Oleo-Mac ORION 700 El manual del propietario
- Tipo
- El manual del propietario

ORION 700
NL GEBRUIKSAANWIJZING E MANUAL DE INSTRUCCIONES


Nederlands
VERTALING VAN DE OORSPRONKELIJKE INSTRUCTIES
5
Español
TRADUCCIÓN DE LAS INSTRUCCIONES ORIGINALES
43


Español
43
Teclas de función y opciones de menú
Las opciones de menú y las respectivas descripciones guran en las páginas indicadas.
Capítulo/Página
Puesta en marcha - página 58
Ajuste de la hora - página 67
Ajuste de la fecha - página 67
Selección del idioma - página 68
Introducción del código PIN - página 59
Modi cación del código PIN - página 59
Activación/desactivación del tono de las teclas - página 68
Contraste de la pantalla LCD - página 69
Restablecimiento de los ajustes de fábrica - página 69
Con guración del programa semanal - página 66
Item Name Item Name
1 Tecla HOME (inicio) 6 Tecla ARRANQUE/PAUSA
2 Pantalla LCD 7 Tecla multifunción derecha
3 Tecla STOP (parar) 8 Tecla multifunción izquierda
4 Tecla echa arriba 9 Tecla ENCENDER/APAGAR
5 Tecla echa abajo 10 Tecla Menú

44
1 Suministro
1.1 Desembalaje de la máquina
Quite con cuidado el robot cortacésped y sus componentes del embalaje y controle si han sufrido algún daño durante el
transporte. Si encuentra algún daño, informe de inmediato a su proveedor.
Si recibe el robot cortacésped por expedición, conserve el embalaje original y el albarán de transporte.
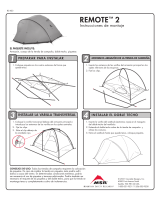
1.2 Suministro
Posición Nombre Posición Nombre
1 Robot cortacésped 5 Piquetas para jar el cable (100 unidades)
2 Base de carga 6 Manual de instrucciones
3 Transformador 7 Guía rápida
4 Cable perimetral (100 m)
1
2
4
3
5
6
7

Español
45
Índice
1 Suministro ...................................................................................................................................................................... 44
1.1 Desembalaje de la máquina ..................................................................................................................................................................44
1.2 Suministro .................................................................................................................................................................................................. 44
2 Información sobre el producto ...................................................................................................................................... 48
2.1 Uso correcto ...............................................................................................................................................................................................48
2.2 Usos prohibidos ........................................................................................................................................................................................ 48
3 Advertencias de seguridad ............................................................................................................................................ 48
3.1 Signi cado de los símbolos .................................................................................................................................................................... 48
3.2 Advertencias generales de seguridad .................................................................................................................................................49
3.3 Advertencias de seguridad para el uso ............................................................................................................................................... 49
4 Información sobre el producto ..................................................................................................................................... 50
4.1 Descripción del producto .......................................................................................................................................................................50
4.2 Descripción del funcionamiento ...........................................................................................................................................................50
4.3 Panel de mando ........................................................................................................................................................................................51
4.4 Sensores del robot cortacésped ............................................................................................................................................................51
4.5 Base de carga ............................................................................................................................................................................................. 52
4.6 Transformador ...........................................................................................................................................................................................52
4.7 Cable perimetral .......................................................................................................................................................................................52
5 Montaje .......................................................................................................................................................................... 53
5.1 Ensamblaje de la base de carga ............................................................................................................................................................53
5.2 Montaje de la base de carga .................................................................................................................................................................. 53
5.3 Tendido del cable perimetral ................................................................................................................................................................. 54
5.4 Modos de tendido ....................................................................................................................................................................................55
5.5 Tendido alrededor de obstáculos .........................................................................................................................................................56
5.6 Conexión del cable perimetral a la base de carga ............................................................................................................................ 56
5.7 Conexión de los cables de baja tensión al transformador ..............................................................................................................56
5.8 Apertura de la tapa posterior de la base de carga ............................................................................................................................57
5.9 Control de la conexión............................................................................................................................................................................. 57

46
6 Puesta en marcha........................................................................................................................................................... 58
6.1 Operaciones preliminares .......................................................................................................................................................................58
6.2 Encendido e indicación de estado ........................................................................................................................................................58
6.3 Selección del idioma ................................................................................................................................................................................ 58
6.4 Introducción del código PIN .................................................................................................................................................................. 59
6.5 Modi cación del código PIN ..................................................................................................................................................................59
6.6 Ajuste de la fecha ......................................................................................................................................................................................59
6.7 Ajuste de la hora .......................................................................................................................................................................................60
6.8 Calibración ..................................................................................................................................................................................................60
6.9 Arranque del robot cortacésped ...........................................................................................................................................................61
7 Corte del césped ............................................................................................................................................................ 62
7.1 Consejos para cortar el césped ..............................................................................................................................................................62
7.2 Ajuste de la altura de corte ....................................................................................................................................................................62
7.3 Carga de la batería del robot cortacésped .........................................................................................................................................62
7.4 Batería agotada ......................................................................................................................................................................................... 63
8 Programación ................................................................................................................................................................ 64
8.1 Arranque del robot cortacésped ...........................................................................................................................................................64
8.2 Esquema del menú ...................................................................................................................................................................................65
9 Menú Programas ............................................................................................................................................................ 66
9.1 Con guración del programa semanal .................................................................................................................................................66
10 Menú Ajustes ................................................................................................................................................................. 67
10.1 Ajuste de la hora ....................................................................................................................................................................................... 67
10.2 Ajuste de la fecha ......................................................................................................................................................................................67
10.3 Selección del idioma ................................................................................................................................................................................68
10.4 Otros ajustes ..............................................................................................................................................................................................68
10.5 Activación/desactivación del sonido de las teclas. ..........................................................................................................................68
10.6 Contraste de la pantalla LCD ..................................................................................................................................................................69
10.7 Restablecimiento de los ajustes de fábrica ........................................................................................................................................69

Español
47
11 Menú Información ......................................................................................................................................................... 69
11.1 Información sobre el hardware .............................................................................................................................................................69
11.2 Información sobre el software ...............................................................................................................................................................70
12 Información sobre los programas ................................................................................................................................. 70
13 Transporte ..................................................................................................................................................................... 70
14 Advertencia .................................................................................................................................................................... 71
14.1 Control del movimiento de las ruedas ................................................................................................................................................ 71
14.2 Control y limpieza de los contactos ..................................................................................................................................................... 71
14.3 Control y limpieza de la base de carga ................................................................................................................................................72
14.4 Limpieza del bastidor .............................................................................................................................................................................. 72
15 Reparación ..................................................................................................................................................................... 72
15.1 Sustitución del disco de corte................................................................................................................................................................ 72
16 Datos técnicos ................................................................................................................................................................ 73
17 Guía para la solución de problemas .............................................................................................................................. 74
17.1 Ejemplos de mensajes de fallo .............................................................................................................................................................74
17.2 Localización de fallos ..............................................................................................................................................................................75
17.3 Guía interactiva ........................................................................................................................................................................................78
18 Garantía ......................................................................................................................................................................... 78
19 Eliminación .................................................................................................................................................................... 79
20 Declaración de conformidad ......................................................................................................................................... 79

48
2 Información sobre el producto
Respete las advertencias e indicaciones de seguridad
contenidas en este manual y aplicadas al robot.
Este manual de instrucciones es parte integrante del
producto descrito y, en caso de cesión, debe entregarse
con él.
Entregue o preste la máquina solo a personas expertas
que conozcan su funcionamiento y uso correcto. Entregue
también el manual de instrucciones de uso, que debe
leerse antes de comenzar el trabajo.
2.1 Uso correcto
El robot cortacésped está destinado exclusivamente al
corte de césped en ámbito privado.
Todo uso distinto del indicado se considera incorrecto.
2.2 Usos prohibidos
1. No utilizar en instalaciones industriales ni públicas,
parques o campos deportivos, y tampoco en agricultura o
silvicultura.
2. No utilizar para cortar otros materiales, en particular si
están elevados del suelo, para lo cual sería necesario
levantar el robot.
3. No utilizar para triturar ramas ni otros materiales más
consistentes que el césped.
4. No utilizar para transportar, empujar o remolcar objetos,
como carros o similares.
5. Se prohíbe conectar a la toma de fuerza de la máquina
herramientas o aplicaciones que no estén indicados por el
fabricante.
3 Advertencias de seguridad
3.1 Signi cado de los símbolos
En el presente manual de instrucciones se utilizan las
siguientes advertencias de seguridad. Las palabras de
indicación se re eren a distintos niveles de riesgo.
Advertencia!
Indicación de posible peligro que
puede derivar en lesiones graves o
mortales.
Precaución!
Situación peligrosa que puede causar
lesiones.
Atención
Situación peligrosa que puede causar
daños a la máquina.
Nota!
Explicación que permite comprender mejor el procedimiento
o modo de trabajo.
1
2
4
56
7
89
0
쐉
씈
씉
쐈
쐅
1 - ATENCIÓN! - No deje que nadie se acerque durante
el trabajo. Preste atención a la posible proyección de
objetos.
2 - Lea el manual de uso y mantenimiento antes de
utilizar la máquina.
3 - Atención a las cuchillas de corte durante el ajuste o
el mantenimiento de la máquina.
4 - Atención a las cuchillas de corte durante el trabajo.
5 - NO ESTÁ PERMITIDO subirse al robot cortacésped.
6 - Tipo de máquina: ROBOT CORTACÉSPED
7 - Marca y modelo de máquina
8 - Número de serie
9 - Datos técnicos
10 - Año de fabricación
11 - Marcado CE de conformidad
12 - Equipo de clase 3
13 - Clase de protección de la máquina
14 - Peso de la máquina.

Español
49
Dispositivos de seguridad
No está permitido alterar, manipular indebidamente ni
quitar los dispositivos de seguridad. La inobservancia de
esta indicación puede poner en peligro al operador y a
terceras personas.
Para evitar el encendido involuntario o no autorizado, el
robot está protegido por un código PIN de acceso.
El código PIN de fábrica es 0000.
Si se escribe tres veces un código PIN incorrecto, es
necesario introducir un código PUK que debe pedirse al
proveedor.
El robot está provisto de un sensor de seguridad. Si
se levanta el robot, el motor y las cuchillas de corte se
detienen en el término de 2 segundos.
Si encuentra un obstáculo, el robot retrocede, se detiene y
arranca en otra dirección.
3.2 Advertencias generales de seguridad
El propietario es responsable de todo daño causado a terceras
personas o a propiedades ajenas.
Precaución!
Peligro de lesiones.
No desactive los dispositivos de seguridad
y protección.
El robot cortacésped debe ser utilizado exclusivamente por
personas que lo conozcan debidamente y que hayan leído
y comprendido el manual de uso.
Durante el corte, mantenga los brazos y las piernas
alejados de las cuchillas en rotación.
No ponga en marcha el robot si nota alguna anomalía,
por ejemplo en las cuchillas de corte, el cable o la base de
carga.
Haga reparar los defectos por un técnico autorizado.
Advertencia!
Evite por todos los medios que los niños y
animales se acerquen a la máquina.
No permita que los niños jueguen con la
máquina.
3.3 Advertencias de seguridad para el uso
Advertencia!
El encendido involuntario o el uso no
autorizado pueden causar lesiones muy
graves.
Cuando no se utiliza, el robot debe estar
apagado y protegido por el código PIN.
Nota!
No deje los códigos PIN y PUK al alcance de personas
no autorizadas.
El propietario puede cambiar el código PIN.
Si se escribe tres veces un código PIN incorrecto, es
necesario introducir un código PUK.
Si se marca un código PUK incorrecto, es necesario
esperar 24 horas para repetir la introducción.
Controle regularmente que el robot y la base de carga no
estén dañados.
Haga reparar la máquina y cambiar las baterías en un taller
autorizado.
Nota!
No realice por su cuenta intervenciones o reparaciones
que no formen parte del mantenimiento normal. En
caso de necesidad, acuda exclusivamente a un taller
autorizado.

50
4 Información sobre el producto
4.1 Descripción del producto
6
3
7
1
8
5
4
2
11
9
12
13
10
1 Panel de mando
2 Asa de transporte
3
Contactos de carga
4
Parachoques
5 Estructura
6 Cubierta (tapa de la regulación de altura)
7 Regulación de la altura en el interior
8 Tecla STOP (parar)
9 Ruedas delanteras
10 Disco de corte
11 Ruedas de tracción con per l reforzado
12/13 Cuchillas de corte/limpieza
4.2 Descripción del funcionamiento
El robot cortacésped es una máquina automática,
alimentada con una batería, que se desplaza libremente
por el área delimitada.
Esta área está delimitada por un cable perimetral
conectado a la base de carga.
Para cargar la batería, el robot se dirige a la base de carga
siguiendo el cable perimetral.
Para los cortes habituales, la máquina se entrega con
programas ya configurados que incluyen el corte de
superficies y el perfilado. Estos programas de corte se
pueden modi car.
Gracias a la disposición especial de las cuchillas, el césped
cortado no se recoge sino que queda en la tierra, mezclado
con las hojas de hierba, produciendo un efecto mulching
de acción fertilizante.

Español
51
4.3 Panel de mando
1 Tecla HOME (inicio) 6 Tecla ARRANQUE/PAUSA
2 Pantalla LCD 7 Tecla multifunción derecha
3 Tecla STOP (parar) 8 Tecla multifunción izquierda
4 Tecla echa arriba 9 Tecla ENCENDER/APAGAR
5 Tecla echa abajo 10 Tecla Menú
Función de las teclas
La [tecla HOME] (1) permite interrumpir el corte en
curso. El robot vuelve a la base de carga y se reactivará
en la primera fase de trabajo programada para el día
siguiente.
En la [pantalla LCD] (2) aparece el estado actual o el
menú seleccionado.
Si se pulsa la [tecla STOP] (3), el robot y las cuchillas de
corte se detienen en el término de 2 segundos.
Las teclas [ echa arriba] (4) y [ echa abajo] (5) permiten
recorrer los menús y modi car los valores.
Con la [tecla ARRANQUE/PAUSA] (6) se activa o
desactiva el funcionamiento del robot. Si se presiona
START/PAUSE durante la fase de trabajo programada,
el robot se reactiva automáticamente al cabo de 2
minutos.
Con las [teclas multifunción derecha o izquierda] (7) u
(8) se con rman los mandos (por ejemplo la selección
de una opción de menú) o se vuelve a la opción anterior.
Con la [tecla ENCENDER/APAGAR] (9) se enciende y
apaga el robot.
Con la [tecla Menú] (10) se abre el menú de selección.
4.4 Sensores del robot cortacésped
Sensores de choque y reconocimiento de
obstáculos
1
Si el robot encuentra un obstáculo, los sensores le hacen
invertir la dirección de marcha. En caso de choque contra
un obstáculo, la carcasa (1) se desplaza ligeramente. Este
desplazamiento activa un sensor que invierte el sentido de
marcha.
Si se levanta el robot por el asa mientras está en
funcionamiento, un sensor de seguridad detiene la cuchilla
en el término de 2 segundos y desconecta la transmisión.
Nota!
Si el robot se apaga por acción de un sensor de seguridad,
no se vuelve a encender por sí solo. Para reactivarlo, hay
que confirmar y eliminar el error presionando la tecla
multifunción.

52
Sensor contra el vuelco en la dirección de marcha
0 - 35 cm
100 cm
> 35 %
Si, durante la marcha, el robot encuentra una subida
o bajada con pendiente superior a 35%, el sensor de
inclinación lo apaga.
Sensor contra el vuelco lateral
>35 %
Si, durante la marcha, el robot encuentra una pendiente
lateral superior a 35%, el sensor de inclinación lo apaga.
4.5 Base de carga
12
3
4
La base de carga (2) se conecta al alimentador
(transformador) mediante el cable de baja tensión (1).
La base de carga (2) genera una señal de mando y la envía
a lo largo del cable perimetral (3).
La base de carga (2) tiene dos contactos (4) que se
conectan a los contactos correspondientes del robot
cuando este entra en la base (2).
4.6 Transformador
Atención
Daños causados por salpicaduras de agua
Ubique el transformador en un lugar seco y
protegido de salpicaduras de agua.
4.7 Cable perimetral
Atención
Daños al cable perimetral
No escarifique la tierra cerca del cable
perimetral tendido.
El cable perimetral se ja con las piquetas especí cas. Si
el cable perimetral suministrado no es suficiente para
delimitar toda la super cie de césped, puede solicitar un
cable prolongador a su proveedor.

Español
53
5 Montaje
5.1 Ensamblaje de la base de carga
3
1
2
2
1
Inserte el borde frontal de la extensión (3) en la placa de apoyo de la base de carga (2) siguiendo la dirección de la echa 1, y
encájela hacia arriba en la dirección indicada por la echa 2. Fije la base al suelo con las piquetas (1).
5.2 Montaje de la base de carga
min. 1 m
min. 20 cm
min. 35 cm
min. 1 m
1
2
Ubique la base de carga en un punto del jardín piso, sombreado y protegido de la lluvia, y fíjela con las piquetas (puntos
blancos). Respete las medidas indicadas.
Pele un extremo del cable perimetral (2) e insértelo en el conector situado en un costado (1) de la base de carga. Luego
tienda el cable como se indica en la gura, respetando las distancias.
Para evitar daños durante el corte del césped, cerciórese de que el cable perimetral (2) se apoye directamente en el suelo en
todo su recorrido. Asegure con más piquetas los puntos donde el cable perimetral (2) no se apoye directamente en el suelo.

54
5.3 Tendido del cable perimetral
Atención!
Peligro de dañar el cable perimetral y
comprometer el funcionamiento del robot
Para garantizar un funcionamiento seguro,
tienda el cable perimetral como se describe a
continuación:
Controle la super cie de césped que se va a
cortar.
Allane los pozos y los montones de tierra
acumulados por los topos, quite los
frutos caídos y demás objetos extraños.
Pase el cable perimetral alrededor de los
obstáculos.
El robot no puede cortar césped de más de
8 cm de altura; en este caso se debe cortar
el césped con otro medio antes de tender el
cable perimetral.
No escarifique la tierra cerca del cable
perimetral tendido.
Modos de tendido
max. 5/7 cm
1
2
El cable perimetral se puede tender en la super cie (1) o
enterrado (2) hasta 5/7 cm de profundidad. El tendido bajo
tierra debe ser realizado por el vendedor.
Si es necesario, se pueden combinar las dos modalidades.
Reservas de cable
ca. 1 - 2 m
Para poder desplazar la base de carga incluso después de
haber preparado el área de corte, o para ampliar dicha
área, es necesario crear reservas de cable perimetral a
distancias regulares. Para ello, gire el cable perimetral
alrededor de una piqueta clavada en la tierra, llévelo de
vuelta a la piqueta anterior, gírelo otra vez hacia delante
como en la gura y fíjelo con otra piqueta.
El número de reservas depende de las necesidades
particulares.

Español
55
5.4 Modos de tendido
min. 30 cm
min. 15 cmmin. 15 cm
Si el cable perimetral se tiende a través de un paso, para garantizar resultados correctos se deben respetar las distancias
mínimas respecto a los obstáculos indicadas en el dibujo y el ancho necesario para que pase el robot.
STOP
Si se entrecruza el cable perimetral, se producen anomalías porque se confunden los lados interiores y exteriores.

56
5.5 Tendido alrededor de obstáculos
Para tender el cable alrededor de un obstáculo, respete las
distancias indicadas en el dibujo.
min. 30 cm
min. 30 cm
A partir de una distancia mínima de 30 cm, el robot detecta
la distancia, la reconoce como parte del recorrido y gira en
torno al obstáculo.
Nota!
Si la porción de cable que va hacia el obstáculo se junta con
la de regreso, es posible que el robot pase por encima del
cable.
min. 30 cm
0 cm
5.6 Conexión del cable perimetral a la base
de carga
1 2
Una vez terminado el tendido, pele el extremo libre del
cable perimetral (2) e insértelo en los conectores de
sujeción (1).
5.7 Conexión de los cables de baja tensión al
transformador
2
1
3
4
Pele los cables de baja tensión (3) y (4) unos 10 mm.
Desenrosque los tornillos con el destornillador (2) y
conecte los cables de baja tensión (3) y (4) al transformador
(1).
Los cables se pueden conectar de cualquier modo, no es
necesario respetar una determinada polaridad.
Introduzca la clavija del transformador en la toma de red.

Español
57
5.8 Apertura de la tapa posterior de la base
de carga
Nota!
La tapa se debe abrir únicamente para revisar los
indicadores de led.
3
1
2
Para controlar la conexión, desenrosque los tornillos de
jación (3) y quite la tapa (2) de la base de carga (1).
5.9 Control de la conexión
21
Atención!
Daños a los cables.
Tras conectar los cables, los ledes se tienen que
encender. Si no se encienden, quite la clavija de
la red y controle que todas las conexiones y los
cables estén en su posición correcta y no estén
dañados.
El led amarillo (1):
se enciende cuando la base de carga está conectada al
transformador y hay paso de corriente entre ambos.
parpadea durante la carga del robot.
El led verde (2):
se enciende cuando el cable perimetral está tendido
correctamente y el circuito es adecuado.
parpadea y después se apaga cuando el circuito del cable
perimetral no es correcto.

58
6 Puesta en marcha
6.1 Operaciones preliminares
Nota!
Antes de proceder a la puesta en marcha, ponga el robot en
la posición de partida en el área de corte delimitada. Para
información sobre el transporte del robot, vea la página 70.
min. 1 m
ca. 1 m
Respete las medidas indicadas.
6.2 Encendido e indicación de estado
Encienda el robot con la [tecla ENCENDER/APAGAR].
En la pantalla LCD aparecen las informaciones siguientes:
Pantalla con indicación de estado
En la pantalla aparece la información Sin calibrar
La pantalla pasa automáticamente a la ventana Selección
idioma.
6.3 Selección del idioma
Nota!
El idioma se debe seleccionar sólo en la primera puesta en
marcha.
1. Utilice las [teclas de echa] para hacer la selección.
2. Con rme con la [tecla multifunción].
3. Tras la confirmación, en la pantalla aparece el mensaje
[Introducir PIN].

Español
59
6.4 Introducción del código PIN
Nota!
El código PIN de fábrica se debe introducir solamente en la
primera puesta en marcha.
El código PIN de fábrica es [0 0 0 0].
Introducción del código PIN de fábrica
1
34
2
1. Seleccione el primer dígito con las [teclas de echa] (1) o
(2) y con rme con la [tecla multifunción] (3).
2. Introduzca del mismo modo los otros tres dígitos.
3. A continuación, en la pantalla aparece la ventana de ajuste
[Modi car PIN].
6.5 Modi cación del código PIN
1. Introduzca dos veces el nuevo PIN.
2. Con rme la última introducción con la [tecla multifunción]
(3).
A continuación, en la pantalla aparece la ventana de ajuste
[Fecha].
6.6 Ajuste de la fecha
Nota!
Introduzca correctamente la fecha y la hora, porque las
programaciones siguientes se basarán en estos datos.
Para introducir el año (AAAA) es suficiente indicar
solamente los dos últimos dígitos, porque los dos primeros
20XX ya están marcados.
1. Seleccione el primer dígito con las [teclas de echa] (1) o
(2) y con rme con la [tecla multifunción] (3).
Tras la confirmación, en la pantalla aparece la ventana de
ajuste [Hora].

60
6.7 Ajuste de la hora
1. Seleccione el primer dígito con las [teclas de echa] (1) o
(2) y con rme con la [tecla multifunción] (3).
A continuación, en la pantalla aparece la ventana de estado
[Sin calibrar].
6.8 Calibración
Nota!
Para la calibración del robot, vea la página 58.
Advertencia!
Al pulsar la [tecla ARRANQUE], el motor se
pone en marcha.
No toque las partes giratorias.
1. Después de pulsar la [tecla ARRANQUE] comienza el
procedimiento de calibración
En la pantalla parpadea la advertencia [Motor en marcha].
Procedimiento de calibración en curso
El robot arranca para detectar la intensidad de la señal,
primero se mueve en línea recta y después gira para volver
a la base de carga.
Nota!
Cuando entra en la base de carga, el robot debe permanecer
inmóvil. Si, al entrar en la base de carga, el robot no
engancha los contactos, continúa la marcha a lo largo del
cable de limitación hasta que encuentra los contactos o se
interrumpe el procedimiento.
La batería del robot se recarga.

Español
61
Indicación tras el procedimiento de calibración
Una vez terminada la puesta en marcha, se puede
comenzar el corte de acuerdo con los horarios
programados en fábrica, sin hacer más ajustes.
El programa de corte está activado y la batería está en
carga.
Los horarios de corte programados en fábrica son los
siguientes: LUN - VIE: 07.00 - 10.00 y LUN - VIE: 17.00 -
19.00
¡ATENCIÓN!
La legislación de algunos países puede
limitar el uso de la máquina. Respete los
horarios de silencio establecidos por las
ordenanzas locales.
Control del tendido del cable
ca. 1 m
1. Coloque el robot a aproximadamente 1 m de frente al
cable perimetral.
2. Pulse la [tecla HOME], el robot se desplaza a lo largo del
cable perimetral en dirección de retorno a la base de carga.
3. Si choca, o si el recorrido del cable perimetral es demasiado
estrecho, el robot se detiene.
4. Corrija el error, ponga otra vez el robot a 1 m del cable
perimetral y vuelva a pulsar la [tecla HOME].
Nota!
Al pulsar la [tecla HOME] se desactiva el día de corte.
Al pulsar la [tecla ARRANQUE] se activa el día y comienza el
corte.
6.9 Arranque del robot cortacésped
Encienda el robot con la [tecla ENCENDER/APAGAR].
Introducción del código PIN
En este momento se debe introducir el código PIN.
Indicación de próximo uso
Después de introducir el código PIN, en la pantalla
aparece la indicación [Próximo uso]. El robot está listo para
comenzar el trabajo.
El robot arranca automáticamente cuando llega el próximo
horario de corte.
Pulsando la [tecla ARRANQUE/PAUSA] se puede iniciar el
corte de inmediato.
En la pantalla parpadea la advertencia [Motor en marcha]
mientras se emite una indicación acústica.

62
7 Corte
7.1 Consejos para cortar el césped
Nota!
Para optimizar las prestaciones del robot, se aconseja
utilizarlo en las horas más frías del día y por la noche.
¡ATENCIÓN!
La legislación de algunos países puede
limitar el uso de la máquina. Respete los
horarios de silencio establecidos por las
ordenanzas locales.
Mantenga constante la altura de corte, comprendida entre
3 y 6 cm, sin superar la mitad de la altura del césped.
Ajuste la altura de corte también en función del tipo de
césped.
Si la hierba es tupida, la velocidad del motor se reduce
mucho; en tal caso, aumente la altura de corte y realice el
trabajo en varias pasadas.
7.2 Ajuste de la altura de corte
2
1
1. Presione el punto (1) para desbloquear la tapa (2) y poder
levantarla.
2
1
Nota!
La altura de corte varía entre 3 y 6 cm de altura del
césped.
La altura de corte se puede regular en quíntuplos de
6 mm.
1. Levante la palanca (2) y gírela un cuarto de vuelta en
sentido horario, hacia el símbolo [candado abierto] (1). Vea
también la Guía rápida.
La regulación de la altura de corte está desbloqueada.
Tire de la palanca (2) hacia arriba para aumentar la
altura de corte.
Empuje la palanca (2) hacia abajo para disminuir la
altura de corte.
Una vez regulada la altura de corte:
Gire la palanca (2) un cuarto de vuelta en sentido
antihorario, hacia el símbolo [candado cerrado] (1) y
encájela.
2. La regulación de la altura de corte está bloqueada.
3. Baje la palanca (2) y cierre la tapa.
7.3 Carga de la batería del robot cortacésped
Nota!
La batería integrada se entrega parcialmente cargada.
No es necesario recargarla, puesto que el robot
funciona también con una carga incompleta.
Cuando la batería se descarga por completo (0 %
de carga), el robot vuelve por sí solo a la base para
recargarse.
Una interrupción de la carga no daña la batería.
La temperatura de carga debe estar comprendida
entre 0 y 40°C.
Con temperaturas superiores a 45 °C, el circuito de
protección incorporado impide que la batería se
cargue para evitar que se dañe.
Si la autonomía con cada carga se reduce
notablemente, haga cambiar la batería por el
concesionario, un técnico o un centro de asistencia
autorizado. Reemplace siempre la batería por otra
nueva y original.
Consejo: Ubique la base de carga en un lugar sombreado.

Español
63
1
estado de la batería se indica en la pantalla (1).
Controle que los contactos de carga de la base de carga
estén bien enganchados a los del robot.
Advertencia!
En invierno, guarde el robot
cortacésped bajo techo.
Durante el uso normal, la batería del robot se carga
periódicamente.
La base de carga está provista de un sistema electrónico
de control. Cuando la carga está completa (100%), la
electrónica la interrumpe automáticamente.
Antes de guardar el robot para el invierno en un lugar
cubierto, efectúe una última carga.
A los 3 meses, encienda el robot y controle la carga de la
batería. Si es necesario, haga una carga.
Si la batería está completamente cargada, guarde otra vez
el robot.
7.4 Batería agotada
Si, por envejecimiento o por una inactividad demasiado
prolongada, la carga de la batería se hace inferior al nivel
aconsejado por el fabricante, ya no es posible recargarla.
Haga controlar y, si corresponde, sustituir la batería y la
electrónica de control por el concesionario, un técnico o un
centro de asistencia autorizado.
Advertencia!
No efectúe ningún tipo de intervención en la
batería.

64
8 Programación
8.1 Arranque del robot cortacésped
Nota!
Para acceder al menú de programación del robot, efectúe
siempre este procedimiento de arranque.
Encienda el robot con la [tecla ENCENDER/APAGAR] (1) e
introduzca el código PIN.
Tras el encendido, aparecen las informaciones sobre el
próximo uso
Nota!
Si aún no se ha programado un próximo uso, se visualiza el
ajuste de fábrica.
Nota!
Si no se ha modi cado el código PIN, aparece el de fábrica.
Después de introducir el código PIN, aparece otra vez la
indicación [Arranque siguiente].
A partir de ese momento se pueden seleccionar los
programas y ajustes.
Selección de los menús
1
Tras el encendido, se puede abrir el menú principal con la
[tecla Menú] (1).

Español
65
8.2 Esquema del menú
El menú principal del robot se divide en los siguientes submenús:
Programas
Ajustes
Información.
Nota!
Ponga en marcha el robot de la manera descrita.
Seleccione la opción deseada con las teclas [ echa arriba] o [ echa abajo].
El asterisco delante de una opción de menú indica que esa es la opción activada.
Con rme la selección con la [tecla multifunción derecha]. Se abre el submenú seleccionado.
Seleccione una opción y confírmela con la [tecla multifunción derecha]. Si lo desea, cambie los ajustes que ofrece el
menú.
Con la [tecla multifunción izquierda] se vuelve a la visualización estándar.

66
9 Programas
Nota!
Para la descripción de las teclas de función, vea la
página 43.
Efectúe los ajustes del programa semanal.
Lea las informaciones del programa, por ejemplo Corte.
Selección del programa
Antes de hacer la programación se debe poner la máquina
en marcha (página 64) .
1. Seleccione el submenú Programas con las teclas [flecha
arriba] o [ echa abajo].
2 Con rme con la [tecla multifunción derecha].
3 Seleccione los programas deseados y confirme con la
[Tecla multifunción derecha].
El símbolo [X] indica el día de la semana actualmente
activo.
9.1 Con guración del programa semanal
1 En el programa semanal se ajustan los días de la semana
(2) y los horarios en los cuales la máquina debe realizar
autónomamente el corte.
2. Si se elige la opción [A diario] (1), el robot efectúa el corte
todos los días en los horarios programados.
3. Observe el resultado del corte y ajuste la duración
apropiada para mantener el césped en condiciones.
4. Seleccione las opciones de menú con las [teclas de echa]
y con rme con la [Tecla multifunción derecha].
Ajuste de los horarios de corte
1. Seleccione la opción deseada, por ejemplo [A diario], con
las [teclas de echa] y con rme con la [tecla multifunción
derecha].
2. Pulse la tecla [ echa abajo] hasta resaltar [Modi car].
3 4 5 6
1. Seleccione la opción deseada con las [teclas de echa] y
con rme con la [tecla multifunción derecha].
Signi cado de los símbolos:
(3) [-] Horario de corte desactivado.
(3) [R] Corte de los bordes.
El robot corta a ambos lados del cable perimetral.
Después de cortar los bordes, pasa a cortar la super cie
delimitada
[M] Corte normal
El robot hace el corte en toda la super cie delimitada
por el cable.
(4) Hora de inicio
A la hora programada, el robot sale de la base de carga
para comenzar el corte.
(5) Ora nal
A la hora programada, el robot vuelve a la base de
carga.
(6) [0 - 9] Punto de partida jo
A la hora programada, el robot comienza a cortar
desde el punto de partida especi cado. Los puntos de
partida se programan automáticamente y no se pueden
modi car.
[?] Punto de partida automático
Los puntos de partida se programan automáticamente y
no se pueden modi car.

Español
67
10 Ajustes
Ajuste de la hora
Ajuste de la fecha
Selección del idioma
Modi cación del código PIN
Ajuste del tono de las teclas
Activación/desactivación del margen de corte
Contraste de la pantalla
Reimiciar calibración
Restablecimiento de los ajustes de fábrica
10.1 Ajuste de la hora
Selección del programa
Antes de hacer la programación se debe poner la máquina
en marcha (página 64).
1. Seleccione la opción [Programas] con las teclas [flecha
arriba] o [Ajustas].
2. Abra el menú [Hora].
3. Con rme con la [tecla multifunción derecha].
Nota!
Para ajustar la hora, seleccione las cifras de una en una (a su
turno comenzarán a parpadear).
Introduzca correctamente la hora porque las
programaciones siguientes se basarán en este dato.
Con rme cada cifra y seleccione las siguientes con las teclas
de echa.
Las horas se visualizan en formato 24 h.
1. Seleccione la hora deseada con las [teclas de flecha] y
con rme con la [tecla multifunción derecha].
Presione dos veces la [tecla Menú] para salir del ajuste.
10.2 Ajuste de la fecha
Selección del programa
Antes de hacer la programación se debe poner la máquina
en marcha (página 64).
1. Seleccione la opción deseada con las [teclas de echa] y
con rme con la [tecla multifunción derecha].
2. Abra el menú [Fecha].
Ajuste de la fecha
Nota!
Introduzca correctamente la fecha porque las
programaciones siguientes se basarán en este dato.
Para introducir el año (AAAA) es suficiente indicar
solamente los dos últimos dígitos, porque los dos primeros
20XX ya están marcados.
La fecha se visualiza en el formato siguiente:
DD para el día.
MM para el mes.
AAAA para el año.

68
10.4 Otros ajustes
Nota!
Proceda del mismo modo para hacer los demás ajustes.
Tras el encendido, es posible acceder al menú principal
mediante la [tecla Menú].
1. Seleccione la opción [Ajustes] del menú principal.
10.5 Activación/desactivación del tono de las
teclas.
Antes de hacer la programación se debe poner la máquina
en marcha (página 64) .
1. Seleccione la opción [Ajustes] con las teclas [ echa arriba]
o [ echa abajo].
2. Abra el menú [Tono teclas].
3. Con rme con la [tecla multifunción derecha].
4 Active o desactive el sonido de las teclas con la [tecla
multifunción derecha].
Presione dos veces la [tecla Menú] para salir del ajuste.
1. Presione una vez brevemente la tecla [ echa arriba]. En el
lugar del primer dígito parpadea un [0]. Si desea cambiarlo,
presione una vez brevemente la [tecla echa] (2). Ahora
parpadea un [9].
2. Si corresponde, disminúyalo con la tecla [ echa abajo] o
auméntelo con la tecla [ echa arriba].
3. Con rme con la [tecla multifunción derecha].
4. Ajuste del mismo modo los dígitos restantes.
5. Con rme con la [tecla multifunción derecha].
Pulse dos veces la [tecla Menú] para con rmar todos los
ajustes y volver al menú principal.
10.3 Ajuste del idioma
Antes de hacer la programación se debe poner la máquina
en marcha (página 64).
1. Seleccione la opción [Ajustes] con las teclas [ echa arriba]
o [ echa abajo].
2. Abra el menú [Idioma].
3. Con rme con la [tecla multifunción derecha].
Nota!
El idioma se debe seleccionar sólo en la primera puesta en
marcha.
1. Utilice las [teclas de echa] para hacer la selección.
2. Con rme con la [tecla multifunción].
3. Tras la confirmación, en la pantalla aparece el mensaje
[Introducir PIN].

Español
69
10.6 Contraste de la pantalla LCD
1 En el submenú Ajustes, seleccione [Contraste pantalla].
2 Ajuste el contraste de la pantalla con las [teclas de echa] y
con rme con la [tecla multifunción derecha].
Presione dos veces la [tecla Menú] para salir del ajuste.
10.7 Restablecimiento de los ajustes de
fábrica
1 En el submenú Ajustes, seleccione [Ajustes de fábrica].
2 Introduzca otra vez el código PIN y con rme.
Presione dos veces la [tecla Menú] para salir del ajuste.
11 Menú Información
En este menú se puede ver información sobre el hardware,
como:
Nombre del producto
Año de fabricación
Horas de funcionamiento
Número de serie
Recorrido efectuado
Versión del software.
Nota!
El menú Información permite ver datos útiles como
la versión del software y del hardware, además de los
ajustes actuales.
En este menú no se pueden hacer ajustes.
Selección del programa
Antes de hacer la programación se debe poner la máquina
en marcha (vea Arranque del robot cortacésped en la
página 64).
1. Seleccione la opción [Información] con la tecla
[flecha arriba] o [flecha abajo] y confirme con la [tecla
multifunción derecha].
11.1 Información sobre el hardware
1. Seleccione la opción [Hardware o Software] con las teclas
[ echa arriba] o [ echa abajo].
2. Con rme con la [tecla multifunción derecha].
3. Vea las informaciones sobre el hardware o el software.
4. Pulse la [tecla multifunción izquierda] para volver al menú
principal.

70
Hardware
Aparecen los datos de la máquina: nombre, fecha de
fabricación, horas de funcionamiento, número de serie,
ciclos de corte, horas de corte, ciclos de carga, horas de
carga y tendido del cable perimetral.
11.2 Información sobre el software
Se indica la versión del software.
12 Información sobre los programas
Tiempo total semanal de corte.
Aparece el total de horas programado para el corte.
Día y horario en que se realiza el corte.
Se indica el tiempo total de corte programado para la
semana.
13 Transporte
1
2
Si desea transportar el robot dentro del área de corte:
1 Párelo con la [tecla STOP] (2).
2 Apáguelo con la [tecla ENCENDER/APAGAR] (1).
Precaución!
Lesiones causadas por las cuchillas de corte
¡Las cuchillas tardan 2 segundos en pararse!
Lleve el disco de corte en dirección opuesta
a su cuerpo.
2
1
3 Agarre el robot solo por el asa (1).

Español
71
14 ATENCIÓN
Advertencia!
Lesiones causadas por las cuchillas de corte
Antes de realizar cualquier operación de
mantenimiento o reparación, apague el
robot con la [tecla ENCENDER/APAGAR].
Utilice guantes de trabajo para realizar
operaciones de mantenimiento o limpieza.
Desconecte el transformador de la base de
carga.
Atención
El sistema eléctrico/electrónico se puede
dañar a causa de una limpieza inadecuada.
No limpie el robot con una hidrolimpiadora
ni bajo el agua del grifo. Si penetra agua en
el robot, puede arruinar los interruptores, la
batería, los motores y los circuitos impresos.
Todas las reparaciones, salvo la sustitución de las cuchillas,
deben hacerse en un taller autorizado.
Responsabilidad del usuario:
1. Entre las 100 y 200 horas de trabajo, lleve el robot a un
taller autorizado para que realicen:
• Control del apriete de los tornillos
• Control general de la programación y corrección de
errores
2. Entre las 500 y 2500 horas de trabajo, lleve el robot a un
taller autorizado para que realicen:
• Control general del apriete de tornillos y partes
mecánicas
• Control de la estadística de errores
• Control del estado de la batería
• Control de las rodamientos de las ruedas
• Control de las cuchillas
• Control y limpieza general
Operaciones que el usuario debe realizar periódicamente
• Una vez por semana, limpie a fondo el robot con una
escobilla o un trapo. Si es necesario, puede emplear un
producto de limpieza en aerosol. La suciedad puede
comprometer el funcionamiento de la máquina.
• Controle una vez por semana si las cuchillas están
dañadas.
14.1 Control del movimiento de las ruedas
1
1 Una vez por semana, limpie a fondo la zona alrededor de
las ruedas (1) con una escobilla o un trapo.
2 Compruebe que las ruedas (1) roten y viren correctamente.
Si las ruedas (1) no giran libremente, deben regularse o
sustituirse.
14.2 Control y limpieza de los contactos
1
Controle si los contactos (1) del robot están sucios.
Si es necesario, límpielos con un paño.
Si las superficies de los contactos tienen trazas de
quemaduras, signi ca que no se conectan bien durante la
carga.
Curve hacia fuera los muelles de la base de carga.

72
14.3 Control y limpieza de la base de carga
1
1 Extraiga la clavija del transformador.
2 Controle si los contactos (1) de la base de carga están
sucios.
3 Si es necesario, límpielos con un paño.
4 Empuje los contactos (1) en dirección a la base de carga
y suéltelos. Los contactos (1) deben volver a la posición
inicial.
5 Si los contactos (1) no vuelven a la posición inicial, hágalos
controlar o reparar en un centro de asistencia técnica.
14.4 Limpieza del bastidor
1
2
Limpie a fondo el plato de corte (1) y la guía (2) con una
escobilla o un trapo.
15 Reparación
Advertencia!
Lesiones causadas por las cuchillas de corte!
Antes de realizar cualquier operación de
mantenimiento o reparación, apague el
robot con la [tecla ENCENDER/APAGAR].
Utilice guantes de trabajo para realizar
operaciones de mantenimiento o limpieza.
Desconecte el transformador de la base de
carga.
Atención
Daños causados por reparación incorrecta!
No suelde, enderece ni modi que la forma
de un equipo de corte dañado con la
intención de repararlo. Estas operaciones
pueden hacer que el equipo de corte se
salga, causando lesiones graves e incluso
mortales.
15.1 Sustitución del disco de corte
1
2
3
1 Apoye el robot con las cuchillas de corte (3) hacia arriba.
2 Sujete el disco de corte (2) para que no se mueva.
3 Desenrosque los tres tornillos (1).
4 Extraiga el disco (2) con las cuchillas de corte (3).
5 Aplique el disco (2) con las cuchillas de corte (3).
6 Sujete el disco de corte (2) para que no se mueva.
7 Coloque tornillos nuevos (1) y apriételos.

Español
73
Sustitución del fusible del transformador
1
Advertencia!
Peligro de incendio por fusible inadecuado o
desactivado.
Para la sustitución, utilice fusibles con el
mismo amperaje.
No desactive nunca el fusible.
1 Extraiga la clavija del transformador.
2 Con un destornillador de punta plana, presione
suavemente el cierre de bayoneta (1) y, al mismo tiempo,
gírelo en sentido antihorario para abrirlo. El cierre de
bayoneta (1) salta ligeramente hacia fuera.
3 Cambie el fusible y gire en sentido horario la unión de
bayoneta (1) con el destornillador hasta cerrarla.
16 Datos técnicos
Datos del robot cortacésped
Longitud en mm 600
Anchura en mm 490
Altura en mm 245
Peso en kg aprox. 8
Sistema de corte eléctrico con 2 cuchillas
Motor cuchillas de corte r/min 3400
Altura de corte en mm
30 - 60
Regulación altura de corte 5 niveles 6 mm por nivel
Anchura de corte en mm 280
Super cie máx. de corte en m
2
aprox. 700
Pendiente máx. del terreno en % 35
Distancia entre cable perimetral y linde (pared/seto) aprox. 20 cm
Datos de la base de carga y del transformador
Tensión de alimentación de la base de carga 230 V / 16 A / 50 HZ
Tensión secundaria/corriente/potencia 27 V AC / 2,2 A / 60 VA
Emisiones sonoras
Ruido medido en db(A) 63
Ruido garantizado en db(A) 69
Batería
Tensión en V 18
Capacidad en Ah 1,5
Energía eléctrica en Wh 27
Temperatura de carga máxima en grados Celsius
40 °C

74
17 Guía para la solución de problemas
17.1 Ejemplos de mensajes de fallo
Nota!
La batería y el motor del robot están controlados por
un sistema electrónico que muestra los fallos y el
estado de funcionamiento en una pantalla LCD.
6
5
4
1
2
3
1 Hora 4 Código de fallo
2 Mensaje de fallo 5 Fecha
3 Campo de acción 6 Indicación del fallo
Nota!
Si esta indicación vuelve a aparecer, interrumpa el
funcionamiento. Haga controlar el robot en un centro de
asistencia técnica autorizado.

Español
75
17.2 Localización de fallos
Si el robot no funciona correctamente, proceda como se indica a continuación. Si el fallo no gura en la lista o no puede localizarlo
con exactitud, acuda a un centro de asistencia autorizado.
Mensajes de fallo Causa probable Solución
Baja tensión batería Cable perimetral averiado, el robot no
encuentra la base de carga.
Controle si el cable está cortado; si es
necesario, haga efectuar la medición por un
centro de asistencia autorizado.
Batería agotada Haga cambiar la batería en un centro de
asistencia autorizado.
Electrónica de carga defectuosa Haga controlar la electrónica de carga en un
centro de asistencia autorizado.
El robot no se conecta a los contactos de
carga.
Coloque manualmente el robot en la base de
carga y observe si los contactos de carga están
conectados.
Haga controlar el mecanismo de muelle de los
contactos de carga en un centro de asistencia
autorizado.
Haga sustituir los contactos de carga torcidos
o rotos en un centro de asistencia autorizado.
Código PIN incorrecto Se ha introducido un código PIN equivocado. Introduzca el código PIN correcto. Se admiten
tres intentos, si fallan los tres hay que
introducir un código PUK.
Corte nal irregular. Tiempo de trabajo demasiado escaso. Programe un tiempo de trabajo más largo.
Área de corte demasiado grande. Programe un tiempo de trabajo más largo.
Reduzca el área de corte.
Relación altura de corte / altura de la hierba
incorrecta.
Aumente la altura de corte.
Luego, redúzcala gradualmente hasta el valor
deseado.
Cuchillas de corte desa ladas. Cambie las cuchillas y los respectivos tornillos.
Haga a lar y montar con tornillos nuevos las
cuchillas de corte por un centro de asistencia
autorizado.
El césped bloquea o di culta la rotación del
disco de corte o del eje motor.
Quite la hierba y compruebe que el disco de
corte gire libremente.
Si el disco de corte no gira libremente,
desmóntelo, límpielo y móntelo con tornillos
nuevos.
El robot hace el corte en un
horario equivocado
Ajuste la hora en el robot. Vea Ajuste de la hora en la página 60.
Hora de comienzo y final del corte mal
programadas.
Programe la hora inicial y final como se
describe en Ajuste de la hora (página 66).
El robot vibra Desequilibrio de las cuchillas de corte o del
motor que las acciona
Controle las cuchillas y el disco, sustituya si
procede.

76
Mensaje de error
Mensaje de error Causa posible Solución
CN001: Tilt sensor • Se ha superado la inclinación máxima.
• Pendiente demasiado empinada
Excluya esa pendiente del área de corte.
El robot ha sido levantado del suelo. Apoye el robot en una superficie horizontal y borre el
error.
CN002: Lift sensor Al levantar el robot o en un choque, la
carcasa se ha desviado hacia arriba.
Quite el cuerpo extraño.
CN005: Bumper
deflected
El robot ha chocado con un obstáculo y
no puede liberarse (choque en
proximidad de la base de carga).
Quite el obstáculo.
CN007: No loop signal
CN017: Cal: signal
weak
No hay señal del circuito.
Error de calibración, señal del circuito
demasiado débil.
• Controle la alimentación de la base de carga.
• Controle el circuito.
• Desconecte y conecte el transformador.
CN008: Loop signal
weak
Señal del circuito débil. • Controle la alimentación de la base de carga.
• Controle el circuito, por ejemplo que no esté enterrado
a demasiada profundidad.
• Desconecte y conecte el transformador.
CN010: Bad position El robot se ha salido del circuito. • Coloque nuevamente el robot en el área de trabajo.
• Circuito entrecruzado
CN011: Escaped robot El robot se ha salido del área de trabajo. Controle el tendido del circuito (curvas, obstáculos, etc.).
CN012: Cal: no loop
CN015: Cal: outside
Error de calibración, el robot no ha
encontrado el circuito.
• Coloque el robot transversalmente respecto al circuito,
el robot debe poder atravesar el circuito.
• Controle la alimentación de la base de carga.
• Controle el circuito.
• Desconecte y conecte el transformador.
• Cable del circuito entrecruzado.
CN018: Cal: Impact Error de calibración, choque. Quite el obstáculo.
CN038: Battery Batería descargada. • Controle que no haya obstáculos en la base de carga.
• Controle los contactos de carga de la base.
• Circuito demasiado largo, demasiadas islas.
• El robot se ha atascado.
Cable perimetral averiado, el
robot no encuentra la base de carga.
Controle que el cable no esté cortado; si es necesario,
haga efectuar la medición por un centro de asistencia
autorizado.
Batería agotada. Se ha terminado la vida útil de la batería. Haga cambiar
la batería por un centro de asistencia autorizado.
Electrónica de carga averiada. Haga cambiar la electrónica de carga por un centro de
asistencia autorizado.
El robot no se conecta a los contactos
de carga.
• Coloque manualmente el robot en la base y controle
que los contactos de carga estén conectados.
• Haga controlar y sustituir los contactos de carga por un
centro de asistencia autorizado.
CN099: Recov escape Imposible eliminar el error
automáticamente
Elimine el error manualmente
El robot se ha salido del circuito. Coloque nuevamente el robot en la base de carga.

Español
77
Mensaje de error Causa posible Solución
CN104: Battery over
heating
Sobrecalentamiento de la batería,
temperatura superior a 60°C, imposible
descargar.
La electrónica de control efectúa un apagado de
emergencia. No ponga el robot en la base de carga.
Apague el robot y deje enfriar la batería.
CN110: Blade motor
over heating
Sobrecalentamiento del motor,
temperatura superior a 80°C.
Apague el robot y déjelo enfriar. Si el problema se repite,
haga controlar el robot por un centro de asistencia
autorizado.
CN119: R-Bumper
deflected
CN120: L-Bumper
deflected
El robot ha chocado con un obstáculo y
por seguridad no puede liberarse (por
ejemplo un choque cerca de la base de
carga).
Quite el obstáculo y borre el error.
CN125: Bumper escape Al dar marcha atrás después de un
choque, el robot se ha salido del área de
trabajo.
Carcasa atascada o parachoques averiado, quite el
obstáculo.
CN128: Recov
Impossible
Choque con un obstáculo o abandono
del circuito -> imposible dar marcha
atrás, el robot no puede liberarse.
Quite el obstáculo, controle la desviación de la carcasa.
CN129: Blocked WL Motor de la rueda izquierda bloqueado Elimine el bloqueo.
CN130: Blocked WR Motor de la rueda derecha bloqueado Elimine el bloqueo.

78
Tras la lectura del código, se accede a la página web que
contiene el tema de interés.
Si no dispone de un lector de códigos QR, puede utilizar el
enlace http://www.oleo-mac.it.
Los costes de acceso a las páginas web dependen del
proveedor de telefonía.
17.3 Guía interactiva
El acceso a la guía interactiva de la programación se puede
realizar a través de un código QR, por ejemplo con un
smartphone.
Para hacer esta operación se debe tener una aplicación
específica, descargada de la página del proveedor del
smartphone. El coste de este servicio depende del
proveedor de telefonía móvil.
Esta máquina ha sido diseñada y realizada con las
técnicas más avanzadas. El fabricante garantiza sus
productos por 24 meses desde la fecha de la primera
compra.
Condiciones generales de la garantía
1) El periodo de garantía transcurre a partir de la fecha
de compra. A través de la red de ventas y asistencia
técnica, el fabricante sustituirá gratuitamente las
partes que presenten defectos de material o de
fabricación. La garantía no priva al comprador de los
derechos legales establecidos por el Código Civil con
respecto a las consecuencias de los defectos o vicios
del objeto vendido.
2) El personal técnico intervendrá lo antes posible,
dentro de los límites impuestos por motivos
organizativos.
3) Para solicitar asistencia en garantía, es necesario
presentar el certificado que figura más adelante,
sellado por el vendedor y cumplimentado en
todas sus partes, además de la factura o el tique
de compra.
4) La garantía pierde validez en caso de:
- Falta manifiesta de mantenimiento
- Utilización incorrecta o manipulación indebida del
producto
- Empleo de recambios o accesorios no originales
- Intervenciones efectuadas por personal no
autorizado
5) La garantía no cubre los materiales de consumo ni las
partes sujetas a un desgaste normal de
funcionamiento (baterías, cuchillas de corte, cables,
conectores, etc.).
6) La garantía de la batería se limita a los defectos de
fabricación encontrados durante la primera puesta en
marcha del producto.
7) La garantía no cubre las intervenciones de
actualización y mejora del producto.
8) La garantía no cubre la puesta a punto ni las
intervenciones de mantenimiento que deban
realizarse durante el período de garantía.
9) Todo daño sufrido por el producto durante el
transporte debe señalarse al transportista; de lo
contrario, la garantía pierde validez.
10) La garantía no cubre los daños de la pintura
atribuibles al desgaste normal.
11) La garantía no cubre daños o perjuicios directos o
indirectos, materiales o personales, causados por
fallos de la máquina o derivados de la imposibilidad
de utilizarla.
MODELO
ADQUIRIDO POR
Nº DE SERIE
FECHA
CONCESIONARIO
¡No expedir! Adjuntar sólo al pedido de asistencia técnica.
18 Certi cado de garantía

Español
79
19 Eliminación
Li
Daños al medio ambiente
No deseche el robot cortacésped, las baterías
ni los componentes electrónicos junto con
los residuos urbanos.
Respete las normas locales sobre la
eliminación.
Conforme a las directivas 2002/95/CE, 2002/96/CE y
2003/108/CE sobre eliminación de residuos y
reducción del uso de sustancias peligrosas en los
equipos eléctricos y electrónicos
El símbolo del contenedor tachado aplicado al producto
indica que este, al final de su vida útil, no debe tratarse
como un desecho urbano.
Cuando ya no utilice la máquina, llévela a un punto de
recogida selectiva de residuos eléctricos y electrónicos, o
entréguesela al vendedor si adquiere una máquina
nueva de tipo equivalente, a razón de una por una.
La recogida selectiva y el reciclaje contribuyen a proteger
el ambiente y la salud, y favorecen la reutilización de los
materiales que componen el equipo.
La eliminación incorrecta de los equipos puede implicar
sanciones.
Nota!
La batería está probada según las normas europeas.
Por lo tanto, ya sea desmontada o montada en
el robot, está sujeta a las normas nacionales e
internacionales sobre mercancías peligrosas.
Deseche la batería completamente descargada.
Si entrega la máquina al vendedor para el desguace,
incluya también la ba
tería.
ATENCIÓN! I
nutilice la máquina antes de desecharla.
Para evitar accidentes, quítele el conector de
seguridad y el cable eléctrico del motor.
20 Declaración de conformidad
El abajo firmante, en representación de, Emak spa,
empresa sita en la calle Fermi nº 4 de Bagnolo in
Piano, 42011 ITALIA declara bajo su propia
responsabilidad que la máquina:
1. Tipo: robot cortacésped
2. Marca Oleo-Mac, Modelo Orion 700
3. Identificación de serie 652 XXX 0001 ÷ 652 XXX 9999
cumple lo establecido por las directivas:
2006/42/CE - 2004/108/CE
y por las siguientes normas armonizadas:
EN 60335-1 / IEC 60335-2-107 / EN 55014-1 / EN 55014-2 /
EN 61000-3-2 / EN 61000-3-3 / EN 61000-3-3/A1
Tipo de dispositivo de corte: cuchilla rotativa.
Anchura de corte: 28 cm
Documentación técnica disponible en la sede
administrativa: Dirección Técnica
Realizado en la calle Fermi 4 de Bagnolo in Piano, Italia
Fecha: 01/09/2013
s.p.a.
Fausto Bellamico - President
El abajo firmante, en representación de, Emak spa,
empresa sita en la calle Fermi nº 4 de Bagnolo in
Piano, 42011 ITALIA declara bajo su propia
responsabilidad que la máquina:
1. Tipo: Transformador de corriente
2. Marca Ulmer Trasformatorenbau, Clase alimentación
monofásica NTEV60
cumple lo establecido por las directivas: 2006/95/CE
y por las siguientes normas
armonizadas: 60335-2-29
Documentación técnica disponible en la sede
administrativa: Dirección Técnica
Realizado en la calle Fermi 4 de Bagnolo in Piano, Italia
Fecha: 01/09/2013
s.p.a.
Fausto Bellamico - President

NL
LET OP! - Dit handboek moet voor de gehele levensduur bij de machine blijven.
E
¡ATENCIÓN! - Este manual debe acompañar a la máquina durante toda su vida útil.
Mod. 67020011 - Set. 2013
It’s an EMAK S.p.A. trademark
42011 Bagnolo in Piano (RE) Italy
Tel. +39 0522 956611 • Fax +39 0522 951555
[email protected] • www.efco.it
-
 1
1
-
 2
2
-
 3
3
-
 4
4
-
 5
5
-
 6
6
-
 7
7
-
 8
8
-
 9
9
-
 10
10
-
 11
11
-
 12
12
-
 13
13
-
 14
14
-
 15
15
-
 16
16
-
 17
17
-
 18
18
-
 19
19
-
 20
20
-
 21
21
-
 22
22
-
 23
23
-
 24
24
-
 25
25
-
 26
26
-
 27
27
-
 28
28
-
 29
29
-
 30
30
-
 31
31
-
 32
32
-
 33
33
-
 34
34
-
 35
35
-
 36
36
-
 37
37
-
 38
38
-
 39
39
-
 40
40
-
 41
41
-
 42
42










































Oleo-Mac ORION 700 El manual del propietario
- Tipo
- El manual del propietario
Artículos relacionados
Otros documentos
-
Efco SIRIUS 1200 El manual del propietario
-
-
Anova RC800 El manual del propietario
-
STIHL RMI 632 P Manual de usuario
-
-
STIHL RMI 522.0 C Manual de usuario
-
Bosch Indego l Original Instructions Manual
-
-
MSR Elixir™ 3 Backpacking Tent Instrucciones de operación
-
 MSR Remote™ 2 Two-Person Mountaineering Tent Assembly Instructions
MSR Remote™ 2 Two-Person Mountaineering Tent Assembly Instructions
