RADWAG HY10.62.HRP.H.M2.1 Manual de usuario
- Tipo
- Manual de usuario

HRP
Plataformas
Serie
Plataformas de alta resolución
IMMU-31-08-11-18-ES
MANUAL DE USUARIO
www.radwag.com

2
NOVIEMBRE 2018

3
Índice
1. DATOS BÁSICOS 4
1.1. Dimensiones 4
1.2. Conectores de conexión 6
1.3. Parámetros técnicos: 9
1.4. Destino 9
1.5. Principios del pesaje correcto 10
1.6. El tiempo de estabilización de la temperatura de balanza 11
1.7. GARANTÍA 12
1.8. Supervisar de los parámetros meteorológicos del módulo 13
1.9. Informaciones incluidas en el manual 13
1.10. Instrucción del servicio 13
1.11. Limpieza 13
2. DESEMBALAJE Y MONTAJE 15
2.1. Lugar de emplazamiento, lugar de uso 15
2.2. DESEMBALAJE Y INSTALACIÓN 15
2.3. Plataforma HRP 16, 32 16
2.4. Plataforma HRP 62, 120 17
2.5. Plataforma HRP 150, 300 21
2.6. Plataforma HRP 300.1, 6001100 24
2.7. Plataforma HRP 2000 28
3. CALIBRACIÓN 32
3.1. Peso inicial del usuario 33
4. PROTOCOLO DE COMUNICACIÓN 34
4.1. Comunicación con el módulo 34
4.2. Parámetros de comunicación predeterminados 34
4.3. Configuración HRP usando MWMH-Manager 35
4.4. Cooperación con indicadores 35
4.5. Cooperación con el programa R-LAB 36
4.6. PROTOCOLO DE COMUNICACIÓN Radwag 36
4.7. Descripción del comando 38
4.8. Mensajes de error 50
4.9. Cables de comunicación, fuente de alimentación 51
4.10. Alimentación de la plataforma 54
5. TRANSPORTE Y ALMACENAMIENTO 55
5.1. Comprobar en la entrega 55
5.2. Embalaje 55

4
1. DATOS BÁSICOS
1.1. Dimensiones
HRP 16, 32
HRP 62, 120

5
HRP 150, 300
HRP 300.1, 600, 1100

6
HRP 2000
1.2. Conectores de conexión
HRP 16, 32

7
HRP 62, 120
HRP 150, 300, 300.1, 600, 1100
HRP 2000

8
Conectores para: HY 10.xx. HRP; PUE7.1.xx.HRP
Sin conexión Sin conexión HY10; PUE7.1;
PC + alimentación
Conectores para: PL.xx HRP con Ethernet y ENTRADAS/SALIDAS
ETHERNET ENTRADAS/SALIDAS RS232, RS485
(conector opcional) + alimentación
Conectores para: PL.xx HRP con Profibus
Profibus OUT Profibus IN RS 232 + alimentación

9
1.3. Parámetros técnicos:
1.4. Destino
La serie de plataformas profesionales de alta resolución HRP se
adapta a todas las ramas de la industria. La serie HRP es perfecta
para aplicaciones que requieren alta precisión, y repetibilidad de
medición en entornos industriales difíciles.
El ajuste automático realizado por medio de un peso de ajuste
interno es una garantía para un funcionamiento extraordinariamente
efectivo y la repetibilidad de las indicaciones. El ajuste automático
ahorra tiempo y permite evitar realizar el proceso de forma manual,
por lo que es cómodo y fácil.
Características:
• Diseño moderno del mecanismo electromagnético en la
carcasa de acerco sellada,
• Grado de protección IP67
• Conectividad: RS 232,RS 485, Ethernet, , opcionalmente
Profibus y entradas /salidas para cooperación con
dispositivos externos,
• Cooperación con indicadores HY 10, PUE 7.1 y PUE 5
• Cooperación con un programa informático.
MWMH-Manager.
Alimentación 12 ÷ 24 V DC
Temperatura de trabajo +10 - +40 °C
Humedad relativa del aire 15% ÷ 80%
Grado de protección IP 66/67 (para lavar)
La tensión de alimentación de
salidas
12 ÷ 24 V DC
Corriente de salida máxima 100 mA
Rango de voltajes de control para
salidas
12 ÷ 24 V DC

10
1.5. Principios del pesaje correcto
A. Antes de usar, por favor, leer atentamente este manual de
instrucciones y utilizar los equipos de acuerdo a las
especificaciones;
B. Las cargas pesadas deberían colocarse posiblemente en la
parte central de la plataforma;
SI
NO
C. El platillo hay que cargar de mercancías de la masa bruto
menor que la capacidad máxima de la plataforma;
D. En el caso de no colocar centralmente cargas en el platillo, no
exceda la mitad de la carga de la plataforma para la carga
colocada en uno de los bordes de la bandeja y un tercio de la
capacidad de carga de la plataforma para la carga colocada
cerca de la esquina del platillo:
E. No hay que dejar por un largo tiempo las cargas de gran
tamaño en el platillo;
F. No golpee el borde lateral del plato de pesaje.

11
NO
NO
SI
NO
G. En caso de avería, se debe inmediatamente desconectar la
balanza de potencia.
H. El dispositivo previsto para la retirada del servicio, eliminar de
acuerdo con la ley actual
1.6. El tiempo de estabilización de la temperatura de balanza
Antes de iniciar el proceso de medición, es necesario esperar hasta
que la plataforma alcance la estabilización térmica.
Las plataformas almacenadas a temperaturas mucho más bajas que
la temperatura del lugar de trabajo, antes de ser enchufadas a la red
eléctrica (por ejemplo, durante el período de invierno), deben
someterse a estabilización térmica. El período de estabilización
térmica dura aproximadamente 8 horas. Durante la estabilización
térmica, las indicaciones en la pantalla pueden cambiar. Se
recomienda que los cambios de temperatura ambiente en el lugar de
uso sean pequeños y se produzcan muy lentamente.

12
1.7. GARANTÍA
A. RADWAG se compromete reparar o cambiar estos elementos,
que resulta ser defectuoso, de forma productiva o estructura
B. La definición de los defectos del origen poco claro e identificar
maneras de su eliminación se puede hacer solamente con la
participación de los representantes del fabricante y el usuario,
C. RADWAG no asume ninguna responsabilidad asociada con
los daños o pérdidas derivadas de no autorizadas o la
ejecución incorrecta de los procesos de producción o servicio.
D. La garantía no ocupa:
• dañados mecánicos causado por la utilización incorrecta y
daños térmicas, químicas, las danos causadas de la
descarga atmosférica, con ascender en la red energética o
con otro acontecimiento,
• daños causados por la explotación del producto que no sea
el previsto,
• daños de la plataforma, cuando el servicio encuentra una
violación de la seguridad antes de abrirla
• daños causados por líquido y un desgaste natural,
• daños debido a la adaptación inadecuada o fallas
eléctricas
• daños resultantes de la sobrecarga del mecanismo de
medición.
• conservaciones (limpieza de balanza).
E. La pérdida de la garantía se produce, cuando:
• se realizarán las reparaciones fuera del centro de servicio
autorizado,
• servicio se encuentra la injerencia no autorizada en el
diseño mecánico o electrónico,
• plataforma no tiene las características de seguridad de la
empresa.
F. Detalles de la garantía se encuentran en la tarjeta de servicio.

13
1.8. Supervisar de los parámetros meteorológicos del módulo
Propiedades de metrología de balanza, deben ser controladas por el
usuario en un intervalo de tiempo fijo. La frecuencia de verificación el
resultado de factores ambientales de trabajo de módulo, tipo del
proceso de pesaje y adoptó un sistema de supervisión de la calidad.
1.9. Informaciones incluidas en el manual
Hay que leer manual de instrucciones atentamente antes de
conectar y poner en marcha la balanza, cuando el usuario tiene
experiencias con el dispositivo de este tipo.
1.10. Instrucción del servicio
La plataforma debe ser operada y supervisada solo por personas
entrenadas para usarla.
1.11. Limpieza
Atención:
• Los pasos deben hacerse con mucho cuidado para no dañar
el mecanismo del módulo
• No use agentes corrosivos para limpiar el dispositivo
• Vacíe la dirección de la corriente fuerte de agua
directamente sobre la membrana de la junta de los módulos
de pesaje.
Limpieza de los elementos de acero inoxidable:
Durante la limpieza del acero inoxidable debe evitar el uso de
limpiadores que contengan productos químicos corrosivos, por
ejemplo. Lejía (que contiene cloro). No utilice productos que
contengan abrasivos. Siempre quite la suciedad con un paño de
microfibra para que no se dañe recubrimiento de protección.
Para el cuidado diario y la eliminación de pequeñas manchas, siga
estos pasos:
• Eliminar la suciedad con un paño humedecido en agua tibia
• Para obtener los mejores resultados, se puede añadir un
poco de líquido para lavar platos

14
Limpieza de los elementos recubrimiento en polvo:
La primera etapa debe ser la limpieza previa de agua corriente, o
una esponja de poro grande y mucha agua para eliminar la suciedad
No utilice productos que contengan abrasivos
Limpieza de la superficie seca se hace usando paños limpios de
celulosa o de algodón, dejando sin rayas y sin colorantes, también
se puede usar una solución de agua y detergente (jabón, detergente
para lavavajillas, limpiador de ventanas) hay que limpiar y secar.
Nunca se debe limpiar el detergente seco, ya que esto puede dañar
el recubrimiento - el uso de grandes cantidades de agua o una
solución de agua con detergente.
Limpieza de piezas de aluminio
Para limpiar el aluminio, utilizar productos con ácidos naturales. Por
lo tanto, los productos de limpieza excelentes serán los siguientes:
vinagre, limón. No utilice productos que contengan abrasivos. Evitar
el uso de cepillos de limpieza abrasivos que fácilmente puedan rayar
la superficie del aluminio. Paño suave de microfibra aquí será la
mejor solución
Limpiamos las superficies pulidas usando movimientos circulares.
Después de quitar la suciedad de la superficie, pulir la superficie con
un paño seco para secar la superficie y darle un brillo. Para obtener
los mejores resultados, se puede añadir un poco de líquido para
lavar platos

15
2. DESEMBALAJE Y MONTAJE
2.1. Lugar de emplazamiento, lugar de uso
* la temperatura del aire en la habitación debe ser: +10 °C ÷
+40 °C
* humedad relativa no debe superar el 80%
* durante el uso del dispositivo los posibles cambios en la
temperatura ambiente, debe ser gradual y muy lento,
* si la electricidad estática afectará las lecturas del módulo,
mueva su base,
2.2. DESEMBALAJE Y INSTALACIÓN
Quitar la cinta de protección. Sacar la balanza de la caja de fábrica.
Con la caja de accesorios, eliminar todos los elementos necesarios
para el buen funcionamiento y montarlos.
Los pasos deben hacerse con mucho cuidado para no dañar el
mecanismo de la plataforma de acuerdo con las siguientes
descripciones.
Después de completar la instalación mecánica, proceda a realizar
las conexiones eléctricas. Dependiendo del tipo de comunicación
preferido, conectamos los cables de comunicación al conector
apropiado (descripción de los conectores en el punto 1.2) de la
interfaz. Se recomienda el uso de cables de comunicación originales
proporcionados por Radwag. La tensión del alimentador (dado
sobre la tabla nominal del alimentador), debe ser compatible con la
tensión nominal de la red.

16
2.3. Plataforma HRP 16, 32
1. Sacar la plataforma de la caja de fábrica.
2. Poner platillo sobre mandril.
3. Conectar el terminal de pesaje u ordenador conectado al
módulo de pesaje. Descripción en el punto 1.2. en las
instrucciones:
4. Coloque la plataforma en un lugar de uso en una superficie
plana y dura,
lejos de las fuentes de calor.
5. La plataforma debe nivelarse girando los pies
de ajuste. La nivelación es correcta si la burbuja de aire
está en la posición central del nivel.
SI
NO

17
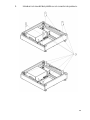
2.4. Plataforma HRP 62, 120
1. La plataforma debe retirarse del embalaje de transporte
tocando solo el "MARCO EXTERNO"
2. Conectar el terminal de pesaje o ordenador conectado al
módulo de pesaje. Descripción en el punto 1.2. en las
instrucciones:

18
3. Introducir el mandril del platillo en el conector de palanca.

19
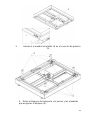
4. Retire el bloqueo de transporte, los pernos y las arandelas
que aseguran el bloqueo.
5. Coloque la plataforma en un lugar de uso en una superficie
plana y dura, alejada de fuentes de calor (no monte el
platillo).

20
6. Tornillo del pie número 3 de modo que las patas 1, 2, 4
forman el plano sobre el que descansa el marco de balanza
7. Nivelar la plataforma girando las patas de ajuste número 1, 2
y 4, de modo que la burbuja de aire esté en la posición
central del nivel.
SI
NO
8. Desatornillar la pata número 3 para que descanse contra el
suelo sin introducir tensión en el marco de la plataforma y no
cambie el nivel de la plataforma (la burbuja en el nivel de
burbuja permanece en la misma posición).
9. Poner platillo (50) sobre mandril.

21
10. Conectar la alimentación de la balanza.
2.5. Plataforma HRP 150, 300
1. La plataforma debe retirarse del embalaje de transporte
tocando solo el "MANIJA DE TRANSPORTE"

22
2. Conectar el terminal de pesaje u ordenador conectado al
módulo de pesaje. Descripción en el punto 1.2. en las
instrucciones:
3. Introducir el mandril del platillo en el conector de palanca.
4. Retire el bloqueo de transporte, los pernos y las arandelas
que aseguran el bloqueo.

23
5. Coloque la plataforma en un lugar de uso en una superficie
plana y dura, alejada de fuentes de calor (no monte el
platillo).
6. Tornillo del pie número 3 de modo que las patas 1, 2, 4
forman el plano sobre el que descansa el marco de balanza
7. Nivelar la plataforma girando las patas de ajuste número 1, 2
y 4, de modo que la burbuja de aire esté en la posición
central del nivel.
SI
NO
8. Desatornillar la pata 3 para que descanse contra el suelo sin
introducir tensión en el marco de la plataforma y no cambie
el nivel de la plataforma (la burbuja en el nivel de burbuja
permanece en la misma posición).
9. Poner platillo (50) sobre mandril.

24
10. Conectar la alimentación de la balanza.
2.6. Plataforma HRP 300.1, 6001100
1. La plataforma debe retirarse del embalaje de transporte
tocando solo el "MANIJA DE TRANSPORTE"
2. Conectar el terminal de pesaje u ordenador conectado al
módulo de pesaje. Descripción en el punto 1.2. en las
instrucciones:

25
3. Introducir el mandril del platillo (4) en el conector de palanca
(5)
4. Retire el bloqueo de transporte, los pernos y las arandelas
que aseguran el bloqueo (6).

26
5. Coloque la plataforma en un lugar de uso en una superficie
plana y dura, alejada de fuentes de calor (no monte el
platillo).
6. Tornillo del pie número 3 de modo que las patas 1, 2, 4
forman el plano sobre el que descansa el marco de balanza
7. Nivelar la plataforma girando las patas de ajuste número 1, 2
y 4, de modo que la burbuja de aire esté en la posición
central del nivel.

27
SI
NO
8. Desatornillar la pata 3 para que descanse contra el suelo sin
introducir tensión en el marco de la plataforma y no cambie
el nivel de la plataforma (la burbuja en el nivel de burbuja
permanece en la misma posición).
9. Poner platillo (7) sobre mandril.
10. Conectar la alimentación de la balanza.

28
2.7. Plataforma HRP 2000
1. La plataforma debe retirarse del embalaje de transporte con
un polipasto. En este objetivo hay que:
• Destornille los 4 tornillos que se muestran en el
siguiente esquema
• Atornille los 4 tornillos de ojo y use los cables y el
polipasto para quitar la plataforma y colóquele en un
lugar de uso en una superficie plana y dura, lejos de
las fuentes de calor.

29
• Después de colocar en el lugar de uso, quite los
tornillos de ojo.
2. Retire la placa del platillo (3).
3. Conectar el terminal de pesaje u ordenador conectado al módulo
de pesaje. Descripción en el punto 1.2. en las instrucciones:
4. Quitar los bloqueos de transporte (5).

30
5. Coloca los parachoques. Afloje las tuercas en las cuatro
esquinas, quite los tornillos ajustando el espacio a
aproximadamente 1 mm y apretar las tuercas.
6. Coloque la plataforma en un lugar de uso en una superficie
plana y dura, alejada de fuentes de calor (no monte el
platillo).

31
7. Tornillo del pie número 3 de modo que las patas 1, 2, 4
forman el plano sobre el que descansa el marco de balanza
8. Nivelar la plataforma girando las patas de ajuste número 1, 2
y 4, de modo que la burbuja de aire esté en la posición
central del nivel.
SI
NO
9. Desatornillar la pata 3 para que descanse contra el suelo sin
introducir tensión en el marco de la plataforma y no cambie
el nivel de la plataforma (la burbuja en el nivel de burbuja
permanece en la misma posición).
10. Poner el platillo (3);

32
11. Conectar la alimentación de la balanza.
3. CALIBRACIÓN
Para el aseguramiento con extremo grande de exactitud de pesaje,
hay que introducir a la memoria de balanza del coeficiente de la
corrigiendo indicación de balanza, en tratar al ejemplo de la masa-
esto se llama. calibración de balanza. La calibración debe realizarse
cuando comenzamos el pesaje, después de un intervalo más largo
entre la serie de mediciones o cuando hay un cambio de paso en la
temperatura ambiente. La calibración de la balanza debe llevarse a
cabo cuando no hay carga en el platillo y las condiciones de trabajo
son estables (sin ráfagas y vibraciones). Si no se cumple alguna de
estas condiciones, se mostrará un mensaje de error. En este caso,
retire la carga del platillo o elimine otros factores perturbadores y
repita el proceso de calibración. Hasta que se complete el
procedimiento de calibración, no realice ninguna operación aparte de
los pasos de calibración indicados por el programa. Las plataformas
están equipadas con un peso de calibración interno y la calibración
se puede realizar con la ayuda del mismo peso o con un peso
externo.
Disponibles tres modos de calibración:
• calibración con la pesa externa
• calibración automática interna iniciada por la balanza (en un
intervalo de tiempo específico y en el caso de un cambio en
la temperatura ambiente)
• calibración interna iniciada por el usuario

33
El procedimiento de calibración con una pesa externa está
disponible desde el nivel de:
• un programa para manejar plataformas y módulos MWMH-
Manager
• terminal de pesaje conectado al módulo
La calibración interna puede iniciarse por:
• el programa para manejar plataformas y módulos MWMH-
Manager
• terminal de pesaje conectado al módulo
• comando IC en un protocolo de comunicación de texto
• comando en el protocolo Profibus
• comando en el protocolo Modbus
Atención
Las plataformas HRP tienen legalización, no tengo la opción de
calibrar con un peso externo.
3.1. Peso inicial del usuario
Las plataformas HRP tienen la capacidad de determinar el punto
cero de la balanza por parte del usuario. Esta opción está disponible
del nivel:
• un programa para manejar plataformas y módulos MWMH-
Manager
• terminal de pesaje conectado al módulo
Atención
La determinación de la masa inicial por parte del usuario no está
disponible para las plataformas con verificación.

34
4. PROTOCOLO DE COMUNICACIÓN
4.1. Comunicación con el módulo
Las plataformas HRP se pueden comunicar con terminales de
pesaje Radwag, aplicaciones informáticas y controladores
industriales mediante RS232, puertos Ethernet, RS485 y
opcionalmente con Profibus.
Los protocolos de comunicación implementados en los módulos son:
• Protocolo de texto Radwag
• Modbus RTU (RS485)
• Modbus TCP (Ethernet)
• Profibus
Modbus y Profibus se describe en un manual separado.
Además, la plataforma puede equiparse adicionalmente con
entradas y salidas digitales con la ayuda de los cuales es posible
realizar una tara, poner a cero, iniciar y detener la dosificación y
señalizar los umbrales de pesaje o controlar el proceso de
dosificación.
Atención:
En la versión con Profibus la plataforma HRP no tiene entradas /
salidas digitales y Ethernet.
4.2. Parámetros de comunicación predeterminados
• RS 232
Velocidad 57600
Bits de datos 8
Paridad no hay
Bits de parada 1
• RS 485
Velocidad 57600
Bits de datos 8
Paridad no hay
Bits de parada 1
Dirección del módulo 1
• TCP/IP
Dirección IP 192.168.0.2
Máscara de subred 255.255.255.0
Puerta supuesta 192.158.0.1
Puerto 4001

35
4.3. Configuración HRP usando MWMH-Manager
„MWMH-Manager "es un programa de ordenador que opera en el
entorno de MS Windows para la operación y configuración de las
plataformas HRP, módulos de pesaje magnetoeléctricos MWSH,
MWMH, MWLH Programa posibilita: lectura en masa, tara, puesta a
cero, configuración de filtros de pesaje, realización de calibración,
configuración de parámetros de comunicación, simulación del
funcionamiento de entradas y salidas digitales.
El programa MWMH-Manage se comunica con los módulos usando
RS232, RS485 y Ethernet. El programa MWMH-Manager ha sido
descrito en un manual separado.
4.4. Cooperación con indicadores
Las plataformas HRP cooperan con los terminales de pesaje:
HY 10, PUE 5 y PUE 7.1. La comunicación entre los dispositivos se
realiza a través de RS232, RS485 y Ethernet. Al combinar HRP con
el terminal, obtenemos una balanza de alta resolución con
aplicaciones dedicadas a la industria. Desde el nivel del indicador, es
posible el acceso completo a los parámetros del módulo y la
calibración.
Indicador HY10 Indicador PUE 5
Indicador PUE 7.1

36
4.5. Cooperación con el programa R-LAB
El programa R-LAB es una aplicación informática que permite leer
valores masivos de módulos conectados, recolectar mediciones,
tarar y poner a cero.
El programa permite la conexión con la plataforma HRP con la ayuda
de RS232 y Ethernet.
4.6. PROTOCOLO DE COMUNICACIÓN Radwag
Datos básicos
• El protocolo de comunicación plataforma –terminal sirve para
la comunicación entra la balanza RADWAG y el dispositivo
externo por el enlace de serie RS-232C, RS 484 o Ethernet.
• Protocolo consta de comandos enviados de un dispositivo
externo a la plataforma y la respuesta de la balanza al
dispositivo
• Las respuestas se envían de la plataforma cada vez, después
de recibir comandos como la respuesta al comando dado.
• Con los comandos que componen el protocolo de
comunicación se puede obtener información sobre el estado
de la plataforma y afectar a su funcionamiento, por ejemplo.
es posible: recibir de las plataformas los resultados de pesaje,
etc.
Comando
Descripción
Z
Puesta a cero de la plataforma
T
Tara la plataforma
OT
Poner el valor de tara
UT
Ajustar tara
S
Poner el resultado estable en la unidad básica
SI
Introducir el resultado inmediatamente en la
unidad básica
SU
Introducir el resultado estable en la unidad actual
SUI
Poner el resultado inmediatamente en la unidad
actual

37
C1
Activar la transmisión continua en la unidad básica
C0
Desconectar la transmisión continúa en la unidad
básica
CU1
Conectar la transmisión continúa en la unidad
actual
CU0
Desactivar la transmisión continua en la unidad
actual
DH
Ajuste el umbral inferior de verificación de
peso(controlador )
UH
Ajuste el umbral superior de verificación de peso
(controlador)
ODH
Poner el valor de umbral inferior de verificación de
peso (controlador)
OUH
Poner el valor de umbral superior de verificación
de peso (controlador)
NB
Introducir el numero de fabrica
UI
Ingresar las unidades disponibles
US
Ajustar la unidad.
UG
Ajustar la unidad actual
BN
Introducir tipo de la balanza.
FS
Introducir la capacidad máxima.
RV
Introducir la versión del programa.
A
Ajustar autocero.
PC
Enviar todos los comandos aplicados.
FIS
Ajuste filtro
GIN
Introducir el estado de las entradas
GOUT
Introducir el estado de las salidas
SOUT
Ajustar salidas
IC
Calibración interna
PS
Enviar los ajustes de la balanza
Atención Cada comando debe ser terminado a los signos CR LF;
Formato de la respuesta a la pregunta del ordenador

38
XX_A CR LF
comando entendido, comenzó a realizar
XX_D CR LF
Comando se terminó (ocurre sólo después de XX_A)
XX_I CR LF
comando entendido, pero en el momento no está disponible
XX _ ^ CR LF
comando entendido, pero se ha superado el rango máximo
XX _ v CR LF
comando entendido, pero se ha superado el rango mínimo
XX _ OK CR LF
Comando realizado
ES_CR LF
comando no entendido
XX _ E CR LF
Límite de tiempo superado en espera del resultado de la
estabilidad (límite de tiempo es el parámetro característico de
balanza)
XX en cada caso, es el nombre del comando enviado
_ - representa un carácter de espacio (el espacio)
4.7. Descripción del comando
Puesta a cero de balanza
Secuencia: Z CR LF
Respuestas posibles:
Z_A CR LF
-
comando entendido, comenzó a realizar
- comando se
terminó
-
comando se terminó
Z_A CR LF
-
comando entendido, comenzó a realizar
Z_^ CR LF
- comando entendido, pero se ha superado el rango de puesta a
cero
Z_A CR LF
-
comando entendido, comenzó a realizar
Z_E CR LF
-
límite de tiempo superado en espera del resultado estable
Z_I CR LF
-
comando entendido, pero en el momento no está disponible
Taraje de la balanza
Secuencia: T CR LF
Respuestas posibles:

39
T_A CR LF
-
comando entendido, comenzó a realizar
T_D CR LF
-
comando se terminó
T_A CR LF
-
comando entendido, comenzó a realizar
T_v CR LF
-
comando entendido, pero se ha superado el rango de tara
T_A CR LF
-
comando entendido, comenzó a realizar
T_E CR LF
-
límite de tiempo superado en espera del resultado estable
T_I CR LF
-
comando entendido, pero en el momento no está disponible
Poner el valor de tara
Secuencia: OT CR LF
Respuesta: OT_TARA CR LF - comando se terminó
Formato de respuestas:
1 2 3 4-12 13 14 15 16 17 18 19
O T espacio tara espacio unidad espacio CR LF
Tara
- 9 signos alineado a la derecha
Unidad
- 3 signos alineado a la izquierda
Atención El valor de la tara se da siempre en la unidad de calibración.
Ajustar tara
Secuencia: UT_TARA CR LF, donde TARA – valor de tara
Respuestas posibles:
UT_OK CR LF
-
comando está hecho
UT_I CR LF
- comando entendido, pero en el momento no está
disponible
ES CR LF
-
comando no entendido (el formato de tara incorrecto)
Atención En formato de tara, hay que usar punto, como un marcador de decimales
Poner el resultado estable en la unidad básica

40
Secuencia: S CR LF
Respuestas posibles:
S_A CR LF
-
comando entendido, comenzó a realizar
S_E CR LF
-
límite de tiempo superado en espera del resultado estable
S_I CR LF
- comando entendido, pero en el momento no está
disponible
MARCO DE MASA
-
valor de la masa se devuelve en la unidad básica
Formato de marco de masa, que corresponde la balanza :
1
2-3
4
5
6
7-15
16
17
18
19
20
21
S espacio
signo
de estabilidad
espacio signo
masa espacio unidad CR LF
Ejemplo:
S CR LF
-
comando del ordenador
S _ A CR LF
-
comando entendido, comenzó a realizar
S _ _ _ _ - _ _ _ _ _ _ 8 . 5 _ g _ _ CR LF
- comando está hecho,
Se devuelve el valor de masa
en la
unidad
básica
donde: _ - espacio
Introducir el resultado inmediatamente en la unidad básica
Secuencia: SI CR LF
Respuestas posibles:
SI_I CR LF
- comando entendido, pero en el momento no está
disponible
no está disponible
MARCO DE MASA
- valor de la masa se devuelve en la unidad básica
inmediatamente
Formato de marco de masa, que corresponde la balanza :
1
2
3
4
5
6
7-15
16
17
18
19
20
21
S I espacio
signo
de
estabilidad
espacio signo
masa espacio unidad CR LF

41
Ejemplo:
S I CR LF
-
comando del ordenador
S I _ ? _ _ _ _ _ _ _ 1 8 . 5 _ k g _ CR LF
- comando realizado, el valor de la masa se
devuelve en la unidad básica
inmediatamente
donde: _ - espacio
Introducir el resultado estable en la unidad actual
Secuencia: SU CR LF
Respuestas posibles:
SU_E CR LF
-
comando entendido, comenzó a realizar
SU_E CR LF
-
límite de tiempo superado en espera del resultado estable
SU_I CR LF
-
comando entendido, pero en el momento no está disponible
MARCO DE MASA
-
valor de la masa se devuelve en la unidad básica
Formato de marco de masa, que corresponde la balanza :
1
2
3
4
5
6
7-15
16
17
18
19
20
21
S U espacio
signo
de
estabilidad
espacio signo masa espacio unidad CR LF
Ejemplo:
S U CR LF
-
comando del ordenador
S U _ A CR LF
-
comando entendido, comenzó a realizar
S U _ _ _ - _ _ 1 7 2 . 1 3 5 _ N _ _ CR LF
-comando realizado, valor de la masa se
devuelve en la unidad actual usada
donde: _ - espacio
Poner el resultado inmediatamente en la unidad actual
Secuencia: SUI CR LF
Respuestas posibles :

42
SUI_I CR LF
-
comando entendido, pero en el momento no está disponible
MARCO DE MASA
- el valor de la masa se devuelve en la unidad básica
inmediatamente
Formato de marco de masa, que corresponde la balanza :
1
2
3
4
5
6
7-15
16
17
18
19
20
21
S U I
signo
de
estabilidad
espacio signo masa espacio unidad CR LF
Ejemplo:
S U CR LF
-
comando del ordenador
S U I ? _ - _ _ _ 5 8 . 2 3 7 _ k g _ CR LF
-comando realizado, valor de la masa se
devuelve en la unidad básica
donde: _ - espacio
Activar la transmisión continua en la unidad básica
Secuencia: C1 CR LF
Respuestas posibles:
C1_I CR LF
-
comando entendido, pero en el momento no está disponible
C1_A CR LF
-
comando entendido, comenzó a realizar
MARCO DE
MASA
-
valor de la masa se devuelve en la unidad básica
Formato de marco de masa, que corresponde la balanza :
1
2
3
4
5
6
7-15
16
17
18
19
20
21
S I espacio
signo
de
estabilidad
espacio signo masa espacio unidad CR LF
Desconectar la transmisión continúa en la unidad básica
Secuencia: C0 CR LF
Respuestas posibles:
C0_I CR LF
-
comando entendido, pero en el momento no está disponible
C0_A CR LF
-
comando entendido y realizado

43
Conectar la transmisión continúa en la unidad actual
Secuencia: CU1 CR LF
Respuestas posibles:
CU1_I CR LF
-
comando entendido, pero en el momento no está disponible
CU1_A CR LF
-
comando entendido, comenzó a realizar
MARCO DE
MASA
-
el valor de la masa se devuelve en la unidad actual
Formato de marco de masa, que corresponde la balanza :
1
2
3
4
5
6
7-15
16
17
18
19
20
21
S U I
signo
de estabilidad
espacio signo masa espacio unidad CR LF
Desactivar la transmisión continua en la unidad actual
Secuencia: CU0 CR LF
Respuestas posibles:
CU0_I CR LF
-
comando entendido, pero en el momento no está disponible
CU0_A CR LF
-
comando entendido y realizado
Ajuste el umbral inferior de verificación de peso (controlador)
Secuencia: DH_XXXXX CR LF, donde: _ -espacio XXXXX – formato
de masa
Respuestas posibles:
DH_OK CR LF
-
comando está hecho
ES CR LF
-
comando no entendido (formato de masa incorrecto)
Ajuste el umbral superior de verificación de peso (controlador)
Secuencia: DH_XXXXX CR LF, donde: _ -espacio XXXXX – formato
de masa
Respuestas posibles:

44
UH_OK CR LF
-
comando está hecho
ES CR LF
-
comando no entendido (formato de masa incorrecto)
Poner el valor de umbral inferior de verificación de peso (controlador)
Secuencia: ODH CR LF
Respuesta: DH_MASA CR LF - comando realizado
Formato de respuestas:
1
2
3
4-12
13
14
15
16
17
18
19
D
H
espacio
masa
espacio
unidad
espacio
CR
LF
Masa
-
9 signos alineado a la derecha
Unidad
-
3 signos alineado a la izquierda
Poner el valor de umbral superior de verificación de peso (controlador)
Secuencia: OUH CR LF
Respuesta: UH_MASA CR LF - comando realizado
Formato de marco de masa, que corresponde la balanza :
1
2
3 4-12 13 14 15
1
6
17 18 19
U
H
espacio
masa
espacio
unidad
espacio
CR
LF
Masa
-
9 signos alineado a la derecha
Unidad
-
3 signos alineado a la izquierda
Introducir el número de fabrica
Secuencia: NB CR LF
Respuestas posibles:
NB_A_” Numero de serie”
CR LF
- comando comprendido devuelve el número de serie.
NB_I CR LF
- comando entendido, pero en el momento no está
disponible.

45
” número de serie – Parámetro que define el número de serie del
dispositivo. Devuelto entre comillas.
Ejemplo:
NB CR LF – orden del ordenador.
NB_A_”123456” CR LF – el número de serie del dispositivo–
123456.
Ingrese las unidades disponibles
Secuencia: UI CR LF
Respuestas posibles:
UI_”x
1
,x
2
, … x
n
”_OK<CR><LF>
- comando ejecutado, las unidades disponibles
se devuel
ven en el modo de trabajo actual.
UI_I <CR><LF>
- comando entendido, pero en el momento no
está disponible.
x - designación de unidades, separadas por comas
Ejemplo:
UI CR LF - ingresar las unidades disponibles.
UI_”kg,N,lb,u1,u2”_OK CR LF - Se devuelven las unidades
disponibles.
Ajustar la unidad.
Secuencia: US_x CR LF
Respuestas posibles :
US_ x_OK CR LF
-
comando esta hecho , devuelve ja unidad ajustada
US_E CR LF
- se ha producido un error durante la ejecución del comando, sin
parámetro o formato incorrecto
US_I CR LF
–
comando entendido, pero en el momento no está disponible
x - parámetro, designación de unidades: g, kg, N, lb, oz, ct, u1, u2,
next.
Atención
En caso, en que x=next comando cambia la unidad a la siguiente
lista disponible (simulación de presionar el botón).
).
Ejemplo:

46
US_kg CR LF - ajustar la unidad „kg”.
US_kg_OK CR LF - "kg"la unidad está configurada”.
Introducir la unidad actual
Secuencia: UG CR LF
Respuestas posibles:
UG_x_OK<CR><LF>
- comando este hecho, devuelve ja unidad ajustada
UG_I <CR><LF>
–
comando entendido, pero en el momento no está disponible
x - parámetro, designación de unidades.
Ejemplo:
UG CR LF - introducir la unidad actual.
UG_kg_OK CR LF – la unidad seleccionada actualmente es "kg”.
Introducir tipo de la balanza
Secuencia: BN CR LF
Respuestas posibles:
BN_A_”x” CR LF
- comando entendido, devuelve tipo de balanza.
BN_I CR LF
-
comando entendido, pero en el momento no está disponible.
x - Tipo de balanza (entre comillas).
Ejemplo:
BN CR LF - introducir tipo de balanza.
BN_A_”C32” CR LF – el tipo de peso ha sido devuelto „C32”.
Introducir la capacidad máxima
Secuencia: FS CR LF
Respuestas posibles:
FS_A_”x” CR LF
-
comando entendido, se devuelve el peso máximo.
FS_I CR LF
-
comando entendido, pero en el momento no está disponible.
x – Capacidad máxima de peso (entre las comillas).

47
Ejemplo:
FS CR LF - introducir la capacidad máxima de la balanza.
3.000BN_A_”” CR LF – capacidad máxima ha sido devuelto
„”3.000.
Introducir la versión del programa
Secuencia: RV CR LF
Respuestas posibles:
RV_A_”x” CR LF
-
comando entendido, devuelve tipo de programa.
RV_I CR LF
-
comando entendido, pero en el momento no está disponible.
x – versión del programa (entre comillas)
Ejemplo:
RV CR LF - introducir la versión del programa.
RV_A_”1.0.0” CR LF – la versión del programa ha sido devuelta
„1.0.0”.
Ajusta autocero
Secuencia: A_n CR LF
Respuestas posibles:
A_OK CR LF
-
comando está hecho
A_E CR LF
- se ha producido un error durante la ejecución del comando,
sin parámetro o formato incorrecto
A_I CR LF
– comando entendido, pero en el momento no está disponible
n – parámetro, valor que especifica el ajuste de auto cero:
0 – auto cero apagado
1 – auto cero conectado
Ejemplo:
A_1<CR><LF> – conectar funcionamiento de auto cera
A_OK CR LF – auto cero conectado.
Enviar todos los comandos aplicados
Secuencia: PC CR LF

48
Respuesta:
PC_A_"Z,T,S,SI,SU,SUI…" - comando realizado,el indicador
muestra todos los comandos implementados..
Ajustar filtro
Secuencia: FIS_n <CR><LF>
Respuestas posibles:
FIS_OK <CR><LF>
-
comando está hecho
FIS_E <CR><LF>
- se ha producido un error durante la
ejecución del comando, si
n parámetro o
formato incorrecto
FIS_I <CR><LF>
– comando entendido, pero en el momento
no está disponible
n – parámetro, valor decimal que especifica el número del filtro.
n → 1 – muy rápido
2 – rápido
3 – medio
4 – lento
5 – muy lento
Atención:
La numeración está muy asignado al nombre del filtro y constante en todo
tipo de balanzas.
Si en tipo determinado de la balanza los ajustes del filtro están asignadas al
modo de trabajo, comando cambia los ajustes para el modo de trabajo
activo.
Ejemplo:
orden:
FIS_3
<CR><LF> - ajustar filtro medio
respuesta:
FIS_OK
<CR><LF> - ajustado filtro medio
Introducir el estado de las entradas
Secuencia: GIN CR LF
Respuesta: GIN_XXXXX CR LF - donde XXXXX-estado de las entradas de
entrada 5 y termina con entrada 1 0-entrada no establecido 1 -entrada establecida
Formato de respuestas:
1 2 3 4 5-9 10 11
G I N espacio
estado
entradas
CR LF

49
Estado entradas
+-5 signos que indican el
estado de las entradas:
signo numero 5 entradas
5 …signo n
umero 9
entradas 1
Introducir el estado de las salidas
Secuencia: GOUT CR LF
Respuesta: GOUT_XXXXX CR LF - donde XXXXX-estado de las entradas de
salidas 4 y termina en salida 1 salida no establecida
1-salida no establecida
Formato de respuestas:
1 2 3 4 5 6-9 10 11
G O U T espacio
estado de
salidas
CR LF
Estado entradas
-4 signos que indican el
estado de salidas
signo
numero
6 salida 5 …signo
numero 9 entrada 1
Ajustar salidas
Secuencia: SOUT_XXXX CR LF, donde: _ - espacio, XXXXX –
establecer el estado de las salidas
para activo-1 o inactivo-0 en el orden de la salida
n. ° 4 a 1.
Respuestas posibles:
SOUT_OK CR LF
-
comando está hecho
ES CR LF
- comando no entendido (formato
de masa incorrecto)
Calibración interna
Secuencia: IC CR LF
Respuestas posibles:
IC_A CR LF
-
comando entendido, comenzó a realizar
IC_D CR LF
-
calibración se terminó
IC_A CR LF
-
comando entendido, comenzó a realizar
IC_E CR LF
- límite de tiempo superado en espera del
resultado estable
IC_I CR LF
- comando entendido, pero en el momento no está
disponible

50
Enviar los ajustes de la balanza
Secuencia: PS <CR><LF>
Respuestas posibles:
Ejemplo:
orden:
PS
<CR><LF>
- enviar los ajustes de la
balanza
respuesta:
PS_A<CR><LF>
…
PS_D<CR><LF>
- ajustes de la balanza
4.8. Mensajes de error
-Err2- Valor fuera del rango de cero
-Err3- Valor fuera del rango de tara
-Err8- Superado el tiempo de operación cero / tara
-NULL- Valor cero del transductor
-FULL- Excediendo el rango de medición
-LH- Error de masa inicial

51
4.9. Cables de comunicación, fuente de alimentación
Cable RS232 HRP-Ordenador
Cable RS485 HRP
Cable RS232 HRP-HY10,PUE 5 + alimentación

52
Cable Ethernet HRP-HY10,PUE 5

53
Cable Ethernet HRP- Ethernet Switch, Pue 7.1
Cable Entradas/Salidas HRP
Atención:
Colores de alambre para cables "M12" estándar.La figura muestra
ejemplos del tipo de cable.

54
4.10. Alimentación de la plataforma
Para alimentar las plataformas HRP, utilizamos la fuente de
alimentación SYS-1544-2415-T3-HRP incluida con el módulo. Si
utiliza cables de comunicación PT0348 o PT0375, conecte la fuente
de alimentación al enchufe del cable. En el caso de utilizar la red
Ethernet o Profibus para la comunicación, podemos alimentar la
plataforma directamente desde la fuente de alimentación
conectándola al zócalo número 3.

55
5. TRANSPORTE Y ALMACENAMIENTO
5.1. Comprobar en la entrega
Por favor, compruebe el embalaje y el equipo inmediatamente
después de entregar y evaluar si no hay signos externos de daños.
5.2. Embalaje
Mantenga todo el embalaje con el fin de utilizarlos para su posible
transporte futuro.
Sólo el embalaje original puede ser utilizado para transferir el
dispositivo. Antes de desempaquetar, desconectar los cables y
retirar las partes móviles (platillo, cubiertas, inserciones).Elementos
del dispositivo deben ser colocados en su embalaje original para
evitar daños durante el transporte.

56
-
 1
1
-
 2
2
-
 3
3
-
 4
4
-
 5
5
-
 6
6
-
 7
7
-
 8
8
-
 9
9
-
 10
10
-
 11
11
-
 12
12
-
 13
13
-
 14
14
-
 15
15
-
 16
16
-
 17
17
-
 18
18
-
 19
19
-
 20
20
-
 21
21
-
 22
22
-
 23
23
-
 24
24
-
 25
25
-
 26
26
-
 27
27
-
 28
28
-
 29
29
-
 30
30
-
 31
31
-
 32
32
-
 33
33
-
 34
34
-
 35
35
-
 36
36
-
 37
37
-
 38
38
-
 39
39
-
 40
40
-
 41
41
-
 42
42
-
 43
43
-
 44
44
-
 45
45
-
 46
46
-
 47
47
-
 48
48
-
 49
49
-
 50
50
-
 51
51
-
 52
52
-
 53
53
-
 54
54
-
 55
55
-
 56
56
























































RADWAG HY10.62.HRP.H.M2.1 Manual de usuario
- Tipo
- Manual de usuario
Artículos relacionados
-
RADWAG HY10.62.HRP.H.M2.1 Manual de usuario
-
RADWAG C315.30/60.C2.M Manual de usuario
-
RADWAG MWLH 10 Manual de usuario
-
-
RADWAG PUE 7.1.150.1.HRP Manual de usuario
-
RADWAG HY10.150.C2.K Manual de usuario
-
RADWAG WPT/4N 600/1500 H2 Manual de usuario
-
RADWAG WPT 15/HR2/K Manual de usuario
-
RADWAG PM 60.1.4Y Manual de usuario
-
RADWAG MYA 5.4Y PLUS Manual de usuario