Plataforma – parámetro de comando compuesto: número de plataforma(1o2)
Tara – parámetro de comando compuesto: valor de tara (en la unidad de
calibración)
Umbral LO – parámetro de comando compuesto valor de umbral LO (en la
unidad de calibración)
Estado de salidas – parámetro de comando compuesto: definir el estado del
indicador de pesaje y las salidas del módulo de comunicación.
Ejemplo:
Configuración de la salida de la plataforma 1 3 en un estado alto.
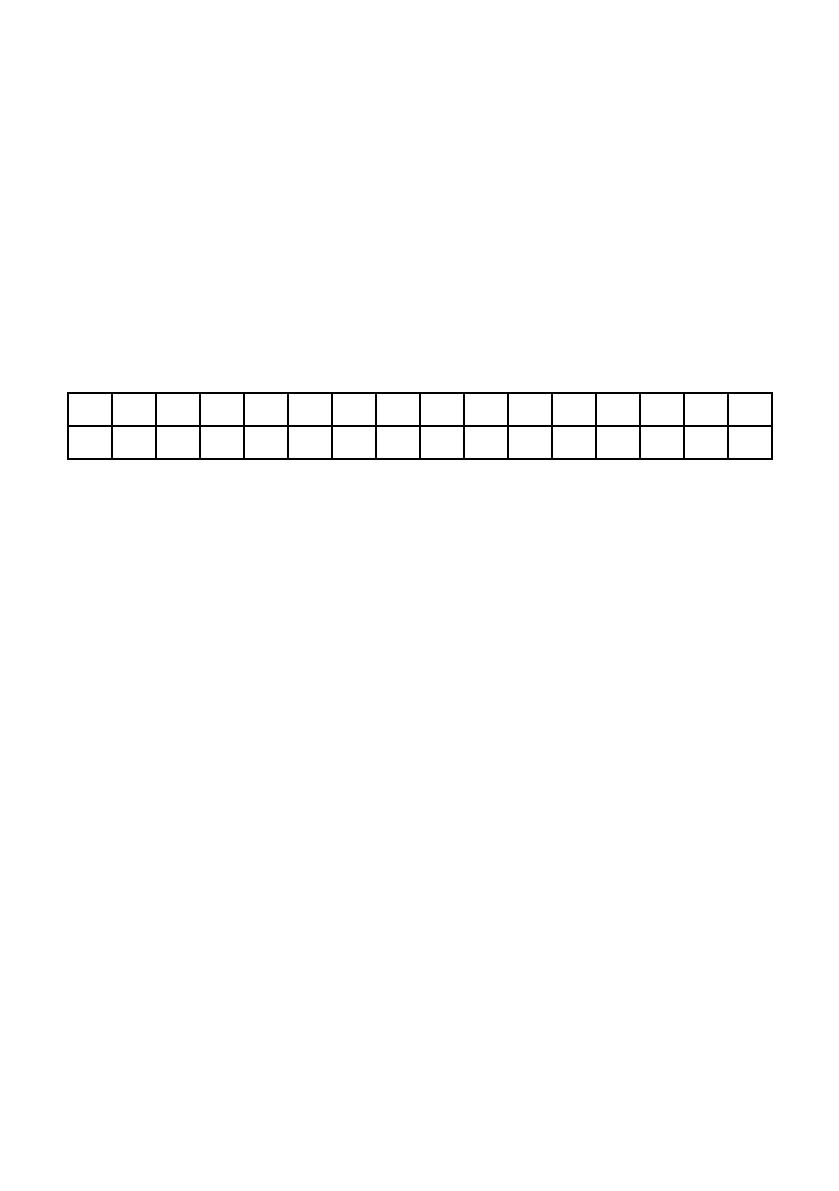
La máscara de las salidas será:
B1/7 B1/6 B1/5 B1/4 B1/3 B1/2 B1/1 B1/0 B0/7 B0/6 B0/5 B0/4 B0/3 B0/2 B0/1 B0/0
0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 1
Después de convertir a HEX, obtenemos 0x05
La ejecución del comando requiere guardar 2 registros de tipo holding:
40502 – comando con un parámetro - valor 0x08 - es decir, guardar el estado
de las salidas.
40507 – máscara de salida 0x05
Guardamos los registros usando la función 16 (0x10) guardando muchos
registros de tipo holding. Configuración de la salida de la plataforma 1 3 en un
estado alto.
Min – parámetro de comando compuesto: el valor del umbral MIN ( en la
unidad del modo de trabajo actual usado).
MÁX – parámetro de comando compuesto: el valor del umbral MÁX.( en la
unidad del modo de trabajo actual usado).
Número de serie – parámetro de comando compuesto: valor de número de
serie¡ Solo se aceptan valores numéricos! Todos los caracteres se omiten.
Usuario – parámetro de comando compuesto: Código de usuario
Producto – parámetro de comando compuesto: Código de producto
Cliente – parámetro de comando compuesto: Código del cliente
Embalaje – parámetro de comando compuesto: Código del embalaje
Recetas – parámetro de comando compuesto: Código de receta
Proceso de dosificación - parámetro de comando compuesto: código del
proceso de dosificación











