
DDS|MAB
Manual de software
Ref.1912
Soft. V0905
DRIVE

INSTRUCCIONES ORIGINALES
Exención de responsabilidad
La información descrita en este manual puede estar sujeta a variacio-
nes motivadas por modificaciones técnicas. Fagor Automation S.
Coop. se reserva el derecho de modificar el contenido del manual, no
estando obligado a notificar las variaciones.
El contenido de este manual y su validez ha sido contrastado para el
producto descrito. Aún así, no se garantiza la integridad, suficiencia o
adecuación de la información técnica o de otro tipo facilitada en los ma-
nuales o en otra forma de documentación.
Es posible la aparición de algún error involuntario y es por esto que no
se garantiza una coincidencia absoluta. No obstante, la información
contenida en manuales y documentos es comprobada regularmente
procediéndose a realizar las correcciones necesarias y quedando in-
cluidas en posteriores ediciones.
Fagor Automation S. Coop. no se responsabilizará de pérdidas o da-
ños, directos, indirectos o fortuitos que puedan resultar de utilizar dicha
información, quedando bajo responsabilidad del usuario el uso de la
misma.
Quedan excluidas las reclamaciones de responsabilidad y garantía por
daños derivados del uso indebido del equipo en entornos no adecua-
dos y no conforme a la finalidad para la que ha sido diseñado, incum-
plimiento de indicaciones de advertencias y seguridades descritas en
este documento y/o legales aplicables al lugar de trabajo, modificacio-
nes de software y/o reparaciones por cuenta propia, catástrofes y da-
ños causados por la influencia próxima de otros aparatos cercanos.
Declaración de Conformidad CE y Condiciones de Garantía
Las condiciones de garantía pueden ser solicitadas a su representante
de Fagor Automation S. Coop. o a través de las habituales vías comer-
ciales.
Las condiciones de garantía están disponibles en la zona de descar-
gas del sitio web corporativo de FAGOR,
http://www.fagorautomation.com
· tipo de fichero: Condiciones generales de venta-garantía ·
La declaración de conformidad CE está disponible en la zona de
descargas del sitio web corporativo de FAGOR,
http://www.fagorautomation.com
· tipo de fichero: Declaración de conformidad CE ·
Marcas registradas
Son reconocidas todas las marcas registradas incluso las que no han
sido señaladas. Las no señalizadas no son indicativas de que sean li-
bres.
Diciembre 2019 | Ref.1912
Reservados todos los derechos.
Ninguna parte de esta documen-
tación puede reproducirse, transmitirse, transcribirse, almacenarse en
un sistema de recuperación de datos o traducirse a ningún idioma sin
permiso expreso de Fagor Automation S. Coop.
Productos de DOBLE-USO.
Productos fabricados por Fagor Auto-
mation S. Coop. incluidos en la lista de productos de doble uso según
el Reglamento (UE) nº 1382/2014. Incluyen en la identificación de
producto el texto -MDU y necesitan licencia de exportación según
destino.
Instrucciones originales.
Cualquier traducción al manual original
(español ó inglés) sustituirá la leyenda ·INSTRUCCIONES ORIGINA-
LES· por ·TRADUCCIÓN DE LAS INSTRUCCIONES ORIGINALES·.

ÍNDICE GENERAL
I.
Ref.1912
· 3 ·
DDS|MAB
SOFTWARE
Soft.09.05
ACERCA DEL MANUAL......................................................................................................................... 7
ACERCA DEL PRODUCTO.................................................................................................................... 8
HISTÓRICO DE VERSIONES ................................................................................................................. 9
CONDICIONES DE SEGURIDAD ......................................................................................................... 17
DECLARACIÓN DE CONFORMIDAD CE Y CONDICIONES DE GARANTÍA .................................... 18
DOCUMENTACIÓN RECOMENDADA ................................................................................................. 19
1 CONOCIMIENTOS PREVIOS .................................................................................................... 21
Estructura del almacenamiento de datos .................................................................................... 22
Niveles de acceso ....................................................................................................................... 23
Edición de parámetros ................................................................................................................ 24
Grabación en la memoria FLASH ............................................................................................... 25
Validación de parámetros offline ................................................................................................. 26
Visualización de errores .............................................................................................................. 27
Proceso de inicialización, RESET ...............................................................................................28
Transferencia de tablas de parámetros ...................................................................................... 29
Transferencia de ficheros « *.mot ». Tabla de motores .............................................................. 30
Identificación del motor ............................................................................................................... 32
Configuraciones del sistema ....................................................................................................... 33
2 IDENTIFICACIÓN DEL MOTOR ................................................................................................ 35
Configuración del motor .............................................................................................................. 36
Selección del motor .................................................................................................................... 37
Identificación e inicialización del motor ....................................................................................... 50
Proceso automático de identificación ......................................................................................... 51
Observaciones finales ................................................................................................................. 52
Ajuste de los offset de encóder ................................................................................................... 53
3 EL REGULADOR DE CORRIENTE........................................................................................... 55
Parametrización del límite de corriente ....................................................................................... 57
Filtros de consigna de corriente .................................................................................................. 58
4 EL REGULADOR DE VELOCIDAD........................................................................................... 63
Lazo de control de velocidad ...................................................................................................... 64
Parametrización del lazo de control de velocidad ....................................................................... 66
Filtros de consigna de velocidad ................................................................................................. 76
Filtro de la captación de velocidad .............................................................................................. 82
Feedforward de aceleración ....................................................................................................... 83
Estimador de velocidad ........................................................................................................
....... 84
5 EL REGULADOR DE POSICIÓN............................................................................................... 87
Lazo de control de posición ........................................................................................................ 88
Búsqueda de cero ..................................................................................................................... 100
CRC en encóders lineales absolutos SA/GA de FAGOR ......................................................... 114
Vigilancia de la marca de I0 en cada vuelta del encóder .......................................................... 115
Compensación de la holgura .................................................................................................... 116
Auto-ajuste de la inercia en modo offline .................................................................................. 126
Vigilancia del error de seguimiento ........................................................................................... 128
Formato módulo ........................................................................................................................ 129
Límites de posición ................................................................................................................... 130
Cambio online de la captación .................................................................................................. 131
Error máximo permitido entre captaciones ............................................................................... 133
Mezcla entre captaciones ......................................................................................................... 134
Compensación de la deformación elástica en el acoplamiento de un eje ................................ 135

6
I.
Ref.1912
DDS|MAB
SOFTWARE
· 4 ·
Soft.09.05
6 SÍNTESIS DE LA PUESTA A PUNTO..................................................................................... 141
Parámetros generales ............................................................................................................... 141
Parámetros relacionados con el estimador de velocidad ......................................................... 142
Parámetros relacionados con el SENSORLESS ...................................................................... 142
Parámetros relacionados con la resolución .............................................................................. 143
Parámetros de identificación de una captación lineal con I0s codificados ............................... 143
Parámetros de búsqueda de referencia .................................................................................... 143
Parámetros relacionados con la ganancia ................................................................................ 144
Parámetros varios del lazo de posición .................................................................................... 145
Parámetros de uso exclusivo en aplicaciones MC ................................................................... 146
Parámetros exclusivos para el control de un cabezal síncrono ................................................ 146
Parámetros exclusivos del control V/f ....................................................................................... 146
Parámetros exclusivos para el ajuste del cogging .................................................................... 146
Configuración de una aplicación ............................................................................................... 147
7 PARAMETRIZACIÓN CNC-REGULADOR.............................................................................. 161
Comunicación SERCOS con el CNC 8055/55i ......................................................................... 162
Comunicación CAN con el CNC 8055/55i ................................................................................ 166
Otros parámetros del CNC 8055/55i ......................................................................................... 169
Consideraciones en los reguladores ......................................................................................... 179
Señales de control PLC 8055/55i - regulador ........................................................................... 181
Comunicación SERCOS con el CNC 8070 ............................................................................... 184
8 SET DE PARÁMETROS Y REDUCCIONES ........................................................................... 189
Terminología empleada ............................................................................................................ 190
Set de parámetros .................................................................................................................... 192
9 MANEJO DE VARIABLES INTERNAS ................................................................................... 203
Señales eléctricas digitales para PLC o maniobra ................................................................... 204
Señales analógicas para reloj .................................................................................................
.. 205
Manejo de variables internas .................................................................................................... 206
10 PRESTACIONES DESTINADAS AL MOTOR......................................................................... 213
Reducción de potencia del motor ............................................................................................. 213
Función HALT ........................................................................................................................... 215
Parada del motor por sobrecarga de par .................................................................................. 216
Reducción de flujo en vacío ...................................................................................................... 217
Auto-ajuste del valor de la resistencia rotórica ......................................................................... 218
Posición eléctrica en el arranque del motor .............................................................................. 219
Motor de usuario con sensor lineal de temperatura .................................................................. 224
Límite de temperatura mínima admisible en el bobinado del motor ......................................... 225
Intercambio ·por parámetro· del orden de las fases de potencia del motor ............................. 226
Control de motor lineal .............................................................................................................. 227
Control V/f ................................................................................................................................. 229
Compensación del «cogging» en motor síncrono ..................................................................... 231
Búsqueda de referencia del cabezal con un sensor de proximidad ......................................... 233
11 PUESTA A PUNTO DE UN CABEZAL ASÍNCRONO............................................................. 235
Motor asíncrono con captación motor ....................................................................................... 235
Motor asíncrono SENSORLESS ............................................................................................... 249
Cálculo de la inductancia en serie ............................................................................................ 252
12 PUESTA A PUNTO DE UN CABEZAL SÍNCRONO ............................................................... 253
Cabezal síncrono frente a cabezal asíncrono ........................................................................... 253
Condiciones para su control ..................................................................................................... 254
Parametrización de un cabezal síncrono de usuario ................................................................ 255
Proceso de arranque ................................................................................................................ 258
Ajuste de lazos .......................................................................................................................... 259

I.
Ref.1912
· 5 ·
DDS|MAB
SOFTWARE
Soft.09.05
13 PARÁMETROS, VARIABLES Y COMANDOS........................................................................ 261
Notación .................................................................................................................................... 261
Grupos de parámetros, variables y comandos ......................................................................... 265
Glosario de parámetros, variables y comandos ........................................................................ 369
14 CÓDIGOS Y MENSAJES DE ERROR..................................................................................... 379
Códigos de mensaje en el regulador ........................................................................................ 379
Códigos de mensaje en las fuentes de alimentación RPS ....................................................... 399
15 PROTECCIONES ..................................................................................................................... 405
Protecciones del regulador ....................................................................................................... 406
Módulo de protección del bus, BPM ......................................................................................... 412
Protecciones del motor ............................................................................................................. 413
Monitorización exterior de los niveles reales de los I²t ............................................................. 415
Protección de la resistencia de Ballast externa ........................................................................ 416
Protección contra la caída de una fase de red ......................................................................... 418
16 WINDDSSETUP ....................................................................................................................... 419
Requerimientos del sistema y compatibilidad ........................................................................... 419
Previo a la instalación sobre Windows Vista y Windows 7 ....................................................... 420
Proceso de instalación .............................................................................................................. 421
Descripción general de la pantalla ............................................................................................ 422

6
I.
Ref.1912
DDS|MAB
SOFTWARE
· 6 ·
Soft.09.05
Página en blanco intencionadamente

Previo I
Ref.1912
· 7 ·
DDS|MAB
SOFTWARE
Soft.09.05
ACERCA DEL MANUAL
Título DRIVE DDS|MAB. Manual de software.
Tipo de documentación Descripción del software de la regulación FAGOR. Puesta a punto, paráme-
tros que intervienen y listado de errores. Aplicación WinDDSSetup.
Documento electrónico man_dds_soft.pdf.
Idioma Español.
Referencia de manual Ref.1912.
Web El usuario debe utilizar siempre la última referencia de este manual, dispo-
nible en el sitio web corporativo de FAGOR.
http://www.fagorautomation.com
Email [email protected]
Código interno Pertenece al manual dirigido al fabricante (OEM). El código del manual de-
pende de la versión de software: estándar o avanzado:
Software asociado V09.05 y anteriores.
Puesta en marcha
Atención
Oficinas Centrales
Fagor Automation, S. Coop.
B.º San Andrés 19, Apdo.144
CP - 20500 Arrasate - Mondragón
www.fagorautomation.com
MAN REGUL (CAS) STAN Código 04754000
PELIGRO. Para que se cumpla el marcado CE indicado en el componente,
comprobar que la máquina donde se incorpora el sistema DDS cumple lo
especificado en la Directiva de Máquinas 2006/42/CE.
Antes de la puesta a punto del sistema DDS, léanse las indicaciones conte-
nidas en el capítulo 1. CONOCIMIENTOS PREVIOS del manual
«man_dds_soft.pdf».
ADVERTENCIA. La información descrita en este manual puede estar sujeta
a variaciones motivadas por modificaciones técnicas. Fagor Automation, S.
Coop. se reserva el derecho de modificar el contenido del manual, no es-
tando obligada a notificar las variaciones.
+34-943-039800 (soporte a cliente)
+34-943-791712 (soporte a cliente)
+34-943-795047 (SAT, sede central)
+34-934-744375 (SAT, Cataluña)
Previo I
Ref.1912
DDS|MAB
SOFTWARE
· 8 ·
Soft.09.05
ACERCA DEL PRODUCTO
Opciones de software
Se debe tener en cuenta que algunas de las prestaciones o aplicaciones descritas en el manual
«man_dds_hard.pdf» y «man_mab_hard.pdf» dependen de la versión de software instalada.
Estas consideraciones quedan reflejadas en este manual que se suministra junto con el manual
«man_dds_hard.pdf».

Previo II
Ref.1912
· 9 ·
DDS|MAB
SOFTWARE
Soft.09.05
HISTÓRICO DE VERSIONES
El histórico de versiones muestra la lista de aplicaciones de software que se han ido añadiendo en cada
referencia de manual. Para conocer los elementos añadidos referentes al hardware y la referencia de
manual donde aparecen descritos, véase para equipos DDS, el manual «man_dds_hard.pdf» que se su-
ministra junto con éste. Ver para equipos MAB, manual «man_mab_hard.pdf».
Referencia de manual Hechos acontecidos
9702
DDS
Software 01.01
. Primera versión
9707
DDS
No se incorpora nuevo software
9802
DDS
Software 02.XX
Señal Halt por entrada digital. Extensión de gamas, (eje C)
Interfaz SERCOS (conexión y parámetros)
9810
DDS
Software 03.XX
Captación por Sincoder (E1).
Identificación del motor en el encóder.
Rampa de emergencias. Filtro de corriente.
Interfaz SERCOS (ajuste del accionamiento).
Extensión de parámetros en reducciones. Comunicación con PLC.
Detección de sobrecarga. Cabezales de bajas revoluciones.
9904
DDS
Software 03.03
Registro de la matrícula completa de los motores.
Parámetro GP9. Drive of Delay time.
0002
(solo en CD Rom)
DDS
Software 04.01
(previo)
Filtro de corriente
Lazo de posición
Feedforward, búsqueda de cero, compensación de holgura.
Control de error de seguimiento, formato módulo
Captación directa
WinDDSSetup
0103
DDS
Software 04.01
(final)
Parámetros de Motion Control en el grupo L.
0112
DDS
Software 04.02
Cambio online de la captación
Sincronización de ejes
Index
Protocolo de comunicaciones DNC50
0303
DDS
Software 04.03
Variables GV3|GV6. Parámetros de checksum.
Variables XV12|XV13. Variables de comunicación entre el PLC del
CN8055 y el PLC del regulador.
Parámetro LP59. Selección de la fuente del maestro en la sincronización.
Software 04.04
Variable HV13. SERCOSRS422Id. Lectura del conmutador rotativo.
Pico de inversión (reversal peak) con forma exponencial.
Software 04.05 (con placa VeCon) y 05.05 (con placa VeCon2)
Parámetro QP13. Ampliación del nº de ejes accesibles por RS-422.
Variable TV92. BipolarTorqueForceLimit. Control del par. ONLINE
Software 04.06 | 05.06
Motores FM7 (versión E01).
Reconocimiento de matrículas para estos motores.
HISTÓRICO DE VERSIONES

Previo II
16
Ref.1912
DDS|MAB
SOFTWARE
· 10 ·
Soft.09.05
0303
(continuación)
DDS
Software 04.07 | 05.07
Motores FM7 (eje C y velocidad máxima).
Protocolo ModBus en RS-422
Software 04.08 | 05.08
Motores FM7 (versión E02)
E412. Detección de la sincronización regulador|CNC a través de canal
SERCOS.
Software 04.09 | 05.09
Corrección de errores.
0305
DDS
Software 04.10 | 05.10
Corrientes máximas en reguladores de cabezal.
0310
DDS
Software 06.01
Cambio de topología del lazo de corriente. Unidades naturales. No se
dispone de PI variable.
Introducción de un segundo filtro de corriente: Parámetros CP33 y CP34.
Parámetros de flujo y EMF. Unidades naturales: FP1, FP2, FP21 y FP22.
Control de electromandrinos: Cambio de nombre de los parámetros:
SP12 pasa a ser MP25
SP11 pasa a ser MP26
MP25 pasa a ser MP21
FP30 ... FP38 pasan a ser MP30 ... MP38
MP22 pasa a ser TP22
Parámetros que desaparecen: MP8
Parámetros: CP16, TP86 y MP41
Auto-ajuste del valor de la resistencia del rotor: Parámetros FP30 y FP31.
Comando de validación de parámetros offline: GC4.
Comando de ejecución del autoajuste de la inercia: GC5 (modo offline).
Offsets de señales de captación:
RP1 ... RP4 y sus equivalentes RP51 ... RP54 pasan a ser online.
Variables SV10|SV11.
Unidades para TV1|TV2.
Rampas de velocidad: SP51=2.
PWM ajustable.
Rampas de emergencia por defecto: SP70=1.
ACForward con lazo de velocidad.
0403
DDS
Software 06.02
Desplazamiento del home-switch de I0:
Parámetro PP4.
Variable PV1.
Comando GC6.
Otras variables: RV9|RV59.
Captación directa absoluta con encoder senoidal Stegmann.
0405
DDS
Software 06.03
Chequeo de cotas iniciales tras una búsqueda de I0.
E150. Límites de desplazamiento sobrepasados.
Variables: HV1 (modificada), HV2 (a), RV10.
Señales RV1|RV2 cuadradas.
Búsqueda de cero con I0 de cabezal y reducción distinta 1:1
0407
DDS
Software 06.04
Corrección de errores.
0410
DDS
Software 06.05
Cálculo de la inductancia en serie para electromandrinos.
Modificación de valores permitidos en las variables LV160 y LV193.
E922. Valor de Jerk incorrecto.
Parámetros online: PP76, PP103, LP143, PP55, PP49 y PP50.
El parámetro NP116 cobra sentido en presencia de resólver.
Referencia de manual Hechos acontecidos

Previo II
Ref.1912
· 11 ·
DDS|MAB
SOFTWARE
Soft.09.05
0501
DDS
Software 06.06
Corrección de errores.
E205. Motor sin tensión como consecuencia de las condiciones de tra-
bajo exigidas.
0504
DDS
Software 06.07
Corrección de errores.
Software 06.08
Regla absoluta FAGOR.
Protocolo de lectura de la regla absoluta FAGOR.
Ampliación en el parámetro GP10.
Parámetros RP60, RP61, RP62 y RP63.
E610. Error en las señales de la regla absoluta FAGOR.
E611. Error de inestabilidad en las señales de la regla absoluta FAGOR.
Identificación de R y L en motores asíncronos.
Nueva variable FV1.
Nueva topología del lazo de velocidad. Parámetro implicado SP52.
Opción «DEFAULT» como matricula de motor.
WinDDSSetup. Ayudas a la parametrización del DDS. Nueva herra-
mienta de ayuda para realizar la configuración de una aplicación.
0506
DDS
Software 06.09
Modificaciones en la prestación de la búsqueda de cero con I0 de cabe-
zal y relación de transmisión distinta de 1:1.
PP5 = - 0,0001. Independencia entre ambas captaciones.
0602
DDS
Software 06.10
Control de los motores de cabezal FM7. Series E03|HS3. Cambio de
configuración estrella-triángulo con el motor parado.
Control de un cabezal síncrono.
Parámetros involucrados: MP42, MP43 y MP50.
Comando CP9. CurrentLoopTimeConstant. Reajuste del lazo de corrien-
te para altas revoluciones en un motor de cabezal.
Detección de la posición eléctrica en el arranque de un motor síncrono.
Comando GC7. AutophasingOnline.
Parámetro PP160. MonitoringWindowPosEleCalc.
Compensación de holgura con control de posición y captación directa.
Parámetro PP58. Backlash. Ampliación de su funcionalidad.
Parámetro PP59. Backlash12. Holgura entre captaciones.
Variable TV5. TorqueFeedforward. Par total compensado.
Parámetro PP13. BacklashPeakDelay. Retardo de la compensación
exponencial de la holgura por pico de inversión.
Parámetro PP14. BacklashPeak2FeedbackDisplacement. Corte de la
compensación exponencial de la holgura por pico de inversión.
Parámetro PP15. ReversalHysteresis. Histéresis en la compensación
exponencial de la holgura por pico de inversión tras una inversión del
sentido del movimiento.
Mejoras en la compensación del rozamiento. Compensación nula del
rozamiento durante la compensación exponencial de la holgura por pico
de inversión.
Parámetro TP15. TorqueCompensationSpeedHysteresis. Histéresis en
la compensación del par de rozamiento.
Códigos de error
:
E158. Movimiento superior al valor dado en PP160.
E216. Error interno.
E316. Problema en el arranque suave (Soft Start) para la carga del bus
de potencia en un regulador compacto.
E813. Error en la inicialización de la posición eléctrica en el arranque
de un motor síncrono.
Incorpora además la documentación referente al software de control de
las fuentes de alimentación estabilizadas regenerativas, RPS.
Referencia de manual Hechos acontecidos

Previo II
16
Ref.1912
DDS|MAB
SOFTWARE
· 12 ·
Soft.09.05
0602
(continuación)
DDS
Software 01.02 (RPS)
Parámetros, variables y comandos.
Listado de errores. Avisos y soluciones.
0606
DDS
Software 06.11
Corrección de errores.
Software 06.12
Mezcla de captaciones.
Parámetro PP16.
Variable PV153.
Estimador de velocidad.
Parámetros SP15, SP16 y SP17.
Variable SV12.
Códigos de error
E205. (modificación): Frenado con rampa de emergencia.
E610 y E611 pasan a ser E814 y E815.
0612
DDS
Software 06.13
Corrección de errores.
Software 06.14
Control de un motor asíncrono sin captador (Sensorless).
Parámetros AP2, FP50, FP51, FP60.
Parámetro MP44.
0706
DDS
Software 06.15
Señal U como I0 en un captador (encóder o regla) con señales U, V
y W. Parámetro RP7.
Sensor lineal de temperatura parametrizable.
Parámetros: MP14=5, MP45 y MP46.
Simplificación automática de la relación mecánica NP121/NP122.
Variables: TV51, PV191, PV192 y PV193.
Software 01.07 (RPS)
Parámetros GP7 y GP8.
Códigos de aviso y error:
A004, E316, E317, E318.
0710
DDS
Software 06.16
Compensación de la deformación elástica en el acoplamiento de
un eje. Parámetro PP20.
0802
DDS
Software 06.17
Corrección de errores.
Software 06.18
Cambio online de la conexión estrella-triángulo del bobinado del
estátor en motores FM7, series E03|HS3. Parámetro MP23.
Cambio online de motor.
Modificaciones en el interpolador. Modificaciones en los valores
mínimos de las variables LV160 y LV193.
Tratamiento de encóders EnDat
Parametrización de las captaciones por el sistema de bits.
Parámetros implicados: GP2 y GP10.
Búsqueda de I0 con captación directa y relación inexacta para ejes
rotativos.
Comando GC8. Actualizar el valor de Rho al paso por I0.
Reconocimiento del motor asíncrono FM7-E600
Reconocimiento del motor síncrono FKM62.60A
Aviso
A189. Se ha parametrizado GP10=0 con tarjeta de captación
directa instalada.
Referencia de manual Hechos acontecidos

Previo II
Ref.1912
· 13 ·
DDS|MAB
SOFTWARE
Soft.09.05
Referencia de manual Hechos acontecidos
0802
(continuación)
DDS
Modificaciones en la ejecución del comando GC7. Parámetros
implicados: CP21, CP22, CP23, CP24, CP26 y CP27.
0806
DDS
Software 06.19
Error E159. Fases cambiadas en cableado de potencia y/o captación
motor.
Error E816. Las señales C y D de la captación motor son inestables.
0811
DDS
Software 06.20
Verificación del CRC en reglas absolutas FAGOR.
Parámetro RP64.
Error E817. Error de comprobación del CRC
Reconocimiento del captador con interfaz digital EnDat 2.1 como
captación motor.
Vigilancia de la señal de I0 del captador.
Parámetros RP8 y RP9.
Error E256. La señal de I0 no se repite en el mismo nº de pulsos por
vuelta del captador
Vigilancia de la rampa de emergencia en la frenada.
Parámetros SP71 y SP72.
Error E160. En una parada de emergencia, la evolución de la frenada
no sigue la rampa de emergencia de referencia de manera satisfacto-
ria.
Lectura de datos de un encóder Stegmann.
Comandos RC2 y RC3.
Variables: RV11, RV12, RV13, RV14, RV15, RV16, RV17 y RV18.
Ampliación de ficheros «*.mot » con motor de cabezal no FAGOR .
Reconocimiento de las referencias de motores FKM:
FKM22.60A.XX.X0X, FKM42.60A.XX.X0X y FKM66.20A.XX.X0X.
Velocidad máxima controlable de un cabezal síncrono.
0905
DDS
Software 06.21
Protocolo de lectura EnDat. Parámetros RP60 ... RP63.
Selección de motor. Opción «DEFAULT2».
0906
DDS
Software 06.22
Auto-ajuste. Variable HV4.
Reconocimiento del regulador SPD3.200 modificado (incompatibili-
dad) destinado al control de motores FM7 de 60 kW y FM9 de 71
kW. Con versiones anteriores de software no es posible gobernar
este modelo de regulador y por tanto, tampoco estos motores de
cabezal.
1003
DDS
Software 06.23
Reconocimiento de los motores síncronos de la serie FKM9, modelos
FKM94.20A, FKM95.20A, FKM96.20A.
Reconocimiento del motor asíncrono de la familia FM9, modelos FM9-
B055-C5C-E01, FM9-B071-C5C-E01, FM9-A100-C5C-E01,
FM9-B113-C5C-E01 y FM9-A130-C5C-E01.
Reconocimiento del encóder SKS36 de Stegmann de idéntica parame-
trización a cualquier encóder Stegmann (ref. E1, A0, A1...)
Posibilidad de latcheo continuo con encóders Stegmann (ref. E1).
Corrección de la posición de arranque con encóders CD al paso por 1er I0.
Habilitación del parametro MP21 con motores sincronos que permitirá
cambiar el orden de fases de potencia (sentido de giro del motor).
Nueva posible configuración en los reguladores: Tarjeta analógica en el
slot SL1 y tarjeta 8I/16O en el slot SL2.
1012
DDS
Software 08.01
Nota importante.
Solo compatible con reguladores con tarjeta e interfaz CAN.
Variable PV148.

Previo II
16
Ref.1912
DDS|MAB
SOFTWARE
· 14 ·
Soft.09.05
Referencia de manual Hechos acontecidos
1209
DDS
Software 08.02
Nota importante.
Solo compatible con reguladores con tarjeta e interfaz CAN.
Corrección de errores.
Software 08.03
Nota importante.
Solo compatible con reguladores con tarjeta e interfaz CAN.
Identificación de temperatura del SPD 2.85 basado en el AXD 2.75.
Software 08.04
Nota importante.
Solo compatible con reguladores con tarjeta e interfaz CAN.
Identificación del regulador compacto de cabezal SCD 2.75.
En fuentes RPS, códigos de error
E319 y E706.
1305
DDS
Software 08.05
Nota importante.
Software compatible tanto para reguladores con interfaz
SERCOS como CAN.
Reconocimiento del interfaz digital EnDat 2.2.
Mejoras de parametrización del motor lineal:
Variables RV20 y RV25.
Comando GC9.
Tratamiento y parametrización de las señales de sensor efecto Hall.
SSI FAGOR. Códigos de error y soluciones.
Comando que fuerza a cero la cota de encóder Stegmann.
Limitación de la temperatura mín. admisible en el bobinado del motor.
Intercambio, por parámetro, del orden de fases de potencia del motor.
Control V/f.
Incompatibilidad con versiones anteriores del WinDDSSetup.
Modificación en el parámetro FP40.
Modificación en los parámetros SP13 y SP15 (conceptual).
Modificación en los parámetros TP10, TP11, TP12 y TP13.
Modificación en el máximo valor válido del parámetro SP16.
Modificación en el máximo valor válido del parámetro MP44.
1310
DDS
Parámetro CP50.
Software 08.06
Parámetro MP144. Par a rótor parado del motor.
Parámetro CP18. Auto-ajuste mejorado del lazo de corriente.
Variable GV69. Ejecución de RESET por software.
1502
DDS
Software 08.07
Identificación del regulador únicamente analógico.
Software 08.08
Parámetros FP1|FP20. Aumento de su valor válido máx, de 32000 a
80000.
Software 08.09
SP17. Modificación en su comportamiento.
Variable GV16. Visualización de la versión de la tabla de motores.
Versión 02.02 de la tabla de motores «*.mot ».
1601
DDS
Software 08.10
Variable GV17. Identificación de la versión de placa VECON.
Reconocimiento de la VECON-4 (vers.10A).
Software 08.11
Variables RV28, RV29 y RV30. Ayudas a la parametrización de capta-
dores EnDat.
Sustitución del código de error
E700 por el aviso A190.

Previo II
Ref.1912
· 15 ·
DDS|MAB
SOFTWARE
Soft.09.05
Referencia de manual Hechos acontecidos
1605
DDS
1605
DDS|MAB
Software 08.12
MP14 = 6. Reconocimiento del sensor de temperatura PTC 111-K13-140
de los motores FKM1.
Versión 02.05 de la tabla de motores «*.mot ».
Software 08.13
Parámetro RP10. Grado de sensibilidad ante los errores E605/E608.
Parámetro SP11. Resolución de hasta 2 decimales para SP1.
MP14=7. Reconocimiento del sensor de temperatura RTD Pt1000.
MAB. Reconocimiento de los reguladores multi-eje.
Versión 02.06 de la tabla de motores «*.mot ».
1702
DDS|MAB
Software 08.14
Deshabilitación con valores por defecto del código de error E108.
Versión 02.07 de la tabla de motores «*.mot ».
Software 08.15
Gestión mejorada del error E108 ·sobretemperatura del motor·
Software 08.16
Versión 02.08 de la tabla de motores «*.mot ».
Software 08.17
Se incluye el bit 3 en el parámetro RP62.
Parámetro RP65. Selección de formato ·en bits o pulsos· para la
resolución absoluta de un captador rotativo SSI.
El parámetro SP65 pasa a ser ONLINE.
Versión 02.09 de la tabla de motores «*.mot ».
1707
DDS|MAB
No ha sido implementado nuevo software.
1710
DDS|MAB
Software 08.18
Modificación en referencia a la incompatibilidad del WinDDSSetup 08.17
y anteriores con las actuales memorias flash en los reguladores.
MAB. Reconocimiento de la versión V2 de las PLDs.
1711
DDS|MAB
Software 08.19
Compensación del efecto ranura (cogging) en motores con rótor de ima-
nes permanentes. Parámetros TP30, TP31 y TP32.
MAB. Códigos de error de la fuente de alimentación principal: E317, E318,
E319, E320, E321, E322, E323, E324, E325, E326, E327, E328, E329.
1807
DDS|MAB
Software 08.20
Versión 02.10 de la tabla de motores «*.mot ».
Software 09.01
Parametrización de la resolución del lazo de posición de la captación
motor con motor lineal. Parámetros PP77 y PP78, modificaciones en el
parámetro RP62 y nuevos parámetros RP66, RP67 y RP68 para llevar a
cabo la parametrización de la regla.
Parámetro PP79. Aumento de resolución en la captación directa con un
máximo de un bit más.
Parámetro SP65. EmergencyAcceleration. ONLINE.
Parámetro PP6. Nº de I0s utilizados en la búsqueda de I0s codificados.
E217. Anti-embalamiento del motor por supervisión del lazo de velocidad.
Variable TV51. Modificación del cálculo para mejora del control adaptativo.
Parámetro MP43. Modificación del valor máximo a 10 000.
Comando GC11. Cálculo del RHO sin movimiento de motor.
Parámetro CP28. % de la corriente del motor síncrono dada en MP3
Búsqueda de cero en el cabezal mediante un sensor de proximidad in-
ductivo NPN como señal de I0.
MAB.
E330. Fallo detectado asociado a la circuitería del freno de man-
tenimiento del motor.
MAB. Gestión de los leds bicolor «A| B| C| S STATUS».
Versión 02.11 de la tabla de motores «*.mot ».

Previo II
16
Ref.1912
DDS|MAB
SOFTWARE
· 16 ·
Soft.09.05
Referencia de manual Hechos acontecidos
1905
DDS|MAB
Software 09.02
Corrección de errores.
Software 09.03
Versión 02.12 de la tabla de motores «*.mot ».
Software 03.03 ·RPS·
Aviso A005. Terminales NS1-NS2 del conector X3, no puenteados.
1910
DDS|MAB
Software 09.04
Corrección de errores.
Software 09.05
Identificación de los reguladores monobloque ACD/SCD para tensiones
de línea de entre 200/240 V AC trifásica.
1912
DDS|MAB
Captación absoluta.
Tratamiento de los captadores mono-vuelta y multi-vuelta.
Ampliación de la información.
Software 09.04

Previo III
Ref.1912
· 17 ·
DDS|MAB
SOFTWARE
Soft.09.05
Con equipos DDS,
léase el apartado correspondiente a las medidas de seguridad en el manual «man_dds_hard.pdf».
Con equipos MAB,
léase el apartado correspondiente a las medidas de seguridad en el manual «man_mab_hard.pdf».
CONDICIONES DE SEGURIDAD

Previo III
20
Ref.1912
DDS|MAB
SOFTWARE
· 18 ·
Soft.09.05
La Declaración de Conformidad CE está disponible en la zona de descargas del sitio web corporativo
de FAGOR, http://www.fagorautomation.com. · tipo de fichero: Declaración de Conformidad CE ·
Las Condiciones de Garantía están disponibles en la zona de descargas del sitio web corporativo de
FAGOR, http://www.fagorautomation.com. · tipo de fichero: Condiciones generales de venta-garantía ·
DECLARACIÓN DE CONFORMIDAD CE
Y CONDICIONES DE GARANTÍA
Previo III
Ref.1912
· 19 ·
DDS|MAB
SOFTWARE
Soft.09.05
Manuales disponibles
Guías de selección de productos
Guías de referencia rápida y de instalación
Manuales de regulación
DOCUMENTACIÓN RECOMENDADA
Manual disponible en
formato eléctronico
http://www.fagorautomation.com
Manual disponible en formato
impreso
Documento Descripción Formato
man_drive_ord_hand.pdf
inglés
Describe los productos que forman parte del siste-
ma DDS y permite seleccionar cada elemento en
función de las necesidades del usuario.
man_8060fl_mab_ord_hand.pdf
inglés
Describe los productos que forman parte del siste-
ma MAB y selecciona cada elemento en función de
las necesidades del usuario.
man_fm7_fm9_ord_hand.pdf
inglés
Describe los motores asíncronos FM7/FM9 y permi-
te seleccionar cada modelo en función de las nece-
sidades del usuario.
man_fxm_ord_hand.pdf
inglés
Describe los motores síncronos FXM y permite se-
leccionar cada modelo en función de las necesida-
des del usuario.
man_fkm_ord_hand.pdf
inglés
Describe los motores síncronos FKM y permite se-
leccionar cada modelo en función de las necesida-
des del usuario.
Documento Descripción Formato
man_dds_mod_quick_ref.pdf
inglés
Describe someramente cada uno de los elementos
que intervienen en el sistema, así como las conside-
raciones más relevantes en cuestiones de instalación
tanto de motores como reguladores modulares, fuen-
tes de alimentación y elementos accesorios (cablea-
dos, conectores, ...)
man_dds_comp_quick_ref.pdf
inglés
Describe someramente cada uno de los elementos
que intervienen en el sistema, así como las conside-
raciones más relevantes en cuestiones de instalación
tanto de motores como reguladores compactos y ele-
mentos accesorios (cableados, conectores, ...)
man_mab_quick_ref.pdf
inglés
Describe someramente cada uno de los elementos
que intervienen en el sistema MAB, así como las con-
sideraciones más relevantes en cuestiones de ins-
talación tanto de motores como del regulador multi-
eje y accesorios (cableados, conectores, ...)
man_fkm_quick_ref.pdf
inglés
Guía de instalación de los servomotores FKM.
Documento Descripción Formato
man_dds_hard.pdf
español/inglés
Describe cada uno de los dispositivos y equipos que
intervienen en el sistema DDS PDS, así como su ins-
talación.
man_dds_soft.pdf
español/inglés
Describe los ajustes del PDS. Parámetros, variables
y comandos disponibles. Prestaciones. Funciona-
miento del software para PC, WinDDSSetup.
man_mab_hard.pdf
español/inglés
Describe cada uno de los dispositivos y equipos que
intervienen en el sistema MAB, así como su instala-
ción.

Previo III
20
Ref.1912
DDS|MAB
SOFTWARE
· 20 ·
Soft.09.05
Manuales de motores eléctricos
Documento Descripción Formato
man_fm7_fm9_motors.pdf
español/inglés
Describen y detallan las familias FM7/FM9 de moto-
res asíncronos del catálogo de FAGOR y su instala-
ción con el sistema DDS.
man_fxm_fkm_motors.pdf
español/inglés
Describen y detallan las familias FXM/FKM de moto-
res síncronos del catálogo de FAGOR y su instalación
con el sistema DDS.
man_fkm_motors.pdf
español/inglés
Describe y detalla la familia FKM de motores síncro-
nos del catálogo de FAGOR y su instalación con el sis-
tema DDS.

1
Ref.1912
· 21 ·
DDS|MAB
SOFTWARE
Soft.09.05
CONOCIMIENTOS PREVIOS
Tras la instalación de todos los elementos que van a formar parte del siste-
ma DDS, habiendo seguido las indicaciones dadas en el manual
«man_dds_hard.pdf», ahora se contempla en este manual todo el proceso
de configuración mecánica del motor así como la parametrización y el ajus-
te de la aplicación en la que interviene el regulador, el CNC y la captación.
En este capítulo se mencionan los conocimientos previos al proceso de
configuración, parametrización y ajuste de la aplicación que el usuario debe
manejar.
La ejecución de todas estas fases del proceso de parametrización y ajuste
se llevarán a cabo a través de la aplicación para PC «WinDDSSetup» de
FAGOR y es por ello que, aunque se dedica un capítulo aparte para esta
aplicación, en muchos capítulos se harán continuas referencias a sus me-
nús, barra de herramientas, iconos y ventanas para facilitar la labor del
usuario.
Se hace mención además a las diferentes configuraciones de sistema en el
que intervienen el regulador, junto al CNC y la captación.
En capítulos posteriores se considerarán de manera detallada los procesos
de ajuste para aplicaciones de regulador de velocidad y regulador de po-
sición.

Conocimientos previos
1.
CONOCIMIENTOS PREVIOS
Estructura del almacenamiento de datos
34
Ref.1912
DDS|MAB
SOFTWARE
· 22 ·
Soft.09.05
1.1 Estructura del almacenamiento de datos
Tanto el PC como el propio regulador disponen de espacios de memoria no
volátil. Esto es, mantienen los datos guardados aunque el equipo pierda su
alimentación eléctrica. Son el disco duro y la memoria flash, respectiva-
mente.
El regulador tiene otras dos zonas de memoria que usa para su funciona-
miento interno y para su comunicación. Son la memoria interna y memo-
ria RAM. La figura F. S1/1 muestra la estructura de interconexión entre
ellas.
F. S1/1
Estructura de almacenamiento de datos.
0HPRULD)ODVK
0HPRULD5DP
0HPRULDLQWHUQD
3&
3&
5HJXODGRU
'LVFR
āQRYROiWLOā
INFORMACIÓN. El funcionamiento del regulador se rige por los datos con-
tenidos en la memoria interna.
i

Conocimientos previos
CONOCIMIENTOS PREVIOS
Niveles de acceso
1.
Ref.1912
· 23 ·
DDS|MAB
SOFTWARE
Soft.09.05
1.2 Niveles de acceso
Una tabla de parámetros determina el funcionamiento del regulador en fun-
ción del motor que gobierna y el comportamiento deseado.
Todos estos parámetros, variables y comandos del regulador están organi-
zados por niveles de accesibilidad:
Los niveles son:
Nivel básico (USUARIO)
Nivel intermedio (OEM )
Nivel máximo (FAGOR)
Para acceder a cada uno de los parámetros es necesario configurar el re-
gulador en el nivel de acceso que requiera ese parámetro.
El acceso a cada nivel exige el conocimiento de una contraseña (pas-
sword).
El cambio del nivel de acceso se establece desde el programa WinDDSSe-
tup ejecutando la opción Nivel de Acceso... en el menú SetUp.
Ver capítulo 16. WINDDSSETUP de este manual.
El nivel de USUARIO es el nivel básico. En el encendido, el regulador
accede a este nivel por defecto, así que no requiere de password.
Desde el nivel de usuario se accede (acceso libre) a un grupo de pará-
metros que modifican levemente el funcionamiento del regulador en fun-
ción de la aplicación desarrollada.
El nivel OEM es un nivel intermedio de acceso. En el capítulo 13. PA-
RÁMETROS, VARIABLES Y COMANDOS de este manual quedan es-
pecificados cuales son las variables, parámetros y comandos
accesibles desde este nivel.
Desde el nivel OEM se accede (acceso restringido al instalador del sis-
tema DDS FAGOR) a un gran grupo de parámetros dependientes del
motor conectado, y que establecen la adaptación de la electrónica del
regulador a ese motor y a la aplicación concreta que se desarrolle.
El nivel FAGOR permite un acceso total a las variables, parámetros y
comandos del sistema.
Desde el nivel FAGOR se accede (acceso restringido al proceso de fa-
bricación y técnicos de Fagor Automation) a un grupo de parámetros de-
pendientes de la electrónica del regulador que vienen ajustados de
fábrica.

Conocimientos previos
1.
CONOCIMIENTOS PREVIOS
Edición de parámetros
34
Ref.1912
DDS|MAB
SOFTWARE
· 24 ·
Soft.09.05
1.3 Edición de parámetros
Respecto a la edición de parámetros hay que tener muy en cuenta la si-
guiente advertencia:
Sólo la modificación de algunos de los parámetros afecta también a los da-
tos contenidos en la memoria interna. Estos parámetros se conocen como
parámetros modificables online. En el capítulo 13 de este manual vienen es-
pecificados y se reconocen con un asterisco tras el identificador del pará-
metro.
PP58 *Os (S00058) Backlash
Para que los cambios hechos en la memoria RAM tengan efecto en el fun-
cionamiento del regulador (a excepción de los parámetros modificados on-
line que actúan con efecto inmediato tras ser introducidos y validados con la
tecla ENTER) es necesario VALIDAR con el icono correspondiente.
Si, además se desea almacenar los cambios permanentemente será nece-
sario GRABAR EN FLASH con el icono correspondiente.
En caso de desconexión, los valores de los parámetros (tanto los online
como los offline) serán los que se almacenaron por última vez en flash tras
un nuevo arranque del regulador. De esta forma queda almacenada la nue-
va configuración permanente.
Véanse los siguientes apartados de este mismo capítulo donde se docu-
menta como actúan estos comandos.
NOTA. Nótese que la edición de parámetros se realiza desde la aplicación
WinDDSSetup y afecta a los datos contenidos en el memoria RAM del re-
gulador.
F. S1/2
Memoria RAM y memoria INTERNA.
Ejemplo.
(',&,Ï1
0HPRULDLQWHUQD
0HPRULD5$0
3&

Conocimientos previos
CONOCIMIENTOS PREVIOS
Grabación en la memoria FLASH
1.
Ref.1912
· 25 ·
DDS|MAB
SOFTWARE
Soft.09.05
1.4 Grabación en la memoria FLASH
Proceder del siguiente modo:
No alimentar el regulador en potencia.
Grabar los parámetros
Para ello ejecutar el comando de grabación a flash o desde la ventana
«configuración de parámetros (modo modificación)» del WinDDSSetup
pulsar el botón (a).
No será necesario resetear el regulador para hacer efectivos los cam-
bios realizados.
GRABAR EN MEMORIA FLASH (desde la aplicación WinDDSSetup)
Para que los valores dados a los parámetros en el ajuste queden como una
configuración permanente del regulador, es necesario traspasarlos a la me-
moria flash. Esto es así tanto para los parámetros online como para los pa-
rámetros offline.
(a)
F. S1/3
Grabar en memoria flash.
NOTA. Cuando el proceso de grabación haya finalizado, el Status Display
volverá a exhibir el mensaje de normalidad o de errores si los hubiere.
5$0D)/$6+
0HPRULD)/$6+
āQRYROiWLOā
0HPRULD5$0
3&

Conocimientos previos
1.
CONOCIMIENTOS PREVIOS
Validación de parámetros offline
34
Ref.1912
DDS|MAB
SOFTWARE
· 26 ·
Soft.09.05
1.5 Validación de parámetros offline
Así, la forma de validar parámetros offline será en:
Ejes analógicos: Activando el icono (b) VALIDAR
Esta validación deberá realizarse sin par, de lo contrario, el regulador no
validará los parámetros. De haber parámetros erróneos aparecerá el
error E502.
La lista de errores podrá visualizarse activando el icono correspondiente
de la barra de iconos del WinDDSSetup (ventana SPY). Véase capítulo
16. WINDDSSETUP de este manual.
Ejes SERCOS: Activando el icono (b) VALIDAR, atendiendo a la vali-
dación según el estándar SERCOS, es decir, cada vez que pase de
fase 2 a fase 4.
En esta validación se testean los parámetros. De haber parámetros erró-
neos aparecerá el código de error E502.
La lista de errores podrá visualizarse activando el icono correspondiente de
la barra de iconos del WinDDSSetup (ventana SPY). Véase capítulo 16.
WINDDSSETUP de este manual.
En todos los casos los parámetros online son validados desde el momento
en el que se escriben en memoria RAM.
VALIDAR (desde la aplicación WinDDSSetup)
La validación de parámetros offline permite que cualquier modificación
sobre el valor de este tipo de parámetros sea efectiva con un sólo click de
ratón en el icono validar (b) (su comando asociado es GC4) que aparece en
la ventana de configuración de parámetros (modo modificación) del
WinDDSSetup. Con este comando no se almacena el nuevo valor dado al
parámetro en memoria flash, si bien no será necesario grabar en flash para
que sea efectiva tal modificación, agilizando la puesta a punto. Para man-
tener el cambio de configuración del regulador de forma permanente será
necesario grabar en flash mediante su icono correspondiente (véase ico-
no (a) del apartado anterior).
(b)
INFORMACIÓN. Las versiones actuales del CNC 8070 y CNC 8055 no es-
tán preparadas para tal validación, y por tanto, deberán validarse los pará-
metros del regulador atendiendo al método dado en el apartado anterior, es
decir, grabando los parámetros en memoria flash y realizando posterior-
mente un reset en el regulador.
i
NOTA. Nótese que los parámetros offline con SET también podrán ser va-
lidados al realizar un cambio de SET o un UNPARK. De haber parámetros
erróneos aparecerá el código de error E504.
NOTA. Nótese que tanto el cambio de SET de parámetros como el
UNPARK no podrán ser ejecutados con parámetros offline comunes (pa-
rámetros offline sin SET) sin ser validados. Dichos comandos devolverán
un error en tal caso.

Conocimientos previos
CONOCIMIENTOS PREVIOS
Visualización de errores
1.
Ref.1912
· 27 ·
DDS|MAB
SOFTWARE
Soft.09.05
1.6 Visualización de errores
Los errores que se generan podrán visualizarse activando el icono corres-
pondiente de la barra de iconos del WinDDSSetup (ventana SPY).
Ver capítulo 16. WINDDSSETUP de este manual.

Conocimientos previos
1.
CONOCIMIENTOS PREVIOS
Proceso de inicialización, RESET
34
Ref.1912
DDS|MAB
SOFTWARE
· 28 ·
Soft.09.05
1.7 Proceso de inicialización, RESET
La alimentación eléctrica del regulador genera un RESET del mismo. Éste,
puede ser provocado también por el usuario:
Por medio del pulsador situado en la parte superior del regulador.
Mediante el lanzamiento del comando - GV11 (F00708) SoftReset - des-
de la aplicación WinDDSSetup. Ver figura F. S1/4.
Mediante escritura de la variable - GV69 (F01847) TempDriverReset -
desde la aplicación WinDDSSetup. El RESET se realiza automática-
mente una vez transcurrido el tiempo establecido en esa variable.
Por efecto de este RESET:
El Status Display muestra la secuencia de inicialización.
Los datos guardados en la FLASH (parámetros y variables que definen
su configuración) pasan a la RAM, y de ésta, a la memoria interna.
Se produce una verificación y chequeo cruzado de los datos.
Los errores encontrados se indican en el display de la carátula.
Reset de errores
Si el sistema detecta errores, deberá solucionarse la causa que los provoca
y seguidamente realizar un reset de errores.
Eléctricamente, por medio del pin 1 de X2 de las fuentes de alimenta-
ción, pin 1 de X6 en las fuentes RPS y pin 3 de X2 en el regulador com-
pacto.
Ejecutando el comando - DC1 (S00099) ResetClass1Diagnostics - des-
de la barra de comandos del WinDDSSetup.
Existen errores calificados como no reseteables, veáse el capítulo 14. CÓ-
DIGOS Y MENSAJES DE ERROR del regulador de este manual. Estos
errores sólo pueden ser eliminados mediante un reset del regulador.
F. S1/4
GV11. SoftReset.
F. S1/5
Reset de errores.
0HPRULD)/$6+
āQRYROiWLOā
0HPRULD5DP
0HPRULDLQWHUQD
3&
5(6(7

Conocimientos previos
CONOCIMIENTOS PREVIOS
Transferencia de tablas de parámetros
1.
Ref.1912
· 29 ·
DDS|MAB
SOFTWARE
Soft.09.05
1.8 Transferencia de tablas de parámetros
Nótese su diferencia con grabar parámetros, donde:
Desde el WinDDSSetup, pulsando el botón (a), se descarga en memoria
flash el contenido de la memoria Ram del regulador estableciéndose así
la grabación de los parámetros.
La ejecución del comando ·GC1 (S00264) BackupWorkingMemory
Command· puede llevar a cabo también la misma operación.
SALVAR (desde la aplicación WinDDSSetup)
Desde la memoria flash del regulador al disco duro del PC.
Este icono perteneciente a la barra de herramientas del WinDDSSetup per-
mite salvar (guardar) la configuración de un regulador.
CARGAR (desde la aplicación WinDDSSetup)
Desde el disco duro del PC o un CD Rom a la memoria flash del regulador.
Este icono perteneciente a la barra de herramientas del WinDDSSetup per-
mite cargar (copiar) una configuración conocida en un regulador.
(c)
(d)
F. S1/6
Transferencia de tablas de parámetros.
0HPRULD)/$6+
āQRYROiWLOā
0HPRULD5$0
0HPRULDLQWHUQD
3&

Conocimientos previos
1.
CONOCIMIENTOS PREVIOS
Transferencia de ficheros « *.mot ». Tabla de motores
34
Ref.1912
DDS|MAB
SOFTWARE
· 30 ·
Soft.09.05
1.9 Transferencia de ficheros « *.mot ». Tabla de motores
El icono (d) del apartado anterior también se utiliza para transferir un fichero
de motor, reconocible por su extensión (*.mot).
Cada modelo de la familia de motores FXM, FKM, FM7 o FM9 del catálogo
FAGOR requiere una configuración específica del software del regulador.
Este software contiene su fichero FM7_SPM_FM9_FS5_xx.mot o
FXM_FKM_xx.mot correspondiente con los datos inicializados de unos pa-
rámetros determinados para cada uno de estos motores, así como los pa-
rámetros correspondientes a los ajustes del lazo de corriente y de flujo.
Además, a partir de la versión 06.20 de software del regulador y posteriores,
se incorporan los ficheros de motores Ejes_Siemens_xx.mot,
Siemens_xx.mot y Cabezales_Varios_xx.mot correspondientes a algunos
motores de usuario (es decir, no FAGOR).
Para establecer los valores apropiados a los parámetros ligados al motor es
necesario comunicar al regulador cual es el motor que va a gobernar.
Con el regulador alimentado y conectado con el PC mediante línea serie
RS-232, y abierta la aplicación WinDDSSetup, activando el icono (d) CAR-
GAR de la barra de herramientas, se localizará la carpeta en el CDRom con
el nombre de la versión (véase figura) desde el cuadro <B
uscar en >. Ob-
sérvese que incorporará todos los ficheros con extensión (*.mot):
INFORMACIÓN. Antes de transferir un fichero de motores (*.mot) al regu-
lador asegúrese de que son compatibles la versión del fichero y la versión
de software del regulador. Recuérdese que versiones anteriores a la 08.09
del software del regulador son incompatibles con versiones 02.02 ó supe-
riores del fichero «*.mot», comúnmente conocido como tabla de motores.
Véase la versión del regulador en la variable GV2 y la versión de la tabla de
motores en la variable GV16.
i
NOTA. Previo a la selección del motor desde la ventana correspondiente
del WinDDSSetup ya habrá sido transferido necesariamente al regulador,
el fichero (*.mot) de parámetros del motor correspondiente.
NOTA. Recuérdese que el regulador lleva almacenado, por defecto, con
la versión de software, un único fichero de motor que es el asociado al re-
gulador, pero, en ocasiones, el usuario desea hacerlo trabajar con un mo-
tor diferente y, por tanto, deberá necesariamente transferir el fichero
(*.mot) que corresponde a este motor y que se encuentra en el Cd ROM
suministrado por FAGOR junto con la versión de software.
Seguir la pauta explicativa que se documenta a continuación.
F. S1/7
Ventana de transferencia de ficheros (*.mot) desde el PC al regulador.

Conocimientos previos
CONOCIMIENTOS PREVIOS
Transferencia de ficheros « *.mot ». Tabla de motores
1.
Ref.1912
· 31 ·
DDS|MAB
SOFTWARE
Soft.09.05
Nótese que:
En el cuadro «Tipo» debe seleccionarse MOT File (*.mot ) mostrándose en
la carpeta de la versión Vxx.xx (ésta concretamente, se trata de una versión
V08.05) todos los ficheros (*.mot) existentes.
Los motores FXM y FKM por un lado, y los motores FM7, SPM, FM9 y FS5
por otro, disponen de un fichero determinado según el regulador con el que
van asociados (por defecto) y que queda reflejado con las cifras que acom-
pañan a FXM_FKM o FM7_SPM_FM9_FS5, respectivamente. Estas cifras
representan la corriente de pico del regulador. Así p. ej. si se asocia un mo-
tor FXM o FKM con un regulador de eje AXD de 75 A deberá seleccionarse
el fichero FXM_FKM_75.mot.
Tras seleccionar el fichero deseado y activar el botón «A
brir» se inicia la
transferencia del fichero seleccionado desde el PC al regulador.
El proceso habrá finalizado trás haber aceptado las dos notificaciones que
aparecerán en pantalla durante el proceso de transferencia.
NOTA. Esta explicación se hace extensible al resto de ficheros incluidos
los de motor de usuario Siemens_xx.mot, Cabezales_Varios_xx.mot, ...
F. S1/8
Notificaciones durante el proceso de transferencia de un fichero (*.mot) des-
de el PC al regulador.

Conocimientos previos
1.
CONOCIMIENTOS PREVIOS
Identificación del motor
34
Ref.1912
DDS|MAB
SOFTWARE
· 32 ·
Soft.09.05
1.10 Identificación del motor
Como se indicaba en el apartado anterior, cada motor requiere una configu-
ración específica del software del regulador. Este software contiene su fi-
chero FXM_FKM_xx.mot, FM7_SPM_FM9_FS5_xx.mot ... correspondiente
con los datos inicializados de los parámetros para cada uno de estos moto-
res, así como los parámetros correspondientes a los ajustes del lazo de co-
rriente y de flujo. En el capítulo 13. PARÁMETROS, VARIABLES Y
COMANDOS de este manual se indica cuales son los parámetros ligados al
motor y los correspondientes al lazo de corriente y de flujo.
Para establecer los valores apropiados a los parámetros ligados al motor es
necesario comunicar al regulador cual es el motor que va a gobernar.
Desde el programa de ajuste WinDDSSetup se realizará todo este procedi-
miento como queda documentado en el capítulo 2. IDENTIFICACIÓN DEL
MOTOR de este manual.
Identificación e inicialización
La selección del motor por este procedimiento realiza el ajuste de los pará-
metros de motor y además pone el resto de parámetros del regulador a
su valor por defecto.
Dentro del grupo de parámetros extendidos en sets y reducciones, esta ini-
cialización afecta solamente a los que pertenecen al set y reducción cero. El
set 0 y la reducción 0 quedan como los únicos útiles.
Para más detalles, ver capítulo 2. IDENTIFICACIÓN DEL MOTOR de este
manual.
NOTA. Este procedimiento de identificación + inicialización es el punto
de partida recomendado para la primera puesta a punto de un acciona-
miento.

Conocimientos previos
CONOCIMIENTOS PREVIOS
Configuraciones del sistema
1.
Ref.1912
· 33 ·
DDS|MAB
SOFTWARE
Soft.09.05
1.11 Configuraciones del sistema
El regulador, junto al CNC y la captación, está preparado para trabajar en di-
ferentes configuraciones. El parámetro AP1 (S00032) configura al regula-
dor para trabajar en cada una de ellas. Véase su significado en el capítulo
13 de este manual.
Préstese especial atención al tipo de interfaz de comunicación utilizado
para realizar la transmisión del valor de la captación o de consigna en cada
uno de los esquemas.
Regulador de velocidad
Regulador de velocidad con simulador de encóder
Regulador de velocidad con captación motor
Regulador de velocidad con captación directa · configuración I ·
NOTA. Tras la identificación del motor serán necesarios otros ajustes.
Ver capítulo 4. EL REGULADOR DE VELOCIDAD de este manual.
F. S1/9
Regulador de velocidad con simuladora de encóder.
F. S1/10
Regulador de velocidad con captación motor.
F. S1/11
Regulador de velocidad con captación directa. Configuración I.
S00032 = xxx010
Velocity
loop
DRIVECNC MOTOR
Current
loop
Encoder
Simulator
Position
loop
CNC
M
s
++
+
-
--
VIA ELECTRICAL CABLE
VIA ELECTRICAL CABLE
VIA SERCOS OR CAN
Current
loop
Velocity
loop
S00032 = xxx010
DRIVECNC MOTOR
CNC
Position
loop
M
s
+
-
++
--
S00032 = xxx010
DRIVECNC MOTOR
CNC
Current
loop
Velocity
loop
Position
loop
M
s
Direct
feedback
+
++
-
--
VIA ELECTRICAL CABLE
VIA SERCOS

Conocimientos previos
1.
CONOCIMIENTOS PREVIOS
Configuraciones del sistema
34
Ref.1912
DDS|MAB
SOFTWARE
· 34 ·
Soft.09.05
Regulador de velocidad con captación directa · configuración II ·
Regulador de posición
Regulador de posición con captación motor
Regulador de posición con captación directa
F. S1/12
Regulador de velocidad con captación directa. Configuración II.
Ver capítulo 5. EL REGULADOR DE POSICIÓN de este manual.
F. S1/13
Regulador de posición con captación motor.
F. S1/14
Regulador de posición con captación directa.
VIA ELECTRICAL CABLE
VIA SERCOS
Current
loop
Velocity
loop
Position
loop
M
s
S00032 = xxx010
DRIVECNC MOTOR
CNC
+
++
-
--
Direct
feedback
VIA ELECTRICAL CABLE
VIA SERCOS
S00032 = xxx010
DRIVECNC MOTOR
CNC
Position
loop
Velocity
loop
Current
loop
M
s
+
-
+
-
+
-
VIA ELECTRICAL CABLE
VIA SERCOS
M
S
Current
loop
Velocity
loop
Position
loop
S00032 = xxx010
DRIVECNC MOTOR
CNC
Direct
feedback
+
-
+
-
+
-

2
Ref.1912
· 35 ·
DDS|MAB
SOFTWARE
Soft.09.05
IDENTIFICACIÓN DEL
MOTOR
Cada motor instalado en un sistema DDS requiere para su funcionamiento
una configuración específica del software del regulador asociado a él.
Este software contiene el fichero de motor correspondiente que, según el
modelo de motor perteneciente al catálogo de FAGOR será el dado por la si-
guiente tabla:
Este fichero (*.mot) contendrá los datos inicializados de los parámetros para
cada uno de estos motores, así como los parámetros correspondientes a
los ajustes del lazo de corriente y de flujo.
Contiene además ficheros de motor correspondientes a ciertos modelos de
motor de usuario (no FAGOR). Estos son:
Para más detalles sobre transferencia de ficheros (*.mot), véase el apartado
correspondiente en el capítulo 1. CONOCIMIENTOS PREVIOS de este ma-
nual.
En el capítulo 13 de este manual se indica cuales son los parámetros liga-
dos al motor y los correspondientes al lazo de corriente y de flujo.
T. S2/1 Motor FAGOR. Ficheros de motor (*.mot) asociados.
Modelo de motor Fichero de motor asociado
FXM FXM_FKM_.mot
FKM FXM_FKM_.mot
SPM FM7_SPM_FM9_FS5_.mot
FM7 FM7_SPM_FM9_FS5_.mot
FM9 FM7_SPM_FM9_FS5_.mot
T. S2/2 Motor NO FAGOR. Ficheros de motor (*.mot) asociados.
Modelo de motor Fichero de motor asociado
SIEMENS
TM
Siemens_.mot
Otros fabricantes Cabezales_Varios_.mot

Identificación del motor
2.
IDENTIFICACIÓN DEL MOTOR
Configuración del motor
54
Ref.1912
DDS|MAB
SOFTWARE
· 36 ·
Soft.09.05
2.1 Configuración del motor
Para establecer los valores apropiados a los parámetros ligados al motor es
necesario comunicar al regulador cual es el motor que va a gobernar de to-
dos los que conforman el catálogo FAGOR.
Esta configuración de motor únicamente podrá realizarse desde la aplica-
ción para PC, WinDDSSetup, y por tanto, para realizar esta labor, el regula-
dor asociado al motor y el PC deben estar conectados via línea serie RS-
232.
Ahora, desde el programa de ajuste WinDDSSetup, en la ventana de confi-
guración de parámetros (modo modificación) que se despliega tras activar
su icono correspondiente en la barra de herramientas se seleccionará el
grupo M. (Motor).
Para más detalles, ver capítulo 16. WINDDSSETUP de este manual.
F. S2/1
Ventana de configuración de parámetros (modo modificación).
Con un nivel de acceso OEM o superior se despliega una ventana como la
de la figura F. S2/1 donde aparece el icono (a) de selección de motor siem-
pre y cuando se haya seleccionado previamente, en el listado de grupos, el
parámetro MP1.# (Motor Type) del grupo M. (Motor).
(a)
NOTA. Con nivel de acceso BÁSICO no se muestra el icono (a) en la ven-
tana de configuración de parámetros y, por tanto, no es posible realizar la
selección a menos de que se disponga de un nivel de acceso menos res-
tringido.
F. S2/2
Icono de selección de motor.
(a)

Identificación del motor
IDENTIFICACIÓN DEL MOTOR
Selección del motor
2.
Ref.1912
· 37 ·
DDS|MAB
SOFTWARE
Soft.09.05
2.2 Selección del motor
Servomotores síncronos FAGOR
La ventana de selección del motor que aparece tras pulsar el botón (a) de la
ventana de configuración de parámetros es similar a la dada en la figura F.
S2/3.
Nótese que para que el listado izquierdo de esta ventana no esté vacío,
debe estar almacenado ya en el regulador, necesariamente, el fichero
FXM_FKM_xx.mot correspondiente. Aunque, por defecto, siempre va alma-
cenado un fichero de motores (*.mot) asociado al regulador, si por la razón
que sea, esto no es así, no podrá realizarse la selección del motor sin haber
transferido previamente al regulador el fichero del motor que va a gobernar.
Ver apartado «transferencia de ficheros (*.mot)» documentado en el capítu-
lo anterior.
La forma de proceder será:
Seleccionar en el cuadro desplegable la opción «gama por gama». Se
mostrará en ventana una columna de 8 flechas (una correspondiente a
cada gama).
Seleccionar en el listado, la matrícula de motor que se corresponde con
el que se va a gobernar. Véase que sólo se incorporan matrículas con
captador resólver (R0).
Pulsar el botón con flecha, correspondiente a la gama 0, es decir MP1.
En este campo aparecerá la matrícula que ha sido seleccionada en el
panel izquierdo. Este campo será editable y, por tanto, si el motor no
dispone de resólver habrá que sobreescribir (mediante el teclado) la re-
ferencia R0 por la que realmente incorpora el motor, que podrá ser una
referencia encóder E1, E3, A1, A3, ... Para saber realmente de cual se
dispone, véase la referencia del motor en su placa de características.
Si la selección inicial hubiese sido «todas las gamas», entonces habría
aparecido un único botón con flecha y la selección de motor hecha en el lis-
tado de matrículas se hubiese asignado a los 8 campos correspondientes a
los 8 sets, tras haber pulsado el botón.
F. S2/3
Ventana de selección de un servomotor síncrono FXM|FKM.
NOTA. A partir de la versión 06.10 del software del regulador el parámetro
MP1 es extensible en sets.
(a)
INFORMACIÓN. Obsérvese que todas las matrículas de motor que apare-
cen en el listado (zona izquierda de la ventana) aparecerán siempre con
resólver (R0) como captador. Si su motor incorpora un captador diferente,
que será lo más probable, identifíquese de cual se trata leyendo la matrícula
en la placa de características del motor, adosada exteriormente en uno de
sus laterales y proceda como se indica seguidamente.
i
NOTA. Selecciónela obligatoriamente aunque su motor
no disponga de un resólver (Ref. R0).
¡Más tarde ya cambiará R0 por la referencia real del captador!

Identificación del motor
2.
IDENTIFICACIÓN DEL MOTOR
Selección del motor
54
Ref.1912
DDS|MAB
SOFTWARE
· 38 ·
Soft.09.05
Con captador encóder
Los servomotores síncronos de FAGOR equipados con captación por encó-
der almacenan en la memoria del captador la referencia comercial del motor
permanentemente. Pueden encontrarse las referencias E1, A1, E3, A3, ...
La versión de software es capaz de leer esta referencia y ejecutar un proce-
so automático de identificación del motor. Así la ventana de selección del
motor ofrece la posibilidad de elegir entre el motor conectado, motor de
usuario (user defined), motor default, motor default2 y clear motor parame-
ters.
En la ventana de la figura F. S2/ 4, el ID del motor que aparece en el campo
1
refleja el tipo de captador conectado. En este caso concreto se trata de un
encóder A1. Podrá seleccionarse entonces el mismo motor que aparece en
este campo, en el listado de matrículas, que aparece en esta ventana (siem-
pre con referencia resólver R0), asignarse a uno o a todos los sets de MP1
mediante los botones de flecha y modificarse por teclado R0 por A1 (ver 2),
ya que estos campos son editables. Será validado pulsando el icono (ver 3)
correspondiente.
La referencia almacenada en la memoria del encóder viene dada también
en la variable RV7. Para más detalles sobre esta variable, ver capítulo 13.
PARÁMETROS, VARIABLES Y COMANDOS de este manual.
F. S2/4
Ventana donde se muestra el ID del motor almacenado en la memoria del
encóder (ver 1).
NOTA. Este automatismo no incluye el ajuste del PI que deberá hacer el
usuario siempre y cuando disponga de acceso OEM.
(1)
FXM55.30A.A1.000.0
(2)
(3)
INFORMACIÓN. La elección de un motor a través de la ventana de selec-
ción (como se ha visto en este capítulo) modifica el parámetro MP1.
(S00141) MotorType (con sets a partir de la versión 06.10). La asignación al
parámetro MP1. de una referencia concreta implica que todos los pará-
metros de motor que en el capítulo 13 de este manual aparecen señalados
con la marca M pertenecientes al grupo MOTOR toman un valor fijo e ina-
movible.
i

Identificación del motor
IDENTIFICACIÓN DEL MOTOR
Selección del motor
2.
Ref.1912
· 39 ·
DDS|MAB
SOFTWARE
Soft.09.05
Con captador resólver
Los servomotores de FAGOR equipados con captación por resólver (ref. del
captador R0) no disponen de autoidentificación, siendo necesario por tanto,
informar al regulador de cual es el motor que le ha sido conectado.
La ventana de selección ofrece la lista de motores incorporada en el fichero
FXM_FKM_.mot (para motores FXM y FKM) que ha sido tansferido al
regulador. Si el motor conectado es, por ejemplo, un FKM62 de 4000
rev/min, (véase la placa de características del motor), seleccionar
FKM62.40A.R0.000 en el listado de matrículas de la ventana y asignarlo a
uno o todos los sets del parámetro MP1 (ver 2) con el botón verde de flecha.
Validar esta selección del motor con el icono (ver 3) correspondiente.
F. S2/5
Con un captador resólver no se muestra el ID del motor conectado (ver 1).
(1)
(2)
(3)
INFORMACIÓN. La elección de un motor a través de la ventana de selec-
ción (como se ha visto en este capítulo) modifica el parámetro MP1.
(S00141) MotorType (con sets a partir de la versión 06.10). La asignación al
parámetro MP1. de una referencia concreta implica que todos los pará-
metros de motor que en el capítulo 13 de este manual aparecen señalados
con la marca «M» toman un valor fijo e inamovible.
i

Identificación del motor
2.
IDENTIFICACIÓN DEL MOTOR
Selección del motor
54
Ref.1912
DDS|MAB
SOFTWARE
· 40 ·
Soft.09.05
Selección de la opción DEFAULT
A partir de la versión de software 06.08 del regulador aparece en la ventana
<selección de motor> la opción DEFAULT. Así, cuando es seleccionada
esta opción y asignada con el botón verde de flecha p. ej. al set 1 del pará-
metro MP1 (ver 2), la matrícula de motor almacenada en la memoria del en-
códer (ver 1) parametriza MP1.1 con este valor y se ponen a su valor por
defecto todos los parámetros del grupo M quedando almacenados en la me-
moria RAM del regulador.
Recuérdese que la referencia o ID del motor almacenada en la memoria del
encóder puede ser visualizada también en la variable RV7. Para más deta-
lles sobre esta variable, véase el capítulo 13. PARÁMETROS, VARIABLES
Y COMANDOS de este manual.
La forma de proceder será:
Con nivel de acceso OEM o FAGOR, activando el icono (a) desde la venta-
na de configuración de parámetros, emerge en pantalla la ventana SELEC-
CIÓN DE MOTOR.
Seleccionar la opción DEFAULT tras ser localizada en la zona donde se
listan las matrículas de todos los motores.
El regulador reconocerá automáticamente la matrícula (ID) grabada en la
memoria del encóder del motor conectado a él.
Asignar DEFAULT con el botón de flecha a uno o todos los sets del pa-
rámetro MP1, p. e. MP1.1 (ver 2).
Validar esta asignación con el icono correspondiente (ver 3).
Ha sido establecida una parametrización automática del regulador para ese
motor y han sido almacenados estos valores en su memoria RAM.
Seleccione la opción DEFAULT 2 que seguidamente se documenta para
solventar esta situación si va a a cambiar de motor.
NOTA. La opción DEFAULT sólo tiene funcionalidad si el captador integra-
do en el motor es un encóder.
F. S2/6
Ventana de selección de motor. Opción DEFAULT.
NOTA. Nótese que si el ID del motor almacenado en la memoria del en-
códer no coincide con alguno de los ID de los motores almacenados en el
fichero de motores FXM_FKM_xx.mot se activará el código de error E505
en el display del regulador indicando esta situación.
NOTA. No olvide ejecutar siempre el comando GC1 para almacenar estos
valores permanentemente en la memoria FLASH del regulador.
NOTA. Si el usuario cambia el motor conectado al regulador por otro dife-
rente y selecciona la opción DEFAULT, el regulador muestra inmediata-
mente el E502 en su display avisando de que los valores de los
parámetros de motor (grupo M) del nuevo motor conectado (almacenados
ahora en la RAM del regulador) y los del motor que ha sido cambiado (to-
davía almacenados en la FLASH del regulador) no coinciden.
(a)
(1)
FXM78.40A.E1.000.1
(2)
(3)

Identificación del motor
IDENTIFICACIÓN DEL MOTOR
Selección del motor
2.
Ref.1912
· 41 ·
DDS|MAB
SOFTWARE
Soft.09.05
Selección de la opción DEFAULT 2
A partir de la versión de software 06.21 del regulador aparece la opción DE-
FAULT 2 en la ventana SELECCIÓN DE MOTOR.
Su funcionalidad (a diferencia de la opción DEFAULT) es la de posibilitar la
parametrización de un regulador de tal manera que al cambiar el motor que
gobierna por otro diferente no se active el error E502 indicando la no coin-
cidencia de los parámetros del nuevo motor (almacenados en RAM tras va-
lidar DEFAULT 2) y los parámetros del motor cambiado (todavía
almacenados en la memoria FLASH del regulador).
Así, cuando es seleccionada esta opción y asignada posteriormente con el
botón de flecha p. ej. al set 1 del parámetro MP1 (ver 2), la matrícula de mo-
tor almacenada en la memoria del encóder (ver 1) parametriza MP1.1 con
valor DEFAULT 2 y se ponen a su valor por defecto todos los parámetros de
motor del grupo M quedando almacenados en la memoria RAM del regula-
dor.
La forma de proceder será:
Con nivel de acceso OEM o FAGOR, activando el icono (a) desde la venta-
na de configuración de parámetros, emerge en pantalla la ventana SELEC-
CIÓN DE MOTOR.
Seleccionar la opción DEFAULT 2 tras ser localizada en la zona donde
se listan las matrículas de los motores.
El regulador reconocerá automáticamente la matrícula (ID) grabada en la
memoria del encóder del motor conectado a él.
Asignar DEFAULT 2 con el botón de flecha a uno o todos los sets del
parámetro MP1, p. e. MP1.1.
Validar esta asignación con el icono
correspondiente.
Ha sido establecida una parametrización automática del regulador para ese
motor y han sido almacenados estos valores en su memoria RAM.
Seleccionar la opción DEFAULT 2 en lugar de la opción DEFAULT evita, por
tanto, la activación del E502 en el regulador como consecuencia de un cam-
bio de motor.
NOTA. La opción DEFAULT 2 sólo tiene funcionalidad si el captador inte-
grado en el motor es un encóder.
NOTA. Nótese que si el ID del motor almacenado en la memoria del en-
códer no coincide con alguno de los ID de los motores almacenados en el
fichero de motores FXM_FKM_xx.mot se activará el error E505 en el dis-
play del regulador indicando esta situación.
NOTA. No olvide ejecutar siempre el comando GC1 para almacenar estos
valores permanentemente en la memoria FLASH del regulador.
NOTA. Si el usuario cambia este motor conectado al regulador por otro di-
ferente y selecciona la opción DEFAULT 2, el regulador ahora no mos-
trará el E502 en su display como ocurría con la opción DEFAULT.
(a)

Identificación del motor
2.
IDENTIFICACIÓN DEL MOTOR
Selección del motor
54
Ref.1912
DDS|MAB
SOFTWARE
· 42 ·
Soft.09.05
Selección de la opción CLEAR MOTOR PARAMETERS
Cuando se instala un servomotor síncrono no FAGOR que no ha sido ajus-
tado nunca, será necesario introducir todos los parámetros de motor y habrá
que asegurarse de que previamente se han puesto todos a cero. Para ello
la selección del motor se hará con la opción CLEAR MOTOR PARAME-
TERS.
El regulador no reconoce el motor conectado a él y para tener acceso a to-
dos los parámetros de motor y poder parametrizarlos se procederá como si-
gue:
Seleccionar la opción CLEAR MOTOR PARAMETERS.
Asignarla con el botón verde de flecha a uno o todos los sets del pará-
metro MP1, p. ej. MP1.1.
Validar esta asignación con el icono correspondiente.
Cuando la selección del motor se hace con la opción CLEAR MOTOR PA-
RAMETERS todos los parámetros del grupo M de motor se ponen a cero.
NOTA. La opción CLEAR MOTOR PARAMETERS debe utilizarse cuando
se dispone de un servomotor síncrono no FAGOR que no ha sido ajustado
en ninguna ocasión.

Identificación del motor
IDENTIFICACIÓN DEL MOTOR
Selección del motor
2.
Ref.1912
· 43 ·
DDS|MAB
SOFTWARE
Soft.09.05
Selección de la opción USER DEFINED
Esta opción se utiliza cuando se desea cambiar algún parámetro del motor,
sabiendo que todos ya han sido parametrizados previamente en alguna
ocasión.
Para realizar esta labor se procederá como sigue:
Con nivel de acceso OEM o FAGOR, activando el icono (a) desde la venta-
na de configuración de parámetros, emerge en pantalla la ventana SELEC-
CIÓN DE MOTOR. Seleccionar la opción USER DEFINED tras localizarla
en la zona donde se listan las matrículas de los motores.
El regulador no reconocerá ninguna matrícula grabada en el encóder del
motor conectado a él cuando el motor sea no FAGOR (ver 1).
Seleccionar la opción USER DEFINED.
Asignarla con el botón de flecha a uno de los sets del parámetro MP1 (p.
ej. MP1.0, ver 2). También podría asignarse a todos los sets en el caso
de que sea de utilidad para el usuario.
Se habrá parametrizado MP1.0 con un valor 0. Puede editarse por tecla-
do su valor si se desea introducir una matrícula que lo identifique po-
niendo siempre por delante un 0, p. ej. «0supermotor».
Validar esta asignación con el icono (ver 3) correspondiente.
Ahora se podrá modificar el valor de los parámetros de motor deseados.
Esta nueva parametrización no será permanente hasta que no haya sido
grabada en flash mediante el icono (b).
El software del regulador, a partir de su versión 06.10 admite tantos motores
de usuario como sets de MP1, es decir, 8 (uno por set).
Para conservar las tablas de parámetros de distintos motores de usuario
con nuevas parametrizaciones deberá hacerse uso de las funciones de
transferencia de parámetros.
Ver apartado 1.8. Transferencia de tablas de parámetros del capítulo 1 de
este manual.
NOTA. La opción USER DEFINED debe utilizarse cuando se dispone de
un servomotor síncrono no FAGOR (o un servomotor síncrono FAGOR
con alguna particularidad especial no estándar), cuyos parámetros de mo-
tor ya han sido parametrizados previamente en alguna ocasión.
F. S2/7
Ventana de selección de motor. Opción USER DEFINED.
(a)
(1)
(2)
(3)
(b)

Identificación del motor
2.
IDENTIFICACIÓN DEL MOTOR
Selección del motor
54
Ref.1912
DDS|MAB
SOFTWARE
· 44 ·
Soft.09.05
Motores asíncronos FAGOR
La ventana de selección del motor que aparece tras pulsar el botón (a) de la
ventana de configuración de parámetros será similar a la dada en la figura
F. S2/8.
Nótese que para que el listado izquierdo de esta ventana no esté vacío debe
estar almacenado ya en el regulador, necesariamente, el fichero
FM7_SPM_FM9_FS5_xx.mot correspondiente. Aunque, por defecto, siem-
pre va almacenado el fichero de motores (*.mot) asociado convenientemen-
te al regulador, si por la razón que sea, esto no es así, no podrá realizarse
la selección del motor sin haber transferido previamente al regulador el fi-
chero del motor que va a gobernar. Véase el apartado «transferencia de fi-
cheros (*.mot)» documentado en el capítulo anterior.
Las referencias E03|HS3 de los motores que aparecen en el listado respon-
den a las matrículas de los motores FM7 que sólo pueden controlarse a par-
tir de la versión 06.10. Tienen la peculiaridad respecto a los motores con
referencias E01|E02 (gobernables ya por versiones de software anteriores)
de que al final de la matrícula incorporan una S o una D.
El motor es único, y su referencia comercial no incluye la última letra (S o D),
pero como la conexión de sus bobinados podrá realizarse en estrella (Star)
o en triángulo (Delta), los datos que el regulador va a necesitar de cada uno
serán diferentes y es por ello que el software los contemplará como si de
dos motores diferentes se tratase, aunque realmente es un único motor. De
ahí que en esta ventana del WinDDSSetup se reconozcan con dos matrícu-
las distintas (con S o con D).
NOTA. A partir de la versión 06.10 del software del regulador se incorpo-
ran las tablas de motores referentes a las series FM7 con referencias
E03|HS3, además de las anteriores con referencias E01|E02. Es impor-
tante reseñar que en esta versión el parámetro MP1 dispone de sets, a di-
ferencia de versiones anteriores. La razón es la posible conexión de los
bobinados tanto en estrella como en triángulo de los motores FM7 con re-
ferencias E03|HS3. Las tablas de motores referentes a la familia FM9 se
incorporan con la versión de software 06.23 y 08.01.
F. S2/8
Ventana de selección de un motor asíncrono de cabezal FM7| SPM|FM9.
(a)

Identificación del motor
IDENTIFICACIÓN DEL MOTOR
Selección del motor
2.
Ref.1912
· 45 ·
DDS|MAB
SOFTWARE
Soft.09.05
Cómo parametrizar un cambio estrella-triángulo del bobinado
Para llevar a cabo una maniobra de cambio de bobinado es necesario:
Disponer de un motor asíncrono FM7, serie E03|HS3.
Realizar toda la instalación según se indica en el esquema facilitado en
el capítulo 10 del manual «man_dds_hard.pdf». Los dos contactores
que aparecen serán accionados mediante programa de PLC del CNC
8070 ya que el regulador no dispone de ninguna salida digital para con-
trolarlo.
Disponer de una versión 06.10 o superior en el regulador de cabezal si
el cambio se va a realizar con el motor parado o 06.18 o superior si el
cambio se va a realizar sin parar motor, es decir, online (al vuelo).
Asignar (a través de la ventana de selección motor del WinDDSSetup) a
un set del parámetro MP1 del regulador la referencia en estrella del mo-
tor y a otro set de MP1 la referencia en triángulo. Ver figura F. S2 /9. Sea
coherente en el programa de PLC con las asignaciones aquí hechas.
Grabar parámetros de forma permanente (comando GC1).
Nótese además que la referencia comercial
del motor es FM7-D-
S1D0-E03 (sin letra S o D final) pero para poder diferenciar el motor para
que pueda trabajar con conexión de bobinado estrella/triángulo (según con-
venga en cada fase de la aplicación), habrá que seleccionar una matrícula
del tipo FM7-D-S1D0-E03-S y asignársela p. e. a MP1 (set 0) y selec-
cionar una FM7-D-S1D0-E03-D y asignársela p. e. a MP1.1 (set 1) en
la ventana de selección del motor desde el WinDDSSetup.
Los motores de eje hueco (hollow shaft), se corresponderán con referencias
del tipo FM7-D-S1D0-HS3. En estos motores también es posible rea-
lizar una conexión estrella/triángulo en sus bobinados y el proceder es aná-
logo a los E03 anteriores.
Si para llevar a cabo la aplicación es suficiente con un único tipo de co-
nexión de bobinado, se asignará directamente en cualquiera de los 8 sets
de MP1 la matrícula del motor que va a ser gobernado, seleccionándola
desde el listado izquierdo de la ventana. Así, si la conexión va a ser única-
mente en estrella (cuando el funcionamiento del motor va a ser preferente
en zona de velocidades medias) se seleccionará la matrícula que va acom-
pañada de la S y si va a ser sólo en triángulo (cuando el funcionamiento del
motor va a ser preferente en zona de altas revoluciones), la que va acom-
pañada de la D.
F. S2/9
Ventana de selección de un motor asíncrono de cabezal FM7 para maniobra
de cambio de conexión de bobinado estrella-triángulo.
NOTA. No es obligatorio que se asignen a los sets 0 y 1 del parámetro
MP1. Puede elegirse para cada matrícula cualquiera de sus 8 sets dispo-
nibles.
NOTA. Si la aplicación sólo exige una de las dos conexiones de bobinado
(estrella o triángulo), no será necesario hacer uso de ningún contactor ex-
terno. Se establecerá el conexionado necesario directamente desde los 6
terminales de la caja de bornes.

Identificación del motor
2.
IDENTIFICACIÓN DEL MOTOR
Selección del motor
54
Ref.1912
DDS|MAB
SOFTWARE
· 46 ·
Soft.09.05
Los motores FM7 con referencias E01|E02 llevan una conexión interna del
bobinado en triángulo fija y sin posibilidad de establecer otro tipo de co-
nexión de sus bobinados.
Por tanto, se asignará la matrícula seleccionada en el listado a cualquiera
de los 8 sets de MP1.
NOTA. Recuérdese que los motores FM7 con referencias E01|E02 no dis-
ponen de opción de conexionado star/delta de sus bobinados.

Identificación del motor
IDENTIFICACIÓN DEL MOTOR
Selección del motor
2.
Ref.1912
· 47 ·
DDS|MAB
SOFTWARE
Soft.09.05
Cómo parametrizar un cambio online de motor de cabezal FM7
La parametrización del cambio online de motor es similar al cambio estrella-
triángulo.
Seleccionar, en la ventana de selección del motor desde el WinDDSSetup,
la matrícula del primer motor, p.e FM7-A--E01 y asignársela
p. e. a MP1 (set 0) y seleccionar la matrícula del segundo motor, p.e. FM7-
A--E02 y asignársela p. e. a MP1.1 (set 1).
El proceso de identificación e inicialización de cualquier motor se documen-
ta más adelante en el apartado correspondiente.
NOTA. La maniobra eléctrica necesita igualmente de dos contactores ex-
ternos y las conexiones eléctricas se realizan de manera similar a las he-
chas para un cambio de bobinado estrella-triángulo salvo que en lugar de
cambiar la configuración del bobinado al abrir un contactor y cerrar el otro,
lo que debe conseguirse es hacer trabajar un motor y detener el otro o al
revés.

Identificación del motor
2.
IDENTIFICACIÓN DEL MOTOR
Selección del motor
54
Ref.1912
DDS|MAB
SOFTWARE
· 48 ·
Soft.09.05
Selección de la opción DEFAULT
A partir de la versión de software 06.08 del regulador aparece en la ventana
SELECCIÓN DE MOTOR la opción DEFAULT. Así, cuando es selecciona-
da esta opción y asignada con el botón de flecha p. ej. al set 1 del parámetro
MP1 (ver 2), la matrícula de motor almacenada en la memoria del encóder
(ver 1) parametriza MP1.1 con este valor y se ponen a su valor por defecto
todos los parámetros del grupo M quedando almacenados en la memoria
RAM del regulador.
Recuérdese que la referencia o ID del motor almacenada en la memoria del
encóder puede ser visualizada también en la variable RV7. Para más deta-
lles sobre esta variable, ver capítulo 13. PARÁMETROS, VARIABLES Y
COMANDOS de este manual.
La forma de proceder será:
Con nivel de acceso OEM o FAGOR, activando el icono (a) desde la venta-
na de configuración de parámetros, emerge en pantalla la ventana SELEC-
CIÓN DE MOTOR.
Seleccionar la opción DEFAULT tras ser localizada en la zona donde se
listan las matrículas de todos los motores.
El regulador reconocerá automáticamente la matrícula (ID) grabada en la
memoria del encóder del motor conectado a él.
Asignar DEFAULT con el botón de flecha a uno o todos los sets del pa-
rámetro MP1, p. e. MP1.1 (véase 2).
Validar esta asignación con el icono
correspondiente (ver 3).
Ha sido establecida una parametrización automática del regulador para ese
motor y han sido almacenados estos valores en su memoria RAM.
NOTA. No olvide ejecutar siempre el comando GC1 para almacenar estos
valores permanentemente en la memoria FLASH del regulador.
IMPORTANTE. Si el usuario cambia el motor conectado al regulador por
otro diferente y selecciona la opción DEFAULT, el regulador muestra inme-
diatamente el E502 en su display avisando de que los valores de los pará-
metros de motor (grupo M) del nuevo motor conectado (almacenados ahora
en la RAM del regulador) y los del motor que ha sido cambiado (todavía al-
macenados en la memoria FLASH del regulador) no coinciden.
Seleccione la opción DEFAULT 2 que seguidamente se documenta para
solventar esta situación si va a a cambiar de motor.
NOTA. La opción DEFAULT sólo tiene funcionalidad si el captador inte-
grado en el motor es un encóder.
F. S2/10
Ventana de selección de motor. Opción DEFAULT.
NOTA. Nótese que si el ID del motor almacenado en la memoria del en-
códer no coincide con alguno de los ID de los motores almacenados en el
fichero de motores FM7_SPM_FM9_FS5_xx.mot se activará el error
E505 en el display del regulador indicando esta situación.
(a)
(1)
FXM78.40A.E1.000.1
(2)
(3)

Identificación del motor
IDENTIFICACIÓN DEL MOTOR
Selección del motor
2.
Ref.1912
· 49 ·
DDS|MAB
SOFTWARE
Soft.09.05
Selección de la opción DEFAULT 2
A partir de la versión de software 06.21 del regulador aparece en la ventana
SELECCIÓN DE MOTOR la opción DEFAULT 2.
Su funcionalidad (a diferencia de la opción DEFAULT) es la de posibilitar la
parametrización de un regulador de tal manera que al cambiar el motor que
gobierna por otro diferente no se active el error E502 indicando la no coin-
cidencia de los parámetros del nuevo motor (almacenados en memoria
RAM tras validar DEFAULT 2) y los parámetros del motor cambiado (toda-
vía almacenados en la memoria FLASH del regulador).
Así, cuando es seleccionada esta opción y asignada posteriormente con el
botón de flecha p. ej. al set 1 del parámetro MP1 (ver 2), la matrícula de mo-
tor almacenada en la memoria del encóder (ver 1) parametriza MP1.1 con
valor DEFAULT 2 y se ponen a su valor por defecto todos los parámetros de
motor del grupo M quedando almacenados en la memoria RAM del regula-
dor.
La forma de proceder será:
Con nivel de acceso OEM o FAGOR, activando el icono (a) desde la venta-
na de configuración de parámetros, emerge en pantalla la ventana SELEC-
CIÓN DE MOTOR.
Seleccionar la opción DEFAULT 2 tras ser localizada en la zona donde
se listan las matrículas de los motores.
El regulador reconocerá automáticamente la matrícula (ID) grabada en la
memoria del encóder del motor conectado a él.
Asignar DEFAULT 2 con el botón de flecha a uno o todos los sets del
parámetro MP1, p. e. MP1.1.
Validar esta asignación con el icono correspondiente.
Ha sido establecida una parametrización automática del regulador para ese
motor y han sido almacenados estos valores en su memoria RAM.
NOTA. No olvide ejecutar siempre el comando GC1 para almacenar estos
valores permanentemente en la memoria FLASH del regulador.
NOTA. Si el usuario cambia este motor conectado al regulador por otro di-
ferente y selecciona la opción DEFAULT 2, el regulador ahora no mostrará
el código de error E502 en su display como ocurría con la opción DEFAULT.
Seleccionar la opción DEFAULT 2 en lugar de la opción DEFAULT evita, por
tanto, la activación del E502 en el regulador como consecuencia de un cam-
bio de motor.
NOTA. La opción DEFAULT 2 sólo tiene funcionalidad si el captador inte-
grado en el motor es un encóder.
NOTA. Nótese que si el ID del motor almacenado en la memoria del encó-
der no coincide con alguno de los ID de los motores almacenados en el fi-
chero de motores FM7_SPM_FM9_FS5_xx.mot se activará el error E505
en el display del regulador indicando esta situación.
(a)

Identificación del motor
2.
IDENTIFICACIÓN DEL MOTOR
Identificación e inicialización del motor
54
Ref.1912
DDS|MAB
SOFTWARE
· 50 ·
Soft.09.05
2.3 Identificación e inicialización del motor
La selección del motor por este procedimiento realiza el ajuste de los pará-
metros de motor y además pone el resto de parámetros del regulador a su
valor por defecto.
Dentro del grupo de parámetros extendidos en sets y reducciones, esta ini-
cialización afecta solamente a los que pertenecen al set y reducción cero. El
set 0, y la reducción 0 quedan como los únicos útiles.
INICIALIZACIÓN
Es posible identificar el motor a través del botón de inicialización que se en-
cuentra en la propia ventana. Activando el icono (c) - ver figura F. S2/2 para
identificarlo - se despliega la ventana SELECCIONE MOTOR PARA INI-
CIALIZACIÓN. Véanse las figuras siguientes.
(c)
F. S2/11
Ventana de selección de un motor FXM para su inicialización.
F. S2/12
Ventana de selección de un motor FM7 para su inicialización.
INFORMACIÓN. A partir de la versión de software 06.13, el código de error
E110 (baja temperatura del radiador de los IGBT) queda deshabilitado cada
vez que se inicializan parámetros por defecto en el regulador desde el botón
de inicialización del WinDDSSetup (ver icono c). Queda a cuenta del usua-
rio volver a habilitarlo mediante el procedimiento ofrecido por el WinDDS-
Setup. Si se realiza una carga de parámetros de versiones anteriores a la
06.13 el código de error E110 quedará deshabilitado. Queda a cuenta del
usuario volver a habilitarlo mediante el procedimiento ofrecido por el
WinDDSSetup.
Si se realiza una carga de parámetros de versiones 06.13 o superior, el có-
digo de error E110 quedará o no deshabilitado en función de dichos pará-
metros. No se efectuará tratamiento alguno.
i
NOTA. El procedimiento de identificación + inicialización es el punto de
partida recomendado para la primera puesta a punto de un accionamien-
to.

Identificación del motor
IDENTIFICACIÓN DEL MOTOR
Proceso automático de identificación
2.
Ref.1912
· 51 ·
DDS|MAB
SOFTWARE
Soft.09.05
2.4 Proceso automático de identificación
Motor FAGOR
Al conectar por primera vez el cable de captación, el regulador lee la refe-
rencia grabada en el encóder, identifica el motor e inicializa los parámetros
.
Tras este ajuste automático, cualquier modificación del parámetro MP1
(S00141) MotorType no tendrá ningún efecto sobre el regulador.
La pérdida de alimentación del regulador o la desconexión del cable de cap-
tación no tendrá efectos en el valor de los parámetros.
Únicamente la detección por parte del regulador de un motor diferente co-
nectado a él iniciará un nuevo proceso automático de identificación.
Motor de usuario
En el caso de instalar un motor NO FAGOR (motor de usuario), o si es FA-
GOR, con el fin de acceder y modificar alguno de los parámetros del grupo
motor, grupo corriente o grupo flujo, es necesario cargar MP1 (S00141) Mo-
torType con un valor que comience por cero
(p.ej: 0supermotor).
El software del regulador sólo admite un motor de usuario.
Para conservar las tablas de parámetros de distintos motores de usuario de-
berá hacerse uso de las funciones de transferencia de parámetros. Ver
apartado 1.8. Transferencia de tablas de parámetros del capítulo 1. CO-
NOCIMIENTOS PREVIOS de este manual.
NOTA. Esta aplicación solo tiene funcionalidad si el captador integrado en
el motor es un encóder
.
NOTA. Únicamente, en el caso de asignar un valor de «motor de usuario»
(motor NO FAGOR asignado con un nombre que comience por 0) hará po-
sible la modificación de los parámetros de motor.

Identificación del motor
2.
IDENTIFICACIÓN DEL MOTOR
Observaciones finales
54
Ref.1912
DDS|MAB
SOFTWARE
· 52 ·
Soft.09.05
2.5 Observaciones finales
Tras cualquiera de los procesos de identificación descritos, la referencia del
motor queda almacenada en la memoria RAM del regulador y aún no tendrá
efecto en el funcionamiento. Así que:
En el encendido o después de un reset, el sistema comprobará que el valor
dado a MP1 (S00141) MotorType (de forma manual o automática) es co-
rrecto, es decir, que el motor y el regulador son compatibles.
Los códigos de error identificarán posibles incongruencias.
En este capítulo se han mencionado los conocimientos para seguir proceso
de configuración, parametrización y ajuste de la aplicación que el usuario
debe manejar.
La ejecución de todas estas fases del proceso se llevarán a cabo a través
de la aplicación WinDDSSetup de FAGOR para PC y es por ello que, aun-
que se dedica un capítulo aparte para esta aplicación, en muchos capítulos
se harán continuas referencias a sus menús, barra de herramientas, iconos
y ventanas para facilitar la labor del usuario.
En capítulos posteriores se considerarán los procesos de ajuste para las
aplicaciones con regulador de velocidad o regulador de posición, realizada
ya la identificación e inicialización del motor.
NOTA. Recuérdese que tras el ajuste por cualquiera de los métodos an-
teriores, es necesario grabar en memoria flash la tabla de parámetros.

Identificación del motor
IDENTIFICACIÓN DEL MOTOR
Ajuste de los offset de encóder
2.
Ref.1912
· 53 ·
DDS|MAB
SOFTWARE
Soft.09.05
2.6 Ajuste de los offset de encóder
Tras el proceso de identificación e inicialización del motor, es posible que el
motor genere un ruido agudo debido a algún desajuste en la generación de
las señales de captación. Si bien, el encóder está ajustado de fábrica, su co-
nexión con el regulador (CAPMOTOR-x, cable, conector) degenera estas
señales. Para solucionar este problema hay que ajustar los offset y ganan-
cias con las que el software del regulador trata las señales generadas por el
captador.
Ajuste del círculo
Es un proceso que permite ajustar el tratamiento de las señales de capta-
ción para que las señales A y B [RV1 (F01506) y RV2 (F01507)] se aproxi-
men a las funciones seny cos. Los ajustes de ganancia
y offset
compensan tanto la amplitud como el offset de las señales A y B con res-
pecto a las funciones sen y cos. En caso ideal los valores de la ganancia
y offset son 1 y 0, respectivamente.
Proceso de ajuste
Para llevar a cabo este procedimiento, realícense los siguientes pasos:
Hacer girar el motor a una velocidad senoidal de 6 rev/min y un período
de 6 s (6 000 ms) utilizando el generador de consignas interno del regu-
lador. Ver apartado correspondiente en el capítulo 16. WINDDSSETUP
de este manual.
Asignar a la variable RV8 (F01519) el valor 1.
Esta acción pondrá en marcha el ajuste automático.
Monitorizar esa variable RV8 (F01519).
Cuando RV8 (F01519) recupere su valor por defecto (0), el ajuste habrá
finalizado.
Una vez realizado el proceso de ajuste del círculo habrán sido modificados
los valores:
y eliminando así el ruido mejorando el control sobre el motor.
Si no es posible utilizar el generador de consignas interno del regulador
para determinar el movimiento del eje, éste deberá realizarse desde el CNC
a las siguientes velocidades:
1. Para ejes rotativos
Establecer un movimiento del eje a una velocidad constante (°/ min)
dada por la expresión:
2. Para ejes lineales
Establecer un movimiento circular interpolando este eje con otro a una
velocidad (mm/min) dada por la expresión:
RP1 F01500 Feedback1SineGain
RP2 F01501 Feedback1CosineGain
RP3 F01502 Feedback1SineOffset
RP4 F01503 Feedback1CosineOffset
NOTA. Finalizado este proceso es necesario grabar en memoria flash
para almacenar los cambios realizados de forma permanente.
V
feed
=
3600
*
NP121
NP122
V
feed
=
6 (rpm)
* *
NP121
NP122
NP123
Radius = V
feed
* Period

Identificación del motor
2.
IDENTIFICACIÓN DEL MOTOR
Ajuste de los offset de encóder
54
Ref.1912
DDS|MAB
SOFTWARE
· 54 ·
Soft.09.05
Ejemplo.
NOTA. Para conocer el significado de los parámetros NP121, NP122 y
NP123, ver apartado «Grupo SERCOS/CAN» del capítulo 13 de este ma-
nual.
F. S2/13
Esquema representativo de las variables que intervienen en el proceso de
ajuste del offset del encóder.
... for NP121 = NP122 = 1
NP123 = 10 mm/rev.
... after replacing values and adjusting units:
Radius = 60 (mm/min)
· 6 s· (1min/60 s) = 6 (mm)
1
1
· 10 (mm/rev.) = 60 (mm/min)
V
feed
=
6 (rpm)·
FeedbackResolver
RhoCorrection
RP5 [F01504]
To Speed Loop
VelocityFeedback
SV2 [S00040]
Feedback1
SineGain
RP3 [F01502]
RP1 [F01500]
RP4 [F01503]
RP2 [ F01501]
RV1 [F01506]
RV2 [F01507]
X4 [DDS]
Feedback1
CosineGain
Feedback1
SineOffset
Feedback1
CosineOffset
HV2-X3 Board Id
Rotor Sensor
From Motor
Sensor
0 : Sine - wave Encoder
GP2 = 0
Sensor
Evaluation
GP2 [F00701]
Encoder
RV3 [F01508]
Feedback
RhoCorrection
Sensor
Position
Position
Speed

3
Ref.1912
· 55 ·
DDS|MAB
SOFTWARE
Soft.09.05
EL REGULADOR DE
CORRIENTE
La función principal del lazo de corriente es alcanzar el valor de referencia
de la corriente en tiempo mínimo y con sobrepasamiento mínimo.
Con motores FAGOR
Los parámetros que intervienen en el lazo de corriente (CP1, ..., CP7) salen
ajustados de fábrica para cada motor FAGOR, y todos ellos (excepto CP1
y CP2) requieren acceso FAGOR para ser editados. Estos parámetros ad-
quieren automáticamente sus valores correspondientes en función de la
matrícula establecida en el parámetro MP1 (S00141) MotorType.
Con motores de usuario
Los parámetros anteriormente indicados son modificables para matrículas
de usuario. Se entiende por motor de usuario aquel que no es suministra-
do por FAGOR y por tanto la matrícula establecida en el parámetro MP1 de-
berá necesariamente comenzar por el carácter 0.
Para solucionar alguna incompatibilidad que pudiera presentarse con los
motores de usuario, se dispone de una prestación que realiza el cálculo
del PI de corriente en función de los datos del motor y es válida tanto para
motores síncronos como asíncronos.
Realizar el cálculo del PI de corriente supone encontrar los valores de CP1
(Kp) y CP2 (Ti) óptimos en función del modelo del motor parametrizado en
MP1.
Para la activación de esta prestación deben darse las siguientes condicio-
nes:
El motor considerado debe ser un motor de usuario, es decir, motor no
comercializado por FAGOR.
El valor de CP8 será igual a 1 y además, los parámetros MP10
(F01206) MotorStatorResistance y MP11 (F01207) MotorStatorLeaka-
geInductance serán distintos de cero, necesariamente.
Por tanto el proceso a seguir es:
1. Parametrizar CP8=1 para asegurar la activación del cálculo del PI.
2. Grabar parámetros desde el icono correspondiente del WinDDSSetup o
mediante el comando GC1 y ejecutar soft-reset mediante el comando
GV11.
3. Grabar parámetros nuevamente, almacenar en flash los valores obteni-
dos para CP1 y CP2 y realizar un soft-reset (comando GV11).
El lazo de corriente dispuesto dentro del lazo de velocidad, contribuye a es-
tabilizar aún más el sistema.
NOTA. Nótese que para un motor síncrono, MP11 representa la in-
ductancia de estátor del motor y no la de fugas ya que no tiene sentido
hablar de inductancia de fugas en estos motores.
NOTA. En el nuevo arranque, se activará la prestación del cálculo del
PI y serán parametrizados CP1 y CP2 con los valores adecuados.

El regulador de corriente
3.
EL REGULADOR DE CORRIENTE
62
Ref.1912
DDS|MAB
SOFTWARE
· 56 ·
Soft.09.05
He aquí una representación esquemática de este lazo:
F. S3/1
Diagrama esquemático del lazo de corriente.
Speed
CP1
CP4*CP1
CP7
CP2
CP5*CP2
CP6
Kp
Ti
Asynchronous Motor
Adapter - Current - PID
Gain
CP1 (S00106) CurrentProportionalGain
CP2 (S00107) CurrentIntegralTime
CP4 (F00301) CurrentAdaptationProportionalGain
CP5 (F00302) CurrentAdaptationIntegralTime
CP6 (F00303) CurrentAdaptationLowerLimit
CP7 (F00304) CurrentAdaptationUpperLimit
3 2
CV10 (F00305)
CV11 (F00306)
CV1
(F00309)
CV2
(F00310)
Drive Enable
X2(2)
0V
+24V
U
W
CurrentUOffset
CurrentVOffset
GP1 (F00700)
PWM Frequency
GP3 (F00702)
StoppingTimeout
HV1 (S00110) DrivePeakCurrent
V
Current
Limit
CP20
(F00307)
PWM
MP1
MP2
..
MP14
MP26
MP25
CP1
CP2
CP3
FP1
FP2
FP20
FP21
FP30
..
FP38
Motor
M
3
Encoder
Current Loop
From
Speed
Loop
Current - PI
CP30 (F00308)
Notch
Filter
CV3 (F00311)
Enable
CP31 (F00312)
CP32 (F00313)
CP30 (F00308)
bit 5 = 0
bit 5 = 1
Either filter is selected
depending on the value
of bit 4 or bit 6 of CP30
CP30 (F00308)
CP33 (F00314)
CP34 (F00315)
bit 7 = 0
bit 7= 1
Filter 1
Filter 2
bit 4 of CP30
= 0 disable
= 1 enable
bit 6 of CP30
= 0 disable
= 1 enable
CP30 (F00308)
CP30 (F00308)
CP30 (F00308)
Notch
Filter
Low-Pass
Filter
Low-Pass
Filter

El regulador de corriente
EL REGULADOR DE CORRIENTE
Parametrización del límite de corriente
3.
Ref.1912
· 57 ·
DDS|MAB
SOFTWARE
Soft.09.05
3.1 Parametrización del límite de corriente
El límite de la consigna de corriente viene determinado por el valor del pa-
rámetro:
Este parámetro se ajusta, por defecto, a un valor de protección de so-
breintensidad tanto para el motor como para el regulador.
Para servoaccionamientos con motores síncronos, el valor de CP20 vendrá
determinado por el menor de los dos valores dados por la corriente de pico
del regulador y del motor.
Para servoaccionamientos con motores asíncronos el valor CP20 vendrá
determinado por la corriente máxima del regulador.
CP20.# O F00307.# CurrentLimit
NOTA. El parámetro CP20 únicamente puede ser modificado con un nivel
de acceso OEM o superior.

El regulador de corriente
3.
EL REGULADOR DE CORRIENTE
Filtros de consigna de corriente
62
Ref.1912
DDS|MAB
SOFTWARE
· 58 ·
Soft.09.05
3.2 Filtros de consigna de corriente
Con el fin de mejorar el comportamiento dinámico del servoaccionamiento y
eliminar ruidos, se introducen dos filtros en serie cuyo cometido es filtrar la
consigna de corriente (consigna de par).
Estos filtros pueden parametrizarse como:
Tipo pasa-bajo
Tipo corta-banda
Con la finalidad de familiarizar al usuario con estos tipos de filtros y los tér-
minos que aparecen en el análisis de la respuesta frecuencial del acciona-
miento para estudiar el comportamiento dinámico del mismo, se dedica a
continuación un apartado explicativo. Posteriormente se definirá todo el pro-
ceso de parametrización.
Filtro pasa-bajo
Las curvas representativas de la respuesta frecuencial de un sistema de se-
gundo orden en un diagrama de Bode para diferentes valores del factor de
amortiguamiento
y ganancia k=1 en la zona pasante (condición absoluta-
mente necesaria en regulación para máquina herramienta) pueden obser-
varse en el diagrama de la figura F. S3/2.
En este diagrama, el comportamiento dinámico de los servoaccionamientos
puede medirse en términos de los siguientes elementos:
Pico de resonancia Mr
, definido como el máximo valor de la amplitud de
la respuesta del sistema. Depende únicamente del factor de amortigua-
miento
y es tanto mayor cuanto menor es
Anchura de banda B
, definida como el rango de frecuencia en el cual
la magnitud de la función de transferencia cae -3 dB. Es dependiente del
factor de amortiguamiento y disminuye al aumentar éste. Fijado por
el pico de resonancia, la anchura de banda depende de la frecuencia na-
tural
n
aumentando con ésta.
El ancho de banda da, en la respuesta temporal, una medida de la velocidad
de respuesta del sistema, de manera que un ancho de banda amplio permi-
te que el accionamiento responda más rápidamente, es decir, que tenga
mayor capacidad para seguir cambios rápidos en la señal de consigna.
F. S3/2
Filtro pasa-bajo. Diagrama de Bode con frecuencia de corte Fc
de 100 Hz y
diferentes valores de factor de amortiguamiento .

El regulador de corriente
EL REGULADOR DE CORRIENTE
Filtros de consigna de corriente
3.
Ref.1912
· 59 ·
DDS|MAB
SOFTWARE
Soft.09.05
En máquina herramienta la capacidad de realizar cambios a gran velocidad
en la trayectoria de mecanizado (esquinas,círculos,...) está directamente re-
lacionada con la anchura de banda del accionamiento.
Frecuencia de corte F
c
, definido como el valor de la frecuencia en el que
el valor de la respuesta (salida) con respecto al de la entrada tiene una
atenuación de - 3 dB (la salida es 0,717 el valor de la entrada). A partir
de este valor de la frecuencia se considera que las señales están filtra-
das.
Para frecuencias inferiores a la frecuencia de corte Fc la curva puede
aproximarse a una asíntota de ordenada constante 20 log k (dB). Como se
ha considerado una ganancia k=1, la curva coincidirá con el eje de ordena-
das. Ver figura F. S3/2.
Para frecuencias superiores, la curva puede aproximarse mediante una rec-
ta de pendiente - 40 dB/década. En las proximidades de Fc la forma de la
curva es muy dependiente del factor de amortiguamiento.
Filtro corta-banda
Un filtro corta-banda elimina o atenúa un cierto intervalo de frecuencias en-
tre dos límites finitos. También suele conocerse este filtro como eliminador
de banda.
Los requerimientos para el filtro corta-banda son:
Una frecuencia de corte en la que la ganancia sea mínima o nula.
Una anchura de frecuencia entorno a la frecuencia de corte donde la ga-
nancia sea menor a -3 dB.
Parametrización de los filtros
Los parámetros que intervienen en el proceso de parametrización de los fil-
tros de consigna de corriente son:
F. S3/3
Filtro corta-banda. Diagrama de Bode para frecuencia de corte Fc de 100
Hz.
CP30
F00308 CurrentCommandFiltersType
CP31
F00312 CurrentCommandFilter1Frequency
CP32
F00313 CurrentCommandFilter1Damping
CP33
F00314 CurrentCommandFilter2Frequency
CP34
F00315 CurrentCommandFilter2Damping
NOTA. Estos parámetros podrán ser editados con nivel de acceso OEM o
superior y son de efecto inmediato (online).
NOTCH FILTER
FREQUENCY (Hz)
10
4
10
3
Fc=10
2
dB
BANDWIDTH
BREAK FREQUENCY
10
1
10
0
-100
-80
-60
-40
-20
-3
0
20
INFORMACIÓN. Todos estos filtros son aplicables tanto a servoacciona-
mientos con máquinas síncronas como con máquinas asíncronas excepto
si se dispone de versiones de software 06.15 o superiores donde CP33 y
CP34 dejan de ser aplicables con motores asíncronos.
i

El regulador de corriente
3.
EL REGULADOR DE CORRIENTE
Filtros de consigna de corriente
62
Ref.1912
DDS|MAB
SOFTWARE
· 60 ·
Soft.09.05
Parametrización de CP30
Este parámetro permite habilitar/deshabilitar los filtros 1 y 2 de consigna de
corriente así como seleccionar el tipo de filtro (pasa-bajo o corta-banda)
para cada uno de ellos. Nótese que cada uno de los dos filtros puede para-
metrizarse como filtro pasa-bajo o filtro corta-banda.
Por tanto, todos los valores posibles para el parámetro CP30 son:
Parametrización de CP31
Este parámetro permite establecer la frecuencia de corte del filtro 1 de la
consigna de corriente. Únicamente será funcional cuando el bit 4 del pará-
metro CP30 esté a 1 y además deberá estar habilitado, es decir, CP31 dis-
tinto de 0.
Parametrización de CP32
Este parámetro realiza dos funciones dependiendo del tipo de filtro selec-
cionado. Únicamente será funcional cuando el bit 4 del parámetro CP30
esté a 1. Si el tipo de filtro seleccionado es:
Pasa-bajo (CP30.bit 5=0). En este parámetro se refleja el factor de
amortiguamiento
del filtro.
Corta-banda (CP30.bit 5=1). En este parámetro se refleja la anchura de
banda B
o anchura de la frecuencia de corte del filtro.
Parametrización de CP33
Este parámetro permite establecer la frecuencia de corte del filtro 2 de la
consigna de corriente. Únicamente será funcional cuando el bit 6 del pará-
metro CP30 esté a 1 y además deberá estar habilitado, es decir, CP33 dis-
tinto de 0.
T. S3/1 Parámetro CP30. Selección de filtro y tipo de filtro de la consigna
de corriente.
PARAM.bit nr FUNCIÓN
CP30.bit 4
FILTRO 1. HABILITAR / DESHABILITAR
0 No habilitado. CP31 y CP32, no funcionales
1 Habilitado. CP31 y CP32, funcionales
CP30.bit 5
FILTRO 1. SELECCIONAR TIPO
0 Pasa-bajo
1 Corta-banda
CP30.bit 6
FILTRO 2. HABILITAR / DESHABILITAR
0 No habilitado. CP33 y CP34, no funcionales
1 Habilitado. CP33 y CP34, funcionales
CP30.bit 7
FILTRO 2. SELECCIONAR TIPO
0 Pasa-bajo
1 Corta-banda
NOTA. Recuérdese que el bit menos significativo es el bit 0 (primer bit
contando de derecha a izquierda en la cadena de bits).
T. S3/2 Combinaciones posibles de parametrización de ambos filtros.
CP30 FILTRO 1 FILTRO 2
0 No habilitado No habilitado
16 Pasa-bajo No habilitado
48 Corta-banda No habilitado
64 No habilitado Pasa-bajo
192 No habilitado Corta-banda
80 Pasa-bajo Pasa-bajo
112 Corta-banda Pasa-bajo

El regulador de corriente
EL REGULADOR DE CORRIENTE
Filtros de consigna de corriente
3.
Ref.1912
· 61 ·
DDS|MAB
SOFTWARE
Soft.09.05
Parametrización de CP34
Este parámetro realiza dos funciones dependiendo del tipo de filtro selec-
cionado. Únicamente será funcional cuando el bit 6 del parámetro CP30
esté a 1. Si el tipo de filtro seleccionado es:
Pasa-bajo (CP30.bit 7=0). En este parámetro se refleja el factor de
amortiguamiento del filtro.
Corta-banda (CP30.bit 7=1). En este parámetro se refleja la anchura de
banda B
o anchura de la frecuencia de corte del filtro.
NOTA. Para obtener más información sobre estos parámetros, ver capítu-
lo 13 de este manual.

3.
EL REGULADOR DE CORRIENTE
El regulador de corriente
Ref.1912
DDS|MAB
SOFTWARE
· 62 ·
Soft.09.05

4
Ref.1912
· 63 ·
DDS|MAB
SOFTWARE
Soft.09.05
EL REGULADOR DE
VELOCIDAD
En este capítulo se describe el proceso de ajuste de la regulación DDS|MAB
en su aplicación como regulador de velocidad.
Los pasos necesarios a seguir en el proceso de ajuste de una aplicación
donde el regulador está configurado para trabajar con control de posición se
detallan en el capítulo 5.

El regulador de velocidad
4.
Ref.1912
DDS|MAB
SOFTWARE
· 64 ·
Soft.09.05
4.1 Lazo de control de velocidad
El lazo de velocidad del regulador queda representado en los siguientes es-
quemas generales que seguidamente se detallan mediante su diagrama de
bloques así como la gestión de consignas del mismo.
Diagrama de bloques
F. S4/1
Lazo de velocidad. Diagrama de bloques.
From Motor feedback
(rotor sensor)
Speed-PI
Current
Filter1
CP31
PP217 [S00348] AccelerationFeedForwardPercentage
SV1 [S00036] VelocityCommand
SV7 [F01612] VelocityCommandFinal
SV2 [S00040] VelocityFeedback
CP30
CP32
Current
Filter2
CP33
CP30
CP34
VelocityFeedback
FilterFrequency
SP50
VelocityReference
FilterFrequency
SP51
Compensation
filter
Note 1: Compensation Filter: Velocity Command delay compensation
( See note 1 )
ErrorStop OR SpeedEnable Function means PWM_OFF
if the motor has not stopped in a time period GP3
Halt Function OR SpeedEnable Function OR Error Stop
TO CURRENT LOOP
+
+
+
-

El regulador de velocidad
4.
Ref.1912
· 65 ·
DDS|MAB
SOFTWARE
Soft.09.05
Diagrama de gestión de consignas
F. S4/2
Lazo de velocidad. Diagrama de gestión de consignas.
DS1
Voltage/Current
Dip-Switch
WV1, WV2, WV3,
WV4, WV5.
WV4=0
WV4=1
SERCOS
Interface
In
Out
X7(3)
X7(2)
Id
IP1=1
SP31
WV5
IV1
IV2
SP30
Id=0
SP20
SP21
ratio
P2
P1
SV1
Analog Input 2
Analog Input 1
X7(5)
X7(4)
Id<>0
SP10
SpeedEnable Function
Ramps
ErrorStop
OR
SpeedEnable Function
means
PWM_OFF
if the motor has not stopped in a time period
GP3
Halt Function
Error Stop
SP80<>0
SP80=0
SP70=0
SP70=1
Jerk
Acc. Emerg.
OR
OR
SP100=0
SP100=1
SP60...
...SP64
SP60
SP80
SP65
VELOCITY LOOP
From Rotor Sensor
Speed-PI
SV2
SV7
SP1, SP2,
SP4, SP5,
SP6, SP7.
CP30
CP31
Low-passing
or notch
CP32
CP33
CP34
CP30
SP50 [F02014]
Low-passing
filter
VelocityFeedback
FilterFrequency
SP51= 0
SP51
VelocityReference
SmoothingMode
by default
[F02015]
Only with Sercos
SV8
Ramps
Filter
SP51=1
SP51=2
Compensation
filter
-
+
-
+
to Curret Loop
Acceleration Feedforward
PP217
IP1=2
Filter 1
Low-passing
or notch
Filter 2

El regulador de velocidad
4.
Ref.1912
DDS|MAB
SOFTWARE
· 66 ·
Soft.09.05
4.2 Parametrización del lazo de control de velocidad
Ajuste del offset de consigna analógica
Tras aplicar potencia al regulador, el paso siguiente es la eliminación del po-
sible offset de la consigna analógica.
Para realizar esta tarea:
Enviar al regulador una consigna de 0 voltios.
Monitorizar la velocidad del motor desde el CNC o mediante un WATCH
de la variable SV2 (S00040).
Asignar valores al parámetro de offset SP30 (F01603), de signo contra-
rio al valor de SV2 (S00040) hasta conseguir que el motor esté totalmen-
te parado.
Para realizar el ajuste del offset en todo el lazo de control procédase como
se indica:
Colocar el CNC en modo visualizador pero con las señales Drive
Enable y Speed Enable activas.
Dar valores a SP30 (F01603) hasta que el motor no se mueva.
Otra modo de proceder equivalente al anterior es:
Fijar con el CNC una posición para el eje.
Ajustar SP30 (F01603) hasta conseguir un error de seguimiento simétri-
co.
Tras determinar el valor correcto para SP30 (F01603), es necesario realizar
una grabación en memoria flash para almacenarlo permanentemente.
Además de este mecanismo de ajuste, se dispone de un potenciómetro P1
- ver figura F. S4/3
- diseñado para que sea el usuario final quien corrija las
leves desviaciones que los componentes electrónicos generan con el tiem-
po.
Se procederá de igual manera para la entrada analógica 2 con SP31
(F01604) y el potenciómetro P2 - ver figura F. S4/3 -
NOTA. Con interfaz SERCOS|CAN este apartado no procede.
NOTA. Nótese que por este método únicamente se elimina el offset del re-
gulador. El CNC puede tener otro offset que debe ajustarse también.
F. S4/3
Ajuste del offset de la consigna analógica 1/2.
X7(3)
X7(2)
IP1=2
IP1=1
IV1 [F00905]
IV2 [F00906]
SP30
[F01603]
P2
P1
Analog Input 1
X7(5)
X7(4)
1
13
1
11
X7
P1
P2
(Phoenix,
3.5mm)
X6
(Phoenix,
3.5mm)
SP31
[F01604]
IP1
[F00900]
Analog Input 2

El regulador de velocidad
4.
Ref.1912
· 67 ·
DDS|MAB
SOFTWARE
Soft.09.05
Relación tensión/velocidad de la consigna
En los equipos dotados de interfaz analógico y en los accionamientos de ca-
bezal con presencia de un CNC 8055/55i e interfaz SERCOS|CAN es ne-
cesario indicar cuál es la relación entre la tensión y la velocidad de
consigna.
Los parámetros implicados en fijar esta relación tensión/velocidad son:
Los dos primeros parámetros establecen la relación voltios/velocidad en la
consigna.
En el parámetro SP21 se introduce la máxima velocidad que, por consigna,
se le solicitará al motor en la aplicación y en SP20 la tensión de consigna
con la que se solicita esa máxima velocidad.
Si la aplicación requiere una velocidad de 4000 rev/min cuando se aplica
una consigna de 9,5 V y el motor tiene una velocidad máxima de 4000
rev/min los valores podrán ser:
Se almacenan en la memoria RAM del regulador, y para que sean efectivos
hay que validarlos. Posteriormente deben almacenarse en memoria flash si
se desean mantener estos valores de forma permanente.
NOTA. Nótese que no procederá parametrizar la relación tensión/veloci-
dad si se está en presencia de un CNC 8070.
SP20
F00031 VoltageRpmVolt
SP21
F00081 RpmRpmVolt
SP10 S00091 VelocityLimit
NOTA. Nótese que el hardware limita SP20 a 10.000 mV (10 V).
Ejemplo.
F. S4/4
Ratio SP20/SP21.
NOTA. La modificación de estos parámetros no tiene efecto online.
Es recomendable evitar la proximidad
de los valores de los parámetros
SP21 y SP10 para permitir a la con-
signa externa solicitar momentánea-
mente una velocidad superior a
SP21.
SP20 = 9500 mV
SP21 = 4000 rev/min
SP10 = 4200 rev/min
SP10
SP10 x 1.12
SP20
10000
500
0
1000 2000
3000
4000
SP21
rpm
mV
R
A
T
I
O
S
P
2
0
/
S
P
2
1
SP10, SP20, SP21:
F. S4/5
Parámetros SP10, SP20 y SP21.
Volts/Rev Ratio
SP20- Volts
SP21- Rev.
X7(5)
X7(4)
V (+)
V (-)
Velocity
Limit
Velocity
Command
Final
Velocity
Feedback
SP10
SV2
SV7
PI
If SV2>(SP10*1.12) then Error 200
Ramps
Filter
SP51=2
SP51
Velocity Reference
SmoothingMode
SP51=0
SP51=1
(only in SERCOS
or CAN)
(by default)

El regulador de velocidad
4.
Ref.1912
DDS|MAB
SOFTWARE
· 68 ·
Soft.09.05
Parametrización con simulador de encóder
El regulador tiene la posibilidad de generar una salida simulada de encóder
incremental con señal cuadrada TTL diferencial, partiendo de la señal ge-
nerada por el sensor del motor.
Son señales cuadradas A y B, sus complementarias A
y B y las de paso por
cero I0 e I0.
Así, el simulador de encóder es programable mediante los parámetros:
Número de pulsos
El número de pulsos EP1 (F00500) deberá programarse antes de la puesta
en marcha del motor.
Punto de I0
El punto I0 es el punto de referencia del contaje. Puede ajustarse siguiendo
dos procedimientos diferentes:
1. Situar el eje del rótor en la posición en la que se desea generar I0. Eje-
cutar, posteriormente, el comando EC1 (F00503).
2. Desplazar el punto de generación de I0 mediante el parámetro EP2
(F00501).
Si el valor de EP1 es 1250 pulsos por vuelta y se desea desplazar el punto
de generación de I0 actual 58°, el parámetro EP2 deberá tomar el valor
1250 x (58/360), aproximadamente 200.
El rango de valores de este parámetro varía desde 1 hasta el asignado al
parámetro EP1. Es recomendable inicializarlo a 1.
Sentido de contaje
Para establecer un sentido de giro horario - ver figura F. S4/7 -, el simulador
de encóder generará la señal A adelantada 90° a la señal B siempre que el
parámetro EP3=0.
NOTA. Recuérdese que la placa simuladora de encóder es opcional.
EP1 F00500 EncoderSimulatorPulsesPerTurn
EP2 F00501 EncoderSimulatorI0Position
EP3 F00502 EncoderSimulatorDirection
NOTA. Recuérdese que con captación motor cuadrada, este parámetro
debe ser igual a la resolución del captador (EP1= NP116). De otra manera
se activará el código de error E502.
Ejemplo.
NOTA. Nótese que si se da como posición de la señal de I0 un valor su-
perior al de pulsos por vuelta definido en el parámetro EP1, se generará
el código de error E500 durante la inicialización.
F. S4/6
Ejemplo del ajuste de I0.
E P 1 ( F 0 0 5 0 0 ) = 1 2 5 0
E P 2 ( F 0 0 5 0 1 ) = 2 0 0
E P 3 ( F 0 0 5 0 2 ) = 0
1 2 5
2 5 0
3 7 5
5 0 0
6 2 5
7 5 0
8 7 5
1 0 0 0
1 1 2 5
R ó t o r
Io
E j e m p l o
1 2 5 0

El regulador de velocidad
4.
Ref.1912
· 69 ·
DDS|MAB
SOFTWARE
Soft.09.05
Con EP3=1, el simulador de encóder generará la señal B adelantada a la
señal A, para este mismo sentido de giro horario del motor.
Patillaje del conector de la tarjeta simuladora de encóder
El conector X3 del regulador es el que ofrece las señales generadas por el
simulador de encóder.
Para más detalles sobre este conector, ver manual · man_dds_hard.pdf ·.
NOTA. Nótese que un sentido de giro antihorario en el rótor invierte el or-
den de las señales A y B del simulador de encóder.
F. S4/7
Sentido de contaje.
F. S4/8
Placa simuladora de encóder. Conector X3. Patillaje.
Sentido de giro horario
I0
B
A
90° PHASE-SHIFT
time (t)
EP3 = 0
I0
B
A
90° PHASE-SHIFT
time (t)
EP3 = 1
Sentido de giro antihorario
EP1 (F00500)
EncoderSimulatorPulsesPerTurn
EP2 (F00501)
EncoderSimulatorI0Position
EP3 (F00502)
EncoderSimulatorDirection
A
A
B
B
Io
Io
X3[1]
X3[2]
X3[3]
X3[4]
X3[5]
X3[6]
HV2-X3 Board Id
Encoder Simulator
X3[11]
GND
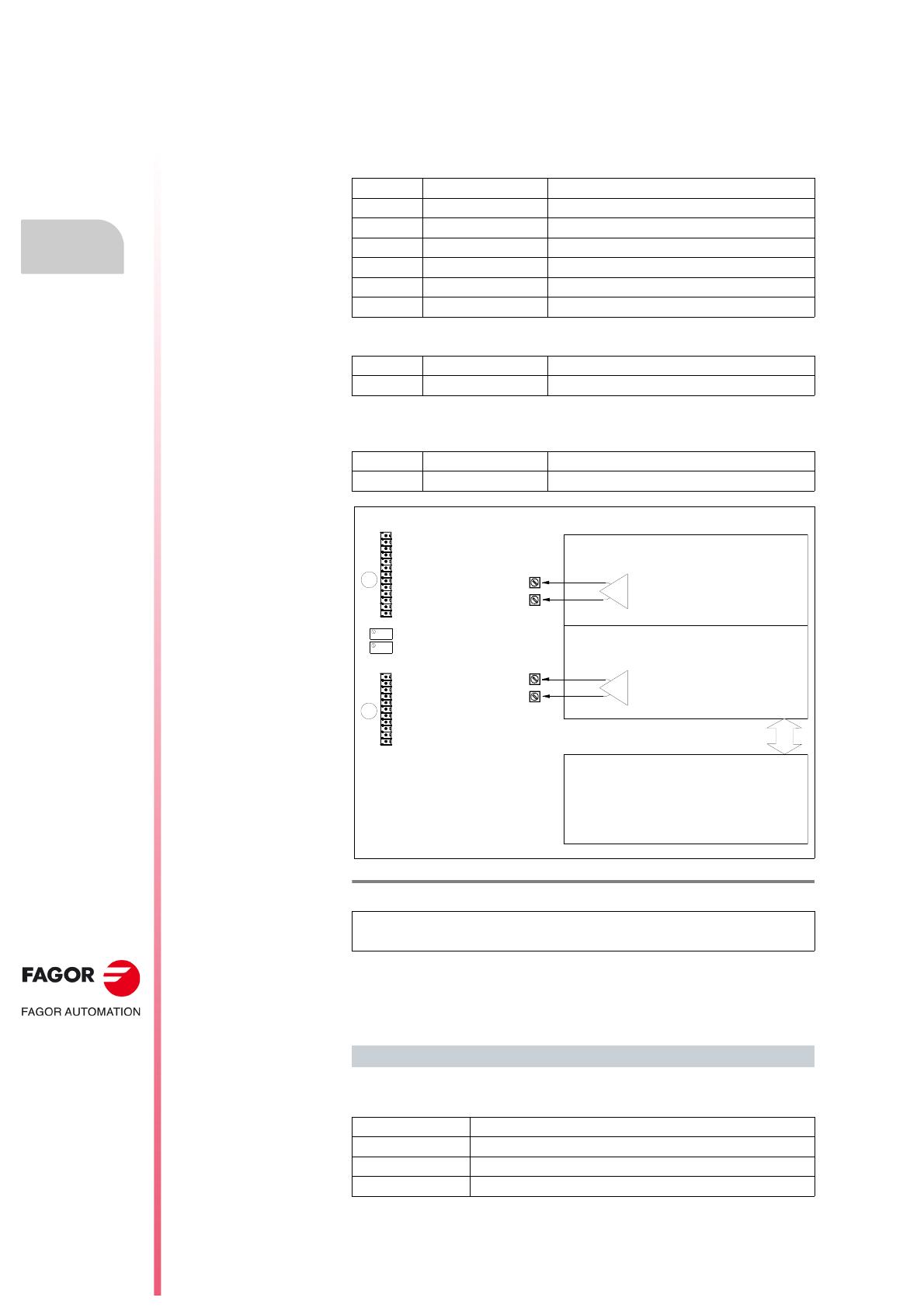
El regulador de velocidad
4.
Ref.1912
DDS|MAB
SOFTWARE
· 70 ·
Soft.09.05
Parametrización de las salidas analógicas
El regulador dispone de dos salidas analógicas en el conector X7 entre los
pines 10/11 (canal 1) y 8/9 (canal 2) que pueden ser programadas para ha-
cer accesible cualquier variable interna del regulador desde el exterior.
Las salidas más habituales son:
Las variables son seleccionadas mediante los parámetros:
Los valores de las variables seleccionadas que corresponden a los 10 V DC
en la tensión de salida analógica son fijados mediante los parámetros:
Para conservar el valor de los parámetros modificados de modo permanen-
te deben grabarse en memoria flash. De no hacerse así, en un nuevo arran-
que los parámetros almacenarán el último valor que fue almacenado en
flash.
Si se desean visualizar las señales de par y de velocidad instante, puede
procederse del siguiente modo:
SV1 S00036 VelocityCommand
SV2 F00040 VelocityFeedback
SV7 F01612 VelocityCommandFinal
CV3 F00311 CurrentFeedback
TV1 S00080 TorqueCommand
TV2 S00084 TorqueFeedback
TV3 F01701 PowerFeedbackPercentage
OP1 F01400 DA1IDN
OP2 F01401 DA2IDN
OP3 F01402 DA1ValuePer10Volt
OP4 F01403 DA2ValuePer10Volt
F. S4/9
Salidas analógicas.
NOTA. Adviértase que la modificación de estos parámetros tendrá un
efecto online.
Ejemplo.
OP1 = SV2 Velocidad real, canal 1, pines 10/11 del conector X7
OP2 = TV2 Par real, canal 2, pines 8/9 del conector X7
OP3 = 1000 1000 rev/min /10 V - léase nota -
OP4 = 60 60 (% de par a rótor parado) / 10 V
X7(11)
X7(10)
X7(9)
X7(8)
Variable examples for OP1 and OP2
SV2 -S00040-
VelocityFeedback
SV7 -F01612-
VelocityCommandFinal
TV1 -S00080-
TorqueCommand
TV2 -S00084-
TorqueFeedback
CV3 -F00311-
CurrentFeedback
.... and more
Physical Analog Outputs
D/A
OP1 -F01400-
DA1IDN
OP3 -F01402-
DA1ValuePer10Volts
Ref
±10 V max.
OP2 -F01401-
DA2IDN
OP4 -F01403-
DA2ValuePer10Volts
OV1 -F01408-
DA1Value
OV2 -F01409-
DA2Value
Channel 1
Channel 2
D/A
Ref
1
13
1
11
X7
P2
P1
(Phoenix,
3.5 mm)
X6
(Phoenix,
3.5 mm)

El regulador de velocidad
4.
Ref.1912
· 71 ·
DDS|MAB
SOFTWARE
Soft.09.05
El oscilograma obtenido mediante un osciloscopio convencional y su inter-
pretación en función de las ganancias seleccionadas puede verse en la fi-
gura F. S4/10.
Si no es de esperar que la velocidad supere nunca las 2500 rev/min, se eva-
luará la ganancia en 2500 rev/min / 10 V o un valor mayor.
Fagor Automation dispone de una aplicación para PC denominada
WinDDSSetup que incorpora un osciloscopio.
Aunque esta aplicación tiene un capítulo propio donde se explican con todo
detalle todas sus posibilidades, se hace referencia en este punto para infor-
mar al usuario de que el ajuste anterior se realizará de modo mucho más
simple y efectivo utilizando el osciloscopio del WinDDSSetup.
NOTA. Con versión 06.15 o superior, al programar OP1=SV2 según ejem-
plo, OP3 se parametrizará en unidades internas, es decir, el valor que se
introducía en versiones anteriores (1000) multiplicado x10
4
, por tanto
1x10
7
. Esto se debe a que a partir de la versión 06.15, tanto SV1 como
SV2 pasan a ser variables de 32 bits. El trato será igual cuando se consi-
dere la variable SV1.
F. S4/10
Oscilograma obtenido desde un osciloscopio convencional.
ADVERTENCIA. Evaluar siempre los parámetros OP3 y OP4 con valores
que nunca vayan a alcanzar las variables internas elegidas con el fin de que
la salida nunca salga del rango ±10 V.
Ejemplo.
NOTA. Adviértase que evaluar los parámetros OP3 y OP4 con valores de-
masiado pequeños supone una saturación de la señal eléctrica al alcan-
zar los ±10 V.

El regulador de velocidad
4.
Ref.1912
DDS|MAB
SOFTWARE
· 72 ·
Soft.09.05
Así, el oscilograma anterior obtenido mediante el osciloscopio que incorpo-
ra el WinDDSSetup tiene el siguiente aspecto:
Se visualizan en los dos canales los valores por división de la velocidad ins-
tantánea SV2 y el par TV2.
Realizando el cálculo de valores, se comprueba que:
Ajuste del lazo de velocidad
En el proceso de ajuste del lazo de velocidad será necesario:
Utilizar el generador de consignas internas del propio regulador
Ajustar el PI del lazo de velocidad
Filtrar la consigna mediante la limitación de la aceleración y/o el choque
y el filtro de alisamiento de consigna mediante el parámetro SP51.
Ajustar el filtro de la captación de velocidad (si fuese necesario) median-
te el parámetro SP50.
En los siguientes apartados se explican con detalle estos pasos.
Generador de consignas
El generador de consignas permite generar consignas internamente. Así,
en estado activo, el regulador ignora la consigna proveniente del exterior.
Es útil para realizar el movimiento del sistema con consignas conocidas y
observar su comportamiento.
Puede generarse las siguientes formas de señal y programarse los siguien-
tes parámetros:
F. S4/11
Oscilograma obtenido desde el osciloscopio del WinDDSSetup.
Formas de señal Elementos programables
Cuadrada Período
Senoidal Offset
Triangular Nº de ondas
Continua Ciclo de trabajo
NOTA. Es común seleccionar la forma cuadrada con el fin de analizar el
comportamiento del sistema frente a un escalón.
Velocidad = (200 rpm/división)· 2.5 divisiones = 500 rpm
Par = (10 %/división)· 3.6 divisiones = 36 % del par a rótor parado

El regulador de velocidad
4.
Ref.1912
· 73 ·
DDS|MAB
SOFTWARE
Soft.09.05
Considérese que trata de visualizarse, en el osciloscopio que incorpora el
WinDDSSetup, un oscilograma donde aparece el valor de la señal genera-
da por el generador interno como consigna de velocidad y el valor de la ve-
locidad real. Es de rigurosa necesidad definir que la consigna generada por
el generador interno es una consigna de velocidad, estableciendo, por tan-
to, un valor para el parámetro AP1= 2.
Desde la aplicación WinDDSSetup:
Los rangos para cada uno de los campos son:
Para activar o desactivar el generador de consignas utilícese el botón que
aparece en la parte inferior de la ventana.
Así, para una señal cuadrada, de amplitud de consigna de 500 rev/min y con
un período de 152 ms, programando los canales para poder observar las
variables WV5 y SV2 (modo osciloscopio) se obtiene el oscilograma:
Ejemplo.
GENERADOR DE CONSIGNAS
Abierta la aplicación WinDDSSetup, activando este icono de la barra de
iconos que aparece en su ventana pueden generarse consignas internas.
Únicamente será posible su activación con niveles de acceso OEM o FA-
GOR, no así para nivel básico. Al activar este botón aparecen en pantalla
las siguiente ventana con sus correspondientes cuadros de diálogo.
F. S4/12
Ventanas del generador de consignas.
Amplitud - 32768, 32767
Período 1, 32764
Offset - 32768, 32767
Nº de ondas 0, 65535
Ciclo de trabajo 1, 99
Activación del generador de consignas
Desactivación del generador de consignas
F. S4/13
Oscilograma obtenido según datos especificados.
NOTA. El motor se moverá intentando seguir la consigna que se acaba de
programar.

El regulador de velocidad
4.
Ref.1912
DDS|MAB
SOFTWARE
· 74 ·
Soft.09.05
Ajuste del PI de velocidad
El lazo de velocidad consta básicamente de un controlador proporcional-in-
tegral (PI) representado en la figura F. S4/14. Su funcionamiento se deter-
mina mediante las constantes Kp y Ti asociadas a los parámetros SP1 y
SP2, respectivamente. El esquema representativo es:
Para un mejor funcionamiento del sistema es posible dar valores distintos a
Kp y Ti dependiendo de la velocidad del motor.
Habitualmente, es preferible un efecto proporcional e integral mayor cuando
el motor gira a pequeñas velocidades, es decir, alta Kp y baja Ti como mues-
tra la figura F. S4/1 5.
El lazo de velocidad puede ajustarse empleando consigna interna - véase el
apartado anterior - o empleando directamente la consigna del dispositivo de
control externo.
Es habitual generar una señal cuadrada que sirva como consigna interna de
velocidad y observar a través de las salidas analógicas la velocidad real y la
propia consigna.
Si se desea que el sistema ajuste su funcionamiento a una consigna exter-
na determinada, se aplicará en los pines 4/5 de X7 o a los pines 2/3 de X7
por la entrada auxiliar.
Para la realización del ajuste se dispone de los parámetros:
F. S4/14
Lazo de velocidad. Topología con SP52=0.
T
i
+
+
1
+
-
Filter
Ramps
K
P
proportional
action
component
integral action
component
Speed - PI (with SP52=0)
Compensation
filter(1)
(1) - Velocity Command delay compensation
To current loop
* (SP51=2,
only in SERCOS or CAN)
SP51=2 * (by default)
SP51=1
SP51=0
Low-passing
filter
VelocityFeedback
FilterFrequency
SP50 [F02014]
VelocityReference
SmoothingMode
SP51 [F02015]
VelocityCommand
Final
SV7 [F01612]
VelocityFeedback
SV2 [S00040]
From Rotor Sensor
F. S4/15
Valores de Kp y Ti, función de la velocidad.
SP1 S00100 Valor de la acción proporcional (Kp) del PI de velocidad.
SP2
S00101
Valor de la acción integral (Ti) del PI de velocidad.
Un valor de Ti menor aumenta el efecto integral del PI.
SP4 S00211
Adaptación del valor de la acción proporcional a bajas velo-
cidades.
SP5 S00212
Adaptación del valor de la acción integral a bajas velocida-
des.
SP6 S00209
Límite de adaptación a bajas velocidades del lazo de velo-
cidad.
SP7 S00210
Límite de adaptación a altas velocidades del lazo de velo-
cidad. Velocidad superior a la cual el PI pasa de ser cons-
tante a ser variable y viceversa.
Speed
Gain
SP4*SP1
SP1
SP7
SP2
SP5*SP2
SP6
Kp
Ti
Adapter-Speed-PI:
SP1 [S00100]
SP2 [S00101]
SP4 [S00211]
SP5 [S00212]
SP6 [S00209]
SP7 [S00210]

El regulador de velocidad
4.
Ref.1912
· 75 ·
DDS|MAB
SOFTWARE
Soft.09.05
Sea:
El valor de la acción proporcional Kp a bajas velocidades será el 150 % de
SP1, es decir, 0,045 Arms/(rev/min).
Para realizar correctamente el ajuste hay que considerar el efecto de los
distintos filtros de consigna previos al PI. Estos filtros se documentan en el
apartado siguiente.
Atendiendo a la respuesta del sistema, deberán modificarse los parámetros
del PI según convenga el usuario y en función de la aplicación.
Llegado al punto en el que el funcionamiento es el deseado, los valores
asignados a los parámetros deberán grabarse en memoria flash del regula-
dor para almacenarlos de forma permanente.
El funcionamiento del PI se determina ahora mediante tres constantes, Kp
dada por el parámetro SP1 (S00100) VelocityProportionalGain, Ti dada por
el parámetro SP2 (S00101) VelocityIntegralTime y la constante de tiempo
T1 del elemento P-T1 dada por el parámetro SP52 (F02017) VelocityLoop-
TimeConstant.
Para más detalles, ver figura F. S4/16 y capítulo 13. PARÁMETROS, VARI-
ABLES Y COMANDOS de este mismo manual.
Ejemplo.
SP4=1500 150 %
SP1=30 0,030 Arms/(rev/min)
NOTA. Las modificaciones de los parámetros SP1, SP2, SP4 y SP5 serán
efectivas instantáneamente al tratarse de parámetros online.
F. S4/16
Lazo de velocidad. Topología con SP52 no 0. PI con elemento de retraso P-T1.
SP51= 0
SP51
VelocityReference
SmoothingMode
Filter
[F02015]
Ramps
SP51=2
*
SP51=1
by default
Velocity
Command
Final
SV7
[F01612]
+
+
-
Velocity
Feedback
SV2
[S00040]
From Rotor Sensor
[F02014]
SP50
+
+
Velocity
LoopTime
Constant
SP52
[F02017]
-
K
P
proportional action
component
T
1
integral action
component
K
I
=
K
P
T
I
To current loop
Velocity
Feedback
FilterFrequency
(P-T
1
element)
Speed - PI (with SP52 0)
**
* SP51=2, only in SERCOS or CAN
** Velocity command delay compensation
COMPENSATION
FILTER
LOW-PASS
FILTER
NOTA. Con SP52=0, la topología del lazo de velocidad coincidirá con la
de versiones de software anteriores a la 06.08.

El regulador de velocidad
4.
Ref.1912
DDS|MAB
SOFTWARE
· 76 ·
Soft.09.05
4.3 Filtros de consigna de velocidad
Con el objetivo de mejorar el comportamiento dinámico del motor (más sua-
ve), existe la posibilidad de filtrar la consigna de velocidad de dos modos di-
ferentes. Mediante:
Generación de rampas. Conversión de la consigna en rampas de velo-
cidad limitando la aceleración.
Límite de choque. Limitación de la aceleración y el choque de la consig-
na.
Ambos filtros de consigna podrán ser eliminados de manera permanente
mediante el parámetro:
En situación de parada puede limitarse la aceleración de esta frenada a un
valor seguro. Este límite se conoce con el nombre de límite de aceleración
de emergencia. Ver la definición de «parada» en el apartado «Notas» del
capítulo 13 de este manual.
SP100 = 0 F01611 AccelerationLimitOn
F. S4/17
Filtros de la consigna de velocidad.
SP10
SpeedEnable Function OR
ErrorStop OR SpeedEnable Function
means PWM_OFF
if the motor has not stopped in a time period GP3
Halt Function OR
Error Stop
SP80<>0
SP80=0
SP70=0
SP70=1
Jerk
Acc. Emerg.
SP100=0
SP100=1
SP60...
...SP64
SP60
SP80
SP65
SV8

El regulador de velocidad
4.
Ref.1912
· 77 ·
DDS|MAB
SOFTWARE
Soft.09.05
Límite de aceleración de emergencia
Para filtrar la consigna de velocidad en una situación de parada de emer-
gencia se considera el parámetro:
Ver la definición de parada en el apartado «notas» del capítulo 13 de este
manual.
SP70=1 F01610 AccelerationOnEmergency
F. S4/18
Límite de aceleración de emergencia.
SV8 [F01612]
SV7 [F01613]
Emergency Ramp [example]:
Speed
[rev/min]
SP65
0
1500
0.1
SP65=1500/0.1/9.5=
157
8 rad/s
2
Time
[s]
SpeedEnable Function
Halt Function
Error Stop
OR
OR
SP70=1

El regulador de velocidad
4.
Ref.1912
DDS|MAB
SOFTWARE
· 78 ·
Soft.09.05
Vigilancia de la rampa en parada de emergencia
Control del comportamiento dinámico del sistema (referente a la rampa de
frenado) en una situación de parada de emergencia mediante la vigilancia
de los límites establecidos en los parámetros:
Para obtener más información referente a los parámetros SP71 y SP72 y al
código de error E160, ver los capítulos 13 y 14, respectivamente, de este
mismo manual.
NOTA. Disponible desde la versión 06.20 del software del regulador.
SP71 F01618 VelFollowMargin
SP72 F01619 VelTimeMargin
F. S4/19
Vigilancia de la evolución real del sistema en una parada de emergencia.
NOTA. Nótese que con SP71=0 se deshabilita la prestación de vigilancia
de la rampa de emergencia y también el código de error E160.
Vigilancia de la rampa de emergencia:
Speed
[rev/min]
0
Time
[ms]
DriveEnable Function
Halt Function
Error Stop
OR
OR
if t>SP72
SpeedEnable Function
OR
t<SP72
SP71
ERROR E160
Rampa de
emergencia
de referencia
Evolución real
de la frenada
Nota.
Para velocidades negativas considérese una figura simétrica a ésta res-
pecto al eje de tiempos.
SP71>0

El regulador de velocidad
4.
Ref.1912
· 79 ·
DDS|MAB
SOFTWARE
Soft.09.05
Generación de rampas
Para activar este modo de filtro de consigna de velocidad deben conside-
rarse los parámetros:
La acción de este filtro generador de rampas se divide en tres tramos de ve-
locidades. En cada tramo, la aceleración podrá estar limitada a un valor di-
ferente. Así, desde 0 rev/min a SP61 la aceleración se limita a SP60, desde
SP61 a SP63 la aceleración se limita a SP62 y desde SP63 en adelante la
aceleración se limita a SP64.
SP80=0 F00349 JerkLimit
SP100=1 F01611 AccelerationLimitOn
F. S4/20
Generación de rampas.
VSHHG
VSHHG
UHYPLQ
69>)@
69>)@
/LPLWVHWE\
63>6@
UHYPLQ
5$036H[DPSOH
WLPH
V
63
63
63
63
63
WLPH
63 UDGV 63 UHYPLQ
63 UDGV 63 UHYPLQ
63 UDGV HJ
63
63
63>6@63>)@
63>)@63>)@
63>)@

El regulador de velocidad
4.
Ref.1912
DDS|MAB
SOFTWARE
· 80 ·
Soft.09.05
Límite de choque
Para activar este modo de filtro de consigna de velocidad deben conside-
rarse los parámetros:
El choque o jerk es la magnitud física que representa la variación de la ace-
leración en el tiempo.
SP80
0 F00349 JerkLimit
SP100 = 1 F01611 AccelerationLimitOn
SP80
S00349
Establece el límite de choque. Cuanto menor sea el
valor de este parámetro más suave será el compor-
tamiento del motor.
SP60
S00138
Establece la aceleración máxima en este modo de
funcionamiento.
F. S4/21
Límite de choque.
Time
Speed
SP80=300
rad/s
3
SP80=700
rad/s
3
Jerk Limit effect:
S
P
6
0
S
P
6
0
SV8 [F01612]
SV7 [F01613]
SP100=1
SP80=300
rad/s
3
Jerk Limit [example]:
Speed
[rev/min]
0
1500
T
Time
Limit set by SP10
S
P
6
0
Time
SP60
SP80
SP80
SP80=SP60/T
Jerk
Jerk
Acceleration
Acceleration

El regulador de velocidad
4.
Ref.1912
· 81 ·
DDS|MAB
SOFTWARE
Soft.09.05
Filtro de alisamiento de consigna
Para activar este modo de filtro de consigna de velocidad debe considerar-
se el parámetro:
Mediante este parámetro y con el regulador funcionando en modo velocidad
(p. ej. con el CNC 8055) se introduce un alisamiento de la consigna de ve-
locidad generándose consignas intermedias entre las enviadas por el con-
trol numérico.
Este alisamiento de consigna puede realizarse por:
filtro de primer orden en la consigna de velocidad (SP51=1).
rampas de velocidad (SP51=2).
Está activo, por defecto, con SP51=2 y es un parámetro online.
SP51 F02015 VelocityReferenceSmoothingMode
NOTA. Únicamente podrá parametrizarse SP51=2 cuando el interfaz de
comunicación sea SERCOS|CAN, es decir, no analógico.
F. S4/22
Localización del filtro y rampas de alisamiento de consigna. Parámetro SP51.
Velocity
Command
Final
Velocity
Feedback
SV2
[S00040]
SV7
[F01612]
K
P
T
i
+
+
1
From Rotor Sensor
+
-
Speed-PI
(with SP52 = 0)
To
Current Loop
[F02014]SP50
Low-passing
filter
Velocity
FeedbackFilter
Frequency
SP51= 0
SP51
VelocityReference
SmoothingMode
*
( SP51 = 2 , only in Sercos)
Filter
[F02015]
Ramps
SP51=2
*
SP51=1
by default
compensation
filter
[1]
Velocity command delay compensation
[1]
NOTA. Si el parámetro SP80=0 y además SP100=1, entonces SP51=2 no
tendrá ningún efecto.

El regulador de velocidad
4.
Ref.1912
DDS|MAB
SOFTWARE
· 82 ·
Soft.09.05
4.4 Filtro de la captación de velocidad
Con el objetivo de reducir el ruido de corriente en el motor y en algunos ca-
sos eliminar resonancias, mejorando así el comportamiento dinámico, exis-
te la posibilidad de filtrar la velocidad real proveniente de la captación de
velocidad provocando su alisamiento.
Es un filtro pasa-bajo de primer orden con frecuencia de corte parametriza-
ble mediante el parámetro:
El valor de la captación de velocidad, ya filtrado, puede visualizarse en la
variable SV2 (S00040) VelocityFeedback.
No está activo por defecto, es decir, SP50 = 0 y es un parámetro online.
Admite valores comprendidos entre 1 y 4000 Hz.
Forma de proceder en el ajuste de este filtro:
Introducir su valor máximo (SP50 = 4000) ya que el valor que toma ini-
cialmente por defecto es nulo (no activado).
Visualizar SV2 para observar su efecto en el ruido de velocidad.
Disminuir su valor, en caso necesario, hasta alcanzar el efecto deseado
teniendo especial cuidado de no provocar la inestabilidad del lazo.
SP50 F02014 VelocityFeedbackFilterFrequency
F. S4/23
Localización del filtro del feedback de velocidad. Parámetro SP50.
Velocity
Command
Final
Velocity
Feedback
SV2
[S00040]
SV7
[F01612]
T
i
+
+
1
+
-
[F02014]SP50
Velocity
FeedbackFilter
Frequency
SP51
VelocityReference
SmoothingMode
Filter
[F02015]
Ramps
by default
(**) Velocity command delay compensation
K
P
From Rotor Sensor
(**)
proportional
action
component
integral action
component
SP51=2
*
SP51=1
SP51=0
LOW-PASS
FILTER
Speed-PI (with SP52=0)
Compensation
filter
To current loop
(*) SP51=2, only in SERCOS or CAN
NOTA. Recuérdese que cuando se introducen frecuencias de corte bajas,
el lazo de velocidad se hace inestable con facilidad. En esta situación
debe aumentarse el valor de SP50 y disminuir el valor de SP1 o aumentar
el valor de SP2.
INFORMACIÓN. Nótese que no es posible filtrar mucho el valor del fee-
dback de velocidad y mantener el PI de velocidad fuertemente ajustado.
OBLIGACIÓN. Debe ajustarse necesariamente el PI de velocidad antes de
parametrizar SP50.
i
NOTA. Un aumento del valor de SP50 repercute aumentando el error de
seguimiento tanto en presencia del CNC 8055/55i como del CNC 8070.

El regulador de velocidad
4.
Ref.1912
· 83 ·
DDS|MAB
SOFTWARE
Soft.09.05
4.5 Feedforward de aceleración
El feedforward de aceleración es un complemento al control proporcional
del lazo de velocidad. Su función en el regulador es idéntica a la del pará-
metro ACFGAIN [P46] en el CNC de FAGOR.
Establece un efecto de consigna adelantada (feedforward) permitiendo re-
ducir el error de seguimiento sin aumentar la ganancia, manteniendo así la
estabilidad del sistema.
Ajuste de la ganancia de feedforward de aceleración
El efecto del feedforward de aceleración viene dado en el regulador median-
te el parámetro:
donde se establece el porcentaje de la consigna de aceleración final que se
anticipa al movimiento. El resto de consigna de aceleración final viene dado
por el PI de velocidad con el valor de la acción proporcional dado por SP1
y el de la acción integral dado por SP2.
Véase el esquema general del diagrama de bloques del lazo de velocidad
de la figura F. S4/1.
NOTA. Tras haber realizado el mejor ajuste posible del lazo de velocidad
parametrizando tanto los parámetros como los filtros mencionados en los
apartados anteriores de este capítulo así como el parámetro ACFGAIN
del CNC 8055/55i, en ocasiones, puede mejorarse el comportamiento di-
námico del lazo de velocidad gracias al efecto del feedforward de acele-
ración. Este efecto permite aumentar el ancho de banda del lazo de
velocidad disminuyendo el error de seguimiento. Ahora bien, recuérdese
que el sistema puede llegar a hacerse inestable. Los ruidos que generan
la inestabilidad del sistema son consecuencia de la derivada de la veloci-
dad del motor.
PP217 S00348 AccelerationFeedForwardPercentage
OBLIGACIÓN. Debe ajustarse necesariamente el PI del lazo de velocidad
y los filtros ya mencionados antes de tratar de mejorar el ajuste con PP217.
NOTA. Si tras parametrizar PP217 con un cierto valor con el fin de mejorar
el comportamiento dinámico del sistema aparecen vibraciones, disminú-
yase este valor hasta hacer desaparecer el fenómeno.
Ejemplo.
PP217= 80 El 80 % de la consigna de aceleración proviene del fee-
dforward de aceleración. No establecer un valor del 100 %
genera un error de seguimiento en la velocidad. Por tanto, el
resto de la consigna de aceleración llegará a través de la ac-
ción proporcional SP1 e integral SP2 del PI de velocidad.

El regulador de velocidad
4.
Ref.1912
DDS|MAB
SOFTWARE
· 84 ·
Soft.09.05
4.6 Estimador de velocidad
El estimador de velocidad permite eliminar la componente de alta frecuen-
cia de la velocidad real y estabilizar el lazo de velocidad cuando un sistema
mecánico entra en resonancia por encima de los 100 Hz. Su objetivo es in-
terrumpir la componente de alta frecuencia de la velocidad real cuando se
estima la velocidad y así eliminar la vibración de alta frecuencia en la má-
quina.
La configuración del lazo de velocidad incluyendo el estimador viene dado
por la siguiente figura:
La principal ventaja que supone la presencia del estimador de velocidad
frente al filtro pasa-bajo (parametrizable desde SP50) es que con el estima-
dor se consigue filtrar la señal de la velocidad real sin introducir retardos en
el lazo de velocidad consiguiendo así una mayor anchura de banda del lazo
y una mayor estabilidad del sistema. Ver figura F. S4/24 y observar dónde
están ubicados ambos elementos dentro del lazo de velocidad.
El estimador es una modelización matemática de la mecánica del sistema
que necesita conocer la inercia de la máquina y que puede evaluarse se-
gún:
y compensarse el rozamiento.
Los parámetros de ajuste serán, por tanto:
F. S4/24
Lazo de velocidad. Diagrama de bloques incluyendo el estimador.
INERCIA
NP1 ReducedActuatedMomentumOfInertiaPercentage
MP24 MotorMomentumOfInertia
ROZAMIENTO
TP10 ConstantPositiveTorqueCompensation
TP11 ConstantNegativeTorqueCompensation
TP12 DynamicPositiveTorqueCompensation
TP13 DynamicNegativeTorqueCompensation
TP14 TorqueCompensationTimeConstant
+
PI de velocidad
+
PI de corriente
0
M
NOTA: En la variable SV10 puede visualizarse la velocidad de la carga medida con la captación motor en m/min
mientras que en la variable SV12 se visualizará la velocidad estimada en rev/min.
Ki
Ti
Kv
Tv
(véanse parámetros de ajuste)
*
*
1
=
=
(filtro pasa-bajo de 1er orden)
-
PiTXLQD
-
FDUJD
NJāFPð-PRWRUNJāFPð
13
-
FDUJD
NJāFPð
13
LQ
13
[
-
PRWRU
NJāFPð
-
PiTXLQD
13
LQ[
-
PRWRU
NJāFPð
-
PRWRU
NJāFPð
-
PiTXLQD
13
LQ[
03
NJāFPð
03
NJāFPð
INFORMACIÓN. Podrán obtenerse mediante la ejecución del comando
GC5 del autoajuste de la inercia (en modo offline) tanto los parámetros de
inercia como los de rozamiento. No será necesario obtener valores riguro-
samente exactos y será suficiente con conseguir unos valores aproxima-
dos.
i

El regulador de velocidad
4.
Ref.1912
· 85 ·
DDS|MAB
SOFTWARE
Soft.09.05
La parametrización del estimador de velocidad se lleva a cabo mediante los
siguientes parámetros:
Desde los dos primeros se parametrizarán, respectivamente, la frecuencia
de corte y el factor de amortiguamiento del estimador con el que será corre-
gida la velocidad estimada. El último parámetro de esta tabla permite activar
(1) o desactivar (0 ó 2) el estimador dentro del lazo de velocidad.
Puede además visualizarse el valor de la velocidad estimada en rev/min a
través de la variable:
Obténgase más información referente a estos parámetros y a esta variable
en el capítulo 13 de este mismo manual.
Forma de proceder en el ajuste:
Con el estimador desactivado (SP17=0) y el filtro pasa-bajo de primer orden
activo (SP50
0):
Ajustar los parámetros de la inercia de la máquina y del rozamiento me-
diante la ejecución del comando GC5 (auto-ajuste del momento de iner-
cia offline). Véase la forma de proceder para ejecutar este comando
siguiendo las indicaciones dadas en el apartado correspondiente de
este mismo manual.
Visualizar desde la aplicación WinDDSSetup las variables SV2 y SV12
llevando a cabo diferentes movimientos de la máquina (p.ej. el que se
propone para realizar el auto-ajuste del momento de inercia en el apar-
tado correspondiente del capítulo 5 de este manual) y comprobar que
ambas variables son prácticamente iguales.
Aumentar o disminuir (según el efecto que genere) el valor del paráme-
tro SP15 (de 10 en 10 Hz) si se observan considerables diferencias
hasta conseguir que sean prácticamente iguales.
Habilitar ahora el estimador de velocidad parametrizando SP17=1.
Comprobar que se han conseguido los efectos deseados.
Si aún no lo son, seguir reajustando el valor de SP15 en un sentido u en
otro, según se genere el efecto deseado, hasta obtener un resultado satis-
factorio.
NOTA. No será necesario que el feedforward de aceleración esté habilita-
do pero sí habrá que parametrizar obligatoriamente la constante de tiempo
de la compensación de par parametrizable desde TP14 y que por defecto
registra un valor nulo.
OBLIGACIÓN. Desactivar el filtro pasa-bajo de primer orden parametriza-
ble desde SP50 dándole valor cero para evitar introducir retardos en el lazo
de velocidad cuando se desee llevar a cabo esta prestación, es decir, cuan-
do el usuario active el estimador de velocidad poniendo el parámetro
SP17=1.
SP15 F01598 SpeedObserverFrequency
SP16 F01599 SpeedObserverDamping
SP17 F01600 SpeedObserverEnable
SV12 F01617 ObserverVelocity
NOTA. Si no se obtiene un filtrado de la velocidad suficientemente vá-
lido, desactivar el filtro pasa-bajo (SP50=0) para evitar introducir retar-
dos en el lazo de velocidad e ir modificando el valor del parámetro
SP15 (de 10 en 10 Hz) hasta obtener el valor deseado.

4.
El regulador de velocidad
Ref.1912
DDS|MAB
SOFTWARE
· 86 ·
Soft.09.05

5
Ref.1912
· 87 ·
DDS|MAB
SOFTWARE
Soft.09.05
EL REGULADOR DE
POSICIÓN
En este capítulo se describe el proceso de ajuste de regulación DDS en su
aplicación como regulador de posición.
Los pasos necesarios a seguir en el proceso de ajuste de una aplicación
donde el regulador está configurado para trabajar con control de velocidad
han sido ya detallados en el capítulo 4.

El regulador de posición
5.
EL REGULADOR DE POSICIÓN
Lazo de control de posición
140
Ref.1912
DDS|MAB
SOFTWARE
· 88 ·
Soft.09.05
5.1 Lazo de control de posición
A partir de la versión de software 04.01, el regulador es capaz de cerrar el
lazo de posición y, por tanto, atender consignas de posicionamiento. El lazo
de posición se compone de un control proporcional y de un control derivati-
vo feed-forward. Ver figura F. S5 /1. El valor de la captación de posición pue-
de obtenerse desde un captador incorporado en el motor y entonces se
hablará de captación motor o bien desde un captador de carga o externo ha-
blándose entonces de captación directa. Se representa el lazo de posición
y su conexión con el resto de los lazos de control en el siguiente esquema
general:
El modo de operación «en posición» se establece a través del parámetro:
Con este parámetro se determina si:
La captación de la posición está en el motor o en la carga.
Los feed-forwards están activos o no.
F. S5/1
Esquema general. Lazo de posición.
AP1 S00032 PrimaryOperationMode
Captación Feed-forwards (OFF) Feed-forwards (ON )
Motor AP1=3 AP1=11
Carga AP1=4 AP1=12
Motor y carga AP1=5 AP1=13
ErrorStop OR SpeedEnable Function means PWM_OFF
if the motor has not stopped in a time period GP3
Halt Function OR SpeedEnable Function OR Error Stop
From Motor Feedback
Speed-PI
Current
Filter1
CP31
PP216 [S00296]
VelocityFeedForwardPercentage
From Direct Feedback or Motor Feedback
AP1 [S32] PrimaryOperationMode [bit 3]
PP217 [S00348] AccelerationFeedForwardPercentage
PP104 [S00104] PositionKvGain
PV189 [S00189] FollowingError
SV1 [S00036] VelocityCommand
SV7 [F01612] VelocityCommandFinal
SV2 [S00040] VelocityFeedback
CP30
Interpolator
Position
command
Depending on AP1:
May be:
AP1= 3,11
AP1= 4,12
Direct Feedback
Motor Feedback
CP32
Current
Filter2
CP33
CP30
CP34
VelocityFeedback
FilterFrequency
SP50
VelocityReference
FilterFrequency
SP51

El regulador de posición
EL REGULADOR DE POSICIÓN
Lazo de control de posición
5.
Ref.1912
· 89 ·
DDS|MAB
SOFTWARE
Soft.09.05
Captación motor. Parametrización
Parametrización de la captación motor. Sistema clásico
Transmitir el valor de la señal desde el captador (integrado en el motor)
mediante un cable de captación motor, al conector X4 perteneciente a la
tarjeta CAPMOTOR-1 del regulador.
Desactivar el bit 2 del parámetro AP1.
Indicar al regulador cuál es el tipo de señal que va a recibir del captador,
es decir, cuál es el tipo de captador y cuál es su resolución mediante los
parámetros:
Si su captador aparece en la siguiente tabla, parametrice GP2 con el valor
indicado en la columna «parámetros». Emplee, siempre que pueda, este
modo (clásico) de parametrización, es decir, siempre que su captador sea
uno de los enumerados en la tabla.
Si su captador no figura entre los anteriores y dispone de una versión de
software 06.18 o superior, lleve a cabo los pasos indicados inicialmente en
el proceso anterior y parametrice GP2 por el sistema de bits cuya descrip-
ción se facilita seguidamente.
GP2.# F00701.# Feedback1Type
NP116 S00116 ResolutionOfFeedback1
NOTA. Nótese que con cualquier motor del catálogo de FAGOR, al para-
metrizar GP2 con su valor correspondiente para indicar el tipo de captador
que incorpora el motor, automáticamente queda parametrizado NP116
con el valor adecuado y, por tanto, no será necesario por parte del usuario
parametrizarlo manualmente.
T. S5/1 GP2. Parametrización por el sistema clásico.
Captador Señales
incrementales
Cota absoluta en
el arranque
Referenciado Parámetros
E0 512-1Vpp RS485, 1 vuelta Leva
GP2=0,
NP116=512
E1 1024-1Vpp C/D, 1 vuelta (A/B) I0 (RS) y leva
GP2=0,
NP116=1024
E2 1024-1Vpp RS485, 1 vuelta Leva
GP2=0,
NP116=1024
Eje C
FM7|FM9
1024-1Vpp RS485, 1 vuelta Leva
GP2=0,
NP116=1024
E3 1024-1Vpp RS485, 1 vuelta Leva
GP2=0,
NP116=1024
E4
FKM1
128-1Vpp RS485, 1 vuelta Leva
GP2=0,
NP116=128
A0 512-1Vpp RS485 ± 1024 vueltas No
GP2=0,
NP116=512
A1 1024-1Vpp RS485 ± 2048 vueltas No
GP2=0,
NP116=1024
A3 1024-1Vpp RS485 ± 2048 vueltas No
GP2=0,
NP116=1024
A4
FKM1
128-1Vpp RS485 ± 256 vueltas No
GP2=0,
NP116=128
R0 1 modulada 1 vuelta Leva
GP2=1,
NP116=1
I0 2500-TTL U,V,W I0
GP2=2,
NP116=2500
TTL
FM7
1024-TTL No I0
GP2=2,
NP116=1024
Heidenhain 2048-1Vpp
C/D, 1 vuelta
I0
GP2=5,
NP116=2048
cabezal
1Vpp
1024-1Vpp No I0
GP2=5,
NP116=1024
NOTA. La parametrización de la captación motor por el sistema de bits es
totalmente compatible con el modo de parametrización clásico.
ATENCIÓN,
no se equivoque.
Fíjese que esto no quiere decir que el valor decimal a introducir desde el
WinDDSSetup en el parámetro GP2 por uno u otro método sea el mismo
para una misma captación. De hecho será diferente.

El regulador de posición
5.
EL REGULADOR DE POSICIÓN
Lazo de control de posición
140
Ref.1912
DDS|MAB
SOFTWARE
· 90 ·
Soft.09.05
Parametrización de la captación motor. Sistema de bits
Este procedimiento de parametrización de la captación motor requiere una
versión de software 06.18 o posterior del regulador.
El parámetro que interviene es:
y sus 16 bits serán interpretados siguiendo esta ordenación:
Nota 1
. Para poder ejecutar el comando GC11 es necesario disponer de una ver-
sión de software 09.01 o superior. No aplicable a motores sin núcleo de hierro
.
Nota 2
. Para reconocer un captador con interfaz digital EnDat 2.1 como captación
motor es necesario disponer de una versión de software 06.21 o superior y tener
instalada una tarjeta de captación motor CAPMOTOR-2 en el regulador. Desde
la versión 08.05 del software del regulador se reconoce la transmisión con cual-
quier regulador FAGOR a través del interfaz digital EnDat 2.2 del valor de la po-
sición inicial dado por un encóder absoluto Heidenhain.
GP2.# F00701.# Feedback1Type
B15 B14 B13 B12 B11 B10 B9 B8 B7 B6 B5 B4 B3 B2 B1 B0
T. S5/2 GP2. Interpretación de los 16 bits.
Bit Valor Significado
B15
Modo de parametrización
0 Sistema clásico (compatibilidad)
1 Sistema de bits
B14
0 El comando GC8 no se ejecuta en el arranque
1
El comando GC8 se ejecuta automáticamente en
el arranque. El valor del RHO se actualiza auto-
máticamente al pasar por el I0
B13...B8 Indiferente Reservados
B7 Cálculo automático de RHO en el arranque, si (B6...B3 = 0111)
0 Se ejecuta con el comando GC7
1 Se ejecuta con el comando GC11.
Ver nota 1.
B6...B3
Lectura de cota de inicio
0000
No se ejecuta
ningún comando del cálculo del
RHO en el arranque (ni GC7, ni GC11)
0001 Tipo resólver
0010
Con comunicación Stegmann
0011
Tipo efecto Hall (U,V,W)
0100
Mediante señales C y D, 1Vpp
0101
Vía protocolo SSI
0110
Vía protocolo EnDat.
Ver nota 2.
0111
Cálculo automático inicial del RHO
(el comando
GC7 ó GC11 se ejecuta automáticamente en el
arranque según el valor del bit B7)
B2 Señal I0
0 No dispone de señal I0
1 Sí dispone de señal I0
B1-B0 Señales incrementales
00 Reservado
01 Señal incremental 1Vpp diferencial
10 Señal incremental TTL diferencial
11 Señal simulada
ADVERTENCIA. Si dispone de un captador con interfaz digital EnDat,
asegúrese de ejecutar siempre
el comando GC7 ·AutophasigOnline· en el
arranque de la máquina, bajo peligro de embalamiento del motor. Con ver-
siones de software 09.01 o superiores queda protegido de peligro del em-
balamiento con el error E217
Anti-embalamiento del motor
. Ver detalles
de este error en el capítulo 13 de este manual.

El regulador de posición
EL REGULADOR DE POSICIÓN
Lazo de control de posición
5.
Ref.1912
· 91 ·
DDS|MAB
SOFTWARE
Soft.09.05
Desde el WinDDSSetup, introducir en GP2 el valor decimal equivalente a la
cadena de 16 bits considerada.
Así, p.ej. para la cadena «1100000000111010», GP2 = 49210 obtenido de
2
15
+2
14
+2
5
+2
4
+2
3
+2
1
.
El rango de valores válidos de GP2 va desde 0 a 65535.
El objetivo del ejemplo es parametrizar por el sistema de bits las captacio-
nes motor que comúnmente han sido parametrizadas por el sistema clásico.
Se ha dicho ya que, estas captaciones han de seguir parametrizándose
como se ha hecho hasta esta versión 06.18, es decir, por el procedimiento
clásico, si bien, este ejercicio será útil para facilitar la compresión de cómo
parametrizar por el sistema de bits otras nuevas captaciones que empiezan
ya a ser consideradas.
Así, el sistema clásico utilizado en la parametrización de una captación mo-
tor era llevado a cabo para los captadores dados en la tabla T. S5/1 que por
el sistema de parametrización de bits, GP2 quedaría parametrizado según
tabla T. S5/3. Fíjese que para habilitar este sistema de parametrización el bit
15 de GP2 debe ser 1, necesariamente.
NOTA. Cualquier combinación de bits no válida será descubierta por com-
probación previa en el arranque (en la validación de parámetros) mostran-
do el código de error E502 en el display del regulador. Desde la ventana
SPY del WinDDSSetup podrá obtenerse información de los parámetros
que entran en conflicto.
Ejemplo de parametrización de la captación motor
T. S5/3 GP2. Parametrización por el sistema de bits (con captador clásico).
Captador Abs.inicial Increm. NP116 B15 B6-B3 B2 B1B0 valor
E0, SinCos RS485 1Vpp 512 1 0010 0 01 32785
E1, SinCoder C/D 1Vpp 1024 1 0010 1 01 32789
E2/E3,SinCos2 RS485 1Vpp 1024 1 0010 0 01 32785
E4 RS485 1Vpp 128 1 0010 0 01 32785
A0, SincCosAbs RS485 1Vpp 512 1 0010 0 01 32785
A1/A3, SinCoderAbs RS485 1Vpp 1024 1 0010 0 01 32785
A4 RS485 1Vpp 128 1 0010 0 01 32785
R0, Resólver Resólver Resólver 1 1 0001 0 00 32776
I0, 2500 TTL U,V,W TTL 2500 1 0011 1 10 32798
Yaskawa, 1024 TTL - TTL 1024 1 0000 1 10 32774
Siemens
TM
,
Heidenhain
TM
·Leer nota de atención
más abajo·
C/D 1Vpp 2048 1 0100 1 01
32805
LenordBauer, +1Vpp - 1Vpp xxxx 1 0000 1 01 32773
SSI, +1Vpp SSI 1Vpp xxxx 1 0101 0 01 32809
ENDAT, +1Vpp EnDat 1Vpp xxxx 1 0110 0 01 32817
Nótese que con NP116= XXXX se quiere indicar que este parámetro debe ser
definido por el usuario mientras que el que ya adopta un valor (p.ej. E0,
NP116=512) va a ser definido por el propio encóder y no por el usuario. Nótese
también que con captación motor SSI o EnDat puede que sea necesario modificar
alguno de los parámetros de la comunicación (RP60, RP61, RP62, RP63).
ADVERTENCIA. Al llevar a cabo una parametrización por el sistema de bits
para una captación motor con un captador con señales C|D , ejecútese
siempre el comando GC3 ·Autophasing· y el comando GC1 ·BackupWo-
rkingMemoryCommand· (almacenar los cambios permanentemente en me-
moria flash) antes de mover el motor, bajo peligro de embalamiento
por
incertidumbre del desplazamiento del RHO.
Nótese además que desde la versión 06.23 se actualiza la posición del cap-
tador encóder con señales C|D al paso por el primer I0.
Con versión de software 09.01 ó superior queda protegido de peligro del
embalamiento con el error E217
Anti-embalamiento del motor
. Ver capítulo
13 de este manual.

El regulador de posición
5.
EL REGULADOR DE POSICIÓN
Lazo de control de posición
140
Ref.1912
DDS|MAB
SOFTWARE
· 92 ·
Soft.09.05
Otros parámetros
Además, si el acoplamiento entre el eje motor y el husillo no es directo (p.ej.
por correa dentada), para que el regulador conozca la relación mecánica de
transmisión entre el giro del eje del motor y el desplazamiento lineal de la
mesa, ajustar los parámetros:
NP121 S00121 InputRevolutions
NP122 S00122 OutputRevolutions
NP123 S00123 FeedConstant
F. S5/2
Relación de transmisión entre el eje motor y el eje del husillo de la máquina.
POLEA DE SALIDA
MESA
HUSILLO
PASO DE HUSILLO
POLEA DE ENTRADA
VELOCIDAD
VELOCIDAD
DEL MOTOR
MOTOR
Ejemplo
Diámetro de la polea de salida = 25,75 mm
Diámetro de la polea de entrada = 15,3 mm
NP121=2575 vueltas
NP122=1530 vueltas
Relación de transmisión = 2575/1530 = 1,683
Paso del husillo = 5 mm
NP123 = 5 mm

El regulador de posición
EL REGULADOR DE POSICIÓN
Lazo de control de posición
5.
Ref.1912
· 93 ·
DDS|MAB
SOFTWARE
Soft.09.05
Captación directa. Parametrización
Parametrización de la captación directa. Sistema clásico
Transmitir el valor de la señal desde el captador de carga mediante un
cable de captación directa al conector X3 perteneciente a la tarjeta de
captación directa del regulador.
Activar el bit 2 del parámetro AP1.
Indicar al regulador cuál es el tipo de señal que va a recibir del captador
externo, es decir, cuál es el tipo de captador y cuál es su resolución me-
diante los parámetros:
Si el captador externo es absoluto (p. ej. reglas FAGOR SA, SVA , GA o
GVA) parametrizar además:
tanto si se dispone de interfaz SSI como EnDat
.
GP10 F00719 Feedback2Type
NP117 S00117 ResolutionOfFeedback2
NP118 S00118 ResolutionOfLinearFeedback
PP115 S00115 PositionFeedback2Type
NOTA. Nótese que si el captador externo de la captación directa es ro-
tativo, el parámetro NP118 no tendrá ningún efecto independiente-
mente del valor con el que esté parametrizado.
RP60 F02360 SSIClockFrequency
RP61 F02361 SSIDataLength
RP62 F02362 SSIDataFormat
RP63 F02363 SSIFeedbackResolution
RP65 F02365 BitsPulsesSelection
NOTA. Los valores con los que se parametriza una regla absoluta FA-
GOR son sus valores por defecto, es decir:
RP60=200 kHz, RP61=32 bits, RP62=0 y RP63=1 dµm
NOTA. Recuérdese que con interfaz SSI (unidireccional), se parame-
trizará GP10 con valor 4 (señal cuadrada SSI) o 5 (señal senoidal
1Vpp SSI) si se utiliza el método clásico. Con interfaz EnDat
la para-
metrización será llevada a cabo siempre por el sistema de bits y se
procede como se indica en el siguiente apartado.

El regulador de posición
5.
EL REGULADOR DE POSICIÓN
Lazo de control de posición
140
Ref.1912
DDS|MAB
SOFTWARE
· 94 ·
Soft.09.05
Parametrización de la captación directa. Sistema de bits
Este procedimiento de parametrización de la captación directa requiere una
versión de software 06.18 o posterior del regulador.
El parámetro que interviene es:
y sus 16 bits serán interpretados siguiendo esta ordenación:
NOTA. Para reconocer un captador con interfaz digital EnDat 2.1 como cap-
tación motor es necesario disponer de una versión de software 06.21 o su-
perior y tener instalada una tarjeta de captación motor CAPMOTOR-2 en el
regulador. Desde la versión 08.05 del software del regulador se reconoce la
transmisión con cualquier regulador FAGOR a través del interfaz digital En-
Dat 2.2 del valor de la posición inicial dado por un encóder absoluto Heiden-
hain.
Desde el WinDDSSetup se introducirá en GP10 el valor decimal equivalente
a la cadena de 16 bits considerada.
Así, p.ej. para la cadena «1100000000111010», GP10 = 49210 obtenido de
2
15
+2
14
+2
5
+2
4
+2
3
+2
1
.
El rango de valores válidos de GP10 va desde 0 a 65535.
GP10.# F00719.# Feedback2Type
B15 B14 B13 B12 B11 B10 B9 B8 B7 B6 B5 B4 B3 B2 B1 B0
T. S5/4 GP10. Interpretación de los 16 bits.
Bit Valor Significado
B15
Modo de parametrización
0 Por el sistema clásico (compatibilidad)
1 Por el sistema de bits
B14
Indiferente No procede
B13...B7 Indiferente Reservados
B6...B3
Lectura de cota de inicio
0000 No procede
0001 Tipo resólver
0010 Con comunicación Stegmann
0011 Tipo efecto Hall (U,V,W)
0100 Mediante señales C y D, 1Vpp
0101 Vía protocolo SSI
0110 Vía protocolo EnDat
0111
No procede
B2 Señal I0
0 No dispone de señal de I0
1 Sí dispone de señal de I0
B1-B0
Señales incrementales
00 Reservado
01 Señal incremental 1Vpp diferencial
10 Señal incremental TTL diferencial
11 Señal simulada
ADVERTENCIA. Si dispone de un captador con interfaz digital EnDat, ase-
gúrese de ejecutar siempre
el comando GC7 ·AutophasigOnline· en el
arranque de la máquina, bajo peligro de embalamiento del motor. Con ver-
siones de software 09.01 o superiores queda protegido de peligro de emba-
lamiento con el error E217
Anti-embalamiento del motor
. Ver detalles de
este error en el capítulo 13 de este manual.
NOTA. Cualquier combinación de bits no válida será descubierta por com-
probación previa en el arranque (en la validación de parámetros) mostran-
do el código de error E502 en el display del regulador. Desde la ventana
SPY del WinDDSSetup podrá obtenerse información de los parámetros
que entran en conflicto.

El regulador de posición
EL REGULADOR DE POSICIÓN
Lazo de control de posición
5.
Ref.1912
· 95 ·
DDS|MAB
SOFTWARE
Soft.09.05
El objetivo es análogo al ejemplo dado para la captación motor pero ahora
para captación directa. Así, el sistema clásicamente utilizado en la parame-
trización de GP10 con captación directa ha sido:
que por el sistema de parametrización de bits, GP10 resulta:
Ejemplo de parametrización de la captación directa
T. S5/5 GP10. Parametrización por el sistema clásico.
Captador Señales
incrementales
Cota absoluta
en el arranque
Referenciado Parámetros
TTL
NP117/NP118
TTL
no I0
GP10=1,
PP115.0
NP117, NP118
1Vpp
NP117/NP118
1Vpp
no I0
GP10=2,
PP115.0
NP117, NP118
Stegmann NP117 ver GP2=0
solo
A0, A1,
A3, A4
GP10=3,
PP115.0=0
NP117
SSI
NP117/NP118
1Vpp
sí
no
necesario
GP10=5,
PP115.0
NP117, NP118
T. S5/6 GP10. Parametrización por el sistema de bits (con captador clásico).
Captador Abs.
inicial
Incr. NP117 NP118 B15 B6...B3 B2 B1B0 valor
TTL estándar,
cuadrada
-
TTL xxxx xxxx 1 0000 1 10 32774
1Vpp estándar,
senoidal
- 1Vpp xxxx xxxx 1 0000 1 01 32773
Stegmann,
Hyperface
-
1Vpp xxxx - 1 0010 0 01 32785
FAGOR,
SSI
- 1Vpp xxxx xxxx 1 0101 0 01 32809
Heidenhain,
ENDAT
-
1Vpp xxxx xxxx 1 0110 0 01 32817
Nótese que con NP117=XXXX y NP118=XXXX se quiere indicar que ambos pa-
rámetros deben ser definidos por el usuario.
NOTA. La parametrización de la captación directa por el sistema de bits
es totalmente compatible con el modo de parametrización clásico.
ATENCIÓN,
no se equivoque.
Fíjese que esto no quiere decir que el valor decimal a introducir desde el
WinDDSSetup en el parámetro GP10 por uno u otro método sea el mismo
para una misma captación. De hecho será diferente.

El regulador de posición
5.
EL REGULADOR DE POSICIÓN
Lazo de control de posición
140
Ref.1912
DDS|MAB
SOFTWARE
· 96 ·
Soft.09.05
Otros parámetros
Además, para que el regulador conozca la relación mecánica existente en-
tre el movimiento de la carga y la captación directa de la posición, ajustar los
parámetros:
NP131 F00130 InputRevolutions2
NP132 F00131 OutputRevolutions2
NP133 F00132 FeedConstant2
F. S5/3
Desplazamiento lineal de la máquina por vuelta de encóder de la captación
directa.
MOTOR
PASO DE HUSILLO
MESA
HUSILLO
ENCÓDER
CAPTACIÓN DIRECTA
CAPTACIÓN MOTOR
VELOCIDAD DEL
MOTOR
Ejemplo
Eje rotativo con reducción de 40 y con encóder externo unido
por correa dentada con relación 2:1
NP121=40 vueltas
NP122=1 vuelta
NP123= 360° por vuelta
NP131=2 vueltas
NP132=1 vuelta
NP133= 360° por vuelta
No será necesario introducir valores en NP123 y NP133 en el caso
de ejes rotativos. Internamente se toma el valor de 360° por vuelta
en cada uno de ellos.
R1
R1'
R2
R2'

El regulador de posición
EL REGULADOR DE POSICIÓN
Lazo de control de posición
5.
Ref.1912
· 97 ·
DDS|MAB
SOFTWARE
Soft.09.05
Parametrización de NP133 y NP117. Relación entera
En un proceso de parametrización, cuando se dispone de captación directa
(GP10
0) y el captador es rotativo (bit 0 de PP115=0 encóder) debe ase-
gurarse que la relación:
es un número entero. Si esta condición no se cumple, se activa en el dis-
play del regulador el código de error E502 indicando que la parametrización
de NP117 no es correcta.
Si la relación
· 1 · anteriormente indicada no es un número entero, siempre
es posible establecer una parametrización equivalente que haga entera
esta relación. Ver la forma de proceder en el siguiente ejemplo :
Supóngase que se han parametrizado inicialmente los parámetros NP133 y
NP117 de las siguiente forma:
Sustituyendo estos valores en la relación
·1· anterior, se obtiene:
Este resultado no es un número entero. Por tanto, esta parametrización ac-
tiva el código de error E502 en el display del regulador.
Para hacer que esta relación dé como solución un número entero y evitar
que se siga dando el error, será necesario obtener una parametrización
equivalente a la inicial y que cumpla este requisito. Para ello, procédase si-
guiendo esta argucia matemática como se indica:
Sustituir los valores de la parametrización inicial en la expresión ·1· y ob-
tener la fracción más simplificada
(irreducible).
Para los valores dados, resultaba: 18432000/13 (nº no entero).
Descomponer el valor de NP117 en un producto de dos valores donde
uno de ellos sea el denominador de la fracción irreducible (en este caso
13). Luego NP117=2600=13x200.
Modificar el factor 13 por un valor cercano que sea múltiplo del numera-
dor (184320000), p.ej. 12. Ahora, el nuevo valor de NP117 será
12x200=2400. Con esta modificación, cada vuelta de encóder sería con-
tabilizada como 13/12 de vuelta.
Compensar la desviación estableciendo para este ejemplo una reduc-
ción de 12/13, asignando a NP131=12 y a NP132=13.
Por tanto:
Volver a evaluar la relación ·1· con la parametrización equivalente:
Esta parametrización será equivalente a la inicial y establecerá para la rela-
ción
·1· un número entero, evitando así la activación del código de error
E502.
NOTA. Si el método de escalado de la consigna de posición se ha para-
metrizado como rotativo, esto es, PP76 (1,0) = 1 0, entonces deberá pa-
rametrizarse siempre NP133 = 360,0000. Asegúrese de que esto es así.
En el caso de que NP133 no tenga este valor, parametrícelo con el valor
360,0000.
Ejemplo.
NP133 = 360,0000 grados (escalado rotativo)
NP117 = 2600 pulsos por vuelta
NP131 = NP132 = 1 (no hay reducción mecánica, acoplamiento directo)
Parametrización inicial Parametrización equivalente
NP117 = 2600 NP117 = 2400
NP133 = 360 grados NP133 = 360 grados
NP132 = 1 NP132 = 13
NP131 = 1 NP131 = 12
NP133 10000 2
10
NP117
· 1 ·
NP133 10000 2
10
NP117 360 10000 2
10
2600 3686400000 2600==
3686400000 2600
1843200000 1300 18432000 13 1417846 154,===
NP117 NP132 NP131
INICIAL
NP117 NP132 NP131
EQUIVALENTE
=
NP133 10000 2
10
NP117 360 10000 2
10
2400 1536000==

El regulador de posición
5.
EL REGULADOR DE POSICIÓN
Lazo de control de posición
140
Ref.1912
DDS|MAB
SOFTWARE
· 98 ·
Soft.09.05
El interpolador
El CNC genera consignas de posición con una frecuencia definida por el pa-
rámetro:
En base a estas consignas enviadas por el CNC, el interpolador genera con-
signas internas con un período de 250 µs (interpolación cúbica).
Este tratamiento de las consignas de posición hacen más lineal el compor-
tamiento del sistema.
El control proporcional
El control proporcional es el elemento básico del lazo de posición. Su fun-
ción en el regulador es idéntica a la del parámetro PROGAIN [P23] en el
CNC de FAGOR.
Ajuste de la ganancia proporcional
La ganancia viene dada en el regulador por el parámetro:
donde:
para ejes lineales se da en m/min de consigna de velocidad programada
por cada milímetro de error de seguimiento.
para ejes rotativos se da en grados/min de consigna de velocidad pro-
gramada por cada miligrado de error de seguimiento.
Si el usuario desea obtener un error de seguimiento de 5 µm para F2000, el
valor de Kv se calcula del siguiente modo:
El feed-forward de velocidad
El feed-forward (prealimentación) de velocidad es un complemento al con-
trol proporcional. Su función en el regulador es idéntica a la del parámetro
FFGAIN [P25] en el CNC de FAGOR.
El objetivo de incorporar el feed-forward de velocidad es proporcionar la ve-
locidad deseada (derivada temporal de la posición) directamente en el lazo
de velocidad sin que tenga que ser la ganancia proporcional la que suminis-
tre este valor, reduciendo así el error de seguimiento.
Establece, por tanto, un efecto de consigna adelantada (feed-forward) per-
mitiendo reducir el error de seguimiento sin aumentar la ganancia, mante-
niendo así la estabilidad del sistema.
QP1 S00001 ControlUnitCycleTime
F. S5/4
Interpolador.
PP104 S00104 PositionKvGain
Ejemplos.
PP104 = 1 Para una velocidad programada de 1000 mm/min (F1000 en
el CNC) el error de seguimiento será de 1 mm.
PP104 = 2 Para una velocidad programada de 1000 mm/min (F1000 en
el CNC) el error de seguimiento será de 0,5 mm.
NOTA. Ajústese este parámetro según el error de seguimiento deseado
para una velocidad de avance dada.
Time
Position
Internal Position Commands [ interpolated ]
CNC Position Commands
2 / 0.005 = 400, luego, PP104 = 400

El regulador de posición
EL REGULADOR DE POSICIÓN
Lazo de control de posición
5.
Ref.1912
· 99 ·
DDS|MAB
SOFTWARE
Soft.09.05
Ajuste de la ganancia de feed-forward de velocidad
El efecto del feed-forward de velocidad viene dado en el regulador mediante
el parámetro:
donde se establece el porcentaje de la consigna de velocidad final que se
anticipa al movimiento. No depende del error de seguimiento (lazo abierto).
El porcentaje restante de consigna de velocidad final es debido a la ganan-
cia proporcional.
Ver esquema general de bloques de la figura F. S5/1.
El feed-forward de aceleración
El feed-forward de aceleración es un complemento al control proporcional y
al feed-forward de velocidad. Su función en el regulador es idéntica a la del
parámetro ACFGAIN [P46] en el CNC de FAGOR.
Establece un efecto de consigna adelantada (feed-forward) permitiendo re-
ducir el error de seguimiento sin aumentar la ganancia, manteniendo así la
estabilidad del sistema.
Ajuste de la ganancia de feed-forward de aceleración
El efecto del feed-forward de aceleración viene dado en el regulador me-
diante el parámetro:
donde se establece el porcentaje de la consigna de aceleración final que se
anticipa al movimiento. El resto de consigna de aceleración final viene dado
por el PI de velocidad con el valor de la acción proporcional dado por SP1
y el de la acción integral dado por SP2.
Ver esquema general de bloques de la figura F. S5/1.
PP216 S00296 VelocityFeedForwardPercentage
Ejemplo.
PP216 = 80 El 80% de la consigna de velocidad proviene del feed-
forward de velocidad. El resto de la consigna de velocidad
proviene del efecto proporcional.
PP217 S00348 AccelerationFeedforwardPercentage
Ejemplo.
PP217 = 80 El 80% de la consigna de aceleración proviene del feed-
forward de aceleración. No establecer un valor de 100 % ge-
nera un error de seguimiento en la posición y en la veloci-
dad. Por tanto, el resto de la consigna de aceleración llegará
a través de la acción proporcional SP1 e integral SP2 del PI
de velocidad.

El regulador de posición
5.
EL REGULADOR DE POSICIÓN
Búsqueda de cero
140
Ref.1912
DDS|MAB
SOFTWARE
· 100 ·
Soft.09.05
5.2 Búsqueda de cero
El regulador de posición es capaz de realizar un proceso automático de bús-
queda del cero máquina.
Captación incremental
Este procedimiento puede activarse con el accionamiento en cualquier po-
sición inicial.
Cuando se encuentra el punto de referencia
concluye el procedimiento y es-
tablece el punto de cero máquina
como origen de coordenadas para los su-
cesivos movimientos a coordenadas absolutas.
Proceso automático de búsqueda de cero
Se consideran aquí los parámetros que corresponden a una captación de
posición ubicada en el motor. En una nota posterior se mencionarán los pa-
rámetros correspondientes a una captación directa.
El punto (0) es el punto aleatorio de encendido de la máquina. La captación
de posición dada en la variable PV51 (S00051) toma inicialmente este pun-
to como origen de coordenadas.
Cuando se ejecuta la instrucción HOME comienza un movimiento automá-
tico para la búsqueda del punto de referencia con dos posibles comporta-
mientos dependiendo de la posición del punto de inicio: Así:
Los parámetros que determinan las velocidades de búsqueda de cero en
cada fase del proceso son:
NOTA. Este proceso automático de búsqueda de cero no es necesario
cuando se está en presencia de motores con captador encóder absoluto
(ref. A1).
NOTA. Si va a realizar una búsqueda de cero con captación directa e in-
terfaz de comunicación CAN, asegúrese de que dispone de una versión
de software del regulador 08.01, 07.04 o superiores.
(bH) = before Homing = antes de la ejecución de HOME
(aH) = after Homing = después de la ejecución de HOME
(1) Con el HomeSwitch liberado PV200 (S00400)=0. Línea continua
(2) Con el HomeSwitch pulsado PV200 (S00400)=1. Línea discontinua
PP41 S00041 HomingVelocity
PP1 F01300 HomingVelocitySlow
F. S5/5
Captación incremental. Proceso automático de búsqueda de cero.
1
20
S51 (bH)
S51 (aH)
S175 S173
S52
S41F1300
S400
I0's
Speed
Position
S150
0
1
2
Punto de referencia
Punto de cero máquina
Punto aleatorio de encendido de la máquina
Con el HomeSwitch liberado
Con el HomeSwitch pulsado

El regulador de posición
EL REGULADOR DE POSICIÓN
Búsqueda de cero
5.
Ref.1912
· 101 ·
DDS|MAB
SOFTWARE
Soft.09.05
Al paso por el punto de referencia (punto con la señal de I0 buscada) que
siempre se establece a velocidad baja PP1, el sistema registra el valor de la
captación de posición en la variable:
Se activa la variable:
y se detiene el motor.
Para establecer el nuevo valor de PV51, se determina la variable:
mediante la ecuación:
Se activa la variable:
y se asigna a la consigna interna de posición suministrada por la variable:
el valor de la nueva captación de posición PV51.
Finalmente, el regulador de posición está preparado para ejecutar los movi-
mientos absolutos.
Cambio de ubicación del punto de referencia
Una sustitución del captador o del motor puede modificar la ubicación del
punto con la señal de I0 buscada.
Para conservar la misma ubicación del cero máquina, ajústese el parámetro
de offset:
Con captación motor:
Con captación directa (homólogos a los anteriores, respectivamente):
Los párametros ReferenceDistance y ReferenceOffset del regulador son
equivalentes a los parámetros REFVALUE (P53) y REFSHIFT (P47) de los
ejes del CNC 8055/55i.
PV173 S00173 MarkerPositionA
PV208 S00408 ReferenceMarkerPulseRegistered
PV175 S00175 DisplacementParameter1
PV203 S00403 PositionFeedbackStatus
PV47 S00047 PositionCommand
S00175 = S00052 - S00150 - S00173
INFORMACIÓN. Búsquedas de cero sucesivas pueden dejar el motor en
posiciones finales diferentes. Esto es debido a que las frenadas no han sido
iguales, pero el cero ha sido buscado correctamente.
i
PP150 S00150 ReferenceOffset1
NOTA. Determínese este ajuste en base a alguna cota conocida en el sis-
tema de referencia anterior.
NOTA. Cuando la captación se realiza a través de un sensor de captación
directa del movimiento (conector X3 del regulador) algunos de los paráme-
tros citados anteriormente deberán ser sustituídos por sus homólogos.
PP52 S00052 ReferenceDistance1
PP150 S00150 ReferenceOffset1
PV51 S00051 PositionFeedback1
PV175 S00175 DisplacementParameter1
PP54 S00054 ReferenceDistance2
PP151 S00151 ReferenceOffset2
PV53 S00053 PositionFeedback2
PV176 S00176 DisplacementParameter2

El regulador de posición
5.
EL REGULADOR DE POSICIÓN
Búsqueda de cero
140
Ref.1912
DDS|MAB
SOFTWARE
· 102 ·
Soft.09.05
Configuración de la búsqueda de cero
Para establecer la dirección de búsqueda y la lógica booleana del Home-
Switch se dispone del parámetro:
que determina con los bits 0 y 1 cuál es la dirección de búsqueda conside-
rada positiva y si la activación del Home-Switch significa que cierra su con-
tacto eléctrico o lo abre.
Conexión eléctrica del Home-Switch
Cuando el contacto eléctrico se lleva a una de las entradas digitales del re-
gulador:
Si no se emplea el PLC, asignar la variable PV200 (S00400) a alguno de
los parámetros IP10, ... , IP13 (en nomenclatura SERCOS F00901, ...,
F00904). Conectar el Home-Switch a la entrada digital asociada al pa-
rámetro elegido.
Si se hace uso del PLC, indicar mediante una instrucción que el bit 0 de
la variable PV200 (S00400) debe tomar el valor de una de las entradas
digitales (p. ej: I1). La instrucción es: I1= B0S400.
Cuando el contacto eléctrico se lleva a una de las entradas digitales del
CNC 8070:
El control numérico comunica el estado del contacto por vía SERCOS
pero sigue siendo el regulador el que controla el proceso de búsqueda
de cero.
Ubicación mecánica del Home-Switch
Con el fin de evitar problemas de repetitividad en la búsqueda de I0, es re-
comendable tomar algunas precauciones en cuanto a la ubicación del
Home-Switch.
Captación sin señales de I0
En cada giro del encóder, la carga se desplaza una distancia L dada por la
expresión:
En el momento en que finaliza la búsqueda de cero y el motor se detiene, la
cota de posición debe estar dentro del margen ± L/4.
Ubíquese el interruptor del Home-Switch en un punto del recorrido de la car-
ga en el que se cumpla la condición anterior.
PP147 S00147 HomingParameter
F. S5/6
Configuración de la búsqueda de cero.
NOTA. En la referencia de motores FAGOR, estos captadores aparecen
como E1, E3 ó R0.
S400
I0s
Pos
S400
I0s
Pos
S400
I0s
Pos
S400
I0s
bit0 S147 = 0
bit1 S147 = 0
Pos
bit0 S147 = 0
bit1 S147 = 1
bit0 S147 = 1
bit1 S147 = 0
bit0 S147 = 1
bit1 S147 = 1
L =
NP122
NP121
· NP123

El regulador de posición
EL REGULADOR DE POSICIÓN
Búsqueda de cero
5.
Ref.1912
· 103 ·
DDS|MAB
SOFTWARE
Soft.09.05
Captación con señales de I0
A.
Problema de repetitividad en la búsqueda de I0
Con el fin de evitar posibles problemas de repetitividad en la búsqueda de
I0, es muy importante estar alerta en la ubicación del Home-Switch de la
máquina y en la del I0 del captador próximo a él.
Así, situar el Home-Switch muy próximo a la posición de un I0 puede gene-
rar la no repetición del I0 en una búsqueda de cero, es decir, puede encon-
trar dos I0s diferentes, y por tanto, distinta posición del cero máquina.
La causa que puede generar este problema es la fluctuación del flanco de
activación o desactivación del Home-Switch.
Ver figura F. S5/7 (A o B) para constatar este hecho.
B.
Solución al problema de repetitividad en la búsqueda de I0
En presencia de una situación de este tipo, el problema puede solucionarse
de dos modos:
Solución por desplazamiento físico del Home-Switch: Alejar física-
mente el Home-Switch de la señal de I0. El valor de la distancia que de-
berá desplazarse viene dada por la variable:
tras haber realizado una búsqueda de I0.
Solución por desplazamiento mediante software del Home-Switch:
Realizar un desplazamiento del Home-Switch mediante la ejecución del
comando:
donde los parámetros a considerar son:
Para obtener más información sobre estos parámetros, ver capítulo 13 de
este mismo manual.
NOTA. En la referencia de motores FAGOR, estos captadores aparecen
como E1 ó I0.
F. S5/7
Problema de repetitividad en la búsqueda de cero.
PV1 S00289 HomeSwitchDistance
GC6 F00615 HomeSwitchAutoCalibration
PP4 S00299 HomeSwitchOffset
PV1 S00298 HomeSwitchDistance
1
S400
I0's
Speed
Position
1
S400
I0's
Speed
Position
Home-switch not pressed
Home-switch pressed
A
B

El regulador de posición
5.
EL REGULADOR DE POSICIÓN
Búsqueda de cero
140
Ref.1912
DDS|MAB
SOFTWARE
· 104 ·
Soft.09.05
C.
Ejecución del comando GC6
El desplazamiento del Home-Switch mediante el comando GC6 se realizará
de la siguiente manera:
Realizar una búsqueda de cero con la finalidad de que el regulador co-
nozca la posición del I0 y del Home-Switch.
El I0 encontrado no será el definitivo ya que habrá que realizar un des-
plazamiento del Home-Switch pero la variable PV1 ya dispondrá del va-
lor óptimo que deberá desplazarse.
Ejecutar el comando GC6.
Se almacena en el parámetro PP4 el valor del desplazamiento óptimo
del Home-Switch. (PV1
PP4).
Ejecutar el comando GC1.
Se almacenan los parámetros en memoria flash para tener ajustado el
Home-Switch de forma permanente.
Realizar nuevamente una búsqueda de cero.
El I0 obtenido será el definitivo.
F. S5/8
Primera búsqueda de cero. Significado de la variable PV1.
F. S5/9
Obtención del I0 válido.
1
S400
I0's
Speed
Position
PV1
optimum
d: distance
between I0s
d/2
home-switch
Home-switch not pressed
Home-switch pressed
1
S400
I0's
Speed
Position
PV1
optimum
d: distance
between I0s
d/2
home-switch
Home-switch not pressed
Home-switch pressed
INFORMACIÓN. A partir de la versión de software 06.03 (07.02 y superi-
ores o 08.01 si dispone de interfaz CAN) se realizará una comprobación de
las cotas obtenidas tras una búsqueda de cero. Así, si la cota obtenida
(PV51 o PV53, según sea el caso) está fuera de límites y éstos, están ha-
bilitados (PP55.4=1) se dará el código de error E150 ·OverTravel LimitsEx-
ceeded·. Esta comprobación es realizada únicamente al finalizar la
búsqueda de cero y es llevada a cabo tanto en control de posición como en
control de velocidad.
i

El regulador de posición
EL REGULADOR DE POSICIÓN
Búsqueda de cero
5.
Ref.1912
· 105 ·
DDS|MAB
SOFTWARE
Soft.09.05
D.
Parametrización de NP166 (es obligatorio siempre)
Cuando se dispone de captación con señales de I0, generalmente el pará-
metro NP166, parametrizado por defecto con un valor de 1000, es válido
prácticamente en la mayoría de las situaciones. Este parámetro es utilizado
internamente por el regulador para realizar el testeo de la distancia entre se-
ñales de I0, generando el código de error E253 en el caso de no encontrar
una señal de I0 en dos vueltas.
Sea una regla que dispone de señales de I0. Si la distancia entre I0s es de
20 mm y su resolución es de 20 µm. ¿Con qué valor debe parametrizarse el
parámetro NP166 ?
El valor de NP166 será el cociente entre:
NP166 = distancia entre I0s / resolución
Tras realizar una conversión a las mismas unidades, se obtiene:
NP166 = 20 000 µm / 20 µm = 1000 ondas entre I0s.
por tanto: NP166 = 1000.
Ahora bien, cuando se dispone de una única señal de I0 (algo poco co-
mún), ya no es válido el valor asignado por defecto a NP166 y, por tanto, es
obligado realizar una parametrización correcta de este parámetro.
Sea una regla que dispone de una única señal de I0. La distancia medida
entre el home-switch y el I0 es de 537 mm y la resolución de la regla es de
20 µm. ¿Con qué valor debe parametrizarse el parámetro NP166 ?
El valor de NP166 será el cociente entre:
NP166 = [ (distancia entre el home-switch y el I0) + k ] / [ resolución ]
donde pueden adoptarse para «k» valores de entre 20 y 30 mm, en general.
Tras convertir los datos a las mismas unidades y considerando arbitraria-
mente un valor de k = 25 mm, se obtiene:
NP166 = (537 000 µm + 25 000 µm) / 20 µm = 28100.
por tanto: NP166 = 28100.
Si para el valor de NP166, calculado en el ejemplo 2, se genera el código de
error E253 en una búsqueda de I0, antes de llegar a la zona del I0, adoptar
un valor del margen «k» algo mayor al que se ha tomado.
Con I0 de cabezal y reducción mecánica distinta de 1:1
A partir de la versión de software 06.03 es posible referenciar un cabezal
que solo disponga de captación motor cuando la relación de transmisión
mecánica NP121/ NP122 no es 1/1.
Restricciones de la aplicación
Únicamente será aplicable a:
Transmisiones por correa dentada.
Ejes rotativos (o cabezales)
NOTA. Recuérdese que el parámetro NP166 indica el nº de ondas incre-
mentales que hay entre dos señales de I0. Síganse los siguientes ejem-
plos para saber con qué valor parametrizar NP166.
Ejemplo 1.
Ejemplo 2.
NOTA. Nótese que este valor «k» se introduce como margen, con el fin de
asegurar que en una búsqueda de I0 va a ser encontrado el único I0 que
existe y evitar que se genere el código de error E253.
OBLIGACIÓN. Es obligatorio parametrizar NP166 tanto si se dispone de
captación con I0s codificados como si solo se dispone de captación con
señales de I0.
NOTA. Nótese que no tiene sentido en presencia de ejes lineales.

El regulador de posición
5.
EL REGULADOR DE POSICIÓN
Búsqueda de cero
140
Ref.1912
DDS|MAB
SOFTWARE
· 106 ·
Soft.09.05
Para evitar posibles problemas de repetitividad en la búsqueda de I0, es
muy importante estar alerta en no disponer de diferentes I0s muy próximos
entre sí como consecuencia de adjudicar a NP121 valores muy altos.
El siguiente ejemplo da idea de la relación existente entre el valor asignado
a NP121 y la proximidad de dos I0s distintos.
Sea una transmisión por correa dentada donde la polea transmisora es so-
lidaria al eje de un motor con captador dotado de señal I0. La relación de
transmisión entre polea conductora y polea conducida es NP121/NP122 =
5/4. Por cada vuelta del motor transmisor (un I0 cada 360°) la polea condu-
cida gira 288° según esta relación de transmisión. Si se representan las po-
siciones de I0 registradas en 5 vueltas de motor en relación a las 4 vueltas
de la polea conducida se obtienen 5 señales I0 separadas 72°.
Si ahora se parametriza NP121 con un valor muy elevado (p. ej, 5.000) la re-
lación de transmisión será NP121/NP122=5000/4 y siguiendo el razona-
miento anterior se obtendrían 5.000 señales de I0 separadas 0,072° por
cada 4 vueltas de la polea conducida.
Se observa, por tanto, que todas estas señales de I0 diferentes estarían tan
próximas que cualquier fluctuación del flanco de activación/desactivación
de la leva (home-switch) en una búsqueda de I0 podría no repetir el I0 y por
tanto establecer una posición de cero máquina distinta.
Captación con marcas I0 e I0 codificadas
Un insignificante movimiento del motor es suficiente para que el regulador
identifique la posición absoluta de la máquina.
Para la ejecución de ese procedimiento es necesario identificar al captador
mediante los parámetros siguientes:
INFORMACIÓN. Adviértase que parametrizar NP121 con valores muy ele-
vados, donde se establece el nº de vueltas de la polea conductora solidaria
al eje del motor dotado de captador con señal de I0, puede generar proble-
mas de repetitividad en la búsqueda de I0. Por tanto:
¡No parametrizar NP121 con valores excesivamente altos!
i
Ejemplo.
NOTA. Recuérdese que si dispone de una versión de software 06.14 o in-
ferior, entonces, con relaciones de transmisión NP121/NP122 simplifica-
bles matemáticamente, debe realizarse la simplificación exacta antes de
ser parametrizados. Así p.ej. para una relación de 32/24, tras la simplifica-
ción resulta 4/3 y, por tanto, se parametrizará NP121= 4 y NP122 = 3.
OBLIGACIÓN. En una búsqueda de cero con captador dotado de señal I0
y relación de transmisión diferente de 1:1 es de suma importancia
realizar
todo el procedimiento indicado en la «solución por desplazamiento me-
diante software del home-switch» en el apartado anterior, es decir, ejecutar
el comando GC6 y realizar los pasos sucesivos que se indican en ese
apartado. Nótese que
para diferentes ejecuciones del comando GC6 en
esta aplicación, la variable PV1 irá tomando distintos valores.
GP10 F00719 Feedback2Type
NP117 S00117 ResolutionOfFeedback2
NP118 S00118 ResolutionOfLinearFeedback
NP165 S00165 DistanceCodedReferenceMarksA
NP166 S00166 DistanceCodedReferenceMarksB
PP115 S00115 PositionFeedback2Type
Nota. Parametrizar NP118 solo procede para encóders lineales. Para en-
códers rotativos es indiferente su parametrización.

El regulador de posición
EL REGULADOR DE POSICIÓN
Búsqueda de cero
5.
Ref.1912
· 107 ·
DDS|MAB
SOFTWARE
Soft.09.05
Con marcas I0 no codificadas en encóders lineales
Una regla de vidrio cromado SVX de FAGOR con paso de rayado de 20 µm
y señal de salida TTL diferencial de período T de 4 µm dispone de un grupo
de marcas de I0 distanciadas entre sí 2500 ciclos de señal (X=50 mm =
50000 µm). Los valores que deben adjudicarse a los parámetros del regu-
lador son:
Además, para establecer el funcionamiento con este tipo de captadores hay
que ajustar los bits 6, 5, 3, 1 y 0 del parámetro PP115. Sígase el procedi-
miento que se indica:
Tabla de parametrización de encóders lineales FAGOR con mar-
cas I0 no codificadas
NP117. Paso del rayado del cristal o fleje del encóder lineal en µm.
En modelos FAGOR, puede ser 20, 40 o 100 µm, según modelo.
NP118. Período T de las señales de salida del encóder lineal en µm.
En modelos FAGOR, puede ser 4, 2, 0.4, 20, 40 o 100 µm, según modelo.
NP166. Valor obtenido de calcular la distancia entre dos I0s consecutivos di-
vidida entre el paso de rayado.
En modelos FAGOR siempre 1000.
F. S5/10
Representación de los parámetros de un encóder lineal con marcas I0 no
codificadas.
Ejemplo.
GP10=1. Señal cuadrada TTL
NP117 = Paso del rayado = 20 µm (dato de catálogo)
NP118 = Período T de las señales de salida = 4 µm (dato de catálogo)
NP165 = No procede
NP166 = 1000 en todas las reglas FAGOR ¡siempre!
bit 0=1 Lineal
bit 1=0 Sin I0s codificados
bit 3 El sentido de contaje debería estar ya ajustado
bit 5
Realizada la búsqueda de I0, mover el eje en dirección positi-
va y realizar una nueva búsqueda de I0. Si la cota dada tras la
segunda búsqueda de I0 es menor que la dada por la primera,
complementar el valor del parámetro PP115.5
bit 6=0 Captador incremental
Encóders lineales FAGOR NP166 NP117 NP118
SX SVX GX MX MKX CX 1000 20 4
SY SVY GY 1000 20 2
SW SVW GW 1000 20 0,4
SP SVP GP MT MK MTD MKT MP CT CP 1000 20 20
LX 1000 40 4
LP 2000 40 40
FX 2000 100 4
FT 1000 100 20
FP 1000 100 100
NOTA. Nótese que no procede parametrizar NP165 cuando se dispone de
encóders lineales sin I0s codificados.
X
X
NP117
X
Paso de rayado

El regulador de posición
5.
EL REGULADOR DE POSICIÓN
Búsqueda de cero
140
Ref.1912
DDS|MAB
SOFTWARE
· 108 ·
Soft.09.05
Con marcas I0 codificadas en encóders lineales
Una regla de vidrio cromado SVOX de FAGOR con paso de rayado de 20
µm y señal de salida TTL diferencial dispone de un grupo de marcas de I0
distanciadas entre sí 100 ciclos de señal (X=20 mm = 20000 µm). El grupo
de marcas que se alternan con las anteriores están distanciadas 100,1 ci-
clos de señal (Y=20,02 mm= 20020 µm).
Suponiendo que, en este modelo de regla, se consigue una precisión de 4
µm (factor multiplicador x5) y las señales de salida son TTL diferenciales,
los valores que deben adjudicarse a los parámetros del regulador son:
Además, para establecer el funcionamiento con este tipo de captadores hay
que ajustar los bits 6, 5, 3, 1 y 0 del parámetro PP115. Sígase el procedi-
miento que se indica:
El proceso de fabricación de los captadores lineales (reglas) con I0s codifi-
cados hace que cada uno de los captadores posea una cota cero diferente.
Para ubicar el origen de coordenadas en un punto concreto del recorrido de-
berán seguirse estos pasos:
Realizar una búsqueda de I0.
Desplazar el accionamiento hasta el punto seleccionado como cero.
Leer la variable PV53.
Introducir el valor leído en PV53 en PP178 con el signo cambiado.
F. S5/11
Representación de los parámetros de un encóder lineal con marcas I0 co-
dificadas.
Ejemplo.
GP10=1. Señal cuadrada TTL
NP117 = Paso del rayado = 20 µm (dato de catálogo)
NP118 = Período T de las señales de salida = 4 µm (dato de catálogo)
NP165 = Y/NP117 = 20,02 mm x (1000 µm/mm) / 20 µm = 1001
Nota
. Y=20,02 mm en todas las reglas FAGOR excepto en modelos L.
NP166 = 20 mm x (1000 µm/mm) / 20 µm = 1000
Nota
. X=20 mm en todas las reglas FAGOR excepto en modelos L.
bit 0=1 Lineal
bit 1=1 Con I0s codificados
bit 3 El sentido de contaje debería estar ya ajustado
bit 5
Realizada la búsqueda de I0, mover el eje en dirección positi-
va y realizar una nueva búsqueda de I0. Si la cota dada tras
la segunda búsqueda de I0 es menor que la dada por la pri-
mera, complementar el valor del parámetro PP115.5
bit 6=0 Captador incremental
X
X
YY
Y NP117
X
Paso de rayado
X=Distancia entre dos I0s codificados "fijos" consecutivos
Y=Distancia entre dos I0s codificados "móviles" consecutivos
NP166 = X/NP117
NP165 = Y/NP117

El regulador de posición
EL REGULADOR DE POSICIÓN
Búsqueda de cero
5.
Ref.1912
· 109 ·
DDS|MAB
SOFTWARE
Soft.09.05
Tabla de parametrización de encóders lineales FAGOR con mar-
cas I0 codificadas
NP117. Paso del rayado del cristal o fleje del encóder lineal en µm.
En modelos FAGOR, puede ser 20, 40 o 100 µm, según modelo.
NP118. Período T de las señales de salida del encóder lineal en µm.
En modelos FAGOR, puede ser 4, 2, 0.4, 20, 40 o 100 µm, según modelo.
NP165. Valor obtenido de calcular la distancia entre dos I0s codificados
“móviles” consecutivos dividida entre el paso de rayado.
En modelos FAGOR, 1001, salvo modelos L, 2001.
NP166. Valor obtenido de calcular la distancia entre dos I0s codificados “fi-
jos” consecutivos dividida entre el paso de rayado.
En modelos FAGOR, 1000, salvo modelos L, 2000.
Con marcas de referencia I0 incremental en encóders rotativos
Sea un disco de vidrio cromado de referencia S-P-18000-D90 de FAGOR.
Según catálogo, su resolución es de 18000 impulsos por vuelta y su señal
de salida es senoidal 1 Vpp.
Los valores que deben adjudicarse a los parámetros son:
Para establecer el funcionamiento con este tipo de captadores hay que
ajustar los bits 6, 5, 3, 1 y 0 del parámetro PP115. Sígase el procedimiento
que se indica:
Para desplazar el cero del encóder seguir estos pasos:
Realizar una búsqueda de I0.
Desplazar el accionamiento hasta el punto seleccionado como cero.
Leer la variable PV53.
Introducir el valor leído de PV53 en PP178 con el signo cambiado.
Encóders lineales FAGOR
NP166 NP165 NP117 NP118 factor multipl.
SOP GOP MOP COP 1000 1001 20 20 1
SVOP MOC COC 1000 1001 20 20 1
MOT COT 1000 1001 20 20 1
SOX GOX MOX COX 1000 1001 20 4 5
SVOX 1000 1001 20 4 5
LOP 2000 2001 40 40 1
LOX 2000 2001 40 4 10
FOP 1000 1001 100 100 1
FOT 1000 1001 100 20 5
FOX 1000 1001 100 4 25
NOTA. Nótese que el factor multiplicador es la relación entre el paso de
rayado del cristal o fleje y el período T de las señales de salida del encóder
lineal. En modelos FAGOR, puede ser 1, 5, 10 o 25, según modelo y no se
refleja explícitamente en ningún parámetro del regulador.
Ejemplo.
GP10=2 Señal senoidal 1Vpp
NP117=18000 Nº impulsos por vuelta
NOTA. Nótese que no procede parametrizar NP165, NP166 y NP118
cuando se dispone de encóders rotativos con marca de referencia I0 in-
cremental.
bit 0=0 Rotativo
bit 1=0 Sin I0s codificados
bit 3 El sentido de contaje debería estar ya ajustado
bit 5
Realizada la búsqueda de I0, mover el eje en dirección positiva
y realizar una nueva búsqueda de I0. Si la cota dada tras la se-
gunda búsqueda de I0 es menor que la dada por la primera,
complementar el valor del parámetro PP115.5
bit 6=0 Captador incremental

El regulador de posición
5.
EL REGULADOR DE POSICIÓN
Búsqueda de cero
140
Ref.1912
DDS|MAB
SOFTWARE
· 110 ·
Soft.09.05
Tabla de parametrización de encóders rotativos FAGOR con mar-
cas de referencia I0 incremental
NP117 = Nº de pulsos por vuelta.
En modelos FAGOR,
Factor multiplicador = Nº impulsos por vuelta /18000.
Con marcas I0 codificadas absolutas en encóders rotativos
Sea un disco de vidrio cromado S-O-P-36000-D200 de FAGOR con un gru-
po de marcas de I0 distanciadas 100 ciclos de señal. Otro grupo de marcas
que se alternan con las anteriores están distanciadas 100,1 ciclos de señal.
La resolución es de 36000 pulsos por vuelta (factor multiplicador x2) y la se-
ñal de salida es senoidal 1 Vpp.
Los valores que deben adjudicarse a los parámetros son:
Encóders rotativos FAGOR Impulsos por vuelta NP117
HP SP 18000 18000
HP SP 36000 36000
H S 18000 18000
H S 36000 36000
H S 90000 90000
H S 180000 180000
- S 360000 360000
NOTA. Nótese que no procede parametrizar NP165, NP166 y NP118
cuando se dispone de encóders rotativos con marca de ref. I0 incremental.
NOTA. Nótese que el factor multiplicador no se refleja explícitamente en
ningún parámetro del regulador.
F. S5/12
Representación de los parámetros de un encóder rotativo con marcas I0 co-
dificadas absolutas.
Ejemplo.
GP10=2 Señal senoidal 1Vpp
NP117= 36000 Nº impulsos por vuelta
Factor multiplicador = NP117 / 18000 = 36000/ 18000 = 2
NP165 = 1001 x factor multiplicador = 1001 x 2 = 2002
NP166 = 1000 x factor multiplicador = 1000 x 2 = 2000
NOTA. Nótese que no procede parametrizar NP118 cuando se dispone de
encóders rotativos.
!!"
# !!"
$%%"&'()* !+"%
,-./...!
#0.120.%.01
, 3"!
4!
5!!"/
,6"0.%.010. 160.%.016...0.16..
#,6"0.10. 160.16...0.16...

El regulador de posición
EL REGULADOR DE POSICIÓN
Búsqueda de cero
5.
Ref.1912
· 111 ·
DDS|MAB
SOFTWARE
Soft.09.05
Para establecer el funcionamiento con este tipo de captadores hay que
ajustar los bits 6, 5, 3, 1 y 0 del parámetro PP115. Sígase el procedimiento
que se indica:
Para desplazar el cero del encóder deberán seguirse estos pasos:
Realizar una búsqueda de I0.
Desplazar el accionamiento hasta el punto seleccionado como cero.
Leer la variable PV53.
Introducir el valor leído de PV53 en PP178 con el signo cambiado.
Tabla de parametrización de encóders rotativos FAGOR con I0s
codificados
NP117 = Nº de pulsos por vuelta.
En modelos FAGOR, NP117 = 18000 x factor multiplicador.
NP118 = No procede con captadores rotativos, por tanto, indiferente (x).
NP165 = Factor multiplicador x Nº de ondas entre dos I0s codificados “mó-
viles” consecutivos.
En modelos FAGOR, NP165 = Factor multiplicador x 1001.
NP166 = Factor multiplicador x Nº de ondas entre dos I0s “fijos” consecuti-
vos.
En modelos FAGOR, NP166 = Factor multiplicador x 1000.
Factor multiplicador. Relación entre el paso del rayado y el período T de
las señales de salida del captador rotativo.
En modelos FAGOR,
Factor multiplicador = Nº impulsos por vuelta /18000.
bit 0=0 Rotativo
bit 1=1 Con I0s codificados
bit 3 El sentido de contaje debería estar ya ajustado
bit 5
Realizada la búsqueda de I0, mover el eje en dirección positi-
va y realizar una nueva búsqueda de I0. Si la cota dada tras la
segunda búsqueda de I0 es menor que la dada por la primera,
complementar el valor del parámetro PP115.5
bit 6=1 Captador absoluto
Encóders
rotativos
Impulsos
por vuelta
NP166 NP165 NP117 NP118
factor
multiplicador
HOP SOP 18000 1000 1001 18000 x 1
HO SO 90000 5000 5005 90000 x 5
HO SO 180000 10000 10010 180000 x 10
NOTA. Nótese que el factor multiplicador no se refleja explícitamente en
ningún parámetro del regulador.

El regulador de posición
5.
EL REGULADOR DE POSICIÓN
Búsqueda de cero
140
Ref.1912
DDS|MAB
SOFTWARE
· 112 ·
Soft.09.05
Captación absoluta
El captador absoluto en la serie de motores FXM de FAGOR registra el va-
lor de su posición angular a lo largo de ± 2048 vueltas (4096 vueltas) y no
la pierde con la desconexión eléctrica de la máquina. Ver variable RV5.
Así, el regulador conoce desde el primer instante cuál es la posición abso-
luta del eje.
Para ubicar el cero de la máquina en un punto concreto del recorrido del ac-
cionamiento deberán seguirse los siguientes pasos:
Ahora, con el motor ya acoplado a la transmisión mecánica:
Desplazar el accionamiento hasta el punto elegido como cero.
Leer la variable PV51 (S00051) ·PositionFeedback1·.
Dar a PP177 (S00177) ·AbsoluteDistance1· el valor leído en PV51.
Captadores mono-vuelta y multi-vuelta
Parametrización
Con versiones de software anteriores a la 09.04
El bit 6 de los parámetros RP77 (S00277) ·PositionFeedback1Type· y
PP115 (S00115) ·PositionFeedback2Type· era escrito siempre por el regu-
lador dependiendo de la captación parametrizada.
Con versiones de software 09.04 y posteriores
El bit 6 de los parámetros RP77 (S00277) ·PositionFeedback1Type· y
PP115 (S00115) ·PositionFeedback2Type· va a permitir que el regulador
funcione de formas que hasta ahora no eran posibles. Así el regulador pon-
drá el bit 6 de estos parámetros a 1 en el caso que el captador parametriza-
do sea absoluto (regla absoluta o encóder absoluto multi-vuelta). Con
encóders absolutos mono-vuelta el regulador no escribirá este bit, de forma
que, el usuario podrá parametrizarlo.
Compatibilidad
Ante el cambio de una versión del regulador anterior a la 9.04 a una su-
perior, se mantendrá la compatibilidad con los parámetros de la versión
anterior y escribirá el bit 6 de la misma forma que lo hacían las versiones
anteriores para todos los tipos de captadores
.
ADVERTENCIA. Antes de realizar cualquier operación, asegúrese de po-
ner a cero vueltas el encóder absoluto con el motor desacoplado de la trans-
misión mecánica. Es decir, mover el motor suelto hasta hacer la variable
PV51=0 y parametrizar PP177=0.
NOTA. Si el captador absoluto es una captación directa, sígase el mismo
procedimiento teniendo en cuenta PV53 (S00053) ·PositionFeedback2· y
PP178 (S00178) ·AbsoluteDistance2·.
OBLIGACIÓN. Adviértase que debe parametrizarse siempre obligatoria-
mente - PP147 (S00147) ·HomingParameter· bit 3 - aunque se disponga
de captación absoluta para indicar con qué captación se va a referenciar la
máquina, es decir, si va a ser con captación motor o captación directa.
NOTA IMPORTANTE. Hasta la versión 09.03 del regulador el tratamiento
del captador absoluto era siempre como un multi-vuelta incluso con cap-
tadores mono-vuelta. A partir de la versión 09.04 se establece un trata-
miento diferente según se disponga de captador mono-vuelta ó multi-
vuelta Stegmann, Endat ó SSI. Este tratamiento ahora afecta en la bús-
queda de cero si la máquina tiene reducción.

El regulador de posición
EL REGULADOR DE POSICIÓN
Búsqueda de cero
5.
Ref.1912
· 113 ·
DDS|MAB
SOFTWARE
Soft.09.05
Forma de proceder
A partir de la version 9.04, tras realizar la parametrización anteriormente
indicada, la forma de proceder es:
Si la captación está parametrizada con RP77.6 o PP115.6 a 1 · sea
captación absoluta o no ·, se utilizará el parámetro PP177 (S00177)
·AbsoluteDistance1· o PP178 (S00178) ·AbsoluteDistance2· en el cál-
culo inicial de la cota (a partir de la posición que devuelve la captación).
Si la captación está parametrizada con RP77.6 o PP115.6 a 0 · capta-
ción incremental o encóder absoluto mono-vuelta · no se utilizará el pa-
rámetro PP177 (S00177) ·AbsoluteDistance1· o PP178 (S00178)
·AbsoluteDistance2· en el cálculo de la cota inicial (a partir de la posi-
ción que devuelve la captación).
Tras la ejecución de una búsqueda de cero, la cota no se verá modifi-
cada.
Tras la ejecución de una búsqueda de cero, el comando se ejecutará
y la cota podrá verse modificada. Habrá que configurar correctamen-
te la búsqueda de cero PP147 (S00147) ·HomingParameter· tenien-
do en cuenta si existe I0 físico, leva ...

El regulador de posición
5.
EL REGULADOR DE POSICIÓN
CRC en encóders lineales absolutos SA/GA de FAGOR
140
Ref.1912
DDS|MAB
SOFTWARE
· 114 ·
Soft.09.05
5.3 CRC en encóders lineales absolutos SA/GA de FAGOR
La familia de reglas absolutas SA/GA de FAGOR dispone de CRC (Compro-
bación de la Redundancia Cíclica) permitiendo detectar cualquier alteración
de los datos durante su transmisión garantizando así la integridad de los
mismos.
Esta comprobación es particularmente efectiva en la detección de errores
ocasionados por la entrada de ruido en los canales de transmisión.
El parámetro que interviene directamente en esta prestación es:
que siendo parametrizado a 1 obliga al regulador a verificar si el valor que
le es enviado de la posición inicial del eje (medido por un encóder lineal ab-
soluto SA/GA de FAGOR) no se ha visto alterado (por ruidos u otros fenó-
menos) durante la transmisión, garantizando así la integridad del dato.
Si el valor de la cota inicial de la posición, enviado desde el captador al re-
gulador, se ve alterado durante la transmisión, el CRC lo detecta y se activa
el código de error E817 en el display del regulador indicando este hecho.
Para obtener más información referente al parámetro RP64 y a los códigos
de error E814 y E817, véanse los capítulos 13 y 14, respectivamente, de
este mismo manual.
NOTA. Disponible desde la versión 06.20 del software del regulador.
RP64 F02364 SSIFCheck

El regulador de posición
EL REGULADOR DE POSICIÓN
Vigilancia de la marca de I0 en cada vuelta del encóder
5.
Ref.1912
· 115 ·
DDS|MAB
SOFTWARE
Soft.09.05
5.4 Vigilancia de la marca de I0 en cada vuelta del encóder
El objetivo de esta prestación es verificar la repetitividad de la señal de I0
del captador en cada vuelta dada por el eje motor. Para ello, el regulador es-
tablece una vigilancia continua que confirme que son generados el mismo
nº de pulsos por vuelta desde que se detecta la marca de I0 del encóder
hasta que es nuevamente detectada en la siguiente vuelta del eje y así su-
cesivamente en el resto de vueltas.
Los parámetros que intervienen directamente en esta prestación son:
que determinan si ha de ejecutarse o no la tarea (RP8) y el máximo nº de
pulsos de desviación entre lecturas de la marca de I0 (RP9) admitidos como
margen de error para considerar satisfactoria la repetitividad de la señal de
I0.
Esta comprobación continua por vuelta permitirá detectar un error de capta-
ción por pérdida de contaje o por modificación de la posición de la marca de
I0 que será visualizado en el display del regulador con el código de error
E256.
Para obtener más información referente a los parámetros RP8 y RP9 y al
código de error E256, véanse los capítulos 13 y 14, respectivamente, de
este mismo manual.
NOTA. Disponible desde la versión 06.20 del software del regulador.
INFORMACIÓN. Adviértase que la prestación de vigilancia de la marca de
I0 no es compatible con encóders lineales programables SUD/SVUD de FA-
GOR.
INFORMACIÓN. Adviértase que no podrá ejecutar esta prestación si dispo-
ne de un encóder SinCoder Stegmann en su motor y de una tarjeta de cap-
tación CAPMOTOR-1 en su regulador.
OBLIGACIÓN. Con un encóder SinCoder Stegmann instale una CAPMO-
TOR-2 en el regulador para que esta tarea pueda ser realizada.
i
i
RP8 F01518 I0DistanceTest
RP9 F01519 I0Margin
OBLIGACIÓN. Asegúrese de que la captación con la que va a comprobar
la repetitividad de I0 y que va a parametrizar en RP8 coincide con la capta-
ción de referenciado de la máquina parametrizada en el bit 3 del parámetro
PP147. Así, si parametriza RP8=1, compruebe que PP147.bit 3=0 y si
RP8=2 compruebe que PP147.bit 3=1.
NOTA. Sepa que con RP8=0 no se comprobará la repetitividad de I0.

El regulador de posición
5.
EL REGULADOR DE POSICIÓN
Compensación de la holgura
140
Ref.1912
DDS|MAB
SOFTWARE
· 116 ·
Soft.09.05
5.5 Compensación de la holgura
Las holguras que podrán compensarse y que ahora se tratan son:
Holgura entre la mesa y el husillo.
Holgura en la sujeción de la cabeza lectora de una regla.
Holgura entre la captación motor y la captación directa.
La compensación de cualquiera de estas holguras podrá realizarse única-
mente en sistemas configurados en modo de funcionamiento con consigna
de control de posición. La captación de la posición se llevará a cabo desde
la captación motor o la captación directa, según sea la que esté presente.
Desde AP1 se establecerá la configuración deseada.
Para más detalles sobre AP1, ver capítulo 13 de este manual.
Con captación motor
Compensación de la holgura mesa-husillo
Cuando la captación de posición se obtiene con un captador motor (encó-
der) puede ser necesario compensar la holgura existente entre la mesa y el
husillo en los cambios de sentido de movimiento de un eje.
El regulador, actuando internamente sobre la consigna de posición
, será ca-
paz de compensar la holgura corrigiendo la histéresis del movimiento en los
cambios de sentido del eje.
El parámetro online de ajuste de compensación de holgura es:
y solamente se realizará el ajuste si:
el regulador está en modo de control de posición y
no se dispone de captación directa.
es decir, el parámetro de configuración del sistema para definir su modo de
funcionamiento será AP1=3 o AP1=11.
F. S5/13
Holgura mesa -husillo.
PP58 S00058 Backlash
En una inversión de movimiento,
la mesa abandona la posición 1
para pasar a la posición 2 e ini-
ciar así el movimiento del eje en
sentido contrario. En la transi-
ción de la posición 1 a la posición
2 recorre un espacio que se co-
rresponde con la holgura y donde
el eje no se mueve. Para com-
pensar la holgura debe parame-
trizarse PP58 con su valor
aproximado.
M
E
M
E
Sentido del movimiento del eje
1
2
1
2
Sentido del movimiento del eje
Husillo
Husillo
Mesa
Mesa
PP58: Holgura mesa-husillo
E: Captación motor (encóder)
M: Motor
Mesa
Husillo
Holgura
OBLIGACIÓN. Tanto el regulador como el CNC disponen del parámetro
que determina el valor de la holgura mesa-husillo. Solo ha de parametrizar-
se este valor en uno de ellos, es decir, en el CNC o en el regulador. Al otro
parámetro se le asignará un valor nulo.
NOTA. Si se dispone de una versión de software instalada en el regulador
anterior a la 06.10, con esta configuración del sistema (AP1=3 o AP1=11)
solo podrá ajustarse la compensación de la holgura.
INFORMACIÓN. Para realizar cualquiera de los ajustes referentes a la com-
pensación de la holgura a los que seguidamente se hace alusión
es necesario
tener instalada en el regulador una versión de software 06.10 o superior.
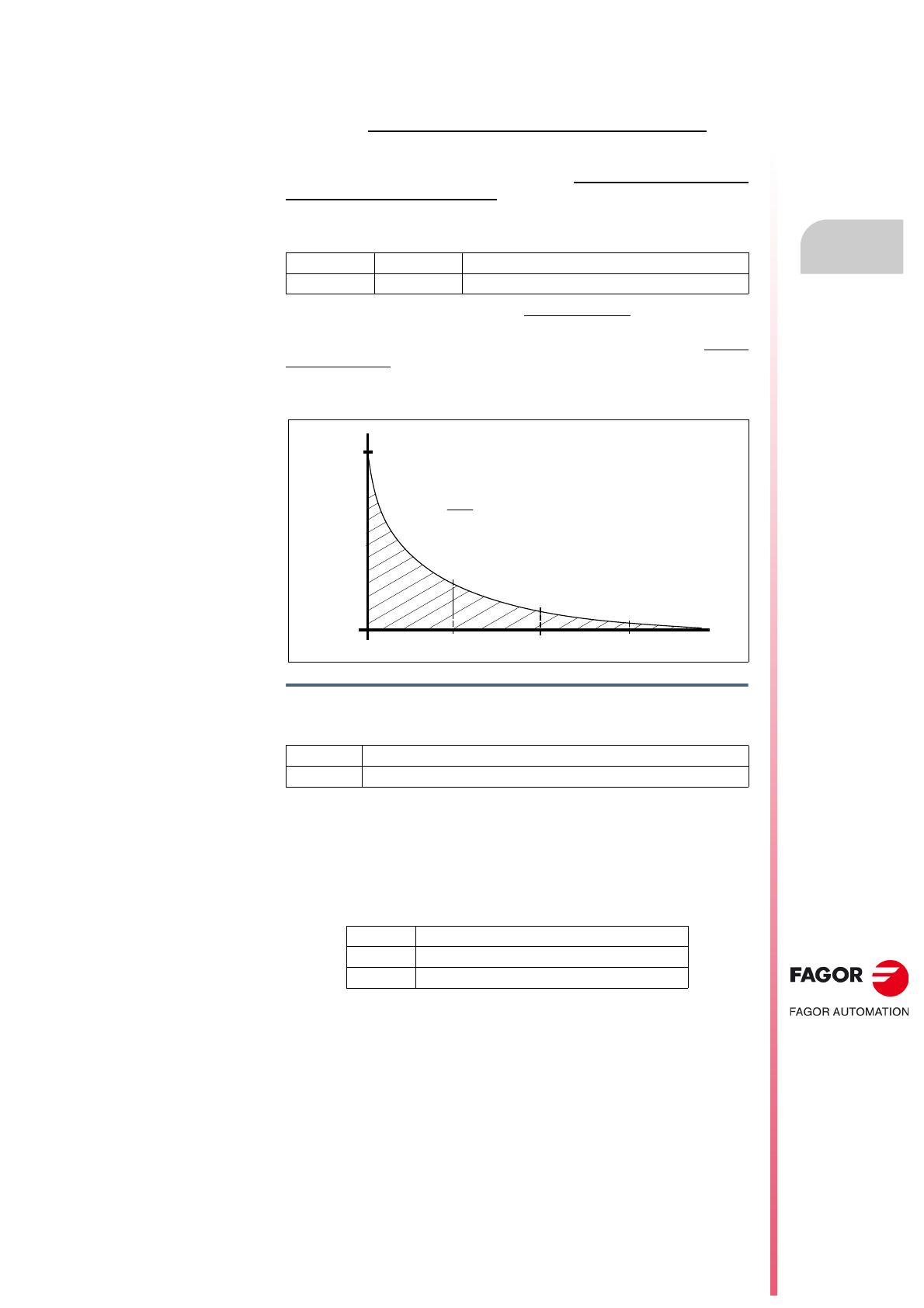
El regulador de posición
EL REGULADOR DE POSICIÓN
Compensación de la holgura
5.
Ref.1912
· 117 ·
DDS|MAB
SOFTWARE
Soft.09.05
Con captación directa
Compensación de la holgura mesa-husillo
El regulador, actuando internamente sobre la consigna de velocidad es ca-
paz de compensar la holgura existente entre la mesa y el husillo corrigiendo
así el error de seguimiento que se origina en los cambios de sentido del mo-
vimiento de un eje. Se hablará en adelante de compensación de la holgura
mesa-husillo por pico de inversión.
Los parámetros online que intervienen en el ajuste de la compensación de
esta holgura son:
Esta compensación de la holgura por pico de inversión
(reversal peak) se
realiza incrementando la amplitud de la velocidad del motor (PP2) durante
un período de tiempo (PP3) tal que el producto de ambos coincida de ma-
nera aproximada con el valor de la holgura mesa-husillo.
La compensación de la holgura por pico de inversión (reversal peak) atien-
de a una función exponencial como la dada en la figura F. S5/14:
donde:
El área total bajo la curva entre (0, infinito) que equivale a la integral de la
función exponencial entre dichos límites, representa exactamente la com-
pensación de la holgura mesa-husillo y entre (0,
PP3) representa un valor
aproximado de la misma:
Así, entre los valores:
Parametrización de PP2 y PP3
El valor de PP2 se obtendrá despejándolo de la expresión:
PP2 (rev/min) · PP3 (ms) = Holgura (mm) · k
donde:
PP3 = 30 ms (valor por defecto)
Holgura (mm) = Medición de la holgura con un reloj comparador.
k = factor de conversión de unidades
PP2 F01301 BacklashPeakAmpliture
PP3 F01302 BacklashPeakTime
F. S5/14
Compensación exponencial de la holgura por pico de inversión.
PP2 Amplitud inicial en rev/min
PP3 Constante de tiempo en ms
0 y 1·PP3
se compensa el 63 % de la holgura
0 y 2·PP3
se compensa el 87 % de la holgura
0 y 3·PP3
se compensa el 95% de la holgura
33āH
UHYPLQ
33
33
ā33 ā33
PV
W
33
Área PP2 PP3 compensación de la holgura, con 123,,=
k
60 1000
NP122 NP123 mm NP121
------------------------------------------------------------------------------------
=

El regulador de posición
5.
EL REGULADOR DE POSICIÓN
Compensación de la holgura
140
Ref.1912
DDS|MAB
SOFTWARE
· 118 ·
Soft.09.05
Esta compensación de la holgura de husillo se realiza sólamente si:
el regulador está en modo de control de posición y
se dispone de captación directa.
es decir, el parámetro de configuración del sistema para definir su modo de
funcionamiento será AP1= 4 o AP1=12.
Compensación de la holgura en la sujeción de la cabeza lectora
de la regla
Además de la compensación mesa-husillo que se acaba de exponer, es po-
sible la existencia de una holgura en la sujeción de la cabeza de la regla en
una inversión de movimiento que también puede compensarse. El regula-
dor, actuando internamente sobre la consigna de posición será capaz de
compensar esta holgura.
El parámetro online que interviene en el ajuste de la compensación de esta
holgura es:
La compensación de esta holgura se realiza sólamente si:
el regulador está en modo de control de posición y
se dispone de captación directa (regla).
es decir, parametrizando AP1=4 o AP1=12.
NOTA. El valor medido con el reloj comparador para la holgura es un valor
aproximado y que dependiendo de las condiciones dinámicas de funcio-
namiento podrá sufrir pequeñas variaciones.
NOTA. En el proceso de ajuste deben manipularse convenientemente am-
bos parámetros (PP2 y PP3) hasta conseguir minimizar el error de segui-
miento.
OBLIGACIÓN. Tanto el regulador como el CNC disponen de parámetros
que determinan el valor de la holgura mesa-husillo. Solo ha de parametri-
zarse este valor en uno de ellos, es decir, en el CNC o en el regulador. Al
otro parámetro se le asignará un valor nulo.
PP58 S00058 Backlash
INFORMACIÓN. La compensación de esta holgura viene implementada a
partir de la versión 06.10 del software del regulador. No es posible esta
compensación con versiones anteriores.
INFORMACIÓN. Por compatibilidad y seguridad, si se actualiza el software
a una versión 06.10 o superior, desde una anterior, parametrizada con
PP58 distinto de cero (recuérdese que este parámetro existía en versiones
anteriores pero solo con captación motor) y regulando en posición con una
regla, internamente se pondrá el parámetro a cero de manera automática
para que su comportamiento sea igual al anterior a la actualización. Si tras
la actualización se desea compensar una posible holgura en la cabeza de la
regla habrá que parametrizar PP58 con el valor correspondiente.
OBLIGACIÓN. Tanto el regulador como el CNC disponen de parámetros
que determinan el valor de la holgura en la sujeción de la cabeza de la re-
gla. Parametrizar este valor solo
en uno de ellos, es decir, en el CNC o en
el regulador. Al otro parámetro se le asignará un valor nulo.
i
i

El regulador de posición
EL REGULADOR DE POSICIÓN
Compensación de la holgura
5.
Ref.1912
· 119 ·
DDS|MAB
SOFTWARE
Soft.09.05
Con ambas captaciones
Cuando la regulación se lleva a cabo con control de posición y se dispone
de las dos captaciones (captación motor y captación directa), tanto si se re-
gula con una como con otra, la compensación de la holgura se parametri-
zará en:
Ahora bien, cuando la regulación se establece con captación motor se está
compensando con este parámetro la holgura mesa-husillo y si se establece
con captación directa se está compensando la holgura de la cabeza lectora
de la regla.
En el caso de regular con captación directa, habrá que ajustar además los
parámetros:
para compensar la holgura mesa-husillo por pico de inversión, ya que con
PP58 se ha compensado la holgura de la cabeza lectora.
Por tanto, ante un cambio de captación online, como estas dos holguras a
las que se acaba de hacer referencia son de diferente naturaleza, habrá que
parametrizar previamente a un cambio de captación online, el parámetro
PP58 según corresponda a una captación motor (holgura mesa-husillo) o
una captación directa (holgura de la cabeza lectora de la regla).
Compensación de la holgura entre ambas captaciones en una
inversión del sentido del movimiento
Cuando la regulación se lleva a cabo con control de posición y con las dos
captaciones, puede suceder que antes de recibir el regulador una consigna
de inversión, haya habido un desplazamiento relativo entre captaciones (p.
ej. en una frenada brusca antes de una inversión de movimiento). Esto sig-
nifica que parte de la holgura entre captaciones ya habría sido recorrida
una distancia «d» y, por tanto, la holgura que habría que compensar en la in-
versión (por pico de inversión) se vería reducida en un porcentaje.
En el ajuste de esta holgura intervienen los siguientes parámetros online:
donde se compensa la holgura entre captaciones (PP59) con un pico de in-
versión de valor (PP2·PP3).
Introducidos los valores correspondientes en estos parámetros, el regula-
dor, calcula internamente cual es el porcentaje de holgura que realmente
debe compensar y recalcula el valor de PP2 multiplicando el valor que tenía
por el factor (1-d/PP59).
PP58 S00058 Backlash
PP2 F01301 BacklashPeakAmpliture
PP3 F01302 BacklashPeakTime
NOTA. Estas compensaciones de las holguras solo podrán realizarse si
se dispone de una versión de software 06.10 o posterior.
NOTA. Esta compensación únicamente deberá realizarse cuando el com-
portamiento de una máquina sometida a inversiones del sentido de su mo-
vimiento no repite su comportamiento desde el punto de vista del error de
seguimiento.
PP59 F01307 Backlash12
PP2 F01301 BacklashPeakAmpliture
PP3 F01302 BacklashPeakTime
PP59 Holgura entre captaciones en mm
PP2 Amplitud inicial en rev/min
PP3 Constante de tiempo en ms
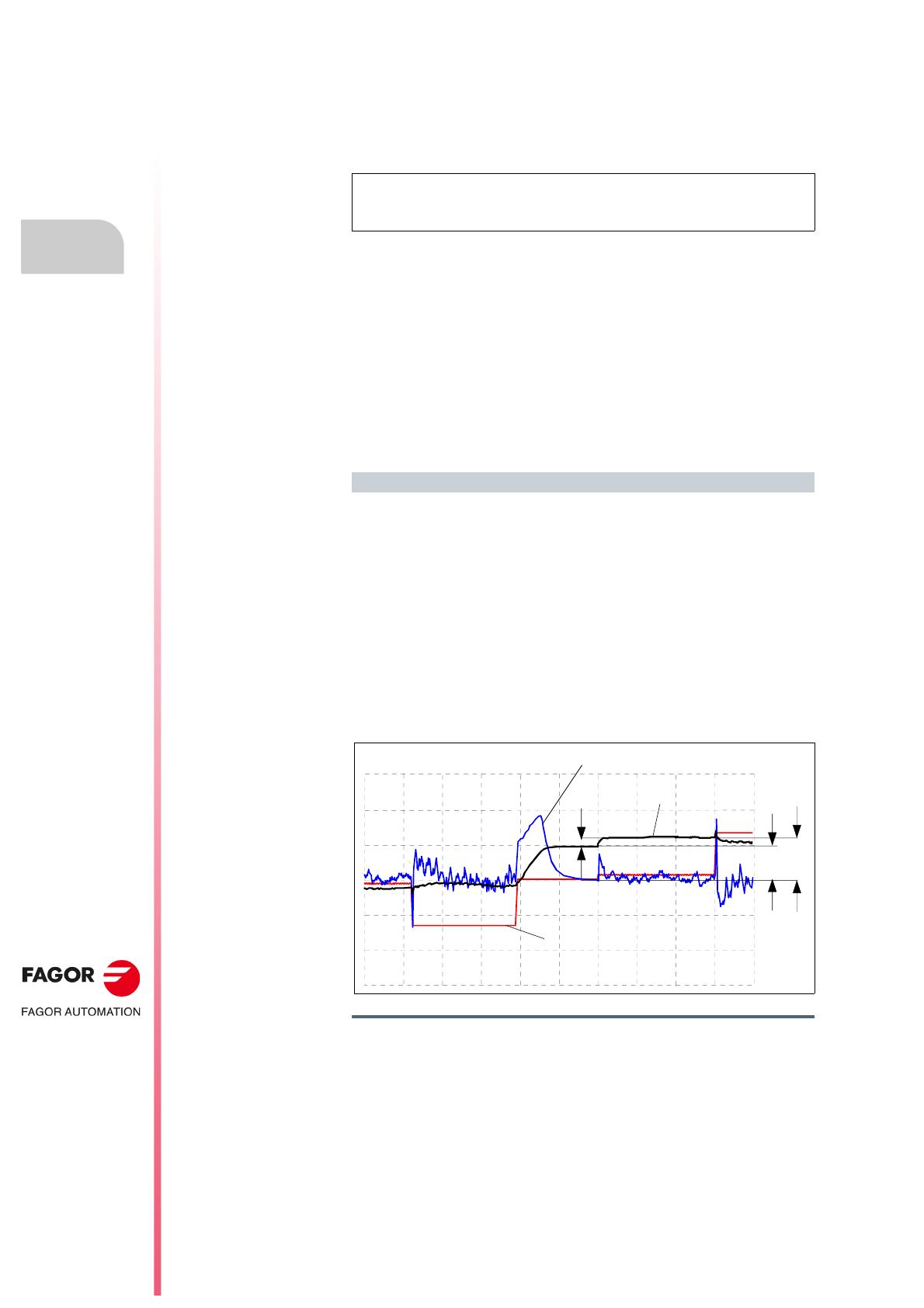
El regulador de posición
5.
EL REGULADOR DE POSICIÓN
Compensación de la holgura
140
Ref.1912
DDS|MAB
SOFTWARE
· 120 ·
Soft.09.05
Parametrización de PP59
El valor de la holgura PP59 será parametrizado con el valor leído en PV190
del oscilograma representativo del movimiento de la mesa (utilícese, p, ej. el
osciloscopio del WinDDSSetup). La variable PV190 deberá visualizarse ya
que en ella se suministra el valor de la diferencia entre captaciones.
Parametrización de PP2 y PP3
El valor de PP2 se obtendrá despejándolo de la expresión:
PP2 (rev/min) · PP3 (ms) = Holgura (mm) · k
donde:
PP3 = 30 ms (valor por defecto)
Holgura (mm) = Valor obtenido en PV190
(véase el oscilograma)
k = factor de conversión de unidades:
Supóngase que el movimiento de una mesa viene representado en el osci-
lograma de la figura donde se muestra el error de seguimiento, la consigna
de velocidad (SV7) y la diferencia entre captaciones (PV190). Una frenada
brusca antes de efectuar el movimiento de inversión de la mesa provoca un
desplazamiento «d» de una captación respecto de la otra dentro de la hol-
gura.
Supóngase que la lectura de PV190 = 20 µm (holgura entre captaciones) y
la del desplazamiento d = 10 µm (desplazamiento relativo entre captaciones
antes de efectuar la inversión). Esto supone que solo habrá que compensar
el porcentaje dado por e = (1- d/PP59) del total de la holgura, es decir = [(1-
10/20)·PP2]·PP3 = (0.5·PP2)·PP3. En este ejemplo, el regulador interna-
mente reducirá al 50% el valor de PP2 parametrizado dejando PP3 con el
valor de 30 ms (por defecto).
Nótese que no es necesario medir rigurosamente exacto el valor de PV190.
Su valor obtenido en el oscilograma será el valor que debe introducirse en
PP59.
No es necesario leer el valor de «d». El regulador internamente realiza esta
labor. Se representa aquí únicamente para informar al usuario de a qué se
hace referencia cuando se dice que se ha producido un desplazamiento «d»
entre captaciones.
NOTA. El valor de la holgura entre captaciones (PP59) también se puede
obtener utilizando un reloj comparador. El resultado será el mismo que el
obtenido en la variable PV190.
Ejemplo.
F. S5/15
Oscilograma representativo del comportamiento de la mesa en una inver-
sión. Obtención del valor de PV190.
k
60 1000
NP122 NP123 mm NP121
------------------------------------------------------------------------------------
=
PV190
Error de seguimiento
Consigna de velocidad
Diferencia entre captaciones
d
e

El regulador de posición
EL REGULADOR DE POSICIÓN
Compensación de la holgura
5.
Ref.1912
· 121 ·
DDS|MAB
SOFTWARE
Soft.09.05
Tampoco es necesario leer el valor de «e». El regulador internamente tam-
bién realiza esta labor. Se representa aquí para informar al usuario de cuál
es el porcentaje de holgura que realmente compensa el regulador.
Esta compensación de la holgura entre captaciones se realizará si:
el regulador está en modo de control de posición.
se regula con ambas captaciones, es decir, el parámetro de configura-
ción del sistema en su modo de funcionamiento será AP1=5 o AP1=13.
OBLIGACIÓN. El CNC no dispone de parámetro equivalente a PP59 y, por
tanto, solo podrá parametrizarse la compensación de esta holgura en el re-
gulador.
NOTA. Esta compensación de holgura solo podrá realizarse si se dispone
de una versión de software 06.10 o posterior.

El regulador de posición
5.
EL REGULADOR DE POSICIÓN
Compensación de la holgura
140
Ref.1912
DDS|MAB
SOFTWARE
· 122 ·
Soft.09.05
Retardo de la compensación por pico de inversión
Con el objetivo de mejorar el control sobre el adelanto que se produce en la
compensación de la holgura en una inversión del sentido del movimiento
con respecto a la posición real del lazo, se dispone de un parámetro que
permite retrasar un cierto tiempo el lanzamiento de esta compensación.
El parámetro online de ajuste donde establecer este tiempo es:
Así, una inversión del sentido de movimiento en un sistema configurado con
control de posición donde el lazo de posición se cierra en el regulador se lle-
va a cabo del siguiente modo:
El CNC envía un incremento de posición, de signo contrario al anterior,
es decir, envía la consigna de inversión del sentido del movimiento.
El regulador recibe esta consigna y ordena la compensación de la hol-
gura en la inversión del sentido del movimiento. Internamente consigue
realizar esta compensación adelantándose a la posición real del lazo.
Con este parámetro, que por defecto está parametrizado a cero, podrán es-
tablecerse cuántos milisegundos se desea retrasar la compensación de la
holgura. El regulador internamente, redondeará el valor parametrizado a un
valor inmediatamente inferior múltiplo del tiempo de lazo.
NOTA. Este retardo de la compensación de holgura solo podrá realizarse
si se dispone de una versión de software 06.10 o superior y es de utilidad
cuando la compensación en una inversión se adelanta demasiado pudien-
do generar pequeñas marcas en forma de «picadas» en la superficie de la
pieza mecanizada.
PP13 F01304 BacklashPeakDelay

El regulador de posición
EL REGULADOR DE POSICIÓN
Compensación de la holgura
5.
Ref.1912
· 123 ·
DDS|MAB
SOFTWARE
Soft.09.05
Mejora en la compensación de la holgura. Corte de la com-
pensación exponencial
Ya se explicaba en un apartado anterior como se realizaba la compensación
de la holgura mesa-husillo cuando se disponía de captación directa. Así, en
una inversión del sentido de movimiento de la mesa cuando se realizaba esta
compensación exponencial por pico de inversión, el producto (PP2·PP3) se
correspondía en primera aproximación con el valor de la holgura
.
Ahora bien, este valor aproximado de la holgura puede variar realmente se-
gún la dinámica del sistema y entonces si la holgura es algo menor que la
considerada habrá que dejar de realizar la compensación (corte de la com-
pensación exponencial) en el momento oportuno. Con el objetivo de saber
cuando se ha alcanzado el otro extremo de la holgura y cuando debe cor-
tarse la compensación exponencial se introduce el parámetro online:
En este parámetro se introducirá cuánto debe moverse la mesa desde el
momento de la inversión para considerar que realmente se ha alcanzado el
otro extremo de la holgura y cortar la compensación exponencial. El valor in-
troducido en este parámetro desde el WinDDSSetup será en mm en pre-
sencia de ejes lineales o en grados con ejes rotativos.
Si se parametriza PP14 con 20 dµm (desde el WinDDSSetup se parametri-
zará PP14 = 0,0020 mm), cuando la mesa se haya movido esta distancia tras
la inversión del sentido del movimiento, el regulador entonces considera que
ha sido alcanzado el otro extremo de la holgura y dejará de realizar la com-
pensación exponencial PP2·PP3 (corte de la compensación exponencial).
NOTA. El corte de la compensación de la holgura por pico de inversión
con captación directa solo podrá realizarse si se dispone de una versión
de software 06.10 o superior. Esta prestación es, siempre, de recomenda-
ble aplicación, al tratarse de una mejora de la compensación por pico de
inversión. Mejora el aspecto del mecanizado especialmente evitando «pi-
cadas» como consecuencia de haber dado un impulso adicional a la con-
signa de velocidad mayor del necesario para compensar la holgura.
PP14 F01305 BacklashPeak2FeedbackDisplacement
Ejemplo.
F. S5/16
Corte de la compensación exponencial de la holgura mesa-husillo en pre-
sencia de captación directa. Parámetro PP14.
PP2
[rev/min]
[ms]
Orden de ejecución
de la compensación
Orden de fin de ejecución
de la compensación (corte).
Se ha producido un movimiento
de la mesa de PP14 mm dado por la
captación directa.
Consigna de
posición
Feedback de
posición de la
captación directa
Amplitud del movimiento
parametrizado
PP3
PP2 · e
- t / PP3
INFORMACIÓN. Nótese que con PP14 = 0 o PP14 = - 0,0001, la compen-
sación exponencial de la holgura por pico de inversión se realizará completa,
es decir, será deshabilitado el corte de la compensación exponencial, tal y
como se ha venido realizando en versiones anteriores a la versión 06.10. Si
se sustituye una versión anterior a la 06.10 por una versión 06.10 o superior,
tras la sustitución se habrá parametrizado automáticamente PP14= - 0,0001.
Para versiones 06.10 y superiores, el valor por defecto será PP14=0.
i
AVISO: Si PP140 no se compensará el rozamiento en la inversión. Hasta
la versión 06.10 ambas compensaciones se realizaban simultáneamente.
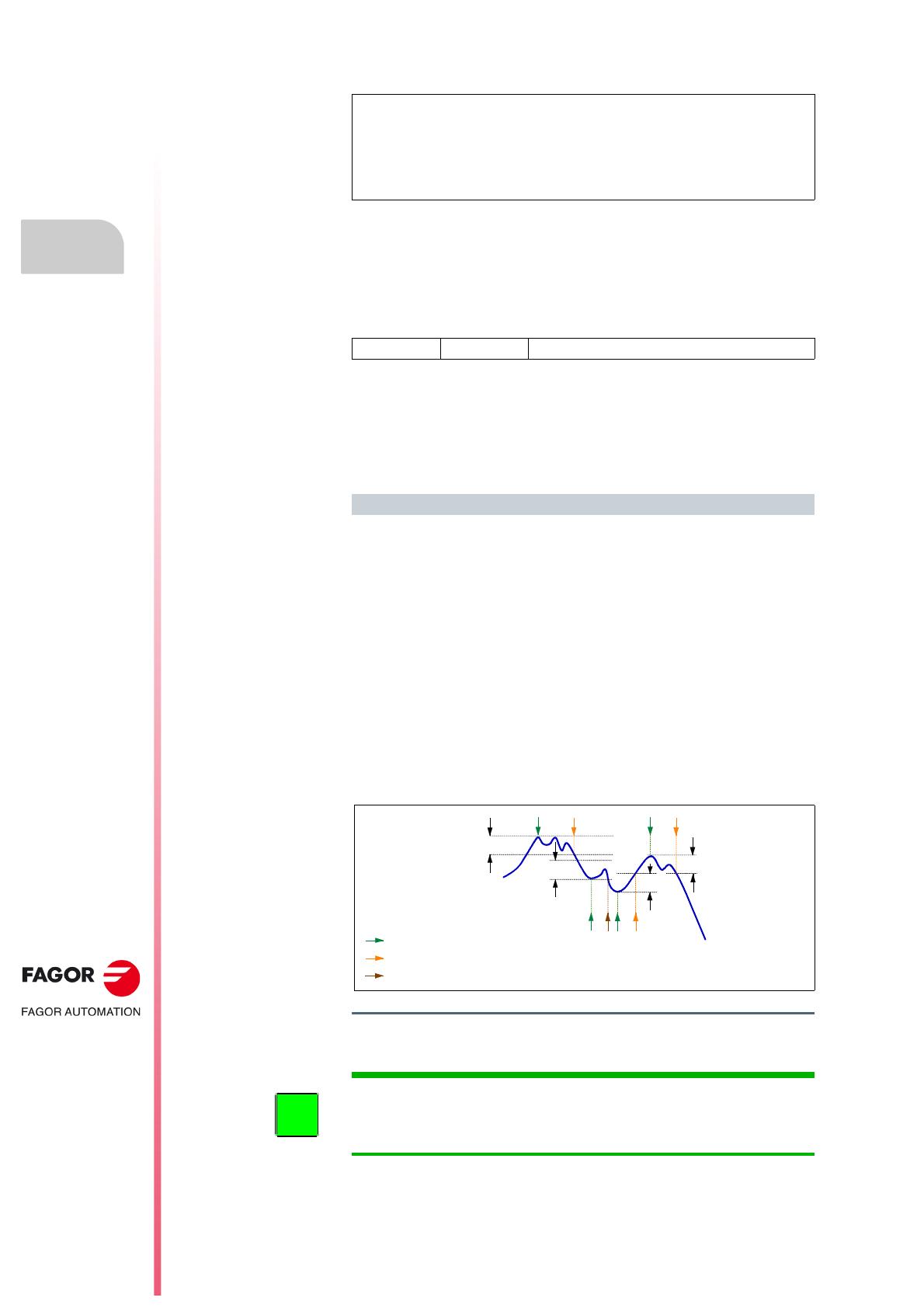
El regulador de posición
5.
EL REGULADOR DE POSICIÓN
Compensación de la holgura
140
Ref.1912
DDS|MAB
SOFTWARE
· 124 ·
Soft.09.05
Histéresis en la orden de compensación
Hasta ahora, el regulador siempre ha dado la orden de compensar por pico
de inversión tras detectar una inversión en el sentido del movimiento de la
mesa, siguiendo la consigna dada por el CNC. Con el objetivo de poder con-
trolar cuándo se desea realmente lanzar la compensación exponencial por
pico de inversión tras detectar una inversión en el sentido del movimiento y
no lanzarla siempre que se recibe una consigna de inversión se introduce el
parámetro de histéresis online:
En este parámetro se introducirá el valor que debe variar la consigna de po-
sición dada por PV47 tras la primera inversión del sentido del movimiento
(histéresis) para que el regulador considere que se le ha dado la orden de
compensar, evitando así lanzar compensaciones cada vez que recibe la or-
den de invertir el sentido del movimiento. El valor introducido en este pará-
metro desde el WinDDSSetup será en mm en presencia de ejes lineales o
en grados con ejes rotativos.
Si se parametriza PP15 con 5 dµm (desde el WinDDSSetup se parametri-
zará PP15 = 0,0005 mm si el eje es lineal), el regulador no activará la com-
pensación de inversión en todas las inversiones siguientes a la primera
mientras la consigna de posición dada por PV47 no haya variado al menos
un valor igual al dado en PP15 desde que se dió la primera orden de invertir
la consigna de posición.
Es decir, que si se le envía una orden de inversión cuando la consigna de
posición ha variado 2 dµm desde la posición donde se produjo la primera or-
den de inversión, no se lanza la compensación (no ha superado el valor
dado en PP15) y simplemente se efectúa la inversión.
Solo cuando la variación de la consigna de posición alcance los 5 dµm se
lanzará entonces la compensación y la siguiente orden de invertir se tomará
como nueva referencia sobre la que se evalue la variación de la consigna de
posición para establecer cuándo se alcanza nuevamente el valor dado en
PP15 y volver a compensar. Ver figura F. S5/17.
NOTA. La disponibilidad de esta prestación es efectiva a partir de la ver-
sión 06.10 del software del regulador y su aplicación es conveniente úni-
camente en situaciones donde se producen inversiones del sentido del
movimiento muy pequeñas (p.ej. de ±1 dµm). El objetivo es evitar que se
lance la compensación en la inversión en estas situaciones ya que suele
generar ligeras marcas en el mecanizado de la pieza.
PP15 F01306 ReversalHysteresis
Ejemplo.
F. S5/17
Compensar o no la holgura (por pico de inversión) tras recibir una consigna
de inversión del sentido de movimiento del eje. Parámetro PP15.
PV47 [S00047]
Amplitud de la histéresis
PP15 [F01306]
ReversalHysteresis
1
Inversión de consigna de posición
1
PP15
PP15
PP15
PP15
1
Límite máximo dado por PP15. Lanzamiento de la compensación
2
Límite de cancelación de la compensación
3
2
2
1
2
1
3
PositionCommand
Consigna de posición
PV47 [S00047]
PositionCommand
Consigna de posición
INFORMACIÓN. Con PP15 = 0, la compensación exponencial de la holgura
por pico de inversión se realizará siempre en cada inversión, es decir, sin
amplitud de histéresis, tal y como se ha venido realizando en versiones an-
teriores a la versión de software 06.10 del regulador.
i

El regulador de posición
EL REGULADOR DE POSICIÓN
Compensación de la holgura
5.
Ref.1912
· 125 ·
DDS|MAB
SOFTWARE
Soft.09.05
Mejoras en la compensación de rozamiento
La compensación del rozamiento y de la holgura (por pico de inversión) has-
ta la versión de software 06.10 del regulador se realizaban simultáneamen-
te generando cierta complejidad a la hora de realizar el ajuste. Así, al
realizar el ajuste para compensar el rozamiento y seguidamente el ajuste
para compensar la holgura, se optimizaba el comportamiento de la máqui-
na. Ahora bien, si por la razón que fuese había que hacer alguna modifica-
ción en el ajuste de la compensación del rozamiento era necesario reajustar
la compensación de la holgura.
A partir de la versión 06.10 del regulador se desacoplan ambas compensa-
ciones y así cuando se compensa la holgura (por pico de inversión) se anula
la compensación del rozamiento. Esta decisión es totalmente coherente con
la realidad, ya que cuando se está en la zona de la holgura el rozamiento es
prácticamente nulo. Ver figura F. S5/18.
Además, en esta misma versión se introduce un nuevo parámetro online de
ajuste de la amplitud de la histéreses en la compensación del par de roza-
miento:
que permite modificar por parámetro la amplitud de la histerésis para com-
pensar el par de rozamiento. Se parametrizará desde el WinDDSSetup en
unidades de rev/min.
Ahora, será posible aumentar este valor mediante el parámetro TP15 resol-
viendo el problema que en algunas máquinas (donde el valor de kv era alto)
podía surgir debido a la existencia de ruido en la consigna de velocidad de
aquel orden de magnitud.
NOTA. La disponibilidad de esta prestación es efectiva a partir de la ver-
sión de software 06.10 del regulador y su aplicación es siempre conve-
niente por tratarse de una mejora.
F. S5/18
Compensación nula del par de rozamiento en la zona de la holgura.
TP15 F01909 TorqueCompensationSpeedHysteresis
NOTA. En versiones anteriores a la 06.10 del software del regulador esta
compensación del par de rozamiento era fija con un valor de 0,0001 x
SP10 (velocidad máxima de la aplicación).
PP2
[rev/min]
[ms]
Orden de corte de la
compensación de la holgura.
Se ha producido un movimiento
de la mesa de PP14 mm dado por la
captación directa.
PP3
PP2 · e
- t / PP3
Orden de inicio
de la compensación
de la holgura
Compensación del par
de rozamiento en versiones
anteriores a la v.06.10
Rozamiento
Compensación del par
de rozamiento en versiones
posteriores a la v.06.10

El regulador de posición
5.
EL REGULADOR DE POSICIÓN
Auto-ajuste de la inercia en modo offline
140
Ref.1912
DDS|MAB
SOFTWARE
· 126 ·
Soft.09.05
5.6 Auto-ajuste de la inercia en modo offline
Es fundamental conocer el valor real del momento de inercia total Jt (inercia
del motor + inercia de la carga) del sistema en movimiento para realizar el
ajuste del feed-forward de aceleración.
A continuación se establece como realizar automáticamente el cálculo del
parámetro de inercia NP1 (relación entre el momento de inercia de la carga
y del rótor del motor) en modo offline durante el proceso de ajuste de la má-
quina.
Nótese que, atendiendo a este cálculo de NP1 con un valor de PP217 del
100 % y con:
captación motor se minimiza prácticamente a 0 el error de seguimiento.
captación directa ·dependiendo de la calidad de la máquina (holgura en-
tre mesa y tornillo del husillo)· el grado de minimización del error de se-
guimiento dependerá de este factor.
Esta prestación actúa sobre los siguientes parámetros:
De rozamiento:
De inercia:
Todos estos parámetros son online, es decir, de efecto inmediato, y por tan-
to, tras ejecutar la prestación mediante el comando:
recalcula todos ellos, sobreescribiéndolos con los nuevos valores calcula-
dos.
Para establecer el autoajuste de estos parámetros deberá programarse
desde el CNC la siguiente secuencia de movimientos:
1. Movimiento a una velocidad constante lenta (p.ej: 50 rev/min).
2. Movimiento a una velocidad constante rápida (p.ej: la mitad de la velo-
cidad nominal del motor).
3. Aceleración apreciable entre ambos movimientos (p. ej: 2000 mm/s²)
4. Duración de los movimientos a velocidad constante (entre 1 y 5 s).
Cuando la máquina está en movimiento, entonces deberá ejecutarse el co-
mando GC5 y esperar a la finalización del mismo.
Si tras el cálculo se desea mantener permanentemente esta parametriza-
ción será necesario almacenarlos en memoria flash mediante el icono co-
rrespondiente del WinDDSSetup o el comando GC1.
TP10 F01902 ConstantPositiveTorqueCompensation
TP11 F01903 ConstantNegativeTorqueCompensation
TP12 F01904 DynamicPositiveTorqueCompensation
TP13 F01905 DynamicNegativeTorqueCompensation
NP1 F02200 ReducedActuatedMomentumOfInertiaPercentage
GC5 F00615 AutoCalculate
INFORMACIÓN. Adviértase que los valores reales de velocidad y acelera-
ción coinciden con los valores programados en el CNC. De no ser así, de-
berán realizarse los ajustes oportunos en la máquina hasta obtener los
valores indicados (p.ej. parametrizar el feed-forward de velocidad con
PP216).
OBLIGACIÓN. El tiempo máximo total de ciclo de vaivén (ida y vuelta) no
será superior a 25 segundos.
i
NOTA. Compruébense los valores de todos los parámetros anteriormente
citados.

El regulador de posición
EL REGULADOR DE POSICIÓN
Auto-ajuste de la inercia en modo offline
5.
Ref.1912
· 127 ·
DDS|MAB
SOFTWARE
Soft.09.05
Los requisitos mínimos del movimiento programado necesarios para el
auto-ajuste de la inercia pueden observarse en la figura F. S5/19:
F. S5/19
Movimiento programado para el auto-ajuste de inercia en modo offline.
tiempo
Velocidad lenta:
Al menos una Vmínima
de 50 rev/min
Velocidad rápida:
Al menos una diferencia de la
Vmínima de un 50 % de la velocidad nominal del motor (SP10)
velocidad
mantener V = Cte en
un tiempo > 500 ms
Aceleración mínima:
Al menos una aceleración
mínima de 1500 mm/s²
máximo tiempo de
aceleración posible
aceleración
mantener V = Cte en
un tiempo > 500 ms
tiempo

El regulador de posición
5.
EL REGULADOR DE POSICIÓN
Vigilancia del error de seguimiento
140
Ref.1912
DDS|MAB
SOFTWARE
· 128 ·
Soft.09.05
5.7 Vigilancia del error de seguimiento
La vigilancia del error de seguimiento ofrece una seguridad contra el emba-
lamiento de los ejes.
El regulador compara los parámetros:
Si FollowingError > MonitoringWindow significa que el accionamiento sigue
a la consigna con un retardo excesivo y se dispara el error:
Esta vigilancia del error de seguimiento se realiza sólamente si:
El regulador está en modo de control de posición. Ver parámetro AP1 en
el capítulo 13 de este manual.
El parámetro MonitoringWindow es distinto de cero. (PP159 > 0).
Hay par motor. (TV100 = 1).
También se vigila el máximo error de seguimiento permitido, indicado en su
parámetro correspondiente en las tablas de parámetros de cada eje en el
CNC.
PV189 S00189 FollowingError
PP159 S00159 MonitoringWindow
E156 DV1 (S00011), bit 11 ExcessiveFollowingError
ADVERTENCIA. Si el parámetro PP159 (S00159) MonitoringWindow vale
cero, no habrá vigilancia del error de seguimiento. Es muy importante darle
un valor distinto de cero para evitar que se lancen los ejes incontroladamente.
F. S5/20
Vigilancia del error de seguimiento.
WLPH
IROORZLQJ
HUURU
WLPH
&RPPDQG
$FWXDO
SRVLWLRQ
IROORZLQJ
HUURU
0RQLWRULQJ
ZLQGRZ

El regulador de posición
EL REGULADOR DE POSICIÓN
Formato módulo
5.
Ref.1912
· 129 ·
DDS|MAB
SOFTWARE
Soft.09.05
5.8 Formato módulo
El regulador es capaz de trabajar en formato módulo. Este formato se utiliza
principalmente en ejes rotativos.
Esto quiere decir que está preparado para manejar todo el recorrido mecá-
nico del accionamiento mediante datos de consigna o feedback restringidos
a un rango de valores, normalmente entre 0 y 360°.
Este rango de valores se establece desde el parámetro:
La configuración del regulador en formato módulo o absoluto se determina
en el bit 7 del parámetro:
PP103 S00103 ModuleValue
PP76 S00076 PositionDataScalingType
F. S5/21
Formato módulo.
NOTA. En formato módulo el regulador no admite consignas de valor ab-
soluto mayor de PP103.
Turn
Command
360°
0°
Modulo Format
Turn
Command
360°
0°
Absolute Format
CommandsCommands
ADVERTENCIA. Vigilar que el CNC defina ese eje del mismo modo (for-
mato módulo o lineal).

El regulador de posición
5.
EL REGULADOR DE POSICIÓN
Límites de posición
140
Ref.1912
DDS|MAB
SOFTWARE
· 130 ·
Soft.09.05
5.9 Límites de posición
Los límites en el recorrido del eje son establecidos mediante los paráme-
tros:
y así, de esta forma se crea una zona permitida para el movimiento del eje
y otra zona prohibida.
Cualquier consigna de posición dada en la variable:
que implique profundizar en la zona prohibida generará el código de error
E150.
Los límites de posición podrán ser desactivados asignando al bit 4 del pa-
rámetro PP55 un cero (PP55.4=0) o bien dejando a cero los parámetros
PP49 y PP50, no siendo necesario que ambas condiciones se cumplan.
Con que una de estas dos condiciones se verifique no se originará el código
de error E150.
PP49 S00049 PositivePositionLimit
PP50 S00050 NegativePositionLimit
PV47 S00047 PositionCommand
NOTA. Para más detalles sobre estos parámetros, ver capítulo 13. La de-
finición de los códigos de error se facilita en el capítulo 14.
F. S5/22
Límites de posición.
Zona permitida
Zona prohibida
Zona prohibida
Límite negativo de posición
Límite positivo de posición
PP50 [S00050]
PP49 [S00049]

El regulador de posición
EL REGULADOR DE POSICIÓN
Cambio online de la captación
5.
Ref.1912
· 131 ·
DDS|MAB
SOFTWARE
Soft.09.05
5.10 Cambio online de la captación
Con la versión de software 04.01 del regulador era obligatorio regular en
todo instante con la captación elegida en la parametrización inicial. Así, si
en un instante dado, era necesario pasar a regular de una captación directa
a una captación motor o al revés, entonces debía eliminarse potencia y ha-
cer cambios en los parámetros oportunos.
En muchas aplicaciones de Motion Control se necesita de un cambio online
de la captación, eliminando así las restricciones de eliminación de potencia,
así como grabar parámetros y hacer un reset del regulador.
La versión de software 04.02 contempló ya el establecimiento del cambio
online de captación.
Modo de funcionamiento y parametrización
Antes de disponer de esta prestación existían dos modos diferentes de re-
gular en posición con cada una de las dos posibles captaciones.
El modo de operación se definía mediante el parámetro:
Así, con:
Con la incorporación de esta prestación aparecen otros dos modos más:
que son los modos con los que se podrá ejecutar el cambio online de cap-
taciones con la que se cierra el lazo de posición.
El comando que ejecuta el cambio de captaciones es:
que se ejecuta haciendo PC150=3 (desde el WinDDSSetup) para cambiar
de una captación motor a una captación directa .
Si el comando se ejecuta correctamente devuelve un valor 7 (ok) y si lo hace
incorrectamente un valor 15 (error).
Una ejecución correcta permite el paso a regular con captación directa. Vol-
ver a regular con captación motor obliga a introducir un valor 0 en el coman-
do PC150.
AP1 S00032 PrimaryOperationMode
AP1=3 Posición y captación motor
AP1=11 Posición y captación motor con feed-forward
AP1=4 Posición y captación directa
AP1=12 Posición y captación directa con feed-forward
AP1=5 Posición y ambas captaciones
AP1=13 Posición y ambas captaciones con feed-forward
PC150 F02003 ChangePosFB12
NOTA. Cada vez que se ejecute este comando se igualará la captación di-
recta a la captación motor impidiendo así que se produzca un golpe debi-
do a un error entre captaciones.
INFORMACIÓN. La captación motor será la inicial utilizada para cerrar el
lazo de posición. Dependerá, por tanto, del CNC o del programa de Motion
Control que en el arranque se ejecute el comando para comenzar la regu-
lación con la captación directa.
i

El regulador de posición
5.
EL REGULADOR DE POSICIÓN
Cambio online de la captación
140
Ref.1912
DDS|MAB
SOFTWARE
· 132 ·
Soft.09.05
Búsqueda de I0 con cualquier captación
Para realizar una búsqueda de I0 con cualquiera de las dos captaciones, in-
dependientemente de con cuál se está estableciendo la regulación se utili-
zan los dos modos de operación definidos en el parámetro AP1 con los
valores 5 y 13.
El bit 3 del parámetro PP147 indica con cuál de las dos captaciones se rea-
lizará la búsqueda de I0.
Estas serán todas las posibilidades:
Con AP1=5 o AP1=13:
1. Regulación y búsqueda de cero con captación motor
El comando PC150=0
El bit 3 del parámetro PP147=0
2. Regulación y búsqueda de cero con captación directa
El comando PC150=3
El bit 3 del parámetro PP147=1
3. Regulación con captación motor y búsqueda de cero con capta-
ción directa
El comando PC150 = 0
El bit 3 del parámetro PP147=1
Puesto que ambas captaciones deben tener la misma cota, se
calcula PV173 (S00173) MarkerPositionA como PV53 (S00053)
PositionFeedback2.
Se toman los valores de los offset de búsqueda de cero de la
captación directa y se calcula el desplazamiento a realizar en las
cotas PV47, PV51 y PV53 para pasar al nuevo sistema de coor-
denadas.
4. Regulación con captación directa y búsqueda de cero con cap-
tación motor
El comando PC150=3
El bit 3 del parámetro PP147=0
NOTA. Este modo de operación es equivalente al dado por
AP1=3 o AP1=11, obligando a realizar una búsqueda de cero
con captación motor.
NOTA. Este modo de operación es equivalente al dado por
AP1=4 o AP1=12, obligando a realizar una búsqueda de cero
con captación directa.
NOTA. En estas condiciones, el I0 es el de la captación direc-
ta.
NOTA. En estas condiciones, el I0 es el de la captación motor.
ADVERTENCIA. No puede ejecutarse el comando de cambio de captación
online en pleno movimiento. ¡El motor debe estar parado! Además, pre-
viamente al cambio de captación debe verificarse que ambas estan bien pa-
rametrizadas. Para realizar esta verificación es útil comprobar que el valor
de la variable PV190 que especifica el error entre ambas captaciones no tie-
ne un valor elevado o bien utilizar el parámetro PP5.

El regulador de posición
EL REGULADOR DE POSICIÓN
Error máximo permitido entre captaciones
5.
Ref.1912
· 133 ·
DDS|MAB
SOFTWARE
Soft.09.05
5.11 Error máximo permitido entre captaciones
El parámetro:
determina el error máximo permitido entre la captación motor y la captación
directa. Así, si al comparar el valor del feedback de posición de la captación
directa (visualizable esta diferencia en PV190), su desviación excede del
valor establecido en este parámetro PP5 durante un período de 20 ms. el re-
gulador comunica el error E157 Excessive ActualPosition Difference - DV11
(S00011), bit 11 -.
Teniendo en cuenta que el objetivo de este parámetro es ofrecer un margen
de seguridad adicional en aplicaciones donde se utiliza un sistema de me-
dición externo, es muy conveniente darle un valor distinto de cero para cap-
taciones externas cuadradas, ya que para este caso no existen otros
sistemas de vigilancia.
Desde la versión de software 06.09 se permite parametrizar PP5= -0,0001
estableciendo así una total independencia entre captaciones.
Esta nueva prestación permitirá conectar en la captación directa una regla u
otro dispositivo de medida que podrá ser leído por un CNC o un PLC y rea-
lizar las operaciones pertinentes.
PP5 F00391 ActualPositionMonitoringWindow
F. S5/23
Error máximo permitido entre captaciones.
NOTA. Recuérdese que no habrá vigilancia en el error de diferencia entre
captaciones si se parametriza PP5=0.
NOTA. Recuérdese que con PP5 = - 0,0001 no se monitorizará el error de
diferencia entre captaciones ni se igualarán ambas captaciones en la bús-
queda de I0, y por tanto, la captación no utilizada para la búsqueda de I0
no sufrirá un desplazamiento de coordenadas.
PositionFeedback1 [S00051]
-
+
Motor encoder position
feedback value
PositionFeedback2 [S00053]
External encoder position
feedback value
Actual Position Monitoring
Window [S00391]
20 ms
The error E157
Excessive Actual
Position Difference

El regulador de posición
5.
EL REGULADOR DE POSICIÓN
Mezcla entre captaciones
140
Ref.1912
DDS|MAB
SOFTWARE
· 134 ·
Soft.09.05
5.12 Mezcla entre captaciones
Generalmente, en máquinas donde la mecánica dispone de grandes holgu-
ras aparecen vibraciones cuyo efecto de inestabilidad repercute negativa-
mente en el control de la posición de sistemas con captación directa (regla).
No ocurre lo mismo cuando el control de la posición es realizado con la cap-
tación del motor (encóder), siendo entonces el funcionamiento de este tipo
de máquinas totalmente estable.
El objetivo de esta prestación, incorporada a partir de la versión 06.12 del
software del regulador, es conseguir un control de la posición con captación
directa, en estas máquinas, tan bueno como el que se obtiene cuando se
lleva a cabo con captación motor. Esto se consigue realizando, de manera
transitoria, una mezcla de captaciones cuando la máquina tiende a sufrir vi-
braciones, y estableciendo siempre el control de posición con la captación
directa cuando desaparece la vibración causante de la inestabilidad.
El diagrama de bloques del lazo de posición puede representarse así:
Para establecer el valor de la constante de tiempo de adaptación a la mez-
cla entre captaciones de posición debe parametrizarse:
que determina el retraso entre las cotas que se introducen al lazo de posi-
ción del encóder y de la regla. Ver parámetro PP16 y variable PV153 en el
capítulo 13 de este manual.
Forma de proceder:
Parametrizar PP16 (F02007) inicialmente con un valor de entre 10 y 300
ms. P.ej: 100 ms.
Aumentar el valor parametrizado anteriormente en incrementos de 30
en 30 ms si se observan oscilaciones en las aceleraciones o decelera-
ciones hasta alcanzar la estabilidad del sistema.
Con el sistema estabilizado, ir disminuyendo el valor parametrizado en
decrementos de 10 en 10 ms hasta ser ajustado al mínimo valor de
PP16 que hace estable el sistema.
F. S5/24
Control de posición con un cambio transitorio adaptado entre captaciones.
Diagrama de bloques.
PP16 F02007 PositionFeedbackAdaptationTimeConstant
Si se configura el regulador en control de velocidad (AP1=2), la variable PV153 permite disponer de la
adaptación o mezcla entre captaciones con un CNC 8070 configurado en control de velocidad que será
el que cierre el lazo de control. No podrá llevarse a cabo esta labor si dispone de un CNC 8055/55i ya
que aún no le ha sido implementada esta prestación.
*
-
+
Captación
de posición
PositionCommand
PV47 (S00047)
P de posición
PositionFeedback1
PV51 (S00051)
PositionFeedback2
PV53 (S00053)
PP16 (S02007)
PositionFeedbackAdaptationTimeConstant
ADAPTACIÓN ENTRE
CAPTACIONES
Kp
- regulador en control de posición -
PositionFeedback12
PV153 (F01308)
*
SÓLO CON CNC 8070
SÓLO CON MOTOR SÍNCRONO
INFORMACIÓN. Nótese que, este procedimiento permite controlar las vi-
braciones durante todo el movimiento como si se tratase de un sistema
cuyo control de posición fuese llevado a cabo con captación motor pero con
una precisión de posicionamiento de una captación directa.
i
NOTA. Parametrizar PP16=0 es establecer una configuración del control
de posición con captación directa (regla) mientras que parametrizar
PP16=3200 (entiéndase, valores elevados) será establecer una configu-
ración del control de posición con captación de motor (encóder).

El regulador de posición
EL REGULADOR DE POSICIÓN
Compensación de la deformación elástica en el acoplamiento de un eje
5.
Ref.1912
· 135 ·
DDS|MAB
SOFTWARE
Soft.09.05
5.13 Compensación de la deformación elástica en el acoplamiento de
un eje
Consideraciones previas
Esta prestación es aplicable a cualquier máquina independientemente del
tipo de trayectoria que vaya a seguir la punta de la herramienta y que dis-
ponga únicamente
de captación motor.
En este capítulo, para obtener el valor de compensación de la deformación
elástica en cada eje de la máquina se recurrirá al estudio de su comporta-
miento dinámico cuando la punta de la herramienta sigue una trayectoria
circular por ser ésta una forma geométrica cómoda en la que realizar medi-
ciones de la desviación de trayectorias.
Es por esto que, la mayoría de las expresiones matemáticas que aparecen
en el capítulo sean solo de aplicación a trayectorias circulares.
Si el usuario desea analizar las deformaciones elásticas de su máquina en-
sayando con otras trayectorias más complejas no podrá aplicar algunas ex-
presiones que aquí se facilitan.
Los datos numéricos que aparecen en sus ejemplos son meramente ilustra-
tivos. No copie estos datos para realizar sus ensayos. Recuérdese que
cada operación de mecanizado que realiza una máquina requiere de unas
condiciones de corte y de trabajo muy determinadas que raramente van a
coincidir con los datos que se facilitan en los ejemplos.
Deformación elástica en el acoplamiento de un eje
Sea un sistema formado por un servomotor con captador de posición, un
acoplamiento elástico y la punta de la herramienta. Ver figura.
Cuando el sistema se pone en movimiento, si el acoplamiento fuese ideal-
mente indeformable, la posición de la punta de la herramienta seguiría rigu-
rosamente la trayectoria que el programa pieza de CNC le ordena y
coincidiría con la posición dada por el captador integrado en el motor.
Ahora bien, suponer que el acoplamiento es indeformable no es real. Así,
durante el movimiento, el acoplamiento sufre una deformación elástica más
o menos significativa dependiendo de su aceleración, es decir, de la veloci-
dad de avance relativa entre la punta de la herramienta y la mesa, que re-
percute directamente en mayor o menor medida en la trayectoria a seguir.
INFORMACIÓN. La disponibilidad de esta prestación es efectiva a partir de
la versión 06.16 del software del regulador y su aplicación es conveniente en
máquinas cuya dinámica provoca deformaciones elásticas significativas en
el sistema de transmisión (acoplamiento) de cada eje generando inacepta-
bles desviaciones en cualquier trayectoria seguida por la punta de una he-
rramienta en procesos de mecanizado, de corte, ... que no pueden ser
compensadas (al estar fuera del sistema de medida) por los lazos de control.
i
NOTA. Léanse las siguientes consideraciones con especial atención.
F. S5/25
Esquema ilustrativo.
MOTOR
ACOPLAMIENTO
ELÁSTICO
CAPTADOR
MOTOR
CARGA
k, m
MEDIDA DADA EN LA
CAPTACIÓN MOTOR
MEDIDA DADA EN LA
PUNTA DE LA HERRAMIENTA

El regulador de posición
5.
EL REGULADOR DE POSICIÓN
Compensación de la deformación elástica en el acoplamiento de un eje
140
Ref.1912
DDS|MAB
SOFTWARE
· 136 ·
Soft.09.05
Luego, la trayectoria exigida por el programa pieza del CNC no es seguida
fielmente por la punta de la herramienta sino que aparece una desviación
debida a la deformación elástica del acoplamiento del eje considerado.
Esta desviación en la trayectoria no es cuantificada por el captador de po-
sición del motor ya que éste está ubicado justo antes del acoplamiento elás-
tico y, por tanto, la deformación no es registrada por él. Es por esto que,
para los lazos de control del regulador, no hay ninguna desviación que com-
pensar.
Ante esta situación, donde no es cuantificada esta desviación de la trayec-
toria y aún siéndolo, no es posible compensarla o corregirla mediante los la-
zos de control aumentando la ganancia proporcional del sistema, se llevará
a cabo la compensación mediante el parámetro online:
parametrizándolo con el valor de la frecuencia de resonancia (en Hz) aso-
ciada al acoplamiento elástico. El procedimiento de obtención de esta fre-
cuencia se detallará más adelante.
Factores dinámicos influyentes en la deformación elástica
La deformación que experimenta un sistema mecánico elástico sometido a
una fuerza viene dada por la expresión:
donde:
k constante elástica
x deformación experimentada
Sabiendo además que:
donde:
m masa de todos los elementos móviles
a aceleración del sistema
y sustituyendo su valor en la expresión anterior se obtiene la igualdad:
La deformación, por tanto, es proporcional a la aceleración:
Para una trayectoria circular, trazado con el que se recomienda realizar los
ensayos de mecanizado en los ajustes de compensación de la deformación
elástica por ser una forma geométrica cómoda para realizar mediciones, la
aceleración normal viene dada por la expresión:
donde:
R Radio de la trayectoria circular seguida por la punta de la herramien-
ta. Introducir su valor en metros (m).
F Velocidad de la punta de la herramienta siempre que la mesa esté en
reposo. Si la herramienta y la mesa se mueven, F será la velocidad
relativa entre ambas. Introducir su valor en metros por minuto
(m/min).
PP20.# F02020.# DynamicDeformationFrequency
Fuerza k x=
Fuerza m a=
ma k x=
x
m
k
-----
a Cte a==
a
F60
2
R
------------------------=
solo aplicable a
trayectorias circulares

El regulador de posición
EL REGULADOR DE POSICIÓN
Compensación de la deformación elástica en el acoplamiento de un eje
5.
Ref.1912
· 137 ·
DDS|MAB
SOFTWARE
Soft.09.05
La deformación elástica en el eje de una máquina es directamente propor-
cional a la aceleración y cuando su dinámica es una trayectoria circular es
además directamente proporcional al cuadrado de la velocidad.
La deformación elástica será, entonces, tanto más significativa cuanto ma-
yor sea la velocidad relativa entre la punta de la herramienta y la mesa.
Mecanizar una pieza siguiendo una trayectoria circular a bajas velocidades
suponiendo deformación elástica en un solo eje o en los dos implica obtener
prácticamente la trayectoria circular deseada ya que la desviación de tra-
yectoria experimentada en los ejes será muy poco significativa. No será un
círculo perfecto realmente pero a efectos prácticos sí y no será necesario
compensar la deformación elástica.
Mecanizar una pieza siguiendo una trayectoria circular a altas velocidades
suponiendo deformación elástica en un solo eje implica obtener una trayec-
toria elíptica ya que la desviación de trayectoria experimentada en ese eje
es significativa. El otro radio principal de la elipse coincidirá con el radio de
la trayectoria circular al suponer que no existía deformación elástica en el
otro eje. Si se considera deformación elástica en ambos ejes se obtendrá
igualmente una trayectoria elíptica en la que ninguno de los dos radios prin-
cipales de la elipse coincidirán con el radio de la trayectoria circular progra-
mada.
Para compensar estas deformaciones habrá que parametrizar PP20 para
cada eje con el valor de la frecuencia de resonancia de su acoplamiento
elástico. Ver la forma de proceder para obtener esta frecuencia en el si-
guiente apartado.
Antes de compensar la deformación elástica, la visualización de la trayec-
toria en el CNC será siempre circular y no elíptica como cabría esperar ante
la existencia de deformación elástica. El captador del motor se sitúa con an-
terioridad al acoplamiento elástico y no registra la desviación de la trayec-
toria por causa de la deformación elástica en ningún momento.
Después de compensar la deformación elástica, la visualización de la tra-
yectoria en el CNC será siempre elíptica y no circular como cabría esperar
tras compensar la deformación elástica.
Ajuste de la compensación. Cómo parametrizar PP20
El valor de la frecuencia de resonancia del acoplamiento elástico que per-
mite compensar la deformación elástica puede obtenerse mediante dos pro-
cedimientos distintos. Uno de ellos basado en los diagramas de Bode de la
máquina y otro mediante un ensayo de mecanizado. Se parametrizará
PP20 con el valor de la frecuencia obtenido.
Obtención de la frecuencia de resonancia del acoplamiento elás-
tico según su diagrama de Bode
Sea un diagrama de bloques representativo del modelo de una máquina
como el de la figura.
Nótese que el bloque que representa la deformación elástica está situado
entre el captador motor y la punta de la herramienta.
Conclusiones
Observaciones
F. S5/26
Máquina con captación motor y deformación elástica del acoplamiento si-
tuado entre el captador motor y la punta de la herramienta. Diagrama de blo-
ques.
FF
+
-
+
Kv
ACOPLAMIENTO
ELÁSTICO
MÁQUINA
MOTOR
CARGA
+

El regulador de posición
5.
EL REGULADOR DE POSICIÓN
Compensación de la deformación elástica en el acoplamiento de un eje
140
Ref.1912
DDS|MAB
SOFTWARE
· 138 ·
Soft.09.05
Una forma indirecta de obtener la frecuencia es disponer del diagrama de
Bode ·consigna de corriente-velocidad del motor·.
El valor de la frecuencia con el que parametrizar PP20 es 30 Hz.
El diagrama de Bode obtenido en máquinas reales atiende más al que se fa-
cilita a continuación:
Diagrama de Bode real.
Consigna de corriente | velocidad del motor
El valle de resonancia representativo de la deformación elástica en este dia-
grama de Bode será siempre el primero que aparece tras superar el máximo
indicado en la figura. El valor de la frecuencia con el que parametrizar PP20
se leerá en el eje de abscisas del diagrama y no será necesario hacer una
lectura rigurosamente exacta sino de manera aproximada. Parametrizar
PP20 = 90 Hz.
F. S5/27
Diagrama de Bode teórico ideal ·consigna de corriente|velocidad del motor·.
NOTA. Téngase en cuenta que el diagrama de Bode representado ante-
riormente es un diagrama teórico ideal.
F. S5/28
Diagrama de Bode real «consigna de corriente | velocidad del motor».
0
15
10
-20
-10
-30
10
0
10
1
10
2
10
3
10
4
5
-35
-25
-15
-5
Frecuencia (Hz)
Valle de resonancia
30 Hz
Ganancia (dB)
[dB]
108.1...
98.125
88.125
78.125
68.125
58.125
48.125
2
10
100 1000 9000
[Hz]
90 Hz
ver F. S5/27
Máximo
1
er
valle de
resonancia
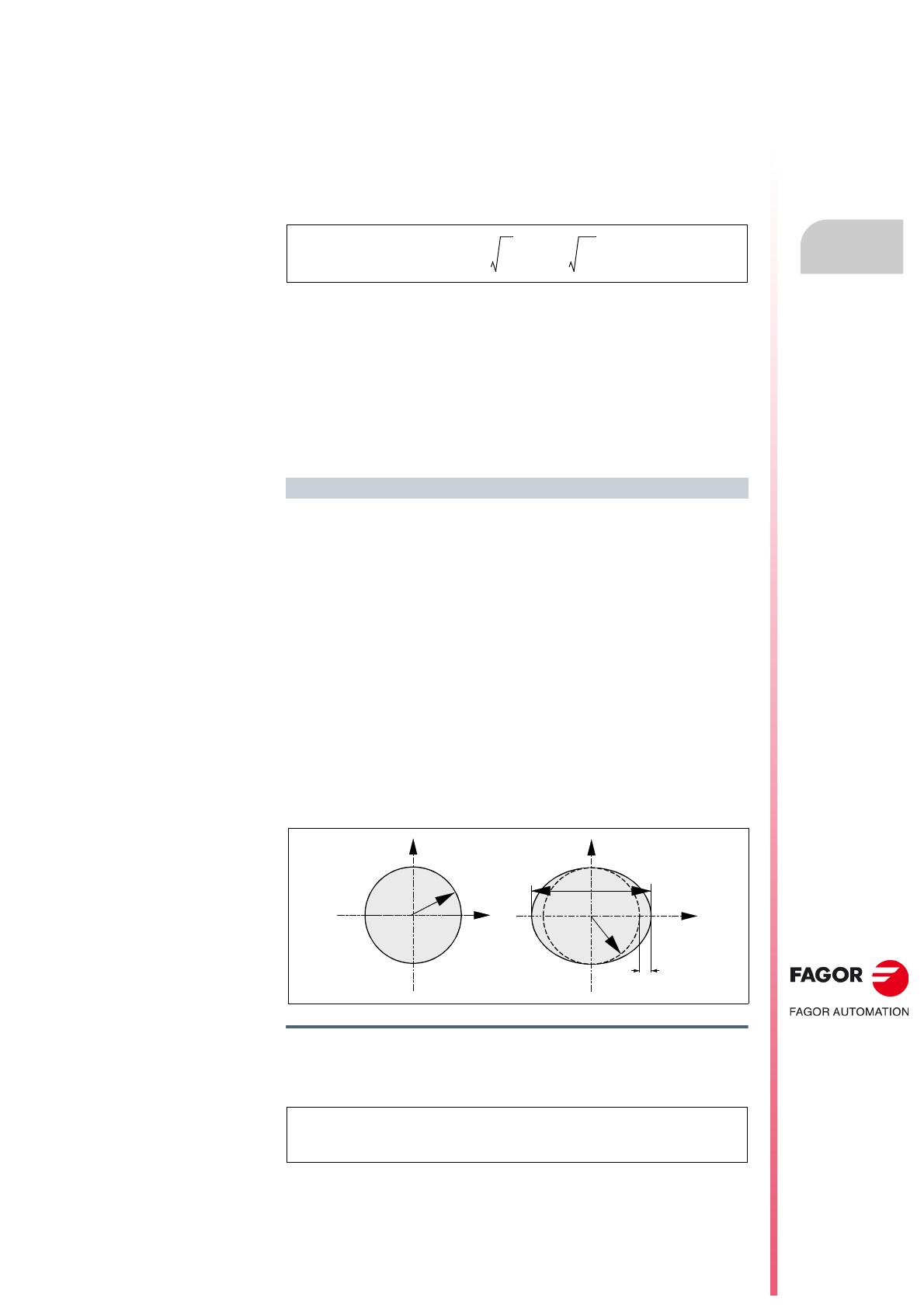
El regulador de posición
EL REGULADOR DE POSICIÓN
Compensación de la deformación elástica en el acoplamiento de un eje
5.
Ref.1912
· 139 ·
DDS|MAB
SOFTWARE
Soft.09.05
Obtención de la frecuencia de resonancia del acoplamiento elás-
tico mediante ensayo de mecanizado
Cuando no se dispone del diagrama de Bode de la máquina o bien se desee
realizar la compensación con un valor de la frecuencia obtenido empírica-
mente se procederá como se indica en este apartado.
De la expresión de la frecuencia de oscilación de un movimiento armónico
simple (m.a.s.) puede obtenerse su relación con la aceleración y la defor-
mación mediante esta igualdad:
Para una trayectoria circular la desviación
x respecto a R puede obtenerse
por medición directa sobre la pieza, previamente mecanizada.
La aceleración del sistema se calcula según la expresión ya dada anterior-
mente:
a = (F/60)²/R
Con estos valores, ahora ya determinados, se obtiene (de la expresión de la
frecuencia) el valor con el que parametrizar PP20 para compensar la defor-
mación elástica que se ha producido en el eje considerado.
Se desea ajustar la compensación de la deformación elástica que se origi-
na en el eje X de una máquina de corte por láser. La máquina dispone de
dos servomotores con captador de posición que mueven la punta de una
herramienta sobre un plano definido por los ejes X e Y. Se supone única-
mente acoplamiento elástico en el eje X.
Su objetivo es realizar agujeros circulares de radio R = 5 mm = 0,005 m a al-
tas velocidades en una chapa que descansa sobre un bastidor fijo.
Para obtener el valor de la frecuencia con la que parametrizar PP20 para
compensar la deformación elástica en el eje X síganse los siguientes pasos.
1. Realizar un agujero haciendo trabajar la punta de la herramienta a una
velocidad elevada de, p.ej, F = 8000 mm/min con el fin de provocar una
desviación Dx alta y generar claramente una trayectoria elíptica.
2. Realizado el agujero, llevar a cabo mediciones con el calibre de distintos
diámetros del agujero elíptico hasta obtener el valor del diámetro del eje
mayor Dm de la elipse. Nótese que visualmente no será apreciable la
forma elíptica.
3. Obtener el valor de la deformación elástica según la expresión:
Supóngase (por hacer números) que el valor obtenido para la deformación
es:
x = 90 µm = 90 x 10
- 6
m.
Ejemplo.
F. S5/29
El trazado real adopta esta forma elíptica y no circular cuando solo hay de-
formación elástica en el eje X.
f
1
2
------
k
m
-----
1
2
------
a
x
-------
==
Y
X
X
R
Y
X
R
Dm
x
D
m
2
-------- R–=
El regulador de posición
5.
EL REGULADOR DE POSICIÓN
Compensación de la deformación elástica en el acoplamiento de un eje
140
Ref.1912
DDS|MAB
SOFTWARE
· 140 ·
Soft.09.05
4. Obtener el valor de la aceleración para una trayectoria circular según la
expresión:
5. Obtener el valor de la frecuencia según la expresión:
6. Parametrizar PP20 con el valor obtenido, es decir, PP20 = 31,8 Hz.
7. Comprobar que tras parametrizar PP20, el mecanizado de su pieza par-
ticular (sea cual fuere la trayectoria de su perfil) es efectuado satisfacto-
riamente.
a
F60
2
R
---------------------
860
2
0,005
---------------------- 3 , 6 m / s ²== =
f
1
2
------
a
x
-------
1
2
------
3,6
90 x 10
6–
-------------------------
31,8 Hz== =

6
Ref.1912
· 141 ·
DDS|MAB
SOFTWARE
Soft.09.05
SÍNTESIS DE LA PUESTA
A PUNTO
6.1 Parámetros generales
Con captación motor (AP1=3 o AP1=11)
No se tendrán en cuenta los parámetros:
Con captación directa (AP1=4 o AP1=12)
No se tendrán en cuenta los parámetros:
Parámetros generales
AP1 Selecciona el modo de operación del regulador
3 Lazo de posición con captación motor, sin feedforward
4 Lazo de posición con captación directa, sin feedforward
5 Lazo de posición con captación motor o directa, sin feedforward
11 Lazo de posición con captación motor, con feedforward
12 Lazo de posición con captación directa, con feedforward
13 Lazo de posición con captación motor o directa, con feedforward
GP10 Tipo de captación directa. MÉTODO CLÁSICO.
Ver apartado -
Captación directa. Parametrización
- del capítulo 5 de
este manual para obtener información referente a su parametrización por el
MÉTODO DEL SISTEMA DE BITS.
0 Ausencia de captación directa
1 Señal cuadrada TTL
2 Señal senoidal de 1 Vpp
3 Señal de un captador Stegmann
4 Señal cuadrada TTL con comunicación SSI
5 Señal senoidal de 1 Vpp con comunicación SSI
GP2 Tipo de captación motor. MÉTODO CLÁSICO.
Ver apartado -
Parametrización de la captación directa. Sistema clási-
co
- del capítulo 5 de este manual para obtener información referente a su
parametrización por el MÉTODO DEL SISTEMA DE BITS.
0 Encóder senoidal
1 Resólver
2 Encóder con señal cuadrada TTL
5
Encóder Heidenhain (ERN 1387) para motores Siemens, familia
1FT6
6 Encóder senoidal (sólo para cabezales)
7 Sin captación
PP54 RefValue con captación directa
PP115 Personalización de la captación directa
NP117 Definición de pitch/pulsos en captación directa
PP150 Refshift para captación motor
PP52 Refvalue con captación motor

Síntesis de la puesta a punto
6.
SÍNTESIS DE LA PUESTA A PUNTO
Parámetros relacionados con el estimador de velocidad
160
Ref.1912
DDS|MAB
SOFTWARE
· 142 ·
Soft.09.05
Si la captación directa es mediante un captador absoluto.
La parametrización de la regla absoluta de FAGOR con interfaz SSI
es la
dada por los siguientes valores (parametrizados por defecto):
6.2 Parámetros relacionados con el estimador de velocidad
6.3 Parámetros relacionados con el SENSORLESS
Parámetros de uso con CAPTACIÓN DIRECTA ABSOLUTA.
Comunicación SSI/EnDat
GP10
Señal eléctrica recibida desde la captación directa.
4
Señal cuadrada con interfaz SSI.
5 Señal 1Vpp con interfaz SSI.
Sólo
parametrizable
por el método
del sistema de
bits
Interfaz EnDat.
Ver apartado - Captación directa. Parametrización - del ca-
pítulo 5 de este manual para obtener información referente
a su parametrización por el método del sistema de bits
.
RP60
Frecuencia soportada por el reloj del regulador con
comunicación SSI/EnDat.
RP61 Tamaño (en bits) de los datos SSI/EnDat.
RP62
Formato de los datos SSI/EnDat.
Código binario (bit 0=0) o código Gray (bit 0=1)
Normal (bit 1=0) o Fir-tree (bit 1=1)
EnDat 2.1 (bit 2=0) o EnDat 2.2 (bit 2=1)
SSI estándar (bit 3=0) o SSI AMO™ (bit 3=1)
RP63
Valor de la resolución del captador absoluto lineal
con
protocolo de comunicación digital SSI/EnDat. Se para-
metriza en dµm.
Nº de bits por vuelta del captador absoluto rotativo
con
protocolo de comunicación digital SSI/EnDat. Se para-
metriza en bits por vuelta ó pulsos por vuelta. Ver RP65.
RP65
Formato · en bits o por pulsos · de la parametrización de
la resolucion absoluta de un captador rotativo (encóder)
SSI, (= 0 en bits, = 1 en pulsos).
RP60 = 200 kHz Frecuencia soportada por el reloj del regulador
RP61 = 32 bits Tamaño (en bits) de los datos SSI
RP62 = 0 El formato de los datos SSI es código binario
RP63 = 1 dµm Resolución de la regla absoluta
NOTA. Nótese que para otros captadores absolutos con protocolo de co-
municación SSI/EnDat, los valores con los que parametrizar RP61 y RP62
deben ser suministrados por el fabricante.
Parámetros del estimador de velocidad
SP15
Frecuencia de corte del filtro pasa-bajo del estimador de velocidad.
SP16
Factor de amortiguamiento del filtro pasa-bajo del estimador de
velocidad.
SP17 Activación (1) o desactivación (0) del estimador de velocidad.
Parámetros con SENSORLESS
AP2=1
Control vectorial tipo SENSORLESS basado en modelo de ten-
sión.
FP50
Valor de la ganancia proporcional del PI utilizado en la estima-
ción de la velocidad en motor asíncrono con control tipo SEN-
SORLESS.
FP51
Valor de la ganancia integral del PI utilizado en la estimación de
la velocidad en motor asíncrono con control tipo SENSORLESS.
FP60 Frecuencia de corte del filtro del modelo de tensión.
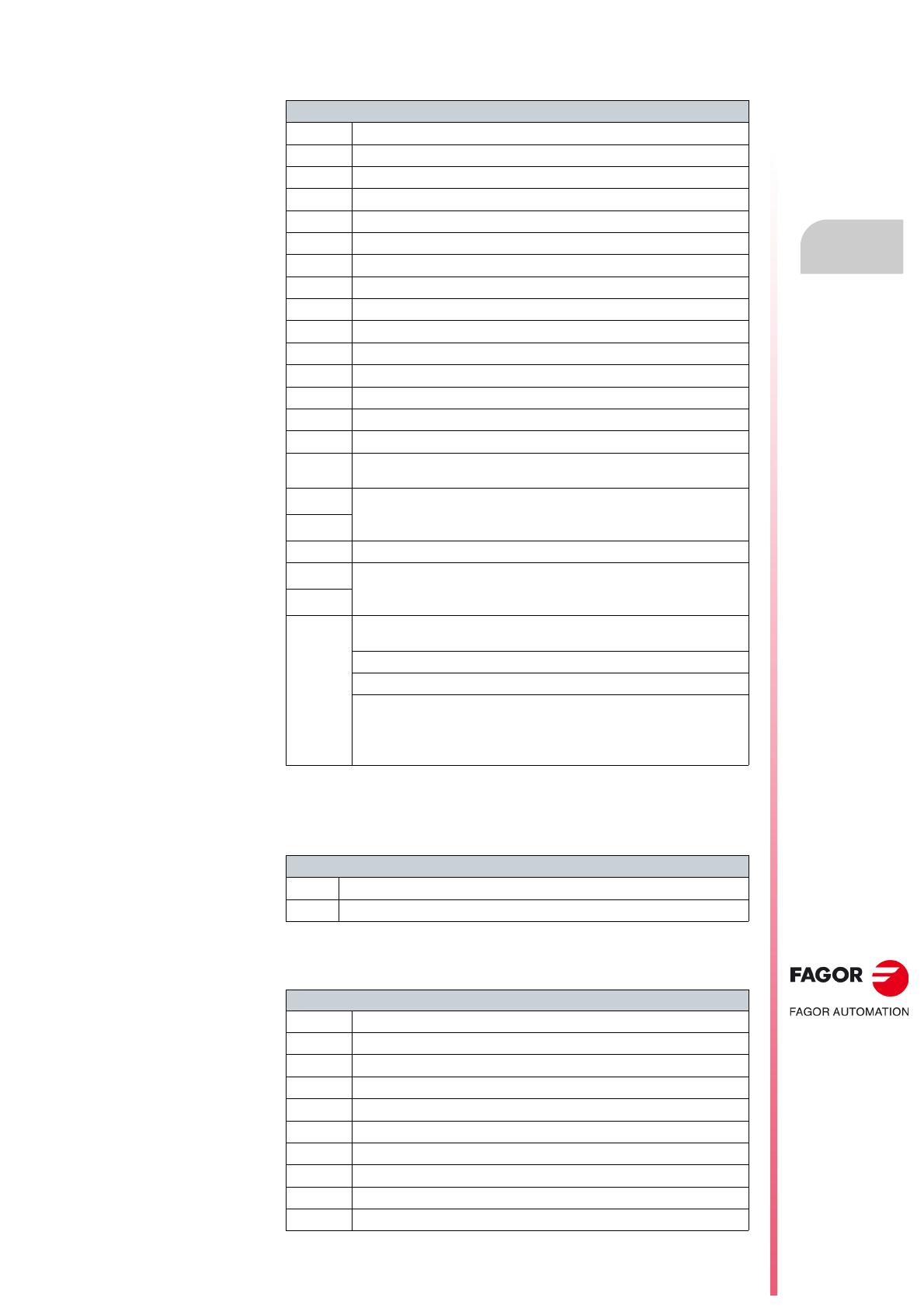
Síntesis de la puesta a punto
SÍNTESIS DE LA PUESTA A PUNTO
Parámetros relacionados con la resolución
6.
Ref.1912
· 143 ·
DDS|MAB
SOFTWARE
Soft.09.05
6.4 Parámetros relacionados con la resolución
6.5 Parámetros de identificación de una captación lineal con I0s codi-
ficados
6.6 Parámetros de búsqueda de referencia
Parámetros relacionados con la resolución
PP115 Parámetro de personalización de la captación directa
bit 5 Estructura de los I0s codificados
bit 5 = 0
contaje positivo en dirección positiva
bit 5 = 1
contaje negativo en dirección negativa
bit 3 Sentido de contaje
bit 3 = 0
no invertido
bit 3 = 1
invertido
bit 1 ¿ la captación tiene I0s codificados ?
bit 1 = 0
sin I0s codificados
bit 1 = 1
con I0s codificados. Ver NP165 y NP166.
bit 0 Tipo de captación directa
bit 0 = 0
rotativo (encóder). NP117 da los impulsos/vuelta.
bit 0 = 1
lineal (regla). NP118 da el período de la señal.
NP117 Resolución del captador rotativo en captación directa.
NP118 Resolución del captador lineal en captación directa (sólo reglas).
Período de la señal de la regla.
En reglas FAGOR (cristal grabado) son 20 µm, S00118=20.
NP121
La relación (NP121/ NP122) indica la relación de transmisión
mecánica motor/husillo. Sólo admite valores enteros de has-
ta 32 767.
NP122
NP123
Paso del husillo. Si el eje es rotativo, NP123 = 360000.
NP131
La relación (NP131/ NP132) indica la relación de transmisión
mecánica entre la captación directa y el movimiento de la car-
ga. Sólo admite valores enteros de hasta 32 767.
NP132
NP133
Desplazamiento lineal de la máquina por vuelta del encóder
de la captación directa.
Máquina rotativa: NP133=0.
Máquina lineal con captación directa lineal: NP133=0.
Máquina lineal con captación directa rotativa:
NP133 = 0
El desplazamiento lineal frente al nº de vueltas de
ambos encóders es igual. NP133
0 El desplazamiento li-
neal frente al nº de vueltas de ambos encóders es distinto.
Parámetros para identificar una captación lineal con I0s codificados
NP165 Distancia entre I0s, dentro del grupo de I0s más distanciados.
NP166 Distancia entre I0s, dentro del grupo de I0s menos distanciados.
Parámetros de búsqueda de referencia
PP147 Personalización de la búsqueda de I0
bit 6
I0
bit 6 = 0
el I0 es evaluado (por defecto)
bit 6 = 1 el I0 no es evaluado
bit 5
Home-Switch
bit 5 = 0
el Home-Switch es evaluado (por defecto)
bit 5 = 1 el Home-Switch no es evaluado
bit 3 Captación empleada
bit 3 = 0
captación motor. Ver PP52 y PP150.
bit 3 = 1
captación directa. Ver PP54 y PP151.

Síntesis de la puesta a punto
6.
SÍNTESIS DE LA PUESTA A PUNTO
Parámetros relacionados con la ganancia
160
Ref.1912
DDS|MAB
SOFTWARE
· 144 ·
Soft.09.05
6.7 Parámetros relacionados con la ganancia
bit 1 Estado del Home-Switch
bit 1 = 0
Normalmente abierto
bit 1 = 1 Normalmente cerrado
bit 0 Sentido de giro del eje del motor en la búsqueda de I0
bit 0 = 0
horario
bit 0 = 1
antihorario
Para poder realizar una búsqueda de I0 con cualquiera de las dos captacio-
nes, independientemente de con cuál se establece la regulación, indíquese
en el bit 3 del parámetro PP147 con cuál de ellas se realizará la búsqueda.
- Ver tabla anterior -. En presencia del CNC 8070 debe llevarse el contacto
eléctrico Home-Switch a una de sus entradas digitales.
PP1
Velocidad lenta del motor en el proceso de búsqueda de cero
controlado desde el propio regulador.
PP4
Distancia de desplazamiento del Home-Switch (vía software)
para evitar problemas de repetitividad de I0 en una búsque-
da de cero.
PP41
Velocidad rápida del motor en el proceso de la búsqueda de
cero controlado desde el propio regulador.
PP42
Aceleración de los movimientos durante el proceso de búsque-
da de cero.
PP52
Posición del punto de referencia de la máquina respecto al cero
máquina, (RefValue captación motor).
PP54
Posición del punto de referencia de la máquina respecto al cero
máquina, (RefValue captación directa).
Los parámetros PP52 y PP54 del regulador son equivalentes a los paráme-
tros REFVALUE [P53] de los ejes del CNC 8055/55i.
PP150
Posición de la marca de I0 respecto al punto de referencia de la
marca (Refshift captación motor).
PP151
Posición de la marca de I0 respecto al punto de referencia de la
marca (Refshift captación directa).
Los parámetros PP150 y PP151 del regulador son equivalentes a los pará-
metros REFSHIFT [P47] de los ejes del CNC 8055/55i, excepto que el re-
gulador no se mueve para volver sobre la cota REFVALUE [P53]. Método de
referenciamiento. El micro de referencia puede estar conectado directa-
mente al PLC o al regulador.
OBLIGACIÓN. Adviértase que debe parametrizarse siempre obligatoria-
mente «PP147 (S00147) HomingParameter, bit 3» aunque se disponga de
captación absoluta (sin búsqueda de cero) para indicar con qué captación
se va a referenciar la máquina, es decir, si va a ser con captación motor o
captación directa.
Parámetros relacionados con la ganancia
PP104
Ganancia proporcional en el lazo de posición. Es similar al pa-
rámetro PROGAIN [P23] de los ejes del CNC 8055/55i. PP104=1
implica un error de seguimiento de 1 mm a F1000 mm/min.
PP216
Porcentaje de feedforward de velocidad (0 a 100 %). Es similar
al parámetro FFGAIN [P25] de los ejes del CNC 8055/55i.
PP159
Máx.error de seguimiento permitido. Si este parámetro está a cero
no habrá vigilancia en el error de seguimiento. Es importante asig-
narle un valor distinto de cero para evitar que se lancen los ejes
incontroladamente. En el CNC también se vigila el máx. error de
seguimiento permitido indicando en su parámetro correspon-
diente en las tablas de parámetros de cada eje en el CNC.
PV189
Monitorización del error de seguimiento.

Síntesis de la puesta a punto
SÍNTESIS DE LA PUESTA A PUNTO
Parámetros varios del lazo de posición
6.
Ref.1912
· 145 ·
DDS|MAB
SOFTWARE
Soft.09.05
6.8 Parámetros varios del lazo de posición
Parámetros varios del lazo de posición
PP49
Indican la máxima cota alcanzable por el accionamiento en la
dirección positiva y negativa, respectivamente. Estos límites
son considerados sólo cuando todos los datos de posición se
refieren al cero máquina, es decir, el bit 0 de PV203=1.
PP50
Si la variable PV58 (S00058) TargetPosition sobrepasa los límites de po-
sición, el regulador activará el bit 13 de DV9.
El CNC también tiene en cuenta los límites de recorridos definidos en sus
tablas de parámetros de ejes.
PP55 Control de polaridad de datos de posición
bit 4 Límites de posición.
bit 4 = 0
No activos
bit 4 = 1
Activos (por defecto). Ver PP49 y PP50.
bit 3 Signo de contaje en la captación directa.
bit 3 = 0
positivo.
bit 3 = 1
negativo (por defecto).
bit 2 Signo de contaje en la captación motor.
bit 2 = 0
positivo.
bit 2 = 1 negativo (por defecto).
bit 0
Signo de la consigna de posición.
bit 0 = 0
positivo.
bit 0 = 1 negativo (por defecto).
PP58
Holgura de husillo. Con captación motor, el regulador compen-
sa la holgura en los cambios de sentido del movimiento.
Holgura en la sujeción de la cabeza lectora de una regla. Con
captación directa, el regulador compensa esta holgura en los
cambios de sentido de movimiento.
PP59 Holgura entre captaciones.
PP2
Holgura de husillo. Con captación directa, el regulador com-
pensa la holgura en los cambios de sentido del movimiento.
Pico de inversión.
PP3
Tanto el regulador como el CNC disponen de parámetros que determinan el
valor de la holgura de husillo. Únicamente ha de registrarse el valor en uno
de ellos. Al parámetro del otro se le asignará valor nulo.
PP13
Corte de la compensación exponencial de la holgura por pico
de inversión.
PP14
Histéresis en la compensación exponencial de la holgura por
pico de inversión tras una inversión del sentido del movimiento.
PP15
Mejoras en la compensación del rozamiento. Compensación
nula del rozamiento durante la compensación exponencial de la
holgura por pico de inversión.
PP16
Mejoras en el control de posición de máquinas con grandes hol-
guras y con captación directa (regla). Constante de tiempo de
adaptación (mezcla) entre captaciones (motor y directa).
PP20
Compensación de la deformación elástica de la transmisión me-
cánica.
PP76
Aplicación de la consigna en formato módulo. Note que el CNC
debe definir el eje del mismo modo (formato módulo o absoluto).
bit 7 Selección del formato módulo.
bit 7 = 0
No se aplica el formato módulo al eje.
bit 7 = 1 Sí se aplica el formato módulo al eje.
PP103
Valor del módulo a aplicar en los ejes rotativos que no funcio-
nan como lineales (normalmente 360°).
QP1
Tiempo del ciclo del lazo. Parámetro de lectura que indica cada
cuanto tiempo se está cerrando el lazo en los reguladores.
PP5
Error máximo permitido entre ambas captaciones.
Con PP5 = -0,0001, independencia entre captaciones.

Síntesis de la puesta a punto
6.
SÍNTESIS DE LA PUESTA A PUNTO
Parámetros de uso exclusivo en aplicaciones MC
160
Ref.1912
DDS|MAB
SOFTWARE
· 146 ·
Soft.09.05
6.9 Parámetros de uso exclusivo en aplicaciones MC
6.10 Parámetros exclusivos para el control de un cabezal síncrono
6.11 Parámetros exclusivos del control V/f
6.12 Parámetros exclusivos para el ajuste del cogging
Parámetros de uso exclusivo en aplicaciones de Motion Control
PP57
Banda de muerte. Señala la diferencia permitida entre la posi-
ción real y la posición final LV158 (S00258) TargetPosition para
considerar que el accionamiento está posicionado.
Parámetros de uso exclusivo para control de motor síncrono en
aplicaciones de cabezal
MP42
Velocidad a la que se iniciará un «aumento del campo magnético
o flujo magnético» en un motor síncrono que trabaja como motor
de cabezal.
MP43
Fuerza contra-electromotriz (en V) generada entre cada dos fa-
ses del bobinado del estátor por cada mil rev/min del motor.
MP50
Establece si el motor que va a ser gobernado por el regula-
dor es síncrono (0) o asíncrono (1).
Parámetros de uso exclusivo para el control tensión/frecuencia de
motores de inducción
FP70
Tensión máxima aplicable con control V/f.
FP71
Porcentaje de la tensión nominal del motor parametrizada en
MP6. Ordenada del pto 1 de la gráfica característica de V/f.
FP72
Porcentaje de la velocidad nominal del motor parametrizada
en MP25. Abscisa del pto 1 de la gráfica característica de V/f.
FP73
Porcentaje de la tensión nominal del motor parametrizada en
MP6. Ordenada del pto 2 de la gráfica característica de V/f.
FP74
Porcentaje de la velocidad nominal del motor parametrizada
en MP25. Abscisa del pto 2 de la gráfica característica de V/f.
FP75
Porcentaje de la tensión nominal del motor.
Parámetros de uso exclusivo para la compensación del efecto ranura
en motores síncronos
TP30 Amplitud de compensación del cogging.
TP31 Desfase de compensación del cogging respecto al rho.
TP32 Nº de senoides por vuelta mecánica del motor.

Síntesis de la puesta a punto
SÍNTESIS DE LA PUESTA A PUNTO
Configuración de una aplicación
6.
Ref.1912
· 147 ·
DDS|MAB
SOFTWARE
Soft.09.05
6.13 Configuración de una aplicación
El objetivo de esta aplicación es facilitar al usuario la labor cuando se trata
de configurar una aplicación determinada.
Su interfaz es muy intuitivo y permite desde una única ventana realizar de
una manera guiada la configuración de la aplicación.
Desde esta ventana y según la etiqueta activada, el usuario deberá ir relle-
nando cada uno de los campos que van apareciendo y que se asocian a pa-
rámetros o variables del regulador.
En este capítulo no se trata de volver a explicar el significado de cada uno
de los parámetros y variables que aparecen, sino únicamente acercar al
usuario al interfaz y al mecanismo de funcionamiento de esta herramienta.
Cada parámetro o variable que se muestra en este interfaz tiene su explica-
ción en el capítulo 13. PARÁMETROS, VARIABLES Y COMANDOS de
este manual. Si el usuario tiene dudas sobre el funcionamiento de alguno de
ellos, acúdase a este capítulo.

Síntesis de la puesta a punto
6.
SÍNTESIS DE LA PUESTA A PUNTO
Configuración de una aplicación
160
Ref.1912
DDS|MAB
SOFTWARE
· 148 ·
Soft.09.05
Acceso al interfaz
Previamente al acceso, debe establecerse la conexión (línea RS-232) entre
el regulador y el PC. La configuración de la aplicación podrá realizarse tras
establecerse la comunicación entre el regulador y el WinDDSSetup (modo
on-line) desde el icono correspondiente de su barra de herramientas
.
Descripción general de la pantalla
La información de la pantalla propia de la «configuración de la aplicación»
se distribuye de la siguiente manera:
Desde la barra de iconos ubicada en la parte superior de la ventana se eje-
cutarán las siguientes operaciones:
F. S6/1
Barra de herramientas del WinDDSSetup.
Configuración de la aplicación
La activación de este icono permite acceder al interfaz desde donde el
usuario podrá realizar la configuración de su aplicación.
Antes de pulsar este icono, en la barra de estado debe aparecer la leyenda
«on-line» en fondo verde, corroborando que existe comunicación entre el
regulador y el WinDDSSetup.
F. S6/2
Configuración de la aplicación desde el WinDDSSetup.
F. S6/3
Barra de iconos.
Selección de gama
Desde este cuadro desplegable se seleccionará la gama (recuérdese que
atiende a una reducción puramente mecánica).
Posibles gamas a seleccionar: gama 0 (sin transmisión o fuera de gama),
gama 1 (mayor reducción de velocidad) ... gama 7 (menor reducción de ve-
locidad).
Parámetros a flash
Permite hacer efectiva la modificación de parámetros y además almacena
el cambio de modo permanente (en memoria flash). Los comandos que ac-
túan al activar este icono son GC1 y posteriormente GC4.

Síntesis de la puesta a punto
SÍNTESIS DE LA PUESTA A PUNTO
Configuración de una aplicación
6.
Ref.1912
· 149 ·
DDS|MAB
SOFTWARE
Soft.09.05
«Configuración de la aplicación» con la etiqueta «motor» activada:
Los campos que aparecen en esta ventana son:
A. Campo «opciones de selección del motor»: En este campo puede
modificarse el valor que aparece, por defecto, en MP1 seleccionando la
opción «motor de usuario», es decir «USER».
Si, tras abrir este cuadro desplegable, no se pretenden realizar cambios
en MP1, selecciónese la opción < ... > para salir del cuadro. La opción
DEFAULT asigna a MP1 la matrícula de motor almacenada en la me-
moria del encóder.
B. Campo «MP1»: Muestra la matrícula del motor seleccionado.
C. Campo «RV7»: Refleja la matrícula que tiene grabada el encóder del
motor. Si no detecta ninguna, el cuadro de texto aparece vacío.
D. Campos de matrícula del motor: Refleja cada uno de los motores que
incorpora el fichero de motores almacenado en el regulador. Pueden ha-
cerse modificaciones tanto en la selección de la serie de motor como en
cada uno de los campos que incorpora el motor en su matrícula.
Iniciar parámetros
Tras introducir la matrícula en MP1, la activación de este icono permite ac-
tualizar todos los parámetros que forman parte del fichero de motor y el res-
to de parámetros del regulador a su valor por defecto.
Validar parámetros
Permite hacer efectiva la modificación de parámetros pero no almacena el
cambio de modo permanente (en memoria flash). El comando que actúa al
activar este icono es GC4.
F. S6/4
Configuración de la aplicación desde el WinDDSSetup con la etiqueta «mo-
tor» activa.
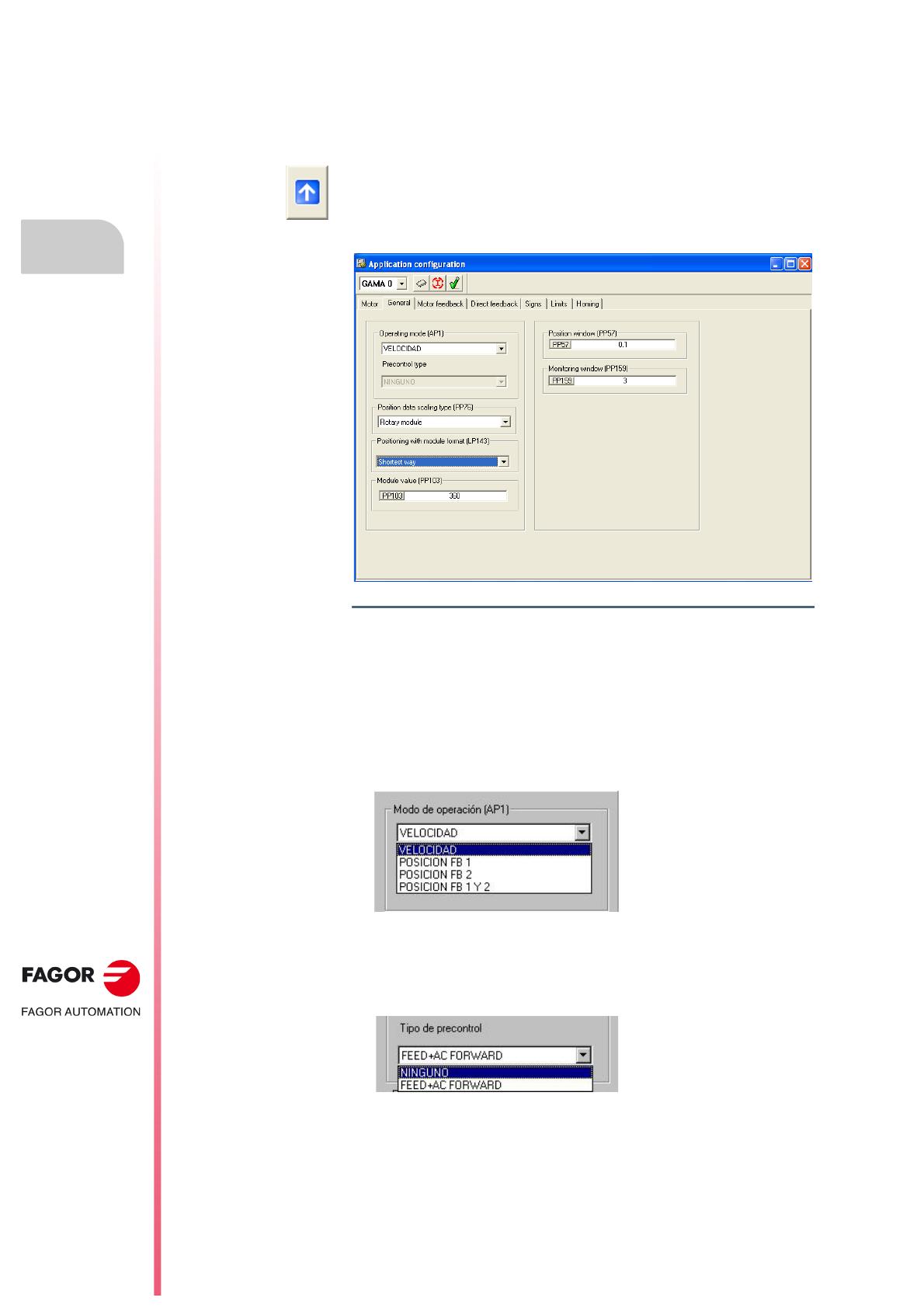
Síntesis de la puesta a punto
6.
SÍNTESIS DE LA PUESTA A PUNTO
Configuración de una aplicación
160
Ref.1912
DDS|MAB
SOFTWARE
· 150 ·
Soft.09.05
E. Tabla de parámetros: Esta tabla contiene cada uno de los parámetros
ligados al motor así como algún parámetro del lazo de corriente. Estos
valores podrán modificarse según el nivel de acceso disponible y/o si se
ha seleccionado «motor de usuario» en el campo «selección de motor».
La activación de los iconos que aparecen en esta ventana permite:
«configuración de la aplicación» con la etiqueta «general» activa:
Los campos que aparecen en esta ventana son:
A. Campo «modo de operación AP1»: En este campo puede seleccio-
narse el modo de funcionamiento referente a la configuración del siste-
ma, pudiendo definirse si la consigna es de velocidad (velocidad), de
posición con captación motor (posición FB 1), de posición con captación
directa (posición FB 2) o de posición con ambas captaciones (posición
FB 1/2).
B. Campo «tipo de precontrol»: En este campo puede decidirse si se es-
tablecerá la activación o no del feed-forward y ac-forward, sólo si en el
campo anterior no ha sido seleccionada la opción «velocidad». Si lo ha
sido, la opción «feed + ac forward» no podrá seleccionarse al quedar
deshabilitada.
Introducir en MP1 la matrícula de motor seleccionada en el campo «moto-
res en el regulador».
F. S6/5
Configuración de la aplicación desde el WinDDSSetup con la etiqueta «ge-
neral» activa.

Síntesis de la puesta a punto
SÍNTESIS DE LA PUESTA A PUNTO
Configuración de una aplicación
6.
Ref.1912
· 151 ·
DDS|MAB
SOFTWARE
Soft.09.05
C. Campo «Tipo de escalado de la consigna de posición»: En este
campo puede seleccionarse si el escalado es lineal o rotativo. En el caso
de rotativo, si es en formato absoluto o módulo.
D. Campo «Posicionamiento con formato módulo»: En este campo
puede seleccionarse si el giro es horario, antihorario o por el camino
más corto, habiendo seleccionado en el campo anterior escalado rotati-
vo con formato módulo.
E. Campo «Valor del módulo»: En este campo se refleja el valor almace-
nado en la RAM del regulador y representa el rango de los datos de po-
sición con el que se trabaja. Para modificar este valor, tecléese en este
campo un valor nuevo.
F. Campo «PositionWindow»: En este campo se refleja el valor almace-
nado en la RAM del regulador y representa la diferencia permitida entre
la posición real y la final. Para modificar este valor, tecléese en este
campo un valor nuevo.
G. Campo «MonitoringWindow»: En este campo se refleja el valor alma-
cenado en la RAM del regulador y representa el rango de valores permi-
tido para el error de seguimiento. Para modificar este valor, tecléese en
este campo un valor nuevo.
«configuración de la aplicación» con la etiqueta «captación motor» activa:
Los campos que aparecen en esta ventana son:
A. Campo «MP1»: En este campo se refleja la matrícula del motor.
B. Campo «GP2»: En este campo puede seleccionarse el tipo de capta-
ción motor. Tipo de captador integrado en el motor. Podrá seleccionarse
desde el cuadro desplegable la opción:
0 Encóder senoidal Stegmann
1 Resólver
2 Encóder cuadrado TTL
5 Encóder Heidenhain para motores Siemens, familia 1FT6.
F. S6/6
Configuración de la aplicación desde el WinDDSSetup con la etiqueta «cap-
tación motor» activa.

Síntesis de la puesta a punto
6.
SÍNTESIS DE LA PUESTA A PUNTO
Configuración de una aplicación
160
Ref.1912
DDS|MAB
SOFTWARE
· 152 ·
Soft.09.05
6 Encóder senoidal (1 Vpp)
7 Sin captador
10 Simulador de motor
Ver figura:
C. Campo «NP121»: En este campo se definen el nº de vueltas de motor.
Para modificar este valor, tecléese en este campo un valor nuevo.
D. Campo «NP122»: En este campo se definen el nº de vueltas del husillo.
Para modificar este valor, tecléese en este campo un valor nuevo.
E. Campo «NP123»: En este campo se define la relación entre el despla-
zamiento lineal de la máquina y el eje que la mueve, es decir, el paso del
husillo. Para modificar este valor, tecléese en este campo un valor nue-
vo.
F. Campo «NP116»: En este campo se define la resolución del captador
que integra el motor. Para modificar este valor, tecléese en este campo
un valor nuevo.
La ventana «configuración de la aplicación» con la etiqueta «captación di-
recta» activa es:
Los campos que aparecen en esta ventana son:
Si se dispone de captación directa, deberá habilitarse la opción «activar se-
gunda captación» y seleccionar en:
A. Campo «Tipo»: Si la captación directa es lineal «encóder lineal» o ro-
tativa «encóder rotativo». Además en el cuadro desplegable de su dere-
cha debe seleccionarse el tipo de señal del captador.
Señal cuadrada TTL.
Señal senoidal (1Vpp).
Señal Stegmann (sólo con encóder rotativo).
Señal cuadrada TTL con comunicación SSI.
Señal 1Vpp con comunicación SSI.
F. S6/7
Configuración de la aplicación desde el WinDDSSetup con la etiqueta «cap-
tación directa» activa.

Síntesis de la puesta a punto
SÍNTESIS DE LA PUESTA A PUNTO
Configuración de una aplicación
6.
Ref.1912
· 153 ·
DDS|MAB
SOFTWARE
Soft.09.05
Ver figura:
Si se selecciona en este campo la opción «encóder lineal» con la opción
«I0s codificados» desactivada, la ventana y los campos que se muestran
son:
B. Campo «NP117»: En este campo se define la resolución del captador li-
neal. Para modificar este valor, tecléese en este campo un valor nuevo.
C. Campo «NP118»: En este campo se define la resolución del captador li-
neal considerando el efecto multiplicador. Para modificar este valor, te-
cléese en este campo un valor nuevo tras activar la casilla inferior.
Si se activa la opción «con I0s codificados» que aparece en esta ventana se
visualizan además los siguientes campos:
D. Campo «NP165»: En este campo se define la separación de dos I0s
codificados consecutivos. Se habrá seleccionado previamente la op-
ción «con I0s codificados». Para modificar este valor, tecléese en este
campo un valor nuevo.
E. Campo «NP166»: En este campo se define la distancia de dos I0s con-
secutivos. Se habrá seleccionado previamente la opción «con I0s codi-
ficados». Para modificar este valor, tecléese en este campo un valor
nuevo.
F. S6/8
Configuración de la aplicación desde el WinDDSSetup con la etiqueta «cap-
tación directa» activa. Captación directa lineal sin I0s codificados.

Síntesis de la puesta a punto
6.
SÍNTESIS DE LA PUESTA A PUNTO
Configuración de una aplicación
160
Ref.1912
DDS|MAB
SOFTWARE
· 154 ·
Soft.09.05
Al estar activada la opción «con I0s codificados» se habilita el «sentido de
contaje (decreciente vs creciente)» que activado establece el sentido de
contaje negativo en dirección positiva. Ver parámetro PP115.bit 5.
Si se selecciona en este campo la opción «encóder rotativo» sin activar la
opción «con I0s codificados» la ventana y los campos que se muestran son:
F. Campo «NP131»: En este campo se definen el nº de vueltas del encó-
der rotativo de la captación directa. Para modificar este valor, tecléese
en este campo un valor nuevo.
G. Campo «NP132»: En este campo se definen el número de vueltas del
husillo. Para modificar este valor, tecléese en este campo un valor nue-
vo.
H. Campo «NP133»: En este campo se define la relación entre el despla-
za- miento lineal de la máquina por vuelta del encóder rotativo de la cap-
tación directa. Para modificar este valor, tecléese en este campo un
valor nuevo.
I. Campo «NP117»: En este campo se define la resolución del captador
rotativo. Para modificar este valor, tecléese en este campo un valor nue-
vo.
F. S6/9
Configuración de la aplicación desde el WinDDSSetup con la etiqueta «cap-
tación directa» activa. Captación directa lineal con I0s codificados.
F. S6/10
Configuración de la aplicación desde el WinDDSSetup con la etiqueta «cap-
tación directa» activa. Captación directa rotativa sin I0s codificados.

Síntesis de la puesta a punto
SÍNTESIS DE LA PUESTA A PUNTO
Configuración de una aplicación
6.
Ref.1912
· 155 ·
DDS|MAB
SOFTWARE
Soft.09.05
Si se activa la opción «con I0s codificados» la ventana y los campos que se
muestran son:
J. Campo «NP165»: En este campo se define la separación de dos I0s
codificados consecutivos cuando dispone de I0s codificados. Habrá
sido previamente seleccionada la opción «con I0s codificados». Para
modificar este valor, tecléese en este campo un valor nuevo.
K. Campo «NP166»: En este campo se define la distancia de dos I0s con-
secutivos, cuando dispone de I0s codificados. Se habrá seleccionado
previamente la opción «con I0s codificados». Para modificar este valor,
tecléese en este campo un valor nuevo.
Al estar activada la opción «con I0s codificados» se habilita la opción «sen-
tido de contaje (decreciente vs creciente)» que activado establece el senti-
do de contaje negativo en dirección positiva. Ver parámetro PP115.bit 5.
La ventana «configuración de la aplicación» con la etiqueta «signos» activa
es:
F. S6/11
Configuración de la aplicación desde el WinDDSSetup con la etiqueta «cap-
tación directa» activa. Captación directa rotativa con I0s codificados.
F. S6/12
Configuración de la aplicación desde el WinDDSSetup con la etiqueta «sig-
nos» activa. Inversión de signos de diferentes datos de velocidad y posición
cuando el CNC cierra el lazo de posición.
A
B
C
D

Síntesis de la puesta a punto
6.
SÍNTESIS DE LA PUESTA A PUNTO
Configuración de una aplicación
160
Ref.1912
DDS|MAB
SOFTWARE
· 156 ·
Soft.09.05
si en el modo de operación AP1 se seleccionó la opción «velocidad»,
esta ventana mostrará un aspecto como el de la figura pudiendo cam-
biar el signo de diferentes datos activando o desactivando el botón que
acompaña a cada bloque con un 1 en su interior. Así, activando cada bo-
tón, el valor (1) visualizado en el bloque asociado al mismo, pasa a un
valor (-1), cambiando así el signo del dato que representa.
Así «activar» el botón implica:
A. Cambiar el sentido de contaje de la captación directa representado por
el parámetro (PP115. bit 3).
B. Cambiar los signos del valor de la consigna de posición (PP55. bit 0)
, del
valor de la captación de posición (motor) monitorizada (PP55. bit 2)
y del
valor de la captación de posición (directa) monitorizada (PP55. bit 3).
Afectan al funcionamiento del lazo y sirven para solucionar un problema
de realimentación positiva.
C. Cambiar el signo del valor de la captación de velocidad representado
por el parámetro (SP43. bit 2)
.
D. Cambiar el signo del valor de la consigna de velocidad representado por
el parámetro (SP43. bit 0)
.
si en el modo de operación AP1 se seleccionó alguna de las opciones de
«posición», esta ventana mostrará un aspecto como el que sigue pu-
diendo cambiar el signo de diferentes datos activando o desactivando el
botón que acompaña a cada bloque con un 1 en su interior. Así, activan-
do cada botón, el valor (1) visualizado en el bloque asociado al mismo,
pasa a un valor (-1), cambiando así el signo del dato que representa:
Así «activar» el botón implica:
A. Cambiar el sentido de contaje de la captación directa representado por
el parámetro (PP115. bit 3)
.
B. Cambiar los signos del valor de la captación de posición (motor) moni-
torizada (PP55. bit 2) y del valor de la captación de posición (directa)
monitorizada (PP55. bit 3)
. No afectan al funcionamiento del lazo y no
sirven para solucionar un problema de realimentación positiva.
C. Cambiar el signo del valor de la consigna de posición representado por
el parámetro (PP55. bit 0)
.
F. S6/13
Configuración de la aplicación desde el WinDDSSetup con la etiqueta «sig-
nos» activa. Inversión de signos de diferentes datos de posición cuando el
regulador cierra el lazo de posición.
A
B
C

Síntesis de la puesta a punto
SÍNTESIS DE LA PUESTA A PUNTO
Configuración de una aplicación
6.
Ref.1912
· 157 ·
DDS|MAB
SOFTWARE
Soft.09.05
La ventana «configuración de la aplicación» con la etiqueta «límites» activa
es:
Los campos que aparecen en esta ventana son:
Si se señala la opción «activar (PP55.bit 4)» en el recuadro «límites de po-
sición» se habilitan entonces los límites de posición que acotarán la zona
permitida para los movimientos del eje y que podrán establecerse en los
campos:
A. Campo «PP49»: En este campo se define el límite de posición positivo.
Para modificar este valor, tecléese en este campo un valor nuevo.
B. Campo «PP50»: En este campo se define el límite de posición negativo.
Para modificar este valor, tecléese en este campo un valor nuevo.
El límite de velocidad se establece en:
C. Campo «SP10.#»: En este campo se define el máximo valor que puede
tomar la consigna final de velocidad (variable SV7). Para modificar este
valor, tecléese en este campo un valor nuevo.
y el límite de aceleración se establece en:
D. Campo «CP20.#»: En este campo se define el máximo valor que puede
tomar la consigna de corriente que llega al lazo de corriente. Para mo-
dificar este valor, tecléese en este campo un valor nuevo si dispone del
nivel de acceso necesario.
E. Campo «LV160»: En este campo se define la aceleración máxima apli-
cada a todos los bloques de posicionamiento (en módulo). Ver figura.
F. S6/14
Configuración de la aplicación desde el WinDDSSetup con la etiqueta «lími-
tes» activa.
NOTA. Nótese que en el recuadro «límite de aceleración» se muestra
además el campo «aceleración máxima con FB1 (LV160)» si el regu-
lador que establece comunicación con el WinDDSSetup es un MMC o
CMC (reguladores para aplicaciones de MC).
F. S6/15
Configuración de la aplicación desde el WinDDSSetup con la etiqueta «lími-
tes» activa. Si el regulador conectado es un MMC o un CMC y en el «Modo
de operación AP1» se seleccionó la opción «posición FB1».

Síntesis de la puesta a punto
6.
SÍNTESIS DE LA PUESTA A PUNTO
Configuración de una aplicación
160
Ref.1912
DDS|MAB
SOFTWARE
· 158 ·
Soft.09.05
Si en el campo «modo de operación AP1» se seleccionó la opción «veloci-
dad» cuando se activó la etiqueta «general», la ventana «configuración de
la aplicación» que se mostrará con la etiqueta «búsqueda de cero» activa
es:
Esta ventana permite configurar la búsqueda de cero, pudiendo seleccio-
nar:
Captación motor
Los campos que aparecen en esta ventana son:
donde:
Captación directa
Los campos que aparecen en esta ventana son:
donde:
F. S6/16
Configuración de la aplicación desde el WinDDSSetup con la etiqueta «bús-
queda de cero» activa.
PP52 Distancia entre el cero máquina y el punto de referencia
de la máquina.
PP150 Posición del punto de referencia de la máquina respecto
a la marca de I0.
PP177 Distancia entre la cota cero del accionamiento y la cota
cero teórica atendiendo a la captación absoluta del encó-
der.
PP54
Distancia entre el cero máquina y el punto de referencia
de la máquina.
PP151
Posición del punto de referencia de la máquina respecto
a la marca de I0.
PP178
Distancia entre la cota cero del accionamiento y la cota
cero teórica atendiendo a la captación directa absoluta.

Síntesis de la puesta a punto
SÍNTESIS DE LA PUESTA A PUNTO
Configuración de una aplicación
6.
Ref.1912
· 159 ·
DDS|MAB
SOFTWARE
Soft.09.05
Si en el campo «modo de operación AP1» se seleccionó cualquier otra op-
ción distinta a «velocidad» cuando se activó la etiqueta «general», la venta-
na «configuración de la aplicación» que se mostrará con la etiqueta
«búsqueda de cero» activa es:
Esta ventana permite configurar la busqueda de cero, pudiendo seleccionar
en el área «configuración de la búsqueda de cero (PP147)» las siguientes
opciones:
No se evalúa el Home Switch (HS)
Si se activa esta opción:
Selección de la captación
La captación utilizada será:
Señal del Home Switch invertida
La pulsación del Home Switch lleva a la entrada del PLC
:
Sentido en la búsqueda de I0
Sentido del movimiento del eje del motor:
Evaluar micro de I0
Evaluación de la marca de I0:
F. S6/17
Configuración de la aplicación desde el WinDDSSetup con la etiqueta «bús-
queda de cero» activa.
El HS no evaluado PP147.bit 5 = 1
Captación motor PP147.bit 3 = 0
Captación directa PP147.bit 3 = 1
(1) Lógica positiva PP147.bit 1 = 0
(0) Lógica negativa PP147.bit 1 = 1
Positivo.
Sentido horario
PP147.bit 0 = 0
Negativo.
Sentido antihorario
PP147.bit 0 = 1
I0 evaluado PP147.bit 6 = 0
I0 no evaluado PP147.bit 6 = 1
NOTA. Nótese que dependiendo de las opciones activadas, las repre-
sentaciones van cambiando en el área gráfica.

Síntesis de la puesta a punto
6.
SÍNTESIS DE LA PUESTA A PUNTO
Configuración de una aplicación
160
Ref.1912
DDS|MAB
SOFTWARE
· 160 ·
Soft.09.05
Además, los campos que aparecen en esta ventana son:
Si se seleccionó «captación motor»:
donde:
Si se seleccionó «captación directa»:
donde:
PP1 Velocidad lenta en el proceso de búsqueda de cero con-
trolada desde el propio regulador.
PP41 Velocidad rápida en el proceso de búsqueda de cero
controlada desde el propio regulador.
PP42 Aceleración aplicada en el proceso de búsqueda de cero
controlada desde el propio regulador.
PP52 Distancia entre el cero máquina y el punto de referencia
de la máquina.
PP150 Posición del punto de referencia de la máquina respecto
a la marca de I0.
PP177 Distancia entre la cota cero del accionamiento y la cota
cero teórica atendiendo a la captación absoluta del encó-
der.
PP1 Velocidad lenta en el proceso de búsqueda de cero con-
trolada desde el propio regulador.
PP41 Velocidad rápida en el proceso de búsqueda de cero
controlada desde el propio regulador.
PP42 Aceleración aplicada en el proceso de búsqueda de cero
controlada desde el propio regulador.
PP54 Distancia entre el cero máquina y el punto de referencia
de la máquina.
PP151 Posición del punto de referencia de la máquina respecto
a la marca de I0.
PP178 Distancia entre la cota cero del accionamiento y la cota
cero teórica atendiendo a la captación absoluta del en-
códer.

7
Ref.1912
· 161 ·
DDS|MAB
SOFTWARE
Soft.09.05
PARAMETRIZACIÓN
CNC-REGULADOR
En este capítulo se describirán algunas particularidades del sistema forma-
do por el CNC 8055/55i de FAGOR y los reguladores, parametrización de
ambos según su interfaz de comunicación, descripción de maniobra en el
PLC 55/55i y demás consideraciones.

Parametrización CNC - regulador
7.
PARAMETRIZACIÓN CNC-REGULADOR
Comunicación SERCOS con el CNC 8055/55i
188
Ref.1912
DDS|MAB
SOFTWARE
· 162 ·
Soft.09.05
7.1 Comunicación SERCOS con el CNC 8055/55i
SERCOS es un estándar internacional para la comunicación digital diseña-
do especialmente para el entorno de máquina herramienta que permite es-
tablecer una interconexión sencilla entre controles y accionamientos de
distintos fabricantes.
Toda la información y comandos se transmiten en formato digital a través de
líneas de fibra óptica.
Estas líneas forman un anillo conectando entre sí todos los elementos elec-
trónicos que forman parte del sistema (control y accionamientos).
Los reguladores provistos de interfaz SERCOS incorporan unas conexio-
nes particulares para las líneas de fibra óptica y que se sitúan junto al dis-
play indicador.
Serán fácilmente reconocidos por los términos SI y S0 que aparecen en su
referencia comercial (p. ej: AXD 1.25.SI.0, SPD 2.75.S0.0).
El uso del interfaz SERCOS
reduce sensiblemente el hardware necesario,
simplifica el cableado y da mayor robustez al sistema al aumentar su inmu-
nidad a ruidos eléctricos.
Para más información, consúltese el capítulo 7. INSTALACIÓN del manual
de regulación ·man_dds_hard.pdf·.
La secuencia de operaciones a seguir para realizar la puesta a punto es:
Conexionado de las líneas de fibra óptica, identificación de los regula-
dores y selección de la velocidad de transmisión.
Parametrización en el CNC 8055/55i.
Descripción de la maniobra en el PLC 55/55i.
Parametrización de los reguladores.
Reencendido de la máquina.
Solución de errores si se producen.

Parametrización CNC - regulador
PARAMETRIZACIÓN CNC-REGULADOR
Comunicación SERCOS con el CNC 8055/55i
7.
Ref.1912
· 163 ·
DDS|MAB
SOFTWARE
Soft.09.05
Consideraciones para el CNC 8055/55i
En presencia de interfaz SERCOS es necesario identificar los reguladores
en el anillo y establecer el modo de funcionamiento. Además habrá que
ajustar algunos de los parámetros del CNC 8055/55i y del regulador.
Modo de funcionamiento
Ajustar en el control numérico los siguientes parámetros para cada acciona-
miento.
DRIBUSID Parámetro P56 (en ejes), P44 (en cabezales) y P5 (en cabezal auxiliar).
Indica la dirección SERCOS asociada al eje o cabezal. Se corresponde con
el valor del conmutador o selector de nodo en los reguladores con SER-
COS. Es recomendable (no necesario) que las direcciones SERCOS de los
distintos ejes y cabezales sean correlativas y comiencen por el número 1. P.
ej: con 3 ejes SERCOS y un cabezal SERCOS los valores de este paráme-
tro son 1, 2, 3 y 4.
DRIBUSLE Parámetro P63 (en ejes), P51 (en cabezales).
El CNC tiene en cuenta este parámetro cuando al eje (o cabezal) se le ha
asignado una dirección SERCOS, es decir, el p.m.e. DRIBUSID es distinto
de cero.
Determina cual es el origen de la captación en ese accionamiento, es decir,
si el CNC recibe la captación de ese accionamiento a través del conector en
el módulo de ejes o a través del interfaz SERCOS.
Por tanto, se ha visto que mediante el parámetro DRIBUSLE se selecciona
cuál será la vía de comunicación de la señal y el tipo de captación. Esto da
lugar a tres modos de trabajo bien diferenciados que se explican a continua-
ción.
V. válidos Función
0
El regulador mantiene la continuidad de las comunica-
ciones en el anillo pero no se reconoce como un ele-
mento más de él.
1 - 8
El regulador queda identificado en el anillo como el ele-
mento nº DRIBUSID, y dispondrá de todas las presta-
ciones del interfaz SERCOS.
NOTA. Recuérdese que si se desea utilizar un mismo motor como eje C
y cabezal, el parámetro DRIBUSID de las dos tablas del CNC debe tener
el mismo valor.
NOTA. En cualquiera de los dos modos, la consigna de velocidad se en-
vía a los reguladores vía SERCOS y el control del lazo de posición se
efectúa en el CNC.
V. válidos Función
DRIBUSLE=0
El accionamiento dispone de encóder o regla externa al
motor y el CNC la recibe a través del conector correspon-
diente en su módulo de ejes.
DRIBUSLE=1
El CNC recibe la captación de posición a través del anillo
SERCOS desde el regulador. Este módulo ha generado
esa señal en base a la captación propia del motor.
DRIBUSLE=2
El CNC recibe la captación de posición a través del anillo
SERCOS desde el regulador. Este módulo ha generado
esa señal en base a la captación directa.
OBLIGACIÓN. El valor del parámetro DRIBUSID deberá coincidir con la di-
rección seleccionada mediante el conmutador rotativo <NODE SELECT>
en el regulador.

Parametrización CNC - regulador
7.
PARAMETRIZACIÓN CNC-REGULADOR
Comunicación SERCOS con el CNC 8055/55i
188
Ref.1912
DDS|MAB
SOFTWARE
· 164 ·
Soft.09.05
Modo de funcionamiento (DRIBUSLE=0). Captación externa.
En este modo de funcionamiento el CNC recibe la captación de posición a
través de su conector en el módulo de ejes. La consigna de velocidad que
envía el CNC al regulador a través de fibra óptica vendrá en revoluciones
por minuto referidas al motor.
Modo de funcionamiento (DRIBUSLE=1). Captación motor.
En este modo de funcionamiento el CNC recibe la captación de posición a
través de la línea de fibra óptica del anillo SERCOS. Esta captación la ge-
nera el regulador en base a la captación propia del motor. La consigna de
velocidad que envía el CNC al regulador a través de la fibra óptica vendrá
en revoluciones por minuto referidas al motor.
F. S7/1
Modo de funcionamiento (DRIBUSLE=0).
F. S7/2
Modo de funcionamiento (DRIBUSLE=1).
Motor
Power
Motor
Feedback
Speed
Command
Position
Feedback
Motor
Speed
VIA Sercos
VIA connector
®
Drive
CNC
55/55i
Speed
Motor
Power
Motor
Feedback
Speed
Command
VIA Sercos
VIA connector
®
Drive
CNC
55/55i
Speed
Position
Feedback
Motor
Speed
Motor
Power
Motor
Feedback
Speed
Command
Position
Feedback
VIA Sercos
VIA connector
®
Drive
CNC
55/55i
Speed
Motor
Speed

Parametrización CNC - regulador
PARAMETRIZACIÓN CNC-REGULADOR
Comunicación SERCOS con el CNC 8055/55i
7.
Ref.1912
· 165 ·
DDS|MAB
SOFTWARE
Soft.09.05
Modo de funcionamiento (DRIBUSLE=2). Captación directa.
En este modo de funcionamiento el CNC recibe la captación de posición a
través de la línea de fibra óptica del anillo SERCOS. Esta captación la ge-
nera el regulador en base a la captación directa. La consigna de velocidad
que envía el CNC al regulador a través de la fibra óptica vendrá en revolu-
ciones por minuto referidas al motor.
Identificación
Ya se ha dicho con anterioridad que era recomendable (no necesario) que
las direcciones SERCOS de los distintos ejes y cabezales sean correlativas
y comiencen por el número 1.
P. ej: con 3 ejes SERCOS y un cabezal SERCOS los valores del parámetro
DRIBUSLE serán 1, 2, 3 y 4, respectivamente.
El hecho de que el accionamiento identificado p. ej. con el nº 1 corresponda
al eje X, al Y, u otro, no es relevante. No obstante, resulta conveniente, para
mayor claridad, que los ejes (cabezales) establecidos en la máquina X, Y, Z,
U, V, W, A, B y C sigan una numeración correlativa en dicho orden. Véase
la figura siguiente:
F. S7/3
Modo de funcionamiento (DRIBUSLE=2).
F. S7/4
Comunicación interfaz SERCOS. CNC 8055/55i o 8070 y reguladores.
Position
Feedback
Motor
Power
Motor
Feedback
Speed
Command
Position
Feedback
VIA Sercos
VIA connector
®
Drive
CNC
55/55i
Speed
Motor
Speed
4
0
F
E
D
C
B
A
9
8
7
6
5
3
2
1
IN
4
0
1
F
E
D
C
B
A
9
8
7
6
5
3
2
C
4
0
F
E
D
B
A
9
8
7
6
5
3
2
1
Node = 4
SPINDLE
4
0
F
E
D
C
B
A
9
8
7
6
5
3
2
1
4
0
F
E
D
C
B
A
9
8
7
6
5
3
2
1
4
8
5
0
F
E
D
C
B
A
9
7
6
3
2
1
4
5
C
3
0
F
E
D
B
A
9
8
7
6
2
1
4
0
F
C
5
3
1
E
D
B
A
9
8
7
6
2
4
0
F
C
5
3
1
E
D
B
A
9
8
7
6
2
4
0
F
E
D
C
B
A
9
8
7
6
5
3
2
1
X AXIS
Node = 1
Y AXIS
Node = 2
B AXIS
Node = 3
CNC
Node = 0
OUT
OUT
IN
OUT
IN
OUT
IN
OUT
IN
CNC 8055/55i FAGOR
PARAM ETERS
S PIN D LE P4 4 =4
X_A XIS P5 6 =1
Y _A XIS P5 6 =2
B _AXIS P5 6 =3
CNC 8070 FAGOR
PARAM ETERS
S PIN DLE D RIVEID =4
X_A XIS D RIVEID =1
Y _A XIS D RIVEID =2
B _A XIS D RIVEID =3
CNC 8055/55i FAGOR
OR CNC 8070 FAGOR
FAGOR
DRIVE SYSTEM

Parametrización CNC - regulador
7.
PARAMETRIZACIÓN CNC-REGULADOR
Comunicación CAN con el CNC 8055/55i
188
Ref.1912
DDS|MAB
SOFTWARE
· 166 ·
Soft.09.05
7.2 Comunicación CAN con el CNC 8055/55i
CAN es otro estándar internacional para la comunicación digital diseñado
especialmente para el entorno de máquina herramienta que permite esta-
blecer una interconexión sencilla entre controles y accionamientos de dis-
tintos fabricantes.
Toda la información y comandos se transmiten en formato digital a través de
un bus de campo utilizando protocolo CANopen.
Este bus diseña una topología en red conectando entre sí todos los elemen-
tos electrónicos que forman parte del sistema (control y accionamientos).
Los reguladores provistos de interfaz CAN incorporan su conexión particu-
lar para el bus que se sitúa junto al display indicador.
Serán fácilmente reconocidos por el término C0 que aparece en su referen-
cia comercial (p. ej: AXD 1.25.C0.0, SPD 2.75.C0.0).
En general, sus características serán similares a las ya comentadas en el
anillo SERCOS, si bien con nivel inferior tanto en velocidad de transmisión
como en prestaciones.
Así, en una transmisión mediante interfaz CAN con velocidad de 1 MHz , el
nº de módulos disponibles en el Bus CAN, en función del tiempo de lazo
(LOOPTIME) serán los siguientes:
Para más información, consúltese el capítulo 7. INSTALACIÓN del manual
«man_dds_hard.pdf».
La secuencia de operaciones a seguir para realizar la puesta a punto es:
Conexionado del bus de campo CAN, identificación de los reguladores
y selección de la velocidad de transmisión.
Parametrización en el CNC 8055/55i.
Descripción de la maniobra en el PLC 55/55i.
Parametrización de los reguladores.
Reencendido de la máquina.
Solución de errores si se producen.
NOTA. Recuérdese que el número máximo total de reguladores (ejes+ca-
bezales) conectados en el bus CAN no podrá ser superior a 6 y la veloci-
dad de transmisión será como máximo de 1 Mbaudio.
LOOPTIME Nº de módulos
4 ms 4 módulos (ejes + cabezales)
5 ms 5 módulos (ejes + cabezales)
6 ms 6 módulos (ejes + cabezales)
2 o 3 ms No es posible
INFORMACIÓN. Para una configuración de LOOPTIME = 6 ms y 6 módu-
los no se dispondrá de canal rápido ni de osciloscopio.
i
NOTA. Recuérdese que toda la parametrización se llevará a cabo a
través del CNC 8055/55i sin necesidad de utilizar un PC ni la aplica-
ción WinDDSSetup.

Parametrización CNC - regulador
PARAMETRIZACIÓN CNC-REGULADOR
Comunicación CAN con el CNC 8055/55i
7.
Ref.1912
· 167 ·
DDS|MAB
SOFTWARE
Soft.09.05
Consideraciones para el CNC 8055/55i
En presencia de interfaz CAN es necesario identificar los reguladores en el
bus de campo y establecer el modo de funcionamiento. Además habrá que
ajustar algunos de los parámetros del CNC 8055/55i y del regulador.
Modo de funcionamiento
Ajustar en el control numérico los siguientes parámetros para cada acciona-
miento.
DRIBUSID Parámetro P56 (en ejes), P44 (en cabezales) y P5 (en cabezal auxiliar).
Indica la dirección CAN asociada al eje o cabezal. Se corresponde con el
valor del conmutador o selector de nodo en los reguladores con CAN. Es re-
comendable (no necesario) que las direcciones CAN de los distintos ejes y
cabezales sean correlativas y comiencen por el número 1.
P. ej: con 3 ejes CAN y un cabezal CAN los valores de este parámetro son
1, 2, 3 y 4.
DRIBUSLE Parámetro P63 (en ejes), P51 (en cabezales).
El CNC tiene en cuenta este parámetro cuando al eje (o cabezal) se le ha
asignado una dirección CAN, es decir, el p.m.e. DRIBUSID es distinto de
cero.
Determina cual es el origen de la captación en ese accionamiento, es decir,
si el CNC recibe la captación de ese accionamiento a través del conector en
el módulo de ejes o a través del interfaz CAN.
Por tanto, se ha visto que mediante el parámetro DRIBUSLE se selecciona
cuál será la vía de comunicación de la señal y el tipo de captación. Esto da
lugar a tres modos de trabajo bien diferenciados que se explican a continua-
ción.
Modo de funcionamiento (DRIBUSLE=0). Captación externa.
En este modo de funcionamiento el CNC recibe la captación de posición a
través de su conector en el módulo de ejes. La consigna de velocidad que
envía el CNC al regulador a través del cable CAN vendrá en revoluciones
por minuto referidas al motor.
Valores válidos Función
0
El regulador mantiene la continuidad de las comunica-
ciones en el bus de campo pero no se reconoce como
un elemento más de él.
1 - 8
El regulador queda identificado en el bus de campo
como el elemento nº DRIBUSID, y dispondrá de todas
las prestaciones del interfaz CAN.
NOTA. Recuérdese que si se desea utilizar un mismo motor como eje C
y cabezal, el parámetro DRIBUSID de las dos tablas del CNC debe tener
el mismo valor.
NOTA. En cualquiera de los dos modos, la consigna de velocidad se en-
vía a los reguladores vía CAN y el control del lazo de posición se efectúa
en el CNC.
Valores válidos Función
DRIBUSLE=0
El accionamiento dispone de encóder o regla externa
al motor y el CNC la recibe a través del conector co-
rrespondiente en su módulo de ejes.
DRIBUSLE=1
El CNC recibe la captación de posición a través del
BUS CAN desde el regulador. Este módulo genera
esa señal en base a la captación propia del motor.
OBLIGACIÓN. El valor del parámetro DRIBUSID deberá coincidir con la di-
rección seleccionada mediante el conmutador rotativo «NODE SELECT»
en el regulador.

Parametrización CNC - regulador
7.
PARAMETRIZACIÓN CNC-REGULADOR
Comunicación CAN con el CNC 8055/55i
188
Ref.1912
DDS|MAB
SOFTWARE
· 168 ·
Soft.09.05
Modo de funcionamiento (DRIBUSLE=1). Captación motor.
En este modo de funcionamiento el CNC recibe la captación de posición a
través del bus CAN. Esta captación la genera el regulador en base a la cap-
tación propia del motor. La consigna de velocidad que envía el CNC al re-
gulador a través del cable de CAN vendrá en revoluciones por minuto
referidas al motor.
Identificación
Ya se ha dicho con anterioridad que era recomendable (no necesario) que
las direcciones CAN de los distintos ejes y cabezales sean correlativas y co-
miencen por el número 1. P. ej: con 3 ejes CAN y un cabezal CAN los valo-
res del parámetro DRIBUSLE serán 1, 2, 3 y 4, respectivamente. El hecho
de que el accionamiento identificado p. ej. con el nº 1 corresponda al eje X,
al Y, u otro, no es relevante. No obstante, resulta conveniente, para mayor
claridad, que los ejes (cabezales) establecidos en la máquina X, Y, Z, U, V,
W, A, B y C sigan una numeración correlativa en dicho orden. Ver figura:
F. S7/5
Modo de funcionamiento (DRIBUSLE=0).
F. S7/6
Modo de funcionamiento (DRIBUSLE=1).
F. S7/7
Comunicación por interfaz CAN. CNC 8055|55i y reguladores.
Motor
Power
Motor
Feedback
Speed
Command
VIA CAN
VIA connector
Drive
CNC
55/55i
Speed
Position
Feedback
Motor
Speed
Motor
Power
Motor
Feedback
Speed
Command
Position
Feedback
VIA CAN
VIA connector
Drive
CNC
55/55i
Speed
Motor
Speed
4
0
1
F
E
D
C
B
A
9
8
7
6
5
3
2
C
4
0
F
E
D
B
A
9
8
7
6
5
3
2
1
Node = 4
SPINDLE
4
0
F
E
D
C
B
A
9
8
7
6
5
3
2
1
4
0
F
E
D
C
B
A
9
8
7
6
5
3
2
1
4
0
F
E
D
C
B
A
9
8
7
6
5
3
2
1
X AXIS
Node = 1
Y AXIS
Node = 2
B AXIS
Node = 3
CNC
Node = 0
CNC 8055/55i FAGOR
PARAM ETERS
S PIN D LE P4 4 =4
X_AXIS P5 6 =1
Y _AXIS P5 6 =2
B_A XIS P5 6 =3
CNC 8055/55i
FAGOR
FAGOR
DRIVE SYSTEM
NONE
5
4
3
2
1
1
2
3
4
5
CAN L
SHIELD
CAN H
NONE
NONE
CAN H
SHIELD
CAN L
NONE
X6 X6 X6 X6
0
1
0
1
0
1
0
1
1
0

Parametrización CNC - regulador
PARAMETRIZACIÓN CNC-REGULADOR
Otros parámetros del CNC 8055/55i
7.
Ref.1912
· 169 ·
DDS|MAB
SOFTWARE
Soft.09.05
7.3 Otros parámetros del CNC 8055/55i
La generación de la consigna analógica de velocidad en el 8055/55i se ajus-
ta mediante los parámetros PROGAIN, FFGAIN, DERGAIN, ACFGAIN,
MAXVOLT1 ... 4.
PROGAIN PROportional GAIN
Parámetro P23 (en ejes y cabezales).
Ganancia proporcional. Constante que establece la relación entre la consig-
na de velocidad y el error de seguimiento. La componente principal de la
consigna de velocidad es proporcional al error de seguimiento y a este pa-
rámetro PROGAIN.
Eje.
PROGAIN suministra la consigna deseada en milivoltios para un error de
seguimiento de 1 mm.
Cabezal.
PROGAIN suministra la consigna deseada en milivoltios para un error de
seguimiento de 1° (sólo cuando el cabezal trabaja en modo M19 o roscado
rígido).
DERGAIN DERivative GAIN
Parámetros P24 (en ejes y cabezales).
Ganancia derivativa. Suministra una componente adicional a la consigna de
velocidad.
Su función depende del parámetro ACFGAIN:
Sea ACFGAIN = NO, entonces:
FFGAIN Feed Forward GAIN
Parámetro P25 (en ejes y cabezales).
NOTA. ¡Su ajuste es imprescindible!
V. válidos Observaciones
0 ... 65535 mV/mm
1000 mV/mm (por defecto).
En mV/grado para cabezal.
Condición Observaciones
Si ACFGAIN = NO DERGAIN es la constante que establece la rela-
ción entre la consigna de velocidad y la varia-
ción del error de seguimiento cada 10 ms.
Si ACFGAIN = YES DERGAIN es la constante que establece la re-
lación entre la consigna de velocidad y la varia-
ción de la velocidad cada 10 ms.
Eje DERGAIN suministra la consigna en mV correspon-
diente a una variación de error de seguimiento de 1 mm
en un tiempo de 10 ms.
Cabezal DERGAIN suministra la consigna en mV para un cam-
bio en el error de seguimiento de 1º durante 10 ms.
Únicamente cuando el cabezal trabaja en modo M19
o roscado rígido.
V. válidos Observaciones
0 ... 65535 mV/(mm/10 ms) 0 mV/ (mm /10 ms) (por defecto)
Eje Define el porcentaje de consigna adicional debido a
la velocidad de avance programada.
Cabezal Define el porcentaje de consigna adicional debido
a la velocidad programada. Únicamente cuando el
cabezal trabaja en modo M19 o roscado rígido.
V. válidos Observaciones
0 ... 100 0 (por defecto)

Parametrización CNC - regulador
7.
PARAMETRIZACIÓN CNC-REGULADOR
Otros parámetros del CNC 8055/55i
188
Ref.1912
DDS|MAB
SOFTWARE
· 170 ·
Soft.09.05
ACFGAIN AC Forward GAIN
Parámetros P46 (en ejes) y P42 (en cabezales).
Establece si el valor del parámetro máquina de ejes DERGAIN se aplica so-
bre las variaciones del error de seguimiento o sobre las variaciones de la ve-
locidad programada. Véase la función DERGAIN.
MAXVOLT MAXimum VOLTage
Parámetro P37 (en ejes).
Suministra el valor de la tensión de consigna de velocidad para G00FEED.
MAXVOLTn MAXimum VOLTage gear n
Parámetros P37 ... P40 para n= 1 ... 4 (en cabezales).
Suministra el valor de la tensión de consigna de velocidad para la velocidad
máxima de la gama n.
Estos parámetros se detallan en el manual de instalación del CNC 8055/55i.
Sus formas de cálculo se aplican también a la generación de consigna SER-
COS (digital) de velocidad.
Esta consigna se transmite a través de fibra óptica en unidades de revolu-
ciones por minuto en el motor.
Esa conversión de la consigna, desde una tensión (mV) a un comando di-
gital hace necesario el ajuste de algún parámetro más tanto en el CNC
8055/55i como en el regulador.
PITCHB Parámetro P86 (en ejes).
Define el paso del husillo cuando se trabaja con interfaz CAN.
PITCH Parámetro P7 (en ejes).
Define la resolución del encóder lineal (regla) cuando la captación del eje se
lleva al CNC (DRIBUSLE=0). No define el paso de husillo que se parame-
triza con el parámetro anterior PITCHB.
NPULSES Parámetro P8 (en ejes) y P13 (en cabezales).
Define el nº de impulsos del encóder cuando la consigna del regulador se
transmite vía CAN (DRIBUSLE=0 o 1). Si se utiliza un encóder lineal debe
definirse con valor 0.
ABSOFF Parámetro P53 (en ejes).
Parámetro necesario en presencia de una captación absoluta. Consulte ma-
nual de instalación del CNC 8055/55i.
MAXGEAR1 Parámetro P2 (en cabezales).
MAXGEAR2 Parámetro P3 (en cabezales).
MAXGEAR3 Parámetro P4 (en cabezales).
MAXGEAR4 Parámetro P5 (en cabezales).
V. válidos Observaciones
No Sobre el error de seguimiento.
Sí Sobre las variaciones de la velocidad programada.
V. válidos Observaciones
0 ... 9999 mV 9500 mV (por defecto)
NOTA. Este parámetro, en accionamientos de ejes y trabajando con in-
terfaz SERCOS debe ajustarse siempre a 9500.
NOTA. Este parámetro no tiene ninguna función con interfaz CAN.
V. válidos Observaciones
0 ... 9999 mV 9500 mV (por defecto)
NOTA. Este parámetro no tiene ninguna función con interfaz CAN.
NOTA. Este parámetro no tiene ninguna función con interfaz SERCOS.
Parametrización CNC - regulador
PARAMETRIZACIÓN CNC-REGULADOR
Otros parámetros del CNC 8055/55i
7.
Ref.1912
· 171 ·
DDS|MAB
SOFTWARE
Soft.09.05
Parámetros que indican la velocidad máxima del cabezal en cada una de
las gamas. Estos parámetros son necesarios para el cambio de gama auto-
mático. Consulte el manual de instalación del del CNC 8055/55i.
INPREV1 Parámetro P72 (en cabezales).
INPREV2 Parámetro P74 (en cabezales).
INPREV3 Parámetro P76 (en cabezales).
INPREV4 Parámetro P78 (en cabezales).
Parámetros que indican la velocidad de entrada para las reducciones en
cada una de las gamas. Consulte el manual de instalación del del CNC
8055/55i.
OUTPREV1 Parámetro P73 (en cabezales).
OUTPREV2 Parámetro P75 (en cabezales).
OUTPREV3 Parámetro P77 (en cabezales).
OUTPREV4 Parámetro P79 (en cabezales).
Parámetros que indican la velocidad de salida para las reducciones en cada
una de las gamas. Consulte el manual de instalación del del CNC 8055/55i.
Los siguientes apartados facilitan las pautas a seguir para realizar el ajuste.
En accionamientos de eje
El CNC comunica al regulador de eje la velocidad de giro deseada en
rev/min de motor (MS) que calcula de la siguiente forma:
CON INTERFAZ SERCOS
Así, para un correcto ajuste del accionamiento síganse las siguientes pau-
tas:
En el regulador:
Ajustar los parámetros del regulador NP121, NP122 y NP123 según
las reducciones instaladas.
SP20 y SP21 son ignorados.
En el CNC:
Hacer MAXVOLT= 9500, es decir, 9.5 V.
Calcular la constante PROGAIN en base a una consigna de 9500
mV, así:
donde:
NOTA. Si no son necesarias las 4 gamas, utilícense las inferiores y asíg-
nense a las gamas no utilizadas el mismo valor que a la gama superior
de las que han sido utilizadas.
NOTA. El parámetro equivalente en el regulador es NP121.
NOTA. El parámetro equivalente en el regulador es NP122.
EdS (mm) Error de seguimiento a una velocidad G00FEED
Kv
Constante que refleja la relación entre G00FEED y EdS:
para kv=1, EdS es 1 mm para una velocidad de 1 m/min.
para kv=2, EdS es 0,5 mm para una velocidad de 1 m/min.
MS =
G00FEED
f [PROGAIN, FFGAIN, ...]
(en mV)
x
MAXVOLT
(en rev/min de motor)
1
x
NP123
NP121
x
NP122
NP121, NP122 y NP123: son parámetros del regulador
PROGAIN =
9500
EdS
(en mV/mm)
=
9500·Kv·1000
G00FEED

Parametrización CNC - regulador
7.
PARAMETRIZACIÓN CNC-REGULADOR
Otros parámetros del CNC 8055/55i
188
Ref.1912
DDS|MAB
SOFTWARE
· 172 ·
Soft.09.05
Ajuste de parámetros de captación con:
CON INTERFAZ CAN
Así, para un correcto ajuste del accionamiento síganse las siguientes pau-
tas:
En el regulador:
Ajustar los parámetros del regulador NP121, NP122 y NP123 ya
que:
En el CNC:
Ajustar el parámetro PITCHB (P86), del CNC.
Calcular la constante PROGAIN en base a una consigna de 9500
mV, así:
donde:
DRIBUSLE=0
El uso de captación externa hace necesario el ajuste
de todos estos parámetros de captación en el CNC.
PITCH (P7), NPULSES (P8), DIFFBACK (P9), SIN-
MAGNI (P10) FBACKAL (P11), REFPULSE (P32), IO-
TYPE (P52), ABSOFF (P53) y EXTMULT (P57). Éstos
se encuentran en la tabla de parámetros de cada eje
en el CNC 8055/55i.
DRIBUSLE=1 El regulador comunica mediante comandos digitales a
través de SERCOS la velocidad del motor al CNC
8055/55i. Así que las características de la captación
vendrán definidas en los parámetros del regulador. En
el CNC 8055/55i los parámetros anteriormente mencio-
nados son ignorados.
DRIBUSLE=2
El regulador comunica mediante comandos digitales a
través de SERCOS la velocidad del motor al CNC
8055/55i. Así que las características de la captación
vendrán definidas en los parámetros del regulador. En
el CNC 8055/55i, los parámetros anteriormente men-
cionados son ignorados.
NOTA. No se han implementado reducciones en accionamientos
de eje para ninguna versión de CNC 8055/55i.
EdS (mm) Error de seguimiento a una velocidad G00FEED
Kv
Constante que refleja la relación entre G00FEED y EdS:
para kv=1, EdS es 1 mm para una velocidad de 1 m/min.
para kv=2, EdS es 0.5 mm para una velocidad de 1
MS =
G00FEED
f [PROGAIN, FFGAIN, ...]
[en mm/min]
x
PITCHB
[en rpm de motor]
p.m.e PITCHB (P86): parámetro de eje del CNC donde se define el paso del husillo
PROGAIN =
9500
EdS
(en mV/mm)
=
9500·Kv·1000
G00FEED

Parametrización CNC - regulador
PARAMETRIZACIÓN CNC-REGULADOR
Otros parámetros del CNC 8055/55i
7.
Ref.1912
· 173 ·
DDS|MAB
SOFTWARE
Soft.09.05
Ajuste de parámetros de captación con:
En accionamientos de cabezal en lazo abierto
El CNC 8055/55i comunica al regulador de cabezal la velocidad de giro de-
seada en rpm de motor (MS) que calcula de la siguiente forma:
CON INTERFAZ SERCOS
Así, para un correcto ajuste del accionamiento síganse las siguientes pau-
tas:
En el regulador:
Ajustar los parámetros del regulador SP20 y SP21 con los valores de
la velocidad máxima del motor en esa aplicación y 9500 mV, respec-
tivamente.
Ajustar siempre las reducciones NP121, NP122 y el paso de husillo
NP123. Si DRIBUSLE=2, ajustar además NP131, NP132, NP133. Si
la captación externa es cuadrada, parametrizar además PP5.
En el CNC:
Parametrizar MAXGEARn del CNC 8055/55i con el valor de la velo-
cidad máxima de giro de la herramienta para ese set de parámetros
n.
Parametrizar MAXVOLTn según la ecuación:
Sea una máquina con tres reducciones de 4/1, 2/1 y 1/1. La velocidad del
motor en la aplicación es de 4000 rev/min y las velocidades máximas de la
herramienta son 1000, 2000 y 3800 rev/min en cada set de parámetros.
DRIBUSLE
= 0
El uso de captación externa hace necesario el ajuste
de todos estos parámetros de captación en el CNC.
PITCH (P7), PITCHB (P86), NPULSES (P8), DIFF-
BACK (P9), SINMAGNI (P10) FBACKAL (P11), REF-
PULSE (P32), IOTYPE (P52), ABSOFF (P53) y
EXTMULT (P57). Éstos se encuentran en la tabla de
parámetros de cada eje en el CNC 8055/55i.
DRIBUSLE
= 1
El regulador comunica mediante comandos digitales a
través de CAN la velocidad del motor al CNC
8055/55i. Así que las características de la captación
vendrán definidas en los parámetros del regulador. En
el CNC 8055/55i los parámetros anteriormente men-
cionados son ignorados.
NOTA. Nótese que a diferencia de SERCOS donde la parametrización
del paso de husillo se realiza desde el parámetro NP123 del regulador,
con interfaz CAN se realiza desde el parámetro PITCHB del CNC.
INFORMACIÓN. Si los parámetros NPULSES y PITCHB se definen con
valor 0, el CNC tomará el valor de los parámetros NP116 y NP123 del reg-
ulador equivalentes del eje correspondiente.
i
Ejemplo de cabezal en lazo abierto.
MS =
MAXVOLTn
velocidad
programada
(en mV)
x
MAXGEARn
(en rev/min de motor)
SP21
x
SP20
SP20 y SP21:
son parámetros del regulador
MAXVOLTn =
SP21
SP20
(en mV )
MAXGEARn x reducción mecánica x
(en rev/min de motor )
SP20 y SP21 son parámetros del regulador
Reducción mecánica =
N motor
N herramienta

Parametrización CNC - regulador
7.
PARAMETRIZACIÓN CNC-REGULADOR
Otros parámetros del CNC 8055/55i
188
Ref.1912
DDS|MAB
SOFTWARE
· 174 ·
Soft.09.05
Siguiendo la pauta indicada anteriormente:
Los parámetros MAXVOLTn serán:
Ajuste de parámetros de captación con:
CON INTERFAZ CAN
Así, para un correcto ajuste del accionamiento síganse las siguientes pau-
tas:
En el CNC:
Parametrizar MAXGEARn del CNC 8055/55i con el valor de la velo-
cidad máxima de giro de la herramienta para ese set de parámetros
n.
SP21 4000
SP20 9500
MAXGEAR1 1000 rev/min
MAXGEAR2 2000 rev/min
MAXGEAR3 3800 rev/min
MAXVOLT1 1000 · (4/1) · (9500/4000) mV = 9500 mV
MAXVOLT2 2000 · (2/1) · (9500/4000) mV = 9500 mV
MAXVOLT3 3800 · (1/1) · (9500/4000) mV = 9025 mV
DRIBUSLE=0
El uso de captación externa hace necesario el ajuste
de todos estos parámetros de captación en el CNC
8055/55i. NPULSES (P13), DIFFBACK (P14), FBAC-
KAL (P15), REFPULSE (P32).
DRIBUSLE=1
El regulador comunica mediante comandos digitales a
través de SERCOS la velocidad del motor al CNC
8055/55i. Así que las características de la captación
vendrán definidas en los parámetros del regulador. En
el CNC 8055/55i los parámetros anteriormente men-
cionados son ignorados.
DRIBUSLE=2 El regulador comunica mediante comandos digitales a
través de SERCOS la velocidad del motor al CNC
8055/55i. Así que las características de la captación
vendrán definidas en los parámetros del regulador. En
el CNC 8055/55i, los parámetros anteriormente men-
cionados son ignorados.
NOTA. Nótese que a diferencia de SERCOS, con interfaz CAN no será
necesario definir los parámetros MAXVOLTn del CNC ni tampoco los pa-
rámetros SP20 y SP21 del regulador de la primera gama.
INFORMACIÓN. Si los parámetros NPULSES, INPREVn y OUTPREVn de
todas las gamas se definen con valor 0, el CNC tomará los equivalentes del
regulador de cabezal correspondiente.
i

Parametrización CNC - regulador
PARAMETRIZACIÓN CNC-REGULADOR
Otros parámetros del CNC 8055/55i
7.
Ref.1912
· 175 ·
DDS|MAB
SOFTWARE
Soft.09.05
Ajuste de parámetros de captación en el accionamiento de cabezal en lazo
abierto:
En cabezales en lazo cerrado, M19 o roscado rígido
El CNC 8055/55i comunica al regulador de cabezal la velocidad de giro de-
seada en rev/min de motor (MS) que calcula de forma similar al caso de los
ejes:
CON INTERFAZ SERCOS
Así, para un correcto ajuste del accionamiento síganse las siguientes pau-
tas:
En el regulador:
Ajustar los parámetros del regulador SP20 y SP21 con los valores de
la velocidad máxima del motor en esa aplicación y 9500 mV, respec-
tivamente.
Ajustar NP121, NP122 y NP123 según las reducciones instaladas.
En el CNC 8055/55i:
Parametrizar MAXGEARn del CNC 8055/55i con el valor de la velo-
cidad máxima de giro de la herramienta para esa gama n.
Parametrizar MAXVOLTn según la ecuación:
Además:
En el CNC 8055/55i:
Ajustar las constantes PROGAIN, DERGAIN, ...
Sean dos parámetros del CNC 8055/55i:
DRIBUSLE
= 0
El uso de captación externa hace necesario el ajus-
te de todos estos parámetros de captación en el
CNC 8055/55i. NPULSES (P13), DIFFBACK (P14),
FBACKAL (P15), REFPULSE (P32).
DRIBUSLE
= 1
El regulador comunica mediante comandos digitales
a través de SERCOS o CAN la velocidad del motor
al CNC 8055/55i. Así que las características de la
captación vendrán definidas en los parámetros del
regulador. En el CNC 8055/55i los parámetros ante-
riormente mencionados son ignorados.
DRIBUSLE
= 2
El regulador comunica mediante comandos digitales
a través de SERCOS la velocidad del motor al CNC
8055/55i. Así que las características de la captación
vendrán definidas en los parámetros del regulador.
En el CNC 8055/55i, los parámetros anteriormente
mencionados son ignorados.
NOTA. La parametrización DRIBUSLE = 2 no está disponible en versio-
nes del CNC 8055/55i con interfaz CAN.
REFEED1 (P34) Velocidad angular máxima en M19 (°/min)
REFEED1 (P35) Velocidad angular máxima de la herramien-
ta en búsqueda de referencia para M19.
MS =
SP21
f [PROGAIN, FFGAIN, ...]
(en mV)
x
SP20
(en rev/min de motor)
SP20 y SP21 son parámetros del regulador
MAXVOLTn =
SP21
SP20
(en mV )
MAXGEARn x reducción mecánica x
(en rev/min de motor )
SP20 y SP21 son parámetros del regulador
Reducción mecánica =
N motor
N herramienta

Parametrización CNC - regulador
7.
PARAMETRIZACIÓN CNC-REGULADOR
Otros parámetros del CNC 8055/55i
188
Ref.1912
DDS|MAB
SOFTWARE
· 176 ·
Soft.09.05
y dos conceptos similares al MaxGear y MaxVolt utilizados anteriormente:
se calcula PROGAIN de la siguiente manera:
donde:
y
y donde:
Sea una máquina con tres reducciones de 4/1, 2/1 y 1/1. La velocidad del
motor en la aplicación es de 4000 rev/min y las velocidades máximas de la
herramienta son 1000, 2000 y 3800 rev/min en cada set de parámetros.
Siguiendo la pauta indicada anteriormente:
Los parámetros MAXVOLTn serán:
y además:
Parametrizar MAXGEARn del CNC 8055/55i con el valor de la velocidad
máxima de giro de la herramienta para esa gama n.
La velocidad máxima de la herramienta en ese modo es de 100 rev/min.
La velocidad máxima de la herramienta en búsqueda de referencia es
de 50 rev/min.
El error de seguimiento debe ser 1° por cada 1000°/min (Kv = 1).
La reducción 1 es la adecuada para trabajar en el modo de orientación
de cabezal M19 ya que MAXGEAR1 es el valor inmediatamente supe-
rior a las 100 rev/min previstas para M19.
MG_M19 Velocidad máxima de la herramienta en el
modo M19 (rev/min).
MV_M19 Consigna de tensión para la REFEED1 (mV).
EdS Error de seguimiento a una velocidad REFEED1
Kv
Constante que refleja la relación entre REFEED y
EdS: Para Kv=1, EdS es 1° para una velocidad de
1000 °/min. Para Kv=2, EdS es 0,5° para una veloci-
dad de 1000 °/min.
Ejemplo de cabezal en lazo cerrado
SP21 4000
SP20 9500
MAXGEAR1 1000 rev/min
MAXGEAR2 2000 rev/min
MAXGEAR3 3800 rev/min
MAXVOLT1 1000 · (4/1) · (9500/4000) mV = 9500 mV
MAXVOLT2 2000 · (2/1) · (9500/4000) mV = 9500 mV
MAXVOLT3 3800 · (1/1) · (9500/4000) mV = 9025 mV
PROGAIN =
MV_M19
EdS
(en mV/°)
=
MV_M19 · Kv · 1000
REFEED1
MV_M19 =
MAXVOLT1
MAXGEAR1
(en mV)
=
REFEED1
360
REFEED1 =
(en °/min)
MG_M19 · 360

Parametrización CNC - regulador
PARAMETRIZACIÓN CNC-REGULADOR
Otros parámetros del CNC 8055/55i
7.
Ref.1912
· 177 ·
DDS|MAB
SOFTWARE
Soft.09.05
Entonces:
El parámetro PROGAIN no admite decimales. Así que, en este ejemplo,
para no perder exactitud en su función, pueden modificarse las unidades en
las que se da PROGAIN por medio de otro parámetro:
Cuando GAINUNIT (P041) = 0, se parametrizará PROGAIN = 26.
Cuando GAINUNIT (P041) = 1, se parametrizará PROGAIN = 2638
Estos están en la tabla de parámetros de cabezal del CNC 8055/55i.
CON INTERFAZ CAN
Ajuste de parámetros de captación con:
CON INTERFAZ SERCOS
NOTA.
Nótese que a diferencia de SERCOS, con interfaz CAN no será
necesario definir los parámetros MAXVOLTn del CNC ni tampoco los pa-
rámetros SP20 y SP21 del regulador.
DRIBUSLE
= 0
El uso de captación externa hace necesario el ajuste de
todos estos parámetros de captación en el CNC. NPUL-
SES (P13), DIFFBACK (P014), FBACKAL (P15) y RE-
FPULSE (P32). Éstos se encuentran en la tabla de
parámetros de cada eje en el CNC 8055/55i.
DRIBUSLE
= 1
En ausencia de un encóder externo siempre puede uti-
lizarse el encóder del motor poniendo DRIBUSLE=1 en
el CNC 8055/55i. En el regulador deben personalizarse
las reducciones que existan por medio de GP6
(F00717), NP121 (S00121), NP122 (S00122). Además
habrá que tener en cuenta otros parámetros tales como
GP2 (F00701), NP123 (S00123), PP76 (S00076) y
PP55 (S00055). En CNC 8055/55i, los parámetros de
captación mencionados anteriormente serán ignorados.
REFEED1 =
(°/min)
100·360 = 36000
REFEED2 =
50·360
= 18000
MV_M19
=
9500
1000
=
950 (mV)
·
36000
360
EdS =
36° para los 36000 de REFEED1
PROGAIN =
950·1·1000
36000
=
950
36
26,38
(mV/°)
=
(°/min)
(°/min)
ADVERTENCIA. Con DRIBUSLE=1, la captación propia del motor sólo es
útil para trabajar en modo M19 y/o roscado rígido cuando el cabezal no dis-
ponga de más de una gama y la reducción cumpla una de estas condicio-
nes:
La reducción es 1/1. La marca I0 del cabezal es la I0 de la captación mo-
tor.
La reducción es del tipo n/1 siendo n un número entero. En este caso es
imprescindible el uso de un micro-conmutadores que permita diferenciar
una señal I0 de entre las n señales que genera el encóder del motor con
cada vuelta de cabezal.
La reducción es del tipo n/1 siendo n un número no entero. Véase el
apartado «
Parametrización de NP133 y NP117. Relación entera» de
este manual.
DRIBUSLE
= 2
En presencia de captación directa, bien sea encóder ex-
terno o regla, el valor de DRIBUSLE=2 en el CNC
8055/55i. En el ajuste del regulador será necesario tener
en cuenta los parámetros GP10 (F00719), PP115
(S00115), NP117 (S00117), NP118 (S00118), NP131
(F00130), NP132 (F00131), NP133 (F00132). Además
habrá que parametrizar otros parámetros tales como
PP76 (S00076) y PP55 (S00055).

Parametrización CNC - regulador
7.
PARAMETRIZACIÓN CNC-REGULADOR
Otros parámetros del CNC 8055/55i
188
Ref.1912
DDS|MAB
SOFTWARE
· 178 ·
Soft.09.05
CON INTERFAZ CAN
No debe realizarse ningún ajuste de los parámetros NP121 [S00121],
NP122 [S00122] y NP123 [S00123] del regulador.
ADVERTENCIA. Con DRIBUSLE=2, es muy recomendable parametrizar
también la captación motor atendiendo a los parámetros del regulador indi-
cados en el apartado (con DRIBUSLE=1), con el fin de evitar posibles con-
flictos. Véase PP5 ActualPositionMonitoringWindow.
NOTA. Recuérdese que, se leen los p.m.c. del CNC 8055/55i: NPUL-
SES, INPREVn y OUTPREVn salvo que todos valgan 0.
NOTA. La parametrización DRIBUSLE=2 no está disponible en versiones
del CNC 8055/55i con interfaz CAN.
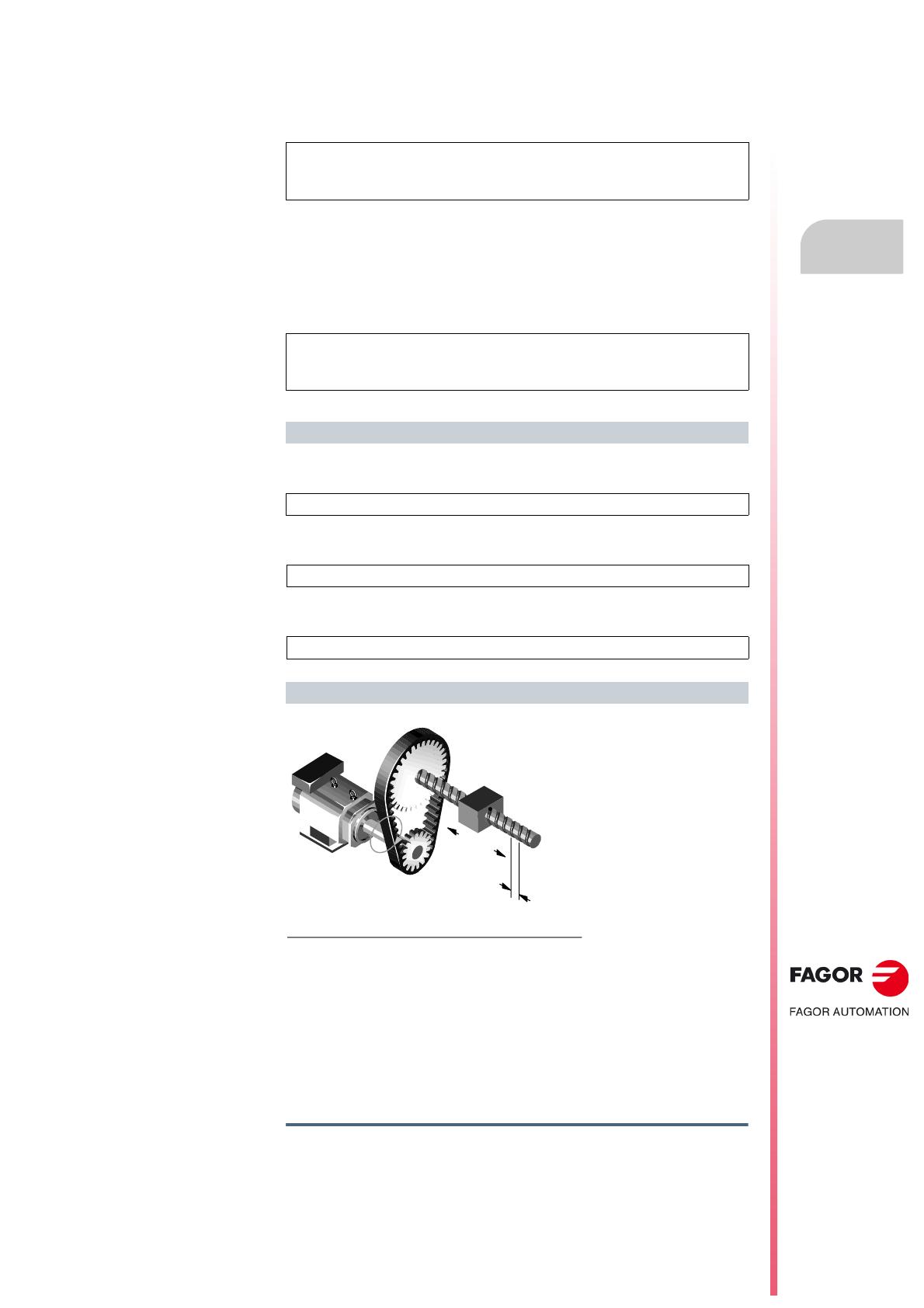
Parametrización CNC - regulador
PARAMETRIZACIÓN CNC-REGULADOR
Consideraciones en los reguladores
7.
Ref.1912
· 179 ·
DDS|MAB
SOFTWARE
Soft.09.05
7.4 Consideraciones en los reguladores
Disponer de un interfaz SERCOS o CAN hace innecesarios algunos de los
parámetros del regulador.
CON INTERFAZ SERCOS
Siempre deberá realizarse un ajuste correcto de los parámetros NP121
(S00121), NP122 (S00122) y NP123 (S00123).
Si además, el parámetro del CNC, DRIBUSLE=2, no sólo habrá que para-
metrizar los parámetros anteriormente indicados sino que además se para-
metrizarán NP131 (F00130), NP132 (F00131) y NP133 (F00132).
Si 5 vueltas de giro de motor generan 3 vueltas de giro de husillo, deben pa-
rametrizarse los parámetros NP121, NP122 y NP123 del siguiente modo:
Si se trata de un eje lineal en el que con cada vuelta de husillo, la mesa
avanza 4 mm:
Si se trata de un eje rotativo en el que cada vuelta de polea de salida supo-
ne, 360° de giro:
NOTA. Recuérdese que si se evita la instalación de la placa simuladora
de encóder y las entradas/salidas, no será necesario parámetrizar los pa-
rámetros asociados a ellas.
NOTA. No olvide parametrizar el parámetro PP5 (S00391) del regulador
con un valor distinto de cero como sistema de vigilancia, especialmente
si la captación externa es cuadrada.
Ejemplo 1. Ajuste de los parámetros NP121, NP122 y NP123
NP121=5 y NP122=3
NP123=4 mm (en el WinDDSSetup se introduce en NP123 un 4)
NP123=360° (en el WinDDSSetup se introduce en NP123 un 360)
Ejemplo 2. Ajuste de los parámetros NP121, NP122 y NP123
F. S7/8
Relación de transmisión entre el eje motor y el eje del husillo de la máquina.
POLEA DE SALIDA
MESA
HUSILLO
PASO DE HUSILLO
POLEA DE ENTRADA
VELOCIDAD
VELOCIDAD
DEL MOTOR
MOTOR
Ejemplo
Diámetro de la polea de salida = 25,75 mm
Diámetro de la polea de entrada = 15,3 mm
NP121=2575 vueltas
NP122=1530 vueltas
Relación de transmisión = 2575/1530 = 1,683
Paso del husillo = 5 mm
NP123 = 5 mm

Parametrización CNC - regulador
7.
PARAMETRIZACIÓN CNC-REGULADOR
Consideraciones en los reguladores
188
Ref.1912
DDS|MAB
SOFTWARE
· 180 ·
Soft.09.05
Si se ataca un motor con correa dentada y encóder externo solidario al hu-
sillo con paso 10 mm y una relación de transmisión 2:1, la parametrización
se llevará a cabo de la siguiente manera:
CON INTERFAZ CAN
No debe realizarse ningún ajuste de los parámetros NP121 (S00121),
NP122 (S00122) y NP123 (S00123) del regulador ya que:
En accionamientos de eje
En accionamientos de cabezal
No debe realizarse ningún ajuste de los parámetros NP131 (F00130),
NP132 (F00131) y NP133 (F00132) del regulador ya que:
Ejemplo 3. Ajuste de los parámetros NP131, NP132 y NP133
NP121=2, NP122=1, NP123=10
NP131=1, NP132=1, NP133=10
Ejemplo 4. Ajuste de los parámetros NP131, NP132 y NP133
F. S7/9
Desplazamiento lineal de la máquina por vuelta del encóder de la captación
directa.
NOTA. No se han implementado reducciones en accionamientos de eje
para ninguna versión del CNC 8055/55i.
NOTA. Recuérdese que si los parámetros NPULSES y PITCHB se para-
metrizan con valor 0, entonces el CNC tomaría los equivalentes del regu-
lador del eje correspondiente.
NOTA. Para obtener las diferentes reducciones deben definirse los p.m.c
INPREVn y OUTPREVn de cada gama. Con DRIBUSLE = 1 no se permi-
ten tener reducciones en las gamas.
NOTA. Recuérdese que si los parámetros NPULSES, INPREVn y OUT-
PREVn de todas las gamas se parametrizan con valor 0, entonces el
CNC tomaría los equivalentes del regulador de cabezal correspondiente.
NOTA. La parametrización DRIBUSLE=2 no está disponible para versio-
nes del CNC 8055/55i con interfaz CAN
MOTOR
PASO DE HUSILLO
MESA
HUSILLO
ENCÓDER
CAPTACIÓN DIRECTA
CAPTACIÓN MOTOR
VELOCIDAD DEL
MOTOR
Ejemplo
Eje rotativo con reducción de 40 y con encóder externo unido
por correa dentada con relación 2:1
NP121=40 vueltas
NP122=1 vuelta
NP123= 360° por vuelta
NP131=2 vueltas
NP132=1 vuelta
NP133= 360° por vuelta
No será necesario introducir valores en NP123 y NP133 en el caso
de ejes rotativos. Internamente se toma el valor de 360° por vuelta
en cada uno de ellos.
R1
R1'
R2
R2'

Parametrización CNC - regulador
PARAMETRIZACIÓN CNC-REGULADOR
Señales de control PLC 8055/55i - regulador
7.
Ref.1912
· 181 ·
DDS|MAB
SOFTWARE
Soft.09.05
7.5 Señales de control PLC 8055/55i - regulador
Señales del PLC 55/55i al regulador
Las habilitaciones Speed Enable y Drive Enable del regulador pueden ser
controladas a través del anillo SERCOS o del bus CAN desde el PLC 55/55i.
Para ello el PLC 55/55i incorpora dos variables lógicas de salida.
SPENAn [ SPeed ENAble n ] [ n = 1, ... 7 ] [M5110, M5160, M5210, M5260, M5310,
M5360 y M5410].
SPENAm [ SPeed ENAble m ] [ m = S, S2, AS ] [M5462, M5487 y M5449].
DRENAn [ DRive ENAble n ] [ n = 1, ... 7 ] [M5111, M5161, M5211, M5261, M5311,
M5361 y M5411].
DRENAm [ DRive ENAble m ] [ m = S, S2, AS ] [M5463, M5488 y M5450].
La función Speed Enable en el regulador se activará cuando lo haga SPE-
NA, o la señal eléctrica Speed Enable en el pin correspondiente del conec-
tor X2 del regulador. Si el regulador es modular también podrá activarse
cuando lo haga la señal eléctrica System Speed Enable en el pin correspon-
diente del conector X6 (en fuentes RPS) o X2 (en el resto de las fuentes FA-
GOR). De igual manera, la función Drive Enable con DRENA y la señal
eléctrica Drive Enable. Ver figura
F. S7/10.
Función: Idéntica a la de la señal eléctrica Speed Enable del
conector X2 del regulador.
Valores válidos: 0 Inhabilita la consigna de velocidad.
Motor con consigna 0.
1 Habilita la consigna de velocidad.
El motor sigue a la consigna.
Función: Idéntica a la de la señal eléctrica Drive Enable del co-
nector X2 del regulador.
Valores válidos: 0 Inhabilita el regulador. Motor sin par.
1 Habilita el regulador.
ADVERTENCIA. Aunque sea utilizada la marca DRENA del interfaz SER-
COS o CAN, no debe eliminarse el control hardware sobre la señal eléctrica
Drive Enable. Utilícense los métodos descritos en el capítulo
9. SEGURI-
DAD FUNCIONAL
del manual «man_dds_hard.pdf».
F. S7/10
Señales de control PLC 8055/55i - regulador.
OR
Halt Function
BV1 [F00201]
BV3 [F00202]
DV32 [S00134]
[bit 13]
OR
DriveEnable
Function
[X2 of the drive]
BV7 [F00203]
DV32 [S00134]
[bit 14]
DriveEnable Pin
DriveEnableDnc
DriveEnable
[SERCOS or CAN]
DRENA
HaltDrive Pin
HaltDriveDnc
Halt
[SERCOS or CAN]
[X2 of the drive]
DV32 [S00134]
[bit 15]
SpeedEnable Pin
SpeedEnable
[SERCOS or CAN]
SPENA
SpeedEnable
Function
OR
SystemSpeedEnable Pin
[X2 of the
p. supply] *
With modular drives
[X2 of the drive]
DV32 [S00134]
[bit 15]
SpeedEnable Pin
SpeedEnable
[SERCOS or CAN]
SPENA
SpeedEnable
Function
OR
With compact drives
(*) X6 if it is an RPS power supply

Parametrización CNC - regulador
7.
PARAMETRIZACIÓN CNC-REGULADOR
Señales de control PLC 8055/55i - regulador
188
Ref.1912
DDS|MAB
SOFTWARE
· 182 ·
Soft.09.05
Señales del regulador al PLC 55/55i
El regulador ofrece al PLC 55/55i dos bits que indican su estado de funcio-
namiento:
DRSTAFn [ DRive STAtus First n ] [ n = 1, ... 7, S, S2, AS ] [M5603, M5653, M5703,
M5753, M5803, M5853 y M5903 en los ejes; M5953, M5978 y M5557 en los
cabezales].
DRSTASn [ DRive STAtus Second n ] [ n = 1, ... 7, S, S2, AS ] [M5604, M5654, M5704,
M5754, M5804, M5854 y M5904 en los ejes; M5954, M5979 y M5556 en los
cabezales].
Así, si la máquina dispone de tres ejes (p. ej: X, Y, B):
Las variables SPENA1, DRENA1, y los bits DRSTAF1 y DRSTAS1 co-
rresponderán al eje X e igualmente las de índice 2 al eje Y, y las de ín-
dice 3 al eje B.
Las variables de índice S, S1 y AS corresponderán al cabezal principal,
secundario y auxiliar, respectivamente.
En el manual de instalación del CNC 8055/55i se mencionan también estas
variables del PLC.
Función: Son los bits que comunican al PLC el estado del regu-
lador. Así, el programa de PLC manejará las señales de
control del regulador en función del estado de éste.
Valores válidos: 0 y 1 con el significado de la tabla T. S7/1.
ADVERTENCIA. Es una norma general que el PLC asigne los índices iden-
tificativos a todas las variables de los ejes según un orden de preferencia
dado por: X, Y, Z, U, V, W, A, B, y C. Nada tienen que ver aquí los números
asignados a los reguladores para su identificación en el anillo SERCOS o
bus CAN (DRIBUSID, Node_Select).
T. S7/1 Señales del regulador al PLC del 8055/55i.
DRSTAFn DRSTASn Estado Acción posterior
0 0 El regulador no está
disponible. No debe
suministrarse potencia
desde red a la fuente
de alimentación.
Compruébese la
alimentación de
24 V DC y/o
soluciónense los
errores.
0 1 El regulador está
preparado para recibir
potencia en el bus.
El contacto Drive OK
está cerrado.
Suminístrese
potencia
a la fuente de
alimentación
desde red.
10
El regulador está
preparado para atender
a las señales de control.
Habilítese el
regulador con
Drive Enable y
Speed Enable.
1 1 Funciones Drive Enable
y Speed Enable activadas.
El motor sigue la consigna.
Gobiérnese
el motor con
la consigna.

Parametrización CNC - regulador
PARAMETRIZACIÓN CNC-REGULADOR
Señales de control PLC 8055/55i - regulador
7.
Ref.1912
· 183 ·
DDS|MAB
SOFTWARE
Soft.09.05
Ejemplo de programación para PLC 8055/55i de FAGOR
Este ejemplo de programación gobierna las señales de control del regulador
en función del estado del mismo y de otras dos variables.
; Sea una máquina de dos ejes (X, Z) y un cabezal (S)
; El eje Z es vertical y no está compensado. Dispone de freno controlado
; por la señal O20.
;
DRSTAF1 = B1R101 ; Estado del regulador del eje X
DRSTAS1 = B0R101
;
DRSTAF2 = B1R102 ; Estado del regulador del eje Z
DRSTAS2 = B0R102
;
DRSTAFS = B1R103 ; Estado del regulador del cabezal
DRSTASS = B0R103
;
CPS R101 GE 1 = M101 ; Regulador del eje X, ok.
CPS R102 GE 1 = M102 ; Regulador del eje Z, ok.
CPS R103 GE 1 = M103 ; Regulador de cabezal, ok.
M101 AND M102 AND M103 = M123 ; Todos los reguladores preparados
; Se puede dar potencia a la máquina
;
M123 AND I1 ; Entradas de emergencias
/AND [otras condiciones] = / EMERGEN
/EMERGEN AND /ALARM
AND [otras condiciones] = O1 ; Salida de emergencia
;
CPS R101 GE 2 = M111 ; Regulador de eje X tiene potencia
CPS R102 GE 2 = M112 ; Regulador de eje Z tiene potencia
M111 AND M112 = M133
; Todos los reguladores de eje (ok) y con potencia
M111 AND NOT LOPEN AND O1 ; Habilitación de eje X
AND [otras] = SERVO1ON = SPENA1 ; Speed Enable de eje X
= TG3 1 300
T1 = DRENA1 ; Drive Enable con retardo de 300 ms a la desconexión para las
; paradas de emergencia
;
M112 AND NOT LOPEN AND O1 AND [otras]
; Habilitación del eje Z (vertical)
= TG3 2 400 = O20 ; Señal para el control del freno
T2 = DRENA2 = SERVO2ON = SPENA2
; Speed y Drive Enable con retardo de 400 ms a la desconexión
; para evitar la caída del eje
;
CPS R103 GE 2 = M113 ; Regulador de cabezal tiene potencia
M3 OR M4 = SET M140 ; Petición de giro del cabezal
M2 OR M5 OR M30 OR RESETOUT OR NOT O1 = RES M140
; Anulación de giro de cabezal
M19 = SET M119 ; Petición M19
M2 OR M3 OR M4 OR M5 OR M30 OR RESETOUT OR NOT O1 = RES M119
; Anulación M19
(M140 OR (M119 AND NOT LOPEN)) AND M113 = SPENAS = TG3 3 4000
T3 = DRENAS ; Retardo de 4 seg. a la desconexión para las paradas de emergencia
SPENAS AND (M119 OR RIGID) AND NOT LOPEN = SERVOSON
; M19 o roscado rígido, cerrar lazo
;
M113 AND [otras] = / FEEDHOL
; Gestión de estado del regulador
; Gestión de las emergencias
; Gestión de habilitación de ejes
; Gestión de habilitación de cabezal
; Gestión del FEED HOLD y el STOP

Parametrización CNC - regulador
7.
PARAMETRIZACIÓN CNC-REGULADOR
Comunicación SERCOS con el CNC 8070
188
Ref.1912
DDS|MAB
SOFTWARE
· 184 ·
Soft.09.05
7.6 Comunicación SERCOS con el CNC 8070
El CNC 8070 tiene algunos parámetros de configuración general similares a
los del regulador FAGOR.
Estos parámetros deben ajustarse para que resulten coherentes con los da-
dos en el regulador.
Son:
OPMODEP Similar al parámetro AP1 (S00032) PrimaryOperationMode del regulador.
Parametrizar este parámetro con un valor coherente con el dado a AP1 en
el regulador.
LOOPTIME Similar al parámetro QP1 (S00001) ControlUnitCycleTime del regulador.
Parametrizar este parámetro con un valor coherente con el dado a QP1 en
el regulador.
También es necesario ajustar otros parámetros en cada uno de los ejes. És-
tos son:
DRIVETYPE Indica el tipo de interfaz utilizado.
Para la conexión del CNC 8070 con los reguladores FAGOR,
DRIVETYPE= SERCOS
TELEGRAMTYPE Indica el tipo de telegrama empleado en la
comunicación SERCOS
Parametrizar TELEGRAMTYPE= 4
DRIVEID Identifica el accionamiento en el anillo
SERCOS.
Parametrizar este parámetro con el mismo valor que se ha seleccionado
en el conmutador rotativo del regulador.
NPULSES
PITCH
Parámetros que determinan la precisión en la
captación.
El CNC 8070 es capaz de trabajar con precisiones de una décima de mi-
cra. Así, la relación entre estos dos parámetros debe ser:
PITCH
NPULSES x 4
=
0,1

Parametrización CNC - regulador
PARAMETRIZACIÓN CNC-REGULADOR
Comunicación SERCOS con el CNC 8070
7.
Ref.1912
· 185 ·
DDS|MAB
SOFTWARE
Soft.09.05
Homogeneización de parámetros. CNC 8070 y regulador SER-
COS
Durante la inicialización de SERCOS, en el arranque del CNC 8070 y en la
validación de los parámetros máquina de los ejes, el CNC 8070 actualiza en
los reguladores los siguientes parámetros.
Los parámetros NP121, NP122, NP131 y NP133 de cada set del CNC 8070
se enviarán al set correspondiente en el regulador. En el resto de los sets
del regulador, se guardarán los parámetros del set por defecto del CNC
8070.
Entendiendo la tabla
CNC
Lista de parámetros máquina del CNC.
DRIVE
Lista de parámetros del regulador que equivalen a cada parámetro del CNC.
Pos/Vel
Indica si la escritura del parámetro en el drive está condicionada por el tipo
de configuración SERCOS, posicion (pos) o velocidad (vel).
Captación
Indica si la escritura del parámetro en el drive está condicionada por el tipo
de captación del eje, motor o directa.

Parametrización CNC - regulador
7.
PARAMETRIZACIÓN CNC-REGULADOR
Comunicación SERCOS con el CNC 8070
188
Ref.1912
DDS|MAB
SOFTWARE
· 186 ·
Soft.09.05
T. S7/2 Homogeneización de parámetros. CNC 8070 y reguladores con interfaz SERCOS.
AXISTYPE
+ AXISMODE
CNC
PROGAIN
I0TYPE
NPULSES2
AXISCH
+ LOOPCH
AXISCH
REFDIREC
+ DECINPUT
+ FBACKSRC
REFEED1
REFEED2
REFVALUE
REFSHIFT
PP76
DRIVE
PP104
PP115 (bit 1,5)
PP115 (bit 0)
PP115 (bit 3)
PP55 (bit 0, 2, 3)
PP147 (bit 0)
PP147 (bit 5)
PP147 (bit 3)
PP147 (bit 1)
PP41
PP1
PP52
PP54
PP150
PP151
pos/vel
pos
pos
pos
pos
pos
pos
Captación
PP76=65; Eje lineal.
PP76=66; Eje rotativo sin módulo.
PP76=194; Eje rotativo con módulo.
Observaciones
Directa
Directa
Motor
Directa
B1=0, B5=0; Si I0 normal.
B1=1, B5=0; Si I0 codificado creciente.
B1=1, B5=1; Si I0 codificado decreciente.
B0=0; Captación directa rotativa (NPULSES<>0).
B0=1; Captación directa lineal (NPULSES == 0).
Directa
B3=0; Contaje captación directa (AXISCH==LOOPCH.
B3=1; Contaje captación directa (AXISCH<>LOOPCH).
B1=0, B2=0, B3=0; No cambia el signo de contaje (AXISCH==NO.
B1=1, B2=1, B3=1; Sí cambia el signo de contaje (AXISCH==SI).
B0=0; Sentido de búsqueda positivo. B0=1; Sentido de búsqueda negativo.
B5=0; Sí se dispone de micro. B5=1; No se dispone de micro.
B3=0; Captación motor. B3=1; Captación directa.
B1=0; La señal DECEL del CNC es siempre lógica positiva.
Significado de símbolos: <> Distinto de ; == Igual a.
Motor
Directa

Parametrización CNC - regulador
PARAMETRIZACIÓN CNC-REGULADOR
Comunicación SERCOS con el CNC 8070
7.
Ref.1912
· 187 ·
DDS|MAB
SOFTWARE
Soft.09.05
T. S7/3 Homogeneización de parámetros. CNC 8070 y reguladores con interfaz SERCOS. (cont.)
ABSOFF
CNC
I0CODDI1
I0CODDI2
BACKLASH
BACKTIME
Activación de
límites
PP177
PP178
DRIVE
NP166
NP165
PP58
PP3
PP55 (bit 4)
pos/vel
Captación
Sólo si se dispone de I0s codificados.
Sólo si se dispone de I0s codificados.
Observaciones
Sólo si BACKANOUT<>0.
motor
directa
Sólo si se dispone de I0s codificados.
Sólo si se dispone de I0s codificados.
pos
BACKANOUT PP2
pos
INPUTREV
NP121.x
Afecta a todas las gamas.
pos
OUTPUTREV
NP122.x
Afecta a todas las gamas.
PITCH
NP123
INPUTREV2
NP131.x
Afecta a todas las gamas. Sólo si se dispone de captación rotativa (NPULSES2<>0)
Directa
OUTPUTREV2
NP132.x
Afecta a todas las gamas. Sólo si se dispone de captación rotativa (NPULSES2<>0)
Directa
PITCH2
NP133
Sólo si se dispone de captación rotativa (NPULSES2<>0)
Directa
NPARSETS
GP6
B4=1; Comprobar los límites.
B4=0; No comprobar los límites. - En cabezales, ejes rotativos con módulo y siempre
que LIMIT+ y LIMIT- (ambos) sean 0.
MODLIMUP
PP103
Sólo si es cabezal ó eje rotativo con módulo.
SZERO
SP42
Sólo si es cabezal.
INPOSW
PP57
MAXFLWE
PP159
Sólo si se activa la monitorización del error de seguimiento.
Significado de símbolos: <> Distinto de ; == Igual a.
Parametrización CNC - regulador
7.
PARAMETRIZACIÓN CNC-REGULADOR
Comunicación SERCOS con el CNC 8070
188
Ref.1912
DDS|MAB
SOFTWARE
· 188 ·
Soft.09.05
T. S7/4 Homogeneización de parámetros. CNC 8070 y reguladores con interfaz SERCOS. (cont.)
Captación
directa
CNC
NPULSES
PITCH2
Resolución de
la captación
directa
PITCH2
Resolución de
una captación
directa lineal
FBACKDIFF
GP10
DRIVE
NP117
NP117
NP118
PP5
pos/vel
pos
Captación
GP10=0; No hay captación directa.
GP10=1; Señal TTL (SINNAGNI==0).
GP10=2; Señal Vpp (SINMAGNI<>0).
Observaciones
Directa
Sólo si es encóder rotativo (NPULSES<>0).
Sólo si es encóder lineal (NPULSES==0).
Sólo si es encóder lineal (NPULSES==0).
Directa
Directa
Directa
FBMIXTIME PP16
pos
Directa
Significado de símbolos: <> Distinto de ; == Igual a.

8
Ref.1910
· 189 ·
DDS|MAB
SOFTWARE
Soft.09.05
SET DE PARÁMETROS Y
REDUCCIONES
El sistema DDS FAGOR se configura mediante una tabla de parámetros.
Algunos de estos parámetros son
arrays de ocho elementos, ordenados
con terminaciones que pueden enumerarse desde 0 en adelante.
Uno de estos
arrays p. ej. es: SP1.0, SP1.1, SP1.2, ...... SP1.6 y SP1.7.
Los parámetros extendidos en
arrays, están organizados en dos grupos,
llamados
set de parámetros y reducciones (gear ratios).
La figura
F. S8/1 muestra la organización de la tabla.

Set de parámetros y reducciones
8.
202
Ref.1910
DDS|MAB
SOFTWARE
· 190 ·
Soft.09.05
8.1 Terminología empleada
Set de parámetros
Atiende al conjunto de parámetros del regulador agrupados por una misma
terminación y que determinan el ajuste del accionamiento.
El set de parámetros
CERO está formado por el conjunto CP20.0, IP1.0,
SP1.0 ··· SP10.0, SP20.0, SP21.0, SP40.0, SP41.0, SP60.0 ··· SP65.0,
SP80.0 y SP100.0.
Cada set de parámetros puede ajustar un mismo accionamiento de forma
diferente. Se puede optar por uno u otro de estos ajustes (set) con sólo cam-
biar de set activo.
Gama
Atiende a la reducción puramente mecánica, sin consideraciones en cuanto
a la parametrización se refiere.
La gama 0 es la denominación de fuera de gama, sin transmisión.
La gama 1 es la más baja, con mayor reducción de velocidad.
La gama 2 y siguientes serán gamas más altas.
Reducción
Atiende al conjunto de parámetros del regulador agrupados por una misma
terminación y que informa al regulador sobre la relación de transmisión mo-
tor-máquina.
La reducción DOS está formada por el conjunto NP121.2 y NP122.2. Se
puede optar por una u otra con sólo cambiar de reducción activa.
Se numeran desde la reducción 0 hasta la reducción 7.
Los parámetros de la reducción informan sobre la gama en funcionamiento
según:
Reducción 0 Gama 1
Reducción 1 Gama 2
Reducción 2 Gama 3 ...
Es posible, en todo momento, llevar a cabo la edición de todos los paráme-
tros (ocho sets y ocho reducciones). Las operaciones de <backup> y <res-
tore> afectan a la totalidad de la tabla de parámetros.
En cada momento, solamente uno de esos sets
y una de esas reducciones
determinan el funcionamiento del sistema, son los set y reducción activos.
Son posibles todas las combinaciones set - reducción.
Parámetros importantes:
La figura
F. S8/1 muestra un ejemplo.
Los parámetros GP4 y GP6 limitan el nº de sets y reducciones activables.
Con GP4=4 los valores de set activo quedan limitados al rango 0 ... 3.
Ejemplo.
NOTA. Es obligatorio ajustar un Eje C sobre el set de parámetros 7.
Ejemplo.
GP4 SetNumber Nº de sets útiles
GP6 GearRatioNumber Nº de reducciones útiles
GV21 ParameterSetActual Set activo
GV25 GearRatioActual Reducción activa
Ejemplo.
INFORMACIÓN. La asignación de una matrícula de motor a la variable
GV10 inicializa toda la tabla de parámetros a sus valores por defecto. Con-
cretamente GP4=1 y GP6=1, con lo cual sólo quedarán como activables el
set 0 y la reducción 0.
i
Set de parámetros y reducciones
8.
Ref.1910
· 191 ·
DDS|MAB
SOFTWARE
Soft.09.05
El reencendido del regulador pone GV21=0 y GV25=0.
Los siguientes apartados documentan el funcionamiento de estos dos sub-
conjuntos.
F. S8/1
Set de parámetros y reducciones.
Set 7
SP10.7
SP100.7
Set 6
SP10.6
SP100.6
Set 5
SP10.5
SP100.5
Set 4
SP10.4
SP100.4
S
e
t
3
S
P
2
0
.
0
S
P
2
1
.
3
S
P
4
0
.3
S
P
4
1
.
3
C
P
2
0
.
3
I
P
1
.
3
S
P
1
.
3
.
.
.
..
.
.
S
P
1
0.
3
S
P
8
0
.
3
S
P
1
0
0
.
3
S
P
6
0
.0
S
P
6
5.
3
.
..
.
.
.
.
Set 2
SP10.2
SP100.2
Set 1
SP10.1
SP100.1
Parameter Table
Set 0
SP20.0 SP21.0 SP40.0 SP41.0
CP20.0 IP1.0
SP1.0 ....... SP10.0
SP80.0 SP100.0SP60.0 SP65.0.......
AP1 BV1 ......
..........................
XV1 XV2......
.........................
&&
Gear Ratio 5
NP122.5NP121.5
NP123.5
Example:
GP4=8 GV21=3
GP6=6 GV25=1
General parameters
General parameters
A
c
t
u
a
l
S
e
t
Gear Ratio 4
NP122.4NP121.5
NP123.5
Gear Ratio 3
NP122.3NP121.5
NP123.5
Gear Ratio 2
NP122.2NP121.5
NP123.5
G
e
a
r
R
a
t
i
o
1
N
P
1
2
2
.
1
N
P
1
2
1
.
1
N
P
1
2
3
.
5
NP122.0NP121.0NP121.0
Gear Ratio 0
A
c
t
u
a
l
G
e
a
r
R
a
t
i
o

Set de parámetros y reducciones
8.
202
Ref.1910
DDS|MAB
SOFTWARE
· 192 ·
Soft.09.05
8.2 Set de parámetros
El cambio de set activo puede hacerse mediante señales digitales externas,
o a través del interfaz SERCOS o CAN.
Cambio de set mediante las entradas digitales
Estado de funcionamiento:
El parámetro
GP4 fija el número de sets útiles (1GP48).
La variable
GV21 informa de cual es el set activo actual (0 GV21
GP4).
Variables booleanas para el cambio de set activo:
Las variables
GV32, GV31 y GV30 sirven para la preselección del que
será nuevo set activo.
La variable
GV22 registra esta preselección.
La variable
GV24 - Strobe - permite (o no) cambiar el set activo.
La variable
GV23 - Acknowledge - es la señal de reconocimiento del
cambio de set.
El valor por defecto de las tres variables de preselección es cero.
El valor por defecto de la señal de Strobe es uno (activa).
Procedimiento para el cambio de set
Asignar a las entradas IP10-13, las variables booleanas que se desean
gobernar.
Preseleccionar el que será nuevo set activo mediante esas entradas di-
gitales.
Activar la señal de strobe por medio de la señal eléctrica asignada a
GV24.
La desactivación de la señal
strobe GV24 puede hacerse temporizada
o como consecuencia del flanco de subida del
Acknowledge GV23.
La figura
F. S8/3 contempla esto con un ejemplo.
F. S8/2
Cambio de set por entradas digitales.
F. S8/3
Procedimiento para el cambio de set.
MUX
&
GV32
GV31
GV30
GV24
GV22
Set 0 0 0 0
Parameter Sets
Set 1 0 0 1
Set 2 0 1 0
Set 3 0 1 1
Set 4 1 0 0
Set 5 1 0 1
Set 6 1 1 0
Set 7 1 1 1
GV21
ActualParameterSet
ParameterSetPreselection
SetChangeStb
SetActiveBits
Delay
t
IP12=GV31
24 V
0 V
24 V
0 V
24 V
0 V
GV21 ActualParameterSet
t
t
t
t
023
1
0
GV23 SetChangeAck
1
0
1
0
1
0
IP13=GV30
IP10=GV24
pin3-5 X6
pin4-5 X6
pin1-5 X6
Strobe
Acknowledge
20 ms
GP4=4
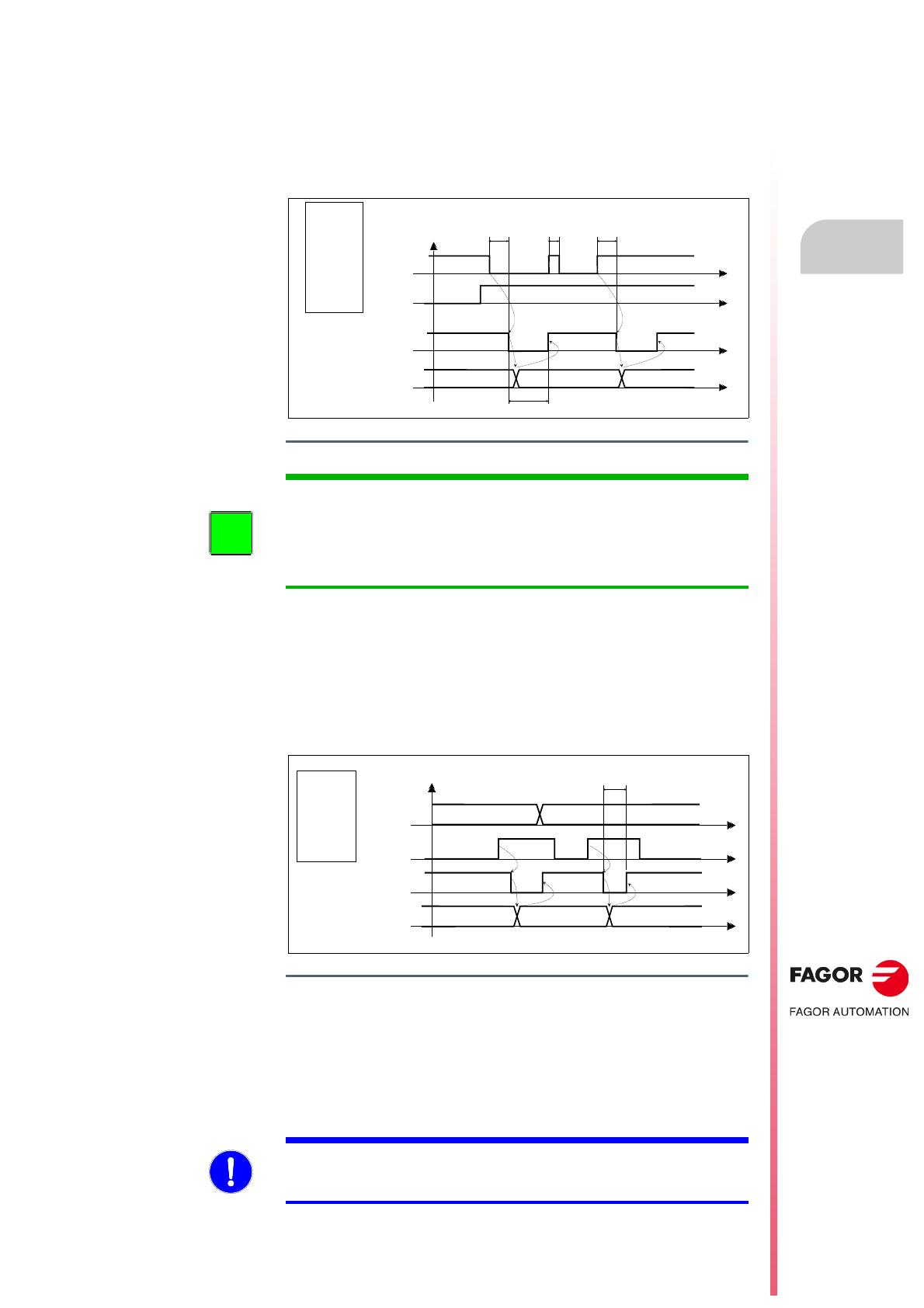
Set de parámetros y reducciones
8.
Ref.1910
· 193 ·
DDS|MAB
SOFTWARE
Soft.09.05
Modo de funcionamiento con el STROBE siempre activo
GV24 strobe permanecerá activa si no se asigna a una entrada digital.
Así se gobierna directamente el cambio de set sin señales de control, con
GV32-30. Para ignorar posibles perturbaciones o rebotes en esas señales
eléctricas, es necesario que mantengan al menos 20 ms su nuevo valor.
La figura
F. S8/4 contempla esto mediante un ejemplo.
Señal de reconocimiento del cambio de set ACKNOWLEDGE
Esta señal sirve como verificación del cambio. Tomará valor cero con el flan-
co de subida de la señal
strobe y recuperará su valor uno cuando el cambio
se haya ejecutado.
Aun en el caso de que el nuevo set sea el mismo que el set previo, esta se-
ñal de reconocimiento GV21 tomará valor cero durante 100 ms.
Ver figura
F. S8/5.
Cambio de set por interfaz SERCOS o CAN
El procedimiento es idéntico y paralelo al cambio de reducción. Ver aparta-
dos de cambio de reducción, por interfaz SERCOS o CAN.
Un aspecto muy importante a tener en cuenta en el caso del cambio de set
en presencia de cualquiera de estos dos interfaces es:
F. S8/4
Funcionamiento con el Strobe siempre activo.
t
IP12=GV31
24 V
0 V
24 V
0 V
t
t
t
013
1
0
GV24=1
unassigned
1
0
1
0
IP13=GV30
pin3-5 X6
pin4-5 X6
20 ms 20 ms< 20 ms
Acknowledge
GV23 SetChangeAck
GV21 ActualParameterSet
>100 ms
GP4=4
INFORMACIÓN. El cambio de set activo puede realizarse con el motor en
marcha. Si el motor está girando a una velocidad superior al límite impuesto
por el nuevo set de parámetros, la velocidad se reducirá automáticamente
hasta tomar el valor de ese nuevo límite, y sólo entonces el nuevo set de pa-
rámetros tendrá validez. La rampa con la que realice ese cambio de veloci-
dad será la que defina el set propio.
i
F. S8/5
Señal de reconocimiento del cambio de set (Acknowledge).
24 V
0 V
GV21 ActualParameterSet
t
t
t
t
055
1
0
GV23 SetChangeAck
1
0
1
0
GV32-GV30
IP10=GV24
pin1-5 X6
Strobe
Acknowledge
100 ms
GP4=8
55
IP13=GV30
IP12=GV31
IP11=GV32
OBLIGACIÓN. Para el control del cambio de set de parámetros a través del
interfaz SERCOS o CAN es necesario que ninguna de las variables GV24,
GV30, GV31 y GV32 haya sido asignada a una entrada digital.

Set de parámetros y reducciones
8.
202
Ref.1910
DDS|MAB
SOFTWARE
· 194 ·
Soft.09.05
Relación mecánica
Con interfaz SERCOS:
Ver apartado, “consideraciones en los reguladores” del capítulo anterior.
Con interfaz CAN:
Ver apartado, “consideraciones en los reguladores” del capítulo anterior.
En ambos casos, la maniobra mecánica en la caja de cambios de la máqui-
na irá acompañada de un cambio de reducción activa.
Estado de funcionamiento:
El parámetro
GP6 fija el número de reducciones útiles (1GP68).
La variable
GV25 informa de cual es la reducción activa actual (0 GV25
GP6).
La variable
GV26 registra la preselección de reducción.
Cambio de reducción por interfaz SERCOS o CAN
Procedimiento de cambio a través de SERCOS o CAN aplicable también al
cambio de set. El control numérico ejecuta los cambios de reducciones me-
diante los comandos M41, M42, M43 y M44. Fijando el parámetro AUTO-
GEAR (P006) a su valor «YES», el CNC generará automáticamente los
comandos M anteriores en función de cual sea la velocidad seleccionada. Si
se hace AUTOGEAR igual a «NO», el usuario debe incluir estos comandos
M en el programa pieza.
Procedimiento
Establecer previamente el número de sets y gamas útiles escribiendo sobre
los parámetros:
Escribir cual va a ser el nuevo set y nueva reducción en las variables del
CNC:
SETGEX, SETGEY, SETGEZ, ... ...........................para los ejes
SETGES ................................................ para el cabezal principal
SSETGS ................................................ para el segundo cabezal
Los cuatro bits de menos peso en estas variables registran la gama activa,
los otros cuatro el set activo tal como se indica:
Estas escrituras se hacen a través del canal de servicio (lento). Se accede
a este canal a través de instrucciones en el programa pieza, del canal de
PLC, o del canal de usuario.
OBLIGACIÓN. La orden para el cambio de reducción se lleva a cabo a tra-
vés del interfaz SERCOS o CAN. No hay posibilidad de realizar el cambio
de reducción a través de entradas digitales.
F. S8/6
Variables GV25 y GV26.
GP4 F00703 SetNumber
GP6 F00717 GearRatioNumber
GV25GV26
ActualGearRatioGearRatioPreselection
Delay
Bit
7 6 5 4
0 0 0 0
0 0 0 1
0 0 1 0
...
Bit
3 2 1 0
0 0 0 0
0 0 0 1
0 0 1 0
...
Set 1
Set 0
Set 2
Gama 1
Gama 3
Gama 2
GV21=0
GV21=2
GV21=1
GV25=0
GV25=2
GV25=1
Reducción 0
Reducción 2
Reducción 1

Set de parámetros y reducciones
8.
Ref.1910
· 195 ·
DDS|MAB
SOFTWARE
Soft.09.05
La marca de PLC (SERPLCAC - SERCOS PLC Acknowledge) sirve como
reconocimiento del cambio.
Permanecerá activa desde que se solicita un nuevo set o reducción por me-
dio de las variables anteriores (SETGEX, ...) hasta que el regulador haya
adoptado los nuevos valores en sus parámetros GV21 ActualParameterSet
y GV25 ActualGearRatio.
Mientras esta marca esté activa, no podrá solicitarse otro cambio SETGE*
ya que se perdería el comando.

Set de parámetros y reducciones
8.
202
Ref.1910
DDS|MAB
SOFTWARE
· 196 ·
Soft.09.05
Programa de PLC para el cambio de reducción en el cabezal
El cabezal dispone dos gamas y trabaja en lazo abierto.
No empleará una captación externa sino que utilizará la captación propia del
motor, es decir, DRIBUSLE=1. Por tanto, para visualizar la S real en el CNC
deberá cambiarse de reducción en el regulador con cada cambio de gama
en la máquina.
El regulador del cabezal principal está identificado con el número 3 en el
anillo SERCOS.
DRIBUSID = 3 en la tabla de parámetros del cabezal principal S.
Se parametrizará el parámetro del PLC P28 (SRR700) = 3.33172.
El número 33172 es el identificador SERCOS de la variable DV11 (F00404).
Esto determina que el registro R700 (asociado al parámetro P28) contenga
la variable DV11 <FagorDiagnostics> del cabezal principal, a través del cual
se conocerá GV25 <ActualGearRatio> y GV21 <ActualParameterSet>.
En el CNC deberá definirse la tabla de cabezal
Cabezal en lazo abierto con dos gamas.
Se define la captación con DRIBUSLE=1
DRIBUSID = 3
En el regulador deberán definirse dos reducciones y un sólo set de
parámetros
;
; Información de recursos utilizados:
;
; I41 = Detector primera gama (M41)
; I42 = Detector segunda gama (M42)
; I79 = <Drive ok> regulador de cabezal
;
; O141 = Electroválvula para la activación de la primera gama (M41)
; O142 = Electroválvula para la activación de la segunda gama (M42)
;
; M41 = Descodificación << M41 >> de CNC: Cambio a primera gama
; M42 = Descodificación << M42 >> de CNC: Cambio a segunda gama
;
; En el parámetro PLC P28 (R700) = 3.33172, se define el identificador
; SERCOS Fagor Diagnostics, porque en este caso, en el cabezal
; DRIBUSID=3
; B10R700 = SV3
; Este bit se activa cuando la velocidad del cabezal es < Nmín (SP40).
;
CY1
;
END
;
PRG
REA
;
Ejemplo de cabezal con interfaz SERCOS
Reducción 0 Gama 1 Set de parámetros 0
Reducción 1 Gama 2
GP4=1
GP6=2
Ejemplo de programación para el cambio de reducción
en el cabezal principal

Set de parámetros y reducciones
8.
Ref.1910
· 197 ·
DDS|MAB
SOFTWARE
Soft.09.05
;
DRSTAFS = B1R104
DRSTASS = B0R104 ; Estado del regulador de cabezal
;
CPS R104 GE 1 = M104 ; Cabezal ok.
;
M104 ; Drive ok (por software)
AND I79 ; Drive ok (por hardware)
= M200 ; Regulador ok
;
CPS R104 GE 2 = M114 ; Regulador de cabezal con potencia
;
I1 AND M200 = / EMERGEN ; Emergencia a CNC
/EMERGEN AND /ALARM = O1 ; Contacto de emergencia al armario
; eléctrico
;
;
M2047 = AND R 700 $0F R45
; Lectura de la variable GV25 <ActualGearRatio>
;
B9R700 = TG2 30 200 ; Retardo confirmación N = 0
B10R700 = TG2 31 200 ; Retardo confirmación N = Nmín
T30 = M155 ; N = 0
T31 = M156 ; N = Nmín
I41 AND NOT I42 = TG2 41 200 ; Retardo confirmación primera gama
I42 AND NOT I41 = TG2 42 200 ; Retardo confirmación segunda gama
;
T41 = GEAR1 ; Confirmación de la primera gama de la máquina
T42 = GEAR2 ; Confirmación de la segunda gama en la máquina
;
M114 AND M41
AND NOT GEAR1
= SET M141 ; Petición de cambio a primera reducción
M114 AND M42
AND NOT GEAR2
= SET M142 ; Petición de cambio a segunda reducción
;
M141 OR M142 = M150 ; Cabezal en cambio de gama
= TG2 10 5000
;
T10 = SET MSG10 ; << tiempo de cambio de gama sobrepasado >>
RESETOUT OR NOT O1 = RES MSG10
;
;
M150 AND M156 = MOV 100 SANALOG = PLCCNTL
; Oscilación en cambio (100x0.3 = 30 mV)
PLCCNTL AND M2011 = SPDLEREV; Inversión en cambio de gama
;
;
M141 AND NOT SERPLCAC; Petición y canal de servicio libre
= SET M241 ; Memoria petición primera reducción del regulador
NOT M242 AND GEAR1
AND NOT CPS R45 EQ $00; Gama 1 no coincide con reducción del
regulador
AND NOT SERPLCAC
= SET M341 ; Memoria petición primera reducción de regulador
;
M241 OR M341 = M146
DFU M146 = MOV $00 R41
= CNCWR (R41, SETGES, M1000) ; Petición de la 1ª reducción al reg.
;
M146 AND CPS R45 EQ $00
AND NOT SERPLCAC AND GEAR1
= RES M141 = RES M241
= RES M341 ; Confirmación del cambio a primera reducción
; Estado del regulador
; Cambio de reducción
Set de parámetros y reducciones
8.
202
Ref.1910
DDS|MAB
SOFTWARE
· 198 ·
Soft.09.05
;
M142 AND NOT SERPLCAC; Petición y canal de servicio libre
= SET M242 ; Memoria petición segunda reducción de regulador
NOT M241 AND GEAR2
AND NOT CPS R45 EQ $01; Gama 2 no coincide con reducción del reg.
AND NOT SERPLC
= SET M342
;
M242 OR M342 = M147
DFU M147 = MOV $01 R41
= CNCWR (R41, SETGES, M1000) ; Petición de la 2ª reducción al reg.
;
M242 AND CPS R45 EQ $01
AND NOT SERPLCAC AND GEAR2
= RES M142 = RES M242
= RES M342 ; Confirmación del cambio a 2ª reducción
;
T10 OR NOT O1 OR RESETOUT ; Anulación de la petición de cambio
= RES M141 = RES M142 = RES M241
= RES M242 = RES M341 = RES M342
;
M241 AND O1 AND M156 = O141 ; Activación de la electroválvula para el
; cambio a primera
M242 AND O1 AND M156 = O142 ; Activación de la electroválvula para el
; cambio a segunda
;
;
M3 OR M4 = SET M140 ; Petición de giro del cabezal
M2 OR M5 OR M30
OR NOT O1 OR RESETOUT = RES M140 ; Anulación de giro del
cabezal
;
(M140 OR PLCCNTL)
AND M114 ; Reguladores con potencia conectada
AND (condiciones puerta cerrada) ; Puerta cerrada
= SPENAS = TG3 3 400 ; Habilitación de la consigna de cabezal
T3 = DRENAS ; Habilitación del regulador de cabezal
;
;
DFU STROBE OR DFU TSTROBE
OR DFU T2STROBE OR DFU MSTROBE
= TG1 1 100 ; Impulso confirmación STROBES
;
NOT T1
AND NOT M150 ; Realizando el cambio de reducción en el regulador
= AUXEND ; En ejecución de funciones M, S, T
;
NOT M241 AND NOT M242 ; Realizando el cambio de reducción en el re-
gulador
= /XFERINH ; Bloqueo de lectura de bloques de CNC
= /FEEDHOLD ; Feedhold ejes de CNC
;
END
; Habilitación del regulador
; AUXEND, /XFERINH, /FEEDHOLD

Set de parámetros y reducciones
8.
Ref.1910
· 199 ·
DDS|MAB
SOFTWARE
Soft.09.05
Programa de PLC para el cambio de set de parámetros
El siguiente ejemplo muestra como se puede trabajar, con un mismo regu-
lador, en forma de cabezal y eje C.
El regulador del cabezal principal (S) está identificado con el numero 3 en el
anillo SERCOS.
En el regulador debe definirse un set de parámetros diferente (por ser eje-
C es obligatorio que sea el último set, es decir, el set 7). En modo eje-C,
debe forzarse a que la máquina trabaje en su gama más baja (mayor reduc-
ción) e indicárselo al regulador (reducción 0).
Parametrizar:
En el CNC deben definirse dos tablas:
Se define la captación externa (DRIBUSLE=0) con todos los parámetros ne-
cesarios.
DRIBUSID=3.
Se parametrizará el parámetro del PLC P28 (SRR700) = 3.33172.
El número 33172 es el ID SERCOS (identificador SERCOS) de la variable
DV11 (F00404).
Esto determina que el registro R700 (asociado al parámetro P28) contenga
la variable DV11 <FagorDiagnostics> del cabezal principal, a través del cual
se conocerán las variables GV21 <ActualParameterSet> y GV25 <Actual-
GearRatio>.
;
; Información de recursos utilizados:
;
; I79 = <Drive OK> regulador de cabezal (eje-C)
;
; En el parámetro PLC P28 (R700) = 3.33172, se define el identificador
; SERCOS Fagor Diagnostics, porque en este caso, en el cabezal DRIBUSID=3
;
CY1
;
END
;
PRG
REA
;
;
DRSTAFS = B1R104
DRSTASS = B0R104 ; Estado del regulador de cabezal
DRSTAF3 = B1R105
DRSTAS3 = B0R105 ; Estado del regulador de eje-C
;
; Las señales DRSTAFS y DRSTASS tienen el mismo comportamiento que
; DRSTAF3 y DRSTAS3
;
GP4=8 Para posibilitar la activación del set 7.
GP6=1 Para funcionar (en este ejemplo) sólo con reducción 0.
Tabla de cabezal DRIBUSID=3
Tabla de eje C Cabezal en lazo cerrado trabajando como eje
OBLIGACIÓN. Si se desea utilizar un mismo motor como eje C y cabezal,
las dos tablas del CNC deben tener idéntico valor en el parámetro DRI-
BUSID.
Ejemplo de programa de PLC para cambio de set en cabezal princi-
pal (eje C)
; Estado del regulador

Set de parámetros y reducciones
8.
202
Ref.1910
DDS|MAB
SOFTWARE
· 200 ·
Soft.09.05
CPS R104 GE 1 = M104 ; Cabezal ok.
CPS R105 GE 1 = M105 ; Eje-C ok.
;
M104 AND M105 ; Drives ok (por software)
AND I79 ; Drives ok (por hardware)
= M200 ; Reguladores ok
;
CPS R104 GE 2 = M114 ; Regulador de cabezal con potencia
CPS R105 GE 2 = M115 ; Regulador de eje-C con potencia
;
I1 AND M200 = / EMERGEN ; Emergencia a CNC
/EMERGEN AND /ALARM = O1 ; Contacto de emergencia al armario
; eléctrico
;
;
M2047 = AND R700 $FF R45 ; Máscara para obtener GV21 y GV25
; GV21: Tabla activa de parámetros
; GV25: Reducción activa
;
DFU CAXIS = SET M251 ; Petición de eje-C
;
M115 AND M251 AND NOT M262
AND NOT SERPLCAC ; Canal de servicio libre
= SET M252 ; Permiso escritura tabla de parámetros en el
; regulador
;
DFU M252 = MOV $77 R41
= CNCWR (R41, SETGES, M1000) ; Selecciona la tabla de parámetros 7
; en el regulador
CPS R45 GE $77 AND NOT CAXIS
= SET M261 ; Fin modo de trabajo eje-C
;
M115 AND M261 AND NOT M252
AND NOT SERPLCAC
= SET M262 ; Permiso de escritura tabla de
parámetros
; en el regulador
;
DFU M262
= MOV $00 R41
= CNCWR (R41, SETGES, M1000) ; Selecciona tabla de parámetros 0
; en el regulador
M252 AND CPS R45 EQ $77 ; Tabla de parámetros eje-C
seleccionada
AND NOT SERPLCAC
= RES M251
= RES M252
;
M262 AND CPS R45 EQ $00; Tabla de parámetros del cabezal
seleccionado
AND NOT SERPLCAC
= RES M261
= RES M262
;
CAXIS AND NOT M251 = SET CAXSEROK ; Confirmación a CNC de
; eje- C por SERCOS Ready
NOT CAXIS AND NOT M261 = RES CAXSEROK
;
;
CAXSEROK ; Eje-C activo
AND M115 ; Reguladores con potencia conectada
AND (condiciones puerta cerrada) ; Puerta cerrada
AND NOT LOPEN
= TG3 58 4000
= SPENA3 ; Speed Enable eje-C
= SERVO3ON ; Habilitación eje-C
; Eje C
; Habilitación del regulador

Set de parámetros y reducciones
8.
Ref.1910
· 201 ·
DDS|MAB
SOFTWARE
Soft.09.05
;
T58 = DRENA3 ; Drive Enable eje-C
;
M3 OR M4 = SET M140 ; Petición de giro de cabezal
M2 OR M5 OR M30
OR NOT O1 OR RESETOUT = RES M140 ; Anulación de giro de cabezal
;
((M140 OR PLCCNTL)
OR (CAXIS AND NOT CAXSEROK))
AND M114 ; Reguladores con potencia conectada
AND (condiciones puerta cerrada) ; Puerta cerrada
= SPENAS = TG3 3 4000 ; Habilitación de la consigna de cabezal
T3 = DRENAS ; Habilitación del regulador de cabezal
;
;
DFU STROBE OR DFU TSTROBE
OR DFU T2STROBE OR DFU MSTROBE
= TG1 1 100 ; Impulso confirmación STROBES
;
NOT T1 AND
NOT SERPLCAC ; Realizando el cambio de set de
parámetros
= AUXEND ; En ejecución de funciones M, S, T
;
NOT SERPLCAC ; Realizando el cambio de set de
parámetros
= /XFERINH ; Bloqueo de lectura bloques de CNC
= /FEEDHOLD ; Feedhold ejes de CNC
;
END
; AUXEND, /XFERINH, /FEEDHOLD

8.
Set de parámetros y reducciones
Ref.1910
DDS|MAB
SOFTWARE
· 202 ·
Soft.09.05

9
Ref.1912
· 203 ·
DDS|MAB
SOFTWARE
Soft.09.05
MANEJO DE VARIABLES
INTERNAS
La monitorización permanente de variables internas del regulador puede
realizarse de dos modos diferentes. A través de:
señales eléctricas por las salidas analógicas o digitales.
la aplicación para PC, WinDDSSetup.
Para la monitorización de la potencia en motores asíncronos (variable
TV50) y el par motor en los motores síncronos (variable TV2) se van a con-
siderar las salidas analógicas y para comprobar si el motor está parado (va-
riable SV5) una salida digital. Así:
Ejemplo
OP1=TV50
Variable de potencia por el canal 1, pines 10/11 de X7
OP3=10000
Diez mil decavatios por cada 10 voltios (10 kW/V)
OP2=TV2
Variable de par por el canal 2, pines 8/9 de X7
OP4=1000
Mil deciNewton metro por cada 10 V (10 Nm/V)
OP10=SV5
Contacto entre pines 6/7 de X6 cerrado si el motor está
parado.
Ver Status > D
igital I/O en la barra de menú del WinDDSSetup.

Manejo de variables internas
9.
MANEJO DE VARIABLES INTERNAS
Señales eléctricas digitales para PLC o maniobra
212
Ref.1912
DDS|MAB
SOFTWARE
· 204 ·
Soft.09.05
9.1 Señales eléctricas digitales para PLC o maniobra
Pueden asignarse cuatro variables booleanas internas del regulador a las
salidas digitales que ofrece el conector X6 de la tarjeta A1 y además que for-
men parte de la maniobra en el armario eléctrico.
Las variables elegidas frecuentemente son:
Velocidad < Nx SV3=nFeedbackMinorNx. Ver SP40.#
Consigna alcanzada
SV4=nFeedbackEqualNCommand. Ver SP41.#
Motor parado
SV5=nFeedbackEqual0. Ver SP42
Par < Tx
TV10=TGreaterTx. Ver TP1
Ver Status > Operation Status en la barra de menú del WinDDSSetup.
Ejemplo
OP12=TV10
El contacto entre los pines 10/11 estará cerrado si
el par del motor es superior al marcado como
umbral Tx por el parámetro TP1.
OP10=SV5
El contacto entre pines 6/7 estará cerrado si el
motor está parado.
ADVERTENCIA. Consúltense en el capítulo 3. MÓDULOS REGULADO-
RES
del manual «man_dds_hard.pdf» las limitaciones eléctricas de los con-
tactos con el fin de no superar estos valores.
F. S9/1
Señales eléctricas digitales para PLC o maniobra.
OP13 (F01407)
OP11 (F01405)
OP10 (F01404)
IN 4
IN 3
IN 2
IP13 (F00904)
IP12 (F00903)
IP11 (F00902)
IP10 (F00901)
OUT 4
OUT 3
OUT 2
OUT 1
REF- IN
IN 1
1
13
7
6
3
5
4
8
2
1
9
11
13
12
10
Pin
Phoenix
3.5 mm
X6-DIGITAL I/Os
A1
1
1
X7-ANALOG I/Os X6-DIGITAL I/Os
P1P2
(A1 Board)
OP12 (F01406)

Manejo de variables internas
MANEJO DE VARIABLES INTERNAS
Señales analógicas para reloj
9.
Ref.1912
· 205 ·
DDS|MAB
SOFTWARE
Soft.09.05
9.2 Señales analógicas para reloj
Haciéndose de un voltímetro, pueden reflejarse en el panel de mando de la
máquina dos variables internas de forma permanente.
Las variables frecuentemente monitorizadas son, en accionamientos de:
Considérese que se instala un voltímetro con fondo de escala de +5 V DC
y se encuentra escalado de 0 % a 100 %. Se trata de reflejar en él, el por-
centaje de la potencia utilizada en función de la potencia disponible. El ajus-
te será:
Considérese que se instala un voltímetro con fondo de escala de +12 V DC
y se encuentra escalado de 0 % a 200 %. Se trata de reflejar en él, el por-
centaje de la potencia nominal (S1) desarrollada. Si el motor de cabezal tie-
ne una potencia nominal (S1) de 11 kW, el ajuste será:
CABEZAL TV50. Potencia desarrollada.
EJE TV2. Par motor.
AMBOS
TV3. Fracción de la potencia disponible que está siendo
desarrollada por el motor. Viene dada en tanto por mil y es
válida tanto para motores síncronos como asíncronos en
cualquier régimen de trabajo.
Ejemplo i
OP2=TV3
Fracción de potencia utilizada respecto a la máxima poten-
cia disponible, canal 2, pines 8/9 del conector X7.
OP4=2000 2000 d% / 10 V = 1000 d% / 5 V. (TV3 en d%)
Ejemplo ii
OP1=TV50 Captación de potencia, canal 1, pines 10/11 del conector X7.
OP3=1833
1833 dW / 10 V (TV50 en dW)
11 kW x 2 x (10/12) = 18,33 kW = 1833 dW
NOTA. La aguja nunca alcanzará el fondo de escala (12 V) debido a que
la tensión máxima en la salida es 10 V. En funcionamiento a máxima po-
tencia en S6 (16 kW) el reloj estará midiendo 8,72 V.
INFORMACIÓN. Si se evalúan OP3 y OP4 con valores demasiados peque-
ños, la señal eléctrica se saturará al alcanzar los 10 voltios.
i
F. S9/2
Mediciones realizadas por los voltímetros en los ejemplos 1 y 2.
+5 Volt
3
2
0
4
5 volts
Voltmeter
+12 Volt
2
4
0
Voltmeter
Power Percentage
0%
100%
50%
1st example.
Power S1 Percentage
2nd example.
12 volts
10
8
6
200%
0%
100%
1
6 V
8.72 V
10 V
11 kW
16 kW
18.3 kW
100%
145%
166%
2.5 V
5 V
50%
100%

Manejo de variables internas
9.
MANEJO DE VARIABLES INTERNAS
Manejo de variables internas
212
Ref.1912
DDS|MAB
SOFTWARE
· 206 ·
Soft.09.05
9.3 Manejo de variables internas
Canales de comunicación
La transferencia de información entre el CNC y los reguladores se realiza en
cada lazo de posición. Cuanta más información se desee transmitir, más so-
brecargada se verá la transmisión SERCOS o CAN.
Se recomienda, por tanto, limitar estos registros dejando únicamente, tras la
puesta a punto, los que sean extrictamente necesarios.
Así mismo, hay información que debe transmitirse obligatoriamente en cada
lazo de posición (consignas, captación, ...) y otra información que puede
transmitirse en varios lazos (monitorización, ...). Como el CNC debe cono-
cer la prioridad de dichas transmisiones, en adelante se utilizarán los térmi-
nos «canal cíclico» y «canal de servicio» para hacer referencia a la forma de
transmitir la información en SERCOS o CAN.
Así se hablará de:
Canal cíclico · rápido ·
La información que se transmite por este canal se actualiza en cada lazo
de posición. Esta información contiene las consignas, la captación, ...
Cada variable que es leída o escrita en el regulador se incorpora a este
paquete de información. Cada tiempo de lazo, el CNC transmite al regu-
lador por este canal, el WordControl (Speed Enable, Drive Enable, Ho-
ming Enable, bit handshake) y la consigna de velocidad. El regulador
transmite al CNC el Word Status y el valor de la posición.
Con el objetivo de no sobrecargar el interfaz debe establecerse una li-
mitación en el número de variables afectadas del regulador a un mínimo
imprescindible.
El acceso síncrono a una variable siempre es llevado a cabo por el canal
cíclico.
Canal de servicio · lento ·
La información que se transmite por este canal se realiza cada cierto
número de lazos de posición (monitorización, ...). Se accede a este ca-
nal a través de instrucciones incorporadas en el programa pieza, del ca-
nal de PLC o del canal de usuario.
El acceso asíncrono a una variable siempre es llevado a cabo por el ca-
nal de servicio.
INFORMACIÓN.
VÍA SERCOS
Todas las prestaciones aquí documentadas requieren el siguiente software:
versiones 01.01 (fresa) y 02.01 (torno) del CNC 8055/55i y posteriores. Ver-
sión 03.01 del regulador y posteriores.
VÍA CAN
Todas las prestaciones aquí documentadas requieren el siguiente software:
versiones 09.11 (fresa) y 10.11 (torno) del CNC 8055/55i y posteriores. Ver-
siones 08.01 o 07.02 del regulador y posteriores.
i

Manejo de variables internas
MANEJO DE VARIABLES INTERNAS
Manejo de variables internas
9.
Ref.1912
· 207 ·
DDS|MAB
SOFTWARE
Soft.09.05
Variables del regulador para su lectura desde el PLC
Canal cíclico
Las variables del regulador legibles desde el PLC son las siguientes:
Identificar el parámetro que se desea leer en uno de los parámetros P28-
P67 de la tabla del PLC.
Utilizar un formato «n.i» donde «n» es el número identificativo del regulador
en el anillo SERCOS o bus CAN e «i» es el identificador SERCOS del pa-
rámetro del regulador.
Los parámetros P28-P67 del PLC van asociados a los registros:
Ejemplo de lectura: Hacer P28 = 4,33172 en los parámetros máquina del
CNC. Así, el registro R700 del PLC contendrá el valor de la variable DV11
[F00404] perteneciente al regulador identificado con el número SERCOS 4.
VARIABLE SERCOS ID NOMBRE
DV9 00012 S00012 Class2Diagnostics (warnings)
DV10 00013 S00013 Class3Diagnostics (op. Status)
SV2 00040 S00040 VelocityFeedback
PV51 00051 S00051 PositionFeedback1
TV2 00084 S00084 TorqueFeedback
CV3 33079 F00311 CurrentFeedback
DV11 33172 F00404 FagorDiagnostics
IV1 33673 F00905 AnalogInput1
IV2 33674 F00906 AnalogInput2
IV10 33675 F00907 DigitalInputs
TV50 34468 F01700 PowerFeedback
TV3 34469 F01701 PowerFeedbackPercentage
Ejemplo
P28 al R700 P29 al R701 P30 al R702 ...

Manejo de variables internas
9.
MANEJO DE VARIABLES INTERNAS
Manejo de variables internas
212
Ref.1912
DDS|MAB
SOFTWARE
· 208 ·
Soft.09.05
Variables del regulador para su escritura desde el PLC
Canal cíclico
Utilícense los parámetros máquina P68-P87 del PLC asociados a los regis-
tros:
Las variables del regulador escribibles en el PLC son las siguientes:
La variable SV1 (S00036) sólo es escribible en ejes y además deberán estar
definidos como visualizador (modo DRO).
Ejemplo de lectura: Hacer P69=1.34176 en los parámetros máquina del
CNC. Así, en el registro R801 del PLC, se podrá forzar el valor de la variable
OV1 perteneciente al regulador identificado con el número SERCOS 1.
Realizando ahora .... = MOV 8000 R801 la salida analógica por el canal 1
(pines 11/10 del conector X7) ofrecerá 2441 mV.
P68 al R800 P69 al R801 P70 al R802 ...
VARIABLE SERCOS ID NOMBRE
OV1 34176 F01408 DA1Value
OV2 34177 F01409 DA2Value
OV10 34178 F01410 DigitalOutputs
SV1 00036 S00036 VelocityCommand
Voltaje = Registro x 0,3 voltios

Manejo de variables internas
MANEJO DE VARIABLES INTERNAS
Manejo de variables internas
9.
Ref.1912
· 209 ·
DDS|MAB
SOFTWARE
Soft.09.05
Variables del regulador para su lectura y escritura
Canal de servicio
El acceso a este canal únicamente puede realizarse vía bloque de alto nivel
en el programa pieza, canal de PLC o canal de usuario. Utilícense los
pa-
rámetros globales
P100-P299 del CNC.
Puede tenerse acceso a todas las variables que no sean de tipo «string».
Desde el programa pieza o canal de usuario.
Desde el canal del PLC.
Ejemplo de lectura:...[P100=SVARX 40]
Introducir en el parámetro P100 el valor de la velocidad del motor del
eje X, es decir, el valor de SV2 [S00040] VelocityFeedback.
Si p. ej. la velocidad fuese 200 rev/min, P100 debe tomar el valor
200000.
Ejemplo de escritura:...[SVARZ 36=P110]
Introducir a la consigna de velocidad del eje Z, es decir a SV1
[S00036] VelocityCommand el valor del parámetro P110.
Si p. ej. P110 = 3500000 , la consigna será 350 rev/min.
Parametro = velocidad (rev/min) x 10000.
Ejemplo de lectura:... = CNCEX[[P100=SVARX 40],M1]
Ejemplo de escritura:... = CNCEX[[SVARZ 36=P100],M1]

Manejo de variables internas
9.
MANEJO DE VARIABLES INTERNAS
Manejo de variables internas
212
Ref.1912
DDS|MAB
SOFTWARE
· 210 ·
Soft.09.05
Variables del regulador para la lectura desde el CNC
Canal cíclico
Las variables del regulador legibles desde el CNC son las siguientes:
VARIABLE SERCOS ID NOMBRE
CV3 33079 F00311 CurrentFeedback
DV9 00012 S00012 Class2Diagnostics (warnings)
DV10 00013 S00013 Class3Diagnostics (Op. Status)
DV11 33172 F00404 FagorDiagnostics
GV16 34100 F01333 MotFileVersion
IV1 33673 F00905 AnalogInput1
IV2 33674 F00906 AnalogInput2
IV10 33675 F00907 DigitalInputs
IV11 33676 F00908 DigitalInputsCh2
PV51 00051 S00051 PositionFeedback1
PV53 00053 S00053 PositionFeedback2
PV130 00130 S00130 ProbeValue1PositiveEdge
PV131 00131 S00131 ProbeValue1NegativeEdge
PV153 34076 F01308 PositionFeedback12
PV179 00179 S00179 ProbeStatus
PV189 00189 S00189 FollowingError
PV190 34773 F02005 PosErrorBetweenFeedbacks
PV191 34777 F02009 FollowingError1
PV192 34778 F02010 FollowingError2
PV193 34779 F02011 FollowingError12
PV205 00405 S00405 Probe1Enable
PV209 00409 S00409 Probe1PositiveLatched
PV210 00410 S00410 Probe1NegativeLatched
QV30 33495 F00727 FiberDistErrCounter
RV17 34298 F01531 DataFile2
RV18 34299 F01532 DataFile3
SV2 00040 S00040 VelocityFeedback
SV9 34382 F01614 PositionCommandDelta
SV10 34383 F01615 PositionFeedback1Delta
SV11 34384 F01616 PositionFeedback2Delta
SV12 34385 F01617 ObserverVelocity
TV2 00084 S00084 TorqueFeedback
TV3 34469 F01701 PowerFeedbackPercentage
TV4 34680 F01912 VelocityIntegralAction
TV5 34681 F01913 TorqueFeedforward
TV50 34468 F01700 PowerFeedback
TV51 00385 S00385 ActivePower
TV92 00092 S00092 BipolarTorqueForceLimit
XV10 34800 F02032 GeneralVariable32A
XV11 34801 F02033 GeneralVariable32B
XV12 34802 F02034 ReadPLCMarksGroup
XV13 34803 F02035 WritePLCMarksGroup

Manejo de variables internas
MANEJO DE VARIABLES INTERNAS
Manejo de variables internas
9.
Ref.1912
· 211 ·
DDS|MAB
SOFTWARE
Soft.09.05
Variables del regulador para su escritura desde el CNC
Canal cíclico
Las variables del regulador escribibles desde el CNC son las siguientes:
VARIABLE SERCOS ID NOMBRE
GV16 34100 F01333 MotFileVersion
OV1 34176 F01408 DA1Value
OV2 34177 F01409 DA2Value
OV10 34178 F01410 DigitalOutputs
OV11 34181 F01413 DigitalOutputsCh2
PV47 00047 S00047 PositionCommand
PV48 00048 S00048 AdditivePositionCommand
PV148 34787 F02019 AdditivePositionCommand1
PV136 00336 S00336 InPosition
PV200 00400 S00400 HomeSwitch
PV201 00401 S00401 Probe1
PV205 00405 S00405 Probe1Enable
QV30 33495 F00727 FiberDistErrCounter
RV17 34298 F01531 DataFile2
RV18 34299 F01532 DataFile3
SV1 00036 S00036 VelocityCommand
SV37 00037 S00037 AdditiveVelocityCommand
TV81 00081 S00081 AdditiveTorqueCommand
TV92 00092 S00092 BipolarTorqueForceLimit
XV10 34800 F02032 GeneralVariable32A
XV11 34801 F02033 GeneralVariable32B
XV12 34802 F02034 RealPLCMarksGroup
XV13 34803 F02035 WritePLCMarksGroup

9.
MANEJO DE VARIABLES INTERNAS
Manejo de variables internas
Ref.1912
DDS|MAB
SOFTWARE
· 212 ·
Soft.09.05

10
Ref.1912
· 213 ·
DDS|MAB
SOFTWARE
Soft.09.05
PRESTACIONES
DESTINADAS AL
MOTOR
10.1 Reducción de potencia del motor
Esta prestación destinada a motores asíncronos puede ser utilizada cuando
se desea disponer de una determinada potencia constante en un amplio
rango de velocidades.
En ocasiones resulta interesante evitar la caja de cambios reductora en el
cabezal de la máquina. Para ello es necesario un accionamiento que ofrez-
ca potencia constante a partir de una velocidad pequeña.
En este tipo de aplicaciones debe seleccionarse un motor cuya potencia no-
minal supere
a la exigida por la aplicación.
Así, al aplicar la reducción, puede conseguirse un ensanchamiento de la
zona de potencia constante, cuyo valor sea el requerido por la aplicación y
desde una velocidad más baja hasta una más alta, es decir, se consigue au-
mentar el rango de velocidades donde el motor suministra la potencia cons-
tante necesaria para la aplicación.
El parámetro empleado para realizar la reducción es:
Ver apartado «
Grupo T. Potencia y par» del capítulo 13 de este manual.
TP22 F01914 MotorPowerReduction
INFORMACIÓN. Recuérdese que en versiones de software anteriores a la
06.01 del regulador este parámetro TP22 se conocía como MP22.
i
Ejemplo
Se desea montar en una máquina un motor que ofrezca 5 kW en S1 para
velocidades a partir de 500 rev/min. ¿Qué motor FM7 del catálogo de FA-
GOR podría seleccionarse sabiendo que puede aplicarse la reducción de
potencia ?
Solución
El motor asíncrono de cabezal FM7-A150--E02 del catálogo de Fa-
gor ofrece una potencia nominal en S1 de 15 kW y en S6-40% de 22 kW. La
velocidad base a partir de la cual suministra realmente toda esta potencia es
de 1500 rev/min.
Si se limita su potencia máxima a un tercio de su capacidad que es la que
necesita la aplicación (5 kW en S1), la velocidad base efectiva queda redu-
cida también en un tercio, es decir, a 500 rev/min. Este efecto se controla
mediante el parámetro TP22 que será modificable únicamente si se dispone
de un nivel de acceso Fagor. En este caso, se parametrizaría TP22=33.
ADVERTENCIA. La limitación de la potencia en el motor no implica la posi-
bilidad de controlarlo mediante un regulador más pequeño. Sin embargo la
potencia exigida a la fuente de alimentación será menor.

Prestaciones destinadas al motor
10.
PRESTACIONES DESTINADAS AL MOTOR
Reducción de potencia del motor
234
Ref.1912
DDS|MAB
SOFTWARE
· 214 ·
Soft.09.05
Parametrizar TP22
El valor que debe introducirse en el parámetro TP22 para aplicar la reduc-
ción se obtiene de la expresión:
donde:
Por defecto:
F. S10/1
Limitación de potencia. Parámetro TP22.
4600
M (S6-40%)
M (S1)
1500
0
500
9000
100
8000
25
50
75
125
150
6800
SPEED (rev/min)
TORQUE (Nm)
TP22=33
TP22=100
FM7-A150-xxxx-E02
TORQUE/SPEED CHARACTERISTIC
M (CP20)
M (CP20) x TP22
M (S6-40%) x TP22
M (S1) x TP22
6800
P(S6-40%)
P(S1)
SPEED (rev/min)
POWER (kW)
10
1500
0
20
8000
25
22
15
4600
5
9000
P(CP20)
500
P(S1) x TP22
P(S6-40%) x TP22
P(CP20) x TP22
TP22=33
TP22=100
FM7-A150-xxxx-E02
POWER/SPEED CHARACTERISTIC
NOTA. Téngase en cuenta que si en la elección del motor las posibilida-
des fuesen varias, se considerará aquella que necesite de un regulador de
menor potencia.
P
ap
Potencia requerida por la aplicación
P
CP20
Potencia correspondiente al valor de corriente dado a CP20.
CP20 = 1,50 x In
en motores asíncronos (excepto FM7)
CP20 = 1,35 x In
en motores de cabezal FM7
NOTA. Nótese que el valor de la corriente nominal «In» del motor viene
dado por el parámetro MP3.
TP22 = (P
ap
/ P
CP20
) · 100
INFORMACIÓN. Si la corriente nominal del motor In es superior a la co-
rriente máxima del regulador (en cualquier régimen), entonces, el valor de
CP20 tendrá, por defecto, el valor de la corriente máxima que puede sumi-
nistrar el regulador.
i

Prestaciones destinadas al motor
PRESTACIONES DESTINADAS AL MOTOR
Función HALT
10.
Ref.1912
· 215 ·
DDS|MAB
SOFTWARE
Soft.09.05
10.2 Función HALT
La activación de la función Halt equivale a poner consigna de velocidad nula
manteniendo el rotor bloqueado (con par).
A diferencia del efecto de la desactivación de la función Speed Enable, la
función Halt no libera el motor cuando ya ha conseguido pararlo.
Puede ser activada
a través de una señal eléctrica en alguna de las entra-
das digitales del regulador, por medio del programa monitor a través de la lí-
nea serie o a través del interfaz SERCOS o CAN.
La función Halt se activa (detiene el motor) cuando:
se ponen a cero voltios en la entrada eléctrica asignada a la variable BV1
(F00201), o bien
se solicita desde el programa monitor ·variable BV3 (F00202) = 0·,
o bien,
se solicita desde el PLC del CNC vía SERCOS o CAN ·bit 13 de la va-
riable DV32 (S00134) se pone a cero·.
Mediante la programación de la variable BV1 del regulador, una de las cua-
tro entradas digitales del conector X6 puede realizar la función de Halt. Para
suavizar la parada del motor es posible limitar su aceleración con el pará-
metro SP65 (con SP70=1, SP100=1).
Seguidamente se muestra un ejemplo de programación y un gráfico demos-
trativo de su funcionamiento.
Así cuando el pin 1 (referido al 5) del conector X6 reciba
cero voltios, BV1
(F00201) tomará el valor cero y se activará la función Halt. El motor se pa-
rará con aceleración máxima de 500 rad/s² y quedará bloqueado. Con 24
voltios en ese pin, el accionamiento seguirá de nuevo a la consigna.
F. S10/2
Función Halt.
Ejemplo
IP10 F00090 = BV1 (F00201)
SP70 F01610 = 1
SP100 F01611 = 1
SP65 F01609 = 500 rad/s²
F. S10/3
Gráfico representativo del ejemplo.
25
+DOW)XQFWLRQ
%9)
%9)
'96
+DOW'ULYH3LQ
+DOW'ULYH'QF
+DOW
6(5&26RU&$1
ELW
time
AnalogInput1
DigitalInput
24 V
0 V
IV1 (F00905)
SV8 (F01613)
Velocity
Command Final
SV7 (F01612)
VelocityCommand
BeforeFilters
SP65 (F01609)
with SP70 (F01610) = 1
& SP100 (F01611) = 1
V
1-5 X6
time
time
time

Prestaciones destinadas al motor
10.
PRESTACIONES DESTINADAS AL MOTOR
Parada del motor por sobrecarga de par
234
Ref.1912
DDS|MAB
SOFTWARE
· 216 ·
Soft.09.05
10.3 Parada del motor por sobrecarga de par
El software del regulador, en su versión 02.04 y en todas sus versiones pos-
teriores, incorpora una prestación destinada principalmente a accionamien-
tos de cabezal, aunque está disponible también para ejes de avance.
Esta prestación permite la detección de una parada del motor debida, p. ej,
a un embotamiento de la herramienta que se comunica mediante un error.
Funcionamiento
Cuando el regulador detecta que la velocidad del motor está por debajo del
umbral fijado por GP8 (F00236) y la consigna interna de corriente está
próxima a su máximo CP20 (F00307), comienza a contar el tiempo en un re-
loj interno.
Si el tiempo transcurrido en estas condiciones (condiciones de sobrecarga
de par) supera el valor fijado en GP7 (F00235), se dispara el código de error
E203.
Si esa consigna interna de corriente se aleja del máximo o se recupera la
velocidad de giro, el reloj interno se pone a cero nuevamente.
Parámetros
Códigos de error generados
Para obtener toda la información referente a estos dos errores, ver capítulo
14. CÓDIGOS Y MENSAJES DE ERROR de este manual.
GP7 O F00720 OverloadTimeLimit
Función Tiempo máximo establecido para un funcionamiento en
condiciones de sobrecarga. Superar este valor de tiem-
po en estas condiciones activa el código de error
E203.
Ver parámetro
GP8.
Valores válidos 0 ... 10 000.
Con GP7 = 0 se deshabilita la detección.
Valor por defecto 200.
Unidades 1 ms.
GP8 O F00721 OverloadVelocityThreshold
Función Establece el umbral de velocidad por debajo del cual se
considera el motor parado a efectos de la detección de
la sobrecarga. Ver parámetro
GP7.
Valores válidos 0 ... 60 000.
Valor por defecto Para motores de cabezal: 100.
Para motores de eje de avance: nmáx.
Nota: n
máx
corresponde a la velocidad máxima del motor.
Unidades 1 rev/min.
E203 Error de sobrecarga de par
E205 Motor sin tensión para las condiciones exigidas

Prestaciones destinadas al motor
PRESTACIONES DESTINADAS AL MOTOR
Reducción de flujo en vacío
10.
Ref.1912
· 217 ·
DDS|MAB
SOFTWARE
Soft.09.05
10.4 Reducción de flujo en vacío
El software del regulador, en su versión 03.06 y en todas sus versiones pos-
teriores, incorpora esta prestación destinada a accionamientos de cabezal
.
Esta prestación permite, mientras el motor gira en vacío, disminuir momen-
táneamente la corriente magnetizante reduciendo considerablemente el rui-
do generado por el motor así como el calentamiento del mismo.
El parámetro empleado para realizar la reducción es:
Ver apartado «
Grupo F. Flujo» del capítulo 13 de este manual.
Este parámetro se extiende en ocho sets
de valores para adaptarlo con
cada cambio de gama.
NOTA. Nótese que esta reducción de la corriente magnetizante no afecta
a la potencia suministrada, ya que aumentará automáticamente cuando se
requiera par motor.
FP40.# F00622.# FluxReduction
OBLIGACIÓN. Dado que el establecimiento del flujo y del par motor máxi-
mo sufren un retardo, no es aconsejable utilizar la reducción de flujo en va-
cío en motores que funcionan como eje.

Prestaciones destinadas al motor
10.
PRESTACIONES DESTINADAS AL MOTOR
Auto-ajuste del valor de la resistencia rotórica
234
Ref.1912
DDS|MAB
SOFTWARE
· 218 ·
Soft.09.05
10.5 Auto-ajuste del valor de la resistencia rotórica
El software del regulador, en su versión 06.01 y posteriores (para SERCOS)
y en sus versiones 07.02 y 08.0x y posteriores (para CAN), incorpora esta
prestación destinada a accionamientos asíncronos.
Esta prestación permite mejorar el comportamiento de un motor asíncrono
independientemente de las variaciones que experimente el valor de la re-
sistencia rotórica en función de la temperatura y la frecuencia.
Este auto-ajuste consiste en realizar una estimación del valor de esta resis-
tencia en todo momento contemplando tales variaciones.
Los parámetros empleados para realizar el auto-ajuste del valor de la resis-
tencia de rotor son:
Ver apartado «
Grupo F. Flujo» del capítulo 13 de este manual.
El valor estimado de esta resistencia puede obtenerse de maneras diferen-
tes dependiendo del motor del que se disponga (si incorpora o no un sensor
de temperatura) y la forma de proceder a la parametrización será:
Determinar si se activa o no la estimación
Determinar si el motor dispone de sensor de temperatura
Determinar la temperatura fija del rótor
Para hacer efectiva cualquier modificación hecha sobre ellos debe ejecutar-
se el comando «validar» mediante GC4 o desde el icono correspondiente
del WinDDSSetup. Si además de hacer efectivos los cambios se desean
mantener permanentemente los nuevos valores en la memoria flash debe
ejecutarse el comando «grabar en flash» mediante GC1 o desde el icono
correspondiente del WinDDSSetup.
FP30 F00612 RotorResistanceEstimationActive
FP31 F00613 RotorFixedTemperature
FP30=1 Activa la estimación
FP30=0 Desactiva la estimación
MP14=2 Con sensor KTY84-130
MP14=3 Con sensor FM7
MP14=5 Con sensor lineal
MP14=6 Con sensor PTC 111-K13-140 en FKM1
MP14=7 Con termorresistencia RTD Pt1000
MP31=0 Si dispone de sensor
MP31=T
Si no dispone de sensor. T= temp. fija (p.ej. 75°C)
Nótese que NO son parámetros ONLINE.
Prestaciones destinadas al motor
PRESTACIONES DESTINADAS AL MOTOR
Posición eléctrica en el arranque del motor
10.
Ref.1912
· 219 ·
DDS|MAB
SOFTWARE
Soft.09.05
10.6 Posición eléctrica en el arranque del motor
IMPORTANTE. Antes de ejecutar esta prestación hay que tener siempre
en cuenta las siguientes consideraciones:
Su objetivo es, que para establecer el control de un motor síncrono es ne-
cesario conocer en el arranque del mismo, cuál es la posición relativa que
ocupan los imanes (solidarios al rótor) respecto al propio estátor, es decir,
cuál es la posición eléctrica
.
Algunos motores incorporan captadores que disponen de un sistema de
medida de la posición absoluta en un giro completo y que pueden determi-
nar, por tanto, la posición eléctrica en el arranque del mismo.
Otros, no disponen de captadores tan inteligentes y desconocen la medida
absoluta de la posición. Para ellos es necesario realizar un cálculo de esti-
mación de la posición eléctrica en el arranque del motor.
Arranque sin posición absoluta en un giro completo
Entonces, si se ha parametrizado GP2 para que se ejecute GC7 ó GC11
en el arranque, previamente al proceso de arranque habrá que:
Inhabilitar el freno del motor por PLC (si dispone de freno) si se ejecuta
GC7 o bien habilitarlo si se ejecuta GC11.
Habilitar todas las señales necesarias para que se permita al regulador
mover el motor, como son DRENA, SPENA, ...
OBLIGACIÓN. Sólo aplicable a motores síncronos.
OBLIGACIÓN.
Si el eje se encuentra bloqueado por el freno, desbloquearlo previa-
mente antes de habilitar el par.
Si se dispone de un eje vertical con el peso sin compensar, no utilizar
esta prestación bajo ningún concepto.
Si se dispone de ejes tándem o ejes gantry, cada motor debe poder mo-
ver el eje por sí sólo para poder utilizar esta prestación.
NOTA. Prestación desarrollada en la versión 06.10 del software del regu-
lador y mejorada posteriormente en la versión 06.18. Contemplada en ver-
siones 08.0x y posteriores. En estas versiones
la prestación es llevada a
cabo mediante la ejecución del comando GC7
, si bien, en la 06.10 su eje-
cución es siempre automática en cada arranque del regulador y en la
06.18, 08.0x y posteriores ya puede seleccionarse la opción de ser ejecu-
tado automáticamente en el arranque o manualmente cuando se desee
mediante el parámetro GP2.
En versiones 09.01 y posteriores la prestación puede llevarse a cabo me-
diante la ejecución del comando GC7
(con movimiento del motor) o del co-
mando GC11 (sin movimiento del motor).
Veáse como parametrizar los bits
B7 y B6...B3 de GP2 en el capítuo 5,
apartado:
Parametrización de la captación motor. Sistema clásico
para determinar si el comando del cálculo del RHO se ejecutará en el
arranque ó no y cuál de ellos se ejecutará, si GC7 ó GC11.
OBLIGACIÓN. Cuando se dispone de un encóder (integrado en el propio
motor) que no proporciona la posición absoluta, al menos en un giro com-
pleto, entonces hay que parametrizar siempre GP2 adecuadamente antes
de arrancar el regulador para establecer que se ejecute siempre el coman-
do GC7 ó GC11 que estime una posición eléctrica en el arranque para po-
der mover el motor controladamente. Si no desea que se ejecute
automáticamente (bits B6 ... B3 de GP2 a 0000) asegúrese de hacerlo ma-
nualmente ejecutando el comando desde el WinDDSSetup antes de dar po-
tencia para evitar perder el control del motor.

Prestaciones destinadas al motor
10.
PRESTACIONES DESTINADAS AL MOTOR
Posición eléctrica en el arranque del motor
234
Ref.1912
DDS|MAB
SOFTWARE
· 220 ·
Soft.09.05
Ahora, para que en el proceso de arranque, el regulador pueda realizar de
manera automática una estimación de la posición eléctrica y evitar que el
motor pueda embalarse, llevar a cabo la ejecución interna del comando:
GC7, parametrizando:
habilitando así la parametrización de GP2 por el sistema de bits (B15=1) y
el cálculo automático inicial del RHO en cada arranque del regulador ejecu-
tando el comando GC7 automáticamente.
o bien, del comando
GC11, parametrizando:
habilitando así la parametrización de GP2 por el sistema de bits (B15=1) y
el cálculo automático inicial del RHO en cada arranque del regulador ejecu-
tando el comando GC11 automáticamente.
Dependiendo de cuál sea su encóder, parametrice el resto de bits según las
indicaciones sobre la parametrización de las captaciones por el sistema de
bits dadas en el capítulo 5 de este manual.
Si no se desea ejecutar automáticamente el comando GC7 ó GC11 en el
arranque, parametrícese GP2 como se indica:
GP2 F00701.# Feedback1Type
B15 B14 B13 B12 B11 B10 B9 B8 B7 B6 B5 B4 B3 B2 B1 B0
1xxxxxxx0 0 1 1 1xxx
GP2
F00701.# Feedback1Type
B15 B14 B13 B12 B11 B10 B9 B8 B7 B6 B5 B4 B3 B2 B1 B0
1xxxxxxx1 0 1 1 1xxx
NOTA.
Nótese que con GC7 en este proceso se origina un ligero movi-
miento del motor. Con GC11, no.
GP2 F00701.# Feedback1Type
B15 B14 B13 B12 B11 B10 B9 B8 B7 B6 B5 B4 B3 B2 B1 B0
1xxxxxxxx 0 0 0 0xxx
ADVERTENCIA. Con esta parametrización de GP2 no será realizada la
estimación inicial del RHO con el consiguiente peligro de embalamiento del
motor si no se ejecuta manualmente el comando GC7 ó GC11 desde el
WinDDSSetup antes de suministrar potencia al equipo.
F. S10/4
Estimación de la posición eléctrica ·RHO· en el arranque del motor.
!"
#$%&$
#'&()$
#*&(
#%&$
#,&$
#-&$
./01
2/3')/3$$
4
25
26
/3')/3$$
4
D R E N A
S P E N A
D R S T A S
e j e c u c i ó n d e
G C 7 o G C 1 1

Prestaciones destinadas al motor
PRESTACIONES DESTINADAS AL MOTOR
Posición eléctrica en el arranque del motor
10.
Ref.1912
· 221 ·
DDS|MAB
SOFTWARE
Soft.09.05
Si durante la ejecución del comando GC7 se genera algún error, es decir, la
ejecución no ha sido satisfactoria, el propio comando devolverá un error de
captación.
Para más detalles sobre los errores que pueden producirse en la ejecución
del comando
GC7, ver códigos de error E158 y E813 en el capítulo 14. CÓ-
DIGOS Y MENSAJES DE ERROR
de este manual.
Si durante la ejecución del comando
GC11 se genera el código de error
E217 de anti-embalamiento del motor su ejecución no ha sido satisfactoria
Ver código de error
E217 en el capítulo 14. CÓDIGOS Y MENSAJES DE
ERROR
de este manual.
Cómo resolver ejecuciones no satisfactorias de GC7
El comando GC7 estima la posición eléctrica en el arranque de un motor
síncrono ·sin captador de posición absoluta en 1 vuelta
· para poder moverlo
controladamente.
Un código de error
E158 durante la ejecución del comando GC7 es indica-
tivo de que el movimiento es superior al máximo parametrizado en PP160
(F01303) MonitoringWindowPosEleCalc.
Para resolver esta situación, aumentar el valor parametrizado en PP160.
Un código de error
E813 durante la ejecución del comando GC7 es indica-
tivo de que la inicialización de la posición eléctrica no ha sido evaluada sa-
tisfactoriamente.
El usuario (tras un análisis previo del sistema) puede resolver una situación
de este tipo parametrizando adecuadamente los parámetros:
Ver el significado de estos parámetros en el capítulo
13. PARÁMETROS,
VARIABLES Y COMANDOS
.
NOTA. Nótese que GV15 no se pondrá a 1.
GC7 F01524 AutoPhasingOnline
NOTA. Recuérdese que el código de error E158 es reseteable y no
desactiva PWM.
NOTA. Recuérdese que el código de error E813 es no reseteable y
desactiva PWM.
CP21.# F00319.# PeakCurrentAutophasingOnline
CP22.# F00320.# NominalCurrentAutophasingOnline
CP23 F00321 AutophasingOnlineFastSlope
CP24 F00322 AutophasingOnlineSlowSlope
F. S10/5
Parámetros que deben ser ajustados cuando la ejecución del comando
GC7 ·AutophasingOnline· no es satisfactoria (código de error
E813).
Con
CP23=0
y además:
CP21 < 10 A
internamente CP23 = 1 A/s
10 A < CP21 < 30 A
internamente CP23 = 3 A/s
CP21 > 30 A
internamente CP23 = (CP21/10) A/s
Con
CP24=0
y además:
CP22 < 10 A
internamente CP24 = 4 A/s
10 A < CP22 < 30 A
internamente CP24 = 8 A/s
CP22 > 30 A
internamente CP24 = (CP22/5) A/s

Prestaciones destinadas al motor
10.
PRESTACIONES DESTINADAS AL MOTOR
Posición eléctrica en el arranque del motor
234
Ref.1912
DDS|MAB
SOFTWARE
· 222 ·
Soft.09.05
Si aún no ha conseguido ejecutar satisfactoriamente el comando GC7 tras
reajustar estos parámetros, es decir, el motor no se mueve o si se mueve no
lo hace como debe, se dispone además de los parámetros:
Ver su significado en el capítulo
13. PARÁMETROS, VARIABLES Y CO-
MANDOS
.
Recuérdese que generalmente el comando GC7 se ejecutará satisfactoria-
mente con los valores parametrizados por defecto de todos estos paráme-
tros en la mayoría de las situaciones.
Pudiera ser que en presencia de motores de par elevado moviendo grandes
inercias deban reajustarse estos dos parámetros, además de los cuatro an-
teriores.
Si reajustados los cuatro parámetros anteriores no ha solucionado el pro-
blema, vaya disminuyendo el valor de CP27 en estos casos y mantenga el
valor de CP26.
Quizá deba reajustar también alguno de los cuatro parámetros anteriores
convenientemente.
Si aún así no resuelve el problema, siga disminuyendo el valor de CP27
hasta igualarlo incluso a CP26.
Obsérvese que no hay una pauta de ajuste rigurosa a seguir y dependiendo
de cada situación deben ir modificándose los valores de estos parámetros y
observando el comportamiento del sistema para modificar los valores de to-
dos estos parámetros en consecuencia.
Cómo resolver ejecuciones no satisfactorias de GC11
El comando GC11 estima la posición eléctrica en el arranque de un motor
síncrono ·sin captador de posición absoluta en 1 vuelta
· para poder moverlo
controladamente.
Un código de error
E217 durante la ejecución del comando GC11 es indica-
tivo de que la supervisión del lazo de velocidad está impidiendo el embala-
miento del motor síncrono. Modificar el valor del parámetro
CP28 con un
valor más bajo. Comprobar también que es correcto el valor de la inductan-
cia del estátor del motor dado en
MP11.#.
Ver código de error
E217 en el capítulo 14. CÓDIGOS Y MENSAJES DE
ERROR
de este manual.
CP26 F00324 I0electSlowVelocity
CP27 F00325 I0electFastVelocity
Observaciones
GC11 S00263 NoMovingAutoPhasing

Prestaciones destinadas al motor
PRESTACIONES DESTINADAS AL MOTOR
Posición eléctrica en el arranque del motor
10.
Ref.1912
· 223 ·
DDS|MAB
SOFTWARE
Soft.09.05
Cómo actualizar el valor del RHO con GC8
El usuario, si lo desea, puede también ejecutar automáticamente en el
arranque el comando
GC8 que actualiza el valor de la posición eléctrica
real (RHO real) y que no es el valor estimado tras la ejecución del coman-
do GC7 ó GC11.
Ahora, para que en el proceso de arranque, el regulador pueda actualizar de
manera automática el valor de la posición eléctrica (RHO) al pasar por el I0
siempre que esté activa la ejecución interna del comando GC8, parametri-
zar:
Se habilita la parametrización de
GP2.# por el sistema de bits (B15=1) y la
actualización automática del RHO al pasar por el I0 en el arranque del re-
gulador (B14=1) ejecutando el comando
GC8 automáticamente. Depen-
diendo de cuál sea su encóder, parametrice el resto de bits según las
indicaciones sobre la parametrización de las captaciones por el sistema de
bits dadas en el capítulo 5 de este manual.
Latcheo continuo con encóders Stegmann · ref. E1 ·
Se ejecuta automáticamente en el arranque, con encóders Stegmann (ref.
E1) permitiendo devolver el valor de la posición de la marca de la señal de
I0 al paso por ella estableciendo así la vigilancia ante una pérdida de con-
taje.
Actualizar el valor de la posición eléctrica al paso por la pri-
mera marca de la señal de I0 con encóders de señales C|D
Se ejecuta automáticamente en el arranque, con encóders de señales C y
D, corrigiéndose la desviación de la posición estimada en el arranque del
motor al paso por la primera marca de la señal de I0.
GC8 F01525 ElectricPositionCorrection
NOTA. Previamente a la ejecución del comando GC8 debe haberse eje-
cutado al menos una vez a lo largo de la vida de la máquina el comando
GC3 para asegurar que el valor del RHO almacenado en RP5 es correcto.
GP2 F00701.# Feedback1Type
B15 B14 B13 B12 B11 B10 B9 B8 B7 B6 B5 B4 B3 B2 B1 B0
1 1 x x x x xxxxxxxxxx
NOTA. Prestación desarrollada en la versión 06.23 del software del regu-
lador y contemplada en versiones 08.0x y posteriores. Requiere disponer
obligatoriamente de una placa CAPMOTOR-2. Es transparente para el
usuario.
NOTA. Prestación desarrollada en la versión 06.23 del software del regu-
lador y contemplada en versiones 08.0x y posteriores. Requiere disponer
obligatoriamente de una placa CAPMOTOR-2. Es transparente para el
usuario.

Prestaciones destinadas al motor
10.
PRESTACIONES DESTINADAS AL MOTOR
Motor de usuario con sensor lineal de temperatura
234
Ref.1912
DDS|MAB
SOFTWARE
· 224 ·
Soft.09.05
10.7 Motor de usuario con sensor lineal de temperatura
Tiene como finalidad poder monitorizar con precisión aceptable la tempera-
tura de un motor de usuario (NO FAGOR) que disponga de sensor lineal de
temperatura. Se definirá la relación lineal existente entre la resistencia y la
temperatura del sensor lineal, suministrando únicamente al regulador, el valor
de la resistencia del sensor lineal a una temperatura de 25°C/77°F y a una
temperatura máxima límite establecida para el funcionamiento del motor.
Los parámetros empleados para poder establecer esta relación lineal resis-
tencia|temperatura característica del sensor lineal son:
y la forma de proceder a su parametrización es:
Determinar que el motor dispone de sensor lineal de temperatura.
Determinar el valor R de la resistencia del sensor a temperatura de
25°C/77°F.
Este valor será obtenido de la recta característica «resistencia-tempera-
tura» suministrada por el fabricante del sensor lineal.
Determinar el valor de la temperatura límite máxima Tmáx. establecida
para el funcionamiento del motor.
Determinar el valor de la resistencia del sensor a esta temperatura máxi-
ma parametrizada en MP41.
Este valor R
Tmáx.
será obtenido de la recta característica «resistencia-
temperatura» suministrada por el fabricante del sensor lineal.
Para hacer efectiva cualquier modificación llevada a cabo sobre ellos debe
ejecutarse el comando «validar» mediante GC4 o desde el icono correspon-
diente del WinDDSSetup.
Si además de hacer efectivos los cambios se desean mantener permanen-
temente los nuevos valores en la memoria flash debe ejecutarse el coman-
do «grabar en flash» mediante GC1 o desde el icono correspondiente del
WinDDSSetup. Véanse representados todos estos parámetros en la figura
F. S10/6 y accédase al apartado «Grupo M. Motor» del capítulo 13 de este
manual para obtener más información sobre los mismos.
NOTA. Prestación desarrollada en la versión 06.15 del software del regu-
lador y contemplada en versiones 08.0x y posteriores, tanto para motores
síncronos como asíncronos que dispongan de sensor lineal de temperatura.
MP14 F01210 MotorTempSensorType
MP45 F01242 MotorTempSensorR25
MP46 F01243 MotorTempSensorR_MP41
MP41 F01237 MotorMaximumTemperature
MP14=5 Motor con sensor lineal de temperatura
MP45 Resistencia a 25°C/77°F del sensor lineal
MP41 Temperatura máxima de funcionamiento del motor
MP46
Resistencia a la temperatura máxima de funcionamiento
del motor (MP41) del sensor lineal
F. S10/6
Ejemplo de recta característica «resistencia-temperatura» de un sensor li-
neal de temperatura PTC integrado en el propio motor.
NOTA. Los parámetros MP45 y MP46 únicamente serán funcionales
siempre que se parametrice MP14=5.
NOTA. Nótese que NO son parámetros ONLINE.
Nota
.
Sólo para motores
con sensor lineal de
temperatura, es decir,
con MP14=5.
03
5HVLVWDQFH:
7HPSHUDWXUH&
03
03
R=R(T
R
T

Prestaciones destinadas al motor
PRESTACIONES DESTINADAS AL MOTOR
Límite de temperatura mínima admisible en el bobinado del motor
10.
Ref.1912
· 225 ·
DDS|MAB
SOFTWARE
Soft.09.05
10.8 Límite de temperatura mínima admisible en el bobinado del motor
A partir de la versión 08.05 del software del regulador puede ser previamen-
te establecido por el usuario un valor mínimo admisible de temperatura en
el devanado del estátor del motor.
El parámetro empleado para establecer esta limitación de temperatura mí-
nima admisible en el bobinado del motor es:
Ver los detalles de su parametrización en el apartado «
Grupo M. Motor»
del capítulo 13 de este mismo manual.
Si el sensor de temperatura KTY mide en el bobinado una temperatura (ver
el valor de temperatura medido en la variable KV6) inferior al valor parame-
trizado, el display del regulador muestra el código de error
E111 de sub-tem-
peratura de motor.
MP47 F01244 MotorMinimumTemperature

Prestaciones destinadas al motor
10.
PRESTACIONES DESTINADAS AL MOTOR
Intercambio ·por parámetro· del orden de las fases de potencia del motor
234
Ref.1912
DDS|MAB
SOFTWARE
· 226 ·
Soft.09.05
10.9 Intercambio ·por parámetro· del orden de las fases de potencia del
motor
A partir de la versión 08.05 del software del regulador, el usuario puede
intercambiar el orden de las fases de potencia del motor mediante paráme-
tro. Esta funcionalidad flexibiliza y facilita el intercambio de fases de poten-
cia de alimentación del motor (especialmente en motores de usuario)
durante el proceso de puesta en marcha.
El parámetro empleado para poder establecer el intercambio del orden de
fases de potencia del motor sin tener que efectuarlo físicamente es:
Ver los detalles de su parametrización en el apartado -
Grupo M. Motor - del
capítulo 13 de este mismo manual.
MP21 F01217 MotorPhasesOrder

Prestaciones destinadas al motor
PRESTACIONES DESTINADAS AL MOTOR
Control de motor lineal
10.
Ref.1912
· 227 ·
DDS|MAB
SOFTWARE
Soft.09.05
10.10 Control de motor lineal
A partir de la versión de software 08.05, el regulador puede gobernar un mo-
tor lineal. Previo a su parametrización, téngase en cuenta la siguiente infor-
mación para llevar a cabo de manera satisfactoria la instalación del
cableado del sistema.
Consideraciones en el cableado
Cablear las fases de potencia entre el motor lineal y el regulador conec-
tando las fases como se indica: U
U , V V y W W.
Cablear las señales del sensor de posición de efecto Hall del motor li-
neal a través del adaptador SA-TTL-TTLD (sólo si las señales no son di-
ferenciales) a los pines del conector X4 del regulador según tabla:
Cablear las señales incrementales diferenciales del encóder lineal (re-
gla) directamente a los pines correspondientes del conector X4 del re-
gulador. Si el encóder lineal no dispone de señales incrementales
diferenciales, conectar las señales incrementales previamente a un
adaptador SA-TTL-TTLD que las convierta a diferenciales y luego llevar-
las a los pines correspondientes del conector X4 del regulador.
Tras llevar a cabo el cableado, comprobar ahora si las conexiones están
bien realizadas y si el funcionamiento del motor lineal es satisfactorio si-
guiendo las pautas que seguidamente se documentan.
Previo a la parametrización
Además de parametrizar el regulador procediendo como es habitual para
una captación motor o directa, asegúrese de:
Comprobar que MP21=0, por defecto. Para más detalles sobre este pa-
rámetro, ver apartado «
Grupo M. Motor» del capítulo 13 de este mismo
manual.
Comprobar que RP77=0, por defecto. Para más detalles sobre este pa-
rámetro, ver apartado «
Grupo R. Sensor del rótor» del capítulo 13 de
este mismo manual.
Puesta a punto
Las variables empleadas para llevar a cabo esta comprobación son:
Ver los detalles de su parametrización en el capítulo
13. PARÁMETROS,
VARIABLES Y COMANDOS
de este mismo manual.
Señales
Hall
Adaptador SA-TTL-TTLD
(cód. 82620110)
Conector
X4 del
regulador
Entrada
TTL
Salida
TTLD
Salida
(con entrada
no conectada)
Pin Señal Pin Señal Pin Señal
U 1 A 1 A +5 V DC 13 U+
2
A
04U -
V 3 B 3 B +5 V DC 15 V+
4
B
06V -
W5Io5Io
0
5W -
6
Io
+5 V DC
14 W+
+5 V DC 9 +5 V DC 9 +5 V DC 24 +5 V DC
GND 11 GND 11 GND 25 GND
Carcasa 15 Malla 26 Malla
NOTA. El patillaje del conector X4 del regulador está definido en el manual
«man_dds_hard.pdf» y el del adaptador SA-TTL-TTLD en el manual
«man_adapter_sa_ttl_ttld.pdf».
OBLIGACIÓN. Sin potencia en el motor, comprobar que el cableado de se-
ñal es satisfactorio.
RV20 F02044 UVW
GV41 F01820 FastPositionFeedback1

Prestaciones destinadas al motor
10.
PRESTACIONES DESTINADAS AL MOTOR
Control de motor lineal
234
Ref.1912
DDS|MAB
SOFTWARE
· 228 ·
Soft.09.05
Forma de proceder
Mover manualmente el motor lineal en un sentido de movimiento arbitra-
rio.
Comprobar visualizando la variable RV20 del regulador que el orden de
secuencia dado por el sensor de posición de efecto Hall al paso por
cada imán es el dado en la tabla adjunta. Recordar el sentido del movi-
miento considerado.
Modificar el cableado de las células y volver a verificar en el caso de no
haber coincidencia con el orden dado en la tabla anterior.
Cuando el sentido de movimiento sea coincidente con el orden secuencial
(1 ... 6) de la tabla anterior:
Visualizar la variable GV41 del regulador (valor de la posición) y com-
probar que al mover manualmente el motor en el sentido de movimiento
considerado se incrementa el valor de la posición.
Las variables empleadas para llevar a cabo esta comprobación son:
Limitar inicialmente (por seguridad) el valor de la variable TV92=200.
Ejecutar el comando GC9 desde la aplicación WinDDSSetup.
Verificar que el sentido de movimiento coincide con el anotado en el
apartado anterior como coincidente con el orden secuencial.
Comprobar el incremento del valor de la posición visualizando la varia-
ble GV41.
Comprobado que el orden de las fases de potencia es satisfactorio, ahora
desde la aplicación WinDDSSetup:
Eliminar la potencia en el sistema o deshabilitar el regulador.
Cancelar la ejecución del comando GC9.
Realizar un soft-reset (GV11) en el regulador.
Ejecutar el comando GC7 y esperar a que finalice.
Cancelar el comando GC7 y limitar nuevamente el valor de la variable
del regulador TV92=200.
Verificar que el movimiento del eje es satisfactorio.
Parametrizar RP5 con el valor facilitado en la variable RV25.
Eliminar la potencia en el sistema y almacenar el cambio en la memoria
flash del regulador mediante la ejecución del comando GC1.
Realizar varios arranques de la máquina en diferentes puntos y compro-
bar que el funcionamiento es correcto.
RV20 ORDEN DE SECUENCIA u-v-w
UVW
001 1
011 2
010 3
110 4
100 5
101 6
NOTA. Si en lugar de incrementarse, el valor decrementa, parametrizar
RP77=8 y verificar tras la nueva parametrización que ahora sí incrementa.
OBLIGACIÓN. Con potencia en el motor, comprobar que la conexión de las
fases del cableado de potencia es satisfactoria.
RV20 F02044 UVW
GV41 F01820 FastPositionFeedback1
RV25 F02049 RHO_CORR2
NOTA. Si el eje realiza un movimiento de vaivén, aumentar ligeramente el
valor.
NOTA. Si en lugar de incrementarse, el valor decrementa, parametrizar
MP21=1 y verificar tras la nueva parametrización que ahora sí incrementa.

Prestaciones destinadas al motor
PRESTACIONES DESTINADAS AL MOTOR
Control V/f
10.
Ref.1912
· 229 ·
DDS|MAB
SOFTWARE
Soft.09.05
10.11 Control V/f
A partir de la versión de software 08.05 se implementa en el regulador la
aplicación de control V/f para motores asíncronos sin encóder. Existe la po-
sibilidad de poder llevar a cabo el control de varios motores de inducción
mediante un único regulador.
El control V/f ajusta la tensión en los terminales del motor según la caracte-
rística de ajuste a la velocidad
(léase frecuencia, f = 2) especificada.
La relación entre la consigna de velocidad
(léase frecuencia) y la tensión
del estátor se obtiene siguiendo la curva característica V/f. También soporta
curvas características adicionales adecuadas a la aplicación parametriza-
bles por el usuario.
Los parámetros implicados particularmente en esta aplicación son:
Ver los detalles de su parametrización en el capítulo
13. PARÁMETROS,
VARIABLES Y COMANDOS
de este mismo manual.
Curva característica V/f cuadrática
El control V/f con característica cuadrática reduce, en comparación con la li-
neal, las pérdidas en el motor y en el inversor, por corrientes más bajas.
A velocidad nula se añadirá, a la curva V/f teórica, una tensión igual al por-
centaje parametrizado en FP75 por la tensión nominal del motor MP6 y que
irá disminuyendo de forma cuadrática con el aumento de la velocidad hasta
anularse al alcanzar la velocidad nominal del motor MP25.
Aplicar la curva característiva V/f cuadrática siempre que se verifique la
desigualdad
FP75 x MP6 > MP39 x MP10 y añadir MP39 x MP10 de no
cumplirse a bajas revoluciones.
OBLIGACIÓN.
Todos los motores conectados al regulador y cuyo funcionamiento pue-
da ser simultáneo deben ser necesariamente iguales.
El tamaño del regulador de cabezal que los gobierne debe ser seleccio-
nado de tal manera que pueda asumir la solicitación máxima, suma de
solicitaciones máximas de cada uno de los motores que van a trabajar
simultáneamente conectados a él.
AP2 S00033 AsynchronousRegulationType
FP70.# F01192.# VFMaximumVoltage
FP71.# F01193.# VFVoltageCurve1
FP72.# F01194.# VFFrequencyCurve1
FP73.# F01195.# VFVoltageCurve2
FP74.# F01196.# VFFrequencyCurve2
FP75.# F01197.# VFBoostVoltage1
MP6.# F01202.# MotorRatedSupplyVoltage
MP10.# F01206.# MotorStatorResistance
MP25.# F01221.# MotorRatedSpeed
MP39.# F01235.# MotorNoLoadCurrent
F. S10/7
Control V/f. Curva característica cuadrática.
Z
USP
9YROWLRV
9HORFLGDGGHOPRWRU
03
7HQVLyQGHOPRWRU
03
)3[03
03[03
f = 2

Prestaciones destinadas al motor
10.
PRESTACIONES DESTINADAS AL MOTOR
Control V/f
234
Ref.1912
DDS|MAB
SOFTWARE
· 230 ·
Soft.09.05
Curva característica V/f adecuada a la aplicación
Aplicar una curva característiva V/f adecuada a la aplicación cuando se ve-
rifique la siguiente desigualdad:
MP39 x MP10 > FP75 x MP6
Asegúrese de no parametrizar ninguna de las siguientes desigualdades:
FP73 < FP71 y/o FP74 < FP72
ya que de lo contrario aparecerá en el display del regulador el código de
error
E502 advirtiendo esta circunstancia. Modificar el valor de alguno de los
parámetros para evitar que estas desigualdades se produzcan y por consi-
guiente, el código de error indicado.
F. S10/8
Control V/f. Curva característica adecuada a la aplicación.
)3
7HQVLyQGHOPRWRU
03
)3[03
)3[03
03[03
)3[03
9HORFLGDGGHOPRWRU
)3[03
03
9YROWLRV
ZUSP
f = 2

Prestaciones destinadas al motor
PRESTACIONES DESTINADAS AL MOTOR
Compensación del «cogging» en motor síncrono
10.
Ref.1912
· 231 ·
DDS|MAB
SOFTWARE
Soft.09.05
10.12 Compensación del «cogging» en motor síncrono
A partir de la versión 08.19 del software del regulador pueden minimizarse
los efectos indeseados causados por la influencia del efecto ranura, común-
mente denominado «cogging», en el control de motores síncronos
.
Para poder realizar satisfactoriamente el ajuste de la compensación del
«cogging» del motor debe cumplirse necesariamente la siguiente condición:
Nº ranuras del estátor / nº de polos = nº entero
Previo a la parametrización
Los parámetros implicados y que deben determinarse en el ajuste de la
compensación del «cogging» son:
y las variables a visualizar en el osciloscopio que servirán de referencias
para realizar el ajuste son:
Nótese que los tres parámetros son online. Ver su significado en el capítulo
13. PARÁMETROS, VARIABLES Y COMANDOS de este mismo manual.
Ajuste de la compensación
Realizar un movimiento de vaivén del eje a baja velocidad (p.ej. 60 rpm) y vi-
sualizar la captación del par (TV2) o el RHO (RV19) y el error de seguimien-
to (PV189) en el osciloscopio del CNC 8070, por ejemplo.
Parametrizar TP32
Conocida la velocidad de giro en rpm del motor podrán contabilizarse níti-
damente en el oscilograma el número de senoides
(de amplitud práctica-
mente constante) del error de seguimiento (PV189) en una vuelta de motor.
Cuente y parametrice TP32 con ese valor. Sepa que este valor es justamen-
te el nº de ranuras del estátor por vuelta mecánica.
NOTA. Esta condición se cumple en los modelos FXM y FKM2/4/6/8 de
FAGOR. No así en las series FKM1/FKM9 y modelos FKM21...-K
y
FKM22...-K
. No realizar, por tanto, el ajuste de compensación del efecto
ranura en estos.
OBLIGACIÓN. En presencia de motor síncrono NO FAGOR, asegúrese de
que se cumple la condición anteriormente indicada. En caso de no cumplir-
se no realice la parametrización de la compensación. Si desconoce el nº de
ranuras del estátor del motor, siga la forma de proceder en el ajuste de la
compensación indicada más abajo.
OBLIGACIÓN. Realizar siempre la pauta de ajuste de compensación del
«cogging» en cada uno de los motores síncronos
que vaya a ser instalado
y que cumpla con la condición exigida, independientemente de que algunos
modelos sean exactamente iguales. Recuerde que la amplitud de la señal
senoidal que va a visualizar en el proceso de ajuste siempre es diferente en
cada motor aunque sean modelos iguales.
TP30 F01915 CoggingCompensationAmplitude
TP31 F01916 CoggingCompensationPhase
TP32 F01917 CoggingCompensationNSines
TV2 S00084 TorqueFeedback
PV189 S00189 FollowingError
RV19 F02043 RHO
NOTA IMPORTANTE. Si no puede contar nítidamente el nº de senoides
debido a que el error de seguimiento muestra amplitudes dispares, el mo-
tor no cumple con la condición,
Nº ranuras del estátor / nº de polos = nº en-
tero y no podrá realizar el ajuste de compensación del cogging.

Prestaciones destinadas al motor
10.
PRESTACIONES DESTINADAS AL MOTOR
Compensación del «cogging» en motor síncrono
234
Ref.1912
DDS|MAB
SOFTWARE
· 232 ·
Soft.09.05
Parametrizar TP31
Parametrice previamente TP30 con un valor bajo (p.ej. 0,5 %) y vaya modi-
ficándolo si es necesario hasta visualizar en el oscilograma que se produce
algún efecto sobre el error de seguimiento (PV189).
Parametrice ahora TP31 con un ángulo de valor entre -180 y +180 y vaya
modificándolo si es necesario hasta encontrar el ángulo que minimiza el
error de seguimiento. Parametrice TP31 con ese valor.
Parametrizar TP30
Localizado el ángulo óptimo con el que acaba de parametrizar TP31, siga
ahora aumentando el valor de la amplitud establecida en TP30 hasta mini-
mizar el error de seguimiento (PV189). Parametrice TP30 con ese valor.

Prestaciones destinadas al motor
PRESTACIONES DESTINADAS AL MOTOR
Búsqueda de referencia del cabezal con un sensor de proximidad
10.
Ref.1912
· 233 ·
DDS|MAB
SOFTWARE
Soft.09.05
10.13 Búsqueda de referencia del cabezal con un sensor de proximidad
A partir de la versión 09.01 del software del regulador puede realizarse una
búsqueda de referencia del cabezal rápida, precisa y repetitiva conectando
un sensor de proximidad inductivo a la entrada de la
señal de I0 de la cap-
tación directa ·pin 5 del conector X3· de un regulador SPD ó SCD.
Requerimientos
Sensor de proximidad
Tipo NPN-N0 ó NPN-NC.
Tensión de alimentación, 5 V DC ó 24 V DC.
Cable apantallado.
Marcado CE en CEM.
Regulador
De cabezal con placa de captación directa, es decir, con referencia co-
mercial del tipo SPD X.XX-S0-
2-B-X si es modular o SCD X.XX-S0-2-B-
X-X si es compacto.
Parametrizar AP1=2, en consigna de velocidad (sin lazo de posición).
INFORMACIÓN. Esta prestación requiere de una versión de software 05.70
o posterior en CNC 8065/70 y de una 01.70 o posterior en CNC 8060.
i
NOTA. Nótese que en cabezales con dos gamas y un solo sensor de
búsqueda de referencia pueden darse problemas de velocidad y repetiti-
vidad de cero. La posición se utiliza en el cambio de herramienta, y por
tanto, la rapidez y la repetitividad son fundamentales. Además, el cambio
de gama requiere instrucciones de PLC para forzar la búsqueda de cero.
Este método proporciona una solución rápida, precisa y repetitiva.
OBLIGACIÓN. NO UTILIZAR sensores de proximidad inductivos del tipo
PNP-N0 o PNP-NC.
NOTA. Conectar la malla del cable al chasis del conector que va al re-
gulador.

10.
PRESTACIONES DESTINADAS AL MOTOR
Prestaciones destinadas al motor
Ref.1912
DDS|MAB
SOFTWARE
· 234 ·
Soft.09.05

11
Ref.1912
· 235 ·
DDS|MAB
SOFTWARE
Soft.09.05
PUESTA A PUNTO
DE UN CABEZAL
ASÍNCRONO
11.1 Motor asíncrono con captación motor
Desde la versión 06.10 del regulador se dispone de un software capaz de
controlar un motor asíncrono de hasta 1 kHz con GP1= 4 000 o de hasta 2
kHz con GP1= 8 000. Esto es, para un motor asíncrono de dos pares de po-
los, las velocidades máximas controlables serán de 30 000 y 60 000 rpm,
respectivamente.
Las expresiones que permiten obtener la velocidad
máx controlable se-
gún el nº de pares de polos del motor (MP5) son:
El proceso de parametrización de un motor asíncrono será diferente depen-
diendo de si forma parte del catálogo de FAGOR o de si se trata de un motor
de usuario (NO FAGOR).
No obstante, hay una parametrización previa, común a todos ellos, que es
conveniente realizar inicialmente.
Adviértase previamente que:
Realice ahora la parametrización previa como se indica:
Seleccionar la frecuencia de conmutación de los IGBTs dependien-
do de la velocidad máxima de funcionamiento del motor y su nº de pares
de polos.
Parametrizar:
Parametrizar:
Con GP1= 4 000 Hz;
máx= 60 x (1 kHz / MP5) en rev/min
Con GP1= 8 000 Hz;
máx= 60 x (2 kHz / MP5) en rev/min
NOTA. Recuérdese que GP1 (F00700) PwmFrequency refleja la frecuen-
cia de conmutación de los IGBTs y MP5 (F01201) MotorPolesPairs el nº
de pares de polos del motor.
OBLIGACIÓN. Parametrizar un regulador para controlar un motor asíncro-
no de cabezal con GP1= 8 000 Hz y con AP2=0 (control vectorial no <SEN-
SORLESS>), no permite configurar el sistema para trabajar con captación
directa. En estas condiciones solo podrá configurarse el sistema para tra-
bajar con captación motor.
GP1= 4 000 Hasta máx= 30 000 rev/min con MP5=2
GP1= 8 000 Hasta
máx= 60 000 rev/min con MP5=2
MP14 MotorTempSensorType
NOTA. Nótese que para controlar un motor asíncrono de usuario, el
sensor de temperatura que incorpore
debe ser necesariamente co-
nocido por un regulador FAGOR.

Puesta a punto de un cabezal asíncrono
11.
252
Ref.1912
DDS|MAB
SOFTWARE
· 236 ·
Soft.09.05
Estimar la resistencia del rótor.
Parametrizar:
Para más detalle sobre esta parametrización, ver apartado «Auto-ajuste
del valor de la resistencia rotórica» del capítulo 10 de este manual.
Identificar la captación motor.
Parametrizar:
Para obtener más información de todos los parámetros mencionados, véa-
se el capítulo
13. PARÁMETROS, VARIABLES Y COMANDOS de este
mismo manual. Seguidamente se procederá a la puesta a punto de cual-
quier motor asíncrono, de manera semiautomática, cuyo proceso se refleja
en el siguiente diagrama.
Su seguimiento facilita el procedimiento de la puesta a punto del motor.
FP30 RotorResistanceEstimationActive
Activar o no la estimación
de la resistencia del rótor.
FP31 RotorFixedTemperature
Determinar la temperatura
fija del rótor.
GP2.# Feedback1Type Tipo de captador motor
NP116 ResolutionOfFeedback1 Resolución del captador motor
NOTA. Nótese que para controlar un motor asíncrono de usuario, el
captador motor que incorpore debe ser necesariamente
conocido por
un regulador Fagor.
F. S11/1
Diagrama de la puesta a punto automática de cualquier motor asíncrono.
SI
NO
¿MOTOR
ASÍNCRONO
FAGOR?
¿MOTOR YA
AJUSTADO POR
FAGOR ?
NO
SI
SI
CARGAR EL BACKUP
DE PARÁMETROS
NO
EJECUTAR EL
COMANDO MC1 y
GRABAR PARÁMETROS
TRANSFERIR EL FICHERO THE
FM7_SPM_FM9_FS5_xx.mot
(sólo si el regulador no se
corresponde con el motor asociado
por FAGOR)
INICIALIZACIÓN DEL MOTOR
DESDE EL WINDDSSETUP
EJECUTAR
«CLEAR MOTOR
PARAMETERS»
DESDE EL WINDDSSETUP
PONER CP8 = 1
y GRABAR PARÁMETROS
SI
CONTACTAR CON
FAGOR PARA
REALIZAR EL AJUSTE
AJUSTADO
INTRODUCIR Y GRABAR
PÁRAMETROS
DESDE EL WINDDSSETUP
(preferiblemente los
indicados para motores tipo I
¿SE COMPORTA
BIEN ?
PONER CP8 = 1
y GRABAR PARÁMETROS
INICIALIZACIÓN DEL
MOTOR DESDE EL
WINDDSSETUP
NO
¿SE COMPORTA
BIEN?
VER APARTADO:
PARAMETRIZACIÓN DE
UN MOTOR ASÍNCRONO
FAGOR.
TRANSFERIR AL REGULADOR EL FICHERO
*.MOT DONDE SE ALMACENA LA TABLA DE
PARÁMETROS.
VER CAPÍTULO 1 DE ESTE MANUAL.
VER PARÁMETROS NECESARIOS
SEGÚN EL TIPO DE MOTOR EN TABLA
S11.3.
IDENTIFICAR E INICIALIZAR EL
MOTOR DESDE EL
WINDDSSETUP.
VER CAPÍTULO 2 DE ESTE MANUAL.
IDENTIFICAR E INICIALIZAR EL MOTOR
DESDE EL WINDDSSETUP.
VER CAPÍTULO 2 DE ESTE MANUAL.
VER APARTADO
«LISTA DE PARÁMETROS»
DEL CAPÍTULO 16 DE ESTE MANUAL
DONDE SE DETALLA COMO
INTRODUCIR LOS VALORES DE LOS
PARÁMETROS
DESDE EL WINDDSSETUP.
VER LOS PASOS A SEGUIR ANTES DE
EJECUTAR MC1 INDICADOS EN EL
APARTADO: AUTO-AJUSTE DE UN
MOTOR ASÍNCRONO DE USUARIO, DE
ESTE MISMO CAPÍTULO.
VER APARTADO:
PARAMETRIZACIÓN DE UN MOTOR
ASÍNCRONO DE USUARIO.

Puesta a punto de un cabezal asíncrono
11.
Ref.1912
· 237 ·
DDS|MAB
SOFTWARE
Soft.09.05
Tras la inicialización, para que el regulador que lo gobierna arranque correc-
tamente, ninguno de los parámetros listados en la columna de motor de
usuario - tipo I - de la tabla
T. S11/3 deberá ser cero.
En motores FAGOR esta condición se verificará siempre, pero en motores
de usuario cabe la posibilidad de que alguno de ellos tome valor nulo. En el
display del regulador se visualizará entonces el código de error
E502.
Activando el icono correspondiente del WinDDSSetup se abrirá la ventana
SPY mostrando los parámetros que no han sido inicializados y aún siguen
con valor cero. Para eliminar el error deberán inicializarse todos ellos.
F. S11/2
Visualización en la ventana SPY de los parámetros no inicializados. Código
de error
E502.

Puesta a punto de un cabezal asíncrono
11.
252
Ref.1912
DDS|MAB
SOFTWARE
· 238 ·
Soft.09.05
Parametrización de un motor asíncronos FAGOR
Todo motor asíncrono de cabezal FAGOR va asociado con un regulador de-
terminado. Este regulador asociado al motor sale de fábrica almacenando
siempre el fichero FM7_SPM_FM9_FS5_
.mot con la tabla de paráme-
tros propia del motor correspondiente asociado a él.
En ocasiones, el usuario puede estar interesado en instalar (por las razones
que sea) un regulador distinto al que realmente se corresponde con el mo-
tor. Debe entonces transferir otro fichero <*.mot> distinto al que el regulador
lleva almacenado (por defecto) con la versión.
La transferencia de este fichero debe llevarse a cabo mediante la aplica-
ción WinDDSSetup y el fichero a transferir será identificado por la familia del
motor y los dígitos «_
» que representan la corriente máxima (de pico)
del regulador asociado. Así, p. ej. si el regulador que va a instalarse con un
motor FM7 es un regulador de 25 A de corriente de pico, el fichero a trans-
ferir será el FM7_SPM_FM9_FS5_25.mot.
Realizada la transferencia de este fichero (si procede) deberá escribirse en
MP1 la matrícula del motor a parametrizar modificándose así los paráme-
tros necesarios.
Para llevar a cabo la transferencia de un fichero <*.mot> al regulador y la
posterior identificación del motor, véanse los apartados, «transferencia de
ficheros <*.mot>» e «identificación del motor» en los capítulos 1 y 2 de este
manual.
NOTA. Se entenderá por motor asíncrono FAGOR a cualquier motor con
la etiqueta FM7 o FM9 en su referencia de identificación.
T. S11/1 Ficheros FM7_SPM_FM9_FS5_.mot que contienen la tabla
de parámetros de las familias de motores asíncronos FAGOR.
Regulador asociado
a motor asíncrono
Nombre del fichero con la tabla de
parámetros del motor asociado
SPD 1.25 FM7_SPM_FM9_FS5_25.mot
SPD 1.35 FM7_SPM_FM9_FS5_35.mot
SPD 2.50 FM7_SPM_FM9_FS5_50.mot
SPD 2.75 FM7_SPM_FM9_FS5_75.mot
SPD 2.85 FM7_SPM_FM9_FS5_85.mot
SPD 3.100 FM7_SPM_FM9_FS5_100.mot
SPD 3.150 FM7_SPM_FM9_FS5_150.mot
SPD 3.200 FM7_SPM_FM9_FS5_200.mot
SPD 3.250 FM7_SPM_FM9_FS5_250.mot
NOTA. Recuérdese que las corrientes de pico de los reguladores para mo-
tores asíncronos de cabezal se facilitan
en el apartado de «datos técni-
cos» del capítulo 3 del manual «man_dds_hard.pdf».

Puesta a punto de un cabezal asíncrono
11.
Ref.1912
· 239 ·
DDS|MAB
SOFTWARE
Soft.09.05
Parametrización de un motor asíncrono de usuario
En presencia de un motor asíncrono no FAGOR, en general no existirá el
fichero <*.mot> anteriormente mencionado, salvo modelos particulares de
Siemens
TM
de los que sí se disponen los ficheros Siemens_.mot y al-
gunos cabezales de otros fabricantes con ficheros Cabezales_Varios_
.mot.
Todos estos y aquellos motores no FAGOR que en alguna ocasión hayan
sido ajustados por FAGOR seguirán un proceso de parametrización idénti-
co a los motores de FAGOR explicado en el apartado anterior.
Para el resto será necesario parametrizar el motor manualmente.
En este proceso de parametrización (que deberá realizarse, insisto, ma-
nualmente) se irán introduciendo, uno por uno, un conjunto de parámetros
conocidos del motor. Según el tipo de motor, los parámetros conocidos,
pueden no ser los mismos y, es por esta razón, por la que se considerarán
cuatro posibles formas de parametrizar manualmente un motor asíncrono
no FAGOR dependiendo de los parámetros conocidos disponibles.
Más adelante se detallan los tipos de motor y los parámetros conocidos
para cada tipo.
Procedimiento a seguir en la parametrización
El proceso se inicia seleccionando el grupo M (motor), desde la ventana
de configuración de parámetros (modo modificación) del programa de ajus-
te WinDDSSetup.
Con un nivel de acceso OEM o superior se despliega una ventana donde
aparece el icono (a) de selección del motor siempre que se haya seleccio-
nado previamente MotorType (MP1).
Al pulsar este botón (a) se despliega en pantalla la ventana < SELECCIÓN
DEL MOTOR >. Mediante la barra de desplazamiento vertical se localiza el
campo < CLEAR MOTOR PARAMETERS > y se valida pulsando el icono
(b) que aparece en la parte superior derecha de esta ventana.
NOTA. Se entenderá por motor asíncrono de usuario, a cualquier motor
asíncrono no contemplado en el catálogo de motores de FAGOR. En ade-
lante, se utilizarán indistintamente los términos «motor NO FAGOR» o
«motor 0» para hacer alusión a ellos.
NOTA. Nótese que para un nivel de acceso BÁSICO no se muestra este
icono (a) en la ventana. No será posible realizar la selección y, por tanto,
no podrá llevarse a cabo la parametrización del motor.
F. S11/3
Selección de CLEAR MOTOR PARAMETERS para MP1.
(a)
(b)

Puesta a punto de un cabezal asíncrono
11.
252
Ref.1912
DDS|MAB
SOFTWARE
· 240 ·
Soft.09.05
Finalizado este proceso se habrán inicializado a cero los siguientes pará-
metros:
Según los datos conocidos (disponibles en la placa de características del
motor) se definen 4 tipos diferentes de parametrización: Así:
T. S11/2 Parámetros que se inicializan a cero tras introducir CLEAR
MOTOR PARAMETERS
en MP1.
Parámetro Nombre
MP1 MotorType
MP3 MotorContinuousStallCurrent
MP5 MotorPolesPairs
MP6 MotorRatedSupplyVoltage
MP7 MotorPowerFactor
MP9 MotorSlip
MP10 MotorStatorResistance
MP11 MotorStatorLeakageInductance
MP12 MotorNominalPower
MP14 MotorTempSensorType
MP21 MotorPhasesOrder
MP25 MotorRatedSpeed
MP26 MotorMaximumSpeed
MP27 MotorRotorResistance
MP28 MotorRotorLeakageInductance
MP29 MotorMagnetizingInductance
MP30 MotorInductanceFactor1
MP31 MotorInductanceFactor2
MP32 MotorInductanceFactor3
MP33 MotorInductanceFactor4
MP34 MotorInductanceFactor5
MP35 MotorInductanceFactor6
MP36 MotorInductanceFactor7
MP37 MotorInductanceFactor8
MP38 MotorInductanceFactor9
T. S11/3 Diferentes tipos de parametrización atendiendo a los datos cono-
cidos del motor de usuario.
Nombre del parámetro Tipo I Tipo II Tipo III Tipo IV
MotorContinuousStallCurrent MP3 MP3 MP3 MP3
MotorPolesPairs MP5 MP5 MP5 MP5
MotorRatedSupplyVoltage MP6 MP6
MotorPowerFactor MP7
MotorSlip MP9 MP9 MP9 MP9
MotorStatorResistance MP10 MP10 MP10
MotorStatorLeakageInductance MP11 MP11 MP11
MotorNominalPower MP12 MP12 MP12 MP12
MotorRatedSpeed MP25 MP25 MP25 MP25
MotorMaximumSpeed MP26 MP26 MP26 MP26
MotorRotorResistance MP27
MotorRotorLeakageInductance MP28
MotorMagnetizingInductance MP29
MotorNoLoadCurrent MP39 MP39 MP39
MotorNoLoadVoltage MP40
MotorInductanceFactor1 MP30 MP30 MP30 MP30
MotorInductanceFactor2 MP31 MP31 MP31 MP31

Puesta a punto de un cabezal asíncrono
11.
Ref.1912
· 241 ·
DDS|MAB
SOFTWARE
Soft.09.05
El motor a parametrizar deberá encuadrarse en uno de estos tipos aten-
diendo a los datos disponibles. Tras introducir los valores (uno por uno) se
graban en flash para almacenar permanentemente la parametrización.
Notas explicativas
Con el fin de facilitar la labor de parametrización de su motor, quizá sea
conveniente hacer ciertas aclaraciones de cómo parametrizar algunos de
estos parámetros cuyo valor a introducir no es inmediato y necesita de al-
gún cálculo previo.
Cómo parametrizar MP9
En general y según el fabricante del motor, el valor del deslizamiento con el
que ha de parametrizarse MP9 no viene expresado en su placa de caracte-
rísticas de manera explícita. En contadas excepciones se suministra exac-
tamente el dato con el que debe parametrizarse MP9. Es más, los
fabricantes de motores incluso no ofrecen los mismos datos con los que
obtener el valor del deslizamiento.
Así, el dato suministrado en la placa de características puede ser:
El valor del deslizamiento en rev/min
Caso prácticamente excepcional. La placa de características de los moto-
res asíncronos FAGOR de la familia SPM suministran el valor del desliza-
miento de manera directa. El valor que aparece es justamente el que debe
asignarse a MP9. Si dispone de un motor FAGOR o de usuario (NO FA-
GOR) que proporcione el dato de esta manera, parametrícese MP9 con
ese valor según se indica en el ejemplo.
MotorInductanceFactor3 MP32 MP32 MP32 MP32
MotorInductanceFactor4 MP33 MP33 MP33 MP33
MotorInductanceFactor5 MP34 MP34 MP34 MP34
MotorInductanceFactor6 MP35 MP35 MP35 MP35
MotorInductanceFactor7 MP36 MP36 MP36 MP36
MotorInductanceFactor8 MP37 MP37 MP37 MP37
MotorInductanceFactor9 MP38 MP38 MP38 MP38
T. S11/3 Diferentes tipos de parametrización atendiendo a los datos cono-
cidos del motor de usuario.
INFORMACIÓN. Los motores asíncronos de FAGOR podrán parametrizar-
se de los dos modos, bien como motor FAGOR o bien como motor de usua-
rio (motor 0).
i
NOTA. Recuérdese que antes de realizar el auto-ajuste del motor asíncro-
no de usuario deberán introducirse los valores adecuados en los paráme-
tros CP20 (F00307) CurrentLimit y SP10 (S00091) VelocityLimit.
Ejemplo
Parametrizar:
Slip
MP9 = 55
Deslizamiento del motor
Dato del fabricante: FAGOR
55 rpm
Puesta a punto de un cabezal asíncrono
11.
252
Ref.1912
DDS|MAB
SOFTWARE
· 242 ·
Soft.09.05
La frecuencia de deslizamiento en Hz
La placa de características de los motores asíncronos FAGOR no suminis-
tra el valor del deslizamiento de manera directa. Se ofrece el valor de la
frecuencia de deslizamiento
fs en Hz. Parametrizar MP9 con este valor es
un error. El valor que debe asignarse a MP9 vendrá dado por
s
obtenido
de la expresión:
donde:
Si dispone de un motor de usuario (motor NO FAGOR) que proporcione el
dato de esta manera, parametrícese MP9 según indica el ejemplo.
La velocidad del rótor en rev/min
La placa de características de otros motores asíncronos de usuario (NO
FAGOR) suministran el valor de la velocidad del rótor
r
en rev/min. Para-
metrizar MP9 con este valor es un error. El valor que debe asignarse a
MP9 vendrá dado por
s
obtenido de la expresión:
donde:
s
Velocidad de deslizamiento en rev/min
f
s
Frecuencia de deslizamiento en Hz
p
Nº de polos.
NOTA. Nótese que el nº de polos de los motores FM7 o FM9 de FAGOR
es 4, es decir, dos pares de polos. Si dispone de un motor NO FAGOR lea
el valor en la placa de características y si no dispone de este dato consulte
con el fabricante del motor.
Ejemplo
s
Velocidad de deslizamiento en rev/min
Velocidad base del motor en rev/min
f
Frecuencia de la tensión de alimentación del motor
r
Velocidad del rótor en rev/min
p
Nº de polos.
NOTA. Lea el valor del nº de polos en la placa de características del motor
de usuario (NO FAGOR) y si no dispone de este dato consulte con el fa-
bricante del motor. En el siguiente ejemplo se ha considerado un motor de
4 polos y una tensión de alimentación del motor de frecuencia f = 50 Hz.
Parametrizar:
fs
MP9 =
s
= (60·fs ) / (p/2)
Frecuencia de deslizamiento del motor
Dato del fabricante: FAGOR
(en Hz)
(en rev/min)
Parametrizar:
fs
MP9 =
s
= (60·1,5 ) / (4/2) = 45 rev/min
Frecuencia de deslizamiento del motor
Dato del fabricante: FAGOR
=1,5 Hz
MP9 = 45
(en rev/min)
Velocidad de giro del rótor
Dato del fabricante: NO FAGOR
Parametrizar:
MP9 =
s
=
r
= (60·f ) / (p/2)
(en rev/min)
r
--
r

Puesta a punto de un cabezal asíncrono
11.
Ref.1912
· 243 ·
DDS|MAB
SOFTWARE
Soft.09.05
Si dispone de un motor de usuario (NO FAGOR) que proporcione el dato
de esta manera, parametrícese MP9 según indica el ejemplo.
La frecuencia de la tensión de alimentación del motor
La placa de características de algunos motores asíncronos de usuario (NO
FAGOR) suministran el valor de la frecuencia de la tensión de alimentación
del motor
f en Hz. Parametrizar MP9 con este valor es un error. El valor
que debe asignarse a MP9 vendrá dado por
s
obtenido de la expresión:
donde:
Si dispone de un motor de usuario (NO FAGOR) que proporcione el dato
de esta manera, parametrícese MP9 según indica el ejemplo.
Cómo parametrizar MP30, ..., MP38
Para cualquier motor de usuario, el fabricante suministra la ganancia de la
inductancia mutua
Lh
. A partir del valor suministrado deben obtenerse
los valores de los parámetros MP30 ... MP38, puntos de la curva de satura-
ción magnética del hierro del estátor. Sígase el siguiente ejemplo para ob-
tener estos parámetros partiendo del dato de la ganancia de Lh.
Ejemplo
s
Velocidad de deslizamiento en rev/min.
’
Velocidad base del motor en rev/min.
Velocidad del campo magnético senoidal giratorio generado por
las corrientes del estator a la frecuencia
f, en rev/min.
f
Frecuencia que debe tener la tensión de alimentación del motor
para conseguir la velocidad
w en Hz.
p
Nº de polos.
NOTA. Lea el valor del nº de polos en la placa de características del motor
de usuario (NO FAGOR) y si no dispone de este dato consulte con el fa-
bricante del motor. Aquí se ha considerado un motor de 4 polos.
Ejemplo
Dato del fabricante: NO FAGOR
Parametrizar:
MP9 =
s
=
r
= (60·f ) / (p/2)
(en rev/min)
= 1470 (en rev/min)
r
-
-
r
Velocidad de giro del rótor
MP9 =
s
= (60·50 ) / (4/2) - 1.470 = 30 rev/min
MP9 = 30
Parametrizar:
MP9 =
s
=
'
= (60·f ) / (p/2)
(en rev/min)
-
-
'
Dato del fabricante: NO FAGOR
= 133,9 (en Hz)
f
Frecuencia de la tensión de alimentación del motor
Nota:
Velocidad base ---->
'
= 4.000 rev/min
MP9 =
s
= [60·133,9 / (4/2)] - 4.000) = 17 rev/min
MP9 = 17
Datos del fabricante: NO FAGOR
= 133,9 Hz
f
'
= 4.000 rev/min
MP9 =
s
= [ 60 f / (p/2) ] -
'
(en rev/min)

Puesta a punto de un cabezal asíncrono
11.
252
Ref.1912
DDS|MAB
SOFTWARE
· 244 ·
Soft.09.05
Si la ganancia de la inductancia mutua dada por el fabricante es
Lh
=120
%, obtener los valores con que deben parametrizarse MP30 ... MP38.
Ejemplo
F. S11/4
Parametrizar MP30, ..., MP38 a partir de la ganancia de la inductancia mu-
tua
Lh
.
MP38
MP30
%
Lh (% )
MP36
MP35
MP34
MP33
MP32
MP31
0.125
nom
porcentaje del valor
de la inductancia mútua
Wb )
Lh
ganancia de la
inductancia mútua
flujo magnético
MP37
nom
1.125
nom
Parametrizar:
Lh
= 120% = 1.2 (en p.u.)
MP30 = 1000 (siempre)
MP37 = MP30/
Lh
= 1000/1.2 = 833
Ganancia de la inductancia mútua
MP31 = MP30 - (MP30-MP37)/7 = 976
MP32 = MP31 - (MP30-MP37)/7 = 952
MP33 = MP32 - (MP30-MP37)/7 = 928
MP34 = MP33 - (MP30-MP37)/7 = 904
MP35 = MP34 - (MP30-MP37)/7 = 880
MP36 = MP35 - (MP30-MP37)/7 = 856
MP37 = MP36 - (MP30-MP37)/7 = 833
MP38 = MP37 - (MP30-MP37)/7 = 809
Dato del fabricante:

Puesta a punto de un cabezal asíncrono
11.
Ref.1912
· 245 ·
DDS|MAB
SOFTWARE
Soft.09.05
Auto-ajuste de un motor asíncrono de usuario
A partir de la versión 06.08 se disponía de un software capaz de obtener una
primera parametrización en el ajuste de un electromandrino o motor asín-
crono de cabezal suministrado por el fabricante, habiendo realizado previa-
mente una identificación de los parámetros eléctricos del motor.
Todos los motores asíncronos catalogados como tipo I disponen en su placa
de características (según normativa) de todos los parámetros que se re-
quieren para el funcionamiento de esta aplicación.
Tras haber parametrizado la captación y realizado el proceso previo de pa-
rametrización de motor de usuario indicado en el apartado anterior, median-
te la aplicación del auto-ajuste de motor asíncrono se obtendrán los ajustes
de los lazos de corriente, de flujo y de fuerza contraelectromotriz.
Con posterioridad deberá ajustarse manualmente el lazo de velocidad y, si
procede, el lazo de posición.
El comando empleado para realizar el auto-ajuste del motor asíncrono es:
Nótese que:
Introduciendo los parámetros de motor de usuario (motor NO FAGOR
del tipo I) el motor debe moverse de una manera aceptable.
Con la ejecución del comando MC1 se efectuará un cálculo aún mejor
de los parámetros eléctricos del motor, especialmente del parámetro
MP10.
Preparación
Antes de ejecutar el comando de auto-ajuste del motor asíncrono deben
realizarse las siguientes operaciones:
Configurar la captación
Llevar la señal al conector X4 del regulador.
Parámetros a tener en cuenta:
Parametrizar el motor de usuario
Hacer GP7= 0
(deshabilitación del tiempo límite de sobrecarga).
Configurar MP1= Clear motor parameters
(desde el WinDDSSetup).
Véase figura F. S11/3.
Introducir uno por uno los valores de todos los parámetros señalados en
la tabla
T. S11/2 para el motor asíncrono correspondientes al tipo del
que se dispone.
Estos valores vendrán dados en la placa de características del motor y
serán todos ellos conocidos.
OBLIGACIÓN. Esta prestación necesita disponer de los parámetros de los
motores asíncronos catalogados como
tipo I en la tabla T. S11/3 anterior.
Si se dispone de un motor distinto al tipo I, averigue de que tipo se trata e
introduzca todos los parámetros conocidos. Este auto-ajuste autocalculará
internamente los que falten en comparación a los del tipo I.
NOTA. Esta prestación será de utilidad en presencia de motores asíncro-
nos NO FAGOR.
INFORMACIÓN. El ajuste obtenido mediante esta prestación es válido para
mover el motor hasta 2 veces su velocidad base. Para velocidades superio-
res (altas velocidades) deberá realizarse el ajuste de modo manual.
i
MC1 F01238 MotorElectricalParametersIdentification
NOTA. Es necesario parametrizar GP1= 4 000 Hz para que al ejecutar el
comando MC1 sea realizado correctamente el auto-ajuste.
GP2 F00701 Feedback1Type
NP116 S00116 ResolutionOfFeedback1

Puesta a punto de un cabezal asíncrono
11.
252
Ref.1912
DDS|MAB
SOFTWARE
· 246 ·
Soft.09.05
Otros parámetros
Deben además parametrizarse:
Inicialización
Deben inicializarse además los parámetros:
El regulador evaluará automáticamente los parámetros relacionados
con el ajuste de los lazos de corriente, de flujo y de fuerza contraelec-
tromotriz a partir de los parámetros eléctricos identificados tras la eje-
cución del comando MC1.
Grabar parámetros mediante el comando GC1
Identificación
Antes de ejecutar el comando de auto-ajuste del motor asíncrono MC1 para
realizar la identificación,
el motor podrá estar acoplado o desacoplado a
la transmisión mecánica.
Dar potencia y habilitar par
Ejecutar el comando MC1
Este comando responderá a la máquina de ejecución estándar del regu-
lador. Se ejecuta de forma habitual, bien desde el PC mediante el inter-
faz estándar correspondiente del WinDDSSetup o bien desde el CNC.
Tras su ejecución se habrán identificado los valores de las resistencias,
inductancias, la curva de saturación del motor y la corriente eficaz del
motor en vacío.
INFORMACIÓN. Si se ejecuta el comando MC1 sin haber realizado previa-
mente estos dos pasos se dará el código de error
E508.
i
MP14 F01210 MotorTempSensorType
MP21 F01217 MotorPhasesOrder
INFORMACIÓN. Asegúrese de que el conexionado de las fases U, V y W es
coherente con el valor dado a MP21 para que el sentido de giro del motor
(visto desde el eje) coincida con el sentido positivo de las agujas del reloj.
i
CP16 SeriesInductance En cabezales de alta velocidad
AP1=2 PrimaryOperationMode Control de velocidad
NOTA. Para determinar si es necesario inicializar CP16 y obtener su valor
en caso afirmativo, ver apartado «cálculo de la inductancia en serie» de
este mismo capítulo.
INFORMACIÓN. Si no se inicializa AP1=2 se generará el código de error
E508.
i
CP8=1 CurrentLoopGainsCalculation
NOTA. Recuérdese que antes de comenzar con el proceso de identifica-
ción y la ejecución del comando MC1 debe comprobarse que el motor gira
correctamente en vacío a velocidades de 60 rpm y de 1 500 rpm.
ADVERTENCIA. El usuario debe saber que al ejecutar el comando MC1 el
motor se moverá a su velocidad nominal.
NOTA. Durante la ejecución del comando MC1, el motor entrará en vi-
bración por un instante.

Puesta a punto de un cabezal asíncrono
11.
Ref.1912
· 247 ·
DDS|MAB
SOFTWARE
Soft.09.05
Todos estos parámetros son especificados en la siguiente tabla:
MP10 MotorStatorResistance
MP11 MotorStatorLeakageInductance *
MP27 MotorRotorResistance
MP28 MotorRotorLeakageInductance *
MP29 MotorMagnetizingInductance *
MP30 MotorInductanceFactor1
MP31 MotorInductanceFactor2
MP32 MotorInductanceFactor3
MP33 MotorInductanceFactor4
MP34 MotorInductanceFactor5
MP35 MotorInductanceFactor6
MP36 MotorInductanceFactor7
MP37 MotorInductanceFactor8
MP38 MotorInductanceFactor9
MP39 MotorNoLoadCurrent
(*) Antes de parametrizar estos parámetros, léanse las observaciones da-
das en el siguiente apartado.

Puesta a punto de un cabezal asíncrono
11.
252
Ref.1912
DDS|MAB
SOFTWARE
· 248 ·
Soft.09.05
Cómo parametrizar MP11, MP28 y MP29
Los parámetros MP11, MP28 y MP29 como coeficientes de autoinducción
(L) que son, deben parametrizarse en mH (en milihenrios). Ahora bien, al-
gunos fabricantes de motores asíncronos NO FAGOR facilitan estos datos
con el valor de la reactancia inductiva (X
L
) en lugar del coeficiente de au-
toinducción (L), es decir, en
(ohmios). Por tanto, antes de realizar la pa-
rametrización debe hacerse previamente una conversión de unidades de
ohmios a henrios siguiendo la expresión:
donde:
X
L
= Reactancia inductiva en ohmios ().
= Velocidad eléctrica nominal en rad/s.
f = Frecuencia eléctrica nominal en hercios (Hz = ciclos/s).
L = Coeficiente de auto-inducción en henrios (H).
Auto-ajuste de lazos
Eliminar potencia
Necesario para poder grabar parámetros.
Restaurar GP7
Dar a GP7 el valor deseado para la aplicación.
Grabar parámetros
Ejecutado el comando de identificación MC1 (recuérdese que CP8 era
igual a 1) únicamente será necesario grabar los parámetros con el co-
mando GC1 para que el regulador calcule los valores de los parámetros
de ajuste del PI del:
Lazo de corriente
Del lazo de flujo
Del lazo de fuerza contraelectromotriz (fcem)
Recomendaciones
Se recomienda:
Ejecutar dos veces el comando MC1.
Realizar una segunda identificación cuando el motor esté a temperatura
de trabajo si éste no dispone de sensor de temperatura.
NOTA. Nótese que este parámetro se había puesto a valor cero antes
de ejecutar el comando MC1.
CP1 S00106 CurrentProportionalGain
CP2 S00107 CurrentIntegralTime
CP3 S00300 CurrentFeedbackDerivativeGain
CP4 S00301 CurrentAdaptationProportionalGain
CP5 S00302 CurrentAdaptationIntegralTime
FP1 S00600 MotorFluxProportionalGain
FP2 S00601 MotorFluxIntegralTime
FP20 S00602 MotorBEMFProportionalGain
FP21 S00603 MotorBEMFIntegralTime
NOTA. Nótese que cuanto mayor sea la corriente suministrada por el re-
gulador más precisa será la identificación.
L
=
X
L
2
f
X
L
=
f
=
[ MP25
(en rev/min)
+ MP9
(en rev/min)
]
60
MP5 ·

Puesta a punto de un cabezal asíncrono
11.
Ref.1912
· 249 ·
DDS|MAB
SOFTWARE
Soft.09.05
11.2 Motor asíncrono SENSORLESS
El objetivo de esta prestación incorporada en la versión 06.14 del software
de regulación es llevar a cabo el control de velocidad de un motor asíncrono
sin captación motor. Va dirigida principalmente a motores no Fagor de gama
baja y puede ser aplicada tanto en motores de cabezal como en motores de
eje de avance.
El interés de disponer de esta aplicación es fundamentalmente económico
ya que los motores SENSORLESS al no disponer de captador motor ni tam-
poco de cable de captación son más baratos. Además, permitirá al usuario
diagnosticar posibles anomalías de comportamiento de la captación.
Parametrización de un motor SENSORLESS
La parametrización previa a realizar en un regulador que va a gobernar un
motor sensorless es:
Identificar el motor asíncrono como motor SENSORLESS
Parametrizar AP2=1 donde:
Adviértase además que:
Con motor asíncrono y AP2=1 puede parametrizarse GP1= 8 000
ya que no estará presente la captación motor.
Con AP2=1 puede ser conectada la captación directa (p.ej. con
GP10 = 1) y contemplar su valor visualizando la variable PV53.
Identificar la captación motor
Parametrizar:
Adviértase que:
Parametrizar GP2=7 cuando se dispone de un motor síncrono activa
el código de error E502 en la ventana SPY del WinDDSSetup refi-
riéndose a MP50 y AP2 como parámetros erróneos. Para evitar el
error cámbiese el valor de parametrización de alguno de ellos.
Parametrizar GP2=7 y AP2=0 cuando se dispone de un motor asín-
crono activa el código de error
E502 en la ventana SPY del WinDDS-
NOTA. A lo largo del documento se utilizará el término SENSORLESS
para hacer referencia a un motor asíncrono sin captador motor.
INFORMACIÓN. Esta aplicación consigue de un motor SENSORLESS un
comportamiento dinámico idéntico al del motor asíncrono con captación
motor excepto a velocidades inferiores a 30 rev/min.
i
AP2 = 1 AsynchronousRegulationType
NOTA. Con motores síncronos parametrizar siempre AP2=0.
OBLIGACIÓN. Cualquier modificación llevada a cabo sobre el parámetro
AP2, surtirá efecto únicamente si tras el cambio se ejecuta un soft-reset en
el regulador. Recuérdese que no será suficiente con la ejecución del co-
mando «validar». Si no se opera de este modo, el WinDDSSetup le adver-
tirá de ello mediante un mensaje.
GP2.# = 7 Feedback1Type Sin captación motor
NOTA. Nótese que esta parametrización de la captación motor evita que
se produzcan mensajes de error de captación.
OBLIGACIÓN. Aunque en esta versión GP2 dispone de gamas, no podrá
realizarse ningún cambio de gamas con diferentes captaciones. Todas las
gamas de GP2 deben ser parametrizadas con el mismo valor, de lo contra-
rio, se dará un error en este parámetro.

Puesta a punto de un cabezal asíncrono
11.
252
Ref.1912
DDS|MAB
SOFTWARE
· 250 ·
Soft.09.05
Setup refiriéndose a GP2 y AP2 como parámetros erróneos. Para
evitar el error cámbiese el valor de parametrización de alguno de
ellos.
Parametrizar GP2=7 impide que se den errores de las señales A y B,
aunque la placa de captación y el cable de captación estén instala-
dos y alguno de ellos o ambos sean defectuosos.
Identificar el sensor de temperatura.
Parametrizar:
Identificar la búsqueda de cero.
Parametrizar:
Además, en la versión 06.14 son incorporados los parámetros:
Ver capítulo 13 de este manual para obtener toda la información referente a
estos parámetros.
Forma de proceder:
Parametrizar el motor siguiendo el procedimiento indicado según dia-
grama de puesta a punto automática de cualquier motor asíncrono es-
pecificado en la figura
F. S11/1 del capítulo 11 de este manual.
Parametrizar obligatoriamente los parámetros AP2, GP2, MP14 y bits 5
y 6 de PP147 con los valores indicados al inicio de este apartado.
Parametrizar SP50=0 o en cualquier caso, de activar este filtro pasa-
bajo de primer orden de la captación de la velocidad, hacerlo siempre
con un valor superior a 2 000 Hz para su frecuencia de corte.
Mantener los parámetros FP50, FP51 y FP60 a su valor por defecto.
Si se observa un comportamiento inestable de la dinámica del motor, enton-
ces:
Disminuir el valor de FP51 hasta hacer desaparecer la inestablidad.
Aumentar el valor de FP50 sin que la dinámica del motor entre en vibra-
ción.
Aumentar FP51 sin que la dinámica del motor entre en vibración.
Mantener FP60 en su valor por defecto.
MP14=4 MotorTempSensorType Sin sensor de temperatura
NOTA. Nótese que esta parametrización del sensor de temperatura
evita que se produzcan mensajes de error de temperatura.
PP147
(bits 5 y 6) = 1
Homing
Parameter
Home-Switch e I0 no
evaluados
NOTA. Nótese que esta parametrización de la búsqueda de I0 evita
que se produzcan mensajes de error de búsqueda de I0. Obsérvese
que no podrá realizarse una búsqueda de I0 al no ser posible dar una
cota de posición.
FP50 MRASProportionalGain
FP51 MRASIntegralTime
FP60 FilterForStatorFluxEstimationOfVoltage
NOTA. Si siguiendo este procedimiento no consigue realizar un ajuste co-
rrecto, contacte con Fagor Automation S.Coop.

Puesta a punto de un cabezal asíncrono
11.
Ref.1912
· 251 ·
DDS|MAB
SOFTWARE
Soft.09.05
Otras aplicaciones
Esta prestación que permite controlar un motor SENSORLESS, tiene otras
aplicaciones alternativas sobre motores asíncronos que sí disponen de
captación motor.
Así:
Puede evitarse una parada prolongada de la producción cuando hay
problemas en la captación motor (entiéndase la placa de captación, el
cable de captación o el propio captador) parametrizando el motor como
sensorless.
Puede diagnosticarse si un comportamiento anómalo del motor es debi-
do al deterioro de algún elemento de la captación motor. El diagnóstico
del estado de la captación deberá ser interpretado en su conjunto.
Parametrizar:
y comprobar un contaje correcto de esta captación mediante la visuali-
zación de la variable
PV51.
Si se da un error de captación, ayúdese de los errores que se muestran
en el display del regulador para averiguar qué elemento del conjunto de
la captación puede estar fallando.
NOTA. Esta opción podrá considerarse para salir del paso mientras se
repara el elemento deteriorado de la captación siempre que se cumpla
la restricción de no tener que realizar una búsqueda de I0 y se asuma
que el nivel de regulación será ligeramente inferior (p.ej. en operacio-
nes de desbaste).
ADVERTENCIA. Si se encuentra en una situación de este tipo y el motor
dispone de un termistor tipo Klixon, una sobretemperatura del motor puede
ser recogida por el PLC del armario. Éste activará su apertura asegurando
la vida de los bobinados del motor. Si dispone de otro tipo de sensor (p.ej.
KTY84-130) será necesario que al menos los dos hilos correspondientes
del cable de captación estén conectados entre el motor y el regulador (en el
caso de haber desconectado el cable por posible defecto) para asegurar la
vida del bobinado.
GP2=2 Feedback1Type
Encóder cuadrado TTL en
un motor FM7
AP2=1
AsynchronousRegulation
Type
Control Sensorless

Puesta a punto de un cabezal asíncrono
11.
252
Ref.1912
DDS|MAB
SOFTWARE
· 252 ·
Soft.09.05
11.3 Cálculo de la inductancia en serie
En presencia de cabezales de alta velocidad el valor de la inductancia de fu-
gas del motor es bajo. Para que la regulación del cabezal tenga un buen
comportamiento, este valor de la inductancia de fugas debe superar un va-
lor mínimo. De no ser así, es necesario instalar una inductancia trifásica en
serie entre el motor y el regulador.
Entonces, primeramente habrá que preguntarse si la inductancia de fugas
del motor supera el valor mínimo según la expresión:
Si no se cumple esta expresión no será necesario instalar la inductancia en
serie. Ahora bien, si se cumple, sí será necesario y su valor vendrá dado
por:
donde:
A la hora de adquirir una inductancia trifásica deberán ser suministrados
como datos, al fabricante de la mismas, las siguientes características:
Término Descripción Unidades Parámetro
V
0
Tensión en vacío (fase-fase) Vrms MP40
I
0
Corriente en vacío Arms MP39
N
máx
Velocidad máxima rev/min MP26
F
pwm
Frecuencia de PWM Hz GP1
p
Número de pares de polos - MP5
N
base
Velocidad base rev/min MP25
Lh
Ganancia de la inductancia
mutua
- MP30 / MP37
L
1
+ L
2
Suma de inductancias de fugas
(fase-neutro) de estátor y rótor
H MP11+ MP28
L
serie
Inductancia serie H CP16
0,005182
V
0
I
0
Nmáx
2
N
base
Lh
- (L
1
+
L
2
)
>100
µH
Fpwm
2
P
·· · ·
0,005182
V
0
I
0
Nmáx
2
N
base
Lh
- (L
1
+
L
2
)
Fpwm
2
P
·· · ·
L
serie
=
OBLIGACIÓN. Es recomendable utilizar una frecuencia de PWM de 8 kHz
(en lugar de 4 kHz) con el fin de evitar instalar la bobina trifásica. Ahora bien,
esto puede repercutir en la necesidad de tener que instalar un regulador
mayor debido al derating de corriente y, por consiguiente, a la reducción de
potencia que el regulador podrá suministrar.
Valor de la inductancia
L
serie
H
Frecuencia de pulsación de cálculo de la L
serie
F
pwm
kHz
Corriente nominal (en S1) del motor
I
S1
A

12
Ref.1912
· 253 ·
DDS|MAB
SOFTWARE
Soft.09.05
PUESTA A PUNTO DE
UN CABEZAL
SÍNCRONO
12.1 Cabezal síncrono frente a cabezal asíncrono
Hasta ahora, las aplicaciones de cabezal han sido llevadas a cabo mediante
motores asíncronos con rótor en jaula de ardilla, comúnmente denominados
motores de inducción. Sin embargo, en la actualidad, ya son utilizados para
estas mismas aplicaciones, motores síncronos con rótor de imanes perma-
nentes. La razón fundamental de esta nueva tendencia estriba en las mejo-
res prestaciones ofrecidas por un cabezal síncrono frente a un asíncrono.
Algunas de ellas son:
Mayor densidad de par.
Aumento de par para el mismo volumen activo.
Menor tiempo de aceleración.
Disminución del tiempo empleado en acelerar para un mismo momento
de inercia.
Menores pérdidas rotóricas.
Disminución de las pérdidas en el rótor para una misma intensidad no-
minal y, por tanto, mayores rendimientos y menores dilataciones de ca-
bezal
ADVERTENCIA. Antes de instalar un cabezal síncrono, léase detenida-
mente el apartado
15.2. Módulo de protección del bus, BPM del capítulo
15. PROTECCIONES de este manual con el fin de averiguar si será nece-
sario o no instalar este módulo para no provocar daños en el regulador.
INFORMACIÓN. Se dispone de toda la documentación referente al módulo
de protección de bus, BPM en los capítulos y apartados correspondientes
del manual man_dds_hard.pdf.
i

Puesta a punto de un cabezal síncrono
12.
260
Ref.1912
DDS|MAB
SOFTWARE
· 254 ·
Soft.09.05
12.2 Condiciones para su control
Si desde la versión 06.10 se disponía de un software capaz de controlar un
motor síncrono de imanes permanentes en aplicaciones de cabezal (cabe-
zal síncrono) de hasta 10 000 rev/min, a partir de la versión 06.20 se dispo-
ne de un software capaz de controlar un motor síncrono de hasta 1 kHz con
GP1= 4 000 o de hasta 2 kHz con GP1= 8 000. Esto es, para un motor sín-
crono (con o sin par de reluctancia) de dos pares de polos (MP5=2), las ve-
locidades máximas controlables serán de 30 000 y 60 000 rpm,
respectivamente.
Las expresiones que permiten obtener la velocidad
máx controlable se-
gún el nº de pares de polos del motor (MP5) son:
Si bien FAGOR dispone de motores síncronos en su catálogo, éstos no go-
zan de los requerimientos necesarios para trabajar en aplicaciones de ca-
bezal. Esto significa que, cualquier cabezal síncrono que vaya a ser
gobernado por un regulador FAGOR deberá seguir un tratamiento de
motor
de usuario
(motor NO FAGOR) y cumplir, al menos, con todos los requisi-
tos siguientes:
Disponer de una captación conocida por un regulador FAGOR, p.ej.
1Vpp.
Disponer de un sensor de temperatura conocido por un regulador FA-
GOR, p.ej. KTY84-130.
Disponer de un regulador FAGOR de cabezal - ref. SPD o SCD - que
pueda suministrar una corriente nominal superior a la corriente nominal
del motor.
Por tanto, si su motor síncrono va a utilizarse en una aplicación de ca-
bezal y tiene una corriente nominal superior a los valores indicados, no
podrá seleccionar ningún regulador FAGOR para gobernarlo.
No parametrizar NUNCA esta configuración:
Para solucionar este conflicto modificar
la parametrización de uno de
ellos.
Normalmente, esta situación no se produce nunca ya que, en presencia
de cabezales de alta velocidad, es poco común la existencia de reduc-
ciones, con lo cual no suele disponerse de captación directa.
Con GP1= 4 000 Hz;
máx= 60 x (1 kHz / MP5) en rpm
Con GP1= 8 000 Hz;
máx= 60 x (2 kHz / MP5) en rpm
NOTA. Recuérdese que GP1 (F00700) PwmFrequency refleja la frecuen-
cia de conmutación de los IGBTs y MP5 (F01201) MotorPolesPairs el nº
de pares de polos del motor. Compruébese con cuál de estos dos valores
de GP1 se obtiene un mejor comportamiento del motor.
NOTA. Recuérdese que el mayor regulador de cabezal del catálogo de
FAGOR es el de referencia SPD 3.250. Su corriente nominal en régi-
men S1 es de 135 A y en régimen S6-40% de 175,5 A.
MP50=0 El motor conectado es síncrono
GP1= 8 000 Frecuencia de conmutación de los IGBTs es de 8 kHz
GP10 no 0 Dispone de captación directa

Puesta a punto de un cabezal síncrono
12.
Ref.1912
· 255 ·
DDS|MAB
SOFTWARE
Soft.09.05
12.3 Parametrización de un cabezal síncrono de usuario
En presencia de un motor síncrono de cabezal, el regulador que lo va a con-
trolar no llevará nunca almacenado el fichero «*.mot» por defecto y, por tan-
to, no dispondrá de la tabla de parámetros propia del motor (salvo que,
previamente, en alguna otra ocasión ya haya sido ajustado por FAGOR). Es
por esta razón que será necesario realizar una parametrización manual
de
los parámetros de motor.
En este proceso de parametrización (que deberá realizarse, insisto, ma-
nualmente) se irán introduciendo, uno por uno, los valores de un conjunto
de parámetros conocidos del motor, dados todos ellos por el fabricante del
mismo. Los parámetros implicados en este proceso se detallarán más ade-
lante, en la tabla
T. S12/2.
Modo de proceder
Antes de parametrizar los parámetros propios de motor, asegúrese de que
ha sido instalada una versión de software para cabezal y no para eje
y pa-
rametrice
MP50 = 0 (síncrono) que por defecto sale a 1.
Es muy recomendable parametrizar además los parámetros correspondien-
tes a la captación motor.
Es necesario
que la captación motor que incorpora el cabezal síncrono sea
conocida por un regulador FAGOR. La señal de la captación motor se trans-
mite a través del cable de captación con destino al conector X4 del regula-
dor.
Parámetros a tener en cuenta:
Una vez asignado el valor conveniente a estos parámetros se procederá
posteriormente a parametrizar los parámetros propios del motor desde el
WinDDSSetup.
Para ello:
Seleccionar
el grupo M (motor), desde la ventana de configuración de pa-
rámetros (modo modificación) del programa de ajuste WinDDSSetup.
Con
nivel de acceso OEM o superior se despliega una ventana donde
aparece el icono (a)
de selección del motor.
Esto ocurre siempre que haya sido seleccionado previamente el parámetro
MP1 (S00141) MotorType.
Al pulsar el botón (a) se despliega en pantalla la ventana «SELECCIÓN
DEL MOTOR».
Como la parametrización va a realizarse manualmente, para un motor de
usuario es necesario inicializar a cero previamente todos los parámetros in-
dicados en la tabla
T. S12/2.
Para ello, parametrizar
MP1 = CLEAR MOTOR PARAMETERS (desde el
WinDDSSetup).
Ver figura F. S12/1.
Mediante la barra de desplazamiento vertical de la ventana izquierda loca-
lizar el campo «CLEAR MOTOR PARAMETERS» en el listado que se ofre-
ce. Activar la flecha única de selección (todos los sets) o una de las flechas
de selección (set por set) para asignar «clear motor parameters» a MP1.x y
validar pulsando el icono (b) que aparece en la parte superior derecha de
esta misma ventana.
NOTA. Se entenderá por cabezal síncrono de usuario, un motor síncrono
utilizado en una aplicación donde se dispone de un cabezal y no está con-
templado en el catálogo de motores de FAGOR. En adelante, se utilizarán
indistintamente los términos «motor NO FAGOR» o «motor 0» cuando se
haga alusión a un motor de usuario.
GP2.# F00701 Feedback1Type
NP116 S00116 ResolutionOfFeedback1
NOTA. Nótese que para un nivel de acceso BÁSICO no se muestra el ico-
no (a) en la ventana. No será posible realizar la selección y, por tanto, no
podrá llevarse a cabo la parametrización del motor.
(a)
(b)

Puesta a punto de un cabezal síncrono
12.
260
Ref.1912
DDS|MAB
SOFTWARE
· 256 ·
Soft.09.05
Una vez finalizado este proceso se habrán inicializado a cero, entre otros,
los siguientes parámetros:
Ahora, parametrizar manualmente desde el WinDDSSetup y, uno por uno,
todos y cada uno de los siguientes parámetros:
F. S12/1
Selección de «CLEAR MOTOR PARAMETERS» para MP1.
T. S12/1 Parámetros que se inicializan a cero tras introducir «CLEAR
MOTOR PARAMETERS» en MP1.
Parámetro ID SERCOS Nombre
MP1 F01210 MotorType
MP3 S00111 MotorContinuousStallCurrent
MP5 F01201 MotorPolesPairs
MP6 F01202 MotorRatedSupplyVoltage
MP7 F01203 MotorPowerFactor
MP10 F01206 MotorStatorResistance
MP11 F01207 MotorStatorLeakageInductance (
*)
MP12 F01208 MotorNominalPower
MP14 F01210 MotorTempSensorType
MP25 F01221 MotorRatedSpeed
MP26 F01222 MotorMaximumSpeed
* Nótese que para un motor síncrono, MP11 representa la inductancia de
estátor del motor y no la de fugas, ya que no tiene sentido hablar de induc-
tancia de fugas en estos motores. Téngase en cuenta este aviso en cual-
quier referencia al parámetro MP11 de este capítulo.
T. S12/2 Parámetros necesarios a parametrizar en una puesta a punto de
un cabezal síncrono.
MP1 F01210 MotorType
MP3 S00111 MotorContinuousStallCurrent
MP5 F01201 MotorPolesPairs
MP10 F01206 MotorStatorResistance
MP11 F01207 MotorStatorLeakageInductance (
*)
MP12 F01208 MotorNominalPower
MP14 F01210 MotorTempSensorType (
**)
MP25 F01221 MotorRatedSpeed
MP26 F01222 MotorMaximumSpeed
* Léase la nota de la página anterior.
** Sensor de temperatura del motor: Es necesario que el sensor de tempe-
ratura que incorpora el cabezal síncrono sea conocido por un regulador
FAGOR. Los dos hilos del sensor van incorporados en el propio cable de
captación y cuyo destino es el conector X4 del regulador.

Puesta a punto de un cabezal síncrono
12.
Ref.1912
· 257 ·
DDS|MAB
SOFTWARE
Soft.09.05
Además, parametrizar los parámetros específicos de cabezal síncrono. Es-
tos parámetros aparecen en la versión de software 06.10 y puede obtenerse
más información sobre ellos en el capítulo
13. PARÁMETROS, VARIA-
BLES Y COMANDOS
de este mismo manual.
Finalizada esta parametrización, grabarla en la memoria flash del regulador
con el fin de que quede almacenada de manera permanente.
MP42 F01239 StartingSpeedForFielweakening
MP43 F01240 Ke_VoltageConstant
MP50=0 F01282 SynchronousAsynchronous
NOTA. Los valores con los que deben parametrizarse los parámetros
MP42 y MP43 del regulador serán suministrados por el fabricante del mo-
tor. Además, recuérdese que con cabezal síncrono,
siempre hay que pa-
rametrizar MP50 = 0.

Puesta a punto de un cabezal síncrono
12.
260
Ref.1912
DDS|MAB
SOFTWARE
· 258 ·
Soft.09.05
12.4 Proceso de arranque
Para establecer el control de un cabezal síncrono, también es necesario
conocer en el arranque cual es la posición relativa que ocupan los imanes
(solidariamente unidos al rótor) respecto del estátor, es decir, cuál es la po-
sición eléctrica.
Si el motor seleccionado no dispone de un encóder con sistema de medida
de la posición absoluta en un giro completo será necesario estimar su valor
en el arranque ya que el regulador necesitará esta información para poder
realizar el control del motor. Ver apartado «
POSICIÓN ELÉCTRICA EN EL
ARRANQUE DEL MOTOR
» del capítulo 10 de este manual donde se de-
talla la prestación que realiza esta estimación.

Puesta a punto de un cabezal síncrono
12.
Ref.1912
· 259 ·
DDS|MAB
SOFTWARE
Soft.09.05
12.5 Ajuste de lazos
Ajuste del lazo de corriente
Ajustar el PI de corriente supone encontrar los valores de CP1 (Kp) y CP2
(Ti) óptimos en función del motor parametrizado en el parámetro MP1 del re-
gulador.
Parámetro a tener en cuenta:
Si se parametriza CP8 a 1 en un regulador que va a gobernar un motor sín-
crono NO FAGOR, se activa, en el arranque del regulador, un autocálculo
de los valores CP1 (Kp) y CP2 (Ti) a partir de los valores con los que se han
parametrizado MP10 (R) y MP11 (L), realizando así un ajuste del lazo de co-
rriente. Esto ocurrirá realmente así, siempre que se cumplan las siguientes
condiciones:
El motor considerado es un motor de usuario, es decir, no comercializa-
do por FAGOR.
CP8 está a 1 y además, los parámetros MP10 (F01206) MotorStatorRe-
sistance y MP11 (F01207) MotorStatorLeakageInductance son distintos
de cero, necesariamente.
Por tanto,
1. Comprobar que CP8 = 1 y si aún no se han parametrizado:
¡hágalo! Los valores de estos parámetros vendrán suministrados por el
fabricante del motor.
2. Grabar parámetros desde el icono del WinDDSSetup o ejecutando el
comando GC1 y un posterior «soft-reset» ejecutando el comando GV11.
3. Arrancar el regulador nuevamente
4. Grabar parámetros nuevamente
para almacenar en la memoria flash
del regulador los valores de CP1 y CP2 obtenidos.
5. Realizar un posterior «soft- reset» ejecutándo el comando GV11.
El PI del lazo de corriente estará ahora ajustado.
Ajuste del lazo de velocidad
El ajuste del lazo de velocidad será llevado a cabo siguiendo las considera-
ciones definidas para cualquier motor y ya explicadas en el capítulo
4. EL
REGULADOR DE VELOCIDAD
de este mismo manual.
CP8 = 1 F00317 CurrentLoopGainsCalculation
MP10.# F01206 MotorStatorResistance
MP11.# F01207 MotorStatorLeakageInductance
NOTA. Recuérdese que todos los parámetros de motor ya deberían
estar parametrizados.
NOTA. En el nuevo arranque, se activará la prestación del auto-cálculo
del PI del lazo de corriente y serán parametrizados CP1 y CP2 con los
valores adecuados.

12.
Puesta a punto de un cabezal síncrono
Ref.1912
DDS|MAB
SOFTWARE
· 260 ·
Soft.09.05

13
Ref.1912
· 261 ·
DDS|MAB
SOFTWARE
Soft.09.05
PARÁMETROS,
VARIABLES Y
COMANDOS
13.1 Notación
Notación empleada
Grupo
Carácter identificador del grupo lógico al que pertenece el parámetro o la
variable.
Los grupos de parámetros son:
Tipo
Carácter identificador del tipo de dato al que corresponde la información.
Puede ser:
La diferencia entre parámetro y variable estriba en que el primero dispone
de un valor inicial programable y, salvo excepciones, cualquier modificación
de su valor solo tendrá efecto mientras sea validado. Ver comando validar
GC4 e icono asociado en la aplicación WinDDSSetup.
Índice
Número identificador dentro del grupo al que pertenece.
[ Grupo ] [ Tipo ] [ Índice ] [ .Gama ]
T. S13/1 Grupo de parámetros, variables y comandos.
Nº Función Grupo Letra
1 Modo de operación Aplicación A
2 Señales de control Bornero B
3 Lazo de control de corriente Corriente C
4 Diagnóstico de errores Diagnósticos D
5 Simulador de encóder Encóder E
6 Lazo de control de flujo Flujo F
7 Generales del sistema Generales G
8 Hardware del sistema Hardware H
9 Entradas analógicas y digitales Entradas I
10 Temperaturas y tensiones Monitorización K
11 Motion Control y PLC MC y PLC L
12 Propiedades del motor Motor M
13 Elementos mecánicos Mecánicos N
14 Salidas analógicas y digitales Salidas O
15 Lazo de posición Posición P
16 Interfaz de comunicación del sistema SERCOS | CAN Q
17 Propiedades de la captación Rótor R
18 Lazo de control de velocidad Velocidad S
19 Parámetros de par y potencia Par T
20 Ayudas a la parametrización Misceláneas X
P Parámetro: Define el funcionamiento del sistema.
V Variable: Legible y modificable dinámicamente.
C Comando: Ejecuta alguna acción concreta.

Parámetros, variables y comandos
13.
PARÁMETROS, VARIABLES Y COMANDOS
Notación
378
Ref.1912
DDS|MAB
SOFTWARE
· 262 ·
Soft.09.05
Set
Conjunto de parámetros que pueden configurar de forma diferente un siste-
ma. Muchos de los parámetros se desdoblan en sets.
Únicamente tiene sentido hablar de sets en presencia de parámetros, no así
de variables. Ver «sets de parámetros y reducciones» del capítulo 8 de este
manual.
Identificación
En la descripción de cada identificador del tipo de dato (parámetro, variable
o comando) que más adelante se detalla, se representarán, simbólicamente
mediante caracteres, ciertas características relevantes a tener en cuenta en
cada uno de ellos.
Se interpretarán del siguiente modo:
El
ID (número identificador) que aparece representado entre corchetes ca-
racterístico de cada parámetro, variable o comando corresponde al propio
del standard SERCOS Interface.
Todos los iniciados por la letra S (p.ej: S00109) pertenecen a dicho están-
dar. Para los parámetros FAGOR (p. ej: F01612) su identificador estándar
SERCOS se obtiene sumando el valor 32768 a su índice numérico.
Así, p. ej: el parámetro F00024 según el Standard SERCOS
Interface es S
(24+32768); esto es: S32792.
Ejemplos de la definición
SP40.4 Grupo S parámetro (P) Nº 10, set 4
CV21 Grupo C variable (V) Nº 21
GC1 Grupo G comando (C) Nº 1
T. S13/2 Descripción de los identificadores.
Set de parámetros # Parámetro extendido en sets
Efecto inmediato
*
Parámetro modificable ON LINE
Variable modificable W Variable modificable desde cualquier nivel
Nivel de acceso F Fagor
OOEM
Usuario (básico)
Signo s Con signo
Ligado al motor M Valor determinado por MotorType (MP1)
Tipo de motor S Síncrono exclusivamente
A Asíncrono exclusivamente
Aplicación del motor AX Como eje exclusivamente
SP Como cabezal exclusivamente
NOTA. La visualización del valor de cualquier parámetro o variable inde-
pendientemente del nivel de acceso disponible puede llevarse a cabo a
través de la aplicación WinDDSSetup.
NOTA. El valor de cualquier parámetro podrá ser modificado siempre que
se disponga del código de acceso correspondiente. Su nivel de acceso
para ser modificado viene dado por la etiqueta F (FAGOR), O (OEM) o en
blanco (básico) junto al nombre del parámetro
NOTA. El valor de cualquier variable podrá ser modificado siempre que se
disponga del código de acceso correspondiente. Su nivel de acceso para
ser modificado viene dado por la etiqueta F (FAGOR), O (OEM) o W (bá-
sico) junto al nombre de la variable.
INFORMACIÓN. Adviértase que una variable puede modificarse desde nivel
básico (sin código de acceso alguno) si aparece etiquetada con una W. Si
el nivel de acceso es más restrictivo (OEM o FAGOR) aparecerá etiquetada
con el símbolo <O> o <F>, respectivamente, y podrá modificarse solo si se
dispone del código de acceso correspondiente. Si no dispone de ninguna eti-
queta, entonces será solo de lectura y, por tanto, no será modificable.
i

Parámetros, variables y comandos
PARÁMETROS, VARIABLES Y COMANDOS
Notación
13.
Ref.1912
· 263 ·
DDS|MAB
SOFTWARE
Soft.09.05
El ID SERCOS para parámetros extendidos en sets se obtiene sumando el
valor 4096 a cada set. Así, p. ej. considerando SP1, el ID SERCOS corres-
pondiente a SP1.0 es S00100, a SP1.1 es S04196, a SP1.2 es S08289, ...
Los parámetros FAGOR extendidos en sets se verán afectados por las dos
consideraciones que se acaban de citar.
Esta nomenclatura se interpreta de la siguiente forma:
Parámetro del grupo motor (se identifica por MP4)
No extensible en sets (no aparece el símbolo # que así lo indique)
No modificable ONLINE (no aparece el símbolo * que así lo indique)
Modificable únicamente desde el nivel de acceso FAGOR (se identifica
por
FMS)
Sin signo (no aparece el símbolo s que así lo indique)
Parámetro ligado al motor y determinado por MP1 (MotorType) (se iden-
tifica por F
MS)
Utilizable únicamente en presencia de motores síncronos (se identifica
por FM
S)
Utilizable tanto en aplicaciones de eje como de cabezal (no lleva ni el
identificador AX ni SP)
Su ID SERCOS es 109 (se identifica por S00109)
Esta nomenclatura se interpreta de la siguiente forma:
Variable del grupo «velocidad» (se identifica por SV7)
De solo lectura (no aparece el símbolo W ni etiquetas O o F )
Con signo (aparece el símbolo s que así lo indica)
Su ID SERCOS al tratarse de una variable FAGOR (se identifica por
F01612) se obtiene de sumar 1612 + 32768 = 34380 (ID representado
como
S34380)
Esta nomenclatura se interpreta de la siguiente forma:
Variable del grupo «hardware» (se identifica por HV1)
De solo lectura (no aparece el símbolo W ni etiquetas O o F)
Sin signo (no aparece el símbolo s que así lo indique)
Utilizable tanto en presencia de motores síncronos como asíncronos (no
incorpora la etiqueta de exclusividad A o S)
Utilizable únicamente en aplicaciones de motor como eje (la etiqueta AX
así lo indica)
Su identificador ID SERCOS al tratarse de una variable FAGOR (se
identifica por F01612) se obtiene de sumar 1612+32768=34380 (ID re-
presentado como S34380)
NOTA. Pueden ser utilizados indistintamente el identificador ID SERCOS
o el identificador ID CAN que se facilitan en la tabla al final del capítulo
para hacer referencia a cualquier parámetro, variable o comando de un re-
gulador aunque el interfaz de comunicación del sistema sea CAN
. Utilice,
por tanto, cualquiera de los dos identificadores (ID SERCOS o ID CAN)
que le sea más oportuno.
Ejemplo i
MP4 FMS S00109 MotorPeakCurrent
Ejemplo ii
SV7 s F01612 VelocityCommandFinal
Ejemplo iii
HV1 (AX) S00110 S3LoadCurrent
INFORMACIÓN. Adviértase que las unidades físicas y rangos en los que se
dan cada uno de los parámetros y variables de este capítulo son los que uti-
liza la aplicación WinDDSSetup para PC sobre Windows.
i

Parámetros, variables y comandos
13.
PARÁMETROS, VARIABLES Y COMANDOS
Notación
378
Ref.1912
DDS|MAB
SOFTWARE
· 264 ·
Soft.09.05
Notas
A lo largo de este capítulo aparece el término «parada» acompañado siem-
pre de su función de seguridad. Aunque en el capítulo
9. SEGURIDAD
FUNCIONAL
del manual «man_dds_hard.pdf» ya se definían estos térmi-
nos, se repiten aquí a modo de notas con el fin de que el usuario sepa en
todo momento de que se está hablando cuando se hace referencia a una
parada o a una parada de emergencia y a su función de seguridad sin tener
que acudir al manual anteriormente mencionado.
Tanto en una parada como en una parada de emergencia el objetivo es de-
tener los elementos móviles de la máquina. La diferencia estriba en que la
parada de emergencia viene siempre provocada por algún riesgo inminente
a personas y se activa por la acción humana de manera directa. En este ca-
pítulo se hablará siempre de «parada» pero teniendo presente que si es
provocada directamente por la acción humana (p. ej. pulsación de la seta de
emergencia) en una situación de peligro inminente, donde se lee «parada»
deberá leerse «parada de emergencia».
Además, según CEI 61800-5-2 y considerando el modo en que se efectúa la
parada, se hablará de:
STO. Safe Torque Off. Desconexión segura de par. Se realiza una desco-
nexión inmediata de la alimentación de los accionamientos de la máquina.
Es provocada mediante:
Desactivación de la señal Drive Enable o
Activación de un error que requiere desconexión segura de par (STO).
Entiéndase como error que deshabilita el par motor.
Esta función de seguridad se corresponde con una parada no controlada
según CEI 60204-1, categoría de parada 0.
SS1. Safe Stop 1. Parada segura 1. Se mantiene la alimentación de los ac-
cionamientos de la máquina hasta su parada realizando su desconexión
tras haber parado. Es provocada mediante:
Desactivación de la señal Speed Enable o
Activación de un error que requiere parada segura 1 (SS1).
Entiéndase como error que desactiva el par motor tras parar.
Esta función de seguridad se corresponde con una parada controlada se-
gún CEI 60204-1, categoría de parada 1.
SS2. Safe Stop 2. Parada segura 2. Se mantiene siempre la alimentación
de los accionamientos de la máquina incluso después de haberse detenido.
Es provocada mediante:
Activación de la señal Halt.
Esta función de seguridad se corresponde con una parada controlada se-
gún CEI 60204-1, categoría de parada 2.

Parámetros, variables y comandos
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
13.
Ref.1912
· 265 ·
DDS|MAB
SOFTWARE
Soft.09.05
13.2 Grupos de parámetros, variables y comandos
Grupo A. Aplicación
Véanse los capítulos 3, 4 y 5 de este manual para obtener más detalles so-
bre estos conceptos.
AP1 O S00032 PrimaryOperationMode
Función
Establece el modo de funcionamiento en lo referente
a la configuración del sistema.
T. S13/3 Parámetro AP1. Significado de sus bits.
Bit Función
3 Establece la activación de los feedforward
(en el caso de trabajar con consigna de posición).
= 0 Control de posición con error de seguimiento
(feedforwards desactivados).
= 1 Control de posición sin error de seguimiento
(feedforwards activados).
2, 1, 0 [LSB] Definen si la consigna es de velocidad o posición
atendiendo además al tipo de captación.
= 001 Reservado.
= 010 Consigna de velocidad (sin lazo de posición).
= 011 Consigna de posición con captación motor.
= 100 Consigna de posición con captación directa.
= 101 Consigna de posición con ambas captaciones.
Valor por defecto
000011 en binario (= 3 en decimal), consigna de po-
sición con captación motor y feedforwards desactiva-
dos.
AP2 OA S00033 AsynchronousRegulationType
Función
Tipo de control sobre el motor asíncrono.
Valores válidos
0, 1 y 2.
0
Control vectorial por orientación de flujo rotóri-
co. Este control es utilizado con captador de ve-
locidad.
1 Control vectorial
SENSORLESS basado en el
modelo de tensión.
2 Control
V/f.
Valor por defecto
0
Control vectorial por orientación de flujo rotórico.
Versión
Operativo a partir de la versión de software 06.14.
Modificado haciendo disponible el control V/f (valor
2) a partir de la versión de software 08.05.
NOTA. Con motores síncronos parametrizar siempre AP2=0.
OBLIGACIÓN. Cualquier modificación llevada a cabo sobre el parámetro
AP2, surtirá efecto únicamente si tras el cambio se ejecuta un soft-reset en
el regulador. Recuérdese que:
¡No será suficiente con la ejecución de
«validar»! Si no se opera de este modo, el WinDDSSetup le advertirá de
ello mediante un mensaje.
AP5 O F02001 PlcPrgScanTime
Función
Establece el período de repetición del módulo princi-
pal del PLC [PRG].
Valores válidos
4, 8, 12, 16 o 20.
Valor por defecto
4.
Unidades
1 ms.

Parámetros, variables y comandos
13.
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
378
Ref.1912
DDS|MAB
SOFTWARE
· 266 ·
Soft.09.05
Grupo B. Entradas/salidas ·no programables·
Agrupa las variables relacionadas con las señales de control hardware no
programables y las variables lógicas asociadas a la función Halt y Drive
Enable a través de la línea serie. La activación de la función Halt equivale a
poner consigna de velocidad nula manteniendo el rótor bloqueado con par.
Puede ser activada a través de una señal eléctrica en alguna de las entra-
das digitales del regulador por medio del WinDDSSetup a través de la línea
serie o a través del interfaz SERCOS o CAN. La función Halt se activa (de-
tiene el motor) cuando se dispone de cero voltios en la entrada eléctrica
asignada a la variable BV1, cuando se solicita desde el WinDDSSetup (va-
riable BV3=0) o cuando se solicita desde el PLC del CNC vía SERCOS o
CAN (bit 13 de la variable DV32 a cero voltios).
La activación de la función Drive Enable permite la circulación de corriente
por el motor. Puede ser desactivada a través de una señal eléctrica en el co-
nector de control X2 del regulador desde la aplicación WinDDSSetup, a tra-
vés de la línea serie o a través del interfaz SERCOS o CAN.
BV1 O F00201 HaltDrivePin
Función
Controla la función Halt a través de una señal eléctri-
ca. BV1 se asigna al parámetro IP10-IP13 corres-
pondiente a la entrada digital que va a funcionar
como Halt.
Valor por defecto
1 Sin efecto.
Ejemplo
IP11= BV1. La entrada digital 2 realiza la función de Halt, es decir, con cero
voltios en el pin 2 referido al pin 5, activa la función Halt.
BV3 O F00202 HaltDriveDnc
Función
Controla la función Halt a través de la línea serie.
Valor por defecto
1 Sin efecto.
Ejemplo
BV3 = 0. Activa la función Halt.
F. S13/1
Control de la función Halt a través de la línea serie.
03
)BMU'VODUJPO
#7<'>
#7<'>
%7<4>
<CJU>
03
%SJWF&OBCMF
'VODUJPO
<9PGUIFESJWF>
#7<'>
%7<4>
<CJU>
%SJWF&OBCMF1JO
%SJWF&OBCMF%OD
%SJWF&OBCMF
<4&3$04PS$"/>
%3&/"
)BMU%SJWF1JO
)BMU%SJWF%OD
)BMU
<4&3$04PS$"/>
<9PGUIFESJWF>
%7<4>
<CJU>
4QFFE&OBCMF1JO
4QFFE&OBCMF
<4&3$04PS$"/>
41&/"
4QFFE&OBCMF
'VODUJPO
03
4ZTUFN4QFFE&OBCMF1JO
<9PGUIF
QTVQQMZ>
8JUINPEVMBSESJWFT
<9PGUIFESJWF>
%7<4>
<CJU>
4QFFE&OBCMF1JO
4QFFE&OBCMF
<4&3$04PS$"/>
41&/"
4QFFE&OBCMF
'VODUJPO
03
8JUIDPNQBDUESJWFT
9JGJUJTBO314QPXFSTVQQMZ

Parámetros, variables y comandos
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
13.
Ref.1912
· 267 ·
DDS|MAB
SOFTWARE
Soft.09.05
La función Drive Enable se desactiva (anula el par motor) cuando hay cero
voltios en esa entrada eléctrica, cuando se solicita desde el WinDDSSetup
(variable BV7= 0) o cuando se solicita desde el PLC del CNC vía SERCOS
o CAN (bit 14 de la variable DV32 (variable DRENA en el PLC) se pone a
cero voltios).
BV7 O F00203 DriveEnableDnc
Función
Controla la función Drive Enable por la línea serie.
Valor por defecto
1 Sin efecto.
Ejemplo
BV7=0. Desactiva la función Drive Enable, anula el par motor.
BV14 F00204 NotProgrammableIOs
Función
Variable que indica los valores lógicos de las señales
eléctricas de control del regulador. Una tensión de 24
voltios en la entrada eléctrica supone un 1 lógico en
los bits de esta variable.
T. S13/4 Variable BV14. Significado de sus bits.
Bit Función
4 [MSB] Status PS (en el bus intermodular X1)
3 Error reset
2 DR. OK (en el microprocesador, no en los pines de X2)
1 Speed Enable & System Speed Enable (regulador y fuente)
0 [LSB] Drive Enable
Ejemplo
BV14=18 (10010 en binario).
Lsc_Status y Speed Enable & System Speed Enable son activos.

Parámetros, variables y comandos
13.
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
378
Ref.1912
DDS|MAB
SOFTWARE
· 268 ·
Soft.09.05
Grupo C. Corriente
CP1.# *OM S00106.# CurrentProportionalGain
Función
Valor de la ganancia proporcional del lazo de corrien-
te.
Valores válidos
0 ... 32767.
Unidades
0,01 V/A.
Versión
Modificado en la versión de software 06.10.
CP2.#
*OM S00107.# CurrentIntegralTime
Función
Valor de la ganancia integral del lazo de corriente.
Valores válidos
0 ... 32767.
Unidades
0,001 ms.
Versión
Modificado en la versión de software 06.10.
CP3.#
*FMA F00300.# CurrentFeedbackDerivativeGain
Función
Valor de la ganancia derivativa del lazo de corriente.
Valores válidos
0 ... 8 000.
Unidades
1 µs.
Versión
Modificado en la versión de software 06.10.
CP4.#
*FMA F00301.#
Current
AdaptationProportionalGain
CP5.#
*FMA F00302.# CurrentAdaptationIntegralTime
Función
Adaptación del valor de la acción proporcional-inte-
gral del PI de corriente.
Valores válidos
100 ... 10 000. La acción del PI a bajas velocidades
puede ir desde la décima parte hasta diez veces la
acción a altas velocidades.
(CP4xCP1)/1000 debe ser menor que el máximo va-
lor que pueda tomar CP1.
(CP5xCP2)/1000 debe ser menor que el máximo va-
lor que pueda tomar CP2.
Valor por defecto
500 % (acción proporcional constante a cualquier ve-
locidad). 1 000 % (acción integral constante a cual-
quier velocidad).
Unidades
0,1 %.
Versión
Modificados en la versión de software 06.10.
CP6.# FMA F00303.# CurrentAdaptationLowerLimit
Función
Es el límite superior de las velocidades consideradas
bajas (en rev/min).
Valores válidos
Menor que CP7.
Versión
Modificado en la versión de software 06.10.
CP7.# FMA F00304.# CurrentAdaptationUpperLimit
Función
Es el límite inferior de las velocidades consideradas
altas (en rev/min).
Valores válidos
Menor que SP10 y mayor que CP6.
Versión
Modificado en la versión de software 06.10.
F. S13/2
Interpretación gráfica de estos parámetros.
Speed
CP1
CP4*CP1
CP7
CP2
CP5*CP2
CP6
Kp
Ti
Asynchronous motor
Adapter-current-PID
Gain
CP1 (S00106) CurrentProportionalGain
CP2 (S00107) CurrentIntegralTime
CP4 (F00301) CurrentAdaptationProportionalGain
CP5 (F00302) CurrentAdaptationIntegralTime
CP6 (F00303) CurrentAdaptationLowerLimit
CP7 (F00304) CurrentAdaptationUpperLimit

Parámetros, variables y comandos
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
13.
Ref.1912
· 269 ·
DDS|MAB
SOFTWARE
Soft.09.05
CP8 F F00317 CurrentLoopsGainCalculations
Función
Parámetro que permite auto-calcular los valores CP1
(Kp) y CP2 (Ti) a partir de MP10 (R) y MP11 (L) para
el ajuste del lazo de corriente en motores síncronos
no FAGOR y los ajustes de los lazos de corriente, flu-
jo y fuerza contra-electromotriz en motores asíncro-
nos no FAGOR.
Valores válidos
0 No activado (por defecto)
1 Activado
Versión
Operativo a partir de la versión de software 06.01.
Ampliado a partir de la versión de software 06.08.
CP9.#
*OA F00318.# CurrentLoopBandwidth
Función
Ancho de banda del lazo de corriente de un motor
asíncrono a velocidad nula. Utilizado por el regulador
en sus cálculos internos con el fin de mantener este
ancho de banda a altas revoluciones.
Valores válidos
0 (no habilitado) ... 8 000.
Valor por defecto
1 000.
Unidades
1 Hz.
Versión
Operativo a partir de la versión de software 06.10.
CP16 F F00316 SeriesInductance
Función
Este parámetro solo procede en cabezales de alta
velocidad por disponer de una inductancia de fugas
muy baja. Con el fin de realizar un control correcto del
lazo de corriente es necesario introducir (entre el re-
gulador y el motor) una inductancia trifásica en serie
con la del motor tratando de aumentar la inductancia
de fugas. El valor mínimo de la inductancia de fugas
del motor será 100 µH. El valor de CP16 será L
serie.
Para más información, ver apartado -
11.3. Cálculo
de la inductancia en serie
.
Valores válidos
0 (por defecto) ... 100 000 000.
Unidades
0,000 1 mH.
Versión
Operativo a partir de las versiones de software 06.01
y 07.02.
CP18 F F00327 CurrentLoopGainsMode
Función
Permite realizar un auto-ajuste mejorado del lazo de
corriente respecto a versiones de software anteriores.
Valores válidos
0 Ajuste normal
1 Ajuste mejorado (por defecto).
Versión
Operativo a partir de la versión de software 08.06.
CP20.# O F00307.# CurrentLimit
Función
Límite de la consigna de corriente que llega al lazo de
corriente del sistema. Ver esquema de configuración
interna. Este valor es impuesto por el usuario.
Valores válidos
0 ... 3 000. Depende del regulador conectado.
Unidades
0,1 A.
Valor por defecto
En accionamientos con servomotores FXM o FKM el
parámetro CP20 tomará el menor de los valores da-
dos por la corriente de pico del regulador y del motor.
Con motores SPM, FM7 o FM9 tomará el valor de la
corriente máxima del regulador.
CP21.# Os F00319.# PeakCurrentAutophasingOnline
Función
Amplitud de la corriente alta durante la ejecución de
GC7 (AutophasingOnline). Ver figura
F. S13/3.
Valores válidos
-1 ... 3 000.
Valor por defecto
0.
Unidades
0,1 A.
Versión
Operativo a partir de la versión de software 06.18.
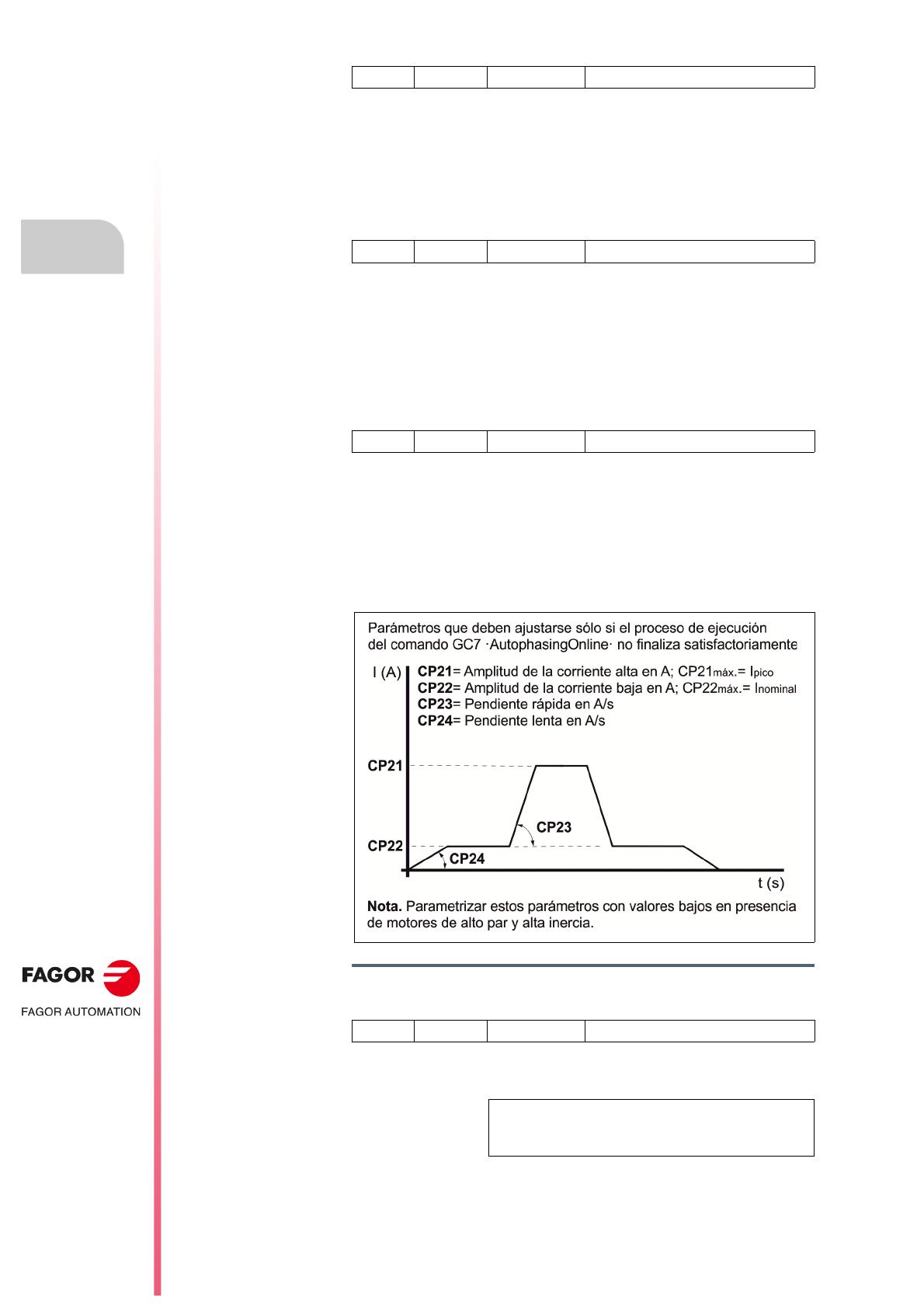
Parámetros, variables y comandos
13.
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
378
Ref.1912
DDS|MAB
SOFTWARE
· 270 ·
Soft.09.05
CP22.# Os F00320.# NominalCurrentAutophasingOnline
Función
Amplitud de la corriente baja durante la ejecución del
comando GC7 (AutophasingOnline). Ver figura
F.
S13/3
.
Valores válidos
-1 ... 3 000.
Valor por defecto
0.
Unidades
0,1 A.
Versión
Operativo a partir de la versión de software 06.18.
CP23 O F00321 AutophasingOnlineFastSlope
Función
Pendiente de la rampa de corriente con la que es al-
canzada la amplitud de la corriente alta durante la
ejecución del comando GC7(AutophasingOnline).
Ver figuras
F. S13/3 y F. S10/5.
Valores válidos
0 ... 1 000.
Valor por defecto
0.
Unidades
1 A/s.
Versión
Operativo a partir de la versión de software 06.18.
CP24 O F00322 AutophasingOnlineSlowSlope
Función
Pendiente de la rampa de corriente con la que es al-
canzada la amplitud de la corriente baja durante la
ejecución del comando GC7 (AutophasingOnline).
Ver figuras
F. S13/3 y F. S10/5.
Valores válidos
0 ... 1 000.
Valor por defecto
0.
Unidades
1 A/s.
Versión
Operativo a partir de la versión de software 06.18.
F. S13/3
Parámetros que deben ser ajustados cuando la ejecución del comando
GC7 ·AutophasingOnline· no es satisfactoria.
CP26 Os F00324 I0electSlowVelocity
Función
Velocidad eléctrica lenta en la ejecución de los co-
mandos GC3 (Autophasing) y GC7 (AutophasingOn-
line).
NOTA. Recuérdese que la velocidad eléctrica equi-
vale a la velocidad mecánica por el nº de pares de
polos.
Valores válidos
-3 200 000 ... 3 200 000.
Valor por defecto
15 000.
Unidades
0,001 mrpm.
Versión
Operativo a partir de la versión de software 06.18.
Ver, además
F. S10/5

Parámetros, variables y comandos
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
13.
Ref.1912
· 271 ·
DDS|MAB
SOFTWARE
Soft.09.05
CP27 Os F00325 I0electFastVelocity
Función
Velocidad eléctrica rápida en la ejecución de los co-
mandos GC3 (Autophasing) y GC7 (AutophasingOn-
line).
NOTA. Recuérdese que la velocidad eléctrica equi-
vale a la velocidad mecánica por el nº de pares de
polos.
Valores válidos
- 3 200 000 ... 3 200 000.
Valor por defecto
60 000.
Unidades
0,001 mrpm.
Versión
Operativo a partir de la versión de software 06.18.
CP28 OS F00328
CurrentPorcentageNoMoving
AutoPhasing
Función
Porcentaje de la corriente del motor síncrono para-
metrizada en MP3.
NOTA. Nótese que, si CP28 x MP3 > CP20, el valor
de la consigna de corriente queda limitado a CP20.
Valores válidos
0 ... 10 000.
Valor por defecto
2 000.
Unidades
0,1 %.
Versión
Operativo a partir de la versión de software 09.01.
CP30.# *O F00308.# CurrentCommandFilterType
Función
Este parámetro permite seleccionar los filtros 1 y/o 2
aplicables a la consigna de corriente y establecer el
tipo de filtro correspondiente a cada uno de ellos.
Pueden parametrizarse como tipo de filtro pasa-bajo
o corta-banda. Así, atendiendo a los bits 4, 5, 6 y 7 de
este parámetro y recordando que el bit menos signi-
ficativo es el bit 0:
T. S13/5 Parámetro CP30. Significado de sus bits.
Bit Función
4
FILTRO 1. HABILITAR / DESHABILITAR
0
No habilitado. CP31 y CP32, no funcionales
1 Habilitado. CP31 y CP32, funcionales
5
FILTRO 1. SELECCIONAR TIPO
0
Pasa-bajo
1 Corta-banda
6
FILTRO 2. HABILITAR / DESHABILITAR
0
No habilitado. CP33 y CP34, no funcionales
1 Habilitado. CP33 y CP34, funcionales
7
FILTRO 2. SELECCIONAR TIPO
0
Pasa-bajo
1 Corta-banda
El resto de los bits son de carácter reservado. Para conocer todas las posi-
bles configuraciones, ver apartado «
Parametrización de los filtros» del
capítulo 3 de este manual.
Valores válidos
0 ... 240.
Valor por defecto
0.
Unidades
1.
Versión
Operativo a partir de las versiones de software 06.01
| 07.02.
CP31.#
*O F00312.#
CurrentCommandFilter1
Frequency
Función
Frecuencia de corte del FILTRO 1 de la consigna de
corriente.
Valores válidos
0 ... 4 000.
Valor por defecto
0.
Unidades
1 Hz.

Parámetros, variables y comandos
13.
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
378
Ref.1912
DDS|MAB
SOFTWARE
· 272 ·
Soft.09.05
CP32.# *O F00313.#
CurrentCommandFilter1
Damping
Función
Según el tipo de FILTRO 1 seleccionado:
FILTRO PASA-BAJO. Factor de amortiguamiento
del filtro de la consigna de corriente en milésimas.
FILTRO CORTA-BANDA. Anchura de la frecuencia
de corte en Hz.
Valores válidos
0 ... 8 000.
Valor por defecto
1 000.
Unidades
1. Adimensional.
CP33.# *OS F00314.#
CurrentCommandFilter2
Frequency
Función
Frecuencia de corte del FILTRO 2 de la consigna de
corriente.
Valores válidos
0 ... 4 000.
Valor por defecto
0.
Unidades
1 Hz.
Versión
Operativo a partir de las versiones de software
06.01 | 07.02.
CP34.#
*OS F00315.#
CurrentCommandFilter2
Damping
Función
Según el tipo de FILTRO 2 seleccionado:
FILTRO PASA-BAJO. Factor de amortiguamiento
del filtro de la consigna de corriente en milésimas.
FILTRO CORTA-BANDA. Anchura de la frecuencia
de corte en Hz.
Valores válidos
0 ... 8 000.
Valor por defecto
1 000.
Unidades
1. Adimensional.
Versión
Operativo a partir de la versión de software 06.01.
CP50
*O F00326 CurrentFeedbackFilterFrequency
Función
Permite seleccionar uno de los dos filtros pasa-bajo
incorporados en la placa VECON-4 del regulador.
Sus frecuencias de corte son de 3,7 y 80 kHz, respec-
tivamente. Llevan a cabo tareas de filtrado de la co-
rriente con el fin de mejorar el comportamiento
dinámico del motor.
Valores válidos
0, 1 y 2.
0AUTOMÁTICO
Regulador Frecuencia PWM
en kHz
Frecuencia de
corte del filtro
Cabezal 4/8 80,0 / 80,0 kHz
Eje 4/8 80,0 / 3,7 kHz
1 FILTRO PASA-BAJO (fc = 3,7 kHz)
2 FILTRO PASA-BAJO (fc = 80,0 kHz)
Valor por defecto
0AUTOMÁTICO
Unidades
Adimensional
Versión
Operativo a partir de la versiones de software
06.26 | 08.05.
CV1 s F00309 CurrentUFeedback
CV2 s F00310 CurrentVFeedback
Función
Visualización del valor del feedback de la corriente
que circula por las fases U/V.
Valores válidos
-2 000 ... 2 000.
Unidades
0,1 A (valores instantáneos).

Parámetros, variables y comandos
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
13.
Ref.1912
· 273 ·
DDS|MAB
SOFTWARE
Soft.09.05
CV3 F00311 CurrentFeedback
Función
Visualización de la corriente eficaz que circula por el
motor.
Valores válidos
0 ... 2 000.
Unidades
0,1 A (valor eficaz).
CV10 Fs F00305 CurrentUOffset
CV11 Fs F00306 CurrentVOffset
Función
Compensación del offset de captación de corriente
de la fase U/V.
Valores válidos
- 5 000 ... 5 000 (según el regulador conectado).
Valor por defecto
0 Este valor es medido y ajustado en fábrica.

Parámetros, variables y comandos
13.
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
378
Ref.1912
DDS|MAB
SOFTWARE
· 274 ·
Soft.09.05
Grupo D. Diagnóstico
DP142 O S00142 ApplicationType
Función
Parámetro informativo. Contiene el tipo de aplicación
a la que se dedica el regulador (p.ej. cabezal, eje ro-
tatorio).
DV1 S00011 Class1Diagnostics(Errors)
Función
Contiene un dato numérico que codificado en 16 bits
del sistema binario representa la situación de los
errores según tabla adjunta. Bit (de más a menos sig-
nificativo), nombre, codificación en el display y frontal
del módulo.
T. S13/6 Parámetro DV1. Significado de sus bits.
Bit Nombre Error
15 [MSB] ManufacturerSpecificError El resto
14 Class1Reversed
13 TravelLimit
12 CommunicationError E400
E499
11 ExcessiveFollowingError E156
10 PowerSupplyPhaseError
9 UnderVoltageError E307
8 OverVoltageError E304, E306
7 OverCurrentError E212
6 ErrorInElectronicCommunicationSystem E213
E214
5 FeedbackError E600
E699
4 ControlVoltageError E100
E105
3 CoolingErrorShutdown E106
2 MotorOvertempShutdown E108
1 AmplifierOvertempShutdown E107
0 [LSB] OverloadShutdown E201, E202, E203
Bit 0
No error, Bit 1 Error
Ejemplo
DV1=32804 (1000000000100100 en binario). Existencia de un FeedbackE-
rror, un MotorOvertempShutdown y un ManufacturerSpecific Error.
DV9 S00012 Class2Diagnostics(Warnings)
Función
Contiene un dato numérico que codificado en 16 bits
del sistema binario representa la situación de los avi-
sos (warnings) según tabla adjunta. Bit (de más a me-
nos significativo).
T. S13/7 Parámetro DV9. Significado de sus bits.
Bit Nombre Aviso
15 ManufacturerSpecificBit * El resto
14 Reservado
13 TargetPositionOutsideTheTravelZone A13
12, ..., 4 Reservados
3 CoolingErrorShutdown A3
2 MotorOvertempShutdown A2
1 AmplifierOvertempShutdown A1
0 [LSB] OverloadShutdown A0
* Cualquier otro aviso (warning) que se produzca y que no sea alguno de
los que aparece en esta tabla, p.ej. A189, activa el bit 15 de DV9 a 1.
Ejemplo
DV9 = 8 (0000000000001000 en binario). Existencia del aviso CoolingError-
Shutdown.

Parámetros, variables y comandos
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
13.
Ref.1912
· 275 ·
DDS|MAB
SOFTWARE
Soft.09.05
DV10 S00013
Class3Diagnostics
(OperationStatus)
Función
Contiene un dato numérico que codificado en 16 bits
del sistema binario representa la situación de las
marcas lógicas (el estado de operación) según tabla
adjunta. Bit (de más a menos significativo).
T. S13/8 Parámetro DV10. Significado de sus bits.
Bit Marca Significado
15, 14, 13, 12 Reservados
11, 10, 9, 8 Reservados
7 TV60 (S00337)
TV50 > TP2
6 PV136 (S00336)
PV189 > PP57
5 Reservado
4 Reservado
3 TV10 (S00333)
TV2 > TP1
2 SV3 (S00332)
SV2 < SP40
1 SV5 (S00331)
SV2 < SP42
0 [LSB] SV4 (S00330) SV2 = SV1
Ejemplo
DV10=14 (0000000000001110 en binario). Activación de SV5, SV3 y TV10.
DV11 F00404 FagorDiagnostics
Función
Contiene un dato numérico que codificado en 16 bits
del sistema binario representa la situación de alguna
de las variables más interesantes en el regulador. Ver
tabla adjunta. Bit (de más a menos significativo).
T. S13/9 Parámetro DV11. Significado de sus bits.
Bit Variable Significado
15, 14, 13 Reservados
12 TV60 (S00337) PGreaterPx
11 TV10 (S00333) TGreaterTx
10 SV3 (S00332) NFeedbackMinorNx
9 SV5 (S00331) NFeedbackEqual0
8 SV4 (S00330) NFeedbackEqualNCommand
7, 6, 5, 4 GV21 (S00254) ParameterSetActual
3, 2, 1, 0 GV25 (S00255) GearRatioActual
Ejemplo
DV11 = 1280 (0000010100000000 en binario). Funcionamiento con gama
0, set 0, sigue correctamente la consigna, no está parado, está por debajo
de los umbrales Nx, Tx, y Px.
DV14 F00405 ErrorsInDncFormat
Función
Permite leer todos los errores activos en ese mismo
instante. Ver capítulo
14. CÓDIGOS Y MENSAJES
DE ERROR
de este manual.
DV31 S00135 DriveStatusWord
Función
Contiene un dato numérico que codificado en 16 bits
del sistema binario representa la situación del siste-
ma en varios aspectos según tabla adjunta. Bit (de
más a menos significativo). Esta variable se comuni-
ca al CNC a través del interfaz SERCOS o CAN. Los
bits 15 y 14 se asignan a las variables DRSTAF y
DRSTAS, respectivamente, del PLC.

Parámetros, variables y comandos
13.
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
378
Ref.1912
DDS|MAB
SOFTWARE
· 276 ·
Soft.09.05
T. S13/10 Parámetro DV31. Significado de sus bits.
Bit Significado Posibles valores
15, 14 Power and Torque Status Bits (15,14)
(0,0)
(0,1)
(1,0)
(1,1)
Significado
DoingInternalTest
ReadyForPower
PowerOn
TorqueOn
Indican en que punto de la secuencia de arranque está el regulador.
13 Error
12 WarningChangeBit
11 OperationStatusChangeBit
9, 8 AcualOperationMode Bits (9,8)
(0,0)
(0,1)
(1,0)
(1,1)
Significado
InPrimaryMode
InSecondary1Mode
InSecondary2Mode
InSecondary3Mode
7 RealTimeStatusBit1
6 RealTimeStatusBit0
5 ChangeBitCommands
4 ... 0 Reservados
Ejemplo
DV31 = 11479 (0010110011010110 en binario). Se está efectuando el test
interno (DoingInternalTest), tiene algún error, ...
DV32 S00134 MasterControlWord
Función
Contiene un dato numérico que codificado en 16 bits
del sistema binario representa la situación de diver-
sas señales de control que el CNC envía al regulador
a través del interfaz SERCOS o CAN. Véase la tabla
adjunta. Bit (de más a menos significativo). A través
del interfaz SERCOS o CAN, esta variable se comu-
nica al CNC. Los bits 15 y 14 corresponden al valor
de las salidas digitales SPENA
y DRENA, respecti-
vamente, en el PLC del CNC 8055/55i.
T. S13/11 Variable DV32. Significado de sus bits.
Bit Nombre
15 Speed Enable (SPENA)
14 Drive Enable (DRENA)
13 Halt
12, ..., 0 Reservados
Ejemplo
DV32 = 57344 (1110000000000000 en binario). El CNC habilita el acciona-
miento para que el motor gire atendiendo la consigna de velocidad.
DC1 S00099 ResetClass1Diagnostics
Función
Reset de los errores que aparecen en el display.

Parámetros, variables y comandos
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
13.
Ref.1912
· 277 ·
DDS|MAB
SOFTWARE
Soft.09.05
Grupo E. Simulador de encóder
EP1 O F00500 EncoderSimulatorPulsesPerTurn
Función
Número de pulsos que genera el simulador de encó-
der por vuelta del rótor.
Valores válidos
1 ... 16 360, (nº entero).
Valor por defecto
1 250.
Unidades
1 pulsos por vuelta.
NOTA. Con captación motor cuadrada (TTL), debe parametrizarse
EP1=NP116 necesariamente, de lo contrario aparecerá el código de error
E502.
EP2 O F00501 EncoderSimulatorI0Position
Función
Posición del rótor en la que el simulador de encóder
genera la señal I0. Este parámetro puede ser modifi-
cado con el comando EC1 desde la aplicación
WinDDSSetup.
Valores válidos
1 ... EP1. (Número entero).
Valor por defecto
1.
EP3 O F00502 EncoderSimulatorDirection
Función
Sentido de giro del encóder simulado.
Valores válidos
0/1 Horario/antihorario.
Valor por defecto
0 Horario.
EC1 O F00503 EncoderSimulatorSetI0
Función
La ejecución de este comando fija la posición de las
señales de I0 en el punto en el que se encuentra el
rótor .
F. S13/4
Detalles de los parámetros del grupo E. Simulador de encóder.
EP1 [F00500]
EP2 [F00501]
EP3 [F00502]
= 1250
= 20 0
= 0
125
250
375
500
625
750
875
1000
1125
Rotor
Io
Example
1250
90° PHASE-SHIFT
A
Io
B
t
90° PHASE-SHIFT
A
Io
B
t
EP3 = 1EP3 = 0
EP1 [F00500]
EncoderSimulatorPulsesPerTurn
EP2 [F00501]
EncoderSimulatorI0Position
EP3 [F00502]
EncoderSimulatorDirection
A
A
B
B
Io
Io
X3(1)
X3(2)
X3(3)
X3(4)
X3(5)
X3(6)
HV2-X3 Board Id
Encoder Simulator
X3(11)
GND
Clockwise-turn

Parámetros, variables y comandos
13.
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
378
Ref.1912
DDS|MAB
SOFTWARE
· 278 ·
Soft.09.05
Grupo F. Flujo
FP1.# *OMA F00600.# MotorFluxProportionalGain
Función
Valor de la ganancia proporcional del lazo de flujo.
Valores válidos
0 ... 80 000.
Valor por defecto
Depende del motor conectado.
Unidades
0,1 A/Wb.
Versión
Operativo a partir de la versión de software 06.01.
Modificado en las versiones 06.10 | 07.02 | 08.08.
FP2.#
*OMA F00601.# MotorFluxIntegralTime
Función
Valor del tiempo integral del lazo de flujo.
Valores válidos
0 ... 32 000.
Valor por defecto
Depende del motor conectado.
Unidades
0,1 ms.
Versión
Operativo a partir de la versión de software 06.01 y
modificado en las versiones 06.10 | 07.02.
FP20.#
*OMA F00602.# MotorBEMFProportionalGain
Función
Valor de la ganancia proporcional de la FCEM (fuerza
contraelectromotriz).
Valores válidos
0 ... 80 000.
Valor por defecto
Depende del motor conectado.
Unidades
0,001 mWb/V.
Versión
Operativo a partir de la versión de software 06.01.
Modificado en las versiones 06.10 | 07.02 | 08.08.
FP21.#
*OMA F00603.# MotorBEMFIntegralTime
Función
Valor del tiempo integral de la FCEM (fuerza contra-
electromotriz).
Valores válidos
0 ... 32 000.
Valor por defecto
Depende del motor conectado.
Unidades
0,1 ms.
Versión
Operativo a partir de la versión de software 06.01 y
modificado en las versiones 06.10 | 07.02.
FP30 FA F00612 RotorResistanceEstimationActive
Función
Activación de la estimación de la resistencia del rótor.
La resistencia rotórica sufre modificaciones por efec-
to de las variaciones de temperatura y de la velocidad
de giro del rótor. Para activar la estimación del nuevo
valor de la resistencia, la potencia debe ser superior
en un 20% a la nominal y este parámetro debe estar
a 1.
Valores válidos
0/1 Desactivado/activado.
Valor por defecto
1Activado
Versión
Operativo a partir de la versión de software 06.01 y
modificado en las versiones 06.10 | 07.02.
FP31 FA F00613 RotorFixedTemperature
Función
Temperatura fija del rótor. El valor de la resistencia ro-
tórica será el correspondiente a la temperatura indi-
cada en este parámetro. Será considerado solo si no
se activa la estimación ni se dispone de sensor ·MP14
2, 3, 6 ó 7· que determine la temperatura.
Valores válidos
0 ... 1 500.
Valor por defecto
0.
Unidades
0,1 °C.
Versión
Operativo a partir de la versión de software 06.01 y
modificado en las versiones 06.10 | 07.02.

Parámetros, variables y comandos
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
13.
Ref.1912
· 279 ·
DDS|MAB
SOFTWARE
Soft.09.05
FP40.# *FA F00622.# FluxReduction
Función:
Reducción porcentual del nivel de flujo. Indica el por-
centaje de la corriente magnetizante del motor sin
carga. Reduce el ruido y el calentamiento del motor
girando en vacío. Para anular el efecto del parámetro,
poner este valor a 1 000%.
Valores válidos:
1 ... 1 000.
Valor por defecto:
1 000.
Unidades
1 %.
Versión:
Modificado a partir de la versión de software 08.05.
FP50
*A F00624 MRASProportionalGain
Función
Valor de la ganancia proporcional del PI utilizado en
la estimación de la velocidad. Solo aplicable con
AP2=1, es decir, con control del tipo SENSORLESS
para motor asíncrono.
Valores válidos
0 ... 32 767.
Valor por defecto
500.
Unidades
1 (rad/s)/Wb².
Versión
Operativo a partir de la versión de software 06.14.
Modificado a partir de la versión de software 06.15.
FP51
*A F00625 MRASIntegralTime
Función
Valor de la ganancia integral del PI utilizado en la es-
timación de la velocidad. Solo aplicable con AP2=1,
es decir, con control del tipo SENSORLESS para mo-
tor asíncrono.
Valores válidos
0 ... 32 767.
Valor por defecto
200 ms.
Unidades
0,1 ms.
Versión
Operativo a partir de la versión de software 06.14.
FP60
*OA(SP) F00626
FilterForStatorFluxEstimation
OfVoltageModel
Función
Frecuencia de corte del filtro del modelo de tensión.
Valores válidos
1 ... 8 000.
Valor por defecto
2.
Unidades
1 Hz.
Versión
Operativo a partir de la versión de software 06.14.
FP70.# FA F01192.# VFMaximumVoltage
Función
Tensión máxima aplicable con control V/f. Ver figura
F. S13/5.
Valores válidos
0 ... 460.
Valor por defecto
400.
Unidades
1 V.
Versión:
Operativo a partir de la versión de software 08.05.
FP71.# FA F01193.# VFVoltageCurve1
Función
Porcentaje de la tensión nominal del motor para-
metrizada en MP6. Ordenada del punto 1 de la grá-
fica característica de V/f. Ver figura
F. S13/5.
Valores válidos
0 ... 1 000.
Valor por defecto
1 000.
Unidades
0,1 %.
Versión:
Operativo a partir de la versión de software 08.05.

Parámetros, variables y comandos
13.
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
378
Ref.1912
DDS|MAB
SOFTWARE
· 280 ·
Soft.09.05
FP72.# FA F01194.# VFFrequencyCurve1
Función
Porcentaje de la velocidad nominal del motor para-
metrizada en MP25. Abscisa del punto 1 de la grá-
fica característica de V/f. Ver figura
F. S13/5.
Valores válidos
0 ... 1 000.
Valor por defecto
1 000.
Unidades
0,1 %.
Versión
Operativo a partir de la versión de software 08.05.
FP73.# FA F01195.# VFVoltageCurve2
Función
Porcentaje de la tensión nominal del motor para-
metrizada en MP6. Ordenada del punto 2 de la grá-
fica característica de V/f. Ver figura
F. S13/5.
Valores válidos
0 ... 1 000.
Valor por defecto
1 000.
Unidades
0,1 %.
Versión
Operativo a partir de la versión de software 08.05.
FP74.# FA F01196.#
VFFrequencyCurve2
Función
Porcentaje de la velocidad nominal del motor para-
metrizada en MP25. Abscisa del punto 2 de la grá-
fica característica de V/f. Ver figura
F. S13/5.
Valores válidos
0 ... 1 000.
Valor por defecto
1 000.
Unidades
0,1 %.
Versión
Operativo a partir de la versión de software 08.05.
F. S13/5
Representación gráfica de los parámetros anteriormente mencionados.
)3
7HQVLyQGHOPRWRU
03
)3[03
)3[03
03[03
)3[03
9HORFLGDGGHOPRWRU
)3[03
03
9YROWLRV
ZUSP
ZUSP
9YROWLRV
9HORFLGDGGHOPRWRU
03
7HQVLyQGHOPRWRU
03
)3[03
03[03
Control V/f.
Característica cuadrática
Control V/f.
Característica configurable
Ver apartado 10.11. Control V/f del capítulo 10 de este manual.

Parámetros, variables y comandos
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
13.
Ref.1912
· 281 ·
DDS|MAB
SOFTWARE
Soft.09.05
FP75.# FA F01197.# VFBoostVoltage1
Función
Porcentaje de la tensión nominal del motor a aplicar
a velocidad nula. Ver figura
F. S13/5.
NOTA. A velocidad nula se añadirá a la curva V/F
teórica una tensión igual al valor de este parámetro
multiplicado por la tensión nominal del motor dada
en MP6 y que irá disminuyendo con el aumento de
la velocidad de forma cuadrática hasta anularse al
alcanzar la velocidad nominal del motor MP25.
Valores válidos
0 ... 500.
Valor por defecto
0.
Unidades
0,1 %.
Versión
Operativo a partir de la versión de software 08.05.
FV1 A F00623 BEMF
Función
Valor de la fuerza contra-electromotriz (FCEM).
Unidades
Voltios.

Parámetros, variables y comandos
13.
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
378
Ref.1912
DDS|MAB
SOFTWARE
· 282 ·
Soft.09.05
Grupo G. Generales
GP1 O F00700 PwmFrequency
Función
Selecciona la frecuencia de conmutación de los
IGBTs. Esta frecuencia determina los tiempos de los
lazos de regulación y del control vectorial. Nótese
que este parámetro es modificable a nivel OEM.
Valores válidos
4 000 y 8 000.
Valor por defecto
4 000 (para motores síncronos y asíncronos).
Unidades
1 Hz.
GP2.# O F00701.# Feedback1Type
Función
Tipo de captación del motor.
Valores válidos
0 Encóder senoidal Stegmann
1Resólver
2 Encóder cuadrado TTL
5 Encóder de Heidenhain (ERN 1387) para motores
de Siemens, familia 1FT6.
6 Encóder senoidal (solo para cabezales)
7Sin captación
Valor por defecto
0 Encóder senoidal Stegmann
NOTA. Si su captador no se encuentra entre los que
se acaban de enumerar hay que parametrizar GP2
por el sistema de bits y disponer de una versión 06.18
o superior. Para más información, ver apartado
Para-
metrización de la captación motor. Sistema clási-
co
del capítulo 5 de este manual.
Valores válidos
0 ... 65 535.
GP3 O F00702 StoppingTimeout
Función
Tras la desactivación del Speed Enable y cumplido
un tiempo GP3, si el motor no se ha detenido, se des-
activa el par automáticamente y se genera el código
de error
E004. Si el motor se detiene antes de supe-
rar el tiempo determinado en GP3, también se desac-
tiva el par, aunque sin generar error.
Valores válidos
0 ... 65 535. Depende del motor.
Valor por defecto
500 (en ejes) y 5 000 (en cabezales).
Unidades
1 ms.
F. S13/6
Detalle ilustrativo de la definición del parámetro GP3. Tiempo de parada.
GP4 O F00703 SetNumber
Función
Número de sets de parámetros útiles. Los sets útiles
van numerados desde cero en adelante. Únicamente
pueden ser activados un número limitado de sets me-
diante este parámetro.
Valores válidos
1 ... 8 (desde un set hasta todos).
Valor por defecto
1 (un único set).
t
Drive Enable
Function
Speed Enable
Function
GP3
Torque "ON"
t
t

Parámetros, variables y comandos
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
13.
Ref.1912
· 283 ·
DDS|MAB
SOFTWARE
Soft.09.05
GP5 O F00704 ParameterVersion
Función
Almacena la versión de la tabla de parámetros del re-
gulador. Es un parámetro de solo lectura.
GP6 O F00717 GearRatioNumber
Función
Número de reducciones útiles. Las reducciones útiles
van aumentando desde cero en adelante. Únicamen-
te pueden ser activadas un número limitado de reduc-
ciones mediante este parámetro.
Valores válidos
1 ... 8 (desde una reducción hasta todas).
Valor por defecto
1 (una única reducción).
GP7 O F00720 OverloadTimeLimit
Función
Tiempo máximo establecido para un funcionamiento
en condiciones de sobrecarga. Superar este valor de
tiempo en estas condiciones activa el código de error
E203. Ver parámetro GP8.
Valores válidos
0 ... 10 000.
Con GP7=0 se deshabilita la detección.
Valor por defecto
200.
Unidades
1 ms.
GP8 O F00721 OverloadVelocityThreshold
Función
Umbral de velocidad por debajo del cual se considera
el motor parado a efectos de la detección de la sobre-
carga. Ver parámetro
GP7.
Valores válidos
0 ... 60 000.
Valor por defecto
Para motores de cabezal: 100.
Para motores de eje: n
máx.
.
Nota:
n
máx.
corresponde a la velocidad máxima del motor.
Unidades
1 rev/min.
GP9 O S00207 DriveOffDelayTime
Función
Tras una parada de categoria 1; la desconexión del
par motor (desactivación del PWM del regulador) se
retrasa el tiempo indicado en GP9. Es útil en situación
de ejes no compensados con freno blocante. Ver
apartado de esquemas del armario eléctrico del ca-
pítulo 10 del manual «man_dds_hard.pdf».
NOTA. Este retardo dado en GP9 no afecta a la fun-
ción Drive Enable.
Valores válidos
0 ... 65 535.
Valor por defecto
0 Desconexión del par motor tras una parada de
categoría 1.
Unidades
0,1 ms.
GP10 O F00719 Feedback2Type
Función
Tipo de señal eléctrica recibida desde la captación di-
recta por el conector X3.
Valores válidos
0 No hay captación directa
1 Señal cuadrada TTL
2 Señal senoidal de 1 Vpp
3 Señal de un captador Stegmann
4 Señal cuadrada TTL con comunicación SSI
5 Señal 1 Vpp con comunicación SSI
Los valores 4 y 5 activan la opción de captación directa con comunicación
SSI. La diferencia entre ambas radica en el tipo de señal incremental del
captador. A nivel de señales incrementales equivalen a los valores 1 y 2,
respectivamente. Por tanto, la parametrización de las señales incrementa-
les se realiza exactamente igual.
Valor por defecto
0 No hay captación directa.

Parámetros, variables y comandos
13.
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
378
Ref.1912
DDS|MAB
SOFTWARE
· 284 ·
Soft.09.05
NOTA. Si su captación no se encuentra entre las que se acaban de enume-
rar y dispone de una versión de software 06.18 o superior, parametrice
GP10 por el método del sistema de bits. Para más información, ver aparta-
do
- Captación directa. Parametrización - del capítulo 5 de este manual.
Valores válidos
0 ... 65 535.
GV2 S00030 ManufacturerVersion
Función
Variable que informa de la versión en uso y del tipo de
regulador (eje o cabezal).
GV3 F00705 FlashParameterChecksum
Función
Variable que informa del checksum de los paráme-
tros.
GV4 S00380 DCBusVoltage
Función
Variable que informa de la tensión del bus de poten-
cia en voltios.
GV5 F00706 CodeChecksum
Función
Variable que informa del checksum del software.
GV6 F00723 RamParameterChecksum
Función
Variable que informa del checksum de los parámetros
en RAM.
GV8 F00707 AcessLevel
Función
Variable que informa del nivel de acceso en el que se
encuentra el usuario.
Valores válidos
1 Básico (usuario)
2 OEM (fabricante)
3FAGOR
GV9 S00140 DriveType
Función
Variable que informa de la denominación comercial
del regulador.
Valores válidos
Todos los posibles según la codificación dada en el
capítulo 12 del manual «man_dds_hard.pdf».
GV10 O S00262 LoadDefaultsCommand
Función
Identificación del motor e inicialización. La asignación
a esta variable de una referencia identificativa de un
motor particular (ver capítulo 12 del manual
«man_dds_hard.pdf») configura los parámetros liga-
dos al motor para su control y el resto de parámetros
a sus valores por defecto. Ver capítulo
2. IDENTIFI-
CACIÓN DEL MOTOR
de este mismo manual.
Valores válidos
Las referencias especificadas en el capítulo 12 del
manual «man_dds_hard.pdf» para motores.
GV11 W F00708 SoftReset
Función
Variable de ejecución de un reset por software. Ver
apartado «
1.7. Proceso de inicialización, RESET»
del capítulo
1. CONOCIMIENTOS PREVIOS de este
mismo manual.
GV13 F00709 PowerBusStatus
Función
Variable en la que se indica si hay o no tensión en el
bus de potencia.
Valores válidos
0/1 No/Sí.
GV14 F F00710 PowerVoltageMinimum
Función
Con el par activo, si la tensión de bus es menor que
GV14, se activa el código de error
E307 o E003.
Valores válidos
0 ... 880.
Unidades
1 V.

Parámetros, variables y comandos
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
13.
Ref.1912
· 285 ·
DDS|MAB
SOFTWARE
Soft.09.05
GV15 S F00725 AutophasingOnlineDone
Función
Variable que informa de si ya se ha realizado el cál-
culo de la posición eléctrica absoluta en el arranque o
aún está pendiente de realizarse la ejecución del co-
mando GC7 (F01524) AutophasingOnline.
Valores válidos
0/1 No/Sí.
Versión
Operativo a partir de la versión de software 06.10.
GV16 F01333 MotFileVersion
Función
Variable que informa de la versión del fichero «*.mot»
(tabla de motores) almacenado en el regulador.
Por ejemplo. 02.02.
Versión
Operativo a partir de la versión de software 08.09.
GV17 F01335 VeconID
Función
Variable que informa de la versión de la placa VECON.
Por ejemplo. Vec.4.10.
Versión
Operativo a partir de la versión de software 08.10.
GV21 S00254 ParameterSetActual
Función
Variable que informa del set de parámetros activo uti-
lizado actualmente por el sistema.
Valores válidos
0 ... 7 8 sets posibles.
Valor por defecto
0 Set 0.
GV22 W S00217 ParameterSetPreselection
Función
Variable que determina el set de parámetros que será
activo cuando haga su aparición la señal de admisión
(GV24).
Valores válidos
0 ... 7 8 sets posibles.
Valor por defecto
0 Set 0.
GV23 F F00711 ParameterSetAck
GV24 W F00712 ParameterSetStb
Función
Variables relacionadas con el cambio de set activo.
Es necesario que GV24 (Strobe) sea 1 para poder
cambiar el set mediante (GV30, GV31 y GV32).
Cuando el cambio de set es efectivo el regulador lo
manifiesta a través de la variable GV23. Si GV24 no
se asigna a ninguna entrada digital, mantiene el va-
lor 1 (activo) y los cambios en GV30, GV31 y GV32
tienen efecto inmediato en el set activo.
Valores válidos
0Inactivo
1Activo
GV25 S00255 GearRatioActual
Función
Variable que informa de cuál es la reducción activa en
el software.
Valores válidos
0 ... 7 8 reducciones posibles.
Valor por defecto
0 Reducción 0.
GV26 W S00218 GearRatioPreselection
Función
Variable que determina cuál será la reducción (soft-
ware) activa cuando se ejecute el cambio a través
del interfaz SERCOS o CAN.
Valores válidos
0 ... 7 8 reducciones posibles.
Valor por defecto
0 Reducción 0.
GV30 W F00713 ParameterSetBit0
GV31 W F00714 ParameterSetBit1
GV32 W F00715 ParameterSetBit2
Parámetros, variables y comandos
13.
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
378
Ref.1912
DDS|MAB
SOFTWARE
· 286 ·
Soft.09.05
Función
Variables booleanas que conforman el número iden-
tificativo del set activo. GV32 es el bit más significa-
tivo [MSB] y GV30 el menos significativo [LSB]. Para
que el cambio del set activo sea efectivo, es necesario
habilitar la variable GV24. La asignación de estas
cuatro variables a los parámetros IP10-IP13 hace que
sea posible controlar cuál es el set activo por medio
de señales eléctricas.
Valores válidos
0/1 Asignadas a las IP, corresponden a 0/24 V DC.
Ejemplo
GV32=1, GV33=1 y GV30=0 representan al set 6.
GV41 s F01820 FastPositionFeedback1
Función
Variable cuya lectura permite conocer el valor de la
posición del eje.
Valores válidos
-2 147 483 647 ... 2 147 483 647.
Unidades
0,000 1 mm (ejes lineales).
0,000 1 grados (ejes rotativos).
Versión
Operativo a partir de la versión de software 08.05.
GV69 W F01847 TempDriverReset
Función
Variable de ejecución de un reset por software. El RE-
SET se hace efectivo una vez transcurrido el tiempo
asignado a esta variable a través del WinDDSSetup
por el usuario. Ver
1.7. Proceso de inicialización, RE-
SET
del capítulo 1. CONOCIMIENTOS PREVIOS de
este mismo manual.
Valores válidos
0 ... 65 535.
Unidades
1 ms.
Versión
Operativo a partir de la versión de software 08.06.
GC1 S00264
BackupWorkingMemory
Command
Función
Ejecución de paso de parámetros de RAM a FLASH.
GC3 F01523 AutoPhasing
Función
Comando que permite, en la sustitución por deterioro
de un resólver o un encóder, en motores para ejes de
avance, ajustar la posición relativa de la señal de re-
ferencia (marca cero) con respecto a la f.e.m. del mo-
tor. Para más información, véase el apartado
SUSTITUCIÓN DEL ENCÓDER del capítulo 1 del ma-
nual de servomotores AC - FXM|FKM -.
GC4 S00220 OfflineParameterValidation
Función
Comando que valida cualquier modificación hecha en
el valor de un parámetro off-line sin grabarlo. No al-
macena el cambio de modo permanente en memoria
FLASH. Es útil para agilizar las puestas a punto.
Versión
Operativo a partir de las versiones de software 06.01
| 07.02.
GC5 F00614 AutoCalculate
Función
Ejecución del auto-ajuste de la inercia en modo off line.
En ella se calcula el parámetro NP1 (relación entre la
inercia de la carga y la del rótor del motor) y los pará-
metros de rozamiento TP10, TP11, TP12 y TP13. Ver
apartado
5.6. Auto-ajuste de la inercia en modo
offline
de este manual.
Versión
Operativo a partir de las versiones de software 06.01
| 07.02.

Parámetros, variables y comandos
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
13.
Ref.1912
· 287 ·
DDS|MAB
SOFTWARE
Soft.09.05
GC6 F00615 HomeSwitchAutoCalculate
Función
Comando que, con el valor de PV1 obtenido en una pri-
mera búsqueda de I0 (antes de efectuar un desplaza-
miento del home-switch), calcula el valor adecuado
para que la salida simulada del home-switch se en-
cuentre en el punto óptimo y lo almacena en el pará-
metro PP4.
Versión
Operativo a partir de las versiones de software 06.02
| 07.02.
GC7 S F01524 AutophasingOnline
Función
Comando de estimación de la posición eléctrica
·RHO
: posición de los imanes del rótor respecto al
estátor· con movimiento de motor
. Es ejecutado auto-
máticamente en el arranque de un motor síncrono
siempre que los bits 7 | 6 | 5 | 4 | 3 de GP2 estén a
0
| 1 | 1 | 1 | 1, respectivamente y siempre que no dis-
ponga de un captador que mida la posición absoluta
dentro de una vuelta. También puede ejecutarse ma-
nualmente cuando sea necesario desde el WinDDS-
Setup. Se verifica que ha sido ejecutado
satisfactoriamente leyendo un 1 en la variable
GV15
(F00725) AutophasingOnlineDone. Si su ejecución
no ha sido satisfactoria, parametrizar CP21, CP22,
CP23, CP24, CP26 y CP27 adecuadamente.
Para más información, ver
10.6. Posición eléctrica
en el arranque del motor
de este manual.
Versión
Operativo a partir de la versión de software 06.10.
Modificado a partir de las versiones de software
06.18 y 09.01 (GP2, bit 7= 0).
GC8 S F01525 ElectricPositionCorrection
Función
Comando cuya ejecución actualiza el valor del rho
real (no el valor estimado) al pasar por el I0. Para
más información, ver
10.6. Posición eléctrica en el
arranque del motor
» de este manual.
Versión
Operativo a partir de la versión de software 06.18.
GC9 S F01534 MoveRho
Función
Comando cuya ejecución establece el movimiento
del eje de un motor síncrono permitiendo verificar si
la conexión del orden de las fases de potencia es sa-
tisfactoria. Como aplicación de este comando, ver
10.10. Control de motor lineal de este manual.
Versión
Operativo a partir de la versión de software 08.05.
GC11 S S00263 NoMovingAutoPhasing
Función
Comando de estimación de la posición eléctrica
·RHO
: posición de los imanes del rótor respecto al
estátor· sin movimiento de motor
. Es ejecutado
automáticamente en el arranque de un motor
síncrono siempre que los bits 7 | 6 | 5 | 4| 3 de GP2
estén a
1 | 0 | 1 | 1 | 1 respectivamente y siempre que
no disponga de un captador que mida la posición
absoluta dentro de una vuelta. También puede
ejecutarse manualmente cuando sea necesario
desde el WinDDSSetup. Si la ejecución del comando
no ha sido satisfactoria se genera el código de error
E217. Parametrizar entonces CP28 con un valor más
bajo. Ver parámetro
CP28. Comprobar también que
es correcto el valor de la inductancia del estátor del
motor dado en
MP11.#.
Para más información, ver
10.6. Posición eléctrica
en el arranque del motor
de este manual.
Versión
Operativo a partir de la versión de software 09.01.

Parámetros, variables y comandos
13.
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
378
Ref.1912
DDS|MAB
SOFTWARE
· 288 ·
Soft.09.05
Grupo H. Hardware
HV1 (AX) S00110 S3LoadCurrent
Función
Identifica la corriente de un regulador de eje (corrien-
te para motor síncrono en ciclo de funcionamiento
S3 con un factor de marcha del 5 % y un tiempo de
ciclo de 10 s).
Valores válidos
Ver tabla correspondiente en el capítulo 3. MÓDULOS
REGULADORES
del manual «man_dds_ hard.pdf».
Versión
Modificado a partir de las versiones de software
06.03 | 07.02.
HV2 (SP) F00804 S6LoadCurrent
Función
Identifica la corriente de un regulador de cabezal (co-
rriente para motor síncrono o asíncrono en ciclo de
funcionamiento S6 con un factor de marcha del 15 %
y tiempo de ciclo de 1 min).
Valores válidos
Ver tablas del capítulo 3. REGULADORES del ma-
nual «man_dds_ hard.pdf».
Versión
Operativo a partir de las versiones de software 06.03
| 07.02.
HV4 F00801 DriveMaxCurrent
Función
Almacena el valor de la corriente máxima representa-
tiva del regulador facilitada en la referencia de su pla-
ca de características. Ver figura.
Este valor de corriente va asociado a la corriente
máxima suministrable por los IGBTs del equipo pero
no coincide estrictamente.
Nótese que siempre ha de verificarse la siguiente
desigualdad:
CP20 HV4.
Valores válidos
8 ... 300.
Unidades
1 A.
Versión
Operativo a partir de la versión de software 06.22.
HV9 F00806 ModularOrCompact
Función
Variable que refleja si el regulador instalado es modu-
lar o compacto.
Valores válidos
0/1 Modular/Compacto.
HV10 F00290 VsMSC
Función
Variable que informa de las diferentes posibilidades
del hardware.
HV11 F00291 FlashManufacturerCode
Función
Variable que refleja el código del fabricante de las
memorias FLASH que incorpora el regulador.
HV13 F00293 SERCOSRS422Id
Función
Variable que facilita el nº del identificador del selector
rotativo de la placa SERCOS, CAN o RS-422, según
proceda. Permite ver continuamente el estado del se-
lector rotativo sin necesidad de realizar un reset en el
regulador.
HV21 F00800 MotorVoltage
Función
Tensión eficaz de línea o entre fases del motor.
Valores válidos
0 ... 1 000.
Unidades
1 V.
Versión
Operativo a partir de las versiones de software 06.01
| 07.02.
HV4 almacena el valor
señalado en la referencia
en la posición indicada
AXD 1. - A1-1-B

Parámetros, variables y comandos
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
13.
Ref.1912
· 289 ·
DDS|MAB
SOFTWARE
Soft.09.05
Grupo I. Entradas
IP1.# O F00900.# AnalogReferenceSelect
Función
Selecciona la entrada analógica utilizada como con-
signa de velocidad.
Valores válidos
1 Entrada analógica 1 (por defecto).
2 Entrada analógica 2.
IP5 O F00909 DigitalInputVoltage
Función
Sus cuatro bits de menor peso configuran las entra-
das digitales de las tarjetas 8I-16O y 16I-8O para fun-
cionar con tensiones de entrada de 24 V DC.
La tarjeta con los conectores X6 y X7 no es configu-
rable por este parámetro.
Los bits 0 y 1 configuran las entradas del slot SL1.
bit 0 configura las entradas I1-I8.
bit 1 configura las entradas I9-I16.
Los bits 2 y 3 configuran las entradas del slot SL2.
bit 2 configura las entradas I17-I24.
bit 3 configura las entradas I25-I32.
Valores válidos
0 Entradas configuradas para 24 V DC.
Por defecto en los cuatro bits.
IP10 O F00901 I1IDN
IP11 O F00902 I2IDN
IP12 O F00903 I3IDN
IP13 O F00904 I4IDN
Función
Contienen los identificadores de los parámetros o va-
riables a los que se asignarán el valor lógico de la se-
ñal eléctrica que recibe el regulador por:
Pin 1 (referido al pin 5)
IP10.
Pin 2 (referido al pin 5)
IP11.
Pin 3 (referido al pin 5)
IP12.
Pin 4 (referido al pin 5)
IP13.
Valor por defecto
0 Sin asignación a ninguna variable.
Ejemplo
IP10 = GV24
El pin 1 referido al pin 5 es el STROBE para la selección de sets.
IP11 = BV1 El pin 2 referido al pin 5 realiza la función del HALT hardware.
IP12 = 0 El pin 3 referido al pin 5 no realiza ninguna función.
F. S13/7
Control de la función Halt a través de la línea serie.
IP1=2
IP1=1
IP10 -F00901-
Analog
X6(1)
X6(2)
X6(3)
X6(4)
IP13 -F00904-
Digital
HV5 - A1 Board IdPhysical Inputs
X7(5)
X7(4)
X7(3)
X7(2)
IV1 -F00905-
IV2 -F00906-
IV10 -F00907-
V (+)
V (-)
V (+)
V (-)
IP11 -F00902-
IP12 -F00903-
IP1 -F00900-

Parámetros, variables y comandos
13.
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
378
Ref.1912
DDS|MAB
SOFTWARE
· 290 ·
Soft.09.05
IV1 s F00905 AnalogInput1
IV2 s F00906 AnalogInput2
Función
Estas dos variables monitorizan las tensiones de en-
trada por la entrada analógica 1 (pines 4-5 de X7) y la
entrada analógica 2 (pines 2-3 de X7). No es posible
modificar su valor al ser variables de solo lectura.
Valores válidos
-10 000 ... 10 000.
Unidades
0,001 V.
IV10 O F00907 DigitalInputs
Función
La variable IV10 contiene un dato numérico que, co-
dificado en el sistema binario, representa la situación
de las entradas digitales presentes en el slot SL1.
Si el slot SL1 está ocupado por los conectores X6
y X7. Estas entradas son las relativas a los pará-
metros IP10-13 (cuatro entradas digitales).
Si el slot SL1 está ocupado por alguna de las tar-
jetas de entradas-salidas 16DI-8DO o 8DI-16DO.
Estas entradas representan a los recursos I1-I16
del PLC.
Valores válidos
0 ... 15.
Ejemplo
La lectura de IV10=3 (0011 en binario). Significa que las entradas 1 y 2 del
conector X6 están activas (reciben 24 V DC) y las entradas 3 y 4 inactivas
(0 V DC).
IV11 O F00908 DigitalInputsCh2
Función
La variable IV11 contiene un dato numérico que, co-
dificado en el sistema binario, representa la situación
de las entradas digitales presentes en el slot SL2.
El slot SL1 solo puede estar ocupado por algunas de
las tarjetas de entradas-salidas 16DI-8DO o 8DI-
16DO. En el PLC estas entradas representan a los
recursos I17-I32.
Ejemplo
La lectura de IV11=30 (00011110 en binario). Significa que las entradas I18,
I19 e I20 están activas y el resto de las entradas están inactivas (0 V DC).
F. S13/8
ENTRADAS|SALIDAS en los slots SL1 y SL2.
8DI-16DO
1
13
1
11
1
9
A1
1
9
I3
I2
I1
1
9
1
9
1
9
I7
I6
I5
I4
O11
O10
O9
O8
O15
O14
O13
O12
O3
O2
O1
O7
O6
O5
O4
I3
I4
I1
I2
O4
O3
O2
O1
I19
I18
I17
16DI-8DO
1
9
1
9
1
9
I23
I22
I21
I20
I27
I26
I25
I24
I31
I30
I29
I28
O19
O18
O17
O23
O22
O21
O20
Drive Module (example)
I32
I8
O16O24
I19
I18
I17
I23
I22
I21
I20
I24
O27
O26
O25
O31
O30
O29
O28
O32
SL2 SL2SL1 SL1
Drive Module (example)
8DI-16DO
1
9
O19
O18
O17
O23
O22
O21
O20
O24
X6
X7
X8
X9
X10X13
X12
X11
X8
X9
X10
P1
P2
drive module · example · drive module · example ·
Parámetros, variables y comandos
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
13.
Ref.1912
· 291 ·
DDS|MAB
SOFTWARE
Soft.09.05
Grupo K. Monitorización
NOTA. Parametrizar KP2/KP3/KP4 en un regulador compacto SCD si-
guiendo los valores que se facilitan en la tabla adjunta según la resistencia
externa de Ballast requerida por la aplicación:
NOTA IMPORTANTE. Si el regulador compacto SCD no emplea resisten-
cia de Ballast externa, el software conoce las características de las resis-
tencias de cada uno de los modelos de regulador compacto SCD y
realiza la vigilancia I²t de forma autónoma.
KP1 F(AX) F01112 DriveI2tErrorEfect
Función
Determina si el error I²t provoca la parada del motor o
limita su corriente a la nominal.
Valores válidos
0 Detiene el sistema.
1 Limita la corriente que circula por el motor a la co-
rriente nominal.
Valor por defecto
0 Detiene el sistema.
KP2 O F01113 ExtBallastResistance
Función
Valor óhmico de la resistencia de Ballast externa en
un regulador compacto. Es de utilidad para la protec-
ción I²t de dicha resistencia.
Valores válidos
0 ... 65 535.
Valor por defecto
0.
Unidades
0,1 .
KP3 O F01114 ExtBallastPower
Función
Valor de la potencia de la resistencia de Ballast exter-
na en un regulador compacto. Es de utilidad para la
protección I²t de dicha resistencia.
Valores válidos
0 ... 65 535.
Valor por defecto
0.
Unidades
1 W.
KP4 O F01116 ExtBallastEnergyPulse
Función
Valor del pulso de energía disipable por la resistencia
de Ballast externa en un regulador compacto. Es de
utilidad para la protección I²t de dicha resistencia.
Valores válidos
0 ... 400 000.
Valor por defecto
0.
Unidades
1 J.
Resistencia de frenado KP2 KP3 KP4
ER+TH-24/1100 240 950 60000
ER+TH-18/1100 180 950 60000
ER+TH-18/1800 180 1300 95000
ER+TH-18/2200 180 2000 120000
ER+TH-18/1000+FAN 180 2000 120000
ER+TH-18/1500+FAN 180 3000 180000
ER+TH-18/2000+FAN 180 4000 240000
RM-15 (descatalogada) 180 1500 75000
INFORMACIÓN. Si alguno de los parámetros KP2, KP3 o KP4 es 0, la pro-
tección I²t es realizada siguiendo las características de la resistencia interna
del regulador compacto considerado.
NOTA. Si a los parámetros KP2, KP3
y KP4 se les asigna el valor 65535, la protección I²t queda deshabilitada.
i
KV2 F01100 DriveTemperature
KV4 W F01101 DriveTemperatureErrorLimit
Función
Lectura/escritura de los límites establecidos por el
usuario para el aviso (warning) y error en la tempera-
tura del regulador.
Valores válidos
50 ... 1 000.
Unidades
0,1 °C.

Parámetros, variables y comandos
13.
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
378
Ref.1912
DDS|MAB
SOFTWARE
· 292 ·
Soft.09.05
KV5 W S00201 MotorTemperatureWarningLimit
KV6 S00383 MotorTemperature
KV8 W S00204 MotorTemperatureErrorLimit
Función
Lectura/escritura de los límites establecidos por el
usuario para el aviso (warning) y error en la tempera-
tura del motor.
Nótese que KV6 no es aplicable a motores que dis-
pongan de sensor de temperatura triple, es decir, mo-
tores FXM y SPM.
Valores válidos
para KV5 y KV8: 0 ... 1 500.
para KV6: 50 ... 1 500.
Unidades
0,1 °C.
KV9 W S00202
Cooling
TemperatureWarningLimit
Función
Lectura/escritura de los límites definidos por el usua-
rio para establecer el aviso
(warning) de la tempera-
tura del refrigerador.
Valores válidos
0 ... 1 100.
Unidades
0,1 °C.
KV10 F01102 CoolingTemperature
Función
Monitorización del valor de la temperatura del refrige-
rador, en °C.
KV12 W S00205
Cooling
TemperatureErrorLimit
Función
Lectura/escritura de los límites definidos por el usua-
rio para establecer el error
en la temperatura del re-
frigerador.
Valores válidos
0 ... 1 100.
Unidades
0,1 °C.
KV20 s F01103 SupplyPlus5V
KV21 s F01104 SupplyPlus8V
KV22 s F01105 SupplyPlus18V
KV23 s F01106 SupplyMinus5V
KV24 s F01107 SupplyMinus8V
KV25 s F01108 SupplyMinus18V
Función
Monitorización del valor de las tensiones de alimen-
tación, en V, presentes en el módulo.
KV32 (AX) F01109 I2tDrive
Función
Variable de utilidad interna al sistema. Mide los nive-
les de carga interna del cálculo I²t en el regulador en
forma de porcentaje utilizado sobre el máximo. Un
valor superior al 100 % en esta variable activa el có-
digo de error
E202.
KV36 F(AX) F01111 I2tMotor
Función
Variable de utilidad interna al sistema. Mide los nive-
les de carga interna del cálculo I²t en el motor en for-
ma de porcentaje utilizado sobre el máximo. Un valor
superior al 100 % en esta variable activa el código de
error
E201.
KV40 F F01115 I2tCrowbar
Función
Muestra el porcentaje de carga sobre la resistencia
de Ballast externa en un regulador compacto. Es de
utilidad para la protección I²t de dicha resistencia. Un
valor superior al 100 % en esta variable activa el có-
digo de error
E301.

Parámetros, variables y comandos
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
13.
Ref.1912
· 293 ·
DDS|MAB
SOFTWARE
Soft.09.05
Grupo L. Motion Control y PLC
LP1 O F02301 SecondCamSwitchStart
Función
Determina cuál es la primera leva perteneciente al
segundo CamSwitch. Así:
LP1= 0 establece la existencia únicamente del primer
CamSwitch y por tanto las 8 levas formarán parte de
él.
LP1= 1 establece la existencia únicamente del se-
gundo CamSwitch y por tanto las 8 levas formarán
parte de él.
LP1= 2 ... 8 define la primera leva que formará parte
del segundo CamSwitch estableciendo así el reparto
de las levas entre ambos.
Ejemplo
Para un valor de LP1=3 establece que las levas 1 y 2 pertenecerán al primer
CamSwitch y el resto hasta 8 formarán parte del segundo CamSwitch.
Valores válidos 0 ... 8.
Valor por defecto 0.
Sin función
En la versión 09.01 y siguientes.
LP10
* F02310 ProcessBlockMode
Función
Define, en los programas de Motion Control, el modo
de enlace dinámico que se aplica entre bloques de
posicionamiento que no especifican el parámetro L
(LINK).
Valores válidos
0 NULL
1 NEXT
2 WAIT_IN_POS
3 PRESENT
Valor por defecto
0 NULL a velocidad nula.
Sin función
En la versión 09.01 y siguientes.
LP11
* F02311 FeedrateOverrideLimit
Función
Define el valor máximo que puede tomar el multiplica-
dor de velocidad Feedrate, registrado en las varia-
bles LV108 (S00108) FeedrateOverride.
Valores válidos
0 ... 250.
Valor por defecto
250.
Unidades
1 %.
Sin función
En la versión 09.01 y siguientes.
LP12
*s F02312 PositioningVelocityDefault
Función
Define, en los programas de MC, la velocidad de po-
sicionamiento que se aplica en bloques de movimien-
to y que no especifican el parámetro V (Velocity).
Valores válidos
-2 147 483 647 ... 2 147 483 647.
Valor por defecto
100 000.
Unidades
0,000 1 m/min.
Sin función
En la versión 09.01 y siguientes.
LP22
*s F02322 JogVelocity
Función
Se emplea como valor asignado al parámetro V (Ve-
locity) dentro de la aplicación de Motion Control
(
*.mc) en el módulo JOG. Velocidad para todos los
movimientos en modo manual (jog).
Valores válidos
-2 147 483 647 ... 2 147 483 647.
Valor por defecto
50 000.
Unidades
0,000 1 m/min.
Sin función
En la versión 09.01 y siguientes.

Parámetros, variables y comandos
13.
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
378
Ref.1912
DDS|MAB
SOFTWARE
· 294 ·
Soft.09.05
LP23 *s F02323 JogIncrementalPosition
Función
Desplazamiento realizado por cada movimiento en
modo manual incremental con cada flanco de subida
de las señales de JOG. Se emplea como valor asig-
nado al parámetro D (Distance) en los movimientos
de jog incremental programados en el módulo ma-
nual del programa de Motion Control.
Valores válidos
-2 147 483 647 ... 2 147 483 647.
Valor por defecto
10 000.
Unidades
0,000 1 mm (ejes lineales).
0,000 1 grados (ejes rotativos).
Sin función
En la versión 09.01 y siguientes.
LP25
* F02325 InPositionTime
Función
Parámetro ligado a los bloques de posicionamiento
con L = WAIT_IN_POS. Este enlace termina el movi-
miento con velocidad nula, espera a que se alcance
la posición de destino y a que permanezca en dicha
posición durante un tiempo que establecerá este pa-
rámetro InPositionTime.
Valores válidos
0 ... 65 535.
Valor por defecto
10.
Unidades
1 ms.
Sin función
En la versión 09.01 y siguientes.
LP40
* F02340 SynchronizationMode
Función
Establece el tipo de sincronización con el regulador
trabajando con control de posición.
Valores válidos
0 Sincronización en velocidad.
1 Sincronización en posición. (por defecto)
Sin función
En la versión 09.01 y siguientes.
LP41 * F02341 SynchronizationAcceleration
Función
Este parámetro define la aceleración de sincroniza-
ción y establece la aceleración máxima durante las
fases de adaptación de velocidad y posición desde
que arranca el proceso de sincronización hasta que
se alcanza.
Valores válidos
0 ... 2 000 000.
Valor por defecto
20 000.
Unidades
0,000 1 m/s².
Sin función
En la versión 09.01 y siguientes.
LP42
* F02342 SynchronizationVelocity
Función
Este parámetro define la velocidad de sincronización
y establece la velocidad máx. durante la fase de adap-
tación de posición en la sincronización de posición.
Valores válidos
0 ... 2 147 480 000.
Valor por defecto
150 000.
Unidades
0,000 1 m/min.
Sin función
En la versión 09.01 y siguientes.
LP47
* F02347 SynchronizationTimeout
Función
Este parámetro establece el tiempo máximo que pue-
de tardar en alcanzarse el estado InSynchronization.
Si se supera este tiempo antes de alcanzar la sincro-
nización se genera
E919 de ejecución del kernel.
Valores válidos
0 ... 2 147 483 647.
Valor por defecto
10 000.
Unidades
1 ms.
Sin función
En la versión 09.01 y siguientes.
NOTA. Recuérdese que para deshabilitar el contaje del TimeOut de sin-
cronización debe parametrizarse LP47 (F02347) SynchronizationTimeout
con el valor válido máximo (2 147 483 647).
Parámetros, variables y comandos
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
13.
Ref.1912
· 295 ·
DDS|MAB
SOFTWARE
Soft.09.05
LP59 F02359 SynchronizationMasterSource
Función
Este parámetro permite seleccionar la fuente para
obtener la posición del eje maestro.
Valores válidos
0 PV53 (S00053) PositionFeedback2.
1 LV245 (S00245) LeadDrive1AngularPosition.
Valor por defecto
0 PV53 (S00053) PositionFeedback2.
Sin función
En la versión 09.01 y siguientes.
LP60 Os S00060 PosSwitch1On
LP61 Os S00061 PosSwitch1Off
Función
Cuando el eje se encuentra posicionado dentro del
rango definido por estos dos parámetros, la salida 1
del CamSwitch será activa.
Valores válidos
-2 147 483 647 ... 2 147 483 647.
Valor por defecto
0.
Unidades
1 mm (ejes lineales).
1 grados (ejes rotativos).
Sin función
En la versión 09.01 y siguientes.
LP62 Os S00062 PosSwitch2On
LP63 Os S00063 PosSwitch2Off
LP64 Os S00064 PosSwitch3On
LP65 Os S00065 PosSwitch3Off
LP66 Os S00066 PosSwitch4On
LP67 Os S00067 PosSwitch4Off
LP68 Os S00068 PosSwitch5On
LP69 Os S00069 PosSwitch5Off
LP70 Os S00070 PosSwitch6On
LP71 Os S00071 PosSwitch6Off
LP72 Os S00072 PosSwitch7On
LP73 Os S00073 PosSwitch7Off
LP74 Os S00074 PosSwitch8On
LP75 Os S00075 PosSwitch8Off
Función
Idem para salidas 2, 3, 4, 5, 6, 7 y 8 del CamSwitch.
Sin función
En la versión 09.01 y siguientes.
LP143.#
*O S00393.# ModuloCommandMode
Función
En ejes rotativos, en formato módulo - véase bit 7 del
parámetro
PP76 -, la interpretación de la consigna de
posición depende de este parámetro.
Bit Significado
15 [MSB]...2 Reservados
1,0 [LSB] = 00 giro horario
= 01 giro antihorario
= 10 giro más corto (por defecto)
= 11 reservado
Valores válidos
0 ... 2.
Valor por defecto
2.
Sin función
En la versión 09.01 y siguientes.
LP183
* S00183
SynchronizationVelocity
Window
Función
Este parámetro establece la ventana de velocidad de
sincronización. Así, durante el modo de sincronización
en velocidad, si la diferencia entre la velocidad de sin-
cronización calculada para el eje esclavo y el feedback
de velocidad está dentro de la ventana de valores se
activa la marca InSynchronization (F02346), indican-
do que se ha alcanzado la sincronización.
Valores válidos
0 ... 2 147 483 647.

Parámetros, variables y comandos
13.
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
378
Ref.1912
DDS|MAB
SOFTWARE
· 296 ·
Soft.09.05
Valor por defecto
3 000.
Unidades
0,000 1 m/min.
Sin función
En la versión 09.01 y siguientes.
LP228
* S00228
SynchronizationPosition
Window
Función
Ventana de posición de sincronización. Así, durante
el modo de sincronización en posición, si la diferencia
entre la posición de sincronización calculada para el
eje esclavo y el feedback de posición está dentro de
dicha ventana de valores se activa la marca InSyn-
chronization (F02346), indicando que se ha alcanza-
do la sincronización.
Valores válidos
0 ... 2 147 483 647.
Valor por defecto
10 000.
Unidades
0,000 1 mm (ejes lineales).
0,000 1 grados (ejes rotativos).
Sin función
En la versión 09.01 y siguientes.
LP236
*s S00236 LeadDrive1Revolutions
Función
Nº de revoluciones del eje maestro necesario para
establecer el ratio de transmisión.
Valores válidos
-2 147 483 647 ... 2 147 483 647.
Valor por defecto
1.
Sin función
En la versión 09.01 y siguientes.
LP237
*s S00237 SlaveDriveRevolutions1
Función
Nº de revoluciones del eje esclavo necesario para es-
tablecer el ratio de transmisión.
Valores válidos
-2 147 483 647 ... 2 147 483 647.
Valor por defecto
1.
Sin función
En la versión 09.01 y siguientes.
LV2 O F02302 CamSwitchCompile
Función
Ante modificaciones de los puntos on/off de alguna de
las levas de cualquier CamSwitch, el regulador debe
ser informado de que ya puede leer los valores de los
parámetros modificados. Este informe, necesario para
que se consideren los cambios, le viene dado median-
te la escritura de esta variable con un 1 o un valor dis-
tinto de 0. Si no se producen modificaciones y se toman
los valores almacenados en el regulador, no será ne-
cesario escribir nada sobre ella ya que el regulador
realizará esta labor automáticamente.
Valores válidos
0/1.
Valor por defecto
0.
Sin función
En la versión 09.01 y siguientes.
LV13 W F02313 KernelOperationMode
Función
Modo de operación del kernel.
Valores válidos
0AUTOMÁTICO.
1 MANUAL.
Valor por defecto
0 AUTOMÁTICO. Tras el arranque del regulador.
Sin función
En la versión 09.01 y siguientes.
LV14 W F02314 KernelAutoMode
Función
Modo de ejecución del kernel, tanto para el modo au-
tomático como el modo manual.
Valores válidos
0 CONTINUO.
1 BLOQUE A BLOQUE.
2 INSTRUCCIÓN A INSTRUCCIÓN.
Valor por defecto
0 CONTINUO.
Sin función
En la versión 09.01 y siguientes.

Parámetros, variables y comandos
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
13.
Ref.1912
· 297 ·
DDS|MAB
SOFTWARE
Soft.09.05
LV15 W F02315 KernelStartSignal
Función
Señal digital que establece con su flanco de subida
(paso de 0 a 1) el arranque de la ejecución del pro-
grama de MC en modo automático o manual. El inicio
de la ejecución mediante la señal de START es nece-
sario siempre tras el encendido del sistema, o bien
tras la activación de las señales de STOP o RESET.
También será necesario generar un flanco de subida
en esta señal para continuar con la ejecución cuando
se está en modo bloque a bloque o instrucción a ins-
trucción.
Sin función
En la versión 09.01 y siguientes.
LV16 W F02316 KernelStopSignal
Función
Señal digital que establece con su flanco de subida
(paso de 0 a 1) la suspensión momentánea del blo-
que de movimiento y detiene el giro del motor. Esta
señal no da el bloque por finalizado, únicamente lo in-
terrumpe de forma que, cuando se active la señal
START, LV15 (F02315) KernelStartSignal continuará
con la parte pendiente.
Sin función
En la versión 09.01 y siguientes.
LV17 W F02317 KernelResetSignal
Función
Señal digital que establece con su flanco de subida
(paso de 0 a 1) el reinicio (reset) de la ejecución del
programa de Motion Control. Esta señal detiene la
ejecución, restaura las condiciones iniciales y el re-
gulador se queda en espera de una nueva señal de
arranque LV15 (F02315) KernelStartSignal.
Sin función
En la versión 09.01 y siguientes.
LV18 W F02318 KernelAbortSignal
Función
Señal digital que establece con su flanco de subida
(paso de 0 a 1) la suspensión definitiva del bloque de
movimiento y detiene el giro del motor. Esta señal
considera el bloque por finalizado y el regulador con-
tinúa con la ejecución del programa de MC.
Sin función
En la versión 09.01 y siguientes.
LV19 W F02319 KernelManMode
Función
Sub-modo de funcionamiento dentro del modo ma-
nual (LV13=1).
Valores válidos
0 SUB-MODO CONTINUO.
1 SUB-MODO INCREMENTAL.
Valor por defecto
0 SUB-MODO CONTINUO.
Sin función
En la versión 09.01 y siguientes.
LV20 W F02320 JogPositiveSignal
Función
Señal digital empleada dentro de la aplicación de Mo-
tion Control (
*.mc) en el módulo JOG para activar el
movimiento de jog en sentido positivo.
Sin función
En la versión 09.01 y siguientes.
LV21 W F02321 JogNegativeSignal
Función
Señal digital empleada dentro de la aplicación de Mo-
tion Control (
*.mc) en el módulo JOG para activar el
movimiento de jog en sentido negativo.
Sin función
En la versión 09.01 y siguientes.
LV24 F02324 FeedrateOverrideEqualZero
Función
Señal digital que indica que el valor del «Feedrate
Override» en la máquina es igual a cero y, por tanto,
el motor no podrá moverse en ningún modo.
Sin función
En la versión 09.01 y siguientes.

Parámetros, variables y comandos
13.
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
378
Ref.1912
DDS|MAB
SOFTWARE
· 298 ·
Soft.09.05
LV26 Ws F02326 ProgramPositionOffset
Función
Esta variable permite establecer un offset o desplaza-
miento respecto al punto de referencia de la máquina
y que será aplicable a los bloques de posicionamien-
to absolutos en el programa de Motion Control. La
sentencia ZERO actualiza esta variable con el valor
actual del feedback de posición.
Valores válidos
-2 147 483 647 ... 2 147 483 647.
Unidades
0,000 1 mm (ejes lineales).
0,000 1 grados (ejes rotativos).
Sin función
En la versión 09.01 y siguientes.
LV27 F02327 KernelInitError
Función
Índice que señala el significado exacto del código de
error
E900. Este error aparece en la inicialización del
programa de Motion Control y se comunica a través
del Status Display del regulador. Cancela el proceso
de inicialización del sistema e impide el funciona-
miento del software MC.
Valores válidos
0 No existe ningún error de inicialización.
1 Aplicación *.MCC no cargada en memoria.
2 Fichero de aplicación *.MCC no válido.
3 Fichero de aplicación *.MCC demasiado grande
(8 kB máx.)
4 Uso de una variable del regulador inexistente.
5 Demasiadas variables del regulador.
6 Recurso del PLC no accesible.
7 Demasiadas marcas del PLC.
8 Demasiados registros del PLC.
9 Demasiados contadores del PLC.
10 Error de checksum del código.
11 Error interno al inicializar la tabla del regulador.
12 Error interno al inicializar índices de variables.
13 Error de parámetros de sincronización.
Sin función
En la versión 09.01 y siguientes.
LV28 F02328 KernelExecError
Función
Variable que agrupa los errores de ejecución del pro-
grama de Motion Control (E901- E923). Estos errores
se comunican también a través del Status Display del
regulador. Detienen la ejecución del programa pero
no impiden el funcionamiento del software MC, con lo
que es posible consultar los valores de las variables y
parámetros.
Valores válidos
0 No existe ningún error.
1 División por cero (error E901 en Status Display).
2 Tamaño de array excedido (error 902, ...).
3 Límite de anidamiento de llamadas excesivo.
4 Error al escribir variable.
5 Error interno al leer variable.
6 Error interno al escribir variable.
7 Desbordamiento al evaluar expresión.
8 Desbordamiento de pila.
9 Carga de pila insuficiente.
10 Desbordamiento al calcular posición.
11 Posicionamiento absoluto sin referenciar.
12 Intento de escritura en contador de PLC.
13 Pcode desconocido.
14 Target Position excede ModuleValue.
15 El recorrido programado para el bloque ha exce-
dido el valor máximo permitido.

Parámetros, variables y comandos
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
13.
Ref.1912
· 299 ·
DDS|MAB
SOFTWARE
Soft.09.05
16 Fallo durante la ejecución del comando HOME.
17 Sobrepasamiento del límite de posición.
18 Sobrepasamiento del límite de velocidad.
19 TimeOut de sincronización.
20 Error en la inicialización de levas.
21 Leva no preparada.
22 Valor de jerk incorrecto.
23 El tiempo «ts» empleado por la aceleración en pa-
sar de un valor cero a un valor máximo supera los
255 ciclos (1 s aprox.).
Sin función
En la versión 09.01 y siguientes.
LV30 F02330 KernelExecutionState
Función
Variable que muestra el estado de ejecución. Así, el
software de depuración testeará periódicamente el
valor de esta variable con dos posibles valores.
Valores válidos
0 EJECUCIÓN DETENIDA.
1 EJECUCIÓN EN MARCHA.
Sin función
En la versión 09.01 y siguientes.
LV31 F02331 KernelExecutionPoint
Función
Variable que muestra el punto de ejecución de la apli-
cación, es decir, el nº de línea del fichero fuente que
se está ejecutando. Cuando la ejecución está en mar-
cha su valor variará, sin embargo si está detenida in-
dicará el punto en el que se ha detenido la ejecución.
Sin función
En la versión 09.01 y siguientes.
LV32 F02332 KernelExecutionPcode
Función
Variable en la que se devuelve el nº de Pcode que se
está ejecutando. Si la ejecución está parada mostrará
dónde se ha detenido.
Sin función
En la versión 09.01 y siguientes.
LV33 F02333 KernelApplicationPars
Función
Variable en la que se devuelven los nombres y los ín-
dices que les corresponden a cada uno de los pará-
metros de usuario que se utilizan en las aplicaciones
de Motion Control cargada en ese mismo instante en
el regulador.
Ejemplo
Cuando el regulador lee la variable LV33 devuelve
una cadena de caracteres ASCII donde aparecen,
para cada parámetro de usuario, el nombre seguido
del índice que le corresponde en la tabla de variables
de usuario. El carácter separador es el espacio, ’
’.
«TABLA_POS [16] 1 TIEMPO_OUTPUT 17».
Sin función
En la versión 09.01 y siguientes.
LV34 F02334 KernelApplicationVars
Función
Variable en la que se devuelven los nombres y los ín-
dices correspondientes a cada una de las variables
de usuario que se utilizan en la aplicación de MC car-
gada en ese mismo instante en el regulador.
Ejemplo
Cuando el regulador lee la variable LV34 devuelve
una cadena de caracteres ASCII donde aparecen,
para cada variable de usuario, el nombre seguido del
índice que le corresponde en la tabla de variables de
usuario. El carácter separador es el espacio, ’ ’.
«IN-
DICE [18] CONTADOR 19 TEMP-AUX 20»
.
Sin función
En la versión 09.01 y siguientes.

Parámetros, variables y comandos
13.
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
378
Ref.1912
DDS|MAB
SOFTWARE
· 300 ·
Soft.09.05
LV35 Ws F02335 BlockTravelDistance
Función
Variable que devuelve el valor de la distancia total a re-
correr del bloque de posicionamiento actual o del úl-
timo que se haya ejecutado de no existir ninguno en
marcha. Su valor se actualiza cada vez que empieza
a ejecutar un nuevo bloque de posicionamiento.
Valores válidos
-2 147 483 647 ... 2 147 483 647.
Unidades
0,000 1 mm (ejes lineales).
0,000 1 grados (ejes rotativos).
Sin función
En la versión 09.01 y siguientes.
LV36 Ws F02336 BlockCoveredDistance
Función
Variable que devuelve para cada instante dado la dis-
tancia recorrida en el bloque de posicionamiento ac-
tual o del último que se haya ejecutado de no haber
ninguno en marcha. Su valor se actualiza por el inter-
polador en cada ciclo de interpolación.
Valores válidos
-2 147 483 647 ... 2 147 483 647
Unidades
0,000 1 mm (ejes lineales).
0,000 1 grados (ejes rotativos).
Sin función
En la versión 09.01 y siguientes.
LV43 Ws F02343 GearRatioAdjustment
Función
El ratio de transmisión viene dado por el cociente del
parámetro LP237 (S00237) SlaveDrive Revolutions1
y el parámetro LP236 (S00236) Lead Drive1 Revolu-
tions permaneciendo constante durante toda la ope-
ración. Mediante esta variable puede establecerse un
ajuste más fino del ratio de transmisión durante la ope-
ración del sistema.
Valores válidos
-9999 ... 9999.
Valor por defecto
0.
Unidades
0,000 1.
Sin función
En la versión 09.01 y siguientes.
LV44 Ws F02344 SynchronizationVelocityOffset
Función
Esta variable permite establecer el valor del offset de
velocidad y modificar la velocidad del eje esclavo in-
dependientemente de la velocidad del eje maestro.
Valores válidos
-2 147 483 647 ... 2 147 483 647.
Unidades
0,000 1 m/min.
Sin función
En la versión 09.01 y siguientes.
LV45 Ws F02345 SynchronizationPositionOffset
Función
Esta variable permite establecer el valor del offset de
posición o modificar la posición del eje esclavo inde-
pendientemente de la posición del eje maestro.
Valores válidos
-2 147 483 647 ... 2 147 483 647.
Unidades
0,000 1 mm (ejes lineales).
0,000 1 grados (ejes rotativos).
Sin función
En la versión 09.01 y siguientes.
LV46 F02346 InSynchronization
Función
Marca que indica si se ha alcanzado o no la sincroni-
zación. Al alcanzar la sincronización se activa un 1 ló-
gico.
Valores válidos
0 y 1.
Sin función
En la versión 09.01 y siguientes.
LV48 Ws F02348 MasterOffset1
Función
Offset de la posición del eje maestro. Valor que se resta
a la posición del eje maestro para calcular la posición
de entrada de la tabla 1 de la leva electrónica.
Valores válidos
-2 147 483 647 ... 2 147 483 647
Unidades
0,000 1 mm (ejes lineales).
0,000 1 grados (ejes rotativos).

Parámetros, variables y comandos
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
13.
Ref.1912
· 301 ·
DDS|MAB
SOFTWARE
Soft.09.05
Versión
Operativo a partir de la versión de software 06.01.
Sin función
En la versión 09.01 y siguientes.
LV49 W F02349 MasterScale1
Función
Una leva del tipo:
POSICIÓN-POSICIÓN. Define la escala o el rango
de la posición del eje maestro atendiendo a la tabla 1
de la leva electrónica.
POSICIÓN-TIEMPO. Define el rango de tiempo o du-
ración total de la función de leva definida en la tabla 1
de la leva electrónica.
Valores válidos
0 ... 2 147 483 647.
Valor por defecto
3 600 000.
Unidades
0,000 1 grados (leva tipo posición-posición).
0,000 1 segundos (leva tipo posición-tiempo).
Versión
Operativo a partir de la versión de software 06.01.
Sin función
En la versión 09.01 y siguientes.
LV50 Ws F02350 SlaveOffset1
Función
Offset de la posición del eje esclavo en función de la
tabla 1 de la leva electrónica.
Valores válidos
-2 147 483 647 ... 2 147 483 647
Valor por defecto
0.
Unidades
0,000 1 mm (ejes lineales).
0,000 1 grados (ejes rotativos).
Versión
Operativo a partir de la versión de software 06.01.
Sin función
En la versión 09.01 y siguientes.
LV51 W F02351 SlaveScale1
Función
Escala o rango de la posición del eje esclavo aten-
diendo a la tabla 1 de la leva electrónica.
Valores válidos
0 ... 2 147 483 647.
Valor por defecto
3 600 000.
Unidades
0,000 1 mm (ejes lineales).
0,000 1 grados (ejes rotativos).
Versión
Operativo a partir de la versión de software 06.01.
Sin función
En la versión 09.01 y siguientes.
LV52 Ws F02352 MasterOffset2
Función
Offset de la posición del eje maestro. Valor que se
resta a la posición del eje maestro para calcular la po-
sición de entrada de la tabla 2 de la leva electrónica.
Valores válidos
-2 147 483 647 ... 2 147 483 647.
Valor por defecto
0.
Unidades
0,000 1 mm (ejes lineales).
0,000 1 grados (ejes rotativos).
Versión
Operativo a partir de la versión de software 06.01.
Sin función
En la versión 09.01 y siguientes.
LV53 W F02353 MasterScale2
Función
Una leva del tipo:
POSICIÓN-POSICIÓN. Define la escala o el rango
de la posición del eje maestro atendiendo a la tabla 2
de la leva electrónica.
POSICIÓN-TIEMPO. Define el rango de tiempo o du-
ración total de la función de leva definida en la tabla 2
de la leva electrónica.
Valores válidos
0 ... 2 147 483 647.
Valor por defecto
3 600 000.
Unidades
0,000 1 grados (leva tipo posición-posición).
0,000 1 segundos (leva tipo posición-tiempo).
Versión
Operativo a partir de la versión de software 06.01.
Sin función
En la versión 09.01 y siguientes.

Parámetros, variables y comandos
13.
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
378
Ref.1912
DDS|MAB
SOFTWARE
· 302 ·
Soft.09.05
LV54 Ws F02354 SlaveOffset2
Función
Offset de la posición del eje esclavo en función de la
tabla 2 de la leva electrónica.
Valores válidos
-2 147 483 647 ... 2 147 483 647.
Valor por defecto
0.
Unidades
0,000 1 mm (ejes lineales).
0,000 1 grados (ejes rotativos).
Versión
Operativo a partir de la versión de software 06.01.
Sin función
En la versión 09.01 y siguientes.
LV55 W F02355 SlaveScale2
Función
Escala o rango de la posición del eje esclavo aten-
diendo a la tabla 2 de la leva electrónica.
Valores válidos
0 ... 2 147 483 647.
Valor por defecto
3 600 000.
Unidades
0,000 1 mm (ejes lineales).
0,000 1 grados (ejes rotativos).
Versión
Operativo a partir de la versión de software 06.01.
Sin función
En la versión 09.01 y siguientes.
LV108 W S00108 FeedrateOverride
Función
Factor multiplicador aplicado a la velocidad de posi-
cionamiento en todos los movimientos programados.
El valor que puede tomar esta variable está limitado
por el parámetro LP11 (F02311) Feedrate OverrideLi-
mit. En cualquier caso, la velocidad quedará limitada
al valor dado por SP10 (S00091) VelocityLimit.
Valores válidos
Varía entre el 0 % y el valor dado por LP11 (F02311)
Feedrate OverrideLimit.
Sin función
En la versión 09.01 y siguientes.
LV158 Ws S00258 TargetPosition
Función
Posición final para el bloque de posicionamiento en
curso. Nótese que en el modo de funcionamiento ac-
tual, la posición final especificada en la sentencia
MOVE en ejecución se copia a la variable LV158
(S00258) Target Position.
Valores válidos
-2 147 483 647 ... 2 147 483 647.
Unidades
0,000 1 mm (ejes lineales).
0,000 1 grados (ejes rotativos).
Sin función
En la versión 09.01 y siguientes.
LV159 W S00259 PositioningVelocity
Función
Velocidad de posicionamiento máxima para el bloque
de posicionamiento en curso (en módulo). Nótese
que en el modo de funcionamiento actual, la veloci-
dad de posicionamiento especificada en la sentencia
MOVE en ejecución se copia la variable LV159
(S00259) PositioningVelocity.
Valores válidos
0 ... 2 147 483 647.
Unidades
0,000 1 m/min.
Sin función
En la versión 09.01 y siguientes.
LV160 W S00260 PositioningAcceleration
Función
Aceleración máxima aplicada a todos los bloques de
posicionamiento (en módulo). Ver nota de LV193.
Valores válidos
10 ... 2 000 000.
Unidades
0,000 1 m/s².
Versión
Modificado en la versión de software 06.18.
Sin función
En la versión 09.01 y siguientes.
LV193 O S00193 PositioningJerk
Función
Límite de choque (jerk) máximo para todos los blo-
ques de posicionamiento (en módulo).
Valores válidos
500 ... 10 000 000.

Parámetros, variables y comandos
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
13.
Ref.1912
· 303 ·
DDS|MAB
SOFTWARE
Soft.09.05
Valor por defecto
0 (anulación de jerk).
Unidades
0,000 1 m/s³.
NOTA. Nótese que para valores de LV160 < 0,0500 m/s², la variable
LV193 se pone a cero automáticamente para minimizar errores de posi-
cionamiento. Existe además un límite de tiempo, ts=255 ciclos (aprox. 1 s)
para alcanzar la aceleración y por tanto, no es admisible, cualquier com-
binación de aceleración y jerk. Si es superado el valor límite de ts se vi-
sualiza el código de error
E923. Algunas combinaciones de valores de
aceleración y jerk pueden originan pequeños errores de sobrepasamiento
que serán considerados como admisibles.
Versión
Modificado en la versión de software 06.18.
Sin función
En la versión 09.01 y siguientes.
LV215 S00315 PositioningVelocityGreaterLimit
Función
Marca que se activa si la velocidad de posiciona-
miento programada para el choque de posiciona-
miento en curso es mayor que el límite dado por
SP10 (S00091) VelocityLimit.
Valores válidos
0 y 1.
Sin función
En la versión 09.01 y siguientes.
LV223 S00323
TargetPositionOutside
OfTravelRange
Función
Marca que se activa si la posición final especificada
para el bloque de posicionamiento en curso está fue-
ra de los límites de posición que vienen dados por los
parámetros PP49 (S00049) PositivePositionLimit o
PP50 (S00050) NegativePositionLimit.
Valores válidos
0 y 1.
Sin función
En la versión 09.01 y siguientes.
LV242 S00342 TargetPositionAttained
Función
Marca indicativa de que el interpolador ha alcanzado
la posición final, es decir, se activa cuando la consig-
na de posición PV47 (S00047) PositionCommand al-
canza LV158 (S00258) TargetPosition.
Valores válidos
0 y 1.
Sin función
En la versión 09.01 y siguientes.
LV243 S00343 InterpolatorHalted
Función
Marca indicativa de que la interpolación se ha deteni-
do (la consigna de posición no varía) pero el bloque
de funcionamiento en curso no ha terminado.
Valores válidos
0 y 1.
Sin función
En la versión 09.01 y siguientes.
LV245 Ws S00245 LoadDrive1AngularPosition
Función
Variable que permite conocer la posición absoluta del
eje maestro respecto al punto de referencia del eje
esclavo.
Valores válidos
-2 147 483 647...2 147 483 647.
Unidades
0,000 1 mm (ejes lineales).
0,000 1 grados (ejes rotativos).
Sin función
En la versión 09.01 y siguientes.
LC1 F02300 BackupMCPar
Función
Backup de parámetros de MC.
Sin función
En la versión 09.01 y siguientes.

Parámetros, variables y comandos
13.
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
378
Ref.1912
DDS|MAB
SOFTWARE
· 304 ·
Soft.09.05
Grupo M. Motor
MP1.# O S00141.# MotorType
Función
Identificación del motor e inicialización. La asigna-
ción a este parámetro de una referencia identificativa
de un motor concreto (ver capítulo 12 del manual
«man_dds_hard.pdf») configura los parámetros liga-
dos al motor para gobernarlo. Ver apartado
Identifi-
cación del motor
del capítulo 2 de este mismo
manual. Para gobernar un motor de usuario (motor
no FAGOR) o para modificar alguno de estos pará-
metros M, el valor dado a MP1 comenzará por el ca-
rácter 0 (p.ej. 0supermotor).
Valores válidos
Referencias especificadas para motores en el capítu-
lo 12 del manual «man_dds_hard.pdf».
Versión
Modificado en la versión de software 06.10.
MP2 FMS F01200 MotorTorqueConstant
Función
Constante de par del motor síncrono (par motor en
función de la corriente eficaz).
Valores válidos
1 ... 10 000.
Unidades
0,1 N·m/A.
MP3.# FM S00111.# MotorContinuousStallCurrent
Función
Corriente a rótor parado. En motores asíncronos,
esta corriente coincide con la corriente nominal del
motor. En motores síncronos son diferentes.
Valores válidos
0 ... 2 000. Depende del motor conectado.
Unidades
0,1 A.
Versión
Modificado en la versión de software 06.10.
MP4 FMS S00109 MotorPeakCurrent
Función
Corriente de pico del motor síncrono. Este valor de
corriente no debe superarse nunca en el motor.
Valores válidos
1 ... 3 000. Depende del motor conectado.
Unidades
0,1 A.
MP5.# FM F01201.# MotorPolesPairs
Función
Número de pares de polos.
Valores válidos
0 ... 99. (nº entero).
Versión
Modificado en la versión de software 06.18.
MP6.# FM F01202.# MotorRatedSupplyVoltage
Función
Tensión nominal del motor.
Valores válidos
0 ... 460.
Unidades
1 V.
NOTA. Nótese que para un motor síncrono, este parámetro es meramente
informativo y no se utiliza en el control.
Versión
Modificado en la versión de software 06.10.
MP7.# FMA F01203.# MotorPowerFactor
Función
Factor de potencia del motor asíncrono.
Valores válidos
0 ... 999.
Unidades
0,001 V.
Versión
Modificado en la versión de software 06.10.
MP9.# FMA F01205.# MotorSlip
Función
Deslizamiento en el motor asíncrono.
Valores válidos
0 ... 60 000.
Unidades
0,1 rev/min.
Versión
Modificado en la versión de software 06.10.

Parámetros, variables y comandos
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
13.
Ref.1912
· 305 ·
DDS|MAB
SOFTWARE
Soft.09.05
MP10.# FM F01206.# MotorStatorResistance
Función
Resistencia fase-neutro del estátor a 20 °C.
Valores válidos
0 ... 10 000 000.
Unidades
0,001 .
Versión
Modificado en la versión de software 06.10.
MP11.# FM F01207.# MotorStatorLeakageInductance
Función
Inductancia de fugas fase-neutro de estátor de un
motor asíncrono.
NOTA. Nótese que para un motor síncrono, este parámetro representa la
inductancia de estátor del motor y no la de fugas, ya que no tiene sentido
hablar de inductancia de fugas en estos motores.
Valores válidos
0 ... 100 000 000.
Unidades
0,000 1 mH.
Versión
Modificado en la versión de software 06.10.
MP12.# FM F01208.# MotorNominalPower
Función
Potencia nominal.
Valores válidos
0 ... 2 000.
Unidades
0,1 kW.
Versión
Modificado en la versión de software 06.10.
MP13 FM F01209 MotorThermalTimeConstant
Función
Constante de tiempo térmica del motor.
Valores válidos
1 ... 200.
Unidades
1 min.
MP14 FM F01210 MotorTempSensorType
Función
Identifica el sensor de temperatura del motor.
Valores válidos
En motores FAGOR
0 Sensor de sobretemperatura (sí/no) en motores
SPM y FXM.
1 Sensor en motores AXM.
2 Sensor PTC KTY-84 en motores FKM ·excepto
serie FKM1· y familia FM9.
3 Sensor en motores FM7.
4 Sin sensor ·SENSORLESS·.
6 Sensor PTC 111-K13-140 en motores FKM1.
7 Sensor RTD Pt1000.
En motores NO FAGOR
5 Sensor lineal incorporado en motores de usuario.
Para más detalles, ver apartado,
10.7. Motor de
usuario con sensor lineal de temperatura
del
capítulo 10 de este mismo manual.
Versión
Modificado en la versión de software 06.15.
Incluye valor 6 en la versión de software 08.12.
Incluye valor 7 en la versión de software 08.13.
MP15 FM F01211 MotorShaft
Función
Tipo de eje instalado en el motor.
Valores válidos En motores FXM|FKM
0 Con chaveta estándar.
1 Sin chaveta.
En motores SPM
0 Eje normal.
1 Eje sellado para evitar el aceite de la caja re-
ductora.
2 ... 9 Eje especial solicitado bajo demanda.
En motores FM7|FM9
0 Con chaveta estándar.
1 Sin chaveta.
Este parámetro se determina durante el proceso de
identificación del motor.

Parámetros, variables y comandos
13.
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
378
Ref.1912
DDS|MAB
SOFTWARE
· 306 ·
Soft.09.05
MP16 FM F01212 MotorBrake
Función
Determina si el motor dispone o no de freno.
Valores válidos
0SIN FRENO.
1 CON FRENO.
Únicamente tiene sentido hablar de este parámetro
en los motores síncronos ya que ningún modelo de
motor asíncrono dispone de freno. Este parámetro se
determina durante el proceso de identificación del
motor.
MP17 FMS F01213 MotorFan
Función
Determina si el motor dispone o no de ventilador.
Valores válidos
0 SIN VENTILADOR.
1 CON VENTILADOR.
Únicamente tiene sentido hablar de este parámetro
en los motores síncronos ya que todos los modelos
de motor asíncrono disponen de ventilador. Este pa-
rámetro se determina durante el proceso de identifi-
cación del motor.
MP18 FMA F01214 MotorMounting
Función
Forma de montaje del motor. Sus rodamientos han
sido diseñados para esta forma de montaje.
Valores válidos
0 Horizontal (IM B3/B5).
1 Vertical con el eje hacia abajo (IM V1/V5).
2 Vertical con el eje hacia arriba (IM V3/V6).
3 Independiente de la forma de montaje.
Este parámetro se determina durante el proceso de
identificación del motor.
MP19 FMA F01215 MotorBalancing
Función
Grado de equilibrado del motor.
Valores válidos
0 Estándar S.
1SR.
2V10.
3V5.
4V3.
Este parámetro se determina durante el proceso de
identificación del motor.
MP20 FMA F01216 MotorBearings
Función
Tipo de rodamientos.
Valores válidos
0 Rodamientos normales.
1 Rodamientos de alta velocidad.
En motores FM7, MP20=1, siempre.
Este parámetro se determina durante el proceso de
identificación del motor.
MP21 FM F01217 MotorPhasesOrder
Función
Inversión de fases de potencia. Este parámetro per-
mite cambiar el orden de las fases de potencia de ali-
mentación del motor sin tener que intercambiar
físicamente el cableado.
Valores válidos
0, 1, 2 y 3.
0 Sin cambios.
1 Intercambio de fases U y V.
2 Intercambio de fases U y W.
3 Intercambio de fases V y W.
Este parámetro se determina durante el proceso de
identificación del motor.
Valor por defecto
0 Sin cambios.

Parámetros, variables y comandos
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
13.
Ref.1912
· 307 ·
DDS|MAB
SOFTWARE
Soft.09.05
En motores:
SPM:
MP21=0 (siempre)
FM7, FXM y FKM: MP21=1 (invierte fases)
Versión
Operativo a partir de las versiones de software 06.01
| 07.02. Modificado en la versión de software 06.23.
Añadidos los posibles valores 2 y 3 desde la versión
de software 08.05.
MP23.# FMA F01219.# MotorCircuitConnection
Función
Tipo de conexión del bobinado en motores FM7, se-
ries E03 y HS3.
Valores válidos
0 Y (estrella).
1 (triángulo).
Valor por defecto
0 Y (estrella).
Versión
Operativo a partir de la versión de software 06.18.
MP24 FM F01220 MotorMomentumOfInertia
Función
Momento de inercia del motor.
Valores válidos
1 ... 1 000 000.
Valor por defecto
10.
Unidades
0,1 kg·cm².
MP25.# FM F01221.# MotorRatedSpeed
Función
Velocidad nominal de un motor síncrono o velocidad
base (por encima de la cual se sitúa la zona de poten-
cia constante) de un motor asíncrono.
Valores válidos
Con motor:
SÍNCRONO MP25 SP10, si no E500.
ASÍNCRONO MP25 MP26
Versión
Modificado en la versión de software 06.10.
MP26 FM F01222 MotorMaximumSpeed
Función
Velocidad máxima del motor.
Valores válidos
MP26 SP10, si no E500.
Versión
Operativo a partir de las versiones de software 06.01
| 07.02. Modificado en la versión de software 06.10.
MP27.# FMA F01223.# MotorRotorResistance
Función
Resistencia fase-neutro del rótor a una temperatura
de 20 °C.
Valores válidos
0 ... 10 000 000.
Valor por defecto
0.
Unidades
0,001 .
Versión
Operativo a partir de las versiones de software 06.01
| 07.02. Modificado en la versión de software 06.10.
MP28.# FMA F01224.# MotorRotorLeakageInductance
Función
Inductancia de fugas fase-neutro del rótor.
Valores válidos
0 ... 100 000 000.
Valor por defecto
0.
Unidades
0,000 1 mH.
Versión
Operativo a partir de las versiones de software 06.01
| 07.02. Modificado en la versión de software 06.10.
MP29.# FMA F01225.# MotorMagnetizingInductance
Función
Inductancia magnetizante.
Valores válidos
0 ... 100 000 000.
Valor por defecto
0.
Unidades
0,000 1 mH.
Versión
Operativo a partir de las versiones de software 06.01
| 07.02. Modificado en la versión de software 06.10.

Parámetros, variables y comandos
13.
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
378
Ref.1912
DDS|MAB
SOFTWARE
· 308 ·
Soft.09.05
MP30.# FMA F01226.# MotorInductanceFactor1
MP31.# FMA F01227.# MotorInductanceFactor2
MP32.# FMA F01228.# MotorInductanceFactor3
MP33.# FMA F01229.# MotorInductanceFactor4
MP34.# FMA F01230.# MotorInductanceFactor5
MP35.# FMA F01231.# MotorInductanceFactor6
MP36.# FMA F01232.# MotorInductanceFactor7
MP37.# FMA F01233.# MotorInductanceFactor8
MP38.# FMA F01234.# MotorInductanceFactor9
Función
Valores de la curva de saturación magnética del hie-
rro del estátor.
Valores válidos
1 ... 1 000.
Valor por defecto
1 000 (para MP30, MP31, MP32, MP33, MP34)
900 (para MP35), 800 (para MP36), 700 (para MP37)
y 600 (para MP38).
Unidades
0,1 %.
Versión
Operativo a partir de las versiones de software 06.01
| 07.02. Modificado en la versión de software 06.10.
NOTA. Para más detalles, ver figura F. S11/4 del capítulo 11. PUESTA A
PUNTO DE UN CABEZAL ASÍNCRONO
de este mismo manual.
MP39.# FM F01235.# MotorNoLoadCurrent
Función
Corriente eficaz del motor en vacío.
Valores válidos
0 ... 2 000.
Valor por defecto
0.
Unidades
0,1 A.
Versión
Operativo a partir de las versiones de software 06.01
| 07.02. Modificado en la versión de software 06.10.
MP40.# FMA F01236.# MotorNoLoadVoltage
Función
Tensión eficaz fase-fase del motor en vacío.
Valores válidos
0 ... 460.
Valor por defecto
0.
Unidades
1 Vrms.
Versión
Operativo a partir de las versiones de software 06.01
| 07.02. Modificado en la versión de software 06.10.
MP41 FM F01237 MotorMaximumTemperature
Función
Límite máximo de temperatura que puede establecer-
se en el motor. Un valor nulo en este parámetro supone
omitir la comprobación del límite de temperatura.
Valores válidos
0 ... 5 000.
Valor por defecto
1 450 (para motores de usuario).
Unidades
0,1 °C.
Valor dado por su correspondiente tabla de motores
(en FXM, FKM, AXM, SPM, FM7 y FM9).
NOTA. No modificar el valor de este parámetro
dado por las tablas de motores (ficheros
*.mot) en
las series FXM y FKM.
Versión
Modificado a partir de la versión de software 06.03 y
operativo a partir de la versión 07.02.
MP42 FMS F01239
Starting
SpeedForFieldweakening
Función
Velocidad a la que se iniciará un «aumento del campo
magnético o flujo magnético» en un motor síncrono
que trabaja como motor de cabezal.
Valores válidos
10 ... 60 100.
Valor por defecto
10.
Unidades
1 rpm.
Versión
Operativo a partir de la versión de software 06.10.

Parámetros, variables y comandos
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
13.
Ref.1912
· 309 ·
DDS|MAB
SOFTWARE
Soft.09.05
MP43 FMS F01240 Ke_VoltageConstant
Función
Fuerza contra-electromotriz (en voltios) generada en-
tre cada dos fases del bobinado del estátor por cada
mil rev/min del motor. Este parámetro se utiliza para
debilitar el flujo magnético en motores síncronos fun-
cionando como cabezales. Con MP43=0 la disminu-
ción del flujo magnético será nula.
Valores válidos
0 ... 10 000.
Valor por defecto
0.
Unidades
1 V/(1000 rpm).
Versión
Operativo a partir de la versión de software 06.10.
Modificado en la versión de software 09.01.
MP44.# FM F01241.# MotorContinuousStallTorque
Función
Par a rótor parado del motor.
Valores válidos
0 ... 32 000.
Valor por defecto
0.
Unidades
0,1 N·m.
Versión
Operativo a partir de la versión de software 06.14.
Modificado en la versión de software 06.18.
NOTA IMPORTANTE. Si el valor del par a rótor parado del motor a para-
metrizar supera el valor válido máximo de 32 000 x 0,1 N·m, parametríce-
se MP144 en lugar de éste. Recuerde que la versión de su regulador debe
ser una 08.06 o superior para poder disponer del parámetro MP144.
MP45 FM F01242 MotorTempSensorR25
Función
Valor de la resistencia a una temperatura de 25 °C
para un sensor lineal (MP14=5) incorporado en un
motor. Obténgase este dato de la curva suministrada
por el fabricante del sensor.
Valores válidos
0 ... 10 000 000.
Valor por defecto
603.
Unidades
0,1 .
Versión
Operativo a partir de la versión de software 06.15.
Ver
10.7. Motor de usuario con sensor lineal de
temperatura
de este manual.
MP46 FM F01243 MotorTempSensorR_MP41
Función
Valor de la resistencia a la temperatura máxima esta-
blecida para el funcionamiento del motor (parametri-
zada en MP41) para un sensor lineal (MP14=5)
incorporado en un motor. Obténgase este dato de la
curva suministrada por el fabricante del sensor.
Valores válidos
0 ... 10 000 000.
Valor por defecto
1298.
Unidades
0,1 .
Versión
Operativo a partir de la versión de software 06.15.
Ver
10.7. Motor de usuario con sensor lineal de
temperatura
de este manual.
MP47 FMs F01244 MotorMinimumTemperature
Función
Valor mínimo admisible de temperatura establecido
para el bobinado del estátor del motor.
Valores válidos
-500 ... 5 000.
Valor por defecto
-200.
Unidades
0,1 °C.
Versión
Operativo a partir de la versión de software 08.05.

Parámetros, variables y comandos
13.
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
378
Ref.1912
DDS|MAB
SOFTWARE
· 310 ·
Soft.09.05
MP50 OM F01282 SynchronousAsynchronous
Función
Establece si el motor que va a ser gobernado por el
regulador es síncrono o asíncrono.
Valores válidos
0/1 SÍNCRONO/ASÍNCRONO
Valor por defecto
MP50=0 en reguladores AXD/ACD
MP50=1 en reguladores SPD/SCD
Versión
Operativo a partir de la versión de software 06.10.
MP144.# FM F01245.# MotorContinuousStallTorqueL
Función
Par a rótor parado del motor.
Valores válidos
0 ... 2 147 483 647.
Valor por defecto
0.
Unidades
0,01 N·m.
Versión
Operativo a partir de la versión de software 08.06.
NOTA IMPORTANTE. Léase detenidamente el parámetro MP44 antes de
parametrizar éste.
MC1 OA F01238
MotorElectricalParameters
Identification
Función
Tras la ejecución de este comando se habrán identi-
ficado los valores de las resistencias, inductancias, la
curva de saturación del motor y la corriente eficaz del
motor en vacío especificados en los siguientes pará-
metros:
MP10. MotorStatorResistance
MP11. MotorStatorLeakageInductance
MP27. MotorRotorResistance
MP28. MotorRotorLeakageInductance
MP29. MotorMagnetizingInductance
MP30. MotorInductanceFactor1
MP31. MotorInductanceFactor2
MP32. MotorInductanceFactor3
MP33. MotorInductanceFactor4
MP34. MotorInductanceFactor5
MP35. MotorInductanceFactor6
MP36. MotorInductanceFactor7
MP37. MotorInductanceFactor8
MP38. MotorInductanceFactor9
MP39. MotorNoLoadCurrent
Ver capítulo
11. PUESTA A PUNTO DE UN CABE-
ZAL ASÍNCRONO
de este manual.
Versión
Operativo a partir de la versión de software 06.08.

Parámetros, variables y comandos
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
13.
Ref.1912
· 311 ·
DDS|MAB
SOFTWARE
Soft.09.05
Grupo N. Mecánica
NP1 *OM F02200
ReducedActuatedMomentumOf
InertiaPercentage
Función
Parámetro que refleja la relación entre el momento
de inercia de la carga y el del rótor del motor. Para
calcular esta relación se ha de tener en cuenta la re-
lación de transmisión mecánica entre el movimiento
de la carga y el giro del motor.
Este parámetro es imprescindible para la gestión in-
terna del feedforward de aceleración en el lazo de
posición.
Valores válidos
0 ... 100 000.
Valor por defecto
0.
Unidades
0,01 %.
NP116 O S00116 ResolutionOfFeedback1
Función
Resolución del captador en la captación motor (co-
nector X4).
Si el captador motor es un resólver con un par de po-
los, tras parametrizar GP2=1, automáticamente por
defecto, NP116 se pone a 1.
Si el nº de pares de polos del resólver es distinto de 1
(p.ej: son 3), MP1 se parametrizará como motor de
usuario, GP2= 1 y se parametrizará NP116= 3.
Valores válidos
1 ... 131 072.
Valor por defecto
1 024.
Unidades
1 pulsos por vuelta.
Versión
Operativo a partir de las versiones de software 06.01
| 07.02. Ampliado en la versión de software 06.05.
NP117 O S00117 ResolutionOfFeedback2
Función
Resolución del captador en la captación directa (co-
nector X3).
Con encóder lineal
. Paso del rayado del cristal o fleje
en µm. En modelos FAGOR, puede ser 20, 40 o 100
µm, según modelo.
Con encóder rotativo
. Nº de impulsos por vuelta. Para
más detalles, ver apartado,
Captación con marcas
I0 e I0 codificadas
, del capítulo 5 de este manual.
Valores válidos
1 ... 2 147 483 647.
Valor por defecto
2 048.
Unidades
1 pulsos por vuelta.
NP118 O S00118 ResolutionOfLinearFeedback
Función
Período de la señal de salida del captador lineal dis-
puesto como captación directa.
NOTA. Con captador rotativo no procede su para-
metrización, es decir, queda sin efecto.
El período de la señal de salida del captador lineal se
parametrizará en µm. Su valor será obtenido de la re-
lación:
NP117 / FACTOR MULTIPLICADOR.
Véase el valor del factor multiplicador correspondien-
te al modelo de encóder lineal FAGOR que va a ser
instalado en la tabla del apartado,
Captación con
marcas I0 e I0 codificadas
del capítulo 5 de este
manual.
Valores válidos
1 ... 500 000.
Valor por defecto
200.
Unidades
0,1.

Parámetros, variables y comandos
13.
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
378
Ref.1912
DDS|MAB
SOFTWARE
· 312 ·
Soft.09.05
NP121.# O S00121.# InputRevolutions
NP122.# O S00122.# OutputRevolutions
Función
Definen la relación de transmisión entre el eje del
motor y el eje final que mueve la máquina. Por ejem-
plo, si 5 vueltas del eje del motor corresponden a 3
vueltas del husillo de la máquina, los parámetros re-
flejarán los valores:
NP121=5 y NP122=3
Valores válidos
1 ... 32 767.
Valor por defecto
1 vuelta en ambos parámetros (acoplamiento directo).
Unidades
1.
F. S13/9
Relación de transmisión entre el eje motor y el eje husillo de la máquina.
NP123 O S00123 FeedConstant
Función
Este parámetro define la relación entre el desplaza-
miento lineal de la máquina y el eje que la mueve. P.
ej: si cada vuelta de husillo supone un desplazamien-
to de 4 mm en la mesa, debe introducirse en este pa-
rámetro el valor (NP123=4). Para un caso de eje
rotativo (NP123=360), que equivale a 360° por vuel-
ta.
Valores válidos
1000 ... 2 147 483 647
Valor por defecto
100 000.
Unidades
0,000 1 mm (ejes lineales).
0,000 1 grados (ejes rotativos).
NP131.# O F00130.# InputRevolutions2
NP132.# O F00131.# OutputRevolutions2
Función
Definen la relación de transmisión entre la captación
directa y el movimiento de la carga. Así, p. ej: Si 5
vueltas del eje del encóder de la captación directa
son debidas a 3 vueltas del husillo de la máquina, los
parámetros reflejarán los valores:
NP131=5 y NP132=3
Valores válidos
1 ... 32 767.
Valor por defecto
1 vuelta en ambos parámetros (acoplamiento directo).
Unidades
1.
POLEA DE SALIDA
MESA
HUSILLO
PASO DE HUSILLO
POLEA DE ENTRADA
VELOCIDAD
VELOCIDAD
DEL MOTOR
MOTOR
EJEMPLO
Diámetro de la polea de salida = 25,75 mm
Diámetro de la polea de entrada = 15,3 mm
NP121=2575 vueltas
NP122=1530 vueltas
Relación de transmisión = 2575/1530 = 1,683
Paso del husillo = 5 mm
NP123 = 5 mm

Parámetros, variables y comandos
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
13.
Ref.1912
· 313 ·
DDS|MAB
SOFTWARE
Soft.09.05
NP133 O F00132 FeedConstant2
Función
Define el desplazamiento lineal de la máquina por
vuelta del encóder de la captación directa. Así, en
presencia de:
En máquinas rotativas este parámetro no procede.
Máquinas lineales con captación directa (GP10
0), rotativa (PP115, bit 0=0) y escalado lineal
(PP76, bits 1,0=01), entonces si:
R1=R2 el desplazamiento lineal frente al nº de
vueltas del encóder es igual y NP133 = valor del
paso del husillo mecánico.
R1R2 el desplazamiento lineal frente al nº de
vueltas del encóder es distinto y debe parámetri-
zarse el parámetro NP133 para que la captación
directa esté bien definida.
Valores válidos
0 ... 2 147 483 647
Valor por defecto
100 000.
Unidades
0,000 1 mm (ejes lineales).
0,000 1 grados (ejes rotativos).
F. S13/10
Desplazamiento lineal de la máquina por vuelta del encóder de la captación
directa.
Versión: Modificado a partir de la versión de software 06.02.
Ejemplo i
Ataque del motor con correa dentada y encóder externo solidario al husi-
llo. Relación de transmisión 2:1 (reducción). Paso del husillo: 10 mm.
NP121=2 NP122=1 NP123=10
NP131=1 NP132=1
NP133=10
Ejemplo ii
En una aplicación de MC (rodillos cilíndricos) con rueda de medida.
NP121=5 NP122=2 NP123=100
NP131=1 NP132=1
NP133=314,15
MOTOR
PASO DE HUSILLO
MESA
HUSILLO
ENCÓDER
CAPTACIÓN DIRECTA
CAPTACIÓN MOTOR
VELOCIDAD DEL
MOTOR
EJEMPLO
Eje rotativo con reducción de 40 y con encóder externo unido
por correa dentada con relación 2:1
NP121=40 vueltas
NP122=1 vuelta
NP123= 360° por vuelta
NP131=2 vueltas
NP132=1 vuelta
NP133= 360° por vuelta
No será necesario introducir valores en NP123 y NP133 en el caso
de ejes rotativos. Internamente se toma el valor de 360° por vuelta
en cada uno de ellos.
R1
R1'
R2
R2'
INFORMACIÓN. En actualizaciones de versión, NP133 tomará el valor que
tenía anteriormente NP123, antes de la instalación. En puestas a punto de
máquina, en NP133 se introducirá el paso del husillo mecánico.
i

Parámetros, variables y comandos
13.
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
378
Ref.1912
DDS|MAB
SOFTWARE
· 314 ·
Soft.09.05
NP165 *O S00165
DistanceCodedReference
Dimension1
Función
Cuando la captación lineal tiene I0s codificados, este
parámetro indica la distancia que separa
dos I0s co-
dificados consecutivos
. Ver capítulo 5, apartado
«
CAPTACIÓN LINEAL CON I0s CODIFICADOS»
de este mismo manual.
Valores válidos
1 ... 2 147 483 647.
Valor por defecto
1 001.
Unidades
1.
Versión
Modificado en la versión de software 06.10.
NP166
*O S00166
DistanceCodedReference
Dimension2
Función
Independientemente de que la captación lineal dis-
ponga o no de I0s codificados
, este parámetro in-
dica la distancia que separa
dos I0s consecutivos,
es decir, el nº de ondas completas de la señal incre-
mental que hay entre I0s.
Los ejemplos 1 y 2 del apartado: «Captación con se-
ñales de I0 - subapartado:
D. Parametrización de
NP166» del capítulo 5, de este manual explican de-
talladamente con qué valores parametrizar NP166.
NOTA. Nótese que NP166 debe parametrizarse
tanto si se dispone de I0s codificados como si no,
mientras disponga de señales de I0. Es utilizado in-
ternamente por el regulador para testear la distan-
cia entre I0s, generando el código de error
E253 si
no detecta un I0 en dos vueltas.
Valores válidos
1 ... 2 147 483 647.
Valor por defecto
1 000.
Unidades
1.
Versión
Modificado en la versión de software 06.10.

Parámetros, variables y comandos
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
13.
Ref.1912
· 315 ·
DDS|MAB
SOFTWARE
Soft.09.05
Grupo O. Salidas analógicas y digitales
OP1 *O F01400 DA1IDN
OP2
*O F01401 DA2IDN
Función
Identifican a las variables analógicas internas del re-
gulador que serán plasmadas en las salidas eléctri-
cas y que serán afectadas por la ganancia OP3 y
OP4, respectivamente. Canal 1 (pines 10-11 de X7) y
canal 2 (pines 8-9 de X7).
Dar a OP1 y/o OP2 el valor cero para permitir forzar
el valor de las señales eléctricas mediante las varia-
bles OV1 y/o OV2.
Valores válidos
Nombre de cualquier parámetro o variable.
Valor por defecto
SV1 en el caso de OP1 y SV2 en el caso de OP2.
OP3
*Os F01402 DA1ValuePer10Volt
OP4
*Os F01403 DA2ValuePer10Volt
Función
Definen las ganancias del canal 1 (pines 10-11 de X7)
y el canal 2 (pines 8-9 de X7).
Estas ganancias se dan por medio del valor de la va-
riable que se hace corresponder a 10 voltios en la sa-
lida.
Valores válidos
-2 147 483 647 ... 2 147 483 647.
Valor por defecto
1 000.
Unidades
1. Unidades de la variable que se esté visualizando.
NOTA. Con versión 06.15 o superior, al programar OP1=SV2, OP2=SV1,
tanto OP3 como OP4 serán parametrizados en unidades internas, es de-
cir, sin decimales. Esto se debe a que a partir de la versión 06.15, SV1 y
SV2 pasan a ser variables de 32 bits.
Ejemplo
Sea OP1=SV2 (VelocityFeedback en 10
4
rpm) y OP3=3000x10
4
. Esto sig-
nifica que cuando SV2 tenga un valor de 3000x10
4
rpm, la salida analógica
valdrá 10 voltios (pines 10-11 de X7). Cumplirá esta relación (10
4
rpm)/vol-
tio para todo el rango ± 10 V.
F. S13/11
Utilización de estos parámetros.
X7(11)
X7(10)
X7(9)
X7(8)
Variable examples for OP1 and OP2
SV2 -S00040-
VelocityFeedback
SV7 -F01612-
VelocityCommandFinal
TV1 -S00080-
TorqueCommand
TV2 -S00084-
TorqueFeedback
CV3 -F00311-
CurrentFeedback
.... and more
Physical Analog Outputs
D/A
OP1 -F01400-
DA1IDN
OP3 -F01402-
DA1ValuePer10Volts
Ref
±10 Volts
max.
OP2 -F01401-
DA2IDN
OP4 -F01403-
DA2ValuePer10Volts
OV1 -F01408-
DA1Value
OV2 -F01409-
DA2Value
Channel 1
Channel 2
D/A
Ref
1
13
1
11
X7
P2
P1
(Phoenix,
3.5mm)
X6
(Phoenix,
3.5mm)

Parámetros, variables y comandos
13.
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
378
Ref.1912
DDS|MAB
SOFTWARE
· 316 ·
Soft.09.05
OP5 O F01411 Prog_OutIDN
Función
Identifica a la variable booleana que será plasmada
en la salida digital Prog_OUT del regulador compacto
(pines 8-9 del conector X2).
Valor por defecto
0 (sin asignación). En esta situación puede forzarse
Prog_Out mediante OV5.
Ejemplo
OP5=TV100 (el contacto se cierra cuando hay par).
F. S13/12
Utilización de este parámetro.
OP10 O F01404 O1IDN
OP11 O F01405 O2IDN
OP12 O F01406 O3IDN
OP13 O F01407 O4IDN
Función
Identifica a las variables booleanas del sistema que
serán plasmadas en las salidas digitales 1, 2, 3 y 4
por los pines (6, 7), (8, 9), (10, 11) y (12, 13) del co-
nector X6.
Unidades
Nombre del parámetro o variable a visualizar, siem-
pre que sea booleana.
Valor por defecto
0 (sin asignación).
Ejemplo
OP11 = TV100 (el contacto entre los pines 8 y 9 se cierra cuando hay par).
OV1 Os F01408 DA1Value
OV2 Os F01409 DA2Value
Función
Estas variables sirven para forzar el valor de la señal
eléctrica en las salidas analógicas del conector X7.
Solo es posible forzar estas señales cuando les han
sido asignadas a estas salidas (OP1, OP2) el valor
cero.
OV1 refleja el valor de la salida por el canal 1 (pines
11 y 10 del conector X7).
OV2 refleja el valor de la salida por el canal 2 (pines
9 y 8 del conector X7).
Valores válidos
-10 000 ... 10 000.
Unidades
0,001 V.
Ejemplo
Siendo OP1=0, introducir en OV1 el valor 2 y entre los pines 11/10 de X7
habrá 2 V.
OP5 - F01411 -
Prog_OutIDN
X2(8)
X2(9)
OV5 - F01412 -
Prog_Out
Physical Digital Output (Compact Drive)
X2
1
10
(Phoenix,
3.5 mm)
INFORMACIÓN. Adviértase que la lectura de estas variables no tiene sen-
tido.
i

Parámetros, variables y comandos
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
13.
Ref.1912
· 317 ·
DDS|MAB
SOFTWARE
Soft.09.05
OV5 O F01412 Prog_Out
Función
La variable OV5 contiene el dato binario que repre-
senta el estado de la salida Prog_OUT del regulador
compacto con dos modos de trabajo:
En lectura:
Valor de la salida digital Prog_OUT.
En escritura:
Valor al que se fuerza esa salida si OP5 no tiene
asignada ninguna función (OP5=0).
Valores válidos
0 y 1.
Ejemplo
Se lee OV5=1 siendo OP5=TV100. Significa que hay par.
Si con OP5=0 se escribe OV5=1, se cierra el contacto Prog_OUT.
F. S13/13
Utilización de estas variables.
OV10 O F01410 DigitalOutputs
Función
La variable OV10 contiene un dato numérico que, co-
dificado en el sistema binario representa la situación
de las salidas digitales presentes en el slot SL1.
Si el slot SL1 está ocupado por los conectores X6 y
X7, estas salidas son las relativas a los parámetros
OP10-OP13. En el PLC estas salidas representan a
los recursos O1-O4.
Si el slot SL1 está ocupado por alguna de las tarje-
tas de entradas-salidas (16DI-8DO, 8DI-16DO),
OV10 se refiere a los recursos O1-O16 del PLC.
En lectura:
Valor de las salidas digitales.
En escritura:
Valores a los que se fuerzan las salidas digitales
que no tienen funciones asociadas por los pará-
metros OP10-OP13.
Valores válidos
0 ... 655 353.
Valor por defecto
0. Sin asignación.
OP10 - F01404 -
O1IDN
X6(6)
X6(7)
X6(8)
X6(9)
X6(10)
X6(11)
X6(12)
X6(13)
SV3 -S00332-
n<nx
SV4 -S00330-
n=ncommand
SV5 -S00331-
n<nmin
TV10 -S00333-
T>Tx
TV60 -S00337-
P>Px
TV100 -F01702-
T active
GV13 -F00709-
PowerBusOn
BV7 -F00203-
DriveEnableDnc
... and more
1
2
3
4
OV10 - F01410 -
DigitalOutputs
Physical Digital Outputs
1
13
1
11
X7
P1
P2
(Phoenix,
3.5 mm)
X6
(Phoenix,
3.5 mm)
OP11 - F01405 -
O2IDN
OP12 - F01406 -
O3IDN
OP13 - F01407 -
O4IDN
Variable examples for OP10-OP13

Parámetros, variables y comandos
13.
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
378
Ref.1912
DDS|MAB
SOFTWARE
· 318 ·
Soft.09.05
Ejemplo
Léase en OV10=11 (1011 en binario). Significa que las salidas 1, 2 y 4 del
conector X6 están activadas y la salida 3 está inactiva. Los contactos (6, 7),
(8, 9) y (12, 13) estarán cerrados y el contacto (10, 11) estará abierto.
Si se escribe este mismo dato, se fuerza a los contactos a adoptar estas po-
siciones siempre que OP10-OP13 no tenga asignaciones.
OV11 O F01413 DigitalOutputsCh2
Función
La variable OV11 contiene un dato numérico que, co-
dificado en el sistema binario, representa la situación
de las salidas digitales presentes en el slot SL2.
En el PLC el valor de OV11 se refiere a los re-
cursos O17- O32.
En lectura:
Valor de las salidas digitales.
En escritura:
Valores a los que se fuerzan las salidas digitales.
Valores válidos
0 ... 65 535.
Valor por defecto
0 (sin asignación).
Ejemplo
Léase en OV11= 35 (00100011 en binario). Significa que los recursos O17,
O18 y O22 están activos y el resto inactivos.
Si se escribe ese mismo dato, se fuerza la activación o desactivación de
esos recursos.
F. S13/14
Entradas y salidas digitales asociadas a los conectores de las placas ubica-
das en los slots SL1 y SL2.
','2
$
,
,
,
,
,
,
,
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
,
,
,
,
2
2
2
2
,
,
,
','2
,
,
,
,
,
,
,
,
,
,
,
,
2
2
2
2
2
2
2
'ULYH0RGXOHH[DPSOH
,
,
2
2
,
,
,
,
,
,
,
,
2
2
2
2
2
2
2
2
6/ 6/6/ 6/
'ULYH0RGXOHH[DPSOH
','2
2
2
2
2
2
2
2
2
;
;
;
;
;;
;
;
;
;
;
3
3
drive module · example · drive module · example ·

Parámetros, variables y comandos
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
13.
Ref.1912
· 319 ·
DDS|MAB
SOFTWARE
Soft.09.05
Grupo P. Posición
PP1.# O F01300.# HomingVelocitySlow
Función
Establece la velocidad lenta en el proceso de bús-
queda de cero controlado desde el propio regulador.
Es necesario cuando se realiza la búsqueda de cero
controlada desde el regulador. PC148 (S00148) Dri-
veControlledHoming activo.
Valores válidos
0 ... 2 147 483 647.
Valor por defecto
1 000 000.
Unidades
0,000 1 rpm del motor.
PP2
*Os F01301 BacklashPeakAmplitude
Función
Amplitud del impulso adicional que suministra inter-
namente el regulador a la consigna de velocidad para
recuperar la holgura carga-husillo en las inversiones
de movimiento. Aplicable en configuraciones con
control de posición y captación directa.
Valores válidos
-10 000 000 ... 10 000 000.
Valor por defecto
0.
Unidades
0,000 1 rpm del motor.
PP3
*O F01302 BacklashPeakTime
Función
Duración del impulso adicional que suministra inter-
namente el regulador a la consigna de velocidad para
compensar la holgura carga-husillo en las inversio-
nes de movimiento. Aplicable en configuraciones con
control de posición y captación directa.
Valores válidos
0 ... 100 ms.
Valor por defecto
0.
Unidades
1 ms.
F. S13/15
Compensación de la holgura por pico de inversión en un cambio de sentido
de movimiento.
PP4 S00299 HomingSwitchOffset
Función
Distancia a la que debe desplazarse el home-switch
(por software) para evitar problemas de repetitividad
de I0 en la búsqueda de cero. Ver comando
GC6.
Valores válidos
0 ... 2 147 483 647
Valor por defecto
0.
Unidades
0,000 1 mm (ejes lineales).
0,000 1 grados (ejes rotativos).
Versión
Operativo a partir de las versiones 06.02 | 07.02.
33āH
UHYPLQ
33
33
ā33 ā33
PV
W
33
El área bajo la curva entre los límites (0,infinito) representaría exactamente la hol-
gura compensada. Entre 0 y 3·PP3 su 95 %.
Nótese que:
Entre (0,PP3) se compensa un 63 % de la holgura.
Entre (0,2·PP3) se compensa un 87 % de la holgura.
Entre (0,3·PP3) se compensa un 95 % de la holgura.

Parámetros, variables y comandos
13.
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
378
Ref.1912
DDS|MAB
SOFTWARE
· 320 ·
Soft.09.05
PP5 Os S00391
Actual
PositionMonitoringWindow
Función
Error máximo permitido entre la captación motor y la
captación directa. Así, si al comparar el valor del fee-
dback de posición de la captación directa (visualiza-
ble esta diferencia en PV190), su desviación excede
del valor establecido en este parámetro PP5 durante
un período de 20 ms, el regulador comunica el error
E157 ExcessiveActual PositionDifference - DV11 (S0
0011), bit 11 -. Su objetivo es ofrecer un margen de
seguridad adicional en aplicaciones donde se utiliza
un sistema de medición externo. Por tanto, es muy
conveniente, parametrizarlo con un valor distinto de
cero cuando se dispone de captación cuadrada ex-
ternas ya que, para este caso, no existen otros siste-
mas de vigilancia. Con PP5=0, no habrá vigilancia en
el error.
Valores válidos
-1 ... 2 147 483 647.
Valor por defecto
0 (no hay vigilancia del error).
Unidades
0,000 1 mm (ejes lineales).
0,000 1 grados (ejes rotativos).
NOTA. Nótese que a partir de la versión 06.09. puede parametrizarse el
parámetro PP5= -1 x 0,000 1, haciendo que la captación motor y la capta-
ción directa sean independientes. Así, no se monitoriza el error de diferen-
cia entre captaciones ni se igualan ambas captaciones en la búsqueda de
I0. Esto permite conectar en la captación directa una regla u otro disposi-
tivo de medida que puede ser leído por un CNC o un PLC y operar de ma-
nera pertinente.
F. S13/16
Error máximo permitido entre captación motor y captación directa.
PP6 O F02055 I0FindActive
Función
Parámetro en el que se determina el nº de I0s codifi-
cados con el que se realiza la búsqueda de I0.
Valores válidos
0 ... 10 (nº entero).
0/1 con 3 I0s / con 2 I0s
Otro reservado
Valor por defecto
0 con 3 I0s codificados
Versión
Operativo a partir de la versión 09.01.
3RVLWLRQ)HHGEDFN
396
0RWRUHQFRGHUSRVLWLRQ
IHHGEDFNYDOXH
3RVLWLRQ)HHGEDFN
396
([WHUQDOHQFRGHU
SRVLWLRQIHHGEDFNYDOXH
$FWXDO3RVLWLRQ0RQLWRULQJ
:LQGRZ
336
PV
(([FHVVLYH$FWXDO3RVLWLRQ'LIIHUHQFH

Parámetros, variables y comandos
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
13.
Ref.1912
· 321 ·
DDS|MAB
SOFTWARE
Soft.09.05
PP13 *O F01304 BacklashPeakDelay
Función
Con control de posición y captación motor o captación
directa, al recibir consigna de inversión del sentido de
movimiento desde el CNC, este parámetro permite re-
trasar la compensación de inversión (holgura y pico
de inversión), en tiempo.
El tiempo de retraso se parametrizará en ms y el re-
gulador redondeará internamente el tiempo parame-
trizado en PP13 al valor inferior más próximo que sea
múltiplo del tiempo de lazo.
Nótese que con PP13=0, la compensación de inver-
sión se realizará justamente tras recibir la consigna de
cambio de sentido de movimiento, es decir, sin retar-
do en la compensación de inversión, tal y como se ha
venido realizando hasta la versión 06.10. Para más
detalles, ver apartado,
COMPENSACIÓN DE LA
HOLGURA
del capítulo 5 de este manual.
Valores válidos
0 ... 32 000.
Valor por defecto
0.
Unidades
0,001 ms.
Versión
Operativo a partir de la versión de software 06.10.
PP14
*Os F01305
BacklashPeak2Feedback
Displacement
Función
Con control de posición y captación directa, este pa-
rámetro establece el espacio
(en mm o grados) que
debe recorrer la mesa (tras la inversión del sentido de
movimiento) antes de que el regulador considere que
se ha alcanzado el otro extremo de la holgura y orde-
ne cortar la compensación exponencial de la holgura
por pico de inversión.
Ver detalles en el apartado, Mejora en la compensa-
ción de la holgura mesa-husillo por pico de inver-
sión con captación directa. Corte de la
compensación exponencial
del capítulo 5 de este
manual.
Valores válidos
-1 ... 2 147 483 647.
Valor por defecto
PP14 = 0 en versiones 06.10 y posteriores.
PP14= -1 x 0,000 1 cuando se sustituye una versión
anterior a la 06.10 por una versión 06.10 o superior.
Unidades
0,000 1 mm (ejes lineales).
0,000 1 grados (ejes rotativos).
Versión
Operativo a partir de la versión de software 06.10.
PP15
*O F01306 ReversalHysteresis
Función
Con control de posición y con cualquier captación (mo-
tor o directa), este parámetro determina cuánto puede
variar la consigna de posición (amplitud de histéresis)
tras recibir una consigna de cambio de sentido de mo-
vimiento (inversión), antes de que el regulador ordene
realizar la compensación de inversión
(por pico de in-
versión). Así, p.ej, si se parametriza con 5 dµm (desde
el WinDDSSetup parametrizar PP15 = 0,0005 mm con
eje lineal), el regulador no activará la compensación de
inversión mientras la consigna de posición no haya re-
trocedido, al menos este valor, por muchas inversiones
intermedias que haya.
Nótese que con PP15 = 0, la compensación por pico
de inversión se realizará siempre
tras recibir una con-
signa de cambio de sentido de movimiento, es decir,
sin amplitud de histéresis tal y como se ha venido rea-
lizando hasta la versión 06.10. Todos los detalles en el
apartado «Histéresis en la orden de compensación
(por pico de inversión) tras detectar una inversión en
el sentido del movimiento del eje» del capítulo
5. EL
REGULADOR DE POSICIÓN
de este manual.

Parámetros, variables y comandos
13.
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
378
Ref.1912
DDS|MAB
SOFTWARE
· 322 ·
Soft.09.05
Valores válidos
0 ... 2 147 483 647
Valor por defecto
0.
Unidades
0,000 1 mm (ejes lineales).
0,000 1 grados (ejes rotativos).
Versión
Operativo a partir de la versión de software 06.10.
PP16
*S F02007
PositionFeedbackAdaptation
TimeConstant
Función
Valor de la constante de tiempo de adaptación entre
ambas captaciones de posición (directa y motor)
cuando se realiza el control de posición con capta-
ción directa (regla) en una máquina con grandes hol-
guras mecánicas generadoras de vibraciones e
inestabilidades. Determina el retraso entre las cotas
del encóder y de la regla que se introducen al lazo de
posición. Con valor 0 indica que el lazo de posición se
cierra siempre con la regla y con valor alto (3200) in-
dica que se cierra siempre con el encóder.
Valores válidos
0 ... 32 000.
Valor por defecto
0.
Unidades
0,1 ms.
Versión
Operativo a partir de la versión de software 06.12.
PP20.#
*sS F02020.# DynamicDeformationFrequency
Función
Frecuencia que permite compensar la desviación de
la trayectoria que sufre la punta de la herramienta de-
bida a las deformaciones elásticas que se originan di-
námicamente a altas velocidades en los elementos de
transmisión (husillos, correas, ...) o acoplamientos
elásticos de una máquina.
Para más detalles, ver apartado «compensación de la
deformación elástica en el acoplamiento de un eje»
del capítulo
5. EL REGULADOR DE POSICIÓN.
Valores válidos
-22 000 ... 22 000.
NOTA. En una compensación por deformación elás-
tica de un acoplamiento del eje se hará uso de valores
de frecuencia positivos cuando la trayectoria real ex-
cede a la programada en el CNC, es decir, la des-
viación es por exceso y valores negativos cuando es
por defecto.
Valor por defecto
0.
Unidades
0,01 Hz.
Versión
Operativo a partir de la versión de software 06.16.
PP41.# O S00041.# HomingVelocityFast
Función
Establece la velocidad rápida en el proceso de bús-
queda de cero controlado desde el propio regulador.
Este parámetro es necesario cuando se realiza la
búsqueda de cero controlada desde el regulador.
PC148 (S00148) DriveControlledHoming activo.
Valores válidos
0 ... 2 147 483 647.
Valor por defecto
2 000 000.
Unidades
0,000 1 rpm del motor.
PP42.# O S00042.# HomingAcceleration
Función
Aceleración aplicada en el proceso de búsqueda de
cero controlado desde el propio regulador. Este pará-
metro es necesario cuando se realiza la búsqueda de
cero controlada desde el regulador. PC148 (S00148)
DriveControlledHoming activo.
Valores válidos
0 ... 2 147 483 647.
Valor por defecto
60 000.
Unidades
0,001 rad/s².

Parámetros, variables y comandos
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
13.
Ref.1912
· 323 ·
DDS|MAB
SOFTWARE
Soft.09.05
PP49 Os S00049 PositivePositionLimit
PP50 Os S00050 NegativePositionLimit
Función
Con estos dos parámetros se delimita la zona permi-
tida para los movimientos del eje. Estos límites son
considerados solo si, previamente, se ha realizado
una búsqueda de I0, es decir, el bit 0 de PV203
(S00403) PositionFeedbackStatus está a 1 (se ha
ejecutado el comando DriveControlledHoming).
Si la variable PV47 (S00047) PositionCommand ge-
nera un movimiento del eje que lo aleja de la zona
permitida se activa el código de error
E150.
Si la variable LV158 (S00258) TargetPosition sobre-
pasa los límites de posición, el regulador activa el bit
13 TargetPositionOutsideTheTravelZone de DV9
(S00012) Class2Diagnostics (Warnings).
Valores válidos
-2 147 483 647 ... 2 147 483 647
Valor por defecto
PP49 = 2 147 483 647
PP50 = -2 147 483 647
Unidades
0,000 1 mm (ejes lineales).
0,000 1 grados (ejes rotativos).
PP52
*Os S00052 ReferenceDistance1
Función
Con captación motor, este parámetro describe la dis-
tancia entre el cero máquina y el punto de referencia
de la máquina. Es similar al parámetro
REFVALUE
[P53]
de los ejes del CNC 8055/55i.
Valores válidos
-2 147 483 647...2 147 483 647
Valor por defecto
0.
Unidades
0,000 1 mm (ejes lineales).
0,000 1 grados (ejes rotativos).
PP54
*Os S00054 ReferenceDistance2
Función
Con captación directa, este parámetro describe la
distancia entre el cero máquina y el punto de referen-
cia de la máquina. Es similar al parámetro
REFVA-
LUE [P53]
de los ejes del CNC 8055/55i.
Valores válidos
-2 147 483 647...2 147 483 647.
Valor por defecto
0.
Unidades
0,000 1 mm (ejes lineales).
0,000 1 grados (ejes rotativos).
PP55 O S00055 PositionPolarityParameters
Función
Registro de 16 bits que sirve para invertir el signo de
diferentes datos de posición.
Cuando el regulador cierra el lazo de posición
Los bits 2 y 3 modifican el signo de la captación de po-
sición monitorizada pero no afectan
al funcionamiento
del lazo. Estos bits no sirven para solucionar un pro-
blema de realimentación positiva.
Este caso se soluciona con el bit 3 de PP115 (S00115)
PositionFeedback2Type. Ver
F. S13/17.

Parámetros, variables y comandos
13.
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
378
Ref.1912
DDS|MAB
SOFTWARE
· 324 ·
Soft.09.05
F. S13/17
PP55 cuando el regulador cierra el lazo de posición.
Cuando el CNC cierra el lazo de posición
Los bits 2 y 3 modifican el signo de la captación de po-
sición monitorizada y sí afectan
al funcionamiento del
lazo. Estos bits sí sirven
para solucionar un problema
de realimentación positiva además del bit 3 de PP115
(S00115) PositionFeedback2Type. Ver
F. S13/18.
F. S13/18
PP55 cuando el CNC cierra el lazo de posición.
CONVENIO: Con ejes rotativos: Si el signo de la variación de la consigna
de posición es positivo, el giro se establece en sentido horario.
T. S13/12 Parámetro PP55. Significado de sus bits.
Bit Función
4
Límites de posición.
0/1 Desactivados/ Activados (por defecto).
Ver parámetros
PP49 y PP50.
3
Signo del valor de la captación de posición directa.
0/1 No invertido/Invertido (por defecto).
2
Signo del valor de la captación en el motor.
= 0/1 No invertido/Invertido (por defecto).
1 Reservado
0 [LSB]
Signo del valor de la consigna de posición.
0/1 No invertido/ Invertido (por defecto).
LAZO DE POSICIÓN
PP55 (S00055)
bit 2, bit 3
PP55 (S00055)
bit 0
PP55 (S00055) PositionPolarityParameters
bit 0 = bit 2 = bit 3
RESTRICCIÓN
x
(+/-) 1
CAPTACIÓN DIRECTA
x
CAPTACIÓN MOTOR
(+/-) 1
RP77 (S00277) bit 3
PP115 (S00115) bit 3
PositionFeedback1Type
PositionFeedback2Type
PV51 (S00051)
PositionFeedback1
PV53 (S00053)
PositionFeedback2
PV47 (S00047)
PositionCommand
+
-
PositionPolarityParameters
PositionPolarityParameters
REGULADOR
SP43 (S00043)
bit 2
VelocityPolarityParameters
SV2 (S00040)
VelocityFeedback
CNC
bits de polaridad
P
+
-
SP43 (S00043) VelocityPolarityParameters bit 0 = bit 2
LAZO DE VELOCIDAD
PP55 (S00055)
bit 2, bit 3
SP43 (S00043)
bit 0
PP55 (S00055) PositionPolarityParameters bit 2 = bit 3
RESTRICCIONES
x
(+/-) 1
CAPTACIÓN DIRECTA
x
CAPTACIÓN MOTOR
(+/-) 1
RP77 (S00277) bit 3
PP115 (S00115) bit 3
PositionFeedback1Type
PositionFeedback2Type
SV1 (S00036)
VelocityCommand
+
-
PositionPolarityParameters
REGULADOR
LAZO DE VELOCIDAD
ENCÓDER
LINEAL
SP43 (S00043)
bit 0
RESTRICCIÓN
SV1 (S00036)
VelocityCommand
+
-
REGULADOR
SP43 (S00043)
bit 2
VelocityPolarityParameters
SV2 (S00040)
VelocityFeedback
CNC
bits de polaridad
P
+
-
SP43 (S00043) VelocityPolarityParameters bit 0 = bit 2

Parámetros, variables y comandos
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
13.
Ref.1912
· 325 ·
DDS|MAB
SOFTWARE
Soft.09.05
PP57 O S00057 PositionWindow
Función
Establece la diferencia permitida entre la posición real
y la final LV158 (S00258) TargetPosition para consi-
derar que el accionamiento está posicionado. El re-
gulador, entonces, activa el parámetro PV136
(S00336) InPosition durante la ejecución del comando.
Valores válidos
0 ... 2 147 483 647.
Valor por defecto
1 000 en ejes lineales.
1 000 en ejes rotativos sobre 360°.
Unidades
0,000 1 mm (ejes lineales).
0,000 1 grados (ejes rotativos).
PP58
*Os S00058 Backlash
Función
Con control de posición y captación motor, este pará-
metro permite compensar la holgura carga-husillo.
A partir de la versión de software 06.10,
este paráme-
tro también podrá utilizarse con control de posición
cuando se disponde de captación directa (regla) con
el objetivo de compensar la holgura que aparece en
la sujeción de la cabeza de la regla en los cambios de
sentido de movimiento del eje.
Nota aclaratoria importante
Cuando se sustituye una versión anterior a la 06.10
por ésta o posterior y el sistema está configurado con
control de posición y captación directa (regla), si
PP58 estaba parametrizado con un valor distinto de
0, automáticamente se pone a cero con el fin de que
su comportamiento siga siendo el mismo (por seguri-
dad). Ver apartado
5.5 Compensación de la holgu-
ra
del capítulo 5 de este manual donde se describe
con más detalle este parámetro.
NOTA. Únicamente ha de registrarse este valor en
el parámetro del regulador o en su equivalente del
CNC,
nunca en ambos simultáneamente, dándole
un valor nulo al otro parámetro.
Valores válidos
-32 767 ... 32 767.
Valor por defecto
0.
Unidades
0,000 1 mm (ejes lineales).
0,000 1 grados (ejes rotativos).
Versión
Ampliado en la versión de software 06.10.
PP59
*Os F01307 Backlash12
Función
Parametrizar con el valor de la holgura entre capta-
ciones (dado por la variable PV190) siempre que la
configuración del sistema se haya establecido en
modo de funcionamiento
con consigna de control de
posición y con ambas captaciones (AP1=5 o AP1=13).
El valor de este parámetro será utilizado internamen-
te por el regulador para establecer qué porcentaje del
producto PP2·PP3 se aplicará en la compensación
de la holgura por pico de inversión cuando se registra
desplazamiento relativo entre captaciones antes de
una inversión de movimiento.
Ver apartado «Compensación de la holgura entre am-
bas captaciones en una inversión de movimiento» del
capítulo
5. EL REGULADOR DE POSICIÓN de este
manual.
Valores válidos
-32 767 ... 32 767.
Valor por defecto
0.
Unidades
0,000 1 mm (ejes lineales).
0,000 1 grados (ejes rotativos).
Versión
Operativo a partir de la versión de software 06.10.

Parámetros, variables y comandos
13.
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
378
Ref.1912
DDS|MAB
SOFTWARE
· 326 ·
Soft.09.05
PP76 S00076 PositionDataScalingType
Función
Registro de 16 bits que configura la escala de medi-
das para el posicionamiento. Todos ellos deben estar
a 0 excepto el bit 6 (siempre a 1) y el bit 7 que esta-
blece la activación/desactivación del formato módulo
en las consignas recibidas.
T. S13/13 Parámetro PP76. Significado de sus bits.
Bit Función
15 [MSB], 14, 13, 12, 11, 10, 9, 8 Reservados = 0
7Formato.
= 0 Absoluto.
= 1 Módulo. Ver parámetro
PP103.
Vigilar que el CNC define igual el eje (formato módulo o li-
neal).
IMPORTANTE. ¡Nunca en formato módulo en presen-
cia de un CNC 8055!
6 La consigna de posición se refiere a:
= 1 La posición de la carga.
¡siempre!
5, 4, 3, 2 Reservados
1, 0 [LSB] Método de escalado de la consigna de posición.
= 01 Escalado lineal (por defecto).
= 10 Escalado rotativo.
PP77 S00077 LinearPositionDataScalingFactor
Función
Define el factor de escala que establece la resolución
del bit menos significativo del dato de posición dado
por la captación motor de un motor lineal o un capta-
dor lineal. Ver figura F. S13/19.
Valores válidos
1 ... 9 (nº entero)
Valor por defecto
1
Versión
Operativo a partir de la versión de software 09.01.
PP78 s S00078 LinearPositionDataScalingExponent
Función
Define el exponente de escala que establece la reso-
lución del bit menos significativo del dato de posición
dado por la captación motor de un motor lineal o un
captador lineal. Ver figura F. S13/19.
Valores válidos
0 ... -9 (nº entero negativo)
Valor por defecto
-7
Versión
Operativo a partir de la versión de software 09.01.
F. S13/19
Establecer la resolución del bit menos significativo del valor de la posición
dado por la captación motor de un motor lineal o de un captador lineal.
PP79 S00079 DirectPlusResolution
Función
Este parámetro permite aumentar en un bit la resolu-
ción en la captación directa.
Valores válidos
0 (igual) | 1 (un bit más).
Valor por defecto
0.
Versión
Operativo a partir de la versión de software 09.01.
L S B w e i g h t = u n i t · f a c t o r · 1 0
e x p o n e n t
L S B
w e i g h t = u n i t · P P 7 7 · 1 0
P P 7 8
LSB weight
unit
PP77 PP78
notes
0,1 µm m 1 - 7
by default
1 nm m 1 - 9 -
10 nm m 1 - 8 -
examples

Parámetros, variables y comandos
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
13.
Ref.1912
· 327 ·
DDS|MAB
SOFTWARE
Soft.09.05
PP103 Os S00103 ModuleValue
Función
Valor del módulo. Si el bit 7 de PP76 selecciona el for-
mato módulo, este parámetro define el rango de los
datos de posición con el que trabaja.
Valores válidos
1 ... 2 147 483 647.
Valor por defecto
3 600 000. Normalmente se emplea en ejes rotativos.
Unidades
0,000 1 mm (ejes lineales).
0,000 1 grados (ejes rotativos).
PP104.#
* S00104.# PositionKvGain
Función
Establece el valor de la consigna de proporcionalidad
Kv en el lazo de posición. Es similar al parámetro
PROGAIN [P23] de los ejes del CNC 8055/55i. Se da
en m/min de consigna de velocidad programada por
cada milímetro en el error de seguimiento.
Valores válidos
0 ... 32 767.
Unidades
0,01 (m/min)/mm.
Ejemplo
S00104=1 significa que a una velocidad programada de 1000 mm/min
(F1000 en el CNC) el error de seguimiento será de 1 mm.
S00104=2 a F1000, el error de seguimiento será de 0,5 mm.
Si se desea un error de seguimiento de 500 µm para F2500, Kv será de 2,5
(m/min) / 0,5 (mm), es decir, S00104 = 5 (m/min)/mm.
Valor por defecto 1 Error de seguimiento de 1 mm para un avance
F1000.
PP115 O S00115 PositionFeedback2Type
Función
Indica diferentes aspectos de la captación directa. El
bit 3 sirve para solucionar un problema de realimen-
tación positiva cuando el regulador cierra el lazo de
posición.
NOTA. Nótese que cuando el CNC cierra el lazo de
posición interviene además el bit 3 del parámetro
PP55.
F. S13/20
PP115 con el lazo de posición cerrado por el regulador (A) o el CNC (B).
LAZO DE POSICIÓN
PP55 (S00055)
bit 2, bit 3
PP55 (S00055)
bit 0
PP55 (S00055) PositionPolarityParameters
bit 0 = bit 2 = bit 3
RESTRICCIÓN
(+/-) 1
CAPTACIÓN DIRECTA
CAPTACIÓN MOTOR
(+/-) 1
RP77 (S00277) bit 3
PP115 (S00115) bit 3
PositionFeedback1Type
PositionFeedback2Type
PV51 (S00051)
PositionFeedback1
PV53 (S00053)
PositionFeedback2
PV47 (S00047)
PositionCommand
+
-
PositionPolarityParameters
PositionPolarityParameters
REGULADOR
x
x
LAZO DE VELOCIDAD
PP55 (S00055)
bit 2, bit 3
SP43 (S00043)
bit 0
PP55 (S00055) PositionPolarityParameters bit 2 = bit 3
RESTRICCIONES
x
(+/-) 1
CAPTACIÓN DIRECTA
x
CAPTACIÓN MOTOR
(+/-) 1
RP77 (S00277) bit 3
PP115 (S00115) bit 3
PositionFeedback1Type
PositionFeedback2Type
SV1 (S00036)
VelocityCommand
+
-
PositionPolarityParameters
REGULADOR
SP43 (S00043)
bit 2
VelocityPolarityParameters
SV2 (S00040)
VelocityFeedback
CNC
bits de polaridad
P
+
-
SP43 (S00043) VelocityPolarityParameters bit 0 = bit 2
fig. B
fig. A

Parámetros, variables y comandos
13.
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
378
Ref.1912
DDS|MAB
SOFTWARE
· 328 ·
Soft.09.05
Los 16 bits serán interpretados siguiendo esta ordenación:
B15 B14 B13 B12 B11 B10 B9 B8 B7 B6 B5 B4 B3 B2 B1 B0
T. S13/14 Parámetro PP115. Significado de sus bits.
Bit Función
15 [MSB], 14, 13, 12, 11, 10, 9, 8, 7 - Reservados -
6 Indica el tipo de captador.
= 0 Captador incremental.
= 1 Captador absoluto.
5 Estructura de los I0s codificados.
= 0 Contaje positivo en dirección positiva.
= 1 Contaje negativo en dirección positiva.
4 Reservado
3 Sentido de contaje.
= 0 No invertido.
= 1 Invertido.
2 Reservado
1 Indica si la captación tiene I0s codificados o no.
= 0 Sin I0s codificados.
= 1 Con I0s codificados. Ver
NP165 y NP166.
0 [LSB] Indica el tipo de captación.
= 0 Captador rotativo (encóder). Ver
NP117.
= 1 Captador lineal (regla). Ver
NP118.
PP147
* S00147 HomingParameter
Función
Es un registro de 16 bits que establece la relación
mecánica y eléctrica del procedimiento búsqueda de
cero con la instalación de la máquina, el CNC o el re-
gulador. Para el procedimiento de búsqueda de cero
controlado por el regulador solo serán aplicables los
bits 0, 1, 2, 3, 5 y 6. Para el procedimiento de búsque-
da de cero controlado por el CNC serán solo de apli-
cación los bits 1, 2, 3 y 4.
T. S13/15 Parámetro PP147. Significado de sus bits.
Bit Función
15 [MSB], 14, 13, 12, 11, 10, 9, 8, 7 - Reservados -
6 Evaluación de la marca de I0.
= 0 El I0 es evaluado (por defecto).
= 1 El I0 no es evaluado.
5 Evaluación del Home-Switch.
= 0 El Home-Switch es evaluado (por defecto).
= 1 El Home-Switch no es evaluado.
4 Reservado
3 Captación empleada.
= 0 Captación motor (por defecto).
= 1 Captación directa.
2 Conexión del Home-Switch.
1 Lógica de la señal eléctrica del Home-Switch.
= 0 La pulsación del Home-Switch lleva un 1 a la entrada
del PLC (lógica positiva, por defecto).
= 1 La pulsación del Home-Switch lleva un 0 a la entrada
del PLC.
0 [LSB] Dirección del movimiento.
= 0 Positivo. El eje del motor gira en sentido horario
(por defecto).
= 1 Negativo. El eje del motor gira en sentido antihorario.
OBLIGACIÓN. Adviértase que debe parametrizarse siempre obligatoria-
mente - PP147 (S00147) HomingParameter, bit 3 - aunque se disponga de
captación absoluta (sin búsqueda de cero) para indicar con qué captación
se va a referenciar la máquina, es decir, si va a ser con captación motor o
captación directa. Si se trata de un SENSORLESS, los bits 5 y 6 de este pa-
rámetro deben parametrizarse obligatoriamente a 1 para evitar un error de
búsqueda de I0.

Parámetros, variables y comandos
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
13.
Ref.1912
· 329 ·
DDS|MAB
SOFTWARE
Soft.09.05
PP150 *Os S00150 ReferenceOffset1
Función
Parámetro que da la posición del punto de referencia
de la máquina respecto a la marca I0, según la cap-
tación motor. Es idéntico al parámetro REFSHIFT
[P47] de los ejes del CNC 8055/55i.
Valores válidos
-2 147 483 647 ... 2 147 483 647.
Valor por defecto
0.
Unidades
0,000 1 mm (ejes lineales).
0,000 1 grados (ejes rotativos).
PP151
*Os S00151 ReferenceOffset2
Función
Parámetro que da la posición del punto de referencia
de la máquina respecto a la marca I0, según la cap-
tación directa. Es idéntico al parámetro REFSHIFT
[P47] de los ejes del CNC 8055/55i.
Valores válidos
-2 147 483 647 ... 2 147 483 647.
Valor por defecto
0.
Unidades
0,000 1 mm (ejes lineales).
0,000 1 grados (ejes rotativos).
PP159 O S00159 MonitoringWindow
Función
Establece el rango permitido para el error de segui-
miento. Si éste excede el valor dado por PP159, el re-
gulador comunica el código de error
E156 (error de
seguimiento excesivo) - DV1 (S00011), bit 11 -. Si
este parámetro está a 0, no habrá vigilancia en el
error de seguimiento.
NOTA. Es muy importante que disponga de un va-
lor distinto de cero para evitar que se lancen los ejes
incontroladamente.
En el CNC también se vigila el máximo error de se-
guimiento permitido, indicado en su parámetro co-
rrespondiente en la tabla de parámetros de cada eje
en el CNC.
Valores válidos
0 ... 2 147 483 647.
NOTA. Si PP159 = 0, no habrá vigilancia en el error
de seguimiento.
Valor por defecto
30 000.
Unidades
0,000 1 mm (ejes lineales).
0,000 1 grados (ejes rotativos).
PP160 OsS F01303 MonitoringWindowPosEleCalc
Función
Mediante este parámetro se limita el movimiento
máximo permitido durante la ejecución del comando
GC7 (F01524) AutophasingOnline que se ejecuta au-
tomáticamente en el arranque de un motor síncrono
sin captador absoluto para estimar la posición eléctri-
ca.
Valores válidos
-1 ... 2 147 483 647
Valor por defecto
-1
Unidades
0,000 1 mm (ejes lineales).
0,000 1 grados (ejes rotativos).
Versión
Operativo a partir de la versión de software 06.10.

Parámetros, variables y comandos
13.
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
378
Ref.1912
DDS|MAB
SOFTWARE
· 330 ·
Soft.09.05
PP169 O S00169 ProbeControlParameter
Función
Parámetro de control del palpador. Determina que
palpadores y que flancos están activados para el co-
mando de procedimiento del ciclo de palpado.
T. S13/16 Parámetro PP169. Significado de sus bits.
Bit Función
0 Probe 1 (flanco positivo).
= 0 Flanco positivo inactivo.
= 1 Flanco positivo activo.
1 Probe 1 (flanco negativo).
= 0 Flanco negativo inactivo.
= 1 Flanco negativo activo.
4 Selección de señal Probe 1.
= 0 Captación directa seleccionada para Probe 1.
= 1 Captación motor seleccionada para Probe 1.
5 Selección de entrada física del Probe 1.
= 0 X4, pines 3 (+) y 12 (-).
= 1 X3, pines 5 (+) y 6 (-).
Aviso. El resto de los bits están reservados.
NOTA. Nótese que si no es parametrizado ningún flanco, su funciona-
miento es nulo.
Valores válidos 0 ... 63.
Valor por defecto 0.
PP177
*Os S00177 AbsoluteDistance1
Función
Para motores con encóder absoluto (véase la varia-
ble
RV5) indica la distancia entre la cota cero del ac-
cionamiento y la cota cero teórica atendiendo a la
captación absoluta del encóder. Ver apartado
Captación absoluta, del capítulo 5 de este manual.
Valores válidos
-2 147 483 647 ... 2 147 483 647.
Valor por defecto
0.
Unidades
0,000 1 mm (ejes lineales).
0,000 1 grados (ejes rotativos).
PP178
*Os S00178 AbsoluteDistance2
Función
Para captación directa de tipo absoluto, indica la dis-
tancia entre la cota cero del accionamiento y la cota
cero teórica atendiendo a esa captación absoluta. Ver
apartado
Captación absoluta, del capítulo 5 de este
manual.
Valores válidos
-2 147 483 647 ... 2 147 483 647
Valor por defecto
0.
Unidades
0,000 1 mm (ejes lineales).
0,000 1 grados (ejes rotativos).
PP216.# S00296.#
Velocity
FeedForwardPercentage
Función
Define el grado en el que se aplica el feedforward de
velocidad. Es similar al parámetro FFGAIN [P25] de
los ejes del CNC 8055/55i. Indica el % de consigna
de velocidad que se anticipa al movimiento, que no
depende del error de seguimiento (lazo abierto).
Valores válidos
0 ... 12 000.
Valor por defecto
0 No se aplica el efecto de feedforward.
Unidades
0,01 %

Parámetros, variables y comandos
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
13.
Ref.1912
· 331 ·
DDS|MAB
SOFTWARE
Soft.09.05
PP217.# S00348.#
Acceleration
FeedFordwardPercentage
Función
Define el grado en el que se aplica el feedfordward de
aceleración tanto en control de posición como en
control de velocidad. Es similar al parámetro
ACFGAIN [P26] de los ejes del CNC 8055/55i.
Valores válidos
0 ... 1 200.
Valor por defecto
0 No se aplica el efecto de feedforward.
Unidades
0,1 %.
PV1
*s S00298 HomeSwitchDistance
Función
Variable que determina la distancia exacta que debe
desplazarse el Home-Switch en una búsqueda de
cero donde se da el riesgo de no repetitividad de I0.
Se considera como distancia óptima el punto medio
entre dos I0s consecutivos dado que en esta zona no
suponen riesgo las fluctuaciones del flanco de activa-
ción /desactivación del Home-Switch.
Valores válidos
-2 147 483 647 ... 2 147 483 647.
Unidades
0,000 1 mm (ejes lineales).
0,000 1 grados (ejes rotativos).
Versión
Operativo a partir de la versión de software 06.02.
PV47 Ws S00047 PositionCommand
Función
Consigna de posición aplicada al lazo de posición en
cada ciclo del lazo de control. El regulador transfiere
un valor al CNC para la visualización.
Valores válidos
-2 147 483 647 ... 2 147 483 647
Unidades
0,000 1 mm (ejes lineales).
0,000 1 grados (ejes rotativos).
PV48 Ws S00048 AdditivePositionCommand
Función Variable utilizada cuando es requerido un valor adi-
cional de posición estando el regulador configurado
como control de posición. Su valor se suma al valor
de la consigna de posición del CNC.
Valores válidos -2 147 483 647 ... 2 147 483 647
Unidades
0,000 1 mm (ejes lineales).
0,000 1 grados (ejes rotativos).
Versión Operativo a partir de la versión de software 06.10.
PV51 s S00051 PositionFeedback1
PV53 s S00053 PositionFeedback2
Función
El regulador transfiere estos datos al CNC para la vi-
sualización de la consigna de posición, de la capta-
ción de posición a través de la captación motor y de la
captación directa, respectivamente.
F. S13/21
Variables PV51 y PV53.
LAZO DE POSICIÓN
PP55 (S00055)
bit 2, bit 3
PP55 (S00055)
bit 0
PV51 (S00051)
PositionFeedback1
PV53 (S00053)
PositionFeedback2
PV47 (S00047)
PositionCommand
+
-
PositionPolarityParameters
PositionPolarityParameters
REGULADOR
Parámetros, variables y comandos
13.
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
378
Ref.1912
DDS|MAB
SOFTWARE
· 332 ·
Soft.09.05
PV130 s S00130 ProbeValue1PositiveEdge
Función
Dependiendo del valor del bit 4 del parámetro PP169
el regulador almacena el valor de la captación motor
o la captación directa de posición en esta variable tras
el flanco positivo de la señal de entrada del INDEX.
Valores válidos
-2 147 483 647 ... 2 147 483 647
Unidades
0,000 1 mm (ejes lineales).
0,000 1 grados (ejes rotativos).
PV131 s S00131 ProbeValue1NegativeEdge
Función
Dependiendo del valor del bit 4 del parámetro PP169
el regulador almacena el valor de la captación motor
o la captación directa de posición en esta variable tras
el flanco negativo de la señal de entrada del INDEX.
Valores válidos
-2 147 483 647 ... 2 147 483 647
Unidades
0,000 1 mm (ejes lineales).
0,000 1 grados (ejes rotativos).
PV136 S00336 InPosition
Función
Marca que se activa cuando el accionamiento ha al-
canzado la posición final LV148 (S00258) TargetPo-
sition. En este posicionamiento se permite un margen
dado por el parámetro PP57 (S00057) PositionWindow.
Valores válidos
0 (por defecto) y 1.
PV148 Ws F02019
AdditivePositionCommand1
Función
Variable utilizada cuando es requerido un valor adi-
cional de posición estando el regulador configurado
como control de posición. El valor de esta variable se
suma al valor de la consigna de posición del regulador.
Valores válidos
-2 147 483 647 ... 2 147 483 647
Unidades
0,000 1 mm (ejes lineales).
0,000 1 grados (ejes rotativos).
Versión
Operativo a partir de la versión de software 08.01.
PV153 sS F01308 PositionFeedback12
Función
Esta variable permite utilizar la prestación «mezcla en-
tre captaciones» cuando se dispone de un CNC
8055/55i o un CNC 8070 (en velocidad). Así, con el re-
gulador configurado en control de velocidad (S00032
= xxx010, es decir, AP1=2), esta variable, que registra
la mezcla (adaptación) entre las captaciones motor
(encóder) y directa (regla) utilizando el parámetro
PP16 como constante de tiempo de adaptación, podrá
enviarse por SERCOS al CNC para cerrar el lazo.
Versión
Operativo a partir de la versión de software 06.12.
PV173 s S00173 MarkerPositionA
Función
En el proceso de búsqueda de cero, cuando el regu-
lador detecta la señal de I0, almacena en esta varia-
ble el valor de PositionFeedback 1/2 (todavía no
referenciada).
Valores válidos
-2 147 483 647 ... 2 147 483 647
Unidades
0,000 1 mm (ejes lineales).
0,000 1 grados (ejes rotativos).
PV174 s S00174 MarkerPositionB
Función
En el proceso de búsqueda de cero, cuando el regu-
lador detecta la señal del segundo I0 codificado, al-
macena en esta variable el valor de PositionFeedback
1/2.
Valores válidos
-2 147 483 647 ... 2 147 483 647
Unidades
0,000 1 mm (ejes lineales).
0,000 1 grados (ejes rotativos).

Parámetros, variables y comandos
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
13.
Ref.1912
· 333 ·
DDS|MAB
SOFTWARE
Soft.09.05
Su estructura es:
PV175 Ws S00175 DisplacementParameter1
Función
Desplazamiento del sistema en coordenadas tras la
ejecución de la búsqueda de cero por el regulador
(con captación motor).
Valores válidos
-2 147 483 647 ... 2 147 483 647
Unidades
0,000 1 mm (ejes lineales).
0,000 1 grados (ejes rotativos).
PV176 Ws S00176 DisplacementParameter2
Función
Desplazamiento del sistema en coordenadas origina-
do tras la ejecución de la búsqueda de cero por el re-
gulador (con captación directa).
Valores válidos
-2 147 483 647 ... 2 147 483 647
Unidades
0,000 1 mm (ejes lineales).
0,000 1 grados (ejes rotativos).
PV179 S00179 ProbeStatus
Función
Si el regulador almacena uno o varios valores de la
medición mientras el comando de procedimiento
PC170 (S00170) ProbingCycleProcedureCommand
está activado, de manera automática, fija el bit asig-
nado en el estado del palpador ProbeStatus.
Si el control resetea PV205 (S00405) Probe1Enable,
el regulador resetea los bits 0 y 1 del estado del pal-
pador ProbeStatus.
El regulador resetea todos los bits del ProbeStatus
cuando el control cancela el comando de procedi-
miento del ciclo de palpador PC170.
T. S13/17 Variable PV179. Significado de sus bits.
Bit Función
0 Probe1PositiveLatched.
= 0 No capturado.
= 1 Capturado
1 Probe1NegativeLatched.
= 0 No capturado.
= 1 Capturado.
Valores válidos 0 ... 3.
PV189 s S00189 FollowingError
Función
Registra la diferencia entre la consigna de posición y el
feedback de posición PV189= PV47 - PV51/53.
FollowingError=PositionCommand-PositionFeedback1/2
Unidades
Décimas de micrómetro en movimientos lineales.
Diezmilésimas de grado en movimientos rotativos.
PV190 s F02005 PosErrorBetweenFeedbacks
Función
Esta variable permite visualizar el error (diferencia)
entre el valor de la captación directa (PV53) y el de la
captación motor (PV51). Inicialmente ambas almace-
nan el mismo valor de la posición de la carga al igua-
larse sus valores en el arranque del regulador.
Ambas captaciones determinan el valor de la posi-
ción de la carga. No tiene sentido visualizar esta va-
riable si no se dispone de captación directa.
PV191 s F02009 FollowingError1
Función
Esta variable permite visualizar el error (diferencia)
entre el valor de la consigna de posición (PV47) y el
valor de la posición dado por la captación motor
(PV51).

Parámetros, variables y comandos
13.
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
378
Ref.1912
DDS|MAB
SOFTWARE
· 334 ·
Soft.09.05
PV192 s F02010 FollowingError2
Función
Esta variable permite visualizar el error (diferencia)
entre el valor de la consigna de posición (PV47) y el
valor de la posición dado por la captación directa
(PV53). No tiene sentido visualizar esta variable si no
se dispone de captación directa.
PV193 s F02011 FollowingError12
Función
Esta variable permite visualizar el error (diferencia)
entre el valor de la consigna de posición (PV47) y el
valor de la posición dado por la mezcla (adaptación)
de captaciones motor y directa (PV153). No tiene
sentido visualizar esta variable si no se dispone de
captación directa.
PV200 O S00400 HomeSwitch
Función
Esta variable binaria representa el estado lógico del
interruptor Home-Switch. Para que así sea, debe
asociarse esta variable a una de las entradas digita-
les del regulador a la que se llevará la conexión eléc-
trica del interruptor.
Ejemplo
Si no se emplea el PLC asígnese al parámetro IP10 (pines 1 y 5 de X6) la
variable PV200.
Si se emplea el PLC la instrucción puede ser I1=B0S400.
Valores válidos
0Switch inactivo.
1 Switch activo (el accionamiento está posicionado
sobre el interruptor).
PV201 O S00401 Probe1
Función
Variable utilizada para asignar un identificador a la
entrada física INDEX (señal externa). Esto permite
asignar un bit de estado a esta variable. El regulador
comprueba y actualiza esta variable únicamente si:
PC170 está activo.
PC205 está activo.
Su estructura es:
Bit 0 = 0 Index inactivo.
Bit 0 = 1 Index activo.
Valores válidos
0 y 1.
PV203 S00403 PositionFeedbackStatus
Función
El regulador activa esta variable binaria para informar
de que entiende la captación de posición como refer-
ida al punto de cero máquina. La variable se desacti-
va cuando se ejecuta el comando:
PC148 (S00148) DriveControlledHoming
y se reactiva al finalizar su ejecución satisfactoria-
mente. También la variable se reactiva cuando el re-
gulador pierde su referencia al cero máquina.
Valores válidos
0 Datos de posición referidos a cualquier punto.
1 Datos de posición referidos a cero máquina.
PV204 W S00404 PositionCommandStatus
Función
Variable de utilidad interna al sistema. Indica si la
consigna de posición está referenciada al cero má-
quina o no.
Valores válidos
0 No referenciada al cero máquina.
1 Referenciada al cero máquina.

Parámetros, variables y comandos
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
13.
Ref.1912
· 335 ·
DDS|MAB
SOFTWARE
Soft.09.05
PV205 O S00405 Probe1Enable
Función
Variable utilizada para asignar un identificador al
Probe1Enable. Esto permite asignar un bit de control
a esta variable. El regulador comprueba esta variable
únicamente si:
PC170 está activo
Para un nuevo ciclo con el mismo flanco de Probe1,
el control debe activar PV205 a 1.
Su estructura es:
Bit 0 = 0 Probe1 inhabilitado.
Bit 0 = 1 Probe1 habilitado.
Valores válidos
0 y 1.
PV207 O S00407 HomingEnable
Función
Habilitación de la búsqueda de cero Homing.
El regulador tiene en cuenta esta función de habilita-
ción HomingEnable solo si la búsqueda de cero se con-
trola desde el CNC, es decir, a través del comando:
PC146 (S00146) NCControlledHoming
Valores válidos
0 Búsqueda de cero inhabilitada.
1 Búsqueda de cero habilitada.
PV208 S00408
Reference
MarkerPulseRegistered
Función
Esta variable binaria es activada cuando en el proce-
so de búsqueda de cero el regulador encuentra la
marca de I0 buscada. En ese instante, el regulador
almacena PositionFeedback (todavía no referencia-
do) en MarkerPositionA.
Valores válidos
0 y 1.
PV209 S00409 Probe1PositiveLatched
Función
Variable utilizada para asignar un identificador a
Probe1PositiveLatched. Esto permite asignar un bit
de estado a esta variable. El regulador pone este bit
a cero únicamente si:
PC170 está activo.
PV205 está a 1.
El flanco positivo de Probe1 está capturado. El regu-
lador almacena el valor de la captación de posición
en PV130.
Su estructura es:
Bit 0 = 0 Probe1 positivo no capturado.
Bit 0 = 1 Probe1 positivo capturado.
Valores válidos
0 y 1.
PV210 S00410 Probe1NegativeLatched
Función
Variable utilizada para asignar un identificador a
Probe1NegativeLatched. Esto permite asignar un bit
de estado a esta variable. El regulador pone este bit
a cero únicamente si:
PC170 está activo.
PV205 está a 1.
El flanco negativo de Probe1 está capturado. El regu-
lador almacena el valor de la captación de posición
en PV131.
Su estructura es:
Bit 0 = 0 Probe1 negativo no capturado.
Bit 0 = 1 Probe1 negativo capturado.
Valores válidos
0 y 1.

Parámetros, variables y comandos
13.
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
378
Ref.1912
DDS|MAB
SOFTWARE
· 336 ·
Soft.09.05
PC150 W F02003 ChangePosFB12
Función
Este comando es ejecutable sólamente cuando al
modo de operación AP1 se le asignan los valores 5 o
13. Inicialmente, en este modo de operación se regu-
lará la posición mediante la captación motor. Si se
ejecuta este comando con un valor 3, se pasa a regu-
lar con captación directa. En estas condiciones, el co-
mando devolverá un valor 7. Cuando se cancela el
comando con un valor 0 se pasará a regular la posi-
ción con captación motor.
NOTA. Es recomendable ejecutar o cancelar el co-
mando con el motor parado.
Valores válidos
0 ... 3.

Parámetros, variables y comandos
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
13.
Ref.1912
· 337 ·
DDS|MAB
SOFTWARE
Soft.09.05
Grupo Q. Comunicación SERCOS|CAN
QP1 * S00001 ControlUnitCycleTime
Función
Parámetro de lectura que indica cada cuanto tiempo
se cierra el lazo en los reguladores.
Valores válidos
1 000 ... 8 000.
Valor por defecto
4 000.
Unidades
0,001 ms.
QP11 F02000 SERCOSMBaud
Función
Establece la velocidad de transmisión a través del
anillo SERCOS o bus CAN. El CNC tiene un paráme-
tro similar con interfaz SERCOS
SERSPEED
(P120) y otro similar con interfaz CAN
CANSPEED
(P169). Para que sea posible la comunicación, am-
bos (tanto el del CNC como el del regulador) deben
establecer velocidades idénticas.
Valores válidos
T. S13/18 Parámetro QP11. Valores válidos con interfaz SERCOS.
Si se dispone de placa SERCOS de hasta 4 MBd, entonces:
Valor de QP11 Velocidad de transmisión
QP11 = 0 4 MBd (por defecto)
QP11 = 1 2 MBd
Si se dispone de placa SERCOS de hasta 16 MBd, entonces:
Valor de QP11 Velocidad de transmisión
QP11=0 4 MBd *
QP11=1 2 MBd *
QP11=2 2 MBd
QP11=4 4 MBd
QP11=8 8 MBd
QP11=16 16 MBd
*
Por compatibilidad con versiones anteriores de la placa SERCOS.
Valor por defecto
(con o sin placa SERCOS de16 MBd)
QP11=0 4 MBd
NOTA. Cada vez que se realiza una selección de
la velocidad de transmisión mediante el botón
«boot» del regulador, el valor seleccionado queda
registrado en el parámero QP11.
Versión
Modificado a partir de la versión de software 06.05.
Ampliado en la versión de software 06.08.
Si se dispone de placa CAN, entonces:
T. S13/19 Parámetro QP11. Valores válidos con interfaz CAN.
Valor de QP11 Velocidad de transmisión
QP11 = 0 1 MBd (por defecto)
QP11 = 1 800 kBd
QP11 = 2 500 kBd
Versión
Operativo a partir de la versión de software 07.02.

Parámetros, variables y comandos
13.
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
378
Ref.1912
DDS|MAB
SOFTWARE
· 338 ·
Soft.09.05
QP12 *O F02002 SERCOSTransmisionPower
Función
Define la potencia SERCOS, es decir, la potencia lu-
minosa transmitida por fibra óptica.
T. S13/20 Parámetro QP12. Valores válidos.
Valor de QP12 Longitud L del cable (en metros)
QP12 = 2 L < 7
QP12 = 4 7
L < 15
QP12 = 6 L
15
Valores válidos
Solo 2, 4 o 6.
Valor por defecto
2.
NOTA. Si se dispone de una placa SERCOS de
hasta 16 MBd deberán considerarse los valores da-
dos en la siguiente tabla. Nótese su compatibilidad
con la tabla anterior para los valores 2, 4 y 6.
T. S13/21 Parámetro QP12.
Valores válidos con placa SERCOS de hasta 16 MBd.
Valor de QP12 Longitud L del cable (en metros)
QP12 = 1, 2 o 3 L < 7
QP12 = 4 7
L < 15
QP12 = 5 o 6 15
L < 30
QP12 = 7 30
L 40
QP12 = 8 L
40
Valores válidos
1 ... 8.
Valor por defecto
1.
Versión
Operativo a partir de la versión de software 06.08.
OBLIGACIÓN. Para longitudes superiores a 40 m es necesario disponer de
cable de fibra óptica con núcleo de vidrio (ref. SF0-V-FLEX-XX).
QP13 F02004 IdOffset
Función
Permite identificar (direccionar) en el sistema más
ejes de los 15 que pueden seleccionarse explícita-
mente desde el conmutador rotativo NODE SELECT
del regulador
.
El identificador real del eje será el nº que ha sido se-
leccionado en el conmutador rotativo + (15 multiplica-
do por el valor de QP13).
Su función es efectiva tanto en presencia de ANILLO
SERCOS como si el sistema dispone de una topolo-
gía en árbol con BUS CAN o línea serie RS-422.
Si el conmutador rotativo está en posición 0, la comu-
nicación quedará establecida como vía línea serie
RS-232, independientemente del valor introducido en
QP13.
Ver ejemplos en los apartados de «identificación» del
capítulo 7
del manual «man_dds_hard. pdf».
Valores válidos
0 ... 8.
Valor por defecto
0.

Parámetros, variables y comandos
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
13.
Ref.1912
· 339 ·
DDS|MAB
SOFTWARE
Soft.09.05
Los 16 bits serán interpretados siguiendo esta ordenación:
QP15 F02008 SerialProtocol
Función
Este parámetro permite seleccionar, junto con la po-
sición del conmutador rotativo de la placa RS-422, el
tipo de protocolo de comunicación.
F. S13/22
Selección del protocolo de comunicación.
QP17 F02018 CommunicationMode
Función
Permite definir algunas particularidades en el modo
de comunicación cuando se dispone de interfaz CAN
modificando el valor de algunos de sus 16 bits.
B15 B14 B13 B12 B11 B10 B9 B8 B7 B6 B5 B4 B3 B2 B1 B0
000000000000/10/1XX0/1
El símbolo X representa «indiferente».
T. S13/22 Parámetro QP17. Interpretación de los 16 bits.
Bit Valor Función
15, ..., 5 0 Reservados
4
0
La comunicación pasa automáticamente del esta-
do operacional a pre-operacional tras un error de
comunicación.
1
La comunicación no pasa automáticamente del
estado operacional a pre-operacional tras un error
de comunicación.
3 Con comunicación síncrona (bit B0=0)
0
La ventana de sincronización es la misma que con
protocolo CAN FAGOR.
1
La ventana de sincronización se ensancha res-
pecto al caso anterior.
2
0 o 1
(indiferente)
Formatos «Status Word» y «Control Word» en
modo CAN.
1
0 o 1
(indiferente)
Reservado
0 Modo de comunicación
0
Comunicación síncrona. Protocolo CAN FAGOR.
Maestro y esclavo sincronizados
1
Comunicación asíncrona. Protocolo CAN SDO.
Maestro y esclavo no sincronizados.
Valores válidos
0 ... 31.
Valor por defecto
0.
Versión
Operativo a partir de la versión de software 07.02.
Modificado a partir de la 07.04.
posición no 0
posición no 0
posición no 0
QP15 = 0
QP15 = 1
QP15 = 2
DNC (RS-422)
ModBus
(Modo ASCII)
(RS-422)
DNC (RS-232)
posición 0
Modo RTU: codificación binaria de datos según estándar RTU.
Modo ASCII: Codificación ASCII de datos.
STATUS
DISPLAY
SELECT
NODE
X6
ModBus
(Modo RTU)
(RS-422)
QP15 = -

Parámetros, variables y comandos
13.
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
378
Ref.1912
DDS|MAB
SOFTWARE
· 340 ·
Soft.09.05
QV1 F F00716 TMODE_Select
Función
Variable útil para el testeo del hardware del anillo
SERCOS o del bus CAN.
Valores válidos
0 Modo normal de funcionamiento.
1 Zero Bit String.
2 Salida de luz continua.
QV30 F F00727 FiberDistErrCounter
Función
Variable que permite diagnosticar problemas en la
comunicación SERCOS. Contador de errores de dis-
torsión indicador del nº de veces que se ha producido
un error de distorsión en la comunicación SERCOS
durante fase 4 (la comunicación del sistema CNC-re-
guladores no ha terminado de inicializarse).
Valores válidos
0 ... 65 535.

Parámetros, variables y comandos
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
13.
Ref.1912
· 341 ·
DDS|MAB
SOFTWARE
Soft.09.05
Grupo R. Sensor del rótor
RP1 *O F01500 Feedback1SineGain
RP2
*O F01501 Feedback1CosineGain
Función
Compensación (modo ganancia proporcional) de la
amplitud de la señal seno/coseno que llega al regula-
dor desde la captación del motor.
Valores válidos
1 500 ... 3 070.
Valor por defecto
2 032.
RP3
*Os F01502 Feedback1SineOffset
RP4
*Os F01503 Feedback1CosineOffset
Función
Compensación (modo offset) de la señal seno/cose-
no que llega al regulador desde la captación del mo-
tor.
Valores válidos
-2 000 ... 2 000.
Valor por defecto
0
RP5 O F01504
Feedback
ParameterRhoCorrection
Función
Parámetro corrector del desplazamiento existente
entre el eje magnético del captador y el eje del rótor
del motor (entre la señal I0 y los imanes). Los moto-
res salen ajustados mecánicamente de fábrica y nor-
malmente no es necesario manipular este parámetro.
NOTA. Solo para captadores sin memoria.
Valores válidos
0 ... 65 535.
Valor por defecto
0.
F. S13/23
Esquema donde se muestra la intervención de estos parámetros.
RP6.# O F01505.# FeedbackErrorDisable
Función
Permite inhibir la comunicación de los posibles erro-
res de captación (grupo 6xx).
Valores válidos
0 Funcionamiento normal. Se genera el error si exis-
te alguna anomalía.
1 Los errores de captación que pudieran producirse
no son comunicados.
Valor por defecto
0.
Feedback without memory
To Speed Loop
VelocityFeedback
SV2 [S00040]
Feedback1
SineGain
RP3 [F01502] RP1 [F01500]
RP4 [F01503]
RP2 [F01501]
RV1 [F01506]
RV2 [F01507]
X4 (DDS)
Feedback1
CosineGain
Feedback1
SineOffset
Feedback1
CosineOffset
HV2-X3 Board Id
Rotor Sensor
From Motor
Sensor
0.
Stegmann Sinusoidal Encoder
1.
Resolver
2.
Square - wave TTL Encoder
5.
Heidenhain Encoder (ERN 1387)
for Siemens motors. 1FT6 family.
6.
Sinusoidal encoder (only for spindles)
GP2=7
GP2=1
GP2=0
Sensor
Evaluation
GP2 [F00701]
Encoder
RV3 [F01508]
Feedback
Sensor
Position
Position
Speed
RhoCorrection
Feedback with memory
Feedback
RP5 [F01504]
Parameter
RhoCorrection
.....

Parámetros, variables y comandos
13.
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
378
Ref.1912
DDS|MAB
SOFTWARE
· 342 ·
Soft.09.05
RP7 O F01499 FeedbackI0Width
Función
Parámetro que permite definir la anchura del I0 cuan-
do se utiliza la señal U de un captador (encóder o re-
gla) con señales U, V y W como I0.
NOTA. Es fundamental parametrizar bien este pa-
rámetro si se pretende que la corrección del rho se
efectúe correctamente en ambos flancos.
Valores válidos
0... 65 535.
360 ° eléctricos (1 par de polos)
RP7=65 535
180 ° eléctricos (2 pares de polos) RP7=32 767
Valor por defecto
0.
Versión
Operativo a partir de la versión de software 06.15.
RP8 O F01518 I0DistanceTest
Función
Determina si se comprueba o no la repetitividad de la
señal de I0 del captador en cada vuelta y con qué
captación.
Valores válidos
0 No. Por defecto.
1 Sí, con captación motor.
2 Sí, con captación directa.
NOTA. Asegúrese de que la captación con la que va a comprobar la repe-
titividad de I0 y que acaba de parametrizar en RP8 coincide con la captación
de referenciado de la máquina, parametrizada en el bit 3 del parámetro
PP147. Así, si parametriza RP8=1, asegúrese de que PP147.bit 3 =0 y si
RP8=2 compruebe que PP147.bit 3=1. Si no procede así, no se llevará a
cabo la comprobación de la repetitividad de I0.
Versión
Operativo a partir de la versión de software 06.20.
RP9 O F01519 I0Margin
Función
Establece el nº de pulsos permitidos como margen de
error para aceptar como satisfactoria la comproba-
ción de que la señal de I0 repite distancia en cada
vuelta del captador.
Valores válidos
0 ... 100.
Valor por defecto
2.
Versión
Operativo a partir de la versión de software 06.20.
RP10 O F02266 ABTestMargin
Función
Parámetro que, ante la repetición consecutiva de un
posible error por atenuación de las señales A/B de la
captación motor E605 y/o directa E608, establece el
nº de veces que será ignorado por el regulador antes
de dar el error.
Valores válidos
1 ... 10.
Valor por defecto
4. Nota. Valores inferiores o superiores a 4 aumen-
tan o disminuyen respectivamente la sensibilidad
ante el error.
Versión
Operativo a partir de la versión de software 08.13.
RP51 O F01550 Feedback2SineGain
RP52 O F01551 Feedback2CosineGain
Función
Compensación (modo ganancia proporcional) de la
amplitud de la señal seno/coseno que llega al regu-
lador desde la captación directa.
Valores válidos
1 500 ... 3 070.
Valor por defecto
2 032.
RP53 Os F01552 Feedback2SineOffset
RP54 Os F01553 Feedback2CosineOffset
Función
Compensación (modo offset) de la señal seno/cose-
no que llega al regulador de la captación directa.
Valores válidos
- 2 000 ... 2 000.
Valor por defecto
0.

Parámetros, variables y comandos
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
13.
Ref.1912
· 343 ·
DDS|MAB
SOFTWARE
Soft.09.05
RP60 O F02360 SSIClockFrequency
Función
Frecuencia soportada por el reloj del regulador con
comunicación SSI/EnDat.
Valores válidos
59 ... 7 500.
Valor por defecto
150.
Unidades
1 kHz.
Versión
SSI. Operativo a partir de la versión 06.08.
EnDat 2.1. Operativo a partir de la versión 06.21.
EnDat 2.2. Operativo a partir de la versión 08.05.
RP61 O F02361 SSIDataLength
Función
Tamaño de los datos SSI/EnDat. En bits o pulsos.
Valores válidos
8 ... 32.
Valor por defecto
32.
Versión
SSI. Operativo a partir de la versión 06.08.
EnDat 2.1. Operativo a partir de la versión 06.21.
EnDat 2.2. Operativo a partir de la versión 08.05.
RP62 O F02362 SSIDataFormat
Función
Formato de los datos SSI/EnDat.
T. S13/23 Parámetro RP62. Significado de sus bits.
Bit Función
15 [MSB], 14, ..., 5 RESERVED
4 *
0 Interfaz SSI. Protocolo estándar.
1 Interfaz SSI. Protocolo OPEN™. Ver
RP66.
3 *
0 Interfaz SSI. Protocolo estándar.
1 Interfaz SSI. Protocolo AMO™.
2
0 Interfaz EnDat 2.1.
1 Interfaz EnDat 2.2.
1
0Normal.
1 Fir-tree.
0 [LSB]
0 Código binario.
1 Código Gray.
* bit 3 = bit 4 = 0 para seleccionar interfaz SSI con protocolo estándar.
* bit 3 = bit 4 = 1 u otras combinaciones incompatibles, código de error,
E502
.
Interfaz Versión Denominación Parametrizar
EnDat 2.1
con señales
incrementales
EnDat 01
RP62=0
EnDat 2.2 EnDat 02
RP62=4
Valores válidos
0 ... 7.
Valor por defecto
0.
Versión
SSI estándar. Operativo a partir de la versión 06.08
EnDat 2.1. Operativo a partir de la versión 06.21
EnDat 2.2. Operativo a partir de la versión 08.05
SSI AMO™. Operativo a partir de la versión 08.17
SSI OPEN™. Operativo a partir de la versión 09.01
RP63 O F02363 SSIFeedbackResolution
Función
Valor de la resolución del captador absoluto lineal en
dµm, con protocolo de comunicación SSI/EnDat. Así,
si la resolución es de 1 µm, RP63 será 10 y no 1.
Valores válidos
1 ... 2 147 483 647.
Valor por defecto
1.
Unidades
1 dµm.
NOTA. Si el captador absoluto es rotativo (encó-
der), este parámetro debe reflejar el nº de bits por
vuelta ó pulsos por vuelta del encóder. Ver
RP65.
Parámetros, variables y comandos
13.
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
378
Ref.1912
DDS|MAB
SOFTWARE
· 344 ·
Soft.09.05
Versión
SSI. Operativo a partir de la versión 06.08.
EnDat 2.1. Operativo a partir de la versión 06.21.
EnDat 2.2. Operativo a partir de la versión 08.05.
RP64 O F02364 SSIFCheck
Función
Determina si es llevada a cabo o no la Comprobación
de la
Redundancia Cíclica (CRC) de 5 bits.
Valores válidos
0/1 No/Sí.
Valor por defecto
0No.
Versión
Con SSI.
Operativo a partir de la versión de software 06.20.
RP65 O F02365 BitsPulsesSelection
Función
Determina el formato ·en bits o por pulsos· de la pa-
rametrización de la resolucion absoluta de un capta-
dor rotativo (encóder) SSI. Ver
RP63.
Valores válidos
0/1 en bits / por pulsos.
Valor por defecto
0 en bits.
Versión
Operativo a partir de la versión 08.17.
RP66 O F02368 SSISHIFT
NOTA. Este parámetro realiza su función si y solo si el bit 4 de RP62 es 1,
es decir, interfaz SSI · Protocolo OPEN™.
Función
Este parámetro determina el nº de bits de la trama de
datos a no considerar
contabilizándolos desde el bit
menos significativo [LSB] de la trama para transmitir
exclusivamente
los bits de cota y no el resto de bits
de datos de la trama.
Valores válidos
0 ... 30.
Valor por defecto
0.
Versión
Operativo a partir de la versión 09.01.
RP67 O F02370 DigitalResolution
Función
Determina la resolución del captador lineal del motor.
Valores válidos
0 ... 1 000.
Valor por defecto
0.
Unidades
1 dnm.
Ejemplo
RP67 = 1 000 dnm = 100 nm = 0,1 µm = 1 dµm.
Versión
Operativo a partir de la versión 09.01.
RP68 O F02371 DigitalAnalogCuadrature
NOTA. Este parámetro realiza su función si y solo si el bit 4 de RP62 es 1,
es decir, interfaz SSI · protocolo OPEN™.
Función
Parámetro de cuadratura de la parte analógica con la
parte digital que establece la relación entre el valor
absoluto y la salida incremental, es decir, determina
el cuadrante en el que está el cero de cota absoluta
respecto al incremental.
NOTA. Una parametrización inadecuada genera el
código de error
E814. El valor introducido es inco-
rrecto, cámbielo.
Valores válidos
0 Desactivado.
1 Suma +90° a la cota digital.
2 Suma +180° a la cota digital.
3 Suma +270° a la cota digital.
Valor por defecto
0 Con SSI ESTÁNDAR.
0 ó 2
Con SSI AMO™ y EnDat™
Versión
Operativo a partir de la versión 09.01.

Parámetros, variables y comandos
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
13.
Ref.1912
· 345 ·
DDS|MAB
SOFTWARE
Soft.09.05
Los 16 bits serán interpretados siguiendo esta ordenación:
F. S13/24
Ejemplo
. Interfaz SSI. Protocolo AMO™ parametrizado como protocolo
OPEN™. RP62. bit 4=1.
RP77 O S00277 PositionFeedback1Type
Función
Indica diferentes aspectos de la captación motor. El
bit 3 sirve para solucionar un problema de realimen-
tación positiva cuando el regulador cierra el lazo de
posición.
NOTA. Nótese que cuando el CNC cierra el lazo de
posición interviene además el bit 3 del parámetro
PP55.
B15 B14 B13 B12 B11 B10 B9 B8 B7 B6 B5 B4 B3 B2 B1 B0
T. S13/24 Parámetro RP77. Significado de sus bits.
Bit Función
15 [MSB], 14, 13, 12, 11, 10, 9, 8, 7 - Reservados -
6 Indica el tipo de captador.
0 Captador incremental
1 Captador absoluto
5, 4 Reservados
3 Indica el sentido de contaje
0 No invertido.
1 Invertido.
2 Reservado
1 Indica si la captación tiene I0s codificados o no.
0 Sin I0s codificados.
1 Con I0s codificados. Ver
NP165 y NP166.
0 [LSB] Indica el tipo de captación.
0 Captador rotativo (encóder). Ver
NP117.
1 Captador lineal (regla). Ver
NP118.
Valores válidos
0 ... 255.
Valor por defecto
0.
RV1 s F01506 FeedbackSine
RV2 s F01507 FeedbackCosine
Función
Seno y coseno de la captación que llega al regulador
desde el motor como variables internas del sistema.
Valores válidos
-32 768 ... 32 767.
NOTA. A partir de las versiones de software 06.03 y 07.02, en presencia
de captación motor cuadrada, puede disponerse de las señales cuadradas
incrementales en estas dos variables para su visualización y diagnóstico.
señal A
señal B
período de señal
360° eléctricos
SSI - valor absoluto de
la posición cero
Sentido con el incremento de valores absolutos

Parámetros, variables y comandos
13.
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
378
Ref.1912
DDS|MAB
SOFTWARE
· 346 ·
Soft.09.05
RV3 F F01508 FeedbackRhoCorrection
Función
Variable que permite visualizar el desplazamiento
entre el eje del captador y el eje del rótor del motor.
Los motores salen ajustados de fábrica y el valor de
esta variable queda almacenado en la memoria del
encóder. La ejecución del comando RC1 actúa sobre
este valor almacenado en el encóder.
Valores válidos
0 ... 65 535.
RV4 F01509 FeedbackRadius
Función
Variable que permite visualizar el radio de la circunfe-
rencia formada por las señales RV1 y RV2.
Valores válidos
0 ... 32 767.
RV5 F01515 StegmannType
Función
Contiene un dato numérico de 16 bits. Los bits menos
significativos indican el tipo de encóder instalado en
el motor según la siguiente tabla:
T. S13/25 Variable RV5. Significado de sus bits.
Bits Nombre Significado
7 - 0 02H Encóder SinCos
07H Encóder SinCos absoluto multi-vuelta
12H Encóder SinCoder
27H Encóder SinCoder absoluto multi-vuelta
15 - 8 Reservados
RV6 F01510 EncoderError
Función
Variable que contiene una lista de errores de capta-
ción para uso exclusivo de los técnicos de FAGOR.
RV7 F01511 StegmannMotorType
Función
El encóder de los motores almacena en su memoria
la referencia identificativa del motor. Esta variable re-
fleja en la memoria del regulador cuál es la referencia
comercial grabada en el encóder. Ver referencias co-
merciales en el capítulo 12 del manual
«man_dds_hard.pdf». RV7 conservará ese valor
mientras no se cambie de motor.
Valores válidos
Las referencias comerciales de los motores indicadas
en el capítulo 12 del manual «man_dds_hard.pdf».
RV8 F F01512 CircleAdjust
Función
Variable que permite establecer la activación del
ajuste del círculo. Este ajuste consiste en suministrar
a los parámetros RP1, RP2, RP3 y RP4 los valores
apropiados para un funcionamiento más silencioso
del motor. Se denomina ajuste del círculo porque tra-
ta de que las señales seno y coseno manejadas por
el software (RV1 y RV2) sean matemáticamente co-
rrectas, es decir, generen una circunferencia perfec-
ta. Este proceso es solo aplicable a encóder y no a
resólver. Ver capítulo
2 de este manual.
Valores válidos
0 Ajuste en proceso.
1 Ajuste finalizado.
RV9 W F01514 Feedback1ErrCounter
Función
Esta variable permite contabilizar los fallos (no nece-
sariamente consecutivos) que se producen en las se-
ñales incrementales con captación motor (p. ej: los
originados por ruido). Ver código de error
E605 de la
lista que se facilita en el capítulo 14 de este manual.
Valores válidos
0 ... 2 147 483 647.
Versión
Operativo a partir de las versiones de software 06.02
| 07.02.

Parámetros, variables y comandos
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
13.
Ref.1912
· 347 ·
DDS|MAB
SOFTWARE
Soft.09.05
RV10 s F01517 FeedbackRhoDisplacement
Función
Variable útil al realizar un ajuste del rho en presencia
de un captador resólver o de un encóder incremental.
Permite visualizar el desplazamiento angular que su-
fre el captador respecto al eje. Girando uno respecto
del otro (con el rótor bloqueado) esta variable irá cam-
biando de valor dinámicamente. El ajuste del RHO se
habrá establecido cuando alcance el valor cero.
Valores válidos
-32 768 ... 32 767 (grados mecánicos).
Valor por defecto
0 (RHO ajustado).
Versión
Operativo a partir de las versiones de software 06.03
| 07.02.
RV11 F01521 SerialNum
Función
Nº de serie grabado en un encóder SinCos o SinCo-
der Stegmann.
P. ej. E10008911. Léase nota más abajo.
Versión
Operativo a partir de la versión de software 06.20.
RV12 F01522 ProgramVer
Función
Versión del programa grabado en un encóder SinCos
o SinCoder Stegmann.
P. ej. SINCOD_7.HEX. Léase nota más abajo.
Versión
Operativo a partir de la versión de software 06.20.
RV13 F01526 Date
Función
Fecha de grabación de un encóder SinCos Stegmann.
P. ej. 01.10.08. Léase nota más abajo
Versión
Operativo a partir de la versión de software 06.20.
OBLIGACIÓN. La lectura de los datos del encóder SinCoder
Stegmann, ac-
cesibles desde las variables RV11, RV12 y RV13 se realizará siempre sin
potencia en el regulador.
RV14 F01527 TempEncoder
Función
Temperatura en °C de un encóder SinCos
Stegmann.
P. ej. 10.
Versión
Operativo a partir de la versión de software 06.20.
RV15 F01528 EncoderEEPR_Size
Función
Tamaño de la memoria E²PROM (en bytes) de un en-
códer SinCos Stegmann. P. ej. 256.
Versión
Operativo a partir de la versión de software 06.20.
RV16 F01529 EncoderType
Función
Tipo de encóder Stegmann. Puede ser:
SinCos E0
SinCos Multi A0
SinCos E2 o E3
SinCoder E1
SinCoder Multi A1
SinCos E4
SinCos Multi A4
Versión
Operativo a partir de la versión de software 06.20.
RV17 F F01531 DataFile2
Función
Variable de escritura de texto libre (p.ej. una referen-
cia) cuya finalidad es grabar posteriormente (ejecu-
tando el comando RC3) el contenido de esta variable
en el campo 2 de un encóder Stegmann. Léase nota
más abajo.
Versión
Operativo a partir de la versión de software 06.20.

Parámetros, variables y comandos
13.
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
378
Ref.1912
DDS|MAB
SOFTWARE
· 348 ·
Soft.09.05
RV18 F F01532 DataFile3
Función
Variable de escritura de texto libre (p.ej. un nº de se-
rie) cuyo fin es grabar posteriormente (ejecutando el
comando RC3) el contenido de esta variable en el
campo 3 de un encóder Stegmann. Léase nota más
abajo.
Versión
Operativo a partir de la versión de software 06.20.
OBLIGACIÓN. La grabación en los campos 2 y 3 del encóder SinCoder
Stegmann del contenido de las variables RV17 y RV18 se realizará siempre
sin potencia en el regulador.
RV19 s F02043 RHO
Función
Variable que permite visualizar la posición estimada
por el regulador del vector campo magnético de los
imanes del rótor respecto al estátor con la corrección
ya hecha por el comando GC7. Dada en grados eléc-
tricos (65 536/360).
Valores válidos
-32 768 ... 32 767.
Versión
Operativo a partir de la versión de software 08.01.
RV20 s F02044 UVW
Función
Variable cuya lectura permite hacer un seguimiento
de la lógica de las señales u, v, y w indicativa del es-
tado lógico de las células del sensor de posición de
efecto Hall.
Valores válidos
-32 768 ... 32 767.
Versión
Operativo a partir de la versión de software 08.05.
RV25 s F02049 Rho_Corr2
Función
Variable que permite visualizar el valor estimado de
la posición eléctrica en el arranque tras la ejecución
del comando GC7 (Autophasing-Online).
Valores válidos
-32 768 ... 32 767.
Versión
Operativo a partir de la versión de software 08.05.
RV28 F02053 EnDatDatabits
Función
Variable que permite visualizar el valor correspon-
diente al número de bits totales de la trama EnDat.
RV28 = 2
RP61
Valores válidos
-32 768 ... 32 767.
Versión
Operativo a partir de la versión de software 08.11.
RV29 F02054 EnDatTurnNbits
Función
Variable que permite visualizar el valor correspon-
diente al número de bits por vuelta que tiene el cap-
tador absoluto multivuelta.
RV29 = 2
bits por vuelta
RV29 = 0 captador monovuelta, entonces:
RV28=RV30, es decir, RP61=RP63
Valores válidos
-32 768 ... 32 767.
Versión
Operativo a partir de la versión de software 08.11.
RV30 F02055 EnDatPositionNbits
Función
Variable que permite visualizar el valor correspon-
diente a los bits de cota por vuelta.
RV30 = 2
(RP61 - bits por vuelta)
RP63 = RP61-bits por vuelta
RV30 = 2
RP63
Valores válidos
0 ... 2 147 483 647.
Versión
Operativo a partir de la versión de software 08.11.

Parámetros, variables y comandos
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
13.
Ref.1912
· 349 ·
DDS|MAB
SOFTWARE
Soft.09.05
RV51 s F01556 Feedback2Sine
RV52 s F01557 Feedback2Cosine
Función
Seno y coseno de la señal de captación que llega al
regulador desde la captación directa como variables
internas del sistema.
Valores válidos
-32 768 ... 32 767.
RV54 F01559 Feedback2Radius
Función
Variable que permite visualizar el radio de la circun-
ferencia formada por las señales RV51 y RV52.
Valores válidos
0 ... 32 767.
RV59 W F01516 Feedback2ErrCounter
Función
En esta variable se contabilizan los fallos (no conse-
cutivos necesariamente) que se producen en seña-
les incrementales con captación directa (p. ej: los
originados por ruido). Ver código de error
E608 del
listado que se facilita en el capítulo 14 de este ma-
Valores válidos
0 ... 4 294 967 295.
Versión
Operativo a partir de la versión de software 06.02.
RC1 O F01513
Encoder
ParameterStoreCommand
Función
Sus funciones son diversas:
En caso de encóder SinCos formatea la memoria del
encóder de igual manera que está formateado el Sin-
Coder. En éste último, el formateo es fijo. El funcio-
namiento a nivel de memoria es igual con SinCos
que con SinCoder.
Graba el offset del encóder (solo para motores sín-
cronos).
Graba la matrícula del motor parametrizada en MP1.
NOTA. Si dispone de encóder con ref. E1 y tarjeta
CAPMOTOR-2 en el regulador, ver apartado «sus-
titución del captador» del capítulo 1 del manual
«man_fxm_fkm_motors.pdf» y los pasos que hay
que llevar a cabo antes de ejecutar este comando.
RC2 O F01520 ReadEncoderData
Función
La ejecución de este comando permite almacenar en
las variables RV11, RV12 y RV13 información refe-
rente al encóder SinCos o SinCoder Stegmann insta-
lado. Para más detalle, ver la función de estas
variables.
Versión
Operativo a partir de la versión de software 06.20.
RC3 O F01530 StoreEncoderData
Función
La ejecución de este comando permite grabar en los
campos 2 y 3 de un encóder SinCos o SinCoder
Stegmann el texto almacenado en las variables
RV17 y RV18.
Versión
Operativo a partir de la versión de software 06.20.

Parámetros, variables y comandos
13.
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
378
Ref.1912
DDS|MAB
SOFTWARE
· 350 ·
Soft.09.05
Grupo S. Velocidad
SP1.# * S00100.# VelocityProportionalGain
SP2.#
* S00101.# VelocityIntegralTime
Función
Valor de la acción proporcional / integral del PI de ve-
locidad.
Valores válidos
SP1: 0 ... 16 384, unidades: 1 mA/rpm
Solo admite valores enteros. Para valores decimales,
actuar previamente sobre el parámetro
SP11.#.
SP2: 0 ... 16 384, unidades: 0,1 ms
El valor de la acción integral SP2 debe reducirse en
un factor x16.
SP4.#
* S00211.#
Velocity
AdaptationProportionalGain
SP5.#
* S00212.#
Velocity
AdaptationIntegralTime
Función
Adaptación de la acción proporcional | integral del PI
a velocidades bajas. SP4 es el factor por el que se
multiplica a SP1 cuando el motor se mueve a baja
velocidad. SP5 es el factor por el que se multiplica a
SP2 a bajas velocidades.
Valores válidos
250 ... 4 000. La acción del PI a bajas velocidades
puede ir desde el 25 % al 400 % de la acción a altas.
SP4·SP1/100 debe ser menor que el máximo valor
que pueda tomar SP1.
SP5·SP2/100 debe ser menor que el máximo valor
que puede tomar SP2.
Valor por defecto
1 000. Acción proporcional/integral constante a cual-
quier velocidad.
Unidades
0,1 %.
SP6.# O S00209.# VelocityAdaptationLowerLimit
Función
Límite superior de las velocidades consideradas ba-
jas.
Valores válidos
< SP7.
Valor por defecto
SP10/10.
Unidades
1 rpm.
SP7.# O S00210.# VelocityAdaptationUpperLimit
Función
Límite inferior de las velocidades consideradas altas.
Valores válidos
< SP10.
> SP6.
Valor por defecto
0,8 x SP10.
Unidades
1 rpm.
F. S13/25
Gráfica ilustrativa representando los valores de estos parámetros.
Speed
Gain
SP4*SP1
SP1
SP7
SP2
SP5*SP2
SP6
Kp
Ti
Adapter-Speed-PI:
Speed
80
160
1000 3000
130
65
Kp
Ti
Example:
SP1 = 80 SP2 = 1300
SP4 = 2000 SP5 = 500
SP6 = 1000 SP7 = 3000

Parámetros, variables y comandos
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
13.
Ref.1912
· 351 ·
DDS|MAB
SOFTWARE
Soft.09.05
SP10.# O S00091.# VelocityLimit
Función
Máximo valor que puede tomar la variable SV7 (Velo-
cityCommandFinal). Si SV2 (VelocityFeedback) es
mayor que un 12 % del valor de este parámetro, se ge-
nera el código de error
E200 (sobrevelocidad).
Valores válidos
1 ... 60 000. Depende del motor conectado.
Valor por defecto
SÍNCRONOS: 110 % de MP26.
ASÍNCRONOS: 100 % de MP26.
Unidades
1 rpm.
SP11.#
* S00102.# VelocityProportionalGainDecimal
Función
Parámetro que permite establecer para SP1 un valor
real (SP1
real) con una resolución de hasta dos deci-
males. Recuérdese que SP1 solo puede parametri-
zarse directamente desde el WinDDSSetup con
valores enteros.
Orden en la parametrización
Parametrizar siempre SP11 antes que SP1.
Nótese que SP11 queda actualizado de manera on-
line tras actualizar SP1. En otro caso, SP11 no tendrá
validez.
Fíjese en sus valores válidos y véanse después los
ejemplos, más abajo.
Valores válidos
0 SP1real = SP1/10
0
= SP1/1 = 1·SP1
1
SP1real = SP1/10
1
= SP1/10 = 0,1·SP1
2
SP1real = SP1/10
2
= SP1/100 = 0,01·SP1
Valor por defecto
0 SP1real = SP1
Ejemplos
Parametrizando:
SP11=0 y SP1=1
SP1real = 1 mA/rpm
SP11=1 y SP1=62
SP1real = 6,2 mA/rpm
SP11=2 y SP1=111
SP1real = 1,11 mA/rpm
Versión
Operativo a partir de la versión de software 08.13.
SP13.#
*O F01601.# VelocityIntegralResetThreshold
Función
La acción integral del PI de velocidad queda desha-
bilitada cuando la velocidad de referencia es menor
que el valor de este parámetro. Con SP13=0 se des-
habilita la aplicación.
Valores válidos
0 ... 10 000 000.
Valor por defecto
0.
Unidades
0,000 1 rpm.
Versión
Modificado a partir de la versión de software 08.05.
SP15
* F01598 SpeedObserverFrequency
Función
Frecuencia de corte del filtro pasa-bajo del estimador
correctora de la velocidad estimada.
Valores válidos
0 ... 30 000.
Valor por defecto
1 250.
Unidades
0,1 Hz.
Versión
Operativo a partir de la versión de software 06.12.
Modificado a partir de la versión de software 08.05.
SP16
* F01599 SpeedObserverDamping
Función
Factor de amortiguamiento del filtro pasa-bajo del es-
timador corrector de la velocidad estimada.
Valores válidos
100 ... 30 000.
Valor por defecto
1 000.
Unidades
0,001. Adimensional.
Versión
Operativo a partir de la versión de software 06.12.
Modificado a partir de la versión de software 08.05.

Parámetros, variables y comandos
13.
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
378
Ref.1912
DDS|MAB
SOFTWARE
· 352 ·
Soft.09.05
SP17 * F01600 SpeedObserverEnable
Función
Activa o desactiva el estimador (observador) dentro
del lazo de velocidad evaluando o no SV12.
Valores válidos
0 No activado.
No se calcula SV12 ni se consume CPU de DSP.
Se cierra el lazo de velocidad con la velocidad
real del motor SV2.
1
Activado.
Calcula SV12 y se consume CPU de DSP.
Se cierra el lazo de velocidad con la velocidad es-
timada del motor SV12.
2
No activado.
Calcula SV12 y se consume CPU de DSP.
No se cierra el lazo de velocidad. Es útil para
comprobar si la velocidad estimada SV12 es
prácticamente igual que la real SV2. De ser así,
activar el estimador con SP17=1.
NOTA. Para más detalles, ver apartado 4.6. Esti-
mador de velocidad
del capítulo 4 de este mismo
manual.
Nota aclaratoria
En versiones anteriores a la 08.09, con SP17=0 sí se
calculaba la variable SV12. Desde la versión 08.09,
no. El modo compatible es SP17=2, es decir, si el
usuario utilizaba SV12 con SP17=0, ahora debe pa-
rametrizar manualmente SP17 a 2.
Valor por defecto
0 No activado. No calcula SV12.
Se cierra el lazo de velocidad con la velocidad
real del motor SV2.
Versión
Operativo a partir de la versión de software 06.12.
Modificado a partir de la versión de software 08.09.
SP20.# F00031.# VoltageRpmVolt
Función
Junto con SP21 definen la relación que ha de existir
entre la tensión de la consigna analógica y la veloci-
dad del motor. Corresponden a la referencia del con-
cepto CNC G00 Feed.
Valores válidos
1 000 ... 10 000.
Valor por defecto
9 500.
Unidades
0,001 V.
SP21.# F00081.# RpmRpmVolt
Función
Ver parámetro SP20.#.
Valores válidos
10 ... 60 000. Depende del motor conectado.
Valor por defecto
95 % del valor por defecto de SP10.
Unidades
1 rpm.
F. S13/26
Gráfica ilustrativa representando los valores de estos parámetros.
SP10
SP10 x 1.12
SP20
10000
500
0
1000 2000
3000
4000
SP21
rpm
mV
R
A
T
I
O
S
P
2
0
/
S
P
2
1
SP10, SP20, SP21:

Parámetros, variables y comandos
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
13.
Ref.1912
· 353 ·
DDS|MAB
SOFTWARE
Soft.09.05
SP30 *s F01603 AnalogInputOffset1
SP31
*s F01604 AnalogInputOffset2
Función
Compensación del offset de las entradas analógicas
1 y 2, respectivamente.
Valores válidos
-8 190 ... 8 190.
Valor por defecto
0.
Unidades
1 mV.
SP40.# O S00125.# VelocityThresholdNx
Función
Nivel de velocidades por debajo del cual la marca ló-
gica n
feedback
< n
x
se activa. La marca lógica es la va-
riable SV3. Puede utilizarse para conocer cuándo la
velocidad supera un determinado valor. Esta denomi-
nación n
x
corresponde a la definida por SERCOS. En
el entorno de la máquina herramienta suele denomi-
narse n
mín
.
Ejemplo
En una determinada aplicación se desea conocer,
cuándo se superan en un motor las 400 rpm. Se pa-
rametriza con 400 este parámetro. Cuando el motor
supere esta velocidad, la marca asociada SV3 se
desactiva a 0.
Valores válidos
0 ... SP10.
Valor por defecto
20.
Unidades
1 rpm.
SP41.# O S00157.# VelocityWindow
Función
Ventana de velocidad asignada a la marca lógica
n
feedback
< n
command
. El valor asignado a este pará-
metro determina el margen o por exceso o por defec-
to de esta ventana.
La marca lógica es la variable SV4. Se utiliza para
conocer cuándo la velocidad real del motor (nfee-
dback)
ha alcanzado la consigna suministrada
(ncommand) dentro de los márgenes de esa ventana
SP41.
Valores válidos
0 ... 12 % de SP10.
Valor por defecto
20.
Unidades
1 rpm.
F. S13/27
Ventana de velocidad.
SP42 O S00124 StandStillWindow
Función
La ventana de velocidades para la marca lógica
nfeedback = 0. La marca lógica es la variable SV5.
Ejemplo
En una determinada aplicación se desea conocer cuándo la velocidad del
motor se hace inferior a 10 rpm. Parametrizar SP42 con un valor de 10.
Mientras el motor no supere esta velocidad, la marca asociada SV5 sigue
activa.
Valores válidos
0 ... SP10.
Valor por defecto
20
Unidades
1 rpm.
n
command
S
P
4
1
S
P
4
1

Parámetros, variables y comandos
13.
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
378
Ref.1912
DDS|MAB
SOFTWARE
· 354 ·
Soft.09.05
F. S13/28
Gráfica ilustrativa representando los valores de estos parámetros.
SP43 O S00043 VelocityPolarityParameters
Función
Con este parámetro se invierte la polaridad de la con-
signa analógica cuando se está regulando con con-
signa de velocidad, tanto internamente como desde
el punto de vista de su monitorización. No ocurre lo
mismo para el signo de la captación de velocidad,
donde únicamente cambia el dato monitorizado pero
no el valor interno.
El motor girará en sentido horario cuando la consigna
de velocidad sea positiva y no haya programada una
inversión de esa consigna.
En posición, no cambiará internamente ni el signo de
la consigna ni tampoco el de la captación. Sí lo hará
desde el punto de vista de la monitorización. Este pa-
rámetro no sirve para solucionar un problema de rea-
limentación positiva originado porque la captación
directa cuente al revés.
Este caso se soluciona mediante el parámetro PP115
(S00115) Position Feedback2Type.
T. S13/26 Parámetro SP43. Significado de sus bits.
Bit Función
15 [MSB], ..., 3 - reservados -
2 Valor de la captación de velocidad.
= 0 No invertido.
= 1 Invertido.
1 Reservado
0 [LSB] Valor de la consigna de velocidad.
= 0 No invertido.
= 1 Invertido.
SP44 S00044 VelocityDataScalingType
Función
Parámetro que contempla el tipo de escalado.
T. S13/27 Parámetro SP44. Significado de sus bits.
Bit Función
15 [MSB], ... 2 - reservados -
1, 0 [LSB] Método de escalado.
= 10 Rotativo.
Valores válidos
2 (en decimal). Rotativo
SP50
*O F02014
Velocity
FeedbackFilterFrequency
Función
Frecuencia de corte del filtro pasa-bajo de primer or-
den que se introduce en la captación de velocidad.
Valores válidos
0 ... 4 000 con encóder senoidal.
0 ... 1 000 con resólver.
Valor por defecto
160 en cualquier motor con captador resólver.
800 en un motor síncrono sin captador resólver.
400 en un motor asíncrono sin captador resólver.
Unidades
1 Hz.
SP42, SV5:SP41, SV4:
Time
SP40 (nx)
Time
nfeedback<nx
Time
SP41
Time
nfeedback=ncommand
Time
SP42
Time
nfeedback = 0
0rpm
Speed
nfeedback
SV3
1
0
nfeedback
ncommand
1
0
SV4
1
0
SV2
SV2
nfeedback
SV2
SP40, SV3:
Speed
SV5
Speed

Parámetros, variables y comandos
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
13.
Ref.1912
· 355 ·
DDS|MAB
SOFTWARE
Soft.09.05
F. S13/29
Ubicación del filtro pasa-bajo SP50 en el diagrama de control.
SP51
*O F02015
Velocity
ReferenceSmoothingMode
Función
En modo velocidad (p. ej. con el CNC 8055), este pa-
rámetro introduce un alisamiento de la consigna de
velocidad, generándose consignas intermedias en-
tre las enviadas por el control númerico.
Valores válidos
0 No activo.
1 Activación de un filtro de 1er orden de la consigna
de velocidad.
2 Activación de las rampas de velocidad (solo con
SERCOS|CAN).
Valor por defecto
2 Activación de las rampas de velocidad.
NOTA. Recuérdese que si SP80=0 y además SP100=1, entonces para-
metrizar SP51=2 no tendrá ningún efecto.
Versión
Modificado en las versiones de software 06.02 | 07.02.
F. S13/30
Filtro de alisamiento de consigna de velocidad en el diagrama de control.
SP52
*O F02017 VelocityLoopTimeConstant
Función
Parámetro que permite modelizar el lazo de velocidad
con una constante de tiempo de primer orden. Se sim-
boliza en el lazo con un elemento de retraso de primer
orden P-T1. Este parámetro se introduce antes del con-
trolador integral para compensar el efecto de retraso
debido al lazo de velocidad. Su valor se parametriza
en ms. Con un valor adecuado se consigue obtener un
sistema que presenta una mayor estabilidad y una res-
puesta más amortiguada. Modifica, por tanto, la topo-
logía del lazo de velocidad con respecto a versiones
de software anteriores a la 06.08 cuando SP52
0.
Esta topología integra una estimación del error de ve-
locidad y no el error propiamente dicho. Mejora la es-
tabilidad del sistema obteniéndose una respuesta más
amortiguada (menos oscilante).
T
i
+
+
1
+
-
Filter
Ramps
K
P
proportional
action
component
integral action
component
Speed - PI > with SP52 = 0 <
Compensation
filter(1)
(1) - Velocity Command delay compensation
To current loop
* (SP51=2, only in Sercos)
SP51=2 * (by default)
SP51=1
SP51=0
Low-passing
filter
VelocityFeedback
FilterFrequency
SP50 [F02014]
VelocityReference
SmoothingMode
SP51 [F02015]
VelocityCommand
Final
SV7 [F01612]
VelocityFeedback
SV2 [S00040]
From Rotor Sensor
T
i
+
+
1
+
-
Filter
Ramps
K
P
proportional
action
component
integral action
component
Speed - PI > with SP52 = 0 <
Compensation
filter(1)
(1) - Velocity Command delay compensation
To current loop
* (SP51=2, only in Sercos)
SP51=2 * (by default)
SP51=1
SP51=0
Low-passing
filter
VelocityFeedback
FilterFrequency
SP50 [F02014]
VelocityReference
SmoothingMode
SP51 [F02015]
VelocityCommand
Final
SV7 [F01612]
VelocityFeedback
SV2 [S00040]
From Rotor Sensor

Parámetros, variables y comandos
13.
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
378
Ref.1912
DDS|MAB
SOFTWARE
· 356 ·
Soft.09.05
F. S13/31
Topología del lazo de velocidad con SP52 no 0.
NOTA. Un mal ajuste de SP52 puede inestabilizar el lazo de control.
Valores válidos
0 ... 1 000.
Valor por defecto
0.
Unidades
0,1 ms.
Con SP52 = 0 la topología del lazo de velocidad
coincide con la de las versiones de software anterio-
res a la 06.08. Véase figura
F. S13/32.
F. S13/32
Topología del lazo de velocidad con SP52=0.
Versión
Modificado en la versión de software 06.08.
SP60.# O S00138.# AccelerationLimit
SP62.# O F01606.# AccelerationLimit2
SP64.# O F01608.# AccelerationLimit3
Función
Definen junto con SP61 y SP63, las rampas para el
filtrado de la consigna de velocidad SV8. Para que
sean efectivas, SP80 = 0. SP60 es útil también en el
modo de limitación de choque (jerk).
Valores válidos
para SP60: 1 000 ... 2 147 483 647.
para SP62 y SP64: 0 ... 32 767 000.
Valor por defecto
1 000.
Unidades
0,001 rad/s².
Conversión
La conversión es:
1 rad/s²
= 9,5492 rpm/s = 0,009545 rpm/ms.
SP61.# O F01605.# AccelerationLimitVelocity2
SP63.# O F01607.# AccelerationLimitVelocity3
Función
Límite de velocidad hasta la que actúa la aceleración
1/2. Definen, junto a SP60, SP61 y SP62 las rampas
para el filtrado de las consignas de velocidad SV8.
Para que sean efectivas, SP80 = 0.
Valores válidos
0 ... 60 000.
Valor por defecto
1 000.
Unidades
1 rpm.
Filter
Ramps
Compensation
filter(1)
* (SP51=2, only in Sercos)
SP51=2 * (by default)
SP51=1
SP51=0
VelocityReference
SmoothingMode
SP51 [F02015]
+
+
-
+
+
-
K
P
proportional action
component
T
1
integral action
component
K
I
=
K
P
T
I
(P-T
1
element)
Low-passing
filter
VelocityFeedback
FilterFrequency
SP50 [F02014]
From Rotor Sensor
To current loop
Speed - PI > with SP52 no 0 <
VelocityCommand
Final
SV7 [F01612]
Velocity
Feedback
SV2 [S00040]
VelocityLoop
TimeConstant
SP52 [F02017]
(1) - Velocity Command delay compensation
T
i
+
+
1
+
-
Filter
Ramps
K
P
proportional
action
component
integral action
component
Speed - PI > with SP52 = 0 <
Compensation
filter(1)
(1) - Velocity Command delay compensation
To current loop
* (SP51=2, only in Sercos)
SP51=2 * (by default)
SP51=1
SP51=0
Low-passing
filter
VelocityFeedback
FilterFrequency
SP50 [F02014]
VelocityReference
SmoothingMode
SP51 [F02015]
VelocityCommand
Final
SV7 [F01612]
VelocityFeedback
SV2 [S00040]
From Rotor Sensor

Parámetros, variables y comandos
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
13.
Ref.1912
· 357 ·
DDS|MAB
SOFTWARE
Soft.09.05
F. S13/33
Gráfica ilustrativa representando los valores de estos parámetros.
SP65.# *O F01609.# EmergencyAcceleration
Función
Limita la aceleración de la consigna para detener el
motor. Cuando su valor es cero, se anula su efecto li-
mitador. Es necesario que SP70 = 1 para que en una
parada se aplique la limitación de SP65.
Valor por defecto
Para motores asíncronos: SP65 = 1 000 000.
Para motores síncronos: El usuario realizará el cál-
culo de SP65 (con k = 0,8 como valor recomendable)
siguiendo esta expresión:
SP65
k·(CP20·MP2) / [MP24·(1+ 0.01·NP1)] don-
de NP1 será el valor obtenido tras ejecutar el coman-
do GC5 (AutoCalculate).
Según la aplicación, k podrá adoptar valores dentro
del rango 0,8
k 1, recomendándose el valor k =
0,8
.
NOTA. Recuérdese que el valor a introducir en
SP65 será menor o igual que el valor obtenido en la
expresión anterior.
Valores válidos
1 000 ... 2 147 483 647.
Unidades
0,001 rad/s².
Conversión
La conversión es:
1 rad/s²
= 9,5492 rpm/s = 0,009545 rpm/ms.
Versión
Modificado en la versión 06.01 y 09.01 (ONLINE).
NOTA. En cabezales de gran inercia, parametrizando varias gamas puede
conseguirse frenar el motor a potencia constante en tiempos aceptables
evitando así rampas de frenado muy lentas y no generar error de sobre-
tensión al inicio de la frenada. Poder modificar de manera progresiva
SP65
mediante sentencias de PLC en una parada a potencia constante
permite suavizar la frenada aumentando rampas, a medida que disminuye
la velocidad. Ver figura
F. S13/14.
F. S13/34
Gráfica ilustrativa del parámetro SP65.
R a m p a s :
t i e m p o
v e l o c i d a d
S P 6 3
S P 1 0 0 = 1 | S P 8 0 < > 0
t i e m p o
S P 1 0 0 = 1 | S P 8 0 = 0
J e r k :
S P 6 4
S P 6 2
S P 6 1
S P 6 0
S P 6 0
v e l o c i d a d
E m e r g e n c i a :
S P 7 0 = 1
S P 6 5
S P 7 0 = 1
S P 6 5
t i e m p o
v e l o c i d a d
S P 6 5
S P 6 5
S P 6 5
E m e r g e n c i a :
s o f t . 0 9 . 0 1
y p o s t e r i o r e s
N O T A
. S e n t e n c i a s e n e l p r o g r a m a d e P L C
A u m e n t o d e S P 6 5 o n l i n e d e f o r m a
p r o g r e s i v a p a r a f r e n a r a p o t e n c i a c t e
S P 6 5
o n l i n e
v e l o c i d a d
t i e m p o

Parámetros, variables y comandos
13.
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
378
Ref.1912
DDS|MAB
SOFTWARE
· 358 ·
Soft.09.05
SP70 O F01610 AccelerationOnEmergency
Función
Determina si se aplica o no la limitación en la acele-
ración dada por SP65 en caso de parada de emer-
gencia debido a la:
desactivación del Speed Enable ó
activación de la función Halt ó
activación de un error. Dependiendo del error, el
PWM será desactivado antes o después de la pa-
rada. Ver ·
Errores que desactivan PWM· en el
capítulo 14.
Valores válidos
0/1 No/Sí se aplican rampas.
Valor por defecto
0 No se aplican rampas.
SP71 O F01618 VelFollowMargin
Función
Umbral (margen máximo por exceso) en % de la ve-
locidad del motor respecto al valor dado por la rampa
de emergencia de referencia. Superar este umbral
durante un tiempo superior al dado en SP72 activa el
error
E160. Ver figura F. S13/35. Con SP71=0 queda
deshabilitada la vigilancia de la rampa en parada de
emergencia y el código de error asociado
E160.
Valores válidos
0 ... 100.
Valor por defecto
10.
Unidades
1 %.
Versión
Operativo a partir de la versión de software 06.20.
SP72 O F01619 VelTimeMargin
Función
Tiempo máximo permitido que puede ser sobrepasa-
do el umbral de velocidad parametrizado en SP71 en
la evolución real de la frenada sin que sea activado el
código de error
E160. Ver figura F. S13/35.
Valores válidos
4 ... 1 000.
Valor por defecto
20.
Unidades
1 ms.
Versión
Operativo a partir de la versión de software 06.20.
F. S13/35
Vigilancia de la rampa de emergencia en una frenada.
SP80.# O S00349.# JerkLimit
Función
Limita el choque de la consigna, es decir, la rapidez
con que varía la aceleración. Actúa en conjunto con
el límite de aceleración SP60.
Para anular el efecto de esta limitación hay que para-
metrizar SP80=0.
Valores válidos
0 ... 2 147 483 647.
Valor por defecto
10 000 rad/s³.
Unidades
1 rad/s³.
Conversión
1 rad/s³
= 9,5492 rpm/s²
S
P
7
1
t<SP72
0
t>SP72
velocidad (rpm)
Error E160
Nota
.
Para velocidades negativas considérese una figura simétrica
a ésta respecto al eje de tiempos.
tiempo (ms)
rampa de emergencia
de referencia
evolución real
de la frenada

Parámetros, variables y comandos
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
13.
Ref.1912
· 359 ·
DDS|MAB
SOFTWARE
Soft.09.05
SP100.# O F01611.# AccelerationLimitOn
Función
Activa o desactiva, en conjunto, las limitaciones y fil-
tros de consignas (rampas, jerk). No afecta a la limi-
tación de la aceleración de emergencia
Valores válidos
0/1 OFF/ON.
Valor por defecto
0 Límites inactivos.
SV1 Ws S00036 VelocityCommand
SV2 s S00040 VelocityFeedback
Función
El regulador transfiere estos datos al CNC para la vi-
sualización del valor de la consigna y captación de
velocidad.
Valores válidos
- 600 000 000 ... 600 000 000.
Unidades
0,000 1 rpm.
F. S13/36
Gráfica ilustrativa representando los valores de estos parámetros.
SV3 S00332 nFeedbackMinorNx
Función
Marca lógica booleana asociada a nfeedback
< n
x
.
Ver parámetro
SP40.#.
Valores válidos
0/1 No/Sí.
SV4 S00330 nFeedbackEqualNCommand
Función
Regulando en velocidad, es la marca lógica booleana
asociada a nfeedback
= ncommand, es decir, cuando
el valor de SV2 está dentro del rango SV1±SP41,
SV4 se activa a 1. Ver parámetro
SP41.#.
Valores válidos
0/1 No/Sí.
SV5 S00331 nFeedbackEqual0
Función
Marca lógica booleana asociada a nfeedback
= 0.
Ver parámetro
SP42.
Valores válidos
0/1 No/Sí.
F. S13/37
Gráfica ilustrativa representando los valores de estos parámetros.
SV7 s F01612 VelocityCommandFinal
Función
Refleja el valor de la consigna de velocidad después
de limitaciones, rampas, ...
Valores válidos
- 600 000 000 ... 600 000 000.
Unidades
0,000 1 rpm.
SP43
[S00043]
bit 0
TP85
[S00085]
bit 0
SP43
[S00043]
bit 2
TP85
[S00085]
bit 2
Current
loop
SV1
[S00036]
SV2
[S00040]
TV2
[S00084]
TV1
[S00080]
Velocity
loop
SP42, SV5:SP41, SV4:
Time
SP40 (nx)
Time
nfeedback<nx
Time
SP41
Time
nfeedback=ncommand
Time
SP42
Time
nfeedback = 0
0rpm
Speed
nfeedback
SV3
1
0
nfeedback
ncommand
1
0
SV4
1
0
SV2
SV2
nfeedback
SV2
SP40, SV3:
Speed
SV5
Speed

Parámetros, variables y comandos
13.
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
378
Ref.1912
DDS|MAB
SOFTWARE
· 360 ·
Soft.09.05
SV8 s F01613 VelocityCommandBeforeFilters
Función
Refleja el valor de la consigna de velocidad antes de
limitaciones, rampas, ...
Valores válidos
- 600 000 000 ... 600 000 000.
Unidades
0,000 1 rpm.
F. S13/38
Gráfica ilustrativa representando los valores de estos parámetros.
SV9 s F01614 PositionCommandDelta
Función
Permite visualizar los incrementos de posición (delta
de posición) de la consigna por cada tiempo de ciclo.
Valores válidos
-2 147 483 647 ... 2 147 483 647.
Valor por defecto
0.
Unidades
0,000 1 mm (ejes lineales).
0,000 1 grados (ejes rotativos).
SV10 s F01615 PositionFeedback1Delta
SV11 s F01616 PositionFeedback2Delta
Función
Velocidad de la carga medida con la captación motor
o con la captación directa, respectivamente.
Valores válidos
-2 147 483 647 ... 2 147 483 647.
Unidades
0,001 m/min.
Versión
Operativos a partir de las versiones de software
06.01 y 07.02.
SV12 s F01617 ObserverVelocity
Función
Variable que permite visualizar el valor de la veloci-
dad estimada en rev/min.
Valores válidos
-600 000 000 ... 600 000 000.
Unidades
0,000 1 rpm.
Versión
Operativo a partir de la versión de software 06.12.
SV37 Ws S00037 AdditiveVelocityCommand
Función
Variable que almacena un valor de velocidad adicio-
nal que se suma a la consigna de velocidad.
Valores válidos
-600 000 000 ... 600 000 000.
Unidades
0,000 1 rpm.
Versión
Operativo a partir de la versión de software 06.10.
SP10
SpeedEnable Function OR
ErrorStop
OR
SpeedEnable Function
means PWM_OFF
if the motor has not stopped in a time period
GP3
Halt Function OR
Error Stop
SP80<>0
SP80=0
SP70=0
SP70=1
Jerk
Acc. Emerg.
SP100=0
SP100=1
SP60...
...SP64
SP60
SP80
SP65
SV8
Parámetros, variables y comandos
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
13.
Ref.1912
· 361 ·
DDS|MAB
SOFTWARE
Soft.09.05
Grupo T. Potencia y par
TP1 Os S00126 TorqueThresholdTx
Función
Umbral de par descrito por el usuario para activar la
marca lógica TV10.
Valores válidos
0 ... 1 000. Depende del regulador conectado.
Valor por defecto
50.
Unidades
0,1 %. Fracción del valor nominal del par del motor.
TP2 Os S00158 PowerThresholdPx
Función
Umbral de potencia descrito por el usuario para acti-
var la marca lógica TV60. Este umbral viene dado en
una fracción de la potencia del motor.
La potencia del motor es:
En un motor síncrono, el producto de tres elementos:
MP2 (F01200) MotorTorqueConstant.
MP3 (S00111) MotorContinuousStallCurrent.
MP25 (F01221) MotorRatedSpeed.
En un motor asíncrono:
MP12 (F01208) MotorNominalPower
Valores válidos
1 ... 1 000.
Valor por defecto
50.
Unidades
0,1 %. Fracción del valor nominal de la potencia del
motor.
TP10
*OsS F01902
ConstantPositiveTorque
Compensation
Función
Compensación de la fricción constante en el sentido
positivo de la velocidad. Es un valor constante para
todas las velocidades de referencias positivas.
Valores válidos
- (CP20 x MP2) ... (CP20 x MP2).
Nótese que: CP20 x MP2 = Par máx. del regulador.
Valor por defecto
0.
Unidades
0,1 N·m.
Versión
Modificado a partir de la versión de software 08.05.
TP11
*OsS F01903
ConstantNegativeTorque
Compensation
Función
Compensación de la fricción constante en el sentido
negativo de la velocidad. Es un valor constante para
todas las velocidades de referencias negativas.
Valores válidos
- (CP20 x MP2) ... (CP20 x MP2).
Nótese que: CP20 x MP2 = Par máx. del regulador.
Valor por defecto
0.
Unidades
0,1 N·m.
Versión
Modificado a partir de la versión de software 08.05.

Parámetros, variables y comandos
13.
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
378
Ref.1912
DDS|MAB
SOFTWARE
· 362 ·
Soft.09.05
TP12 *OsS F01904
DynamicPositiveTorque
Compensation
Función
Compensación de la fricción dinámica en el sentido
positivo de la velocidad. Es el valor de la compensa-
ción con la velocidad de referencia igual a SP10.
Para otras velocidades de referencia positivas es di-
rectamente proporcional. Ver figura
F. S13/39.
Valores válidos
- (CP20 x MP2) ... (CP20 x MP2).
Nótese que: CP20 x MP2 = Par máx. del regulador.
Valor por defecto
0.
Unidades
0,1 N·m.
Versión
Modificado a partir de la versión de software 08.05.
F. S13/39
Gráfica ilustrativa representando los valores de estos parámetros.
TP13
*OsS F01905
DynamicNegativeTorque
Compensation
Función
Compensación de la fricción dinámica en el sentido
negativo de la velocidad. Es el valor de la compensa-
ción con la velocidad de referencia igual a - SP10.
Para otras velocidades de referencia negativas es di-
rectamente proporcional.
Valores válidos
- (CP20 x MP2) ... (CP20 x MP2).
Nótese que: CP20 x MP2 = Par máx. del regulador.
Valor por defecto
0.
Unidades
0,1 N·m.
Versión
Modificado a partir de la versión de software 08.05.
< Reference Speed >
TP11
TP10
SP10
TP12
- SP10
TP13
Velocidad de referencia
Par de compensación
< Compensation torque >

Parámetros, variables y comandos
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
13.
Ref.1912
· 363 ·
DDS|MAB
SOFTWARE
Soft.09.05
TP14 *OS F01908
TorqueCompensation
TimeConstant
Función
Constante de tiempo de la compensación de par. An-
tes de ser aplicada la compensación de par, se pasa
por un filtro pasa-bajo. Con este filtro se mejora el
modelo de comportamiento del rozamiento en los
cambios de sentido de la velocidad. El rozamiento
constante cambia de signo bruscamente al cambiar
de signo la velocidad de referencia. Al pasar por el fil-
tro, se suaviza el par de compensación, evitando dar
un golpe al sistema y modelizando mejor el compor-
tamiento del rozamiento. Un valor de 0 desactiva las
compensaciones de rozamiento.
Valores válidos
0 ... 20 000.
Valor por defecto
0.
Unidades
0,1 ms.
Versión
Modificado en la versión de software 06.15 y 08.05.
F. S13/40
Gráfica ilustrativa representando los valores de estos parámetros.
Par de compensación [Nm]
< Compensation torque >
63%
TP10
TP11
t (ms)
3xTP142xTP14TP140
Nótese que:
Entre (0,TP14) se establece un 63 % del par de compensación.
Entre (0,2·TP14) se establece un 87 % del par de compensación.
Entre (0,3·TP14) se establece un 95 % del par de compensación.
Compensación de par al pasar de una velocidad
de valor negativo a valor positivo
TP10
Par de compensación [Nm]
< Compensation torque >
TP11
t (ms)
3xTP142xTP14TP14
63%
0
Compensación de par al pasar de una velocidad
de valor positivo a valor negativo

Parámetros, variables y comandos
13.
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
378
Ref.1912
DDS|MAB
SOFTWARE
· 364 ·
Soft.09.05
TP15 *OsS F01909
TorqueCompensation
SpeedHysteresis
Función
Amplitud de la histéresis en la compensación del par
de rozamiento. Nótese que con TP15=0, el regulador,
internamente, establece una amplitud de histéresis
fija de valor aproximado a SP10/10000 para compen-
sar el par de rozamiento, tal y como se ha venido rea-
lizando hasta la versión 06.10. Recuérdese que
SP10 corresponde a la velocidad máxima de la apli-
cación. Para más detalles, ver apartado,
Mejoras en
la compensación de rozamiento
del capítulo 5 de
este manual.
Valores válidos
-10 000 000 ... 10 000 000.
Valor por defecto
0.
Unidades
0,000 1 rpm.
Versión
Operativo a partir de la versión de software 06.10.
TP22
*FA F01914 MotorPowerReduction
Función
Reducción porcentual del nivel de potencia. Se utiliza
para la reducción de potencia donde se necesita de
un amplio rango de velocidades con potencia cons-
tante. El motor seleccionado debe disponer de poten-
cia nominal superior a la exigida en la aplicación con
el fin de poder suministrar la potencia requerida des-
de velocidades muy bajas.
A altas velocidades ocurrirá lo mismo. El rango en el
que el motor suministra la potencia mínima de la apli-
cación es mayor que utilizando un motor cuya poten-
cia nominal sea la requerida por la aplicación.
Valores válidos
0 ... 1 000.
Valor por defecto
1 000.
Unidades
0,1 %.
Versión
Operativo a partir de las versiones de software 06.01
| 07.02.
F. S13/41
Gráfica ilustrativa sobre este parámetro.
TP30 *OS F01915 CoggingCompensationAmplitude
Función
Parámetro utilizado en el proceso de ajuste del efec-
to ranura (cogging) de un motor síncrono.
Establece la amplitud
de compensación del cogging
dada en % del par nominal del motor.
Valores válidos
0 ... 1 000.
Valor por defecto
0.
Unidades
0,1 %.
Versión
Operativo a partir de la versión de software 08.19.
100%
30%
TP22
Rango de velocidades con potencia cte
del 30% de la nominal del motor.
Rango de velocidades con potencia cte
del 100% de la nominal del motor.
Velocidad
Potencia nominal
del motor
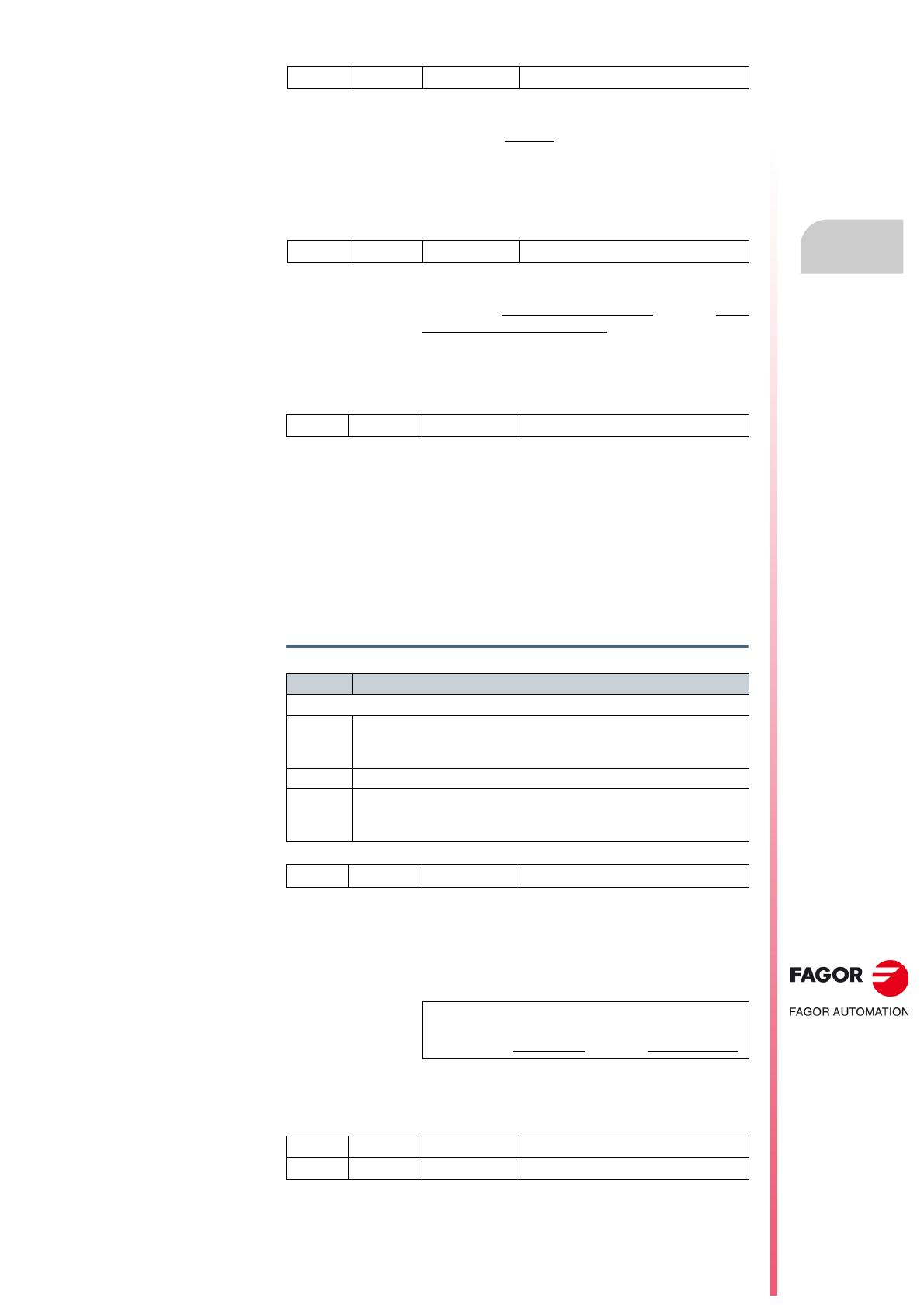
Parámetros, variables y comandos
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
13.
Ref.1912
· 365 ·
DDS|MAB
SOFTWARE
Soft.09.05
TP31 *OsS F01916 CoggingCompensationPhase
Función
Parámetro utilizado en el proceso de ajuste del efecto
ranura (cogging) de un motor síncrono.
Establece el desfase
de compensación del cogging
respecto al RHO.
Valores válidos
-180 ... 180.
Valor por defecto
0.
Versión
Operativo a partir de la versión de software 08.19.
TP32 *OS F01917 CoggingCompensationNSines
Función
Parámetro utilizado en el proceso de ajuste del efecto
ranura (cogging) de un motor síncrono.
Establece el nº de ranuras del estátor
, es decir, nº de
senoides por vuelta mecánica del motor.
Valores válidos
0 ... 32767.
Valor por defecto
0.
Versión
Operativo a partir de la versión de software 08.19.
TP85 O S00085 TorquePolarityParameters
Función
Parámetro utilizado para cambiar de signo algunos
datos de par en aplicaciones específicas. Los signos
son cambiados únicamente a los datos monitoriza-
dos, pero no internamente. El motor gira en sentido
horario cuando la consigna de par es positiva y no
hay programada una inversión de esta consigna.
Este parámetro no sirve para solucionar un problema
de realimentación positiva originada como conse-
cuencia de que la captación directa cuente al revés.
Este caso se soluciona mediante el parámetro PP115
(S00115) PositionFeedback2 Type.
T. S13/28 Parámetro TP85. Significado de sus bits.
Bit Función
15 [MSB], ... 3 - reservados -
2 Valor de la captación de par.
= 0 No invertido.
= 1 Invertido.
1 Reservado
0 [LSB] Valor de la consigna de par.
= 0 No invertido.
= 1 Invertido.
TP86 S00086 TorqueScalingParameters
Función
Parámetro en el que se define las unidades en las
que se lee el valor del par, además de otros aspec-
tos. Se inicializa con el valor que indica que el par
está referido al motor, es decir 0. Por defecto, las uni-
dades son % del par a rótor parado del motor. Ver
además las variables TV1 y TV2.
NOTA. Recuérdese que, a día de hoy, el parámetro
TP86 se inicializa con todos sus bits a cero y es un
parámetro de solo lectura
, es decir, no modificable.
Valores válidos
0.
Versión
Operativo a partir de las versiones de software 06.01
| 07.02.
TV1 s S00080 TorqueCommand
TV2 s S00084 TorqueFeedback
Función
El regulador transfiere estos datos al CNC para la vi-
sualización del valor de la consigna (TV1) y la capta-
ción de par (TV2).

Parámetros, variables y comandos
13.
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
378
Ref.1912
DDS|MAB
SOFTWARE
· 366 ·
Soft.09.05
Valores válidos
- 10 000 ... 10 000.
Unidades
0,1 %.
NOTA. Ambas variables se leen como % del par a
rótor parado del motor. El valor de este par ya viene
parametrizado desde la versión 06.14 en el pará-
metro MP44.
TV3 F01701 PowerFeedbackPercentage
Función
Visualización instantánea del porcentaje de potencia
utilizada respecto a la máxima potencia disponible a
esa velocidad en el accionamiento (motor, regulador,
límite de corriente).
Valores válidos
0 ... 32 767.
Unidades
0,1 %.
TV4 s F01912 VelocityIntegralAction
Función
Salida del integrador PI de velocidad. Cuando la ace-
leración no es extremadamente alta es igual al par de
rozamiento. Al compensar el rozamiento, el valor de
esta variable deberá reducirse a valores próximos a
cero.
Valores válidos
-10 000 ... 10 000.
Unidades
0,1 N·m.
TV5 sS F01913 TorqueFeedforward
Función
Variable que almacena el valor total del par compen-
sado ·suma del par compensado debido a la acelera-
ción (feedforward de aceleración) y del par
compensado debido al rozamiento)· en % del par no-
minal. Comparando el valor de esta variable con el
valor del par real (dado como % del par nominal en la
variable TV2) se tiene una idea de cuanto par falta
por compensar en el movimiento.
Valores válidos:
-10 000 ... 10 000.
Unidades
0,1 %.
Versión:
Operativo a partir de la versión de software 06.10.
TV10 S00333 TGreaterTx
Función
Marca lógica indicativa de que el par TV2 es superior
a un valor umbral TP1. Ver parámetro
TP1.
Valores válidos
= 0 TV2 < TP1
= 1 TV2 > TP1
TV50 s F01700 PowerFeedback
Función
Visualización del valor real de la potencia activa total
suministrada por el motor, es decir, su potencia útil. El
signo dependerá de si el motor acelera (+) o frena (-).
Valores válidos
-10 000 ... 10 000.
Unidades
0,01 kW.
TV51 sA S00385 ActivePower
Función
Visualización del valor real de la potencia activa total
suministrada por el regulador, es decir, la potencia útil
suministrada por el motor asíncrono más la suma de
todas las potencias perdidas en el propio motor y en
el cableado. El signo de esta variable dependerá de
si el motor acelera (+) o frena (-).
Valores válidos
-2 147 483 647 ... 2 147 483 647.
Unidades
1 W.
Versión
Operativo a partir de la versión de software 06.15.

Parámetros, variables y comandos
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
13.
Ref.1912
· 367 ·
DDS|MAB
SOFTWARE
Soft.09.05
TV60 S00337 PGreaterPx
Función
Marca indicativa de que la potencia TV50 es superior
a un valor umbral TP2. Ver parámetro
TP2.
Valores válidos
= 0 TV50 < TP2.
= 1 TV50 > TP2.
TV81 Ws S00081 AdditiveTorqueCommand
Función
Variable con una función adicional para el control de
par en el regulador cuyo valor se suma al valor de la
consigna de par y cuyas unidades vienen dadas en %
del par nominal.
Valores válidos
-10 000 ... 10 000.
Unidades
0,1 %.
Versión
Operativo a partir de la versión de software 06.10.
TV92 O S00092 BipolarTorqueForceLimit
Función
Limitación del par máximo que el motor puede llegar
a suministrar. Se expresa en % del límite máximo in-
dicado por el parámetro CP20 (límite de corriente).
Valores válidos
0 ... 1 000.
Valor por defecto
1 000.
Unidades
1.
TV100 F01702 TorqueStatus
Función
Indica si existe par o no.
NOTA. ¡Adviértase de la existencia de par cuando
se está frenando! El error que provoca el frenado no
inhabilita el par.
Valores válidos
0/1 no hay par / sí hay par.

Parámetros, variables y comandos
13.
PARÁMETROS, VARIABLES Y COMANDOS
Grupos de parámetros, variables y comandos
378
Ref.1912
DDS|MAB
SOFTWARE
· 368 ·
Soft.09.05
Grupo X. Misceláneas
XV1 F01900 One
XV2 F01901 Zero
Función
Estas variables se utilizan para forzar la salida de un
1 o un 0 por una salida digital. Así, para que una en-
trada digital no realice función alguna, escribir un 0.
Ejemplo
OP10=XV1 Fuerza la salida digital a un 1 lógico.
IP12=0 Elimina a la entrada digital de cualquier
finalidad.
XV10 Ws F02032 GeneralVariable32A
XV11 Ws F02033 GeneralVariable32B
Función
Variables de 32 bits utilizadas para visualizar varia-
bles del CN. Es posible, además, escribir en ellas
desde el CNC mediante SERCOS o CAN. De esta
manera, están disponibles en el regulador para su
monitorización y visualización en el WinDDSSetup.
Se utilizan generalmente para la visualización del
error de seguimiento. Un programa de PLC asigna la
variable a monitorizar al identificador ID SERCOS,
de manera que estas dos variables pueden seleccio-
narse en el osciloscopio.
XV12 W F02034 ReadPlcMarksGroup
XV13 W F02035 WritePlcMarksGroup
Función
Variables que permiten compartir información en
tiempo real entre el PLC del CNC 8055/55i y el regu-
lador. Posibilitan leer y escribir marcas mediante co-
municación SERCOS | CAN.
NOTA. Nótese que si estas variables se parametri-
zan en el canal rápido del CNC 8055/55i, el PLC del
control puede leer y escribir estas marcas como si
fuesen registros propios con el retardo lógico del
lazo SERCOS o del BUS CAN.

Parámetros, variables y comandos
PARÁMETROS, VARIABLES Y COMANDOS
Glosario de parámetros, variables y comandos
13.
Ref.1912
· 369 ·
DDS|MAB
SOFTWARE
Soft.09.05
13.3 Glosario de parámetros, variables y comandos
NOTA IMPORTANTE. Pueden ser utilizados indistintamente el identificador ID SERCOS o el ID CAN
que se facilitan en la siguiente tabla para hacer referencia a cualquier parámetro, variable o comando
de un regulador cuando el interfaz de comunicación del sistema es por BUS CAN. Utilice, por tanto,
cualquiera de los dos identificadores (ID SERCOS o ID CAN) que le sea más oportuno.
ID SERCOS ID CAN MNEM. NOMBRE PÁG.
00001 20841 QP1 ControlUnitCycleTime 265
00011 20491 DV1 Class1Diagnostics (Errors) 274
00012 20492 DV9 Class2Diagnostics (Warnings) 274
00013 20493 DV10 Class3Diagnostics (OperationStatus) 275
00030 20510 GV2 ManufacturerVersion 284
00032 20512 AP1 PrimaryOperationMode 265
00033 20513 AP2 AsynchronousRegulationTime 265
00036 20516 SV1 VelocityCommand 359
00037 20517 SV37 AdditiveVelocityCommand 360
00040 20520 SV2 VelocityFeedback 359
00041 20521 PP41 HomingVelocityFast 322
00042 20522 PP42 HomingAcceleration 322
00043 20523 SP43 VelocityPolarityParameters 354
00044 20524 SP44 VelocityDataScalingType 354
00047 20527 PV47 PositionCommand 331
00048 20528 PV48 AdditivePositionCommand 331
00049 20529 PP49 PositivePositionLimit 323
00050 20530 PP50 NegativePositionLimit 323
00051 20531 PV51 PositionFeedback1 331
00052 20532 PP52 ReferenceDistance1 323
00053 20533 PV53 PositionFeedback2 331
00054 20534 PP54 ReferenceDistance2 323
00055 20535 PP55 PositionPolarityParameters 323
00057 20537 PP57 PositionWindow 325
00058 20538 PP58 Backlash 325
00060 20540 LP60 PosSwitch1On 295
00061 20541 LP61 PosSwitch1Off 295
00062 20542 LP62 PosSwitch2On 295
00063 20543 LP63 PosSwitch2Off 295
00064 20544 LP64 PosSwitch3On 295
00065 20545 LP65 PosSwitch3Off 295
00066 20546 LP66 PosSwitch4On 295
00067 20547 LP67 PosSwitch4Off 295
00068 20548 LP68 PosSwitch5On 295
00069 20549 LP69 PosSwitch5Off 295
00070 20550 LP70 PosSwitch6On 295
00071 20551 LP71 PosSwitch6Off 295
00072 20552 LP72 PosSwitch7On 295
00073 20553 LP73 PosSwitch7Off 295
00074 20554 LP74 PosSwitch8On 295
00075 20555 LP75 PosSwitch8Off 295
00076 20556 PP76 PositionDataScalingType 326
00077 20557 PP77 LinearPositionDataScalingFactor 326
00078 20558 PP78 LinearPositionDataScalingExponent 326
00079 20559 PP79 DirectPlusResolution 326
00080 20560 TV1 TorqueCommand 365
00081 20561 TV81 AdditiveTorqueCommand 367

Parámetros, variables y comandos
13.
PARÁMETROS, VARIABLES Y COMANDOS
Glosario de parámetros, variables y comandos
378
Ref.1912
DDS|MAB
SOFTWARE
· 370 ·
Soft.09.05
ID SERCOS ID CAN MNEM. NOMBRE PÁG.
00084 20564 TV2 TorqueFeedback 365
00085 20565 TP85 TorquePolarityParameters 365
00086 20566 TP86 TorqueScalingParameters 365
00091 20571 SP10 VelocityLimit 351
00092 20572 TV92 BipolarTorqueForceLimit 367
00099 20579 DC1 ResetClass1Diagnostics 276
00100 20580 SP1 VelocityProportionalGain 350
00101 20581 SP2 VelocityIntegralTime 350
00102 20582 SP11 VelocityProportionalGainDecimal 351
00103 20583 PP103 ModuleValue 327
00104 20584 PP104 PositionKvGain 327
00106 20586 CP1 CurrentProportionalGain 268
00107 20587 CP2 CurrentIntegralTime 268
00108 20588 LV108 FeedrateOverride 302
00109 20589 MP4 MotorPeakCurrent 304
00110 20590 HV1 S3LoadCurrent 288
00111 20591 MP3 MotorContinuousStallCurrent 304
00115 20595 PP115 PositionFeedback2Type 327
00116 20596 NP116 ResolutionOfFeedback1 311
00117 20597 NP117 ResolutionOfFeedback2 311
00118 20598 NP118 ResolutionOfLinearFeedback 311
00121 20601 NP121 InputRevolutions 312
00122 20602 NP122 OutputRevolutions 312
00123 20603 NP123 FeedConstant 312
00124 20604 SP42 StandStillWindow 353
00125 20605 SP40 VelocityThresholdNx 353
00126 20606 TP1 TorqueThresholdTx 361
00130 20610 PV130 ProbeValue1PositiveEdge 332
00131 20611 PV131 ProbeValue1NegativeEdge 332
00134 20614 DV32 MasterControlWord 276
00135 20615 DV31 DriveStatusWord 275
00138 20618 SP60 AccelerationLimit 356
00140 20620 GV9 DriveType 284
00141 20621 MP1 MotorType 304
00142 20622 DP142 ApplicationType 274
00147 20627 PP147 HomingParameter 328
00150 20630 PP150 ReferenceOffset1 329
00151 20631 PP151 ReferenceOffset2 329
00157 20637 SP41 VelocityWindow 353
00158 20638 TP2 PowerThresholdPx 361
00159 20639 PP159 MonitoringWindow 329
00165 20645 NP165 DistanceCodedReferenceDimension1 314
00166 20646 NP166 DistanceCodedReferenceDimension2 314
00169 20649 PP169 ProbeControlParameter 330
00173 20653 PV173 MarkerPositionA 332
00174 20654 PV174 MarkerPositionB 332
00175 20655 PV175 DisplacementParameter1 333
00176 20656 PV176 DisplacementParameter2 333
00177 20657 PP177 AbsoluteDistance1 330
00178 20658 PP178 AbsoluteDistance2 330
00179 20659 PV179 ProbeStatus 333
00183 20663 LP183 SynchronizationVelocityWindow 295

Parámetros, variables y comandos
PARÁMETROS, VARIABLES Y COMANDOS
Glosario de parámetros, variables y comandos
13.
Ref.1912
· 371 ·
DDS|MAB
SOFTWARE
Soft.09.05
ID SERCOS ID CAN MNEM. NOMBRE PÁG.
00189 20669 PV189 FollowingError 333
00193 20673 LV193 PositioningJerk 302
00201 20681 KV5 MotorTemperatureWarningLimit 292
00202 20682 KV9 CoolingTemperatureWarningLimit 292
00204 20684 KV8 MotorTemperatureErrorLimit 292
00205 20685 KV12 CoolingTemperatureErrorLimit 292
00207 20687 GP9 DriveOffDelayTime 283
00209 20689 SP6 VelocityAdaptationLowerLimit 350
00210 20690 SP7 VelocityAdaptationUpperLimit 350
00211 20691 SP4 VelocityAdaptationProportionalGain 350
00212 20692 SP5 VelocityAdaptationIntegralTime 350
00217 20697 GV22 ParameterSetPreselection 285
00218 20698 GV26 GearRatioPreselection 285
00220 20700 GC4 OfflineParameterValidation 286
00228 20708 LP228 SynchronizationPositionWindow 296
00236 20716 LP236 LeadDrive1Revolutions 296
00237 20717 LP237 SlaveDriveRevolutions1 296
00245 20725 LV245 LeadDrive1AngularPosition 303
00254 20734 GV21 ParameterSetActual 285
00255 20735 GV25 GearRatioActual 285
00258 20738 LV158 TargetPosition 302
00259 20739 LV159 PositioningVelocity 302
00260 20740 LV160 PositioningAcceleration 302
00262 20742 GV10 LoadDefaultsCommand 284
00263 20743 GC11 NoMovingAutoPhasing 287
00264 20744 GC1 BackupWorkingMemoryCommand 286
00277 20757 RP77 PositionFeedback1Type 345
00296 20746 PP216 VelocityFeedForwardPercentage 330
00298 20748 PV1 HomeSwitchDistance 331
00299 20749 PP4 HomeSwitchOffset 319
00315 20795 LV215 PositioningVelocityGreaterLimit 303
00323 20803 LV223 TargetPositionOutsideOfTravelRange 303
00330 20810 SV4 nFeedbackEqualNCommand 359
00331 20811 SV5 nFeedbackEqual0 359
00332 20812 SV3 nFeedbackMinorNx 359
00333 20813 TV10 TGreaterTx 366
00336 20816 PV136 InPosition 332
00337 20817 TV60 PGreaterPx 367
00342 20822 LV242 TargetPositionAttained 303
00343 20823 LV243 InterpolatorHalted 303
00348 20828 PP217 AccelerationFeedForwardPercentage 331
00349 20829 SP80 JerkLimit 358
00380 20860 GV4 DCBusVoltage 284
00383 20863 KV6 MotorTemperature 292
00385 20865 TV51 ActivePower 366
00391 20871 PP5 ActualPositionMonitoringWindow 320
00393 20873 LP143 ModuloCommandMode 295
00400 20880 PV200 HomeSwitch 334
00401 20881 PV201 Probe1 334
00403 20883 PV203 PositionFeedbackStatus 334
00404 20884 PV204 PositionCommandStatus 334
00405 20885 PV205 Probe1Enable 335

Parámetros, variables y comandos
13.
PARÁMETROS, VARIABLES Y COMANDOS
Glosario de parámetros, variables y comandos
378
Ref.1912
DDS|MAB
SOFTWARE
· 372 ·
Soft.09.05
ID SERCOS ID CAN MNEM. NOMBRE PÁG.
00407 20887 PV207 HomingEnable 335
00408 20888 PV208 ReferenceMarkerPulseRegistered 335
00409 20889 PV209 Probe1PositiveLatched 335
00410 20890 PV210 Probe1NegativeLatched 335
32799 16415 SP20 VoltageRpmVolt 352
32849 16465 SP21 RpmRpmVolt 352
32898 16514 NP131 InputRevolutions2 312
32899 16515 NP132 OutputRevolutions2 312
32900 16516 NP133 FeedConstant2 313
32969 16585 BV1 HaltDrivePin 266
32970 16586 BV3 HaltDriveDnc 266
32971 16587 BV7 DriveEnableDnc 267
32972 16588 BV14 NotProgrammableIOs 267
33058 16674 HV10 VsMSC 288
33059 16675 HV11 FlashManufacturerCode 288
33061 16677 HV13 SERCOSRS422Id 288
33068 16684 CP3 CurrentFeedbackDerivativeGain 268
33069 16685 CP4 CurrentAdaptationProportionalGain 268
33070 16686 CP5 CurrentAdaptationIntegralTime 268
33071 16687 CP6 CurrentAdaptationLowerLimit 268
33072 16688 CP7 CurrentAdaptationUpperLimit 268
33073 16689 CV10 CurrentUOffset 273
33074 16690 CV11 CurrentVOffset 273
33075 16691 CP20 CurrentLimit 269
33076 16692 CP30 CurrentCommandFiltersType 271
33077 16693 CV1 CurrentUFeedback 272
33078 16694 CV2 CurrentVFeedback 272
33079 16695 CV3 CurrentFeedback 273
33080 16696 CP31 CurrentCommandFilter1Frequency 271
33081 16697 CP32 CurrentCommandFilter1Damping 272
33082 16698 CP33 CurrentCommandFilter2Frequency 272
33083 16699 CP34 CurrentCommandFilter2Damping 272
33084 16700 CP16 SeriesInductance 269
33085 16701 CP8 CurrentLoopGainsCalculation 269
33087 16703 CP21 PeakCurrentAutophasingOnline 269
33088 16704 CP22 NominalCurrentAutophasingOnline 270
33089 16705 CP23 AutophasingOnlineFastSlope 270
33090 16706 CP24 AutophasingOnlineSlowSlope 270
33092 16708 CP26 I0electSlowVelocity 270
33093 16709 CP27 I0electFastVelocity 271
33094 16710 CP50 CurrentFeedbackFilterFrequency 272
33095 16711 CP18 CurrentLoopGainsMode 269
33096 16712 CP28 CurrentPorcentageNoMovingAutoPhasing 271
33172 16788 DV11 FagorDiagnostics 275
33173 16789 DV14 ErrorsInDncFormat 275
33268 16884 EP1 EncoderSimulatorPulsesPerTurn 277
33269 16885 EP2 EncoderSimulatorI0Position 277
33270 16886 EP3 EncoderSimulatorDirection 277
33271 16887 EC1 EncoderSimulatorSetI0 277
33368 16984 FP1 MotorFluxProportionalGain 278
33369 16985 FP2 MotorFluxIntegralTime 278
33370 16986 FP20 MotorBEMFProportionalGain 278

Parámetros, variables y comandos
PARÁMETROS, VARIABLES Y COMANDOS
Glosario de parámetros, variables y comandos
13.
Ref.1912
· 373 ·
DDS|MAB
SOFTWARE
Soft.09.05
ID SERCOS ID CAN MNEM. NOMBRE PÁG.
33371 16987 FP21 MotorBEMFIntegralTime 278
33380 16996 FP30 RotorResistanceEstimationActive 278
33381 16997 FP31 RotorFixedTemperature 278
33382 16998 GC5 AutoCalculate 286
33383 16999 GC6 HomeSwitchAutoCalibration 287
33390 17006 FP40 FluxReduction 279
33392 17008 FP50 MRASProportionalGain 279
33393 17009 FP51 MRASIntegralTime 279
33394 17010 FP60 FilterForStatorFluxEstimationOfVoltageModel 279
33468 17084 GP1 PwmFrequency 282
33469 17085 GP2 Feedback1Type 282
33470 17086 GP3 StoppingTimeout 282
33471 17087 GP4 SetNumber 282
33472 17088 GP5 ParameterVersion 283
33473 17089 GV3 FlashParameterChecksum 284
33474 17090 GV5 CodeChecksum 284
33475 17091 GV8 AccessLevel 284
33476 17092 GV11 SoftReset 284
33477 17093 GV13 PowerBusStatus 284
33478 17094 GV14 PowerVoltageMinimum 284
33479 17095 GV23 ParameterSetAck 284
33480 17096 GV24 ParameterSetStb 285
33481 17097 GV30 ParameterSetBit0 285
33482 17098 GV31 ParameterSetBit1 285
33483 17099 GV32 ParameterSetBit2 285
33485 17101 GP6 GearRatioNumber 283
33487 17103 GP10 Feedback2Type 283
33488 17104 GP7 OverLoadTimeLimit 283
33489 17105 GP8 OverLoadVelocityThreshold 283
33491 17107 GV6 RamParameterChecksum 284
33493 17109 GV15 AutophasingOnlineDone 285
33495 17111 QV30 FiberDistErrCounter 340
33568 17184 HV21 MotorVoltage 288
33569 17185 HV4 DriveMaxCurrent 288
33572 17188 HV2 S6LoadCurrent 288
33574 17190 HV9 ModularOrCompact 288
33668 17284 IP1 AnalogReferenceSelect 289
33669 17285 IP10 I1IDN 289
33670 17286 IP11 I2IDN 289
33671 17287 IP12 I3IDN 289
33672 17288 IP13 I4IDN 289
33673 17289 IV1 AnalogInput1 290
33674 17290 IV2 AnalogInput2 290
33675 17291 IV10 DigitalInputs 290
33676 17292 IV11 DigitalInputsCh2 290
33677 17293 IP5 DigitalInputVoltage 289
33868 17484 KV2 DriveTemperature 291
33869 17485 KV4 DistanceTemperatureErrorLimit 291
33870 17486 KV10 CoolingTemperature 292
33871 17487 KV20 SupplyPlus5V 292
33872 17488 KV21 SupplyPlus8V 292
33873 17489 KV22 SupplyPlus18V 292

Parámetros, variables y comandos
13.
PARÁMETROS, VARIABLES Y COMANDOS
Glosario de parámetros, variables y comandos
378
Ref.1912
DDS|MAB
SOFTWARE
· 374 ·
Soft.09.05
ID SERCOS ID CAN MNEM. NOMBRE PÁG.
33874 17490 KV23 SupplyMinus5V 292
33875 17491 KV24 SupplyMinus8V 292
33876 17492 KV25 SupplyMinus18V 292
33877 17493 KV32 I2tDrive 292
33879 17494 KV36 I2tMotor 292
33880 17495 KP1 DriveI2tErrorEfect 291
33881 17496 KP2 ExtBallastResistance 291
33882 17497 KP3 ExtBallastPower 291
33883 17498 KV40 I2tCrowbar 292
33884 17499 KP4 ExtBallastEnergyPulse 291
33960 17576 FP70 VFMaximumVoltage 279
33961 17577 FP71 VFVoltageCurve1 279
33962 17578 FP72 VFFrequencyCurve1 280
33963 17579 FP73 VFVoltageCurve2 280
33964 17580 FP74 VFFrequencyCurve2 280
33965 17581 FP75 VFBoostVoltage1 281
33968 17584 MP2 MotorTorqueConstant 304
33969 17585 MP5 MotorPolesPairs 304
33970 17586 MP6 MotorRatedSupplyVoltage 304
33971 17587 MP7 MotorPowerFactor 304
33973 17589 MP9 MotorSlip 304
33974 17590 MP10 MotorStatorResistance 305
33975 17591 MP11 MotorStatorLeakageInductance 305
33976 17592 MP12 MotorNominalPower 305
33977 17593 MP13 MotorThermalTimeConstant 305
33978 17594 MP14 MotorTempSensorType 305
33979 17595 MP15 MotorShaft 305
33980 17596 MP16 MotorBrake 306
33981 17597 MP17 MotorFan 306
33982 17598 MP18 MotorMounting 306
33983 17599 MP19 MotorBalancing 306
33984 17600 MP20 MotorBearings 306
33985 17601 MP21 MotorPhasesOrder 306
33987 17603 MP23 MotorCircuitConnection 307
33988 17604 MP24 MotorMomentumOfInertia 307
33989 17605 MP25 MotorRatedSpeed 307
33990 17606 MP26 MotorMaximumSpeed 307
33991 17607 MP27 MotorRotorResistance 307
33992 17608 MP28 MotorRotorLeakageInductance 307
33993 17609 MP29 MotorMagnetizingInductance 307
33994 17610 MP30 MotorInductanceFactor1 308
33995 17611 MP31 MotorInductanceFactor2 308
33996 17612 MP32 MotorInductanceFactor3 308
33997 17613 MP33 MotorInductanceFactor4 308
33998 17614 MP34 MotorInductanceFactor5 308
33999 17615 MP35 MotorInductanceFactor6 308
34000 17616 MP36 MotorInductanceFactor7 308
34001 17617 MP37 MotorInductanceFactor8 308
34002 17618 MP38 MotorInductanceFactor9 308
34003 17619 MP39 MotorNoLoadCurrent 308
34004 17620 MP40 MotorNoLoadVoltage 308
34005 17621 MP41 MotorMaximumTemperature 308

Parámetros, variables y comandos
PARÁMETROS, VARIABLES Y COMANDOS
Glosario de parámetros, variables y comandos
13.
Ref.1912
· 375 ·
DDS|MAB
SOFTWARE
Soft.09.05
ID SERCOS ID CAN MNEM. NOMBRE PÁG.
34007 17623 MP42 StartingSpeedForFieldweakening 308
34008 17624 MP43 Ke_VoltageConstant 309
34009 17625 MP44 MotorContinuousStallTorque 309
34010 17626 MP45 MotorTempSensorR25 309
34011 17627 MP46 MotorTempSensorR_MP41 309
34012 17628 MP47 MotorMinimumTemperature 309
34013 17629 MP144 MotorContinuousStallTorqueL 310
34050 17666 MP50 SynchronousAsynchronous 310
34068 17684 PP1 HomingVelocitySlow 319
34069 17685 PP2 BacklashPeakAmplitude 319
34070 17686 PP3 BacklashPeakTime 319
34071 17687 PP160 MonitoringWindowPosEleCalc 329
34072 17688 PP13 BacklashPeakDelay 321
34073 17689 PP14 BacklashPeak2FeedbackDisplacement 321
34074 17690 PP15 ReversalHysteresis 321
34075 17691 PP59 Backlash12 325
34076 17692 PV153 PositionFeedback12 332
34100 17716 GV16 MotFileVersion 285
34102 17718 GV17 VeconID 285
34168 17784 OP1 DA1IDN 315
34169 17785 OP2 DA2IDN 315
34170 17786 OP3 DA1ValuePer10Volt 315
34171 17787 OP4 DA2ValuePer10Volt 315
34172 17788 OP10 O1IDN 316
34173 17789 OP11 O2IDN 316
34174 17790 OP12 O3IDN 316
34175 17791 OP13 O4IDN 316
34176 17792 OV1 DA1Value 316
34177 17793 OV2 DA2Value 316
34178 17794 OV10 DigitalOutputs 317
34179 17795 OP5 Prog_OutIDN 316
34180 17796 OV5 Prog_Out 317
34181 17797 OV11 DigitalOutputsCh2 318
34267 17883 RP7 FeedbackI0Width 342
34268 17884 RP1 Feedback1SineGain 341
34269 17885 RP2 Feedback1CosineGain 341
34270 17886 RP3 Feedback1SineOffset 341
34271 17887 RP4 Feedback1CosineOffset 341
34272 17888 RP5 FeedbackParameterRhoCorrection 341
34273 17889 RP6 FeedbackErrorDisable 341
34274 17890 RV1 FeedbackSine 345
34275 17891 RV2 FeedbackCosine 345
34276 17892 RV3 FeedbackRhoCorrection 346
34277 17893 RV4 FeedbackRadius 346
34278 17894 RV6 EncoderError 346
34279 17895 RV7 StegmannMotorType 346
34280 17896 RV8 CircleAdjust 346
34281 17897 RC1 EncoderParameterStoreCommand 349
34282 17898 RV9 Feedback1ErrCounter 346
34283 17899 RV5 StegmannType 346
34284 17900 RV59 Feedback2ErrCounter 349
34285 17901 RV10 FeedbackRhoDisplacement 347

Parámetros, variables y comandos
13.
PARÁMETROS, VARIABLES Y COMANDOS
Glosario de parámetros, variables y comandos
378
Ref.1912
DDS|MAB
SOFTWARE
· 376 ·
Soft.09.05
ID SERCOS ID CAN MNEM. NOMBRE PÁG.
34286 17902 RP8 I0DistanceTest 342
34287 17903 RP9 I0Margin 342
34288 17904 RC2 ReadEncoderData 349
34289 17905 RV11 SerialNum 347
34290 17906 RV12 ProgramVer 347
34291 17907 GC3 AutoPhasing 286
34292 17908 GC7 AutoPhasingOnline 287
34293 17909 GC8 ElectricPositionCorrection 287
34294 17910 RV13 Date 347
34295
17911
RV14 TempEncoder
347
34296
17912
RV15 EncoderEEPR_Size
347
34297
17913
RV16 EncoderType
347
34298 17914 RC3 StoreEncoderData 349
34299 17915 RV17 DataFile2 347
34300 17916 RV18 DataFile3 348
34302 17918 GC9 MoveRho 287
34318 17934 RP51 Feedback2SineGain 342
34319 17935 RP52 Feedback2CosineGain 342
34320 17936 RP53 Feedback2SineOffset 342
34321 17937 RP54 Feedback2CosineOffset 342
34324 17940 RV51 Feedback2Sine 349
34325 17941 RV52 Feedback2Cosine 349
34327 17943 RV54 Feedback2Radius 349
34366 17982 SP15 SpeedObserverFrequency 351
34367 17983 SP16 SpeedObserverDamping 351
34368 17984 SP17 SpeedObserverEnable 352
34369 17985 SP13 VelocityIntegralResetThreshold 351
34371 17987 SP30 AnalogInputOffset1 353
34372 17988 SP31 AnalogInputOffset2 353
34373 17989 SP61 AccelerationLimitVelocity2 356
34374 17990 SP62 AccelerationLimit2 356
34375 17991 SP63 AccelerationLimitVelocity3 356
34376 17992 SP64 AccelerationLimit3 356
34377 17993 SP65 EmergencyAcceleration 357
34378 17994 SP70 AccelerationOnEmergency 358
34379 17995 SP100 AccelerationLimitOn 359
34380 17996 SV7 VelocityCommandFinal 359
34381 17997 SV8 VelocityCommandBeforeFilters 360
34382 17998 SV9 PositionCommandDelta 360
34383 17999 SV10 PositionFeedback1Delta 360
34384 18000 SV11 PositionFeedback2Delta 360
34385 18001 SV12 ObserverVelocity 360
34386 18002 SP71 VelFollowMargin 358
34387 18003 SP72 VelTimeMargin 358
34468 18084 TV50 PowerFeedback 366
34469 18085 TV3 PowerFeedbackPercentage 366
34470 18086 TV100 TorqueStatus 367
34588 18204 GV41 FastPositionFeedback1 286
34615 18231 GV69 TempDriverReset 286
34668 18284 XV1 One 368
34669 18285 XV2 Zero 368
34670 18286 TP10 ConstantPositiveTorqueCompensation 361

Parámetros, variables y comandos
PARÁMETROS, VARIABLES Y COMANDOS
Glosario de parámetros, variables y comandos
13.
Ref.1912
· 377 ·
DDS|MAB
SOFTWARE
Soft.09.05
ID SERCOS ID CAN MNEM. NOMBRE PÁG.
34671 18287 TP11 ConstantNegativeTorqueCompensation 361
34672 18288 TP12 DynamicPositiveTorqueCompensation 362
34673 18289 TP13 DynamicNegativeTorqueCompensation 362
34676 18292 TP14 TorqueCompensationTimeConstant 363
34677 18293 TP15 TorqueCompensationSpeedHysteresis 364
34681 18297 TV5 TorqueFeedforward 366
34682 18298 TP22 MotorPowerReduction 364
34683 18299 TP30 CoggingCompensationAmplitude 364
34684 18300 TP31 CoggingCompensationPhase 365
34685 18301 TP32 CoggingCompensationNSines 365
34768 18384 QP11 SERCOSMBaud 337
34769 18385 AP5 PlcPrgScanTime 265
34770 18386 QP12 SERCOSTransmisionPower 338
34771 18387 PC150 ChangePostFB12 336
34772 18388 QP13 IdOffset 338
34773 18389 PV190 PostErrorBetweenFeedbacks 333
34775 18391 PP16 PositionFeedbackAdaptationTimeConstant 322
34776 18392 QP15 SerialProtocol 339
34777 18393 PV191 FollowingError1 333
34778 18394 PV192 FollowingError2 334
34779 18395 PV193 FollowingError12 334
34782 18398 SP50 VelocityFeedbackFilterFrequency 354
34783 18399 SP51 VelocityReferenceSmoothingMode 355
34786
18402
QP17 CommunicationMode
339
34787
18403
PV148 AdditivePositionCommand1
332
34788
18404
PP20 DynamicDeformationFrequency
322
34800 18416 XV10 GeneralVariable32A 368
34801 18417 XV11 GeneralVariable32B 368
34802 18418 XV12 ReadPlcMarksGroup 368
34803 18419 XV13 WritePlcMarksGroup 368
34811 18427 RV19 RHO 348
34812 18428 RV20 UVW 348
34817 18433 RV25 Rho_Corr2 348
34820 18436 RV28 EnDatDatabits 348
34821 18437 RV29 EnDatTurnNbits 348
34822 18438 RV30 EnDatPositionNbits 348
34823 18439 PP6 I0FindActive 320
34968 18584 NP1
ReducedActuatedMomentumOfInertiaPercentage
311
35034 18650 RP10 ABTestMargin 342
35068 18684 LC1 BackupMCPar 303
35069 18685 LP1 SecondCamSwitchStart 293
35070 18686 LV2 CamSwitchCompile 296
35078 18694 LP10 ProcessBlockMode 293
35079 18695 LP11 FeedrateOverrideLimit 293
35080 18696 LP12 PositioningVelocityDefault 293
35081 18697 LV13 KernelOperationMode 296
35082 18698 LV14 KernelAutoMode 296
35083 18699 LV15 KernelStartSignal 297
35084 18700 LV16 KernelStopSignal 297
35085 18701 LV17 KernelResetSignal 297
35086 18702 LV18 KernelAbortSignal 297
35087 18703 LV19 KernelManModel 297

Parámetros, variables y comandos
13.
PARÁMETROS, VARIABLES Y COMANDOS
Glosario de parámetros, variables y comandos
378
Ref.1912
DDS|MAB
SOFTWARE
· 378 ·
Soft.09.05
ID SERCOS ID CAN MNEM. NOMBRE PÁG.
35088 18704 LV20 JogPositiveSignal 297
35089 18705 LV21 JogNegativeSignal 297
35090 18706 LP22 JogVelocity 293
35091 18707 LP23 JogIncrementalPosition 294
35092 18708 LV24 FeedrateOverrideEqualZero 297
35093 18709 LP25 InPositionTime 294
35094 18710 LV26 ProgramPositionOffset 298
35095 18711 LV27 KernelInitError 298
35096 18712 LV28 KernelExecError 298
35098 18714 LV30 KernelExecutionState 299
35099 18715 LV31 KernelExecutionPoint 299
35100 18716 LV32 KernelExecutionPcode 299
35101 18717 LV33 KernelApplicationPars 299
35102 18718 LV34 KernelApplicationVars 299
35103 18719 LV35 BlockTravelDistance 300
35104 18720 LV36 BlockCoveredDistance 300
35108 18724 LP40 SynchronizationMode 294
35109 18725 LP41 SynchronizationAcceleration 294
35110 18726 LP42 SynchronizationVelocity 294
35111 18727 LV43 GearRatioAdjustment 300
35112 18728 LV44 SynchronizationVelocityOffset 300
35113 18729 LV45 SynchronizationPositionOffset 300
35114 18730 LV46 InSynchronization 300
35115 18731 LP47 SynchronizationTimeout 294
35116 18732 LV48 MasterOffset1 300
35117 18733 LV49 MasterScale1 301
35118 18734 LV50 SlaveOffset1 301
35119 18735 LV51 SlaveScale1 301
35120 18736 LV52 MasterOffset2 301
35121 18737 LV53 MasterScale2 301
35122 18738 LV54 SlaveOffset2 302
35123 18739 LV55 SlaveScale2 302
35127 18743 LP59 SynchronizationMasterSource 295
35128 18744 RP60 SSIClockFrequency 343
35129 18745 RP61 SSIDataLength 343
35130 18746 RP62 SSIDataFormat 343
35131 18747 RP63 SSIFeedbackResolution 343
35132 18748 RP64 SSIFCheck 344
35133 18749 RP65 BitsPulsesSelection 344
35136 18752 RP66 SSISHIFT 344
35138 18754 RP67 DigitalResolution 344
35139 18755 RP68 DigitalAnalogQuadrature 344

14
Ref.1912
· 379 ·
DDS|MAB
SOFTWARE
Soft.09.05
CÓDIGOS Y
MENSAJES DE ERROR
14.1 Códigos de mensaje en el regulador
La activación de cualquiera de los errores listados en este capítulo origina
unos efectos en el sistema que dependen del tipo de interfaz de comunica-
ción establecido.
Interfaz analógico
El código del error activado se visualiza en el display del regulador.
Interfaz SERCOS o CAN
El código del error activado se visualiza en el display del regulador.
En la pantalla del CNC se visualiza este mismo código de error.
El CNC puede visualizar tanto los errores listados en este capítulo como los
códigos y textos de errores propios de la comunicación SERCOS o CAN.
El regulador activa el bit 13 de la variable DV31 (S00135).
El regulador activa el bit correspondiente al error en la variable DV31
(S00135).
Acciones del CNC
Detiene el programa de ejecución.
Anula el movimiento de los ejes y cabezales.
Se ponen a cero las marcas /ALARM. Estas marcas estarán presentes
en el programa de PLC que gestionará esa emergencia sin necesidad
de saber cuál ha sido el error activado.
No podrá iniciarse el funcionamiento de un sistema sin haber eliminado to-
dos los errores detectados por el regulador.
Pueden ser:
Errores reseteables
Definición. Errores que sí pueden ser suprimidos mediante un «reset» de
errores tras eliminar la causa que los provoca.
Modo de proceder
. El «reset» de errores puede llevarse a cabo a través del
pin 1 «ERROR RESET» del conector X2 de la fuente de alimentación (co-
nector X6 si se trata de fuentes RPS). En los reguladores compactos (inte-
gran la fuente de alimentación) desde el pin 3 del conector X2.
Errores no reseteables
Definición. Errores que no pueden ser suprimidos mediante un «reset» de
errores tras eliminar la causa que los provoca, es decir, no puede seguirse
el procedimiento anterior para su eliminación.
Modo de proceder
. Eliminar la causa que provoca el error y cuando éste
haya cesado llevar a cabo un reencendido del regulador
.
NOTA. Cuando se dispone del interfaz de comunicación SERCOS o CAN,
el «reset» de errores se efectúa de la misma manera que cualquier otro
error del CNC.

Mensajes de error en el regulador
14.
CÓDIGOS Y MENSAJES DE ERROR
Códigos de mensaje en el regulador
404
Ref.1912
DDS|MAB
SOFTWARE
· 380 ·
Soft.09.05
Son errores no reseteables:
La activación de cualquiera de los errores tanto «reseteables» como «no-
reseteables» origina una parada segura 1 (SS1).
Errores que desactivan PWM
Definición. Errores que hacen que se corte el suministro de corriente que
circula por los bobinados del motor.
Modo de proceder
. Eliminar la causa que provoca el error y cuando éste
haya cesado llevar a cabo un reencendido del regulador.
Son errores que desactivan PWM:
La activación de cualquier error mencionado en la tabla
T. S14/2 origina una
parada por desconexión segura de par (STO).
T. S14/1 Errores no reseteables.
E001 E002 E005 E006 E007 E008 E009 E010 E031 E050
E051 E052 E053 E054 E055 E100 E101 E102 E103 E104
E105 E109 E211 E216 E217 E305 E330 E410 E501 E502
E503 E504 E505 E506 E507 E508 E604 E605 E606 E607
E608 E700 E701 E702 E703 E704 E705 E706 E707 E800
E801 E802 E803 E804 E805 E807 E808 E809 E810 E811
E812 E813 E814 E816 E817 E818 E819 E820 E821 E822
E823 E900
T. S14/2 Errores que cortan la circulación de corriente en el motor.
E002 E004 E005 E006 E007 E109 E160 E200 E202 E203
E211 E212 E213 E214 E215 E216 E217 E302 E303 E304
E306 E314 E315 E316 E410 E500 E501 E502 E503 E504
E506 E507 E508 E604 E605 E606 E607 E608 E609 E700
E701 E702 E703 E704 E705 E706 E707 E801 E802 E803
E804 E806 E807 E808 E809 E810 E811 E813

Mensajes de error en el regulador
CÓDIGOS Y MENSAJES DE ERROR
Códigos de mensaje en el regulador
14.
Ref.1912
· 381 ·
DDS|MAB
SOFTWARE
Soft.09.05
Códigos de error. Significado y solución
Contactar con Fagor Automation S. Coop.
Contactar con Fagor Automation S. Coop.
Posible caída en alguna de las líneas trifásicas o fallo en al-
guno de los reguladores.
Compruébese si es correcto el estado de las líneas y los re-
guladores e iníciese nuevamente el arranque.
Ver aviso A005 en fuentes RPS.
Intento de parada segura 1 (SS1).
El sistema intenta detener el motor a par máximo pero no lo
consigue en un tiempo inferior al prefijado en el parámetro
GP3. El retardo en la eliminación de pulsos es igual al máxi-
mo tiempo permitido para frenar antes de considerar el E004
por no poder parar en el tiempo estipulado o bien el paráme-
tro SP42 (que determina cuándo se considera parado el mo-
tor) es excesivamente pequeño.
Téngase en cuenta que la velocidad cero o ausencia absoluta
de velocidad no existe; se dispone mínimamente de un pe-
queño ruido de velocidad debido a la captación.
Puede ser que:
La carga sea excesiva para ser detenida por el motor en
el tiempo prefijado en GP3. Auméntese, por tanto, el valor
de este parámetro.
El umbral o ventana de velocidad SP42 considerada
como cero sea demasiado pequeño. Auméntese, por tan-
to, el valor de este parámetro.
El funcionamiento del módulo sea deficiente e incapaz de
detener el motor. Avería en el regulador.
El checksum del código de programa cargado no es correcto.
Cargar nuevamente el software. Si persiste el problema es
posible que las memorias RAM, FLASH o el código cargado
sean defectuosos.
Contactar con Fagor Automation S. Coop.
Sustituir la tarjeta SERCOS.
Si persiste el error, sustituir la placa VeCon.
Contactar con Fagor Automation S. Coop.
Consultar capítulos referentes al PLC en el manual «man_
dds_mc.pdf» que especifica el significado del error.
Corregir la edición del programa.
E001
Interno
E002
Interno
E003
Caída del bus de potencia en presencia de par
E004
Tiempo límite de parada establecido en GP3 superado
E005
Error de checksum del código
E006
Error en la tarjeta SERCOS
E007
Fallo del clock de la placa SerCon
E008
Fallo de la memoria del SerCon corrompida
E009
Pérdida de datos no volátiles
E010
Datos no volátiles dañados
E031
Interno
E050-55
Error de compilación interna del PLC

Mensajes de error en el regulador
14.
CÓDIGOS Y MENSAJES DE ERROR
Códigos de mensaje en el regulador
404
Ref.1912
DDS|MAB
SOFTWARE
· 382 ·
Soft.09.05
Consultar capítulos referentes al PLC en el manual «man_
dds_mc.pdf» que especifica el significado del error.
El regulador está realizando una labor que sobrecalienta en
exceso los dispositivos de potencia.
Detener el sistema unos minutos y reducir el grado de esfuer-
zo exigido al regulador.
El entorno de ubicación del regulador se encuentra a tempe-
ratura excesivamente elevada.
Reducir la temperatura ambiente.
El cableado de medición de temperatura del motor (mangue-
ra del sensor de posición) o el termistor están en malas con-
diciones.
La aplicación exige fuertes picos de corriente.
Detener el sistema unos minutos y disminuir el grado de es-
fuerzo exigido al regulador.
Ventilar el motor.
Las entradas digitales del regulador reciben una tensión su-
perior a la que han sido configuradas.
Revisar la configuración (parámetro IP5) y la tensión eléctrica
aplicada.
El regulador está siendo sometido a temperatura igual o por
debajo de cero grados, es decir, excesivamente baja.
Templar su temperatura.
Existe la posibilidad de que el sensor o el cable estén dete-
riorados.
El valor de temperatura medido por el sensor KTY es inferior
al mínimo admisible establecido por el usuario y parametriza-
do en MP47.
Posibles causas:
La temperatura ambiente es demasiado baja.
El sensor de temperatura está en cortocircuito con el bo-
binado del estátor.
Posibles soluciones:
Parametrizar MP47 con un valor inferior al actual.
Eliminar el cortocircuito existente entre el sensor de tem-
peratura y el bobinado del motor.
E066-69
Error de ejecución del PLC
E100
Tensión interna de +5 V fuera de rango
E101
Tensión interna de -5 V fuera de rango
E102
Tensión interna de +8 V fuera de rango
E103
Tensión interna de -8 V fuera de rango
E104
Tensión interna de +18 V fuera de rango
E105
Tensión interna de -18 V fuera de rango
E106
Temperatura extrema en el radiador de los IGBTs
E107
Sobretemperatura en el regulador · placa CPU ·
E108
Sobretemperatura del motor
E109
Sobretensión en las entradas digitales
E110
Baja temperatura del radiador de los IGBTs
E111
Sub-temperatura del motor

Mensajes de error en el regulador
CÓDIGOS Y MENSAJES DE ERROR
Códigos de mensaje en el regulador
14.
Ref.1912
· 383 ·
DDS|MAB
SOFTWARE
Soft.09.05
Superación de los límites establecidos por los parámetros
PP49 y PP50 en el recorrido del accionamiento.
La activación de este error abre el contacto DR_OK del regu-
lador.
Tras recuperar potencia en el accionamiento, es posible des-
plazar el eje a la zona permitida.
Revisar los valores de los límites y de la programación de los
movimientos para que no se repita el fenómeno nuevamente.
A partir de la 06.03, trás finalizar una búsqueda de I0, el soft-
ware realiza un chequeo de cotas iniciales. Si la cota obteni-
da (PV53 o PV51, según el caso) está fuera de límites y éstos
están habilitados (PP55.4=1) se dará este error (con control
de posición o de velocidad).
Con consigna en formato módulo, se recibe una consigna de
valor superior al módulo fijado por el parámetro PP103.
Revisar el valor de este parámetro junto con el parámetro
equivalente en el CNC.
Comprobar que ambos trabajan en el mismo modo de con-
signa.
La trayectoria requerida por la consigna de posición provoca
una consigna de velocidad demasiado elevada, es decir, la
velocidad programada en el CNC es superior al valor máximo
dado en SP10 (máximo valor que puede alcanzar la consigna
de velocidad tras las limitaciones, rampas, ...). La velocidad
programada viene en m/min y SP10 en rev/min. La ecuación
para unificar las unidades a m/min es:
Reducir las exigencias en la trayectoria en cuanto a la veloci-
dad requerida, es decir, disminuir la velocidad programada o
modificar la relación de transmisión.
La trayectoria requerida por la consigna de posición provoca
una consigna de velocidad adelantada (feedforward) dema-
siado elevada.
Reducir las exigencias en la trayectoria en cuanto a la veloci-
dad requerida.
La trayectoria requerida por la consigna de posición provoca
una consigna de aceleración adelantada (feedforward) de-
masiado elevada.
Reducir las exigencias en la trayectoria en cuanto a la acele-
ración requerida.
El accionamiento sigue a la consigna de posición con un error
de seguimiento PV189 (FollowingError) superior al permitido
por la ventana de monitorización PP159 (MonitoringWindow).
Revisar el ajuste de todos los aspectos que tienen influencia
en el error de seguimiento, así como del dado al parámetro
PP159.
E150
Límites de desplazamiento sobrepasados
E152
Módulo de consigna superado
E153
Incremento excesivo en la consigna de posición
E154
Consigna de velocidad de feedforward excesiva
E155
Consigna de aceleración de feedforward excesiva
E156
Error de seguimiento excesivo
Velocidad programada SP10
NP122 NP123
NP121
------------------------------------------
>

Mensajes de error en el regulador
14.
CÓDIGOS Y MENSAJES DE ERROR
Códigos de mensaje en el regulador
404
Ref.1912
DDS|MAB
SOFTWARE
· 384 ·
Soft.09.05
Este error puede aparecer con control de posición o veloci-
dad y siempre que esté habilitado el parámetro PP5.
Se produce cuando la desviación o diferencia entre los valo-
res del feedback de la captación motor y de la captación di-
recta supera el error máximo permitido parametrizado en
PP5 (ActualPositionMonitoring Window) durante al menos 20
ms.
Revisar la parametrización de PP5 (rango demasiado peque-
ño).
Comprobar que la diferencia de valores entre PV190 y PP5
no son desproporcionadas. De serlo, las captaciones están
mal parametrizadas o los cables de conexión, captadores, ...
están en malas condiciones o deteriorados.
Movimiento superior al máximo indicado en el parámetro
PP160 (F01303) MonitoringWindowPosEleCalc durante la
ejecución del comando GC7. Recuerde que este comando
estima la posición eléctrica de un motor síncrono sin captador
de posición absoluta en una vuelta.
Aumentar el valor parametrizado en PP160.
Fases cambiadas en el cableado de potencia, de captación
motor o en ambos.
Corregir el orden de las fases del cableado.
Error indicativo de que la parada no sigue la rampa de emer-
gencia propiciada por la frenada dentro de los límites estable-
cidos en los parámetros SP71 y SP72.
Adecuar las exigencias de la frenada de su máquina y/o
reajustar convenientemente los dos parámetros menciona-
dos.
La velocidad del motor ha superado en un 12 % el valor de
SP10.
Realizar una revisión del cableado del sensor de posición o
del cableado de potencia del motor.
El lazo de velocidad puede no estar bien ajustado.
Reducir sobrepasamiento en velocidad de la respuesta.
Salto de la protección I²t del motor.
El ciclo de trabajo es superior al que puede proporcionar el
motor.
Salto de la protección I²t del regulador.
El ciclo de trabajo es superior al que puede proporcionar el
regulador.
E157
Diferencia excesiva de la posición real
E158
Desviación excesiva de la posición al estimar la posi-
ción eléctrica con el comando GC7
E159
Sentido de contaje incorrecto cuando se ejecuta el co-
mando GC3
E160
Error en el seguimiento de la rampa de emergencia en
frenada
E200
Sobrevelocidad
E201
Sobrecarga del motor
E202
Sobrecarga del regulador

Mensajes de error en el regulador
CÓDIGOS Y MENSAJES DE ERROR
Códigos de mensaje en el regulador
14.
Ref.1912
· 385 ·
DDS|MAB
SOFTWARE
Soft.09.05
A. El accionamiento ha sufrido un bloqueo y no ha podido
girar con libertad. Con par motor muy elevado la velocid-
ad de giro no ha superado GP8 durante un tiempo supe-
rior a GP7.
Liberar el accionamiento y si el error se repite sin un mo-
tivo aumentar los valores de GP7 y/o GP8. Para desacti-
var este error y hacer que éste no vuelva a presentarse,
parametrizar GP7=0.
B. Comprobar que:
No existen dos fases intercambiadas y que los cables
de potencia tienen un buen contacto en su amarre.
El cable de captación no está deteriorado y que el co-
nexionado entre pines es correcto (especialmente si
el cable ha sido confeccionado por el usuario).
El valor con el que se ha parametrizado NP116 (con
motores 0) es correcto.
El valor de RV3 (o RP5 si se dispone de resólver) es
correcto.
A. El accionamiento ha sufrido un bloqueo y no ha podido
girar con libertad. Con par motor muy elevado la veloci-
dad de giro no ha superado GP8 durante un tiempo su-
perior a GP7.
Aumentar la tensión en el motor o reducir las condiciones
de trabajo exigidas y si el error se repite sin un motivo,
aumentar los valores de GP7 y/o GP8. Para desactivar
este error y hacer que éste no vuelva a presentarse, pa-
rametrizar GP7=0.
B. Comprobaciones:
Comprobar que con el motor parado que no existe
ninguna fase suelta.
Ver las velocidades próximas a la nominal en la curva
par-velocidad del motor correspondiente en el ma-
nual de motores y observar que se produce esta cir-
cunstancia para las condiciones de par y velocidad
exigidas.
Aumentar entonces el valor de la tensión de red si no
se desean modificar estas condiciones de trabajo o
bien reducir el valor de la aceleración o de la veloci-
dad máxima.
Hacer las comprobaciones que se listan en el aparta-
do B del código de error
E203.
La consigna de velocidad que se recibe (en lazo de veloci-
dad) supera la consigna máxima del motor SP10.
El DSP no dispone de tiempo suficiente para ejecutar todas
las funcionalidades que han sido parametrizadas.
E203
Sobrecarga de par
E205
El motor se queda sin tensión para las condiciones de
trabajo exigidas
NOTA. Nótese que hasta la versión de software 06.11 la
aparición del código de error
E205 generaba una parada
por desconexión segura de par, STO. A partir de la versión
06.12 genera una parada segura 1, SS1.
E206
Consigna de velocidad excesiva
E211
Interno

Mensajes de error en el regulador
14.
CÓDIGOS Y MENSAJES DE ERROR
Códigos de mensaje en el regulador
404
Ref.1912
DDS|MAB
SOFTWARE
· 386 ·
Soft.09.05
Posibilidades de actuación:
Desactivar el estimador dentro del lazo de velocidad
(SP17=0) y habilitar un filtro pasa-bajo con SP50 o en su
defecto con CP30.
Quitar la captación directa (GP10=0) y si es posible llevar-
la al CNC.
Reducir la frecuencia de conmutación de los IGBTs de 8
kHz a 4 kHz (GP1= 4 000).
Si el error continúa, contactar con Fagor Automation S. Coop.
Detección de corriente excesiva circulando por el regulador.
Funcionamiento incorrecto del regulador.
Realizar un reset del error ya que posiblemente la parametri-
zación no sea la adecuada y se generan sobrepasamientos
en la corriente.
Detección de baja tensión de alimentación de los circuitos de
ataque al IGBT en el regulador.
Posible avería en el driver del IGBT o en el mismo IGBT.
Realizar un reset del error y si éste perdura contactar con Fa-
gor Automation S. Coop.
Detección de cortocircuito en el regulador.
Realizar un reset del error. Si éste persiste es posible la exis-
tencia de secuencia errónea en la conexión de los cables de
potencia o que estén en contacto provocando cortocircuito.
Es posible que los parámetros sean incorrectos o se deba a
un fallo del regulador.
Contactar con Fagor Automation S. Coop.
El hardware del regulador ha detectado una tensión excesiva
en el BUS DC de potencia.
Ausencia del puente de conexión del Ballast interno (ver es-
tos conectores).
Mala conexión si se utiliza el Ballast externo.
Destrucción de la resistencia de Ballast.
Desconectar la alimentación y comprobar el conexionado del
circuito de Ballast.
Verificar el apriete de las pletinas del BUS DC de potencia.
Ver los códigos de error
E304 y E306.
Contactar con Fagor Automation S. Coop.
Una supervisión del lazo de velocidad impide el embalamien-
to de cualquier motor síncrono como consecuencia de una
captación motor no satisfactoria
.
Comprobar que:
El cable de captación motor no está deteriorado y que
el conexionado del patillaje es correcto (especialmen-
te si el cable ha sido confeccionado por el usuario).
La parametrización de la captación motor es correcta.
E212
Sobrecorriente
E213
Subtensión en el driver del IGBT
E214
Cortocircuito
E215
Sobretensión en el BUS DC del regulador · hardware ·
E216
Interno
E217
Anti-embalamiento del motor

Mensajes de error en el regulador
CÓDIGOS Y MENSAJES DE ERROR
Códigos de mensaje en el regulador
14.
Ref.1912
· 387 ·
DDS|MAB
SOFTWARE
Soft.09.05
El orden de fases de potencia del motor es el que co-
rresponde.
El cálculo del RHO tras la ejecución de alguno de los
comandos GC7|GC11 no es erróneo.
No ha habido pérdida del valor del RHO como conse-
cuencia de ruido durante el funcionamiento del motor.
No existe algún otro motivo que pueda generar un
descontrol en el lazo de velocidad.
Contactar con Fagor Automation S. Coop.
Contactar con Fagor Automation S. Coop.
Asegúrese de que NP166 está bien parametrizado al igual
que los parámetros del encóder y/o de posición. Compruebe
que el cable de captación, el propio encóder o el hardware del
regulador no sufren avería.
Verificar la colocación de cabeza y regla de la captación di-
recta.
Verificar que el parámetro AP1 está a 5 o 13.
Error indicativo de no repetitividad de la señal de I0 en cada
vuelta del encóder. Pérdida de pulsos y/o la medida dada por
el captador es errónea.
Compruebe que la conexión y el cableado son satisfactorios.
Compruebe que el nº de pulsos permitidos como margen de
error no es rigurosamente bajo. Aumente ligeramente el valor
de RP9 y compruebe si se repite el error.
Si el error se sigue repitiendo, posiblemente el captador esté
deteriorado. Cámbielo.
Detección de temperatura excesiva del radiador o del circuito
de Ballast de la fuente de alimentación.
Detenga el sistema unos minutos y reduzca el grado de es-
fuerzo exigido al regulador.
Contactar con Fagor Automation S. Coop.
Contactar con Fagor Automation S. Coop.
E250
Error en la búsqueda de I0
E251
Error del comando PC148 «DriveControlledHoming»
E253
I0 no encontrado en dos vueltas
E254
Lectura errónea de los I0s codificados
E255
Error en el cambio de captaciones tras la ejecución
del comando PC150 ·cambio de captaciones·
E256
Error de distancia de la señal de I0 por vuelta del cap-
tador
E300
Sobretemperatura del radiador de la fuente de alimen-
tación o del regulador compacto
E301
Sobretemperatura del circuito de Ballast de la fuente
de alimentación o del regulador compacto
E302
Cortocircuito en el Ballast de la fuente de alimenta-
ción
E303
Tensión de alimentación del driver del circuito de Ba-
llast fuera de rango

Mensajes de error en el regulador
14.
CÓDIGOS Y MENSAJES DE ERROR
Códigos de mensaje en el regulador
404
Ref.1912
DDS|MAB
SOFTWARE
· 388 ·
Soft.09.05
La fuente de alimentación ha detectado una tensión excesiva
en el BUS DC de potencia.
Posible desconexión del Ballast interno (ver fuente de ali-
mentación).
Si se utiliza Ballast externo es posible que no esté conectado.
Desconecte la alimentación y compruebe el correcto estado
de las líneas.
Véanse los códigos de error
E215 y E306.
Detección de errores de comunicación entre la fuente de ali-
mentación y el regulador a través del bus interno.
Contactar con Fagor Automation S. Coop.
Las fuentes con devolución XPS incorporan la detección de
un grupo de errores que los reguladores (con versiones 03.05
y anteriores) no pueden expresar a través del Status Display.
En esta situación las XPS definen los errores mediante distin-
tas combinaciones luminosas de los LEDs de su frontal.
En la tabla adjunta se determinan estas combinaciones para la interpreta-
ción de los códigos de error.
E304
Sobretensión en el BUS DC de potencia de la PS
E305
Error de protocolo en el interfaz entre la fuente de ali-
mentación y el regulador
T. S14/3 Definición de errores según la iluminación combinada de los leds
de estado. Fuentes de alimentación principal, XPS.
XPS ERROR
Rojo Ámbar Verde Descripción
IOFFOFFFuente sin errores. No hay tensión de línea
OFF OFF OFF BUS DC en proceso de carga
ON OFF OFF
Sobretensión en el BUS DC
ON OFF OFF Baja tensión en el Driver del IGBT de crowbar
ON OFF OFF Cortocircuito en el IGBT de crowbar
ON OFF OFF Sobretemperatura en el radiador
ON OFF ON Sobrecorriente en consumo
ON ON OFF Sobrecorriente en regeneración
ON ON ON Cortocircuito en el High Side IGBT del inversor
ON ON I
Baja tensión en el Driver del High Side IGBT del
inversor
ON I ON Cortocircuito en el Low Side IGBT del inversor
ON I I
Baja tensión en el Driver del Low Side IGBT del
inversor
I: Intermitente
T. S14/4 Definición de errores según la iluminación combinada de los leds
de estado. Fuentes de alimentación principal, PS-xxA.
PS-xxA ERROR
Rojo Ámbar Verde Descripción
IOFFOFFFuente sin errores. No hay tensión de línea
OFF OFF OFF BUS DC en proceso de carga
ON OFF OFF Sobretensión en el BUS DC
ON OFF OFF
Arranque fallido.
La fuente no arranca satisfactoriamente
ON OFF OFF Baja tensión en el Driver del IGBT de crowbar
ON OFF OFF Cortocircuito en el IGBT de crowbar
ON OFF OFF
Sobretemperatura en la resistencia de crowbar
(temperatura del aire de salida)
ON OFF OFF Sobretemperatura en el radiador
ON OFF OFF Sobrecarga en la resistencia de crowbar
I: Intermitente

Mensajes de error en el regulador
CÓDIGOS Y MENSAJES DE ERROR
Códigos de mensaje en el regulador
14.
Ref.1912
· 389 ·
DDS|MAB
SOFTWARE
Soft.09.05
El software del regulador ha detectado una tensión excesiva
en el bus de potencia.
Ver los códigos de error
E215 y E304.
La tensión de red es menor que la tensión admisible (tensión
nominal < 380 V AC).
Desconéctese la alimentación y compruébese el correcto es-
tado de las líneas.
La aplicación exige fuertes picos de corriente y la línea de ali-
mentación de red tiene una impedancia excesiva.
Verificar el apriete de las pletinas del bus de potencia y el fu-
sible de la fuente de alimentación.
Contactar con Fagor Automation S. Coop.
Contactar con Fagor Automation S. Coop.
Contactar con Fagor Automation S. Coop.
Contactar con Fagor Automation S. Coop.
Contactar con Fagor Automation S. Coop.
La corriente exigida a la fuente de alimentación es excesiva.
Reducir las exigencias del ciclo de trabajo.
Protección I²t de la resistencia de crowbar.
La fuente no ha arrancado correctamente.
Si la fuente de alimentación es una PS-25x, verificar el esta-
do de la resistencia de Ballast.
Para cualquier fuente de alimentación, verificar que está en
perfecto estado.
El tiempo de carga del BUS DC (tipo soft-start) en un regula-
dor compacto ha superado el tiempo de 4 s establecido para
aceptar que esta tarea se ha realizado correctamente.
Verificar que:
La conexión del crowbar (interno o externo) es correcta.
La resistencia interna de crowbar/soft-start se encuentra
en perfecto estado y está bien conectada.
El fusible interno de limitación de corriente en soft-
start/crowbar está en perfecto estado.
Ver tabla
T. S14/5.
E306
Sobretensión en el BUS DC de potencia del regulador
·software·
E307
Subtensión en el BUS DC de potencia del regulador
·software·
E308
Sobrecorriente en el circuito de devolución
E309
Cortocircuito en el high side IGBT
E310
Baja tensión en el Driver del high side IGBT
E311
Cortocircuito en el low side IGBT
E312
Baja tensión en el driver del low side IGBT
E313
Sobrecorriente en el consumo
E314
Sobrecarga del crowbar
E315
Arranque fallido de la fuente de alimentación
E316
Tiempo excesivo empleado en la carga del BUS DC de
un regulador compacto
E317
Error en la selección del nº de nodo SERCOS.
Debe ser inferior a ·D·

Mensajes de error en el regulador
14.
CÓDIGOS Y MENSAJES DE ERROR
Códigos de mensaje en el regulador
404
Ref.1912
DDS|MAB
SOFTWARE
· 390 ·
Soft.09.05
Ver tabla T. S14/5.
Ver tabla
T. S14/5.
Ver tabla
T. S14/5.
Ver tabla
T. S14/5.
Ver tabla
T. S14/5.
Ver tabla
T. S14/5.
Ver tabla
T. S14/5.
Ver tabla
T. S14/5.
Ver tabla
T. S14/5.
Ver tabla
T. S14/5.
Ver tabla
T. S14/5.
Ver tabla
T. S14/5.
E318
Cortocircuito en el IGBT de Crowbar
E319
Sobretemperatura en el radiador
E320
Incompatibilidad de la placa de potencia con el mode-
lo de MAB
E321
Error de comunicación SPI de la placa cap_SERCOS
con la de potencia
E322
Tiempo excesivo empleado en la carga del BUS DC
E323
Sobretensión en el BUS DC
E324
Sobrecorriente en consumo o regeneración
E325
Cortocircuito en uno de los IGBTs de la rama L1
E326
Error en la captación de fases para el sincronismo
E327
Cortocircuito en uno de los IGBTs de la rama L3
E328
Cortocircuito en uno de los IGBTs de la rama L2
E329
Error en la identificación de las fases de alimentación
T. S14/5 Definición de errores según la iluminación combinada de los leds
de estado de la fuente de alimentación principal en equipos
MAB-X-XXX-XXX.
MAB-X-XXX-XXX ERROR
FAULT
·rojo·
REGEN
·ámbar·
DC BUS ON
·verde·
CÓDIGO DE ERROR.
Significado
I OFF OFF Sin error. Sin tensión de línea
OFF OFF OFF Sin error. BUS DC en proceso de carga
OFF OFF ON Sin error. Bus ok
ON OFF OFF Ver
E317
ON OFF OFF Ver E318 (sólo en MAB--...)
ON OFF OFF Ver
E319
ON OFF OFF Ver E320
ON OFF OFF Ver E321
ON OFF OFF Ver E322
ON OFF OFF Ver E323
ON OFF OFF Ver E324 (sólo en MAB-R-...)
ON OFF OFF Ver
E325 (sólo en MAB-R-...)
ON OFF OFF Ver
E326 (sólo en MAB-R-...)
ON OFF OFF Ver
E327 (sólo en MAB-R-...)
ON OFF OFF Ver
E328 (sólo en MAB-R-...)
ON OFF OFF Ver
E329 (sólo en MAB-R-...)
I: Intermitente

Mensajes de error en el regulador
CÓDIGOS Y MENSAJES DE ERROR
Códigos de mensaje en el regulador
14.
Ref.1912
· 391 ·
DDS|MAB
SOFTWARE
Soft.09.05
Se ha producido sobrecorriente, cortocircuito o caída/ausen-
cia de la tensión de la alimentación en los circuitos asociados
al freno de mantenimiento del motor.
Con el sistema en movimiento se produce el frenado dinámi-
co de los motores
sin la desactivación del PWM.
Al ser un
error no reseteable, solo podrá resetearse el equipo
ante:
cortocircuito o sobrecorriente, desconectando la alimen-
tación de 24 V DC del freno de mantenimiento. Si solo se
desconecta y se reconecta la alimentación del freno tam-
bién habrá que realizar un «reset» de errores.
una falta de alimentación del freno, conectando la alimen-
tación de 24 V DC del freno y realizando un «reset» de
errores.
Los códigos de error de la serie 400 se refieren a diversos
problemas en la comunicación a través del anillo de fibra óp-
tica.
Verificar las conexiones en el anillo y la identificación de cada
módulo.
Por el latiguillo de conexión del bus interno entran ruidos que
resetean el SerCon pero no el VeCon2.
El dispositivo maestro (CNC) envía un mensaje de sincronis-
mo en cada ciclo (4 ms, normalmente) que hace que los re-
guladores se sincronicen.
Si en algún momento no pueden sincronizarse o pierden sin-
cronización se origina este error.
Posiblemente el CNC no ha enviado este mensaje o si lo ha
hecho no ha sido en el momento exacto.
Revisar el cable de transmisión o comprobar que no hay pre-
sencia de ruido en la transmisión.
Sincronización perdida entre CNC y regulador.
Mensaje cíclico (el que el regulador debe recibir en cada ci-
clo) no enviado o bien datos del mensaje recibido no correc-
tos en la transmisión por CAN.
Revisar el cable CAN de transmisión o comprobar que no hay
presencia de ruido en la misma.
Ver código de error
E502.
Detección de checksum de parámetros no correcto. Proba-
blemente se ha cambiado de versión de software y la nueva
versión requiere de un número diferente de parámetros.
E330
Fallo detectado en el MAB asociado a la circuitería del
freno de mantenimiento del motor
E403
Fallo MST
E404
Fallo MDT
E405
Err_InvalidPhase
E406
Err_PhaseUpshift
E407
Err_PhaseDownshift
E410
Err_RuidoEntraAlSerconReset
E411
Telegrama recibido erróneo
E412
Error de sincronización SERCOS
E413
Error de sincronización CAN
E500
Parámetros incongruentes
E501
Error de checksum de parámetros

Mensajes de error en el regulador
14.
CÓDIGOS Y MENSAJES DE ERROR
Códigos de mensaje en el regulador
404
Ref.1912
DDS|MAB
SOFTWARE
· 392 ·
Soft.09.05
Ante este error, el regulador toma los valores por defecto de
los parámetros. El usuario dispone de dos opciones:
Validar los valores por defecto. Es suficiente con volver a
grabar los parámetros.
Recuperar los valores previos. Deben transferirse los pa-
rámetros a la memoria RAM y examinarlos con el PC.
Si el usuario considera que son válidos, podrá validarlos gra-
bándolos.
Algún parámetro tiene un valor erróneo.
Activando este icono de la barra del WinDDSSetup
se despliega la ventana SPY en la que se visualizan
todos los parámetros cuyos valores no son correc-
tos.
En general, se reconoce fácilmente cual ha sido el error co-
metido al parametrizar el parámetro o parámetros generado-
res del código de error E502 que salen en la ventana en la
mayoría de las situaciones, si bien hay algunos que no son
tan intuitivos.
Así, p. ej. si se muestra como parámetro erróneo:
EP1: Asegúrese, si está en presencia de captación motor
cuadrada, que su valor coincide con el número de pulsos de
dicha captación, es decir, EP1= NP116. Disponible a partir de
versiones de software 05.xx y posteriores.
NP133: Asegúrese, si está en presencia de captación directa
rotativa y escalado lineal, que el parámetro NP133 no es ce-
ro. Si es cero, introduzca el valor del paso de husillo.
NP117: Asegúrese, si dispone de captación directa (GP10
0) y el captador es rotativo (bit 0 de PP115=0 encóder) que
la relación:
es un número entero. De no ser así se producirá un error en
el parámetro NP117. Si está en una situación de este tipo,
véase como resolverla en el apartado «captación directa» del
capítulo 5 de este manual.
Este error no aparece en versiones 03.01 de software ni pos-
teriores.
No ha sido grabada la tabla de valores por defecto del motor
y debe grabarse.
Existe algún parámetro con valor erróneo en fase 2 del proto-
colo SERCOS.
Identificar el parámetro en la ventana SPY del WinDDSSe-
tup siguiendo las indicaciones ya dadas en el código de error
E502.
Corregir todos los parámetros erróneos visualizados.
E502
Parámetro erróneo
E503
La tabla de valores por defecto del motor es errónea
E504
Parámetro erróneo en fase 2 de SERCOS
NP133 10000 2
10
NP117

Mensajes de error en el regulador
CÓDIGOS Y MENSAJES DE ERROR
Códigos de mensaje en el regulador
14.
Ref.1912
· 393 ·
DDS|MAB
SOFTWARE
Soft.09.05
Se han ajustado los parámetros de la memoria RAM del re-
gulador para el nuevo motor conectado.
No obstante, el ajuste de parámetros almacenado en memo-
ria FLASH corresponde a otro motor, es decir, el valor de MP1
en FLASH y en RAM no coinciden.
Este error no interrumpe el funcionamiento normal del regu-
lador.
Grabar los parámetros en memoria FLASH para trabajar con
el motor conectado.
Durante el proceso de carga de la versión de software, ase-
gúrese de
activar la opción «cargar después de la versión»
en el campo «tabla de motores» que muestra la ventana
«configuración» que aparece en pantalla tras pulsar el icono
representado en la siguiente figura:
Activar la opción que se indica en el caso de que
se genere el código de error E507 tras la carga
de versión.
Parámetro con valor erróneo en fase 4 del protocolo SERCOS.
Identificar el parámetro en la ventana SPY del WinDDSSetup
siguiendo las indicaciones ya dadas en el código de error
E502.
Corregir todos los parámetros erróneos visualizados.
El cableado, el captador y/o la tarjeta de captación motor (co-
nector X4) es defectuoso.
Comprobar los valores de los parámetros RP1, RP2, RP3 y
RP4. Alguno puede ser demasiado elevado.
Revisar el estado del cable, del captador, de la tarjeta de cap-
tación motor o reducir el valor de estos parámetros.
El cableado, el captador y/o la tarjeta de captación (conector
X4) es defectuoso.
Los valores de los parámetros RP1, RP2, RP3, RP4 son de-
masiado bajos.
Comprobar que no se han producido cuatro errores consecu-
tivos en las señales de la captación disponible. Ver variable
RV9.
E505
Motor conectado distinto al ajustado en FLASH
E506
Fichero *.mot no encontrado
E507
Motor no encontrado en el fichero *.mot
E508
Parámetro erróneo en fase 4 de SERCOS
E604
Saturación en los valores de las señales A y/o B de la
captación motor
E605
Alarma en las señales de captación. Excesiva atenua-
ción en las señales A y/o B en la captación del motor

Mensajes de error en el regulador
14.
CÓDIGOS Y MENSAJES DE ERROR
Códigos de mensaje en el regulador
404
Ref.1912
DDS|MAB
SOFTWARE
· 394 ·
Soft.09.05
Revisar el estado del cable, del captador y/o de la tarjeta de
captación motor o aumentar el valor de los parámetros men-
cionados.
Ver parámetro
RP10.
La calidad de la señal ha degenerado.
Cableado del sensor del rótor defectuoso, encóder defectuo-
so, tarjeta de captación motor defectuosa o conexión de tie-
rras defectuosa.
Revisar el estado del cable, del encóder, de la tarjeta de cap-
tación motor y las conexiones a tierras.
El cableado, el captador o la tarjeta de captación directa (co-
nector X3) es defectuoso.
Los valores de los parámetros RP51, RP52, RP53 o RP54
son demasiado elevados.
Revisar el estado del cable, del captador, de la tarjeta o redu-
cir el valor de estos parámetros.
El cableado, el captador y/o la tarjeta de captación directa
(conector X3) es defectuoso.
Los valores de los parámetros RP51, RP52, RP53 o RP54
son demasiado bajos.
Comprobar que no se han producido cuatro errores consecu-
tivos en las señales de la captación disponible. Ver variable
RV59.
Revisar el estado del cable, del captador, de la tarjeta de cap-
tación directa o aumentar el valor de los parámetros mencio-
nados.
Ver parámetro
RP10.
Comprobar que el selector de nodo no está en posición cero
o en una posición intermedia que no corresponde a ningún
nodo. En caso de error E700, léase además el aviso A190.
E606
Dispersión excesiva en las señales del sensor del rótor
E607
Saturación de los valores de las señales A y/o B de la
captación directa
E608
Alarma en las señales de captación. Excesiva atenua-
ción en las señales A y/o B en la captación directa
E609
Cable de temperatura deteriorado
E610-11
- Ver códigos de error
E814
y
E815
-
NOTA. Si en su display aparecen los códigos de error E610 o E611, usted
dispone de una versión de software anterior a la 06.12. Para obtener infor-
mación sobre ambos, acuda a los códigos de error
E814 y E815 de este
manual, sustitutos respectivos de los dos anteriores a partir de la versión
de software mencionada.
E700
Error en la identificación de la placa RS-232
E701
Error en la identificación de la placa VeCon
E702
No hay placa SERCOS. No hay placa IOs
E703
Versión errónea de la placa IOs
E704
Selección errónea del AD en la placa IOs
E705
Error en la identificación de la placa potencia
E706
Error en la identificación de la placa de captación
motor
E707
Error en la identificación de la placa simuladora de
encóder

Mensajes de error en el regulador
CÓDIGOS Y MENSAJES DE ERROR
Códigos de mensaje en el regulador
14.
Ref.1912
· 395 ·
DDS|MAB
SOFTWARE
Soft.09.05
La serie 700 de errores se refiere al funcionamiento incorrec-
to del hardware o a la falta de alguna de las placas necesa-
rias.
Contactar con Fagor Automation S. Coop.
Comprobar que el cable de captación está conectado y en
condiciones óptimas.
Hacer coherente el valor de GP2 con el tipo de captación ins-
talada. Es posible p. ej. que se haya dado al parámetro GP2
el valor 0 (encóder senoidal) y la captación motor sea un
resólver.
Contactar con Fagor Automation S. Coop.
Contactar con Fagor Automation S. Coop.
Se ha parametrizado GP2 como resólver y la captación motor
no es de este tipo. Probablemente el motor disponga de un
encóder en lugar de un resólver.
Hacer coherente GP2 con la captación instalada.
Contactar con Fagor Automation S. Coop.
Contactar con Fagor Automation S. Coop.
Los valores de las señales C y D del encóder SinCoder son
incorrectos y detectables.
Nótese que si dispone de un cable de captación (que trans-
mite señales A y B) y está deteriorado, posiblemente aparez-
ca este error además del código de error
E605.
Contactar con Fagor Automation S. Coop.
Comprobar que el cable de captación está conectado y en
condiciones óptimas.
Hacer coherente GP10 con el tipo de captador instalado
como captación directa.
Contactar con Fagor Automation S. Coop.
Contactar con Fagor Automation S. Coop.
Hacer coherente GP10 con la captación instalada.
Contactar con Fagor Automation S. Coop.
Parametrizar adecuadamente CP21, CP22, CP23, CP24,
CP26 y CP27.
E801
Encóder no detectado · con captación motor ·
E802
Error de comunicación con el encóder · con captación
motor ·
E803
Encóder no inicializado · con captación motor·
E804
Encóder defectuoso · con captación motor ·
E805
Encóder detectado · con captación motor ·
E806
Error en la búsqueda de I0 con SinCoder
E807
Señales C y D defectuosas
E808
Encóder no detectado · con captación directa ·
E809
Error de comunicación con el encóder · con captación
directa ·
E810
Encóder no inicializado · con captación directa ·
E811
Encóder defectuoso · con captación directa ·
E812
Encóder detectado · con captación directa ·
E813
Error de inicialización de la posición eléctrica

Mensajes de error en el regulador
14.
CÓDIGOS Y MENSAJES DE ERROR
Códigos de mensaje en el regulador
404
Ref.1912
DDS|MAB
SOFTWARE
· 396 ·
Soft.09.05
Señales absolutas erróneas. Datos extraños en la posición
absoluta leída.
Incoherencia en la parametrización de RP64 entre el capta-
dor absoluto instalado y su disponibilidad o no de CRC.
Comprobar que NP117 y NP118 están bien parametrizados.
Revisar el cable y el conexionado de la captación.
Comprobar que se ha parametrizado RP64=1 si la regla dis-
pone de CRC.
Contactar con Fagor Automation S. Coop.
El eje se está moviendo en el momento del arranque del re-
gulador y no es posible efectuar la lectura correcta de la po-
sición absoluta.
Las señales C y D que recibe el regulador a través de su tar-
jeta CAPMOTOR-x, provenientes del captador motor instala-
do, no son estables.
Comprobar previamente que el motor no está en movimiento
cuando el regulador se pone en marcha.
Verificar que las señales provenientes del captador son váli-
das y que el cable de captación está en buenas condiciones.
Si es así, sustituir la tarjeta CAPMOTOR-X del regulador y
comprobar si se produce ahora el error.
Si el captador no envía estas señales correctamente o el ca-
ble está en malas condiciones, sustituirlos.
Si es la tarjeta la que falla, sustituirla.
Si todo es correcto y sigue produciéndose el error, contactar
con Fagor Automation S. Coop.
El CRC de la regla absoluta FAGOR conectada no ha sido
identificado por el regulador.
Comprobar que conexión y cableado son satisfactorios.
Si todo es correcto y sigue produciéndose el error, contactar
con Fagor Automation S. Coop.
Pérdida de la configuración del encóder o de la cabeza de la
regla.
Reemplazar el encóder o la cabeza de la regla.
No puede calcular la posición absoluta. Pérdida de contaje.
La señal analógica < 0,20 Vpp.
Comprobar que el encóder o la regla están trabajando a una
velocidad apropiada.
Comprobar las tolerancias de montaje.
Limpiar el cristal o la cinta de acero de la regla.
Si ninguna de las soluciones anteriores resuelve el error,
reemplazar el encóder o la cabeza de la regla.
Encóder o cabeza de la regla dañado/a.
Reemplazar el encóder o la cabeza de la regla.
E814
Error en las señales de la regla absoluta FAGOR
E815
Error de inestabilidad en las señales de la regla abso-
luta FAGOR
E816
Error de inestabilidad en las señales C y D de la cap-
tación motor
E817
Error de comprobación del CRC
E818
SSI FAGOR. Error en la pista absoluta
E819
SSI FAGOR. Error en la CPU

Mensajes de error en el regulador
CÓDIGOS Y MENSAJES DE ERROR
Códigos de mensaje en el regulador
14.
Ref.1912
· 397 ·
DDS|MAB
SOFTWARE
Soft.09.05
Encóder o cabeza de la regla dañado/a.
Reemplazar el encóder o la cabeza de la regla.
Comprobar las tolerancias de montaje.
Limpiar el cristal o la cinta de acero de la regla.
Encóder o cabeza de la regla dañado/a, el CCD (
Charge-
Coupled Device) o el LED (Light-Emitting Diode).
Reemplazar el encóder o la cabeza de la regla.
5,3 V < Voltaje < 4,1 V.
Comprobar que el cable de alimentación del encóder o de la
regla no está deteriorado.
Comprobar también que la longitud del cable es adecuada y
la conexión del cableado es satisfactoria.
Pérdida de la configuración del encóder o de la cabeza de la
regla.
Reemplazar el encóder o la cabeza de la regla.
Consultar estos códigos de error en el manual «man_dds_
mc.pdf».
E820
SSI FAGOR. Error de los potenciómetros de ajuste
E821
SSI FAGOR. Error del captador de imagen (CCD)
E822
SSI FAGOR. Tensión de alimentación fuera de rango
E823
SSI FAGOR. Error de parámetros
E900
Error de inicialización en el programa de MC
E9xx
Errores de ejecución en el programa de MC

Mensajes de error en el regulador
14.
CÓDIGOS Y MENSAJES DE ERROR
Códigos de mensaje en el regulador
404
Ref.1912
DDS|MAB
SOFTWARE
· 398 ·
Soft.09.05
Códigos de aviso. Significado y solución
Cuando se trata de un aviso en el indicador electrónico de siete segmentos,
se visualiza una A en lugar de la E que se presenta para los errores. Los avi-
sos indican que el regulador se está aproximando a un límite de error.
Previo al código de error
E107.
Se detecta que la temperatura interna del regulador KV2 ha
superado la temperatura de aviso de 90 °C.
Previo al código de error
E108.
Se detecta que la temperatura del motor KV6 ha superado la
temperatura de aviso KV5.
Únicamente con motores asíncronos de cabezal FM7.
Previo al código de error
E106.
Se detecta que la temperatura del radiador KV10 ha supera-
do la temperatura de aviso KV9.
Previo al código de error
E917.
Previo al código de error
E918.
Desde la versión 06.05 se incorporan además los siguientes avisos:
Aviso indicativo de que el regulador no está utilizando la tar-
jeta de captación directa que lleva instalada, es decir, el pará-
metro GP10 ha sido parametrizado con valor nulo (sin
captación directa) y el regulador lleva instalada una tarjeta de
captación directa.
Aviso indicativo de que el selector de nodo del regulador está
en la posición cero o en una posición intermedia que no co-
rresponde a ningún nodo. Versiones de software anteriores a
la 08.11 muestran el código de error E700 ante este compor-
tamiento en lugar de este aviso.
A001
Temperatura interna del regulador
A002
Temperatura del motor
A003
Temperatura extrema del radiador
A005
Sobrepasamiento del límite de velocidad
A013
Sobrepasamiento del límite de posición
A182
WarSinchronizationT3in165
A183
WarSinchronizationT3inDSP
A184
WarSinchronizationT4in165
A185
WarSinchronizationCubicInterp
A186
WarSinchronizationDeltaIniError
NOTA. Ante la presencia de alguno de estos avisos relacio-
nados con cuestiones de tipo interno, consultar directamen-
te con Fagor Automation S. Coop.
A189
GP10=0 con tarjeta de captación directa instalada
NOTA. Hasta la versión 06.09 inclusive, si el regulador dis-
pone de tarjeta de captación directa, la posición dada por
ella es calculada aún habiendo parametrizado GP10=0 (sin
captación directa). Con versiones 06.10 y superiores, no.
Este aviso, por tanto, permite diagnosticar este comporta-
miento cuando se llevan a cabo actualizaciones de versio-
nes 06.09 o inferiores con versiones superiores.
A190
Identificación de la placa RS-232

Mensajes de error en el regulador
CÓDIGOS Y MENSAJES DE ERROR
Códigos de mensaje en las fuentes de alimentación RPS
14.
Ref.1912
· 399 ·
DDS|MAB
SOFTWARE
Soft.09.05
14.2 Códigos de mensaje en las fuentes de alimentación RPS
Las fuentes de alimentación estabilizadas con devolución RPS puede pre-
sentar en su display de estado mensajes con los códigos de error o aviso
que ahora se documentan.
El sistema no iniciará su funcionamiento hasta que hayan sido eliminados
todos los errores detectados por la fuente de alimentación o los reguladores
instalados junto con ella.
Pueden ser:
Errores reseteables
Definición. Errores que pueden ser suprimidos mediante un «reset» de erro-
res tras eliminar la causa que los provoca.
Modo de proceder
. El «reset» de errores puede llevarse a cabo a través del
pin 1 (conector X6) de la fuente de alimentación RPS.
Errores no reseteables
Definición. Errores que no pueden ser suprimidos mediante un «reset» de
errores tras eliminar la causa que los provoca, es decir, no puede seguirse
el procedimiento anterior para su eliminación.
Modo de proceder
. Eliminar la causa que provoca el error y siempre que
éste haya cesado llevar a cabo un reencendido del equipo.
Son errores no reseteables:
La activación de cualquiera de los errores tanto «reseteables» como «no-
reseteables» origina una parada segura 1, SS1.
Errores que desactivan PWM
Definición. Errores que hacen que se corte el suministro de corriente que
circula por los bobinados del motor.
Modo de proceder
. Eliminar la causa que provoca el error y cuando éste
haya cesado llevar a cabo un reencendido del equipo.
Son errores que desactivan el PWM:
La activación de cualquier error que desactive el PWM origina una parada
por desconexión segura de par, STO.
T. S14/6 Errores no reseteables.
E005 E211 E701 E705
T. S14/7 Errores que cortan la circulación de corriente en el motor.
E003 E005 E100 E101 E102 E104 E105 E107 E211 E212
E213 E214 E300 E304 E306 E307 E308 E315 E316 E317
E318 E501 E502 E701 E705 E706 E707 E900 E901 E902
E903 E904 E905 E906 E907 E909

Mensajes de error en el regulador
14.
CÓDIGOS Y MENSAJES DE ERROR
Códigos de mensaje en las fuentes de alimentación RPS
404
Ref.1912
DDS|MAB
SOFTWARE
· 400 ·
Soft.09.05
Códigos de error. Significado y solución
E003
Con tensión en el BUS DC de potencia se ha pro-
ducido un error en algún regulador alimentado
por la fuente RPS
Identificar el regulador en el que se ha producido el
error ·ver display de estado de cada uno de los regula-
dores· y según el código de error mostrado actuar se-
gún se indica en el apartado «listado de mensajes de
error» del regulador, documentado en el capítulo 14 de
este manual.
E005
Error de checksum del código de programa
El checksum del código de programa cargado no es co-
rrecto.
Cargar nuevamente el software. Si persiste el problema
es posible que las memorias RAM, FLASH o el código
cargado sean defectuosos.
Contactar con Fagor Automation S. Coop.
E100
Tensión interna de +5 V fuera de rango
E101
Tensión interna de -5 V fuera de rango
E102
Tensión interna de +3,3 V fuera de rango
E104
Tensión interna de +15 V fuera de rango
E105
Tensión interna de -15 V fuera de rango
E107
Sobretemperatura en la fuente · placa CPU ·
El entorno de ubicación de la fuente de alimentación
estabilizada RPS se encuentra a una temperatura ex-
cesivamente elevada.
Reducir la temperatura ambiente.
E211
Interno. Error fatal
Contactar con Fagor Automation S. Coop.
E212
Sobrecorriente
Detección de corriente excesiva circulando por la fuen-
te de alimentación RPS.
E213
Subtensión en el Driver del IGBT
Detección de baja tensión de alimentación de los cir-
cuitos de ataque al IGBT en la fuente de alimentación
RPS.
Posible avería en el Driver del IGBT o en el mismo
IGBT.
Hacer un reset del error y si éste perdura, contactar con
Fagor Automation S. Coop.
E214
Cortocircuito
Detección de cortocircuito en la fuente RPS.
Hágase un reset del error y si éste persiste es posible la
existencia de una secuencia errónea en la conexión de
los cables de potencia o de un contacto provocando
cortocircuito.
Es posible que los parámetros sean incorrectos o se
deba a un fallo de la fuente.
Contactar con Fagor Automation S. Coop.

Mensajes de error en el regulador
CÓDIGOS Y MENSAJES DE ERROR
Códigos de mensaje en las fuentes de alimentación RPS
14.
Ref.1912
· 401 ·
DDS|MAB
SOFTWARE
Soft.09.05
E300
Sobretemperatura del radiador de potencia de la
fuente de alimentación RPS
Detección de temperatura excesiva en el radiador de
potencia de la fuente de alimentación RPS.
Detener unos minutos el sistema y reducir el grado de
esfuerzo que se le estaba exigiendo.
E304
Sobretensión en el BUS DC de potencia ·hardware·
Detección de una tensión excesiva en el BUS DC de
potencia de la fuente de alimentación RPS.
Considerar la posibilidad de instalar un circuito de Ba-
llast externo.
Desconectar la alimentación y comprobar si el estado
de las líneas es satisfactorio.
Ver código de error
E306.
E306
Sobretensión en el BUS DC de potencia ·software·
Detección de una tensión excesiva en el BUS DC de
potencia por el software de la fuente de alimentación
RPS.
E307
Subtensión en el BUS DC de potencia ·software·
La tensión de la red eléctrica es menor que la tensión
mínima admisible (tensión nominal < 380 V AC).
Desconectar la alimentación y comprobar que el estado
de las líneas es satisfactorio.
La aplicación exige fuertes picos de corriente y la línea
de alimentación de la red eléctrica tiene una impedan-
cia excesiva.
Verificar el apriete de las pletinas del BUS DC de po-
tencia.
E308
PWM Enable sin 24 V DC. Relé interno abierto
El pin 4 «PWM Enable» del conector X6 no está ali-
mentado con 24 V DC o, si lo está, el relé no responde
a esta excitación para cerrarse. Comprobar si se ha
deteriorado.
Contactar con Fagor Automation S. Coop.
E315
Tiempo excesivo de carga del BUS DC de potencia
Contactar con Fagor Automation S. Coop.
E316
Error de maniobra
No ha sido realizado el puente (cortocircuito) entre los
pines NS1 y NS2 del conector X3.
El BUS DC está en cortocircuito y el valor mínimo de
la tensión parametrizado en GP8 que debe alcanzar
en su proceso de carga no es alcanzado en el tiem-
po parametrizado en GP7.
E317
Coincidencia en el tiempo de activación de la se-
ñal SoftStart y de la señal PwmOn
Contactar con Fagor Automation S. Coop.
E318
Coincidencia en el tiempo de activación de las
señales SoftStart y StatusLscOn
Contactar con Fagor Automation S. Coop.
E319
Los contactos auxiliares del contactor interno
no se activan
Contactar con Fagor Automation S. Coop.

Mensajes de error en el regulador
14.
CÓDIGOS Y MENSAJES DE ERROR
Códigos de mensaje en las fuentes de alimentación RPS
404
Ref.1912
DDS|MAB
SOFTWARE
· 402 ·
Soft.09.05
E501
Error de checksum de parámetros
Detección de checksum de parámetros no correcto.
Probablemente se ha cambiado de versión de software
y la nueva versión requiere de un nº diferente de pará-
metros.
E502
Parámetro erróneo
Algún parámetro tiene valor erróneo.
Activando este icono de la barra del WinDDSSetup se
despliega una ventana en pantalla que permite visualizar
todos los parámetros cuyos valores no son correctos.
E701
Error en la identificación de la placa VECON
E705
Error en la identificación de la placa potencia
La serie 700 de errores se refiere al funcionamiento in-
correcto del hardware o a la falta de alguna de las pla-
cas necesarias. Contactar con Fagor Automation S.
Coop.
E706
Configuración errónea de la consigna de tensión
del BUS DC. La posición de los conmutadores ha
sido mal seleccionada
La consigna de tensión establecida para el BUS DC se-
gún la configuración de los conmutadores seleccionada
por el usuario es inferior a la proporcionada por la red
(1,41xVred). Modifique la posición de los conmutadores
para que se establezca una tensión igual o superior. In-
fórmese en el apartado «conmutadores de selección de
consigna de tensión en el BUS DC» de las fuentes de
alimentación estabilizadas con devolución del capítulo
2 del manual «man_dds_hard.pdf».
Habiendo sido seleccionada la configuración de con-
mutadores «VP5 DC» de la RPS y modificada por el
usuario la parametrización dada por defecto (650 V DC)
de este parámetro, la tensión de red rectificada
(1,41xVred) es demasiado próxima al límite de consig-
na de bus programada. Recuérdese que en este caso
no se establece el ajuste automático de tensión y se vi-
sualiza este error.
E707
Límite máximo de la consigna de la tensión del
BUS DC
Se ha intentado superar el límite máximo (725 VDC)
de consigna de la tensión de bus en una fuente RPS.
E900
Error de hardware
Contactar con Fagor Automation S. Coop.
E901
Interno
Contactar con Fagor Automation S. Coop.
E902
Tensión de red fuera de rango
La fuente de alimentación RPS no está siendo alimen-
tada con una tensión de red que esté dentro del rango
de valores 400 V AC (1-10 %) y 460 V AC (1+10 %).
E903
Falta de fase en la línea de potencia
No se detecta la presencia de las tres fases de poten-
cia. Asegúrese de que las conexiones de potencia es-
tán perfectamente realizadas.

Mensajes de error en el regulador
CÓDIGOS Y MENSAJES DE ERROR
Códigos de mensaje en las fuentes de alimentación RPS
14.
Ref.1912
· 403 ·
DDS|MAB
SOFTWARE
Soft.09.05
E904
Falta de fase en la línea de alimentación auxiliar
No se detecta la presencia de las tres fases de poten-
cia en la línea de alimentación de la fuente auxiliar in-
tegrada. Asegúrese de que las conexiones están
perfectamente realizadas.
E905
El orden de las fases en la conexión de potencia
y en la conexión de la captación de tensión no
coinciden
Asegúrese que el orden de las fases establecido en el
conector de potencia principal (1) y en el conector de la
captación de tensión de línea (2) coincide rigurosamen-
te. Para más detalle, ver manual «man_dds_hard.pdf».
E906
Interno
Contactar con Fagor Automation S. Coop.
E907
Interno
Contactar con Fagor Automation S. Coop.
E909
Tensión de red descompensada
Contactar con Fagor Automation S. Coop.

Mensajes de error en el regulador
14.
CÓDIGOS Y MENSAJES DE ERROR
Códigos de mensaje en las fuentes de alimentación RPS
404
Ref.1912
DDS|MAB
SOFTWARE
· 404 ·
Soft.09.05
Códigos de aviso. Significado y solución
Cuando se trata de un aviso en el display de siete segmentos de la fuente
de alimentación RPS, se visualiza una A en lugar de la E que se presenta
para los errores. Los avisos indican que la fuente de alimentación RPS se
está aproximando a un límite de error.
Si el usuario no ha puenteado los terminales NS1-NS2 del
conector X3 de la fuente RPS y se detecta presencia de
tensión de red, entonces se visualiza el aviso
A005 en el
display de 7 segmentos de la fuente RPS.
NOTA. Recuérdese que para que el contactor principal y
los relés de soft-start ·ambos internos en la RPS· funcio-
nen, es necesario puentear previamente con un conduc-
tor de 1 mm² los terminales NS1-NS2 del conector X3.
Si se abre el puente que cortocircuita los terminales NS1-
NS2 del conector X3 de la fuente RPS una vez que la
fuente está elevando la tensión o funcionando en modo
RB6, además de visualizar el aviso
A005 en el display de
7 segmentos de la fuente, se deshabilita la señal
STATUS_LSC pudiéndose generar el código de error
E003 en los reguladores conectados al BUS DC si éstos
estuviesen habilitados con par.
En fuentes RPS, modo de funcionamiento RPS (modo ele-
vador), cuando la diferencia entre la consigna de la tensión
de bus y el valor de la tensión de red (1,41xVred) es inferior
a 30 voltios aprox. se produce un ajuste automático de 30
voltios por encima de la tensión de pico de red, dando cuen-
ta este aviso del hecho.
Previo al código de error
E706.
Consultar con Fagor Automation S. Coop.
Consultar con Fagor Automation S. Coop.
A001
Sobretemperatura en la placa VECON de la fuente RPS
A003
Sobretemperatura en el radiador de potencia de la
fuente RPS
A004
Presencia de red y señal PWM Enable (pin 4 de X6) no
activada
A005
Terminales NS1-NS2 del conector X3, no puenteados
A315
Tiempo de carga del BUS DC (tipo soft-start) supe-
rior al valor máximo establecido
A706
Configuración errónea de la consigna de tensión del
BUS DC · micro-conmutadores ·
A907
Interno
A908
Interno

15
Ref.1912
· 405 ·
DDS|MAB
SOFTWARE
Soft.09.05
PROTECCIONES
Este capítulo describe las limitaciones y sistemas de vigilancia que realiza
el regulador para proteger el accionamiento contra excesos de corriente y
temperatura.

Protecciones
15.
418
Ref.1912
DDS|MAB
SOFTWARE
· 406 ·
Soft.09.05
15.1 Protecciones del regulador
Los elementos que establecen la limitación de corriente por el regulador
son los semiconductores de potencia (IGBTs). La gama de reguladores FA-
GOR incorpora IGBTs con corrientes máximas admisibles (I
IGBT
) desde 8 a
175,5 A.
Estos IGBTs del regulador pueden ser dañados si:
La corriente sobrepasa el valor de pico permitido.
Para prevenir este hecho, el regulador limita la consigna de corriente
que atenderá (icommand) y vigila la corriente real instantánea (ireal).
Véase el apartado «limitación de la corriente de pico en el regulador»
más adelante de este mismo capítulo.
El regulador funciona con ciclos de trabajo demasiado exigentes que
hacen que la corriente eficaz Irms sea superior a la permitida provocan-
do así un sobrecalentamiento de los IGBTs.
Para prevenir este hecho se dispone de una doble protección:
1. Unos sensores térmicos ubicados en el radiador que vigilan las tem-
peraturas reales de estos semiconductores de potencia.
Véase el apartado «sensores de temperatura en el radiador» más
adelante en este mismo capítulo.
2. El regulador realiza una estimación de esta corriente eficaz median-
te la integral del producto I²t. Con esta integral se obtiene una esti-
mación del valor de la temperatura de los IGBTs.
Véase el apartado «servicios permanentes permitidos al regulador,
cálculo del producto I²t » más adelante desde este mismo capítulo.
Limitación de su corriente de pico
El usuario puede ajustar el valor del parámetro CP20 (F00307) para limitar
la consigna de corriente. Así, en ningún caso, el regulador atenderá a con-
signas de corriente mayores a la Ipico.
Parametrización
Téngase en cuenta que:
En versiones 04.10 y 05.10 y posteriores, para cada ciclo definido (ver ciclos
de carga del regulador para motores asíncronos en el capítulo 3 del manual
«man_dds_hard.pdf») se calculan unas determinadas corrientes. Estos va-
lores son aquellos con los que se asegura el correcto funcionamiento del re-
gulador con temperatura ambiente de 40 °C /104 °F. Esta limitación no es
teórica. No se realiza ningún cálculo del I²t o de integración de la corriente
que circula por el regulador de manera que en cuanto se sobrepasan los lí-
mites descritos se indica el error o se reduce la corriente del regulador.
La limitación se realiza monitorizando la temperatura del radiador. Así,
cuando éste alcanza un valor determinado se activa el código de error
E106
de sobretemperatura del radiador originándose una parada sin par en el re-
gulador.
Cada regulador tiene un límite de temperatura diferente obtenido mediante
ensayos de carga.
Si CP20 < Ipico:
En motores síncronos I
pico
= I
IGBT
En motores asíncronos I
pico
= valor dado en el manual del motor
Si (I
real
> 1,6 · I
IGBT
) se origina el código de error E212.
NOTA. ¡Superado este límite, los IGBTs quedarán dañados!

Protecciones
15.
Ref.1912
· 407 ·
DDS|MAB
SOFTWARE
Soft.09.05
Las ventajas de limitar de este modo los ciclos de corriente son:
Para temperatura ambiente superior a 40 °C el regulador está bien pro-
tegido.
Para temperatura ambiente inferior a 40 °C es posible obtener ciclos de
corriente más exigentes, es decir, puede obtenerse más del mismo re-
gulador.
Para prevenir errores de temperatura del radiador imprevistos existen dos
mecanismos:
Monitorizar la posible aparición del aviso (warning) de sobretemperatura
del radiador. Este aviso se produce cuando la temperatura del radiador
está a 5 °C de la temperatura que activa el error.
Monitorizar la temperatura del radiador y compararla con el límite del
error. Puede visualizarse en pantalla un valor porcentual de la carga del
regulador. Para realizar esta prestación en el CNC es necesario recurrir
a las variables KV10 (F01102) CoolingTemperature y KV12 (S00205)
CoolingTemperatureErrorLimit.
Sensores de temperatura en el radiador
En el radiador del regulador existe un sensor de temperatura encargado de
suministrar su valor y que será visualizable en la variable KV10 (F01102).
Servicios permanentes permitidos al regulador. Cálculo del I²t
En el capítulo 3 del manual «man_dds_hard.pdf» se facilita el valor de la co-
rriente permitida en ciclos de trabajo constante S1 para cada modelo de re-
gulador. Con el aumento de la temperatura ambiente se reducen las
posibilidades del regulador y, por tanto, el usuario debe disminuir las exigen-
cias de su ciclos de trabajo. Este efecto de la temperatura es conocido como
«
derating» de potencia.
En las figuras adjuntas se incluyen ejemplos de derating. El ciclo de trabajo
S1 supone una carga constante que lleva al sistema a su temperatura máxi-
ma permitida. El ciclo S3-5% reproduce condiciones de trabajo intermiten-
tes en períodos de 10 s, con tc=0,5 s. y tv=9,5 s.
KV10 F01102 CoolingTemperature
Función Monitorización de la temperatura del refrigerador (°C).
Valores validos 0 ... 110
Unidades 0,1 °C.
F. S15/1
Ciclos de funcionamiento y ejemplos de derating para un AXD 3.100.
T = 10 s
max
t
Electrical losses
t
Load
t
Cycle S3-5%
N
N/V = 0.5/9.5
= Temperature
N: Nominal in S3-5%
V: Resting
V
N
max
t
Electrical losses
t
t
Load
Cycle S1
Thermal balanced
= Temperature
N: Nominal in S1
35 40 55 60
40
I (Arms)
Tambient
°C (°F)
45 50
(95)
(104)
(113) (122) (131) (140)
60
In
80
Imax
20
100
35 40 55 60
40
I (Arms)
Tambient
°C (°F)
45 50
(95)
(104)
(113) (122) (131) (140)
60
In
80
Imax
20
100
0

Protecciones
15.
418
Ref.1912
DDS|MAB
SOFTWARE
· 408 ·
Soft.09.05
El ciclo S6-40% reproduce condiciones de trabajo intermitentes en períodos
de 10 minutos, con tc= 4 min y tv= 6 min y el ciclo S6-15% reproduce con-
diciones de trabajo intermitentes en períodos de 60 s, con valores de tiempo
tc= 10 s y tv= 50 s.
El regulador realiza una estimación de la temperatura alcanzada por los
IGBTs en base a la corriente eficaz que circula por ellos.
Se define la corriente eficaz al valor dado por la expresión:
Esta estimación de la temperatura se basa en el cálculo que se denomina-
rá siempre en este manual como I²t. Si esta temperatura supera un valor
establecido, se activa el código de error
E202 - DriveOverload -.
Para un sistema con unos determinados IGBTs, el regulador permitirá unas
corrientes eficaces (estimadas mediante el cálculo I²t):
Para motor síncrono
I
rms
= 0,5 I
IGBT
Para motor asíncrono I
rms
= valor dado en el manual del motor
El cálculo del I²t supone una temperatura ambiente de 40 °C (104 °F). Para
temperaturas de hasta 60 °C (140 °F) que es el máximo permitido y dado
que el regulador no conoce la temperatura ambiente real, esta protección
puede no ser suficiente. En esta situación, y si el usuario utiliza un ciclo
que supere el derating, el regulador puede ser dañado.
La implantación de la posibilidad de variar la frecuencia del PWM supon-
dría que el límite máximo permitido del I²t se adaptara automáticamente
para tener en cuenta las pérdidas en la conmutación propias de cada fre-
cuencia.
F. S15/2
Ciclos de funcionamiento y ejemplos de derating para un SPD 3.100.
T = 60 s
máx
t
Pérdidas eléctricas
t
Carga
t
Ciclo S6-15%
N
N/V = 10/50
= Temperatura
N: Nominal en S6-15%
V: En vacío
V
T = 10 min
máx
t
Pérdidas eléctricas
t
Carga
t
Ciclo S6- 40%
N
N/V = 4/6
= Temperatura
N: Nominal en S6-40%
V: En vacío
V
35 40 55 60
60
I (Arms)
Tambient
°C (°F)
45 50
(95)
(104)
(113) (122) (131) (140)
70
In
80
50
90
IS6-40
40
30
35 40 55 60
50
I (Arms)
Tambient
°C (°F)
45 50
(95)
(104)
(113) (122) (131) (140)
60
In
70
40
80
IS6-40
30
I
rms
I
2
ttd
t +
t
=

Protecciones
15.
Ref.1912
· 409 ·
DDS|MAB
SOFTWARE
Soft.09.05
Ciclos de trabajo equivalentes
Estos reguladores admiten también, cualquier otro ciclo de trabajo equiva-
lente en el que la corriente eficaz sea la permitida en su curva de derating.
La figura
F. S15/3 representa un ejemplo de dos ciclos de trabajo equivalen-
tes. La integral del I²t es la misma en ambos casos, aunque la integral del
producto It resulte mayor en el caso (b).
Ciclo típico del regulador para motores síncronos
El regulador síncrono soporta, por ejemplo, ciclos equivalentes al dado en la
siguiente figura:
Donde In es la corriente nominal que, en amperios y para cada regulador,
viene dada en las siguientes tablas:
Mientras los IGBTs estén por debajo de su temperatura de trabajo nominal
(p.ej, en los arranques) les serán permitidos unos ciclos iniciales más exi-
gentes.
F. S15/3
Ciclos de trabajo equivalentes.
F. S15/4
Ciclos del regulador para motor síncrono.
T. S15/1 Corrientes en reguladores modulares para motor síncrono. Fre-
cuencia de conmutación de los IGBTs, fc= 4 kHz.
Con ventilación
interna
Regulador para motor síncrono (como eje)
AXD/MMC 1.08 1.15 1.25 1.35 2.50 2.75 3.100 3.150
I S1= In en A 4,0 7,5 12,5 17,5 25,0 37,5 50,0 75,0
Imáx. S1 en A 8,0 15,0 25,0 35,0 50,0 75,0 100,0 150,0
Potencia disipada
en W
33 69 88 156 225 270 351 536
T. S15/2 Corrientes en reguladores modulares para motor síncrono. Fre-
cuencia de conmutación de los IGBTs, fc= 8 kHz.
Con ventilación
interna
Regulador para motor síncrono (como eje)
AXD/MMC 1.08 1.15 1.25 1.35 2.50 2.75 3.100 3.150
I S1= In en A 4,0 7,5 12,5 17,5 25,0 37,5 50,0 75,0
Imáx. S1 en A 8,0 15,0 25,0 35,0 50,0 75,0 100,0 150,0
Potencia disipada
en W
44 89 132 195 305 389 510 605
Tiempo
Corriente
a
b
In
Ip
T T
Corriente
10 s
0.5 s
9.5 s
2I
N
Tiempo
I
N
I
máx
S1 I
IGBT
2I
N
==
I
rms
2I
N
2
0.5
10
--------
I
N
2
9.5
10
--------
+1.07I
N
==

Protecciones
15.
418
Ref.1912
DDS|MAB
SOFTWARE
· 410 ·
Soft.09.05
Ciclos de carga del regulador para motores asíncronos
Para versiones anteriores a la 04.09/05.09 inclusive, el regulador asíncrono
soporta indefinidamente ciclos equivalentes a su corriente nominal In que
es, además, la máxima que puede ofrecer (Ipico= In). La limitación de co-
rriente máxima es suficiente para la protección de los reguladores asíncro-
nos, y por tanto no se necesita del cálculo I²t.
donde I S1= In es la corriente nominal y para cada regulador es:
NOTA. En el caso de cabezales, las potencias disipadas indicadas corres-
ponden a funcionamiento a corriente nominal en modo S1.
Para versiones posteriores a la 04.09/05.09, se reducen los valores de co-
rriente en S1 y es el ciclo S6-40% el más utilizado en el proceso de selec-
ción del motor de cabezal.
Normalmente el regulador asociado al motor es elegido de modo que sea
capaz de suministrar la corriente suficiente para que el motor alcance este
ciclo.
F. S15/5
Ciclo de carga S1.
T. S15/3 Corrientes en reguladores modulares para motor síncrono o asín-
crono. Frecuencia de conmutación de los IGBTs, fc= 4 kHz.
Con venti-
lación interna
Regulador para motor síncrono o asíncrono
(como cabezal)
SPD 1.15 1.25 1.35 2.50 2.75 2.85 3.100 3.150 3.200 3.250
I S1=In A 10,5 16,0 23,1 31,0 42,0 50,0 70,0 90,0 121,0 135,0
0,7xIn A 7,3 11,2 16,1 21,7 29,0 35,0 49,0 63,0 84,7 94,5
I S6-40 A 13,7 20,8 30,0 40,3 54,6 65,0 91,0 117,0 157,3 175,5
Potencia
disip. en W
98 110 195 349 289 432 496 626 1163 1333
T. S15/4 Corrientes en reguladores modulares para motor síncrono o asín-
crono. Frecuencia de conmutación de los IGBTs, fc= 8 kHz.
Con venti-
lación interna
Regulador para motor síncrono o asíncrono
(como cabezal)
SPD 1.15 1.25 1.35 2.50 2.75 2.85 3.100 3.150 3.200 3.250
I S1= In A 10,5 13,0 18,0 27,0 32,0 37,0 56,0 70,0 97,0 108,0
0,7xIn A 7,3 9,1 12,6 18,9 22,4 25,9 39,2 49,7 67,9 75,6
I S6-40 A 11,6 16,9 23,4 35,1 41,6 48,1 72,8 91,0 126,1 140,4
Potencia
disip. en W
98 130 201 350 333 438 546 668 1187 1344
F. S15/6
Ciclo de carga S6-40%.
I
t
Ciclo S1
I
N
I
t
Ciclo S1
In
I
t
Ciclo S6-40
4 min
10 min
0,7·In
In
I
S6-40

Protecciones
15.
Ref.1912
· 411 ·
DDS|MAB
SOFTWARE
Soft.09.05
Este ciclo intenta reproducir condiciones de trabajo intermitentes en perío-
dos de 10 minutos, con 4 minutos de carga y 6 minutos en vacío.
La corriente disponible en la parte baja del ciclo debe ser suficiente para
proporcionar al motor la corriente magnetizante. El valor de 0,7 viene de la
relación que hay entre la corriente magnetizante y la corriente nominal en la
mayoría de los motores asíncronos.
En ciclo de carga S1 con pico de corriente Imáx son permisibles mayores pi-
cos de aceleración al proporcionarse una corriente máxima superior.
La duración del ciclo en la que se permite la corriente máxima es de 10 se-
gundos, suficiente en la gran mayoría de los casos para acelerar el cabezal
hasta la máxima velocidad de trabajo. Como esta corriente puede ser muy
elevada, la parte del ciclo en la que el motor gira en vacío es proporcional-
mente mayor que en el ciclo S6-40 %. Así mismo la duración total del ciclo
es menor (60 s).
La corriente en vacío corresponde a la magnetizante del motor (0,7xIn).
Los valores de estas corrientes para los reguladores modulares SPD vienen
dados en amperios en las anteriores tablas.
INFORMACIÓN. En el caso de que en una aplicación real, el radiador se
caliente demasiado, siempre es posible reducir la corriente en la parte baja
del ciclo. Utilícese el parámetro
FP40.# (F00622) FluxReduction que deter-
mina el % de corriente magnetizante deseado cuando el motor gira en va-
cío. Por defecto tiene un valor del 100 %. Nótese que
en aplicaciones de
eje C debe adoptar el valor de 100 %.
i
F. S15/7
Ciclo de carga S1 con pico de corriente Imáx.
I
t
0,5 s
10 s
Imáx
In
Ciclo S1 con pico de
corriente Imáx
INFORMACIÓN. Nótese que si se ha utilizado el parámetro FP40.#
(F00622) FluxReduction la corriente de la parte baja del ciclo se reducirá en
la misma proporción.
i

Protecciones
15.
418
Ref.1912
DDS|MAB
SOFTWARE
· 412 ·
Soft.09.05
15.2 Módulo de protección del bus, BPM
Cuando se dispone de un motor síncrono de cabezal es posible alcanzar
velocidades de giro por encima de las cuales, la tensión que puede gene-
rarse en el bus de potencia (bus DC) puede hacer circular corrientes supe-
riores a las soportadas por los semiconductores de potencia o IGBTs,
dañando así el regulador.
La entrada de tensión de potencia máxima en el bus DC para no dañar el re-
gulador es de 900 V DC, luego deberá cumplirse que:
donde:
Estas altas velocidades pueden ser alcanzadas cuando se pierde el control
de giro del motor como consecuencia p. ej. de una caída de tensión en
emergencia y sin poder devolver la energía de frenada.
El módulo de protección de bus BPM irá instalado junto al resto de módulos
(fuente, reguladores, ...) mediante pletinas a través del propio bus. Recono-
ce cuándo la fuerza electromotriz inducida en los bobinados del estátor es
demasiado alta y actúa abriendo su DR O.K. en la cadena de emergencia
disipando la energía cinética del motor a través de resistencias de frenado.
Nótese que el módulo de protección de bus BPM es suministrado bajo pe-
dido por FAGOR.
2k
E
900 V DC<
k
E
Constante eléctrica del motor en V/min
-1
Velocidad máxima del rótor en la aplicación en min
-1
INFORMACIÓN. Nótese que no siempre será necesario instalar el módulo
de protección de bus cuando se dispone de un cabezal síncrono. Depende-
rá de las condiciones del motor y de su utilización.
INFORMACIÓN. Nótese que si se dispone además de una fuente de ali-
mentación RPS, instalando el módulo BPM se garantiza una parada contro-
lada del motor ante un corte en la red gracias a que la disipación de energía
en la frenada puede llevarse a cabo en las resistencias de Ballast externas
instaladas en el módulo BPM. No instalar este módulo supondrá, en caso de
corte de tensión, una parada no controlada (por inercia) por error de sobre-
tensión del bus ante la ausencia de resistencias en las que disipar la ener-
gía de frenado.
i
i

Protecciones
15.
Ref.1912
· 413 ·
DDS|MAB
SOFTWARE
Soft.09.05
15.3 Protecciones del motor
La limitación de la potencia mecánica de un motor se corresponde con un
valor determinado, entre otras causas, por la temperatura máxima admisi-
ble por sus bobinados estatóricos y por el ciclo de funcionamiento.
Al igual que en la protección de los reguladores, la protección de los moto-
res se lleva a cabo mediante tres procedimientos simultáneos de vigilancia:
No sobrepasar la corriente del valor de pico máximo permitido.
Con el fin de prevenir este hecho, el regulador limita la consigna de co-
rriente que atenderá (
icommand) y realiza una vigilancia de la corriente
real instantánea (
ireal).
Véase el apartado «limitación de la corriente de pico en el motor» de
este mismo capítulo.
Vigilancia de la temperatura del motor en ciclos permanentes de trabajo
mediante:
1. Sensores térmicos ubicados en el motor.
Véase el apartado «sensores de temperatura en el motor» de este
mismo capítulo.
2. Estimación de la corriente eficaz mediante el cálculo de la integral
del producto I²t que es una estimación de temperatura.
Véase el apartado «servicios permanentes permitidos al motor. Cál-
culo del I²t» de este mismo capítulo.
Limitación de su corriente de pico
El usuario puede ajustar el valor del parámetro CP20.# (F00307) para limitar
la consigna de corriente. Así, en ningún caso, el regulador atenderá consig-
nas de corriente mayores que MP4 (S00109) que es la corriente de pico
máxima permitida por el motor.
Esta corriente de pico máxima viene dada por las tablas de motores que son
facilitadas por el manual de motores correspondiente. Este dato únicamente
establece un límite de corriente preventivo por características térmicas.
CP20 < MP4 donde MP4 (S00109) es un parámetro exclusivo de los motores
síncronos. Con motores asíncronos no se vigila la consigna de corriente.
Sensores de temperatura
Los motores FXM y SPM (ya descatalogado) disponen de un sensor triple
de sobretemperatura PTC que permite detectar si existe o no sobretempe-
ratura en los bobinados de cada una de las fases del estátor. Se conecta al
regulador a través de dos hilos incluidos en el cable de captación propio del
motor. Cuando la temperatura límite permitida en el motor ha sido
alcanzada se activa el código de error
E108. Para bobinados de clase F
esta temperatura es de 150°C/302°F.
Los motores síncronos:
FKM1 disponen de termistor PTC 111-K13-140.
FKM2/4/6/8 disponen de termistor PTC KTY84-130 (ahora descataloga-
do) ó de termorresistencia RTD Pt1000
FKM9 disponen de termistor PTC KTY84-130
Los motores asíncronos:
FM7 disponen de termistor NTC simple
FM9 disponen de termistor PTC KTY84-130
Para obtener información sobre la identificación del sensor en un motor FA-
GOR, ver parámetro
MP14 en el manual «man_dds_soft.pdf». Las caracte-
rísticas más relevantes de estos sensores de temperatura se documentan
en el manual del motor correspondiente.
NOTA. Recuérdese que el motor asíncrono SPM dispone de un interruptor
Klixon que se abre cuando se alcanzan los 150°C y que debe ser incluido
en la cadena de emergencia del armario eléctrico.

Protecciones
15.
418
Ref.1912
DDS|MAB
SOFTWARE
· 414 ·
Soft.09.05
Servicios permanentes permitidos al motor. Cálculo del I²t
El regulador implementa en su software un procedimiento de cálculo de la
integral de I²t aplicado tanto a motores síncronos como asíncronos.
La vigilancia permanente del producto I²t tolera cualquier ciclo de trabajo
equivalente que origine una temperatura máxima igual a la que se genera
con funcionamiento en servicio S1 con constante de tiempo dada por el pa-
rámetro
MP13 (F01209) MotorThermalTimeConstant.
No obstante, el calentamiento producido por corrientes de pico muy inten-
sas no puede ser modelizado con el cálculo de I²t. En este caso, son los
sensores de temperatura del motor los que detectarán sobretemperaturas.
Motores síncronos
En el manual del motor correspondiente se indican sus corrientes nomina-
les y de pico máximas.
Motores asíncronos
En el manual del motor correspondiente se indican las corrientes máximas
en el motor en ciclos de trabajo S1 y S6. Un aumento de la temperatura am-
biente y la altitud obligarán al usuario a disminuir la exigencia de los ciclos
solicitados.

Protecciones
15.
Ref.1912
· 415 ·
DDS|MAB
SOFTWARE
Soft.09.05
15.4 Monitorización exterior de los niveles reales de los I²t
El usuario puede conocer el nivel de esfuerzo del regulador consultando el
valor del producto I²t a través de la variable:
valor real:
KV32 F01109 I²tDrive
El usuario puede conocer el nivel de esfuerzo del motor consultando el valor
del producto I²t a través de la variable:
valor real:
KV36 F01111 I²tMotor
Estos valores vienen dados en forma de porcentaje utilizado sobre el máxi-
mo.
Para determinar si un ciclo de trabajo exige un nivel de esfuerzo soportable
indefinidamente por el accionamiento (regulador + motor) es necesario eje-
cutar el ciclo a una temperatura de funcionamiento nominal.
Editando las variables KV32 y KV36 puede simularse un aumento en la tem-
peratura del accionamiento. Posteriormente, se ejecuta el ciclo de prueba.
El cálculo del I²t determinará si el accionamiento soporta o no el ciclo.
Mediante el osciloscopio integrado en el WinDDSSetup pueden visualizarse
estas variables durante el ciclo en proceso de ensayo. En el oscilograma
obtenido se calcula el producto I²t y se comprueba si será soportable o no
por el accionamiento.
NOTA. En versiones de software anteriores a la 04.01 las unidades eran
absolutas y se empleaban dos parámetros más.

Protecciones
15.
418
Ref.1912
DDS|MAB
SOFTWARE
· 416 ·
Soft.09.05
15.5 Protección de la resistencia de Ballast externa
A partir de la versión de software 03.07 del regulador se realiza un cálculo
interno del producto I²t para proteger la resistencia de Ballast en los regula-
dores compactos (referencias ACD y SCD).
Regulador compacto con resistencia de Ballast externa
Si el regulador compacto emplea una resistencia de Ballast externa será ne-
cesario informar al regulador de las características eléctricas de esa resis-
tencia a través de los parámetros:
NOTA. Si se instala una resistencia externa de frenado mayor que la que
suministra Fagor con los reguladores SCD de cabezal porque la aplicación
así lo requiere, parametrizar KP2, KP3 y KP4 según se indica en la siguiente
tabla:
KP2 O F01113 ExtBallastResistance
Función Valor óhmico de la resistencia de Ballast externa
en un regulador compacto. Es de utilidad para la
protección I²t de dicha resistencia.
Valores válidos 0 ... 65 535.
Valor por defecto 0.
Unidades 0,1 .
KP3 O F01114 ExtBallastPower
Función Valor de la potencia de la resistencia de Ballast ex-
terna en un regulador compacto. Es de utilidad
para la protección I²t de dicha resistencia.
Valores válidos 0 ... 65 535.
Valor por defecto 0.
Unidades 1 W.
KP4 O F01116 ExtBallastEnergyPulse
Función Valor del pulso de energía disipable por la resis-
tencia de Ballast externa en un regulador compac-
to. Es de utilidad para la protección I²t de dicha
resistencia.
Valores válidos 0 ... 400 000.
Valor por defecto 0.
Unidades 1 J.
Resistencia de frenado KP2 KP3 KP4
ER+TH-24/1100 240 950 60000
ER+TH-18/1100 180 950 60000
ER+TH-18/1800 180 1300 95000
ER+TH-18/2200 180 2000 120000
ER+TH-18/1000+FAN 180 2000 120000
ER+TH-18/1500+FAN 180 3000 180000
ER+TH-18/2000+FAN 180 4000 240000
RM-15 (descatalogada) 180 1500 75000
KV40 F F01115 I2tCrowbar
Función Muestra el porcentaje de carga sobre la resisten-
cia de Ballast externa en un regulador compacto.
Es de utilidad para la protección I²t de esta resis-
tencia. Un valor superior a 100 % en esta variable
activa el código de error
E301.

Protecciones
15.
Ref.1912
· 417 ·
DDS|MAB
SOFTWARE
Soft.09.05
Regulador compacto sin resistencia de Ballast externa
Si el regulador compacto no emplea una resistencia de Ballast externa, el
software conoce las características de las resistencias de cada uno de los
modelos de regulador compacto y realiza la vigilancia I²t de forma autóno-
ma.
INFORMACIÓN. Si alguno de los parámetros KP2, KP3 o KP4 vale 0, la
protección I²t se realiza atendiendo a las características de las resistencias
internas de los reguladores.
Si a los parámetros KP2, KP3 y KP4 se les
asigna el valor 65 535 la protección I²t queda deshabilitada
.
i

Protecciones
15.
418
Ref.1912
DDS|MAB
SOFTWARE
· 418 ·
Soft.09.05
15.6 Protección contra la caída de una fase de red
A partir de la versión de software 03.07 del regulador y con versión de la pla-
ca MSC=06A o posteriores, los reguladores compactos (ref. ACD/SCD) vi-
gilan la presencia de las tres fases de alimentación desde la red eléctrica.
Si una de estas fases cae por un tiempo superior a 10 ms, se activa el có-
digo de error
E003.

16
Ref.1912
· 419 ·
DDS|MAB
SOFTWARE
Soft.09.05
WINDDSSETUP
16.1 Requerimientos del sistema y compatibilidad
Antes de proceder a la instalación del programa compruebe que su equipo
dispone de todas las prestaciones mínimamente exigibles para ejecutar
WinDDSSetup.
Ordenador Pentium 133, compatibles o superiores.
Monitor Super VGA 800x600 con 256 colores, si bien se recomienda su-
per VGA 1024x768.
Unidad de CD-ROM 4x o superior para proceder a la instalación del pro-
grama.
Ratón o dispositivo señalador.
32 Mb de memoria RAM recomendado 64 Mb.
36 Mb de espacio libre en disco duro (30 Mb para la instalación y 6 Mb
para el archivo de intercambio).
Impresora o trazador gráfico (opcional).
Compatible con los sistemas operativos Windows
9x, Windows NT, Win-
dows 2000, Windows XP, Windows Vista y Windows 7/8/10.
Si se trata de una actualización, no es aconsejable instalar la nueva versión
en el mismo directorio que la versión actual. Indique un trayecto diferente en
el proceso de instalación cuando le sea cuestionado. Instalada la versión
actual transfiera los ficheros personales o de interés al directorio en el que
se haya situado la nueva versión. Compruebe que todo funciona de forma
correcta y elimine posteriormente la versión anterior.
NOTA. Si en su ordenador ya ha sido previamente instalado cualquiera
de los sistemas operativos anteriormente mencionados podrá instalar la
aplicación WinDDSSetup sin ningún problema siempre que se cumplan
los requerimientos mínimos anteriormente mencionados.
NOTA. Antes de instalar el programa es recomendable cerrar todas las
aplicaciones que pudieran estar abiertas, incluidos los programas de de-
tección de virus.

WinDDSSetup
16.
WINDDSSETUP
Previo a la instalación sobre Windows Vista y Windows 7
458
Ref.1912
DDS|MAB
SOFTWARE
· 420 ·
Soft.09.05
16.2 Previo a la instalación sobre Windows Vista y Windows 7
Si su sistema operativo es Windows Vista o Windows 7, antes de proceder
a la instalación del WinDDSSetup desactive el control de cuentas de usuario
(UAC). Para ello, vaya a
Inicio > Panel de control > Cuentas de Usuario
> Activar o desactivar el control de cuentas de usuario
y deshabilite la
opción «Usar el control de cuentas de usuario (UAC) para ayudar a proteger
el equipo».
Reinicie ahora su PC para asumir la nueva configuración.
Acceda ahora a través de una cuenta con privilegios de administrador e ins-
tale el software WinDDSSetup siguiendo las indicaciones dadas para el pro-
ceso de instalación en el apartado siguiente.

WinDDSSetup
WINDDSSETUP
Proceso de instalación
16.
Ref.1912
· 421 ·
DDS|MAB
SOFTWARE
Soft.09.05
16.3 Proceso de instalación
Inserte el CD-ROM en la unidad correspondiente. Si se encuentra activada
la opción de «ejecución automática» se cargará de forma automática el pro-
grama «vxxxxwin.exe».
En caso contrario, localice este fichero en el CD-ROM desde el explorador
y ejecútelo.
Este fichero se localiza en la carpeta WinDDSSetup.
Aparece en la pantalla una ventana de bienvenida en
la que se aconseja seguir algunas instrucciones durante el proceso de ins-
talación del software.
Pulsar el botón
«Siguiente» para continuar.
Por defecto, los archivos del programa se copiarán en la carpeta c:\Windd-
sxx.xx. Si lo prefiere podrá seleccionar un trayecto diferente pulsando el bo-
tón «
Examinar».
Pulsar ahora el botón
«Instalar» y el proceso de instalación se iniciará en
estos momentos. Una nueva ventana informará del proceso de copiado de
los archivos necesarios para ejecutar WinDDSSetup y tras pulsar el botón
«Siguiente» aparece la última ventana indicando que la instalación ha sido
completada. Pulsar el botón «
Finalizar» para cerrar el asistente.
F. S16/1
Ventanas emergentes durante el proceso de instalación del WinDDSSetup.
INFORMACIÓN. Para poder ejecutar el WinDDSSetup de forma correcta
no será necesario reinicializar el PC tras realizar la instalación.
i

WinDDSSetup
16.
WINDDSSETUP
Descripción general de la pantalla
458
Ref.1912
DDS|MAB
SOFTWARE
· 422 ·
Soft.09.05
16.4 Descripción general de la pantalla
La información de la pantalla propia del WinDDSSetup se distribuye de la si-
guiente manera:
Trás iniciar la aplicación WinDDSSetup desde el menú
Inicio > Programas
> Winddsxx.xx > Winddssetup.exe
se despliega la pantalla más general
del WinDDSSetup.
A. Menú de control. Con un clic de ratón sobre el icono FAGOR en la parte
superior izquierda (A) se accede al menú estándar de las aplicaciones
Windows desde donde el usuario puede cerrar, desplazar, minimizar o
maximizar la ventana.
B. Barra de menús. Será desde este área desde el que se accederá a los
menús desplegables de los que dispone la aplicación. La mayor parte de
las órdenes que encierran los menús pueden llevarse a cabo directa-
mente desde su icono asociado en la barra de herramientas.
C. Barra de comandos. Será desde este cuadro desplegable desde don-
de se ejecuten los comandos.
D. Barra de herramientas. Cada uno de los iconos perteneciente a esta
barra realiza una función determinada. La función realizada por cada
uno de ellos se explicará con detenimiento más adelante.
E. Barra de estado. Barra informativa que especifica si se dispone de co-
nexión entre PC y regulador (online) o no (offline), el identificador del re-
gulador con el que comunica, el nivel de acceso, la versión de software
que incorpora, si el regulador es de eje o de cabezal, la matrícula del
motor asociado al regulador y la matrícula del propio regulador conecta-
do.
F. S16/2
Pantalla general del WinDDSSetup. A. Menú de control. B. Barra de menús.
C. Barra de comandos. D. Barra de herramientas. E. Barra de estado.
B
C
D
E
A
A

WinDDSSetup
WINDDSSETUP
Descripción general de la pantalla
16.
Ref.1912
· 423 ·
DDS|MAB
SOFTWARE
Soft.09.05
Barra de menús
Ver
Su menú desplegable dispone de las opciones:
• Barra de herramientas. Activa/desactiva la visualización en pantalla
de la barra de herramientas (D). Véase figura
F. S16/2.
• Barra de estado. Activa/desactiva la visualización en pantalla de la
barra de estado (E). Véase figura
F. S16/2.
Modo de trabajo
Su menú desplegable dispone de las opciones:
•Online. Activa/desactiva la conexión del WinDDSSetup con el regula-
dor. Previamente debe haberse realizado la conexión física a través
de línea serie RS-232 entre PC y regulador.
•Boot. Activa/desactiva la carga de software en el regulador. En estado
online esta opción estará deshabilitada. Para realizar un «
Boot» debe
haberse realizado previamente la conexión física mediante cable lí-
nea serie RS-232 entre PC y regulador y estar en estado offline.
Utilidades
Su menú desplegable dispone de las opciones:
• Configurar Parámetros
• Configurar Variables
• Osciloscopio
• Barra de Comandos
• Generador
• Salidas D/A
• Depurador MC
• Monitor
• Ver memoria
• Imprimir parámetros
F. S16/3
Barra de menús.

WinDDSSetup
16.
WINDDSSETUP
Descripción general de la pantalla
458
Ref.1912
DDS|MAB
SOFTWARE
· 424 ·
Soft.09.05
Status
Su menú desplegable dispone de las opciones:
• Hard y Soft
• Estado Regulador
• Spy
• IOs Digitales
En este cuadro de diálogo se visualizarán:
Zona A. Los leds visualizados en este área de la ventana indican la activa-
ción (iluminado) o desactivación (no iluminado) de los valores lógicos de las
señales eléctricas de control del regulador. Cada led representa el estado
de un bit determinado de la variable BV14 «
NotProgrammableIOs» y el es-
tado de la salida digital PROG OUT dado por la variable OV5. La siguiente
tabla especifica qué representa cada led:
NOTA. Todas estas opciones de menú tienen su icono asociado en la
barra de herramientas. Para conocer su utilidad, véase la explicación
de su icono correspondiente.
NOTA. No existe icono equivalente en la barra de herramientas.
F. S16/4
Status > IOs Digitales.
T. S16/1 Variable BV14. Significado de sus bits.
Bit Nombre
4 LSC STATUS (en el bus intermodular X1)
3 ERROR RESET
2 DR OK (en el microprocesador, no en los pines de X2)
1 SPEED ENABLE SIGNAL
0 DRIVE ENABLE SIGNAL
T. S16/2 Variable OV5. Significado.
Estado Evento
OV5=0 Contacto PROG OUT abierto (led no iluminado)
OV5=1 Contacto PROG OUT cerrado (led iluminado)
A
C
B

WinDDSSetup
WINDDSSETUP
Descripción general de la pantalla
16.
Ref.1912
· 425 ·
DDS|MAB
SOFTWARE
Soft.09.05
Zona B. Los leds visualizados en este área de la ventana indican la situa-
ción de diversas señales de control que el CNC envía al regulador a través
de interfaz SERCOS. Cada led representa el estado de un bit determinado
de la variable DV32 «
MasterControlWord» y el estado de la marca lógica
TV10 indicativa de que el par (TV2) es superior a un valor umbral (TP1). La
siguiente tabla especifica qué representa cada led:
Zona C. Los leds visualizados en este área corresponden a los bits que re-
presentan la situación de las entradas y salidas digitales presentes en el slot
SL1. Véase el significado de estas variables en el capítulo 13 de este ma-
nual.
• Estado de operación
Los leds visualizados en este cuadro de diálogo representan la activación
(iluminados) o desactivación (no iluminados) de las marcas lógicas (estado
de operación) según los bits de la variable DV10.
La siguiente tabla especifica qué representa cada led:
NOTA. Nótese que en la ventana de la figura se muestran unos leds de-
terminados pero en otras situaciones pudieran mostrarse otros diferentes.
T. S16/3 Variable DV32. Significado de sus bits.
Bit Nombre
15 Speed Enable (SPENA)
14 Drive Enable (DRENA)
13 Halt
T. S16/4 Variable TV10. Significado.
Estado Evento
TV10=0 TV2 < TP1 (led no iluminado)
TV10=1 TV2 > TP1 (led iluminado)
NOTA. Nótese que no tiene icono equivalente en la barra de herramien-
tas.
F. S16/5
Status > Estado de operación.
T. S16/5 Variable DV10. Significado de sus bits.
Bit Marca Significado
7 TV60 TV50>TP2 P > Px
5 Reservado TV2 > un
valor función
de CP20
T > Tlím
4 Reservado SV1>SP10 VelocityCommand > VelocityLimit
3 TV10 TV2>TP1 T > Tx
2 SV3 SV2<SP40 VelocityFeedback < nx
1 SV5 SV2<SP42 VelocityFeedback < Min
0 SV4 SV2=SV1 VelocityFeedback=VelocityCommand

WinDDSSetup
16.
WINDDSSETUP
Descripción general de la pantalla
458
Ref.1912
DDS|MAB
SOFTWARE
· 426 ·
Soft.09.05
SetUp
Su menú desplegable dispone de las opciones:
• Preferencias...
Esta ventana, según la pestaña activa, permite establecer unas determina-
das consideraciones. Ver figura
F. S16/7.
Así, activando la pestaña:
Idioma
Permite seleccionar el idioma para toda la aplicación. Los idiomas disponi-
bles son castellano, inglés y euskera.
Aplicación
Permite establecer un comportamiento determinado en cualquier inicio de
una sesión con el WinDDSSetup. Cualquier modificación sobre este cuadro
de diálogo es de efecto inmediato.
F. S16/6
SetUp > Preferencias...
NOTA. No existe icono equivalente en la barra de herramientas.
F. S16/7
SetUp > Preferencias...
F. S16/8
SetUp > Preferencias... > Idioma.
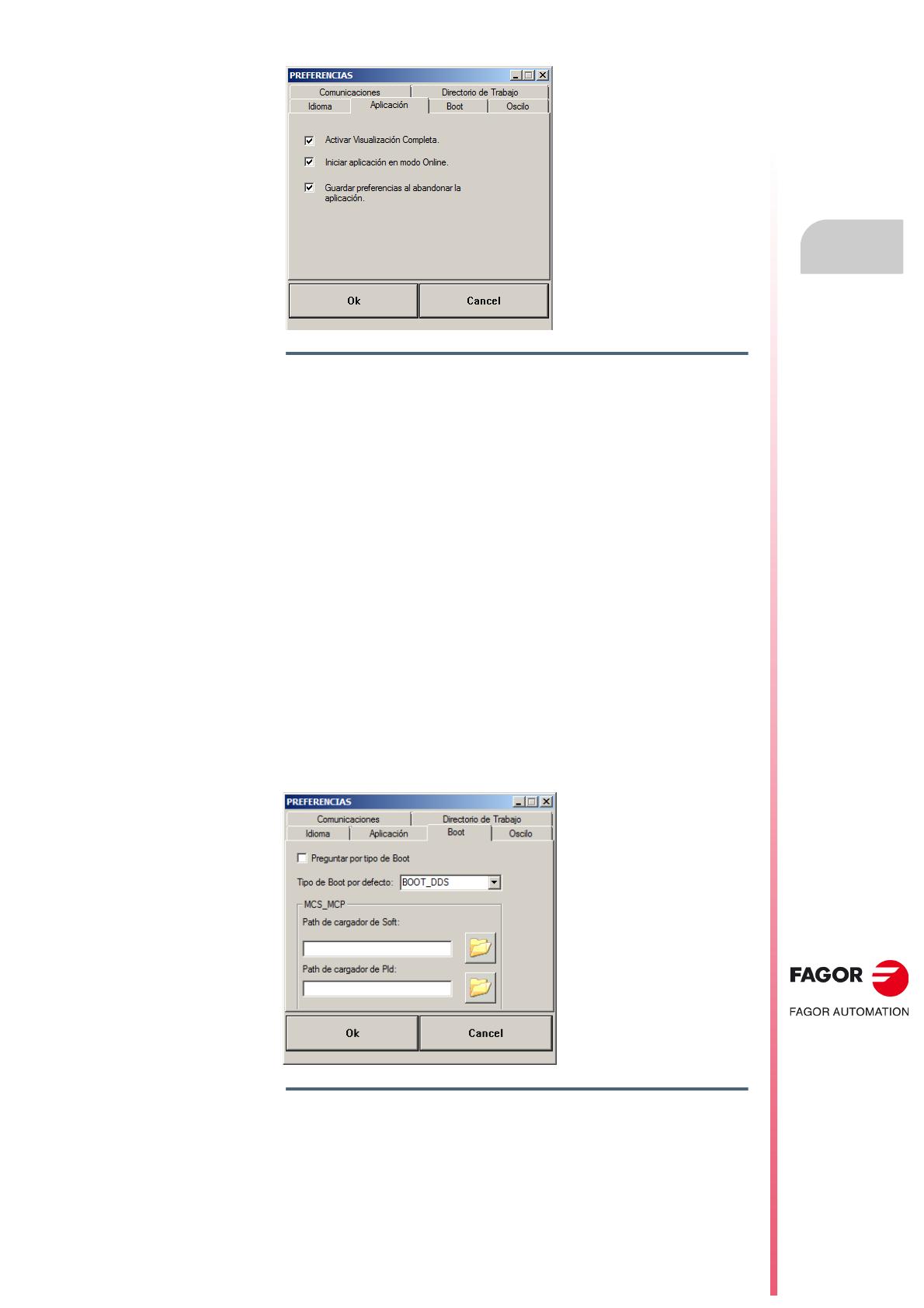
WinDDSSetup
WINDDSSETUP
Descripción general de la pantalla
16.
Ref.1912
· 427 ·
DDS|MAB
SOFTWARE
Soft.09.05
Activar Visualización Completa: cuando se activa esta propiedad, las
ventanas de configuración de parámetros y de variables presentan un
listado de todos los parámetros y variables del regulador, independien-
temente del nivel de acceso disponible. Únicamente podrán modificarse
los que el nivel de acceso permita. Se reconocerán porque no van
acompañados por un identificador «llave» junto al nombre. Su «no acti-
vación» hace que se listen únicamente los parámetros y variables que el
nivel de acceso permite modificar.
Iniciar aplicación en modo Online: cuando se activa esta propiedad,
cada vez que se inicia una nueva sesión del WinDDSSetup, intenta la
conexión con el regulador según las consideraciones hechas por última
vez en la ventana «
Preferencias...».
Guardar preferencias al abandonar la aplicación: cuando se activa
esta propiedad, cada vez que se cierra la sesión del WinDDSSetup se
almacenan todas las determinaciones tomadas en la ventana «
Prefe-
rencias...
». Cuando se vuelva a iniciar la aplicación, ésta actuará con-
forme a las especificaciones dadas en «
Preferencias...» en la anterior
sesión.
Boot
Permite establecer el tipo de «Boot» (carga de software) al iniciar una se-
sión con el WinDDSSetup.
Preguntar por tipo de Boot cuando se activa esta propiedad, cada
vez que se inicia una nueva sesión con el WinDDSSetup, aparece la
ventana «
BootType» preguntando por el tipo de boot (boot DDS, boot
MCS_MCP, ...) que se desea realizar. Si el usuario quiere evitar que se
le haga esta pregunta continuamente, cada vez que realiza un «
Boot»,
esta casilla estará desactivada y se seleccionará en el cuadro desple-
gable situado más abajo, el «
Boot» que por defecto se realizará.
F. S16/9
SetUp > Preferencias... > Aplicación.
F. S16/10
SetUp > Preferencias... > Boot.

WinDDSSetup
16.
WINDDSSETUP
Descripción general de la pantalla
458
Ref.1912
DDS|MAB
SOFTWARE
· 428 ·
Soft.09.05
Oscilo
Permite establecer por defecto algunas propiedades del osciloscopio al ini-
ciar una sesión con el WinDDSSetup. Cualquier modificación sobre este
cuadro de diálogo es de efecto inmediato.
Zoom respecto al centro gráfico: Su activación permite que en cada
zoom que el usuario realice en la ventana osciloscopio se amplie o re-
duzca el oscilograma respecto al centro gráfico y no respecto al cero de
la señal. De no activarse, el zoom se establece respecto al cero de la
señal y es común que la señal ampliada se salga de la imagen.
Iniciar osciloscopio con parámetros del regulador (vs. fiche-
ro.cfg):
Su activación hace que al iniciar la aplicación «Osciloscopio»
se lean los parámetros del regulador. De no activarse se leerán los pa-
rámetros almacenados en el fichero oscilo.ocg.
Comunicaciones
Permite establecer todas las características de comunicación entre el PC y
el regulador y que quedarán por defecto al iniciar una nueva sesión con el
WinDDSSetup. Cualquier modificación sobre este cuadro de diálogo es de
efecto inmediato.
Puerto. Selección del puerto de comunicación.
Opciones: COM1, COM3 y COM4.
Velocidad (Bd). Selección de la velocidad de comunicación.
Opciones: 9600, 19200 y 57600.
Protocolo. Selección del protocolo de comunicación.
Opciones: DNC50-Monoslave, DNC50-Multislave, MODBUS-RTU y
MODBUS-ASCII.
F. S16/11
SetUp > Preferencias... > Oscilo.
F. S16/12
SetUp > Preferencias... > Comunicaciones.
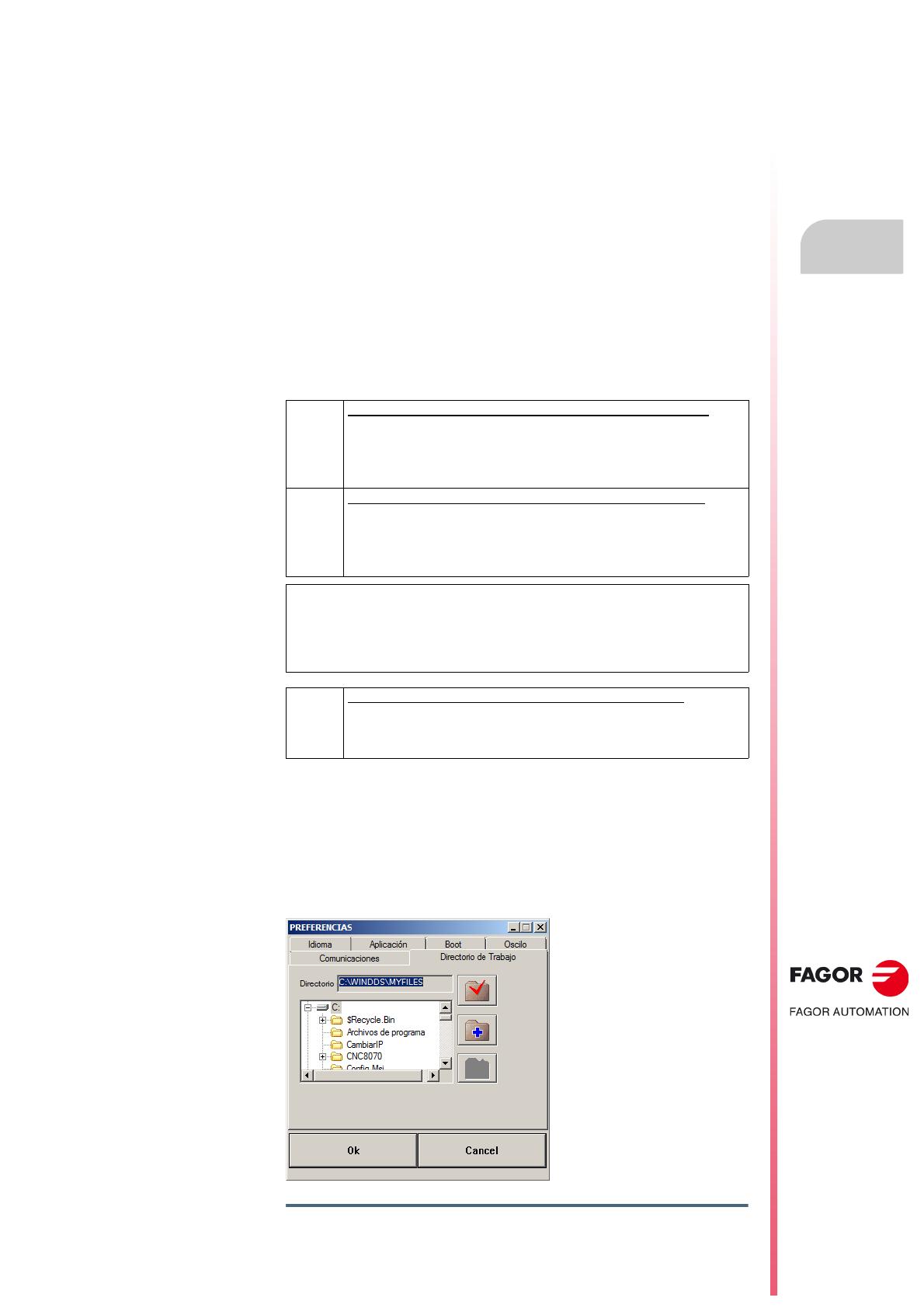
WinDDSSetup
WINDDSSETUP
Descripción general de la pantalla
16.
Ref.1912
· 429 ·
DDS|MAB
SOFTWARE
Soft.09.05
Conexión. Selección de la conexión vía línea serie RS-232, RS-422 y
RS-485 habiendo seleccionado como protocolo MODBUS RTU o ASCII.
Nº máx. de ejes (n). Nº de reguladores conectados al elemento maestro
como un PC o un VT de ESA.
Eje activo. Selección del regulador con el que se establecerá la comu-
nicación. El valor introducido selecciona el regulador cuyo nº de nodo
es coincidente con él.
Todas las aplicaciones que pueden ejecutarse desde el WinDDSSetup (os-
ciloscopio, generador de ondas, ...) hacen referencia al regulador que se ha
determinado en el campo «
Eje activo», a excepción de aquellos que per-
mitan indicar de forma específica el nº de ejes mediante la ventana
«Watch».
Para evitar problemas en la transmisión del sistema ténganse en cuenta las
siguientes consideraciones, vigilando siempre si el modo de conexión es
RS-422, RS-232 o RS-485 en cada regulador y el nodo asignado al mismo
mediante su conmutador rotativo.
Casos en los que se establecerá una transmisión:
En la barra de estado de la ventana general del WinDDSSetup situada en la
parte inferior podrá visualizarse cual es el eje activo y será coincidente con
el que se ha establecido en el campo «
Eje activo» del cuadro de diálogo
«Preferencias...».
Directorio de Trabajo
Permite seleccionar, por defecto, un directorio en cualquier inicio de sesión
del WinDDSSetup.
RS-422
(n >1)
Comunicación con varios reguladores en modo RS-422
El protocolo de comunicación será el DNC50 para varios
ejes
en modo RS-422. El nº de nodo asignado a cada re-
gulador mediante su conmutador rotativo lo identifica con
ese nº y debe ser distinto de cero.
RS-422
(n=1)
Comunicación con un sólo regulador en modo RS-422
El protocolo de comunicación será el DNC50 para varios
ejes
en modo RS-422. El nº de nodo asignado a cada regula-
dor mediante su conmutador rotativo lo identifica con ese nº y
debe ser distinto de cero.
NOTA. Nótese que si se desea establecer comunicación con un sólo re-
gulador en modo RS-422, debe hacerse a través del protocolo DNC50
para varios ejes. Se introducirá en el campo «nº máximo de ejes» un valor
superior a 1. El WinDDSSetup realizará un chequeo previo reconociendo
la existencia de un sólo eje.
RS-232
(n=1)
Comunicación con un sólo regulador en modo RS-232
El protocolo de comunicación será el DNC50 para un sólo
eje
en modo RS-232. El nº de nodo asignado al regulador
será necesariamente el cero.
F. S16/13
SetUp > Preferencias... > Directorio de Trabajo.

WinDDSSetup
16.
WINDDSSETUP
Descripción general de la pantalla
458
Ref.1912
DDS|MAB
SOFTWARE
· 430 ·
Soft.09.05
Este icono permite asignar una carpeta o directorio seleccionado de la lista
en el directorio de trabajo «por defecto». Al pulsar el botón tras haber selec-
cionado el directorio se mostrará en el cuadro de texto «Directorio».
Este icono permite crear una carpeta o directorio nuevo.
Este icono permite borrar la carpeta o directorio seleccionado en la lista.
• Nivel de Acceso...
Los parámetros, variables y comandos del regulador están organizados por
niveles de accesibilidad. Ver capítulo 13 de este manual.
Los niveles son:
Nivel básico - USUARIO -.
Nivel intermedio - OEM -.
Nivel máximo - FAGOR -.
Para acceder a cada uno de los parámetros es necesario configurar el re-
gulador en el nivel de acceso que requiera ese parámetro.
Para cambiar el nivel de acceso desde el programa WinDDSSetup ejecutar
la opción «
Nivel de Acceso...» del menú SetUp. En la barra de estado (ubi-
cada en la parte inferior de la ventana) se indica cual es el nivel de acceso
activo.
El acceso a cada nivel exige disponer de una contraseña (password).
El nivel de USUARIO es el nivel básico. En el encendido, el regulador
accede a este nivel por defecto, por tanto, no requiere de ningún pas-
sword.
Desde el nivel de usuario se accede a un grupo de parámetros que mo-
difican levemente el funcionamiento del regulador en función de la apli-
cación desarrollada.
El nivel OEM es un nivel intermedio de acceso.
Desde el nivel OEM se accede a un gran grupo de parámetros depen-
dientes del motor conectado que establecen la adaptación de la electró-
nica del regulador a ese motor y a la aplicación concreta que se
desarrolle.
El nivel FAGOR permite un acceso total a las variables, parámetros y
comandos del sistema.
NOTA. No existe icono equivalente en la barra de herramientas.
F. S16/14
SetUp > Nivel de Acceso...
F. S16/15
Contraseña para cambiar el nivel de acceso.
NOTA. El usuario únicamente tendrá acceso libre al nivel básico.
NOTA. Nótese que el instalador del sistema DDS FAGOR tendrá ac-
ceso restringido al nivel OEM.

WinDDSSetup
WINDDSSETUP
Descripción general de la pantalla
16.
Ref.1912
· 431 ·
DDS|MAB
SOFTWARE
Soft.09.05
Desde el nivel FAGOR se accede además a un grupo de parámetros de-
pendientes de la electrónica del regulador que vienen ajustados de fá-
brica.
• Seleccionar Regulador...: orden equivalente a la dada por la pulsa-
ción del icono SELECCIONAR DISPOSITIVO
.
BackUp
Su menú desplegable dispone de las opciones:
• DRVPC...: orden equivalente a la dada por la pulsación del icono
BACKUP REGULADOR/PC
.
• PCDRV...: orden equivalente a la dada por la pulsación del icono
BACKUP PC/REGULADOR
.
Ventanas
Su menú desplegable dispone de las opciones:
• Cascada
• Mosaico horizontal
• Mosaico vertical
• Alinear iconos
?
Su menú desplegable dispone de las opciones:
• Temas de Ayuda
• Using Help
• Acerca de WinDDSSetup... : Informa de la versión y la fecha de crea-
ción de la aplicación.
NOTA. Nótese que únicamente los técnicos de Fagor Automation y
proceso de fabricación tendrán acceso al nivel FAGOR.
NOTA. Esta opción de menú tiene su icono asociado en la barra de he-
rramientas. Para conocer su utilidad, véase la explicación de su icono
correspondiente.
NOTA. Todas estas opciones de menú tienen su icono asociado en la
barra de herramientas. Para conocer su utilidad, véase la explicación
de su icono correspondiente.
F. S16/16
Acerca de WinDDSSetup...

WinDDSSetup
16.
WINDDSSETUP
Descripción general de la pantalla
458
Ref.1912
DDS|MAB
SOFTWARE
· 432 ·
Soft.09.05
Barra de comandos
Su menú desplegable dispone de los comandos:
Para ejecutar un comando debe ser seleccionado previamente en el cuadro
de texto desplegable y posteriormente activar el botón
«ENTER» situado a
su derecha.
Barra de herramientas
CONEXIÓN
El icono «Conexión» permite establecer comunicación entre el WinDDSSe-
tup del PC y el regulador, previamente conectados físicamente mediante
cable línea serie.
Antes de pulsar este icono, en la barra de estado aparece la leyenda «offli-
ne» en fondo gris. Tras pulsar el icono se irán visualizando en la barra de es-
tado las siguientes leyendas:
Conectando ...
Intentando Drive 0 a velocidad 19200.
Leyendo valores en RAM.
Online (en fondo verde).
F. S16/17
Barra de comandos.
DC1 Resetear errores
EC1 Fijar I0 del simulador de encóder
GC1 Pasar parámetros de RAM a FLASH
GC10 Inicializar parámetros
GC11
NoMovingAutoPhasing
GC3
Autophasing
GC4 Validar
GC5 Calcular el rozamiento e inercia
GC6 Autocalibración del HomeSwitch
GC7 AutophasingOnline
GC8 Corrección de la posición eléctrica
GC9 MoveRho
GV11 Soft Reset
LC1 Salvar parámetros MC
MC1 Identificación de los parámetros eléctricos del motor
PC150 Cambio de la captación activa
RC1 Guardar parámetros en el encóder
RC2 ReadEncoderData
RC3 StoreEncoderData
RC4 ForceEncoder0
F. S16/18
Barra de herramientas: A. Iconos habilitados con conexión (online). B. Ico-
nos habilitados sin conexión (offline).
A
B

WinDDSSetup
WINDDSSETUP
Descripción general de la pantalla
16.
Ref.1912
· 433 ·
DDS|MAB
SOFTWARE
Soft.09.05
BOOT
El icono «Boot» permite iniciar el proceso de instalación/actualización de
una versión de software en el regulador. Al pulsar este botón se despliega la
ventana
«BootType».
Seleccionar el tipo de modelo de regulador conectado.
Pulsar el botón «validar».
Se despliega la ventana «
BootStrap».
BUSCAR DIRECTORIO
Pulsar este icono para acceder a la ventana «Directorio de versión» y po-
der seleccionar el directorio donde ha sido descomprimida la versión a ins-
talar.
Localizar y seleccionar el archivo «
modulos.cfg» en el directorio corres-
pondiente y pulsar el botón «A
brir».
F. S16/19
BootType.
F. S16/20
BootStrap.
F. S16/21
Directorio de versión.

WinDDSSetup
16.
WINDDSSETUP
Descripción general de la pantalla
458
Ref.1912
DDS|MAB
SOFTWARE
· 434 ·
Soft.09.05
CARGAR SOFTWARE (desde el PC al REGULADOR)
Pulsar este icono para acceder a la ventana de texto «Instrucciones». Lle-
var a cabo siguiendo el orden todos los pasos que aquí se indican.
Nota. Los botones a los que se hace referencia en el texto de esta ventana
están dispuestos en la parte frontal del regulador.
Una vez realizados todos los pasos indicados, pulsar el botón «
Aceptar»
para iniciar el proceso de carga de la versión de software desde el PC al
regulador.
SetUp > Preferencias ... > Boot
Esta secuencia de menú permite al usuario establecer el «
Tipo de Boot por
defecto
» y marcar/desmarcar también la opción «Preguntar por tipo de
Boot
».
Tras aceptar con el botón Ok, la próxima vez que se pulse el icono
«Boot»
de la barra de herramientas desde la pantalla inicial del WinDDSSetup ya no
aparecerá la ventana
«BootType». Recuerda la opción que fue marcada en
el desplegable
«Tipo de Boot por defecto» y que para este caso fue
«BOOT_DDS» como puede verse en la figura. Si además el usuario des-
marcó la opción
«Preguntar por tipo de Boot», ni tan siquiera preguntará si
se desea elegir otro
«Tipo de Boot por defecto».
Desde la ventana BootStrap, es posible además establecer desde los ico-
nos que aparecen en ella otras consideraciones en el proceso de carga del
software. He aquí una breve explicación sobre ellos:
PASSWORD
Al pulsar este icono se despliega una ventana donde se solicita una clave
para salir del nivel básico y disponer de todas las posibles acciones de car-
ga del desplegable «acciones».
F. S16/22
Instrucciones.
Configurar el Boot por defecto
Iconos de la ventana BootStrap

WinDDSSetup
WINDDSSETUP
Descripción general de la pantalla
16.
Ref.1912
· 435 ·
DDS|MAB
SOFTWARE
Soft.09.05
CONFIGURACIÓN
Al pulsar este icono se despliega el cuadro de diálogo «configuración».
Desde él se configuran ciertos detalles que deben tenerse en cuenta en el
proceso de carga de la versión de software.
Comunicaciones
Determinar tanto el puerto como la velocidad de comunicación así como
el resto de elementos que aparecen en el mismo.
Tabla de parámetros
Marcar/desmarcar:
• Guardar antes de cargar versión, si el regulador ya disponía de una
tabla de parámetros y se desea mantener guardada en el PC al reali-
zar una actualización de versión de software.
• Restaurar después de cargar versión, si durante el proceso de ac-
tualización de software se desea restaurar la tabla de parámetros
guardada en el PC anteriormente en el regulador.
F. S16/23
Password para entrar en Boot.
F. S16/24
Desplegable «Acciones» de la ventana «BootStrap». Sólo con nivel de ac-
ceso FAGOR.
F. S16/25
Configuración.

WinDDSSetup
16.
WINDDSSETUP
Descripción general de la pantalla
458
Ref.1912
DDS|MAB
SOFTWARE
· 436 ·
Soft.09.05
Tabla de motores
Marcar/desmarcar:
• Cargar después de la versión, si durante el proceso de actualización
de software se desea cargar el fichero de motores (*.mot) asociado al
regulador, que por defecto será un FXM_FKM_xx.mot si se trata de un
regulador de eje (AXD o ACD) o un FM7_SPM_FM9_ FS5_xx.mot si
se trata de un regulador de cabezal (SPD o SCD).
SELECCIONAR DISPOSITIVO
SetUp > Seleccionar Regulador...
En modo offline este icono queda habilitado. Desde la ventana que se des-
pliega se trata de informar al WinDDSSetup del modelo de regulador, de la
versión de software y del motor asociado (síncrono o asíncrono). En modo
online este icono queda deshabilitado ya que el regulador está conectado y
suministra directamente al WinDDSSetup esta información.
LISTA DE PARÁMETROS
Este icono está habilitado tanto en modo offline (sin conexión) como en
modo online (con conexión). Al pulsar este botón (estando en modo online)
se despliega la ventana «Configuración de Parámetros (modo modifica-
ción)»:
NOTA. Esta opción permite el envío de nuevos ajustes de motores a
campo sin necesidad de cambiar de versión de software.
F. S16/26
Seleccione regulador. Habilitado únicamente en modo offline.
F. S16/27
Configuración de parámetros. Modo online. a. Icono validar. b. Icono guardar
en flash.
b
a
e
f
e
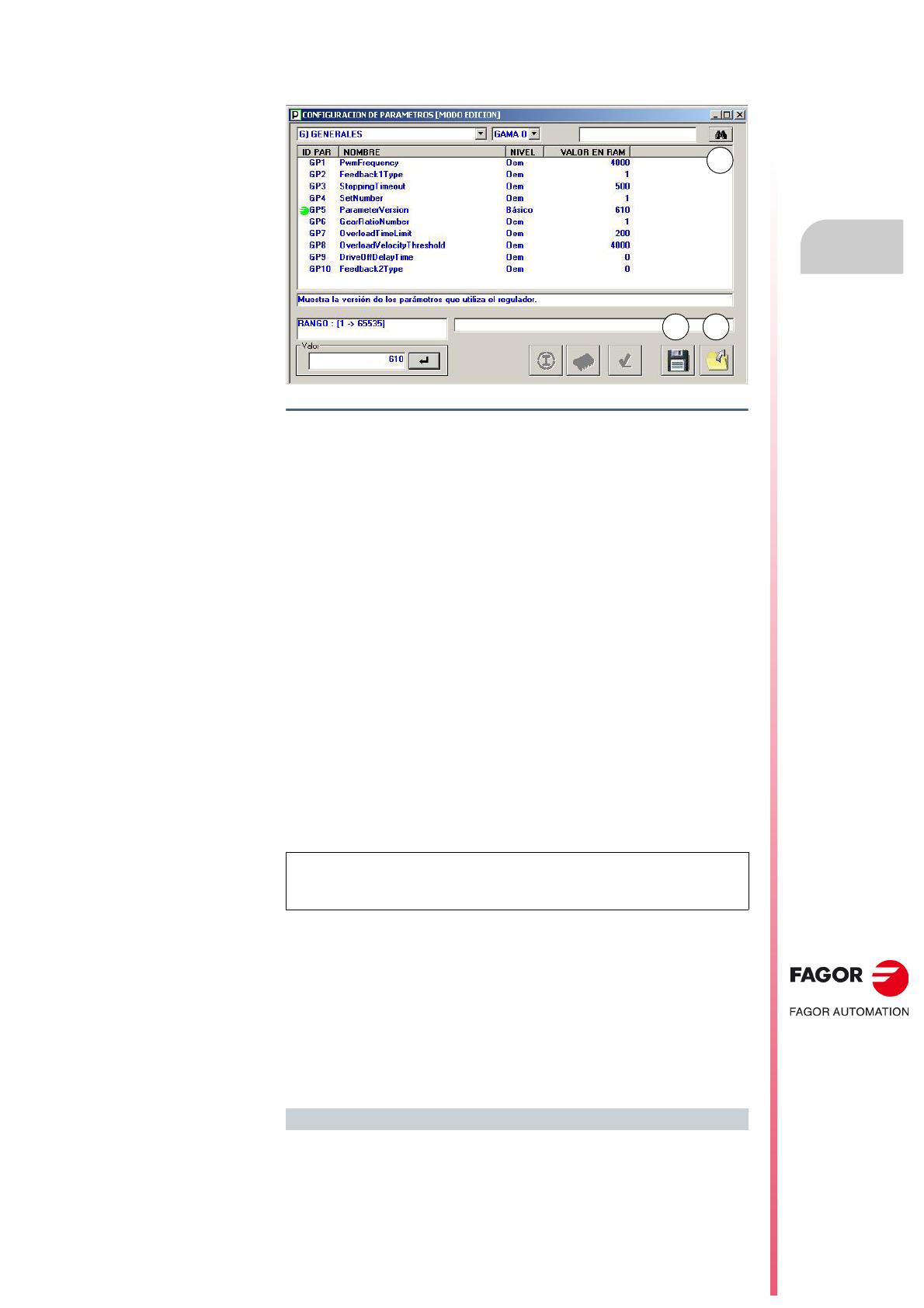
WinDDSSetup
WINDDSSETUP
Descripción general de la pantalla
16.
Ref.1912
· 437 ·
DDS|MAB
SOFTWARE
Soft.09.05
o (estando en modo offline) se despliega la ventana «Configuración de Pa-
rámetros (modo edición)»:
En su interior se muestra un listado de parámetros del regulador. Para editar
uno de ellos es necesario localizarlo para su posterior selección. La locali-
zación puede realizarse de diferentes modos:
Seleccionar, del cuadro de lista, la opción «TODOS» mediante la flecha
desplegable y localizar el parámetro mediante la barra de desplazamiento
vertical si no se visualiza directamente en pantalla.
Seleccionar, del cuadro de lista, el grupo concreto al que pertenece me-
diante la flecha desplegable y localizar el parámetro, de todos los que con-
forman ese grupo, cuyo listado visualizado en pantalla, obviamente, será
más pequeño.
Teclear el parámetro (p. ej: GP5) en el cuadro de texto de búsqueda y pul-
sar el icono
BÚSQUEDA (e).
Una vez localizado, se selecciona haciendo un clic sobre él (aparecerá el lo-
gotipo de Fagor a su izquierda) y se introduce el valor deseado tecleándolo
en el cuadro de lista «
VALOR». Para hacer efectiva esta modificación es
necesario pulsar el botón «
ENTER» situado a su derecha y posteriormente
el icono
VALIDAR (a).
Este valor quedará almacenado en la memoria RAM del regulador (véase la
columna
VALOR EN RAM de la ventana).
Para almacenar el cambio de manera permanente pulsar el botón
GUAR-
DAR EN FLASH
(b).
Así, es posible editar parámetros desde el PC en modo offline y enviar la ta-
bla de parámetros con los cambios realizados a un usuario que dispone del
equipo en otra zona geográfica, para que sustituya, ya en modo online, la ta-
bla de parámetros de su regulador por la que le ha sido enviada con los
cambios. Este fichero tiene extensión (*.par).
Así, en modo offline, la ventana dispone de los iconos
GUARDAR (c) y RE-
CUPERAR
(d) que permiten almacenar o volver a abrir el fichero de tabla de
parámetros.
La ventana «Configuración de Parámetros (modo modificación)» experi-
menta ciertas variaciones si el nivel de acceso no es el básico y desde ella
puede realizarse la identificación e inicialización de un motor, seleccionando
el grupo M «Motor».
F. S16/28
Configuración de parámetros. Modo offline.
NOTA. Nótese que en modo offline únicamente se modifica la tabla de pa-
rámetros existente en el PC mientras que en modo online se modifica tam-
bién la tabla de parámetros del regulador.
Con nivel de acceso OEM o FAGOR
e
c d

WinDDSSetup
16.
WINDDSSETUP
Descripción general de la pantalla
458
Ref.1912
DDS|MAB
SOFTWARE
· 438 ·
Soft.09.05
SELECCIÓN DE MOTOR
Este icono se mostrará siempre que se haya seleccionado previamente en
el listado que aparece en la ventana el parámetro MotorType (MP1) y el ni-
vel de acceso sea OEM o FAGOR. Ver figura
F. S16/30.
Tras pulsar el botón asomará la ventana «SELECCIONE MOTOR»
con un
listado de todos los modelos de motor posibles que pueden ser gobernados
por el regulador del que se dispone en función del fichero (*.mot) cargado
(por defecto) en el software del regulador. Así, un regulador AXD 1.25 lleva-
rá cargado, por defecto, un fichero FXM_FKM_25.mot que incorpora todas
las posibles referencias de motores que pueden ser gobernados por él y
que aparecen en la siguiente ventana.
F. S16/29
Configuración de parámetros. Grupo M «Motor».
F. S16/30
Botón de selección de motor.
F. S16/31
Selección de motor síncrono de eje para un regulador dado.
Ver apartado 1.4 Grabación en la memoria FLASH
Ver apartado 1.5 Validación de parámetros offline
Ver apartado 2.3 Identificación e inicialización del motor

WinDDSSetup
WINDDSSETUP
Descripción general de la pantalla
16.
Ref.1912
· 439 ·
DDS|MAB
SOFTWARE
Soft.09.05
Un regulador SPD 1.25 llevará cargado, por defecto, un fichero
FM7_SPM_FM9_FS5_25.mot que incorpora todas las referencias de moto-
res que pueden ser gobernados por él y que aparecen en la ventana.
Para más detalles sobre la forma de configurar, identificar e inicializar el mo-
tor desde estas ventanas, así como el empleo de las gamas, ver capítulo
2.
IDENTIFICACIÓN DEL MOTOR
.
En esta misma ventana «Configuración de Parámetros (modo modifica-
ción)» aparece también un cuadro de lista con flecha desplegable (f) que
permite visualizar las gamas existentes (sets). Al seleccionar una de las ga-
mas se identifican en el listado de parámetros aquellos que pertenecen a la
gama elegida.
Obsérvese el dígito identificativo de la gama tras el ID PAR del parámetro
(véase p. ej. en la figura que, seleccionada la gama 3 (SET 3), el ID PAR
PP1.3, finaliza con un «
.3»).
F. S16/32
Selección de un motor asíncrono para un regulador dado.
Set de parámetros
F. S16/33
Set de parámetros.
F. S16/34
Identificación de parámetros pertenecientes a la gama seleccionada.
f

WinDDSSetup
16.
WINDDSSETUP
Descripción general de la pantalla
458
Ref.1912
DDS|MAB
SOFTWARE
· 440 ·
Soft.09.05
LISTA DE VARIABLES
Este icono se muestra habilitado únicamente en modo online (con co-
nexión). Pulsando este botón se despliega una ventana cuyo nombre es
«Configuración de Variables»:
En su interior se muestra un listado de variables del regulador.
Esta ventana puede utilizarse para:
Leer y/o editar variables que sean de lectura y escritura (véase su dis-
tintivo RW en la columna de atributos).
Leer variables que sean sólo de lectura (véase su distintivo R en la co-
lumna de atributos).
Obsérvese que al introducir el cursor en el cuadro «
VALOR» el icono situa-
do a su derecha cambia de aspecto representando el sentido de circulación
de la información dependiendo de que la variable seleccionada sea de lec-
tura (R) desde el regulador o lectura/escritura (RW) hacia el regulador.
Véanse los iconos:
El mecanismo de localización y selección de variables es idéntico al utiliza-
do en la ventana de configuración de parámetros, sólo que aquí se listan las
variables del regulador.
F. S16/35
Configuración de variables.
F. S16/36
R.
Variable de lectura. RW. Variable de lectura/escritura.
El símbolo «llave» que se muestra junto al ID del parámetro o varia-
ble en su ventana correspondiente significa que no se permite su
modificación en ese nivel de acceso.
R RW
INFORMACIÓN. El funcionamientos de los iconos correspondientes a VA-
LIDAR
y GUARDAR EN FLASH ya fueron explicados con detenimiento en
el capítulo
1. CONOCIMIENTOS PREVIOS.
i

WinDDSSetup
WINDDSSETUP
Descripción general de la pantalla
16.
Ref.1912
· 441 ·
DDS|MAB
SOFTWARE
Soft.09.05
INFORMACIÓN HARD/SOFT
Al pulsar este icono se despliega una ventana informativa como ésta:
GENERADOR DE FUNCIONES
Pulsar este icono permite generar consignas de manera interna. Únicamen-
te estará habilitado con niveles de acceso OEM o FAGOR, no así para nivel
de acceso básico. Al pulsar este botón se despliega en pantalla la ventana
«Generador Interno de Consignas» con los siguientes campos:
En los campos de texto de esta ventana podrán determinarse la forma de la
señal, su amplitud, período y demás especificaciones.
Para una señal cuadrada, de amplitud de consigna de 500 rev/min y con un
período de 152 ms, programando los canales para observar las variables
WV5 y SV2 (modo osciloscopio) se obtiene el siguiente oscilograma:
F. S16/37
Información sobre el software y el hardware del regulador conectado así
como el identificador del motor conectado al regulador.
F. S16/38
Generador interno de consignas.
Ejemplo.
F. S16/39
Oscilograma según datos especificados para la señal de consigna interna.

WinDDSSetup
16.
WINDDSSETUP
Descripción general de la pantalla
458
Ref.1912
DDS|MAB
SOFTWARE
· 442 ·
Soft.09.05
Los rangos para cada uno de los campos son:
La activación y desactivación del generador de consignas interno se llevará
a cabo mediante los botones:
SALIDAS ANALÓGICAS
Al pulsar este icono se despliega un cuadro de diálogo que permite progra-
mar dos salidas analógicas y así sacar al exterior cualquier variable interna
del regulador.
Así, en los cuadros de texto «Output data» de los canales 1 y 2 se selec-
cionan las variables. Estas variables quedan seleccionadas en los paráme-
tros del regulador OP1 y OP2.
Además, en los cuadros de texto «Value/10 volts» de los canales 1 y 2 se fi-
jan los valores de estas variables que corresponderán a los 10 V DC de ten-
sión de salida analógica. Estos valores quedan almacenados en los
parámetros del regulador OP3 y OP4.
Las salidas analógicas son útiles como herramienta de ajuste. Así, con un
osciloscopio conectado a estas salidas, es posible visualizar esas variables
internas del regulador y comprobar sobrepasamientos, tiempos de estabili-
zación, aceleraciones, estabilidad del sistema ...
Supóngase que se desean visualizar las señales de par y velocidad instan-
táneas:
Véase la figura
F. S16/41 donde queda reflejada la manera de introducir es-
tos datos.
NOTA. Nótese que el motor se moverá intentando seguir la consigna que
se ha programado.
Amplitud - 3276832767
Período 132764
Offset - 3276832767
Nº de ondas 065535
Ciclo de trabajo 199
F. S16/40
A.
Activar generador de consignas. B. Desactivar generador de consignas.
F. S16/41
Programación de las dos salidas analógicas.
Ejemplo.
OP1=SV2 Velocidad real, canal 1 (pines 10/11 de X7)
OP2= TV2 Par real, canal 2 (pines 8/9 del conector X7)
OP3=1000 1000 (rev/min) / 10 V
OP4=600 600 dNm / 10 V
A B

WinDDSSetup
WINDDSSETUP
Descripción general de la pantalla
16.
Ref.1912
· 443 ·
DDS|MAB
SOFTWARE
Soft.09.05
ESTADO DE ERRORES
Al pulsar este icono se despliega la ventana (SPY) desde la que podrá vi-
sualizarse, por orden de aparición, el listado de errores detectados por el re-
gulador, facilitando, en ocasiones, el diagnóstico.
Si es de interés deshabilitar algún error de los que aparecen en la ventana
SPY es posible desde la etiqueta «deshabilitar errores».
Se localizará el grupo al que pertenece desde el desplegable «Grupo de
errores» y se marcará la cuadrícula situada a la izquierda del error en la lista
de errores.
Posteriormente, se ejecutará el comando DC1 (resetear errores) para hacer
efectiva la deshabilitación del error.
F. S16/42
SPY. Listado de errores.
NOTA. Nótese que sólo podrán deshabilitarse los errores reseteables
aunque en el listado aparezcan también los errores no reseteables.
F. S16/43
SPY. Deshabilitación de errores.
NOTA. Nótese que para disponer de esta opción es necesario tener un ni-
vel de acceso de usuario OEM o FAGOR.
F. S16/44
Ejecutar el comando DC1. Resetear errores.

WinDDSSetup
16.
WINDDSSETUP
Descripción general de la pantalla
458
Ref.1912
DDS|MAB
SOFTWARE
· 444 ·
Soft.09.05
DEPURADOR DE PROGRAMAS MC
Pulsar este icono permite visualizar la ventana «Debugger» desde la cual
se realiza la depuración de aplicaciones de Motion Control. Aparecen agru-
padas las funciones de visualización de ficheros a depurar, funciones de ac-
tivación de comandos de ejecución de la aplicación y las funciones de
establecimiento de puntos de ruptura.
La barra de herramientas situada en la parte superior de la ventana «
Debu-
gger
» dispone de los siguientes iconos:
VISUALIZAR CÓDIGO FUENTE
Pulsar este icono desde la ventana «Debugger» permite al usuario abrir
una ventana para visualizar el código fuente de la aplicación que desea de-
purar. Pueden establecer puntos de ruptura y en el caso de que la ejecución
se detenga, visualizar en qué línea de código se ha detenido la ejecución.
La depuración se realiza sobre código fuente de alto nivel y no a nivel de
pseudocódigo. La ventana de visualización refleja el estado de la aplicación
en la barra de estado indicando si está o no en marcha y en qué sentencia
se ha detenido en el caso de estar parada.
Estos datos son obtenidos por el software de depuración accediendo a dos
variables del software de Motion Control que indican, por un lado, el estado
de ejecución LV30 (F02330) KernelExecutionState y, por otro, el punto de
ejecución donde se detuvo en el caso de estar detenida LV31 (F02331) Ker-
nelExecutionPoint.
F. S16/45
Debugger.
F. S16/46
La barra de estado.
Depuración
GO
Lanza la ejecución de la aplicación.
STOP
Detiene la ejecución de forma inmediata.
RESET
Detiene la ejecución de forma inmediata y hace un «reset» de la
aplicación a depurar situándose al inicio.
ABORT
Interrumpe y finaliza un bloque de posicionamiento en cualquier
instante sin esperar a alcanzar la posición final.
STEP
Permite realizar la ejecución de la aplicación paso a paso donde
las sentencias de alto nivel pueden ir ejecutándose una a una.
MOVE
Ejecuta cada bloque de posicionamiento.

WinDDSSetup
WINDDSSETUP
Descripción general de la pantalla
16.
Ref.1912
· 445 ·
DDS|MAB
SOFTWARE
Soft.09.05
El software de MC implementa dos mecanismos de este tipo para permitir la
depuración de aplicaciones de MC:
Los puntos de ruptura BP (Break Point).
La ejecución hasta el cursor RTC (Run To Cursor).
Los BP establecen puntos de parada en la aplicación de forma que la eje-
cución se detiene cada vez que alcanza dicho punto. Es posible definir has-
ta 8 puntos de ruptura simultáneamente.
Los RTC también establecen un punto de parada en la aplicación de forma
que, alcanzado dicho punto, la ejecución se detiene la primera vez desacti-
vándose posteriormente el RTC. Únicamente es posible definir un elemento
de este tipo cada vez que se arranca la ejecución.
Así, para establecer un BP, el usuario debe seleccionar la línea de programa
deseada y activar el icono correspondiente de la barra de herramientas,
mostrándose la línea resaltada de forma permanente. Este BP se desacti-
vará volviendo a pulsar el mismo botón tras seleccionar nuevamente la lí-
nea.
Si el usuario desea eliminar de forma rápida todos los BP establecidos, de-
berá activar el botón de la barra de herramientas BP bajo el aspa.
Para establecer un RTC, el usuario debe situar el cursor sobre la línea de
programa y activar el botón de la barra de herramientas «RTC».
MONITORIZAR
Pulsar este icono permite visualizar la ventana «Watch» desde la cual el
usuario puede acceder a las variables de la aplicación durante el proceso
de depuración (tanto en lectura como en escritura). Desde esta ventana se
ofrece la posibilidad de seleccionar las variables a visualizar y también la vi-
sualización de los valores de las variables seleccionadas.
Como se observa en la ventana «
Watch» además de la selección de pará-
metros y variables del regulador, incorpora también la posibilidad de selec-
cionar variables de PLC y de MC. Podrán monitorizarse conjuntamente si se
desea.
Puntos de ruptura
RTC
Establece un punto de parada de la aplicación definido por el
cursor.
BP
Activa/desactiva los puntos de ruptura en la línea actual de la
aplicación.
NOT BP
Elimina todos los puntos de ruptura de la aplicación.
F. S16/47
Watch.
NOTA. Nótese que para que aparezcan en esta ventana las etiquetas
«PLC» y «MC» el regulador conectado debe ser un modelo MMC o CMC.

WinDDSSetup
16.
WINDDSSETUP
Descripción general de la pantalla
458
Ref.1912
DDS|MAB
SOFTWARE
· 446 ·
Soft.09.05
Desde el punto de vista del software de MC, las variables y arrays de usua-
rio son registros de una estructura o tabla, identificándose por su índice den-
tro de ella. Sin embargo, al depurar una aplicación de MC, el usuario podrá
visualizarlas por los nombres con que fueron asignadas durante la edición
de la aplicación. Por tanto, mientras no se abra una aplicación concreta para
su depuración, el regulador conocerá las variables de usuario de MC por su
nombre genérico.
Al abrir una aplicación de MC con el fin de depurarla, el software de depu-
ración será capaz de reconocer los nombres concretos que el usuario asig-
nó a las variables permitiéndole así visualizarlas con esos mismos
nombres. Ver figura
F. S16/48.
Con la finalidad de visualizar simultáneamente los valores de las variables
seleccionadas tanto de MC como de PLC además de otras variables y co-
mandos del regulador, la ventana «
Watch» ofrece la etiqueta «Monitoriza-
ción
» que al ser activada por el usuario despliega otra ventana con un
conjunto de campos de texto.
Cada campo de texto corresponde a una de las variables o comandos se-
leccionados y muestra el valor que el regulador almacena de cada una de
ellas en ese mismo instante. Todo este mecanismo se ejecutará después de
pulsar el botón que aparece en esa misma ventana.
Algunas de estas variables muestran un valor fijo mientras que otras ofre-
cen diferentes valores en el tiempo atendiendo a la información que el re-
gulador le suministre de ellas tanto estando el programa de aplicación activo
como no activo.
El límite de variables y comandos a seleccionar es de 10 y aparecerán aten-
diendo al orden establecido en su selección. Cada variable se seleccionará
desde su etiqueta correspondiente según sea de MC, PLC o DRIVE.
Además, podrán modificarse los valores de estas variables escribiendo di-
rectamente en el cuadro de texto de la variable a modificar y ejecutando un
«return» de teclado.
Una imagen ilustrativa de esta situación puede verse en la figura
F. S16/49.
F. S16/48
Reconocimiento de nombres de variables asignadas por el usuario.
F. S16/49
Watch. Etiqueta «Monitorización».

WinDDSSetup
WINDDSSETUP
Descripción general de la pantalla
16.
Ref.1912
· 447 ·
DDS|MAB
SOFTWARE
Soft.09.05
Para cargar una nueva configuración de variables a visualizar y salvar mo-
dificaciones hechas sobre ellas desde el cuadro de diálogo «
Monitoriza-
ción
» deberá hacerse un clik de ratón con el botón derecho bajo la pestaña
«Monitorización»
desplegándose una ventana como ésta:
Activando «Load configuration» emerge en pantalla la ventana que permite
localizar un fichero con la configuración de las variables a visualizar.
Activando «Save configuration» emerge en pantalla la ventana que permite
guardar el fichero modificado con el mismo nombre o con otro distinto si se
desea mantener intacto el fichero anteriormente abierto.
IMPRIMIR
Al pulsar este icono se despliega una ventana desde la que se acepta o se
deniega la impresión.
BACKUP REGULADOR/PC
Pulsar este icono permite salvar (guardar) una configuración conocida de
un regulador. Así, tras pulsar este botón se despliega la ventana «Backup
Regulador
Fichero» desde donde el usuario podrá almacenar el tipo de
archivo y el nombre del fichero que se va a salvar en el PC. El sentido de
carga es desde la memoria flash del regulador al disco duro de un PC.
BACKUP PC/REGULADOR
Pulsar este icono permite cargar (copiar) una configuración conocida a un
nuevo regulador. Así, tras pulsar el botón se despliega la ventana «Backup
Fichero
Regulador» donde el usuario podrá seleccionar el tipo de archivo
y el nombre del fichero que se va a cargar desde el PC al regulador. El sen-
tido de carga es desde el disco duro de un PC a la memoria flash del regu-
lador.
El tipo de archivo podrá ser:
La carga de aplicaciones de MC o PLC (una vez compiladas) pueden reali-
zarse desde el entorno de carga y depuración, evitando así posibles conflic-
tos de acceso a la línea serie entre las aplicaciones de edición y depuración.
Esta función envía el fichero de la aplicación de MC, PLC, tabla de paráme-
tros, ... de forma similar al envío de parámetros del regulador quedando di-
cha aplicación almacenada en la memoria flash del regulador.
Considerando que el regulador accede a estos archivos en el momento del
arranque, es necesario hacer efectiva la actualización o modificación de al-
gún programa tanto de MC como de PLC y WinDDSSetup realiza directa-
mente un reset en el regulador para actualizar la RAM con los parámetros
modificados.
F. S16/50
Cargar y guardar nuevas configuraciones.
TIPO EXTENSIÓN SIGNIFICADO
Parámetros *.par Tabla de parámetros del regulador
Ficheros PLC *.pcd Programas de PLC compilados
Ficheros MC *.mcc Programas de MC compilados
Ficheros MCP *.mcp Tabla de parámetros de aplicación de MC
Ficheros CFG *.cfg Ficheros de configuración
Ficheros MOT *.mot Tabla de parámetros del motor
Ficheros CAM *.cam Tablas de perfil de leva

WinDDSSetup
16.
WINDDSSETUP
Descripción general de la pantalla
458
Ref.1912
DDS|MAB
SOFTWARE
· 448 ·
Soft.09.05
La ventana muestra el entorno de carga de ficheros en el regulador:
Seleccionado el tipo de archivo y el nombre del mismo se hace efectiva su
carga en el regulador activando el botón «A
brir».
OSCILOSCOPIO
Pulsar este icono permite utilizar la herramienta «Osciloscopio» de la apli-
cación WinDDSSetup, accesible desde su ventana principal, mostrando la
siguiente pantalla:
Con esta herramienta que incorpora el WinDDSSetup podrá visualizarse en
el oscilograma el comportamiento en el tiempo de dos variables del regula-
dor. Para ello dispone de dos canales
a los que habrá que indicar las varia-
bles a visualizar. Así, desde este cuadro de diálogo podrá asignarse la
variable a visualizar a cada canal fijandose con las flechas de cambio de va-
lor:
Para asignar una variable a un canal es necesario desplegar el cuadro de
diálogo que emerge en pantalla al hacer clic con el botón izquierdo del ratón
sobre ese canal de captura. Desde este cuadro puede seleccionarse prime-
ramente el grupo al que pertenece la variable, realizando previamente su
búsqueda con la barra de desplazamiento vertical si no aparece explícita-
mente en el listado desplegable.
F. S16/51
Backup Fichero Regulador.
F. S16/52
Osciloscopio.
F. S16/53
Canales de captura.
1 2
1. La escala
2. La posición del cero referencial, es
decir, el desplazamiento vertical de la
señal respecto al eje horizontal de
coordenadas.
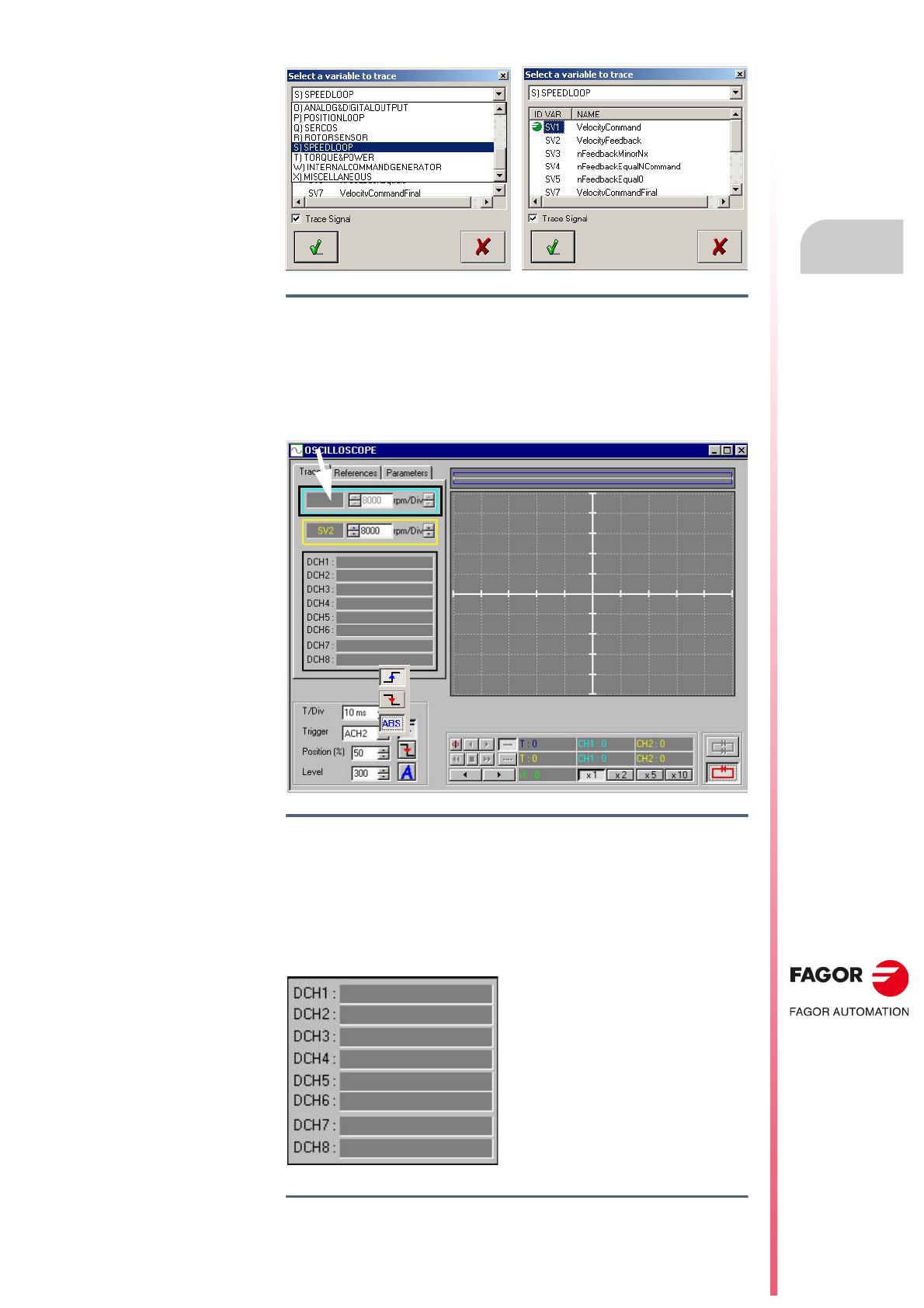
WinDDSSetup
WINDDSSETUP
Descripción general de la pantalla
16.
Ref.1912
· 449 ·
DDS|MAB
SOFTWARE
Soft.09.05
Una vez hecha la selección del grupo, se listan todas las variables pertene-
cientes al mismo, pudiendo seleccionar la variable con tan sólo hacer un clic
sobre ella.
Obsérvese que, marcar o no la opción «
Trace Signal» de esta ventana im-
plica activar o desactivar el canal de captura al que se asigna la variable se-
leccionada.
Véase que el primer canal de captura está desactivado (no se visualiza el
nombre de la variable asignada al canal).
Dispone además de ocho canales digitales, de utilidad cuando es de interés
conocer el comportamiento de alguno de los bits de la variable seleccionada
en alguno de los dos canales.
Se muestran en pantalla del siguiente modo:
F. S16/54
Cuadro de selección de la variable asignada a un canal de captura.
F. S16/55
No marcar la opción «Trace Signal» desactiva el canal.
F. S16/56
Canales digitales.
Con un clic de botón izquierdo del
ratón sobre el panel de los canales
digitales emerge en pantalla una
ventana con dos cuadros desplega-
bles donde podrán seleccionarse el
canal digital y el bit de la variable que
se asignará al canal y cuyo compor-
tamiento se desea visualizar en el
tiempo.

WinDDSSetup
16.
WINDDSSETUP
Descripción general de la pantalla
458
Ref.1912
DDS|MAB
SOFTWARE
· 450 ·
Soft.09.05
El cuadro que aparecerá en la pantalla se verá del siguiente modo:
Incorpora un campo denominado
Alias donde podrán introducirse un con-
junto de caracteres arbitrarios (desde teclado) que luego aparecerán delan-
te del identificador de la variable (bit) en el canal digital seleccionado.
La activación de la opción «
Trazar» (señal de traza) permite visualizar su
representación en el oscilograma y el Alias - ID var (bit) en el canal digital
seleccionado.
F. S16/57
Cuadro Setup Canal Digital. Configuración del canal digital seleccionado.
F. S16/58
Resultado visual tras aplicar un Alias para los canales digitales DCH1,
DCH2 y DCH3 donde la opción «
Trazar» (señal de traza) fue marcada en
su ventana de configuración <Digital Channel Setup>.
F. S16/59
Campos T/Div, trigger, posición y nivel.
Establece el disparo por flanco de subida para el nivel estableci-
do en el cuadro etiquetado «nivel».
Establece el disparo por flanco de bajada para el nivel estableci-
do en el cuadro etiquetado «nivel».
Establece el disparo por flanco de subida, de bajada, o ambos
(dependiendo de si han sido activados alguno o los dos botones
anteriores) para el valor absoluto del nivel establecido en el cua-
dro etiquetado «nivel».
Puede establecerse también el tiem-
po/división, el canal analógico a con-
siderar en la activación del trigger, la
posición donde se representará el
disparo por flanco de subida, de baja-
da o ambos simultáneamente y si se
considera o no el nivel de activación
del disparador en modo absoluto (de-
finiendo una franja dada por ± el valor
del nivel asignado) en el oscilograma
mediante los campos existentes en la
ventana del osciloscopio.

WinDDSSetup
WINDDSSETUP
Descripción general de la pantalla
16.
Ref.1912
· 451 ·
DDS|MAB
SOFTWARE
Soft.09.05
Para la señal senoidal de la figura, véanse los puntos de activación del dis-
parador (trigger) según los botones activados.
Con el fin de obtener datos numéricos de las señales mostradas en el osci-
lograma aparece en la pantalla del osciloscopio el siguiente panel que en-
cierra todas estas posibilidades de actuación.
Así, es posible:
activar dos cursores de referencia.
manipular sus posiciones en el oscilograma.
ampliar la imagen de una captura.
visualizar numéricamente las intersecciones de las señales con los cur-
sores activados.
visualizar las referencias temporales relativas entre los cursores activa-
dos y entre cada cursor.
visualizar la posición donde se activa el trigger.
Ejemplo.
F. S16/60
Puntos de activación del disparador (trigger) según botones activados.
NOTA. Nótese que si los tres botones están desactivados o únicamente
se activa el botón ABS, el disparo será automático e inmediato al igual que
en versiones anteriores a la 06.10.
F. S16/61
Panel de control del osciloscopio.
Nivel = 0.5
1
0.5
- 0.5
-1
1
0.5
- 0.5
-1
1
0.5
- 0.5
-1
1
0.5
- 0.5
-1
1
0.5
- 0.5
-1
1
0.5
- 0.5
-1
NO SI NO
SI NO NO
SI NO SI
NO SI SI
SI SI NO
SI SI SI
SI
NO
Botón activado
Botón desactivado

WinDDSSetup
16.
WINDDSSETUP
Descripción general de la pantalla
458
Ref.1912
DDS|MAB
SOFTWARE
· 452 ·
Soft.09.05
Es de interés, además, tener la posibilidad de personalizar los ejes de coor-
denadas (X e Y), cursores, posición del disparador,... a la hora de visualizar
todos estos elementos en pantalla.
Todo esto es posible haciendo clic con el botón derecho del ratón en la pan-
talla del osciloscopio, seleccionando e introduciendo valores elegidos por el
usuario en los diferentes campos confinados en el cuadro que emerge tras
seleccionar «
Setup Gráfico».
Además desde el menú desplegable aparecen opciones como imprimir,
guardar y cargar datos, guardar y cargar configuraciones y ajustar escala.
Véase la figura siguiente:
Activación / desactivación de los dos cursores
Selección del cursor
Desplazamiento izda / dcha del cursor seleccionado
Desplazamiento izda / dcha de los dos cursores simultáneamente
Reducción de los tiempos / división en las proporciones indicadas
Visualizadores de los valores intersección entre las señales represen-
tadas en el oscilograma y los cursores activados
Tiempo relativo entre cursor 1 y la posición de disparo
Tiempo relativo entre cursor 2 y la posición de disparo
Tiempo relativo entre cursor 1 y cursor 2
Adquisición continua de muestreo
Captura o adquisición única
F. S16/62
Setup gráfico.

WinDDSSetup
WINDDSSETUP
Descripción general de la pantalla
16.
Ref.1912
· 453 ·
DDS|MAB
SOFTWARE
Soft.09.05
Desde:
Graph Setup > X Axis... se configuran atributos del eje horizontal X di-
mensiones de la rejilla, escala logarítmica, color, estilo, anchura de lí-
nea...
Graph Setup > Y Axis... se configuran atributos del eje vertical Y dimen-
siones de la rejilla, escala logarítmica, color, estilo, anchura de línea...
Graph Setup > Cursor línea... se establece el color del cursor línea.
Graph Setup > Cursor discontínuo... se establece el color del cursor
discontinuo.
Graph Setup > Trigger... se establece el color del trigger.
Se abren ventanas como las de la figura
F. S16/63 desde donde puede lle-
varse a cabo esta personalización de atributos.
Imprimir Gráfico se imprime (en papel) el oscilograma en pantalla.
Guardar Datos... se permite almacenar en un fichero de texto (*.m) los
puntos de captura.
Cargar Datos... se permite cargar un fichero de texto (*.m) con los pun-
tos de una captura anteriormente guardada.
Comenzar almacenamiento... se van almacenando en un fichero un nº
determinado de capturas. Este número será establecido previamente en
el cuadro de texto «nº de trazas a guardar» que aparece en pantalla tras
activar esta opción. Podrá finalizarse el almacenamiento de capturas en
este mismo menú con la opción «Finalizar almacenamiento».
Guardar Configuración... se permite almacenar en un fichero (*.ocg) la
configuración del osciloscopio: trigger, variables de cada canal, número
de muestras ...
Cargar Configuración... se permite cargar un fichero (*.ocg) con una
configuración del osciloscopio: trigger, variables de cada canal, número
de muestras anteriormente almacenada.
Ajustar escala se selecciona una de las escalas predefinidas de forma
que la señal se amplifica al máximo sin que sobrepase los bordes de la
gráfica.
Es personalizable también la forma de visualizar el comportamiento de la
variable asignada a cada canal en el oscilograma.
F. S16/63
Ventanas que permiten definir atributos de los ejes, cursores y trigger.

WinDDSSetup
16.
WINDDSSETUP
Descripción general de la pantalla
458
Ref.1912
DDS|MAB
SOFTWARE
· 454 ·
Soft.09.05
Haciendo clic con el botón derecho del ratón en cada uno de los dos canales
de captura de los que dispone el osciloscopio y seleccionando «
Setup» en
el menú desplegable que aparece. Véase figura.
Se muestra una u otra de estas dos ventanas desde donde se pueden per-
sonalizar diferentes atributos para la representación de la señal correspon-
diente a ese canal.
La selección de «
Shift data» desde el mismo menú desplegable (única-
mente habilitada cuando la variable asignada al canal es de 32 bits) permite
visualizar 16 de ellos eligiendo en la ventana que se despliega cuales serán.
Así, eligiendo 0 bits se visualizarán los 16 primeros y se irá desplazando la
cadena de bits según el número de bits seleccionado.
Existen también dos canales denominados canales de referencia cuya úni-
ca forma de poseer traza es obteniéndola a partir de uno de los dos canales
de captura.
F. S16/64
Menú desplegable «Setup...».
F. S16/65
Ventanas que permiten definir parámetros de Plot y gráficos de barras.
F. S16/66
Menú desplegable «Shift data».

WinDDSSetup
WINDDSSETUP
Descripción general de la pantalla
16.
Ref.1912
· 455 ·
DDS|MAB
SOFTWARE
Soft.09.05
Para poder cargar una traza desde un fichero a uno de los canales de refe-
rencia deberá hacerse previamente a un canal de captura para posterior-
mente pasarlo al canal de referencia deseado.
Si alguno de los canales de referencia ya contiene una traza de referencia
no podrán modificarse las condiciones de trigger, nº de muestras ni período
de muestreo para evitar que las trazas que cohabitan en pantalla hayan sido
tomadas en distintas condiciones.
Con un clic del botón derecho del ratón sobre el nombre de la variable del
canal de captura que se desea transferir (la pestaña activa debe ser «
Tra-
zas
»), se desplegará un menú en el que podrá seleccionarse el canal de re-
ferencia al que se desea transferir la traza capturada (poner REF1 o poner
REF2).
La traza capturada en el canal 1 se carga como una traza de referencia 1 al
activar REF1 del menú desplegado. Activando la pestaña «
Referencias»
puede comprobarse que en el primer canal de referencia está justamente la
traza capturada.
F. S16/67
Menú de transferencia con traza capturada en canal 1 a canal de referencia
1 mediante REF1.
F. S16/68
Traza capturada en el canal de referencia 1.

WinDDSSetup
16.
WINDDSSETUP
Descripción general de la pantalla
458
Ref.1912
DDS|MAB
SOFTWARE
· 456 ·
Soft.09.05
Dispone, además, de una lista configurable de parámetros para el ajuste
que se despliega activando la pestaña «
Parámetros». Esto permite modifi-
car los ajustes desde la propia ventana del osciloscopio configurando desde
esta opción los parámetros de ajuste deseados.
En la tabla de dos columnas que aparece puede visualizarse el valor de
cada parámetro en ese instante, tecleando el nombre del parámetro en la
columna de la izquierda, en mayúsculas (p. ej. AP1) y pulsando enter. El va-
lor aparecerá en la columna de su derecha.
Podrá modificarse su valor tecleando un nuevo valor en esa misma celda y
ejecutando un enter.
La lista de parámetros se almacena junto a la configuración del oscilosco-
pio, por tanto, podrá ser recuperada desde este fichero. Un clic con el botón
derecho del ratón en el oscilograma despliega un menú desde el cual puede
guardarse o cargarse la lista configurada con los parámetros de ajuste.
F. S16/69
Etiqueta «Parámetros». Lista configurable de parámetros para el ajuste.
F. S16/70
Almacenar lista de parámetros en un fichero mediante la opción «Guardar
Datos».

WinDDSSetup
WINDDSSETUP
Descripción general de la pantalla
16.
Ref.1912
· 457 ·
DDS|MAB
SOFTWARE
Soft.09.05
Es posible también incluir variables. Ahora bien, debe tenerse en cuenta
que su valor visualizado es fruto de una lectura inicial y no de un refresco
continuo.
F. S16/71
Guardar datos de traza como ....
NOTA. Nótese que si no se especifica la gama en el nombre del paráme-
tro, implica trabajar con la gama 0 del mismo.
F. S16/72
Menú desplegable para seleccionar el modo AC o DC.
Tanto los canales de captura como los de
referencia tienen la posibilidad de ser vi-
sualizados
en modo DC o en modo AC.
El modo puede seleccionarse desde el
menú utilizado para transferir una traza de
un canal de captura a un canal de referen-
cia.
Este menú se despliega haciendo clic con
el botón derecho del ratón sobre cada uno
de los 2 canales de captura.
El modo DC muestra la señal con sus va-
lores reales y el modo AC resta al valor
real de la señal el valor medio de todos los
puntos de la muestra tomada.

16.
WINDDSSETUP
WinDDSSetup
Ref.1912
DDS|MAB
SOFTWARE
· 458 ·
Soft.09.05


Fagor Automation S. Coop.
Bº San Andrés, 19 - Apdo. 144
E-20500 Arrasate-Mondragón, Spain
Tel: +34 943 039 800
Fax: +34 943 791 712
E-mail: [email protected]
www.fagorautomation.com
FAGOR AUTOMATION
-
 1
1
-
 2
2
-
 3
3
-
 4
4
-
 5
5
-
 6
6
-
 7
7
-
 8
8
-
 9
9
-
 10
10
-
 11
11
-
 12
12
-
 13
13
-
 14
14
-
 15
15
-
 16
16
-
 17
17
-
 18
18
-
 19
19
-
 20
20
-
 21
21
-
 22
22
-
 23
23
-
 24
24
-
 25
25
-
 26
26
-
 27
27
-
 28
28
-
 29
29
-
 30
30
-
 31
31
-
 32
32
-
 33
33
-
 34
34
-
 35
35
-
 36
36
-
 37
37
-
 38
38
-
 39
39
-
 40
40
-
 41
41
-
 42
42
-
 43
43
-
 44
44
-
 45
45
-
 46
46
-
 47
47
-
 48
48
-
 49
49
-
 50
50
-
 51
51
-
 52
52
-
 53
53
-
 54
54
-
 55
55
-
 56
56
-
 57
57
-
 58
58
-
 59
59
-
 60
60
-
 61
61
-
 62
62
-
 63
63
-
 64
64
-
 65
65
-
 66
66
-
 67
67
-
 68
68
-
 69
69
-
 70
70
-
 71
71
-
 72
72
-
 73
73
-
 74
74
-
 75
75
-
 76
76
-
 77
77
-
 78
78
-
 79
79
-
 80
80
-
 81
81
-
 82
82
-
 83
83
-
 84
84
-
 85
85
-
 86
86
-
 87
87
-
 88
88
-
 89
89
-
 90
90
-
 91
91
-
 92
92
-
 93
93
-
 94
94
-
 95
95
-
 96
96
-
 97
97
-
 98
98
-
 99
99
-
 100
100
-
 101
101
-
 102
102
-
 103
103
-
 104
104
-
 105
105
-
 106
106
-
 107
107
-
 108
108
-
 109
109
-
 110
110
-
 111
111
-
 112
112
-
 113
113
-
 114
114
-
 115
115
-
 116
116
-
 117
117
-
 118
118
-
 119
119
-
 120
120
-
 121
121
-
 122
122
-
 123
123
-
 124
124
-
 125
125
-
 126
126
-
 127
127
-
 128
128
-
 129
129
-
 130
130
-
 131
131
-
 132
132
-
 133
133
-
 134
134
-
 135
135
-
 136
136
-
 137
137
-
 138
138
-
 139
139
-
 140
140
-
 141
141
-
 142
142
-
 143
143
-
 144
144
-
 145
145
-
 146
146
-
 147
147
-
 148
148
-
 149
149
-
 150
150
-
 151
151
-
 152
152
-
 153
153
-
 154
154
-
 155
155
-
 156
156
-
 157
157
-
 158
158
-
 159
159
-
 160
160
-
 161
161
-
 162
162
-
 163
163
-
 164
164
-
 165
165
-
 166
166
-
 167
167
-
 168
168
-
 169
169
-
 170
170
-
 171
171
-
 172
172
-
 173
173
-
 174
174
-
 175
175
-
 176
176
-
 177
177
-
 178
178
-
 179
179
-
 180
180
-
 181
181
-
 182
182
-
 183
183
-
 184
184
-
 185
185
-
 186
186
-
 187
187
-
 188
188
-
 189
189
-
 190
190
-
 191
191
-
 192
192
-
 193
193
-
 194
194
-
 195
195
-
 196
196
-
 197
197
-
 198
198
-
 199
199
-
 200
200
-
 201
201
-
 202
202
-
 203
203
-
 204
204
-
 205
205
-
 206
206
-
 207
207
-
 208
208
-
 209
209
-
 210
210
-
 211
211
-
 212
212
-
 213
213
-
 214
214
-
 215
215
-
 216
216
-
 217
217
-
 218
218
-
 219
219
-
 220
220
-
 221
221
-
 222
222
-
 223
223
-
 224
224
-
 225
225
-
 226
226
-
 227
227
-
 228
228
-
 229
229
-
 230
230
-
 231
231
-
 232
232
-
 233
233
-
 234
234
-
 235
235
-
 236
236
-
 237
237
-
 238
238
-
 239
239
-
 240
240
-
 241
241
-
 242
242
-
 243
243
-
 244
244
-
 245
245
-
 246
246
-
 247
247
-
 248
248
-
 249
249
-
 250
250
-
 251
251
-
 252
252
-
 253
253
-
 254
254
-
 255
255
-
 256
256
-
 257
257
-
 258
258
-
 259
259
-
 260
260
-
 261
261
-
 262
262
-
 263
263
-
 264
264
-
 265
265
-
 266
266
-
 267
267
-
 268
268
-
 269
269
-
 270
270
-
 271
271
-
 272
272
-
 273
273
-
 274
274
-
 275
275
-
 276
276
-
 277
277
-
 278
278
-
 279
279
-
 280
280
-
 281
281
-
 282
282
-
 283
283
-
 284
284
-
 285
285
-
 286
286
-
 287
287
-
 288
288
-
 289
289
-
 290
290
-
 291
291
-
 292
292
-
 293
293
-
 294
294
-
 295
295
-
 296
296
-
 297
297
-
 298
298
-
 299
299
-
 300
300
-
 301
301
-
 302
302
-
 303
303
-
 304
304
-
 305
305
-
 306
306
-
 307
307
-
 308
308
-
 309
309
-
 310
310
-
 311
311
-
 312
312
-
 313
313
-
 314
314
-
 315
315
-
 316
316
-
 317
317
-
 318
318
-
 319
319
-
 320
320
-
 321
321
-
 322
322
-
 323
323
-
 324
324
-
 325
325
-
 326
326
-
 327
327
-
 328
328
-
 329
329
-
 330
330
-
 331
331
-
 332
332
-
 333
333
-
 334
334
-
 335
335
-
 336
336
-
 337
337
-
 338
338
-
 339
339
-
 340
340
-
 341
341
-
 342
342
-
 343
343
-
 344
344
-
 345
345
-
 346
346
-
 347
347
-
 348
348
-
 349
349
-
 350
350
-
 351
351
-
 352
352
-
 353
353
-
 354
354
-
 355
355
-
 356
356
-
 357
357
-
 358
358
-
 359
359
-
 360
360
-
 361
361
-
 362
362
-
 363
363
-
 364
364
-
 365
365
-
 366
366
-
 367
367
-
 368
368
-
 369
369
-
 370
370
-
 371
371
-
 372
372
-
 373
373
-
 374
374
-
 375
375
-
 376
376
-
 377
377
-
 378
378
-
 379
379
-
 380
380
-
 381
381
-
 382
382
-
 383
383
-
 384
384
-
 385
385
-
 386
386
-
 387
387
-
 388
388
-
 389
389
-
 390
390
-
 391
391
-
 392
392
-
 393
393
-
 394
394
-
 395
395
-
 396
396
-
 397
397
-
 398
398
-
 399
399
-
 400
400
-
 401
401
-
 402
402
-
 403
403
-
 404
404
-
 405
405
-
 406
406
-
 407
407
-
 408
408
-
 409
409
-
 410
410
-
 411
411
-
 412
412
-
 413
413
-
 414
414
-
 415
415
-
 416
416
-
 417
417
-
 418
418
-
 419
419
-
 420
420
-
 421
421
-
 422
422
-
 423
423
-
 424
424
-
 425
425
-
 426
426
-
 427
427
-
 428
428
-
 429
429
-
 430
430
-
 431
431
-
 432
432
-
 433
433
-
 434
434
-
 435
435
-
 436
436
-
 437
437
-
 438
438
-
 439
439
-
 440
440
-
 441
441
-
 442
442
-
 443
443
-
 444
444
-
 445
445
-
 446
446
-
 447
447
-
 448
448
-
 449
449
-
 450
450
-
 451
451
-
 452
452
-
 453
453
-
 454
454
-
 455
455
-
 456
456
-
 457
457
-
 458
458
-
 459
459
-
 460
460












































































































































































































































































































































































































































































Fagor CNC 8037 Manual de usuario
- Tipo
- Manual de usuario
- Este manual también es adecuado para
Artículos relacionados
-
Fagor CNC 8058elite M El manual del propietario
-
Fagor CNC 8065 El manual del propietario
-
-
Fagor CNC 8035M Manual de usuario
-
-
Fagor CNC 8060 El manual del propietario
-
-
-
-
Otros documentos
-
Honeywell SV2 Series Security Instrucciones de operación
-
Mitel 6755 Guía de instalación
-
Franke FMA 2.0 607 Manual de usuario
-
Promax GF-232B Guia de referencia
-
EUCHNER Interruptor de accionamiento por cable RPS… Instrucciones de operación
-
Eurotherm ER-PL/ER El manual del propietario
-
CompuSTAR KP2 Manual de usuario
-
Marantec Dynamic 400-413 El manual del propietario
-
OJ Electronics OJ-DRHX-MRHX-1-8Nm Instrucciones de operación
-
Blaupunkt IF APPLE IPOD INTERFACE T-LINE El manual del propietario