Simrad NSO Multi-function Display Instrucciones de operación
- Categoría
- Navegantes
- Tipo
- Instrucciones de operación
Este manual también es adecuado para

www.simrad-yachting.com
A brand by Navico - Leader in Marine Electronics
Manual de Usuario
Simrad NSO
Pantalla multifunción
Español

Prefacio | 1
Prefacio
Exención de responsabilidad
Dado que Navico siempre está mejorando su producto, nos reservamos el derecho de
realizar cambios al producto en cualquier momento, lo cual puede no estar reflejado en
este manual. Póngase en contacto con su distribuidor más cercano si necesita ayuda.
Es responsabilidad exclusiva del propietario instalar y usar el instrumento y los
transductores de manera que no causen accidentes, daños personales o a la propiedad.
El usuario de este producto es responsable único de seguir las medidas de seguridad
para la navegación.
NAVICO HOLDING AS Y SUS FILIALES, SUCURSALES Y AFILIADOS RECHAZAN TODA
RESPONSABILIDAD POR USO DE CUALQUIER TIPO QUE PUEDA CAUSAR ACCIDENTES,
DAÑOS O QUE PUEDA QUEBRANTAR LA LEY.
Idioma principal: Este informe, cualquier manual de instrucciones, guías de usuario y
otra información relacionada con el producto (Documentación) puede ser traducida a,
o ha sido traducida de, otro idioma (Traducción). En caso de conflicto entre cualquier
traducción de la documentación, la versión en lengua inglesa de la documentación será
la versión oficial de la misma.
Este manual representa el producto tal y como es en el momento de la impresión.
NAVICO HOLDING AS y sus filiales, sucursales y afiliados se reservan el derecho de
realizar cambios sin previo aviso en las características técnicas.
Copyright
Copyright © 2011 Navico Holding AS.
Garantía
La tarjeta de garantía se suministra como un documento aparte.
En caso de cualquier duda, consulte el sitio web de la marca de su pantalla o sistema:
www.simrad-yachting.com
Declaraciones y conformidad
Este equipo es para ser usado en aguas internacionales y en aguas costeras
administradas por países de la U.E. y el E.E.E. Para obtener más información consulte el
manual de Instalación NSO.
Sobre este manual
Este manual es una guía de referencia para el uso de los sistemas Simrad NSO. Asume
que todo el equipo está instalado y configurado, y que el sistema está listo para ser
usado.
El manual asume que el usuario tiene un conocimiento básico de navegación,
terminología y prácticas náuticas.
El manual no brinda información básica sobre cómo funcionan los equipos tales como
radares, sondas acústicas y AIS. Dicha información está disponible en nuestro sitio web:
www.simrad-yachting.com/en/Support/Library/.
El texto importante que requiere una atención especial del lector está resaltado del
siguiente modo:
Usado para atraer la atención del lector a un comentario o información importante.
Usado cuando es necesario advertir al personal de que debe actuar con cuidado
para evitar lesiones y/o daños a equipos o al personal.

2 | Prefacio
En este manual verá algunas referencias textuales directas a teclas, menúes y elementos
de menú, y algunas descripciones paso por paso. Le guiaremos mediante gráficos hacia
las teclas y selecciones de menú requeridas.
En las ilustraciones del manual se usan los siguientes símbolos:
MENU WIN
Pulsación corta
única de una tecla
ilustrada
MENU WIN
x2
Pulsar dos
veces una tecla
ilustrada
MENU WIN
3 s
Pulsar y mantener
pulsada una
tecla ilustrada
con indicación de
duración
Girar el botón
rotatorio
Pulsación única
corta del botón
rotatorio
Las referencias a teclas del panel de operador están escritas en negrita, por ejemplo:
tecla WIN.
El software
Este manual fue escrito para la versión Simrad NSO Release to Market 1.1 (RTM1.1).
Por favor obtenga detalles sobre las versiones del software en nuestro sitio web.
MENU WIN
x2
¡El cuadro de diálogo Acerca de que puede ver arriba es sólo un ejemplo y puede ser
diferente del software instalado en su unidad!
El manual se actualizará continuamente para adaptarse a nuevas versiones de software.
La última versión disponible del manual puede descargarse de
www.simrad-yachting.com/en/Support/Library/.
MENU WIN

Índice de contenidos | 3
Índice de contenidos
1 Descripción general ........................................................................7
OP40 Panel frontal ............................................................................. 7
Estructura de pantalla de la unidad NSO ............................................... 8
Comunicación con la unidad NSO ......................................................... 9
2 Funcionamiento básico ................................................................. 11
Selección del procesador a controlar .................................................. 11
Encender y apagar la unidad ............................................................. 11
Marcar la Posición de hombre al agua ................................................ 11
Ajustar la iluminación ....................................................................... 12
Manejar el menú del sistema ............................................................ 12
Usar el cursor ................................................................................. 13
Añadir datos en los cuadros de diálogo ............................................... 13
Trabajar con páginas y ventanas ....................................................... 14
3 Uso del simulador .........................................................................15
Modo simulador ............................................................................... 15
Modo de demostración ..................................................................... 15
Selección del archivo de simulación ................................................... 15
Ajustes avanzados de simulador ........................................................ 15
4 Usar las cartas .............................................................................. 17
La ventana de carta ......................................................................... 17
El símbolo de la embarcación ............................................................ 18
Lineas de extensión ......................................................................... 18
Usar el cursor de la ventana de carta ................................................. 18
Escala de la carta ............................................................................ 19
Buscar objetos en la carta ................................................................ 19
Mostrar información de la carta ......................................................... 19
Posicionar la carta en la ventana ....................................................... 20
Selecionar el nivel de detalle de la carta ............................................. 20
Categorías de carta ......................................................................... 21
Estilo de imagen de la carta .............................................................. 21
Superposición de cartas ................................................................... 21
Datos de carta ................................................................................ 21
Opciones de carta en la base de datos de Navionics ............................. 22
Superponer fotos ............................................................................ 23
Fish-n-Chips de Navionics ................................................................. 23
5 Waypoints, rutas y tracks .............................................................25
Waypoints ...................................................................................... 25
Tracks............................................................................................ 26

4 | Índice de contenidos
Rutas ............................................................................................. 27
Página waypoints, rutas y tracks ....................................................... 28
6 Uso del radar ................................................................................29
La ventana de radar ........................................................................ 29
Los modos de operación del radar ..................................................... 30
Ajuste de la imagen de radar ............................................................ 30
Usar el cursor en la ventana de radar ................................................. 31
Optimización de la imagen de radar ................................................... 32
Denición de una zona de guarda alrededor de su embarcación ............. 33
Otras embarcaciones en la imagen de radar........................................ 34
Medición de distancia y rumbo hacia un blanco. ................................... 35
Radar Dual ..................................................................................... 36
Operación del Broadband 4G
TM
Radar ................................................. 39
7 Otras embarcaciones en carta y radar ..........................................43
Símbolos de blancos ....................................................................... 43
Cómo visualizar otras embarcaciones ................................................. 44
Recepción de mensajes MMSI ........................................................... 44
Denición de una zona de protección alrededor de su embarcación ........ 44
Ajustes de alarma de blancos ............................................................ 45
Ver información sobre blancos .......................................................... 46
Búsqueda de otras embarcaciones AIS ............................................... 46
8 Utilización de la ecosonda ............................................................ 47
Ajuste del panel de la ecosonda ........................................................ 47
Nivel de zoom ................................................................................. 49
Conguración de los ajustes de ganancia y color ................................. 49
Utilización del cursor en el panel de la ecosonda .................................. 50
Reproducción del registro de datos de la sonda ................................... 52
Opciones de sonda .......................................................................... 52
Elementos de imagen opcionales de la sonda ...................................... 53
Superposición de StructureScan™ ..................................................... 53
Panel de ajustes de la sonda ............................................................. 53
9 StructureScan™ ............................................................................55
Acceso al panel de StructureScan™ ................................................... 55
Las imágenes de StructureScan™ ...................................................... 55
Cambio de la imagen de StructureScan .............................................. 57
Pausar StructureScan ...................................................................... 58
Utilización del cursor en el panel de StructureScan .............................. 58
Ajuste de la imagen de StructureScan ................................................ 59
Grabación de los datos de StructureScan............................................ 59
Superposición en StructureScan ........................................................ 61

Índice de contenidos | 5
10 Uso del Piloto Automático ............................................................. 63
Indicación del piloto automático en las ventanas NSO .......................... 63
Uso seguro del piloto automático ....................................................... 63
La ventana de piloto automático ........................................................ 64
Descripción del modo de Piloto Automático ......................................... 65
Elegir modos de piloto automático ..................................................... 66
Usar el piloto automático en modo Standby ........................................ 66
Gobierno con seguimiento (FU) ......................................................... 66
Modo AUTO (auto-compás) ............................................................... 66
Modo Sin Deriva .............................................................................. 70
Navegar con el NSO ......................................................................... 70
Navegación a vela con piloto automático ............................................ 72
Navegación y gobierno por viento ...................................................... 74
Control del rendimiento de gobierno .................................................. 74
Usar el NSO en un sistema AP24/AP28 ............................................... 75
Usar el piloto en un sistema EVC ....................................................... 76
11 Navegación ...................................................................................77
Navegar a la posición del cursor ........................................................ 77
Navegar a una Ruta ......................................................................... 77
Cancelar la navegación .................................................................... 77
Parámetros de navegación ................................................................ 78
Ventanas de navegación ................................................................... 79
12 Ventanas de información .............................................................. 81
Paneles de instrumentos .................................................................. 81
Grácos de tiempo .......................................................................... 82
Personalizar los paneles de información .............................................. 83
13 Las páginas de utilidades ......... .....................................................85
AIS ............................................................................................... 85
Alarmas ......................................................................................... 86
Satélites ........................................................................................ 86
Buscar ........................................................................................... 86
Waypoints/rutas/tracks .................................................................... 86
Registro de viajes ............................................................................ 87
Sol/luna ......................................................................................... 87
Mareas ........................................................................................... 87
Archivos ......................................................................................... 87
CZone ............................................................................................ 87
14 Audio ............................................................................................89
Habilitar el Audio ............................................................................. 89
Seleccionar la fuente de audio (solo SonicHub) .................................... 89

6 | Índice de contenidos6 | Índice de contenidos
Funcionamiento de la fuente de audio ................................................ 89
Utilizar la radio FM/AM ..................................................................... 91
Utilizar una radio Sirius .................................................................... 91
Bloquear canales ............................................................................. 91
Ajustar las zonas de audio SonicHub .................................................. 92
15 Meteorología .................................................................................93
Meteorología GRIB .......................................................................... 93
Meteorología SiriusXM
TM
(solo América del Norte) ................................ 96
16 CZONE BEP ...................................................................................99
Panel CZone BEP ............................................................................. 99
Modos CZone .................................................................................. 99
Opciones generales del sistema CZone .............................................. 100
Panel info CZone BEP .....................................................................100
17 Personalizar el sistema ............................................................... 101
Conguración de la página ...............................................................101
Ajustar el tamaño de la ventana .......................................................103
Ajustar la apariencia de la barra de instrumentos ...............................103
Cambiar los ajustes del sistema .......................................................104
18 El sistema de alarmas ................................................................. 105
Tipos de mensajes .......................................................................... 105
Conrmar un mensaje.....................................................................105
Personalizar los ajustes de las alarmas .............................................. 106
19 Mantenimiento ............................................................................ 107
Mantenimiento preventivo ...............................................................107
Procedimientos de mantenimiento simples ......................................... 107
Actualizaciones de Software ............................................................107
Copia de seguridad de sus datos de sistema ......................................107
20 Descripción del menú ................................................................. 109
Menú ajustes .................................................................................109
Menúes contextuales ......................................................................110
Menú Gráco .................................................................................110
Menú Ir a ......................................................................................110
21 Índice ......................................................................................... 111

Descripción general | 7
1 Descripción general
OP40 Panel frontal
MARK
VESSEL
STBY
AUTO
PWR
MOB
PLOT GO TO
MENU WIN
1
3
6
7
PQRS
8
TUV
9
WXYZ
MNO
5
JKL
2
ABC DEF
GHI
4
0
STBY
AUTO
OUT
IN
RADARCHART
ECHO NAV
INFO PAGES
DISPLAY
2 3 54 6 7 8
10
1112131415
16
9
1
Tecla Descripción
1
MOB. Hombre al agua. Una pulsación de 3 segundos crea un waypoint MOB
en la posición actual del barco
2 LED de pantalla en uso. Indica que pantalla es controlada por el OP40
3
Tecla DISPLAY. Pulsación corta: Cambia que pantalla es controlada por el
OP40.
Pulsación de 5 segundos: accedemos a la conguración del OP40 e inicio del
sistema
4
Tecla PLOT/MARK. Una pulsación corta activa el menú Plot, una pulsación
larga crea un waypoint en la posición del barco
5 Teclas de zoom para radar, sonda y carta
6
Tecla GOTO/VESSEL. Una pulsación corta activa el menú Goto, una pulsación
larga centra la carta en la posición del barco
7
P tecla — Activa/conrma la selección actual
8
Control giratorio. Se utiliza para manejar el menú del sistema y para
funciones especícas
9
Tecla X (Salir). Se utiliza para cerrar los diálogos y para volver al nivel
anterior del menú. Quita el cursor en las pantallas de radar, sonda y carta
10
Teclas de cursor, se utiliza para mover el cursor por la pantalla y para
manejar el menú del sistema
11
Tecla WIN, se utiliza en paginas de múltiples pantallas. Una pulsación corta
alterna entre los paneles, una pulsación larga expande el panel seleccionado
a pantalla completa y viceversa
12
Tecla MENU. Una pulsación simple muestra el menú de contexto para el panel
activo. Una pulsación doble accede al menú de ajuste
13
Teclas de acceso directo (TAD). Proporciona acceso directo a la página.
Repetidas pulsaciones a cada TAD accede a las diferentes páginas
relacionadas con las TAD
14
PWR: Una pulsación corta enciende la pantalla/unidad activa.
Una pulsación corta durante la operación habilita el menú de conguración de
iluminación y alimentación (y Radar “En Espera” si esta disponible)
15 STBY AUTO: Piloto Automático Auto/Stand-By
16 El teclado Alfanumérico se utiliza para introducir números y texto

8 | Descripción general del sistema
Estructura de pantalla de la unidad NSO
Páginas y grupos de páginas
La pantalla del NSO está compuesta por grupos de páginas, a los
que se accede presionando una de las Teclas de Acceso Directo
(TAD). Una pulsación corta abrirá la ultima página visualizada
desde esta TAD. Una segunda pulsación abrirá el menú con
el grupo de páginas y las opciones de edición. Pulsaciones
repetidas alternaran entre las diferentes páginas disponibles.
Cada grupo de páginas (excepto el grupo de Utilidades) puede
incluir 5 páginas. La primera página en un grupo de páginas
siempre será una ventana de pantalla completa.
El sistema viene preconfigurado con algunas páginas de uso
común, y también puede definir sus propias páginas. Consulte la sección Personalizar
su sistema.
Ejemplo de grupo de páginas de carta Ejemplo de grupo de páginas de radar
Ventanas
Cada aplicación conectada al sistema NSO se presenta en ventanas, y tiene hasta 4
ventanas por página.
Página con 1 ventana Página con 2 ventanas Página con 3 ventanas Página con 4 ventanas
Las siguientes ventanas están disponibles:
Ventana Descripción
Carta Carta marítima. Puede visualizarse en 2D o 3D (cartas Navionics)
Radar Radar IPP (Indicador de Plan de Posición)
Sonda Sonda
Instrumentos Conjunto congurable de pantallas que presentan información
actualizada de la embarcación. Presentado como indicadores
analógicos/lineales
Navegación Información de navegación
Vídeo Vídeo en directo
Posición Posición GPS, SOG/COG y hora
RADARCHART
ECHO NAV
INFO PAGES

Descripción general del sistema | 9
Además de estas ventanas, las siguientes aplicaciones pueden conectarse y visualizarse
en otras ventanas:
Aplicación Descripción
AIS
Información AIS como capa superpuesta sobre ventanas de carta y
radar.
Meteorología
Grácos y datos meteorológicos como capa superpuesta en la ventana de carta.
La aplicación Sirius Weather está disponible solamente en América del Norte.
Audio
La radio satelital funciona como ventana en la parte inferior de una página.
La aplicación Sirius Audio está disponible solamente en América del Norte.
Barra de instrumentos
Los sensores conectados al sistema pueden visualizarse en una barra de instrumentos
sobre su pantalla.
Hay varias opciones de presentación para esta barra; consulte la sección
Personalización de su sistema.
Comunicación con la unidad NSO
El sistema NSO se comunica con el usuario mediante menúes y cuadros
de diálogo.
Menú ajustes
El sistema incluye un menú de Ajustes, al que se accede pulsando la
tecla MENU dos veces. Brinda acceso a los ajustes del sistema, ajustes
avanzados para cada función y para ajustes específicos de la embarcación.
Menúes contextuales
Un menú contextual contiene elementos relevantes al contexto
presente. Se accede a un menú contextual pulsando la tecla MENU.
Cada ventana tiene su propio menú contextual, que permite
acceder a funciones básicas para dicha ventana.
Menú Gráco
Usado para crear nuevos waypoints, rutas y tracks, y para acceder
a la biblioteca de waypoints, rutas y tracks.
Puede accederse a este menú independientemente de qué panel
se encuentre activo. Cuando se pulsa la tecla PLOT, cualquier otra
acción de menú será interrumpida.
Menú Ir a
Usado para iniciar la función de navegación.
Cuando la embarcación esté navegando, se extenderá el menú con opciones
para detener o modificar la navegación.
Puede accederse a este menú independientemente de qué panel se
encuentre activo. Cuando se pulsa la tecla GOTO, cualquier otra acción de
menú será interrumpida.
MENU WIN
x2
MENU WIN
PLOT
GO TO
MARK
VESSEL
PLOT
GO TO
MARK
VESSEL

10 | Descripción general del sistema
Cuadros de diálogo
Los cuadros de diálogo se usan para que el usuario
introduzca datos o para presentarle información.
Un cuadro de diálogo puede presentarse a pantalla
completa, o como un cuadro de diálogo emergente en
el centro de la pantalla.
Dependiendo del tipo de información o anotación, se
usan teclas diferentes para confirmar, cancelar y cerrar
el cuadro de diálogo.
Mensajes de alarma
El sistema NSO comprobará de manera continua cualquier situación
peligrosa o fallos del sistema mientras éste esté operativo.
En caso de ocurrir una situación de alarma aparecerá la ventana
Alarma.
Si usted ha activado la sirena, se activará una alarma sonora
cuando ocurra cualquier situación de alarma.
Consulte la sección Sistema de alarma para obtener más
información.

Funcionamiento básico | 11
2 Funcionamiento básico
Selección del procesador a controlar
Antes de que el OP40 pueda ser usado, este debe configurarse y asignarse al
procesador. Diríjase al manual de Instalación del NSO para más información.
Los siguientes códigos de colores son empleados en el LED del OP40:
Color/Estado Descripción
Rojo Procesador está apagado
Verde -
Intermitente
Procesador está arrancando
Verde Procesador está encendido
Para tomar el control de la siguiente pantalla, presione la tecla DISPLAY. Una pulsación
corta en DISPLAY alternara entre las diferentes posiciones de LED que hayan sido
asignadas.
Encender y apagar la unidad
ENCENDIDO EN ESPERA APAGADO
2
PWR
1 *
DISPLAY
PWR
PWR
3 s
* Solo para sistemas con múltiples procesadores
Hay un retraso de 5 segundos antes de que la imagen
aparezca en pantalla.
Si el radar está en funcionamiento, puede ponerlo en modo
de espera desde la pantalla de diálogo de Iluminación.
Marcar la Posición de hombre al agua
Si ocurre una situación de emergencia, puede marcar un Waypoint de hombre al agua en
la posición actual de la embarcación pulsando y manteniendo presionada la tecla MOB.
Cuando active la función MOB, las siguientes acciones se llevan a cabo de forma
autómatica:
- Un MOB waypoint se marca en la posición de la embarcación
- El equipo cambia a una ventana de carta ampliada, centrada en la posición del
barco.
- La embarcación comienza a navegar hacia el MOB waypoint
MOB
MOB
DISPLAY
MOB
DISPLAY
PWR

12 | Funcionamiento básico
La embarcación continuará navegando hacia el punto
MOB hasta que se alcance el waypoint o hasta que
seleccione parar esta navegación.
Ajustar la iluminación
La iluminación de la pantalla LCD y de las teclas pueden ajustarse en cualquier momento
independientemente de lo que aparezca en la pantalla.
o
PWR
10
10
3
1 6
PWR
MENU WIN
Se ha incluido y optimizado un modo de noche para las condiciones de poca luz.
¡Los detalles de la carta pueden ser menos visibles cuando se ha seleccionado el modo
Noche!
Manejar el menú del sistema
Seleccionar la opción del menú y conrmar la selección
El menu se maneja usando el botón rotatorio para seleccionar la opción del menú y
después pulsando el botón para confirmar la selección.
También puede manejar el menú usando el teclado de dirección para seleccionar una
opción y después la tecla Aceptar para confirmar la selección.
MENU WIN
MENU WIN
¡Las ilustraciones del manejo del menú a lo largo de este manual harán referencia al
botón rotatorio!
PLOT
GO TO
MARK
VESSEL

Funcionamiento básico | 13
Salir del menú
Pulsando la tecla X , el menú retrocede al nivel anterior y después se sale del menú.
Usar el cursor
El cursor no se muestra por defecto en ningún panel.
Cuando use una de las teclas de dirección en una Ventana de
carta, radar o sonda, el cursor desaparecerá. La ventana de
información del cursor muestra las coordenadas de posición
en la posición del cursor, así como la escala y la orientación
a la embarcación.
En una Ventana de sonda la ventana de información del cursor incluye la profundidad en
la posición del cursor.
En las Secciones de carta, radar y sonda están descritos más usos del cursor.
Para quitar del panel el cursor y los elementos del cursor, presione la tecla X.
Añadir datos en los cuadros de diálogo
Seleccionar el campo de los datos
Navegue entre los campos de datos y las teclas en un cuadro de diálogo, usando el botón
rotatorio y las teclas de dirección.
Puede introducir información pulsando el botón rotatorio o la tecla Aceptar cuando un
campo esté resaltado.
Ajustar los valores
El valor numérico de un campo se ajusta usando el teclado, las teclas de
dirección o el botón rotatorio.
Tiene que pulsar primero el botón rotatorio para cambiar desde la función
de selección de campos a la de editar la barra móvil.
Introducir texto
El teclado alfanumérico se usa para introducir dígitos y texto en los cuadros de diálogo.
Si se piden anotaciones con dígitos, el teclado introducirá dígitos exclusivamente.
Si se aceptan tanto dígitos como letras en el cuadro de diálogo, se pasa de una letra
a otra para esa tecla al pulsarla repetida y brevemente, mientras que si se pulsa
prolongadamente, se introducirá el dígito correspondiente.
TECLA 1ª pulsación 2ª pulsación 3ª pulsación 4ª pulsación/pre-
sionar y mantener
ABC
2
A B C 2
Pulse la tecla IN para las letras mayúsculas y la tecla OUT para las minúsculas.
Dependiendo del tipo de información o datos, se usan teclas diferentes para confirmar
los datos. Cuando se confirme o cancele, se cierra el cuadro de diálogo.
Ayuda de contexto en los
cuadros de diálogo
Cuando selecione un campo de
entrada, aparece una ayuda de
contexto para ese campo.
MENU WIN
MOB
ABC DEF
1 2 3
JKLGHI MNO
4 5 6
TUV
PQRS
WXYZ
7
STBY
AUTO
PWR
8
0
9
IN
OUT

14 | Funcionamiento básico
Trabajar con páginas y ventanas
Seleccionar páginas
Se accede a un grupo de páginas pulsando la correspondiente TAD (Tecla de acceso
directo).
Cuando presione una TAD por primera vez, se muestra la página
por defecto para ese grupo. Cuando más tarde cambie de grupo
de páginas, se mostrará la última página activa en cada grupo.
Si vuelve a pulsar una TAD de un grupo de páginas, se muestra
una lista de páginas disponibles para ese grupo.
Seleccionar una ventana activa
En una pantalla partida puede tener varias ventanas pero sólo una de ellas puede estar
activa al mismo tiempo. Sólo podra acceder al menú de contexto de la ventana activa. La
ventana activa tendrá un contorno de color rojo.
Para cambiar de ventana activa pulse la tecla WIN.
Maximizar una ventana activa
Pulse y mantenga presionada la tecla WIN para maximizar la ventana seleccionada.
Pulsando la tecla WIN , la tecla vuelve a la vista anterior de pantalla partida.
MENU WIN
MENU WIN
3 s
Editar una página
Puede editar cualquier página en un grupo de páginas excepto la primera página.
También puede determinar sus propias páginas para cada TAD como se describe en la
sección Personalizar el sistema .
RADARCHART
ECHO NAV
INFO PAGES
MENU WIN

Uso del simulador | 15
3 Uso del simulador
Modo simulador
La función de simulador dispone de las principales fuentes de datos, de modo que usted
puede ver cómo funciona la unidad sin que esté conectada a la sonda, el radar, el GPS,
etc.
Puede usar el simulador para ayudarle a familiarizarse con su unidad antes de usarla en
el mar.
Cuando el simulador está activado, esto se indica en la parte inferior de
la pantalla.
Modo de demostración
En este modo, la unidad pasa automáticamente por las características principales del
producto, cambia las páginas automáticamente, ajusta valores, abre menúes, etc.
Si usted pulsa una tecla en el modo demostración, esta se pondrá en pausa. Luego de
un período de tiempo, el modo de demostración continuará.
Selección del archivo de simulación
Usted puede seleccionar que archivo de datos
será usado por el simulador.
Se incluye un conjunto de archivos fuente en
su sistema, y usted puede importar archivos
usando una memoria USB o una tarjeta de
memoria. Consulte la sección de Las páginas
de utilidades.
También puede usar sus propios archivos
guardados de sonda en el simulador.
Para saber cómo guardar archivos de sonda,
consulte la sección Usar la sonda.
Ajustes avanzados de simulador
Los ajustes avanzados de simulador le permiten definir cómo funcionará el simulador. Al
guardar los ajustes, estos se usarán por defecto al iniciar el modo simulador.
Fuente GPS
Establece desde dónde se genera la información
GPS.
Velocidad, rumbo y ruta
Usado para ingresar manualmente valores cuando
la fuente GPS se establece en Rumbo simulado
o Ruta simulada. De otro modo, los datos GPS
incluyendo velocidad y rumbo, provienen de los
archivos de sonda o radar seleccionados.
Establecer punto de partida
Mueve la embarcación a la posición actual del cursor.
MENU WIN
x2

16 | Uso del simulador
Página en blanco

Usar las cartas | 17
4 Usar las cartas
En la ventana de carta puede determinar la posición de la embarcación en relación
con la tierra. Puede usar la carta en el equipo para planificar rutas y navegar por rutas
predefinidas.
La función de carta también puede mostrar la posición relativa de la embarcación con
respecto a otros objetos de la carta, planificar y navegar por rutas, crear waypoints,
superponer imágenes de radar y mostrar objetivos del AIS e información.
En la ventana de carta puede superponer imágenes de radar, información del AIS y
símbolos meteorológicos (sólo en Norteamérica).
Simrad NSO viene con la cartografía regional precargada.
Las versiones USA incluyen la cartografía InsightHD para todo USA con relieve. Europa y
el resto de mundo incluyen Cartografía Navionics Costera.
Todas las versiones son compatibles con Navionics Platinum Plus via tarjetas SD.
La ventana de carta
LÍNEAS DE CUADRÍCULA *
EXTENSIÓN
LÍNEA *
ANILLOS DE
DISTANCIA *
TRACK *
RUTA *
EMBARCACIÓN
ESCALA DE LA CARTA
AMPLITUD DE
LA ESCALA
INDICADOR
DEL NORTE
WAYPOINT *
* Opciones de la imagen de carta opcional
Las imágenes opcionales se activan y se deasctivan de forma individual.

18 | Usar las cartas
El símbolo de la embarcación
Cuando existe un GPS y un sensor de compás adecuado conectados al sistema, el
símbolo de la embarcación indica la posición de la embarcación y el rumbo. Sin un sensor
de compás instalado, el símbolo de la embarcación se orientará usando el COG (rumbo
de GPS).
Si no existe ningún GPS disponible, el símbolo de la embarcación incluye un signo de
interrogación.
Lineas de extensión
Las lineas de extensión de la embarcación pueden activarse para mostrar el rumbo,
rumbo de GPS (COG) o ambos. La longitud de esta linea puede ajustarse a una longitud
fija o para que indique la distancia que el barco recorrerá a la velocidad actual en el
periodo de tiempo seleccionado.
Seleccionando longitud infinita se proyectara una linea de extensión continua.
COG
RUMBO
Usar el cursor de la ventana de carta
El cursor no se muestra por defecto en la ventana de carta.
Cuando pulse una de las teclas de dirección, el cursor
aparece y la ventana de posición del cursor se activa.
Cuando esté en el modo cursor, la carta no se desplaza o
gira para seguir la embarcación.
Pulsando la tecla X cambia la posición de la carta entre la embarcación y la posición
anterior del cursor.
Para quitar el cursor y los elementos del cursor del panel, presione la tecla X .
Seleccionar objetos
Cuando coloque el cursor sobre una opción de carta,
un waypoint, una ruta o un objetivo, se muestra
información básica para la opción seleccionada.
Pulsando el botón rotatorio o la tecla aceptar cuando
se ha seleccionado una opción de carta, se muestra
toda la información disponible sobre la opción.
La información emergente tiene que estar activada.
Crear waypoints y rutas
El cursor puede usarse para marcar waypoints y rutas como se describe en la sección
Waypoints, Rutas y Tracks.

Usar las cartas | 19
Medir distancias
El cursor puede usarse para medir la distancia entre la embarcación y una posición, o
entre 2 puntos en la ventana de carta.
Use el siguiente proceso para medir la distancia.
1 Inicie la Función de medida
2 Mueva el cursor hacia el segundo punto de
medición
- Aparecerá una línea desde el centro de la
embarcación hasta la posición del cursor, y
la distancia se mostrará en la Ventana de
información del cursor
Puede restablecer la medición y empezar a medir a
partir de la posición del cursor pulsando la tecla Tilde.
Puede terminar la función de medida pulsando la tecla X.
Escala de la carta
Puede acercar o alejar la carta usando las teclas IN/OUT o usando
el botón rotatorio.
La escala de la carta se muestra en la esquina inferior derecha
de la ventana de carta
Buscar objetos en la carta
El menú de contexto de la carta incluye una función de búsqueda que sirve para
encontrar y mostrar objetos en la carta.
También se puede acceder a esta función desde las Páginas de utilidades.
Mostrar información de la carta
Se puede mostrar la información disponible para la carta y las opciones de la carta en la
posición del cursor o de la embarcación.
Puede seleccionar más detalles sobre una opción seleccionada, pulsando el botón
rotatorio o la tecla Aceptar.

20 | Usar las cartas
Posicionar la carta en la ventana
Seleccionar el centro de la carta
Cuando el cursor se encuentra activo en la ventana, la carta se centra alrededor de la
posición del cursor (modo cursor).
Pulsando la tecla X se quita el cursor y el centro de la carta de sitúa sobre la
embarcación (modo embarcación).
Puede cambiar entre modo cursor y modo embarcación pulsando la tecla X.
Recorrer
Moviendo el cursor al borde de la ventana, la carta se moverá en la dirección del cursor.
Vista avanzada
Esta opción centra la carta un poco mas adelantada a su
embarcación, de esta manera usted puede maximizar su vista hacia
adelante.
Ajustar la orientación de la carta
Existen varias opciones disponibles para cómo orientar la carta en la
ventana. El símbolo de orientación de la carta, en la esquina superior
derecha de la ventana, indica la dirección norte.
Norte arriba
Muestra la carta con la dirección norte hacia arriba.
Corresponde a la orientación habitual de las cartas
náuticas.
Rumbo arriba
Muestra la carta con la embarcación dirigiéndose directamente
hacia arriba en la imagen de la carta.
La información de rumbo se recibe desde un compás. Si el rumbo
no se encuentra disponible, se usa entonces el COG del GPS.
Curso arriba
La carta rota en la dirección del siguiente waypoint cuando
esté en modo de navegación.
Esta opción funciona sólo cuando hay una ruta activa. Si
no existe una ruta activa, se usa la orientación del rumbo
hacia arriba hasta que sea activada la ruta.
Selecionar el nivel de detalle de la carta
Bajo
Es el nivel básico de información y no puede quitarse. Incluye
la información requerida en todas las áreas geográficas. No es
suficiente para una navegación segura.
Medio
Es el nivel mínimo de información suficiente para la navegación.
Completo
Es toda la información disponible de la carta en uso.

Usar las cartas | 21
Categorías de carta
Esta categoría le permite seleccionar qué categorías de carta quiere mostrar el la misma.
Estilo de imagen de la carta
Las cartas se pueden mostrar con dos estilos diferentes de imagen.
La opción 2D de carta muestra información en una modalidad básica de mapa, mietras
que la opción de relieve sombreado muestra la carta incluyendo información del terreno.
2D Relieve sombreado
Superposición de cartas
El radar y la información meteorológica se pueden mostrar superpuestas a la ventana de
carta.
Cuando se selecciona una de las opciones de superposición, el menú de contexto de la
carta se expande para incluir la función básica de la superposición seleccionada.
Las funciones de radar y meteorológicas están descritas en secciones separadas de este
manual.
Datos de carta
El sistema NSO puede usar las bases de datos para cartas de
Simrad y Navionics.
La carta de Navionics incluye opciones que no se encuentran
disponibles en la base de datos de Simrad. Las opciones de
Navionics están descritas en las siguientes secciones.

22 | Usar las cartas
Opciones de carta en la base de datos de Navionics
Vista de la carta
La base de datos de Navionics ofrece opciones de vista en 2D y 3D.
La opción de 2D muestra información de la carta en un modalidad
básica de mapa pero con detalles de Navionics Platinum.
La opción de 3D muestra una vista tridimensional gráfica de
los contornos de la tierra y el mar.
Ampliación 3D
La carta en 3D se acerca usando las teclas IN/OUT.
Ver la carta en 3D
Existen dos modos disponibles para mover la cámara en vistas de 3D: el Modo
embarcación y el Modo cursor. Se cambia entre estos dos modos pulsando la tecla X.
Modo embarcación
En este modo la cámara sigue la embaración. La posición de la embarcación se
encuentra centrada si no está seleccionada la opción de Vista avanzada. El ángulo de la
cámara se encuentra por defecto visto desde arriba y desde detrás de la embarcación,
mirando hacia adelante. Puede inclinar la cámara usando las teclas de dirección arriba/
abajo pero no puede rotar la cámara de forma horizontal.
Modo cursor
Este modo incluye dos opciones diferentes para mover la cámara: Recorrer de cámara y
Rotar cámara. Puede cambiar entre estos dos modos de cámara pulsando el botón rotatorio
o la tecla √. El modo de cámara activa se indica en la parte superior de la ventana.
Recorrer cámara
En este modo, puede alejar la cámara de la posición de la embarcación
y sus alrededores, en la carta, usando las teclas de dirección y puede
hacerla rotar horizontalmente usando el botón rotatorio.
Puede volver a la posición de la embarcación (modo embarcación) pulsando la tecla X.
Rotar cámara
En este modo, la posición de la cámara se mantiene fija y sólo se
puede rotar la cámara. La cámara se rota horizontalmente usando
la teclas de dirección izquierda/derecha o el botón rotatorio. La
cámara puede inclinarse verticalmente pulsando las teclas de dirección arriba/abajo.

Usar las cartas | 23
Superponer fotos
Esta opción le permite ver imágenes fotográficas por satélite
sobre un área, superpuestas a la carta.
La disponibilidad de dichas fotos está limitada a ciertas regiones.
Puede ver las fotos superpuestas tanto en el modo 2D o 3D.
La opción de Superponer fotografías se desactiva cuando aleja la carta más allá de cierto
nivel.
Transparencia de las fotos
La trasparencia selecciona la opacidad de la foto superpuesta.
Fish-n-Chips de Navionics
NSO es compatible con Fish-n-Chips de Navionics (sólo EEUU).
Fish-n-Chips ofrece datos muy detallados y batimétricos de
alta resolución que muestran los contornos del fondo marino.
Los datos de Fish-n-Chips están normalizados en las tarjetas
Navionics Platinium Plus.
Si se encuentra activado algunas características de la carta
pueden desaparecer y sobrecargar la pantalla.

24 | Usar las cartas
Ajustes opcionales para las cartas de Navionics
Anotación
Determina qué información de área (como por ejemplo, nombres de lugar o notas de
área) está disponible en el equipo.
Tipo de presentación
Proporciona información de carta máritima tales como símbolos, colores de las cartas
de navegación y nomenclatura tanto del tipo de presentación internacional como
norteamericano.
Detalles de la carta
Proporciona distintos niveles de información sobre la capa geográfica.
Profundidad de seguridad
Las cartas de Navionics usan diferentes tonos de azul para distinguir las aguas
superficiales de las profundas.
La profundidad de seguridad establece el límite para el que se dibujará la profundidad sin
estas tonalidades de azul.
Profundidad de contorno
Determina qué contornos pueden verse en la carta hasta llegar al valor de la profundidad
del contorno seleccionado.

Waypoints, rutas y tracks | 25
5 Waypoints, rutas y tracks
Waypoints
Un waypoint es una marca ubicada en una carta, en una imagen de radar o en una
imagen de sonda. Cada waypoint tiene una posición exacta con coordenadas de latitud y
longitud. Un waypoint ubicado en una imagen de sonda tendrá un valor de profundidad
además de su información de posición.
Un waypoint es usado para marcar una posición a la que luego puede querer regresar.
Dos o más waypoints pueden además combinarse para crear una ruta.
Colocar waypoints
Puede colocar un waypoint en la posición de la embarcación desde cualquier ventana
pulsando la tecla PLOT.
- Pulsación corta: activa el menú de Gráfico, que le permite especificar detalles del
waypoint en el cuadro de diálogo Waypoint
- Pulsar y mantener: crea un waypoint en la posición actual de la embarcación
PLOT
GO TO
MARK
VESSEL
Puede ubicar un waypoint en la posición del cursor en una ventana de carta, radar y
sonda moviendo el cursor a la posición elegida y pulsando después la tecla PLOT.
Los cuadros de diálogo de waypoint
Puede introducir detalles para un waypoint en el cuadro de diálogo waypoint, que se
activa pulsando el botón rotatorio o la tecla Tilde con un waypoint seleccionado.
El cuadro de diálogo waypoint también puede activarse desde la lista de Waypoints.
Consulte La librería de waypoints, rutas y tracks más adelante en esta sección.

26 | Waypoints, rutas y tracks
Editar waypoints
Puede editarse un waypoint en el cuadro de diálogo Waypoint. También puede mover el
waypoint manualmente usando el cursor;
1 Seleccione el waypoint ubicando el cursor sobre él
2 Pulse la tecla MENU y seleccione la opción mover
3 Use las teclas de dirección para mover el cursor a una nueva posición
4 Conrme la nueva posición pulsando el botón rotatorio o la tecla tilde
Se indica el modo de mover waypoint en la parte superior de
la ventana.
También pueden editarse waypoints desde la Lista de
waypoints tal como se describe más adelante en esta sección.
Ajustes de alarma de waypoint
Puede establecer un radio de alarma para cada waypoint
individual que usted cree.
Cuando la alarma de waypoint está activada en el panel de
alarma y la embarcación entre al radio definido, se activará un
mensaje de alarma.
Si quiere activar un radio de alarma para un punto de una
ruta, debe primero convertir este punto en un waypoint.
Tracks
Un track es una presentación gráfica del recorrido
histórico de la embarcación, que le permite rastrear su
viaje. Un track puede convertirse luego en una ruta en el
cuadro de diálogo Tracks descrito más adelante en esta
sección.
El sistema está preconfigurado de fábrica para rastrear
automáticamente el movimiento de la embarcación.
El sistema continuará grabando el track hasta que la
longitud del track alcance el ajuste máximo de puntos de track, y luego comenzará a
sobreescribir automáticamente los puntos más viejos de seguimiento.
La función de seguimiento automático puede desactivarsee desde la librería de Tracks
del modo descrito más adelante.
Ajustes de track
El track está compuesto por una serie de puntos de track
(seguimiento) conectados por segmentos de línea cuya longitud
depende de la frecuencia de registro de seguimiento.
Puede elegir ubicar los puntos de seguimiento en base a ajustes
de tiempo, distancia, o permitiéndole al sistema NSO colocar un
waypoint automáticamente cuando se registra un cambio de curso.
¡La opción Tracks además debe estar activada en los ajustes de carta para ser visible!
Consulte la sección Carta.
Crear un nuevo track
Usted define los ajustes de track y comienza el
nuevo track desde el menú de Gráfico.
También puede iniciarse un nuevo track desde
la librería de Tracks descrita más adelante en
este capítulo.
PLOT
GO TO
MARK
VESSEL

Waypoints, rutas y tracks | 27
Rutas
Una ruta está compuesta por una serie de waypoints
introducidos en el orden en que quiera navegarlos.
Cuando coloca el cursor sobre una ruta, se volverá azul y
verá el nombre de la ruta.
Crear nuevas rutas usando el cursor
Puede crear una nueva ruta en la ventana de Carta del siguiente modo:
1 Pulse la tecla PLOT y seleccione la opción nueva ruta
2 Use las teclas de dirección para mover el cursor a la posición deseada para el
primer waypoint
3 Conrme la posición pulsando el botón rotatorio
4 Mueva el cursor a la posición del siguiente waypoint y conrme la posición
pulsando el botón rotatorio nuevamente
5 Continúe moviendo el cursor y pulsando el botón rotatorio hasta
que todos los waypoints de la ruta hayan sido creados
6 Pulse la tecla MENU para guardar la ruta
Se indica el modo Editar ruta y la información de la ruta en la parte superior de la
ventana hasta que la ruta se guarda.
También puede crearse una ruta desde la Lista de rutas tal como se describe más
adelante en esta sección.
Editar una ruta usando el cursor
Puede editar una ruta en una ventana de carta usando el cursor;
1 Seleccione la ruta ubicando el cursor sobre ella
- Se resaltará la ruta
2 Pulse la tecla MENU y seleccione la opción editar
- Se indica el modo Editar ruta y la información de la ruta en la parte
superior de la ventana
3 Mueva el cursor al sitio que quiere editar, un waypoint o un track, y
pulse la tecla MENU nuevamente para elegir las opciones de edición
- Las opciones disponibles en el menú Editar ruta dependen de que el
cursor esté ubicado sobre un waypoint o sobre un track
4 Use el cursor para agregar, mover o eliminar cualquier elemento
5 Pulse la tecla MENU de nuevo para guardar los cambios
PLOT
GO TO
MARK
VESSEL

28 | Waypoints, rutas y tracks
Página waypoints, rutas y tracks
Las páginas de Utilidades incluyen una página Waypoints, Rutas y Tracks. Esta le ofrece
funciones avanzadas de edición y ajustes para todos aquellos elementos disponibles en
su sistema.
Hay varios modos de acceder a la librería. Un par de ellos se pueden ver abajo.
Se puede desplazar entre las pestañas en la librería usando las teclas de izquierda/
derecha.
Puede accederse a las opciones de edición y ajustes pulsando la tecla MENU cuando uno
de los elementos esté seleccionado.
PLOT
GO TO
MARK
VESSEL
PAGES

Uso del radar | 29
6 Uso del radar
La ventana de radar puede ser configurada como vista de pantalla completa o
combinarse con otras ventanas.
La imagen de radar también puede visualizarse como capa superpuesta a la vista de
carta 2D, y 3D de Navionics. Consulte la sección Carta.
La ventana de radar
MARCADORES DE
DISTANCIA *
ANILLOS DE
DISTANCIA *
INDICADOR
DE NORTE *
CONTROLES
ROTATORIOS
DISTANCIA
ORIENTACIÓN
MOVIMIENTO
BARRA DE
DATOS*
LÍNEA DE
RUMBO *
COMPÁS *
* Simbología de radar opcional
La simbología opcional se activa y
desactiva de forma individual.
La simbología puede activarse
o desactivarse colectivamente.

30 | Uso del radar
Los modos de operación del radar
Los modos de operación del radar se controlan desde la unidad NSO. Los siguientes
modos están disponibles:
Apagado
El escáner de radar está desconectado
Espera
El escáner de radar está encendido, pero el radar no está
transmitiendo señales.
El radar también puede pasarse a modo de espera pulsando la
tecla PWR.
Transmitir
El escáner está activo y transmitiendo. Los blancos detectados serán representados en
la pantalla de radar (PPI).
Si el radar esta apagado o en espera, puede activar o
desactivar el radar desde la pantalla de radar.
Usar el cursor para seleccionar Transmitir/Apagar y
confirmar con la tecla Aceptar.
Ajuste de la imagen de radar
Posición del centro del radar
Puede mover el PPI centro del radar a distintas posiciones en la ventana de radar.
Las siguientes opciones están disponibles:
Centro
Ajuste por defecto. El PPI centro de radar está centrado en el panel de radar.
Vista Avanzada
Mueve el PPI centro de radar hacia la parte inferior de la ventana para permitir una
máxima visión hacia adelante.
Desplazado
Le permite mover el PPI centro a cualquier posición en la ventana de radar.
1 Seleccione la opción Desplazado
2 Use las teclas de dirección para disponer el centro de radar
3 Conrme el ajuste con la tecla Tilde
Centro Vista avanzada Personalizado
Ajuste del movimiento del radar
Puede elegir cómo se mueve su embarcación en la imagen de radar.
El movimiento de radar sólo puede cambiarse cuando el radar está transmitiendo. Si no
hay información de rumbo o COG, sólo estará disponible el modo Movimiento Relativo.
PWR

Uso del radar | 31
Movimiento relativo
Su embarcación permanece en una ubicación fija en la pantalla de radar y todos los
demás objetos se desplazan relativos a su posición. Puede elegir la posición de la
ubicación fija, consultar Posición del centro del radar.
El ajuste por defecto es Movimiento relativo.
Movimiento Real
En el modo Movimiento Real, su barco y el resto de blancos, se mueven a través de la
pantalla de Radar tal como usted navegue. Todos los objetos inmóviles permanecerán
fijos en su posición. Cuando el símbolo del barco alcance el borde de la pantalla, la
imagen de radar se redibujará con el símbolo del barco posicionado en el centro de la
pantalla.
Cuando Movimiento Real esta seleccionado, aparecerá una nueva opción en el menú para
reiniciar el modo Movimiento Real. Esta opción se utiliza para reiniciar manualmente la
imagen de radar y el símbolo del barco al centro de la pantalla.
Cambio del color de la imagen
Pueden usarse distintos colores (paletas) para representar los detalles
en su ventana de radar.
Ajuste de la orientación del radar
Rumbo arriba
Gira la imagen de radar para mostrar el rumbo actual directamente en la
parte superior de la imagen de radar.
Norte arriba
Gira la imagen de radar con la dirección norte hacia arriba.
Curso arriba
Gira la imagen de radar para mostar el curso actual de navegación
directamente hacia arriba.
Esta opción sólo funciona cuando la embarcación está navegando hacia una ruta activa.
Si la embarcación no está navegando hacia una ruta activa, se usará la orientación
rumbo arriba hasta que se inicie la función de navegación.
Ajuste del umbral del radar
El umbral establece la intensidad de señal requerida para las señales de radar más
débiles. Las señales de radar por debajo de este límite se filtrarán y no se mostrarán.
Valor por defecto: 30%.
Usar el cursor en la ventana de radar
El cursor no se muestra por defecto en ninguna ventana.
Cuando presione una de las teclas de dirección, el cursor se hará
visible y la ventana de posición del cursor se activará.
El cursor puede usarse para medir una distancia a un objetivo, y
para seleccionar objetivos tal como se describe más adelante en
esta misma sección.
Para quitar del panel el cursor y los elementos del cursor, presione la tecla X.

32 | Uso del radar
Optimización de la imagen de radar
Puede mejorar la imagen de radar
ajustando la sensibilidad del radar, y
filtrando de las señales los efectos de
ecos aleatorios causados por el mar y
condiciones meteorológicas.
Los parámetros se ajustan usando el
botón rotatorio. Puede elegir entre las
imágenes de control presionando el
botón rotatorio. Se expandirá el control
activo y mostrará su nombre completo.
Puede entonces ajustar el valor girando
el control rotatorio.
Ganancia
La ganancia controla la sensibiliad del receptor de radar.
Una mayor ganancia hace al radar más sensible a los retornos de señal de radar,
permitiéndole mostrar objetivos más débiles. Si la ganancia se ajusta demasiado alta, la
imagen queda saturada con ruido de fondo.
La ganancia tiene 2 modos; Automático y Manual. Puede cambiar entre los modos
manteniendo pulsado el botón rotatorio. Sólo puede ajustar el valor de ganancia girando
el botón rotatorio cuando está en modo manual.
Filtro de mar
El filtro de mar se usa para filtrar el efecto de retornos de eco aleatorios producidos por
olas o aguas bravas cerca de la embarcación.
Al aumentar el filtrado de mar, se reducirá la saturación en pantalla producida por loecos
de olas.
El filtro de mar tiene 3 modos: automática-puerto, automática-mar adentro y manual.
Una pulsación larga del control rotatorio pasará entre los modos. Sólo puede ajustar el
valor de saturación girando el botón rotatorio cuando está en modo manual.
Filtro de lluvia
La opción filtro de lluvia se usa para reducir el efecto de lluvia, nieve u otras condiciones
meteorológicas sobre la imagen de radar.
El valor no debería aumentarse demasiado pues podría filtrar objetivos reales.
Rechazo de interferencia de radar
La interferencia podría deberse a señales de radar provenientes de otras unidades de
radar que estén operando en la misma banda de frecuencia.
Un ajuste alto reducirá la interferencia de otros radares.
Para no eliminar objetivos, el rechazo de interferencia debe fijarse en un valor bajo
cuando no exista interferencia.

Uso del radar | 33
Escaneo rápido (solo Radar Broadband)
Incrementa la velocidad de giro del radar cuando la escala es 2nm o
menor. Está opción le proporciona una actualización mas rápida en el
movimiento de los blancos en esas escalas.
Curva STC (solo Radar Broadband)
El STC (Control de Tiempo de la Sensibilidad) controla la sensibilidad de
la señal del radar cercana a su barco. La curva STC tiene 3 opciones de
ajuste. Su selección debe basarse en las condiciones actuales del mar.
Superposición de radar
Puede superponer la Imagen de radar en la Carta. Esto puede ayudarle a interpretar
fácilmente la imagen de radar relacionando los blancos del radar con los objetos en la
carta.
Al seleccionar la superposición de radar, las funciones operativas básicas de radar están
disponibles desde el menú contextual de la página de Carta.
Hay más información disponible sobre superposición de radar en la sección Usar las
cartas de este manual.
Denición de una zona de guarda alrededor de su
embarcación
Una zona de guarda es una región (circular o un sector) que usted puede definir en la
imagen de radar. También puede definir si se activará una alarma cuando un objetivo del
radar entre o salga de la zona.
Denición de una zona circular
1 Active una de las zonas de guarda
2 Seleccione forma circular
- Ahora se colocará una zona de guarda en la
imagen de radar
3 Seleccione la opción de menú usada para ajustar la zona
- El menú desaparecerá y se aumentará el
símbolo rotatorio para la distancia de cobertura
4 Use el botón rotatorio para ajustar la distancia
y la profundidad.
- Puede cambiar entre los ajustes de distancia y
profundidad pulsando el botón rotatorio.
5 Pulse la tecla Menu para guardar los ajustes de
zona de guarda

34 | Uso del radar
Denición de una zona por sector
1 Active una de las zonas de guarda
2 Elija una forma de sector
- Aparecerá una zona de guarda en la
imagen de radar
3 Seleccione la opción de menú usada para ajustar la zona
- El menú desaparecerá y se aumentará el símbolo
rotatorio para la distancia de cobertura.
4 Use el botón rotatorio para ajustar la distancia,
la profundidad, la orientación y el ancho. Puede
cambiar entre los ajustes pulsando el botón
rotatorio
5 Pulse la tecla Menu para guardar los ajustes de
zona de guarda
Otras embarcaciones en la imagen de radar
Otros blancos provenientes de un receptor de AIS (si está instalado) o de la función
MARPA pueden mostrarse en la pantalla de Radar o en la de superposición de Radar
y Carta. También puede ver mensajes y posición de dispositivos DSC que transmiten
dentro del rango de cobertura.
Para obtener más información, consulte la sección Otras embarcaciones en carta e
imagen de radar.
Seguimiento de blancos
Los blancos visibles en pantalla pueden seguirse usando la función MARPA (Mini
Automatic Radar Plotting Aid).
NOTA: MARPA requiere datos de rumbo tanto en el Radar como en el NSO.
1 Seleccione Adquirir blancos en el menú
2 Coloque el cursor sobre el blanco y pulse la tecla de tilde para conrmar
3 Repita el proceso para otros blancos
4 Presione la tecla X cuando haya nalizado la selección de blancos
Una vez que sus blancos estén identificados, puede tardar hasta 10 pasadas de radar
adquirir y rastrear el objetivo.
Conguración de blancos
Expansión de blancos
Puede seleccionar aumentar el tamaño de todos los blancos pequeños en las
ventanas de radar.
Estelas de blancos
Puede definir cuánto tiempo permanecerá en pantalla el rastro dejado
por cada blanco en su ventana de radar. También puede desactivar las
estelas de blancos.
NOTA: Se recomienda Movimiento Real para el uso de las estelas de blancos.

Uso del radar | 35
Limpieza de estelas de blancos de la ventana
Cuando las estelas de los blancos son mostradas en la pantalla, el menú mostrará
una opción adicional para poder borrar las estelas de blancos de su ventana de radar
momentáneamente. Las estelas de blancos comenzarán a aparecer nuevamente a menos
que los desactive tal como se describió antes.
Medición de distancia y rumbo hacia un blanco.
Usando el cursor
Cuando mueve el cursor en una ventana de radar, se activará la
ventana de información de cursor.
La ventana de cursor muestra la distancia y rumbo de su
embarcación a la posición del cursor.
Anillos de distancia
Los anillos de distancia se muestran a distancias fijas desde la embarcación en base al
rango de distancia del radar.
Puede usar los anillos de distancia para calcular la distancia entre un eco de radar y su
embarcación.
EBL/VRM
La línea electrónica de demora (EBL) es una línea que parte del centro de la
embarcación. La orientación de la línea permanece constante mientras la embarcación
se desplaza. El marcador de distancia variable (VRM) es un anillo de distancia controlado
por el usuario que rodea a la embarcación.
La función EBL/VRM se usa para medir distancias y demoras desde la posición de la
embarcación a un blanco. Pueden colocarse dos EBL/VRM en la imagen de radar.
Colocación de una EBL/VRM
1 Mueva el cursor a un blanco seleccionado
2 Pulse la tecla Menu
3 Seleccione una de las opciones EBL/VRM
- El menú desaparecerá de la pantalla y se trazarán la
línea EBL y el anillo VRM en la imagen de radar.
- La ventana de información EBL/VRM mostrará la
distancia y demora desde la embarcación al
marcador
4 En caso de ser necesario, use las teclas de dirección para reubicar
el marcador
5 Pulse la tecla Menu de nuevo para guardar la posición
Puede reubicar una EBL/VRM fijada, desactive la ventana de información
EBL/VRM y quite el marcador desde el mismo menú.
Cuando reubique el marcador EBL/VRM use el cursor y guarde la posición
tal como se describió antes.

36 | Uso del radar
Radar Dual
La capacidad del radar dual permite que dos fuentes de radar se muestren en la pantalla
de forma simultánea. Conecte dos radares Broadband o dos radares de pulso o bien uno
de cada tipo y podrá obtener ambas imágenes al mismo tiempo.
Si un radar de pulso y un radar Broadband están transmitiendo imágenes simultáneamente
en el mismo barco, pueden visualizarse interferencias en el radar Broadband en la mayoría
de las escalas. Se recomienda trasmitir sólo con un radar al mismo tiempo; por ejemplo,
el radar Broadband para una navegación normal o el radar de pulso para localizar frentes
meteorológicos, denir líneas de costa a distancia y detectar Racons.
Configuración inicial:
1. Encienda el sistema y los dos radares.
2. En cualquier pantalla, el primer radar que se detecte será el utilizado como fuente
para todos los paneles de carta y de radar. Esta configuración se mantendrá por
defecto cada vez que se encienda el sistema hasta que se cambie.
La fuente del radar se identifica mediante un tipo de radar con un número de cuatro
dígitos y se muestra en la esquina superior izquierda de los paneles de carta y de radar.
El número de cuatro dígitos coincide con los cuatro últimos dígitos del número de serie
de los radares.
3. Para un panel de radar, es posible cambiar la fuente del radar en el menú tal y como
se muestra a continuación

Uso del radar | 37
4. Para un panel de carta (con superposición de radar), es posible cambiar la fuente del
radar en el menú tal y como se muestra a continuación:
5. Para páginas con más de un panel de carta o de radar, es posible configurar las
diferentes fuentes de radar para cada panel:

38 | Uso del radar
6. La selección de fuentes de radares no se aplica a todas las pantallas, sino a aquella
en la que se detectó la fuente. La fuente del radar deberá configurarse para cada
pantalla de la red.
Una vez que se hayan configurado las fuentes del radar, se utilizarán en cada inicio
del sistema hasta que el usuario las cambie.
7. Para visualizar o cambiar algún elemento del menú de instalación para una fuente
de radar en particular, debe seleccionar dicha fuente primero, como se muestra a
continuación:

Uso del radar | 39
Operación del Broadband 4G
TM
Radar
Doble escala
Cuando esté conectado al Radar Broadband 4G™, podrá activar el radar en modo Doble
escala. El radar 4G se mostrará en el menú de fuentes del radar como dos fuentes de
radar virtuales A y B. Los controles de escala y de radar de cada fuente de radar virtual
son completamente independientes*. Es posible seleccionar una fuente para un panel de
carta o de radar en particular siguiendo los mismos pasos que los descritos en la sección
anterior referente al radar dual.
El dispositivo MARPA es completamente independiente y es capaz de rastrear hasta 10
blancos para cada fuente de radar virtual.
Asimismo, es posible definir hasta dos Zonas de Guarda independientes para cada fuente
de radar virtual.
*Algunos controles relacionados con las propiedades físicas del propio radar no son
independientes a la fuente. Dichos controles son el escaneo rápido, la altura de la
antena y la alineación de demora.

40 | Uso del radar
Controles de radar 4G
El Radar Broadband 4G™ dispone de varios controles que no están presentes en ningún
otro radar Navico:
Separación de blancos
El control Separación de blancos le permite controlar la diferenciación de blancos del
radar como se ilustra a continuación:
Apagado Bajo Medio Alto

Uso del radar | 41
Rechazo de ruido
El control Rechazo de ruido establece la cantidad de ruido que filtra el radar. La
visibilidad de blancos incrementa en grandes escalas si este control se establece en Alto
o Bajo, pero provoca una disminución de la calidad de la diferenciación del blanco.
Sugerencia: para obtener el máximo rendimiento de la escala de su 4G, transmita solo
a una escala y establezca el control Rechazo de ruido en Alto y el umbral en lo más bajo
posible. La configuración por defecto es 30% para obtener menos interferencias en la
pantalla. Si está desactivado en la unidad NSE, NSO y Zeus, el rendimiento de alcance
se iguala, aproximadamente, al del radar 3G. En algunas zonas en las que puedan existir
interferencias extremadamente elevadas, pruebe a desactivarlo para conseguir una
imagen de radar mejor.
Escaneo rápido
El control Escaneo rápido establece la velocidad de rotación del escáner del radar. Las
opciones del Radar Broadband 4G™ son Apagado/Medio/Alto (24/36/48 rpm nominal).
Sin embargo, la velocidad del Escaneo rápido puede verse limitada en determinados
modos de funcionamiento:
- En el modo Doble escala, la velocidad se limita a 24 rpm.
- Si el Rechazo de ruido se ha establecido en Bajo o Alto, la velocidad se limita a
21 rpm para escalas 1 nm o superiores.

42 | Uso del radar
Rechazo de interferencias direccionales
Este modo funciona automáticamente cuando GANANCIA = AUTO y MAR = PUERTO
o MAR ADENTRO. El objetivo es permitir que los pequeños navíos se hagan ver en
dirección sotavento del filtro de mar. La GANANCIA del receptor del radar aumenta
dinámicamente durante el barrido, en dirección sotavento, para aumentar la visibilidad
del blanco cuando el mar está agitado.
Cuando GANANCIA o MAR = MANUAL, el modo Rechazo de interferencias direccionales
se apagará (no direccional).
Además, los ajustes de la curva STC (control de tiempo de la sensibilidad) CALMA,
MODERADA o MAREJADA están disponibles en el menú de opciones del radar para
personalizar mejor la optimización de la imagen del radar.
Reiniciar ID dispositivo
No es necesario reiniciar el ID del dispositivo
para llevar a cabo una operación con el radar
dual. Esta función se ofrece para habilitar
pantallas que no son compatibles con los radares
duales con el fin de visualizar una fuente de
radar en particular. Esta operación debe llevarse
a cabo solo con el radar que se vaya a utilizar
para el reinicio del ID del dispositivo conectado a
la red.
El botón para reiniciar el ID del dispositivo está
situado en la ventada de Estado del radar, en el
menú de Instalación del radar. Una vez realizada
esta acción, apague y encienda el radar y vuelva
a conectar otros radares. El radar reiniciado
se mostrará en la pantalla Navico que no es
compatible con los radares duales.

Otras embarcaciones en carta y radar | 43
7 Otras embarcaciones en carta y radar
Si el sistema NSO tiene un sensor de rumbo, la función MARPA (Mini Automatic Radar
Plotting Aid) puede usarse para realizar el seguimiento de blancos.
Si un dispositivo de AIS esta conectado, cualquier blanco detectado por este dispositivo
puede ser mostrado y seguido. Usted puede incluso ver mensajes y posición de los
dispositivos de transmisión DSC a su alcance.
Los blancos AIS pueden mostrarse superpuestos en la pantalla de radar y carta, y ambas
funciones son importantes para una navegación segura y sin colisiones.
Usted puede definir alarmas para notificarle si un blanco se acerca demasiado o si se pierde.
Embarcaciones AIS en una ventana de carta Embarcaciones AIS en una ventana de radar
Símbolos de blancos
El sistema NSO usa los símbolos de blancos que se ven abajo:
Símbolo Descripción
Blanco AIS parado (inmóvil o fondeado).
Blanco AIS móvil y seguro con línea de extensión de rumbo.
Adquiriendo blanco MARPA. Normalmente tarda hasta 10 rotaciones
completas de escáner.
Siguiendo blanco MARPA, inmóvil o fondeado.
Siguiendo blanco MARPA y seguro con líneas de extensión.
Blanco AIS peligroso,
ilustrado con línea gruesa.
Un objetivo se dene como peligroso en
base a los ajustes de Rango CPA, TCPA
y AIS. Consulte Denición de límites
de alarma más adelante en esta misma
sección.
Blanco MARPA peligroso
Blanco AIS perdido.
Cuando no se hayan recibido señales dentro
de un límite de tiempo, se denirá a un blanco
como perdido.
El símbolo de blanco representa la última
posición válida del blanco antes de que se
perdiera la recepción de datos.
Blanco MARPA perdido
Blanco AIS seleccionado,
activado al colocar el cursor
sobre un símbolo de blanco.
El blanco regresará al símbolo de blanco por
defecto cuando se mueve el cursor.
Blanco MARPA seleccionado

44 | Otras embarcaciones en carta y radar
Cómo visualizar otras embarcaciones
Selecciona qué blancos mostrar.
Establece la longitud de la línea de extensión
para su embarcación y otras embarcaciones.
La información de rumbo es leída desde un
sensor activo de rumbo, y la información COG
es recibida desde el GPS activo.
La longitud de la linea de extensión puede
ajustarse a una longitud ja o para que indique
la distancia que el barco recorrerá en el
periodo de tiempo seleccionado.
COG
RUMBO
Selecciona cómo usar la línea de extensión
para indicar velocidad y rumbo para blancos;
ya sea como movimiento real en la carta o
relativo a su embarcación.
Establece la orientación del ícono AIS; ya sea
basado en orientación o información COG.
Recepción de mensajes MMSI
Debe tener su propio número MMSI introducido en el sistema NSO
para poder recibir mensajes provenientes de embarcaciones AIS y
DSC.
La opción Mensaje de embarcación en los ajustes de alarma debe
estar activada para poder ver cualquier mensaje MMSI, consulte la
próxima página.
Denición de una zona de protección alrededor de su
embarcación
Puede definir una zona de guarda invisible alrededor de su embarcación. Cuando
un blanco se acerca a esta distancia desde su embarcación, el símbolo cambiará a
"peligroso" . Se activará una alarma en caso de haberla activado en el panel de ajustes
de Alarma.

Otras embarcaciones en carta y radar | 45
Ajustes de alarma de blancos
Puede definir alarmas para alertarle si un blanco entra en ciertos límites de distancia
predefinidos, o si un blanco previamente identificado se pierde.
Pueden establecerse las siguientes alarmas:
ID de alarma Descripción
Embarcación
peligrosa
Controla si se activa una alarma cuando una embarcación entra en
la zona de guarda predenida.
La casilla de vericación controla si se muestra la ventana
emergente de alarma y si suena la alarma. La zona de guarda
dene cuándo una embarcación es peligrosa, independientemente
del estado activo/inactivo.
Embarcación AIS
perdida
Establece la distancia para embarcaciones perdidas. Se activará
una alarma si se pierde una embarcación dentro de esta distancia.
Mensaje de
embarcación
Controla si se activará una alarma al recibir un mensaje desde un
blanco AIS.
Blanco MARPA
perdido
Controla si se activará una alarma cuando se pierde un blanco
MARPA.
MARPA no
disponible
Controla si se activará una alarma en caso de no tener las entradas
necesarias para el funcionamiento de MARPA (con posicionamiento
GPS y sensor de rumbo conectados al servidor de radar).

46 | Otras embarcaciones en carta y radar
Ver información sobre blancos
Cuando seleccione una embarcación en la carta, el símbolo cambiará al símbolo de
blanco Seleccionado, y verá el nombre de la embarcación.
Puede visualizar información detallada para un blanco seleccionado pulsando el mando
giratorio o la tecla MENU.
También puede obtener información sobre otras embarcaciones de la página AIS tal
como se describe enla sección páginas de Utilidades.
Búsqueda de otras embarcaciones AIS
Puede buscar otras embarcaciones equipadas con dispositivos AIS en el menú de carta
o desde las funciones Buscar o AIS de las páginas de utilidades (consulte la sección
páginas de Utilidades).

Utilización de la ecosonda| 47
8 Utilización de la ecosonda
La función de la ecosonda proporciona una visión del agua y del fondo por debajo de su
barco para que le permita detectar peces y examinar la estructura del fondo marino.
La ecosonda muestra la columna de agua moviéndose de derecha a izquierda en el
panel.
Puede seleccionar entre visualizar un solo panel o varias vistas partidas tal y como se
describe más adelante en este capítulo.
RANGO
SUPERIOR
PROFUNDIDAD
RANGO
INFERIOR
TEMPERATURA
FRECUENCIA
ZOOMUMENTO
GANANCIA/
INDICADORES
DE COLOR
ARCOS DE
PECES
FONDO
MARINO
GRAF*
TEMP
ESCALA DE
RANGO
BARRAS DE
ZOOM
*
LINEA DE PRO-
FUNDIDAD
*
ECO
AMPLIADO
*
Las imágenes opcionales de sonda se activan/desactivan de forma individual, consulte
“Panel de ajustes de la sonda” como se describe más adelante en este capítulo.
Ajuste del panel de la ecosonda
Ell panel Sonda se regula desde de menú principal del panel.
Escala
El ajuste de escala determina la profundidad del agua visible en la pantalla.
Auto escala
Si selecciona Auto, el sistema mostrará automáticamente el rango total desde la
superficie del agua hasta el fondo marino.
Niveles de escala predenidos
Puede seleccionar varios niveles de escala predefinidos.
Escala personalizada
Esta opción permite establecer de forma manual los límites inferior y
superior de la escala.
Límites superiores e inferiores
Controla la escala de la profundidad (Límite inferior), y le permite
elegir los límites inferiores y superiores a lo largo de toda la columna
* Elementos opcionales de la imagen de ecosonda

48 | Utilización de la ecosonda
de agua. Los límites inferiores y superiores deben tener al menos una diferencia de 1.5
metros (5 pies).
Normalmente la escala es controlada por las teclas IN y OUT, usted puede cambiar estas
teclas para permitir que puedan ajustar el zoom marcando la opción “Cambiar controles
escala/zoom” en Sistema, Ajustes, Avanzadas, menú de Sonda.
LÍMITE SUPERIOR ES 30 PIES
LÍMITE INFERIOR ES 50 PIES
El panel Sonda puede ajustarse a pantalla completa o dividirse en dos y ver una imagen
en el lado derecho y otra en el izquierdo.
Opciones de pantalla dividida
Zoom
El modo de zoom presenta una vista ampliada de
la imagen de la sonda en la parte izquierda del
panel.
Por defecto el nivel del zoom se ajusta a 2x.
Puede seleccionar en el menú desplegable hasta
un zoom de 8x.
Las barras de zoom de escala de la parte derecha
de la pantalla muestran la escala que se está
ampliando. Si aumenta el factor del zoom, la escala
de ampliación se reduce. Verá esto como una
reducción de la distancia entre las barras del zoom.
Zoom fondo
El modo de zoom de fondo es útil cuándo se
desea ver ecos cerca del fondo marino.
En este modo se muestra en el lado izquierdo del
panel una imagen donde el fondo está aplanado.
La escala se cambia para medir desde el fondo
marino (0) hacia arriba. El fondo y la línea de cero
siempre se muestran en la imagen de la izquierda,
independientemente de la escala.
El factor de escala de la imagen de la parte
izquierda del panel se ajusta tal como se ha
descrito para la opción de zoom.
Frecuencia de la sonda
La unidad NSO es compatible con varias
frecuencias de transductor. Las frecuencias
disponibles dependen del módulo de sonda y el
modelo del transductor conectado.
Puede ver dos frecuencias al mismo tiempo si
configura una sonda doble.
Barras de zoom

Utilización de la ecosonda| 49
Rechazo de ruido
Las interferencias de señal producidas por las bombas de achique, vibraciones del motor
y burbujas de aire pueden generar ruido en la imagen.
La opción de rechazo del ruido filtra la interferencia de la señal y reduce la distorsión en
la pantalla.
Velocidad de desplazamiento
Puede seleccionar la velocidad de desplazamiento de una imagen de sonda en la pantalla.
Una velocidad alta de desplazamiento actualizará la imagen rápidamente, mientras que
una velocidad de desplazamiento lenta presentará un historial más largo.
Nivel de zoom
Puede utilizar las teclas IN / OUT para seleccionar el nivel de zoom de la
imagen de la sonda.
El nivel de zoom se muestra en la parte superior izquierda del panel de
sonda.
Al hacer zoom en la imagen, el fondo marino se mantendrá cerca de la parte inferior
de la pantalla, independientemente de que se haya seleccionado la opción de escala
automática o manual.
Si la escala establecida es considerablemente inferior a la profundidad real, la unidad no
será capaz de llegar al fondo al hacer zoom.
Si el cursor está activo, la unidad hará zoom en el lugar donde apunta el cursor.
Conguración de los ajustes de ganancia y color
Ganancia
La ganancia controla la sensibilidad de la
ecosonda.
Cuanto más se aumenta la ganancia, la
imagen se muestra con más detalles.
Sin embargo, cuanto más alto de ajusta
la ganancia también se introduce mayor
interferncia de ecos indeseados de fondo
en la imagen. Por el contrario, si la
ganancia se establece demasiado baja
los ecos débiles no podrán verse.
Auto ganancia
La auto ganancia mantendrá el nivel de
sensibilidad que funcionará bien en la
mayoría de las condiciones.
Con la ganancia en modo automático, puede ajustar un desfase positivo o negativo que
se aplica a la autoganancia. Esto se indica como A-40 - A40.
Color
Los signos de eco fuertes y débiles tienen colores diferentes para indicar las distintas
intensidades de señal. Los colores que se utilizan dependen de la paleta seleccionada.
Cuanto más incrementa el color, los ecos recibidos se mostrarán en color más fuerte.
Ajuste de Ganancia y color
La ganancia y el color se ajustan utilizando el botón giratorio.
Puede seleccionar entre Ganancia y Color pulsando el botón giratorio. El control activo
aumenta y muestra su nombre completo. Luego puede ajustar el valor girando el botón.
Si pulsa y mantiene el botón giratorio cuando selecciona la Ganancia, puede cambiar
entre la opción de Auto o Manual.
IN
OUT

50 | Utilización de la ecosonda
PLOT
GO TO
MARK
VESSEL
Si no se realizan ajustes en 3 segundos los controles vuelven al tamaño por defecto.
Utilización del cursor en el panel de la ecosonda
Por defecto el cursor no se muestra en la imagen de la sonda.
Cuando pulse una de las teclas de dirección el cursor, aparecerá
visible, la profundidad en la posición del cursor se mostrará, se
activara la ventana de información y la barra de historial.
Utilice las teclas con flechas para mover el cursor en
cualquier dirección en la pantalla.
Para quitar el cursor y los elementos del cursor del panel, pulsar la tecla X.
Visualización del histórico de la sonda
Siempre que el cursor se muestre en el panel de la sonda, la barra de desplazamiento roja también
aparece. La barra de desplazamiento muestra la imagen que está actualmente visualizando en
relación con el historial total en imágenes almacenadas de la ecosonda.
Cuando la barra de desplazamiento está en el extremo de la derecha esto indica que
está visualizando los últimos sondeos. Si mueve el cursor al lado izquierdo de la pantalla
la barra de historia comenzará a desplazarse hacia la izquierda, y el desplazamiento
automático se desconecta a medida que se reciben nuevos ecos.
Para continuar con el desplazamiento de la ecosonda, mueva el cursor a la derecha hasta
que la barra roja de la historia alcanza el lado derecho de la imagen, o pulse la tecla X.
Utilización del cursor para posicionar un waypoint
Puede posicionar un waypoint en la posición del cursor
pulsando la tecla PLOT tal y como se describe en la sección de
waypoints, rutas y tracks.
Cuando se pulsa la tecla el símbolo del waypoint y el ID se
posicionan en la posición del cursor.
Sólo se incluirá información de profundidad en las marcas
colocadas utilizando el cursor.
Medir la distancias
El cursor puede utilizarse para medir la distancia entre las posiciones de dos puntos en la
imagen de la sonda. Es más sencillo utilizar la función para la medida cuando la imagen
de la sonda está en pausa.
Utilice el proceso siguiente para medir la distancia:
1 Desplace el cursor hasta el primer punto de
medida
2 Comience con la función para la medida
3 Desplace el cursor hasta el segundo punto de

Utilización de la ecosonda| 51
medida
- Se dibujará una línea desde el primer punto hasta el cursor, y la distancia queda
reflejada en la ventana de información
Puede reposicionar la medida pulsando la tecla Tick .
Cuando pulse la tecla X la ecosonda reanudará el desplazamiento normal.
Pausa de la sonda
Puede detener la sonda para examinar los ecos con detenimiento. Para activar esta
función, consulte “Panel de ajustes de la sonda” página 53.
Esta función es útil cuando necesita colocar un punto de referencia exacto en el panel
de la sonda, y cuando utiliza el cursor para medir la distancia entre 2 elementos de la
imagen.
Grabación de los datos de la sonda
Puede grabar los datos de la sonda y guardar el
archivo en la unidad NSO o en una tarjeta Micro-SD
insertada en el lector de tarjetas.
Para activar esta función, consulte “Panel de ajustes
de la sonda” página 53 .
Las siguientes opciones están disponibles:
Bytes por sondeo
Seleccione cuántos bytes por segundo han de usarse cuando se guarde el archivo de
registro. Más bytes dan una mayor resolución, pero harán que el archivo de grabación
aumente de tamaño comparado con la utilización de ajustes de menos bytes.
Registrar todos los canales
Registra todos los datos disponibles de la sonda de forma simultánea.
Cuando se registran todos los canales, los registros se guardan en formato SL2 en lugar
de en formato .slg.
Registro en formato XTF
Formato opcional de registro para los datos de SideScan. Sólo estará disponible si se ha
conectado una unidad StructureScan.
Este formato no registra todos los canales en el mismo archivo. Este formato se usa para
soporte de aplicaciones de terceros en PC (como SonarWiz) que necesitan acceder a los
datos de StructureScan.
Durante la grabación de la
imagen de sonda, se muestra un
símbolo rojo que parpadea y un
mensaje que aparece de forma
periódica en la parte inferior de
la pantalla.
En el gráfico se muestra un
ejemplo de grabación de datos
de la sonda convencional y de
StructureScan.
La grabación de los datos de la sonda se detiene al volver a seleccionar la función de
grabación.
Símbolo de
grabación
Mensaje de
registro

52 | Utilización de la ecosonda
Reproducción del registro de datos de la sonda
Tanto los registros de sonda almacenados internamente como externamente pueden
reproducirse al seleccionarlos.
El archivo de registro se muestra como una imagen detenida, y tienes acceso a la
reproducción pulsando la tecla MENU .
Si se ha registrado más de un canal en el archivo seleccionado de sonda, puede
seleccionar qué canal e imagen del StructuralScan quiere mostrar.
Sale del modo reproducción pulsado la tecla X.
Opciones de sonda
Paletas
Hay disponibles varias paletas de visualización con diversos grados de color y brillo.
Color del fondo
La opción de color del fondo colorea todo el fondo y las zonas sólidas del fondo marino
en color marrón. Esto hace que sea posible diferenciar claramente entre los peces y la
vegetación, y el fondo marino.
Sin coloreado del fondo Coloreado activado

Utilización de la ecosonda| 53
Elementos de imagen opcionales de la sonda
Las imágenes de sonda pueden activarse y desactivarse individualmente. Consulte la
ilustración de página 47.
Los ecos de los peces
Puede seleccionar cómo quiere que aparezcan los ecos en la imagen de la ecosonda.
ECOS TRADICIONA-
LES DE LOS PECES
LOS SÍMBOLOS DE LOS PECES Y LA
INDICACIÓN DE PROFUNDIDAD
Alarma de peces
Puede ajustar NSO para dar una alarma cuando el eco de peces aparece en la pantalla.
Superposición de StructureScan™
Cuando una unidad StructureScan está conectada al sistema NSO, puede
superponer una imagen DownScan a la imagen de sonda normal.
Cuando se active esta función tal como se describe a continuación, el menú
de sonda se ampliará e incluirá las opciones básicas de StructureScan.
La ganancia de ambas imágenes puede ajustarse como se describe en
“Configuración de los ajustes de ganancia y color” página 49.
Para obtener más información sobre StructureScan, consulte
“StructureScan™” en la capítulo 9.
Panel de ajustes de la sonda
Fuente de la sonda
Si dispone de más de una sonda en la red, puede seleccionar la sonda
que se utilizará como fuente preferida en esta unidad NSO.
Sonda de red
Puede compartir la sonda conectada a esta unidad NSO en la red.
Para obtener más información sobre cómo configurar sondas, consulte
el manual de instalación del NSO, que está disponible por separado.
Velocidad de pulso
La opción Velocidad de pulso controla la velocidad de transmisión del
transductor dentro del agua. Una alta velocidad de pulso hará que la
imagen se mueva rápidamente en la pantalla, mientras que una velocidad baja de pulso
presentará un historial más largo en la pantalla. Las posibles reverberaciones causadas
por la velocidad de pulso demasiado alta pueden provocar interferencias en la pantalla.
Claridad
La acción de las olas, el balanceo de la embarcación y la inversión de temperatura
pueden causar interferencias en la pantalla cerca de la superficie.
La opción de claridad en superficie reduce las interferencias al disminuir la sensibilidad
del receptor cerca de la superficie.

54 | Utilización de la ecosonda
Pausa de la sonda
Consulte la página 51.
Superposición de DownScan
Cuando una unidad StructureScan está conectada al sistema NSO, puede superponer
una imagen DownScan a la imagen de sonda normal.
Cuando se active esta función, el menú de sonda se ampliará e incluirá las opciones
básicas de StructureScan. Consulte la sección “Superposición de StructureScan™”
anterior.
Grabación y visualización de los datos de sonda
Consulte página 51.
Profundidad de búsqueda
Los ruidos pueden causar que la sonda busque profundidades no reales.
Al ajustar la profundidad de búsqueda, puede evitar que tales condiciones interfieran
en el funcionamiento normal de la sonda.
Profundidad NMEA2000
Si usted no tiene una sonda compatible conectada al NSO, la pagina de sonda también
puede mostrar un claro contorno de profundidad coloreado basado en los datos de
profundidad recibidos desde un sensor tanto NMEA0183 como NMEA2000.
La profundidad recibida vía NMEA no mostrará ecos o retornos de pescados.
Dígitos ajustables de profundidad
Usted puede ajustar el tamaño de los dígitos de profundidad a
pequeños, medianos o grande, cambiando el ajuste en el menú de
sistema opciones avanzadas de sonda. Como estándar el dígito esta
fijado en grande.

StructureScan | 55
9 StructureScan™
StructureScan™ es un módulo opcional de hardware que usa altas frecuencias para
conseguir una imagen de alta resolución del fondo del mar.
StructureScan™ proporciona una cobertura de 150 mts (480 pies) de ancho en alta
resolución con SideScan, mientras que DownScan™ ofrece imágenes perfectas de
estructuras y peces directamente por debajo de su embarcación hasta los 90 mts (300
pies) de profundidad.
Acceso al panel de StructureScan™
Se accede a StructureScan mediante la TAD ECHO cuando la caja externa y el
transductor de StructureScan están instalados.
ECHO
x2
StructureScan también puede configurarse en uno de los otros grupos de páginas a los
que se accede mediante las teclas TAD. Puede configurarse como panel único o como
uno más en una página con varios paneles. Remitirse a la sección Personalizar su
sistema NSO.
Las imágenes de StructureScan™
El panel de StructureScan puede ajustarse como una imagen tradicional de escaneo
hacia abajo o mostrando el escaneo lateral desde izquierda/derecha.
La ventana DownScan también puede agregarse como una superposición a la imagen
tradicional de sonda. Para mayor información, consulte la sección La ecosonda.

56 | StructureScan
La imagen DownScan
RANGO
SUPERIOR
RANGO
INFERIOR
PROFUNDIDAD
TEMPERATURA
FRECUENCIA
ZOOM
INDICADOR DE
COLOR
FONDO
MARINO
ESCALA
ANGO
La imagen SideScan
PROFUNDIDAD
TEMPERATURA
FRECUENCIA
ZOOM
INDICADOR DE
COLOR
PROFUN-
DIDAD DEL
AGUA
ESCALA DE
RANGO
COLUMNA DE
AGUA IZQUIERDA
COLUMNA DE
AGUA DERECHA
SUPERFICIE

StructureScan | 57
Cambio de la imagen de StructureScan
Zoom
Puede seleccionar distintos niveles de zoom en la
imagen de StructureScan
El nivel del zoom por defecto esta Apagado.
La escala
El ajuste de escala determina la profundidad de
agua que es visible en la pantalla
Auto
El modo Auto ajustará automáticamente la escala según la profundidad. La Auto Escala
se desactivará automáticamente una vez que ajuste la esc manualmente.
Cambiar la escala manualmente
Puede aumentar o disminuir la escala pulsando las teclas de zoom.
Pulsando y manteniendo una de las teclas del zoom conmutará entre la escala auto y
manual. La Auto Escala se restablece al pulsar la tecla "0".
Al cambiar la escala manualmente, la línea superior de profundidad estará siempre en la
superficie del agua. Estas opciones le permiten enfocar ecos de la parte superior de la
columna de agua.
La frecuencia
StructureScan soporta dos frecuencias. 455 kHZ es ideal para una penetración de
más profundidad, mientras que 800 kHZ ofrece una mejor definición, especialmente a
profundidades menores.
Claridad
La acción de las olas, el buque se balancea y la inversión de temperatura pueden causar
interferencias en pantalla cerca de la superficie.
La opción de claridad reduce las interferencias al disminuir la sensibilidad del receptor
cerca de la superficie.
Ajustar los valores de color
Los ecos fuertes y débiles tienen colores
diferentes para indicar las distintas
intensidades de señal. Los colores
que se utilizan dependen de la paleta
seleccionada.
Cuanto más se incrementa el valor
de Color, se mostrarán más ecos
en el color del extremo de la escala
correspondiente al retorno fuerte.
El color se ajusta utilizando el botón
giratorio. Cuando usted pulsa el botón
giratorio, la imagen del control de
color aumenta y muestra su nombre
completo. Luego puede ajustar el valor
girando el botón. Si no se realizan
ajustes en 3 segundos el control vuelve al tamaño por defecto.
NIVEL ZOOM
SELECCIONADO
IN
OUT

58 | StructureScan
Pausar StructureScan
Puede pausar la función de StructureScan para examinar las estructuras y otras
imágenes con más detalle.
Esta función es útil cuando necesita posicionar un waypoint exactamente en la imagen
de StructureScan, y cuando utiliza el cursor para medir la distancia entre 2 puntos de la
imagen.
Utilización del cursor en el panel de StructureScan
El cursor no se muestra por defecto en la imagen de StructureScan.
Cuando pulse una de las teclas de dirección aparecerá el
cursor, se mostrará la profundidad en la posición del cursor
y se activarán la ventana de información y la barra de
historial.
Utilice las teclas con flechas para mover el cursor en
cualquier dirección en la pantalla.
Para quitar el cursor y los elementos del cursor del panel,
pulsar la tecla X.
Utilización del cursor para posicionar un waypoint
Puede posicionar un waypoint en la posición del cursor
pulsando la tecla PLOT tal y como se describe en la sección
de waypoints, rutas y tracks.
Cuando se pulsa la tecla el símbolo de waypoint y el ID se
posicionan en la posición del cursor.
Medir distancias
El cursor puede utilizarse para medir la distancia entre dos puntos en la imagen de
StructureScan. Es más sencillo utilizar la función de medición cuando la imagen de la
sonda está en pausa.
Utilice el proceso siguiente para medir la distancia:
1 Desplace el cursor hasta el primer punto de medida
2 Comience con la función para la medida
3 Desplace el cursor hasta el segundo punto de medida
- Se dibujará una línea desde el primer punto hasta el cursor, y la distancia queda
reflejada en la ventana de información
Puede reajustar la medida pulsando la tecla Tick.
Cuando pulse la tecla X la sonda reanudará el desplazamiento normal.
Visualización del histórico de StructureScan
Siempre que el cursor se muestre en el panel de StructureScan, la barra de
desplazamiento roja también aparece. La barra de desplazamiento muestra la imagen
que está actualmente visualizando en relación con el historial total de imágenes
almacenadas de StructureScan.
Según la vista seleccionada, la barra de desplazamiento estará en el extremo derecho
(DownScan) o en la parte inferior de la pantalla (SideScan), lo cual indica que está
viendo los últimos datos.
Si mueve el cursor al lado izquierdo de la pantalla (modo DownScan), la barra de
historial comenzará a desplazarse hacia la izquierda y el desplazamiento automático
a medida que se reciben nuevos datos se desconecta. Si mueve el cursor hacia arriba
(en modo SideScan), la barra de historial comenzará a desplazarse hacia arriba y el
desplazamiento automático a medida que se reciben nuevos datos se desconecta.
Para continuar con el desplazamiento de StructureScan, mueva el cursor hasta que
la barra roja de historial alcance el lado derecho de la imagen (DownScan) o la parte
inferior de la imagen (SideScan), o pulse la tecla X.

StructureScan | 59
Ajuste de la imagen de StructureScan
Las paletas de imagen
Hay disponibles varias paletas de visualización con diversos
grados de color y brillo.
Rechazo del ruido
Interferencias de señal producidas por las bombas de achique, vibraciones del motor y
burbujas de aire pueden generar ruido en la imagen.
La opción de rechazo del ruido filtra la señal de la interferencia y reduce la distorsión en
la pantalla.
Inversión de imagen a izquierda/derecha
Si es necesario, las imágenes de izquierda/derecha de SideScan pueden invertirse para
coincidir con el lado correspondiente de su embarcación.
Grabación de los datos de StructureScan
Puede grabar los datos de StructureScan y guardar el archivo internamente en la unidad
NSO, o en una tarjeta SD insertada en el lector de tarjetas de la unidad.
Están disponibles las siguientes opciones;
Los bytes por sondeo
Seleccione cuántos bytes por segundo han de usarse cuando se guarde el archivo de
registro. Más bytes dan una mayor resulución, pero harán que el archivo de registro
aumente de tamaño comparado con la utilización de ajustes de menos bytes.
Registro de todos los canales
Registra los datos de StructureScan y los datos convencionales del sonda en un archivo.
Cuando se registran todos los canales, los registros se guardan en formato SL2 en
lugar de en formato .slg. El simulador integrado puede usar este formato para mostrar
registros convencionales y de StructureScan.
Registro en formato XTF
Formato opcional de registro para los datos de SideScan.
Este formato no registra todos los canales en el mismo archivo. Este formato se usa para
soporte de aplicaciones de terceros en PC (como SonarWiz) que necesitan acceder a los
datos de StructureScan.

60 | StructureScan
Cuando se está grabando la imagen de StructureScan, un símbolo rojo parpadea y un
mensaje de registro aparece de forma periódica en la parte inferior de la pantalla.
Los gráficos de abajo muestran que se están registrando tanto datos de ecosonda
convencional como de StructureScan.
SÍMBOLO DE
GRABACIÓN
MENSAJE DE
REGISTRO
El registro de la sonda se para al volver a pulsar la tecla MENU.
Reproducción del registro de datos de la sonda
Tanto los registros de sonda almacenados internamente como externamente pueden
reproducirse al seleccionarlos.

StructureScan | 61
El archivo de registro se muestra como una imagen detenida, y puede acceder al menú
de reproducción pulsando la tecla MENU.
Si se ha registrado más de un canal en el archivo seleccionado de sonda, puede
seleccionar qué canal e imagen del StructureScan puede mostrar.
Sale del modo reproducción pulsado la tecla X.
Superposición en StructureScan
Es posible agregar la imagen de DownScan como una superposición a una imagen
convencional de Ecosonda.
Consulte la descripción en la sección de Ecosonda.

62 | StructureScan
Página en blanco

Uso del Piloto Automático | 63
10 Uso del Piloto Automático
Si hay un procesador de piloto automático AC12 o AC42 conectado al sistema NSO, las
funciones de Piloto Automático se habilitarán en el NSO.
La función de Piloto Automático ha sido diseñada para mantener un rumbo adecuado
en varias condiciones marítimas con mínimos movimientos de timón. Como el piloto
automático gobierna con precisión, permitirá ahorrar combustible y llegará a destino
más rápidamente, especialmente al navegar hacia un waypoint o seguir una ruta.
Indicación del piloto automático en las ventanas NSO
La ventana emergente de piloto automático
Sólo es posible operar el piloto automático cuando la
ventana emergente está activa.
Puede usar distintas teclas para activar la ventana
emergente;
- una pulsación corta de la tecla STBY/AUTO activa el
modo STBY y la ventana emergente
- una pulsación larga de la tecla STBY/AUTO activa la
ventana emergente en el modo actual.
Puede quitar la ventana emergente de una página pulsando la tecla X.
La ventana emergente de piloto automático muestra el modo actual, rumbo, timón y
varios datos de gobierno según el modo de piloto automático activo.
La ventana emergente tiene una posición fija en la página, y puede activarse en todas
las páginas excepto cuando haya una ventana activa de Gobierno.
Indicación de piloto automático en la parte
superior de la página
La información de piloto automático se muestra por defecto en
la parte superior de las páginas cuando el piloto está activado.
Puede elegir desactivar esta información.
Símbolo del compás en la ventana de carta
Puede elegir mostrar un símbolo de
compás alrededor de su barco en la
ventana de carta. El símbolo de compás
desaparecerá cuando se active el cursor en
la ventana.
Uso seguro del piloto automático
Un piloto automático es una ayuda útil a la navegación, pero BAJO NINGUNA
CIRCUNSTANCIA reemplaza a un navegante humano.
Cambiar de modo automático a operación manual
Puede cambiar el piloto automático a modo STBY durante cualquier operación automática
mediante una pulsación breve de la tecla STBY/AUTO.

64 | Uso del Piloto Automático
Bloqueo de una unidad NSO
Si hay varias unidades NSO o AP24/AP28 en el sistema, una
unidad NSO no activa puede ser bloqueada para evitar el uso
no autorizado del piloto automático.
Cuando la unidad está bloqueada, esto se indica con un
símbolo de bloqueo y texto en la ventana emergente.
Cuando la función de bloqueo está activada, no puede seleccionarse ningún modo
automático desde la unidad NSO.
¡La función de bloqueo no está disponible en una unidad NSO activa!
Si la unidad NSO es parte de un sistema AP24/AP28, podrá bloquearse la unidad desde la
unidad de control AP24/AP28. Consulte Bloquear estaciones remotas al final de este
capítulo.
La ventana de piloto automático
La ventana de Piloto Automático puede usarse para mostrar información cuando esté
navegando. La ventana puede agregarse a los grupos de páginas NAV o a cualquier otro
grupo de páginas descrito en la sección Personalizar su sistema.
Campos de datos
La ventana de piloto automático muestra el nombre del destino e información de rumbo
y timón. Se usan las siguientes abreviaturas:
CTS Curso a gobernar
DTD Distancia al destino
SOG Velocidad sobre el fondo
COG Rumbo sobre el fondo
DTW: Distancia hacia el siguiente waypoint
XTE: Error de deriva

Uso del Piloto Automático | 65
Descripción del modo de Piloto Automático
El piloto automático tiene varios modos de gobierno. El número de modos y las
características dentro del modo dependen del tipo de barco y las entradas disponibles,
tal como se muestra abajo:
MODO CARACTERÍSTICAS
TIPO DE BARCO
DESCRIPCIÓN
ENTRADA
REQUERIDA
MOTOR VELERO
Modo pasivo usado para
gobernar el barco con el
timón
Gobierno (NFU) x x
Controla el movimiento
del timón usando las
teclas de dirección
Sensor de timón
x x
Ajusta el ángulo del
timón usando las teclas
de dirección
Respuesta de timón
x x
Mantiene el barco en el
rumbo establecido
Rumbo, velocidad
Captura de rumbo x x
Cancela el giro y continúa
en el rumbo leido desde
el compás
Giro (Patrón) x
Mueve el barco
automáticamente en
patrones predenidos
de giro (sólo barcos
motorizados)
Giro (Virada) x
Cambia el rumbo
comandado con un valor
predenido
x x
Mantiene el barco en una
línea de rumbo recto
Rumbo, velocidad y
posición
Esquivar x x
Vuelve al modo NoDrift
después de un cambio de
rumbo
x x
Gobierna el barco hacia
la ubicación de un
waypoint especíco, o en
una ruta de waypoints
Rumbo, velocidad,
posición e
información de
waypoint/ruta
x
Gobierna el barco para
mantener el ángulo de
viento establecido
Rumbo, velocidad y
ángulo de viento
Virada
x
Iguala el ángulo de viento
establecido en el lado
opuesto de la pro
x
Gobierna el barco hacia
la ubicación de un
waypoint especíco, o en
una ruta de waypoints
Rumbo, velocidad,
ángulo de viento
e información de
waypoint/ruta
Controlar el rendimiento del gobierno en modos automáticos
El piloto automático debe configurarse durante la instalación y configuración. Algunos
parámetros pueden ajustarse durante el uso para aumentar el rendimiento del gobierno.
Consulte la descripción al final de esta sección.

66 | Uso del Piloto Automático
Elegir modos de piloto automático
Se elige un modo o función de piloto automático desde el menú de selección Modo de
Piloto Automático.
MENU WIN
Usar el piloto automático en modo Standby
El piloto automático debe estar en modo STBY al gobernar usted el
barco con el timón.
Puede cambiar el piloto automático a modo STBY durante cualquier
operación automática mediante una pulsación breve de la tecla
STBY/AUTO.
Gobierno potenciado (NFU)
Si pulsa las teclas de dirección cuando el piloto automático está
en modo STBY, el sistema cambiará a NFU (no seguimiento). En
modo FU pasará a NFU pulsando las teclas izquierda/derecha.
Puede entonces usar las teclas de dirección para controlar el
timón, y el timón se moverá mientras la tecla esté pulsada.
Se regresa al modo STBY con una pulsación corta de la tecla
STBY/AUTO.
Gobierno con seguimiento (FU)
Puede elegir Gobierno con seguimiento desde el menú de Piloto
Automático, o pulsando o girando el control giratorio cuando
este en modo Standby o NFU..
Cuando FU está activado, puede usar el control rotatorio para
ajustar el ángulo del timón. El timón se moverá hacia el ángulo
especificado y se detendrá.
En modo de Seguimiento, no puede tomar control manual
del timón.
Se regresa al modo STBY con una pulsación corta de la tecla STBY/AUTO.
Modo AUTO (auto-compás)
Cuando se pulsa la tecla AUTO, el piloto automático selecciona
el rumbo actual del barco como curso establecido. Esto permite
una transferencia suave al cambio de modo.
El piloto automático mantendrá el barco en el rumbo fijado hasta
que se seleccione un nuevo modo o se ajuste un nuevo curso
con el botón rotatorio o las teclas PORT o STBD.
Una vez que el rumbo haya cambiado a un nuevo rumbo fijado,
el barco girará automáticamente hacia el nuevo rumbo y mantendrá el nuevo curso.
Captura de rumbo
En modo AUTO o Sin Deriva, la función de captura de rumbo le permite cancelar
automáticamente el giro en el que está mediante una pulsación corta del botón rotatorio.
El piloto automático cancelará el giro para continuar en el rumbo tomado del compás en

Uso del Piloto Automático | 67
el preciso momento en que pulsó el botón rotatorio. Esta es una función útil si no está
seguro del giro exacto que tiene que hacer para entrar, por ejemplo, en una bocana o un
muelle.
Gobierno por patrón de giro (barcos a motor)
El piloto automático incluye una serie de funciones de gobierno por giro automático para
los barcos a motor cuando el piloto está en modo AUTO.
La opción de gobierno por giro no está disponible si el tipo de barco configurado es
Velero.
Comienzo de un giro
La ilustración de abajo le muestra cómo comenzar un gobierno por giro en espiral desde
el menú de Piloto Automático.
Usted elige la dirección del giro y comienza a girar usando las teclas de dirección o el
botón rotatorio.
MENU WIN
Detener el giro
En cualquier momento durante un giro puede pulsar la tecla AUTO/STBD para volver al
modo standby y al gobierno manual.
Variables de giro
Todas las opciones de gobierno, excepto el giro en C, tienen ajustes que puede definir
antes de comenzar un giro y en cualquier momento durante un giro. Consulte el ejemplo
ilustración de arriba.
Giro en U
El giro en U cambia el rumbo actual 180º en
la dirección opuesta.
El ratio de giro es idéntico al ajuste de ROT.
Este no puede ser cambiado durante el giro..
Giro en C
El giro en C, hace girar al barco en circulo.
Usted puede ajustar el ratio de giro (ROT)
antes de que inicie el giro y durante el giro.
Incrementando el ratio de giro el barco hará
un circulo mas pequeño.
Parametro de giro Rango Cambio por paso Por defecto Unidades
Ratio de giro(ROT) 10 - 600 5 90 °/min

68 | Uso del Piloto Automático
Giro en espiral
El giro en espiral hace que el barco haga un giro en espiral con un radio creciente o
decreciente. Esta función puede usarse para rodear bancos de peces o al buscar un
objeto en el fondo del mar.
Si el Cambio de radio se define en cero, el barco girará en círculo. Valores negativos
indican un radio decreciente, mientras que valores positivos indican un radio creciente.
Parámetros de giro Rango Cambio por paso
Ajustes de
fábrica
Radio inicial
33 ft - 3281 pies
10 m - 1000 m
10
10
656 pies
200 m
Cambio de radio por giro
-164 ft - +164 pies
-50 m - +50 m
5
2
66 pies
20 m
Giros en zigzag
Cuando navegue en zigzag, usted
debe jar el cambio de rumbo
inicial antes de que inicie el giro.
Durante el giro, usted puede
cambiar el cambio de rumbo y la
distancia de las etapas.
El rumbo principal puede
cambiarse con el control giratorio.
A = Cambio del rumbo inicial
B = Cambio de rumbo
C = Distancia de la etapa
C
A
B
Parámetros de giro Rango Cambio por paso Ajustes de
fábrica
Cambio de rumbo 4° - 140° 4 28°
Distancia de la etapa
82 ft - 9843 pies
25 m - 3000 m
50
25
1641 pies
500 m
Giro perpendicular
El giro cuadrado hace que el barco
gire 90º después de recorrer una
distancia denida.
Usted puede en todo momento
durante el giro variar la distancia
antes de que el barco realice un
nuevo giro. Usted incluso puede
variar el rumbo del barco, girando
el control giratorio.
Parámetros de
giro
Rango Cambio por paso Ajustes de
fábrica
Distancia
82 ft - 9843 pies
25 m - 3000 m
50
25
1641 pies
500 m

Uso del Piloto Automático | 69
Giro suave en S
En el giro suave en S, el barco
dará guiñadas alrededor del rumbo
principal.
Usted dene el cambio de rumbo
seleccionado antes de comenzar el
giro.
Durante el giro se puede alterar
el cambio de rumbo y el radio de
giro.
El rumbo principal puede
cambiarse girando el botón
rotatorio.
Parámetros de
giro
Rango Cambio por paso Ajustes de
fábrica
Cambio de rumbo 4° - 160° 4 28°
Radio
16 ft - 1641 pies
5 m – 500 m
5
10
656 pies
200 m
Seguimiento de Contorno de Profundidad, DCT
TM
Si el sistema recibe datos de una sonda, puede configurarse el piloto automático para
seguir un contorno de profundidad.
No use esta función a menos que el fondo del mar sea adecuado. No la use en
fondos rocosos donde la profundidad varía mucho en una supercie pequeña.
Pendiente Canal
angosto
Cresta
Use este proceso para comenzar el giro por DCT;
1 Asegúrese de que recibe lectura de profundidad en la unidad NSO o en un
instrumento de profundidad aparte
2 Gobierne el barco hacia la profundidad que quiere seguir, y en la dirección del
contorno de profundidad (rumbo principal)
3 Active el modo AUTO, seleccione Giro DCT y observe la lectura de profundidad
4 Use los botones Starboard o Port para iniciar el giro DCT según si el fondo tiene
pendiente hacia estribor o hacia babor.
Los siguientes parámetros están disponibles para el Giro DCT:
Parámetros de giro Rango Cambio por paso Ajustes de fábrica
Aumento de profundidad 5 - 95 5 5
Ángulo de cruce de contorno 0° - 50° 1 0

70 | Uso del Piloto Automático
Ganancia de profundidad
Este parámetro determina la relación entre el timón comandado y el desvío del contorno
de profundidad seleccionado. Cuanto mayor es el valor de ganancia de profundidad, más
variación de timón se aplica.
Si el valor es demasiado pequeño, tomará mucho tiempo compensar los desvíos del
contorno de profundidad fijado, y el piloto automático no podrá mantener el barco en la
profundidad seleccionada.
Si el valor es demasiado alto el desvío aumentará y el gobierno será inestable.
Ángulo de cruce de contorno (CCA)
El CCA es un ángulo que se agrega a o se resta del rumbo fijado.
Con este parámetro se puede hacer que el bote dé guiñadas alrededor de la profundidad
de referencia con movimientos suaves en S.
Mientras mayor sea el CCA, se permitirán guiñadas más grandes. Si define el valor CCA
en cero, no habrá movimientos en S.
Modo Sin Deriva
Este modo combina el piloto automático y la información de
posicionamiento del GPS.
Cuando Sin Deriva está activado, el piloto automático trazará
una línea de rumbo invisible basándose en el rumbo actual
desde la posición del barco.
A diferencia del modo AUTO (compás), el piloto automático usará
en este caso la información de posicionamiento para calcular el
error de desvio, y mantendrá automáticamente el rumbo recto.
Puede usar las teclas de dirección o el botón rotatorio para reiniciar la línea de rumbo en
el modo Sin Deriva.
Evitar
Si necesita evitar un obstáculo en el
modo Sin Deriva, puede pulsar STBY y
gobernar asistido por potencia o usar
el timón hasta que se haya pasado el
obstáculo.
Si regresa al modo Sin Deriva antes de
transcurridos 60 segundos, puede elegir
continuar en la línea de rumbo antes
fijada.
Si no responde, el cuadro de diálogo desaparecerá y el piloto automático pasará a modo
Sin Deriva con el rumbo actual como línea de rumbo fijado.
Si su maniobra de evitación le toma más de 60 segundos, el piloto automático
permanecerá en modo Standby.
Navegar con el NSO
Puede usar la función de piloto automático para gobernar automáticamente el barco a
la ubicación de un waypoint específico, o por una ruta de waypoints. La información de
posición recibida del GPS se usará para cambiar el rumbo a gobernar para mantener el
barco en la línea de ruta y directo al waypoint de destino.
Para lograr un gobierno de navegación satisfactorio, los siguientes puntos deben
cumplirse antes de entrar al modo NAV:
- El gobierno automático debe estar probado y considerado satisfactorio
- El GPS debe estar en modo de funcionamiento completo y transmitiendo
información de posicionamiento al NSO
Puede iniciar la navegación desde cualquier ventana pulsando la tecla GOTO. La opción
ir hacia el cursor sólo estará disponible cuando el cursor esté activo en una ventana de

Uso del Piloto Automático | 71
carta, radar o sonda. Para obtener mayor información acerca de navegar con el NSO,
consulte la sección Navegación.
También puede comenzar a navegar desde el menú de Piloto Automático.
Cuando se inicia el modo de Navegación, el piloto mantendrá automáticamente la
embarcación en el track. Cuando su embarcación llegue al radio de llegada de un
waypoint, el piloto emitirá una advertencia sonora y mostrará una pantalla de alerta con
la nueva información de rumbo.
Si el cambio de rumbo requerido hacia el nuevo waypoint es menor que el límite de
cambio de navegación, el piloto automático cambiará el rumbo automáticamente. Si el
cambio de rumbo requerido hacia el siguiente waypoint de una ruta es mayor que el
límite establecido, se le pedirá verificar si el próximo cambio de rumbo es aceptable.
Para obtener mayor información acerca de los parámetros de navegación y sobre cómo
navegar con el NSO, consulte la sección Navegación.
El gobierno de navegación sólo debería usarse en aguas abiertas. Al seleccio-
nar el modo NAV, el piloto mantiene el rumbo actual fijado y pide al usuario que
acepte el cambio de rumbo hacia el waypoint de destino.
El radio de llegada del waypoint
El Radio de llegada define el punto en el que se inicia un giro cuando está navegando una
ruta.
WP1
WP2
El radio de llegada debe ajustarse de acuerdo a la velocidad del barco. Mientras mayor la
velocidad, más amplio deberá ser el radio. La idea es que el piloto automático comience
el cambio de rumbo a tiempo para hacer un giro suave hacia la etapa siguiente.
La figura de abajo puede usarse para seleccionar el radio de waypoint apropiado al crear
la ruta.
1
5
10
15
20
25
30
2 3 4 5 6 7 8 9 10 11 12 13
Ejemplo: A una velocidad de 20 nudos debe usar un radio de llegada de 0,09 mn.
La distancia entre dos waypoints cualquiera en una ruta no debe ser menor que el radio
del círculo de llegada al waypoint al usar el desplazamiento de waypoint automático.
CIRCULO DE
LLEGADA
CÍRCULOS DE LLEGADA
RADIO EN 1/100 MN
VELOCIDAD
DEL BARCO

72 | Uso del Piloto Automático
Navegación a vela con piloto automático
Varios parámetros de navegación a vela deberán estar definidos antes de entrar al modo
Viento o Nav Viento. Estos parámetros se describen en la sección de Instalación del
Piloto Automático.
Gobierno por viento
El modo VIENTO sólo estará disponible si el sistema fue configurado para un velero en el
menú de Instalación del Piloto Automático.
Antes de iniciar el modo VIENTO, debe verificarse que haya una entrada de datos válida
disponible desde el transductor de viento.
Comience el gobierno por viento de este modo;
1 Ajuste el rumbo del barco hasta que el ángulo del vieno coincida con el ángulo que
desea mantener
2 Pulse la tecla MENU y seleccione Viento
MENU WIN
El curso a gobernar (CTS) definido y el ángulo de viento definido se introducen desde
el rumbo del compás y el transductor de viento en el momento en que se selecciona
el modo VIENTO. Desde ese momento, el piloto automático cambiará el rumbo para
mantener el ángulo del viento, pues la dirección del viento puede cambiar.
Virada
La función de virada sólo estará disponible cuando el sistema esté congurado para un
barco VELERO.
Sólo deberá realizarse viraje hacia el viento y debe probarse en condiciones marítimas
de calma con viento suave para descubrir cómo funciona en su barco. Debido a un
amplio espectro de características de los barcos (desde barcos de crucero hasta
embarcaciones de regata), el desempeño de la función de virada puede variar de barco a
barco.
Puede iniciar la función de virada desde los modos AUTO y VIENTO. La ilustración de
abajo muestra cómo se inicia la función desde el modo AUTO.
En ambos modos se puede interrumpir la operación de virada cuando el cuadro de
diálogo de virada esté abierto seleccionando la dirección opuesta de virada. Al ser
interrumpido, el barco regresará al rumbo fijado previo.
MENU WIN

Uso del Piloto Automático | 73
Virada en modo Auto
La virada en modo AUTO es diferente
del virada en modo VIENTO. En el
modo AUTO, el ángulo de viraje está
fijo y definido por el usuario. Consulte
la descripción de configuración de
navegación a vela en la sección de
Instalación del Piloto Automático.
Al seleccionar la dirección de virada,
el piloto automático cambia el rumbo
actual fijado de acuerdo al ángulo de
virada establecido.
Virada en modo Viento
La virada en modo VIENTO, a diferencia del modo AUTO, puede realizarse al navegar
con referencia de viento aparente o real. El ángulo de viento real debe ser menor de 90
grados.
La velocidad de giro durante la virada será dada por el Tiempo de virada definido en la
configuración de parámetros de navegación a vela (ver ilustración de arriba). El tiempo
de virada también es controlado por la velocidad del barco para evitar la pérdida de
velocidad durante una virada.
Al iniciar una virada, el piloto automáticamente igualará el ángulo de viento definido al
lado opuesto de la proa.
Trasluchar
Se puede trasluchar cuando el ángulo de viento real es mayor de 120º.
El momento de trasluchar se determina por la velocidad del barco para hacerlo tan
rápido como se pueda manteniendo el control.
Prevención de virada y trasluchada
Use el piloto automático con cuidado al navegar de ceñida y empopada.
Si las velas no están trimadas al navegar de ceñida, las fuerzas de guiñada de las velas
pueden llevar al barco hacia el viento. Si el barco es impulsado más allá del ángulo de
viento mínimo, el impulso de las velas desaparecerá repentinamente y se reducirá la
velocidad del barco. El barco será entonces más difícil de gobernar pues el timón se
vuelve menos efectivo.
La función de prevención de viraje en el modo VIENTO se implementó para evitar estas
situaciones. Reaccionará inmediatamente cuando el ángulo aparente de viento llega a 5º
menos que el ángulo de viento mínimo, y se comandará más timón.
Al navegar a empopada, es difícil gobernar el barco con olas que vienen del costado o
de atrás. Las olas pueden hacer guiñar el barco hacia una trasluchada no deseada; esto
puede ser peligroso tanto para la tripulación como para el mástil.
La función de prevención de trasluchada se activará cuando el ángulo de viento aparente
actual pase de 175º o se vuelva opuesto al ángulo de viento definido. Se comandará más
timón para evitar una trasluchada no deseada.
Las funciones de prevención de virada y trasluchada no son garantía para evitar
situaciones peligrosas. Si el efecto del timón y/o de la unidad de potencia no son los
adecuados, puede darse una situación peligrosa. Preste especial atención en estas
situaciones.

74 | Uso del Piloto Automático
Navegación y gobierno por viento
En Nav Viento el piloto automático gobierna el barco a partir de datos del viento y datos
de ruta de un Chartplotter/GPS.
En el modo Nav Viento el piloto automático calcula el cambio del rumbo inicial necesario
para navegar hacia el waypoint activo, y usará también la dirección actual del viento en
el cálculo.
Control del rendimiento de gobierno
Al funcionar en un modo automático, el piloto usa
dos conjuntos diferentes de parámetros de gobierno
(HI/LO). Los parámetros controlan la respuesta del
barco a diferentes velocidades o direcciones del
viento. Los dos conjuntos de parámetros pueden
seleccionarse automáticamente o manualmente, y
cada conjunto puede definirse manualmente.
La velocidad a la que el piloto automático cambia
automáticamente de LO a HI se define en el ajuste
de velocidad de transición.
Si no hay entrada de datos de velocidad, el piloto
automático usa los parámetros LO al activar un
modo automático desde STBY. Esta es una función
de seguridad para evitar un gobierno excesivo.
El conjunto de parámetros de respuesta activa
se muestra en la ventana emergente de piloto
automátco, y se usan las siguientes abreviaturas:
HI-A Parámetros de alta respuesta denidos
automáticamente
LO-A Parámetros de baja respuesta denidos
automáticamente
HI-M Parámetros de alta respuesta denidos
manualmente
LO-M Parámetros de baja respuesta denidos
manualmente
Barcos con motor
En los barcos con motor, la selección automática de HI o LO se determina
exclusivamente por la velocidad del barco tal como se muestra en las ilustraciones de
abajo.
Transición a parámetros LO con
mayor velocidad: 10 nudos
Velocidad de transición ajustada en 9 nudos
Transición a parámetros LO con menor
velocidad: 8 nudos
Respuesta LO
Respuesta HI

Uso del Piloto Automático | 75
Veleros
Al navegar en modo VIENTO, el conjunto de parámetros se determina por la velocidad
del barco y la dirección del viento tal como se ilustra abajo. De modo que si usted pierde
demasiada velocidad, por ejemplo al virar, los parámetros cambiarán a HI para lograr
una respuesta suficiente del timón. Considere esto al ajustar la velocidad de transición
en veleros.
Parámetros LO Parámetros HI
Ajuste manual de la respuesta
Usted puede ajustar manualmente cada uno de los
conjuntos de parámetros (HI/LO) seleccionando nueve
niveles diferentes. El valor por defecto es nivel 4 con
los valores de parámetros definidos por la funcion de
autoajuste. Si no se hizo autoajuste (no se recomienda),
los valores de nivel 4 son los valores de fábrica.
Un nivel de respuesta bajo reduce la actividad del timón y ofrece un
gobierno más "suave".
Un nivel de respuesta alto aumenta la actividad del timón y ofrece un
gobierno más "brusco". Un nivel de respuesta demasiado alto hará que el
barco comience a hacer movimientos en S.
Ajuste manual del conjunto de parámetros
Por defecto, el sistema cambia entre los conjuntos de parámetros HI/
LO en base a la velocidad (barcos motorizados) o a velocidad y viento
(veleros). Sin embargo, usted puede elegir configurar manualmente qué
conjunto de parámetros se usará.
HI o LO debe estar seleccionado si no hay entrada de velocidad disponible.
Usar el NSO en un sistema AP24/AP28
Transferencia de comando
Si su unidad NSO está conectada a un sistema de piloto automático
que incluye una unidad de control AP24 o AP28, sólo podrá haber
una unidad de control activa al mismo tiempo. Una unidad inactiva
se indica con la imagen de un sobre en la pantalla.
Puede tomar el control desde una unidad NSO inactiva con la ventana emergente de
piloto automático activa girando el botón rotatorio.
Si no se ve la ventana emergente, puede tomar el control desde la unidad NSO pulsando
y manteniendo pulsada la tecla STBY/AUTO para abrir el menú de selección de modo, y
luego confirmando el modo activo.
Bloqueo de estaciones remotas
El AP24/AP28 incluye una función de Bloqueo Remoto que desactivará
todas las demás unidades de control. Una unidad bloqueada se indica
con la imagen de una llave.
Cuando la función de bloqueo remoto está activada en un AP24/
AP28, no puede hacerse transferencia de comando a la unidad NSO
o a otras unidades AP en el sistema, sólo la unidad de control AP activa mantiene el
comando.

76 | Uso del Piloto Automático
Las estaciones remotas sólo pueden desbloquearse desde la unidad AP24/AP28 que tiene
el comando.
Usar el piloto en un sistema EVC
Cuando el NSO esta conectado a un sistema EVC a través del SG05, usted puede tomar
el control manual del gobierno, independientemente del modo de piloto.
El indicador de modo del piloto le mostrara el error “EVC Override”.
El sistema pasará a modo “En espera” si no se recibe ningún comando de gobierno desde
el sistema EVC en un periodo de tiempo predefinido.
A = El piloto está en modo
Auto
La ventana indica gobierno
manual a través del sistema
EVC

Navegación | 77
11 Navegación
La función de navegación de la unidad NSO le permite navegar hacia la posición del
cursor, una posición definida por valores de latitud y longitud, un waypoint, o por una
ruta predefinida.
Para obtener información sobre el posicionamiento de waypoints y la creación de rutas,
consulte la sección Waypoints, Rutas y Tracks.
Navegar a la posición del cursor
Usted puede iniciar un navegación a la posición del cursor desde cualquier ventana,
moviendo el cursor a la posición que usted desee navegar y presionando la tecla GOTO.
La opción ir hacia el cursor sólo estará disponible cuando el cursor esté activo en una
ventana de carta, radar o sonda.
Navegar a una Ruta
Puede iniciar la navegación de una ruta en una ventana de carta desplazando el cursor
sobre la ruta y pulsando la tecla MENU.
MENU WIN
Selección del punto de partida
Puede navegar una ruta comenzando desde cualquier waypoint colocando el cursor sobre
el waypoint elegido y pulsando la tecla MENU.
MENU WIN
Cancelar la navegación
Puede cancelar la navegación pulsando la tecla GOTO.
PLOT
GO TO
MARK
VESSEL
PLOT
GO TO
MARK
VESSEL

78 | Navegación
Parámetros de navegación
Método de navegación
Hay distintos métodos disponibles para calcular la distancia y la
orientación entre dos puntos cualquiera en una carta.
La ruta de ortodrómica es el camino más corto entre dos puntos.
Sin embargo, si usted quiere recorrer dicha ruta, sería difícil
gobernar manualmente pues la orientación estaría cambiando
constantemente (excepto en caso de norte franco o sur franco, o
a lo largo del ecuador).
Las loxodromias son rutas de rumbo constante. Es posible viajar
entre dos sitios usando Cálculo de loxodromias, pero la distancia
sería normalmente mayor que si se usa gran círculo.
Límites de alarma de gobierno
Radio de llegada
Establece un radio invisible alrededor del waypoint de destino.
Cuando se activa la alarma de llegada, aparecerá una alarma cuando
la embarcación se encuentre dentro de este radio.
Límite de fuera de rumbo
Este parámetro define la distancia aceptada de desviación del
trayecto de la embarcación. Se activará una alarma en caso de que la
embarcación se aleje más de este límite.
La alarma de fuera de rumbo debe activarse/desactivarse en la
ventana de alarmas.
Variación magnética
Convierte la información de norte magnético a norte geográfico para coincidir con la
carta.
Auto convierte automáticamente el norte magnético a norte geográfico. Al usar el modo
manual, usted deberá introducir la variación magnética local.
Formato de referencia (Datum)
La mayoría de las cartas en papel se realizan usando el formato WGS84, que también es
usado por el sistema NSO.
Si sus cartas en papel fueron hechas usando un formato diferente, puede cambiar los
ajustes en el sistema NSO para que coincidan con sus cartas en papel.
Sistema de coordenadas
Controla el formato para las coordenadas lat/lon presentadas en las ventanas.
Máscara Loran
Activa mascara Loran para introducir waypoints y mostrar posición de embarcación y
cursor.
Ajustes Loran
Permite el ajuste de GRI y pares TD preferidos para mostrar posición de embarcación y
cursor.

Navegación | 79
Ventanas de navegación
Las ventanas Navegación y Posición pueden usarse para mostrar información cuando
esté navegando.
La ventana Navegación
CAMPOS
DE DATOS
USE LAS
TECLAS
DE DIREC-
CIÓN PARA
CAMBIAR
LÍNEA DE
RUMBO
SÍMBOLO DE
EMBARCACIÓN
LÍMITE DE FUERA
DE RUMBO
Campos de datos
La ventana de Navegación ofrece la siguiente información:
DTD Distancia al destino
BTW Rumbo al waypoint
SOG Velocidad sobre el fondo
COG Rumbo sobre el fondo
TTD Tiempo al destino
ETA Hora estimada de llegada al siguiente waypoint
VMG Velocidad efectiva hacia el próximo waypoint.
STEER Rumbo a navegar hacia el próximo waypoint
La línea de rumbo
Al viajar en una ruta, la línea de rumbo muestra el rumbo planeado desde un waypoint
hacia el siguiente.
Al navegar hacia un waypoint (posición del cursor, MOB o una posición lat/lon
introducida), la línea de rumbo mostrará el rumbo planeado desde el punto donde se
inició la navegación.
Símbolo de embarcación
El símbolo de embarcación indica la
distancia y orientación relativos al rumbo
deseado.
Límite de fuera de rumbo
Si el XTE excede el límite de fuera de
rumbo definido (ver Límite de fuera
de rumbo), esto será indicado con una
flecha roja que indica la distancia desde
la línea de ruta.
Si la alarma de fuera de rumbo está activada, sonará si el XTE supera el límite de fuera
de rumbo definido.

80 | Navegación
Ventana de posición
Campos de datos
Posición en lat. y lon.
Fecha y hora
SOG Velocidad sobre el fondo
COG Rumbo sobre el fondo

Ventanas de información | 81
12 Ventanas de información
El grupo de páginas INFO incluye un conjunto congurable de pantallas que presentan
información actualizada de la embarcación.
INFO
Paneles de instrumentos
Los paneles de instrumentos están compuestos por varios indicadores —analógicos,
digitales y de presión— que pueden personalizarse para visualizar cierta información. El
panel de instrumentos presenta la información en tableros de control, y pueden definirse
hasta diez tableros de control en el panel de instrumentos.
Estilos de tableros de control de instrumentos
Hay tres diseños de tablero de control predefinidos para visualizar indicadores que
muestran información sobre la embarcación, la navegación y necesidades de pesca.
Cambie de panel utilizando las teclas de flechas del teclado a izquierda y derecha o
seleccionaldo el tablero de control del menú.
Tablero de control del
buque
Tablero de control de nave-
gación
Tablero de control para
pesca
Añadir tableros de control
Puede haber hasta 10 tableros de control en cada panel de
instrumentos. Además de los 3 tableros de control predefinidos,
puede diseñar los suyos propios en base a los estilos de tableros
de control predefinidos.

82 | Ventanas de información
Grácos de tiempo
El sistema puede presentar el historial de datos en distintos gráficos, y el usuario puede
definir el tipo de datos.
Los gráficos pueden ajustarse como diseños de panel único, o combinarse en un panel
tal como se muestra abajo.
El panel de gráfico de tiempo consiste en dos diseños predefinidos. Puede cambiar entre
los diseños utilizando las teclas de dirección de izquierda y derecha o seleccionando el
tablero de control del menú cuando el panel de gráfico de tiempo está activo.
Diseño 1, 4 conjuntos de da-
tos
Diseño 2, 3 conjuntos de
datos
Datos no disponibles
Si no hay datos de instrumento disponibles, el gráfico de tiempo cambiará a una línea
discontinua y quedará recta en el punto en que se dejaron de recibir datos.
Cuando los datos se restablezcan, una línea discontinua unirá los dos puntos mostrando
una línea promedio correspondiente a los datos perdidos.

Ventanas de información | 83
Personalizar los paneles de información
Puede personalizar los tableros de control de instrumentos cambiando el estilo de tablero
y la información de cada indicador en el tablero. También puede establecer límites en los
indicadores analógicos.
Los gráficos de tiempo pueden personalizarse cambiando los datos mostrados y las
etiquetas temporales.
Las opciones de edición disponibles dependen de las fuentes de datos conectadas a su
sistema.
Tras guardar los cambios regresará al tablero de control o al panel de diseño con la
nueva configuración. Puede cancelar los cambios en cualquier momento antes de
guardar.
Edición de un tablero de control de instrumentos
Seleccione el tablero de control que quiera editar, y luego:
+
Edición de un diseño de gráco de tiempo
Seleccione el diseño de gráfico de tiempo que quiera editar, y luego:
+

84 | Ventanas de información
Página en blanco

Las páginas de utilidades | 85
13 Las páginas de utilidades
Las páginas de utilidades incluyen opciones y herramientas que no son específicas de
ninguna ventana.
Estas páginas actúan de modo diferente sobre carta, radar, eco, etc. Siempre son a
pantalla completa, y no puede usarlas en una página dividida con ninguna otra ventana.
Una página de utilidades se abrirá sobre la página anterior. Cuando cierra un cuadro
de diálogo en una de las páginas de utilidades, la función de utilidades se cerrará y la
pantalla volverá a la última página activa.
Se accede a las páginas de utilidades y se opera con ellas mediante la operación normal
de menúes.
Puede cambiar entre distintas pestañas en una página usando las teclas de dirección.
También puede acceder a una página usando las teclas numéricas, según se indica en
cada icono.
Todo listado en las páginas de utilidades tiene un menú contextual que da acceso a
las opciones disponibles para el elemento seleccionado. Se accede al menú contextual
pulsando la tecla MENU.
AIS
Listado de estados
Lstado de todas las embarcaciones AIS, MARPA y DSC
con información disponible.
Lista de mensajes
Lista de todos los mensajes recibidos desde otras
embarcaciones AIS con indicación de hora.

86 | Las páginas de utilidades
Alarmas
Alarmas activas
Lista de alarmas activas.
Historial de alarmas
Lista de todas las alarmas con indicación de hora.
Ajustes de alarma
Lista de todas las opciones de alarma disponibles en el
sistema, con los ajustes actuales.
Satélites
Página de estado para los satélites activos.
Buscar
Función de búsqueda para varios elementos de carta.
Al pulsar la tecla MENU usted obtiene acceso a las
opciones disponibles para el elemento seleccionado.
Waypoints/rutas/tracks
Lista de waypoints, rutas y tracks con detalles.

Las páginas de utilidades | 87
Registro de viajes
Viaje 1 / Viaje 2
Muestra información de viaje y motor, con opción de
reinicialización para todos los campos de datos.
Hoy
Muestra información de viaje y motor para la fecha
actual. Todos los campos de datos se reinicializarán
automáticamente al cambiar la fecha.
Sol/luna
Muestra la salida y puesta del sol y de la luna para una
posición basada en la fecha introducida y la latitud/
longitud
Mareas
Muestra información de mareas para la estación de
mareas más cercana a su embarcación.
Puede usar las teclas de dirección para desplazarse a
otra fecha.
Las estaciones de mareas disponibles pueden
seleccionarse usando la tecla MENU.
Archivos
Sistema de gestión para archivos, waypoints, rutas,
tracks y ajustes.
Al pulsar la tecla MENU usted obtiene acceso a las
opciones disponibles para los distintos tipos de
archivos.
CZone
CZone aparecerá cuando esté conectado a un sistema
CZone.
Esto le permitirá acceder a controlar y monitorizar
todos los circuitos asociados con CZone. También le
permite seleccionar modos de operación personales si
estos han sido congurados previamente.

88 | Las páginas de utilidades
Página en blanco

Audio | 89
14 Audio
Cuando el NSO se conecta al servidor SonicHub puede utilizar su unidad para controlar
la reproducción del audio desde el iPod, iPhone, un dispositivo de almacenamiento USB
(mp3), satélite (SIRIUS™) y radio AM/FM. Antes de poner su radio FM con el SoniHub,
debe comprar una antena AM/FM de calidad marina
Cuando se conecte a un módulo de Satélite WM-2 puede suscribirse e incluir Sirius™
audio en su sistema NSO. El servicio audio y del tiempo de Sirius™ cubre las aguas
continentales y las zonas costeras de EE.UU. en los océanos Atlántico y Pacífico, el golfo
de México y el mar del Caribe. Los productos Sirius™ de audio que ha recibido varían
dependiendo del paquete elegido en su suscripción. Para más información remítase a
www.sirius.com.
Antes de poder utilizar su equipo, debe ser instalado de acuerdo al manual del
instalación que va adjunto a esta unidad.
Habilitar el Audio
Debe habilitar Audio para controlar el audio en su unidad NSO.
Cuando se habilita el audio, aparecerá la barra multimedia en la parte de abajo de
la pantalla en todas las páginas. La barra multimedia varía de una fuente de audio
a otra.
Cambie la selección entre otros paneles y la barra multimedia pulsando la tecla
WIN.
Seleccionar la fuente de audio (solo SonicHub)
Puede cambiar entre las fuentes disponibles de audio del menú de audio.
Cuando se reinicia el audio lo hace con los ajustes que estaban activos al apagarlo.
NOTA: La fuente Mic selecciona un nivel de entrada de alta tensión para permitirle
retransmitir mensajes de megafonía por el sistema de audio.
Funcionamiento de la fuente de audio
Maneja los dispositivos de audio utilizando las teclas de función, el teclado o el menú
audio.
Teclas de funciones
Disminuya/aumente el
volumen
o
IN
OUT
Silencio
MENU WIN
o

90 | Audio
Teclado
iPod, iPhone,
USB Almacenamiento masivo
SIRIUS, AM/FM radio
Cuando escuche la radio AM/FM, pulse y mantenga la tecla izquierda o derecha para
cambiar del modo sintonizar al modo buscar.
Cuando pone el audio desde un iPod o desde un dispositivo USB, pulse y mantenga la
tecla izquierda o derecha para rebobinar o para marcha rápida hacia adelante por una
pista..
Los menús de audio
Cuando el panel activo es el panel multimedia, pulse la tecla Menu para acceder al menú
de audio.
El menú difiere de una fuente de audio a otra tal y como se muestra en los ejemplos de
más abajo.
Menú iPod Menú Radio FM
La Unidad virtual
El menú de audio incluye la opción Unidad Virtual que da acceso a la estructura de
archivos o al menú de archivos de la fuente. La unidad virtual se utiliza para seleccionar
las opciones y para ajustar la fuente del audio.
Pista
anterior
Siguiente
pista
Reproducir/
pausa
Menú de la fuente del audio
MENU WIN
Estación
previa:
(AM/FM —
sintonizar
hacia atrás
Siguiente
estación
(AM/FM — sinton-
izar hacia adelante
Desplazar hacia atrás
por los favoritos
Desplazar hacia ad-
elante por los favoritos
MENU WIN

Audio | 91
Utilizar la radio FM/AM
Seleccionar la región de sintonía AM/FM
Antes de poner la radio FM o AM, tiene que seleccionar las regiones de sintonía
apropiadas de AM y de FM para su ubicación.
Sintonizar una emisora de radio
Utilice las teclas Izquierda/Derecha del teclado para buscar una emisora de radio AM/FM.
Cuando la emisora canal está sintonizadea, puede añadir estaciones a su lista de
favoritos desde el menú de audio.
Utilice las teclas Arriba/Abajo del teclado para desplazarse por sus emisoras favoritas.
Utilizar una radio Sirius
La lista de canales muestra todos los canales Sirius disponibles, tenga o no tenga una
suscripción al canal.
Puede crear una lista de sus canales favoritos Sirius escogiendo de la lista de canales. No
podrá añadir canales no suscritos.
Cuando está disponible una lista de favoritos, puede desplazarse por la lista utilizando
las teclas con flechas.
Bloquear canales
Puede bloquear los canales seleccionados mientras no se introduzca un código de
desbloqueo.
Cuando la función se ha activado, hay que introducir un código de 4 dígitos antes de que
se active el bloqueo.
Se introduce el mismo código para que el canal bloqueado pueda desbloquearse.

90 | Audio
Ajustar las zonas de audio SonicHub
Zonas de audio
Su unidad tiene cuatro salidas amplificadas para la conexión directa de los altavoces.
También existen dos canales (estéreo) de bajo nivel para enviar la señal a un
amplificador externo, y dos canales mono para subwoofer(s) amplificados.
Las salidas de audio están organizadas en 3 zonas. Puede ajustar el balance, el volumen
y el ajuste del límite de volumen independientemente para cada zona. Los ajustes a los
de bajos y agudos cambian todas las zonas. Remítase a los gráficos más abajo
Zona 1 Altavoces Izquierdo/derecho
Zona 2 Altavoces Izquierdo/derecho
Zona 3 Salida del amplicador, salida del subwoofer
Control maestro de volumen
Puede seleccionar qué zonas serán ajustada por el control maestro de volumen. Cuando
esté activa la barra de audio, el volumen en todas las zonas seleccionadas cambiará al
subir/bajar el volumen de la unidad OP40.
MENU WIN

Meteorología | 93
15 Meteorología
Meteorología GRIB
GRIB es el formato usado por los institutos meteorológicos del mundo para transmitir y
manipular datos meteorológicos. Puede importar archivos GRIB mediante una tarjeta SD
insertada en el lector de tarjetas, y superponer la información en sus cartas.
Explicación de símbolos GRIB
Cero nudos / Dirección de viento indeterminada
Dirección del viento Pequeña linea de intensidad = 5 nudos
Dirección del viento Gran linea de intensidad = 10 nudos
Dirección del viento Linea de intensidad de flecha = 50 nudos
Dirección del viento 2 x Lineas Grandes 1 x Linea Pequeña = 25 nudos
La cola de viento indica la dirección relativa del viento entre 0 y 359º. La velocidad del
viento se indica mediante una combinación de lineas de intensidad pequeñas y grandes
al final de la cola de viento. Si se muestra una combinación de lineas de intensidad de 5
y 10 nudos en una cola entonces deberán sumarse para dar la velocidad total del viento.
El ejemplo de abajo a la izquierda muestra 3 lineas grandes + 1 linea pequeña = 35
nudos. Abajo a la derecha se muestran 60 nudos en otra dirección, 1 flecha de 50 nudos
+ 1 linea grande.
Dirección
Lineas grandes
Linea pequeña
Linea
grande
Flecha de 50 nudos

94 | Meteorología
Carga de un archivo GRIB a la memoria
NSO no viene pre-cargado con ningún archivo GRIB.
Para cargar un archivo GRIB en su sistema, inserte una tarjeta SD que contenga un
archivo GRIB en el lector de tarjetas SD. Entonces use el procedimiento indicado abajo
para copiar los archivos al directorio Gribs en su sistema NSO.
PAGES
El archivo GRIB ahora aparecerá en el directorio Gribs.
Importar un archivo GRIB
Puede importarse un archivo GRIB directamente a la memoria activa desde su
dispositivo de almacenamiento portátil. Si se había cargado antes un archivo GRIB
aparecerá un texto de advertencia y se le preguntará si quiere sobreescribir los datos.
Los archivos GRIB que se importan directamente desde la memoria portátil no se
guardan al directorio Gribs y se perderán cuando se importe un nuevo archivo GRIB.

Meteorología | 95
Activar la superposición de GRIB
Una vez que se haya importado un archivo GRIB, los datos GRIB pueden activarse y se
superpondrá la información GRIB sobre el sector relevante de la carta.
Selección de la hora de pronóstico GRIB
El archivo GRIB contiene información de pronóstico para un cierto número de días. Es posible
animar los datos meteorológicos y moverse hacia adelante en el tiempo para ver el pronóstico para
una fecha y hora específicas. Estas escalas de tiempo varían según el archivo que esté usando.
Una vez que se haya seleccionado Animar, aparecerán
controles rotatorios de tiempo y velocidad en el lado
derecho de la pantalla.
Pulse el botón giratorio para cambiar entre los
controles de tiempo y velocidad.
Pulse la tecla enter para cerrar la animación y volver a
la carta.
Control de tiempo
El control de tiempo le permite cambiar manualmente la fecha y hora de la superposición
GRIB y ver el pronóstico para ese momento específico. Los increementos de tiempo
pueden variar según el archivo GRIB.
Una vez que se haya seleccionado Animar, gire el botón giratorio para ajustar el control
de tiempo. De este modo se cambiará la fecha y hora de la superposición.
El desplazamiento de tiempo indicado en el control de tiempo será relativo al momento
actual según lo indique la unidad GPS conectada al sistema NSO.
Mientras pase el tiempo de un archivo GRIB, será posible ver los datos históricos representados
en horas pasadas hasta que el archivo queda desactualizado. Una vez que queda
desactualizado, se regresa al marco de tiempo relativo al pronóstico más antiguo en el archivo.
Si no hay datos de hora actual provistos via GPS, entonces la hora del archivo GRIB será
solo relativo al pronóstico más antiguo en el archivo y no mostrará una representación
meteorológica en tiempo real.

94 | Meteorología
Meteorología SiriusXM
TM
(solo América del Norte)
Si se conecta a un módulo meteorológico Navico WM-2, puede suscribirse a los servicios
de audio y meteorología marítima Sirius™ e incluirlos en el sistema NSO (sólo América
del Norte).
Los servicios de audio y meteorología Sirius™ cubren las aguas interiores y las áreas
costeras del Atlántico y Pacífico de Estados Unidos, incluidos el Golfo de México y el Mar
Caribe.
Los productos de audio y meteorología recibidos varían según su paquete de suscripción.
Para obtener más información, visite www.siriusxm.com/marineweather.
Panel de estado de Sirius
TM
Si el WM-2 está conectado al sistema, tendrá acceso al panel de estado de Sirius™.
La intensidad de la señal se indica como 1/3 (débil), 2/3 (buena) o 3/3 (preferida).
ESN indica el número de serie electrónico del módulo WM-2.
Pantalla meteorológica
El mapa meteorológico de Sirius™ puede superponerse al panel de carta.
Si se selecciona esta opción, el menú de carta se ampliará e incluirá las opciones de
meteorología disponibles.
Barra de
coloreado SST
Sombreados
de color de las
precipitaciones
Sombreados de
color de SST
Iconos de
tormenta
Flechas
de viento
Icono de previsión
en ciudad
* Elementos opcionales de imagen meteorológica
Las imágenes meteorológicas opcionales se activan
y desactivan de forma individual.
Ajuste del mapa del tiempo Sirius
Iconos del tiempo
El sistema NSO usa distintos iconos para
presentar condiciones meteorológicas. Los iconos
meteorológicos pueden activarse o desactivarse
individualmente.

Meteorología | 95
Simbología meteorológica
Precipitaciones
Se utilizan distintos tonos de color para mostrar los tipos e intensidad de las
precipitaciones. Cuanto más oscuro sea el tono utilizado, mayor será la intensidad.
Tipo de precipitación Códigos de colores
Lluvia De verde claro (poca intensidad) a rojo oscuro (gran intensidad),
pasando por amarillo y naranja
Nieve Azul
Lluvia/nieve Rosa
Temperatura de la supercie del mar (SST)
Puede mostrarse con colores o texto.
Si se selecciona la opción de código de colores, la barra de color SST se mostrará en el
lado izquierdo de la pantalla.
Puede definir la escala de temperaturas que se codificará por colores tal como se
describe más adelante en esta sección.
Indicación de olas
Los colores se utilizan para indicar la previsión de altura de las olas. El rojo oscuro
representa las olas más altas, mientras que el azul se utiliza para las más bajas.
Puede definir la escala de alturas que se codificará por colores tal como se describe más
adelante en esta sección.
Símbolos de viento
La longitud y la rotación de las flechas indican la dirección y la velocidad del viento.
Ajuste de los sombreados de color
Puede definir el código de colores que se utilizará para
representar la escala de temperaturas de la superficie
y la altura de las olas.
Las temperaturas que estén por encima del límite
superior de calor se mostrarán en rojo cada vez más
oscuro y las que estén por debajo del límite inferior de
frío en azul cada vez más oscuro.
Las olas que sean más altas que el valor máximo se mostrarán en rojo cada vez más
oscuro. Las que estén por debajo del valor mínimo no se mostrarán en color.
Iconos meteorológicos
Existen varios iconos meteorológicos para mostrar las condiciones meteorológicas
actuales y las previsiones. Puede tocar los iconos para ver información meteorológica
más detallada.
Icono Descripción
Previsión en ciudad
Observación en superficie
Seguimiento de tormenta tropical; gris: histórico, rojo: actual, amarillo: previsto
Seguimiento de huracán (categoría 1-5); gris: histórico, rojo: actual, amarillo: previsto
Seguimiento de borrasca/alteración tropical; gris: histórico, rojo: actual, amarillo: previsto
Atributos de tormentas
Relámpagos
Ubicación de zona de vigilancia y advertencia
Ubicación en zona marítima
Dirección

94 | Meteorología
Transparencia de la superposición meteorológica
La opacidad de la superposición meteorológica puede ajustarse.
Transparencia mínima Transparencia máxima
Alarmas meteorológicas
Puede establecer alarmas en caso de que se produzcan tormentas y relámpagos dentro
de un límite de distancia de la embarcación.
También puede establecer una alarma en caso de que se produzca un aviso de
condiciones meteorológicas extremas para la zona marítima en la que se encuentra.
Las zonas de vigilancia las define el Instituto meteorológico de Estados Unidos. Si activa
esta alarma, recibirá un aviso si la embarcación se encuentra o entra en una zona de
vigilancia.
Informes meteorológicos
Zonas Marítimas
Puede configurar el sistema para leer el pronóstico para un área seleccionada.
La ayuda contextual en los cuadros de diálogo muestra cómo usar las teclas para
seleccionar la zona marítima. Si no hay área seleccionada, el sistema leerá el pronóstico
para su posición de embarcación actual.
Comunicados tropicales
Puede leer informes tropicales, incluyendo información sobre condiciones meteorológicas
tropicales. Estos informes están disponibles solo para ciertas áreas.
Animación de grácos meteorológicos Sirius™
El NSO registra la información meteorológica activada, que puede utilizarse para
realizar una presentación animada de las condiciones meteorológicas pasadas y futuras.
La cantidad de información disponible en el sistema depende del comportamiento
meteorológico: cuanto más complejo sea, menor será el periodo de tiempo disponible
para su animación.
Puede animar el comportamiento pasado o futuro en función de la vista que haya
activado:
• Si ha activado la superposición de precipitaciones, puede animar el comportamiento
pasado y prever las condiciones meteorológicas del futuro más inmediato.
• Si ha activado la superposición de colores de altura de olas, puede animar el
comportamiento futuro (predicciones).
Al activar la función, la hora de la actual animación gráfica se mostrará en la esquina
inferior izquierda del panel de carta.

CZONE BEP | 99
16 CZONE BEP
El sistema NSO se integra con el sistema CZone de BEP utilizado para controlar y
monitorizar el sistema de distribución de la alimentación eléctrica de su barco.
Se suministrará un manual adicional con su sistema CZone. Remítase a esta
documentación y a la de instalación del NSO para ver cómo se instala y confgura el
sistema la CZone.
Panel CZone BEP
Cuando el sistema CZone está conectado y configurado, el icono CZone estará
disponible en las páginas del panel. Este icono da acceso al panel de CZone, mostrando
iconos de los modos ZCone y una perspectiva general del sistema.
PAGES
Modos CZone
Los modos CZone proporcionan una función con una sola pulsación que permite
controlar con eficacia circuitos múltiples. Los modos se configuran durante la instalación
del sistema.
Todos los módulos disponibles se visualizrán en el panel CZone.
Si hay más de 6 modos configurados en pantalla el resto de los módulos se moverán a la
opción de Más Modos.

100 | CZONE BEP
Opciones generales del sistema CZone
Le permite monitorizar todos los parámetros de a bordo incluyendo los niveles del
tanque visualizados en formatos gráficos, en tanto por ciento y como volumen
remanente.
Muestra las opciones de control así como la información monitorizada.
Muestra las alarmas visuales y auditivas que pueden fijarse para niveles altos y bajos.
Panel info CZone BEP
Cuando se instala y configura CZone, se añadirá un nuevo panel de control a los paneles
de instrumentos.
Panel de control del
buque
Panel de control de nave-
gación
Panel de control para
pesca
Panel de control CZone
Cambie los paneles de control utilizando las teclas de flechas izquierda y derecha o
seleccionaldo el panel de control del menú.
Editar el panel de control CZone
Puede personalizar el panel de control CZone cambiando los datos de cada indicador.
Las opciones para editar que están disponibles dependerá del tipo de indicador y qué
fuentes de datos están conectados a su sistema. Remítase a la sección del panel de Info

Personalizar el sistema | 101
17 Personalizar el sistema
Conguración de la página
El sistema NSO incluye un conjunto de páginas predeterminadas para cada grupo de
páginas a las que se accede con la Tecla de acceso directo (TAD). La lista de páginas
disponibles se muestra cuando pulsa la TAD de la página activa.
Cada grupo de páginas puede tener hasta 5 páginas, organizadas como ventanas
individuales o como una combinación de ventanas. La primera opción de cada lista de
páginas se muestra a tamaño completo en la ventana relacionada con cada grupo de
páginas.
Puede haber hasta 4 ventanas para cada página y puede organizarse la disposición como
se ilustra más abajo. Los números indicados en cada página muestran el orden en que se
añaden las ventanas.
1 1 2 1
2
3
1
4
2
3
Los gráficos de la página siguiente ilustran cómo se añade un página y cómo se definen
las ventanas para el grupo de páginas de RADAR. El proceso es idéntico para cada grupo
de páginas.
Se pueden añadir, quitar y sustituir las ventanas del mismo menú.
La ilustración no indica cómo se usa el botón rotatorio para moverse por el menú y
conrmar la dirección. Esto está descrito en la sección de Operacines básicas.

102 | Personalizar el sistema
RADAR
MENU WIN
MENU WIN

Personalizar el sistema | 103
Ajustar el tamaño de la ventana
El tamaño de las ventanas puede ajustarse en una página multiventana pulsando la TAD
del grupo de páginas .
La ilustración de abajo muestra cómo cambiar el tamaño de una página de carta de 3 ventanas.
CHART
MENU WIN
Ajustar la apariencia de la barra de instrumentos
La fuentes de datos conectadas al sistema pueden verse en una barra
de instrumentos en la parte superior de la pantalla.
Puede elegir desactivar la barra de instrumentos, mostrar una o dos
filas o seleccionar que se alternen las filas de forma automática.
También puede seleccionar que se muestre sólo en una página
determinada o en todas la páginas.
Seleccionar las fuentes de datos
1 Mueva el botón rotatorio para destacar la barra de instrumentos en la parte
superior del cuadro de diálogo
2 Pulse el botón rotatorio para destacar el primer campo de instrumentos
3 Gire el botón para seleccionar la fuente de datos y presione el botón para conrmar
4 Use el botón rotatorio para ir al siguiente campo de datos
5 Continúe usando el botón rotatorio hasta que todos los capos de datos estén denidos
6 Presione la tecla X para volver al funcionamiento normal
INFO
x2

104 | Personalizar el sistema
La barra de instrumentos se desactivará por defecto en cualquier página que contenga
panel de Posición, Gobierno, Instrumentos y Piloto automático.
Cambiar los ajustes del sistema
El menú de ajustes del sistema permite acceder a los ajustes
avanzados para la unidad NSO y determina la manera en que la
unidad NSO muestra la información de las interfaces de varios
usarios en el equipo.
Seleccionar idioma
Cuando seleccione el idioma deseado, las ventanas, los menús y los
cuadros de diálogo cambiarán en consecuencia.
Tamaño del texto
Se usa para ajustar el tamaño del texto de los menús
Ajustes de fábrica: Normal
El sonido de las teclas
Sonará un tono (sonido de la tecla) cuando se pulse cualquier tecla de la unidad NSO.
Ajustes de fábrica: Encendido
Hora
Le permite seleccionar el formato de la hora, el de la fecha y dar cuenta de las
diferencias entre las zonas horarias, usando la unidad NSO en una zona horaria diferente
(Desfase local)
Sirius Audio
Se usa para activar la función Sirius de radio por satélite (sólo en EE.UU.)
Capturar pantalla
Le permite usar la tecla PWR para realizar capturas de pantalla.
Los archivos de imagen pueden moverse o copiarse a una tarjeta de memoria. Consulte
la sección de Página de utilidades.
Restablecer ajustes de fábrica
Le permite restablecer todos los ajustes a los ajustes de fábrica.
Control de encendido
Determina cómo se controla el encendido en las unidades NSO en un sistema
interconectado.
Avanzado
Contiene funciones de ajuste avanzado.
Acerca de
Contiene la versión actual del software de la unidad NSO.

El sistema de alarmas | 105
18 El sistema de alarmas
El sistema NSO comprobará de manera continuacualquier situación peligrosa o fallos del
sistema mientras éste esté operativo. Cuando se produce una situación de alarma,un
mensaje de alarma aparecerá en la pantalla.
Si ha habilitado la sirena, al mensaje de alarma le seguirá una alarma audible.
La alarma se registra en el listado de alarmas para que pueda ver los detalles y llevar a
cabo la acción correctiva más apropiada.
Tipos de mensajes
Los mensajes se clasifican según cómo la situación señalada pueda afectar a la
envarcación. Se usan los siguientes códigos de colores:
COLOR IMPORTANCIA
Rojo Vital
Naranja Importante
Amarillo Normal
Azul Advertencia
Verde Advertencia baja
Alarmas indiviuales
Una única alarma aparece con el nombre de la alarma como título y
con los detalles de la misma.
Alarmas múltiples
Si más de una alarma se activa de forma simultánea, el mensaje
de alarma mostrará una lista de hasta 3 alarmas. Las alarmas se
enumeran en el orden en que se producen con la alarma que se ha
activado primero en la parte superior. Las alarmas restantes están
disponibles en el Listado de alarmas. Consulte la sección de Las
páginas de utilidades.
Conrmar un mensaje
Las siguientes opciones están disponibles en la ventana de diálogo de la alarma para
confirmar un mensaje:
OPCIÓN RESULTADO
OK Cambia el estado de la alarma a conrmado, lo cual signica que se
tiene conocimiento de la situación de alarma. La sirena / timbre cesa
y la ventana de diálogo de la alarma desaparece.
Sin embargo, la sirena se mantendrá activa en el listado de alarmas
hasta que la causa de la alarma se haya eleminado.
Desactivar Desactiva la conguración actual de la alarma. La alarma no volverá
a aparecer hasta que la active de nuevo en el cuadro de diálogo de
ajustes de la alarma.
No existe límite de tiempo para el mensaje de alarma o sirena. Éstas permanecen hasta
que las confirme o hasta que la causa de la alarma se elemine.

106 | El sistema de alarmas
Personalizar los ajustes de las alarmas
Las alarmas pueden ser configuradas en la pestaña de Ajustes de la Pagina de Alarmas.
Esta página también incluye información sobre alarmas activas y el historial de alarmas.
La Página de alarmas también puede activarse desde la Página de utilidades.
MENU WIN
Las alarmas están descritas en el capítulo que describe la aplicación correspondiente.
E.j. Las alarmas de la embarcación están descritas en la sección Seguimiento de otros
movimientos de los barcos.

Mantenimiento | 107
19 Mantenimiento
Mantenimiento preventivo
La unidad NSO no contiene ningún componente que pueda ser reparado por el usuario,
por lo tanto el operador sólo debe realizar un mantenimiento preventivo muy limitado.
Se recomienda colocar el protector solar incluido siempre que la unidad no esté en uso.
Procedimientos de mantenimiento simples
Limpieza de la unidad
Limpie la carcasa y el vidrio frontal de la OP40 con un trapo húmedo y detergente suave.
Prueba de las teclas
Asegúrese de que no haya teclas pulsadas trabadas. Si hubiera una trabada, mueva la
tecla varias veces para liberarla.
Vericación de los conectores
Los conectores sólo deben ser verificados visualmente.
Presione los enchufes del conector dentro del conector, si los enchufes del conector
disponen de seguro; asegúrese de que está en la posición correcta.
Actualizaciones de Software
La última versión de software para su sistema NSO estará disponible para descargar
desde nuestra web: www.simrad-yachting.com.
La información detallada acerca de como instalar el software viene con el archivo de
actualización.
Para más información acerca de la actualización de software, dirijase al manual de
Instalación.
Copia de seguridad de sus datos de sistema
Los waypoints, rutas y tracks que usted crea se guardan en su sistema. Se recomienda
exportar regularmente estos archivos y su archivo de configuración como parte de su
rutina de copia de seguridad.
Los archivos se exportan a SD insertada en el lector de tarjetas.
La ilustración de la página siguiente muestra el proceso de exportación de waypoints,
rutas y tracks. Otros archivos se pueden exportar con el mismo proceso.

108 | Mantenimiento
MENU WIN

Descripción del menú | 109
20 Descripción del menú
Menú ajustes
Sistema
Carta
Sonda
Radar
Navegación
Combustible
Tracks
Alarmas
Unidades
Red
AIS
Simulador
MENU WIN
x2

110 | Descripción del menú
Menúes contextuales
Carta
Radar
Sonda
Info
Menú Gráco
Menú Ir a
MENU WIN
PLOT
GO TO
MARK
VESSEL
PLOT
GO TO
MARK
VESSEL

111 | Maintenance Índice | 111 Índice | 111
21 Índice
A
Aguas bravas 32
AIS 17, 34, 85, 86
Lista de estados 85
Lista de mensajes 85
Ajustes de distancia 43
Ajustes de fábrica 104
Ajustes del simulador 15
Ajustes del sistema 104
Ajustes de track 26
Ajustes Loran 78
Alarma de fuera de rumbo 78
Alarmas 86
Ajustes de alarma 86
Ajustes de alarma de waypoint 26
Alarmas activas 86
Historial de alarmas 86
Meteorología 98
Alarma sonora 10
Anillos de distancia 35
Anotación 24
Audio 9
iPhone 89
iPod 89
SonicHub 89
Ayuda de contexto 13
B
Barra de desplazamiento , 50
Barra de desplazamiento roja , 50
Barra de instrumentos 103
Base de datos de la carta 22
Blanco 34
Blanco MARPA perdido 45
Blancos 44
Botón rotatorio 2, 12, 13, 46, 103
Buscar 86
C
Cálculo de loxodromias. 78
Campos de datos 87
Canales seleccionados bloqueados 91
Capturar pantalla 104
Carta 8, 17, 19
3D 21
Categorías de carta 21
Centro del radar 30
COG 30
Color 49
Columna de agua 47
Compás 20
Componentes que el usuario puede reparar 107
Comprobar las teclas 107
Comunicados tropicales 98
Condiciones del tiempo 96
Condiciones de poca luz 12
Condiciones meteorológicas 32
Contorno 24
Control de ganancia 49
Cuadro de diálogo 13
Seleccionar los campos de datos
Ajustar los valores
Introducir texto 13
Cuadro de diálogo de waypoint 25
Cuadro de diálogo emergente 10
Cuadros de diálogo 10
Cursor 18
Quitar el cursor 18
Usar el cursor 13
Cursor para marcar un punto de referencia , 50
Curva STC (solo Radar Broadband) 33
D
Datos de carta 21
Datos de GPS 15
Datos de rumbo 30, 31
Detalles de la carta 24
Distancia al destino
DTD 79
Distancias preestablecidas 35
DSC 85
AIS 44
E
Eco 8
Ecos 53
Ecos de olas 32
Editar 27
Elementos de carta 86
El sonido de las teclas 104
Embarcaciones en la carta 43, 44
Escala de la carta 20
Escaneo rápido (solo Radar Broadband) 33
F
Filtrado de señales 32
Filtro de lluvia 32
Filtro de mar 32
Filtro de pantalla 32
Formato de hora 104
Formato de la fecha 104
Formato de referencia (Datum) 78
Fuente de datos 15, 83
Fuente GPS 15
Fuentes de datos 103
Función de búsqueda 86
Función de carta 17
Función de medida , 50
Función de MOB 11
Función de navegación 9
Función de sonda acústica 47
Función de utilidades 85
Función EBL/VRM 35
Funciones operativas del radar 33
Función Sirius de radio por satélite 104
Función VRM 35
G
Ganancia 32
Automático y Manual 32
Color 49
Ganancia y Color 49
GPS 18
Grupo de páginas 101
Grupos de páginas 8
H
Hacer una copia de seguridad 107
Hombre al agua 11

I | Índice112 | Índice
Hombre al agua waypoint 11
Hora 104
Hora estimada de llegada
ETA 79
I
Iconos del tiempo 96
Idioma 104
Imagen de carta 21
Imágen de radar 17
Imágenes fotográcas por satélite 23
Indicación de hora 85
información COG 44
Instrumentos 8
Interferencia 32
L
Latitud/Longitud 79, 87
Límite de distancia 45
Límite de fuera de rumbo 78, 79
Limpieza 107
Línea de extensión 44
Línea de extensión de rumbo 43
Línea de seguimiento. 79
Línea electrónica de rumbo (EBL) 35
Longitud de track 26
Loxodromias 78
M
Mantenimiento 107
Mareas 87
MARPA 85
Mascara Loran 78
Medición de distancia y rumbo 34, 35
Uso del cursor
Anillos de distancia
EBL/VRM 35
Medición de la distancia a un blanco 31
Medir 19
Medir distancias 19
Memoria USB 15
Mensaje de embarcación 45
Mensajes de alarma 10
Mensajes MMSI 44
Menú
Salir del menú
Cancelar 13
Menú ajustes 9, 109
Menú contextual 9
Menú de contexto de la carta 19
Menú Gráco 9
Menú Ir a 9
Meteorología 9
Meteorología Sirius
Alarmas meteorológicas 98
Animación de grácos meteorológicos 98
Iconos 97
Transparencia de la superposición 98
MOB 79
Modo cursor 20, 22
Modo de demostración 15
Modo de edición de ruta 27
Modo de mapa 21
Modo embarcación 22
Modo Movimiento relativo 30
Modo noche 12
Modo simulación 15
Modo simulador 15
Modos operativos del radar
Apagado
Espera
Transmitir 30
Movimiento del radar 30
Movimiento real 31
Movimiento relativo 31
N
Navegación 24
Navegar 8
Navegar hacia un waypoint 79
Navegar por rutas 17
Navionics 22, 24
Navionics Platinum 22
Nivel de detalle de la carta 20
Bajo 20
Medio
Completo 20
Completo 20
Medio 20
Vista Avanzada 20
Norte arriba 20
Norte verdadero 78
NSO
Sistema NSO 101
Unidad NSO 104
Números 13
O
Objetivos del AIS 17
Opción de carta 18
Opciones de pantalla dividida 48
Orientación curso arriba 31
Orientación de la carta 21, 22
Norte arriba 20
Rumbo arriba 20
Rumbo hacia arriba 20
Orientación del radar
Rumbo hacia arriba
Norte arriba
Rumbo arriba 31
Orientación hacia el siguiente waypoint
BTW 79
P
Página de carta 103
Página de RADAR 101
Página de utilidad 85
Páginas
Seleccionar páginas 14
Páginas de utilidades 85
Páginas predeterminadas 101
Paleta de colores 31
Panel de instrumentos (INFO) 81
Analógico 81
Barra analógica
Barra digital 81, 83
Panel del receptor acústico 47
Pantalla de NSO 8
Planicar rutas 17
Plantillas de color 59
Posición 8
Posición del cursor 13, 50
Procedimientos simples de mantenimiento 107
Profundidad de seguridad 24
Pulsación corta 2
Punto de track 26

Índice | IÍndice | 113
R
Radar 8
Controles de radar 4G 40
Doble escala 39
La ventana de radar 29
Radar Dual 36
Uso del radar 29
Radio de llegada 78
Rango de distancia del radar 35
Rastros de blancos
Conguración 34
Recorrer 20
Recorrer cámara 22
Registrar los datos de la sonda acústica 59
Registrar los datos del receptor acústico
Ver , 50
Registro de viajes 87
Reiniciar ID dispositivo 42
relieve sombreado 21
Retornos de eco 32
Retornos de radar 31
Retornos de radar en la Carta 33
Rotar cámara 22
Rumbo arriba 20
Rumbo de navegación 31
Rumbo de navegación hacia el destino
NAVEGACIÓN 79
Rumbo hacia arriba 20
Rumbo simulado 15
Rumbo sobre el fondo
COG 79, 80
Ruta 27, 79
Modo de edición de ruta 27
Ruta de gran círculo 78
Ruta simulada 15
S
Satélites 86
Seguir el movimiento de la embarcación 26
Seleccionar idioma 104
Señales de radar 32
Símbolo de blanco 43, 45, 46
Simbología 29
Símbolos meteorológicos 17
Simulación 15
Sirius
Audio 89
Sirius Audio 104
Sistema de alarma |
Cuadro de diálogo de ajustes de alarma 105
Estado de la alarma 105
mensaje de alarma 105
Página de alarmas 106
Tipos de mensajes 105
Sistema de coordenadas 78
Sistema de gestión de archivos 87
Sistema NSO 8, 10, 44
Situaciones peligrosas 105
Software 2
Sol/luna 87
Sonda
Aumento 49
Claridad 53
Elementos de imagen 53
Frecuencia 48
Grabación 51, 54
Opciones 52
Opciones de pantalla dividida 48
Paletas 52
Pausa 51
Profundidad de búsqueda 54
Rechazo de ruido 49
Red 53
Superposición de DownScan 54
Superposición de StructureScan™ 53
Velocidad de desplazamiento 49
Velocidad de pulso 53
Superponer fotos
2D 23
3D 23
Superposición de cartas 21
Superposición de radar 33
T
Tablero de control 81
Disposición 81
Indicadores 81
Opciones de edición 83
Personalizar 83
TAD 14, 103
Tecla de acceso directo (TAD) 101
Teclado alfanumérico 13
tecla MENÚ 46
Teclas de dirección 13
Texto 13
Tiempo al destino
TTD 79
Tiempo en el mar 98
Tipo de presentación 24
Track 26
Transparencia de las fotos 23
U
Ubicación del radar
Centro
Vista avanzada
Desplazado 30
Umbral del radar 31
Unidad NSO 30
Usar el teclado de dirección 12
V
Variación magnética 78
Velocidad efectiva
VMG 79
Velocidad sobre el fondo
SOG 79, 80
Ventana de carta 17
Ventana de información del cursor 13, 35
Ventana de radar 29, 30, 31, 35
Ventanas 8, 101
Seleccionar una ventana activa 14
Version del Software 104
Vídeo 8
Vista de la carta 11, 22
Vista de pantalla 29
W
Waypoint 25
Posición 26
Posición en imagen de sonda 25
Waypoints, rutas y tracks 86
Z
Zona de guarda 33
Zona de sector 34

NSO Operation Manual, Spanish, Doc.no. 988-10030-002
*988-10030-002*
-
 1
1
-
 2
2
-
 3
3
-
 4
4
-
 5
5
-
 6
6
-
 7
7
-
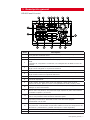 8
8
-
 9
9
-
 10
10
-
 11
11
-
 12
12
-
 13
13
-
 14
14
-
 15
15
-
 16
16
-
 17
17
-
 18
18
-
 19
19
-
 20
20
-
 21
21
-
 22
22
-
 23
23
-
 24
24
-
 25
25
-
 26
26
-
 27
27
-
 28
28
-
 29
29
-
 30
30
-
 31
31
-
 32
32
-
 33
33
-
 34
34
-
 35
35
-
 36
36
-
 37
37
-
 38
38
-
 39
39
-
 40
40
-
 41
41
-
 42
42
-
 43
43
-
 44
44
-
 45
45
-
 46
46
-
 47
47
-
 48
48
-
 49
49
-
 50
50
-
 51
51
-
 52
52
-
 53
53
-
 54
54
-
 55
55
-
 56
56
-
 57
57
-
 58
58
-
 59
59
-
 60
60
-
 61
61
-
 62
62
-
 63
63
-
 64
64
-
 65
65
-
 66
66
-
 67
67
-
 68
68
-
 69
69
-
 70
70
-
 71
71
-
 72
72
-
 73
73
-
 74
74
-
 75
75
-
 76
76
-
 77
77
-
 78
78
-
 79
79
-
 80
80
-
 81
81
-
 82
82
-
 83
83
-
 84
84
-
 85
85
-
 86
86
-
 87
87
-
 88
88
-
 89
89
-
 90
90
-
 91
91
-
 92
92
-
 93
93
-
 94
94
-
 95
95
-
 96
96
-
 97
97
-
 98
98
-
 99
99
-
 100
100
-
 101
101
-
 102
102
-
 103
103
-
 104
104
-
 105
105
-
 106
106
-
 107
107
-
 108
108
-
 109
109
-
 110
110
-
 111
111
-
 112
112
-
 113
113
-
 114
114
-
 115
115



















































































































Simrad NSO Multi-function Display Instrucciones de operación
- Categoría
- Navegantes
- Tipo
- Instrucciones de operación
- Este manual también es adecuado para
Artículos relacionados
-
Simrad NSE8/NSE12 Multi-function Displays Instrucciones de operación
-
-
Simrad NSO evo3 Instrucciones de operación
-
-
-
-
-
Simrad AP44 Guía de inicio rápido
-
-