Prestaciones destinadas al motor
PRESTACIONES DESTINADAS AL MOTOR
Posición eléctrica en el arranque del motor
10.
Ref.1912
· 219 ·
DDS|MAB
SOFTWARE
Soft.09.05
10.6 Posición eléctrica en el arranque del motor
IMPORTANTE. Antes de ejecutar esta prestación hay que tener siempre
en cuenta las siguientes consideraciones:
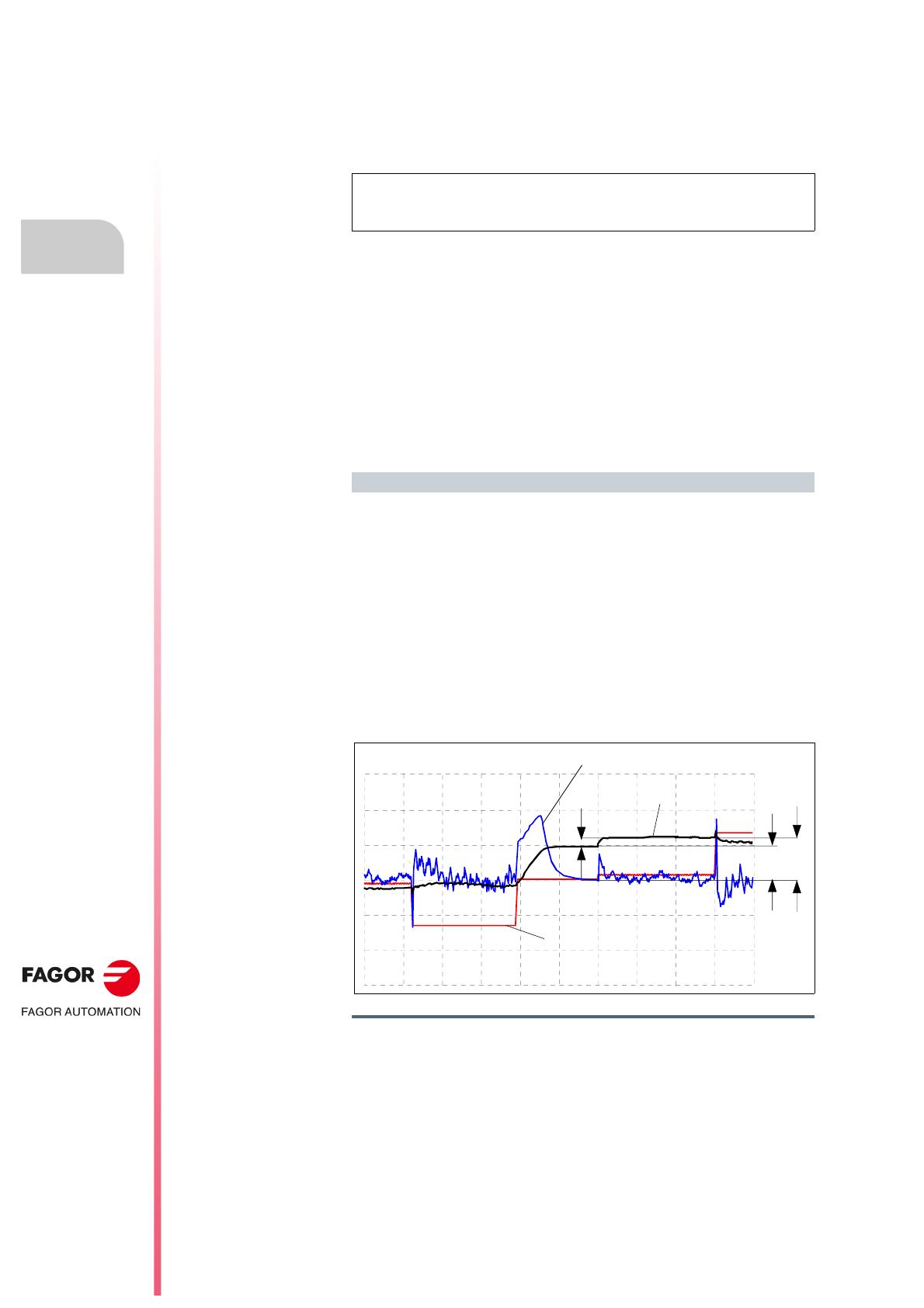
Su objetivo es, que para establecer el control de un motor síncrono es ne-
cesario conocer en el arranque del mismo, cuál es la posición relativa que
ocupan los imanes (solidarios al rótor) respecto al propio estátor, es decir,
cuál es la posición eléctrica
.
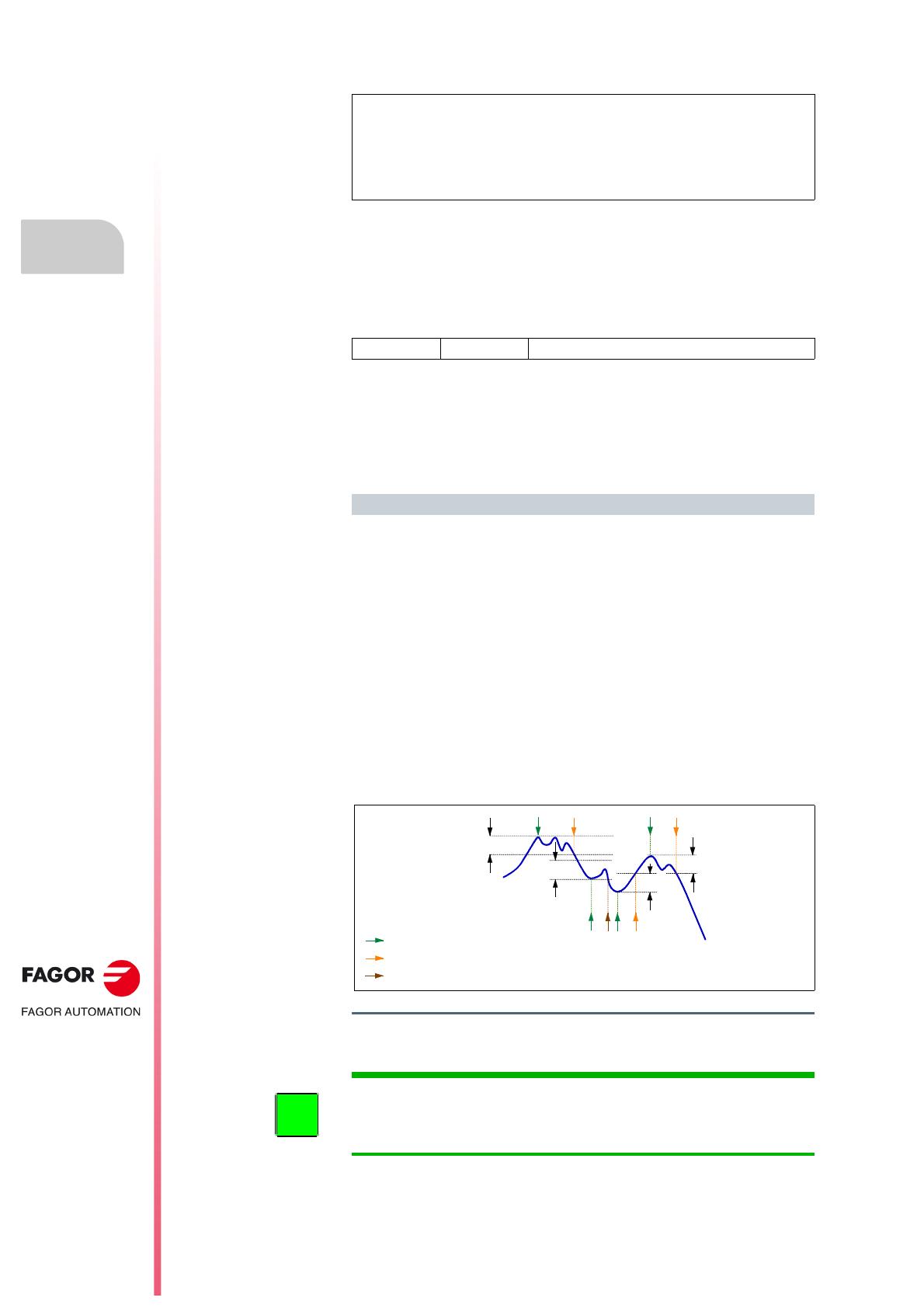
Algunos motores incorporan captadores que disponen de un sistema de
medida de la posición absoluta en un giro completo y que pueden determi-
nar, por tanto, la posición eléctrica en el arranque del mismo.
Otros, no disponen de captadores tan inteligentes y desconocen la medida
absoluta de la posición. Para ellos es necesario realizar un cálculo de esti-
mación de la posición eléctrica en el arranque del motor.
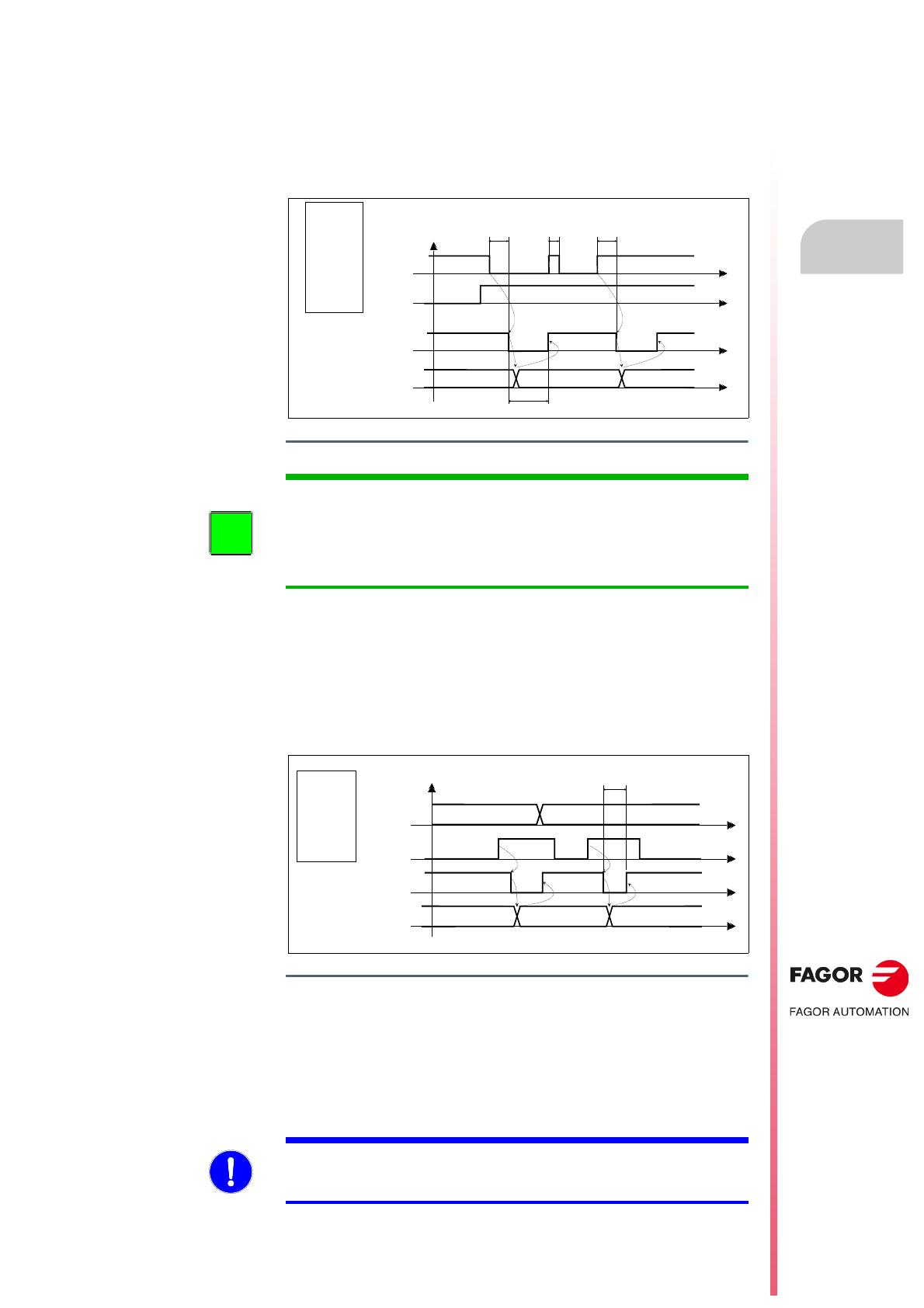
Arranque sin posición absoluta en un giro completo
Entonces, si se ha parametrizado GP2 para que se ejecute GC7 ó GC11
en el arranque, previamente al proceso de arranque habrá que:
Inhabilitar el freno del motor por PLC (si dispone de freno) si se ejecuta
GC7 o bien habilitarlo si se ejecuta GC11.
Habilitar todas las señales necesarias para que se permita al regulador
mover el motor, como son DRENA, SPENA, ...
OBLIGACIÓN. Sólo aplicable a motores síncronos.
OBLIGACIÓN.
Si el eje se encuentra bloqueado por el freno, desbloquearlo previa-
mente antes de habilitar el par.
Si se dispone de un eje vertical con el peso sin compensar, no utilizar
esta prestación bajo ningún concepto.
Si se dispone de ejes tándem o ejes gantry, cada motor debe poder mo-
ver el eje por sí sólo para poder utilizar esta prestación.
NOTA. Prestación desarrollada en la versión 06.10 del software del regu-
lador y mejorada posteriormente en la versión 06.18. Contemplada en ver-
siones 08.0x y posteriores. En estas versiones
la prestación es llevada a
cabo mediante la ejecución del comando GC7
, si bien, en la 06.10 su eje-
cución es siempre automática en cada arranque del regulador y en la
06.18, 08.0x y posteriores ya puede seleccionarse la opción de ser ejecu-
tado automáticamente en el arranque o manualmente cuando se desee
mediante el parámetro GP2.
En versiones 09.01 y posteriores la prestación puede llevarse a cabo me-
diante la ejecución del comando GC7
(con movimiento del motor) o del co-
mando GC11 (sin movimiento del motor).
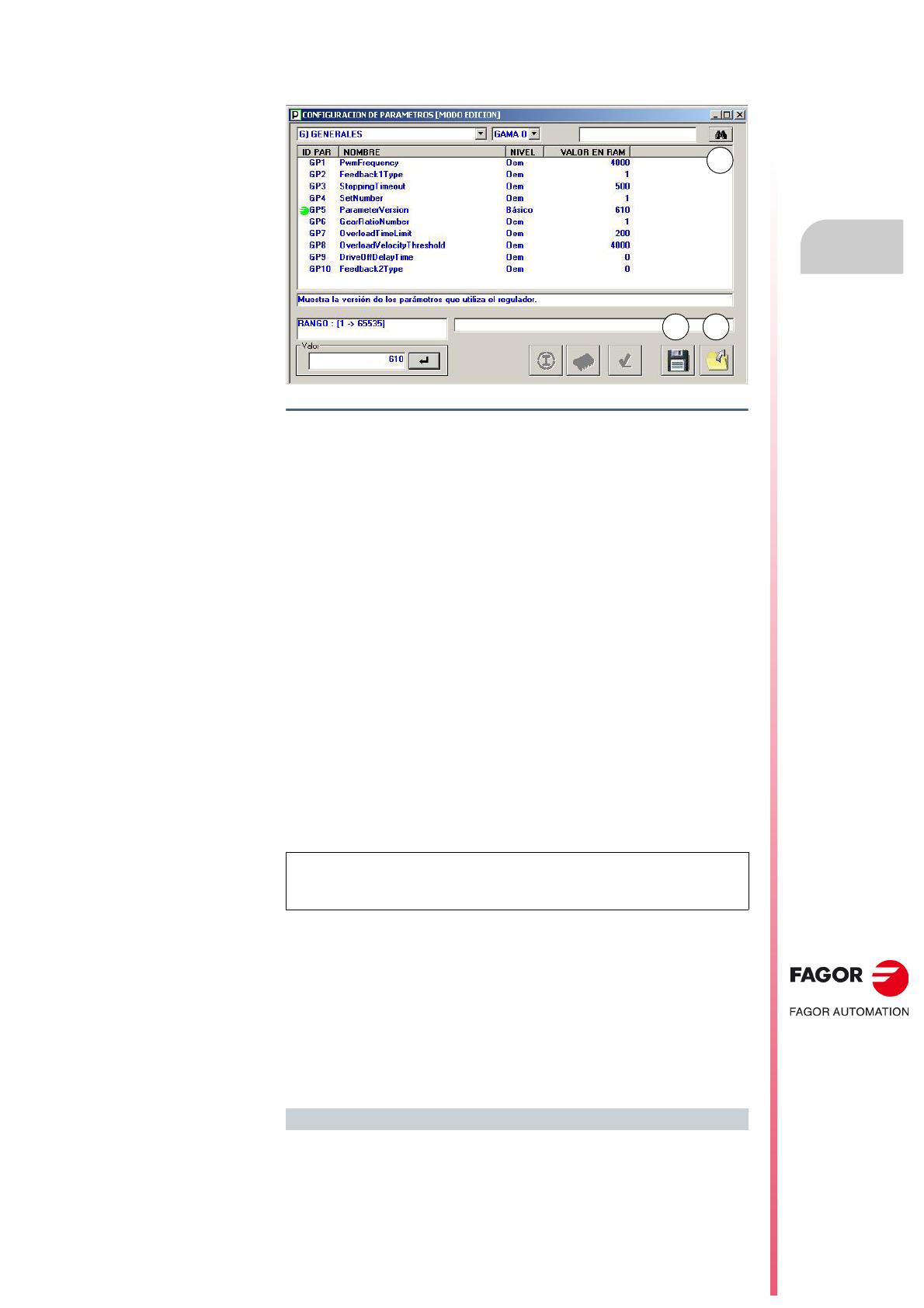
Veáse como parametrizar los bits
B7 y B6...B3 de GP2 en el capítuo 5,
apartado:
Parametrización de la captación motor. Sistema clásico
para determinar si el comando del cálculo del RHO se ejecutará en el
arranque ó no y cuál de ellos se ejecutará, si GC7 ó GC11.
OBLIGACIÓN. Cuando se dispone de un encóder (integrado en el propio
motor) que no proporciona la posición absoluta, al menos en un giro com-
pleto, entonces hay que parametrizar siempre GP2 adecuadamente antes
de arrancar el regulador para establecer que se ejecute siempre el coman-
do GC7 ó GC11 que estime una posición eléctrica en el arranque para po-
der mover el motor controladamente. Si no desea que se ejecute
automáticamente (bits B6 ... B3 de GP2 a 0000) asegúrese de hacerlo ma-
nualmente ejecutando el comando desde el WinDDSSetup antes de dar po-
tencia para evitar perder el control del motor.