CNC asuma el valor asignado al registro R156 se debe activar la marca M1956, tal y como se detalla
en el manual PLCI (apartado 5.5.2 Escritura en las variables internas del CNC)
Cabezal controlado por el CNC o por el PLCI
El CNC puede disponer de 2 consignas analógicas de cabezal en su interior, la propia del CNC y la fijada desde
el PLCI.
Para indicar al CNC cual de ellas debe proporcionarla al exterior se debe utilizar la salida O27 del PLCI.
O27 = 0 La consigna del cabezal la fija el propio CNC.
O27 = 1 La consigna del cabezal la fija el PLCI (binomio M1956-R156).
1.3 LECTURA DE VARIABLES INTERNAS DEL CNC
A partir de esta versión, el PLCI y el PLC64 disponen de más información interna del CNC.
En el PLCI no es necesario activar ninguna marca interna para acceder a esta información. El propio CNC se encarga
de actualizar la información al comienzo de cada Scan del PLCI.
En el PLC64 es necesario consultar la marca correspondiente cada vez que se desea conocer el valor de una variable
del CNC.
La información del CNC a la que se tiene acceso es la siguiente:
S real en r.p.m (REG119 en el PLCI M1919 en el PLC64)
No se debe confundir con el registro R112 que indica la velocidad S programada del cabezal.
Se expresa en r.p.m y en formato hexadecimal. Ejemplo: S 2487 R119= 967
Número de bloque en ejecución (REG120 en el PLCI M1920 en el PLC64)
Se expresa en formato hexadecimal. Ejemplo: N120 R120= 78
Código de la tecla pulsada (B0-7 REG121 en el PLCI No disponible en el PLC64)
No se debe confundir con el registro R118 que indica el código correspondiente a la última tecla pulsada.
Cuando se pulsa una tecla ambos registros tienen el mismo valor, pero la información en el R121 únicamente se
mantiene durante un Scan y en el R118 hasta que se pulse otra tecla.
Si se pulsa varias veces seguidas la misma tecla (por ejemplo 1111):
El R121 mostrara 4 veces el código de la tecla 1 (una por scan).
El R118 mostrará siempre el mismo valor, por lo que no se sabrá si se ha pulsado una o varias veces la tecla 1.
Los códigos de tecla están detallados en el apéndice del manual PLCI.

- 5 -
Modo de trabajo seleccionado en el CNC (B8-11 REG121 en el PLCI No disponible en el PLC64)
Estado de las funciones auxiliares (REG122 en el PLCI No disponible en el PLC64)
El estado de cada una de las funciones viene dado en 1 bit y estará indicado con un 1 en caso de que se encuentre
activo y con un 0 cuando no lo esté.
2. DISPONIBILIDAD DEL 4º EJE EN LOS MODELOS CNC 8025 T
A partir de esta versión, esta prestación se encuentra disponible en todos los modelos:
CNC-8025T (no disponible hasta esta versión) CNC-8025TG CNC-8025TS
CNC-8025TI(no disponible hasta esta versión) CNC-8025TGI CNC-8025TSI
3. UNIDADES DE VISUALIZACIÓN DEL GIRO DEL CABEZAL
Hasta ahora, la velocidad del cabezal se visualizaba siempre en rev/min. A partir de esta versión, se podrá seleccionar
mediante el parámetro máquina "P621(6)", el formato de visualización.
P621(6) = 0 En rev/min cuando se trabaja en RPM y en m/min. cuando se trabaja en velocidad de corte constante.
P621(6) = 1 Siempre en rev/min. incluso cuando se trabaja en velocidad de corte constante.
4. TRATAMIENTO DE BLOQUE ÚNICO
El CNC considera como “Bloque Unico” el grupo de bloques que se encuentra entre las funciones G47 y G48.
Tras ejecutarse la función G47 el CNC ejecuta todos los bloques que vienen a continuación hasta ejecutar un bloque
que contiene la función G48.
Cuando el programa se ejecuta en el modo “Bloque a Bloque” el CNC ejecuta, en ciclo continuo, la función G47 y todos
los bloques que vienen a continuación, deteniéndose al ejecutar la función G48.
Si se pulsa la tecla durante la ejecución de un “Bloque único”, en modo Automático o Bloque a Bloque, el CNC
continúa con la ejecución hasta ejecutar la función G48, momento en que se detiene la ejecución.
Estando activa la función G47, el conmutador M.F.O. y las teclas de variación de la velocidad de giro del cabezal,
estarán inhabilitados, ejecutándose el programa al 100% de la F y la S programadas.
Las funciones G47 y G48 son modales e incompatibles entre sí.
Cuando se enciende el CNC, después de ejecutarse M02/M30, después de una EMERGENCIA o después de un
RESET, el CNC asume el código G48.
5. DISPONIBILIDAD DE 2 VOLANTES
A partir de esta versión se puede disponer de hasta 2 volantes electrónicos, uno para el eje X y otro para el eje Z. No
se podrá disponer de 4º eje ni de Herramienta Sincronizada. Las entradas de captación se utilizarán del siguiente modo:
A1 - Eje X A2 - Volante eje Z A3 - Eje Z A4 - 3º eje o eje C A5 - Cabezal A6 - Volante eje X
Los volantes serán efectivos cuando se encuentre seleccionado el modo de operación MANUAL. Además se debe
seleccionar mediante el conmutador selector del Panel de Mando, una de las posiciones correspondientes al volante
electrónico.
Las posiciones que se disponen son 1, 10 y 100, indicando todos ellos el factor de multiplicación que se aplica a los
impulsos proporcionados por el volante electrónico.
B15 B14 B13 B12 B11 B10 B9 B8 B7 B6 B5 B4 B3 B2 B1 B0
M44 M43 M42 M41 M19 M1 M30 M4 M3 M2 M0
B8 B9 B10 B11
0 0 0 0 Automático
0 0 0 1 Bloque a Bloque
0 0 1 0 Play-Back
0 0 1 1 Teach-in
0 1 0 0 Dry-Run
0 1 0 1 Manual
0 1 1 0 Editor
0 1 1 1 Periféricos
1 0 0 0 Tabla de Herramientas y funciones G
1 0 0 1 Modos Especiales
Posición del conmutador
Desplazamiento por vuelta

- 6 -
De esta forma y tras multiplicar el factor de multiplicación por los impulsos proporcionados por el volante, se obtienen
las unidades que se desea desplazar el eje. Dichas unidades corresponden a las unidades utilizadas en el formato de
visualización.
Ejemplo:Resolución del Volante : 250 impulsos por vuelta
Si se desea mover un eje con un avance superior al máximo permitido, parámetro máquina "P110, P310", el CNC limitará
el avance a dicho valor, despreciando los impulsos adicionales y evitando de esta forma la generación de errores de
seguimiento.
5.1 PARÁMETROS MÁQUINA DE LOS VOLANTES:
P622(6) = 0 No se dispone de volante electrónico asociado al eje Z
P622(6) = 1 Si se dispone de volante electrónico asociado al eje Z
P609(1) = 0 El Volante Electrónico utilizado no es el FAGOR 100P
P609(1) = 1 El Volante Electrónico utilizado si es el FAGOR 100P
Este parámetro tiene sentido cuando se utiliza un único volante, el asociado al eje X. Indica si se trata o
no del modelo FAGOR 100P con pulsador de eje incorporado.
P500 Sentido de contaje del Volante Electrónico asociado al eje X (No / Yes)
P622(5) Sentido de contaje del Volante Electrónico asociado al eje Z (0 / 1)
P602(1) Unidades de medida de captación del Volante Electrónico asociado al eje X (0 = milímetros /1 =
pulgadas)
P622(3) Unidades de medida de captación del Volante Electrónico asociado al eje Z (0 = milímetros /1 = pulgadas)
P501 Resolución de contaje, que proporciona señales cuadradas, del Volante Electrónico asociado al eje X
P622(1,2) Resolución de contaje, que proporciona señales cuadradas, del Volante Electrónico asociado al eje Z
P602(4) Factor multiplicador de las señales del Volante Electrónico del eje X (0= x4 / 1= x2)
P622(4) Factor multiplicador de las señales del Volante Electrónico del eje Z (0= x4 / 1= x2)
P621(2) = 0 Volante inactivo cuando el conmutador está fuera de las posiciones de volante
P621(2) = 1 Cuando el conmutador está fuera de las posiciones de volante, el CNC lo tiene en cuenta aplicándole el
factor multiplicador "x1"
Ejemplo: Se dispone de un volante electrónico Fagor (25 impulsos/vuelta) asociado al eje X y personalizado de
la siguiente forma:
P602(1)=0 Milímetros P501=1 Resolución 0.001 mm. P602(4)=0 Factor de multiplicación x4
Dependiendo de la posición del conmutador MFO (Manual Feedrate Override) el eje seleccionado
avanzará: Posición 1 1 x 25 x 4 = 0,100 milímetros por vuelta
Posición 10 10 x 25 x 4 = 1,000 milímetros por vuelta
Posición 100 100 x 25 x 4 = 10,.000 milímetros por vuelta
5.2 UTILIZACIÓN DE LOS VOLANTES ELECTRÓNICOS
La máquina dispone de un volante electrónico.
Cuando se dispone de un único volante electrónico es obligatorio que el mismo se encuentre conectado a través
del conector A6. Si dicho volante es el FAGOR 100P se personalizará el parámetro "P609(1)=1"
Una vez seleccionada la posición de volante deseada en el conmutador, se debe pulsar una de las teclas de JOG
correspondientes al eje de la máquina que se desea desplazar. El eje seleccionado se visualizará en modo resaltado.
Si se dispone de un volante electrónico FAGOR con pulsador, la selección del eje que se desea desplazar también
podrá realizarse del siguiente modo:
* Accionar el pulsador situado en la parte posterior del volante. El CNC selecciona el primero de los ejes y lo
muestra en modo resaltado.
* Si se vuelve a accionar nuevamente el pulsador el CNC seleccionará el siguiente eje, realizándose dicha
selección en forma rotativa.
* Si se mantiene pulsado el pulsador durante un tiempo superior a 2 segundos, el CNC dejará de seleccionar
dicho eje.
Posición del conmutador Desplazamiento por vuelta
1 0.250 mm o 0.0250 pulgadas
10 2.500 mm o 0.2500 pulgadas
100 25.000 mm o 2.5000 pulgadas
P501 P622(2) P622(1) Resolución
1 0 0 0,001 mm 0,0001"
2 0 1 0,002 mm 0,0002"
5 1 0 0,005 mm 0,0005"
10 1 1 0,010 mm 0,0010"

- 7 -
La máquina desplazará el eje seleccionado según se vaya girando el volante, respetándose además el sentido de
giro aplicado al mismo.
Si se desea mover un eje con un avance superior al máximo permitido, parámetro máquina "P110, P310", el CNC limitará
el avance a dicho valor, despreciando los impulsos adicionales y evitando de esta forma la generación de errores
de seguimiento.
La máquina dispone de dos volantes electrónicos.
La máquina desplazará cada uno de los ejes según se vaya girando su volante asociado, teniendo en cuenta la
posición seleccionada en el conmutador y respetándose además el sentido de giro aplicado.
Si se desea mover un eje con un avance superior al máximo permitido, parámetro máquina "P110, P310", el CNC
limitará el avance a dicho valor, despreciando los impulsos adicionales y evitando de esta forma la generación de
errores de seguimiento.
Versión 7.2 (Abril de 1997)
1. SALVAPANTALLAS
La función salvapantallas actúa del siguiente modo:
Siempre que transcurran 5 minutos sin que se pulse ninguna tecla, o bien el CNC no tenga nada que refrescar
(actualizar) en la pantalla, se elimina la señal de vídeo apagándose la pantalla. Con pulsar cualquier tecla se
restaura de nuevo el vídeo.
El parámetro máquina "P619(5)" indica si se desea utilizar esta prestación.
P619(5) = 0 No se dispone de esta prestación.
P619(5) = 1 Si se dispone de esta prestación.
2. VELOCIDAD DE AVANCE EN MODO MANUAL
A partir de esta versión el parámetro máquina P812 permite fijar la velocidad de avance de los ejes que el CNC selecciona
cada vez que se accede al modo de operación Manual.
Asimismo, siempre que en modo Manual, esté activada la entrada condicional, terminal 18 del conector I/O1, el CNC
no permite introducir un nuevo valor de F, únicamente se podrá modificar el % de avance seleccionado mediante el
conmutador de Feed-rate.
3 TECLA DE AVANCE RÁPIDO EN MODO MANUAL
Siempre que en modo Manual, esté activada la entrada condicional, terminal 18 del conector I/O1, el CNC no hará caso
de la tecla de avance rápido
Versión 7.4 (Mayo de 1999)
1. NUEVO PARÁMETRO MÁQUINA ASOCIADO A LAS FUNCIONES M
El parámetro máquina "P620(8)", indica cuando se sacan las funciones M3, M4, M5 durante la aceleración y deceleración
del cabezal.
2. ANULAR CORRECTOR DURANTE EL CAMBIO DE HERRAMIENTA
A partir de esta versión es posible ejecutar, dentro de la rutina asociada a la herramienta, un bloque del tipo "T.0" para
anular el corrector de la herramienta. Esto permite efectuar desplazamientos a una determinada cota sin necesidad de
efectuar cálculos engorrosos.
Unicamente se permite anular (T.0) o modificar (T.xx) el corrector. No se permite cambiar de herramienta (Txx.xx) dentro
de la rutina asociada a la herramienta.

- 8 -
3. FACTOR DIVISOR DE LAS SEÑALES DE CAPTACIÓN
Los parámetros P620(5), P620(6), P613(8) y P613(7) se utilizan junto con los parámetros P602(6), P602(5), P612(5) y P614(5)
que indican el factor multiplicador de las señales de captación de los ejes X, Z, 3º, 4º respectivamente.
Eje X Eje Z 3º Eje 4º Eje
P602(6) P602(5) P612(5) P614(5)
P620(5) P620(6) P613(8) P613(7)
Indican si se dividen (=1) o no (=0) las señales de captación.
P620(5)=0, P620(6)=0, P613(8)=0 y P613(7)=0 No se dividen
P620(5)=1, P620(6)=1, P613(8)=1 y P613(7)=1 Se dividen por 2.
Ejemplo: Se desea obtener una resolución de 0,01 mm mediante un encoder de señales cuadradas colocado en el eje
X cuyo paso de husillo es de 5 mm.
Nº impulsos = paso husillo / (Factor multiplicación x Resolución)
Con P602(6)=0 y P620(5)=0 Factor de multiplicación x4 Nº impulsos = 125
Con P602(6)=1 y P620(5)=0 Factor de multiplicación x2 Nº impulsos = 250
Con P602(6)=0 y P620(5)=1 Factor de multiplicación x2 Nº impulsos = 250
Con P602(6)=1 y P620(5)=1 Factor de multiplicación x1 Nº impulsos = 500
Versión 7.6 (Julio de 2001)
1. G75 AFECTADO POR EL FEED-RATE
A partir de esta versión se dispone de un parámetro máquina que indica si la función G75 está afectada por el Feed-rate.
P623(1) = 0No está afectado, siempre al 100%, como en versiones anteriores.
P623(1) = 1Si está afectado por el Feed-rate.
2. FACTOR DE CAPTACIÓN.
A partir de esta versión se dispone de un nuevo parámetro máquina para fijar la resolución de un eje que dispone de
encoder y husillo.
P819 Factor de Captación del eje X P820 Factor de Captación del 3º eje
P821 Factor de Captación del eje Z P822 Factor de Captación del 4º eje
Valores entre 0 y 65534, el valor 0 indica que no se desea esta prestación.
Para calcular el «Factor de Captación» se debe utilizar la siguiente fórmula:
Factor de Captación = (Reducción x Paso Husillo / Nº de impulsos del Encoder) x 8.192
Ejemplos: Reducción 1 1 2 1
Paso husillo 5.000 6.000 6.000 8.000 (micras)
Encoder 2.500 2.500 2.500 2.500 (impulsos/vuelta)
Factor de Captación 16.384 19.660,8 39.321,6 26.214,4
Los parámetros máquina sólo admiten números enteros y en ocasiones el «Factor de Captación» tiene parte fraccionaria.
En estos casos se asigna al parámetro máquina la parte entera y se utiliza la tabla de error de husillo para compensar
la parte fraccionaria.
Los valores a introducir en la tabla se calculan con la siguiente fórmula:
Cota del husillo = Error de husillo (micras) x Parte entera del factor de captación / Parte fraccionaria del factor
de captación
Para el caso: Reducción = 1 Paso husillo = 6.000 Encoder = 2.500
Factor de Captación = 19.660,8 Parámetro máquina = 19660
Para un error de husillo de 20 micrasCota del husillo = 20 x 19.660 / 0.8 = 491.520
Continuando con el cálculo se obtiene la siguiente tabla.
Cota del Husillo Error de Husillo
P0 = -1966.000 P1 = -0.080
P2 = -1474.500 P3 = -0.060
P4 = -983.000 P5 = -0.040
P6 = -491.500 P7 = -0.020
P8 = 0 P9 = 0
P10 = 491.500 P11 = 0.020
P12 = 983.000 P13 = 0.040
P14 = 1472.500 P15 = 0.060
P16 = 1966.000 P17 = 0.080
3. NUEVO MODELO
A partir de esta versión está disponible el modelo TLI.
Dispone de las mismas prestaciones que el modelo TGI y se vende junto con los motores y reguladores ACS.


ACERCA DE LA INFORMACION DE ESTE MANUAL
Este manual está dirigido al fabricante de la máquina.
Incluye información necesaria para los nuevos usuarios, además de temas avanzados para los que
ya conocen el producto CNC 8025.
No será necesario leer completamente este manual. Consulte la lista de Nuevas Prestaciones y
Modificaciones” y los apéndices relacionados con los parámetros máquina. Todos ellos
disponen de referencias cruzadas que le indicarán el capítulo o apartado del manual en que se
detalla el parámetro o tema deseado.
El manual describe todas las funciones que tiene la familia CNC 8025. Consulte la tabla
comparativa de modelos para conocer las funciones que dispone su CNC.
Para instalar el CNC en su máquina le aconsejamos consultar el apéndice que hace referencia
a los habitáculos que se requieren para la ubicación del CNC, y el capítulo 1 "Configuración del
CNC" que indica las dimensiones del CNC y detalla todos los terminales de sus conectores.
Si su CNC dispone de Autómata integrado (PLCI) la configuración de los conectores de entradas
y salidas es distinta. Por ello debe consultar, además de este manual, el manual "PLCI".
El Capítulo 2 "Conexión a red y a máquina" indica cómo se debe conectar el CNC a la red
eléctrica y al armario eléctrico.
Para asociar el CNC a la máquina se deben personalizar todos los parámetros máquina del CNC.
Le aconsejamos consultar los capítulos 3, 4, 5 y los apéndices relacionados con los parámetros
máquina.
Existen 2 apéndices, uno con los parámetros ordenados por temas, el mismo orden que se utiliza
en los capítulos 3, 4 y 5, y otro apéndice con los parámetros ordenados numéricamente.
Ambos apéndices disponen de referencias cruzadas que le indicarán el apartado del manual en
que se detalla cada parámetro.
Durante la explicación detallada de cada parámetro, capítulos 3, 4 y 5, en ocasiones se hace
referencia al capítulo 6 "Temas conceptuales" ya que en el mismo, algunos parámetros, se
encuentran explicados más ampliamente al indicar como se deben efectuar diversos ajustes del
conjunto máquina-CNC
Una vez definidos todos los parámetros máquina le sugerimos que haga uso del apéndice
"Cuadro archivo de parámetros máquina", indicando en él los valores con que fueron
personalizados todos ellos.

También existe un apéndice de errores, que indica algunas de las causas que pueden producir
cada uno de ellos.
Asimismo, si desea que su CNC se comunique con otros productos Fagor debe utilizar la red de
comunicación local FAGOR. Para ello consulte el manual "RED LOCAL FAGOR".
Notas:
La información descrita en este manual puede estar sujeta a variaciones motivadas
por modificaciones técnicas.
FAGOR AUTOMATION, S. Coop. Ltda. se reserva el derecho de modificar
el contenido del manual, no estando obligada a notificar las variaciones.

INDICE
Apartado Pagina
Tabla comparativa de los modelos FAGOR CNC 8025/8030.......................................ix
Nuevas prestaciones y modificaciones ........................................................................xiii
INTRODUCCION
Declaración de Conformidad.......................................................................................3
Condiciones de Seguridad ..........................................................................................4
Condiciones de Garantía.............................................................................................7
Condiciones de Reenvío.............................................................................................8
Notas Complementarias ..............................................................................................9
Documentación Fagor para el CNC 8025/30 T ............................................................11
Contenido de este manual...........................................................................................12
Capítulo 1 CONFIGURACION DEL CNC
1.1 CNC 8025 ..................................................................................................................1
1.1.1 Dimensiones e instalación del CNC 8025....................................................................2
1.2 CNC 8030 ..................................................................................................................3
1.2.1 Unidad central del CNC 8030 .....................................................................................4
1.2.1.1 Conector de las señales del teclado .............................................................................6
1.2.1.2 Conector de las señales del vídeo................................................................................8
1.2.2 Monitor/Teclado del CNC 8030 .................................................................................9
1.2.2.1 Dimensiones del monitor/teclado................................................................................9
1.2.2.2 Elementos constituyentes del monitor/teclado ............................................................10
1.2.2.3 Conectores y conexionado del monitor/teclado ..........................................................11
1.2.3 Panel de mando del CNC 8030 ...................................................................................12
1.3 Conectores y conexionado del sistema CNC 8025/8030 .............................................13
1.3.1 Conectores A1, A2, A3, A4 .........................................................................................15
1.3.1.1 Microconmutadores de los conectores A1, A2, A3, A4.................................................17
1.3.2 Conector A5 ...............................................................................................................18
1.3.2.1 Microconmutadores del conector A5...........................................................................19
1.3.3 Conector A6 ...............................................................................................................20
1.3.4 Conector RS232C.......................................................................................................21
1.3.5 Conector RS485 .........................................................................................................24
1.3.5.1 Cable recomendado para la RS485..............................................................................24
1.3.6 Conector I/O 1 ............................................................................................................25
1.3.6.1 Entradas del conector I/O 1 .........................................................................................26
1.3.6.2 Salidas del conector I/O 1 ...........................................................................................29
1.3.7 Conector I/O 2 ............................................................................................................31
1.3.7.1 Salidas del conector I/O 2 ...........................................................................................32

Capítulo 2 CONEXION A RED Y A MAQUINA
2.1 Conexión a red .......................................................................................................... 1
2.1.1 Fuente de alimentación interna .................................................................................. 1
2.2 Conexión a máquina.................................................................................................. 2
2.2.1 Consideraciones generales ......................................................................................... 2
2.2.2 Salidas digitales......................................................................................................... 4
2.2.3 Entradas digitales ...................................................................................................... 4
2.2.4 Salidas analógicas...................................................................................................... 5
2.2.5 Entradas de captación ................................................................................................ 5
2.3 Puesta a punto ........................................................................................................... 6
2.3.1 Consideraciones generales ......................................................................................... 6
2.3.2 Precauciones.............................................................................................................. 6
2.3.3 Conexión................................................................................................................... 7
2.3.4 Test de las entradas / salidas del sistema..................................................................... 8
2.4 Conexión de la entrada y salida de emergencia .......................................................... 10
Capítulo 3 PARAMETROS MAQUINA
3.1 Introducción .............................................................................................................. 1
3.2 Operación con las tablas de parámetros ...................................................................... 3
3.3 Parámetros máquina generales.................................................................................... 4
3.3.1 Parámetros relacionados con la configuración de ejes................................................. 6
3.3.2 Parámetros relacionados con las entradas y salidas ..................................................... 8
3.3.3 Parámetros máquina del volante................................................................................. 11
3.3.4 Parámetros relacionados con el palpador de medida ................................................... 13
3.3.5 Parámetros relacionados con las herramientas............................................................. 14
3.3.6 Parámetros relacionados con la subrutina de emergencia ............................................ 16
3.3.7 Parámetros máquina de la línea serie RS232C ............................................................ 17
3.3.8 Parámetros relacionados con la visualización............................................................. 19
3.3.9 Parámetros del modo de operación manual................................................................. 20
3.3.10 Parámetros relacionados con el modo de operación .................................................... 22
Capítulo 4 PARAMETROS MAQUINA DE LOS EJES
4.1 Parámetros relacionados con la resolución de los ejes................................................. 2
4.2 Parámetros relacionados con la consigna.................................................................... 5
4.3 Parámetros relacionados con los límites de recorrido .................................................. 6
4.4 Parámetros relacionados con el husillo....................................................................... 7
4.4.1 Holgura de husillo ..................................................................................................... 7
4.4.2 Error de husillo .......................................................................................................... 8
4.5 Parámetros relacionados con los avances.................................................................... 11
4.6 Parámetros relacionados con el control de los ejes...................................................... 13
4.7 Parámetros relacionados con la referencia máquina .................................................... 15
4.8 Parámetros relacionados con la aceleración/deceleración ........................................... 18
4.8.1 Aceleración/deceleración lineal ................................................................................. 18
4.8.2 Aceleración/deceleración en forma de campana ......................................................... 19
4.8.3 Ganancia Feed_forward.............................................................................................. 20
4.9 Parámetros relacionados con la herramienta motorizada o sincronizada ...................... 21
4.10 Parámetros máquina especiales .................................................................................. 23
Apartado Pagina

Capítulo 5 PARAMETROS MAQUINA DEL CABEZAL
5.1 Parámetros relacionados con el cambio de gama......................................................... 2
5.2 Parámetros utilizados con salida de consigna analógica ............................................. 4
5.3 Parámetros utilizados con salida de consigna en BCD ................................................ 5
5.4 Parámetros utilizados para el control del cabezal........................................................ 7
5.4.1 Parámetros relacionados con la parada orientada de cabezal (M19)............................. 9
Capítulo 6 TEMAS CONCEPTUALES
6.1 Ejes y sistemas de coordenadas .................................................................................. 1
6.1.1 Nomenclatura y selección de los ejes ......................................................................... 1
6.2 Sistemas de captación ................................................................................................ 2
6.2.1 Limitaciones de la frecuencia de contaje .................................................................... 3
6.3 Resolución de los ejes................................................................................................ 4
6.4 Ajuste de los ejes ....................................................................................................... 11
6.4.1 Ajuste de la deriva (offset) y velocidad máxima de avance (G00)................................ 12
6.4.2 Ajuste de las ganancias .............................................................................................. 14
6.4.3 Ajuste de la ganancia proporcional ............................................................................ 15
6.4.3.1 Cálculo de K1, K2 y del punto de discontinuidad ...................................................... 17
6.4.4 Ajuste de la ganancia Feed-Forward ........................................................................... 19
6.4.4.1 Cálculo de la ganancia Feed-Forward......................................................................... 19
6.4.5 Compensación de error de husillo .............................................................................. 20
6.5 Sistemas de referencia ................................................................................................ 23
6.5.1 Puntos de referencia ................................................................................................... 23
6.5.2 Búsqueda de referencia máquina ................................................................................ 24
6.5.3 Ajuste en sistemas que no disponen de Io codificado.................................................. 25
6.5.3.1 Ajuste del punto de referencia máquina...................................................................... 25
6.5.3.2 Consideraciones ........................................................................................................ 26
6.5.4 Ajuste en sistemas que disponen de Io codificado ...................................................... 27
6.5.4.1 Ajuste del offset de la regla ........................................................................................ 27
6.5.4.2 Consideraciones ........................................................................................................ 28
6.5.5 Límites de recorrido de los ejes (límites de software) .................................................. 29
6.6 Funciones auxiliares M, S, T ...................................................................................... 30
6.6.1 Tabla de las funciones M decodificadas ..................................................................... 31
6.6.2 Transferencia de las funciones auxiliares M, S, T........................................................ 33
6.6.3 Transferencia de las funciones M, S, T usando la señal "M ejecutada"......................... 34
6.7 Cabezal ..................................................................................................................... 36
6.8 Cambio de gama del cabezal ...................................................................................... 39
6.9 Control del cabezal.................................................................................................... 41
6.10 Herramientas.............................................................................................................. 42
6.11 Herramienta motorizada / Sincronizada ...................................................................... 43
6.11.1 Herramienta motorizada ............................................................................................. 43
6.11.2 Herramienta sincronizada........................................................................................... 44
6.11.2.1 Ejemplos de aplicación de la herramienta sincronizada .............................................. 45
6.12 Eje C ......................................................................................................................... 46
6.12.1 Ajuste del eje C.......................................................................................................... 47
Apartado Pagina

APENDICES
A Características técnicas del CNC ................................................................................ 2
B Habitáculos ............................................................................................................... 5
C Circuitos recomendados para conexión de palpador................................................... 6
D Entradas y salidas del CNC ........................................................................................ 7
E Tabla de conversión para salida "S" BCD en 2 dígitos ................................................ 8
F Cuadro resumen de los parámetros máquina ............................................................... 9
G Lista ordenada de los parámetros máquina ................................................................. 14
H Cuadro archivo de los parámetros máquina ................................................................ 21
I Cuadro archivo de las funciones auxiliares "M" decodificadas ................................... 23
J Tablas de compensación de error de husillo ............................................................... 24
K Mantenimiento .......................................................................................................... 25
CODIGOS DE ERROR
Apartado Pagina


DESCRIPCION TECNICA
T TG TS
ENTRADAS SALIDAS
Entradas de captación. 6 6 6
Ejes lineales 4 4 4
Ejes rotativos 2 2 2
Encoder de cabezal 1 1 1
Volante electrónico 1 1 1
Tercer eje como eje C x
Herramienta sincronizada x
Entrada de palpador x x x
Multiplicación de los impulsos de captación, señal cuadrada, x2/x4 x x x
Multiplicación impulsos captación, señal senoidal, x2/x4/10/x20 x x x
Máxima resolución de contaje 0.001mm/0.001°/0.0001pulgadas x x x
Salidas analógicas (±10V) para control de los ejes 4 4 4
Salida analógica (±10V) para control del cabezal 1 1 1
Herramienta motorizada 1 1 1
CONTROL DE EJES
Ejes que interpolan simultáneamente en desplazamientos lineales 3 3 3
Ejes que interpolan simultáneamente en desplazamientos circulares 2 2 2
Roscado electrónico x x x
Control del cabezal x x x
Límites de recorrido de los ejes, limites por software x x x
Parada orientada del cabezal x x x
PROGRAMACION
Cero pieza seleccionable por el usuario x x x
Programación absoluta/incremental x x x
Programación de cotas en coordenadas cartesianas x x x
Programación de cotas en coordenadas polares x x x
Programación de cotas mediante ángulo y una coordenada cartesiana x x x
COMPENSACION
Compensación de radio de herramienta x x x
Compensación de longitud de herramienta x x x
Compensación de holgura de husillo x x x
Compensación de error de paso de husillo x x x
VISUALIZACION
Textos del CNC en español, inglés, francés, alemán e italiano x x x
Visualización del tiempo de ejecución x x x
Contador de piezas x x x
Representación gráfica de los movimientos y simulación de piezas x x
Visualización de la punta de la herramienta x x x
Ayudas geométricas a la programación x x x
COMUNICACION CON OTROS DISPOSITIVOS
Comunicación vía RS232C x x x
Comunicación DNC x x x
Comunicación RS485 (Red FAGOR) x x x
Introducción de programas desde periféricos en código ISO x x x
VARIOS
Programación paramétrica x x x
Digitalización de modelos x
Posibilidad de disponer de PLC integrado x x x

FUNCIONES PREPARATORIAS
T TG TS
EJES Y SISTEMAS DE COORDENADAS
Acotación de la pieza. Milímetros o pulgadas (G70,G71) x x x
Programación absoluta/incremental (G90,G91) x x x
Eje independiente (G65) x x x
SISTEMAS DE REFERENCIA
Búsqueda de referencia máquina (G74) x x x
Preselección de cotas (G92) x x x
Traslados de origen (G53...G59) x x x
Preselección del origen polar (G93) x x x
Guardar el origen de coordenadas (G31) x x x
Recuperar el origen de coordenadas (G32) x x x
FUNCIONES PREPARATORIAS
Velocidad de avance F x x x
Avance en mm/min. o pulgadas/minuto (G94) x x x
Avance en mm/revolución o pulgadas/revolución (G95) x x x
Feed-rate programable (G49) x x x
Velocidad de giro del cabezal (S) x x x
Velocidad de giro en rpm (G97) x x x
Velocidad de corte constante (G96) x x x
Limitación de S cuando se trabaja en corte constante (G92) x x x
Selección de herramienta y corrector (T) x x x
Activación del eje C en grados (G14) x
Plano principal C-Z (G15) x
Plano principal C-X (G16) x
FUNCIONES AUXILIARES
Parada de programa (M00) x x x
Parada condicional del programa (M01) x x x
Final del programa (M02) x x x
Final de programa con vuelta al comienzo (M30) x x x
Arranque del cabezal a derechas, sentido horario (M03) x x x
Arranque del cabezal a izquierdas, sentido anti-horario (M04) x x x
Parada del cabezal (M05) x x x
Parada orientada del cabezal (M19) x x x
Cambio de gamas del cabezal (M41, M42, M43, M44) x x x
Cambio de herramienta con M06 x x x
Herramienta motorizada (M45 S) x x x
Herramienta sincronizada (M45 K) x
CONTROL DE TRAYECTORIA
Posicionamiento rápido (G00) x x x
Interpolación lineal (G01) x x x
Interpolación circular (G02,G03) x x x
Interpolación circular con el centro en coordenadas absolutas (G06) x x x
Trayectoria circular tangente a la trayectoria anterior (G08) x x x
Trayectoria circular definida mediante tres puntos (G09) x x x
Entrada tangencial al comienzo de mecanizado (G37) x x x
Salida tangencial al final de mecanizado (G38) x x x
Redondeo controlado de aristas (G36) x x x
Achaflanado (G39) x x x
Roscado electrónico (G33) x x x
FUNCIONES PREPARATORIAS ADICIONALES
Temporización (G04 K) x x x
Trabajo en arista matada y en arista viva (G05, G07) x x x
Factor de escala (G72) x x x
Tratamiento de bloque único (G47, G48) x x x
Visualizar código de error de usuario (G30) x x x
Creación automática de bloques (G76) x
Comunicación con la red local FAGOR (G52) x x x

T TG TS
COMPENSACION
Compensación de radio de herramienta (G40,G41,G42) x x x
Carga de dimensiones de herramienta en la tabla interna (G50, G51) x x x
CICLOS FIJOS
Ciclo fijo de seguimiento de perfil (G66) x x x
Ciclo fijo de desbastado en X (G68) x x x
Ciclo fijo de desgastado en Z (G69) x x x
Ciclo fijo de torneado de tramo recto (G81) x x x
Ciclo fijo de refrentado de tramo recto (G82) x x x
Ciclo fijo de taladrado profundo (G83) x x x
Ciclo fijo de torneado de tramo curvo (G84) x x x
Ciclo fijo de refrentado de tramo curvo (G85) x x x
Ciclo fijo de roscado longitudinal (G86) x x x
Ciclo fijo de roscado frontal (G87) x x x
Ciclo fijo de ranurado en X (G88) x x x
Ciclo fijo de ranurado en Z (G89) x x x
TRABAJO CON PALPADOR
Movimiento con palpador (G75) x x x
Ciclo fijo de calibrado de la herramienta (G75N0) x
Ciclo fijo de calibrado de palpador (G75N1) x
Ciclo fijo de medida de pieza en X (G75N2) x
Ciclo fijo de medida de pieza en Z (G75N3) x
Ciclo fijo de medida de pieza y corrección de herramienta en X (G75N4) x
Ciclo fijo de medida de pieza y corrección de herramienta en Z (G75N5) x
TRABAJO CON SUBRUTINAS
Número de subrutinas estándar 99 99 99
Definición de subrutina estándar (G22) x x x
Llamada a subrutina estándar (G20) x x x
Número de subrutinas paramétricas 99 99 99
Definición de subrutina paramétrica (G23) x x x
Llamada a subrutina paramétrica (G21) x x x
Final de subrutina estándar y paramétrica (G24) x x x
FUNCIONES DE SALTO O LLAMADA
Salto o llamada incondicional (G25) x x x
Salto o llamada si cero (G26) x x x
Salto o llamada si no cero (G27) x x x
Salto o llamada si menor (G28) x x x
Salto o llamada si mayor (G29) x x x

NUEVAS PRESTACIONES
Y
MODIFICACIONES
Fecha: Marzo 1991 Versión Software: 2.1 y siguientes
PRESTACION MANUAL Y APARTADO MODIFICADO
El sentido de búsqueda de referencia máquina se Manual Instalación Apart. 4.7
selecciona por parámetro máquina P618(5,6,7,8)
El 2º avance en búsqueda de referencia máquina Manual Instalación Apart. 4.7
se selecciona por parámetro máquina P807...P810
Resolución de contaje 1, 2, 5, 10 con señales Manual Instalación Apart. 4.1
senoidales en cada eje P619(1,2,3,4)
Acceso desde el CNC a los registros del PLCI Manual Programación G52
Fecha: Junio 1991 Versión Software: 3.1 y siguientes
PRESTACION MANUAL Y APARTADO MODIFICADO
Nueva función F36. Toma valor del número de Manual Programación Capítulo 13
la herramienta seleccionada
Ciclos G68 y G69 modificados. Si P9=0 efectúa Manual Programación Capítulo 13
una pasada final de desbaste
Fecha: Septiembre 1991 Versión Software: 3.2 y siguientes
PRESTACION MANUAL Y APARTADO MODIFICADO
Subrutina asociada a la función T Manual Instalación Apart. 3.3.5
Ciclos G68 y G69 modificados. Manual Programación Capítulo 13
Admiten P9 negativo.

Fecha: Marzo 1992 Versión Software: 4.1 y siguientes
PRESTACION MANUAL Y APARTADO MODIFICADO
Control de aceleración/deceleración en forma Manual Instalación Apart. 4.8
de campana
Posibilidad de introducir el signo de la holgura Manual Instalación Apart. 4.4
de husillo en cada eje P620(1,2,3,4)
Ejecución independiente de un eje Manual Programación G65
En modo Manual se permite trabajar con Manual Instalación Apart. 3.3.9
Velocidad de Corte Constante P619(8)
Fecha: Julio 1992 Versión Software: 4.2 y siguientes
PRESTACION MANUAL Y APARTADO MODIFICADO
Sincronización con el eje independiente P621(4) Manual Instalación Apart. 3.3.10
Fecha: Julio 1993 Versión Software: 5.1 y siguientes
PRESTACION MANUAL Y APARTADO MODIFICADO
Combinación de rampas de aceleración/decele- Manual Instalación Apart. 4.8
ración de ejes (lineal y forma de campana)
Control de aceleración/deceleración en Manual Instalación Apart. 5.
el cabezal P811
La subrutina asociada a la herramienta se Manual Instalación Apart. 3.3.5
ejecuta antes que la función T P617(2)
Ciclos G68 y G69 modificados. Si P10 distinto Manual Programación Capítulo 13
de 0 efectúa siempre una pasada final de
desbaste antes de la pasada de acabado
Cuando la máquina dispone de una única gama Manual Programación Capítulo 6
de cabezal y se ejecuta G96 sin estar
seleccionada la gama, el CNC la selecciona
CNC 8030. Monitor VGA Manual Instalación Capítulo 1
Fecha: Marzo 1995 Versión Software: 5.3 y siguientes
PRESTACION MANUAL Y APARTADO MODIFICADO
Gestión de sistemas de captación que disponen Manual Instalación Apart. 4.7 y 6.5
de Io codificado
Inhibición del cabezal desde el PLC Manual Instalación Apart. 3.3.10
Volante gestionado desde el PLC Manual Instalación Apart. 3.3.3
Simulación de la tecla rápido (JOG) desde el PLC Manual PLCI
Inicialización de parámetros máquina, en caso
de perdida de memoria

Introducción - 1
INTRODUCCION
Atención
Antes de la puesta en marcha del Control Númerico leer las indicacio-
nes contenidas en el Capítulo 2 del Manual de Instalación.
Está prohibida la puesta en marcha del Control Númerico hasta
comprobar que la máquina donde se incorpora cumple lo especificado
en la Directiva 89/392/CEE.

Introducción - 3
DECLARACION DE CONFORMIDAD
Fabricante: Fagor Automation, S. Coop.
Barrio de San Andrés s/n, C.P. 20500, Mondragón -Guipúzcoa- (ESPAÑA)
Declaramos bajo nuestra exclusiva responsabilidad la conformidad del producto:
Control Numérico Fagor CNC 8025 T
al que se refiere esta declaración, con las normas:
SEGURIDAD:
EN 60204-1 Seguridad de las máquinas. Equipo eléctrico de las máquinas
COMPATIBILIDAD ELECTROMAGNÉTICA:
EN 50081-2 Emisión
EN 55011 Radiadas. Clase A, Grupo 1.
EN 55011 Conducidas. Clase A, Grupo 1.
EN 61000-3-2 Armónicos en corriente
EN 61000-3-3 Fluctuaciones de tensión y flickers
EN 50082-2 Inmunidad
EN 61000-4-2 Descargas electrostáticas.
EN 61000-4-3 Campos magnéticos radiados en radiofrecuencia
EN 61000-4-4 Transitorios rápidos y ráfagas.
EN 61000-4-5 Pulsos conducidos de alta tensión en red (Surges)
EN 61000-4-6 Perturbaciones conducidas por campos en radiofrecuencia
EN 61000-4-8 Campos magnéticos a frecuencia de red
EN 61000-4-11 Variaciones de tensión y cortes.
ENV 50204 Campos generados por radioteléfonos digitales
De acuerdo con las disposiciones de las Directivas Comunitarias: 73/23/CEE de Bajo
Voltaje, 89/392/CEE de Seguridad de las Máquinas, 89/336/CEE de Compatibilidad
Electromagnética y sus actualizaciones.
En Mondragón a 1 de Octubre de 2001

Introducción - 4
CONDICIONES DE SEGURIDAD
Leer las siguientes medidas de seguridad con objeto de evitar lesiones a personas
y prevenir daños a este producto y a los productos conectados a él.
El aparato sólo podrá repararlo personal autorizado de Fagor Automation.
Fagor Automation no se responsabiliza de cualquier daño físico o material
derivado del incumplimiento de estas normas básicas de seguridad.
Precauciones ante daños a personas
Interconexionado de módulos
Utilizar los cables de unión proporcionados con el aparato.
Utilizar cables de red apropiados.
Para evitar riesgos, utilizar sólo cables de red recomendados para este aparato.
Evitar sobrecargas eléctricas
Para evitar descargas eléctricas y riesgos de incendio no aplicar tensión eléctrica fuera
del rango seleccionado en la parte posterior de la Unidad Central del aparato.
Conexionado a tierra.
Con objeto de evitar descargas eléctricas conectar las bornas de tierra de todos los
módulos al punto central de tierras. Asimismo, antes de efectuar la conexión de las
entradas y salidas de este producto asegurarse que la conexión a tierras está efectuada.
Antes de encender el aparato cerciorarse que se ha conectado a tierra
Con objeto de evitar descargas eléctricas cerciorarse que se ha efectuado la conexión
de tierras.
No trabajar en ambientes húmedos
Para evitar descargas eléctricas trabajar siempre en ambientes con humedad relativa
inferior al 90% sin condensación a 45°C.
No trabajar en ambientes explosivos
Con objeto de evitar riesgos, lesiones o daños, no trabajar en ambientes explosivos.
Precauciones ante daños al producto
Ambiente de trabajo
Este aparato está preparado para su uso en Ambientes Industriales cumpliendo las
directivas y normas en vigor en la Unidad Europea.
Fagor Automation no se responsabiliza de los daños que pudiera sufrir o provocar si
se monta en otro tipo de condiciones (ambientes residenciales o domésticos).
Instalar el aparato en el lugar apropiado
Se recomienda que, siempre que sea posible, la instalación del Control Numérico se
realice alejada de líquidos refrigerantes, productos químicos, golpes, etc. que pudieran
dañarlo.

Introducción - 5
El aparato cumple las directivas europeas de compatibilidad electromagnética. No
obstante, es aconsejable mantenerlo apartado de fuentes de perturbación
electromagnética, como son:
- Cargas potentes conectadas a la misma red que el equipo.
- Transmisores portátiles cercanos (Radioteléfonos, emisores de radio aficionados).
- Transmisores de radio/TV cercanos.
- Máquinas de soladura por arco cercanas.
- Líneas de alta tensión próximas.
- Etc.
Envolventes
El fabricante es responsable de garantizar que la envolvente en que se ha montado el
equipo cumple todas las directivas al uso en la Comunidad Económica Europea.
Evitar interferencias provenientes de la máquina-herramienta
La máquina-herramienta debe tener desacoplados todos los elementos que generan
interferencias (bobinas de los relés, contactores, motores, etc.).
Utilizar la fuente de alimentación apropiada
Utilizar, para la alimentación de las entradas y salidas, una fuente de alimentación
exterior estabilizada de 24 Vcc.
Conexionado a tierra de la fuente de alimentación
El punto de cero voltios de la fuente de alimentación externa deberá conectarse al
punto principal de tierra de la máquina.
Conexionado de las entradas y salidas analógicas
Se recomienda realizar la conexión mediante cables apantallados, conectando todas
las mallas al terminal correspondiente (Ver capítulo 2).
Condiciones medioambientales
La temperatura ambiente que debe existir en régimen de funcionamiento debe estar
comprendida entre +5°C y +45°C.
La temperatura ambiente que debe existir en régimen de no funcionamiento debe estar
comprendida entre -25°C y 70°C.
Habitáculo del monitor
Garantizar entre el Monitor y cada una de las paredes del habitáculo las distancias
requeridas en el Apéndice.
Utilizar un ventilador de corriente continua para mejorar la aireación del habitáculo.
Dispositivo de seccionamiento de la alimentación
El dispositivo de seccionamiento de la alimentación ha de situarse en lugar fácilmente
accesible y a una distancia del suelo comprendida entre 0,7 m y 1,7 m.
Protecciones del propio aparato
Lleva incorporados 2 fusibles exteriores rápidos (F) de 3,15 Amp./ 250V. para
protección de la entrada de red.
Todas las entradas-salidas digitales disponen de aislamiento galvánico mediante
optoacopladores entre la circuitería del CNC y el exterior.
Están protegidas mediante 1 fusible exterior rápido (F) de 3,15 Amp./ 250V. ante
sobretensión de la fuente exterior (mayor de 33 Vcc.) y ante conexión inversa de la
fuente de alimentación.

Introducción - 6
El tipo de fusible de protección depende del tipo de monitor. Ver etiqueta de
identificación del propio aparato.
Precauciones durante las reparaciones
No manipular el interior del aparato
Sólo personal autorizado de Fagor Automation puede manipular el
interior del aparato.
No manipular los conectores con el aparato conectado a la red eléctrica
Antes de manipular los conectores (entradas/salidas, captación, etc)
cerciorarse que el aparato no se encuentra conectado a la red eléctrica.
Símbolos de seguridad
Símbolos que pueden aparecer en el manual
Símbolo ATENCION.
Lleva asociado un texto que indica las acciones u operaciones que pueden
provocar daños a personas o aparatos.
Símbolos que puede llevar el producto
Símbolo ATENCION.
Lleva asociado un texto que indica las acciones u operaciones que pueden
provocar daños a personas o aparatos.
Símbolo CHOQUE ELÉCTRICO.
Indica que dicho punto puede estar bajo tensión eléctrica.
Símbolo PROTECCIÓN DE TIERRAS.
Indica que dicho punto debe ser conectado al punto central de tierras de la
máquina para protección de personas y aparatos.

Introducción - 7
CONDICIONES DE GARANTIA
GARANTIA
Todo producto fabricado o comercializado por FAGOR Automation tiene una
garantía de 12 meses a partir de la fecha de envio desde nuestros almacenes.
La citada garantía cubre todos los gastos de materiales y mano de obra de reparación,
en las instalaciones de FAGOR, utilizados en subsanar anomalías de funcionamiento
de los equipos.
Durante el periodo de garantía, Fagor reparará o sustituirá los productos que ha
comprobado como defectuosos.
FAGOR se compromete a la reparación o sustitución de sus productos en el período
comprendido desde su inicio de fabricación hasta 8 años a partir de la fecha de
desaparición del producto de catálogo.
Compete exclusivamente a FAGOR el determinar si la reparación entra dentro del
marco definido como garantía.
CLAUSULAS EXCLUYENTES
La reparación se realizará en nuestras dependencias, por tanto quedan fuera de la
citada garantía todos los gastos de transporte así como los ocasionados en el
desplazamiento de su personal técnico para realizar la reparación de un equipo, aún
estando éste dentro del período de garantía antes citado.
La citada garantía se aplicará siempre que los equipos hayan sido instalados de
acuerdo con las instrucciones, no hayan sido maltratados, ni hayan sufrido desperfec-
tos por accidente o negligencia y no hayan sido intervenidos por personal no
autorizado por FAGOR.
Si una vez realizada la asistencia o reparación, la causa de la avería no es imputable
a dichos elementos, el cliente está obligado a cubrir todos los gastos ocasionados,
ateniéndose a las tarifas vigentes.
No están cubiertas otras garantías implícitas o explícitas y FAGOR AUTOMATION
no se hace responsable bajo ninguna circunstancia de otros daños o perjuicios que
pudieran ocasionarse.
CONTRATOS ASISTENCIA
Están a disposición del cliente Contratos de Asistencia y Mantenimiento tanto para
el periodo de garantía como fuera de el.

Introducción - 8
CONDICIONES DE REENVIO
Si va a enviar el Monitor o la Unidad Central, empaquételas en su cartón original con su
material de empaque original. Si no dispone del material de empaque original, empaquételo
de la siguiente manera:
1.- Consiga una caja de cartón cuyas 3 dimensiones internas sean al menos 15 cm (6
pulgadas) mayores que las del aparato. El cartón empleado para la caja debe ser de una
resistencia de 170 Kg (375 libras).
2.- Si va a enviar a una oficina de Fagor Automation para ser reparado, adjunte una
etiqueta al aparato indicando el dueño del aparato, su dirección, el nombre de la
persona a contactar, el tipo de aparato, el número de serie, el síntoma y una breve
descripción de la avería.
3.- Envuelva el aparato con un rollo de polietileno o con un material similar para
protegerlo.
Si va a enviar el monitor, proteja especialmente el cristal de la pantalla.
4.- Acolche el aparato en la caja de cartón rellenándola con espuma de poliuretano por
todos lados.
5.- Selle la caja de cartón con cinta para empacar o grapas industriales.

Introducción - 9
NOTAS COMPLEMENTARIAS
* Situar el CNC alejado de líquidos refrigerantes, productos químicos, golpes, etc. que
pudieran dañarlo.
* Antes de encender el aparato verificar que las conexiones de tierra han sido correctamente
realizadas. Ver Apartado 2.2 de este mismo manual.
* Para prevenir riesgos de choque eléctrico en la Unidad Central utilizar el conector de
red apropiado. Usar cables de potencia de 3 conductores (uno de ellos de tierra).
* Para prevenir riesgos de choque eléctrico en el Monitor, del CNC 8030 T, utilizar el
conector de red apropiado con cables de potencia de 3 conductores (uno de ellos de
tierra).
* Antes de encender el aparato comprobar que el fusible externo de línea, de cada
aparato, es el apropiado.
Unidad Central
Deben ser 2 fusibles rápidos (F) de 3,15 Amp./ 250V.

Introducción - 10
Monitor del CNC 8030 T
Deben ser 2 fusibles rápidos (F) de 0,5 Amp./ 250V.
* En caso de mal funcionamiento o fallo del aparato, desconectarlo y llamar al servicio
de asistencia técnica. No manipular el interior del aparato

Introducción - 11
DOCUMENTACION FAGOR
PARA EL CNC 8025/30 T
Manual CNC 8025T OEM Está dirigido al fabricante de la máquina o persona encargada de efectuar la
instalación y puesta a punto del Control Numérico.
Dispone de 2 manuales en su interior:
Manual de Instalación Detalla la forma de instalar y personalizar el
CNC a la máquina.
Manual de Red local Detalla la forma de instalar el CNC en la red
local Fagor.
Ocasionalmente puede contener un manual que hace referencia a las "Nuevas
Prestaciones" de software recientemente incorporadas.
Manual CNC 8025T USER Está dirigido al usuario final, es decir, a la persona que va a trabajar con el
Control Numérico.
Dispone de 2 manuales en su interior:
Manual de Operación Detalla la forma de operar con el CNC.
Manual de Programación Detalla la forma de elaborar un programa.
Ocasionalmente puede contener un manual que hace referencia a las "Nuevas
Prestaciones" de software recientemente incorporadas.
Manual DNC 25/30 Está dirigido a las personas que van a utilizar la opción de software de
comunicación DNC.
Manual Protocolo DNC Está dirigido a las personas que desean efectuar su propia comunicación de
DNC, sin utilizar la opción de software de comunicación DNC 25/30.
Manual PLCI Debe utilizarse cuando el CNC dispone de Autómata integrado.
Está dirigido al fabricante de la máquina o persona encargada de efectuar la
instalación y puesta a punto del Autómata integrado.
Manual DNC-PLC Está dirigido a las personas que van a utilizar la opción de software de
comunicación DNC-PLC.
Manual FLOPPY DISK Está dirigido a las personas que utilizan la disquetera de Fagor. Este manual
indica cómo se debe utilizar dicha disquetera.

Introducción - 12
CONTENIDO DE ESTE MANUAL
El Manual de Instalación se compone de los siguientes apartados:
Indice
Tabla comparativa de los modelos Fagor CNC 8025/30 T.
Nuevas Prestaciones y modificaciones.
Introducción Hoja de advertencia previa a la puesta en marcha.
Declaración de Conformidad.
Condiciones de Seguridad.
Condiciones de Garantía.
Condiciones de Reenvío.
Notas Complementarias.
Listado de Documentos Fagor para el CNC 8025/30 T.
Contenido de éste Manual.
Capítulo 1 Configuración del CNC.
Indica las composiciones posibles: modular y compacto.
La descripción y dimensiones de la Unidad Central.
La descripción y dimensiones del monitor.
La descripción y dimensiones del panel de mandos.
La descripción detallada de todos los conectores.
Capítulo 2 Conexión a red y a máquina.
Indica cómo efectuar la conexión a la red eléctrica.
El conexionado a tierra.
Las características de las entradas y salidas digitales.
Las características de la salida analógica.
Las características de las entradas de captación.
La puesta a punto y la puesta en marcha del CNC.
El test de las entradas y salidas del sistema.
La conexión de la entrada y salida de Emergencia.
Capítulo 3 Parámetros máquina.
La forma de operar con los parámetros máquina.
Cómo personalizar los parámetros máquina.
Explicación detallada de los parámetros máquina generales.
Capítulo 4 Parámetros máquina de los ejes.
Explicación detallada de los parámetros máquina de los ejes.
Capítulo 5 Parámetros máquina del cabezal.
Explicación detallada de los parámetros máquina del cabezal.
Capítulo 6 Temas conceptuales.
Ejes y sistemas de coordenadas. Nomenclatura y selección
Sistemas de captación, resolución.
Ajuste de los ejes, ajuste de las ganancias.
Sistemas de Referencia: puntos de referencia, búsqueda, ajuste.
Limitación del recorrido de los ejes por software.
Aceleración / deceleración.
Cabezal: control de la velocidad, cambio de gamas.
Herramientas y almacén de herramientas.
Tratamiento de las señales "Feed Hold" y "M ejecutada".
Transferencia de las funciones auxiliares M, S, T.
Herramienta motorizada y herramienta sincronizada.
Eje C.
Apéndices Características técnicas del CNC. Habitáculos.
Circuitos recomendados para conexión de palpador.
Entradas y salidas del CNC.
Tabla de conversión para salida S BCD en 2 dígitos.
Parámetros máquina. Cuadro resumen, lista ordenada y cuadro archivo.
Funciones auxiliares "M". Cuadro archivo.
Tablas de compensación de error de husillo.
Mantenimiento.
Códigos de error.

PáginaCapítulo: 1 Sección:
CONFIGURACION DEL CNC
1
1. CONFIGURACION DEL CNC
Atención:
El CNC está preparado para su uso en Ambientes Industriales, concretamente
en tornos. Permite controlar los movimientos y accionamientos de la máquina.
1.1 CNC 8025
El control numérico CNC 8025 es un módulo cerrado y compacto que dispone en su parte
frontal de:
1. Un Monitor o Pantalla CRT de 8" monocromo fósforo ámbar, que se utiliza para
mostrar la información requerida del sistema.
2. Un teclado que permite la comunicación con el CNC, pudiéndose solicitar información
mediante comandos o bien alterar el estado del CNC mediante la generación de nuevas
instrucciones.
3. Un panel de mando que contiene las teclas necesarias para trabajar en Modo Manual
y los pulsadores de Marcha/Parada del ciclo.
CNC 8025

Sección:Capítulo: 1
Página
CONFIGURACION DEL CNC
2
1.1.1 DIMENSIONES E INSTALACION DEL CNC 8025
El control numérico CNC 8025, ubicado normalmente en la botonera de la máquina dispone
de 4 orificios de amarre. Las dimensiones mínimas del habitáculo que se debe utilizar para
su ubicación se detallan en un apéndice de este manual.
En el momento de su instalación se debe dejar suficiente espacio para poder abrir el PANEL
FRONTAL, y permitir de este modo futuras manipulaciones en su interior.
Para poder abrirlo se deben soltar los 4 tornillos tipo allen situados junto a los orificios de
amarre del CNC.
CNC 8025

PáginaCapítulo: 1 Sección:
CONFIGURACION DEL CNC
3
1.2 CNC 8030
El control numérico CNC 8030 está formado por 3 Módulos independientes
interconexionados entre si. Estos módulos que pueden ser ubicados en diferentes
emplazamientos de la máquina son los siguientes:
- UNIDAD CENTRAL
- MONITOR/TECLADO
- PANEL DE MANDO
El módulo PANEL DE MANDO se interconexiona con el módulo MONITOR/TECLADO
mediante el cable de unión que se suministra junto con dicho módulo.
Estos dos módulos estarán situados uno junto al otro y deberán ser interconexionados con
el módulo UNIDAD CENTRAL, que podrá ocupar un emplazamiento diferente de la
máquina, mediante los dos cables de unión que se suministran para ello. Estos dos cables
de unión, que pueden tener una longitud de hasta 25 m. se denominan:
- Cable de unión de las señales de vídeo.
- Cable de unión de las señales del teclado.
CNC 8030

Sección:Capítulo: 1
Página
CONFIGURACION DEL CNC
4
UNIDAD CENTRAL
CNC 8030
1.2.1 UNIDAD CENTRAL DEL CNC8030
La UNIDAD CENTRAL se encuentra ubicada normalmente en el armario eléctrico y su
sujeción se realiza mediante los orificios que a tal fin dispone la TAPA SOPORTE.
En el momento de su instalación debe tenerse en cuenta el espacio que permita abatir la
UNIDAD CENTRAL para futuras manipulaciones en su interior.
Para abatirla, una vez fijada la TAPA SOPORTE en el armario eléctrico, se deben soltar
las 2 tuercas moleteadas situadas en la parte superior y proceder a su abatimiento sujetando
el cuerpo de la UNIDAD CENTRAL.

PáginaCapítulo: 1 Sección:
CONFIGURACION DEL CNC
5
La UNIDAD CENTRAL dispone de 2 conectores que permiten conexionar dicho módulo
con el módulo MONITOR/TECLADO, mediante los cables de unión de las señales de
vídeo y de las señales del teclado.
1.- Conector tipo SUB-D (hembra) de 15 terminales para la conexión del cable de unión
de las señales de vídeo.
2.- Conector tipo SUB-D (hembra) de 25 terminales para la conexión del cable de las
señales del teclado.
UNIDAD CENTRAL
CNC 8030

Sección:Capítulo: 1
Página
CONFIGURACION DEL CNC
6
1.2.1.1CONECTOR DE LAS SEÑALES DEL TECLADO
Es un conector hembra tipo SUB-D de 25 terminales que se utiliza para la conexión de la
UNIDAD CENTRAL con el MONITOR/TECLADO.
FAGOR AUTOMATION suministra el cable de unión necesario para esta conexión,
estando formado por una manguera y dos conectores macho tipo SUB-D de 25 terminales,
uno en cada extremo.
Ambos conectores llevan un sistema de enclavamiento por medio de 2 tornillos UNC4.40.
TERMINAL SEÑAL
1 GND
2 C9
3 C11
4 C13
5 C15
6 C1
7 C3
8 C5
9 C7
10 D1
11 D3
12 D5
13 D7
14 C8
15 C10
16 C12
17 C14
18 C0
19 C2
20 C4
21 C6
22 D0
23 D2
24 D4
25 D6
Caperuza metálica apantallamiento
La manguera utilizada dispone de 25 hilos de 0.14 mm² (25 x 0.14mm²), con apantallamiento
global y cubierta de goma acrílica. Se permite una longitud máxima de 25m.
UNIDAD CENTRAL
CNC 8030

PáginaCapítulo: 1 Sección:
CONFIGURACION DEL CNC
7
El apantallamiento de la manguera está soldado en las caperuzas metálicas que recubren
ambos conectores y tanto en la UNIDAD CENTRAL como en el MONITOR/TECLADO
este apantallamiento se encuentra unido por hardware al terminal 1 del conector.
UNIDAD CENTRAL
CNC 8030

Sección:Capítulo: 1
Página
CONFIGURACION DEL CNC
8
1.2.1.2CONECTOR DE LAS SEÑALES DE VIDEO
Es un conector hembra tipo SUB-D de 15 terminales que se utiliza para la conexión de la
UNIDAD CENTRAL con el MONITOR/TECLADO.
FAGOR AUTOMATION suministra el cable de unión necesario para esta conexión,
estando formado por una manguera con un conector macho tipo SUB-D de 15 terminales
(lado unidad central) y otro conector hembra tipo SUB-D de 15 terminales (lado monitor).
Ambos conectores llevan un sistema de enclavamiento por medio de 2 tornillos UNC4.40.
TERMINAL SEÑAL
1 GND
2 H
3 V
4 I
5 R
6 G
7 B
8 No conectado
9 No conectado
10 H
11 V
12 I
13 R
14 G
15 B
Caperuza metálica apantallamiento
La manguera utilizada dispone de 6 pares de hilos trenzados de 0.34 mm² (6 x 2 x 0.34mm²),
con apantallamiento global y cubierta de goma acrílica. Dispone de una impedancia
específica de 120 Ohmios y se permite una longitud máxima de 25m.
El apantallamiento de la manguera está soldado en las caperuzas metálicas que recubren
ambos conectores y tanto en la UNIDAD CENTRAL como en el MONITOR/TECLADO
este apantallamiento se encuentra unido por hardware al terminal 1 del conector.
UNIDAD CENTRAL
CNC 8030

PáginaCapítulo: 1 Sección:
CONFIGURACION DEL CNC
9
1.2.2 MONITOR/TECLADO DEL CNC8030
Este módulo, ubicable en la botonera de la máquina, permite disponer al usuario de la
información necesaria mediante el MONITOR, así como operar con el CNC mediante el
TECLADO y el PANEL DE MANDO.
En este módulo se encuentran ubicados los conectores que permitirán interconexionar la
UNIDAD CENTRAL con el MONITOR/TECLADO
1.2.2.1 DIMENSIONES DEL MONITOR/TECLADO
MONITOR/TECLADO
CNC 8030

Sección:Capítulo: 1
Página
CONFIGURACION DEL CNC
10
1.2.2.2 ELEMENTOS CONSTITUYENTES DEL MONITOR/TECLADO
X1 Conector tipo SUB-D (hembra) de 25 terminales para la conexión delas señales del
teclado.
X2 Conector tipo SUB-D (macho) de 15 terminales para la conexión de las señales de
vídeo.
X3 Conector tipo SUB-D (hembra) de 15 terminales para la conexión del MONITOR/
TECLADO con el PANEL DE MANDO.
1.- Conector de conexión a red. Se utilizará el conector proporcionado a tal fin para
conectarlo a 220 V. de corriente alterna y a tierra.
2.- Borna de tierra. Utilizada para la conexión general de tierras de la máquina. Es de
métrica 6.
3.- Zumbador
Atención:
No manipular el interior del aparato
Sólo personal autorizado de Fagor Automation puede manipular el
interior del aparato.
No manipular los conectores con el aparato conectado a la red eléctrica
Antes de manipular los conectores (entradas/salidas, captación, etc)
cerciorarse que el aparato no se encuentra conectado a la red
eléctrica.
MONITOR/TECLADO
CNC 8030

PáginaCapítulo: 1 Sección:
CONFIGURACION DEL CNC
11
1.2.2.3 CONECTORES Y CONEXIONADO DEL MONITOR TECLADO
Conectores X1, X2
Se encuentran explicados en el apartado correspondiente a la UNIDAD CENTRAL.
Conector X3
Es un conector hembra tipo SUB-D de 15 terminales que se utiliza para la conexión del
TECLADO con el PANEL DE MANDO.
FAGOR AUTOMATION suministra el cable de unión necesario para esta conexión,
estando formado por un cable plano de 15 hilos y 250mm de longitud.
Si se desea una mayor separación entre el Monitor/Teclado y el Panel de Mando, este
cable debe ser sustituido por una manguera de 15 hilos de 0.14 mm² (15 x 0.14mm²)
con apantallamiento global y cubierta de goma acrílica. La longitud asignada a este
cable más la longitud que tiene el cable que une la Unidad Central con el Teclado
(conector X1) no podrá ser superior a 25 m.
TERMINAL SEÑAL
1
2 uC13
3 uC12
4 jC11
5 jC10
6 jC9
7 D7
8 D6
9 D5
10 D4
11 D3
12 D2
13 D1
14 D0
15 C14
MONITOR/TECLADO
CNC 8030

Sección:Capítulo: 1
Página
CONFIGURACION DEL CNC
12
1.2.3 PANEL DE MANDO DEL CNC8030
Este módulo conectado al MONITOR/TECLADO mediante cable plano, contiene los
mandos para trabajar en Modo Manual (teclas JOG, avance rápido, conmutador M.F.O.,
teclas de manejo del cabezal), los pulsadores de Marcha/Parada del ciclo, así como un
pulsador de Emergencia o el Volante Electrónico (opcional).
X1 Conector tipo SUB-D (hembra) de 15 terminales para la conexión del PANEL DE
MANDO con el MONITOR TECLADO.
EStá explicado en el apartado correspondiente al MONITOR/TECLADO.
1.- Sin función.
2.- Conexión opcional del pulsador de emergencia o del Volante Electrónico.
PANEL DE MANDO
CNC 8030

PáginaCapítulo: 1 Sección:
CONFIGURACION DEL CNC
13
1.3 CONECTORES Y CONEXIONADO DEL SISTEMA CNC 8025/30
A1 Conector tipo SUB-D (hembra) de 15 terminales para la conexión del sistema de
captación del eje X. Admite señal senoidal.
A2 Conector tipo SUB-D (hembra) de 15 terminales para la conexión del sistema de
captación de la herramienta sincronizada o del 4º eje. Admite señal senoidal.
A3 Conector tipo SUB-D (hembra) de 15 terminales para la conexión del sistema de
captación del eje Z. Admite señal senoidal.
A4 Conector tipo SUB-D (hembra) de 15 terminales para la conexión del sistema de
captación del eje C o del 3º eje. Admite señal senoidal.
A5 Conector tipo SUB-D (hembra) de 15 terminales para la conexión del sistema de
captación del encoder del cabezal. No admite señal senoidal.
A6 Conector tipo SUB-D (hembra) de 9 terminales para la conexión de la herramienta
sincronizada o del volante electrónico y de un palpador de medida. No admite señal
senoidal.
RS485 Conector tipo SUB-D (hembra) de 9 terminales para la conexión de la línea
serie RS485.
RS232C Conector tipo SUB-D (hembra) de 9 terminales para la conexión de la línea
serie RS232C.
I/O1 Conector tipo SUB-D (hembra) de 37 terminales para la conexión al armario
eléctrico de 10 entradas digitales, 16 salidas digitales y 4 salidas analógicas de
tensión de mando de los reguladores (rango ±10 V.).
CONECTORES Y
CONEXIONADO

Sección:Capítulo: 1
Página
CONFIGURACION DEL CNC
14
I/O2 Conector tipo SUB-D (hembra) de 25 terminales para la conexión al armario
eléctrico de 16 salidas digitales y 2 salidas analógicas de tensión de mando de los
reguladores (rango ±10 V.).
1- Fusibles de red. Lleva 2 fusibles rápidos (F), uno por cada línea de red, de 3,15Amp./
250V para protección de la entrada de red.
2- Conector de conexión a red. Sirve para alimentar el CNC, conectándolo al transforma-
dor y a tierra.
3- Borna de tierra. En ella se debe realizar la conexión general de tierras de la máquina.
Es de métrica 6.
4- Fusible. Fusible rápido (F) de 3,15Amp./250V para protección de la circuitería interna
de las entradas y salidas del CNC.
5- Pila de litio. Mantiene la información de la memoria RAM cuando desaparece la
alimentación del sistema.
6- Potenciómetros de ajuste de las salidas analógicas. Para uso exclusivo del Servicio
de Asistencia Técnica.
7- 10 Microconmutadores. Se dispone de 2 microconmutadores bajo cada uno de los
conectores de entrada de captación (A1 ... A5), y permiten personalizar el CNC de
acuerdo con el tipo de señales de captación empleado.
8 Mando de ajuste del brillo de la pantalla del MONITOR.
9 Refrigerador.
Atención:
No manipular los conectores con el aparato conectado a la red eléctrica
Antes de manipular los conectores (entradas/salidas, captación, etc)
cerciorarse que el aparato no se encuentra conectado a la red
eléctrica.
CONECTORES Y
CONEXIONADO

PáginaCapítulo: 1 Sección:
CONFIGURACION DEL CNC
15
1.3.1 CONECTORES A1, A2, A3, A4
Son conectores hembra tipo SUB-D de 15 terminales que se utilizan para la conexión de
las señales de captación.
* El conector A1 se utiliza para las señales de captación del eje X.
* El conector A2 se utiliza para las señales de captación del 4º eje o de la herramienta
motorizada o sincronizada.
Cuando se dispone de 4º eje se debe personalizar el parámetro máquina "P614(1)=1"
y utilizar la entrada de captación A6 para la herramienta motorizada o sincronizada.
Cuando no se dispone de 4º eje se debe personalizar el parámetro máquina
"P614(1)=0". En este caso, si se dispone de herramienta motorizada o sincronizada,
se debe conectar en este conector.
Además, cuando se dispone de herramienta motorizada se debe personalizar el
parámetro máquina "P802" con un valor distinto de 0 y cuando se dispone de
herramienta sincronizada se deben personalizar los parámetros máquina "P802" y
"P803" con un valor distinto de 0
* El conector A3 se utiliza para las señales de captación del eje Z.
* El conector A4 se utiliza para las señales de captación del eje C o del 3º eje
En ambos casos se debe personalizar el parámetro máquina "P612(1)=1", indicando
de esta forma que la máquina dispone del 3º eje.
Cuando el tercer eje es el eje C, se debe personalizar el parámetro máquina
"P613(5)" con el valor "1", indicativo de eje C.
El tipo de cable utilizado deberá disponer apantallamiento global. El resto de características
así como su longitud dependerán del tipo y modelo de captación empleado.
Se recomienda alejar el máximo posible de los conductores de potencia de la máquina el
cable utilizado en el conexionado de la captación.
CONECTORES
A1, A2, A3 y A4

Sección:Capítulo: 1
Página
CONFIGURACION DEL CNC
16
CONECTORES
A1, A2, A3 y A4
TERMINAL SIGNIFICADO Y FUNCION
1 A
2 /A Señales cuadradas de contaje diferenciales.
3 B
4 /B
5 Io Señales del impulso de referencia máquina.
6 /Io
7 Ac Señales senoidales de contaje.
8 Bc
9 +5V. Alimentación de los sistemas de captación.
10 No conectado.
11 0V. Alimentación de los sistemas de captación.
12 No conectado.
13 -5V. Alimentación de los sistemas de captación.
14 No conectado.
15 CHASIS Apantallamiento.
Atención:
Cuando se utilizan captadores rotativos de señal cuadrada, la señal proporcionada
por los mismos debe ser compatible TTL. Además, no se permite utilizar
captadores que proporcionan señales de salida en colector abierto (Open
Collector).
No manipular los conectores con el aparato conectado a la red eléctrica
Antes de manipular los conectores (entradas/salidas, captación, etc)
cerciorarse que el aparato no se encuentra conectado a la red eléctrica.

PáginaCapítulo: 1 Sección:
CONFIGURACION DEL CNC
17
1.3.1.1 MICROCONMUTADORES DE LOS CONECTORES A1, A2, A3, A4
Se dispone de 2 microconmutadores bajo cada uno de los conectores de entrada de
captación (A1, A2, A3, A4), para personalizar el CNC de acuerdo con el tipo de señales
de captación empleado.
El microconmutador 1 indica si se utiliza señal de captación senoidal o cuadrada, y el
microconmutador 2 indica si la señal de captación dispone de señales complementadas.
Las señales de captación que se pueden utilizar en los conectores A1, A2, A3, A4 son:
* Señales de captación senoidales (Ac, Bc, Io)
* Señales de captación cuadradas (A, B, Io)
* Señales de captación cuadradas complementadas (A, /A, B, /B, Io, /Io)
Para poder personalizar el CNC con el tipo de señal que se utiliza en cada eje, se dispone
de las siguientes combinaciones de microconmutadores:
Microconmutador SIGNIFICADO Y FUNCION
1 2
ON ON Señal senoidal (Ac,Bc,Io)
ON OFF Señal senoidal complementada "No permitida"
OFF ON Señal cuadrada (A,B,Io)
OFF OFF Señal cuadrada complementada (A,/A,B,/B,Io,/Io)
Junto a cada pareja de microconmutadores, se dispone de una etiqueta que indica el
significado de cada microconmutador.
CONECTORES
A1, A2, A3 y A4

Sección:Capítulo: 1
Página
CONFIGURACION DEL CNC
18
CONECTOR A5
1.3.2 CONECTOR A5
Es un conector hembra tipo SUB-D de 15 terminales que se utiliza para la conexión de la
señal de captación del encoder del cabezal. No admite señal senoidal.
El tipo de cable utilizado deberá disponer apantallamiento global. El resto de características
así como su longitud dependerán del tipo y modelo de captación empleado.
Se recomienda alejar el máximo posible de los conductores de potencia de la máquina el
cable utilizado en el conexionado de la captación.
TERMINAL SIGNIFICADO Y FUNCION
1 A
2 /A Señales cuadradas de contaje diferenciales.
3 B
4 /B
5 Io Señales del impulso de referencia máquina.
6 /Io
7 Micro Io Señal de referencia máquina del cabezal.
8 0V. Entrada 0V del micro Io (armario eléctrico).
9 +5V. Alimentación de los sistemas de captación.
10 No conectado.
11 0V. Alimentación de los sistemas de captación.
12 No conectado.
13 -5V. Alimentación de los sistemas de captación.
14 No conectado.
15 CHASIS Apantallamiento.
Atención:
Cuando se utilizan captadores rotativos de señal cuadrada, la señal proporcionada
por los mismos debe ser compatible TTL. Además, no se permite utilizar
captadores que proporcionan señales de salida en colector abierto (Open
Collector).
No manipular los conectores con el aparato conectado a la red eléctrica
Antes de manipular los conectores (entradas/salidas, captación, etc)
cerciorarse que el aparato no se encuentra conectado a la red eléctrica.

PáginaCapítulo: 1 Sección:
CONFIGURACION DEL CNC
19
1.3.2.1 MICROCONMUTADORES DEL CONECTOR A5
Se dispone de 2 microconmutadores bajo el conector de captación A5, para personalizar el
CNC de acuerdo con el tipo de señal de captación empleado.
El microconmutador 1 indica si se utiliza señal de captación senoidal o cuadrada, y el
microconmutador 2 indica si la señal de captación dispone de señales complementadas.
Las señales de captación que se pueden utilizar en este conectores son:
* Señales de captación cuadradas (A, B, Io)
* Señales de captación cuadradas complementadas (A, /A, B, /B, Io, /Io)
Para poder personalizar el CNC con el tipo de señal que se utiliza en cada eje, se dispone
de las siguientes combinaciones de microconmutadores:
Microconmutador SIGNIFICADO Y FUNCION
1 2
ON ON Señal senoidal "No permitida"
ON OFF Señal senoidal complementada "No permitida"
OFF ON Señal cuadrada (A,B,Io)
OFF OFF Señal cuadrada complementada (A,/A,B,/B,Io,/Io)
Junto a cada pareja de microconmutadores, se dispone de una etiqueta que indica el
significado de cada microconmutador.
CONECTOR A5

Sección:Capítulo: 1
Página
CONFIGURACION DEL CNC
20
1.3.3 CONECTOR A6
Es un conector hembra tipo SUB-D de 9 terminales que se utiliza para la conexión de la
herramienta sincronizada o del volante electrónico y de un palpador de medida. No admite
señal senoidal.
El tipo de cable utilizado en la conexión de la herramienta sincronizada o del volante
electrónico deberá disponer de apantallamiento global. El resto de características así como
su longitud dependerán del tipo y modelo de captación empleado.
Se recomienda alejar el máximo posible de los conductores de potencia de la máquina el
cable utilizado en el conexionado de la captación.
Para la conexión del palpador se dispone de 2 entradas (5V. y 24V.), debiendo conectarse
el 0V. de la fuente de alimentación utilizada al terminal “Entrada del palpador 0V”.
En el apéndice de este manual se adjunta información sobre las características de estas
entradas de palpador, así como una relación de circuitos de conexión recomendados.
Todas las pantallas de los cables deben ser llevadas a tierra únicamente en el CNC a través
del conector, dejando el otro extremo libre. Los hilos de un cable apantallado no deben tener
una longitud superior a 75 mm sin protección de pantalla.
TERMINAL SIGNIFICADO Y FUNCION
1 A Señales cuadradas de contaje
2 B Señales cuadradas de contaje
3 IO Señal del impulso de referencia máquina.
4 +5V. Alimentación del sistema de captación
5 0V. Alimentación del sistema de captación
6 PALP 5 Entrada del palpador 5 V. TTL
7 PALP 24 Entrada del palpador 24 Vcc
8 0 PALP Entrada del palpador 0 V.
9 CHASIS Apantallamiento.
Atención:
Cuando se utilizan captadores rotativos de señal cuadrada, la señal proporcionada
por los mismos debe ser compatible TTL. Además, no se permite utilizar
captadores que proporcionan señales de salida en colector abierto (Open
Collector).
Cuando se utiliza el volante FAGOR 100P, la señal seleccionadora de eje debe
conectarse al terminal 3.
No manipular los conectores con el aparato conectado a la red eléctrica
Antes de manipular los conectores (entradas/salidas, captación, etc)
cerciorarse que el aparato no se encuentra conectado a la red eléctrica.
CONECTOR A6

PáginaCapítulo: 1 Sección:
CONFIGURACION DEL CNC
21
1.3.4 CONECTOR RS232C
Es un conector hembra tipo SUB-D de 9 terminales que se utiliza para la conexión de la línea
serie RS232C.
El apantallamiento de la manguera utilizada se conectará al terminal 1 del conector en el lado
del CNC y a la caperuza metálica que recubre el conector en el lado del PERIFERICO.
TERMINAL SEÑAL FUNCION
1 FG Apantallamiento
2 TxD Transmisión de datos
3 RxD Recepción de datos
4 RTS Petición de emisión
5 CTS Preparado para transmitir
6 DSR Datos preparados para enviar
7 GND Señal de tierra
8 —- No conectado
9 DTR Terminal preparado para recibir datos
RECOMENDACIONES PARA LA UTILIZACION DEL INTERFAZ RS232C
* Conexión - desconexión del periférico.
El CNC deberá estar apagado cuando se conecta o desconecta cualquier
periférico a través de este conector.
* Longitud de los cables. La norma EIA RS232C especifica que la capacidad del cable
no debe superar los 2400 pF., por lo tanto y debido a que los cables comúnmente
utilizados tienen una capacidad entre 130 y 170 pF, la longitud de los mismos queda
limitada a 15 m.
Para distancias superiores se aconseja intercalar convertidores de señal RS232C a
RS422A y viceversa. (Contactar con el distribuidor correspondiente).
Es aconsejable utilizar cables apantallados y/o conductores trenzados para minimizar
interferencias entre cables, evitando de esta forma comunicaciones defectuosas en
recorridos con cables largos.
Se recomienda utilizar mangueras de 7 hilos, con una sección mínima de 0.14 mm² por
hilo y con apantallamiento.
* Velocidad de transmisión. La velocidad de transmisión normalmente utilizada entre
un periférico u ordenador y el CNC es de 9600 Bd.
Se aconseja unir a masa los conductores o hilos que no se utilicen, evitando así
interpretaciones erróneas de señales de control y de datos.
* Conexión a tierra. Se recomienda referenciar todas las señales de control y de datos
al mismo cable de toma de tierra (terminal 7 GND), evitando puntos de referencia con
diversas tensiones, ya que en recorridos largos pueden existir diferencias de potencial
entre los dos extremos del cable.
CONECTOR RS232C

Sección:Capítulo: 1
Página
CONFIGURACION DEL CNC
22
CONEXIONES RECOMENDADAS PARA EL INTERFAZ RS232C
* Conexión completa
* Conexión simplificada
Se utilizará si el periférico u ordenador cumple uno de los siguiente requisitos:
- Si no dispone de la señal RTS.
- Si se opera con DNC.
- Si el receptor puede recibir datos a la velocidad de transmisión seleccionada.
No obstante, se recomienda consultar los manuales técnicos del periférico u ordenador
por si hubiera alguna discrepancia.
CONECTOR RS232C

PáginaCapítulo: 1 Sección:
CONFIGURACION DEL CNC
23CONECTOR RS232C
CONEXIONES RS232C

Sección:Capítulo: 1
Página
CONFIGURACION DEL CNC
24
CONECTOR RS485
1.3.5 CONECTOR RS485
Es un conector hembra tipo SUB-D de 9 terminales que se utiliza para la conexión de la línea
serie RS485.
Esta línea serie se utiliza para integrar el CNC en una red local FAGOR, pudiendo de esta
forma comunicarse con otros controles numéricos FAGOR y Autómatas programables
(FAGOR PLC 64).
Atención: No manipular los conectores con el aparato conectado a la red eléctrica.
Antes de manipular los conectores (entradas/salidas, captación, etc)
cerciorarse que el aparato no se encuentra conectado a la red eléctrica.
Para mejorar la inmunidad de la línea serie RS485 a perturbaciones
electromagnéticas conducidas, se recomienda soldar la malla del cable a la
caperuza metálica que recubre el conector.
1.3.5.1 CABLE RECOMENDADO PARA LA RS485
CARACTERISTICAS TECNICAS
CABLE “TWINAXIAL”
TERMINAL SEÑAL FUNCION
1 ---
No conectado
2 ---
No conectado
3 TxD Transmisión de datos
4 ---
No conectado
5 ---
No conectado
6 ---
No conectado
7 ---
No conectado
8 TxD Transmisión de datos
9
---
No conectado
ESPECIFICACIONES
Conductor
Tipo:
Material:
Resistencia:
02 AWG trenzado 7x28
Cobre (estañado sólo 1 conductor)
Máximo 11 L por cada 305m. (1000 pies)
Aislamiento
Material: Teflón
Blindajes
Material
Tipo
Recubrimiento
Resistencia
Cobre estañado
Trenza 34 AWG. 8 finales / 16 portadores
Mínimo 95%
Máximo 3L por cada 305m. (1000 pies)
Cubierta
Material:
Diámetro ext.
Teflón
Nominal 7mm. (0.257 pulgadas)
Capacitancia
Máximo53,1 pF/m (16.2 pF/pie)
Impedancia
107± 5% Ohmios a 1 MHz.

PáginaCapítulo: 1 Sección:
CONFIGURACION DEL CNC
25CONECTOR I/O1
1.3.6 CONECTOR I/O 1
Es un conector hembra tipo SUB-D de 37 terminales que permite la conexión con el armario
eléctrico.
Terminal SEÑAL Y FUNCION
1 0V. Entrada de alimentación externa
2 T Strobe Salida. Las salidas BCD muestran el código de herramienta.
3 S Strobe Salida. Las salidas BCD muestran el código S (cabezal).
4 M Strobe Salida. Las salidas BCD muestran el código de una función auxiliar.
5 Emergencia Salida
6 Roscado ON Salida
Cicle ON
7 Embrague Z Salida
8 Reset Salida
9 Embrague X Salida
10 Micro Io (X) Entrada del micro de búsqueda de referencia máquina.
11 Micro Io (3º eje) Entrada del micro de búsqueda de referencia máquina.
12 Micro Io (Z) Entrada del micro de búsqueda de referencia máquina.
13 Micro Io (4º eje) Entrada del micro de búsqueda de referencia máquina.
Subrut. Emergencia Activación de la subrutina de emergencia
14 Stop Emergencia Entrada
15 Feed Hold Entrada
Transfer inhibit
M ejecutada
16 Parada Entrada
Subrut. Emergencia Activación de la subrutina de emergencia
17 Marcha Entrada
18 Entr. Condicional Entrada.
19 Manual Entrada. El CNC actúa como Visualizador
20 MST80 Salida código BCD, peso 80
21 MST40 Salida código BCD, peso 40
22 MST20 Salida código BCD, peso 20
23 MST10 Salida código BCD, peso 10
24 MST08 Salida código BCD, peso 8
25 MST04 Salida código BCD, peso 4
26 MST02 Salida código BCD, peso 2
27 MST01 Salida código BCD, peso 1
28 CHASIS Conectar en él todos los apantallamientos de los cables utilizados.
29 24V. Entrada de alimentación externa
30 ±10V Salida de consigna analógica para el regulador del eje X
31 0V. Salida de consigna analógica para el regulador del eje X
32 ±10V Salida de consigna analógica para la herramienta motorizada
33 0V. Salida de consigna analógica para la herramienta motorizada
34 ±10V Salida de consigna analógica para el regulador del eje Z
35 0V. Salida de consigna analógica para el regulador del eje Z
36 ±10V Salida de consigna analógica para el regulador del cabezal
37 0V. Salida de consigna analógica para el regulador del cabezal
Atención:
El fabricante de la máquina debe cumplir la norma EN 60204-1 (IEC-204-1),
en lo que respecta a la protección contra choque eléctrico ante fallo de los
contactos de entradas/salidas con alimentación exterior, cuando no se conecta
este conector antes de dar fuerza a la fuente de alimentación.
No manipular los conectores con el aparato conectado a la red eléctrica
Antes de manipular los conectores (entradas/salidas, captación, etc)
cerciorarse que el aparato no se encuentra conectado a la red eléctrica.

Sección:Capítulo: 1
Página
CONFIGURACION DEL CNC
26
1.3.6.1 ENTRADAS DEL CONECTOR I/O 1
MICRO Io DEL EJE X Terminal 10
Esta ENTRADA debe encontrarse a nivel lógico alto siempre que el microinterruptor
de búsqueda de referencia máquina del eje X se encuentre pulsado.
MICRO Io DEL EJE C o 3º Terminal 11
Esta ENTRADA debe encontrarse a nivel lógico alto siempre que el microinterruptor
de búsqueda de referencia máquina del eje C o del 3º eje se encuentre pulsado.
MICRO Io DEL EJE Z Terminal 12
Esta ENTRADA debe encontrarse a nivel lógico alto siempre que el microinterruptor
de búsqueda de referencia máquina del eje Z se encuentre pulsado.
MICRO Io DEL 4º EJE / Activación subrutina de emergencia Terminal 13
Cuando la máquina dispone de 4º eje "P614(1)=1", esta entrada corresponde al micro
Io del 4º eje. Debe encontrarse a nivel lógico alto siempre que el microinterruptor de
búsqueda de referencia máquina del 4º eje se encuentre pulsado.
Cuando la máquina no dispone de 4º eje "P614(1)=0" y se dispone de subrutina de
emergencia, "P716" distinto de 0, el CNC activará la subrutina de emergencia cuyo
número se indica en el parámetro "P716" cada vez que pone a nivel lógico bajo esta
entrada.
Si la máquina dispone de 4º eje el CNC utiliza como entrada de activación de la
subrutina de emergencia la entrada 16 de este mismo conector.
STOP EMERGENCIA Terminal 14
Esta ENTRADA debe encontrarse normalmente a nivel lógico alto.
Si se pone a nivel lógico bajo, el CNC desactiva los embragues y las consignas de todos
los ejes, interrumpe la ejecución del programa pieza y visualiza en pantalla el error 64.
No implica salida de emergencia (terminal 5 de este conector).
FEED HOLD / TRANSFER INHIBIT / M EJECUTADA Terminal 15
Esta ENTRADA debe encontrarse normalmente a nivel lógico alto, y su significado
depende del tipo de bloque o de la función que se esté ejecutando.
* Si durante el desplazamiento de los ejes se pone esta señal (FEED HOLD) a nivel
lógico bajo, el CNC mantiene el giro del cabezal y detiene el avance de los ejes,
proporcionando consignas de valor 0V y manteniendo los embragues activados.
Cuando esta señal vuelve a nivel lógico alto, el CNC continuará con el desplazamiento
de los ejes.
CONECTOR I/O1

PáginaCapítulo: 1 Sección:
CONFIGURACION DEL CNC
27
* Si durante la ejecución de un bloque sin movimiento se pone esta señal (TRANSFER
INHIBIT) a nivel lógico bajo, el CNC detiene la ejecución del programa una vez
finalizado el bloque actual.
Cuando esta señal vuelve a nivel lógico alto, el CNC continuará con la ejecución del
programa.
* La señal “M EJECUTADA” se utilizará cuando el parámetro máquina "P602(7)"
se ha personalizado con el valor “1”.
El CNC espera a que el armario eléctrico ejecute la función auxiliar M solicitada, es
decir, a que vuelva a activar la señal “M EJECUTADA”.
PARADA / Activación subrutina de emergencia Terminal 16
Esta ENTRADA debe encontrarse normalmente a nivel lógico alto, y su significado
depende de la configuración del sistema.
* Si la máquina dispone de 4º eje "P614(1)=1" y de subrutina de emergencia, "P716"
distinto de 0, el CNC activará la subrutina de emergencia cuyo número se indica en
el parámetro "P716" cada vez que pone a nivel lógico bajo esta entrada.
* Si la máquina no dispone de 4º eje "P614(1)=0" o de subrutina de emergencia
"P716=0", el CNC trata esta entrada (PARADA) de la siguiente forma:
Si se pone a nivel lógico bajo el CNC detiene la ejecución del programa. Su
tratamiento es idéntico a la tecla del PANEL DE MANDO.
Para poder continuar con la ejecución del programa es necesario que esta señal
vuelva a nivel lógico alto y que se active la entrada MARCHA (terminal 17 de este
mismo conector) o que se pulse la tecla del PANEL DE MANDO.
MARCHA Terminal 17
Esta ENTRADA debe encontrarse normalmente a nivel lógico bajo.
Además, en posición de reposo esta entrada deberá conectarse, a través de una
resistencia de 10 K Ohmios, a 0V.
Cuando se detecta un flanco de subida, cambio de nivel lógico bajo a nivel lógico alto,
el CNC actúa como si se hubiera pulsado la tecla del PANEL DE MANDO.
No obstante, si se desea deshabilitar la tecla del PANEL DE MANDO y
utilizar únicamente esta entrada, se debe personalizar el parámetro máquina "P601(5)"
con el valor 1.
CONECTOR I/O1

Sección:Capítulo: 1
Página
CONFIGURACION DEL CNC
28
ENTRADA CONDICIONAL Terminal 18
Cada vez que el CNC ejecuta la función auxiliar M01 (parada condicional) se analizará
el estado de esta entrada. Si se encuentra activada, nivel lógico alto, el CNC detiene la
ejecución del programa.
Del mismo modo, cada vez que el CNC debe ejecutar un “bloque condicional” se
analizará el estado de esta entrada, ejecutándose la misma si esta entrada se encuentra
activada, nivel lógico alto.
MANUAL (Modo Visualizador) Terminal 19
Si estando el CNC en modo Manual (JOG), se pone esta ENTRADA a nivel lógico
alto, el CNC actúa como visualizador.
CONECTOR I/O1

PáginaCapítulo: 1 Sección:
CONFIGURACION DEL CNC
29
1.3.6.2 SALIDAS DEL CONECTOR I/O 1
T Strobe Terminal 2
El CNC activa esta salida, la pone a nivel lógico alto, siempre que por las salidas BCD
(terminales 20 a 27) se está enviando el código correspondiente a una herramienta
(función T).
S Strobe Terminal 3
El CNC activa esta salida, la pone a nivel lógico alto, siempre que por las salidas BCD
(terminales 20 a 27) se está enviando el código correspondiente a la velocidad del
cabezal (función S en BCD).
M Strobe Terminal 4
El CNC activa esta salida, la pone a nivel lógico alto, siempre que por las salidas BCD
(terminales 20 a 27) se está enviando el código correspondiente a una función auxiliar
(función M).
EMERGENCIA Terminal 5
El CNC activa esta salida siempre que detecta una condición de alarma o emergencia
interna.
El estado normal de funcionamiento de esta salida (nivel lógico alto o bajo) depende del
valor asignado al parámetro máquina "P604(4)".
ROSCADO ON / CYCLE ON Terminal 6
Esta salida se encuentra normalmente a nivel lógico bajo, y su significado depende del
como se haya personalizado El parámetro máquina "P605(4)".
"P605(4)=0" ROSCADO ON.
El CNC activa esta salida, la pone a nivel lógico alto, siempre que se encuentra
ejecutando un roscado.
"P605(4)=1" CYCLE ON.
El CNC activa esta salida, la pone a nivel lógico alto, siempre que se está ejecutando
un bloque de programa.
EMBRAGUE Z Terminal 7
El CNC activa esta salida, la pone a nivel lógico alto, siempre que se necesite habilitar
el regulador del eje Z.
RESET Terminal 8
Esta salida se activa, se pone a nivel lógico alto, siempre que se inicializa el CNC
mediante la tecla [RESET].
El CNC mantiene la señal activa durante 80 milisegundos.
CONECTOR I/O1

Sección:Capítulo: 1
Página
CONFIGURACION DEL CNC
30
EMBRAGUE X Terminal 9
El CNC activa esta salida, la pone a nivel lógico alto, siempre que se necesite habilitar
el regulador del eje X.
MST80 Terminal 20
MST40 Terminal 21
MST20 Terminal 22
MST10 Terminal 23
MST08 Terminal 24
MST04 Terminal 25
MST02 Terminal 26
MST01 Terminal 27
El CNC utiliza estas salidas para indicar al armario eléctrico la función M, S o T que
se ha seleccionado.
Dicha información se encuentra codificada en BCD y el peso de cada una de estas
salidas viene indicado por el mnemónico correspondiente.
Por ejemplo, cuando se debe seleccionar la primera gama de cabezal el CNC enviará
al armario eléctrico el código M41.
MST80 MST40 MST20 MST10 MST08 MST04 MST02 MST01
0 1 0 0 0 0 0 1
Junto con estas señales se activará la salida “M Strobe”, “T Strobe” o “S Strobe” para
indicar el tipo de función que se ha seleccionado.
Consigna del eje X ±10V. Terminal 30
Consigna del eje X 0V. Terminal 31
Estas salidas proporcionan la señal analógica correspondiente para gobernar el eje X.
Su conexión al regulador se realizará mediante cable apantallado.
Consigna de la herramienta motorizada ±10V. Terminal 32
Consigna de la herramienta motorizada 0V. Terminal 33
Estas salidas proporcionan la señal analógica correspondiente para gobernar la
herramienta motorizada. Su conexión al regulador se realizará mediante cable apantallado.
Consigna del eje Z ±10V. Terminal 34
Consigna del eje Z 0V. Terminal 35
Estas salidas proporcionan la señal analógica correspondiente para gobernar el eje Z.
Su conexión al regulador se realizará mediante cable apantallado.
Consigna del cabezal ±10V. Terminal 36
Consigna del cabezal 0V. Terminal 37
Estas salidas proporcionan la señal analógica correspondiente para gobernar el cabezal,
cuando se encuentra en lazo abierto (S) o cuando trabaja como eje C. Su conexión al
regulador se realizará mediante cable apantallado.
CONECTOR I/O1

PáginaCapítulo: 1 Sección:
CONFIGURACION DEL CNC
31
1.3.7 CONECTOR I/O 2
Es un conector hembra tipo SUB-D de 25 terminales que permite la conexión con el armario
eléctrico.
TERMINAL SEÑAL Y FUNCION
1 0V. Entrada de alimentación externa
2 0V. Entrada de alimentación externa
3 Salida M1 Valor del bit 1 de la tabla de funciones auxiliares M.
4 Salida M2 Valor del bit 2 de la tabla de funciones auxiliares M.
5 Salida M3 Valor del bit 3 de la tabla de funciones auxiliares M.
6 Salida M4 Valor del bit 4 de la tabla de funciones auxiliares M.
7 Salida M5 Valor del bit 5 de la tabla de funciones auxiliares M.
8 Salida M6 Valor del bit 6 de la tabla de funciones auxiliares M.
9 Salida M7 Valor del bit 7 de la tabla de funciones auxiliares M.
10 Salida M8 Valor del bit 8 de la tabla de funciones auxiliares M.
11 Salida M9 Valor del bit 9 de la tabla de funciones auxiliares M.
12 Salida M10 Valor del bit 10 de la tabla de funciones auxiliares M.
13 Salida M11 Valor del bit 11 de la tabla de funciones auxiliares M.
Embrague 4º eje
14 0V. Salida de consigna analógica para el regulador del 4º eje
15 ±10V Salida de consigna analógica para el regulador del 4º eje
16 CHASIS Para conectar los apantallamientos de los cables utilizados.
17 0V. Salida de consigna analógica para el regulador del 3º eje
18 ±10V Salida de consigna analógica para el regulador del 3º eje
19 24V. Entrada de alimentación externa
20 24V. Entrada de alimentación externa
21 Manual Salida. Modo de operación Manual seleccionado.
22 Salida M15 Valor del bit 15 de la tabla de funciones auxiliares M.
Bloqueo cabezal
Embrague eje C
23 Salida M14 Valor del bit 14 de la tabla de funciones auxiliares M.
G00
24 Salida M13 Valor del bit 13 de la tabla de funciones auxiliares M.
Giro torreta
25 Salida M12 Valor del bit 12 de la tabla de funciones auxiliares M.
Embrague 3º eje
Atención:
El fabricante de la máquina debe cumplir la norma EN 60204-1 IEC-204-1),
en lo que respecta a la protección contra choque eléctrico ante fallo de los
contactos de entradas/salidas con alimentación exterior, cuando no se conecta
este conector antes de dar fuerza a la fuente de alimentación.
No manipular los conectores con el aparato conectado a la red eléctrica
Antes de manipular los conectores (entradas/salidas, captación, etc)
cerciorarse que el aparato no se encuentra conectado a la red eléctrica.
CONECTOR I/O2

Sección:Capítulo: 1
Página
CONFIGURACION DEL CNC
32
1.3.7.1 SALIDAS LOGICAS DEL CONECTOR I/O 2
Salidas M decodificadas Terminales 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 22, 23, 24, 25
Estas SALIDAS proporcionan los valores que se encuentran seleccionados en la tabla
decodificada correspondiente a la función auxiliar M seleccionada.
Por ejemplo: Si la tabla correspondiente a la función M41 se ha personalizado de la
siguiente forma:
M41 100100100100100 (salidas que se activan)
00100100100100100 (salidas que se desactivan)
El CNC actuará de la siguiente forma cada vez que se ejecute la función auxiliar M41
(selección de la primera gama de cabezal):
Salidas M11 / Embrague del 4º eje Terminal 13
Esta SALIDA proporciona el valor del bit 11 de la tabla decodificada correspondiente
a la función auxiliar M seleccionada.
Cuando la máquina dispone del 4º eje "P614(1)=1", esta salida será el embrague del 4º
eje.
Se debe tener cuidado, cuando se dispone de esta opción, de no utilizar el bit
correspondiente a esta salida en la tabla de M decodificadas ya que el CNC activará esta
salida en ambos casos.
Consigna del 4º eje ±10V. Terminal 15
Consigna del 4º eje 0V. Terminal 14
Estas salidas proporcionan la señal analógica correspondiente para gobernar el 4º eje.
Su conexión al regulador se realizará mediante cable apantallado.
Consigna del 3º eje ±10V. Terminal 18
Consigna del 3º eje 0V. Terminal 17
Estas salidas proporcionan la señal analógica correspondiente para gobernar el 3º eje.
Su conexión al regulador se realizará mediante cable apantallado.
MANUAL Terminal 21
El CNC activa esta SALIDA poniéndola a nivel lógico alto siempre que se encuentre
seleccionado el modo de operación MANUAL.
CONECTOR I/O2
M01 M02 M03 M04 M05 M06 M07 M08 M09 M10 M11 M12 M13 M14 M15
Terminal
I/O2
3 4 5 6 7 8 9 10 11 12 13 25 24 23 22
a 24V
x x x x x
a 0V
x x x x x
No
modifica
x x x x x

PáginaCapítulo: 1 Sección:
CONFIGURACION DEL CNC
33
Salidas M15 / Bloqueo del cabezal / Embrague del eje C Terminal 22
Esta SALIDA proporciona el valor del bit 15 de la tabla decodificada correspondiente
a la función auxiliar M seleccionada.
Cuando el cabezal trabaja en lazo cerrado (M19) esta salida indica el bloqueo de
cabezal, es decir, se encontrará a nivel lógico 0 cuando debe desplazarse el eje y volverá
al estado lógico 1 cuando el eje haya alcanzado la posición programada (cuando se
encuentre dentro de la banda de muerte).
Cuando la máquina dispone del 3º eje "P612(1)=1" y además dicho eje se ha
personalizado como eje C "P613(5)=1", esta salida será el embrague del eje C.
Se debe tener cuidado, cuando se dispone de una de estas opciones, de no utilizar el bit
correspondiente a esta salida en la tabla de M decodificadas ya que el CNC activará esta
salida en todos los casos.
Salidas M14 / G00 Terminal 23
Esta SALIDA proporciona el valor del bit 14 de la tabla decodificada correspondiente
a la función auxiliar M seleccionada.
Si se personaliza el parámetro máquina “P604(3)=1" para que el CNC proporcione el
estado de la señal de G00, esta SALIDA se pondrá a nivel lógico alto siempre que el
CNC se encuentre ejecutando un posicionamiento rápido (G00).
Se debe tener cuidado, cuando se dispone de esta opción, de no utilizar el bit
correspondiente a esta salida en la tabla de M decodificadas ya que el CNC activará esta
salida en ambos casos.
Salidas M13 / Sentido de giro de la torreta portaherramientas Terminal 24
Esta SALIDA proporciona el valor del bit 13 de la tabla decodificada correspondiente
a la función auxiliar M seleccionada.
Si se personaliza el parámetro máquina “P609(6)=1", esta SALIDA se pone a nivel
lógico alto siempre que la torreta se deba desplazar en sentido positivo.
Si se dispone, por ejemplo, de una torreta con 12 herramientas y se está trabajando con
la herramienta 2, el valor de esta salida depende del número de herramienta que se desea
seleccionar
* Si se selecciona la herramienta 4, esta salida se pone a nivel lógico alto (sentido 2,
3, 4).
* Si se selecciona la herramienta 10, esta salida se pone a nivel lógico bajo (sentido 2,
1, 12, 11, 10).
Se debe tener cuidado, cuando se dispone de esta opción, de no utilizar el bit
correspondiente a esta salida en la tabla de M decodificadas ya que el CNC activará esta
salida en ambos casos.
CONECTOR I/O2

Sección:Capítulo: 1
Página
CONFIGURACION DEL CNC
34
Salidas M12 / Embrague del 3º eje Terminal 25
Esta SALIDA proporciona el valor del bit 12 de la tabla decodificada correspondiente
a la función auxiliar M seleccionada.
Cuando la máquina dispone del 3º eje "P612(1)=1" esta salida será el embrague del 3º
eje.
Se debe tener cuidado, cuando se dispone de esta opción, de no utilizar el bit
correspondiente a esta salida en la tabla de M decodificadas ya que el CNC activará esta
salida en ambos casos.
CONECTOR I/O2

PáginaCapítulo: 2 Sección:
CONEXION A RED Y A MAQUINA
1
2. CONEXION A RED Y A MAQUINA
Atención:
Dispositivo de seccionamiento de la alimentación
El dispositivo de seccionamiento de la alimentación ha de situarse en
lugar fácilmente accesible y a una distancia del suelo comprendida
entre 0,7 m y 1,7 m.
Instalar el aparato en el lugar apropiado
Se recomienda que, siempre que sea posible, la instalación del Control
Numérico se realice alejada de líquidos refrigerantes, productos
químicos, golpes, etc. que pudieran dañarlo.
2.1 CONEXION A RED
El CNC 8025 dispone en la parte posterior, de un conector de tres bornas para la conexión
a red y a tierra.
Su alimentación se realizará mediante un transformador independiente apantallado de
110VA, con una tensión de salida comprendida entre 100V y 240V de corriente alterna,
+10% y -15%.
La base de toma de corriente para la conexión del equipo debe situarse en las cercanías del
mismo y ser fácilmente accesible.
En caso de detectarse una sobrecarga o sobretensión es aconsejable esperar unos 3 minutos
antes de conectar de nuevo, evitando de esta forma desperfectos en la fuente.
2.1.1 FUENTE DE ALIMENTACION INTERNA
El CNC 8025 dispone en su interior de una fuente de alimentación que proporciona las
distintas tensiones de alimentación que se requieren.
Para su protección, además de los 2 fusibles exteriores de protección de la entrada de red
(uno por cada línea), dispone de un fusible interior de 5 Amp. para la protección contra
sobreintensidades.
CONEXION A RED

Sección:Capítulo: 2
Página
CONEXION A RED Y A MAQUINA
2
2.2 CONEXION A MAQUINA
2.2.1 CONSIDERACIONES GENERALES
La máquina-herramienta debe tener desacoplados todos los elementos que generan
interferencias (bobinas de los relés, contactores, motores, etc.).
* Bobinas de relés de c.c.
Diodo tipo 1N4000.
* Bobinas de relés de c.a.
RC conectada lo mas próximo posible a las bobinas , con unos valores aproximados
de:
R 220 Ohmios/1W
C 0,2 µF/600V
* Motores de c.a.
RC conectadas entre fases, con valores:
R 300 Ohmios/6W
C 0,47µF/600V
Conexionado a tierra.
Un correcto conexionado de tierras en la instalación eléctrica es fundamental en orden
a conseguir:
* La protección de personas contra descargas eléctricas originadas por alguna
anomalía.
* La protección de los equipos electrónicos contra interferencias generadas tanto en
la propia máquina en cuestión, como en equipamientos electrónicos en las cercanías,
que pueden ocasionar un anormal funcionamiento del equipo.
Así, el conexionado de todas las partes metálicas en un punto y éste a tierra es básico
para lograr lo indicado. Por ello es importante establecer uno o dos puntos principales
en la instalación, donde deben ser conectadas todas las partes antes citadas.
Se deben utilizar cables con suficiente sección, pensados más para conseguir una baja
impedancia y lograr la supresión efectiva de interferencias, que bajo el punto de vista
de una corriente teórica circulando en condiciones anómalas por dichos cables,
manteniendo de esta forma todas las partes de la instalación al mismo potencial de tierra.
Una adecuada instalación del cableado de tierras reduce los efectos de interferencias
eléctricas. Pero además los cables de señales requieren protecciones adicionales. Esto
se consigue generalmente, utilizando cables trenzados y cubiertos de pantalla de
protección electrostática. Esta deberá conectarse en un punto concreto, evitando así
lazos de tierra, que ocasionen efectos no deseables. Esta conexión de la pantalla a tierra
normalmente se realiza en un punto de tierra del CNC.
CONEXION A MAQUINA

PáginaCapítulo: 2 Sección:
CONEXION A RED Y A MAQUINA
3
Cada parte componente del conjunto máquina-herramienta CNC, debe ser conectada
a tierra a través de los puntos principales establecidos. Estos serán convenientemente
fijados a un punto próximo a la máquina-herramienta y correctamente conectados a la
tierra general.
Cuando sea necesario establecer un segundo punto de tierra, es aconsejable unir ambos
puntos con cable de sección no inferior a 8 mm².
Se debe comprobar que entre el punto central de la carcasa de cada conector y la toma
de tierra debe haber menos de 1 Ohmio medido con un polímetro.
Diagrama de conexionado de tierras
CONEXION A MAQUINA
Chasis
Tierra
Tierra de Protección (para seguridad)

Sección:Capítulo: 2
Página
CONEXION A RED Y A MAQUINA
4
2.2.2 SALIDAS DIGITALES.
El CNC dispone de una serie de salidas digitales optoacopladas que pueden utilizarse para
la activación de relés, señalizaciones, etc.
Todas estas salidas que disponen de aislamiento galvánico por optoacopladores entre la
circuitería del CNC y el exterior, permiten conmutar una tensión continua que es
suministrada desde el armario eléctrico de la máquina.
Las características eléctricas de estas salidas son:
Valor nominal de la tensión +24 V de corriente continua.
Valor máximo de la tensión +30 V.
Valor mínimo de la tensión +18 V.
Tensión de salida 2V < Vcc.
Intensidad de salida máxima 100 mA.
Todas las salidas se encuentran protegidas mediante:
Aislamiento galvánico mediante optoacopladores.
Fusible exterior de 3 Amp. para protección ante sobrecargas de las salidas (mayores
de 125 mA.), sobretensión de la fuente exterior (mayor de 33 Vcc.) y para protección
ante conexión inversa de la fuente de alimentación.
2.2.3 ENTRADAS DIGITALES.
Las entradas digitales que dispone el CNC son utilizadas para la lectura de dispositivos
exteriores, etc.
Todas ellas disponen de aislamiento galvánico por optoacopladores entre la circuitería del
CNC y el exterior.
Las características eléctricas de estas entradas son:
Valor nominal de la tensión +24 V de corriente continua.
Valor máximo de la tensión +30 V.
Valor mínimo de la tensión +18 V.
Tensión de entrada para umbral alto (nivel lógico 1) a partir de +18V.
Tensión de entrada para umbral bajo (nivel lógico 0) por debajo de +5V.
Consumo típico de cada entrada 5 mA.
Consumo máximo de cada entrada 7 mA.
Todas las entradas se encuentran protegidas mediante:
Aislamiento galvánico mediante optoacopladores.
Protección ante conexión inversa de la fuente de alimentación hasta -30 V.
Atención:
La fuente de alimentación exterior de 24 Vcc. utilizada para la alimentación de
las entradas y salidas digitales, deberá ser una fuente estabilizada.
El punto de cero voltios de dicha fuente deberá conectarse al punto principal
de tierra del armario eléctrico.
SALIDAS DIGITALES
ENTRADAS DIGITALES

PáginaCapítulo: 2 Sección:
CONEXION A RED Y A MAQUINA
5
2.2.4 SALIDAS ANALOGICAS.
El CNC dispone de 6 salidas analógicas para accionamiento de los regulares de avance y
de cabezal, o para accionamiento de otros dispositivos.
Las características eléctricas de estas salidas son:
Tensión de consigna dentro del rango ±10V.
Impedancia mínima del regulador conectado 10 KOhm.
Longitud máxima de cable sin protección de pantalla 75 mm.
Se recomienda realizar la conexión mediante cable apantallado, conectando la malla al
terminal del conector correspondiente.
Atención:
Se recomienda ajustar los reguladores de avance de forma que el máximo
avance deseado (G00) se consiga con ±9.5 V. de consigna.
2.2.5 ENTRADAS DE CAPTACION
Las entradas de captación se utilizan para la lectura de señales senoidales, cuadradas y
cuadradas complementadas procedentes de trasductores lineales y de captadores rotativos.
El conector A1 se utiliza para conectar las señales de captación del eje X, y admite señal
senoidal y señal cuadrada diferencial.
El conector A2 se utiliza para conectar las señales de captación del 4º eje o de la herramienta
sincronizada. Admite señal senoidal y señal cuadrada diferencial.
El conector A3 se utiliza para conectar las señales de captación del eje Z, y admite señal
senoidal y señal cuadrada diferencial.
El conector A4 se utiliza para conectar las señales de captación del 3º eje o del eje C. Admite
señal senoidal y señal cuadrada diferencial.
El conector A5 se utiliza para conectar las señales de captación del encoder de cabezal.
Admite señal cuadrada diferencial.
El conector A6 se utiliza para conectar las señales de captación del Palpador y del volante
electrónico o de la herramienta sincronizada. Admite señal cuadrada no diferencial.
Las características eléctricas de estas entradas son:
Señales senoidales Tensión de alimentación ±5V.±5%
Frecuencia máxima de contaje 25KHz.
Señales cuadradas Tensión de alimentación ±5V.±5%
Frecuencia máxima de contaje 200KHz.
Se recomienda realizar la conexión mediante cables apantallados, conectando las pantallas
al terminal correspondiente del conector.
SALIDAS ANALOGICAS
ENTRADAS DE CAPTACION

Sección:Capítulo: 2
Página
CONEXION A RED Y A MAQUINA
6
2.3 PUESTA A PUNTO
2.3.1 CONSIDERACIONES GENERALES
Antes de conectar el armario eléctrico a la red eléctrica, es aconsejable realizar una
inspección general del mismo, comprobando la conexión de tierras.
Esta conexión deberá estar realizada sobre un único punto de la máquina, denominado
Punto principal de tierras, al que se conectarán todas las tierras de la máquina y del armario
eléctrico.
Se debe comprobar que la fuente de alimentación del armario eléctrico utilizada para la
alimentación de las entradas-salidas digitales, es estabilizada y que los cero voltios de dicha
fuente están conectados al punto principal de tierras.
Se comprobará la conexión de las mangueras y conectores de conexión de los captadores
al CNC.
No se deben conectar ni desconectar estos conectores al CNC mientras se encuentre bajo
tensión.
Se comprobará, sin conectar el armario eléctrico a la red, si hay cortocircuitos en cada uno
de los terminales de los conectores de entradas y salidas, ejes, captación, etc.
2.3.2 PRECAUCIONES
Es aconsejable reducir el curso de los ejes aproximando los micros de emergencia o
soltando el motor del eje hasta que los mismos se encuentren controlados.
Comprobar que las salidas de potencia de los reguladores a los motores están deshabilitadas.
Comprobar que los conectores de entradas y salidas digitales se encuentran desconectados
en el CNC.
Comprobar que la posición de los microconmutadores de captación de cada eje corresponden
al tipo de señal de captación utilizado.
Comprobar que la seta de Emergencia se encuentra pulsada.
PUESTA A PUNTO

PáginaCapítulo: 2 Sección:
CONEXION A RED Y A MAQUINA
7
2.3.3 CONEXION
Se verificará que la tensión de red es correcta.
Con el CNC desconectado, se conectará la tensión del armario eléctrico, comprobando que
el mismo responde correctamente.
Comprobar que en los conectores de entradas y salidas digitales, existe una diferencia de
tensión adecuada entre los terminales correspondientes a 0 V. y 24 V. externos.
Ir aplicando 24 V. en el armario eléctrico, a cada uno de los terminales correspondientes a
las salidas digitales del CNC que se utilizan. Comprobar que el armario eléctrico responde
correctamente.
Con los motores desacoplados de los ejes, comprobar que el sistema regulador, motor,
tacodinamo de cada eje funciona correctamente.
Conectar el CNC a la red, en la pantalla se mostrará el modelo y el tipo de software que se
dispone (por ejemplo: CNC8025-TS).
Tras realizarse un autotest del sistema el CNC mostrará el mensaje “TEST GENERAL
PASADO”. En caso de detectarse algún error, el CNC visualizará el mensaje de error
correspondiente.
PUESTA A PUNTO

Sección:Capítulo: 2
Página
CONEXION A RED Y A MAQUINA
8
2.3.4 TEST DE LAS ENTRADAS/SALIDAS DEL SISTEMA
El CNC dispone de un modo de trabajo que permite activar y desactivar cada una de las
entradas y salidas lógicas del CNC.
Para ello se debe pulsar la siguiente secuencia de teclas:
[OP MODE]
[9] (MODOS ESPECIALES)
[0] (TEST)
Tras realizar el CNC el autotest del sistema, se mostrará en la parte inferior de la pantalla
una serie de opciones que pueden ser seleccionadas mediante la softkey correspondiente.
Si se pulsa la softkey correspondiente a la función [EN/SAL] el CNC mostrará el estado
de las entradas lógicas y permitirá alterar el estado de las salidas lógicas.
Entradas lógicas
ENTRADA TERMINAL FUNCION
A 17 (I/O 1) MARCHA
B 16 (I/O 1) PARADA
C 15 (I/O 1) FEED HOLD
D 14 (I/O 1) STOP EMERGENCIA
E 13 (I/O 1) Micro Io del 4º eje
F 12 (I/O 1) Micro Io del eje Z
G 11 (I/O 1) Micro Io del 3º eje
H 10 (I/O 1) Micro Io del eje X
I 19 (I/O 1) MANUAL (Modo visualizador)
J 18 (I/O 1) Entrada condicional
K Para uso del servicio de asistencia técnica
L Para uso del servicio de asistencia técnica
M Para uso del servicio de asistencia técnica
N Para uso del servicio de asistencia técnica
El CNC mostrará en todo momento y dinámicamente el estado de todas estas entradas.
Si se desea examinar alguna de ellas se deberá actuar sobre los pulsadores e interruptores
externos, observando en la pantalla el estado de la entrada correspondiente.
El valor “1” indica que las entrada correspondiente se encuentra alimentada a 24V. En
caso contrario se mostrará el valor “0”.
PUESTA A PUNTO

PáginaCapítulo: 2 Sección:
CONEXION A RED Y A MAQUINA
9
Salidas lógicas
FILA 1 FILA 2
SALIDA TERMINAL/FUNCION TERMINAL/FUNCION
A (2 I/O 1) T Strobe (3 I/O 2) Salida 1, M decodificada
B (3 I/O 1) S Strobe (4 I/O 2) Salida 2, M decodificada
C (4 I/O 1) M Strobe (5 I/O 2) Salida 3, M decodificada
D (5 I/O 1) Emergencia (6 I/O 2) Salida 4, M decodificada
E (6 I/O 1) Roscado ON (7 I/O 2) Salida 5, M decodificada
F (7 I/O 1) Embrague Z (8 I/O 2) Salida 6, M decodificada
G (8 I/O 1) Reset (9 I/O 2) Salida 7, M decodificada
H (9 I/O 1) Embrague X (10 I/O 2) Salida 8, M decodificada
I (27 I/O 1) MST01 (11 I/O 2) Salida 9, M decodificada
J (26 I/O 1) MST02 (12 I/O 2) Salida 10, M decodificada
K (25 I/O 1) MST04 (13 I/O 2) Salida 11, M decodificada
L (24 I/O 1) MST08 (25 I/O 2) Salida 12, M decodificada
M (23 I/O 1) MST10 (24 I/O 2) Salida 13, M decodificada
N (22 I/O 1) MST20 (23 I/O 2) Salida 14, M decodificada
O (21 I/O 1) MST40 (22 I/O 2) Salida 15, M decodificada
P (20 I/O 1) MST80 (21 I/O 2) CNC en modo Manual
Si se desea examinar una de las salidas se debe seleccionar la misma mediante el cursor.
El cursor debe desplazarse mediante las teclas [flecha a la derecha] y [flecha a la
izquierda].
Una vez seleccionada la salida deseada se podrá activar (1) y desactivar (0) la misma
asignándole el valor correspondiente.
Se puede disponer de varias salidas activadas a la vez, y todas las salidas que se
encuentren activadas proporcionarán una tensión de 24 Vcc. en el terminal
correspondiente.
Una vez finalizado el test de ENTRADAS/SALIDAS, se debe desconectar el armario
eléctrico y conectar a continuación los conectores de entradas-salidas, así como los sistemas
de captación de los ejes, al CNC.
Tras ello, conectar el armario eléctrico y el CNC a la red y activar los reguladores de
velocidad.
PUESTA A PUNTO

Sección:Capítulo: 2
Página
CONEXION A RED Y A MAQUINA
10
2.4 CONEXION DE LA ENTRADA Y SALIDA DE EMERGENCIA
La Entrada de Emergencia que dispone el CNC se denomina STOP EMERGENCIA y
corresponde al terminal 14 del conector I/O 1. Esta entrada debe estar alimentada a 24 V.
Por otra parte y debido a que el CNC trata directamente esta señal, en caso de desaparecer
dicha alimentación visualizará el ERROR DE EMERGENCIA EXTERNA (error 64).
Además, detiene el avance de los ejes y el giro del cabezal, desactivando los embragues.
No implica salida de emergencia.
El cableado del armario eléctrico se realizará de forma que todos los agentes exteriores que
puedan activar dicho error sean tenidos en cuenta.
Entre dichos agentes se pueden citar las siguientes causas:
* Se ha pulsado la seta de emergencia.
* Se ha sobrepasado el límite de recorrido de alguno de los ejes.
* Existe alguna anomalía en los reguladores de avance.
Por su parte el CNC siempre que detecte una condición de error o alarma interna, activará
la SALIDA de EMERGENCIA que dispone el CNC y que corresponde al terminal 5 del
conector I/O 1.
El estado normal de funcionamiento de esta salida (nivel lógico alto o bajo) depende del
valor asignado al parámetro máquina P605(8).
Entre las causas internas que pueden provocar la activación de esta salida de emergencia
se pueden citar las siguientes:
* Se ha producido error de seguimiento de alguno de los ejes.
* Se ha producido fallo de captación en alguno de los ejes.
* Existe algún error en las tablas de parámetros máquina.
CONEXION DE LA ENTRADA Y
SALIDA DE EMERGENCIA

PáginaCapítulo: 2 Sección:
CONEXION A RED Y A MAQUINA
11
El circuito de conexión recomendado con P604(4)= 1 es el siguiente:
El circuito de conexión recomendado con P604(4)= 0 es el siguiente:
CONEXION DE LA ENTRADA Y
SALIDA DE EMERGENCIA

PáginaCapítulo: 3 Sección:
PARAMETROS MAQUINA
1
INTRODUCCION
3. PARAMETROS MAQUINA
Atención:
Es obligatorio definir con valor “0” todos los parámetros máquina que no se
utilizan, evitando de esta forma funcionamientos incorrectos del CNC.
Se aconseja salvar los parámetros máquina del CNC a un periférico u
ordenador, evitando de este modo la perdida de los mismos por negligencias
del operario, error de checksum, etc.
Algunos de los parámetros citados en este capítulo, se encuentran más detallados en
el capítulo "Temas Conceptuales" de este mismo manual.
3.1 INTRODUCCION
En el encendido, el CNC realiza un autotest del hardware del sistema visualizándose en la
pantalla además del modelo, el mensaje “TEST GENERAL PASADO”. En caso de
detectarse algún error, el CNC visualizará el mensaje de error correspondiente.
Para que la máquina-herramienta pueda ejecutar correctamente las instrucciones programadas,
así como interpretar los elementos que tienen interconectados, el CNC debe conocer los
datos específicos de la máquina como son avances, aceleraciones, captaciones, etc.
Estos datos están determinados por el fabricante de la máquina y se pueden introducir a
través del teclado o de la línea serie RS232C, mediante la personalización de los parámetros
máquina.
Para bloquear o desbloquear el acceso a los parámetros máquina, a la tabla de funciones
auxiliares M decodificadas y a la tabla de compensación de error de husillo, se debe:
* Pulsar la tecla [OP MODE]
* Pulsar la tecla [6] para seleccionar el modo Editor.
* Pulsar la tecla de función correspondiente a la opción [BLOQ DESBLO]. En la pantalla
aparece el texto "CODIGO: "
* Teclear la secuencia de caracteres "PKAI1" y la tecla [ENTER] para bloquear el acceso,
o la secuencia de caracteres "PKAI0" y la tecla [ENTER] para desbloquear el acceso.
Cuando se encuentra bloqueado el acceso a la tabla de parámetros máquina únicamente se
pueden modificar los parámetros máquina relacionados con la línea serie RS232C. El CNC
no permite modificar el resto de parámetros máquina.
Precaución en el modelo CNC + PLCI

Sección:Capítulo: 3
Página
2
PARAMETROS MAQUINA
Siempre que se utiliza el código de bloqueo el CNC almacena en la memoria EEPROM
los parámetros máquina, las funciones "M" decodificadas y las tablas de compensación
de error de husillo.
Asimismo, cuando se utiliza el código de desbloqueo el CNC recupera de la memoria
EEPROM los parámetros máquina, las funciones "M" decodificadas y las tablas de
compensación de error de husillo.
Si se desea introducir los valores de los parámetros máquina a través del teclado, se debe
pulsar la siguiente secuencia de teclas:
[OP MODE] Muestra los distintos modos de operación
[9] Accede a los modos especiales
[1] Accede a la opción de parámetros máquina
INTRODUCCION

PáginaCapítulo: 3 Sección:
PARAMETROS MAQUINA
3
3.2 OPERACION CON LAS TABLAS DE PARAMETROS
Una vez seleccionada la tabla de parámetros máquina, el usuario podrá avanzar o retroceder
página a página mediante las teclas [flecha arriba] y [flecha abajo].
Si se desea visualizar un determinado parámetro se permite teclear el número del parámetro
deseado y de la tecla [RECALL]. El CNC mostrará la página correspondiente a dicho
parámetro.
Para EDITAR un parámetro se debe teclear el número del parámetro deseado, el signo “=”
y del valor que se desea asignar al parámetro.
En función del tipo de parámetro máquina seleccionado, se le podrá asignar uno de los
siguientes tipos de valores:
* Un número P111 = 30000
* Un grupo de 8 bits P602 = 00001111
* Un carácter P105 = Y
Una vez definido el parámetro máquina se debe pulsar la tecla [ENTER] para que dicho
valor sea introducido en la tabla.
Si al pulsar la tecla [=], el parámetro en edición desaparece de la pantalla significa que la
memoria de parámetros máquina se encuentra protegida frente a escritura.
Se debe tener en cuenta que una vez personalizados los parámetros máquina se debe pulsar
la tecla [RESET], o bien desconectar y conectar el CNC para que dichos valores sean
asumidos por el CNC.
Cada vez que durante la explicación de los diferentes parámetros máquina se hace referencia
a un bit de un parámetro, se tendrá en cuenta la siguiente nomenclatura:
P602 = 0 0 0 0 1 1 1 1
Bit 1
Bit 2
Bit 3
Bit 4
Bit 5
Bit 6
Bit 7
Bit 8
OPERACION CON LAS
TABLAS DE PARAMETROS

Sección:Capítulo: 3
Página
4
PARAMETROS MAQUINA
3.3 PARAMETROS MAQUINA GENERALES
P5 Frecuencia de la tensión de red
Valores posibles: 50 Hz. y 60 Hz.
P99 Idioma
Indica el idioma que asume el CNC para representación de los textos y mensajes que
se muestran en el monitor.
0 = Castellano.
1 = Alemán.
2 = Inglés.
3 = Francés.
4 = Italiano.
P13 Unidades de medida (mm/pulgadas)
Define las unidades de medida que asume el CNC, para los parámetros máquina, tablas
de herramientas y unidades de trabajo, en el momento del encendido y después de una
emergencia o RESET.
0 = milímetros.
1 = pulgadas.
P11 Eje X en radios o diámetros
Valores posibles:
0 = Radios
1 = Diámetros
P600(1) Disposición de los ejes en la máquina
GENERALES

PáginaCapítulo: 3 Sección:
PARAMETROS MAQUINA
5
P801 Programa protegido
Indica el número de programa que se desea proteger contra lectura y escritura.
Se expresará mediante un número entero comprendido entre 0 y 9999. Si se le asigna
el valor 0, el CNC entiende que no se desea proteger ningún programa.
Se recomienda utilizar este parámetro para proteger el programa que contenga las
subrutinas que por su contenido deben de permanecer ocultas para el operario.
El programa protegido no se mostrará en el directorio de programas, y cuando al
solicitar en el directorio de subrutinas el número del programa en el que se encuentra
una subrutina definida en este programa, el CNC mostrará el texto “P????”.
GENERALES

Sección:Capítulo: 3
Página
6
PARAMETROS MAQUINA
3.3.1 PARAMETROS RELACIONADOS CON LA DE
CONFIGURACION DE EJES
El CNC dispone de 6 entradas de captación de los ejes, A1 a A6, y los parámetros que se
indican a continuación permiten personalizar el CNC al tipo de máquina que se dispone.
Las posibles combinaciones de ejes que se pueden controlar son:
P612(1), P614(1) La máquina dispone del 3º, 4º eje
0 = La máquina no dispone del 3º, 4º eje
1 = La máquina si dispone del 3º, 4º eje
P613(5) El 3º eje es el eje C
0 = No es el eje C
1 = Si es el eje C
P613(4), P615(4) El 3º, 4º eje se denomina Y/W
0 = El 3º, 4º eje se denomina Y
1 = El 3º, 4º eje se denomina W
Lógicamente, cuando se utilizan ambos ejes uno se debe denominar W y el otro Y.
Normalmente se denomina eje W al que se utiliza para el control del contrapunto.
P613(3), P615(3) El 3º, 4º eje es un eje visualizador
Indica si el CNC trata el eje correspondiente como eje visualizador o como eje normal.
0 = Eje normal.
1 = Eje visualizador.
Sin Herramienta Sincronizada Con Herramienta Sincronizada
A1 A2 A3 A4 A5 A6 A1 A2 A3 A4 A5 A6
X - Z - S Volante X Herr. Sinc. Z - S Volante
X - Z 3º S Volante X Herr. Sinc. Z 3º S Volante
X - Z C S Volante X Herr. Sinc. Z C S Volante
X 4º Z 3º S Volante X 4º Z 3º S
Volante
Herr. Sinc.
X 4º Z C S Volante X 4º Z C S
Volante
Herr. Sinc.
RELACIONADOS CON LA
CONFIGURACION DE EJES

PáginaCapítulo: 3 Sección:
PARAMETROS MAQUINA
7
P613(1), P615(1) El 3º, 4º eje es un eje rotativo
Define si el eje es rotativo o lineal.
Un eje rotativo se representa en grados por lo que no le afecta el cambio de unidades
(milímetros/pulgadas). No admite compensación del radio de la herramienta ni
interpolación circular.
0 = Eje lineal.
1 = Eje rotativo.
P613(2), P615(2) El 3º, 4º eje es un eje rotativo ROLLOVER
Este parámetro se utilizará cuando el eje es rotativo “P613(1)=1, P615(1)=1” y se desea
que el contaje se ponga a 0 cuando llegue a 360°.
0 = No es ROLLOVER.
1 = Es ROLLOVER. El contaje se pone a cero al llegar a 360°.
P613(6), P615(5) 3º, 4º eje rotativo rollover por el camino más corto
Este parámetro se utilizará cuando el eje es rotativo rollover y se desea que los
movimientos programados se realicen por el camino más corto.
0 = No se desplaza por el camino más corto.
1 = Si se desplaza por el camino más corto.
P616(8) Conector A6 compartido por el volante y la herramienta sincronizada
Este parámetro se debe personalizar con el valor "1" cuando la máquina dispone del 4º
eje, de herramienta sincronizada y de volante electrónico.
La captación del 4º eje se debe efectuar por la entrada A2 y por la entrada A6 se realizará
la captación de la herramienta sincronizada y del volante.
Para poder conmutar ambas captaciones, herramienta sincronizada y volante electrónico,
se puede utilizar la salida indicativa de "Modo de operación Manual seleccionado",
terminal 21 del conector I/O1, ya que el volante electrónico únicamante puede utilizarse
en modo manual.
0 = No se comparte el conector A6
1 = Si se comparte el conector A6
RELACIONADOS CON LA
CONFIGURACION DE EJES

Sección:Capítulo: 3
Página
8
PARAMETROS MAQUINA
3.3.2 PARAMETROS RELACIONADOS CON LAS ENTRADAS Y SALIDAS
P604(4) Estado de la salida de Emergencia (terminal 5 conector I/O 1)
Indica el estado de la salida de Emergencia (terminal 5 del conector I/O 1).
0 = Normalmente a nivel lógico bajo (0V). Al producirse una Emergencia, el
CNC activa esta señal poniéndola a nivel lógico alto (24 V).
1 = Normalmente a nivel lógico alto (24 V). Al producirse una Emergencia, el
CNC activa esta señal poniéndola a nivel lógico bajo (0V).
P609(6) Terminal 24 del conector I/O 2 como sentido de giro de la torreta
portaherramientas
Indica si el CNC utiliza el terminal 24 del conector I/O 2 como salida indicativa del
sentido de giro de la torreta portaherramientas.
0 = Es la salida 13 de las funciones M decodificadas.
1 = Es la salida del sentido de giro, y la salida 13 de las funciones M.
Si se personaliza este parámetro máquina con el valor "1", esta salida se pone a nivel
lógico alto siempre que la torreta deba desplazarse en sentido positivo.
Si se dispone, por ejemplo, de una torreta con 12 herramientas y se está trabajando con
la herramienta 2, el valor de esta salida depende del número de herramienta que se desea
seleccionar
* Si se selecciona la herramienta 4, esta salida se pone a nivel lógico alto (sentido 2,
3, 4).
* Si se selecciona la herramienta 10, esta salida se pone a nivel lógico bajo (sentido 2,
1, 12, 11, 10).
Se debe tener en cuenta que el CNC utiliza el mismo terminal para mostrar ambos
valores, por lo que no se debe personalizar el valor M13 en la tabla de funciones M
cuando se desea utilizar la salida como sentido de giro de la torreta.
P604(3) Terminal 23 del conector I/O 2 como G00
Indica si el CNC utiliza el terminal 23 del conector I/O 2 como salida indicativa de la
función G00.
0 = Es la salida 14 de las funciones M decodificadas.
1 = Es la salida de G00, y la salida 14 de las funciones M.
La señal de G00 se encontrará activa siempre que el CNC se encuentre ejecutando un
posicionamiento rápido (G00).
Se debe tener en cuenta que el CNC utiliza el mismo terminal para mostrar ambos
valores, por lo que no se debe personalizar el valor M14 en la tabla de funciones M
cuando se desea utilizar la salida como G00.
RELACIONADOS CON LAS
ENTRADAS Y SALIDAS

PáginaCapítulo: 3 Sección:
PARAMETROS MAQUINA
9
P605(4) Terminal 6 del conector I/O 1 como ROSCADO_ON o CYCLE_ON
Valores posibles:
0 = El terminal 6 del conector I/O 1 se utiliza como salida ROSCADO_ON.
1 = El terminal 6 del conector I/O 1 se utiliza como salida CYCLE_ON.
La señal de ROSCADO_ON se encontrará activa (nivel lógico alto) siempre que el
CNC se encuentre ejecutando un roscado.
La señal de CYCLE ON se encontrará activa siempre que el CNC se encuentra
ejecutando un bloque de programa.
P606(7) Las funciones M definidas en la tabla decodificada no tienen salida en
código BCD
Siempre que se ejecuta una función M que se encuentra definida en la tabla de M
decodificadas el CNC activa las salidas M BCD del conector I/O 1.
Este parámetro indica si además de activar dichas salidas, el CNC debe enviar al
exterior, a través de los terminales 20 a 27 del conector I/O 1, el número de M que se
ha ejecutado.
0 = Si saca el número de función M en código BCD.
1 = No saca el número de función M en código BCD.
P602(7) El CNC espera una bajada de señal en la entrada M EJECUTADA
Indica si es necesario o no la existencia de un flanco de bajada de la señal M
EJECUTADA (terminal 15 del conector I/O 1), como respuesta a una señal “S
STROBE”, “T STROBE” o “M STROBE” para que el CNC continúe con la ejecución
de dichas funciones.
“P602(7)=0”
El CNC enviará las señales de salida BCD correspondientes a la función M, S o T
al armario eléctrico durante 200 milisegundos. A continuación y si la señal “M
EJECUTADA” no se encuentra a nivel lógico alto, esperará a que lo esté, para dar
por finalizada la ejecución de la función auxiliar M, S, T.
RELACIONADOS CON LAS
ENTRADAS Y SALIDAS

Sección:Capítulo: 3
Página
10
PARAMETROS MAQUINA
“P602(7)=1”
50 milisegundos después de enviar al armario eléctrico las señales de salida BCD
correspondientes a la función M, S o T, se envía la señal de “Strobe” correspondiente.
A continuación y si la señal “M EJECUTADA” no se encuentra a nivel lógico bajo,
el CNC esperará a que lo esté.
Una vez que la señal “M EJECUTADA” alcance dicho valor, el CNC mantiene
activa la señal “Strobe” durante 100 milisegundos más.
Tras desactivarse la señal de Strobe, las señales de salida BCD correspondientes a
la función M, S o T, se mantienen activas durante 50 milisegundos más.
Finalizado dicho tiempo y si la señal “M EJECUTADA” no se encuentra a nivel
lógico alto, el CNC esperará a que lo esté, para dar por finalizada la ejecución de la
función auxiliar M, S, T.
P603(4), P603(3), P603(2), P603(1), P608(1)
Anulación de la alarma de captación del eje A1, A2, A3, A4, A5
El CNC mostrará la alarma de captación de un eje cuando no se dispone de todas las
señales de captación correspondientes, o cuando alguna de ellas no se encuentra dentro
de los límites admisibles.
Este parámetro indica si se desea anular o no dicha alarma de captación.
0 = No se anula la alarma de captación.
1 = Si se anula la alarma de captación.
Si el sistema de captación empleado utiliza solamente tres señales cuadradas (A, B, Io),
se debe personalizar el parámetro correspondiente con el valor “1” (alarma de captación
anulada).
RELACIONADOS CON LAS
ENTRADAS Y SALIDAS

PáginaCapítulo: 3 Sección:
PARAMETROS MAQUINA
11
3.3.3 PARAMETROS MAQUINA DEL VOLANTE
P609(1) El volante electrónico es el FAGOR 100P
Define si el volante electrónico empleado es el modelo FAGOR 100P con pulsador de
eje incorporado.
0 = No es el modelo FAGOR 100P.
1 = Si es el modelo FAGOR 100P.
P500 Sentido de contaje del Volante Electrónico
Define el sentido de contaje del volante electrónico. Si es correcto dejarlo como está,
pero si se desea cambiarlo seleccionar el otro valor.
Valores posibles: “0” (NO) y “1” (YES).
P602(1) Unidades de medida de captación del Volante Electrónico
Indica si el CNC entiende que los impulsos de captación recibidos del volante
electrónico se encuentran expresados en milímetros o en pulgadas.
0 = milímetros.
1 = pulgadas.
P501 Resolución de contaje del Volante Electrónico
Indican la resolución de contaje del volante electrónico.
Valores posibles con señales cuadradas:
1 = la resolución es de 0,001 mm, 0,0001 pulgadas
2 = la resolución es de 0,002 mm, 0,0002 pulgadas
5 = la resolución es de 0,005 mm, 0,0005 pulgadas
10= la resolución es de 0,010 mm, 0,0010 pulgadas
P602(4) Factor multiplicador de las señales del Volante Electrónico
Indica el factor de multiplicación, x2 o x4, que el CNC aplicará a las señales de
captación del volante electrónico.
0 = Aplica factor de multiplicación x4.
1 = Aplica factor de multiplicación x2.
Ejemplo: Si el volante electrónico se encuentra personalizado de la siguiente forma:
P602(1) = 0 Milímetros
P501 = 1 Resolución 0.001 mm.
P602(4) = 0 x4
Y el conmutador MFO (Manual Feedrate Override) se encuentra posicionado en
“x100”.
El eje seleccionado avanzará 0.001mm x4 x100 = 0.4 milímetros por cada impulso
recibido.
DEL VOLANTE

Sección:Capítulo: 3
Página
12
PARAMETROS MAQUINA
P619(7) Volante gestionado desde el PLC
Indica si al desplazarse los ejes mediante el volante, el CNC tiene en cuenta las
posiciones de volante del conmutador o si tiene en cuenta la información que
muestran las salidas O44 y O45 del PLCI o las marcas M12, M13 del PLC64.
0 = Tiene en cuenta las posiciones del conmutador de Feedrate Override
1 = Tiene en cuenta la información que muestran las salidas O44 y O45 del
PLCI o las marcas M12, M13 del PLC64.
O44
M12
O45
M13
0 0 Tiene en cuenta lo indicado por el conmutador
1 0 Equivalente a la posición x1 del conmutador
0 1 Equivalente a la posición x10 del conmutador
1 1 Equivalente a la posición x100 del conmutador
DEL VOLANTE

PáginaCapítulo: 3 Sección:
PARAMETROS MAQUINA
13
3.3.4 PARAMETROS RELACIONADOS CON EL PALPADOR DE MEDIDA
P606(6) Tipo de impulso del palpador de medida
Indica si las funciones de palpador que dispone el CNC actúan con el nivel lógico alto
(impulso positivo) o con el nivel lógico bajo (impulso negativo), de la señal que
proporciona el palpador de medida que se encuentra conectado a través del conector
A6.
0 = Impulso negativo (0V.).
1 = Impulso positivo (5V. o 24V.).
P710 Función M asociada al movimiento de palpación (G75)
Indica la función M que se ejecuta cuando se realiza un movimiento de palpación (G75).
Se define mediante un número entero comprendido entre 0 y 99. Si se personaliza con
el valor 0, el CNC entiende que no debe ejecutar ninguna función auxiliar M.
El CNC ejecuta la función M seleccionada antes de comenzar la ejecución de la función
G75
La función M seleccionada podrá emplearse, por ejemplo, para activar un palpador de
medida que realice las trasmisiones de las medidas mediante señales de infrarrojos.
P806 Velocidad de avance de palpación en modo MANUAL
Indica la velocidad de avance F con que se realizarán los movimientos de palpación en
las funciones de medición y carga de la longitud de herramienta utilizando un palpador,
en el modo de operación MANUAL
Valores posibles: Desde 1 hasta 65.535 mm./minuto.
Desde 1 hasta 25.800 décimas de pulgada/minuto.
P902 Cota X mínima del palpador de medida
P903 Cota X máxima del palpador de medida
P904 Cota Z mínima del palpador de medida
P905 Cota Z máxima del palpador de medida
Definen la posición que ocupa el palpador que se utiliza para calibración de herramientas.
Las cotas con las que se definirán cada uno de estos parámetros se expresarán en cota
absolutas y estarán referidas al cero máquina.
Valores posibles: ± 8388,607 milímetros.
± 330,2599 pulgadas.
DEL PALPADOR DE MEDIDA

Sección:Capítulo: 3
Página
14
PARAMETROS MAQUINA
3.3.5 PARAMETROS RELACIONADOS CON LAS HERRAMIENTAS
En el apartado "Herramientas" del capítulo "Temas Conceptuales" de este mismo
manual se indica la forma en que se pueden utilizar los parámetros que se detallan a
continuación.
P700 Número de herramientas
Se expresa mediante un número entero comprendido entre 0 y 32.
P730 Subrutina asociada a la función T
Indica el número de la subrutina estándar que ejecutará el CNC cuando el bloque en
ejecución contiene la función T, es decir, cada vez que se selecciona una herramienta
en el programa pieza.
Se define mediante un número entero comprendido entre 0 y 99. Si se personaliza con
el valor 0, el CNC entiende que no debe ejecutar ninguna subrutina.
De esta forma, se podrá definir la subrutina estándar correspondiente para realizar la
secuencia de selección de herramienta deseada.
Atención:
Si se asocia una subrutina a la función T, no se debe programar nada tras la
función T. En caso contrario el CNC mostrará el error correspondiente.
P617(2) La subrutina asociada se ejecuta antes que la función T
Define si el CNC ejecuta la subrutina asociada a la función T antes o después de
ejecutarse la función T.
0 = La subrutina asociada se ejecuta después que la función T.
1 = La subrutina asociada se ejecuta antes que la función T.
Cuando la subrutina asociada se ejecuta antes que la función T se deben tener en cuenta
las siguientes consideraciones:
* La función T deberá programarse sola en un bloque
* Si se ejecuta la función T en los modos Manual o Teach-in, el CNC no ejecutará la
subrutina asociada.
P604(5) Los valores del corrector son efectivos tras la ejecución de M06
Indica si los valores de corrección de herramienta son efectivos inmediatamente
después de efectuar T2.2 o espera a que se ejecute M06.
0 = Los valores del corrector son efectivos tras efectuar T2.2
1 = Los valores del corrector son efectivos tras la ejecución de M06
Por ejemplo: Si cada vez que se selecciona una nueva herramienta la máquina debe
efectuar unos desplazamientos previos al cambio, es aconsejable personalizar
"P604(5)=1" y programar en la subrutina asociada a la función T la función M06 justo
tras el cambio de herramienta.
RELACIONADOS CON LAS
HERRAMIENTAS

PáginaCapítulo: 3 Sección:
PARAMETROS MAQUINA
15
P609(3) La cota teórica corresponde a la punta o a la base de la herramienta
Indica si el CNC tiene en cuenta las dimensiones de la herramienta al mostrar las cotas
teóricas, es decir, si la cota teórica corresponde a la base de la herramienta o la punta
de la misma.
0 = La cota teórica corresponde a la punta de la herramienta.
1 = La cota teórica corresponde a la base de la herramienta.
Cuando se tiene en cuenta la dimensión de la herramienta "P609(3)=0", el CNC
actualizará, tras el cambio de herramienta, las cotas teóricas, correspondiendo los
nuevos valores a la punta de la nueva herramienta seleccionada.
De esta forma, si tras el cambio de herramienta se programa un desplazamiento en forma
incremental (G91), la cota a dirigirse estará referida a la punta de la nueva herramienta
seleccionada.
Por el contrario, si no se tiene en cuenta la dimensión de la herramienta "P609(3)=1",
el CNC no actualizará las cotas teóricas y si tras el cambio de herramienta se programa
un desplazamiento en forma incremental (G91), la cota a dirigirse estará referida a la
última posición programada.
RELACIONADOS CON LAS
HERRAMIENTAS

Sección:Capítulo: 3
Página
16
PARAMETROS MAQUINA
3.3.6 PARAMETROS RELACIONADOS CON LA SUBRUTINA DE
EMERGENCIA
P716 Subrutina de EMERGENCIA
Indica el número de la subrutina estándar que debe ejecutar el CNC cuando se activa,
cambio de nivel lógico alto a nivel lógico bajo, la entrada SUBRUTINA DE
EMERGENCIA (terminal 13 o 16 del conector I/O 1).
Se define mediante un número entero comprendido entre 0 y 99. Si se personaliza con
el valor 0, el CNC entiende que no debe ejecutar ninguna subrutina.
P616(2) La subrutina de EMERGENCIA ejecuta la función M00
Indica si el CNC debe ejecutar la función auxiliar M00 tras finalizar la subrutina de
Emergencia.
La función auxiliar M00 implica parada de programa y no sale al exterior.
0 = Si se ejecuta la función auxiliar M00.
1 = No se ejecuta la función auxiliar M00.
P616(1) Asignación de cotas a parámetro aritmético en subrutina de Emergencia
Indica la cota que se debe asignar a un parámetro aritmético, al ejecutarse un bloque del
tipo P0=X, en la subrutina de emergencia.
0 = Asigna la cota correspondiente al punto donde comienzo la ejecución del
bloque en que se interrumpió el programa.
1 = Asigna la cota correspondiente al punto donde se activó la entrada de subrutina
de Emergencia.
Si al comienzo de la subrutina de emergencia se programa el bloque “P0=X P2=Z”, y
tras realizarse las operaciones correspondientes a la Emergencia se programa dentro de
la misma subrutina un bloque de desplazamiento al punto XP0 ZP2, la herramienta se
desplazará al punto de interrupción o al punto donde comenzó el bloque.
RELACIONADOS CON LA
SUBRUTINA EMERGENCIA

PáginaCapítulo: 3 Sección:
PARAMETROS MAQUINA
17
3.3.7 PARAMETROS MAQUINA DE LA LINEA SERIE RS232C
P0 Velocidad de transmisión en Baudios
Indica la velocidad de transmisión que se utilizará para realizar la comunicación entre
el CNC y los periféricos.
Se define mediante un número entero (valor máximo 9600) y se expresará en Baudios.
Valores típicos: 110
150
300
600
1.200
2.400
4.800
9.600
P1 Número de bits de información por carácter
Indica el número de bits que contienen información dentro de cada carácter transmitido.
Valores posibles:
7 = Utiliza los 7 bits de menor peso de un carácter de 8 bits. Se utiliza cuando se
transmiten caracteres ASCII estándares.
8 = Utiliza los 8 bits del carácter transmitido. Se utiliza cuando se transmiten
caracteres especiales (código superior a 127).
P2 Paridad
Indica el tipo de paridad utilizado.
Valores posibles:
0 = No se utiliza el indicativo de paridad.
1 = Paridad impar (ODD).
2 = Paridad par (EVEN).
P3 Bits de parada
Indica el número de bits de parada que se utilizan al final de la palabra transmitida.
Valores posibles: 1 = 1 bit de parada.
2 = 2 bits de parada.
P605(5) DNC activo
Indica si el CNC puede trabajar con el protocolo DNC.
0 = No se dispone de la función DNC.
1 = Si se dispone de la función DNC.
DE LA LINEA SERIE RS232C

Sección:Capítulo: 3
Página
18
PARAMETROS MAQUINA
P605(6) Valores de transmisión en la comunicación con Disquetera o Casette
P605(6)=1 Comunicación con Disquetera. El CNC utilizará los valores indicados en
los parámetros máquina P0, P1, P2 y P3.
P605(6)=0 Comunicación con Casette. El CNC no modifica los valores asignados a
los parámetros P0, P1, P2 y P3, pero utilizará los valores correspondientes
al casette FAGOR.
Velocidad de transmisión = 13.714 Baudios
Número de bits de información = 7 bits de carácter
Paridad par
Bits de parada = 1
Atención:
En la comunicación DNC y en la comunicación con periféricos el CNC utiliza
los valores indicados en los parámetros máquina P0, P1, P2 y P3.
P605(7) Protocolo DNC activo tras el encendido
Indica si el protocolo DNC se encuentra activo tras el encendido del CNC.
0 = No se encuentra activo.
1 = Si se encuentra activo.
P605(8) El CNC no aborta la comunicación DNC (depuración de programas)
El CNC dispone de un sistema de seguridad que aborta la comunicación vía DNC
siempre que:
* Estando el CNC en recepción, trascurren más de 30 segundos sin recibir ningún
carácter.
* Estando el CNC en transmisión, se producen 3 reconocimientos incorrectos o no
reconocimientos sucesivos.
Este parámetro se utiliza cuando se desea depurar el programa de comunicación de
usuario, disponiendo de una opción en la que el CNC no aborta la transmisión.
0 = El CNC aborta la comunicación.
1 = El CNC no aborta la comunicación.
P606(8) Informe de estado por interrupción
Indica si en DNC el “Informe de estado por interrupción”, está activo o no.
0 = No se encuentra activo.
1 = Si se encuentra activo.
Una explicación más detallada, así como su utilización, se encuentran indicadas en el
manual del PROTOCOLO DE COMUNICACION DNC CON EL CNC8025.
DE LA LINEA SERIE RS232C

PáginaCapítulo: 3 Sección:
PARAMETROS MAQUINA
19
3.3.8 PARAMETROS RELACIONADOS CON LA VISUALIZACION
P6 Visualización Teórica o Real
Indica si las cotas correspondientes a los ejes mostrarán las cotas teóricas o las cotas
reales de la máquina.
0 (REAL) = El CNC visualizará las cotas reales.
1 (THEO) = El CNC visualizará las cotas teóricas.
P606(4, 5) Sentido de los ejes en la representación gráfica
Mediante estos parámetros se puede personalizar el CNC de forma que la representación
gráfica utilizada coincida con la orientación de los ejes en la máquina.
P612(8), P614(8) Visualización del 3º, 4º eje
Indica si se visualiza o no, el eje correspondiente en la pantalla del CNC.
0 = Si se visualiza.
1 = No se visualiza.
P611(7), P611(8) Combinación de colores del monitor.
Estos parámetros los utiliza el CNC cuando se dispone de un monitor color y permiten
seleccionar una de las combinaciones de colores que se disponen:
P611(8) P611(7) Color
0 0 Monocromo
0 1 Combinación 1
1 0 Combinación 2
RELACIONADOS CON LA
VISUALIZACION

Sección:Capítulo: 3
Página
20
PARAMETROS MAQUINA
3.3.9 PARAMETROS DEL MODO DE OPERACION MANUAL
P12 Desplazamiento de los ejes en Modo Manual pulsante o mantenido
Indica si los ejes de la máquina se mueven mientras se pulsa la tecla de JOG
correspondiente, o si el desplazamiento de los ejes se mantiene hasta que pulse
la tecla u otra tecla de JOG.
0 (NO) = Modo mantenido. El desplazamiento del eje comienza al pulsar la tecla de
JOG correspondiente y finaliza al pulsar la tecla o cualquier
otra tecla de JOG. En este caso el CNC desplazará el nuevo eje deseado
y en el sentido solicitado hasta que se pulse la tecla o cualquier
otra tecla de JOG.
1 (YES) = Modo pulsante. El eje se desplaza mientras se pulsa la tecla de JOG
correspondiente.
P600(2) Las teclas de JOG (ejes X y Z) son al revés
Valores posibles:
0 = Las teclas permiten controlar el eje X y las teclas
permiten controlar el eje Z (torno horizontal).
1 = Las teclas permiten controlar el eje Z y las teclas
permiten controlar el eje X (torno vertical).
P603(5) No se permite ejecutar la función auxiliar S en modo Manual
Indica si se puede ejecutar o no, la función S en modo Manual.
0 = Si se puede.
1 = No se puede.
P603(6) No se permite ejecutar la función auxiliar T en modo Manual
Indica si se puede ejecutar o no, la función T en modo Manual.
0 = Si se puede.
1 = No se puede.
P603(7) No se permite ejecutar la función auxiliar M en modo Manual
Indica si se puede ejecutar o no, la función M en modo Manual.
0 = Si se puede.
1 = No se puede.
DEL MODO DE OPERACION
MANUAL

PáginaCapítulo: 3 Sección:
PARAMETROS MAQUINA
21
P619(8) En modo Manual se permite trabajar con Velocidad de Corte Constante
Indica si cuando se encuentra seleccionado el modo de operación Manual se puede
trabajar o no, con Velocidad de Corte Constante
0 = No se puede.
1 = Si se puede.
Cuando se ha personalizado "P619(8)=1", el CNC muestra en el modo de operación
Manual una softkey que permite acceder al modo de Velocidad de Corte Constante
P601(7) Recupera condiciones iniciales, genera la función M30, al pasar al modo
Manual
Indica si el CNC debe ejecutar automáticamente la función M30 siempre que se pasa
al modo de operación Manual.
Se debe tener en cuenta, que el CNC cada vez que se ejecuta la función M30 recupera
las condiciones iniciales, fijadas mediante parámetro máquina (estado del cabezal,
velocidades, avances, etc.).
Valores posibles:
0 = No ejecuta la función M30 (no recupera las condiciones iniciales).
1 = Si ejecuta la función M30 (si recupera las condiciones iniciales).
DEL MODO DE OPERACION
MANUAL

Sección:Capítulo: 3
Página
22
PARAMETROS MAQUINA
3.3.10 PARAMETROS RELACIONADOS CON EL MODO DE OPERACION
P601(5) Inhabilitación de la tecla de MARCHA
Indica si el CNC acepta a no la tecla del Panel de Mando.
0 = El CNC si acepta la tecla
1 = Queda inhabilitada. El CNC no la acepta.
P619(6) Inhibición del cabezal desde el PLC
Para parar el cabezal desde el PLC se puede:
* Anular la habilitación del regulador.
* Enviar al CNC el código de la función "M5" (Stop cabezal).
* Utilizar las señales O43 (en el PLCI) o M11 (en el PLC64) para habilitar o
inhabilitar el cabezal.
El parámetro máquina "P619(6)" indica si se desean utilizar las señales O43 (en
el PLCI) o M11 (en el PLC64) para habilitar o inhabilitar el cabezal.
0 = No se utilizan.
1 = Si se utilizan.
Cuando el CNC recibe la señal de inhabilitación del cabezal, "O43=1" o "M11=1",
proporciona una salida de consigna de 0V, pero no modifica ninguna de las
condiciones en que se encuentra el cabezal, tales como gama activa, sentido de
giro, etc.
Cuando se habilita nuevamente el cabezal, "O43=0" o "M11=0", el CNC volverá
a restaurar la consigna del cabezal.
P600(3) Máximo valor del conmutador MFO que aplica el CNC
Indica cual es el máximo valor de los seleccionables mediante el conmutador MFO
(Manual Feedrate Override) que aplicará el CNC.
0 = Permite hasta el 120%.
1 = Permite hasta el 100%. Si se seleccionan los valores 110% y 120%, el CNC
desplazará los ejes al avance programado (100%).
P4 El conmutador MFO también funciona en los posicionamientos rápidos
Indica si se permite modificar, mediante el conmutador MFO (Manual Feedrate
Override), el avance de los ejes durante los posicionamientos rápidos.
Este conmutador se encuentra graduado del 0% al 120% y el CNC aplicará al avance
de los ejes, el porcentaje que se encuentra seleccionado.
0 (NO) = El CNC ignora el conmutador MFO, siempre aplica el 100%
1 (YES) = El CNC aplica al avance programado el porcentaje que se encuentra
seleccionado (0% ... 100%).
Si se seleccionan los valores 110% y 120%, el CNC aplica el 100%.
RELACIONADOS CON EL
MODO DE OPERACION

PáginaCapítulo: 3 Sección:
PARAMETROS MAQUINA
23
P607(8) G05 o G07 tras el encendido
Indica cual de las funciones G05 (arista matada) o G07 (arista viva) asume el CNC en
el momento del encendido, después de un M02, M30 o después de una EMERGENCIA
o RESET.
0 = G07 (arista viva).
1 = G05 (arista matada).
P607(3) G00 vectorizado
Indica si los movimientos en avance rápido G00 se realizarán en trayectoria vectorizada
o en trayectoria no controlada.
0 = G00 en trayectoria no controlada.
1 = G00 en trayectoria vectorizada.
P616(4) G59 como translado de origen aditivo
Indica si la función G59 es tratada como translado de origen normal o como translado
de origen aditivo.
0 = G59 como translado de origen normal.
1 = G59 como translado de origen aditivo.
Cuando se personaliza este parámetro con el valor "1", G59 aditivo, el CNC cada vez
que se ejecuta una función del tipo G54 .... G58, aplica a cada eje un translado de origen
igual a la suma de los valores asignados en la tabla de translados de origen a la función
seleccionada y la función G59.
P609(5) Parámetros aritméticos P150 a P254 de sólo lectura
Indica si los parámetros aritméticos P150 al P254 son parámetros de lectura y escritura,
o si son únicamente de lectura cuando están bloqueados los parámetros máquina
(código PKAI1).
0 = Siempre son de lectura y escritura.
1 = Cuando los parámetros máquina se encuentran bloqueados, estos parámetros
son sólo de lectura. Si no se bloquean los parámetros máquina, serán de lectura
y escritura.
P611(6) La función P1=0X tiene en cuenta las unidades de trabajo
Indica si se tiene en cuenta o no el sistema de unidades empleado (milímetros o
pulgadas) cuando se ejecuta un bloque del tipo P1=0X.
0 = No tiene en cuenta. La cota del eje respecto al cero máquina se toma siempre
en milímetros.
1 = Si tiene en cuenta. La cota del eje respecto al cero máquina se toma en las
unidades de trabajo activas (milímetros o pulgadas).
RELACIONADOS CON EL
MODO DE OPERACION

Sección:Capítulo: 3
Página
24
PARAMETROS MAQUINA
P621(4) Sincronización con el eje independiente
Indica si el eje que se ejecuta por el canal independiente (G65) se sincroniza o no con
el siguiente bloque.
0 = No se sincroniza.
1 = Si se sincroniza.
Por ejemplo, si se ha programado: N100 G65 X32
N110 G01 Z100
N120 G01 Z20
El CNC, dependiendo del valor asignado al parámetro "P621(4)", actuará del siguiente
modo:
P621(4)=0 El CNC comienza a ejecutar el bloque N100 y a continuación el N110.
Una vez ejecutado el bloque N110 el CNC sigue con la ejecución del
programa, independientemente de si ha finalizado o no la ejecución del
bloque N100.
P621(4)=1 El CNC comienza a ejecutar el bloque N100 y a continuación el N110.
Una vez ejecutado el bloque N110 el CNC espera a que finalice la
ejecución del bloque N100 para continuar con la ejecución del programa.
P607(5) Velocidad de Corte Constante en torno de varios cabezales
Indica si se dispone o no, de un torno de varios cabezales que trabaja con Velocidad de
Corte Constante.
0 = No se dispone de un torno de varios cabezales que trabaja con Velocidad de
Corte Constante.
1 = Si se dispone de un torno de varios cabezales que trabaja con Velocidad de
Corte Constante.
Por definición, "P607(5)=0", el CNC supone que el cero máquina del eje X coincide
con el eje de giro de la pieza y por lo tanto, considera, al trabajar con velocidad de corte
constante, que el radio de corte de la pieza es la cota en X pero referida al cero máquina.
Cuando se personaliza "P607(5)=1", el CNC asume como eje de giro de la pieza el cero
pieza del eje X que se encuentra activo en cada momento. Por ello, cada vez que se
cambia de cabezal se debe seleccionar como nuevo cero pieza el centro de giro
seleccionado, programando para ello un translado de origen del tipo G92, G53, G54
.... G59.
RELACIONADOS CON EL
MODO DE OPERACION

PáginaCapítulo: 4 Sección:
PARAMETROS MAQUINA DE LOS EJES
1
4. PARAMETROS MAQUINA DE LOS EJES
Se debe tener en cuenta que algunos de los parámetros citados en este capítulo, se
encuentran más detallados en el capítulo "Temas Conceptuales" de este mismo
manual.
P100, P300, P200, P400 Signo de la consigna del eje X, Z, 3º, 4º
Define el signo de la consigna. Si es correcto dejarlo como está, pero si se desea
cambiarlo seleccionar “0” si antes había “1” y viceversa.
Valores posibles: “0”(NO) y “1”(YES).
P101, P301, P201, P401 Sentido de contaje del eje X, Z, 3º, 4º
Define el sentido de contaje del eje. Si el signo es correcto dejarlo como está, pero si
se desea cambiarlo seleccionar “0” si antes había “1” y viceversa.
Valores posibles: “0”(NO) y “1”(YES).
Se debe tener en cuenta que si se modifica este parámetro se deberá cambiar, a su vez,
el parámetro correspondiente al signo de la consigna (P100, P200, P300, P400).
P102, P302, P202, P402 Sentido de desplazamiento en modo MANUAL del eje
X, Z, 3º, 4º
Define el sentido de desplazamiento del eje cuando es gobernado mediante la teclas de
JOG del PANEL DE MANDO.
Si el signo es correcto dejarlo como está, pero si se desea cambiarlo seleccionar “0” si
antes había “1” y viceversa.
Valores posibles: “0”(NO) y “1”(YES).

Sección:Capítulo: 4
Página
PARAMETROS MAQUINA DE LOS EJES
2
4.1 PARAMETROS MAQUINA RELACIONADOS CON LA
RESOLUCION DE LOS EJES
En el apartado "Resolución de los ejes" del capítulo "Temas Conceptuales" de este
mismo manual se indica la forma en que se pueden utilizar los parámetros que se detallan
a continuación.
P103, P303, P203, P403 Resolución de contaje del eje X, Z, 3º, 4º
Definen la RESOLUCION de contaje que utiliza el eje.
Valores posibles:
1 = la resolución es de 0,001 mm, 0,0001 pulgadas o 0,001°.
2 = la resolución es de 0,002 mm, 0,0002 pulgadas o 0,002°.
5 = la resolución es de 0,005 mm, 0,0005 pulgadas o 0,005°.
10 = la resolución es de 0,010 mm, 0,0010 pulgadas o 0,010°.
P619(1), P619(2), P619(3), P619(4) Resolución de contaje con señal senoidal para
el eje X, Z, 3º, 4º
Cuando se utilizan sistemas de captación con señal senoidal el CNC tiene en cuenta
estos parámetros y los parámetros P103, P203, P303 y P403 para conocer la resolución
de los ejes.
Valores posibles de P103, P203, P303 y P403, con P619(1), P619(2), P619(3),
P619(4)=0:
5 = la resolución es de 0,001 mm, 0,0001 pulgadas o 0,001°.
10 = la resolución es de 0,002 mm, 0,0002 pulgadas o 0,002°.
Valores posibles de P103, P203, P303 y P403, con P619(1), P619(2), P619(3),
P619(4)=1:
1 = la resolución es de 0,001 mm, 0,0001 pulgadas o 0,001°.
2 = la resolución es de 0,002 mm, 0,0002 pulgadas o 0,002°.
5 = la resolución es de 0,005 mm, 0,0005 pulgadas o 0,005°.
10 = la resolución es de 0,010 mm, 0,0010 pulgadas o 0,010°.
P602(3), P602(2), P612(2), P614(2) Unidades de medida del sistema de captación
del eje X, Z, 3º, 4º
Indica las unidades de medida con que se personaliza el sistema de captación para
realizar la lectura del eje.
0 = Milímetros o Grados
1 = Pulgadas.
RELACIONADOS CON LA
RESOLUCION DE LOS EJES

PáginaCapítulo: 4 Sección:
PARAMETROS MAQUINA DE LOS EJES
3
P106, P306, P206, P406 Tipo de señal de captación del eje X, Z, 3º, 4º
Definen si el sistema de captación empleado utiliza señales senoidales o señales
cuadradas.
0 (NO) = Utiliza señales cuadradas.
1 (YES) = Utiliza señales senoidales.
El CNC aplica siempre un factor multiplicador x5 a las señales de captación senoidales.
P602(6), P602(5), P612(5), P614(5) Factor multiplicador de las señales del eje X,
Z, 3º, 4º
Indica el factor de multiplicación, x2 o x4, que el CNC aplicará a las señales de
captación del eje, sean estas cuadradas o senoidales.
0 = Aplica factor de multiplicación x4.
1 = Aplica factor de multiplicación x2.
En caso de emplear trasductores lineales FAGOR introducir el valor 0 en estos
parámetros.
Ejemplos de aplicación para el eje X:
Utilizando transductores lineales de señal cuadrada:
Como el CNC aplica un factor de multiplicación x2 ó x4 se debe seleccionar un
transductor lineal con periodo de señal 2 ó 4 veces la resolución requerida.
Utilizando transductores lineales de señal senoidal y P619(1)=1:
El CNC aplica además del factor de multiplicación x2 ó x4 seleccionado
mediante P602(6) otro factor x5 a las señales senoidales. Por lo tanto, se debe
seleccionar un transductor lineal con periodo de señal 10 ó 20 veces la
resolución requerida.
Si se selecciona el parámetro P619(1)=1 el CNC permite obtener resoluciones de 1, 2,
5 y 10 micras o décimas de pulgada.
RELACIONADOS CON LA
RESOLUCION DE LOS EJES
Resolución requerida
P103 P602(6) Periodo de señal
Transductor lineal
FAGOR
P602(3)=0 P602(3)=1
0.001 mm 0.0001 pulgadas 1
x2 P602(6)=1 0.002 mm
x4 P602(6)=0 0.004 mm
CX, CVX, MX
0.002 mm 0.0002 pulgadas 2
x2 P602(6)=1 0.004 mm
CX, CVX, MX
x4 P602(6)=0 0.008 mm
0.005 mm 0.0005 pulgadas 5
x2 P602(6)=1 0.010 mm
x4 P602(6)=0 0.020 mm
CT, CVT, MT, MVT, FT
0.010 mm 0.0010 pulgadas 10
x2 P602(6)=1 0.020 mm
CT, CVT, MT, MVT, FT
x4 P602(6)=0 0.040 mm

Sección:Capítulo: 4
Página
PARAMETROS MAQUINA DE LOS EJES4
RELACIONADOS CON LA
RESOLUCION DE LOS EJES
Utilizando transductores lineales de señal senoidal y P619(1)=0:
El CNC aplica además del factor de multiplicación x2 ó x4 seleccionado mediante
P602(6) otro factor x5 a las señales senoidales. Por lo tanto, se debe seleccionar un
transductor lineal con periodo de señal sea 10 ó 20 veces la resolución requerida.
Si se selecciona el parámetro P619(1)=0 el CNC permite obtener resoluciones de 1 y
2 micras o décimas de pulgada.
P604(2), P604(1), P612(3), P614(3) Encoder binario en el eje X, Z, 3º, 4º
Indica si el eje dispone de ENCODER ROTATIVO BINARIO (1024/2048 impulsos/
vuelta).
0 = No dispone de encoder rotativo.
1 = Si dispone de encoder rotativo.
P604(7), P604(6), P612(4), P614(4) Equivalencia del encoder binario del eje X, Z,
3º, 4º
Este parámetro se utilizará cuando se dispone de un encoder rotativo binario de 1024
impulsos (o 2048) y se necesita uno de 1000 o 1250 impulsos (2000 o 2500) para
obtener la resolución deseada.
El CNC permite personalizar este parámetro para adaptar la captación del encoder
binario (1024 o 2048), a la captación deseada.
0 = Adapta la captación del encoder binario de 1024 impulsos (o 2048) para
tratarla como captación de un encoder de 1250 impulsos (o 2500).
1 = Adapta la captación del encoder binario de 1024 impulsos (o 2048) para
tratarla como captación de un encoder de 1000 impulsos (o 2000).
Los cálculos necesarios para definir la resolución del eje (P103, P203, P303, P403) se
realizarán con el número de impulsos seleccionados (1000, 1250, 2000, 2500).
Resolución requerida
P103 P602(6) Periodo de señal
Transductor lineal
FAGOR
P602(3)=0 P602(3)=1
0.001 mm 0.0001 pulgadas 1
x2 P602(6)=1 0.010 mm
x4 P602(6)=0 0.020 mm
CVS,MVS
0.002 mm 0.0002 pulgadas 2
x2 P602(6)=1 0.020 mm
CVS,MVS
x4 P602(6)=0 0.040 mm
0.005 mm 0.0005 pulgadas 5
x2 P602(6)=1 0.050 mm
x4 P602(6)=0 0.100 mm
FS
0.010 mm 0.0010 pulgadas 10
x2 P602(6)=1 0.100 mm
FS
x4 P602(6)=0 0.200 mm
Resolución requerida
P103 P602(6) Periodo de señal
Transductor lineal
FAGOR
P602(3)=0 P602(3)=1
0.001 mm 0.0001 pulgadas 5
x2 P602(6)=1 0.010 mm
x4 P602(6)=0 0.020 mm
CVS,MVS
0.002 mm 0.0002 pulgadas 10
x2 P602(6)=1 0.020 mm
CVS,MVS
x4 P602(6)=0 0.040 mm

PáginaCapítulo: 4 Sección:
PARAMETROS MAQUINA DE LOS EJES
5
4.2 PARAMETROS MAQUINA RELACIONADOS CON LA CONSIGNA
En el apartado "Ajuste de los ejes" del capítulo "Temas Conceptuales" de este mismo
manual se indica la forma en que se pueden utilizar los parámetros que se detallan a
continuación.
P117, P317, P217, P417 Consigna mínima del eje X, Z, 3º, 4º
Define el valor de consigna mínima del eje.
Se expresará mediante un número entero comprendido entre 1 y 255.
Valor 1 = 2.5 mV.
Valor 10 = 25.0 mV. (10 x 2.5)
Valor 255 = 637.5 mV. (255 x 2.5)
P104, P304, P204, P404 Temporización Embrague-Consigna del eje X, Z, 3º, 4º
Definen si existe una temporización de 400 mseg. desde que se activa la salida
correspondiente a la señal de EMBRAGUE, hasta que se produce la salida de la
CONSIGNA de dicho eje.
0 (NO) = No existe temporización.
1 (YES) = Si existe temporización.
Este parámetro se utilizará cuando no se dispone de control continuo del eje, disponiendo
de esta forma de 400 mseg. para desactivar posibles dispositivos de sujeción del eje
(frenos, etc).
P118, P318, P218, P418 Banda de muerte del eje X, Z, 3º, 4º
Se define como “Banda de muerte” la zona anterior y posterior de la cota programada
en la que el CNC considera que se encuentra en posición.
Esta distancia se define siempre en micras, independientemente de las unidades de
trabajo utilizadas.
Valores posibles: 0 a 255 micras.
P105, P305, P205, P405 Control continuo del eje X, Z, 3º, 4º
Define si existe o no CONTROL CONTINUO del eje después de llegar a posición.
Es decir, si mantiene o no la señal de embrague al llegar a posición.
0 (NO) = No existe control continuo.
1 (YES) = Si existe control continuo.
En los ejes que disponen de control continuo el CNC se encarga, una vez alcanzada la
cota de destino, en mantenerlos en dicho punto.
RELACIONADOS CON LA
CONSIGNA

Sección:Capítulo: 4
Página
PARAMETROS MAQUINA DE LOS EJES
6
4.3 PARAMETROS MAQUINA RELACIONADOS CON LOS LIMITES
DE RECORRIDO
En el apartado "Ajuste de los ejes" del capítulo "Temas Conceptuales" de este mismo
manual se indica la forma en que se pueden utilizar los parámetros que se detallan a
continuación.
P107, P307, P207, P407 Límite de recorrido positivo del eje X, Z, 3º, 4º
P108, P308, P208, P408 Límite de recorrido negativo del eje X, Z, 3º, 4º
Definen los límites de recorrido del eje (positivo y negativo). En cada uno de ellos se
indicará la distancia desde el cero máquina al límite de recorrido correspondiente.
Valores posibles: ± 8388,607 milímetros o grados.
± 330,2599 pulgadas.
Si ambos límites se definen con el mismo valor (por ejemplo 0), el CNC no permitirá
el movimiento del eje.
Mediante las teclas de JOG y por motivos de seguridad, se permite desplazar el eje hasta
100 micras antes que los límites de recorrido seleccionados.
RELACIONADOS CON LOS
LIMITES DE RECORRIDO

PáginaCapítulo: 4 Sección:
PARAMETROS MAQUINA DE LOS EJES
7
4.4 PARAMETROS MAQUINA RELACIONADOS CON EL HUSILLO
El CNC permite compensar el error de medición causado por la inexactitud de los husillos
que se utilizan en cada eje, así como la holgura del mismo cuando se cambia el sentido de
desplazamiento del eje.
4.4.1 HOLGURA DE HUSILLO
P109, P309, P209, P409 Holgura del husillo en el eje X, Z, 3º, 4º
Define el valor de la holgura de husillo. Si se emplean sistemas lineales de captación,
introducir el valor 0.
Se definirá siempre en micras, independientemente de las unidades de trabajo utilizadas.
Valores posibles: 0 a 255 micras.
P620(1), P620(2), P620(3), P620(4) Signo de la holgura de husillo del eje X, Z,
3º, 4º
Define el signo correspondiente al valor de la holgura de husillo definido en el
parámetro P109, P209, P309, P409
0 = Signo positivo.
1 = Signo negativo.
P113, P313, P213, P413 Impulso adicional de consigna del eje X, Z, 3º, 4º
Impulso adicional de consigna para recuperar la posible holgura del husillo en las
inversiones de movimiento.
Se expresará mediante un número entero comprendido entre 0 y 255.
Valor 0 = No se aplica impulso adicional.
Valor 1 = 2.5 mV.
Valor 10 = 25.0 mV. (10 x 2.5)
Valor 255 = 637.5 mV. (255 x 2.5)
Cada vez que se invierte el movimiento, el CNC aplicará a dicho eje la consigna
correspondiente más la consigna adicional indicada en este parámetro. Esta consigna
adicional se aplicará durante 40 mseg.
Cuando el sistema de captación utilizado es un encoder rotativo, este parámetro se
personalizará con el valor 0.
RELACIONADOS CON EL
HUSILLO

Sección:Capítulo: 4
Página
PARAMETROS MAQUINA DE LOS EJES
8
RELACIONADOS CON EL
HUSILLO
4.4.2 ERROR DE HUSILLO
Para compensar el error de medición causado por la inexactitud de los husillos se dispone
de 2 tablas de compensación de husillo de 30 puntos cada una, una para el eje X y otra para
el eje Z.
En cada punto se debe definir la posición del eje que se desea compensar y el error que tiene
dicho eje en ese punto.
Para acceder a estas tablas se debe pulsar la siguiente secuencia de teclas:
[OP MODE] Muestra los distintos modos de operación
[9] Accede a los modos especiales
[3] Accede a la opción compensación de error de husillo
El usuario podrá avanzar o retroceder mediante las teclas [flecha arriba] y [flecha abajo].
Si se desea visualizar un determinado parámetro se permite teclear el número del parámetro
deseado y de la tecla [RECALL]. El CNC mostrará la página correspondiente a dicho
parámetro.
Cuando se desea inicializar la tabla asignando a todos los parámetros el valor 0 se debe
teclear el código: [K] [A] [I] [ENTER].
Cada pareja de parámetros de la tabla representa:
Parámetro par La posición que ocupa un punto del perfil, vendrá definido por su cota
referida al cero máquina.
Valores posibles: ±8388,607 milímetros ó ±330,2599 pulgadas
Parámetro impar El error que tiene el husillo en dicho punto.
Valores posibles: ±32,766 milímetros ó ±1,2900 pulgadas
Al definir los diferentes puntos del perfil en la tabla, se deberán cumplir los siguientes
requisitos:
* Los puntos de la tabla (parámetros pares) estarán ordenados según su posición en el eje,
debiendo comenzar la tabla (P0 o P60) por el punto más negativo o menos positivo que
se vaya a compensar.
* Si no se definen todos los puntos de la tabla, se deben definir con valor 0 todos los
parámetros no utilizados.
* A los tramos del eje que se encuentran fuera de esta zona, el CNC les aplicará la
compensación definida para el extremo que más próximo se encuentre.
* El punto de referencia máquina tiene que tener error 0.
* La distancia entre dos puntos consecutivos (parámetros impares consecutivos) estará
comprendido entre 524,278 milímetros ó 29,6212 pulgadas

PáginaCapítulo: 4 Sección:
PARAMETROS MAQUINA DE LOS EJES
9
* La diferencia de error entre dos puntos consecutivos (parámetros impares consecutivos)
estará comprendido entre:
Valores posibles: ±0,127 milímetros ó ±0,0050 pulgadas
* El gráfico correspondiente al error del husillo no podrá tener pendientes superiores al
3%.
Ejemplo: Si la distancia entre dos puntos consecutivos es 3 mm, la diferencia de error
entre ambos puntos debe ser igual o menor que 0,009 mm.
Para EDITAR un parámetro se debe teclear el número del parámetro deseado, el signo "=”
y del valor que se desea asignar al parámetro. A continuación, se debe pulsar la tecla
[ENTER] para que dicho valor sea introducido en la tabla.
Se debe tener en cuenta que una vez personalizados todos los parámetros se debe pulsar la
tecla [RESET], o bien desconectar y conectar el CNC para que dichos valores sean
asumidos por el CNC.
Ejemplo de programación:
Se desea compensar el error de husillo del eje X en el tramo X-20 a X160 según la
siguiente gráfica de error de husillo:
Teniendo en cuenta que el punto de referencia máquina tiene valor X30 (se encuentra
situado a 30 mm del punto Cero Máquina), se deben definir los parámetros de la
siguiente forma:
P000 = X -20,000 P001 = X 0,001
P002 = X 0,000 P003 = X -0,001
P004 = X 30,000 P005 = X 0,000
P006 = X 60,000 P007 = X 0,002
P008 = X 90,000 P009 = X 0,001
P010 = X 130,000 P011 = X -0,002
P012 = X 160,000 P013 = X -0,003
P014 = X 0,000 P015 = X 0,000
P016 = X 0,000 P017 = X 0,000
" " " "
" " " "
P056 = X 0,000 P057 = X 0,000
P058 = X 0,000 P059 = X 0,000
RELACIONADOS CON EL
HUSILLO

Sección:Capítulo: 4
Página
PARAMETROS MAQUINA DE LOS EJES
10
P605(2), P605(1) Compensación de error de husillo del eje X, Z
Indica si el CNC debe aplicar compensación de error de paso de husillo al eje
correspondiente.
0 = No se aplica compensación de error de husillo.
1 = Si se aplica compensación de error de husillo.
El CNC dispone de 2 tablas de compensación de husillo de 30 puntos cada una, una
para el eje X y otra para el eje Z.
RELACIONADOS CON EL
HUSILLO

PáginaCapítulo: 4 Sección:
PARAMETROS MAQUINA DE LOS EJES
11
4.5 PARAMETROS MAQUINA RELACIONADOS CON LOS AVANCES
El avance de los ejes se programa mediante la letra "F" y su valor depende de las unidades de
trabajo seleccionadas, mm o pulgadas, y del tipo de avance seleccionado, G94 o G95.
Programación
en milímetros:
Programación
en pulgadas:
Cuando se trabaja en pulgadas y con ejes rotativos aconsejamos personalizar el parámetro
máquina P618(2) con el valor "1" para que las unidades de programación, en G94, estén en
grados/minuto.
A continuación se detalla éste y otros parámetros relacionados con el avance de los ejes.
P618(2) Avance de los ejes rotativos en grados/minuto
Este parámetro se utiliza cuando se trabaja en pulgadas. Indica si el avance de los ejes
rotativos es interpretado por el CNC como grados/minuto o como 2.54 grados/minuto.
0 = Las unidades del avance de los ejes se expresan en 2.54 grados/minuto.
1 = Las unidades del avance de los ejes se expresan en grados/minuto.
P110, P310, P210, P410 Máximo avance programable en el eje X, Z, 3º, 4º
Define la máxima velocidad de avance (F) que se puede programar.
Valores posibles: Desde 1 hasta 65535 mm./minuto o grados/minuto
Desde 1 hasta 25800 décimas de pulgada/minuto.
P111, P311, P211, P411 Avance para los posicionamientos rápidos del eje X, Z, 3º, 4º
Define el avance que se aplicará en los posicionamientos rápidos.
Valores posibles: Desde 1 hasta 65535 mm./minuto o grados/minuto
Desde 1 hasta 25800 décimas de pulgada/minuto.
RELACIONADOS CON LOS
AVANCES
Formato
Programación
Unidad de
programación
Valor mínimo Valor máximo
G94 F 4 F1= 1mm/min
F1
(1 mm/min)
F9999
(9999 mm/min)
G95 F3.4 F1= 1mm/revol
F0.001
(0.001 mm/revol)
F500.0000
(500 mm/revol)
Formato
programación
Unidad de
programación
Valor mínimo Valor máximo
G94 F 4 F1= 0,1"/min
F1
(0,1"/min)
F3937
(393,7"/min)
G95 F 3.4 F1= 1"/revol
F0.0001
(0,0001"/revol)
F19.6850
(19,6850"/revol)
P618(2) Solo eje rotativo Interpolación de eje rotativo con eje lineal
G94
P618(2)=0 F1= 2,54°/min F1= 1"/min
P618(2)=1 F1= 1°/min F1= 1"/min

Sección:Capítulo: 4
Página
PARAMETROS MAQUINA DE LOS EJES
12
P717 Máximo avance F para los tramos curvos
Define el máximo avance F permitido en una interpolación circular. Dicho valor estará
en función del radio del arco y vendrá dado por la siguiente formula:
P717 x Radio
F máxima =
0.085
Se expresará mediante un número entero comprendido entre 0 y 255. Si se le asigna el
valor 0, no existirá limitación de velocidad de avance F.
Ejemplo:
Se ha personalizado el parámetro P717 con el valor 17, de forma que el avance en
arcos de 15 mm de radio queda limitado a 3.000 mm/min.
Si a continuación se programa un arco 100 mm, la velocidad de avance máxima
permitida será:
P717 x Radio 17 x 100
F máxima = = = 20000 mm/min
0.085 0.085
P703 Feedrate/Override cuando la consigna de algún eje alcanza 10V.
Indica el valor de Feedrate/Override (%) que aplicará el CNC cuando la consigna de
algún eje alcanza los 10 V.
Se expresará mediante un número entero comprendido entre 0 y 128.
Valor 0 = No se aplica ningún %
Valor 32 = 25 %
Valor 64 = 50 %
Valor 128= 100 %
Este parámetro permite que el CNC “espere” a la máquina en los arranques, disminuyendo
la consigna del eje y por tanto el error de seguimiento, evitando de esta forma que el
CNC muestre el código de error de seguimiento correspondiente.
P705 Error si el avance del eje no está entre el 50% y el 200% del programado
Indica si el CNC comprueba que el avance del eje se encuentra entre un 50% y un 200%
del avance programado.
Se define mediante el tiempo que se permite al eje estar fuera de dicho rango y se expresa
mediante un número entero comprendido entre 0 y 255.
Valor 0 = No se realiza esta comprobación
Valor 1 = Se da error si permanece más de 10 mseg.
Valor 10 = Se da error si permanece más de 100 mseg.
Valor 255 = Se da error si permanece más de 2550 mseg.
RELACIONADOS CON LOS
AVANCES

PáginaCapítulo: 4 Sección:
PARAMETROS MAQUINA DE LOS EJES
13
4.6 PARAMETROS MAQUINA RELACIONADOS CON EL CONTROL
DE LOS EJES
En el apartado "Ajuste de las ganancias" del capítulo "Temas Conceptuales" de este
mismo manual se indica la forma en que se pueden utilizar los parámetros que se detallan
a continuación.
P114, P314, P214, P414 Ganancia proporcional K1 del eje X, Z, 3º, 4º
Fija la consigna correspondiente a 1 micra de error de seguimiento.
Se define mediante un número entero comprendido entre 0 y 255, correspondiendo al
valor 64 una consigna de 2,5 mV.
2,5mV.
Consigna (mV) = K1 x Error de Seguimiento (micras) x
64
P115, P315, P215, P415 Punto de discontinuidad del eje X, Z, 3º, 4º
Define el valor correspondiente al error de seguimiento hasta el que se aplica la ganancia
proporcional “K1” y a partir del cual se empieza a aplicar la ganancia proporcional
“K2”.
Se recomienda asignar a este parámetro un valor ligeramente superior al error de
seguimiento correspondiente al máximo avance de mecanizado (P110, P210, P310,
P410).
Valores posibles: Desde 1 hasta 32766 micras.
Desde 1 hasta 12900 diezmilésimas de pulgada.
P116, P316, P216, P416 Ganancia proporcional K2 del eje X, Z, 3º, 4º
Fija la consigna correspondiente a 1 micra de error de seguimiento a partir del punto de
discontinuidad.
Se define mediante un número entero comprendido entre 0 y 255, correspondiendo al
valor 64 una consigna de 2,5 mV.
Consigna = (K1 x Ep) + [K2 x (Error de Seguimiento - Ep)]
Donde Ep es el valor correspondiente al punto de discontinuidad.
Es aconsejable asignar a este parámetro un valor comprendido ente un 50% y un 70%
de K1, con objeto de evitar cambios bruscos de la consigna al pasar de G00 a
velocidades de mecanizado bajas.
La utilización de los parámetros correspondientes a las ganancias K1 y K2, así como
la del punto de discontinuidad se encuentran detalladas en el apartado “Ajuste de la
ganancia proporcional” del capítulo “TEMAS CONCEPTUALES”.
RELACIONADOS CON EL
CONTROL DE LOS EJES

Sección:Capítulo: 4
Página
PARAMETROS MAQUINA DE LOS EJES
14
P607(6) Cuando se efectúa un roscado se aplica sólo la ganancia proporcional K1
Cada vez que se efectúa un roscado, el CNC puede aplicar las ganancias proporcionales
“K1” y “K2”, o bien, aplicar todo el tiempo la ganancia proporcional “K1”.
0 = Aplica ambas ganancias “K1” y “K2”.
1 = Durante el roscado se aplica sólo la ganancia “K1”.
P607(7) Cuando se efectúa un posicionamiento rápido se aplica sólo la ganancia
proporcional K2
El CNC permite en los desplazamientos rápidos aplicar la ganancia proporcional “K1”
hasta alcanzar 256 micras de error de seguimiento y a continuación la ganancia
proporcional “K2”, o bien, aplicar todo el tiempo la ganancia proporcional “K2”.
0 = Aplica ambas ganancias “K1” y “K2”, fijando el punto de discontinuidad en
256 micras.
1 = Todo el desplazamiento se aplica la ganancia “K2”.
P715 Recuperación de la posición programada en los ejes “con control no continuo”
Indica como actúa el CNC en los ejes “con control no continuo”.
Se expresa mediante un número entero comprendido entre 0 y 255.
Una vez alcanzada la posición programada el eje queda libre, es decir, no es controlado
por el CNC, pero actúa de forma distinta en función del valor que se le ha asignado a
este parámetro.
P715 = 0
Si el eje se separa de la posición alcanzada una distancia superior a 16 veces la banda
de muerte "P118, P218, P318, P418", el CNC mostrará el mensaje de error de
seguimiento correspondiente.
P715 distinto de cero.
Si el eje se separa de la posición alcanzada una distancia superior a “P715”/2 veces
la banda de muerte, el CNC activa el embrague correspondiente para recuperar la
posición programada.
RELACIONADOS CON EL
CONTROL DE LOS EJES

PáginaCapítulo: 4 Sección:
PARAMETROS MAQUINA DE LOS EJES
15
4.7 PARAMETROS MAQUINA RELACIONADOS CON LA
REFERENCIA MAQUINA
En el apartado "Sistemas de referencia" del capítulo "Temas Conceptuales" de este
mismo manual se indica la forma en que se pueden utilizar los parámetros que se detallan
a continuación.
P608(5), P608(8), P617(5), P615(8)Señal Io del sistema de captación. Eje X, Z, 3º, 4
Indican el tipo de señal Io que dispone el sistema de captación.
0 = Io normal
1 = Io codificado
Cuando se utilizan transductores lineales (reglas) que disponen de Io codificado, no
hace falta disponer de micro de referencia máquina, ya que se puede efectuar la
búsqueda de referencia máquina en cualquier punto del recorrido.
P608(3), P608(6), P617(3), P615(6) Periodo señal Io codificada. Eje X, Z, 3º, 4
Estos parámetros se deben definir cuando se utilizan transductores lineales (reglas) que
disponen de Io codificado.
Indican el periodo de la señal Io codificado que dispone el sistema de captación.
0 = Periodo de señal Io de 20mm
1 = Periodo de señal Io de 100mm
P608(4), P608(7), P617(4), P615(7)
Secuencia de Io creciente con contaje positivo o negativo. Eje X, Z, 3º, 4
Estos parámetros se deben definir cuando se utilizan transductores lineales (reglas) que
disponen de Io codificado. Indican la secuencia de señal Io codificado que dispone el
sistema de captación.
0 = Secuencia de señal Io creciente con contaje positivo.
1 = Secuencia de señal Io creciente con contaje negativo.
Fagor dispone de las siguientes reglas con Io codificado:
P908, P909, P910, P911 Offset de la regla de Io codificado. Eje X, Z, 3º, 4
Estos parámetros se deben definir cuando se utilizan transductores lineales (reglas) que
disponen de Io codificado.
Los trasductores lineales con Io codificado disponen de una escala graduada con su
propio Cero de Regla, siendo suficiente efectuar un desplazamiento de 20mm o 100mm
para conocer la posición, respecto al Cero de Regla.
RELACIONADOS CON LA
REFERENCIA MAQUINA
Regla P608 (5) P608(3) P608(4) Regla P608 (5) P608(3) P608(4)
COS
COC
COX
1
1
1
0
0
0
1
0
0
MOVS
MOVC
MOVX
1
1
1
0
0
0
0
0
0
COVS
COVC
COVX
1
1
1
0
0
0
1
0
0
FOT
FOS
FOC
1
1
1
1
1
1
0
0
0

Sección:Capítulo: 4
Página
PARAMETROS MAQUINA DE LOS EJES
16
Para que el CNC muestre las cotas referidas al Cero Máquina es necesario definir en
este parámetro "P908, P909, P910, P911" el offset o posición que ocupa el Cero
Máquina (M) respecto al Cero de la Regla.
P600(5), P600(4), P612(6), P614(6) Micro referencia máquina del eje X, Z, 3º, 4º
Indican si el eje dispone de microinterruptor para la búsqueda del punto de referencia
máquina.
0 = Si dispone de micro.
1 = No dispone de micro.
P618(8), P618(7), P618(6), P618(5) Sentido de búsqueda de referencia máquina
del eje X, Z, 3º, 4º
Indica el sentido en que se desplazará el eje durante la búsqueda del punto de referencia
máquina.
0 = Sentido positivo.
1 = Sentido negativo.
P600(7), P600(6), P612(7), P614(7) Tipo de impulso de referencia máquina del eje
X, Z, 3º, 4º
Definen el tipo de impulso Io que dispone el sistema de captación. Este impulso se
utiliza para realizar la búsqueda del punto de referencia máquina.
Los transductores lineales FAGOR disponen de un impulso de Io negativo cada 50 mm
(parámetro = 0) y los Encoders FAGOR proporcionan un impulso de Io positivo por
vuelta (parámetro = 1).
RELACIONADOS CON LA
REFERENCIA MAQUINA

PáginaCapítulo: 4 Sección:
PARAMETROS MAQUINA DE LOS EJES
17
P119, P319, P219, P419 Cota de referencia máquina del eje X, Z, 3º, 4º
Define la cota del punto de referencia respecto al cero máquina.
Valores posibles: ± 8388,607 milímetros.
± 330,2599 pulgadas.
El punto de referencia máquina es un punto de la máquina fijado por el fabricante sobre
el que se realiza la sincronización del sistema. El control se posiciona sobre este punto,
en lugar de desplazarse hasta el origen de la máquina.
Cuando el sistema de captación dispone de Io codificado la búsqueda de referencia
puede efectuarse en cualquier punto de la máquina, siendo necesario definir este
parámetro únicamente cuando el eje utiliza la compensación de error husillo. El error
de husillo en el punto de referencia máquina debe ser 0.
P112, P312, P212, P412 1º Avance búsqueda referencia máquina del eje X, Z, 3º, 4º
P807, P808, P809, P810 2º Avance búsqueda referencia máquina del eje X, Z, 3º, 4º
Definen el avance utilizado en la búsqueda del punto de referencia máquina.
El eje utilizará el 1º avance hasta pulsar el micro y el 2º avance una vez pulsado éste y
hasta recibir el Io del sistema de captación.
Valores posibles: Desde 1 hasta 65535 mm./minuto.
Desde 1 hasta 25800 décimas de pulgada/minuto.
Si al 2º avance se le asigna el valor 0, el CNC realizará el desplazamiento correspondiente
a dicho avance a 100 mm./minuto (39 décimas de pulgada/minuto).
P604(8) Búsqueda de referencia máquina tras el encendido
Define si es obligatorio o no, realizar la búsqueda del punto de referencia máquina de
todos los ejes tras el encendido del CNC.
0 = No es obligatorio.
1 = Si es obligatorio.
Cuando a este parámetro se le ha asignado el valor “1” y no se ha efectuado la búsqueda
de referencia máquina tras el encendido, el CNC actúa de la siguiente manera:
* Permite desplazar la máquina manualmente, mediante las manivelas, volantes o las
teclas de JOG.
* Si se intenta ejecutar un bloque de programa, el CNC mostrará el error correspondiente.
P601(8) La función G74 genera un M30
Indica si el CNC debe generar automáticamente la función M30 al ejecutarse la función
G74 (búsqueda de referencia máquina).
0 = No genera.
1 = Si genera.
RELACIONADOS CON LA
REFERENCIA MAQUINA

Sección:Capítulo: 4
Página
PARAMETROS MAQUINA DE LOS EJES
18
4.8 PARAMETROS RELACIONADOS CON LA ACELERACION /
DECELERACION
En el apartado "Ajuste de las ganancias" del capítulo "Temas Conceptuales" de este
mismo manual se indica la forma en que se pueden utilizar los parámetros que se detallan
a continuación.
4.8.1 ACELERACION / DECELERACION LINEAL
Este tipo de aceleración se aplica fundamentalmente en los desplazamientos que se efectúan
en G00 y F00, aunque también es posible utilizarlo en desplazamientos en G01.
P712, P713, P714, P724 Control de ACELERACION/DECELERACION del eje
X, Z, 3º, 4º
Con objeto de evitar arranques y frenadas bruscas en los ejes de la máquina, el CNC
permite trabajar con control de aceleración y deceleración.
Estos parámetros definen el tiempo que necesita el eje, durante la fase de aceleración,
en alcanzar el avance de posicionamiento (parámetro máquina P111, P211, P311,
P411). Este tiempo será igualmente válido para la fase de deceleración.
Se expresará mediante un número entero comprendido entre 0 y 255.
Valor 0 = No existe control de aceleración/deceleración.
Valor 1 = 0.020 segundos.
Valor 10 = 0.200 segundos. (10 x 0.02)
Valor 255 = 5.100 segundos. (255 x 0.02)
Cuando se realiza un desplazamiento de ejes en G00 vectorizado o una interpolación
lineal G01 en F0, el CNC aplica a la trayectoria resultante el mayor de los tiempos que
se han asignado a los ejes implicados.
No aplica aceleración/deceleración en las interpolaciones circulares (G02, G03).
P609(4) Aceleración/deceleración en todas las interpolaciones lineales
Define si el CNC aplica las rampas de aceleración deceleración (P712, P713, P714,
P724) en todas las interpolaciones lineales (G01), o si únicamente lo aplica cuando
dichos desplazamientos se efectúan en F0.
0 = Cuando se programa G01 y a F0
1 = En todas las interpolaciones lineales (con cualquier F).
ACELERACION
DECELERACION

PáginaCapítulo: 4 Sección:
PARAMETROS MAQUINA DE LOS EJES
19
P616(6) Aceleración/deceleración en G05 (arista matada)
Indica si se aplica o no el Control de Aceleración/Deceleración, en los empalmes de
bloques con movimiento en arista matada (G05).
0 = Si se aplica aceleración/deceleración.
1 = No se aplica aceleración/deceleración.
4.8.2 ACELERACION / DECELERACION EN FORMA DE CAMPANA
Este tipo de aceleración se puede aplicar en todo tipo de movimiento, G00, G01, G02, etc.
y con cualquier tipo de avance F.
P621(8) Control de Aceleración /Deceleración en forma de campana
Se utilizará cuando se dispone de una máquina que trabaja a grandes velocidades.
0 = No se aplica este tipo de aceleración
1 = Se aplica este tipo de aceleración en todo tipo de desplazamiento, G00, G01,
G02, G03, ...
La rampa de aceleración/deceleración que se aplica a cada uno de los ejes de la máquina
será la misma y se encuentra definida mediante el parámetro máquina “P731”.
P731 Duración de la rampa de Aceleración/Deceleración en forma de campana
Este parámetro se utilizará cuando se ha seleccionado un control de ACELERACION/
DECELERACION en forma de campana “P621(8)=1”
Define el tiempo que necesita cada uno de los ejes en alcanzar el avance seleccionado
(fase de aceleración). Este tiempo será igualmente válido para la fase de deceleración.
Se expresará mediante un número entero comprendido entre 0 y 255.
Valor 0 = No existe control de aceleración/deceleración.
Valor 1 = 0.010 segundos.
Valor 10 = 0.100 segundos. (10 x 0.01)
Valor 255 = 2.550 segundos. (255 x 0.01)
ACELERACION
DECELERACION

Sección:Capítulo: 4
Página
PARAMETROS MAQUINA DE LOS EJES
20
4.8.3 GANACIA FEED_FORWARD
Esta ganacia puede aplicarse con ambos tipos de aceleración
P720, P721, P722, P723 Ganancia FEED_FORWARD del eje X, Z, 3º, 4º
La ganancia Feed-Forward o ganancia proporcional a la velocidad de avance, permite
mejorar el lazo de posición minimizando el error de seguimiento, no siendo aconsejable
su utilización cuando no se trabaja con control de ACELERACION/
DECELERACION.
Este parámetro define el porcentaje de consigna que es debido al avance programado.
Se define mediante un número entero comprendido entre 0 y 255.
El valor que se sumará al error de seguimiento es (Kf x F/6), donde F es el avance
programado y Kf es:
* El valor de este parámetro en el caso de aceleración/deceleración lineal. Por
ejemplo, para el eje X "Kf=P720"
* La octava parte del valor asignado a este parámetro en el caso de aceleración/
deceleración en forma de campana.
Por ejemplo, para el eje X "Kf=P720/8"
El CNC aplicará la ganancia proporcional (K1 y K2) al valor resultante de la suma del
error de seguimiento de la máquina más el valor seleccionado mediante la ganancia
Feed-Forward.
La formula que aplicará el CNC cuando el valor resultante de la suma es inferior al valor
asignado al punto de discontinuidad es:
Consigna = K1 x [Error de seguimiento + (Kf x F/6)]
Y cuando el valor resultante de la suma es superior al valor del punto de discontinuidad:
Consigna = (K1 x Ep) + {K2 x [Error de seguimiento + (Kf x F/6) - Ep]}
Donde “Ep” es el valor definido en el parámetro correspondiente al punto de
discontinuidad.
ACELERACION
DECELERACION

PáginaCapítulo: 4 Sección:
PARAMETROS MAQUINA DE LOS EJES
21
4.9 PARAMETROS RELACIONADOS CON LA HERRAMIENTA
MOTORIZADA O SINCRONIZADA
En el apartado "Herramienta motorizada / Sincronizada" del capítulo "Temas
Conceptuales" de este mismo manual se indica la forma en que se pueden utilizar los
parámetros que se detallan a continuación.
El CNC permite gobernar mediante la función M45S una herramienta motorizada,
debiendo indicarse cada vez que se programa dicha función la velocidad de giro de la misma
en revoluciones por minuto. Por ejemplo M45 S100, M45 S-125, etc.
La salida de consigna analógica correspondiente a la herramienta motorizada la proporciona
el CNC a través de los terminales 32 y 33 del conector I/O1. Asimismo, se deben
personalizar los siguientes parámetros máquina:
P607(1) Signo de la consigna de la herramienta motorizada o sincronizada
Define el signo de la consigna. Si es correcto dejarlo como está, pero si se desea
cambiarlo seleccionar “0” si antes había “1” y viceversa.
Valores posibles: 0 y 1
P802 Máximo avance programable para la herramienta motorizada o sincronizada
Indica la máxima velocidad que se puede programar para la herramienta motorizada o
sincronizada.
Se expresará en revoluciones por minuto, admitiendo cualquier número entero entre 0
y 9999.
Si a este parámetro se le asigna el valor 0 el CNC entiende que no se dispone de
herramienta motorizada o sincronizada.
P609(8) La velocidad de giro de la herramienta motorizada puede ser modificada
desde el panel
Este parámetro indica si las teclas de Speed-rate ubicadas en el panel de mando del
CNC modifican o no, además de la velocidad de giro del cabezal, la
velocidad de giro de la herramienta motorizada.
0 = No se permite variar la velocidad de giro de la herramienta motorizada
1 = Si se permite variar la velocidad de giro de la herramienta motorizada
Si este parámetro se personaliza con el valor "1", el CNC permite modificar la velocidad
de giro entre el 50% y el 120% de la velocidad programada con paso de 5%.
Se debe tener en cuenta que el CNC aplica el porcentaje seleccionado a la velocidad
de giro del cabezal y al velocidad de giro de la herramienta motorizada.
HERRAM. MOTORIZADA O
SINCRONIZADA

Sección:Capítulo: 4
Página
PARAMETROS MAQUINA DE LOS EJES
22
Cuando la máquina dispone de una herramienta sincronizada el CNC permite gobernarla
mediante la función M45K, debiendo indicarse cada vez que se programa dicha función el
factor de sincronización o relación existente entre la velocidad de giro de la herramienta
sincronizada y la velocidad de giro del cabezal. Por ejemplo M45 K2.
El CNC utiliza la misma salida de consigna, terminales 32 y 33 del conector I/O1, para la
herramienta sincronizada o herramienta motorizada, ya que solamente se puede disponer de
una de las dos.
Además de los parámetros máquina P607(1) y P802 comentados anteriormente, se deben
personalizar los siguientes parámetros máquina:
P803 Número de impulsos de la herramienta sincronizada
Indica el número de impulsos por vuelta de la herramienta sincronizada.
Se expresará mediante un número entero comprendido entre 0 y 9999.
Si se introduce el valor 0, el CNC entiende que la máquina no dispone de herramienta
sincronizada y que se desea trabajar con herramienta motorizada, siempre que el
parámetro P802 sea distinto de 0.
P607(2) Sentido de contaje de la herramienta sincronizada
Define el sentido de contaje de la herramienta sincronizada. Si el signo es correcto
dejarlo como está, pero si se desea cambiarlo seleccionar “0” si antes había “1” y
viceversa.
Valores posibles: 0 y 1
Se debe tener en cuenta que si se modifica este parámetro se deberá cambiar, a su vez,
el parámetro correspondiente al signo de la consigna "P607(1)".
P711 Ganancia proporcional K de la herramienta sincronizada
Fija la consigna correspondiente a 1 micra de error de seguimiento.
Se define mediante un número entero comprendido entre 0 y 255, correspondiendo al
valor 64 una consigna de 2,5 mV.
2,5mV.
Consigna (mV) = K1 x Error de Seguimiento (micras) x
64
HERRAM. MOTORIZADA O
SINCRONIZADA

PáginaCapítulo: 4 Sección:
PARAMETROS MAQUINA DE LOS EJES
23
4.10 PARAMETROS MAQUINA ESPECIALES
P606(1) Trabajo con máquina de más de 8 metros.
Se debe utilizar únicamente cuando se dispone de una máquina de este tipo. El CNC
utilizará una resolución de los ejes de 0,01 mm (0,001 pulgadas).
Valores posibles:
0 = Resolución normal. 0,001 milímetros (0,0001 pulgadas).
± 8388,607 milímetros. ó ± 330,2599 pulgadas.
1 = Resolución especial. 0,01 milímetros (0,001 pulgadas).
± 83886,07 milímetros. ó ± 3302,599 pulgadas.
Si se selecciona una resolución de 0,01 mm (0,001 pulgadas), se debe tener en cuenta
lo siguiente:
* El formato de programación y visualización de las cotas de los ejes es ±5.2 en mm
o ±4.3 en pulgadas.
* El mínimo desplazamiento posible de cada eje es de ±0,01 mm (±0,001 pulgadas),
y el máximo posible es de ±83886,07 mm (±3302,599 pulgadas).
* El formato utilizado en los diferentes campos de las tablas de herramientas es:
R, L ±4.2 en mm o ±3.3 en pulgadas. El valor mínimo asignable es de ±0,01 mm
(±0,001 pulgadas), y el máximo es de ±9999,99 mm (±393,699 pulgadas).
I, K ±3.2 en mm o ±2.3 en pulgadas. El valor mínimo asignable es de ±0,01 mm
(±0,001 pulgadas), y el máximo es de ±327,66 mm (±12,900 pulgadas).
* Los parámetros “P103, P203, P303, P403” indican la resolución de cada uno de los
ejes, y se expresarán en centésimas de milímetro o en milésimas de pulgada.
1 = la resolución es de 0,01 mm, 0,001 pulgadas.
2 = la resolución es de 0,02 mm, 0,002 pulgadas.
5 = la resolución es de 0,05 mm, 0,005 pulgadas.
10= la resolución es de 0,10 mm, 0,010 pulgadas.
* El calculo de las ganancias K1, K2 y Feed Forward se realizará teniendo en cuenta
que el error de seguimiento está expresado en centésimas de milímetro o en
milésimas de pulgada.
El máximo error de seguimiento permisible es de 320 mm.
Es decir, que las ganacias K1 y K2 (parámetros P114, P314, P116, P316) hay que
expresarlas en "mV/0,01mm" (mV/0,001 pulgadas).
* Los parámetros “P115, P215, P315, P415” indican el valor del punto de discontinuidad
de la ganancia proporcional de cada uno de los ejes y se expresarán en centésimas
de milímetro o en milésimas de pulgada.
ESPECIALES

Sección:Capítulo: 4
Página
PARAMETROS MAQUINA DE LOS EJES
24
* Los parámetros “P109, P209, P309, P409” (holgura de husillo) y “P118, P218,
P318, P418” (banda de muerte) estarán expresados en centésimas de milímetro o en
milésimas de pulgada.
P118 = 100Asigna una banda de muerte al eje X de 1mm.
* Los parámetros “P112, P212, P312, P412, P807, P808, P809, P810” (avance de
búsqueda de referencia máquina), se expresarán en centésimas de milímetro/minuto
o en milésimas de pulgada/minuto.
P112 = 10000 Asigna un avance de 100m/min.
Ejemplos de calculo de resolución con P606(1)=1:
Ejemplo 1: Resolución en "mm" con encoder de señales cuadradas
Se desea obtener una resolución de 0,01 mm mediante un encoder de señales cuadradas colocado
en el eje X cuyo paso de husillo es de 5 mm.
Teniendo en cuenta que el factor de multiplicación que aplica el CNC puede ser x2 o x4, se
necesitará, en cada uno de los casos, de un encoder que disponga de los siguientes impulsos por
vuelta:
Para factor de multiplicación x4:
paso husillo 5 mm
Nº impulsos = = = 125 impulsos/vuelta
Factor multiplicación x Resolución 4 x 0,01 mm
P103= 1 P602(3)=0 P106=N P602(6)=0
Para factor de multiplicación x2:
paso husillo 5 mm
Nº impulsos = = = 250 impulsos/vuelta
Factor multiplicación x Resolución 2 x 0,01 mm
P103= 1 P602(3)=0 P106=N P602(6)=1
Ejemplo 2: Resolución en "mpulgadas" con encoder de señales cuadradas
Se desea obtener una resolución de 0,001 pulgadas mediante un encoder de señales cuadradas
colocado en el eje X con un husillo de 4 vueltas por pulgada (0,25 pulgadas/vuelta).
Teniendo en cuenta que el factor de multiplicación que aplica el CNC puede ser x2 o x4, se
necesitará, en cada uno de los casos, de un encoder que disponga de los siguientes impulsos por
vuelta:
Para factor de multiplicación x4:
paso husillo 0,25
Nº impulsos = = = 62,5 impulsos/vuelta
Factor multiplicación x Resolución 4 x 0,001
P103= 1 P602(3)=1 P106=N P602(6)=0
Para factor de multiplicación x2:
paso husillo 0,25
Nº impulsos = = = 125 impulsos/vuelta
Factor multiplicación x Resolución 2 x 0,001
P103= 1 P602(3)=1 P106=N P602(6)=1
ESPECIALES

PáginaCapítulo: 4 Sección:
PARAMETROS MAQUINA DE LOS EJES
25
P609(7) Resolución de 0,0001 milímetros (0,00001 pulgadas)
Se debe utilizar únicamente cuando se desea una resolución de los ejes de 0,0001 mm
(0,00001 pulgadas).
Valores posibles:
0 = Resolución normal. 0,001 milímetros (0,0001 pulgadas).
± 8388,607 milímetros. ó ± 330,2599 pulgadas.
1 = Resolución especial. 0,0001 milímetros (0,00001 pulgadas).
± 838,8607 milímetros. ó ± 33,02599 pulgadas.
Si se selecciona una resolución de 0,0001 mm (0,00001 pulgadas), se debe tener en
cuenta lo siguiente:
* El formato de programación y visualización de las cotas de los ejes es ±3.4 en mm
o ±2.5 en pulgadas.
* El mínimo desplazamiento posible de cada eje es de ±0,0001 mm (±0,00001
pulgadas), y el máximo posible es de ±838,8607 mm (±33,02599 pulgadas).
* El formato utilizado en los diferentes campos de las tablas de herramientas es:
R, L ±2.4 en mm o ±1.5 en pulgadas. El valor mínimo asignable es de ±0,0001
mm (±0,00001 pulgadas), y el máximo es de ±99,9999 mm (±3,93699
pulgadas).
I, K ±1.4 en mm o ±0.5 en pulgadas. El valor mínimo asignable es de ±0,0001
mm (±0,00001 pulgadas), y el máximo es de ±3,2766 mm (±0,12900
pulgadas).
* Los parámetros “P103, P203, P303, P403” indican la resolución de cada uno de
los ejes, y se expresarán en diezmilésimas de milímetro o en cienmilésimas de
pulgada.
1 = la resolución es de 0,0001 mm, 0,00001 pulgadas.
2 = la resolución es de 0,0002 mm, 0,00002 pulgadas.
5 = la resolución es de 0,0005 mm, 0,00005 pulgadas.
10= la resolución es de 0,0010 mm, 0,00010 pulgadas.
* El calculo de las ganancias K1, K2 y Feed Forward se realizará teniendo en cuenta
que el error de seguimiento está expresado en diezmilésimas de milímetro o en
cienmilésimas de pulgada.
El máximo error de seguimiento permisible es de 3.2 mm.
Es decir, que las ganacias K1 y K2 (parámetros P114, P314, P116, P316) hay que
expresarlas en "mV/0,0001mm" (mV/0,00001 pulgadas).
* Los parámetros “P115, P215, P315, P415” indican el valor del punto de discontinuidad
de la ganancia proporcional de cada uno de los ejes y se expresarán en diezmilésimas
de milímetro o en cienmilésimas de pulgada.
ESPECIALES

Sección:Capítulo: 4
Página
PARAMETROS MAQUINA DE LOS EJES
26
* Los parámetros “P109, P209, P309, P409” (holgura de husillo) y “P118, P218,
P318, P418” (banda de muerte) estarán expresados en diezmilésimas de milímetro
o en cienmilésimas de pulgada.
P118 = 100 Asigna una banda de muerte al eje X de 0.0100mm.
* Los parámetros “P112, P212, P312, P412, P807, P808, P809, P810” (avance de
búsqueda de referencia máquina),, se expresarán en diezmilésimas de milímetro/
minuto o en cienmilésimas de pulgada/minuto.
P112 = 10000 Asigna un avance de 1m/min.
Ejemplos de calculo de resolución con P609(7)=1:
Ejemplo 1: Resolución en "mm" con encoder de señales cuadradas
Se desea obtener una resolución de 0,0001 mm mediante un encoder de señales cuadradas colocado
en el eje X cuyo paso de husillo es de 5 mm.
Teniendo en cuenta que el factor de multiplicación que aplica el CNC puede ser x2 o x4, se
necesitará, en cada uno de los casos, de un encoder que disponga de los siguientes impulsos por
vuelta:
Para factor de multiplicación x4:
paso husillo 5 mm
Nº impulsos = = = 12500 imp/vuelta
Factor multiplicación x Resolución 4 x 0,0001 mm
P103= 1 P602(3)=0 P106=N P602(6)=0
Para factor de multiplicación x2:
paso husillo 5 mm
Nº impulsos = = = 25000 imp/vuelta
Factor multiplicación x Resolución 2 x 0,0001 mm
P103= 1 P602(3)=0 P106=N P602(6)=1
Ejemplo 2: Resolución en "mpulgadas" con encoder de señales cuadradas
Se desea obtener una resolución de 0,00001 pulgadas mediante un encoder de señales cuadradas
colocado en el eje X con un husillo de 4 vueltas por pulgada (0,25 pulgadas/vuelta).
Teniendo en cuenta que el factor de multiplicación que aplica el CNC puede ser x2 o x4, se
necesitará, en cada uno de los casos, de un encoder que disponga de los siguientes impulsos por
vuelta:
Para factor de multiplicación x4:
paso husillo 0,25
Nº impulsos = = = 6250 imp/vuelta
Factor multiplicación x Resolución 4 x 0,00001
P103= 1 P602(3)=1 P106=N P602(6)=0
Para factor de multiplicación x2:
paso husillo 0,25
Nº impulsos = = = 12500 imp/vuelta
Factor multiplicación x Resolución 2 x 0,00001
P103= 1 P602(3)=1 P106=N P602(6)=1
ESPECIALES

PáginaCapítulo: 5 Sección:
PARAMETROS MAQUINA DEL CABEZAL
1
5. PARAMETROS MAQUINA DEL CABEZAL
Se debe tener en cuenta que algunos de los parámetros citados en este capítulo, se
encuentran más detallados en el capítulo "Temas Conceptuales" de este mismo
manual.
P811 Control de ACELERACION/DECELERACION del cabezal
Con objeto de evitar arranques y frenadas bruscas del cabezal, el CNC permite trabajar
con control de aceleración y deceleración.
Este parámetro define el tiempo que necesita el cabezal, durante la fase de aceleración,
en alcanzar la velocidad S indicada. Este tiempo será igualmente válido para la fase de
deceleración.
Se expresará mediante un número entero comprendido entre 0 y 65535
Valor 0 = No existe control de aceleración/deceleración.
Valor 1 = 0.010 segundos.
Valor 10 = 0.100 segundos. (10 x 0.01)
Valor 2000 = 20 segundos. (2000 x 0.01)
Valor 4095 = 40.95 segundos. (4095 x 0.01)
Mayor que 4095 = 40.95 segundos. (4095 x 0.01)

Sección:Capítulo: 5
Página
PARAMETROS MAQUINA DEL CABEZAL
2
5.1 PARAMETROS RELACIONADOS CON EL CAMBIO DE GAMA
En el apartado "Cambio de gama de cabezal" del capítulo "Temas Conceptuales" de
este mismo manual se indica la forma en que se pueden utilizar los parámetros que se
detallan a continuación.
P7, P8, P9, P10 Máxima velocidad del cabezal en la GAMA 1, 2, 3 y 4
Indican la máxima velocidad del cabezal que se asigna a cada una de las gamas.
Se expresarán en revoluciones por minuto, admitiendo cualquier número entero entre
0 y 9999.
El valor asignado a P7 será el correspondiente a la menor de las gamas y el asignado
a P10 el de la mayor. En caso de no ser necesarias las 4 gamas, deben emplearse las
inferiores comenzando por P7, y las gamas que no se utilicen se les asignará el mismo
valor que a la superior de las utilizadas.
P601(1) La máquina dispone de cambiador automático de gamas.
Indica si al programarse una velocidad del cabezal que implica cambio de gama, el CNC
debe gestionar el cambio de gama, generando automáticamente el código (M41, M42,
M43, M44) correspondiente a la nueva gama seleccionada.
M41 al seleccionarse la 1º gama de cabezal
M42 al seleccionarse la 2º gama de cabezal
M43 al seleccionarse la 3º gama de cabezal
M44 al seleccionarse la 4º gama de cabezal
Introducir los valores:
0 = No dispone de cambiador automático de gamas.
1 = Si dispone de cambiador automático de gamas.
P601(6) S Analógica residual en un cambio de gama
Indica si el CNC debe generar una salida S analógica residual cuando exista un cambio
en la gama de velocidades del cabezal.
Introducir los valores:
0 = No genera salida analógica residual.
1 = Si genera salida analógica residual.
P701 Valor de la S analógica residual
Indica el valor de la salida S analógica residual asociada al cambio de gama de
velocidades del cabezal.
Se expresará mediante un número entero comprendido entre 1 y 255.
Valor 1 = 2.5 mV.
Valor 10 = 25.0 mV. (10 x 2.5)
Valor 255 = 637.5 mV. (255 x 2.5)
RELACIONADOS CON EL
CAMBIO DE GAMA

PáginaCapítulo: 5 Sección:
PARAMETROS MAQUINA DEL CABEZAL
3
P702 Tiempo de oscilación en un cambio de gama
Indica el período de tiempo de oscilación durante el cambio de gama.
Se expresará mediante un número entero comprendido entre 0 y 255.
Valor 0 = Movimiento continuo en un sentido.
Valor 1 = Movimiento continuo en el otro sentido.
Valor 2 = 20 mseg. de periodo de oscilación.
Valor 10 = 100 mseg. de periodo de oscilación.
Valor 255 = 2550 mseg. de periodo de oscilación.
RELACIONADOS CON EL
CAMBIO DE GAMA

Sección:Capítulo: 5
Página
PARAMETROS MAQUINA DEL CABEZAL
4
5.2 PARAMETROS MAQUINA UTILIZADOS CON SALIDA DE
CONSIGNA ANALOGICA
En el apartado "Cabezal" del capítulo "Temas Conceptuales" de este mismo
manual se indica la forma en que se pueden utilizar los parámetros que se detallan
a continuación.
P601(4) Signo de la consigna S del cabezal
Define el signo de la consigna S analógica del cabezal. Si es correcto dejarlo como está,
pero si se desea cambiarlo, seleccionar “1” si antes había “0” y viceversa.
Valores posibles: “0” y “1”.
P607(4) Consigna S unipolar o bipolar
Indica el tipo de consigna de cabezal.
Si la consigna es BIPOLAR el CNC generará una salida positiva (0 a +10V.) cuando
se ha seleccionado “cabezal a derechas” y una salida negativa (0 a -10V.)
cuando se ha seleccionado “cabezal a izquierdas”
Si la consigna es UNIPOLAR el CNC generará una salida positiva (0 a +10V.) para
ambos sentidos de giro.
0 = Se dispone de salida BIPOLAR.
1 = Se dispone de salida UNIPOLAR.
Se debe tener en cuenta que el parámetro máquina P601(4) permite cambiar el signo de
la consigna y por tanto el sentido de giro.
UTILIZADOS CON SALIDA DE
CONSIGNA ANALOGICA

PáginaCapítulo: 5 Sección:
PARAMETROS MAQUINA DEL CABEZAL
5
5.3 PARAMETROS UTILIZADOS CON SALIDA DE CONSIGNA EN
BCD
En el apartado "Cabezal" del capítulo "Temas Conceptuales" de este mismo manual se
indica la forma en que se pueden utilizar los parámetros que se detallan a continuación.
P601(3) Salida S en BCD de 2 dígitos.
Indica si existe salida S en BCD de 2 dígitos. En este caso el CNC no proporcionará
la salida de consigna analógica.
0 = No dispone de salida S en BCD de 2 dígitos.
1 = Si dispone de salida S en BCD de 2 dígitos.
Si se selecciona S en BCD de 2 dígitos, el CNC proporcionará el valor correspondiente
a la S programada a través de las salidas BCD del conector I/O 1 (terminales 20 a 27).
Además proporcionará un impulso S STROBE, por el terminal 3 del conector I/O 1.
El valor correspondiente a la S programada vendrá dado por la siguiente tabla:
Si se programa un valor superior a 9999 el CNC tomará la velocidad de cabezal
correspondiente al valor 9999.
UTILIZADOS CON SALIDA DE
CONSIGNA EN BCD
S
Programada
S BCD
S
Programada
S BCD
S
Programada
S BCD
S
Programada
S BCD
0 S 00 25-27 S 48 200-223 S 66 1600-1799 S 84
1 S 20 28-31 S 49 224-249 S 67 1800-1999 S 85
2 S 26 32-35 S 50 250-279 S 68 2000-2239 S 86
3 S 29 36-39 S 51 280-314 S 69 2240-2499 S 87
4 S 32 40-44 S 52 315-354 S 70 2500-2799 S 88
5 S 34 45-49 S 53 355-399 S 71 2800-3149 S 89
6 S 35 50-55 S 54 400-449 S 72 3150-3549 S 90
7 S 36 56-62 S 55 450-499 S 73 3550-3999 S 91
8 S 38 63-70 S 56 500-559 S 74 4000-4499 S 92
9 S 39 71-79 S 57 560-629 S 75 4500-4999 S 93
10-11 S 40 80-89 S 58 630-709 S 76 5000-5599 S 94
12 S 41 90-99 S 59 710-799 S 77 5600-6299 S 95
13 S 42 100-111 S 60 800-899 S 78 6300-7099 S 96
14-15 S 43 112-124 S 61 900-999 S 79 7100-7999 S 97
16-17 S 44 125-139 S 62 1000-1119 S 80 8000-8999 S 98
18-19 S 45 140-159 S 63 1120-1249 S 81 9000-9999 S 99
20-22 S 46 160-179 S 64 1250-1399 S 82
23-24 S 47 180-199 S 65 1400-1599 S 83

Sección:Capítulo: 5
Página
PARAMETROS MAQUINA DEL CABEZAL
6
P601(2) Salida S en BCD de 4 dígitos
Indica si existe salida S en BCD de 4 dígitos. En este caso el CNC no proporcionará
la salida de consigna analógica.
0 = No dispone de salida S en BCD de 4 dígitos.
1 = Si dispone de salida S en BCD de 4 dígitos.
Si se selecciona S en BCD de 4 dígitos, el CNC proporcionará el valor correspondiente
a la S programada a través de las salidas BCD del conector I/O 1 (terminales 20 a 27).
El valor correspondiente a la S programada se proporcionará en dos fases, con un
retardo entre fases de 100 mseg. Además proporcionará un impulso S STROBE, por
el terminal 3 del conector I/O 1, en cada una de las fases.
Terminal 1ª Fase 2ª Fase
20
21 Millares Decenas
22
23
24
25 Centenas Unidades
26
27
UTILIZADOS CON SALIDA DE
CONSIGNA EN BCD

PáginaCapítulo: 5 Sección:
PARAMETROS MAQUINA DEL CABEZAL
7
5.4 PARAMETROS UTILIZADOS PARA EL CONTROL DEL CABEZAL
Es necesario disponer de captación de cabezal cuando se desean efectuar las siguientes
operaciones:
* Roscado electrónico (G33)
* Parada orientada de cabezal (M19)
Cuando se trabaja con parada orientada de cabezal (M19) es necesario que el cabezal se
encuentre en lazo cerrado, es decir, que el CNC realiza el control de cabezal, comprobando
en todo momento la velocidad de giro real del mismo y proporcionando al armario eléctrico
la consigna necesaria para que el cabezal gire a la velocidad seleccionada.
En el apartado "Cabezal" del capítulo "Temas Conceptuales" de este mismo manual se
indica la forma en que se pueden utilizar los parámetros que se detallan a continuación.
P800 Número de impulsos del encoder de cabezal
Indica el número de impulsos por vuelta del captador rotativo del cabezal.
Se expresará mediante un número entero comprendido entre 0 y 9999.
Si se introduce el valor 0, el CNC entiende que la máquina no dispone de captador
rotativo en el cabezal y por lo tanto no se desea trabajar en lazo cerrado.
P606(3) Sentido de contaje del cabezal
Define el sentido de contaje del cabezal. Si es correcto dejarlo como está, pero si se
desea cambiarlo seleccionar “1” si antes había “0” y viceversa.
Valores posibles: “0” y “1”.
P603(8) No se realiza un control exhaustivo de la velocidad del cabezal
El CNC, además de visualizar la velocidad real del cabezal, permite controlar el mismo
de la siguiente forma:
* Cuando la velocidad real es inferior al 50% de la velocidad S programada, el CNC
genera un Feed-Hold interno. Permitiendo al cabezal disponer del tiempo necesario
para alcanzar dicha velocidad.
* Cuando la velocidad real es superior al 150% de la velocidad S programada, el CNC
activa la salida de emergencia y muestra el código de error correspondiente.
Valores posibles:
0 = Si se realiza un control exhaustivo de la velocidad del cabezal.
1 = No se realiza un control exhaustivo de la velocidad del cabezal.
UTILIZADOS PARA EL
CONTROL DEL CABEZAL

Sección:Capítulo: 5
Página
PARAMETROS MAQUINA DEL CABEZAL
8
P704 Tiempo de estabilización de la S
Se utiliza cuando se realiza un control exhaustivo del cabezal “P603(8)=0” e indica el
tiempo que necesita el cabezal en alcanzar la velocidad programada.
Se expresará mediante un número entero comprendido entre 1 y 255.
Valor 1 = 0,1 seg.
Valor 10 = 1,0 seg. (10 x 0,1)
Valor 255 = 25,5 seg. (255 x 0,1)
Durante este tiempo el CNC no realiza un control exhaustivo de la velocidad del
cabezal, pero si monitoriza el valor del mismo.
UTILIZADOS PARA EL
CONTROL DEL CABEZAL

PáginaCapítulo: 5 Sección:
PARAMETROS MAQUINA DEL CABEZAL
9
5.4.1 PARAMETROS RELACIONADOS CON LA PARADA ORIENTADA
DE CABEZAL (M19)
En el apartado "Control del cabezal" del capítulo "Temas Conceptuales" de este mismo
manual se indica la forma en que se pueden utilizar los parámetros que se detallan a
continuación.
P706 Velocidad de cabezal S cuando se trabaja en M19
Se expresa en revoluciones por minuto, admitiendo cualquier número entero entre 0 y
255.
P606(2) Signo de la salida S analógica asociada a M19
Define el signo de la salida S analógica asociada a M19. Si es correcto dejarlo como está,
pero si se desea cambiarlo seleccionar “1” si antes había “0” y viceversa.
Valores posibles: “0” y “1”.
P600(8) Tipo de impulso de referencia máquina en el CABEZAL
Define el tipo de impulso Io del sistema de captación empleado en el cabezal para
realizar la sincronización del cabezal con M19.
Los encoders FAGOR proporcionan un impulso de Io positivo por vuelta (parámetro
= 1).
P709 Consigna analógica mínima del cabezal con M19
Define el valor mínimo de la consigna del cabezal.
Se expresará mediante un número entero comprendido entre 0 y 255.
Valor 0 = 2.5 mV.
Valor 1 = 2.5 mV.
Valor 10 = 25.0 mV. (10 x 2.5)
Valor 255 = 637.5 mV. (255 x 2.5)
RELACIONADOS CON LA
PARADA ORIENTADA

Sección:Capítulo: 5
Página
PARAMETROS MAQUINA DEL CABEZAL
10
P707 Banda de muerte del cabezal con M19
Define la anchura de la banda de muerte, o zona anterior y posterior de la cota
programada en la que el CNC considera que se encuentra en posición.
Vendrá expresado por el número de impulsos de contaje y se define mediante un
número entero comprendido entre 0 y 255.
Se debe tener en cuenta que el CNC aplicará internamente, a las señales de captación
proporcionadas por el encoder del cabezal, un factor de multiplicación x4.
Por lo tanto si se utiliza un encoder de cabezal de 1000 impulsos por vuelta y se define
P707= 100, la banda de muerte será:
360°
x 100 = ±9°
1000 x 4
P708 Ganancia proporcional K del cabezal con M19
Fija la consigna correspondiente a 1 impulso de contaje de error de seguimiento del
captador rotativo del cabezal.
Se define mediante un número entero comprendido entre 0 y 255, correspondiendo al
valor 64 una consigna de 2,5 mV
2,5mV.
Consigna (mV.) = K x Error de Seguimiento (impulsos) x
64
RELACIONADOS CON LA
PARADA ORIENTADA

PáginaCapítulo: 6 Sección:
TEMAS CONCEPTUALES
1
6. TEMAS CONCEPTUALES
6.1 EJES Y SISTEMAS DE COORDENADAS
Dado que el objetivo del Control Numérico es controlar el movimiento y posicionamiento
de los ejes, será necesario determinar la posición del punto a alcanzar por medio de sus
coordenadas.
El CNC 8025 permite hacer uso de coordenadas absolutas y de coordenadas relativas o
incrementales, a lo largo de un mismo programa.
6.1.1 NOMENCLATURA Y SELECCION DE LOS EJES
Los ejes que permite controlar el CNC se denominan del siguiente modo:
X, Z Movimientos principales de avance en el plano de trabajo principal de la
máquina.
3º, 4º Ejes auxiliares, que se denominarán W e Y en función del valor asignado a los
parámetros máquina "P613(4)" y "P615(4)".
S Cabezal
Todos ellos deberán estar definidos adecuadamente mediante los parámetros máquina
correspondientes.
Además, el CNC permite utilizar una Herramienta motorizada o sincronizada, por lo que
se puede disponer de los siguientes tipos de máquinas:
EJES Y SISTEMAS DE
COORDENADAS
Sin Herramienta Sincronizada Con Herramienta Sincronizada
A1 A2 A3 A4 A5 A6 A1 A2 A3 A4 A5 A6
X - Z - S Volante X Herr. Sinc. Z - S Volante
X - Z 3º S Volante X Herr. Sinc. Z 3º S Volante
X - Z C S Volante X Herr. Sinc. Z C S Volante
X 4º Z 3º S Volante X 4º Z 3º S
Volante
Herr. Sinc.
X 4º Z C S Volante X 4º Z C S
Volante
Herr. Sinc.

Sección:Capítulo: 6
Página
TEMAS CONCEPTUALES
2
6.2 SISTEMAS DE CAPTACION
Las entradas de captación que dispone el CNC son las siguientes:
A1 Se utiliza para conectar las señales de captación del eje X. Es un conector tipo SUB-
D (hembra) de 15 terminales y admite señal senoidal.
A2 Se utiliza para las conectar las señales de captación del 4º eje o de la herramienta
motorizada o sincronizada. Es un conector tipo SUB-D (hembra) de 15 terminales y
admite señal senoidal.
Cuando se dispone de 4º eje se debe personalizar el parámetro máquina "P614(1)=1"
y utilizar la entrada de captación A6 para la herramienta motorizada o sincronizada.
Cuando no se dispone de 4º eje se debe personalizar el parámetro máquina "P614(1)=0".
Si se dispone de herramienta motorizada se debe personalizar el parámetro máquina
"P802" con un valor distinto de 0 y cuando se dispone de herramienta sincronizada se
deben personalizar los parámetros máquina "P802" y "P803" con un valor distinto de
0
A3 Se utiliza para conectar las señales de captación del eje Z. Es un conector tipo SUB-D
(hembra) de 15 terminales y admite señal senoidal.
A4 Se utiliza para conectar las señales de captación del 3º eje o del eje C. Es un conector
tipo SUB-D (hembra) de 15 terminales y admite señal senoidal.
Cuando la máquina dispone del 3º eje se debe personalizar el parámetro máquina
"P612(1)=1", pero si el 3º eje es el eje C se debe personalizar también el parámetro
máquina "P613(5)=1".
A5 Se utiliza para conectar las entradas de captación del encoder del cabezal. Es un
conector tipo SUB-D (hembra) de 15 terminales y admite señal cuadrada diferencial.
A6 Se utiliza para conectar las entradas de captación del volante electrónico y de la
herramienta motorizada o sincronizada (cuando se dispone del 4º eje). Es un conector
tipo SUB-D (hembra) de 9 terminales y admite señal cuadrada no diferencial.
Cuando se utiliza esta entrada para la herramienta motorizada o sincronizada se debe
personalizar el parámetro "P616(8)=1". Además, cuando se dispone de herramienta
motorizada se debe personalizar el parámetro máquina "P802" con un valor distinto de
0 y cuando se dispone de herramienta sincronizada se deben personalizar los parámetros
máquina "P802" y "P803" con un valor distinto de 0
El tipo de cable utilizado en todos ellos deberá disponer de apantallamiento global. El resto
de características así como su longitud dependerán del tipo y modelo de captación
empleado.
Se recomienda alejar el máximo posible de los conductores de potencia de la máquina el
cable utilizado en el conexionado de la captación.
SISTEMAS DE CAPTACION

PáginaCapítulo: 6 Sección:
TEMAS CONCEPTUALES
3
6.2.1 LIMITACIONES DE LA FRECUENCIA DE CONTAJE
Señales senoidales
La máxima frecuencia de contaje para sistemas de captación senoidales es de 25 KHz
(25.000 impulsos/seg.)
El avance máximo de cada eje en sistemas lineales estará en función de la resolución
seleccionada (parámetros máquina “P103, P203, P303, P403”), y del periodo de señal
de contaje utilizado.
El avance máximo de cada eje en sistemas rotativos estará en función del número de
impulsos por vuelta.
Ejemplo 1:
Si se utiliza un Transductor Lineal de periodo de señal de contaje de 20 µm, se tiene
que para resolución de 1 µm el máximo avance del eje será:
20 µm/impulso x 25.000 impulsos/seg = 500 mm/seg = 30 m/min.
Ejemplo 2:
Si se utiliza un plato divisor con encoder senoidal de 3600 impulsos por vuelta, se
tiene que para resolución de 1 µm el máximo avance del eje será:
360 °/vuelta
x 25.000 impulsos/seg. = 2.500 °/seg. = 150.000 °/min.
3.600 impulsos/vuelta
Señales cuadradas
La máxima frecuencia de contaje para sistemas de captación de señales cuadradas de
contaje diferencial es de 200 KHz (200.000 impulsos/seg.), con una separación entre
flancos de las señales A y B de 450 ns. lo que equivale a un desfase de 90º ±20º.
El avance máximo de cada eje estará en función de la resolución seleccionada,
(parámetros máquina “P103, P203, P303, P403”), y del periodo de señal de contaje
utilizado.
Si se utilizan Transductores lineales FAGOR la limitación del avance viene dada por
sus características, que será de 60 m/min.
Si se utilizan Encoders Rotativos FAGOR la limitación viene impuesta por la
frecuencia máxima de contaje del captador (200 KHz.).
SISTEMAS DE CAPTACION

Sección:Capítulo: 6
Página
TEMAS CONCEPTUALES
6.3 RESOLUCION DE LOS EJES
El CNC dispone de una serie de parámetros máquina para poder fijar la resolución de cada
uno de los ejes de la máquina.
La resolución utilizada en cada uno de los ejes indica la variación mínima que el sistema
de captación puede apreciar. Se expresará en milésimas de grado cuando se trate de un eje
rotativo, y en micras ó diezmilésimas de pulgada en los ejes longitudinales.
Los parámetros que se utilizan para definir la resolución de los ejes son los siguientes:
P103, P203, P303, P403
Definen la resolución de contaje que utiliza cada uno de los ejes.
P602(3), P612(2), P602(2), P614(2)
Indican las unidades de medida con que se personaliza el sistema de captación para
realizar la lectura de cada uno de los ejes.
P106, P206, P306, P406
Definen el tipo de señal de captación (cuadrada o senoidal) utilizada por cada uno de
los ejes.
P602(6), P612(5), P602(5), P614(5)
Indican el factor de multiplicación, x2 o x4, que el CNC aplicará a las señales de
captación de cada uno de los ejes.
P619(1), P619(3), P619(2), P619(4)
Factor multiplicador especial para las señales senoidales de cada uno de los ejes.
RESOLUCION DE LOS EJES

PáginaCapítulo: 6 Sección:
TEMAS CONCEPTUALES
5
Ejemplo 1: Resolución en "mm" con encoder de señales cuadradas
Se desea obtener una resolución de 2 µm mediante un encoder de señales cuadradas
colocado en el eje X cuyo paso de husillo es de 5 mm.
Teniendo en cuenta que el factor de multiplicación que aplica el CNC puede ser x2
o x4, se necesitará, en cada uno de los casos, de un encoder que disponga de los
siguientes impulsos por vuelta:
paso husillo
Nº impulsos =
Factor multiplicación x Resolución
Para factor de multiplicación x4:
5000 µm
Nº impulsos = = 625 impulsos/vuelta
4 x 2 µm
P103= 2 P602(3)=0 P106=N P602(6)=0
Para factor de multiplicación x2:
5000 µm
Nº impulsos = = 1250 impulsos/vuelta
2 x 2 µm
P103= 2 P602(3)=0 P106=N P602(6)=1
Si se selecciona un encoder rotativo FAGOR la frecuencia de contaje está limitada a
200 KHz (el CNC admite frecuencias de hasta 200 KHz para señales cuadradas), por
lo que el máximo avance de este eje será:
Para factor de multiplicación x4:
200.000 imp./seg.
Max. avance = x 5 mm/vuelta = 1600 mm/seg. = 96 m/min.
625 imp./vuelta
Para factor de multiplicación x2:
200.000 imp./seg.
Max. avance = x 5 mm/vuelta = 800 mm/seg. = 48 m/min.
1250 imp./vuelta
RESOLUCION DE LOS EJES

Sección:Capítulo: 6
Página
TEMAS CONCEPTUALES
6
Ejemplo 2: Resolución en "mm" con encoder de señales senoidales
Se desea obtener una resolución de 2 µm mediante un encoder de señales senoidales
colocado en el eje X cuyo paso de husillo es de 5 mm.
Existen las siguientes opciones:
Teniendo en cuenta que el CNC aplica siempre para las señales senoidales un factor
de multiplicación interno de x5, se necesita un encoder de:
paso husillo
Nº impulsos =
5 x Factor multiplicación x Resolución
Para P602(6)=x2:
5000 µm
Nº impulsos = = 250 impulsos/vuelta
5x2 x 2 µm
Por lo tanto:
Si P619(1)=0 P602(3)=0 P106=Y P602(6)=1 P103=10
Si P619(1)=1 P602(3)=0 P106=Y P602(6)=1 P103=2
Para P602(6)=x4:
5000 µm
Nº impulsos = = 125 impulsos/vuelta
5x4 x 2 µm
Por lo tanto:
Si P619(1)=0 P602(3)=0 P106=Y P602(6)=0 P103=5
Si P619(1)=1 P602(3)=0 P106=Y P602(6)=0 P103=2
Aunque los encoder rotativos FAGOR permite una frecuencia de contaje de hasta 200
KHz, el CNC lo limita a 25 KHz para señales senoidales, por lo tanto el máximo
avance de este eje será:
30 m/min. con el encoder de 250 imp./vuelta y 60 m/min. con el encoder de 125 imp./
vuelta.
RESOLUCION DE LOS EJES
P619(1)=0
P602(6) Resolución P103
x2 2 micras 10
x4 2 micras 5
P619(1)=1
P602(6) Resolución P103
x2 2 micras 2
x4 2 micras 2

PáginaCapítulo: 6 Sección:
TEMAS CONCEPTUALES
7
Ejemplo 3: Resolución en "mm" con transductor lineal de señales cuadradas
Teniendo en cuenta que el factor de multiplicación que aplica el CNC puede ser x2
o x4, se debe seleccionar un transductor lineal cuyo paso de regla sea 2 o 4 veces la
resolución requerida.
Si se utiliza un transductor lineal FAGOR con paso de regla de 20 µm, se pueden
obtener las siguientes resoluciones: 5µm (20/4), 10µm (20/2).
Por lo tanto :
Paso de regla P103 P602(3) P106 P602(6)
20µm 5 0 N 0
20µm 10 0 N 1
La frecuencia de contaje está limitada a 200 KHz para señales cuadradas, por lo que
el máximo avance que se puede alcanzar con un transductor con 20 µm de paso de
regla es:
Max. avance = 20 µm/impulso x 200000 imp./seg. = 4000 mm/seg. = 240 m/min.
Si se utilizan Transductores lineales FAGOR la limitación del avance viene dada por
sus características, que será de 60 m/min.
Ejemplo 4:
Resolución en "mm" con transductor lineal de señales senoidales
Se dispone en el eje X de un transductor lineal de señales senoidales con un paso de
regla de 20 µm y se desea obtener una resolución de 1 µm.
Existen las siguientes opciones:
Por lo tanto:
Si P619(1)=0 P602(3)=0 P106=Y P602(6)=0 P103=5
Si P619(1)=1 P602(3)=0 P106=Y P602(6)=0 P103=1
La frecuencia de contaje está limitada a 25KHz para señales senoidales, por lo que el
máximo avance de este eje será:
Max. avance = 20 µm/impulso x 25000 imp./seg. = 500 mm/seg. = 30 m/min.
Si se utilizan Transductores lineales FAGOR la limitación del avance viene dada por
sus características, que será de 60 m/min.
RESOLUCION DE LOS EJES
P619(1)=0
P602(6) Resolución P103
x4 1 micras 5
P619(1)=1
P602(6) Resolución P103
x4 1 micras 1

Sección:Capítulo: 6
Página
TEMAS CONCEPTUALES
8
Ejemplo 5: Resolución en "pulgadas" con encoder de señales cuadradas
Se desea obtener una resolución de 0,0001 pulgadas mediante un encoder de señales
cuadradas colocado en el eje X con un husillo de 4 vueltas por pulgada (0,25 pulgadas/
vuelta).
Teniendo en cuenta que el factor de multiplicación que aplica el CNC puede ser x2 o
x4, se necesitará, en cada uno de los casos, de un encoder que disponga de los siguientes
impulsos por vuelta:
paso husillo
Nº impulsos =
Factor multiplicación x Resolución
Para factor de multiplicación x4:
0,25
Nº impulsos = = 625 impulsos/vuelta
4 x 0,0001
P103= 1 P602(3)=1 P106=N P602(6)=0
Para factor de multiplicación x2:
5000 µm
Nº impulsos = = 1250 impulsos/vuelta
2 x 2 µm
P103= 1 P602(3)=1 P106=N P602(6)=1
Si se selecciona un encoder FAGOR la frecuencia de contaje está limitada a 200 KHz
(el CNC admite frecuencias de hasta 200 KHz para señales cuadradas), por lo que el
máximo avance de este eje será:
200.000 imp/seg
Max. avan. = x 0,25 pulg/vuelta
Nº imp/vuelta
Para factor de multiplicación x4: 4800 pulg/min
Para factor de multiplicación x2: 2400 pulg/min
Ejemplo 6:
Resolución en “pulgadas” con encoder de señales senoidales
Se desea obtener una resolución de 0,0001 pulgadas mediante un encoder de señales
senoidales colocado en el eje X con un husillo de 4 vueltas por pulgada (0,25 pulgadas/
vuelta).
Existen las siguientes opciones:
RESOLUCION DE LOS EJES
P619(1)=0
P602(6) Resolución P103
x2 0,0001 pulgadas 5
x4 0,0001 pulgadas 5
P619(1)=1
P602(6) Resolución P103
x2 0,0001 pulgadas 1
x4 0,0001 pulgadas 1

PáginaCapítulo: 6 Sección:
TEMAS CONCEPTUALES
9
Teniendo en cuenta que el CNC aplica siempre para las señales senoidales un factor
de multiplicación interno de x5, se necesita un encoder de:
paso husillo
Nº impulsos =
5 x Factor multiplicación x Resolución
Para P602(6)=0, x4:
0,25
Nº impulsos = = 125 impulsos/vuelta
5x4x0,0001
Si P619(1)=0 P602(3)=1 P106=Y P602(6)=0 P103=5
Si P619(1)=1 P602(3)=1 P106=Y P602(6)=0 P103=1
Para P602(6)=1, x2:
0,25
Nº impulsos = = 250 impulsos/vuelta
5x2x0,0001
Si P619(1)=0 P602(3)=1 P106=Y P602(6)=1 P103=5
Si P619(1)=1 P602(3)=1 P106=Y P602(6)=1 P103=1
Aunque los encoder rotativos FAGOR permite una frecuencia de contaje de hasta 200
KHz, el CNC lo limita a 25 KHz para señales senoidales, por lo tanto el máximo
avance de este eje será:
25.000 imp./seg.
Max. avan. = x 0,25 pulg/vuelta
impulsos/vuelta
Es decir, 3000 pulg/min para el encoder de 125 imp/vuelta y 1500 pulg/min para el
encoder de 250 imp/vuelta.
Ejemplo 7:
Resolución en “grados” con encoder de señales cuadradas
Se desea obtener una resolución de 0,005 grados mediante un encoder de señales
cuadradas colocado en el 3º eje.
Teniendo en cuenta que el factor de multiplicación que aplica el CNC para obtener una
resolución de 0,005° es x4, se necesitará un encoder que disponga los siguientes
impulsos por vuelta:
Milésimas de grado por vuelta
Nº impulsos =
Factor multiplicación x Resolución
360000
Nº impulsos = = 18000 impulsos/vuelta
4 x 5
P203= 5 P612(2)=0 P206=N P612(5)=0
Si se selecciona un encoder rotativo FAGOR la frecuencia de contaje está limitada a
200 KHz (el CNC admite frecuencias de hasta 200 KHz para señales cuadradas), por
lo que el máximo avance de este eje será:
RESOLUCION DE LOS EJES

Sección:Capítulo: 6
Página
TEMAS CONCEPTUALES
10
200.000 imp./seg.
Max. avance = = 11,111 vueltas/seg. = 666,66 rpm
18000 imp./vuelta
Ejemplo 8:
Resolución en “grados” con encoder de señales senoidales
Se desea obtener una resolución de 0.005° mediante un encoder de señales senoidales
colocado en el 3º eje.
Existe la siguiente opción:
Teniendo en cuenta que el CNC aplica siempre para las señales senoidales un factor
de multiplicación interno de x5, se necesita un encoder de:
Milésimas de grado por vuelta
Nº impulsos =
5 x Factor multiplicación x Resolución
Para P612(5)=0, x4:
360000
Nº impulsos = = 3600 impulsos/vuelta
5 x 4 x 5
P619(3)=1 P612(5)=0 P203= 5 P612(2)=0 P206=Y
Para P612(5)=1, x2:
360000
Nº impulsos = = 7200 impulsos/vuelta
5 x 2 x 5
P619(3)=1 P612(5)=1 P203= 5 P612(2)=0 P206=Y
Aunque los encoder rotativos FAGOR permite una frecuencia de contaje de hasta 200
KHz, el CNC lo limita a 25 KHz para señales senoidales, por lo tanto el máximo
avance de este eje será:
25.000 imp./seg.
Max. avan. =
impulsos/vuelta
Es decir, 416,66 rpm para el encoder de 3600 imp/vuelta y 208,33 rpm para el encoder
de 7200 imp/vuelta.
RESOLUCION DE LOS EJES
P619(3)=1
x2 0,005 grados
x4 0,005 grados

PáginaCapítulo: 6 Sección:
TEMAS CONCEPTUALES
11
6.4 AJUSTE DE LOS EJES
Para poder realizar este ajuste es necesario que los sistemas de captación de cada uno de los
ejes que dispone la máquina se encuentren conectados al CNC.
Previamente a realizar el ajuste de los ejes es conveniente situar cada uno de ellos
aproximadamente en el centro de su recorrido y colocar los topes de recorrido mecánicos
(los controlados por el armario eléctrico) próximos a dicho punto, con el fin de evitar golpes
o desperfectos.
Cerciorarse de que los ejes se encuentran en CONTROL NO CONTINUO, que no
mantienen la señal de embrague una vez alcanzada la posición seleccionada. Para ello, los
parámetros máquina P105, P205, P305 y P405 se deben encontrar personalizados mediante
la letra “N”.
Del mismo modo, comprobar que se ha personalizado el CNC de forma que se disponga
TEMPORIZACION ENTRE EL EMBRAGUE Y LA CONSIGNA de cada uno de los
ejes. Para ello, los parámetros máquina P104, P204, P304 y P404 se deben encontrar
personalizados mediante la letra “Y”.
Tras seleccionar adecuadamente los parámetros de los ejes proceder al ajuste de los mismos
siguiendo los siguientes consejos.
* El ajuste de los ejes se realizará uno a uno.
* Se conectará la salida de potencia del regulador correspondiente al eje que se desea
ajustar.
* Seleccionado el Modo de Operación Manual en el CNC, se moverá el eje que se desea
ajustar.
En caso de embalarse el eje el CNC visualizará el error de seguimiento correspondiente,
debiendo modificarse el parámetro máquina correspondiente al SIGNO DE LA
CONSIGNA. Parámetros P100, P200, P300 y P400.
* Si el eje no se embala pero el sentido de contaje es el contrario al deseado, se deberán
modificar el parámetro máquina correspondiente al SENTIDO DE CONTAJE del eje
(P101, P201, P301 y P401) y el parámetro máquina correspondiente al SIGNO DE
LA CONSIGNA (P100, P200, P300 y P400).
* Si el sentido de contaje es el correcto pero el eje se desplaza en sentido contrario al
indicado, se debe modificar el parámetro máquina correspondiente al SENTIDO DE
DESPLAZAMIENTO del eje (P102, P202, P302 y P402).
AJUSTE DE LOS EJES

Sección:Capítulo: 6
Página
TEMAS CONCEPTUALES
12
6.4.1 AJUSTE DE LA DERIVA (OFFSET) Y VELOCIDAD MAXIMA DE
AVANCE (G00)
Estos ajustes se realizarán en los reguladores de avance de los ejes y en el regulador del
cabezal.
Ajuste de la deriva (offset)
El ajuste de la deriva u “offset” de los reguladores se realizará en dos pasos:
Preajuste del “offset” del regulador
* Desconectar la entrada de consigna del regulador y cortocircuitarla mediante un
puente de hilo.
* Realizar el ajuste de la deriva mediante el potenciómetro de offset del regulador
hasta que la tensión en bornas de la tacodinamo sea 0 V. Esta comprobación se
realizará mediante un polímetro, en la escala de 200 mV. DC.
* Retirar el puente de hilo que cortocircuitaba la entrada de consigna.
Ajuste crítico del “offset” del regulador
* Se ejecutará un programa de CNC que desplace el eje a calibrar en G00 de un
lado a otro continuamente. Un programa de este tipo pudiera ser el siguiente:
N10 G00 G90 X200
N20 X-200
N30 G25 N10
Durante el movimiento del eje y con el potenciómetro de ajuste del “offset” del
regulador, se igualará el error de seguimiento obtenido en ambos sentidos del
desplazamiento.
AJUSTE DE LOS EJES

PáginaCapítulo: 6 Sección:
TEMAS CONCEPTUALES
13
Ajuste de la máxima velocidad de avance
Es conveniente ajustar todos los reguladores de forma que la máxima velocidad se
obtenga para una consigna de 9.5 V.
Del mismo modo es necesario indicar al CNC mediante el parámetro máquina
correspondiente el máximo avance o velocidad que alcanzará dicho eje. Parámetro
P111, P211, P311, P411.
La forma de calcular está velocidad máxima estará en función de las revoluciones del
motor, del sistema de reducción empleado y del tipo de husillo utilizado.
Ejemplo para el eje X:
Si se dispone de un motor cuya velocidad máxima es 3000 r.p.m. y de un husillo con
paso de 5 mm/revolución, se tiene que:
Avance máximo (G00) = r.p.m. del husillo x Paso del husillo
Por lo tanto:
P111 = 3000 r.p.m. x 5mm/rev. = 15000 mm/minuto
Para realizar el ajuste del regulador es conveniente asignar al parámetro P110 el
mismo valor que al parámetro P111.
Además se debe ejecutar un programa de CNC que desplace en G00 el eje a calibrar
de un lado a otro continuamente. Un programa de este tipo podría ser el siguiente:
N10 G00 G90 X200
N20 X-200
N30 G25 N10
Durante el movimiento del eje se debe medir la consigna que proporciona el CNC
al regulador y ajustar el potenciómetro de avance del regulador hasta que dicho valor
sea 9,5 V.
AJUSTE DE LOS EJES

Sección:Capítulo: 6
Página
TEMAS CONCEPTUALES
14
6.4.2 AJUSTE DE LAS GANANCIAS
En cada uno de los ejes será necesario realizar el ajuste de las ganancias al objeto de
conseguir la respuesta óptima del sistema para los desplazamientos programados.
Para realizar un ajuste crítico de los ejes es aconsejable utilizar un osciloscopio, observando
las señales de la tacodinamo. La siguiente figura muestra la forma óptima de esta señal (parte
izquierda) y las inestabilidades en el arranque y en la frenada que se deben de evitar.
El CNC dispone de una serie de parámetros que permiten ajustar los distintos tipos de
Ganancia de cada eje. Estos parámetros son:
GANANCIA PROPORCIONAL K1.
Se define mediante los parámetros P114, P214, P314, P414.
GANANCIA PROPORCIONAL K2.
Se define mediante los parámetros P116, P216, P316, P416.
Valor del PUNTO DE DISCONTINUIDAD.
Se define mediante los parámetros P115, P215, P315, P415.
GANANCIA FEED-FORWARD o ganancia proporcional a la velocidad de avance.
Se define mediante los parámetros P720, P722, P721, P723.
Los parámetros correspondientes a la ganancia proporcional K1 y K2, y el punto de
discontinuidad permiten ajustar la Ganancia Proporcional del eje.
El parámetro correspondiente a la Ganancia Feed-Forward o ganancia proporcional a la
velocidad de avance, se utilizará cuando se disponga de control de aceleración/deceleración
en el eje correspondiente.
AJUSTE DE LOS EJES

PáginaCapítulo: 6 Sección:
TEMAS CONCEPTUALES
15
6.4.3 AJUSTE DE LA GANANCIA PROPORCIONAL
La consigna suministrada por el CNC para gobernar un eje estará en todo momento en
función del error de seguimiento, diferencia entre la posición teórica y real, de dicho eje.
Consigna = Ganancia proporcional “K” x Error de seguimiento
En las fases de arranque y frenada el error de seguimiento del eje es muy pequeño, siendo
necesario un valor grande de K (ganancia) para que el eje responda adecuadamente.
Por el contrario, una vez alcanzado el avance programado del eje, el error de seguimiento
se mantiene prácticamente constante, siendo necesario aplicar un valor pequeño de K
(ganancia) para que el sistema se mantenga estable.
Así pues, el CNC FAGOR 8025 dispone de dos ganancias proporcionales K1 y K2, que
permiten realizar un mejor ajuste del sistema, así como de un parámetro denominado Punto
de Discontinuidad que define la zona en que actúa cada uno de ellos.
El CNC aplica la ganancia proporcional K1 siempre que el error de seguimiento del eje sea
inferior al definido en el parámetro correspondiente al punto de discontinuidad.
Cuando el error del seguimiento del eje supera el valor definido en el parámetro
correspondiente al punto de discontinuidad, el CNC aplicará la ganancia proporcional K1
para dicho valor y la ganancia proporcional K2 para el error de seguimiento restante.
Consigna = (K1 x Ep) + [K2 x (Error de seguimiento - Ep)]
Donde “Ep” es el valor definido en el parámetro correspondiente al punto de
discontinuidad y estará definido en micras.
AJUSTE DE LOS EJES

Sección:Capítulo: 6
Página
TEMAS CONCEPTUALES
16
A la hora de realizar el ajuste de la ganancia proporcional se debe tener en cuenta, que:
* El error de seguimiento máximo permisible es de 32 mm, superado éste, el CNC
visualiza el error de seguimiento del eje correspondiente.
* El error de seguimiento disminuirá al aumentar la ganancia pero se tiende a desestabilizar
el sistema.
* La práctica demuestra que la mayoría de las máquinas consiguen un buen
comportamiento con 1 mm. de error de seguimiento para un avance de desplazamiento
del eje de 1 m./minuto.
AJUSTE DE LOS EJES

PáginaCapítulo: 6 Sección:
TEMAS CONCEPTUALES
17
6.4.3.1 CALCULO DE K1, K2 Y DEL PUNTO DE DISCONTINUIDAD
El parámetro correspondiente a la GANANCIA K1 fija la consigna correspondiente a 1
micra de error de seguimiento. Se definirá mediante un número entero comprendido entre
0 y 255, correspondiendo al valor 64 una consigna de 2,5mV.
2,5mV.
Consigna (mV) = K1 x Error de Seguimiento (micras) x
64
El parámetro correspondiente al PUNTO DE DISCONTINUIDAD se define en micras
e indica el valor a partir del cual se empieza a aplicar la ganancia proporcional K2. Se
recomienda asignar un valor ligeramente superior al error de seguimiento correspondiente
al máximo avance de mecanizado F0.
El parámetro correspondiente a la GANANCIA K2 fija la consigna correspondiente a 1
micra de error de seguimiento, a partir del punto de discontinuidad.
Se definirá mediante un número entero comprendido entre 0 y 255, correspondiendo al
valor 64 una consigna de 2,5mV. Un valor típico de K2 suele oscilar entre un 50% y un 70%
de K1.
Ejemplo:
Se dispone de un eje (X) cuya velocidad máxima de posicionamiento (G00) es de 15 m/min.
El avance de mecanizado (F) se desea limitar en 3m/min. y obtener 1 milímetro de error de
seguimiento para un avance de 1 m/min.
Se asignará al parámetro P111 (avance en G00) el valor 15.000 (15 m/min) y el
regulador se ajustará de forma que para una consigna de 9.5 V se obtenga un avance
de 15 m/min.
Se asignará al parámetro P110 (máximo avance programable F0) el valor 3.000 (3 m/
min).
La consigna necesaria para obtener un avance de 1 m/min. es:
9,5 V.
Consigna = x 1 m/min = 633 mV
15 m/min
La ganancia K1 tendrá el siguiente valor:
64
K1 = 633 mV x = 16
2,5 mV
El valor teórico del punto de discontinuidad corresponde al error de seguimiento que
se alcanza con el avance de 3m/min.
1000 micras
P115 = x 3 m/min = 3.000 micras
1 m/min
AJUSTE DE LOS EJES

Sección:Capítulo: 6
Página
TEMAS CONCEPTUALES
18
Es aconsejable asignar al parámetro correspondiente a la ganancia K2 un valor
comprendido entre un 50% y un 70% de K1, con objeto de evitar cambios bruscos de
la consigna al pasar de G00 a velocidades de mecanizado bajas.
Por lo tanto:
P111 (avance en G00) = 15.000
P114 (K1) = 16
P115 (punto discontinuidad) = 3.000
P116 (K2) = 50% - 70% de K1
Si se desea realizar un ajuste práctico a pie de máquina aconsejamos utilizar el siguiente
método:
1.- Ajustar el valor de la ganancia K1.
Para ello se debe personalizar K2 = K1 o bien asignar al punto de discontinuidad un
valor muy grande, por ejemplo 50000, y ejecutar un programa que desplace el eje a
calibrar en G00 de un lado a otro continuamente. Un programa de este tipo pudiera ser
el siguiente:
N10 G00 G90 X200
N20 X-200
N30 G25 N10
Ajustar el valor de K1 hasta obtener la respuesta adecuada.
2.- Ajustar el valor del punto de discontinuidad.
Volver a ejecutar el programa anterior y observar el valor que alcanza el error de
seguimiento.
Personalizar el parámetro correspondiente al punto de discontinuidad con dicho valor
o con uno ligeramente superior.
3.- Una vez ajustado el valor de K1 y del punto de discontinuidad, asignar al parámetro
correspondiente a la ganancia K2 un valor comprendido entre un 50% y un 70%
de K1.
Atención:
Una vez ajustados los ejes por separado es aconsejable reajustar los ejes que
interpolan entre si de forma conjunta, de forma que los errores de seguimiento
de los ejes para una misma velocidad sean iguales.
Cuanto más parecidos sean los errores de seguimiento de los ejes el CNC
efectuará mejor las interpolaciones circulares que se han programado
AJUSTE DE LOS EJES

PáginaCapítulo: 6 Sección:
TEMAS CONCEPTUALES
19
6.4.4 AJUSTE DE LA GANANCIA FEED-FORWARD.
La ganancia Feed-Forward permite mejorar el lazo de posición de los ejes, minimizando
de esta forma el error de seguimiento. Esta ganancia se debe utilizar únicamente cuando se
trabaja con control de aceleración y deceleración.
El CNC dispone de 2 tipos de aceleración/deceleración:
Aceleración/deceleración lineal
Se aplica fundamentalmente en los desplazamientos que se efectúan en G00 y F00,
aunque también es posible utilizarlo en desplazamientos en G01.
Aceleración/deceleración en forma de campana
Este tipo de aceleración se puede aplicar en todo tipo de movimiento, G00, G01, G02,
etc. y con cualquier tipo de avance F.
6.4.4.1 CALCULO DE LA GANANCIA FEED-FORWARD.
La ganancia Feed-Forward o ganancia proporcional a la velocidad de avance, se define
mediante los parámetros P720, P722, P721, P723, que indican el porcentaje de consigna
que es debido al avance programado.
El valor que se sumará al error de seguimiento es (Kf x F/6), donde Kf es el valor de Feed-
Forward seleccionado mediante el parámetro máquina correspondiente y F es el avance
programado.
El CNC aplicará la ganancia proporcional (K1 y K2) al valor resultante de la suma del error
de seguimiento de la máquina más el valor seleccionado mediante la ganancia Feed-
Forward.
La formula que aplicará el CNC cuando el valor resultante de la suma es inferior al valor
asignado al punto de discontinuidad es:
Consigna = K1 x [Error de seguimiento + (Kf x F/6)]
Y cuando el valor resultante de la suma es superior al valor del punto de discontinuidad:
Consigna = (K1 x Ep) + {K2 x [Error de seguimiento + (Kf x F/6) - Ep]}
Donde “Ep” es el valor definido en el parámetro correspondiente al punto de
discontinuidad.
AJUSTE DE LOS EJES

Sección:Capítulo: 6
Página
TEMAS CONCEPTUALES
20
6.4.5 COMPENSACION DE ERROR DE HUSILLO
El CNC permite compensar el error de medición causado por la inexactitud de los husillos
que se utilizan en cada eje, así como la holgura del mismo cuando se cambia el sentido de
desplazamiento del eje.
Si dispone de 2 tablas de compensación de husillo de 30 puntos cada una, una para el eje
X (parámetros P0 a P59) y otra para el eje Z (parámetros P60 a P119).
Para bloquear o desbloquear el acceso a la tabla de compensación de error de husillo, a los
parámetros máquina y a la tabla de funciones auxiliares M decodificadas se debe:
* Pulsar la tecla [OP MODE]
* Pulsar la tecla [6] para seleccionar el modo Editor.
* Pulsar la tecla de función correspondiente a la opción [BLOQ DESBLO]. En la pantalla
aparece el texto "CODIGO: "
* Teclear la secuencia de caracteres "PKAI1" y la tecla [ENTER] para bloquear el acceso,
o la secuencia de caracteres "PKAI0" y la tecla [ENTER] para desbloquear el acceso.
Precaución en el modelo CNC + PLCI:
Siempre que se utiliza el código de bloqueo el CNC almacena en la memoria EEPROM
los parámetros máquina, las funciones "M" decodificadas y las tablas de compensación
de error de husillo.
Asimismo, cuando se utiliza el código de desbloqueo el CNC recupera de la memoria
EEPROM los parámetros máquina, las funciones "M" decodificadas y las tablas de
compensación de error de husillo.
Para acceder a las tablas de compensación de error de husillo se debe pulsar la siguiente
secuencia de teclas:
[OP MODE] Muestra los distintos modos de operación
[9] Accede a los modos especiales
[3] Accede a la opción compensación de error de husillo
El usuario podrá avanzar o retroceder mediante las teclas [flecha arriba] y [flecha abajo].
Si se desea visualizar un determinado parámetro se permite teclear el número del parámetro
deseado y de la tecla [RECALL]. El CNC mostrará la página correspondiente a dicho
parámetro.
Cuando se desea inicializar la tabla asignando a todos los parámetros el valor 0 se debe
teclear el código: [K] [A] [I] [ENTER].
Cada pareja de parámetros de la tabla representa:
Parámetro par La posición que ocupa un punto del perfil, vendrá definido por su cota
referida al cero máquina.
Valores posibles: ±8388,607 milímetros ó ±330,2599 pulgadas
COMPENSACION ERROR
DE HUSILLO

PáginaCapítulo: 6 Sección:
TEMAS CONCEPTUALES
21
Parámetro impar El error que tiene el husillo en dicho punto.
Valores posibles: ±32,766 milímetros ó ±1,2900 pulgadas
Al definir los diferentes puntos del perfil en la tabla, se deberán cumplir los siguientes
requisitos:
* Los puntos de la tabla (parámetros pares) estarán ordenados según su posición en el eje,
debiendo comenzar la tabla (P0 o P60) por el punto más negativo o menos positivo que
se vaya a compensar.
* Si no se definen todos los puntos de la tabla, se deben definir con valor 0 todos los
parámetros no utilizados.
* A los tramos del eje que se encuentran fuera de esta zona, el CNC les aplicará la
compensación definida para el extremo que más próximo se encuentre.
* El punto de referencia máquina tiene que tener error 0.
* La distancia entre dos puntos consecutivos (parámetros impares consecutivos) estará
comprendido entre 524,278 milímetros ó 29,6212 pulgadas
* La diferencia de error entre dos puntos consecutivos (parámetros impares consecutivos)
estará comprendido entre:
Valores posibles: ±0,127 milímetros ó ±0,0050 pulgadas
* El gráfico correspondiente al error del husillo no podrá tener pendientes superiores al
3%.
Ejemplo: Si la distancia entre dos puntos consecutivos es 3 mm, la diferencia de error
entre ambos puntos debe ser igual o menor que 0,009 mm.
Para EDITAR un parámetro se debe teclear el número del parámetro deseado y el signo "=".
A continuación introducir el valor que se desea asignar al parámetro o desplazar, mediante
las teclas de JOG, el eje correspondiente hasta el punto deseado y pulsar la tecla [ENTER].
Para que dicho valor sea introducido en la tabla se debe pulsar la tecla [ENTER].
Se debe tener en cuenta que una vez personalizados todos los parámetros se debe pulsar la
tecla [RESET], o bien desconectar y conectar el CNC para que dichos valores sean
asumidos por el CNC.
COMPENSACION ERROR
DE HUSILLO

Sección:Capítulo: 6
Página
TEMAS CONCEPTUALES
22
Ejemplo de programación:
Se desea compensar el error de husillo del eje X en el tramo X-20 a X160 según la
siguiente gráfica de error de husillo:
Teniendo en cuenta que el punto de referencia máquina tiene valor X30 (se encuentra
situado a 30 mm del punto Cero Máquina), se deben definir los parámetros de la
siguiente forma:
P000 = X -20,000 P001 = X 0,001
P002 = X 0,000 P003 = X -0,001
P004 = X 30,000 P005 = X 0,000
P006 = X 60,000 P007 = X 0,002
P008 = X 90,000 P009 = X 0,001
P010 = X 130,000 P011 = X -0,002
P012 = X 160,000 P013 = X -0,003
P014 = X 0,000 P015 = X 0,000
P016 = X 0,000 P017 = X 0,000
" " " "
" " " "
P056 = X 0,000 P057 = X 0,000
P058 = X 0,000 P059 = X 0,000
COMPENSACION ERROR
DE HUSILLO

PáginaCapítulo: 6 Sección:
TEMAS CONCEPTUALES
23
6.5 SISTEMAS DE REFERENCIA
6.5.1 PUNTOS DE REFERENCIA
Una máquina dirigida por control numérico, necesita tener definidos los siguientes puntos
de origen y de referencia:
Cero máquina o punto de origen de la máquina. Es fijado por el constructor como el origen
del sistema de coordenadas de la máquina.
Cero pieza o punto de origen de la pieza. Es el punto de origen que se fija para la
programación de las medidas de la pieza, puede ser elegido libremente por el programador
y su referencia con el cero máquina se fija mediante el decalaje de origen.
Punto de referencia. Es un punto de la máquina fijado por el fabricante.
* Cuando el sistema de captación dispone de Io codificado, este punto se utiliza
únicamente cuando el eje dispone de compensación de error de husillo. El error de
husillo en el punto de referencia máquina debe ser 0.
* Cuando el sistema de captación no dispone de Io codificado el CNC, además de
utilizar este punto en la compensación de error de husillo, realiza la sincronización
del sistema en este punto, en lugar de desplazarse hasta el origen de la máquina.
M Cero Máquina
W Cero Pieza
R Punto de referencia máquina
XMW, ZMW, etc Coordenadas del cero pieza
XMR, ZMR, etc Coordenadas del punto de referencia máquina
SISTEMAS DE REFERENCIA

Sección:Capítulo: 6
Página
TEMAS CONCEPTUALES
24
6.5.2 BUSQUEDA DE REFERENCIA MAQUINA
El CNC permite realizar la búsqueda de referencia máquina en modo manual o por
programa.
Cuando se programa la búsqueda de referencia de varios ejes en un mismo bloque, el CNC
efectúa la búsqueda eje a eje y en el orden indicado.
La búsqueda de referencia de cada eje se efectúa del siguiente modo:
El eje se desplaza en el sentido indicado por el parámetro máquina de ejes correspondiente,
"P618(8), P618(6), P618(7), P618(5)".
En ejes cuyo sistema de captación no dispone de Io codificado:
El eje se desplaza al avance indicado en los parámetros máquina de ejes "P112, P212,
P312, P412" hasta que se pulsa el micro de referencia máquina, parámetro máquina de
ejes "P600(5), P612(6), P600(4), P614(6)".
Una vez pulsado el micro la búsqueda continuará según el avance indicado en los
parámetros máquina de ejes "P807, P809, P808, P810", hasta que se reciba el impulso
de Io de los sistemas de captación, dando por finalizada la búsqueda de referencia
máquina del eje.
En ejes cuyo sistema de captación dispone de Io codificado:
El eje se desplaza, al avance indicado en los parámetros máquina de ejes "P807, P809,
P808, P810", la cantidad mínima, 20mm o 100mm, dando por finalizada la búsqueda
de referencia máquina del eje.
Si la búsqueda se realiza en el modo de operación MANUAL, se anulará el traslado de
origen que se encontraba seleccionado (cero pieza). Las cotas visualizadas estarán referidas
al Cero Máquina.
En el resto de los casos se conservará el cero pieza seleccionado, por lo que las cotas
visualizadas estarán referidas a dicho Cero Pieza.
SISTEMAS DE REFERENCIA

PáginaCapítulo: 6 Sección:
TEMAS CONCEPTUALES
25
6.5.3 AJUSTE EN SISTEMAS QUE NO DISPONEN DE Io CODIFICADO
6.5.3.1 AJUSTE DEL PUNTO DE REFERENCIA MAQUINA
El ajuste del punto de referencia se debe realizar eje a eje, siendo aconsejable utilizar el
siguiente proceso:
* Indicar en el parámetro máquina correspondiente el tipo de impulso de Io que dispone
el sistema de captación para realizar la búsqueda del punto de referencia máquina.
Parámetros "P600(7)", "P612(7)", "P600(6)" y "P614(7)" .
* Asimismo, se indicará en el parámetro máquina correspondiente el sentido en el que se
desplazará el eje durante la búsqueda de dicho punto. Parámetros "P618(8)", "P618(6)",
"P618(7)", "P618(5)".
* Además, se deben personalizar los parámetros máquina que definen la velocidad de
aproximación del eje hasta que se pulsa el micro de referencia máquina (P112, P212,
P312, P412), y la velocidad en que continuará realizándose la búsqueda del punto de
referencia máquina (P807, P809, P808, P810).
* Al punto de referencia máquina se le asignará el valor 0. Parámetro P119, P219, P319,
P419.
* Seleccionado el Modo de Operación Manual en el CNC, y tras posicionar el eje en la
posición adecuada, se ejecutará el comando de búsqueda del punto de referencia
máquina de este eje. Al finalizar el mismo el CNC asignará a este punto el valor 0.
* Tras desplazar el eje hasta el punto cero máquina, o hasta un punto de dimensiones
conocidas respecto al cero máquina, se observará la lectura que el CNC realiza de dicho
punto.
Esta será la distancia que lo separa del punto de referencia máquina, por lo tanto, el valor
que se debe asignar al parámetro máquina que define la cota correspondiente al punto
de referencia máquina. Parámetro P119, P219, P319, P419.
P*19 = Cota máquina del punto - Lectura del CNC en dicho punto.
Ejemplo para el eje X: Si el punto de dimensiones conocidas se encuentra a 230
mm del cero máquina y si el CNC muestra la cota -123.5 mm, la cota que tiene
el punto de referencia máquina respecto al cero máquina será:
Parámetro máquina P119 = 230 - (-123.5) = 353.5 mm.
* Tras asignar este nuevo valor al parámetro máquina que define la cota correspondiente
al punto de referencia máquina, es necesario pulsar la tecla RESET o bien desconectar/
conectar el CNC, para que este valor sea asumido por el CNC.
* Es necesario realizar una nueva búsqueda del punto de referencia máquina para que este
eje tome los valores correctos.
SISTEMAS DE REFERENCIA

Sección:Capítulo: 6
Página
TEMAS CONCEPTUALES
26
6.5.3.2 CONSIDERACIONES
* Si en el momento de iniciarse la búsqueda de referencia máquina se encuentra pulsado
el micro de referencia máquina, el eje retrocederá (sentido contrario al indicado en el
parámetro máquina de ejes “P618(8), P618(6), P618(7), P618(5)”) hasta liberar el
micro, antes de comenzar la búsqueda de referencia máquina.
* Si el eje se encuentra posicionado fuera de los límites de recorrido fijados por software
(parámetros máquina “P107-P108, P207-P208, P307-P308, P407-P408”), es necesario
mover el eje manualmente para introducirlo en la zona de trabajo y a continuación
situarlo en la zona adecuada para la realización de la búsqueda de referencia máquina.
* Se debe tener cuidado a la hora de situar el micro de referencia máquina y al programar
los avances de búsqueda de referencia máquina, parámetros máquina “P112, P212,
P312, P412, P807, P809, P808 ,P810”.
* Si el eje seleccionado no dispone de micro para la búsqueda del punto de referencia
máquina (parámetro máquina de ejes “P600(5), P612(6), P600(4), P614(6)”), el CNC
supondrá que el mismo se encuentra pulsado cuando se ejecute el comando de
búsqueda de referencia máquina, ejecutándose únicamente un desplazamiento según
el avance indicado en el parámetro máquina de ejes “P807, P809, P808 ,P810” hasta
que se reciba el impulso de Io del sistema de captación, dando por finalizada la búsqueda
de referencia máquina.
* Los transductores lineales FAGOR disponen de un impulso de Io negativo cada 50 mm
(parámetros "P600(7), P612(7), P600(6), P614(7)" = 0) y los Encoders FAGOR
proporcionan un impulso de Io positivo por vuelta (parámetros "P600(7), P612(7),
P600(6), P614(7)" = 1).
* El micro de referencia máquina se situará de modo que el impulso de “Io” se produzca
siempre en la zona correspondiente al segundo avance (definido por los parámetros
máquina “P807, P809, P808 ,P810”).
Si no existe espacio para ello se debe reducir el primer avance que se encuentra definido
por los parámetros máquina “P112 ,P212, P312, P412”. Por ejemplo, captadores
rotativos en los que la distancia entre dos impulsos de referencia consecutivos es muy
pequeña.
SISTEMAS DE REFERENCIA

PáginaCapítulo: 6 Sección:
TEMAS CONCEPTUALES
27
6.5.4 AJUSTE EN SISTEMAS QUE DISPONEN DE Io CODIFICADO
6.5.4.1 AJUSTE DEL OFFSET DE LA REGLA
El ajuste del offset de la regla se debe realizar eje a eje, siendo aconsejable utilizar el
siguiente proceso:
* Indicar en el parámetro máquina correspondiente el tipo de impulso de Io que dispone
el sistema de captación. Parámetros "P600(7)", "P612(7)", "P600(6)" y "P614(7)" .
* Asimismo, se indicará en el parámetro máquina correspondiente el sentido en el que se
desplazará el eje durante la búsqueda de dicho punto. Parámetros "P618(8)", "P618(6)",
"P618(7)", "P618(5)".
* Además, se deben personalizar los parámetros máquina que definen la velocidad del eje
en la búsqueda del Cero Máquina. Parámetros "P807, P809, P808, P810".
* Al parámetro que indica el offset de la regla se le asignará el valor 0. Parámetro " P908,
P909, P910, P911".
* Seleccionado el Modo de Operación Manual en el CNC, y tras posicionar el eje en la
posición adecuada, se ejecutará el comando de búsqueda de Cero Máquina de este eje.
Al finalizar el mismo el CNC mostrará la cota del eje referida al Cero la Regla.
* Tras desplazar el eje hasta el punto cero máquina, o hasta un punto de dimensiones
conocidas respecto al cero máquina, se observará la lectura que el CNC realiza de dicho
punto.
El valor que se debe asignar al parámetro máquina que define el offset de la regla, se
debe calcular mediante la siguiente fórmula.
Valor = Lectura del CNC en dicho punto - Cota máquina del punto.
Ejemplo para el eje X: Si el punto de dimensiones conocidas se encuentra a 230
mm del cero máquina y el CNC muestra la cota 423.5 mm, el offset de la regla
será:
Parámetro máquina P908 = 423,5 - 230 = 193.5 mm.
* Tras asignar este nuevo valor al parámetro máquina que define el offset de la regla es
necesario pulsar la tecla RESET o bien desconectar/conectar el CNC, para que este
valor sea asumido por el CNC.
* Es necesario realizar una nueva búsqueda del Cero Máquina para que este eje tome los
valores correctos.
SISTEMAS DE REFERENCIA

Sección:Capítulo: 6
Página
TEMAS CONCEPTUALES
28
SISTEMAS DE REFERENCIA
6.5.4.2 CONSIDERACIONES
* Si el eje se encuentra posicionado fuera de los límites de recorrido fijados por software
(parámetros máquina "P107-P108, P207-P208, P307-P308, P407-P408"), es necesario
mover el eje manualmente para introducirlo en la zona de trabajo.
* Cuando se utilizan transductores lineales que disponen de Io codificado no hace falta
disponer de micro de referencia máquina.
No obstante, se puede utilizar el micro de referencia máquina como límite de recorrido
durante la búsqueda de referencia máquina.
Si durante la búsqueda de referencia máquina se pulsa el micro de referencia máquina,
el eje invertirá el sentido de avance del eje y la búsqueda se efectuará en sentido
contrario.
* Los transductores lineales FAGOR disponen de Io codificado negativo. Parámetros
"P600(7), P612(7), P600(6), P614(7)" = 0.

PáginaCapítulo: 6 Sección:
TEMAS CONCEPTUALES
29
6.5.5 LIMITES DE RECORRIDO DE LOS EJES (límites de SOFTWARE)
Una vez realizada la búsqueda del punto de referencia máquina en todos los ejes, se
procederá a realizar la medición de los límites de recorrido por software de cada uno de los
ejes.
Este proceso que se realizará eje a eje, se podrá realizar como sigue:
* Desplazar el eje en sentido positivo hasta un punto próximo del tope de recorrido
mecánico, manteniendo una distancia de seguridad del mismo.
* Asignar la cota que indica el CNC para dicho punto al parámetro máquina
correspondiente al límite de software positivo. Parámetro P107, P207, P307, P407.
* Repetir esta secuencia pero en sentido negativo, asignando la cota indicada por el
CNC al parámetro máquina correspondiente al límite de software negativo. Parámetro
P108, P208, P308, P408.
* Una vez finalizado este proceso en todos los ejes, es necesario pulsar la tecla RESET
o bien desconectar/conectar el CNC, para que estos valores sean asumidos por el
CNC.
SISTEMAS DE REFERENCIA

Sección:Capítulo: 6
Página
TEMAS CONCEPTUALES
30
6.6 FUNCIONES AUXILIARES M, S, T
Función auxiliar M
El CNC permite al usuario disponer de hasta 100 funciones auxiliares, M00 a M99.
En un bloque de programa se pueden definir hasta 7 funciones auxiliares M, que serán
enviadas al armario eléctrico cada vez que se ejecute dicho bloque.
El CNC envía al armario eléctrico, en código BCD y a través de los terminales 20 a 27
del conector I/O 1, el número de la función auxiliar M que se ha ejecutado.
Asimismo, se debe tener en cuenta que el CNC dispone de una tabla interna de
funciones auxiliares M decodificadas. La forma de acceder a dicha tabla y operar con
la misma se indica más adelante.
Cada vez que se ejecuta una función M que se encuentra personalizada en esta tabla el
CNC actualiza con los valores definidos en la tabla las salidas M decodificadas del
conector I/O 2.
El parámetro máquina "P606(7)" indica si cada vez que se ejecuta una función M
definida en la tabla el CNC debe, además de actualizar las salidas M decodificadas del
conector I/O 2, enviar al exterior a través de los terminales 20 a 27 del conector I/O 1
el número de M que se ha ejecutado.
Función S
Se utilizará únicamente cuando se dispone de salida de consigna de cabezal en BCD,
parámetro máquina "P601(3)=1".
Siempre que se ejecute un bloque en el que se ha programado una nueva velocidad de
cabezal "S", el CNC enviará al armario eléctrico, a través de los terminales 20 a 27 del
conector I/O 1, el código correspondiente a dicha velocidad.
Función T
Siempre que se ejecute un bloque en el que se ha programado una nueva herramienta
"T", el CNC enviará al armario eléctrico, a través de los terminales 20 a 27 del conector
I/O 1, el código correspondiente a dicha herramienta para que la misma sea seleccionada
en el almacén.
Además, el CNC dispone de una tabla en la que se deben definir la forma y dimensiones
de cada una de las herramientas. De esta forma se podrán obtener acabados más
precisos.
La forma de operar con esta tabla se encuentra detallada en el manual de Operación y
para acceder a ella se debe pulsar la siguiente secuencia de teclas:.
[OP MODE] Muestra los distintos modos de operación
[8] Accede a la tabla de herramientas
FUNCIONES AUXILIARES "M,
S, T"

PáginaCapítulo: 6 Sección:
TEMAS CONCEPTUALES
31
6.6.1 TABLA DE LAS FUNCIONES M DECODIFICADAS
Para bloquear o desbloquear el acceso a la tabla de funciones auxiliares M decodificadas,
a los parámetros máquina y a la tabla de compensación de error de husillo, se debe:
* Pulsar la tecla [OP MODE]
* Pulsar la tecla [6] para seleccionar el modo Editor.
* Pulsar la tecla de función correspondiente a la opción [BLOQ DESBLO]. En la pantalla
aparece el texto "CODIGO: "
* Teclear la secuencia de caracteres "PKAI1" y la tecla [ENTER] para bloquear el acceso,
o la secuencia de caracteres "PKAI0" y la tecla [ENTER] para desbloquear el acceso.
Precaución en el modelo CNC + PLCI:
Siempre que se utiliza el código de bloqueo el CNC almacena en la memoria EEPROM
los parámetros máquina, las funciones "M" decodificadas y las tablas de compensación
de error de husillo.
Asimismo, cuando se utiliza el código de desbloqueo el CNC recupera de la memoria
EEPROM los parámetros máquina, las funciones "M" decodificadas y las tablas de
compensación de error de husillo.
Para acceder a la tabla de funciones auxiliares M decodificadas se debe pulsar la siguiente
secuencia de teclas:
[OP MODE] Muestra los distintos modos de operación
[9] Accede a los modos especiales
[2] Accede a la tabla de funciones auxiliares M decodificadas
El CNC muestra para cada una de las funciones M que se ha personalizado la siguiente
información:
M41 100100100100100 (salidas que se activan)
00100100100100100 (salidas que se desactivan)
* El número de función M personalizada, en el ejemplo M41. El valor Mxx indica que
dicha posición se encuentra libre y que puede personalizarse cualquier M en su lugar.
* La primera fila está formada por 15 caracteres. Cada uno de ellos corresponde a cada
una de las salidas M decodificadas del conector I/O2 y el valor asignado a cada uno de
ellos indica los siguiente:
0 La función no debe activar la salida M decodificada del conector I/O 2
1 La función debe activar la salida M decodificada del conector I/O 2
* La segunda fila está formada por 17 caracteres. Los 15 primeros corresponden, al igual
que los de la fila superior, a cada una de las salidas M decodificadas del conector I/O2
y el valor asignado a cada uno de ellos indica los siguiente:
0 La función no debe desactivar la salida M decodificada del conector I/O 2
1 La función debe desactivar la salida M decodificada del conector I/O 2
El bit 16 indica si la función M se ejecuta al principio (0) del bloque en que está
programada, o al final (1) del mismo una vez efectuados los desplazamientos
programados.
FUNCIONES AUXILIARES "M,
S, T"

Sección:Capítulo: 6
Página
TEMAS CONCEPTUALES
32
El bit 17 indica cómo se realiza la transferencia al armario eléctrico de la función auxiliar
M correspondiente. Ver el siguiente apartado.
Por ejemplo: Si la tabla correspondiente a la función M41 se ha personalizado de la siguiente
forma:
M41 100100100100100 (salidas que se activan)
00100100100100100 (salidas que se desactivan)
El CNC actuará de la siguiente forma cada vez que se ejecute la función auxiliar M41
FUNCIONES AUXILIARES "M,
S, T"
M01 M02 M03 M04 M05 M06 M07 M08 M09 M10 M11 M12 M13 M14 M15
Terminal
I/O2
3 4 5 6 7 8 9 10 11 12 13 25 24 23 22
a 24V
x x x x x
a 0V
x x x x x
No
modifica
x x x x x

PáginaCapítulo: 6 Sección:
TEMAS CONCEPTUALES
33
6.6.2 TRANSFERENCIA DE LAS FUNCIONES AUXILIARES M, S, T
Cada vez que se ejecuta un bloque, el CNC pasa información al armario eléctrico de las
funciones M, S y T que se activan en el mismo.
Primeramente se pasa la información correspondiente a las funciones M, luego la
correspondiente a las funciones S y por último la correspondiente a las funciones T.
Función M:
El CNC analiza las funciones M programadas en el bloque y en función de como se
encuentren definidas, las pasará al armario eléctrico antes y/o después del movimiento.
Cuando se debe enviar más de una función M al armario eléctrico (antes o después del
movimiento), el CNC las enviará una a una comenzando por la primera que se
encuentra programada en el bloque y continuando con la siguiente una vez finalizada
la transmisión de la misma.
Para ello utiliza las salidas BCD (terminales 20 a 27 del conector I/O 1) y activa la
salida “M Strobe” para indicar al armario eléctrico que debe ejecutarlas.
Dependiendo de cómo se encuentren definidas estas funciones en la tabla, el CNC
debe esperar o no la activación de la entrada “M EJECUTADA” para dar por
finalizada su ejecución.
Si se ejecuta una función auxiliar M que no se encuentra definida en la tabla de
funciones M, la función programada se ejecutará al principio del bloque y el CNC
esperará la señal “M EJECUTADA” para continuar la ejecución del programa.
Función S:
Si se ha programado una S y se dispone de salida S en BCD, el CNC pasará dicho valor
en las salidas BCD (terminales 20 a 27 del conector I/O 1) y activará la salida “S
Strobe” para indicar al armario eléctrico que debe ejecutarla.
Esta transmisión se realiza al comienzo de la ejecución del bloque y el CNC esperará
la activación de la señal “M EJECUTADA” para dar por finalizada su ejecución.
Función T:
El CNC indicará mediante las salidas BCD (terminales 20 a 27 del conector I/O 1) la
función T que se ha programado en el bloque y activará la salida “T Strobe” para
indicar al armario eléctrico que debe ejecutarla.
Esta transmisión se realiza al comienzo de la ejecución del bloque y el CNC esperará
la activación de la señal “M EJECUTADA” para dar por finalizada su ejecución.
FUNCIONES AUXILIARES "M,
S, T"

Sección:Capítulo: 6
Página
TEMAS CONCEPTUALES
34
6.6.3 TRANSFERENCIA DE LAS FUNCIONES "M, S, T" USANDO LA
SEÑAL “M EJECUTADA”
Cuando al parámetro "P602(7)" se le asigna el valor "0", el CNC mantiene activas durante
100 milisegundos las salidas BCD y la señal de Strobe correspondiente a la función "M,
S, T" seleccionada.
Si el armario eléctrico necesita que las señales del CNC se mantengan activas durante más
tiempo se debe personalizar el parámetro máquina "P602(7)" con el valor "1".
El CNC actúa en cada uno de los casos del siguiente modo:
“P602(7)=0”
1.- El CNC pasa los valores correspondientes a la función seleccionada, en las salidas BCD
(terminales 20 a 27 del conector I/O 1).
50 milisegundos más tarde se activa la salida “Strobe” correspondiente para indicar al
armario eléctrico que se debe ejecutar la función auxiliar requerida.
2.- Al detectar el armario eléctrico la activación de una de las señales de “Strobe”, debe
comenzar la ejecución de la función correspondiente, desactivando o no la entrada “M
EJECUTADA”.
3.- El CNC mantendrá durante 100 milisegundos la señal de "Strobe" y durante 50
milisegundos más las salidas BCD.
Finalizado dicho tiempo esperará que el armario eléctrico active la señal “M
EJECUTADA” indicando de este modo al CNC que ha finalizado el tratamiento de la
función requerida.
Si no se desactivó la señal "M EJECUTADA" en el punto 2, el CNC dará por finalizada
la transferencia de la función auxiliar tras desaparecer las señales BCD (no existe
ninguna espera).
FUNCIONES AUXILIARES "M,
S, T"

PáginaCapítulo: 6 Sección:
TEMAS CONCEPTUALES
35
“P602(7)=1”
Este tipo de transferencia se utiliza cuando se dispone en el armario eléctrico de un
dispositivo que necesita que las señales del CNC se mantengan activas durante más
tiempo.
1.- El CNC pasa los valores correspondientes a la función seleccionada, en las salidas
BCD (terminales 20 a 27 del conector I/O 1).
50 milisegundos más tarde se activa la salida “Strobe” correspondiente para indicar
al armario eléctrico que se debe ejecutar la función auxiliar requerida.
2.- Al detectar el armario eléctrico la activación de una de las señales de “Strobe” debe
comenzar la ejecución de la función correspondiente, desactivando la entrada “M
EJECUTADA” para indicar al CNC que comienza la ejecución de la función
correspondiente.
3.- El CNC mantendrá aún durante 100 milisegundos la señal de “Strobe” y durante
150 milisegundos las salidas BCD.
Finalizado dicho tiempo esperará que el armario eléctrico active la señal “M
EJECUTADA”, indicando de este modo al CNC que ha finalizado el tratamiento
de la función requerida.
Atención:
Es posible personalizar una función auxiliar M para que siempre espere la
activación - desactivación de la señal M Ejecutada.
Para ello se debe personalizar en la tabla de funciones auxiliares M, el
correspondiente bit 17 de la fila inferior con el valor "1".
El CNC al ejecutar esta M no tiene en cuenta el valor asignado al parámetro
"P602(7)", ejecutándola como se ha explicado para el caso de "P602(7)=1".
El CNC tiene en cuenta el parámetro "P602(7)" en los siguientes casos:
* En la ejecución de las funciones "S".
* En la ejecución de las funciones "T".
* Al ejecutar una función auxiliar "M" no definida en la tabla.
* Al ejecutar una función auxiliar "M" definida en la tabla con el bit 17 de
la fila inferior con el valor "0".
FUNCIONES AUXILIARES "M,
S, T"

Sección:Capítulo: 6
Página
TEMAS CONCEPTUALES
36
6.7 CABEZAL
Dependiendo de cómo se hayan personalizado los parámetros máquina "P601(3)" y
"P601(2)", el CNC proporciona una de las siguientes salidas:
* Salida de consigna analógica (±10V), a través de los terminales 36 y 37 del conector I/
O1.
* Salida de consigna en formato BCD de 2 dígitos, a través de los terminales 20 a 27 del
conector I/O1.
* Salida de consigna en formato BCD de 4 dígitos, a través de los terminales 20 a 27 del
conector I/O1.
Salida Analógica
Cuando se desea que el CNC proporcione una salida analógica para el regulador del
cabezal se deben personalizar los parámetros máquina de cabezal “P601(3)” y
“P601(2)” con el valor 0.
El CNC generará la señal analógica correspondiente a la velocidad de giro programada
(S), dentro del rango ±10 V.
Si se desea una consigna unipolar se debe personalizar el parámetro máquina del
cabezal “P607(4)” con el valor “1”. El signo de dicha consigna se define mediante el
parámetro máquina de cabezal “P601(4)”.
Siempre que se selecciona una velocidad de cabezal que implica cambio de gama, el
CNC generará automáticamente la función M asociada a la nueva gama de cabezal
“M41, M42, M43, M44”.
Salida BCD
Cuando se desea que el CNC proporcione una salida BCD para controlar el cabezal
se deben personalizar adecuadamente los parámetros máquina de cabezal “P601(3)”
y “P601(2)”.
Si se desea salida BCD de 2 dígitos P601(3)=1 y P601(2)=0
Si se desea salida BCD de 4 dígitos P601(3)=0 y P601(2)=1
El CNC mostrará en las salidas BCD (terminales 20 a 27 del conector I/O 1) el código
BCD correspondiente a la velocidad “S” programada, y activa la salida “S Strobe”
para indicar al armario eléctrico que se debe ejecutar la función auxiliar requerida.
Esta información se muestra al comienzo de la ejecución del bloque programado y el
CNC esperará que el armario eléctrico active la señal “M EJECUTADA”, indicando
de este modo al CNC que ha finalizado el tratamiento de la función requerida.
Si se desea salida BCD de 2 dígitos “P601(3)=1 y P601(2)=0”, el CNC indicará la
velocidad del cabezal seleccionada según la siguiente tabla de conversión:
CABEZAL

PáginaCapítulo: 6 Sección:
TEMAS CONCEPTUALES
37
Cuando se programa un valor superior a 9999 el CNC indicará la velocidad de
cabezal correspondiente al valor 9999.
Ejemplo:
Si se selecciona el valor S800, el CNC mostrará el valor "S78" en formato BCD,
es decir:
Si se desea salida BCD de 4 dígitos “P601(3)=0 y P601(2)=1”, el CNC proporcionará
el valor correspondiente a la S programada en dos fases, con un retardo entre fases de
100 mseg.
Además activa la salida “S Strobe” en cada una de las fases y esperará la señal “M
EJECUTADA” procedente del armario eléctrico en cada una de dichas fases.
En la primera fase se mostrarán los valores correspondientes a los Millares y Centenas
y en la segunda fase los correspondientes a las Decenas y Unidades. Los terminales del
conector I/O 1 correspondientes a cada uno de ellos son los siguientes:
CABEZAL
MST80 MST40 MST20 MST10 MST08 MST04 MST02 MST01
Terminal
20 21 22 23 24 25 26 27
Valor
0 1 1 1 1 0 0 0
S
Programada
S BCD
S
Programada
S BCD
S
Programada
S BCD
S
Programada
S BCD
0 S 00 25-27 S 48 200-223 S 66 1600-1799 S 84
1 S 20 28-31 S 49 224-249 S 67 1800-1999 S 85
2 S 26 32-35 S 50 250-279 S 68 2000-2239 S 86
3 S 29 36-39 S 51 280-314 S 69 2240-2499 S 87
4 S 32 40-44 S 52 315-354 S 70 2500-2799 S 88
5 S 34 45-49 S 53 355-399 S 71 2800-3149 S 89
6 S 35 50-55 S 54 400-449 S 72 3150-3549 S 90
7 S 36 56-62 S 55 450-499 S 73 3550-3999 S 91
8 S 38 63-70 S 56 500-559 S 74 4000-4499 S 92
9 S 39 71-79 S 57 560-629 S 75 4500-4999 S 93
10-11 S 40 80-89 S 58 630-709 S 76 5000-5599 S 94
12 S 41 90-99 S 59 710-799 S 77 5600-6299 S 95
13 S 42 100-111 S 60 800-899 S 78 6300-7099 S 96
14-15 S 43 112-124 S 61 900-999 S 79 7100-7999 S 97
16-17 S 44 125-139 S 62 1000-1119 S 80 8000-8999 S 98
18-19 S 45 140-159 S 63 1120-1249 S 81 9000-9999 S 99
20-22 S 46 160-179 S 64 1250-1399 S 82
23-24 S 47 180-199 S 65 1400-1599 S 83

Sección:Capítulo: 6
Página
TEMAS CONCEPTUALES
38
Terminal 1ª Fase 2ª Fase
20
21 Millares Decenas
22
23
24
25 Centenas Unidades
26
27
Ejemplo:
Si se selecciona el valor S 1234 el CNC mostrará los siguientes valores:
Terminal 2 dígitos 4 dígitos
(Valor S81) 1ª Fase 2ª Fase
20 (MST80) 1 0 0
21 (MST40) 0 0 0
22 (MST20) 0 0 1
23 (MST10) 0 1 1
24 (MST08) 0 0 0
25 (MST04) 0 0 1
26 (MST02) 0 1 0
27 (MST01) 1 0 0
CABEZAL

PáginaCapítulo: 6 Sección:
TEMAS CONCEPTUALES
39
6.8 CAMBIO DE GAMA DEL CABEZAL
El CNC permite que la máquina disponga de una caja de velocidades constituida por
reductores y engranajes, para poder ajustar convenientemente las velocidades y los “par-
motor” del cabezal a las necesidades del mecanizado en cada momento.
Se admiten hasta 4 gamas de cabezal, las cuales se personalizan en los parámetros máquina
del cabezal “P7, P8, P9 y P10”, especificando en revoluciones/minuto la velocidad máxima
para cada una de ellas.
El valor asignado al parámetro “P7” será el correspondiente a la menor de las gamas
(GAMA1) y el valor asignado al parámetro “P10” corresponderá a la mayor de las gamas
(GAMA4).
En caso de no ser necesarias las 4 gamas, deben emplearse las inferiores comenzando por
la GAMA1 y a las gamas que no se utilicen se les asignará el mismo valor que a la superior
de las utilizadas.
Cuando la nueva velocidad de cabezal “S” seleccionada implica cambio de gama, el CNC
ejecutará la función auxiliar correspondiente a la nueva gama.
El CNC utiliza las funciones auxiliares “M41, M42, M43 y M44” para indicar al armario
eléctrico la gama que se debe seleccionar (GAMA 1, GAMA 2, GAMA 3, GAMA 4).
Además, para facilitar el cambio de gama, el CNC permite disponer de una consigna S
analógica residual cuando exista un cambio en la gama de velocidades del cabezal.
Parámetro máquina de cabezal “P601(6)”.
El valor de dicha consigna residual se define mediante el parámetro máquina de cabezal
“P701”, y el tiempo de oscilación de dicha consigna se encuentra fijado mediante el
parámetro máquina de cabezal “P702”.
CAMBIO DE GAMA DEL
CABEZAL

Sección:Capítulo: 6
Página
TEMAS CONCEPTUALES
40
El cambio de gama del cabezal se realiza de la siguiente forma:
1.- Una vez detectado el cambio de gama el CNC pasa en las salidas BCD (terminales 20
a 27 del conector I/O 1) el valor correspondiente a la función auxiliar M41, M42, M43
o M44.
50 milisegundos más tarde se activa la salida “M Strobe” para indicar al armario
eléctrico que se debe ejecutar la función auxiliar requerida. Esta señal se mantiene activa
durante 100 milisegundos.
2.- Al detectar el armario eléctrico la activación de la señal “M Strobe”, deberá desactivar
la entrada “M EJECUTADA” para indicar al CNC que comienza la ejecución de la
función correspondiente.
3.- El armario eléctrico ejecutará la función auxiliar requerida, debiendo analizar para ello
las salidas BCD (terminales 20 a 27 del conector I/O 1).
4.- Tras mantener activas las salidas BCD (terminales 20 a 27 del conector I/O 1) durante
200 milisegundos, el CNC proporcionará, si el parámetro “P601(6)” lo indica, la
consigna S residual indicada en el parámetro máquina de cabezal “P701”.
El tiempo de oscilación de la consigna S residual se encuentra fijado mediante el
parámetro máquina de cabezal “P702”.
5.- Una vez finalizado el cambio de gama de cabezal, el armario eléctrico deberá activar
la señal “M EJECUTADA” para indicar al CNC que ha finalizado el tratamiento de la
función solicitada.
Atención:
Si el armario eléctrico dispone de un dispositivo que necesita que las señales
del CNC (BCD y M Strobe) se mantengan activas durante más tiempo, se debe
personalizar el parámetro máquina “P607(2)” con el valor “1”.
CAMBIO DE GAMA DEL
CABEZAL

PáginaCapítulo: 6 Sección:
TEMAS CONCEPTUALES
41
6.9 CONTROL DEL CABEZAL
Es necesario disponer de captación de cabezal cuando se desean efectuar las siguientes
operaciones:
* Roscado electrónico (G33)
* Parada orientada de cabezal (M19)
Para ello es necesario disponer de un encoder situado en el cabezal y personalizar los
parámetros máquina siguientes:
P800 Número de impulsos del encoder de cabezal
P606(3) Sentido de contaje del cabezal
Además, si se desea trabajar con la opción "Parada orientada de cabezal (M19)" se deben
personalizar los siguientes parámetros:
P706 Velocidad de cabezal S cuando se trabaja en M19
P606(2) Signo de la salida S analógica asociada a M19
P600(8) Tipo de impulso de referencia máquina en el CABEZAL
P709 Consigna analógica mínima del cabezal con M19
P707 Banda de muerte del cabezal con M19
P708 Ganancia proporcional K del cabezal con M19
Cuando se desea pasar de lazo abierto (M3, M4) a lazo cerrado, se debe ejecutar la función
M19. El CNC reduce la velocidad del cabezal hasta que esté por debajo de la velocidad
indicada en el parámetro "P706" y a continuación, realiza una búsqueda de cero.
Si se ejecutó la función "M19 S", el CNC una vez realizada la búsqueda de cero posiciona
el cabezal en la posición "S" indicada.
La forma de programar un posicionamiento de cabezal es “M19 S4.3”, donde:
M19 Indica que se trata de un desplazamiento de cabezal en lazo cerrado.
S4.3 Indica la posición en que se desea posicionar el cabezal. Dicho valor estará
expresado en grados y referido al cero máquina.
La ejecución de un bloque del tipo “M19 S4.3” se realiza de la siguiente forma:
* El CNC indicará al armario eléctrico la ejecución de la función M19, realizándose esta
transferencia de información como cualquier función auxiliar “M”.
* A continuación el CNC desplaza el cabezal al punto indicado y a la velocidad fijada
por el parámetro máquina "P706".
El sentido en que se realiza el posicionamiento se encuentra indicado en el parámetro
máquina “P606(2)”.
Ejemplo:
M3 S1000 Cabezal en lazo abierto, sentido de giro a derechas.
M19 Cabezal en lazo cerrado, búsqueda de cero.
M19 S100 Posicionamiento a 100°
S1000 Cabezal en lazo abierto. Mantiene sentido de giro anterior (M3).
M19 S200 Cabezal en lazo cerrado, búsqueda de cero y posicionamiento a 200°.
CONTROL DE CABEZAL

Sección:Capítulo: 6
Página
TEMAS CONCEPTUALES
42
6.10 HERRAMIENTAS
Los parámetros máquina relacionados con las herramientas son los siguientes:
P700 Número de herramientas
P730 Subrutina asociada a la función T
P604(5) Los valores del corrector son efectivos tras la ejecución de M06
P609(3) EL CNC no tiene en cuenta las dimensiones de la herramienta
Es aconsejable asignar al parámetro “P701” el número de herramienta más alto que se puede
seleccionar en el CNC, evitando de esta forma errores durante la ejecución.
Cada vez que se desea realizar un cambio de herramienta se debe ejecutar el comando T2.2
T2.2 El número situado entre la “T” y el “.” indica el número de herramienta que se desea
seleccionar, y el número situado tras el punto indica el corrector que debe asumir el
CNC para realizar los mecanizados.
El CNC indicará al armario eléctrico el número de herramienta que se desea
seleccionar. La transferencia de esta información se realiza como se indica en el
apartado de “TRANSFERENCIA DE LAS FUNCIONES AUXILIARES M, S,
T”, y a través de las salidas BCD (terminales 20 a 27 del conector I/O 1) y de la salida
“T Strobe”.
Si se dispone de subrutina asociada a la función T, parámetro máquina “P730” ésta
se ejecutará después de realizar la transferencia de la función T al armario eléctrico.
Normalmente el CNC asume los valores correspondientes al nuevo corrector seleccionado
tras ejecutarse la función T2.2.
No obstante puede ocurrir que la máquina necesite efectuar unos desplazamientos previos
al cambio, por lo que interesa que el CNC mantenga los valores del corrector actual hasta
haberse efectuado el cambio.
En dicho caso es aconsejable personalizar "P604(5)=1" y programar en la subrutina
asociada a la función T la función M06 justo tras el cambio de herramienta.
HERRAMIENTAS

PáginaCapítulo: 6 Sección:
TEMAS CONCEPTUALES
43
6.11 HERRAMIENTA MOTORIZADA / SINCRONIZADA
Los parámetros máquina relacionados con la herramienta motorizada o sincronizada son los
siguientes:
P607(1) Signo de la consigna de la herramienta motorizada o sincronizada
P802 Máximo avance programable para la herramienta motorizada o sincronizada
P609(8) La velocidad de giro de la herramienta motorizada puede ser modificada
desde el panel
P803 Número de impulsos de la herramienta sincronizada
P607(2) Sentido de contaje de la herramienta sincronizada
P711 Ganancia proporcional K de la herramienta sincronizada
6.11.1 HERRAMIENTA MOTORIZADA
Cuando se dispone de una herramienta motorizada se deben definir los parámetros
"P607(1)" y "P802".
La función M45 S permite arrancar o parar la herramienta motorizada.
M45 Es una función auxiliar especial que sirve para indicar al CNC que se desea
modificar el estado o la velocidad de giro de la herramienta motorizada.
S±4 Indica el sentido (±) y la velocidad de giro, en revoluciones por minuto, de la
herramienta motorizada.
Valores posibles: Entre ±P802 rpm
Para detener la herramienta motorizada se puede programar la función M45 sola o bien
M45 S0.
Ejemplo de programación suponiendo que la herramienta motorizada está parada:
M45 S100 Arranque de la herramienta motorizada que girará a 100 rpm
M45 S200 Mantiene el sentido pero modifica la velocidad de giro.
M45 S0 Detiene la herramienta motorizada
M45 S-50 La herramienta motorizada arranca en sentido contrario y a 50 rpm
M45 Detiene la herramienta motorizada
Si se selecciona el parámetro máquina "P609(8)=1", el CNC actúa del siguiente
modo:
Cada vez que se pulsa una de las teclas de Speed-rate ubicadas en el panel de mando del
CNC se modificará, además de la velocidad de giro del cabezal, la velocidad de
giro de la herramienta motorizada.
HERRAMIENTA
MOTORIZADA/SINCRONIZ.

Sección:Capítulo: 6
Página
TEMAS CONCEPTUALES
44
6.11.2 HERRAMIENTA SINCRONIZADA
El CNC permite sincronizar el giro de la herramienta sincronizada con el giro del cabezal.
Para ello es necesario que ambos dispositivos dispongan de encoder.
P800 Número de impulsos del encoder de cabezal
P606(3) Sentido de contaje del cabezal
P803 Número de impulsos del encoder de la herramienta sincronizada
P607(2) Sentido de contaje de la herramienta sincronizada
Además, será necesario definir los siguientes parámetros:
P607(1) Signo de la consigna de la herramienta sincronizada
P711 Ganancia proporcional K de la herramienta sincronizada
P802 Velocidad de giro máxima para la herramienta sincronizada
La función M45 K permite arrancar o parar la herramienta sincronizada.
M45 Es una función auxiliar especial que sirve para indicar al CNC que se desea
modificar el estado o la velocidad de giro de la herramienta sincronizada.
K±3.4 Indica el sentido (±) de giro y la relación existente entre las velocidades de giro
de la herramienta sincronizada y el cabezal.
Valores posibles: Entre ±655.3509
Por ejemplo el valor K2 indica que la herramienta sincronizada girará al doble de
velocidad que el cabezal.
Si la velocidad resultante es superior al máximo fijado mediante el parámetro
máquina "P802", el CNC interrumpe la ejecución y muestra el error 71.
Se debe tener en cuenta que el CNC permite asignar a la variable K el valor de
un parámetro aritmético. Por ejemplo: si se desea que la velocidad de giro de la
herramienta sincronizada sea la tercera parte del cabezal, se puede programar:
P1=K1F4K3 ;Asigna a P1 el valor 1/3
M45 KP1 ;Sincroniza la herramienta al cabezal con la relación 1/3
Para detener la herramienta sincronizada se debe programar la función M45 sola.
HERRAMIENTA
MOTORIZADA/SINCRONIZ.

PáginaCapítulo: 6 Sección:
TEMAS CONCEPTUALES
45
6.11.2.1 EJEMPLOS DE APLICACION DE LA HERRAM. SINCRONIZADA
* Utilización de una herramienta de varias cuchillas para mecanizar polígonos en la pieza
La formula que se debe emplear para calcular el factor K es la siguiente:
Número de lados del polígono
Factor K =
Número de cuchillas
Ejemplo: Se dispone de una herramienta con cuatro cuchillas, el factor que se debe
aplicar en cada caso es el siguiente:
Para efectuar un cuadrado K= 4/4 = 1
Para efectuar un hexágono K= 6/4 = 1.5
Para efectuar un octógono K= 8/4 = 2
* Sincronización de ambos cabezales en un torno de 2 cabezales.
Esta aplicación permite, por ejemplo, transferir la pieza de un cabezal a otro.
HERRAMIENTA
MOTORIZADA/SINCRONIZ.

Sección:Capítulo: 6
Página
TEMAS CONCEPTUALES
46
EJE C
6.12 EJE C
El CNC permite interpolar el cabezal de la máquina con los ejes X y Z, pudiendo de esta
forma efectuar mecanizados en la superficie cilíndrica o el la cara frontal de la pieza
(cilindro).
Para poder utilizar esta prestación es necesario que el cabezal de la máquina disponga de
sistema de captación (encoder rotativo) y definir el 3º eje como eje C.
El eje C es un eje rotativo y se expresará en grados. Por lo tanto se debe definir:
P612(1)=1 La máquina dispone de 3º eje
P613(5)=1 El 3º eje es el eje C
P612(2)=0 Unidades de medida en grados

PáginaCapítulo: 6 Sección:
TEMAS CONCEPTUALES
47
6.12.1 AJUSTE DEL EJE C
* Se deben definir además los siguientes parámetros máquina:
P203 Resolución de contaje del eje C
P619(3) Resolución de contaje con señal senoidal para el eje C
P206 Tipo de señal de captación del eje C
P612(5) Factor multiplicador de las señales del eje C
* Es aconsejable utilizar los apartados "Resolución de los ejes", "Ajuste de los ejes" y
"Sistemas de referencia" de este mismo capítulo para ajustar el eje C.
El avance del eje C se debe programar en grados/minuto (P210, P212, P809, etc.), es
decir, que la máxima velocidad programable es:
65535
65535 grados/minuto = = 182 rpm
360
* A continuación ejecutar en modo "Teach-in" la función G14. EL CNC efectúa una
búsqueda de referencia máquina del cabezal y activa el eje C.
La búsqueda de referencia máquina se efectúa como se indica en el apartado "Sistemas
de referencia" de este mismo capítulo y los parámetros máquina que interviene son:
P219 Cota de referencia máquina del eje C
P618(6) Sentido de búsqueda de referencia máquina del eje C
P612(7) Tipo de impulso de referencia máquina del eje C
P612(6) Micro referencia máquina del eje C
P212, P809 Avances de búsqueda de referencia máquina del eje C
Puede ocurrir que el cabezal no pare, que siga girando, en cuyo caso no finaliza la
búsqueda de referencia máquina. Las causas posibles son:
- El CNC no recibe la señal de Io. Comprobar el captador rotativo, la alargadera, etc.
- El cabezal no se ha ajustado correctamente y se encuentra girando por debajo del
50% o por encima del 150% de la velocidad programada (P809).
Comprobar las revoluciones de giro reales del cabezal.
Por ejemplo, si se ha programado P809=10000 grados/minuto, la velocidad de giro
correspondiente es 10000/360=27,777 rpm. El cabezal debe encontrarse entre
13,888 rpm y 41,666 rpm.
Por el contrario, si nada más ejecutar la función G14 finaliza la búsqueda de referencia
máquina, se debe modificar el parámetro máquina "P612(7)" (tipo de impulso de
referencia máquina del eje C).
EJE C

APENDICE A
CARACTERISTICAS TECNICAS DEL CNC
CARACTERISTICAS GENERALES
3 Procesadores de 8 bits
Capacidad de 32Kbytes para albergar programas pieza.
2 líneas de comunicación RS232C y RS485.
6 entradas de contaje hasta 4 ejes + encoder cabezal + herramienta sincronizada + volante electrónico
Entrada para palpador digital (TTL o 24 Vcc)
Resolución de 0.001 mm. ó 0.0001 pulgadas.
Factor multiplicador hasta x100 con entrada senoidal.
Velocidades de avance desde 0.001 mm/min hasta 65535 mm/min (0.0001 hasta 2580 pulgadas/min)
Recorrido máximo ±8388.607 mm (330.2601 pulgadas)
11 entradas digitales optoacopladas.
32 salidas digitales optoacopladas.
6 salidas analógicas: ±10V (una para cada eje + cabezal).
Peso aproximado: Modelo compacto 12 Kg.
Modelo Modular: Unidad Central 9 Kg. Monitor 20Kg.
Consumo aproximado: Unidad Central 75w. Monitor 85w.
EMBALAJE
Cumple la norma EN 60068-2-32
ALIMENTACION
Alimentación Universal de corriente alterna entre 100V y 240V (+10% y -15%)
Frecuencia de red: 50 - 60 Hz ±1% y ±2% durante periodos muy cortos
Cortes de red: Cumple la norma EN 61000-4-11. Es capaz de resistir microcortes de hasta 10
milisegundos a 50 Hz partiendo de 0º y 180º (dos polaridades, positiva y negativa)
Distorsión armónica: Menor del 10% de la tensión eficaz total entre conductores bajo tensión (suma
del 2º al 5º armónico)
CARACTERISTICAS ELECTRICAS DE LAS ENTRADAS DE CAPTACION
Consumo de la alimentación de +5V. 750 mA (250 mA por cada conector)
Consumo de la alimentación de -5V. 0.3A (100 mA por cada conector)
Niveles de trabajo para señal cuadrada.
Frecuencia máxima 200KHz.
Separación mínima entre flancos 950 nseg.
Desfase 90º ±20º
Umbral alto (nivel lógico “1”) 2.4V. < V
IH
< 5V.
Umbral bajo (nivel lógico “0”) -5V. < V
IL
< 0.8V.
Vmax. ±7 V.
Histéresis 0.25 V.
Corriente de entrada máxima 3mA.
Niveles de trabajo para señal senoidal.
Frecuencia máxima 25KHz.
Tensión pico a pico 2V. < Vpp < 6V.
Corriente de entrada I
I
1mA.
CARACTERISTICAS ELECTRICAS DE LAS ENTRADAS DIGITALES
Tensión nominal +24 Vcc.
Tensión nominal máxima +30 Vcc.
Tensión nominal mínima +18 Vcc.
Umbral alto (nivel lógico “1”) V
IH
>+18 Vcc.
Umbral bajo (nivel lógico “0”) V
IL
< +5 Vcc. o no conectado.
Consumo típico de cada entrada 5 mA.
Consumo máximo de cada entrada 7 mA.
Protección mediante aislamiento galvánico por optoacopladores.
Protección ante conexión inversa hasta -30 Vcc.

CARACTERISTICAS ELECTRICAS DE LAS SALIDAS DIGITALES
Tensión nominal de alimentación +24 Vcc.
Tensión nominal máxima +30 Vcc.
Tensión nominal mínima +18 Vcc.
Tensión de salida Vout = Tensión de alimentación (Vcc) - 2 V.
Intensidad de salida máxima 100 mA.
Protección mediante aislamiento galvánico por optoacopladores.
Protección por fusible exterior de 3 Amp. ante conexión inversa hasta -30 Vcc y ante sobretensiones
de la fuente exterior superiores a 33 Vcc.
CARACTERISTICAS ELECTRICAS DE LA ENTRADA DE PALPADOR DE 5V.
Valor típico 0.25 mA. @ Vin = 5V.
Umbral alto (nivel lógico “1”) V
1.7 V.
Umbral bajo (nivel lógico “0”) V 0.9 V.
Tensión nominal máxima Vimax = +15 Vcc.
CARACTERISTICAS ELECTRICAS DE LA ENTRADA DE PALPADOR DE 24V.
Valor típico 0.30 mA. @ Vin = 24V.
Umbral alto (nivel lógico “1”) V
12.5 V.
Umbral bajo (nivel lógico “0”) V
8.5 V.
Tensión nominal máxima Vimax = +35 Vcc.
CRT
Monitor 8" monocromo Deflexión: 90 grados
Pantalla: Antirreflexiva Fósforo: PLA (ámbar)
Resolución: 600 líneas Superficie visualizable: 146 x 119 mm.
FRECUENCIA DE BARRIDO
Sincronismo vertical: 50-60 Hz positivo Sincronismo horizontal: 19,2 KHz positivo
CONDICIONES AMBIENTALES
Humedad relativa: 30-90% sin condensación
Temperatura de trabajo: 5-40ºC con una media inferior a 35ºC
Temperatura ambiente en régimen de No funcionamiento: entre -25ºC y +70ºC
Altitud máxima de funcionamiento. Cumple la norma IEC 1131-2
VIBRACION
En régimen de funcionamiento 10-50 Hz. amplitud 0,2 mm.
En régimen de transporte 10-50 Hz. amplitud 1 mm, 50-300 Hz. 5g de aceleración.
Caída libre de equipo embalado 1 m.
COMPATIBILIDAD ELECTROMAGNETICA
Ver la hoja de "Declaración de Conformidad" en la introducción de este manual.
SEGURIDAD
Ver la hoja de "Declaración de Conformidad" en la introducción de este manual.

GRADO DE PROTECCION
Unidad central: IP2X
Partes accesibles en el interior de la envolvente: IP1X
El fabricante de la máquina debe cumplir la norma EN 60204-1, en lo que respecta a la
protección contra choque eléctrico ante fallo de los contactos de entradas/salidas con
alimentación exterior, cuando no se conecta este conector antes de dar fuerza a la fuente
de alimentación.
El acceso al interior del aparato está terminantemente prohibido a personal no autorizado.
PILA
Pila de litio de 3,5 V.
Vida estimada 10 años.
A partir del mensaje de batería descargada la información contenida en la memoria
será retenida durante 10 días mas, estando apagado el CNC. Debiendo ser sustituida.
Precaución, debido al riesgo de explosión o combustión:
No intentar recargar la pila.
No exponerla a temperaturas superiores a 100 °C.
No cortocircuitar los bornes.
Atención:
Para evitar el excesivo calentamiento de la circuitería interna, las diversas ranuras de
ventilación no deben estar obstruidas, siendo asimismo necesario instalar un sistema
de ventilación que desaloje el aire caliente del armazón o pupitre que soporta el CNC.

APENDICE B
HABITACULOS
La mínima distancia que debe existir entre cada una de las paredes del CNC y el habitáculo en que se encuentra
situado, para garantizar las condiciones ambientales requeridas, debe ser el siguiente:
Cuando se utiliza un ventilador para mejorar la aireación del habitáculo se debe utilizar un ventilador con
motor de corriente continua, puesto que los motores de corriente alterna producen campos magnéticos que
pueden distorsionar las imágenes mostradas en la pantalla.
La sujeción del CNC se debe realizar como se indica a continuación (dimensiones en mm):

APENDICE C
CIRCUITOS RECOMENDADOS PARA CONEXION DE PALPADOR
El CNC dispone de dos entradas de palpador situadas en el conector A6 (terminales 6 y 7),
una para entradas de 5 V. y otra para 24V.
En función del tipo de conexión aplicada se deberá personalizar el parámetro máquina
"P612(7)", indicando si actúa con el nivel lógico alto o bajo de la señal que proporciona el
palpador.
CONEXION DIRECTA
- Palpador con salida por “contacto normalmente abierto”
- Palpador con salida por “contacto normalmente cerrado”
CONEXION MEDIANTE INTERFACE
- Interface con salida en colector abierto
Conexión a +5 V.
Conexión a +24 V.
- Interface con salida en PUSH-PULL

APENDICE D
ENTRADAS Y SALIDAS DEL CNC
ENTRADAS
Terminal Conector Significado
10 I/O 1 Micro Io del eje X
11 I/O 1 Micro Io del 3º eje
12 I/O 1 Micro Io del eje Z
13 I/O 1 Micro Io del 4º eje - /Subrutina de emergencia
14 I/O 1 /Stop Emergencia.
15 I/O 1 /Feed hold - /Transfer inhibit - /M ejecutada
16 I/O 1 /Parada - /Subrutina de emergencia
17 I/O 1 Marcha
18 I/O 1 Entrada condicional
19 I/O 1 Manual (modo visualizador)
SALIDAS
Terminal Conector Significado
2 I/O 1 T Strobe
3 I/O 1 S Strobe
4 I/O 1 M Strobe
5 I/O 1 Emergencia
6 I/O 1 Roscado on - Cicle on
7 I/O 1 Embrague Z
8 I/O 1 Reset
9 I/O 1 Embrague X
20 I/O 1 MST80
21 I/O 1 MST40
22 I/O 1 MST20
23 I/O 1 MST10
24 I/O 1 MST08
25 I/O 1 MST04
26 I/O 1 MST02
27 I/O 1 MST01
30, 31 I/O 1 Consigna eje X
32, 33 I/O 1 Consigna para la herramienta sincronizada
34, 35 I/O 1 Consigna eje Z
36, 37 I/O 1 Consigna del cabezal
3 I/O 2 Salida decodificada M01
4 I/O 2 Salida decodificada M02
5 I/O 2 Salida decodificada M03
6 I/O 2 Salida decodificada M04
7 I/O 2 Salida decodificada M05
8 I/O 2 Salida decodificada M06
9 I/O 2 Salida decodificada M07
10 I/O 2 Salida decodificada M08
11 I/O 2 Salida decodificada M09
12 I/O 2 Salida decodificada M10
13 I/O 2 Salida decodificada M11 - Embrague 4º eje
14, 15 I/O 2 Consigna 4º eje
17, 18 I/O 2 Consigna 3º eje
21 I/O 2 Salida Modo de operación Manual
22 I/O 2 Salida decodificada M15 - Bloqueo cabezal - Embrague eje C
23 I/O 2 Salida decodificada M14 - G00
24 I/O 2 Salida decodificada M13 - Giro de torreta
25 I/O 2 Salida decodificada M12 - Embrague 3º eje

APENDICE E
TABLA DE CONVERSION PARA SALIDA "S" BCD EN 2 DIGITOS
S
Programada
S BCD
S
Programada
S BCD
S
Programada
S BCD
S
Programada
S BCD
0 S 00 25-27 S 48 200-223 S 66 1600-1799 S 84
1 S 20 28-31 S 49 224-249 S 67 1800-1999 S 85
2 S 26 32-35 S 50 250-279 S 68 2000-2239 S 86
3 S 29 36-39 S 51 280-314 S 69 2240-2499 S 87
4 S 32 40-44 S 52 315-354 S 70 2500-2799 S 88
5 S 34 45-49 S 53 355-399 S 71 2800-3149 S 89
6 S 35 50-55 S 54 400-449 S 72 3150-3549 S 90
7 S 36 56-62 S 55 450-499 S 73 3550-3999 S 91
8 S 38 63-70 S 56 500-559 S 74 4000-4499 S 92
9 S 39 71-79 S 57 560-629 S 75 4500-4999 S 93
10-11 S 40 80-89 S 58 630-709 S 76 5000-5599 S 94
12 S 41 90-99 S 59 710-799 S 77 5600-6299 S 95
13 S 42 100-111 S 60 800-899 S 78 6300-7099 S 96
14-15 S 43 112-124 S 61 900-999 S 79 7100-7999 S 97
16-17 S 44 125-139 S 62 1000-1119 S 80 8000-8999 S 98
18-19 S 45 140-159 S 63 1120-1249 S 81 9000-9999 S 99
20-22 S 46 160-179 S 64 1250-1399 S 82
23-24 S 47 180-199 S 65 1400-1599 S 83

APENDICE F
CUADRO RESUMEN DE LOS PARAMETROS MAQUINA
PARAMETROS MAQUINA GENERALES
P5 Frecuencia de la tensión de red (50/60)
P99 Idioma (0=Cas, 1=Ale, 2=Ing, 3=Fra, 4=Ita)
P13 Unidades de medida: mm (0), pulgadas (1)
P11 Eje X en radios (0) o diámetros (1)
P600(1) Disposición de los ejes en la máquina
P801 Programa protegido
PARAMETROS RELACIONADOS CON LA CONFIGURACION DE EJES
P612(1), P614(1) La máquina dispone del 3º, 4º eje (0=No, 1=Si)
P613(5) El 3º eje es el eje C (0=No, 1=Si)
P613(4), P615(4) El 3º, 4º eje se denomina Y/W (0=Y, 1=W)
P613(3), P615(3) El 3º, 4º eje es un eje visualizador (0=No, 1=Si)
P613(1), P615(1) El 3º, 4º eje es un eje rotativo (0=No, 1=Si)
P613(2), P615(2) El 3º, 4º eje es un eje rotativo rollover (0=No, 1=Si)
P613(6), P615(5) 3º, 4º eje rotativo rollover por el camino más corto (0=No, 1=Si)
P616(8) Conector A6 compartido por el volante y la herramienta sincronizada (0=No, 1=Si)
PARAMETROS MAQUINA RELACIONADOS CON LAS ENTRADAS Y SALIDAS
P604(4) Estado de la salida de Emergen, terminal 5 conector I/O1 (0=0V, 1=24V)
P609(6) Termin. 24 del I/O2 como sentido de giro de la torreta portaherram. (0=No, 1=Si)
P604(3) Terminal 23 del conector I/O2 como G00 (0=No, 1=Si)
P605(4) Terminal 6 del conector I/O1 como Roscado ON (0) o Cicle ON (1)
P606(7) Las M decodificadas tienen salida en código BCD (0=Si, 1=No)
P602(7) El CNC espera una bajada de señal en la entrada M Ejecutada (0=No, 1=Si)
P603(4,3,2,1), P608(1) Anulación de la alarma de captación del eje A1, A2, A3, A4, A5 (0=No, 1=Si)
PARAMETROS MAQUINA DEL VOLANTE
P609(1) El volante electrónico es el FAGOR 100P (0=No, 1=Si)
P500 Sentido de contaje del Volante Electrónico
P602(1) Unidades de medida de captación del Volante Electrónico (0=mm, 1=pulgadas)
P501 Resolución de contaje del Volante Electrónico
P602(4) Factor multiplicador de las señales del Volante Electrónico (0=x4, 1=x2)
P619(7) Volante gestionado desde el PLC (0=No, 1=Si)
PARAMETROS RELACIONADOS CON EL PALPADOR DE MEDIDA
P606(6) Tipo de impulso del palpador de medida (0=0V, 1=5V o 24V)
P710 Función M asociada al movimiento de palpación, G75
P806 Velocidad de avance de palpación en modo Manual
P902 Cota X mínima del palpador de medida
P903 Cota X máxima del palpador de medida
P904 Cota Z mínima del palpador de medida
P905 Cota Z máxima del palpador de medida
Apartado 3.3
Apartado 3.3.1
Apartado 3.3.2
Apartado 3.3.3
Apartado 3.3.4

PARAMETROS MAQUINA RELACIONADOS CON LAS HERRAMIENTAS
P700 Número de herramientas (0...32)
P730 Subrutina asociada a la función T
P617(2) La subrutina asociada se ejecuta antes (1) o después (0) que la función T
P604(5) Los valores del corrector son efectivos tras efectuar T2.2 (0) o tras la ejecución de M06 (1)
P609(3) La cota teórica corresponde a la punta (0) o a la base (1) de la herramienta
PARAMETROS RELACIONADOS CON LA SUBRUTINA DE EMERGENCIA
P716 Subrutina de emergencia
P616(2) La subrutina de emergencia ejecuta la función M00 (0=Si, 1=No)
P616(1) Asignación de cotas a parámetro aritmético en subrutina de emergencia (0=Inicio, 1=Actual)
PARAMETROS MAQUINA DE LA LINEA SERIE RS232C
P0 Velocidad de transmisión en Baudios (110, 150, 300, 600, 1200, 2400, 4800, 9600)
P1 Número de bits de información por carácter (7/8)
P2 Paridad (0=No, 1=Impar/ODD, 2=Par/EVEN)
P3 Bits de parada (1/2)
P605(5) DNC activo (0=No, 1=Si)
P605(6) Valores de transmisión en la comunicación con Disquetera (1) o Casette (0)
P605(7) Protocolo DNC activo tras el encendido (0=No, 1=Si)
P605(8) El CNC aborta la comunicación DNC (0=Si, 1=No)
P606(8) Informe de estado por interrupción activo (0=No, 1=Si)
PARAMETROS RELACIONADOS CON LA VISUALIZACION
P6 Visualización teórica (1) o real (0)
P606(4), P606(5) Sentido de los ejes en la representación gráfica
P612(8), P614(8) Visualización del 3º, 4º eje (0=Si, 1=No)
P611(7), P611(8) Combinación de colores del monitor
PARAMETROS RELACIONADOS CON EL MODO DE OPERACION MANUAL
P12 Desplazamiento de los ejes en modo Manual pulsante (Y) o mantenido (N)
P600(2) Las teclas de JOG (ejes X y Z) son al revés (0=No, 1=Si)
P603(5) Se permite ejecutar la función auxiliar S en modo Manual (0=Si, 1=No)
P603(6) Se permite ejecutar la función auxiliar T en modo Manual (0=Si, 1=No)
P603(7) Se permite ejecutar la función auxiliar M en modo Manual (0=Si, 1=No)
P619(8) En modo Manual se permite trabajar con Velocidad de Corte Constante (0=No, 1=Si)
P601(7) Recupera condiciones iniciales, genera función M30, al pasar a modo Manual (0=No, 1=Si)
PARAMETROS MAQUINA RELACIONADOS CON EL MODO DE OPERACION
P601(5) Inhabilitación de la tecla de MARCHA (0=No, 1=Si)
P619(6) Inhibición del cabezal desde el PLC (0=No, 1=Si)
P600(3) Máximo valor del conmutador MFO que aplica el CNC (0=120%, 1=100%)
P4 El conmutador MFO funciona en G00 (No, YES=Si)
P607(8) G05 o G07 tras el encendido (0=G07, 1=G05)
P607(3) G00 vectorizado (0=No, 1=Si)
P616(4) G59 como translado de origen aditivo (0=No, 1=Si)
P609(5) Parámetros aritméticos P150 a P254 de sólo lectura (0=No, 1=Si)
P611(6) La función P1=0X tiene en cuenta las unidades de trabajo (0=No, 1=Si)
P621(4) Sincronización con el eje independiente (0=No, 1=Si)
P607(5) Velocidad de Corte Constante en torno de varios cabezales (0=No, 1=Si)
Apartado 3.3.5
Apartado 3.3.6
Apartado 3.3.7
Apartado 3.3.8
Apartado 3.3.9
Apartado 3.3.10

PARAMETROS MAQUINA DE LOS EJES
P100, P300, P200, P400 Signo de la consigna del eje X, Z, 3º, 4º
P101, P301, P201, P401 Sentido de contaje del eje X, Z, 3º, 4º
P102, P302, P202, P402 Sentido de desplazamiento en modo MANUAL del eje X, Z, 3º, 4º
PARAMETROS MAQUINA RELACIONADOS CON LA RESOLUCION DE LOS EJES
P103, P303, P203, P403 Resolución de contaje del eje X, Z, 3º, 4º
P619(1), P619(2), P619(3), P619(4) Resolución de contaje con señales senoidales del eje X, Z, 3º, 4º
P602(3), P602(2), P612(2), P614(2) Unidades medida del sistema de captación X, Z, 3º, 4º (0=mm, 1=pul)
P106, P306, P206, P406 Tipo de señal de captación del eje X, Z, 3º, 4º (Y=sen, N=cuad)
P602(6), P602(5), P612(5), P614(5) Factor multiplicador de las señales del eje X, Z, 3º, 4º (0=x4, 1=x2)
P604(2), P604(1), P612(3), P614(3) Encoder binario en el eje X, Z, 3º, 4º (0=No, 1=Si)
P604(7), P604(6), P612(4), P614(4) Equivalencia del encoder binario del eje X, Z, 3º, 4º
PARAMETROS MAQUINA RELACIONADOS CON LA CONSIGNA
P117, P317, P217, P417 Consigna mínima del eje X, Z, 3º, 4º (1=2,5 mV)
P104, P304, P204, P404 Temporización Embrague-Consigna del eje X, Z, 3º, 4º (N=No Y=Si)
P118, P318, P218, P418 Banda de muerte del eje X, Z, 3º, 4º (0...255 micras)
P105, P305, P205, P405 Control continuo del eje X, Z, 3º, 4º (N=No, Y=Si)
PARAMETROS MAQUINA RELACIONADOS CON LOS LIMITES DE RECORRIDO
P107, P307, P207, P407 Límite de recorrido positivo del eje X, Z, 3º, 4º
P108, P308, P208, P408 Límite de recorrido negativo del eje X, Z, 3º, 4º
PARAMETROS MAQUINA RELACIONADOS CON EL HUSILLO
P109, P309, P209, P409 Holgura del husillo en el eje X, Z, 3º, 4º (0...255 micras)
P620(1), P620(2), P620(3), P620(4) Signo de la holgura de husillo del eje X, Z, 3º, 4º (0=Posi, 1=Nega)
P113, P313, P213, P413 Impulso adicional de consigna del eje X, Z, 3º, 4º (1=2,5 mV)
P605(2), P605(1) Compensación de error de husillo del eje X, Z (0=No, 1=Si)
PARAMETROS MAQUINA RELACIONADOS CON LOS AVANCES
P618(2) Avance de los ejes rotativos en 2,54 grados/min (0) o en grados/min (1)
P110, P310, P210, P410 Máximo avance programable en el eje X, Z, 3º, 4º
P111, P311, P211, P411 Avance para los posicionamientos rápidos del eje X, Z, 3º, 4º
P717 Máximo avance F para los tramos curvos
P703 Feedrate/Override cuando la consigna de algún eje alcanza 10V.
P705 Error si el avance del eje no está entre el 50% y el 200% del programado
PARAMETROS MAQUINA RELACIONADOS CON EL CONTROL DE LOS EJES
P114, P314, P214, P414 Ganancia proporcional K1 del eje X, Z, 3º, 4º
P115, P315, P215, P415 Punto de discontinuidad del eje X, Z, 3º, 4º
P116, P316, P216, P416 Ganancia proporcional K2 del eje X, Z, 3º, 4º
P607(6) Cuando se efectúa un roscado se aplica sólo la ganacia K1 (0=No, 1=Si)
P607(7) Cuando se efectúa un posicionamiento rápido se aplica sólo la K2 (0=No, 1=Si)
P715 Recuperación de posición programada en ejes "con control no continuo"
Apartado 4.
Apartado 4.1
Apartado 4.3
Apartado 4.2
Apartado 4.4
Apartado 4.5
Apartado 4.6

PARAMETROS MAQUINA RELACIONADOS CON LA REFERENCIA MAQUINA
P608(5), P608(8), P617(5), P615(8) Señal Io del sistema de captación, eje X, Z, 3º, 4º (0=Normal, 1=Codi)
P608(3), P608(6), P617(3), P615(6) Periodo señal Io codificada, eje X, Z, 3º, 4º (0=20mm, 1=100mm)
P608(4), P608(7), P617(4), P615(7) Secuencia Io creciente con contaje "+" (0) o "-" (1), eje X.... 4º
P908, P909, P910, P911 Offset de la regla de Io codificado, eje X, Z, 3º, 4º
P600(5), P600(4), P612(6), P614(6) Micro de referencia máquina del eje X, Z, 3º, 4º (0=Si, 1=No)
P618(8), P618(7), P618(6), P618(5) Sentido búsqueda referencia máquina, eje X, Z, 3º, 4º (0=Pos, 1=Neg)
P600(7), P600(6), P612(7), P614(7) Tipo impulso referencia máquina del eje X, Z, 3º, 4º (0=Neg, 1=Pos)
P119, P319, P219, P419 Cota de referencia máquina del eje X, Z, 3º, 4º
P112, P312, P212, P412 1º Avance en búsqueda de referencia máquina X, Z, 3º, 4º
P807, P808, P809, P810 2º Avance en búsqueda de referencia máquina X, Z, 3º, 4º
P604(8) Búsqueda de referencia máquina tras el encendido (0=No, 1=Si)
P601(8) La función G74 genera un M30 (0=No, 1=Si)
PARAMETROS RELACIONADOS CON LA ACELERACION / DECELERACION
P712, P713, P714, P724 Control de aceleración/deceleración del eje X, Z, 3º, 4º (1=20ms)
P609(4) Aceleración/deceleración en todas las interpolaciones lineales (0=No, 1=Si)
P616(6) Aceleración/deceleración en G05, arista matada (0=Si, 1=No)
P621(8) Control de aceleración/deceleración en forma de campana (0=No, 1=Si)
P731 Duración rampa Aceleración/Deceleración en forma de campana (1=10ms)
P720, P721, P722, P723 Ganancia FEED_FORWARD del eje X, Z, 3º, 4º
PARAMETROS RELACIONADOS CON LA HERRAMIENTA MOTORIZADA O SINCRONIZADA
P607(1) Signo de la consigna de la herramienta motorizada o sincronizada
P802 Máximo avance programable para la herramienta motorizada o sincronizada (0...9999 rpm)
P609(8) Velocidad giro de herramienta motorizada puede ser modificada desde el panel (0=No, 1=Si)
P803 Número de impulsos de la herramienta sincronizada (0...9999)
P607(2) Sentido de contaje de la herramienta sincronizada
P711 Ganacia proporcional K de la herramienta sincronizada
PARAMETROS MAQUINA ESPECIALES
P606(1) Trabajo con máquina de más de 8 metros (0=No, 1=Si)
P609(7) Resolución de 0,0001 milímetros / 0,00001 pulgadas (0=No, 1=Si)
Apartado 4.7
Apartado 4.8
Apartado 4.9
Apartado 4.10

PARAMETROS MAQUINA DEL CABEZAL
P811 Control de aceleración/deceleración del cabezal (1=10ms)
PARAMETROS MAQUINA RELACIONADOS CON EL CAMBIO DE GAMA
P7, P8, P9, P10 Máxima velocidad del cabezal en la GAMA 1, 2, 3 y 4 (0...9999 rpm)
P601(1) La máquina dispone de cambiador automático de gamas (0=No, 1=Si)
P601(6) S Analógica residual en un cambio de gama (0=No, 1=Si)
P701 Valor de la S analógica residual (1=2,5mV)
P702 Tiempo de oscilación en un cambio de gama
PARAMETROS MAQUINA UTILIZADOS CON SALIDA DE CONSIGNA ANALOGICA
P601(4) Signo de la consigna S del cabezal
P607(4) Consigna S unipolar (1) o bipolar (0)
PARAMETROS MAQUINA UTILIZADOS CON SALIDA DE CONSIGNA EN BCD
P601(3) Salida S en BCD de 2 dígitos (0=No, 1=Si)
P601(2) Salida S en BCD de 4 dígitos (0=No, 1=Si)
PARAMETROS MAQUINA UTILIZADOS PARA EL CONTROL DEL CABEZAL
P800 Número de impulsos del encoder de cabezal (0...9999)
P606(3) Sentido de contaje del cabezal
P603(8) Control exaustivo de la velocidad del cabezal (0=Si, 1=No)
P704 Tiempo de estabilización de la S (1=100ms)
PARAMETROS RELACIONADOS CON LA PARADA ORIENTADA DEL CABEZAL (M19)
P706 Velocidad de cabezal S cuando se trabaja en M19 (0...255 rpm)
P606(2) Signo de la salida S analógica asociada a M19
P600(8) Tipo de impulso de referencia máquina en el cabezal (0=Nega, 1=Posi)
P709 Consigna analógica mínima del cabezal con M19 (1=2,5mV)
P707 Banda de muerte del cabezal con M19
P708 Ganancia proporcional K del cabezal con M19
Apartado 5.
Apartado 5.1
Apartado 5.2
Apartado 5.3
Apartado 5.4
Apartado 5.4.1

APENDICE G
LISTA ORDENADA DE LOS PARAMETROS MAQUINA
P0 Velocidad de transmisión en Baudios (110, 150, 300, 600, 1200, 2400, 4800, 9600). Apartado 3.3.7
P1 Número de bits de información por carácter (7/8) ...................................................... Apartado 3.3.7
P2 Paridad (0=No, 1=Impar/ODD, 2=Par/EVEN) ............................................................. Apartado 3.3.7
P3 Bits de parada (1/2)................................................................................................... Apartado 3.3.7
P4 El conmutador MFO funciona en G00 (NO, YES=Si) ................................................. Apartado
3.3.10
P5 Frecuencia de la tensión de red (50/60) ..................................................................... Apartado 3.3
P6 Visualización Teórica (1) o Real (0) .......................................................................... Apartado 3.3.8
P7 Máxima velocidad del cabezal en la GAMA 1 (0...9999 rpm) .................................... Apartado 5.1
P8 Máxima velocidad del cabezal en la GAMA 2 (0...9999 rpm) .................................... Apartado 5.1
P9 Máxima velocidad del cabezal en la GAMA 3(0...9999 rpm) ..................................... Apartado 5.1
P10 Máxima velocidad del cabezal en la GAMA 4 (0...9999 rpm) .................................... Apartado 5.1
P11 Eje X en rádios (0) o diámetros (1) ............................................................................ Apartado 3.3
P12 Desplazamiento de los ejes en Modo Manual pulsante (Y) o mantenido (N) .............. Apartado 3.3.9
P13 Unidades de medida: mm (0), pulgadas(1) ................................................................. Apartado 3.3
P99 Idioma (0=Cas, 1=Ale, 2=Ing, 3=Fra, 4=Ita) ............................................................... Apartado 3.3
P100 Signo de la consigna del eje X .................................................................................. Apartado 4.
P101 Sentido de contaje del eje X...................................................................................... Apartado 4.
P102 Sentido de desplazamiento en modo MANUAL del eje X.......................................... Apartado 4.
P103 Resolución de contaje del eje X................................................................................ Apartado 4.1
P104 Temporización Embrague-Consigna del eje X (N=No, Y=Si) ..................................... Apartado 4.2
P105 Control continuo del eje X (0=No, 1=Si) ................................................................... Apartado 4.2
P106 Tipo de señal de captación del eje X (Y=Sen, N=Cua) ............................................... Apartado 4.1
P107 Límite de recorrido positivo del eje X ....................................................................... Apartado 4.3
P108 Límite de recorrido negativo del eje X ...................................................................... Apartado 4.3
P109 Holgura del husillo en el eje X (0...255 micras) ......................................................... Apartado 4.4
P110 Máximo avance programable en el eje X................................................................... Apartado 4.5
P111 Avance para los posicionamientos rápidos del eje X ................................................. Apartado 4.5
P112 1º Avance en búsqueda de referencia máquina del eje X............................................ Apartado 4.7
P113 Impulso adicional de consigna del eje X (1=2,5mV).................................................. Apartado 4.4
P114 Ganancia proporcional K1 del eje X.......................................................................... Apartado 4.6
P115 Punto de discontinuidad del eje X ............................................................................ Apartado 4.6
P116 Ganancia proporcional K2 del eje X.......................................................................... Apartado 4.6
P117 Consigna mínima del eje X (1=2,5mV)...................................................................... Apartado 4.2
P118 Banda de muerte del eje X (0...255 micras) ................................................................ Apartado 4.2
P119 Cota de referencia máquina del eje X ........................................................................ Apartado 4.7
P200 Signo de la consigna del 3º eje.................................................................................. Apartado 4.
P201 Sentido de contaje del 3º eje ..................................................................................... Apartado 4.
P202 Sentido de desplazamiento en modo MANUAL del 3º eje ......................................... Apartado 4.
P203 Resolución de contaje del 3º ejeº .............................................................................. Apartado 4.1
P204 Temporización Embrague-Consigna del 3º eje (N=No, Y=Si) .................................... Apartado 4.2
P205 Control continuo del 3º ejeº (0=No, 1=Si) ................................................................. Apartado 4.2
P206 Tipo de señal de captación del 3º eje (Y=Sen, N=Cua)............................................... Apartado 4.1
P207 Límite de recorrido positivo del 3º eje ...................................................................... Apartado 4.3
P208 Límite de recorrido negativo del 3º eje...................................................................... Apartado 4.3
P209 Holgura del husillo en el 3º eje (0...255 micras)......................................................... Apartado 4.4
P210 Máximo avance programable en el 3º eje .................................................................. Apartado 4.5
P211 Avance en G00 del 3º eje .......................................................................................... Apartado 4.5
P212 1º Avance en búsqueda de referencia máquina del 3º eje ........................................... Apartado 4.7
P213 Impulso adicional de consigna del 3º eje (1=2,5mV) ................................................. Apartado 4.4
P214 Ganancia proporcional K1 del 3º eje ......................................................................... Apartado 4.6
P215 Punto de discontinuidad del 3º eje ............................................................................ Apartado 4.6
P216 Ganancia proporcional K2 del 3º eje ......................................................................... Apartado 4.6
P217 Consigna mínima del 3º eje (1=2,5mV) ..................................................................... Apartado 4.2
P218 Banda de muerte del 3º eje (0...255 micras) ............................................................... Apartado 4.2
P219 Cota de referencia máquina del 3º eje........................................................................ Apartado 4.7

P300 Signo de la consigna del eje Z .................................................................................. Apartado 4.
P301 Sentido de contaje del eje Z...................................................................................... Apartado 4.
P302 Sentido de desplazamiento en modo MANUAL del eje Z .......................................... Apartado 4.
P303 Resolución de contaje del eje Z ................................................................................ Apartado 4.1
P304 Temporización Embrague-Consigna del eje Z (N=No, Y=Si) ..................................... Apartado 4.2
P305 Control continuo del eje Z (0=No, 1=Si) ................................................................... Apartado 4.2
P306 Tipo de señal de captación del eje Z (Y=Sen, N=Cua) ............................................... Apartado 4.1
P307 Límite de recorrido positivo del eje Z ....................................................................... Apartado 4.3
P308 Límite de recorrido negativo del eje Z ...................................................................... Apartado 4.3
P309 Holgura del husillo en el eje Z (0...255 micras).......................................................... Apartado 4.4
P310 Máximo avance programable en el eje Z ................................................................... Apartado 4.5
P311 Avance en G00 del eje Z ........................................................................................... Apartado 4.5
P312 1º Avance en búsqueda de referencia máquina del eje Z ............................................ Apartado 4.7
P313 Impulso adicional de consigna del eje Z (1=2,5mV) .................................................. Apartado 4.4
P314 Ganancia proporcional K1 del eje Z .......................................................................... Apartado 4.6
P315 Punto de discontinuidad del eje Z............................................................................. Apartado 4.6
P316 Ganancia proporcional K2 del eje Z .......................................................................... Apartado 4.6
P317 Consigna mínima del eje Z (1=2,5mV) ...................................................................... Apartado 4.2
P318 Banda de muerte del eje Z (0...255 micras) ................................................................ Apartado 4.2
P319 Cota de referencia máquina del eje Z ........................................................................ Apartado 4.7
P400 Signo de la consigna del 4º eje.................................................................................. Apartado 4.
P401 Sentido de contaje del 4º eje ..................................................................................... Apartado 4.
P402 Sentido de desplazamiento en modo MANUAL del 4º eje ......................................... Apartado 4.
P403 Resolución de contaje del 4º eje ............................................................................... Apartado 4.1
P404 Temporización Embrague-Consigna del 4º eje (N=No, Y=Si) .................................... Apartado 4.2
P405 Control continuo del 4º eje (0=No, 1=Si)................................................................... Apartado 4.2
P406 Tipo de señal de captación del 4º eje (Y=Sen, N=Cua)............................................... Apartado 4.1
P407 Límite de recorrido positivo del 4º eje ...................................................................... Apartado 4.3
P408 Límite de recorrido negativo del 4º eje...................................................................... Apartado 4.3
P409 Holgura del husillo en el 4º eje (0...255 micras)......................................................... Apartado 4.4
P410 Máximo avance programable en el 4º eje .................................................................. Apartado 4.5
P411 Avance en G00 del 4º eje .......................................................................................... Apartado 4.5
P412 1º Avance en búsqueda de referencia máquina del4º eje ............................................ Apartado 4.7
P413 Impulso adicional de consigna del 4º eje (1=2,5mV) ................................................. Apartado 4.4
P414 Ganancia proporcional K1 del 4º eje ......................................................................... Apartado 4.6
P415 Punto de discontinuidad del 4º eje ............................................................................ Apartado 4.6
P416 Ganancia proporcional K2 del 4º eje ......................................................................... Apartado 4.6
P417 Consigna mínima del 4º eje (1=2,5mV) ..................................................................... Apartado 4.2
P418 Banda de muerte del 4º eje (0...255 micras) ............................................................... Apartado 4.2
P419 Cota de referencia máquina del 4º eje........................................................................ Apartado 4.7
P500 Sentido de contaje del Volante Electrónico............................................................... Apartado 3.3.3
P501 Resolución de contaje del Volante Electrónico......................................................... Apartado 3.3.3
P600(8) Tipo de impulso de referencia máquina en el cabezal (0=Nega, 1=Posi) ...............Apartado 5.4.1
(7) Tipo de impulso de referencia máquina del eje X (0=Nega, 1=Posi)......................Apartado 4.7
(6) Tipo de impulso de referencia máquina del eje Z (0=Nega, 1=Posi) ......................Apartado 4.7
(5) Micro de referencia máquina del eje X (0=Si, 1=No) ............................................Apartado 4.7
(4) Micro de referencia máquina del eje Z (0=Si, 1=No).............................................Apartado 4.7
(3) Máximo valor del conmutador MFO que aplica el CNC (0=120%, 1=100%)........Apartado 3.3.10
(2) Las teclas de JOG (ejes X y Z) son al revés (0=No, 1=Si).......................................Apartado 3.3.9
(1) Disposición de los ejes en la máquina..................................................................Apartado 3.3
P601(8) La función G74 genera un M30 (0=No, 1=Si).......................................................Apartado 4.7
(7) Recupera condiciones iniciales, genera M30, al pasar a Manual (0=No, 1=Si) ......Apartado 3.3.9
(6) S Analógica residual en un cambio de gama (0=No, 1=Si)....................................Apartado 5.1
(5) Inhabilitación de la tecla de Marcha (0=No, 1=Si)................................................Apartado 3.3.10
(4) Signo de la consigna S del cabezal ......................................................................Apartado 5.2
(3) Salida S en BCD de 2 dígitos (0=No, 1=Si) ..........................................................Apartado 5.3
(2) Salida S en BCD de 4 dígitos (0=No, 1=Si) ..........................................................Apartado 5.3
(1) La máquina dispone de cambiador automático de gamas (0=No, 1=Si).................Apartado 5.1

P602(8) Sin función (=0)
(7) El CNC espera una bajada de señal en la entrada M Ejecutada (0=No, 1=Si).........Apartado 3.3.2
(6) Factor de multiplicación de las señales del eje X (0=x4, 1=x2).............................Apartado 4.1
(5) Factor de multiplicación de las señales del eje Z (0=x4, 1=x2) .............................Apartado 4.1
(4) Factor multiplicador de las señales del volante electrónico (0=x4, 1=x2) .............Apartado 3.3.3
(3) Unidades de medida del sistema de captación del eje X (0=mm, 1=pul)................Apartado 4.1
(2) Unidades de medida del sistema de captación del eje Z (0=mm, 1=pul) ................Apartado 4.1
(1) Unidades de medida de captación del Volante Eletrónico (0=mm, 1=pul) ............Apartado 3.3.3
P603(8) Control exaustivo de la velocidad de cabezal (0=Si, 1=No)..................................Apartado 5.4
(7) Se permite ejecutar la función auxiliar M en modo Manual (0=Si, 1=No) .............Apartado 3.3.9
(6) Se permite ejecutar la función auxiliar T en modo Manual (0=Si, 1=No) ..............Apartado 3.3.9
(5) Se permite ejecutar la función auxiliar S en modo Manual (0=Si, 1=No)...............Apartado 3.3.9
(4) Anulación de la alarma de captación del eje A1 (0=No, 1=Si) ..............................Apartado 3.3.2
(3) Anulación de la alarma de captación del eje A2 (0=No, 1=Si) ..............................Apartado 3.3.2
(2) Anulación de la alarma de captación del eje A3 (0=No, 1=Si) ..............................Apartado 3.3.2
(1) Anulación de la alarma de captación del eje A4 (0=No, 1=Si) ..............................Apartado 3.3.2
P604(8) Búsqueda de referencia máquina tras el encendido (0=No, 1=Si) ..........................Apartado 4.7
(7) Equivalencia del encoder binario del eje X..........................................................Apartado 4.1
(6) Equivalencia del encoder binario del eje Z ..........................................................Apartado 4.1
(5) Valores de corrector efectivos tras T2.2 (0) o tras la ejecución de M06 (1) ............Apartado 3.3.5
(4) Estado salida de Emergencia, terminal 5 conector I/O1 (0=0V, 1=5V o 24V) ........Apartado 3.3.2
(3) Terminal 23 del conector I/O2 como G00 (0=No, 1=Si) ........................................Apartado 3.3.2
(2) Encoder binario en el eje X (0=No, 1=Si) .............................................................Apartado 4.1
(1) Encoder binario en el eje Z (0=No, 1=Si) .............................................................Apartado 4.1
P605(8) El CNC aborta la comunicación DNC (0=Si, 1=No) .............................................Apartado 3.3.7
(7) Protocolo DNC activo tras el encendido (0=No, 1=Si)..........................................Apartado 3.3.7
(6) Valores de transmisión en la comunicación con Disquetera (1) o Casette (0) ........Apartado 3.3.7
(5) DNC activo (0=No, 1=Si) .....................................................................................Apartado 3.3.7
(4) Terminal 6 del conector I/O1 como Roscado ON (0) o Ciclo ON (1) .....................Apartado 3.3.2
(3) Sin función (=0)
(2) Compensación de error de husillo del eje X (0=No, 1=Si).....................................Apartado 4.4
(1) Compensación de error de husillo del eje Z (0=No, 1=Si) .....................................Apartado 4.4
P606(8) Informe de estado por interrupción activo (0=No, 1=Si) .......................................Apartado 3.3.7
(7) Las M decodificadas tienen salida en código BCD (0=Si, 1=No) ..........................Apartado 3.3.2
(6) Tipo de impulso del palpador de medida (0=0V, 1=5V o 24V) .............................Apartado 3.3.4
(5) Sentido de los ejes en la representación gráfica....................................................Apartado 3.3.8
(4) Sentido de los ejes en la representación gráfica....................................................Apartado 3.3.8
(3) Sentido de contaje del cabezal ............................................................................Apartado 5.4
(2) Signo de la salida S analógica asociada a M19 ....................................................Apartado 5.4.1
(1) Trabajo con máquina de más de 8 metros (0=No, 1=Si) ........................................Apartado 4.10
P607(8) G05 o G07 tras el encendido (0=G07, 1=G05)......................................................Apartado 3.3.10
(7) Cuando se efectúa un posicionamiento rápido se aplica sólo K2 (0=No, 1=Si) .....Apartado 4.6
(6) Caundo se efectúa un roscado se aplica sólo K1 (0=No, 1=Si) ..............................Apartado 4.6
(5) Velocidad de Corte Constante en torno de varios cabezales (0=No, 1=Si).............Apartado 3.3.10
(4) Consigna S unipolar (1) o bipolar (0)...................................................................Apartado 5.2
(3) G00 vectorizado (0=No, 1=Si) .............................................................................Apartado 3.3.10
(2) Sentido de contaje de la herramienta motorizada o sincronizada ..........................Apartado 4.9
(1) Signo de la herramienta motorizada o sincronizada .............................................Apartado 4.9
P608(8) Señal Io del sistema de captación del eje Z (0=Normal, 1=Codi) ..........................Apartado 4.7
(7) Secuencia Io creciente con contaje positivo (0) o negativo (1) del eje Z...............Apartado 4.7
(6) Periodo señal Io codificada del eje Z (0=20mm, 1=100mm) .................................Apartado 4.7
(5) Señal Io del sistema de captación del eje X (0=Normal, 1=Codi) ..........................Apartado 4.7
(4) Secuencia Io creciente con contaje positivo (0) o negativo (1) del eje X...............Apartado 4.7
(3) Periodo señal Io codificada del eje X (0=20mm, 1=100mm) .................................Apartado 4.7
(2) Sin función (=0)
(1) Anulación de la alarma de captación del eje A5 (0=No, 1=Si) ..............................Apartado 3.3.2

P609(8) Velo giro herram. motorizada puede ser modificada desde panel (0=No, 1=Si) .....Apartado 4.9
(7) Resolución de 0,0001 milímetros / 0,00001 pulgadas (0=No, 1=Si) .....................Apartado 4.10
(6) Terminal 24, I/O2, como sentido de giro de torreta portaherram. (0=No, 1=Si) ......Apartado 3.3.2
(5) Parámetros aritméticos P150 a P254 de sólo lectura (0=No, 1=Si) .........................Apartado 3.3.10
(4) Aceleración/deceleración en todas las interpolaciones lineales (0=No, 1=Si) .......Apartado 4.8
(3) La cota teórica corresponde a la punta (0) o a la base (1) de la herramienta...........Apartado 3.3.5
(2) Hay PLC64 en la red (0=No, 1=Si) .......................................................................Red local Fagor
(1) El volante electrónico es el FAGOR 100P (0=No, 1=Si) .......................................Apartado 3.3.3
P610 Parámetro de identificación del CNC en la red local ............................................Red local Fagor
P611(8) Combinación de colores del monitor ...................................................................Apartado 3.3.8
(7) Combinación de colores del monitor ...................................................................Apartado 3.3.8
(6) La función P1=0X tiene en cuenta las unidades de trabajo (0=No, 1=Si)...............Apartado 3.3.10
(5) El CNC ocupa el nodo principal de la red local ...................................................Red local Fagor
(4) Nodo que ocupa el CNC o número de nodos en la red..........................................Red local Fagor
(3) Nodo que ocupa el CNC o número de nodos en la red..........................................Red local Fagor
(2) Nodo que ocupa el CNC o número de nodos en la red..........................................Red local Fagor
(1) Nodo que ocupa el CNC o número de nodos en la red..........................................Red local Fagor
P612(8) Visualización del 3º eje (0=Si, 1=No)...................................................................Apartado 3.3.8
(7) Tipo de impulso de referencia máquina del 3º eje (0=Nega, 1=Posi) .....................Apartado 4.7
(6) Micro de referencia máquina del 3º eje (0=Si, 1=No) ............................................Apartado 4.7
(5) Factor de multiplicación de las señales del 3º eje (0=x4, 1=x2) ............................Apartado 4.1
(4) Equivalencia del encoder binario del 3º eje .........................................................Apartado 4.1
(3) Encoder binario en el 3º eje (0=No, 1=Si).............................................................Apartado 4.1
(2) Unidades de medida del sistema de captación del 3º eje (0=mm, 1=pul) ...............Apartado 4.1
(1) La máquina dispone del 3º eje (0=No, 1=Si).........................................................Apartado 3.3.1
P613(8) Sin función (=0)
(7) Sin función (=0)
(6) 3º eje rotativo rollover por el camino más corto (0=No, 1=Si)...............................Apartado 3.3.1
(5) El 3º eje es el eje C (0=No, 1=Si)..........................................................................Apartado 3.3.1
(4) El 3º eje se denomina Y/W (0=Y, 1=W)................................................................Apartado 3.3.1
(3) El 3º eje es un eje visualizador (0=No, 1=Si) ........................................................Apartado 3.3.1
(2) El 3º eje es un eje rotativo rollower (0=No, 1=Si) .................................................Apartado 3.3.1
(1) El 3º eje es un eje rotativo (0=No, 1=Si)...............................................................Apartado 3.3.1
P614(8) Visualización del 4º eje (0=Si, 1=No)...................................................................Apartado 3.3.8
(7) Tipo de impulso de referencia máquina del 4º eje (0=Nega, 1=Posi) .....................Apartado 4.7
(6) Micro de referencia máquina del 4º eje (0=Si, 1=No) ............................................Apartado 4.7
(5) Factor de multiplicación de las señales del 4º eje (0=x4, 1=x2) ............................Apartado 4.1
(4) Equivalencia del encoder binario del 4º eje .........................................................Apartado 4.1
(3) Encoder binario en el 4º eje (0=No, 1=Si).............................................................Apartado 4.1
(2) Unidades de medida del sistema de captación del 4º eje (0=mm, 1=pul) ...............Apartado 4.1
(1) La máquina dispone del 4º eje (0=No, 1=Si).........................................................Apartado 3.3.1
P615(8) Señal Io del sistema de captación del 4º eje (0=Normal, 1=Codi)..........................Apartado 4.7
(7) Secuencia Io creciente con contaje positivo (0) o negativo (1) del 4º eje ..............Apartado 4.7
(6) Periodo señal Io codificada del 4º eje (0=20mm, 1=100mm) ................................Apartado 4.7
(5) 4º eje rotativo rollover por el camino más corto (0=No, 1=Si)...............................Apartado 3.3.1
(4) El 4º eje se denomina Y/W (0=Y, 1=W)................................................................Apartado 3.3.1
(3) El 4º eje es un eje visualizador (0=No, 1=Si) ........................................................Apartado 3.3.1
(2) El 4º eje es un eje rotativo rollower (0=No, 1=Si) .................................................Apartado 3.3.1
(1) El 4º eje es un eje rotativo (0=No, 1=Si)...............................................................Apartado 3.3.1

P616(8) Conector A6 compartido por volante y herramienta sincronizada (0=No, 1=Si) ...Apartado 3.3.1
(7) Entradas Transfer-inhibit y M Ejecutada independientes de Feed-hold ...............Red local Fagor
(6) Aceleración/deceleración en G05, arísta matada (0=Si, 1=No) .............................Apartado 4.8
(5) Se utilizan las marcas M1801 a 1899 para enviar mensajes al CNC .....................Red local y PLCI
(4) G59 como translado de origen aditivo (0=No, 1=Si)............................................Apartado 3.3.10
(3) Sin función (=0)
(2) La subrutina de emergencia ejecuta la función M00 (0=No, 1=Si) .......................Apartado 3.3.6
(1) Asignación de cotas a parámetro en subrutina emergencia (0=Inicio, 1=Actual) ..Apartado 3.3.6
P617(8) Para uso excluxivo del Servicio de Asistencia Técnica
(7) Sin función (=0)
(6) Sin función (=0)
(5) Señal Io del sistema de captación del 3º eje (0=Normal, 1=Codi).........................Apartado 4.7
(4) Secuencia Io creciente con contaje positivo (0) o negativo (1) del 3º eje .............Apartado 4.7
(3) Periodo señal Io codificada, del 3º eje (0=20mm, 1=100mm)...............................Apartado 4.7
(2) La subrutina asociada se ejecuta antes (1) o después (0) que la función T............Apartado 3.3.5
(1) El CNC dispone de PLCI (0=No, 1=Si)................................................................Manual PLCI
P618(8) Sentido de búsqueda de referencia máquina del eje X (0=Pos, 1=Neg).................Apartado 4.7
(7) Sentido de búsqueda de referencia máquina del eje Z (0=Pos, 1=Neg) .................Apartado 4.7
(6) Sentido de búsqueda de referencia máquina del 3º eje (0=Pos, 1=Neg) ................Apartado 4.7
(5) Sentido de búsqueda de referencia máquina del 4º eje (0=Pos, 1=Neg) ................Apartado 4.7
(4) Sin función (=0)
(3) La señal Transfer-inhibit no actúa sobre las funciones M, S, T.............................Red local Fagor
(2) Avance de los ejes rotativos en 2,54 grados/min (0) o en grados/min (1) .............Apartado 4.5
(1) Sin función (=0)
P619(8) En Manual se permite trabajar con Velocidad de Corte Constante (0=No, 1=Si) ..Apartado 3.3.9
(7) Volante gestionado desde el PLC (0=No, 1=Si)...................................................Apartado 3.3.3
(6) Inhibición del cabezal desde el PLC (0=No, 1=Si) ..............................................Apartado 3.3.10
(5) Sin función (=0)
(4) Resolución de contaje con señales senoidales del 4º eje .....................................Apartado 4.1
(3) Resolución de contaje con señales senoidales del 3º eje .....................................Apartado 4.1
(2) Resolución de contaje con señales senoidales del eje Z ......................................Apartado 4.1
(1) Resolución de contaje con señales senoidales del eje X ......................................Apartado 4.1
P620(8) Sin función (=0)
(7) Sin función (=0)
(6) Sin función (=0)
(5) Sin función (=0)
(4) Signo de la holgura de husillo del 4º eje (0=Pos, 1=Neg).....................................Apartado 4.4
(3) Signo de la holgura de husillo del 3º eje (0=Pos, 1=Neg).....................................Apartado 4.4
(2) Signo de la holgura de husillo del eje Z (0=Pos, 1=Neg) .....................................Apartado 4.4
(1) Signo de la holgura de husillo del eje X (0=Pos, 1=Neg) .....................................Apartado 4.4
P621(8) Control de aceleración/deceleración en forma de campana (0=No, 1=Si) .............Apartado 4.8
(7) Sin función (=0)
(6) Sin función (=0)
(5) Sin función (=0)
(4) Sincronización con eje independiente (0=No, 1=Si)............................................Apartado 3.3.10
(3) Sin función (=0)
(2) Sin función (=0)
(1) Para uso excluxivo del Servicio de Asistencia Técnica
P622 Para uso excluxivo del Servicio de Asistencia Técnica
P623 Para uso excluxivo del Servicio de Asistencia Técnica

P700 Número de herramientas (0...32)..................................................................................Apartado 3.3.5
P701 Valor de la S analógica residual (1=2,5mV).................................................................Apartado 5.1
P702 Tiempo de oscilación en un cambio de gama ..............................................................Apartado 5.1
P703 Feedrate/Override cuando la consigna de un algún eje alcanza 10 V ...........................Apartado 4.5
P704 Tiempo de estabilización de la S (1=100ms) ...............................................................Apartado 5.4
P705 Error si el avance del eje no está entre el 50% y el 200% del programado ....................Apartado 4.5
P706 Velocidad de cabezal S cuando se trabaja en M19 (0...255 rpm) ..................................Apartado 5.4.1
P707 Banda de muerte del cabezal con M19 ........................................................................Apartado 5.4.1
P708 Ganancia proporcional K del cabezal con M19 ...........................................................Apartado 5.4.1
P709 Consigna analógica mínima del cabezal con M19 (1=2,5mV) .....................................Apartado 5.4.1
P710 Función M asociada al movimiento de palpación, G75 ...............................................Apartado 3.3.4
P711 Ganacia proporcional K de la herramienta sincronizada ..............................................Apartado 4.9
P712 Control de aceleración/deceleración del eje X (1=20ms) .............................................Apartado 4.8
P713 Control de aceleración/deceleración del eje Z (1=20ms)..............................................Apartado 4.8
P714 Control de aceleración/deceleración del 3º eje (1=20ms).............................................Apartado 4.8
P715 Recuperación de posición programada en ejes "con control no continuo" ...................Apartado 4.6
P716 Subrutina de emergencia.............................................................................................Apartado 3.3.6
P717 Máximo avance F para los tramos curvos ....................................................................Apartado 4.5
P718 Nº de nodo al que se envían las funciones M, S, T .......................................................Red local Fa-
gor
P719 Nº de registro del nodo P718 al que se envían las funciones M, S, T ............................Red local Fa-
gor
P720 Ganancia Feed-Forward del eje X ................................................................................Apartado 4.8
P721 Ganancia Feed-Forward del eje Z ................................................................................Apartado 4.8
P722 Ganancia Feed-Forward del 3º eje ...............................................................................Apartado 4.8
P723 Ganancia Feed-Forward del 4º eje ...............................................................................Apartado 4.8
P724 Control de aceleración/deceleración del 4º eje (1=20ms).............................................Apartado 4.8
P725 Grupo de marcas que utiliza el CNC para enviar su información interna ......................Red local Fa-
gor
P726 Grupo de marcas que utiliza el CNC para actualizar estado de los conectores ..............Red local Fa-
gor
P727 Grupo de marcas que utiliza el CNC para actualizar su información interna.................Red local Fa-
gor
P728 Grupo de marcas que utiliza el CNC para actual. su infor. interna adicional.................Red local Fa-
gor
P729 Cada cuanto tiempo comienza la ejecución de un nuevo ciclo de PLCI.......................Manual PLCI
P730 Subrutina asociada a la función T ...............................................................................Apartado 3.3.5
P731 Duración de la rampa de aceleración/Deceleración en forma de campana (1=10ms) .....Apartado 4.8
P732 a P741 Sin función (=0)

P800 Número de impulsos del encoder de cabezal (0...9999)...............................................Apartado 5.4
P801 Programa protegido ....................................................................................................Apartado 3.3
P802 Máximo avance programable, herramienta motorizada o sincronizada (0...9999 rpm) ..Apartado 4.9
P803 Número de impulsos de la herramienta sincronizada (0...9999)....................................Apartado 4.9
P804 Sin función (=0)
P805 Sin función (=0)
P806 Velocidad de avance de palpación en modo Manual...................................................Apartado 3.3.4
P807 2º Avance en búsqueda de referencia máquina del eje X..............................................Apartado 4.7
P808 2º Avance en búsqueda de referencia máquina del 3º eje .............................................Apartado 4.7
P809 2º Avance en búsqueda de referencia máquina del eje Z ..............................................Apartado 4.7
P810 2º Avance en búsqueda de referencia máquina del 4º eje .............................................Apartado 4.7
P811 Control de aceleración/deceleración del cabezal (1=10ms) .........................................Apartado 5.
P812 a P823 Sin función (=0)
P900 Sin función (=0)
P901 Sin función (=0)
P902 Cota X mínima del palpador de medida ......................................................................Apartado 3.3.4
P903 Cota X máxima del palpador de medida......................................................................Apartado 3.3.4
P904 Cota Z mínima del palpador de medida.......................................................................Apartado 3.3.4
P905 Cota Z máxima del palpador de medida ......................................................................Apartado 3.3.4
P906 Sin función (=0)
P907 Sin función (=0)
P908 Offset de la regla de Io codificado del eje X ................................................................Apartado 4.7
P909 Offset de la regla de Io codificado del eje Z ................................................................Apartado 4.7
P910 Offset de la regla de Io codificado del 3º eje ................................................................Apartado 4.7
P911 Offset de la regla de Io codificado del 4º eje ................................................................Apartado 4.7
P912 a P923 Sin función (=0)

APENDICE H
CUADRO ARCHIVO DE LOS PARAMETROS MAQUINA
Parámetro VALOR Parámetro VALOR Parámetro VALOR Parámetro VALOR
P0 P4 P8 P12
P1 P5 P9 P13
P2 P6 P10
P3 P7 P11 P99
Parámetro VALOR Parámetro VALOR Parámetro VALOR Parámetro VALOR
P100 P200 P300 P400
P101 P201 P301 P401
P102 P202 P302 P402
P103 P203 P303 P403
P104 P204 P304 P404
P105 P205 P305 P405
P106 P206 P306 P406
P107 P207 P307 P407
P108 P208 P308 P408
P109 P209 P309 P409
P110 P210 P310 P410
P111 P211 P311 P411
P112 P212 P312 P412
P113 P213 P313 P413
P114 P214 P314 P414
P115 P215 P315 P415
P116 P216 P316 P416
P117 P217 P317 P417
P118 P218 P318 P418
P119 P219 P319 P419
Parámetro VALOR Parámetro VALOR
P500 P501

PARAMETRO VALOR PARAMETRO VALOR
P600 P612
P601 P613
P602 P614
P603 P615
P604 P616
P605 P617
P606 P618
P607 P619
P608 P620
P609 P621
P610 P622
P611 P623
Parámetro VALOR Parámetro VALOR Parámetro VALOR Parámetro VALOR
P700 P711 P722 P733
P701 P712 P723 P734
P702 P713 P724 P735
P703 P714 P725 P736
P704 P715 P726 P737
P705 P716 P727 P738
P706 P717 P728 P739
P707 P718 P729 P740
P708 P719 P730 P741
P709 P720 P731
P710 P721 P732
Parámetro VALOR Parámetro VALOR Parámetro VALOR Parámetro VALOR
P800 P806 P812 P818
P801 P807 P813 P819
P802 P808 P814 P820
P803 P809 P815 P821
P804 P810 P816 P822
P805 P811 P817 P823
Parámetro VALOR Parámetro VALOR Parámetro VALOR Parámetro VALOR
P900 P906 P912 P918
P901 P907 P913 P919
P902 P908 P914 P920
P903 P909 P915 P921
P904 P910 P916 P922
P905 P911 P917 P923

Función
auxiliar
VALOR
M
M
M
M
M
M
M
M
M
M
M
M
M
M
M
M
M
M
M
APENDICE I
CUADRO ARCHIVO DE LAS FUNCIONES AUXILIARES "M" DECODIFICADAS

Posición ERROR Posición ERROR
P0 P1 P60 P61
P2 P3 P62 P63
P4 P5 P64 P65
P6 P7 P66 P67
P8 P9 P68 P69
P10 P11 P70 P71
P12 P13 P72 P73
P14 P15 P74 P75
P16 P17 P76 P77
P18 P19 P78 P79
P20 P21 P80 P81
P22 P23 P82 P38
P24 P25 P84 P85
P26 P27 P86 P87
P28 P29 P88 P89
P30 P31 P90 P91
P32 P33 P92 P93
P34 P35 P94 P95
P36 P37 P96 P97
P38 P39 P98 P99
P40 P41 P100 P101
P42 P43 P102 P103
P44 P45 P104 P105
P46 P47 P106 P107
P48 P49 P108 P109
P50 P51 P110 P111
P52 P53 P112 P113
P54 P55 P114 P115
P56 P57 P116 P117
P58 P59 P118 P119
APENDICE J
TABLAS DE COMPENSACION DE ERROR DE HUSILLO

APENDICE K
MANTENIMIENTO
Limpieza:
La acumulación de suciedad en el aparato puede actuar como pantalla que impida la correcta
disipación de calor generado por los circuitos electrónicos internos con el consiguiente riesgo de
sobrecalentamiento y avería del CNC.
También, la suciedad acumulada puede, en algunos casos, proporcionar un camino conductor
a la electricidad que pudiera provocar por ello fallos en los circuitos internos del aparato,
especialmente bajo condiciones de alta humedad.
Para la limpieza del panel de mandos y del monitor se recomienda el empleo de una bayeta suave
empapada con agua desionizada y/o detergentes lavavajillas caseros no abrasivos (líquidos,
nunca en polvos
), o bien con alcohol al 75%.
No utilizar aire comprimido a altas presiones para la limpieza del aparato, pues ello puede ser
causa de acumulación de cargas que a su vez den lugar a descargas electrostáticas.
Los plásticos utilizados en la parte frontal del CNC son resistentes a:
1.- Grasas y aceites minerales
2.- Bases y lejías
3.- Detergentes disueltos
4.- Alcohol
Evitar la acción de disolventes como Clorohidrocarburos, Benzol, Ésteres y
Éteres porque pueden dañar los plásticos con los que está realizado el frontal del
aparato.
Inspección Preventiva
Si el CNC no se enciende al accionar el interruptor posterior de puesta en marcha, comprobar
que el fusible del monitor y los fusibles de la Unidad Central se encuentran en perfecto estado
y que son los apropiados.
La unidad central lleva 2 fusibles rápidos (F), uno por cada línea de red, de 3,15Amp./250V.
En el Monitor del CNC 8030 lleva 2 fusibles rápidos (F) de 0,5Amp./250V.

Para comprobar el fusible, desconectar previamente la alimentación del CNC
No manipular el interior del aparato
Sólo personal autorizado de Fagor Automation puede manipular el interior del
aparato.
No manipular los conectores con el aparato conectado a la red eléctrica
Antes de manipular los conectores (entradas/salidas, captación, etc) cerciorarse
que el aparato no se encuentra conectado a la red eléctrica.
Nota:
Fagor Automation no se responsabilizará de cualquier daño material o físico que
pudiera derivarse de un incumplimiento de estas exigencias básicas de seguridad.
Lista de materiales, piezas reemplazables
Descrición Pieza Código Fabricante Referencia
Unidad central
8030 TG
8030 TGI
8030 TSI
83360008
83360005
83360001
Fagor Automation
Monitor color de 14" 83420005 Fagor Automation
Panel de Mandos 80300015 Fagor Automation
Juego de cables para
el Monitor
de 5 m
de 10 m
de 15 m
83640000
83640001
83640002
Fagor Automation
Cable de red 3x0,75 11313000 Fagor Automation
Fusible de 3,15A/250V 12130015
Schurter
Wickmann
FST-034-1521
Ref. 19115
Manual en castellano
OEM
USER
83750040
8G900060
Fagor Automation


001 Este error se produce en los siguientes casos:
> Cuando el primer carácter del bloque que se desea ejecutar no es una "N".
> Cuando se está editando en modo BACKGROUND y el programa en ejecución realiza una llamada a una
subrutina que se encuentra definida en el programa en edición o en otro programa posterior.
El orden en que se encuentran almacenados los programas en memoria se muestra al solicitarse el directorio
de programas. Asimismo, si durante la ejecución de un programa se edita uno nuevo, este se sitúa al final de
memoria.
002 Demasiados dígitos al definir una función en general.
003 Se ha asignado un valor negativo a una función que no acepta el signo (-), o se ha asignado un valor incorrecto
a un parámetro de ciclo fijo.
004 Definición de un ciclo fijo estando activa la función G02, G03 ó G33.
005 Bloque paramétrico mal editado.
006 Más de 10 parámetros afectados en un mismo bloque.
007 División por cero.
008 Raíz cuadrada de un número negativo.
009 Valor demasiado grande asignado a un parámetro.
010 * No se ha programado la gama o la velocidad de corte constante.
011 Más de siete funciones M en un mismo bloque.
012 Este error se produce en los siguientes casos:
> Mal programada la función G50.
> Sobrepasamiento del valor de las dimensiones de herramienta.
> Sobrepasamiento del valor de los traslados de origen G53/G59.
013 Perfil de un ciclo fijo mal definido.
014 Se ha programado un bloque que no es correcto, bien en sí mismo o bien en relación con la historia del programa
hasta el momento.
015 Las funciones G14, G15, G16, G20, G21, G22, G23, G24, G25, G26, G27, G28, G29, G30, G31, G32, G50, G52,
G53, G54, G55, G56, G57, G58, G59, G72, G74, G92 y G93 deben ir solas en un bloque.
016 No existe la subrutina o el bloque llamado ó no existe el bloque buscado mediante la función especial F17.
017 Este error se produce en los siguientes casos:
> Paso de rosca negativo o demasiado elevado.
> Factor de sincronización K de la herramienta sincronizada demasiado grande
018 Error en los bloques en que se definen los puntos mediante ángulo-ángulo o ángulo-coordenada.
019 Este error se produce en los siguientes casos:
> Tras definir G20, G21, G22 ó G23 no viene el número de subrutina al que se refiere.
> No se ha programado el carácter "N" tras la función G25, G26, G27, G28 o G29.
> Demasiados niveles de imbricación, uno dentro de otro.
020 Se ha definido más de una gama de cabezal en un mismo bloque
021 Este error se produce en los siguientes casos:
> No existe un bloque en la dirección definida por el parámetro asignado a F18, F19, F20, F21, F22.
> No se ha definido el eje correspondiente en el bloque direccionado
022 Al programar los ejes en G74, se repite alguno de ellos.
023 No se ha programado K tras G04.

024 Falta el punto decimal en los formatos T2.2 ó N2.2.
025 Error en un bloque de definición o llamada a subrutina, o bien, de definición de saltos condicionales o
incondicionales.
026 Este error se produce en los siguientes casos:
> Sobrepasamiento de la capacidad de memoria.
> Capacidad de cinta libre ó de memoria de CNC inferior al tamaño del programa que se intenta introducir.
027 No se ha definido I/K en interpolación circular o roscado.
028 Se ha intentado seleccionar un corrector en la tabla de herramientas o una herramienta externa no existente (el
número de herramientas se define mediante parámetro-máquina).
029 Se ha asignado un valor demasiado grande a una función.
Este error se produce con gran frecuencia si se programa un valor de F en mm/min y luego se pasa a trabajar en
mm/rev sin cambiar el valor de F.
030 Se ha programado una G no existente.
031 Valor del radio de la herramienta demasiado grande.
032 Valor del radio de la herramienta demasiado grande.
033 Se ha programado un desplazamiento superior a 8388 mm o 330,26 pulgadas.
Ejemplo: Si el eje Z se encuentra en la posición Z-5000 y se desea desplazarlo hasta el punto Z5000, el CNC
mostrará el error 33 si se programa el bloque N10 Z5000, ya que el desplazamiento programado
es Z5000 - Z-5000 = 10000 mm.
Por el contrario, si el desplazamiento se efectúa en dos fases, como se indica a continuación, el CNC
no mostrará el error 33 puesto que cada desplazamiento es inferior a 8388 mm.
N10 Z0 ; Desplazamiento 5000 mm
N10 Z5000 ; Desplazamiento 5000 mm
034 Se han definido S ó F con un valor superior al permitido.
035 No existe información suficiente para compensar, para redondear aristas o achaflanar.
036 Subrutina repetida.
037 Mal programada la función M19.
038 Mal programada la función G72.
Se debe tener en cuenta que si se aplica la función G72 a un solo eje, este debe de estar en el origen pieza (valor
0) en el momento de aplicarse el factor de escala.

039 Este error se produce en los siguientes casos:
> Más de 15 niveles de anidamiento en llamada a subrutinas
> Se ha programado un bloque que contiene un salto a si mismo. Ejemplo: N120 G25 N120.
040 El arco programado no pasa por el punto final definido. (Tolerancia 0,01 mm) o no existe un arco que pasa por
los puntos definidos mediante G08 o G09.
041 Este error se produce cuando se ha programado una entrada tangencial y se dan los siguientes casos:
> No existe espacio para realizar la entrada tangencial. Se requiere un espacio superior o equivalente a 2 veces
el radio de redondeo programado.
> El tramo en que se ha definido la entrada tangencial es un tramo curvo (G02, G03). El tramo en que se define
la entrada tangencial debe ser lineal.
042 Este error se produce cuando se ha programado una salida tangencial y se dan los siguientes casos:
> No existe espacio para realizar la salida tangencial. Se requiere un espacio superior o equivalente a 2 veces
el radio de redondeo programado.
> El tramo en que se ha definido la salida tangencial es un tramo curvo (G02, G03). El tramo en que se define
la salida tangencial debe ser lineal.
043 Origen de coordenadas polares (G93) mal definido.
044 Mal programada la función M45 S, velocidad de giro de la herramienta motorizada.
045 Mal programadas las funciones G36, G37, G38 ó G39.
046 Coordenadas polares mal definidas.
047 Se ha programado un desplazamiento cero durante una compensación de radio o redondeo.
048 Inicio o anulación de compensación de radio con G02/G03.
049 Chaflán mal programado.
050 Se ha programado G96 con salida S en BCD en parámetro (torno con cabezal c.a.)
051 Eje C mal programado.
054 No existe disquette en la Disquetera FAGOR o no existe cinta en el Lector de cassette o bien la tapa de la cabeza
del Lector está abierta.
055 Error de paridad en la escritura o lectura del disquete o cinta
056 Este error se produce en los siguientes casos:
> Cuando la memoria se encuentra bloqueada y se pretende generar un programa de CNC mediante la función
G76.
> Cuando el programa que se desea generar mediante la función G76 es el programa P99999 o el programa
protegido.
> Si detrás de la función G76 va la función G22 ó G23.
> Si detrás de la función G76 hay más de 70 caracteres.
> Si se programa la función G76 (contenido del bloque) sin haber programado anteriormente G76 P5 ó G76
N5.

> Si en una función del tipo G76 P5 ó G76 N5 no se programan las 5 cifras del número de programa.
> Cuando se está generando un programa (G76 P5 ó G76 N5) se cambia de número de programa a generar sin
anular el anterior.
> Si durante la ejecución de un bloque del tipo G76 P5, el programa al que se hace referencia no ha sido el último
editado. Es decir, que se ha editado otro con posterioridad o que durante la edición de un programa en
background se ejecuta un bloque del tipo G76 P5.
057 Disquette o cinta protegida contra escritura.
058 Dificultades en movimiento del disquette o en el arrastre de cinta.
059 Error de diálogoentre el CNC y la Disquetera FAGOR o entre el CNC y el Lector de cinta.
060 Fallo de circuitería interna del CNC. Consultar con el servicio de asistencia técnica.
061 Fallo de batería.
A partir de producirse este error, la información contenida en la memoria será retenida durante 10 días más,
estando apagado el CNC. Debiendo ser sustituido el módulo de batería ubicado en la parte posterior del aparato.
Consúltese con el Servicio de Asistencia Técnica.
Debido al riesgo de explosión ó combustión no intente recargar la pila, no la exponga a
temperaturas superiores a 100 grados centígrados y no cortocircuite sus bornas.
064 * La entrada de emergencia externa (terminal 14 del conector I/O 1) se encuentra activada.
065 * Este error se produce en los siguientes casos:
> Cuando trabajando con palpador (G75) se ha alcanzado la posición programada y no se ha recibido la señal
exterior del palpador.
> Si al ejecutarse un ciclo fijo de palpación, el control recibe la señal enviada por el palpador cuando no se está
realizando el movimiento propio de palpación (colisión).
066 * Límite de recorrido eje X sobrepasado
El error se genera bien porque la máquina está fuera de límite o bien porque se ha programado un bloque que
obligaría a la máquina a salirse de límites.
068 * Límite de recorrido eje Z sobrepasado.
El error se genera bien porque la máquina está fuera de límite o bien porque se ha programado un bloque que
obligaría a la máquina a salirse de límites.
070 ** Error de seguimiento eje X.
071 ** Error de seguimiento de la herramienta sincronizada.
072 ** Error de seguimiento eje Z.
073 ** Error de seguimiento del 4º eje.
074 ** Este error se produce en los siguientes casos:
> Error de seguimiento del 3º eje.
> Error de seguimiento del eje C.
> Valor de S (velocidad de cabezal) demasiado elevado.
075 ** Fallo de captación en el conector A1.
076 ** Fallo de captación en el conector A2.
077 ** Fallo de captación en el conector A3.
078 ** Fallo de captación en el conector A4.
079 ** Fallo de captación en el conector A5.
081 ** Límite de recorrido del 3º eje sobrepasado.
082 ** Error de paridad de los parámetros del 4º eje. El CNC inicializa los parámetros máquina de la línea serie RS232C
"P0=9600", "P1=8", "P2=0", "P3=1", "P605(5)=1", "P605(6)=1", "P605(7)=1".

083 ** Límite de recorrido del 4º eje sobrepasado.
087 ** Fallo de circuitería interna del CNC. Consultar con el servicio de asistencia técnica.
088 ** Fallo de circuitería interna del CNC. Consultar con el servicio de asistencia técnica.
089 * No se ha realizado la búsqueda del punto referencia máquina de todos los ejes.
Este error se produce cuando es obligatorio realizar la búsqueda del punto de referencia máquina tras el
encendido. Se define mediante parámetro máquina.
090 ** Fallo de circuitería interna del CNC. Consultar con el servicio de asistencia técnica.
091 ** Fallo de circuitería interna del CNC. Consultar con el servicio de asistencia técnica.
092 ** Fallo de circuitería interna del CNC. Consultar con el servicio de asistencia técnica.
093 ** Fallo de circuitería interna del CNC. Consultar con el servicio de asistencia técnica.
094 Error de paridad en la tabla de herramientas, o en la tabla G53-G59. El CNC inicializa los parámetros máquina
de la línea serie RS232C "P0=9600", "P1=8", "P2=0", "P3=1", "P605(5)=1", "P605(6)=1", "P605(7)=1".
095 ** Error de paridad de los parámetros generales. El CNC inicializa los parámetros máquina de la línea serie RS232C
"P0=9600", "P1=8", "P2=0", "P3=1", "P605(5)=1", "P605(6)=1", "P605(7)=1".
096 ** Error de paridad de los parámetros eje Z. El CNC inicializa los parámetros máquina de la línea serie RS232C
"P0=9600", "P1=8", "P2=0", "P3=1", "P605(5)=1", "P605(6)=1", "P605(7)=1".
097 ** Error de paridad de los parámetros del 3º eje o eje C. El CNC inicializa los parámetros máquina de la línea serie
RS232C "P0=9600", "P1=8", "P2=0", "P3=1", "P605(5)=1", "P605(6)=1", "P605(7)=1".
098 ** Error de paridad de los parámetros eje X. El CNC inicializa los parámetros máquina de la línea serie RS232C
"P0=9600", "P1=8", "P2=0", "P3=1", "P605(5)=1", "P605(6)=1", "P605(7)=1".
099 ** Error de paridad en la tabla de M. El CNC inicializa los parámetros máquina de la línea serie RS232C "P0=9600",
"P1=8", "P2=0", "P3=1", "P605(5)=1", "P605(6)=1", "P605(7)=1".
100 ** Fallo de circuitería interna del CNC. Consultar con el servicio de asistencia técnica.
101 ** Fallo de circuitería interna del CNC. Consultar con el servicio de asistencia técnica.
105 Este error se produce en los siguientes casos:
> Más de 43 caracteres dentro de un comentario
> Más de 5 caracteres para definir el número de programa
> Más de 4 caracteres para definir el número de bloque
> Caracteres extraños en memoria.
106 ** Límite de temperatura interior sobrepasado.
108 ** Error en parámetros de compensación del husillo del eje Z. El CNC inicializa los parámetros máquina de la línea
serie RS232C "P0=9600", "P1=8", "P2=0", "P3=1", "P605(5)=1", "P605(6)=1", "P605(7)=1".
110 ** Error en parámetros de compensación del husillo del eje X. El CNC inicializa los parámetros máquina de la
línea serie RS232C "P0=9600", "P1=8", "P2=0", "P3=1", "P605(5)=1", "P605(6)=1", "P605(7)=1".
111 * Error en la red local Fagor. Instalación incorrecta de la línea (hardware)
112 * Error en la red local Fagor. Se produce en los siguientes casos:
> La configuración de la red (nodos) es incorrecta.
> La configuración de red ha cambiado. Alguno de los nodos ha dejado de estar presente en la misma.
Si se produce este error es necesario acceder al modo red, edición o monitorización, antes de ejecutar un bloque
de programa.
113 * Error en la red local Fagor. Algún nodo no se encuentra en condiciones de trabajar en la red local. Por ejemplo:
> No se encuentra compilado el programa del PLC64.
> Se ha enviado a un CNC82 un bloque del tipo G52 mientras se hallaba en ejecución.
114 * Error en la red local Fagor. Se ha enviado una orden incorrecta a un nodo.

115 * Error de Watch-dog en la rutina periódica.
Este error se produce cuando la rutina periódica dura más de 5 milisegundos.
116 * Error de Watch-dog en el programa principal.
Este error se produce cuando el programa principal dura más de la mitad del tiempo indicado en el parámetro
máquina "P729".
117 * La información interna del CNC que se ha solicitado mediante la activación de las marcas M1901 a M1949
no se encuentra disponible.
118 * Se ha intentado modificar, mediante la activación de las marcas M1950 a M1964, una variable interna del
CNC que no se encuentra disponible.
119 Error al escribir los parámetros máquina, tabla de funciones M decodificadas y las tablas de compensación de
error de husillo, en la EEPROM.
Este error se puede producir cuando al bloquear los parámetros máquina, tabla de funciones M decodificadas
y las tablas de compensación de error de husillo, el CNC no puede guardar dicha información en el la memoria
EEPROM.
120 Error de checksum al recuperar los parámetros máquina, tabla de funciones M decodificadas y las tablas de
compensación de error de husillo, de la EEPROM.
Los ERRORES que disponen de “*” actúan de la siguiente manera:
Detienen el avance de los ejes y el giro del cabezal. Eliminando para ello todas las
señales de Enable y anulando todas las salidas analógicas del CNC.
Detienen la ejecución del programa pieza del CNC si se encuentra en ejecución.
Los ERRORES que disponen de “**” además de actuar como los errores que disponen
de “*”, activan la SALIDA DE EMERGENCIA .


ACERCA DE LA INFORMACION DE ESTE MANUAL
Este manual, dirigido al fabricante de la máquina, debe ser utilizado únicamente cuando se desea
instalar el CNC 8025 en la red local FAGOR.
El capítulo 1 "Configuración de la red local Fagor" explica en que consiste dicha red local y cómo
se debe efectuar el conexionado entre los distintos componentes de la misma.
El capítulo 2 "El CNC 8025 en la red local Fagor" indica:
* Cómo de personalizar el CNC 8025 en la red local.
* Cual es la información interna del CNC a la que pueden acceder el resto de los elementos
instalados en la red local Fagor.
* La forma de acceder desde el CNC a la información disponible en el resto de los
componentes de la red local.
Para conocer con más detalle cómo configurar y utilizar cualquier otro componente de la red local
Fagor le sugerimos consultar su manual correspondiente.
Notas:
La información descrita en este manual puede estar sujeta a variaciones motivadas
por modificaciones técnicas.
FAGOR AUTOMATION, S. Coop. Ltda. se reserva el derecho de modificar
el contenido del manual, no estando obligada a notificar las variaciones.

INDICE
Apartado Pagina
Capítulo 1 CONFIGURACION DE LA RED LOCAL FAGOR
1.1 Introducción ....................................................................................................................1
1.2 Conexionado ...................................................................................................................2
Capítulo 2 EL CNC 8025 EN LA RED LOCAL FAGOR
2.1 Introducción ....................................................................................................................1
2.2 Personalización del CNC 8025 en la red local fagor.......................................................2
2.3 Trasvase de información entre un CNC 8025 y el resto de los nodos de
la red local .......................................................................................................................6
2.4 Trasvase de información entre un CNC 8025 con PLC integrado y el resto de
los nodos de la red local ..................................................................................................13
2.5 Información interna del CNC 8025 T a la que tiene acceso cualquier PLC64
de la red ...........................................................................................................................15
2.5.1 Lectura de variables internas del CNC ............................................................................16
2.5.2 Escritura en las variables internas del CNC.....................................................................18
2.6 Acceso desde el CNC 8025 a los registros de un PLC64 ................................................21
2.7 Acceso desde el CNC 8025 a un CNC82, CNC101S, CNC102 o CNC102S ..................23
2.7.1 Acceso a las variables de lectura .....................................................................................23
2.7.1.1 Variables de lectura .........................................................................................................24
2.7.2 Acceso a las variables internas de escritura .....................................................................26
2.7.2.1 Variables de escritura.......................................................................................................27
2.7.3 Generación de comandos de ejecución ...........................................................................29
APENDICES
A Códigos de tecla del CNC 8025 ......................................................................................2
B Códigos de tecla del CNC101S, CNC102, CNC102S.....................................................3

Página
Capítulo: 1 Sección:
CONFIGURACION DE LA RED LOCAL FAGOR 1
1. CONFIGURACION DE LA RED LOCAL FAGOR
1.1 INTRODUCCION
La RED LOCAL FAGOR es una red de comunicación del tipo Token Passing Bus (bus
con paso de testigo), que permite conectar en ella hasta un máximo de 15 elementos.
Los elementos que pueden ser conectados en la red local FAGOR son:
CNC 82
CNC 101S, CNC 102, CNC 102S
CNC 800 MG (con o sin PLC Integrado)
CNC 800 T o TG (con o sin PLC Integrado)
CNC 8025 GP
CNC 8025 M, MG o MS (con o sin PLC Integrado)
CNC 8025 T, TG o TS (con o sin PLC Integrado)
CNC 8025 P, PG o PS (con o sin PLC Integrado)
PLC64
Cada elemento ocupa un NODO de la red y todos ellos disponen de una serie de parámetros
máquina de configuración de red.
La numeración de los nodos debe comenzar en 0 y ser sucesiva. El Nodo 0 se denomina
Nodo Principal y el elemento que lo ocupa define el número total de nodos de la red local
instalada.
El sistema empleado en la Red Local es el de MAESTRO ROTATIVO, es decir, los
diferentes nodos asumen la función de Maestro de manera temporal, permitiendo que todos
ellos puedan comunicarse directamente entre sí.
INTRODUCCION

Sección:
Capítulo: 1
Página
CONFIGURACION DE LA RED LOCAL FAGOR2
1.2 CONEXIONADO
La conexión entre los distintos elementos se realiza a través de la línea serie RS485 de cada
uno de ellos.
El conector correspondiente a la línea serie RS485, es en todos los elementos, un conector
hembra tipo SUB-D de 9 terminales con la siguiente configuración:
TERMINAL SEÑAL FUNCION
1 FG Apantallamiento
2 —- No conectado
3 TxD Transmisión de datos
4 —- No conectado
5 —- No conectado
6 —- No conectado
7 —- No conectado
8 TxD Transmisión de datos
9 —- No conectado
Se debe utilizar cable "TWINAXIAL" para realizar la conexión entre los diversos nodos
de la red local Fagor. Además, dicho cable debe cumplir las siguientes características:
Tipo: 02 AWG trenzado 7x28
Conductor Material: Cobre (estañado sólo 1 conductor)
Resistencia: Máximo 11 L por cada 305m. (1000 pies)
Aislamiento Material: Teflón
Material Cobre estañado
Tipo Trenza 34 AWG. 8 finales / 16 portadores
Blindajes Recubrimiento Mínimo 95%
Resistencia Máximo 3L por cada 305m. (1000 pies)
Cubierta Material: Teflón
Diámetro ext. Nominal 7mm. (0.257 pulgadas)
Capacitancia Máximo 53,1 pF/m (16.2 pF/pie)
Impedancia 107± 5% Ohmios a 1 MHz.
CONEXIONADO

Página
Capítulo: 1 Sección:
CONFIGURACION DE LA RED LOCAL FAGOR 3
Para realizar el conexionado se debe tener en cuenta las siguientes consideraciones:
* El apantallamiento deberá conectarse únicamente en uno de los nodos de la red,
empleando para ello el terminal 1 del conector correspondiente.
* Entre los terminales 3 y 8 de los nodos de la red mas distantes entre sí, se debe colocar
una resistencia terminadora de línea de 120 ohmios 1/4 w.
* Cuando la red local Fagor esté compuesta por más de 2 nodos, se debe utilizar
derivadores "TEE TWINAXIAL", tal como se indica a continuación.
Se debe tener en cuenta que la máxima longitud de cable permitida entre el derivador
"TEE TWINAXIAL" y el elemento es de 80 cm.
CONEXIONADO

Sección:
Capítulo: 1
Página
CONFIGURACION DE LA RED LOCAL FAGOR4
Antes de efectuar el conexionado de la red local Fagor se debe efectuar el conexionado de
tierras de todos los elementos que se desean unir a la red local Fagor y comprobar entre las
bornas de 0V de los distintos elementos:
- que hay continuidad (con los aparatos desconectados).
- o que no existe diferencial de tensión entre ellos (con los aparatos conectados).
Si no se cumple esta condición, la circuitería interna de algunos elementos puede resultar
dañada.
Asimismo, para conectar o desconectar los conectores de la red local Fagor es obligatorio
que todos los elementos que se desean interconexionar se encuentren desconectados de la
red eléctrica.
CONEXIONADO

Página
Capítulo: 2 Sección:
EL CNC 8025 EN LA RED LOCAL FAGOR
1
2. EL CNC 8025 EN LA RED LOCAL FAGOR
2.1 INTRODUCCION
Cualquier PLC64 que se encuentra instalado en la red local Fagor puede acceder a la
información interna de cualquier CNC instalado en la red local, pudiendo:
* Conocer el número de programa que se está ejecutando, el avance F que se encuentra
seleccionado, que ejes se encuentran en movimiento, etc.
* Inhibir ejes, visualizar mensajes en el CNC, modificar el Speed Rate o el Feed Rate,
simular el teclado del CNC, etc.
Además, el CNC 8025 puede intervenir en el trasvase de información que se efectúa
mediante marcas. Esto permite por ejemplo:
* Interponer un PLC64 entre el núcleo del CNC y sus conectores, de forma que todas las
entradas de los conectores sean tratadas previamente por el PLC64 y que sea éste quien
indique al CNC lo que debe de hacer. Asimismo, será el PLC64 quien trate la
información de salida del CNC y quien active o desactive las salidas de los conectores.
INTRODUCCION

Sección:
Capítulo: 2
Página
EL CNC 8025 EN LA RED LOCAL FAGOR
2
2.2 PERSONALIZACION DEL CNC 8025 EN LA RED LOCAL FAGOR
Cuando se hace referencia a un bit de un parámetro del CNC o a un bit de un registro del
PLC64, se tendrá en cuenta la siguiente nomenclatura:
Parámetro CNC
Registro PLC64
P602= 00001111 R155=0000111100001111
Bit 1 Bit 0
Bit 2 Bit 1
...... ......
Bit 7 Bit 14
Bit 8 Bit 15
Para instalar un CNC 8025 T en la red local Fagor se deben personalizar los siguientes
parámetros máquina:
P611(5) El CNC ocupa el Nodo principal de la red local
Indica si el CNC es el nodo principal, es decir, si ocupa o no el NODO 0.
P611(5) = 0 No es el nodo principal
P611(5) = 1 Si es el nodo principal
P611(4, 3, 2, 1) Nodo que ocupa el CNC o número de nodos en la red
Si el CNC ocupa el nodo principal, indican cuantos nodos más hay en la red local
y cuando el CNC no ocupa el nodo principal indican el número de nodo en que se
encuentra situado.
Ejemplos:
Se encuentran conectados a la red local Fagor, 2 PLC64 (nodos 0 y 1) y un
CNC8025T (nodo 2).
P611(4) P611(3) P611(2) P611(1)
P611(5)=1 CNC en Nodo 0 P611(5)=0
Nodos además del
principal
Nodos en la
red:
El CNC ocupa el Nodo:
0 0 0 0 Incorrecto Incorrecto
0 0 0 1 1 2 1
0 0 1 0 2 3 2
0 0 1 1 3 4 3
0 1 0 0 4 5 4
0 1 0 1 5 6 5
0 1 1 0 6 7 6
0 1 1 1 7 8 7
1 0 0 0 8 9 8
1 0 0 1 9 10 9
1 0 1 0 10 11 10
1 0 1 1 11 12 11
1 1 0 0 12 13 12
1 1 0 1 13 14 13
1 1 1 0 14 15 14
1 1 1 1 Incorrecto Incorrecto
PERSONALIZACION DEL
CNC8025

Página
Capítulo: 2 Sección:
EL CNC 8025 EN LA RED LOCAL FAGOR
3
CNC 8025T P611(5) P611(4) P611(3) P611(2) P611(1)
Nodo 2 0 0 0 1 0
Se encuentran conectados a la red local Fagor, un CNC8025T (nodo 0) y 2
PLC64 (nodos 1 y 2).
CNC 8025T P611(5) P611(4) P611(3) P611(2) P611(1)
Nodo 0 1 0 0 1 0
Una vez instalado el CNC en la red local Fagor, parámetro P611(5, 4, 3, 2, 1), se deben
personalizar los siguientes parámetros máquina relacionados con la red local:
P610 Parámetro de identificación del CNC en la red local
Cualquier elemento instalado en la red local puede leer el contenido de este parámetro
máquina y en función de como haya sido personalizado por el fabricante, conocer más
datos respecto al CNC y a la máquina.
Atención:
Este parámetro máquina no afecta para nada al funcionamiento del CNC.
P616(7) Entradas Transfer-inhibit y M Ejecutada independientes de Feed-hold
El CNC 8025 T utiliza el terminal 15 del conector I/O1 como entrada de las señales
Feed-Hold, Transfer-Inhibit y M Ejecutada.
Este parámetro permite separar dicho tratamiento. Si se personaliza "P616(7)=1" el
CNC actúa del siguiente modo:
* La entrada Feed-Hold seguirá tomándola del terminal 15 del conector I/O1.
* La entrada Transfer-Inhibit la toma de la red local. Su estado puede ser fijado por
cualquier PLC64 instalado en la red local. Para ello se debe utilizar en el PLC64 la
marca M1955 y el bit 0 del registro R155.
* La entrada M Ejecutada la toma de la red local. Su estado puede ser fijado por
cualquier PLC64 instalado en la red local. Para ello se debe utilizar en el PLC64 la
marca M1955 y el bit 1 del registro R155.
P618(3) La señal Transfer Inhibit no actúa sobre las funciones M, S, T
El CNC analiza este parámetro cuando al parámetro P616(7) se le ha asignado el valor "1".
Si durante la ejecución de un bloque se pone la señal Transfer Inhibit a nivel lógico bajo,
el CNC analiza el estado del parámetro P618(3) y actúa del siguiente modo:
P618(3)=0 Una vez finalizado el bloque actual se detiene la ejecución del programa
y cuando la señal Transfer-Inhibit vuelve a nivel lógico alto, el CNC
continuará con la ejecución del programa.
P618(3)=1 Una vez finalizado el bloque actual, el CNC analiza el próximo bloque
de programa:
* Si contiene únicamente información del tipo M, S o T lo ejecuta y
analiza el próximo bloque.
PERSONALIZACION DEL
CNC8025

Sección:
Capítulo: 2
Página
EL CNC 8025 EN LA RED LOCAL FAGOR
4
* Si el bloque contiene otro tipo de información, desplazamiento, etc.
detiene la ejecución del programa y cuando la señal Transfer-Inhibit
vuelve a nivel lógico alto, el CNC continuará con la ejecución del
programa.
Esto permite, por ejemplo, efectuar un cambio de herramienta que
necesita de 2 bloques "N100 T2.2" y "N110 M06" y detener la
ejecución del programa hasta que finalice el cambio de herramienta.
P609(2) Hay PLC64 en la red
Este parámetro máquina indica al CNC si se encuentra instalado algún PLC64 en la red
local Fagor.
Siempre que el CNC ejecuta una función M, S o T analiza este parámetro, y si hay algún
PLC64 instalado en la red local Fagor envía el código de la función M, S o T que se
ha ejecutado a la red local.
Dicha información se envía al registro indicado por el parámetro "P718" del nodo
especificado por el parámetro máquina "P719".
P718 Nº de nodo al que se envían las funciones M, S, T
P719 Nº Registro del nodo P718 al que se envían las funciones M, S, T
Cuando en la red local se encuentra instalado algún PLC64, "P609(2)=1", el CNC
necesita conocer a qué nodo debe enviar el código de las funciones M, S o T y en que
registros del PLC64 instalado en dicho nodo debe depositar la información.
El parámetro "P718" indica el número de nodo en que se encuentra instalado el PLC64
al que se desea enviar la información de las funciones M, S, T.
Atención:
Si a este parámetro se le asigna el valor "P718=15", el CNC envía dicha
información a todos los nodos de la red que estén ocupados por autómatas
PLC64.
El parámetro "P719" indica el número de registro del PLC64 en que se debe depositar
el código de las funciones M. El código de las funciones S y T se depositará en los 2
registros siguientes.
Ejemplo: Se desea enviar el código de las funciones M, S, T al PLC64 que se
encuentra instalado en el nodo 3 y depositar dicha información en los
registros R20, R21 y R22.
P718=3 Envía la información al nodo 3
P719=20 El código de las funciones M se deposita en el registro R20
El código de las funciones S se deposita en el registro R21
El código de las funciones T se deposita en el registro R22
PERSONALIZACION DEL
CNC8025

Página
Capítulo: 2 Sección:
EL CNC 8025 EN LA RED LOCAL FAGOR
5
P616(5) Los mensajes del PLC vienen vía Marcas
Existen 3 formas de generar, desde el PLC64, un error o un mensaje de error en el CNC:
Utilizando la instrucción MSG, las marcas M1801 a M1899 o el binomio M1951 - R151.
El CNC requiere conocer el sistema empleado, actuando de forma distinta tal y como
se indica a continuación:
"P616(5)=1" Se utilizan las marcas M1801 a 1899 para generar errores o mensajes en
el CNC. No se puede utilizar la instrucción MSG ni el binomio M1951
- R151.
El CNC visualiza el texto asociado, que se encuentra definido en el
programa P99998, correspondiente a la marca más prioritaria y permite
acceder a la opción "Mensajes" en la que se muestran todos los mensajes
y errores activados desde el PLC.
"P616(5)=0" Se puede utilizar la instrucción MSG y el binomio M1951 - R151. No
se pueden utilizar las marcas M1801 a 1899 para generar errores o
mensajes en el CNC.
Cuando se utiliza el binomio M1951 - R151, se debe seleccionar el
número de error o mensaje en el registro R151 y activar, nivel lógico
alto, la marca M1951.
En ambos casos, el CNC visualiza el texto asociado que se encuentra
definido en el programa P99998.
Unicamente visualiza el número correspondiente al último mensaje o
error que se ha activado desde el PLC. Para borrarlo pulsar la tecla
[DELETE].
No se puede acceder a la opción "Mensajes" del PLC.
Atención:
El método más aconsejado en el PLC64 para generar errores o mensajes en
el CNC es utilizar las marcas M1801 a 1899.
Este método, además de ser más sencillo necesita menor tiempo de ejecución,
por lo que el ciclo de escán del PLC64 es más rápido.
PERSONALIZACION DEL
CNC8025

Sección:
Capítulo: 2
Página
EL CNC 8025 EN LA RED LOCAL FAGOR
6
2.3 TRASVASE DE INFORMACION ENTRE UN CNC8025 Y EL RESTO
DE LOS NODOS DE LA RED LOCAL
El CNC dispone de 8 grupos de 64 marcas internas para intercambiar información con el
resto de los elementos de la red local.
Grupo 1 M1 a M64 Grupo 5 M257 a M320
Grupo 2 M65 a M128 Grupo 6 M321 a M384
Grupo 3 M129 a M192 Grupo 7 M385 a M448
Grupo 4 M193 a M256 Grupo 8 M449 a M512
Además, es necesario personalizar los siguientes parámetros máquina:
P725 Grupo de marcas que utiliza el CNC para enviar su información interna
Indica el grupo de marcas que utiliza el CNC para enviar, al resto de los elementos el
estado de los conectores (entradas) y el estado de las salidas propias del CNC.
La siguiente tabla muestra que Entradas del conector envía el CNC a la red local, y las
marcas en que se deposita dicha información. Se ha supuesto P725=1, primer grupo de
marcas. Si se personaliza P725=3, la señal "Entrada condicional" será M(10+128) =
M131.
TRASVASE DE INFORMACION
ENTRADA TERMINAL
P725=1 P725=3
MARCA MARCA
Marcha 17 (Conector I/O1) M1 M129
Parada / Subrutina Emergencia 16 (Conector I/O1) M2 M130
Feed Hold 15 (Conector I/O1) M3 M131
Stop Emergencia 14 (Conector I/O1) M4 M132
Micro Io (4º eje) / Subrutina Emergencia 13 (Conector I/O1) M5 M133
Micro Io (Z) 12 (Conector I/O1) M6 M134
Micro Io (eje C o 3º eje) 11 (Conector I/O1) M7 M135
Micro Io (X) 10 (Conector I/O1) M8 M136
Manual (Modo Visualizador) 19 (Conector I/O1) M9 M137
Entrada condicional 18 (Conector I/O1) M10 M138

Página
Capítulo: 2 Sección:
EL CNC 8025 EN LA RED LOCAL FAGOR
7
La siguiente tabla muestra las salidas propias que envía el CNC a la red local, y las marcas
en que se deposita dicha información. Se ha supuesto P725=1, primer grupo de marcas. Si
se personaliza P725=3, la señal "Embrague eje X" será M(20+128) = M148.
Atención:
Si el CNC no interviene en el trasvase de información que se efectúa mediante
marcas se debe personalizar "P725=0". El CNC no tiene en cuenta los
parámetros "P726", "P727" y "P728".
TRASVASE DE INFORMACION
Salida del CNC MARCA Salida del CNC MARCA
Código BCD, peso 1 M12 Bit 9 de la tabla de funciones M M36
Código BCD, peso 2 M13 Bit 10 de la tabla de funciones M M37
Código BCD, peso 4 M14 Bit 11 de la tabla de funciones M M38
Código BCD, peso 8 M15 Bit 12 de la tabla de funciones M M39
Código BCD, peso 10 M16 Bit 13 de la tabla de funciones M M40
Código BCD, peso 20 M17 Bit 14 de la tabla de funciones M M41
Código BCD, peso 40 M18 Bit 15 de la tabla de funciones M M42
Código BCD, peso 80 M19 Modo de operación Manual M43
Embrague eje X M20 Embrague 4º eje M44
Reset M21 Embrague 3º eje M45
Embrague eje Z M22 Embrague eje C M46
Roscado ON M23 Bloqueo de cabezal M47
T Strobe. M24 Sentido de giro de la torreta M48
S Strobe M25 4º eje en movimiento M49
M Strobe M26 Eje Z en movimiento M50
Salida de Emergencia M27 Eje C o 3º eje en movimiento M51
Bit 1 de la tabla de funciones M M28 Eje X en movimiento M52
Bit 2 de la tabla de funciones M M29 M53
Bit 3 de la tabla de funciones M M30 CNC en ejecución /CYCLE ON M54
Bit 4 de la tabla de funciones M M31 CNC interrumpido M55
Bit 5 de la tabla de funciones M M32 Error M56
Bit 6 de la tabla de funciones M M33 M57
Bit 7 de la tabla de funciones M M34 Modo de operación Automático M58
Bit 8 de la tabla de funciones M M35 Desplazamiento rápido (G00) M59

Sección:
Capítulo: 2
Página
EL CNC 8025 EN LA RED LOCAL FAGOR
8
P726 Grupo de marcas que utiliza el CNC para actualizar el estado de los conectores
Indica el grupo de marcas del que el CNC toma la información para actualizar el estado
de las salidas correspondientes a los conectores I/O1 e I/O2. Debe tener un valor distinto
a "P725" ya que en caso contrario existirá un solapamiento de información.
Si se define "P726=0" el CNC entiende que debe actualizar el estado de las salidas con
los valores propios del CNC, como si no existiera red local. Se debe tener en cuenta que
esta misma información también se envía a la red local, al grupo indicado por "P725".
La siguiente tabla muestra la denominación de las salidas de los conectores I/O1 e I/O2
y las marcas correspondientes. Se ha supuesto P726=1, primer grupo de marcas. Si se
personaliza P726=3, la señal de T Strobe será M(29+128) = M157.
TRASVASE DE INFORMACION
TERMINAL DENOMINACION MARCA TERMINAL DENOMINACION MARCA
27 (I/O1) Código BCD, peso 1 M17 3 (I/O2) Bit 1 tabla de funciones M M33
26 (I/O1) Código BCD, peso 2 M18 4 (I/O2) Bit 2 tabla de funciones M M34
25 (I/O1) Código BCD, peso 4 M19 5 (I/O2) Bit 3 tabla de funciones M M35
24 (I/O1) Código BCD, peso 8 M20 6 (I/O2) Bit 4 tabla de funciones M M36
23 (I/O1) Código BCD, peso 10 M21 7 (I/O2) Bit 5 tabla de funciones M M37
22 (I/O1) Código BCD, peso 20 M22 8 (I/O2) Bit 6 tabla de funciones M M38
21 (I/O1) Código BCD, peso 40 M23 9 (I/O2) Bit 7 tabla de funciones M M39
20 (I/O1) Código BCD, peso 80 M24 10 (I/O2) Bit 8 tabla de funciones M M40
9 (I/O1) Embrague eje X M25 11 (I/O2) Bit 9 tabla de funciones M M41
8 (I/O1) Reset M26 12 (I/O2) Bit 10 tabla de funciones M M42
7 (I/O1) Embrague eje Z M27 13 (I/O2) Bit 11 tabla de funciones M M43
6 (I/O1) Roscado ON M28 25 (I/O2) Bit 12 tabla de funciones M M44
2 (I/O1) T Strobe. M29 24 (I/O2) Bit 13 tabla de funciones M M45
3 (I/O1) S Strobe M30 23 (I/O2) Bit 14 tabla de funciones M M46
4 (I/O1) M Strobe M31 22 (I/O2) Bit 15 tabla de funciones M M47
5 (I/O1) Emergencia M32 21 (I/O1) Modo de operación Manual M48

Página
Capítulo: 2 Sección:
EL CNC 8025 EN LA RED LOCAL FAGOR
9
P727 Grupo de marcas que utiliza el CNC para actualizar su información interna
Indica el grupo de marcas del que el CNC toma la información para actualizar su
información interna. Debe tener un valor distinto a "P725" ya que en caso contrario
existirá un solapamiento de información.
Si se define "P727=0" el CNC entiende que debe actualizar su información interna con
los valores correspondientes a las entradas de los conectores I/O1 e I/O2, como si no
existiera red local. Se debe tener en cuenta que esta misma información también se envía
a la red local, al grupo indicado por "P725".
La siguiente tabla muestra la denominación de las variables internas y las marcas
correspondientes. Se ha supuesto P727=1, primer grupo de marcas. Si se personaliza
P727=3, la señal de "Stop Emergencia" será M(4+128) = M132.
TRASVASE DE INFORMACION
VARIABLE INTERNA CNC MARCA
Marcha M1
Parada / Subrutina Emergencia M2
Feed Hold M3
Stop Emergencia M4
Micro Io (4º eje) / Subrutina Emergencia M5
Micro Io (Z) M6
Micro Io (eje C o 3º eje) M7
Micro Io (X) M8
Manual (Modo Visualizador) M9
Entrada condicional M10

Sección:
Capítulo: 2
Página
EL CNC 8025 EN LA RED LOCAL FAGOR
10
P728 Grupo de marcas que utiliza el CNC para actualizar su información interna
adicional
Dependiendo del valor asignado al parámetro P728, la información interna adicional
del CNC puede ser actualizada de uno de los siguientes modos:
* Si se define "P728=0" el CNC no utiliza los grupos de marcas. Se debe efectuar una
llamada al sistema y utilizar en el PLC64 la marca M1955 y el registro R155.
* Si se define "P728" con un valor distinto de 0, el CNC utiliza los grupos de marcas.
El número asignado al parámetro "P728" indica el grupo de marcas del que el CNC toma
la información para actualizar su información interna adicional. Debe tener un valor
distinto a "P725" ya que en caso contrario existirá un solapamiento de información.
La siguiente tabla muestra cuales son las variables internas adicionales y las marcas o
bit del registro correspondientes. En el caso de las marcas se ha supuesto P728=1,
primer grupo de marcas. Si se personaliza P728=3, la señal "M Ejecutada" será
M(50+128) = M178.
TRASVASE DE INFORMACION
VARIABLE INTERNA CNC
P728=0 P728=1
REGISTRO PLC MARCA
Transfer Inhibit R155 bit 0 M49
M Ejecutada R155 bit 1 M50

Página
Capítulo: 2 Sección:
EL CNC 8025 EN LA RED LOCAL FAGOR
11
Ejemplo de aplicación:
Se desea utilizar un CNC 8025 y un PLC64, de forma que la información que el CNC
recibe del exterior (entradas de los conectores I/O1 e I/O2) sean tratadas previamente
por el PLC64.
Asimismo, se desea que las salidas propias del CNC sean tratadas por el PLC64 y que
sea el PLC64 quien actualice las salidas de los conectores I/O1 e I/O2.
Para ello, se conectarán ambos elementos vía RS485 y se personalizarán sus parámetros
máquina para que formen una red local Fagor.
En este ejemplo el CNC ocupará el Nodo 0 y el PLC64 el Nodo 1.
CNC8025: P611(5)=1
P611(4)=0, P611(3)=0, P611(2)=0, P611(1)=1
PLC64: DS4=0
DS8=0, DS7=0, DS6=0, DS5=1
Se utiliza el primer grupo de marcas, M1-M64, para enviar la información interna del
CNC al PLC64 y el segundo grupo de marcas, M65-M128 para actualizar la
información interna del CNC y el estado de los conectores I/O1 e I/O2.
Parámetros a definir en el CNC:
P725=1 El CNC envía al PLC64, en las marcas M1 a M11, el estado de las entradas
(conectores I/O1 e I/O2).
El CNC envía al PLC64, en las marcas M12 a M59, el estado de las salidas
propias del CNC.
P726=2 El CNC actualiza el estado de las salidas (conectores I/O1 e I/O2) con el
valor que el PLC64 le entrega en las marcas M81 a M112.
TRASVASE DE INFORMACION

Sección:
Capítulo: 2
Página
EL CNC 8025 EN LA RED LOCAL FAGOR
12
P727=2 El CNC actualiza su información interna con el valor que el PLC64 le
entrega en las marcas M65 a M75.
P728=2 El CNC actualiza su información interna adicional con el valor que el
PLC64 le entrega en las marcas M113 a M117.
Parámetros a definir en el PLC64:
R240 bit 11=0
R240 bit 10=0
R240 bit 9=1
R240 bit 8=0 El PLC64 envía al CNC el contenido de las marcas M65-M128
TRASVASE DE INFORMACION

Página
Capítulo: 2 Sección:
EL CNC 8025 EN LA RED LOCAL FAGOR
13
2.4 TRASVASE DE INFORMACION MEDIANTE MARCAS ENTRE UN
CNC8025 CON PLCI Y EL RESTO DE LOS NODOS DE LA RED
LOCAL
Cuando el CNC dispone de PLC integrado es el PLCI quien interviene en el trasvase de
información mediante marcas. Para ello el PLCI dispone de 8 grupos de 64 marcas para
intercambiar información con el resto de los elementos de la red local.
Grupo 1 M1 a M64 Grupo 5 M257 a M320
Grupo 2 M65 a M128 Grupo 6 M321 a M384
Grupo 3 M129 a M192 Grupo 7 M385 a M448
Grupo 4 M193 a M256 Grupo 8 M449 a M512
El PLCI utilizará una de estos grupos de marcas para enviar a la red local su propia
información y puede acceder al resto de los grupos para conocer la información que en ellos
han depositado el resto de los elementos de la red.
Para ello es necesario personalizar el siguiente parámetro máquina:
P725 Grupo de marcas que utiliza el CNC para enviar su información interna
Indica el grupo de marcas que utiliza el PLCI para enviar su propia información al resto
de los elementos de la red local.
El significado de cada una de estas marcas lo fija el fabricante al definir el programa del PLCI.
Los parámetros "P726", "P727" y "P728" quedan sin función cuando el CNC 8025
dispone de PLCI.
TRASVASE DE INFORMACION
CON PLCI

Sección:
Capítulo: 2
Página
EL CNC 8025 EN LA RED LOCAL FAGOR
14
Ejemplo de aplicación:
Se desea utilizar un PLC64 como ampliación de las entradas y salidas de un CNC 8025
con PLCI.
Como el CNC 8025 con PLCI dispone de 40 entradas y 24 salidas y el PLC64 tiene
64 entradas y 32 salidas, el PLCI controlará un total de:
Entradas: 40+64 = 104
Salidas: 24+32 = 56
En este ejemplo el CNC 8025 con PLCI ocupará el Nodo 0 y el PLC64 el Nodo 1.
CNC8025: P611(5)=1
P611(4)=0, P611(3)=0, P611(2)=0, P611(1)=1
PLC64: DS4=0
DS8=0, DS7=0, DS6=0, DS5=1
El PLC64 utiliza el primer grupo de marcas M1-M64 para enviar el estado de sus
entradas y el CNC utiliza el segundo grupo de marcas M65-M128 para actualizar las
salidas del PLC64.
CNC8025: P725=2
PLC64: R240(8)=1, R240(9)=0, R240(10)=0, R240(11)=0
La denominación de las entradas y salidas en el CNC y PLC64, así como su
denominación en el programa del PLCI es la siguiente:
El programa del PLC64 debe actualizar las marcas M1 a M64 con el estado de sus
entradas y las salidas O1 a O32 con el estado de las marcas M65 a M96. Por lo tanto,
el programa del PLC64 será:
M2047 = MOV I1 M1 16
= MOV I17 M17 16
= MOV I33 M33 16
= MOV I49 M49 16
= MOV M65 O1 16
= MOV M81 O17 16
Si se desea, por ejemplo, que la salida O32 del PLC64 se encuentre activa cuando estén
activadas las entradas I10 del PLCI e I64 del PLC64, el programa del PLCI será:
I10 AND M64 = M96
TRASVASE DE INFORMACION
CON PLCI
DENOMINACION PLCI I1 a I40 M1 a M64 O1 a O24
M65 a
M96
CNC
Entradas I1 a I40
Salidas O1 a O24
PLC64
Entradas I1 a I64
Salidas O1 a O32

Página
Capítulo: 2 Sección:
EL CNC 8025 EN LA RED LOCAL FAGOR
15
2.5 INFORMACION INTERNA DEL "CNC8025T" A LA QUE TIENE
ACCESO CUALQUIER PLC64 DE LA RED
El PLC64 dispone de una serie de marcas asociadas a registros que permiten acceder a las
diferentes variables internas del CNC 8025T. Esta información se encuentra disponible en
todos los modelos CNC 8025, dispongan o no de PLCI.
Los recursos que dispone el PLC64 para esta aplicación son:
M1901 - M1949 Cada una de estas marcas se encuentra asociada a un registro (R101 - R149).
Siempre que en el PLC64 se activa una de estas marcas el CNC deposita
en el registro asociado del PLC64 la información correspondiente a
dicha marca.
M1950 - M1964 Cada una de estas marcas se encuentra asociada a un registro (R150 - R164).
Siempre que se activa una de estas marcas, el PLC64 envía al CNC la
información que se encuentra almacenada en el registro asociado
Para que el PLC64 pueda acceder a las variables internas del CNC se deben personalizar
adecuadamente algunos bits del registro R240 del PLC64.
bits 0, 1, 2, 3 Indican el número de nodo que ocupa el CNC.
bit 14 Se debe personalizar con el valor 1 para acceder a la información interna del CNC
situado en el nodo indicado por los bits 0, 1, 2 y 3.
INFORMACION INTERNA DEL
CNC8025M
Nodo con que se comunicará el PLC64 Bit 3 Bit 2 Bit 1 Bit 0
0 0 0 0 0
1 0 0 0 1
2 0 0 1 0
3 0 0 1 1
4 0 1 0 0
5 0 1 0 1
6 0 1 1 0
7 0 1 1 1
8 1 0 0 0
9 1 0 0 1
10 1 0 1 0
11 1 0 1 1
12 1 1 0 0
13 1 1 0 1
14 1 1 1 0
Incorrecto 1 1 1 1

Sección:
Capítulo: 2
Página
EL CNC 8025 EN LA RED LOCAL FAGOR
16
2.5.1 LECTURA DE VARIABLES INTERNAS DEL CNC
Siempre que en el PLC64 se activa una de las marcas M1901 a M1949 el CNC deposita en el
registro asociado (R101 a R149) del PLC64 la información correspondiente a dicha marca.
Error
Cuando se recibe el indicativo de error (B7 R101), el CNC mostrará el código
correspondiente a dicho error en los bits B0 a B6 del registro R101.
B7 B6 B5 B4 B3 B2 B1 B0
1 0 1 1 1 1 0 1
Código del error B0111101 = 61
Indicativo de error
Cotas de los ejes
Cuando se solicita la cota del eje X, el CNC muestra el valor correspondiente en el doble
registro R102-103. Dicho valor se encuentra expresado en micras, respecto al cero
máquina y en formato binario como se muestra a continuación:
Si cota X: 123.456 Valor: H1E240 R103=0001 R102=E240
Si cota X: -30.506 Valor: HFFFF88D6 R103=FFFF R102=88D6
INFORMACION INTERNA DEL
CNC8025M
INFORMACION INTERNA DEL CNC
REGISTRO
ASOCIADO
MARCA QUE SE
DEBE ACTIVAR
4º eje en movimiento (0=No 1=Si) B0 R101 M1901
Eje Z en movimiento (0=No 1=Si) B1 R101 M1901
3º eje o eje C en movimiento (0=No 1=Si) B2 R101 M1901
Eje X en movimiento (0=No 1=Si) B3 R101 M1901
CNC en ejecución (0=No 1=Si) B5 R101 M1901
CNC interrumpido (0=No 1=Si) B6 R101 M1901
Error B7 R101 M1901
Parte baja cota X R102 M1902
Parte alta cota X R103 M1903
Parte baja cota del 3º eje o eje C R104 M1904
Parte alta cota del 3º eje o eje C R105 M1905
Parte baja cota Z R106 M1906
Parte alta cota Z R107 M1907
Parte baja cota del 4º eje R108 M1908
Parte alta cota del 4º eje R109 M1909
Número de programa R112 M1912
F programada R113 M1913
S programada R114 M1914
% Speed Rate B0-7 R116 M1916
% Feed Rate B8-15 R116 M1916
Parámetro P610. Identificación del CNC en la Red B0-7 R117 M1917
Código correspondiente a la última tecla pulsada B0-7 R118 M1918

Página
Capítulo: 2 Sección:
EL CNC 8025 EN LA RED LOCAL FAGOR
17
Número de Programa
El número de programa se expresa en código BCD. Por ejemplo, si se encuentra
seleccionado en el CNC el programa 12345, el registro R112 mostrará el valor:
R112= 0001 0010 0011 0100 0101
Avance F y velocidad de cabezal S
El valor de la F programada se expresa en formato hexadecimal.
Cuamdo se trabaja en G94 (mm/min o pulgadas/min) siempre en mm/minuto.
Cuando se trabaja en G95 (mm/rev o pulgadas/rev) siempre en micras/revolución
El valor de la S (rpm) programada se expresa en formato hexadecimal.
G94 G71 F 1000 (1000 mm/min) R113=3E8 (H03E8)
G94 G70 F 394 (1000 mm/min) R113=3E8 (H03E8)
G95 G71 F 1,0000 (1000 micras/min) R113=3E8 (H03E8)
G95 G70 F 0,0394 (1000 micras/min) R113=3E8 (H03E8)
S 2500 R113=9C4 (H09C4)
Speed-Rate y Feed-Rate
Los valores que están seleccionados en el CNC se muestran según el siguiente código:
1000 0000 100% 0010 0000 25% 0000 0001 1%
0100 0000 50% ....... ....... 0000 0000 0%
Parámetro de identificación del CNC en la red local
La marca M1917 permite conocer, cuando el CNC se encuentra conectado a la red local
Fagor, el valor con se ha personalizado el parámetro máquina P610 del CNC.
Dicho valor viene dado en los 8 bits más bajos (0 a 7) del registro R117, manteniéndose
la relación que se indica a continuación con los bits del parámetro. Los bits (8 a 15) se
encuentran sin función.
P610(8) P610(7) P610(6) P610(5) P610(4) P610(3) P610(2) P610(1)
R117(7) R117(6) R117(5) R117(4) R117(3) R117(2) R117(1) R117(0)
Códigos de tecla
Los códigos de tecla que puede devolver el CNC en el registro R118 al activarse la
marca M1918 se encuentran detallados en el apéndice de este manual.
INFORMACION INTERNA DEL
CNC8025M

Sección:
Capítulo: 2
Página
EL CNC 8025 EN LA RED LOCAL FAGOR
18
2.5.2 ESCRITURA EN LAS VARIABLES INTERNAS DEL CNC
Siempre que se activa una de las marcas M1950 a M1964 el PLC64 envía al CNC la
información que se encuentra almacenada en el registro asociado (R150 - R164).
Inhibición de ejes
El PLC64 puede inhibir un eje de forma que no se permite su movimiento.
Al ejecutar el CNC un bloque que supone desplazamiento de algún eje inhibido, detiene
la ejecución hasta que desaparezca la inhibición.
Mensajes
Existen 3 formas de generar, desde el PLC64, un mensaje de error en el CNC. Utilizando
la instrucción MSG, las marcas M1801 a M1899 o el binomio M1951 - R151.
El CNC requiere conocer el sistema empleado, actuando de forma distinta tal y como
se indica a continuación:
"P616(5)=1" Se utilizan las marcas M1801 a 1899 para generar mensajes en el CNC.
No se puede utilizar la instrucción MSG ni el binomio M1951 - R151.
El CNC permite utilizar el programa P99998 para definir los textos asociados a
los mensajes y errores, visualiza el texto asociado a la marca más prioritaria y
permite acceder a la opción "Mensajes" en la que se muestran todos los mensajes
y errores activados desde el PLC.
"P616(5)=0" Se puede utilizar la instrucción MSG y el binomio M1951 - R151. No se
pueden utilizar las marcas M1801 a 1899 para generar errores o mensajes en el CNC.
El CNC no permite utilizar el programa P99998 ni acceder a la opción "Mensajes".
Unicamente visualiza el número correspondiente al último mensaje o error que
se ha activado desde el PLC. Para borrarlo pulsar la tecla [DELETE].
INFORMACION INTERNA DEL
CNC8025M
INFORMACION INTERNA DEL CNC
REGISTRO
ASOCIADO
MARCA QUE SE
DEBE ACTIVAR
Eje Z inhibido (0=No 1=Si) B1 R150 M1950
3º eje inhibido (0=No 1=Si) B2 R150 M1950
Eje X inhibido (0=No 1=Si) B3 R150 M1950
4º eje inhibido (0=No 1=Si) B4 R150 M1950
Número de mensaje que se desea visualizar B0-7 R151 M1951
Número de error que se desea visualizar B8-15 R151 M1951
Speed Rate B0-7 R152 M1952
Feed Rate B8-15 R152 M1952
Código de tecla que se desea simular B0-7 R154 M1954
Teclado CNC anulado o activo B8-15 R154 M1954
Transfer Inhibit (activa a 0V) B0 R155 M1955
M ejecutada (activa a 0V) B1 R155 M1955

Página
Capítulo: 2 Sección:
EL CNC 8025 EN LA RED LOCAL FAGOR
19
INFORMACION INTERNA DEL
CNC8025M
Para enviar un mensaje al CNC usando el binomio M1951 - R151, además de
personalizar "P616(5)=0", se debe indicar el número de mensaje en código binario en
los bits 0-7 del registro R151 y activar la marca M1951.
Error
Para enviar un error al CNC se debe indicar el número de error en código binario en los
bits 8-15 del registro R151 y activar la marca M1951.
Speed-Rate y Feed-Rate
Los valores se deben indicar según el siguiente código:
1000 0000 100% 0010 0000 25% 0000 0001 1%
0100 0000 50% ....... ....... 0000 0000 No modifica el valor
Simulación de teclas
Cuando se desea gestionar el CNC desde el PLC64, vía simulación de teclas (M1954
y B0-7 R154), puede ser conveniente desactivar el teclado, impidiendo de esta forma
al operario el control de la máquina.
Activar el teclado del CNC B8-15 R154 = 0000 0000
Desactivar el teclado del CNC B8-15 R154 = 1111 1111
Las teclas se simularán una a una, indicando en los bits 0-7 del registro R154 el código
de tecla que se desea simular y activando la marca M1954. Ver códigos de tecla en el
apéndice de este manual.
Tras finalizar la simulación del teclado desde el PLC64 se debe devolver el control del
CNC al usuario, habilitando nuevamente el teclado del CNC. B8-15 R154 = 0000 0000
y activando la marca 1954.
Transfer Inhibit y M ejecutada
El CNC 8025 T utiliza el terminal 15 del conector I/O1 como entrada de las señales
Feed-Hold, Transfer-Inhibit y M Ejecutada.
El parámetro máquina P616(7) permite separar dicho tratamiento. Si se personaliza
"P616(7)=1" el CNC actúa del siguiente modo:
* La entrada "Feed-Hold" seguirá tomándola del terminal 15 del conector I/O1.
* La entrada "Transfer-Inhibit" la toma de la red local. B0 R155.
Para fijar su estado se debe asignar el valor correspondiente al Bit 0 del registro R155
y activar la marca M1955.
Si durante la ejecución de un bloque se le asigna el valor 0 el CNC analiza el estado
del parámetro P618(3) y actúa del siguiente modo:

Sección:
Capítulo: 2
Página
EL CNC 8025 EN LA RED LOCAL FAGOR
20
P618(3)=0 Una vez finalizado el bloque actual se detiene la ejecución del programa.
Al asignarle nuevamente el valor 1, el CNC continuará con la ejecución
del programa.
P618(3)=1 Una vez finalizado el bloque actual, el CNC analiza el próximo bloque
de programa:
> Si contiene únicamente información del tipo M, S o T lo ejecuta y
analiza el próximo bloque.
> Si el bloque contiene otro tipo de información, desplazamiento, etc.
detiene la ejecución del programa. Al asignarle nuevamente el valor
1, el CNC continuará con la ejecución del programa.
Esto permite, por ejemplo, efectuar un cambio de herramienta que
necesita de 2 bloques "N100 T2.2" y "N110 M06" y detener la
ejecución del programa hasta que finalice el cambio de herramienta.
* La entrada "M Ejecutada" la toma de la red local. B1 R155.
Para fijar su estado se debe asignar el valor correspondiente al Bit 1 del registro R155
y activar la marca M1955.
Valor 0 Nivel lógico bajo
Valor 1 Nivel lógico alto.
El tratamiento de esta señal se encuentra explicado en el Manual de Instalación.
Capítulo "Temas conceptuales". Apartado "Transferencia de las funciones auxiliares
M, S, T
INFORMACION INTERNA DEL
CNC8025M

Página
Capítulo: 2 Sección:
EL CNC 8025 EN LA RED LOCAL FAGOR
21
2.6 ACCESO DESDE EL CNC 8025 A LOS REGISTROS DE UN PLC64
La función G52 permite leer o modificar el contenido de un registro de cualquier PLC64
instalado en la red local o de su propio PLC integrado. No se permite acceder al PLC
integrado de otro CNC.
Algunas aplicaciones de esta prestación son:
* Cuando el engrase de los ejes lo controla el PLC64, se puede seleccionar desde el
programa del CNC el tiempo de engrasado de los ejes en función del tipo de mecanizado.
* Cuando la máquina dispone de varios almacenes controlados por una PLC64, se puede
seleccionar desde el programa del CNC el almacén correspondiente en cada caso.
* Selección desde el programa del CNC el tiempo de soplado que aplica el PLC64 en los
cambios de herramienta.
Asignar un valor a un Registro simple
Formato de programación: G52 N2 R3 K5
N2 Indica el número de nodo en que se encuentra situado el PLC64. Valores posibles
de N0 a N14.
R3 Indica el número de registro del PLC64 que se desea modificar. Valores posibles
de R1 a R255.
K5 Valor que se desea asignar al registro seleccionado. Se define mediante un
número entero comprendido entre ±32767. Por ejemplo: K3000
Asignar un valor a un Registro doble
Formato de programación: G52 N2 D3 H8
N2 Indica el número de nodo en que se encuentra situado el PLC64. Valores posibles
de N0 a N14.
D3 Indica el número de registro doble del PLC64 que se desea modificar. Se debe
indicar el primero de ellos. Valores posibles de R1 a R254. Por ejemplo: R200
indica que se trata del registro doble R200-R201
H5 Valor que se desea asignar al registro seleccionado. Se define mediante un
número hexadecimal comprendido entre 0 y FFFFFFFF. Por ejemplo: H1ABC.
Asignar el valor de un parámetro aritmético del CNC a un Registro simple
Formato de programación: G52 N2 R3 P3
N2 Indica el número de nodo en que se encuentra situado el PLC64. Valores posibles
de N0 a N14.
R3 Indica el número de registro del PLC64 que se desea modificar. Valores posibles
de R1 a R255.
P3 Número del parámetro aritmético. Valores posibles P0 a P254.
ACCESO A UN PLC64

Sección:
Capítulo: 2
Página
EL CNC 8025 EN LA RED LOCAL FAGOR
22
Asignar el valor de un parámetro aritmético del CNC a un Registro doble
Formato de programación: G52 N2 D3 P3
N2 Indica el número de nodo en que se encuentra situado el PLC64. Valores posibles
de N0 a N14.
D3 Indica el número de registro doble del PLC64 que se desea modificar. Se debe
indicar el primero de ellos. Valores posibles de R1 a R254. Por ejemplo: R200
indica que se trata del registro doble R200-R201
P3 Número del parámetro aritmético. Valores posibles P0 a P254.
Asignar a un parámetro aritmético del CNC el valor de un Registro simple
Formato de programación: G52 N2 P3 R3
N2 Indica el número de nodo en que se encuentra situado el PLC64. Valores posibles
de N0 a N14.
P3 Número del parámetro aritmético. Valores posibles P0 a P254.
R3 Indica el número de registro del PLC64 que se desea modificar. Valores posibles
de R1 a R255.
Asignar a un parámetro aritmético del CNC el valor de un Registro doble
Formato de programación: G52 N2 P3 D3
N2 Indica el número de nodo en que se encuentra situado el PLC64. Valores posibles
de N0 a N14.
P3 Número del parámetro aritmético. Valores posibles P0 a P254.
D3 Indica el número de registro doble del PLC64 que se desea modificar. Se debe
indicar el primero de ellos. Valores posibles de R1 a R254. Por ejemplo: R200
indica que se trata del registro doble R200-R201.
Atención:
Cuando se desea acceder a un registro del propio PLC integrado se debe
indicar el número de nodo que ocupa el CNC+PLCI.
ACCESO A UN PLC64

Página
Capítulo: 2 Sección:
EL CNC 8025 EN LA RED LOCAL FAGOR
23
2.7 ACCESO DESDE EL CNC8025 A UN CNC82, CNC101S, CNC 102
o CNC102S
El CNC8025 dispone de la función G52 que permite acceder a las variables internas de un
CNC82, 101S, 102 o 102S, así como generar comandos de ejecución en un CNC82, 101S,
102 o 102S.
2.7.1 ACCESO A LAS VARIABLES DE LECTURA
Las variables internas de lectura del CNC82, 101S, 102 o 102S tienen asociado, en el mismo
CNC, un registro que puede ser consultado por cualquier CNC8025 instalado en la red
local.
Estos registros pueden ser simples o dobles. Se encuentran detallados más adelante y la
forma de acceder a las mismas es la siguiente:
Asignar a un parámetro aritmético del CNC 8025 el valor de un Registro simple
Formato de programación: G52 N2 P3 R3
N2 Indica el número de nodo en que se encuentra situado el CNC82, 101S, 102 o
102S. Valores posibles de N0 a N14.
P3 Número del parámetro aritmético del CNC 8025. Valores posibles P0 a P254.
R3 Indica el número de registro del CNC82, 101S, 102 o 102S. Valores posibles de
R1 a R11.
Asignar a un parámetro aritmético del CNC 8025 el valor de un Registro doble
Formato de programación: G52 N2 P3 D3
N2 Indica el número de nodo en que se encuentra situado el CNC82, 101S, 102 o
102S. Valores posibles de N0 a N14.
P3 Número del parámetro aritmético del CNC 8025. Valores posibles P0 a P254.
D3 Indica el número de registro doble del CNC82, 101S, 102 o 102S. Se debe indicar
el primero de ellos. Valores posibles de R1 a R10. Por ejemplo: R2 indica que
se trata del registro doble R2-R3.
ACCESO A UN
CNC82, 101S, 102, 102S

Sección:
Capítulo: 2
Página
EL CNC 8025 EN LA RED LOCAL FAGOR
24
2.7.1.1 VARIABLES DE LECTURA
Las variables internas de lectura del CNC82, 101S, 102 o 102S son las siguientes:
Error
Cuando se recibe el indicativo de error (B7 R1 = 1), el CNC mostrará el código binario
correspondiente a dicho error en los bits B0 a B6 del registro R1.
Ejemplo, error 26: R1= 0000 0000 1001 1010
Modo de operación
El CNC muestra en forma codificada, en los bits 8, 9 y 10 del registro R1, el modo de
operación que se encuentra seleccionado.
Cotas de los ejes
Cuando se solicita la cota del eje X, el CNC muestra el valor correspondiente en el doble
registro R2-3. Dicho valor se encuentra expresado en micras, respecto al cero máquina
y en formato hexadecimal como se muestra a continuación:
Si cota X: 123.456 Valor: H1E240 R3=0001 R2=E240
Si cota X: -30.506 Valor: HFFFF88D6 R3=FFFF R2=88D6
INFORMACION INTERNA DEL CNC
Registro del CNC102
que se debe consultar
Eje Y en movimiento (0=No 1=Si) B2 R1
Eje X en movimiento (0=No 1=Si) B3 R1
CNC en ejecución (0=No 1=Si) B5 R1
CNC interrumpido (0=No 1=Si) B6 R1
Error B7 R1
Modo de operación seleccionado B8,9,10 R1
Movimiento en G00 (0=No 1=Si) B11 R1
Parte baja cota X R2
Parte alta cota X R3
Parte baja cota Y R4
Parte alta cota Y R5
Número de bloque inicial del programa R6
F programada en mm/minuto R7
S programada en r.p.m. R8
Número de herramienta "T" activa R9
Parámetro P80. Identificación del CNC en la Red R10
Código correspondiente a la última tecla pulsada R11
R101
Modo de operación
R101
Modo de operación
Bit 10 Bit 9 Bit 8 Bit 10 Bit 9 Bit 8
1 0 0 Play-back
0 0 1 Periféricos 1 0 1 Editor
0 1 0 Aux mode 1 1 0 Bloque a bloque
0 1 1 Manual 1 1 1 Automático
ACCESO A UN
CNC82, 101S, 102, 102S

Página
Capítulo: 2 Sección:
EL CNC 8025 EN LA RED LOCAL FAGOR
25
Número de bloque inicial del programa
El número de bloque inicial del programa se expresa en código BCD. Por ejemplo, si
el bloque inicial es el 278 el registro R6 mostrará el valor 0000 0010 0111 1000
Avance F y velocidad de cabezal S
El valor de la F (mm/min) y S (rpm) programadas se expresa en formato hexadecimal
como se muestra a continuación:
F 10000 Valor: H2710 R7=2710
S 2500 Valor: H9C4 R8=9C4
Número de herramienta "T" activa
El número de herramienta activa se expresa en código BCD. Por ejemplo, si T12 el
registro R9 mostrará el valor 0000 0000 0001 0010
Red local Fagor
Cuando el CNC se encuentra conectado a la red local Fagor, este registro muestra el
valor con se ha personalizado el parámetro máquina P80 del CNC.
Dicho valor viene dado en los 8 bits más bajos (0 a 7) del registro R10, manteniéndose
la relación que se indica a continuación con los bits del parámetro. Los bits (8 a 15) se
encuentran sin función.
Códigos de tecla
Los códigos de tecla que puede devolver el CNC en el registro R11 se encuentran
detallados en el apéndice de este manual.
ACCESO A UN
CNC82, 101S, 102, 102S
P80(8) P80(7) P80(6) P80(5) P80(4) P80(3) P80(2) P80(1)
R10 (7) R10 (6) R10 (5) R10 (4) R10 (3) R10 (2) R10 (1) R10 (0)

Sección:
Capítulo: 2
Página
EL CNC 8025 EN LA RED LOCAL FAGOR
26
2.7.2 ACCESO A LAS VARIABLES INTERNAS DE ESCRITURA
Las variables internas de escritura del CNC82, 101S, 102 o 102S tienen asociado, en el
mismo CNC, un registro que puede ser modificado por cualquier CNC8025 instalado en
la red local.
Estos registros pueden ser simples o dobles. Se encuentran detallados más adelante y la
forma de acceder a las mismas es la siguiente:
Asignar un valor a un Registro simple
Formato de programación: G52 N2 R3 K5
N2 Indica el número de nodo en que se encuentra situado el CNC82, 101S, 102 o
102S. Valores posibles de N0 a N14.
R3 Indica el número de registro que se desea modificar. Valores posibles de R50 a
R54.
K5 Valor que se desea asignar al registro seleccionado. Se define mediante un
número entero comprendido entre ±32767. Por ejemplo: K30
Asignar un valor a un Registro doble
Formato de programación: G52 N2 D3 H8
N2 Indica el número de nodo en que se encuentra situado el CNC82, 101S, 102 o
102S. Valores posibles de N0 a N14.
D3 Indica el número de registro doble que se desea modificar. Se debe indicar el
primero de ellos. Valores posibles de R50 a R53. Por ejemplo: R50 indica que
se trata del registro doble R50-R51
H8 Valor que se desea asignar al registro seleccionado. Se define mediante un
número hexadecimal comprendido entre 0 y FFFFFFFF. Por ejemplo: H1ABC.
Asignar el valor de un parámetro aritmético del CNC 8025 a un Registro simple
Formato de programación: G52 N2 R3 P3
N2 Indica el número de nodo en que se encuentra situado el CNC82, 101S, 102 o
102S. Valores posibles de N0 a N14.
R3 Indica el número de registro que se desea modificar. Valores posibles de R50 a
R54.
P3 Número del parámetro aritmético del CNC 8025. Valores posibles P0 a P254.
ACCESO A UN
CNC82, 101S, 102, 102S

Página
Capítulo: 2 Sección:
EL CNC 8025 EN LA RED LOCAL FAGOR
27
Asignar el valor de un parámetro aritmético del CNC 8025 a un Registro doble
Formato de programación: G52 N2 D3 P3
N2 Indica el número de nodo en que se encuentra situado el CNC82, 101S, 102 o
102S. Valores posibles de N0 a N14.
D3 Indica el número de registro doble que se desea modificar. Se debe indicar el
primero de ellos. Valores posibles de R50 a R53. Por ejemplo: R50 indica que
se trata del registro doble R50-R51
P3 Número del parámetro aritmético del CNC 8025. Valores posibles P0 a P254.
2.7.2.1 VARIABLES DE ESCRITURA
Las variables internas de escritura del CNC82, 101S, 102 o 102S son las siguientes:
Inhibición de ejes
Cuando se inhibe un eje no se permite su movimiento.
Al ejecutar el CNC un bloque que supone desplazamiento de algún eje inhibido, detiene
la ejecución hasta que desaparezca la inhibición.
Visualización de errores
Los 8 bits más altos, bits 8 a 15, del registro R51 indican en código binario el número
de error que se desea visualizar en el CNC82, 101S, 102 o 102S.
Por ejemplo, si se desea que el CNC102 muestre el mensaje de error 17 se debe definir
R51= 0001 0001 0000 0000
El CNC detiene la posible ejecución del programa y visualiza la siguiente información:
LAn
Error 17
ACCESO A UN
CNC82, 101S, 102, 102S
INFORMACION INTERNA DEL CNC
Registro del CNC102
que se debe modificar
Eje Y inhibido (0=No 1=Si) B2 R50
Eje X inhibido (0=No 1=Si) B3 R50
Número de error que se desea visualizar B8-15 R51
Número de bloque en que comienza la ejecución R52
Número de bloque que se desea ejecutar R53
Código de tecla que se desea simular B0-7 R54

Sección:
Capítulo: 2
Página
EL CNC 8025 EN LA RED LOCAL FAGOR
28
Número de bloque en que comienza la ejecución
El CNC permite fijar, desde un CNC8020, CNC8025 o CNC8030, el número de
bloque en que comenzará la ejecución del programa.
Para ello se debe indicar en el registro R52 y en código BCD el número de bloque
deseado.
Por ejemplo, si se desea comenzar la ejecución en el bloque 123, se debe personalizar
R52= 0000 0001 0010 0011.
Número de bloque que se desea ejecutar
Un CNC8020, CNC8025 o CNC8030 puede indicar al CNC82, 101S, 102 o 102S que
ejecute un determinado bloque del programa.
Para ello se debe indicar en el registro R53 y en código binario el número de bloque
deseado.
Por ejemplo, si se desea ejecutar el bloque 456, se debe personalizar R53= 0000 0100
0101 0110.
Una vez ejecutado el bloque, el CNC82, 101S, 102 o 102S devolverá en el registro R1
el estado del CNC.
Código de tecla que se desea simular
Cada vez que se envía un código de tecla al CNC82, 101S, 102 o 102S, éste actúa como
si se hubiera pulsado la tecla correspondiente.
Para ello se debe indicar en el registro R54 el código de la tecla que se desea simular.
Cuando se desea enviar una secuencia de teclas al CNC es conveniente, tras el envío
de cada tecla y antes de enviar la siguiente, consultar si dicha tecla ha sido aceptada por
el CNC, consultando el registro R11
Los códigos de tecla que se desean enviar al CNC se encuentran detallados en el
apéndice de este manual.
ACCESO A UN
CNC82, 101S, 102, 102S

Página
Capítulo: 2 Sección:
EL CNC 8025 EN LA RED LOCAL FAGOR
29
2.7.3 GENERACION DE COMANDOS DE EJECUCION
La función G52 permite generar comandos de ejecución en un CNC82, 101S, 102 o 102S.
Por ejemplo: si la máquina dispone de un pórtico controlado por un CNC82, 101S, 102 o
102S, el usuario puede, desde el programa del CNC 8025 gobernar dicho pórtico.
Enviar un comando de ejecución a un CNC82, 101S, 102, 102S
Formato de programación: G52 N2 = (Comando)
N2 Indica el número de nodo en que se encuentra situado el CNC82, 101S,
102 o 102S. Valores posibles de N0 a N14.
() Delimitadores del "Comando"
Comando Debe estar escrito en el formato que admite el CNC82, 101S, 102 o 102S.
Los comandos posibles son los que se detallan a continuación y aconsejamos
consultar el manual del propio CNC para editarlos correctamente.
Función Descripción 101S 102 102S
G00 Posicionamiento rápido * * *
G01 Interpolación lineal * * *
G02 Interpolación circular a derechas * *
G03 Interpolación circular a izquierdas * *
G04 Temporización * * *
G05 Arista matada * * *
G07 Arista viva * * *
G25 Salto incondicional * * *
G26 Salta si cero * * *
G27 Salta si no cero * * *
G28 Salta si menor que cero * * *
G29 Salta si mayor o igual a cero * * *
G33 Sincronización *
G45 Incrementa contador de piezas * * *
G47 Inhibición de impulsos * * *
G48 Anula la función G47 * * *
G51 a G60 Cargas de traslados de origen * * *
G61 La F no está afectada por "P18" * * *
G62 Anula la función G61 * * *
G70 Programación en pulgadas * * *
G71 Programación en milímetros * * *
G74 Búsqueda del cero máquina * * *
G75 Palpación * * *
G81 Programación por lotes * *
G84, G80 Roscado rígido *
G90 Programación de cotas absolutas * * *
G91 Programación de cotas incrementales * * *
G92 Preselección de cotas * * *
G93 Variación de la rampa de aceleración * * *
ACCESO A UN
CNC82, 101S, 102, 102S

Sección:
Capítulo: 2
Página
EL CNC 8025 EN LA RED LOCAL FAGOR
30
Sincronización de procesos entre un CNC 8025 y un CNC82, 101S, 102 o 102S
Formato de programación: G52 N2
N2 Indica el número de nodo en que se encuentra situado el CNC82, 101S,
102 o 102S. Valores posibles de N0 a N14.
El CNC espera a que el CNC82, 101S, 102 o 102S finalice la ejecución del proceso
en curso para continuar con la ejecución del programa.
Ejemplo: La máquina dispone de un pórtico controlado por un CNC82, 101S, 102 o 102S
y se desea desplazarlo al punto X100 Y50 en dos movimientos paraxiales.
Además , el CNC 8025 debe esperar a que finalice dicho desplazamiento para
continuar con la ejecución del programa.
Programación en el 8025
N100 G52 N3=(G01X100F100) ; Desplazamiento al punto X100
N110 G52 N3=(Y50) ; El CNC espera que finalice el bloque N100
y a continuación envía este comando para
que el pórtico se desplace al punto Y50
N120 G52 N3 ; El CNC espera que finalice el bloque N110
para continuar con la ejecución del programa
ACCESO A UN
CNC82, 101S, 102, 102S

APENDICE A
CODIGOS DE TECLA DEL CNC8025
Atención:
La tecla no pueden ser leida ni simulada desde el PLC64

APENDICE "B"
CODIGOS DE TECLA DEL CNC101S, CNC102, CNC102S
El código correspondiente a las teclas de control que se pueden disponer a través del panel de
mandos externo es:
M3 (cabezal a derechas) Código 27
M4 (cabezal a izquierdas) Código 28
M5 (parada de cabezal) Código 29
-
 1
1
-
 2
2
-
 3
3
-
 4
4
-
 5
5
-
 6
6
-
 7
7
-
 8
8
-
 9
9
-
 10
10
-
 11
11
-
 12
12
-
 13
13
-
 14
14
-
 15
15
-
 16
16
-
 17
17
-
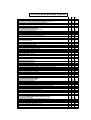 18
18
-
 19
19
-
 20
20
-
 21
21
-
 22
22
-
 23
23
-
 24
24
-
 25
25
-
 26
26
-
 27
27
-
 28
28
-
 29
29
-
 30
30
-
 31
31
-
 32
32
-
 33
33
-
 34
34
-
 35
35
-
 36
36
-
 37
37
-
 38
38
-
 39
39
-
 40
40
-
 41
41
-
 42
42
-
 43
43
-
 44
44
-
 45
45
-
 46
46
-
 47
47
-
 48
48
-
 49
49
-
 50
50
-
 51
51
-
 52
52
-
 53
53
-
 54
54
-
 55
55
-
 56
56
-
 57
57
-
 58
58
-
 59
59
-
 60
60
-
 61
61
-
 62
62
-
 63
63
-
 64
64
-
 65
65
-
 66
66
-
 67
67
-
 68
68
-
 69
69
-
 70
70
-
 71
71
-
 72
72
-
 73
73
-
 74
74
-
 75
75
-
 76
76
-
 77
77
-
 78
78
-
 79
79
-
 80
80
-
 81
81
-
 82
82
-
 83
83
-
 84
84
-
 85
85
-
 86
86
-
 87
87
-
 88
88
-
 89
89
-
 90
90
-
 91
91
-
 92
92
-
 93
93
-
 94
94
-
 95
95
-
 96
96
-
 97
97
-
 98
98
-
 99
99
-
 100
100
-
 101
101
-
 102
102
-
 103
103
-
 104
104
-
 105
105
-
 106
106
-
 107
107
-
 108
108
-
 109
109
-
 110
110
-
 111
111
-
 112
112
-
 113
113
-
 114
114
-
 115
115
-
 116
116
-
 117
117
-
 118
118
-
 119
119
-
 120
120
-
 121
121
-
 122
122
-
 123
123
-
 124
124
-
 125
125
-
 126
126
-
 127
127
-
 128
128
-
 129
129
-
 130
130
-
 131
131
-
 132
132
-
 133
133
-
 134
134
-
 135
135
-
 136
136
-
 137
137
-
 138
138
-
 139
139
-
 140
140
-
 141
141
-
 142
142
-
 143
143
-
 144
144
-
 145
145
-
 146
146
-
 147
147
-
 148
148
-
 149
149
-
 150
150
-
 151
151
-
 152
152
-
 153
153
-
 154
154
-
 155
155
-
 156
156
-
 157
157
-
 158
158
-
 159
159
-
 160
160
-
 161
161
-
 162
162
-
 163
163
-
 164
164
-
 165
165
-
 166
166
-
 167
167
-
 168
168
-
 169
169
-
 170
170
-
 171
171
-
 172
172
-
 173
173
-
 174
174
-
 175
175
-
 176
176
-
 177
177
-
 178
178
-
 179
179
-
 180
180
-
 181
181
-
 182
182
-
 183
183
-
 184
184
-
 185
185
-
 186
186
-
 187
187
-
 188
188
-
 189
189
-
 190
190
-
 191
191
-
 192
192
-
 193
193
-
 194
194
-
 195
195
-
 196
196
-
 197
197
-
 198
198
-
 199
199
-
 200
200
-
 201
201
-
 202
202
-
 203
203
-
 204
204
-
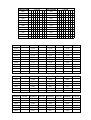 205
205
-
 206
206
-
 207
207
-
 208
208
-
 209
209
-
 210
210
-
 211
211
-
 212
212
-
 213
213
-
 214
214
-
 215
215
-
 216
216
-
 217
217
-
 218
218
-
 219
219
-
 220
220
-
 221
221
-
 222
222
-
 223
223
-
 224
224
-
 225
225
-
 226
226
-
 227
227
-
 228
228
-
 229
229
-
 230
230
-
 231
231
-
 232
232
-
 233
233
-
 234
234
-
 235
235
-
 236
236
-
 237
237
-
 238
238
-
 239
239
-
 240
240
-
 241
241
-
 242
242
-
 243
243
-
 244
244
-
 245
245
-
 246
246
-
 247
247
-
 248
248
-
 249
249
-
 250
250
-
 251
251
-
 252
252
-
 253
253
-
 254
254
-
 255
255































































































































































































































































Artículos relacionados
-
Fagor CNC 8025 T Manual de usuario
-
-
-
-
-
-
Fagor CNC 8050 T Manual de usuario
-
-
Fagor CNC 8050 M Manual de usuario
-